mec¶anica y ondas - fnl.usal.esfnl.usal.es/pilar/myo/tema3/tema3.pdf · reducir un problema...
TRANSCRIPT

Mecanica y Ondas
Salamanca, 2007-2008. Primer semestre

Indice
1. Movimiento de una partıcula en tres dimensiones . . . . . . . . . . 11..1 Segunda ley de Newton: Momento lineal . . . . . . . . . . . 21..2 Fuerzas conservativas: Conservacion de la energıa . . . . . . 21..3 Fuerzas centrales: Conservacion del momento angular . . . . 3
2. Potencial efectivo . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32..1 Puntos de retroceso . . . . . . . . . . . . . . . . . . . . . . . 42..2 Estados ligados y estados de difusion . . . . . . . . . . . . . 4
3. El oscilador armonico tridimensional . . . . . . . . . . . . . . . . . 53..1 Resolucion en coordenadas cartesianas . . . . . . . . . . . . 53..2 Resolucion en coordenadas esfericas . . . . . . . . . . . . . . 6
4. Potencial de Coulomb . . . . . . . . . . . . . . . . . . . . . . . . . 104..1 Caso repulsivo . . . . . . . . . . . . . . . . . . . . . . . . . . 104..2 Caso Atractivo . . . . . . . . . . . . . . . . . . . . . . . . . 14
5. Seccion eficaz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 235..1 Concepto de seccion eficaz y seccion eficaz diferencial . . . . 235..2 Difusion por una esfera dura . . . . . . . . . . . . . . . . . . 265..3 Difusion de Rutherford . . . . . . . . . . . . . . . . . . . . . 275..4 Aproximacion de angulos pequenos . . . . . . . . . . . . . . 28
6. Problemas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
i

Movimiento de una partıcula entres dimensiones: Fuerzascentrales
1. Movimiento de una partıcula en tres dimen-
siones
A la hora de plantear el movimiento en mas de una dimension, hemos de pensaren generalizar las magnitudes fundamentales. Tales magnitudes han de cumplirlas siguientes condiciones
• Ser suficientes para definir el sistema mecanico
• Estar claramente definidas
• Construir un sistema formal para definirlas, de modo que quedenpatentes sus leyes de transformacion.Las magnitudes fundamentales que hemos de definir son tres:
1) Momento lineal2) Energıa3) Momento angularEn tres dimensiones la posicion de un punto en el espacio en cada instante de
tiempo viene dado por el vector posicion
~r = ~r(t) (1.1)
mientras que la velocidad y la aceleracion seran
~v = ~r =d~r
dt(1.2)
~a = ~r =d2~r
dt2(1.3)
1

2 Capıtulo 3
1..1 Segunda ley de Newton: Momento lineal
Nuestro punto de partida son simplemente las leyes de Newton. La segunda leyde Newton se escribira en forma vectorial como
m~r = ~F (1.4)
El momento lineal se define como
~p = m~v (1.5)
y por tanto su variacion vendra dada por la ley de Newton
d~p
dt= ~F (1.6)
de forma que la variacion del momento cinetico es debida a la fuerzaaplicada
1..2 Fuerzas conservativas: Conservacion de la energıa
Si la fuerza es conservativa (irrotacional), significa que se puede escribir como
~F = − ~∇V =⇒ dV = ~∇V .d~r = −~F ~dr (1.7)
donde V es la Energıa potencial, que en el caso mas general sera funcion de ~r,~r y t (sin embargo, en la mayorıa de los casos nos limitaremos a potenciales quesolo dependen de la posicion). Se define la energıa como
E = T + V (1.8)
siendo T la energıa cinetica
T =1
2m(~r)2 (1.9)
La variacion de la energıa con el tiempo sera
dE
dt=
dT
dt+
dV
dt= m~r.~r + ~∇V .~r (1.10)
Empleando (1.4) y (1.7)
dE
dt= ~r. ~F − ~F .~r = 0 (1.11)
Por tanto, Para fuerzas conservativas la energıa es una constante delmovimiento.

Movimiento de una partıcula en tres dimensiones 3
1..3 Fuerzas centrales: Conservacion del momento angular
El momento angular se define como
~L = ~r × ~p = m~r × ~r (1.12)
Su variacion con el tiempo es:
d~L
dt= m~r × ~r + m~r × ~r (1.13)
Empleando (1.4)
d~L
dt= ~r × ~F (1.14)
que se anula cuando la fuerza esta dirigida en la direccion radial. Para fuerzascentrales, el momento angular es una constante del movimiento.
2. Potencial efectivo
A partir de ahora vamos a dedicarnos al estudio de fuerzas centrales
~F = F (r)~jr −→ V (r) = −∫
F (r)dr (2.1)
para las cuales tanto E como ~L son conservadas. Notese que toda fuerza centrales conservativa pero no al reves.
La constancia de ~L significa que el plano formado por ~r y ~r es constante y portanto el movimiento se realiza en un plano. Podemos pues sin restriccion elegir eleje z en la direccion de ~L de manera que el movimiento se realizara en el planoXY . En consecuencia
z = 0, θ =π
2r = ρ
Las coordenadas adecuadas a este problema son polares planas, en las cuales:
~r = r~jr (2.2)
~r = r~jr + rϕ~jϕ (2.3)
(~r)2 = (r)2 + r2ϕ2 (2.4)
de manera que la conservacion de L y E se escribe:
L = mr2ϕ
E =1
2m(r2 + r2ϕ2) + V (r) (2.5)

4 Capıtulo 3
eliminando ϕ entre ambas
E =1
2mr2 +
[L2
2mr2+ V (r)
](2.6)
Para un valor dado de L esta ecuacion tiene la misma forma que la ecuacionde conservacion de la energıa en una dimension con un potencial efectivo dela forma
U(r) =L2
2mr2+ V (r) (2.7)
dondeL2
2mr2puede considerarse como el potencial correspondiente a la fuerza
centrıfuga − L2
mr3~jr. En consecuencia, las leyes de conservacion nos han permitido
reducir un problema tridimensional a uno unidimensional que se limita a estudiarla variacion de la coordenada r en el potencial U(r) con la salvedad de que r solopuede tomar valores positivos.
2..1 Puntos de retroceso
Puesto que la velocidad radial es:
r =
√2
m(E − U(r))
el movimiento solo podra existir para aquellos valores de r para los cuales
U(r) ≤ E
los puntos en los cuales E = U(r) se denominan puntos de retroceso. En ellos lavelocidad radial es cero y la velocidad esta dirigida en la direccion de jϕ por loque la posicion y la velocidad son perpendiculares. Si ~r1 es un punto de retroceso,entonces:
~r1 = r1~jr1
~v1 = r1ϕ1~jϕ1 (2.8)
2..2 Estados ligados y estados de difusion
Los estados para los cuales la energıa, el momento y/o las condiciones inicialesson tales que la partıcula permanece confinada entre dos puntos de retroceso sedenominan estados ligados. Conviene tomar las condiciones iniciales en uno de lospuntos de retroceso
Por el contrario si r puede ser indefinidamente grande se trata de un estado dedifusion (o scattering). En estos casos las condiciones iniciales conviene tomarlasen el infinito

Movimiento de una partıcula en tres dimensiones 5
3. El oscilador armonico tridimensional
Corresponde a una partıcula sometida a una fuerza
~F = −k~r (3.1)
y por tanto
V (r) =1
2kr2 (3.2)
3..1 Resolucion en coordenadas cartesianas
La ecuacion (3.1) puede escribirse en cartesianas en la forma
mx + kx = 0
my + ky = 0
mz + kz = 0 (3.3)
La ecuacion del movimiento de cada coordenada es analoga a la de un osciladorarmonico unidimensional. La solucion general es:
x = a1 cos(ωt− θ1)
y = a2 cos(ωt− θ2)
z = 0 (3.4)
donde hemos hecho
ω =
√k
m(3.5)
Dado que el momento angular es constante, el movimiento puede considerarse sinrestriccion, confinado al plano XY. Hay por tanto cuatro constantes de integracion.Dado que es un estado ligado, conviene tomar las condiciones iniciales de formaque
~r(0) = r0~i
~r(0) = v0~j (3.6)
de forma que para t = 0 esten en un punto de retroceso y en consecuencia ~r0 y ~v0
sean perpendiculares. Substituyendo (3.6) en (3.4) tenemos
r0 = a1 cos θ1
0 = a2 cos θ2
0 = −ωa1 sin θ1
v0 = −ωa1 sin θ1 (3.7)

6 Capıtulo 3
que combinadas proporcionan
a1 = r0
a2 = −v0
ωθ1 = 0
θ2 =π
2(3.8)
y por tanto la trayectoria es:
x = r0 cos(ω0t)
y = − v0
ω0
sin (ω0t) (3.9)
y la orbita es la elipsex2
r20
+y2
(v0/ω0)2= 1 (3.10)
• Conservacion de la energıa
E =1
2mv2
0 +1
2mω2r2
0 (3.11)
• Conservacion del momento angular
Lx = 0, Ly = 0
Lz = ma1a2ω0 sin (θ2 − θ1) = mr0v0 (3.12)
3..2 Resolucion en coordenadas esfericas
Para ver de que orbita se trata es preferible resolver el problema en polares
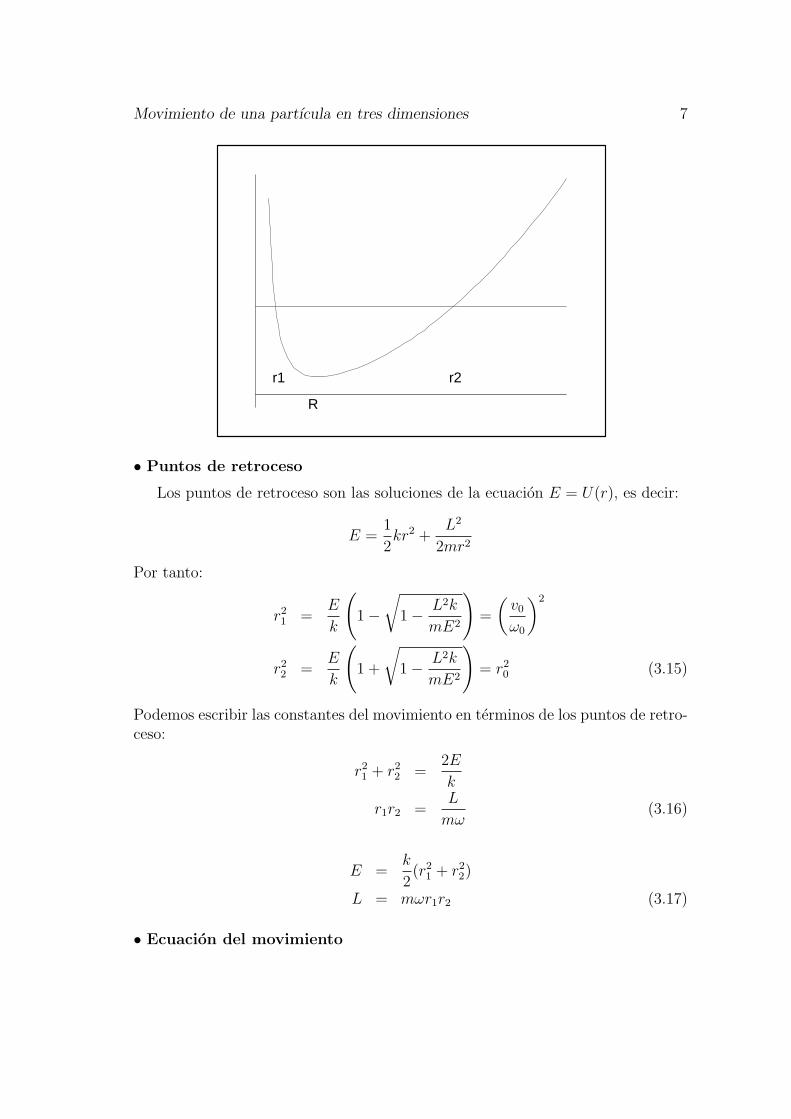
• Potencial efectivo
U(r) =1
2kr2 +
L2
2mr2(3.13)
El potencial se encuentra representado en la figura. Su mınimo R es
(dU
dr
)
r=R
= 0 =⇒ R =
(L
mω
)1/2
=⇒ U(R) = ωL (3.14)
Movimiento de una partıcula en tres dimensiones 7
R
r1 r2
• Puntos de retroceso
Los puntos de retroceso son las soluciones de la ecuacion E = U(r), es decir:
E =1
2kr2 +
L2
2mr2
Por tanto:
r21 =
E
k
(1−
√1− L2k
mE2
)=
(v0
ω0
)2
r22 =
E
k
(1 +
√1− L2k
mE2
)= r2
0 (3.15)
Podemos escribir las constantes del movimiento en terminos de los puntos de retro-ceso:
r21 + r2
2 =2E
k
r1r2 =L
mω(3.16)
E =k
2(r2
1 + r22)
L = mωr1r2 (3.17)
• Ecuacion del movimiento

