moisés jiménez león estimulador electrico para la...
TRANSCRIPT
Informe Proyecto de Título de Ingeniero Civil Electrónico
Moisés Jiménez León
Estimulador electrico para la rehabilitación muscular
Escuela de Ingeniería Eléctrica Facultad de Ingeniería
Valparaíso, 12 de octubre de 2018

Moisés Guillermo Jiménez León
Informe Final para optar al título de Ingeniero Civil Electrónico,
aprobada por la comisión de la
Escuela de Ingeniería Eléctrica de la
Facultad de Ingeniería de la
Pontificia Universidad Católica de Valparaíso
conformada por
Sr. Juan Vignolo Barchiesi
Profesor Guía
Sr. Sebastian Fingerhurt
Segundo Revisor
Sr. Jorge Mendoza Baeza
Director de Escuela
Valparaíso, 12 de octubre de 2018
Título completo del documento

A mi madre por ser quién me ha guiado sin límites a conseguir lo inimaginable.

Agradecimientos Gracias a mi madre por ser un ejemplo a seguir y por creer que todo es posible. Mis hermanos y
familia por demostrar que puedo contar con ellos en cada momento y a Kirsten por ser un
partner ideal en todo lo que alguien podría pedir.
Valparaíso, 12 de octubre de 2018
Moisés Jiménez León.

Resumen El desarrollo del presente proyecto, consiste en el diseño y la fabricación de un estimulador
eléctrico para la rehabilitación muscular mediante la aplicación de pulsos de corriente. El
sistema consta de dos canales que permiten estimular, por separado, a dos grupos musculares.
Para la estimulación muscular se implementó un sistema que consta de una etapa de potencia
que a través un puente H de corriente permite obtener los pulsos bipolares necesarios para
producir la estimulación a una frecuencia de 2 kHz. La frecuencia está fijada sólo por una etapa,
compuesta por un oscilador y un sistema de interruptores de alta velocidad.
El sistema permite prefijar la amplitud de la corriente que se desea aplicar con el uso de un
potenciómetro por cada canal. Además se utiliza un botón por canal que permite activar la
estimulación durante el tiempo que se mantenga presionado; para procesar estas órdenes se
utilizó una placa Arduino que es la encargada de leer la información externa y mediante un
conversor D/A, enviar la estimulación que se desea aplicar a la etapa de switching y
posteriormente a la etapa de potencia.
Se logró flexionar la muñeca de los sujetos de prueba y también la rodilla mediante la
estimulación, lo que permitió registrar los valores de corrientes mínimas de estimulación.
Palabras clave: Estimulación, conversor D/A, Muscular, potencia.

Abstract
The presented project consists of the design and implementation of a system for the electrical
stimulation of different muscle groups, with the objetive of the rehabilitation of said muscles.
The process of stimulation will be executed via the aplication of modulated current pulses. The
system operates by utilizing two different channels, thus allowing us to stimulate two different
muscle groups in separate ways.
In order to effect the muscular stimulation, the system utilizes two different main stages, ths
first of which is a stage of power, which is managed for an H current bridge. The H current
bridge gives us the possibility to apply bipolar pulses, which are necessary to produce the
electrical stimulation of the muscles with a fixed frequency of 2 kHz. The frequency is fixed for
only one of the stages, and is comprised of one oscilator and a system of high-speed switches.
The system allows one to preset the amplitude of the current, which is applied by using a
potentiometer for each channel. It is also possible to use a button for each channel, which
allows one to activate the stimulation during the time that the button is being pressed. In order
to process these commands, the system utilizes an Arduino board, which is in charge of reading
the external information using a digital analog conversor, sending the stimulation that needs to
be applied to the switching stage, which finally then continues onward to the power stage.
In conclusion: in applying the above-described electrical stimulation, it was possible to effect a
flicking movement in the wrist of the test users; it was also possible to cause a jerk/flick of the
knee when the electrical stimulation was applied. This allows us to understand the minimum
values of current needed to generate a stimulation.
Key words: stimulation, digital analog converter, muscles, power.

Índice general
Índice general Introducción ................................................................................................................. 1
Objetivos generales ............................................................................................................................. 3
1 Descripción del proyecto. ........................................................................................ 4 1.1 Descripción general del proyecto. ............................................................................................... 4 1.2 Objetivos específicos. ................................................................................................................... 4
2 Electroterapia. ........................................................................................................... 6 2.1.1 Introducción a la electroterapia. ....................................................................................... 6
2.2 Fisiología Esqueleto – Muscular. ................................................................................................. 7 2.3 Carácterísticas de las corrientes. ................................................................................................. 8
2.3.1 Pulsos de corrientes. .......................................................................................................... 8 2.3.2 Clasificación según la frecuencia de la corriente. ........................................................... 9 2.3.3 Clasificación según la aplicación de la corriente. .......................................................... 10 2.3.4 Corrientes Bipolares. ........................................................................................................ 11
3 Señales y rangos de operación para la estimulación. ......................................... 13 3.1 Introduccion al capítulo. ............................................................................................................ 13 3.2 Parámetros observados en otros estimuladores. ..................................................................... 13
4 Descripción del sistema desarrollado. ................................................................. 18 4.1 Descripción general del sistema. ............................................................................................... 18
4.1.1 Sección análoga. ............................................................................................................... 18 4.1.2 Etapa de control................................................................................................................ 19
4.2 Implementación sección análoga. ............................................................................................ 19 4.2.1 Etapa de potencia. ............................................................................................................ 19 4.2.2 Conversor digital/análogo. ............................................................................................. 21 4.2.3 Oscilador y conmutador. ................................................................................................. 24
4.3 Implementación sección digital. ............................................................................................... 27 4.4 Construcción del circuito. .......................................................................................................... 32
5 Pruebas realizadas. ................................................................................................. 34 5.1 Diseño del experimento. ............................................................................................................ 34
5.1.1 Objetivos. .......................................................................................................................... 34 5.1.2 Mediciones a realizar. ...................................................................................................... 34 5.1.3 Procedimiento. ................................................................................................................. 35 5.1.4 Resultados obtenidos. ...................................................................................................... 35
Discusión y conclusiones .......................................................................................... 46
Bibliografía ................................................................................................................. 49

1
Introducción En Chile existe cerca de un 5.9% de población con discapacidades y problemas en el sistema
nervioso [1], dentro de estas discapacidades se encuentra la Hemiplejia y las discapacidades
producidas por accidentes cardiovasculares y por daños en la medula espinal. Existe un
porcentaje de la población nacional expectante por tener mejores oportunidades de
recuperación y tratamientos en sus diversas condiciones. Investigar y desarrollar proyectos en
áreas que puedan suplir estas necesidades es una tarea fundamental y además enriquecedora
que se condice con la visión que genera en sus alumnos la PUCV como casa de estudio.
Con el objetivo de generar conocimientos acerca de áreas como la electroterapia y poder
entregar elementos que contribuyan a la investigación de estas, se hace un enfoque de prototipo
para el proyecto desarrollado. Se busca tener una primera aproximación a la electroterapia por
parte de LABSEI con la intención de poder generar proyectos complementarios o de mejorías
para el área mencionada.
La instrumentación electrónica y la generación de señales de forma digital, entre otras
especialidades, permitirán describir de una forma técnica y comprensible, desde el punto de
vista electrónico, los fenómenos detrás del sistema desarrollado en el presente informe.
Se busca entonces, desarrollar un sistema de estimulación muscular mediante la aplicación de
corrientes eléctricas moduladas y controladas, dichas corrientes y sus parámetros han sido
estudiados en detalle durante la primera etapa del desarrollo del sistema para poder tener
claridad en el objetivo final a desarrollar desde el punto de vista de una máquina que permitirá
estimular ciertos grupos musculares.
El electro estimulador, diseñado, cuenta con dos etapas principales en su funcionamiento y
desarrollo. Las distintas etapas serán abordadas de forma independiente, ambas etapas serán
integradas finalmente para el funcionamiento del sistema completo. El estudio de un electro
estimulador comercial presentó cierta efectividad a la hora de generar la estimulación de
diversos grupos musculares e incluso la flexión de la articulación de la muñeca, siendo este el

Introducción
2
movimiento que se desea generar con el desarrollado en el presente informe. Basados en las
pruebas de dicho estimulador comercial se pudieron obtener parámetros de referencias para la
estimulación en cargas reales, con el objetivo de poder tener referencias a la hora de comenzar
a operar con el sistema a construir. Las pruebas realizadas permitieron tener nociones y
referencias de como operar a medida que el proyecto avanza. Además de poder visualizar de
forma directa el funcionamiento de un sistema de estimulación muscular.
Dentro de las etapas desarrolladas, la etapa de potencia fue la que presentó el mayor riesgo de
presentar problemas durante su implementación. En caso de no ser capaz de generar la
estimulación requerida, el proyecto no podría continuar con el desarrollo propuesto. Es,
entonces, esa una de las razones principales por la que se optó por comenzar el curso de
Proyecto de Titulación con el diseño, implementación y prueba de la etapa de potencia, para
luego poder continuar con las siguientes secciones del proyecto que se encargarán de tareas
como: Generar la señal deseada y mediar entre el usuario y la estimulación mediante un sistema
de control compuesto por potenciómetros y pulsadores quienes serán los encargados de
ordenar la intensidad y la duración de la estimulación.
Finalmente el sistema contará con una etapa de control comandada por un Arduino UNO,
quien será el encargado de leer los potenciómetros y además enviar la intensidad de la señal que
se desea aplicar mediante la salida a un conversor D/A el cual funcionará como enlace entre las
etapas de control y potencia. El Arduino UNO, hará el papel de cerebro del sistema, definiendo
entonces cada parámetro de los pulsos de corrientes que serán aplicados a el usuario del
sistema. La etapa digital del sistema cuenta con un control directo por parte del usuario,
permitiendo esto poder definir la amplitud de pulso de corriente aplicado y la duración del
anterior. Parámetros como la frecuencia de los pulsos aplicados, quedará estable.
El proceso de construcción de la máquina de estimulación muscular, comienza con el estudio
de la materia de electro terapia y estimulaciones musculares mediante pulsos de corrientes
eléctricas, lo anterior, debido a que es necesario comprender de forma clara que se debe aplicar
para generar la estimulación y con ello claro poder comenzar a desarrollar un sistema que
permita responder al cómo se va a aplicar la estimulación.

Introducción
3
Objetivos generales
Realizar un estudio del funcionamiento de la estimulación eléctrica muscular.
Comprender los parámetros detrás de la estimulación eléctrica muscular.
Definir la factibilidad de construir un sistema de estimulación muscular mediante
pulsos de corrientes eléctricas.
Generar estímulos eléctricos a través de la maquina construida para generar una
activación muscular.
Crear la base para futuros proyectos relacionados con la electro estimulación.
4
1 Descripción del proyecto. 1.1 Descripción general del proyecto.
El presente proyecto consiste en el desarrollo de un estimulador eléctrico para la recuperación
muscular. Durante el proceso de investigación, se encontraron los valores óptimos para los
parámetros más importantes involucrados en la producción de los estímulos eléctricos de la
máquina diseñada. El estimulador aplicará secuencias de impulsos eléctricos en los músculos
del ante brazo, generando de esta forma, la estimulación de la zona antes mencionada.
Produciendo una flexión en la articulación de la muñeca. A su vez, se evaluaron diferentes
opciones, de controles posibles, que al implementarse sean capaz de generar un sistema que
permita ser operado en forma autónoma por el usuario. Siendo este sistema lo más simple
posible para su uso.
El prototipo desarrollado, permitió probar su efectividad en pruebas físicas. Por lo que dentro de
las ambiciones de este proyecto está el fomentar y estimular la investigación en lo referente al
área de la electro estimulación, llevándose a cabo , entonces, un primer acercamiento a este tipo
de sistemas; Además de generar conocimientos que permitan continuar, a futuro, con el
desarrollo e implementación de mejoras y complementos al sistema original.
1.2 Objetivos específicos.
Se considera en primera instancia realizar un estudio de las características principales de la
electro terapia para poder definir y comprender los requerimientos de los impulsos eléctricos
necesarios para producir una contracción muscular. Se busca desarrollar un prototipo funcional
que genere secuencias de impulsos de corriente eléctrica. Los impulsos de corriente deben
cumplir con ciertos parámetros específicos de amplitud y frecuencia en su salida.
La aplicación de las corrientes estimulantes se realizará mediante los canales de salida de la
máquina. Dichos canales serán fijados para aplicar las corrientes en uno de los antebrazos de
las personas, específicamente en el grupo muscular encargado de flectar la muñeca (músculos
agonistas) y en el grupo muscular encargado de extender la articulación de la muñeca
(músculos antagonistas). Los parámetros y secuencias presentadas por el estimulador estarán

1 Descripción del proyecto.
5
abocados a generar la activación de estos grupos musculares. El usuario tiene la posibilidad de
pre-fijar mediante los potenciómetros el valor de la amplitud que se desea aplicar en cada canal
de salida y además poder elegir en tiempo real la duración del estímulo mediante un botón por
cada canal, permitiendo al usuario tener un control total sobre la estimulación de una forma
simple.

