motor y contactor
DESCRIPTION
tipos de motor y contactoresTRANSCRIPT
INDICE
I. INTRODUCCION
II. CUERPO
1. MOTOR
1.1 Concepto
1.2 Características
1.3 Tipos y partes
2. CONTACTOR
2.1 Concepto
2.2 Funcionamiento
2.3 Partes
III. CONCLUSION
IV. BIBLIOGRAFIA
V. ANEXOS
I. INTRODUCCION
El siguiente informe es realizado con el propósito de conocer los elementos del motor y
contactor, así mismo conocer los diferentes tipos de motores y contactores en este se
hablara sobre el concepto, elementos que lo componen, tipos y funcionamiento de un
motor y contactor.
Para alcanzar este propósito nuestros objetivos específicos son:
Adquirir conocimientos a través del laboratorio y complementar con ayuda de medios
de información.
Explorar los motores y contactores para conocer sus partes y funcionamientos.
Conocer la diferencia, importancia y características de los motores y contactores.
.II. CUERPO
1. MOTOR
1.1 Concepto
Un motor es la parte sistemática de una máquina capaz de hacer funcionar el
sistema, transformando algún tipo de energía (eléctrica,
de combustibles fósiles, etc.), en energía mecánica capaz de realizar
un trabajo. En los automóviles este efecto es una fuerza que produce el
movimiento.
1.2 Características generales
Rendimiento: es el cociente entre la potencia útil que generan y la
potencia absorbida. Habitualmente se representa con la letra griega η.
Velocidad de poco giro o velocidad nominal: es la velocidad angular del
cigüeñal, es decir, el número de revoluciones por minuto (rpm o RPM) a las
que gira. Se representa por la letra n.
Potencia: es el trabajo que el motor es capaz de realizar en la unidad de
tiempo a una determinada velocidad de giro. Se mide normalmente
en caballos de vapor (CV), siendo 1 CV igual a 736 vatios.
Par motor: es el momento de rotación que actúa sobre el eje del motor y
determina su giro. Se mide en kgf·m (kilogramo-fuerza metro) o lo que es lo
mismo newtons-metro (N·m), siendo 1 kgf·m igual a 9,81 N·m. Hay varios
tipos de pares, véanse por ejemplo el par de arranque, el par de
aceleración y el par nominal.
Estabilidad: es cuando el motor se mantiene a altas velocidades sin gastar
demasiado combustible tanto como energía eléctrica en sus
correspondientes tiempos que pasa el motor sin ningún defecto pero esto
solo se hace en las fábricas donde se desarrolla el motor.
1.3 Tipos de motores
Existen diversos tipos, siendo de los más comunes los siguientes:
Motores térmicos : Cuando el trabajo se obtiene a partir de energía
calórica.
Motores de combustión interna, son motores térmicos en los cuales
se produce una combustión del fluido del motor, transformando
su energía química en energía térmica, a partir de la cual se
obtiene energía mecánica. El fluido motor antes de iniciar la
combustión es una mezcla de un comburente (como el aire) y
un combustible, como los derivados del petróleo y gasolina, los
del gas natural o los biocombustibles.
Motores de combustión externa, son motores térmicos en los
cuales se produce una combustión en un fluido distinto al fluido
motor. El fluido motor alcanza un estado térmico de mayor fuerza
posible de llevar es mediante la transmisión de energía a través de
una pared.
Motores eléctricos: Cuando el trabajo se obtiene a partir de
una corriente eléctrica.
En los aerogeneradores, las centrales hidroeléctricas o los reactores
nucleares también se transforman algún tipo de energía en otro. Sin embargo,
la palabra motores reserva para los casos en los cuales el resultado inmediato
es energía mecánica.
Los motores eléctricos utilizan la inducción electromagnética que produce la
electricidad para producir movimiento, según sea la constitución del motor:
núcleo con cable arrollado, sin cable arrollado, monofásico, trifásico, con
imanes permanentes o sin ellos; la potencia depende del calibre del alambre,
las vueltas del alambre y la tensión eléctrica aplicada.
1.3.1 Motor térmico
Es aquel que transforma la energía térmica producida al quemar un
combustible en energía mecánica para realizar un trabajo.
Energía térmica → MOTOR TÉRMICO → Energía mecánica
Al proceso de quemar un combustible (reacción del combustible con
oxígeno) se le conoce como COMBUSTIÓN.
1.3.1.1 Motores de combustión interna
Son aquellos en los que la combustión se realiza dentro del
propio motor. Son usados en la mayor parte de las máquinas
que necesitan autonomía para funcionar o moverse
(automóviles, motocicletas, motosierras). Los motores de
combustión interna alternativos se caracterizan porque un
pistón se desplaza alternativamente dentro de un cilindro
desde el PMS al PMI.
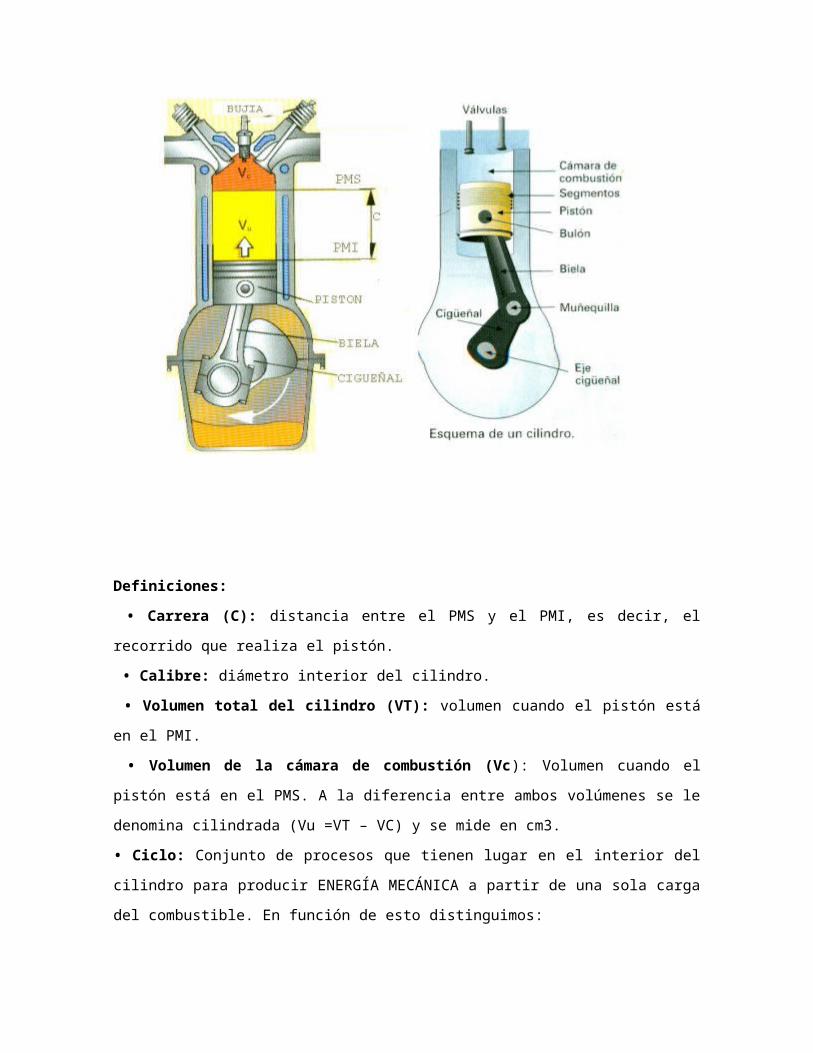
PMS (punto muerto superior): punto más alto que alcanza el
pistón en su movimiento alternativo.
PMI (punto muerto inferior): punto más bajo que alcanza el
pistón en su movimiento alternativo.
Este movimiento alternativo del pistón es transformado en un
movimiento circular mediante el conjunto biela-manivela.
Definiciones:
• Carrera (C): distancia entre el PMS y el PMI, es decir, el recorrido que realiza el pistón.
• Calibre: diámetro interior del cilindro.
• Volumen total del cilindro (VT): volumen cuando el pistón está en el PMI.
• Volumen de la cámara de combustión (Vc): Volumen cuando el pistón está en el
PMS. A la diferencia entre ambos volúmenes se le denomina cilindrada (Vu =VT – VC) y
se mide en cm3.
