luis a. fern¶andez - personales.unican.espersonales.unican.es/lafernandez/metodos.pdf ·...
TRANSCRIPT

Luis A. Fernandez
Dep. de Matematicas, Estadıstica y Computacion
Universidad de Cantabria
Junio 2009

2 Luis A. Fernandez

Contenidos
1 Variable Compleja 51.1 Introduccion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.2 Operaciones basicas y funciones elementales . . . . . . . . . . . . . . . . . . . . . . . . . . . 61.3 Derivacion de funciones de variable compleja: condiciones de Cauchy-Riemann . . . . . . . 101.4 Integracion sobre curvas. Teorema de Cauchy. Teorema de los residuos . . . . . . . . . . . . 131.5 Variable Compleja con Maple . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
2 Introduccion a las Ecuaciones en Derivadas Parciales 272.1 EDP lineales de primer orden con coeficientes constantes . . . . . . . . . . . . . . . . . . . . 282.2 EDP lineales de primer orden con coeficientes variables . . . . . . . . . . . . . . . . . . . . . 302.3 EDP lineales de segundo orden con coeficientes constantes: clasificacion y reduccion a la
forma canonica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 312.4 EDP semilineales de segundo orden . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 382.5 EDP con Maple . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
3 Series de Fourier 433.1 El metodo de separacion de variables: resolucion de EDP en dimension dos . . . . . . . . . 433.2 Serie de Fourier completa. Convergencia puntual y en el sentido de L2 . . . . . . . . . . . . 513.3 Series de Fourier con Maple . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
4 Transformadas integrales de funciones 634.1 Transformada de Fourier . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 634.2 Aplicaciones de la transformada de Fourier a las EDP . . . . . . . . . . . . . . . . . . . . . 714.3 Transformada de Laplace . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 734.4 Aplicaciones de la transformada de Laplace a las EDO . . . . . . . . . . . . . . . . . . . . . 774.5 Aplicacion de la transformada de Laplace a las EDP . . . . . . . . . . . . . . . . . . . . . . 804.6 Transformadas integrales con Maple . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
5 Problemas de Contorno asociados a Ecuaciones Diferenciales Ordinarias 855.1 Problemas de Contorno . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 855.2 Funcion de Green . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 895.3 Autovalores y autofunciones de un Problema Regular de Sturm -Liouville . . . . . . . . . . 935.4 Problema Singular de Sturm -Liouville . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1005.5 Problemas de Contorno con Maple . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
6 Funciones especiales de la Fısica Matematica 1036.1 Funcion Gamma . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1036.2 Funcion Beta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1056.3 Funciones de Bessel y asociadas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1066.4 Polinomios de Legendre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1196.5 Otros polinomios ortogonales: Hermite y Laguerre . . . . . . . . . . . . . . . . . . . . . . . 1256.6 Aplicacion a las EDP en dimension tres . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 130
3

4 Luis A. Fernandez
6.7 Funciones especiales con Maple . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 139
7 Teorıa elemental de distribuciones 1457.1 La Delta de Dirac . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1457.2 Extension del concepto de derivada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1477.3 Transformadas integrales y la Delta de Dirac . . . . . . . . . . . . . . . . . . . . . . . . . . 1517.4 Cambio de variables y la Delta de Dirac . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1537.5 Otras propiedades de la Delta de Dirac . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1537.6 Series de Fourier y la Delta de Dirac . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1547.7 EDO y la Delta de Dirac . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1577.8 EDP y la Delta de Dirac . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1607.9 Distribuciones con Maple . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161
8 Anexo 1658.1 Tabla de Transformadas de Fourier . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1668.2 Tabla de Transformadas de Laplace . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 167

Capıtulo 1
Variable Compleja
1.1 Introduccion
El interes y la necesidad por resolver ecuaciones polinomicas viene de muy antiguo. A traves de unastablillas de arcilla sobre las que escribıan con punzones, se sabe que hace mas de 4000 anos, en la civilizacionbabilonica (situada en la actual Irak) sabıan resolver algunas ecuaciones de primer y segundo grado, verhttp://press.princeton.edu/books/maor/sidebar b.pdf.
Figura 1.1: Tablilla Plimpton 322.
Asimismo, algunas ecuaciones lineales aparecen en el papiro de Rhind (Museo Britanico de Londres):se trata de una coleccion de 85 problemas matematicos con sus soluciones recopiladas por el sacerdoteegipcio Ahmes, unos 2000 anos antes de Cristo.
Practicamente todo el mundo conoce la formula que proporciona la raız de un polinomio de grado uno(ecuacion lineal):
az + b = 0 ⇔ z =−b
a, si a 6= 0.
Como se puede apreciar, aunque los coeficientes a y b sean numeros naturales, la solucion va a ser (engeneral) un numero racional. Esto explica la necesidad que hubo de ampliar el sistema numerico naturalpara poder trabajar con estos numeros fraccionarios.
Tambien resulta muy conocida la formula de las raıces de cualquier polinomio de grado dos (ecuacioncuadratica):
az2 + bz + c = 0 ⇔ z =−b±√b2 − 4ac
2a, si a 6= 0.
5

6 Luis A. Fernandez
Figura 1.2: Papiro de Rhind.
De nuevo, se puede apreciar que aunque coeficientes a, b y c sean numeros naturales y aunque se verifiqueb2 − 4ac ≥ 0, las raıces no van a ser (en general) numeros racionales, debido a la presencia de la raızcuadrada. Por ello, nuevamenteme hubo que ampliar el sistema numerico racional para manejar estosnuevos numeros “irracionales”.
A su vez, el caso b2−4ac < 0 condujo a nuevas dificultades. Por ejemplo, es evidente que ningun numeroreal z verifica la ecuacion z2 +1 = 0. Los numeros complejos surgieron al intentar resolver estas ecuacionescuadraticas. Para ello, se introdujo la unidad “imaginaria” i =
√−1, que formalmente es solucion de laecuacion z2 + 1 = 0. La primera referencia conocida a raıces cuadradas de numeros negativos proviene deltrabajo de los matematicos griegos, como Heron de Alejandrıa en el siglo I antes de Cristo. El matematicoitaliano G. Cardano (1501-1576) fue el primero en escribir las raıces de numeros negativos solucion de unaecuacion de segundo grado, aunque especificando que no tenıan sentido (“soluciones imposibles”).
Resulta interesante notar que los nombres que se han ido asignando a los diferentes tipos de numerosson indicativos de la creciente dificultad que tenıan para comprenderlos quienes los manejaban y los debatesque se suscitaron sobre su existencia (o no) en el mundo real.
1.2 Operaciones basicas y funciones elementales
DEFINICION 1.1 1. Se llama numero complejo a cualquier expresion del tipo z = x + yi, donde x
e y son numeros reales e i =√−1. En ocasiones, resulta conveniente identificar el numero complejo
z con el punto (x, y) del plano.
2. En estas condiciones, se dice que x es la parte real de z (x = Re(z)) e y la parte imaginaria (y =Im(z)). i se denomina unidad imaginaria.
3. Dado el numero complejo z = x+yi, se denomina conjugado de z y se designa z al numero complejodado por x− iy.
4. Dados dos numeros complejos z1 = x1 + y1i y z2 = x2 + y2i,se definen su suma y su producto comoz1 + z2 = (x1 + x2) + (y1 + y2)i y z1 · z2 = (x1x2 − y1y2) + (x1y2 + x2y1)i, respectivamente.
5. El conjunto de todos los numeros complejos se designa por lC.
El termino “imaginario” fue acunado por Descartes en el siglo XVII. La existencia de numeros complejosno fue completamente aceptada hasta finales del siglo XVIII, gracias a los trabajos de Leonhard Euler yCarl Friedrich Gauss. La implementacion mas formal que acabamos de ver, con pares de numeros reales,fue dada en el siglo XIX.
EJERCICIO 1.1 Probar que:
1. El conjunto de los numeros complejos lC es mayor que el conjunto de los numeros reales IR.

Metodos matematicos avanzados 7
Figura 1.3: Leonhard Euler y Carl Friedrich Gauss.
2. z ∈ IR si y solo si z = z.
3. La operacion suma de numeros complejos verifica las propiedades conmutativa, asociativa y 0 es elelemento neutro; otro tanto sucede con la operacion producto de numeros complejos, cuyo elementoneutro es 1. Ademas, se verifica la propiedad distributiva de la suma respecto del producto.
z1 + z2 = z2 + z1, (z1 + z2) + z3 = z1 + (z2 + z3), z1 + 0 = z1, ∀z1, z2, z3 ∈ lC
z1 · z2 = z2 · z1, (z1 · z2) · z3 = z1 · (z2 · z3), z1 · 1 = z1, ∀z1, z2, z3 ∈ lC
(z1 + z2) · z3 = z1 · z3 + z2 · z3, ∀z1, z2, z3 ∈ lC
4. Si z = x + yi, z 6= 0, entonces z−1 =x
x2 + y2− y
x2 + y2i.
5. lC es un cuerpo conmutativo.
6. Es imposible definir en lC un orden que satisfaga las propiedades habituales.
7. z = z, z1 + z2 = z1 + z2, z1 · z2 = z1 · z2.
PROPOSICION 1.1 (Forma polar) Todo numero complejo z = x+yi 6= 0 se puede expresar en formapolar z = r(cos (θ) + i sin (θ)), donde r = |z| =
√x2 + y2 > 0 se denomina modulo o valor absoluto de z y
θ = arctan (y/x) se denomina argumento. r y θ se denominan coordenadas polares de z.
El modulo de un numero complejo se determina de manera unica. Sin embargo, su argumento sedetermina salvo multiplos enteros de 2π, dado que tan (θ) = tan (θ + 2πk) para cualquier numero entero k.Por este motivo, el unico argumento de z comprendido en [0, 2π) se suele denominar argumento principaly se designa arg(z) (en otros textos, arg(z) ∈ (−π, π]).
EJERCICIO 1.2 Probar las siguientes propiedades
1. |z1 + z2| ≤ |z1|+ |z2|, ∀z1, z2 ∈ lC.
2. ||z1| − |z2|| ≤ |z1 − z2|, ∀z1, z2 ∈ lC.
3. z · z = |z|2. Por tanto, si z 6= 0, entonces z−1 =z
|z|2 .
4. |z1 · z2| = |z1| · |z2|, ∀z1, z2 ∈ lC.
5. |z−1| = 1|z| , ∀z ∈ lC \ 0.

8 Luis A. Fernandez
6. z−1 = (z)−1
DEFINICION 1.2 1. Dado z ∈ lC y un numero entero n, se define la potencia n-esima de z comosigue:
z0 = 1, zn+1 = zn · z, si n ≥ 0, z−n = (z−1)n, si z 6= 0, n > 0.
2. Dado un numero real y, se define eiy = cos (y) + i sin (y). Esta expresion se conoce como Formulade Euler.
3. Dado z = x + yi ∈ lC, se define ez = ex · eiy.
La definicion de la exponencial de un numero complejo se puede justificar de muchas formas; enparticular, utilizando las expresiones de ex, cos (x) y sin (x) en serie de potencias, cuando x ∈ IR.
EJERCICIO 1.3 1. Probar que si los coeficientes de un polinomio son reales y z es una raız compleja,entonces z tambien es raız del mismo polinomio.
2. Calcular todas las potencias de la unidad imaginaria.
EJERCICIO 1.4 Probar las siguientes propiedades:
1. zn · zm = zn+m, si n y m son numeros enteros.
2. (z1 · z2)n = zn1 · zn
2 , si n es un numero entero.
3. eiπ + 1 = 0 (identidad de Euler).
4. ez1+z2 = ez1ez2 , ∀z1, z2 ∈ lC.
5. (ez)−1 = e−z, ∀z ∈ lC.
6. (cos (y) + i sin (y))n = cos (ny) + i sin (ny), ∀y ∈ IR (formula de De Moivre).
7. |eiy| = 1, ∀y ∈ IR.
8. ez1 = ez2 si y solo si z1 − z2 = 2kπi, para algun numero entero k.
Utilizando la funcion exponencial, la forma polar de un numero complejo queda z = reiθ. Estarepresentacion resulta particularmente util para expresar la multiplicacion y division en lC:
(r1eiθ1) · (r2e
iθ2) = r1r2ei(θ1+θ2),
r1eiθ1
r2eiθ2=
r1
r2ei(θ1−θ2)
PROPOSICION 1.2 Si z 6= 0 y n es un numero natural, entonces existen exactamente n numeroscomplejos distintos z0, z1, . . . , zn−1 (llamados raıces n-esimas de z), tales que zn
k = z para cada k =0, 1, . . . , n − 1. Ademas. estas raıces vienen dadas por zk = |z|1/neiθk , donde θk = (arg(z) + 2πk)/n,k = 0, 1, . . . , n− 1.
EJERCICIO 1.5 Calcular las raıces n-esimas de 1 y −1 para distintos valores de n.
El siguiente resultado (demostrado por Carl F. Gauss en 1799 como tema de su tesis doctoral) justificapor sı solo el interes que tiene estudiar los numeros complejos y el hecho de que ya no haga falta seguirampliando el sistema numerico para resolver ecuaciones polinomicas.
TEOREMA 1.1 (Teorema Fundamental del Algebra) Todo polinomio de grado n con coeficientescomplejos posee exactamente n raıces complejas, contando cada raız con su multiplicidad.

Metodos matematicos avanzados 9
A lo largo de su vida, Gauss obtuvo no una, sino cuatro demostraciones diferentes de este teorema,ninguna de las cuales es elemental. Una demostracion de este teorema utilizando argumentos elementales(mas de analisis que algebraicos), puede encontrarse en Spivak, pag. 751. Curiosamente, tal demostracionno es constructiva como uno podrıa esperar en un principio: es decir, dado un polinomio no nos dice comoencontrar explıcitamente todas sus raıces. La obtencion de una tal formula explıcita (a partir de los coefi-cientes del polinomio) ha sido uno de los problemas matematicos que mas tiempo y esfuerzos han precisadoa lo largo de la Historia y que no fue completamente resuelto hasta el siglo XIX. Conocidas de antiguo (comoya se ha mencionado) la formulas para resolver ecuaciones lineales y cuadraticas, hubo que esperar a prin-cipios del siglo XVI, para que los matematicos italianos Scipione del Ferro, Tartaglia y Cardano resolvieranla ecuacion cubica general mediante radicales (formulas con un numero finito de terminos en las que inter-vienen los coeficientes del polinomio, las cuatro operaciones elementales (+,−, ∗, /) y radicales). Ver, porejemplo la pagina 9 del libro “Formulas y tablas de la matematica aplicada” o en las enciclopedias libreshttp://planetmath.org/encyclopedia/CubicFormula.html o http://es.wikipedia.org, buscando “Ecuacionde tercer grado”. Otra buena referencia es http://eqworld.ipmnet.ru/en/solutions/ae/ae-toc1.htm
Figura 1.4: Niels Abel y Evariste Galois.
Ludovico Ferrari, alumno de Cardano, resolvio despues por radicales la ecuacion de cuarto grado (verhttp://planetmath.org/encyclopedia/QuarticFormula.html o la pagina 10 del libro “Formulas y tablas dela matematica aplicada”), expresando cada polinomio de grado cuatro como producto de dos polinomios degrado dos (ver http://es.wikipedia.org, buscando “Ecuacion de cuarto grado”). En la practica no se suelenutilizar estas formulas por ser muy complicadas. Muchos matematicos posteriores intentaron encontrarla formula general que permitiera determinar las raıces de las ecuaciones de quinto grado y superior. Sinembargo, a principios del siglo XIX, dos matematicos jovencısimos, el noruego Niels Abel (1802-1829) yel frances Evariste Galois (1811-1832), demostraron su inexistencia: en concreto, Abel demostro (a los 19anos!!) la imposibilidad de resolver la ecuacion general de quinto grado por radicales y Galois establecio demanera teorica en que casos es posible resolver por radicales una ecuacion de cualquier grado. La relevanciade esta investigacion queda patente en el hecho de que el premio matematico equivalente al premio Nobelen otras ciencias lleva el nombre de “premio Abel”.
La historia personal de los matematicos que intervinieron en estos descubrimientos esta llena de cu-riosidades, rivalidades e infortunios y merecerıa ser llevada al cine, sin duda ninguna. Al final del capıtulose indican algunas referencias (de las muchas existentes) donde poder obtener mas informacion al respecto.
DEFINICION 1.3 1. Si z ∈ lC, z 6= 0, existen infinitos numeros complejos w (llamados logaritmode z), tales que ew = z. Todos ellos tienen la forma w = log|z| + i(arg(z) + 2kπ), donde k es unentero. El valor particular con k = 0 se denomina logaritmo principal de z y se denota por Log(z).
2. Si z, w ∈ lC, z 6= 0, se define zw = ewLog(z).
3. Dado z ∈ lC, se define cos (z) =eiz + e−iz
2y sin (z) =
eiz − e−iz
2i. Las restantes funciones trigono-

10 Luis A. Fernandez
metricas se definen a partir de ellas:
tan (z) =sin (z)cos (z)
, cot (z) =cos (z)sin (z)
, sec (z) =1
cos (z), . . .
4. Dado z ∈ lC, se define cosh (z) =ez + e−z
2y sinh (z) =
ez − e−z
2. Las restantes funciones hiperbo-
licas se definen a partir de ellas.
EJERCICIO 1.6 Probar las siguientes propiedades:
1. Si z ∈ (0, +∞), Log(z) = log(z).
2. zw1zw2 = zw1+w2
3. (z1 ·z2)w = zw1 ·zw
2 ·e2πwiα, donde α = 0, si arg(z1)+arg(z2) ∈ [0, 2π) y α = −1, si arg(z1)+arg(z2) ∈[2π, 4π).
4. Si z = x+yi, cos (z) = cos (x) cosh (y)−i sin (x) sinh (y) y sin (z) = sin (x) cosh (y)+i cos (x) sinh (y).
5. Comprobar que cos (z) y sin (z) NO estan acotadas cuando z ∈ lC.
Otra forma habitual de definir las funciones de variable compleja elementales (exponencial, seno, coseno,etc...) es a traves de su expresion en serie de potencias como funciones de variable real, sin mas que sustituirla variable real por la variable compleja. Ası, se define
ez =∞∑
j=0
zj
j!, sin (z) =
∞∑
j=0
(−1)j z2j+1
(2j + 1)!, cos (z) =
∞∑
j=0
(−1)j z2j
(2j)!, sinh (z) =
∞∑
j=0
z2j+1
(2j + 1)!, . . .
1.3 Derivacion de funciones de variable compleja: condiciones deCauchy-Riemann
Dependiendo de cuales sean sus espacios de partida y de llegada, conviene distinguir entre los siguientestipos de funciones
1. f : IR → IR funcion real de variable real
2. f : lC → IR funcion real de variable compleja
3. f : IR → lC funcion compleja de variable real
4. f : lC → lC funcion compleja de variable compleja
Dada una funcion compleja de variable compleja f : lC → lC, las definiciones de lımite, continuidad yderivabilidad coinciden con las correspondientes para funciones reales de variable real.
DEFINICION 1.4 1. Se dice que l = limz→z0 f(z), cuando para cada ε > 0 existe δ > 0 tal que|f(z)− l| < ε siempre que |z − z0| < δ.
2. Se dice que f es continua en z0, cuando f(z0) = limz→z0 f(z)
3. Se dice que f es derivable en z0 con derivada f ′(z0), cuando
f ′(z0) = limz→z0
f(z)− f(z0)z − z0
4. Se dice que f es holomorfa (o analıtica) en z0 si f es derivable en cada punto de algun entorno dez0.

Metodos matematicos avanzados 11
PROPOSICION 1.3 Las reglas basicas para derivar funciones complejas de variable compleja coincidencon las reglas para derivar funciones reales de variable real:
1. (f + g)′(z0) = f ′(z0) + g′(z0)
2. (f · g)′(z0) = f ′(z0) · g(z0) + f(z0) · g′(z0)
3.(
f
g
)′(z0) =
f ′(z0)g(z0)− f(z0)g′(z0)g(z0)2
, supuesto que g(z0) 6= 0.
4. (f g)′(z0) = f ′(g(z0)) · g′(z0) (regla de la cadena).
El hecho de que lC tenga dimension dos conlleva consecuencias insospechadas a priori:
TEOREMA 1.2 Supongamos que f(z) = f(x + iy) = u(x, y) + iv(x, y) es derivable en z0 = x0 + iy0.Entonces, se verifican las ecuaciones de Cauchy-Riemann
∂u
∂x(x0, y0) =
∂v
∂y(x0, y0),
∂u
∂y(x0, y0) = −∂v
∂x(x0, y0). (1.1)
Dem. Sabemos que
f ′(z0) = limz→z0
f(z)− f(z0)z − z0
.
Tomemos, en particular, z = z0 + h con h ∈ IR. Entonces,
f ′(z0) = limh→0
f(z0 + h)− f(z0)h
=
= limh→0
u(x0 + h, y0) + iv(x0 + h, y0)− u(x0, y0)− iv(x0, y0)h
=∂u
∂x(x0, y0) + i
∂v
∂x(x0, y0).
Por otro lado, tomamos z = z0 + ih con h ∈ IR. Entonces,
f ′(z0) = limh→0
f(z0 + ih)− f(z0)ih
=
= limh→0
u(x0, y0 + h) + iv(x0, y0 + h)− u(x0, y0)− iv(x0, y0)ih
= −i∂u
∂y(x0, y0) +
∂v
∂y(x0, y0).
Para que ambas expresiones de f ′(z0) coincidan, deben verificarse las ecuaciones de Cauchy-Riemann.A pesar del nombre que se le han dado, estas ecuaciones fueron obtenidas por primera vez por
D’Alembert (1752) y L. Euler (1755) en relacion con problemas hidrodinamicos.Destaquemos que la demostracion anterior nos asegura ademas como se calcula (en la practica) la
derivada de una funcion compleja de variable compleja. En particular, las funciones complejas de variablecompleja habituales (polinomios, exponencial, seno, coseno, etc...) son holomorfas en lC y sus derivadas
coinciden con las derivadas de las correspondientes funciones reales de variable real:d
dz(zn) = nzn−1 para
n ∈ IN,d
dz(ez) = ez,
d
dz(sin (z)) = cos (z) y
d
dz(cos (z)) = − sin (z). Vefiquemos, por ejemplo, esto ultimo:
como cos (z) = u(x, y) + iv(x, y) = cos (x) cosh (y)− i sin (x) sinh (y), se sigue que
d
dz(cos (z)) =
∂u
∂x(x, y) + i
∂v
∂x(x, y) = − sin (x) cosh (y)− i cos (x) sinh (y) = − sin (z)
El siguiente resultado (junto al teorema anterior) asegura que las condiciones de Cauchy-Riemann son“casi” equivalentes a la derivabilidad.
TEOREMA 1.3 Supongamos que las derivadas parciales que aparecen en (1.1) son continuas en algunentorno de (x0, y0) y que las condiciones de Cauchy-Riemann se verifican en z0. Entonces, f es derivableen z0.

12 Luis A. Fernandez
La demostracion puede verse en Apostol, pag. 422 (ver tambien Ayres, pag. 73). Notemos que si severifican las ecuaciones de Cauchy-Riemann en (x0, y0), pero las derivadas parciales no son continuas enningun entorno de (x0, y0), entonces la funcion f no es necesariamente derivable en z0: un ejemplo puedeverse en o’ Neill. pag. 414 o en Apostol, pag. 145.
Por otro lado, las funciones reales de variable compleja solo pueden ser derivables en los puntos z0 enlos cuales
∂u
∂x(x0, y0) = 0,
∂u
∂y(x0, y0) = 0.
Analogamente, las funciones complejas de variable compleja que toman valores imaginarios puros solopueden ser derivables en los puntos z0 en los cuales
∂v
∂x(x0, y0) = 0,
∂v
∂y(x0, y0) = 0.
Si las segundas derivadas parciales de u y v con respecto a x e y existen y son continuas en algunaregion abierta (a, b)×(c, d) ⊂ IR2, donde se verifican las ecuaciones de Cauchy-Riemann, derivando se llegaa que
∂2u
∂x2(x, y) +
∂2u
∂y2(x, y) = 0,
∂2v
∂x2(x, y) +
∂2v
∂y2(x, y) = 0.
Es decir, tanto la parte real como la parte imaginaria de f satisfacen la ecuacion de Laplace en dimensiondos en dicha region. Por este motivo se llaman armonicas.
EJERCICIO 1.7 Demostrar que la funcion f(z) = f(x + iy) = x2 + iy2 es derivable solamente en lospuntos x + ix, ∀x ∈ IR, pero no es holomorfa en ningun punto.
Recıprocamente, dada u una funcion armonica en una region, es facil demostrar que u es la parte realde alguna funcion holomorfa f en dicha region de lC:
TEOREMA 1.4 Dada una funcion u(x, y) armonica en (a, b) × (c, d) ⊂ IR2, existe alguna (de hecho,infinitas) funcion holomorfa f en Ω = z = x + iy : x ∈ (a, b), y ∈ (c, d) ⊂ lC tal que u es su parte real.
Dem. Sabemos que la parte imaginaria v(x, y) de la funcion f que buscamos debe verificar lasecuaciones de Cauchy-Riemann. Fijemos (x0, y0) ∈ (a, b) × (c, d). Integrando la primera ecuacion conrespecto de y, resulta que
v(x, y) = φ(x) +∫ y
y0
∂u
∂x(x, y)dy,
donde φ puede ser cualquier funcion que solo dependa de x. Derivando ahora la expresion anterior conrespecto de x y utilizando que u es armonica, llegamos a que
∂v
∂x(x, y) = φ′(x) +
∫ y
y0
∂2u
∂x2(x, y)dy, = φ′(x)−
∫ y
y0
∂2u
∂y2(x, y)dy = φ′(x)− ∂u
∂y(x, y) +
∂u
∂y(x, y0).
Para que se cumpla la segunda ecuacion de Cauchy-Riemann debe suceder que
φ′(x) +∂u
∂y(x, y0) = 0,
para lo cual basta tomar φ de la forma
φ(x) = C −∫ x
x0
∂u
∂y(x, y0)dx,
donde C ∈ IR cualquiera. Ası, las funciones
f(z) = f(x + iy) = u(x, y) + i
(∫ y
y0
∂u
∂x(x, y)dy −
∫ x
x0
∂u
∂y(x, y0)dx + C
),

Metodos matematicos avanzados 13
satisfacen la condicion requerida.El resultado anterior sigue siendo cierto para funciones armonicas sobre regiones simplemente conexas,
es decir, regiones “sin agujeros”.Relacionando cada funcion holomorfa en Ω, f(z) = f(x+ iy) = u(x, y)+ iv(x, y) (con u y v de clase C1
en Ω) con el campo vectorial en el plano ~F (x, y) = (u(x, y),−v(x, y)), las condiciones de Cauchy-Riemannse pueden interpretar como sigue:
• ∂u∂y (x, y) = − ∂v
∂x (x, y) ⇐⇒ ∂F1∂y (x, y) = ∂F2
∂x (x, y) en Ω. Esta condicion implica que ~F es un campovectorial gradiente y, por lo tanto, conservativo (o irrotacional) en Ω.
• ∂u∂x (x, y) = ∂v
∂y (x, y) ⇐⇒ div ~F (x, y) = 0 en Ω. Esta condicion se expresa diciendo que ~F es un campovectorial solenoidal en Ω.
1.4 Integracion sobre curvas. Teorema de Cauchy. Teorema delos residuos
Veremos a continuacion la manera en que se define la integral de una funcion compleja de variable complejasobre una curva. Tras el comentario anterior, se comprende su similitud con la definicion de la integral delınea de un campo vectorial.
DEFINICION 1.5 Dada una funcion γ : [a, b] → lC, γ(t) = α(t) + iβ(t), se define∫ b
a
γ(t)dt =∫ b
a
α(t)dt + i
∫ b
a
β(t)dt,
siempre que las integrales de la derecha existan.
DEFINICION 1.6 1. Se dice que C es una curva cuando C = γ([a, b]), siendo γ : [a, b] → lC unafuncion continua en [a, b]. Se dice que C es una curva cerrada cuando verifica γ(a) = γ(b). Se diceque es una curva simple cuando γ es inyectiva en [a, b). En este contexto, se dice que γ es unaparametrizacion de C.
2. Se dice que C es una curva C1 a trozos cuando C = γ([a, b]), siendo γ : [a, b] → lC una funcioncontinua y con derivada γ′ continua en [a, b], salvo quizas en un numero finito de puntos, donde ladiscontinuidad de γ′ es de salto finito.
3. Dadas C una curva C1 a trozos y f una funcion definida sobre C, se define la integral de f sobre Ccomo ∫
C
f(z)dz =∫ b
a
f(γ(t))γ′(t)dt,
siempre que la integral de la derecha existe, entendiendo que se descompone como suma de las inte-grales de la misma funcion sobre los subintervalos de [a, b] donde existe γ′(t).
4. Supongamos que γ : [a, b] → lC y γ : [c, d] → lC son dos parametrizaciones de una misma curva C.Se dice que son equivalentes cuando existe una funcion ϕ : [a, b] → [c, d] continua y estrictamentecreciente tal que ϕ(a) = c, ϕ(b) = d y γ(t) = γ(ϕ(t)) para cada t ∈ [a, b].
Si f(z) = f(x + iy) = u(x, y) + iv(x, y) y γ(t) = α(t) + iβ(t), desarrollando∫
C
f(z)dz =∫ b
a
f(γ(t))γ′(t)dt =∫ b
a
(u(α(t), β(t)) + iv(α(t), β(t))) (α′(t) + iβ′(t))dt = (1.2)
=∫ b
a
[u(α(t), β(t))α′(t)− v(α(t), β(t))β′(t)] dt + i
∫ b
a
[u(α(t), β(t))β′(t) + v(α(t), β(t))α′(t)] dt.
Dadas dos parametrizaciones equivalentes de una curva C conviene notar que el sentido de recorridoes el mismo para ambas (se mantiene la orientacion), debido a que ϕ es estrictamente creciente.

14 Luis A. Fernandez
EJERCICIO 1.8 La recta C que une los puntos z = 0 y z = 1 + i se puede parametrizar de infinitasmaneras, entre otras, C = t + ti : t ∈ [0, 1] = (t − 2) + (t − 2)i : t ∈ [2, 3] = sin (t) + sin (t)i :
t ∈ [0, arcsin (1)]. Comprobar que (en todos los casos)∫
C
zdz =(1 + i)2
2. Notemos que (formalmente)
∫ 1+i
0
zdz =z2
2
∣∣∣∣1+i
0
=(1 + i)2
2.
Aplicando la formula de cambio de variables para integrales se demuestra que la definicion anterior esindependiente de la parametrizacion γ utilizada, siempre que las parametrizaciones sean equivalentes.
Dadas dos parametrizaciones equivalentes de una curva C donde la funcion ϕ es estrictamente decre-ciente (se cambia el sentido de recorrido de C), dicho cambio de orientacion produce el cambio de signoen la integral, ver Apostol, pg. 530.
EJERCICIO 1.9 1. Sea C = (1− t) + (1− t)i : t ∈ [0, 1]. Probar que∫
C
zdz = − (1 + i)2
2.
2. Sean C1 = eit : t ∈ [0, 2π] y C2 = eit : t ∈ [0, 4π]. Comprobar que∫
C1
dz
z= 2πi, mientras que
∫
C2
dz
z= 4πi.
Teniendo en cuenta que tanto C1 como C2 son parametrizaciones de la circunferencia de centro elorigen y radio 1, ¿ como es posible explicar que las integrales anteriores tengan valores diferentes ?
EJERCICIO 1.10 Probar las siguientes propiedades
1.∫
C
(f(z) + g(z))dz =∫
C
f(z)dz +∫
C
g(z)dz
2.∫
C
λf(z)dz = λ
∫
C
f(z)dz para cada λ ∈ lC
3.∫
C
f(z)dz = −∫
C−f(z)dz, donde C− denota la curva C recorrida en sentido opuesto.
4. Si C = C1 ∪C2 con C1 ∩C2 = ∅, siendo las orientaciones de C1 y C2 coherentes con la orientacion
de C, entonces∫
C
f(z)dz =∫
C1
f(z)dz +∫
C2
f(z)dz.
Estas propiedades (especialmente la ultima) resultan muy utiles en la practica: en particular, cuandola curva C se puede descomponer en trozos, para cada uno de los cuales se utiliza una parametrizaciondiferente. Ası, por ejemplo, cuando C viene dada en la forma C = C1 ∪ C2 con C1 ∩ C2 = ∅, dondeC1 = x + iϕ(x) : x ∈ [a, b] y C2 = ψ(y) + iy : y ∈ [c, d], siendo las orientaciones de C1 y C2 coherentescon la orientacion de C, se sigue de la relacion (1.2) aplicada en cada trozo, que
∫
C
f(z)dz =∫
C1
f(z)dz +∫
C2
f(z)dz =
=∫ b
a
[u(x, ϕ(x))− v(x, ϕ(x))ϕ′(x)] dx + i
∫ b
a
[u(x, ϕ(x))ϕ′(x) + v(x, ϕ(x))] dx+
+∫ d
c
[u(ψ(y), y)ψ′(y)− v(ψ(y), y)] dy + i
∫ d
c
[u(ψ(y), y) + v(ψ(y), y)ψ′(y)] dy.
En lo sucesivo (y salvo indicacion en contra), dada una curva cerrada, supondremos siempre que serecorre en sentido positivo (sentido contrario a las agujas del reloj): mas concretamente, al recorrerla endicho sentido, cualquier observador deja a su izquierda la region encerrada por la curva.

Metodos matematicos avanzados 15
TEOREMA 1.5 Sea C una curva C1 a trozos que une los puntos z1 y z2 y f una funcion de variablecompleja que posee una primitiva holomorfa F , es decir, F ′(z) = f(z) para cada z ∈ lC. Entonces,∫
Cf(z)dz = F (z2)− F (z1). En particular, si C es cerrada,
∫C
f(z)dz = 0.
Dem. Sea γ : [a, b] → lC una parametrizacion de C. Aplicando la regla de la cadena:∫
C
f(z)dz =∫
C
F ′(z)dz =∫ b
a
F ′(γ(t))γ′(t)dt =
=∫ b
a
d
dt(F (γ(t))dt = F (γ(b))− F (γ(a)) = F (z2)− F (z1).
EJERCICIO 1.11 Si C = eit : t ∈ [0, 2π], hemos visto que∫
C
dz
z= 2πi. Teniendo en cuenta que
ddz (Log(z)) = 1
z , ¿ como se explica que la integral anterior no se anule ?
Como consecuencia de este Teorema, se sigue que la integral∫ z2
z1f(z)dz tiene un valor independiente
de la curva que utilicemos para unir z1 con z2. De hecho, se puede probar este resultado sin necesidad deque exista primitiva alguna de f :
TEOREMA 1.6 (Teorema de Cauchy) Sea C una curva cerrada simple C1 a trozos y f una funcionholomorfa en la region limitada por C y sobre C tal que f ′ es continua en la misma region. Entonces,
∫
C
f(z)dz = 0.
Dem. Por definicion,∫
C
f(z)dz =∫ b
a
[u(α(t), β(t))α′(t)− v(α(t), β(t))β′(t)] dt+
+i
(∫ b
a
[u(α(t), β(t))β′(t) + v(α(t), β(t))α′(t)] dt
)=
∫
C
u(x, y)dx− v(x, y)dy+
+i
(∫
C
u(x, y)dy + v(x, y)dx
).
Aplicando el Teorema de Green en el plano,∫
C
u(x, y)dx− v(x, y)dy =∫
Ω
(−∂v
∂x(x, y)− ∂u
∂y(x, y)
)dxdy,
∫
C
u(x, y)dy + v(x, y)dx =∫
Ω
(∂u
∂x(x, y)− ∂v
∂y(x, y)
)dxdy,
siendo Ω la region limitada por C.Puesto que f es holomorfa en Ω, se verifican las ecuaciones de Cauchy-Riemann en Ω y, por lo tanto,
las integrales anteriores son nulas. Entonces,∫
Cf(z)dz = 0.
Una vez mas, esta propiedad nos recuerda la correspondiente para campos vectoriales conservativos, locual no es sorprendente tras el comentario final de la seccion anterior.
Todavıa, la condicion de que f ′ sea continua en la region Ω puede eliminarse, aunque entonces lademostracion no se obtiene a partir del Teorema de Green, ver Spiegel pags. 104-107.
TEOREMA 1.7 Supongamos que C,C1, . . . , Ck son curvas cerradas simples disjuntas C1 a trozos y queC1, . . . , Ck estan dentro de la region limitada por C (como en la Figura 1.1). Sea f una funcion holomorfaen la region intermedia entre C y las curvas interiores C1, . . . , Ck y sobre todas las curvas. Entonces,
∫
C
f(z)dz =k∑
j=1
∫
Cj
f(z)dz.

16 Luis A. Fernandez
<
<
<
C
C1
C2
C3
<
Figura 1.5: Una curva C con otras curvas C1, C2, C3 dentro.
Dem. Comencemos con el caso k = 1. El argumento mas claro es el geometrico. Como en la Figura1.2, construimos los cortes AB y PQ que unen un punto de C con uno de C1. Notar que ABRPQTA yAUQPSBA son curvas cerradas simples C1 a trozos y que f es holomorfa en las regiones limitadas porellas (y sobre ellas). Por el Teorema de Cauchy,
∫
ABRPQTA
f(z)dz = 0, y∫
AUQPSBA
f(z)dz = 0.
Descomponiendo las integrales en varias partes, resulta∫
AB
f(z)dz +∫
BRP
f(z)dz +∫
PQ
f(z)dz +∫
QTA
f(z)dz = 0,
∫
AUQ
f(z)dz +∫
QP
f(z)dz +∫
PSB
f(z)dz +∫
BA
f(z)dz = 0.
C
C1
<
<P
Q A B
R
T
U
S
Figura 1.6: Una curva C con otra C1 dentro y con dos cortes.
Como∫
ABf(z)dz = − ∫
BAf(z)dz y
∫PQ
f(z)dz = − ∫QP
f(z)dz, sumando las expresiones anterioresnos queda ∫
BRP
f(z)dz +∫
QTA
f(z)dz +∫
AUQ
f(z)dz +∫
PSB
f(z)dz = 0.

Metodos matematicos avanzados 17
Se concluye teniendo en cuenta que∫
QTA
f(z)dz +∫
AUQ
f(z)dz = −∫
C1
f(z)dz y∫
BRP
f(z)dz +∫
PSB
f(z)dz =∫
C
f(z)dz.
En el caso general, el razonamiento es similar, haciendo cortes de C a C1, de C1 a C2, etc... hasta de Ck
a C.En el teorema anterior, notemos que no es necesario que f sea holomorfa en el interior de la region
limitada por cada una de las curvas C1, . . . , Ck.Llegados a este punto conviene hacer notar que la intuicion geometrica no siempre es correcta: por
ejemplo, es posible construir una curva continua cerrada simple, incluida en una region acotada, pero quetiene longitud infinita, ver Spiegel pag. 112. Esto explica que algunos hechos (aparentemente “evidentes”)puedan ser matematicamente difıciles de demostrar.
DEFINICION 1.7 Dado un numero natural n ≥ 1, se dice que una funcion f tiene un polo de orden n en z1
cuando limz→z1(z − z1)nf(z) es finito y no nulo. En el caso n = 1, se dice que f tiene un polo simple.
En la practica, resulta util tener en cuenta las siguientes relaciones:
• Si f tiene un polo en z1, entonces limz→z1 f(z) es infinito.
• Si limz→z1 f(z) es infinito, no siempre f tiene un polo en z1. Por ejemplo, f(z) = exp (1/z2) enz = 0, ya que limz→0 zn exp (1/z2) no es finito para ningun n.
• Si limz→z1(z − z1)f(z) es nulo, entonces z1 no es polo de f .
• Si limz→z1(z − z1)f(z) es infinito, entonces z1 no es polo simple de f .
EJERCICIO 1.12 Comprobar que f(z) = z +1
(z − 2i)3tiene un polo de orden 3 en z = 2i y que
f(z) =z − sin z
zno tiene ningun polo (se trata de una singularidad evitable).
EJERCICIO 1.13 Comprobar que si f(z) = e1/z2, se verifica que limz→0 f(z) es infinito, pero sin em-
bargo z = 0 no es un polo de f(z). En estos casos, se dice que f tiene una singularidad esencial en elpunto z = 0.
TEOREMA 1.8 Supongamos que f es holomorfa, salvo en z1 y que f tiene un polo de orden n en z1.Entonces, en un algun entorno de z1, f se puede expresar en la forma
f(z) =a−n
(z − z1)n+
a−n+1
(z − z1)n−1+ . . . +
a−1
z − z1+ f1(z) (1.3)
con f1 una funcion holomorfa que admite derivadas de cualquier orden y todas ellas son holomorfas endicho entorno de z1.
La demostracion de un resultado mas general (que incluye este como caso particular) puede verse enApostol, pag 555 o Spiegel pags. 156-8. De hecho, se demuestra que la parte regular de la funcion f (laque designamos por f1) se puede expresar en forma de serie de potencias como
f1(z) =+∞∑
k=0
ak(z − z1)k,
en un entorno de z1. El tipo de series
f(z) =+∞∑
k=−∞ak(z − z1)k (1.4)

18 Luis A. Fernandez
que pueden incluir tanto potencias positivas de (z−z1), como potencias negativas, se denomina desarrollo de Laurent(o serie de Laurent) de f(z) alrededor de z1.
En la expresion (1.3), el coeficiente a−1 se llama residuo de f en el polo z1 y se denota Res(f, z1).A partir de la expresion de f , se puede calcular el residuo por la formula
a−1 = Res(f, z1) =1
(n− 1)!lim
z→z1
dn−1
dzn−1((z − z1)nf(z)) ,
donde n es el orden del polo z1. Si z1 es un polo simple, entonces
a−1 = Res(f, z1) = limz→z1
(z − z1)f(z).
TEOREMA 1.9 (Teorema de los residuos) Sea C una curva cerrada simple C1 a trozos y f unafuncion holomorfa en la region limitada por C, excepto en un numero finito de polos z1, . . . , zk, y sobre C.Entonces ∫
C
f(z)dz = 2πi
k∑
j=1
Res(f, zj).
Dem. Consideremos el caso en que hay un solo polo z1. En virtud de (1.3), sabemos que (en algunentorno de z1)
f(z) =a−n
(z − z1)n+
a−n+1
(z − z1)n−1+ . . . +
a−1
z − z1+ f1(z),
con f1 holomorfa en dicho entorno. De otro lado, en virtud del Teorema 1.7, resulta que para todo n ∈ IN∫
C
dz
(z − z1)n=
∫
C1
dz
(z − z1)n,
siendo C1 una circunferencia con centro en z1 y radio suficientemente pequeno para que este contenida enC y el entorno de z1. Ahora, es inmediato comprobar que
∫
C1
dz
(z − z1)n= 0, si n 6= 1,
∫
C1
dz
z − z1= 2πi.
Como consecuencia del Teorema de Cauchy se sigue que∫
C
f(z)dz = 2πia−1 +∫
C
f1(z)dz = 2πiRes(f, z1).
Cuando hay varios polos, rodeamos cada uno de ellos con una circunferencia con centro en el y radiosuficientemente pequeno para que esten todas ellas dentro de C y sean disjuntas y descomponemos laintegral sobre C como la suma de las integrales sobre cada una de dichas circunferencias, gracias alTeorema 1.7. Para calcular cada una de dichas integrales, utilizamos la correspondiente expresion de f deltipo (1.3), en torno del polo en cuestion.
EJERCICIO 1.14 Si C = eit : t ∈ [0, 2π], determinar el valor de la integral∫
C
(3z2 +4z)dz directa-
mente y a traves del Teorema de los residuos.
El Teorema de los residuos permite el calculo de diversas integrales reales (definidas o impropias),mediante la eleccion de una funcion f y una curva C apropiadas. Veamos algunos de los tipos mascomunes:
1.∫ 2π
0
g(sin (θ), cos (θ))dθ, donde g es una funcion racional.
Haciendo z = eiθ, sin (θ) =z − z−1
2i, cos (θ) =
z + z−1
2, dz = ieiθdθ, o sea, dθ =
dz
iz, entonces

Metodos matematicos avanzados 19
∫ 2π
0
g(sin (θ), cos (θ))dθ =∫
C
f(z)dz,
donde f(z) =1zi
g
(z − z−1
2i,z + z−1
2
), C es la circunferencia de centro el origen y radio 1 orientada
positivamente.
La integral de la derecha se calcula utilizando el Teorema de los residuos, supuesto que f(z) cumplelas condiciones requeridas por dicho teorema.
Ejemplo: Calcular I1 =∫ 2π
0
dθ
2 + cos (θ). Haciendo la transformacion anterior, resulta que I1 =
−2i
∫
C
dz
z2 + 4z + 1. El integrando posee polos simples en las raıces de la ecuacion z2 + 4z + 1 = 0,
es decir, en z1 = −2 +√
3 y z2 = −2−√3.
Es facil comprobar que z1 es interior al cırculo unidad y z2 es exterior.
El residuo correspondiente a z1 viene dado por
Res(f, z1) = limz→z1
z − z1
z2 + 4z + 1=
1z1 − z2
=1
2√
3.
Por lo tanto, aplicando el Teorema de los residuos se sigue que I1 =−2i2πi
2√
3=
2π√3.
A pesar de que en este caso es factible encontrar una primitiva de la funcion 12+cos (θ) , el valor de I1
NO se puede obtener utilizando directamente el Teorema Fundamental del Calculo Integral, ya quetendrıamos
I1 =∫ 2π
0
dθ
2 + cos (θ)=
[2√3
arctan(
1√3
tan(
θ
2
))∣∣∣∣θ=2π
θ=0
=
=2√3
(arctan
(tan (π)√
3
)− arctan
(tan (0)√
3
))= 0,
lo cual es evidentemente falso, ya que 12+cos (θ) > 0 para cada θ ∈ [0, 2π]. ¿ Podrıas explicar por que
se produce esta aparente paradoja y como podrıa evitarse ?
2.∫ +∞
−∞g(x)dx = lim
R→+∞
∫ +R
−R
g(x)dx, donde g es una funcion racional.
Consideramos∫
CRg(z)dz, donde la curva CR viene dada por el segmento sobre el eje x desde −R
hasta +R y la semicircunferencia ΓR por encima del eje x que tiene este segmento como diametro(ver Figura 1.3). Entonces, haciendo R → +∞ se obtiene la integral en algunos casos; en particular,si g(x) = p(x)/q(x), con p y q polinomios tales que el grado de q es mayor o igual que el grado de pmas 2 y ninguna de las raıces de q es real.
Ejemplo: Calcular I2 =∫ +∞
−∞
1x4 + 1
dx.
Dada CR como antes,∫
CR
dz
z4 + 1=
∫ R
−R
dx
x4 + 1+
∫
ΓR
dz
z4 + 1=
∫ R
−R
dx
x4 + 1+
∫ π
0
Rieiθdθ
R4e4iθ + 1(1.5)
El integrando posee polos simples en las raıces de la ecuacion z4 +1 = 0, es decir, en z1 = eπi/4, z2 =e3πi/4, z3 = e5πi/4 y z4 = e7πi/4. De ellas, solo z1 y z2 pertenecen al semiplano superior.

20 Luis A. Fernandez
><
-R +R
GR
Figura 1.7: La curva CR.
El residuo correspondiente a z1 viene dado por
Res(z1) = limz→z1
z − z1
z4 + 1=
1(z1 − z2)(z1 − z3)(z1 − z4)
=e−iπ/4
4i.
El lımite anterior puede calcularse mas facilmente utilizando la Regla de L’Hopital.
Analogamente, se deduce que Res(z2) =eiπ/4
4i.
Por lo tanto, aplicando el Teorema de los residuos se sigue que∫
CR
dz
z4 + 1=
2πi(e−iπ/4 + eiπ/4)4i
= π cos (π/4) =π√2.
Para concluir, basta ahora tomar lımites cuando R → +∞ en la expresion (1.5) y notar que∣∣∣∣∫ π
0
Rieiθdθ
R4e4iθ + 1
∣∣∣∣ ≤∫ π
0
Rdθ
|R4e4iθ + 1| ≤∫ π
0
Rdθ
|R4 − 1| = πR
|R4 − 1| ,
que tiende hacia 0 cuando R → +∞. Ası, I2 =π√2.
Este mismo tipo de razonamiento se puede aplicar siempre que g(x) = p(x)/q(x), con p y q polinomiostales que si n es el grado de p y k es el grado de q, entonces k ≥ n+2. Escribiendo q(x) = akxk+q1(x),donde q1 es un polinomio de grado (a lo sumo) k−1, resulta que, cuando R es suficientemente grande,
∣∣∣∣∫ π
0
p(Reiθ)Rieiθdθ
q(Reiθ)
∣∣∣∣ ≤ C1
∫ π
0
Rn+1dθ
||ak|Rk − |q1(Reiθ)|| ≤ C1
∫ π
0
Rn+1dθ
|ak|Rk − C2Rk−1=
=C1π
Rk−n−2 (|ak|R− C2), que tiende hacia 0 cuando R → +∞.
En este caso, el calculo directo de la primitiva (vıa MAPLE) sı que nos conduce hasta el mismo valor,ya que
∫1
x4 + 1dx =
12√
2
(12
log
(x2 + x
√2 + 1
x2 − x√
2 + 1
)+ arctan(x
√2 + 1) + arctan(x
√2− 1)
)
¿ Sabrıas deducir que I2 =π√2
a partir de la formula anterior?