6
2 Electroterapia. 2.1.1 Introducción a la electroterapia.
La electroterapia es una disciplina que se engloba dentro de la medicina física y la
rehabilitación, y se define como el arte y la ciencia del tratamiento de lesiones y enfermedades
por medio de la electricidad [2]. Dentro de la electroterapia se encuentra la estimulación
eléctrica funcional (FES), la cual es una técnica que mediante corrientes eléctricas activa los
nervios que inervan las extremidades afectadas por parálisis resultantes por distintas causas
como lesiones en la médula espinal, lesiones cerebrales y accidentes cerebro vasculares entre
otros [3]. Su principal función es de restaurar la función muscular en personas con
discapacidad, en algunos casos se llama también estimulación eléctrica neuromuscular (NMES).
Además de la fisioterapia convencional y la terapia ocupacional, la técnica más utilizada para
mejorar la función motora en pacientes con SCI es la estimulación eléctrica funcional (FES), con
la que se producen contracciones en los músculos paralizados, dichas contracciones pueden ser
controladas. Las articulaciones se accionan mediante la estimulación de varios músculos que
ejercen un torque en la articulación, el ángulo resultante de la articulación puede ser controlado
por la modulación de intensidad de los pulsos ejercidos en el músculo flector y extensor, los
cuales actúan en direcciones opuestas.
Los FES pueden utilizar sistemas de control de lazo abierto o sistemas de control de tiempo
finito para dichas funciones. En el caso de FES con sistemas de control en tiempo finito, se
ejecuta una secuencia de estimulación prefijada en modo de ciclo abierto cuando se cumple
una condición específica. Un ejemplo de FES con sistema de control en tiempo finito, es
utilizado en ¨Dropfoot¨ daño que se caracteriza por la incapacidad de levantar los dedos del pie
o el pie completo desde el tobillo, en ese caso, el sistema FES utiliza un sensor para detectar
cuando el talón del usuario se levanta del suelo y luego estimula los músculos flexores del tobillo
permitiendo al usuario realizar un pivote en su pie y dar un paso.
2 Electroterapia.
7
2.2 Fisiología Esqueleto – Muscular.
La función del sistema esqueleto muscular es mantener la posición del cuerpo y producir
movimientos, la acción de este sistema está controlada por el sistema nervioso. La producción
de la tensión en el sistema esqueleto muscular se logra por una estimulación secuencial a las
unidades motoras adyacentes llamadas también MU, cada unidad motora se contrae después
de una estimulación previa, y la tensión muscular total es la suma de las tensiones individuales
de las unidades motoras [4].
Los músculos dependiendo de su objetivo pueden tener más o menos unidades motoras. Los
músculos de las piernas tienen pocas unidades motoras con muchas fibras cada una, por otro
lado, los músculos faciales tienen muchas unidades motoras y cada una incluye un número
pequeño de fibras. El cuerpo recluta un número variante de unidades motoras dependiendo de
la tarea, por ejemplo, en una tarea que requiere un máximo esfuerzo muscular se usaran todas
las unidades en el músculo, activando una gran cantidad de fibras para estos [4].
Un impulso de una neurona motora resulta en una rápida contracción de una unidad motora,
pero las neuronas motoras pueden entregar un tren de impulsos, los que producen que la fibra
se mantenga en contracción constante en la porción muscular dirigida por esa unidad motora,
en músculos voluntarios esta tensión constante y sostenida se conoce como contracción
tetánica y se produce entonces mediante la activación de las unidades motoras adyacentes de
una manera secuencial a una frecuencia de entre 6Hz y 8 Hz [4].
Actualmente se cree que los FES reclutan en primer lugar las fibras de rápida contracción y
luego las de lenta contracción, el orden de reclutamiento es opuesto al orden naturalmente
producido por el sistema fibro-muscular, el tipo de reclutamiento no fisiológico se debe a que
las fibras de contracción rápida están inervadas por axones con un mayor diámetro que las
fibras de respuesta lenta, el mayor diámetro capta más el campo eléctrico por lo que las fibras de
respuesta rápida responden a los FES con niveles más bajos de estimulación que las fibras de
respuesta lenta, es por esto que las fibras de respuesta rápida se fatigan más rápido [4]. El torque
generado por una articulación depende de los músculos flexores y extensores de la articulación,
por lo que el ángulo de la articulación se puede controlar modulando la amplitud del pulso, la
frecuencia y la duración.
2 Electroterapia.
8
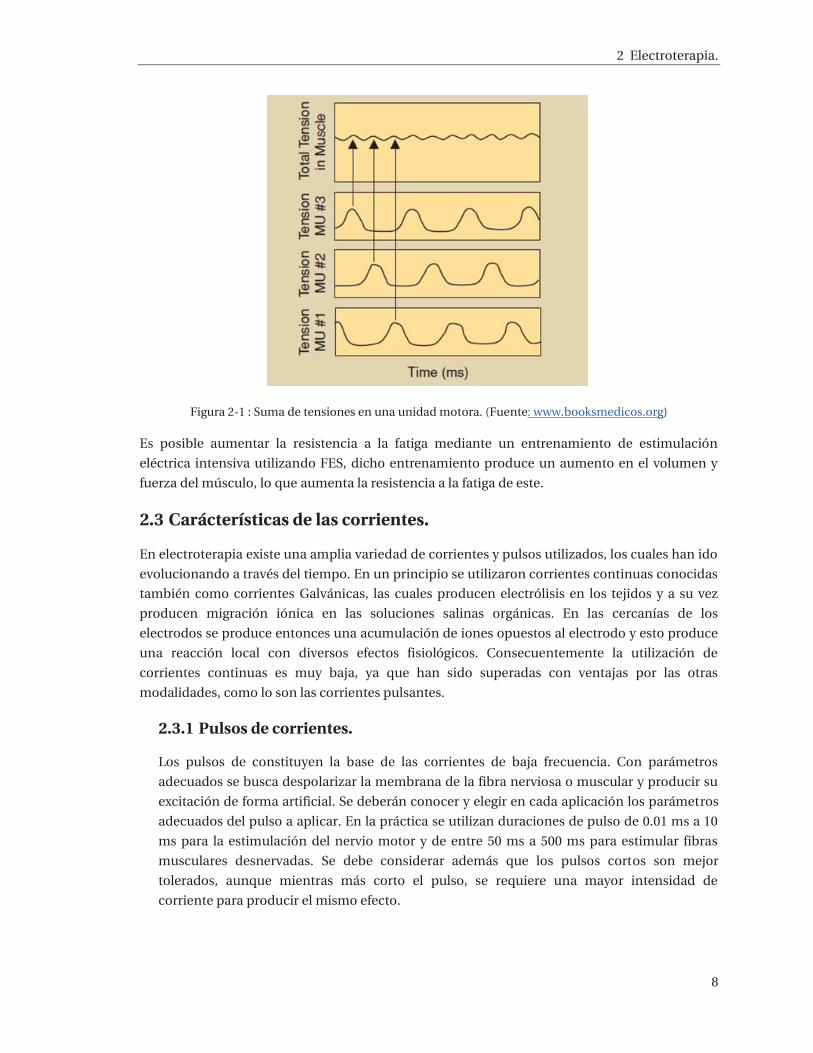
Figura 2-1 : Suma de tensiones en una unidad motora. (Fuente: www.booksmedicos.org)
Es posible aumentar la resistencia a la fatiga mediante un entrenamiento de estimulación
eléctrica intensiva utilizando FES, dicho entrenamiento produce un aumento en el volumen y
fuerza del músculo, lo que aumenta la resistencia a la fatiga de este.
2.3 Carácterísticas de las corrientes.
En electroterapia existe una amplia variedad de corrientes y pulsos utilizados, los cuales han ido
evolucionando a través del tiempo. En un principio se utilizaron corrientes continuas conocidas
también como corrientes Galvánicas, las cuales producen electrólisis en los tejidos y a su vez
producen migración iónica en las soluciones salinas orgánicas. En las cercanías de los
electrodos se produce entonces una acumulación de iones opuestos al electrodo y esto produce
una reacción local con diversos efectos fisiológicos. Consecuentemente la utilización de
corrientes continuas es muy baja, ya que han sido superadas con ventajas por las otras
modalidades, como lo son las corrientes pulsantes.
2.3.1 Pulsos de corrientes.
Los pulsos de constituyen la base de las corrientes de baja frecuencia. Con parámetros
adecuados se busca despolarizar la membrana de la fibra nerviosa o muscular y producir su
excitación de forma artificial. Se deberán conocer y elegir en cada aplicación los parámetros
adecuados del pulso a aplicar. En la práctica se utilizan duraciones de pulso de 0.01 ms a 10
ms para la estimulación del nervio motor y de entre 50 ms a 500 ms para estimular fibras
musculares desnervadas. Se debe considerar además que los pulsos cortos son mejor
tolerados, aunque mientras más corto el pulso, se requiere una mayor intensidad de
corriente para producir el mismo efecto.
2 Electroterapia.
9
La pausa entre los pulsos debe ser al menos el doble de la duración del pulso, lo que permite
una recuperación de la fibra estimulada y además evita que el pulso siguiente caiga en el
periodo refractario.
El periodo de los trenes de pulso o periodo de estimulación viene dado por la suma de la
duración del pulso y la duración de la pausa, por lo que la frecuencia de estimulación es
entonces el inverso de dicho valor. Los nervios admiten frecuencias de estimulación de hasta
1000 Hz pero se suelen utilizar en las aplicaciones clínicas frecuencias inferiores a los 300 Hz.
La intensidad del mulso está siempre en el rango de mili Amperes (mA).
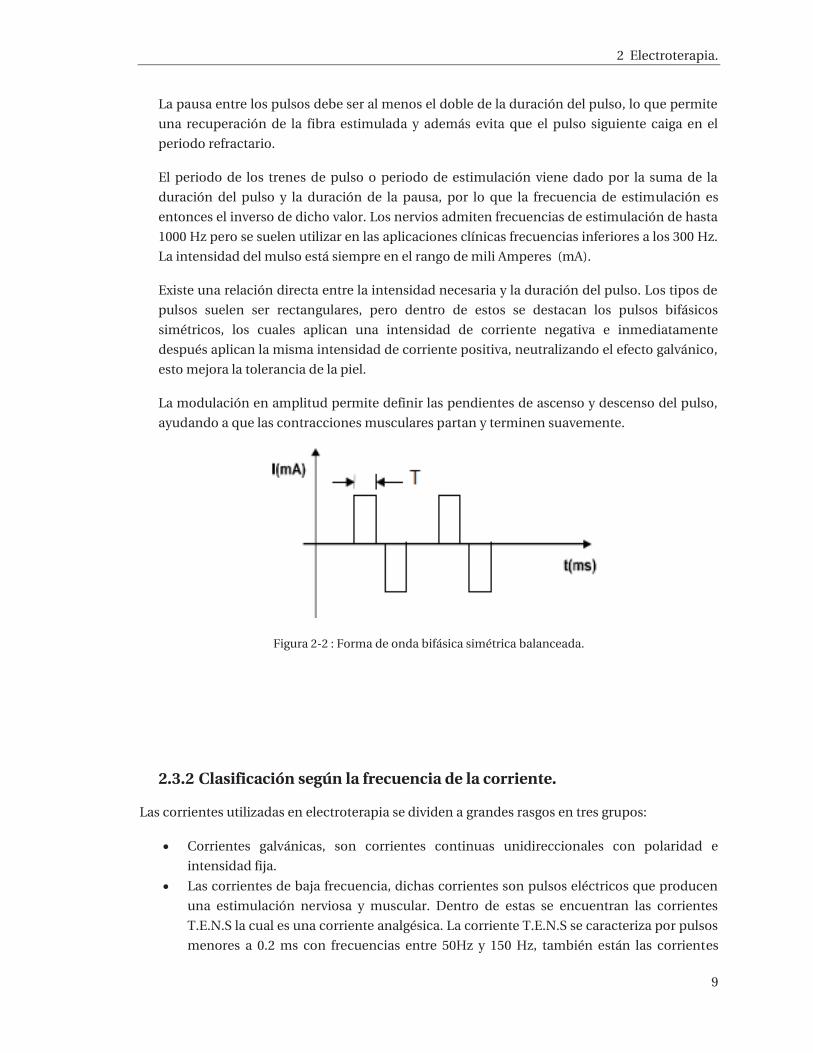
Existe una relación directa entre la intensidad necesaria y la duración del pulso. Los tipos de
pulsos suelen ser rectangulares, pero dentro de estos se destacan los pulsos bifásicos
simétricos, los cuales aplican una intensidad de corriente negativa e inmediatamente
después aplican la misma intensidad de corriente positiva, neutralizando el efecto galvánico,
esto mejora la tolerancia de la piel.
La modulación en amplitud permite definir las pendientes de ascenso y descenso del pulso,
ayudando a que las contracciones musculares partan y terminen suavemente.
Figura 2-2 : Forma de onda bifásica simétrica balanceada.
2.3.2 Clasificación según la frecuencia de la corriente.
Las corrientes utilizadas en electroterapia se dividen a grandes rasgos en tres grupos:
Corrientes galvánicas, son corrientes continuas unidireccionales con polaridad e
intensidad fija.
Las corrientes de baja frecuencia, dichas corrientes son pulsos eléctricos que producen
una estimulación nerviosa y muscular. Dentro de estas se encuentran las corrientes
T.E.N.S la cual es una corriente analgésica. La corriente T.E.N.S se caracteriza por pulsos
menores a 0.2 ms con frecuencias entre 50Hz y 150 Hz, también están las corrientes

