localização de fontes acústicas em interiores de avião ... · tendo acesso a um conjunto...
TRANSCRIPT
Localização de Fontes Acústicas em Interiores de AviãoUsando o Conceito de Transmissibilidade
Carlos Daniel Vieira Guedes
Dissertação para obtenção do Grau de Mestre em
Engenharia Aeroespacial
Orientador: Prof. Miguel António Lopes de Matos Neves
Júri
Presidente: Prof. Fernando José Parracho LauOrientador: Prof. Miguel António Lopes de Matos NevesVogal: Dr. Jorge Viçoso Patrício
Junho 2016


Agradecimentos
Em primeiro lugar gostaria de agradecer ao meu orientador, o Prof. Miguel Neves, pela sua colaboracao
ao longo do semestre na elaboracao da tese. Queria agradecer ao IDMEC-IST pelo apoio atraves do
”Projecto Institucional” LAETA-2015. com o tıtulo: ”Advanced materials for noise reduction: modeling,
optimization and experimental validation”. Queria tambem agradecer aos muitos amigos e colegas
que estiveram comigo neste caminho nao so pelos momentos vividos, mas pela ajuda inestimavel
em inumeras ocasioes, tanto no curso de Eng. Fısica como Eng. Aeroespacial. Finalmente queria
expressar a minha profunda gratidao aos meus pais pelo seu apoio e amor incondicional, e por me
darem o privilegio de ser estudante.
iii

Resumo
A presente tese responde essencialmente a seguinte questao: como localizar fontes acusticas harmonicas
tendo acesso a um conjunto reduzido de pressoes medidas. Para abordar este problema, e inspirado
em recentes estudos em dinamica estrutural, o autor propoe um novo conceito de matriz de transmissi-
bilidade de pressoes. A transmissibilidade relaciona as pressoes medidas com conjuntos de pressoes
desconhecidas em potenciais locais de fontes . Nao obstante o conceito de transmissibilidade escalar
ja ser tratado na literatura, estes desenvolvimentos sao considerados importantes, por exemplo, em
casos onde as posicoes sao inacessıveis.
A localizacao das fontes e efectuada comparando o erro ou correlacao entre pressoes medidas, para
uma dada gama de frequencias, e pressoes estimadas. As pressoes estimadas sao obtidas por um mo-
delo de elementos finitos que assume fluıdo invıscido e compressıvel, ausencia de escoamento medio
e pressao e densidade medias uniformes no domınio. Casos simples ilustram a deteccao de fontes
pontuais em domınios unidimensionais ou localizacao de uma ou duas fontes em linha em domınios bi-
dimensionais simples. Uma versao simplificada (em duas dimensoes) de interior de aviao foi modelada
onde se testa com sucesso a localizacao de uma fonte em linha.
Finalmente, note-se que o conceito de matriz de transmissibilidade de pressao e considerado uma
nova e significativa contribuicao, dado que o autor nao a encontrou na literatura. O metodo de localizacao
e uma exploracao academica das aplicacoes da transmissiiblidade que revelou o seu potencial e limitacoes.
Adicionalmente, e requerido um modelo suficientemente preciso do domınio e sao esperados calculos
computacionais intensivos.
Palavras-chave: Transmissibilidade Acustica, Localizacao de Fontes Acusticas, Metodo dos Ele-
mentos Finitos, Problema Inverso
v


Abstract
This thesis answers essentially to the following question: how to locate harmonic acoustic sources
having a reduced set of measured pressures? To address this problem, and inspired in state-of-the-art
studies in structural dynamics, the author proposes a new concept of pressure transmissibility matrix.
The transmissibility relates the measured pressures with sets of unknown pressures i.e. in potential
locations of the sources. Although a scalar transmissibility concept is already found in the literature,
these developments are considered important e.g. in cases with inaccessible positions.
The source location is done by comparing the error or the correlation between measured pressures,
for a given frequency range, with estimated pressures. The estimated pressures are obtained by using a
finite element model that assumes inviscid and compressible fluid, no mean flow and mean density and
pressure uniform through all the domain. Simple cases illustrate the detection of punctual sources in
one-dimensional domains or localization of one or two line sources in simple two-dimensional domains.
A two-dimensional simplified version of an aircraft interior was modelled and used to successfully locate
a line source.
Finally, note that the concept of pressure transmissibility matrix is considered a new and significant
contribution, as the author did not found it in the literature. The localization method is an academic ex-
ploration on the applications of the proposed transmissibility which revealed its potential and limitations.
On the other hand it requires a sufficiently accurate model of the domain and intensive computations
are to be expected.
Keywords: Acoustic Transmissibility, Acoustic Source Localization, Finite Element Method, Inverse
Problem
vii

Conteudo
Agradecimentos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . iii
Resumo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . v
Abstract . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . vii
Lista de Tabelas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xi
Lista de Figuras . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xv
Nomenclatura . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xix
1. Introducao 1
1.1. Recentes Desenvolvimentos do Conceito de Transmissibilidade . . . . . . . . . . . . . . . 4
1.2. O Problema Inverso na acustica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.3. Principais desafios e objectivos da tese . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.4. Estrutura da Dissertacao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2. Fundamentos 9
2.1. Equacao de Onda Acustica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.1.1. Propagacao e Reflexao a uma dimensao . . . . . . . . . . . . . . . . . . . . . . . 15
2.1.2. Equacao de Helmholtz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
2.1.3. Condicoes de Fronteira e Fontes . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.2. Formulacao de Elementos Finitos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.2.1. Erros do Metodo na Solucao de Elementos Finitos . . . . . . . . . . . . . . . . . . 22
2.3. A Transmissibilidade em Acustica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
2.3.1. Transmissibilidade por via da Rigidez Dinamica . . . . . . . . . . . . . . . . . . . . 24
2.3.2. Transmissibilidade por via da Matriz de Resposta em Frequencia . . . . . . . . . . 25
2.3.3. Aspectos Computacionais da Transmissibilidade . . . . . . . . . . . . . . . . . . . 26
3. Metodologia 29
3.1. Localizacao de fontes pontuais a uma dimensao com transmissibilidade escalar . . . . . 29
3.1.1. Descricao de Algoritmo de Localizacao 1D com transmissibilidade escalar . . . . 30
3.2. Localizacao de fontes pontuais a uma dimensao com a matriz de transmissibilidade . . . 32
3.2.1. Descricao de algoritmo de localizacao com matriz de transmissibilidade de pressoes 33
3.3. Localizacao de fontes em linha a duas dimensoes . . . . . . . . . . . . . . . . . . . . . . 34
3.3.1. Localizacao de duas fontes em duas dimensoes . . . . . . . . . . . . . . . . . . . 36
3.4. Implementacao da localizacao a duas dimensoes . . . . . . . . . . . . . . . . . . . . . . . 37
ix

4. Resultados e Discussao 39
4.1. Verificacao do modelo de elementos finitos a uma dimensao . . . . . . . . . . . . . . . . 39
4.2. Verificacao da transmissibilidade escalar da literatura a uma dimensao . . . . . . . . . . . 42
4.3. Localizacao de fontes pontuais a uma dimensao com transmissibilidade escalar . . . . . 45
4.3.1. Localizacao de duas fontes pontuais a uma dimensao . . . . . . . . . . . . . . . . 46
4.3.2. Efeito do refinamento da malha na localizacao . . . . . . . . . . . . . . . . . . . . 49
4.4. Verificacao da matriz de transmissibilidade de pressao a uma dimensao . . . . . . . . . . 52
4.4.1. Demonstracao de Localizacao com Transmissibilidade de Pressoes . . . . . . . . 56
4.5. Transmissibilidade de pressao a duas dimensoes . . . . . . . . . . . . . . . . . . . . . . . 59
4.6. Identificacao de fontes em linha a duas dimensoes . . . . . . . . . . . . . . . . . . . . . . 66
4.6.1. Localizacao de duas fontes em linha . . . . . . . . . . . . . . . . . . . . . . . . . . 70
4.7. Identificacao de fontes harmonicas no interior de aviao por domınios a duas dimensoes . 71
4.7.1. Estudo das Condicoes de Fronteira de Impedancia . . . . . . . . . . . . . . . . . . 73
4.7.2. Resultados de Localizacao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
5. Conclusoes 79
5.1. Trabalho Futuro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
Referencias 83
A. Anexo 85
A.1. Solucao Analıtica Harmonica de Onda Plana em Domınio Unidimensional . . . . . . . . . 85
x

Lista de Tabelas
4.1. Propriedades do Ar e do Domınio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
4.2. Dados utilizados no modelo para a Transmissibilidade 2D . . . . . . . . . . . . . . . . . . 60
4.3. Informacoes da Malha da Cabine 2D . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
4.4. Coeficientes de Absorcao na Cabine . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
xi


Lista de Figuras
1.1. Fontes e observador . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2. Localizacao no Tempo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.3. Campo Sonoro e Estado Estacionario . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.4. Transmissibilidade em sistema mecanico com um grau de liberdade . . . . . . . . . . . . 4
1.5. Transmissibilidade de pressoes em sistema acustico com NGDL . . . . . . . . . . . . . . 5
1.6. Problema Inverso na Acustica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.1. Exemplo de Onda Plana . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.2. Domınio Tridimensional . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.3. Esquema ilustrativo de propagacao a uma dimensao . . . . . . . . . . . . . . . . . . . . . 16
2.4. Modelo de Elementos Finitos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.5. Esquema do Domınio Acustico com Conjunto de Coordenadas . . . . . . . . . . . . . . . 24
2.6. Padrao de esparsidade de Z(ω) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
3.1. Problema de Identificacao 1D . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
3.2. Domınio Acustico unidimensional discretizado , indicando o conjunto U e e conjunto K . 32
3.3. Divisao de malha estruturada em zonas para localizacao + possıveis orientacoes das
fontes em linha . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
3.4. Esquema do processo de localizacao com celula e figura de busca, para tres nıveis de
refinamento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
3.5. Representacao esquematica do metodo de localizacao 2D . . . . . . . . . . . . . . . . . 37
4.1. Esquema da equivalencia 3D-2D-1D do modelo de tubo de ar . . . . . . . . . . . . . . . 40
4.2. Solucao de Elementos Finitos 1D . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
4.3. Convergencia da Amplitude Maxima (Condicao de Fronteira Reflectiva) . . . . . . . . . . 41
4.4. Erro da Solucao de Elementos Finitos 1D . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
4.5. Esquema do modelo 1D para verificacao da transmissibilidade escalar . . . . . . . . . . . 43
4.6. Curvas de transmissibilidade escalar num sistema com 60 elementos finitos . . . . . . . 43
4.7. Transmissibilidades com diferentes localizacoes da fonte . . . . . . . . . . . . . . . . . . 44
4.8. Esquema ilustrativo da posicao da fonte e da posicao dos nos de pressao conhecida na
identificacao de fonte pontual . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
4.9. Curvas de pressao e curva de transmissibilidade em funcao da frequencia nos nos co-
nhecidos. Condicao de fronteira reflectiva . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
xiii

