mantenimiento predictivo eléctrico de motores trifásicos
TRANSCRIPT
MANTENIMIENTO PREDICTIVO ELECTRICO DE MOTORES TRIFASICOS
DE CORRIENTE ALTERNA
ALIRIO JOSE MEDINA ROJAStl
RICARDO PEREA VILLADA
;i 4'3 ;) 2,
CALI
CORPORACION UNIVERSITARIA AUTONOMA DE OCCIDENTE
DIVISION DE INGENIERIAS
PROGRAMA DE INGENTERIA ELECTRICAc.u.A.O
BIBLIOTECA
p(T=
I| ilrururü|trllltrlululul
u llil
leez l$f
r=-€Ef@---[ñtñ,,ud 'ut'¡nemo de 0tcidenf¡
MANTENIMIENTO PREVETIVO ELECTRICO DE MOTORES TRIFASICOS
DE CORRIENTE ALTERNA
ALIRIO JOSE MEDINA ROJAStlRICARDO PEREA VILLADA
Trabajo de grado presentado
como requisito parcial para
optar aI titulo de
Ingeniero Eléctricista.
Director
Guillerno Gonzalez
Ingeniero E1éctricista
CALI
CORPORACION UNIVERSITARIA AUTONOMA DE OCCIDENTE
DIVISTON DE INGENIERIAS
PROGRAMA DE INGENIERTA ELECTRTCA
1 992
ú!¿,ootr tM +q | ^''--J-'l
NT(J
s¡
Aprobado por el comite de
trabajo de grado en
cunpliniento de }os
requisitos exigidos por Ia
Universidad Autonoma de
Occidente para optar aI
titulo de fngeniero
EIéctricista.
PRESIDENTE
JURADO
JURADO
DIRECTOR
lrl
AGRADECIMIENTOS
AI hacer entrega de este proyecto a la comunidad
acadénica, Ios autores reconocen el significativo aporte
profesional y expresan sus agradecimientos.
A GUILLERMO GONZALEZ, Ingeniero Eléctricista CARVAJAL
S.A.,profesor hora catédra de la Universidad Autonoma de
Occidente y director de la presente tesis.
A EDINSON MAHECHA LEDEZMA, Ingeniero Eléctricista
PROPAL S.A.,director de} programa de Manteniniento
Prédictivo Eléctrico y asesor del proyecto de tesis.
A ENRIQUE QUISPE, fngeniero Eléctricista, profesor hora
catédra de la Universidad Autonona de Occidente y asesor
del proyecto de tesis.
A LA UNfVERSIDAD AUTONOMA DE OCCIDENTET €D especial
programa de fngenieria Eléctricar comité de tesis
cuerpo docente del Area de Ingenieria Eléctrica. r
aI
v
lv
DEDTCATORIA
RICARDO PEREA VILLADA
Un especial reconocimiento por su esfuerzo
dado en el desarrollo y culminación de mis
estudioe a mis padres José V. Perea y Ayda
Villada de Perea, a ni abuela Soledad
Sanchez de Perea, a nis hernanas LiLiana
Perea y Claudia P. Perea¡ Y & todas aquellas
personas que de una u otra forna contribuyen
a mi realización como Ingeniero Eléctricista.
ALIRIO JOSE MEDINA ROJAS
Dedico nuy especialmente los logros obtenidos
durante la carrera a las personas mAs
especiales e inportantes que tomarón gran
parte en Ia realización de nis estudios.
A nis padres Alirio Medina DurAn
Emma Rojas de Medina
Por su apoyo brindado y el permanente
esfuerzo dado en Ia culminación de mis
estudios como Ingeniero Eléctricista.
RESUMEN
Toda empresa tiene Ia necesidad de desarrollar un
programa de mantemiento sobre sus equipos de manejo que
pernita asegurar un óptino nivel de producción. El primer
tipo de nantenimiento que se inplenentó en la Industria
fue eI correctivo que se desarrollo con base en un
stock de repuestos, este tipo de mantenimiento se
realizaba teniendo encuenta la vida ütil del notor, y los
esfuerzos a que era sometidon ademAs contando con Ia
experiencia del operador y de] Ingeniero encargado se
podla calcular eI tienpo de operación antes de salir de
funcionamiento. En Ia rnedida que se adquirieron
conocimientos y tendencia de los notores se creó
paralelanente un tipo diferente de nanteniniento como fué
eI preventivo que funcionaba programando parades y
chequeos de los equiposr pero aün contando con Ia
capacidad de anAlisis de los Ingenieros encargados era
inrposible predeterninar eI estado de falla en que se
encontraba Ia máquina, sin embarÉor con el progreso de
nuevas técnologias en eI análisis espectral de Ia
frecuencia y eI anáIisis del espectro infrarrojor se
inventarón una serie de equipos especializados que
permitian obtener datos concernientes aI estado funcional
y estructural del motor, estos equipos entraron a
desempeñar un papel inportante en eI desarrollo de lavt
producción de cualquier empresa, ya que era posible con
antelación adelantarse a las posibles fallas que pudieran
interrumpir el proceso.
Un correcto prograna de mantenimiento predictivo consta
de una serie de equipos especializados en monitoreo como
son: EI analizador espectral de corriente, CAmara de
termovisión del espectro infrarrojo, El analizador de las
ondas de inpulso en bobinas, y otros tipo de equipos que
ayudan en Ia detección de fallas, permitiendo algunos de
estos equipos diferenciar Ia presencia de fallas
mecAnicas v/o eléctricas por medio de un anAlisis
espectral de Ia frecuencia determinando Ia existencia de
problemas en barras rotas, en eI entrehierro "air gap"ren
eI rotorr éD Ios rodamientos o en otras partes de Ia
estructura de la máquina.
vl_ 1
LISTA DE FIGURAS
Pág.
Figura 1 : Magneto............................ 4
Figura 2 z Representación de un magneto con
polaridad opuesta................. 4
Figura 3 : Representación de un magneto con
polaridad igual................... 4
Figura 4 : Electromagnetos................... 5
Figura 5 : Solanoide de corriente alterna.... 7
Figura 6 : Diagrama de corriente ( 3 fases).. I
Figura 7 z Representación de un conductor
Figura 8
pasando a través de un campo
nag né t i c o . . . . . . . . . . . . . . . . . . . . . . . . . 9
Representación de un conductor
pasando a través de un campo
nragnético con polaridad
invertid&.....,....... ....... 10
Representación de espira orientada
en un campo magnético............. 11
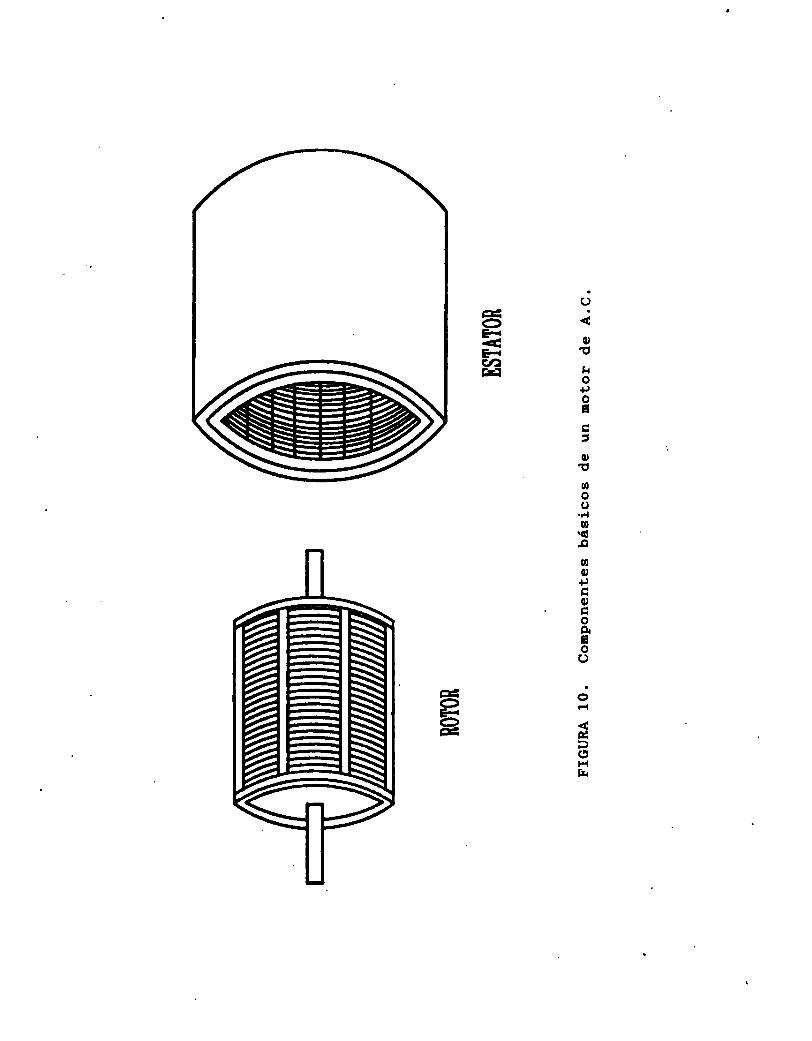
Componentes básicos de un motor
AC................. .......... L4
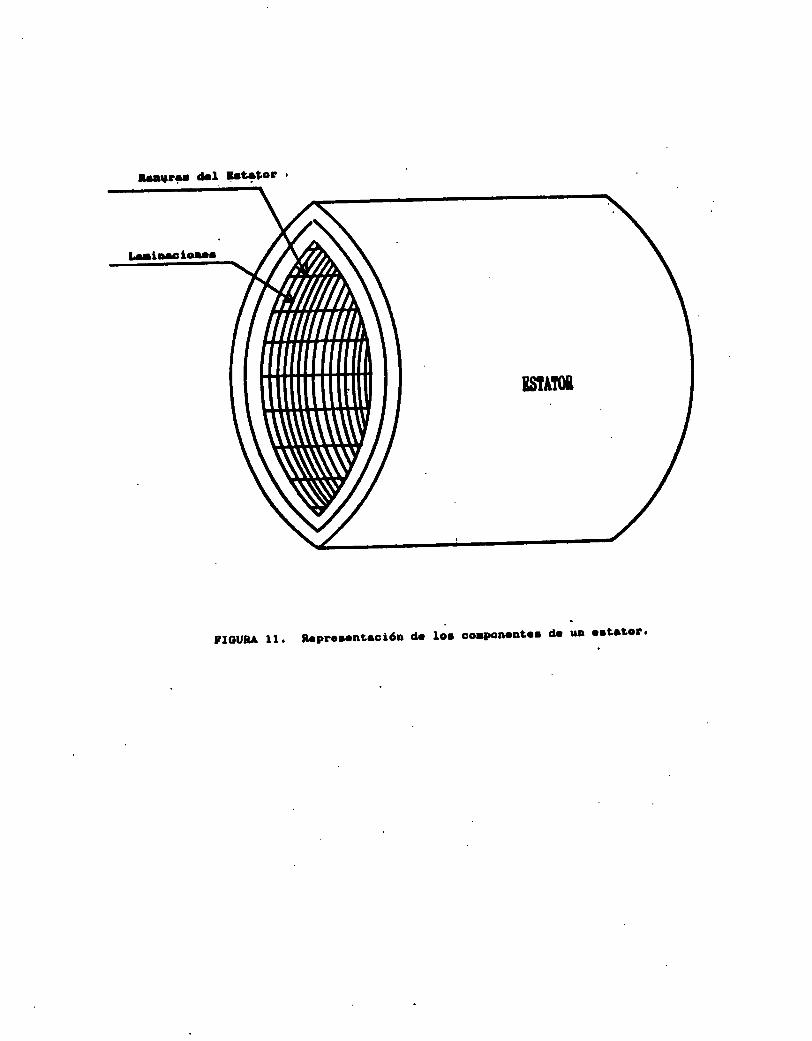
Representación de los componentes
Figura I
Figura 10
Figura 11
de un estator..... ...... 15
v¡.11
Figura Lz
Figura 13
Figura L4
Figura 15
Figura 16
Figura L7
Figura 18
Figura 19
Figura
Figura
Fígura 22
Figura 23
20
2L
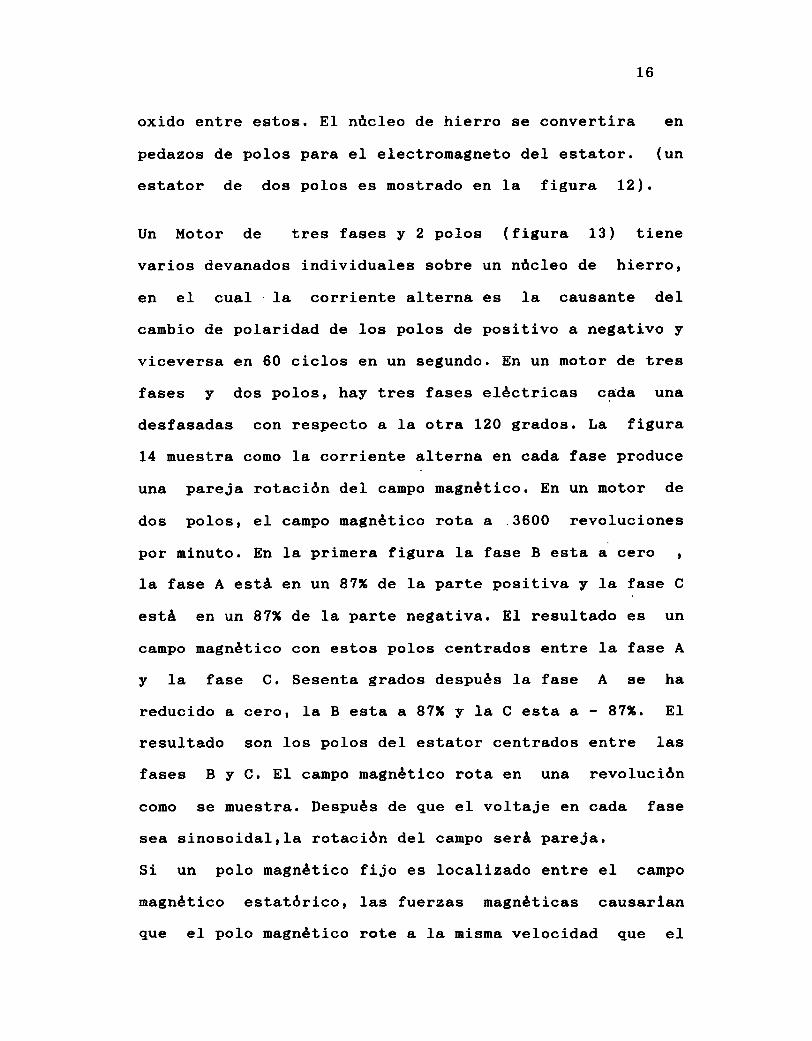
Representación de un estator de 2
polos............................. L7
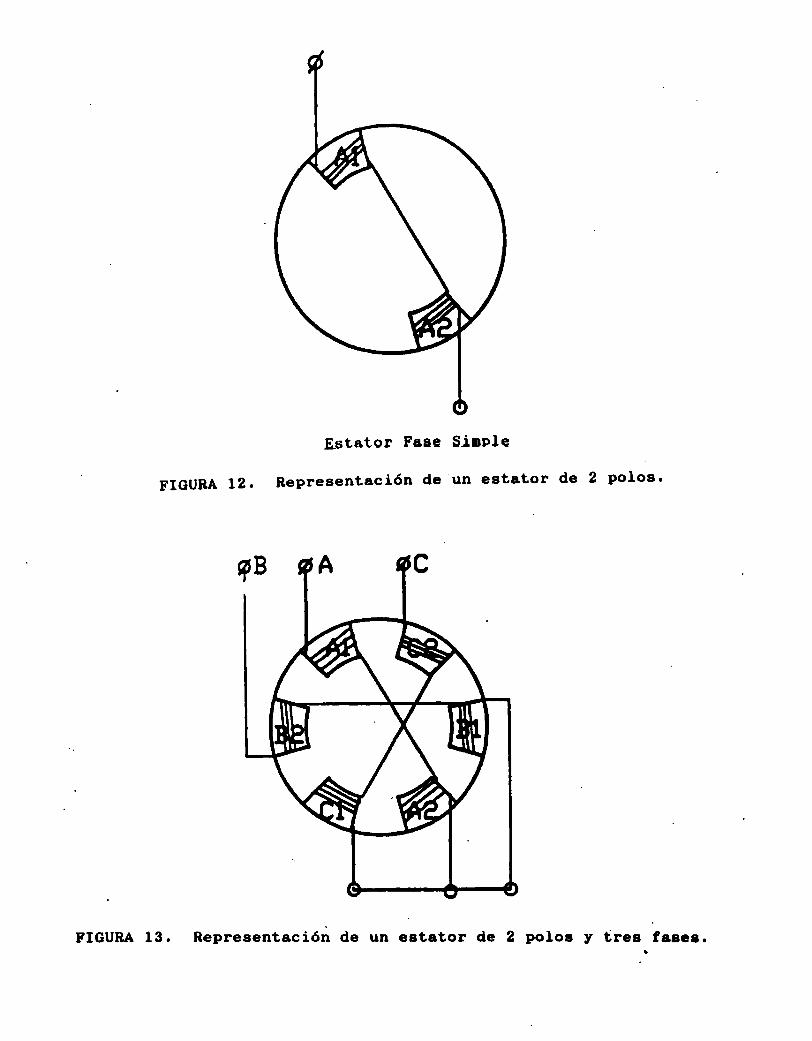
Representación de un estator de 2
polos y tres fases............... , 17
Estudio de operación de un motor
de inducción y diagnóstico........ 18
Representación de un polo magnetico
fijo localizado en un campo
nagnético estatórico.............. 20
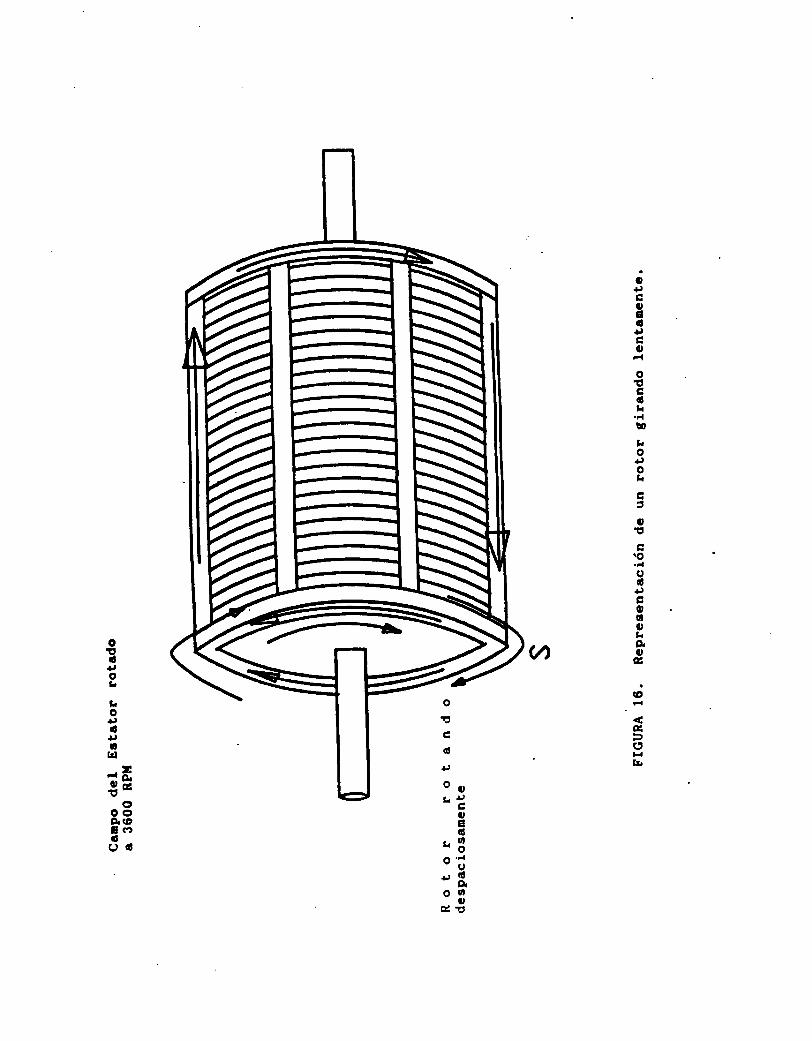
Representación de un rotor girando
lgntamente....... ....... 23
Diagrama de corriente vs velocidad
del rotor.......... .......... 24
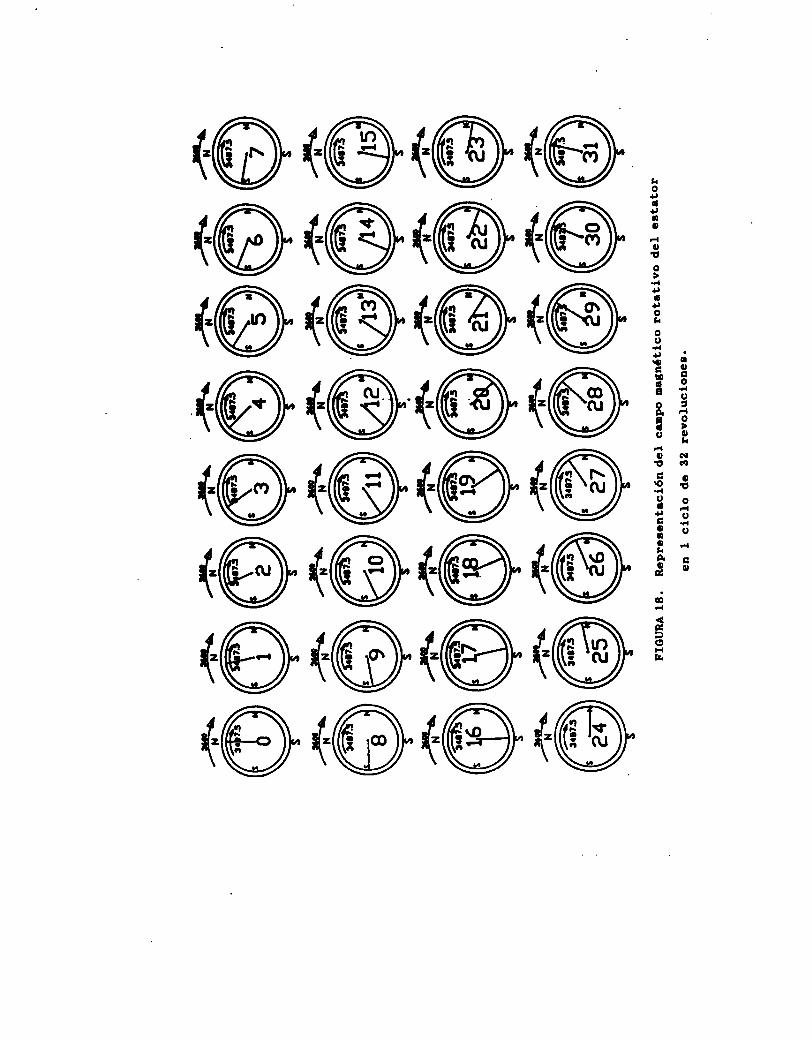
Representación del campo nragnético
rotativo del estator en 1 ciclo de
32 revoluciones.... o... o.......... 26
Formación del momento de rotación
histéretico.. ...... 33
Momento de rotación y pérdidaS.... 35
Influencia de los momentos
asinorónicos de los armonicos
superiores . . . . . . . . . . . . . . . . . . . . . . . .
Curvas de los momentos.....
Momentos de vibración.............
4l
44
46
Unirclslde0 r¡ runomo de 0cridants
Serción Sibtisleco
1X
Figura 24 : Representación de un motor con un
rotor perfectanente centrado..... , 77
Figura 25 : Representación de un motor con un
rotor descentrado en eI estator... 79
Figura 26 : Representación de una revolución a
intervalos de 90o................. 83
Figura 27 : Espectro tlpico de un motor en
buenas condiciolr€s.........o...... 87
Figura 28 : Espectro tlpico de un motor en
malas condiciones................ . 87
Figura 29 : Esquema de un rotor............... 89
Figura 30 : Espectro de vibración de un
ventiladof....... ....... 103
Figura 31 : Representación de un motor de
induccióll ........ ....... LO?
Figura 32 : Espira rotando a través de campo
nagnético...'.................o... t07
Figura 33 : Amplitud espectral de bandas
Iaterales.... ........... 115
Figura 34 : Distorción del campo nagnético.... 115
Figura 35 : Golpeteo de vibración en la
anplitud de la onda............... lzL
Figura 36 : Fórmula para calcular Ia frecuencia
gn los rodamientos................ lzt
Figura 37 : Acercaniento de los comPonentes de
las bandas debidos a Problenas
nagnéticos y mécanicos, utilizando
un anAlisis por nedio de un Zoottl.. t26
Figura 38 : Imagen térmica vista a través del-
software de anAlisis INFRA/SOFT
correspondiente a un buie de un
trafo............................. L29
Figura 39 : Acercamiento de Ia Inagen térnica
de los buies del trafo a través de
lln ZOOD..........................' 130
Figura 40 : Acercamiento de un buie del trafo
a través de un zoom........ '...... L32
Figura 41 : Vista detallada en cuatro ventanas
Ce los bujes de1 trafo............ 133
Figura 42 : Inagenes ilustrativas de fallas en
devanados de un motor configuradas
en Ia pantalla del equipo BAKER... L42
Figura 43 : Inagenes ilustrativas de fallas en
devanados de un notor configuradas
en Ia pantalla del equipo BAKER... 143
Figura 44 : Devanado en estrella doble
paralelo........................., t47
Figura 45 : Diagrama de prueba de rotor
bloqueado............. ....... 151
xl
Figura 46
Figura 47
Figura 48
Figura 49
Figura 50
Figura 51
Figura 52
Figura 53
Figura 54
Figura 55
Ensayo de jaula abierta.......... , L52
Esfuerzos internos y externos a
que es sonetido un motor.......... 153
Diagrana de fuerzas de deflexión.. 154
Campo magnético de cuatro polos... 160
Diagrama de alteraciones en Ia
prueba del notof¡................. 161
Diagrama espectral de vibración
centrada a 1800 r.p.m............. 164
Diagrama espectral de vibración
centrada a 3600 r.p.m............. 165
Diagrama espectral de desalineaniento
entre eI motor y Ia caja de
rodamientos para altas
velocidades 1800 r.p.m............ 167
Diagrama espectral de desalineamiento
entre eI motor y Ia caja de
rodamientos para altas
velocidades 960 f .p.llt............. 168
Diagrama espectral de desalineamiento
entre eI motor y la caja de
rodamientos para bajas
velocidades 3600 r.p.m............ 169
x].1
Figura 56
Figura 57
Figura 58
vibracióÍl.......................... I73
Ampliación del espectro de vibración
Diagrama espectral
entre eI motor
rodanientos
velocidades 570
Espectro con
de desalineaniento
y Ia caja de
para bajas
r.P.m.............. 170
altos niveles de
t74
175
L76
L79
t79
t79
1?9
179
L79
Figura
Figura
Figura
Figura
Figura
Figura
59
60
61
62
63
64
al rededor de 119.9................
AnAlisis del motor 1...............
Análilsis del notor 2..............
Espectro de banda base a 5O H2.....
Cepstrun de banda base a 50 H2....,
Espectro de banda base a 1.6k,h,2,,
Zoom deI espectro alrededor del
segundo armonico principal.. .......
Cepstrun de banda base & 1.6k.h.2.,
Cubierta espectral desde 3/8
centrados sobre 800 h.2............
fnrpresión por conputador de eie¡¡plo
de un motor en buena condición para
Figura
Figura
figura 67
Figura 68
65:66:
Ias caracteristicas sin carga y
plena carga........................ 181
Impresión por computador de eiemplo
de un motor en buena condición para
las caracteristicas sin cargaq y
plena carga........................ L82xiii
LISTA DE TABLAS
P¿9.
Tabla 1 : Diagnóstico de problemas en los
nOtofeS......................... 94
Tabla 2 z Representación de los problemas
de vibración ......... 97
Tabla 3 : Problemas de vibr¿ción magnéticos
rotatorios o estacionarios. . . . . . . LLz
Tabla 4 : Problema de vibración mecAnica en
rotación de1 eje................. 116
Tabla 5 : Diagnóstico en problemas eléctricos
de notor€s....... ...... 118
Tabla 6 : Problemas de vibración en los
motores . ¡........ .......... I23
Tabl-a 7 z Resistencia de aislamiento....... 148
Tabla 8 : Ensayo en vacio-voltaje ..... 149
Tabla 9 : Ensayo en vacio-corrient€........ 149
Tabla 10 : Ensayo a rotor bloqueado Corto
uoltaje.................... 150
Tabla 11 : Ensayo a rotor bloqueado Corto
corrient€........ ...... 150
Tabla L2 : Ensayo en carga.................. 151
Tabla 13 : Ensayo de jaula abierta.......... t52
xtv
TABLA DE CONTENIDO
PAG
INTRODUCCION
1. FUNDAMENTOS DE OPERACION DE UN MOTOR DE INDUCCION DE
TRES FASES..... ..........................31.1. Motores de induccion de corriente alterna. . . . . ., , ,Lz
1.1.1. Construccion de un notore de inducción..........13
L.I.z. Principios de Ia construccion de motores de
induccióD... .......... ...27
L,L,2.L. Construcción del estator.................... .,28
L.1.2,2. Construcción del rotor.......... 30
1.1.3. Pérdidad en los motores de induccion .....,,..,,321.1.3.1. Momento de rotación histerético............ ..32
L,L.3,2, Momentos parAsitos del notor asincrónico. . .. .37
1.1.3.3. Momentos parásitos asincrónicos.......... ....371.1.S.4. Armónicas en los dientes.......... ......421.1.3.5. Monento sincrónicos...... .....431.1.3.6. Momentos de vibración............. .,...,44
15
1.1.4. fnstalación
1.1.4.1. Verificación
L,L.4,2. Manipulación . . . . . . . . . .46
1.1.4.3. Alnacenamiento............... ......47L,L,4.4. Emplazamiento de instalación..................481.1.4.5. Instalación del motor .....o.... .........491.1.4.6. Resistencia del ais1amiento...... ..50
L.L,4.7. Puesta a tierra............... .....511.1.4.8. Alineación de los ejgs....................,,522, TIPOS DE MANTENTMIENTO.......
2.1 Mantenimiento Preventivoo o ¡ o ¡
2,2 Mantenimiento Correctivo. . . . .
2,3 Mantenimiento Predictivo¡ e e o o
2.3,t. Programas de soporte
. . . o . . . . . | . . . . . . . . . . .53
. . . . . . .53
......,54
. . . . . . .56
de mantenimiento
eléctrico predictivo ..................................582.4. Descripción de un mantenimiento general.........66
3. PROGRAMAS Y TEORIAS DE MANTENIMIENTO
PREDICTM................. .......... ........?33.1. PROGRAMA DE ANALTSIS DE SIMETRIA MAGNETICA EN
MOTORES DE INDUCCION...,.............. ..........,.'l33.1.1. Excentricidad Estatica.......... ......763.L.2. Rotor excéntrico.. ..... .... r.....823.1.3. Presencia de barras rotas en el rotor . . . . . .85
3.1.4. Láminas del rotor en corto.......... .......883.1.5. AnAlisis de vibración.....,........! ......913.1.6. Pruebas en motores de inducción... ........933.1.6.1. Pruebas estacionarias.......... ........g33.1.6.2. Prueba de velocidad...........................98
xvI
3.1.7. Monitoreo de corriente en Motores..............1013. 1.8. Problemas de vibración nagnéticos o
mgCánicoS.... ... r................ ......1043. 1.9. Vibración nagn¿tica en los motores de
induccióD.................. .......... .......1053. 1 . 10. Variaciones del "air Élap" debido a Ia
excentricidad ............... .....1103.1.11. Problemas nagnéticos del tipo rotativos
o estacionario............... ....,.....1113,1,L2. Modulación de la Frecuencia debido a variaciones
de la velocidad.. .......... ................113
3.1.13. Frecuencias en las ranuras.......... .....114
3.1.14. Frecuencias a 1 x RPM y a 2 x RPM.............114
3.1.15. Truncación de Ia onda espectral de vibración,,Lt73.1.16. Problemas de vibración generado a través de los
rodamientos ............... LzO
3.1.17. Perturbaciones en la onda espectral....... . .,,L223. 1. 18. Constante de porcentaje de ancho de banda y
anAlisis con acercamiento alrededor de Ia banda,,,,!22
3.1.19. Pronóstico de fallas............... ....,L25g,2. PROGRAMA ANALISIS DE TERMOGRAFIA EN MOTORES
ELECTRICOS DE INDUCCION.....E" ....' L28
3,2,1. fnspección termogrAfica en el Motor. . . . . . . . . . . 131
3,2.2. fnspección ternogrAfica en 1os centros de controlde motores................. .......... .......134
xvl.l
3.3. PROGRAMA COMPARACION DE RESPUESTA DE LAS BOBTNAS A
LAS DIFERENTES ONDAS DE IMPULSO.......... 135
3.3.1. Aplicación en motores de corriente Alterna . . . .137
3,3,2. Aplicación en motores de corriente Directa , . . .138
3.3.3. Pruebas en los devanados del Motor. . . . . . . .138
4, Estudio y diagnóstico de fallas en motores eléctricosde inducción... .......... 144
4.t. Estudio de un notor de inducción tipo jaula de
ardilla de 25OO HP............ ....... I44
4.1.1. Antecedentes.................... ....,1444.L.2, Especificaciones del equipo....................1454.Lr2.l.Conpresor............................'........145
4,L2,2.Ttansrnisión. . . . . , . . . . 145
4.l,2.3.Motor asincrono con rotor de jaula de ardilIa.1464.1.3. fnspección preliminar.........................146
4.t.4, Pruebas realizadas.. ......... o..... .I47
4,l,4,l.Resistencia y conexión del devanado ..... .L47
4.1.4.2.Resistencia de aislamiento.. . ... . ..... ...1484,L.4,3,Ensayo en vacio.....,........................,148
4.L,4,4,Ensayo a rotor bloqueado.......... 1...........1494.L,4.5,Ensayo en carga..... .. o o......,..........1514.L,4.6.Ensayo de jaula abierta.......................1514.L.5, Analisis de resuItados............ ..152
4.1.5.1 Introducción...,...... ..... ....o,,..L524.1.5.2.Analisis de pares parasitos...................154
X\¡¡.II
4.I.5.2.L. Pares asincrónicos de armonicos superiores.lSS
4.1.5,2,2.Pares asincrónicos de armónicos de diente.. 155
4.I.5.2.3. Pares sincrónicos. . 156
4.L,5,2,4.Pares de vibració................ ,L57
4,!,5.3.AnAlisis de desequilibrio magnético. . . . . . . . ...158
4,1,5.3.1.Campo magnético del estator.................158
4,t,5.3,z.Campo magnético del rotor...................1594.L.5.4. Analisis del informe de Ia prueba de vibración
nragnétic&. . . . . . . . . . . . . . . . . , . . . . . . . . . . . . . . . . . . . . . . 161
4.2. ESTUDIO DE VTBRACTON DE UN MOTOR QUE MANEJA UN
COMPRESOR DE UN REFRIGERADOR............... .L62
4.2.L. Antecedentes.......... ..... .....L624.2,2, Conclusiones.......... .....163
4,2,3. Reconendaciones...,, ..L7L
4.3. Estudio de vibración en notores de una fAbrica en
New Johnsonville...¡........ .....171Anexo.......... ....178Conclusiones . .184
Bibliografia.......................................'..189
',sn¡o de 0ccidentc
Bibl;otaco
xrx
INTRODUCCION
En Ia construcción de náquinas eléctricas, DoIivo-
Dobrovolsky prestó un notable servicio con Ia invencción
de un motor de inducción trifAsico de tipo comercial,
empleando eI principio del campo magnético giratorio
creado por un sistema de corriente polifAsica. EI
fundamento del campo magnético giratorio fue descubierto
por eI flsico italiano G. Ferraris en 1885. Este en
Italiar y posteriormente Tesla en 1886 en EE.UU.,
construyeron sus primeros nodelos de motores bifAsicos de
inducción. Sin enbargor debido a sus muchos defectos de
proyector Do fueron de uso prActico. Dolivo-Dobrovolsky
fue quien primero proyectó, y en 1889 construyó a escal-a
comercial, Ios motores de induceión tanto de rotores con
bobinas de fase cono de caja y cuyas caracterlsticasfundamentales se conservan en todas las modernas mAquinas
de inducción.
EI motor de inducción polifAsico se ha convertido en el
tipo mAs usado en Ia industria, debido a que Ia mayoria
de los sistemas actuales de distribución de energia
eléctrica suministran corriente alterna. Conparado con
2
el de corriente continuar el motor de inducción tiene Ia
ventaja de su sinplicidad¡ 9üé se traduce en bajo costo y
nAxir¡a eficacia con mLnimo mantenimiento.
EI rendiniento es alto para nedia y máxima carga, y puede
asegurare un buen factor de potencia si la elección es
correcta.
Los Motores de inducción son sinilares a otros tipos de
mAquinas rotativas y al igual que ellos exhíben problenas
comunes de desbalance, desalineaniento, resonancia,
problemas de rodaniento etc. Estos, sin embargo son los
ünicos que exhiben problenas asociados con el campo
nagnético producidos por el rotor y eI estator. Esto hace
que eI diagnóstico de problenas de vibración en motores
sea mas conplejo, pero hay técnicas disponibles para la
ayuda de estos diagnosticos en el area de Mantenimiento
Predictivo
1. FUNDAMENTOS DE OPERACION DE UN MOTOR DE INDUCCION DE
TRES FASES.
Para entender Ia operación de un motor de AC, los
conceptos de magnetismo, electromagnetismo, corriente
alternar y eI flujo de corriente inducida tiene que ser
primeros estudiados.
La figura #1 muestra una tlpica herradura nagnética
que para todos es familiar. Todo magneto tiene un polo
norte y un polo sur. En magnetos¡ los polos de polaridad
opuesta se atraen. El polo positivo de un magneto podrla
atraer eI polo negativo del otro ( figura 2l , Igualnente
los polos sinilares serian repelidos cada uno ( figura 3 ).
Sin embargo, cada punta del magneto podrla atraerpartlculas
nagnética.
de hierro que no tienen una polaridad
Un electronagneto consiste de un nücleo de hierrocon un conductor enrrolado alrededor de este (figura 4).
Cuando eI alambre conductor de un electromagneto esta
conectado a Ia bateriar uD campo rnagnético es generado.
FICURA I . llaancto.
FICUBA 2. Reprerent¡ción de un Drancto con polrridrd opu€ltl.
FIOUBA 3. Beprcrcnt¡cion dc un r¡fn.to con poluid¡d l¡url.
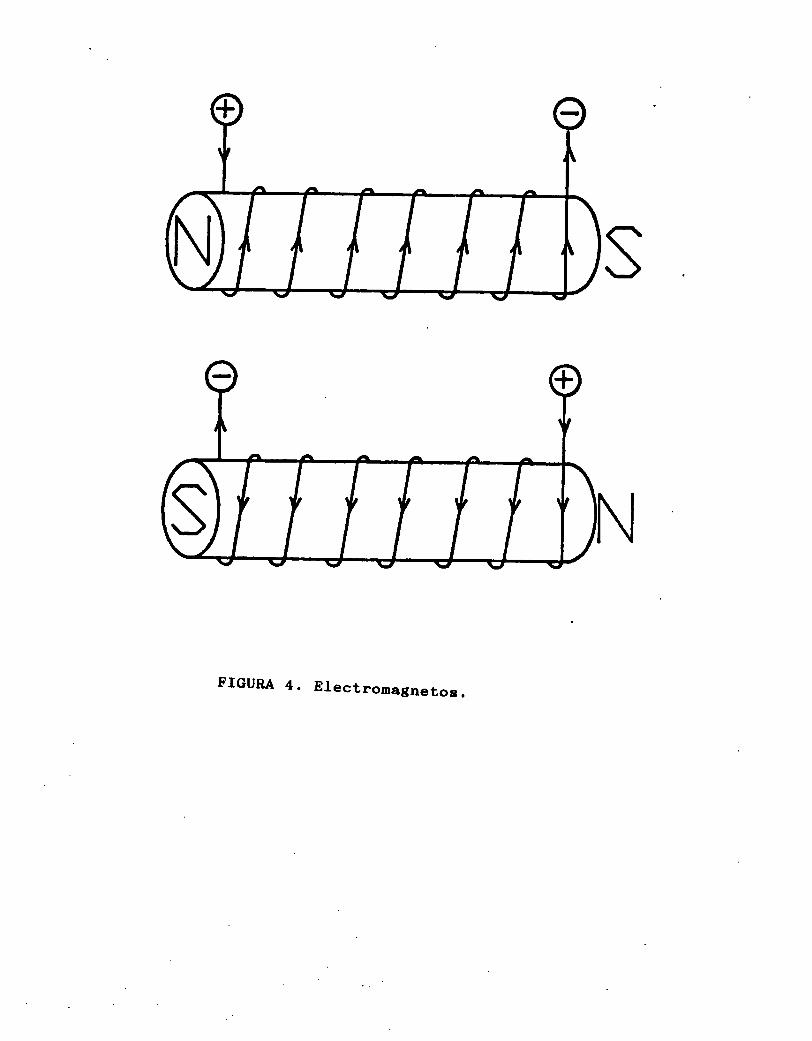
FIGURA 4. Electromagnetos.
6
Una punta del nücleo de hierro del nagneto tendria una
polaridad positiva y eI otro serLa negativa. Si el
alambre conductor es conectado aI reves, Ia dirección del
flujo de corriente sera en sentido contrario, y Iapolaridad nagnética serA cambiada.
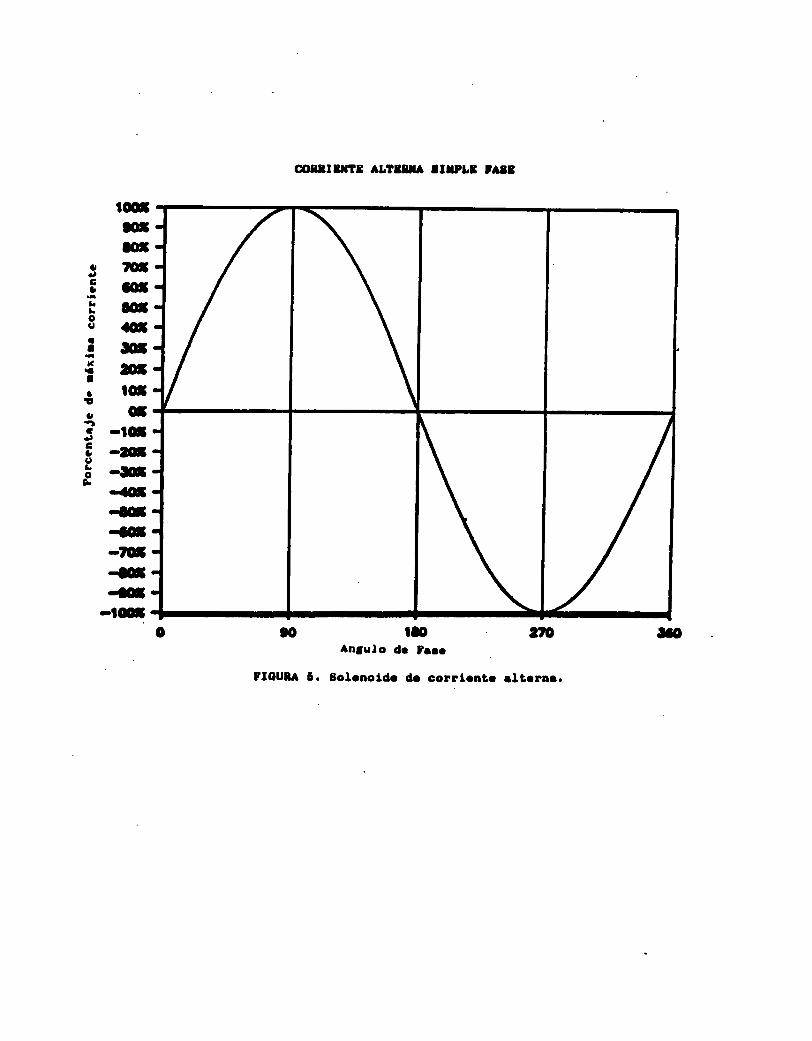
La figura 5 muestra una representación grAfica de
corriente alterna AC. En Colombia, el canbio de dirección
de corriente alterna se presenta cada 60 ciclos en un
segundo. La corriente se incrementa a mAxino en una
dirección y luego se decrementa a cero¡ y se incrementa
aI ¡rAxino en Ia otra dirección. Si un electronagneto se
conecta a corriente alterna, la polaridad serl-a cambiada
de positivo a negativo 60 cielos en un segundo o 3600
ciclos en un minuto.
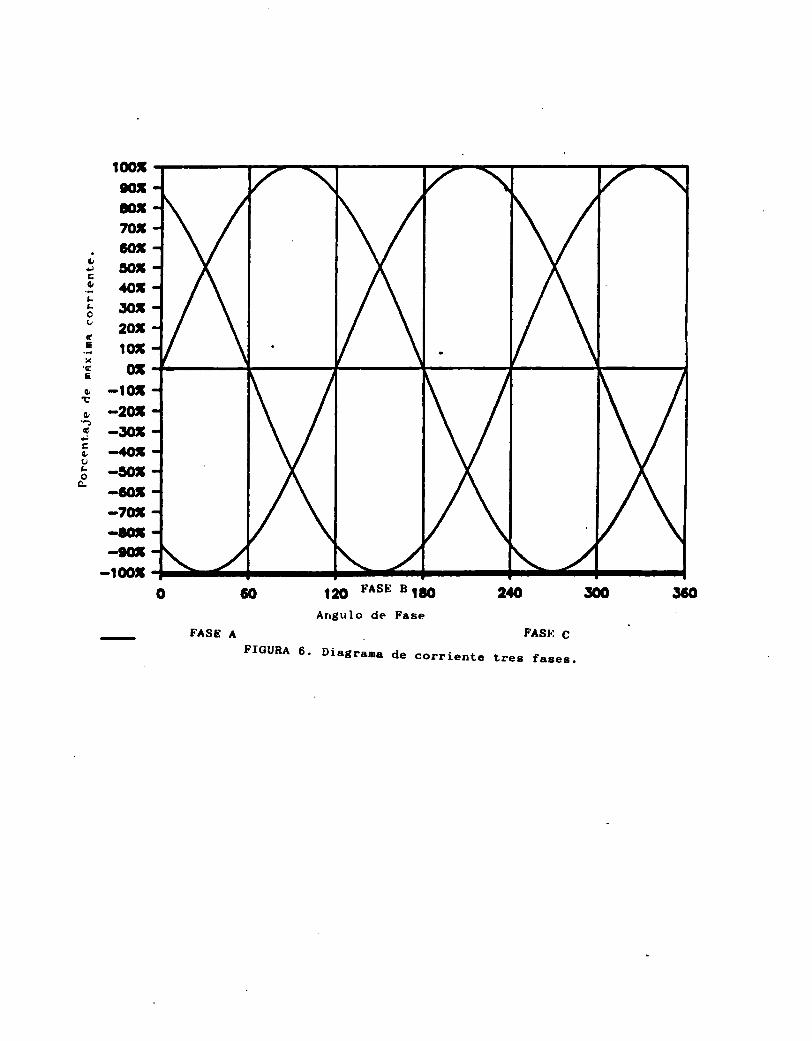
La Industria usa tres fases de corriente alterna en mAs
aplicaciones. Las cuales estan compensadas con respecto a
la otra fase L?O grados como se muestra en la figura 6.
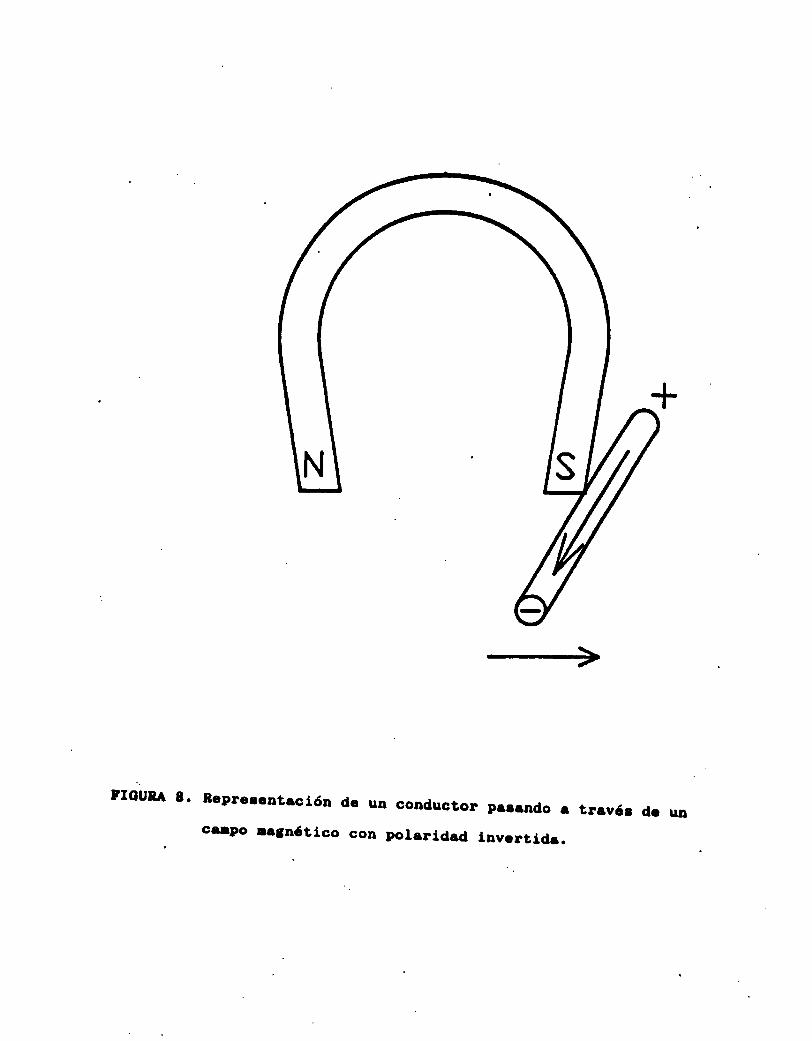
EI flujo de corriente es inducido cuando un conductor es
pasado a través de un campo nagnético (figura 7r, Siendo
este proporcional a la velocidad con Ia cual eI conductor
es movido a través del campo nagnético. La dirección del
flujo de corriente es perpendicular a Ia dirección de
velocidad relativa, y solamente depende del instante de
la polaridad del campo uragnético por la cual se esta
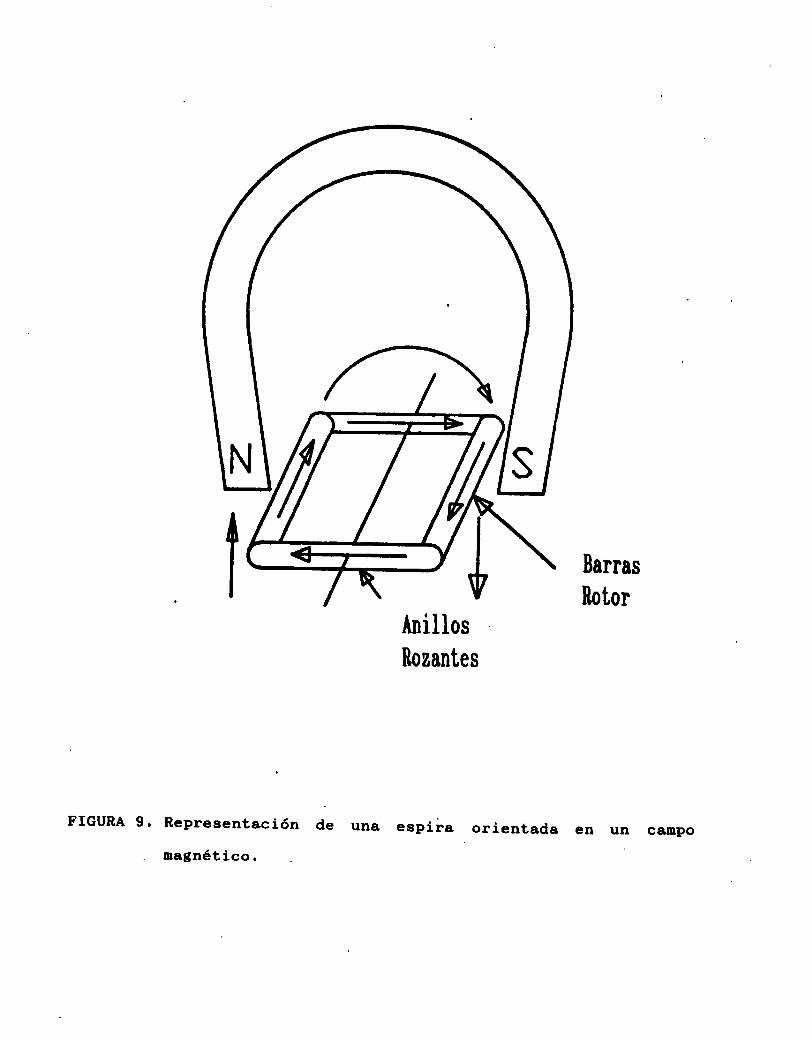
pasando ( figura 8 ). Si dos conductores son conectados
como muestra la figura 9, y rotados a travAs de un campo
oa,ÉaLLct¡aaut¡a3!oaaa,c3(,|.oL
co¡¡¡3xT3 Att¡¡It ¡¡IPt¡ tA83
An¡ulo dr p¡¡o
t¡OUtA 6. Soleaoldo d¡ corrl¡nü¡ .lt.r¡¡.
tugg,ü¡ügaütüuICC
-tc-tÜru-aü-g-g-'ltúqE{
-lc
dEI!Lo
e)1'cE
t,!e).D6+ta'oAoA
roof00¡to¡70uGO¡lotao¡50¡20/1ro¡0¡
-ro¡-20¡-JO¡-ao¡-tlo¡-@f-?9,-to¡-9ü
-r@fo 60 t20 FASE 8¡¡6 20
Arrgulo de FaseFASE A
FIGURA 6. Diagrama de corriente trea fases.