2 Electroterapia.
10
excito-motoras, que son las que generan la excitación muscular, dichas corrientes no
superan los 500 Hz [5].
Las corrientes de frecuencia media, oscilan entre 1 kHz y 10 kHz, tienen la capacidad de
disminuir la impedancia de la piel, permitiendo una mayor facilidad de penetración y
mejor efecto con una dosis menor [5].
Figura 2-3: Modulación en amplitud de la secuencia bifásica.
2.3.3 Clasificación según la aplicación de la corriente.
Una división importante es entre las corrientes analgésicas y las corrientes excito-motoras. Las corrientes analgésicas estimulan las fibras nerviosas aferentes, esto con el fin de influir en los centros de modulación del dolor. Cada fibra aferente responde a una determinada gama de frecuencias lo cual complica la individualización de estas pero se pueden conseguir acciones analgésicas con diversas modalidades de corriente de baja frecuencia y media frecuencia modulada o interferencial. La acción dependerá de la frecuencia e intensidad aplicada.
Las corrientes excito-motoras, funcionan bajo el siguiente principio. Un pulso negativo en la proximidad de un nervio despolariza su membrana lo que disminuye el potencial de reposo, cuando se alcanza cierto umbral se produce una excitación, dicho potencial de acción generado se propaga hasta la unión neuromuscular. Para la excitación muscular se supone la ley del todo o nada, es decir que una vez que el pulso supera el umbral produce una respuesta idéntica, independiente de la intensidad aplicada. Las fibras responden a impulsos de intensidad

2 Electroterapia.
11
creciente de forma escalonada, por lo que depende del umbral y de la proximidad del electrodo al punto motor. Para una mejor respuesta se debe estimular el punto motor del músculo, es decir donde existe la mayor concentración de fibras nerviosas. La estimulación con corrientes excito-motoras se divide en dos tipos principalmente.
Estimulación con inervación: esta estimulación es vía nervio. Se utilizan pulsos
bifásicos compensados con tramas moduladas en amplitud generando intensidad creciente y luego decreciente, cada pulso genera un potencial de acción en el nervio. Como el musculo es lento en su contracción y relajación en frecuencias iguales o superiores a los 30 Hz no se logra relajar por lo que se mantiene en contracción permanente.
Estimulación de un musculo desnervado: en este caso existe una interrupción en la vía de los impulsos nerviosos, es decir los nervios no son utilizados pues no activan los músculos, por ello se estimula directamente el musculo con pulsos de larga duración, superando los 100 ms. Se utilizan pulsos exponenciales, los que aprovechan diferentes capacidades de acomodación nervio-músculo y se acerca a una respuesta selectiva del músculo desnervado, dicha terapia se denomina denominada terapia exponencial y los electrodos se pueden ubicar en cualquier zona del músculo.
2.3.4 Corrientes Bipolares.
Las corrientes bipolares directas y bipolares moduladas exógenamente inducen una
transferencia de carga en el tejido e inmediatamente después inducen una transferencia de
carga fuera del tejido, dicho tipo de patrones de carga evita las componentes galvánicas que
pueden causar daños, además producen acciones tanto analgésicas como excito-motoras en
profundidad. Dentro de las corrientes de frecuencia media se destacan las corrientes bipolares
interferenciales, lo cual es la aplicación de dos corrientes independientes que al interferirse una
con otra producen una corriente de baja frecuencia en profundidad y dentro del cuerpo del
paciente, la frecuencia resultante se puede modular en amplitud y frecuencia. Se suele utilizar
en estas una frecuencia fija de 4 kHz modulada.
Se ha demostrado que para una impedancia de la piel de 3 kΩ a 50 Hz se puede obtener una
equivalente de 80 Ω para una corriente de 2 kHz y en el caso de 4kHz una impedancia de 41 Ω
[6], lo que evidencia el aumento de la permeabilidad de los tejidos cuando aumenta la
frecuencia, permitiendo una mayor facilidad de penetración de la corriente y un mejor efecto de
esta. A su vez aumenta el umbral de sensibilidad con la frecuencia lo que permite aplicar
mayores intensidades.
Para las frecuencias de modulación se pueden hacer dos divisiones. Las frecuencias entre (75-
100 Hz) son adecuadas para producir analgesia mediante un proceso similar utilizado en
corrientes T.E.N.S y estimular fibras de mayor diámetro, y las frecuencias entre (25-50 Hz)
producen contracciones musculares, y aumento de irrigación en la zona estimulada [6].

2 Electroterapia.
12
Figura 2-4: Modalidades de corrientes bipolares. (Fuente: www.wikipedia.org)

13
3 Señales y rangos de operación para la estimulación. 3.1 Introduccion al capítulo.
Mediante la aplicación de corrientes eléctricas se busca generar una estimulación muscular que
permita la activación de estructuras musculares y de esa forma poder obtener el movimiento
deseado, mover la muñeca. La aplicación de la corriente se llevará a cabo en el antebrazo del
usuario. Se han observado rangos de operación específicos para la estimulación de fibras
musculares. Las corrientes que han tenido mejor desempeño en pruebas realizadas en diversos
estudios y además las que suelen ser más implementadas en sistemas actuales son las
denominadas corrientes bifásicas moduladas, las cuales consisten en corrientes bifásicas que se
pueden modular en amplitud para generar una activación muscular más paulatina y menos
brusca, además debido a su alta frecuencia portadora permite traspasar las capas de piel y
tejidos pudiendo llegar de forma eficiente al punto motor y generar la activación muscular
deseada, por lo que esta corriente es la base sobre la cual se desarrolló la estimulación el sistema
Dentro de los parámetros relevantes para manejar la estimulación se encuentran la amplitud de
los pulsos de corriente, la frecuencia de dichos pulsos y el ancho de los pulsos, dichos
parámetros se espera puedan ser fijados por el usuario dentro de los rangos determinados, para
de esta forma adaptarse al paciente y a sus necesidades. No todas las personas necesitan el
mismo nivel de estimulación para llevar a cabo una actividad determinada [7].
3.2 Parámetros observados en otros estimuladores.
Las mediciones realizadas a un TENS comercial, consistieron en principalmente conectar dos
tipos de electrodos con áreas distintas. En primera instancia se conectaron electrodos circulares
en un área de 8 cm cuadrados, posteriormente se conectó un electrodo rectangular con un área
de 50 cm cuadrados. Ambos electrodos presentan diferencias considerables en la superficie de
contacto con la piel.
3 Señales y rangos de operación para la estimulación.
14
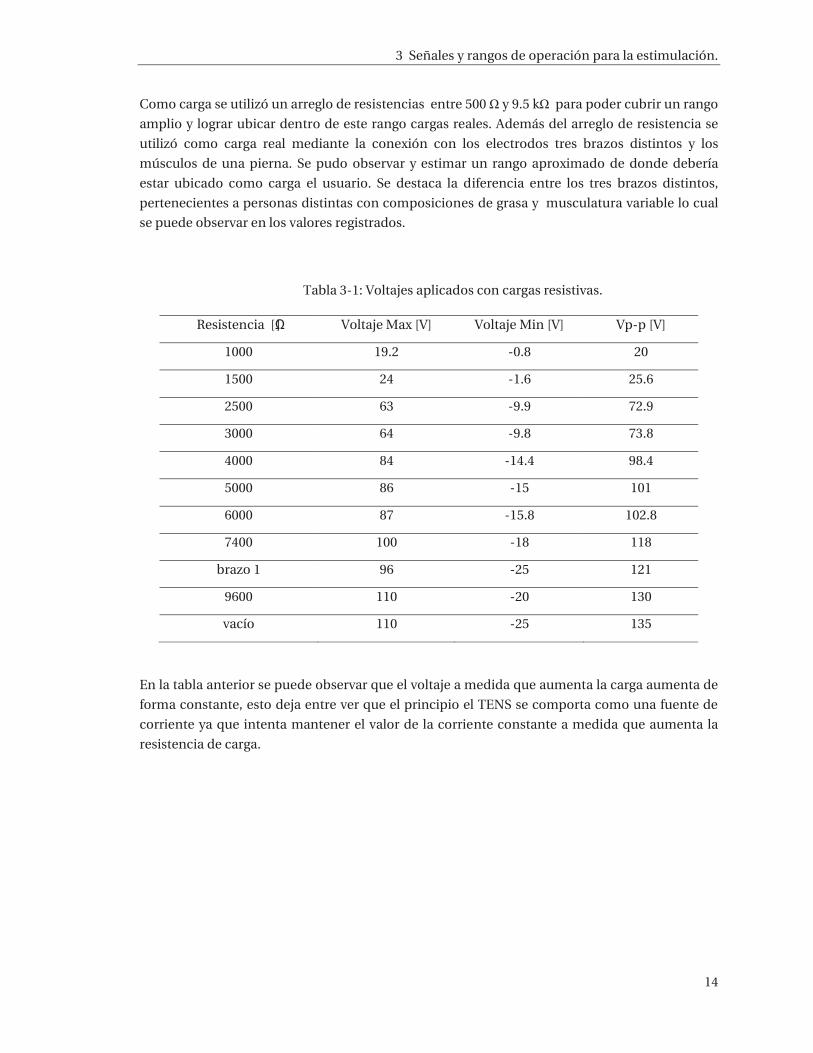
Como carga se utilizó un arreglo de resistencias entre 500 Ω y 9.5 kΩ para poder cubrir un rango
amplio y lograr ubicar dentro de este rango cargas reales. Además del arreglo de resistencia se
utilizó como carga real mediante la conexión con los electrodos tres brazos distintos y los
músculos de una pierna. Se pudo observar y estimar un rango aproximado de donde debería
estar ubicado como carga el usuario. Se destaca la diferencia entre los tres brazos distintos,
pertenecientes a personas distintas con composiciones de grasa y musculatura variable lo cual
se puede observar en los valores registrados.
Tabla 3-1: Voltajes aplicados con cargas resistivas.
Resistencia [Ω] Voltaje Max [V] Voltaje Min [V] Vp-p [V]
1000 19.2 -0.8 20
1500 24 -1.6 25.6
2500 63 -9.9 72.9
3000 64 -9.8 73.8
4000 84 -14.4 98.4
5000 86 -15 101
6000 87 -15.8 102.8
7400 100 -18 118
brazo 1 96 -25 121
9600 110 -20 130
vacío 110 -25 135
En la tabla anterior se puede observar que el voltaje a medida que aumenta la carga aumenta de
forma constante, esto deja entre ver que el principio el TENS se comporta como una fuente de
corriente ya que intenta mantener el valor de la corriente constante a medida que aumenta la
resistencia de carga.
3 Señales y rangos de operación para la estimulación.
15
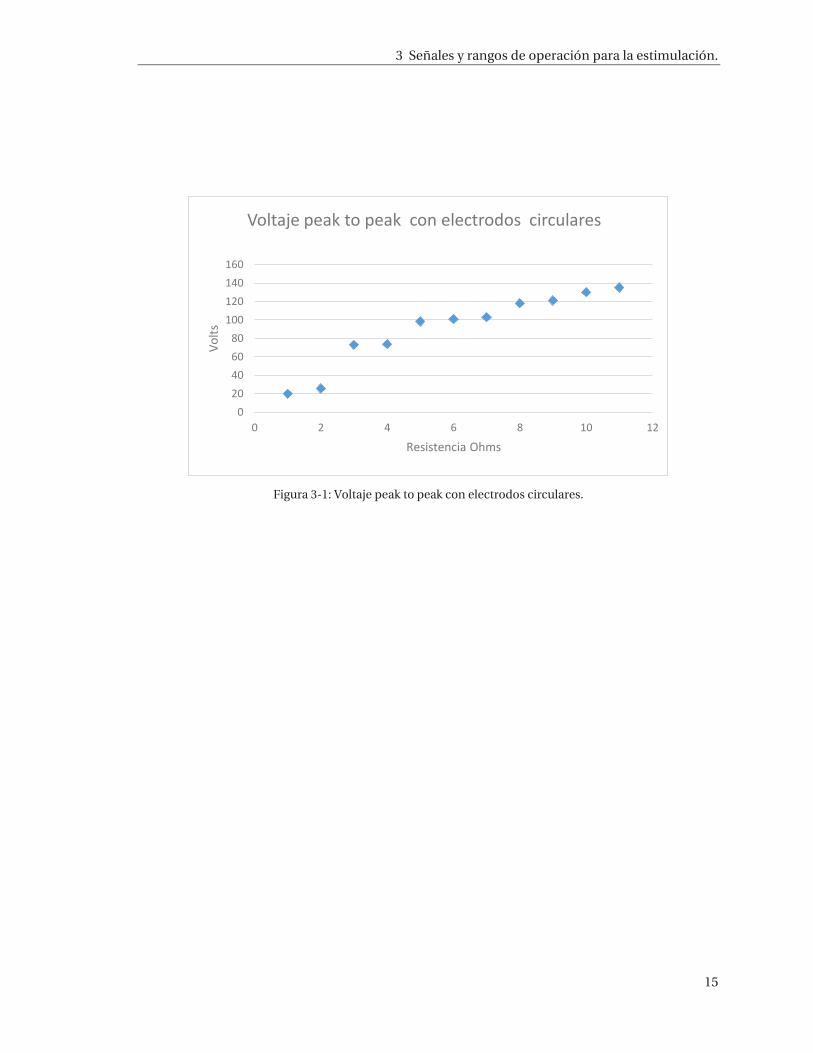
020406080
100120140160
0 2 4 6 8 10 12
Volts
Resistencia Ohms
Voltaje peak to peak con electrodos circulares
Figura 3-1: Voltaje peak to peak con electrodos circulares.