Metodos matematicos avanzados 21
3.∫ +∞
−∞g(x) cos (mx)dx, o
∫ +∞
−∞g(x) sin (mx)dx, donde m 6= 0 y g(x) = p(x)/q(x), con p y q poli-
nomios tales que el grado de q es mayor o igual que el grado de p mas 1 y ninguna de las raıces de qes real. Utilizando que cos (x) = cos (−x) y que sin (x) = − sin (−x), podemos suponer, sin perdidade generalidad, que m > 0. Aquı se considera
∫CR
g(z)eimzdz con CR como en el caso anterior. Serazona como antes y se toma parte real o parte imaginaria del resultado segun interese.
Ejemplo: Calcular I3 =∫ +∞
−∞
cos (mx)x2 + 1
dx, para m ≥ 0.
Consideramos∫
CR
eimz
z2 + 1dz con CR como en el apartado anterior.
∫
CR
eimz
z2 + 1dz =
∫ R
−R
eimx
x2 + 1dx +
∫
ΓR
eimz
z2 + 1dz =
∫ R
−R
eimx
x2 + 1dx+ (1.6)
+∫ π
0
emR(− sin (θ)+i cos (θ))
R2e2iθ + 1Rieiθdθ
El integrando posee polos simples en las raıces de la ecuacion z2+1 = 0, es decir, en z1 = i y z2 = −i.Es claro que z1 es interior a CR (si R > 1) y z2 es exterior.
El residuo correspondiente a z1 viene dado por Res(z1) = limz→i
(z − i)eimz
z2 + 1=
e−m
2i.
Gracias al Teorema de los residuos se sigue que∫
CR
eimzdz
z2 + 1=
2πie−m
2i= πe−m.
Para concluir, basta ahora tomar lımites cuando R → +∞ en la expresion (1.6) y notar que, comom ≥ 0,
∣∣∣∣∫ π
0
emR(− sin (θ)+i cos (θ))
R2e2iθ + 1Rieiθdθ
∣∣∣∣ ≤∫ π
0
Re−mR sin (θ)dθ
|R2e2iθ + 1| ≤∫ π
0
Rdθ
|R2 − 1| = πR
|R2 − 1| ,
que tiende hacia 0 cuando R → +∞. Por lo tanto,∫ ∞
−∞
eimx
x2 + 1dx = πe−m, de donde (tomando partes
real e imaginaria) se sigue que I3 =∫ +∞
−∞
cos (mx)x2 + 1
dx = πe−m, mientras que∫ +∞
−∞
sin (mx)x2 + 1
dx = 0.
Esta ultima relacion se deduce directamente del hecho de que la funcion a integrar es impar, porserlo sin (mx).
Notemos por ultimo que si m = 0, resulta que∫ +∞
−∞
1x2 + 1
dx = π, lo cual se deduce facilmente
utilizando metodos elementales, ya que
∫ +∞
−∞
1x2 + 1
dx = limR→+∞
∫ +R
−R
1x2 + 1
dx = limR→+∞
(arctan (+R)− arctan (−R)) = π.
Cuando m > 0, el mismo tipo de razonamiento se puede aplicar siempre que g sea una funcionracional donde el grado del denominador sea (al menos) el grado del numerador mas uno
∣∣∣∣∣∫ π
0
p(Reiθ)eimReiθ
Rieiθdθ
q(Reiθ)
∣∣∣∣∣ ≤ C1
∫ π
0
Rn+1e−mR sin (θ)dθ
|ak|Rk − C2Rk−1≤ C3
∫ π
0
e−mR sin (θ)dθ =
= C3
(∫ π/2
0
e−mR sin (θ)dθ +∫ π
π/2
e−mR sin (θ)dθ
)≤ C3
(∫ π/2
0
e−2mRθ/πdθ+

22 Luis A. Fernandez
+∫ π
π/2
e−2mR(π−θ)/πdθ
)=
C3π
mR(1− e−mR),
que tiende hacia 0 cuando R → +∞. En la ultima desigualdad hemos utilizado el hecho de quesin (θ) ≥ 2θ/π, para cada θ ∈ [0, π/2], mientras que sin (θ) ≥ 2(π − θ)/π, para cada θ ∈ [π/2, π].
Una cuestion interesante a explicar es si la argumentacion anterior podrıa llevarse a cabo integrandola funcion g(z) cos (mz) en lugar de g(z)eimz.
1.5 Variable Compleja con Maple
Podemos realizar las operaciones basicas:
> 4-3*I+(-8+2*I);
−4− I
> (3+2*I)*(2-I);
8 + I
> (2-3*I)/(4-I);1117− 10
17I
> (5+5*I)/(3-4*I)+20/(4+3*I);
3− I
La orden polar calcula la forma polar de un numero complejo. Cuidado, porque en MAPLE, elargumento principal se toma en (−π, π] y no en [0, 2π).
> polar(-I);
polar(1, −12
π)
> polar(2+2*sqrt(3)*I);
polar(4,13
π)
> polar(-sqrt(6)-sqrt(2)*I);
polar(2√
2, arctan(16
√2√
6)− π)
Las funciones elementales (exp, cos, cosh, ...) admiten argumentos complejos
> 6*exp(I*Pi/3);
3 + 3 I√
3
> evalc(exp(6+I));
e6 cos(1) + I e6 sin(1)

Metodos matematicos avanzados 23
> evalf(exp(6+I));
217.9735074 + 339.4736242 I
> simplify((-2^(1/4)*exp(I*Pi/8))^2);
1 + I
> evalc((sqrt(2)*exp(I*Pi*5/6))^2);
1− I√
3
> log(-5);
ln(5) + I π
> evalc(log(1+I));
12
ln(2) +14
I π
> evalc(cos(3+I));
cos(3) cosh(1)− I sin(3) sinh(1)
> evalc(I^I);
e(−1/2 π)
> evalc(-I*exp((x+I*y)^2));
e(x2−y2) sin(2x y)− I e(x2−y2) cos(2 x y)
Para dibujar funciones complejas de variable compleja, la orden complexplot3d representa el modulode los valores, mientras colorea el resultado (que aquı se aprecia poco) utilizando su argumento comocriterio. Hay que cargar el paquete “plots” previamente a usar la orden.
> with(plots):complexplot3d(sin(z),z=-Pi-I..Pi+I);

24 Luis A. Fernandez
> complexplot3d(sinh(z),z=-Pi-I..Pi+I);
Las ordenes solve y roots permiten encontrar las raıces (reales o complejas) de polinomios
> roots(5*z^2+2*z+10,I);
[[−15− 7
5I, 1], [
−15
+75
I, 1]]
> solve(z^5-2*z^4-z^3+6*z-4);
2, 1, 1, −1 + I, −1− I
> solve(z^4+z^2+1);12
+12
I√
3,12− 1
2I√
3, −12
+12
I√
3, −12− 1
2I√
3
Las integrales que hemos calculado utilizando el Teorema de los residuos se obtienen directamentemediante la orden int, incluso si son impropias.
> int(1/(2+cos(x)), x=0..2*Pi);23
π√
3
> int(1/(x^4+1), x=-infinity..infinity);12
π√
2
> int(cos(2*x)/(x^2+1), x=-infinity..infinity);
−π sinh(2) + π cosh(2)
> int(sin(2*x)/(x^2+1), x=-infinity..infinity);
0
> evalf(int(cos(2*Pi*x)/(x^4+x^2+1), x=0..infinity));
−.0039302 + 0. I

Metodos matematicos avanzados 25
Bibliografıa sobre variable compleja:
1. “Analisis Matematico”, T.M. Apostol, Ed. Reverte, 1989.
2. “Variable Compleja. Un curso practico”, D. Pestana Galvan, J. M. Rodrıguez y F. Marcellan. Ed.Sıntesis, 1999.
3. “Teorıa y problemas de Variable Compleja”, M. R. Spiegel, Ed. McGraw-Hill, 1971.
4. “Curso de Matematicas Superiores (Tomo 6)”. M. L. Krasnov, A.I. Kiseliov, G.I. Makarenko, Ie.V.Shikin y V. I. Zaliapin, Ed. URSS, 2003.
5. “Mathematical methods for physicists”, G. B. Arfken y H. J. Weber, Harcourt-Academic Press, 2001.
6. “Formulas y tablas de la matematica aplicada”, M. R. Spiegel, J. Liu y L. Abellanas, Mc Graw Hill,2000.
7. “Calculus”, M. Spivak, Ed. Reverte, 1991.
Recursos en Internet sobre Variable Compleja:
1. http://www.dmae.upm.es/WebpersonalBartolo/MmIoficial.html
Pagina en espanol con transparencias desarrollando la teorıa y tambien ejemplos, en un tono muyestimulante.
2. http://www.ugr.es/∼fjperez/apuntes.html
Pagina en espanol con apuntes desarrollados, ejemplos resueltos y ejercicios propuestos.
3. http://mathworld.wolfram.com/topics/ComplexAnalysis.html
4. http://math.fullerton.edu/mathews/c2003/ComplexUndergradRes.html
Recopilacion de numerosos enlaces clasificados por temas.
5. http://www.mapleapps.com/powertools/MathEducation.shtml
(Apartado “Complex Analysis”)
o, directamente, http://www.mapleapps.com/powertools/complex/complex.shtml
6. http://www.exampleproblems.com/wiki/index.php/Complex Variables
Pagina con muchos ejercicios resueltos.
Bibliografıa sobre Matematicos e Historia de las matematicas:
1. “Cardano y Tartaglia. Las matematicas en el Renacimiento italiano”, F. Martın Casalderrey, Ed.Nivola, 2000.
2. “Euler. El maestro de todos los matematicos”, W. Dunham, Ed. Nivola, 2000.
3. “Galois. Revolucion y matematicas”, F. Corbalan, Ed. Nivola, 2000.
4. “El teorema del loro” (Novela para aprender matematicas), D. Guedj, Ed. Anagrama, 2000.

26 Luis A. Fernandez

Capıtulo 2
Introduccion a las Ecuaciones enDerivadas Parciales
DEFINICION 2.1 1. Una ecuacion en derivadas parciales (EDP) de orden n ∈ IN es una ecuacionen la que aparece una funcion desconocida que depende (al menos) de dos variables reales, junto aalgunas de sus derivadas parciales hasta orden n. Cuando la funcion incognita solo depende de unavariable real, se trata de una ecuacion diferencial ordinaria (EDO) de orden n.
2. Se dice que una EDP es lineal si es lineal respecto de la funcion desconocida y de todas sus derivadasparciales. En otro caso, se dice que es no lineal.
Dada una funcion u(x, y), es habitual utilizar la siguiente notacion abreviada para designar sus derivadasparciales
∂u
∂x(x, y) = ux(x, y),
∂u
∂y(x, y) = uy(x, y),
∂2u
∂x2(x, y) = uxx(x, y),
∂2u
∂x∂y(x, y) = uxy(x, y),
∂2u
∂y∂x(x, y) = uyx(x, y),
∂2u
∂y2(x, y) = uyy(x, y) . . .
A partir de ahora, supondremos que las funciones que manejamos son suficientemente regulares deforma que todas las derivadas parciales que aparecen esten bien definidas y sean continuas.
Por otra parte, si la funcion u es de clase C2 en un cierto dominio (existen todas las derivadas parcialeshasta orden 2 de dicha funcion y son continuas en el dominio), se sabe que uyx(x, y) = uxy(x, y), graciasal Teorema de Schwarz (igualdad de las derivadas cruzadas). Por ello, en las EDP de segundo ordensolo aparecera uxy (y no uyx(x, y)). En general, es irrelevante el orden en el cual se aplican k (o menos)derivadas parciales a una funcion de clase Ck en un cierto dominio.
EJEMPLO 2.1 1. Una EDP lineal de primer orden: ux(x, y)− uy(x, y) + 2u(x, y) = 6.
2. Una EDP no lineal de primer orden: (ux(x, y))2 + (uy(x, y))2 = 0.
3. Algunas EDP lineales de segundo orden:
a) uxx(x, y) + uyy(x, y) = 0 (Ec. de Laplace)
b) ut(t, x)− uxx(t, x) = 0 (Ec. del calor)
c) utt(t, x)− uxx(t, x) = 0 (Ec. de ondas)
4. Una EDP no lineal de segundo orden: u(x, y) · uxy(x, y) + ux(x, y) = y.
27

28 Luis A. Fernandez
Por regla general, al integrar una EDO de orden n aparecen n constantes arbitrarias. De la mismamanera, al integrar una EDP de orden n, es habitual que aparezcan n funciones arbitrarias. Por ejemplo,la EDP lineal de primer orden uy(x, y) = 0, tiene como solucion u(x, y) = f(x), donde f es una funcionarbitraria que solo depende de x. Del mismo modo, dada la EDP lineal de segundo orden uxy(x, y) = 0,al integrarla con respecto de y se obtiene que
ux(x, y) = f(x),
donde f es una funcion arbitraria que solo depende de x. Integrando ahora esta ultima identidad conrespecto de x, resulta que la solucion general de la EDP viene dada por
u(x, y) =∫
f(x)dx + G(y),
donde G es una funcion arbitraria que solo depende de y. Teniendo en cuenta que f es una funcionarbitraria, podemos expresar u en la forma
u(x, y) = F (x) + G(y),
donde F y G son funciones arbitrarias.
2.1 EDP lineales de primer orden con coeficientes constantes
Cuando la funcion incognita depende de dos variables independientes, son aquellas que tienen la forma
a · ux(x, y) + b · uy(x, y) + c · u(x, y) = f(x, y) (2.1)
donde a, b, c ∈ IR son conocidos (|a|+ |b| > 0); tambien es conocida la funcion f(x, y).Supongamos, para empezar, que a = 0 y b 6= 0. Ası la EDP queda
b · uy(x, y) + c · u(x, y) = f(x, y) (2.2)
En este caso, para cada x fijo, podemos ver la EDP anterior (2.2) como una EDO lineal de primer orden.Resolviendola como tal, obtenemos que
u(x, y) = e−cy/b
(K(x) +
∫ y 1bf(x, r)ecr/bdr
),
donde K es una funcion arbitraria.En el caso general (cuando a 6= 0 y b 6= 0), introducimos la nueva variable
ξ = b · x− a · yy la nueva funcion incognita v(ξ, y) = u(x, y). Utilizando la regla de la cadena, podemos escribir la EDP(2.1) en terminos de la nueva funcion incognita, en la forma
b · vy(ξ, y) + c · v(ξ, y) = f
(ξ + a · y
b, y
)(2.3)
Ahora, esta EDP es del tipo anterior y aplicando la formula correspondiente a este caso, se obtiene
v(ξ, y) = e−cy/b
(K(ξ) +
∫ y 1bf
(ξ + a · r
b, r
)ecr/bdr
).
Deshaciendo el cambio, se llega a que
u(x, y) = e−cy/b
(K(bx− ay) +
∫ y 1bf
(x +
a(r − y)b
, r
)ecr/bdr
), (2.4)

Metodos matematicos avanzados 29
donde K es una funcion arbitraria. Las rectas b · x− a · y = cte se denominan rectas caracterısticas de laEDP.
Para resolver la EDP (2.1) tambien es posible utilizar el cambio de funcion incognita v(x, ξ) = u(x, y).Con ello, la EDP queda
a · vx(x, ξ) + c · v(x, ξ) = f
(x,
bx− ξ
a
)(2.5)
de donde
v(x, ξ) = e−cx/a
(K(ξ) +
∫ x 1af
(r,
br − ξ
a
)ecr/adr
)
y por lo tanto
u(x, y) = e−cx/a
(K(bx− ay) +
∫ x 1af
(r, y +
b(r − x)a
)ecr/adr
). (2.6)
A pesar de las apariencias, es posible demostrar que los segundos miembros de las expresiones (2.4)y (2.6) son iguales, teniendo en cuenta que las funciones K y K deben estar relacionadas entre sı: paraverlo, basta igualar (2.4) y (2.6) y tomar algun valor concreto para x o y.
EJERCICIO 2.1 Probar que la solucion general de la EDP 3ux(x, y)−2uy(x, y)+u(x, y) = 1 viene dadapor u(x, y) = 1 + K(−2x − 3y)ey/2, donde K es una funcion arbitraria. Obtener soluciones particulares,eligiendo la funcion K de diferentes maneras. Probar que tambien se puede expresar en la forma u(x, y) =1 + K(−2x − 3y)e−x/3, donde K es una funcion arbitraria. Ambas expresiones coinciden si y solo siK(−2x − 3y)ey/2 = K(−2x − 3y)e−x/3 para cada x, y ∈ IR: haciendo (por ejemplo) x = 0, resultaK(−3y)ey/2 = K(−3y), o equivalentemente, K(r) = K(r)e−r/6. Comprobar ahora que las dos expresionesanteriores de u coinciden, si K y K estan relacionadas de esa manera.
En ciertas aplicaciones, resulta interesante determinar una solucion particular de la EDP que satisfaceuna condicion adicional del tipo u(x, ϕ(x)) = g(x) (resp. u(ϕ(y), y) = g(y)), donde las funciones ϕ y gson conocidas. En muchos de estos casos, esta condicion sirve para determinar la funcion arbitraria K demanera unica. Cuando y = ϕ(x) (resp. x = ϕ(y)) es una recta caracterıstica para la EDP, existe solucionverificando la condicion adicional solo para ciertas funciones particulares g; ademas, en el caso de que gtenga la forma particular requerida, existiran infinitas funciones K satisfaciendo el requisito. Para verlo,basta derivar u(x, ϕ(x)) = g(x) con respecto de x, de donde resulta ux(x, ϕ(x))+uy(x, ϕ(x))ϕ′(x) = g′(x).Multiplicando por a, se sigue que
a · ux(x, ϕ(x)) + a · ϕ′(x) · uy(x, ϕ(x)) = a · g′(x).
Haciendo ahora y = ϕ(x) en la EDP, tenemos que
a · ux(x, ϕ(x)) + b · uy(x, ϕ(x)) + c · u(x, ϕ(x)) = f(x, ϕ(x)).
Cuando a · ϕ′(x) = b, resulta evidente que ambas expresiones solo son compatibles si
a · g′(x) + c · g(x) = f(x, ϕ(x)).
EJEMPLO 2.2 La unica solucion del problema 3ux(x, y) − 2uy(x, y) + u(x, y) = 1 que ademas verifica
u(x, 0) = x2 viene dada por u(x, y) = 1 +(
(2x+3y)2
4 − 1)
ey/2. Por otro lado, ninguna de las soluciones
de esta EDP verifica u(x, 1− 2x
3
)= x, mientras que existen infinitas soluciones verificando u
(x,− 2x
3
)=
1 + e−x/3 (todas aquellas que satisfacen K(0) = 1). Notar que la recta y = 0 no es caracterıstica para laEDP, mientras que las rectas y = 1− 2x
3 e y = − 2x3 sı lo son.

30 Luis A. Fernandez
2.2 EDP lineales de primer orden con coeficientes variables
Cuando la funcion incognita depende de dos variables independientes son aquellas que tienen la forma
a(x, y) · ux(x, y) + b(x, y) · uy(x, y) + c(x, y) · u(x, y) = f(x, y) (2.7)
donde las funciones a(x, y), b(x, y), c(x, y) y f(x, y) son conocidas, |a(x, y)|+ |b(x, y)| > 0.El planteamiento teorico aquı es muy parecido al caso de coeficientes constantes. Cuando a(x, y) = 0
y b(x, y) 6= 0 la EDP queda
b(x, y) · uy(x, y) + c(x, y) · u(x, y) = f(x, y) (2.8)
y, de nuevo (para cada x fijo), podemos ver (2.8) como una EDO lineal de primer orden, que podemosresolver explıcitamente, obteniendo
u(x, y) = exp(−
∫ y c(x, r)b(x, r)
dr
)(K(x) +
∫ y f(x, r)b(x, r)
exp(∫ r c(x, s)
b(x, s)ds
)dr
),
donde K es una funcion arbitraria.En el caso general (cuando a(x, y) 6= 0 y b(x, y) 6= 0), queremos introducir una nueva variable
ξ = ξ(x, y) (2.9)
y una nueva funcion incognita v(ξ, y) = u(x, y) tal que la nueva EDP que resulte sea del tipo (2.8). Veamoscomo debemos elegir la funcion ξ(x, y) para conseguirlo. Utilizando la regla de la cadena, tenemos que
ux(x, y) = vξ(ξ, y)∂ξ
∂x(x, y), uy(x, y) = vξ(ξ, y)
∂ξ
∂y(x, y) + vy(ξ, y).
Sustituyendo en la EDP (2.7) se sigue que
f(x, y) = a(x, y) · vξ(ξ, y)∂ξ
∂x(x, y) + b(x, y) ·
(vξ(ξ, y)
∂ξ
∂y(x, y) + vy(ξ, y)
)+ c(x, y) · v(ξ, y).
Ası pues, la condicion necesaria y suficiente para que el termino vξ no aparezca es que
a(x, y) · ∂ξ
∂x(x, y) + b(x, y) · ∂ξ
∂y(x, y) = 0.
En otras palabras, la funcion ξ(x, y) que nos interesa utilizar en el cambio de variable, es una solucion dela parte principal de la propia EDP (2.7), esto es, de la EDP inicial con c = f = 0. Esto puede conseguirsecuando ξ(x, y) = cte define (implıcitamente) alguna solucion de la EDO (en general, no lineal)
dy
dx=
b(x, y)a(x, y)
. (2.10)
ya que, derivando la expresion ξ(x, y(x)) = cte con respecto de x, resulta que
0 =∂ξ
∂x(x, y) +
∂ξ
∂y(x, y)
dy
dx=
∂ξ
∂x(x, y) +
∂ξ
∂y(x, y)
b(x, y)a(x, y)
, (2.11)
que es la condicion que buscamos.Con este cambio de variable, la EDP (2.7) queda
b(x, y) · vy(ξ, y) + c(x, y) · v(ξ, y) = f(x, y).
Para poderla resolver, necesitamos expresar todos los coeficientes en terminos de la nueva variable ξ; paraello, precisamos despejar x = h(ξ, y) a partir de (2.9). Una vez hecho esto, la EDP queda
b(h(ξ, y), y) · vy(ξ, y) + c(h(ξ, y), y) · v(ξ, y) = f (h(ξ, y), y) (2.12)

Metodos matematicos avanzados 31
Ahora sı, esta EDP es del tipo anterior y aplicando la formula correspondiente a este caso, se obtienev(ξ, y). Deshaciendo el cambio, resulta u(x, y) = v(ξ(x, y), y).
Las soluciones de la EDO (2.10) se denominan curvas caracterısticas de la EDP. Notemos que, cuandoa y b son constantes, la solucion general de (2.10) viene dada por y = b
ax + cte, y por lo tanto, podemostomar ξ(x, y) = b · x− a · y.
EJERCICIO 2.2 Probar que la solucion general de la EDP xux(x, y) − yuy(x, y) + yu(x, y) = 0 vienedada por u(x, y) = K(xy)ey, donde K es una funcion arbitraria. Obtener soluciones particulares, eligiendola funcion K de diferentes maneras.
En la practica, es claro que la determinacion de alguna funcion ξ (curva caracterıstica) puede ser (vaa ser, en muchos casos) complicado; por otra parte, aunque sea posible, el calculo explıcito de la funcioninversa h resulta (en general) muy difıcil. Todo ello implica que (salvo casos concretos) la resolucion deEDP lineales de primer orden con coeficientes variables resulte una tarea complicada mediante metodosexplıcitos.
De nuevo, en ocasiones, una condicion adicional del tipo u(x, ϕ(x)) = g(x) (resp. u(ϕ(y), y) = g(y)),donde las funciones ϕ y g son conocidas, sirve para determinar la funcion arbitraria K de manera unica.Tambien puede suceder que dicha condicion adicional sea incompatible con la EDP o que haya infinitasfunciones K verificando el requisito. Derivando u(x, ϕ(x)) = g(x) con respecto de x resulta ux(x, ϕ(x)) +uy(x, ϕ(x))ϕ′(x) = g′(x). Multiplicando por a(x, ϕ(x)), se sigue que
a(x, ϕ(x)) · ux(x, ϕ(x)) + a(x, ϕ(x)) · ϕ′(x) · uy(x, ϕ(x)) = a(x, ϕ(x)) · g′(x).
Haciendo ahora y = ϕ(x) en la EDP, tenemos que
a(x, ϕ(x)) · ux(x, ϕ(x)) + b(x, ϕ(x)) · uy(x, ϕ(x)) + c(x, ϕ(x)) · u(x, ϕ(x)) = f(x, ϕ(x)).
Cuando a(x, ϕ(x)) · ϕ′(x) = b(x, ϕ(x)), las expresiones solo son compatibles si
a(x, ϕ(x)) · g′(x) + c(x, ϕ(x)) · g(x) = f(x, ϕ(x)).
Resaltemos que esta incompatibilidad entre la EDP y la condicion inicial se puede producir cuando
ϕ′(x) =b(x, ϕ(x))a(x, ϕ(x))
,
es decir, cuando la condicion inicial viene dada sobre una curva caracterıstica.
EJEMPLO 2.3 La unica solucion del problema xux(x, y)− yuy(x, y) + yu(x, y) = 0 que ademas verificau(x, 1) = x2 viene dada por u(x, y) = (xy)2ey−1. Por otro lado, ninguna de las soluciones de esta EDPverifica u(x, 0) = x, mientras que existen infinitas soluciones verificando u(x, 0) = 1 (todas aquellas quesatisfacen K(0) = 1).
El metodo de las caracterısticas se puede extender al caso de EDP lineales donde la funcion incognitadepende de tres o mas variables independientes. Tambien es posible tratar EDP cuasilineales del tipo
a(x, y, u(x, y))ux(x, y) + b(x, y, u(x, y))uy(x, y) = c(x, y, u(x, y)),
donde los coeficientes pueden ser no lineales respecto de u, ver Bleecker y Csordas, pag. 92 y siguientes.
2.3 EDP lineales de segundo orden con coeficientes constantes:clasificacion y reduccion a la forma canonica
Vamos a considerar EDP del tipo
a · uxx(x, y) + b · uxy(x, y) + c · uyy(x, y) + d · ux(x, y) + e · uy(x, y) + f · u(x, y) = F (x, y) (2.13)

32 Luis A. Fernandez
donde a, b, c, d, e, f ∈ IR son conocidos (|a|+ |b|+ |c| > 0) lo mismo que la funcion F (x, y).En esta seccion vamos a ver que estas EDP pueden clasificarse (segun sean los coeficientes a, b y c) y
reducirse (mediante cambios de variable adecuados) a ciertas formas canonicas, de una manera totalmenteanaloga a la clasificacion y reduccion de las conicas en el plano, es decir, de las ecuaciones cuadraticas
a · x2 + b · xy + c · y2 + d · x + e · y + f = 0.
Recordemos que (en la terminologıa habitual) se dice que esta ecuacion cuadratica es hiperbolica (esen-cialmente reducible a una hiperbola) si b2 − 4ac > 0 (p.e. x2 − y2 = 1), elıptica (esencialmente reduciblea una elipse) si b2 − 4ac < 0 (p.e. x2 + y2 = 1) y parabolica (esencialmente reducible a una parabola) sib2 − 4ac = 0 (p.e. x2 − y = 0).
En el caso de las EDP esta terminologıa se mantiene. Veremos que (esencialmente) la EDP (2.13)puede reducirse a la ec. de ondas (prototipo de ec. hiperbolica), ec. de Laplace (prototipo de ec. elıptica)o a la ec. del calor (prototipo de ec. parabolica) mencionadas en la introduccion de este capıtulo.
Para transformar (2.13) en su forma canonica, introducimos de nuevo un cambio de variables
ξ = ξ(x, y), η = η(x, y) (2.14)
y una nueva funcion incognita v(ξ, η) = u(x, y). Una vez mas, utilizando la regla de la cadena, resulta que
ux = vξξx + vηηx, uy = vξξy + vηηy,
uxx = vξξ(ξx)2 + 2vξηξxηx + vηη(ηx)2 + vξξxx + vηηxx,
uxy = vξξξxξy + vξη(ξxηy + ξyηx) + vηηηxηy + vξξxy + vηηxy,
uyy = vξξ(ξy)2 + 2vξηξyηy + vηη(ηy)2 + vξξyy + vηηyy.
Sustituyendo en la EDP (2.13) se obtiene
a?(x, y) · vξξ + b?(x, y) · vξη + c?(x, y) · vηη + d?(x, y) · vξ + e?(x, y) · vη + f · v = F (x, y) (2.15)
donde los coeficientes vienen dados por
a?(x, y) = a · (ξx)2 + b · ξxξy + c · (ξy)2
b?(x, y) = 2a · ξxηx + b · (ξxηy + ξyηx) + 2c · ξyηy
c?(x, y) = a · (ηx)2 + b · ηxηy + c · (ηy)2
d?(x, y) = a · ξxx + b · ξxy + c · ξyy + d · ξx + e · ξy
e?(x, y) = a · ηxx + b · ηxy + c · ηyy + d · ηx + e · ηy
(2.16)
Notar que ahora los nuevos coeficientes pueden no ser constantes, por lo que la EDP transformadase antoja mas difıcil que la EDP inicial. Sin embargo, podemos elegir ξ y η del modo que nos resultemas conveniente. El unico requisito es que las funciones que definen el cambio debe ser funcionalmenteindependientes, es decir, ξxηy − ξyηx 6= 0 . Una buena opcion consiste en elegirlos de tal forma que
a?(x, y) = a · (ξx)2 + b · ξxξy + c · (ξy)2 = 0,
c?(x, y) = a · (ηx)2 + b · ηxηy + c · (ηy)2 = 0.
Como las dos expresiones son similares, trabajaremos con la primera. Dividiendola por (ξy)2, resulta
a ·(
ξx
ξy
)2
+ b ·(
ξx
ξy
)+ c = 0.
Teniendo ahora en cuenta que si ξ(x, y(x)) = cte define implıcitamente una funcion, derivando con respectode x, vemos que
ξx(x, y(x)) + ξy(x, y(x))dy
dx(x) = 0,

Metodos matematicos avanzados 33
o, lo que es lo mismo, esa funcion es una solucion de la EDO
dy
dx(x) = −ξx(x, y(x))
ξy(x, y(x)),
llegamos a que debemos elegir ξ como solucion (implıcita) de la EDO
a ·(
dy
dx
)2
− b ·(
dy
dx
)+ c = 0. (2.17)
Supongamos por el momento que a 6= 0. Resolviendo, obtenemos que
dy
dx=
b +√
b2 − 4ac
2a(2.18)
dy
dx=
b−√b2 − 4ac
2a(2.19)
Estas ecuaciones (llamadas caracterısticas) admiten como soluciones las familias de rectas
y = λ1x + cte, y = λ2x + cte,
respectivamente, siendo λ1 = b+√
b2−4ac2a y λ2 = b−√b2−4ac
2a . Una vez mas, estas rectas se denominancaracterısticas.
Dependiendo ahora del signo del termino b2 − 4ac se distinguen los siguientes casos:
Caso Hiperbolico: b2 − 4ac > 0
Aquı, los valores λ1 y λ2 son reales y distintos. Tomando
ξ(x, y) = y − λ1x, η(x, y) = y − λ2x,
resulta que la EDP transformada (2.15) queda
vξη(ξ, η) + d · vξ(ξ, η) + e · vη(ξ, η) + f · v(ξ, η) = F (ξ, η) (2.20)
donde los coeficientes son constantes y vienen dados por d = a(e−dλ1)4ac−b2 ,e = a(e−dλ2)
4ac−b2 , f = af4ac−b2 y la funcion
F (ξ, η) = a4ac−b2 F
(η−ξ
λ1−λ2, ξ + λ1
η−ξλ1−λ2
).
Cuando a = 0 ni siquiera tiene sentido considerar λ1 y λ2. En este caso, hay que elegir un cambio devariable distinto. Si ademas c = 0, la EDP inicial ya esta en la misma forma que (2.20). Si a = 0, c 6= 0,en lugar de elegir ξ (resp. η) como solucion de la EDO (2.17), escribimos la ecuacion caracterıstica en laforma
−b ·(
dx
dy
)+ c ·
(dx
dy
)2
= 0, (2.21)
cuyas soluciones viene dadas por
x = cte, x =b
cy + cte
y planteamos el cambio de variable
ξ(x, y) = x, η(x, y) = x− b
cy.
En este caso, la EDP transformada resulta ser de nuevo (2.20), pero ahora con d = −dcb2 , e = eb−dc
b2 ,
f = − fcb2 y la funcion F (ξ, η) = −c
b2 F(ξ, c(ξ−η)
b
). Notar que b 6= 0, por la condicion de hiperbolicidad.

34 Luis A. Fernandez
Caso Parabolico: b2 − 4ac = 0
Si a = b = 0 (y por lo tanto c 6= 0), la ecuacion inicial ya esta en la forma
uyy(x, y) +d
c· ux(x, y) +
e
c· uy(x, y) +
f
c· u(x, y) =
1cF (x, y) (2.22)
Algo similar sucede cuando b = c = 0, a 6= 0.Si a 6= 0, b 6= 0, las raıces λ1 y λ2 son ambas iguales a b
2a , por lo que solo contamos con una familia derectas caracterısticas: y = b
2ax + cte. En estas circunstancias, nos planteamos el cambio de variable
ξ(x, y) = y − b
2ax, η(x, y) = x,
(otras opciones para η son posibles, del tipo η(x, y) = hy + kx tales que 2ak + bh 6= 0).La eleccion que hemos hecho nos lleva a que a? = 0 y b? = 0, por lo que la EDP transformada (2.15)
queda
vηη(ξ, η) + d · vξ(ξ, η) + e · vη(ξ, η) + f · v(ξ, η) = F (ξ, η) (2.23)
donde d = 2ae−db2a2 , e = d
a , f = fa y F (ξ, η) = 1
aF (η, ξ + bη2a ).
Caso Elıptico: b2 − 4ac < 0
Aquı, los valores λ1 y λ2 son complejos conjugados. Usando las mismas variables ξ y η que en el casohiperbolico (aunque en este caso sean complejas), se llega a una EDP como (2.20). Si no queremos trabajarcon las variables complejas y − λ1x, y − λ2x, podemos considerar sus partes real e imaginaria, es decir, elcambio de variable
ξ(x, y) = y − b
2ax, η(x, y) = −
√4ac− b2
2ax.
Con esta eleccion, la EDP transformada queda
vξξ(ξ, η) + vηη(ξ, η) + d · vξ(ξ, η) + e · vη(ξ, η) + f · v(ξ, η) = F (ξ, η) (2.24)
donde d = 4ae−2bd4ac−b2 , e = −2d√
4ac−b2, f = 4af
4ac−b2 y F (ξ, η) =(
4a4ac−b2
)F
(−2aη√4ac−b2
, ξ − bη√4ac−b2
)
Como b2 < 4ac, notemos que no puede suceder que a o c sea nulo.Acabamos de ver que es posible transformar la EDP original (2.13) en otra EDP de la forma (2.20),
(2.23) y (2.24), segun sea el caso (hiperbolico, parabolico o elıptico, respectivamente).Pero todavıa es posible simplificar aun mas las EDP transformadas, haciendo “desaparecer” las deriva-
das parciales de primer orden con el siguiente argumento: consideramos el cambio de funcion incognitaw(ξ, η) = v(ξ, η) exp (kξ + hη) con k y h constantes por determinar. Derivando la expresion v(ξ, η) =w(ξ, η) exp (−kξ − hη) y utilizando la regla de la cadena, resulta
vξ = (wξ − kw) exp (−kξ − hη), vη = (wη − hw) exp (−kξ − hη)vξξ = (wξξ − 2kwξ + k2w) exp (−kξ − hη),vηη = (wηη − 2hwη + h2w) exp (−kξ − hη),vξη = (wξη − kwη − hwξ + hkw) exp (−kξ − hη).
En el caso hiperbolico, sustituyendo las expresiones anteriores en (2.20) y eligiendo k = e y h = d, nosqueda
wξη(ξ, η) + (f − de) · w(ξ, η) = F (ξ, η) exp (eξ + dη) (2.25)
En el caso parabolico, distinguiremos dos situaciones: si d 6= 0 o no en (2.23). En el primer caso,sustituyendo las expresiones anteriores y eligiendo k = 4f−e2
4dy h = e
2 , nos queda
wηη(ξ, η) + d · wξ(ξ, η) = F (ξ, η) exp
(4f − e2
4dξ +
eη
2
)(2.26)

Metodos matematicos avanzados 35
Si d = 0, sustituyendo las expresiones anteriores y eligiendo h = e/2 y k como se quiera, nos queda
wηη(ξ, η) +(
f − e2
4
)w(ξ, η) = F (ξ, η) exp
(kξ +
eη
2
)(2.27)
En el caso elıptico, sustituyendo las expresiones anteriores en (2.24) y eligiendo k = d/2 y h = e/2, nosqueda
wξξ(ξ, η) + wηη(ξ, η) +
(f − d2
4− e2
4
)· w(ξ, η) = F (ξ, η) exp
(dξ + eη
2
)(2.28)
Los desarrollos anteriores se pueden resumir en el siguiente resultado:
TEOREMA 2.1 (Teorema de clasificacion) Dada la EDP (2.13), existen cambios de variable y defuncion incognita que la transforman en una de las siguientes formas canonicas:
• Si b2 − 4ac > 0 (caso hiperbolico),
wξη(ξ, η) + f · w(ξ, η) = F (ξ, η)
• Si b2 − 4ac < 0 (caso elıptico),
wξξ(ξ, η) + wηη(ξ, η) + f · w(ξ, η) = F (ξ, η)
• Si b2 = 4ac (caso parabolico), hay dos posibilidades:
wηη(ξ, η) + d · wξ(ξ, η) = F (ξ, η) ( Caso no degenerado, si d 6= 0 )
wηη(ξ, η) + f · w(ξ, η) = F (ξ, η) ( Caso degenerado )
donde d, f son constantes.
COROLARIO 2.1 a) En el caso hiperbolico, la EDP tambien se puede escribir en la forma
Wtt(t, s)−Wss(t, s) + f ·W (t, s) = G(t, s).
b) En el caso parabolico no degenerado, la EDP tambien se puede escribir en la forma
Wt(t, s)−Wss(t, s) = G(t, s).
Dem. En a), basta hacer el cambio de variables t = ξ + η, s = ξ − η y de funcion incognita W (t, s) =w(ξ, η), tomando G(t, s) = F
(t+s2 , t−s
2
). En b), podemos hacer el cambio de variable t = −ξ/d, s = η y
de funcion incognita W (t, s) = w(ξ, η), tomando G(t, s) = −F (−dt, s). El caso d = 0 lo incluimos en elcaso degenerado.
Conviene destacar que en el caso hiperbolico con f = 0, la parte homogenea de la EDP nos quedawξη(ξ, η) = 0, cuya solucion general (obtenida al principio del capıtulo) viene dada por
w(ξ, η) = K1(ξ) + K2(η),
donde K1 y K2 son funciones arbitrarias. En el caso elıptico con f = 0, la parte homogenea de la EDPqueda wξξ(ξ, η) + wηη(ξ, η) = 0. En este caso su solucion general viene dada por
w(ξ, η) = K1(ξ + iη) + K2(ξ − iη),
donde K1 y K2 son funciones arbitrarias e i es la unidad imaginaria. Para verlo, basta realizar el cambiode variable α = ξ+iη, β = ξ−iη que proviene de trabajar directamente con las curvas caracterısticas. Este

36 Luis A. Fernandez
resultado esta relacionado con el hecho de que tanto la parte real como la parte imaginaria de una funcionde variable compleja es armonica (ver el capıtulo 1, despues de las condiciones de Cauchy-Riemann).Tambien en el caso parabolico degenerado (llamado ası porque no aparece wξ), la parte homogenea de laEDP nos queda
wηη(ξ, η) + f · w(ξ, η) = 0
y es facilmente resoluble por metodos elementales, porque (una vez mas) para cada ξ fijo, podemos verlacomo una EDO (en esta ocasion, lineal de segundo orden con coeficientes constantes). Segun sea el signode f , la solucion viene dada por:
a) Si f = 0, w(ξ, η) = K1(ξ)η + K2(ξ).
b) Si f < 0, w(ξ, η) = K1(ξ)e√−fη + K2(ξ)e−
√−fη.
c) Si f > 0, w(ξ, η) = K1(ξ) cos(√
fη
)+ K2(ξ) sin
(√fη
).
donde K1 y K2 son funciones arbitrarias.
EJEMPLO 2.4 Reducir a su forma canonica la EDP
4uxx(x, y) + 5uxy(x, y) + uyy(x, y) + ux(x, y) + uy(x, y) = 2
Aquı, a = 4, b = 5, c = d = e = 1, f = 0 y F (x, y) = 2. Como b2 − 4ac = 9 > 0, la EDP es hiperbolica.Las EDO caracterısticas quedan y′(x) = 1, y′(x) = 1
4 , por lo que hacemos el cambio de variables
ξ = y − x, η = y − x
4.
Notemos que ξxηy − ξyηx = −3/4 6= 0. Haciendo v(ξ, η) = u(x, y), la EDP transformada resulta
vξη(ξ, η)− vη
3(ξ, η) = −8
9.
Ahora, el cambio w(ξ, η) = v(ξ, η)e−ξ/3, nos conduce a la forma canonica
wξη(ξ, η) = −89e−ξ/3.
Esta EDP se puede integrar primero con respecto de η
wξ(ξ, η) = −89e−ξ/3η + K1(ξ),
y luego con respecto de ξ,
w(ξ, η) =83e−ξ/3η +
∫K1(ξ)dξ + K2(η) =
83e−ξ/3η + K1(ξ) + K2(η),
donde K1, K1 y K2 son funciones arbitrarias. Deshaciendo los cambios, resulta que
v(ξ, η) =83η + (K1(ξ) + K2(η)) eξ/3
y, por lo tanto,
u(x, y) =83
(y − x
4
)+
(K1(y − x) + K2
(y − x
4
))e(y−x)/3.

Metodos matematicos avanzados 37
EJEMPLO 2.5 Reducir a su forma canonica la EDP
uxx(x, y) + uxy(x, y) + uyy(x, y) + ux(x, y) = 0
Aquı, a = b = c = d = 1, e = f = F = 0. Como b2 − 4ac = −3 < 0, la EDP es elıptica. Las EDOcaracterısticas quedan y′(x) = 1
2 ± i√
32 , por lo que hacemos el cambio de variables
ξ = y − x
2, η = −
√3x
2.
Notemos que ξxηy − ξyηx =√
3/2 6= 0. Haciendo v(ξ, η) = u(x, y), la EDP transformada queda
vξξ(ξ, η) + vηη(ξ, η)− 2vξ
3(ξ, η)− 2vη√
3(ξ, η) = 0.
Ahora, el cambio w(ξ, η) = v(ξ, η)e−ξ/3−η/√
3, nos conduce a la forma canonica
wξξ(ξ, η) + wηη(ξ, η)− 49w(ξ, η) = 0.
EJEMPLO 2.6 Reducir a su forma canonica la EDP
uxx(x, y)− 4uxy(x, y) + 4uyy(x, y) = ey
Aquı, a = 1, b = −4, c = 4, d = e = f = 0 y F (x, y) = ey. Como b2 − 4ac = 0, la EDP es parabolica. LaEDO caracterıstica queda y′(x) = −2. Planteamos el cambio de variables dado por
ξ = y + 2x, η = x.
Notemos que ξxηy − ξyηx = −1 6= 0. Haciendo v(ξ, η) = u(x, y), la forma canonica queda
vηη(ξ, η) = eξ−2η.
Integrando dos veces con respecto de η resulta
v(ξ, η) =eξ−2η
4+ K1(ξ)η + K2(ξ)
donde K1 y K2 son funciones arbitrarias. Deshaciendo los cambios, nos queda que
u(x, y) =ey
4+ K1(y + 2x)x + K2(y + 2x).
Si elegimos η = y, la forma canonica nos queda
vηη(ξ, η) =eη
4
de dondev(ξ, η) =
eη
4+ K1(ξ)η + K2(ξ),
y, por lo tanto,
u(x, y) =ey
4+ K1(y + 2x)y + K2(y + 2x).
Como en el caso de las EDP de primer orden, resultan dos expresiones aparentemente distintas parau(x, y). De hecho, se puede comprobar que son iguales: para verlo, hay que encontrar las relaciones quehay entre K1,K2, K1 y K2. Las dos expresiones de u coinciden si y solo si
K1(y + 2x)x + K2(y + 2x) = K1(y + 2x)y + K2(y + 2x), para cada x, y ∈ IR.
Haciendo y = 0, se sigue que K2(r) = K1(r) r2 +K2(r); si hacemos x = 0, resulta K1(y)y+K2(y) = K2(y),
de donde K1(r) = −K1(r)2 . Con estas relaciones en la mano, es facil comprobar que las dos expresiones de
u(x, y) coinciden para cada x, y ∈ IR.

38 Luis A. Fernandez
En el caso de EDP lineales de segundo orden con coeficientes constantes en IRn
n∑
i,j=1
aijuxixj (x) +n∑
j=1
bjuxj (x) + cu(x) = F (x),
donde aij , bj , c ∈ IR, i, j = 1, . . . , n y la funcion incognita u(x) depende de n de variables independientes(es decir, x ∈ IRn), es posible establecer una clasificacion similar a la que hemos visto aquı (ligeramentemas complicada), mediante transformaciones parecidas. En este caso (ver Casas, capıtulo 7), las formascanonicas quedan
wtt(y, t)−n−1∑
i=1
wyiyi(y, t) + cw(y, t) = F (y, t) (caso hiperbolico)
wt(y, t)−n−1∑
i=1
wyiyi(y, t) + cw(y, t) = F (y, t) (caso parabolico)
n∑
i=1
wyiyi(y) + cw(y) = F (y) (caso elıptico).
Los resultados anteriores justifican que (a partir de ahora) nos centremos en el estudio y la resolucion delas tres EDP canonicas, dado que cualquier otra EDP lineal de segundo orden con coeficientes constantespuede ser transformada en una de ellas. Deshaciendo los cambios de variables efectuados tendremosentonces resueltas las EDP originales.
2.4 EDP semilineales de segundo orden
Son aquellas de la forma
a(x, y) · uxx(x, y) + b(x, y) · uxy(x, y) + c(x, y) · uyy(x, y) = F (x, y, u, ux, uy) (2.29)
donde a, b, c y F son funciones conocidas (|a(x, y)|+ |b(x, y)|+ |c(x, y)| > 0).No estamos suponiendo que la funcion F sea lineal con respecto de u, ux, uy. De hecho, puede no serlo,
como en el casouxx(x, y) + uyy(x, y) = (ux)2(x, y) + (uy)2(x, y).
No obstante, el caso particular de EDO lineales de segundo orden con coeficientes variables esta incluidoen la formulacion (2.29) considerando
F (x, y, ux, uy, u) = −d(x, y) · ux(x, y)− e(x, y) · uy(x, y)− f(x, y) · u(x, y) + F (x, y)
con d, e, f y F funciones conocidas.A pesar del caracter tan general de la EDP (2.29), todavıa es posible reducirla a una forma canonica de
manera similar al caso lineal con coeficientes constantes (nos referimos solo a la transformacion de la parteprincipal de la EDP, la parte que no esta contenida en F ). De hecho, el mismo razonamiento usado allınos sirve para deducir que las transformaciones mas convenientes en este caso se obtienen a partir de lasmismas ec. caracterısticas que vimos anteriormente, es decir, si a(x, y) 6= 0, las EDO (2.18) y (2.19), conla “pequena” diferencia que ahora, los coeficientes a, b y c dependen de (x, y),con lo que las EDO quedan
dy
dx=
b(x, y) +√
b2(x, y)− 4a(x, y)c(x, y)2a(x, y)
(2.30)
dy
dx=
b(x, y)−√
b2(x, y)− 4a(x, y)c(x, y)2a(x, y)
(2.31)

Metodos matematicos avanzados 39
Naturalmente, las soluciones de estas ec. caracterısticas no son (en general) familias de rectas, por loque los cambios de variable a efectuar resultan mas complicados que en el caso lineal y (probablemente)solo tendran sentido en ciertos dominios del plano. Ademas, la resolucion de estas EDO puede resultardifıcil. No obstante, se mantiene el mismo tipo de clasificacion que antes: tipo hiperbolico cuando b2(x, y)−4a(x, y)c(x, y) > 0, tipo parabolico cuando b2(x, y) − 4a(x, y)c(x, y) = 0 y tipo elıptico cuando b2(x, y) −4a(x, y)c(x, y) < 0. Eso sı, ahora el caracter de una EDP como (2.29) va a depender del punto (x, y) queconsideremos: por ejemplo, es evidente que la ec. de Tricomi (utilizada en aerodinamica)
uxx(x, y) + xuyy(x, y) = 0
es hiperbolica cuando x < 0 y elıptica cuando x > 0.
EJEMPLO 2.7 Reducir a su forma canonica la EDP lineal de coeficientes variables
x2uxx(x, y)− y2uyy(x, y) = 0.
Aquı, a(x, y) = x2, b(x, y) = 0, c(x, y) = −y2 y F = 0. Como b2(x, y) − 4a(x, y)c(x, y) = 4x2y2 > 0(si x 6= 0, y 6= 0), la EDP es hiperbolica salvo si x = 0 o y = 0 . Las EDO caracterısticas quedany′(x) = y(x)/x, y′(x) = −y(x)/x, por lo que realizamos el cambio de variables
ξ =y
x, η = xy.
Notemos que ξxηy − ξyηx = −2y/x que esta bien definido y es distinto de 0, si x 6= 0, y 6= 0. Haciendov(ξ, η) = u(x, y), la forma canonica queda
vξη(ξ, η)− 12η
vξ(ξ, η) = 0.
De nuevo, resulta una EDP que podemos integrar, reduciendo su orden. Haciendo w(ξ, η) = vξ(ξ, η), seobtiene la EDP de primer orden
wη(ξ, η) =12η
w(ξ, η),
cuya solucion general viene dada porw(ξ, η) = K1(ξ)
√|η|.
Integrando ahora con respecto de ξ, obtenemos
v(ξ, η) =√|η|
∫K1(ξ)dξ + K2(η) =
√|η|K1(ξ) + K2(η),
donde K1, K1 y K2 son funciones arbitrarias. Deshaciendo los cambios, resulta que
u(x, y) =√|xy|K1
(y
x
)+ K2(xy).
EJEMPLO 2.8 Reducir a su forma canonica la EDP lineal de coeficientes variables
x2uxx(x, y) + 2xyuxy + y2uyy(x, y) = 0.
Aquı, a(x, y) = x2, b(x, y) = 2xy, c(x, y) = y2 y F = 0. Como b2(x, y) − 4a(x, y)c(x, y) = 0, la EDP esparabolica en todo el plano. La EDO caracterıstica queda y′(x) = y(x)/x. Nos planteamos el cambio devariables dado por
ξ =y
x, η = y,
donde hemos elegido libremente η con el unico requisito de que sea funcionalmente independiente con ξ(es decir, ξxηy − ξyηx 6= 0, lo cual es cierto cuando x 6= 0, y 6= 0). Haciendo v(ξ, η) = u(x, y), la formacanonica queda
vηη(ξ, η) = 0.

40 Luis A. Fernandez
Integrando la EDP, obtenemosv(ξ, η) = K1(ξ)η + K2(ξ),
donde K1 y K2 son funciones arbitrarias. Deshaciendo el cambio, resulta que
u(x, y) = K1
(y
x
)y + K2
(y
x
).
EJEMPLO 2.9 Reducir a su forma canonica la EDP lineal de coeficientes variables
uxx(x, y) + x2uyy(x, y) = 0.
Aquı, a(x, y) = 1, b(x, y) = 0, c(x, y) = x2 y F = 0. Como b2(x, y) − 4a(x, y)c(x, y) = −4x2, la EDP eselıptica, salvo si x = 0. Las EDO caracterısticas quedan y′(x) = ix, y′(x) = −ix. Elegimos el cambio devariables dado por
ξ = 2y, η = −x2,
Notar que ξxηy − ξyηx = 2x2 6= 0, si x 6= 0. Haciendo v(ξ, η) = u(x, y), la forma canonica queda
vξξ(ξ, η) + vηη(ξ, η) = − 12η
vη(ξ, η).
2.5 EDP con Maple
La orden basica para resolver EDP con Maple es pdsolve. Se puede utilizar para resolver distintos tiposde EDP. La solucion se expresa en terminos de funciones arbitrarias F1, F2, . . .. Veamos cual es su sintaxismediante algunos ejemplos:
Se resuelven EDP lineales de primer orden y coeficientes constantes.
> edp1 := diff(u(x,y),y)-diff(u(x,y),x) = 0;
edp1 := (∂
∂yu(x, y))− (
∂
∂xu(x, y)) = 0
> pdsolve(edp1);
u(x, y) = F1(y + x)
> pdsolve(3*diff(u(x,y),x)-2*diff(u(x,y),y) + u(x,y) = 1);
u(x, y) = 1 + e(− 13 x) F1(y +
23
x)
Se pueden elegir los nombres de la funcion y las variables.
> pdsolve(diff(v(w,z),z)+3*diff(v(w,z),w) = 9*w^2);
v(w, z) = w3 + F1(z − 13
w)
Tambien se pueden resolver algunas EDP lineales de primer orden y coeficientes variables.
> pdsolve(x*diff(u(x,y),x)-2*y*diff(u(x,y),y) + u(x,y) = exp(x));
u(x, y) =ex + F1(y x2)
x
Igualmente, ciertas EDP lineales de segundo orden.
> edp2 := diff(u(x,y),x,x)+10*diff(u(x,y),x,y) + 9*diff(u(x,y),y,y)=y;
edp2 := (∂2
∂x2u(x, y)) + 10 (
∂2
∂y ∂xu(x, y)) + 9 (
∂2
∂y2u(x, y)) = y

Metodos matematicos avanzados 41
> pdsolve(edp2);
u(x, y) = F1(y − x) + F2(y − 9 x)− 16
x2 (10x− 3 y)
Ademas se pueden comprobar expresiones equivalentes de la solucion.
> soledp2:=u(x,y)=-y*(y-9*x)*(y-x)/128+F1(y-9*x)+F2(y-x);
soledp2 := u(x, y) = − 1128
y (y − 9 x) (y − x) + F1(y − 9 x) + F2(y − x)
> pdetest(soledp2,edp2);
0
Tambien admite EDP lineales de segundo orden y coeficientes variables.
> pdsolve(x*diff(u(x,y),x,x)+ y*diff(u(x,y),x,y) = 0);
u(x, y) = F2(y) + F1(y
x) y
A veces, MAPLE no proporciona solucion explıcita.
> edp3:= diff(u(x,y),x$2)- 2*sin(x)*diff(u(x,y),x,y) - (cos(x))^2*diff(u(x,y),y$2)- cos(x)*diff(u(x,y), y) =0;
> pdsolve(edp3);
lo cual no significa que no se pueda obtener:
> soledp3:= u(x,y) = F1(y-cos(x)-x)+F2(y-cos(x)+x);
soledp3 := u(x, y) = F1(y − cos(x)− x) + F2(y − cos(x) + x)
> pdetest(soledp3,edp3);
0
Otras veces, la expresion de la solucion que nos ofrece se obtiene por el metodo de separacion devariables y esta en funcion de la resolucion de unas EDO, como en
> pdsolve(x*diff(u(x,y),x$2) + diff(u(x,y),y$2) = x^2);
Podemos forzar a que las EDO que aparecen sean integradas, mediante
> pdsolve(x*diff(u(x,y),x$2) + diff(u(x,y),y$2) = x^2, INTEGRATE);
A veces, las expresiones que resultan ocupan varias paginas. Probar, por ejemplo,
> pdsolve(diff(u(t,x),t$2)+ diff(u(t,x),x$2) -u(t,x) + cos(t));
Algunas EDP de orden superior con facilmente integrables por tecnicas de EDO:
> pdsolve(diff(u(x,y,z),x,y,z) = 0);
u(x, y, z) = F3(x, y) + F2(x, z) + F1(y, z)
> pdsolve(diff(u(x,t),x,t,t) = exp(2*x+3*t));
u(x, t) = F3(x) + F2(x) t + F1(t) +118
e(2 x+3 t)

42 Luis A. Fernandez
Aunque raramente, algunas EDP no lineales son tambien integrables.
> pdsolve(diff(u(x,t),x) = u(x,t)^2+diff(u(x,t),t));
u(x, t) = − 1x− F1(t + x)
> pdsolve(diff(u(x,t),x,x) = (diff(u(x,t),t,t))^2, INTEGRATE);
Bibliografıa sobre EDP:
1. “Basic partial differential equations”, D. Bleecker y G. Csordas, Van Nostrand, 1992.
2. “Partial differential equations for scientists and engineers”, Tyn Myint-U y L. Debnath, North Hol-land, 1987.
3. “Partial differential equations for scientists and engineers”, Stanley J. Farlow, Dover Publications,1982.
4. “Introduccion a las Ecuaciones en Derivadas Parciales”, E. Casas, Universidad de Cantabria, 1992.
Recursos en Internet sobre EDP:
1. http://eqworld.ipmnet.ru/
Web muy recomendable y completa donde se recopila informacion sobre metodos de resolucion deEDP y EDO (lineales y no lineales), tipos de soluciones particulares, transformaciones interesantesen cada caso, etc...
2. http://mathworld.wolfram.com/PartialDifferentialEquation.html
3. http://xaravve.trentu.ca/305/resources.html
Pagina con apuntes, animaciones y otro material de interes.
4. http://www.mapleapps.com/powertools/MathEducation.shtml
(Apartado “Partial Differential Equations”)
o, directamente, http://www.mapleapps.com/powertools/pdes/pdes.shtml
5. http://www.exampleproblems.com/wiki/index.php/PDE:Method of characteristics
Pagina con ejercicios resueltos.