• Ciclo: Conjunto de procesos que tienen lugar en el interior del cilindro para producir
ENERGÍA MECÁNICA a partir de una sola carga del combustible. En función de esto
distinguimos:
- Motores de dos tiempos: si usa “dos” carreras del émbolo para completar un
ciclo.
- Motores de cuatro tiempos: si usa “cuatro” carreras del émbolo para
completar un ciclo.
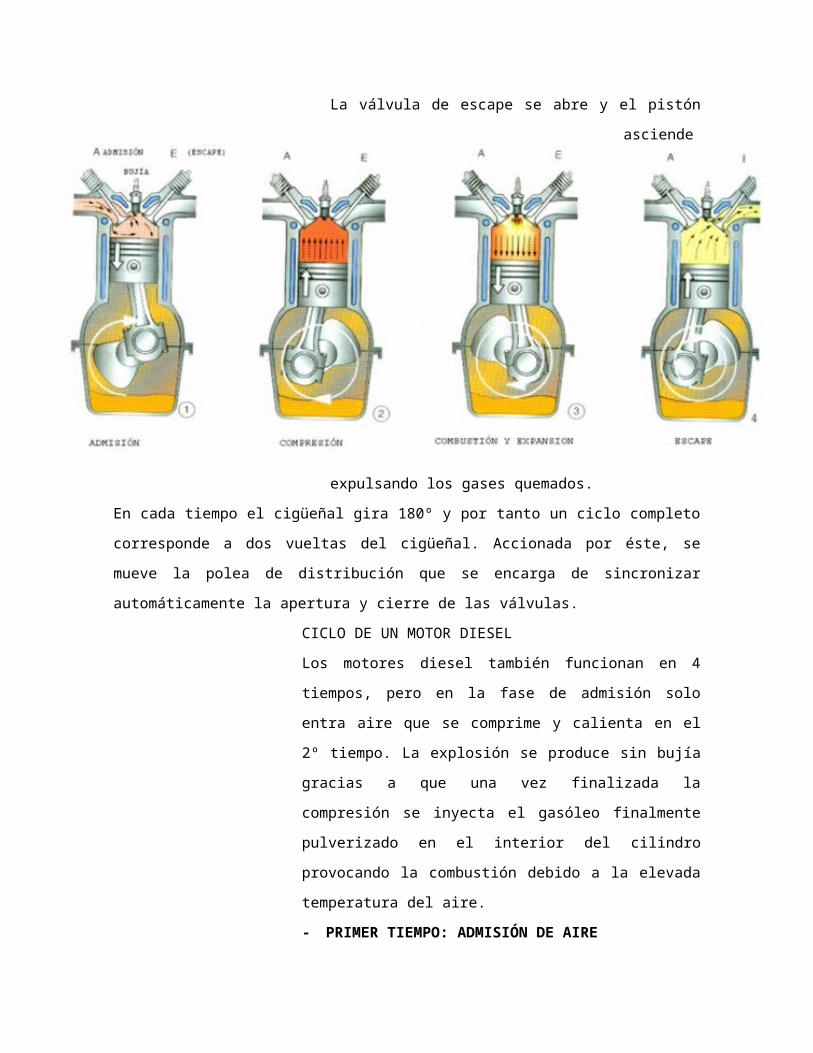
1.3.1.2 Motores de cuatro tiempos
CICLO DE UN MOTOR DE GASOLINA (motor de explosión)
La secuencia de funcionamiento tiene lugar en cuatro fases o
tiempos:
- PRIMER TIEMPO: ADMISIÓN
La válvula de admisión se abre. El pistón desciende por
el cilindro y deja entrar una mezcla de combustible y aire
convenientemente dosificada por el carburador o equipo
de inyección.
- SEGUNDO TIEMPO: COMPRESIÓN
Cuando el pistón llega al PMI la válvula de admisión se
cierra. El pistón comienza a subir y comprime la mezcla
gaseosa. Se produce un aumento de temperatura y
presión.
- TERCER TIEMPO: EXPLOSIÓN Y EXPANSIÓN.
Una chispa eléctrica suministrada por una bujía provoca
la combustión de la mezcla comprimida. El pistón
desciende empujado por la presión de los gases de la
combustión. En esta fase se produce un TRABAJO.
- CUARTO TIEMPO: ESCAPE.
La válvula de escape se abre y el pistón asciende
expulsando los gases quemados.
En cada tiempo el cigüeñal gira 180º y por tanto un ciclo completo corresponde a dos
vueltas del cigüeñal. Accionada por éste, se mueve la polea de distribución que se
encarga de sincronizar automáticamente la apertura y cierre de las válvulas.
CICLO DE UN MOTOR DIESEL
Los motores diesel también funcionan en 4 tiempos, pero en
la fase de admisión solo entra aire que se comprime y
calienta en el 2º tiempo. La explosión se produce sin bujía
gracias a que una vez finalizada la compresión se inyecta el
gasóleo finalmente pulverizado en el interior del cilindro
provocando la combustión debido a la elevada temperatura
del aire.
- PRIMER TIEMPO: ADMISIÓN DE AIRE
Carrera descendente del émbolo, válvula de admisión
abierta y llenado del cilindro de aire.
- SEGUNDO TIEMPO: COMPRESIÓN
Carrera ascendente del émbolo, compresión del aire
hasta una presión elevada originando un aumento de la
temperatura del aire. Válvulas de admisión y escape
cerradas.
- TERCER TIEMPO: EXPANSIÓN
Inyección del combustible finamente pulverizado que se
inflama al contacto con el aire sobrecalentado a medida
que se introduce en el cilindro, y segunda carrera
descendente. Es el tiempo de aportación de trabajo al
ciclo.
- CUARTO TIEMPO: ESCAPE
Segunda carrera ascendente, se abre válvula de escape
y el pistón al subir provoca la evacuación de los gases
quemados.
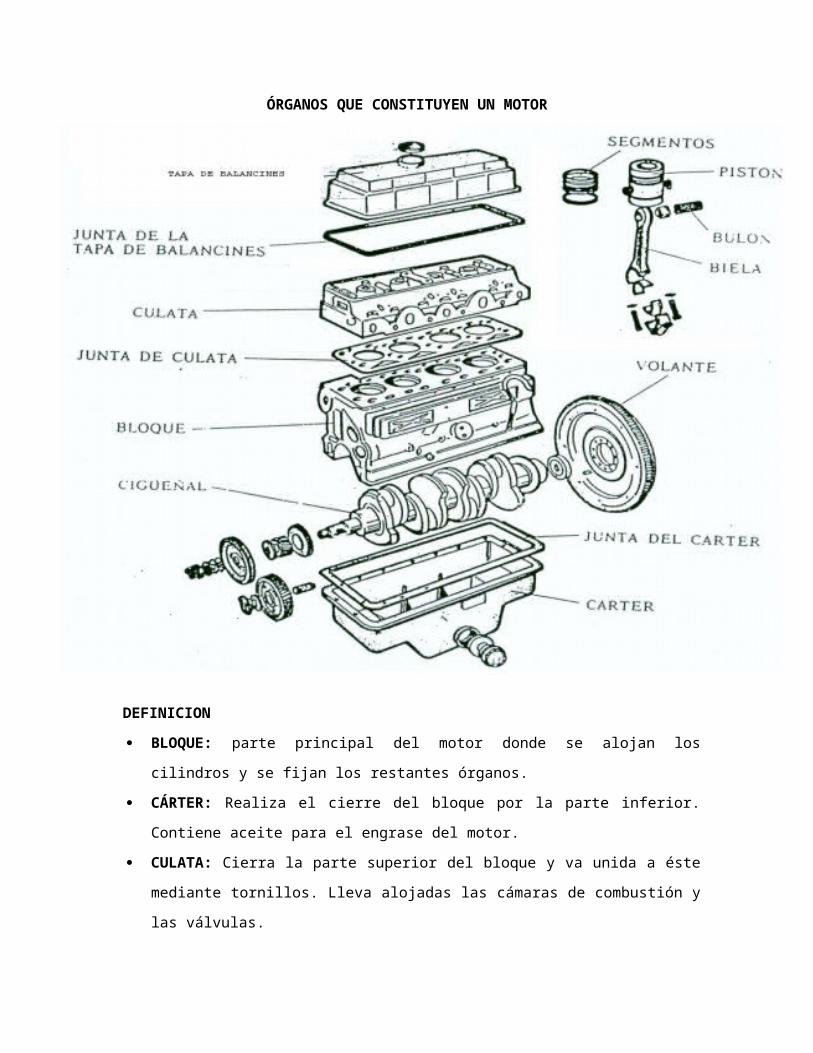
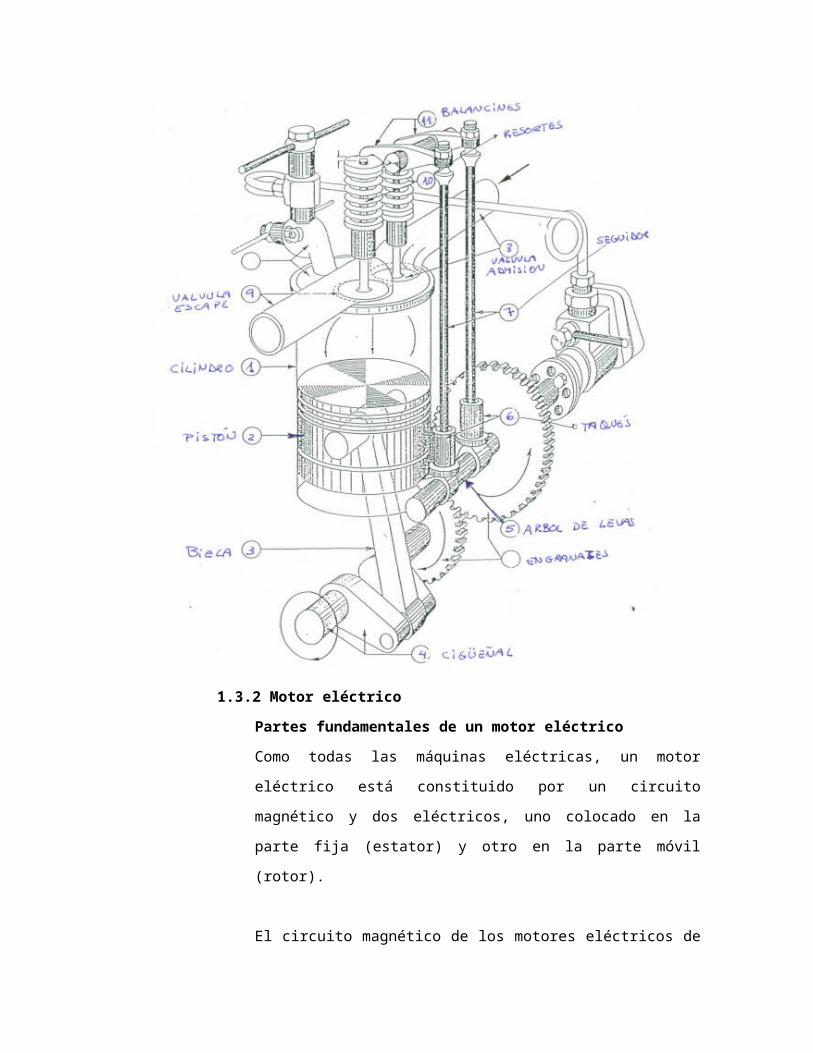
ÓRGANOS QUE CONSTITUYEN UN MOTOR
DEFINICION