FAS|,: c
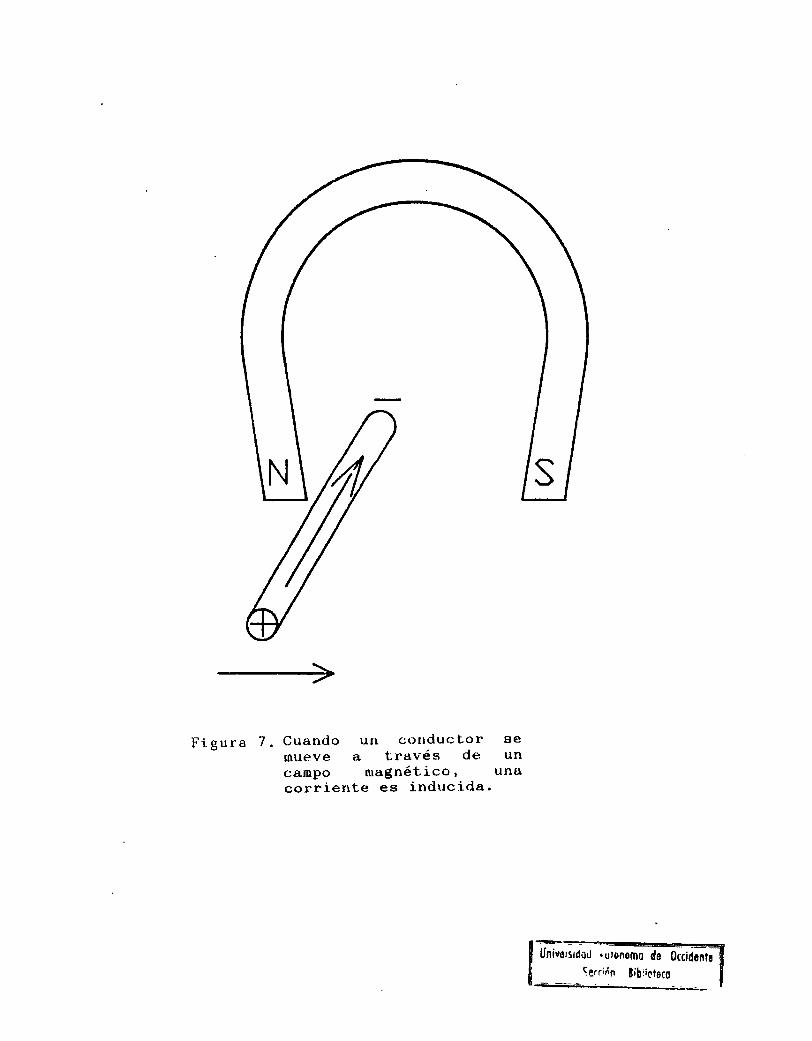
Fi gura 7. Cr¡ando utl corlducLor semueve a través de uncanpo nragnét ico ' unacorriente es indtlcida.
r-I Unlvorídod .uronomo de 0rcidcnn
[ !err;;¡ tibiít.toco
trIOUnA g. Reprercnt¡ción
c¡rpo la3nóticodc un conductor paaando ¡ tr¡vó¡con polarid¡d lnvcrtide.
dr un
Barras
[otorAniIIos
Rozantes
de una espira orientada en un campoFIGURA 9. Representación
magnético.
L2
magnético, un ftujo de corriente serla eI resultado.
figura 9 describe un sinple generador. EI fluio
corriente alrededor del rotor serA cambiado el misno
veces en una revolución del rotor.
1.1. MOTORES DE INDUCCION DE CORRIENTE ALTERNA
Los motores de inducción pueden ser de anillos rozantes y
de jaula de ardilla, segün la construcción del rotor. EI+motor de anillos rozantes tiene en el rotor un devanado
conectado a unos anillos colectores, que permiten cerrar
eI circuito a través de unas escobillas sobre una
resistencia externa calculada para linitar la corriente
durante el arrangue y mantener eI par necesario para
acelerar Ia carga a su velocidad de trabaio.
Et notor de jaula de ardilla tiene el rotor aislado del
exterior, de manera que no se pueda variar Ia
caracteristica par-velocidad elegida aI diseñarlo, a no
ser que reduzca Ia tensión aplicada aI devanado del
estator, variando entonces el par desarrollado con el
cuadrado de 1a tensión. En los motores de jaula de
ardilla se usa el arranque a tensión reducida para
causar un¿ fluctuación apreciable en cualquier sistena de
iluminación conectado a Ia misma.
La
de
dos
13
EI motor de inducción és; en esenciar un motor de
velocidad constante, siendo ésta función de Ia frecuencia
de linea y del nümero de pares de polos del devanado. Se
pueden controlas en cierto grado Ia velocidad de un motor
de anillos rozantes intercalando resistencie en el
circuito del rotor pero para cualquier reducción de
velocidad la potencia tomada de Ia red Permaneee
constante para un par dador aunque la potencia de salida
se reduce proporcionalmente a Ia velocidad. Por 1o
tanto, hay una pérdida de energia en la resistencia de
regulación. Por otra Parter aun que la velocidad de un
motor de anillos permanece PrActicamente constante Para
un mismo parr una carɡa variable con una resistencia fiia
en eI circuito del rotor¡ s€ traduce en un motor con una
regulación muy deficiente de velocidad.
1.1.1. CONSTRUCCION DE UN MOTOR DE INDUCCION
Un Motor de inducción consiste de un electronagneto
estacionario (estator) nontado en una armadura y un
electromagneto rotativo (rotor) montado entre rodanientos
y centrado en el estator (figura 10).
Un estator de un notor (figura 11) es un electromagneto
compuesto de devanados de alambre en ranuras sobre un
nüc1eo de hierro. El nücleo de hierro consiste de una
pila de láninas de hierro o laninaciones con una caPa de
L)
0)ttt'.o+JoE
É,o€oooo
\ql!oo+Jgo.EoAEoo
o
ÉDoHk
FIoEi<ts?t2Er¡
ÉoE{E
¡a¡Tt.t drl l¡trlor t
o'Pon'otor d' L r¡tl3or'FIOUiA 11. n Prc.ont.ctón dr lol c'
1b
oxido entre estos. EI nücleo de hierro se convertira en
pedazos de polos para eI electromagneto del estator. (un
estator de dos polos es mostrado en la figura t2),
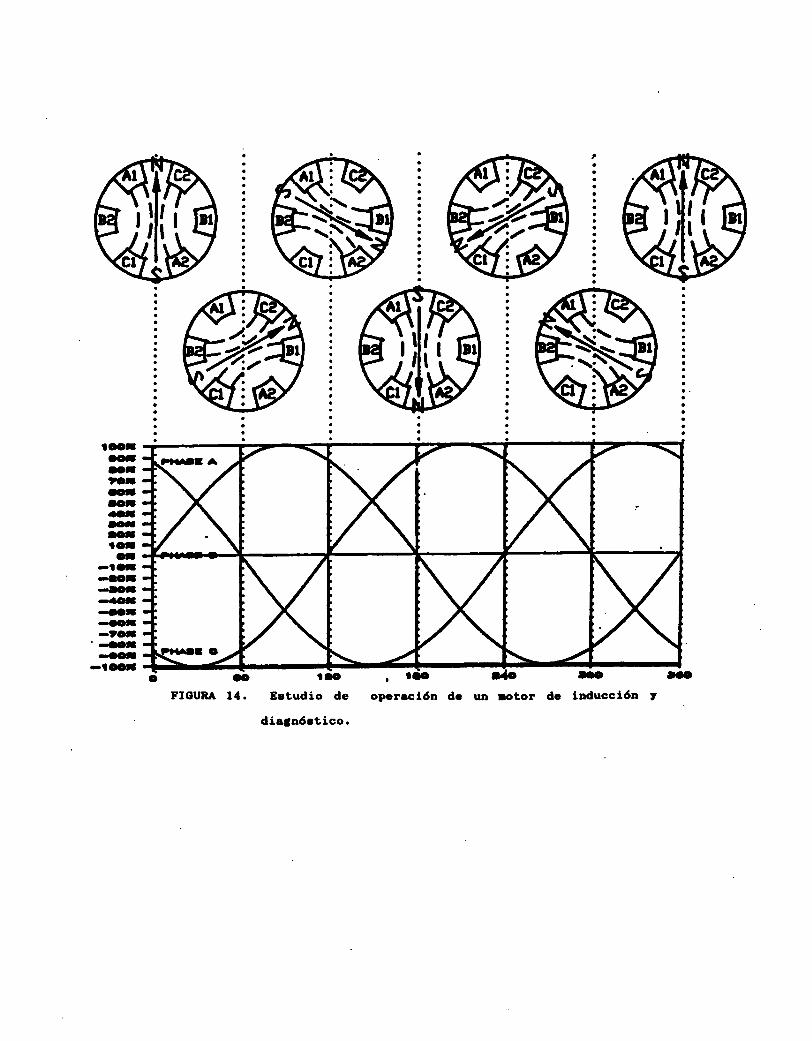
Un Motor de tres fases v 2 polos ( figura 13 ) tiene
varios devanados individuales sobre un nücleo de hierro,
en eI cual Ia corriente alterna es la causante del
cambio de polaridad de los polos de positivo a negativo y
viceversa en 60 ciclos en un segundo. En un motor de tres
fases y dos polos, hay tres fases eléctricas cada una
desfasadas con respecto a Ia otra 120 grados. La figura
L4 muestra como Ia corriente alterna en cada fase produce
una pareja rotación del campo magnético. En un notor de
dos polos, eI campo nagnético rota a .3600 revoluciones
por minuto. En Ia primera figura la fase B esta a cero t
la fase A está en un 87% de Ia parte positiva y Ia fase C
estA en un 87% de la parte negativa. El resultado es un
campo nagnético con estos polos centrados entre la fase A
y la fase C. Sesenta grados después la fase A se ha
reducido a cero, Ia B esta a 87% y la C esta a - 87%. El
resultado son los polos de1 estator centrados entre las
fases B y C. El campo magnético rota en una revolución
como se muestra. Después de que el voltaje en cada fase
sea sinosoidalrla rotación del campo serA pareja.
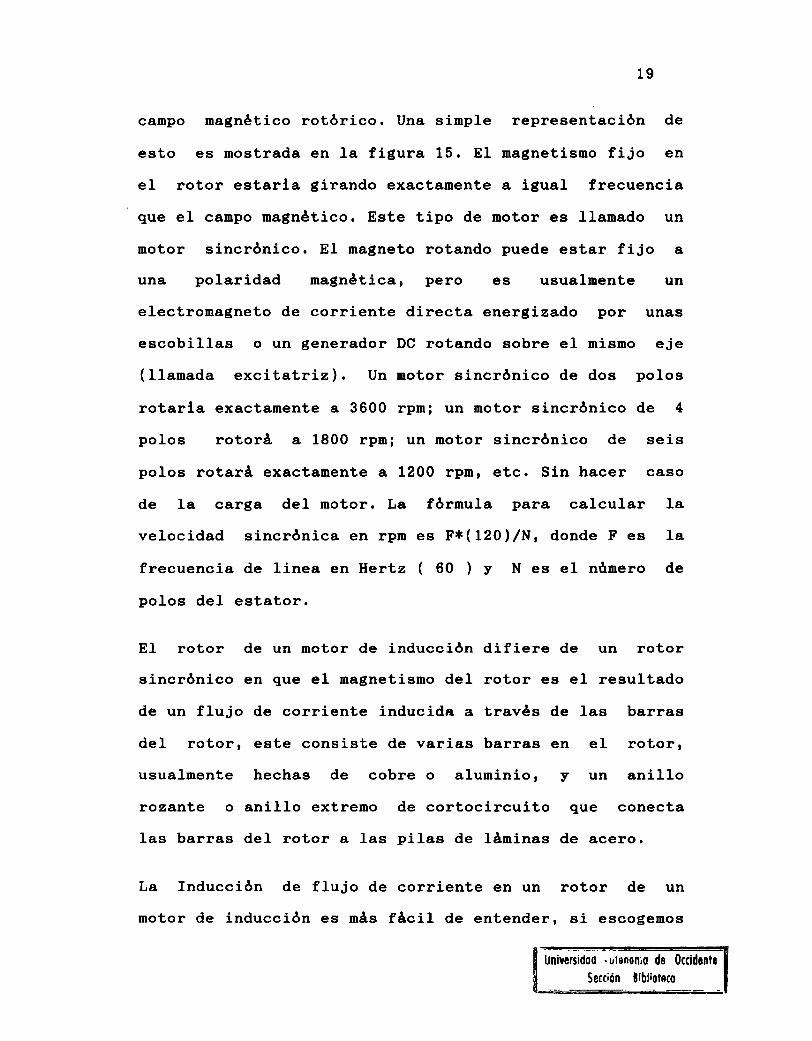
Si un polo magnético fijo es localizado entre eI campo
magnético estatórico, Ias fuerzas magnéticas caugarLan
que eI polo magnético rote a Ia misma velocidad que el
Estator Fage SinPle
Represent¿ción de un estator de 2 polos.FIGUBA T2.
FIGURA 13. Representación de un egtator de 2 poloe y fage¡.tres
Ii.r.v.
{:
i{!r.s\'
toc¡oortacrtDrCSac¡aaaD'tcrtca
il-lCl-lCl-tcf,o¡lOl-aC¡-alo¡-?Ol'.-aofeaü
¡iCCüt
FIOURA 14. E¡tudio de opcrrclón dc un totor dc l¡ducción ,di¡tnórtico.
19
campo nagnético rotórico. Una simple representación de
esto es mostrada en la figura 15. EI magnetismo fijo en
el rotor estarLa girando exactamente a igual frecuencia
que el campo magnético. Este tipo de motor es llanado un
motor sincrónico. El nagneto rotando puede estar fijo a
una polarid¿d nagnética, pero es usualmente un
electromagneto de corriente directa energizado por unas
escobillas o un generador DC rotando sobre el mismo eje
(llanada excitatriz). Un motor sincrónico de dos polos
rotarla exactamente a 3600 rpm; un motor sincrónico de 4
polos rotorá a 1800 rpm; un motor sincrónico de seis
polos rotarA exactamente a 1200 rpnr etc, Sin hacer caso
de Ia carga del motor. La fór¡¡ula para calcuLar la
velocidad sincrónica en rpm es F*(120)/tl, donde F es la
frecuencia de linea en Hertz ( 60 ) v N es el nümero de
polos del estator.
EI rotor de un notor de inducción difiere de un rotorsincrónico en que el nagnetismo del rotor es el resultado
de un flujo de corriente inducida a través de las barras
del rotor, este consiste de varias barras en eI rotor,usualnente hechas de cobre o aluninior y un anillo
rozante o anillo extremo de cortocircuito que conecta
las barras del rotor a las pilas de láninas de acero.
La Inducción de flujo de corriente en un rotor de un
motor de inducción es mAs fAcil de entender, si escogemos
Univcrsidod .ut0n0n¡0 do 0ccidcnl¡
S¿tcién libl¡oteco
6!:F¡
C{¡!
ia
l
i
I
I
I
I
\l
FÍcUnA ¡5' sirPle llotor Élincronico
2L
un motor de dos polos tomado desde el reposo y acelerado
a la velocidad de operación, Para un correcto
entendimientor &sun& que el motor consisle de 2 polos,
tres fases en el estator con eI rotor como muestra Ia
figura 16.
Cuando la corriente es aplicada aI estatorr eI campo
magnAtico rotórico enpieza a rotar a la frecuencia de
Iinea y las barras del rotor estacionario estan sujetas
aI máxino movimiento rotativo del camPo magnético, y
ademas una máxima corriente es generada a Io largo ellas.
Como eI polo norte del estator pasa a las barras del
rotor, Ia corriente es inducida a lo largo de la barra.
En el mismo instante, las barras del rotor sobre el lado
opuesto del notor es pasada aI polo sur del estator y la
corriente en dirección opuesta es inducida. El resultado
es un flujo circular de corriente en eI rotor a Io largo
de una barra del rotor¡conectado a través del anillo
rozante a lo largo de Ia otra barra del rotor. Este fluio
ci.rcular de corriente a través de las barras del rotor y
alrededor de las lAminaciones da como resultado que el
rotor se comporte como un electroinan. La potencia del
electroiman es nAxima cuando el rotor esta estacionariot
y es acelerado. Como el rotor incrementa Ia velocidadt
el movimiento relativo entre las barras del rotor y el
campo magnético rotativo decrece, ademas el flujo de
o+¡ÉoEd+¡É:o
o!Eclkt0¡.o+¡ohÉao.rt
f:ro
(Jd+)Éooo¡.IoÉ
toFa
GD(,f&
(/)oltór,ot].o¡tó¡¡o¡{.taarrd.()
o00Aro3(?6oó
oacqt
Ioo,u"
oEdu!
o'6o$oo
oG!
23
corriente disminuye aI igual que eI torque en Ia nedida
que eI motor se acerque a la velocidad sincrónica, el
moviniento relativo entre eI campo del estator y las
barras del rotor se acerca a ceror y eI flujo de
corriente a Ia largo del rotor podrla cesar. Et
nagnetismo del rotor estarA adenas disrninuyendose hasta
gue el torque generado por eI motor iguale aI torque
requerido para moverlo con algün equipo de nanejo.
El increnento de carga en el r¡otor produce una
disminución de Ia velocidadr y ün decremento de Ia carga
produce un aumento de Ia velocidad. La fricción y las
pérdidas en los devanados del motor ocasionan que este
nunca alcance exactamente la velocidad sincrónica. La
diferencia entre velocidad sincrónica y velocidad del
rotor se llana "frecuencia de deslizamiento".
En datos de placa se indica la mAxina velocidad a plena
carga del motor, por ejemplo un motor de 4 polos, 3000
Hp, 2300 voltiosr eI motor tona 670 amps a plena carga
y una velocidad de 1785 rpm. Si la carga disninuye, lacorriente estaria disminuyendo y la velocidad estarLa
aumentendo ligeramente. Esto es inportante si queremos¡
entender las variedades de deslizamiento con carga.
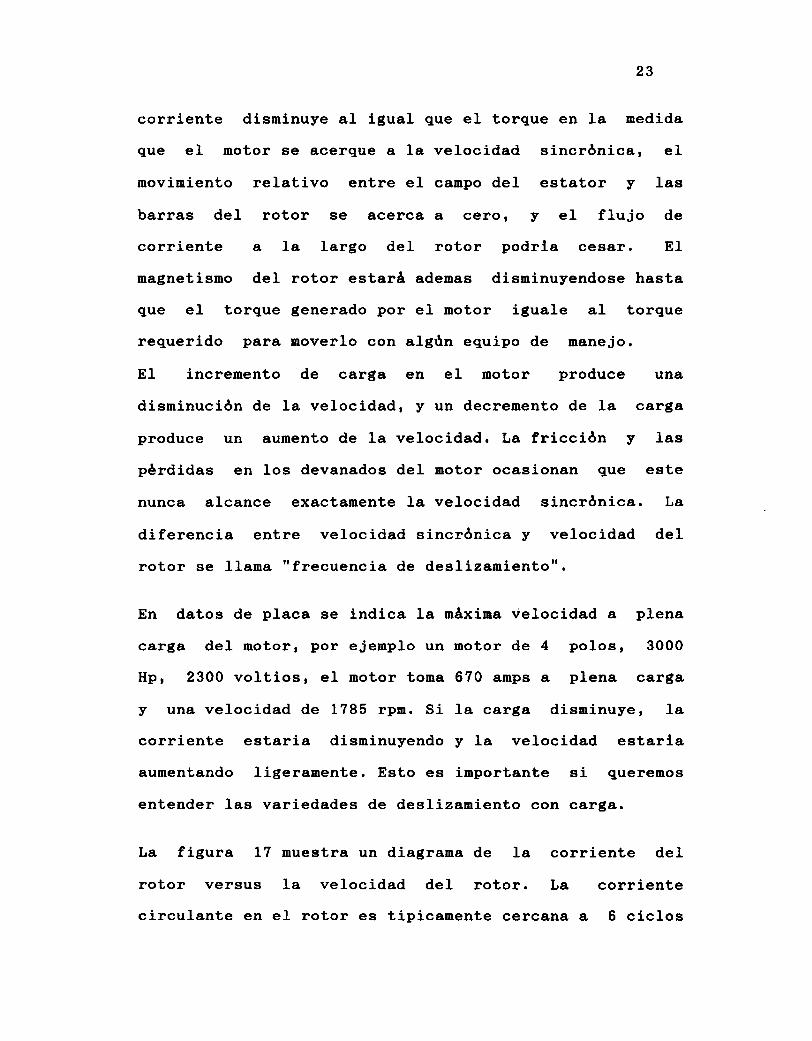
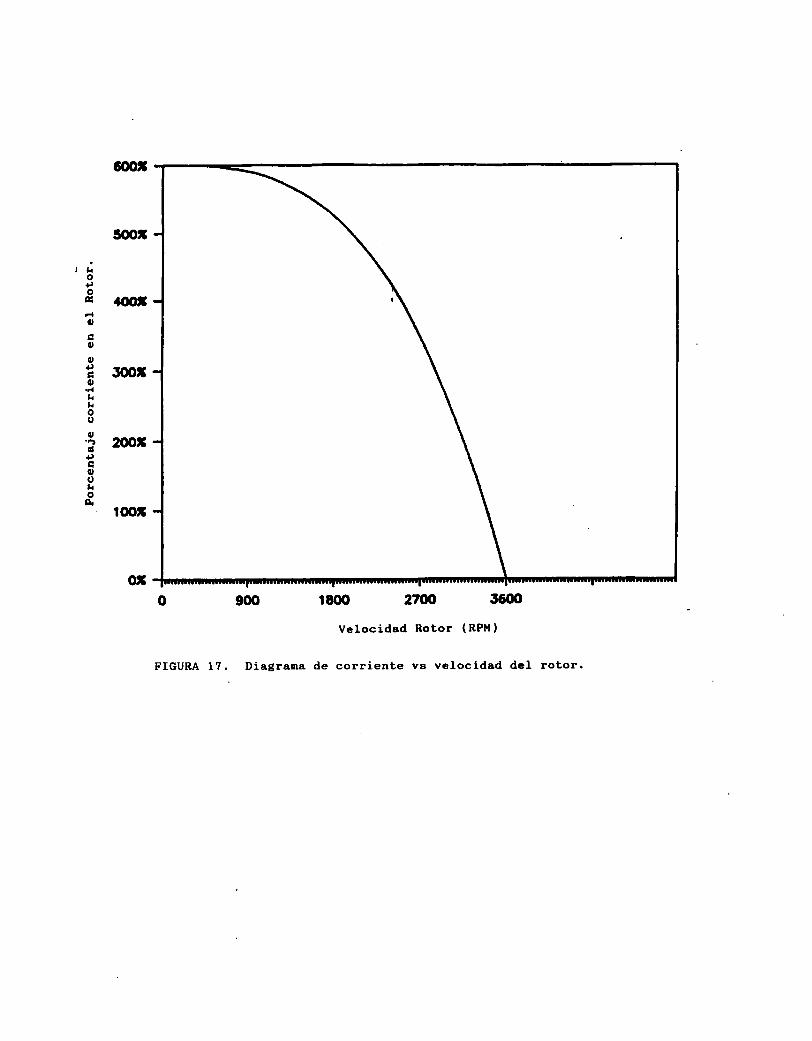
La figura L7 muestra un diagrana de la corriente del
rotor versus Ia velocidad del rotor. La corrientecirculante en eI rotor es tipicanente cercana a 6 ciclos
tko+JoE
o
{¡
c¡+)Éo¡rhoo{¡
¡¡+¡tio()¡{oft
FIGURA 1?. Diagrama
faoo 2700 3600
Velocidad Rotor (RPM)
de corriente vs velocidad del rotor.
25
de Ia corriente rateada a plena carga del motor.
El calentamiento en el rotor en el momento de arranque
produce que los motores grandes sean Iimitados a 2 veces
Ias tentativas de arranque por hora. La figura nuestra
que cuando Ia velocidad del motor alcanza 3600 rpnr el
flujo de corriente disninuye a cero. Un dificil concepto
de entender que ayuda en eI entendiniento de vibraciones
en el motor de inducción es la frecuencia magnetica del
rotor. En este ejenplo un motor de 2 polos es
considerado con una velocidad del rotor de 348?.5 rpm
(este inusual nümero es considerado como Ia descripción
mas cercana de construcción), ademas la frecuencia de
deslizamiento es II2.5 rpm. La figura 18 muestra que
sucede en el sitio sobre eI rotor en eI cual el campo
magnético rotativo del estator va a través de un ciclo de
deslizamiento (32 revoluciones) .
En una revolución del campo del estator, eI rotor atraza
al estator por t/32 de una revolución o 1L,25 grados
( 360/32 ). Al comienzo de Ia secuencia la localización de
unpunto del rotor sobre el estator estA en eI polo norte,
ocho revoluciones mas tarde estA localizado entre los
polos, despuAs de mas de ocho revoluciones lalocalización del punto con el estator estA en el polo
sur, ocho revoluciones mas tarde está localizado entre
Ios polos, y después de un total de 32 revoluciones el
+@+@+@+@+@+@+@+@{@+@+@+@+@+@+@+@+@+@+@+@
¡.oI¡l+¡¡o
oEo
I6+,o¡.oo
.f;zoó'9E'3o1g?e>óo-j.
ON!c¡EoYO9o2ogtfl't*Éüo
a;
ÉD(,k
27
punto en el rotor se alinea con eI estator otra vez en eI
polo norte. En un motor de 2 polos, sobre un sitio el
rotor estarl.a alineandose con un polo del estator dos
veces durante cada revolución de deslizamiento. Solamente
una barra del rotor estaria suieta al ¡ráxino fluio de
corriente 2 veces por revolución. El significado de esto
es eI efe.cto que causa una falla de la simetria del rotor
o estator con resPecto a Ia vibración. Un problena
nagnético en el rotor se manifestaria en vibraciones a 2
veces la frecuencia de linea, para el estudio de estos
problemas se hace necesario el entendiniento de todos los
factores que influyen en eI correcto funcionaniento del
motor tales como el anáIisis de pares ParAsitosr anAlisis
de desequilibrio nagnético y anAlisis de prueba de
vibración magnética.
L.L.z. PRINCIPIOS DE LA CONSTRUCCION DE MOTORES DEINDUCCION
Para apreciar las caracteristicasd de los diferentes
motores de induccion disponiblesr es importante
considerar los princiPios generales de su construcción y,
en particular, las distintas nodificaciones en diseño del
rotor con relación a los efectos sobre las
caracteristicas par-velocidad del motor.
EI estator y eI rotor en los nodelos normales de motor
28
de inducción llevan los devanados primario y secundariot
respectivamente .
1. 1.2. 1. CONSTRUCCION DEL ESTATOR
Con pocas excepcionesr Ia carcasa y los escudos son de
hierro colado y el nücleo de chaPas de acero al silicio;
algunos constructores usan aluminio fundido en lugar de
hierro colado en los notores industriales normales de
jaula de ardilla de hasta 10 HP, y colocan una lánina de
acero abrazando eI nücleo del estator en los notores
fraccionarios. En los motores grandesr particularmente
en los de pedestal, la catca,zs- es de piezas soldadas de
acero laminado.
En los motores grandes se usa todavia nicanita con apoyos
de similcuero, pero Ia micanita se está remPlazando por
nilinez o teylene, una fibra de poliéster que proporciona
mejor coeficiente de aprovechamiento.
En los motores de anillos rozantes de nas de 250 HPr con
devanado de barras, Ia cinta de algodón usada para
aislar los conductores recubiertos se impregna de barniz
aislante, asi como todos los conductores recubiertos
algodón. En los motores de alto voltie Ia parte de las
bobinas prefabricadas que va dentro de las ranuras se
envuelve en mica noldeada.
29
Cuando se emplea el aislamiento Clase E para motores
industriales normales, los devanados se hacen con esnalte
sintético, que está remplazando ampliamente aI recubierto
con doble capa de algodón. Es un esmalte exento de
aceite con base de resina de polivinilo y formal que
posee propiedades mecAnicas estraordinarias, quinicamente
inerte y que puede doblarse o retorcerse sin agrietarse.
Sus cualidades eléctricas son muy buenas, puede trabajar
a t2OoC y tiene mejor factor de aprovechamientot
permitiendo mayor cantidad de cobre en Ia ranura, con Io
gue se obtiene una mayor potencia para un t¿maño dado.
Las bobinas preformadas se insertan en las chapas con eI
aislante de la ranura doblado sobre las Lineas
introduciendose cuña o cierres en U para sujetar éstas.
Después se introducen separadores de fase entre el cruce
de las bobinasr s€ hacen las conexiones y se sujetan los
terninales. Cuando es necesario, los extremos del
devanado se encintan Vr en los motores grandesr s€
sujetan a unos anillos aislados que abrazan eI conjunto
para evitar cualquier movimiento del bobinado.
Los paquetes de chapas pueden unirse constituyendo un
nücleo completo y devanarse antes de ser introducidos en
la carcasa. Este nétodo tiene muchas ventajas desde eI
punto de vista de fabricación, puesto que reduce eI peso
manejado durante eI devanado.
30
EI estator, ya bobinado, pasa a través de un horno de
secado controlado a una temperatura que aseÉ¡ure ladesaparición de toda traza de humedad del davanado. El
secado también reduce las tensiones mecánicas del
devanado y ayuda a Ia penetración del barniz aislante;después de este proceso de secado¡ el estator se sumerge
en un barniz aislante por un periódo que depende del
tamaño, para asegurar una penetración completa del barniz
en el devanado. Cuando se usa barniz sintético, elestator se pasa después por un horno de endurecimiento a
una temperatura apropiada, para fijar eI barniz por todo
eI bobinado.
I,L.2,2. CONSTRUCCTON DEL ROTOR
EI rotor
esencia,
de
es
anillos rozantes tiene un devanado guer en
como eI del estator y tiene el misno nümero
de polos. Et devanado rotórico debe estar totalmente
aislado ¡ X és sinilar al estatórico tanto en los que se
refiere aI aislamiento de las ranuras, como a Iainpreganación. En tamaños grandesr s€ emplean barras
aislantes en lugar de conductores cilindriGos. El
devanado se aloja en ranuras junto a la peroferia de laschapas del rotor y se conecta a unoa anillos colectoresmontados sobre eI eje. un juego de escobillas qlue apoyan
31
en Ios anillos pernite conectar eI devanado
resistencia exterior de arranque.
una
EI rotor de iaula de ardilla consiste en un paquete de
chapas encajadas en eI eie de1 motor. Las ranuras del
rotor deben estar inclinadas resPecto a las del estatort
disposición que asegura pérdidas por dispersión nLnimas,
reduce el ruido nagnético y cualquier tendencia aI
engrane, ademAs de meiorar los pares de arranque y de
aceleración. Con execpción de los rotores fundidosr cada
ranura contiene un conductor de gran sección de cobre
estirado o aleacción de cobrer 9u€ se conecta sóIidanente
a un robusto anillo lateral de bronce fosforoso. Durante
muchos años, los fabricantes han dedicadoo gran atención
a la manera de asegurar las barras del rotor a los
anillos estremos de cortocircuito. Los objetivos son
proporcionar uniones de baia resistencia y suficiewnte
resistencia mecAnica que soporten las vibraciones y
choques violentos, asi como conexiones eléctricas
correctas sin propensión alguna a Ia corrosión durante un
Iargo tiempo.
Las barras se abrazan a sueldan a los anillosr pero deben
de estar fuertemente ajustadas a las ranuras. En los
notores de gran diAnetro¡ los anillos extremos de
cortocircuito deben sujetarse al eje para lograr una
construcción rlgida y asegurar que los anillos extremos
32
aceleren a La vez qlue eI nücleo; de 1o contrario, Ias
barras pueden partirse durante eI funcionamiento. Puesto
que no es necesario aislar estos conductoresr la onisión
del aislante de las ranuras ayuda a asegurar la sujeción
de las bararas, permaneciendo ajustadas a las ranuras
durante la vida del motor.
Por üItimo eI rotor conpleto con un ventilador se
equilibra dinAmicamente para eliminar cualquier vibración
que pudierar Do sóIo transmitirse a Ia rnáquina novidat
sino afectar seriamente a la vida de l-os coiinetes. EI
equilibrio se hace nornalmente sin las suieciones del
ejer pero con media chaveta del mismo. Cuando se
requiere un buen equilibrio para accionar mAquinas
rectificadoras, es necesario equilibrar el rotor completo
con sus sujeciones.
1.1.3. PERDIDAS EN LOS MOTORES DE INDUCCION
1. 1.3. 1. Momento de rotación histerético
Las pérdidas en el acero (hierro) del rotor se componen
de las pérdidas por histéresis Phis y las pérdidas Por
corrientes parásitas Ppar; las primeras¡ cotrto es
conocido, varlan proporcionalmente a la frecuencia de
remagnetízaeión del rotor f2=f1sr y las segundas son
proporcionales al cuadrado de esta frecuencia. Sí
designamos los valores de estas pérdidas para la
frecuencia fl,
respectivamente
6n = const
es decir, con
por Phis.o y Ppar.o,
33
rotor innóvil,
entonces siendo
a)
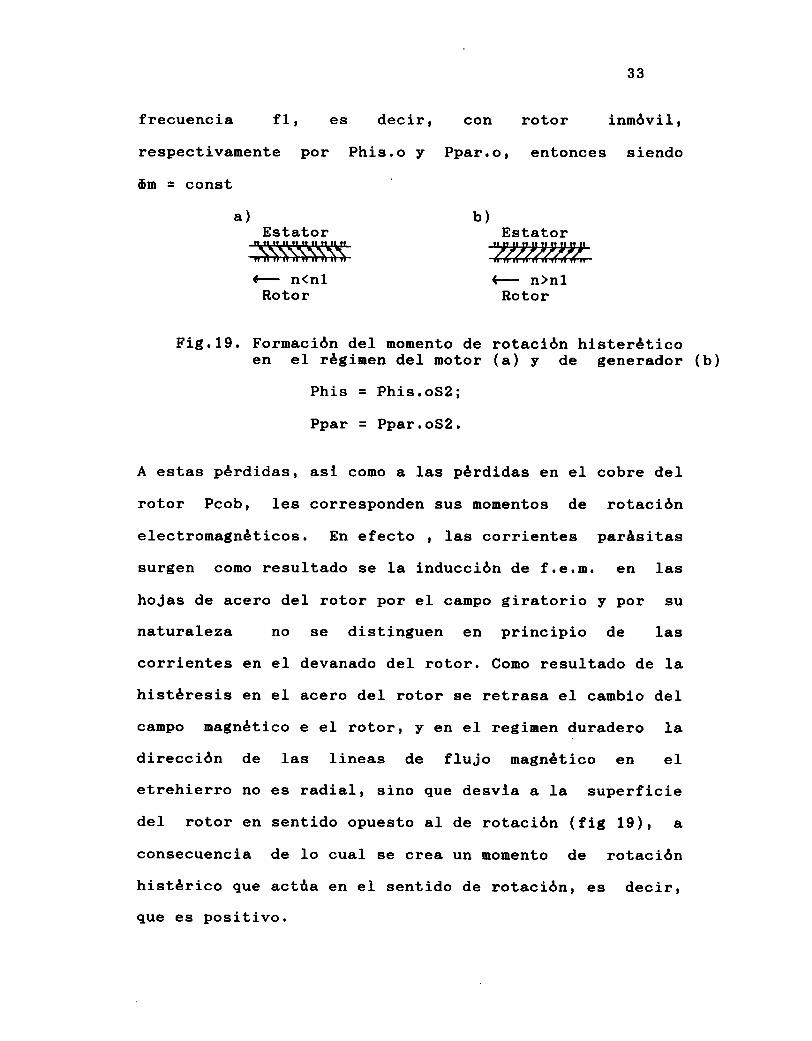
n(n1Rotor
Fig.19. Formación del momento deen el réginen del motor
Phis = Phis.oS2;
Ppar = Ppar.oS2.
n)n1Rotor
rot¿ción histerético(a) y de generador (b)
A estas pérdidas, asL como a las pérdidas en el cobre del
rotor Pcob, les corresponden sus momentos de rotacíón
electromagnéticos. En efecto , Ias corrientes parAsitas
surgen como resultado se la inducción de f .€.tn¡ €lt las
hojas de acero del rotor por el campo giratorio y por su
naturaleza no se distinguen en principio de las
corrientes en el devanado del rotor. Cono resultado de Ia
histéresis en el acero del rotor se retrasa eI canbio del
campo nagnético e eI rotor, y en eI regimen duradero ladirección de Las lineas de flujo magnético en eIetrehierro no es radial, sino que desvLa a la superficiedel rotor en sentido opuesto al de rotación (fig 19), a
consecueneia de Io cual se crea un momento de rotación
histérico que actüa en eI sentido de rotaciónr €s decir,qtue es positivo.
Estator Estator
34
En el réginen de generador el signo del momento
histerético verla por eI contrario.
En correspondencia con Ia formula:
Mem = Pcob2 /snL = Pcob2 /Z¡nLs .
el momento histerético Mhis y eI momento debido a las
corrientes parAsitas Mpar son iguales a:
Mhis = Phis,/snl = Phis,o/nl
Mpar = Ppar/snl = sPpar,o/gL
Asl pues, la nagnitud del momento histeretico Mhis no
depende del resbalamiento. Este momento, siendo 6n =
const¡ €s de nagnitud constante y solo varLa su signo
cuando s = 0. EI nomento de corrientes parásitas varLa
proporcionalmente al deslizamiento.
Anbos motores Mhis y MPar actüan sobre el rotor de la
nisna manera que el momento electromagnetico PrinciPal r y
por esos son momentos ütiles.
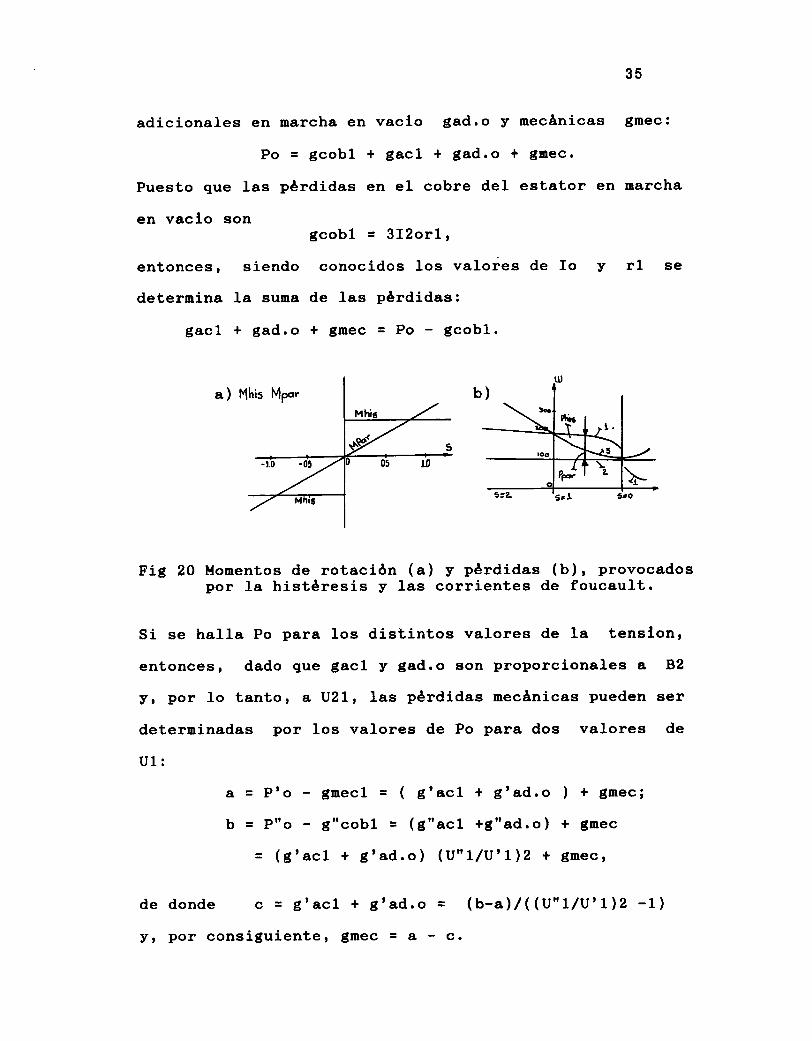
En Ia figura 20 vienen representados los momentos Mhis
y Mpar en función del resbalamiento s. EI momento Mpar
en Ia zona de regLmenes normales es bastante Pequeño. El
momento Mhis en algunas máquinas cuyos rotores se han
fabricado tiene una magnitud mAs notable.
El ensayo de marcha en vacl.o ofrece Ia posibilidad de
determinar la suma de las pérdidas en el cobre del
estator gcobl r én el acero del estator gacl t
adicionales en marcha en vaclo gad.o y mecánicas
Po = gcobl + gacl + gad.o + gmec.
Puesto que las pérdidas en el cobre del estator en
en vacLo son
35
gmec:
gcobl = 3f2or1 t
entonces, siendo conocidos los valores de Io y 11
deternina la suma de las pérdidas:
gacl + gad.o + gmec = Po gcobl.
Fig 20 Monentos de rotación (a) y pérdidas (b) ' provocadospor Ia histéresis y las corrientes de foucault.
Si se halla Po para los distintos valores de Ia tensLon,
entonces, dado que gacl y gad.o son proporcionales a Bz
V ¡ por Io tanto I a lJ2L, las pérdidas mecAnicas pueden ser
determinadas por los valores de Po para dos valores de
Ul:
Pto Bmecl = ( gtacl + gtad.o ) + gmec;
P"o g"cobl = (g"acl +g"ad.o) + gmec
= (g'acl + g'ad.o) (U"1/U'Lrz + gmec,
de donde c = g'acl + g'ad.o = (b-a)/((U'L/V'll2 -1)
yr por consiguienter gmec = a - Q,
marcha
a=
b=
a ) Mhis Mpo'
36
En la fig.20 viene representada Ia curva 1 de potencia
consumida de la redr obtenida deL ensayo de Ia rotación
con la ayuda de un motor accesorio conectado a Ia red de
una ¡ráquina asincrónica de rotor bobinado de 5 KI{ de
potencia. La curva 2 da Ia suma de las pérdidas en eI
cobre del estator y en eI acero de1 mismo. La diferenciaentre .las curvas t v 2 da la suma de las pérdidas por
histAresis y por corrientes parAsitas en eI rotor. La
diferencia entre Ia curva 3 r que muestra el carActer de
variación de las pérdidas por corrientes parAsitas, y Ia
curva 2 da Ia potencia Pparr correspondientes a las
corrientes parAsitas en eI rotorr y la diferencia entre
las curvas 1 y 3, la potencia Phisr correspondiente a1
momento hiterético.
En las máquinas asincrónicas nornales los momentos Mhis y
Mpar no se toman en consideración en los cAlculosr pero
en los üItinos años encuentran mas cada vez nAs
divulgación los asl llanados motores de histéresis de
pequeña potencia (hasta 200 vf). Et rotor del motor es
redondor fio lleva devanado alguno y se fabrica de chapas
de acero con anplio bucle de histéresis. La puesta en
marcha tiene lugar bajo Ia influencia deI momento
histerético y deI momento de corrientes parAsitas. Bajo
la influencia del ¡romento histerético el motor el motor
engancha y luego funciona como notor sincrónico. En elmotor de 200 I{ el rendiniento alcanza 80%.
37
1.1.3.2. Momentos parAsitos del motor asincrónico
AdemAs del momento principal, creado por las primeras
armónicas del fluio y Ia corriente, en e1 motor
asincrónico surge una serie de momentos adicionales o
par¿sitos, gue en deterninadas condiciones pueden alterar
el funcionaniento del motor e incluso hacerlo inposible'
Se distinguen los siguientes tipos de monentos parAsitos:
1 ) Momentos asincrónicos creados por las armónicas
superiores de f.m., incluyendo las armónicas en los
dientes.
2) Momentos sincrónicos que surgen a una deterninada
velocidad y con una relación determinada entre los
nümeros de las ranuras en el estator y en eI rotor 21 y
22.
3 ) Momentos de vibración condicionados tanbién por la
relación desfavorable de los nümeros de ranuras 21 y 22,
Adenás, ejercen cierta influencia en eI funcionamiento
de} notor asincrónico las arónicas superiores de tensión
(te¡rporales)r pero esta influencia puede despreciarset
puesto que habitualmente es muy pequeña.
1. 1.3.3. Momentos parAsitos asincrónicos
AI hablar sobre eI funcionamiento del motor asincrónico,
mostramos que las primeras armónicas de f.m. del estator
38
y eI rotor giran en el espacio siempre en una misma
dirección y con igual velocidad nl, ademAs la velocidad
de Ia onda fundanental de f.n. del rotor se compone de su
velocidad de rotación respecto del rotor nl n y Ia
velocidad de rotación del rotor n.
Extendamos esta noción sobre Ia interdependencia entre Ia
f.¡r. del rotor y el estator para las armónicas de f.rl. de
cualquier orden. Si Ia prirnera armónica de f.m. del
estator gira con Ia velocidad nl, entonces Ia armónica
de f.nt. del estator del v-esino orden gira con la
velocidad n1v = + nL/v. Aqul el signo "más" se refiere a
la f.n. que gira en Ia nisma direción que la primera
armónica de f .ttl . ¡ y eI signo ttmenos", a Ia f .m. que gira
en sentido contrario. con el fin de sinplificar¡ I las
primeras f.m las llanaremos directasry a las segundas
contrarias.
Et resbalamiento correspondiente a la arnónica dada es:
+ nlvsv= =l+ = lt (1 s)v.
lnlv nL/v
Aqul s es el resbalamiento del rotor respecto de Ia
onda fundamental de f.n. ¡ o bienr abreviadamentet
deslizamiento fundamental.
n1 (n1 n)
nL/v
39
La frecuencia de la corriente inducida en eI rotor por
flujo de la v-sina armónica de f.rl. del estator
deternina por la formula
nlntZ = gr.Z = g(n1 n) = n18 = flst
nl
f?v = flsv = f1[1 + (1 s)v].
Dado que n1v = +nl/v, entonces Ia v-sirna arnónica de f.m.
del rotor gira respecto del rotor con la velocidad
n2v
Por consiguientet
arrnónica del rotor
=+(nl/v)-n.
+n=f(n[/v)-n+n=LnL/v
el
se
la
en
velocidad de rotación de Ia v-sima
el espacio es
n2v
es decirr €s
sima armónica
igual a la velocidad de rotación de
de f.n. del estator.
la v-
Sobre la base de esto podemos calcular
asincrónicos creados por las arnónicas
f .|tl . ¡ sustituyendo en ellas las
Ios nomentos
superiores de
magnitudes
correspondientes a la armónica dada.
acción de los momentos asincrónicos parAsitos depende
Ia dirección de rotación de la armónica de f.n.
Examinemos aI principio el efecto de la armónica directo
de f .n. de v-sima orden.
La
de
.%Unirsrsidod ^urunomo de (}ccidcntc
Sabemos que la velocidad sincrónica de
armónica es nlv=nl/v. Esto corresponde
40
rotación de esta
aI resbalamiento
En los llnites de variación de resbalamiento desde s=1
hasta s=l-L/v eL rotor gira con menor velocidad que laarmónica y en los llmites desde s=1-1,/v hasta s=0, con
mayor velocidad. En eI priner caso la v-esina armónica
de f .rD. ¡ de generador, yr por lo tanto, de frenado.
Et momento del motor de Ia armónica se adiciona alnomento principal, mientras que eI nomento de generador
se extrae de é1. En Ia figura 2I Ia curva 1
representa el- momento principal, y la curva 2 eI momento
de la armónica de séptino orden.
Exaninemos ahora eI efecto de las armónicas contrarias de
f.n. puesto que al funcionar como motor el rotor gira en
sentido contrario al sentido de rotación de estas
armónicas, con respecto de esta ültinas eI motor
asincrónica representa un freno electromagnético. Por
esta razón, para todos los resbalamientos en los llnitesdesde s=l hasta s=0 las armónicas contrarias de f.D.crean monentos de frenado, como Io muestra Ia curva 3 del
momento creado por Ia armónica contraria del quinto
4L
orden. Pero si giramos el motor en sentido contrario aI
sentido de rotación de la f.m. fundamental, es decirr €D
un nismo sentido que l¿ armónica contraria, entonces,
para eI resbalamiento s=1*1/vr correspondiente a larotación sincrónica del rotor en eI flujo de esta
arnónicar su monento pasarA por eI cero yr luego, para
Ios valores de s> L+L/v, adquirirA valores positivos.