3 Señales y rangos de operación para la estimulación.
16
Tabla 3-2: Voltaje aplicado a cargas resistivas y reales.
Resistencia [Ω] Voltaje Max [V] Voltaje Min [V] V p-p [V]
1000 0 0 0
1500 16 -0.8 16.8
2500 42 -4 46
3000 50 -6 56
brazo 1 42.4 -12.8 55.2
brazo 3 50.4 -12.8 63.2
brazo 2 64.8 -17.6 82.4
pierna 69.6 -16 85.6
4000 76 -12 88
5000 81 -14 95
6000 88 -16 104
7400 96 -16 112
9600 106 -20 126
vacío 110 -28 138
Para las cargas reales se registraron valores cercanos a los 3.5 kΩ, siendo estos valores no muy
variantes entre los tres brazos. Cabe destacar que el brazo uno presenta una masa total
considerablemente menor a los otros dos brazos con un porcentaje de grasa mucho menor y
menor diámetro, lo cual se ve reflejado en los valores obtenidos. El hecho de poder ubicar las
tres cargas reales dentro de un rango cercano es de mucha ayuda ya que se puede deducir que la
carga con la cual se deberá trabajar estará en el rango de los 3 kΩ.

3 Señales y rangos de operación para la estimulación.
17
Finalmente, mediante las distintas pruebas e iteraciones con cargas reales se buscaba encontrar
los valores necesarios para poder producir la estimulación en los músculos del antebrazo.
Se obtuvieron valores que de forma experimental generaron la estimulación y en base a estos se
realizó una tabla resumen con los rangos de operación del electro estimulador a desarrollar en el
proyecto.
Tabla 3-3 : Valores definidos para producir la estimulación.
Parámetro Valor Mínimo Valor Máximo Resolución
Frecuencia de Estimulación 2 kHz 2 kHz -
Amplitud de Corriente 0 mA 32 mA 2mA
Voltaje Aplicado 0 V 90 Vptp -
Se puede observar finalmente que lo importante para poder realizar una electro estimulación de
forma correcta es necesario definir de forma clara los parámetros a utilizar, siendo la resolución,
el parámetro que dará la posibilidad de aumentar o disminuir la intensidad de la estimulación
mediante la variabilidad de la amplitud de los pulsos de corriente. Los valores de frecuencia se
mantendrán fijos y el voltaje será directamente definido por la corriente aplicada.
020406080
100120140160
0 2 4 6 8 10 12 14 16
Volts
Resistencia Ohms
Voltaje peak to peak con electrodos cuadrados
Figura 3-2: Voltaje peak to peak con electrodos cuadrados.

18
4 Descripción del sistema desarrollado.
4.1 Descripción general del sistema.
El electro estimulador desarrollado se divide básicamente en dos secciones importantes, una
sección denominada como sección análoga que incluye la etapa de potencia, la conversión
digital/análoga y el circuito oscilador encargado de entregar los 2 kHz de frecuencia necesarios
para estimular. Dicha sección es controlada por la otra mitad del sistema que consiste en la
etapa de control. La etapa de control cuenta con un Arduino UNO como cerebro principal del
proceso de control y se cataloga como la sección digital del sistema.
4.1.1 Sección análoga.
Dicha etapa cuenta con un puente H de corriente elemento principal. Dicho puente H de
corriente cuenta con cuatro transistores de potencia. Los transistores de potencia están
separados en dos grupos, los transistores del grupo A y los transistores del grupo B. Los
transistores del grupo A son transistores NPN con capacidad de manejar 250 Volts y 500 mA en
su voltaje colector emisor. Los valores descritos pueden parecer elevados, dichos valores son por
seguridad, debido a que se trabajara con personas y la salida será manejada por estos dos grupos
de transistores directamente. Con altos márgenes de seguridad se logra evitar posibles fallas. En
el emisor de ambos transistores del grupo A se puede conectar un osciloscopio donde se
observara de forma clara la corriente generada. El otro grupo de transistores B consiste en dos
transistores PNP capaces de manejar los mismos niveles de voltaje y corriente que el grupo A,
siendo los dos transistores superiores del puente H. Ambos transistores están controlados por
dos transistores de menores características y se rigen por los pulsos provenientes de la etapa de
generación de secuencias.
En la sección análoga también se cuenta con la implementación del conversor D/A y el circuito
oscilador. Ambos elementos permiten la conexión entre la sección digital y la sección análoga.

4 Descripción del sistema desarrollado.
19
4.1.2 Etapa de control.
La etapa de control es la encargada de leer las órdenes externas para saber cuándo aplicar los
pulsos de corrientes necesarios para estimular y durante cuánto tiempo se realizara la
estimulación. Consta con Arduino UNO como parte central. Las entradas análogas permitirán
leer la amplitud de corriente deseada para estimular mediante dos potenciómetros (uno por
cada canal) y el tiempo que se aplicará la estimulación mediante dos pulsadores (uno por cada
canal). Además esta etapa permitirá visualizar en tiempo real la amplitud de corriente aplicada
en la salida de cada canal mediante una pantalla LCD, siendo finalmente la encargada de enviar
los pulsos al conversor D/A que tiene en su salida y a través del cual se realiza la estimulación
del puente H de corriente.
4.2 Implementación sección análoga.
A continuación se explica el funcionamiento detallado y construcción de la sección análoga del
sistema.
4.2.1 Etapa de potencia.
Para las primeras pruebas de la etapa de potencia, se implementó el circuito con una señal de
entrada proveniente de un generador de funciones. El circuito funciona como una fuente de
corriente y por ende mantiene el valor de la corriente fijada independiente de la variación en la
carga. En pruebas realizadas con voltajes de 50 V en la fuente se fijó una corriente de 30 mA y se
probaron cargas de 100 Ω, 300 Ω y 1000 Ω y se pudo observar como la corriente se mantuvo fija
sin variar su forma de onda y ajustándose a la carga.
El circuito funciona recibiendo en su entrada una onda cuadrada de 2.5 V de amplitud a una
frecuencia de 2 kHz. La señal se separa en dos canales distintos y mediante un arreglo de
inversores quedaran en contra fase, cada canal es un espejo del otro. El puente H de corriente
funciona saturando transistor y luego , no pudiendo ocurrir una saturación de transistores
de una misma rama al mismo momento ya que de ocurrir se produciría un corto circuito. La
señal luego de salir de los inversores toma dos caminos distintos para activar y . Para la
activación del transistor la señal entra a un arreglo de una resistencia de 10 kΩ en paralelo
con un capacitor de 4.7nF, el objetivo del arreglo es solucionar un desfase temporal en la restas
de las dos señales (canal uno y canal dos) que resultaba en una diferencia de 40 μs. Terminó
concluyéndose que era un tiempo de recuperación del transistor con la resistencia de 4.7 kΩ con
la que contaba en su base, la resistencia de 470 Ω es solo por seguridad en la entrada de la señal.
La señal se encarga de saturar el transistor inyectando suficiente corriente en su base. De
forma paralela la señal se desvía en dirección a un divisor de voltaje donde mediante la
resistencia de 4.7 K Ω y 100 Ω se fija un voltaje de 100 mV que va directo a la entrada no
inversora del amplificador operacional TL072. Dicho amplificador operacional se encarga de