BLOQUE: parte principal del motor donde se alojan los cilindros y se fijan los
restantes órganos.
CÁRTER: Realiza el cierre del bloque por la parte inferior. Contiene aceite para el
engrase del motor.
CULATA: Cierra la parte superior del bloque y va unida a éste mediante tornillos.
Lleva alojadas las cámaras de combustión y las válvulas.
CIGÜEÑAL: Es el eje del motor que recibe el movimiento alternativo de la biela y lo
transforma en circular. A su vez transmite la fuerza motriz a los órganos de
transmisión.
BIELA: Pieza de unión entre el pistón y el cigüeñal, al que transmite el esfuerzo que
se produce en el tiempo motor (tiempo en el que se realiza trabajo).
PISTON: émbolo colocado en el interior del cilindro que describe un movimiento
lineal alternativo. Va unido a la biela mediante un eje llamado bulón.
DISTRIBUCIÓN: Conjunto de órganos formado por un árbol de levas que recibe
movimiento del cigüeñal y lo transmite a las válvulas para regular la apertura y cierre
en el momento oportuno.
VOLANTE DE INERCIA: se encuentra colocado en un extremo del cigüeñal. Es
muy voluminoso. Regula el funcionamiento equilibrado del motor almacenando
energía en el tiempo motor para aportarla en los tiempos muertos como admisión,
compresión y escape.
1.3.2 Motor eléctrico
Partes fundamentales de un motor eléctrico
Como todas las máquinas eléctricas, un motor eléctrico está
constituido por un circuito magnético y dos eléctricos, uno colocado
en la parte fija (estator) y otro en la parte móvil (rotor).
El circuito magnético de los motores eléctricos de corriente alterna
está formado por chapas magnéticas apiladas y aisladas entre sí
para eliminar el magnetismo remanente.
El circuito magnético está formado por chapas apiladas en forma de
cilindro en el rotor y en forma de anillo en el estátor.
El cilindro se introduce en el interior del anillo y, para que pueda
girar libremente, hay que dotarlo de un entrehierro constante.
El anillo se dota de ranuras en su parte interior para colocar el
bobinado inductor y se envuelve exteriormente por una pieza
metálica con soporte llamada carcasa.
El cilindro se adosa al eje del motor y puede estar ranurado en su
superficie para colocar el bobinado inducido (motores de rotor
bobinado) o bien se le incorporan conductores de gran sección
soldados a anillos del mismo material en los extremos del cilindro
(motores de rotor en cortocircuito) similar a una jaula de ardilla, de
ahí que
reciban el nombre de rotor de jaula de ardilla.
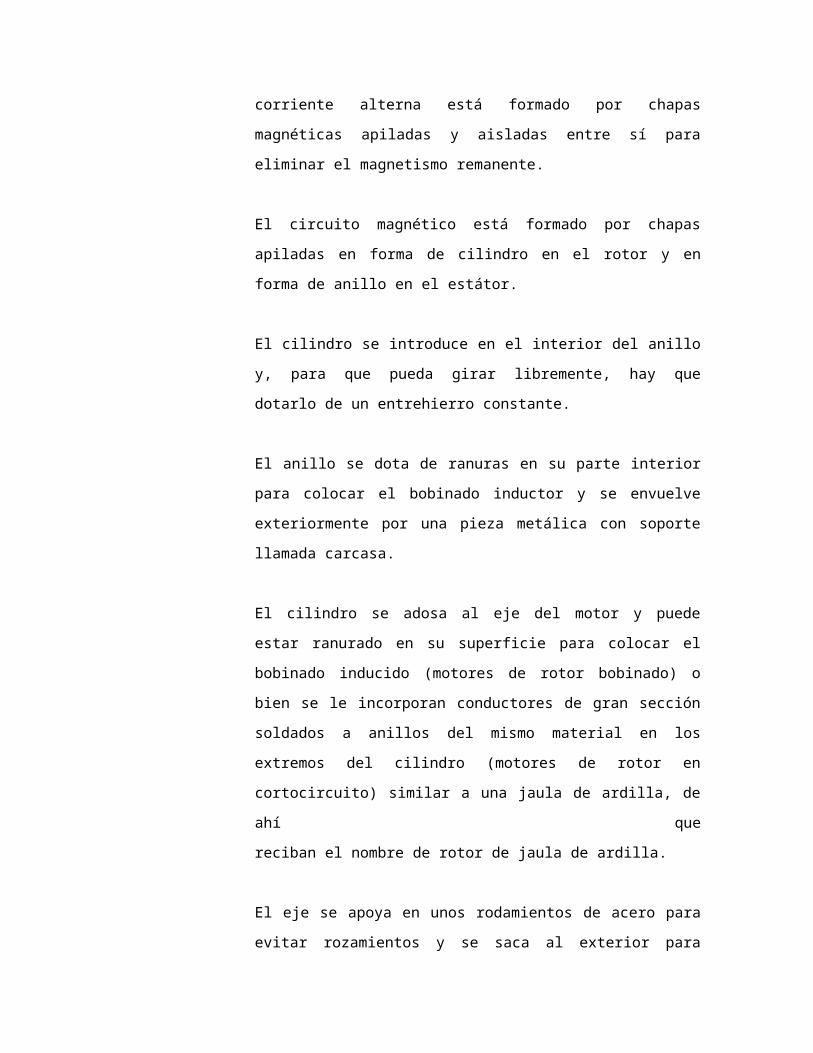
El eje se apoya en unos rodamientos de acero para evitar
rozamientos y se saca al exterior para transmitir el movimiento, y
lleva acoplado un ventilador para refrigeración. Los extremos de los
bobinados se sacan al exterior y se conectan a la placa de bornes.