8 Capıtulo 3
Las ecuaciones del movimiento son:
L = mr2ϕ
E =1
2mr2 +
1
2kr2 +
L2
2mr2
o bienϕ = ω
r1r2
r2(3.18)
r2r2 = −ω2r21r
22 + ω2(r2
1 + r22)r
2 − ω2r4 (3.19)
• Orbita
Para calcular la orbita, hemos de eliminar el tiempo. Para ello, hacemos
r2(t) =1
p(ϕ)(3.20)
en cuyo caso
2rr = − 1
p2ϕ
dp
dϕ
empleando (3.18)
2rr = −ωr1r2
pp′ (3.21)
donde p′ = dpdϕ
Substituyendo en (3.18)
ω2r21r
22p′2 = −4ω2r2
1r22p
2 + 4ω2(r21 + r2
2)p− 4ω2
p′2 = −4p2 + 4r21 + r2
2
r21r
22
p− 4
r21r
22
completado cuadrados
p′2 = −4
(p− r2
1 + r22
2r21r
22
)2
+ 4(r21 + r2
2
2r21r
22
)2 − 4
r21r
22
o bien
p′2 = −4
(p− r2
1 + r22
2r21r
22
)2
+
(r22 − r2
1
r21r
22
)2
p′2 =
(r22 − r2
1
r21r
22
)2(
1−(
2r21r
22
r22 − r2
1
)2 (p− r2
1 + r22
2r21r
22
)2)
haciendo
q =
(2r2
1r22
r22 − r2
1
)(p− r2
1 + r22
2r21r
22
)(3.22)

Movimiento de una partıcula en tres dimensiones 9
(r22 − r2
1
2r21r
22
)2
q′2 =
(r22 − r2
1
r21r
22
)2
(1− q2)
q′ = 2√
1− q2 (3.23)
integrandoarcsen q = 2ϕ + α0
deshaciendo el cambio
p =r22 + r2
1
2r21r
22
+r22 − r2
1
2r21r
22
sin (2ϕ + α0)
r2 =2r2
1r22
(r22 + r2
1) + (r22 − r2
1) sin (2ϕ + α0)
orientando la orbita de forma que para ϕ = 0 estemos en r1, r(0) = r1
sin α0 = 1 =⇒ α0 = π/2
y por tanto1
r2=
r22 + r2
1
2r21r
22
+r22 − r2
1
2r21r
22
cos (2ϕ) (3.24)
Pasando a cartesianas
1 = (x2 + y2)
(r22 + r2
1
2r21r
22
)+
(r22 − r2
1
2r21r
22
)(x2 − y2)
1 =y2
r22
+x2
r21
(3.25)
En la figura se muestra esta orbita que es una elipse comprendida entre dos cırculosde radios r1 y r2

10 Capıtulo 3
4. Potencial de Coulomb
La fuerza de Coulomb es:~F = ± k
r2~jr (4.1)
donde el signo + indica que la fuerza es repulsiva y el − que es atractiva Elpotencial correspondiente sera
V = ±k
r(4.2)
4..1 Caso repulsivo
• Potencial efectivoel potencial efectivo sera
U(r) =k
r+
L2
2mr2(4.3)
que no tiene mınimos y tiene un unico punto de retroceso. Para que el movimientosea posible E > 0
Potencial de Coulomb. Caso repulsivo
E
R1
• Punto de retroceso. El punto de retroceso r1 se puede calcular como
E = U(r1) =k
r1
+L2
2mr21
La unica solucion positiva de esta ecuacion es:
r1 =k
2E(1 + ε) (4.4)

Movimiento de una partıcula en tres dimensiones 11
donde
ε =
√1 +
2EL2
mk2(4.5)
• Condiciones iniciales Puesto que los estados son de difusion, las condicionesinciales han de tomarse en el infinito. En particular, aqui orientaremos la orbitasuponiendo que la partıcula entra paralela al eje x, es decir que para ϕ = π:
~r (ϕ = π) = (−∞, b)
~r (ϕ = π) = (v0, 0) (4.6)
donde b es el parametro de impacto Las constantes del movimiento son portanto
E =1
2mv2
0
L = mbv0 (4.7)
y en tal caso:
ε =
√1 +
b2m2v40
k2(4.8)
de forma quek
2E=
k
mv20
=b√
ε2 − 1(4.9)
r1 = b
√(ε + 1)
(ε− 1)(4.10)
de manera que las caracterısticas de la orbita van a depender de b y ε que a su vezson las condiciones iniciales• Ecuacion del movimiento
Las ecuaciones del movimiento seran
L = mr2ϕ
E =1
2mr2 +
k
r+
L2
2mr2
Para eliminar el tiempo hacemos
r(t) =1
p(ϕ)=⇒ r = − p′
p2ϕ = −L
mp′ (4.11)
y por tanto
E =L2
2mp′2 + kp +
L2p2
2m

12 Capıtulo 3
empleando (4.5) y (4.7)
p′2 =1
b2− p2 − 2
b√
ε2 − 1p (4.12)
completando cuadrados
p′2 =ε2
b2(ε2 − 1)− (p +
1
b√
(ε2 − 1))2
p′2 =ε2
b2(ε2 − 1)
1−
p + 1
b√
(ε2−1)
εb√
ε2−1
2 (4.13)
haciendo
q =p + 1
b√
(ε2−1)
εb√
ε2−1
(4.14)
q′ =√
1− q2 =⇒ arcsen q = ϕ− ϕ0 (4.15)
deshaciendo los cambios1
r=
ε sin(ϕ− ϕ0)− 1
b√
(ε2 − 1)
De acuerdo con las condiciones iniciales propuestas, hemos de orientar la orbitade forma que r(π) = ∞. Por tanto
0 = ε sin(π − ϕ0)− 1
y en consecuencia
sin ϕ0 =1
ε(4.16)
r =b√
(ε2 − 1)
ε sin (ϕ− ϕ0)− 1=
r1
√(ε− 1)
ε sin (ϕ− ϕ0)− 1(4.17)
de forma que la partıcula est en el punto de retroceso r1 para ϕ = α0 + π2
• AsintotasLas asintotas correponden a sin (ϕ− ϕ0) = 1
ε. Hay por tanto dos asintotas:
ϕA = π, ϕA = 2ϕ0
Las ecuaciones de las asıntotas seran
y = c + tg ϕAx

Movimiento de una partıcula en tres dimensiones 13
donde la ordenada en el origen es:
c = limϕ→ϕA(y − tg ϕAx) = limϕ→ϕA
(r sin(ϕ− ϕA)
cos ϕA
)
c = limϕ→ϕA
b√
(ε2 − 1)
ε sin (ϕ− ϕA)− 1
sin(ϕ− ϕA)
cos ϕA
)
Resolviendo la indeterminacion
c = limϕ→ϕA
b√
(ε2 − 1)
ε cos ϕA cos (ϕ− ϕA)(4.18)
? Asıntota de entrada:
ϕA = π, c = b =⇒ y = b
Θ
Θ
Θ
Θ
? Asıntota de salida:
ϕA = 2ϕ0, c = bε2
ε2 − 2
y =ε2
ε2 − 2+
2√
ε2 − 1
ε2 − 2x
Por tanto el angulo de dispersion es:
Θ = 2ϕ0 = 2 arcsen1
ε= 2 arctg
1√ε2 − 1
= 2 arctgk
mv20b
(4.19)
Las dos asıntotas se cortan en el punto (x = −a, y = b).