4.10.Erro de localizacao com uma fonte em domınio unidimensional com 61 coordenadas (nos) 46
4.11.Configuracao para localizacao com 2 fontes . . . . . . . . . . . . . . . . . . . . . . . . . 47
4.12.Erro de localizacao vs combinacoes nos nos, com duas fontes . . . . . . . . . . . . . . . 48
4.13.Erro de identificacao c/ 2 fontes, terminacoes anecoicas . . . . . . . . . . . . . . . . . . 49
4.14.Funcao de erro no caso anecoico, c/ 2 fontes . . . . . . . . . . . . . . . . . . . . . . . . . 49
4.15.Estudo do efeito de Neλ (I) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
4.16.Estudo do efeito de Neλ (II) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
4.17.Esquema de transmissibilidade matricial com dimensao 1× 1 . . . . . . . . . . . . . . . . 53
4.18.Transmissibilidade obtida c/ Solucao Analıtica vs obtida c/ Matriz H(ω) . . . . . . . . . . . 53
4.19.Esquema de Transmissibilidade 2x2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
4.20.Modulo e Fase de THKU (ω) vs TZRU (ω)-I . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
4.21.Modulo e Fase de THKU (ω) vs TZRU (ω)-II . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
4.22.Comparacao de pressao obtida por THKU (ω) c/ Solucao de Elementos finitos . . . . . . . 56
4.23.Esquema de localizacao de uma fonte c/ transmissibilidade de pressoes . . . . . . . . . 56
4.24.Graficos de σ obtidos na localizacao de uma fonte pontual com transmissibilidade de
pressoes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
4.25.Curvas de pressao conhecida, PK e de pressao estimada P sK . . . . . . . . . . . . . . . . 57
4.26.Graficos de σ obtidos na localizacao de duas fonte pontuais c/ transmissibilidade de
pressoes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
4.27.Parametros do Ar e da Malha 2D . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
4.28.Malha 2D com 60× 12 elementos finitos . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
4.29.Solucao de elementos finitos 2D de Onda Plana . . . . . . . . . . . . . . . . . . . . . . . 60
4.30.Solucao de elementos finitos 2D vs. Solucao Analıtica 1D . . . . . . . . . . . . . . . . . . 60
4.31.Esquema do tubo 2D com os pontos de interesse . . . . . . . . . . . . . . . . . . . . . . 61
4.32.Transmissibilidades de pressao para caso de onda plana . . . . . . . . . . . . . . . . . . 62
4.33.Comparacao das pressoes obtidas pela solucao de elementos finitos vs obtida pela trans-
missibilidade . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
4.34.Solucao 2D c/ pressao imposta em y=L/3,x=0 a h/2, f=1500 Hz.Condicao de fronteira
refletiva nas extremidades . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
4.35.Solucao 2D c/ pressao imposta em y=L/3,x=0 a h/2, f=1500 Hz. Condicao de fronteira
anecoica nas extremidades . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
4.36.Transmissibilidades de pressao para caso de onda nao plana(Modulo e Fase).Extremidades
reflectivas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
4.37.Transmissibilidades de pressao para caso de onda nao plana(Modulo e Fase). Extremi-
dades anecoicas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
4.38.Comparacao da pressao no ponto (x, y) = (0, h/2). Solucao elementos finitos vs pressao
obtida c/ transmissibilidade(onda nao plana, extremidades reflectivas) . . . . . . . . . . . 65
4.39.Comparacao da pressao no ponto (x, y) = (0, h/2). Solucao de elementos finitos vs
pressao obtida c/ transmissibilidade(onda nao plana, extremidades anecoicas) . . . . . . 66
xiv

4.40.Malha 2D com 60× 12 elementos finitos para identificacao . . . . . . . . . . . . . . . . . 66
4.41.Exemplo de distribuicao de pressoes (parte real) para, f=1500 Hz . . . . . . . . . . . . . 67
4.42.Curvas de pressoes conhecidas PK para identificacao 2D . . . . . . . . . . . . . . . . . . 67
4.43.Configuracao de zonas de busca para identificacao 2D . . . . . . . . . . . . . . . . . . . 68
4.44.Mapas de correlacao (por celula) do domınio 2D (I) . . . . . . . . . . . . . . . . . . . . . . 68
4.45.Mapas de correlacao (por celula) do domınio 2D (II) . . . . . . . . . . . . . . . . . . . . . 69
4.46.Mapas de correlacao (por celula) do domınio 2D (III) . . . . . . . . . . . . . . . . . . . . . 69
4.47.Distribuicao de pressao (parte real) a 1500 Hz, c/ duas fontes . . . . . . . . . . . . . . . . 70
4.48.Localizacao de fonte acustica em 2D c/ 2 fontes . . . . . . . . . . . . . . . . . . . . . . . 70
4.49.Seccao Transversal da Fuselagem de um ATR 72 . . . . . . . . . . . . . . . . . . . . . . 72
4.50.Malha 2D do troco de seccao longitudinal do interior de cabine de aviao . . . . . . . . . . 72
4.51.Pormenor da malha no assento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
4.52.Estudo do efeito do coeficiente de absorcao: Sol. software de elementos finitos 2D vs
Sol. Analıtica 1D . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
4.53.Exemplos de curvas de pressao PK , para identificacao na cabine . . . . . . . . . . . . . 74
4.54.Distribuicao de pressao (parte real), a 1000 Hz, c/ fonte no chao . . . . . . . . . . . . . . 75
4.55.Mapa de correlacao da cabine c/ 1 linha de pressao conhecida e celula de busca c/
16× 16 cm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
4.56.Mapa de correlacao da cabine c/ 2 linha de pressao conhecida e celula de busca c/
16× 16 cm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
4.57.Mapa de correlacao da cabine c/ 1 linha de pressao conhecida e celula de busca c/ 8×8 cm 77
4.58.Mapa de correlacao da cabine c/ 2 linhas de pressao conhecida e celula de busca c/
8× 8 cm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
xv


Nomenclatura
1GDL Um grau de liberdade.
FRF Funcoes de resposta em frequencia.
LFA Localizacao de fontes acusticas.
MEF Metodo dos elementos finitos.
NGDL N graus de liberdade.
Simbolos gregos
α Coeficiente de absorcao sonora.
ε Erro de elementos finitos.
εsP Funcao de erro de pressao.
εsT Funcao de erro de transmissibilidade.
γ Razao de calores especıficos.
λ Comprimento de onda.
∇2 Laplaciano.
Ω Fronteira do domınio.
ω Frequencia angular .
Φ Potencial de Velocidade.
φ Funcao de forma.
ρ Densidade.
ρ′ Perturbacao na densidade de equilıbrio.
ρ0 Densidade no equilıbrio.
σ Coeficiente de correlacao
Simbolos romanos
r Coordenadas cartesianas no referencial do elemento.
xvii
C Matriz de amortecimento.
FK ,FU ,FC Vector de cargas acusticas nos respectivos conjuntos de coordenadas K,U e C.
H Matriz de resposta em frequencia.
K Matriz de rigidez.
M Matriz de massas.
PK ,PU ,PC Vector de pressoes acusticas nos respectivos conjuntos de coordenadas K,U e C.
r Vector das coordenadas cartesianas.
v′ Perturbacao na velocidade das partıculas.
v Vector da velocidade das partıculas.
Z Matriz de rigidez dinamica.
A0 Amplitude maxima (de pressao ou velocidade).
C Conjunto de todas as coordenadas excepto K e U .
c Velocidade de propagacao do som.
F Vector de cargas acusticas.
f Frequencia.
F (ω)s Vector de forcas harmonicas.
gx, gy, gz Componentes cartesianas da aceleracao da gravidade.
he Comprimento de um elemento finito.
K Conjunto das coordenadas de pressao conhecida.
k Numero de onda.
p Pressao (ate a seccao 2.1.3). Pressao acustica em regime estacionario a partir dessa seccao.
p′ Perturbacao na pressao de equilıbrio/Pressao acustica (ate a seccao 2.1.3).
P (ω) Vector de pressoes harmonicas.
p0 Pressao no equilıbrio.
Q(ω) Vector de aceleracoes de volume.
R Resistencia (parte real da impedancia) (no preambulo do capıtulo 2).Conjunto das coordenadas
C e K (a partir do preambulo do capıtulo 2)
r Coeficiente de reflexao.
xviii

Rx, Ry, Rz Termos devidos a resistencia distribuıda nas equacoes de Navier-Stokes(nas coordenadas
cartesianas).
t Tempo.
Tx, Ty, Tz Termos (nas coordenadas cartesianas) devidos as perdas viscosas nas equacoes de Navier-
Stokes.
THKU Transmissibilidade de pressoes por via da matriz H, entre as coordenadas K e U
Tuk Transmissibilidade escalar de pressoes (da literatura) entre uma coordenada k e uma coorde-
nada de referencia kref , assumindo uma fonte na coordenada u
TZRU Transmissibilidade de pressoes por via da matriz Z, entre as coordenadas R e U .
U Conjunto das coordenadas onde se pode impor uma pressao.
V Domınio.
vn Velocidade normal.
v′x Velocidade das partıculas na componente cartesiana x.
X Reactancia (parte imaginaria da impedancia).
X(ω) Vector de deslocamentos.
Z Impedancia acustica.
Z0 Impedancia especıfica do meio.
Zar Impedancia especıfica do ar.
xix