Capıtulo 3
Series de Fourier
3.1 El metodo de separacion de variables: resolucion de EDP endimension dos
Supongamos que queremos estudiar como se difunde el calor en un alambre homogeneo de longitud L alo largo del tiempo. Para ello, necesitamos conocer la temperatura inicial en cada punto del alambre.Tambien necesitamos contar con alguna informacion sobre lo que sucede en los extremos del alambre(cual es su temperatura durante el proceso, si permanecen aislados, si reciben calor, etc...) Comencemosconsiderando el caso en que dicha temperatura permanece igual a cero todo el tiempo. Supondremos queel alambre es suficientemente fino de manera que el calor esta igualmente distribuido sobre cada secciontransversal en cada instante de tiempo t y que la superficie del alambre esta aislado, por lo que no seproduce perdida de calor a traves de ella. Si denotamos por u(x, t) la temperatura del alambre en el puntox y en el instante t, desde el punto de vista matematico, este problema se puede formular de la siguientemanera:
ut(x, t) = uxx(x, t), x ∈ (0, L), t > 0 Ec. del Calor
u(0, t) = u(L, t) = 0, t > 0 Condiciones de Contorno
u(x, 0) = f(x), x ∈ (0, L) Condicion inicial
(3.1)
En principio, como no sabemos resolver la ec. del calor, podemos comenzar buscando algunas solucionesparticulares. Por ejemplo, las soluciones de la forma
u(x, t) = F (x) ·G(t), (3.2)
donde F y G son funciones desconocidas. Es decir, queremos determinar las soluciones en las cuales lasvariables x y t aparecen separadas (de ahı el nombre del metodo). Es inmediato ver que para este tipo defunciones la ec. del Calor se reduce a un par de EDO: sustituyendo la expresion (3.2) en la EDP, resulta
F (x)G′(t) = F ′′(x)G(t), x ∈ (0, L), t > 0.
Suponiendo que F 6= 0 y G 6= 0 (en otro caso, obtenemos la solucion u(x, t) ≡ 0 con la que ya contamos)y dividiendo por F (x)G(t), se sigue que
G′(t)G(t)
=F ′′(x)F (x)
, x ∈ (0, L), t > 0.
Como las variables x y t son independientes, la unica posibilidad para que la igualdad anterior se produzcaes que exista una constante λ ∈ IR tal que
G′(t)G(t)
=F ′′(x)F (x)
= −λ, x ∈ (0, L), t > 0,
43

44 Luis A. Fernandez
donde el signo menos se introduce por motivos tecnicos. Ademas, imponiendo las condiciones de contorno,
u(0, t) = F (0)G(t) = 0, u(L, t) = F (L)G(t) = 0, t > 0
resulta que F (0) = F (L) = 0.Por lo tanto, las funciones F y G que nos interesan deben verificar
F ′′(x) + λF (x) = 0, x ∈ (0, L), F (0) = F (L) = 0, (3.3)
G′(t) + λG(t) = 0, t > 0 (3.4)
donde λ es una constante desconocida arbitraria. Vamos a determinar los valores λ que proporcionansoluciones no nulas. Para ello, resolvemos el problema de contorno (3.3).
Notemos que en (3.3) tenemos una EDO de segundo orden lineal y con coeficientes constantes quees facil resolver. Para ello, basta distinguir el signo de λ. Si λ = 0, F (x) = c1x + c2 con c1, c2 ∈ IR.Como 0 = F (0) = c2 y 0 = F (L) = c1L + c2, resulta c1 = c2 = 0. Si λ < 0, la solucion general dela EDO viene dada por F (x) = c1e
√−λx + c2e−√−λx, con c1, c2 ∈ IR. Como 0 = F (0) = c1 + c2 y
0 = F (L) = c1e√−λL + c2e
−√−λL, resulta de nuevo c1 = c2 = 0. Consideremos, por tanto, el caso λ > 0.Ahora, la solucion general de la EDO viene dada por F (x) = c1 cos (
√λx) + c2 sin (
√λx), con c1, c2 ∈ IR.
Usando las condiciones de contorno resulta que c1 = 0 y c2 sin (√
λL) = 0, de donde c2 = 0 o λ = n2π2
L2
para algun numero natural n. Este ultimo caso es el unico que nos proporciona soluciones no nulas delproblema (3.3); dependiendo del valor de n, vienen dadas por Fn(x) = C sin
(nπxL
), con C ∈ IR. Llevando
el valor de λ a la ecuacion (3.4), se sigue que
Gn(t) = C exp(−n2π2t
L2
),
con C ∈ IR arbitraria. Por lo tanto, para cada n ∈ IN encontramos que las funciones
un(x, t) = C sin(nπx
L
)exp
(−n2π2t
L2
),
donde C ∈ IR, son soluciones de la ec. del Calor y verifican tambien las condiciones de contorno.Nos falta unicamente verificar la condicion inicial. Haciendo t = 0 en la expresion de un resulta que
un(x, 0) = C sin(nπx
L
),
con C ∈ IR. Ahora, resulta inmediato deducir cual es la solucion del problema (3.1) si la funcion f tieneesa forma. Por ejemplo, si f(x) = −3 sin
(5πxL
), entonces la solucion del problema (3.1) viene dada por
u(x, t) = −3 sin(
5πx
L
)exp
(−25π2t
L2
).
Asimismo, gracias a la linealidad del problema, si f(x) = −3 sin(
5πxL
)+2 sin
(7πxL
), la solucion del problema
viene dada por
u(x, t) = −3 sin(
5πx
L
)exp
(−25π2t
L2
)+ 2 sin
(7πx
L
)exp
(−49π2t
L2
).
En general, si
f(x) =N∑
n=1
bn sin(nπx
L
),
entonces la solucion del problema (3.1) viene dada por
u(x, t) =N∑
n=1
bn sin(nπx
L
)exp
(−n2π2t
L2
).

Metodos matematicos avanzados 45
De esta manera, queda claro que cubrimos algunas, pero no todas las posibilidades, ya que no siempre latemperatura inicial f va a tener la forma anterior. Llegados a este punto, la genial aportacion que hizoJ.-B. J. Fourier fue imaginar que “cualquier funcion arbitraria f(x) puede ser expresada como una serieinfinita de senos ”, es decir en la forma
f(x) =∞∑
n=1
bn sin(nπx
L
), (3.5)
tal como anuncio en 1807 ante la Academia de Ciencias de Parıs. En su honor, nos referimos a (3.5) comola “serie de Fourier” de senos de la funcion f . Una vez asumido esto, resulta claro que la solucion delproblema (3.1) puede expresarse formalmente como
u(x, t) =∞∑
n=1
bn sin(nπx
L
)exp
(−n2π2t
L2
). (3.6)
Figura 3.1: Jean Baptiste Joseph Fourier.
Por supuesto, la afirmacion de Fourier causo un impresionante revuelo entre los miembros de la Acad-emia, muchos de los cuales no aceptaron la validez de su planteamiento. Tal incomprension puede enten-derse facilmente, debido a que es la primera vez en la Historia que aparece el concepto de “una base coninfinitos elementos” y a que en aquel momento muchos de los conceptos matematicos (funcion, convergen-cia de series, etc...) todavıa no estaban rigurosamente establecidos. En este capıtulo precisaremos en quesentido se verifica la igualdad (3.5) y para que tipo de funciones.
Previamente, una cuestion basica es la determinacion de los coeficientes bn a partir de la funcion f .Basicamente, se sigue de las propiedades
∫ L
0
sin(nπx
L
)sin
(kπx
L
)dx =
0 si k 6= nL2 si k = n
(3.7)
Supuesto que se verifica (3.5), multiplicando a ambos lados por sin(
kπxL
)e integrando con respecto de x
entre 0 y L resulta que
∫ L
0
f(x) sin(
kπx
L
)dx =
∫ L
0
∞∑n=1
bn sin(nπx
L
)sin
(kπx
L
)dx.

46 Luis A. Fernandez
Suponiendo que la integral de la serie coincide con la serie de la integral (este paso se puede justificarrigurosamente en ciertas condiciones, ver Tyn Myint-U, pg. 117), es decir,
∫ L
0
∞∑n=1
bn sin(nπx
L
)sin
(kπx
L
)dx =
∞∑n=1
bn
∫ L
0
sin(nπx
L
)sin
(kπx
L
)dx,
y utilizando ahora (3.7), se obtiene
bk =2L
∫ L
0
f(x) sin(
kπx
L
)dx, k = 1, 2, . . . (3.8)
Notemos que estas expresiones son faciles de calcular en multitud de casos, incluso bajo requisitos deregularidad mınimos sobre f (por ejemplo, podemos considerar el caso de una funcion f constante atrozos).
EJEMPLO 3.1 Para expresar la funcion f(x) = x(1 − x) en serie de Fourier de senos en [0, 1] bastacalcular
bn = 2∫ 1
0
x(1− x) sin (nπx)dx, n = 1, 2, . . .
Integrando dos veces por partes,
bn = 2(−x(1− x)
cos (nπx)nπ
∣∣∣∣x=1
x=0
+ 2∫ 1
0
(1− 2x)cos (nπx)
nπdx = 2
∫ 1
0
(1− 2x)cos (nπx)
nπdx =
= 2(
(1− 2x)sin (nπx)
n2π2
∣∣∣∣x=1
x=0
+ 4∫ 1
0
sin (nπx)n2π2
dx = −4(
cos (nπx)n3π3
∣∣∣∣x=1
x=0
=4(1− (−1)n)
n3π3.
0
0.05
0.1
0.15
0.2
0.25
0.2 0.4 0.6 0.8 1x
Figura 3.2: Aproximacion en serie de Fourier de senos con tres terminos para x(1-x) en [0,1].
Entonces, aplicando (3.6), la solucion del problema (3.1) con L = 1 y f(x) = x(1− x) viene dada por
u(x, t) =∞∑
n=1
4(1− (−1)n)n3π3
sin (nπx)e−n2π2t

Metodos matematicos avanzados 47
00.2
0.40.6
0.81
x
00.2
0.40.6
0.81
t
00.05
0.10.15
0.20.25
Figura 3.3: Aproximacion de la solucion del Ejemplo 3.1.
El metodo de separacion de variables puede aplicarse a la resolucion de diversos problemas asociados aEDP, de manera analoga a la que acabamos de ver. Por ejemplo, si estudiamos el mismo proceso de difusiondel calor, suponiendo que los extremos del alambre permanecen aislados todo el tiempo, el problema seformula:
ut(x, t) = uxx(x, t), x ∈ (0, L), t > 0 Ec. del Calor
ux(0, t) = ux(L, t) = 0, t > 0 Condiciones de Contorno
u(x, 0) = f(x), x ∈ (0, L) Condicion inicial
(3.9)
donde solo han cambiado las condiciones de contorno, que se imponen sobre las derivadas de u con respectode x. Aplicando el mismo razonamiento que antes, se obtiene ahora que la funcion F debe satisfacer
F ′′(x) + λF (x) = 0, x ∈ (0, L), F ′(0) = F ′(L) = 0, (3.10)
mientras que G sigue siendo solucion de la misma EDO (3.4).Volviendo a distinguir los casos λ = 0, λ < 0 y λ > 0, es facil deducir que las unicas soluciones no nulas
vienen dadas por F0(x) = C, cuando λ0 = 0 y
Fn(x) = C cos(nπx
L
), cuando λn =
n2π2
L2para algun numero natural n,
con C ∈ IR. Siguiendo el paralelismo, en este caso, dada una funcion arbitraria f necesitamos poderexpresarla como
f(x) =a0
2+
∞∑n=1
an cos(nπx
L
), (3.11)
para obtener la solucion del problema (3.9) en la forma
u(x, t) =a0
2+
∞∑n=1
an cos(nπx
L
)exp
(−n2π2t
L2
). (3.12)

48 Luis A. Fernandez
Es costumbre referirse a (3.11) como la “serie de Fourier” de cosenos de la funcion f . Cuestiones similaresa las enumeradas antes quedan abiertas tambien en este caso.
De nuevo, es factible determinar los coeficientes an a partir de la funcion f de manera similar a comose hizo en el caso de la serie de Fourier de senos, utilizando ahora que
∫ L
0
cos(nπx
L
)cos
(kπx
L
)dx =
0 si k 6= nL2 si k = n 6= 0L si k = n = 0
(3.13)
obteniendose que
an =2L
∫ L
0
f(x) cos(nπx
L
)dx, n = 0, 1, 2, . . . (3.14)
EJEMPLO 3.2 Para expresar la funcion f(x) = x(1− x) en serie de Fourier de cosenos en [0, 1] bastacalcular a0 = 2
∫ 1
0x(1− x)dx = 1
3 y
an = 2∫ 1
0
x(1− x) cos (nπx)dx, n = 1, 2, . . .
Integrando dos veces por partes,
an = 2(
x(1− x)sin (nπx)
nπ
∣∣∣∣x=1
x=0
− 2∫ 1
0
(1− 2x)sin (nπx)
nπdx = −2
∫ 1
0
(1− 2x)sin (nπx)
nπdx =
= 2(
(1− 2x)cos (nπx)
n2π2
∣∣∣∣x=1
x=0
+ 4∫ 1
0
cos (nπx)n2π2
dx =−2(1 + (−1)n)
n2π2.
Aplicando (3.12), la solucion del problema (3.9) con L = 1 y f(x) = x(1− x) viene dada por
u(x, t) =16
+∞∑
n=1
−2(1 + (−1)n)n2π2
cos (nπx)e−n2π2t
Veamos otro tipo de problemas que tambien se resuelven mediante la misma tecnica, aunque la EDPsea en este caso hiperbolica: determinar las vibraciones de una cuerda elastica de longitud L y densidadconstante, sujeta por los extremos y de la cual conocemos la posicion y la velocidad inicial en cada punto.Matematicamente, si u(x, t) representa la posicion del punto x de la cuerda en el instante t, se trata deresolver el problema
utt(x, t) = uxx(x, t), x ∈ (0, L), t > 0 Ec. de Ondas
u(0, t) = u(L, t) = 0, t > 0 Condiciones de Contorno
u(x, 0) = f(x), x ∈ (0, L)
ut(x, 0) = g(x), x ∈ (0, L) Condiciones iniciales
(3.15)
En este caso, si u(x, t) = F (x) ·G(t), los mismos razonamientos de antes nos conducen a
G′′(t)G(t)
=F ′′(x)F (x)
= −λ ∈ IR, x ∈ (0, L), t > 0,
de donde se concluye de nuevo que la funcion F debe ser solucion del problema (3.3), mientras que G debeverificar ahora
G′′(t) + λG(t) = 0, t > 0.

Metodos matematicos avanzados 49
00.2
0.40.6
0.81
x
00.2
0.40.6
0.81
t
0.050.1
0.150.2
0.25
Figura 3.4: Aproximacion de la solucion del Ejemplo 3.2.
Teniendo en cuenta que λn = n2π2
L2 para algun numero natural n son los unicos valores que proporcionansoluciones F no nulas, se sigue que
Gn(t) = c1 cos(
nπt
L
)+ c2 sin
(nπt
L
),
con c1, c2 ∈ IR arbitrarias. Por lo tanto, para cada n ∈ IN encontramos que
un(x, t) = sin(nπx
L
) (an cos
(nπt
L
)+ bn sin
(nπt
L
)),
donde an, bn ∈ IR, es una solucion basica de la ec. de Ondas y verifica tambien las condiciones de contorno.Formalmente, para que la expresion
u(x, t) =∞∑
n=1
sin(nπx
L
) (an cos
(nπt
L
)+ bn sin
(nπt
L
))(3.16)
satisfaga las condiciones iniciales, debe suceder que
f(x) = u(x, 0) =∞∑
n=1
an sin(nπx
L
)
g(x) = ut(x, 0) =∞∑
n=1
nπbn
Lsin
(nπx
L
),
es decir, nos volvemos a encontrar con las series de Fourier de senos. Aquı, hemos derivado (3.16) formal-mente con respecto de t para obtener
ut(x, t) =∞∑
n=1
sin(nπx
L
)(nπ
L
)(−an sin
(nπt
L
)+ bn cos
(nπt
L
)).

50 Luis A. Fernandez
EJEMPLO 3.3 Aplicando (3.16), la solucion del problema (3.15) con L = 1, f(x) = x(1−x) y g(x) = 0viene dada por
u(x, t) =∞∑
n=1
4(1− (−1)n)n3π3
sin (nπx) cos (nπt).
Analogamente, la solucion del problema (3.15) con L = 1, f(x) = 0 y g(x) = x(1− x) viene dada por
u(x, t) =∞∑
n=1
4(1− (−1)n)n4π4
sin (nπx) sin (nπt).
Finalmente, el metodo de separacion de variables tambien es aplicable en el caso de EDP elıpticas.Consideremos el siguiente problema de Dirichlet para la ec. de Laplace sobre un rectangulo
uxx(x, y) + uyy(x, y) = 0, x ∈ (0, L), y ∈ (0, L) Ec. de Laplace
u(0, y) = u(L, y) = 0, y ∈ (0, L)
u(x, 0) = 0, x ∈ (0, L) Condiciones de Contorno
u(x, L) = f(x), x ∈ (0, L)
(3.17)
Aquı, el metodo nos lleva a considerar u(x, y) = F (x) ·G(y). Sustituyendo en la EDP, resulta
−G′′(y)G(y)
=F ′′(x)F (x)
= −λ ∈ IR, x ∈ (0, L), y ∈ (0, L).
Ademas, como u(0, y) = F (0)G(y) = 0, u(L, y) = F (L)G(y) = 0 para cada y ∈ (0, L) debe ser F (0) =F (L) = 0; por otro lado, la condicion u(x, 0) = F (x)G(0) = 0 para cada x ∈ (0, L) nos lleva a queG(0) = 0. Otra vez nos encontramos con que λn = n2π2
L2 con n = 1, 2, . . . , son los unicos valores queproporcionan soluciones F no nulas, mientras que G debe verificar ahora
G′′(y)− λnG(y) = 0, G(0) = 0, y ∈ (0, L).
para algun n. Entonces,Gn(y) = C sinh
(nπy
L
),
con C ∈ IR. Por lo tanto, a falta de imponer la condicion u(x, L) = f(x), podemos expresar las solucionesdel problema (3.17) en la forma
u(x, y) =∞∑
n=1
bn sin(nπx
L
)sinh
(nπy
L
)(3.18)
con bn ∈ IR. Tomando ahora y = L, llegamos a
f(x) =∞∑
n=1
bn sin(nπx
L
)sinh
(nπL
L
)
y volvemos a recuperar una expresion del tipo (3.5).
EJEMPLO 3.4 Aplicando (3.18), la solucion del problema (3.17) con L = L = 1 y f(x) = x(1−x) vienedada por
u(x, y) =∞∑
n=1
4(1− (−1)n)n3π3 sinh (nπ)
sin (nπx) sinh (nπy)

Metodos matematicos avanzados 51
3.2 Serie de Fourier completa. Convergencia puntual y en elsentido de L2
DEFINICION 3.1 Dada una funcion f definida en el intervalo [−L,L], se denomina serie de Fourierasociada a f a la expresion
a0
2+
∞∑n=1
(an cos
(nπx
L
)+ bn sin
(nπx
L
)),
donde los coeficientes vienen dados por
an =1L
∫ L
−L
f(x) cos(nπx
L
)dx, n = 0, 1, 2, . . . (3.19)
bn =1L
∫ L
−L
f(x) sin(nπx
L
)dx, n = 1, 2, . . . (3.20)
El argumento para obtener las expresiones (3.19)-(3.20) es el mismo que utilizamos en el caso de lasseries de Fourier de senos o de cosenos. Supuesto que se verifica
f(x) =a0
2+
∞∑n=1
(an cos
(nπx
L
)+ bn sin
(nπx
L
))(3.21)
se basa en las propiedades de ortogonalidad
1L
∫ L
−L
cos(nπx
L
)cos
(kπx
L
)dx =
0 si k 6= n1 si k = n 6= 02 si k = n = 0
1L
∫ L
−L
sin(nπx
L
)sin
(kπx
L
)dx =
0 si k 6= n1 si k = n
(3.22)
1L
∫ L
−L
cos(nπx
L
)sin
(kπx
L
)dx = 0.
Multiplicando la expresion (3.21) a ambos lados por cos(
kπxL
), integrando con respecto de x entre −L y
L, suponiendo que se verifica que la integral de la serie coincide con la serie de la integral, las propiedadesde ortogonalidad nos llevan a (3.19). Si multiplicamos ahora (3.21) por sin
(kπxL
), el mismo razonamiento
nos conduce a (3.20).
EJEMPLO 3.5 Consideremos la funcion
f(x) =
x2 si x ∈ [0, 1]0 si x ∈ [−1, 0)
Los coeficientes de la serie de Fourier completa asociada a f vienen dados por
a0 =∫ 1
−1
f(x)dx =∫ 1
0
x2dx =13,
an =∫ 1
−1
f(x) cos (nπx)dx =∫ 1
0
x2 cos (nπx)dx =2(−1)n
n2π2, n = 1, 2, . . .
bn =∫ 1
−1
f(x) sin (nπx)dx =∫ 1
0
x2 sin (nπx)dx =(−1)n+1
nπ+
2((−1)n − 1))n3π3
, n = 1, 2, . . .

52 Luis A. Fernandez
0
0.2
0.4
0.6
0.8
1
–1 –0.8 –0.6 –0.4 –0.2 0.2 0.4 0.6 0.8 1x
Figura 3.5: Aproximacion de Fourier con cien terminos para el ejemplo 3.5 en [-1,1].
sin mas que integrar por partes.Ası, la serie de Fourier completa asociada a la funcion f(x) en [−1, 1] viene dada por
16
+∞∑
n=1
2(−1)n
n2π2cos (nπx) +
∞∑n=1
((−1)n+1
nπ+
2((−1)n − 1))n3π3
)sin (nπx).
COMENTARIOS 3.1 Recordemos que una funcion se dice que es par en [−L,L] si verifica f(x) =f(−x) para todo x ∈ [−L, L] y se dice que es impar en [−L,L] si verifica f(x) = −f(−x) para todox ∈ [−L,L]. Resulta sencillo comprobar las siguientes propiedades:
i) Si f es par en [−L,L], entonces∫ L
−Lf(x)dx = 2
∫ L
0f(x)dx.
ii) Si f es impar en [−L,L], entonces∫ L
−Lf(x)dx = 0.
iii) El producto de dos funciones pares en [−L,L] es una funcion par en [−L,L].
iv) El producto de dos funciones impares en [−L,L] es una funcion par en [−L,L].
v) El producto de una funcion par en [−L,L] y una funcion impar en [−L,L] es una funcion impar en[−L,L].
Utilizando estas propiedades, resulta inmediato comprobar que la serie de Fourier completa de unafuncion impar en [−L,L] es una serie de Fourier que solo contiene senos (del tipo (3.5) y con los coeficientesdados por (3.8)), dado que el coseno es una funcion par en IR y por lo tanto el producto de f por el cosenoes impar, mientras que el seno es una funcion impar en IR y por lo tanto el producto de f por el seno espar. Un razonamiento analogo nos permite deducir que la serie de Fourier completa de una funcion paren [−L,L] es una serie de Fourier que solo contiene cosenos (del tipo (3.11) con los coeficientes dados por(3.14)).
Finalmente, dada una funcion cualquiera definida en [0, L] podemos extenderla a todo [−L, L] bien demanera impar (f(−x) = −f(x) para cada x ∈ [−L, 0]), bien de manera par (f(−x) = f(x) para cadax ∈ [−L, 0]), segun nos interese. Ası, podemos lograr que su serie de Fourier sea una serie de Fourier quesolo contenga senos o cosenos, respectivamente.

Metodos matematicos avanzados 53
Con el fin de estudiar bajo que condiciones la serie de Fourier coincide con la funcion f , es decir, severifica realmente la igualdad (3.21), vamos a considerar (como es habitual) la sucesion de sumas parciales
SN (x) =a0
2+
N∑n=1
(an cos
(nπx
L
)+ bn sin
(nπx
L
)), (3.23)
donde los coeficientes an y bn vienen dados por (3.19)-(3.20).
DEFINICION 3.2 Dada una funcion f definida en el intervalo [−L,L], se dice que f es de cuadradointegrable en [−L,L] (y se escribe f ∈ L2(−L,L)) cuando
∫ L
−Lf2(x)dx < +∞.
Dada f ∈ L2(−L,L), vamos a estudiar la diferencia entre f y SN en el sentido de L2. Desarrollando,∫ L
−L
(f(x)− SN (x))2dx =∫ L
−L
f2(x)dx− 2∫ L
−L
f(x)SN (x)dx +∫ L
−L
S2N (x)dx.
Introduciendo la expresion de SN (x) y de los coeficientes, se deduce que∫ L
−L
f(x)SN (x)dx =a0
2
∫ L
−L
f(x)dx +N∑
n=1
an
∫ L
−L
f(x) cos(nπx
L
)dx + bn
∫ L
−L
f(x) sin(nπx
L
)dx =
=
(a20
2+
N∑n=1
(a2n + b2
n)
)· L
Por otro lado, al desarrollar el termino S2N (x) e integrarlo con respecto de x entre −L y L, resulta facil
comprobar que los terminos que contienen alguno de los factores
cos(nπx
L
)· cos
(kπx
L
), sin
(nπx
L
)· sin
(kπx
L
)o cos
(nπx
L
)· sin
(kπx
L
)
van a desaparecer si n 6= k debido a las condiciones de ortogonalidad (3.22), por lo que nos queda∫ L
−L
S2N (x)dx =
∫ L
−L
a20
4dx +
N∑n=1
a2n
∫ L
−L
cos2(nπx
L
)dx + b2
n
∫ L
−L
sin2(nπx
L
)dx =
=
(a20
2+
N∑n=1
(a2n + b2
n)
)· L
Combinando todas las expresiones anteriores, resulta∫ L
−L
(f(x)− SN (x))2dx =∫ L
−L
f2(x)dx−(
a20
2+
N∑n=1
(a2n + b2
n)
)· L (3.24)
A partir de esta igualdad (que es cierta para cada N) es posible deducir algunas conclusiones importantes:
1. Teniendo en cuenta que el termino de la izquierda es siempre mayor o igual que cero, se tiene
a20
2+
N∑n=1
a2n + b2
n ≤1L
∫ L
−L
f2(x)dx
Tomando lımites cuando N tiende hacia +∞ llegamos a que
a20
2+
∞∑n=1
a2n + b2
n ≤1L
∫ L
−L
f2(x)dx. (3.25)
Esta desigualdad se conoce con el nombre de Desigualdad de Bessel y veremos que juega unpapel muy importante en el contexto del Analisis de Fourier. De hecho, la desigualdad anterior esrealmente una igualdad (ver mas adelante el teorema 3.3).

54 Luis A. Fernandez
2. Como primera consecuencia de la desigualdad de Bessel tenemos que las series numericas∑∞
n=1 a2n y∑∞
n=1 b2n son claramente convergentes. Por lo tanto, los terminos generales a2
n y b2n deben converger
hacia 0 cuando n tiende hacia +∞; en particular esto implica que
an −→ 0 y bn −→ 0 cuando n −→ +∞,
o, lo que es lo mismo,
∫ L
−L
f(x) cos(nπx
L
)dx −→ 0 y
∫ L
−L
f(x) sin(nπx
L
)dx −→ 0,
cuando n tiende hacia +∞.
COMENTARIOS 3.2 La misma argumentacion que hemos seguido para la serie de Fourier completa(3.21) puede aplicarse en situaciones mas generales, donde se mantengan las siguientes caracterısticasbasicas: supongamos que contamos con una familia de funciones ϕn∞n=1 ⊂ L2(α, β) que verifican lascondiciones de ortogonalidad ∫ β
α
ϕn(x)ϕk(x)dx =
0 si k 6= n1 si k = n
(3.26)
Consideramos entonces una serie de funciones relativa a la familia ϕn∞n=1 dada por
f(x) =∞∑
n=1
anϕn(x), (3.27)
con los coeficientes
an =∫ β
α
f(x)ϕn(x)dx, n = 1, 2, . . . (3.28)
y donde f ∈ L2(α, β). Se demuestra entonces la correspondiente Desigualdad de Bessel
∞∑n=1
a2n ≤
∫ β
α
f2(x)dx < +∞ (3.29)
de donde se concluye que
an =∫ β
α
f(x)ϕn(x)dx −→ 0 cuando n −→ +∞. (3.30)
Utilizando la desigualdad de Bessel es posible obtener un primer resultado que nos garantiza que (bajociertas hipotesis) efectivamente la serie de Fourier asociada a una funcion f coincide con ella.
TEOREMA 3.1 Supongamos que f es una funcion continua y derivable en [−L, L] tal que f(−L) = f(L)y f ′(−L) = f ′(L). Entonces, se verifica que
a0
2+
∞∑n=1
(an cos
(nπx
L
)+ bn sin
(nπx
L
))= f(x) (3.31)
para cada x ∈ [−L,L].
Dem. Vamos a comenzar obteniendo una expresion de SN (x) equivalente a (3.23). Partiendo de (3.23)y sustituyendo los valores (3.19)-(3.20) de los coeficientes, se llega a
SN (x) =1L
∫ L
−L
[12
+N∑
n=1
cos(nπx
L
)cos
(nπy
L
)+ sin
(nπx
L
)sin
(nπy
L
)]f(y)dy.

Metodos matematicos avanzados 55
Utilizando la identidad trigonometrica
cos (u) cos (v) + sin (u) sin (v) = cos (u− v),
resulta
SN (x) =1
2L
∫ L
−L
[1 + 2
N∑n=1
cos(
nπ(x− y)L
)]f(y)dy.
Introduciendo la funcion Nucleo de Dirichlet
KN (z) = 1 + 2N∑
n=1
cos(nπz
L
)(3.32)
la formula para SN queda
SN (x) =1
2L
∫ L
−L
KN (x− y)f(y)dy.
Extendemos ahora f a todo IR por periodicidad: esto es, si x ∈ [(j − 1)L, (j + 1)L] para algun numeroentero j, definimos f(x) = f(x− jL). Debido a las hipotesis f(−L) = f(L) y f ′(−L) = f ′(L), el resultadoes una funcion continua y derivable en todo IR.
Haciendo el cambio de variable z = y − x en la expresion de SN , se sigue que
SN (x) =1
2L
∫ L−x
−L−x
KN (−z)f(x + z)dz =1
2L
∫ L
−L
KN (z)f(x + z)dz,
ya que KN (−z) = KN (z) para cada z ∈ IR y KN (z)f(x+z) es una funcion 2L−periodica (por ser productode funciones 2L−periodicas) por lo que el valor de su integral es el mismo sobre cualquier intervalo delongitud 2L.
Nos interesa ahora estudiar algunas propiedades de la funcion KN :
i) Una simple integracion inmediata nos convence de que
12L
∫ L
−L
KN (z)dz = 1.
ii) Denotando θ = πzL , se verifica
KN (z) = 1 + 2N∑
n=1
cos (nθ) = 1 +N∑
n=1
(einθ + e−inθ) =N∑
n=−N
einθ = e−iθN2N∑n=0
(eiθ)n =
= e−iθN ei(2N+1)θ − 1eiθ − 1
=ei(N+1/2)θ − e−i(N+1/2)θ
eiθ/2 − e−iθ/2=
sin((N + 1
2 )πzL
)
sin(
πz2L
)
Combinando las expresiones y propiedades anteriores resulta que
SN (x)− f(x) =1
2L
∫ L
−L
KN (z)f(x + z)dz − f(x) · 12L
∫ L
−L
KN (z)dz =
=1
2L
∫ L
−L
KN (z) (f(x + z)− f(x)) dz =1
2L
∫ L
−L
sin((
N +12
)πz
L
)g(z)dz, (3.33)
donde
g(z) =f(x + z)− f(x)
sin(
πz2L
) .

56 Luis A. Fernandez
Por supuesto, la funcion g tambien depende de x, sin embargo este aspecto no es relevante aquı, puesto quepodemos fijar el valor de x a lo largo de toda la demostracion. Por otra parte, la funcion g es claramentecontinua en todos los puntos z ∈ [−L,L], excepto en z = 0. Sin embargo, aplicando L’Hopital,
limz→0
g(z) = limz→0
2Lf ′(x + z)π cos
(πz2L
) =2L
πf ′(x),
por lo que (tomando este cantidad como valor g(0)), resulta que g es continua en [−L,L]; en particular,g ∈ L2(−L, L). Por otra parte, resulta inmediato comprobar que las funciones
ϕn(z) = sin((
n +12
)πz
L
),
satisfacen las propiedades de ortogonalidad
1L
∫ L
−L
ϕn(z)ϕk(z)dz =
0 si k 6= n1 si k = n
Por lo tanto, como consecuencia de la desigualdad de Bessel correspondiente a esta familia de funciones(ver (3.30)), se obtiene finalmente que
∫ L
−L
ϕN (z)g(z)dz −→ 0 cuando N → +∞.
En virtud de (3.33), esto significa que
SN (x) −→ f(x) cuando N → +∞,
o equivalentemente, (3.31).Como ya se ha dicho, un aspecto a destacar es que para determinar la serie de Fourier asociada a
una funcion f basta poder calcular los correspondientes coeficientes an y bn y, para ello, no es necesarioque f sea continua. Este hecho resulta muy interesante en la practica donde es habitual encontrarse (porejemplo) con funciones definidas a trozos. Vamos a ser mas precisos con las funciones que manejaremos:
DEFINICION 3.3 i) Dada una funcion f definida en [α, β], se dice que f es continua a trozos en[α, β] cuando f es continua en todos los puntos de [α, β], salvo quizas en un numero finito de puntosinteriores, donde la discontinuidad es de salto finito.
ii) Dada una funcion f definida en [α, β], se dice que f es C1 a trozos en [α, β] cuando tanto f comof ′ son continuas a trozos en [α, β].
En el caso de funciones continuas a trozos, la igualdad (3.31) puede no verificarse en los puntos dediscontinuidad, ya que los lımites laterales f(x+) = limy→x,y>x f(y) y f(x−) = limy→x,y<x f(y) sondistintos. No obstante, la conclusion del teorema 3.1 puede “afinarse” en el siguiente sentido:
TEOREMA 3.2 Supongamos que f es una funcion C1 a trozos en [−L,L]. Entonces, se verifica que
a0
2+
∞∑n=1
(an cos
(nπx
L
)+ bn sin
(nπx
L
))=
f(x+) + f(x−)2
(3.34)
para cada x ∈ (−L,L). Ademas,
a0
2+
∞∑n=1
an cos (nπ) =f(−L) + f(L)
2(3.35)

Metodos matematicos avanzados 57
Dem. Es una variante de la demostracion anterior. Dado x ∈ (−L,L) escribimos
SN (x) =1
2L
∫ L
−L
KN (z)f(x + z)dz =1
2L
[∫ 0
−L
KN (z)f(x + z)dz +∫ L
0
KN (z)f(x + z)dz
],
donde seguimos designando por f la extension 2L-periodica a todo IR de la funcion inicial f , en principiosolo definida en [−L,L].
Por otra parte, se comprueba facilmente que
12L
∫ 0
−L
KN (z)dz =1
2L
∫ L
0
KN (z)dz =12.
Entonces,f(x−) + f(x+)
2=
12L
[∫ 0
−L
KN (z)f(x−)dz +∫ L
0
KN (z)f(x+)dz
]
y por lo tanto
SN (x)− f(x+) + f(x−)2
=1
2L
[∫ 0
−L
ϕn(z)g−(z)dz +∫ L
0
ϕn(z)g+(z)dz
], (3.36)
donde
g−(z) =f(x + z)− f(x−)
sin(
πz2L
) , g+(z) =f(x + z)− f(x+)
sin(
πz2L
) .
Razonando como en el teorema anterior, la regla de L’Hopital nos permite concluir que g−(z) es continuaa trozos en [−L, 0] (definiendo g−(0) = 2L
π f ′(x−)) y que g+(z) es continua a trozos en [0, L] (definiendog+(0) = 2L
π f ′(x+)), por lo que g− ∈ L2(−L, 0) y g+ ∈ L2(0, L). La demostracion se concluye como enaquel caso, sin mas que observar que las funciones ϕn(z) verifican
2L
∫ 0
−L
ϕn(z)ϕk(z)dz =2L
∫ L
0
ϕn(z)ϕk(z)dz =
0 si k 6= n1 si k = n
y volviendo a utilizar la desigualdad de Bessel con respecto de cada intervalo (ver (3.30)) para concluirque cada integral del lado derecho de (3.36) tiende hacia 0 cuando N tiende hacia +∞, por lo que se llegaa (3.34).
En el caso x = L, debido a la periodicidad de f , se verifica f(L) = f(L−) y f(−L) = f(L+), por lo queel mismo argumento nos permite concluir que SN (L) −→ f(L+)+f(L−)
2 = f(−L)+f(L)2 cuando N → +∞, o
lo que lo mismo,(3.35). El razonamiento para x = −L es similar.
COMENTARIOS 3.3 i) En los puntos x donde f es continua, se verifica f(x+)+f(x−)2 = f(x) y,
por lo tanto, se recupera (3.31). En cuanto a lo que sucede en los extremos, si f(−L) = f(L), laexpresion (3.35) tambien coincide con (3.31) para los valores particulares x = L y x = −L.
ii) La conclusion del teorema 3.2 se mantiene (con la misma demostracion), si f es continua a trozosen [−L,L] y existen las derivadas laterales (a derecha e izquierda) de f en cada punto de [−L, L],aunque dichas derivadas laterales no coincidan, ver Tveito y Winther, pags. 294-295.
iii) Otros resultados de convergencia puntual (con hipotesis menos exigentes sobre f) pueden probarse,ver por ejemplo Gadella y Nieto, pag. 126 o Apostol, pag. 388.
iv) Supuesto que f es continua en [−L,L], f(−L) = f(L) y f ′ es continua a trozos en [−L, L], se puedeprobar (no es difıcil) que SN −→ f uniformemente en [−L,L] cuando N −→ +∞. La demostracionpuede verse (por ejemplo) en Bleecker y Csordas, pags. 228-230 o Tveito y Winther, pags. 296-98.

58 Luis A. Fernandez
–1
–0.5
0
0.5
1
–1 –0.8 –0.6 –0.4 –0.2 0.2 0.4 0.6 0.8 1x
Figura 3.6: Aproximacion de Fourier con cinco terminos para signo(x) en [-1,1].
En el caso de funciones menos regulares (pero todavıa de L2(−L,L)) la igualdad (3.34) puede fallarincluso en un numero infinito de puntos. No obstante, se verifica, al menos, la convergencia de SN haciala funcion f en el sentido de L2, es decir,
TEOREMA 3.3 Dada f ∈ L2(−L,L), se verifica que
∫ L
−L
(f(x)− SN (x))2dx −→ 0 cuando N −→ +∞.
En virtud de la expresion (3.24), la conclusion del teorema 3.3 es equivalente a que
a20
2+
∞∑n=1
a2n + b2
n =1L·∫ L
−L
f2(x)dx, (3.37)
relacion que se conoce con el nombre de Identidad de Parseval y se considera una generalizacion delclasico teorema de Pitagoras. La demostracion de este resultado transciende el nivel de este curso, ver porejemplo Folland, pags. 75-79.
Las identidades (3.34) y (3.37) obtenidas en los teoremas precedentes y aplicadas a funciones particu-lares f resultan extraordinariamente utiles a la hora de sumar series numericas, tarea esta (como es sabido)muy complicada en general. Veamos algunos ejemplos:
EJEMPLO 3.6 i) Consideremos la funcion
f(x) = signo(x) =
1 si x ∈ [0, 1]−1 si x ∈ [−1, 0)
Como f es impar, la serie de Fourier asociada a f es una serie de Fourier de senos (es decir, an = 0para cada n = 0, 1, ...). Ademas,
bn =∫ 1
−1
f(x) sin (nπx)dx = 2∫ 1
0
sin (nπx)dx =2(1− (−1)n)
nπ.

Metodos matematicos avanzados 59
–1
–0.5
0
0.5
1
–1 –0.8 –0.6 –0.4 –0.2 0.2 0.4 0.6 0.8 1x
Figura 3.7: Aproximacion de Fourier con cincuenta terminos para signo(x) en [-1,1].
Ası, la serie de Fourier asociada a la funcion signo(x) viene dada por
∞∑n=1
2(1− (−1)n)nπ
sin (nπx) =∞∑
k=1
4(2k − 1)π
sin ((2k − 1)πx)
Como la funcion f es C1 a trozos, en virtud del teorema 3.2 se tiene que
∞∑
k=1
4(2k − 1)π
sin ((2k − 1)πx) =
1 si x ∈ (0, 1)−1 si x ∈ (−1, 0)
0 si x = 0, 1 o − 1
En particular, tomando x = 1/2 obtenemos la suma de la serie alternada
∞∑
k=1
(−1)k+1
(2k − 1)= 1− 1
3+
15− 1
7+ . . . =
π
4.
Utilizando ahora la identidad de Parseval y teniendo en cuenta que∫ 1
−1(signo(x))2dx = 2, deducimos
que∞∑
k=1
1(2k − 1)2
= 1 +19
+125
+149
+ . . . =π2
8.
ii) Consideremos ahora la funcion f(x) = x en el intervalo [−L,L]. De nuevo, como f es impar, laserie de Fourier asociada a f es una serie de Fourier de senos. Ademas,
bn =1L
∫ L
−L
f(x) sin(nπx
L
)dx =
2L
∫ L
0
x sin(nπx
L
)dx = (−1)n+1 2L
nπ.
Ası, la serie de Fourier asociada a x viene dada por
∞∑n=1
(−1)n+1 2L
nπsin
(nπx
L
)

60 Luis A. Fernandez
Como la funcion f es C1, en virtud del teorema 3.2 se tiene que
∞∑n=1
(−1)n+1 2L
nπsin
(nπx
L
)= x, ∀x ∈ (−L,L).
Notemos que la igualdad anterior no se verifica para x = −L ni para x = L, dado que f(−L) = −L 6=L = f(L), aunque f ′(−L) = f ′(L) = 1. Por lo tanto no estamos en las condiciones del teorema 3.1.Podemos comprobar que la igualdad (3.35) si que se verifica, dado que f(−L) + f(L) = 0.
En virtud de la identidad de Parseval y teniendo en cuenta que∫ L
−Lx2dx = 2L3/3, resulta que
∞∑n=1
1n2
= 1 +14
+19
+116
+ . . . =π2
6.
Leonhard Euler obtuvo esta expresion en 1735, cuando tenıa veintiocho anos, despues de que losmatematicos mas importantes de la epoca (como los Bernoulli) lo hubieran intentado. Este problema seconoce en matematicas como “Problema de Basilea” y es famoso en teorıa de numeros. Se puede encontrarmas informacion en http://es.wikipedia.org/wiki/Problema de Basilea.
Ademas de las series de potencias, una tecnica completamente diferente que permite sumar algunasseries numericas involucra variable compleja (y en particular, el Teorema de los Residuos). Una descripcionde este metodo puede encontrarse en el libro “Teorıa y problemas de Variable Compleja”, M. R. Spiegel,Ed. McGraw-Hill, pags. 176-197.
Todavıa nos quedan pendientes de estudiar cuestiones importantes en relacion con las series de Fouriery sus aplicaciones a la resolucion de EDP. En particular, no hemos analizado en que sentido las expresiones(formales) obtenidas en la primera parte de este capıtulo por el metodo de separacion de variables (ver(3.6), (3.12), (3.16) y (3.18)) son soluciones de los correspondientes problemas. Se trata de una cuestiondelicada sobre la que volveremos mas adelante.
3.3 Series de Fourier con Maple
Las siguientes sentencias MAPLE se utilizaron para generar las figuras 3.3 y 3.4
> u := 4*sum(’(1-(-1)^n)/((n*Pi)^3)*sin(n*Pi*x)*exp(-t*(n*Pi)^2)’, ’n’=1..8):plot3d(u, x = 0..1, t = 0..1,axes=boxed);
> u := 1/6-2*sum(’(1+(-1)^n)/((n*Pi)^2)*cos(n*Pi*x)*exp(-t*(n*Pi)^2)’, ’n’=1..30):plot3d(u, x = 0..1, t = 0..1,axes=boxed);
esta otra para obtener la figura 3.5
> f:=1/6+sum(’2*(-1)^n*cos(n*Pi*x)/(n^2*Pi^2)+ sin(n*Pi*x)*((-1)^(n+1)/(n*Pi)+2*((-1)^n-1)/(n^3*Pi^3))’, ’n’=1..100);g:=piecewise(x<0, 0,x>0,x^2);plot([f, g], x=-1..1, color=[red,blue], style=[line,line]);
y esta para generar la figura 3.7
> f:=sum(’2*((1-(-1)^n)/(n*Pi))*sin(n*Pi*x)’, ’n’=1..50);g:=piecewise(x<0,-1,x>0,1); plot([f, g], x=-1..1, color=[red,blue],style=[line,line]);
Las series numericas que hemos sumado utilizando las series de Fourier y la Identidad de Parseval seobtienen directamente mediante la orden sum
> sum(’(-1)^(k+1)/(2*k-1)’,k=1..infinity);
14
π

Metodos matematicos avanzados 61
> sum(’1/(2*k-1)^2’,k=1..infinity);
18
π2
> sum(’1/n^2’,n=1..infinity);
16
π2
Bibliografıa sobre Series de Fourier y sus aplicaciones a las EDP:
1. “Matematicas avanzadas para ingenierıa”, Peter V. O’Neil, Ed. Thomson, 2004.
2. “Introduction to Partial Differential Equations”, A. Tveito y R. Winther, Springer, 1998.
3. “Basic partial differential equations”, D. Bleecker y G. Csordas, Van Nostrand, 1992.
4. “Partial differential equations for scientists and engineers”, Tyn Myint-U y L. Debnath, North Hol-land, 1987.
5. “Fourier analysis and its applications”, G. B. Folland, Wadsworth and Brooks, 1992.
6. “Metodos matematicos avanzados para ciencias e ingenierıas”, M. Gadella y L.M. Nieto, Univ. deValladolid, 2000.
Recursos en Internet sobre Series de Fourier:
1. Para observar “interactivamente” la convergencia de la serie de Fourier asociada a la funcion quequieras dibujar http://www.jhu.edu/∼signals/fourier2/ y tambien http://www.falstad.com/fourier/
2. http://www.sosmath.com/calculus/calculus.html (Apartado “Fourier Series”)
3. http://mathworld.wolfram.com/FourierSeries.html
4. http://mwt.e-technik.uni-ulm.de/world/lehre/basic mathematics/fourier es/index.php3
Un resumen (en espanol) de las principales cuestiones del Analisis de Fourier con demostraciones yalgunos ejercicios para autoevaluacion.
5. http://www.ugr.es/∼fjperez/apuntes.html
Pagina en espanol con apuntes desarrollados, ejemplos resueltos y ejercicios propuestos.
6. http://www.mathphysics.com/pde/
Libro web “Linear Methods of Applied Mathematics: Orthogonal series, boundary-value problems,and integral operators”. Autores: Evans M. Harrell II y James V. Herod. Muy completo y conejemplos.
7. http://www.efunda.com/math/math home/math.cfm (Apartado “Series”) – Acceso limitado.
8. http://www.mapleapps.com/powertools/MathEducation.shtml
(Apartado “Partial Differential Equations”)
o, directamente, http://www.mapleapps.com/powertools/pdes/pdes.shtml
9. http://www.sc.ehu.es/sbweb/fisica/ondas/MovOndulatorio.html
Una coleccion de paginas muy completas (y en espanol) desde el punto de vista fısico y con muchasactividades interactivas sobre movimiento ondulatorio. Autor: Angel Franco Garcıa. Universidaddel Paıs Vasco.

62 Luis A. Fernandez
10. http://www.exampleproblems.com/wiki/index.php/Fourier Series
Pagina con ejercicios resueltos.
Recursos en Internet sobre Historia de las matematicas:
1. Fourier
http://es.wikipedia.org/wiki/Fourier (en espanol)
http://www-groups.dcs.st-and.ac.uk/∼history/Mathematicians/Fourier.html (en ingles)

Capıtulo 4
Transformadas integrales defunciones
4.1 Transformada de Fourier
DEFINICION 4.1 Dada una funcion f(x) definida para cada x ∈ IR, la transformada de Fourierde f es otra funcion (que designamos por F(f) o f) y que para cada ξ ∈ IR viene dada por
F(f)(ξ) =∫ +∞
−∞f(x)e−iξxdx,
en caso de que exista.
COMENTARIOS 4.1 No hay unanimidad a la hora de definir la transformada de Fourier. Otras defini-ciones que pueden encontrarse en la literatura son
F(f)(ξ) =∫ +∞
−∞f(x)eiξxdx, F(f)(ξ) =
∫ +∞
−∞f(x)e−2πiξxdx, F(f)(ξ) =
∫ +∞
−∞f(x)e2πiξxdx,
F(f)(ξ) =12π
∫ +∞
−∞f(x)eiξxdx o F(f)(ξ) =
1√2π
∫ +∞
−∞f(x)e−iξxdx.
Esta cuestion debe ser tenida muy en cuenta a la hora de comparar las propiedades y los resultados, segunlas diversas referencias.
No es difıcil comprobar que la transformada de Fourier de una funcion f puede no existir. Por ejemplo,si f(x) = 1 para cada x ∈ IR
F(f)(0) =∫ +∞
−∞1dx = +∞,
y si ξ 6= 0,
F(f)(ξ) =∫ +∞
−∞e−iξxdx = lim
R→+∞
∫ +R
−R
e−iξxdx = limR→+∞
eiξR − e−iξR
iξ=
2ξ
limR→+∞
sin (Rξ),
pudiendo comprobarse que este ultimo lımite no existe.Una condicion suficiente para que exista la transformada de Fourier de una funcion f(x) para cada
ξ ∈ IR es que∫ +∞
−∞|f(x)|dx < +∞, ya que entonces
|F(f)(ξ)| ≤∫ +∞
−∞|f(x)e−iξx|dx =
∫ +∞
−∞|f(x)|dx < +∞, ∀ξ ∈ IR.
En lo sucesivo, esta es una condicion que impondremos a menudo.
63

64 Luis A. Fernandez
EJEMPLO 4.1 1) La transformada de Fourier de una funcion real puede tomar valores complejos.Por ejemplo, si
f1(x) =
e−x si x ≥ 00 si x < 0 (4.1)
F(f1)(ξ) =∫ +∞
0
e−xe−iξxdx =∫ +∞
0
e−(1+iξ)xdx = − e−(1+iξ)x
1 + iξ
∣∣∣∣x=+∞
x=0
=1
1 + iξ∈ lC.
2) La transformada de Fourier de una funcion “muy concentrada” (cero fuera de un cierto dominioacotado) resulta ser una funcion “muy extendida” (distinta de cero en todo IR). Por ejemplo, si
f2(x) =
1 si |x| ≤ 10 si |x| > 1 (4.2)
F(f2)(ξ) =∫ +1
−1
e−iξxdx = − e−iξx
iξ
∣∣∣∣x=+1
x=−1
=2 sin (ξ)
ξ.
Veamos ahora cuales son las principales propiedades de la transformada de Fourier:
i) La transformada de Fourier de una funcion real y par es una funcion real y par. Al ser el seno unafuncion impar y el coseno una funcion par en IR y ser el producto de dos funciones pares, otra funcionpar y el producto de una funcion par por una funcion impar, otra funcion impar en IR, resulta que
F(f)(ξ) =∫ +∞
−∞f(x) (cos (ξx)− i sin (ξx)) dx = 2
∫ +∞
0
f(x) cos (ξx)dx ∈ IR,
que es una funcion par, respecto de ξ.
ii) La transformada de Fourier de una funcion real e impar es una funcion imaginaria pura e impar.Argumentando como antes y utilizando que el producto de dos funciones impares es otra funcionpar, resulta que
F(f)(ξ) =∫ +∞
−∞f(x) (cos (ξx)− i sin (ξx)) dx = −2i
∫ +∞
0
f(x) sin (ξx)dx,
que es una funcion impar, respecto de ξ.
Estas propiedades dan lugar a otras transformadas integrales de interes, como son la transformadade Fourier en cosenos y la transformada de Fourier en senos, respectivamente.
iii) La transformada de Fourier es lineal:
F(αf1 + βf2) = αF(f1) + βF(f2), ∀ α, β ∈ lC.
iv) Supongamos que f es continua en IR, limx→±∞ f(x) = 0, f ′ es continua a trozos en IR y que∫ +∞−∞ |f ′(x)|dx < +∞. Entonces
F(f ′)(ξ) = iξF(f)(ξ).
Dem. Basta integrar por partes la definicion de F(f ′) y utilizar las hipotesis
F(f ′)(ξ) =∫ +∞
−∞f ′(x)e−iξxdx = f(x)e−iξx
∣∣x=+∞x=−∞ + iξ
∫ +∞
−∞f(x)e−iξxdx = iξF(f)(ξ).