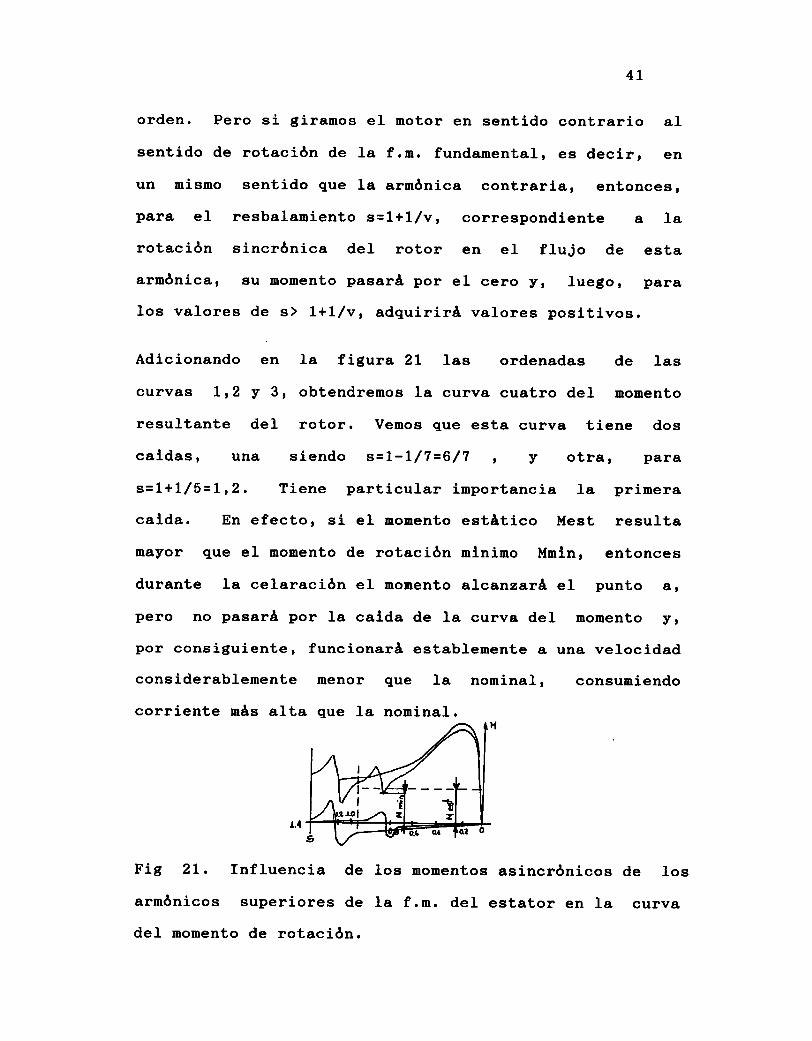
Adicionando en la figura 2l las ordenadas de las
curvas LrZ y 3, obtendremos la curva cuatro del momento
resultante de1 rotor. Vemos que esta curva tiene dos
caldas, una siendo s=1-t/7=6/? r V otra, para
s=1+L/5=L12. Tiene particular importancia la primera
calda. En efecto, si el momento estAtico Mest resultamayor que eI momento de rotación nlnino Mnln, entonces
durante la celaración eI nomento alcanzarA el punto &¡
pero no pasarA por Ia calda de Ia curva deL momento y¡
por consiguiente, funcionarA establenente a una velocidad
considerablemente menor que Ia nominal, consumiendo
corriente nAs alta que la nominal.
Fig 2L. fnfluencia de
armónicos superiores de
del momento de rotación.
Ios monentos
Ia f .n. del
asincrónicos de los
estator en Ia curva
42
I . I .3.4. Armónicas en los dientes
Entre las armónicas del estatorr gü€ crea momentos
asincrónicos, hay que destacar las armónicas en 1os
dientes¡ éS decir, las armónicas que en el caso general
tienen un orden vdl=kzL/g + L, Aqul k es cualquier
nümero entero porsitivo. La armónica en el diente'
siendo k=1r se considera como primera, Ias demasr cottro
superiores. Las armónicas en los dientes de orden
superiores se pueden despreciar.
La inportancia primordial que tienen las armónicas en los
dientes respecto a Ia creación de momentos asincrónicos
parásitos está condicionada principalnente por el hecho
de que para las armónicas en los dientes el coeficiente
de distribución del devanado es igual al coeficiente de
distribución de la priurera arnónica, mientras gue Para
Ias armonicas de f.m de otros órdenes dicho coeficiente
es mucho menor. Mientras tantor como muestra un análisis
mas detallado, Ia magnitud del momento asincrónico
parAsito depende fundamentalmente de Ia relación
(Kdevv/Kdevl )2 ' de donde Kdevl y Kdevv son los
coeficientes del devanado para Ia primera y v-sirnas
armónicas. Asl pues, para las armónicas superiores Ia
relación indicada mas arriba es mayor gue para otras
arnónicas, por 1o que se explica la inportancia
prinordial precisamente de las armónicas en los dientes.
43
Et efecto de las armónicas de los dientes de1 estator y
los nomentos creados por e1las pueden ser linitados en
sumo grado eligiendo adecuadamente el nümero de ranuras
del rotor 22, Un anAlisis esPecial nuestra que Para ello
hace falta que
zLzZ < L,25(------ + 1)g < L'25( ZL + p)
p
1. 1.3.5. Momento sincrónicos
En eI caso generalr por monento sincrónico se comprende
eI momento gue surge a determinada velocidad de rotación
del rotor, como resultado de la interación de las
armónicas de un mismo orden del rotor y del estator¡ €s
decir, cuando vt=v2¡ estas armónicas E¡iran
sincrónicamente. En particular, tiene importancia
prinordial los momentos sincrónicos que surgen en
presencia de armónicas en los dientes del rotor y eI
estator de igual ordenr €s decir, cuando vd1=vd2.
Considerando que kd=l ¡ tenemos
(zLlpl + | = (22/p) + 1.
Por consiguienter los momentos sincrónicos tienen lugar
cuando
ZL=ZZi Zl-22=!2p.
Estas relaciones entre los nümeros de ranuras del estator
y el rotor deben ser evitadas. AdenAs, el caso cuando
44
ZL=22 prácticamente no se usa, puesto que desde hace ya
mucho tienpo se conoce la adherencia que surge en este
caso siendo el rotor inmóvil.
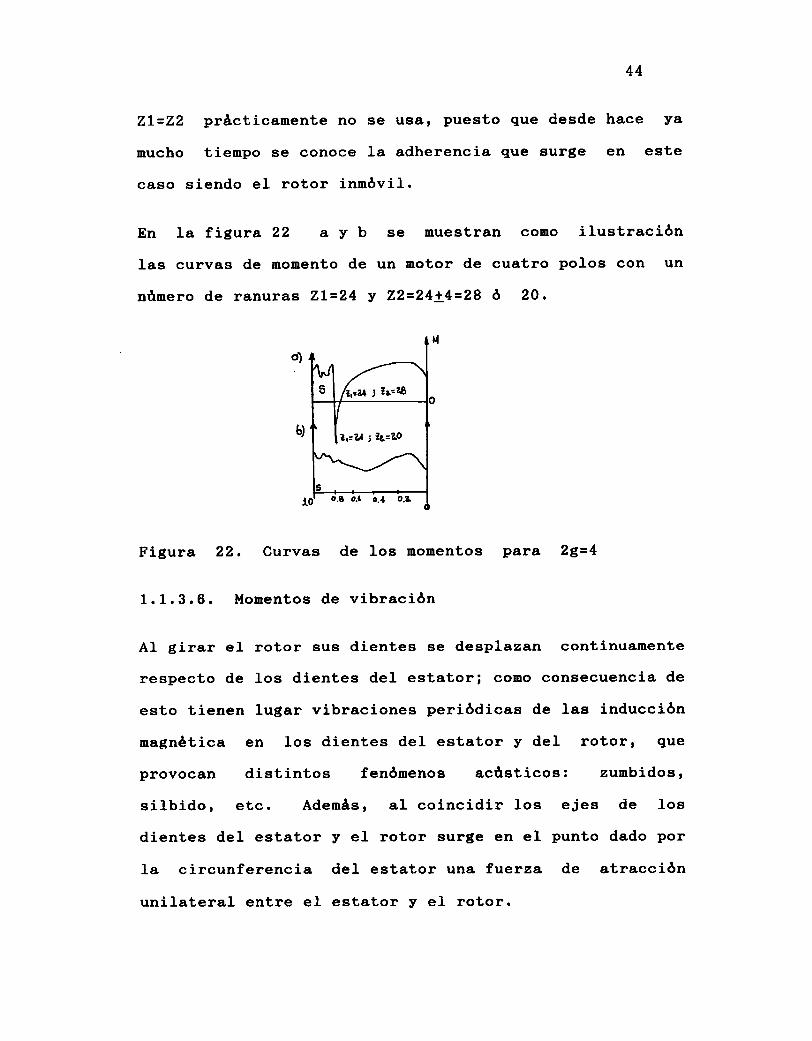
En Ia figura 22 a y b se muestran como ilustración
Ias curvas de momento de un notor de cuatro polos con un
nümero de ranuras Zl=24 y 22=24+4=28 ó 20,
Figura 22. Curvas de los momentos Para 2g=4
1. 1.3.6. Momentos de vibración
AI girar eI rotor suct dientes se desPlazann continuamente
respecto de los dientes de1 estator; como consecuencia de
esto tienen lugar vibraciones periódicas de las inducción
nagnética en los dientes del estator y del rotor¡ 9ü€
provocan distintos fenómenos acüsticos: zunbidost
silbido, etc. AdemAs, al coincidir los ejes de los
dientes del estator y eI rotor surÉe en el punto dado por
Ia circunferencia del estator una fuerza de atracción
unilateral entre el estator y eI rotor.
}e?A i l¿=LO
45
AI girar el rotor esta fuerza se desplaza en eI
entrehierro con determinada veloeidad, provocando Ia
vibración del rotor. A determinada velocidad de rotación
del rotor estas vibraciones pueden comenzat a resonar con
oscilaciones propias, (mecánicas) del rotor. Si este
fenómeno adquiere un desarrollo considerabler puede
hacere el funcionamiento del motor imposible. El
anAlisis muestra que los monentos de vibración surgen con
Ia condición de que
Zl-22=+LlZp.
Por algunas investigaciones se ha establecido que tampoco
son deseables las relaciones entre los nümeros de
ranur&s, para las cuales
0.5(ZL-22) = +1 +2p ó bien
Zl 22 = *2 *4p.
Cono Zl=2plmLqtt entoncesr para ql=nümero entero Ia
nagnitud de Zt es un nümero par. En este caso Ia
condición ZL-22=+1i2p conduce a Ia deducción de gue los
nüneros inpares de ranuras en eI rotor son indeseables.
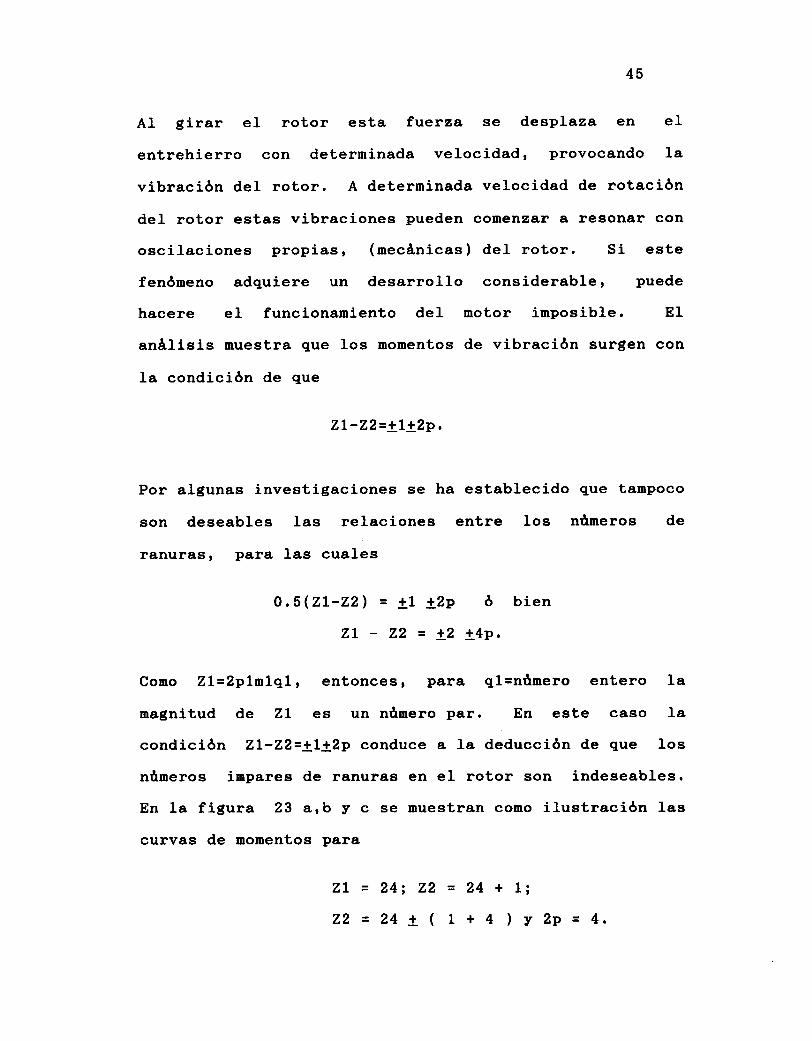
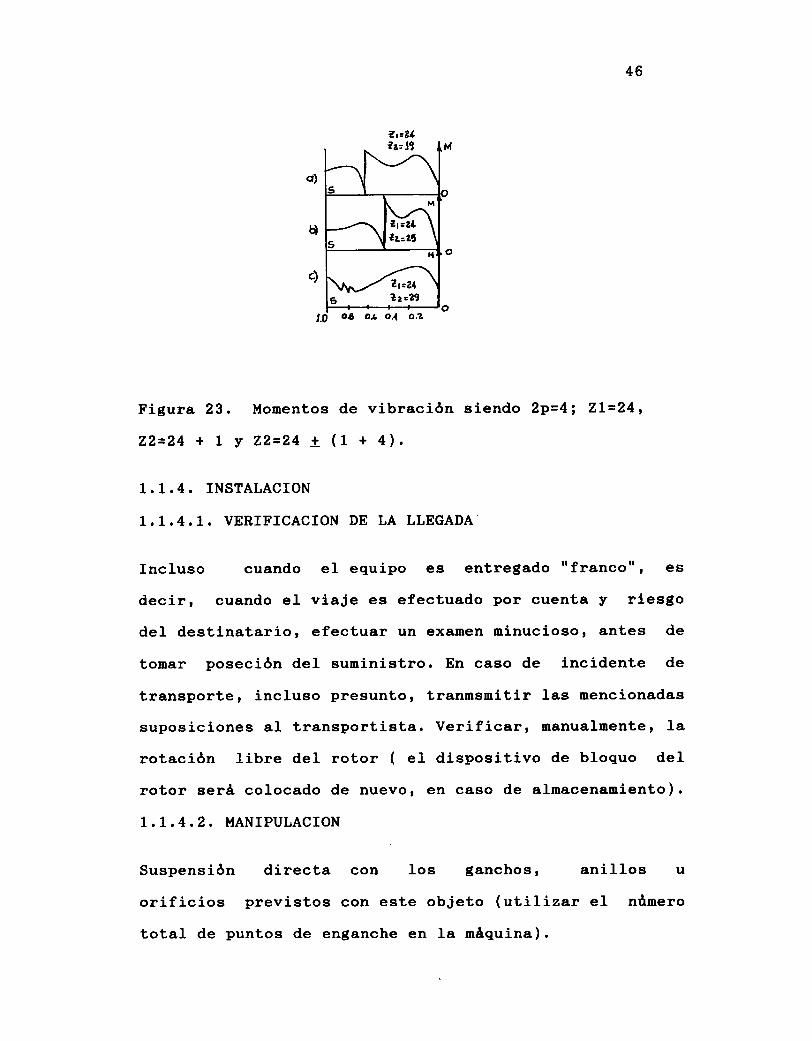
En la figura 23 arb y c se muestran como ilustración las
curvas de momentos para
Zl=24;22=24+1;22=24+(1+4)vZp=4.
46
Zt=71?a' J9
-\5
-
\-{It=2I \2¿.26 \
-^,\-/ zr.e+ \g lz.2l
06 0L o.1 0.2
o)
o
c)
Figura 23. Momentos de vibración siendo 2p=4; ZL=24,
22=24+Ly22=24+(1+4).
1. 1.4. INSTALACION
1.1.4.1. VERIFICACION DE LA LLEGADA
Incluso cuando el equipo es entregado "franco", es
decir, cuando eI viaje es efectuado por cuenta y riesgo
del destinatarior efectuar un examen ninucioso, antes de
tomar poseción del suministro. En caso de incidente de
transporte, incluso presunto, tranmsmitir Ias mencionadas
suposiciones aI transportista. Verificar, manualmente, Ia
rotación libre del rotor ( el dispositivo de bloquo del
rotor será colocado de nuevor €rr caso de almacenamiento).
1,T,4.2. MANIPULACION
Suspensión directa con los ganchosr anillos u
orificios previstos con este objet,o (utilizar eI nümero
total de puntos de enganche en Ia ¡náquina).
47
Angulo nAximo de las eslingas en eI punto de comienzo del
gancho : 60o.
1. 1.4. 3. ALMACENAMIENTO
Antes del almacenamiento, cerciorarse de gue los
orificios (tapa de caja de terminales y entradas de
cables) esten obturados y de que eI estado de protección
antióxido de las partes no pintadas (extremos de ejes y
superficies de colocación de los pies o de la brida) es
correcto. Si fuere preciso, aplicar una capa de producto
de protección antióxido tal cono ref. Gp L253 de Ia cia
francesa de protección quLmica.
Dejar en su lugar eI dispositivo de bloqueo del rotor en
eI caso en que exista. Proteger eI extreno de eie contra
los posibles chogues.
Almacenar
humedad y
1aeI
Ias
motor en un local cubierto del polvot
vibraciones.
En el caso de motores destinados a funcionar aI exterior
a Ia intenperle (protección IPW 55). el almacenamiento
puede llevarse a cabo en el lugar de utilización (puesta
en funciona¡niento de la instalación diferida) r tomando
Ias siguientes precausiones suplementarLas :
sustraer el motor a las vibraciones qlue puedan serle
transmitidas, especialmente en eI caso en que eI motor
esté acoplado o sin dispositivo de bloqueo.
verificar a intervalos regulares ( de 2
eI nedio ¿¡rbiente ) si eI estado de
antióxido de las partes no pintadas es
fuere preciso, restaurarlas.
T,T.4.4. EMPLAZAMIENTO DE INSTATACION
El grado de protección indicado
señaliación es conveniente Para
utilización. Para la instalación
intemperie, utilizar exclusivamente
IPr{ 55
48
a 6 neses segün
Ia protección
correcto yr si
en la placa de
eI enplazamiento de
al exterior a Ia
motores de protección
Antes de instalar el motor, debe cerciorarse de que el
emplazamiento es conveniente. Concretamente verificar si:
En el caso de motores cerrados o protegidos normalesr Ia
atmósfera de} emplazamiento de instalación pueda contener
v¿pores o gases explosivos.
La temperatura ambiente no corre eI riesgo de sobrepasar
Ios 40oC, salvo indicación contraria de la Placa de
señalización. En eI caso de que exista el riesgo de que
la tenperatura ambiente sobrepase eI valor indicado en Ia
placa de señalización, Ia potencia de utilización del
motor debe ser reducida en consecuencia, respecto a Ia
potencia nominal indicada en Ia placa de señalización.
EI local se encuentre suficientemente ventilado.
49
EI espacio libre existente en torno aI motor es
suficiente para pernitir el acceso de los engrasadores y
una eorrecta ventilación: entre eI orificio de
aspiración de Ia tapa del ventilador y el posible
obstáculo, dejar una distancia que sea equivalenter como
nlnimo, a la altura de eje del motor.
EI aire de enfriamientor €rr la entrada de la tapa del
ventilador, no corra el riego de encontrarse a una
temperatura superior a la temperatura ambienter como
conscuencia de una recirculación de aire caliente
procedente de una máquina vecina.
1. 1.4.5. INSTALACION DEL MOTOR
Retirar eI dispositivo de bloqueo del rotorr €rr caso
que exista. Verificar si el rotor gira libremente.
Utilizar un órgano de aeoplamiento (polea o nanguito)
perfectamente equilibrado sin chaveta de extremo de eie).
No utilizar un acoplamiento rigido por motivos de
dificultad de alineación.
Para eI nontaje del órgano de acoplamientor evitargolpear este ültinor ya que los chogues repercuten en los
rodamientos del motor.
Calentar previanente el cubo
dependerA de su apriete en
una temperatura que
eje ( aproxinradamente
a
el
lJnivctsidod rut0n0m0 de 0rcld¿nta
Serr¡in t¡blrotcro
10OoC). se recomienda .Ia utilización de
especial (Molikote).
50
Iubricante
Los manguitos de apriete mediante
montados en frlo.
como pueden ser
Verificar si el rotor É¡ira libremente.
Las superficies en la que se colocarA eI motor deberA ser
plana y horizontal. Si fuere necesario, caLzar las patas
del notor antes de efectuar eI bloque de los Pernos de
anclaje. Atención: un calce incorrecto puede ocasionar
una defornación grave de la máquina.
Se tomarAn las mismas precauciones para un motor
entregado montado en grupo con Ia nAquina accionadar Ya
gue Ia alineación del eonjunto puede ser desaiustada
durante la instalación: rectificar eI calce de la base y
rectificar Ia alineación de las nAquinas en la base
bloqueda.
1. 1.4.6. Resistencia deI aislamiento
Antes de conectar eI motor a la linea se ha de medir
resistencia entre fases y entre éstas y tierra con
"Megger" de 500 V. La resistencia entre los devanados
tierra no debe ser menor qlue
tensión nominal
Ia
un
v
potencia nominal en KVA o HP + 1000
51
Si la resistencia es menor que eI valor dado por la
fórmula anterior deben secar los devanadosr cosa muy
inportante en nAquinas de tensión alta o cuando han
estado aLnacenadas durante cierto tiernpo. En los motores
normales de tensión media se obtiene generalnente una
resistencia de 1 megaohnio.
EI secado se puede realízar de varias formas segün eI
tamaño de Ias nAquinas y los medios. disponibles. La
operación consiste en aumentar Ia tenperatura del
devanado a unos 110 ó l2O oC para. evaporar cualquier
hunedad, teniendo cuidado de no calentar excesivamente el
aislaniento en lugares deterninados o derretir Ia grasa
de los cojinetes. Se pueden colocar calentadores
alrededor o dentro del motor, Ianzar aire caliente o
aplicar una tensión baja a los devanados para qlue se
eleve la temperatura suficientemente. Se debe medir la
resistencia de1 aislante de vez en cuando durante eI
secado y antes de hacer Ia nedición final se ha de dejar
enf rl-ar eI motor totalmente.
1.1.4.'l , Puesta a tierra
Se han de tomar las precauciones necesarias para cunplircon las normas sobre esta cuestión y evitar que no gueden
accidentalnente cargadas otras partes netáIicas que los
conductor€s. Par¿ eIIo, el motor lleva un terminal unido
a Ia carcasa para conectarlo al cable de tierra.
52
Se dispone de cajas de bornes para varios tipos de
cables, pero cuando eI terminal no es capa,z de soportar
Ia corriente de cortocircuito se debe suplementar con un
conductor asicional de tierra. Las impedancias total del
circuito de tierra debe ser Io suficientemente baja cono
para pernitir que pase la corriente necesaria del
dispositivo de disparo o para fundir eI fusible mayor.
Como conductor de tierra no se debe emplear cable
flexible, y siempre se ha de instalar cable de retorno.
1. 1.4.8. Alineación de los ejes
Cuando eI motor se acopla directamente a la carga hay que
tener gran cuidado aI alinear los ejes para no producir
un desgaste excesivo de los cojinetes y que los ejes
queden sometidos a torsión. Esto se suele olvidar cuando
se enplean acoplamientos rlgidos y a menudo se ignora con
acoplamientos elAsticos porque se suele caer en eI error
de creer que estos acoplamientos compensan los errores de
alineación. Los acoplamientos elAsticos no deben
considerarse como un medio de corregir los defectos de
alineación porque la mayoria de ellos se conportan como
acoplamientos rlgidos cuando transmiten par. Se debe
tener eI nismo cuidado aI alinear dos mAquinas con un
acoplar¡ientos eIástico que si Io tuviera rlgido; de Io
contrario, eI acoplamiento puede ser fuente de problemas
y la vida de los cojinetes se reduce apreciablemente.
2. TIPOS DE MANTENIMIENTO
Explica'remos de una forma breve los tipos de
mantenimiento que se emplean ganeralmente en gran parte
de los motores trifAsicos de corriente alternar para su
constante uso y buen funcionamiento de estosr hablaremos
de los tipos de manteniniento como son el preventivot
correctivo y predictivo.
2,L, Manteniniento preventivo.
El mantenimiento preventivo es un conjunto de actividades
qlue ayuda a asegurar la continua y seÉ¡ura oPeración de Ia
maquinaria y del equipo en general, cuando se realiza
regular y en forma satisfactoria.
EI mantenimiento se realiza mediante un programa de
actividades previamente establecido basandose en
revisiones e inspecciones que conllevan en algunas
ocaciones a reaLízar correciones o cambios. Con dichas
actividades se eliminan las situaciones de riesgor como
son averias o paradas que inplican imprevistos y por 1o
tanto altos costos.
Es importante la realización de un estudio de movimientos
64
y/o desgastes de acuerdo a Ia utilizaciün de cada equipo¡
y asl prestar de manera mas organizada el mantenimiento
oportuno que asegure su buen funcionamiento. Esta
organización incluye Ia programación de todas las
actividades de mantenimiento para cada máquina y eI
control de1 cumplimiento estricto de dichas actividades.
EI nantenimiento preventivo tiene como finalidad reducir
Ias interrupciones de producción al igual que se comporta
como un instrumento para Ia reducción de costos de
fabricación.
El mantenimiento preventivo
precisanente a Io siguiente.
debe responder muy
Que hay que hacer para mantener eI equipo en
funcionamiento?
Cuando hay que hacerlo?
Que personal se necesita para realizar Ia labor?
Cuanto tienpo se requiere para llevarlo a cabo?
El manteniniento preventivo es eI que presenta r¡ayores
ventajas y por eI inician la mayoria de fabricas.
2.2. Mantenimiento correctivo.
Es eI conjunto de actividades cuyo proposito es corregir
una falla que se presente en deterninado momento y asL
poner en funcionamiento un equipo en eI menor tiempo
y costo posibles. Para desarrollar este mantenimientor €s
55
necesario cumplir las siguientes etapas:
fdentificar el problema y sus causas.
Estudiar las diferentes alternativas para su reparación.
- Evaluar Ias ventajas y esco¡¡er Ia mejor alternativa.Planear Ia reparación de acuerdo al personal y equipo
disponible.
Supervisar las actividades a desarrollar.Clarificar y archivar Ia información sobre los tiempos,
personal y repuestos empleados en la labor realizada,
al igual que las observaciones al respecto.
Este tipo de mantenimiento tiene sus inconvenientes que
son:
Debido aI desgaste de equiposr s€ podra ver el-
incremento de fallas ocasionado por las pocas o nulas
actividaddes de nantenimiento preventivo, y por
consiguiente se necesitara contratar mas personal para
subsanar dichos imprevistos.
Una pequeña falla que se registraria a tienpo con un
mantenimiento preventivo, podria ocasionar otros daños
a Ia mAquina, aumentando las actividades y tiempo de
reparación.
Debido a que no se posee un inventario de repuestos
requeridosral no encontrarse en almacen dicho repuesto,
se incrementará el tienpo en que la naquina estaraparada.
56
Si Ia falla coincide con un evento inaplazable en
producción se obliga a trabajar en condieiones de
riesgo tanto al personal como a la nAquinaria.
2,3, Mantenimiento predictivo.
Es eI diagnóstico de fallas futuras mediante pruebas,
inspecciones, anAlisis de datos de naquinarLa que
estA en operación nediante equipos de diagnósticos y
pruebas no destructivas que sin interrupción de laproducción perniten detectar anomallas y dignosticar
probabilidades de fallas.Mediante este tipo de mantenimiento se g,arant-iza un
proceso productivo continuo ya que evita que los equipos
se paralicen, y pernite el funcionamiento de equiPos muy
costosos o en los cuales no se permiten fallas
inprevistas. Con este tipo de manteniuriento se podran
reparar las partes de Ia nAquina que sufriran deterioro
antes de su ocurrencia y en tiempos propios para
realizarJ-or no interfiriendo en el proceso productivo.
En el campo mecAnico el anAlisis de vibraciones ayuda
detectar desgaste de rodamientos o condiciones
desalineamiento. se pueden corregir desbalances
equipos rotatorios.
La termografLa como herramienta deI mantenimiento
predictivo empieza a ser usada a gran escal¿.
a
de
en
57
Que es Ia termografia? La termografia es una técnica que
posibilita a la visión humana ver a través del espectro
infrarrojo, las inAgenes térnicas obtenidas a través de
la termografla son llanadas termogratrl&s. Ios termogramas
permiten un anAlisis cuantitativo para deterninaciones
precisas de temperaturas de niveles isotérnicoS.
Por medio de esta técnica objetos estacionarios o en
novimiento pueden ser observados a distancias segurasr loque es de gran importancia cuando altas temperaturast
cargas eléctricas, gases venenosos o humosr estAn
presentes en los sistemas y/o áreas industriales que se
deseen inspeccionar y/o analizar. Mediante el uso de los
equipos para efectuar !.ermograflas se pueden detectar
rApidamente el estado de sistenas industiales eléctricos,
neumAticos, necAnicos, asl como su diseño y
comportamiento en general.
58
mantenimiento e1éctrico2,3,L. Progranas de soportepredictivo.
2.3. 1. 1. fnspección termogrAfica.
2.3.1.1.1 Objetivos.
Detectar mediante inAgenes
calientes que revelen daños
equipos antes de que
considerable que lo
inesperadamente .
termogrAficas
o problemas
ocurra una
saque de
puntos
en los
falla
servicio
2.3.1.L.2. Descripción.
Todo objeto orgAnico o inorgánico radla energla
en el espectro infrarrojo. A través de una
cAmara de termovisión es posible detectar ésta energla
térmica y transformarla en inAgenes de
televisión. Estas inágenes pueden ser grabadas y
anAlizadas posteriormente en un televisor o
procesadas de un computador con ayuda de un
software para el procesamiento de imagen
térmica INFRA/SOFT. Adicionalnenter €s posible obtener
directamente los valores de tenperatura promedio de los
objetos inspeccionados debido a que la cámara dispone de
un ternómetro interno de no contacto. El increnento de
temperatura en un elemento puede dar indicación del
deterioro del aislamiento, defectos en los ajustes o
contactos o sobrecarga en los equipos. Su aplicacióncontinuada permite llevar un control del estado de éstos
59
equipos para Prevenir fallas y evitar paradas
innecesarias o daños considerables en los equipos, los
cuales representan grandes costos y pérdidas en el
Proceso.
2,3.1.1.3. Aplicación.
Tablero de automáticos
Subestaciones eléctricas: Aparatos de
conectores, terminales¡ aisladoresr etc.
Bandejas portacables
Lineas de trannisión.
Contactoresr breakerr cuchiIIss.
2.3.L.L,4. Metodologia.
Seleccionar la ruta a inspecciorrar.
maniobra,
Proveerse de
Se hace
determinando
Una vez
todos los elementos de seguridad a utilízat.
un barrido con la cAmara termogrAfica
puntos calientes.
detectada una posible fallat
por nedio
Ia falla'
verifica Ia tenperatura con el pirónetro
tona corrientes con la pinza voltianPerimetricat
posible.
Se graba éste registro, detallando
det micrófono, caracterlsticas de
ubicación y descripción del equipo.
se
yse
si es
Univcrsiúorl .utonsmo de 0ccldcnt¡
Scrrién lifiisrs¡¡
60
Se toma una fotografla del equipo
ubicada la falla para anexarla al informe.
donde estA
Conpletada Ia ruta, Ia grabación puede ser
repasada en eI computador y analizada por
nedio del software para procesamiento de
imagen tér¡rica¡ o en un monitor de video para
discuciones de grupo.
Se generan
defectuoso.
las órdenes deI trabajo del equipo
Se organizan los informes ordenando los
registros procesados en eI conputador y las
fotografias del equipo reportado. Ta¡rbién es
posible anexar fotograflas de las inAgenes
termogrAficas tomadas directamente en lapantalla del computador.
Se almacenan los datosr para llevar un
registro continuado del equipo inspeccionado,
para analizar tendencias de fallar varíación
de los parAmetros de corriente y tenperatura
del equipo y
cumplimiento de
hacer un seguimiento aI
Ias órdenes de trabajo
generadas y correción adecuada y oportuna de
Ia falla de acuerdo a las espécificaciones
hechas.
61
2.g.1.2, AnáIisis de corriente de motores de inducción.
2.3.t,2.t. Objetivos.
Detectar oportunamente Problenas que puedan
presentarse en los notores asincrónicos de
corriente alterna ( inducción) operando baio
carga, tales como: desbalance de corrientes de
fase, barras rotas o averiadas en eI rotort
rotores desalineadosr etc.
2.3. I.2.2. descripción.
EI programa de anAlisis de corrientes de motores
detectarde inducción MOTORCHECK, permite
barras rotas del rotor, usando Ia tecnologla del
anAlisis
alimentación
espectral de la corriente de
Ias señales eléctricas asociadas
con eI rotor inducen corrientes en los devanados
del estator. Estas corrientes aparecen como
bandas laterales al rededor del pico de la
frecuencia de deslizamiento. Con base en éstos
parAmetros es posible deter¡rinar con exactitud eI nümero
de barras rotas en el rotorr generando el reporte
correspondiente con reconendaciones para su reparación.
Para la detección de Ia corriente es utilizado un
transfornador de corriente de pinza, el cual es conectado
a los analizadores de maquinaria zLtO, utilizados Para
62
análisis de vibraciones y analizados en eI conputador a
través deI programa MASTER TREND.
2.3,L.2,3. Aplicaciones.
Detección de barras rotas en eI rotor.
Defectos en las soldaduras de unión entre las
barras y los anillos de Ia iaula.
AniIIos de la jaula rotos.
Desbalance entre fases.
Rotores desalineados.
2.3.1,2,4. Metodologia.
Seleccionar Ia ruta a seguir. Estas pueden ser las
mismas utilizadas para el registro de vibraciones.
Se carga la ruta en el analizador por medio del
computador.
Proveerse de los elementos de seguridad.
Realizar eI barrido de Ia ruta seleccionada.
Conpletada la ruta, la información es alimentada aI
computador y analizados los espectros de corriente, por
medio de1 software notorcheck, para detectar los
problenas y generar los diagnósticos.
Generar las
defectuoso.
órdenes de trabajo deI
Es posible hacer un anAlisis combinado
registro de vibraciones para tener juntos
parametros de diagnóstico y
acertadamente si un problena de vibraciones
a fallas mecánicas o eléctricas.
63
equipo
con el
estos
determinar
es debido
Se almacenan los
registro continuado
analizar tendencias
de trabaj.o y
diagnóstico una vez
datos para llevar a cabo el
del equipo inspeccionado, para
de fallas, cunplimientos de órdenes
evaluación de la exactitud del
identificada la fa1la.
2.3. 1.3. Pruebas dieléctricas de enbobinados.
2,3.L.3. 1 . Objetivos.
Evaluar la calidad del aislaniento de un embobinado
eléctrico mediante Ia utilización del equipo BAKER, para
detectar deterioro en eI aislamiento antes de que ocurra
una falla y de esta forma prevenir daños que puedan
ocacionar la pérdida total de1 devanado.
Controlar la calidad de los devanados de los motores y/o
generadores enviados a reparación para garantizar que
cumplan con Ias especificaciones técnicas.
64
2,3.1.3.2. Descripción.
EI equipo Baker permite realizar tres tipos de pruebas.
Una prueba de comparación de impulso de alto voltaje :
Dos impulsos de alto voltaje se descargan a través de dos
bobinas y eI refleio de las dos señales se observa en un
monitor de rayos catódicos. si las dos bobinas son
iguales y sin falla, sus señales seran identicas y
estaran superpuestas en e1 monitor. se utilizan
principalmente para probar aislaniento entre vueltast
entre bobinas y entre fases.
prueba de DC de alta tensión: Esta prueba investiga Ia
integrid¿d del aislaniento a tierra. Un voltaje de Prueba
es aplicado aI motor e incrementando uniformemente hasta
el náxi¡ro prescrito para el motor. El incremento de
corriente es nedido y graficado Vs. el increnento de
voltaje. Un incremento desproporcionado en Ia corriente
es una indicación del deterioro deI aislamiento. * Prueba
de alta corriente y baio voltaie para deterninar eI
aisla¡riento entre barras de las armaduras de los motores
de DC.
Las pruebas convencionales Para evaluar el estado de
aislaniento de un devanado nediante la utilización de1
negohnetro y ohmetro de baja resistencia revelan fallas
inninentes o confirman eI ural estado del devanador pero
65
no son un argumento confiable para ger utilizado como
nantenimiento predictivo que permita planear el
mantenimiento para prevenir fallas.
El equipo Baker integra pruebas no destructivas
funcionalmente y no garantiza un mantenimiento predictivo
que pernita reducir los costos por reparación o canbio
del embobinado de un motor de AC ó DC.
2.3.L. 3 .3. AplicacioD€s.
EI equipo Baker esta diseñado Para realizar pruebas de
i¡rpulso y alta tensión en la planta o en eI taller de
reparación antes y desPues de la reparación. Es utilízado
para probar motores de hasta L3,2 Rv y/o hasta 10.000
caballos de fuerza de corriente alterna o corriente
continua.
2.3 , L. 3 .4. Metodologla.
Implementar un programa de inspección periódica a los
embobinados de motores de CA y DC, identificando los
motores más crlticos para Ia producción y asi establecer
las prioridades y periodicidad de las nediciones.
Generación de órdenes de trabajo para mantenimiento
de los motores que se encuentran baios de aislamiento o
presenten algün tipo de fallar P&ra reforzat el
aislaniento si es posible, o programar su reparación.
llevar un registro estadlstico de
Ias reparaciones realizadas Para
del programa.
66
Ias fallas detectadas Y
evaluar la efectividad
Controlar las reparaciones hechas por fuera de Ia plantat
exigiendo protocolos de prueba y verificando las
condiciones de aislamiento en el nomento de la recepción.
2.4. Descripción de un mantenimiento general
Para un mantenimientor s€ recomienda equipar
alimentación de cada motor con un contador horario.
Durante los seis meses consecutivos a Ia primera puesta
en servicio de Ia instalación, controlar el estado de la
Iinea deI eje de las mAquinas midiendo periódicamente eI
nivel de vibraciones (hundir¡iento posible de los
cinientos). Si el nivel de las vibraciones aumenta con el
transcurso del tienpo, parar eI motor y verificar si la
alinentación de las nAquinas es correcta.
Mantenimiento corriente.
Este mantenimiento se Iinita a Ia linpieza exterior del
notor y al engrasedo de los coiinetes.
Limpieza exterior.
Con objeto de conservar las condiciones nornales de
refrigeración es preciso efectuar una linpieza periódica
del armazón y de Ia rejilla de Ia tapa del ventilador.
Ia
67
Cerciorarse de gue eI circuito de aire no estA obstruido
por ningün cuerpo extraño. La periodicidad depende del
grado de contaninación de Ia atnósfera.
Segün el tipo de depósito, Ia limpieza puede ser
realizada con aire comprinido, cepillo o disolvente.
Linpiar las placas de señalización e indicador&s.
Engrase : Motores de tipo > a 160.
Efectuar los engrases periódicos segün los intervalos
indicados en la tabla del documento Engrase o en la placa
de engrase que poseen los motores en Ios otros tipos (en
casilla INTERV, engrase). No obstante, estos intervalos
pueden ser mayores o menoresr seun Ia experiencia del
utilizador, en función de las condiciones de utilización
del motor (tenperatura anbiente, esfuerzos axiales y
radiales debidos a Ia transnisión, potencia absorvida y
calentaniento del motor). Los intervalos indicados son
deterninados por un¿ temperatura de rodamiento de 85oCt
es decirr una temperatura exterior del cojinete de unos
?OoC. Una disminución de 15oC de Ia temperatura de los
rodamientos permite doblar eI intervalo de engrase e
inversanente para un incremento. Ambiente mAximo = 40oC.
En ningün caso el intervalo entre dos engrases debe ser
superior a un año.
EI engrase debe ser efectuado con el motor en marcha.
68
Antes del engrase, Ia boca de bomba y los engrasadores
del notor deben ser limpiados. Los engrasadores son del
tipo Hydraulic.
Introducir Ia cantídad de grasa indicada en la placa
engrase ( Ias bonbas de presión corrientes expulsan de
a 6 cm^3 de grasa cada 10 movimientos de Pistón).
de
5
Se recomienda utilizar Ia grasa
Ia placa de engrase. No obstantet
grasa de calidad equivalente.
origen indicada en
posible utilizar una
de
es
Revisión a las 15.OOO horas (Motores engrasados a vida).
Para los motores equipados de rodamientos engrasados a
vidar s€ recomienda verificar si el estado de los
rodanientos es correcto al cabo de 15.000 horas de
funcionamiento. Para eIIo, retirarlos siguiendo las
indicaciones de} folleto " Desmontaje- Montaje" de estos
tipos de motor. Seguir las indicaciones de este folleto
para la eventual sustitución de los rodamientos.
Revisión cada. 30.000 horas.
Se recomienda proceder a Ia linpieza de los rodanientos
cada 30.000 horas con objeto de eliminar }a grasa seca o
usada que no haya sido evacuada al'exterior.
Para efectuar esta linpieza, desmontar los coiinetest
retirar los rodamientos, limpiar las tapas de
69
rodamientos con white spirit, petróleo, gasolina
benzol.
Se recomienda sustituir sistenAticamente todos los
rodamientos que presenten marcas de fatiÉlar superficies
azuladas o marcas en las pistas de rodadurar grietas o
escamado de las bolas.
Aprovechar el momento del desmontaie para insuflar aire
conprinido seco, excento de aceite, aI polvo aglomerado
en los enbobinados. Si fuere preciso efectuar el
desengrasado de los enbobinados, realizarlo con un trapo
inpregnado o nediante pulverización con pistola de un
producto especial de linpieza para embobinados, tal como
Baltane o Chlorotene aI descubierto. No utilizar
disolventes corrientes. Todo tipo de innersión de los
er¡bobinados, incluso en el producto especial de Iinpieza
para embobinados, es totalmente desaconsejada por nuestra
parte.
Una vez efectuado eI engrasado, secar eI embobinado.
Linpiar tanbien el interior del armazón.
Incluso en el caso en que eI desengrasado de los
enbobinados no haya sido necesario, verificar la
resistencia de aislamiento entre fases y masa.
70
Incidentes de rodamientos.
Los incidentes de rodamiento se manifiestan por Io
general, mediante un ruido anormal. Si desean escuchar
nejor un ruido existente en eI cojinete, lo nAs cerca
posible del rodaniento y con Ia oreja aplicada aI extremo
deI mango.
Ruidos anormales: Presencia de materias ajenas en
rodamiento. Aplicar grasa nueva o en caso
persistencia del ruidor limpiar el cojinete.
Si eI rodamiento se calienta de forma exagerada o
produce unruido anormalr p€s€ a estar correctamente
engrasado o¡ en caso de que ocacione vibraciones
anornales, es que está usado y es necesario cambiarlo.
Incidentes electricos.
Pueden ser
exteriores:
consecutivos la acción de agentes
Silbidos: Lubricación defectuosa.
aportación de grasa nueva.
Motor ahogado, bloqueo accidental de
accionada o tanbién puede existir un
alimentación.
Efectuar una
Ia máquina
defecto de
elde
Tensión de alimentación demasiado reducida o denasiado
elevada.
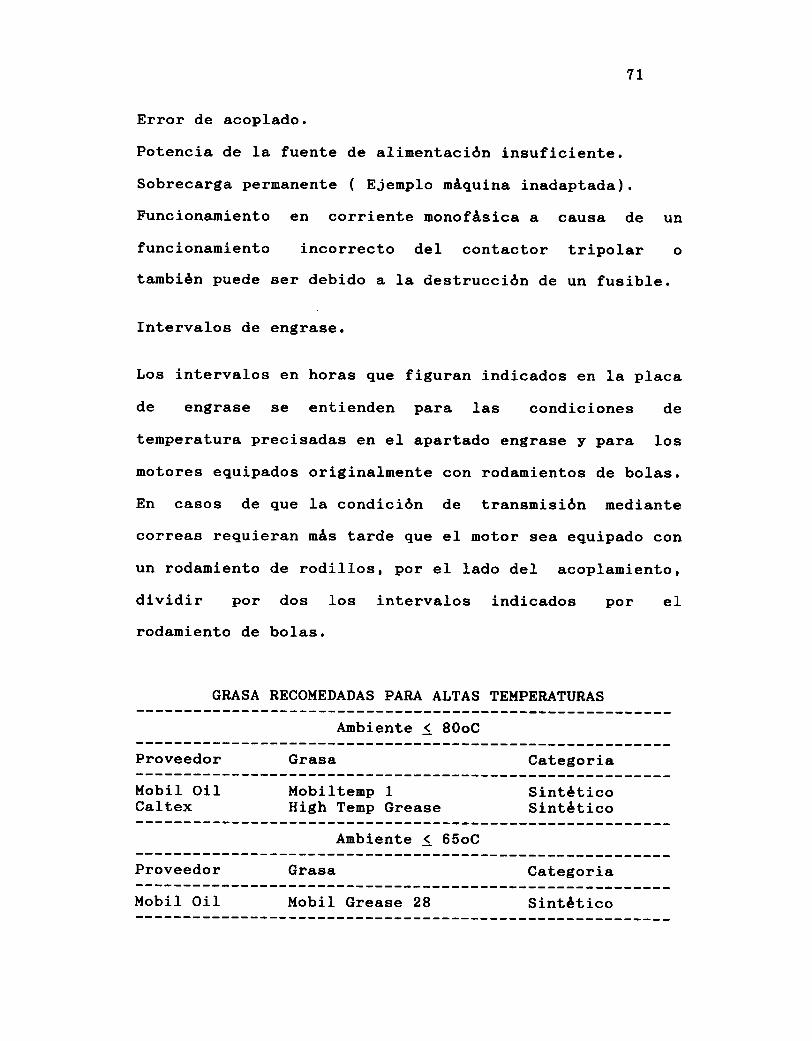
7L
Error de acoplado.
Potencia de la fuente de alinentación insuficiente.Sobrecarga permanente ( Eje¡rplo máquina inadaptada).
Funcionamiento en corriente monofásica a causa de
funcionamiento incorrecto deI contactor tripolarta¡nbién puede ser debido a Ia destrucción de un fusibLe.
Intervalos de engrase.
Los intervalos en horas qlue figuran indicados en Ia placa
de engrase se entienden para las condiciones de
temperatura precisadas en el apartado engrase y para los
motores equipados originalmente con rodamientos de bolas.
En casos de que la condición de transnisión mediante
correas requieran más tarde que eI motor sea equipado con
un rodaniento de rodillos, por eI lado del acoplaniento,
dividir por dos los intervalos indicados por elrodamiento de bolas.
GRASA RECOMEDADAS PARA ALTAS TEMPERATURAS
un
o
Anbiente < 80oC
Proveedor Grasa Categoria
MobiI OilCaItex
Mobiltenp 1High Temp Grease
SintéticoSintético
Anbiente < 65oC
Proveedor Grasa Categoria
Mobil Oil Mobil Grease 28 Sintético
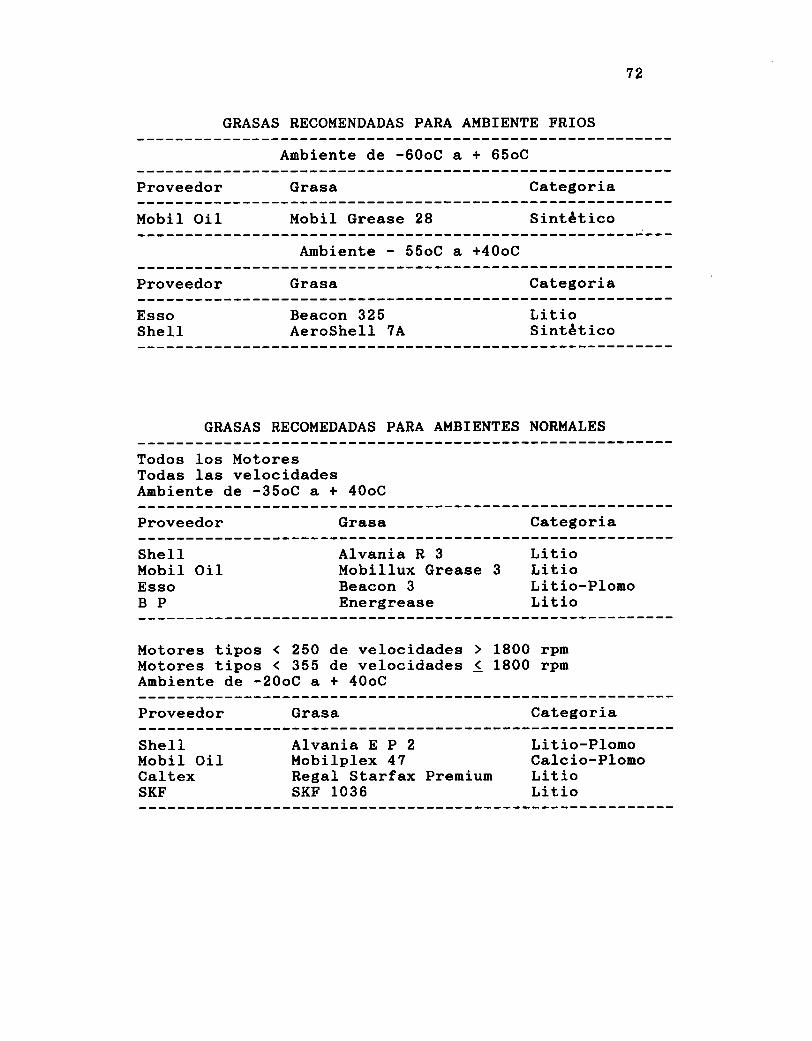
72
GRASAS RECOMENDADAS PARA AMBIENTE FRIOS
Anbiente de -60oC a + 65oC
Proveedor Grasa Categoria
Proveedor Grasa Categoria
EssoSheII
Beacon 325AeroShelt ?A
LitioSintético
GRASAS RECOMEDADAS PARA AMBTENTES NORMALES
Todos los MotoresTodas las velocidadesAmbiente de -35oC a + 40oC
Proveedor Grasa Categoria
SheII AlvaniaRS LitioMobil Oil Mobillux Grease 3 LitioEsso Beacon 3 Litio-PlonoB P Energrease Litio
Motores tipos < 25O de velocidades > 1800 rpmMotores tipos < 355 de velocidades ( 1800 rpmAnbiente de -20oC a + 40oC
Proveedor Grasa Categoria
Shell AlvaniaEPZ Litio-PlonoMobil OiI Mobilplex 47 Calcio-PlomoCaltex Regal Starfax Premium LitioSKF SKF 1036 Litio
3. PROGRAMAS Y TEORIAS DE MANTENIMIENTO PREDICTIVO
EI programa de mantenimiento predictivo consta de una
serie de equipos especializados en Ia ayuda de detección
de fallas¡ siendo necesario de antemano conocer las
teorias de los problemas asociados al funcionamiento de
Ias rnáquinas asincrónicas, l¡ de esta manera entender Ia
operación y aplicación de estos equipos en eI area de
manteniniento.