1. Introducao
O som e um fenomeno cada vez mais presente em todas as vertentes da vida humana. Exemplos
agradaveis sao o som da musica preferida que se ouve na radio e menos agradaveis sao o ruıdo
(como vulgarmente se designa nestes casos) emitido por um aviao a aterrar num aeroporto, situado
nas proximidades de uma zona residencial. Um dos muitos problemas do interesse da engenharia que
envolvem o som e saber o que esta a produzi-lo e onde esta localizado.
A localizacao de fontes acusticas (LFA) tem como proposito estimar a posicao de uma fonte acustica,
conhecidas determinadas medicoes do campo sonoro onde esta esta inserida. Considera-se um campo
sonoro como uma regiao num meio material onde o som se esta a propagar. Grandezas como a pressao
acustica ou a velocidade das partıculas do meio onde se propaga o som caracterizam um campo
sonoro. Esta informacao, funcao do tempo e do espaco, pode ser medida atraves de um conjunto de
microfones dispostos estrategicamente para tal.
A importancia da LFA leva-a a ter varias aplicacoes em areas relacionadas com a aeronautica tais
como radar, monotorizacao de equipamentos (em ingles health monitoring), automacao de producao
industrial, navegacao e sistemas de posicionamento global (GPS) [1].
Esta tecnica tambem se estende a outros domınios, para nomear alguns: direccionamento au-
tomatico de cameras em conferencias, sistemas de vigilancia, teleconferencias, tecnicas de melhoria
da fala, controlo de trafego, aparelhos auditivos, interaccao computador-humano, sonar, localizacao de
telemoveis, localizacao de epicentros de terramotos e explosoes subterraneas, robots, eventos micro-
sısmicos em minas e redes de sensores [1].
O som pode ter variadas origens, sendo que se podem dividir em tres categorias[2]:
• Som induzido por um escoamento: um exemplo e o ruıdo de um escoamento turbulento envol-
vente a um aviao, tanto na interaccao com a fuselagem como devido ao jacto do motor. Outro
exemplo e o escoamento na turbina de um ventilador
• Som induzido por uma estrutura: tome-se o exemplo de uma maquina de lavar roupa a vibrar
devido a centrifugacao, a corda de uma guitarra ou mesmo a membrana de um altifalante.
• Som induzido termicamente: causado por variacoes locais de temperatura, como e o exemplo
de um relampago. O som subsequente e causado devido a variacao brusca de temperatura que
origina uma subita expansao do ar.
Os exemplos acima indicados sao casos em que a fonte acustica pode ser perfeitamente definida
num espaco bem identificado ou casos em que a fonte e uma envolvente ao proprio ambiente. Pense-
se na situacao em que o observador e uma pessoa no interior de uma cabine de aviao (figura 1.1
a)). Se este estiver a estudar o som do altifalante de um telemovel e possıvel definir com precisao
1

a localizacao espacial do mesmo. No entanto, se estiver a ouvir o som devido ao escoamento na
fuselagem rapidamente vai concluir que a fonte do mesmo e a cabine inteira. Se, por outro lado, o
observador for uma pessoa no solo a observar o aviao (figura 1.1 b)) , podia-se reduzir a origem do
som de todos os componentes do aviao (fuselagem, motores, telemovel) a um ponto que se deslocava
no espaco a velocidade do mesmo. Em suma, o efeito de uma fonte acustica e um conceito relativo ao
observador.
O presente trabalho foca-se, portanto, em localizar fontes acusticas perfeitamente definidas no espaco,
estaticas relativamente ao observador e situadas em ambientes interiores.
(a) Observador Interior ao Aviao (b) Observador Exterior ao Aviao
Fig. 1.1.: Fontes e observadores
Posto isto, e natural que para um dado observador, o som emitido por uma determinada fonte pode
chegar-lhe de varias formas. Tome-se o exemplo da figura 1.2 em que os dois observadores sao neste
caso dois microfones posicionados a distancias diferentes (r1 e r2) da fonte que esta a emitir som que
se propaga a uma velocidade c. Cada microfone esta a receber nesse exacto instante de tempo t uma
frente de onda diferente (linhas circulares).
A maioria dos metodos que aqui serao designados de localizacao no domınio do tempo baseiam-
se neste princıpio simples: uma frente de onda sonora chegara a um sensor antes de chegar a um
segundo. Numa segunda fase, apos o calculo do atraso relativo (na figura representado por τ ) entre
microfones pode-se aplicar um metodo como a interseccao ou interpolacao espacial para se obter ao
local exacto da fonte.
Exemplos desses metodos foram abordados e revistos por Ritu and Dhull [1] . Sao eles a estimacao
de atraso temporal estudado por Bestagini et al. [3] ou variantes desse metodo como o usado em Lima
et al. [4]. A estimacao de atraso temporal apresenta algumas desvantagens dado que os erros de
medicao provocam erros de localizacao, o que torna este metodo significativamente difıcil na presenca
2

Fig. 1.2.: Localizacao no Tempo.Fonte: [1]
de fenomenos de reverberacao, ruıdo de fundo e caso o intervalo de tempo de observacao seja curto
[1]. A acrescentar a estes factores existe ainda o facto de que a deducao realizada na imagem 1.2
assume que se esta num ambiente livre de eco.
Uma forma alternativa de analisar o som e medir a velocidade das suas partıculas, grandeza que
oferece informacao quanto a direccao de propagacao do som, ao contrario da pressao sonora. Esta
tecnica, mais recente, pode ser aplicada com o recurso a uma sonda construıda especificamente para
tal. Um exemplo, e o estudado por Visser [5] que analisa o som causado por uma placa a vibrar numa
dada gama de frequencias.
O conceito de frequencia, e outra forma de analisar o som que chega a um observador, dado que
o som e um fenomeno ondulatorio. O que e usual se designar por sons graves sao na realidade sons
de baixas frequencias enquanto que os sons agudos estao na banda das altas frequencias. Fontes a
emitir em frequencias diferentes irao provocar campos sonoros distintos.
Dada uma determinada fonte, posicionada numa sala, que comece a emitir num instante de tempo
t, como e apresentado na figura 1.3 a), eventualmente o som vai encontrar as paredes e ser em parte
reflectido de volta para o interior da sala. O somatorio das ondas sonoras reflectidas e as que estao a
ser emitidas, vao gerando o campo sonoro, ate que ao fim de um certo perıodo de tempo (designado
como transiente) esse mesmo campo vai atingir o denominado estado estacionario. Este estado, tıpico
de fenomenos ondulatorios (ou analogamente, na mecanica, em fenomenos vibratorios), caracteriza-se
por certas propriedades do campo sonoro nao dependerem do tempo. Um exemplo concreto sao os
padroes que se formam na agua contida num recipiente, quando uma fonte acustica emite a determi-
nadas frequencias, fenomeno conhecido como ressonancia (figura 1.3 b)). As moleculas de agua tem
um comportamento vibratorio induzido pelo som mas a forma (padrao) resultante e constante e nao se
altera com o tempo. Ao se alterar a frequencia para outra frequencia de ressonancia, eventualmente
a agua passara por um curto perıodo transiente ate formar um padrao diferente e atingir novamente
o estado estacionario. Metodos que aqui designaremos de localizacao no domınio da frequencia,
assumindo um estado estacionario, sao uma categoria na qual o metodo desenvolvido na presente
dissertacao se insere.
3

(a) Reflexao do Som (b) Padroes de Ressonancia na agua. Fonte:www.cymatics.co.uk
Fig. 1.3.: Campo Sonoro e Estado Estacionario
1.1. Recentes Desenvolvimentos do Conceito de
Transmissibilidade
A transmissibilidade, e uma grandeza matematica que pode ser medida ou calculada, assumindo re-
gime estacionario a uma dada frequencia angular ω.
M
𝐹𝑎𝑝𝑜𝑖𝑜 = 𝐹𝑎𝑝𝑜𝑖𝑜𝑒𝑗ω𝑡
𝐹 = 𝐹𝑒𝑗ω𝑡𝑋 = 𝑋𝑒𝑗ω𝑡
Tran
smis
sib
ilid
ade
de
forç
as
K
M
KC C
Transm
issibilid
ade
de d
eslocam
en
tos
𝑇 =𝐹𝑎𝑝𝑜𝑖𝑜
𝐹𝑇 =
𝑋𝑎𝑝𝑜𝑖𝑜
𝑋
𝑋𝑎𝑝𝑜𝑖𝑜 = 𝑋𝑎𝑝𝑜𝑖𝑜𝑒𝑗ω𝑡
Corpo Apoiado Corpo Livre
Fig. 1.4.: Transmissibilidade em sistema mecanico com um grau de liberdade
No caso de sistemas mecanicos de um grau de liberdade (1GDL) (em ingles single degree of freedom-
SDOF ), a formulacao da transmissibilidade e relativamente simples como e ilustrado na figura 1.4. A
figura representa o caso de uma massa M, excitada a uma dada frequencia por uma forca F, e sujeita a
accao de uma rigidez K, e de um amortecimento C. O conceito de transmissibilidade de deslocamentos
e semelhante ao ja largamente estudado conceito de transmissibilidade de forcas (por exemplo por Rao
[6]). O primeiro define-se como a razao entre a forca transmitida ao apoio e a forca aplicada na estrutura.
Ja o segundo e dado pela razao entre a resposta do deslocamento da estrutura, e o deslocamento
imposto no apoio. As funcoes de transmissibilidade relacionam portanto variaveis do mesmo tipo ou
seja forcas com forcas ou deslocamentos com deslocamentos; ao contrario das funcoes de resposta
em frequencia (FRF) que relacionam variaveis conjugadas: por exemplo, forca com deslocamento.
Transportar a ideia de transmissibilidade de deslocamentos do caso 1GDL para um caso de n graus
4

de liberdade (NGDL)(em ingles multiple degrees of freedom-MDOF ) e, em suma, um problema de como
relacionar um conjunto de respostas desconhecidas a um conjunto de respostas conhecidas, quando
um determinado conjunto de forcas e aplicado na estrutura em questao. Esse problema foi abordado
por Lage et al. [7] onde foi desenvolvido um conceito de transmissibilidade para um sistema mecanico
sujeito a accao de forcas harmonicas. Uma das vantagens concluıdas nesse trabalho consiste na ideia
de que a transmissibilidade pode ser obtida experimentalmente ou via um modelo computacional, neste
caso, de elementos finitos.
A modelacao com elementos finitos na acustica e a base do metodo desta dissertacao e e tratada
na literatura por exemplo por Howard and Cazzolato [8] e Howard [9]. Nesses estudos os autores
abordam varios casos com elementos finitos de uma duas e tres dimensoes, com diferentes condicoes
de fronteira e casos de interacao de fluıdo-estrutura (que nao e considerada nesta dissertacao).
Em Maia et al. [10] tambem sao discutidas as aplicacoes onde este conceito se pode revelar de
grande interesse, por exemplo aquando uma estrutura esta em servico, na impossibilidade de medir
as respostas em certas coordenadas. Caso a transmissibilidade possa ser avaliada antecipadamente
em laboratorio ou numericamente, entao, posteriormente e atraves de medicoes realizadas durante o
servico, seria possıvel estimar as respostas nas coordenadas inacessıveis.
A generalizacao da transmissibilidade para a acustica reflecte a grande analogia existente entre sis-
temas acusticos e mecanicos no domınio da frequencia. E possıvel, de facto, considerar o meio que
propaga som (fluido) como uma sucessao de massas e molas equivalentes, como representado na
figura 1.5, e onde o sistema acustico esta tambem a ser excitado por uma fonte a uma dada frequencia.
Fig. 1.5.: Transmissibilidade de pressoes em sistema acustico com NGDL
Devriendt et al. [11] aborda essa mesma analogia em sistemas nao-amortecidos. comparando as
matrizes de elementos finitos de rigidez K e de massas M tal que em mecanica tem-se:
(− ω2Ms + Ks
)X(ω) = Fs(ω) (1.1)
e em acustica tem-se: (− ω2Mf + Kf
)P(ω) = Q(ω) (1.2)
5