14 Capıtulo 3
4..2 Caso Atractivo
• Potencial efectivoel potencial efectivo sera
U(r) =−k
r+
L2
2mr2(4.20)
que tiene un mınimo que corresponde al valor r = R tal que U ′(R) = 0, es decir:
R =L2
mk(4.21)
En este punto el valor del potencial es:
U(R) = −mk2
2L2
Por tanto para que el movimiento sea posible, ha de ser:
E ≥ −mk2
2L2(4.22)
Podemos pues distinguir tres casos:
Caso a) −mk2
2L2 < E < 0
Resulta util hacer E = −H
Potencial de Coulomb. Caso atractivo. E<0

Movimiento de una partıcula en tres dimensiones 15
• Hay dos puntos de retroceso dados por:
−H =−k
r+
L2
2mr2
y por tanto
r1 =k
2H
(1−
√1− 2HL2
mk2
)
r2 =k
2H
(1 +
√1− 2HL2
mk2
)(4.23)
de manera que
r1 + r2 =k
H≡ 2a
r1r2 =L2
2mH≡ b2
ε ≡√
1− b2
a2(4.24)
y por tanto
H =k
2a
L2 = mkb2
a(4.25)
y
r1 = a(1− ε)
r2 = a(1 + ε)
b = a√
1− ε2 (4.26)
• Ecuacion del movimientoLas ecuaciones del movimiento seran
L = mr2ϕ
−H =1
2mr2 − k
r+
L2
2mr2
Para determinar la orbita haremos
r(t) =1
p(ϕ)=⇒ r = −L
mp′ (4.27)

16 Capıtulo 3
de forma que la ecuacion de conservacion de la energıa es:
p′2 = −p2 +2mk
L2p− 2mH
L2
Utilizando (4.22)
p′2 = −p2 + 2a
b2p− 1
b2
Completando cuadrados
p′2 = −(p− a
b2
)2
+a2
b4− 1
b2= −
(p− a
b2
)2
+a2ε2
b4
o bien
p′2 =a2ε2
b4
(1−
(b2p
aε− 1
ε
)2)
Haciendo el cambio
q =b2p
aε− 1
ε(4.28)
la ecuacion de la orbita es:
q′ =√
1− q2 =⇒ q = sin (ϕ− α0) (4.29)
y por tanto, deshaciendo los cambios
1
r=
a
b2(1 + ε sin (ϕ− α0))
Orientando la orbita de forma que para ϕ = 0, r = r1 = a(1− ε)
α0 = −π/2
de forma que
1
r=
a
b2(1 + ε cos ϕ) (4.30)

Movimiento de una partıcula en tres dimensiones 17
Potencial de Coulomb atractivo. Orbita para E<0
No es dıficil comprobar que para ϕ = π, r = r2. La orbita es una elipseestando el centro de fuerzas situado en el foco.
• Podemos calcular el perıodo de la orbita a partir de
1
2m(r)2 = H(r2 − r)(r − r1)
de forma que∫ r2
r1
dr√(r2 − r)(r − r1)
=
∫ T2
0
√2H
mdt
(r2 + r1)π
2=
√2H
m
T
2
Teniendo en cuenta r2 + r1 = 2a y H = k2a
aπ =
√k
ma
T
2
elevando al cuadrado
a3 =k
m(
T
2π)2
que es la tercera ley de Kepler

18 Capıtulo 3
Caso b) E = 0
El potencial efectivo es:
Potencial de Coulomb. Caso atractivo. E=0
• En este caso hay un unico punto de retroceso
r1 =L2
2mk(4.31)
y si hacemos r = 1p(ϕ)
, la ecuacion de la orbita es:
p′2 = −p2 +2mk
L2p = −p2 +
p
r1
que haciendoq = 2r1p− 1 (4.32)
se convierte enq′ =
√1− q2 =⇒ q = sin(ϕ− α0)
y por tanto
r =2r1
1 + sin(ϕ− α0)
Orientando la orbita de forma que r(ϕ = 0) = r1
α0 = −π/2
La orbita es la parabola
r =2r1
1 + cos ϕ(4.33)

Movimiento de una partıcula en tres dimensiones 19
Potencial de Coulomb atractivo. E=0
Caso c) E > 0
Potencial de Coulomb. Caso atractivo. E>0
• Punto de retroceso. El punto de retroceso r1 se puede calcular como
E = U(r1) =−k
r1
+L2
2mr21
La unica solucion positiva de esta ecuacion es:
r1 =k
2E
(−1 +
√1 +
2EL2
mk2
)(4.34)

20 Capıtulo 3
• Condiciones iniciales Puesto que los estados son de difusion, las condicionesinciales han de tomarse en el infinito. En particular, aqui orientaremos la orbitasuponiendo que la partıcula entra paralela al eje x, es decir que para ϕ = π:
~r(ϕ = π) = (−∞, b)
~v(ϕ = π) = (v0, 0) (4.35)
donde b es el parametro de impacto Las constantes del movimiento son portanto
E =1
2mv2
0
L = mbv0 (4.36)
y se pueden definir por tanto las longitudes:
b =
√L2
2mE
a =k
2E(4.37)
asi como
ε =
√1 +
b2
a2(4.38)
de forma quer1 = a(−1 + ε) (4.39)
E =k
2a
L2 = mkb2
a(4.40)
• Ecuacion del movimientoLas ecuaciones del movimiento seran
L = mr2ϕ
E =1
2mr2 − k
r+
L2
2mr2
Para eliminar el tiempo hacemos
r(t) =1
p(ϕ)=⇒ r = − p′
p2ϕ = −L
mp′ (4.41)

Movimiento de una partıcula en tres dimensiones 21
y por tanto
E =L2
2mp′2 − kp +
L2p2
2m
p′2 =1
b2− p2 +
2a
b2p (4.42)
completando cuadrados
p′2 =1
b2− (p− a
b2)2 +
a2
b4=
ε2a2
b4− (p− a
b2)2
p′2 =ε2a2
b4
(1−
(b2p− a
aε
)2)
(4.43)
haciendo
q =b2p− a
aε(4.44)
q′ =√
1− q2 =⇒ arcsen q = ϕ + α0 (4.45)
deshaciendo los cambios
1
r=
a
b2(1 + ε sin (ϕ + α0))
De acuerdo con las condiciones iniciales propuestas, hemos de orientar la orbitade forma que r(π) = ∞. Por tanto
0 = 1 + ε sin (π + α0)
y en consecuencia
sin α0 =1
ε(4.46)
r =b2
a(ε sin (ϕ + α0) + 1)(4.47)
• AsintotasLas asintotas correponden a sin (ϕ + α0) = −1
ε. Hay por tanto dos asintotas:
ϕ = π, ϕ = −2α0
Para calcular la asintota hemos de determinar la ordenada en el origen
c = limϕ→ϕ0(y − tg ϕ0x)
ac = limϕ→ϕ0(b2
ε sin (ϕ + α0) + 1)(sin ϕ− tg ϕ0 cos ϕ)

22 Capıtulo 3
ac = limϕ→ϕ0
(b2
(ε sin (ϕ + α0) + 1)cosϕ0
)sin (ϕ− ϕ0)
aplicando L’Hopital
ac = limϕ→ϕ0
(b2
ε cos(ϕ + α0) cosϕ0
)cos(ϕ− ϕ0)
ac =
(b2
ε cos(ϕ0 + α0) cosϕ0
)
de manera que
c =b2
a√
ε2 − 1= b si ϕ0 = π
c =b2
aε cos α0 cos 2α0
= bε2
ε2 − 2si ϕ0 = −2α0
Coulomb atractivo. Orbita para E>0
la asıntota de entrada es:y = b
la asıntota de salida
y =b
ε2 − 2
(1 +
b2
a2− 2
x
a
)
Por tanto el angulo de dispersion es:
Θ = −2ϕ0 = −2 arcsen1
ε= −2 arctg
1√ε2 − 1
= −2 arctga
b

Movimiento de una partıcula en tres dimensiones 23
Teniendo en cuenta que a = kmv2
0, podemos escribir el angulo de dispersion en
terminos de las condiciones iniciales como
Θ = −2 arctgk
mv20b
(4.48)
5. Seccion eficaz
5..1 Concepto de seccion eficaz y seccion eficaz diferencial
Una de las maneras mas importantes de obtener informacion acerca de la estruc-tura de cuerpos pequenos es bombardearlos con partıculas y medir el numero departıculas dispersadas en las distintas direcciones. La distribucion angular de laspartıculas dispersadas dependera de la naturaleza del blanco que se bombardea yde las fuerzas que actuan entre este y las partıculas.
En el caso de colisiones entre partıculas atomicas, la region en la cual la trayec-toria se desvıa es muy pequena y la magnitud observable es el angulo de dispersion.
La situacion experimental es la siguiente:
• A la entrada
Se envıa un chorro de partıculas con una determinada energıa E = (1/2)mv20 donde
v0 es medible, y diferentes parametros de impacto b (que no es un observable). SeaN el numero de partıculas enviadas. N no es medible pero si lo es n definidocomo el numero de partıculas que atraviesan la unidad de area perpendicular a ladireccion de incidencia y por tanto
n =dN
dσ(5.1)
donde dσ es el elemento de area perpendicular a la direccion de incidencia y portanto en terminos del parametro del impacto
dσ = bdbdΦ (5.2)

24 Capıtulo 3
Θ
Φ
Θ
Φ
Ω
• A la salida
El otro dato medible es la distribucion angular, es decir, cuantas partıculas sedispersan con angulos de dispersion comprendidos ente Θ y Θ + dΘ
NΘ =dN
dΩ(5.3)
siendo dΩ el angulo solido subtendido por dΘ
dΩ = sin ΘdΘdΦ (5.4)
Combinando (5.3) y (5.1)
NΘ = ndσ
dΩ(5.5)
y por tanto la fraccion de partıculas dispersadas es:
NΘ
n=
dσ
dΩ(5.6)
Substituyendo (5.2) y (5.4)
NΘ
n=
dσ
dΩ= b sin Θ
db
dΘ(5.7)

Movimiento de una partıcula en tres dimensiones 25
La magnitud dσdΩ
se denomina seccion eficaz diferencial y es el area normala la direccion de incidencia que atraviesan las partıculas que se dispersan en unangulo solido dΩmientras que
σ =
∫dσ
dΩdΩ (5.8)
es la seccion eficaz total y da cuenta del area total que han atravesado todas laspartıculas que sufren dispersion
? Calculo experimentaldσ
dΩ=
NΘ
n(5.9)
? Calculo Teoricodσ
dΩ=
b
sin Θ
db
dΘ(5.10)
donde es necesario conocer la funcion b(Θ) es decir como depende el angulo dedispersion del parametro de impacto

26 Capıtulo 3
5..2 Difusion por una esfera dura
Corresponde a un potencial
V (r) = ∞ si r < R
V (r) = 0 si r > R
de forma que solo las partıculas con b < R se dispersan
α
α Θ
• Calculo de b(Θ)Dado que el angulo de reflexion es igual al de incidencia
Θ = π − 2α (5.11)
donde
sin α =b
R(5.12)
de manera que
cos(Θ/2) =b
R(5.13)
yb = R cos(Θ/2) (5.14)

Movimiento de una partıcula en tres dimensiones 27
• Calculo de dσdΩ
dσ
dΩ=
R2
2
sin(Θ/2) cos(Θ/2)
sin Θ
dσ
dΩ=
R2
4(5.15)
como la seccion eficaz diferencial es constante se dice que es isotropa ya que elnumero de partıculas difundidas en cualquier direccion es el mismo.
• Calculo de σ
σ =R2
4
∫ 2π
0
dθ
∫ π
o
sin ΘdΘ =R2
42π2
σ = πR2 (5.16)
La partıculas que se dispersan atraviesan una superficie equivalente a la de unacircunferencia de radio R
5..3 Difusion de Rutherford
Segun hemos visto ((4.16) y (4.45)). para el potencial de Coulomb
b =| k
mv0 tg(Θ/2)| (5.17)
y por tantodb
dΘ=| k
2mv20
1
sin2(Θ/2)| (5.18)
Substituyendo en (5.9)
dσ
dΩ=
(k
mv20
)21
2 sin2(Θ/2) tg(Θ/2)
1
sin Θ=
(k
mv20
)21
4 sin4(Θ/2)
y por tanto
dσ
dΩ=
(k
2mv20
)21
sin4(Θ/2)(5.19)
La integracion proporciona
σ =
∫dσ
dΩdΩ = 2π
(k
2mv20
)2 ∫ π
0
sinΘdΘ
sin4(Θ/2)= ∞ (5.20)
como corresponde al hecho de que el potencial de Coulomb tiene alcance infinitoy por tanto hay dispersion para cualquier parametro de impacto por grande queeste sea.