3.1. PROGRAMA DE ANALISIS DE SIMETRIA MAGNETICA EN MOTORES
DE INDUCCION
Los motores estAn sujetos a iguales tipos de problenas
mecAnicos como aI igual que otras náquinas. El
desbalance, desalineaniento, rodanientos malos y
resonancia todo esto puede ocurrir en los motores. Los
notores solamente tienen campo magnético rotativos en el
estator y eI rotor, estos pueden ser Ia causa de
problemas, afortunadamente hay técnicas que ayudan a
diferenciar los problemas mecánicos y eléctricos.
La obtención tenprana de advertencia de f¿llas en las
74
mAquinas ¡ I través de una regular comparación de|
espectro de vibraciónr caPacita aI Ingeniero en
mantenimiento en Ia realización de un plan avanzado de
prevenir fallas. Estos Puede reducir eI mantenimiento en
Ios equipos y prevenir fallas catastróficas. La
detección del desarrollo de la falla ademas requiere de
un correcto diagnóstico del problema Para desarrollar una
mayor efectiva acción.
La determinación de problemas de vibración en un motor
eléctrico debido a Ia presencia de fallas mecAnicas o
eléctricas es inpresindible en un programa de
mantenimiento.
Et programa an¿lisis de inducción de corrientes en
motores electricos (MotorCheck) de fAcil uso' es efectivo
en eI netodo de pruebas en motores de inducción para
barras rotas, excentricidad estática¡ €xc€ntricidad
dinánica, Iamincaiones en corto, vibraciones en eI rotor
y anillos r etc.
Este usa un anAlisis de Ia frecuencia eléctrica de
suministro en el diagnostico de problenas relacionados
con eI rotor. Motorcheck anaLiza los notores cuando
operan por debajo de la carga normal sin interrunpir el
servicio, y puede aün identificar problemas que no puede
75
ser detectados visualmente.
EI espectro de la corriente eIéctrica refleja Ia
influencia de Ia carga en los motores y Ia respuesta aI
suministro de corriente. Durante cada movimiento del
motor¡ las señales eléctricas asociadas con problenas en
el rotor inducen corrientes en los devanados del estatort
estas corrientes aparacen como bandas laterales alrededor
del pico de la frecuencia de suministro.
Como funciona eI MotorCheck ?
fnicialmente se comienza con el database de Mastertrend.
EI programa de dbase es usado en crear los puntos de
nedición en cada motorr para almacenar datos del espectro
de corriente eléctrica, luego una aplicación tlpicar el
programa de rutas es usado en construir una ruta
consistente con los puntos de medición.
La obtención de datos con el sistema MotorCheck es
simple¡ después de que la ruta ha sido descargada en Ia
mAquina analizadorar los datos del espectro son
colectados desde eI motor usando una pínza
transformadora de corriente, como el nodelo 34L. El
transformador es sujetado alrededor de una de las fases
que suministran eorriente del motor (o en eI circuito
76
secundario de Ia sala de distribución) ' Ios datos
descargados aI computador para una autonAtica detección
en eI diagnóstico de fallas.
MotorCheck automAticamente anaLíza cada espectro y luego
genera un reporte de los problemas encontrados como se
muestra en los resultados de anAlisis de las barras del
rotor, Ios cuales son Iistados Para el espectro
seleccionado, nostrando Ia infor¡nación pertinente aI
anáIisis de cada espectro incluyendo un estimativo de
barras rotas y un aviso de recomendación de un próximo
chequeo.
3. 1. 1. Irregular entrehierro (excentricidad estAtica)
Un motor con un rotor perfectanente centrado en eI
estator, (figura 24) Ias fuerzas que interactuan en eI
estan balanceadas. Note que hay dos areas de alto fluio
magnético. Ambos polos Norte y Sur estan tratando de
jalar el rotor hacia eI estator. Si eI entrehierro o
"air gap" es igual, Ias fuerzas nagnéticas son iguales,
opuestas y balanceadas. La ünica fuerza remanente en el
rotor es el Torque.
En Ia figura 25, un rotor perfectanente redondo pero
descentrado es compensado a través del "air gaPtt. En Ia
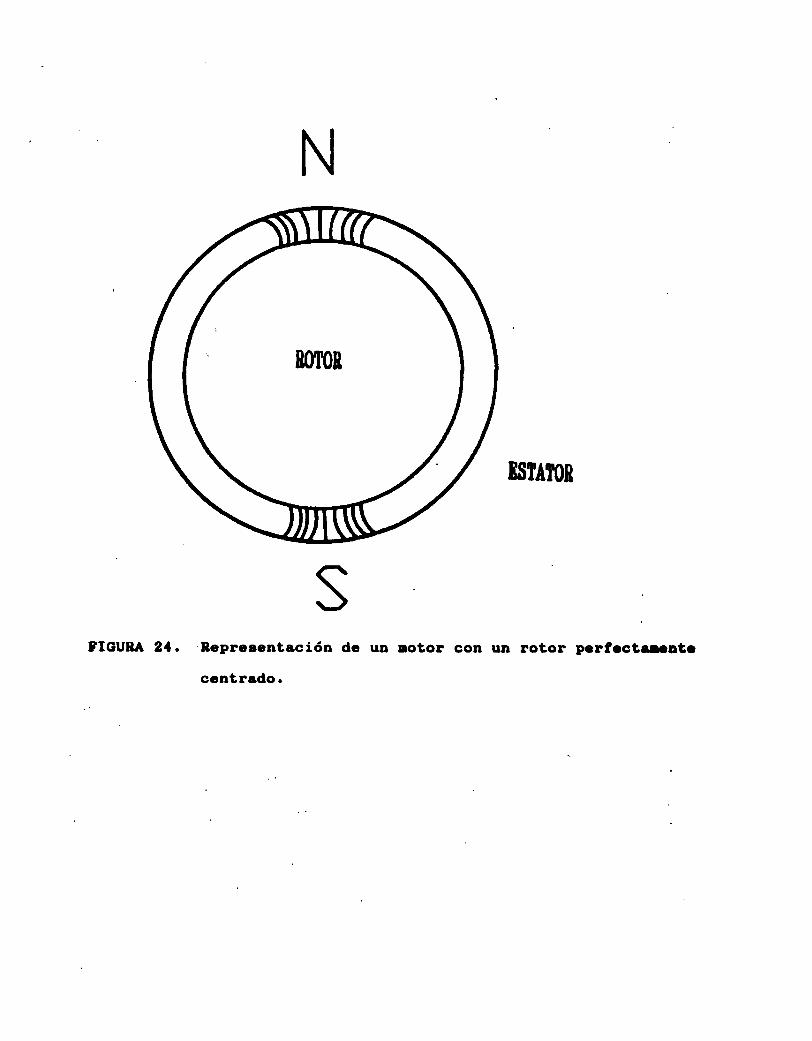
BSTAMI
de un ¡otor con un rotor perfoctuantoDICURA 24. Beprerentación
centrado.
78
figura 25, Ias zonas del alto fluio del campo rnagnético
rotórico estan posicionadas como se muestra. En esta
posición, las "eir gaPs" estan Pareios y las fuerzas
radiales sobre e1 rotor estan balanceadas.
Cuando eI campo nagnético del estator ha rotado 90o
(figura 251 las fuerzas nagnéticas estan desbalanceadas.
Al reducir eI "air gap" sobre eI- lado derecho del rotor
tiende ha jalar el rotor hacia Ia derecha.
Cuando eI campo estatórico del rotor ha rotado 90o
( figura 25), el entrehierro en las areas de densidad de
alto flujo son otra vez iguales y la fuerzas nagnéticas
estan oi-ra vez balanceadas.
Cuando eI campo estatórico ha rotado 90o ademas (figura
25\ las fuerzas magnAticas estan otra vez desbalanceadas.
A1 reducirse el "air gap" sobre eI lado derecho del rotor
tiende ha arrastrarlo otravés.
Observe que el desbalance de las fuerzas nagnéticas del
rotor ocurre dos veces en una revolución del camPo
rotórico. En efecto, Ia frecuencia es a dos veces la
frecuencia de llnea (tzO Hert-z) para todos los notores
sin importar el nümero de po1os.
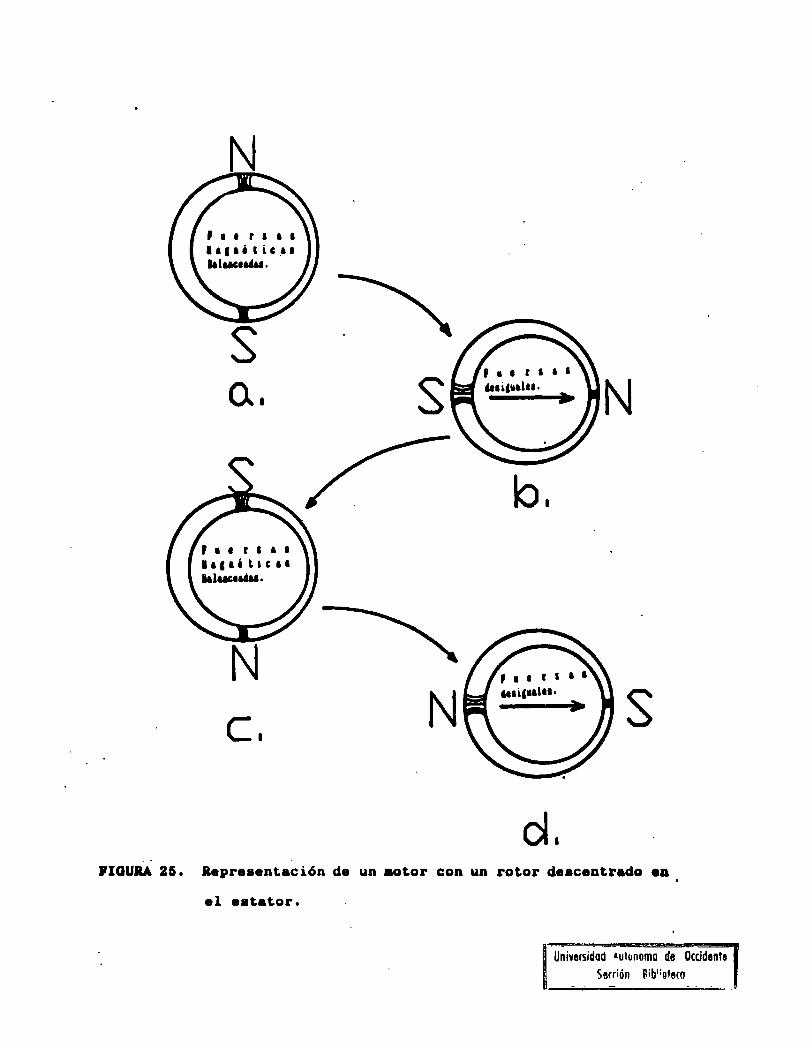
l¡¡ t¡ ¡¡l¡l¡ótic¡¡l¡l¡rr¡l¡¡.
o,
c,
tIOUnA 26. BoDre¡ont¡ción de
ol c¡t¡tor.
b,
d,
lrr r¡ ¡¡ócril¡¡l¡.
-i>
trr r¡ ¡¡lr¡rót¡3rrl¡lr¡¡ró¡¡.
lr¡ r¡ ¡lar¡il|¡1.¡..rrr+)
un ¡otor con un rotor do¡contr¡do ¡¡
80
Un irregular "air gap" es caracterizado por una vibración
a dos veces la frecuencia de linea ( 120 Hert-z) sin
importar eI nümero de polos. Cuando la fuente de poder
es cortada, la vibración a dos veces la frecuencia de
linea desaparece inmediatamente.
Después que el estator es atr¿ido a Ia armadura
estacionaria del motor, se produce una vibración a dos
veces Ia frecuencia de linea indicando Ia presencia de
perdidas en eI estator.
La nagnitud del desbalance de las fuerzas
electromagnéticas sobre el estator o arnadura del motor
son bastante altas. Un eiemplo dado para un motor de
2OOO Hp con un 10% de excentricidad "air gaP" indica una
fuerza dinámica desbalanceada sobre eI rotor de 1500 Lbs.
Esto comparado con un desbalance de fuerzas mecAnicas
solamente de L28 Lbs.
La excentricidad del "air gap" podrla ser mantenido
menos del 5% del espacio nominal radial.
Un notor con problemas de "pie" puede exhibir sintomas
parecidos. Esto ocurre cuando eI notor es inpropiamente
caLzado de los tornillos distorcionando eI estator tanto
que eI t'air gap" no presenta una simetria nagnética.
81
En recientes años, Ias fábricas de motores han tratado de
hacer motores mas eficientes reduciendo eI ancho del "airgap". Esto incrementa la atracción nagnética del rotor y
el estator haciendo que la inducción de corriente en eI
rotor sea mas eficiente.
La sinetria de1 entrehierro (distancia entre eI estator y
eI rotor) es estremadamente importante en un motor de
inducción, debido a 1a influencia de las fuerzas
magnéticas del rotor y eI estator, y de Ia cantidad de
flujo inducido en el rotor.
Si eI rotor se asume que no es mas que un t-tozo de
hierro, entonces las fuerzas nagnéticas entre eI estator
y el rotor se pueden definir como:
F=l¡
Donde F es Ia fuerza magnética, I es Ia corriente del
estatorr g es el "air gap" y K es una constante. Como se
puede ver Ia fuerza es proporcional al cuadrado de la
corriente e inversamente proporcional aI cuadrado del
"air gap".
T2
e2
Esto quiere decir que si eI motor gira a 50 amps
82
sobrecarga a 200 amps, }a corriente se incrementa por un
factor de 4, pero Ia fuerza y Ia vibración nagnética se
incrementa por un factor de 16. Si el "air gaP" se
reduce de 0.100 inches a 0.075 inches sobre un lado del
motor y se incrementa Ia misma cantidad sobre eI otro
Iado, la fuerza nagnética es 75% nas grande sobre un lado
del rotor y 36% menos sobre el otro.
Los motores grandes tienen una abertura para calibrar y
chequear la simetria del "air gap". En notores pequeños
se cuentan con anillos rozantes aptos para asegurar la
simetria de1 "air gap". Es imPortante que la variación
del "air gap" sea menos del 10% del radio total del "air
Éap". Cuando se compre un motor, esto se debe verificar
y comprobar.
3.L,2. Rotor excéntrico.
En eI anterior eienplor ün rotor redondo fue instalado
descentrado en un estator perfectanente redondo. En este
ejemplor el rotor es centrado en el estatorr P€Fo no es
completanente redondo.
En este caso, el notor presenta vibración a IxRPM y
parejamente hasta el instante qlue la fuente de suminsitro
es interrumpida. Sin enbargo eI espectro de vibración de
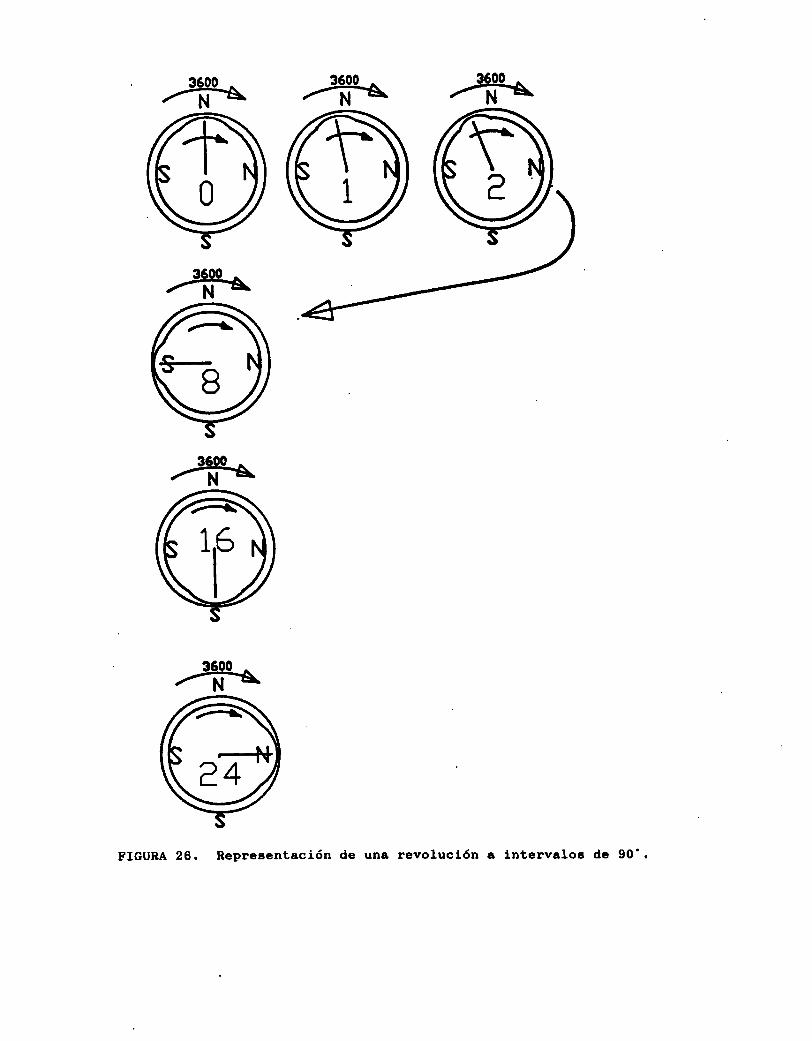
f?
T0
rn.c-ÑB
"ü
FIGURA 26. Represent¿ción de una revolución a intervaloe de 90'.
un motor con rotor excentrico tiene
84
otras
caracterisiticas. La figura 26 nuestra una revolución de
deslizamiento a intervalos de 90o (refierase a Ia figura
18 para mayor claridad).
Recuerde que el desbalance de fuerzas en este ejeurplo
solamente ocurre cuando el area de mayor fluio nagnético
se alinea en el punto mas estrecho de1 "air gaP". En la
figura 26, esto ocurre dos veces en una revolución de
deslizamiento. La vibración a IxRPM es ademas causada o
modulada (sube y cae) a una rata igual a dos veces Ia
frecuencia de deslizaniento. En este caso del motor
mostrado, la modulación ocurre 25O ciclos Por minuto.
Para un motor tipico que gira a 3575 RPM Ia nodulación
ocurre a 50 ciclos por minuto ((3600-35751 x 21, AdenAs,
un rotor excentrico causarLa una vibración o modulación a
una rata igual aI nümero de polos.
La carga del motor determina Ia rata de deslizaniento; un
motor se aproxina a la velocidad de placa cuando estA a
plena cargar y sin carga a Ia velocidad sincrónica.
Durante una prueba sin ca'rfta este podrla tonar algunos
minutos para un ciclo de revolución. Sin enbargor si eI
nivel de vibración de un motor con un rotor redondo es
perfectamente monitoeado, podrla ser vista Ia nodulación
85
a dos veces la frecuencia de linear &un sin carga.
EstAtica y dinAnicamente la excentricidad del "air gap"
puede solamente producir vibración en las barras del
rotor vista en algunas frecuencias (nünero de ciclos de
velocidad de las barras del rotor) y eI ancho de banda
tZO Hz lejos de esta frecuencia.
3.1.3. Presencia de barras rotas en el rotor.
Un motor con problenas de barra rotas en el rotor
presenta sintomas similares a un motor con rotor
excéntrico. Un motor sobrecargado, Ia vibración se
nodularia a. una rata igual al nümero de polos de
deslizamiento. Con una barra rota, la a¡rplitud del Pulso
se incrementa con la carga. Cuando eI motor es operado
sin acoplarse las barras rotas virtualmente no afectan y
este giraria parejamente.
La diferencia esta en que una b¿rra rota no puede llevar
corrienter cuando estA en una area de alto fluior las
fuerzas nagnéticas estan desbalanceadas¡ puesto que el
flujo de corriente qlue at-ravíeza Ia barra del rotor es
proporcional aI deslizamiento, cuando eI fluio de
corriente en eI rotor es baio, la corriente que se deia
de inducir en la barra virtualmente no afecta. Una
86
fisura en una barra del rotor podrla ser Ia causa de una
fuente de calor del rotor, Ia cual causarLa una desigual
exp¿nsión de este y un rotor con problemas. Este serla
el resultado de un desbalance y de una fuerza de 1 ciclogirando a la velocidad de vibración tan bien como la
relación de las bandas laterales (sidebands) con la
frecuencia de deslizamiento. Una alta resitencia de lajuntura entre las barras del rotor y los anillos rozantes
podrla exhibir sintomas parecidos.
Una barra suelta podria exhibir sintonas parecidos
solamente mostraria vibración en las barras del rotor
algunas frecuencias.
La figwra 27 muestra un espectro tlpico de un motor en
buenas condiciones. EI pico ¡rAximo dominante es Ia
f recuencia de suninistro ( 50 o 60 Hz ) . Los picos rnAs
pequeños igualmente espaciados sobre cada lado del pico
máxino de le frecuencia de Iinea son las bandas
laterales, las cuales son usadas para determinar las
condiciones de las barras del rotor. La frecuencia de Ia
b¿nda lateral mas baja es igual a Ia frecuencia de llnea
menos el nünero de ciclos de polos de la frecuencia de
deslizamiento. Un motor en buenas condición muestra
bandas laterales aI menos a 50 db por debajo del nivel de
Ia anplitud de Ia frecuencia de suministro.
v
a
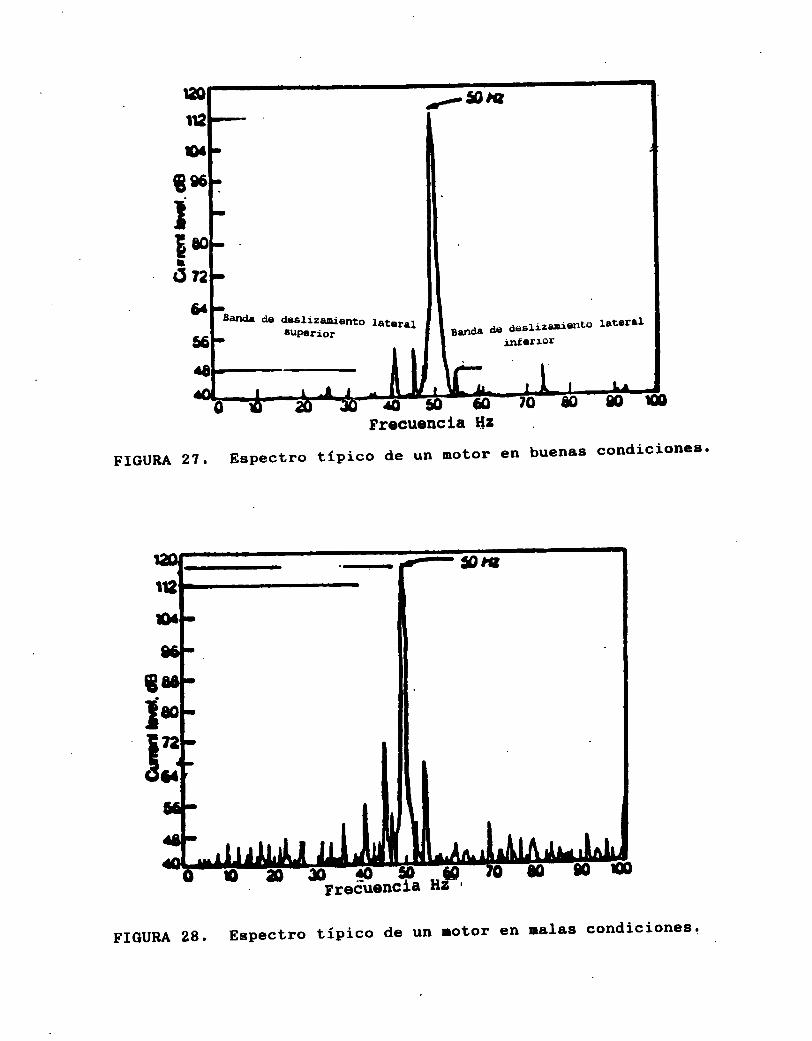
8a¡rda d€ iT¿t""r*""to let€ral
| [ "-u. d3 de¡.Iiza¡iento lateral
FIGURA 2?.
Frecuenc
Frecuencia Hz
Espectro tlPico de un motor en buenas condiciones'
malas condiciones.
tiI
FIGURA 28. Espectro tíPico de un
88
Cuando hay presencia de bandas laterales y alta
resistencia en las junturas¡ las bandas laterales
incrementan su amplitud como se nuestra en la figura 28,
Un estimativo del nümero de barras rotas puede ser
llevado a cabo sobre eI radio de la amplitud de la banda
Iateral nás inferior a Ia frecuencia de llnea.
MotorCheck precisamente localiza eI pico mAximo de la
frecuencia de llnea, determina su anplitud y calcula Ia
J-ocat-ízación de las bandas laterales. EI programa gue
determina Ia anplitud de las bandas lateral mAs inferior,
Ileva a cabo los calculos necesarios para estimar el
nümero de barras rotasr y muestra un apropiado
diagnóstico del problema en forma de mensaje.
3.1.4. Láminas del rotor en corto
Como se muestra previamente en 1¿ figura 29 un rotor de
un motor esta compuesto de barras conectadas por anillosde cortocircuitor V una serie de láminaciones. Las
Iaminaciones estan bañadas con una capa de óxido para
prevenir eI flujo de corrientes de eddy y ademas
incrementar Ia eficiencia. Muchas cosas pueden ocurrirque puedan dañar las lAurinaciones pernitiendo un flujo de
corriente y una fuente de calor.
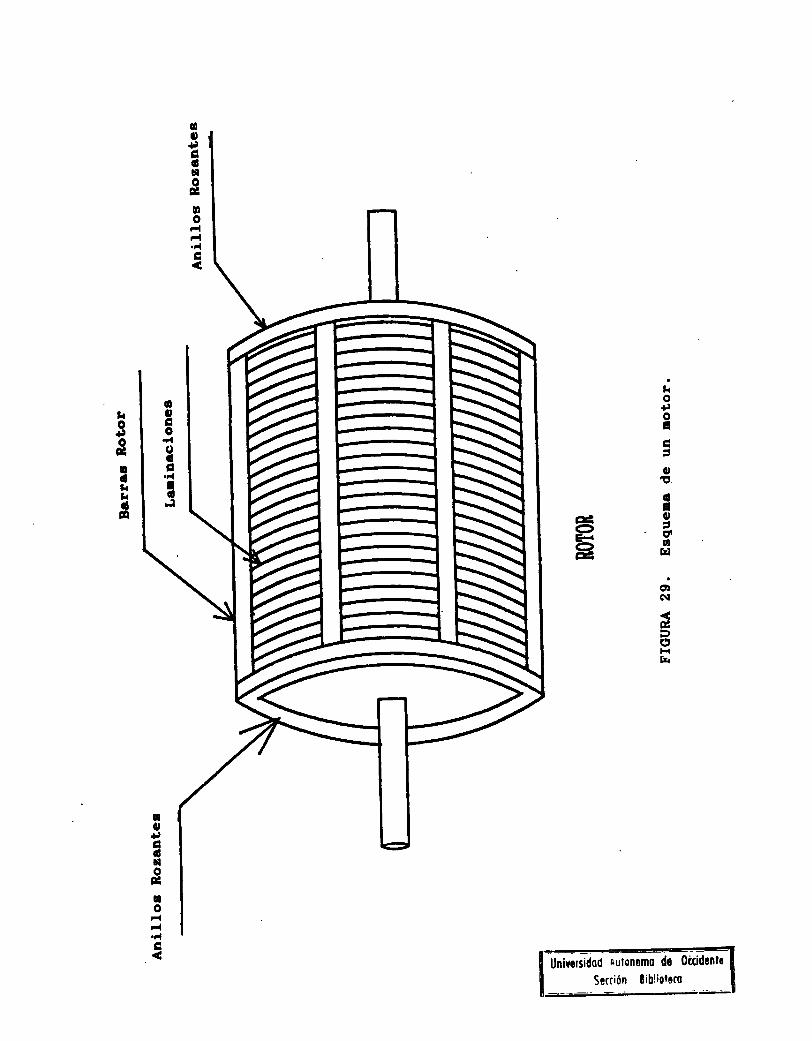
üo€cúNoÉoor.{F1.r{É
ooEo.r{oóÁ.d¡ó-¡
oo+¡cc¡loEEot4F{.r{É
;o+¡oE
E3o!dEo,'dof¡¡
ol6\¡
Ép(,h
úoE
Ao+¡oo¿
¡ó¡.¡.6É
Uniwrsidod ¡ulonomo ds Oicid¡nla
Serrión liUiet6¡s
90
Una fricción entre eI motor y el estator se nota como una
manchar en la superficie, produciendo daño en las
Ianinaciones, como tarnbién Ia manipulación inpropia del
rotor puede dañarlas. EI manejo de un instrumento
inapropiado tanbién puede ser Ia causa del manchado y
cortado de las laminaciotl€s.
EI resultado de una laminaciones cortadas o fracturadas
es una desigual expansión de calor en eI rotor. Esto
puede ser la cuasa de una inclinación del rotor y la
salida de desbalance. En la experiencia los niveles de
vibración usualmente se incrementan después de haberse
encendido y estabilizado. Usualmete eI motor Puede ser
balanceado sucesivamente después gue se ha calentado.
Cuando se hace balance un motor sobre cargador €s
importante dejar que los niveles de vibración y
temperatura se estabilizen durante cada balanceo de
funcionamiento.
La literatura dice que las lanineciones cortadas causan
un desigual calentamiento y un desbalance resultante aün
cuando el notor esta girando desacopladamente.
La cura para las laninaciones cortadas es removerlas del
rotor con mucho cuidado preservando la potencia mecAnica
del rotor.
91
Las laminaciones del rotor son usualmente contraidas
sobre la longitud máxima del eie y tensionadas. Si hay
alguna clase de irregularidad del encogimiento acertado o
si Ia tensión propia de ellas es incorrecta, eI rotor
podrla expandirse irregularmente cuando se caliente.
Esto causarLa un inclinación del rotor y un desbalance
resultante.
3.1.5. Análisis de vibración
Hay pruebas que son comunmente echas Para diferenciar
entre los problemas mecánicos y nagnéticos de1 motor.
Las pruebas podrlan ser echas sin cargar media carga y
a plena carga. Los niveles de vibración podrlan ser
monitoreados como eI c¿Ientamiento del motor a través del
analizador CSI "2110" (Collector de datos de vibración )
y con una cámara de termografia (Videothern). Los
niveles de vibración pueden ser observados aün cuando Ia
fuente de suministro sea interrumpida.
Algunos de los problemas mencionados son eI resultado de
una oscilación periódica o golpeteo en vibración. Como
se explicó, el golpeteo es causado por la iteración de
dos frecuencias muy cercanas (eg. L2O Hz y ZxRPMr Para un
motor de dos polos), o por una modul-ación de Ia anplitud
de vibración a IxRPM (para una excentricidad del "air
gap" o rotor). Si
92
Ia fuente de suministro es
interrumpida, cuando la vibración esta en eI punto
uráximo, toda Ia vibración inducida eléctricamente
desaparecerLa inmediatamente, y Ia vibración causada por
las componentes mecánicas Permanecen.
Un problema que se presenta con esta técnica es que eI
instrumento de vibración no es lo suficientemente rápido
en precisar el rastro de vibración si eI motor es parado
sobrecargado. Si el motor esta operando cerca aI nivel
de resonancia se pueden obtener datos €rrotl€os.
Un analizador de espectro con caPacidad de "zoom" es
quizas eI instrumento mas usado en eI diagnóstico de
problemas de motores. Este tipo de analizador tiene Ia
facultad de exanin¿r un espectro de vibración en gran
detalle y diferenciar entre las frecuencias gue son muy
cercanas. Las areas del espectro que son de interés son
multiples y estan centradas alrededor de Ia velocidad de
funcionamiento a dos veces la frecuencia de linea y las
frecuencias que pasan por las barras del rotor.
El CSI ?ILO y los colectores similares de vibración
tienen la habilidad de recoger en alta resolución (3200-
6400 lineas ) el espectro de vibración sobre eI espacio
linite de frecuencia. Esto dado con una adecuada
93
resolución ayuda a seParar las conponentes eléctricas
mecánicas en los motores operando a plena car6Sa.
Las Tablas 1 y 2 son diagranas de diagnóstico Para el
de datos de vibración.
3.1.6. Pruebas en motores de inducción
Como ya se ha mencionado las fuerzas nagnéticas en un
notor son proporcionales aI cuadrado de Ia corriente del
motorr por consiguiente es muy dificil detectar un
problema eléctrico en un motor que esta operando sin
c.ar^ge. y que ha reducido su voltaje, para tal fin existen
unas pruebas que ayudan en Ia detección de fallas y que
se describen a continuación.
3. 1.6. 1. Pruebas estacionarias.
Los talleres de motores rutinariamente llevan a cabo
pruebas para determinar la condición de los devanados.
Esto incluye chequeo por cortocircuito, chegueo de
anáIisis de resistencia del aislamiento. En sumar Ia
inspección de un motor reparado podrla incluir la
medicion del rotor sacandolo del estator para nedir Ia
unifornidad del "air E¡4p", Ios chequeos podrian ser
solamente hechos para la detección de barras rotas. Los
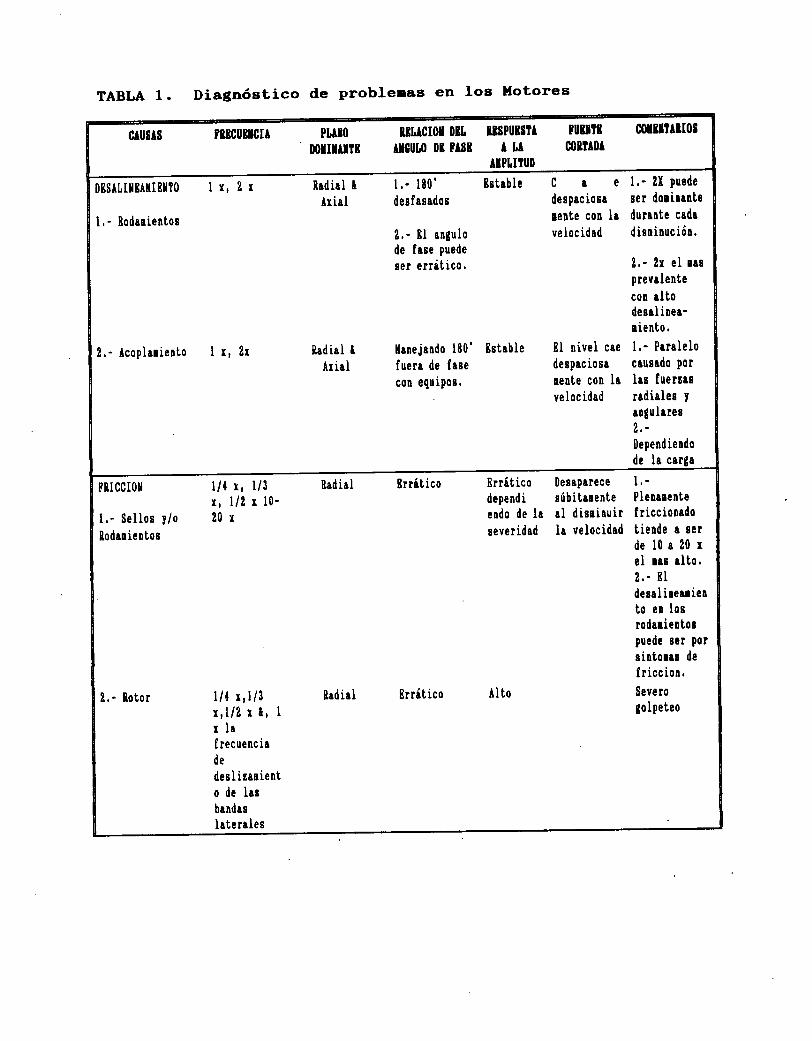
TABLA 1. Diagnóstico de problelas en los Motores
caü$ts nBcüBrctt
I r, 2 r
PilT()DOTTIUIB
R¡di¡l IAri¡l
u¡,tctol DB¡,
AIOÜI,O DB FISB
ItsPulsltt ¡,4
rüPüTIÜD
tütttBC(lTTTDA
colBnilt08
DBSALtXBAlltEllT0
l, - lod¿¡iento¡
l.- 180'
de¡f¿s¡dos
2.- tsl engulo
de frre puede
ser e¡rático.
Bst¡ble C¿edesprc iortrente con l¡ve Ioc id¿d
l.- 2I puede
ger dorin¡ntedur¡nte c¡d¡d isn i¡uc ión.
l.- 2r el r¡sprevrlente
con ¡ltodes¡l i¡e¡-¡iento.l.- P¿r¡IeIocrusrdo por
I¡¡ fuer¿¡¡rrdirlea ¡roguluer't,-Depend iendo
de Ir cmge
2,- Acopluienlo I r, 2r R¿di¿l IAr i¡l
llanejrndo 180'
fuer¿ de fa¡econ equipor.
8st¿bIe 8l nivel c¡e
derpac iosr¡eube con I¡ve loc id¡d
FBICCIOII
l.- Sellos t/olod¡¡iento¡
l/{ r, l/3r, l/2 r l0'l0r
fladial Brrót ico Erróticodepe nd iendo de l¡sever idad
[}esrptrecesúbit¡¡ente¡l dis¡inuirle velocid¡d
t,-PIenr¡entef r icc ion¡do
tiende ¡ serdel0¡20¡el r¡s ¡lto.2.. BI
de¡¡l ine¡¡iento en lo¡rod¿riento¡puede rer por
sirto¡¡s de
friccion.Severo
go Ipeteo2.- Botor l/{ r, l/3 l¡di¡l
r,l/2 ¡ &' Irl¡f recuenc i¡de
des i iz¡¡iento de lasbrnd¡sleter¡Ies
tsrrót ico Alto
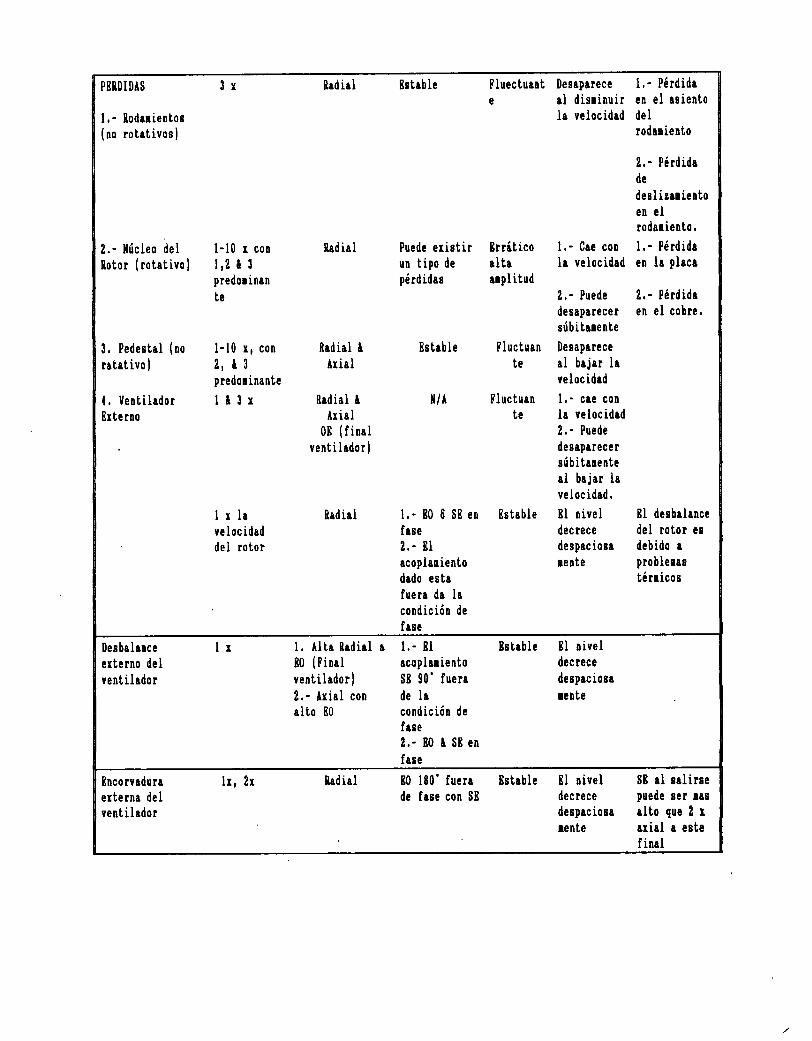
PBRDI DAS
l.- lodarientos( no rot¡bivos I
3r [¿d i¡l EstrbIe Fluectu¿nte
Deseparece
¿l dis¡inuiri¿ velocid¿d
l,- Pérdidren el ¡¡ientodelroduiento
2.- Pérdid¿
de
desl i¿¿rientoen eIrod¡riento.
l.- Pérdid¡en h plrcr
2.- Pérdid¡en el cobre.
2.- llúcleo del[otor (rotetivol
l-10 r con
I 12 ¡ 3
predor inrnte
l-10 rr con
¿, ¡ 3
predor inante
l&3r
[¡d ial Puede eri¡ti¡un tipo de
pé rd idrs
Brrít ico¡lt¡mplitud
l.- C¡e con
l¡ velocidad
2.- Puede
desrprrecersúb it¡rente
Desaparece
al brjrr hveloc id¡d
l.' c¡e con
l¿ velocid¡d2. - Puede
desaprrecersúb it¡renteal brjar hve I oc id¡d .
El niveldecrece
despac iorrrente
3, Pedestal (no
rairtivo I
{. llenüil¡dorErte rno
R¡dial &
ki¡l
R¡dial tlr i¡l
0E (finalventil¿dorl
Est¡ble
IU,t
Fluctuante
FIucbu¿n
te
lxl¡ve Ioc idad
del rotor
lad i¡l l,- B0 6 SE en
f¡se¿.- BI
acoplmientod¡do est¡fuer¡ d¡ l¿condición de
f¡se
t.- 8IrcoplrlientoSE 90' fuer¡de I¡condición de
f¡se2.- B0 & SB en
frse
Bst¡bIe 8l desb¡l¡ncedel rotor es
debido ¡pro blelrstérrico¡
Des bel¡nceerterno delventil¡dor
lr l. Alt¿ l¿di¿lB0 (Fin¿l
venti lado r I
2,- Ari¡l con
¿lto B0
Bsb¡bIe Bl niveldec rece
despec iosa
rente
Enco rv¡dur¡erterne deIvent i lrdor
h, 2r [¡d i¡l B0 180' fuer¡de frse con SB
Bst¡bIe Bl niveldecrece
despac iosarente
SB ¡l srlir¡epuede ser msrlto que 2 r¡ri¡I e e¡[efin¡l
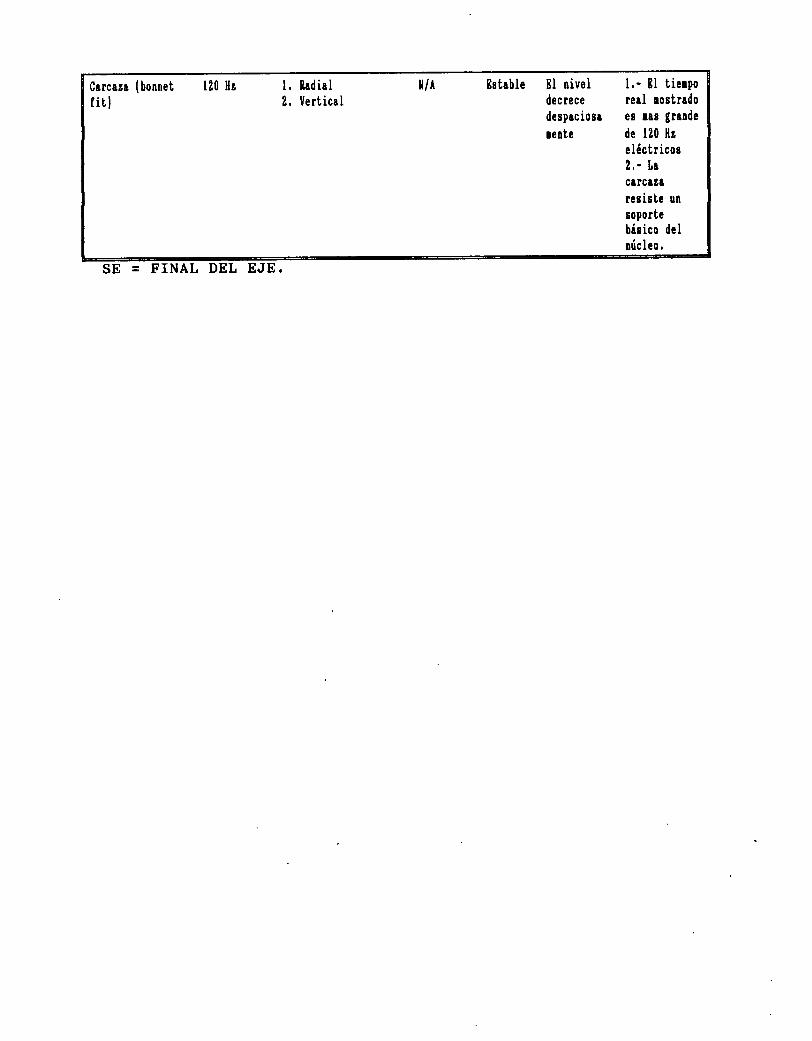
C¡rc¡z¿ (bonnet
fib I
120 l|¿ l,z.
led i¡lVert ic¿l
il/r Bst¡ble BI niveldecrece
desprc iosrrente
l.- Bl tierpore¡I ¡o¡tr¡doe8 ¡ss 8r¡ndede 120 ll¿
eléctrico¡2,- L¡cSrctz¡re¡iste un
soportebósico delnúcleo,
SE = FINAL DEL EJE.
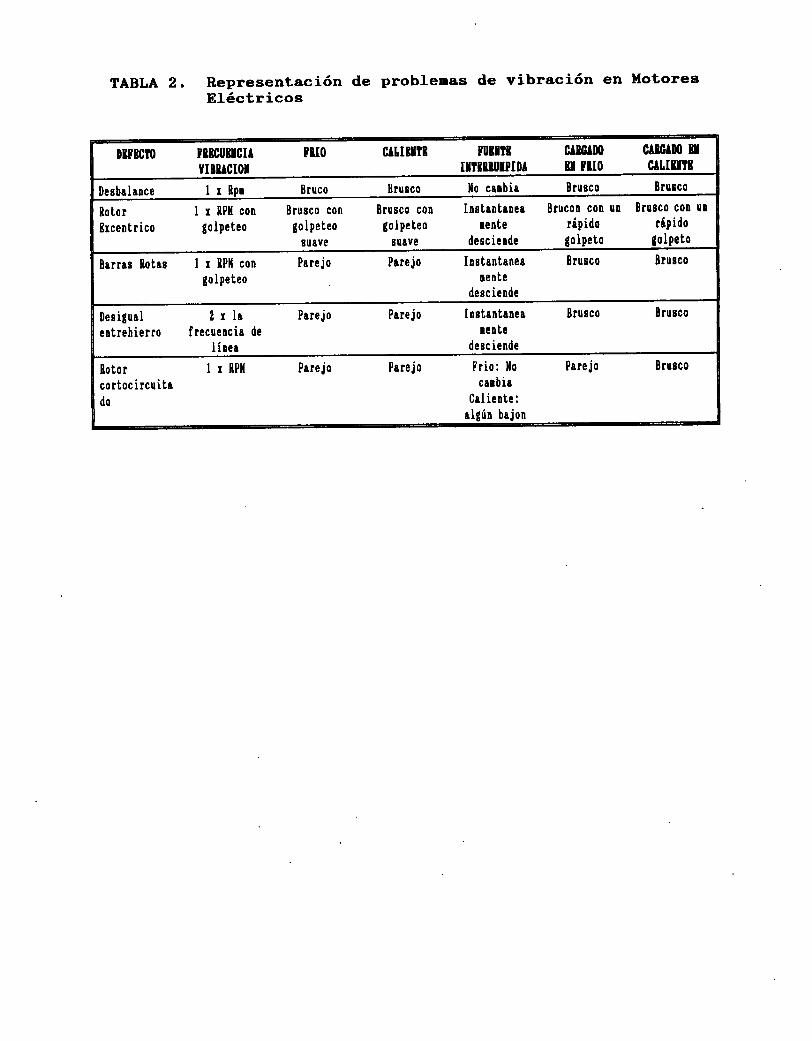
TABLA 2. Representación de problenas de vibración en MotoresEléctricos
DBIBCI(I ilBCUBlCttÍTBIACIOI
tu0 CII.IBITB tuilt3ilTIITI¡TPTDA
il¡0rD0BT NT()
ü¡0rD0 ilcrInnB
Desb¡l¡nce I r lpr Bruco B¡usco llo c¡¡bi¡ Brusco Bru¡co
Roto rErcent r ico
I r IPX con
go lpeteo
Brusco con
go lpeteo8U8Ye
Brusco con
go I pebeo
su8ve
I¡st¡nt¡ne¡ Brucon co¡ u¡ Bru¡co con u¡
rente ripido róPido
desciende golpeto ¡olPeto
r lPll con
go IpeteoPme jo Puejo ln¡t¡nt¡ne¿
¡entedesc iende
Brusco B¡u¡coD¿rr¡¡ lot¿s I
Desigual X r l¡ Parejo Parejo lnst¡nt¡ne¡ Erusco Brusco
entrehierro frecuenci¡ de ¡e¡be
líne¡ desciende
lotor I r [Pll Parejo Ptrejo Frio: llo Prrejo Bru¡co
cortocircuit¿ c¿rbi¡
do C¡liente:rlgún brjon
98
talleres usan al menos dos técnicas comunes Para
localización de barras rotas, Ia prueba growler y
prueba de fase.
Ambas pruebas son llevadas a cabo cuando eI notor esta
parado, Ia prueba growler es llevada a cabo con el rotor
fuera del estatorr s€ envuelve eI rotor con una espira
de alanbre energizandolar V se prueba con una pieza
flexible de acero en forna de tajo de sierra o con
polvillo de hierro Ia presencia de campo magnetico en
las barras del rotor, La discontinuidad del fluio de
corriente en las barras produce una interrupción del
campo rnagnético.
La prueba en una fase se hace con la ayuda de una pínza
para medir los amps y una fuente bajo voltaje. Se aplica
voltaje en una de las fases del motorr el rotor se vuelve
Iento y se miden los amperios para cualquier fluctuación,
especialmente para un bajon de corriente. Si la
corriente del estator disninuye, esto es signo de una o
m&s barras rotas.
3.1.6.2. Prueba de velocidad.
la
la
Para aplicaciones
pueden hacer
criticaspruebas
un taller especial se
plena carga, pero
99
desafortunadanente, nuchos talleres no presentan Ia
facilidad para reaLizar este tipo de prueba. En virtud
de esta restricción hay tecnicas disponibles que ayudan
en eI dignóstico de vibracion en un motor sin carga.