onde os expoentes s e f significam estrutura e fluıdo acustico respectivamente e X e o deslocamento
nos graus de liberdade da estrutura avaliada. P e o vector de pressoes nos graus de liberdade do fluido
acustico. O vector F contem as amplitudes das forcas e o vector Q(ω) e o vector de aceleracoes de
volume (em ingles volume acceleration vector ).
A transmissibilidade acustica e definida em [11] como a razao entre duas pressoes do sistema
acustico. Esta relacao pode ser medida experimentalmente ou calculada atraves de um modelo compu-
tacional, tal como a transmissibilidade em mecanica. Neste estudo os autores abordam um problema
de analise modal acustica operacional (AMAO). Combinando medicoes de transmissibilidade sob di-
ferentes localizacoes de aceleracoes de volume, demonstrou-se que parametros acusticos (como os
modos e frequencias de ressonancia) podem ser identificados, tal como num caso apresentado de uma
cavidade acustica.
O conceito de transmissibilidade de pressao acustica nao e totalmente novo, por exemplo, aparece
em Curling and Paıdoussis [12] onde os autores propoem um metodo discreto para a transmissibilidade
acustica de um transdutor de pressao usado em experiencias para medir os espectros de pressao junto
a parede do tanque e junto as barras de combustıvel do reator nuclear e de tubos de permutadores de
calor.
No capıtulo 2 a formulacao teorica da transmissibilidade sera abordada detalhadamente. Os problemas
da localizacao por transmissibilidade estao igualmente relacionados com os problemas dos metodos
inversos como sera abordado na seccao seguinte.
1.2. O Problema Inverso na acustica
Lage et al. [13] e Neves and Maia [14] desenvolveram um metodo de localizacao de forcas e calculo
das suas amplitudes, com recurso a formulacao da transmissibilidade de forcas em [7]. A metodologia
adoptada baseava-se em comparar o erro entre as reaccoes medidas nos apoios de uma estrutura,
com as reaccoes que se obteriam pela transmissibilidade (determinada computacionalmente) numa
certa gama de frequencias. O trabalho testou com sucesso o metodo num modelo de elementos finitos
com NGDL, a uma dimensao.
Em acustica, de modo similar a mecanica, podem-se distinguir dois tipos de problemas: os problemas
directos e os problemas inversos. Nos primeiros, as fontes acusticas estao totalmente caracterizadas
e o objectivo e encontrar uma solucao do campo sonoro resultante das mesmas, dadas determinadas
condicoes de fronteira. Nos segundos, o campo sonoro e conhecido, total ou parcialmente, e procura-se
calcular as fontes sonoras . Este tipo de problemas, como o metodo inverso da funcao de resposta em
frequencia (em ingles inverse frequency response function method) estudado por Visser [5], consistem
normalmente dos seguintes passos [2]:
-Medicao da pressao acustica ou velocidade das partıculas perto da superfıcie da fonte sonora. Uti-
lizando tecnicas de processamento de sinal de modo a representar essa resposta estatisticamente no
domınio da frequencia;
6
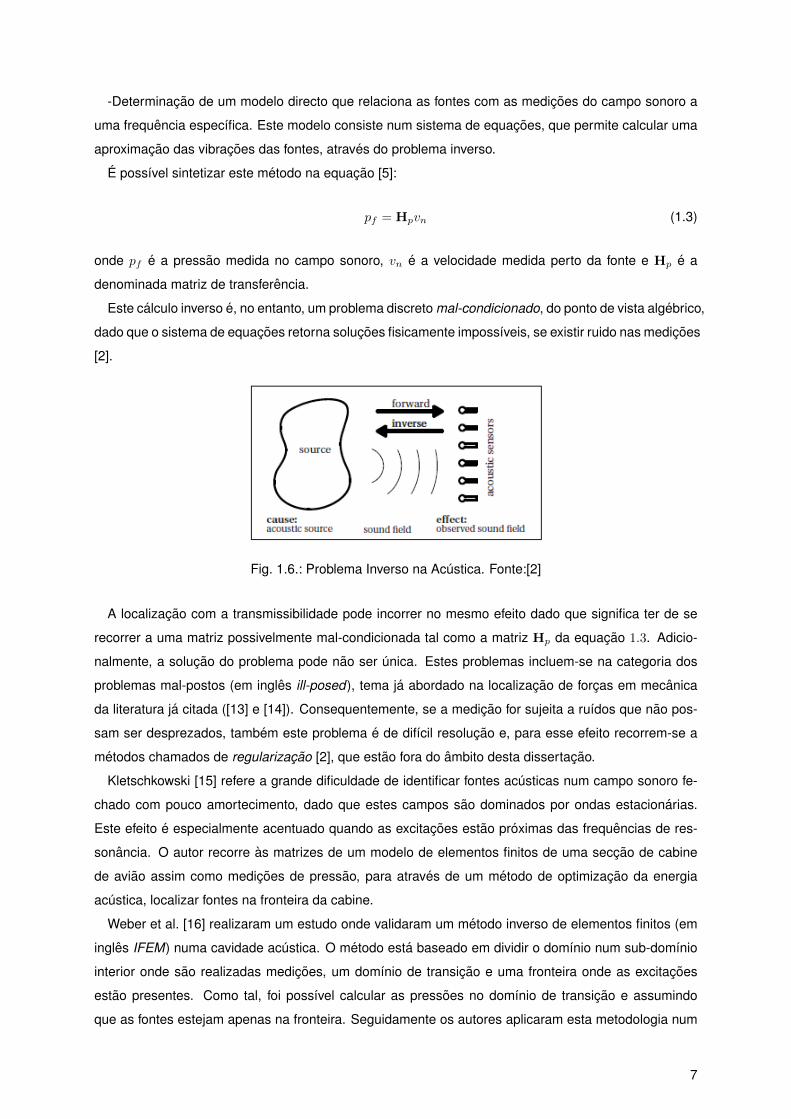
-Determinacao de um modelo directo que relaciona as fontes com as medicoes do campo sonoro a
uma frequencia especıfica. Este modelo consiste num sistema de equacoes, que permite calcular uma
aproximacao das vibracoes das fontes, atraves do problema inverso.
E possıvel sintetizar este metodo na equacao [5]:
pf = Hpvn (1.3)
onde pf e a pressao medida no campo sonoro, vn e a velocidade medida perto da fonte e Hp e a
denominada matriz de transferencia.
Este calculo inverso e, no entanto, um problema discreto mal-condicionado, do ponto de vista algebrico,
dado que o sistema de equacoes retorna solucoes fisicamente impossıveis, se existir ruido nas medicoes
[2].
Fig. 1.6.: Problema Inverso na Acustica. Fonte:[2]
A localizacao com a transmissibilidade pode incorrer no mesmo efeito dado que significa ter de se
recorrer a uma matriz possivelmente mal-condicionada tal como a matriz Hp da equacao 1.3. Adicio-
nalmente, a solucao do problema pode nao ser unica. Estes problemas incluem-se na categoria dos
problemas mal-postos (em ingles ill-posed), tema ja abordado na localizacao de forcas em mecanica
da literatura ja citada ([13] e [14]). Consequentemente, se a medicao for sujeita a ruıdos que nao pos-
sam ser desprezados, tambem este problema e de difıcil resolucao e, para esse efeito recorrem-se a
metodos chamados de regularizacao [2], que estao fora do ambito desta dissertacao.
Kletschkowski [15] refere a grande dificuldade de identificar fontes acusticas num campo sonoro fe-
chado com pouco amortecimento, dado que estes campos sao dominados por ondas estacionarias.
Este efeito e especialmente acentuado quando as excitacoes estao proximas das frequencias de res-
sonancia. O autor recorre as matrizes de um modelo de elementos finitos de uma seccao de cabine
de aviao assim como medicoes de pressao, para atraves de um metodo de optimizacao da energia
acustica, localizar fontes na fronteira da cabine.
Weber et al. [16] realizaram um estudo onde validaram um metodo inverso de elementos finitos (em
ingles IFEM) numa cavidade acustica. O metodo esta baseado em dividir o domınio num sub-domınio
interior onde sao realizadas medicoes, um domınio de transicao e uma fronteira onde as excitacoes
estao presentes. Como tal, foi possıvel calcular as pressoes no domınio de transicao e assumindo
que as fontes estejam apenas na fronteira. Seguidamente os autores aplicaram esta metodologia num
7

segmento de fuselagem de Airbus A-340, onde se instalou uma serie de microfones (numa seccao
do segmento) e um altifalante. A fuselagem foi tambem modelada em elementos finitos e foi possıvel
aplicar o metodo para estimar a pressao em toda a seccao. Um dos aspectos referidos e que nao
e necessaria informacao a priori das condicoes de fronteira de impedancia e que estas podem ser
deduzidas pelo IFEM.
1.3. Principais desafios e objectivos da tese
Dado as condicoes que foram ate aqui abordadas os objectivos desta dissertacao passam por:
• Estudar o conceito de transmissibilidade entre duas pressoes em NGDL , ja existente na literatura
(Devriendt et al. [11])e desenvolver um metodo simples para localizar fontes pontuais, com recurso
a um modelo computacional de elementos finitos. O objectivo e desenvolver uma metodologia de
localizacao e simular a desenvolvida para forcas harmonicas nos estudos de Lage et al. [13] e
Neves and Maia [14];
• Desenvolver um conceito de transmissibilidades matricial de pressoes entre conjuntos de n pressoes.
Desenvolver metodologia e testar o seu funcionamento no problema da localizacao a uma di-
mensao (fontes pontuais) e duas dimensoes (fontes em linha);
• Construir um modelo simplificado a duas dimensoes de interior de cabine de aviao com um soft-
ware comercial de elementos finitos e aplicar o metodo de localizacao neste domınio, com dife-
rentes condicoes de fronteira, de modo a ilustrar as potencialidades do metodo proposto.
No presente trabalho verificou-se que a metodologia aqui proposta e viavel com as condicoes de
regime estacionario. O metodo foi implementado simplesmente recorrendo a um modelo de elementos
finitos, e por estarem fora do plano de trabalhos nao foram feitas medicoes ou testes experimentais.
E importante enfatizar que nao foram encontrados na literatura (e muito menos em aplicacoes praticas)
exemplos de metodos de LFA, recorrendo ao conceito de transmissibilidade acustica. Tal deve-se, em
parte, ao facto de o conceito de transmissibilidade ser recente.
1.4. Estrutura da Dissertacao
Esta dissertacao foi estruturada por 5 capıtulos que serao explicados brevemente. No Capıtulo 2 (Fun-
damentos) e feita uma introducao ao tema e problema em questao, com a referencia a alguns metodos
de identificacao e indicacao das principais vantagens e desvantagens. Apresentam-se as principais leis
e equacoes da acustica, assim como o desenvolvimento teorico do conceito de transmissibilidade. E
tambem neste capıtulo que e descrito o metodo dos elementos finitos, que serviu de base para cons-
truir o modelo de localizacao. No capıtulo 3 (Metodologia), e proposta uma metodologia para identificar
fontes em domınios com uma e duas dimensoes. O capıtulo 4 (Resultados) apresenta a demonstracao
do conceito de transmissibilidade a uma e duas dimensoes, assim como os resultados de identificacao
a uma dimensao, a duas dimensoes e para um modelo de cabine a duas dimensoes. Para finalizar, no
capıtulo 5, sao sumarizadas as conclusoes e e sugerido algum trabalho futuro considerado de interesse.
8

