mrt_s 080227 full manual
DESCRIPTION
MRT ManualTRANSCRIPT

Page 1 of 4
Guía Rápida del
Gobernador de Velocidad MRT
©L&S Electric, Inc.
Los derechos de autor de este documento, así como las ideas y diseños incluidos en este, son propiedad de L&S
Electric, y no podrán ser transmitidos, reproducidos o comunicados sin el permiso expresamente otorgado por escrito
por L&S Electric, Inc.
NOTA: Los datos e ilustraciones de esta guía no representan obligaciones. Nos reservamos el derecho a modificar
nuestros productos conforme a nuestra política de mejoramiento continuo de productos. La información en este
documento está sujeta a cambios sin previo aviso y no representará un compromiso para L&S Electric, Inc.
L&S Electric, Inc.
División de Ingeniería
1810 County Road XX
Rothschild, WI, 54474USA

Guía Rápida del Gobernador de Velocidad MRT

Guía Rápida del Gobernador de Velocidad MRT
MRT_SQG 080227 - 3
INTRODUCCIÓN
Esta Guía Rápida de Operación ha sido desarrollada para complementar el manual de operación y
manteamiento escrito en Inglés para el sistema de gobernación MRT de L&S Electric, Inc. Favor
de referirse al manual de operación y mantenimiento para la completa información respecto a la
instalación y mantenimiento del equipo.
El gobernador MRT de L&S Electric ha sido diseñado para un fácil mantenimiento, usando
tecnología de punta. Los componentes fueron seleccionados por su calidad y alta confiabilidad,
desde fusibles hasta el controlador lógico programable (PLC).
El gobernador MRT de L&S Electric ha sido comprobado ser de alta seguridad y confiabilidad
para la industria hidroeléctrica tanto para nuevas instalaciones como para rehabilitaciones o
modernizaciones.
L&S ELECTRIC, INC. 2007
Los derechos de autor de este documento, así como las ideas y diseños incluidos en este, son
propiedad de L&S Electric, y no podrán ser transmitidos, reproducidos o comunicados sin el
permiso expresamente otorgado por escrito por L&S Electric, Inc.

Guía Rápida del Gobernador de Velocidad MRT
MRT_SQG 080227 - 4

Operación de la Interfaz
MRTOM09 SP 080227 - 1
Índice
1. Operación Básica del Panel de la Entrada de Datos ........................................................... 3
1.1 Seguridad ........................................................................................................................ 3
1.1.1 Acceso a Pantallas................................................................................................... 3
1.1.2 Ingreso de Contraseñas ........................................................................................... 3
1.1.3 Estatus de Seguridad ............................................................................................... 4
1.1.4 Grupos de Seguridad y Derechos del Usuario ........................................................ 4
1.1.5 Configuración de Sistema del Panel ....................................................................... 7
1.2 Navegación ................................................................................................................... 10
1.3 Objetos de la Pantalla.................................................................................................... 10
1.4 Alarmas ......................................................................................................................... 14
1.4.1 Restablecimiento de Alarmas ............................................................................... 14
1.4.2 Codificación del Estatus de las Alarmas............................................................... 14
1.4.3 Prioridades de las Alarmas.................................................................................... 15
1.4.4 Pantalla de Alarmas Activas ................................................................................. 15
1.4.5 Pantalla de Historial de Alarmas........................................................................... 16
1.4.6 Registro de Eventos .............................................................................................. 17
2. Pantallas de Operación...................................................................................................... 18
2.1 Pantalla de Control del Gobernador.............................................................................. 18
2.1.1 Propiedades de la Visibilidad de la Pantalla de Control del Gobernador ............. 19
2.2 Pantallas de Control de la Válvula del Deflector o de la Válvula de Álabes............... 22
2.2.1 Propiedades de Visibilidad de la Pantalla de Control de Válvula Principal ......... 24
2.3 Pantalla de Control de la Válvula de Aguja / Válvula de Aspas .................................. 26
2.3.1 Propiedades de Visibilidad de la Pantalla del Control de la Válvula Auxiliar ..... 28
2.4 Pantalla de Sincronización............................................................................................ 32

Operation and Security
MRTOM09 SP 080227 - 2

Operación de la Interfaz
MRTOM09 SP 080227 - 3
1. Operación Básica del Panel de la Entrada de Datos
Esta sección describe las operaciones generales de navegación y de control del panel de
la entrada de datos (DEP del inglés ‘Data Entry Panel’) Magelis XBTGT. Para
instrucciones más detalladas en la operación de los sistemas del DEP, refiérase a la
documentación del fabricante sobre el funcionamiento que se encuentra en el volumen
manual 2 del Manual de Operación y Mantenimiento o a la ayuda en línea del software.
1.1 Seguridad
Figura 1: Entrada de la contraseña
El sistema del DEP utiliza varias contraseñas de seguridad para prevenir la
operación sin autorización. El operador debe ingresar la primera contraseña para
obtener el control básico de la unidad.
Nota: Si la pantalla del DEP no está presente (fondo negro), puede ser porque la
luz de fondo se haya apagado para ahorra energía. Para encenderla toque la
pantalla una vez.
1.1.1 Acceso a Pantallas
Al tratar de abrir una pantalla controlada, si el nivel de la seguridad no
concede los derechos de acceso a tal pantalla, entonces aparecerá una
pantalla que indicará el nivel requerido de la contraseña.
1.1.2 Ingreso de Contraseñas
Para ingresar manualmente una contraseña, toque el Candado en la
esquina superior de la pantalla. Esto abrirá el panel de la entrada de la
contraseña.
Para ingresar, toque “Ingresar la contraseña”, teclee la contraseña
apropiada en el teclado numérico que aparece y presione la tecla ‘Enter’
para terminar la transacción.
Para salir del sistema, toque “Borrar la contraseña”. Esto reajusta el nivel
al mínimo de seguridad permitida (0 llano) y regresa a la pantalla inicial.

Operation and Security
MRTOM09 SP 080227 - 4
1.1.3 Estatus de Seguridad
El candado demuestra el estado actual de la seguridad del panel. La
Figura 2 muestra un candado cerrado, indicando que no se tiene acceso y
en la figura 3 el candado abierto indica acceso abierto. El número dentro
del candado indica el nivel de seguridad presente.
Figura 1: Candado de seguridad que muestra acceso
Figura 3: Candado de seguridad muestra No acceso
1.1.4 Grupos de Seguridad y Derechos del Usuario
Usuario Derecho
a Ver Control
Sintoni-zar
Cambio de contraseña
Invitado (Nivel 1)
Operador (Nivel 2)
Configuración (Nivel 3)
Administrador (Nivel 4)
• El grupo “Derecho a Ver” permite visualizar solamente los valores
presentes en cualquier pantalla.
• El grupo “Control” puede operar objetos y/o las pantallas generales de
control y trabajar con las alarmas.
• El grupo “Sintonizar” puede utilizar funciones y/o pantallas para
sintonizar, incluyendo cualquier pantalla del ajuste de ganancias.
• El grupo “Administrar” puede ajustar parámetros del sistema, tales
como las contraseñas, y tiene acceso a panel del menú del sistema.
La panel sensible al tacto utiliza varias contraseñas de seguridad para
prevenir la operación desautorizada del gobernador MRT. Estas
contraseñas se pueden configurar, pero primero el usuario debe estar en la
pantalla del control del gobernador.
Para Configurar el Sistema del Panel presione el botón ‘Config. Del Sist.’
en la esquina izquierda superior de la pantalla del control del gobernador,
después presione botón SEGURIDAD (véase el Figura 4).

Operación de la Interfaz
MRTOM09 SP 080227 - 5
Figura 2: Ventana de Configuración del Sistema
• El botón ‘Seguridad’ abre la pantalla de disposición de niveles de
seguridad que se utiliza para configurar las contraseñas para acceso a las
pantallas. Se requiere el nivel 4 de seguridad para cambiar contraseñas.
• El botón ‘Configuración’ abre la pantalla de la configuración de MRT
para configurar el gobernador. Se requiere el nivel 3 ó 4 de seguridad para
cambiar la configuración del gobernador.
• El botón ‘Sistema’ abre la pantalla de disposición del sistema del panel
que se utiliza para configurar los ajustes del sistema del panel. Se requiere
el nivel 3 ó 4 de seguridad para configurar el sistema del panel.
• El botón ‘Registro de Eventos’ abre la pantalla de registro de eventos que
se utiliza para ver eventos en tiempo real. El nivel 2 de seguridad o mayor
se requiere para ver el registro de eventos.

Operation and Security
MRTOM09 SP 080227 - 6
La pantalla de la disposición de seguridad.
Figura 5: Pantalla de la disposición de la seguridad
Hay cuatro niveles de acceso de seguridad, que son inicialmente
deshabilitados, permitiendo el acceso a todas las pantallas y ventanas en el
panel. Para configurar una contraseña, presione los botones de arriba
señalados con flechas. Un teclado numérico aparecerá mediante el cual el
usuario puede especificar la contraseña numérica para cada uno de los
cuatro niveles de acceso. Un “0” deshabilita la verificación de contraseña
para ese nivel específico – en otras palabras, no se requiere contraseña.
También, una misma contraseña se puede asignar a múltiples niveles de
seguridad. Si se hace esto, el nivel de acceso más alto será concedido al
usuario cuando se use tal contraseña.
El tiempo de expiración de Contraseña (min) - el nivel de la contraseña de
seguridad expirará después del tiempo en minutos especificado aquí si no
se observa ninguna actividad en el panel. Después de la expiración, se
mostrará la pantalla inicial. Para deshabilitar esta característica y que la
Contraseña no expire, fije a “0”los minutos del tiempo.
Para una explicación del resto de los botones en la pantalla de la
disposición del sistema, vea el Manual de Operación y Mantenimiento.

Operación de la Interfaz
MRTOM09 SP 080227 - 7
1.1.5 Configuración de Sistema del Panel
Figura 6: Configuración del Sistema del Panel
Pantalla de la configuración de Fecha/Hora

Operation and Security
MRTOM09 SP 080227 - 8
Figura 3: Pantalla de la configuración de Fecha/Hora
Para fijar la fecha y hora del panel al valor deseado seleccione el campo a
cambiar e teclee la fecha o hora deseada en el teclado numérico que
aparece. Presione ‘Aceptar’ para volver al panel del sistema. Presione ‘a
modo de ejec.’ para volver al modo de ejecución o de uso normal.
Selección de Idioma
Figura 4: Panel de la selección de idioma
La Figura 8 la pantalla usada para fijar tanto el idioma del sistema del
panel como el idioma para loas pantallas del usuario. El idioma del
sistema es el que se utiliza en las pantallas del sistema del panel y el
idioma del usuario es el que se usada en las pantallas de la configuración
y de operación del MRT. Después de seleccionar el idioma deseado,
presione ‘Aceptar’ para volver al panel del sistema. Presione ‘a modo de
ejec.’ para volver al modo de ejecución o de uso normal. Los siguientes
idiomas están disponibles para el sistema:
• Inglés (default)
• Francés
• Alemán
• Español

Operación de la Interfaz
MRTOM09 SP 080227 - 9
Dependiendo del modelo del MRT, los siguientes idiomas pueden ser
disponibles para el uso del usuario:
• Inglés
• Francés
• Portugués
• Español
Nota: El idioma del sistema de panel y el idioma del usuario también se puede
elegir en la pantalla de configuración del MRT ver la sección 1.0 del capítulo de
Configuración del Controlador
Configuración del ahorro de la pantalla (Luz de Fondo)
Figura 5: Panel de control del Luz de Fondo
Para fijar el tiempo de espera para la activación del ahorro de energía,
utilice la pantalla de la configuración, toque la lengüeta ‘Fuera de línea’ y
toque el ‘LuzFondo’. Aparecerá una ventana pidiendo que se confirme la
terminación del “Runtime”, toque “ACEPTAR”. Al restablecerse
aparecerá el panel de control de Luz de Fondo. Cerciórese de que la
opción de “Wait” esté seleccionada. Las opciones por tiempos de la
espera son 15 y 30 segundos, y 1, 2, 5, 10, 15 y 30 minutos. Fije el tiempo

Operation and Security
MRTOM09 SP 080227 - 10
deseado. Presione OK para volver al menú fuera de línea. Presione ‘a
modo de ejec.’ para volver al modo de ejecución o de uso normal
Red
Esta opción no se usa actualmente.
1.2 Navegación
Después de obtener acceso al sistema de gobernación, el operador puede moverse
entre las pantallas tocando los botones de la navegación en la parte de abajo de la
pantalla. Los botones de la navegación se etiquetan con los títulos de las pantallas
individuales. Toque el botón correspondiente para moverse a la pantalla
indicada. Una contraseña puede ser requerida (véase sección de Seguridad).
Figura 6: Barra de Menú para una turbina Pelton
Nota: La etiqueta de la pantalla visible se mostrará con texto gris. Si se presiona este
botón no se irá a ninguna otra pantalla, por que ya se está allí.
Algunos botones de navegación pueden también abrir una ventana con un menú
(como el de la Figura 11) que contenga los botones relacionados de la
navegación. Presione una de las opciones disponibles para tener acceso esa
opción (tenga presente que una contraseña puede ser requerida – ver sección de
Seguridad) o ‘Cancelar’ para cerrar la ventana de menú.
Figura 7: Ventana de Menú
1.3 Objetos de la Pantalla
El sistema de la pantalla utiliza varios controles comunes. Esta sección describe
esos controles y cómo utilizarlos. Las etiquetas en los ejemplos del botón

Operación de la Interfaz
MRTOM09 SP 080227 - 11
demostrados abajo pueden que no sean las realmente usadas en las pantallas del
MRT.
Display de Multi-Estado
El Display de Multi-Estado muestra diversos valores de
texto codificación en color en base al valor numérico o
boleano de la dirección que es leída. El Display de Multi-
estado se utiliza para mostrar modos de control o para
mostrar el estatus de operación.
Barra de Estatus
Las barras de estatus se utilizan para mostrar valores
boleanos tales como Permisivos y Secuencias, o estado del
relés que dispara. La figura a la izquierda muestra dos
barras de estado - con los colores para cada valor boleano.
El Display Numérico muestra el valor actual de un registro
del PLC. Pueden ser también código de color, dependiendo
de valores del alarma. De acuerdo con el siguiente código:
Válido Verde
Alarma Alta o Baja Amarillo
Disparo Alto o Bajo Rojo
Datos Inválidos Magenta
*** Datos fuera de la gama o
Inválidos
Display Numérico
Botón
Los botones permiten que el operador envíe comandos al
sistema de control. Active la selección tocando el botón.
Los botones se etiquetan basados en su función. Tienen
color los botones cuando están seleccionados y están en gris
cuando no están seleccionados. Esto sirve para indicar al
operador que el comando fue aceptado.
Si los controles no están habilitados, los botones aparecerán
desvanecidos (con el color apropiado).

Operation and Security
MRTOM09 SP 080227 - 12
Un botón dinámico es el que, cuando se presiona, abre una
ventana con un menú. Seleccione un botón radial par
ejecutar un comando. La ventana se cerrará
automáticamente después de la ejecución.
Algunos botones puedes abrir una ventana de
confirmación. Toque “OK” para ejecutar el comando, o
presione la ‘CANCELAR’ para abortar la operación. La
ventana de confirmación se cerrará y también cerrará
cualquier ventana relacionada (es decir, una opción fijada
como se describe anteriormente)
Consigna Analógica:
Botones para Subir-Bajar
Consignas Analógicas de Subir-Bajar tienen un pantalla
numérica de con dos o cuatro botones dependiendo de la
necesidad del ajuste grueso/fino. Los botones de subir y
bajar envían pulsos al registro del PLC para incrementar o
decrementar el valor exhibido. Esto permite un control
preciso del valor.
Si los controles no están habilitados, los botones aparecerán
desvanecidos.

Operación de la Interfaz
MRTOM09 SP 080227 - 13
Consigna Analógica:
Entrada Numérica
(Cualquiera de los dos puede
aplicar)
Estos controles se utilizan tanto para mostrar la información
analógica como para ingresar un nuevo valor. El operador
usa el botón para incorporar un nuevo valor. Esto exhibe
una entrada del teclado numérico.
Ingrese el valor deseado usando el teclado numérico, y
presione la tecla ENTER. Presione BS para borrar entradas
incorrectas un número a la vez. Presione CLR para borrar
el valor. Presione ESC para cancelar la entrada sin cambiar
el valor.
Si un valor incorporado está fuera de gama, el valor
incorporado será demostrado en texto rojo.
Para salir de una pantalla actual y volver a la anterior use el
botón de la salida, que parece como una X, en la esquina
superior derecha de la pantalla.
Ayuda o información adicional para un a pantalla puede
estar disponible. Para tener acceso a esta información
presione el botón de la ayuda, que parece un signo de
interrogación, en la esquina inferior izquierda de la
pantalla.
Botón de la selección de canal. Presionar este botón abrirá
un teclado numérico para especificar el canal físico de
entrada o salida que debe ser configurado. Este botón se
utiliza para entradas analógicas, salidas analógicas y los
canales discretos de salida
Botón de Selección de la Señal. Al presionar este botón, que
inicialmente lee “Sin Usar’, se abre un teclado de selección
(mostrado a la izquierda abajo). Seleccione la señal interna
apropiada con los botones de subir y bajar

Operation and Security
MRTOM09 SP 080227 - 14
Botón de Selección de canal discreto de entrada. Este botón,
que inicialmente lee “Sin Usar”, abrirá un teclado de
selección (mostrado abajo a la izquierda). Seleccionar la
entrada física de hardware apropiada con los botones hacia
arriba y hacia abajo.
1.4 Alarmas
Las alarmas de la unidad se exhiben en las pantallas de alarmas. El botón de
“Alarmas Activas” destellará en rojo en forma intermitente cuando alguna alarma
esté presente. El destello intermitente parará una vez que se abra la pantalla de
Alarmas Activas o cuando se borren las condiciones de alarma.
1.4.1 Restablecimiento de Alarmas
El operador presiona el botón de Restablecer Alarma o Señal de
Emergencia (cuando sea aplicable) para borrar las alarmas en el PLC.
Observe que el botón de restablecer alarmas borra todas las alarmas en la
unidad, no solo aquellas que aparecen en la pantalla. Por esta razón es
importante que el operador mire cada una de las pantallas del alarmas
(cuando sea aplicable) antes de usar el botón de restablecer. También
observe que si todavía existe la condición de alarma, la alarma no se
borrará. Por ejemplo, si el relé de cierre está disparado el operador debe
reajustar manualmente el cierre antes de que la alarma se despeje.
1.4.2 Codificación del Estatus de las Alarmas
El estatus de las alarmas se indica por el color del texto:
• Activo: Texto rojo
• Reconocido: Texto amarillo
• Inactivo: Texto verde

Operación de la Interfaz
MRTOM09 SP 080227 - 15
1.4.3 Prioridades de las Alarmas
Las prioridades de las alarmas se indican en la columna de “Prioridad” de
las pantallas de alarmas activas y de historial de alarmas:
• Disparo: Las alarmas con esta prioridad, en la activación, dan lugar a
una parada de emergencia de la unidad.
• Alarma: Las alarmas en esta sección no afectan el estado corriente de
la unidad.
1.4.4 Pantalla de Alarmas Activas
Figura 8: Pantalla de Alarmas Activas
La pantalla Alarmas Activas muestra las alarmas presentes que son activas
y/o que no han sido reconocidas. La columna de Hora muestra la hora en
el cual el alarmar e activó. La pantalla tiene los siguientes controles:
Subir-Página, Bajar-Página (Navegación)
Subir o Bajar el cursor para navegar la lista de
artículos,
Una barra de avance (‘Scroll’) para moverse a

Operation and Security
MRTOM09 SP 080227 - 16
lo largo de la lista
Una tecla del reconocimiento para reconocer
una alarma*
Una tecla del reconocimiento para reconocer las
alarmas mostradas en la paina desplegada*
Una tecla para restablecer las alarmas del PLC
(disparos, por ejemplo)**
* - La página de Alarmas Activas no mostrará alarmas que hayan sido
borradas, sin importar su estatus de reconocimiento.
** - Éste es un componente opcional que no se mostrará en todos los
casos.
1.4.5 Pantalla de Historial de Alarmas
Figura 9: Pantalla de Historial de Alarmas

Operación de la Interfaz
MRTOM09 SP 080227 - 17
La pantalla de la historia del alarmar es similar en estructura a la pantalla
de Alarmas Activas excepto por la omisión de las teclas de
reconocimiento, reconocer a todas, y restablecimiento. La columna de
Hora muestra la hora de cada uno de los estados (activo, reconocido, y
vuelta a normal).
1.4.6 Registro de Eventos
Figura 10: Pantalla de Registro de Eventos
El registro de eventos registra mensajes del acontecimiento cuando ocurre
un evento de “Runtime” y cuando el evento de “Runtime” vuelve a la
normalidad. La fecha y la hora que ocurrió el evento de “Runtime” se
registran en el mensaje del evento. Si el evento está activo el mensaje del
evento será rojo y habrá un X en la columna extrema izquierda. Si el
evento ha vuelto a su estado normal el mensaje del acontecimiento será
verde o blanco y aparecerá un símbolo de menos ‘- ‘, en la columna
extrema izquierda.

Operation and Security
MRTOM09 SP 080227 - 18
2. Pantallas de Operación
Las siguientes pantallas son visibles durante la operación normal después de que el
usuario ha terminado el proceso de configuración.
Cada pantalla tiene sus propiedades de visualización en base a la configuración. Por
ejemplo, en la pantalla de Control de Gobernador (Figura 15), si el “Control de Nivel” no
ha sido habilitado durante la configuración de los modos de control del gobernador,
entonces no aparecerán los botones de “Control de Nivel” y “Consigna de Nivel”.
Este documento mostrará las pantallas de operación y enumerará las opciones de
configuración que habilita o deshabilitan la visibilidad de ciertos objetos de la pantalla.
Por esta razón, se recomienda que se tenga a la mano la sección de la configuración de
MRT como referencia.
2.1 Pantalla de Control del Gobernador
Figura 11: Pantalla del Control del Gobernador para turbina Kaplan
Nota: Botón “Aspas Manual” en el menú inferior de navegación no será visible si ha
seleccionado una “Francis” como el tipo de la turbina. Si se ha seleccionado turbina
“Pelton” el menú inferior aparecerá como en la Figura 10.

Operación de la Interfaz
MRTOM09 SP 080227 - 19
2.1.1 Propiedades de la Visibilidad de la Pantalla de Control del Gobernador
Interruptores de control del modo de control del gobernador
Figura 12: Interruptores de control del modo del control del gobernador
La visibilidad de estos interruptores se definida por los botones de
Habilitar / Deshabilitar en la pantalla de modos del control del gobernador.
Figura 17: Pantalla de los modos del control del gobernador
Por ejemplo, el deshabilitar “Control de Red Aislada” resultará en que no
aparezca el interruptor de control de este modo.

Operation and Security
MRTOM09 SP 080227 - 20
Botones de Consignas del Gobernador
Figura 13: Botón de Consigna de Nivel
El botón de ‘Consigna de Nivel’ no será visible si el “Control de Nivel” se
deshabilita en las pantallas de Modos de Control de Gobernador (ver
Error! Reference source not found.).
Indicaciones de la pantalla del control del gobernador
Figura 14: Indicaciones de la pantalla del control del gobernador
Las indicaciones de arriba son visibles cuando una entrada analógica se ha
definido como la base para la señal: “Potencia”, “Flujo”, “Nivel de
Embalse”, “Nivel en Desagüe”, y “Altura del Salto”. La indicación de
“Posición de Aguja” será visible cuando “Pelton 1” o “Pelton 2” se
configure como el tipo de la turbina. Si seleccionan “Kaplan” como el
tipo de la turbina, éste resultará en “Posición de Aspa”. Si seleccionan a
“Francis” o “Pelton 0” como el tipo de la turbina, no se demostrará nada
aquí.
Interruptores de Control del Gobernador
Figura 15: Interruptores de control del gobernador
Los interruptores de control mostrados son visibles sólo cuando sus
opciones correspondientes son habilitadas en el proceso de configuración.

Operación de la Interfaz
MRTOM09 SP 080227 - 21
La pantalla siguiente muestra donde estos interruptores pueden ser
habilitados o deshabilitados. Para desactivar la visibilidad de estas
opciones presione los botones señalados con las flechas en la figura de
abajo. Para más información sobre la funcionalidad de estos interruptores,
vea el Manual de Operación y Mantenimiento.
Figura 16: Interruptores de control de la pantalla de la configuración del gobernador

Operation and Security
MRTOM09 SP 080227 - 22
2.2 Pantallas de Control de la Válvula del Deflector o de la Válvula de Álabes.
La pantalla de control de la válvula del deflector es visible cuando se selecciona
“Pelton 0”, “Pelton 1”, o “Pelton 2” como el tipo de la turbina.
Figura 17: Pantalla de Control de la Válvula del Deflector
Operación de la Interfaz
MRTOM09 SP 080227 - 23
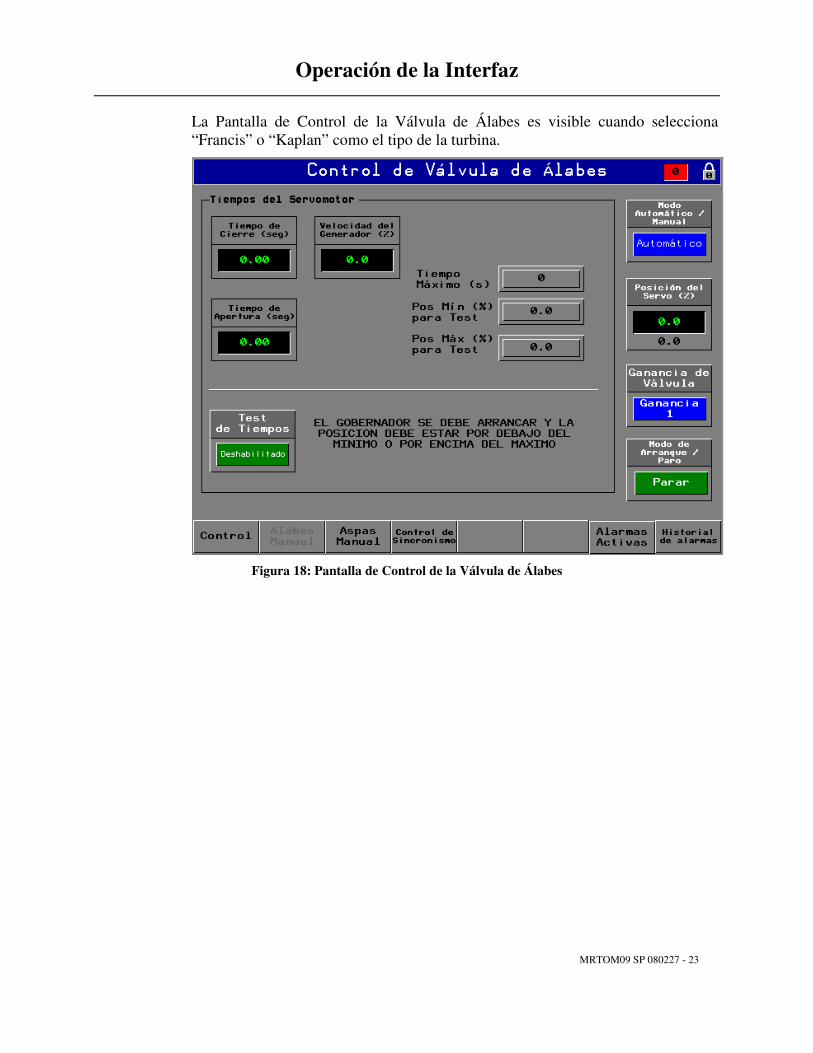
La Pantalla de Control de la Válvula de Álabes es visible cuando selecciona
“Francis” o “Kaplan” como el tipo de la turbina.
Figura 18: Pantalla de Control de la Válvula de Álabes

Operation and Security
MRTOM09 SP 080227 - 24
2.2.1 Propiedades de Visibilidad de la Pantalla de Control de Válvula Principal
Interruptor de Control del Modo Automático / Manual
Figura 19: Interruptor de Control del Modo Automático/Manual
Este interruptor es solamente visible si una referencia manual se ha
habilitado para el control de la válvula principal. La pantalla siguiente
muestra donde se habilita o deshabilita una referencia manual (véase la
flecha). Para más información sobre referencia manual, vea el Manual de
Operación y Mantenimiento.
Figura 20: Pantalla principal de la Configuración de la Válvula Principal

Operación de la Interfaz
MRTOM09 SP 080227 - 25
Interruptor de Control de Selección de Ganancia de la Válvula
Figura 21: Interruptor de control de selección de ganancia de la válvula
Este interruptor es solamente visible si se ha habilitado el “Elegir
Ganancia” de la válvula para el control del lazo cerrado de la válvula
principal. La pantalla siguiente muestra donde se habilita/deshabilita el
interruptor de selección de ganancia de la válvula (véase la flecha). Para
más información, véase el Manual de Operación y Mantenimiento.
.
Figura 22: Pantalla de la configuración del servomotor principal

Operation and Security
MRTOM09 SP 080227 - 26
2.3 Pantalla de Control de la Válvula de Aguja / Válvula de Aspas
La pantalla de control de la válvula de aguja es visible cuando se selecciona
“Pelton 1” o “Pelton 2” como el tipo de la turbina.
Figura 23: Pantalla del control de la válvula de aguja

Operación de la Interfaz
MRTOM09 SP 080227 - 27
La Pantalla de Control de la Válvula de Aspas es visible cuando
seleccionan “Francis” o “Kaplan” como el tipo de la turbina.
Figura 24: Pantalla del Control de la Válvula de Aspas

Operation and Security
MRTOM09 SP 080227 - 28
2.3.1 Propiedades de Visibilidad de la Pantalla del Control de la Válvula
Auxiliar
Interruptor de Control del Modo Automático/Manual
Figura 25: Interruptor de control del modo automático/manual
Este interruptor es solamente visible si una referencia manual se ha
habilitado para el control de la válvula auxiliar. La pantalla siguiente
muestra donde se habilita/deshabilita una referencia manual (véase la
flecha). Para más información, vea el Manual de Operación y
Mantenimiento.
Figura 26: Pantalla de la configuración de la válvula auxiliar
Interruptor de Control de Selección de la Ganancia de la Válvula
Figura 27: Interruptor de control de selección de la ganancia de la válvula

Operación de la Interfaz
MRTOM09 SP 080227 - 29
Este interruptor es solamente visible si se ha habilitado el “Elegir
Ganancia” de Válvula para el control del lazo cerrado de la válvula
auxiliar. La pantalla siguiente muestra donde se habilita/deshabilita el
interruptor de selección de ganancia de la válvula (véase la flecha). Para
mayor información, véase el Manual de Operación y
Mantenimiento.
Figura 28: Pantalla de configuración del servomotor auxiliar

Operation and Security
MRTOM09 SP 080227 - 30
Preselecciones 1 y 2 de la Válvula e Interruptores de Control del candado
de la Válvula
Figura 29: Preselecciones 1 y 2 de la Válvula e Interruptor de Control del Candado de la Válvula
Los interruptores de control mostrados arriba se habilitan/deshabilitan
durante la configuración de la válvula auxiliar. La pantalla siguiente
muestra donde se habilitan/deshabilitan los interruptores de preselección y
de control del candado de la válvula (véase las flechas). Para más
información, vea el Manual de Operación y Mantenimiento.
Figura 30: Pantalla de la configuración de la válvula auxiliar

Operación de la Interfaz
MRTOM09 SP 080227 - 31
Interruptor de Control de Offset de la Válvula
Figura 31: Interruptor de Control de Offset de la Válvula
El control mostrado arriba se habilita/deshabilita durante la configuración
de la función de “Consigna Automática” de la válvula auxiliar. La
pantalla siguiente demuestra donde habilita/deshabilita el interruptor de
control del Offset de la válvula (véase la flecha). Para más información,
vea el Manual de Operación y Mantenimiento.
Figura 32: Pantalla de Consigna Automática

Operation and Security
MRTOM09 SP 080227 - 32
2.4 Pantalla de Sincronización
Esta pantalla ser utilizada como referencia para la “sincronización automática”.
Figura 33: Pantalla de Sincronización
Las dos luces señaladas por las flechas se pondrán verdes cuando se cumplan los
permisivos que habilitan el comando de “Cierre del Disyuntor”. La luz verde
superior indicará que la velocidad está dentro de los parámetros definidos por la
función de sincronía automática. La luz verde inferior indicará que el voltaje está
dentro de los parámetros definidos por la función que sincroniza automática.