Otro problemas con las pruebas sin carga es que eI calor
generado es muy pequeño en eI rotor. Ademas un rotor
inclinado puede ocurrir que no sea detectado cuando este
sin cargar Do se pueden descubrir fisuras en las barras
hasta que el rotor este plenamente caliente y sean hechas
las pruebas mencionadas. Algunas han reportado sucesos
en Ia detección de problemas termicos por calentamiento
en el rotorr s€ asume que es muy probable que se detecten
problenas en eI eje y en las laminaciones del rotorr pero
no la detección de problemas por fisuras en las barras
del rotor o laminaciones cortadas.
AI menos 2 técnicas son usadas inicialmente calentando eI
rotor y simulando condiciones de carga. En una técnica
eI rotor es soportado sobre bloques en el interior del
estado y evitando eI giro de este. Se aplica un bajo
voltaje aI estator y este induce un flujo de corrientes
en el rotor y genera calor. El rotor podria ser renovido
he inspeccionado con una cAmara infrarroja los puntos
calientes, Ia prueba en una simplefase y growler tiene
mas posibilidad en Ia detección de estos problenas. En
Unircrsidoo . urunomo do 0ccidcnta
Sercién Siblls¡6¡g
100
un caso, esta técnica fue usada en un notor de dos polos
de 4000 Hp encontrandose puntos calientes y laminaciones
en corto. Cuando las areas dañadas son arregladas, los
puntos calientes desaparecen como los problemas de
vibración.
En otro casor ün motor de 2 polos de' 450 Hp han
experinentado problemas de vibración, los chequeos de
growler y en una sirnple fase no han mostrado problenas
en el rotor. Cuando la prueba de velocidad sobre un
taller, las vibraciones fueron significativamente al-tas y
un buen estado de balanceo fue llevado a cabo. Esta es
una prActica normal en una prueba de notor invertir Ia
condición de una de las fases de1 motor para parar elmotor, esto es una efectiva via de conseguir
calentamiento entre el rotor. En este ejenplo como eI
rotor se ha calentado Ia anplitud de vibración y la fase
no se repiten, sospechandose I¿ existencia de una barra
rota, Ia prueba en una fase ha denostrado Ia presencia de
barras rotas.
Otra técnica en Ia detección de problemas eléctricas en
los motores es girarlo a diferentes niveles de voltaje.Una prueba a bajo voltaje toma mas corriente y tiene una
mayor frecuencia de deslizamiento que proporciona prueba
de voltaje. Esto podria por consiguiente facilitar Ia
101
detección exacta Ia frecuencia de vibración y
correctamente en diagnosticar un problé[t&. El nivel de
vibración no puede variar nas que eI 10% para motores
desacoplados sin hacer caso de los niveles de voltaje.
3,1,7. Monitoreo de corriente en Motores.
EI nonitoreo de corriente en motores es una nuev& técnicaque ayuda a determinar Ia condición eléctrica de un
motor. Una indicación de esto es obtenida al conectar un
transformador de corriente a una de las fases del motor.
EI espectro de corriente es examinado para Ia presencia
de bandas laterales (sidebands) cercanas a la frecuencia
de linea y en Ia inr¡ediación de las frecuencias que pasan
por las barras del rotor.
La técnica es basada en Ia teorla que los problemas en
Ias barras deI rotor y la excentricidad del "air gap"
causan una variación del flujo de corriente. Un motor en
buen estado exhibe en el espectro un pico náximo de
corriente a 60 Hz, y un motor con una o mas barras rotas
tendra picos mAximos de corrientes separados de Iafrecuencia de linea (60 Hz) por 2 veces Ia frecuencia de
deslizamiento.
La anplitud de estas bandas laterales pueden predecir eI
lo2
nümero de barras rotas. Un motor con un "air gap"
excentrico tendrA picos mAxinos de corriente en la
vecindad de la frecuencia que pasan por las barras de1
rotor (velocidad de funcionamiento x nümero de barras del
rotor ) v las bandas laterales alejadas l2O Hz.
La busqueda de infornación ha sido docunentado e
incorpoprada en un "sistema experto" que demanda ser
bastante conpetente en el diagnóstico de barras rotas y
excentricidad.
La reciente busqueda en OAK RIDGE NATIONAL LABORATORIES
determinó que eI monitoreo de corriente en motores puede
ser usado en la detección de fallas mecAnicas en equipos
de manejo. Se experimento en un motor que opera una
valvulas en una planta nuclear que no son fAcilnente
accesibles. La tecnica aplicada es una especial
circuiteria que se encarga de filtrar la frecuencia de
linea, y un ¿nalizador espectral con un alto rango
dinA¡nico que pernite examinar aün con un muy bajo nivel
Ios signos de corriente. La figura 30 muestra una
comparación de vibración y espectro de corriente de un
ventilador. La similitud es apreciabler no presentando
niveles severos de corriente ya que han sido
estabilizados.
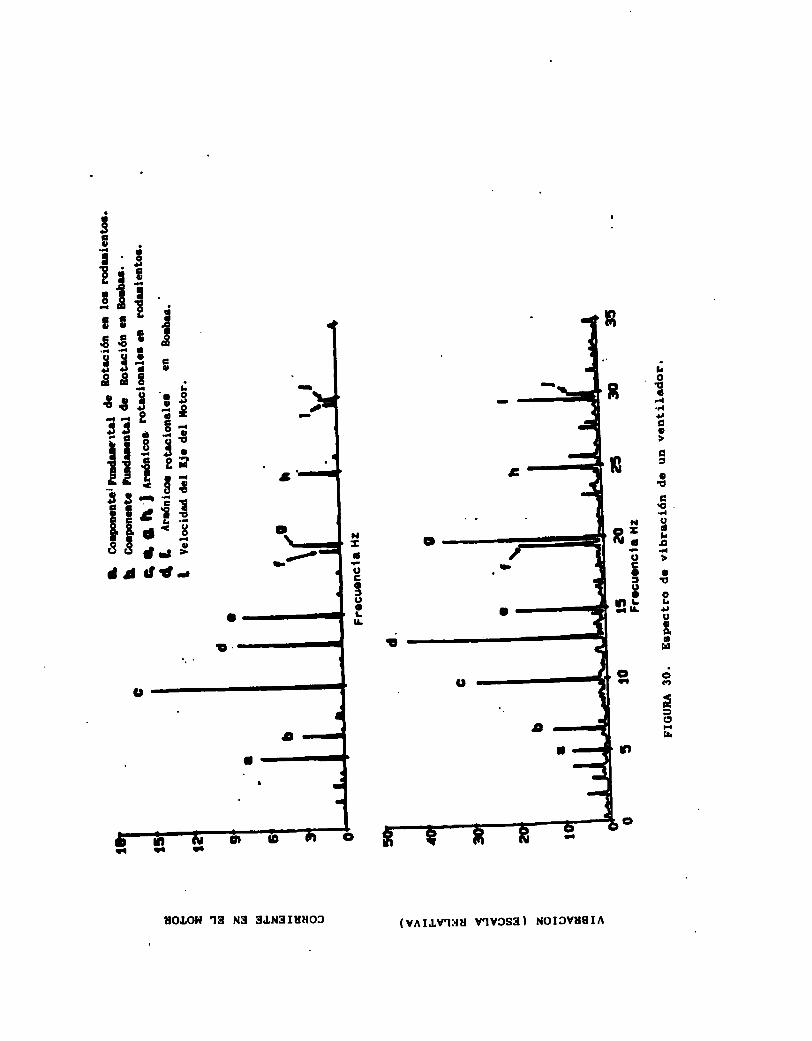
t..otó
a¡Eo
Ét
5eo.
iit:i! jssl ¡! !; 6t tE ¡
:i I i iiiiiiÉÉi:!llÚ€¿
oEE!o
-$ 3Lra .o
ogaot!(,ooE,! !t¡o¡oE
C¡c;.tt (r)
coHh
n
r{aat,cotIoLlta
!.
( vAtrvl:,|ü vlvcsg I N()¡cvü8rAüo¡ot{ Is Ns g¿NsrüuoJ
104
3. 1.8. Problemas de vibración rnagnéticos o mecAnicos.
Los problemas de vibración relacionados con los motores de
inducción es una combinación de dos grupos llamados
tMecAnicost y 'Magnéticos', eI anAlisis del espectro de
vibración es una ayuda para deterninar cual de los dos
grupos de vibración estan presentes. Un golpeteo es
identificado como Ia anplitud de una oscilación de
vibración, debido aI espaciamiento cercano de Ia
frecuencias alternadanente reforzandose y luego
cancelandose con Ia siguienter estos problemas
relativamente se presentan en cada una de las fases. La
ausencia de golpeteo puede indicar solamente la no
presencia de problemas necAnicosr y la presencia de este
indica la presencia de problemas mecánicos y eléctricos.
Por ejemplo, cada componente en un motor de inducción de
dos polos puede ocurrir a espacianientos cercanos de
frecuencia, de dos veces Ia velocidad de rotación y dos
veces Ia frecuencia de suministro respectivamente.
Note que la amplitud de una oscilación de vibración
solanente ocurre con una modulación de Ia amplitud de Ia
componente de la frecuencia simpler debido solamente a
problemas magnéticos. Como las componentes de modulación
de anplitud y de frecuencia de golpeteo aparecen en los
notores de inducción son explicados mas adelante.
105
Una forma de distinguir los problemas necAnicos de los
eléctricos es desconectar el suministro eléctrico, esto
ayuda en Ia distinción de los problemas mecAnicos, los
efectos de estos problemas pueden ser observados en un
analizador espectral.
3.1.9. Vibración nagnética en los motores de inducción.
Una máquina de inducción es mostrada en la figura 31 Ia
eorriente es producida en los conductores del rotorr la
cual es proporcional a la diferecnia en velocidad entre
eI campo uragnético rotórico producido por Ia corriente en
las 3 fases de los, devanados del estator y en eI rotor
mismo. Esta corriente produce un campo en el rotor eI
cual interactua con eI campo del estator y genera una
fuerza en eI rotor.
EI campo en el rotor gira en sincronismo con el campo
rotórico en eI estator, ambos avanzan 2 polos relativos
al estatorr por cada ciclo de Ia frecuencia de linea a lavelocidad sincrónica, pero el deslizamiento attaza el
campo rotórico. La rata de deslizamiento es Ia
diferencia entre la velocidad sincrónica y la velocidad
del rotor.
Cada vez que Ia velocidad sincrónica dependa de Ia
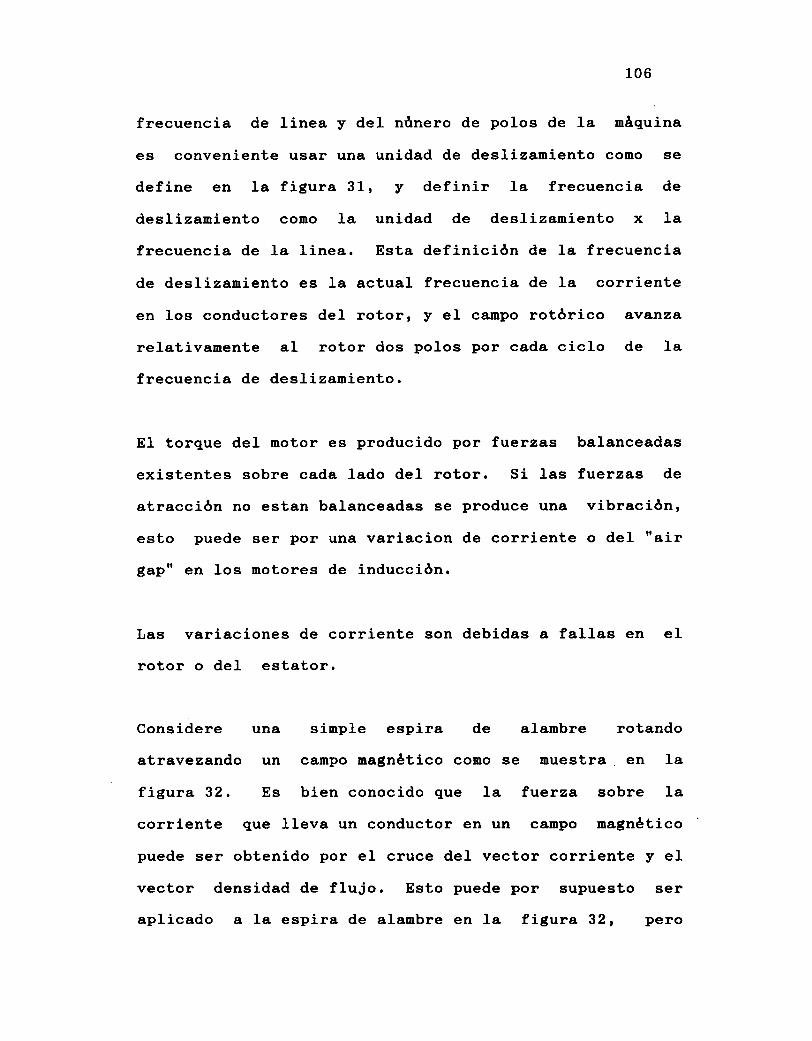
106
frecuencia de linea y del nünero de polos de la náquina
es conveniente usar una unidad de deslizaniento como se
define en la figura 31, y definir la frecuencía de
deslizaniento como Ia unidad de deslizamiento x Ia
frecuencia de la Iinea. Esta definición de Ia frecuencia
de deslizamiento es la actual frecuencia de la corriente
en los conductores del rotorr y el campo rotórico a,va'lnza
relativamente aI rotor dos polos por cada ciclo de la
frecuencia de deslizamiento.
El torque del notor es producido por fuerzas balanceadas
existentes sobre cada lado del rotor. Si Las fuerzas de
atracción no estan balanceadas se produce una vibraciónt
esto puede ser por una variacion de corriente o del "airgap" en los motores de inducción.
Las variaciones de corriente son debidas a fallas en eI
rotor o del estator.
Considere una sinple espira de alanbre rotando
atravezando un campo rnagnético como se muestra en Ia
figura 32. Es bien conocido que Ia fuerza sobre Ia
corriente que lleva un conductor en un campo nagnético
puede ser obtenido por el cruce del vector corriente y eI
vector densidad de flujo. Esto puede por supuesto ser
aplicado a Ia espira de alanbre en Ia figura 32, pero
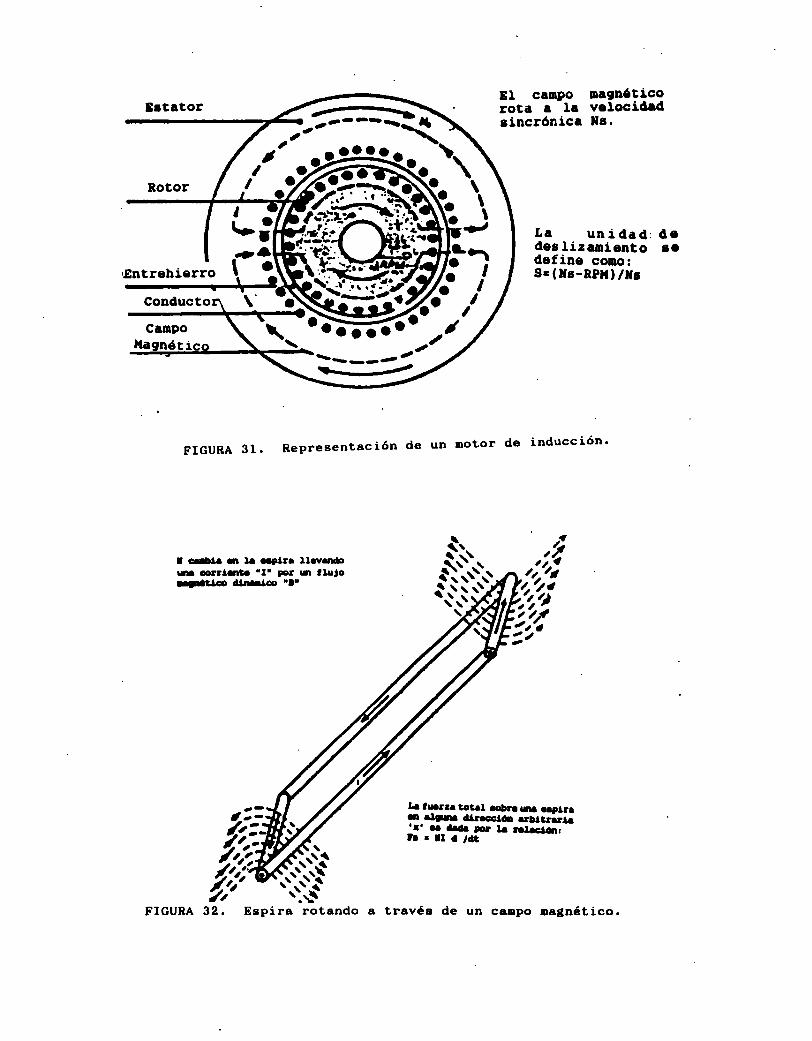
ErtatorEI cao¡rorota ¡ la¡incrónica
DrgnÓticoveloci0edf,s.
ofr
IIRotor
I\-
a
!-r,I
La unidad: dcdeglizaniento ¡cdefine cono:S= { l|s-RPl|) /I¡,Entrehierro
Canpot
o I,
\\
FIGURA 31. RePresentación de un motor de inducción'
I csl¡ ¡¡ l¡ ¡Dl¡¡ ll.v.rüür cosslüta 'l' g.¡r |I¡ t¡¡¡to¡.ata3¡o ¿lrrl¡llco '¡' $
¡a t¡¡ass¡ tot¡¡ aoDra st a.plsa-t .¡gr¡¡ .l¡¡.ccr(¡¡ ¡8D138r8¡a'¡. aa aaá¡ pcr ¡a sa¡ac¡C¡!lr:¡¡¿¡6\\a
l.s$"..:¡
FIGURA 32. Espira rotando a travée de un ce¡rpo nagnético.
108
se utilizarA una expresión mas general de la fuerza sobre
Ia espira de alambre dada. La relación dada en Ia figura
32 muestra que Ia fuerza sobre Ia espira de alambrer €rr
alguna dirección arbitaria frxf' es directanente
proporcional a la corriente en la espira de alanbre y a
la rata de cambio del flujo magnético en Ia dirección de
Ia fuerza ( y no del ftujo nismo). EI término NI es
Ilar¡ado fuerza magnetonotríz (MAGNETOMOTMFORCE FMM) '
y eI campo nagnético rotórico en el notor de inducción
puede ser definido como una onda de fuerza magnetomotriz
en los conductores alzandose como una onda de fluio en eIttair B&ptt.
Un nümero de barras rotas produce un desequilibrio de Ia
FMM, y ademas una fuerza resultante entre los dos lados
del rotor. Esta fuerza desbalanceada rota con eI rotor.
La ecuación dada en Ia figura 32 sin enbargor revela que
Ia fuerza desbalanceada es obtenida de la ¡rultPlicación
del desbalance de Ia FMM y Ia rata de canbio del fluio
nagnético en dirección de la fuerza.
El desbalance de la fuerza puede ser descrito por elproducto de dos térninos alternados de Ia frecuencia
fund¿rnental, para Io cual no es necesario que este en
fase, de Ia forma.
109
k sin swt sin(swt + 9)
(k/z)(cos I - cos (2wst' + e)
donde t
frecuencia de lineaIa unidad por deslizamientoun valor de anplitudangulo de fase
La vibración tiene una parte constante y una parte
cambiante igual a 2 x frecuencia de deslizamiento.
Transf ormand.o esta estructura como una referencia
estacionaria requiere una frecuencia multiplicativa de
I x RPM. Un transductor estacionario posicionado por un
instante sobre eI eje de los rodamientos, ademas medirla
una vibración con componentes de 1 x RPM y 2 x frecuencia
de las bandas laterales de deslizamiento alrededor de Ia
frecuencia central de 1 x RPM.
Para un similar razonamiento, fa discontinuidad de Ia
corriente es debido a fallas en los devanados del
estator, luego el resultado es una fuerza desbalanceada
no rotativa, y de la forma.
w=s=k=e
Uníversidoo r¡rr¡nOmo de 0aidcnt¡
Sección Biblloreco
(k/z)(cos e - cos(2wt + e))
110
aIa3. 1. 10. Variaciones del
excentricidad.
Ahora consideremos Ia relación
considerando las variaciones del
eI "air gap" es generado por la
magnético, donde el flujo es:
"air gap" debido
dada en Ia figura 32
"air gap". Et flujo en
total FMM del circuito
ñ=Fm/Rm
donde,
= la- FMM total= Ia reluctancia nagnética total en el circuito
Una variación del "air gap" da como resultado una
variación de Ia reluctancia nagnéticar la cual depende de
Ia logitud radial del "air gap". Este efecto
particularmente aparece en los motores de inducción ya
que estos requieren de un entrehierro muy pequeño
comparado con los motores sincrónicos o mAquinas de
corriente directa. Por Io tanto puden resultar pequeños
defectos en motores de inducción cuya reluctancia es
relativamente grande.
Si en un instante el entrehierro disninuye, entonces la
reluctancia decrece y Ia misna FMM inplica un aumento de
flujo. Los efectos de la varición del entrehierro pueden
ser similares a los efectos de variación de Ia corriente.
La nisma relación para eI desbalance de la fuerza
FnR¡t
111
resultante donde solamente componentes de I¿ frecuencia
fundanental de Ia FMM son consideradas. La excentricidad
estática referida a una excentricidad Ia cual no es
movibler €sto produciria una fuerza de vibración con
componentes a d.c y a dos por la frecuencia de llnea, la
excentricidad dinamica se mueve con eI rotor (debido a
que eI rotor esta inclinado); esto produciria una fuerza
de vibracion a 1 xRPMy 2 x las frecuencias de
deslizamiento de las bandas laterales sobre 1 x RPMr en
verdad estos estanentos son justificados por el resultado
prácticor por consideración de Ia variación de la
reluct¿ncia como una función periódica (del espacio¡ €n
eI caso de Ia excentricidad estáticar V de un ciclo y un
espacio, en eI caso de la excentricidad dinAnica ) r las
diferentes componentes relacionadas son Ia nejor
indicación de excentricidad.
3.1.11. Problemas nagnéticos del tipo rotativos
estacionario.
Los problemas nagnéticos discutidos hasta ahora pueden
ser clasificados como problenas rotativos o estacionarios
de acuerdo a Ia vibración producida. Una presentación de
estas causas tipicas son nostradas en Ia Tabla # 3.
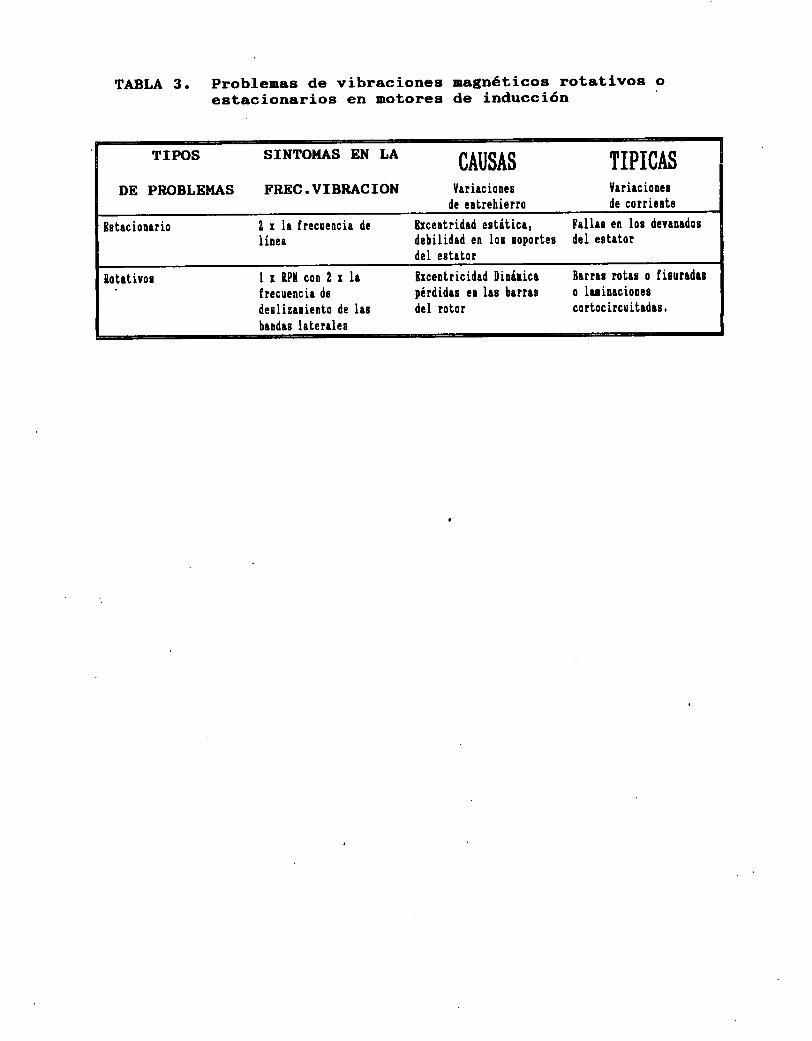
TABLA 3. Probleuas de vibracionesest¿cionarios en motores
uagnéticos rot¿tivos ode inducción
rrPos sINroMAs EN LA 0AUSAS TIPICAS
DE PROBLEI.IAS FREC . VIBRACION lf¿ri¡ciones U¡ri¡cio¡e¡de e¡trehierro de corriente
Bst¡cion¿rio I r I¡ frecue¡ci¿ de Ercentrid¡d estótica, F¡ll¡s en los dev¡n¡do¡
Ií¡ea debilid¡d en lor roportes del e¡t¡tordeI est¡[or
lot¡tivo¡ I r IPX con 2 r Ir Brce¡tricid¡d Dinóric¡ B¡¡r¡¡ rotr¡ o fi¡ur¡d¡¡frecuenci¡ de pérdidrs en h¡ b¡rr¡s o l¡¡in¡cio¡esdesli¿e¡iento de l¿s del rotor cortocircuit¡d¡s.b¿nd¡s l¡ter¡les
113
3,LL2, Modulación de Ia Frecuencia debido a variaciones
de Ia velocidad.
La discontinuidad en la fuerza nagnética de atracción dan
como resultado un aumento de la vibración como se
discutióre igualmente una variación en el torque del
motor. Dependiendo de Ia constante de inercia del eie en
rotor se pueden producir variaciones de velocidad. EI
canbio de variaciones de Ia velocidad Puede ser mayor
para inercias pequeñas, y puede por consiSuiente causar
una nodulación en la frecuencia de Ia conponente de la
vibración cuya frecuencia es referida a Ia velocidad del
rotor. Para altas inercias la variación de la velocidad
es menor¡ V por consiguiente el grado de nodulación de Ia
frecuencia es menor.
La presencia de bandas laterales se nota en un rango
entre Ia mudulación pura de la amplitud y la modulación
de Ia frecuencia. El espacio entre las bandas laterales
es una nodulación de la frecuencia, sin embarSor en eI
caso de la modulación de Ia frecuencia el nümero de
bandas laterales (sidebands) puede ser mayor que dos
dependiendo de la nodulación ordenada, i.e. eI radio del
pico mAxino de velocidad desvia la modulación de Ia
frecuencia (o Ia frecuencia de Ia variación del torque).
ver figura 33.
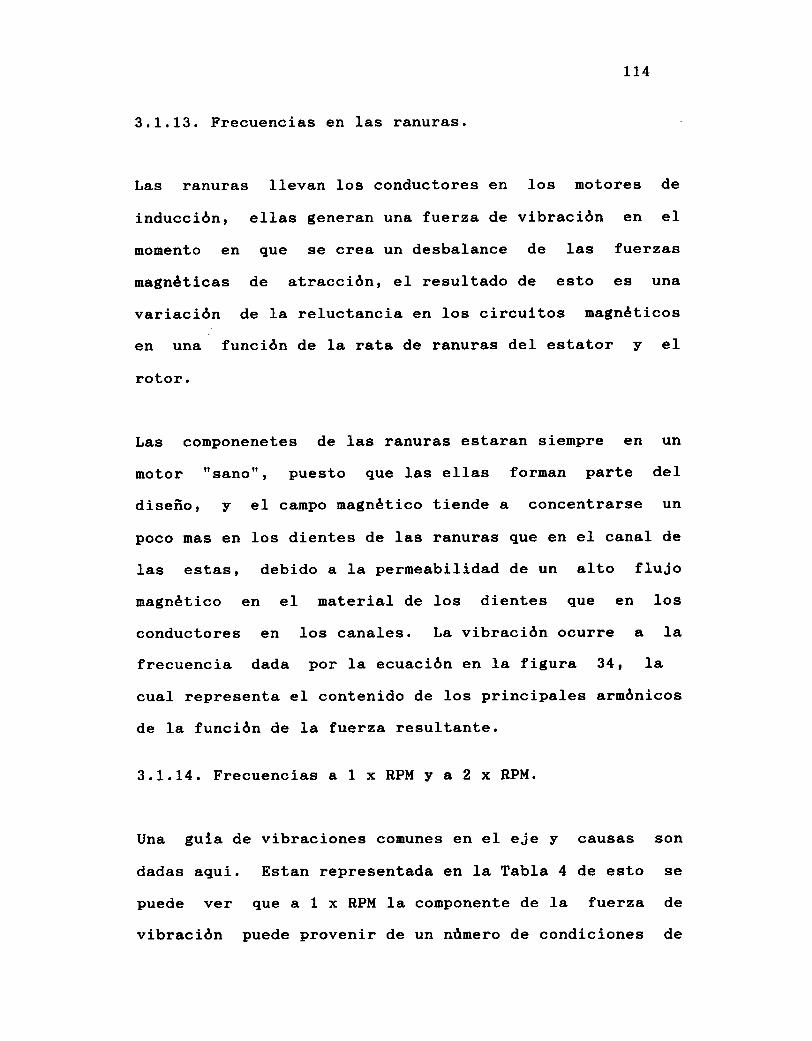
Lt4
3. 1. 13. Frecuencias en las ranuras.
Las ranuras llevan los conductores en los motores de
inducción, ellas generan una fuerza de vibración en eI
momento en que se crea un desbalance de las fuerzas
raagnéticas de atracción, eI resultado de esto es una
variación de Ia reluctancia en los circuitos nagnéticos
en una función de Ia rata de ranuras del estator y eI
rotor.
Las componenetes de las ranuras estaran sienpre en un
motor ttsano", puesto que las e1las forman parte del
diseñor y eI campo nagnético tiende a concentrarse un
poco mas en los dientes de las ranuras que en el canal de
Ias estas, debido a Ia permeabilidad de un alto fluio
nagnético en eI material de los dientes que en los
conductores en los canales. La vibración ocurre a Ia
frecuencia dada por Ia ecuación en la figura 34 r la
cual representa eI contenido de los principales armónicos
de Ia función de Ia fuerza resultante.
3.1.14. Frecuencias a 1 x RPM y a 2 x RPM.
Una gula de vibraciones comunes en eI eje y causas son
dadas aqui. Estan representada en la Tabla 4 de esto se
puede ver gue a 1 x RPM Ia conponente de Ia fuerza de
vibración puede provenir de un nümero de condiciones de
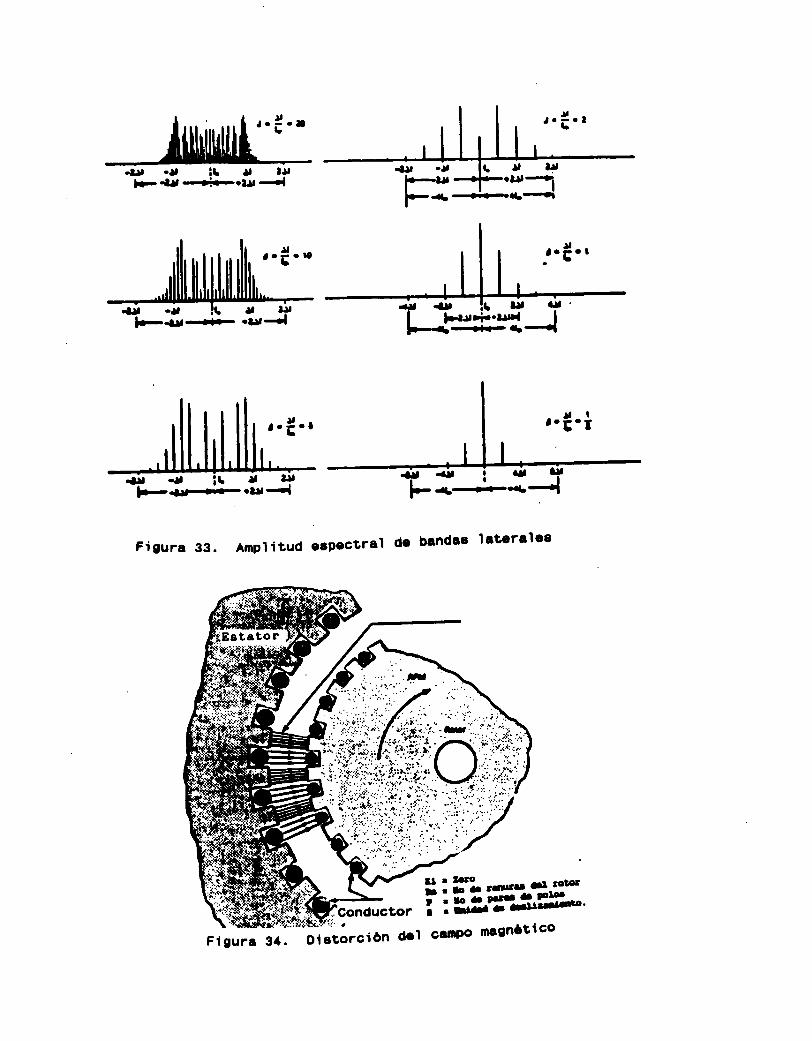
_ ll[ilrtrilll "*"
.¡¡r .J i¡ ¡l ¡¡llF{f, -$o¡¡¡ <{
,.ü.i
Figura 33. Amplitud eePectral de b¡ndag latcr¡lea
il&ttnxcanpo magnÓtlcoFigur¡ 3¡[. oletorciÓn dol
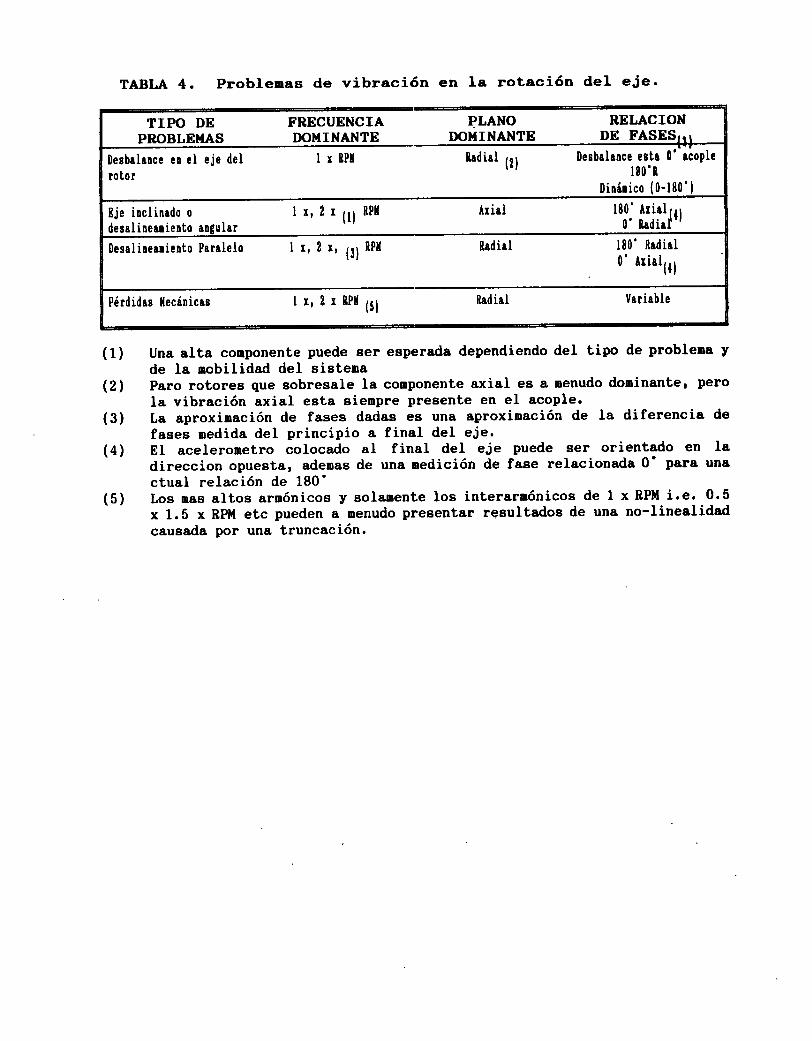
TIPO DE FRECUENCIA PLANO RELACIONPROBLEMAS DOI'IINANTE DOMINANTE DE FASESTTT
Desb¡le¡ce en el eje del
r0torIrRPX nrdirl
1XIDesb¡I¡nce ertr 0' acople
180'IDinó¡ico (0-180'l
Bje inclinrdo o
desrl ineariento ¿nEul¿r
lr'2r(tl[Pf Ari¡l'8f. f;;,'l¡rr
Des¡l ine¡liento P¿r¿lelo I r, 2 I¡{31
nPt ladi¡l 180'R¡di¡lo'rrirl¡1¡
Pérdid¡s llecónic¡s lr,2rRPl|(51 ft¿di¿I V¿ri¿ble
(1)
(21
(3)
(4)
(5)
TABLA 4. Problemas de vibración en Ia rotación del eie.
Una ¿Ita colponente puede aer eaperada dependiendo del tipo de problena yde la nobilidad del sistenaParo rotores que sobresale la conponente axial es a nenudo doninanter perola vibración axial esta sienpre presente en el acople.La aproxiuación de fases dadas es una aproxinación de la diferencia defases nedida del principio a final del eje.El aceleronetro colocado aI final del eje puede ser orientado en Iadireccion opuesta, adenas de una nedición de f¿se relacionada 0' para unactual relación de 180'Los nas altos arnónicos y solanente los interar¡ónicos de I x RPll i.€. 0.5x 1.5 x RPM etc pueden a uenudo presentar resultados de una no-Iinealidadcausada por una truncación.
TL7
fallas. Et desalineamiento y la encorvadura del- eje
pueden ser separados desde el desbalance por indaganiento
de la existencia de una componente mayor de vibración a 2
x RPM, ya que si estA presenta indica problemas
relacionados directa¡rente con e1e eje. Al distinguir una
encorvadura del eje y diferentes formas de
desalineanientor identificando eI plano predoninante de
vibración (axial o radial) ' y Ia relativa fase de
vibración entre los dos puntos finales de1 eie. La fase
puede solamente ser usada en distinguir los tipos de
desbalance, como se identifica en Ia Tabla 5.
3.1.15. Truncación de la onda espectral de vibración.
EI espectro en la frecuencia es caracterizado por una
gran cantidad de arnónicos y posiblemente subarmónicos de
Ia componente fundanental. C¿da espectro puede resultar
de un relajamiento mecAnico, donde eI armónico es de 1 x
RPM, la truncación indica Ia presencia de desalineamiento
y tarnbién de rigidez no -Iineal. En eI caso de estudio
de rotor de un motor de inducción y eI eier esto puede
ser de un mayor anAlisis, especialmente si la truncación
ocurre del golpe como se ve en la figura 35 ' indicando una
fuerte componente de golpeteo, dicho wl Y w2¡ Y tanbién
las componentes a (2wL+w2) &, (2w + wl ). Adicionalmente
estas componentes. En un motor de inducción de 2 Polost
esta diferencia es igual a 2 x frecuencia de
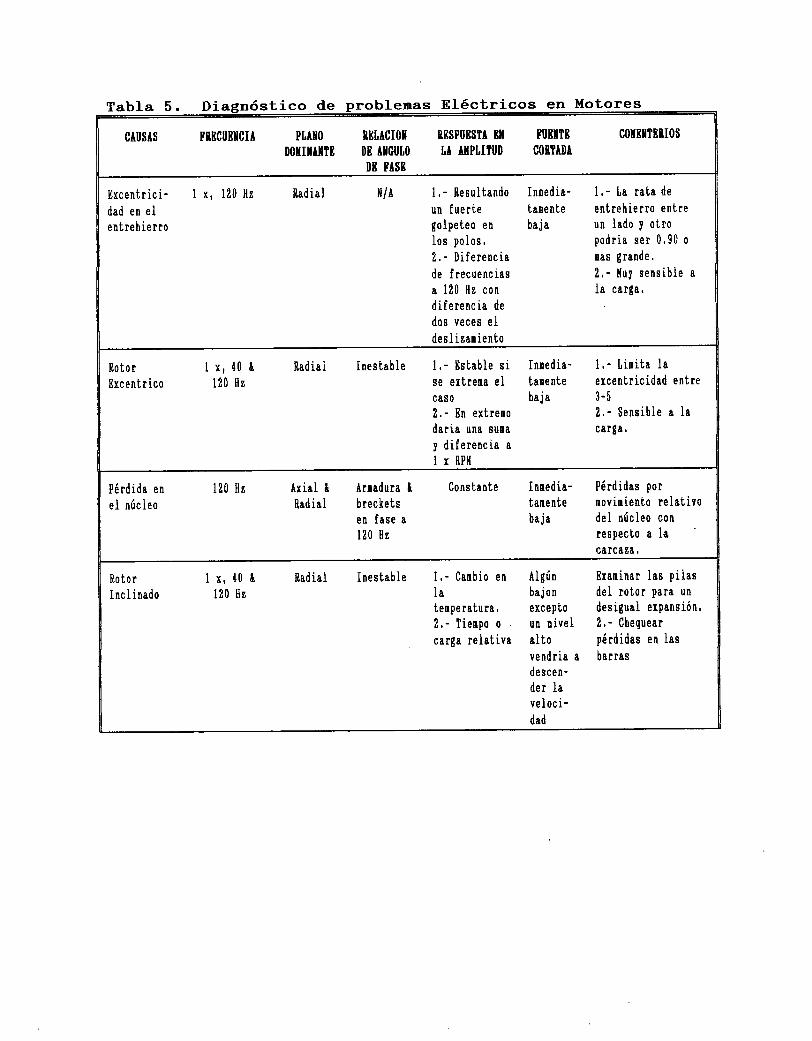
Tabla 5. Diagnóstico de problemas Eléctricos en Motoresabra c. lagnostrco e¡ll¿l¡i
CAU$IS FTBCUBXCII PilXO TBI,ATIOT R8$PI¡BSTT BX FIIETTB COIBXTBNIOS
DOXITTITB DB TXCUIO tT ITPI,ITUD COITADT
DT FTSB
Excent r ic i'dad en elenbreh ie rro
x, 120 l|z fladial l.- [esultando Innedia'un fuerte banente
golpeteo en bajaIos poIos,
2. - Diferenciade frecuencias¿ l?0 [|z con
dife¡enci¿ de
dos veces eldes I izar iento
l. - [a ra[a de
entrehierro entreun lado y o[ropodria ser 0,90 o
nas grande.
2 , - l{uy sens ibleIa carga.
l¡14
Rotor I r, 40 & ladiai Inestable l,- Esbable si In¡edia' l.' [iniia la
Ercentrico 120 l|s se extre¡a eI tanente excenf¡icidad entre
caso baja 3-5
2.- Bn exbreno 2,' $ensible a ladari¿ una su¡a carga.
y diferencia a
IxRPl{
Pérdida en
el núcleo
120 l|¿ Constante Innedia- Pérdidas por
üanente noviniento relativobaja del núcleo con
respecto a lacsrcau 8,
Ariai &
Rad iaIArnadura &
brecketsen fase a
1?0 l|z
Rotor I x, 10 & ftadial Inestable l,- Canbio en Algún Exaninar las piias
Inclinado 120 llz ia bajon del rolor para un
lenperatura, excepto desiguai expansión,
2,- Tienpo o un nivel 2'- Chequear
carga relativa alto pérdidas en las
vendria a barras
descen-
der laveloci-ded
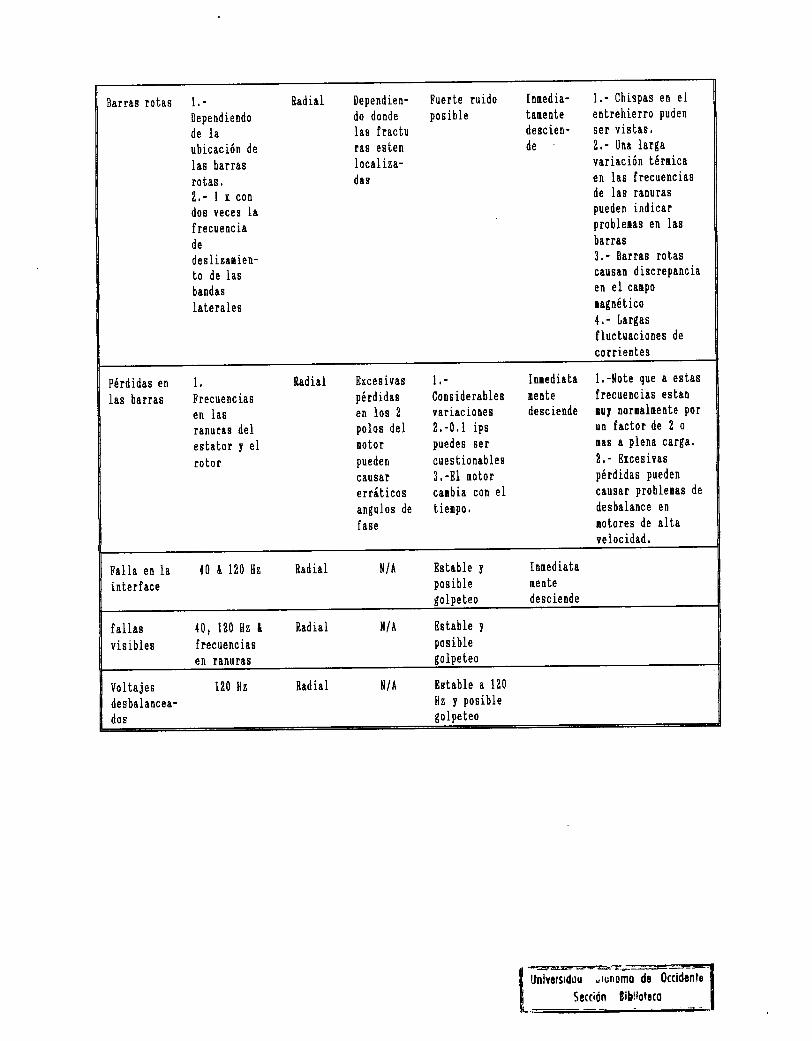
Barras rolas t,-Depe nd iendo
de laubicación de
las barrasrobas,2,- I x con
dos veees Iaf recuenc iade
des I izan ien-to de Ias
bandas
Ialera les
Rad ial Depend ien'do donde
Ias fracturas esten
Iocal is¿-das
Fuerte ruidoposible
Innedia- l.- Chispas en el
ba¡ente enbrehierro Puden
descien- ser visbas,
de Z.- Una largavariación bérnica
en Ias frecuenciasde las ranur¿spueden indicarproblenas en las
ba¡ras
3.- Barras rotascausan discrePanciaen eI canPo
nagnét ico
{. - Largas
fluctu¿ciones de
corrientes
Pérdidas en
las barras
l,Frecuenc iasen Ias
ranuras delestator y el
rotor
Rad ial Exces ivaspé rd idas
en los 2
polos deI
noto rpueden
causale ¡rát ico s
anflulos de
fase
l,-Cons iderablesvar iac ione s
2, -0. 1 ipspuedes ser
cuestion¡bles3, -EI rotorcanbia con eIt ienpo ,
Inned iatanentedesc iende
l,-llote que a estas
frecuencias estan
nuy nornalnente por
un factor de 2 o
nas a plena carga.
2. - Dxcesivaspérdidas pueden
causar problenas de
desbalance en
notores de albavelocidad,
Falla en lainte rface
{0 & 120 H¡ Rad ial IUA Bsbable y
po s iblego lpe teo
In¡ed iatanente
desc iende
fallasvi s ibles
10, 120 }lz
f recuenc iasen ranutas
I tad i¿l }¡/A Estab Iepo s iblego Ipeteo
t
Voltajesdesbalancea-
dos
120 lIz Rad ial }|/A Bsiable a 120
I|s y posiblego Ipe teo
¡@
[ ünivcrsrdrru úr0n0m0 de 0ccid¿ntc
f Sett¡ón Eibllotcco[-.+
L20
deslizamiento cuando de produce golPeteo en frecuencia
2 x vibración nagnética de Ia frecuencia de linea y 2
RPM de Ia vibración mecAnica.
3.1.16. Problemas de vibración generado a través de los
rodamientos.
Los rodamientos en los motores de inducción pueden ser
de} tipo de elementos rodantesr Y €rI nAquinas grandes son
usualmente del tipo manga. En eI rodamiento tipo
elenento las fallas producen una serie de inpactos Ia
cual excita resonancias en las estructura de Ia ca¡.caza
de los rodamientos en Ia cubierta de Ia nAquina. Estas
resonancias son tipicas entre L KHz y 20 KHz. La
frecuencia fundamental con la repetición de una rata de
impactos son mostrados en la Fig.36 r estos son
generalmente bajos en nivel y estan perdidos en el fondo
del espectro.
Los problemas asociados con eI tipo de rodaniento manga
presentan componentes en Ia frecuencia en el rango de
interés para los problemas asociados con los motores de
inducción discutidos con anterioridad, eston son debido a
la lubricación del rodaniento y pueden tener componentes
a una fracción (0.43 a 0.48 ) de 1 x RPM.
a
x
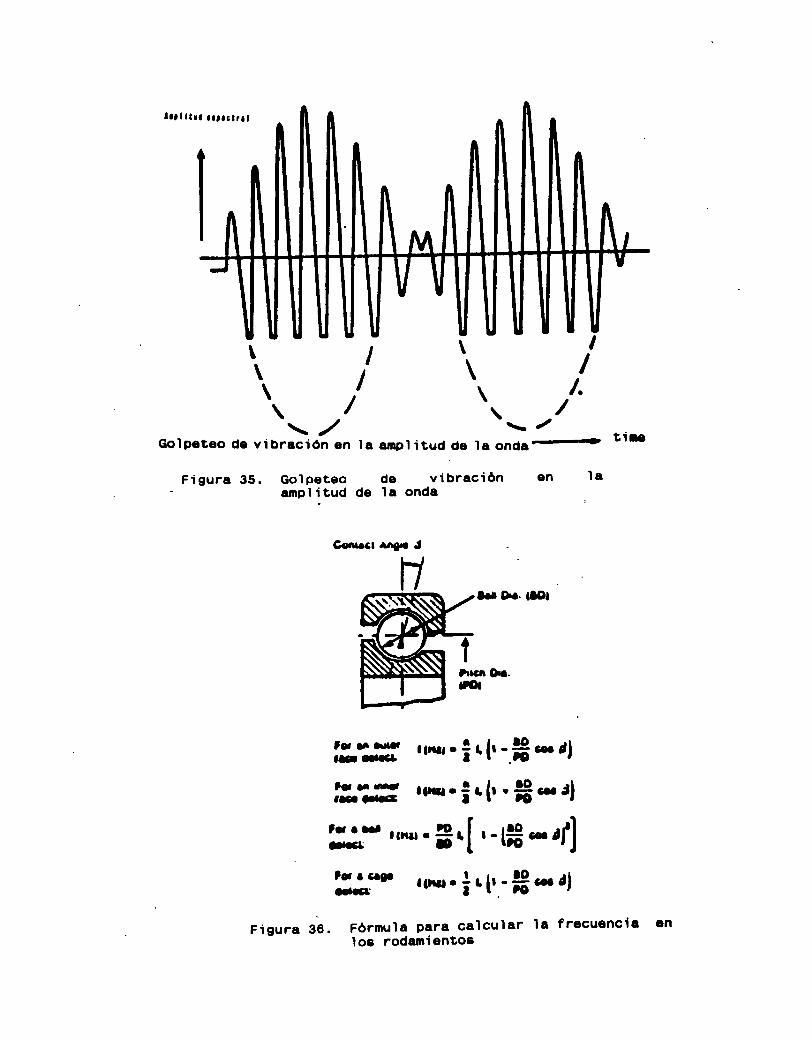
la, I I trl
I
II
l.I\\ I
/\-. ,z
tt-. a' timGo|peteodevibraciónenlaamplitudc|elaonda_
Figura 35. Golpeteo ds vibración en laarnPl itud de la onda
t ¡ D.. Oel
u¡t J
D
Í¿?rH f rru¡ r i .l, -.*.- ¿l
lg:.8 r0rr¡i.1,'*o¡l
:3- r,i..3.[ ¡-tH.-rfJ
i:::' r0r¡r ¡ i .1, '# * ¿l
Fórmula para calcular la frecuencialos rodamientos
Figura 36.