DEFINICION:
Estator
Constituye la parte fija del motor. El estator es el elemento que opera como base,
permitiendo que desde ese punto se lleve a cabo la rotación del motor. El estator no se
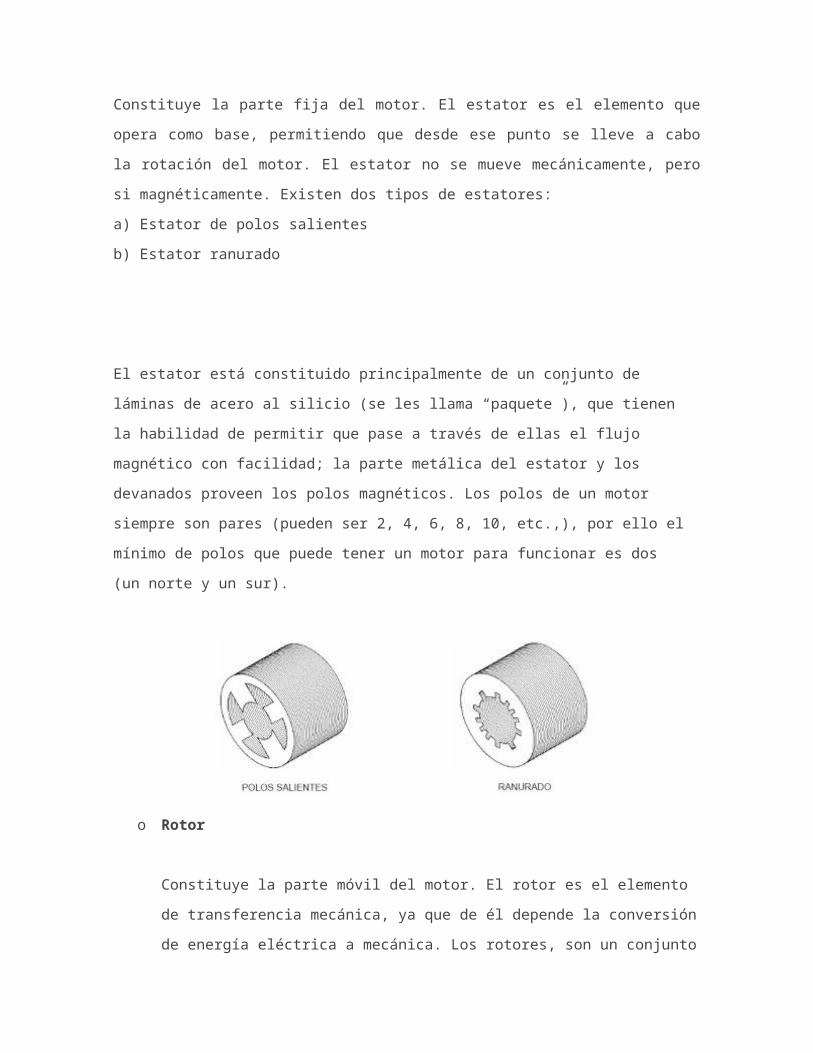
mueve mecánicamente, pero si magnéticamente. Existen dos tipos de estatores:
a) Estator de polos salientes
b) Estator ranurado
El estator está constituido principalmente de un conjunto de láminas de acero al silicio (se
les llama “paquete”), que tienen la habilidad de permitir que pase a través de ellas el flujo
magnético con facilidad; la parte metálica del estator y los devanados proveen los polos
magnéticos. Los polos de un motor siempre son pares (pueden ser 2, 4, 6, 8, 10,
etc.,), por ello el mínimo de polos que puede tener un motor para funcionar es dos
(un norte y un sur).
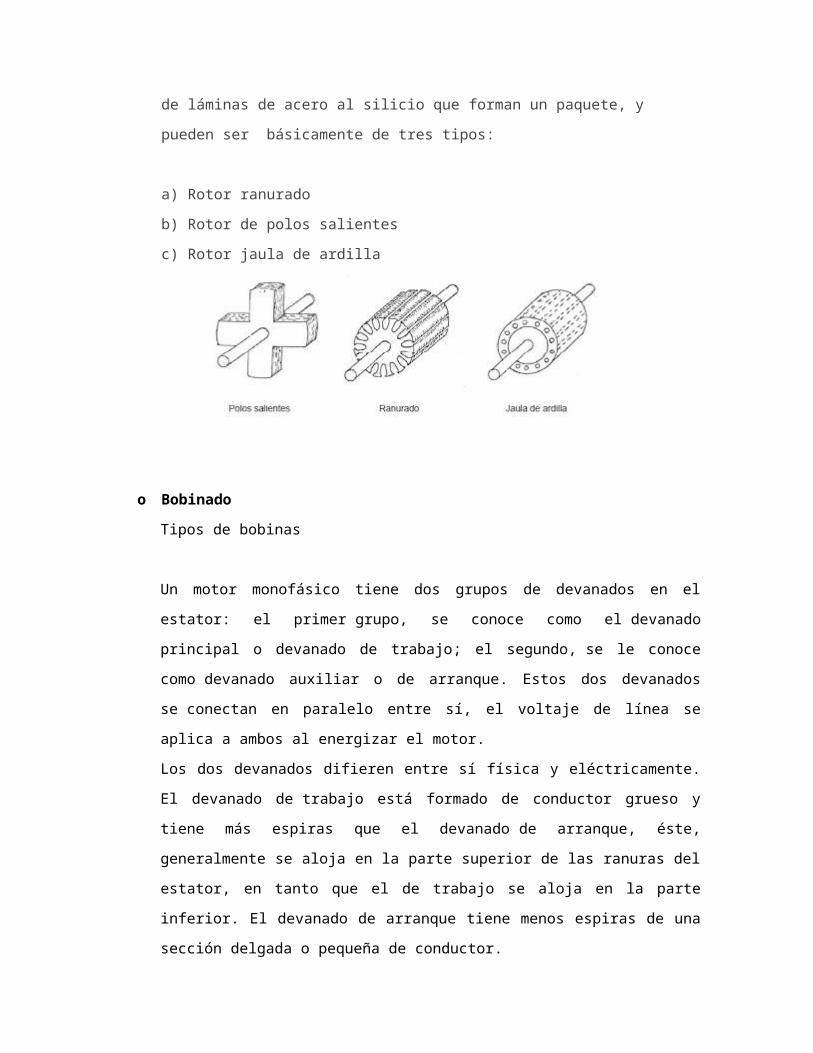
o Rotor
Constituye la parte móvil del motor. El rotor es el elemento de transferencia
mecánica, ya que de él depende la conversión de energía eléctrica a mecánica.
Los rotores, son un conjunto de láminas de acero al silicio que forman un paquete,
y pueden ser básicamente de tres tipos:
a) Rotor ranurado
b) Rotor de polos salientes
c) Rotor jaula de ardilla
o Bobinado
Tipos de bobinas
Un motor monofásico tiene dos grupos de devanados en el estator: el
primer grupo, se conoce como el devanado principal o devanado de trabajo; el
segundo, se le conoce como devanado auxiliar o de arranque. Estos dos
devanados se conectan en paralelo entre sí, el voltaje de línea se aplica a ambos
al energizar el motor.
Los dos devanados difieren entre sí física y eléctricamente. El devanado de trabajo
está formado de conductor grueso y tiene más espiras que el devanado de
arranque, éste, generalmente se aloja en la parte superior de las ranuras del
estator, en tanto que el de trabajo se aloja en la parte inferior. El devanado de
arranque tiene menos espiras de una sección delgada o pequeña de conductor.