2. Fundamentos
O som e um fenomeno fısico de vibracao que se propaga na forma de uma onda mecanica atraves
de um meio solido, lıquido ou gasoso. A geracao do som tem origem numa perturbacao do meio
envolvente, por exemplo, um corpo em vibracao, ou fonte acustica, e propaga-se afastando-se da fonte,
e a uma velocidade fixa que depende do meio. Em termos praticos, o som que e perceptıvel pelo ouvido
humano e, em geral, resultante da sobreposicao de varias ondas sonoras, resultantes de outras tantas
fontes acusticas.
As ondas sonoras sao um caso particular de uma classe de ondas designadas como ondas elasticas,
proprias de meios com massa e elasticidade. As partıculas deste tipo de meios, quando sujeitas a
perturbacoes que as desloquem da posicao original, tendem a retornar a essa posicao, originando
oscilacoes. Devido ao facto de possuırem inercia, as partıculas podem transferir energia as partıculas
na vizinhanca e desse modo propagar a perturbacao.
Quando o meio de propagacao e o ar, a onda sonora consiste em sucessivas compressoes e rarefaccoes
de camadas de ar, que por sua vez provocam a oscilacao das partıculas que o constituem. Esta
oscilacao da-se em torno de um valor medio e as partıculas vibram na direcao de propagacao da onda
mas nao se deslocam com ela. Tal caracterıstica e propria das denominadas ondas longitudinais e e
derivada do facto do ar nao ter tensoes de corte, e portanto so poder ser veıculo deste tipo de ondas.
No entanto, existe outro tipo de ondas sonoras, designadas transversais, em que as partıculas vibram
numa direcao perpendicular a direcao de propagacao.
Dado que o som se propaga como uma onda, e caracterizado por grandezas bem definidas da
mecanica de ondas tais como:
• Frequencia de propagacao, f , (dependente da frequencia de vibracao da fonte) e definida como
o numero de ciclos (oscilacoes) por unidade de tempo (segundo) e tendo como unidade o Hertz
[Hz]. O som e, em geral, detectavel pelo ouvido humano na gama de 20 Hz a 20 KHz;
• Perıodo de onda , T , que corresponde ao tempo necessario para a onda perfazer um ciclo com-
pleto de compressao/rarefaccao, ou seja, o inverso da frequencia;
• Amplitude maxima, A0, de pressao ou de velocidade das partıculas. Define-se como o valor
maximo que a onda de pressao ou velocidade pode tomar e mede-se em Pascal [Pa] e [m/s]
respectivamente;
• Velocidade de propagacao do som, c, que e caracterıstica do meio e dada por:
c =
√γP0
ρ0[m/s], (2.1)
9

onde γ e razao de calores especıficos do ar, P0 e a pressao ambiente e ρ0 e a densidade do ar
com unidades [Pa] e [Kg/m3] respectivamente;
• Comprimento de Onda, λ, que e o comprimento medido em metros [m] de uma onda completa
(ver figura 2.1). Calcula-se com a razao:
λ =c
f[m]. (2.2)
.
As ondas acusticas tambem podem ser classificadas em [17]:
• Ondas Divergentes: a energia sonora e dispersa por uma area cada vez maior a medida que a
onda se afasta da fonte. Consequentemente a intensidade sonora diminui com a distancia;
• Ondas Esfericas: produzida por uma fonte acustica que radia energia sonora igualmente em todas
as direcoes. Estas ondas sao tambem divergentes;
• Ondas Progressivas: quando existe uma transferencia de energia na direcao de propagacao;
• Ondas Estacionarias: surgem quando ocorre uma interferencia construtiva de duas ou mais ondas
sonoras, que por sua vez origina um padrao de maximos e mınimos que e estavel no tempo. Essas
ondas sao tıpicas de instrumentos musicais;
e por ultimo a onda plana. Este tipo de onda caracteriza-se por frentes que sao planos infinitos e
paralelos entre si com amplitude e frequencia constantes. Como consequencia esta onda e funcao
apenas de uma variavel espacial e do tempo:
A(x, t) = A0 cos(kx− ωt+ ∠) (2.3)
em que k = ω/c e o numero de onda, x e a coordenada espacial, ∠ e a fase medida em radianos [rad],
ω = 2πf , e a frequencia angular de unidade radianos por segundo [rad/s] e t e o tempo. Um caso deste
tipo de onda e o som a propagar-se num cilindro muito comprido, produzido por um pistao a deslocar-se
com uma dada velocidade (figura 2.1).
Na pratica, e impossıvel a existencia de ondas perfeitamente planas, mas existem situacoes em que
o som se comporta aproximadamente como uma onda plana numa regiao localizada do espaco. E
o que sucede quando as dimensoes espaciais sao muito maiores que o comprimento de onda a ser
emitido. As ondas sonoras, como ja foi referido, sao perturbacoes de pressao, densidade e velocidade
das partıculas do ar:
• Velocidade das partıculas:
v = v0 + v′(r, t) (2.4)
• Pressao:
p = p0 + p′(r, t) (2.5)
• Densidade:
ρ = ρ0 + ρ′(r, t) (2.6)
10

Fig. 2.1.: Exemplo de Onda Plana com oscilacao de densidade ρ′ em torno do equilıbrio ρo
onde r e o vector das coordenadas espaciais (x, y, z) e usa-se uma notacao com as grandezas vec-
toriais assinaladas a negrito. A pressao acustica e simplesmente a variacao p′ em torno da pressao
de equilıbrio p0, e o mesmo e valido para a densidade (ver figura 2.1) e velocidade das partıculas.
E importante sublinhar que uma partıcula representa um elemento de volume suficientemente grande
para conter milhoes de moleculas e, portanto poder ser tomado como contınuo mas suficientemente
pequeno para que estas grandezas serem consideradas constantes ao longo desse elemento, ou seja
o fluido e homogeneo.
Define-se como a impedancia acustica Z:
Z =p′
v′[Pa.s/m2 ou Rayl] (2.7)
sendo que Z e uma grandeza, em geral complexa, que pode ser decomposta em parte real, a re-
sistencia R e parte imaginaria, a reactancia X:
Z = R+ jX j2 = −1 (2.8)
No caso particular de ondas planas progressivas, a impedancia tem apenas parte real e e igual ao
produto ρ0c, caracterıstica do meio de propagacao e como tal denominada impedancia especıfica do
fluido Z0.
Como ja foi discutido, o som necessita de um meio para se propagar, e no ambito desta dissertacao
sera introduzido a nocao de domınio de fluido acustico (neste caso o fluido e o ar). E um conceito
que nao se confunde necessariamente com o de campo sonoro, visto que um dado domınio pode
ser parte integrante de um campo sonoro maior. O domınio doravante indicado com a letra V e o
espaco (unidimensional, bidimensional ou tridimensional) constituıdo pelo fluido acustico que esta a
ser estudado e e delimitado por uma fronteira. Essa fronteira pode ser um ponto, linha ou superfıcie
consoante o domınio ser unidimensional, bidimensional ou tridimensional respectivamente e e indicada
11
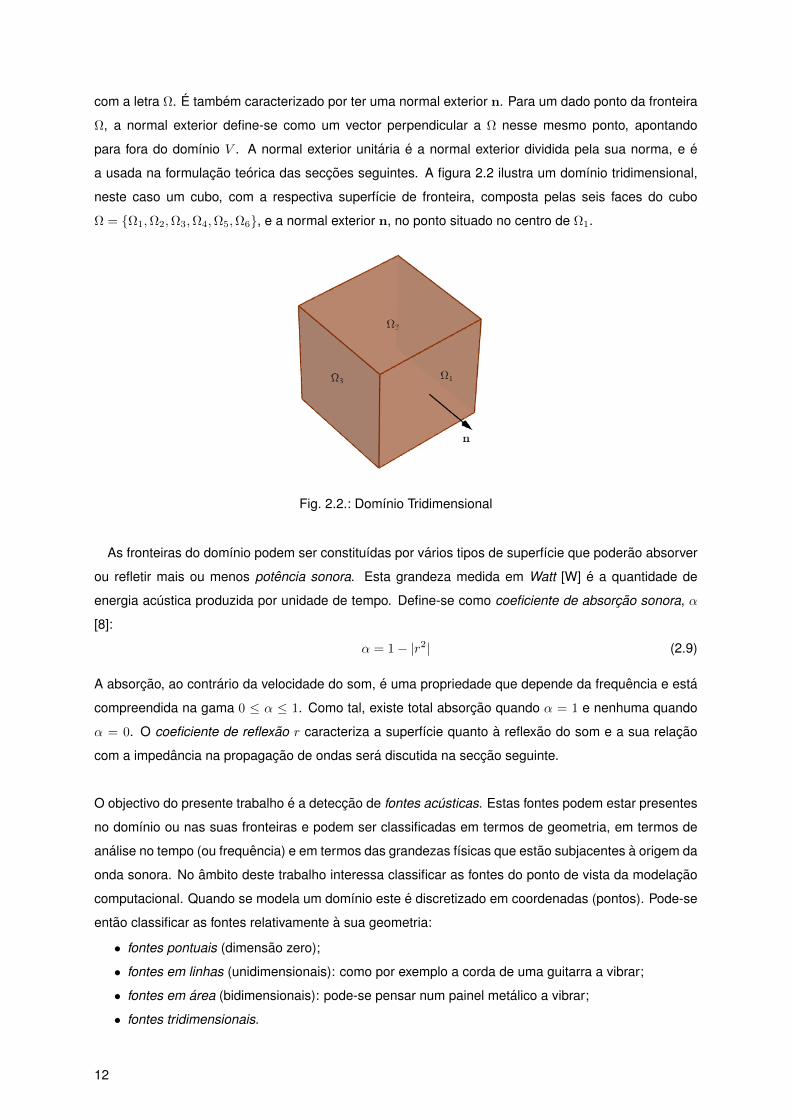
com a letra Ω. E tambem caracterizado por ter uma normal exterior n. Para um dado ponto da fronteira
Ω, a normal exterior define-se como um vector perpendicular a Ω nesse mesmo ponto, apontando
para fora do domınio V . A normal exterior unitaria e a normal exterior dividida pela sua norma, e e
a usada na formulacao teorica das seccoes seguintes. A figura 2.2 ilustra um domınio tridimensional,
neste caso um cubo, com a respectiva superfıcie de fronteira, composta pelas seis faces do cubo
Ω = Ω1,Ω2,Ω3,Ω4,Ω5,Ω6, e a normal exterior n, no ponto situado no centro de Ω1.
Fig. 2.2.: Domınio Tridimensional
As fronteiras do domınio podem ser constituıdas por varios tipos de superfıcie que poderao absorver
ou refletir mais ou menos potencia sonora. Esta grandeza medida em Watt [W] e a quantidade de
energia acustica produzida por unidade de tempo. Define-se como coeficiente de absorcao sonora, α
[8]:
α = 1− |r2| (2.9)
A absorcao, ao contrario da velocidade do som, e uma propriedade que depende da frequencia e esta
compreendida na gama 0 ≤ α ≤ 1. Como tal, existe total absorcao quando α = 1 e nenhuma quando
α = 0. O coeficiente de reflexao r caracteriza a superfıcie quanto a reflexao do som e a sua relacao
com a impedancia na propagacao de ondas sera discutida na seccao seguinte.
O objectivo do presente trabalho e a deteccao de fontes acusticas. Estas fontes podem estar presentes
no domınio ou nas suas fronteiras e podem ser classificadas em termos de geometria, em termos de
analise no tempo (ou frequencia) e em termos das grandezas fısicas que estao subjacentes a origem da
onda sonora. No ambito deste trabalho interessa classificar as fontes do ponto de vista da modelacao
computacional. Quando se modela um domınio este e discretizado em coordenadas (pontos). Pode-se
entao classificar as fontes relativamente a sua geometria:
• fontes pontuais (dimensao zero);
• fontes em linhas (unidimensionais): como por exemplo a corda de uma guitarra a vibrar;
• fontes em area (bidimensionais): pode-se pensar num painel metalico a vibrar;
• fontes tridimensionais.
12