L22
3.1.1?. Perturbaciones en Ia onda espectral.
EI descubrimiento de a}gün problema de vibración en un
espectro sobre un analizador espectral no necesariamente
inplica una rectificación innediata de este. Esto puede
ser alguna inperfección de tipo nagnético o mecAnico del
rotor. Ver Tabla 6.
EI incremento en Ia onda espectral es el mas efectivo
medio de determinar Ia existencia de problemast
comparando eI espectro de vibración tonado en el
analizador con un espectro de una nraAquina en buenas
condiciones. El incremento en las componentes de Ia
frecuencia o la aparición de nuevas componentes son el
mejor indicador que algo anormal este pasando en el
¡notor.
3.1.18. Constante de porcentaje de ancho de banda
anAlisis con acercamiento alrededor de la banda.
Un paquete que ayuda en la comparasión de ondas
espectrales y que hace parte de un programa regular de
nantenimiento es eI Brüel & Kiars tipo 25L6 analizador de
vibración ( un FFT analizador espectral) y el tipo 7616
software de aplicación en un computador personal IBMt
automAticamente hace un proceso de comparasión basado en
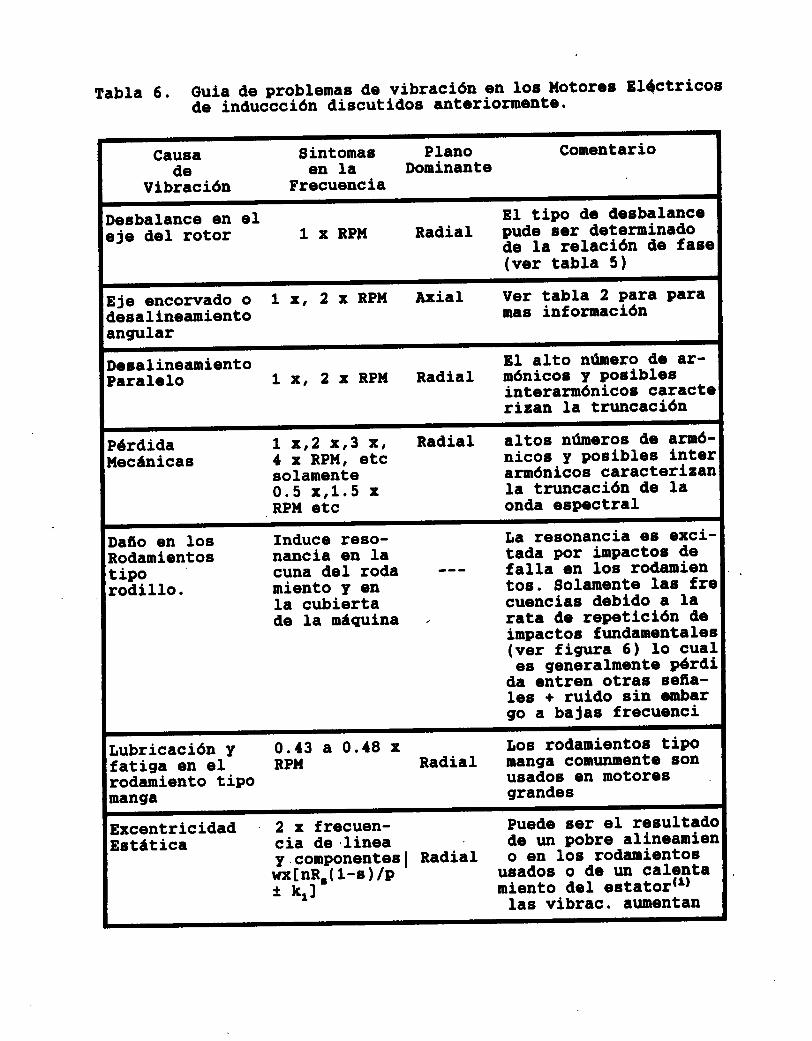
Tabla 6. Guia de problemaa de vibración en los l{otores Eláctricosde induccción discutidos anteriormente'
9intornas Plano ComentarioCaugade
Vibraciónen Ia Dominante
Frecuencia
Degbalance en eleje del rotor 1 r RPI{ RadiaI
EI tipo de degbalancepude ger deterninadoáe Ia relación de fase(ver tabla 5)
Eje encorvado o ! 7, 2 x RPt{ Axialdesalineamientoangular
Ver tabla 2 gara Paramaa inf,oruación
DesalineamientoParalelo 1 RadiaIRPI{2 xx,
El alto número de ar-mónicoa y Pogiblesinterarmónicog caracterizan Ia tnu¡cación
altog nrlnerog de arnó-nicoE y Posiblee interarmónicos caracterizanla truncación de laonda esPectral
Pérdidallecánicas
L t,2 xr3 tt Radial{ x RPl,l, etceolamente0.5 x,1.5 xRPll etc
La reEonancia es exci-tada por imPactos defalla en los rodamientos. Solanente lag frecuencias debido a Iarata de reI¡etición deirnpactos fundanentaleE(ver figura 6) 1o cualea generalmente Pérdi
da entren otrag seña-les + ruido gin eubargo a bajas frecuenci
Daño en loERoda¡nientostiporodillo.
Induce reao-nancia en Iacuna del rodamiento y anIa cubiertade Ia náquina
Los rodanientos tiPonanga conutrmente sonusadoe en motoreEgrandes
Lubricación Yfatiga en elrodaniento tiPo[¡anga
0.43RPH
a 0.48 rRadiaI
Puede Eer el resultadode un pobre alineanieno en los rodanientoE
usados o de un calentamiento del esta¡6¡11)Ias vibrac. aumentan
ExcentricidadEstática
2 z fracuen-cia de ,lineay . conponentea Is¡[n_R.( t-al lpt krl
Radiat
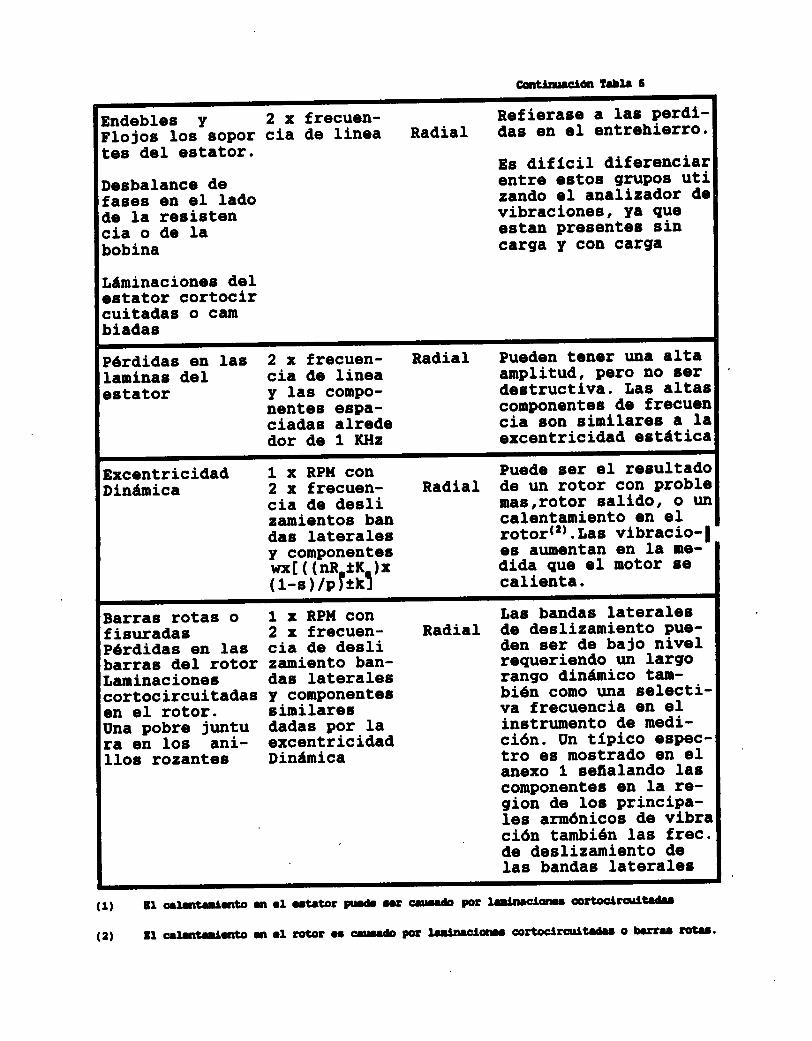
Cüüf¡r¡rcfdr LD¡¡ 6
Endebles Y 2 zFlojos log soI¡or ciates del egtator.
Desbalance defases en el ladode la resistencia o de labobina
fráninaciones delestator cortocircuitadas o canbiadas
Refierase a las Perdi-das en eI entrehierro.
EE diffcil diferenciarentre egtoe gruDos utizando el analizador devibraclones, Ya qu€estan preaentes gincarga y con carga
Párdidae en laElaninas delegtator
2 x frecuen-cia de lineay las compo-nsntes eBPa-ciadas alrededor de 1 KHz
Pueden tener una altaanplitud, Pero no Bordestructiva. Las altasconponentes de frecuencia gon sinilares a Iaexcentricidad estática
Barras rotas ofisuradasPérdidas en lagbarras del rotorIraminacioneacortocircuitadaeen eI rotor.Una pobre juntura en los ani-llos rozanteg
1 x RPI{ con2 z fteeuen-cia de óeelizamiento ban-das lateraleEy componenteesimilaresdadas por laexcentricidadDinárnica
frag bandas lateralesde deslizamiento Pue-den ser de bajo nivelrequeriendo un largorango dinánico tam-bién como una selecti-va frecuencia en eIinstrumento de nedi-ción. Un tlpico egPec-tro es noatrado en eIanexo 1 señalando lasconponentes en la re-gíon de log PrinciPa-les arnónicos de vibración tanbién las frec.de deslizamiento delas bandas laterales
ExcentricidadDinánica
1 x RPM con2 x frecuen-cia de deelizamientos bandag lateralesy componenteswxf ( (nR-tK-)x( i-jilp ltnl'
crlÍüul¡lto m .l artrtos Pu.d. aat
crl¡ür¡l¡rto r¡ rl roGor ¡l ce¡¡r|do
RadialPuede ger el regultadode un rotor con Problena¡,rotor salido, o uncalentamiento en elrotor(2! . Iras vibracio- |ea at¡mentan en Ia me-dida que el motor gecalienta.
c¡¡rdo Dot l¡r¡nrc¡crr €stoc¡ssltrlr¡
Dos ¡¡¡¡n¡clcra costoclro¡ttrd¡r o blss¡a sotrt.
(1' ll
(21 ll
L25
una constante en porcentaie del ancho de banda especetral
constance percentage bandwidth - CPB) ¡ siendo ideal para
detectar el desarrollo de fallas¡ P€ro Para un correcto
diagnóstico use el tipo 25L6's capacitado con una
analizador tipo tzoomt para estudiar eI espectro de ondat
ya que se requiere ver el pico máximo fuera de1 estrecho
de banda y las bandas laterales generadas como problema
de vibración magnético, y eI poderlas distinguir de las
vibraciones mecánicas. Una ilustración de esto es dada
en la figura 37, donde una constante espectral de ancho de
banda es mostrada como un pico sinple alrededor de Ia
frecuencia de 100 Hz, con 2 componentes¡ ürl4 a 99,6 Hz, y
Ia otra a lOO Hz, El espectro es tomado de un motor de
inducción de 2 polos naneiando un compresorr y los dos
picos en cuestion son 2 x RPM, y 2 x Ia frecuencia de
linea respectivamente.
3. 1. 19. Pronóstico de faIIas.
Como se mencionor los problemas de excentricidad pueden
estar presentes en motores sanos. Estos rePresentan una
causa de estudio para determinar el estado de condición
de operación mediante la comparación de estandares de
vibración del ancho de bandar aPlicado con un estudio
de ingenieria en eI desarrollo de la falla o laprogresión de esta con la observación en los cambios
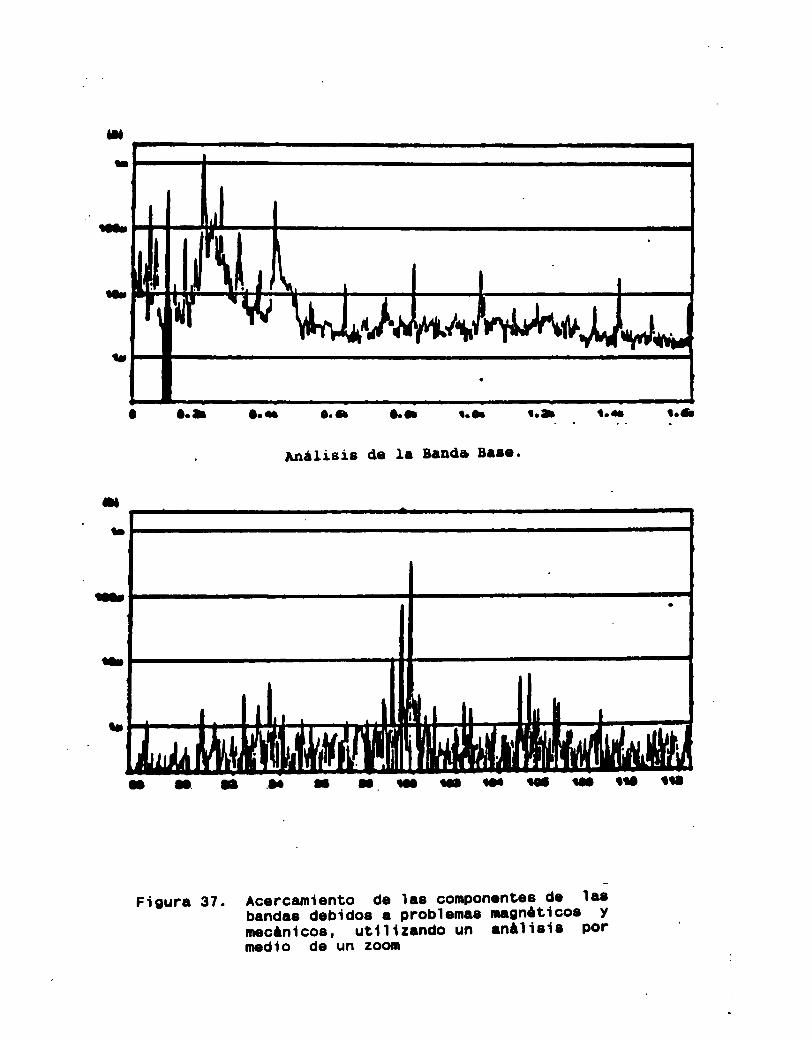
t
rl
lJt\l ,[ I I I
ilT 'W t rl.¡l
l|f5
nr
3
r,
l¡la l.l f.lt ,l¡ó r.3C.¡ O.l l.l
AnáIisie de I¡ Banda B¡3c'
T r- r-.D¡t- rC| r¡
97. Acercamiento de laa componentee de lasbandae debidoa ¡ problcmaa magn¿ticos yneclnicos, uttlizando un ¡nAlieie pormedlo de un zoom
Fi gura

r27
cercanos a las bandas. si el nivel de Ia falla no se
incrementa, no es causa de preocupación, mas si se va
incrementando en un paulatino monitoreo, es un cl¿ro
indicio de una falla en progr€so. La tendencia de la
falla en una m{quina, y }a experiencia del ingeniero
ayuda a decidir el monento en que la falla debe ser
corregida. Los problemas de excentricidad pueden ocurrir
al mismno tiernpo con problemas mecAnicos como el
resultado de una pobre instalación.
La presencia de barras en eI rotor no se presentan
obviamente en motores "satlos" r Pero la ruptura de estas
es un claro indicio de una Progresiva falla que esta
afectando las barras adyacentes. Esta tienden a'
afectarse debido a las altas temperaturas circundantesr y
a tensiones mecAnicas en las barras contiguasr ya que
ellas deben llevar mas cantidad de corriente. La
progresion de estas dependen de muchos factores¡
incluyendo la edad del motor y los ciclos de arranque
continuos que son sometidos los motores causando
excesivas tensiones que producen ruptura en las barras
del rotor.
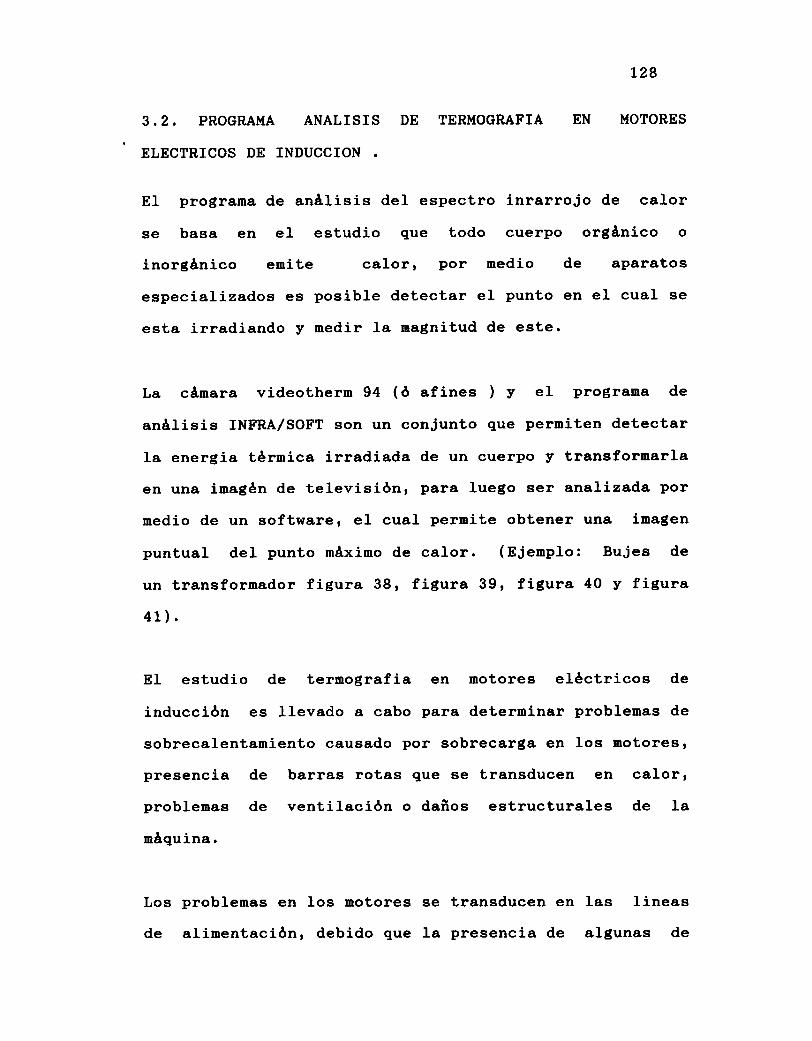
3.2, PROGRAMA ANALISIS DE TERMOGRAFIA
ELECTRICOS DE INDUCCION
r28
MOTORES
EI prograna de anAlisis del espectro inrarroio de calor
se basa en el estudio que todo cuerPo org¿nico o
inorgAnico emite calorr por nedio de aparatos
especializados es posible detectar eI punto en eI cual se
esta irradiando y nedir Ia magnitud de este.
La cAmara videothern 94 (ó afines ) v el Programa de
anAlisis INFRA/SOFT son un coniunto que permiten detectar
la energia tér¡rica irradiada de un cuerPo y transformarla
en una inagén de televisión, para luego ser analizada por
nedio de un software, el cual permite obtener una imagen
puntual del punto máximo de calor. (Eiemplo: Bujes de
un transformador figura 38' figura 39' figura 40 y figura
41).
El estudio de ternografia en motores eléctricos de
inducción es llevado a cabo para deterninar Problemas de
sobrecalentamiento causado por sobrecarga en los motorest
presencia de barras rotas que se transducen en calort
problenas de ventilación o daños estructurales de la
máguina.
Los problemas en los motores
de alimentación, debido que
transducen en las lineas
presencia de algunas de
se
Ia
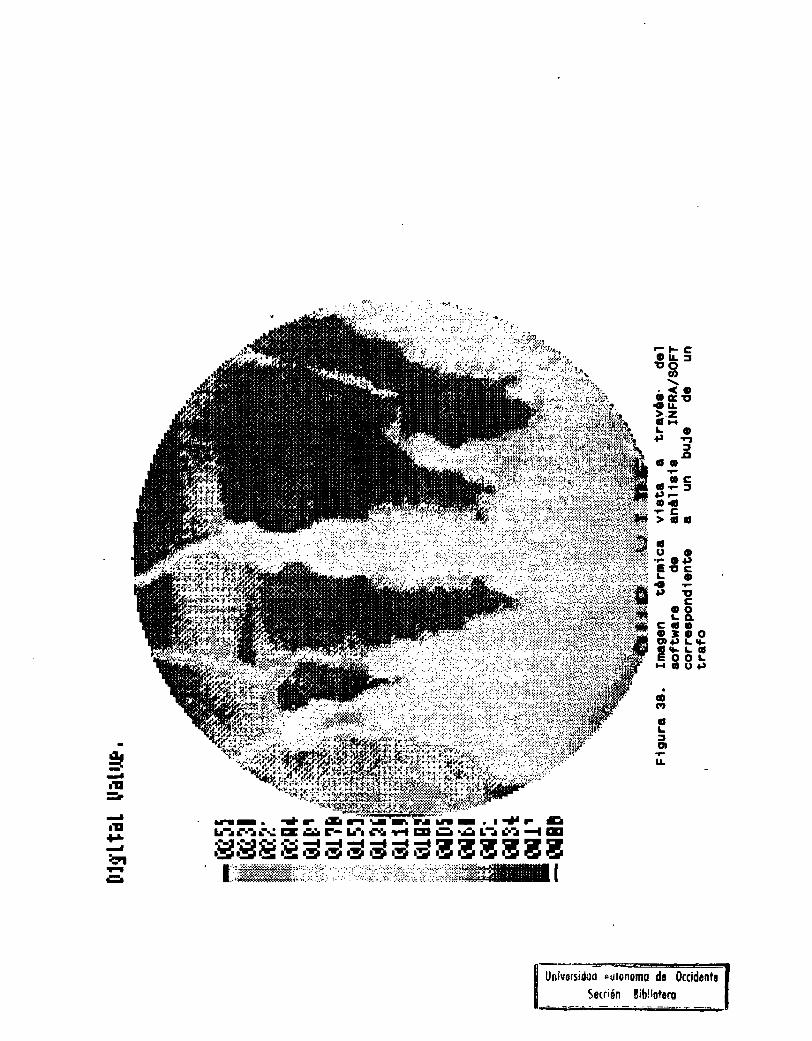
685EOat
óÉ€.O l!>.2fHLoP .ir
toloOE
6r foa?c>ú6aoo! O+,EE gLOo+,E
CooLO,c.úootooO+t L rF.|FLúEOOLHOO+t
(octóLtolt
GIEEll
-. r{.F.€ L-¡ d.-¿ {
EfrTTI¡+¡-.-¡rt Ef;gttfi
:s'lj
+¿JE-¿J!E{¡¿br.FtÉ
Univ¡¡sidoo auronomo dc 0ccidcnl¡
Serrién Bib!loraro
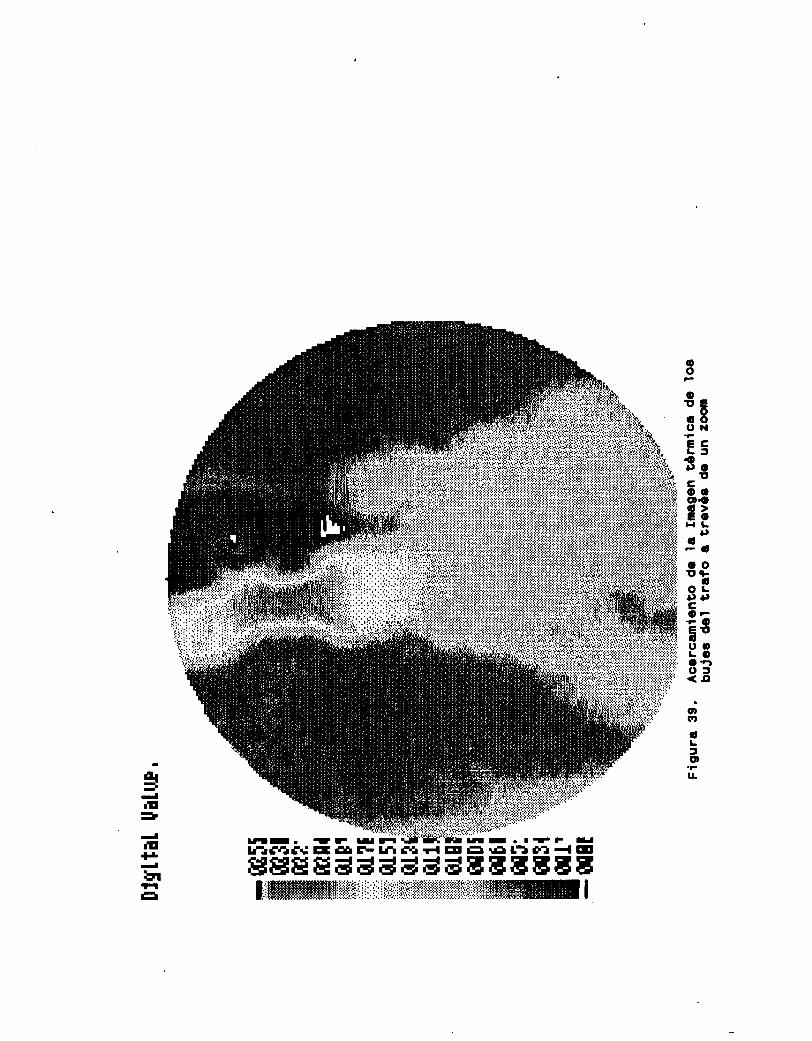
oo
oE560(,N
ECL'o+roEgooo.oú>EOHL
+,aeatoot'IF
aoL+'+tgOFroEO6uoLOO +'t(rt<.o
ot(r,
aLtol¡-4
-JIE=.¡JIE{¿Jür.FlÉ
F¡r . -- - -'-''."*"'i¡E¡t¡¡¡l''¿[ r ¡ r -F F rJ
kAftÉ\: Ef ÉE EL lfl ft -l E! É 1É f? út -l fHsÉtdÉddddtEEEEElilffil!#i*#iiiiiii:iirrifri¡i4Ír$li*irf f:$i-T*!Ml
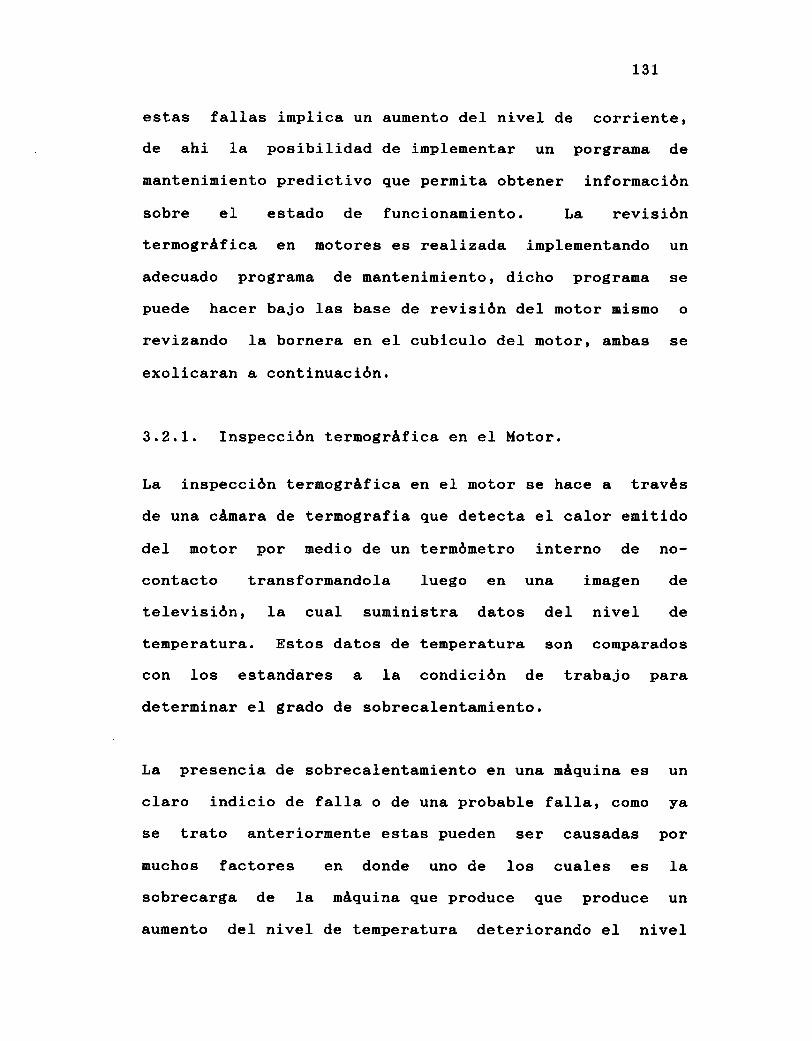
131
estas fallas inplica un aumento del nivel de corriente,de ahi la posibilidad de implementar un porgrama de
manteniniento predictivo que permita obtener información
sobre el estado de funcionamiento. La revisiónternográfica en motores es realizada implenentando un
adecuado programa de nantenimiento, dicho programa se
puede hacer bajo las base de revisión del motor mismo o
revizando Ia bornera en eI cublculo del motor, ambas se
exolicaran a continuación.
3.2,t. Inspección ternográfica en eI Motor.
La inspección termográfica en eI motor se hace a través
de una cAnara de termografia que detecta eI calor enitido
del motor por nedio de un termómetro interno de no-
contacto transformandola luego en una imagen de
televisión, Ia cual suministra datos del nivel de
temperatura. Estos datos de temperatura son comparados
con los estandares a Ia condición de trabajo para
determinar el grado de sobrecalentamiento.
La presencia de sobrecalentamiento en una nAquina es un
claro indicio de falla o de una probable falla, como ya
se trato anteriormente estas pueden ser causadas por
muchos factores en donde uno de los cuales es lasobrecarga de Ia náquina que produce que produce un
aumento de1 nivel de temperatura deteriorando eI nivel
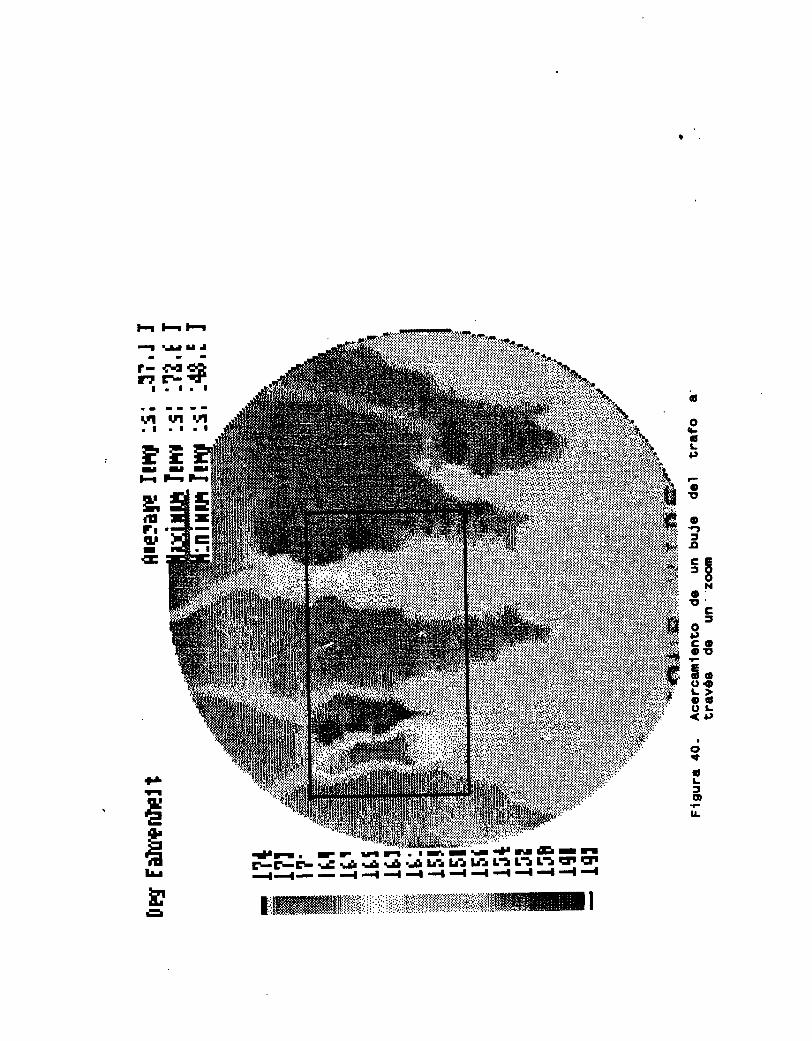
-t l l¡¡
f- f{ Cf,¡a Er- q.
I ¡ l. I
=-
l- l- r-
";.tEILDl-r
Et'l¡FrtrlrTE
=¡al-r
f
!t
olFúL+t
oE
o.r,'t=.oCE'8Noo'
CJo+¡COottE,ooL>o6OL<+¡
+¡
EgEl¡r
E,É
o*¡L3olr
d.-. - r. g-r;*IT-tril 14l ..1f ;¡ El r !rÉÉ:R- '*.c
-r.ü *A -.ó .i l¡" E 14 t-I1'l q q q
=== = = = = = -l = -r -r -r -l -l -l
ott
occrtr¡Co
oL+¡Ito
oC ll-o6
Ltt +tE!reOrlt¡t+tooolt'Dal.o+too.rO>F
t(tLJott
r|EI\r.t\frFJE?¡¡srrd
EI
r?¡afr
ta||
i-EfIE
EFI
Hl¡¡
tfr+l\¡EDtt¡+
'5EIEEJ
FrEÉ¡r?
-
134
de aislaniento de estar con
cortocircuito entre esPiras.
posibles causas de
9.2.2. Inspección ternogrAfica en los centros de control
de rnotores.
La termografia en los centros de control de motores es
Ilevada a cabo en cada cublculo del motor inspeccionando
tanto Ia parte frontal como en Ia posterior, en Ia
frontal se debe nedir el nivel de calor a que estan
sometidos los componentes de protección del motor tales
como disyuntores, transfornadores, relésr contactorest
etc, y en Ia parte posterior, Ia cual es de mayor
significancia en termografia ]os bornes de salida de
acometida del cublculo hacia el motorr para luego
comparar en primera instancia el nivel calorlfico de cada
una de las fases entre si ¡ y determinar con base en Ia
diferencia entre ellasr Y €n la diferencia de tensión y
corriente algün problema de tipo estructural o de diseño
del tipo de cableado de Ia acometida del ¡rotor o del tipo
de conectores utilizados, como tanbién Ia deficiente
sujección del cable a Ia bornera.
135
3.3. PROGRAMA COMPARACION DE RESPUESTA DE LAS BOBINAS
LAS DIFERENTES ONDAS DE IMPULSO
EI nodelo BAKER es un probador de inpulso de alta
corriente barra a barra. Utiliza un imPulso de descarga
de capacitor para tensionar eI aislarniento entre las
barras de las armaduras CDr este nétodo ofrece una prueba
del aíslamiento mas efectiva que cualquier otra técnica.
EI voltaje entre barras puede ser variado entre 50 y 750
voltios en arnaduras de gran tamaño conectadas en cruz.
Estas pruebas pueden ser llevadas a cabo en los devanados
del motor sin ir aI motor nisno, desconectando el
breaker, conectando Ia carga aI lado del circuito del
breaker y llevando a cabo una primera prueba de alto
potencial d.c. Este procediniento chequea el aislamiento
del cable de alimentación y eI aislaniento de tierra del
motor. si eI aislarniento es bueno, use Ia prueba de
comparasión de fuente y cambie de fase del motor. La
prueba de comParasión de fuente es de corriente linitada.
cuando se prueba un motor a través del cable de
alimentación y este es de gran tamaño (mayor que 100
pies) mucho del rendi¡riento de corriente se carga en el
cable.
Las fallas son idénticas y localizadas observando
perfil de Ia onda mostrada en la pantalla. Cuando
else
136
estA probando una barra en cortor Ia forna y amplitud del
perfil de la onda es reducida significativamente.
Se utiliza un contactor manual para aplicar el voltaie
aI conmutador y medir eI voltaie entre barras de Ia
armadura. Los contactos a tierra li¡nitan Ia prueba de
impulso a un pequeño segnento de la armadura evitando
cualquier efecto de sobrevoltaie que pueda dañar el
aislamiento de la arnadura.
Este modelo estA diseñado especlficamente para probar
embobinados eléctricos de gran tamaño. La baia
inpedancia y alta capacitancia de estos embobinados
requiere alto voltaie y alta corriente instAntaneat
para tal fin utiliza capacitores de 0.05 Microfaradios en
eI circuito generador del impulso y los mas avanzados
semiconductores para descargar esos capacitores
( condensadores ) .
Existen modelos de provadores como el ST106E' ST112E'
ST124E, ST124A, AT150E' ST115E' MT165E, etc que pueden
ser utilizados en eI taller de reparación de notores Para
probar embobinados antes y despues de su reaparación
mostrando en Ia pantalla durante la prueba de alta
tensión, el voltaje de salida y la pérdida de corriente;
asimismo pueden ser utilizados para probar estatores de
13?
CA, armaduras y bobinas de campo de CDr motores y
generadores sincrónicos, asl como gran variedad de
bobinas y enbobinados; tanbién son una excelente
herramienta de manteniniento predictivo. Estos modelos
son de fAcil transportación y pueder llevados aI sitio de
prueba en Ia planta para probar notores de gran tamaño en
su sitio. Estos provadores de impulso de alta voltaie
han sido utitizados amplianente como herramienta de
mantenimiento Predictivo.
AntiEluanente, Ia nedición deI aislaniento a tierra
utilizando el negaóhmetro y la alta tensión (CAICD) r eran
Ias ünicas pruebas realizadas en los motores eléctricost
pero teniendo en cuenta que una buena parte de las fallas
de los motores comienzan con una corto entre vueltasr Ia
prueba por comparación de inpulso ha crecido en
popularidad ya que es la forma mas efectiva de detectar
cortocircuitos entre vultas de un embobinado. AI
combinar la prueba de impulso con la prueba de alta
tensión en un solo instrunento, los equiPos Baker se
convierten en una completa herramienta Para mediciones
eléctricas.
3.3.1. Aplicación en notores de corriente Alterna (CA)
La gran energl.a acumulada en estos probadores permite
probar grandes motores en su sitio. La enerE¡la de pulso
138
(11.3 julios), es suficiente para car¡¡ar el embobinado
de1 estator y ca'rgg;r los relativanente largos cables de
alimentación. Adicionalmente, Ias bobinas de alambre
rlgido pueden ser probadas antes y despues de ser
insertadas en el estator.
g.g,2. Aplicación en motores de corriente Directa (cD).
La baja impedancia de las bobinas en serie de los motores
cD los hace nas diflciles de probar para determinar
cortos vuelta a vuelta; este probador resuelve esta
dificultad aI Proveer alta corriente instantAnea para
tensionar el aislaniento entre vueltas de estas bobinas.
3.3.3.Pruebas en los devanados del Motor.
Un taller comercial de rebobinados de motores ejecuta
pruebas que aportan información sobre la corriente nedida
en la fase del motor, Megeando, realizando pruebas de
alto potencial(high potencial testing) V pruebas de
fuente (surge testing).
El megeo y Ia prueba de alto potencial (hipot) son
pruebas qque son similares aI principio. Un voltaie es
aplicado al devanado y a Ia tierra de Ia rmadura de}
motor. Si eI aislamiento es bueno da una lectura de alta
139
resistencia (altos megaohmios). Una lectura baia indica
presencia en los devanados de polvo y hunedad aI menos o
en el peor de los casos un nal aislamiento de tierra.
La prueba de ac es una prueba de alta potenciat cargando
el devanado 60 ciclos por segundo. El notor se comporta
como un circuito capacitor, la corriente es tan grande
qlue Io car1a alternadamente de positivo a neElativo a, la
frecuencia de linea. La fuga de corriente entre eI
devanado y Ia tierra es una fracción de la carga de Ia
corriente, tan Pequeña que Puede ser fAcilnente medida'
solamente Ia corriente total aplicada es nedida. La
ausencia de esta prueba no me darian eI É¡rado de falla
hasta que eI aislaniento de tierra no falle.
Las pruebas de dc, se hacen cargando lentamente el
devanado , solamente pocos microamperios son necesarios.
Solamente la prueba especLfica de voltaie es
deterninante. la corriente solamente tomada es la
corriente de fuga, Ia cual indica eI estado exacto del
aislamiento del motor. La corriente de fuga es el
inverso de Ia resistencia de aisla¡riento ¡ 1o preferible
es una alta resistencia o una baia fuga de corriente.
de
de
La
de
nueva prueba usadas facilitan Ia prueba
fuente. Esta es hecha con baios pulsos
comParacion
energia que
140
se enfocan turnandose de fase en fase eI aislamiento deI
motor, cuando se realizan las pruebas de negeo y de alto
potencial dc se provee eI usuario de una completa
historia sobra Ia condición del motor.
Un procediniento de controL de calidad que ha sido
reaizado por muchos años en los talleres de motores son
Ias pruebas de fuente (surge testing). Sin enbargo,
ttrr"vós datos muestran que las pruebas podrian ser
ejecutas desde eI punto de instalación del notor. Un
instrumento que permite eiecutar estas pruebas desde el
punto de ubicación del notor es eI equipo BEAKER¡ este es
conectado a las tres fases del motor, a través de los
cables de alimentación del notor del encendido o del
centro de control de motores, examinando la onda patron
sobre la pantalla del osciloscopio. Si Ia onda patron es
estable y no titila por encima de 2000 voltios sobre un
notor de 480 voltios c¿mbiandose de fase en faser indica
que no hay cortos presentes. Esta sinple onda patron
esmostrada aI 95 porciento del ciclo. Sin enbprgor s€
veria gue Ia onda se quiebra y cambia abruptanente Para
voltajes bajos. Cuando Ia onda patron canbiar el motor
esta empezando a cortocircuitarse a las pruebas de
voltaje. Este es eI ciclo necesario Para una inspección
completa.
t4l
No es necesario interpretar las diferentes ondas que
aparecen sobre Ia pantalla, Ia interpretación
no necesariamente deternina Ia condición del devanado¡
sin embargor €s necesario conocer si una falla se
presenta en una prueba de un voltaie denasiado baio. No
tiene imprtancia la existencia de Ia falla nisma, sino eI
estado de deterioro del devanado figura 42 y 43.
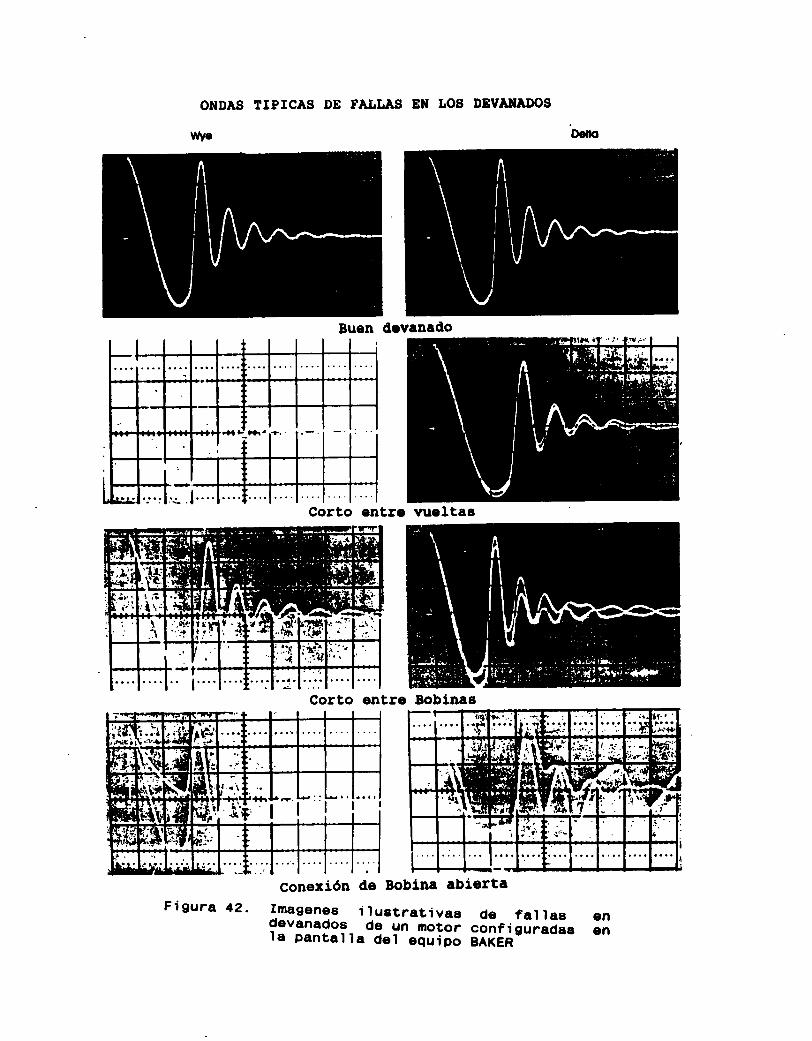
ONDAS TIPICAS DE FAI..I.AS EN I.Og DEVA¡IADOS
devanado
Corto entre
Corto €ntre Bobinas
Conexión de Bobina abiertaImagenes i lustrativaedevanados de un motorla panral la ctel equlóó
cle fal lasconfi guradasBAKER
enen
Deüo
vueltas
Figura 42.
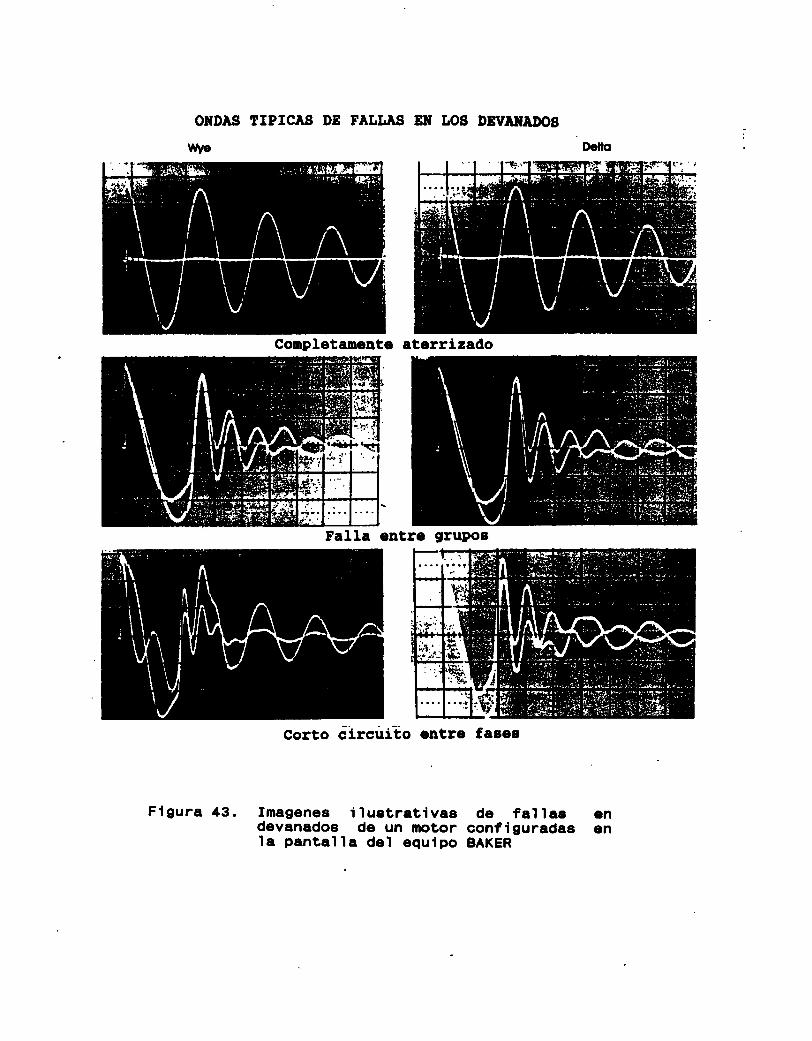
OIfDAS IIPICA8 DE FALLAS
wtp
E¡I T,Og DBVAf,ADOS
CompletaneBte aterrizado
grupo8
Figura 43. fmagenes i luetrativaedevanadoe de un motorla pantalla del equipo
de fallasconfi guradaeBAKER
en€n
4, Estudio y diagnóstico de fallas en motores eléctricos
de inducción.
Et estudio y diagnóstico de fallas en motores eléctricos
de inducción se pueden realizar ejecutando los Programas
de análisis antes vistos, o con un detallado estudio de
Ia condición eléctrica del motor aplicando una serie de
pruebas que se describen en unos de los casos estudiados.
4,L, Estudio de un motor de inducción tipo iaula de
ardilla de 25OO HP.
4.1.1. Antecedentes
A fin de nultiplicar la producción de acido citrico, una
empresa adquirió un compresor tipo ATLAS KOPCO. El
compresor tiene una capacidad de 16800 Pies cubicos/seÉr
toma aire det ambiente y los inyecta aI Proceso; es
accionado por un motor de inducción de 2500 HP a 4160
Voltios, a través de una unidad de transmisión que eleva
Ia velocidad de 1780 a 13000 rPm.
L45
Desde su instalación el equipo ha presentado dificultades
traducidas en :
Fuerte corriente de arranque, obligando a1 reaiuste de
protecciones.
- Vibraciones anornales.
- Oscilaciones periódicas audibles
Elevación de la temperatura de los devanados¡ hasta el
punto de disparo de las protecciones.
Fuerte desbalance de corrientes
- Adición de extractores para permitir eI funcionamiento
del equipo.
4,L,2, Especificaciones del equiPo.
4.I.2.1.Compr€sor.
Tipo : centrlfugo
Velocidad : 13106 rpm
Caudal : 16800 pies cubicos/seɡ.
4 , | .2 ,2 ,Trat:smi s ión .