4 Descripción del sistema desarrollado.
20
inyectar la corriente necesaria a la base de para hacerlo conducir y mediante la lectura de la
corriente en el emisor de dicho transistor se mantendrá siempre fija la corriente que polariza del
mismo. La etapa del amplificador operacional tiene como objetivo realizar una conversión de
tensión en corriente fijando 10 mA en el transistor cuando el divisor de voltaje fija los 100 mV
en su entrada, gracias a la resistencia de 10 Ω que se encuentra en el emisor de . El proceso
explicado funciona de forma idéntica para la otra rama, saturando al transistor y activando
el transistor .
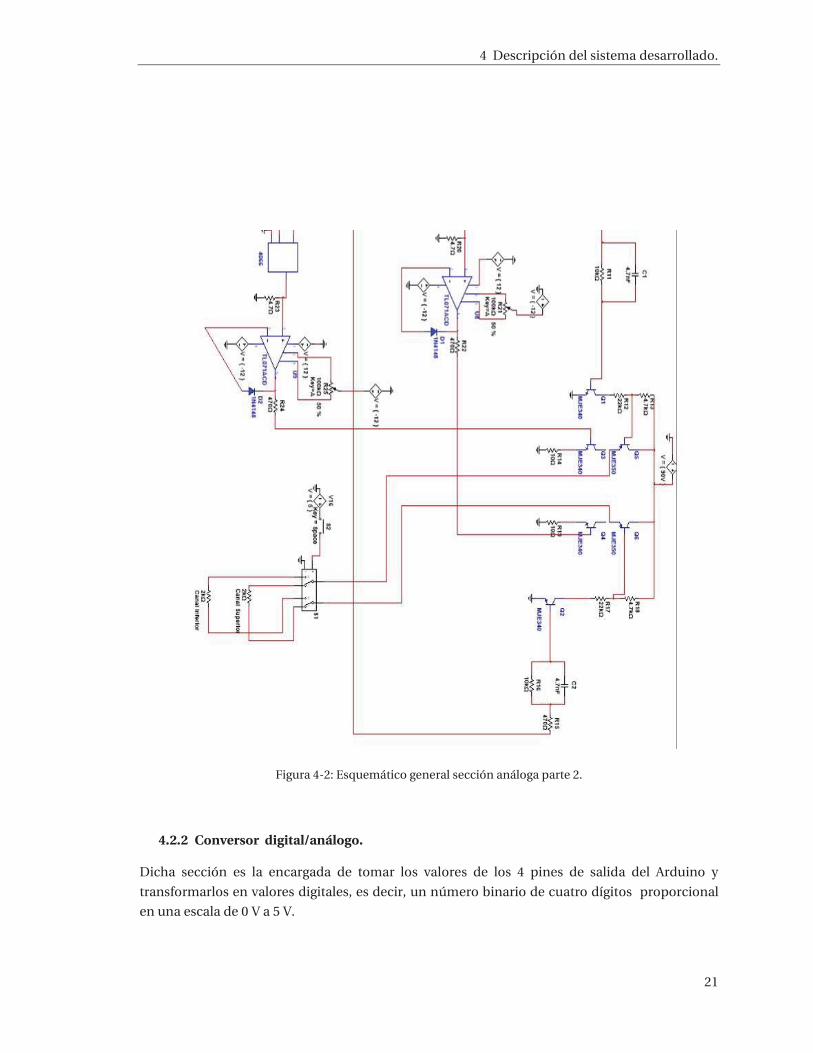
A continuación se presenta un esquema donde se muestra la etapa de potencia, dicha etapa está
precedida del conversor Digital/Análogo el cual es el encargado de conectar la etapa de control
con la etapa de potencia (fig. 4-1: Esquemático general sección análoga parte 1).
Figura 4-1: Esquemático general sección análoga parte 1
4 Descripción del sistema desarrollado.
21
Figura 4-2: Esquemático general sección análoga parte 2.
4.2.2 Conversor digital/análogo.
Dicha sección es la encargada de tomar los valores de los 4 pines de salida del Arduino y
transformarlos en valores digitales, es decir, un número binario de cuatro dígitos proporcional
en una escala de 0 V a 5 V.

4 Descripción del sistema desarrollado.
22
El circuito a utilizar es un conversor D/A de tipo sumador de 4 bits compuesto por un
amplificador operacional y un arreglo de resistencias. Cada resistencia asigna una ponderación
deseada para el bit correspondiente, la señal real a convertir viene de la entrada del voltaje de
referencia. Ya que se eligió un conversor de 4 bits solo se necesita una resistencia de 8 veces el
valor de la primera, en dado caso se eligió una resistencia en el canal A de 10 kΩ por lo que las
siguientes resistencias a utilizar serían la resistencia de B de 20 kΩ , la resistencia del canal C de
40 kΩ y la resistencia del canal D de 80 kΩ, finalmente la suma en paralelo de todas estas
resistencias da como resultado 5 kΩ por lo que para tener una ganancia unitaria en el circuito se
debe fijar una resistencia de 5 kΩ en el lazo de realimentación del pin negativo. El circuito es de
rápida reacción y presenta una solución muy simple para poder realizar el proceso de
conversión deseada.
Se procedió a elegir resistencias con los siguientes valores:
RA = 9.89 kΩ
RB = 19.7 kΩ
RC = 39.2 kΩ
RD = 79.7 kΩ
La corriente aplicada en el usuario estará totalmente definida por dos elementos, el voltaje
máximo fijado a la salida del conversor digital análogo y la resistencia de 10 Ω en el emisor de los
transistores inferiores en el puente H de corriente. Para poder obtener 30 mA en ese punto se
debe fijar un voltaje de 300 mv como máxima salida en el conversor D/A (con el código 1111).
Las otras salidas dependiendo del código irán variando desde ese valor hasta cero. Para poder
fijar el voltaje señalado se realizó el siguiente cálculo.
(4-1)
(4-2)
Por lo que, para poder obtener una salida de 300 mv se debe reemplazar la resistencia de
5 kΩ por una resistencia de 320 Ω. Finalmente el segundo inversor deberá tener una ganancia
unitaria para de esta forma no alterar el voltaje anteriormente calculado; para esto se eligieron
dos resistencias de 4.7 kΩ de precisión y que al ser medidas con un multímetro han arrojado
valores muy similares.
4 Descripción del sistema desarrollado.
23
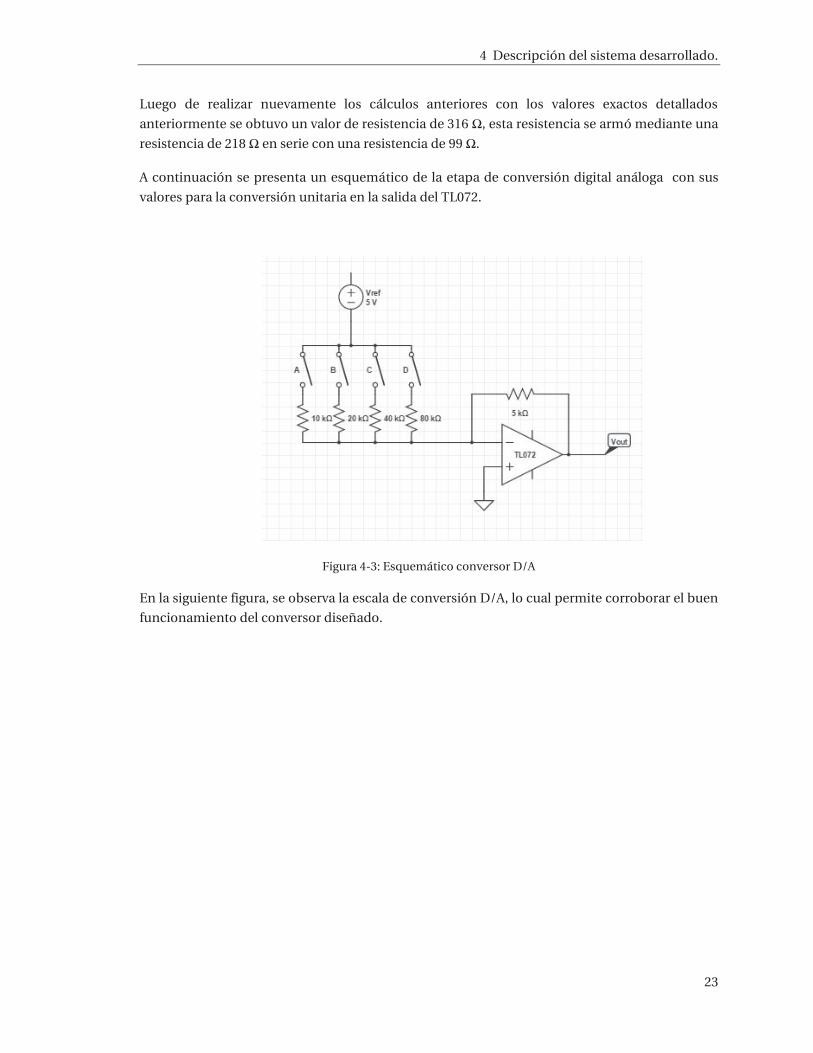
Luego de realizar nuevamente los cálculos anteriores con los valores exactos detallados
anteriormente se obtuvo un valor de resistencia de 316 Ω, esta resistencia se armó mediante una
resistencia de 218 Ω en serie con una resistencia de 99 Ω.
A continuación se presenta un esquemático de la etapa de conversión digital análoga con sus
valores para la conversión unitaria en la salida del TL072.
Figura 4-3: Esquemático conversor D/A
En la siguiente figura, se observa la escala de conversión D/A, lo cual permite corroborar el buen
funcionamiento del conversor diseñado.

4 Descripción del sistema desarrollado.
24
Figura 4-4: Escala conversión D/A.
4.2.3 Oscilador y conmutador.
Consiste en la sección del circuito encargada de la generación de la señal de 2 kHz. Dicha señal
será muy importante en lo que respecta a el control del puente H de corriente, ya que será la
encargada de recibir la orden desde el Arduino y se activará aplicando los 2 kHz durante el
tiempo deseado y con la amplitud deseada. Se optó por desarrollar esta etapa de forma física y
no en la programación del Arduino para no sobrecargar el tiempo de cálculo de este y de esta
forma no sobre exigirle en los procesos necesarios para realizar sus tareas, siendo este método
bastante exacto y eficiente.
La etapa consta de un chip oscilador CD4060, que mediante un arreglo RC fijará la frecuencia de
salida deseada. En las distintas salidas del 4060 se podrán obtener subdivisiones de dicha
frecuencia siendo estas, Q3 con una salida dividida por 2 elevado a 4 es decir dividida por 16 y
siendo la última salida Q13 con una división de 2 elevado a 14, es decir, una frecuencia de salida
dividida por 16348.

4 Descripción del sistema desarrollado.
25
Figura 4-5: 4060 conexiones de los pines. (Fuente: www.alldatasheet.com)
Figura 4-6: 4060 Diagrama funcional. (Fuente: www.alldatasheet.com)
Se utilizará entonces la configuración astable del oscilador para la cual se debe realizar la
conexión detallada a continuación:

4 Descripción del sistema desarrollado.
26
Figura 4-7: Conexión astable del 4060. (Fuente: www.alldatasheet.com)
Para el cálculo de la frecuencia deseada en conexión astable se aplica la fórmula siguiente:
(4-3)
Basados en la fórmula detallada anteriormente se calcularon los valores partiendo con un valor
para de 100 pF y en base a dicho capacitor se obtuvo un valor de 34 kΩ para lo cual con la
fórmula entrega una frecuencia de salida de 128 khz y dicha frecuencia dividida por 64, entrega
2 kHz en la salida , siendo esta la frecuencia deseada.
Figura 4-8: Frecuencia fijada en el CD4060.
A continuación el circuito deriva en un chip CD4066 el cual es un arreglo de interruptores
análogos de alta frecuencia controlados por una señal proveniente del conversor D/A y además
4 Descripción del sistema desarrollado.
27
por la señal de 2 kHz fijada en el oscilador. La salida del circuito encargado de mezclar la
frecuencia fija de 2 kHz con la señal de control irá al circuito de potencia.
Como se puede observar en el esquemático general de la sección análoga, la sección termina
con un relé de doble polo. Dicho relé estará siempre en un canal de estimulación en su estado
normalmente cerrado, al abrir el relé se activará el otro canal de estimulación que
corresponderá al otro grupo muscular que se desea activar. El relé permite activar de forma
alternada los grupos musculares y además evita una posible estimulación simultánea de ambos
grupos.
4.3 Implementación sección digital.
La etapa de control cuenta con un Arduino UNO como parte central y este es el encargado de
leer las entradas análogas y además generar las salidas deseadas. El sistema consiste
básicamente en la lectura de dos potenciómetros encargados de fijar la amplitud de corriente
deseada mediante la lectura de su variación de voltaje entre 0 V y 5 V. Se convierten dichos
valores en una salida de 4 bits, mediante una escala en el programa que permitirá variar la
amplitud de corriente aplicada entre 0 mA y 30 mA. El Arduino lee dos botones pulsadores
encargados de indicar el canal a activar y durante cuánto tiempo aplicar la estimulación, por lo
que se utilizan 4 entradas análogas en la placa Arduino, las cuales son A0, A1 y dos entradas
digitales para los botones 3, 4. Para las salidas se utiliza la salida análoga 2, TX como salida de
conexión serial para enviar la información al LCD, el cual está conectado mediante el shield
Sparkfun serLCD, lo que permite que el visor LCD necesite una salida digital. Para las salidas de
los LED encargados de indicar cual canal está siendo activado se utilizarán las salidas digitales 5
y 6, necesitándose 4 salidas para el código digital de cuatro bits que indicará el nivel de corriente
fijado en el potenciómetro. Dichas salidas son la 9, 10, 11, 12. Se puede observar que aún quedan
6 salidas digitales libres con posibilidades de ser utilizadas en otras aplicaciones.
El circuito de control tiene como objetivo principal poder hacer una interfaz fácil de utilizar para
el usuario y que además permite a este tener el control total sobre la estimulación que se está
aplicando. A continuación se presenta un esquema de lo descrito en el párrafo anterior.