No ambito desta tese serao estudadas as fontes pontuais e em linha . Para esse efeito podem-se
modelar as fontes em linha com uma sucessao de fontes pontuais dispostas em linha e nas fontes de
area como uma sucessao de linhas. Em suma, podem-se modelar todos os tipos de fonte, recorrendo
a fontes pontuais.
Analisando o comportamento das fontes no tempo ou frequencia tem-se:
• Periodicas: emitem ondas com uma estrutura cıclica no tempo. Este tipo de fonte sonora e o mais
comum de encontar numa aeronave, por exemplo no ruıdo da turbina de um motor. Entre estas
destacam-se as fontes de ondas sinusoidais ou harmonicas: produzem sons de uma frequencia
pura em forma de sinusoide. O exemplo classico e o vibrar de um diapasao de afinar instrumentos;
• Nao periodicas: emitem sons que nao se repetem no tempo. O exemplo disso e um som tipo
impulso ou seja quase instantaneo. Pode-se pensar no exemplo de um martelo a bater numa
mesa.
Por ultimo, em termos de modelacao, as fontes podem ainda ser divididas nas seguintes categorias
[18]:
• Fontes de Aceleracao ou Velocidade: sao fontes que impoe uma determinada aceleracao ou
velocidade nas partıculas do fluido de uma zona do domınio, provocando uma onda sonora. Em
regime estacionario utilizam-se as fontes de velocidade que podem simular, por exemplo, um
pistao como o da figura 2.1 a oscilar em torno de uma posicao de equilıbrio a uma dada frequencia;
• Fontes de Massa: e uma forma de modelar fenomenos como uma esfera a pulsar ou a injeccao
de calor no fluido;
• Fontes de Pressao: consiste num metodo de modelar uma fonte simplesmente impondo um de-
terminada amplitude de pressao numa regiao do domınio, a uma dada frequencia.
As grandezas de pressao acustica e velocidade estao relacionadas entre si como ja foi referido e por-
tanto na pratica pode-se usar uma ou outra para modelar uma fonte em geral. No presente trabalho
serao unicamente estudadas fontes harmonicas dado se estar a trabalhar em regime estacionario.
2.1. Equacao de Onda Acustica
Considera-se, como ja foi referido, que as ondas acusticas sao perturbacoes do meio (fluido). Como tal,
a derivacao da equacao de onda parte das equacoes de Navier Stokes para o escoamento de fluidos
homogeneos (aqui nas tres coordenadas cartesianas) 2.10 a 2.12:
∂ρvx∂t
+∂(ρvxvx)
∂x+∂(ρvyvx)
∂y+∂(ρvzvx)
∂z= ρgx−
∂p
∂x+Rx+
∂
∂x
(µe∂vx∂x
)+∂
∂y
(µe∂vx∂y
)+∂
∂z
(µe∂vx∂z
)+Tx (2.10)
∂ρvy∂t
+∂(ρvxvy)
∂x+∂(ρvyvy)
∂y+∂(ρvzvy)
∂z= ρgy−
∂p
∂y+Ry+
∂
∂x
(µe∂vy∂x
)+∂
∂y
(µe∂vy∂y
)+∂
∂z
(µe∂vy∂z
)+Ty (2.11)
∂ρvz∂t
+∂(ρvxvz)
∂x+∂(ρvyvz)
∂y+∂(ρvzvz)
∂z= ρgz−
∂p
∂z+Rz+
∂
∂x
(µe∂vz∂x
)+∂
∂y
(µe∂vz∂y
)+∂
∂z
(µe∂vz∂z
)+Tz (2.12)
13

onde vx, vy, vz e gx, gy, gz sao as componentes nas direccoes cartesianas da velocidade v e da
aceleracao da gravidade respectivamente, µe e a viscosidade efectiva ,Rx, Ry, Rz sao as componentes
de resistencia distribuıda e Tx, Ty, Tz sao os termos de perdas viscosas.
Estas equacoes podem ser simplificadas ao se aplicar as aproximacoes usadas em [19]:
• Densidade e Pressao media uniformes em todo o fluido
• Ausencia de escoamento medio do fluido;
• As variacoes de densidade do fluido sao resultantes das varicoes de pressao - fluido compressıvel;
• Nao ha dissipacoes viscosas - fluido invıscido.
Assume-se que as perturbacoes em torno do equilıbrio sao muito pequenas [20][21]:
ρ′ ρ0, p′ p0, (2.13)
A perturbacao da-se sobre o fluido em repouso (v = 0), e a velocidade das partıculas de fluido v′ e
muito inferior a velocidade do som c, ou seja:
|v′| c. (2.14)
Nestas condicoes, a equacao linearizada de conservacao da massa e dada por:
∂ρ′
∂t+∇ · (ρ0v
′) = 0 (2.15)
e a equacao de conservacao de momento e dada por:
ρ0∂v′
∂t+∇p′ = 0 (2.16)
onde ∇ e o operador nabla em coordenadas cartesianas:
∇ =∂
∂xix +
∂
∂yiy +
∂
∂ziz (2.17)
(ix, iy, iz) sao os vectores base cartesianos. Derivando a equacao 2.15 em ordem ao tempo e 2.16 em
ordem a r, e combinando as duas obtem-se:
∂2ρ′
∂t2= ∇2p′ (2.18)
A equacao necessaria para se fechar o sistema ( tres componentes de velocidade, pressao e densidade
como incognitas) e a chamada equacao de estado. Se o processo for aproximadamente adiabatico (a
energia sob a forma de calor que uma parte comprimida do fluido troca com o exterior for desprezavel),
considera-se que a pressao e apenas funcao da densidade [19]). Nesse caso, a expansao em serie de
14
Taylor da equacao de estado em torno de um estado nao perturbado e:
p = p(ρ0) + (ρ− ρ0)∂p
∂ρ
∣∣∣ρ=ρ0
+O[(ρ− ρ0)2] (2.19)
Desprezando os termos de ordem superior a primeira, considerando que p(ρ0) = p0, e atraves das
relacoes 2.4 a 2.6 obtem-se:
p′ = c2ρ′, c2 =∂p
∂ρ
∣∣∣ρ=ρ0
(2.20)
onde se introduziu a definicao de velocidade do som c que e uma propriedade do fluido. Considerando
o processo como isentropico, o ar como gas perfeito a seguinte relacao e valida [19] :
p
ργ= K (2.21)
onde K e uma constante. Diferenciando 2.21 e possıvel obter a expressao final para a velocidade do
som (ja introduzida na equacao 2.1). Por fim, substituindo 2.20 em 2.18 resulta na equacao de onda
classica para perturbacoes de pressao:
1
c2∂2p′
∂t2= ∇2p′ (2.22)
o que para o caso uni-dimensional, e para uma onda plana, reduz-se a:
1
c2∂2p′
∂t2=∂2p′
∂x2(2.23)
A velocidade v′,sendo um vector, tambem satisfaz a equacao de onda 2.23 na sua forma vectorial, e
portanto a componente vx′ satisfaz a equacao escalar. E possıvel definir um potencial de velocidade Φ
tal que:
v′ = ∇Φ (2.24)
e que satisfaz igualmente 2.23. Introduzindo 2.24 na equacao 2.16 resulta em:
p′ = −ρ0∂Φ
∂t(2.25)
e portanto e possıvel obter uma solucao, calculando o potencial e depois obter o campo de velocidades
e de pressoes atraves de 2.24 e 2.25 respectivamente.
2.1.1. Propagacao e Reflexao a uma dimensao
Uma possıvel solucao geral da equacao diferencial 2.23 e:
p′(x, t) = f1(x− ct) + f2(x+ ct) (2.26)
onde o primeiro termo representa uma onda plana progressiva a mover-se a jusante da origem, a uma
velocidade c e o segundo representa uma onda a mover-se no sentido oposto com igual velocidade.
15