Metodos matematicos avanzados 65
v) En las condiciones de la propiedad anterior,
lim|ξ|→+∞
F(f)(ξ) = 0.
De hecho, esta propiedad es cierta solo suponiendo que∫ +∞−∞ |f(x)|dx < +∞, como se demuestra en
Folland, p. 217.
Dem. Basta notar que
|F(f)(ξ)| = |F(f ′)(ξ)||ξ| ≤
∫ +∞−∞ |f ′(x)|dx
|ξ| =C
|ξ| → 0, cuando |ξ| → +∞.
vi) Supongamos que f y f ′ son continuas en IR, limx→±∞ f(x) = limx→±∞ f ′(x) = 0, f ′′ es continua atrozos en IR y que
∫ +∞−∞ |f ′′(x)|dx < +∞. Entonces
F(f ′′)(ξ) = −ξ2F(f)(ξ).
Dem. Basta aplicar la propiedad iv) primero a f y luego a f ′:
F(f ′′)(ξ) = iξF(f ′)(ξ) = (iξ)2F(f)(ξ).
vii) Supongamos que∫ +∞−∞ |xf(x)|dx < +∞. Entonces,
F(xf(x))(ξ) = idF(f)
dξ(ξ).
Dem. Formalmente, basta utilizar que podemos intercambiar la derivacion respecto de ξ con laintegracion respecto de x
F(xf(x))(ξ) =∫ +∞
−∞xf(x)e−iξxdx = i
∫ +∞
−∞f(x)
de−iξx
dξdx = i
d
dξ
(∫ +∞
−∞f(x)e−iξxdx
).
EJEMPLO 4.2 Combinando varias propiedades anteriores, podemos calcular indirectamente la transfor-mada de Fourier de funciones para las cuales, a partir de la definicion, serıa mucho mas difıcil. Porejemplo, la funcion f(x) = e−x2
verifica f ′(x) + 2xf(x) = 0 para cada x ∈ IR. Aplicando transformada deFourier de esta expresion y suponiendo que estamos en condiciones de poder utilizar las propiedades iii),iv) y vii), resulta que
0 = F(f ′(x) + 2xf(x))(ξ) = F(f ′)(ξ) + 2F(xf(x))(ξ) = iξF(f)(ξ) + 2idF(f)
dξ(ξ),
o, lo que es lo mismo,dF(f)
dξ(ξ) = −ξ
2F(f)(ξ),
que es otra EDO lineal de primer orden, por lo que integrandola
F(f)(ξ) = Ce−ξ2/4, C ∈ IR.
Por otro lado,
C = F(f)(0) =∫ +∞
−∞e−x2
dx =√
π
y por lo tanto,F(e−x2
)(ξ) =√
πe−ξ2/4.

66 Luis A. Fernandez
En otros casos, debemos utilizar el Teorema de los residuos. Consideramos, por ejemplo, la funcion
f(x) =1
x2 + 1. Empecemos considerando el caso en que ξ < 0. Por definicion,
F(f)(ξ) =∫ +∞
−∞
e−iξx
x2 + 1dx = lim
R→+∞
∫ +R
−R
e−iξx
x2 + 1dx = lim
R→+∞
(∫
CR
e−iξz
z2 + 1dz −
∫
ΓR
e−iξz
z2 + 1dz
),
donde la curva CR viene dada por el segmento sobre el eje x desde −R hasta +R y la semicircunferenciaΓR por encima del eje x que tiene este segmento como diametro (ver Figura 4.1).
>
<
-R +R
GR
Figura 4.1: La curva CR.
Aplicando el Teorema de los residuos, podemos concluir que (si R > 1)∫
CR
e−iξz
z2 + 1dz = 2πi ·Res
(e−iξz
z2 + 1, i
)= 2πi
eξ
2i= πeξ.
Ademas, podemos garantizar que si ξ < 0
limR→+∞
∫
ΓR
e−iξz
z2 + 1dz = 0,
razonando como al final del Capıtulo 1 (en las aplicaciones del Teorema de los residuos, tercer tipo deintegral).
Por lo tanto, si ξ < 0,
F(
1x2 + 1
)(ξ) = πeξ.
Gracias a la propiedad i), al ser f una funcion real y par, su transformada de Fourier tambien va aser una funcion real y par, por lo que
F(
1x2 + 1
)(ξ) = πe−|ξ| para cada ξ ∈ IR.
DEFINICION 4.2 Dadas dos funciones f y g definidas en todo IR, se denomina producto de con-volucion de f y g (y se designa por f ? g) a una nueva funcion que para cada x ∈ IR viene dadapor
(f ? g)(x) =∫ +∞
−∞f(x− y)g(y)dy.

Metodos matematicos avanzados 67
Es facil convencerse de que el producto de convolucion no siempre esta bien definido. Por ejemplo, sif(x) = g(x) = 1 para cada x ∈ IR, resulta que
(1 ? 1)(x) =∫ +∞
−∞1dy = +∞, ∀x ∈ IR.
En cambio, el producto de convolucion (f ? g)(x) es finito para cada x ∈ IR (al menos) en los siguientescasos:
• si∫ +∞−∞ |f(x)|dx < +∞ y g es acotada (existe C ∈ IR tal que |g(y)| ≤ C para cada y ∈ IR), ya que
|(f ? g)(x)| ≤∫ +∞
−∞|f(x− y)g(y)|dy ≤ C
∫ +∞
−∞|f(x− y)|dy < +∞.
• si f es acotada (existe C ∈ IR tal que |f(y)| ≤ C para cada y ∈ IR) y∫ +∞−∞ |g(x)|dx < +∞, ya que
|(f ? g)(x)| ≤∫ +∞
−∞|f(x− y)g(y)|dy ≤ C
∫ +∞
−∞|g(y)|dy < +∞.
Veamos algunos ejemplos: supuesto que
f2(x) =
1 si |x| ≤ 10 si |x| > 1 (4.3)
resulta inmediato comprobar que
(1 ? f2)(x) =∫ +∞
−∞f2(y)dy =
∫ 1
−1
1dy = 2.
Algo mas trabajoso resulta ver que
(f2 ? f2)(x) =∫ 1
−1
f2(x− y)dy =
0 si x ≤ −22 + x si x ∈ [−2, 0]2− x si x ∈ [0, 2]0 si x ≥ 2
Entre las propiedades que verifica el producto de convolucion, destacamos aquı las mas importantesque, sin duda, nos recuerdan a las correspondientes propiedades del producto de funciones habitual (estees el motivo por el cual se denomina “producto” a la convolucion).
Dadas funciones f, g, h y α ∈ lC, se verifica
1. f ? g = g ? f (Prop. conmutativa)
2. f ? (g ? h) = (f ? g) ? h (Prop. asociativa)
3. f ? (g + h) = f ? g + f ? h (Prop. distributiva respecto de la suma)
4. f ? (α · g) = α · (f ? g),
supuesto que los productos de convolucion anteriores estan bien definidos.La razon por la cual el producto de convolucion se introduce en conexion con la transformada de Fourier
queda recogida en el siguiente teorema.
TEOREMA 4.1 Supongamos que∫ +∞−∞ |f(x)|dx < +∞,
∫ +∞−∞ |g(x)|dx < +∞ y existe (f ? g)(x) para
cada x ∈ IR. EntoncesF(f ? g)(ξ) = F(f)(ξ) · F(g)(ξ).

68 Luis A. Fernandez
Dem. Basta utilizar las definiciones y un simple cambio de variable
F(f ? g)(ξ) =∫ +∞
−∞(f ? g)(x)e−iξxdx =
∫ +∞
−∞
(∫ +∞
−∞f(x− y)g(y)dy
)e−iξxdx =
=∫ +∞
−∞
∫ +∞
−∞f(x−y)e−iξ(x−y)g(y)e−iξydydx
z=x−y=
∫ +∞
−∞
∫ +∞
−∞f(z)e−iξzg(y)e−iξydzdy = F(f)(ξ)·F(g)(ξ).
Aplicando ahora este teorema, teniendo en cuenta el Ejemplo 4.1-2), resulta inmediato deducir que
F(f2 ? f2)(ξ) = (F(f2)(ξ))2 =
(2 sin (ξ)
ξ
)2
=4(sin (ξ))2
ξ2.
TEOREMA 4.2 (Teorema de inversion de Fourier) Supongamos que∫ +∞−∞ |f(x)|dx < +∞ y que f
es C1 a trozos en cada intervalo de IR. Entonces,
12π
∫ +∞
−∞F(f)(ξ)eiξxdξ =
f(x+) + f(x−)2
, ∀x ∈ IR.
Idea de la demostracion. El punto de partida es la igualdad (3.34) del Teorema 3.2 relativo a laconvergencia de series de Fourier
a0
2+
∞∑n=1
(an cos
(nπx
L
)+ bn sin
(nπx
L
))=
f(x+) + f(x−)2
, ∀ x ∈ (−L,L), (4.4)
donde
an =1L
∫ L
−L
f(x) cos(nπx
L
)dx, n = 0, 1, 2, . . . (4.5)
bn =1L
∫ L
−L
f(x) sin(nπx
L
)dx, n = 1, 2, . . . (4.6)
No es difıcil comprobar que (4.4) se puede re-escribir en la forma exponencial
f(x+) + f(x−)2
=1
2L
∞∑n=−∞
cneinπx
L , ∀ x ∈ (−L,L) (4.7)
donde
cn =∫ L
−L
f(x)e−inπx
L dx, n = 0,±1,±2, . . . (4.8)
teniendo en cuenta que
c0 = La0, cn = L(an − ibn), c−n = L(an + ibn) si n = 1, 2, . . .
Definiendo ∆ξ = πL y ξn = n∆ξ, las identidades (4.7)-(4.8) quedan
f(x+) + f(x−)2
=12π
∞∑n=−∞
cneiξnx∆ξ, ∀ x ∈ (−L,L) (4.9)
y
cn =∫ L
−L
f(x)e−iξnxdx, n = 0, 1, 2, . . . (4.10)

Metodos matematicos avanzados 69
Suponiendo que f(x) → 0 cuando x → ±∞ y que L es suficientemente grande, todavıa podemos re-escribir(4.9)-(4.10) de manera aproximada como
cn ≈∫ +∞
−∞f(x)e−iξnxdx = F(f)(ξn), n = 0, 1, 2, . . . (4.11)
f(x+) + f(x−)2
≈ 12π
∞∑n=−∞
F(f)(ξn)eiξnx∆ξ, ∀ x ∈ (−L,L) (4.12)
Finalmente, teniendo en cuenta que ∆ξ → 0 cuando L → +∞ y que la serie (4.12) se asemeja a la sumade Riemann de una integral, en el lımite tendrıamos
f(x+) + f(x−)2
=12π
∫ +∞
−∞F(f)(ξ)eiξxdξ, ∀ x ∈ IR. (4.13)
La expresion (4.13) nos sugiere la siguiente
DEFINICION 4.3 Dada una funcion g(ξ) definida para cada ξ ∈ IR, la transformada inversa deFourier de g es otra funcion (que designamos por F−1(g)) y que para cada x ∈ IR viene dada por
F−1(g)(x) =12π
∫ +∞
−∞g(ξ)eiξxdξ.
A partir del Teorema de inversion de Fourier, resulta inmediato comprobar que para cada funcion f(x)continua en IR tal que
∫ +∞−∞ |f(x)|dx < +∞ y con derivada f ′ continua a trozos en cada intervalo de IR,
se verificaF−1 (F(f)(ξ)) (x) = f(x), ∀ x ∈ IR,
F (F−1(f)(x))(ξ) = f(ξ), ∀ ξ ∈ IR,
como cabıa esperar.
EJEMPLO 4.3 Hemos visto en el Ejemplo 4.1 que si
f(x) =
e−x si x ≥ 00 si x < 0 ,
su transformada de Fourier viene dada por
F(f)(ξ) =1
1 + iξ.
Segun el Teorema de inversion de Fourier, se verifica en este caso
12π
∫ +∞
−∞
eiξx
1 + iξdξ =
e−x si x > 012 si x = 00 si x < 0
Vamos a comprobar directamente este resultado, utilizando el Teorema de los Residuos.
En el caso x > 0, integramos la funcion ϕ(z) =eixz
1 + izsobre la curva CR de la Figura 4.1 con R > 1.
Parametrizando sobre la parte del eje como z = ξ ∈ [−R, R] y en la parte curva como z = Reiθ conθ ∈ [0, π], se obtiene que
∫
CR
eixz
1 + izdz =
∫ +R
−R
eixξ
1 + iξdξ +
∫ π
0
eixReiθ
1 + iReiθiReiθdθ.

70 Luis A. Fernandez
Teniendo en cuenta que|eixReiθ | = e−xR sin (θ),
entonces (si R ≥ 2)∣∣∣∣∣∫ π
0
eixReiθ
1 + iReiθiReiθdθ
∣∣∣∣∣ ≤∫ π
0
e−xR sin (θ)
R− 1Rdθ ≤ 2
∫ π
0
e−xR sin (θ)dθ ≤ 2π
xR
(1− e−xR
) → 0 si R → +∞,
ya que x > 0, donde la estimacion de la integral se obtuvo al final del Capıtulo 1.Por otro lado, gracias al Teorema de los Residuos,
∫
CR
eixz
1 + izdz = 2πi ·Res(ϕ, i) = 2πi ·
(limz→i(z − i)
eixz
1 + iz
)= 2πi
e−x
i= 2πe−x.
Agrupando los argumentos anteriores, obtenemos el valor de la integral en el caso x > 0.En el caso x = 0 podemos razonar exactamente como antes y obtener
∫
CR
11 + iz
dz =∫ +R
−R
11 + iξ
dξ +∫ π
0
11 + iReiθ
iReiθdθ =∫ +R
−R
11 + iξ
dξ + π −∫ π
0
11 + iReiθ
dθ.
Claramente, si R > 1,∣∣∣∣∫ π
0
11 + iReiθ
dθ
∣∣∣∣ ≤∫ π
0
1R− 1
dθ =π
R− 1→ 0 si R → +∞,
y en virtud del Teorema de los Residuos,∫
CR
11 + iz
dz = 2πi ·(
limz→i(z − i)1
1 + iz
)= 2π.
Tomando lımites cuando R → +∞, resulta
2π =∫ +∞
−∞
11 + iξ
dξ + π,
como querıamos demostrar.Finalmente, en el caso x < 0, la argumentacion es la misma, salvo que ahora nos interesa integrar
sobre la curva CR representada en la Figura 4.2. Ası pues, analogamente a los casos anteriores tendremos∫
CR
eixz
1 + izdz =
∫ +R
−R
eixξ
1 + iξdξ +
∫ −π
0
eixReiθ
1 + iReiθiReiθdθ,
por lo que si R ≥ 2∣∣∣∣∣∫ −π
0
eixReiθ
1 + iReiθiReiθdθ
∣∣∣∣∣ ≤∫ 0
−π
e−xR sin (θ)
R− 1Rdθ ≤ 2
∫ 0
−π
e−xR sin (θ)dθψ=−θ
=
= 2∫ π
0
exR sin (ψ)dψ ≤ 2π
xR
(exR − 1
) → 0 si R → +∞,
ya que x < 0 (la eleccion de la nueva curva CR se planteo precisamente para conseguir esto). Por otrolado, teniendo en cuenta que el unico polo de ϕ(z) es z = i que queda fuera del dominio delimitado porCR y gracias al Teorema de Cauchy, resulta
∫
CR
eixz
1 + izdz = 0,
de donde se sigue facilmente el resultado que querıamos demostrar.
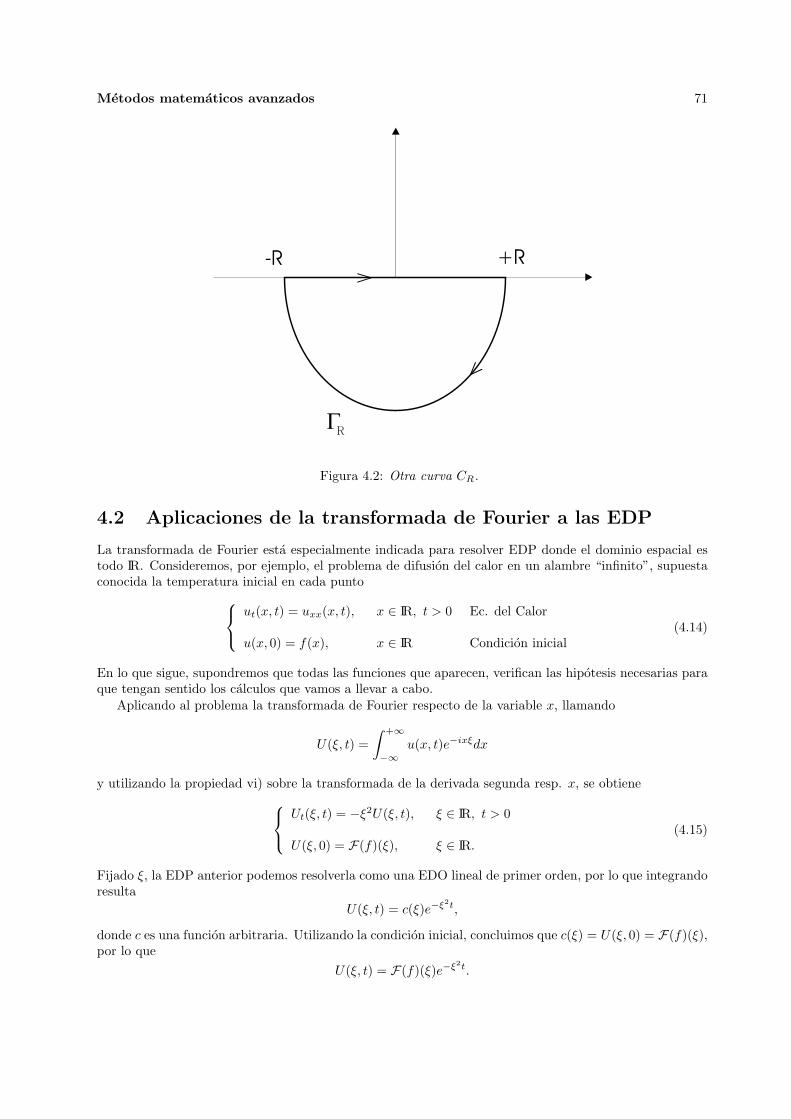
Metodos matematicos avanzados 71
Figura 4.2: Otra curva CR.
4.2 Aplicaciones de la transformada de Fourier a las EDP
La transformada de Fourier esta especialmente indicada para resolver EDP donde el dominio espacial estodo IR. Consideremos, por ejemplo, el problema de difusion del calor en un alambre “infinito”, supuestaconocida la temperatura inicial en cada punto
ut(x, t) = uxx(x, t), x ∈ IR, t > 0 Ec. del Calor
u(x, 0) = f(x), x ∈ IR Condicion inicial(4.14)
En lo que sigue, supondremos que todas las funciones que aparecen, verifican las hipotesis necesarias paraque tengan sentido los calculos que vamos a llevar a cabo.
Aplicando al problema la transformada de Fourier respecto de la variable x, llamando
U(ξ, t) =∫ +∞
−∞u(x, t)e−ixξdx
y utilizando la propiedad vi) sobre la transformada de la derivada segunda resp. x, se obtiene
Ut(ξ, t) = −ξ2U(ξ, t), ξ ∈ IR, t > 0
U(ξ, 0) = F(f)(ξ), ξ ∈ IR.(4.15)
Fijado ξ, la EDP anterior podemos resolverla como una EDO lineal de primer orden, por lo que integrandoresulta
U(ξ, t) = c(ξ)e−ξ2t,
donde c es una funcion arbitraria. Utilizando la condicion inicial, concluimos que c(ξ) = U(ξ, 0) = F(f)(ξ),por lo que
U(ξ, t) = F(f)(ξ)e−ξ2t.

72 Luis A. Fernandez
Queremos ahora aplicar transformada inversa y obtener la solucion del problema inicial (4.14). En virtudde (4.13) se tiene que
u(x, t) =12π
∫ +∞
−∞F(f)(ξ)e−ξ2teiξxdξ. (4.16)
En algunos casos particulares, es posible calcular la integral anterior. Por ejemplo, si f(x) = e−x2, sabemos
que F(f)(ξ) =√
πe−ξ2/4, por lo que
u(x, t) =12π
∫ +∞
−∞
√πe−ξ2/4e−ξ2teiξxdξ =
12√
π
∫ +∞
−∞e−ξ2(t+1/4)eiξxdξ =
12√
πF(e−ξ2(t+1/4))(−x) =
=1
2√
π
√π
1√t + 1/4
e−x2/(4t+1) =e−x2/(4t+1)
√4t + 1
,
utilizando la propiedad de que si α > 0,
F [f(αx)](ξ) =1αF [f ]
(ξ
α
), (4.17)
con α =√
t + 1/4 y f(x) = e−x2.
En general, para invertir la expresion de U(ξ, t), se tiene en cuenta que
e−ξ2t =1√πF(e−x2
)(2ξ√
t) =1
2√
πtF
(e−
x24t
)(ξ),
usando nuevamente (4.17), pero ahora con α = 12√
t. Por lo tanto,
U(ξ, t) = F(f)(ξ) · 12√
πtF
(e−
x24t
)(ξ).
Utilizando ahora el producto de convolucion (respecto de la variable x) y la conclusion del Teorema4.1, se sigue que
u(x, t) = f(x) ?xe−
x24t
2√
πt=
12√
πt
∫ +∞
−∞f(x− y)e−
y2
4t dy =1
2√
πt
∫ +∞
−∞f(y)e−
(x−y)2
4t dy. (4.18)
La funcion
E(x, t) =e−
x24t
2√
πt, (4.19)
se denomina nucleo gaussiano y, como acabamos de ver, juega un papel destacado a la hora de resolverla Ec. del Calor (de hecho, se le suele llamar por ello solucion fundamental de la Ec. del Calor).
Consideremos ahora el siguiente problema elıptico en un semiplano
uxx(x, y) + uyy(x, y) = 0, x ∈ IR, y > 0 Ec. de Laplace
u(x, 0) = f(x), x ∈ IR. Condicion de Contorno(4.20)
La primera observacion es que si u(x, y) es una solucion de este problema, entonces u(x, y)+Cy tambienlo es para cualquier valor de C ∈ IR. Con el fin de quedarnos con una unica solucion, vamos a determinaraquella que esta acotada cuando y → +∞. De nuevo, vamos a suponer que estamos en condiciones depoder llevar a cabo todos los calculos que siguen.
Aplicando transformada de Fourier respecto de la variable x, llamando
U(ξ, y) =∫ +∞
−∞u(x, y)e−ixξdx

Metodos matematicos avanzados 73
y utilizando la propiedad vi) sobre la transformada de la derivada segunda respecto de x, se obtiene comoantes
−ξ2U(ξ, y) + Uyy(ξ, y) = 0, ξ ∈ IR, y > 0
U(ξ, 0) = F(f)(ξ), ξ ∈ IR.(4.21)
Fijado ξ, la EDP anterior podemos resolverla como si fuera una EDO lineal de segundo orden, por lo queintegrando se llega a
U(ξ, y) = c1(ξ)e|ξ|y + c2(ξ)e−|ξ|y,
donde c1, c2 son funciones arbitrarias. Como queremos que u(x, y) este acotada cuando y → +∞, tambiendebe estarlo U(ξ, y), por lo que debe ser c1(ξ) = 0. De otro lado, utilizando la condicion inicial, concluimosque c2(ξ) = U(ξ, 0) = F(f)(ξ), por lo que finalmente
U(ξ, y) = F(f)(ξ)e−|ξ|y.
Hemos visto en el Ejemplo 4.2 que
F(
1x2 + 1
)(ξ) = πe−|ξ| para cada ξ ∈ IR,
ası que podemos escribir
e−|ξ|y =1πF
(1
x2 + 1
)(ξ · y) =
1πyF
1(
xy
)2
+ 1
(ξ) = F
(y
π (x2 + y2)
)(ξ),
usando de nuevo (4.17), ahora con α = 1y . Por lo tanto,
U(ξ, y) = F(f)(ξ) · F(
y
π (x2 + y2)
)(ξ)
y utilizando otra vez el producto de convolucion (respecto de la variable x) y la conclusion del Teorema4.1, se sigue que
u(x, y) = f(x) ?xy
π (x2 + y2)=
∫ +∞
−∞f(x− z)
y
π (z2 + y2)dz. (4.22)
4.3 Transformada de Laplace
DEFINICION 4.4 Dada una funcion f(t) definida (al menos) para cada t > 0, (si se prefiere se puedesuponer que f(t) = 0 para cada t < 0) la transformada de Laplace de f es otra funcion (que designamospor L(f) o F ) y que viene dada por
L(f)(s) = F (s) =∫ +∞
0
f(t)e−stdt,
para los valores s para los cuales la integral sea finita.
COMENTARIOS 4.2 i) Curiosamente, y a diferencia de lo que sucede con la transformada deFourier, la definicion de la transformada de Laplace no presenta ningun tipo de controversia y estaunanimemente aceptada en la literatura.
ii) Supuesto que f(t) = 0 para t < 0 y que∫ +∞0
|f(t)|dt < +∞, resulta inmediato comprobar la relacionque existe entre la Transformada de Fourier y la de Laplace
L(f)(s) = F(f)(−is) y F(f)(ξ) = L(f)(iξ),

74 Luis A. Fernandez
iii) En general, la transformada de Laplace L(f)(s) existe cuando s > γ, donde γ es una cierta constante,que puede ser diferente para cada f .
EJEMPLO 4.4 1) Aplicando la definicion, es inmediato comprobar que si f(t) = 1 para t > 0
L(1)(s) =∫ +∞
0
e−stdt =
e−st
−s
∣∣∣t=+∞
t=0= 1
s si s > 0
+∞ si s ≤ 0
2) Hemos visto que la transformada de Fourier de
f(t) =
e−t si t ≥ 00 si t < 0 (4.23)
viene dada por
F(f)(ξ) =1
1 + iξ.
Segun lo que acabamos de ver, se tiene entonces que
L(f)(s) = F(f)(−is) =1
1 + s,
expresion que es valida si s > −1.
3) En general, dado α ∈ IR
L(eαt)(s) =∫ +∞
0
e−(s−α)tdt = L(1)(s− α) =1
s− α,
siempre que s > α.
4) Dada f(t) = t, integrando por partes, se obtiene
L(t)(s) =∫ +∞
0
te−stdt = te−st
−s
∣∣∣∣t=+∞
t=0
+1s
∫ +∞
0
e−stdt =1sL(1)(s) =
1s2
,
supuesto que s > 0. Por induccion, es sencillo comprobar que para cada n ∈ IN, si s > 0
L(tn)(s) =n!
sn+1.
5) Dada f(t) = sin (t), se tiene
L(sin (t))(s) =∫ +∞
0
sin (t)e−stdt =∫ +∞
0
Im(e(i−s)t)dt =
= Im
(e(i−s)t
i− s
∣∣∣∣t=+∞
t=0
)= Im
(1
s− i
)=
1s2 + 1
,
supuesto que s > 0. Analogamente, si s > 0
L(cos (t))(s) =∫ +∞
0
cos (t)e−stdt =∫ +∞
0
Re(e(i−s)t)dt =
= Re
(e(i−s)t
i− s
∣∣∣∣t=+∞
t=0
)= Re
(1
s− i
)=
s
s2 + 1.

Metodos matematicos avanzados 75
Al igual que sucede con la transformada de Fourier, tampoco la transformada de Laplace esta definidapara cualquier funcion f(t). Sin embargo, la clase de funciones que admiten transformada de Laplace esmucho mas amplia que en el caso de la transformada de Fourier, razon que explica su mayor utilidad. Eneste sentido, resulta interesante definir el siguiente tipo de funciones:
DEFINICION 4.5 Se dice que una funcion f(t) es de orden exponencial γ cuando t → +∞, siexisten M > 0 y T > 0 tales que se verifica
|f(t)| ≤ Meγt para cada t > T.
EJEMPLO 4.5 1) Toda funcion acotada es de orden exponencial γ cuando t → +∞, para todo γ ≥ 0,dado que
|f(t)| ≤ M ≤ Meγt para cada t ≥ 0.
En particular, las funciones constantes, seno y coseno son de orden exponencial γ cuando t → +∞,para todo γ ≥ 0.
2) Si f(t) · e−γt → 0 cuando t → +∞, entonces f(t) de orden exponencial γ cuando t → +∞. Enparticular, cualquier polinomio es de orden exponencial γ cuando t → +∞, para todo γ > 0.
3) Sin embargo, la funcion f(t) = et2 no es de orden exponencial γ cuando t → +∞, para ningun γ ≥ 0.
Supuesto que lo fuera, existirıan γ ∈ IR, M > 0 y T > 0 tales que et2 ≤ Meγt para cada t >T. Entonces, et(t−γ) ≤ M para cada t > T y tomando lımites cuando t → +∞, llegamos a lacontradiccion de que +∞ ≤ M .
PROPOSICION 4.1 Supongamos que f(t) es una funcion continua a trozos en [0, T ] para todo T > 0y de orden exponencial γ cuando t → +∞. Entonces, existe L(f)(s) para cada s > max 0, γ. Ademas,se verifica
L(f)(s) −→ 0, cuando s → +∞.
Dem. Por ser f(t) una funcion de orden exponencial γ cuando t → +∞, existen M > 0 y T > 0 talesque se verifica
|f(t)| ≤ Meγt para cada t > T.
Por otra parte, como f(t) es una funcion continua a trozos en [0, T ], en particular f esta acotada, luegoexiste C > 0 tal que
|f(t)| ≤ C para cada t ∈ [0, T ].
Combinando ambas estimaciones, se sigue que si s > max 0, γ,
|L(f)(s)| =∣∣∣∣∫ +∞
0
f(t)e−stdt
∣∣∣∣ =
∣∣∣∣∣∫ T
0
f(t)e−stdt +∫ +∞
T
f(t)e−stdt
∣∣∣∣∣ ≤
C
∫ T
0
e−stdt + M
∫ +∞
T
e−(s−γ)tdt = C1− e−sT
s+ M
e(γ−s)T
s− γ< +∞.
Ademas, es evidente que el termino de la derecha tiende hacia cero cuando s → +∞, por lo que L(f)(s)tambien.
EJERCICIO 4.1 1) Probar que no existe la transformada de Laplace L(f)(s) de la funcion f(t) = et2
para ningun valor de s. Indicacion: Probar que para cada s ∈ IR se verifica
et2−st ≥ e−s2 ∀ t > 0.
2) Probar que no existe ninguna funcion f(t) funcion continua a trozos en [0, T ] para todo T > 0 y deorden exponencial γ cuando t → +∞ tal que
L(f)(s) =s
3s− 1.

76 Luis A. Fernandez
Las principales propiedades de la transformada de Laplace que vamos a utilizar son las siguientes:
i) La transformada de Laplace es lineal: dadas dos funciones f1 y f2,
L(αf1 + βf2) = αL(f1) + βL(f2), ∀ α, β ∈ IR.
ii) Supongamos que f es continua en [0,+∞), de orden exponencial γ cuando t → +∞ y que f ′(t) escontinua a trozos en [0, T ] para cada T > 0. Entonces, si s > γ,
L(f ′)(s) = sL(f)(s)− f(0).
Dem. Basta integrar por partes la definicion de L(f ′) y utilizar las hipotesis
L(f ′)(s) =∫ +∞
0
f ′(t)e−stdt = f(t)e−st∣∣t=+∞t=0
+ s
∫ +∞
0
f(t)e−stdt = sL(f)(s)− f(0),
dado que, si s > γ,|f(t)e−st| ≤ Me(γ−s)t → 0 cuando t → +∞.
iii) Supongamos que f y f ′ son continuas en [0, +∞), de orden exponencial γ cuando t → +∞ y quef ′′(t) es continua a trozos en [0, T ] para cada T > 0. Entonces, si s > γ,
L(f ′′)(s) = s2L(f)(s)− sf(0)− f ′(0).
Dem. Basta aplicar la propiedad ii) a primero a f ′′ y f ′ y luego a f ′ y f :
L(f ′′)(s) = sL(f ′)(s)− f ′(0) = s (sL(f)(s)− f(0))− f ′(0).
EJERCICIO 4.2 1) En la propiedad ii) anterior, es fundamental que f sea continua en [0, +∞) y nobasta que sea continua a trozos en [0, T ] para cada T > 0. En el caso de que f sea solo continua atrozos en [0, T ] para cada T > 0 y se mantengan el resto de las condiciones, obtener la expresion deL(f ′)(s).
2) Partiendo de que L(1)(s) = 1s , si s > 0, y aplicando las propiedades anteriores, volver a obtener
que si s > 0
L(tn)(s) =n!
sn+1, L(sin (t))(s) =
1s2 + 1
y L(cos (t))(s) =s
s2 + 1
para cada n ∈ IN.
DEFINICION 4.6 Dadas dos funciones f y g definidas en [0, +∞), se denomina producto de con-volucion de f y g (y se designa por f ? g) a una nueva funcion que para cada t > 0 viene dada por
(f ? g)(t) =∫ t
0
f(t− y)g(y)dy.
Es facil comprobar que esta definicion de producto de convolucion coincide con la definicion 4.2,supuesto que f(t) = g(t) = 0 para t < 0. Segun la definicion 4.2
(f ? g)(t) =∫ +∞
−∞f(t− y)g(y)dy =
∫ t
0f(t− y)g(y)dy si t > 0
0 si t ≤ 0
A la vista del Teorema 4.1, no sorprende que el producto de convolucion que acabamos de introducirverifique la siguiente propiedad en conexion con la transformada de Laplace:

Metodos matematicos avanzados 77
TEOREMA 4.3 Supongamos que f(t) y g(t) son funciones continuas a trozos en [0, T ] para todo T > 0y de orden exponencial γ cuando t → +∞. Entonces
L(f ? g)(s) = L(f)(s) · L(g)(s), si s > γ.
Dem. Una vez mas, basta utilizar las definiciones y un simple cambio de variable
L(f ? g)(s) =∫ +∞
0
(f ? g)(t)e−stdt =∫ +∞
0
(∫ t
0
f(t− y)g(y)dy
)e−stdt =
=∫ +∞
0
∫ t
0
f(t− y)g(y)e−stdydt =∫ +∞
0
∫ ∞
y
f(t− y)g(y)e−stdtdy =
=∫ +∞
0
∫ ∞
y
f(t− y)e−s(t−y)g(y)e−sydtdyz=t−y
=∫ +∞
0
∫ +∞
0
f(z)e−szg(y)e−sydzdy = L(f)(s) · L(g)(s).
4.4 Aplicaciones de la transformada de Laplace a las EDO
Vamos a considerar un problema de Cauchy muy sencillo, que sabemos resolver por metodos elementales.La idea es resolverlo aquı por otra vıa totalmente diferente, utilizando transformada de Laplace. Se tratadel siguiente problema
x′(t)− 2x(t) = e5t
x(0) = 3(4.24)
Procederemos como en casos anteriores, suponiendo que podemos utilizar la propiedad ii) que hemosvisto. Ası pues, aplicando transformada de Laplace, se tiene
L(e5t)(s) = L(x′ − 2x)(s) = L(x′)(s)− 2L(x)(s) = sL(x)(s)− x(0)− 2L(x)(s) = (s− 2)L(x)(s)− 3,
de donde deducimos que
L(x)(s) =L(e5t)(s) + 3
s− 2=
1(s− 2)(s− 5)
+3
s− 2=
8/3s− 2
+1/3
s− 5.
Teniendo en cuenta lo que sabemos,
L(x)(s) =83L(e2t)(s) +
13L(e5t)(s) = L
(83e2t +
13e5t
)(s),
de donde parece logico concluir que
x(t) =8e2t + e5t
3.
Es sencillo comprobar ahora que (efectivamente) esta es la solucion del problema (4.24).La transformada de Laplace esta especialmente indicada para resolver problemas donde aparezcan
funciones definidas a trozos, como en el siguiente ejemplo:
x′(t)− 2x(t) = f(t)
x(0) = 3(4.25)
con
f(t) =
0 si t ∈ [0, 1]
2 si t > 1

78 Luis A. Fernandez
Razonando como antes, es sencillo deducir que
L(x)(s) =L(f)(s) + 3
s− 2.
Llegados a este punto es posible actuar de dos maneras:
1) Calculamos la transformada de Laplace de f e invertimos la expresion global que resulte:
L(f)(s) =∫ +∞
0
f(t)e−stdt =∫ +∞
1
2e−stdt = 2e−st
−s
∣∣∣∣t=+∞
t=1
=2e−s
s, si s > 0.
Por lo tanto,
L(x)(s) =2e−s
s(s− 2)+
3s− 2
= e−s
(1
s− 2− 1
s
)+
3s− 2
= e−sL(e2t − 1)(s) + L(3e2t)(s).
Nos conviene mencionar aquı la siguiente propiedad: si f(t) es continua a trozos en cualquier intervalo[0, T ] y de orden exponencial γ, a > 0 e introducimos la funcion definida por g(t) = 0 para t ≤ a yg(t) = f(t− a) para t > a, entonces L[g](s) = e−asL[f ](s), si s > γ.
Utilizando dicha propiedad con a = 1 y f(t) = e2t − 1, resulta L(x)(s) = L(g(t) + 3e2t)(s), donde
g(t) =
0 si t ∈ [0, 1]
e2(t−1) − 1 si t > 1
por lo que llegamos finalmente a que
x(t) = g(t) + 3e2t.
2) Utilizamos el producto de convolucion y el Teorema 4.3:
L(x)(s) =L(f)(s) + 3
s− 2= L(f)(s) · 1
s− 2+
3s− 2
= L(f)(s) · L(e2t)(s) + L(3e2t)(s) =
= L(f(t) ∗ e2t)(s) + L(3e2t)(s) = L(f(t) ∗ e2t + 3e2t)(s),
de dondex(t) = f(t) ∗ e2t + 3e2t.
Basta utilizar la definicion del producto de convolucion para comprobar que (como cabıa esperar)
f(t) ∗ e2t = e2t ∗ f(t) =∫ t
0
f(y)e2(t−y)dy =
0 si t ∈ [0, 1]
∫ t
1
2e2(t−y)dy = e2(t−1) − 1 si t > 1= g(t).
Por supuesto, tambien es posible resolver el problema (4.25) mediante un enfoque clasico, a trozos.En concreto, en el intervalo [0, 1], el problema queda
x′(t)− 2x(t) = 0
x(0) = 3(4.26)
por lo que es facil deducir que x(t) = 3e2t, para cada t ∈ [0, 1].

Metodos matematicos avanzados 79
Por otro lado, si t > 1, solo contamos con la EDO
x′(t)− 2x(t) = 2 (4.27)
y no tenemos condicion inicial, por lo que x(t) = Ce2t − 1, con C ∈ IR arbitraria, para cada t > 1.La constante C se determina de manera unica si estamos interesados en la solucion continua: enparticular, para que las expresiones anteriores “peguen” con continuidad en t = 1, debe verificarseque 3e2 = Ce2 − 1, de donde C = 3 + e−2, por lo que nuevamente llegamos a que
x(t) =
3e2t si t ∈ [0, 1]
(3 + e−2)e2t − 1 si t > 1.
Para la resolucion de EDO lineales de segundo orden y coeficientes constantes, la transformada deLaplace es una herramienta igualmente interesante. En general, dado el problema de Cauchy
a0x′′(t) + a1x
′(t) + a2x(t) = f(t)x(0) = x0
x′(0) = x1
(4.28)
donde a0, a1, a2, x0, x1 ∈ IR son conocidos, al igual que la funcion f , aplicando transformada de Laplace yutilizando las propiedades i)-iii), se sigue
L(f)(s) = L(a0x′′ + a1x
′ + a2x)(s) = a0L(x′′)(s) + a1L(x′)(s) + a2L(x)(s) =
= a0
(s2L(x)(s)− sx(0)− x′(0)
)+ a1 (sL(x)(s)− x(0)) + a2L(x)(s) =
= (a0s2 + a1s + a2)L(x)(s)− a0x0s− a0x1 − a1x0,
de donde
L(x)(s) =L(f)(s)
a0s2 + a1s + a2+
a0x0s + a0x1 + a1x0
a0s2 + a1s + a2
Denotemos por h1 y h2 las dos funciones que verifican
L(h1)(s) =1
a0s2 + a1s + a2, L(h2)(s) =
s
a0s2 + a1s + a2.
En virtud de la linealidad de la transformada de Laplace y utilizando de nuevo el producto de convoluciony el Teorema 4.3, resulta
L(x)(s) = L(f)(s) · L(h1)(s) + a0x0L(h2)(s) + (a0x1 + a1x0)L(h1)(s) =
= L(f ∗ h1)(s) + L(a0x0h2 + (a0x1 + a1x0)h1)(s),
por lo que llegamos a que la solucion del problema (4.28) viene dada por
x(t) = (f ∗ h1)(t) + a0x0h2(t) + (a0x1 + a1x0)h1(t).
Por ejemplo, la solucion del problema
x′′(t) + 3x′(t) + 2x(t) = f(t)x(0) = 0x′(0) = −1
(4.29)
vendra dada por la expresionx(t) = (f ∗ h1)(t)− h1(t),
donde h1(t) = e−t − e−2t, debido a que
1s2 + 3s + 2
=1
s + 1− 1
s + 2= L(h1)(s).

80 Luis A. Fernandez
1) Si f(t) = 1 en (4.29), la solucion queda
x(t) =∫ t
0
(e−y − e−2y
)dy − e−t + e−2t =
12
+3e−2t
2− 2e−t
2) En cambio, si
f(t) =
0 si t ∈ [0, 5]
2 si t > 5
se tiene que
x(t) =∫ t
0
f(y)h1(t−y)dy−e−t +e−2t =
e−2t − e−t si t ∈ [0, 5]
2∫ t
5
(ey−t − e2(y−t)
)dy − e−t + e−2t si t > 5
=
=
e−2t − e−t si t ∈ [0, 5]
1− (1 + 2e5)e−t + (e10 + 1)e−2t si t > 5.
EJERCICIO 4.3 Volver a calcular las transformadas de Laplace de sin (t) y cos (t), utilizando que sonsoluciones de EDO de segundo orden.
4.5 Aplicacion de la transformada de Laplace a las EDP
Consideremos el problema de la vibraciones de una cuerda “infinita” colocada en el eje x > 0, supuestaconocida la posicion del extremo x = 0 en cada momento, junto a las condiciones iniciales en cada punto
utt(x, t) = uxx(x, t), x > 0, t > 0 Ec. de Ondas
u(0, t) = f(t), t > 0 Condicion fronterau(x, 0) = 0, x > 0 Posicion inicial (en reposo)ut(x, 0) = 0, x > 0 Velocidad inicial (nula)
(4.30)
Desde un punto de vista fısico, nos interesan las soluciones u(x, t) que esten acotadas cuando x → +∞.En lo que sigue, volvemos a suponer que todas las funciones que aparecen, verifican las hipotesis necesariaspara que tengan sentido los calculos que vamos a llevar a cabo.
Aplicando al problema la transformada de Laplace respecto de la variable t, llamando
U(x, s) = L(u(x, t))(s) =∫ +∞
0
u(x, t)e−stdt
y utilizando la propiedad iii) sobre la transformada de la derivada segunda respecto de t, se obtiene
s2U(x, s)− su(x, 0)− ut(x, 0) = Uxx(x, s), x > 0, s > γ
U(0, s) = L(f)(s), s > γ.(4.31)
Teniendo en cuenta las condiciones iniciales del problema (4.30) nos queda
s2U(x, s) = Uxx(x, s), x > 0, s > γ
U(0, s) = L(f)(s), s > γ.(4.32)

Metodos matematicos avanzados 81
Fijado s > 0, la EDP anterior podemos resolverla como una EDO lineal de segundo orden respecto dex, por lo que integrando resulta
U(x, s) = c1(s)esx + c2(s)e−sx,
donde c1 y c2 son funciones arbitrarias. Si u(x, t) esta acotada cuando x → +∞, tambien debe estarU(x, s) acotada cuando x → +∞, por lo que obligatoriamente c1(s) ≡ 0. Por ello,
U(x, s) = c2(s)e−sx,
y utilizando la condicion frontera, concluimos que c2(s) = U(0, s) = L(f)(s), de donde resulta
U(x, s) = L(f)(s) · e−sx.
Queremos ahora aplicar transformada inversa y obtener la solucion del problema inicial (4.30). Para ello,volvemos a usar la propiedad indicada en el apartado anterior, pero ahora con a = x y f(t) = f(t),resultando
u(x, t) =
0 si t ≤ xf(t− x) si t > x.
Esta solucion se puede interpretar del siguiente modo: la posicion del extremo x = 0 en cada instantede tiempo t se transmite al punto x0 > 0 de la cuerda en el instante t + x0, lo cual significa en particularque la onda se mueve hacia la derecha con velocidad 1.
4.6 Transformadas integrales con Maple
La sintaxis para la transformada de Fourier es fourier y para la transformada de Laplace es laplace. Antesde usarlas, es preciso “cargar” el paquete inttrans que hace referencia (logicamente) a “transformadasintegrales”. Para las transformadas inversas, la sintaxis tambien es natural: invfourier e invlaplace,respectivamente.
> with(inttrans):
> fourier(exp(-x^2),x,w);√
π e(−1/4 w2)
> fourier(1/(1+x^2),x,w);
ew π Heaviside(−w) + e(−w) π Heaviside(w)
Observacion: La funcion Heaviside(w) es aquella que vale cero para w < 0 y 1 para w > 0.
> fourier(BesselJ(0,x), x, w);
2−Heaviside(w − 1) + Heaviside(w + 1)√
1− w2
> invfourier(1/(1+I*w),w,x);
e(−x) Heaviside(x)
> invfourier(exp(-w^2/4),w,x);
12
√4 e(−x2)
√π
> laplace(t^2+sin(t), t, s);
21s3
+1
s2 + 1

82 Luis A. Fernandez
> laplace(BesselJ(0,t), t, s);
1√s2 + 1
> invlaplace((s+2)/(s^2-4*s+9), s, t);
e(2 t) cos(√
5 t) +45
√5 e(2 t) sin(
√5 t)
> invlaplace(s^2/(s^2+1)^(3/2), s, t);
BesselJ(0, t)− tBesselJ(1, t)
A partir de la version 9 de MAPLE se puede calcular directamente la transformada de Fourier defunciones definidas a trozos
> f(x):=piecewise(abs(x)<1,1);
f(x) :=
1 |x| < 10 otherwise
> fourier(f(x),x,w);
2 sin(w)w
y tambien transformadas de Laplace
> h:=piecewise(t<1 and t > 0,1);
h := 1 t < 1 and 0 < t
0 otherwise
> laplace(h,t,s);
1− e(−s)
s
En la version 8 de MAPLE y anteriores, el resultado que se obtenıa era incorrecto (calculaba lastransformadas de cada trozo por separado, como los malos estudiantes !!). Para obtener el resultadocorrecto, habıa que escribir primero la funcion usando la funcion de Heaviside.
> convert(h,Heaviside);
Heaviside(t)−Heaviside(−1 + t)
> laplace(convert(h,Heaviside),t,s);
1− e(−s)
s
Este problema se presentaba tanto con la transformada de Fourier como con la de Laplace.
Bibliografıa sobre Transformadas integrales:
1. “Mathematical methods for physicists”, G. B. Arfken y H. J. Weber, Harcourt-Academic Press, 2001.
2. “Basic partial differential equations”, D. Bleecker y G. Csordas, Van Nostrand, 1992.
3. “Fourier analysis and its applications”, G. B. Folland, Wadsworth and Brooks, 1992.
4. “Formulas y tablas de la matematica aplicada”, M. R. Spiegel, J. Liu y L. Abellanas, Mc Graw Hill,2000.
5. “Partial differential equations for scientists and engineers”, Tyn Myint-U y L. Debnath, North Hol-land, 1987.

Metodos matematicos avanzados 83
6. “Ecuaciones diferenciales con aplicaciones de modelado”, D. G. Zill, International Thomson Editores,1997.
7. “Metodos matematicos avanzados para ciencias e ingenierıas”, M. Gadella y L.M. Nieto, Univ. deValladolid, 2000.
Recursos en Internet sobre Transformadas Integrales:
1. http://mathworld.wolfram.com/FourierTransform.html
2. http://www.efunda.com/math/math home/math.cfm (Apartado “Transforms”) – Acceso limitado.
3. http://aurora.phys.utk.edu/∼forrest/papers/fourier/
4. http://www.sosmath.com/diffeq/laplace/basic/basic.html
5. http://mathworld.wolfram.com/LaplaceTransform.html
6. http://www.mapleapps.com/powertools/des/des.shtml (Seccion “Laplace Transforms”)
7. http://mwt.e-technik.uni-ulm.de/world/lehre/basic mathematics/fourier es/index.php3
Un resumen (en espanol) de las principales cuestiones sobre Transformada de Fourier con demostra-ciones.