4 Descripción del sistema desarrollado.
28
Figura 4-9: Esquemático sección digital.
Para la programación de la etapa digital, se optó por un loop que realiza todas las funciones
necesarias en un tiempo determinado. En la siguiente figura se detallan algunas de las tareas
realizadas por el software durante un ciclo.

4 Descripción del sistema desarrollado.
29
En el primer paso dentro del programa se realiza la lectura de los potenciómetros de referencia
con el conversor A/D de 10 bits con los que cuenta la placa Arduino, su valor de referencia de 5V
se subdividirá en los 1024 niveles posibles. Al mismo tiempo se realiza la lectura de los botones
pulsadores encargados de elegir el canal en el cual se aplicará la estimulación, dichos botones
utilizarán la configuración típica sugerida por Arduino y su lectura se realiza como entradas
digitales variando su valor desde 0 a 5 V, siendo cero un 0 y siendo 5 V un valor lógico 1.
Para mostrar en la pantalla LCD los datos registrados con el potenciómetro en la escala de 0 mA
hasta 30 mA con escalones de dos en dos se implementó la función “map” de Arduino
realizando la conversión de 10 bits de entrada a 4 bits y además se multiplicaron estos valores
por dos para de esta forma obtener los 16 niveles pares de 0 a 30 mA, representando como será
aplicada la corriente en el usuario. El nivel de corriente fijado con los potenciómetros aparecerá
en el visor LCD independiente de si se está aplicando o no el estímulo, permitiendo fijar el valor
deseado antes de ser aplicado el formato que se muestra en la siguiente imagen.
Figura 4-10: Diagrama de bloques del software.

4 Descripción del sistema desarrollado.
30
Figura 4-11: Función ¨map¨Arduino.
Para poder realizar pruebas de funcionamiento del programa se conectó un LED a cada salida
encargada de enviar la información al conversor D/A. Cada LED representa a uno de los 4 bits de
salida y se enciende o apaga dependiendo del código binario que se desea en la salida el cual es
directamente proporcional al valor fijado con el potenciómetro. Esto permitió que mientras se
realizaba la programación se realizaran pruebas en el minuto y con esto evaluar el desarrollo
correcto del programa.
Para poder realizar la conversión de la lectura de los potenciómetros a una salida de 4 bits
dominada por los pulsadores, se utilizaron comparaciones “if” como encargado de decisión
donde se evaluaba cual botón que se está pulsando. Luego de leer alguno de los pulsadores se
aplica el valor leído en la entrada del potenciómetro correspondiente a dicho pulsador y
mediante la división de 2 niveles para el bit más significativo y de 16 niveles para el bit menos
significativo se arma el código binario en la salida, tal como se muestra en las imágenes. Si bien
se utilizaron los valores reales de conversión de 0 a 1023 para este proceso, es posible
implementar el código con una división de valores de 0 a 16 bits utilizando la función “map”.
4 Descripción del sistema desarrollado.
31
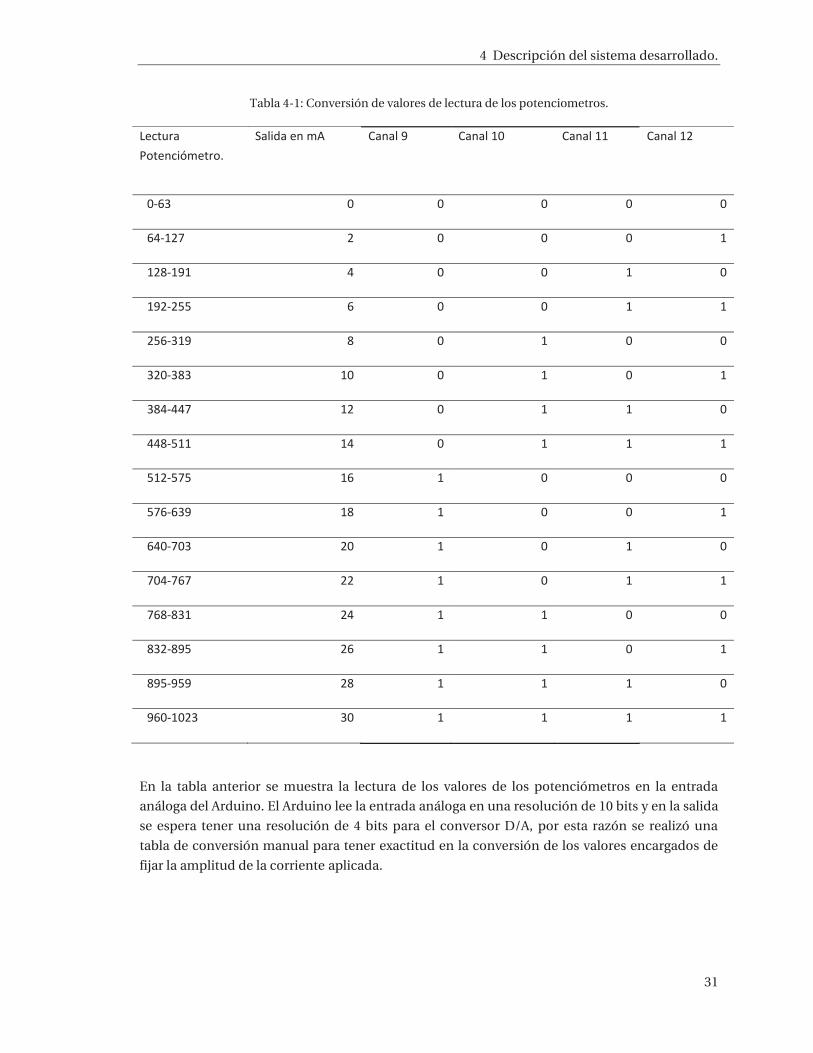
Tabla 4-1: Conversión de valores de lectura de los potenciometros.
Lectura Potenciómetro.
Salida en mA
Canal 9 Canal 10 Canal 11 Canal 12
0-63 0 0 0 0 0
64-127 2 0 0 0 1
128-191 4 0 0 1 0
192-255 6 0 0 1 1
256-319 8 0 1 0 0
320-383 10 0 1 0 1
384-447 12 0 1 1 0
448-511 14 0 1 1 1
512-575 16 1 0 0 0
576-639 18 1 0 0 1
640-703 20 1 0 1 0
704-767 22 1 0 1 1
768-831 24 1 1 0 0
832-895 26 1 1 0 1
895-959 28 1 1 1 0
960-1023 30 1 1 1 1
En la tabla anterior se muestra la lectura de los valores de los potenciómetros en la entrada
análoga del Arduino. El Arduino lee la entrada análoga en una resolución de 10 bits y en la salida
se espera tener una resolución de 4 bits para el conversor D/A, por esta razón se realizó una
tabla de conversión manual para tener exactitud en la conversión de los valores encargados de
fijar la amplitud de la corriente aplicada.
4 Descripción del sistema desarrollado.
32
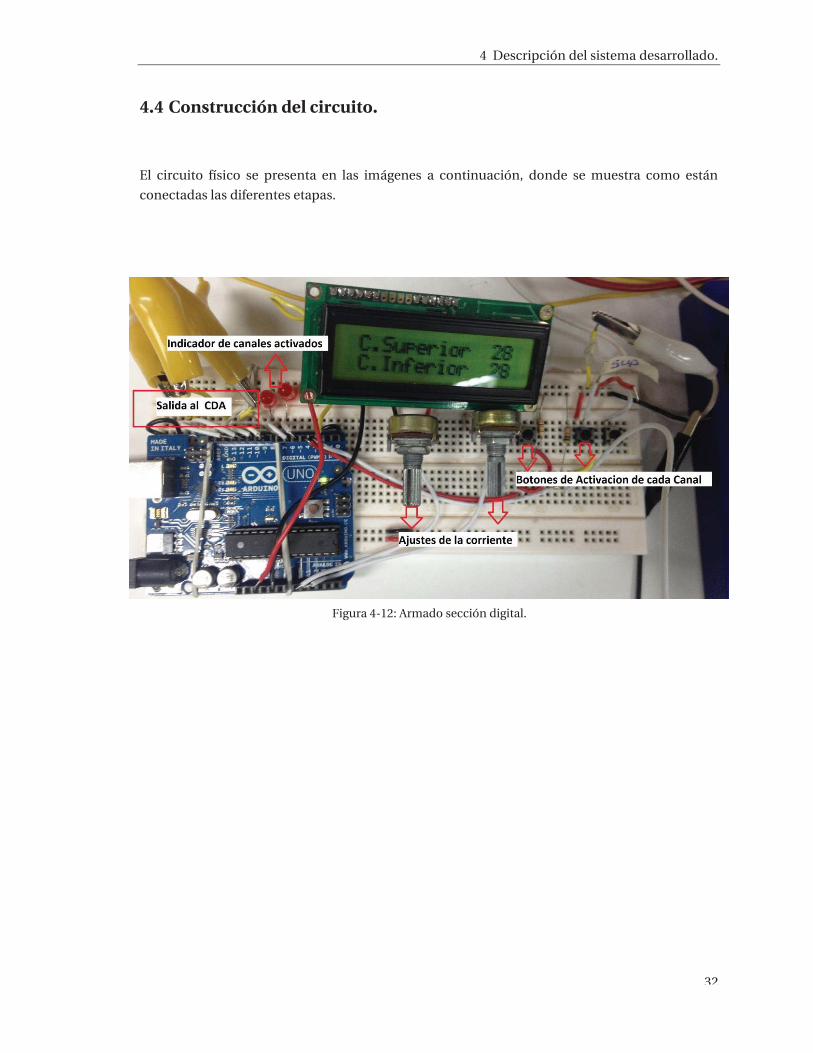
4.4 Construcción del circuito.
El circuito físico se presenta en las imágenes a continuación, donde se muestra como están
conectadas las diferentes etapas.
Figura 4-12: Armado sección digital.
4 Descripción del sistema desarrollado.
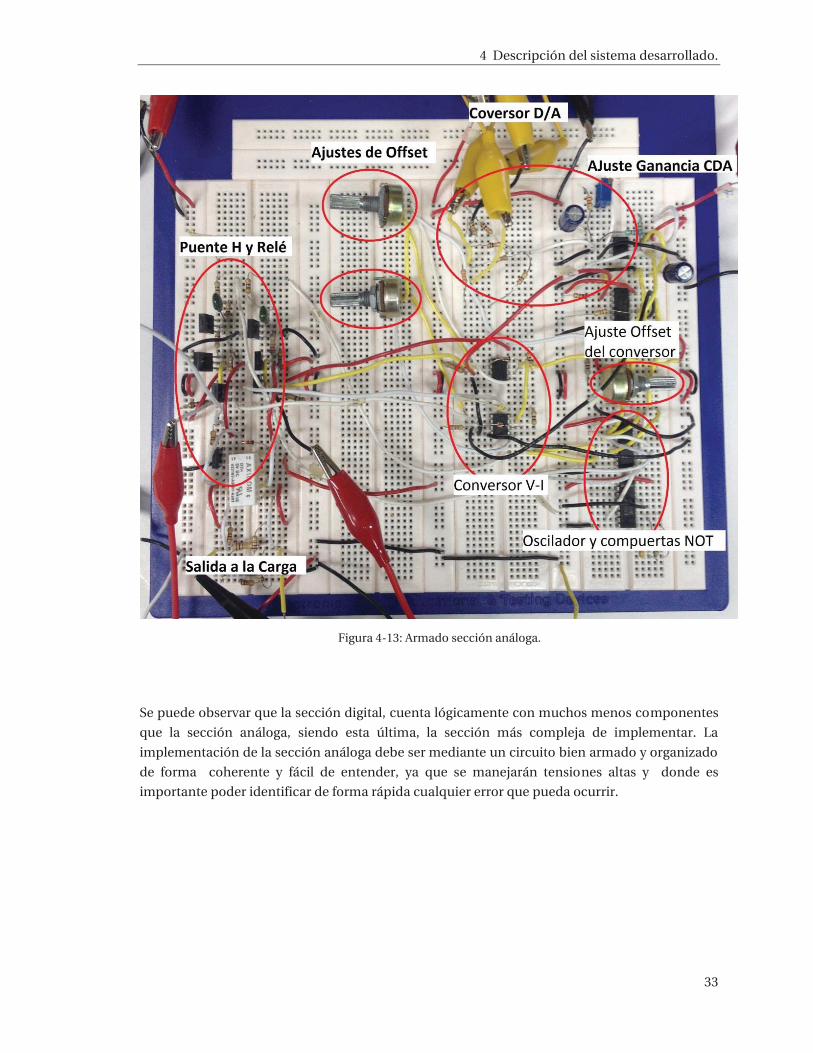
33
Se puede observar que la sección digital, cuenta lógicamente con muchos menos componentes
que la sección análoga, siendo esta última, la sección más compleja de implementar. La
implementación de la sección análoga debe ser mediante un circuito bien armado y organizado
de forma coherente y fácil de entender, ya que se manejarán tensiones altas y donde es
importante poder identificar de forma rápida cualquier error que pueda ocurrir.
Figura 4-13: Armado sección análoga.
34
5 Pruebas realizadas.
5.1 Diseño del experimento.
5.1.1 Objetivos.
Realizar la estimulación de la articulación de la muñeca y evaluar:
El funcionamiento correcto del electro estimulador generando el movimiento deseado,
para lo cual se buscará en principio solamente generar la flexión de la articulación.
Encontrar la relación existente entre la composición muscular del sujeto de pruebas y
la corriente necesaria para la estimulación, para el cual se deberán realizar ciertas mediciones.
Los distintos niveles de tolerancia de los sujetos de pruebas a la estimulación.
Variación de la corriente al modificar los puntos de estimulación.
5.1.2 Mediciones a realizar.
Para poder llevar acabo los objetivos planteados anteriormente, se deberán realizar las
mediciones expuestas a continuación.
Grosor del Brazo del sujeto.
Largo del Brazo del sujeto.
Corriente umbral mínima para generar la flexión de la muñeca.
Corriente máxima tolerada al flectar la muñeca.
Corriente Umbral mínima para generar la enderezar de la muñeca.
Corriente máxima tolerada al enderezar la muñeca.