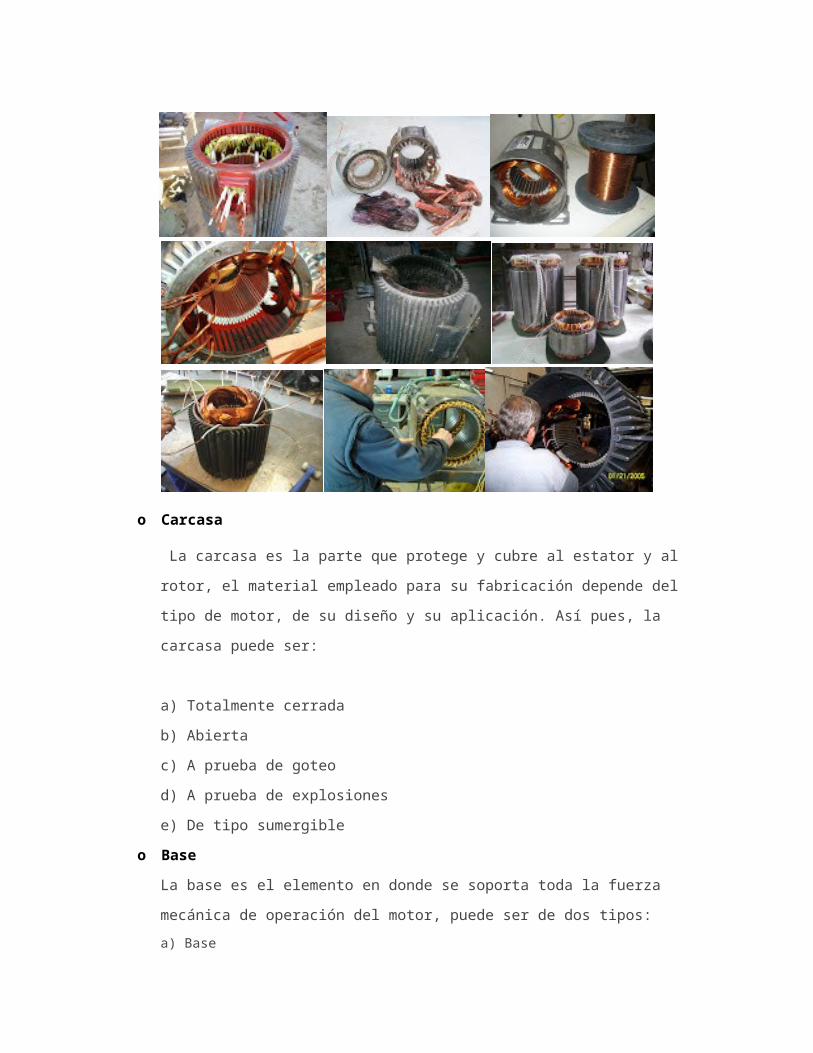
o Carcasa
La carcasa es la parte que protege y cubre al estator y al rotor, el material
empleado para su fabricación depende del tipo de motor, de su diseño y su
aplicación. Así pues, la carcasa puede ser:
a) Totalmente cerrada
b) Abierta
c) A prueba de goteo
d) A prueba de explosiones
e) De tipo sumergible
o Base
La base es el elemento en donde se soporta toda la fuerza mecánica de operación
del motor, puede ser de dos tipos:
a) Base frontal b) Base lateral
o Caja de conexiones
Por lo general, en la mayoría de los casos los motores eléctricos cuentan con caja
de conexiones. La caja de conexiones es un elemento que protege a los
conductores que alimentan al motor, resguardándolos de la operación mecánica
del mismo, y contra cualquier elemento que pudiera dañarlos.
o Cojinetes
Contribuyen a la óptima operación de las partes giratorias del motor. Se utilizan
para sostener y fijar ejes mecánicos, y para reducir la fricción, lo que contribuye a
lograr que se consuma menos potencia. Los cojinetes pueden dividirse en dos
clases generales:
a) Cojinetes de deslizamiento: Operan basándose en el principio de la película de
aceite, esto es, que existe una delgada capa de lubricante entre el eje y la
superficie de apoyo.
b) Cojinetes de rodamiento: Se utilizan preferentemente en lugar de los cojinetes
de deslizamiento por varias razones:
• Tienen un menor coeficiente de fricción, especialmente en el arranque.
• Son compactos en su diseño
• Tienen una alta precisión de operación.
• No se desgastan tanto como los cojinetes de tipo deslizante.
• Se remplazan fácilmente debido a sus tamaños estándares
o Placa de características
Cada motor debe contar con una placa de características, en idioma español,
fácilmente visible y firmemente sujeta al motor con remaches del mismo material
que las placas. Deben ser de acero inoxidable, la pintura del motor no debe
cubrirlas, la información debe ser grabada en el metal de las placas de tal manera
que pueda ser leída aunque desaparezcan la coloración e impresiones de
superficie.
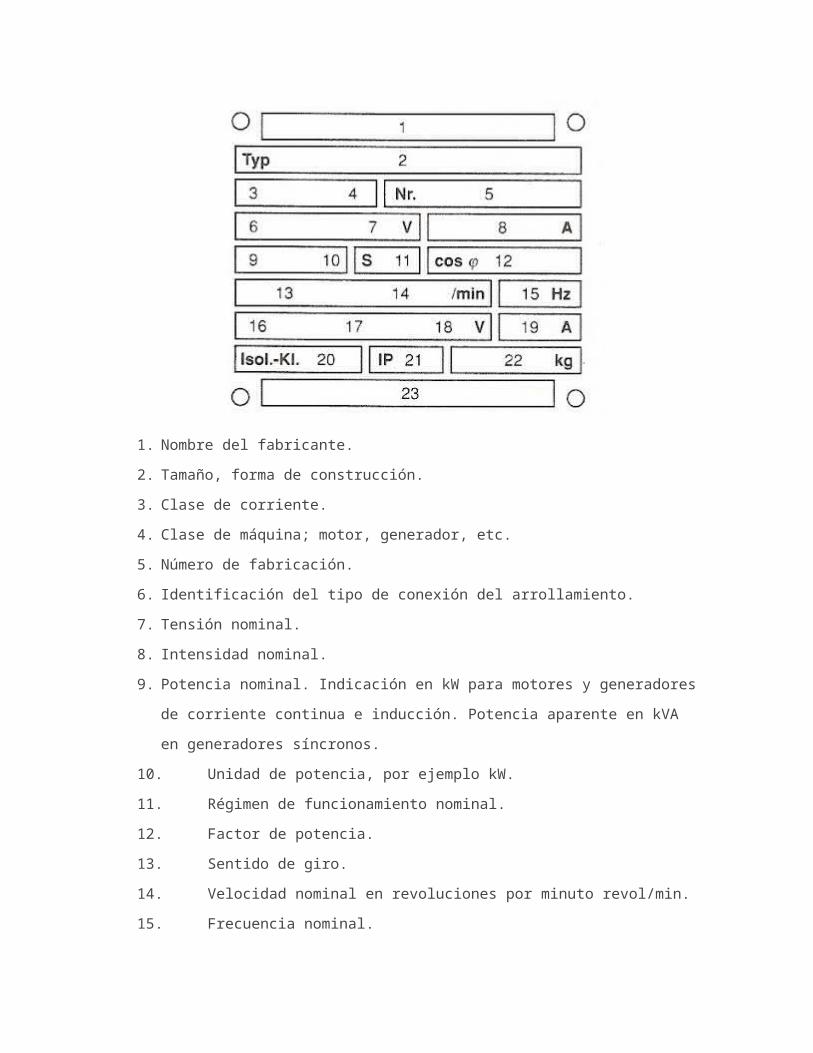
La siguiente información o datos son los mínimos que debe llevar la placa de datos
y placas auxiliares, de cualquier motor de corriente alterna monofásico o trifásico,
en forma indeleble y en lugar visible.
1. Nombre del fabricante.
2. Tamaño, forma de construcción.
3. Clase de corriente.
4. Clase de máquina; motor, generador, etc.
5. Número de fabricación.
6. Identificación del tipo de conexión del arrollamiento.
7. Tensión nominal.
8. Intensidad nominal.
9. Potencia nominal. Indicación en kW para motores y generadores de corriente
continua e inducción. Potencia aparente en kVA en generadores síncronos.
10. Unidad de potencia, por ejemplo kW.
11. Régimen de funcionamiento nominal.
12. Factor de potencia.
13. Sentido de giro.
14. Velocidad nominal en revoluciones por minuto revol/min.
15. Frecuencia nominal.
16. “Err” excitación en máquinas de corriente continua y máquinas síncronas. “Lfr”
inducido para máquinas asíncronas.
17. forma de conexión del arrollamiento inducido.
18. Máquinas de cc y síncronas: tensión nominal de excitación. Motores de inducido
de anillos rozantes: tensión de parada del inducido (régimen nominal).
19. Máquinas de cc y síncronas: corriente nominal de excitación. Motores de inducido
de anillos rozantes: intensidad nominal del motor.