84 Luis A. Fernandez

Capıtulo 5
Problemas de Contorno asociados aEcuaciones Diferenciales Ordinarias
5.1 Problemas de Contorno
En un capıtulo anterior nos hemos encontrado con un problema que no es el tıpico problema de valorinicial asociado a una EDO, puesto que las condiciones suplementarias a la EDO vienen dadas sobrepuntos distintos (los extremos del intervalo de trabajo, ver por ejemplo (3.3)). Este tipo de problemasse denominan problemas de contorno y tienen gran interes en numerosas areas de la fısica, la tecnicay la ingenierıa, donde se presentan con frecuencia. A pesar de lo que pudiera parecer en un principio,incluso cuando la EDO es lineal y de coeficientes constantes, no siempre esta garantizada la existencia nila unicidad de solucion para estos problemas, como podemos ver en los siguientes ejemplos:
EJEMPLO 5.1 i) x′′(t)+x(t) = 0, x(0) = 0, x(π/2) = 1. Resulta inmediato verificar que tiene unaunica solucion, x(t) = sin (t).
ii) x′′(t) + x(t) = 0, x(0) = 0, x(π) = 1. En este caso, el problema no tiene solucion: las condicionesde contorno son incompatibles con la EDO.
iii) x′′(t)+x(t) = 0, x(0) = 0, x(2π) = 0. Ahora el problema tiene infinitas soluciones (x(t) = C sin (t),para cualquier C ∈ IR). La segunda condicion de contorno es redundante.
En este capıtulo vamos a estudiar una clase restringida de problemas de contorno. En concreto, aquellosdel tipo
(PCont)
(p(t)x′(t))′ + q(t)x(t) = f(t), t ∈ [a, b]
a1x(a) + a2x′(a) = α
b1x(b) + b2x′(b) = β
(5.1)
donde p ∈ C1[a, b], q, f ∈ C[a, b], p(t) > 0 ∀ t ∈ [a, b], α, β ∈ IR y |a1|+ |a2| > 0, |b1|+ |b2| > 0.En lo sucesivo, vamos a simplificar las expresiones anteriores utilizando las notaciones
L[x](t)def= (p(t)x′(t))′ + q(t)x(t), ∆a[x]
def= a1x(a) + a2x
′(a) y ∆b[x]def= b1x(b) + b2x
′(b).
Entonces, podemos expresar (5.1) en la forma
(PCont)
L[x](t) = f(t), t ∈ [a, b]
∆a[x] = α
∆b[x] = β
(5.2)
85

86 Luis A. Fernandez
En primer lugar, conviene aclarar que la forma del operador L (llamada forma autoadjunta) no esrestrictiva, dentro de las EDO lineales de segundo orden, dado que cualquier EDO del tipo
a0(t)x′′(t) + a1(t)x′(t) + a2(t)x(t) = h(t), t ∈ [a, b]
con a0, a1, a2 ∈ C[a, b], a0(t) 6= 0 en [a, b], se puede expresar en forma autoadjunta: basta multiplicar laEDO por el termino
µ(t) =1
a0(t)exp
(∫ t a1(s)a0(s)
ds
)
y denominar p(t) = a0(t)µ(t), q(t) = a2(t)µ(t) y f(t) = h(t)µ(t).En lo que sigue, utilizaremos en ocasiones la Identidad de Lagrange
x(t)L[y](t)− y(t)L[x](t) =d
dt(p(t)W [x, y](t)) ∀ t ∈ [a, b], (5.3)
donde W [x, y](t) = x(t)y′(t) − y(t)x′(t) se denomina wronskiano de x e y. Para comprobar la identidadanterior basta desarrollar cada uno de los terminos que aparecen:
x(t)L[y](t)− y(t)L[x](t) = x(t) (p(t)y′(t))′ − y(t) (p(t)x′(t))′ =
=d
dt(x(t) (p(t)y′(t))− y(t) (p(t)x′(t))) =
d
dt(p(t)W [x, y](t)) .
En lo que se refiere a la existencia y unicidad de solucion para (PCont), la situacion reflejada con losejemplos anteriores queda aclarada (en parte) en el siguiente teorema
TEOREMA 5.1 (Teorema de la Alternativa) Consideremos el problema (PCont) en las condicionesanteriores. Entonces, se verifica UNA Y SOLO UNA de las siguientes posibilidades:
1) (PCont) posee una unica solucion para cada f ∈ C[a, b], α, β ∈ IR.
2) El problema de contorno homogeneo asociado a (PCont), es decir,
(PContH)
L[x](t) = 0, t ∈ [a, b]
∆a[x] = 0
∆b[x] = 0
(5.4)
posee alguna solucion, distinta de la solucion nula.
Dem. En relacion al problema (P Cont H) evidentemente solo caben dos opciones: o bien solo posee lasolucion nula o bien posee alguna otra solucion, aparte de esta. La segunda opcion coincide exactamentecon 2), por lo que vamos a suponer que (P Cont H) solo posee la solucion nula. Nuestro objetivo es probarentonces 1). Utilizaremos un metodo llamado de tiro, (el nombre esta inspirado en el baloncesto !!)cuya filosofıa consiste en resolver problemas de contorno, a traves de la resolucion de problemas de Cauchy.Por ello consideramos dos problemas de Cauchy
(PC1)
L[x](t) = f(t), t ∈ [a, b]
x(a) = α1
x′(a) = α2
(5.5)
(PC2)
L[x](t) = f(t), t ∈ [a, b]
x(a) = β1
x′(a) = β2
(5.6)

Metodos matematicos avanzados 87
donde elegimos (α1, α2) 6= (β1, β2) verificando a1α1 + a2α2 = a1β1 + a2β2 = α.El teorema de existencia y unicidad de solucion para problemas de Cauchy nos asegura que cada uno de
los problemas anteriores posee solucion unica definida en [a, b], dado que la EDO es lineal con coeficientescontinuos en [a, b]. Denotaremos dichas soluciones por x1(t) y x2(t), resp. Notemos que la eleccion de lascondiciones iniciales nos asegura que ∆a[x1] = ∆a[x2] = α. Es decir, tanto x1 como x2 verifican la EDOy la primera condicion de contorno de (PCont).
Vamos a buscar la solucion del (PCont) de la forma
x(t) = l · x1(t) + (1− l) · x2(t), t ∈ [a, b] (5.7)
con l una constante por determinar.Por ser L un operador lineal, resulta inmediato comprobar que
L[x](t) = l · L[x1](t) + (1− l) · L[x2](t) = lf(t) + (1− l)f(t) = f(t), t ∈ [a, b], ∀ l ∈ IR.
Por ser ∆a un operador lineal, tambien se tiene
∆a[x] = l ·∆a[x1] + (1− l) ·∆a[x2] = lα + (1− l)α = α, ∀ l ∈ IR.
Para que se cumpla la condicion de contorno en b es necesario y suficiente que
∆b[x] = l ·∆b[x1] + (1− l) ·∆b[x2] = β.
Si ∆b[x1] 6= ∆b[x2], se obtiene que el problema de contorno (PCont) posee una solucion dada por (5.7)con
l =β −∆b[x2]
∆b[x1]−∆b[x2].
Si ∆b[x1] = ∆b[x2], es sencillo comprobar que x0(t) = x1(t)− x2(t) es una solucion (no identicamentenula, ya que (α1, α2) 6= (β1, β2)) del problema de contorno homogeneo (PContH), pero esto es imposible,bajo la hipotesis de partida. Del mismo modo, podemos concluir que la solucion del problema de contorno(PCont) que hemos construido anteriormente es la unica: si hubiera otra distinta, la diferencia entreambas serıa una solucion no nula del problema de contorno homogeneo (PContH), lo cual ya sabemos quecontradice la suposicion inicial.
COMENTARIOS 5.1 i) El Teorema de la Alternativa se puede interpretar en el siguiente sentido:consideremos el operador Φ : C2[a, b] −→ C[a, b]× IR2 definido por
Φ(x) = (L[x], ∆a[x], ∆b[x]) .
Entonces, si Φ es inyectivo, se verifica que Φ es suprayectivo.
ii) Debido a la linealidad de L, ∆a y ∆b, resulta inmediato comprobar que si (PContH) posee unasolucion x0(t) distinta de la solucion nula, entonces posee infinitas soluciones de la forma Cx0(t)para cualquier C ∈ IR.
Una vez aclarado en que situaciones el problema de contorno (PCont) no tiene solucion unica (cuandoel problema de contorno homogeneo asociado (PContH) tiene alguna solucion no nula), falta por dilucidaren que casos (PCont) no tiene solucion y en cuales tiene infinitas. El siguiente resultado permite distinguirambas situaciones con claridad:
TEOREMA 5.2 Supongamos que el problema de contorno homogeneo (PContH) posee alguna solucionx0(t) distinta de la solucion nula. Entonces, dada f ∈ C[a, b], el problema de contorno
(PContS)
L[x](t) = f(t), t ∈ [a, b]
∆a[x] = 0
∆b[x] = 0
(5.8)
posee solucion si y solo si∫ b
af(t)x0(t)dt = 0.

88 Luis A. Fernandez
Dem. En primer lugar, supongamos que x(t) es solucion del problema (PContS). Utilizando laidentidad de Lagrange (5.3) con x0 y x e integrando entre a y b, tenemos que
∫ b
a
x0(t)f(t)dt =∫ b
a
x0(t)L[x](t)− x(t)L[x0](t)dt = p(b)W [x0, x](b)− p(a)W [x0, x](a). (5.9)
El hecho de que ∆a[x0] = ∆a[x] = 0 podemos interpretarlo en el sentido de que el sistema de ecuacioneslineal homogeneo de 2 ecuaciones con 2 incognitas
a1x0(a) + a2x′0(a) = 0
a1x(a) + a2x′(a) = 0
posee una solucion (a1, a2) que no es nula (|a1|+ |a2| > 0), por lo que el determinante del sistema debe sernulo, es decir, W [x0, x](a) = 0. Analogamente, como ∆b[x0] = ∆b[x] = 0, deducimos que W [x0, x](b) = 0.Junto a (5.9), estas condiciones implican que
∫ b
a
x0(t)f(t)dt = 0.
Recıprocamente, supongamos que se verifica esta ultima condicion. Vamos a demostrar ahora que cualquiersolucion x(t) del problema de Cauchy
(PC)
L[x](t) = f(t), t ∈ [a, b]
x(a) = a2
x′(a) = −a1
(5.10)
es tambien solucion de (PContS). Una vez mas, la existencia de solucion del problema (5.10) quedagarantizada por el teorema de existencia y unicidad de solucion para problemas de Cauchy.
Por construccion, es evidente que x verifica ∆a[x] = 0. Solamente nos falta por probar que ∆b[x] = 0.Aplicando la identidad de Lagrange a x0 y x como antes e integrando, vuelve a resultar (5.9). Ahora,graciasa la hipotesis,
0 =∫ b
a
x0(t)f(t)dt = p(b)W [x0, x](b)− p(a)W [x0, x](a).
Nuevamente, como ∆a[x0] = ∆a[x] = 0, se tiene que W [x0, x](a) = 0 y como p(b) > 0, llegamos a queW [x0, x](b) = 0. Esta condicion, junto al hecho de que ∆b[x0] = 0, podemos interpretarlo en el sentido deque el sistema de ecuaciones lineal homogeneo de 2 ecuaciones con 2 incognitas
x′(b)x0(b)− x(b)x′0(b) = 0
b1x0(b) + b2x′0(b) = 0
posee una solucion (x0(b), x′0(b)) que no es nula (si x0(b) = x′0(b) = 0, como x0 es solucion de una EDOlineal homogenea, la unicidad de solucion para problemas de Cauchy nos conducirıa a que x0(t) ≡ 0, locual es falso), por lo que el determinante del sistema debe ser nulo, esto es, ∆b[x] = 0.
COMENTARIOS 5.2 En las condiciones del Teorema 5.2, debido a la linealidad de los operadores L,∆a y ∆b, resulta inmediato comprobar que si (PContS) posee una solucion x(t), entonces posee infinitassoluciones de la forma x(t) + Cx0(t) para cualquier C ∈ IR.
El teorema de la Alternativa, combinado con el teorema que acabamos de probar, nos permite deducircuantas soluciones poseen algunos problemas de contorno, sin necesidad de tener que resolverlos; es mas,en muchos casos la resolucion de dichos problemas (en el caso de existir solucion) no puede realizarse demanera explıcita y hay que hacerla a traves de metodos numericos. Veamos algunos ejemplos aclaratorios:

Metodos matematicos avanzados 89
EJEMPLO 5.2 i) El problema de contorno x′′(t) = et2 cos (t4+5), x(0) = 56, x(1) = −π posee unaunica solucion, dado que el problema de contorno homogeneo asociado x′′(t) = 0, x(0) = x(1) = 0posee como unica solucion x(t) ≡ 0. Notemos que la determinacion explıcita de dicha solucion noresulta ni mucho menos elemental.
ii) El problema de contorno x′′(t) = et2 cos (t4+5), x′(0) = x′(1) = 0 no posee ninguna solucion, dadoque el problema de contorno homogeneo asociado x′′(t) = 0, x′(0) = x′(1) = 0 admite como solucionx0(t) ≡ 1, pero ∫ b
a
f(t)x0(t)dt =∫ 1
0
et2 cos (t4+5)dt > 0,
ya que el integrando es estrictamente positivo en [0, 1].
iii) El problema de contorno x′′(t) = cos (2πt), x′(0) = x′(1) = 0 posee infinitas soluciones, dado que
∫ b
a
f(t)x0(t)dt =∫ 1
0
cos (2πt)dt = 0.
En este caso, es sencillo verificar que las infinitas soluciones vienen dadas por x(t) = − cos (2πt)4π2 + C
para cualquier C ∈ IR.
iv) El problema de contorno x′′(t) = t6 sin (7t3 − 4t5), x′(−1) = x′(1) = 0 posee infinitas soluciones, yaque ∫ b
a
f(t)x0(t)dt =∫ 1
−1
t6 sin (7t3 − 4t5)dt = 0.
El hecho de que esta ultima integral se anule, resulta evidente si tenemos en cuenta que el integrandoes una funcion impar en [−1, 1].
v) El problema de contorno x′′(t) − et2 cos (t4+5)x(t) = t2, x(0) = x(1) = 0 posee una unica solucion.Para probar que el problema de contorno homogeneo asociado
x′′(t)− et2 cos (t4+5)x(t) = 0, x(0) = x(1) = 0
posee como unica solucion x(t) ≡ 0 vamos a utilizar argumentos geometricos. Si x(t) es una solucionno trivial del problema homogeneo, en algun subintervalo de la forma (0, t0) sera x(t) > 0 (o < 0)para t ∈ (0, t0) y x(t0) = 0. En el primer caso, utilizando la EDO
x′′(t) = et2 cos (t4+5)x(t) > 0, t ∈ (0, t0),
lo cual significa que x(t) es convexa en (0, t0), pero esto contradice el hecho de que x(t0) = 0. Six(t) < 0 para t ∈ (0, t0) se deduce que x(t) es concava y se llega a la misma contradiccion.
5.2 Funcion de Green
Dada f ∈ C[a, b], cuando el problema de contorno
(PContS)
L[x](t) = f(t), t ∈ [a, b]
∆a[x] = 0
∆b[x] = 0
(5.11)
posee una unica solucion, existe una expresion de tipo integral que nos permite determinarla, a traves de loque se conoce como funcion de Green. Vamos a ver que forma tiene dicha funcion y como se construye.

90 Luis A. Fernandez
Designemos por x(t) la unica solucion de (PContS). Vamos a determinar la expresion de x(t) medianteel metodo de variacion de constantes. Para ello, consideramos los problemas de Cauchy
(PC1)
L[x](t) = 0, t ∈ [a, b]
x(a) = a2
x′(a) = −a1
(5.12)
(PC2)
L[x](t) = 0, t ∈ [a, b]
x(b) = b2
x′(b) = −b1
(5.13)
El teorema de existencia y unicidad de solucion para problemas de Cauchy nos asegura que cadauno de ellos posee solucion unica definida en [a, b]. Denotaremos dichas soluciones por x1(t) y x2(t),resp. Por construccion, es evidente que ∆a[x1] = 0 y que ∆b[x2] = 0. Ademas, x1(t) y x2(t) sonsoluciones linealmente independientes en [a, b] de la misma EDO: si no lo fueran, existirıa k ∈ IR tal quex1(t) = kx2(t) ∀ t ∈ [a, b]; entonces, ∆b[x] = k∆b[x2] = 0 y x1(t) serıa una solucion (no nula, puesto que|a1|+ |a2| > 0) del (PContH), lo cual contradice al Teorema de la Alternativa, ya que estamos suponiendoque (PContS) posee solucion unica.
Para aplicar el metodo de variacion de constantes, se transforma primero la EDO de segundo orden enun sistema equivalente de dos EDO de primer orden. En este caso, introducimos las funciones incognitasy1(t) = x(t), y2(t) = p(t)x′(t), con lo que la EDO L[x](t) = f(t) nos queda
y′1(t) =y2(t)p(t)
y′2(t) = −q(t)y1(t) + f(t)
(5.14)
El metodo de variacion de constantes nos lleva entonces a buscar x(t) en la forma
x(t)
p(t)x′(t)
= c1(t)
x1(t)
p(t)x′1(t)
+ c2(t)
x2(t)
p(t)x′2(t)
(5.15)
con c1(t) y c2(t) funciones desconocidas.Operando y sustituyendo en el sistema (5.14) resulta que
c′1(t)x1(t) + c′2(t)x2(t) = 0
c′1(t)x′1(t) + c′2(t)x
′2(t) =
f(t)p(t)
(5.16)
Este sistema tiene determinante no nulo (W [x1, x2](t) 6= 0, ∀ f ∈ [a, b]). Gracias a la regla de Cramer,su unica solucion viene dada por
c′1(t) =−x2(t)f(t)
p(t)W [x1, x2](t), c′2(t) =
x1(t)f(t)p(t)W [x1, x2](t)
.
Por motivos que se entenderan enseguida, elegimos
c1(t) =∫ t
b
−x2(s)f(s)p(s)W [x1, x2](s)
ds, c2(t) =∫ t
a
x1(s)f(s)p(s)W [x1, x2](s)
ds. (5.17)

Metodos matematicos avanzados 91
Por otra parte, gracias a la identidad de Lagrange (5.3),
d
dt(p(t)W [x1, x2](t)) = 0, ∀ t ∈ [a, b],
luego existe K ∈ IR tal quep(t)W [x1, x2](t) = K, ∀ t ∈ [a, b]. (5.18)
Utilizando ahora las expresiones anteriores, resulta que
x(t) = c1(t)x1(t) + c2(t)x2(t) =(∫ t
b
−x2(s)f(s)K
ds
)x1(t) +
(∫ t
a
x1(s)f(s)K
ds
)x2(t) (5.19)
Por construccion, sabemos que x(t) verifica L[x](t) = f(t) en [a, b]. Vamos a comprobar que tambiensatisface las condiciones de contorno homogeneas. Para ello utilizamos que x′(t) = c1(t)x′1(t) + c2(t)x′2(t),ver (5.15), y que c1(b) = c2(a) = 0. Sustituyendo,
∆a[x](t) = a1(c1(a)x1(a) + c2(a)x2(a)) + a2(c1(a)x′1(a) + c2(a)x′2(a)) = c1(a)(a1a2 − a1a2) = 0,
∆b[x](t) = b1(c1(b)x1(b) + c2(b)x2(b)) + b2(c1(b)x′1(b) + c2(b)x′2(b)) = c2(b)(b1b2 − b1b2) = 0.
Para finalizar, basta tener en cuenta que (5.19) puede expresarse como
x(t) =∫ b
a
G(t, s)f(s)ds, (5.20)
donde G es la funcion de Green del problema dada por
G(t, s) =
x1(t)x2(s)K
, si t ∈ [a, s]
x1(s)x2(t)K
, si t ∈ [s, b]
(5.21)
Una cuestion fundamental es que la funcion de Green G se construye a partir de los datos L, ∆a y ∆b,independientemente del segundo miembro f(t). Por ello, una vez contruida, la expresion (5.20) nos permiteexpresar la solucion del problema (PContS) para diferentes funciones f(t), sin mas que ir introduciendolasen la formula (5.20), sin tener que volver a calcular G. Debido a esta propiedad, se dice que la funcionde Green es la solucion fundamental del problema de contorno: sirve como germen u origen de todaslas soluciones. En el Capıtulo 7 veremos que este hecho se puede interpretar de una manera bien precisa,en el sentido de las distribuciones. Ademas, en los casos en que la expresion (5.20) no puede calcularse demanera analıtica (exacta), todavıa se puede tratar de calcular de forma numerica o aproximada.
Cabe destacar que la funcion de Green satisface diversas propiedades, entre ellas la mas evidente es susimetrıa: G(t, s) = G(s, t) para cada t, s ∈ [a, b]. De hecho, es posible caracterizar (de manera unica) lafuncion de Green a traves de ciertas propiedades, ver Tyn Myint-U y L. Debnath.
Por otra parte, para su contruccion no es imprescindible que x1 y x2 sean las soluciones de los problemasde Cauchy (5.12) y (5.13): basta que x1 sea cualquier funcion (hay infinitas) verificando L[x1](t) = 0 en[a, b] y ∆a[x1] = 0 y que x2 sea cualquier funcion (tambien hay infinitas) verificando L[x2](t) = 0 en [a, b]y ∆b[x2] = 0. Notemos que al variar x1 y/o x2 se modifica tambien K, ver (5.18), por lo que (al final) lafuncion de Green no cambia.
EJEMPLO 5.3 El problema de contorno
x′′(t) = t, x(0) = 0, x(1) = 0
se puede resolver por integracion directa, resultando que su unica solucion viene dada por
x(t) =t3 − t
6.

92 Luis A. Fernandez
Por otra parte, tambien podemos resolverlo a traves de la funcion de Green, sin mayor dificultad.Como x′′1(t) = 0, x1(0) = 0 podemos tomar x1(t) = t; como x′′2(t) = 0, x2(1) = 0 podemos tomar
x2(t) = t− 1. En este caso, p(t) ≡ 1, luego K = p(t)W [x1, x2](t) = 1, por lo que
G(t, s) =
t(s− 1), si t ∈ [0, s]
s(t− 1), si t ∈ [s, 1]
Es facil comprobar que∫ 1
0
G(t, s)sds =∫ t
0
s(t− 1)sds +∫ 1
t
t(s− 1)sds =t3 − t
6.
Si en lugar de la eleccion anterior, tomamos x1(t) = 2t y x2(t) = 5(t− 1), la funcion de Green quedaigual, dado que ahora K = 10.
Una vez calculada, podemos utilizar la funcion de Green para resolver el mismo problema con distintossegundos miembros. Supongamos por ejemplo, que nos interesa ahora resolver el problema
x′′(t) = e−t2 , x(0) = 0, x(1) = 0.
La integracion directa nos lleva a
x(t) =∫ t
0
(∫ r
0
e−s2ds
)dr − t
∫ 1
0
(∫ r
0
e−s2ds
)dr,
mientras que utilizando la funcion de Green se obtiene
x(t) =∫ 1
0
G(t, s)e−s2ds =
∫ t
0
s(t− 1)e−s2ds +
∫ 1
t
t(s− 1)e−s2ds =
=t + e−t2 − te−1 − 1
2− t
∫ 1
t
e−s2ds,
expresion equivalente a la anterior, aunque algo mas manejable.De otro lado, si queremos calcular la funcion de Green asociada al problema de contorno
t2x′′(t) + tx′(t) + x(t) = f(t), x(1) = 0, x(eπ/2) = 0,
la primera cuestion a tener en cuenta es que la EDO no esta en forma autoadjunta. A los efectos deresolverla este hecho puede no ser relevante, ni siquiera conveniente; de hecho, en este caso, tal comoviene dada, se observa que la EDO es de Euler, lo que nos permite resolverla facilmente mediante latransformacion habitual (s = log (t)), obteniendo que la solucion general de la EDO homogenea viene dadapor
xh(t) = C1 cos (log (t)) + C2 sin (log (t)).
Para construir la funcion de Green podemos elegir (por ejemplo) x1(t) = sin (log (t)) y x2(t) = cos (log (t)).Con el fin de calcular el valor K necesitamos escribir la EDO en forma autoadjunta. En este caso seconsigue sin mas que dividir por t, con lo que el problema queda
d
dt(tx′(t)) +
x(t)t
=f(t)
t, x(1) = 0, x(eπ/2) = 0.
Ası, p(t) = t y K = p(t)W [x1, x2](t) = t(− 1
t
)= −1, por lo que la funcion de Green asociada al problema
queda
G(t, s) =
− sin (log (t)) cos (log (s)), si t ∈ [1, s]
− sin (log (s)) cos (log (t)), si t ∈ [s, eπ/2]

Metodos matematicos avanzados 93
Con vistas a utilizar esta funcion de Green, hay que resaltar que la solucion del problema viene dada porla expresion
x(t) =∫ eπ/2
1
G(t, s)f(s)
sds
y NO por
x(t) =∫ eπ/2
1
G(t, s)f(s)ds,
como podrıa pensarse en un principio, ya que el segundo miembro de la EDO (una vez escrita en formaautoadjunta) es f(t)
t . En particular, si f(t) = 1, resulta que
x(t) = − cos (log (t))∫ t
1
sin (log (s))1sds− sin (log (t))
∫ eπ/2
t
cos (log (s))1sds =
= 1− cos (log (t))− sin (log (t)).
5.3 Autovalores y autofunciones de un Problema Regular deSturm -Liouville
Al aplicar el metodo de separacion de variables para resolver EDP, nos encontramos con un problema decontorno homogeneo donde aparece una constante desconocida λ como coeficiente de la EDO (ver (3.3) y(3.10)). Nos interesamos entonces por los valores λ para los cuales el correspondiente problema de contornoposee soluciones (aparte de la solucion nula). Posteriormente vimos que las familias de dichas solucionesno nulas proporcionan una base con infinitos elementos que nos permiten expresar funciones muy generalescomo combinacion lineal infinita de esos elementos (ver las expresiones (3.5), (3.11) y los Teoremas 3.1,3.2 y 3.3). Vamos a ver que esta situacion es mucho mas general de lo que pudiera parecer en un principio.
Conviene destacar aquı las semejanzas entre esta situacion y lo que sucede en dimension finita: supuestoque λ1, . . . , λn son los valores propios (o autovalores) reales distintos de una matriz real n×n, los vectorespropios (o autovectores) asociados a λ1, . . . , λn proporcionan un base del espacio IRn.
Comenzaremos introduciendo algunos conceptos claramente inspirados en el caso finito dimensional.Utilizaremos para ello, las notaciones fijadas anteriormente, bajo las mismas hipotesis.
DEFINICION 5.1 i) Se denomina Problema Regular de Sturm-Liouville al siguiente
(PRSL)
L[x](t) + λs(t)x(t) = 0, t ∈ [a, b]
∆a[x] = 0
∆b[x] = 0,
donde λ es una constante y s ∈ C[a, b], siendo s(t) > 0, ∀ t ∈ [a, b].
ii) Se denominan autovalores del (PRSL) a los valores λ para los cuales (PRSL) posee solucionesdistintas de la solucion nula.
iii) Se denominan autofunciones del (PRSL) asociados al autovalor λ a las soluciones del (PRSL),distintas de la solucion nula, correspondientes a dicho λ.
EJEMPLO 5.4 Con esta terminologıa, en el capıtulo anterior vimos que

94 Luis A. Fernandez
i) Los autovalores del Problema Regular de Sturm-Liouville
x′′(t) + λx(t) = 0, t ∈ (0, L), x(0) = x(L) = 0,
vienen dados por
λn =n2π2
L2, n = 1, 2, 3, . . .
y sus autofunciones por
xn(t) = C sin(
nπt
L
), ∀ C ∈ IR,
respectivamente.
Notar que aquı p(t) ≡ 1, q(t) ≡ 0, s(t) ≡ 1, a = 0, b = L, a1 = 1, a2 = 0, b1 = 1 y b2 = 0.
ii) Los autovalores del Problema Regular de Sturm-Liouville
x′′(t) + λx(t) = 0, t ∈ (0, L), x′(0) = x′(L) = 0,
vienen dados por
λn =n2π2
L2, n = 0, 1, 2, 3, . . .
y sus autofunciones por
xn(t) = C cos(
nπt
L
), ∀ C ∈ IR,
respectivamente.
Con respecto del caso anterior, solo cambia que a1 = 0, a2 = 1, b1 = 0 y b2 = 1.
Vamos a demostrar ahora que las principales propiedades que verifican los autovalores y autofuncionesde un Problema Regular de Sturm-Liouville cualquiera se asemejan mucho a las que se satisfacen enestos ejemplos particulares. Previamente, introducimos alguna terminologıa adicional (comparar con ladefinicion 3.2):
DEFINICION 5.2 i) Dadas dos funciones x(t) e y(t) definidas en el intervalo [a, b], se dice que sonortogonales en [a, b] respecto del peso s(t) cuando verifican
∫ b
a
x(t)y(t)s(t)dt = 0.
ii) Dada una funcion x(t) definida en el intervalo [a, b], se dice que x es de cuadrado integrable en[a, b] respecto del peso s(t) y se escribe x ∈ L2
s(a, b), cuando
∫ b
a
x2(t)s(t)dt < +∞.
TEOREMA 5.3 i) Dos autofunciones de un (PRSL) asociadas a autovalores distintos son ortogo-nales en [a, b] respecto del peso s(t).
ii) Todos los autovalores de un (PRSL) son numeros reales.
iii) Las autofunciones de un (PRSL) asociadas a un autovalor estan determinadas de manera unica,salvo constante multiplicativa.

Metodos matematicos avanzados 95
Dem. Para el apartado i), supongamos que λ y λ son autovalores distintos del (PRSL), con x(t) ey(t) autofunciones asociadas a λ y λ, resp. Multiplicando la EDO que satisface x(t) por y(t) y la EDOque verifica y(t) por x(t), restando ambas expresiones e integrando entre a y b, resulta
∫ b
a
x(t)L[y](t)− y(t)L[x](t)dt = (λ− λ)∫ b
a
x(t)y(t)s(t)dt (5.22)
Utilizando la identidad de Lagrange (5.3) se sigue que
p(b)W [x, y](b)− p(a)W [x, y](a) = (λ− λ)∫ b
a
x(t)y(t)s(t)dt
Argumentando como en (5.9), el hecho de que ∆a[x] = ∆a[y] = 0 implica que W [x, y](a) = 0;analogamente, ∆b[x] = ∆b[y] = 0, nos lleva a que W [x, y](b) = 0.
Por lo tanto, obtenemos
(λ− λ)∫ b
a
x(t)y(t)s(t)dt = 0 (5.23)
Como λ 6= λ, concluimos la ortogonalidad de x e y en [a, b] respecto del peso s(t).En la parte ii), supuesto que λ = α + iβ es un autovalor del (PRSL) y que x(t) es una autofuncion
asociada a λ, basta tomar conjugados en la EDO que verifica x(t) y en las condiciones de contorno (ytener en cuenta que los coeficientes p(t), q(t) y s(t) son reales, ası como los escalares a1, a2, b1 y b2) paraconcluir que el conjugado λ = α− iβ tambien es un autovalor del (PRSL) y que la funcion conjugada x(t)es una autofuncion asociada a λ. Aplicando la relacion (5.23) con λ = λ e y(t) = x(t) se sigue que
2iβ
∫ b
a
|x(t)|2s(t)dt = 0 (5.24)
Por ser autofuncion, x(t) no puede ser identicamente nula; ademas, sabemos que s(t) > 0 para cadat ∈ [a, b], por lo que necesariamente (5.24) implica que β = 0; es decir, el autovalor λ es real.
Finalmente, para el apartado iii), supongamos que λ es un autovalor del (PRSL) y que x(t) e y(t) sonautofunciones asociadas a λ. Teniendo que cuenta que son soluciones de la misma EDO homogenea en[a, b] y de que W [x, y](a) = 0 (debido a las condiciones ∆a[x] = ∆a[y] = 0, como antes), concluimos eneste caso que W [x, y](t) = 0 para cada t ∈ [a, b]. Es decir, x e y son linealmente dependientes en [a, b] y,por lo tanto, existe una constante C ∈ R tal que x(t) = C · y(t) para todo t ∈ [a, b]. Esto es precisamentelo que querıamos probar.
COMENTARIOS 5.3 La propiedad ii) sobre el caracter real de todos los autovalores de un (PRSL) nosrecuerda (y esta relacionada) a la misma propiedad relativa a los valores propios de las matrices realessimetricas. La simetrıa del (PRSL) se interpreta aquı en la forma
∫ b
a
x(t)L[y](t)dt =∫ b
a
y(t)L[x](t)dt,
igualdad que se sigue de las relaciones (5.22) y (5.23).
Tal y como adelantamos al principio de esta seccion, sin ningun genero de dudas, la propiedad quejustifica por sı sola el estudio de los Problemas Regulares de Sturm-Liouville es que las familias de susautofunciones proporcionan diferentes “bases” en el espacio de las funciones (que resulta ser de dimension“infinita”), de manera analoga a lo que sucede en el caso finito-dimensional con los valores propios de lasmatrices. Vimos en el capıtulo 3 que esta propiedad se verifica para la familia de los senos y los cosenos(ver los teoremas 3.1-3.3). Esta circunstancia no es exclusiva de dicha familia, sino que se extiende acasos mucho mas generales, incluso de los aquı considerados. El siguiente teorema recoge los principalesresultados en esta direccion; su demostracion (que no se incluye por ser excesivamente tecnica) puedeencontrarse, por ejemplo, en Courant-Hilbert, volumen 1, capıtulo 6, seccion 3 o en Folland, capıtulo 10,seccion 3. Ver tambien http://www.math.ohio-state.edu/∼gerlach/math/BVtypset/node74.html

96 Luis A. Fernandez
TEOREMA 5.4 i) Cada Problema Regular de Sturm-Liouville posee una sucesion infinita de auto-valores reales, verificando
λ1 < λ2 < λ3 < . . . y limn
λn = +∞.
ii) Supongamos que xn(t) es una autofuncion del (PRSL) asociada al autovalor λn para cada n ∈ IN.Dada x ∈ C2[a, b] tal que ∆a[x] = ∆b[x] = 0 , se verifica que
x(t) =∞∑
n=1
anxn(t) ∀ t ∈ [a, b], (5.25)
donde la serie converge uniforme y absolutamente, con
an =
∫ b
a
x(t)xn(t)s(t)dt
∫ b
a
x2n(t)s(t)dt
n = 1, 2, 3, . . .
iii) Dada x una funcion C1 a trozos en [a, b], se verifica que
x(t+) + x(t−)2
=∞∑
n=1
anxn(t) ∀ t ∈ (a, b),
con an dado como antes.
iv) Dada x ∈ L2s(a, b), se verifica que
∫ b
a
(x(t)− SN (t))2s(t)dt −→ 0 cuando N −→ +∞,
donde SN (t) =∑N
n=1 anxn(t), con an dados como antes.
La determinacion de los coeficientes an vuelve a ser una cuestion sencilla, utilizando la ortogonalidadde las autofunciones en [a, b] con respecto del peso s(t): supuesto que se verifica (5.25), basta multiplicara ambos lados de la igualdad por xm(t)s(t) e integrar entre a y b para llegar a que
∫ b
a
x(t)xm(t)s(t)dt =∫ b
a
∞∑n=1
anxn(t)xm(t)s(t)dt.
Cuando la convergencia es uniforme, sabemos que la integral de la serie coincide con la serie de la integral;utilizando ademas la propiedad de ortogonalidad, se sigue
∫ b
a
x(t)xm(t)s(t)dt =∞∑
n=1
an
∫ b
a
xn(t)xm(t)s(t)dt = am
∫ b
a
x2m(t)s(t)dt,
de donde llegamos a la expresion de am que habıamos anticipado.
EJEMPLO 5.5 Dado el Problema Regular
t2x′′(t) + tx′(t) + λx(t) = 0, x(1) = 0, x(e) = 0.
Notemos que la EDO es de Euler y, una vez mas, el cambio (s = log (t), y(s) = x(t)) transforma elproblema en
y′′(s) + λy(s) = 0, y(0) = 0, y(1) = 0,

Metodos matematicos avanzados 97
–0.25
–0.2
–0.15
–0.1
–0.05
01.2 1.4 1.6 1.8 2 2.2 2.4 2.6
t
Figura 5.1: Aproximacion con cinco terminos para g1(t) en [1,e].
cuyos autovalores y autofunciones ya conocemos y vienen dados por
λn = n2π2, yn(s) = C sin(nπs), n = 1, 2, . . .
Deshaciendo la transformacion, concluimos que los autovalores y autofunciones asociados al problemainicial vienen dados por
λn = n2π2, xn(t) = C sin(nπ log (t)), n = 1, 2, . . .
Como consecuencia del Teorema 5.3-i) alguien podrıa esperar que se cumpliera∫ e
1
sin(nπ log (t)) sin(mπ log (t))dt = 0,
siempre que n 6= m. No obstante, si tomamos n = 1 y m = 2, resulta (utilizando por ejemplo Maple) que∫ e
1
sin(π log (t)) sin(2π log (t))dt =−4π2(e + 1)
(π2 + 1)(9π2 + 1).
La explicacion a esta aparente contradiccion proviene del hecho de que la EDO original no esta en formaautoadjunta, por lo que el “peso” s(t) no es 1, como se podrıa pensar: basta dividir la EDO inicial por tpara escribirla en dicha forma
(tx′(t))′ +λ
tx(t) = 0.
Notemos que los coeficientes p(t) = t y s(t) = 1/t son continuos y positivos en [1, e] y que q(t) = 0. Porlo tanto, la propiedad que realmente nos garantiza el Teorema 5.3-i) en este caso es
∫ e
1
sin(nπ log (t)) sin(mπ log (t))t
dt = 0,
siempre que n 6= m.Consideremos, por ejemplo, las funciones siguientes
g1(t) = log (t) (log (t)− 1) ,

98 Luis A. Fernandez
0
0.2
0.4
0.6
0.8
1
1.2
1.2 1.4 1.6 1.8 2 2.2 2.4 2.6t
Figura 5.2: Aproximacion con cinco terminos para g2(t) en [1,e].
g2(t) =
1 si t ∈ [1, 2]0 si t ∈ (2, e]
En el primer caso se puede comprobar que al desarrollarla en serie de las autofunciones que acabamosde determinar, sus coeficientes vienen dados por
an =
∫ e
1
log (t) (log (t)− 1)sin (nπ log (t))
tdt
∫ 2
1
sin2 (nπ log (t))t
dt
=4(cos (nπ)− 1)
n3π3,
mientras que en el segundo caso es facil comprobar que sus coeficientes son
an =
∫ 2
1
sin (nπ log (t))t
dt
∫ 2
1
sin2 (nπ log (t))t
dt
=2(1− cos (log (2)nπ))
nπ.
Ası, en virtud del teorema 5.4 (apartados ii) y iii)) se tiene que∞∑
n=1
4(cos (nπ)− 1)n3π3
sin (nπ log (t)) = log (t) (log (t)− 1) , ∀ t ∈ [1, e],
∞∑n=1
2(1− cos (log (2)nπ))nπ
sin (nπ log (t)) =
1 si t ∈ (1, 2)0 si t ∈ (2, e)12 si t = 2
Ademas, en este ultimo caso, se comprueba por sustituicion directa que la suma de la serie es igual a0, tanto para t = 1, como para t = e.
Las figuras 5.1, 5.2 y 5.3 muestran las aproximaciones con 5 y 50 terminos de g1(t) y g2(t), respecti-vamente, y vienen a corroborar graficamente la afirmacion anterior. De hecho, en el primer caso, comog1 ∈ C2[1, e] y g1(1) = g1(e) = 0, resulta casi imposible distinguir las graficas de la funcion y su apro-ximacion con cinco terminos, mientras que en el caso de g2 (que solo es C1 a trozos en [1, e]) hace faltaconsiderar bastantes mas terminos en la suma parcial para apreciar la convergencia.

Metodos matematicos avanzados 99
0
0.2
0.4
0.6
0.8
1
1.2
1.2 1.4 1.6 1.8 2 2.2 2.4 2.6t
Figura 5.3: Aproximacion con cincuenta terminos para g2(t) en [1,e].
EJEMPLO 5.6 A partir de los ejemplos que hemos visto puede parecer que los autovalores siempreadmiten una expresion explıcita. En el siguiente caso
x′′(t) + λx(t) = 0, x(0) = 0, x(1) + x′(1) = 0,
es sencillo descartar que haya autovalores λ ≤ 0. Una vez mas, si λ > 0, la solucion general de la EDOviene dada por x(t) = C1 cos(
√λt) + C2 sin(
√λt) con C1, C2 ∈ IR. Como C1 = x(0) = 0, la condicion
x(1) + x′(1) = 0 con C2 6= 0, nos lleva a que sin(√
λ) +√
λ cos(√
λ) = 0, o equivalentemente,√
λ debecoincidir con alguna de las soluciones de la ecuacion tan(z) = −z. Teniendo en cuenta que la funciontangente definida en (−π/2, +π/2) diverge hacia −∞ en el extremo −π/2 y que la tangente es periodica deperiodo π, graficamente es sencillo de comprobar que las soluciones de la ecuacion tan(z) = −z forman unasucesion infinita y estrictamente creciente de numeros reales positivos. Sus cuadrados seran los autovaloresdel Problema Regular de Sturm-Liouville que estamos considerando. La determinacion explıcita (exacta)de dichos autovalores no es ni mucho menos elemental.
EJEMPLO 5.7 Otra conclusion erronea que puede obtenerse a partir de los ejemplos anteriores es quelos autovalores siempre sean positivos. En el siguiente caso
x′′(t) + 100x(t) + λx(t) = 0, x(0) = 0, x(1) = 0,
es facil comprobar que los autovalores vienen dados por λn = n2π2 − 100, n = 1, 2, . . ., por lo que λ1, λ2 yλ3 son negativos, mientras que el resto son positivos. Las autofunciones asociadas siguen viniendo dadaspor xn(t) = C sin (nπt).
EJEMPLO 5.8 Igualmente, puede suceder que 0 sea autovalor de un (PRSL), como en el siguiente caso
x′′(t) + 25π2x(t) + λx(t) = 0, x(0) = 0, x(1) = 0,
donde los autovalores vienen dados por λn = (n2 − 25)π2, n = 1, 2, . . ., por lo que λ5 = 0. Aquı tambienlas autofunciones asociadas vienen dadas por xn(t) = C sin (nπt).

100 Luis A. Fernandez
5.4 Problema Singular de Sturm -Liouville
En algunos de los casos practicos mas interesantes de la fısica, nos encontramos con problemas de Sturm-Liouville que no verifican todos los requisitos descritos en la seccion anterior, aunque los aspectos que seincumplen son mınimos. Ası, se dice que un Problema de Sturm-Liouville es singular cuando verificanlos requisitos de un Problema Regular de Sturm-Liouville, excepto en uno o varios de los siguientes aspectos:
• los coeficientes p(t) o s(t) se anulan en a y/o en b
• alguno de los coeficientes p(t), q(t) o s(t) tiende a infinito cuando t → a+ o t → b−
• el intervalo [a, b] no es acotado.
En el extremo del intervalo donde se produce la singularidad, a menudo la condicion de contorno sesustituye por el requisito de que “la funcion (y quizas tambien su derivada) sea finita cuando t tiende adicho extremo”. Veamos algunos ejemplos importantes:
EJEMPLO 5.9 El Problema Singular de Sturm - Liouville asociado a la ecuacion de Legendre((1− t2)x′(t)
)′+ λx(t) = 0, t ∈ [−1, 1].
Notemos que aquı, p(t) = 1 − t2, q(t) = 0, s(t) = 1, p(t) > 0 si t ∈ (−1, 1), pero p(1) = p(−1) = 0. Serequieren las condiciones de que x(t) y x′(t) sean finitas cuando t → −1 y t → 1.
EJEMPLO 5.10 El Problema Singular de Sturm - Liouville asociado a la ecuacion de Bessel
(tx′(t))′ +(
λt− ν2
t
)x(t) = 0, t ∈ [0, 1].
Aquı, p(t) = t, q(t) = −ν2
t , s(t) = t, p(t) > 0 y s(t) > 0 si t ∈ (0, 1], pero p(0) = s(0) = 0 y q(t) diverge ent = 0. Se requieren las condiciones de que x(t) y x′(t) sean finitas cuando t → 0+ y x(1) = 0.
EJEMPLO 5.11 El Problema Singular de Sturm - Liouville
x′′(t) + ((1− t2) + λ)x(t) = 0, t ∈ (−∞, +∞),
donde p(t) = 1, q(t) = 1 − t2, s(t) = 1. El intervalo de trabajo es (−∞, +∞) y se impone la condicion deque x(t) sea finita cuando t → −∞ y t → +∞.
Este problema esta relacionado con la ecuacion de Hermite y′′(t)− 2ty′(t) + λy(t) = 0, mediante latransformacion x(t) = exp(−t2/2)y(t).
La principal diferencia con el Problema Regular de Sturm-Liouville, es que (en algunos casos) el conjuntode autovalores de un Problema Singular deja de ser numerable. En los casos en que el Problema Singularposee un conjunto numerable de autovalores, la mayor parte de las propiedades anteriores (la ortogonalidadrespecto del peso y el hecho de que sean reales) siguen siendo validas, ası como el caracter de “base” delas autofunciones asociadas y con las mismas expresiones.
5.5 Problemas de Contorno con Maple
La siguiente sentencia MAPLE se utilizo para generar la figura 5.1
> f:=sum(’4*(cos(n*Pi)-1)/(n^3*Pi^3)*sin(n*Pi*log(t))’, ’n’=1..5);g:=log(t)*(log(t)-1);plot([f, g], t=1..exp(1), color=[red,blue], style=[line,line]);
y esta otra para generar la figura 5.3
> f:=sum(’2*(1-cos(log(2)*n*Pi))/(n*Pi)*sin(n*Pi*log(t))’, ’n’=1..50);g:=piecewise(t<2,1,t>2,0);plot([f, g], t=1..exp(1),color=[red,blue],style=[line,line]);

Metodos matematicos avanzados 101
Bibliografıa sobre problemas de Contorno asociadas a EDO:
1. “Basic partial differential equations”, D. Bleecker y G. Csordas, Van Nostrand, 1992.
2. “Partial differential equations for scientists and engineers”, Tyn Myint-U y L. Debnath, North Hol-land, 1987.
3. “Ecuaciones diferenciales y problemas con valores en la frontera”, W.E. Boyce y R. C. DiPrima,Limusa, 1998.
4. “Fourier analysis and its applications”, G. B. Folland, Wadsworth and Brooks, 1992.
5. “Mathematical methods for physicists”, G. B. Arfken y H. J. Weber, Harcourt-Academic Press, 2001.
6. “Metodos matematicos avanzados para ciencias e ingenierıas”, M. Gadella y L.M. Nieto, Univ. deValladolid, 2000.
7. “Methods of Mathematical Physics” , R. Courant y D. Hilbert, Wiley and Sons, 1953.
Recursos en Internet sobre Problemas de Contorno:
1. http://mathworld.wolfram.com/topics/OrdinaryDifferentialEquations.html
2. http://www.math.ohio-state.edu/∼gerlach/math/BVtypset
3. http://www.efunda.com/math/ode/Sturm liouville.cfm – Acceso limitado.
4. http://www.boulder.nist.gov/div853/greenfn/tutorial.html

102 Luis A. Fernandez

Capıtulo 6
Funciones especiales de la FısicaMatematica
Cualquiera de las funciones especiales de la Fısica Matematica que vamos a estudiar en este tema merecerıaun capıtulo aparte para sı misma, por su indudable interes, la variedad de sus aplicaciones y la larga listade propiedades que verifica: para confirmar este punto, basta echar un vistazo a la “Biblia” en este campo,el libro de Abramowitz y Stegun. Aquı, vamos a presentar las funciones especiales mas conocidas y susprincipales propiedades en relacion con las aplicaciones de tipo fısico.
6.1 Funcion Gamma
La funcion Gamma aparece de manera natural en el calculo de ciertas integrales multiples (ver el comentario6.1)), como generalizacion de la funcion factorial de un numero natural y en la definicion de otras funcionesespeciales de la Fısica Matematica.
DEFINICION 6.1 Dado z ∈ lC, con Re(z) > 0, se define la funcion Gamma de z como la integral
Γ(z) =∫ ∞
0
e−ttz−1dt.
Propiedades.
i) Γ(z) esta bien definida si z ∈ lC, con Re(z) > 0: tomando modulos en la expresion de Γ(z), teniendoen cuenta que |ti| = 1 cuando t > 0, se sigue que
|Γ(z)| ≤∫ ∞
0
e−t|tz−1|dt =∫ ∞
0
e−ttRe(z)−1|ti|Im(z)dt =∫ ∞
0
e−ttRe(z)−1dt =
=∫ 1
0
e−ttRe(z)−1dt +∫ ∞
1
e−ttRe(z)−1dt ≤∫ 1
0
tRe(z)−1dt + C1
∫ ∞
1
e−t/2dt =1
Re(z)+ 2C1e
− 12 ,
que es finito. Hemos utilizado en la deduccion anterior que existe una constante C1 > 0 tal que
e−ttRe(z)−1 ≤ C1e−t/2 ∀t ≥ 1.
ii) Notemos que para z = 0 la integral es divergente:
Γ(0+) =∫ ∞
0
e−tt−1dt ≥∫ 1
0
e−tt−1dt ≥ e−1
∫ 1
0
t−1dt = e−1(log t|t=1t=0 = +∞.
103

104 Luis A. Fernandez
iii) Γ(1) =∫ +∞
0
e−tdt = [−e−t|t=+∞t=0 = 1.
iv) Integrando por partes, se obtiene que
Γ(z + 1) =∫ +∞
0
e−ttzdt = [−e−ttz|t=+∞t=0 +
∫ +∞
0
ze−ttz−1dt = z · Γ(z),
para cada z ∈ lC con Re(z) > 0.
v) Utilizando repetidamente las propiedades anteriores, con z = n ∈ IN, se tiene que
Γ(n + 1) = n · Γ(n) = n · (n− 1) · Γ(n− 1) = . . . = n · (n− 1) · . . . · 1 · Γ(1) = n!.
vi) Si z ∈ lC con Re(z) > 0, Γ(z) = 2∫ +∞
0
e−s2s2z−1ds.
Para comprobarlo, basta hacer el cambio de variable t = s2 en la integral que define Γ.
vii) Γ(
12
)=√
π.
Utilizando la propiedad vi), Γ(
12
)= 2
∫ +∞
0
e−s2ds. El valor de esta integral impropia no se puede
calcular directamente, pero sı utilizando el siguiente “truco”:
14
[Γ
(12
)]2
=(∫ +∞
0
e−t2dt
)(∫ +∞
0
e−s2ds
)=
∫ +∞
0
∫ +∞
0
e−(t2+s2)dtds =
=∫ +∞
0
∫ π/2
0
e−r2rdθdr = −π
2e−r2
2
∣∣∣∣∣
r=+∞
r=0
=π
4,
donde hemos utilizado el cambio a coordenadas polares t = r cos (θ), s = r sin (θ).
viii) Como consecuencia de las propiedades vii) y iv), se tiene
Γ(
32
)= Γ
(12
+ 1)
=12Γ
(12
)=√
π
2
Γ(
52
)= Γ
(32
+ 1)
=32Γ
(32
)=
3√
π
4
Γ(
72
)= Γ
(52
+ 1)
=52Γ
(52
)=
15√
π
8
Hemos visto que la definicion de Γ(z), en principio, tiene sentido para z ∈ lC con Re(z) > 0. Lapropiedad iv), permite extender su definicion a los numeros z con Re(z) ∈ (−1, 0):
DEFINICION 6.2 Dado z ∈ lC con Re(z) ∈ (−1, 0), definimos
Γ(z) =Γ(z + 1)
z.
Notemos que si Re(z) ∈ (−1, 0), entonces Re(z + 1) ∈ (0, 1) por lo que Γ(z + 1) esta bien definido enla expresion anterior. Ası, por ejemplo, tendremos que Γ(−1/2) = Γ(1/2)
−1/2 = −2√
π. Tambien deducimosque Γ(0−) = Γ(−1+) = −∞. Por induccion, podemos extender la definicion de Γ a todo lC, excepto losnumeros enteros negativos:

Metodos matematicos avanzados 105
–4
–2
0
2
4
y
–4 –2 2 4z
Figura 6.1: Grafica de la funcion Gamma.
DEFINICION 6.3 Dado z ∈ lC con Re(z) ∈ (−n− 1,−n), n = 1, 2, . . . definimos
Γ(z) =Γ(z + 1)
z.
En cada intervalo (−n− 1,−n), la definicion utiliza que Γ ya tiene sentido en (−n,−n + 1).Inspirandonos en la propiedad v) vemos en que sentido podemos definir el factorial de un numero
complejo:
DEFINICION 6.4 Dado z ∈ lC con Re(z) 6= −1,−2,−3, . . ., definimos el factorial de z como
z! = Γ(z + 1).
Con la notacion anterior, las relaciones vii) y viii) se expresan en la forma(−1
2
)! =
√π,
(12
)! =
√π
2,
(32
)! =
3√
π
4,
(52
)! =
15√
π
8.
6.2 Funcion Beta
DEFINICION 6.5 Dados z, w ∈ lC con Re(z) > 0 y Re(w) > 0, se define la funcion Beta de (z, w)como
B(z, w) =∫ 1
0
tz−1(1− t)w−1dt.
Cuando z y w son numeros naturales, el calculo explıcito de B(z, w) se reduce a la integracion de unpolinomio. Por ejemplo,
B(1, 1) = 1, B(2, 1) =∫ 1
0
tdt =12, B(3, 1) =
∫ 1
0
t2dt =13, B(2, 2) =
∫ 1
0
t(1− t)dt =16, . . .
Propiedades:Aunque no lo parezca a primera vista, existe una estrecha relacion entre esta funcion Beta que acabamos
de introducir y la funcion Γ.

106 Luis A. Fernandez
i) B(z, w) =Γ(z)Γ(w)Γ(z + w)
para cada z, w ∈ lC con Re(z) > 0 y Re(w) > 0:
Γ(z)Γ(w) =(∫ +∞
0
e−ttz−1dt
)(∫ +∞
0
e−ssw−1ds
)=
∫ +∞
0
∫ +∞
0
e−(s+t)tz−1sw−1dsdt =
r=s+t=∫ +∞
0
∫ +∞
t
e−rtz−1(r − t)w−1drdt =∫ +∞
0
∫ r
0
e−rtz−1(r − t)w−1dtdr =
u=t/r=
∫ +∞
0
∫ 1
0
e−r(ur)z−1(r − ru)w−1rdudr =∫ +∞
0
∫ 1
0
e−rrz+w−1uz−1(1− u)w−1drdu =
=(∫ +∞
0
e−rrz+w−1dr
) (∫ 1
0
uz−1(1− u)w−1du
)= Γ(z + w)B(z, w).
Como consecuencia de esta propiedad y de la extension de Γ(z) a valores z ∈ lC con Re(z) 6=0,−1,−2,−3, . . . la relacion anterior permite extender tambien la definicion de B(z, w) a dichosvalores. Por otra parte, utilizando las propiedades vistas para Γ, se sigue facilmente que
ii) B(z, w) = B(w, z).
iii) B(z + 1, w) =z
z + wB(z, w).
iv) B(z, w + 1) =w
z + wB(z, w).
COMENTARIO 6.1 La funcion Γ(z) y su relacionada B(z, w) surgen de manera natural en el calculode algunos tipos de integrales multiples (areas, volumenes, momentos de inercia,...) extendidas al interiorde ciertos recintos (triangulos, tetraedros, circunferencias, esferas, elipses, elipsoides, ...) Por ejemplo, siT es el tetradro situado en el octante positivo cuyos puntos verifican x + y + z ≤ 1, se tiene que
∫ ∫ ∫
T
xp−1yq−1zr−1dxdydz =Γ(p)Γ(q)Γ(r)
Γ(p + q + r + 1),
y si R es la parte del elipsoide (x
a
)α
+(y
b
)β
+(z
c
)γ
≤ 1,
situada en el octante positivo, se obtiene mediante el correspondiente cambio de variable, la que se conocecomo Formula de Dirichlet
∫ ∫ ∫
R
xp−1yq−1zr−1dxdydz =apbqcr
αβγ
Γ( pα )Γ( q
β )Γ( rγ )
Γ( pα + q
β + rγ + 1)
.
Mas detalles en las paginas 225-6 del libro “Calculo Integral”, P. Puig Adam, Biblioteca matematica, 1979.
6.3 Funciones de Bessel y asociadas
Surgen al resolver la EDO
t2x′′(t) + tx′(t) + (t2 − α2)x(t) = 0, (6.1)
llamada Ec. de Bessel de orden α, donde α es un parametro real mayor o igual que cero.