5 Pruebas realizadas.
35
5.1.3 Procedimiento.
Los pasos a seguir para poder realizar las mediciones son los expuestos a continuación.
Medir el grosor del Brazo del sujeto en su parte más gruesa.
Medir el Largo del Brazo del sujeto desde el codo hasta la muñeca.
Conectar los electrodos en las zonas definidas y marcadas. Posiciones de músculos agonistas y antagonistas en la flexión de la articulación en cuestión.
Realizar la estimulación para flectar la muñeca y medir el valor mínimo de corriente para generar flexión
Medir valor máximo de corriente tolerado.
Realizar la estimulación para enderezar la muñeca y medir el valor mínimo de corriente para generar flexión
Medir valor máximo de corriente tolerado.
5.1.4 Resultados obtenidos.
En las pruebas realizadas se pudieron observar varios fenómenos. En primer lugar, la diferencia
existente entre la forma del voltaje en la carga al pasar de una carga resistiva a la carga real (
brazo ), esta diferencia se debe a la característica capacitiva que presenta el cuerpo humano al
ser estimulado eléctricamente.
A continuación se presentarán capturas del osciloscopio correspondientes a la señal de
corriente y voltaje de salida para distintos valores de estimulación fijados con una carga
netamente resistiva. Para medir la corriente de salida se procede a medir el valor del voltaje en la
resistencia de 10 Ω de los transistores de switching y para medir el voltaje en la carga se utilizan
puntas atenuadoras x10 que permiten visualizar hasta 60 V comprendidos en la prueba
realizada. Las pruebas se realizaron con una carga resistiva de 3 kΩ.

5 Pruebas realizadas.
36
Figura 5-1: Voltaje en mili Volts, correspondientes a 2 mA de corriente.
Figura 5-2: Voltaje en la carga para 2mA.

5 Pruebas realizadas.
37
Figura 5-3: 200 mV correspondientes a 20 mA.
Figura 5-4: Voltaje en la carga para 20 mA.
El voltaje en el osciloscopio corresponde a una de las puntas atenuadoras en el canal donde se
está realizando la estimulación y la otra punta atenuadora en el canal que se encuentra
desactivado por el relé.

5 Pruebas realizadas.
38
Antes de realizar las pruebas con carga real, se implementó una carga con características
capacitivas y resistivas para de esa forma poder tener una aproximación al comportamiento de
la carga real y poder realizar pruebas del sistema. Se utilizó una carga resistiva de 3.2 kΩ
aproximadamente y basado en pruebas realizadas a la etapa de potencia se logró calcular una
capacitancia que permitió simular la carga real.
Figura 5-5: Forma de onda en carga real.
(5-1)
(5-2)
(5-3)
Para el caso de una señal de 9 mA con 30 V se obtiene mediante el mismo método el valor de
capacitancia siguiente:
Por lo que los valores de la capacitancia concuerdan de forma coherente y en base a esto se
realizaron diversas mediciones con un armado de una carga que consistía en 3 capacitores y una
resistencia en paralelo. Finalmente los resultados obtenidos mostraron formas de onda muy
similar a la observada con las cargas reales y con conocimiento exacto de los valores de la carga.

5 Pruebas realizadas.
39
Figura 5-6: Forma de onda con carga modelada.
Figura 5-7: Forma de onda en la resistencia de 10 Ω con carga modelada.
A continuación se muestran las formas de ondas de corriente y voltaje en carga real.

5 Pruebas realizadas.
40
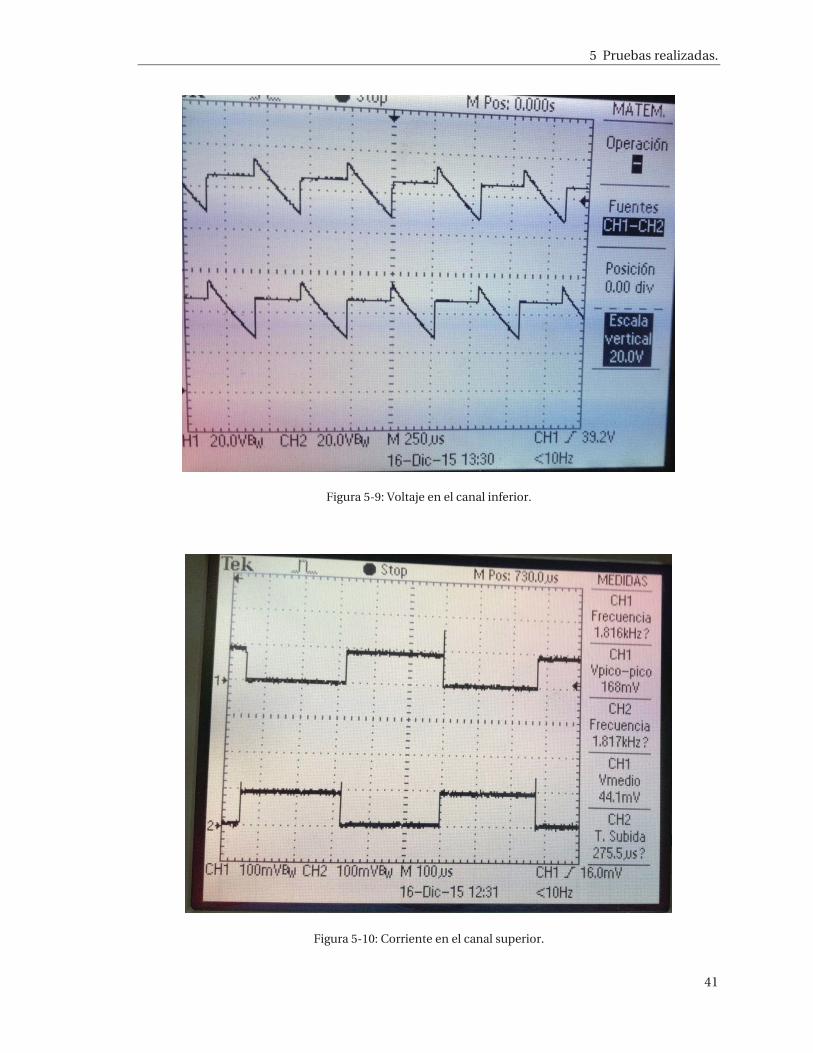
Para la estimulación de los músculos superiores e inferiores. Los valores de estimulación fueron
de 8 mA para el canal inferior y de 10 mA para el canal superior.
Figura 5-8: Corriente en el canal inferior.
5 Pruebas realizadas.
41
Figura 5-9: Voltaje en el canal inferior.
Figura 5-10: Corriente en el canal superior.