20. Clase de aislamiento.
21. Clase de protección.
22. Peso en Kg o T.
23. Número y año de edición de la disposición VDE tomada como base.
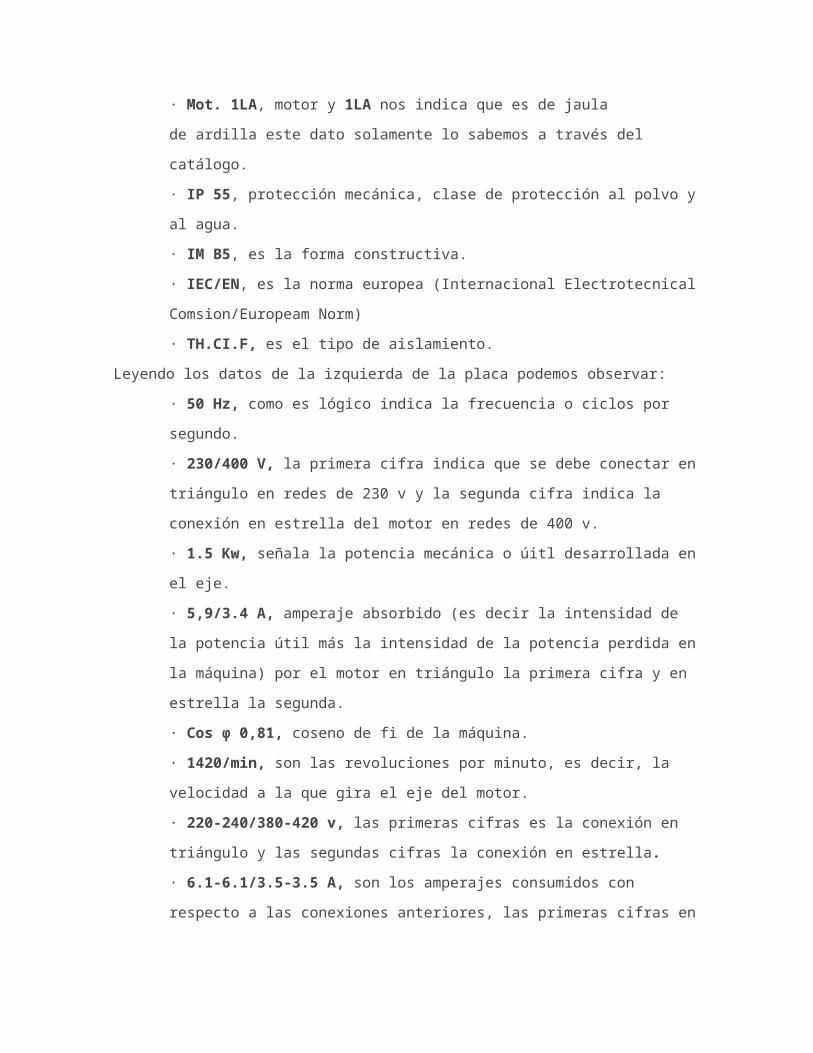
La siguiente placa de características es de la casa comercial SIEMENS, veamos que nos
indica:

Leyendo los datos podemos observar:
· 3 ~, representa que es trifásico de corriente alterna.
· Mot. 1LA, motor y 1LA nos indica que es de jaula de ardilla este dato solamente
lo sabemos a través del catálogo.
· IP 55, protección mecánica, clase de protección al polvo y al agua.
· IM B5, es la forma constructiva.
· IEC/EN, es la norma europea (Internacional Electrotecnical Comsion/Europeam
Norm)
· TH.CI.F, es el tipo de aislamiento.
Leyendo los datos de la izquierda de la placa podemos observar:
· 50 Hz, como es lógico indica la frecuencia o ciclos por segundo.
· 230/400 V, la primera cifra indica que se debe conectar en triángulo en redes de
230 v y la segunda cifra indica la conexión en estrella del motor en redes de 400
v.
· 1.5 Kw, señala la potencia mecánica o úitl desarrollada en el eje.
· 5,9/3.4 A, amperaje absorbido (es decir la intensidad de la potencia útil más la
intensidad de la potencia perdida en la máquina) por el motor en triángulo la
primera cifra y en estrella la segunda.
· Cos φ 0,81, coseno de fi de la máquina.
· 1420/min, son las revoluciones por minuto, es decir, la velocidad a la que gira el
eje del motor.
· 220-240/380-420 v, las primeras cifras es la conexión en triángulo y las
segundas cifras la conexión en estrella.
· 6.1-6.1/3.5-3.5 A, son los amperajes consumidos con respecto a las conexiones
anteriores, las primeras cifras en conexión triángulo y las segundas cifras el
consumo en la conexión estrella.

2. CONTACTORES
2.1 Concepto
Un contactor es un componente electromecánico que tiene por objetivo
establecer o interrumpir el paso de corriente, ya sea en el circuito de potencia o
en el circuito de mando, tan pronto se dé tensión a la bobina (en el caso de ser
contactores instantáneos). Un contactor es un dispositivo con capacidad de cortar
la corriente eléctrica de un receptor o instalación, con la posibilidad de ser
accionado a distancia, que tiene dos posiciones de funcionamiento: una estable o
de reposo, cuando no recibe acción alguna por parte del circuito de mando, y otra
inestable, cuando actúa dicha acción. Este tipo de funcionamiento se llama de
"todo o nada". En los esquemas eléctricos, su simbología se establece con las
letras KM seguidas de un número de orden.
Si bien constructivamente son similares a los relés, no son lo mismo. Su
diferencia radica en la misión que cumple cada uno: ambos permiten controlar en
forma manual o automática, ya sea localmente o a distancia toda clase de
circuitos, pero mientras que los relés controlan corrientes de bajo valor como las
de circuitos de alarmas visuales o sonoras, alimentación de contactores, etc. Los
contactores se utilizan como interruptores electromagnéticos en la conexión y
desconexión de circuitos de iluminación y fuerza motriz de elevada tensión y
potencia.
2.2 Funcionamiento
Los contactos principales se conectan al circuito que se quiere gobernar.
Asegurando el establecimiento y cortes de las corrientes principales y según el
número de vías de paso de corriente podrá ser bipolar, tripolar, tetrapolar, etc.
realizándose las maniobras simultáneamente en todas las vías.
Los contactos auxiliares son de dos clases: abiertos, NA, y cerrados, NC. Estos
forman parte del circuito auxiliar del contactor y aseguran las autoalimentaciones,
los mandos, enclavamientos de contactos y señalizaciones en los equipos de
automatismo.
Cuando la bobina del contactor queda excitada por la circulación de la corriente,
esta mueve el núcleo en su interior y arrastra los contactos principales y
auxiliares, estableciendo a través de los polos, el circuito entre la red y el
receptor. Este arrastre o desplazamiento puede ser:
Por rotación, pivote sobre su eje.
Por traslación, deslizándose paralelamente a las partes fijas.
Combinación de
movimientos,
rotación y
traslación.
Cuando la bobina
deja de ser
alimentada, abre los
contactos por efecto
del resorte de presión
de los polos y del
resorte de retorno de
la armadura móvil. Si
se debe gobernar
desde diferentes
puntos, los
pulsadores de
marcha se conectan en paralelo y el de parada en serie.