Metodos matematicos avanzados 107
El metodo que se utiliza para resolver este tipo de EDO se llama metodo de Frobenius y es una mezclaentre el metodo de serie de potencias y el metodo para resolver la ec. de Euler, dado que la ec. de Besselpuede considerarse un “hıbrido” entre ambas EDO. Consiste en ensayar soluciones del tipo
x(t) = tλ∞∑
n=0
antn =∞∑
n=0
antn+λ, t > 0,
donde hay que determinar λ ∈ IR y los coeficientes an. En general, λ no va a ser un numero natural,por lo que, en principio, tλ solo tiene sentido en IR para t > 0, tal como estamos suponiendo. Pensemospor ejemplo en el caso λ = −1/2. Claramente, la serie de potencias nos recuerda la resolucion de ec. concoeficientes analıticos, mientras que tλ tiene que ver con la resolucion de la ec. de Euler.
Teniendo en cuenta que (formalmente) la derivada de tρ viene dada por ρtρ−1, independientemente deque ρ sea un numero natural o no, resulta inmediato comprobar que
x′(t) =∞∑
n=0
(n + λ)antn+λ−1, x′′(t) =∞∑
n=0
(n + λ)(n + λ− 1)antn+λ−2.
Sustituyendo estas expresiones en la ec. de Bessel y agrupando terminos, se obtiene
0 = t2x′′(t) + tx′(t) + (t2 − α2)x(t) =∞∑
n=0
(n + λ)(n + λ− 1)antn+λ +∞∑
n=0
(n + λ)antn+λ +∞∑
n=0
antn+λ+2+
−∞∑
n=0
α2antn+λ =
( ∞∑n=0
[(n + λ)2 − α2]antn +∞∑
n=2
an−2tn
)tλ,
de donde
0 =∞∑
n=0
[(n + λ)2 − α2]antn +∞∑
n=2
an−2tn =
= a0(λ2 − α2) + a1[(λ + 1)2 − α2]t +∞∑
n=2
([(n + λ)2 − α2]an + an−2
)tn.
Igualando cada coeficiente de tn a cero, nos queda
a0(λ2 − α2) = 0, si n = 0 (6.2)
a1[(λ + 1)2 − α2] = 0, si n = 1 (6.3)
[(n + λ)2 − α2]an + an−2 = 0, si n = 2, 3, . . . (6.4)
Si a0 6= 0, la relacion (6.2) nos lleva a que λ2 = α2, de modo que las raıces son λ1 = α y λ2 = −α.En el primer caso (λ = α), la igualdad (6.3) se reduce a a1(1 + 2α) = 0 y como α ≥ 0, necesariamente
a1 = 0.La formula de recurrencia (6.4) queda ahora
n(n + 2α)an + an−2 = 0, si n = 2, 3, . . . (6.5)
Como a1 = 0, esta formula nos lleva a que a3 = a5 = a7 = . . . = a2k+1 = 0. Por ello, nos centramos enlos coeficientes con subındice par (n = 2k). Podemos ver que
a2 =−a0
22(α + 1), a4 =
a0
242!(α + 1)(α + 2), a6 =
−a0
263!(α + 1)(α + 2)(α + 3), . . .
En general,
a2k =(−1)ka0
22kk!(α + 1)(α + 2)(α + 3) . . . (α + k).

108 Luis A. Fernandez
Eligiendo a0 = 12αΓ(α+1) y utilizando la propiedad iv) de la funcion Gamma, resulta que
a2k =(−1)k
22k+αk!Γ(k + α + 1).
Los calculos anteriores se pueden repetir en el segundo caso (λ = −α) y nos conducen a la siguiente
DEFINICION 6.6 Dado α ≥ 0, se define la funcion de Bessel de primera clase y orden α como
Jα(t) =∞∑
k=0
(−1)k
k!Γ(k + α + 1)
(t
2
)2k+α
, t > 0.
Igualmente, se define la funcion de Bessel de primera clase y orden −α como
J−α(t) =∞∑
k=0
(−1)k
k!Γ(k − α + 1)
(t
2
)2k−α
, t > 0.
Utilizando el criterio del cociente, es facil comprobar que las series que definen Jα(t) y J−α(t) convergensi t > 0. Evidentemente, si α > 0, J−α(t) diverge en t = 0, por las potencias negativas que contiene.
Si α 6= 0, 1, 2, . . ., se puede demostrar que las soluciones Jα(t) y J−α(t) son linealmente independientessi t > 0, por lo que la solucion general de la ec. de Bessel de orden α viene dada por
x(t) = C1Jα(t) + C2J−α(t), ∀ C1, C2 ∈ IR.
Si α = 0, es claro que Jα(t) = J−α(t). Ademas, si α = n ∈ IN, evidentemente se tiene que
Jn(t) =∞∑
k=0
(−1)k
k!(k + n)!
(t
2
)2k+n
, t > 0 (6.6)
De otro lado, teniendo en cuenta que Γ(0)−1 = Γ(−1)−1 = . . . = Γ(1− n)−1 = 0, se sigue que
J−n(t) =∞∑
k=0
(−1)k
k!Γ(k − n + 1)
(t
2
)2k−n
=∞∑
k=n
(−1)k
k!(k − n)!
(t
2
)2k−nm=k−n=
=∞∑
m=0
(−1)m+n
m!(m + n)!
(t
2
)2m+n
= (−1)nJn(t).
En particular,
J−1(t) = −J1(t), J−3(t) = −J3(t), J−5(t) = −J5(t), J−7(t) = −J7(t), . . .
J−2(t) = J2(t), J−4(t) = J4(t), J−6(t) = J6(t), J−8(t) = J8(t), . . .
Por tanto, si α = n ∈ IN ∪ 0, Jn(t) y J−n(t) son linealmente dependientes, por lo que necesitamoscalcular una segunda solucion (linealmente independiente con Jn(t)) para completar la resolucion de la ec.de Bessel de orden n. Por analogıa con la resolucion de la ec. de Euler, en el caso de raız doble, se ensayauna solucion del tipo
x(t) = b−1(log t)Jn(t) + t−n∞∑
k=0
bktk, t > 0, (6.7)
donde hay que determinar los coeficientes bk, imponiendo que x(t) verifique la ec. de Bessel de orden n. Noestamos interesados en detallar el calculo de estos bk (se puede encontrar en Coddington, pags. 175-178).Nos basta destacar la forma que tiene la funcion resultante y el hecho de que diverge en t = 0. Una maneraalternativa de definir esta segunda solucion es la siguiente:

Metodos matematicos avanzados 109
DEFINICION 6.7 Dado n ∈ IN ∪ 0, se define la funcion de Bessel de segunda clase y orden ncomo
Yn(t) = limα→n
cos (απ)Jα(t)− J−α(t)sin (απ)
, t > 0.
Con el fin de relacionar ambas expresiones, merece la pena destacar que si se sustituye α = n en elcociente anterior, se llega a una indeterminacion del tipo 0/0, por lo que el lımite se calcula utilizando laregla de L’Hopital, obteniendo
Yn(t) = limα→n
−π sin (απ)Jα(t) + cos (απ)∂Jα(t)∂α − ∂J−α(t)
∂α
π cos (απ)=
1π
(∂Jα(t)
∂α+ (−1)n+1 ∂J−α(t)
∂α
)∣∣∣∣α=n
Para el calculo de las derivadas respecto de α que aparecen, conviene fijarse en que α aparece en ladefinicion de la funcion de Bessel en dos posiciones: como exponente de t y en Γ(k + α + 1). Por ello,teniendo en cuenta que ∂
∂α (tα) = tα log t, t > 0, al menos resulta clara la aparicion del termino logarıtmico,tal como vimos en (6.7). No entramos en los detalles del resto de los calculos.
Si α = n ∈ IN∪0, se puede demostrar que las soluciones Jn(t) e Yn(t) son linealmente independientessi t > 0, por lo que la solucion general de la ec. de Bessel de orden n viene dada por
x(t) = C1Jn(t) + C2Yn(t), ∀ C1, C2 ∈ IR.
Las funciones de Bessel verifican una larga lista de propiedades (ver Abramowitz, pags. 355-494) delas cuales solo vamos a ver las mas importantes. Aunque nos interesan principalmente las funciones deBessel de primera clase y orden natural o cero, la mayorıa de estas propiedades son validas tambien paralas funciones de segunda clase y/o con orden no natural.
Para comenzar, detallamos la expresion de J0(t) y J1(t) como funciones mas habituales. Tomandon = 0 y n = 1 en (6.6) resulta
J0(t) =∞∑
k=0
(−1)k
(k!)2
(t
2
)2k
= 1− t2
22+
t4
2242− t6
224262+ . . . (6.8)
J1(t) =∞∑
k=0
(−1)k
k!(k + 1)!
(t
2
)2k+1
=t
2− t3
224+
t5
22426− t7
2242628+ . . . (6.9)
Las figuras 5.2 y 5.3 contienen las graficas de estas funciones, junto a Y0(t) e Y1(t). Ahı se aprecia conclaridad la divergencia de Y0(t) e Y1(t) cuando t → 0+, mientras que J0(0) = 1 y J1(0) = 0. En general,notemos que Jn(0) = 0 para n = 1, 2, . . ..
Otro aspecto muy interesante que se aprecia en las graficas es el caracter oscilatorio de las funciones deBessel, ası como que los ceros (esto es, los puntos donde se anulan) de las funciones de Bessel se vanalternando. Ambas cuestiones recuerdan claramente las correspondientes propiedades para las funcionesseno y coseno. Vamos a ver a continuacion que dichas similitudes no son casuales.
TEOREMA 6.1 (Teorema de comparacion de Sturm) Dada la EDO x′′(t) + q(t)x(t) = 0, dondeq ∈ C[a, b] verifica q(t) > m2 > 0 para cada t ∈ [a, b], supongamos que x(t) es una solucion en [a, b](distinta de la solucion nula). Sean t1, t2 ∈ [a, b] dos ceros consecutivos de sin (mt). Entonces, x(t) posee(al menos) un cero en (t1, t2).
Dem. Designaremos y(t) = sin (mt). Sabemos que se verifica y′′(t) + m2y(t) = 0 y que y(t) 6= 0 en(t1, t2), porque los ceros son consecutivos. Sin perdida de generalidad, podemos suponer que y(t) > 0 en(t1, t2). Supongamos por reduccion al absurdo que x(t) no se anula en (t1, t2). Tambien sin perdida degeneralidad, vamos a suponer que x(t) > 0 en (t1, t2).
Multiplicando la EDO que satisface y(t) por x(t), la EDO que satisface x(t) por y(t) y restando seobtiene
(q(t)−m2)x(t)y(t) = x(t)y′′(t)− y(t)x′′(t) =d
dt(W [x, y](t)) , t ∈ (t1, t2).

110 Luis A. Fernandez
–1.5
–1
–0.5
0
0.5
1
y
2 4 6 8 10 12 14 16 18 20t
Figura 6.2: Graficas de las funciones J0(t) (a puntos) e Y0(t) (continua).
Integrando esta expresion entre t1 y t2, se sigue que∫ t2
t1
(q(t)−m2)x(t)y(t)dt = W [x, y](t2)−W [x, y](t1) =
= x(t2)y′(t2)− x′(t2)y(t2)− x(t1)y′(t1) + x′(t1)y(t1) = x(t2)y′(t2)− x(t1)y′(t1),
dado que y(t1) = y(t2) = 0.Se llega a una contradiccion al analizar los signos de cada termino: por un lado, las hipotesis asumidas
implican que∫ t2
t1(q(t) − m2)x(t)y(t)dt > 0; pero, por otro, teniendo en cuenta que t1 y t2 son ceros
de y(t) y que y(t) > 0 en (t1, t2), no queda mas remedio que ser y′(t1) > 0 e y′(t2) < 0, por lo quex(t2)y′(t2)− x(t1)y′(t1) < 0.
Si la situacion fuera otra (por ejemplo, x(t) < 0 e y(t) > 0 en (t1, t2)), el mismo argumento nos con-ducirıa a la contradiccion, ya que ahora serıa
∫ t2t1
(q(t)−m2)x(t)y(t)dt < 0, pero, x(t2)y′(t2)−x(t1)y′(t1) > 0.
Analogamente, se descartarıan los casos x(t) > 0 e y(t) < 0 en (t1, t2) y x(t) < 0 e y(t) < 0 en (t1, t2).
TEOREMA 6.2 Supongamos que x1(t) y x2(t) son dos soluciones linealmente independientes en [a, b]de una EDO del tipo x′′(t) + p(t)x′(t) + q(t)x(t) = 0, con p, q ∈ C[a, b]. Entonces, entre cada dos cerosconsecutivos de x1(t) en [a, b] existe exactamente un cero de x2(t) y, viceversa, entre cada dos cerosconsecutivos de x2(t) en [a, b] existe exactamente un cero de x1(t).
Dem. Supongamos que t1 y t2 son dos ceros consecutivos de x1(t) en [a, b]. Desde luego, x2 no sepuede anular ni en t1 ni en t2: si (por ejemplo) fuera x2(t1) = 0, se llegarıa a que W [x1, x2](t1) = 0, lo cualentrarıa en contradiccion con el hecho de que x1 y x2 son linealmente independientes en [a, b]. Supongamos,por reduccion al absurdo, que x2(t) tampoco se anula en (t1, t2). Podemos considerar entonces la funcion
ϕ(t) =x1(t)x2(t)
, t ∈ [t1, t2].
Gracias a las hipotesis, podemos asegurar que ϕ(t) es una funcion de clase C1 en [t1, t2], ϕ(t1) = ϕ(t2) = 0y ϕ(t) 6= 0 para cada t ∈ (t1, t2), dado que x1(t) no se puede puede anular entre t1 y t2. Por el Teoremade Rolle, debe existir un punto t? intermedio entre t1 y t2 tal que ϕ′(t?) = 0. Dado que
ϕ′(t) =W [x2, x1](t)
(x2(t))2, t ∈ [t1, t2],

Metodos matematicos avanzados 111
–1.5
–1
–0.5
0
0.5
1
y
2 4 6 8 10 12 14 16 18 20t
Figura 6.3: Grafica de las funciones J1(t) (a puntos) e Y1(t) (continua).
solo puede suceder que ϕ′(t?) = 0 si W [x2, x1](t?) = 0, pero esto es imposible por la independencia entrex1 y x2 en [a, b]. Ası pues, x2(t) debe tener (al menos) un cero en (t1, t2). Ahora bien, en principio, podrıasuceder que tuviera mas de uno. Si fuera este el caso, seleccionando t1 y t2 dos ceros consecutivos de x2(t)en (t1, t2), el mismo argumento anterior cambiando los papeles de x1(t) y x2(t) nos llevarıa a concluir quex1(t) debe tener (al menos) un cero en (t1, t2) ⊂ (t1, t2). Esto entrarıa en contradiccion con el hecho deque t1 y t2 son dos ceros consecutivos de x1(t).
Vamos a transformar ahora la Ec. de Bessel de dos maneras distintas que nos van a ser muy utilespara probar diversas propiedades de las funciones de Bessel:
• El cambio de funcion incognita y(t) =√
tx(t) transforma la ec. de Bessel (6.1) en la EDO
y′′(t) +(
1 +14 − α2
t2
)y(t) = 0. (6.10)
Para verlo, basta operar:
y′(t) =1
2√
tx(t) +
√tx′(t), y′′(t) =
−14t3/2
x(t) +1√tx′(t) +
√tx′′(t)
y notar que
t3/2y′′(t) =−x(t)
4+ tx′(t) + t2x′′(t) =
(α2 − t2 − 1
4
)x(t) =
(α2 − t2 − 14 )√
ty(t).
• Dado µ > 0 fijo, el cambio de funcion incognita y(t) = x(µt) transforma la ec. de Bessel (6.1) en laEc. parametrica de Bessel
t2y′′(t) + ty′(t) + (µ2t2 − α2)y(t) = 0. (6.11)
Operando, y′(t) = µx′(µt), y′′(t) = µ2x′′(µt), por lo que se obtiene
t2y′′(t) + ty′(t) = t2µ2x′′(µt) + tµx′(µt) = (α2 − µ2t2)x(µt) = (α2 − µ2t2)y(t).

112 Luis A. Fernandez
Combinando los resultados anteriores, podemos deducir las siguientes propiedades cualitativas de lasfunciones de Bessel. Conviene destacar lo difıcil (por no decir imposible) que resultarıa obtener estaspropiedades a partir de las expresiones dadas en las definiciones 6.6 y 6.7.
TEOREMA 6.3 Cada funcion de Bessel posee infinitos ceros en (0, +∞). Ademas,
• si α 6∈ IN ∪ 0, entre cada dos ceros consecutivos de Jα(t) en (0, +∞) existe exactamente un cerode J−α(t) y, viceversa, entre cada dos ceros consecutivos de J−α(t) en (0,+∞) existe exactamenteun cero de Jα(t).
• si n ∈ IN∪ 0,entre cada dos ceros consecutivos de Jn(t) en (0, +∞) existe exactamente un cero deYn(t) y, viceversa, entre cada dos ceros consecutivos de Yn(t) en (0, +∞) existe exactamente un cerode Jn(t).
Dem. La primera parte del resultado es consecuencia del Teorema de comparacion de Sturm aplicadoa las soluciones de la ec. (6.10) y tomando m = 1/4: basta tener en cuenta que a partir de algun t0 > 0se verifica
q(t) = 1 +14 − α2
t2>
14,
siendo q(t) contınua en (0, +∞). Ası, cada solucion de la ec. (6.10) posee (al menos) un cero en (2kπ, 2(k+1)π) para cada k tal que 2kπ > t0, ya que 2kπ y 2(k + 1)π son dos ceros consecutivos de sin
(t2
). Esta
propiedad se transmite inmediatamente a cualquier funcion de Bessel, porque los ceros de las solucionesy(t) de la ec. (6.10) en t > 0 y los ceros de las funciones de Bessel x(t) son los mismos: recordemos larelacion que hay entre ambas: y(t) =
√tx(t).
La segunda parte es consecuencia del Teorema 6.2 y de que, si α 6∈ IN ∪ 0, Jα(t) y J−α(t) son dossoluciones linealmente independientes en (0,+∞) de la Ec. de Bessel (6.1) que se puede escribir en laforma
x′′(t) +1tx′(t) +
(1− α2
t2
)x(t) = 0,
donde p(t) = 1t y q(t) = 1 − α2
t2 son contınuas en (0, +∞). Analogamente, tendrıamos en el caso n ∈IN ∪ 0.
A continuacion, demostramos una propiedad de ortogonalidad que, sin ninguna duda, nos debe recordarla correspondiente propiedad de las autofunciones de un (PRSL) que vimos en el capıtulo anterior, ver elteorema 5.3.
TEOREMA 6.4 Supongamos que µ y µ son dos ceros positivos (distintos) de una funcion de Bessel x(t).Entonces, se cumple
∫ 1
0
x(µt)x(µt)tdt = 0. (6.12)
Dem. Si x(t) es una funcion de Bessel, sabemos que es solucion de una Ec. de Bessel de un cierto ordenα, es decir, verifica (6.1). Por otro lado, acabamos de probar que y(t) = x(µt) e y(t) = x(µt) verifican lascorrespondientes Ec. parametricas de Bessel, ver (6.11). Dividiendolas por t > 0, podemos escribirlas enforma autoadjunta
(ty′(t))′ +(
µ2t− α2
t
)y(t) = 0, (6.13)
(ty′(t))′ +(
µ2t− α2
t
)y(t) = 0. (6.14)
Multiplicando (6.13) por y(t), (6.14) por y(t) y restando, se obtiene
(µ2 − µ2)y(t)y(t)t = y(t)(ty′(t))′ − y(t)(ty′(t))′ = (tW [y, y](t))′.

Metodos matematicos avanzados 113
Integrando esta igualdad respecto de t entre t = 0 y t = 1, resulta que
(µ2 − µ2)∫ 1
0
y(t)y(t)tdt = (tW [y, y](t)|t=1t=0 = W [y, y](1) =
= y(1)y′(1)− y(1)y′(1) = µx(µ)x′(µ)− µx(µ)x′(µ) = 0,
por ser µ y µ ceros de x(t). Como µ 6= µ, esto nos lleva a (6.12).Vamos a centrarnos ahora en la Ec. parametrica de Bessel de orden n ∈ IN ∪ 0 (fijo), es decir,
(ty′(t))′ +(
µ2t− n2
t
)y(t) = 0, t ∈ [0, 1]. (6.15)
Si se requieren las condiciones de que y(t) e y′(t) sean finitas cuando t → 0+ y que y(1) = 0, llamandoλ = µ2, nos encontramos con un Problema Singular de Sturm - Liouville, con p(t) = t, q(t) = −n2
t ,s(t) = t, ya que p(t) > 0 y s(t) > 0 si t ∈ (0, 1], pero p(0) = s(0) = 0 y q(t) diverge cuando t → 0+.
Por lo que sabemos, la solucion general de (6.15) viene dada por
y(t) = C1Jn(µt) + C2Yn(µt), t ∈ [0, 1]
Si requerimos que y(t) este acotada cuando t → 0+, necesariamente tenemos que C2 = 0 (recordar queYn(t) diverge en t = 0, debido a la presencia del termino logarıtmico). Adicionalmente, obtenemos ademasque y′(t) esta acotada cuando t → 0+. La condicion anadida y(1) = 0 nos lleva a que C1Jn(µ) = 0, porlo que (si C1 6= 0) no queda mas posibilidad que µ sea un cero positivo de Jn(t). Por el teorema 6.3,se sabe que Jn(t) posee infinitos ceros µkk∈IN en (0, +∞). En la terminologıa del capıtulo anterior, losautovalores del Problema Singular considerado vienen dados por µ2
kk∈IN, mientras que las autofuncionesasociadas son yk(t) = CJn(µkt), k ∈ IN. En este caso, el conjunto de autovalores del Problema Singularsigue siendo numerable como en el caso regular.
La ortogonalidad de las autofunciones con respecto del peso s(t) = t es consecuencia del teorema 6.4,aplicado con x(t) = Jn(t), µ = µk y µ = µk con k 6= k.
Destaquemos el absoluto paralelismo entre esta situacion y el (PRSL) mas sencillo, donde los autovaloresvienen dados por k2π2k∈IN y las autofunciones asociadas son xk(t) = C sin (kπt), k ∈ IN.
Finalmente, la propiedad de que dichas autofunciones forman “bases” en el espacio de las funcionessigue manteniendose, exactamente en los mismos terminos que en el caso regular, ver el teorema 5.4.Tampoco aquı se incluye la demostracion.
TEOREMA 6.5 (Series de Fourier-Bessel) Sea n ∈ IN ∪ 0 fijo y µkk∈IN los ceros de Jn(t) en(0,+∞).
i) Dada x una funcion C1 a trozos en [0, 1], se verifica que
x(t+) + x(t−)2
=∞∑
k=1
γkJn(µkt) ∀ t ∈ (0, 1),
con
γk =
∫ 1
0
x(t)Jn(µkt)tdt
∫ 1
0
J2n(µkt)tdt
k = 1, 2, 3, . . .
ii) Dada x ∈ L2t (0, 1), es decir, satisfaciendo
∫ 1
0
x2(t)tdt < +∞,
se verifica que ∫ 1
0
(x(t)− SN (t))2tdt −→ 0 cuando N −→ +∞,
donde SN (t) =∑N
k=1 γkJn(µkt), con γk dados como antes.

114 Luis A. Fernandez
En los puntos t donde x es continua, se verifica x(t+)+x(t−)2 = x(t). En particular, si x(t) es continua
en [0, 1] con derivada continua a trozos, el teorema anterior nos garantiza que
x(t) =∞∑
k=1
γkJn(µkt) ∀ t ∈ (0, 1).
Si n = 1, 2, . . ., el valor de la serie de Fourier-Bessel es 0, tanto para t = 0 como para t = 1, dado queJn(0) = Jn(µk) = 0 para cada k ∈ IN. Si n = 0, el valor de la serie sigue siendo 0 para t = 1, pero (apriori) desconocemos su lımite para t = 0, dado que J0(0) = 1.
Para aplicar este teorema en casos concretos necesitamos poder calcular integrales que involucran afunciones de Bessel de primera clase. Veamos algunos resultados utiles en esta direccion:
PROPOSICION 6.1 Sean µ > 0 y b > 0 cualesquiera. Dado α ≥ 0, se verifica
∫ b
0
J2α(µt)tdt =
b2
2(J ′α(µb))2 +
µ2b2 − α2
2µ2J2
α(µb). (6.16)
Dem. Hemos visto que y(t) = Jα(µt) es solucion de la Ec. parametrica de Bessel (6.11). Multiplicandodicha EDO por 2y′(t) y agrupando terminos, se tiene que
((ty′(t))2)′ + (µ2t2 − α2)(y2(t))′ = 0.
Integrando esta expresion respecto de t entre t = 0 y t = b, se llega a
(by′(b))2 +∫ b
0
(µ2t2 − α2)(y2(t))′dt = 0.
Deshaciendo el cambio, resulta que
µ2b2(J ′α(µb))2 +∫ b
0
(µ2t2 − α2)(J2α(µt))′dt = 0.
Integrando ahora por partes, concluimos que
0 = µ2b2(J ′α(µb))2 + (µ2t2 − α2)J2α(µt)|t=b
t=0 − 2µ2
∫ b
0
J2α(µt)tdt =
= µ2b2(J ′α(µb))2 + (µ2b2 − α2)J2α(µb) + α2J2
α(0)− 2µ2
∫ b
0
J2α(µt)tdt.
Notemos que α2J2α(0) = 0, bien porque α = 0 o bien porque Jα(0) = 0, cuando α > 0. Basta entonces
despejar la integral para llegar a (6.16).
PROPOSICION 6.2 (Formulas de recurrencia) Dado α ≥ 0, se verifica para t > 0 que
tJ ′α(t) = αJα(t)− tJα+1(t), (6.17)
(t−αJα(t))′ = −t−αJα+1(t), (6.18)
(tαJα(t))′ = tαJα−1(t), (6.19)

Metodos matematicos avanzados 115
Dem. Partiendo de la definicion de Jα(t), podemos escribir
tJ ′α(t) =∞∑
k=0
(−1)k(2k + α)k!Γ(k + α + 1)
(t
2
)2k+α
= α
∞∑
k=0
(−1)k
k!Γ(k + α + 1)
(t
2
)2k+α
+
+2∞∑
k=0
(−1)kk
k!Γ(k + α + 1)
(t
2
)2k+α
= αJα(t) + t
∞∑
k=1
(−1)k
(k − 1)!Γ(k + α + 1)
(t
2
)2k+α−1
=
m=k−1= αJα(t)− t
∞∑m=0
(−1)m
m!Γ(m + α + 2)
(t
2
)2m+α+1
= αJα(t)− tJα+1(t).
Dividiendo la relacion (6.17) por t, se obtiene
J ′α(t)− α
tJα(t) = −Jα+1(t).
Multiplicando a ambos lados por el factor integrante t−α, se llega a (6.18).Finalmente podemos demostrar (6.19) partiendo de nuevo de la definicion de Jα(t):
(tαJα(t))′ =∞∑
k=0
(−1)k(2k + 2α)t2k+2α−1
k!Γ(k + α + 1)22k+α= tα
∞∑
k=0
(−1)k(2k + 2α)t2k+α−1
k!Γ(k + α + 1)22k+α=
= tα∞∑
k=0
(−1)k
k!Γ(k + α)
(t
2
)2k+α−1
= tαJα−1(t).
COROLARIO 6.1 Sea µ un cero positivo de Jα(t) con α ≥ 0. Entonces,
∫ 1
0
J2α(µt)tdt =
(J ′α(µ))2
2=
(Jα+1(µ))2
2. (6.20)
Dem. Basta aplicar primero la relacion (6.16) con b = 1 y tener en cuenta que Jα(µ) = 0. En virtudde (6.17) con t = µ se llega a que J ′α(µ) = −Jα+1(µ) y, por lo tanto, a la segunda identidad.
COROLARIO 6.2 Sea n ∈ IN ∪ 0 fijo y µkk∈IN los ceros positivos de Jn(t). Entonces, la expresionde los coeficientes γk del Teorema 6.5 queda
γk =2
∫ 1
0
x(t)Jn(µkt)tdt
(Jn+1(µk))2k = 1, 2, 3, . . . (6.21)
Dem. Basta sustituir el denominador de la expresion de γk en el Teorema 6.5 por su valor, aplicandoel corolario 6.1 con α = n y µ = µk.
PROPOSICION 6.3 Se verifican las siguientes relaciones:
i)∫ x
0
sJ0(s)ds = xJ1(x).
ii)∫ x
0
s2J0(s)ds = x2J1(x) + xJ0(x)−∫ x
0
J0(s)ds.
iii)∫ x
0
s3J0(s)ds = (x3 − 4x)J1(x) + 2x2J0(x).

116 Luis A. Fernandez
iv)∫ x
0
s4J0(s)ds = (x4 − 9x2)J1(x) + (3x3 − 9x)J0(x) + 9∫ x
0
J0(s)ds.
En general, para cada n ∈ IN, se satisface∫ x
0
snJ0(s)ds = xnJ1(x) + (n− 1)xn−1J0(x)− (n− 1)2∫ x
0
sn−2J0(s)ds (6.22)
Dem. Si n = 1, aplicando la identidad (6.19) con α = 1,∫ x
0
sJ0(s)ds =∫ x
0
(sJ1(s))′ds = xJ1(x).
Si n = 2, integrando por partes,∫ x
0
s2J0(s)ds =∫ x
0
s(sJ1(s))′ds = x2J1(x)−∫ x
0
sJ1(s)ds.
Utilizando ahora la identidad (6.18) con α = 0, resulta que J1(s) = −J ′0(s), por lo que∫ x
0
s2J0(s)ds = x2J1(x) +∫ x
0
sJ ′0(s)ds = x2J1(x) + xJ0(x)−∫ x
0
J0(s)ds.
Finalmente, usando de nuevo las relaciones sJ0(s) = (sJ1(s))′ y J1(s) = −J ′0(s) e integrando otra vezpor partes se llega a que
∫ x
0
snJ0(s)ds =∫ x
0
sn−1(sJ0(s))ds =∫ x
0
sn−1(sJ1(s))′ds = snJ1(s)|s=xs=0 −
∫ x
0
(n− 1)sn−1J1(s)ds =
= xnJ1(x)− (n− 1)∫ x
0
sn−1J1(s)ds = xnJ1(x) + (n− 1)∫ x
0
sn−1J ′0(s)ds =
= xnJ1(x) + (n− 1)(sn−1J0(s)
∣∣s=x
s=0− (n− 1)2
∫ x
0
sn−2J0(s)ds =
= xnJ1(x) + (n− 1)xn−1J0(x)− (n− 1)2∫ x
0
sn−2J0(s)ds.
La relacion iii) (resp. iv)) se obtiene combinando esta formula para n = 3 (resp. n = 4) con la expresioni) (resp. ii)) .
EJEMPLO 6.1 Suponiendo que µk∞k=1 son los ceros positivos de J0(t), desarrollar en el intervalo [0, 1]la funcion
x(t) =
2 t ∈ [0, 1/2)1 t ∈ [1/2, 1] (6.23)
en serie Fourier-Bessel del tipo∑∞
k=1 γkJ0(µkt). Para ello, ver el Teorema 6.5 y el corolario 6.2, bastacalcular
γk =2
(J1(µk))2
∫ 1
0
x(t)J0(µkt)tdt k = 1, 2, 3, . . .
Haciendo el cambio de variable s = µkt y utilizando la proposicion 6.3-i), se sigue que
γk =2
(J1(µk))2
(2
∫ 1/2
0
J0(µkt)tdt +∫ 1
1/2
J0(µkt)tdt
)=

Metodos matematicos avanzados 117
2(µkJ1(µk))2
(2
∫ µk/2
0
J0(s)sds +∫ µk
µk/2
J0(s)sds
)=
2(µkJ1(µk))2
(∫ µk
0
J0(s)sds +∫ µk/2
0
J0(s)sds
)=
=2
µk(J1(µk))2
(J1(µk) +
12J1
(µk
2
))
Entonces, aplicando el Teorema 6.5, resulta que
∞∑
k=1
2J0(µkt)µk(J1(µk))2
(J1(µk) +
12J1
(µk
2
))=
2 si t ∈ (0, 1/2)1 si t ∈ (1/2, 1)1.5 si t = 1/2
0
0.5
1
1.5
2
0.2 0.4 0.6 0.8 1t
Figura 6.4: Aproximaxion de Fourier-Bessel con diez terminos para el ejemplo 6.1.
Notemos que para t = 1, la serie vale 0, ya que J0(µk) = 0 para cada k ∈ IN.En las figuras 6.4 y 6.5 se comparan las graficas de la funcion original x(t) (a puntos) con sus apro-
ximaciones (sumas parciales) de Fourier-Bessel∑N
k=1 γkJ0(µkt) para N = 10 y N = 100, apreciandose laconvergencia a medida que N crece. Para t = 0, no sabıamos en principio cual serıa el valor de la serie:en este caso, a traves de las figuras vemos que la suma vale 2.
EJEMPLO 6.2 Suponiendo que µk∞k=1 son los ceros positivos de J1(t), desarrollar en el intervalo [0, 1]la funcion x(t) = 1− t en serie Fourier-Bessel del tipo
∑∞k=1 γkJ1(µkt). En este caso, basta calcular
γk =2
(J2(µk))2
∫ 1
0
(t− t2)J1(µkt)dt k = 1, 2, 3, . . .
Aquı, haciendo el cambio de variable s = µkt, utilizando (6.17) con α = 0, la proposicion 6.3-i) eintegrando por partes, se obtiene
γk =2
µ3k(J2(µk))2
∫ µk
0
(µks− s2)J1(s)ds =−2
µ3k(J2(µk))2
∫ µk
0
(µks− s2)J ′0(s)ds =
=−2
µ3k(J2(µk))2
(µksJ0(s)|s=µk
s=0 − µk
∫ µk
0
J0(s)ds− s2J0(s)|s=µk
s=0 +∫ µk
0
2sJ0(s)ds
)=

118 Luis A. Fernandez
0
0.5
1
1.5
2
0.2 0.4 0.6 0.8 1t
Figura 6.5: Aproximaxion de Fourier-Bessel con cien terminos para el ejemplo 6.1.
=−2
µ3k(J2(µk))2
(µ2
kJ0(µk)− µk
∫ µk
0
J0(s)ds− µ2kJ0(µk) + 2µkJ1(µk)
)=
2µ2
k(J2(µk))2
∫ µk
0
J0(s)ds
En virtud del Teorema 6.5, resulta que
∞∑
k=1
2J1(µkt)µ2
k(J2(µk))2
∫ µk
0
J0(s)ds = 1− t, si t ∈ (0, 1)
En las figuras 6.6 y 6.7 se comparan las graficas de la funcion 1− t (a puntos) con sus aproximacionesde Fourier-Bessel
∑Nk=1 γkJ1(µkt) para N = 20 y N = 200; de nuevo se aprecia la convergencia a medida
que N → +∞. En este caso, sabemos que el valor de la serie es 0 tanto para t = 0 como para t = 1, dadoque J1(0) = J1(µk) = 0 para cada k ∈ IN.
A partir de las funciones de Bessel de primera y segunda clase, habitualmente se definen otras funciones“asociadas” a ellas:
DEFINICION 6.8 i) Dado α ∈ IR, se define la funcion modificada de Bessel de primera clasey orden α como Iα(t) = i−αJα(it). Tambien se define la funcion modificada de Bessel desegunda clase y orden n ∈ IN ∪ 0 como
Kn(t) = limα→n
π (I−α(t)− Iα(t))2 sin (απ)
, t > 0.
ii) Dado α ∈ IR, se define la funcion de Hankel de primera clase y orden α como
H(1)α (t) = Jα(t) + iYα(t).
Asimismo, se define la funcion de Hankel de segunda clase y orden α como
H(2)α (t) = Jα(t)− iYα(t).

Metodos matematicos avanzados 119
0
0.2
0.4
0.6
0.8
1
0.2 0.4 0.6 0.8 1t
Figura 6.6: Aproximaxion de Fourier-Bessel con veinte terminos para el ejemplo 6.2.
Se puede demostrar que las funciones modificadas de Bessel de orden α son soluciones de la Ec.modificada de Bessel dada por
t2x′′(t) + tx′(t)− (t2 + α2)x(t) = 0.
De hecho, se verifica que la solucion general de esta ecuacion viene dada por
x(t) = C1Iα(t) + C2I−α(t), si α 6= 0, 1, 2, . . .
x(t) = C1In(t) + C2Kn(t), si α = n ∈ IN ∪ 0
6.4 Polinomios de Legendre
Surgen al resolver la EDO
(1− t2)x′′(t)− 2tx′(t) + α(α + 1)x(t) = 0, (6.24)
llamada Ec. de Legendre de orden α, donde α es un parametro real. Esta EDO surge en distintaspartes de la fısica; en particular, al resolver la ec. de Laplace en coordenadas esfericas.
Cuando t2 6= 1, diviendo la EDO por 1− t2 podemos escribirla en la forma
x′′(t) +2t
t2 − 1x′(t) +
α(α + 1)1− t2
x(t) = 0,
por lo que los coeficientes son analıticos en t = 0 y convergentes si |t| < 1.Para resolver esta EDO utilizamos el metodo de serie de potencias, ensayando soluciones analıticas en
t = 0
x(t) =∞∑
n=0
antn,
donde los coeficientes an son desconocidos y hay que determinarlos.

120 Luis A. Fernandez
0
0.2
0.4
0.6
0.8
1
0.2 0.4 0.6 0.8 1t
Figura 6.7: Aproximaxion de Fourier-Bessel con doscientos terminos para el ejemplo 6.2.
Derivando dos veces, resulta inmediato comprobar que
x′(t) =∞∑
n=0
nantn−1, x′′(t) =∞∑
n=0
n(n− 1)antn−2.
Sustituyendo estas expresiones en la ec. de Legendre y agrupando terminos, se obtiene
0 = (1− t2)x′′(t)− 2tx′(t) + α(α + 1)x(t) =∞∑
n=0
n(n− 1)antn−2 −∞∑
n=0
n(n− 1)antn − 2∞∑
n=0
nantn+
+α(α + 1)∞∑
n=0
antn =∞∑
n=0
(n + 2)(n + 1)an+2tn +
∞∑n=0
(α(α + 1)− n2 − n)antn =
=∞∑
n=0
((n + 2)(n + 1)an+2 + (α + n + 1)(α− n)an) tn
Igualando cada coeficiente de tn a cero, llegamos a la formula de recurrencia
an+2 = − (α + n + 1)(α− n)(n + 2)(n + 1)
an, si n = 0, 1, 2, 3, . . . (6.25)
Dando valores a n vamos obteniendo
a2 = − (α + 1)α2
a0, a3 = − (α + 2)(α− 1)3 · 2 a1
a4 = − (α + 3)(α− 2)4 · 3 a2 =
(α + 3)(α + 1)α(α− 2)4!
a0
a5 = − (α + 4)(α− 3)5 · 4 a3 =
(α + 4)(α + 2)(α− 1)(α− 3)5!
a1
a6 = − (α + 5)(α− 4)6 · 5 a4 = − (α + 5)(α + 3)(α + 1)α(α− 2)(α− 4)
6!a0

Metodos matematicos avanzados 121
a7 = − (α + 6)(α− 5)7 · 6 a5 =
(α + 6)(α + 4)(α + 2)(α− 1)(α− 3)(α− 5)7!
a1
Por induccion, no es difıcil obtener la formula general para los coeficientes
a2k = (−1)k (α + 2k − 1)(α + 2k − 3) . . . (α + 1)α(α− 2) . . . (α− 2k + 2)(2k)!
a0
a2k+1 = (−1)k (α + 2k)(α + 2k − 2) . . . (α + 2)(α− 1)(α− 3) . . . (α− 2k + 1)(2k + 1)!
a1
Agrupando por un lado los terminos que dependen de a0 y por otro los que dependen de a1, podemosescribir la expresion de la solucion como
x(t) = a0
(1 +
∞∑
k=1
(−1)k (α + 2k − 1)(α + 2k − 3) . . . (α + 1)α(α− 2) . . . (α− 2k + 2)(2k)!
t2k
)+
+a1
(t +
∞∑
k=1
(−1)k (α + 2k)(α + 2k − 2) . . . (α + 2)(α− 1)(α− 3) . . . (α− 2k + 1)(2k + 1)!
t2k+1
)=
def= a0x1(t) + a1x2(t), ∀ a0, a1 ∈ IR
Las soluciones x1(t) y x2(t) forman una base del espacio de todas las soluciones de la ec. de Legendre,sea cual sea el valor del parametro α.
Utilizando el criterio del cociente, es facil comprobar que las series que definen x1(t) y x2(t) convergen(en principio) si |t| < 1. No obstante, cuando α toma valores naturales podemos observar que o bienx1(t) o bien x2(t) contienen solo un numero finito de terminos: es decir, son polinomios y por lo tantoconvergen para todo t ∈ IR. En concreto, si α = 2m, con m ∈ IN, x1(t) es un polinomio de grado α,ya que en la expresion del coeficiente correspondiente a t2m+2 aparece el factor (α − 2m), que es nuloy anula al resto de los coeficientes de orden mas alto. Mientras tanto, x2(t) es realmente una serie depotencias con infinitos terminos, dado que los factores (α− 2k + 1) nunca se van anular, porque α es par.Analogamente, si α = 2m + 1, con m ∈ IN, entonces x2(t) es un polinomio de grado α, mientras que ahorax1(t) tiene infinitos terminos, dado que los factores (α−2k) no se anulan nunca, porque α es impar. Estasobservaciones dan lugar a la siguiente
DEFINICION 6.9 Dado n ∈ IN, se define el polinomio de Legendre de grado n como el unicopolinomio Pn(t) que es solucion de la ec. de Legendre de orden n y verifica Pn(1) = 1. Concretamente,
P0(t) = 1, P2m(t) = a0
(1− (2m + 1)2m
2t2 +
(2m + 3)(2m + 1)2m(2m− 2)4!
t4 + . . . +
+(−1)m (4m− 1)(4m− 3) · · · (2m + 3)(2m + 1)2m(2m− 2)(2m− 4) · · · 4 · 2(2m)!
t2m
)
P1(t) = t, P2m+1(t) = a1
(t− (2m + 3)2m
3!t3 +
(2m + 5)(2m + 3)2m(2m− 2)5!
t5 + . . . +
+(−1)m (4m + 1)(4m− 1) · · · (2m + 3)2m(2m− 2)(2m− 4) · · · 4 · 2(2m + 1)!
t2m+1
)
con a0 = (−1)m 1 · 3 · · · (2m− 1)2 · 4 · · · (2m)
y a1 = (−1)m 1 · 3 · · · (2m + 1)2 · 4 · · · (2m)
, si m = 1, 2, . . .

122 Luis A. Fernandez
Las constantes a0 y a1 se han elegido de manera que se cumpla la condicion Pn(1) = 1.De la forma que tienen los polinomios de Legendre se pueden deducir algunas primeras propiedades
interesantes: si n es par, Pn(t) solo contiene potencias pares de t y, por tanto, es una funcion par, mientrasque si n es impar, Pn(t) contiene solo potencias impares de t y, por tanto, es una funcion impar. Ademas,P2m(0) = a0 y P2m+1(0) = 0 para cada m = 1, 2, . . .
Una forma alternativa de generar los polinomios de Legendre es a traves de la Formula de Rodrigues
Pn(t) =1
2nn!dn
dtn(t2 − 1)n (6.26)
Vamos a verificar primero que el polinomio de la derecha satisface la ec. de Legendre de orden n. Siderivamos u(t) = (t2 − 1)n, resulta que
(t2 − 1)u′(t)− 2ntu(t) = 0. (6.27)
Recordemos ahora la Formula de Leibniz, que proporciona la expresion de la derivada n−esima delproducto de dos funciones:
(u(t) · v(t))(n =(
n0
)u(n(t) · v(t) +
(n1
)u(n−1(t) · v′(t) +
(n2
)u(n−2(t) · v′′(t) + . . . +
+(
nk
)u(n−k(t) · vk(t) + . . . +
(n
n− 1
)u′(t) · v(n−1(t) +
(nn
)u(t) · v(n(t), (6.28)
donde(
nk
)=
n!(n− k)!k!
, como es habitual.
Derivando n + 1 veces la expresion (6.27) y aplicando la correspondiente formula de Leibniz, se sigueque
(t2 − 1)u(n+2(t) + 2t(n + 1)u(n+1(t) + (n + 1)nu(n(t)− 2ntu(n+1(t)− 2n(n + 1)u(n(t) = 0.
Llamando φ(t) = u(n(t), resulta que
(t2 − 1)φ′′(t) + 2tφ′(t)− n(n + 1)φ(t) = 0,
o equivalentemente, φ(t) verifica la ec. de Legendre de orden n. Para concluir la obtencion de la formula(6.26) basta comprobar que φ(1) = 2nn!: para ello, volvemos a utilizar la formula de Leibniz en la forma
φ(t) =dn
dtn((t− 1)n(t + 1)n) =
dn
dtn((t− 1)n) (t + 1)n + terminos con el factor (t− 1) =
= n!(t + 1)n + terminos con el factor (t− 1) ,
de donde se sigue que φ(1) = 2nn!.Dando valores a n en la formula de Rodrigues (6.26), se obtienen las expresiones de los primeros
polinomios de Legendre:
P0(t) = 1, P1(t) = t, P2(t) =3t2 − 1
2, P3(t) =
5t3 − 3t
2, P4(t) =
35t4 − 30t2 + 38
,
P5(t) =63t5 − 70t3 + 15t
8, P6(t) =
231t6 − 315t4 + 105t2 − 516
, . . .
Otra expresion equivalente de los polinomios de Legendre, en este caso con las potencias de t ordenadasde forma decreciente, viene dada por
Pn(t) =12n
[n/2]∑
k=0
(−1)k (2n− 2k)!(n− k)! · k! · (n− 2k)!
tn−2k,

Metodos matematicos avanzados 123
donde [n/2] = n/2, si n es par y [n/2] = (n− 1)/2, si n es impar.Llamando λ = α(α + 1) en la Ec. de Legendre, nos encontramos con un Problema Singular de Sturm
- Liouville, ((1− t2)x′(t)
)′+ λx(t) = 0,
con p(t) = 1− t2, q(t) = 0, s(t) = 1, ya que p(t) > 0 si t ∈ (−1, 1), pero p(−1) = p(1) = 0.Sabemos que la solucion general viene dada por
x(t) = a0x1(t) + a1x2(t), t ∈ (−1, 1)
Si requerimos las condiciones de que x(t) y x′(t) sean finitas cuando t → ±1, necesariamente tenemos queλ = n(n + 1) (en general, x1(t) y x2(t) divergen en t = −1 y t = 1, salvo si son polinomios, es decir,salvo si α ∈ IN). Adicionalmente, obtenemos ademas que x′(t) esta tambien acotada cuando t → ±1. Enla terminologıa del capıtulo anterior, los autovalores del Problema Singular considerado vienen dados porn(n + 1)n=0,1,..., mientras que las autofunciones asociadas son xn(t) = cPn(t), n ∈ IN ∪ 0. En estecaso, el conjunto de autovalores del Problema Singular sigue siendo numerable como en el caso regular. Seexplica entonces que los polinomios de Legendre verifiquen la siguiente lista de importantes propiedades
TEOREMA 6.6 i) Dados n,m ∈ IN ∪ 0 distintos, se verifica∫ 1
−1
Pn(t)Pm(t)dt = 0.
ii) Para cada n ∈ IN ∪ 0, se verifica∫ 1
−1
P 2n(t)dt =
22n + 1
.
iii) Series de Fourier-Legendre. Dada x una funcion C1 a trozos en [−1, 1], se verifica que
x(t+) + x(t−)2
=∞∑
n=0
δnPn(t) ∀ t ∈ (−1, 1),
con
δn =2n + 1
2
∫ 1
−1
x(t)Pn(t)dt n = 0, 1, 2, 3, . . .
iv) Dada x ∈ L2(−1, 1), se verifica que
∫ 1
−1
(x(t)− SN (t))2dt −→ 0 cuando N −→ +∞,
donde SN (t) =∑N
n=0 δnPn(t), con δn dado como antes.
v) Todo polinomio x(t) de grado N se puede escribir como combinacion lineal de P0(t), P1(t), . . . ,PN (t). Concretamente, x(t) = SN (t) para cada t ∈ IR, con SN (t) definido en iv).
EJEMPLO 6.3 Desarrollar en el intervalo [−1, 1] la funcion
x(t) =
1 t ∈ (0, 1]−1 t ∈ [−1, 0) (6.29)
en serie Fourier-Legendre. A la vista del Teorema 6.6, basta calcular
δn =2n + 1
2
∫ 1
−1
x(t)Pn(t)dt n = 0, 1, 2, 3, . . .
En primer lugar, como x(t) es una funcion impar, notemos que si n es par, entonces Pn(t) es unafuncion par, por lo que x(t)Pn(t) es una funcion impar y δn = 0. Ademas en el caso n impar, x(t)Pn(t)es una funcion impar, por lo que

124 Luis A. Fernandez
δn = (2n + 1)∫ 1
0
Pn(t)dt n = 1, 3, 5, . . .
Para determinar estos coeficientes vamos a utilizar la siguiente propiedad de los polinomios de Legendre
P ′n+1(t)− P ′n−1(t) = (2n + 1)Pn(t), n = 0, 1, 2, 3, . . .
con lo que si n = 1, 3, 5, . . .
δn =∫ 1
0
(P ′n+1(t)− P ′n−1(t)
)dt = Pn+1(1)− Pn+1(0)− Pn−1(1) + Pn−1(0) = Pn−1(0)− Pn+1(0)
Aplicando entonces el Teorema 6.6, resulta que
∞∑
k=0
(P2k(0)− P2k+2(0)) P2k+1(t) =
−1 si t ∈ (−1, 0)
1 si t ∈ (0, 1)0 si t = 0
–1
–0.5
0.5
1
–1 –0.8 –0.6 –0.4 –0.2 0.2 0.4 0.6 0.8 1t
Figura 6.8: Aproximacion de Fourier-Legendre con diez terminos significativos para el ejemplo 6.3.
EJEMPLO 6.4 Desarrollar el polinomio x(t) = t3 + t2 en Serie de Fourier-Legendre. Al tratarse de unpolinomio sabemos que el desarrollo va a tener solo un numero finito de terminos: en concreto, aquı
x(t) = t3 + t2 =3∑
n=0
δnPn(t) = δ0 + δ1t + δ23t2 − 1
2+ δ3
5t3 − 3t
2.
En este caso, es facil determinar (por simple inspeccion) que deben ser
δ3 =25, δ2 =
23, δ1 =
35, δ0 =
13

Metodos matematicos avanzados 125
–1
–0.5
0.5
1
–1 –0.8 –0.6 –0.4 –0.2 0.2 0.4 0.6 0.8 1t
Figura 6.9: Aproximacion de Fourier-Legendre con cincuenta terminos significativos para el ejemplo 6.3.
6.5 Otros polinomios ortogonales: Hermite y Laguerre
Los polinomios de Hermite surgen al resolver la EDO
x′′(t)− 2tx′(t) + 2αx(t) = 0, (6.30)
llamada Ec. de Hermite de orden α, donde α es un parametro real. Entre las ramas de la fısicadonde surge esta ecuacion podemos citar, por ejemplo, la mecanica cuantica, al investigar la ecuacion deSchrodinger para un oscilador armonico.
En esta EDO, es claro que los coeficientes son analıticos en todo IR, por lo que para resolverla volvemosa utilizar el metodo de serie de potencias, ensayando soluciones del tipo x(t) =
∑∞n=0 antn, donde los
coeficientes an estan por determinar.Derivando dos veces, sustituyendo las expresiones en la ec. de Hermite y agrupando terminos, se obtiene
0 = x′′(t)− 2tx′(t) + 2αx(t) =∞∑
n=0
n(n− 1)antn−2 − 2∞∑
n=0
nantn + 2α
∞∑n=0
antn =
=∞∑
n=0
((n + 2)(n + 1)an+2 − 2(n− α)an) tn
Igualando cada coeficiente de tn a cero, obtenemos la formula de recurrencia
an+2 =−2(α− n)
(n + 2)(n + 1)an, si n = 0, 1, 2, 3, . . . (6.31)
Dando valores a n vamos obteniendo
a2 = −2α
2a0, a3 = −2(α− 1)
3 · 2 a1
a4 = −2(α− 2)4 · 3 a2 =
22α(α− 2)4!
a0

126 Luis A. Fernandez
a5 = −2(α− 3)5 · 4 a3 =
22(α− 1)(α− 3)5!
a1
a6 = −2(α− 4)6 · 5 a4 = −23α(α− 2)(α− 4)
6!a0
a7 = −2(α− 5)7 · 6 a5 = −23(α− 1)(α− 3)(α− 5)
7!a1
Por induccion, se obtiene la formula general para los coeficientes
a2k =(−2)kα(α− 2) . . . (α− 2k + 2)
(2k)!a0, a2k+1 =
(−2)k(α− 1)(α− 3) . . . (α− 2k + 1)(2k + 1)!
a1
Agrupando por un lado los terminos que dependen de a0 y por otro los que dependen de a1, podemosescribir la expresion de la solucion como
x(t) = a0
(1 +
∞∑
k=1
(−2)kα(α− 2) . . . (α− 2k + 2)(2k)!
t2k
)+
+a1
(t +
∞∑
k=1
(−2)k(α− 1)(α− 3) . . . (α− 2k + 1)(2k + 1)!
t2k+1
)def= a0x1(t) + a1x2(t), ∀ a0, a1 ∈ IR
Las soluciones x1(t) y x2(t) forman una base del espacio de todas las soluciones de la ec. de Hermite,sea cual sea el valor del parametro α. Utilizando el criterio del cociente, es facil comprobar que las seriesque definen x1(t) y x2(t) convergen en todo IR. Al igual que sucedıa para la ecuacion de Legendre, cuandoα toma valores naturales podemos observar que o bien x1(t) o bien x2(t) son polinomios. En concreto,si α = 2m, con m ∈ IN, x1(t) es un polinomio de grado α, mientras que x2(t) es realmente una serie depotencias con infinitos terminos, dado que los factores (α− 2k + 1) nunca se van anular, porque α es par.Analogamente, si α = 2m + 1, con m ∈ IN, entonces x2(t) es un polinomio de grado α, mientras que ahorax1(t) tiene infinitos terminos, dado que los factores (α − 2k) no se anulan nunca, dado que α es impar.Estas observaciones dan lugar a la siguiente
DEFINICION 6.10 Dado n ∈ IN, se define el polinomio de Hermite de grado n como el unicopolinomio Hn(t) que es solucion de la ec. de Hermite de orden n y cuyo coeficiente de tn es igual a 2n.
Las constantes a0 y a1 se eligen de manera que se cumpla la condicion Hn(t) = 2ntn + . . . .Los polinomios de Hermite verifican algunas propiedades comunes a los polinomios de Legendre; en
particular, Hn(t) es una funcion par, si n es par, mientras que Hn(t) es una funcion impar, si n es impar.Tambien para los polinomios de Hermite existe una Formula de Rodrigues que en este caso queda
Hn(t) = (−1)net2 dn
dtne−t2 (6.32)
Vamos a verificar primero que el lado de la derecha es un polinomio: basta tener en cuenta que si u(t) =e−t2 , resulta que u′(t) = −2te−t2 y que, en general, por induccion, u(n(t) = (polinomio de grado n) · e−t2 .Ademas, este polinomio satisface la ec. de Hermite de orden n: derivando n veces la expresion
u′(t) + 2tu(t) = 0 (6.33)
y aplicando la formula de Leibniz (6.28), se obtiene que
u(n+1(t) + 2tu(n(t) + 2nu(n−1(t) = 0.
Llamando φn(t) = (−1)net2u(n(t), la expresion anterior se puede escribir en la forma
φn+1(t)− 2tφn(t) + 2nφn−1(t) = 0. (6.34)

Metodos matematicos avanzados 127
Teniendo en cuenta que φ′n(t) = 2tφn(t)−φn+1(t), la igualdad (6.34) nos lleva a que φ′n(t) = 2nφn−1(t)y, por lo tanto,
φ′′n(t) = 2nφ′n−1(t) = 4n(n− 1)φn−2(t).
Podemos verificar ahora que φm(t) satisface la ec. de Hermite de orden m:
φ′′m(t)− 2tφ′m(t) + 2mφm(t) = 2m (2(m− 1)φm−2(t)− 2tφm−1(t) + φm(t)) = 0,
donde hemos usado la relacion (6.34) para n = m− 1.Para concluir la obtencion de la formula (6.32) basta comprobar que φn(t) = 2ntn + . . .: para ello,
usamos que φ0(t) = 1, φ1(t) = 2t; por induccion, si φn(t) = 2ntn + . . ., gracias a la igualdad (6.34), setiene que
φn+1(t) = 2tφn(t)− 2nφn−1(t) = 2n+1tn+1 + . . .
Dando valores a n en la formula de Rodrigues (6.32), se obtienen las expresiones de los primerospolinomios de Hermite:
H0(t) = 1, H1(t) = 2t, H2(t) = 4t2 − 2, H3(t) = 8t3 − 12t, H4(t) = 16t4 − 48t2 + 12,
H5(t) = 32t5 − 160t3 + 120t, H6(t) = 64t6 − 480t4 + 720t2 − 120, . . .
Otra expresion equivalente de los polinomios de Hermite con las potencias de t ordenadas de formadecreciente, viene dada por
Hn(t) =[n/2]∑
k=0
(−1)kn!k! · (n− 2k)!
(2t)n−2k,
donde [n/2] = n/2, si n es par y [n/2] = (n− 1)/2, si n es impar.Llamando λ = 2α en la Ec. de Hermite, nos encontramos con un Problema Singular de Sturm -
Liouville, que se puede escribir en la forma autoadjunta(e−t2x′(t)
)′+ λe−t2x(t) = 0, t ∈ IR
con p(t) = e−t2 , q(t) = 0, s(t) = e−t2 , ya que p(t) > 0 si t ∈ (−∞,+∞), pero donde el intervalo(−∞, +∞) no esta acotado. En la terminologıa del capıtulo anterior, resulta claro que si requerimoslas condiciones de que e−t2/2x(t) y (e−t2/2x(t))′ sean finitos cuando t → ±∞, entonces 2nn=0,1,... sonautovalores del Problema Singular que estamos considerando, mientras que las autofunciones asociadasson xn(t) = cHn(t), n ∈ IN∪0, por lo que se entiende entonces que los polinomios de Hermite verifiquenalgunas de las siguientes propiedades:
TEOREMA 6.7 i) Dados n,m ∈ IN ∪ 0 distintos, se verifica∫ +∞
−∞Hn(t)Hm(t)e−t2dt = 0.
ii) Para cada n ∈ IN ∪ 0, se verifica∫ +∞
−∞H2
n(t)e−t2dt = 2nn!√
π.
iii) Series de Fourier-Hermite. Dada una funcion x(t) tal que∫ +∞
−∞x2(t)e−t2dt < +∞,
se verifica que ∫ +∞
−∞(x(t)− SN (t))2e−t2dt −→ 0 cuando N −→ +∞,
donde SN (t) =∑N
n=0 ρnHn(t), con ρn dado por
ρn =1
2nn!√
π
∫ +∞
−∞x(t)Hn(t)e−t2dt n = 0, 1, 2, 3, . . .