5 Pruebas realizadas.
42
Figura 5-11: Voltaje en el canal superior.
Se puede observar que no existe mayor diferencia en las formas del voltaje en la carga superior e
inferior. Para estimular el canal superior se requiere un nivel de corriente mayor que en el canal
inferior.
Luego de aplicar la estimulación a seis sujetos distintos se puede observar una concordancia en
los valores de corriente necesarios para generar la estimulación, tanto como los valores
máximos tolerados. Es importante destacar que una vez percibida la flexión de la muñeca no se
realizó estimulación con valores de corriente muy superiores, debido a que no era necesario
someter a los sujetos de prueba a una estimulación que pudiera tornarse molesta e incluso
pudiera provocar alguna sensación de dolor. Se muestra una tabla que resume los datos
obtenidos en las mediciones realizadas.
5 Pruebas realizadas.
43
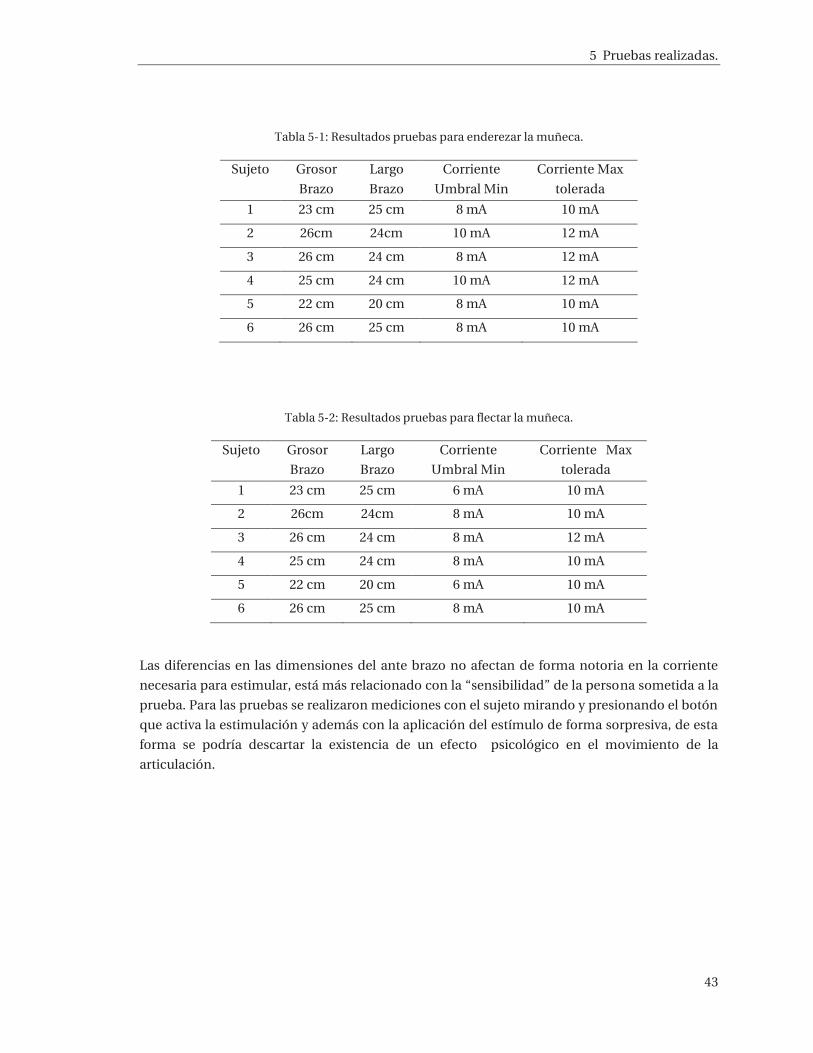
Tabla 5-1: Resultados pruebas para enderezar la muñeca.
Sujeto Grosor
Brazo
Largo
Brazo
Corriente
Umbral Min
Corriente Max
tolerada
1 23 cm 25 cm 8 mA 10 mA
2 26cm 24cm 10 mA 12 mA
3 26 cm 24 cm 8 mA 12 mA
4 25 cm 24 cm 10 mA 12 mA
5 22 cm 20 cm 8 mA 10 mA
6 26 cm 25 cm 8 mA 10 mA
Tabla 5-2: Resultados pruebas para flectar la muñeca.
Sujeto Grosor
Brazo
Largo
Brazo
Corriente
Umbral Min
Corriente Max
tolerada
1 23 cm 25 cm 6 mA 10 mA
2 26cm 24cm 8 mA 10 mA
3 26 cm 24 cm 8 mA 12 mA
4 25 cm 24 cm 8 mA 10 mA
5 22 cm 20 cm 6 mA 10 mA
6 26 cm 25 cm 8 mA 10 mA
Las diferencias en las dimensiones del ante brazo no afectan de forma notoria en la corriente
necesaria para estimular, está más relacionado con la “sensibilidad” de la persona sometida a la
prueba. Para las pruebas se realizaron mediciones con el sujeto mirando y presionando el botón
que activa la estimulación y además con la aplicación del estímulo de forma sorpresiva, de esta
forma se podría descartar la existencia de un efecto psicológico en el movimiento de la
articulación.
5 Pruebas realizadas.
44
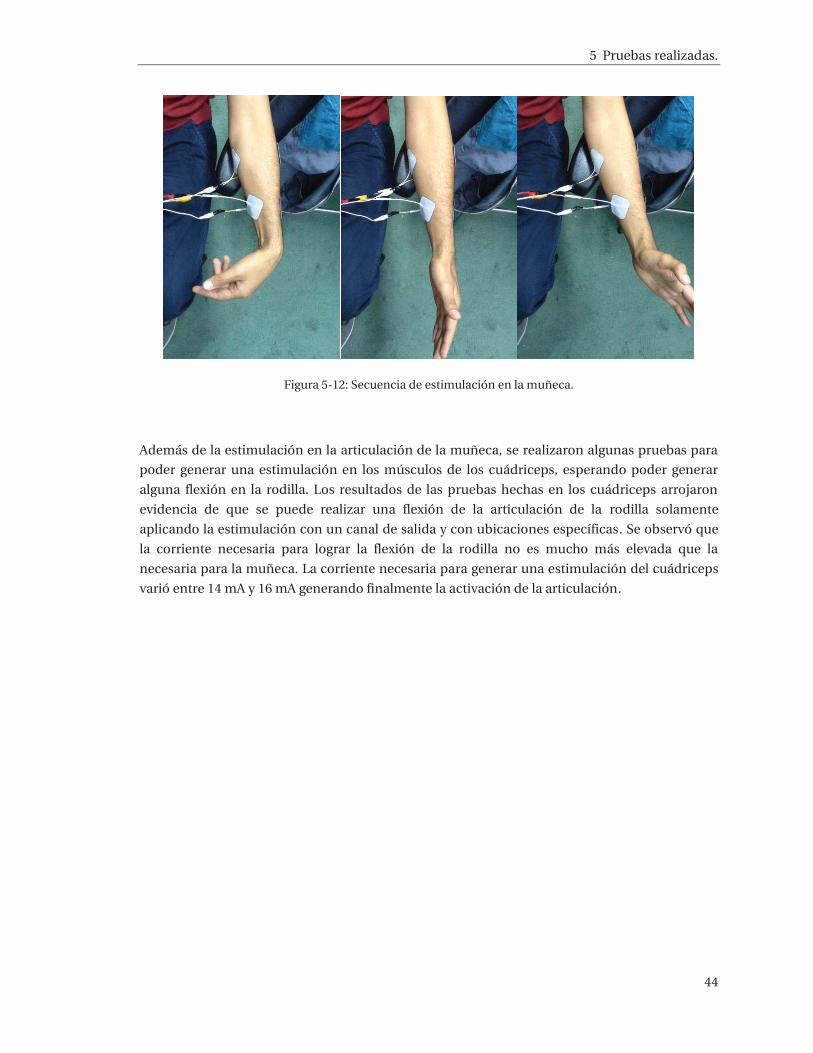
Figura 5-12: Secuencia de estimulación en la muñeca.
Además de la estimulación en la articulación de la muñeca, se realizaron algunas pruebas para
poder generar una estimulación en los músculos de los cuádriceps, esperando poder generar
alguna flexión en la rodilla. Los resultados de las pruebas hechas en los cuádriceps arrojaron
evidencia de que se puede realizar una flexión de la articulación de la rodilla solamente
aplicando la estimulación con un canal de salida y con ubicaciones específicas. Se observó que
la corriente necesaria para lograr la flexión de la rodilla no es mucho más elevada que la
necesaria para la muñeca. La corriente necesaria para generar una estimulación del cuádriceps
varió entre 14 mA y 16 mA generando finalmente la activación de la articulación.

5 Pruebas realizadas.
45
Figura 5-13: Secuencia de estimulación en los cuádriceps.
46
Discusión y conclusiones El objetivo principal del proyecto consistía en estudiar la electro estimulación, su efecto en el
cuerpo humano, parámetros de funcionamiento y comprender las diferentes aplicaciones de
dicha terapia. Mediante la comprensión general de la estimulación eléctrica muscular, se ha
buscado poder comenzar el diseño de una máquina de estimulación muscular que permita
realizar la activación de músculos específicos en ciertas articulaciones. Para poder diseñar el
electro estimulador se han analizado diversas opciones, ya que existen diferentes
aproximaciones para obtener el mismo tipo de resultado, existe en el mercado un número
elevado de electro estimuladores que funcionan en base a un transformador de voltaje que
permite llevar a voltajes elevados para poder aplicar la estimulación deseada. En este caso, se ha
optado por diseñar un sistema estable con dos etapas claves, análoga y digital y mediante ello
poder aplicar pulsos eléctricos específicos y poder generar la activación de los grupos
musculares encargados de realizar el movimiento de la articulación de la muñeca, dicho
objetivo se logró y se pudo generar un movimiento en ambos sentidos de la articulación,
generando flexión y la extensión de esta.
Se ha optado por la articulación de la muñeca por la facilidad de acceso a esta y porque es
posible manejar el estimulador al mismo momento en el que se observa cómo reaccionan los
grupos musculares y la articulación en cuestión.
Dentro de lo que se puede concluir en las pruebas hechas para distintos sujetos, está el hecho
de que, independiente de las dimensiones del brazo de la persona, los valores necesarios para la
estimulación son similares en todos los casos, por lo que los valores de estimulación necesarios
se han mantenido acotados dentro de niveles cercanos. Para generar una flexión de la muñeca
se necesita generar una estimulación con pulsos de corriente de entre 6 mA y 8 mA, siendo 8 mA
el valor que siempre generó flexión en los sujetos sometidos a las pruebas, es decir, cada
individuo ha podido ser estimulado al menos con 8 mA y en algunos casos se ha presentado
movimiento articular incluso con pulsos de 6 mA. Para la extensión de la muñeca los valores de
los pulsos de corrientes necesarios oscilaron entre 8 mA y 10 mA. Se observa que en ambos
grupos musculares se necesitaron valores de corrientes muy similares. Siendo la extensión de la
muñeca un movimiento que requiere 2 mA más en promedio que la flexión de la misma. Lo
anterior puede deberse a que es más fácil poder encontrar el grupo muscular flector de forma
clara y puntual que el grupo muscular encargado de estirar la articulación. Por otro lado, se
Discusión y conclusiones
47
destaca que la diferencia es relativamente marginal por lo que se sigue estando bajo los 10 mA
para realizar la estimulación tanto de flexión como de estiramiento de la articulación de la
muñeca.
Poder trabajar con sistemas médicos o diseñar y construir máquinas que estarán en contacto
con el cuerpo humano o algún individuo de forma directa amerita un nivel extra de
preocupación al detalle y debe contar con niveles de exactitud elevados, es sumamente
importante reducir cada riesgo de error al mínimo ya que un mal funcionamiento de la máquina
puede causar en este caso por ejemplo daño físico directo al usuario. Es por ello que compañías
dedicadas al mercado de máquinas como las que se ha desarrollado en este informe, cuentan
con sistemas de seguridad elevados, tanto e las máquinas mismas como en la empresa para
poder enfrentar potenciales problemas legales y de funcionamiento.
Dentro del proceso de conexión de las distintas etapas, se debió ajustar el circuito para poder
entregar en la salida hacia la carga el valor especificado en el visor LCD, lo cual es importante
debido a que es un sistema que estará en contacto con el cuerpo humano y es relevante tener
información verídica de los valores aplicados,. Los ajustes consistieron básicamente en 3 ajustes
de offset y un ajuste de ganancia. Se utilizaron potenciómetros para los ajustes de offset y un
trimpot para el ajuste de ganancia en la salida del conversor D/A. Es importante mantener un
nivel precisión suficiente que permita asegurar un margen de error mínimo en los valores de
corriente que se desea aplicar. Para el electro estimulador se buscó mantener un error menor a 1
mA de corriente ya que si bien no sería notorio para los valores altos de estimulación (30 mA),
para la estimulación mínima posible (2 mA) será más importante. Presentando en dicho caso
una variabilidad del 50%. Cabe destacar que una estimulación de 2 mA es una estimulación
mínima y casi imperceptible por lo que el valor de error de 1 mA presenta una variabilidad a su
vez imperceptible.
Una prueba que se realizó con el electro estimulador fue en los músculos de los cuádriceps.
Dicho músculo representa dimensiones muy superiores a los músculos presentes en el brazo
por lo que se deduce que se necesitara una corriente mayor. Se observó que la corriente
necesaria para estimular la pierna e incluso flectar la articulación de la rodilla no es muy
superior a la corriente necesaria para flectar el brazo. Se necesitaron entre 14 mA y 16 mA para
generar la estimulación deseada, siendo entre un 40% y un 50% mayor que la necesaria para
estimular el brazo pero aun así está muy lejos de los valores máximos posibles del sistema. El
cuádriceps es un músculo que presenta una masa bastante grande, siendo uno de los músculos
más grandes del cuerpo humano. Realizar la estimulación de dicho músculo, implica generar un
movimiento en la articulación de la rodilla.
Uno de los casos de estudios de aplicación para un sistema como el desarrollado en el presente
informe, ha sido personas con hemiplejia, es decir, personas que han perdido la movilidad de
un hemisferio del cuerpo, ya sea el lado derecho o izquierdo. Dichas personas solo tienen
autonomía y control sobre una de sus piernas en casos particulares. El poder estimular un
cuádriceps, implica que desarrollando un sistema específico para este tipo de casos, permitiría
por ejemplo, tener la posibilidad de desplazarse de forma independiente con una bicicleta

Discusión y conclusiones
48
especial a las personas que necesitan una estimulación extra para completar un pedaleo
continuo. Esto mediante la lectura de la posición de la pierna controlada por el usuario y
complementando cada movimiento con la estimulación necesaria para generar la flexión de
rodilla adecuada y con ello el complemento al movimiento de pedalear. Aplicando de esta forma
un sistema de control automático cómo complemento al sistema ya desarrollado y obteniendo
una aplicación práctica y funcional.
Por otro lado, un complemento posible sería automatizar la secuencia aplicada al usuario y de
esa forma poder generar secuencias con un objetivo específico como por ejemplo, poder coger
algún objeto. El electro estimulador desarrollado en este proyecto permite continuar una línea
de investigación que se complemente con la kinesiología y la interacción de la electrónica con el
cuerpo humano.

49
Bibliografía
[1] FONADIS, «Primer estudio nacional de la discapacidad e informes regionales 2004 » INE, Santiago de Chile 2004. [En línea]. Available:http://www.ine.cl/canales/chile- _estadistico/encuestas_discapacidad/pdf/reultados3.pdf .
[2] Dr. J. Rodlés,Dr J. Piqué, Dr. A. Trilla « Libro de la salud del hospital clinico de barcelona y la fundacion BBVA» 2007.
[3] D. Adamini «Utilizacion del FES en subluxación escapulohumeral de pacientes con hemiplejia en estado fláccido» Universidad Abierta Interamericana, 2005.
[4] C. Lynch, M. Popovic «Functional Electrical Stimulation» IEEE, 2008.
[5] J. Plaja «Guia practica de lectroterapia» pag(16-18), Electromedicarin, Barcelona.
[6] J. Plaja «Guia practica de lectroterapia» pag(20-24), Electromedicarin, Barcelona.
[7] Eric Cheng, Yan Lu,Kai-YU «Developmen of a circuit for functional electrical stimulation » , IEE transactions on neural systems and rehabilitation engieneering, 2004.