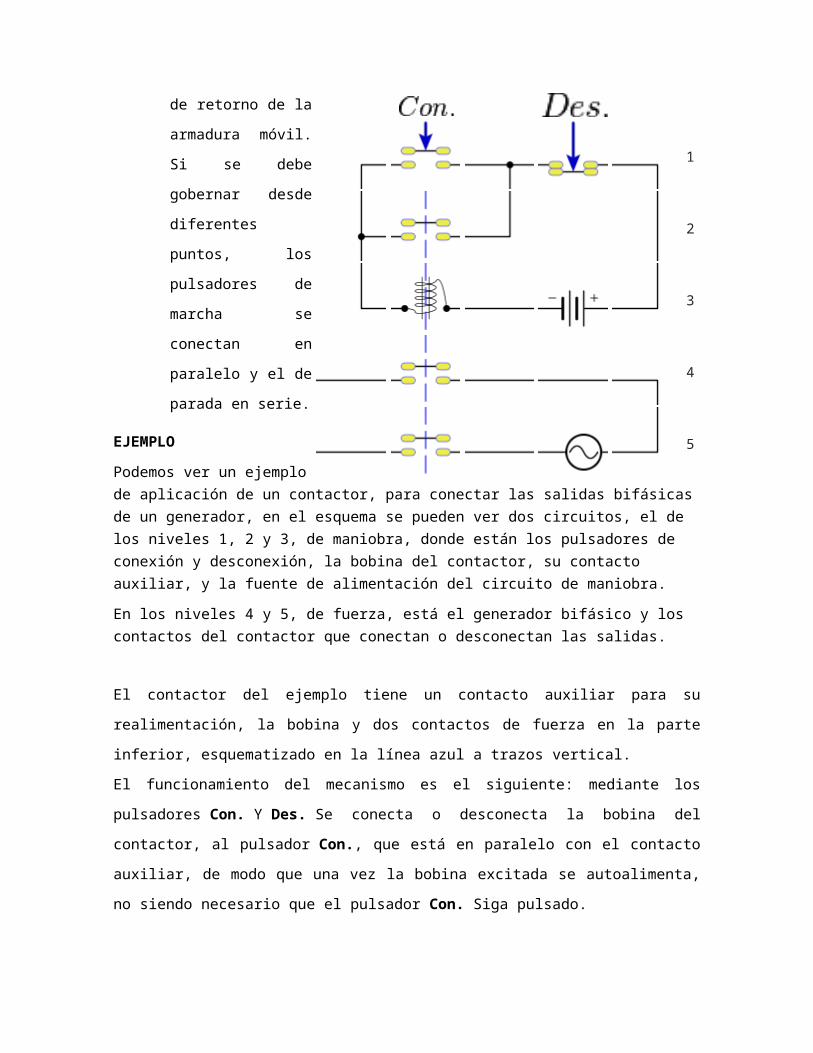
EJEMPLO
Podemos ver un ejemplo de aplicación de un contactor, para conectar las salidas bifásicas
de un generador, en el esquema se pueden ver dos circuitos, el de los niveles 1, 2 y 3, de
maniobra, donde están los pulsadores de conexión y desconexión, la bobina del
contactor, su contacto auxiliar, y la fuente de alimentación del circuito de maniobra.
En los niveles 4 y 5, de fuerza, está el generador bifásico y los contactos del contactor
que conectan o desconectan las salidas.
El contactor del ejemplo tiene un contacto auxiliar para su realimentación, la bobina y dos
contactos de fuerza en la parte inferior, esquematizado en la línea azul a trazos vertical.
El funcionamiento del mecanismo es el siguiente: mediante los
pulsadores Con. Y Des. Se conecta o desconecta la bobina del contactor, al
pulsador Con., que está en paralelo con el contacto auxiliar, de modo que una vez la
bobina excitada se autoalimenta, no siendo necesario que el pulsador Con. Siga pulsado.
1
2
3
4
5
Si se pulsa Des. Se corta la alimentación a la bobina, que se des excita, desconectándose
tanto su realimentación por el contacto auxiliar, como la salida del generador por los
contactos de fuerza.
Si se pulsa simultáneamente Con. Y Des. El contactor se desactiva, dado que Des. Corta
la alimentación a la bobina, independientemente de la posición de Con. O del contacto
auxiliar.
No es necesario señalar que este mismo mecanismo puede emplearse para poner en
marcha un motor, conectando o desconectando el motor de una fuente de alimentación
exterior, y que el número de contactos de fuerza puede ser mayor.
2.3 Partes de un contactor
Los contactores aunque parezcan componentes que son un único bloque, están
formados por diferentes piezas que se pueden desmontar e intercambiar o
sanear para alargar la vida del contactor y disminuir costes, aunque el contactor
no es un componente excesivamente caro para la importancia de su
funcionalidad y en muchos casos es mejor poner componentes nuevos para
garantizar un número de maniobras como marca el fabricante.
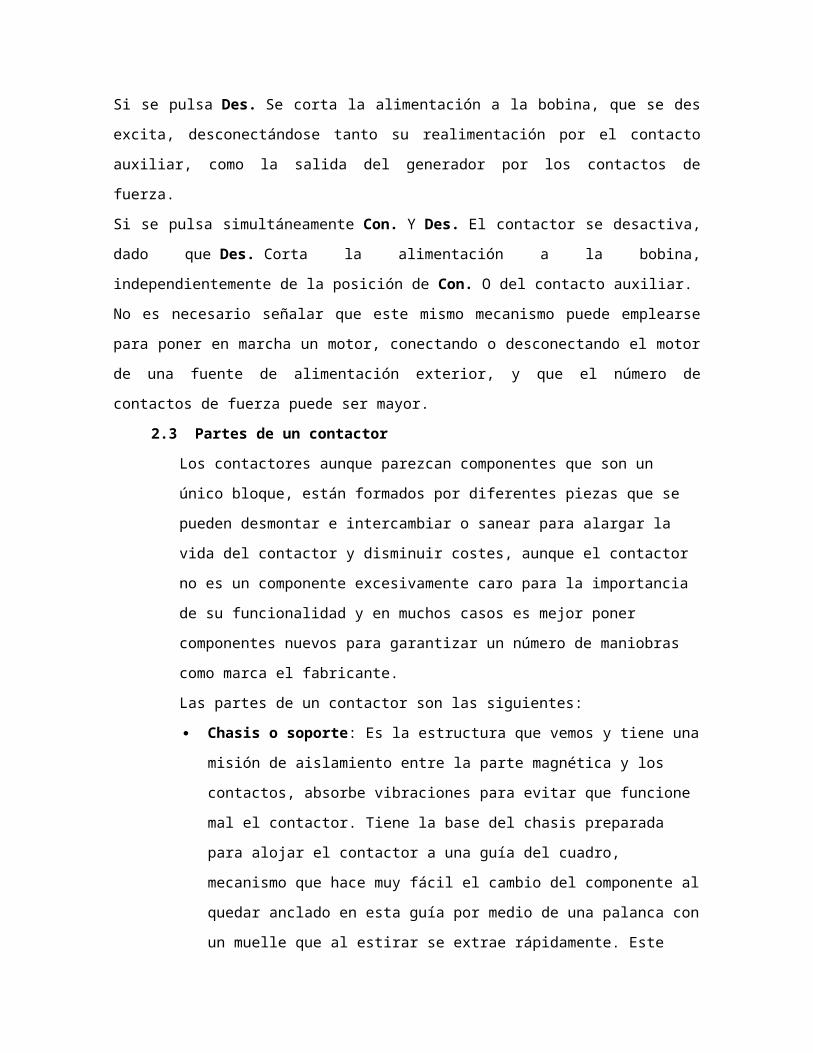
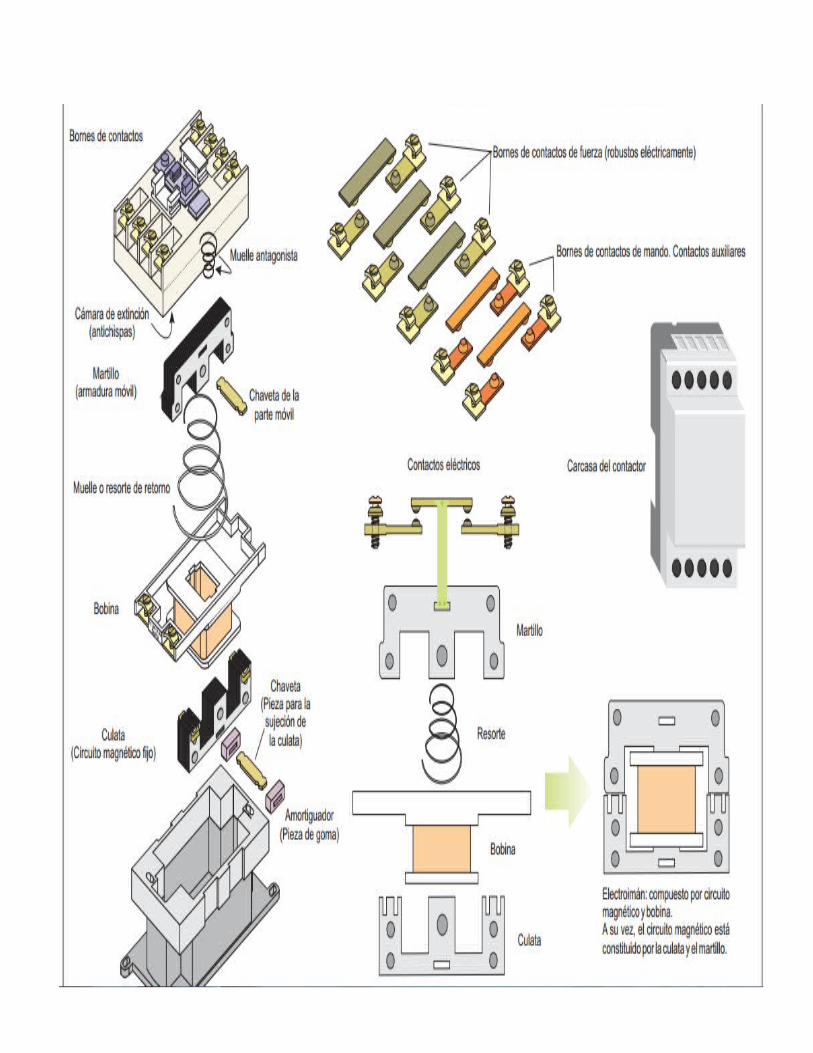
Las partes de un contactor son las siguientes:
Chasis o soporte: Es la estructura que vemos y tiene una misión de
aislamiento entre la parte magnética y los contactos, absorbe vibraciones
para evitar que funcione mal el contactor. Tiene la base del chasis
preparada para alojar el contactor a una guía del cuadro, mecanismo que
hace muy fácil el cambio del componente al quedar anclado en esta guía
por medio de una palanca con un muelle que al estirar se extrae
rápidamente. Este chasis está preparado para soportar los golpes de
armadura y evita los arcos eléctricos.