Admite-se agora a situacao em que 2.23 tem uma solucao harmonica, de frequencia angular ω, com
funcoes f1 e f2 do tipo exponencial. Tal permite escrever 2.26 da seguinte forma:
p′(x, t) = Aejw(t−x/c) +Bejw(t+x/c) (2.27)
com A e B constantes. A equacao 2.27 pode igualmente ser expressa em funcao do numero de onda
k:
p′(x, t) =[Ae−jkx +Bejkx
]ejwt (2.28)
onde j2 = −1. Relembrando que o potencial Φ (2.24), por satisfazer a equacao de onda, tem uma
solucao semelhante a 2.28:
Φ(x, t) =[A′e−jkx +B′ejkx
]ejwt (2.29)
com constantes diferentes A′ e B′. Substituindo 2.29 e 2.28 em 2.25 deduze-se as seguintes relacoes:
A = −ρojωA′, B = −ρojωB′ (2.30)
Finalmente, diferenciando o potencial em x obtem-se a componente v′x da velocidade expressa em
funcao de A e B:
v′x(x, t) =1
ρ0c
[Ae−jkx −Bejkx
]ejwt (2.31)
Pretende-se agora estudar um caso academico simples (estudado por exemplo em [8]) de uma onda
plana a propagar-se da esquerda para a direita tal como representada na figura 2.3. Coloca-se a
extremidade esquerda num referencial em x = −L e uma terminacao a direita em x = 0.
Onda incidente
Onda reflectida
X=0X=-L
Fig. 2.3.: Propagacao a uma dimensao
16

Partindo da equacao 2.28 onde o factor ejwt pode ser absorvido pelas constantes A e B e possıvel
somar as solucoes de onda incidente e a de reflectida na terminacao, de tal maneira que se obtem uma
nova solucao:
p′(x, t) = C1e−jkx + C2e
jkx (2.32)
com C1 e C2 a dependerem de t. O mesmo raciocınio pode ser aplicado para a expressao da velo-
cidade. Como foi abordado no preambulo deste capıtulo as propriedades de absorcao das fronteiras
do domınio estao expressas na equacao 2.9 que depende do coeficiente de reflexao r. Define-se esse
coeficiente como a razao entre a pressao da onda incidente pi e a reflectida pr [8]:
r =prpi
=C2
C1(2.33)
E possıvel expressar a impedancia (equacao 2.7), para qualquer ponto x e em funcao de r:
Z = ρ0cC1e
−jkx + rC1ejkx
C1e−jkx − rC1ejkx= ρ0c
1 + re2jkx
1− re2jkx(2.34)
Dividindo pela impedancia especıfica do fluido Z0 = ρ0c chega-se a expressao final na terminacao
(x = 0):Z(0)
Z0=
1 + r
1− r(2.35)
onde ZZ0
e a razao de impedancia acustica especıfica. Caso a impedancia da superfıcie na terminacao,Z,
iguale Z0, o coeficiente r e nulo, portanto a onda e toda ela absorvida e nenhuma e reflectida. As fron-
teiras com esta propriedade denominam-se anecoicas. Na situacao oposta, se r = 1, tem-se que a
razao ZZ0
=∞ e a onda incidente e toda ela reflectida ( tal como ilustrado na figura 2.3).
2.1.2. Equacao de Helmholtz
A equacao 2.22 admite como solucoes, funcoes periodicas no tempo. No caso de solucao harmonicas,
de frequencia angular ω, e possıvel expressar o potencial Φ como:
Φ(r, t) = Re(ψ(r)e−jωt) (2.36)
onde ψ(r) e uma funcao escalar complexa e Re() representa a respectiva parte real. Introduzindo a
expressao 2.36 em 2.22, verifica-se que esta solucao e satisfeita, se ψ(r) for uma solucao da equacao
de Helmholtz (sem fontes acusticas):
∇2ψ(r) + k2ψ(r) = 0 (2.37)
com k real (para ω real). A equacao de Helmholtz e valida para ondas monocromaticas, ou seja ondas
de uma so frequencia w. Esta equacao sera a base do estudo realizado, dado que o objectivo e
trabalhar no domınio da frequencia.
17

2.1.3. Condicoes de Fronteira e Fontes
No ambito deste trabalho, o objectivo passara por analisar a equacao de Helmholtz (ou de onda) com
as respectivas condicoes de fronteira que incluem numa fase preliminar fontes pontuais. Para melhor
clareza sera doravante usada a letra p para a pressao acustica em vez de p′. Esta pressao e equivalente
a ψ(r) na equacao 2.37. As principais condicoes de fronteira que se podem impor no domınio onde se
esta a resolver o problema sao [22]:
• pressao:
p = p (2.38)
• velocidade normal vn:
j∂p
∂n= ρ0ωvn = vn (2.39)
. com ∂p∂n = ∇p.n
• impedancia normal Z = p/vn:
j∂p
∂n=ρ0ωp
Z(2.40)
Como ja foi referido, para uma onda plana |Z| = ρ0c. Na pratica ao impor |Z|ar na fronteira e equivalente
a introduzir uma condicao de fronteira anecoica. Se, por outro lado, se usar |Z| = ∞ resulta numa
condicao de fronteira totalmente reflectiva.
Ao se adicionar uma fonte de excitacao acustica ao domınio, de natureza harmonica, obtem-se a
equacao de Helmholtz (com fontes acusticas) [22]:
∇2p(r) + k2p(r) = −jρ0ωq(r) (2.41)
com q(r) a representar uma distribuicao de fontes a frequencia ω. No caso uni-dimensional de uma
fonte pontual a fonte e caracterizada por:
q(r) = qi.δ(ri) (2.42)
onde δ = 1 no ponto i e δ = 0 para todos os outros pontos.
2.2. Formulacao de Elementos Finitos
O metodo dos elementos finitos (MEF) e, actualmente, um dos mais utilizados em engenharia, e tem
como principal objectivo obter uma solucao aproximada de uma grandeza governada por uma equacao
diferencial dentro de um dado domınio e sujeita a determinadas condicoes de fronteira. Essencialmente,
o processo pode sumarizar-se nos seguintes passos [22]:
• Transformar o problema da sua forma original (formulacao forte) para uma forma integral equiva-
lente denominada formulacao fraca atraves do metodo dos resıduos ou formulacao variacional
• Escolha de funcoes de forma apropriadas, que interpolem a distribuicao da grandeza em questao.
Estas sao definidas localmente em subdomınios designados de elementos finitos e interligados
18

pelos seus nos.
• Construir um sistema de equacoes algebricas cuja solucao pode ser facilmente obtida recorrendo
a metodos numericos. Essa solucao representa a aproximacao da grandeza nas coordenadas
dos nos.
A formulacao variacional de elementos finitos da equacao 2.41, pressupoe um campo de pressoes p,
em regime estacionario, num domınio V tal que a expressao:
∫V
(∇2p+ k2p+ jρ0ωq
)p.dV = 0 ,∀p admıssivel (2.43)
seja satisfeita para qualquer funcao de ponderacao p delimitada e unicamente definida no domınio
V e na sua fronteira Ω ([22]). Tal implica que p integre uma classe de funcoes P contınuas em V ,
que possuem primeiras derivadas contınuas por trocos e que satisfacam as condicoes de fronteira do
problema ([23]. A teoria da formulacao variacional esta descrita por exemplo em [24] e nao sera aqui
abordada .
Utilizando as regras de derivacao i.e. integracao por partes, podemos reformular a equacao 2.43:
∫V
∇(p.∇p).dV −∫V
∇p∇p.dV + k2
∫V
pp.dV +
∫V
jρ0ωqp.dV = 0 ,∀p admıssivel (2.44)
Aplicando o Teorema da Divergencia de Gauss 1 ao primeiro termo da equacao 2.44 obtem-se:
∫Ω
p∂p
∂n.dΩ−
∫V
∇p∇p.dV + k2
∫V
pp.dV +
∫V
jρ0ωpq.dV = 0 ,∀p admıssivel (2.46)
em que n e a normal exterior na fronteira do domınio considerado. A equacao 2.46 e a denominada
a forma fraca da equacao de Helmholtz. O primeiro termo desta equacao e relativo as condicoes de
fronteira que se quer impor no domınio, dado estar dependente da derivada ∂p∂n . Como abordado na
subseccao 2.1.3 elas podem ser de velocidade,impedancia ou pressao e portanto o integral pode-se
subdividir em:
• velocidade: ∫Ωv
jρ0ωpvn.dΩ , (2.47)
• impedancia: ∫ΩZ
jρ0ωpp
Z.dΩ , (2.48)
• pressao: ∫Ωp
jρ0ωpv.n.dΩ . (2.49)
O metodo de integrar estas tres condicoes de fronteira na resolucao da solucao de elementos finitos e
descrito mais a frente.
1Seja Ψ um campo vectorial aplicado numa fronteira Ω, que delimita um volume V entao [22]:∫V∇.Ψ.dV =
∫Ω
Ψ.n.dΩ (2.45)
19
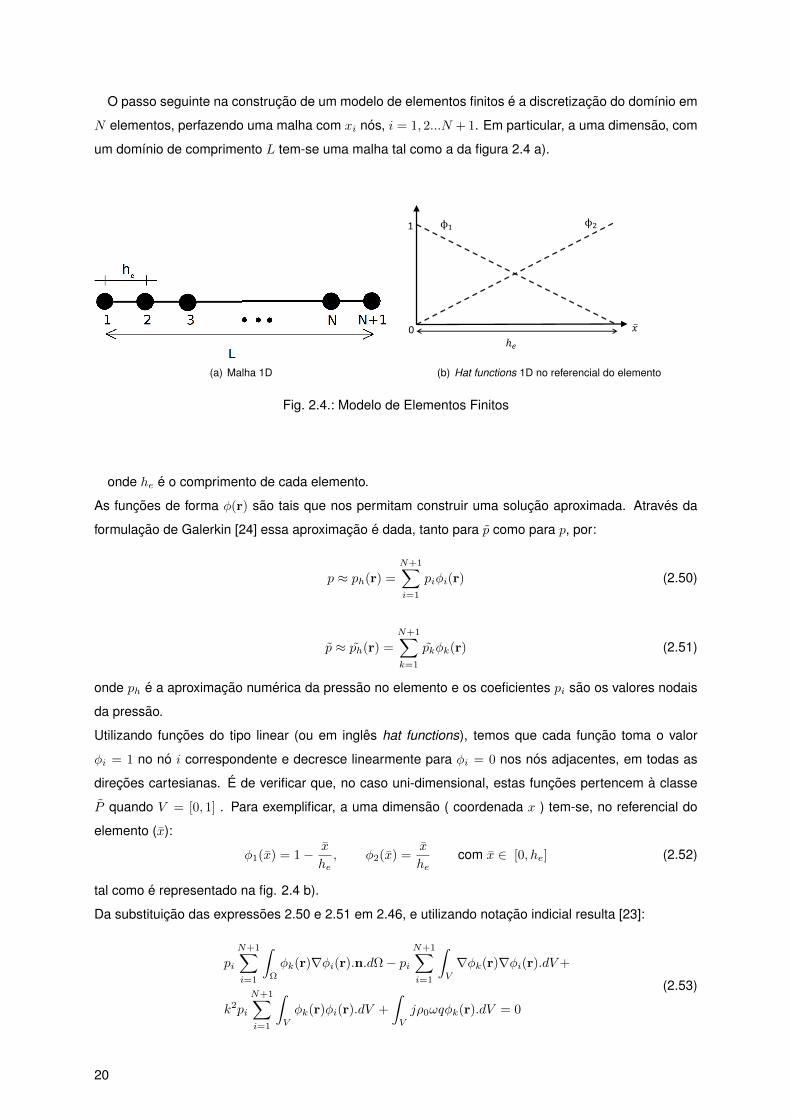
O passo seguinte na construcao de um modelo de elementos finitos e a discretizacao do domınio em
N elementos, perfazendo uma malha com xi nos, i = 1, 2...N + 1. Em particular, a uma dimensao, com
um domınio de comprimento L tem-se uma malha tal como a da figura 2.4 a).
(a) Malha 1D
1
𝑥
ℎ𝑒
ϕ1 ϕ2
0
(b) Hat functions 1D no referencial do elemento
Fig. 2.4.: Modelo de Elementos Finitos
onde he e o comprimento de cada elemento.
As funcoes de forma φ(r) sao tais que nos permitam construir uma solucao aproximada. Atraves da
formulacao de Galerkin [24] essa aproximacao e dada, tanto para p como para p, por:
p ≈ ph(r) =
N+1∑i=1
piφi(r) (2.50)
p ≈ ph(r) =
N+1∑k=1
pkφk(r) (2.51)
onde ph e a aproximacao numerica da pressao no elemento e os coeficientes pi sao os valores nodais
da pressao.
Utilizando funcoes do tipo linear (ou em ingles hat functions), temos que cada funcao toma o valor
φi = 1 no no i correspondente e decresce linearmente para φi = 0 nos nos adjacentes, em todas as
direcoes cartesianas. E de verificar que, no caso uni-dimensional, estas funcoes pertencem a classe
P quando V = [0, 1] . Para exemplificar, a uma dimensao ( coordenada x ) tem-se, no referencial do
elemento (x):
φ1(x) = 1− x
he, φ2(x) =
x
hecom x ∈ [0, he] (2.52)
tal como e representado na fig. 2.4 b).
Da substituicao das expressoes 2.50 e 2.51 em 2.46, e utilizando notacao indicial resulta [23]:
pi
N+1∑i=1
∫Ω
φk(r)∇φi(r).n.dΩ− piN+1∑i=1
∫V
∇φk(r)∇φi(r).dV+
k2pi
N+1∑i=1
∫V
φk(r)φi(r).dV +
∫V
jρ0ωqφk(r).dV = 0
(2.53)
20