Configuración del Controlador
MRTOM10 SP 080227 - 1
El Gobernador Digital MRT
Esta sección describe el proceso de la configuración del gobernador digital MRT.
El gobernador digital MRT se puede configurar para cumplir con los requisitos de casi cualquier
turbina hidroeléctrica, incluyendo turbinas del tipo Francis, Kaplan, y Pelton. El gobernador
MRT ofrece tres configuraciones de turbinas Pelton para acomodar diversas relaciones de la
aguja y deflector. Cada tipo de la turbina es completamente configurable a los requisitos del
sistema. Múltiples configuraciones se pueden almacenar, y después cargar en cualquier
momento para permitir al usuario usar configuraciones específicas y definir varios ajustes
basados en la estación del año o el nivel del agua.

Controller Configuration
MRTOM10 SP 0802270 - 2
Índice
1. Pantalla de Configuración del MRT ....................................................................................5
1.1 Pantalla de configuración Base................................................................................6
1.1.1 Cargar una Configuración Base ...................................................................7
1.2 Pantalla de configuración Final ...............................................................................9
1.2.1 Almacenar una Configuración Final ..........................................................10
1.2.2 Cargar una Configuración Final.................................................................12
1.3 La Pantalla de configuración del MRT con la Configuración Cargada.................12
2. Pantalla de configuración de Sistema ................................................................................14
2.1 Pantalla de Estado de Entradas Analógicas ...........................................................15
2.2 Pantalla de configuración de Salidas Analógicas ..................................................15
2.2.1 Escalamiento ..............................................................................................17
2.2.2 Forzamiento de Salidas ..............................................................................17
2.2.3 Selección de Salidas Analógicas................................................................18
2.2.4 Valores Prefijados (Defaults).....................................................................19
2.3 Pantalla del Estado de la Entradas Discretas .........................................................19
2.4 Pantalla de configuración de Salida Discretas .......................................................20
2.4.1 Selección de Salida Discreta ......................................................................22
2.4.2 Condicionamiento de Señal de Salida Discreta .........................................22
2.4.3 Forzamiento de Salidas ..............................................................................23
2.4.4 Valores Prefijados (Defaults).....................................................................23
2.5 Pantalla del Puerto de Comunicaciones #2............................................................24
2.5.1 Tiempo de Restablecimiento de Subir/Bajar .............................................24
2.5.2 Sólo Punto Flotante....................................................................................25
2.5.3 Actualización Continua..............................................................................26
2.5.4 Valores Prefijados (Defaults).....................................................................26
2.6 Pantalla de configuración de Alarmas y Paros de Emergencia..............................26
2.6.1 Reset Automático.......................................................................................27
2.6.2 Pantalla del Interruptor de Control del Reset del Alarmas del Sistema.....27
2.6.3 Pantalla del Interruptor de Control del Reset de Paros del sistema ...........29
2.6.4 Valores Prefijados (Defaults).....................................................................30
2.7 La Pantalla de Entradas de Hardware del Sistema.................................................31
2.7.1 Seleccionar Entradas de Hardware del Sistema.........................................32
2.7.2 Alarmas en Disparos de Protección ...........................................................32
2.7.3 Valores Prefijados (Defaults).....................................................................32
2.8 Interruptores del Mando Local/Remoto.................................................................32
2.9 Interruptores de Control del Arranque / Paro ........................................................33
3. Pantalla de configuración de la Válvula Principal .............................................................34
3.1 Pantalla de configuración del Servomotor Principal .............................................35
3.1.1 Pantalla de configuración de la Entrada Analógica del Servomotor
Principal .................................................................................................................37
3.1.2 Sintonización del Lazo Cerrado.................................................................41

Configuración del Controlador
MRTOM10 SP 080227 - 3
3.1.3 Modo de Prueba .........................................................................................43
3.1.4 Salida..........................................................................................................44
3.1.5 Valores Prefijados (Defaults).....................................................................46
3.2 Pantalla del Piloto Universal de Control................................................................47
3.2.1 Valores Prefijados (Defaults).....................................................................49
3.3 Configuración del Control Manual de Referencia .................................................49
3.3.1 Pantalla de Referencia Manual (Servo Principal)......................................49
3.3.2 Interruptor de Control de Activación Manual de la Válvula Principal ......51
3.3.3 Control de Consignas de Referencia de la Válvula ...................................51
3.3.4 Valores Prefijados (Defaults).....................................................................52
4. Pantalla de configuración del Gobernador.........................................................................53
4.1 Pantalla de los Modos del Control del Gobernador ...............................................55
4.1.1 Pantalla de configuración del Límite del Servomotor ...............................56
4.1.2 Pantalla de configuración de la Velocidad Fuera de Línea........................61
4.1.3 Servo Pantalla de configuración de Servomotor (Automático) .................65
4.1.4 Pantalla de configuración de Velocidad en Red Aislada ...........................69
4.1.5 Pantalla de configuración de Velocidad del Sistema Pequeño ..................74
4.1.6 Pantalla de configuración de Proceso ........................................................78
4.1.7 Pantalla de configuración de Nivel ............................................................83
4.1.8 Condensador sincrónico la Pantalla de configuración ...............................87
4.2 Pantalla de Entradas Alambradas al Gobernador...................................................90
4.3 Presione el botón ‘Configurar’ en la sección Entradas Alambradas de la Pantalla
de configuración del gobernador para exhibir la Pantalla de entradas alambradas al
gobernador. Presione el `X' en la esquina superior derecha de la pantalla para volver a
Pantalla de configuración del gobernador........................................................................90
4.3.1 Pantalla de configuración de Entrada Analógica .......................................91
4.4 Interruptor de control de Razón de Corrección Anticipante..................................94
4.5 Interruptor de Control Manual de Mando Automático / Manual..........................95
4.6 Interruptor de Control de Arranque Rápido...........................................................96
5. Pantalla de las funciones auxiliares ...................................................................................97
5.1 Pantalla de Configuración del Interruptor Limitador.............................................97
5.1.1 Detección de Falla......................................................................................99
5.1.2 Valores Prefijados (Defaults).....................................................................99
5.2 Pantalla de Detección de Rotación ......................................................................100
5.2.1 Pantalla de Entradas de Detección de Rotación.......................................103
5.2.2 Valores Prefijados (Defaults)...................................................................105
5.3 Pantalla de la Detección de Red Aislada .............................................................106
5.3.1 Valores prefijados (Default) ...................................................................107
5.4 Pantalla de Configuración del Sincronizador Automático...................................107
5.4.1 Interruptor de Control del Sincronizador.................................................109
5.4.2 Valores Prefijados (Defaults)...................................................................109
6. Pantalla de Configuración de la auxiliar Válvula Auxiliar..............................................110
6.1 Interruptor de Control de Bloqueo de la Válvula.................................................111
6.2 Interruptores de Control de Preselección de la Válvula.......................................112
6.3 Configuración del Servomotor Auxiliar ..............................................................112

Controller Configuration
MRTOM10 SP 0802270 - 4
6.3.1 Pantalla de Configuración de la Entrada Analógica del Servomotor
Auxiliar ................................................................................................................115
6.3.2 Valores Prefijados (Defaults)...................................................................118
6.4 Configuración de Referencia Control Manual.....................................................121
6.4.1 Pantalla de Referencia Manual (Válvula Aux.) .......................................121
6.4.2 Interruptor de Control de Activación Manual de la Válvula Auxiliar .....123
6.4.3 Control de Consignas de Referencia de la Válvula Auxiliar ...................123
6.4.4 Valores Prefijados (Defaults)...................................................................123
6.5 Pantalla de Consigna Automática ........................................................................124
6.5.1 Valores del Salto Bruto............................................................................125
6.5.2 Datos de la Curva.....................................................................................126
6.5.3 Interruptor de Control Compensado ........................................................127
6.5.4 Pantalla de Configuración Altura Bruta...................................................128
6.5.5 Valores Prefijados (Defaults)...................................................................131
7. Información General de la Configuración .......................................................................132
7.1 Interruptores de Control .......................................................................................132
7.1.1 Botones Habilitadores de Interruptores de Control .................................134
7.1.2 Interruptor de Control del Condicionamiento de Señal ...........................135
7.2 Referencia Control de la Consigna ......................................................................136
7.2.1 Comandos de Control de Subir / Bajar la Consigna ................................136
7.2.2 Comandos de Control de la Consigna Analógica ....................................138
7.2.3 El Botón Habilitador de Comando...........................................................140
7.2.4 Acondicionamiento de Entradas de Comandos Subir/Bajar ....................141
7.3 Pantallas de la Ayuda...........................................................................................142
7.4 Pantalla del Control del Gobernador....................................................................142
7.5 Diagramas de Flujos para la Configuración de los Varios Tipos de Turbinas ....143
7.5.1 Francis y Pelton 0 turbinas.......................................................................144
7.5.2 Turbinas Kaplan y de Pelton 1.................................................................145
7.5.3 Turbina Pelton 2.......................................................................................146
7.6 Ganancias y Estatismo del Gobernador ...............................................................147
7.6.1 Estatismo (Droop)....................................................................................147
7.6.2 Ganancias.................................................................................................150

Configuración del Controlador
MRTOM10 SP 080227 - 5
1. Pantalla de Configuración del MRT
Al inicializar, el gobernador digital MRT tendrá una configuración en blanco. Refiérase
a la sección 7.5 que ofrece un diagrama de flujo recomendado para los varios tipos de
turbinas. La siguiente pantalla aparecerá al inicializarse el sistema:
Figura 1: Pantalla de inicialización
Esta pantalla permite seleccionar el idioma de la interfaz de configuración del gobernador
MRT y la interfaz del sistema del panel. Como se muestra mas adelante, también se
puede seleccionar el idioma de la interfaz del panel en la Pantalla de configuración del
sistema de gobernación.
La pantalla de inicialización también muestra los números de las versiones usadas tanto
en el controlador (PLC) como en la interfaz. Esto no tiene influencia alguna en la
configuración de sistema, pero se proporciona como una referencia en la localización de
averías. La versión del controlador se refiere a la versión específica del software en el
procesador (PLC) y la versión del interfaz se refiere a la versión específica del software
en el panel. Los números de versión no cambiarán, sin importar los cambios que se
realicen a los parámetros de la configuración vía el interfaz. Las versiones específicas de
su sistema pueden ser diferentes a las versiones mostradas en la figura de arriba. Presione
el botón ‘CONFIGURAR’ para continuar el proceso de la configuración.

Controller Configuration
MRTOM10 SP 0802270 - 6
Se debe seleccionar una configuración base o una configuración final para continuar el
proceso de la configuración. Cargue una configuración base al comenzar el proceso de la
configuración por primera vez. Cargue una configuración final si el ya ha terminado el
proceso de configuración y ha almacenado ya una configuración final en la tarjeta de
memoria de la interfaz. Para más información sobre la configuración base o la
configuración final, vea las secciones 1.1 ó 1.2, respectivamente.
Si no se especifica ninguna configuración base o final, la pantalla aparecerá así:
Figura 2: La Pantalla de configuración de MRT sin tipo del control seleccionado
Para seleccionar una configuración, presione el botón ‘SELECCION DEL TIPO DE
CONTROL’.
1.1 Pantalla de configuración Base
Es en esta Pantalla de configuración base que el usuario define qué tipo de turbina
hidroeléctrica controlará el gobernador MRT. Presionando el botón ‘X’ en la
esquina superior derecha de la pantalla, el usuario vuelve a la Pantalla de
configuración del MRT. Presionando el botón ‘CONFIGURACIÓN FINAL’, el
usuario navegará a la Pantalla de configuración final.

Configuración del Controlador
MRTOM10 SP 080227 - 7
Figura 3: Pantalla de configuración Base sin ningún tipo de turbina seleccionado
Al cargar una configuración base, el usuario inicializa el gobernador con los
parámetros prefijados asociados al tipo elegido de la turbina.
Nota: Al cargarse una configuración base se RESTABLECERÁ cualquier
configuración de los parámetros que ya se hubiese hecho antes a los parámetros
prefijados. Esta opción se debe utilizar solamente durante la fase de la
configuración inicial. Una vez definidos los ajustes no se deberán cambiar a
menos que el usuario quisiera comenzar el proceso de la configuración
nuevamente. Para cargar una configuración previamente almacenada, presione
botón de la CONFIGURACIÓN FINAL.
1.1.1 Cargar una Configuración Base
Presione la flecha del menú para mostrar las cinco configuraciones bases
disponibles. Sólo se puede elegir una configuración base del la lista; no es
posible cambiar el nombre de ninguna de las configuraciones bases.

Controller Configuration
MRTOM10 SP 0802270 - 8
Figura 4: Lista de tipos de turbinas a elegir
Francis: Seleccione la configuración base ‘Francis’ para una turbina tipo
Francis. Este tipo de turbina implementa el control de la válvula principal
para controlar un cilindro de la válvula (o controlar simultáneamente dos
cilindros de la válvula en una disposición de movimiento reciproco) para
abrir y cerrar las compuertas o álabes.
Kaplan: Seleccione la configuración base ‘Kaplan’ para una turbina de
Kaplan. Este tipo de turbina usa el control de la válvula principal para
controlar un cilindro de la válvula (o controlar simultáneamente dos
cilindros de la válvula en una disposición “de movimiento reciproco”)
para abrir y cerrar las puertas o álabes; y el control auxiliar de la válvula
se incluye también para controlar otro cilindro de válvula con el propósito
único de cambiar el ángulo de las aspas de la turbina.
Pelton 0: Seleccione la configuración base ‘Pelton 0’ para controlar una
turbina de Pelton donde los cilindros de la válvula de la aguja y del
deflector son controlados por un servo único que implementa el control de
válvula principal. En este tipo de control, las válvulas de la aguja y del
deflector se instalan juntas con conexiones hidráulicas.
Pelton 1: Seleccione configuración base de un “Pelton 1’ para controlar
una turbina Pelton donde los cilindros de la válvula de la aguja y del
deflector se controlan independientemente el uno del otro. El control de la
válvula principal determina la posición del deflector, mientras que el
control de la válvula auxiliar determina la posición de las agujas.
Pelton 2: Seleccione configuración base ‘Pelton 2’ para controlar una
turbina Pelton con dos agujas, donde los pares de agujas y los cilindros de
la válvula del deflector se controlan independientemente el uno del otro.
El control de la válvula principal determina la posición del deflector. Dos
lazos de control de las válvulas auxiliares determinan la posición de las
dos agujas que se pueden controlar independientemente el uno del otro.
Seleccione la configuración base que cumpla con los requisitos del
sistema, y presione el botón ‘USAR ESTA CONFIGURACIÓN’ que
aparece une vez que se hace la selección.

Configuración del Controlador
MRTOM10 SP 080227 - 9
Figura 5: Pantalla de configuración Base con el tipo de turbina Pelton 2 seleccionado
Nota: Tomará un momento para que el interfaz cargue la configuración deseada,
mientras tanto el botón “Usar esta Configuración” es substituido temporalmente
por indicación que lee “ESPERE”.
1.2 Pantalla de configuración Final
Presione el botón ‘Configuración Final’ en la Pantalla de configuración base para
exhibir Pantalla final de la configuración. Presione el `X' en la esquina superior
derecha del Pantalla final de la configuración para volver a Pantalla de
configuración de MRT. Presione el botón de ‘Configuración Base’ para volver a
Pantalla de la configuración base.

Controller Configuration
MRTOM10 SP 0802270 - 10
Figura 6: Pantalla de configuración Final
Es posible almacenar y cargar una configuración final previamente definida en el
controlador. Una configuración final es una configuración hecha a la medida que
parte de la información de la configuración base así como las modificaciones de
ésta hechas por el usuario. Una configuración final se debe primero definir y
almacenar por el usuario antes de que se cargue. Esta característica de almacenaje
es muy útil cuando la configuración se ha perdido y necesita ser restaurada, o si se
desean configuraciones múltiples para la unidad basada en a la salida, o cambios
de estaciones como en el nivel del agua.
Nota: Una vez que el usuario haya terminado la configuración de sistema, SE
RECOMIENDA que el usuario regrese a esta pantalla y ALMACENE la
configuración modificada a la medida que se ha generado con el proceso de la
configuración.
1.2.1 Almacenar una Configuración Final
Si se termina el proceso completo de la configuración, se recomienda
mucho que el usuario almacene los datos de la configuración en uno de los
seis archivos de configuración finales. Cuando se presiona el botón de la
‘ALMACENAR CONFIGURACIÓN’ una tarjeta de memoria en el panel
de interfaz toma los parámetros de la configuración del gobernador y los
almacena al archivo específico. Para almacenar una configuración final,

Configuración del Controlador
MRTOM10 SP 080227 - 11
seleccione un archivo de la lista del menú.
Figura 7: Lista de selección de la configuración final.
Es posible cambiar el nombre del archivo presionando el nombre del
archivo una vez que se haya seleccionado (véase sobre flecha),
escribiendo el nuevo nombre con el teclado que aparece, entonces
presione el botón ‘ENTER’ (véase el Figura 8).
Figura 8: Cambio de nombre de una configuración final

Controller Configuration
MRTOM10 SP 0802270 - 12
Para almacenar la configuración final, presione el botón ‘ALMACENAR
CONFIGURACIÓN’ que se muestra en la Figura 6.
Nota: Tomará un momento para que el panel de interfaz almacene la
configuración final, mientras tanto los botones ’USAR ESTA CONFIGURACIÓN’
y ’ALMACENAR CONFIGURACIÓN’ son substituidas temporalmente por
indicación de ESPERE.
Nota: L&S Electric Inc. recomienda mucho que se haga una copia de respaldo de
la tarjeta de Flash del panel, y que se almacene en una localización separada y
segura después de la configuración final se haya creado y se haya almacenado en
la tarjeta de Flash. Este respaldo será muy útil en caso de que los datos se
corrompan en la tarjeta Flash.
1.2.2 Cargar una Configuración Final
Es posible restaurar una configuración perdida o cargar un archivo de la
configuración final al gobernador. Hasta seis diversas configuraciones
finales se pueden almacenar. Un archivo final de la configuración
contiene todo el tipo información de la turbina, así que es innecesario
cargar una configuración base antes de cargar una configuración final.
Para cargar una configuración final, seleccione el nombre del archivo de la
lista, después presione el botón ‘USAR ESTA CONFIGURACIÓN’ que
se muestra en la Figura 6.
Nota: Tomará un momento para que se cargue la configuración final,
mientras tanto el botón ‘USAR ESTA CONFIGURACIÓN’ y el botón de
’ALMACENAR CONFIGURACIÓN’ son substituidos temporalmente por
una indicación de una ESPERE.
1.3 La Pantalla de configuración del MRT con la Configuración Cargada
La pantalla siguiente muestra la Pantalla de configuración de MRT con el tipo de
‘Pelton 2’ seleccionado como la configuración base.

Configuración del Controlador
MRTOM10 SP 080227 - 13
Figura 9: Pantalla de configuración de MRT con el tipo de ‘Pelton 2’ seleccionado
Para el fin de este documento, se asume que el usuario no ha terminado el proceso
de la configuración y que ha elegido cargar una configuración base.
Nota: Si se elige ‘Francis' o ‘Pelton 0' como la configuración base, el botón de
‘CONFIGURAR VÁLVULA AUXILIAR.' no aparece (ninguna de estas
configuraciones requieren la configuración de una válvula auxiliar). Seleccionar
la configuración base correcta para la operación correcta del gobernador digital
MRT.

Controller Configuration
MRTOM10 SP 0802270 - 14
2. Pantalla de configuración de Sistema
Presione el botón ‘CONFIGURAR EL SISTEMA' en Pantalla de configuración de MRT
para exhibir Pantalla de configuración de sistema. Presione el `X' en la esquina superior
derecha de la pantalla para volver a Pantalla de configuración del MRT.
Figura 10: Pantalla de configuración del sistema
Aquí el usuario puede seleccionar el idioma de la interfaz y tener acceso a la(s):
• Pantalla del estado de entradas analógicas
• Pantalla de configuración de salidas analógicas
• Pantalla del estado de la entradas discretas
• Pantalla de configuración de salidas discretas
• Pantalla del puerto de comunicación #2
• Pantalla de configuración del alarmas y de la paros
• Pantalla de configuración de la entradas alambradas del sistema
• Pantallas del interruptor del control de comando local/remoto
• Pantallas del interruptor de control de arranque/parada

Configuración del Controlador
MRTOM10 SP 080227 - 15
2.1 Pantalla de Estado de Entradas Analógicas
Presione botón de ‘ENTRADAS ANALÓGICAS’ en la Pantalla de
configuración de sistema para exhibir la Pantalla del estado de Entrada
Analógicas. Presione el `X' en la esquina superior derecha de la pantalla para
volver a la Pantalla de configuración de sistema. Presione el botón ‘?’, en la
esquina izquierda inferior de la pantalla, para navegar a una pantalla de ayuda
asociada a esta pantalla.
Figura 11: Pantalla del estado de entradas analógicas
Esta pantalla muestra el estado de todas las entradas analógicas disponibles. La
columna ‘Corriente (mA)’ exhibe el valor en miliamperios vistos en la entrada
analógica correspondiente. La columna ‘Valor (Unidades)’ exhibe el valor de la
entrada analógica basada en el escalamiento configurado para esta entrada. Esta
columna es útil en verificar el escalamiento correcto de una entrada analógica.
2.2 Pantalla de configuración de Salidas Analógicas
Presione botón de ‘SALIDAS ANALÓGICAS’ en la Pantalla de configuración
de sistema para exhibir Pantalla de configuración de salidas analógicas.
Presione la `X' en la esquina superior derecha de la pantalla para volver a
Pantalla de configuración de sistema. Presione el botón ‘?’ en la esquina
izquierda inferior de la pantalla, para navegar a una pantalla de ayuda asociada a
esta pantalla.

Controller Configuration
MRTOM10 SP 0802270 - 16
Figura 12: Pantalla de configuración de salidas analógicas
La Pantalla de configuración de salidas analógicas permite que el usuario
configure ocho diversas salidas analógicas de 4–20 mA. Para cada uno de los
ocho canales, el usuario debe elegir una variable interna del sistema como la base
para la señal de salida (selección de la señal). Veintiún señales internas están
disponibles para tal selección. Se requiere definir los valores de escalamiento
para producir un valor en miliamperio basado en el valor de la variable interna del
sistema seleccionada (escala). Esta pantalla maneja la configuración de las ocho
salidas simplemente cambiando que ‘Canal’ (o la salida) el usuario va a
configurar. Para cambiar la salida que se quiera configurar, presione el botón
numérico en el lado izquierdo superior de la pantalla (véase la flecha) e incorpore
un número del uno a ocho. El número exhibido corresponde a la salida que va a
ser configurada.

Configuración del Controlador
MRTOM10 SP 080227 - 17
2.2.1 Escalamiento
Figura 13: Sección del escalamiento de salidas analógicas
La figura anterior muestra la porción de la Pantalla de configuración del
escalamiento de salidas analógicas. La primera fila se utiliza para
incorporar los valores bajo y alto de la señal interna seleccionada en las
unidades de la ingeniería correspondientes. Esto define la gama de la
señal interna que la salida analógica representará. La segunda fila se
utiliza para incorporar los valores en miliamperios (mA) bajo y alto que el
sistema hará salir basado en el valor actual de la señal seleccionada y de su
gama.
Nota: Fijar la gama (valores ‘bajo' y ‘alto') para la señal interna no
limita los valores de la señal interna misma. Afecta solamente la gama a
través de la cual la señal será representada vía la salida analógica.
Por ejemplo, si el usuario está configurando una salida de 4–20 mA para
representar el porcentaje de velocidad de la unidad con valores de “0.0” y
“200.0” para bajo y alto, respectivamente. Las entradas del mA serían
“4.0” y “20.0” para bajo y alto, respectivamente. Así, si la velocidad de la
unidad fuera del 100% (velocidad nominal), el sistema generaría una
salida de 12 mA.
Columna ‘Valor Actual’ muestra el valor actual de la salida en EU y el
mA, basado sobre la configuración entrada por el usuario. Esto permitirá
que el usuario verifique el escalamiento correcto de una salida.
Nota: Si una salida analógica no se usa, asegúrese de que se especifique
“0.00” mA para los valores alto y bajo.
2.2.2 Forzamiento de Salidas
El forzamiento de salidas se puede activar o desactivar mediante el botón
abajo en la pantalla. Cuando se oprime ‘Forzamiento de salidas’ aparece
un botón en la posición del mA actual. Esto permite que el usuario
incorpore un valor válido del mA para probar el cableado al dispositivo
externo. El forzamiento de salida está desactivado por Default.

Controller Configuration
MRTOM10 SP 0802270 - 18
Figura 14: Sección del escalamiento de la Pantalla de configuración de salidas analógicas con el forzamiento de salidas activado
Nota: Habilitar el forzamiento de salida aquí o en la Pantalla de
configuración de salidas discretas tiene el mismo efecto. Al habilitar el
forzamiento de salida mantendrá a todas las salidas analógicas y
discretas a su valor de su estado actual. La única manera de que el valor
de cualquier salida analógica o discreta cambie es que manualmente se
cambien los valores en las pantallas de configuración. Esta práctica
puede ser insegura y esta pensada solamente para el uso cuando la
unidad sin agua y en un estado seguro.
2.2.3 Selección de Salidas Analógicas
Figura 15: Selección de la señal de salida analógica de la Pantalla de configuración de salidas analógicas
El botón de ‘SELECCIÓN DE SEÑAL’ (véase la flecha) permite que el
usuario elija la variable interna del sistema a utilizar como base para la
señal de salida. Con las teclas de subir y bajar, el usuario puede pasar la
lista y seleccionar la variable interna deseada del sistema. Referirse a la
sección ‘Hardwired Interface’ del manual de Operación y Mantenimiento
para una descripción de las variables internas disponibles. Presionando el
botón ‘ENTER’ para asignar la variable interna seleccionada del sistema
al canal. Presionando botón ‘ESC’ se cancela cualquier cambio realizado.
Para definir una salida como sin usar, presione la tecla de punta hacia
abajo hasta que encontrar ‘SIN USAR’ y presione ‘ENTER’.

Configuración del Controlador
MRTOM10 SP 080227 - 19
2.2.4 Valores Prefijados (Defaults)
Canal Valor Bajo
Valor Alto
mA Bajo
mA Alto
mA Gama Señal Interna
1 -100 100 4 20 0 – 25
Consigna(%) de
Válvula Principal
2 0 100 4 20 0 – 25
Posición (%) de
Servomotor Principal
3 0 200 4 20 0 – 25
Velocidad de la
Unidad (%)
4 0 0 4 20 0 – 25 Potencia (MW)
5* -100 100 4 20 0 – 25
Consigna 1 (%) de
Válvula Auxiliar
6* 0 100 4 20 0 – 25
Posición (%) del
Servo Auxiliar 1
7** -100 100 4 20 0 – 25
Consigna (%) de
Válvula Auxiliar 2
8** 0 100 4 20 0 – 25
Posición (%) del
Servo Auxiliar 2
* Fije a ‘No asignado’ para la configuración base Francis, Pelton 0 y
asignado para Kaplan, Pelton 1 y Pelton 2.
** Fije a ‘No asignado’ para la configuración base Francis, Kaplan,
Pelton 0, y Pelton 1 y asignado para Pelton 2.
2.3 Pantalla del Estado de la Entradas Discretas
Presione botón ‘ENTRADAS DISCRETAS’ de la Pantalla de configuración de
sistema para exhibir Pantalla del estado de entradas discretas. Presione el `X' en
la esquina superior derecha de la pantalla para volver a Pantalla de configuración
de sistema. Presione el botón ‘?’ en la esquina izquierda inferior de la pantalla,
para navegar a una pantalla de ayuda asociada a esta pantalla.

Controller Configuration
MRTOM10 SP 0802270 - 20
Figura 16: Pantalla del Estado de la Entradas Discretas
Esta pantalla muestra el estado de las entradas discretas. Si la entrada es roja es
que está desenergizada. Si la entrada es verde es que está energizada. Esta
pantalla es bastante útil cuando se realiza el chequeo inicial de la entrada-salida
para determinarse si el PLC está leyendo correctamente las entradas.
2.4 Pantalla de configuración de Salida Discretas
Presione el botón de ‘SALIDAS DISCRETAS’ en la Pantalla de configuración
de sistema para exhibir la Pantalla de configuración de salidas discretas.
Presione el `X' en la esquina superior derecha de la pantalla para volver a
Pantalla de configuración de sistema. Presione el botón ‘?’ en la esquina inferior
izquierda de la pantalla, para navegar a una pantalla de ayuda asociada a esta
pantalla.

Configuración del Controlador
MRTOM10 SP 080227 - 21
Figura 17: Pantalla de configuración de Salida Discretas
Pantalla discreta de la configuración de salida permite que el usuario configure
las dieciséis salidas discretas disponibles en el gobernador MRT. Para cada uno
de los dieciséis canales, el usuario debe elegir una variable interna del sistema
como la base para la señal de salida (selección de la señal). Setenta y cinco
señales internas están disponibles para la selección. Esta pantalla maneja la
configuración de las dieciséis salidas simplemente cambiando que el número del
canal (o salida) que el usuario va a configurar. Para cambiar la salida que se está
configurando actualmente, presione el botón numérico en el lado izquierdo
superior de la pantalla (véase la flecha) e incorpore un número a partir del uno a
dieciséis. El número exhibido corresponde a la salida que es configurada
actualmente.
El relé de salida mostrado en la derecha de la pantalla indica el estado de la
salida. Un color verde en la salida significa la salida se energiza, mientras que un
color rojo en la salida significa la salida se desenergiza.