28 Capıtulo 3
5..4 Aproximacion de angulos pequenos
Veamos ahora que sucede cuando calculamos la seccion eficaz en la aproximacionde angulos pequenos sin necesidad de conocer a priori el angulo de dispersion. Enesta aproximacion
sin Θ =p′yp′
siendo p′ el momento lineal final de la partıcula y p′y el momento lineal final en ladireccion y. Si el angulo es pequeno podemos aproximar
p′ ≈ p′x ≈ p = mv0
debido a que el momento lineal en la direccion x practicamente se conserva. En ladireccion y
p′y =
∫ ∞
−∞Fydt
con lo cual
sinΘ =
∫∞−∞ Fydt
mv0
Las fuerzas consideradas son fuerzas centrales conservativas, luego entonces
Fy = −∂V
∂y= −∂V
∂r
∂r
∂y= −∂V
∂r
y
r
y por lo tanto
sin Θ =− ∫∞
∞∂V∂r
yrdt
mv0
En la aproximacion de angulos pequenos podemos considerar la trayectoria de lapartıcula como una linea recta de ecuacion
y = b, x = v0t
y por tantodx = v0dt
Utilizando las expresiones anteriores tenemos para el angulo de dispersion en estaaproximacion
sin Θ = − 2
mv20
∫ ∞
b
∂V
∂r
b
r
r√r2 − b2
dr
donde hemos utilizado que
dx =∂x
∂rdr =
r
xdr =
r√r2 − y2
dr =r√
r2 − b2dr

Movimiento de una partıcula en tres dimensiones 29
Por lo tanto
sin Θ ≈ Θ = − 2b
mv20
∫ ∞
b
∂V
∂r
dr√r2 − b2
La integral se ha multiplicado por dos para tener en cuenta la contribucion de las xpositivas y negativas. La expresion anterior representa el angulo de dispersion parauna partıcula sometida a un potencial V en terminos del parametro de impactoen la aproximacion de angulos pequenos.

30 Capıtulo 3
6. Problemas
Enunciados
1) Encontrar cual de las siguientes fuerzas es conservativa y para la que lo seahallar el potencial
a) Fx = ax + by2, Fy = az + 2bxy, Fz = ay + bz2
b) Fx = ay, Fy = az, Fz = axc) Fr = 2ar sin θ sin ϕ, Fϕ = ar cos ϕ, Fθ = ar cos θ sin ϕ
d) ~F = r~a
e) ~F = ~a× ~r
f) ~F = (~a.~r)~a2) Una partıcula de masa m se mueve bajo la accion de una fuerza central cuyopotencial es V (r) = kr4 con k > 0. ¿Para que energıa y momento angular serala orbita una circunferencia con centro en el origen? ¿Cual es el periodo de estemovimiento circular? Si se perturba ligeramente el movimiento, ¿cual sera elperiodo de las pequenas oscilaciones radiales alrededor de r = a?
3) Dado el potencial V (r) = −kr−n, siendo k una constante positiva, demostrarque las orbitas circulares son inestables para n > 2.
4) En algunos libros de Fısica elemental se acostumbra a igualar la fuerza gravi-tatoria con la centrıfuga para efectuar ciertos calculos de orbitas planetarias. Ra-zonar que esto solamente es util en el caso de orbitas circulares y aprovechar elrazonamiento para calcular el radio de curvatura en el afelio de una orbita elıpticaen funcion de los parametros habituales.
5) Un satelite artificial de masa m describe una orbita circular de radio R. Enun cierto instante su velocidad se reduce a la mitad y el satelite pasa a una orbitaelıptica. Calcular la energıa, el momento angular y los semiejes de la nueva orbita.
6) Se ha observado un cometa cuya distancia mınima al Sol es la mitad del radiode la orbita terrestre (supuesta circular) y cuya velocidad para esa distancia es eldoble de la velocidad orbital de la Tierra. ¿Se podra observar dicho cometa en elfuturo?
7) Se considera un sistema planetario de ficcion en el que la Estrella-Sol correspon-diente genera un campo conservativo del tipo V = kr3/3, siendo k una constantepositiva. Un planeta de este sistema tiene inicialmente una velocidad ~v0 ortogonala la fuerza central. ¿Para que valor del modulo v0 la orbita del planeta sera unacircunferencia?
8) Un cometa se mueve en el campo gravitatorio del Sol con periodo T . En elperihelio la distancia del Sol al cometa es rp. Hallar la distancia del Sol al afeliode la orbita del cometa si se conoce el periodo de la Tierra alrededor del Sol y eleje mayor de la orbita de la Tierra.

Movimiento de una partıcula en tres dimensiones 31
9) Estudiar el potencial V = − k2r2 con k > 0.
10) Sea el vector
~M =1
m~L× ~p + k
~r
r
Demostrar que es una constante para el potencial V (r) = −kr. Utilizarlo para
calcular la trayectoria.
11) Una masa m se une mediante un hilo flexible ligero de longitud a a un resortecuya longitud es tambien a y su constante de recuperacion k. El otro extremo delresorte esta en un punto fijo O permitiendo el giro del hilo alrededor de ese punto.Demostrar que la ecuacion radial del movimiento de la masa para r > 2a es:
1
2mr2 +
L2
2mr2+
1
2k(r − 2a)2 = E
donde L es el momento angular y E la energıa total. ¿Cual es la ecuacion corre-spondiente para r < 2a?
Se tira de la masa hasta llevarla a una distancia 3a de O y se le da una velocidad ~v perpendicular al hilo.
a) ¿Para que valor de v sera circular la trayectoria de la masa?b) ¿Cual es el valor mınimo vm de v que mantendra tenso el hilo en todo
movimiento subsiguiente? Ayuda: El hilo se mantiene tenso siempre que la distancia al centro sea mayor que 2a.
c) Verificar que cuando v sea menor que vm la distancia rm de maxima aprox-imacion vendra dada por:
rm = 3a
[1 +
ka2
mv2
]−1/2
12) Sea el potencial V (r) = −kr
+ k′2r2 . Demostrar que las orbitas son elipses que
precesan.
13) Determinar la seccion eficaz para la ‘caıda” de partıculas en el centro de uncampo de fuerzas F = − k
r3 con k > 0.
14) Determinar la seccion eficaz para la “caıda” de partıculas en el centro de uncampo V = − k
rn con k > 0 y n > 2..
15) Analizar el proceso de scattering producido por una fuerza repulsiva centralde la forma F = kr−3. Mostrar que la seccion eficaz diferencial viene dada por laexpresion
dσ
dΩ=
k
2πE sin(πx)
1− x
x2(2− x)2
siendo E la energıa y x = Θ/π.
16) Hallar la seccion eficaz de Rutherford exacta y en la aproximacion de angulospequenos y comprobar que en ese lımite coinciden.

32 Capıtulo 3
1) Encontrar cual de las siguientes fuerzas es conservativa y para la que lo seahallar el potencial
a) Fx = ax + by2, Fy = az + 2bxy, Fz = ay + bz2
b) Fx = ay, Fy = az, Fz = axc) Fr = 2ar sin θ sin ϕ, Fϕ = ar cos ϕ, Fθ = ar cos θ sin ϕ
d) ~F = r~a
e) ~F = ~a× ~r
f) ~F = (~a.~r)~a
Solucion
• a) Fx = ax + by2, Fy = az + 2bxy, Fz = az + 2bxy Tenemos
~∇× ~F = (a− a, 0− 0, 2by − 2by) = 0
Por tanto
−∂V
∂x= ax + by2
−∂V
∂y= az + 2bxy2
−∂V
∂z= az + 2bxy2
Integrando
V =ax2
2+ by2x + ayz +
bz3
3
• b) Fx = ay, Fy = az, Fz = ax
En este caso
~∇× ~F = (−a,−a,−a)
luego no es no es conservativa
• c) Fr = 2ar sin θ sin ϕ, Fϕ = ar cos ϕ, Fθ = ar cos θ sin ϕ
Escribiendo el rotacional en esfericas
~∇× ~F =1
rsenθ
(∂Fθ
∂ϕ− ∂(Fϕsenθ)
∂θ
)~jr
+1
r
(∂Fr
∂θ− ∂(rFθ)
∂r
)~jϕ
+1
rsenθ
(∂(rsenθFϕ)
∂r− ∂Fr
∂ϕ
)~jθ