Tipo: Sistemas de engranajes sin fin
Etapas: Una
Relación: 7
1870 13106 rpm
L46
4.1.2.3.Motor asincrono con rotor de jaula de ardilla
Siemens.
Serie No. 15110-64503-1-1
Type-Fods Mod 139
HP-2500 Frame 6811 Factor service 1.0
Anp 3Oz
Volts 4160 Clase Insulation F
rop.m L778
Duty cont Anb 40oc
H END 55900-889-501
4. 1.3. Inspección preliminar
Se hizo una inspección preliminar para evaluar
Elementos móviles del comPresor y Posibilidad de iuego en
sus ajustes. (vAlvula de entrada).
Nümero de dientes de la corona de transmisión y su
relación con la frecuencia de Ia oscilación presente.
Nünero de dientes de la corona 90, velocidad de giro 1780
rPm.
Alineación de1 sistema y posibles iuegos en las
chumaceras del motor.
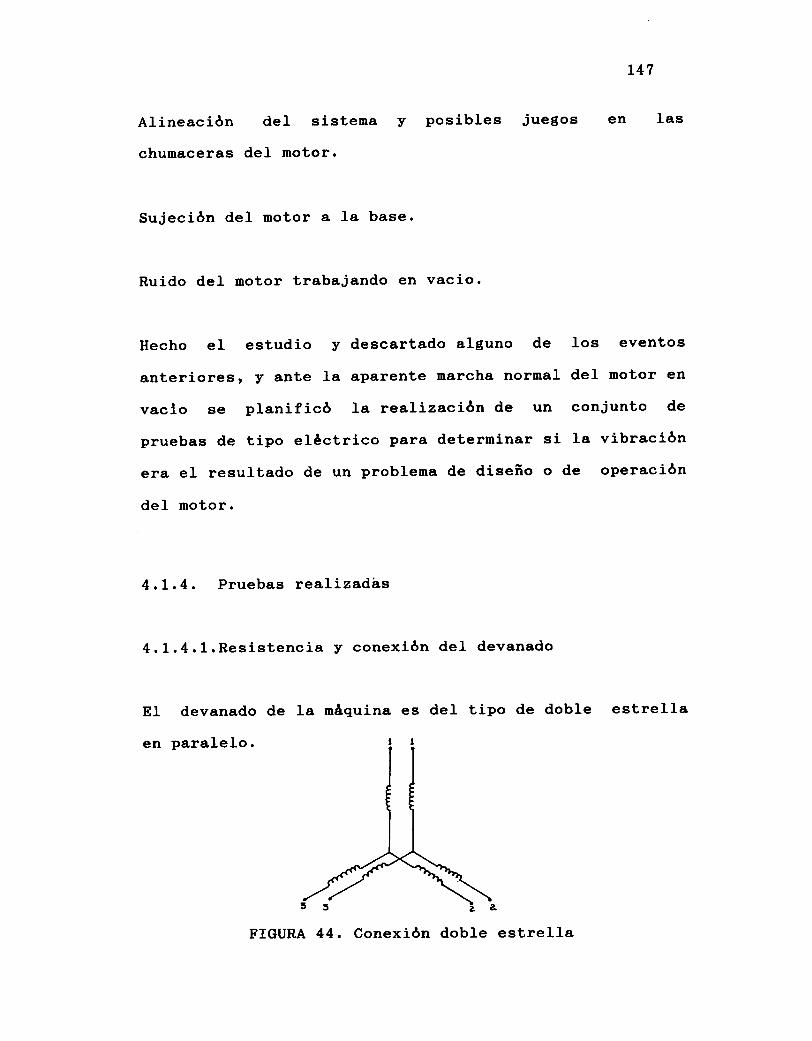
L47
Alineación del sistema
chumaceras del motor.
y posibles juegos Ias
Sujeción del notor a la base.
Ruido del motor trabajando en vacio.
Hecho eI estudio y descartado alguno de los eventos
anteriores, y ante la aparente marcha normal del motor en
vaclo se planificó la realización de un conjunto de
pruebas de tipo eléctrico para determinar si la vibración
era el resultado de un problema de diseño o de operación
del notor.
4,L,4. Pruebas realizadbs
4.L.4.l.Resistencia y conexión del devanado
devanado de
paralelo.
la raáquina es del tipo de doble estrellaEI
en
FfGURA 44. Conexión doble estrella
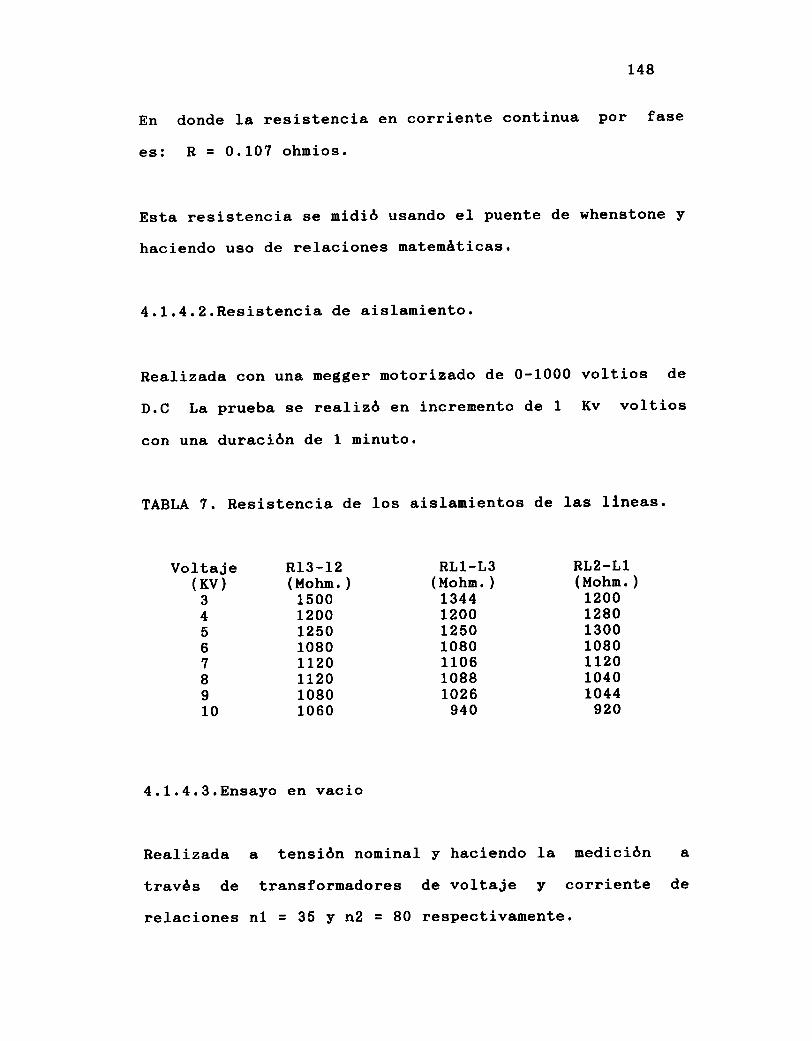
148
En donde Ia resistencia en corriente continua por fase
es: ft, = 0.107 ohnios.
Esta resistencia se midió usando eI puente de whenstone y
haciendo uso de relaciones natenáticas.
4.l,4.2.Resistencia de aislamiento.
Realizada con una megger notorizado de 0-1000 voltios de
D.C La prueba se realizó en incremento de 1 Kv voltios
con una duración de 1 minuto.
TABLA 7. Resistencia de los aislamientos de las lLneas.
Voltaje(Kv)
345678I10
Realizada
través de
relaciones
Rr3-12(Mohn. )
1 500120012 501080tL20LLzO10801060
a tensión nominal
transformadores
nl=35yn'2=80
RL1-L3(Mohn. )
L3441 200125010801 10610881026
940
Rt2-L1(tlohn. )
1200r2801 3001080LLzO1040LO44
920
4. 1.4.3.Ensayo en vacio
y haciendo la nedición
de voltaje y corriente
respectivamente .
a
de
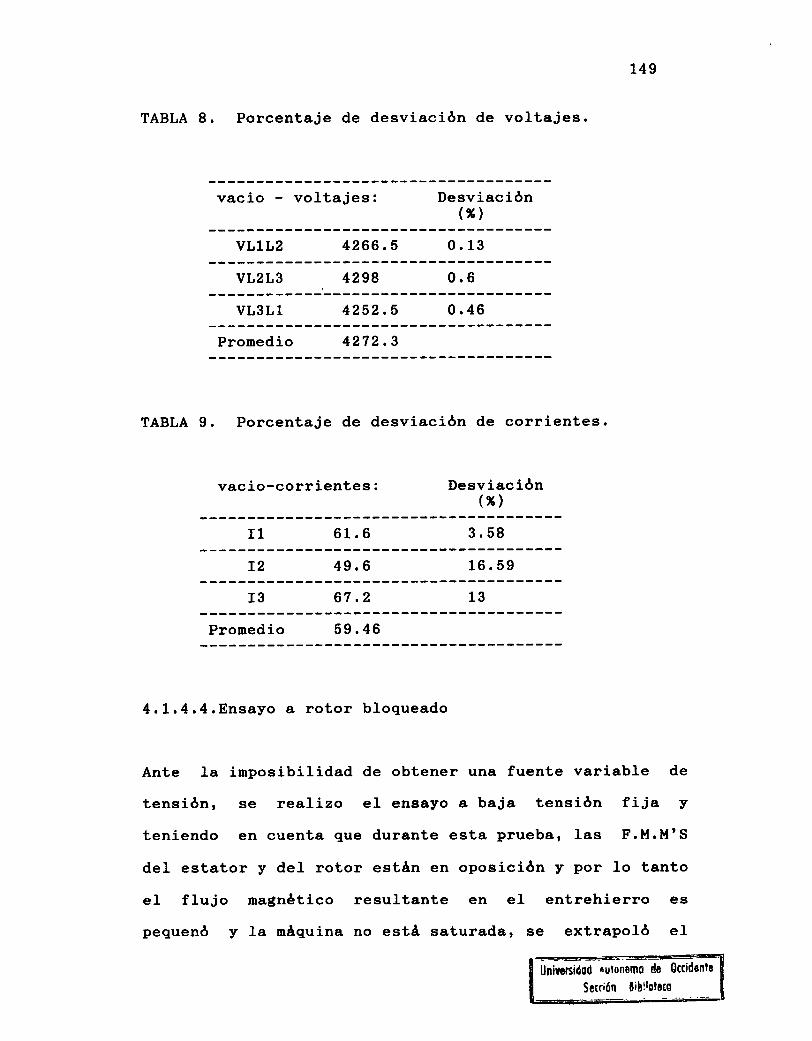
149
TABLA 8. Porcentaje de desviación de voltajes.
vacio voltajes: Desviación(%)
VLIL? 4266 ,6 0. 13
VL2L3 4298 0.6
VL3L1 4252 .5 0.46
Pronedio 4272,3
TABLA 9. Porcentaje de desviación de corrientes.
vacio-corrientes: Desviación(x)
11 61.6 3. 58
49.6 16.59
67 .2
Pro¡¡edio 59.46
4,L,4,4,Ensayo a rotor bloqueado
Ante Ia irnposibilidad de obtener una fuente variable de
tensión, se realizo eI ensayo a baia tensión fiia y
teniendo en cuenta que dur¿nte esta prueba, las F.M.M'S
del estator y del rotor estAn en oposición y por 1o tanto
el flujo magnético resultante en eI entrehierro es
pequenó y la náquina no estA saturadar s€ extrapoló el
T2
13I3
Unircrsidod ¡ulon0m0 de occidsnt¡
Scrr¡ón tibllstrco
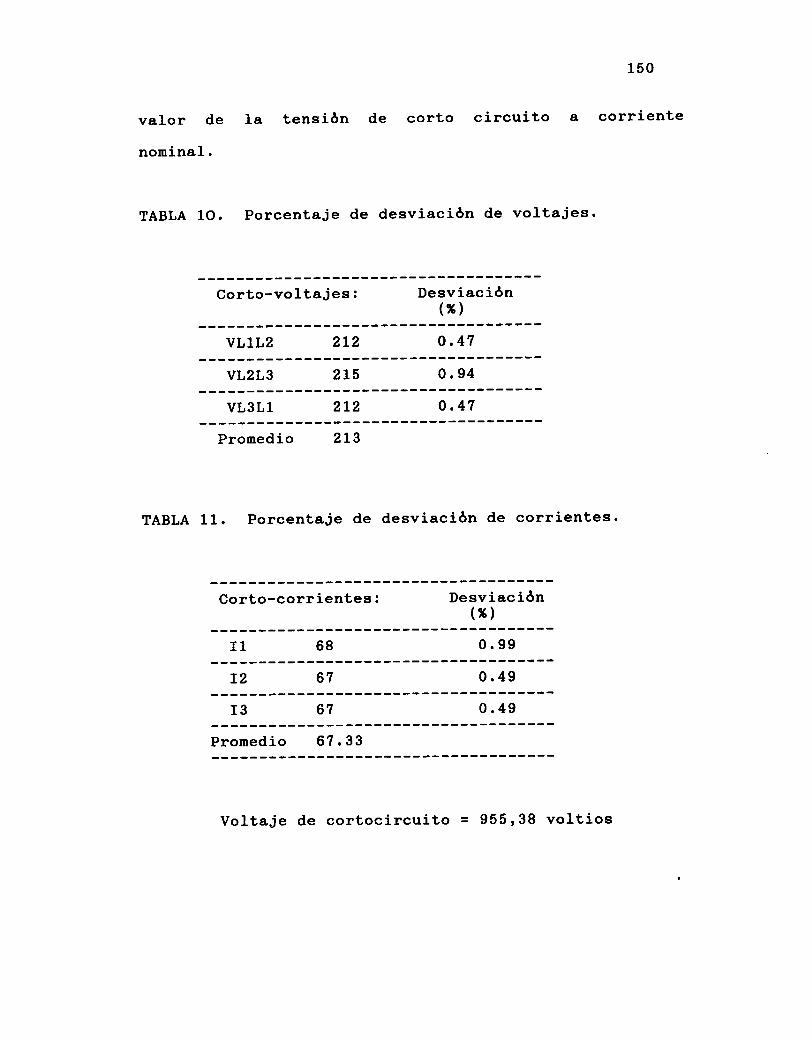
150
valor de Ia tensión de corto circuito a corriente
noninal.
TABLA 10. Porcentaie de desviación de voltajes.
Corto-voltaies: Desviación(%)
vL1L2 212 0.47
vL2L3 2L5 0.94
vL3L1 2L2 0.47
Promedio ztg
TABLA 11. Porcentaie de desviación de corrientes.
Corto-corrientes: Desviación(x)
11 68 0.99
12 67 0.49
r3 67 0 .49
Promedio 67.33
Voltaje de cortocircuito = 955 r 38 voltios
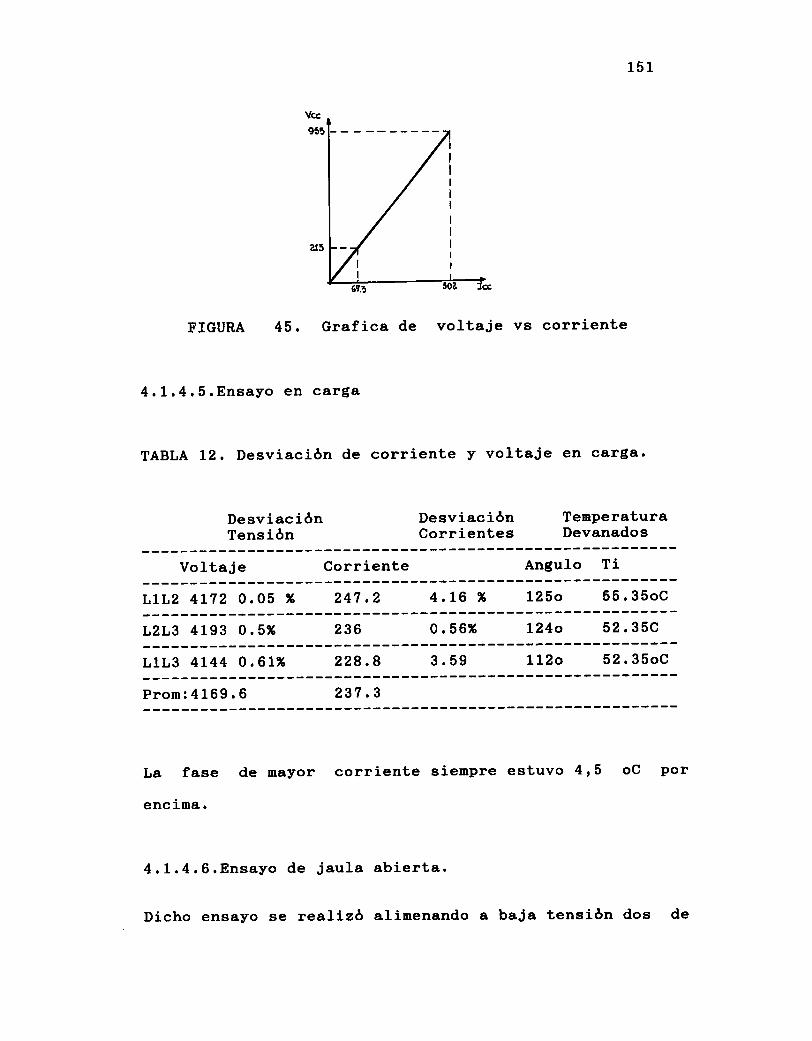
151
FIGURA 45.
613
Grafica de voltaje vs corriente
4,L,4,5,Ensayo en carga
TABLA 12, Desviación de corriente y voltaie en carga.
DesviaciónTensión
DesviaciónCorrientes
TemperaturaDevanados
Voltaje Corriente Angulo Ti
LLL? 4t72 0.05 % 247 ,2 4.16 '6
L25o 55.35oC
L2L3 4193 0.5% 236 0.56% L24o 52.35C
L1L3 4L44 0.61% 228.8 3 .59 LL2o 52.35oC
Prom:4169.6 237 .3
La fase
enc ina.
de mayor corriente sienpre estuvo 4r5 oC por
4,L.4.6.Ensayo de jaula abierta.
Dicho ensayo se realizó alinenando a baia tensión dos de
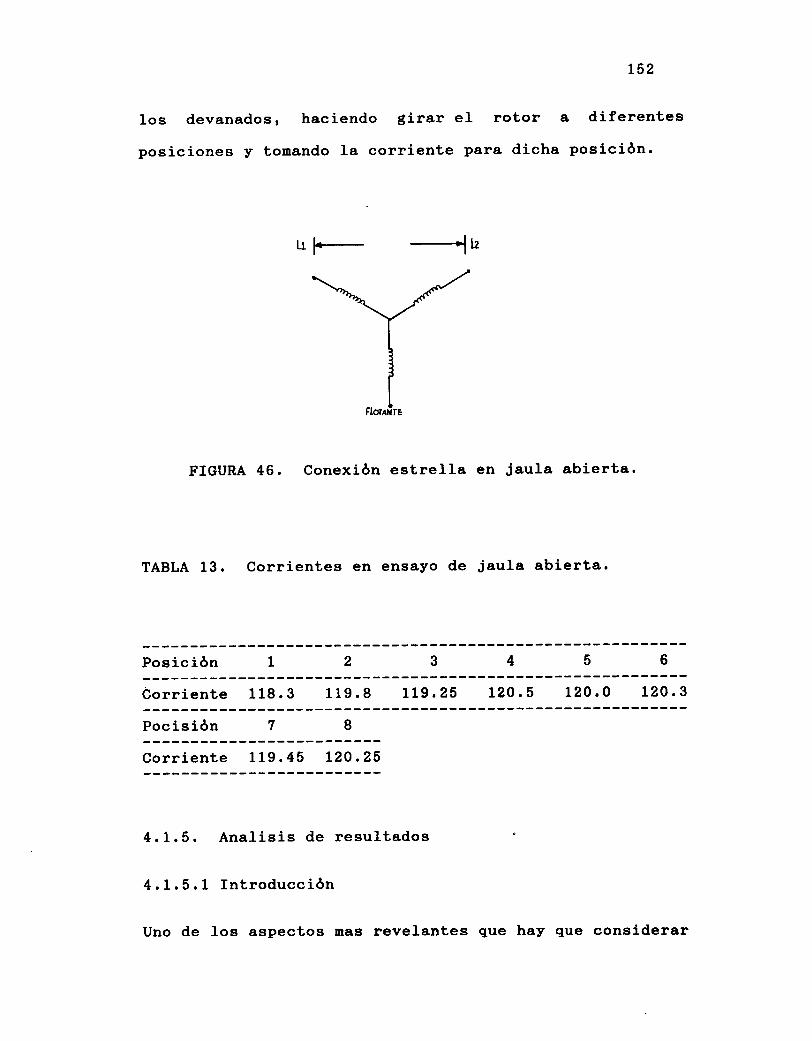
los devanados, haciendo girar
posiciones y tomando la corriente
eI rotor a
para dicha
L52
diferentes
posición.
u l+- .--_l r,
FIGURA 46. Conexión estrella en jaula abierta.
TABLA 13. Corrientes en ensayo de jaula abierta.
Posición I
Corriente 118.3 119.8 119.25 L20.5 120.0 120.3
Pocisión
Corriente 119.45 tzO.25
4,L.5, Analisis de resultados
4.1.5.1 fntroducción
Uno de los aspectos mas revelantes gue hay que considerar
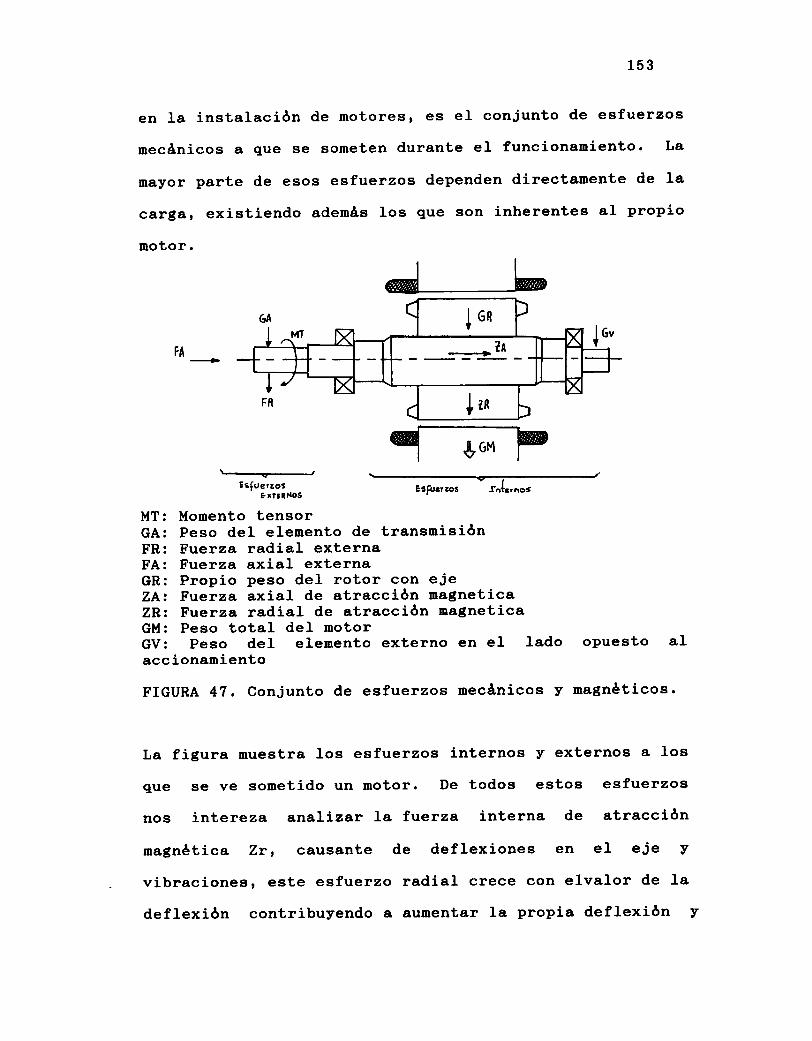
153
en la instalación de motoresr €S eI coniunto de esfuerzos
mec¿nicos a que se someten durante eI funcionamiento. La
mayor parte de esos esfuerzos dependen directamente de la
g,arga, existiendo ademAs los que son inherentes aI propio
motor.
FA
\---v-JEtfrrerzos
5 ¡y¡¡NoSEsFocr¿os
- t^L,^ot
MT: Momento tensorGA: Peso del elemento de transmisiónFR: Fuerza radial externaFA: Fuerza axial externaGR: Propio peso del rotor con eieZA: Fuerza axial de atracción magneticaZRz Fuerza radial de atracción maÉ neticaGM: Peso total del motorGV: Peso del elemento externo en el lado opuesto alaccionamiento
FIGURA 4?. Conjunto de esfuerzos mec¿nicos y magnéticos.
La figura muestra los esfuerzos internos y externos a los
que se ve sometido un motor. De todos estos esfuerzos
nos intereza analizar la fuerza interna de atracción
magnética Zr, causante de deflexiones en eI eie y
vibraciones, este esfuerzo radial crece con elvalor de Ia
deflexión contribuyendo a aumentar la proPia deflexión y
w
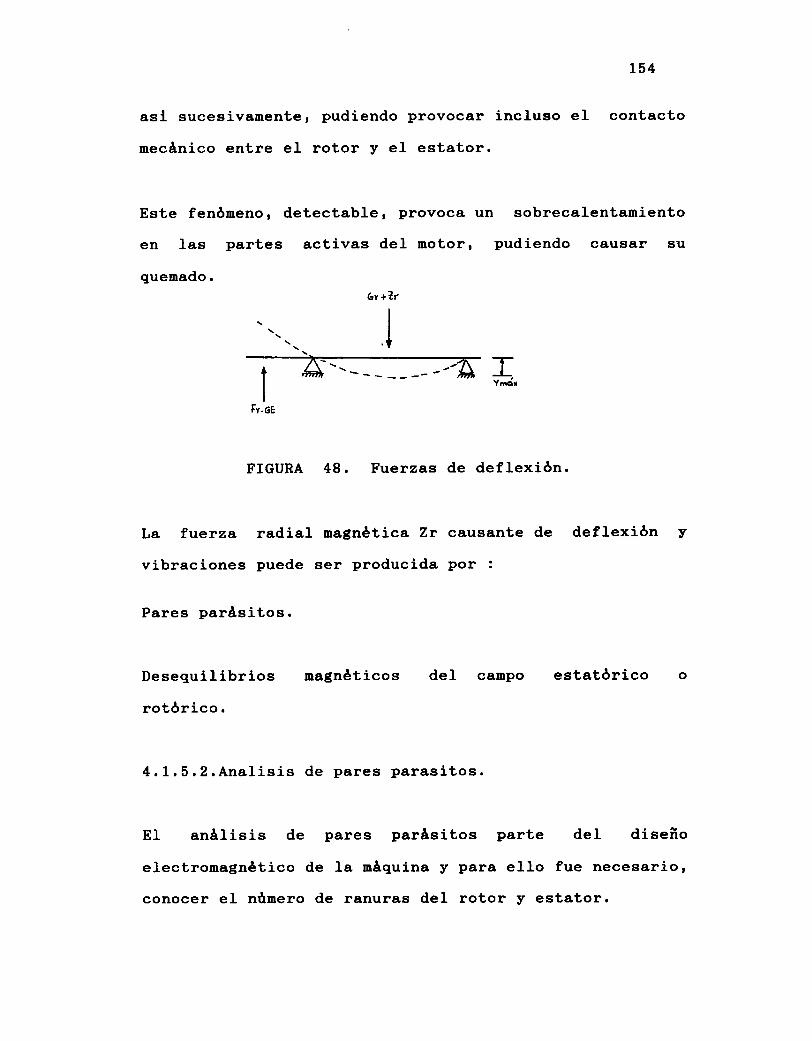
r54
asl sucesivamenter pudiendo provocar incluso eI contacto
mecAnico entre eI rotor y el estator.
Este fenóneno, detectabler provoca un sobrecalentamiento
en las partes activas de1 motorr pudiendo causar su
quemado.6v +?r
It-- I
FIGURA 48. Fuerzas de deflexión.
rv-dt
causante de deflexiónpor :
La fuerza radial nagnética Zr
vibraciones puede ser producida
Pares parásitos.
Desequilibrios
rotórico.
nagnéticos deI campo estatórico
4.]-5.2.Analisis de pares parasitos.
EI anáIisis de pares parAsitos parte del diseño
electronagnético de la raAquina y para ello fue necesario,
conocer eI nümero de ranuras del rotor y estator.
155
Nümero de
Nünero de
Nümero de
Nünero de
Nümero de
ranuras
ranuras
pares de
ranuras
ranuras
del estator
del rotorpolos
por polo
por polo y fase
ZL=7222=58p =2A =24q =6
De los datos anteriores se deternina que eI devanado es
entero, Iuego no hay asimetrla nagnética por diseño y
sóIo contiene armónicos de fuetza magnetomotríz FMM.
4.1.5,2.I. Pares asincrónicos de armónicos superiores.
Los armónicos 5 y 7 de FMM crean pares parAsitos que
deforman la curva torque vs velocidad del motor y
presentan dificultades en eI arranque del motor.
Estos pares son minimizados realizando un devanado
distribuido tal como el de Ia rnáquina objeto de anAlisis'
descartando la posibilidad de problemas por los
mencionados pares.
4.L,5.2.2. Pares asincrónicos de armóni.cos de diente.
Los mornentos asincrónicos de diente que dificultan el
funcionaniento del motor se Presentan cuando se escoja
una relación desafortunada deI nümero de ranuras deI
156
rotor frente al estator, estas dificultades se obviant
inclinando las ranuras del rotor y haciendo que :
22 < L.25 (zI + pl
En eI caso que nos preocupa
22 = 58 < L,25 (72 + 21 3 92,5
ZZ = 58 < 1,25 (72 2l < 92.5
Por lo tanto en la mAquina no se presentan problenas por
dichos pares.
4. 1. 5,2.3.Pares sincrónicos.
Surgen a determinada velocidad de rotación y como
resultado de Ia interación de los armónicos del mismo
orden de rotor y estator. Se evitan por diseño haciendo
que :
Zl diferente 22 y ZL ZZ diferente + 2p
para eI motor siemens:
ZL = 72 diferente ZZ = 58
ZL ZZ = 72 58 = L4 diferente + 2p = 4
No se presentan pares sincrónicos.
L57
4. 1.5 .2,4.Pares de vibración.
Surgen por eI desplazaniento continuo entre los dientes
det estator y rotor; a una determinada relación entre
ellos aparece una fuerza de atracción unilateral entre
eI estator y el rotor que se desplaza en eI entrehierro
( "air gap" ) a determinado velocidad provocando la
vibración del rotor.
Et análisis ha mostrado que estas vibraciones se
presentan cuando:
ZL 22 =+L+2p y
(zL zZ)=t2+4P
Para eI motor siemens de 2500 HP:
Zt-ZZ =14 diferente +1+2P
Zl 22=14 diferente +1-2P =-$ZL 22 = L4 diferente 1 + 2P = $
Z1. 22 = 14 diferente 1 - 2P = -$
{=zt 22 =L4 diferente +2+ 8=10
Y=ZI 22 =14 diferente +2- 8=-$
Y=ZL 22=L4 diferente 2+ 8= $
f=Zl 22=L4 diferente 2- 8=-10
158
4. 1.5.3.AnAIisis de desequilibrio magnético'
En carga surgen fuerzas nagnéticas de ¿traccion radial
entre el estator y eI rotor; de haber un desequilibrio en
alguno de los dos, esta fuerza no serla Ia misna en todos
Ios puntos aparaciendo una componente neta Zt que
provocarla la disminución del entrehierro en unos puntos
y aumento en otros¡ causando Ia deflexión del eier el
ruido y vibraciones.
4,1,5.3. l.Canpo nagnético del egtator.
EI campo ná'gnético de} estator puede desequilibrarse por:
a) Un desequilibrio en las tensiones de alinentación.
Las normas internacionales MG - 1982 e IEC Pub 34 '
admiten un desbalance de un 1% ¡rAxino entre tensiones.
EI sistema que alimenta Ia empresa en aI cual se esta
haciendo eI estudio presenta un desbalance de voltajes
que se detectó en las pruebas de vacLo, corto y cargat
cuyo valor mAximo es de 0.9% como se deduce de las tablas
No. 8r 10, y 12, pudiendose concluir que el fuerte
desbalance de corrientes no es producto de un
desequilibrio de tensiones.
b) Desbalance de las resistencias del estator. La
medición de fa resistencia no admite la posibilidad de un
159
desequilibrio nagnético Por dicha causa.
c) Cortocircuito entre espiras deI devanado estatórico,
que ocasiona diferentes FEM inducidas Por fase y por
consiguiente desequilibrio de corriente y camPo
nagnético. La prueba de resistencia de aislamiento
pernite descartar ]a posibilidad de una falla a tierra
de] devanado pues todos los valores tonados y consignados
en Ia tabla No.? estan por encima del mlnimo adnisible
dado por :
20 UnRais = M ohn.
1000 + ZPn
4160 voltios
2500 HP * 0,746 KI{/HP = 1865 M ohm.
17.58 M ohm.
4.1,6,3.2.Campo nagnético del rotor.
Unom
Pnom
Rais
El desequilibrio
dar por rotura
barras al anillo
del campo nagnético
de las barras, mala
o rotura del anillo
del rotor se puede
soldadura de las
de cortocircuito.
Como en la prueba de la
una tensión nonofásica
creó un campo magnético
rotura de jaula se alinentó con
de 438 voltios, en el estator se
nonofásico pulsante, es decir,
ünivclsi¿o¿ ¡u¡sn0m0 tlo 0ccid¿ntc
Sección 0ibrrot0t0
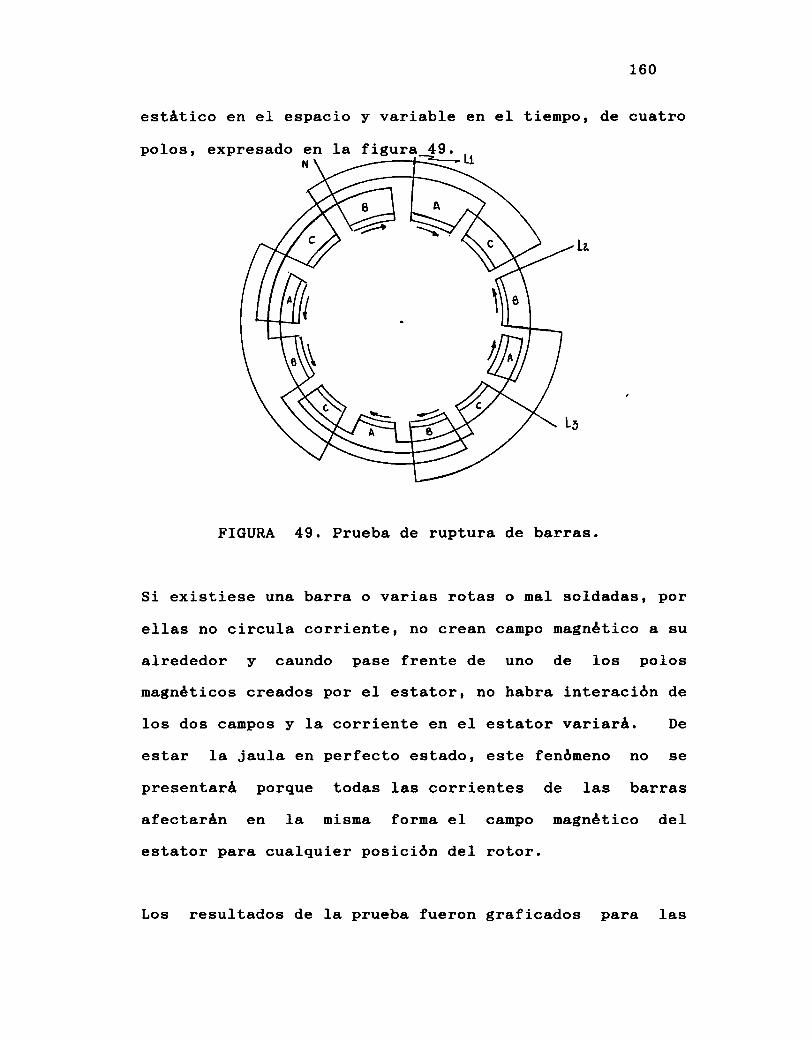
160
estAtico en eI espacio y variable en eI tiempor de cuatro
FIGURA 49. Prueba de ruptura de barras.
Si existiese una barra o varias rotas o mal soldadasr por
e1las no circula corriente, no crean campo magnético a su
alrededor y caundo pase frente de uno de los polos
magnéticos creados por el estatorr Do habra interación de
los dos campos y Ia corriente en el estator variará. De
estar Ia jaula en perfecto estado, este fenómeno no se
presentarA porque todas las corrientes de las barras
afectarAn en la misna forma el campo nagnético del
estator para cualquier posición del rotor.
Los resultados de la prueba fueron graficados para las
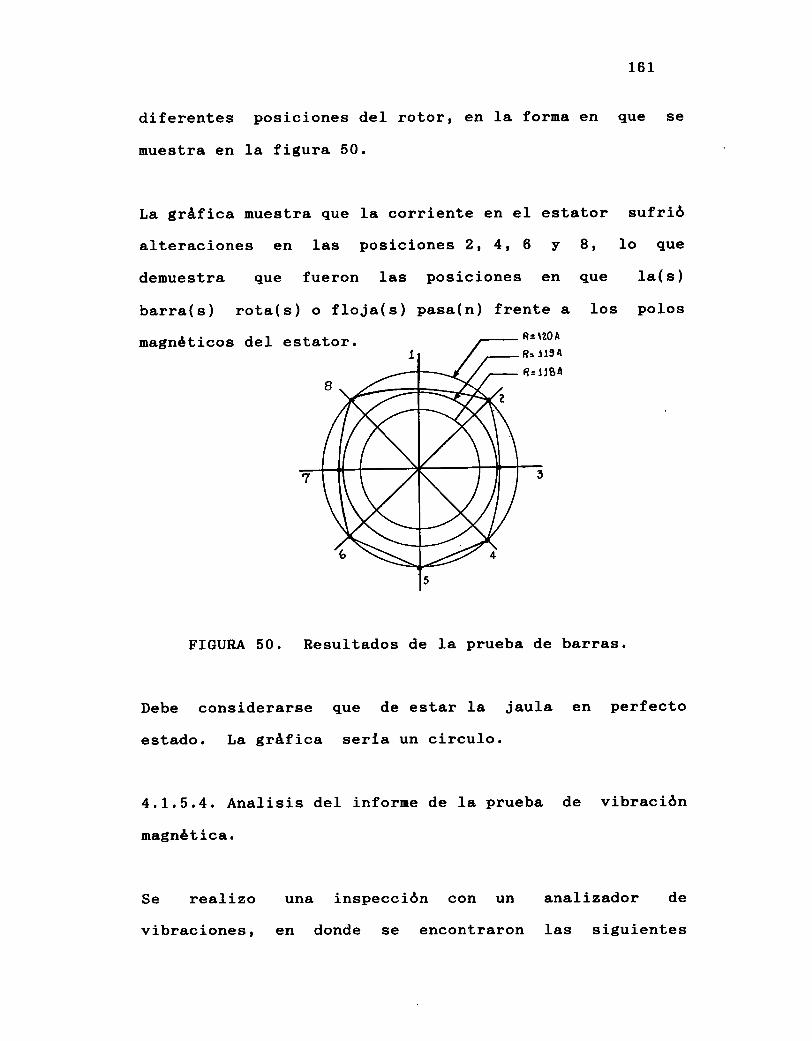
diferentes posiciones del rotor¡ €D Ia forna en
muestra en la figura 50.
161
que se
La grAfica ¡ruestr¿ que Ia corriente en el estator sufrió
alteraciones en las posiciones 2, 4, 6 y Ir Io que
demuestra q.ue fueron las posiciones en que Ia( s )
barra(s) rota(s) o floia(s) pasa(n) frente a los polos
nagnéticos del estator.
FIGURA 50. Resultados de Ia prueba de barras.
Debe considerarse que de estar la iaula en perfecto
estado. ta grAfica serLa un circulo.
4,1,5.4. Analisis del informe de Ia prueba de
magnética.
vibraeión
Se realizo
vibraeiones,
una inspección con un
en donde se encontraron
analizador de
las siguientes
R= J19A
8= IJBA
L62
irregularidades .
1. Una fuerte componente de vibración alrededor de las
72OO rpn. r 1o que confirma Ia existencia de fuerzas que
actüan en el entrehierror entre eI estator y eI rotor y
gue tienden a aproximarlos. Estas fuerzas producen
vibraciones con el doble de Ia frecuencia de
alimentación.
2, Con eI motor en car:ga tanto necAnica como
eléctrica¡nente (corriente de llnea) r eI analizador
presentaba una oscilación periódica de frecuencia
constante y coincidente con el ruido de arrastre del
rotor que desapareció en cuanto se elininó la
aIi¡nentación del motor, determinAndose asl que el origen
de las vibraciónes era de origen electromagnético.
4.2. ESTUDIO DE VIBRACION DE UN MOTOR QUE MANEJA UN
COMPRESOR DE UN REFRIGERADOR.
4.2,t, Antecedentes.
En enero 5 de 1989 r €D un regular informe se reÉlistro y
analizó el nivel de vibración de un motor eléctrico
Siemens Allis, eI cual naneja un compresor de un
refrigerador. El motor ha sido rebobinado varias veces
163
debido a la presencia de vibración.
Los datos de vibración fueron tomados con eI motor
acoplado aI compresor, sin embargo eI compresor estaba
descargado durante Ia pruebar Por 1o tanto el motor
tomaba una carga entre I3.7 a L4.4 amPs comparada con
48.5 amps a plena carÉia.
EI espectro de vibración indicó que eI motor estaba
girando a una rata de velocidad aproximadamente igual a
L797,3 rpm durante la prueba. La frecuencia de
deslizamiento estaba ademas cercana a 2,7 rpttrr El
espectro centrado a 1800 y 3600 (Figura 51 y figura 52)
ciclos por minuto mostro nultiples picos separados de la
velocidad de funcionamiento y a dos veces la velocidad de
funcionamiento cercana a 10.8 rpm ( 4 ciclos de Ia
frecuencia de deslizamiento) .
Los datos de vibración fueron tomados en el interior del
motor en los rodamientos en dirección horizontal,
vertical y axialr y sobre Ia caia de enÉlranaie en Ia
entrada del rodamientos en las tres direccioll€g.
4,2,2, Conclusiones.
Los picos de vibración separados ciclos de Ia
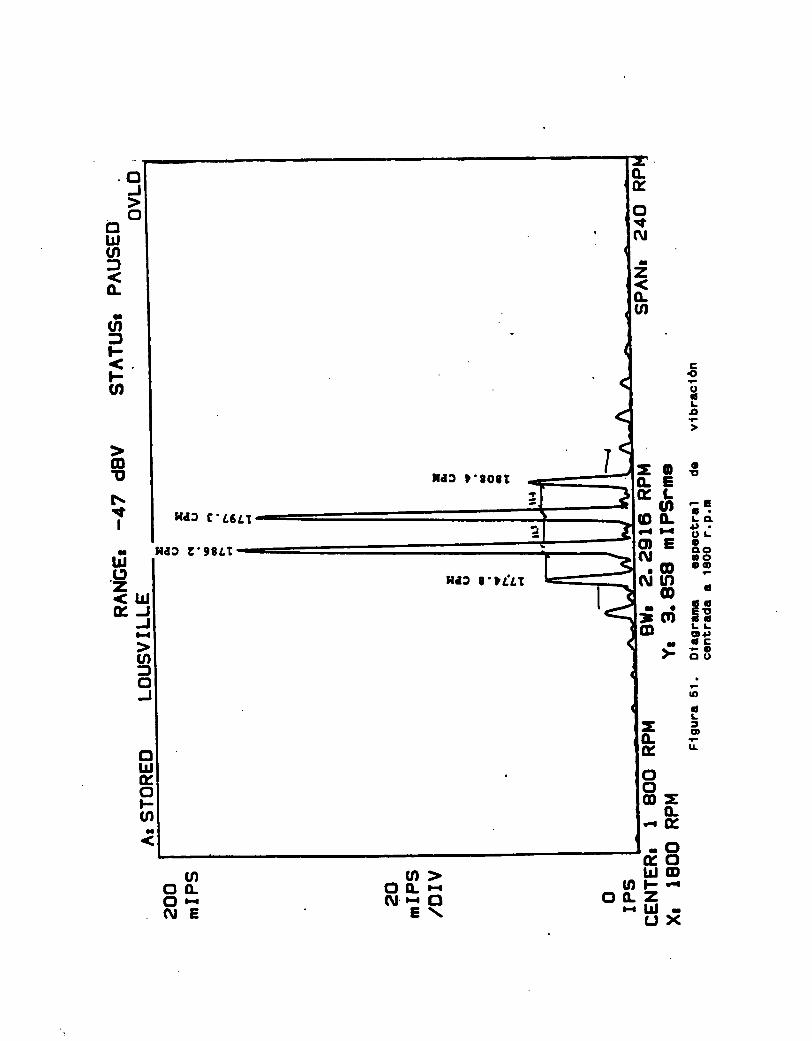
CooaL.o
0-frofN
IzGUI
.c¡Jc¡(f
t¡la:lo-
¡a3Fl-a
-GÉ,
(odon|
a
Nl¡l-lo
o€ELA Eqr lor{ üdEto
oo@ oo
ó.oi É!
o+¡
' ;E
tO
dLJof,
o!r\!tI
¡l¡lct'zÉ,
t¡lJJt<
U)foJ
ou¡ÉoFa-
oo@-
o-aÉ,
-C)Gctt¡J @Fdzl¡l ¡(JX
oO0.
H
o>O O- r-¡N'x CtE\
ac¡o-@ r.rNE
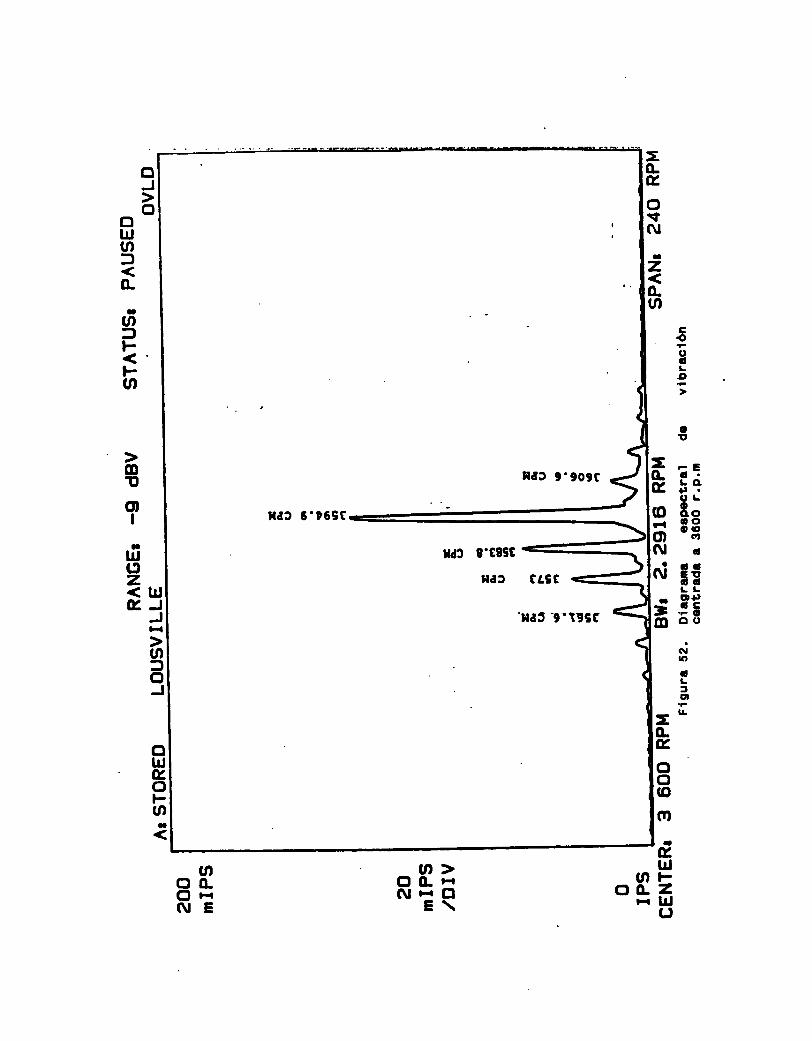
=GÉ,
oIN-z
o-UI
oo
ñ ?qÉ, !t
Q)LOto6tgN6ñg€
LL
;3Éo oo
a;ro
aLtot
-*o.É,
ctofo(lt
oJoo
lr,UI:ffL
C€(,aLo
o3FFo
@1¡
oI
tlr¡c,zÉ,
l¡¡JJF'
a:loJ
-É,t¡lFzt¡lu
ocl0-
FI
a>OG¡rN>¡ClE\
aoo-QrrNE
166
frecuencia de deslizamiento son un indicativo de
problemas eléctricos con el rotor. EI problema puede
radicar en una(s) rotura(s) o fisura(s) en Ia(s)
barra(s), o Ia discontinuidad en Ia conexión entre las
barras y los anillos de cortocircuito, o tanbién puede
ser que eI rotor no presenta redondes (.necanica o
eIéctrica).
Los problenas eléctricos como los exhibidos por este
motor usualmente son mas severos a plena cargar estos
datos indican que los problemas no estan asociados con
los devanados del estator tales coltro las pérdida en eI
hierro ( ta vibración ocurre exactamente a dos veces Ia
frecuencia de suministro). Sin enbargor si se ejecutan
pruebas a plena carga esto podrla ser fAcilnente
verificado.
Los datos indican desalineaniento entre eI motor y la
caja de rodanientos, y posiblemente entre la caia y eI
compresor. La componente de mayor vibración en eI
interior del motor ( rodanientos) en la dirección axial
esta a Ia velocidad del comPresor ( 3960 rprn). Figura 53
y figura 54,
A bajas velocidades aI acoPlamiento no nuestra marcas y
no indica que halla sido balanceado dinánicamente.
Figura 55 y figura 56.