Controller Configuration
MRTOM10 SP 0802270 - 22
2.4.1 Selección de Salida Discreta
Figura 18: Selección de la señal de salida para la configuración de salida discreta
El botón ‘SELECCIÓN DE SEÑAL’ (véase la flecha) permite que el
usuario elija la variable interna del sistema a utilizar como la base para la
señal de salida. Usando las teclas con puntas de flecha, el usuario puede
navegar la lista y seleccionar la variable interna del sistema deseada. Para
una descripción de todas las variables internas del sistema disponibles,
refiérase a la sección ‘Hardwired Interface’ del manual de Operación y
Mantenimiento. Presionando el botón ‘ENTER’ para asignar la variable
interna seleccionada del sistema al canal. Presionando botón ‘ESC’ se
cancela cualquier cambio realizado. Para definir una salida como sin usar,
presione la tecla de punta hacia abajo hasta que encontrar ‘SUIN USAR’ y
presione ‘ENTER’.
2.4.2 Condicionamiento de Señal de Salida Discreta
El usuario puede configurar la salida discreta para utilizar el estado actual
de la variable interna del sistema o la señal invertida de la variable interna
del sistema. Esta distinción es hecha accionando el botón que se
encuentra en serie con el alambre que conecta el botón ‘SELECCIÓN DE
SEÑAL’ al relé de salida. Los dos estados del botón se muestran abajo.
Figura 19: Botón de inversión mostrado en estado normal
La señal de entrada se pasa directamente a la salida. Si la señal de entrada
está ENCENDIDA, la señal de salida está ENCENDIDA. Si la señal de
entrada está apagada, la señal de salida está apagada.
Figura 20: Botón de inversión mostrado en estado invertido

Configuración del Controlador
MRTOM10 SP 080227 - 23
La señal de entrada se invierte antes de pasar a la salida. Si la señal de
entrada está energizada, la señal de salida está apagada. Si la señal de
entrada está apagada, la señal de salida está energizada.
Por ejemplo, usando el estado invertido de la variable del sistema interno
de parada del controlador se logra una operación de falla segura. Es decir,
el contacto seguiría energizado siempre que el controlador no se pare, y se
desenergizará cuando el controlador se pare.
2.4.3 Forzamiento de Salidas
El forzamiento de salidas se puede activar o desactivar mediante el botón
abajo en la pantalla. Cuando se oprime ‘Forzamiento de salidas’ aparece
un botón en la posición del mA actual. Esto permite alternar el estado de
la salida para probar el cableado al dispositivo externo. Un color verde en
el relé de salida significa la salida está energizada, mientras que un color
rojo en la salida significa la salida se desenergiza.
Figura 21: Control de forzamiento de salida discreta
Nota: Habilitar el forzamiento de salida aquí o en la Pantalla de
configuración de salidas analógicas tiene el mismo efecto. Al habilitar el
forzamiento de salida mantendrá a todas las salidas analógicas y
discretas a su valor de su estado actual. La única manera de que el valor
de cualquier salida analógica o discreta cambie es que manualmente se
cambien los valores en las pantallas de configuración. Esta práctica
puede ser insegura y esta pensada solamente para el uso cuando la
unidad sin agua y en un estado seguro.
2.4.4 Valores Prefijados (Defaults)
Canal Señal Interna Invertida 1 Paro del Controlador Falso
2 Problemas en el Controlador Falso
3 Operar Piloto Universal de Control Falso
4 Interruptor de Nivel #1 Falso
5 Interruptor de Nivel # 2 Falso
6 Interruptor de Nivel # 3 Falso
7 Interruptor de Nivel # 4 Falso
8 OFF Falso
9 OFF Falso
Botón de
alternación del
estado de la
salida forzada

Controller Configuration
MRTOM10 SP 0802270 - 24
Canal Señal Interna Invertida 10 Indefinido Falso
11 Indefinido Falso
12 Indefinido Falso
13 Indefinido Falso
14 Indefinido Falso
15 Indefinido Falso
16 Indefinido Falso
2.5 Pantalla del Puerto de Comunicaciones #2
Use el botón ‘Puerto de Comunicación No. 2’ en la Pantalla de configuración de
sistema para exhibir la Pantalla del Puerto Comunicación No.2. Presione la `X'
en la esquina superior derecha para volver anterior.
Figura 22: Pantalla del puerto de comunicaciones No.2 con punto flotante en `sí'
2.5.1 Tiempo de Restablecimiento de Subir/Bajar
La pantalla del puerto de comunicaciones No. 2 permite que el usuario
configure la longitud del tiempo un comando de subir/bajar será permitido
afectar la consigna de referencia, cambiando la duración del ‘Tiempo de
Reset de señal de Subir/bajar’ (ms). Esto es una característica de
seguridad pues un comando de subir/bajar puede trabar encendido si la

Configuración del Controlador
MRTOM10 SP 080227 - 25
comunicación a través del puerto #2 fallara enseguida después que el
comando fue recibido. En este caso, el comando sería reseteado o
restablecido después de que expire el ‘Tiempo de Reset de señal de
Subir/bajar’, aun y cuando comunicación se pierda.
2.5.2 Sólo Punto Flotante
El usuario puede también configurar el tipo de datos a ser comunicados y
la frecuencia de su actualización. Los dos tipos de datos reconocidos por
el controlador son “punto Flotante’ (también conocida como número Real)
y ‘Número Entero’. El tipo de ‘Punto Flotante’ requiere dos registros
contiguos y permite punto decimal, mientras que un ‘Número Entero’
requiere sólo un registro y su valor se limita de - 32768 a +32767 y no
permite comas. La opción a configura depende enteramente del tipo de
datos que comunique el dispositivo externo. Si el dispositivo externo se
comunica con punto flotante, fije la opción de “Solo punto flotante” en
“sí”, como se muestra en la figura anterior. Si el dispositivo externo se
comunica con números enteros, entonces fije en ‘No’ la condición de
‘Sólo Punto Flotante’. Como se muestra en la figura a continuación:
Figura 23: Pantalla de Puerto de Comunicación 2 con ‘Sólo Punto Flotante’ en ‘No’
La sección de “Ganancias’ es ahora visible. Este permite definir una
ganancia para un valor del número entero. Esto es útil en el caso que el
número o números subsecuentes representen los decimales. La ganancia
se debe fijar en base a la resolución de la señal deseada. La ganancia se
multiplica por la entrada para generar el valor de la entrada analógica. Sin

Controller Configuration
MRTOM10 SP 0802270 - 26
embargo, observe por favor que los límites para un número entero son de
-32768 a +32767. La tabla siguiente muestra los resultados para los varios
valores de la entrada y ganancias.
Gama de la entrada
Entrada
Ganancia
Valor de la entrada analógica
0 a 100 40 1 40
0 a 1000 401 0.1 40.1
0 a 10000 4013 0.01 40.13
0 a 32000 12842 0.003125 40.13125
2.5.3 Actualización Continua
Típicamente, hay dos tipos de dispositivos externos que se pueden
interconectar con el controlador. Un dispositivo que escribe
continuamente es un dispositivo que continuamente actualiza todos los
datos en el controlador. Un ejemplo de esto sería un PLC externo que se
comunica con el gobernador MRT. Si éste es el tipo de dispositivo que se
comunica a través del puerto No.2, fije esta opción en ‘Si’.
El otro caso es un dispositivo que sólo envía datos nuevos solicitados al
controlador. Un ejemplo de esto sería una Interfaz Humano-Máquina
basado en computadora. Si éste es el tipo de dispositivo que se comunica
a través del puerto No.2, fije esta a opción en ‘N’.
2.5.4 Valores Prefijados (Defaults)
Ítem Ganancia Valor
prefijado Tiempo de Reset de Subir/Bajar 0 – 99999 5000
Sólo Punto Flotante --- Si
Actualización Continua --- No
Ganancia de límite del gobernador 0 – 10000 1
Ganancia de consigna de velocidad 0 – 10000 1
Ganancia de consigna de Servo (Auto) 0 – 10000 1
Ganancia de consigna del Proceso 0 – 10000 1
Ganancia de consigna de Nivel 0 – 10000 1
Ganancia de consigna de Válvula
Principal 0 – 10000 1
Ganancia de consigna de Válvula
Aux. 0 – 10000 1
Ganancia de consigna de Salto Bruto 0 – 10000 1
2.6 Pantalla de configuración de Alarmas y Paros de Emergencia
Presione el botón ‘CONFIGURAR’ en sección de ‘Alarmas/ Paros de
Emergencia’ en la Pantalla de configuración de sistema para exhibir la Pantalla

Configuración del Controlador
MRTOM10 SP 080227 - 27
de configuración del alarmas y paros de emergencia. Presione la `X' en la
esquina superior derecha de la pantalla para volver a la pantalla anterior.
Figura 24: Pantalla de configuración del alarmas y paros de emergencia
Esta pantalla permite que el usuario configure cómo las alarmas y los paros de
emergencia son manejados por el controlador.
2.6.1 Reset Automático
Si se fija en ‘Si’, el controlador hace el reset automático de las alarmas o
señales d paro de emergencia. Cuando desaparece la condición que activó
la alarma o paro, la alarma o paro de emergencia desaparecen o se resetean
automáticamente después del ‘Tiempo de Reset Automático’ especificado.
Si se fija en ‘No’, entonces se debe configurar un reset externo para
resetear el evento. Se proporcionan interruptores de control para los
eventos de Alarmar y Paros de Emergencia.
Por lo tanto, es posible configurar un tipo de evento para que se resetee
automáticamente, mientras que los otros reciban el reset vía una entrada
del sistema.
2.6.2 Pantalla del Interruptor de Control del Reset del Alarmas del Sistema
Presione el botón ‘Reset de Alarmas’ de la sección ‘Interruptor de
Control’ de la pantalla de ‘Alarmas y Paros de Emergencia’ para exhibir la
pantalla de ‘Reset de Alarmas del Sistema’. Presione la `X' en la esquina

Controller Configuration
MRTOM10 SP 0802270 - 28
superior derecha de la pantalla para volver a la pantalla anterior. Presione
el botón ’?’, en el lado inferior izquierdo de la pantalla, para navegar a una
pantalla de la ayuda asociada a esta pantalla.
Figura 25: Pantalla del reset de alarmas del sistema
El Figura 25 muestra un ejemplo en el que la entrada de hardware No. 3 da
un pulso de un segundo al comando de Reset de Alarmas del Sistema
cuando se esté en Modo Local para iniciar un reset de todas las alarmas
del sistema que ya no estén activas. El resto de las entradas del comando
del interruptor de control están desactivadas (indicado por los
correspondientes interruptores abiertos).
Los interruptores de control se usan en el proceso de la configuración para
determinar qué variables activan o desactivan funciones específicas, y son
completamente configurables para permitir el control a partir de entradas
del hardware, de variables discretas internas del sistema, y/o variables
provenientes del puerto de comunicación. Además, cualquiera o todas las
entradas elegidas se pueden habilitar o deshabilitar en base al estado del
modo del mando local o remoto. Para aprender cómo configurar los
interruptores de control, vea la sección 7.1. Una descripción completa de
todas las variables internas que se puedan usar para un interruptor de
control se encuentra en la sección “Hardwired Interface” de la descripción
de la funcionalidad en el manual de operación y mantenimiento.

Configuración del Controlador
MRTOM10 SP 080227 - 29
2.6.3 Pantalla del Interruptor de Control del Reset de Paros del sistema
Presione el botón ‘Reset de Paros de Emergencia’ en la sección de
‘Interruptor de control’ de la Pantalla de configuración del alarmas y paros
de emergencia para exhibir la pantalla del ‘Reset de Paros de
Emergencia’. Presione la `X' en la esquina superior derecha de la pantalla
para volver a la pantalla anterior. Presione el botón ’?’, en el lado inferior
izquierdo de la pantalla, para navegar a una pantalla de la ayuda asociada a
esta pantalla .
Figura 26: Pantalla del reset de paros de emergencia
La Figura 26 muestra un ejemplo en el que la entrada de hardware No.10
dará un pulso de cinco segundos al comando de reset de paros de
emergencia del sistema cuando se esté en el modo remoto para iniciar un
reset de todas las señales de paro de emergencia del sistema que ya no
estén activas. El resto de las entradas del interruptor de control están
desactivadas (indicado por los correspondientes interruptores abiertos). El
pulso de la entrada de hardware No.10 está condiciona dado el uso del
bloque AND. Este bloque AND requiere que la entrada No. 10 siga
siendo activa para que el comando al interruptor de control se mantenga
energizado. Si la entrada No. 10 se desenergiza antes del pulso de cinco
segundos, la entrada al interruptor de control también se desenergizará.
Sin embargo, la duración máxima del control se limita a cinco segundos,
sin importar si la entrada hardware No.10 permanece energizada, porque
el pulso durará solamente cinco segundos.

Controller Configuration
MRTOM10 SP 0802270 - 30
Los interruptores de control se usan en el proceso de la configuración para
determinar qué variables activan o desactivan funciones específicas, y son
completamente configurables para permitir el control a partir de entradas
del hardware, de variables discretas internas del sistema, y/o variables
provenientes del puerto de comunicación. Además, cualquiera o todas las
entradas elegidas se pueden habilitar o deshabilitar en base al estado del
modo del mando local o remoto. Para aprender cómo configurar los
interruptores de control, vea la sección 7.1. Una descripción completa de
todas las variables internas que se puedan usar para un interruptor de
control se encuentra en la sección “Hardwired Interface” de la descripción
de la funcionalidad en el manual de operación y mantenimiento.
2.6.4 Valores Prefijados (Defaults)
Valores prefijados de las Alarmas
Ítem Gama Valor prefijado
Reset Automático --- No
Tiempo de Auto Reset (ms) 0 – 99999 0
Selección de Entrada de Hardware 0 – 16 1
Inversión de Entrada de Hardware --- No
Modo de Entrada de Hardware 0 – 2 0
Tiempo de pulso de entrada de hardware 0 – 99999 0
Entrada de hardware habilitada en local --- Falso
Puerto de Com. 1 habilitado en local --- Verdadero
Entrada de hardware habilitada en remoto --- Verdadero
Puerto de Com. 1 habilitado en remoto --- Falso
El resto de las entradas al interruptor de control son deshabilitadas, sus
habilitadores tienen la condición de falso; el resto de los modos del control
son 0, el resto de los pulsos son 0ms. Vea la sección 7.1 para más detalles.
Valores prefijados de los paros de emergencia
Ítem Gama Valor prefijado
Reset Automático --- No
Tiempo de Auto Reset (ms) 0 – 99999 0
Selección de Entrada de Hardware 0 – 16 1
Inversión de Entrada de Hardware --- No
Modo de Entrada de Hardware 0 – 2 0
Tiempo de pulso de entrada de hardware 0 – 99999 0
Entrada de hardware habilitada en local --- Falso
Selección de Entrada de Hardware --- Trae
Entrada de hardware habilitada en remoto --- Verdadero
Puerto de Com. 1 habilitado en remoto --- Falso

Configuración del Controlador
MRTOM10 SP 080227 - 31
El resto de las entradas al interruptor de control son deshabilitadas; los
habilitadores de el resto las entradas al interruptor de control tienen una
condición de falso; el resto de los modos del control son 0; el resto de los
pulsos son 0 ms. Vea la sección 7.1 para más detalles
2.7 La Pantalla de Entradas de Hardware del Sistema
Presione el botón ‘CONFIGURAR’ en la sección ‘Entradas Alambradas del
Sistema’ de la Pantalla de configuración de sistema para exhibir la Pantalla de
Entradas de Hardware del Sistema. Presione el `X' en la esquina superior
derecha de la pantalla para volver a la Pantalla de configuración de sistema.
Figura 27: Pantalla de configuración de entradas de hardware
Esta pantalla permite que el usuario configure las entradas de hardware
específicas para la:
• Detección de falla de la fuente de alimentación
• Detección del botón de paro de emergencia
• Detección de un disparo de protección

Controller Configuration
MRTOM10 SP 0802270 - 32
2.7.1 Seleccionar Entradas de Hardware del Sistema
Presionando los botones señalados por las flechas arriba aparece una
pantalla con el siguiente teclado:
Figura 28: Teclado para selección de entrada
Este teclado permite que el usuario elija la entrada de hardware a utilizar
como la base para las señales arriba enumeradas. Presionando el botón
‘ENTER’ se asigna un de las 16 entradas de hardware. Presionando botón
‘ESC’ se cancela cualquier cambio realizado. Para definir una entrada
como sin usar, presione la tecla con punta de flecha hacia abajo hasta que
se muestre ‘SIN USAR’ y presione ‘ENTER’..
2.7.2 Alarmas en Disparos de Protección
Un disparo de protección indica un evento externo al gobernador que
genera una condición de paro de emergencia del gobernador.
En caso que usted no desee generar una alarma para indicar esto, fije este
interruptor de la configuración a 'NO ALARMAR en disparo de
protección’.
En caso que usted desee una alarma que indique que se haya generado un
disparo externo, fije el interruptor de la configuración en ‘ALARMAR en
disparo de protección'.
2.7.3 Valores Prefijados (Defaults)
Ítem Gama Valor prefijado
Número de entrada para falla de fuente de
alimentación
0 – 16 0
Número de entrada para botón de paro de
emergencia
0 – 16 0
Número de entrada para disparo de protección 0 – 16 10
Alarmar en disparo de protección --- Falso
2.8 Interruptores del Mando Local/Remoto
El usuario puede configurar un interruptor de control para seleccionar el modo
local presionando botón ‘Local’, y presionando ‘Remoto’ para modo remoto en
la Pantalla de configuración de sistema.

Configuración del Controlador
MRTOM10 SP 080227 - 33
Los interruptores de control se usan en el proceso de la configuración para
determinar qué variables activan o desactivan funciones específicas, y son
completamente configurables para permitir el control a partir de entradas del
hardware, de variables discretas internas del sistema, y/o variables provenientes
del puerto de comunicación. Además, cualquiera o todas las entradas elegidas se
pueden habilitar o deshabilitar en base al estado del modo del mando local o
remoto. Para aprender cómo configurar los interruptores de control, vea la
sección 7.1. Una descripción completa de todas las variables internas que se
puedan usar para un interruptor de control se encuentra en la sección “Hardwired
Interface” de la descripción de la funcionalidad en el manual de operación y
mantenimiento.
2.9 Interruptores de Control del Arranque / Paro
El usuario puede configurar un interruptor de control para el arranque
presionando el botón ‘Arranque’, y para el paro presionando el botón ‘Paro’ de la
sección Interruptor de Control de la Pantalla de configuración de sistema.
Los interruptores de control se usan en el proceso de la configuración para
determinar qué variables activan o desactivan funciones específicas, y son
completamente configurables para permitir el control a partir de entradas del
hardware, de variables discretas internas del sistema, y/o variables provenientes
del puerto de comunicación. Además, cualquiera o todas las entradas elegidas se
pueden habilitar o deshabilitar en base al estado del modo del mando local o
remoto. Para aprender cómo configurar los interruptores de control, vea la
sección 7.1. Una descripción completa de todas las variables internas que se
puedan usar para un interruptor de control se encuentra en la sección “Hardwired
Interface” de la descripción de la funcionalidad en el manual de operación y
mantenimiento.

Controller Configuration
MRTOM10 SP 0802270 - 34
3. Pantalla de configuración de la Válvula Principal
Presione el botón ‘CONFIGURAR VÁLVULA PRINCIPAL' en Pantalla de
configuración del MRT para exhibir la Pantalla de configuración de la válvula principal.
Presione el `X' en la esquina superior derecha de la pantalla para volver a Pantalla de
configuración del MRT.
Figura 29: Pantalla de configuración de la válvula principal
En esta pantalla el usuario puede:
• Configurar el valor de la posición de paro del gobernador
• Tener acceso a la Pantalla de configuración del servo (el control del lazo cerrado)
• Tener acceso a la pantalla del piloto universal del control
• Tener acceso a las pantallas de configuración para el control manual de la referencia
del servomotor principal Posición de Válvula en Paro – Es el valor que es forzado en el comando de la consigna
de la válvula principal cuando ocurre un paro de la unidad.
Ítem Gama Valor prefijado Valor de posición de paro (%) -50 – 150 -50

Configuración del Controlador
MRTOM10 SP 080227 - 35
3.1 Pantalla de configuración del Servomotor Principal
Presione el botón ‘Controlador de Válvula’ en la sección ‘Control del lazo
cerrado’ de la Pantalla de configuración de la válvula principal para exhibir la
Pantalla de configuración del servomotor principal. Presione la `X' en la esquina
superior derecha de la pantalla para volver a la Pantalla de configuración de la
válvula principal.
Figura 30: Pantalla de configuración del servomotor principal con salida direccional
Esta pantalla permite que el usuario configure los parámetros del control del lazo
cerrado del servomotor principal. Observe que dependiendo del tipo de salida
seleccionado se presentarán diversas opciones de la configuración.

Controller Configuration
MRTOM10 SP 0802270 - 36
Figura 31: Pantalla de configuración del servomotor principal con salida integrativa
Figura 32: Pantalla de configuración del servomotor principal con salida proporcional

Configuración del Controlador
MRTOM10 SP 080227 - 37
3.1.1 Pantalla de configuración de la Entrada Analógica del Servomotor
Principal
Figura 33: Sección del canal de la entrada de la Pantalla de configuración del servomotor principal
El usuario debe configurar la entrada analógica que será la señal de
retroalimentación para el control del lazo cerrado. Para hacer esto el
usuario debe designar el número de canal correspondiente.
Una vez designado el canal, aparece el botón ‘Configurar’. Presiónelo
para exhibir la Pantalla de configuración de la entrada analógica del
servomotor principal. Presione el `X' en la esquina superior derecha de la
pantalla para volver a la Pantalla de configuración del servomotor
principal.
Figura 34: Pantalla de configuración de la entrada analógica del servomotor principal

Controller Configuration
MRTOM10 SP 0802270 - 38
a. Escalamiento
Figura 35: Sección del escalamiento de la pantalla principal de la configuración de la entrada analógica del servomotor
La figura de arriba representa la porción del escalamiento de la Pantalla de
configuración de la entrada analógica del servomotor principal. La
primera fila se utiliza para incorporar los valores alto y bajo en
miliamperios (mA) de la entrada al sistema. La segunda fila se utiliza para
incorporar los valores bajo y alto en las unidades de la ingeniería que la
entrada en miliamperios representará.
Columna actual a la derecha muestra el valor actual de la entrada en mA y
en Unidades. El valor en Unidades es en base a la configuración
incorporada por el usuario. El Valor Actual permitirá que el usuario
verifique el escalamiento correcto de una entrada variando los mA
provistos al sistema.
Por ejemplo, para configurar correctamente la señal de retroalimentación
del servomotor principal, el servomotor debe ser forzado a las posiciones
de completamente cerrado y completamente abierto. La lectura del valor
Actual en mA mostrará al usuario qué entrar para los valores bajo y alto en
mA. Los valores de Unidades entonces serían fijados a 0 y a 100 para el
bajo y alto, respectivamente, para representar 0 - el 100% de apertura de
los álabes.
Nota: ¡El cierre y apertura completa de los álabes deben ser hechos
mientras que la unidad no tenga agua y esté en un estado seguro!

Configuración del Controlador
MRTOM10 SP 080227 - 39
Detección de Falla
Figura 36: Sección de la detección de falla de la Pantalla de configuración de la entrada analógica del servomotor principal
En esta sección el usuario puede configurar los límites Bajo y Alto de falla
para la entrada analógica. El `Tiempo' en milisegundos (ms) es la
cantidad de tiempo que la entrada debe estar sobre el límite alto o debajo
del límite bajo para generarse una señal de falla.
Tiempo de Filtrado
Figura 37: Sección del tiempo de filtrado de la Pantalla de configuración de la entrada analógica del servomotor principal
El usuario puede agregar filtración a una entrada cambiando este valor
(ms). Esto puede ser útil al configurar un transductor del nivel del
embalse para eliminar o reducir al mínimo el efecto que tengan las olas en
el transductor.

Controller Configuration
MRTOM10 SP 0802270 - 40
Determinación de Disparidad
Figura 38: Sección de la determinación de disparidad en la Pantalla de configuración de la entrada analógica del servomotor principal
La función de determinación de disparidad compara el valor de la
retroalimentación del servomotor a la consigna del servomotor. Si la
retroalimentación no cambia y no se alinea con la consigna, se genera una
alarma y/o señal de paro. La función de determinación de disparidad se
realiza sólo cuando la señal de retroalimentación no se está moviendo.
Para determinarse si la señal de retroalimentación no se está moviendo, la
función primeramente filtra la retroalimentación para eliminar cualquier
ruido. La filtración depende del Tiempo del filtro (ms); cuanto más largo
la retroalimentación se filtra, más tiempo lleva a la función el detectar un
cambio en la retroalimentación. Después del filtrado, se calcula el índice
de cambio de la retroalimentación y se compara al valor del umbral del
(%/s). Si el índice del cambio de la señal de retorno es menos que el
umbral, la función de determinación de disparidad se habilita.
Si la función se habilita (la señal de retroalimentación se ha parado de
mover) y el error entre la consigna y la retroalimentación es mayor que el
error máximo (%) por la cantidad de tiempo especificada en el ‘Tiempo
Máx’ (ms), una alarma o una señal de paro será generada (la señal de paro
se configura típicamente con un Error Máx. más grande).
Si la función de determinación de disparidad no se desea, es posible fijar
error máximo al 100% (carrera completa del servo). Por ejemplo, la
alarma se podría configurar con un error máximo del 10% y un Tiempo
máximo de 20000ms, y la señal de paro se podría configurar con un error
máximo del 100%. En este caso, solamente sería generada una alarma de
disparidad en caso de disparidad. La señal de paro de disparidad no sería
generada; por lo tanto la unidad no dispararía Fuera de Línea.
Nota: El Tiempo de filtro y el umbral en la sección de ‘Determinación de
Disparidad’ condiciona la señal de retroalimentación sólo para la
determinación de disparidad. Es decir, no tienen ningún efecto en la señal
de retroalimentación de la posición del servomotor principal a otra parte
en el sistema. El Tiempo de filtro de la sección de determinación de
disparidad no reemplaza ni substituye el Tiempo de filtrado descrito en la
sección de arriba.

Configuración del Controlador
MRTOM10 SP 080227 - 41
Parámetros Prefijados (Default)
Ítem Gama Valores prefijados
Señal alta de entrada analógica (mA) 0 – 25 20
Señal baja de entrada analógica (mA) 0 – 25 4
Valor alto de entrada analógica (%) --- 100
Valor bajo de entrada analógica (%) --- 0
Falla por entrada analógica alta (mA) 0 – 25 22
Falla por entrada analógica baja (mA) 0 – 25 2
Tiempo para falla de entrada analógica (ms) 0 – 99999 100
Tiempo de filtro de entrada analógica (ms) 0 – 99999 0
Error Máx. para alarma de disparidad (%) 0 – 100 10
Error Máx. para el paro de disparidad (%) 0 – 100 20
Tiempo Máx. para alarma de disparidad
(ms)
0 – 99999 20000
Tiempo Máx. para paro de disparidad (ms) 0 – 99999 12000
Tiempo de filtro de disparidad (ms) 0 – 99999 1000
Umbral de disparidad (% / s) --- 1
Las secciones siguientes requieren la navegación a la Pantalla de
configuración del servomotor principal.
3.1.2 Sintonización del Lazo Cerrado
Figura 39: Sección de control de lazo cerrado de la Pantalla de configuración del servomotor principal
Nota: La sección de Sintonización del Lazo Cerrado no aparece cuando el
tipo de la salida elegida es ‘Proporcional’.

Controller Configuration
MRTOM10 SP 0802270 - 42
Interruptor de Control
El interruptor de control de selección de ganancia permite seleccionar una
de las dos ganancias disponibles para el control de lazo cerrado del
servomotor. La ventaja del tener más de una ganancia es que permite al
sistema tener respuestas similares bajo condiciones de funcionamiento
sumamente diversas. Por ejemplo, puede ser deseable tener una respuesta
rápida del servomotor principal bajo control automático, pero indeseable
bajo control manual. También, una ganancia alta puede ser necesaria
cuando se está en línea, pero ésa misma ganancia alta podría hacer el
sistema inestable cuando se está Fuera de Línea. Dos ganancias distintas
permiten que el sistema alcance un control preciso en estas situaciones.
Los interruptores de control se usan en el proceso de la configuración para
determinar qué variables activan o desactivan funciones específicas, y son
completamente configurables para permitir el control a partir de entradas
del hardware, de variables discretas internas del sistema, y/o variables
provenientes del puerto de comunicación. Además, cualquiera o todas las
entradas elegidas se pueden habilitar o deshabilitar en base al estado del
modo del mando local o remoto. Para aprender cómo configurar los
interruptores de control, vea la sección 7.1. Una descripción completa de
todas las variables internas que se puedan usar para un interruptor de
control se encuentra en la sección “Hardwired Interface” de la descripción
de la funcionalidad en el manual de operación y mantenimiento.
Ganancia 1, Ganancia 2, Tiempo de Adelanto, Ganancia de la Válvula
Para aumentar o disminuir la respuesta del sistema el usuario debe
modificar la ganancia del control del lazo cerrado. En control de lazo
cerrado, el error se calcula como la diferencia entre la consigna y la
posición. Este error es multiplicado por la ganancia para conducir al
servomotor hacia la posición de consigna. Una ganancia alta hará el
servomotor más sensible, mientras que una ganancia baja hará el
servomotor menos sensible. Se proporcionan dos ganancias para permitir
diversas condiciones de funcionamiento. Cuando interruptor de control de
selección de ganancia se habilita, el usuario debe dar valores para la
Ganancia 1 y la Ganancia 2. Cuando interruptor de control se deshabilita,
sólo se debe dar un valor para la Ganancia 1.
El ‘Tiempo de adelanto’ (ms) también afectará la respuesta del sistema.
Un Tiempo de adelanto largo dará lugar a una respuesta ‘amortiguada’ y
reducirá exceso del movimiento en la posición del servomotor. Un
Tiempo de adelanto de menos que 10ms producirá respuesta bajo
amortiguada. El Tiempo de adelanto es comparable a la porción
derivativa en un sistema tradicional de PID.

Configuración del Controlador
MRTOM10 SP 080227 - 43
La ‘Ganancia de la válvula’ es la ganancia de la válvula que está siendo
usada el control de lazo cerrado, ya sea la Ganancia 1 o la Ganancia 2.
3.1.3 Modo de Prueba
Figura 40: Sección de Modo de Prueba de la Pantalla de configuración del servomotor principal
El servomotor principal se puede operar usando la interfaz del ‘Modo de
Prueba’ mostrado arriba. Este modo de prueba se habilita cuando el
control de la válvula no se habilita. El modo de prueba permite al usuario
enviar comandos directos de consigna a la válvula en una manera de lazo
cerrado o de lazo abierto. Esto se utiliza típicamente durante la
calibración inicial de transductores, de modo que haya correlación entre lo
que lee el controlador de válvula y lo que el servomotor está haciendo.
El modo de la prueba se debe habilitar para que aparezca botón de
Activado/ Inactivado.
Para funcionar en modo de prueba con control de lazo cerrado, presione el
botón (véase la flecha) para alternar la selección a servomotor. Si el modo
de prueba está activado, aparecerá un botón para la consigna del servo. De
un valor aquí para conducir el servomotor a esta posición a la respuesta a
la prueba de lazo cerrado. Cuanto más alto es el aumento, más aprisa el
servomotor conducirá al setpoint. La posición principal del servomotor
exhibirá en la posición.
Para funcionar modo de la prueba con control de lazo abierto, presione el
botón (véase la flecha) para alternar a Válvula. Si el modo de la prueba
está activado, aparecerá un botón de la consigna para la posición de la
válvula. De un valor aquí para conducir la válvula proporcional a esta
posición. Porque éste es control del lazo abierto, una consigna positiva
conducirá el servomotor principal a una forma constante a la posición
completamente abierta. Una consigna negativa conducirá el servomotor
principal en forma constante a la posición completamente cerrada. Se
debe tener el cuidado apropiado para asegurar que el recorrido completo
en cualquier dirección no dañe a la unidad. Para parar el recorrido, de una
consigna de valor 0. La posición del servomotor principal se exhibirá en
el campo llamado ‘Posición’.

Controller Configuration
MRTOM10 SP 0802270 - 44
3.1.4 Salida
Salida Proporcional
Figura 41: Salida tipo Proporcional
Se usa el tipo de la salida proporcional cuando la salida del gobernador es
una señal indicativa de la consigna deseada para el servomotor. Éste es el
caso cuando se tiene una electrónica de control externa capaz de
posicionar el servomotor (p.ej. un amplificador sumador). Para el caso de
salida proporcional, el gobernador no necesita una retroalimentación de
posición del servo. Tampoco se requiere, por tanto, sintonizar al
controlador, pues la señal de salida del gobernador es una señal de 4 – 20
mA que indica la posición deseada del servomotor (0 – 100%).
Salida Integrativa
Figura 42: Salida tipo integrativa
Si la salida del gobernador es una señal de control diseñada para
proporcionar control de lazo cerrado a un dispositivo externo tal como una
válvula proporcional, el tipo de la salida que debe ser utilizado es
integrativa. En este caso, el gobernador requiere tener una
retroalimentación de la posición, pues ésta se utiliza para determinar la
consigna de la válvula. Si se utiliza una salida integrativa, los siguientes
valores del controlador actuador necesitan ser ajustados.
Ganancia de la válvula - La diferencia entre la consigna y la posición es
multiplicada por este número para determinar el comando a la consigna
de la válvula. Una ganancia mayor hará que el servomotor sea más
sensible, mientras que una ganancia menor hará que el servomotor sea
menos sensible. Se proporciona un interruptor de selección de ganancia
para permitir diversas ganancias para diversas condiciones de
funcionamiento (p.ej. operación automática contra la manual, fuera de
línea contra en línea). Vea Figura 39.