Electroimán: Está formado por el núcleo y la armadura móvil que están
creados con chapas laminadas aisladas entre sí. La armadura móvil cierra
el circuito magnético desplazando los contactos móviles hacia los contactos
fijos en el momento de estar activo el electroimán.
Bobina: La bobina es el componente que activa el electroimán cuando se
le aplica la tensión de trabajo. Esta bobina está alojada en el campo de
acción del electroimán y tiene dos conexiones que equivalen a la
alimentación del mando del control. Estas bobinas pueden ser tanto de
corriente continua (DC) como de corriente alterna (AC) y de un voltaje
variado (24v, 48v, 110v, 220v, etc.) para adaptarse a la tensión de
maniobra del circuito donde está ubicado, estos componentes son
fácilmente intercambiables y se debe observar siempre que el voltaje de
esta bobina sea el adecuado, mirando en una etiqueta que hay entre los
terminales de la bobina, para evitar que ésta se estropee
Contactos principales: Son los encargados de cerrar el circuito de
potencia cuando se activa el contactor. Tienen una parte fija que está unida
a las conexiones de entrada (alimentación) y salida (actuador eléctrico) de
los cables de potencia. Y una parte móvil que cierran el circuito de potencia
cuando se excita la bobina activándose el electroimán. Las características
de estos contactos son la no oxidación, evitan pegarse o soldarse,
resistente mecánicamente, no se erosionan al formarse el arco eléctrico y
son muy conductivos teniendo poca resistencia eléctrica.
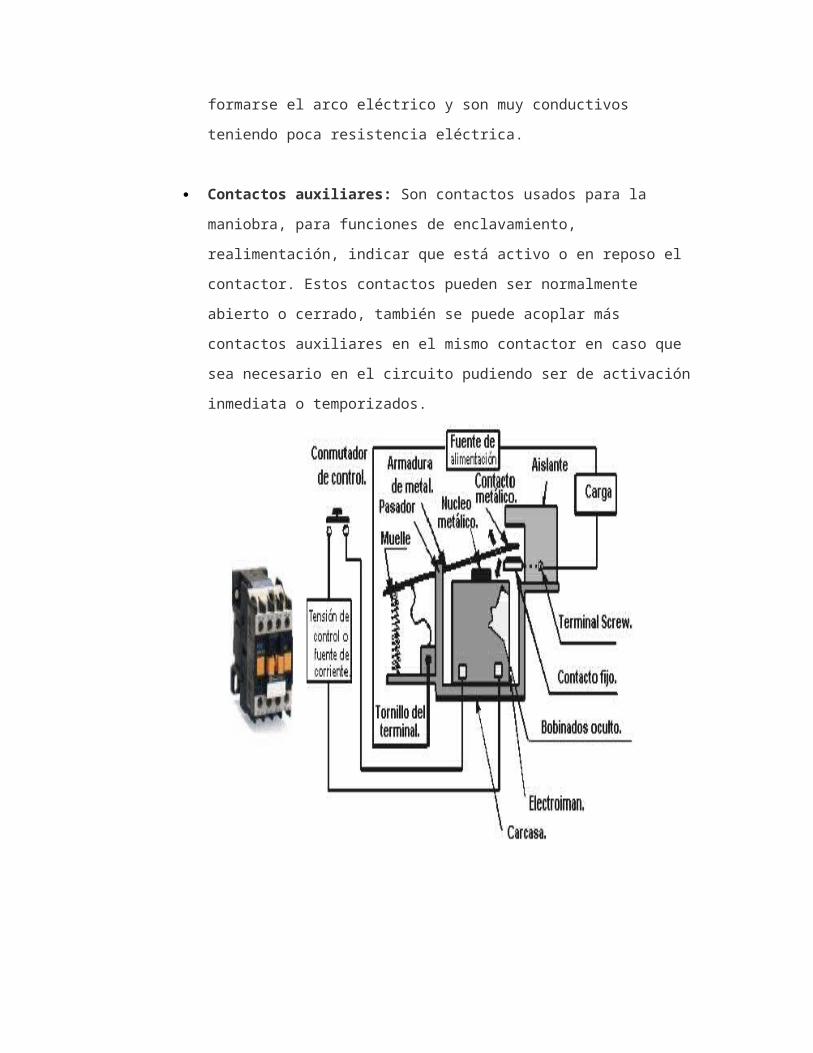
Contactos auxiliares: Son contactos usados para la maniobra, para
funciones de enclavamiento, realimentación, indicar que está activo o en
reposo el contactor. Estos contactos pueden ser normalmente abierto o
cerrado, también se puede acoplar más contactos auxiliares en el mismo
contactor en caso que sea necesario en el circuito pudiendo ser de
activación inmediata o temporizados.
III. CONCLUSIONES
Después de la realización de este trabajo se pueden llegar a estas conclusiones:
Existe gran variedad de dispositivos auxiliares de mando, la diferencia entre unos y otros
radica muy especialmente en el campo de aplicación.
En cuando a los contactores, se puede notar su gran importancia en cuanto al desarrollo
de sistemas de producción y de la industria en general.
Es muy importante la característica de protección al operario que posee el contactor pues
la conservación de la integridad de la vida humana debe ser prioridad siempre.
Gracias al uso de estos dispositivos se han logrado muchos procesos que antes no se
podían imaginar por su cantidad de maniobras.
Existen gran cantidad de clases de contactor para lo cual debemos tener muy en cuenta
las características de la carga para la escogencia de estos.
La bobina es el elemento fundamental para el funcionamiento del contactor.
Los contactos son el principal elemento en cuanto a la aplicación del contactor.
El arco eléctrico es el principal obstáculo en el diseño de instalaciones con contactores.
Existen dos tipos de motores que son las termicas y electricas.
IV. BIBLIOGRAFIAo http://www.edu.xunta.es/centros/cpiantonioorzacouto/system/files/motor_termico.pdf
o http://upcommons.upc.edu/bitstream/handle/2099.1/9682/03_Mem%20ria.pdf?sequence=4
o http://www.monografias.com/trabajos93/motores-electricos/motores-electricos.shtml
o http://descom.jmc.utfsm.cl/sgeywitz/sub-paginas/Maquinas%20y%20equipos/motores.htm
o http://html.rincondelvago.com/contactores-y-elementos-auxiliares-de-mando_1.html
o http://www.monografias.com/trabajos11/contact/contact.shtml
o http://www.profesormolina.com.ar/electromec/contactor.htm
o http://www.areatecnologia.com/electricidad/contactor.html
V. ANEXOS
ANEXO 01: MOTOR DESARMADO ANEXO 02: ROTOR
ANEXO 03: ESTATOR ANEO 04: CARCASA
ANEXO 05: CONTACTOR
ANEXO 06: PLACA DEL CONTACTOR ANEXO 07: COMPROBACION DE LA ENTRADA DE
CORRIENTE AL CONTACTOR