Movimiento de una partıcula en tres dimensiones 33
~∇× ~F = 0
luego es conservativa y por tanto
−∂V
∂r= 2ar sin θ sin ϕ
−∂V
∂ϕ= 2ar cos ϕ
−∂V
∂θ= ar cos θ sin ϕ
Integrando
V = −ar2 sin θ sin ϕ
• d) ~F = r~a
~∇× ~F = −1
r~a× ~r 6= 0
No es conservativa
• e) ~F = ~a× ~r
~∇× ~F = ~∇× (~a× ~r) = ~a(~∇.~r)− (~a.~∇)~r = 3~a− ~a
No es conservativa
• f) ~F = (~a.~r)~a
Hacendolo en cartesianas
~∇× ~F = 0
Luego es conservativa y el potencial es
V =1
2
(a2
xx2 + a2
yy2 + a2
zz2)
+ axayxy + axazxz + ayazyz
34 Capıtulo 3
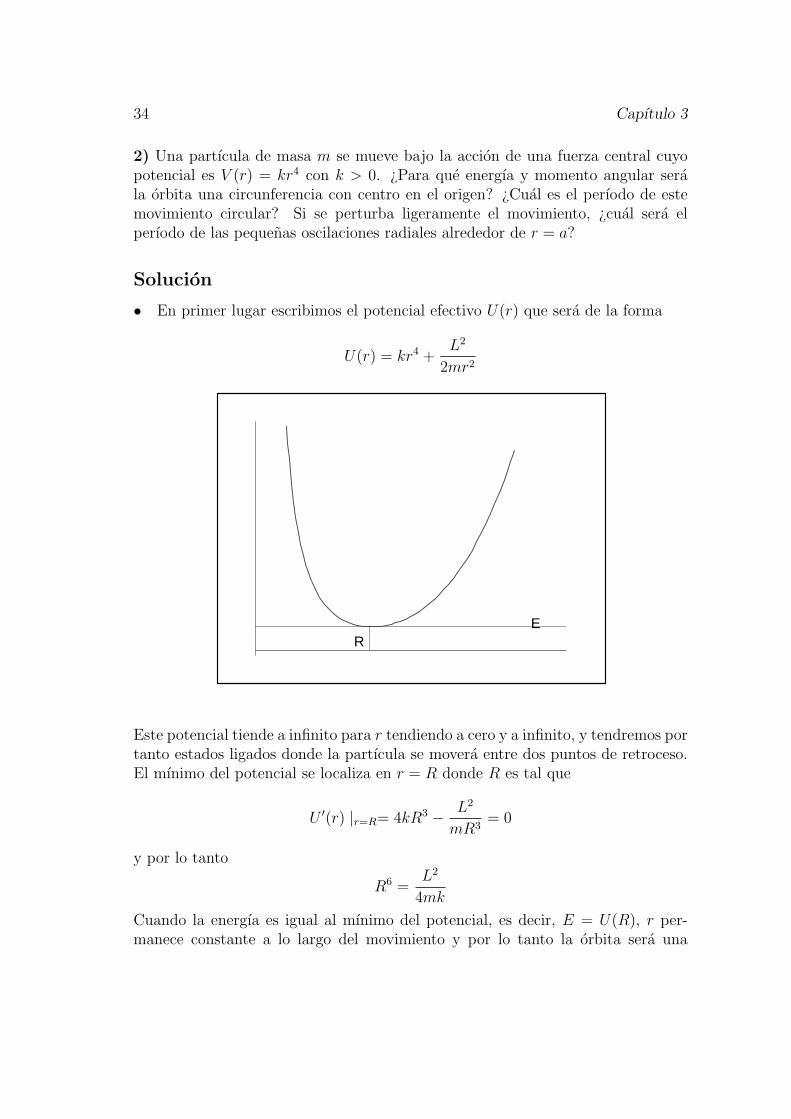
2) Una partıcula de masa m se mueve bajo la accion de una fuerza central cuyopotencial es V (r) = kr4 con k > 0. ¿Para que energıa y momento angular serala orbita una circunferencia con centro en el origen? ¿Cual es el perıodo de estemovimiento circular? Si se perturba ligeramente el movimiento, ¿cual sera elperıodo de las pequenas oscilaciones radiales alrededor de r = a?
Solucion
• En primer lugar escribimos el potencial efectivo U(r) que sera de la forma
U(r) = kr4 +L2
2mr2
RE
Este potencial tiende a infinito para r tendiendo a cero y a infinito, y tendremos portanto estados ligados donde la partıcula se movera entre dos puntos de retroceso.El mınimo del potencial se localiza en r = R donde R es tal que
U ′(r) |r=R= 4kR3 − L2
mR3= 0
y por lo tanto
R6 =L2
4mk
Cuando la energıa es igual al mınimo del potencial, es decir, E = U(R), r per-manece constante a lo largo del movimiento y por lo tanto la orbita sera una

Movimiento de una partıcula en tres dimensiones 35
circunferencia con centro en el origen. Esta situacion se dara para un valor de laenergıa
E = U(R) = 3kR4
El valor correspondiente del momento angular es simplemente, utilizando la ex-presion calculada para R,
L = 2R3√
mk
El perıodo de este movimiento circular puede calcularse teniendo en cuenta que
L = mR2ω = mR2 2π
T
y el valor calculado para el momento angular. El resultado es
T =
√m
kπ
1
R
• Supongamos ahora que perturbamos ligeramente el movimiento. Alrededor delmınimo todo potencial puede aproximarse por el potencial del oscilador armonico.En efecto, desarrollamos en serie de Taylor en torno a r = R
U(r) = U(R) + U ′(R)(r −R) +1
2U ′′(R)(r −R)2 + · · ·
En este caso, quedandonos con la aproximacion a segundo orden en las derivadasse tiene,
U(r) = 3kR4 +1
224kR2(r −R)2
Para calcular el perıodo de las pequenas oscilaciones alrededor del mınimo, bastaracomparar el termino procedente de la perturbacion con el potencial del osciladorarmonico 1
2mω2
0r2, esto es
24kR2 = mω20
de donde obtenemos para la frecuencia y el perıodo las expresiones
ω0 =√
6ω > ω
T0 =2π√6ω
< T
En consecuencia, la orbita no cierra nunca ya que la relacion entre las frecuenciases irracional. Se completa un perıodo de oscilacion antes de que la partıcula recorrauna circunferencia entera.

36 Capıtulo 3
3) Dado el potencial V (r) = −kr−n, siendo k una constante positiva, demostrarque las orbitas circulares son inestables para n > 2.
Solucion
El potencial efectivo correspondiente a este potencial sera de la forma
U(r) = − k
rn+
L2
2mr2
Tal y como vimos en el problema anterior, las orbitas circulares corresponderana un valor de la energıa tal que E = U(R), siendo R el mınimo del potencial.Calculemos en primer lugar los puntos crıticos del potencial efectivo.
U ′(r) |r=R=kn
Rn+1− L2
mR3= 0
Por lo tanto
Rn−2 =nmk
L2
Para decidir si las orbitas circulares son estables o inestables, es preciso determinarcuando el punto crıtico correspondiente a r = R es un mınimo o un maximo delpotencial efectivo. Para ello calculamos la derivada segunda
U ′′(r) |r=R= −kn(n + 1)
Rn+2+
3L2
mR4=
L2
R4m(2− n)
donde hemos utilizado la expresion calculada anteriormente para R. Si n > 2,se tiene que U ′′(R) < 0. Para estos valores de n, R corresponde a un maximodel potencial efectivo y por lo tanto las orbitas circulares seran inestables. Porel contrario cuando n < 2, R sera un mınimo del potencial efectivo y las orbitascirculares seran estables.

Movimiento de una partıcula en tres dimensiones 37
4) En algunos libros de Fısica elemental se acostumbra a igualar la fuerza gravi-tatoria con la centrıfuga para efectuar ciertos calculos de orbitas planetarias. Ra-zonar que esto solamente es util en el caso de orbitas circulares y aprovechar elrazonamiento para calcular el radio de curvatura en el afelio de una orbita elıpticaen funcion de los parametros habituales.
Solucion
Los vectores velocidad y aceleracion en coordenadas polares planas se escriben enla forma
~r = r~jr + rϕ~jϕ,
~a = (r − rϕ2)~jr + (rϕ + 2rϕ)~jϕ
y la fuerza gravitatoria
~F = − k
r2~jr
Utilizando la segunda ley de Newton ~F = m~a, se tiene
mr −mrϕ2 = − k
r2
ϕ + 2rϕ = 0
• Cuando la orbita es circular v2 = r2ϕ2 y r = 0 con lo cual r = 0 y la expresionanterior se convierte en
−mv2
r= − k
r2
donde el primer termino corresponde a la fuerza centrıfuga. Luego solo en el casode orbitas circulares es posible igualar la fuerza gravitatoria a la fuerza centrıfuga.
• Sin embargo, para una orbita elıptica, el afelio y el perihelio corresponden apuntos de retroceso del potencial, en los cuales r1 = 0 y por lo tanto la velocidady aceleracion en dichos puntos se escriben en la forma
~r1 = r1ϕ1~jϕ1 , =⇒ v1 = r1ϕ1
~r1 = (r1 − r1ϕ12)~jr1
de manera que ~r1 y ~r1 son perpendicularesY las ecuaciones de movimiento son:
mr1 −mr1ϕ21 = − k
r21
ϕ1 = 0

38 Capıtulo 3
Puesto que la aceleracion solo tiene componente normal, podemos definir el radiode curvatura como ρ que verifique
a1 =v2
1
ρ
Utilizando la segunda ley de Newton,
− k
r21
= −mv2
1
ρ
o bien
ρ =mv2
1r21
k
teniendo en cuenta quek = GMsm
r1 = a± c = a(1± ε)
donde a es el semieje mayor de la orbita, c la distancia focal, y Ms la masa delsol, situado en el foco de la elipse. El signo ± indica que se trata del afelio o delperihelio.
Para determinar el valor de v1 utilizamos la expresion para la conservacion dela energıa. En el afelio y en el perihelio sera
E =1
2mv2
1 −GMsm
(a± c)
donde m es la masa del planeta. En terminos del semieje mayor de la orbita a,la energıa se escribe como E = −k
2a, donde k = GMsm. Comparando las dos
expresiones para la energıa, obtenemos la velocidad en el afelio y en el periheliode la orbita
v21 = GMs
a∓ c
a(a± c)
El radio de curvatura en el afelio y en el perihelio de la orbita sera entonces
ρ =1
a(a2 − c2) =
b2
a
En el caso particular en que la orbita es circular, b = a y por lo tanto el radio decurvatura coincide exactamente con el radio de la orbita como era de esperar.

Movimiento de una partıcula en tres dimensiones 39
5) Un satelite artificial de masa m describe una orbita circular de radio R. Enun cierto instante su velocidad se reduce a la mitad y el satelite pasa a una orbitaelıptica. Calcular la energıa, el momento angular y los semiejes de la nueva orbita.
Solucion
Como vimos en el problema anterior, cuando la orbita es circular podemosigualar la fuerza gravitatoria a la fuerza centrıfuga, lo cual nos permitira calcularla velocidad del satelite cuando se encuentra en esa orbita
mv2
R= G
Mm
R2
siendo M la masa del planeta. La velocidad en esta orbita es entonces
v2 = GM
R

40 Capıtulo 3
R
En un cierto instante la velocidad se reduce a la mitad, con lo cual la energıa y elmomento angular en esta nueva situacion seran
E =1
2m
(v
2
)2
−GMm
R= −7
8G
Mm
R,
L = mRv
2=
1
2m√
GMR.
Con estos valores de E y L el satelite empieza a describir una orbita elıptica, cuyossemiejes vendran dados por las longitudes caracterısticas del potencial de Coulomba y b,
a =| k |
2 | E | =1
2GMm
8R
7GMm=
4
7R,
b2 =L2
2m | E | =1
7R2

Movimiento de una partıcula en tres dimensiones 41
6) Se ha observado un cometa cuya distancia mınima al Sol es la mitad del radiode la orbita terrestre (supuesta circular) y cuya velocidad para esa distancia es eldoble de la velocidad orbital de la Tierra. ¿Se podra observar dicho cometa en elfuturo?
Solucion
Por tratarse de fuerzas centrales, la energıa es una constante del movimiento,por lo cual podemos calcular su valor a partir del correspondiente al punto demaxima aproximacion al sol, para el cual el radio es la mitad del de la orbitaterrestre R (supuesta circular) y la velocidad v el doble de la velocidad orbital dela tierra,
E =1
2m(2v)2 −G
Msm
R/2
siendo m la masa del cometa y Ms la del sol.Para determinar la relacion entre R y v, en la aproximacion de orbita circular
para la tierra, se verifica
Mtv2
R= G
MtMs
R2
donde Mt es la masa de la tierra, y en consecuencia despejando v,
v2 = GMs
R
Sustituyendo la expresion para v en la de la energıa del cometa
E =1
2m4G
Ms
R− 2Gm
Ms
R= 0
Teniendo en cuenta que para el potencial de Coulomb, el parametro ε se escribecomo
ε =
√1 +
2EL2
mk2

42 Capıtulo 3
en este caso ε = 1. La orbita sera una parabola y por lo tanto no sera posibleobservar el cometa en el futuro.