Configuración del Controlador
MRTOM10 SP 080227 - 45
Sesgo (Bias) de la válvula - Un sesgo de la válvula se proporciona para
compensar cualquier error en el sistema de control proporcional de la
válvula. Dado que un control del lazo cerrado que no tiene ningún
integrador cualquier error de estado estacionario en el sistema de control
será mantenido Este error puede ocurrir debido a un transductor de
posición de la segunda etapa (como un LVDT) que no este centrado, o una
señal de comando a la válvula proporcional que no este calibrada
correctamente. Durante la calibración inicial de la válvula, el sesgo de la
válvula se puede ajustar para eliminar el error de estado estacionario en el
sistema de control. Este valor debe ser modificado si la consigna y la
posición no son iguales una vez que el servomotor deja de moverse.
Figura 43: Sección del dither de la Pantalla de configuración del servomotor principal
Dither – La oscilación, Dither, se utiliza típicamente solamente con las
válvulas de dos etapas. Una onda cuadrada se aplica a la consigna de la
válvula para mantener la hidráulica en constante oscilación durante la
operación normal. Se fijan la frecuencia y la magnitud de oscilación. El
dither se requiere para proporcionar el movimiento en la válvula
distribuidora principal. Esto responde a dos propósitos:
La válvula distribuidora principal se comportará como una válvula cero-
traslapa. Las válvulas distribuidoras principales se diseñan con un cierto
regazo positivo para reducir la salida. El movimiento cíclico elimina el
regazo positivo, permitiendo que el servomotor logre la posición final en
forma exacta. Y ayuda a prevenir que la válvula distribuidora principal se
pegue. El movimiento constante ayuda a prevenir que en el carrete se
forme barniz, eliminando problemas potenciales en la válvula.
Salida Direccional
Figura 44: Salida tipo direccional
Si las salidas del gobernador son señales de subir y bajar diseñadas para
activar un dispositivo externo tal como una válvula direccional de doble

Controller Configuration
MRTOM10 SP 0802270 - 46
acción, se debe usar el tipo de la salida direccional. Para este caso, el
gobernador requiere tener una retroalimentación de la posición, pues la
retroalimentación se utiliza para determinarse cuando se requieren las
señales de subir o bajar. Si se utilizan las salidas direccionales, los valores
siguientes dentro del conductor del actuador necesitan ser configurados,
además de los que se necesita configurar para una salida integrativa. Se
recomienda que la ganancia de la válvula esté fijada a 1.0 al usar salidas
direccionales. Así los parámetros siguientes son más intuitivos.
Período de PWM – El tiempo del ciclo del modulador de ancho de pulso.
Un nuevo pulso se genera una vez por período. La anchura del pulso
depende de los dos parámetros siguientes.
Valor continuo - La diferencia entre la consigna del servomotor y la
posición, sobre la cual los comandos de Subir y Bajar Válvula se activa
continuamente. Por ejemplo, suponga que se fija el valor continuo al
25%, la consigna actual del servomotor es 75%, y su posición actual del
servomotor es el 40%; el comando del subir la válvula estará activado
continuamente hasta que la posición del servomotor exceda el 50%.
Después de esto, comenzará a pulsar en base en el error que disminuye.
Tiempo mínimo - La duración más corta del pulso que se emite como un
señal de subir o baja la válvula. Esto determina la cantidad de banda
muerta en el controlador direccional.
3.1.5 Valores Prefijados (Defaults)
Ítem Gama Valor prefijado
Canal de la entrada analógica de la
retroalimentación del servomotor 0 – 8 1
Tipo de la salida 0 – 2 0 (Integrativa)
Sesgo (Bias) -100 – 100 0
Ganancia 1 0 – 100 10
Ganancia 2 0 – 100 15
Tiempo de Adelanto (ms) 0 – 99999 100
Modo de Prueba Habilitado --- Desactivado
Modo de Prueba --- Desactivado
Selección de prueba Servo/Válvula --- Servo
Consigna de prueba de servo (%) -5 – 105 0
Consigna de prueba de válvula (%) -100 – 100 -100
Magnitud del Dither (%) 0 – 5 0.5
Frecuencia del Dither (Hz) 1 – 50 20
Valor continuo del pulso (%) --- 0
Período del pulso PWM (ms) 0 – 99999 0
Tiempo mínimo del pulso (ms) 0 – 100 0

Configuración del Controlador
MRTOM10 SP 080227 - 47
3.2 Pantalla del Piloto Universal de Control
Presione el botón ‘Configurar’ en la sección del piloto universal de control de la
Pantalla de configuración de la válvula principal para exhibir la Pantalla del
piloto universal del control. Presione el `X' en la esquina superior derecha de la
pantalla para volver a Pantalla de configuración de la válvula principal.
Figura 45: Pantalla del Piloto Universal de Control
Nota: El botón ‘Configurar’ en el la sección del piloto universal de control es
solamente visible si se habilita la función. Necesita sólo ser habilitado si el
sistema usa el Piloto Universal de Control proveído por L&S Electric, Inc.
Esta pantalla permite que el usuario ate las cuatro señales de retroalimentación del
Piloto Universal de Control de L&S Electric, Inc.:
• Paro Restablecido
• Disparo de Paro
• Buena Presión
• Filtro Sucio
Cuando se presiona cualquiera de los cuatro botones (véase las flechas), aparecerá
el siguiente teclado:

Controller Configuration
MRTOM10 SP 0802270 - 48
Figura 46: Teclado de selección de entrada
Este teclado permite que el usuario elija la entrada de hardware a utilizar como la
base para las señales listadas arriba. Presionando las flechas y el botón ‘ENTER’
se asigna una de las 0 – 16 señales de hardware. Presionando el botón ESC se
cancela cualquier cambio realizado. Para definir una entrada como ‘Sin Usar’,
presione la flecha hacia abajo hasta que aparezca ‘Sin Usar’, y oprima “ENTER”.
El usuario puede también configurar los siguientes tiempos:
Retraso del arranque (ms) - Si se desea un corto retraso después de emitirse un
comando de funcionamiento al gobernador mientras que el mecanismo de paro se
desengancha, configure un retraso aquí. Por ejemplo, el usuario puede desear dar
un plazo de espera para que los frenos se dejen de aplicar. En algunos casos, un
interruptor de presión de aire se utiliza para determinar el estado de los frenos. Si
el interruptor se dispara, no significa necesariamente que las zapatas han sido
contraídas. Un Retraso da a las zapatas un tiempo adicional para terminar su
operación.
Pulso de salida (ms) – El tiempo que el contacto de la salida de arranque o
parada se mantiene activado para darle tiempo a la hidráulica de reaccionar al
comando.
Falla en el piloto (ms) - Esto previene alarmas falsas de bloque de la válvula al
dar un plazo para que las señales del piloto (Paro Restablecido y Disparo de Paro)
puedan cambiar su estado.
Se genera una alarma de bloqueo de la válvula cuando una de las condiciones
siguientes ocurre por más tiempo que la Falla en el piloto:
Operación de Arranque Inesperada – el solenoide de operación se energiza sin
comando del controlador.
Falla en el Arranque - el solenoide de operación no puede energizarse después de
comando del comienzo del controlador.
Operación de Paro Inesperada - el solenoide de operación se desenergiza sin
comando del controlador.
Falla en el Paro - el solenoide de operación no puede desenergizarse después de
comando de parada del controlador.
Estado Desconocido – La señales de ‘Paro Restablecido’ y “Disparo de Paro’
están ambas en el mismo estado (energizado o desenergizado).

Configuración del Controlador
MRTOM10 SP 080227 - 49
3.2.1 Valores Prefijados (Defaults)
Ítem Gama Valor prefijado Entrada de Hardware pare el Paro
Restablecido
0 – 16 0
Entrada de Hardware para el
Disparo de Paro
0 – 16 0
Entrada de Hardware para Buena
Presión
0 – 16 0
Entrada de Hardware para Filtro
Sucio
0 – 16 0
Retraso de Arranque (ms) 0 – 99999 500
Pulso de Salida (ms) 0 – 99999 1000
Falla en el Piloto (ms) 0 – 99999 1000
3.3 Configuración del Control Manual de Referencia
El usuario puede configurar el control manual del servomotor principal con el uso
botones del control mostrados abajo.
Figura 47: Sección de control manual de la Pantalla de configuración de la válvula principal
El control manual de la referencia da a usuario la capacidad de funcionar el
servomotor estrictamente como posicionador. Cuando se da una consigna
manual, el control de lazo cerrado llevará al servomotor hacia la posición de
consigna y descansará allí, sin importar error de la velocidad.
Nota: Estos botones son solamente visibles cuando están habilitados. Sólo se
necesitan habilitar si se desea una referencia manual para el servomotor.
3.3.1 Pantalla de Referencia Manual (Servo Principal)
Presione el botón ‘Configurar’ en la sección del control manual de
consigna de la Pantalla de configuración de la válvula principal para

Controller Configuration
MRTOM10 SP 0802270 - 50
exhibir la pantalla manual de la referencia (servo principal). Presione el
`X' en la esquina superior derecha de la pantalla para volver a la pantalla
principal de la configuración de la válvula.
Figura 48: Pantalla manual de la referencia (servo principal)
Esta pantalla permite que el usuario configure los parámetros de la
referencia manual para el servo principal.
Límite mínimo - Éste es el valor mínimo, o la consigna, que la referencia
puede obtener. Una vez que la referencia alcance este límite inferior, no
podrá disminuir más, sin importar comandos o consignas.
Límite máximo - Éste es el valor máximo, o la consigna, que la referencia
puede obtener. Una vez que la referencia alcance este límite superior, no
podrá aumentar más, sin importar comandos o consignas.
Razón de cambio (Unidades/s) - Este valor indica que tan rápidamente la
referencia cambiará cuando se le da un pulso de subir o bajar, o una nueva
consigna analógica. Esto es útil si se desea limitar que tan rápidamente la
referencia cambie con un cambio en la consigna. No importando la
magnitud del cambio en la consigna, este valor aumentará o disminuirá la
salida de la referencia de una manera constante y controlada para
mantener estabilidad del sistema.
Tiempo Mín. del Pulso (ms) - Ésta es la duración mínima que un
comando de subir o bajar afectará la salida de la referencia. Si el comando
de subir la consigna manual de referencia se activa para una fracción de

Configuración del Controlador
MRTOM10 SP 080227 - 51
segundo, la salida de la referencia continuará aumentando a la razón del
‘Razón de cambio’ hasta que el Tiempo Mín. del Pulso expire.
3.3.2 Interruptor de Control de Activación Manual de la Válvula Principal
Se proporciona un interruptor de control para activar o desactivar la
referencia manual. Presione el botón ‘Activar/Desactivar’ en la sección de
interruptor de control de la pantalla de control manual de configuración de
la pantalla de selección de Activación o desactivación del control manual
de la válvula. Presione el `X' en la esquina superior derecha de cualquier
pantalla para volver a la pantalla principal de configuración de la válvula.
Los interruptores de control se usan en el proceso de la configuración para
determinar qué variables activan o desactivan funciones específicas, y son
completamente configurables para permitir el control a partir de entradas
del hardware, de variables discretas internas del sistema, y/o variables
provenientes del puerto de comunicación. Además, cualquiera o todas las
entradas elegidas se pueden habilitar o deshabilitar en base al estado del
modo del mando local o remoto. Para aprender cómo configurar los
interruptores de control, vea la sección 7.1. Una descripción completa de
todas las variables internas que se puedan usar para un interruptor de
control se encuentra en la sección “Hardwired Interface” de la descripción
de la funcionalidad en el manual de operación y mantenimiento.
3.3.3 Control de Consignas de Referencia de la Válvula
Presione el botón Subir/Bajar en la sección de Control de Consignas de la
Pantalla de configuración de la válvula principal para exhibir la pantalla 1
de control manual de la válvula principal. Presione el botón ‘Consigna
Analógica’ en la misma sección para exhibir la pantalla 2 de control
manual de la válvula principal. Presione el `X' en la esquina superior
derecha de cualquier pantalla para volver a la Pantalla de configuración de
la válvula principal.
Las pantallas del control de consignas de referencia permiten que el
usuario asigne entradas de hardware, variables discretas internas del
sistema, y/o variables de la comunicación a los comandos de subir/bajar, y
a los comandos de consignas analógicas para ajustar la consigna de
referencia. Además, todas las entradas elegidas puede ser habilitadas o
deshabilitadas en base al estado del modo del mando local o remoto. Para
aprender cómo configurar comandos de la consigna de la referencia, vea la
sección 7.2.

Controller Configuration
MRTOM10 SP 0802270 - 52
3.3.4 Valores Prefijados (Defaults)
Ítem Gama
Valor prefijado
Límite Mín. de Referencia Manual 0 – 100 0
Límite Máx. de Referencia Manual 0 – 100 100
Razón de Cambio de Ref. Manual (1/s) --- 5
Tiempo Mín. del Pulso de Ref. Manual
(ms) 0 – 99999 100
Interruptor de Control Manual de
Desactivar – No. de señal de entrada 0 – 74 21
Interruptor de Control Manual de
Desactivar – inversor de señal interna --- No
Interruptor de Control Manual de
Desactivar – modo de señal interna 0 – 2 0
Interruptor de Control Manual de
Desactivar – Puerto de Com. No.1
habilitado en Local
--- Verdadero
Interruptor de Control Manual de
Desactivar – señal interna habilitada en
Remoto
--- Verdadero
Interruptor de Control Manual de Activar
– Puerto de Com. No.1 habilitado en
Local
--- Si
Control de Consignas – Puerto de Com.
No.1 Consigna analógica habilitada en
Local
--- Verdadero
Control de Consignas – Puerto de Com.
No.1 Subir/bajar habilitado en Local --- Verdadero
La tabla anterior es para cuando se selecciona el control manual para el
servomotor principal y el usuario cambia el modo del control de local a
remoto, la acción inicial es emitir una señal interna para desactivar
automáticamente el control manual (señal de entrada interna No.21 es
‘Indicación de Modo Remoto’). También por default, cuando el modo del
control es local el usuario puede activar o desactivar el control manual, o
cambiar la consigna manual del control del Puerto de Com. No.1 (el panel
de interfaz).
El resto de los parámetros del control de consigna para la referencia
manual son inhabilitados. Para una lista completa de gamas y de variables
para el control de consigna, vea las secciones 7.1 (interruptor de control) y
7.2 (los comandos de la referencia).

Configuración del Controlador
MRTOM10 SP 080227 - 53
4. Pantalla de configuración del Gobernador
Presione el botón ‘Configurar el Gobernador’ en la Pantalla de configuración de MRT
para exhibir Pantalla de configuración del gobernador. Presione el `X' en la esquina
superior derecha de la pantalla para volver a Pantalla de configuración del MRT.
Figura 49: Pantalla de Configuración del Gobernador
Aquí el usuario puede:
• Configurar las entradas de señal de la velocidad
• Tener acceso a la pantalla de los modos del control del gobernador
• Tener acceso a la pantalla de las entradas de hardware
• Tener acceso a las pantallas de interruptores de control de la razón de control
anticipante
• Tener acceso a las pantallas de interruptores de control del arranque
manual/automático
• Tener acceso a las pantallas de interruptores de control de activar/Desactivar el
arranque rápido
Dos entradas de velocidad están disponibles para la configuración (la pantalla de arriba
muestra las dos señales de la velocidad habilitadas). Se miden las señales de la velocidad
usando los contadores de alta velocidad (HSC). Los parámetros siguientes se deben
configurar para definir las señales de la velocidad.

Controller Configuration
MRTOM10 SP 0802270 - 54
Frecuencia Nominal (Hz) – La frecuencia que el contador de alta velocidad va a medir
cuando la unida gira a la velocidad nominal. Idealmente, la señal de velocidad primaria es
la señal del TP del generador. La frecuencia nominal de esta señal será típicamente 60Hz
o 50 Hz. Preferentemente, dos señales redundantes estarán disponibles para reducir el
tiempo que la unidad esté parada en caso de una falla en la señal de velocidad. La señal
secundaria de velocidad es típicamente de un sensor de proximidad (magnético u óptico)
que lee los pulsos de una rueda dentada. En ese caso, el usuario debe contar el número de
dientes de la rueda y multiplicar por el número de revoluciones por minuto, y dividir por
60 (o 50) para determinar los pulsos/segundo o frecuencia nominal en 60Hzo 50Hz.
Tiempo de Filtrado (ms) – Fije este valor diferente a cero para filtrar el ruido a la
entrada de la señal de velocidad.
Velocidad Nominal (Hz) – La frecuencia nominal en Hertz de la turbina (50 o 60 Hz).
Velocidad Nominal (rpm) – La velocidad nominal de la turbina en rpm
Tiempo para falla de velocidad (s) – Durante el arranque de la unidad, si no se detecta
una señal de velocidad después de este tiempo, la unidad emitirá una alarma por Falla en
Señal de Velocidad y un paro. Este parámetro se debe fijar con cuidado para evitar
indicaciones falsas que podrían ocurrir si se da un tiempo muy corto para que la unidad
pueda alanzar la velocidad inicial de rotación.
Falla de Velocidad en Línea – este botón determina como la unidad reacciona a una
pérdida total de señal de velocidad cuando opera en línea. Normlmente, cuando la señal
de veocidad falla (o ambas señales de velocidad fallan, si es que hay dos), la unidad
genera un disparo de paro de emergencia y la unidad se para. Sin embargo, puede haber
unos casos en los que se quiera permitir a la unidad continuar operando (por ejemplo,
cuando se está conectada a la red). Si se elige, con este botón, el ‘100%’, el controlador
fijara la consigna de velocidad a la velocidad nominal y la turbina continuará operando, a
sin señal de velocidad. Tenga en cuenta que en este modo, el controlador no podrá
regular la velocidad y en este caso actúa sólo como un posicionador. Una condición de
sobre velocidad puede ocurrir sin generarse una alarme de sobre velocidad ni apagar la
unida.
Ítem Gama Valor prefijado Habilitación del 2
do canal --- Falso
Frecuencia Nominal Canal 1 --- 60
Tiempo de filtrado de canal 1 (ms) 0 – 99999 50
Frecuencia Nominal Canal 2 --- 100
Tiempo de filtrado de canal 2 (ms) 0 – 99999 75
Velocidad Nomina del Gobernados (Hz) --- 60
Velocidad Nomina del Gobernados (RPM) --- 100
Tiempo para falla de velocidad (s) 0 – 99 20
Falla de Velocidad en línea --- Paro

Configuración del Controlador
MRTOM10 SP 080227 - 55
4.1 Pantalla de los Modos del Control del Gobernador
Presione el botón ‘Configurar’ en la sección del `del control del gobernador ' del
Pantalla de configuración del gobernador para exhibir Pantalla de los modos del
control del gobernador. Presione el `X' en la esquina superior derecha de la
pantalla para volver a Pantalla de configuración del gobernador. ¿Presione el
botón ‘?’ en el lado inferior izquierdo de la pantalla para navegar a una pantalla
de la ayuda asociada a esta pantalla.
Figura 50: Pantalla de los modos del control del gobernador con todos los modos del control permitidos
Aquí el usuario puede configurar los modos de funcionamiento del gobernador
MRT. Los modos de funcionamiento siguientes están disponibles:
• Control de Límite del Servo
• Control en Fuera de Línea
• Control del Servomotor
• Control de Red Aislada
• Control de Sistema Pequeño
• Control de Proceso (control de potencia o control de flujo)
• Control de Nivel
• Control de Condensador Sincrónico

Controller Configuration
MRTOM10 SP 0802270 - 56
• Los únicos modos de funcionamiento habilitados por Default son: Control del
Límite del Servo, Control en Fuera de Línea y Control de Servomotor. Para
una descripción de los diversos modos de funcionamiento y cuando son
activos, vea el manual de operación y mantenimiento.
Número de los modos del control activos - Afecta cuántos modos pueden ser
seleccionados simultáneamente. Afecta los siguientes modos de control:
• Control de Red Aislada
• Control de Sistema Pequeño
• Control de Proceso
• Control de Nivel
Si este ajuste es ‘Uno a la vez’, sólo uno de los cuatro modos del control se puede
seleccionar a la vez. Así, si se selecciona el Control de Red Aislada cuando el
control de proceso está activado, el control de proceso será desactivado.
Si el ajuste es ‘Múltiples’ los cuatro de los modos del control se pueden
seleccionar simultáneamente. En ese caso, el modo de más alta prioridad toma
precedencia sobre las otras. La orden de la prioridad es: Control de Red Aislada,
Control de Sistema Pequeño, Control de Proceso, y Control de Nivel.
4.1.1 Pantalla de configuración del Límite del Servomotor
Presione el botón ‘Configurar’ en la sección de ‘Control de Límite de
Servo’ de la pantalla de los modos del control del gobernador para exhibir
la Pantalla de configuración del límite del servomotor. Presione el `X' en
la esquina superior derecha de la pantalla para volver a la pantalla de los
modos del control del gobernador.

Configuración del Controlador
MRTOM10 SP 080227 - 57
Figura 51: Pantalla de configuración de límite del servomotor
Este modo se habilita siempre. El control del límite del servomotor da a
usuario la capacidad de operar el servomotor estrictamente dentro de
ciertos límites físicos. Para más información sobre límite del servomotor
El control, considera el manual de operación y mantenimiento.
a. Control de la Consigna
Las pantallas del control de la consigna de la referencia permiten que el
usuario asigne entradas de hardware, variables discretas internas del
sistema, y/o variables de la comunicación de subir o bajar y a los
comandos analógicos de la consigna de referencia para ajustar la consigna
de referencia. Además, cualquiera de las entradas elegidas puede ser
habilitadas o deshabilitadas en base al estado del modo del mando local o
remoto. Para aprender cómo configurar comandos de la consigna de
referencia, vea la sección 7.2.
b. Pantalla de la Referencia de Límite de Servomotor
Presione el botón ‘Consigna’ en la sección de ‘Configuración de Control’
de la Pantalla de configuración de límite de servomotor para exhibir la
pantalla de la referencia del límite del servomotor. Presione el `X' en la
esquina superior derecha de la pantalla para volver a la Pantalla de
configuración del límite del servomotor.

Controller Configuration
MRTOM10 SP 0802270 - 58
Figura 52: Pantalla de la referencia de límite de servomotor
Esta pantalla permite que el usuario configure los parámetros de la
referencia del límite para el servomotor principal.

Configuración del Controlador
MRTOM10 SP 080227 - 59
Límite Mínimo - Éste es el valor mínimo, o consigna, que la referencia
puede obtener. Una vez que la referencia alcance este límite inferior, no
podrá disminuir más, sin importar los comandos o consignas.
Límite Máximo - Éste es el valor máximo, o consigna, que la referencia
puede obtener. Una vez que la referencia alcance este límite superior, no
podrá aumentar para fomentar, sin importar comandos o consignas.
Razón de Cambio (1/s) - Este valor indica que tan rápidamente la
referencia cambiará cuando se le da un pulso de subir o bajar, o una nueva
consigna analógica. Esto es útil si se desea limitar que tan rápidamente la
referencia cambie con un cambio en la consigna. No importando la
magnitud del cambio en la consigna, este valor aumentará o disminuirá la
salida de la referencia de una manera constante y controlada para
mantener estabilidad del sistema.
Tiempo Mín. del Pulso (ms) - Ésta es la duración mínima que un
comando de subir o bajar afectará la salida de la referencia. Si el comando
de subir la consigna manual de referencia se activa para una fracción de
segundo, la salida de la referencia continuará aumentando a la razón del
‘Razón de cambio’ hasta que el Tiempo Mín. del Pulso expire.
Posición de Inicio de Rotación (%) - Si la velocidad del gobernador es
menos de 20%, la posición de inicio de rotación se utiliza como el valor
inicial para el límite del servomotor. Una vez que la velocidad del
gobernador aumente sobre el 20%, se utiliza el límite en Fuera de Línea.
Este parámetro puede tomar en uno de dos valores, dependiendo de la
configuración de “Arranque Rápido” en el interruptor de control de
Activar/Desactivar. Este parámetro es útil si una apertura de los álabes
más grande que el límite en Fuera de Línea es requerida para hacer que la
turbina empiece a rodar.
Límite en Fuera de Línea (%) - Éste es el límite máximo del servomotor
cuando la unidad está Fuera de Línea y la velocidad está por encima del
20%. La referencia del límite del servomotor no se puede aumentar sobre
el límite en Fuera de Línea.
Límite en Línea (%) - Éste es el límite máximo del servomotor cuando la
unidad está en Línea. La referencia del límite del servomotor no se puede
aumentar sobre el límite en línea.
c. Pantalla del Control del Límite del Servomotor
Presione el botón ‘Control’ en sección de la ‘Configuración del control’
de la Pantalla de configuración del límite del servomotor para exhibir la
pantalla del control del límite del servomotor. Presione el `X' en la
esquina superior derecha de la pantalla para volver a la Pantalla de
configuración del límite del servomotor.

Controller Configuration
MRTOM10 SP 0802270 - 60
Figura 53: Pantalla del control del límite del servomotor
Sobrepaso (%) - Ésta es la cantidad que la consigna del gobernador se
permite adelantar la posición real del servomotor (o el límite, basado en
parámetro ‘Limitación por’). Esto se usa para evitar el efecto ‘Windup’.
Limitación por – Límite o Posición. Esto trabaja en forma conjunta con el
sobrepaso para limitar la consigna del gobernador a un máximo de el
“límite + sobrepaso’ o “posición + sobrepaso” respectivamente.
Comando de subir (límite) - Este parámetro configurará si el comando de
subir es permitido o bloqueado cuando en la posición esté por encima del
límite.
d. Valores Prefijados (Defaults)
Ítem Gama Valor prefijado
Límite Mín. de la Referencia --- 0
Límite Máx. de la Referencia --- 100
Límite de Razón de Cambio de Ref (1/s) --- 5
Límite de Tiempo Mín. del Pulso de Ref
(ms)
0 – 99999 100
Límite de Posición de Inicio de Rotación –
Arranque Rápido Desactivado
0 – 100 0
Límite de Posición de Inicio de Rotación – 0 – 100 0

Configuración del Controlador
MRTOM10 SP 080227 - 61
Ítem Gama Valor prefijado
Arranque Rápido Activado
Límite de Referencia en Fuera de Línea 0 – 100 0
Límite de Referencia en Línea 0 – 100 100
Límite de Referencia de Sobrepaso 0 – 50 5
Límite de Referencia de Limitación por --- Posición
Límite de Referencia Comando de Subir --- Falso
4.1.2 Pantalla de configuración de la Velocidad Fuera de Línea
Presione el botón ‘Configurar’ en la sección del control Fuera de Línea de
la pantalla de los modos del control del gobernador para exhibir la Pantalla
de configuración de la velocidad fuera de línea. Presione el `X' en la
esquina superior derecha de la pantalla para volver a la pantalla de los
modos del control del gobernador.
Figura 54: Pantalla de configuración de Velocidad Fuera de Línea
Este modo del control del gobernador siempre se habilita. Y da al usuario
la capacidad de fijar una consigna de la velocidad cuando se está en Fuera
de Línea para permitir la sincronización con la red. Para más información
sobre el control de velocidad fuera de línea, vea el manual de operación y
mantenimiento.
a. Control de la Consigna

Controller Configuration
MRTOM10 SP 0802270 - 62
En esta pantalla el usuario puede asignar entradas de hardware, variables
discretas internas del sistema, y/o variables de comunicación a los
comandos de referencia de subir o bajar y referencias analógicas para
ajustar la referencia de la consigna. Además, cualquiera de estas entradas
pueden ser habilitadas o deshabilitadas en base al modo local o
remoto. Para más información acerca de esto ver la sección 7.2.
b. Pantalla de Referencia de la Velocidad Fuera de Línea
Presione el botón ‘Consigna’ en la sección de ‘control configuración’ de la
Pantalla de configuración de la velocidad fuera de línea para exhibir
Pantalla de referencia de la velocidad fuera de línea. Presione el `X' en la
esquina superior derecha de la pantalla para volver a Pantalla de
configuración de la velocidad fuera de línea.
Figura 55: Pantalla de referencia de la velocidad fuera de línea
Esta pantalla permite que el usuario configurar los parámetros de la
referencia de velocidad fuera de línea para el servomotor principal.
Límite Mínimo - Éste es el valor mínimo, o consigna, que la referencia
puede obtener. Una vez que la referencia alcance este límite inferior, no
podrá disminuir más, sin importar los comandos o consignas.
Límite Máximo - Éste es el valor máximo, o consigna, que la referencia
puede obtener. Una vez que la referencia alcance este límite superior, no
podrá aumentar para fomentar, sin importar comandos o consignas.

Configuración del Controlador
MRTOM10 SP 080227 - 63
Razón de Cambio (1/s) - Este valor indica que tan rápidamente la
referencia cambiará cuando se le da un pulso de subir o bajar, o una nueva
consigna analógica. Esto es útil si se desea limitar que tan rápidamente la
referencia cambie con un cambio en la consigna. No importando la
magnitud del cambio en la consigna, este valor aumentará o disminuirá la
salida de la referencia de una manera constante y controlada para
mantener estabilidad del sistema.
Tiempo Mín. del Pulso (ms) - Ésta es la duración mínima que un
comando de subir o bajar afectará la salida de la referencia. Si el comando
de subir la consigna manual de referencia se activa para una fracción de
segundo, la salida de la referencia continuará aumentando a la razón del
‘Razón de cambio’ hasta que el Tiempo Mín. del Pulso expire.
c. Pantalla Control de la Velocidad Fuera de Línea
Presione el botón ‘Control’ en la sección ‘configuración del control’ de la
Pantalla de configuración de la velocidad fuera de línea para exhibir la
Pantalla Control de la velocidad fuera de línea. Presione el `X' en la
esquina superior derecha de la pantalla para volver a Pantalla de
configuración de la velocidad fuera de línea.
Figura 56: Pantalla Control de la velocidad fuera de línea
Ganancia Proporcional (Kp) - Aumente este valor para aumentar el
cambio en la salida que se basa en el error entre la consigna y la
retroalimentación. Disminuya este valor para disminuir el cambio en la

Controller Configuration
MRTOM10 SP 0802270 - 64
salida que se basa en el error entre la consigna y la retroalimentación.
(Refiera a la sección 7.6 para la información adicional)
Ganancia Integral (Ki), (1/s) - Aumente este valor para aumentar el
cambio en la salida que se basa en el error entre la consigna y la
retroalimentación después de un plazo. Disminuya este valor para
disminuir el cambio en la salida que se basa en el error entre la consigna y
la retroalimentación después de un plazo. El término “integral” en un
control PID tradicional se refiere a veces como la “Ganancia de Reset”.
Esto es porque integra el error en un cierto plazo y ajusta la consigna de la
salida para reducir o ‘resetear’ el error de estado estacionario que puede
estar presente en el sistema. (Refiera a la sección 7.6 para la información
adicional).
Derivativa (Kd), (s) - Aumente este valor para aumentar el cambio en la
salida que se basa en la razón de cambio de la retroalimentación.
Disminuya este valor para disminuir el cambio en la salida que se basa en
la razón de cambio de la retroalimentación. (Refiera a la sección 7.6 para
la información adicional)
Ganancia de Estatismo o Droop (%) – El Estatismo permanente para el
modo del control. (Refiera a la sección 7.6 para la información adicional).
Droop - Estabilidad Transitoria (%) - Droop temporal para el modo del
control. (Refiera a la sección 7.6 para la información adicional).
Droop - Tiempo de filtrado de la estabilidad transitorio (ms) - Tiempo
temporal del droop temporal para el modo del control. (Refiera a la
sección 7.6 para la información adicional).
d. Valores Prefijados (Default)
Ítem Gama Valor prefijado
Límite Mín de Ref. de Velocidad Fuera
de Línea (%)
--- 85
Límite Máx. de Ref. de Velocidad Fuera
de Línea (%)
--- 110
Razón de Cambio de Ref. de Velocidad
Fuera de Línea (%/s)
--- 0.05
Tiempo Mín. de Pulso de Ref de
Velocidad Fuera de Línea (ms)
0 – 99999 100
Ganancia Proporcional del Control de
Velocidad Fuera de Línea (Kp)
0 – 20 1
Ganancia Integral del Control de
Velocidad Fuera de Línea (Ki)
0 – 9.99 0.1
Ganancia Derivativa del Control de
Velocidad Fuera de Línea (Kd)
0 – 9.99 0

Configuración del Controlador
MRTOM10 SP 080227 - 65
Estatismo (Droop) (%) 0 – 10 0
Droop – Ganancia Temporal (%) 0 – 100 5
Droop temporal – Filtrado (ms) 0 – 99999 5000
4.1.3 Servo Pantalla de configuración de Servomotor (Automático)
Presione el botón ‘Configurar’ en la sección control de servomotor de la
pantalla de los modos del control del gobernador para exhibir la Pantalla
de configuración de servo (automática). Presione el `X' en la esquina
superior derecha de la pantalla para volver a la pantalla de los modos del
control del gobernador.
Figura 57: Servo pantalla (auto) de la configuración
Este modo del control del gobernador siempre se habilita. El control de
servo da al usuario la capacidad de fijar una consigna al servomotor
mientras que está conectado con la red para cambiar salida de potencia
real del generador. Para más información sobre el control de servo, vea el
manual de operación y mantenimiento.
a. Control de Consigna
En esta pantalla el usuario puede asignar entradas de hardware, variables
discretas internas del sistema, y/o variables de comunicación a los
comandos de referencia de subir o bajar y referencias analógicas para
ajustar la referencia de la consigna. Además, cualquiera de estas entradas
pueden ser habilitadas o deshabilitadas en base al modo local o
remoto. Para más información acerca de esto ver la sección 7.2.

Controller Configuration
MRTOM10 SP 0802270 - 66
b. Pantalla de la Referencia para Control del Servo
Presione el botón ‘Consigna’ en la sección ‘configuración del control’ de
la Pantalla de configuración del Servomotor para exhibir la Pantalla de
referencia para control del servo. Presione el `X' en la esquina superior
derecha de la pantalla para volver a la Pantalla de configuración del
Servomotor.
Figura 58: Pantalla de la referencia de control del servo
Esta pantalla permite que el usuario configure los parámetros de referencia
de control del servomotor principal.
Límite Mínimo - Éste es el valor mínimo, o consigna, que la referencia
puede obtener. Una vez que la referencia alcance este límite inferior, no
podrá disminuir más, sin importar los comandos o consignas.
Límite Máximo - Éste es el valor máximo, o consigna, que la referencia
puede obtener. Una vez que la referencia alcance este límite superior, no
podrá aumentar para fomentar, sin importar comandos o consignas.
Razón de Cambio (1/s) - Este valor indica que tan rápidamente la
referencia cambiará cuando se le da un pulso de subir o bajar, o una nueva
consigna analógica. Esto es útil si se desea limitar que tan rápidamente la
referencia cambie con un cambio en la consigna. No importando la
magnitud del cambio en la consigna, este valor aumentará o disminuirá la
salida de la referencia de una manera constante y controlada para
mantener estabilidad del sistema.