128 Luis A. Fernandez
iv) Todo polinomio x(t) de grado N se puede escribir como combinacion lineal de H0(t), H1(t), . . . ,HN (t). Concretamente, x(t) = SN (t) para cada t ∈ IR, con SN (t) definido en iii).
EJEMPLO 6.5 Desarrollar el polinomio x(t) = t3 + t2 en Serie de Fourier-Hermite. Al tratarse de unpolinomio sabemos que el desarrollo va a tener solo un numero finito de terminos: en concreto, aquı
x(t) = t3 + t2 =3∑
n=0
ρnHn(t) = ρ0 + ρ12t + ρ2(4t2 − 2) + ρ3(8t3 − 12t).
Por simple inspeccion, se concluye que
ρ3 =18, ρ2 =
14, ρ1 =
34, ρ0 =
12
Finalmente, los polinomios de Laguerre surgen al resolver la EDO
tx′′(t) + (1− t)x′(t) + αx(t) = 0, (6.35)
llamada Ec. de Laguerre de orden α, donde α es un parametro real. La aplicacion mas importante deesta ecuacion aparece al resolver la ecuacion de Schrodinger para el atomo de hidrogeno.
Aquı, volvemos a utilizar el metodo de Frobenius, ya usado con la Ec. de Bessel, ensayando solucionesdel tipo x(t) = tr
∑∞n=0 antn, para t > 0, donde los coeficientes an y r ∈ IR estan por determinar.
Derivando dos veces, sustituyendo las expresiones en la ecuacion y agrupando terminos, se obtiene
0 = tx′′(t) + (1− t)x′(t) + αx(t) = tr
( ∞∑n=0
(n + r)2antn−1 +∞∑
n=0
(α− n− r)antn
).
Dividendo por tr y arreglando los ındices, resulta
r2a0t−1 +
∞∑n=0
((n + 1 + r)2an+1 + (α− n− r)an
)tn = 0
Igualando cada coeficiente de tn a cero, vemos que debe ser r = 0 (salvo si a0 = 0) y llegamos a laformula de recurrencia
an+1 =−(α− n)(n + 1)2
an, si n = 0, 1, 2, 3, . . . (6.36)
Dando valores a n, se sigue que
a1 = −αa0, a2 = − (α− 1)22
a1 =α(α− 1)
22a0, a3 = −α(α− 1)(α− 2)
(3!)2a0
Por induccion, se deduce la formula general para los coeficientes
an =(−1)nα(α− 1) . . . (α− n + 1)
(n!)2a0
Obtenemos ası una solucion de la Ec. de Laguerre dada por
x1(t) = 1 +∞∑
n=1
(−1)nα(α− 1) . . . (α− n + 1)(n!)2
tn
Utilizando el criterio del cociente, es facil comprobar que la serie anterior converge en todo IR. Al igualque sucedıa en casos anteriores, cuando α toma un valor natural observamos que x1(t) es un polinomio degrado precisamente α.

Metodos matematicos avanzados 129
De la misma manera que ya vimos para la Ec. de Bessel (caso α = 0), puede encontrarse una segundasolucion (linealmente independiente con x1(t)) de la forma
x2(t) = log (t) · x1(t) +∞∑
n=0
bntn,
donde hay que determinar los coeficientes bn a traves de la ecuacion. Aunque no vamos a detallar el calculode estos coeficientes, notemos que esta segunda solucion x2(t) no va a estar definida en t = 0, debido a lapresencia del termino logarıtmico.
Evidentemente, la solucion general de la Ec. de Laguerre vendra dada en la forma
x(t) = c1x1(t) + c2x2(t), ∀ c1, c2 ∈ IR.
Las consideraciones anteriores nos permiten plantear la siguiente
DEFINICION 6.11 Dado n ∈ IN, se define el polinomio de Laguerre de grado n como el unicopolinomio Ln(t) que es solucion de la ec. de Laguerre de orden n y verifica Ln(0) = 1.
La expresion de los polinomios de Laguerre queda entonces
Ln(t) =n∑
k=0
(−1)kn!(k!)2 · (n− k)!
tk. (6.37)
En este caso, tambien existe una Formula de Rodrigues que viene dada por
Ln(t) =et
n!dn
dtn(tne−t
)(6.38)
Dando valores a n en la formula de Rodrigues (6.38), se obtienen las expresiones de los primerospolinomios de Laguerre:
L0(t) = 1, L1(t) = −t + 1, L2(t) =12!
(t2 − 4t + 2),
L3(t) =13!
(−t3 + 9t2 − 18t + 6), L4(t) =14!
(t4 − 16t3 + 72t2 − 96t + 24), . . .
Haciendo λ = α en la Ec. de Laguerre, nos encontramos con un Problema Singular de Sturm - Liouville,que se puede escribir en la forma autoadjunta
(te−tx′(t)
)′ + λe−tx(t) = 0, t ∈ (0,∞)
con p(t) = te−t, q(t) = 0, s(t) = e−t, ya que p(t) > 0 si t ∈ (0,+∞), pero p(0) = 0 y el intervalo (0, +∞)no esta acotado. En la terminologıa del capıtulo anterior, resulta claro que si requerimos las condiciones deque x(t) sea finita cuando t → 0+ y e−tx(t) tambien sea finita cuando t → +∞, entonces nn∈IN∪0 sonautovalores del Problema Singular que estamos considerando, mientras que las autofunciones asociadas sonxn(t) = cLn(t), n ∈ IN ∪ 0, por lo que no sorprende que los polinomios de Laguerre verifiquen algunaspropiedades como las que siguen:
TEOREMA 6.8 i) Dados n,m ∈ IN ∪ 0 distintos, se verifica∫ +∞
0
Ln(t)Lm(t)e−tdt = 0.
ii) Para cada n ∈ IN ∪ 0, se verifica∫ +∞
0
L2n(t)e−tdt = 1.

130 Luis A. Fernandez
iii) Series de Fourier-Laguerre. Dada una funcion x(t) tal que∫ +∞
0
x2(t)e−tdt < +∞,
se verifica que ∫ +∞
0
(x(t)− SN (t))2e−tdt −→ 0 cuando N −→ +∞,
donde SN (t) =∑N
n=0 σnLn(t), con σn dado por
σn =∫ +∞
0
x(t)Ln(t)e−tdt n = 0, 1, 2, 3, . . .
iv) Todo polinomio x(t) de grado N se puede escribir como combinacion lineal de L0(t), L1(t), . . . ,LN (t). Concretamente, x(t) = SN (t) para cada t ∈ IR, con SN (t) definido en iii).
EJEMPLO 6.6 Desarrollar el polinomio x(t) = t3 +t2 en Serie de Fourier-Laguerre. De nuevo, sabemosque el desarrollo va a tener solo un numero finito de terminos: en concreto,
x(t) = t3 + t2 =3∑
n=0
σnLn(t) = σ0 + σ1(1− t) + σ212!
(t2 − 4t + 2) + σ313!
(−t3 + 9t2 − 18t + 6).
Por simple inspeccion, se concluye que
σ3 = −6, σ2 = 20, σ1 = −22, σ0 = 8
6.6 Aplicacion a las EDP en dimension tres
En el Capıtulo 3, hemos visto como se pueden resolver algunos problemas de interes fısico (difusion delcalor en un alambre, vibraciones de una cuerda,...) mediante el metodo de separacion de variables. En estaseccion queremos ampliar ese estudio a otras situaciones donde el cuerpo que estamos estudiando tienedimension espacial mayor que uno. En este caso, veremos que la geometrıa del dominio juega un papelfundamental y tiene unas consecuencias muy importantes a la hora de la resolucion.
Empezamos planteandonos la determinacion de las vibraciones de una membrana rectangular elasticade dimension L×K y densidad constante, sujeta por los extremos y de la cual conocemos la posicion f yla velocidad inicial g en cada punto. Matematicamente, si u(x, y, t) representa la posicion del punto (x, y)de la membrana en el instante t y u = 0 representa la posicion de reposo, se trata de resolver el problema
utt(x, y, t) = uxx(x, y, t) + uyy(x, y, t), x ∈ (0, L), y ∈ (0,K), t > 0 Ec. de Ondas
u(0, y, t) = u(L, y, t) = 0, y ∈ (0, K), t > 0
u(x, 0, t) = u(x,K, t) = 0, x ∈ (0, L), t > 0
Condiciones de Contorno
u(x, y, 0) = f(x, y), x ∈ (0, L), y ∈ (0, K),
ut(x, y, 0) = g(x, y), x ∈ (0, L), y ∈ (0, K).
Condiciones iniciales
(6.39)Como en otras ocasiones, nos planteamos buscar soluciones basicas (no identicamente nulas), de la
forma u(x, y, t) = F (x) ·G(y) · T (t). Sustituyendo en la ec. de Ondas y dividiendo por u, llegamos a que
T ′′(t)T (t)
=F ′′(x)F (x)
+G′′(y)G(y)
= −λ ∈ IR, x ∈ (0, L), y ∈ (0,K), t > 0.

Metodos matematicos avanzados 131
Ademas, fijando un valor de x y otro de t y permitiendo que y varıe en (0,K) y fijando un valor de y yotro de t y permitiendo que x varıe en (0, L), obtenemos que
F ′′(x)F (x)
= −µ1 ∈ IR, x ∈ (0, L),G′′(y)G(y)
= −µ2 ∈ IR, y ∈ (0,K)
y por lo tanto las constantes estan relacionadas en la forma λ = µ1 + µ2. Teniendo ahora en cuenta lascondiciones de contorno, es sencillo darse cuenta que las funciones F y G que nos interesan deben verificar
F ′′(x) + µ1F (x) = 0, x ∈ (0, L), F (0) = F (L) = 0, (6.40)
G′′(y) + µ2G(y) = 0, y ∈ (0,K), G(0) = G(K) = 0, (6.41)
Este tipo de problemas es exactamente el mismo que aparecio en el Capıtulo 3, por lo que ya sabemoscuales son sus soluciones (no nulas). Concretamente,
Fn(x) = C sin(nπx
L
), cuando µ1n =
n2π2
L2para n = 1, 2, 3, . . . , con C ∈ IR y
Gm(y) = C sin(mπy
K
), cuando µ2m =
m2π2
K2para m = 1, 2, 3, . . . , con C ∈ IR.
Si definimos ahora λnm = µ1n + µ2m > 0 y usando que
T ′′(t) + λnmT (t) = 0, t > 0,
se sigue queTnm(t) = c1 cos
(√λnmt
)+ c2 sin
(√λnmt
),
con c1, c2 ∈ IR arbitrarias, por lo que nos encontramos que (para cada par de numeros naturales n y m)una solucion basica de la ec. de Ondas verificando ademas las condiciones de contorno, viene dada por
unm(x, y, t) = sin(nπx
L
)sin
(mπy
K
)(anm cos
(√n2π2
L2+
m2π2
K2t
)+ bnm sin
(√n2π2
L2+
m2π2
K2t
)),
donde anm, bnm ∈ IR. Ası pues, la solucion mas completa que podemos obtener por este metodo vienedada por la serie doble (suma de todas las soluciones basicas)
u(x, y, t) =∞∑
n,m=1
sin(nπx
L
)sin
(mπy
K
) (anm cos
(√n2π2
L2+
m2π2
K2t
)+ bnm sin
(√n2π2
L2+
m2π2
K2t
)).
(6.42)Formalmente, para que esta expresion satisfaga ademas las condiciones iniciales, debe suceder que
f(x, y) = u(x, y, 0) =∞∑
n,m=1
anm sin(nπx
L
)sin
(mπy
K
), (6.43)
g(x, y) = ut(x, y, 0) =∞∑
n,m=1
bnm
√λnm sin
(nπx
L
)sin
(mπy
K
). (6.44)
Nos encontramos entonces con la necesidad de tener que desarrollar funciones arbitrarias (que dependende dos variables) en series de Fourier dobles de senos.
Una vez mas, la determinacion de los coeficientes anm a partir de la funcion f , se sigue de las propiedades(3.7). Supuesto que se verifica (6.43), multiplicando a ambos lados por sin
(jπxL
)y sin
(lπyK
)e integrando
con respecto de x entre 0 y L y con respecto de y entre 0 y K resulta que∫ L
0
∫ K
0
f(x, y) sin(
jπx
L
)sin
(lπy
K
)dydx =

132 Luis A. Fernandez
=∫ L
0
∫ K
0
∞∑n,m=1
anm sin(nπx
L
)sin
(mπy
K
)sin
(jπx
L
)sin
(lπy
K
)dydx
Suponiendo que la integral de la serie coincide con la serie de la integral (este paso se puede justificarrigurosamente bajo ciertas condiciones), podemos continuar la relacion anterior, escribiendo
=∞∑
n,m=1
anm
∫ L
0
∫ K
0
sin(nπx
L
)sin
(mπy
K
)sin
(jπx
L
)sin
(lπy
K
)dydx =
=∞∑
n,m=1
anm
(∫ L
0
sin(nπx
L
)sin
(jπx
L
)dx
)(∫ K
0
sin(
lπy
K
)sin
(mπy
K
)dy
)= ajl
L
2· K
2,
gracias a(3.7). Se obtiene ası que
anm =4
LK
∫ L
0
∫ K
0
f(x, y) sin(nπx
L
)sin
(mπy
K
)dydx, n,m = 1, 2, . . . (6.45)
Del mismo modo, a partir de (6.44) se tiene que
bnm =4
LK√
λnm
∫ L
0
∫ K
0
g(x, y) sin(nπx
L
)sin
(mπy
K
)dydx, n, m = 1, 2, . . . (6.46)
Una vez mas, notemos que estas expresiones son faciles de calcular en multitud de casos, incluso bajorequisitos de regularidad mınimos sobre f y g (por ejemplo, podemos considerar el caso de funcionesconstantes a trozos).
EJEMPLO 6.7 Supongamos que L = K = 1. Utilizando la expresion obtenida en el Ejemplo 3.1,podemos concluir que la solucion del problema (6.39) con f(x, y) = x(1 − x)y(1 − y) y g(x, y) = 0 vienedada por
u(x, y, t) =∞∑
n,m=1
16(1− (−1)n)(1− (−1)m)n3m3π6
cos(π√
n2 + m2t)
sin (nπx) sin (mπy).
Analogamente, la solucion del problema (6.39) con f(x, y) = 0 y g(x, y) = x(1− x)y(1− y) viene dadapor
u(x, y, t) =∞∑
n,m=1
16(1− (−1)n)(1− (−1)m)n3m3π7
√n2 + m2
sin(π√
n2 + m2t)
sin (nπx) sin (mπy).
Finalmente,la solucion del problema (6.39) con f(x, y) = g(x, y) = x(1− x)y(1− y) viene dada por lasuma de las dos expresiones anteriores.
Nos planteamos ahora el mismo problema de las vibraciones de una membrana en el caso de que tengaforma circular (y radio 1, por ejemplo). El resto de las condiciones se mantienen: esta sujeta por el borde yconocemos la posicion f y la velocidad inicial g en cada punto. Para simplificar los calculos, supondremosque tanto f como g solo dependen de la distancia al origen. La formulacion matematica del problemaquedarıa
utt(x, y, t) = uxx(x, y, t) + uyy(x, y, t), si x2 + y2 ≤ 1, t > 0 Ec. de Ondas
u(x, y, t) = 0, si x2 + y2 = 1, t > 0 Condicion de Contorno
u(x, y, 0) = f(√
x2 + y2), x2 + y2 ≤ 1,
ut(x, y, 0) = g(√
x2 + y2), x2 + y2 ≤ 1.
Condiciones iniciales
(6.47)

Metodos matematicos avanzados 133
00.2
0.40.6
0.81
x
00.2
0.40.6
0.81
y
0
0.02
0.04
0.06
Figura 6.10: Posicion inicial de la membrana cuadrada (Ejemplo 6.7.)
Si tratamos de utilizar el metodo de separacion de variables como en el caso anterior, nos encontramoscon el problema de que los intervalos en que varıan x e y son dependientes: para cada x ∈ (−1, 1) fijo, yse mueve en el intervalo (−√1− x2,
√1− x2), lo cual nos imposibilita seguir la argumentacion standard.
Una manera de solventar esta dificultad es realizar el cambio de variables a coordenadas polares
x = r cos (θ), y = r sin (θ), r ∈ [0, 1], θ ∈ [0, 2π),
porque ahora las nuevas variables r y θ sı que se mueven en intervalos independientes y fijos. Si llamamosu(x, y, t) = U(r, θ, t), basta utilizar la regla de la cadena y las relaciones
r =√
x2 + y2, tan (θ) =y
x,
para obtener la expresion de la Ec. de Ondas en terminos de las nuevas variables. En realidad, bastaobtener la expresion de la Ec. de Laplace en dos variables, porque la variable temporal t no se estacambiando. Ası pues, si u(x, y) = U(r, θ) se puede comprobar que
uxx(x, y) + uyy(x, y) = Urr(r, θ) +Ur(r, θ)
r+
Uθθ(r, θ)r2
,
por lo que el problema (6.39) se puede escribir en la forma
Utt(r, θ, t) = Urr(r, θ, t) +Ur(r, θ, t)
r+
Uθθ(r, θ, t)r2
, r ∈ [0, 1], θ ∈ [0, 2π), t > 0
U(1, θ, t) = 0, θ ∈ [0, 2π), t > 0 Cond. de Contorno
U(r, θ, 0) = f(r), r ∈ [0, 1], θ ∈ [0, 2π),
Ut(r, θ, 0) = g(r), r ∈ [0, 1], θ ∈ [0, 2π).
Cond. iniciales
(6.48)Desde un punto de vista fısico, parece plausible esperar que si las condiciones iniciales son indepen-
dientes del angulo θ, la solucion mantenga esta propiedad a lo largo de todo el proceso. Esta observacionse ve ratificada en la practica, por lo que el problema que nos planteamos resolver finalmente es el siguiente

134 Luis A. Fernandez
00.2
0.40.6
0.81
x
00.2
0.40.6
0.81
y
–0.006
–0.004
–0.002
0
Figura 6.11: Posicion aproximada de la membrana cuadrada cuando t = 0.38 (Ejemplo 6.7.)
Utt(r, t) = Urr(r, t) +Ur(r, t)
r, r ∈ [0, 1], t > 0
U(1, t) = 0, t > 0 Cond. de Contorno
U(r, 0) = f(r), r ∈ [0, 1],
Ut(r, 0) = g(r), r ∈ [0, 1].
Cond. iniciales
(6.49)
El metodo de separacion de variables nos conduce en este caso a buscar soluciones basicas (no identi-camente nulas) del tipo U(r, t) = R(r) ·T (t), que al ser sustituidas en la EDP de (6.49) y divididas por U ,se transforman en
T ′′(t)T (t)
=R′′(r) + R′(r)
r
R(r)= −λ ∈ IR, r ∈ [0, 1], t > 0.
Se obtienen ası las siguientes EDO
T ′′(t) + λT (t) = 0, t > 0 (6.50)
r2R′′(r) + rR′(r) + λr2R(r) = 0, r ∈ [0, 1] (Ec. parametrica de Bessel de orden 0)
donde hemos multiplicado la segunda EDO por r2. Incorporando ahora la condicion de contorno, resulta
0 = U(1, t) = R(1) · T (t), t > 0,
por lo que debe ser R(1) = 0. Segun hemos visto, para λ > 0, las soluciones de la Ec. parametrica deBessel de orden 0 vienen dadas por
R(r) = c1J0(√
λr) + c2Y0(√
λr).
Desde un punto de vista fısico, nos interesan las soluciones acotadas (notemos que las vibraciones de unamembrana circular sobre la que no actuan fuerzas externas van a estar acotadas, sin ningun genero deduda: en particular, R(0) debe ser finito). Teniendo en cuenta los puntos anteriores, podemos asegurar

Metodos matematicos avanzados 135
que (al menos) nos aparecen las soluciones Rn(r) = CJ0(µnr) con C ∈ IR y λn = µ2n, donde µnn∈IN son
los ceros positivos de J0(s) (de hecho, esas son las unicas soluciones no nulas y acotadas que aparecen).Para cada λ = µ2
n > 0, las soluciones de la EDO (6.50) vienen dadas por
Tn(t) = c1 cos (µnt) + c2 sin (µnt),
por lo que cada solucion basica se expresa como
Un(r, t) = (an cos (µnt) + bn sin (µnt))J0(µnr)
y la solucion mas completa que se obtiene por este metodo queda
U(r, t) =∞∑
n=1
(an cos (µnt) + bn sin (µnt)) J0(µnr), (6.51)
donde µnn∈IN son los ceros positivos de J0(s).Formalmente, para que U satisfaga ademas las condiciones iniciales, debe suceder que
f(r) = U(r, 0) =∞∑
n=1
anJ0(µnr), r ∈ (0, 1) (6.52)
g(r) = Ut(r, 0) =∞∑
n=1
bnµnJ0(µnr), r ∈ (0, 1). (6.53)
Estas expresiones nos plantean la necesidad de utilizar las Series de Fourier-Bessel (ver el Teorema 6.5y el Corolario 6.2), por lo que ya hemos visto que los coeficientes an y bn pueden determinarse (de maneraunica) sin mayor dificultad:
an =2∫ 1
0
f(r)J0(µnr)rdr
(J1(µn))2, n = 1, 2, . . .
bn =2∫ 1
0
g(r)J0(µnr)rdr
µn(J1(µn))2, n = 1, 2, . . .
EJEMPLO 6.8 La solucion del problema (6.47) con f(x, y) = 1− (x2 + y2) y g(x, y) = 0 viene dada por
u(x, y, t) =∞∑
n=1
4J2 (µn)(µnJ1(µn))2
J0(µn
√x2 + y2) cos (µnt).
Analogamente, la solucion del problema (6.47) con f(x, y) = 0 y g(x, y) = 1− (x2 + y2) viene dada por
u(x, y, t) =∞∑
n=1
4J2 (µn)µ3
n(J1(µn))2J0(µn
√x2 + y2) sin (µnt),
donde µnn∈IN son los ceros positivos de J0(s).
Para terminar este capıtulo, nos planteamos la resolucion de la Ec. de Laplace en la esfera de centroel origen y radio 1, conocido el valor g de la funcion sobre la superficie de la esfera. Matematicamente, setrata de resolver el problema
uxx(x, y, z) + uyy(x, y, z) + uzz(x, y, z) = 0, si x2 + y2 + z2 ≤ 1 Ec. de Laplace
u(x, y, z) = g(x, y, z) si x2 + y2 + z2 = 1 Condicion de Contorno(6.54)

136 Luis A. Fernandez
–1–0.5
00.5
1
–1–0.5
00.5
1
00.20.40.60.8
1
Figura 6.12: Posicion inicial de la membrana circular (Ejemplo 6.8.)
Una vez mas, si tratamos de utilizar el metodo de separacion de variables en las variables (x, y, z), nosencontramos con que los intervalos en que varıan son dependientes y no estan fijados.
En este caso, solventamos la dificultad realizando el cambio de variables a coordenadas esfericas
x = r cos (θ) sin (φ), y = r sin (θ) sin (φ), z = r cos (φ), r ∈ [0, 1], θ ∈ [0, 2π), φ ∈ [0, π].
Si llamamos u(x, y, z) = U(r, θ, φ), tras algunos desarrollos, utilizando la regla de la cadena y las relaciones
r =√
x2 + y2 + z2, tan (θ) =y
x, cos (φ) =
z√x2 + y2 + z2
,
podemos obtener la expresion de la Ec. de Laplace en terminos de las nuevas variables:
uxx(x, y, z) + uyy(x, y, z) + uzz(x, y, z) =(r2Ur(r, θ, φ)
)r+
Uθθ(r, θ, φ)(sin (φ))2
+(sin (φ)Uφ(r, θ, φ))φ
sin (φ).
Ademas, aplicando tambien el cambio a la condicion de contorno, resulta
U(1, θ, φ) = g(cos (θ) sin (φ), sin (θ) sin (φ), cos (φ))def= g(θ, φ).
Para simplificar los calculos, vamos a suponer que g solo depende del angulo φ. Nuevamente, desde unpunto de vista fısico, parece plausible esperar que si la condicion de contorno es independiente del angulo θ,la solucion conservara esta propiedad (es decir Uθ(r, θ, φ) = 0), por lo que el problema que nos planteamosresolver finalmente es el siguiente
(r2Ur(r, φ)
)r+
(sin (φ)Uφ(r, φ))φ
sin (φ)= 0 r ∈ [0, 1], φ ∈ [0, π]
U(1, φ) = g(φ), φ ∈ [0, π]
(6.55)
El metodo de separacion de variables nos conduce en este caso a buscar soluciones basicas (no identi-camente nulas) del tipo U(r, φ) = R(r) · F (φ), que al ser sustituidas en la EDP de (6.55) y divididas porU , se transforman en
r2R′′(r) + 2rR′(r)R(r)
= − (sin (φ)F ′(φ))′
sin (φ)F (φ)= α(α + 1) ∈ IR, r ∈ [0, 1], φ ∈ [0, π],

Metodos matematicos avanzados 137
–1–0.5
00.5
1
–1–0.5
00.5
1
–0.08
–0.04
0
0.04
Figura 6.13: Posicion aproximada de la membrana circular cuando t = 0.68 (Ejemplo 6.8.)
donde hemos llamado a la constante α(α + 1), y no −λ como otras veces, por conveniencia, como veremosa continuacion.
Se obtienen ası las EDO siguientes
r2R′′(r) + 2rR′(r)− α(α + 1)R(r) = 0, r ∈ [0, 1], (Ec. de Euler) (6.56)
(sin (φ)F ′(φ))′ + α(α + 1) sin (φ)F (φ) = 0, φ ∈ [0, π]. (6.57)
La solucion general de la ec. de Euler (6.56) se obtiene facilmente, resultando aquı
R(r) = c1rα + c2r
−(α+1).
Sin embargo, la EDO (6.57) no es tan facil de reconocer. Para ello, hay que realizar un nuevo cambiode variable s = cos (φ). Si F (φ) = F (s) se obtiene entonces
F ′(φ) =dF
ds(s)
ds
dφ= − sin (φ)
dF
ds(s).
(sin (φ)F ′(φ))′ =d
dφ
(−(sin (φ))2
dF
ds(s)
)= −2 sin (φ) cos (φ)
dF
ds(s) + (sin (φ))3
d2F
ds2(s).
Sustituyendo en el EDO (6.57), dividiendo por sin (φ) y usando que s = cos (φ), llegamos a
(1− s2)F ′′(s)− 2sF ′(s) + α(α + 1)F (s) = 0, s ∈ (−1, 1). (6.58)
Esta es la Ec. de Legendre de orden α. Hemos visto que sus soluciones vienen dadas en forma deserie de potencia alrededor de s = 0. El radio de convergencia de dichas series es exactamente igual a 1,divergiendo (en general) si |s| = 1, debido a la presencia del termino 1 − s2 en la EDO. No obstante, yde nuevo desde un punto de vista fısico, nos interesan las soluciones acotadas cuando |s| = 1, ya que estecaso corresponde con la condicion φ = 0 y φ = π, (es decir, los polos norte y sur de la esfera). Teniendo encuenta estas consideraciones, podemos asegurar que (al menos) nos aparecen las soluciones Fn(s) = CPn(s)

138 Luis A. Fernandez
y α = n, donde Pn es el polinomio de Legendre de orden n ∈ IN ∪ 0. Ademas, para que esten acotadassi r = 0, debe ser Rn(r) = C1r
n. Deshaciendo el cambio, las soluciones basicas se expresan como
Un(r, φ) = anrnPn(cos (φ))
con an ∈ IR y la solucion mas completa que se obtiene por este metodo viene dada por
U(r, φ) =∞∑
n=0
anrnPn(cos (φ)), (6.59)
donde Pn es el polinomio de Legendre de orden n ∈ IN ∪ 0. Para que U satisfaga ademas la condicionde contorno, debe suceder que
g(φ) = U(1, φ) =∞∑
n=0
anPn(cos (φ)), φ ∈ (0, π). (6.60)
Volviendo a introducir la variable s = cos (φ) y llamando ϕ(s) = g(φ), podemos re-escribir la relacionanterior como
ϕ(s) =∞∑
n=0
anPn(s), s ∈ (−1, 1),
expresion que nos conduce de manera natural a las Series de Fourier-Legendre (ver el Teorema 6.6), porlo que ya hemos visto que los coeficientes an vienen determinados por
an =2n + 1
2
∫ 1
−1
ϕ(s)Pn(s)ds =2n + 1
2
∫ π
0
g(φ)Pn(cos (φ)) sin (φ)dφ, n = 0, 1, 2, . . . (6.61)
Deshaciendo el cambio a coordenadas esfericas resulta finalmente que la solucion del problema (6.54)(cuando g(θ, φ) = g(cos (θ) sin (φ), sin (θ) sin (φ), cos (φ)) solo depende de φ) viene dada por
u(x, y, z) =∞∑
n=0
an(x2 + y2 + z2)n/2Pn
(z√
x2 + y2 + z2
), (6.62)
con an dado en (6.61).
EJEMPLO 6.9 Resulta inmediato comprobar que la solucion del problema (6.54) con g(x, y, z) = 1 − zviene dada por u(x, y, z) = 1− z para cada (x, y, z) tal que x2 + y2 + z2 ≤ 1.
Si aplicamos la formula (6.62) llegamos a la misma conclusion, dado que en virtud del cambio acoordenadas esfericas g(φ) = 1− cos (φ), por lo que ϕ(s) = 1− s y se verifica
ϕ(s) = a0P0(s) + a1P1(s) +∞∑
n=2
anPn(s) = a0 + a1s +∞∑
n=2
anPn(s), s ∈ IR,
de donde (por simple igualacion de terminos) tenemos a0 = 1, a1 = −1 y an = 0, si n = 2, 3, . . .. Por lotanto,
u(x, y, z) = a0 + a1(x2 + y2 + z2)1/2P1
(z√
x2 + y2 + z2
)= 1− z.
Analogamente, podemos ahora encontrar la solucion del problema (6.54) con g(x, y, z) = 2z2−1. Aquı,g(φ) = 2(cos (φ))2 − 1, por lo que ϕ(s) = 2s2 − 1 y se verifica
ϕ(s) = a0P0(s) + a1P1(s) + a2P2(s) +∞∑
n=3
anPn(s) = a0 + a1s + a2
(3s2 − 1
2
)+
∞∑n=3
anPn(s), s ∈ IR,

Metodos matematicos avanzados 139
de donde (por simple igualacion de terminos) tenemos a0 = − 13 , a1 = 0, a2 = 4
3 y an = 0, si n = 3, 4, . . ..Por lo tanto,
u(x, y, z) = a0 + a1(x2 + y2 + z2)1/2P1
(z√
x2 + y2 + z2
)+ a2(x2 + y2 + z2)P2
(z√
x2 + y2 + z2
)=
=4z2 − 2x2 − 2y2 − 1
3.
6.7 Funciones especiales con Maple
Funcion Gamma.La sintaxis para Γ(z) es GAMMA(z). Tambien existe z!.
Ejemplos:
> GAMMA(5);
24
> evalf(GAMMA(2-7*I));
−.0006488334052− .0004448653393 I
> evalf((-1/2)!);
1.772453851
Obviamente, este valor coincide con
> evalf(GAMMA(1/2));
1.772453851
Tambien existe
> evalf((5-3*I)!);
28.38008928 + 47.11834080 I
Funcion Beta.La sintaxis para B(z, w) es Beta(z,w).
Ejemplos:
> Beta(32,5);
11884960
> evalf(Beta(2,5-3*I));
.01372549020 + .02156862745 I

140 Luis A. Fernandez
Funciones de Bessel.La sintaxis para Jv(t) e Yv(t) es BesselJ(v,t) y BesselY(v,t), resp.
La coordenada del m-esimo cero positivo de Jv(t) o Yv(t) se obtiene mediante BesselJZeros(v,m) oBesselYZeros(v,m), resp.
Finalmente, tambien es posible manejar las funciones de Bessel modificadas Iv(t) y Kv(t), ası como lasfunciones de Hankel H
(1)v (t) y H
(2)v (t). La sintaxis nuevamente es muy cercana a la notacion matematica:
BesselI(v,t), BesselK(v,t), HankelH1(v,t) y HankelH2(v,t).
Ejemplos
> BesselJ(0,3.);
−.2600519549
> BesselY(0,4.5);
−.1947050086
> BesselJ(1/2,0.2);
.3544507442
> evalf(BesselJ(2,180));
.05876652675
> evalf(BesselJZeros(0,1));
2.404825558
> evalf(BesselYZeros(1,2));
5.429681041
> evalf(BesselJZeros(1,16));
51.04353518
> evalf(BesselYZeros(0,4));
10.22234504
> evalf(BesselJZeros(0,4));
11.79153444
> BesselJ(1,BesselJZeros(1,4));
0
> evalf(BesselJ(1,BesselJZeros(0,4)));
−.2324598313
> BesselK(1,-3.);
−.04015643113− 12.41987883 I
> BesselI(4,2.5);
.1379771668
> HankelH1(5,6.8);
.3628759764 + .01356822161 I

Metodos matematicos avanzados 141
> HankelH2(1/3,-0.6);1.658231990 + .9573806856 I
Veamos como aparecen las funciones de Bessel al resolver las ec. de Bessel y sus transformadas.
> edo1:=t^2*diff(x(t),t,t)+t*diff(x(t),t)+(t^2-7)*x(t)=0;
edo1 := t2 (d2
dt2x(t)) + t (
d
dtx(t)) + (t2 − 7) x(t) = 0
> dsolve(edo1);x(t) = C1 BesselJ(
√7, t) + C2 BesselY(
√7, t)
> sol:=x(t)=C1*BesselJ(sqrt(7),t)+C2*BesselJ(-sqrt(7),t);
sol := x(t) = C1 BesselJ(√
7, t) + C2 BesselJ(−√
7, t)
> odetest(sol,edo1);0
> dsolve(t^2*diff(x(t),t,t)+t*diff(x(t),t)+(t^2-16)*x(t)=0);x(t) = C1 BesselJ(4, t) + C2 BesselY(4, t)
> dsolve(t^2*diff(x(t),t,t)+t*diff(x(t),t)+(2*t^2-9)*x(t)=0);x(t) = C1 BesselJ(3,
√2 t) + C2 BesselY(3,
√2 t)
> dsolve(t^2*diff(x(t),t,t)+(t^2-1/4)*x(t)=0);
x(t) = C1√
t BesselJ(√
22
, t) + C2√
t BesselY(√
22
, t)
La siguiente sentencia MAPLE se utilizo para generar la figura 6.3
> plot([BesselJ(1,t),BesselY(1,t)], t=0..18,y=-3..1,color=[red,blue],style=[point,line]);
esta para obtener la figura 6.4
> f:=sum(’2*BesselJ(0,BesselJZeros(0,k)*t)*(BesselJ(1,BesselJZeros(0,k) /2)/2+BesselJ(1,BesselJZeros(0,k)))/(BesselJZeros(0,k)*BesselJ(1,BesselJZeros(0,k))^2)’,’k’=1..10);g:=piecewise(t<1/2,2,t>1/2,1);plot([f, g], t=0..1, color=[red,blue],style=[line,point]);
y estas otras para obtener las figuras 6.6, 6.12 y 6.13, respectivamente.
> f:=sum(’BesselJ(1,BesselJZeros(1,k)*t)*(2/(BesselJZeros(1,k)^2*BesselJ(2,BesselJZeros(1,k))^2)*evalf(int(BesselJ(0,t),t=0..BesselJZeros(1,k))))’,’k’=1..20);plot([f, 1-t], t=0..1, color=[red,blue], style=[line,point]);
> plot3d([r,theta,1-r^2],theta=0..2*Pi,r=0..1,coords=cylindrical,axes=boxed);
> z:=4*sum(’BesselJ(0,BesselJZeros(0,n)*r)*BesselJ(2,BesselJZeros(0,n))/(BesselJZeros(0,n))^2*(BesselJ(1,BesselJZeros(0,n)))^2)*cos(BesselJZ eros(0,n)*0.68)’,’n’=1..6):plot3d([r,theta,z],theta=0..2*Pi,r=0..1,coords=cylindrical,axes=boxed);
Polinomios ortogonales.La sintaxis para los polinomios de Legendre, Hermite y Laguerre
(Pn(t),Hn(t) y Ln(t)) es LegendreP(n,t), HermiteH(n,t) y LaguerreL(n,t), respectivamente.
Ejemplos:
> LegendreP(1,t);
t

142 Luis A. Fernandez
> LegendreP(3,1.2);
2.520000000
> expand(LegendreP(5,t));
LegendreP(5, t)
> evalf(HermiteH(3,sqrt(2)));
5.656854236
> expand(HermiteH(5,t));
32 t5 − 160 t3 + 120 t
> evalf(LaguerreL(2,5/4));
−.7187500000
> expand(LaguerreL(4,t));
1− 4 t + 3 t2 − 23
t3 +124
t4
La siguiente sentencia MAPLE se utilizo para generar la figura 6.9
> f:=sum(’LegendreP(2*k+1,t)*(LegendreP(2*k,0)-LegendreP(2*k+2,0))’,’k’=0..50); g:=piecewise(t<0,-1,t>0,1);plot([f, g], t=-1..1, color=[red,blue], style=[line,point]);
y estas otras para generar las figuras 6.10 y 6.11
> plot3d(x*(1-x)*y*(1-y),x=0..1,y=0..1,axes=boxed);
> plot3d(sum(sum(’16*(1-(-1)^n)*(1-(-1)^m)/((n^3*m^3*Pi^6))*sin(n*Pi*x) *sin(m*Pi*y)*cos(Pi*0.38*sqrt(n^2+m^2))’,’n’=1..20),’m’=1..20),x=0..1,y=0..1,axes=boxed);
Bibliografıa sobre Funciones especiales de la Fısica Matematica:
1. “Formulas y tablas de la matematica aplicada”, M. R. Spiegel, J. Liu y L. Abellanas, Mc Graw Hill,2000.
2. “Matematicas avanzadas para ingenierıa”, Peter V. O’Neil, Ed. Thomson, 2004.
3. “Special functions for scientists and engineers”, W. W. Bell, Van Nostrand Reinhold, 1968.
4. “Ecuaciones diferenciales con aplicaciones y notas historicas”, G. F. Simmons, Mc Graw Hill, 1993.
5. “Ecuaciones diferenciales con aplicaciones de modelado”, D. G. Zill, International Thomson Editores,1997.
6. “Fourier analysis and its applications”, G. B. Folland, Wadsworth and Brooks, 1992.
7. “Mathematical methods for physicists”, G. B. Arfken y H. J. Weber, Harcourt-Academic Press, 2001.
8. “Metodos matematicos avanzados para ciencias e ingenierıas”, M. Gadella y L.M. Nieto, Univ. deValladolid, 2000.
9. “An introduction to Ordinary Differential Equations”, E. A. Coddington, Dover, 1961.
10. “Handbook of mathematical functions”, M. Abramowitz e I. A. Stegun, Dover, 1965.
11. “Linear methods of applied analysis”, A. M. Krall, Addison-Wesley, 1973.

Metodos matematicos avanzados 143
Recursos en Internet sobre Funciones especiales de la Fısica Matematica:
1. http://www.sosmath.com/calculus/improper/gamma/gamma.html
2. http://mathworld.wolfram.com/topics/SpecialFunctions.html
3. http://www.efunda.com/math/math home/math.cfm (Apartados “Special Functions” y “Orthogo-nal Polynomials”) – Acceso limitado.
4. http://www.mapleapps.com/powertools/MathEducation.shtml
(Apartado “Partial Differential Equations”)
o, directamente, http://www.mapleapps.com/powertools/pdes/pdes.shtml
5. http://www.math.sfu.ca/∼cbm/aands/
Version electronica completa de “Handbook of mathematical functions” de Abramowitz y Stegun.