Movimiento de una partıcula en tres dimensiones 43
7) Se considera un sistema planetario de ficcion en el que la Estrella-Sol correspon-diente genera un campo conservativo del tipo V = kr3/3, siendo k una constantepositiva. Un planeta de este sistema tiene inicialmente una velocidad ~v0 ortogonala la fuerza central. ¿Para que valor del modulo v0 la orbita del planeta sera unacircunferencia?
Solucion
El potencial efectivo asociado al potencial V (r) es
U(r) =1
3kr3 +
L2
2mr2
El mınimo del potencial efectivo correspondiente a r = R, se determinara derivandola expresion anterior
U ′(r) |r=R= kR2 − L2
mR3= 0
y por lo tanto
R =
(L2
mk
) 15
Para que la orbita sea una circunferencia, la energıa debe ser igual al mınimodel potencial, E = U(R). Ademas por ser una fuerza conservativa la energıa esuna constante del movimiento, con lo cual puede determinarse con su valor en elinstante inicial
E =1
2mv2
0 +1
3kR3
mientras que el mınimo del potencial es
U(R) =1
3kR3 +
L2
2mR2
Igualando las dos expresiones anteriores obtenemos el valor para v0
v20 =
k
mR3
que tendra unicamente direccion angular por tratarse de una orbita circular
~v0 = R
√k
mR~jϕ

44 Capıtulo 3
8) Un cometa se mueve en el campo gravitatorio del Sol con perıodo T . En elperihelio la distancia del Sol al cometa es rp. Hallar la distancia del Sol al afeliode la orbita del cometa si se conoce el perıodo de la Tierra alrededor del Sol y eleje mayor de la orbita de la Tierra.
Solucion
Sean ra y rp las distancias del sol al afelio y al perihelio de la orbita del cometaalrededor del sol, respectivamente. Sea a el semieje mayor de dicha orbita. Severifica
ra = 2a− rp
Utilizando la tercera ley de Kepler del movimiento planetario
T 2 = 4π2 a3
GMs
donde T es el perıodo de la orbita y Ms la masa del sol. La misma expresion sesatisface obviamente para el movimiento de la tierra alrededor del sol con perıodoTt y semieje mayor de la orbita at,
T 2t = 4π2 a3
t
GMs
Dividiendo una expresion entre otra obtenemos
a = at
(T
Tt
)2/3
y por lo tanto la distancia del sol al afelio del cometa sera
ra = 2at
(T
Tt
)2/3
− rp
La tercera Ley de Kepler puede obtenerse facilmente a partir de la conservaciondel momento angular para fuerzas centrales. El elemento diferencial de area quebarre el vector r a lo largo de la orbita es
dA
dt=
1
2r2ϕ =
L
2m
Teniendo en cuenta que el area de la elipse es A = πab, integrando obtenemos elperıodo de la orbita dado por la expresion (6.). Es posible obtener tambien esteresultado utilizando la expresion para el momento angular L = mr2ϕ y la ecuacionpara la orbita, e integrando entre angulos 0 y 2π, es decir
T =mb4
La2
∫ 2π
0
dϕ
(1 + ε cos(ϕ))2

Movimiento de una partıcula en tres dimensiones 45
Otra manera de obtener la expresion para la tercera ley de Kepler es a partir dela integracion de la ecuacion del movimiento
−H =1
2mr2 +
L2
2mr2− k
r
entre los puntos de retroceso r1 y r2, es decir
T = 2
∫ r2
r1
dr√2m
(−H − L2
2mr2 + kr
)

46 Capıtulo 3
9) Estudiar el potencial V = − k2r2 con k > 0.
Solucion
El potencial efectivo asociado al potencial V (r) toma la forma
U(r) =L2
2mr2+ V (r) =
L2 − km
2mr2
Dependiendo del signo de U(r) debemos considerar dos casos por separado a lahora de analizar el potencial: el caso con L2 > km y el caso con L2 < km.
Caso 1) L2 −mk > 0 incluye el caso k = − | k |
En este caso los estados son siempre de difusion y por lo tanto es convenientetomar las condiciones iniciales en el infinito. Suponemos que la partıcula viene delinfinito, con parametro de impacto b, paralela al eje X (ϕ∞ = 0) y con velocidad−v0
~i. Con estas condiciones iniciales, podemos determinar las expresiones para elmomento angular y la energıa,
L = mbv0
E =1
2mv2
0
Existe un unico punto de retroceso ~r1 dado por la condicion E = U(r1) quecorrespondera por tanto a
r21 =
L2 −mk
2mE

Movimiento de una partıcula en tres dimensiones 47
Combinando las expresiones anteriores es posible expresar la energıa, el momentoangular y la velocidad inicial v∞ en terminos del punto de retroceso y del parametrode impacto en la forma
L = b
√mk
b2 − r21
,
E =k
2(b2 − r21)
,
v∞ =
√k
m(b2 − r21)
donde ademas el parametro de impacto b y el punto de retroceso r1 estan rela-cionados mediante la expresion,
b2 =L2
L2 −mkr21
de donde se deduce que b ≥ r1. Una vez expresados el momento angular y laenergıa en terminos de los parametros habituales, procedemos a calcular la orbita.Las ecuaciones del movimiento son
E =1
2mr2 +
L2 −mk
2mr2,
L = mr2ϕ
Para integrarlas es conveniente utilizar el cambio de variable
r(t) =1
p(ϕ)
de forma que
r = − 1
p2ϕp′ = − 1
p2p′
L
mr2= −L
mp′
donde p′ = dpdϕ
. Sustituyendo r en la expresion para la energıa obtenemos
p′2 =2m
L2
(E − L2 −mk
2mp2
)
En terminos del punto de retroceso y del parametro de impacto, la ecuacion difer-encial anterior puede escribirse en la forma,
p′2 =1
b2(1− r2
1p2)

48 Capıtulo 3
Integrando y deshaciendo el cambio, obtenemos
r =r1
sin(
r1ϕb
+ α0
)
La condicion inicial es que ϕ = 0 cuando r tiende a ∞, lo que determina α0 = 0 ypor lo tanto
r =r1
sin(
r1ϕb
)
En el punto de retroceso r = r1, se verifica que sin(
r1ϕ1
b
)= 1, y por lo tanto
r1 =π
2
b
ϕ1
En terminos del angulo ϕ1, la expresion para la orbita es
r =r1
sin(
π2
ϕϕ1
)
donde r1, b y ϕ1 pueden escribirse en la forma
r1 =
√L2 −mk
2mE,
b =
√L2
2mE,
ϕ1 =π
2
√L2
L2 −mk.
A continuacion pasamos a analizar la orbita.Asıntotas
De la ecuacion 6., es facil ver que r tiende a∞ cuando ϕ = 0 y cuando ϕ = 2ϕ1,y por tanto las asıntotas corresponderan a estos dos valores del angulo. Veamoscuales son las dos asıntotas, de entrada y de salida, correspondientes a los valoresde ϕ anteriores.i) Asıntota de entrada
Puesto que ϕ = 0, la asıntota sera y = c donde c se determina como
c = limϕ→0
y = limϕ→0
r sin ϕ = limϕ→0
r1 sin ϕ
sin(
π2
ϕϕ1
) =2
πr1ϕ1 = b
luego como era de esperar por las condiciones iniciales, la asıntota de entrada esy = b.ii) Asıntota de salida
Movimiento de una partıcula en tres dimensiones 49
Esta asıntota sera la asociada a ϕ = 2ϕ1, que es de la forma y = tg 2ϕ1x + c,donde ahora c es
limϕ→2ϕ1
(y − tg 2ϕ1x) = − b
cos 2ϕ1
La asıntota de salida tiene entonces la ecuacion
y = (tg 2ϕ1)x− b
cos 2ϕ1
Veamos ahora algunos casos por separado, dependiendo del rango de valores paraϕ1.
a) 2ϕ1 = π
. Este valor de ϕ1 corresponde a k = 0. La asıntota de salida es la misma quela de entrada, y = b. En este caso el potencial es V = 0, por lo que como era deesperar la partıcula es libre y no modifica su trayectoria.
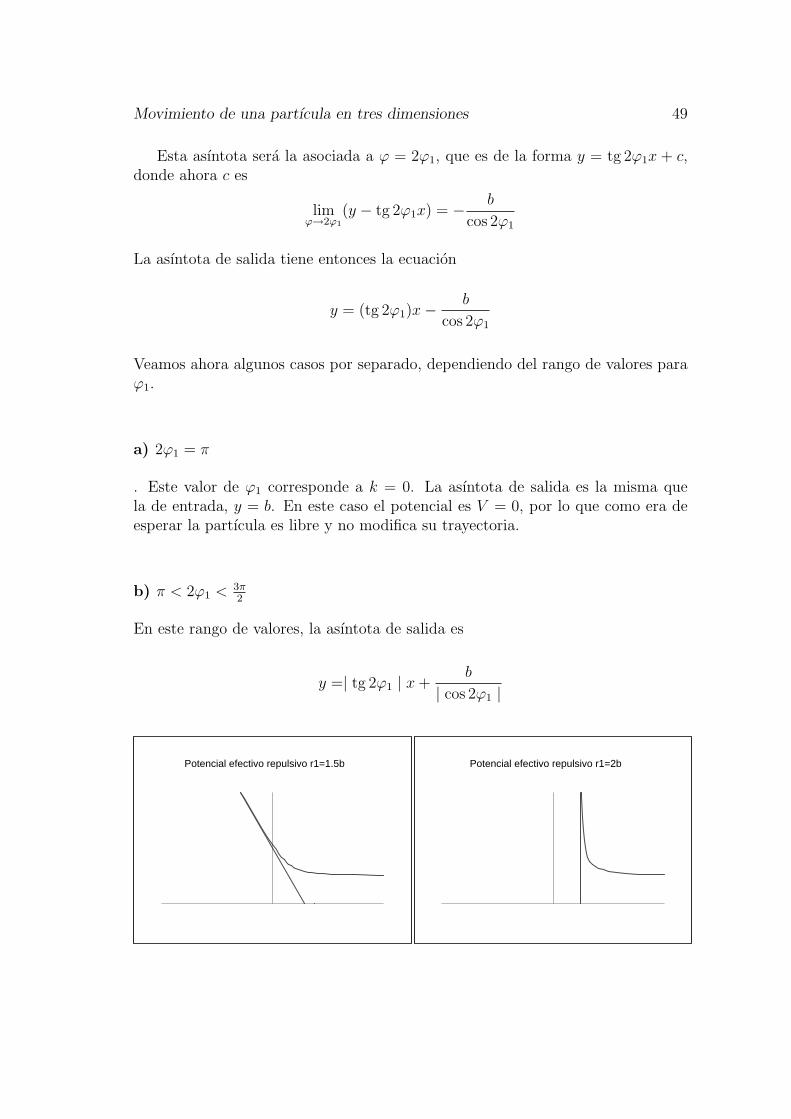
b) π < 2ϕ1 < 3π2
En este rango de valores, la asıntota de salida es
y =| tg 2ϕ1 | x +b
| cos 2ϕ1 |
Potencial efectivo repulsivo r1=1.5b Potencial efectivo repulsivo r1=2b