Configuración del Controlador
MRTOM10 SP 080227 - 67
Tiempo Mín. del Pulso (ms) - Ésta es la duración mínima que un
comando de subir o bajar afectará la salida de la referencia. Si el comando
de subir la consigna manual de referencia se activa para una fracción de
segundo, la salida de la referencia continuará aumentando a la razón del
‘Razón de cambio’ hasta que el Tiempo Mín. del Pulso expire.
c. Pantalla de Control de Servomotor
Presione el botón ‘Control’ en la sección ‘configuración del control’ de la
Pantalla de configuración del Servomotor para exhibir la Pantalla de
control del servomotor. Presione el `X' en la esquina superior derecha de
la pantalla para volver a la Pantalla de configuración del Servomotor.
Figura 59: Pantalla de control del servo
Ganancia Proporcional (Kp) - Aumente este valor para aumentar el
cambio en la salida que se basa en el error entre la consigna y la
retroalimentación. Disminuya este valor para disminuir el cambio en la
salida que se basa en el error entre la consigna y la retroalimentación.
(Refiera a la sección 7.6 para la información adicional)
Ganancia Integral (Ki), (1/s) - Aumente este valor para aumentar el
cambio en la salida que se basa en el error entre la consigna y la
retroalimentación después de un plazo. Disminuya este valor para
disminuir el cambio en la salida que se basa en el error entre la consigna y
la retroalimentación después de un plazo. El término “integral” en un
control PID tradicional se refiere a veces como la “Ganancia de Reset”.
Esto es porque integra el error en un cierto plazo y ajusta la consigna de la

Controller Configuration
MRTOM10 SP 0802270 - 68
salida para reducir o ‘resetear’ el error de estado estacionario que puede
estar presente en el sistema. Vea la sección 7.6 para más información.
Derivativa (Kd), (s) - Aumente este valor para aumentar el cambio en la
salida que se basa en la razón de cambio de la retroalimentación.
Disminuya este valor para disminuir el cambio en la salida que se basa en
la razón de cambio de la retroalimentación. (Refiera a la sección 7.6 para
la información adicional)
Ganancia de Estatismo o Droop (%) – El Estatismo permanente para el
modo del control. (Refiera a la sección 7.6 para la información adicional).
Droop - Estabilidad Transitoria (%) - Droop temporal para el modo del
control. (Refiera a la sección 7.6 para la información adicional).
Droop - Tiempo de filtrado de la estabilidad transitorio (ms) - Tiempo
temporal del droop temporal para el modo del control. (Refiera a la
sección 7.6 para la información adicional).
Corrección Anticipante - curva de relación – Lleva la posición hacia la
consigna final más rápidamente que con el solo uso de las ganancias PID.
La cantidad que ayuda a conducir la posición hacia la consigna final es
determinada por el polinomio de segundo orden: Ax2 + Bx + C, donde “x”
es la consigna de referencia. Por ejemplo, en control de servomotor el
coeficiente de B sería fijado a 1.0, mientras que A y C se fijan a 0.0. Esto
es porque hay una correlación de uno a uno entre la retroalimentación
(posición de la compuerta) y la consigna (consigna del servomotor). Si la
interfaz de control fuera utilizada para el control de potencia, la relación
entre la abertura de los álabes y la potencia sería utilizada para determinar
los coeficientes. Éste es para permitir a la alimentación anticipante de la
señal para aproximar la abertura deseada basada en una consigna.
Corrección Anticipante – ganancia - La salida final con la corrección
anticipante es: FF = Ganancia* (Ax2 + Bx + C), donde “x” es la consigna
de referencia. Se aumenta la ganancia para incrementar la cantidad de
corrección anticipante aplicada al sistema.
Corrección Anticipante – Razón 1 (%/s) – Limita la razón de cambio de
la consigna del servomotor debido a la corrección anticipante a este valor
en %/s. Este razón de cambio se activa cuando se selecciona ‘Razón 1” en
el interruptor de control de selección.
Corrección Anticipante – Razón 2 (%/s) – Limita la razón de cambio de
la consigna del servomotor debido a la corrección anticipante a este valor
en %/s. Este razón de cambio se activa cuando se selecciona ‘Razón 2” en
el interruptor de control de selección.
Alimentación delantera - filtro Tiempo (ms) - Ésta es la constante de
tiempo de la corrección anticipante.

Configuración del Controlador
MRTOM10 SP 080227 - 69
d. Valores Prefijados (Defaults)
Ítem Gama Valor prefijado
Límite Mín. de Ref de Servo --- 0
Límite Máx. de Ref de Servo --- 100
Razón de Cambio de Ref de Servo (1/s) --- 5
Tiempo Mín. del Pulso de Ref de Servo
(ms)
0 – 99999 100
Ganancia Proporcional de Control del
Servo (Kp)
0 – 20 1
Ganancia Integral de Control del Servo
(Ki)
0 – 9.99 0.1
Ganancia Derivativa de Control del
Servo (Kd)
0 – 9.99 0
Estatismo (Droop) (%) 0 – 10 5
Estatismo (Droop) temporal (%) 0 – 100 5
Tiempo de Filtrado – Droop Temporal
(ms)
0 – 99999 5000
Coeficiente A de Control Anticipante -5 – 5 0
Coeficiente B de Control Anticipante -5 – 5 1
Coeficiente C de Control Anticipante -5 – 5 0
Ganancia de Control Anticipante 0 – 2 1
Razón 1 de Control Anticipante (%/s) 0 – 100 5
Razón 2 de Control Anticipante (%/s) 0 – 100 5
Tiempo de Filtrado de Control
Anticipante (ms)
0 – 99999 1000
4.1.4 Pantalla de configuración de Velocidad en Red Aislada
Presione el botón ‘Configurar’ en la sección del control de Red Aislada
en la pantalla de control de modos del gobernador para mostrar la Pantalla
de configuración del servo. Presione el `X' en la esquina superior derecha
de la pantalla para volver a la pantalla anterior.

Controller Configuration
MRTOM10 SP 0802270 - 70
Figura 60: Pantalla aislada de la configuración de la velocidad
El control de velocidad en red Aislada da al usuario la capacidad de fijar
una consigan de velocidad cuando la unidad está conectada a un sistema
aislado. Esta característica puede ser deshabilitada. Para más información
sobre el control de velocidad de red aislada, vea el manual de operación y
mantenimiento.
a. Interruptor de Control
Este interruptor de control se utiliza para activar el modo de red aislada.
Los interruptores de control se usan en el proceso de la configuración para
determinar qué variables activan o desactivan funciones específicas, y son
completamente configurables para permitir el control a partir de entradas
del hardware, de variables discretas internas del sistema, y/o variables
provenientes del puerto de comunicación. Además, cualquiera o todas las
entradas elegidas se pueden habilitar o deshabilitar en base al estado del
modo del mando local o remoto. Para aprender cómo configurar los
interruptores de control, vea la sección 7.1. Una descripción completa de
todas las variables internas que se puedan usar para un interruptor de
control se encuentra en la sección “Hardwired Interface” de la descripción
de la funcionalidad en el manual de operación y mantenimiento.
b. Control de la consigna
Las pantallas del control de la consigna de la referencia permiten que el
usuario asigne entradas de hardware, variables discretas internas del

Configuración del Controlador
MRTOM10 SP 080227 - 71
sistema, y/o variables de la comunicación de subir o bajar y a los
comandos analógicos de la consigna de referencia para ajustar la consigna
de referencia. Además, cualquiera de las entradas elegidas puede ser
habilitadas o deshabilitadas en base al estado del modo del mando local o
remoto. Para aprender cómo configurar comandos de la consigna de
referencia, vea la sección 7.2.
c. Pantalla de Referencia de la Velocidad en Red Aislada
Presione el botón ‘Consigna’ en la sección de ‘Configuración de Control’
de la Pantalla de configuración de la velocidad en red aislada para
exhibir la Pantalla de referencia de velocidad en red aislada. Presione el
`X' en la esquina superior derecha de la pantalla para volver Pantalla de
configuración de la velocidad en red aislada.
Figura 61: Pantalla de referencia de velocidad en red aislada
Esta pantalla permite que el usuario configure los parámetros de la
referencia de la velocidad en red aislada para el servomotor principal.
Límite Mínimo - Éste es el valor mínimo, o consigna, que la referencia
puede obtener. Una vez que la referencia alcance este límite inferior, no
podrá disminuir más, sin importar los comandos o consignas.
Límite Máximo - Éste es el valor máximo, o consigna, que la referencia
puede obtener. Una vez que la referencia alcance este límite superior, no
podrá aumentar para fomentar, sin importar comandos o consignas.
Razón de Cambio (1/s) - Este valor indica que tan rápidamente la
referencia cambiará cuando se le da un pulso de subir o bajar, o una nueva

Controller Configuration
MRTOM10 SP 0802270 - 72
consigna analógica. Esto es útil si se desea limitar que tan rápidamente la
referencia cambie con un cambio en la consigna. No importando la
magnitud del cambio en la consigna, este valor aumentará o disminuirá la
salida de la referencia de una manera constante y controlada para
mantener estabilidad del sistema.
Tiempo Mín. del Pulso (ms) - Ésta es la duración mínima que un
comando de subir o bajar afectará la salida de la referencia. Si el comando
de subir la consigna manual de referencia se activa para una fracción de
segundo, la salida de la referencia continuará aumentando a la razón del
‘Razón de cambio’ hasta que el Tiempo Mín. del Pulso expire.
d. Pantalla de Control de la Velocidad en Red Aislada
Presione el botón ‘Control’ en sección de la ‘Configuración del control’
de la Pantalla de configuración de la velocidad en red aislada para
exhibir Pantalla de control de velocidad en red aislada. Presione el `X'
en la esquina superior derecha de la pantalla para volver a Pantalla de
configuración de la velocidad en red aislada
Figura 62: Pantalla aislada del control de la velocidad
Ganancia Proporcional (Kp) - Aumente este valor para aumentar el
cambio en la salida que se basa en el error entre la consigna y la
retroalimentación. Disminuya este valor para disminuir el cambio en la
salida que se basa en el error entre la consigna y la retroalimentación.
(Refiera a la sección 7.6 para la información adicional)

Configuración del Controlador
MRTOM10 SP 080227 - 73
Ganancia Integral (Ki), (1/s) - Aumente este valor para aumentar el
cambio en la salida que se basa en el error entre la consigna y la
retroalimentación después de un plazo. Disminuya este valor para
disminuir el cambio en la salida que se basa en el error entre la consigna y
la retroalimentación después de un plazo. El término “integral” en un
control PID tradicional se refiere a veces como la “Ganancia de Reset”.
Esto es porque integra el error en un cierto plazo y ajusta la consigna de la
salida para reducir o ‘resetear’ el error de estado estacionario que puede
estar presente en el sistema. (Refiera a la sección 7.6 para más adicional).
Derivativa (Kd), (s) - Aumente este valor para aumentar el cambio en la
salida que se basa en la razón de cambio de la retroalimentación.
Disminuya este valor para disminuir el cambio en la salida que se basa en
la razón de cambio de la retroalimentación. (Refiera a la sección 7.6 para
la información adicional)
Ganancia de Estatismo o Droop (%) – El Estatismo permanente para el
modo del control. (Refiera a la sección 7.6 para la información adicional).
Droop - Estabilidad Transitoria (%) - Droop temporal para el modo del
control. (Refiera a la sección 7.6 para la información adicional).
Droop - Tiempo de filtrado de la estabilidad transitorio (ms) - Tiempo
temporal del droop temporal para el modo del control. (Refiera a la
sección 7.6 para la información adicional).
e. Valores Prefijados (Defaults)
Ítem Gama Valor prefijado
Límite Mín. de Ref. de Velocidad En
Red Aislada (%)
0 – 200 85
Límite Máx. de Ref. de Velocidad En
Red Aislada (%)
0 – 200 110
Razón de Cambio de Ref. de Velocidad
En Red Aislada (%/s)
0 – 100 0.05
Tiempo Mín. de Pulso de Ref de
Velocidad En Red Aislada (ms)
0 – 99999 100
Ganancia Proporcional del Control de
Velocidad En Red Aislada (Kp)
0 – 20 1
Ganancia Integral del Control de
Velocidad En Red Aislada (Ki)
0 – 9.99 0.1
Ganancia Derivativa del Control de
Velocidad Fuera de Línea (Kd)
0 – 9.99 0
Estatismo (Droop) (%) 0 – 10 5
Droop – Ganancia Temporal (%) 0 – 100 5
Droop temporal – Filtrado (ms) 0 – 99999 5000

Controller Configuration
MRTOM10 SP 0802270 - 74
4.1.5 Pantalla de configuración de Velocidad del Sistema Pequeño
Presione el botón ‘Configurar’ en la sección de control de sistema
pequeño de la pantalla de modos del control del gobernador para exhibir la
Pantalla de configuración de la velocidad del sistema pequeño. Presione
el `X' en la esquina superior derecha de la pantalla para volver a la pantalla
de modos del control del gobernador.
Figura 63: Pantalla de configuración de la velocidad del sistema pequeño
El control de la velocidad del sistema pequeño da al usuario la capacidad
de fijar una consigna de velocidad cuando la unidad está conectada en
línea en un sistema pequeño. Este modo puede ser deshabilitado. Para
más información sobre velocidad del sistema pequeño vea el manual de
operación y mantenimiento.
a. Interruptor de Control
Este interruptor de control se utiliza para activar o desactivar el modo de
control.
Los interruptores de control se usan en el proceso de la configuración para
determinar qué variables activan o desactivan funciones específicas, y son
completamente configurables para permitir el control a partir de entradas
del hardware, de variables discretas internas del sistema, y/o variables
provenientes del puerto de comunicación. Además, cualquiera o todas las
entradas elegidas se pueden habilitar o deshabilitar en base al estado del
modo del mando local o remoto. Para aprender cómo configurar los

Configuración del Controlador
MRTOM10 SP 080227 - 75
interruptores de control, vea la sección 7.1. Una descripción completa de
todas las variables internas que se puedan usar para un interruptor de
control se encuentra en la sección “Hardwired Interface” de la descripción
de la funcionalidad en el manual de operación y mantenimiento.
b. Control de la consigna
En esta pantalla el usuario puede asignar entradas de hardware, variables
discretas internas del sistema, y/o variables de comunicación a los
comandos de referencia de subir o bajar y referencias analógicas para
ajustar la referencia de la consigna. Además, cualquiera de estas entradas
pueden ser habilitadas o deshabilitadas en base al modo local o
remoto. Para más información acerca de esto ver la sección 7.2.
c. Pantalla de Referencia de Velocidad pata Sistema Pequeño
Presione el botón ‘Consigna’ en la sección de ‘control configuración’ de la
Pantalla de configuración de la velocidad del sistema pequeño para exhibir
la pantalla de referencia de velocidad del sistema pequeño. Presione el `X'
en la esquina superior derecha de la pantalla para volver a la Pantalla de
configuración de la velocidad del sistema pequeño.
Figura 64: Pantalla de referencia de velocidad para un sistema pequeño
Esta pantalla permite configurar los parámetros de la referencia de la
velocidad del sistema pequeño para el servomotor principal.

Controller Configuration
MRTOM10 SP 0802270 - 76
Límite Mínimo - Éste es el valor mínimo, o consigna, que la referencia
puede obtener. Una vez que la referencia alcance este límite inferior, no
podrá disminuir más, sin importar los comandos o consignas.
Límite Máximo - Éste es el valor máximo, o consigna, que la referencia
puede obtener. Una vez que la referencia alcance este límite superior, no
podrá aumentar para fomentar, sin importar comandos o consignas.
Razón de Cambio (1/s) - Este valor indica que tan rápidamente la
referencia cambiará cuando se le da un pulso de subir o bajar, o una nueva
consigna analógica. Esto es útil si se desea limitar que tan rápidamente la
referencia cambie con un cambio en la consigna. No importando la
magnitud del cambio en la consigna, este valor aumentará o disminuirá la
salida de la referencia de una manera constante y controlada para
mantener estabilidad del sistema.
Tiempo Mín. del Pulso (ms) - Ésta es la duración mínima que un
comando de subir o bajar afectará la salida de la referencia. Si el comando
de subir la consigna manual de referencia se activa para una fracción de
segundo, la salida de la referencia continuará aumentando a la razón del
‘Razón de cambio’ hasta que el Tiempo Mín. del Pulso expire.
d. Pantalla del Control de Velocidad del sistema pequeño
Presione el botón ‘Control’ en la sección ‘configuración del control’ de la
Pantalla de configuración de la velocidad del sistema pequeño para
exhibir Pantalla del control de la velocidad del sistema pequeño.
Presione el `X' en la esquina superior derecha de la pantalla para volver a
Pantalla de configuración de velocidad del sistema pequeño.

Configuración del Controlador
MRTOM10 SP 080227 - 77
Figura 65: Pantalla del control de la velocidad del sistema pequeño
Ganancia Proporcional (Kp) - Aumente este valor para aumentar el
cambio en la salida que se basa en el error entre la consigna y la
retroalimentación. Disminuya este valor para disminuir el cambio en la
salida que se basa en el error entre la consigna y la retroalimentación.
(Refiera a la sección 7.6 para la información adicional)
Ganancia Integral (Ki), (1/s) - Aumente este valor para aumentar el
cambio en la salida que se basa en el error entre la consigna y la
retroalimentación después de un plazo. Disminuya este valor para
disminuir el cambio en la salida que se basa en el error entre la consigna y
la retroalimentación después de un plazo. El término “integral” en un
control PID tradicional se refiere a veces como la “Ganancia de Reset”.
Esto es porque integra el error en un cierto plazo y ajusta la consigna de la
salida para reducir o ‘resetear’ el error de estado estacionario que puede
estar presente en el sistema. (Refiera a la sección 7.6 para la información
adicional).
Derivativa (Kd), (s) - Aumente este valor para aumentar el cambio en la
salida que se basa en la razón de cambio de la retroalimentación.
Disminuya este valor para disminuir el cambio en la salida que se basa en
la razón de cambio de la retroalimentación. (Refiera a la sección 7.6 para
la información adicional)
Ganancia de Estatismo o Droop (%) – El Estatismo permanente para el
modo del control. (Refiera a la sección 7.6 para la información adicional).
Droop - Estabilidad Transitoria (%) - Droop temporal para el modo del
control. (Refiera a la sección 7.6 para la información adicional).
Droop - Tiempo de filtrado de la estabilidad transitorio (ms) - Tiempo
temporal del droop temporal para el modo del control. (Refiera a la
sección 7.6 para la información adicional).
e. Valores Prefijados (Defaults)
Ítem Gama Valor prefijado
Límite Mín. de Ref. de Velocidad
Sist. Pequeño (%) 0 – 200 85
Límite Máx. de Ref. de Velocidad
Sist. Pequeño (%) 0 – 200 110
Razón de Cambio de Ref. de
Velocidad Sist. Pequeño (%/s) 0 – 100 0.05
Tiempo Mín. de Pulso de Ref de
Velocidad Sist. Pequeño (ms) 0 – 99999 100
Ganancia Proporcional del Control
de Velocidad Sist. Pequeño (Kp) 0 – 20 1
Ganancia Integral del Control de 0 – 9.99 0.1

Controller Configuration
MRTOM10 SP 0802270 - 78
Ítem Gama Valor prefijado
Velocidad Sist. Pequeño (Ki)
Ganancia Derivativa del Control de
Velocidad Sist. Pequeño (Kd) 0 – 9.99 0
Estatismo (Droop) (%) 0 – 10 5
Droop – Ganancia Temporal (%) 0 – 100 5
Droop temporal – Filtrado (ms) 0 – 99999 5000
4.1.6 Pantalla de configuración de Proceso
Presione el botón ‘Configurar’ en la sección del control de proceso de la
pantalla de modos del control del gobernador para exhibir la Pantalla de
configuración de proceso. Presione el `X' en la esquina superior derecha
de la pantalla para volver a la pantalla de los modos del control del
gobernador.
Figura 66: Pantalla de proceso de la configuración
El control de proceso da a usuario la capacidad de fijar un consigna de la
potencia o de la velocidad (dependiendo del proceso a controlar) cuando
se está conectado a la red para cambiar la potencia real del generador o el
flujo de salida de la turbina. Este modo puede ser deshabilitado. Para más
información sobre el control de proceso vea el manual de operación y
mantenimiento.

Configuración del Controlador
MRTOM10 SP 080227 - 79
El control de proceso es - Presione este botón para alternar la selección
del proceso controlado por el gobernador MRT entre “potencia” y
“flujo”. Solamente uno de estos dos procesos puede ser configurado.
a. a. Interruptor de control
Este interruptor de control se usa para activar o desactivar este modo.
Los interruptores de control se usan en el proceso de la configuración para
determinar qué variables activan o desactivan funciones específicas, y son
completamente configurables para permitir el control a partir de entradas
del hardware, de variables discretas internas del sistema, y/o variables
provenientes del puerto de comunicación. Además, cualquiera o todas las
entradas elegidas se pueden habilitar o deshabilitar en base al estado del
modo del mando local o remoto. Para aprender cómo configurar los
interruptores de control, vea la sección 7.1. Una descripción completa de
todas las variables internas que se puedan usar para un interruptor de
control se encuentra en la sección “Hardwired Interface” de la descripción
de la funcionalidad en el manual de operación y mantenimiento.
b. Control de la consigna
Las pantallas del control de la consigna de la referencia permiten que el
usuario asigne entradas del hardware, variables discretas internas del
sistema, y/o variables de la comunicación al aumento/más bajo y a los
comandos analógicos de la referencia de la consigna de ajustar la consigna
de la referencia. Además, lo que sea de las entradas elegidas puede ser
permitido o ser inhabilitado basado en el estado del modo del mando
local/a distancia. Para aprender cómo configurar comandos de la consigna
de la referencia, vea la sección 7.2.
c. Pantalla de Referencia del Proceso
Presione el botón ‘Consigna’ en la sección de ‘control configuración’ de la
Pantalla de configuración de proceso para exhibir la Pantalla de
referencia de proceso. Presione el `X' en la esquina superior derecha de la
pantalla para volver a Pantalla de configuración del proceso.

Controller Configuration
MRTOM10 SP 0802270 - 80
Figura 67: Pantalla de proceso de la referencia
Esta pantalla permite que el usuario configure los parámetros de la
referencia manual para el servo principal.
Límite mínimo - Éste es el valor mínimo, o la consigna, que la referencia
puede obtener. Una vez que la referencia alcance este límite inferior, no
podrá disminuir más, sin importar comandos o consignas.
Límite máximo - Éste es el valor máximo, o la consigna, que la referencia
puede obtener. Una vez que la referencia alcance este límite superior, no
podrá aumentar más, sin importar comandos o consignas.
Razón de cambio (Unidades/s) - Este valor indica que tan rápidamente la
referencia cambiará cuando se le da un pulso de subir o bajar, o una nueva
consigna analógica. Esto es útil si se desea limitar que tan rápidamente la
referencia cambie con un cambio en la consigna. No importando la
magnitud del cambio en la consigna, este valor aumentará o disminuirá la
salida de la referencia de una manera constante y controlada para
mantener estabilidad del sistema.
Tiempo Mín. del Pulso (ms) - Ésta es la duración mínima que un
comando de subir o bajar afectará la salida de la referencia. Si el comando
de subir la consigna manual de referencia se activa para una fracción de
segundo, la salida de la referencia continuará aumentando a la razón del
‘Razón de cambio’ hasta que el Tiempo Mín. del Pulso expire.

Configuración del Controlador
MRTOM10 SP 080227 - 81
d. Pantalla del Control de Proceso
Presione el botón ‘Control’ en la sección ‘configuración del control’ de la
Pantalla de configuración del proceso para exhibir la Pantalla de control
de proceso. Presione el `X' en la esquina superior derecha de la pantalla
para volver a Pantalla de configuración del proceso.
Figura 68: Pantalla del control de proceso
Ganancia Proporcional (Kp) - Aumente este valor para aumentar el
cambio en la salida que se basa en el error entre la consigna y la
retroalimentación. Disminuya este valor para disminuir el cambio en la
salida que se basa en el error entre la consigna y la retroalimentación.
(Refiera a la sección 7.6 para la información adicional)
Ganancia Integral (Ki), (1/s) - Aumente este valor para aumentar el
cambio en la salida que se basa en el error entre la consigna y la
retroalimentación después de un plazo. Disminuya este valor para
disminuir el cambio en la salida que se basa en el error entre la consigna y
la retroalimentación después de un plazo. El término “integral” en un
control PID tradicional se refiere a veces como la “Ganancia de Reset”.
Esto es porque integra el error en un cierto plazo y ajusta la consigna de la
salida para reducir o ‘resetear’ el error de estado estacionario que puede
estar presente en el sistema. Vea la sección 7.6 para más información.
Derivativa (Kd), (s) - Aumente este valor para aumentar el cambio en la
salida que se basa en la razón de cambio de la retroalimentación.
Disminuya este valor para disminuir el cambio en la salida que se basa en

Controller Configuration
MRTOM10 SP 0802270 - 82
la razón de cambio de la retroalimentación. (Refiera a la sección 7.6 para
la información adicional)
Ganancia de Estatismo o Droop (%) – El Estatismo permanente para el
modo del control. (Refiera a la sección 7.6 para la información adicional).
Droop - Estabilidad Transitoria (%) - Droop temporal para el modo del
control. (Refiera a la sección 7.6 para la información adicional).
Droop - Tiempo de filtrado de la estabilidad transitorio (ms) - Tiempo
temporal del droop temporal para el modo del control. (Refiera a la
sección 7.6 para la información adicional).
Corrección Anticipante - curva de relación – Lleva la posición hacia la
consigna final más rápidamente que con el solo uso de las ganancias PID.
La cantidad que ayuda a conducir la posición hacia la consigna final es
determinada por el polinomio de segundo orden: Ax2 + Bx + C, donde “x”
es la consigna de referencia. Por ejemplo, en control de servomotor el
coeficiente de B sería fijado a 1.0, mientras que A y C se fijan a 0.0. Esto
es porque hay una correlación de uno a uno entre la retroalimentación
(posición de la compuerta) y la consigna (consigna del servomotor). Si la
interfaz de control fuera utilizada para el control de potencia, la relación
entre la abertura de los álabes y la potencia sería utilizada para determinar
los coeficientes. Éste es para permitir a la alimentación anticipante de la
señal para aproximar la abertura deseada basada en una consigna.
Corrección Anticipante – ganancia - La salida final con la corrección
anticipante es: FF = Ganancia* (Ax2 + Bx + C), donde “x” es la consigna
de referencia. Se aumenta la ganancia para incrementar la cantidad de
corrección anticipante aplicada al sistema.
Corrección Anticipante – Razón 1 (%/s) – Limita la razón de cambio de
la consigna del servomotor debido a la corrección anticipante a este valor
en %/s. Este razón de cambio se activa cuando se selecciona ‘Razón 1” en
el interruptor de control de selección.
Corrección Anticipante – Razón 2 (%/s) – Limita la razón de cambio de
la consigna del servomotor debido a la corrección anticipante a este valor
en %/s. Este razón de cambio se activa cuando se selecciona ‘Razón 2” en
el interruptor de control de selección.
Alimentación delantera - filtro Tiempo (ms) - Ésta es la constante de
tiempo de la corrección anticipante.
e. Valores Prefijados (Defaults)
Ítem Gama Valor prefijado
El Proceso es --- Potencia
Límite Mín. de Ref de Proceso --- 0

Configuración del Controlador
MRTOM10 SP 080227 - 83
Ítem Gama Valor prefijado
Límite Máx. de Ref de Proceso --- 100
Razón de Cambio de Ref de Proceso (1/s) --- 5
Tiempo Mín. del Pulso de Ref de Proceso
(ms) 0 – 99999 100
Ganancia Proporcional de Control del
Proceso (Kp) 0 – 20 1
Ganancia Integral de Control del Proceso
(Ki) 0 – 9.99 0.1
Ganancia Derivativa de Control del
Proceso (Kd) 0 – 9.99 0
Estatismo (Droop) (%) 0 – 10 5
Estatismo (Droop) temporal (%) 0 – 100 5
Tiempo de Filtrado – Droop Temporal
(ms) 0 – 99999 5000
Coeficiente A de Control Anticipante -5 – 5 0
Coeficiente B de Control Anticipante -5 – 5 1
Coeficiente C de Control Anticipante -5 – 5 0
Ganancia de Control Anticipante 0 – 2 1
Razón 1 de Control Anticipante (%/s) 0 – 100 5
Razón 2 de Control Anticipante (%/s) 0 – 100 5
Tiempo de Filtrado de Control Anticipante
(ms) 0 – 99999 1000
4.1.7 Pantalla de configuración de Nivel
Presione el botón ‘Configurar’ en la sección del ‘control del nivel’ de la
pantalla de modos del control del gobernador para exhibir la Pantalla de
configuración de nivel. Presione el `X' en la esquina superior derecha de
la pantalla para volver a la pantalla anterior.