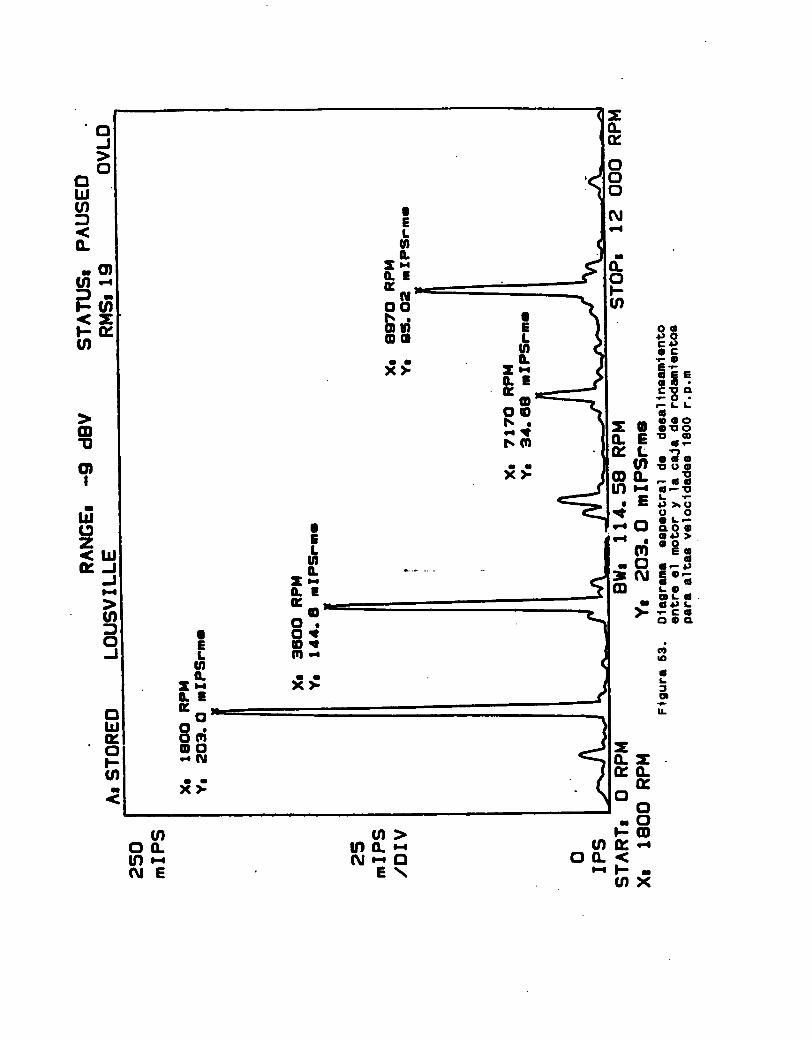
aEtoG!>r
GEc
'oJoo
u,a:lo-
-tllE:FU|<-F0rUl
oo+rOtr.POCrOEE=06 'ctt clrO.rLL6
o 8€8F o.3Larñ 060l9' EIJOL -¡El{ úpllE !-E(roo tb6- o., >oi '8.O ¡-En| 5"ELOoLa; :É b- ctoo
t;tlo
aLtolr
-o--GGuc'
¡ELItG
!rrGEtr oO.oo@o¡N
ol¡¡ol'oFa-
dctFUl
-GÉ,
onalfld
l-l-l-lo
IELo0,txGEc oooN.¡a
¡\O
fuooF.on@oaax>
¡ax>
@!oI
-t¡lc,zÉ
IEtoG!xo.EqoO.
OrrO!tO¡
t¡fJJF'
ofoJaax>
-¡x>o.ClFO
IaF-Ulx
aoo.F{
o>lfl O. ¡rN¡¡OE\
ac,o.lfl >tNE
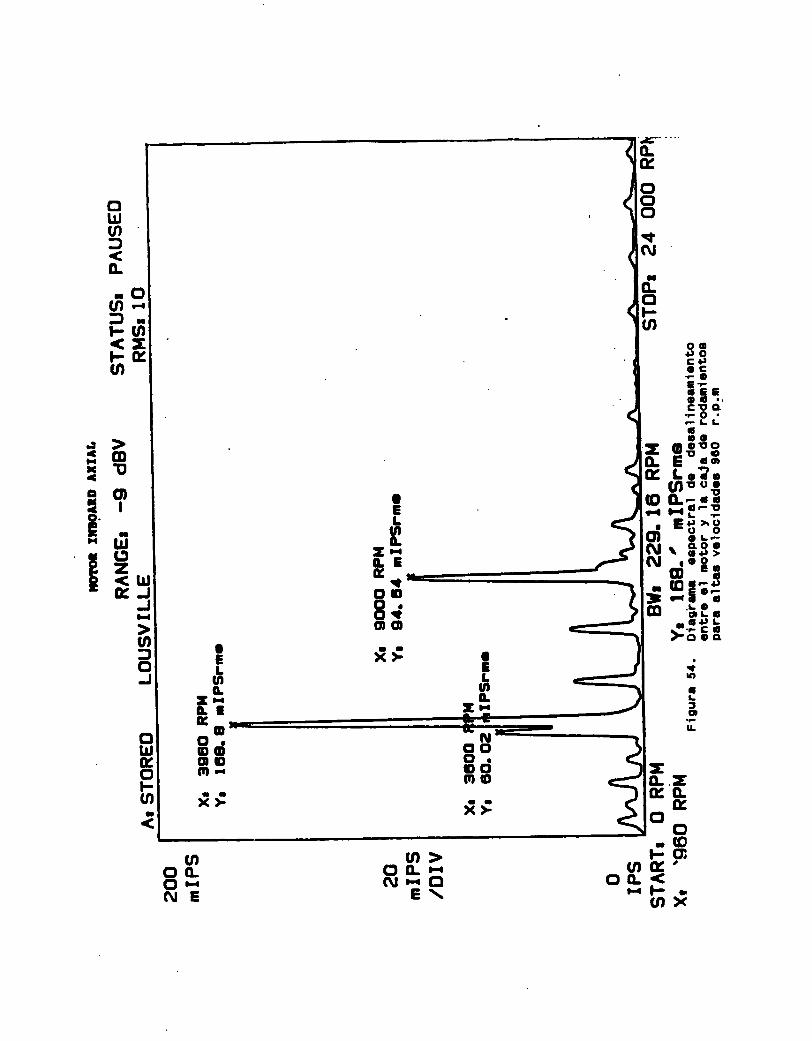
Eo-É,
octotN¡
o-cll-(,)
c¡lr,o30.
-O(/l -tJ-FO<-Ftra
3tcatOC.rOEEeoi!..cEOrO.Ioori o1'o
=tt roFg'f.OaO(,lE o9O--. ó- Í-PEü'8
oLF\ 839si"8tlfl úe+¡
=50E.LOOLú
- Ú.lJ t--.r C f-croo'
.;tO
aL=oii
o-É,
@Fa
ao|NN-
=@
l¡JJJ¡-a
ofoJ
o¡¡,É,c,Fo¡
@!oI
¡l¡lc,zÉ
r¡¡axoII8'-H¡II
-o-.-GO-
E,o o-@Fo}É'l-f,ax
oClG
l{
('t>CtO-¡t$lr<ClE\
aclo-fl >rNE
aELoGL.C
Noaooa
oooo-x
tELoo.
-HGEÉ, tooO.otooatx>t
ELoo.
!xo.EE oOro@oo|ll-aax>

oo+roc+tos'FoEE=g3¿.-C)'IoooOE C'EO6c,.?oúooErltfl-Er, >(,oogb?o+, >ooEQa|trQE ".8LoOL'art L+Clctoo
";t/O
aLtoE
E(Lot
oooo(f)
-o-oFlU,
-oo.EÉ,Lv,
@o-SH.Eo@nN.
@. C)'
=oo-
¡aE
oF
!ño
=L=g¿-cl
F.--Fi¡9,frFrLtx
0ELoGF'3
Dna€
6-
-BEontiG.N
IELo
=¡,!.xCE
rGcúrNo{Sa
axoELoG!xGE
c,F|ooC.f¡ t?FG
ONn.@@FNrad
aax>
¡EL
Üra!r<8.Etr ÉO.coofll
olt,uc¡FL1
ol|
-a
Fr
Ü:>Cf.-t')xEE\
U'col-l r-u)=
Univclsidod ¿ul0n0m0 de 0ctidcnla
od
aaxl¡,o.
@!
É,fil t-rN<1 J¡Otrl ClctFz<NÉ,.oz
ulJh
oIJa:f0-
-a:fFFo
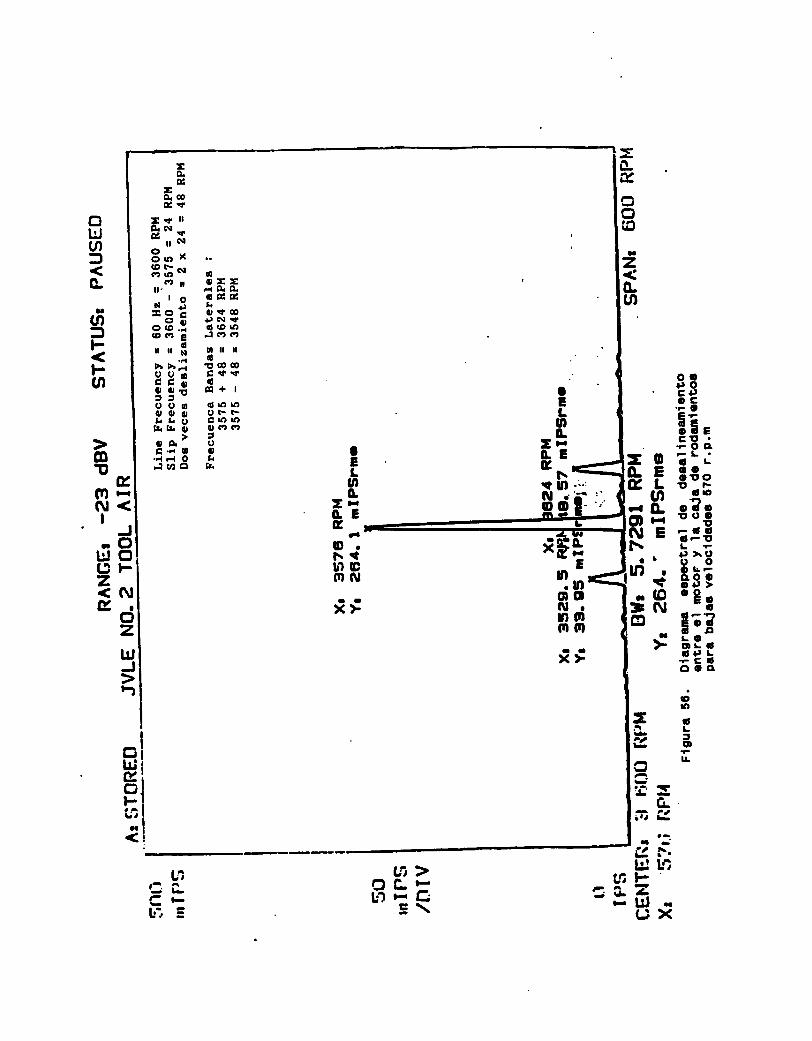
-0-g,
ooio
aaz0-o
IAE-QOÉr
-tt l¡
**=-nNt. xHü* ú
(ril r¡ O--ll' " ,-tAA
I a 6ÉC
:ai txr@ca E Jcer,uu.$ orrrl}'¡'rJ €CO(¡o o'; É$íg¡s s*,E E 3 3pp¡. & ó E¡.)rll,** E g'-oa o.::3 g-¡(4O l¡.
ot¡¡afc-
aa
út
=FFo oo
+tOc+toc+OB+Bá=co.+OOaLoooEoltFa¡o'noóoEOOEelúlrE+t >rOooO ¡LFo.ooo.t, >"83óenE'ELOoLa6+¡ LrCfooo
-o0.EÉ,Lo¡G!l :rNE¡\
¡tnrti.(D=NE
¡
r0t¡t
=..aL-g,ó
Ira^.9j-,
-c.
:ri g,
rjg ¡'.uJ u;F3t¡¡ ¡(jX
a'J rJ-
F
]"rt >BIEE\
!?,-¡f=U, =
oEIoo.
!x0.EÉ, aO.1\t'ur tcON
o!É,(ll t<
N<I
FE
úroIoo
--x>
ürI
oNÚfo
a-x>
JooFN
aozt¡,Jh
üuze
tr!
EI<i
L7L
4,2.3. Recomendaciones.
EI motor debe ser llevado a un taller esPecializado en
donde se Ie deben teaLizar pruebas, inspeccionar y
reparar. EI rotor puede ser inspeccionado con una
cAmara terrnogrAfica para localízar puntos calientes' y
rotura o fisuras en las barras, se podrlan utilizar
tecnicas de tintura y ultrasonido, complemetadas con la
prueba growler Y de fase.
Si no se encuentran problemasr puede ser porque eI rotor
no está 1o suficientenente calienter Proceda
inmediantanente a calentarlo y luego inspecciona usando
Ias técnicas apropiadas. Basandose en estas técnicas se
debe determinar si es necesario reparar el rotorr I.é-
barrear eI rotor o reemplazar eI notor enterarnente.
El alineamiento deI comPresor enteramente debe ser
chequeado y a baja velocidad balanceado dinánicamente.
4.3. Estudio de vibración en motores de una fábrica en
New Johnsonville.
Los motores encargados en nanejar los compresores de aire
en esta fAbrica son de inducción (500 HP GE 2 polos)'
estos durante muchos años han venido Presentando
r72
problemas, Io cual conllevo a la realización de un
estudio detallado que determine las posibles causas que
ocasionan estas vibracionesr causantes de preocupación en
el departamento de mantenimiento.
Durante las pruebas realizadas de vibración en algunos de
estos motores, se vió que eI espectro era muy "vivo" con
muy altos niveles de vibraciónr Presentando picos a la
velocidad de funcionamiento y algunos armónicos. (tr'igura
57 y figura 58) ' ademAs se observó la presencia de
golpeteo en cada uno de estos picos.
Se decidió por lo tanto enviar algunos de estos motores a
un taller especializado, en eI cual se puedan realizar
pruebas que me determinen el estado actual de estos. Las
pruebas de vibración arrojaron problemas de excentricidad
del entrehierro. Chequeos a través de una abertura en eI
estator, revelaron que algunos de estos rotores no eran
total¡¡ente redondos. Por lo tantor s€ decidió utilizar
eI analizador "MotorMonitor", chequeando todos los
motores, éste indicó que solamente dos motores
presentaban severos problemas de excentricidad (Figura 59
y figura 60). Durante Ia investigación en estos motores
es evidente que los problemas en ellosr €s un desigual
aumento de la inductancia de Ia armadura del estatorr la
altura de la armadura es menos gue el ancho de esta.
F<ctJ..O.vr
P-. E"'oitE¡ t¡fo@r\
dl rClof\ .3?TErt ¡F=¡ ¡HÍ !L.h$3 ÉSffi C¡T.
tl
ooo
c
gr¡,n;
f¡
Yc-8EhGFe9E +¡Oe (,6rr¡ t;=.
O'F-a l¡¡ >JAJüroAú L;¡etii¡Ja.'¡C¡
ootl
]+=
8ñ
2PH
fEIL
C'f
E
C)rl
C)
C¡.
citflcoC)
o.C'
c¡s./Nr Nr Arigo.tSl )ld
6I6TT
t'68
I
9'69 -l
{I
lI
8'6¿!I1
rt'
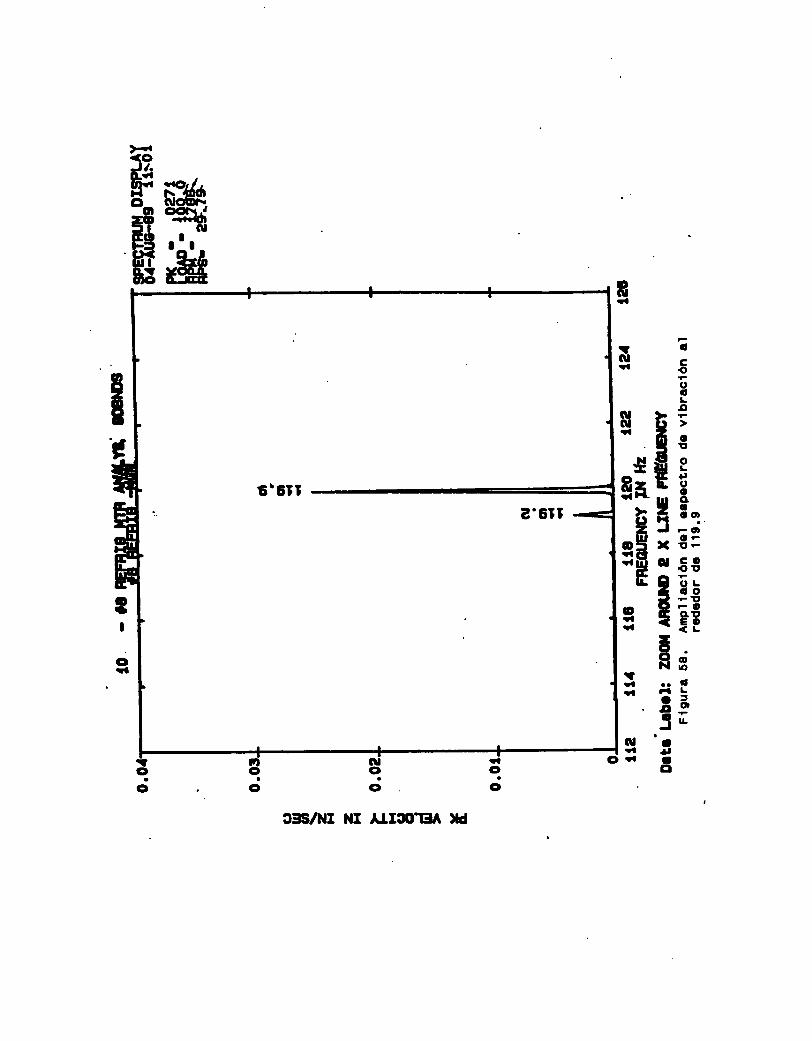
ñKCIEhr.J.ffi|
n¡
F<od*gll.lFlot-o3lEgtfs¡í
1'6tU-!r5EL
nl >f;:t ü;^sf; g
ESLI-¡t::g$x€:..Fo5€
E 0'6¡-
3 ÉÉÉüRg
: o.f
¡¡st't,d t
ü
É
o.¡I
C'
oa
C'a
C) o
3!ts/1{r NI Llr9sEA )H
?.6TT
.a
['
' 6'6¡¡
I
I
lge
lmqurncg,
Hlll'' iluillf' ¡t 6e.?r5 [z ! Gffifli'üt
--------- -----_-_--'
noton rrxDttc r¡rr¡is¡s DEllarLS¡ NoSREFBc
l$:l'i:'olHirte ro:o¡r'1!------
ñ=.-r-ff-ü;:tt¡;¡------- ---;il;i.ii..*r (o-gt r '1
nua¡fng ¡!PÜ ' 5'?i¡o lor¡ e{t ' 17{ñóré¡oi roi¿ I ?5
n¡ted 11¡¡ fr¡e ¡ 60ññirü-'ar ir"q ¡ 5e'e?
n¡tcd nPl{ t¡ ' 1785
l¡t d RPH ¡t tblg llne freql"l:t ' 178¿'2
npt{ .rp.c¡.o liltnt:.p:glt roi¿ : ll33:iitP¡i ÉóD 2 r'rrlP sldcbano¡
dsteRotordevanadoestáenco¡¡diciónsana!rpodrfaserrevizadoenáo"" t.t"s a esta fecha'
¡dl
ITIDII
w^.fli'&'l
Figura 59. AnAliaie del motor I
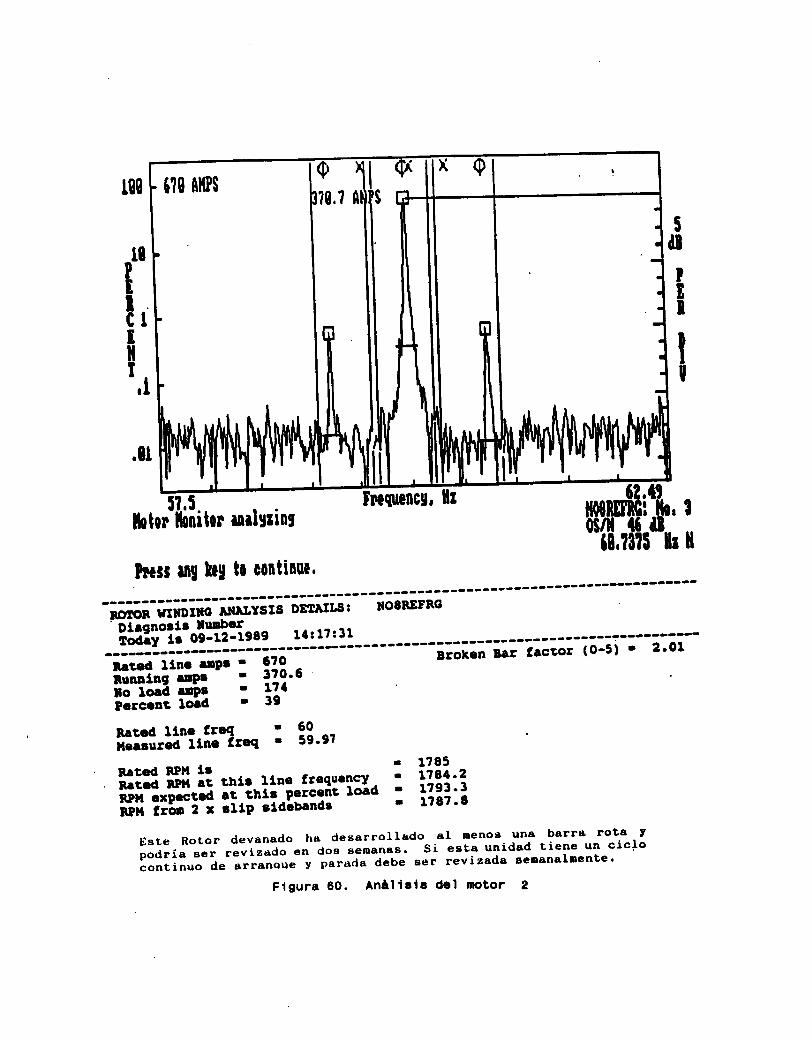
teTItctIllt,r
5
dt
ItID
II
e'3
t¡ ll
[¡qqW[CI,nmlhl¡hr urrlr¡ing
Dns¡ üI hI to continu.
n(tñ¡R HINDINC ANI¡'ISIS DEttILSs NOSREFRC
*::l'i:'ol$li,.' 14:1?:
;;1i;:1;;:=i¡-:--- ----;ñ;;;;'ccos (o-3) ' 2'01
Ña¡fng ¡¡¡¡r ' 3?0'6iió róió ¡¡br ' 1?'iáréáni roia ' 3e
R¡ted llne freq ' 99 --ññ""áá--irñe ireq ' 5e'e?
nlt3d RPü 1¡ ' 17E5
R|ccdnPt{ttthl¡Ilnclregucnev.178¡[.2Rpt{ expcc..a .l'ini-¡'i"iéáñt r"ia ' 17e3'3
RPntroozreiri"Ilol¡an¿s ' 1787'E
l]steRotordevanadot¡adesarrolladoalDenosunabarrarotaYpotlrÍaeerrevizadoendossemar¡as.Siestaunidadtieneunciclocontinuo de arranque v par¿cla debe ser revizada sen¿nalnente'
Figura 6O. AnAlista del motor 2
t77
Esto es causa de dos Problemas:
1 ) EI estator es distorcionado cuando se presiona Ia
armadura. La deficiencia del aumento de la inductancia
verticalmente causa que el estator tome una defornación
ellptica, con mayor longitud axial en la dirección
vertical.
2) Et estator tiene un desigual auurento de Ia
inductancia en Ia dirección vertical y horizontal'
causando que eI estator se distorcione por la rotación
del campo nagnético rotórico. Esto representa un
problema de vibración y de arnónicos a L2O Hz'
Es patente que eI estado de estos motores es causado por
excentricidad del entrehierro o desbalance de catg,a. Se
recomendo instalar breackets Para soPortar mas
rlgidanente el aumento de la inductancia en la direceión
vertical.
178
ANEXO 1
Una serie de figuras son presentadas aqul, describiendo
Ia información obtenida en un monitor de un motor con
barrras rotas. En concordancia con la Tabla 6 en
particular, dos regiones espectrales son concentradas
sobre la region alrededor de Ia velocidad det motor ( 1 X
RPM) y Ia region alrededor de los principales armónicos.
EI motor representado tiene 2 pares de polos y 28 ranuras
en eI rotor ¡ Y esta girando a 24.876 Hz de una
frecuencia de suministro de 50 HZ, EI primer principal
armónico de vibración esta justamente sobre 696 Hz. Se
encontro en eI anAlisis de vibración qlue eL motor
presentaba alrededor de 3 barras rotas ó fisuradas.
Las primeras dos figuras muestra identificando Ia
velocidad del motor y las comPonentes de Ia frecuencia de
las barras l¿terales de deslizamiento en un espectro de
banda base a 5O Hz ( figua 61 ), y el corresPondiente
cepstrum ( figura 62'). A continuación cuatro figuras
nuestran eI espectro de banda base a 1.6 KHz (figura
63 ), un "zoom" de este espectro alrededor del segundo
arnónico principal ( figura 64 ) , y eI correspondiente
cepstrum ( figura 65 ) y finalnente }a cubierta espectral
desde tres octavos centrado sobre 800 Hz (figura 66).
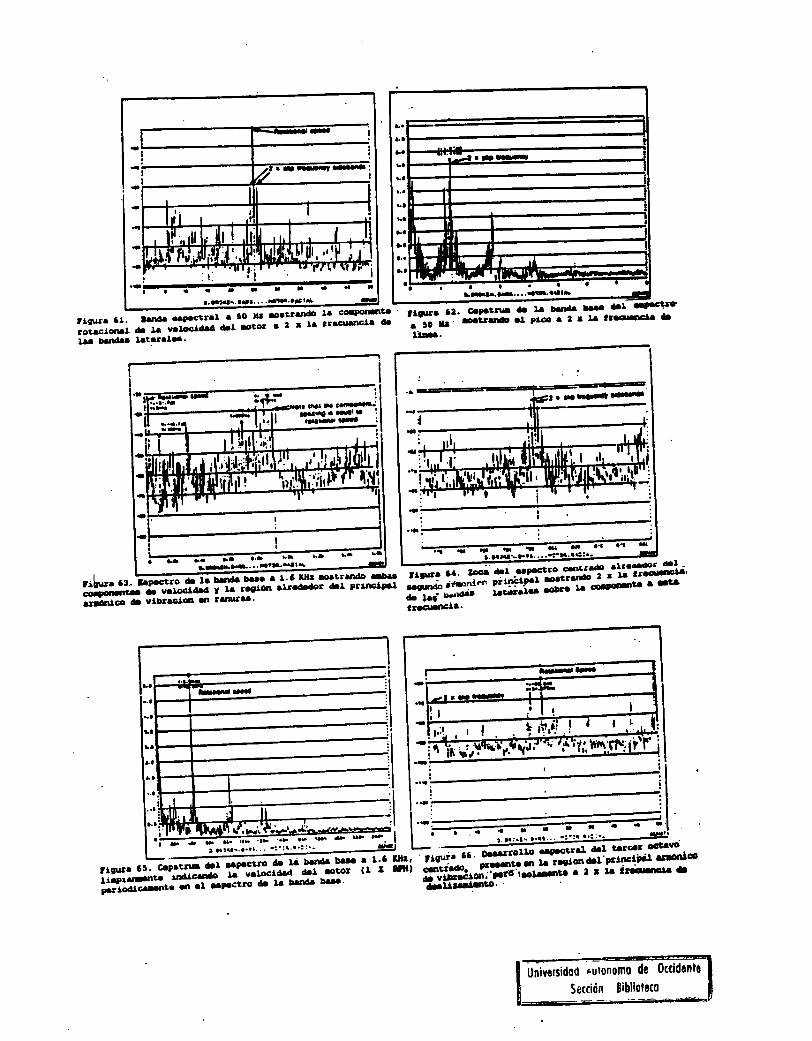
¡.r'|sF:IEflfmF
trtr¡s. 6¡. r.r.a. ttit*fr t ro Ís D'rr"¡& l' corDorrrt'
rot¡c¡oBl a¡ ¡¡ Yr¡ocrü ¡r-rtor ¡ ¿ ¡ l¡ tr¡cu¡nt¡¡ "tl¡!¡s. Ó¡.¡ lo l|¡'l-l¡r..¡¡¡ ¡¡n¡¡r ¡¡t.a¡!"'
-' ; ;;; -tt t b"|d¡ b'x ¡ l'3 lH"ttgur. 6r. c.P¡tf__?] rr-
--r¿id¡d d.¡ Dror ir-l nn¡l
d
3
¡ F¡]Ff a'IXr
{
t
--.; dtL)nirc Psf:¡. r-t'
f-i.To..rat ¡'t¡¡¡¡'tr¡<¡¡lrl¡'
ir*ffit¡.?.?.iH¿t##ff.,;#F*-lllrnlsff-
UniycrsidoO aul0n0m0 de occidanfa
Serción Bibllolcco
'ÉH#n:'ffi.I1'*'lrtt*'Dsr (r ¡ nm¡
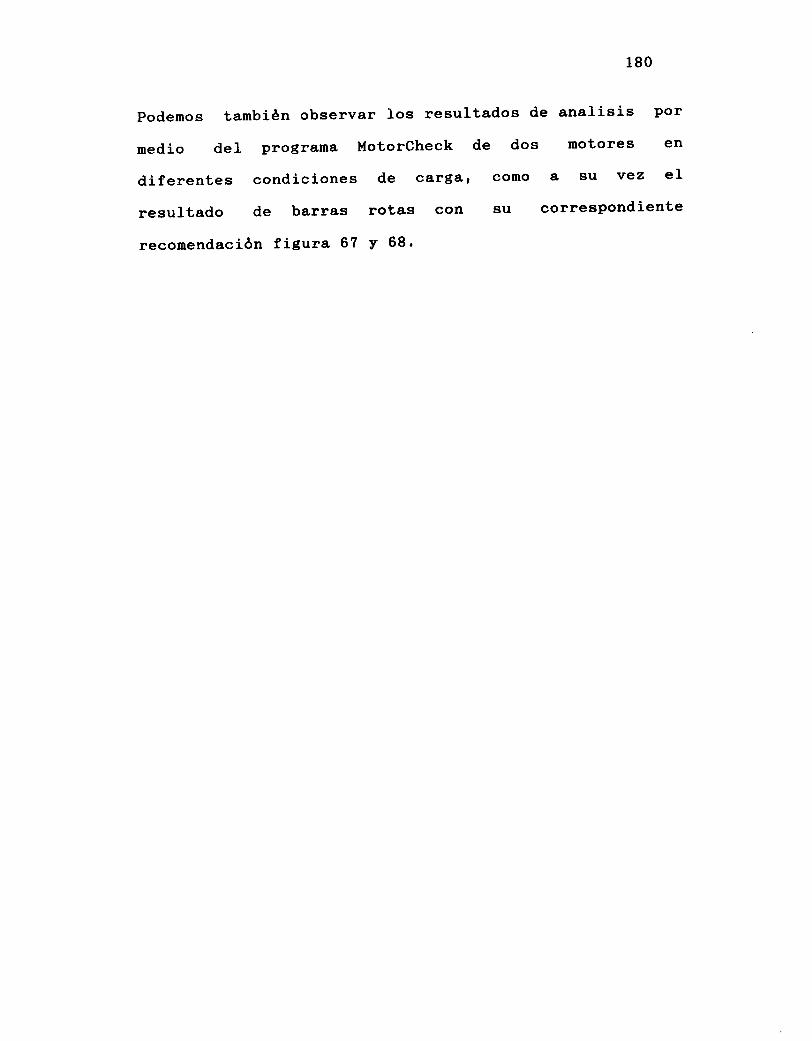
180
Podemos también observar los resultados de analisis por
medio de1 programa Motorcheck de dos motores en
diferentes condiciones de cargar como a su vez eI
resultado de barras rotas con su corresPondiente
recomendación figura 6? Y 68.
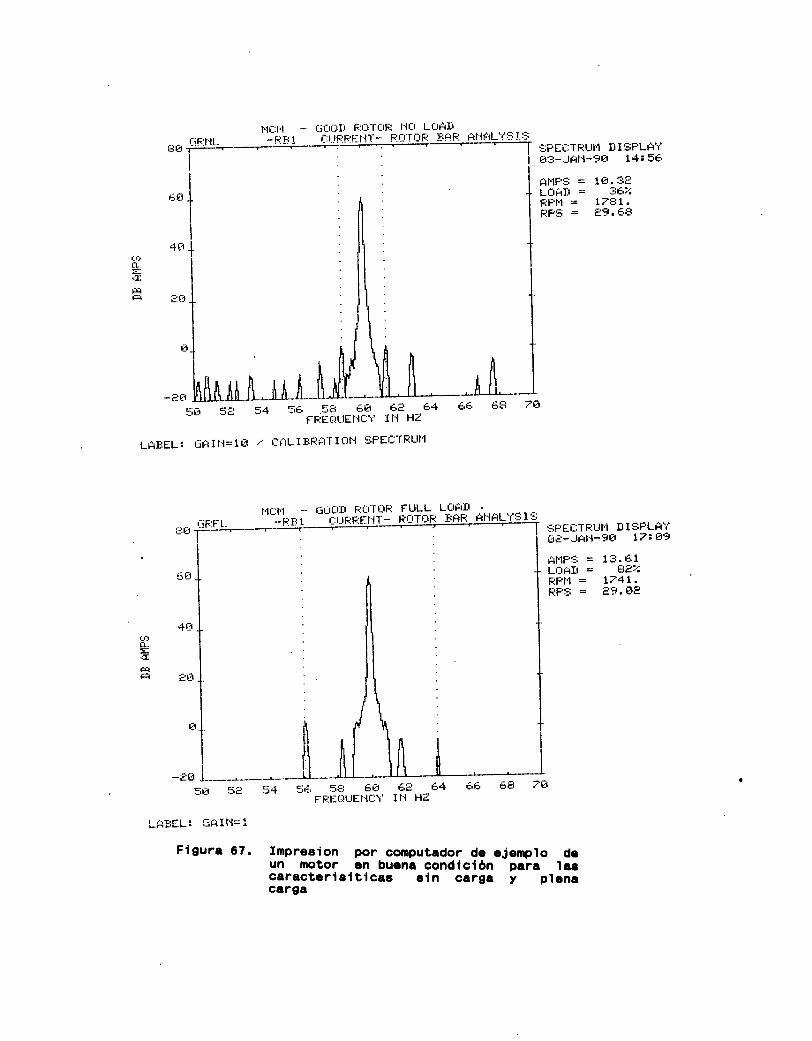
fi:r-r-f ütÉ flfl Lürjrlr- F:r:J f nF:üE l{l
L!É +:::i'-:
5É 5e
LfiI,EL: tjiÍ:i I ll= I El
.. .. 'lF:F 1..i;llt a---
I.li::l.l-.FrF
r:;ürürIi¡::r.!F:l
r:.rfr:1.-
ü:
l-¡
üLrLrIr F{Lr-f ÉrR FULI- LÚ$¡Iltrr11ÉlLEfiT -
-;iPEüTÍ;jL[..l Ir I gF LÉTEl:3--rÉil{--cr¡r 1+: E€,
r:rl.lF l: = l ü. 3ELrlr*f.r = 3É.;lFrF I't = lFEr 1 .F¿P5 = ¡=9. ÉL+
.;F'Eú:TÉUI'l NISF'LÉTTÉ18=--lÉr1{-9€r 17: B9
¡:rl'lFf: = 13.É1Lirillr * ElÉ'/iRFt'l = 1141 .RF-6 = É'r. Be
F4 liÉ .5i+ É:'l¿t t'É E +FFjUütJEftr::.,. IH H¿
'" t:Éll I lrFll¡'f I Clt{ E:F Eü-f EUl'l
L
6É
t,lült
r'-'f,ü..ErIÉrt
-ilÉ5H
L*IIEL.: G'ltIl'l=1
Figura 67.
54 5,:i 5+ Ér¡r ÉÉj tr4 ÉÉ hÉFl'jEr:luErll::-l I1{ He
Impresion por computador dc ejemplo deun motor €n bu€na condlclón p¡ra l¡acaracterisltlca8 sln carga y plenacarga
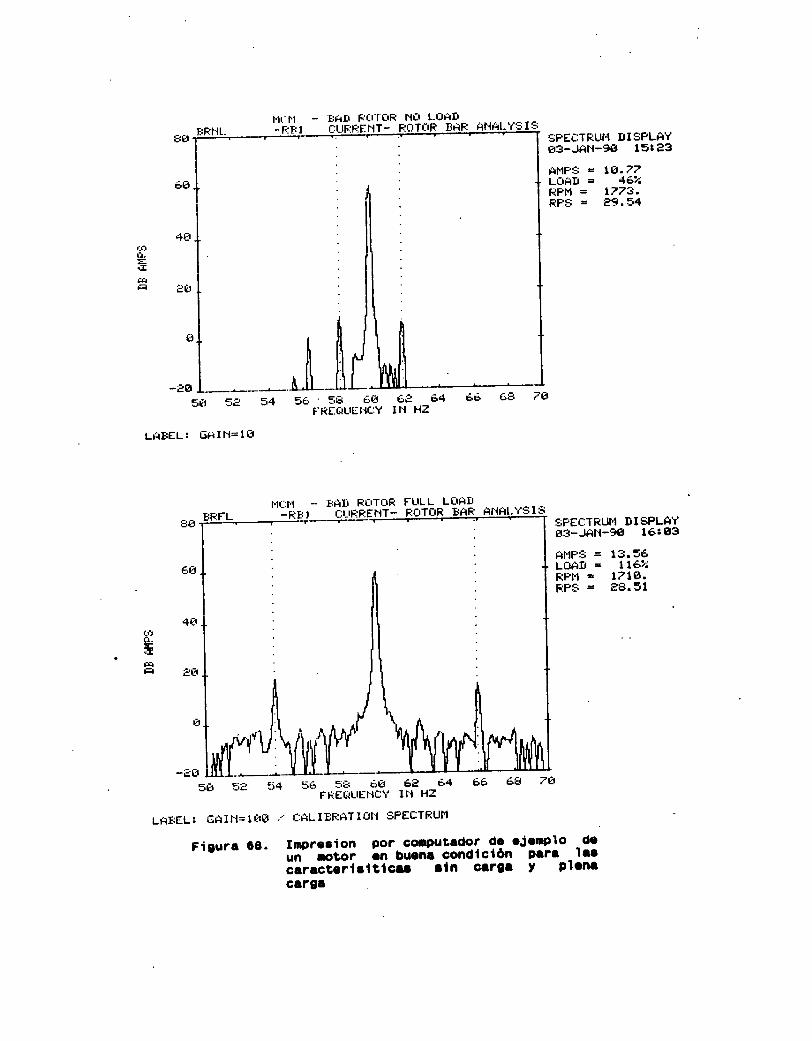
¡1r't'l _ ÉHI¡ F|:.rlCrR r{cr t_gr¡Il- RTJT
r'-Dú-iE¡rala
5Er 5E
Lf"rEEL: rliri I1{= I É
5ú E.É É'B üe É4É.REG¡LIETIüY I1{ HZ
r.É EB ¡B
-JF,EüTÉUI.I II ¡ SPLÉIYg3-Jltl{-99 t5¡ e3
ÉitF$ = ttt.77LúÉf¡ = 4ÉZftFl.f = t773.ÉFS = ?9.34
SPEÉTRU].I TI¡SPLÉYÉ3-Jf{1{-99 l6¡ g3
Al'1F.5 = 13.=ÉLCrÉB = I t6:¿RPl"f = L?lg.F:PS = eB.El
5.1
l.lü:1'l-Fiti t
- l,r-1Ir ttftTr:rR FLIL L LCrÉntlT- CrR
f_úü..f{I54F¡
5ú "Jé
Lr¡IrEL: ütlIIt=lÉrF ." L:rrtLIEF:r:tTIÜfl SFEüTFUI'I
:i4 :;jr :;¡!t ú\t 6g É4 bÉ' É8 7ÉFÉEüLIETIC:Y IfI HZ
Imorc¡ion por colllputador d? si.nplo -dcüil-rnot'or Ln oucni condlclón p¡r¡ l¡riiir¡éiiit3ltlc.¡ ¡ln crrg. v plon'c¡rg¡
Figur¡ 08.
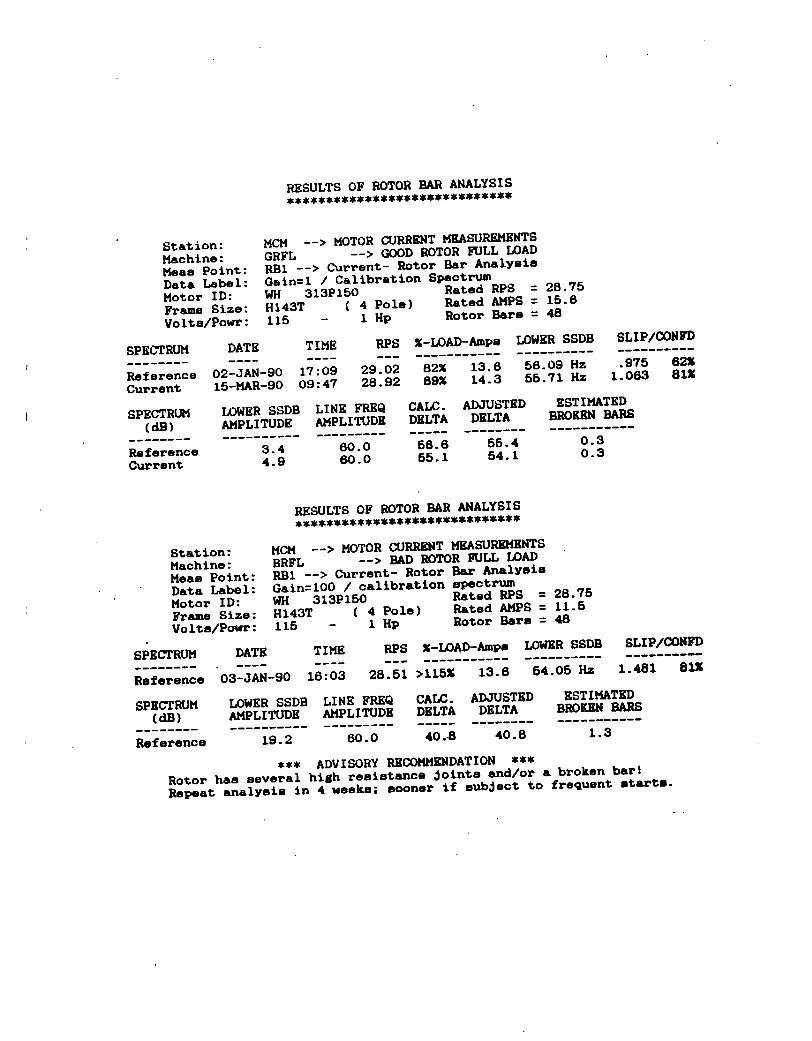
Station:llachlne:Meaa Polnt:Dat¡ Label:llotor ID:Fra¡re Slze:Volto/Powr:
SPECTRI'}I DATE
RESULTS OF RO|rOR BAR ANALYSIS¡*¡l¡ittü*t¡;¡¡:;*¡}¡¡ ül¡¡t¡;ü¡¡ü¡3:**r:3¡¡:¡
MCM --> MOTOR CURRBNT MEA1qREITENTS'iñer. --- --> c@D RoroR FULL-I¡AD
ñiii---t L\rrent- Rotor Bar AnalvataCafn=f / Calibratton S¡rctrln---ü'ñ-'- ársprso Ratad RPs = 28'?5fii¿at-----( ¿ pot") Rated AI{PS = 15'6iid-- I Hp Rotor Bara = {8
TIME RPS f-tOAD-A¡nPa IOÍfER SSDB SLIP,/@NFD
Raference 02-JAN-90Currcnt 15-!IAR-9O
29.O22A.92
LINE FREQ CALC.N{PLITUDB DBLTA
13.6 56.O9 Hz '9?5i¿.a bb.?l Hz l-063
AD'USTED ESTIMATEDDELTA BROKEN BARS
17: 0909:47
BzXE9¡
s2/81¡
sPECrRUll(dB)
TD$IER SSDBA}IPLITUDE
RsferenceCurrsnt
Statlon:Machlnc -'
lleas Pol'nt:' Data Label:Motor ID:Fra¡¡e Slze:Volta,/Porr:
SPBCTRUM DATB
SPECTRUI{(dB)
3.44.9
60. o60.o
68.665. 1
55.454. 1
o.3o.3
I.OhIER SSDB SLIP,/@NFD
54.05 Hz 1-481 El¡
RESULTS OF ROTOR BAR ANALYSISlrr*****rüt;t3|t¡lü*f |3ü!¡¡tü¡¡¡3:f ¡} f ¡; t
MCM --> t{oToR CURRENT MEASUFEIENTS
üñür. - ---'-;
BAD RCIroR FULL IoADñiir---t Cr¡rrent- Rotor Bar Analvalodáf"= LoO / callbratlon al¡€ctrr¡lr-TfIf 313Pr5O nÁte¿ nps = 28'75fii¿gt-----i-¿ pot") Rate¿ ¡l{p$ = 11'5iié-- i np- Roto" g6¡e = 48
TIIIE RFS f-fOAD-AnPa
Rcference O3-JAN-9O 16:03 28.51 >1151 13.6
IotfER ssDB LINE FREQ c4!Qterri;IlruDg AIIPLITUDB DELTA
AD'USTBD ESTIUATED_ DELTA BNOKE}¡ BARS
Reference 19.2 BO.O 40..E 40. E 1.3
II* ADVISORY RBCOMMENDATION ¡¡IIRotor has aeveral high reslatanc"
-Jórr,t"_ and/or a broken barlncp€at analyala rn i-re"ra; eooner lf eubJcct to frequent aüert¡'
184
CONCLUSIONES
Las fuerzas de las barras det rotor son Proporcional aI
cuadrado de Ia corriente del estatorr Y és funcion del
deslizaniento y de Ia resistencia de] rotor. La fuerza
sobre Ia barra del rotor tendra una Parte constante y una
gue varia a dos veces Ia frecuencia del deslizamiento.
La fuerzas sobre ]os rodamientos, por Io tanto tendran
componentes frecuenciales a IxRPM y IxRPM + deslizamiento
x rlp. Multiplos y sulmutiplos usualmente aParecen a np
por eI deslizaniento .
Por consiguiente habra tres fuentes mayores de vibración
rnagnética en un motor de inducción.
La primerar €s el efecto del camPo magnetico rotando
sobre eI estator. La frecuencia de esta fuetza serA a 2
x Ia frecuencia de lLnea.
La segunda fuente de vibración ¡ragnética es eI efecto del
campo nagnético sobre eI nücleo del rotor. Esta fuerza
esta afectada por el entrehierro y podra tener una
componente frecuencial a 2 x la frecuencia de llnea o 1 x
RPM + eI deslizamiento x nP.
Finalmente como tercera fuente de vibración, el efecto
del campo nagnético sobre las barras del rotor Produce un
torquer y si las corrientes en las barras son
desiguales inplicara la existencia
185
de fuerzas radiales
Esta vibración derivada del torque es afectada por
entrehierro (gap) v tiene una frecuencia 1 x RPM
Deslizamiento X nP.
Estas tres fuentes de vibración magnética, estan
influenciadas Por un nümero de condiciones de diseño y de
operación. Saturación del estator ó rotor causarán no
linealidades que exPandirA el nümero de frecuencias de
excitación.
Estas nuevas frecuencias serAn nültiplosrsubnultiplos ó
la suma y diferencia en frecuencia.
EI ftujo magnético a través del entrehierro es
aproximable a una forma sinosoidal. Las derivaciones de
una onda sinosoidal causan asimetrias que pueden
ocasionar vibraciotr€s. cambiando eI metodo de
distribución de los embobinados ó aunentaqndo eI nünero
de ranuras del estator y de las barras del rotor puede
reducir la vibración nagnética. Aumentando eI
entrehiero¡ reducirá las fuerzas sobre eI nücleor pero
causará la pérdida o disminución de la eficienciar puede
hacerse pero teniendo en cuenta que se sacrificara parte
de Ia eficiencia.
eI
+
186
A- Vibración durante la operación
La vibración nagnética durante4 Ia operación de los
motores eIéctricos ususalmente se caracterízan por
presentar el fenóneno de Golpeteo Beats es causado por
dos frecuencias cercanas cuyos Angulos lentamente
cambian en relación uno al otro, primero adicionandolos y
luego restAndose. Estas dos frecuencias pueden tener
fuentes diferentes. Por eiemplo un motor de dos polos
con sus cojinetes bastante desgastados tendrA un
entrehierro variable y como resultado vibración a L20 Hz,
St a su vez el motor está desalineado¡ habra una
vibración a 2 X. RPM. Una lectura tonada a 2 X RPM
presentará una vibración cuya anplitud serA modulada Por
una frecuencia a 2 X Deslizaniento, caracterizandose por
Ia variación de a¡nplitud.
Frecuencias causando REAT pueden también tener una misma
causa (P.E en un motor de dos polosr una barra partida
causarA vibraciones a 1 X RPMrcon bandas laterales igual
a 2 XDeslizamiento. Esta frecuencianoduladaa 1 XRPM
twambién involucran el beat.
general Ia mayoria de las causas que producen beating
motores de inducción involucran algün tipo de
En
en
187
vibración raagnética.
B - Vibración axial
En Ia mayoria de los motores de inducción estos son nds
débiles en Ia dirección axial que en Ia dirección
radial;como resultado la vibración axial generada de
vibraciones magnéticas debido a asinetria radi¿Ies pueden
ser iguales o mayores que las vibraciones radiales. En
adición, vibraciones axiales pueden darse si las fuerzas
magnéticas axiales no estAn balanceadas. Los nücleos del
estator y del rotor son fabricados con Ia misna longitudt
por que las longitudes iguales causan "elongamiento" del
campo rnagnético conllevando a pérdidas como a la
generación de fuerzas axiales. El motor tratarA de
equilibrar esta desigualdadr en sus extremos moviéndose
hacia eI centro nagnético. Dos eie¡rplos que son
Éelativamente comunes son: Ia correctaq instalación del
cojinete de enpuje del estator forzando eI rotor a estar
por fuera del su eentro magnético y cuando el motor se
encuentra desnivelado. La instalación incorrecta del
cojinete de enpuje causarA vibraciones a 2 X RPM con
bandas laterales a 2 X Deslizamiento en un motor de dos
polos.
188
C - Vibración durante eI arrangue
Motores de Inducción (y notores sincrónicos gue en su
arrangue se conportan como motores de inducción están
sujetos a grandes fuerzas transitorias durante eI
arrangue. Hay fuerzas transientes que actüan
directamente sobre el nücleo del rotor como tanbién las
hay derivadas del torque. La corriente del estator
durante eI arranque es a Ia frecuencia de Ia llnea con un
componente DC decayendo exponecialmente. Los efectos
sobre el rotor son los mismos gue cuando en operación
excepto que Ia frecuencia de paso de PoIo durante la
aceleración hasta Ia velocidad de operación decrece desde
LzO HZ a practicamente cero. Las fuerzas generadas
durante el arranque pueden excitar frecuencia de
resonancia tanto laterales como torsionales. La cantidad
de deflexión o de otra parte estructural durante Ia
transición depende de las propiedades nagnéticas del
motor y de las caracteristicas modal de rigidez y de
amortiEluamientor pero resonancias por debaio de L20 Hz
conun factor de Q elevado pueden ocasionar deflexiones
significativas. Estas grandes deflexiones pueden causar
contactos de inpulsores y anillos de desgaste.
189
BIBTIOGRAFIA
MORROIf L.C. Manual de Mantenimiento
Editorial Morrow.
Industrial tono 2.
Manual de Manteniniento MotorCheck.
Computational Systen, Inc.
Manual de Operación Camara videotherm 94.
Conputational System, Inc.
Manual de Adaptadores de AIta Corriente para Ia prueba de
Impulso ¡ Baker.
KOSTENCO M.P.,PIOTROVSKI L.M.. MAquinas Eléctricas fI.
Editorial Mir Moscu.
L. MAHECHA, Edinson. Prograna de Mantenimiento Eléctrico
Predictivo.