144 Luis A. Fernandez

Capıtulo 7
Teorıa elemental de distribuciones
7.1 La Delta de Dirac
En general, las magnitudes fısicas tienen una naturaleza distribuida, es decir, estan definidas sobre uncierto dominio espacial y/o en cada instante de un cierto intervalo temporal. No obstante, esta regla tieneexcepciones: existen sistemas donde puede haber parametros, acciones o condiciones iniciales que estanlocalizados en partes muy pequenas (casi puntuales) del dominio. Por ejemplo, una carga concentrada enuna seccion muy pequena de una viga o una fuente termica localizada en una zona tambien muy pequena.Existen tambien procesos en los que se ejercen acciones con valores significativos unicamente en intervalosde tiempo muy cortos, como fuerzas producidas por impactos y aportaciones de calor u otras magnitudesen forma impulsiva (“chispazos”, destellos,...). Surge ası la necesidad de representar en un mismo esquematanto variables distribuidas en el espacio y el tiempo como concentradas unicamente en puntos o instantesde tiempo especıficos. Pensemos, por ejemplo, en la accion de una fuerza “instantanea”. Supongamos queun cuerpo de masa unidad, en reposo en el instante inicial t = 0, experimenta la accion de una fuerzaimpulsiva en un instante t0 > 0, que le comunica una velocidad v = 1, despues de lo cual la accion de lafuerza termina. Nos interesa determinar la fuerza F (t) que actua sobre el cuerpo en el instante t. Segunla Segunda Ley de Newton, si a(t) designa la aceleracion del cuerpo en el instante t
F (t) = a(t) (7.1)
En este caso,
a(t) =
+∞ si t = t00 si t 6= t0,
dado que la velocidad del cuerpo es constante todo el tiempo, salvo en t = t0, donde pasa de valer 0 avaler 1 instantaneamente. Desde el punto de vista clasico, es evidente que la expresion que resulta no tienesentido matematico, ya que no existe una funcion de t ası definida.
Todavıa mas, si integramos formalmente la expresion (7.1) entre 0 y τ > t0, teniendo en cuenta que laaceleracion es la derivada de la velocidad, resulta que
∫ τ
0
F (t)dt = v(τ)− v(0) = 1,
donde v(t) designa la velocidad del cuerpo en el instante t. De nuevo, es facil darse cuenta que la igualdadanterior no tiene sentido clasico: como F (t) = 0 cuando t 6= t0, la integral que figura en el termino de laizquierda es igual a cero, mientras que el segundo miembro no lo es. A partir de los razonamientos fısicos,cabrıa esperar que dichas igualdades tuvieran algun sentido. Estas aparentes contradicciones se puedensuperar mediante una nueva nocion matematica: las distribuciones o funciones generalizadas.
Sin duda, la distribucion mas conocida es la Delta de Dirac. Este ente matematico fue manejado congran habilidad por Oliver Heaviside a finales del siglo XIX y ha sido usado por los fısicos desde 1920.En particular, fue utilizado sistematicamente por el fısico teorico ingles Paul A. M. Dirac en su libro
145

146 Luis A. Fernandez
“Principios de Mecanica Cuantica”, obteniendo muchas de las propiedades que veremos mas adelante.Dirac gano el Premio Nobel en 1933 (a los treinta y un anos !) por su trabajo sobre la formulacionteorica de la mecanica cuantica. Pero, para los matematicos la Delta de Dirac era una monstruosidad:Heaviside fue atacado y muchos de sus trabajos no fueron aceptados para su publicacion por los editoresde revistas alegando falta de rigor matematico, a lo que el respondıa: “¿Deberıa renunciar a mi cenaporque no entiendo completamente el proceso de la digestion?”. Entre 1945 y 1948, Laurent Schwartzpublico una serie de artıculos exponiendo una teorıa matematicamente coherente y completa de esta nuevaherramienta, lo que le valio la Medalla Fields en 1950. De manera independiente, la escuela rusa (I. M.Gelfand, G. E. Shilov, S. L. Sobolev) tambien trabajo en el mismo campo, por lo cual esta consideradaigualmente responsable de esta nueva teorıa. En la actualidad, el estudio de las Ecuaciones en DerivadasParciales no puede entenderse fuera del ambito de las distribuciones, como se puede ver por ejemplo enlos libros de Casas, Folland y Renardy-Rogers de la bibliografıa.
Figura 7.1: Paul A. M. Dirac.
Segun acabamos de ver, intuitivamente, la Delta de Dirac en el punto t0 (que se suele representar porδ(t− t0)) debe verificar
δ(t− t0) =
+∞ si t = t00 si t 6= t0
Por supuesto, no existe una tal funcion entre las clasicas, pero sı es posible definir una “funcion generalizadao distribucion” como lımite de la siguiente familia de funciones clasicas: si ε > 0,
fε(t) =
12ε si t ∈ [t0 − ε, t0 + ε]0 si t 6∈ [t0 − ε, t0 + ε].
Notemos que
limε→0+
fε(t) =
+∞ si t = t00 si t 6= t0.
El uso de este procedimiento no es una novedad en matematicas: por ejemplo, ha sido utilizado paraconstruir los numeros reales a partir de los numeros racionales (“todo numero real es lımite de una sucesionde numeros racionales”). Paul Dirac utilizo esta tecnica para trabajar con la Delta y definir sobre elladiversas operaciones de interes. Por ejemplo, la integral: teniendo en cuenta que para cada ε > 0,
∫ +∞
−∞fε(t)dt =
∫ t0+ε
t0−ε
12ε
dt = 1,
definio ∫ +∞
−∞δ(t− t0)dt
def= lim
ε→0+
∫ +∞
−∞fε(t)dt = 1,

Metodos matematicos avanzados 147
tal y como precisamos en el caso de la fuerza “instantanea”. De la misma forma, para cada funcion ψ(t)continua en t0 ∫ b
a
δ(t− t0)ψ(t)dtdef= lim
ε→0+
∫ b
a
fε(t)ψ(t)dt = 0, si t0 6∈ (a, b), (7.2)
∫ b
a
δ(t− t0)ψ(t)dtdef= lim
ε→0+
∫ b
a
fε(t)ψ(t)dt = limε→0+
12ε
∫ t0+ε
t0−ε
ψ(t)dt = ψ(t0), si t0 ∈ (a, b), (7.3)
gracias al Teorema del Valor Medio para el Calculo Integral.Existen muchas otras familias de funciones clasicas que pueden ser utilizadas para definir la Delta de
Dirac en un punto t0, en diferentes situaciones segun convenga. Algunos ejemplos son:
i) fε(t) =12ε
e−|t−t0|
ε .
ii) fε(t) =ε
π((t− t0)2 + ε2).
iii) fε(t) =1
π(t− t0)sin (
t− t0ε
).
iv) fε(t) =1
2√
πεe−
(t−t0)2
4ε .
Comprobemos, por ejemplo, la familia i): en primer lugar, se observa que
fε(t0) =12ε→ +∞, cuando ε → 0+,
y si t 6= t0, no es difıcil comprobar que
fε(t) → 0, cuando ε → 0+.
Ademas, haciendo el cambio de variable y = (t− t0)/ε:
limε→0+
∫ +∞
−∞fε(t)ψ(t)dt = lim
ε→0+
∫ +∞
−∞
12ε
e−|t−t0|
ε ψ(t)dt = limε→0+
∫ +∞
−∞
e−|y|
2ψ(t0 + εy)dy =
=∫ +∞
−∞
e−|y|
2ψ(t0)dy = ψ(t0)
∫ +∞
0
e−ydy = ψ(t0).
El resto se comprueban de manera similar.
7.2 Extension del concepto de derivada
Veamos ahora como se puede extender la nocion de derivada para que sea aplicable a las distribucioneso funciones generalizadas como la Delta de Dirac, pero de manera que siga coincidiendo con la nocionhabitual sobre las funciones conocidas. Para ello se utiliza la siguiente idea: supongamos que tenemos dosfunciones regulares f y ϕ de clase C1 en el intervalo (a, b). En virtud de la formula de intregracion porpartes, sabemos que se verifica
∫ b
a
f ′(t)ϕ(t)dt = f(b)ϕ(b)− f(a)ϕ(a)−∫ b
a
f(t)ϕ′(t)dt.
Si la funcion ϕ verifica ademas que ϕ(a) = ϕ(b) = 0, resulta que∫ b
a
f ′(t)ϕ(t)dt = −∫ b
a
f(t)ϕ′(t)dt. (7.4)

148 Luis A. Fernandez
1
2
3
4
5
–1 –0.8 –0.6 –0.4 –0.2 0.2 0.4 0.6 0.8 1t
–2
0
2
4
6
8
10
–1 –0.8 –0.6 –0.4 –0.2 0.2 0.4 0.6 0.8 1t
Figura 7.2: Dos aproximaciones diferentes de la Delta de Dirac en el origen.
Notemos que el termino de la izquierda de la expresion (7.4) solamente tiene sentido si f es regular.Sin embargo, el termino de la derecha tiene sentido, aunque f no sea derivable en el sentido clasico (porejemplo, es valido si f es continua a trozos en [a, b]). Teniendo este hecho en cuenta, introducimos lasiguiente
DEFINICION 7.1 Dada f una funcion (clasica o generalizada) en [a, b], se define la derivada primerade f (en el sentido de las distribuciones) como la aplicacion lineal
f ′ : D(a, b) −→ IR,
dada por ∫ b
a
f ′(t)ϕ(t)dtdef= −
∫ b
a
f(t)ϕ′(t)dt,
dondeD(a, b) = ϕ ∈ C∞(a, b) : ϕ ≡ 0 fuera de un subintervalo de (a, b),
siempre y cuando la integral de la derecha este bien definida para cada ϕ ∈ D(a, b).
Notemos que en la definicion anterior estamos cometiendo un abuso de lenguaje al escribir∫ b
af ′(t)ϕ(t)dt,
aun cuando esta expresion (en principio) solo tiene sentido para funciones regulares.
EJEMPLO 7.1 Para empezar, vamos a calcular la derivada en el sentido de las distribuciones de lafuncion de Heaviside H(t) dada por
H(t) =
1 si t > 00 si t < 0
Eligiendo por ejemplo el intervalo de trabajo (a, b) = (−1, 1), resulta que para cada ϕ ∈ D(−1, 1)∫ 1
−1
H ′(t)ϕ(t)dtdef= −
∫ 1
−1
H(t)ϕ′(t)dt = −∫ 1
0
ϕ′(t)dt = ϕ(0)− ϕ(1) = ϕ(0).
Por otro lado, teniendo en cuenta lo que conocemos sobre la Delta de Dirac en el origen (t0 = 0), sabemosque ∫ 1
−1
δ(t)ϕ(t)dt = ϕ(0),
de donde concluimos que ∫ 1
−1
δ(t)ϕ(t)dt =∫ 1
−1
H ′(t)ϕ(t)dt,

Metodos matematicos avanzados 149
para cada ϕ ∈ D(−1, 1).Se dice entonces que la derivada (en el sentido de las distribuciones) de la funcion de Heaviside coincide
con la Delta de Dirac en el origen, es decir, H ′(t) = δ(t).
EJEMPLO 7.2 Dada la funcion
f1(t) = −t2 si t ∈ (0, 1)
t2 si t ∈ [1, 2),
sabemos que es derivable (en el sentido clasico) en todos los puntos, salvo en t = 1 donde es discontinua.Vamos a calcular ahora su derivada en el sentido de las distribuciones. En este caso, tomando (a, b) =(0, 2), por definicion, tenemos que para cada ϕ ∈ D(0, 2)
∫ 2
0
f ′1(t)ϕ(t)dtdef= −
∫ 2
0
f1(t)ϕ′(t)dt =∫ 1
0
t2ϕ′(t)dt−∫ 2
1
t2ϕ′(t)dt.
Integrando por partes en cada integral y usando que ϕ(0) = ϕ(2) = 0, resulta∫ 2
0
f ′1(t)ϕ(t)dtdef= t2ϕ(t)
∣∣10−
∫ 1
0
2tϕ(t)dt− t2ϕ(t)∣∣21+
∫ 2
1
2tϕ(t)dt = 2ϕ(1)−∫ 1
0
2tϕ(t)dt+∫ 2
1
2tϕ(t)dt =
= 2∫ 2
0
δ(t− 1)ϕ(t)dt +∫ 2
0
g1(t)ϕ(t)dt,
con
g1(t) = −2t si t ∈ (0, 1)
2t si t ∈ (1, 2).
Por ello, tenemos finalmente quef ′1(t) = 2δ(t− 1) + g1(t).
Es decir, la derivada de f1 en el sentido de las distribuciones viene dada por la suma de g1 (derivada def1 en el sentido clasico en los puntos donde existe) mas la Delta de Dirac en t = 1 (porque ese es el puntodonde f1 posee una discontinuidad de salto finito) multiplicada por 2 (porque ese es el salto de f1 en t = 1).
COMENTARIOS 7.1 i) En general, es posible utilizar la misma tecnica del ejemplo anterior parademostrar que para cada funcion f de clase C1 a trozos en un intervalo (a, b), se verifica que laderivada de f en el sentido de las distribuciones viene dada por
f ′(t) = (f(t+1 )− f(t−1 ))δ(t− t1) + . . . + (f(t+n )− f(t−n ))δ(t− tn) + g(t),
siendo t1, . . . tn los puntos de (a, b) donde f presenta discontinuidades de salto finito y
g(t) =
f ′(t) si t ∈ (a, t1)f ′(t) si t ∈ (t1, t2)· · ·
f ′(t) si t ∈ (tn−1, tn)f ′(t) si t ∈ (tn, b)
donde f ′(t) designa la derivada de f en el sentido clasico en los puntos donde existe. Para verlo,basta integrar por partes en cada subintervalo donde la funcion f es derivable.
ii) Por supuesto, en los casos en que f es C1(a, b), su derivada en el sentido de las distribuciones coincidecon la derivada clasica, ya que al no tener f discontinuidades las Deltas de Dirac no aparecen.
iii) Una propiedad interesante de la derivacion en el sentido de las distribuciones es que sigue siendouna operacion lineal, esto es, la derivada de la suma es la suma de las derivadas y la derivada de unafuncion multiplicada por una constante, viene dada por la constante que multiplica a la derivada dela funcion. Por ello podemos ahora combinar los ejemplos (7.1)-(7.2) y concluir (por ejemplo) que laderivada en el sentido de las distribuiciones de 5H(t)+7f1(t) viene dada por 5δ(t)+14δ(t−1)+7g1(t).

150 Luis A. Fernandez
iv) Otra cuestion muy interesante de la nueva nocion es que puede aplicarse a funciones generalizadas,como por ejemplo, la propia Delta de Dirac en un punto, obteniendose que viene dada por
∫ +∞
−∞δ′(t− t0)ϕ(t)dt
def= −
∫ +∞
−∞δ(t− t0)ϕ′(t)dt = −ϕ′(t0).
–40
–20
20
40
–1 –0.8 –0.6 –0.4 –0.2 0.2 0.4 0.6 0.8 1t
–2000
–1000
0
1000
2000
–1 –0.8 –0.6 –0.4 –0.2 0.2 0.4 0.6 0.8 1t
Figura 7.3: Dos aproximaciones diferentes de la derivada de la Delta de Dirac en el origen.
De la misma manera que hemos introducido la derivada primera en el sentido de las distribuciones esevidente que podemos definir la derivada segunda, sin mas que tener en cuenta que para funciones f y ϕde clase C2 en el intervalo (a, b), se verifica
∫ b
a
f ′′(t)ϕ(t)dt = f ′(b)ϕ(b)− f ′(a)ϕ(a)−∫ b
a
f ′(t)ϕ′(t)dt = −∫ b
a
f ′(t)ϕ′(t)dt =
= −f(b)ϕ′(b) + f(a)ϕ′(a) +∫ b
a
f(t)ϕ′′(t)dt =∫ b
a
f(t)ϕ′′(t)dt,
siempre que ϕ verifique ϕ(a) = ϕ(b) = ϕ′(a) = ϕ′(b) = 0.Teniendo en cuenta esta identidad, planteamos la siguiente
DEFINICION 7.2 Dada f una funcion (clasica o generalizada) en [a, b], se define la derivada segundade f (en el sentido de las distribuciones) como la aplicacion lineal
f ′′ : D(a, b) −→ IR,
dada por ∫ b
a
f ′′(t)ϕ(t)dtdef=
∫ b
a
f(t)ϕ′′(t)dt,
siempre y cuando la integral de la derecha este bien definida para cada ϕ ∈ D(a, b).En general, dada f una funcion (clasica o generalizada) en [a, b], se define la derivada n−esima de f
(en el sentido de las distribuciones) como la aplicacion lineal
f (n : D(a, b) −→ IR,
dada por ∫ b
a
f (n(t)ϕ(t)dtdef= (−1)n
∫ b
a
f(t)ϕ(n(t)dt,
siempre y cuando la integral de la derecha este bien definida para cada ϕ ∈ D(a, b).

Metodos matematicos avanzados 151
COMENTARIOS 7.2 i) Teniendo en cuenta que las funciones ϕ son de clase C∞ y, por lo tanto,derivables infinitas veces, una conclusion muy importante de las definiciones anteriores es que lasdistribuciones (o funciones generalizadas) se pueden derivar infinitas veces en el sentido de las dis-tribuciones.
ii) Por ejemplo, podemos derivar la Delta de Dirac tantas veces como queramos, obteniendo
∫ +∞
−∞δ′′(t− t0)ϕ(t)dt
def=
∫ +∞
−∞δ(t− t0)ϕ′′(t)dt = ϕ′′(t0)
y sucesivamente
∫ +∞
−∞δ(n(t− t0)ϕ(t)dt
def= (−1)n
∫ +∞
−∞δ(t− t0)ϕ(n(t)dt = (−1)nϕ(n(t0)
para cada n ∈ IN.
iii) Combinando los resultados anteriores y volviendo a los ejemplos (7.1)-(7.2) se pueden comprobar sinmucha dificultad las identidades siguientes:
H ′′(t) = δ′(t), . . . , H(n(t) = δ(n−1(t),
f ′′1 (t) = 2δ′(t− 1) + 4δ(t− 1) + g2(t)
con
g2(t) = −2 si t ∈ (0, 1)
2 si t ∈ (1, 2),
f ′′′1 (t) = 2δ′′(t− 1) + 4δ′(t− 1) + 4δ(t− 1),
y si n ≥ 4f
(n1 (t) = 2δ(n−1(t− 1) + 4δ(n−2(t− 1) + 4δ(n−3(t− 1).
7.3 Transformadas integrales y la Delta de Dirac
Uno de los temas centrales de la teorıa de distribuciones desarrollada por Schwartz es ampliar el usode la Transformada de Fourier a distribuciones y funciones clasicas que no cumplen los requisitos vistosen el Capıtulo 4. Veamos como hacerlo, a partir de las definiciones vistas allı, entendidas en el sentidogeneralizado del apartado anterior:
a) F(δ(t− α))(ξ) = e−iξα. Tomando α = 0, resulta que F(δ(t))(ξ) = 1.
F(δ(t− α))(ξ)def=
∫ +∞
−∞δ(t− α)e−iξtdt = e−iξα. (7.5)
b) Si α > 0, L(δ(t − α))(s) = e−sα. Por paso al lımite cuando α → 0 en particular tenemos queL(δ(t))(s) = 1.
L(δ(t− α))(s)def=
∫ +∞
0
δ(t− α)e−stdt = e−sα. (7.6)
Notemos que las Transformadas de Fourier y Laplace de δ(t) no verifican la propiedad de tenderhacia 0 cuando |ξ| → +∞ (resp. s → +∞) que, segun vimos en el Capıtulo 4, verifican las funcionesclasicas.

152 Luis A. Fernandez
c) F(δ′(t− α))(ξ) = iξe−iξα. Tomando α = 0, resulta que F(δ′(t))(ξ) = iξ.
F(δ′(t− α))(ξ)def=
∫ +∞
−∞δ′(t− α)e−iξtdt
def= −
∫ +∞
−∞δ(t− α)
d
dt(e−iξt)dt =
= iξ
∫ +∞
−∞δ(t− α)e−iξtdt = iξe−iξα. (7.7)
Analogamente, para cada n ∈ IN, se obtiene la expresion F(δ(n(t − α))(ξ) = (iξ)ne−iξα. Tomandoα = 0, resulta que F(δ(n(t))(ξ) = (iξ)n.
F(δ(n(t− α))(ξ) =∫ +∞
−∞δ(n(t− α)e−iξtdt = (−1)n
∫ +∞
−∞δ(t− α)
dn
dtn(e−iξt)dt =
= (−1)n
∫ +∞
−∞(−iξ)nδ(t− α)e−iξtdt = (iξ)ne−iξα. (7.8)
d) Con la misma filosofıa, F−1(δ(ξ − α))(t) = eitα
2π , o equivalentemente, F(eitα)(ξ) = 2πδ(ξ − α).
F−1(δ(ξ − α))(t)def=
12π
∫ +∞
−∞δ(ξ − α)eitξdξ =
eitα
2π. (7.9)
En particular, haciendo α = 0, se llega a F−1(δ(ξ))(t) = 12π o F(1)(ξ) = 2πδ(ξ). Usando la expresion
integral de la Transformada de Fourier, estas identidades se pueden expresar como
∫ +∞
−∞e−it(ξ−α)dt = 2πδ(ξ − α) y
∫ +∞
−∞e−itξdt = 2πδ(ξ). (7.10)
e) F−1(δ′(ξ − α))(t) = − it2π eitα o F(teitα)(ξ) = 2πiδ′(ξ − α). En particular, F−1(δ′(ξ))(t) = −it
2π oF(t)(ξ) = 2πiδ′(ξ).
F−1(δ′(ξ − α))(t)def=
12π
∫ +∞
−∞δ′(ξ − α)eitξdξ = − 1
2π
∫ +∞
−∞δ(ξ − α)
d
dξ(eitξ)dξ =
= − 12π
∫ +∞
−∞δ(ξ − α)iteitξdξ = − it
2πeitα. (7.11)
Analogamente, para cada n ∈ IN, se deduce la expresion
F−1(δ(n(ξ − α))(t) =(−it)n
2πeitα o F(tneitα)(ξ) = 2πinδ(n(ξ − α). (7.12)
F−1(δ(n(ξ − α))(t)def=
12π
∫ +∞
−∞δ(n(ξ − α)eitξdξ = (−1)n 1
2π
∫ +∞
−∞δ(ξ − α)
dn
dξn(eitξ)dξ =
= (−1)n 12π
∫ +∞
−∞δ(ξ − α)(it)neitξdξ =
(−it)n
2πeitα
Nuevamente, considerando el caso particular α = 0, llegamos a que
F−1(δ(n(ξ))(t) =(−it)n
2πo F(tn)(ξ) = 2πinδ(n(ξ).
Usando la linealidad, podemos obtener entonces la Transformada de Fourier (generalizada) de cualquierpolinomio:
F(a0 + a1t + . . . + antn)(ξ) = 2π
n∑
k=0
akikδ(k(ξ). (7.13)

Metodos matematicos avanzados 153
7.4 Cambio de variables y la Delta de Dirac
Queremos ver ahora como podemos aplicar la nocion de cambio de variables a otras funciones generalizadaso distribuciones como la Delta de Dirac. Supongamos que tenemos dos funciones regulares g y ϕ de claseC1 en el intervalo (a, b), de forma que g : (a, b) −→ (c, d) es estrictamente creciente y otra funcion f declase C1 en el intervalo (a, b). Utilizando el cambio de variables s = g(t), se verifica
∫ b
a
f(g(t))ϕ(t)dt =∫ d
c
f(s)ϕ(g−1(s))ds
g′(g−1(s)).
Si la funcion g es estrictamente decreciente, la expresion anterior solo varıa en el signo, por lo queambas pueden agruparse en la forma
∫ b
a
f(g(t))ϕ(t)dt =∫ d
c
f(s)ϕ(g−1(s))ds
|g′(g−1(s))| . (7.14)
Teniendo en cuenta esta igualdad, resultan razonables las siguientes “definiciones”:
a) Para cada k ∈ IR, k 6= 0,
δ(kt− t0) =1|k|δ
(t− t0
k
).
Tomando g(t) = kt− t0 en la expresion (7.14), se sigue
∫ +∞
−∞δ(kt− t0)ϕ(t)dt =
∫ +∞
−∞δ(s)ϕ
(s + t0
k
)ds
|k| =1|k|ϕ
(t0k
)=
=1|k|
∫ +∞
−∞δ
(t− t0
k
)ϕ(t)dt.
En particular, δ(−t) = δ(t).
b) Supongamos que g(t) es una funcion con un numero finito tj , j = 1, . . . , N de ceros reales y simples.Entonces,
δ(g(t)) =N∑
j=1
δ(t− tj)|g′(tj)| . (7.15)
Notemos que si algun tj es un cero multiple de g(t), la expresion anterior no tiene sentido, porqueg′(tj) = 0. En particular, si t1 6= t2,
δ((t− t1)(t− t2)) =1
|t2 − t1| (δ(t− t1) + δ(t− t2)) .
7.5 Otras propiedades de la Delta de Dirac
1. Para cada funcion φ ∈ C∞(IR), se verifica φ(t)δ(t − t0) = φ(t0)δ(t − t0). En particular, φ(t)δ(t) =φ(0)δ(t) y (t− t0)nδ(t− t0) = 0, si n > 0.
∫ +∞
−∞φ(t)δ(t− t0)ϕ(t)dt = φ(t0)ϕ(t0) =
∫ +∞
−∞φ(t0)δ(t− t0)ϕ(t)dt.
Tomando t0 = 0, se tiene por ejemplo que tδ(t) = 0, lo cual resulta sorprendente, porque la unicasolucion clasica de la ecuacion tx(t) = 0 es x(t) = 0, mientras que en el espacio de las distribucionestendrıamos infinitas soluciones de la forma x(t) = Cδ(t), para cada C ∈ IR.

154 Luis A. Fernandez
2. Para cada funcion φ ∈ C(IR), se verifica δ(t− t0) ? φ(t) = φ(t) ? δ(t− t0) = φ(t− t0). En particular,δ(t) ? φ(t) = φ(t) ? δ(t) = φ(t), es decir, la Delta de Dirac en el origen es el elemento neutro para elproducto de convolucion segun la Definicion 4.2:
(δ(t− t0) ? φ(t))(s) =∫ +∞
−∞δ(t− s− t0)φ(s)ds = φ(t− t0),
(φ(t) ? δ(t− t0))(s) =∫ +∞
−∞φ(t− s)δ(s− t0)ds = φ(t− t0).
Notemos ademas que si t0 ≥ 0 y φ(t) = 0 para cada t < 0, se verifica
δ(t− t0) ? φ(t) =
φ(t− t0) si t ≥ t00 si t < t0
3. Se verifica la identidadtδ′(t) = −δ(t),
ya que para cada ϕ ∈ D(−1, 1), se satisface
∫ 1
−1
tδ′(t)ϕ(t)dt = −∫ 1
−1
δ(t) (tϕ(t))′ dt = −∫ 1
−1
δ(t) (ϕ(t) + tϕ′(t)) dt = −ϕ(0) = −∫ 1
−1
δ(t)ϕ(t)dt.
7.6 Series de Fourier y la Delta de Dirac
Para empezar, podemos utilizar las expresiones vistas en el Capıtulo 3 (ver (3.19)-(3.21)) para obtener eldesarrollo en serie de Fourier de la Delta de Dirac en un punto t = t0 ∈ (−π, π):
an =1π
∫ π
−π
δ(t− t0) cos (nt)dt =1π
cos (nt0), n = 0, 1, 2, . . . (7.16)
bn =1π
∫ π
−π
δ(t− t0) sin (nt)dt =1π
sin (nt0) n = 1, 2, . . . , (7.17)
de donde se llega a la identidad
δ(t− t0) =12π
+1π
∞∑n=1
(cos (nt0) cos (nt) + sin (nt0) sin (nt)) =
=12π
+1π
∞∑n=1
cos (n(t− t0)), t ∈ (−π, π). (7.18)
Notemos que los coeficientes an y bn no verifican (en general) la propiedad de tender hacia 0 cuandon → +∞, porque la Desigualdad de Bessel deja de tener sentido en este contexto.
Como consecuencia de (7.18) extendida por periodicidad, se llega a que
∞∑
k=−∞δ(t− (t0 + 2kπ)) =
12π
+1π
∞∑n=1
cos (n(t− t0)), t ∈ IR. (7.19)
Utilizando las formulas analogas a (7.16)-(7.17) para δ′(t− t0), obtenemos otras identidades igualmenteinteresantes
δ′(t− t0) =1π
∞∑n=1
n (sin (nt0) cos (nt)− cos (nt0) sin (nt)) , t ∈ (−π, π), (7.20)

Metodos matematicos avanzados 155
–2
0
2
4
6
8
–8 –6 –4 –2 2 4 6 8t –300
–200
–100
100
200
300
–8 –6 –4 –2 2 4 6 8t
Figura 7.4: Aproximacion de Fourier para la Delta de Dirac y su derivada en el origen.
∞∑
k=−∞δ′(t− (t0 + 2kπ)) =
1π
∞∑n=1
n (sin (nt0) cos (nt)− cos (nt0) sin (nt)) , t ∈ (−π, π). (7.21)
La figura 7.4 muestra las sumas parciales (con cincuenta terminos cada una) de las series de Fourierasociadas a la Delta de Dirac en el origen y su derivada en [−π, π], aunque representadas en el intervalo[−3π, 3π]. Por supuesto, se pueden obtener expresiones analogas para la derivadas de orden superior.
Otra cuestion interesante tiene que ver con la relacion que existe entre la serie de Fourier de f ′(t) y laderivada de la serie de Fourier asociada a f(t). Vamos a ver que en ocasiones coinciden y que en otros casosno. Para fijar ideas, supongamos que f(t) es una funcion C1 a trozos en [−π, π], que tiene eventualmenteuna discontinuidad de salto finito en un punto t1 y que existe f ′(t) para cada t 6= t1. Como hemos hechoanteriormente, denotamos
g(t) =
f ′(t) si t ∈ (−π, t1)f ′(t) si t ∈ (t1, π)
Vamos a estudiar la relacion existente entre los coeficientes de Fourier asociados a f y g, que designaremospor (an, bn) y (a′n, b′n), respectivamente. Integrando por partes las expresiones iniciales se sigue que
a′0 =1π
∫ π
−π
g(t)dt =1π
(∫ t1
−π
f ′(t)dt +∫ π
t1
f ′(t)dt
)=
1π
(f(t−1 )− f(−π+) + f(π−)− f(t+1 )
). (7.22)
a′n =1π
∫ π
−π
g(t) cos (nt)dt =1π
(∫ t1
−π
f ′(t) cos (nt)dt +∫ π
t1
f ′(t) cos (nt)dt
)=
=1π
(f(t) cos (nt)|t1−π + n
∫ t1
−π
f(t) sin (nt)dt + f(t) cos (nt)|πt1 + n
∫ π
t1
f(t) sin (nt)dt
)=
=1π
((f(t−1 )− f(t+1 )) cos (nt1) + (f(π−)− f(−π+)) cos (nπ)
)+ nbn, n = 1, 2, . . . (7.23)
b′n =1π
∫ π
−π
g(t) sin (nt)dt =1π
(∫ t1
−π
f ′(t) sin (nt)dt +∫ π
t1
f ′(t) sin (nt)dt
)=
=1π
(f(t) sin (nt)|t1−π − n
∫ t1
−π
f(t) cos (nt)dt + f(t) sin (nt)|πt1 − n
∫ π
t1
f(t) cos (nt)dt
)=

156 Luis A. Fernandez
=sin (nt1)
π
(f(t−1 )− f(t+1 )
)− nan, n = 1, 2, . . . (7.24)
Teniendo en cuenta las expresiones (7.22)-(7.24), se llega a las siguientes conclusiones:
1. Si f es continua en t1 y f(−π+) = f(π−), la serie de Fourier de g coincide con la derivada (terminoa termino) de la serie de Fourier asociada a f , ya que
f(t) =a0
2+
∞∑n=1
(an cos (nt) + bn sin (nt)) , ∀ t ∈ (−π, π),
mientras que
g(t) =a′02
+∞∑
n=1
(a′n cos (nt) + b′n sin (nt)) =∞∑
n=1
(−nan sin (nt) + nbn cos (nt)) , ∀ t ∈ (−π, π), t 6= t1,
dado que a′0 = 0, a′n = nbn y b′n = −nan.
2. Si f no es continua en t1, pero f(−π+) = f(π−), la serie de Fourier de la derivada de f en el sentidode las distribuciones coincide con la derivada (termino a termino) de la serie de Fourier asociada a fen (−π, π), ya que
f(t) =a0
2+
∞∑n=1
(an cos (nt) + bn sin (nt)) , t ∈ (−π, π), t 6= t1
mientras que usando (7.18) se tiene
g(t) =a′02
+∞∑
n=1
(a′n cos (nt) + b′n sin (nt)) =
=(f(t−1 )− f(t+1 )
)δ(t− t1) +
∞∑n=1
(−nan sin (nt) + nbn cos (nt)) ,
o equivalentemente,
f ′(t) = g(t) +(f(t+1 )− f(t−1 )
)δ(t− t1) =
∞∑n=1
(−nan sin (nt) + nbn cos (nt)) .
3. Si f no es continua en t1 y f(−π+) 6= f(π−), aparece ademas otra Delta de Dirac:
g(t) =a′02
+∞∑
n=1
(a′n cos (nt) + b′n sin (nt)) =
=(f(t−1 )− f(t+1 )
)δ(t− t1) +
(f(π−)− f(−π+)
)δ(t− π) +
∞∑n=1
(−nan sin (nt) + nbn cos (nt), ) .
que se corresponde con la discontinuidad de salto finito que aparece en los multiplos de π, cuando seextiende la funcion f por periodicidad.
EJEMPLO 7.3 1. Es sencillo comprobar que
t2
2=
π2
6+
∞∑n=1
2(−1)n
n2cos (nt), ∀ t ∈ (−π, π).

Metodos matematicos avanzados 157
Como f(t) = t2
2 es de clase C1 en [−π, π] y ademas f(π) = f(−π), se sigue del desarrollo anteriorque podemos obtener el desarrollo en serie de Fourier de la funcion f ′(t) = t, sin mas que derivartermino a termino la serie de la derecha, llegando a
t =∞∑
n=1
2(−1)n+1
nsin (nt), ∀ t ∈ (−π, π).
2. Otro caso similar serıa
|t| = π
2+
∞∑n=1
2((−1)n − 1)πn2
cos (nt), ∀ t ∈ (−π, π).
Como f(t) = |t| es continua y de clase C1 a trozos en [−π, π] y ademas f(π) = f(−π), obtenemos eldesarrollo en serie de Fourier de la funcion g(t) = signo(t), sin mas que derivar termino a terminola expresion anterior:
−1 si t ∈ (−π, 0)0 si t ∈ −π, 0, π1 si t ∈ (0, π)
=
∞∑n=1
2(1− (−1)n)πn
sin (nt), ∀ t ∈ (−π, π).
Si queremos seguir derivando ahora esta expresion en el sentido de las distribuciones, nos encon-tramos que
δ(t) =∞∑
n=1
(1− (−1)n)π
cos (nt), ∀ t ∈ (−π, π).
A partir de esta identidad extendida por periodicidad a todo IR, se llega a que
∞∑
k=−∞(−1)kδ(t− kπ) =
∞∑n=1
(1− (−1)n)π
cos (nt), ∀ t ∈ IR.
Y si seguimos derivando
δ′(t) =∞∑
n=1
n((−1)n − 1)π
sin (nt), ∀ t ∈ (−π, π),
∞∑
k=−∞(−1)kδ′(t− kπ) =
∞∑n=1
n((−1)n − 1)π
sin (nt), ∀ t ∈ IR.
7.7 EDO y la Delta de Dirac
En correspondencia con las propiedades que vimos en la seccion 7.5, es facil convencerse que el conjuntode las soluciones de algunas EDO tambien puede ampliarse con respecto de lo que estamos acostumbradosen el campo clasico. Por ejemplo:
1. la EDO x′(t) = 0 admite como soluciones x(t) = C1 para cada C1 ∈ IR,
2. la EDO tx′(t) = 0 admite como soluciones x(t) = C1H(t) + C2 para cada C1, C2 ∈ IR,
3. la EDO t2x′(t) = 0 admite como soluciones x(t) = C1H(t) + C2δ(t) + C3 para cada C1, C2, C3 ∈ IR.

158 Luis A. Fernandez
Se observa aquı que el numero de constantes arbitrarias que aparecen al integrar una EDO lineal en elespacio de las distribuciones puede no coincidir con su orden, como sucede siempre en el caso clasico. Estadiscrepancia viene motivada por la presencia de coeficientes de x′(t) que se anulan en algun punto (elorigen, en este caso), pero no se produce cuando los coeficientes son constantes (entonces el conjunto desoluciones clasicas y generalizadas coincide).
Vamos a considerar ahora un sistema masa-muelle sobre el que actua una fuerza externa f(t) quedepende del tiempo. La situacion se puede modelizar usando la EDO de segundo orden
mx′′(t) + cx′(t) + kx(t) = f(t),
donde x(t) es el desplazamiento de la masa respecto del punto de equilibrio, m es la masa que cuelga delmuelle, k es una constante positiva que mide la rigidez del muelle y c es otra constante positiva que midela amortiguacion del sistema y que depende del medio donde se desplaza. Supongamos que en el instanteinicial la masa se encuentra en reposo en su posicion de equilibrio (es decir, x(0) = x′(0) = 0). Si en uninstante t = t0 > 0 aplicamos un fuerte martillazo “instantaneo” a la masa, el modelo matematico delsistema quedarıa
mx′′(t) + cx′(t) + kx(t) = δ(t− t0), x(0) = x′(0) = 0. (7.25)
Para determinar la solucion del problema, vamos a aplicar transformada de Laplace. Teniendo encuenta las propiedades vistas para la transformada se llega a que
(ms2 + cs + k
)L(x)(s) = L(δ(t− t0))(s), (7.26)
de donde
L(x)(s) =L(δ(t− t0))(s)ms2 + cs + k
, (7.27)
Dependiendo ahora de los valores de m, c y k, podemos determinar x(t), invirtiendo la transformadaanterior. Por ejemplo, si m = 1, k = 2 y c = 3, se tiene
L(x)(s) =L(δ(t− t0))(s)
s2 + 3s + 2= L(δ(t− t0))(s)
(1
(s + 1)(s + 2)
)= L(δ(t− t0))(s)
(1
s + 1− 1
s + 2
)=
= L(δ(t−t0))(s)L(e−t−e−2t))(s) = L(δ(t−t0)?(e−t−e−2t))(s) = L(∫ t
0
δ(t− t0 − r)(e−r − e−2r)dr
)(s).
Usando (7.2)-(7.3) se llega finalmente a que
x(t) =∫ t
0
δ(t− t0 − r)(e−r − e−2r)dr =
e−(t−t0) − e−2(t−t0) si t ≥ t00 si t < t0
Para problemas de contorno, estamos en condiciones de re-interpretar la funcion de Green que seintrodujo en el Capıtulo 5, utilizando la Delta de Dirac. Vamos a comenzar con el ejemplo 5.3, dondevimos que la funcion de Green asociada al problema de contorno
x′′(t) = f(t), t ∈ [0, 1], x(0) = 0, x(1) = 0, (7.28)
viene dada por
G(t, s) =
t(s− 1), si t ∈ [0, s]
s(t− 1), si t ∈ [s, 1](7.29)
y que ademas la unica solucion del problema de contorno puede expresarse (ver (5.20)), como
x(t) =∫ 1
0
G(t, s)f(s)ds. (7.30)
Derivando dos veces G(t, s) respecto de t, en el sentido de las distribuciones, resulta

Metodos matematicos avanzados 159
dG
dt(t, s) =
s− 1, si t ∈ [0, s]
s, si t ∈ [s, 1](7.31)
d2G
dt2(t, s) = δ(t− s) (7.32)
Derivando formalmente la expresion (7.30) dos veces respecto de t, se obtiene
x′′(t) =∫ 1
0
d2G
dt2(t, s)f(s)ds =
∫ 1
0
δ(t− s)f(s)ds = f(t), t ∈ [0, 1], (7.33)
tal y como ya sabıamos.El caso general sigue las mismas pautas. Partiendo de (5.21),
G(t, s) =
x1(t)x2(s)K
, si t ∈ [a, s]
x1(s)x2(t)K
, si t ∈ [s, b]
(7.34)
por lo que
dG
dt(t, s) =
x′1(t)x2(s)K
, si t ∈ [a, s]
x1(s)x′2(t)K
, si t ∈ [s, b]
(7.35)
p(t)dG
dt(t, s) =
p(t)x′1(t)x2(s)K
, si t ∈ [a, s]
p(t)x1(s)x′2(t)K
, si t ∈ [s, b]
(7.36)
d
dt
(p(t)
dG
dt(t, s)
)(t, s) =
(p(t)x′1(t))′x2(s)
K, si t ∈ [a, s]
x1(s)(p(t)x′2(t))′
K, si t ∈ [s, b]
+ δ(t− s), (7.37)
donde hemos tenido en cuenta que el salto en la discontinuidad t = s vale (ver (5.18))
p(t)W [x1, x2](t)K
= 1, ∀ t ∈ [a, b].
Se concluye entonces que
L[G(·, s)](t) = δ(t− s), (7.38)
dado que
L[G(·, s)](t) =d
dt
(p(t)
dG
dt(t, s)
)(t, s) + q(t)G(t, s) =
=
((p(t)x′1(t))′ + q(t)x1(t)) x2(s)
K, si t ∈ [a, s]
x1(s) ((p(t)x′2(t))′ + q(t)x2(t))
K, si t ∈ [s, b]
+ δ(t− s) = δ(t− s).

160 Luis A. Fernandez
Aplicando formalmente el operador L a la expresion (5.20)
x(t) =∫ b
a
G(t, s)f(s)ds, (7.39)
se obtiene en virtud de (7.38)
L[x](t) =∫ b
a
L[G(·, s)](t)f(s)ds =∫ b
a
δ(t− s)f(s)ds = f(t), ∀ t ∈ [a, b], (7.40)
como ya esperabamos.
7.8 EDP y la Delta de Dirac
En el Capıtulo 4, se estudiaron algunas aplicaciones de la transformada de Fourier a la resolucion dedistintas EDP, cuando el dominio espacial es IR. Mas concretamente, resolvimos el problema de difusiondel calor en un alambre “infinito”, supuesta conocida la temperatura inicial en cada punto (ver (4.14))
ut(x, t) = uxx(x, t), x ∈ IR, t > 0 Ec. del Calor
u(x, 0) = f(x), x ∈ IR Condicion inicial(7.41)
obteniendo que la solucion viene dada por (ver (4.18))
u(x, t) = f(x) ?e−
x24t
2√
πt=
12√
πt
∫ +∞
−∞f(x− y)e−
y2
4t dy. (7.42)
Como se aprecia, en la expresion anterior tiene un protagonismo destacado la funcion
E(x, t) =e−
x24t
2√
πt,
que se denomina nucleo gaussiano o solucion fundamental de la Ec. del Calor. Considerando quet juega el papel del parametro que tiende hacia 0, no es difıcil identificar la funcion anterior como una delas familias de la seccion 7.1 que definen la Delta de Dirac en x = 0 en el sentido de que
E(x, t) → δ(x), cuando t → 0+.
Otro tanto puede decirse de la solucion del problema elıptico en un semiplano (ver (4.20))
uxx(x, y) + uyy(x, y) = 0, x ∈ IR, y > 0 Ec. de Laplace
u(x, 0) = f(x), x ∈ IR. Condicion de Contorno(7.43)
cuya solucion se puede expresar (ver (4.22)) como
u(x, y) = f(x) ?y
π (x2 + y2)=
∫ +∞
−∞f(x− z)
y
π (z2 + y2)dz. (7.44)
En este caso, la funcionE(x, y) =
y
π (x2 + y2),
es la que juega un papel fundamental en la resolucion del problema y de manera similar a lo que pasabaen el caso anterior, considerando ahora que y es el parametro que tiende hacia 0, se puede identificar esafuncion como otra de las familias de la seccion 7.1 que definen la Delta de Dirac en x = 0, en la forma
E(x, y) → δ(x), cuando y → 0+.
Para profundizar en la teorıa de distribuciones desde un punto de vista riguroso, incluyendo sus apli-caciones al estudio de los problemas de contorno generales asociados a EDP en dimension mayor o igualque uno, se pueden utilizar los libros de Casas, Folland y Renardy-Rogers citados en la bibliografıa.

Metodos matematicos avanzados 161
7.9 Distribuciones con Maple> int(Dirac(t-2)*t^3,t=0..1);
0
> int(Dirac(t-2)*t^3,t=0..6);
8
Con MAPLE es posible calcular derivadas en el sentido de las distribuciones, como por ejemplo,
> diff(Heaviside(t),t);
Dirac(t)
o tambien,
> diff(Dirac(t),t);
Dirac(1, t)
donde, obviamente, se esta usando la notacion δ′(t) = Dirac(1, t). Sin embargo, la version 11 de MAPLE (yanteriores) no permite calcular correctamente la derivada (en el sentido de las distribuciones) de funcionesdiscontinuas definidas con la orden ”piecewise”
> f1:=t->piecewise(t<1,-t^2,t>1,t^2);
f1 := t → piecewise(t < 1, −t2, 1 < t, t2)
> diff(f1(t),t); −2 t t < 1undefined t = 12 t 1 < t
Para poder calcular bien la derivada de la funcion f1(t) anterior, hay que definirla usando la funcionde Heaviside:
> f1:=t-> t^2*Heaviside(t-1)-t^2*Heaviside(1-t);
f1 := t → t2 Heaviside(t− 1)− t2 Heaviside(1− t)
> diff(f1(t),t);
2 t Heaviside(t− 1) + 2 t2 Dirac(t− 1)− 2 t Heaviside(1− t)
> simplify(%);
4 t Heaviside(t− 1) + 2Dirac(t− 1)− 2 t
> diff(f1(t),t,t);
2Heaviside(t− 1) + 8 tDirac(t− 1) + 2 t2 Dirac(1, t− 1)− 2Heaviside(1− t)
> simplify(%);
4Heaviside(t− 1) + 4Dirac(t− 1) + 2 Dirac(1, t− 1)− 2
> int(Dirac(1,t)*t,t=-1..1);
−1
> int(Dirac(2,t)*t^2,t=-1..1);
2
> with(inttrans): fourier(Dirac(t-2),t,s);
e(−2 I s)
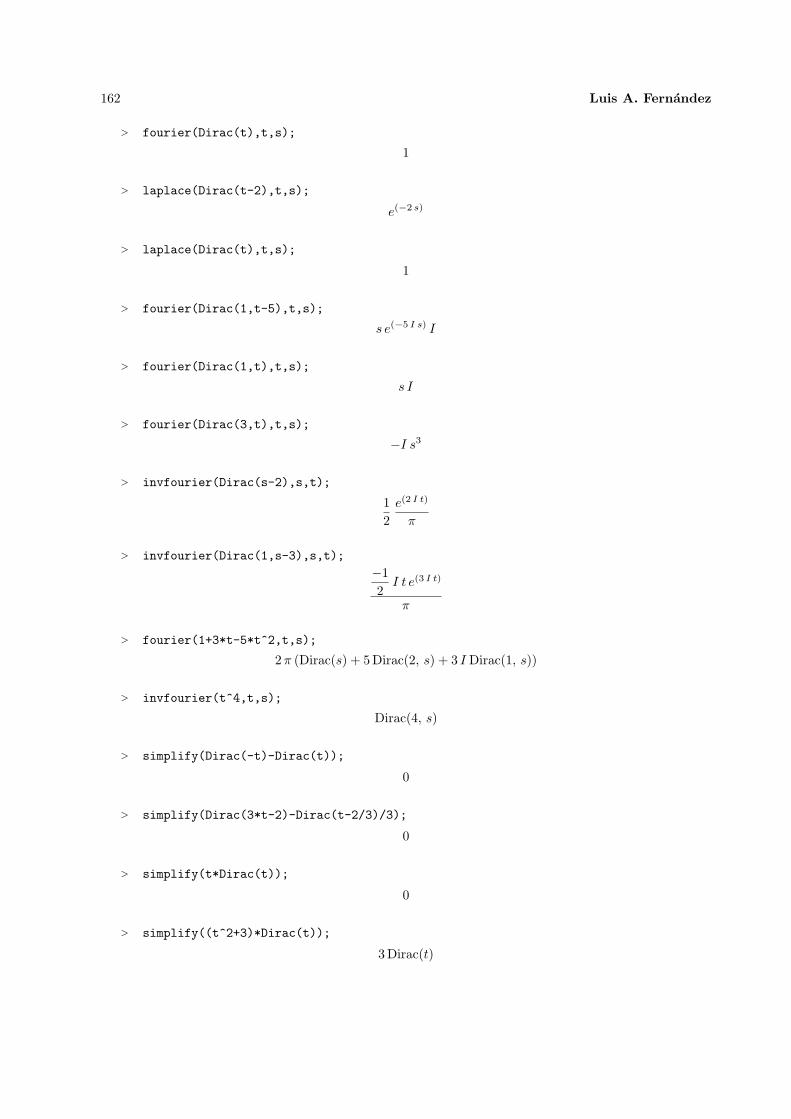
162 Luis A. Fernandez
> fourier(Dirac(t),t,s);
1
> laplace(Dirac(t-2),t,s);
e(−2 s)
> laplace(Dirac(t),t,s);
1
> fourier(Dirac(1,t-5),t,s);
s e(−5 I s) I
> fourier(Dirac(1,t),t,s);
s I
> fourier(Dirac(3,t),t,s);
−I s3
> invfourier(Dirac(s-2),s,t);
12
e(2 I t)
π
> invfourier(Dirac(1,s-3),s,t);
−12
I t e(3 I t)
π
> fourier(1+3*t-5*t^2,t,s);
2 π (Dirac(s) + 5 Dirac(2, s) + 3 I Dirac(1, s))
> invfourier(t^4,t,s);
Dirac(4, s)
> simplify(Dirac(-t)-Dirac(t));
0
> simplify(Dirac(3*t-2)-Dirac(t-2/3)/3);
0
> simplify(t*Dirac(t));
0
> simplify((t^2+3)*Dirac(t));
3Dirac(t)

Metodos matematicos avanzados 163
Las siguientes sentencias MAPLE se utilizaron para generar la figura 7.2
> epsilon:=10^(-1):plot(exp(-abs(t)/epsilon)/(2*epsilon),t=-1..1);
> epsilon:=10^(-3/2):plot(sin(t/epsilon)/(Pi*t),t=-1..1);
estas otras para generar la figura 7.3
> epsilon:=10^(-1):plot(diff(exp(-abs(t)/epsilon)/(2*epsilon),t),t=-1..1);
> epsilon:=10^(-2):plot(cos(t/epsilon)/(Pi*t*epsilon)-sin(t/epsilon)/(Pi*t^2),t=-1..1,-2*10^3..2*10^3);
y estas para la figura 7.4
> h:=1/(2*Pi)+(1/Pi)*sum(’cos(n*t)’, ’n’=1..50):plot(f,t=-3*Pi..3*Pi);
> dh:=(-1/Pi)*sum(’n*sin(n*t)’, ’n’=1..50):plot(df, t=-3*Pi..3*Pi);
Con respecto de la resolucion de EDO con Deltas de Dirac, MAPLE permite que se haga exactamenteigual que en el caso de funciones clasicas
> simplify(dsolve(diff(y(t),t,t) + 3*diff(y(t),t) + 2*y(t)= Dirac(t-1),y(0)=0,
D(y)(0)=0));y(t) = −Heaviside(t− 1) (e(−2 t+2) − e(−t+1))
> y(t):=rhs(%):plot(y(t),t=0..2);
Se observa claramente en la figura 7.5 que la solucion del problema es derivable en todos los puntos,en el sentido clasico, salvo en t = 1, aunque verifica la EDO en el sentido de las distribuciones.
0
0.05
0.1
0.15
0.2
0.25
0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2t
Figura 7.5: Solucion del Problema de Cauchy con la Delta de Dirac.
MAPLE no siempre resuelve correctamente los problemas de Cauchy con Delta de Dirac; por ejemplo,si la Delta esta concentrada en el mismo punto donde se imponen las condiciones iniciales.
> simplify(dsolve(2*diff(y(t),t,t) + 4*diff(y(t),t) + 10*y(t)= Dirac(t),y(0)=0,
D(y)(0)=0));y(t) = 0

164 Luis A. Fernandez
Bibliografıa sobre Distribuciones:
1. “Principios de Mecanica Cuantica”, P. A. M. Dirac, Ariel, 1968.
2. “Metodos matematicos para las ciencias fısicas”, L. Schwartz, Selecciones Cientıficas, 1969.
3. “Mathematical methods for physicists”, G. B. Arfken y H. J. Weber, Harcourt-Academic Press, 2001.
4. “Generalized functions in Mathematical Physics”, V. S. Vladimirov, USSR, 1979.
5. “Distribution theory and transform analysis: an introduction to generalized functions with applica-tions”, A. H. Zemanian, Dover, 1987.
6. “Theory of distributions : a non-technical introduction”, J. I. Richards, H. K. Youn, CambridgeUniversity Press, 1990.
7. “A Collection of Problems on the Equations of Mathematical Physics”, V. S. Vladimirov, Mir, 1986.
8. “Introduccion a las Ecuaciones en Derivadas Parciales”, E. Casas, Universidad de Cantabria, 1992.
9. “Fourier analysis and its applications”, G. B. Folland, Wadsworth and Brooks, 1992.
10. “An introduction to Partial Differential Equations”, M. Renardy y R. C. Rogers, Springer, 2004.
Recursos en Internet sobre Distribuciones:
1. http://mathworld.wolfram.com/DeltaFunction.html
2. http://en.wikipedia.org/wiki/Dirac delta function
3. http://www-groups.dcs.st-and.ac.uk/∼history/Mathematicians/Dirac.html
4. http://turnbull.mcs.st-and.ac.uk/∼history/Mathematicians/Schwartz.html
5. http://ochoa.mat.ucm.es/∼bombal/Personal/Historia/Schwartz.pdf

165
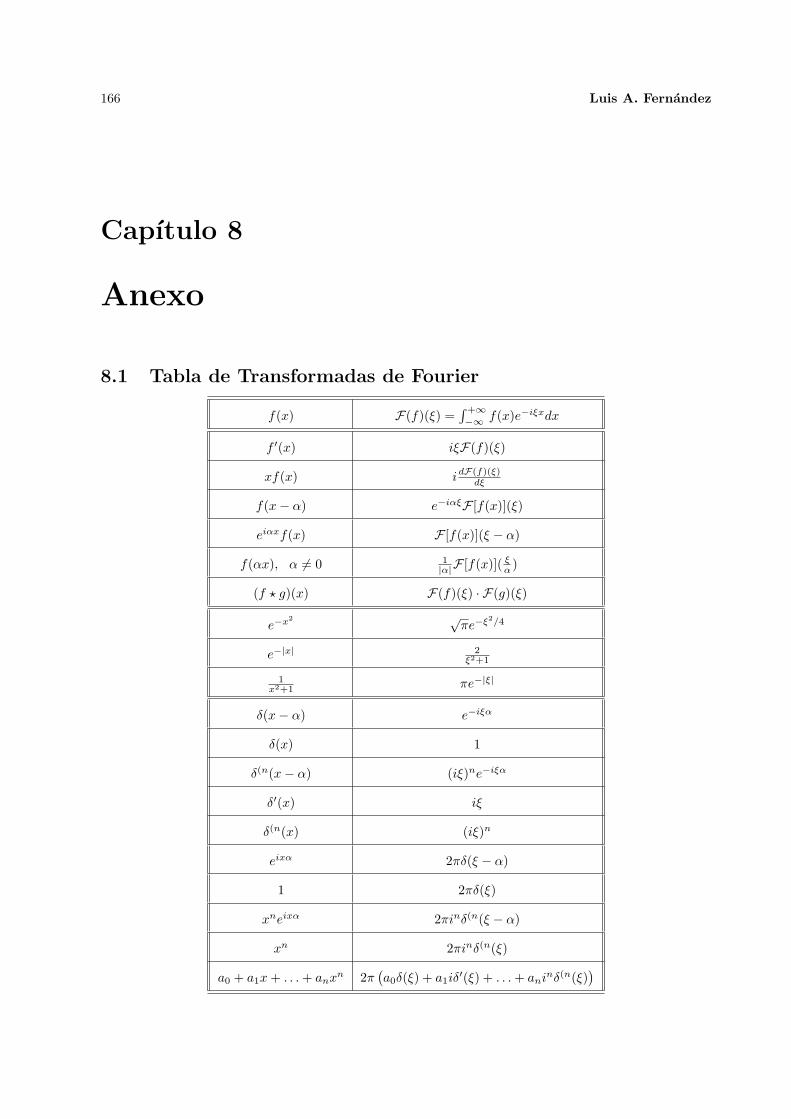
166 Luis A. Fernandez
Capıtulo 8
Anexo
8.1 Tabla de Transformadas de Fourier
f(x) F(f)(ξ) =∫ +∞−∞ f(x)e−iξxdx
f ′(x) iξF(f)(ξ)
xf(x) idF(f)(ξ)dξ
f(x− α) e−iαξF [f(x)](ξ)
eiαxf(x) F [f(x)](ξ − α)
f(αx), α 6= 0 1|α|F [f(x)]( ξ
α )
(f ? g)(x) F(f)(ξ) · F(g)(ξ)
e−x2 √πe−ξ2/4
e−|x| 2ξ2+1
1x2+1 πe−|ξ|
δ(x− α) e−iξα
δ(x) 1
δ(n(x− α) (iξ)ne−iξα
δ′(x) iξ
δ(n(x) (iξ)n
eixα 2πδ(ξ − α)
1 2πδ(ξ)
xneixα 2πinδ(n(ξ − α)
xn 2πinδ(n(ξ)
a0 + a1x + . . . + anxn 2π(a0δ(ξ) + a1iδ
′(ξ) + . . . + aninδ(n(ξ))

Metodos matematicos avanzados 167
8.2 Tabla de Transformadas de Laplace
f(t) L(f)(s) =∫ +∞0
f(t)e−stdt
f ′(t) sL(f)(s)− f(0)
eαtf(t) L[f(t)](s− α)
f(αt), α > 0 1αL[f(t)]( s
α )
(f ? g)(t) L(f)(s) · L(g)(s)
tnf(t) (−1)n dnL[f(t)](s)dsn
f(t), w−periodica 11−e−sw
∫ w
0e−stf(t)dt
g(t) = 0 si t ≤ α y g(t) = f(t− α) si t > α, α > 0 e−αsL[f(t)](s)
tn n!sn+1
eαt sin (βt) β(s−α)2+β2
eαt cos (βt) s−α(s−α)2+β2
δ(t− α), α > 0 e−sα
δ(t) 1
δ(t + α), α > 0 0
δ(n(t− α), α > 0 sne−sα
δ′(t) s
δ(n(t) sn
δ(n(t + α), α > 0 0