Controller Configuration
MRTOM10 SP 0802270 - 84
Figura 69: Pantalla configuración de nivel
El control de nivel da al usuario la capacidad de definir y controlar una
consigna de nivel del embalse o el desagüe cuando se está conectado a
red. Este modo se puede deshabilitar. Para más información sobre el
control de nivel, vea el manual de operación y mantenimiento.
a. Interruptor de control
Este interruptor de control se utiliza para activar o desactivar este modo.
Los interruptores de control se usan en el proceso de la configuración para
determinar qué variables activan o desactivan funciones específicas, y son
completamente configurables para permitir el control a partir de entradas
del hardware, de variables discretas internas del sistema, y/o variables
provenientes del puerto de comunicación. Además, cualquiera o todas las
entradas elegidas se pueden habilitar o deshabilitar en base al estado del
modo del mando local o remoto. Para aprender cómo configurar los
interruptores de control, vea la sección 7.1. Una descripción completa de
todas las variables internas que se puedan usar para un interruptor de
control se encuentra en la sección “Hardwired Interface” de la descripción
de la funcionalidad en el manual de operación y mantenimiento.
b. Control de la consigna
Las pantallas del control de la consigna de la referencia permiten que el
usuario asigne entradas de hardware, variables discretas internas del

Configuración del Controlador
MRTOM10 SP 080227 - 85
sistema, y/o variables de la comunicación de subir o bajar y a los
comandos analógicos de la consigna de referencia para ajustar la consigna
de referencia. Además, cualquiera de las entradas elegidas puede ser
habilitadas o deshabilitadas en base al estado del modo del mando local o
remoto. Para aprender cómo configurar comandos de la consigna de
referencia, vea la sección 7.2.
c. Pantalla de Referencia de Nivel
Presione el botón ‘Consigna’ en la sección de ‘Configuración de Control’
de la Pantalla de configuración de nivel para exhibir la pantalla de
referencia de nivel. Presione el `X' en la esquina superior derecha de la
pantalla para volver a la Pantalla de configuración de nivel.
Figura 70: Pantalla de nivel de la referencia
Esta pantalla permite que el usuario configure los parámetros de la
referencia de nivel para el servomotor principal.
Límite Mínimo - Éste es el valor mínimo, o consigna, que la referencia
puede obtener. Una vez que la referencia alcance este límite inferior, no
podrá disminuir más, sin importar los comandos o consignas.
Límite Máximo - Éste es el valor máximo, o consigna, que la referencia
puede obtener. Una vez que la referencia alcance este límite superior, no
podrá aumentar para fomentar, sin importar comandos o consignas.
Razón de Cambio (1/s) - Este valor indica que tan rápidamente la
referencia cambiará cuando se le da un pulso de subir o bajar, o una nueva

Controller Configuration
MRTOM10 SP 0802270 - 86
consigna analógica. Esto es útil si se desea limitar que tan rápidamente la
referencia cambie con un cambio en la consigna. No importando la
magnitud del cambio en la consigna, este valor aumentará o disminuirá la
salida de la referencia de una manera constante y controlada para
mantener estabilidad del sistema.
Tiempo Mín. del Pulso (ms) - Ésta es la duración mínima que un
comando de subir o bajar afectará la salida de la referencia. Si el comando
de subir la consigna manual de referencia se activa para una fracción de
segundo, la salida de la referencia continuará aumentando a la razón del
‘Razón de cambio’ hasta que el Tiempo Mín. del Pulso expire.
d. Pantalla de Control de Nivel
Presione el botón ‘Control’ en sección de la ‘Configuración del control’
de la Pantalla configuración de nivel para exhibir Pantalla de control de
nivel. Presione el `X' en la esquina superior derecha de la pantalla para
volver a Pantalla de configuración de nivel.
Figura 71: Pantalla del control de nivel
Control - Este botón permite elegir realizar control de nivel sobre el
Embalse o sobre en Desagüe.
Autoseguimiento - Este botón permite cómo definir la consigna de
Autoseguimento. Esta es la consigna que se carga en la referencia siempre
que se seleccione. Si se selecciona “Nivel”, la retroalimentación de nivel
actual será escrita en la consigna. Si se selecciona “Servo”, la consigna de

Configuración del Controlador
MRTOM10 SP 080227 - 87
referencia se calcula a partir de la posición del servo cuando el control de
nivel fue seleccionado como el modo del control del gobernador.
Ventana de nivel (Unidades) - Esto se determina que tan holgado es el
control de lazo cerrado. La diferencia entre la consigna de nivel y la
retroalimentación se llama el error de nivel. La consigna del servomotor
se calcula en base al error de nivel, o “Ventana de Nivel”, y los límites
máximo y del mínimo del servomotor. Cuando es el error de nivel es
mayor o igual que la ventana de nivel, la consigna del servomotor estará
en el límite del servomotor, el cual depende del parámetro de control.
Para el control de nivel de embalse', el servomotor se mueve en la
dirección abierta (del flujo de aumento) mientras el nivel aumenta. Para el
control de nivel de Desagüe, el servomotor se mueve en la dirección de
cerrar (el flujo disminuye) mientras que el nivel de desagüe aumenta. Para
los depósitos pequeños, este número puede ser relativamente pequeño
(quizás 0.01 pies). Para depósitos más grandes, este número se debe
mantener mucho más grande (0.1 a 0.5 pies). Para más información sobre
control de nivel, vea la sección del gobernador en la descripción de la
funcionalidad en el manual de operación y mantenimiento.
Límite mínimo del servomotor (%) - Ésta es la posición del servomotor
mínima permisible cuando se usa el control de nivel y se utiliza para
definir la consigna del servomotor en base a la ventana del nivel y error de
nivel como se describe anteriormente.
Límite máximo del servomotor (%) - Ésta es la posición del servomotor
máxima permisible cuando se usa el control de nivel y se utiliza para
definir la consigna del servomotor en base a la ventana del nivel y error de
nivel como se describe anteriormente.
e. Valores Prefijados (Defaults)
Ítem Gama Valor prefijado
Límite Mín. de Ref de Nivel --- 0
Límite Máx. de Ref de Nivel --- 0
Razón de Cambio de Ref de Nivel (1/s) --- 1
Tiempo Mín. de Pulso de Ref de Nivel (ms) 0 – 99999 100
Selección de Control de Nivel --- Embalse
Autoseguimento --- Nivel
Ventana de Nivel 0 – 99.999 1
Limite Mín. de Servomotor (%) 0 – 100 20
Limite Máx. de Servomotor (%) 0 – 100 100
4.1.8 Condensador sincrónico la Pantalla de configuración
Presione el botón ‘Configurar’ en la sección de Condensador Sincrónico
en la pantalla de modos del control del gobernador para exhibir la Pantalla

Controller Configuration
MRTOM10 SP 0802270 - 88
de configuración de Condensador Sincrónico. Presione el `X' en la
esquina superior derecha de la pantalla para volver a la pantalla de los
modos del control del gobernador.
Figura 72: Pantalla de Configuración de Condensador Sincrónico
Este modo puede ser deshabilitado. Para más información sobre el control
de condensador sincrónico, vea el manual de operación y mantenimiento.
a. Interruptor de Control
Este interruptor de control se utiliza para activar o desactivar este modo.
Los interruptores de control se usan en el proceso de la configuración para
determinar qué variables activan o desactivan funciones específicas, y son
completamente configurables para permitir el control a partir de entradas
del hardware, de variables discretas internas del sistema, y/o variables
provenientes del puerto de comunicación. Además, cualquiera o todas las
entradas elegidas se pueden habilitar o deshabilitar en base al estado del
modo del mando local o remoto. Para aprender cómo configurar los
interruptores de control, vea la sección 7.1. Una descripción completa de
todas las variables internas que se puedan usar para un interruptor de
control se encuentra en la sección “Hardwired Interface” de la descripción
de la funcionalidad en el manual de operación y mantenimiento.
b. Condensador sincrónico la pantalla de la referencia
Presione el botón ‘Consigna’ en la sección ‘configuración del control’ de

Configuración del Controlador
MRTOM10 SP 080227 - 89
la Pantalla de configuración de condensador sincrónico para exhibir la
pantalla de referencia del condensador sincrónico. Presione el `X' en la
esquina superior derecha de la pantalla para volver a Pantalla de
configuración de condensador sincrónico.
Figura 73: Condensador sincrónico la pantalla de la referencia
Valor de Salida de Condensador – cantidad sobre velocidad en vacío (%) - Es la cantidad que el servomotor principal se abre más allá de la
abertura para velocidad en vacío (sin carga) al salir del modo de
condensador sincrónico y antes que haga la transición de nuevo a control
de la velocidad. Por ejemplo, si el disyuntor del generador se cerró
cuando la abertura del servomotor (álabes o deflector) era de 20%, y 5%
es el valor de la salida, el gobernador llevará la abertura del servo a hasta
que alcance el 25% antes de volver al control automático de la velocidad.
Razón de Cambio (1/s) - Este valor indica que tan rápidamente la
referencia cambiará cuando se le da un pulso de subir o bajar, o una nueva
consigna analógica. Esto es útil si se desea limitar que tan rápidamente la
referencia cambie con un cambio en la consigna. No importando la
magnitud del cambio en la consigna, este valor aumentará o disminuirá la
salida de la referencia de una manera constante y controlada para
mantener estabilidad del sistema.
Tiempo Mín. del Pulso (ms) - Ésta es la duración mínima que un
comando de subir o bajar afectará la salida de la referencia. Si el comando
de subir la consigna manual de referencia se activa para una fracción de

Controller Configuration
MRTOM10 SP 0802270 - 90
segundo, la salida de la referencia continuará aumentando a la razón del
‘Razón de cambio’ hasta que el Tiempo Mín. del Pulso expire.
c. Valores Prefijados (Defaults)
Ítem Gama Valor prefijado
Valor de Salida de Condensador
Sincrónico (%)
0 – 100 2
Razón de Cambio de Condensador
Sincrónico (1/s)
0 – 100 5
Tiempo Mín. de Pulso de
Condensador Sincrónico (ms)
0 – 99999 100
4.2 Pantalla de Entradas Alambradas al Gobernador
4.3 Presione el botón ‘Configurar’ en la sección Entradas Alambradas de la Pantalla
de configuración del gobernador para exhibir la Pantalla de entradas alambradas
al gobernador. Presione el `X' en la esquina superior derecha de la pantalla para
volver a Pantalla de configuración del gobernador.
Figura 74: Pantalla de Entradas Alambradas al Gobernador

Configuración del Controlador
MRTOM10 SP 080227 - 91
Esta pantalla permite que el usuario configure todas las entradas necesarias para el
control del gobernador. Para que los diversos modos del control del gobernador
funcionen correctamente, sus entradas correspondientes deben ser mapeadas aquí.
Se puede seleccionar entradas discretas para ‘Unidad en Línea’ y ‘Permisivo de
Arranque’. Observe que existe un botón de inversión de la entrada para dar más
flexibilidad al usuario (véase la Figura 18). Presionando las Entradas Discretas
aparecen las teclas de flechas:
Figura 75: Teclado de selección de entrada
Este teclado permite que el usuario elija la entrada de hardware a utilizar como la
base para las señales listadas arriba. Presionando las flechas y el botón ‘ENTER’
se asigna una de las 0 – 16 señales de hardware. Presionando el botón ESC se
cancela cualquier cambio realizado. Para definir una entrada como ‘Sin Usar’,
presione la flecha hacia abajo hasta que aparezca ‘Sin Usar’, y oprima “ENTER”.
Se pueden elegir entradas analógicas para la Potencia, el Flujo, el Nivel de
Embalse, el Nivel en Desagüe, y la Altura Bruta del Salto. Incorpore el número
de canal que corresponde a la entrada analógica deseada. Hay registros para
definir la potencia y el flujo nominal. Ingrese en esta sección el flujo y la potencia
nominales. Se pueden también configurar las unidades para la potencia (KW ó
MW), el flujo (m3/s ó pies
3/s), y de nivel (pies ó m).
Nota: Los botones de ‘Configurar’ aparecen solamente después de que se haya
seleccionado un canal de la entrada analógica. Presione los botones de
‘Configurar’ para navegar a las pantallas de configuración de la entrada
analógica. Dado que todos los parámetros y pantallas de configuración de la
entrada son iguales, sólo una se ha demostrado aquí.
4.3.1 Pantalla de configuración de Entrada Analógica
Presione el botón ‘Configurar’ en la sección de las entradas analógicas de
la pantalla de Entradas Alambradas del Gobernador para exhibir la
Pantalla de configuración de entrada analógica. Presione el `X' en la
esquina superior derecha de la pantalla para volver a la pantalla de
Entradas Alambradas del Gobernador.

Controller Configuration
MRTOM10 SP 0802270 - 92
Figura 76: Pantalla de configuración de entrada analógica
a. Escalamiento
Figura 77: Sección de escalamiento de la Pantalla de configuración de entrada analógica
La figura de arriba representa la porción del escalamiento de la Pantalla de
configuración de la entrada analógica del servomotor principal. La
primera fila se utiliza para incorporar los valores alto y bajo en
miliamperios (mA) de la entrada al sistema. La segunda fila se utiliza para
incorporar los valores bajo y alto en las unidades de la ingeniería que la
entrada en miliamperios representará.
Columna actual a la derecha muestra el valor actual de la entrada en mA y
en Unidades. El valor en Unidades es en base a la configuración
incorporada por el usuario. El Valor Actual permitirá que el usuario
verifique el escalamiento correcto de una entrada variando los mA
provistos al sistema.

Configuración del Controlador
MRTOM10 SP 080227 - 93
Por ejemplo, para configurar correctamente la señal de retroalimentación
del servomotor principal, el servomotor debe ser forzado a las posiciones
de completamente cerrado y completamente abierto. La lectura del valor
Actual en mA mostrará al usuario qué entrar para los valores bajo y alto en
mA. Los valores de Unidades entonces serían fijados a 0 y a 100 para el
bajo y alto, respectivamente, para representar 0 - el 100% de apertura de
los álabes.
b. Detección de Falla
Figura 78: Sección de la Detección de Falla de la Pantalla de configuración de la entrada analógica
En esta sección el usuario puede configurar los límites Bajo y Alto de falla
para la entrada analógica. El `Tiempo' en milisegundos (ms) es la
cantidad de tiempo que la entrada debe estar sobre el límite alto o debajo
del límite bajo para generarse una señal de falla.
c. Tiempo de Filtrado
Figura 79: Sección de Tiempo de filtrado de la Pantalla de configuración de la entrada analógica
El usuario puede agregar filtración a una entrada cambiando este valor
(ms). Esto puede ser útil al configurar un transductor del nivel del
embalse para eliminar o reducir al mínimo el efecto que tengan las olas en
el transductor.

Controller Configuration
MRTOM10 SP 0802270 - 94
d. Valores Prefijados (Defaults)
Ítem Gama Valor prefijado
No. de entrada de hardware de
Unidad en Línea
0 – 16 9
No. de entrada de hardware de
Permisivo de Arranque
0 –16 0
Canal de entrada de realimentación
Analógica de Potencia
0 – 8 0
Canal de entrada de realimentación
Analógica de Flujo
0 – 8 0
Canal de entrada de realimentación
Analógica de Nivel de Embalse
0 – 8 0
Canal de entrada de realimentación
Analógica de Nivel en Desagüe
0 – 8 0
Canal de entrada de realimentación
Analógica de Altura Bruta de Salto
0 – 8 0
Potencia Nominal -9999.99 –
9999.99
1
Flujo Nominal -9999.99 –
9999.99
1
Escalamiento de valor Bajo de
señal de Potencia (mA)
0 – 25 4
Escalamiento de valor Alto de señal
de Potencia (mA)
0 – 25 20
Escalamiento de valor Bajo en
unidades de Potencia
--- 0
Escalamiento de valor Alto en
unidades de Potencia
--- 100
Valor bajo para falla de señal de
potencia (mA)
0 – 25 2
Valor alto para falla de señal de
potencia (mA)
0 – 25 22
Tiempo para falla de señal de
potencia (ms)
0 – 99999 100
Tiempo de filtrado de señal de
potencia (ms)
0 – 99999 0
4.4 Interruptor de control de Razón de Corrección Anticipante
Se proporciona un interruptor de control para permitir que el usuario elija cual de
las dos razones de corrección anticipante disponibles será aplicada por el
controlador. La segunda razón puede ser deshabilitada, la Razón 1 se selecciona

Configuración del Controlador
MRTOM10 SP 080227 - 95
siempre. Este interruptor de control elige cual razón de Corrección Anticipante se
aplicará en todos los modos del control del gobernador que usen la corrección
anticipante (servo y de proceso).
Los interruptores de control se usan en el proceso de la configuración para
determinar qué variables activan o desactivan funciones específicas, y son
completamente configurables para permitir el control a partir de entradas del
hardware, de variables discretas internas del sistema, y/o variables provenientes
del puerto de comunicación. Además, cualquiera o todas las entradas elegidas se
pueden habilitar o deshabilitar en base al estado del modo del mando local o
remoto. Para aprender cómo configurar los interruptores de control, vea la
sección 7.1. Una descripción completa de todas las variables internas que se
puedan usar para un interruptor de control se encuentra en la sección “Hardwired
Interface” de la descripción de la funcionalidad en el manual de operación y
mantenimiento.
4.5 Interruptor de Control Manual de Mando Automático / Manual
Se proporciona un interruptor de control para determinar la acción de control
cuando se le da un comando de arranque al gobernador. Si esta característica es
habilitada, el controlador siempre iniciará en Auto-arranque.
Cuando se selecciona el ‘auto-arranque’, el límite de los álabes va
inmediatamente al límite de Fuera de línea, permitiendo que la unidad vaya a la
velocidad sincronía automáticamente. Cuando el disyuntor del generador se
cierra, el límite de los álabes va inmediatamente al límite en línea, permitiendo
que la unidad genere energía.
Cuando se selecciona el comienzo manual del `', sigue habiendo el límite de los
álabes en cero. El operador debe levantar manualmente el límite de los álabes
para permitir que la unidad vaya a la velocidad de sincronía. Cuando el disyuntor
del generador se cierra, sigue habiendo el límite de los álabes en su valor actual.
El operador debe levantar manualmente el límite de los álabes para permitir que la
unidad genere energía.
Los interruptores de control se usan en el proceso de la configuración para
determinar qué variables activan o desactivan funciones específicas, y son
completamente configurables para permitir el control a partir de entradas del
hardware, de variables discretas internas del sistema, y/o variables provenientes
del puerto de comunicación. Además, cualquiera o todas las entradas elegidas se
pueden habilitar o deshabilitar en base al estado del modo del mando local o
remoto. Para aprender cómo configurar los interruptores de control, vea la
sección 7.1. Una descripción completa de todas las variables internas que se
puedan usar para un interruptor de control se encuentra en la sección “Hardwired
Interface” de la descripción de la funcionalidad en el manual de operación y
mantenimiento.

Controller Configuration
MRTOM10 SP 0802270 - 96
4.6 Interruptor de Control de Arranque Rápido
El controlador tiene la capacidad de realizar un comienzo rápido de la unidad.
Esto se ha utilizado en sistemas con las bombas de elevación de alta presión del
aceite. Si la bomba de elevación falla, se considera ventajoso abrir el servomotor
más durante el arranque, de modo que la unidad aumente velocidad rápidamente
para reducir el riesgo de daña un cojinete de izaje. Este interruptor de control
activa o desactiva este modo de arranque. Si esta característica es habilitada, el
‘Límite de Inicio de Rotación en Arranque Rápido’ es utilizado siempre por el
controlador.
Cuando el comienzo rápido del `' está ENCENDIDO, el comienzo rápido del `en
el límite disidente' se utiliza para un comienzo del gobernador. Cuando el
comienzo rápido del `' está apagado, el comienzo rápido del ` del límite disidente'
se utiliza para un comienzo del gobernador. Vea la sección 4.1.1b.
Los interruptores de control se usan en el proceso de la configuración para
determinar qué variables activan o desactivan funciones específicas, y son
completamente configurables para permitir el control a partir de entradas del
hardware, de variables discretas internas del sistema, y/o variables provenientes
del puerto de comunicación. Además, cualquiera o todas las entradas elegidas se
pueden habilitar o deshabilitar en base al estado del modo del mando local o
remoto. Para aprender cómo configurar los interruptores de control, vea la
sección 7.1. Una descripción completa de todas las variables internas que se
puedan usar para un interruptor de control se encuentra en la sección “Hardwired
Interface” de la descripción de la funcionalidad en el manual de operación y
mantenimiento.

Configuración del Controlador
MRTOM10 SP 080227 - 97
5. Pantalla de las funciones auxiliares
Presione el botón ‘CONFIGURAR AUXILIARES’ en Pantalla de configuración del
MRT para exhibir Pantalla de las funciones auxiliares. Presione el `X' en la esquina
superior derecha de la pantalla para volver a Pantalla de configuración del MRT.
Figura 80: Pantalla de las funciones auxiliares
De esta pantalla el usuario puede tener acceso a las pantallas de configuración de las
funciones auxiliares.
5.1 Pantalla de Configuración del Interruptor Limitador
Presione botón ‘Interruptor Limitador’ en la Pantalla de las funciones auxiliares
para exhibir Pantalla de configuración del interruptor limitador. Presione el `X'
en la esquina superior derecha de la pantalla para volver a Pantalla de las
funciones auxiliares. Presione el botón ‘?’, en el lado inferior izquierdo de la
pantalla, para navegar a una pantalla de la ayuda asociada a esta pantalla.

Controller Configuration
MRTOM10 SP 0802270 - 98
Figura 81: Pantalla de configuración del interruptor limitador
Esta pantalla permite que el usuario configure la funcionalidad del el interruptor
limitador. Los 16 interruptores limitadores son configurables mediante esta
pantalla simplemente cambiando el número del interruptor que se desee
configurar. Esto es hace presionando el botón del interruptor (véase la flecha) y
dando el número del interruptor (1 al 16) que se quisiera configurar. Los
siguientes parámetros se necesitan configurar para cada interruptor limitador.
Opera: - Este botón selecciona cómo el interruptor limitador se energiza, ya sea
‘Debajo de’ o ‘Arriba de’ la consigna.
La consigna a la que el interruptor limitador responde se configura con el botón
siguiente:
Figura 82: Botón de la referencia del interruptor limitador
La referencia para la consigna arriba puede también ser configurada. Las
opciones de la referencia son:
• Velocidad
• Posición

Configuración del Controlador
MRTOM10 SP 080227 - 99
• Límite
• Consigna de velocidad
Figura 83: Teclado para la referencia del interruptor limitador
Presionando las teclas de flechas se selecciona la referencia a utilizar (velocidad,
posición, límite y consigna de la velocidad). Presione ‘ENTER’ para hacer la
selección, o ‘ESC’ para cancelar cualquier cambio hecho.
Banda Muerta (%) - Los interruptores limitadores operan sobre una curva de
histéresis para evitar intermitencia en la consigna del interruptor limitador. La
banda muerta determina cuánta histéresis se aplica a cada interruptor limitador.
Por ejemplo, si el interruptor se configura para funcionar sobre el 25% con una
histéresis del 5%, el interruptor se activará cuando la señal pasa por encima del
25%, y se resetea cuando la señal va por debajo del 20%.
Tiempo de Retraso (ms) – Éste configura cuánto tiempo la variable de referencia
debe estar por debajo de la consigna antes de activar el interruptor. Esto se aplica
solamente al interruptor que se habilita.
5.1.1 Detección de Falla
La falla en la señal de velocidad o de posición puede afectar la operación
del interruptor limitador. Los ajustes de la detección de falla permiten que
el interruptor limitador opere en una consigna que el usuario defina en
caso de falla de la señal, de tal modo que se sostenga operaciones
predecibles para los procedimientos de arranque o de parada.
Forzar Bajo Falla - Elija forzar un valor en la referencia en la que el
interruptor limitador funcione en el caso de una falla de la señal.
Forzar Velocidad (%) - El valor de la velocidad forzada en la referencia
para la operación del interruptor limitador en el caso de falla de la señal.
Posición de la fuerza (%) - El valor de la posición forzada en la
referencia para la operación del interruptor limitador en el caso de falla de
la señal.
5.1.2 Valores Prefijados (Defaults)
Ítem Gama Valor prefijado
Interruptor Limitador No.1 Operar --- Debajo de
Interruptor Limitador No. 1 Consigna
(%)
0 – 200 1
Interruptor Limitador No. 1 Banda 0 – 100 2

Controller Configuration
MRTOM10 SP 0802270 - 100
Ítem Gama Valor prefijado
Muerta (%)
Interruptor Limitador No. 1 Tiempo de
Retraso (ms)
0 – 99999 0
Interruptor Limitador No. 1 Tipo --- Posición
Interruptor Limitador No.2 Operar --- Arriba de
Interruptor Limitador No. 2 Consigna
(%)
0 – 200 20
Interruptor Limitador No. 2 Banda
Muerta (%)
0 – 100 5
Interruptor Limitador No. 2 Tiempo de
Retraso (ms)
0 – 99999 0
Interruptor Limitador No.2 Operar --- Posición
Interruptor Limitador No.3 Operar --- Debajo de
Interruptor Limitador No. 3 Consigna
(%)
0 – 200 1
Interruptor Limitador No. 3 Banda
Muerta (%)
0 – 100 5
Interruptor Limitador No. 3 Tiempo de
Retraso (ms)
0 – 99999 0
Interruptor Limitador No.3 Operar --- Velocidad
Interruptor Limitador No.4 Operar --- Arriba de
Interruptor Limitador No.4 Consigna (%) 0 – 200 125
Interruptor Limitador No.4 Banda
Muerta (%)
0 – 100 5
Interruptor Limitador No.4 Tiempo de
Retraso (ms)
0 – 99999 10000
Interruptor Limitador No.4 Operar --- Velocidad
Forzar Posición en Falla --- No
Valor de posición forzada en falla (%) 0 – 100 0
Forzar Velocidad en Falla --- No
Valor de velocidad forzada en falla (%) 0 – 200 0
Selección de Interruptor Limitador 1 – 16 ---
Nota: Todos los otros valores prefijados del interruptor limitador son
cero.
5.2 Pantalla de Detección de Rotación
Presione ‘Detección de Rotación’ en la Pantalla de las funciones auxiliares para
exhibir la pantalla de detección de rotación. Presione el `X' en la esquina
superior derecha de la pantalla para volver a la Pantalla de funciones auxiliares.

Configuración del Controlador
MRTOM10 SP 080227 - 101
Figura 84: Pantalla de Detección de Rotación
Esta pantalla permite que el usuario configure la funcionalidad de la detección de
la rotación. Mediante esta función se detecta si la unidad se está deslizando, se
determina si toda la energía mecánica se ha quitado de la unidad, y permite
configurar la acción de los frenos de la unidad. Más información sobre la
detección de rotación puede ser encontrada refiriéndose a la sección de detección
y frenos en la sección de la descripción de la funcionalidad del manual de
operación y mantenimiento.
Habilitador – Habilita o Deshabilita la función de detección de rotación.
Velocidad de Habilitación (%) - Velocidad debajo de la cual se habilita la
función de detección de rotación.
Interruptor de Reset del deslizamiento – Configura el Reset de detección de
deslizamiento.
Los interruptores de control se usan en el proceso de la configuración para
determinar qué variables activan o desactivan funciones específicas, y son
completamente configurables para permitir el control a partir de entradas del
hardware, de variables discretas internas del sistema, y/o variables provenientes
del puerto de comunicación. Además, cualquiera o todas las entradas elegidas se
pueden habilitar o deshabilitar en base al estado del modo del mando local o
remoto. Para aprender cómo configurar los interruptores de control, vea la
sección 7.1. Una descripción completa de todas las variables internas que se

Controller Configuration
MRTOM10 SP 0802270 - 102
puedan usar para un interruptor de control se encuentra en la sección “Hardwired
Interface” de la descripción de la funcionalidad en el manual de operación y
mantenimiento.
Tiempo de Reset (ms) del deslizamiento - La cantidad de tiempo después de que
se genere un reset interno del deslizamiento hasta que la indicación del
deslizamiento se despeje. Este parámetro se diseña para dar a la unidad un tiempo
adicional para parar después de que una alarma del deslizamiento se genere para
evitar el controlador inicie otra a alarma del deslizamiento después del reset.
Tiempo de Retraso (ms) del deslizamiento - La cantidad de tiempo después de
que se indique la parada hasta que se habilite el circuito de detección de
deslizamiento. Éste da a los auxiliares, tales como frenos y bombas de elevación,
tiempo para ir a su estado normal antes de permitir la detección del deslizamiento.
Tiempo de Retraso (ms) de Reset Automático - El tiempo después de que se
indique el deslizamiento hasta que indicación interna del deslizamiento se resetea
automáticamente.
Resets Máximos de Reset Automático - El número de veces que la indicación
del deslizamiento será reseteada automáticamente:
-1 = continuamente
0 = nunca
>1 = número de resets
Usar temporizador de velocidad para detección de paro - Utilice un
temporizador basado en velocidad como parte lógica de la determinación de un
paro. El controlador requiere que exista una condición de parada antes de que
habilite la función de detección del deslizamiento. Si la unidad nunca para debido
a una fuga de agua o a un cierto otro malfuncionamiento mecánico, utilice este
parámetro para forzar el controlador en un estado de parada y para habilitar
función de la detección del deslizamiento.
Anular indicación de paro total bajo deslizamiento - Determina si se anula la
indicación de paro total bajo la detección del deslizamiento.
Tiempo del pulso inhibidor de detección de paro total - El período durante el
cual ningún cambio se considera en los pulsos de indicación para que se genere
una detección del paro total.
Retraso del temporizador para la detección de paro - El tiempo después de
que se habilita la detección de rotación y antes de que se emita una indicación de
paro. Aplica solamente si temporizador basado en velocidad se utiliza para
determinar la condición de parada.
Umbral de velocidad para la indicación del paro total (%) - Velocidad debajo
de la cual el sistema indicarán un paro total.

Configuración del Controlador
MRTOM10 SP 080227 - 103
Frenos – Usar indicación de paro total - Para explicar porqué se provee el
parámetro “Usar indicación de paro total” considere el panorama
siguiente: primero asuma que este parámetro es ‘Si’, y que el parámetro de que
los frenos se van a “Aplicar después del paro” es ‘No’, y la unidad se ha
detenido. Después del ‘Tiempo de aplicación después del paro’ el temporizador
de este tiempo se activa, causando que los frenos se apliquen. Si “Anular
indicación de paro total bajo deslizamiento” es ‘Si’ y la unidad comienza a
deslizarse, la indicación del paro total desaparece. Esto causará que el
temporizador de “Aplicar frenos después de paro” se resetee, haciendo que los
frenos se reaplican. Los frenos quedarán aplicados hasta que la detección de
deslizamiento se despeje, regresando la indicación de paro total, y el
temporizador de “Aplicar frenos después de paro” se resetea.
Si este parámetro es ‘No’, los frenos nunca se reaplicarán en caso de un
deslizamiento. Si “Anular indicación de paro total bajo deslizamiento” es ‘No’,
los frenos nunca se reaplicarán porque la indicación de paro total sigue siendo
verdad.
Frenos – Aplicar después de paro total - Si se fija en ‘Si’ los frenos
permanecerán aplicados después de que la unidad se pare (ya sea detenida o paro
total, dependiendo de ‘Usar indicación de paro total’). Si se fija en ‘No’ los
frenos se sueltan después de que se pare la unidad.
Frenos – Tiempo de aplicación después del paro (ms) - Este parámetro se
determina cuanto tiempo se aplican los frenos una vez que los permisivos para
energizarlos se cumplan.
Frenos – Velocidad de habilitación (%) - Este interruptor de velocidad arranca
un temporizador para habilitar los frenos. Típicamente este interruptor se fija a
energizarse a una velocidad debajo del 95%.
Frenos – Tiempo para rehabilitación (ms) - La cantidad de tiempo después de
que la velocidad de la unidad caiga debajo de ‘Velocidad habilitación’ y antes que
se permita la aplicación de que los frenos. El propósito de este parámetro es
proporcionar un retraso después de parar la unidad y antes de que los frenos
puedan ser aplicados. Así, si ocurre una falla de la señal de velocidad (la
velocidad cae inmediatamente a cero), los frenos no serán aplicados
inmediatamente después que los álabes se cierren. Esto dará un plazo para que la
unidad se detenga antes de que se apliquen los frenos.
Frenos – Velocidad para aplicación (%) - La velocidad debajo de la cual los
frenos deben ser aplicados (sin retraso).
Frenos – Posición para aplicación (%) - La posición debajo de la cual el
servomotor principal debe estar antes de que se apliquen los frenos.
5.2.1 Pantalla de Entradas de Detección de Rotación
Presione el botón ‘Configuración de Hardware’ en la pantalla de
detección de rotación para exhibir la pantalla de entradas alambradas de

Controller Configuration
MRTOM10 SP 0802270 - 104
rotación. Presione el `X' en la esquina superior derecha de la pantalla para
volver la pantalla de detección de rotación.
Figura 85: Pantalla de entradas alambradas de rotación
Utilice esta pantalla para configurar las entradas de hardware para la
función que detecta la rotación. Observe que un botón de la inversión de
la entrada ofrece más flexibilidad al usuario (véase la Figura 19).
Presionando en el los botones de entradas discretas de arriba (véase las
flechas), aparece el teclado siguiente sobre los botones:
Figura 86: Teclado para seleccionar la entrada
Este teclado permite que el usuario elija la entrada de hardware a utilizar
como la base para las señales listadas arriba. Presionando las flechas y el
botón ‘ENTER’ se asigna una de las 0 – 18 señales de hardware.
Presionando el botón ESC se cancela cualquier cambio realizado. Para
definir una entrada como ‘Sin Usar’, presione la flecha hacia abajo hasta
que aparezca ‘Sin Usar’, y oprima “ENTER”.

Configuración del Controlador
MRTOM10 SP 080227 - 105
Además de las dieciséis entradas discretas del hardware, dos entradas
adicionales de los contadores de alta velocidad están disponibles. Las dos
entradas adicionales son pulsos del TP del generador y de los sensores de
velocidad de la rueda dentada.
Estos pulsos de entrada se utilizan para detectar el movimiento de la
turbina. Se prefiere utilizar dos entradas del pulsos siempre que sea
posible para evitar indicaciones falsas de deslizamiento, que puede ocurrir
debido a una señal intermitente de un sensor mal posicionado con respecto
al engranaje de una rueda dentada.
5.2.2 Valores Prefijados (Defaults)
Ítem Gama Valor Prefijado
Velocidad de habilitación de detección
de rotación (%)
0 – 100 10
Tiempo de reset de detección
deslizamiento (ms)
0 – 99999 0
Tiempo de retraso de detección de
deslizamiento (ms)
0 – 99999 0
Tiempo de retraso de auto reset (ms) 0 – 99999 0
Resets máximos de auto reset -1 – 32767 0
Usar temporizador de vel. Para
detección de paro
--- No
Anular indicación de paro total bajo
deslizamiento
--- No
Tiempo de pulso inhibidor de detección
de paro total (ms)
0 – 99999 50
Retraso del temporizador para la
detección de paro (ms)
0 – 99999 0
Umbral de velocidad para la indicación
de paro total (%)
0 – 100 0
Frenos- Usar Indicación de paro total --- No
Frenos- Aplicar después de paro --- No
Tiempo de aplicación después de paro
(ms)
0 – 999999 0
Frenos- Velocidad de habilitación (%) 0 – 100 0
Frenos- Tiempo para habilitación (ms) 0 – 9999999 0
Frenos- Velocidad para aplicación
(%)
0 – 100 0
Frenos- Posición para aplicación (%) 0 – 100 0
Canal de entrada de pulsos 1 0 – 18 0
Canal de entrada de pulsos 2 0 – 18 0

Controller Configuration
MRTOM10 SP 0802270 - 106
5.3 Pantalla de la Detección de Red Aislada
Presione botón d ‘Detección de Red Aislada’ en la Pantalla de funciones
auxiliares para exhibir la Pantalla de detección de red aislada. Presione el `X' en
la esquina superior derecha de la pantalla para volver a Pantalla de funciones
auxiliares. Presione el botón ‘?’, en el lado inferior izquierdo de la pantalla, para
navegar a una pantalla de la ayuda asociada a esta pantalla.
Figura 87: Pantalla de la detección de red aislada
Aquí el usuario puede configurar parámetros de detección de red aislada.
Cualquiera de las dos condiciones siguientes generará la detección automática del
aislamiento:
• El error de la velocidad excede el ‘Ajuste 1 del umbral del error de velocidad’
por más que lo que fija el ‘Tiempo de Retraso de umbral 1’.
• El error de la velocidad excede el ‘Ajuste 2 del umbral del error de velocidad’
por más que lo que fija el ‘Tiempo de Retraso de umbral 2’.
Los dos umbrales de error de velocidades se dan para permitir flexibilidad en la
configuración de la detección de red aislada.
Consigna del umbral del error de la velocidad (%) - La excursión de velocidad
más allá de la velocidad nominal (100%) antes que se detecte la red aislada.