50 Capıtulo 3
Potencial efectivo repulsivo r1=2.3b Potencial efectivo repulsivo r1=0.9b
Potencial efectivo repulsivo r1=0.3b Potencial efectivo repulsivo r1=0.1b
c) 3π2
< 2ϕ1 < 2π
La asıntota de salida tiene la ecuacion
y = − | tg 2ϕ1 | x− b
| cos 2ϕ1 |
d) 2π < 2ϕ1 < 5π2
La asıntota de salida es
y =| tg 2ϕ1 | x− b
| cos 2ϕ1 |A medida que mk aumenta, lo hace tambien ϕ1. En el lımite cuando mk → L2,
se tiene que ϕ1 →∞ y r1 → 0. El caso lımite es entonces
e) ϕ1 →∞, y r1 → 0
La ecuacion para la orbita es
r = limr1→0
r1
sin(
ϕr1
b
) =b
ϕ

Movimiento de una partıcula en tres dimensiones 51
en cuyo caso la orbita es la espiral hiperbolica de ecuacion r = bϕ
y no hay asıntotade salida.
Caso 2)L2 < mk
En este caso podemos escribir el potencial efectivo en la forma,
U(r) = −mk − L2
2mr2
y por tanto habremos de considerar dos casos independientes, dependiendo de quela energıa sea positiva o negativa.
2a) E > 0
potencial efectivo para L2–2mk<0; E>0
Debido a que el potencial es negativo, los estados son de difusion pero no haypuntos de retroceso. Conviene, al igual que en el caso 1, tomar las condicionesiniciales en el infinito
L = mbv∞
E =1
2mv2
∞
Con el cambio de coordenadas r(t) = 1p(ϕ)
, la ecuacion diferencial para determinarla orbita es
p′2 =2m
L2E +
mk − L2
L2p2

52 Capıtulo 3
Introduciendo la constante
α2 =mk − L2
L2
la solucion correspondiente es
r =αb
senh(αϕ + α0)
Teniendo en cuenta las condiciones iniciales ϕ = 0 cuando r → ∞, luego se tieneque α0 = 0, y por tanto la orbita
r =αb
senh(αϕ)
segun la cual ϕ puede tomar un valor arbitrariamente grande y r se va haciendopequeno a medida que ϕ crece.
Potencial efectivo atractivo. Energia positiva a=0.1b

Movimiento de una partıcula en tres dimensiones 53
2b) E < 0
potencial efectivo para L2–2mk<0; E<0
Teniendo en cuenta que siempre debe verificarse que E > U(r), el estado esligado y la partıcula esta confinada en el tramo 0 < r < r1, siendo r1 el punto deretroceso que satisface la condicion E = U(r1). Debido a que E < 0, se verificaademas que E = − | E | y por tanto el punto de retroceso sera
r21 =
mk − L2
2m | E |Utilizando el mismo cambio de coordenadas a la variable p que en el apartadoanterior, se tiene
p′2 =2m | E |
L2(−1 + r2
1p2)
Introduciendo ahora la constante
β2 =L2
2m | E |La ecuacion para la orbita es
r =r1
cosh( r1ϕβ
+ α0)
Imponiendo como condicion inicial que ϕ = 0 cuando r = r1, se tiene de nuevoque α0 = 0 y entonces
r =r1
cosh( r1ϕβ
)

54 Capıtulo 3
Potencial efectivo atractivo. Energia negativa a=0.1b

Movimiento de una partıcula en tres dimensiones 55
10) Sea el vector
~M =1
m~L× ~p + k
~r
r
Demostrar que es una constante para el potencial V (r) = −kr. Utilizarlo para
calcular la trayectoria.
Solucion
Para dempostrar que el vector ~M es una constante para este potencial calculamossu derivada temporal
d ~M
dt= m(~r × ~r)× ~r + m(~r × ~r)× ~r + k
~r
r− k
~r
r2r
En coordenadas polares planas, los vectores ~r, ~r y ~r se escriben en la forma
~r = r~jr,
~r = r~jr + rϕ~jϕ,
~r = (r − rϕ2)~jr + (rϕ + 2rϕ)~jϕ
Por otra parte, ϕ y su derivada se escriben en terminos del momento angular como
ϕ =L
mr2,
ϕ = − 2L
mr3r
y por lo tanto
~r = r~jr,
~r = r~jr +L
mr~jϕ,
~r =
(r − L2
m2r3
)~jr
A partir de las expresiones anteriores, se tiene que
d ~M
dt= L
(r − L2
m2r3+
k
mr2
)~jϕ
Teniendo en cuenta que la energıa para este potencial se escribe como
E =1
2mr2 +
L2
2mr2− k
r

56 Capıtulo 3
y que es una constante del movimiento y por tanto
r − L2
m2r3+
k
mr2= 0
se satisface tambien que ~M es una constante del movimiento, es decir
d ~M
dt= 0
Por su parte, el vector ~M puede escribirse en coordenadas polares como
~M =
(k − L2
mr
)~jr + Lr~jϕ
y en coordenadas cartesianas como
~M =
[(k − L2
mr
)cos θ − Lr sin θ
]~i +
[(k − L2
mr
)sin θ + Lr cos θ
]~j
Si consideramos la situacion de estados de difusion, imponemos como condicionesiniciales que para θ = 0, r = ∞ y r = v∞, el vector ~M por ser un vector constante,podra escribirse como
~M = k~i + Lv∞~j
Comparando las expresiones anteriores tenemos en componentes que(
k − L2
mr
)cos θ − Lr sin θ = k,
(k − L2
mr
)sin θ + Lr cos θ = Lv∞
Entre las dos ecuaciones anteriores es posible eliminar r, de manera que utilizandolas expresiones para la energıa y el momento angular determinadas a partir de susvalores en el instante inicial, es decir
E =1
2mv2
∞,
L = mbv∞
podemos escribir (k − 2Eb2
r
)= k cos θ + 2Eb sin θ
La expresion anterior puede escribirse en la forma
1
r=
k
2Eb2
(1− 1
cos αcos(θ − α)
)

Movimiento de una partıcula en tres dimensiones 57
donde hemos introducido el angulo α definido como
tg α =2Eb
k
De la definicion para α obtenemos las siguientes relaciones
cos α = −1
ε,
2Eb
k=
√ε2 − 1
con lo cual la expresion para la orbita es
r =b√
ε2 − 1
1 + ε cos(θ − α)=
r1(ε + 1)
1 + ε cos(θ − α)
Las asıntotas de entrada y salida corresponden precisamente a angulos θ = 0 yθ = 2α, y el punto de maximo acercamiento se localiza para un valor del anguloθ = α y corresponde a
rmin = b
√ε− 1
ε + 1= r1
Analicemos ahora el caso particular en el cual las orbitas son cerradas. Las condi-ciones iniciales vienen dadas por θ = 0 y r = r1,r1 = 0. Podemos calcular elvector ~M a partir de su valor en el instante inicial por ser un vector constante delmovimiento, esto es
~M =
(k − L2
mr1
)~i
Comparando con la expresion general para ~M en cualquier instante de tiempo,(
k − L2
mr
)cos θ − Lr sin θ = k − L2
mr1
,
(k − L2
mr
)sin θ + Lr cos θ = 0
Es posible tambien en este caso eliminar r entre ellas de manera que
1
r=
mk
L2
[1 +
(L2
kmr1
− 1
)cos θ
]
Teniendo en cuenta que
ε =L2
mkr1
− 1
podemos escribir la expresion para la orbita en terminos de ε y r1 como
r =r1(ε + 1)
1 + ε cos θ

58 Capıtulo 3
11) Una masa m se une mediante un hilo flexible ligero de longitud a a un resortecuya longitud es tambien a y su constante de recuperacion k. El otro extremo delresorte esta en un punto O permitiendo el giro del hilo alrededor de ese punto.Demostrar que la ecuacion radial del movimiento de la masa para r > 2a es:
1
2mr2 +
L2
2mr2+
1
2k(r − 2a)2 = E
donde L es el momento angular y E la energıa total. ¿Cual es la ecuacion corre-spondiente para r < 2a?
Se tira de la masa hasta llevarla a una distancia 3a de O y se le da una velocidad ~v perpendicular al hilo.
a) ¿Para que valor de v sera circular la trayectoria de la masa?
b) ¿Cual es el valor mınimo vm de v que mantendra tenso el hilo en todomovimiento subsiguiente? Ayuda: El hilo se mantiene tenso siempre que la dis-tancia al centro sea mayor que 2a.
c) Verificar que cuando v sea menor que vm la distancia rm de maxima aprox-imacion vendra dada por:
rm = 3a
[1 +
ka2
mv2
]−1/2
Solucion
La energıa y el momento angular pueden calcularse a partir de las condicionesiniciales del problema, es decir, se tira de la masa hasta una distancia 3a de O yse le da una velocidad ~v perpendicular al hilo de forma que r2 = 3a es un puntode retroceso
E =1
2mv2 +
1
2k(3a− 2a)2 =
1
2mv2 +
1
2ka2,
L = 3mav
En cuanto al potencial efectivo sera de la forma
U(r) =L2
2mr2+
1
2k(r − 2a)2 si r > 2a
U(r) =L2
2mr2si r < 2a
• a) El mınimo del potencial efectivo se determinara derivando U(r)

Movimiento de una partıcula en tres dimensiones 59
r1=r2=R=2a
0 2 4r
U ′(r) |r=R= − L2
mR3+ k(R− 2a) = 0
Para que R = 3a sea un mınimo del potencial con el momento angular dado porla condicion inicial se debera cumplir
U ′(3a) = −9m2a2v2
27ma3+ ka = 0
y por lo tanto el valor de v para que la trayectoria de la masa sea circular es
v =
√3k
ma
• b) Se trata de que la energıa sea tal que r = 2a sea el punto de maximoacercamiento. Es decir E = U(r = 2a)

60 Capıtulo 3
r1=2a, r2=3a
0 2 4r
E =L2
2m4a2+
1
2k(2a− 2a)2 =
L2
2m4a2
y por lo tanto
9m2a2v2m
8ma2=
1
2mv2
m +1
2ka2
Luego la velocidad mınima es
vm = 2a
√k
5m
• c) En este caso el punto de maximo acercamiento es menor que 2a. En conse-cuencia viene determinado por
E =L2
2mr21