Configuración del Controlador
MRTOM10 SP 080227 - 107
El retraso del umbral de error de la velocidad (ms) – El tiempo la excursión de
la velocidad debe ocurrir antes de que se detecte la operación de red aislada.
5.3.1 Valores prefijados (Default)
Ítem Gama Valor prefijado Consigna de umbral de velocidad 1
(%)
0 – 200 0.5
Retraso del umbral 1 de error de
velocidad (ms)
0 – 99999 5000
Consigna de umbral de velocidad 2
(%)
0 – 200 1
Retraso del umbral 2 de error de
velocidad (ms)
0 – 99999 100
5.4 Pantalla de Configuración del Sincronizador Automático
Presione botón ‘Sincronización Automática” en la Pantalla de funciones
auxiliares para exhibir la Pantalla automática de configuración del sincronizador
automático. Presione el `X' en la esquina superior derecha de la pantalla para
volver a Pantalla de funciones auxiliares.
Figura 88: Pantalla de Configuración del Sincronizador Automático
Aquí el usuario puede configurar funcionalidad del sincronizador automático.

Controller Configuration
MRTOM10 SP 0802270 - 108
Frecuencia de Desliz (Hz) - Este valor se agrega a la frecuencia de la barra y el
resultado se usa como la frecuencia del gobernador en la sincronización.
Control de Ángulo – Se habilita permite el control del ángulo de la fase, la
consigna de la velocidad se modifica continuamente de tal manera que el ángulo
relativo de la fase entre el generador y la barra se mantiene a este valor o con cero
grados de diferencia.
Tiempo Activo de Referencia (ms) – La duración de pulso en que se activan los
comandos de subir o bajar voltaje.
Tiempo Desactivo (ms) - La duración de pulso en que se desactivan los
comandos de subir o bajar voltaje.
Control del ángulo de fase - Constante de tiempo de adelanto (ms) – El tiempo
de adelanto para el controlador de adelanto/retraso de quinto-orden usado para
generar la señal del comando cuando el control del ángulo de la fase es activo.
Control del ángulo de fase - Constante de tiempo de retraso (ms) - El tiempo
de retraso para el controlador de adelanto/retraso de quinto-orden usado para
generar la señal del comando cuando el control del ángulo de la fase es activo.
Control del ángulo de fase - Ganancia de entrada – La ganancia de la señal del
ángulo de la fase, usada como entrada al circuito de control del ángulo de la fase.
Control del ángulo de fase - Ganancia de control – La ganancia del controlador
del ángulo de la fase.
Habilitación del control de fase - máximo error de velocidad (Hz) - La
diferencia en velocidad entre el generador y la frecuencia de la barra, debajo de la
cual se permite el control del ángulo de la fase.
Control del Disyuntor - Ventana de frecuencia (Hz) - La ventana de la
frecuencia dentro de la cual la diferencia en frecuencia del generador y la barra se
permite un cierre del disyuntor.
Control del Disyuntor - Ventana de voltaje (V) - La ventana del voltaje dentro
de la cual la diferencia en voltaje del generador y de la barra debe se permite un
cierre del disyuntor.
Control del Disyuntor - Ventana de la fase (grados) - La ventana de la fase
dentro de la cual el ángulo entre el generador y la barra se permite un cierre del
disyuntor.
Retraso del disyuntor (ms) - Este parámetro es para consideras el tiempo que
toma en cerrar físicamente el disyuntor a partir del momento que se emite el
comando de cierre. El controlador anticipará este retraso e inicia el comando del
cierre del disyuntor antes para compensarlo.
Tiempo máximo de cierre (ms) - La duración máxima para que el comando del
cierre del disyuntor permanezca energizado.

Configuración del Controlador
MRTOM10 SP 080227 - 109
5.4.1 Interruptor de Control del Sincronizador
Un interruptor de control se proporciona para activar o desactivar esta
función.
Los interruptores de control se usan en el proceso de la configuración para
determinar qué variables activan o desactivan funciones específicas, y son
completamente configurables para permitir el control a partir de entradas
del hardware, de variables discretas internas del sistema, y/o variables
provenientes del puerto de comunicación. Además, cualquiera o todas las
entradas elegidas se pueden habilitar o deshabilitar en base al estado del
modo del mando local o remoto. Para aprender cómo configurar los
interruptores de control, vea la sección 7.1. Una descripción completa de
todas las variables internas que se puedan usar para un interruptor de
control se encuentra en la sección “Hardwired Interface” de la descripción
de la funcionalidad en el manual de operación y mantenimiento.
5.4.2 Valores Prefijados (Defaults)
Ítem Gama Valor prefijado
Frecuencia de desliz (Hz) 0 – 0.5 0
Ángulo de control --- No
Tiempo Activo de control de
voltaje (ms)
0 – 99999 0
Tiempo Desactivo de control de
voltaje (ms)
0 – 99999 0
Constante de tiempo de Adelanto
de control del ángulo de fase (ms)
0 – 99999 0
Constante de tiempo de retraso de
control del ángulo de fase (ms)
0 – 99999 0
Ganancia de entrada del control de
ángulo de fase
0 – 10 0
Ganancia de control de ángulo de
fase
0 – 10 0
Máx. error de velocidad de control
de ángulo de fase (Hz)
0 – 5 0
Ventana de frecuencia de control de
disyuntor (Hz)
0 – 0.5 0
Ventana de Voltaje de control de
disyuntor (V)
0 – 10 0
Ventana de fase de control de
disyuntor (grados)
0 – 15 0
Retraso del disyuntor (ms) 0 – 99999 0
Máx. tiempo de cierre (ms) 0 – 99999 0

Controller Configuration
MRTOM10 SP 0802270 - 110
6. Pantalla de Configuración de la auxiliar Válvula Auxiliar
Presione el botón ‘CONFIGURAR VÁLVULA AUX.’ en la Pantalla de configuración
del MRT para exhibir Pantalla de configuración de la válvula auxiliar. Presione el `X' en
la esquina superior derecha de la pantalla para volver a la pantalla anterior.
Figura 89: Pantalla auxiliar de la configuración de la válvula
Nota: Esta pantalla será solamente accesible si seleccionan una turbina Kaplan, Pelton
1, o Pelton 2. Esta pantalla no será accesible si elige una Francis o Pelton 0.
Aquí el usuario puede configurar:
• El valor de la parada del gobernador
• Tener acceso a las pantallas de configuración para el control manual de la referencia
de los servomotores auxiliares
• Tener acceso a la pantalla automática de la consigna

Configuración del Controlador
MRTOM10 SP 080227 - 111
• Tener acceso a pantallas de configuración del servomotor auxiliar (control del lazo
cerrado) - los botones exhibidos dependen del tipo de turbina seleccionado (Pelton 2
demostrado arriba)
• Configurar funcionalidad del interruptor de control del bloqueo de la válvula
• Configurar valores preestablecidos para las válvulas auxiliares
Valor de paro - El valor que es forzado en el comando de consigna para la válvula
auxiliar cuando ocurre un paro de la unidad.
Valor de Preselección 1 (%) - La posición que el servomotor de la válvula auxiliar
tratará obtener cuando se activa el interruptor de control de preselección 1. Esto se puede
utilizar como el ángulo de las Aspas de una turbina Kaplan, o como la posición de
lanzamiento para las turbinas del impulso (Pelton). La preselección 1 tiene precedencia
sobre la preselección 2. Esto se debe utilizar como un ángulo de las Aspas de una turbina
Kaplan en sobre velocidad, si se requiere dos preselecciones una para sobre velocidad y
otra para inicio de rotación.
Valor de Preselección 2 (%) - La posición que el servomotor de la válvula auxiliar
tratará obtener cuando se activa el interruptor de control de preselección 2 Esto se puede
utilizar como el ángulo de las Aspas de una turbina Kaplan, o como la posición de
lanzamiento para las turbinas del impulso (Pelton). La preselección 1 tiene precedencia
sobre la preselección 2. Esto se debe utilizar como un ángulo de las Aspas de una turbina
Kaplan en sobré velocidad, si se requiere dos preselecciones una para sobre velocidad y
otra para inicio de rotación.
Valores Prefijados (Defaults)
Ítem Gama Valor prefijado
Valor de paro (%) -50 – 150 -50
Valor de preselección 1 (%) 0 – 100 0
Valor de preselección 2 (%) 0 – 100 0
6.1 Interruptor de Control de Bloqueo de la Válvula
Éste interruptor de control activa o desactiva el bloqueo de la válvula. El bloqueo
de la válvula congela la consigna del servomotor en su valor actual. Esto se
utiliza típicamente como función de bloquear las aspas en las turbinas de Kaplan.
Un bloqueo de aspas se utiliza bajo condiciones de limitado luido hidráulico (baja
presión del aceite del acumulador del gobernador), donde el aceite restante
necesita ser reservado para cerrar los álabes. Se actúa esta función cuando el
interruptor de bloque de válvula (véase los interruptores de control abajo) está
activado. El modo de bloque de la válvula tiene precedencia sobre los modos
preestablecidos de la válvula.
Los interruptores de control se usan en el proceso de la configuración para
determinar qué variables activan o desactivan funciones específicas, y son
completamente configurables para permitir el control a partir de entradas del
hardware, de variables discretas internas del sistema, y/o variables provenientes

Controller Configuration
MRTOM10 SP 0802270 - 112
del puerto de comunicación. Además, cualquiera o todas las entradas elegidas se
pueden habilitar o deshabilitar en base al estado del modo del mando local o
remoto. Para aprender cómo configurar los interruptores de control, vea la
sección 7.1. Una descripción completa de todas las variables internas que se
puedan usar para un interruptor de control se encuentra en la sección “Hardwired
Interface” de la descripción de la funcionalidad en el manual de operación y
mantenimiento.
6.2 Interruptores de Control de Preselección de la Válvula
Estos interruptores de control se proporcionan para activar o desactivar los
valores de preselección 1 y2. Con la válvula auxiliar, es posible preestablecer la
consigna del servomotor en dos valores independientes: El valor de preselección
1 y El valor de preselección 2. El interruptor de control de la ‘preselección 1' es
mejor usada para la inclinación de las aspas de prevención de sobrevelocidad en
las turbinas de Kaplan, o posiblemente posición de arranque de la aguja de las
turbinas del impulso (Pelton). El interruptor de control de la ‘preselección 2' es
mejor usada para la inclinación de las aspas en las turbinas de Kaplan durante el
arranque, o posiblemente posición de arranque de la aguja en las turbinas del
impulso (Pelton).
Si se activa la preselección 1, se desactiva el bloqueo de la válvula, el valor de la
preselección 1 se da como consigna de servomotor auxiliar. Si se activa la
preselección 2, se desactiva el valor de preselección 1 y el bloqueo de la válvula,
el valor de la preselección 2 se da como consigna de servomotor auxiliar.
Los interruptores de control se usan en el proceso de la configuración para
determinar qué variables activan o desactivan funciones específicas, y son
completamente configurables para permitir el control a partir de entradas del
hardware, de variables discretas internas del sistema, y/o variables provenientes
del puerto de comunicación. Además, cualquiera o todas las entradas elegidas se
pueden habilitar o deshabilitar en base al estado del modo del mando local o
remoto. Para aprender cómo configurar los interruptores de control, vea la
sección 7.1. Una descripción completa de todas las variables internas que se
puedan usar para un interruptor de control se encuentra en la sección “Hardwired
Interface” de la descripción de la funcionalidad en el manual de operación y
mantenimiento.
6.3 Configuración del Servomotor Auxiliar
Para tener acceso a las pantallas de configuración del servomotor del auxiliar,
presione los botones ‘Controlador de Válvula 1’ o ‘Controlador de Válvula 2’ en
sección de ‘Control del lazo cerrado’ del Pantalla de configuración de la válvula
auxiliar.

Configuración del Controlador
MRTOM10 SP 080227 - 113
Figura 90: Sección de control del lazo cerrado de la pantalla de configuración de la válvula auxiliar
Presione el botón ‘Controlador de Válvula 1’ en sección de ‘Control del lazo
cerrado’ de la Pantalla de configuración de la válvula auxiliar para exhibir la
Pantalla de configuración del servomotor auxiliar 1. Presione el `X' en la
esquina superior derecha de la pantalla para volver a la Pantalla de configuración
de la válvula auxiliar.
Figura 91: Pantalla de configuración del servomotor auxiliar con salida direccional seleccionada

Controller Configuration
MRTOM10 SP 0802270 - 114
Figura 92: Pantalla de configuración del servomotor auxiliar con salida integrativa seleccionada
Figura 93: Pantalla de configuración del servomotor auxiliar con salida proporcional seleccionada

Configuración del Controlador
MRTOM10 SP 080227 - 115
Esta pantalla permite que el usuario configure los parámetros del control del lazo
cerrado del servomotor auxiliar. Observe que dependiendo del tipo de salida
seleccionada diversas opciones de la configuración llegan a estar disponibles.
6.3.1 Pantalla de Configuración de la Entrada Analógica del Servomotor
Auxiliar
Figura 94: Pantalla auxiliar de la configuración de la entrada analógica del servomotor
El usuario debe configurar la entrada analógica que será la señal de
retroalimentación para el control del lazo cerrado. Para hacer esto el
usuario debe designar el número de canal correspondiente.
Una vez designado el canal, aparece el botón ‘Configurar’. Presiónelo
para exhibir la pantalla de configuración de la entrada analógica del
servomotor auxiliar. Presione el `X' en la esquina superior derecha de la
pantalla para volver a la pantalla de configuración del servomotor auxiliar.
Figura 95: Pantalla de configuración de la entrada analógica del servomotor auxiliar 1

Controller Configuration
MRTOM10 SP 0802270 - 116
a. Escalamiento
Figura 96: Sección del escalamiento de la pantalla auxiliar de la configuración de la entrada analógica del servomotor
La figura de arriba representa la porción del escalamiento de la pantalla de
configuración de la entrada analógica del servomotor auxiliar. . La
primera fila se utiliza para incorporar los valores alto y bajo en
miliamperios (mA) de la entrada al sistema. La segunda fila se utiliza para
incorporar los valores bajo y alto en las unidades de la ingeniería que la
entrada en miliamperios representará.
Columna actual a la derecha muestra el valor actual de la entrada en mA y
en Unidades. El valor en Unidades es en base a la configuración
incorporada por el usuario. El Valor Actual permitirá que el usuario
verifique el escalamiento correcto de una entrada variando los mA
provistos al sistema.
Por ejemplo, para configurar correctamente la señal de retroalimentación
del servomotor auxiliar, el servomotor debe ser forzado a las posiciones
de completamente cerrado y completamente abierto. La lectura del valor
Actual en mA mostrará al usuario qué entrar para los valores bajo y alto en
mA. Los valores de Unidades entonces serían fijados a 0 y a 100 para el
bajo y alto, respectivamente, para representar 0 - el 100% de apertura de
los álabes.
Nota: ¡El cierre y apertura completa de los álabes deben ser hechos
mientras que la unidad no tenga agua y esté en un estado seguro!
b. Detección de Falla
Figura 97: Sección de la Detección de Falla de la pantalla de configuración de la entrada analógica del servomotor auxiliar

Configuración del Controlador
MRTOM10 SP 080227 - 117
En esta sección el usuario puede configurar los límites Bajo y Alto de falla
para la entrada analógica. El `Tiempo' en milisegundos (ms) es la
cantidad de tiempo que la entrada debe estar sobre el límite alto o debajo
del límite bajo para generarse una señal de falla.
c. Tiempo de Filtrado
Figura 98: Sección de tiempo de filtrado de la pantalla aux. de la configuración de la entrada analógica del servomotor
El usuario puede agregar filtración a una entrada cambiando este valor
(ms). Esto puede ser útil al configurar un transductor del nivel del
embalse para eliminar o reducir al mínimo el efecto que tengan las olas en
el transductor.
d. Determinación de disparidad
Figura 99: Sección de determinación de disparidad de la pantalla de configuración de la entrada analógica del servomotor auxiliar
La función de determinación de disparidad compara el valor de la
retroalimentación del servomotor auxiliar a la consigna del servomotor. Si
la retroalimentación no cambia y no se alinea con la consigna, se genera
una alarma y/o señal de paro. La función de determinación de disparidad
se realiza sólo cuando la señal de retroalimentación no se está moviendo.
Para determinarse si la señal de retroalimentación no se está moviendo, la
función primeramente filtra la retroalimentación para eliminar cualquier
ruido. La filtración depende del Tiempo del filtro (ms); cuanto más largo
la retroalimentación se filtra, más tiempo lleva a la función el detectar un
cambio en la retroalimentación. Después del filtrado, se calcula el índice
de cambio de la retroalimentación y se compara al valor del umbral del
(%/s). Si el índice del cambio de la señal de retorno es menos que el
umbral, la función de determinación de disparidad se habilita.

Controller Configuration
MRTOM10 SP 0802270 - 118
Si la función se habilita (la señal de retroalimentación se ha parado de
mover) y el error entre la consigna y la retroalimentación es mayor que el
error máximo (%) por la cantidad de tiempo especificada en el ‘Tiempo
Máx’ (ms), una alarma o una señal de paro será generada (la señal de paro
se configura típicamente con un Error Máx más grande).
Si la función de determinación de disparidad no se desea, es posible fijar
error máximo al 100% (carrera completa del servo). Por ejemplo, la
alarma se podría configurar con un error máximo del 10% y un tiempo
máximo de 20000ms, y la señal de paro se podría configurar con un error
máximo del 100%. En este caso, solamente sería generada una alarma de
disparidad en caso de disparidad. La señal de paro de disparidad no sería
generada; por lo tanto la unidad no dispararía Fuera de Línea.
Nota: El Tiempo de filtro y el umbral en la sección de ‘Determinación de
Disparidad’ condiciona la señal de retroalimentación sólo para la
determinación de disparidad. Es decir, no tienen ningún efecto en la señal
de retroalimentación de la posición del servomotor principal a otra parte
en el sistema. El Tiempo de filtro de la sección de determinación de
disparidad no reemplaza ni substituye el Tiempo de filtrado descrito en la
sección de arriba.
Vuelva a la sección 6.3 y repita los pasos antedichos como necesarios para
la configuración auxiliar de la válvula 2.
6.3.2 Valores Prefijados (Defaults)
Ítem Gama Valor prefijado
Válvula Aux 1 – Señal alta de entrada
analógica (mA) 0 – 25 20
Válvula Aux 1 – Señal baja de entrada
analógica (mA) 0 – 25 4
Válvula Aux 1 – entrada analógica alta --- 100
Válvula Aux 1 – entrada analógica baja --- 0
Válvula Aux 1 – falla por entrada
analógica alta (mA) 0 – 25 22
Válvula Aux 1 – falla por entrada
analógica baja (mA) 0 – 25 2
Válvula Aux 1 – tiempo para falla por
entrada analógica (ms) 0 – 99999 100
Válvula Aux 1 – Tiempo de filtrado
(ms) 0 – 99999 0
Válvula Aux 1 – Error Máx. para
Alarma de Disparidad (%) 0 – 100 10
Válvula Aux 1 – Error Máx. para Paro 0 – 100 20

Configuración del Controlador
MRTOM10 SP 080227 - 119
Ítem Gama Valor prefijado
de Disparidad (%)
Válvula Aux 1 – Tiempo máx. para
Alarma de disparidad (ms) 0 – 99999 20000
Válvula Aux 1 - Tiempo máx. para paro
de disparidad (ms) 0 – 99999 12000
Válvula Aux 1- Tiempo de filtrado de
disparidad(ms) 0 – 99999 1000
Válvula Aux 1- Umbral de disparidad
(% /s) --- 1
Válvula Aux 2 – Señal alta de entrada
analógica (mA) 0 – 25 20
Válvula Aux 2 – Señal baja de entrada
analógica (mA) 0 – 25 4
Válvula Aux 2 – entrada analógica alta --- 100
Válvula Aux 2 – entrada analógica baja --- 0
Válvula Aux 2 – falla por entrada
analógica alta (mA) 0 – 25 22
Válvula Aux 2 – falla por entrada
analógica baja (mA) 0 – 25 2
Válvula Aux 2 – tiempo para falla por
entrada analógica (ms) 0 – 99999 100
Válvula Aux 2 – Tiempo de filtrado
(ms) 0 – 99999 0
Válvula Aux 2 – Error Máx. para
Alarma de Disparidad (%) 0 – 100 10
Válvula Aux 2 – Error Máx. para Paro
de Disparidad (%) 0 – 100 20
Válvula Aux 2 – Tiempo máx. para
Alarma de disparidad (ms) 0 – 99999 20000
Válvula Aux 2 - Tiempo máx. para paro
de disparidad (ms) 0 – 99999 12000
Válvula Aux 2- Tiempo de filtrado de
disparidad(ms) 0 – 99999 1000
Válvula Aux 2- Umbral de disparidad
(% /s) --- 1
Válvula Aux 1– Canal de entrada de
realimentación analógica 0 – 8 2
Válvula Aux 2– Canal de entrada de
realimentación analógica 0 – 8 3
Válvula Aux 1- Tipo de Salida 0 – 2
0
(Integrativa)
Válvula Aux 1– Sesgo (Bias) -100 – 100 0

Controller Configuration
MRTOM10 SP 0802270 - 120
Ítem Gama Valor prefijado
Válvula Aux 1 – Ganancia 1 0 – 100 10
Válvula Aux 1 - Ganancia 2 0 – 100 0
Válvula Aux 1- Tiempo de adelanto
(ms) 0 – 99999 100
Válvula Aux 1- Modo de prueba
habilitado --- Desactivado
Válvula Aux 1- Modo de prueba
activado/desactivado --- Desactivado
Válvula Aux 1- Selección de Test
Válvula / Servo --- Servo
Válvula Aux 1- Magnitud del Dither
(%) 0 – 5 0.5
Válvula Aux 1- Frecuencia del Dither
(Hz) 1 – 50 20
Válvula Aux 1- Valor de Pulso
Continuo (%) --- 0
Válvula Aux 1- Periodo del Pulso PWM
(ms) 0 – 99999 0
Válvula Aux 1- Tiempo Mín. del Pulso
(ms) 0 – 100 0
Válvula Aux 2- Tipo de Salida 0 – 2
0
(Integrativa)
Válvula Aux 2– Sesgo (Bias) -100 – 100 0
Válvula Aux 2 – Ganancia 1 0 – 100 0
Válvula Aux 2 - Ganancia 2 0 – 100 0
Válvula Aux 2- Tiempo de adelanto
(ms) 0 – 99999 0
Válvula Aux 2- Modo de prueba
habilitado --- Desactivado
Válvula Aux 2- Modo de prueba
activado/desactivado --- Desactivado
Válvula Aux 2- Selección de Test
Válvula / Servo --- Válvula
Válvula Aux 2- Magnitud del Dither
(%) 0 – 5 0
Válvula Aux 2- Frecuencia del Dither
(Hz) 1 – 50 1
Válvula Aux 2- Valor de Pulso
Continuo (%) --- 0
Válvula Aux 2- Periodo del Pulso PWM
(ms) 0 – 99999 0

Configuración del Controlador
MRTOM10 SP 080227 - 121
Ítem Gama Valor prefijado
Válvula Aux 2- Tiempo Mín. del Pulso
(ms) 0 – 100 0
6.4 Configuración de Referencia Control Manual
El usuario puede configurar el control manual del servomotor auxiliar con el uso
de los botones del control manual mostrados abajo. Observe que estos botones
son solamente visibles cuando están habilitados.
Figura 100: Sección de control manual de la pantalla de configuración de la válvula auxiliar
6.4.1 Pantalla de Referencia Manual (Válvula Aux.)
Presione el botón ‘Configurar’ en la sección del control manual de la
pantalla de configuración de la válvula auxiliar para exhibir la pantalla de
la referencia manual (servo aux.). Presione el `X' en la esquina superior
derecha de la pantalla para volver a la pantalla de configuración de la
válvula auxiliar.

Controller Configuration
MRTOM10 SP 0802270 - 122
Figura 101: Pantalla manual de la referencia (servo auxiliar)
Esta pantalla permite que el usuario configure los parámetros de la
referencia manual para el servo auxiliar.
Límite mínimo - Éste es el valor mínimo, o la consigna, que la referencia
puede obtener. Una vez que la referencia alcance este límite inferior, no
podrá disminuir más, sin importar comandos o consignas.
Límite máximo - Éste es el valor máximo, o la consigna, que la referencia
puede obtener. Una vez que la referencia alcance este límite superior, no
podrá aumentar más, sin importar comandos o consignas.
Razón de cambio (Unidades/s) - Este valor indica que tan rápidamente la
referencia cambiará cuando se le da un pulso de subir o bajar, o una nueva
consigna analógica. Esto es útil si se desea limitar que tan rápidamente la
referencia cambie con un cambio en la consigna. No importando la
magnitud del cambio en la consigna, este valor aumentará o disminuirá la
salida de la referencia de una manera constante y controlada para
mantener estabilidad del sistema.
Tiempo Mín. del Pulso (ms) - Ésta es la duración mínima que un
comando de subir o bajar afectará la salida de la referencia. Si el comando
de subir la consigna manual de referencia se activa para una fracción de
segundo, la salida de la referencia continuará aumentando a la razón del
‘Razón de cambio’ hasta que el Tiempo Mín. del Pulso expire.
Configuración del Controlador
MRTOM10 SP 080227 - 123
6.4.2 Interruptor de Control de Activación Manual de la Válvula Auxiliar
Se proporciona un interruptor de control para activar o desactivar la
referencia manual. Presione el botón ‘Activar/Desactivar’ en la sección de
interruptor de control de la pantalla de control manual de configuración de
la pantalla de selección de Activación o desactivación del control manual
de la válvula auxiliar. Presione el `X' en la esquina superior derecha de
cualquier pantalla para volver a la pantalla principal de configuración de la
válvula.
Los interruptores de control se usan en el proceso de la configuración para
determinar qué variables activan o desactivan funciones específicas, y son
completamente configurables para permitir el control a partir de entradas
del hardware, de variables discretas internas del sistema, y/o variables
provenientes del puerto de comunicación. Además, cualquiera o todas las
entradas elegidas se pueden habilitar o deshabilitar en base al estado del
modo del mando local o remoto. Para aprender cómo configurar los
interruptores de control, vea la sección 7.1. Una descripción completa de
todas las variables internas que se puedan usar para un interruptor de
control se encuentra en la sección “Hardwired Interface” de la descripción
de la funcionalidad en el manual de operación y mantenimiento.
6.4.3 Control de Consignas de Referencia de la Válvula Auxiliar
Presione el botón Subir/Bajar en la sección de Control de Consignas de la
pantalla de configuración de la válvula auxiliar para exhibir la pantalla 1
de control manual de la válvula auxiliar. Presione el botón ‘Consigna
Analógica’ en la misma sección para exhibir la pantalla 2 de control
manual de la válvula auxiliar. Presione el `X' en la esquina superior
derecha de cualquier pantalla para volver a la pantalla de la configuración
de la válvula auxiliar.
Las pantallas del control de consignas de referencia permiten que el
usuario asigne entradas de hardware, variables discretas internas del
sistema, y/o variables de la comunicación a los comandos de subir/bajar, y
a los comandos de consignas analógicas para ajustar la consigna de
referencia. Además, todas las entradas elegidas puede ser habilitadas o
deshabilitadas embalse al estado del modo del mando local o remoto. Para
aprender cómo configurar comandos de la consigna de la referencia, vea la
sección 7.2.
6.4.4 Valores Prefijados (Defaults)
Ítem Gama Valor prefijado
Límite Mín. de Referencia Manual 0 – 100 0
Límite Máx. de Referencia Manual 0 – 100 100
Razón de Cambio de Ref. Manual (1/s) --- 5
Tiempo Mín. del Pulso de Ref. Manual (ms) 0 – 99999 100

Controller Configuration
MRTOM10 SP 0802270 - 124
6.5 Pantalla de Consigna Automática
Presione el botón ‘Consigna Automática’ de la sección del control automático de
la Pantalla de configuración de la válvula auxiliar para exhibir la Pantalla de la
consigna automática. Presione el `X' en la esquina superior derecha de la pantalla
para volver a Pantalla de configuración de la válvula auxiliar.
Figura 102: Pantalla de la consigna automática
El propósito de esta pantalla es permitir que el usuario configure una consigna
automática de la válvula auxiliar basada en la consigna del servomotor principal y
del nivel principal presentes en el sistema. Para una turbina de Kaplan, esto es
ideal para obtener una posición de las Aspas que maximice la eficacia de la
turbina. Para una turbina del impulso (Pelton), utilice característica de la
consigna automática para asegurar que el deflector está cerca del borde de la
corriente de la aguja.
El usuario puede entrar hasta 11 curvas que definan una gama de niveles de
embalse. Cada curva tiene 11 puntos de referencias para permitir que el usuario
incorpore la consigna del servo auxiliar deseada en incrementos del 10% de la
consigna principal del servomotor (álabes o deflector). Las consignas auxiliares
del servomotor se pueden incorporar en estos incrementos del 10% en una gama a
partir de la -100% a 200%.

Configuración del Controlador
MRTOM10 SP 080227 - 125
El controlador entonces determinará la consigna de la válvula auxiliar
automáticamente interpolando los puntos incorporados en las curvas. Así una
nueva consigna se calcula en cualquier momento del nivel del embalse o el
cambio de la consigna del servomotor principal. Si se define solamente una
curva, el controlador no hace caso del nivel de embalse y la consigna automática
se basará solamente de la consigna del servomotor principal.
Cuando se incorporan datos, tenga cuidado al extrapolar más allá del rango de
operación normal del servomotor auxiliar (típicamente de 0% a 100%). Aunque
la consigna automática es limitada por el rango de operación (definido cuando se
configura la entrada analógica que corresponde a la retroalimentación del
servomotor, vea 6.3), el no definir los puntos más allá de estos límites puede
causar errores grandes de la interpolación. La figura siguiente ilustra esto.
-20
0
20
40
60
80
100
120
0 10 20 30 40 50 60 70 80 90 100
Posición de álabes/deflector (%)
Po
sic
ión
de
as
pas
/ag
uja
(%
)
Datos de Entrada Correctos
Valor Correcto del Controlador
Datos de Entrada Incorrectos Valor Incorrecto
del Controlador
Figura 103: Entrada de datos de la curva: Correcta vs. Incorrecta
6.5.1 Valores del Salto Bruto
Figura 104: Sección de los datos de altura del salto de la pantalla de la consigna automática

Controller Configuration
MRTOM10 SP 0802270 - 126
Número de curvas - El número de curvas de esto definirá la consigna
automática. Hasta 11 curvas pueden ser configuradas.
Número de la curva - Presionar este botón cambiará qué curva se está
configurando en ese momento.
Salto Bruto - Éste es el valor del salto bruto para la curva que se está
configurando en ese momento.
6.5.2 Datos de la Curva
Figura 105: Sección de los datos curva de la pantalla de la consigna automática
Incorpore la consigna deseada del servo auxiliar para los incrementos
dados de la consigna principal del servomotor para el número de la curva
se está configurando en ese momento. La gama de consignas del servo
auxiliar es de -100% a 200% de tal modo que el usuario puede incorporar
datos extrapolados en el borde del rango de operación del servomotor
auxiliar (véase la Figura 103).

Configuración del Controlador
MRTOM10 SP 080227 - 127
6.5.3 Interruptor de Control Compensado
Figura 106: Sección del interruptor de control de compensación de la pantalla de la consigna automática
Es posible aplicar un Offset o compensación a la curva de la consigna
automática. La consigna del servomotor principal (álabes o deflector) o la
consigna del servomotor auxiliar (aspas o aguja) pueden ser compensadas.
Valor del Offset (%) - La cantidad de compensación se aplicó en
términos de porcentaje de cambio (+/- 100%).
Razón del Offset (%/s) - La razón en la cual se aplica la compensación.
Aplique el Offset a - Esto determina si la compensación se aplica a la
entrada (servomotor principal) o a la salida (consigna del servo auxiliar).
El interruptor compensado de la válvula es mejor utilizado como el sesgo
o bias de la aguja en unidades del impulso (Pelton). Puede ser utilizado
para fijar las agujas con valor más alto que la curva de aguja contra
deflector durante la operación en red aislada para lograr el modo de
“desperdicio de agua”. Este modo da a una turbina de impulso una mejor
capacidad de aceptar la carga.
La figura siguiente muestra los efectos de compensar la entrada o la
salida. Utilice esto como guía si usa la compensación u Offset en el modo
de “desperdicio de agua”. Al compensar la entrada, típicamente hay un
desperdicio de agua significativo para consignas más altas del deflector.
Al compensar la salida, el desperdicio de agua es típicamente más
significativo para consignas más bajos del deflector.

Controller Configuration
MRTOM10 SP 0802270 - 128
0
20
40
60
80
100
120
0 10 20 30 40 50 60 70 80 90 100
Figura 107: Efectos del ‘desperdicio de agua’ por la compensación de entrada o salida
Se proporciona un interruptor de control para activar o desactivar el
Offset.
Los interruptores de control se usan en el proceso de la configuración para
determinar qué variables activan o desactivan funciones específicas, y son
completamente configurables para permitir el control a partir de entradas
del hardware, de variables discretas internas del sistema, y/o variables
provenientes del puerto de comunicación. Además, cualquiera o todas las
entradas elegidas se pueden habilitar o deshabilitar en base al estado del
modo del mando local o remoto. Para aprender cómo configurar los
interruptores de control, vea la sección 7.1. Una descripción completa de
todas las variables internas que se puedan usar para un interruptor de
control se encuentra en la sección “Hardwired Interface” de la descripción
de la funcionalidad en el manual de operación y mantenimiento.
6.5.4 Pantalla de Configuración Altura Bruta
Presione el botón ‘Configurar’ en la sección de Altura Bruta de la pantalla
de la consigna automática para exhibir la pantalla de configuración de
altura bruta. Presione el `X' en la esquina superior derecha de la pantalla
para volver a la pantalla de la consigna automática.

Configuración del Controlador
MRTOM10 SP 080227 - 129
Figura 108: Pantalla de configuración de la altura bruta
La señal de altura bruta es responsable de la consigna del servomotor
auxiliar generado por función de la consigna automática. En el caso de
una falla en la señal de altura bruta (la señal de entrada que provee la
altura bruta falla, o falla el nivel del embalse o el nivel en desagüe), el
controlador necesita un método para proveer la señal de altura bruta a la
función de consigna automática. Esto se logra vía el control manual de la
señal de altura bruta. En caso de una falla de la señal de altura bruta, el
interruptor de control es automáticamente activado. Este interruptor puede
también ser configurado para poder lograr esa operación usando una
consigna manual de la altura bruta bajo operación normal.
a. Interruptor de Control Manual
Se proporciona un interruptor de control para poder utilizar una
consigna manual de la altura bruta bajo operación normal. Cuando se
activa, la consigna manual de altura bruta determina el control de la
función de la consigna automática.
Los interruptores de control se usan en el proceso de la configuración
para determinar qué variables activan o desactivan funciones
específicas, y son completamente configurables para permitir el
control a partir de entradas del hardware, de variables discretas
internas del sistema, y/o variables provenientes del puerto de
comunicación. Además, cualquiera o todas las entradas elegidas se
pueden habilitar o deshabilitar en base al estado del modo del mando
local o remoto. Para aprender cómo configurar los interruptores de

Controller Configuration
MRTOM10 SP 0802270 - 130
control, vea la sección 7.1. Una descripción completa de todas las
variables internas que se puedan usar para un interruptor de control se
encuentra en la sección “Hardwired Interface” de la descripción de la
funcionalidad en el manual de operación y mantenimiento.
b. Control de la Consigna
Las pantallas del control de la consigna de la referencia permiten que
el usuario asigne entradas del hardware, variables discretas internas del
sistema, y/o variables de la comunicación al aumento/más bajo y a los
comandos analógicos de la referencia de la consigna de ajustar la
consigna de la referencia. Además, lo que sea de las entradas elegidas
puede ser permitido o ser inhabilitado basado en el estado del modo
del mando local/a distancia. Para aprender cómo configurar comandos
de la consigna de la referencia, vea la sección 7.2.
c. Setpoint manual
Esta sección permite que el usuario configure los parámetros de la
referencia manual de altura bruta para la función de la consigna
automática. El control manual de altura bruta de la referencia da a
usuario la capacidad de determinar la consigna del servomotor auxiliar
con un valor de altura bruta incorporado manualmente.
Mínimo - Éste es el valor mínimo, o consigna, que la referencia
puede obtener. Una vez que la referencia alcance este límite inferior,
no podrá disminuir más, sin importar los comandos o consignas.
Máximo - Éste es el valor máximo, o consigna, que la referencia
puede obtener. Una vez que la referencia alcance este límite superior,
no podrá aumentar para fomentar, sin importar comandos o consignas.
Razón de Cambio (1/s) - Este valor indica que tan rápidamente la
referencia cambiará cuando se le da un pulso de subir o bajar, o una nueva
consigna analógica. Esto es útil si se desea limitar que tan rápidamente la
referencia cambie con un cambio en la consigna. No importando la
magnitud del cambio en la consigna, este valor aumentará o disminuirá la
salida de la referencia de una manera constante y controlada para
mantener estabilidad del sistema.
Tiempo Mín. del Pulso (ms) - Ésta es la duración mínima que un
comando de subir o bajar afectará la salida de la referencia. Si el comando
de subir la consigna manual de referencia se activa para una fracción de
segundo, la salida de la referencia continuará aumentando a la razón del
‘Razón de cambio’ hasta que el Tiempo Mín. del Pulso expire.

Configuración del Controlador
MRTOM10 SP 080227 - 131
d. Entradas Analógicas
Figura 109: Sección de entrada analógica de la pantalla altura bruta de la configuración
Esta sección permite que el usuario configure todas las entradas
analógicas necesarias para control de la consigna automática del
servomotor auxiliar. Para que estas funciones trabajen correctamente,
sus entradas correspondientes deban se mapeadas aquí. Incorpore el
número de canal que corresponde a la entrada analógica deseada.
Aparecerá un botón de ‘Configurar’ después de que se haga esto. Para
más información sobre el configuración de entradas analógicas, vea
4.2.1. Accione el botón de las UNIDADES para cambiar unidades de
pies a metros.
Para elegir una de las dos señales a usar en la determinación de la
altura bruta, presione botón ‘Usar’ arriba (véase la flecha). Este botón
dará escoger entre la “altura bruta” y “embalse y desagüe”. Cuando se
selecciona la “altura bruta”, el nivel altura bruta es determinado por la
entrada analógica asignada a la altura bruta. Cuando se selecciona la
“embalse y desagüe”, el nivel altura bruta es determinado por la
diferencia entre la entrada analógica asignada al nivel de embalse y el
nivel en el desagüe.
Nota: Las pantallas de configuración para estas entradas analógicas se
pueden también alcanzar mediante la pantalla de entradas alambradas
del gobernador. Sin embargo, la selección de cómo determinar la altura
bruta se puede hacer solamente en esta pantalla.
6.5.5 Valores Prefijados (Defaults)
Ítem Gama Valor prefijado
Número de curvas de altura bruta 0 – 11 1
Todos los valores de altura bruta -99.99 – 99.99 0
Todas las consignas del servo aux. -100 – 200 0
Valor del Offset (%) -25 – 25 0
Razón del Offset (%/s) 0.01 – 25 0
Aplicar Offset a --- Salida
Número de índice de la entrada
analógica de nivel de embalse
0 – 8 0

Controller Configuration
MRTOM10 SP 0802270 - 132
Ítem Gama Valor prefijado
Número de índice de la entrada
analógica de nivel de desagüe
0 – 8 0
Número de índice de la entrada
analógica de altura bruta
0 – 8 0
Límite mín de consigna manual -9999.99 –
9999.99
0
Límite máx. de consigna manual -9999.99 –
9999.99
0
Razón de Cambio de Consigna
manual (1/s)
-9999.99 –
9999.99
0
Tiempo mín del pulso de consigna
manual (ms)
0 – 99999 0
Usar Altura Bruta / Embalse &
Desagüe
--- Embalse &
Desagüe
7. Información General de la Configuración
7.1 Interruptores de Control
Los interruptores de control se usan en el proceso de la configuración para
determinar qué variables activan o desactivan funciones específicas, y son
completamente configurables para permitir el control a partir de entradas del
hardware, de variables discretas internas del sistema, y/o variables provenientes
del puerto de comunicación. Además, cualquiera o todas las entradas elegidas se
pueden habilitar o deshabilitar en base al estado del modo del mando local o
remoto.
Cada pantalla del interruptor de control aparecerá idéntica a excepción del título
de la pantalla.

Configuración del Controlador
MRTOM10 SP 080227 - 133
Figura 110: Pantalla de configuración del interruptor de control
Hay esencialmente dos pantallas separadas construidas en esta pantalla. Esto
permite la operación entre local y remoto. De esta forma un usuario puede desear
una entrada específica para manejar la entrada al interruptor de control en modo
local, pero no en modo remoto. Para alternar entre el modo local y remoto use el
botón señalado por la flecha.
Es en esta pantalla que el usuario elige cual entrada de hardware (o ninguna) usar
(véase óvalo) o las variables discretas internas del sistema (véase el rectángulo)
activarán el interruptor de control. Vea la sección del interfaz de Hardware en la
sección de la descripción de la funcionalidad del manual de operación y
mantenimiento para una descripción completa de las entradas del hardware y de
las variables discretas del sistema interno.
Los puertos de comunicación pueden también enviar comandos de selección a los
interruptores de control. Para ver una lista de dirección se asoció a cada puerto de
comunicación, ven el manual de operación y mantenimiento - interfaz de
comunicaciones.
Para señalar una entrada para el interruptor de control, presione en los botones y
aparecerá el teclado siguiente:

Controller Configuration
MRTOM10 SP 0802270 - 134
Figure 111: Teclado de selección de entrada
Este teclado permite que el usuario elija que entrada de hardware a utilizar como
la entrada al interruptor de control presionando las teclas de flecha. Presionando
el botón ‘ENTER’ para asignar la variable interna seleccionada del sistema al
canal. Presionando botón ‘ESC’ se cancela cualquier cambio realizado. Para
definir una salida como sin usar, presione la tecla de punta hacia abajo hasta que
encontrar ‘SIN USAR’ y presione ‘ENTER’.
7.1.1 Botones Habilitadores de Interruptores de Control
Después de que el usuario haya elegido las entradas del control, los
habilitadores deben ser fijado para designar la operación local o remota.
Los botones interruptores “abiertos/cercados” se proporcionan para este
propósito.
Figura 112: Interruptor cerrado o selección permitida
La señal se permite, significando que la señal de entrada es permitida
pasar a la salida. Se pueden fijar diferente condiciones para la operación
local y remota.
Figura 113: Interruptor abierto o selección inhabilitada
La señal no se permite, significando que la señal de entrada no está
permitida de pasar a la salida. Se pueden fijar diferente condiciones para
la operación local y remota.
Figura 114: Botón de alternación local/remoto

Configuración del Controlador
MRTOM10 SP 080227 - 135
Accione el botón de alternación de local y remoto para asignar el
habilitador para cada modo de la operación. Cuando se exhibe el modo
remoto, se configuran los habilitadores para el modo remoto. Cuando
exhiben al Local, el usuario configura habilitadores para el modo local.
Los habilitadores para todos los tipos de la entrada (entradas del hardware,
entradas del puerto de com. No.1, entradas del puerto de comunicación
No.2, y entradas discretas del sistema interno) se configuran aquí.
Nota: El botón de local/remoto cambiará solamente los habilitadores
para esa entrada. Las entradas separadas o los modos de condición de
entradas no se pueden configurar entre los modos de la operación local y
remota. Cambiar la entrada seleccionada en modo remoto también
cambiará la entrada seleccionada para el modo local.
7.1.2 Interruptor de Control del Condicionamiento de Señal
El usuario puede configurar cómo las entradas seleccionadas afectarán la
operación del interruptor de control configurando los botones de
condicionamiento de la entrada. Éstos son los botones presentes en la
representación gráfica del alambre de la entrada a la compuerta lógica OR.
a. Botón Inversor de la Entrada
Figura 115: Botón inversor de la entrada mostrado en estado normal
La señal de entrada se pasa directamente a la salida. Si la señal de
entrada está activada, la señal de salida estará activada. Si la señal de
entrada está desactivada, la señal de salida estará desactivada.
Figura 116: Botón inversor de la entrada mostrado en estado invertido
La señal de entrada se invierte antes de pasar a la salida. Si la señal de
entrada está activada, la señal de salida estará desactivada. Si la señal
de entrada está desactivada, la señal de salida estará activada.
b. Botón del Modo de Entrada
Figura 117: Botón del modo de entrada mostrado en estado normal

Controller Configuration
MRTOM10 SP 0802270 - 136
La señal de entrada pasa al comando directamente. Mientras la señal
de entrada esté activada, la señal de salida estará activada.
Figura 118: Botón del modo de entrada mostrado en estado de pulso
La señal de entrada se convierte a un pulso de tiempo limitado, que
entonces se utiliza para manejar el comando. Cuando la señal de
entrada se activa, la señal de salida se activa para un número
especificado (0-99999) de milisegundos. Esta señal de salida
permanece activada por el tiempo configurado sin importar el estado
de la señal de entrada.
Figura 119: Botón del modo de entrada mostrado en estado condicional del pulso
La señal de entrada se convierte a un pulso de tiempo limitado que
entonces se utiliza para manejar el comando. Cuando la señal de
entrada se activa, la señal de salida se activa para un número
especificado (0-99999) de milisegundos. Si la señal de entrada se
desactiva durante el tiempo de pulso, la señal de salida se desactiva
inmediatamente.
7.2 Referencia Control de la Consigna
Las pantallas del control de la consigna de la referencia permiten que el usuario
asigne entradas del hardware, variables discretas internas del sistema, y/o
variables de la comunicación de subir o bajar y a los comandos analógicos de la
referencia de la consigna para ajustar la consigna de la referencia. Además, lo
cualquiera de las entradas elegidas puede ser habilitada o inhabilitada en base al
estado del modo del mando local o remoto.
7.2.1 Comandos de Control de Subir / Bajar la Consigna
Cada pantalla de control de subir / baja de la consigna aparecerá en forma
idéntica con excepción del título de la pantalla.

Configuración del Controlador
MRTOM10 SP 080227 - 137
Figura 120: Pantalla de configuración de comando de subir o bajar
Hay esencialmente cuatro pantallas separadas construidas en esta pantalla. Esto
permite tener configuraciones separadas para los comandos de subir y bajar, así
como para la operación local y remota. De este modo un usuario puede desear
para entradas diversas los comandos de subir y bajar u otras entradas para
mientras se este en modo local, pero no en modo remoto. Para alternar entre el
modo local y remoto use el botón señalado por la flecha en la derecha. Para
alternar entre los comandos subir y bajar use el botón señalado por la flecha en la
izquierda.
Es en esta pantalla que el usuario elige cual entrada de hardware (o ninguna) usar
(véase óvalo) o las variables discretas internas del sistema (véase el rectángulo)
activarán el interruptor de control. Vea la sección del interfaz de Hardware en la
sección de la descripción de la funcionalidad del manual de operación y
mantenimiento para una descripción completa de las entradas del hardware y de
las variables discretas del sistema interno.
Los puertos de comunicación pueden también enviar comandos de selección a los
interruptores de control. Para ver una lista de dirección se asoció a cada puerto de
comunicación, ven el manual de operación y mantenimiento - interfaz de
comunicaciones.
Para señalar una entrada para el interruptor de control, presione en los botones y
aparecerá el teclado siguiente:

Controller Configuration
MRTOM10 SP 0802270 - 138
Figura 121: Teclado de selección de la entrada
Este teclado permite que el usuario elija que entrada de hardware a utilizar como
la entrada al interruptor de control presionando las teclas de flecha. Presionando
el botón ‘ENTER’ para asignar la variable interna seleccionada del sistema al
canal. Presionando botón ‘ESC’ se cancela cualquier cambio realizado. Para
definir una salida como sin usar, presione la tecla de punta hacia abajo hasta que
encontrar ‘SIN USAR’ y presione ‘ENTER’.
Para cambiar entre la configuración para los comandos de subir y bajar use el
botón señalado abajo.
Figura 122: Botón de selección de subir o bajar
Cuando se exhibe ‘Subir’ el usuario configura los comandos de subir. Cuando se
muestra ‘bajar’, el usuario configura los comandos de bajar.
7.2.2 Comandos de Control de la Consigna Analógica
Cada pantalla de control de consignas analógicas aparecerá en forma
idéntica con excepción del título de la pantalla.

Configuración del Controlador
MRTOM10 SP 080227 - 139
Figura 123: Pantalla de configuración del comando de la consigna analógica
Hay esencialmente dos pantallas funcionales diferentes que se cubren en
esta pantalla. Esto es para permitir diferentes configuraciones entre la
operación local y remota. De tal modo que un usuario pueda tener una
entrada específica como la entrada al interruptor de control en modo local,
y otra para el modo remoto. Para cambiar entre el modo local y remoto
use el botón local/remoto (véase la flecha).
Es en esta pantalla que el usuario elige cual entrada de hardware (o
ninguna) usar para el comando analógico de la consigna.
Los puertos de comunicación pueden también ser habilitados para dar
comandos analógicos de la consigna. Para ver una lista de dirección
asociadas a cada puerto de comunicación, vea el manual de operación y
mantenimiento - interfaz de comunicaciones.
Para seleccionar una entrada para un comando, use el teclado siguiente:
Figura 124: Selección de la entrada Teclado
Este teclado permite que el usuario elija la entrada de hardware a utilizar
como la entrada a la consigna analógica presionando las teclas con

Controller Configuration
MRTOM10 SP 0802270 - 140
flechas. Presionando el botón ‘ENTER’ asigna la entrada de hardware
seleccionada – una de las disponibles (de 0 a 16). Presionando botón
‘ESC’ se cancela cualquier cambio realizado. Para definir una entrada
como ‘Sin Usar’, presione la tecla con flecha hacia abajo hasta que
aparezca ‘Sin Usar’ y presione ‘ENTER’.
7.2.3 El Botón Habilitador de Comando
Después de que el usuario haya elegido las entradas del comando, los
habilitadores deben ser fijados para la operación local y remota. Para este
propósito se proporciona un interruptor ‘abierto/cerrado’.
Figura 125: Interruptor habilitador de selección con estado habilitado
Cuando el interruptor se muestra cerrado se habilita la señal de entrada
para pasar a la salida. Se puede fijar diferentes condiciones para la
operación local y remota.
Figura 126: Interruptor habilitador de selección con estado deshabilitado
Cuando el interruptor se muestra abierto se deshabilita la señal de entrada
para pasar a la salida. Se puede fijar diferentes condiciones para la
operación local y remota.
Figura 127: Botón de alternación local/remoto
Accione el botón de alternación de local y remoto para asignar el
habilitador para cada modo de la operación. Cuando se exhibe el modo
remoto, se configuran los habilitadores para el modo remoto. Cuando
exhiben al Local, el usuario configura habilitadores para el modo local.
Los habilitadores para todos los tipos de la entrada (entradas del hardware,
entradas del puerto de comunicación #1, entradas del puerto de
comunicación #2, y entradas discretas del sistema interno) se configuran
aquí.
Nota: El botón de local/remoto cambiará solamente los habilitadores
para esa entrada. Las entradas separadas o los modos de condición de
entradas no se pueden configurar entre los modos de la operación local y

Configuración del Controlador
MRTOM10 SP 080227 - 141
remota. Cambiar la entrada seleccionada en modo remoto también
cambiará la entrada seleccionada para el modo local.
7.2.4 Acondicionamiento de Entradas de Comandos Subir/Bajar
El usuario puede configurar cómo las entradas seleccionadas afectarán el
los comandos de subir o bajar configurando los botones de
acondicionamiento de la entrada. Éstos son los botones presentes en la
representación gráfica del alambre de la entrada a la compuerta lógica OR.
a. Botón Inversor de la Entrada
Figura 128: : Botón inversor de la entrada mostrado en estado normal
La señal de entrada se pasa directamente a la salida. Si la señal de entrada
está activada, la señal de salida estará activada. Si la señal de entrada está
desactivada, la señal de salida estará desactivada.
Figura 129: Botón inversor de la entrada mostrado en estado invertido
La señal de entrada se invierte antes de pasar a la salida. Si la señal de
entrada está activada, la señal de salida estará desactivada. Si la señal de
entrada está desactivada, la señal de salida estará activada.
b. Botón del Modo de Entrada
Figura 130: Botón del modo de entrada mostrado en estado normal
La señal de entrada pasa al comando directamente. Mientras la señal
de entrada esté activada, la señal de salida estará activada.
Figura 131: Botón del modo de entrada mostrado en estado de pulso

Controller Configuration
MRTOM10 SP 0802270 - 142
La señal de entrada se convierte a un pulso de tiempo limitado, que
entonces se utiliza para manejar el comando. Cuando la señal de
entrada se activa, la señal de salida se activa para un número
especificado (0-99999) de milisegundos. Esta señal de salida
permanece activada por el tiempo configurado sin importar el estado
de la señal de entrada.
Figura 132: Botón del modo de entrada mostrado en estado condicional del pulso
La señal de entrada se convierte a un pulso de tiempo limitado que
entonces se utiliza para manejar el comando. Cuando la señal de
entrada se activa, la señal de salida se activa para un número
especificado (0-99999) de milisegundos. Si la señal de entrada se
desactiva durante el tiempo de pulso, la señal de salida se desactiva
inmediatamente.
7.3 Pantallas de la Ayuda
Cuando aparece un botón ‘?’ en el lado inferior izquierdo de cualquier pantalla,
este botón se puede presionar para navegar a una pantalla de ayuda asociada a los
asuntos de la configuración en esa pantalla. Para volver a la pantalla anterior,
presione el botón de 'X' en la esquina superior derecha de la pantalla. Algunas
pantallas de la ayuda con mucha información usan más de una pantalla. Si éste es
el caso, se mostrará el botón ‘Siguiente’ que el usuario puede presionar para ir a la
pantalla siguiente de la ayuda.
7.4 Pantalla del Control del Gobernador
Presione el botón ‘OPERAR’ en la Pantalla de configuración del MRT para
exhibir la Pantalla del control del gobernador.

Configuración del Controlador
MRTOM10 SP 080227 - 143
Figura 133: Pantalla del control del gobernador
Las pantallas de la operación son las pantallas mediante las cuales se lleva a cabo
todo el control y la supervisión de la unidad durante la operación normal del
gobernador MRT y después de que el proceso de la configuración se haya
completado.
Para aprender más sobre la operación del gobernador de MRT Digital, refiérase a
la sección de la Operación del Gobernador.
Para regresar a la Pantalla de la configuración de MRT se requieren dos pasos.
Primero, presione botón ‘Config. Del Sist.’ en la esquina superior izquierda de la
Pantalla del control del gobernador. La Pantalla de configuración de sistema
aparecerá. Para volver a Pantalla de la configuración de MRT, presione botón de
‘Configuración’ – note que se requiere un nivel de la seguridad de 3 o mayor para
obtener acceso a esta opción. Para definir las contraseñas de los niveles des
seguridad del DEP use el botón de la SEGURIDAD de la Pantalla de
configuración de sistema – note que requisé un nivel de seguridad 4 para esta
opción.
7.5 Diagramas de Flujos para la Configuración de los Varios Tipos de Turbinas
Las siguientes figuras muestran los diagramas de flujo del procedimiento
recomendado para configurar las diversas turbinas. Estos incluyen el orden
recomendado de los pasos.

Controller Configuration
MRTOM10 SP 0802270 - 144
El procedimiento recomendado para configurar Francis y Pelton 0 turbinas se
muestra en la Figura 134. El procedimiento recomendado para configurar turbinas
Kaplan y Pelton 1 se muestra en el Figura 135. El procedimiento recomendado
para configurar turbinas Pelton 2 se muestra en el Figura 136.
7.5.1 Francis y Pelton 0 turbinas
Figura 134: Procedimiento recomendado para configurar turbinas Francis y Pelton 0

Configuración del Controlador
MRTOM10 SP 080227 - 145
Nota: L&S Electric Inc. recomienda que se haga una copia de respaldo de la tarjeta de
Flash con una computadora portátil o una cierta otra localización separada y segura
después de la configuración final se ha creado y se ha almacenado a la tarjeta de Flash.
Tal copia de reserva será muy útil si se encuentra algún problema de corrupción de
datos en tarjeta Flash, haciendo posible producir otra tarjeta de Flash y re cargar
fácilmente la configuración en el controlador (PLC)
7.5.2 Turbinas Kaplan y de Pelton 1
Figura 135: Kaplan y Pelton 1 organigrama recomendado turbina de la configuración
Nota: L&S Electric Inc. recomienda que se haga una copia de respaldo de la tarjeta de
Flash con una computadora portátil o una cierta otra localización separada y segura
después de la configuración final se ha creado y se ha almacenado a la tarjeta de Flash.
Tal copia de reserva será muy útil si se encuentra algún problema de corrupción de
datos en tarjeta Flash , haciendo posible producir otra tarjeta de Flash y re cargar
fácilmente la configuración en el controlador (PLC).

Controller Configuration
MRTOM10 SP 0802270 - 146
7.5.3 Turbina Pelton 2
Figura 136: Organigrama recomendado turbina de la configuración de Pelton 2
Nota: L&S Electric Inc. recomienda que se haga una copia de respaldo de la tarjeta de
Flash con una computadora portátil o una cierta otra localización separada y segura
después de la configuración final se ha creado y se ha almacenado a la tarjeta de Flash.
Tal copia de reserva será muy útil si se encuentra algún problema de corrupción de
datos en tarjeta Flash , haciendo posible producir otra tarjeta de Flash y re cargar
fácilmente la configuración en el controlador (PLC).

Configuración del Controlador
MRTOM10 SP 080227 - 147
7.6 Ganancias y Estatismo del Gobernador
El estatismo del Gobernador, también llamado Droop, determina el estado
estacionario, o el comportamiento estático del sistema de control. Es decir, ¿hacia
donde va el gobernador? Mientras que las ganancias del gobernador determinan el
comportamiento dinámico, o transitorio, del sistema de control. ¿Cómo llega el
gobernador a su posición final?
7.6.1 Estatismo (Droop)
Definición de Términos
Ganancia de Droop (%) es el droop de estado estacionario del
gobernador. Las Figuras 137 a la 140 ilustran el concepto del droop.
Estabilidad Transitoria– Ganancia (%) es el estatismo temporal que se
aplica sólo durante una condición transitoria. Durante una condición
transitoria se puede desear retrasar la respuesta del gobernador limitando
el movimiento de los álabes durante el transitorio, lo cual se logra
aumentando temporalmente el estatismo. Si el gobernador es demasiado
sensible durante un transitorio el gobernador podría reaccionar de más.
Estabilidad Transitoria– Tiempo de Filtrado (ms) es el tiempo de
efectividad del estatismo temporal en el modo del control. Es decir, cuánto
tiempo, durante una condición transitoria, el estatismo temporal se
inyectada en la consigna de la velocidad. C C C C C C
0 20 40 60 80 100
100
Sp
eed
(%
)
95
105
Gate Position (%)
101
102
103
100
96
97
98
99
5%
Figura 137: Relación de Posición y Velocidad con Droop de 5%
El estatismo de velocidad, o droop, se define como el cambio en la

Controller Configuration
MRTOM10 SP 0802270 - 148
velocidad requerido para que los álabes se mueva el 100%. La figura
anterior muestra una unidad con un estatismo del 5%. De acuerdo con la
figura, si la unidad operara a la velocidad del 100%, el gobernador
controlaría la posición de abertura de los álabes al 50%. Si la unidad
operara al 97.5% de la velocidad, el gobernador controlaría la posición de
la puerta en la abertura 100%. Si la unidad funcionara al 102.5% de la
velocidad, el gobernador controlaría la posición de abertura de los álabes
al 0%.
C C C C C C
0 20 40 60 80 100
100
95
105
Gate Position (%)
101
102
103
104
96
97
98
99
5%
Spe
ed
(%
)
Figura 138: Droop de 5% con Consigna de 100%
La Consigna o ajuste de velocidad representa la velocidad deseada del
gobernador. Cuando el disyuntor del generador se cierra, la consigna o
ajuste de velocidad del gobernador se fija para que sea automáticamente el
100% en la condición sin carga. En la figura anterior, la posición de los
álabes de la velocidad sin carga es el 20%.

Configuración del Controlador
MRTOM10 SP 080227 - 149
C C C C C C
0 20 40 60 80 100
100
95
105
Gate Position (%)
101
102
103
104
96
97
98
99
5%
Sp
ee
d (
%)
Figura 139: Relación de Posición al 102.5% de Velocidad con Droop de 5%
El modificar la Consigna de velocidad equivaldría a deslizar para arriba o
para abajo la línea inclinada en la figura. Así, si se aumenta la consigna de
velocidad, la línea inclinada subirá y la posición deseada de loa álabes
aumentará. En el ejemplo, el ajuste de la velocidad se aumentada al
102.5% (la intersección de la línea del ajuste de la velocidad y la posición
de los álabes del 20%, que es la velocidad sin carga es ahora 102.5%). En
este caso, la posición de los álabes para una velocidad del 100% aumenta
hasta el 70% (la intersección del ajuste de la velocidad y de las líneas de la
velocidad). Observe que esta es velocidad es 50% mayor que la velocidad
sin carga, esto se puede calcular. Dado que un cambio del 5% en el ajuste
de la velocidad da lugar a un cambio del 100% en la posición de los
álabes, un cambio 2.5% en el ajuste de la velocidad resulta en un cambio
del 50% en la posición de los álabes.

Controller Configuration
MRTOM10 SP 0802270 - 150
C C C C C C
0 20 40 60 80 100
100
95
105
Gate Position (%)
101
102
103
104
96
97
98
99
5%
Spe
ed
(%
)
Figura 140: Droop de 5% con Consigna de 102.5% y Velocidad en 101%
Con la consigna de la velocidad en 102.5% y la velocidad en 100%,
hemos visto que el gobernador será satisfecho con una abertura del 70%.
¿Qué sucede si la velocidad cambia? Por ejemplo, si la velocidad de la
unidad aumenta a 101%. De nuevo, podemos mirar la intersección del
ajuste de la velocidad y de las líneas de la velocidad para determinar el
comportamiento del gobernador. Vemos que este aumento del 1% en
velocidad causas que la posición de los álabes caiga del 70% hasta el
50%. Así, el aumento del 1% en velocidad hizo al gobernador caer un
20% de su salida en un intento por traer la velocidad de nuevo al normal.
7.6.2 Ganancias
Definición de términos
El termino Proporcional es la cantidad agregada a la salida basada en el
error actual.
La ganancia proporcional (Kp) es simplemente un multiplicador Si el
error es 10% y la ganancia es .8 la salida moverá el 8%. Una ganancia
proporcional alta resultará en condición de sobretiro y oscilaciones, una
ganancia demasiado baja produce una respuesta pobre a cambios de la
consigna o a cambios de la carga. Refiera al cuadro 141 a la Figura 143
con ejemplos de respuestas del gobernador.

Configuración del Controlador
MRTOM10 SP 080227 - 151
El término integral es la cantidad agregada a la salida en base a la suma
del error.
La constante de Tiempo Integral es el tiempo para una repetición
completa del término proporcional. Si el término proporcional es el 8% y
la constante de Tiempo es 10 segundos la salida crecerá, gracias al
componente integral en una razón de 8% cada 10 segundos.
La razón de reset es la cantidad que la salida se moverá en un segundo.
Si el término proporcional es el 8%, y la razón de reset es 0.1 repetición/s,
la salida moverá 0.1 * 8 cada segundo y tomará 10 segundos para la
repetición completa del término proporcional de 8%.
La ganancia integral (Ki) es igual que la razón de reset multiplicada por
la ganancia proporcional. En el gobernador MRT se define la ganancia
integral y el resto de los valores integrales se calculan de la ganancia
integral. Puesto que el término integral es basado en tiempo, un error con
una duración extendida junto con una ganancia integral alta puede resultar
en un sobretiro y una respuesta pobre en restablecer el gobernador a la
posición de consigna. Una ganancia integral baja resulta en una respuesta
lenta del gobernador en eliminar un error. Referirse a las figuras 141 a la
Figura 143 con ejemplos de las respuestas del gobernador.
El término derivativo es la cantidad que se resta de la salida en base al
razón de cambio del error.
La constante de tiempo derivativa es la cantidad de tiempo de avance el
controlador considerará.
Ganancia derivativa (Kd) es la cantidad de tiempo de avance que el
controlador considera multiplicada por la ganancia proporcional. En el
gobernador MRT se define la ganancia derivativa y la constante de
Tiempo del derivado se calcula de la ganancia derivado. La ganancia
derivativa se agrega después de que se fijen las ganancias proporcionales e
integrales y es a menudo útil para eliminar los sobretiros en la respuesta.
Una ganancia derivativa alta puede hacer el sistema excesivamente
sensible al ruido y se debe utilizar con precaución. Referirse al cuadro 141
a la Figura 143 por ejemplos de respuestas del gobernador. Idealmente la
ganancia derivativa debe ser 0.
Ejemplos de respuestas ideales, inaceptables y aceptables del gobernador
se muestran abajo:

Controller Configuration
MRTOM10 SP 0802270 - 152
Y-A
xis
X-Axis
Figura 141: Respuesta ideal del gobernador
Gains too lowIncrease ProportionalGain and Integral Gain
Y-A
xis
X-Axis
Y-A
xis
X-Axis
Decrease Gains to removeOscillation
Figura 142: Respuestas inaceptables del gobernador

Configuración del Controlador
MRTOM10 SP 080227 - 153
Y-A
xis
X-AxisY
-Axi
s
X-Axis
Curve OKTo sharpen, increaseProportional Gain or IntegralGain
Curve OKTo sharpen, decreaseProportional Gain or IncreaseDerivative
Figura 143: Respuestas aceptables del gobernador