Movimiento de una partıcula en tres dimensiones 61
r1<a,
2 4r
de manera que
r1 =L√2mE
=3mav√
m2v2 + mka2=
3a√1 + ka2
mv2

62 Capıtulo 3
12) Sea el potencial V (r) = −kr
+ k′2r2 . Demostrar que las orbitas son elipses que
precesan.
Solucion
El potencial efectivo es
U(r) = −k
r+
k′m + L2
2mr2
que tiende a cero cuando r tiende a infinito y a infinito cuando r tiende a cero.Presenta ademas un mınimo para
r =L2 + mk′
2mk
Para tener orbitas cerradas es necesario considerar el caso en que E < 0. Intro-ducimos H = −E al igual que hicimos en el potencial de Coulomb. Tendremosen esta situacion estados ligados en los cuales la partıcula se movera entre dospuntos de retroceso que calcularemos a partir de la condicion r = 0, y por tanto−H = U(r). Estos puntos son
r =k
2H
[1±
√1− 4a2H2
k2
]
donde hemos introducido la constante
a2 =L2 + mk′
2mH
En terminos de
ε2 = 1− 4a2H2
k2
los puntos de retroceso r1 y r2 pueden escribirse como
r1 = a
√1− ε
1 + ε,
r2 = a
√1 + ε
1− ε
La ecuacion del movimiento sera
−H =1
2mr2 − k
r+ H
a2
r2
Para su integracion hacemos el cambio de variable
r(t) =1
p(ϕ), → r = −L
mp′

Movimiento de una partıcula en tres dimensiones 63
e introducimos una nueva constante α
α2 =L2 + mk′
L2=
2mH
L2a2
La ecuacion diferencial correspondiente es, en terminos de los parametros a, α y ε
p′2 =α2
a2
ε2
1− ε2
[1−
(a√
1− ε2
εp− 1
ε
)2]
Hacemos de nuevo otro cambio de variable
q =a√
1− ε2
εp− 1
ε
con el cual la ecuacion se escribe
q′2 = α2(1− q2)
cuya integracion daq = sin α(ϕ + α0)
Deshaciendo cambios la ecuacion resultante para la orbita es
r =a√
1− ε2
1 + ε sin α(ϕ + α0)
El angulo α0 puede determinarse a partir de las condiciones iniciales, teniendo encuenta que si orientamos la orbita de manera que para ϕ = 0 r = r1, obtenemosque
αα0 =π
2La ecuacion para la orbita, escrita ya en terminos de r1 es
r =r1(1 + ε)
1 + ε cos(αϕ)
n=3/2 n=5/2

64 Capıtulo 3
Es interesante notar que, unicamente cuando α es un numero impar, tendremosque para ϕ = π r = r2. Las orbitas son por tanto elipses que precesan. Elmovimiento es el mismo que el correspondiente al potencial de Coulomb solo peroexpresado en terminos de un sistema de coordenadas que precesa en torno al centrode fuerzas.
n irracional

Movimiento de una partıcula en tres dimensiones 65
13) Determinar la seccion eficaz para la “caıda” de partıculas en el centro de uncampo de fuerzas F = − k
r3 con k > 0.
Solucion
El potencial efectivo es
U(r) =L2 −mk
2mr2
Cuando L2 > mk el potencial efectivo es positivo y por tanto repulsivo. Por elcontrario cuando L2 < mk el potencial es atractivo. Por lo tanto para que sede la situacion de “caıda” de partıculas al centro de fuerzas, debera cumplirse lacondicion
L2 ≤ mk
El momento angular puede calcularse a partir de su valor en el instante inicial
L = mbv∞
con lo cual la condicion sobre el parametro de impacto b es
b2 ≤ k
mv2∞
Luego el parametro de impacto solo puede tomar valores comprendidos entre unvalor mınimo bm = 0 y un valor maximo bM dado por
b2M =
k
mv2∞
La seccion eficaz sera por tanto
σ =
∫bdbdϕ =
∫ 2π
0
dϕ
[b2
2
]bM
bm
= πk
mv∞
Es decir, la seccion eficaz es exactamente el area de una esfera de radio bM , quecorresponde al area que atraviesan las partıculas que se dispersan.

66 Capıtulo 3
14) Determinar la seccion eficaz para la “caıda” de partıculas en el centro de uncampo V = − k
rn con k > 0 y n > 2..
Solucion
El potencial efectivo asociado a este potencial es
U(r) = − k
rn+
L2
2mr2=
L2rn − 2mr2
2mrn+2
Este potencial tiende a menos infinito en el origen y a cero en el infinito. Presentaun maximo en el punto
rm =
(nmk
L2
) 1n−2
Para que las partıculas puedan caer en el centro de fuerzas, debe cumplirse ladesigualdad
E ≥ Um
siendo Um el valor maximo del potencial, esto es
Um = k
(L2
nmk
) nn−2
(n− 2
2
)
Consideremos ahora las condiciones iniciales en el infinito para calcular la energıay el momento angular
E =1
2mv2
0
L = mbv0
La condicion que tenıamos para la energıa implica la desigualdad
k
(n− 2
2
)(mv2
0b2
nk
) nn−2
(n− 2
2
)≤ 1
2mv2
0
(mv2
0b2
nk
) nn−2
≤ 1
n− 2
mv20
k
con lo cual, despejando el parametro de impacto
b2 ≤ n
(1
n− 2
)n−2n
(k
mv20
) 2n
Luego el parametro de impacto puede tomar valores comprendidos entre 0 ≤ b ≤bm, donde
bm = n
(1
n− 2
)n−2n
(k
mv20
) 2n

Movimiento de una partıcula en tres dimensiones 67
La seccion eficaz puede calcularse ya facilmente mediante una integracion
σ =
∫ bm
0
bdbdϕ = πn
(1
n− 2
)n−2n
(k
mv20
) 2n
o bien en terminos de la energıa como
σ = πn
(1
n− 2
)n−2n
(k
2E
) 2n

68 Capıtulo 3
15) Analizar el proceso de scattering producido por una fuerza repulsiva centralde la forma F = kr−3. Mostrar que la seccion eficaz diferencial viene dada por laexpresion
dσ
dΩ=
k
2πE sin(πx)
1− x
x2(2− x)2(6.1)
siendo E la energıa y x = Θ/π.
Solucion
El potencial efectivo correspondiente a la fuerza del enunciado es
U(r) =L2 + mk
2mr2
analogo al considerado en el primer caso del problema 8. Los estados son dedifusion con un punto de retroceso dado por la expresion
r1 =
(L2 + mk
2mE
)1/2
La energıa y el momento angular pueden escribirse en terminos de r1 y del parametrode impacto como
E =k
2(r21 − b2)
L = b
√mk
r21 − b2
La expresion para la orbita es identica a la del problema 8
r =r1
sin(
r1ϕb
)
Cuando la partıcula se encuentra en el punto de retroceso r = r1 se tiene para ϕel valor
ϕ1 =π
2
b
r1
=π
2
√L2
L2 + mk
De la ecuacion de la orbita se deduce que las asintotas de entrada y de salidacorresponden respectivamente a angulos ϕe = 0 y ϕs = πb
r1,
ϕs = π
√L2
L2 + mk=
√2mEb2
2mEb2 + km
Movimiento de una partıcula en tres dimensiones 69
de donde puede obtenerse la expresion para el parametro de impacto en terminosde ϕs
b =
√k
2E
ϕs√π2 − ϕ2
s
Teniendo en cuenta que el angulo de dispersion es Θ = π − ϕs
b =
√k
2E
√(π −Θ)2
Θ(2π −Θ)
La seccion eficaz diferencial es
dσ
dΩ=
b
sin Θ
db
dΘ
donde en este casodb
dΘ=
√k
2E
π2
[Θ(2π −Θ)]3/2
Sustituyendo todo en la expresion para la seccion eficaz diferencial obtenemos
dσ
dΩ=
kπ2
2E sin Θ
π −Θ
Θ2(2π −Θ)2
o bien en terminos de x, teniendo en cuenta que Θ = πx,
dσ
dΩ=
k
2πE sin(πx)
1− x
x2(2− x)2

70 Capıtulo 3
16) Hallar la seccion eficaz de Rutherford exacta y en la aproximacion de angulospequenos y comprobar que en ese lımite coinciden.
Solucion
Vimos en teorıa que la seccion eficaz diferencial exacta de Rutherford era
dσ
dΩ=
1
4
(k
mv20
)21
sin4(Θ/2)
Por lo tanto en la aproximacion de angulos pequenos podemos aproximar en laexpresion anterior el seno por el angulo y tendremos entonces
dσ
dΩ=
(2k
mv20Θ
2
)2
Veamos ahora que sucede cuando calculamos la seccion eficaz en la aproximacionde angulos pequenos sin necesidad de conocer a priori el angulo de dispersion. Enesta aproximacion
sin Θ =p′yp′
siendo p′ el momento lineal final de la partıcula y p′y el momento lineal final en ladireccion y. Si el angulo es pequeno podemos aproximar
p′ ≈ p′x ≈ p = mv0
debido a que el momento lineal en la direccion x practicamente se conserva. En ladireccion y
p′y =
∫ ∞
−∞Fydt
con lo cual
sinΘ =
∫∞−∞ Fydt
mv0
Las fuerzas consideradas son fuerzas centrales conservativas, luego entonces
Fy = −∂V
∂y= −∂V
∂r
∂r
∂y= −∂V
∂r
y
r
y por lo tanto
sin Θ =− ∫∞
∞∂V∂r
yrdt
mv0
En la aproximacion de angulos pequenos podemos considerar la trayectoria de lapartıcula como una linea recta de ecuacion
y = b, x = v0t

Movimiento de una partıcula en tres dimensiones 71
y por tantodx = v0dt
Utilizando las expresiones anteriores tenemos para el angulo de dispersion en estaaproximacion
sin Θ = − 2
mv20
∫ ∞
b
∂V
∂r
b
r
r√r2 − b2
dr
donde hemos utilizado que
dx =∂x
∂rdr =
r
xdr =
r√r2 − y2
dr =r√
r2 − b2dr
Por lo tanto
sin Θ ≈ Θ = − 2b
mv20
∫ ∞
b
∂V
∂r
dr√r2 − b2
La integral se ha multiplicado por dos para tener en cuenta la contribucion de las xpositivas y negativas. La expresion anterior representa el angulo de dispersion parauna partıcula sometida a un potencial V en terminos del parametro de impactoen la aproximacion de angulos pequenos.
Para el potencial de Coulomb V = k/r la integracion anterior proporciona
Θ =2k
mv20b
y por tanto el parametro de impacto
b =2k
mv20Θ
La seccion eficaz diferencial sera por tanto
dσ
dΩ=
b
Θ
db
dΘ=
(2k
mv20Θ
2
)2
que coincide con el resultado que obteniamos calculando primero la seccion eficazexacta y considerando despues el lımite de angulos pequenos.