onde as funcoes φ sao avaliadas apenas no domınio Vh correspondente a cada elemento. Os coeficien-
tes pk relativos a p foram suprimidos dado que a formulacao variacional e valida para qualquer conjunto
de contribuicoes de funcoes de forma pk que satisfacam as mesmas condicoes de fronteira essenciais
de p [22]. A expressao 2.53 representa, portanto, um sistema linear deN+1 equacoes, cujas incognitas
sao os coeficientes pi. Na forma matricial este sistema e dado por:
([K]− ω2[M] + jω[C]
)︸ ︷︷ ︸Z
pi = Fi (2.54)
E imediata a analogia com um sistema mecanico onde K e M representam as matrizes de rigidez e
massas equivalentes. C e a matriz das condicoes de fronteira equivalente a matriz de amortecimento
e varia consoante as condicoes de impedancia que se queira impor na fronteira (ver seccao 2.1.3). F e
o vector de cargas acusticas que pode integrar a parte de fontes acusticas ( o quarto termo de 2.53) e
a parte de condicoes de fronteira de velocidade (2.47). O lado esquerdo da equacao pode englobar-se
na matriz Z designada como a matriz de rigidez dinamica.
Considerando o referencial do elemento r, podem-se obter as matrizes em 2.54, derivando em pri-
meiro lugar as designadas matrizes do elemento (ındice superior ’e’):
Keik =
∫V
∇φi(r)∇φk(r).dV, Meik =
1
c2
∫V
φi(r)φk(r).dV
Ceik =
ρ0
Z
∫Ω
φi(r)φk(r).dΩ Fek = jρ0ω
∫V
qkφk(r).dV
(2.55)
onde ,neste caso, nao se aplicaram condicoes de velocidade ou pressao no vector de cargas acusticas.
Por intermedio de uma matriz de conectividades do sistema global de elementos finitos, e recorrendo as
matrizes do elemento, as matrizes globais na equacao 2.54 podem ser assembladas. Na maioria dos
casos tambem e necessario efectuar uma transformacao de coordenadas do referencial do elemento
para o referencial global. Por fim o sistema pode ser resolvido, para uma dada frequencia ω, e as
pressoes nodais pi dadas por:
pi(ω) = [Z(ω)]−1︸ ︷︷ ︸H
Fi(ω) (2.56)
Este processo denomina-se analise harmonica (pois na obtencao de 2.37 efectuou-se uma separacao
de variaveis em espaco e em tempo) e H(ω) e a matriz de resposta em frequencia do sistema acustico
de elementos finitos. Note-se a inversao da matriz Z e numericamente ineficiente e portanto ,na pratica,
a operacao em 2.56 e realizada com metodos numericos optimizados para tal. As condicoes de fronteira
de pressao, referidas na equacao 2.49, sao introduzidas substituindo os valores nodais directamente
no vector pi. Apos alguma manipulacao na matriz Z, onde se eliminam as linhas e colunas dos nos
de pressao conhecida e possıvel resolver o sistema 2.56.
Tambem e possıvel se considerar a aplicacao de pressao nao so nas fronteiras do domınio, mas
tambem no interior do domınio, como se de uma fonte se tratasse. No entanto, tal so e valido se nao for
considerado efeito da pressao reflectida por outros objectos de volta ao ponto de aplicacao [18]. Como
tal, admite-se que, no modelo, a potencia da fonte nao e afectada pelas ondas incidentes.
21

Os valores de pressao que se obtem da resolucao do sistema 2.56, possuem uma parte imaginaria
Im(pi) e uma parte real Re(pi). No ambito deste trabalho sera usado o modulo |pi| e a fase ∠pi dados
por:
|pi| =√
Re(pi)2 + Im(pi)2 ∠pi = tan−1[Im(pi)
Re(pi)
](2.57)
Por vezes e vantajoso analisar-se o modulo da pressao na unidade Decibel ( uma variante do bel do
seu inventor Alexander Bell) definida como:
|pi|dB = 20 log10
( |pi|pref
)(2.58)
onde pref e uma dada pressao de referencia. O valor usual para essa referencia e 20 µPa, dado ser
o nıvel mais baixo de pressao que o ouvido humano em geral consegue captar, mas neste trabalho foi
usado pref = 1 Pa. Uma das razoes por se usar o decibel e devida ao facto de se poder expressar
grandezas em escalas muito diferentes, o que, graficamente, e mais compreensıvel.
2.2.1. Erros do Metodo na Solucao de Elementos Finitos
Os erros introduzidos numa solucao de elementos finitos, para uma dada equacao diferencial podem
dividir-se em tres categorias [24]:
• erros de aproximacao do domınio,
• erros numericos,
• erros de aproximacao, derivados de se considerar a solucao da forma da equacao 2.50.
No primeiro caso, os erros sucedem porque ao se discretizar o domınio em elementos (que podem
ser linhas rectas, quadrados, etc), se este for nao-rectangular, esta-se a introduzir uma modificacao no
domınio. Este erro, deixa de ser um problema a medida que se refina a malha, ou seja se diminui o ta-
manho do elemento (he no caso uni-dimensional)e, portanto aumenta-se o numero de elementos totais
no domınio. O segundo tipo de erros surgem devido aos arredondamentos nos calculos computacio-
nais em aritmetica de vırgula flutuante. Quando se utiliza uma precisao elevada (e.g. dupla precisao),
normalmente estes erros tornam-se desprezaveis.
Os erros de aproximacao, em geral, decrescem com o refinamento. Pode-se provar que, para este
tipo de equacoes diferenciais, aproximadas por funcoes de forma lineares, uma estimativa deste erro,ε,
e majorada por:
ε ≤ C × h2e (2.59)
onde C e uma constante independente de he. No entanto, para a equacao de Helmholtz, esta constante
depende do numero de onda k [25]. A regra usual e usar-se dez elementos por comprimento de onda
como mınimo para se considerar a onda bem modelada, e portanto para elevados numeros de onda, o
custo computacional comeca a ser um problema na analise por elementos finitos.
22

Em [26] tambem foi estudada outra componente do erro, designado como pollution error, dado por:
ε ≤ C1hek + C2k3h2e (2.60)
com constantes C1 e C2 independentes de he e k. Devido a este tipo de erro nao e garantida uma
melhoria da precisao com o refinamento. Varias tecnicas foram abordadas por [27] para controlar o
erro numerico na versao h do metodo de Galerkin. Entre as quais e sugerido diminuir h de tal forma
que o segundo termo de (2.60) permaneca constante o mais possıvel, ou para usar polinomios de
ordens superiores como funcoes de base. A discussao destas tecnicas esta fora do ambito desta tese.
2.3. A Transmissibilidade em Acustica
Na formulacao proposta por Devriendt et al. [11], as funcoes de transmissibilidade acustica sao definidas
como a razao entre uma resposta de pressao e uma pressao imposta, de forma similar a mecanica
(resposta de deslocamento/deslocamento imposto). Sao, portanto, transmissibilidades escalares.
Considerando que existe uma unica fonte acustica na coordenada u, a funcao de transmissibilidade
escalar Tuk (ω) e definida como a razao das pressoes pk(ω) e pkref (ω) medidas na coordenada de saıda
k e numa coordenada fixa de referencia kref :
Tuk (ω) =pk(ω)
pkref (ω)=
HkuquHkrefuqu
(2.61)
onde qu e a entrada u do vector de cargas acusticas (aqui utiliza-se uma notacao diferente do au-
tor). Estas transmissibilidades podem, portanto, ser obtidas experimentalmente, ao introduzir uma fonte
(desconhecida) numa coordenada do domınio (desconhecida) e medindo as respostas noutras coorde-
nadas. No entanto, tambem se podem calcular transmissibilidades modeladas, a partir das matrizes de
elementos finitos, em particular da matriz de resposta em frequencia H(ω) (ou FRF).
Devriendt and Guillaume [28] estudou um caso mecanico para multiplas forcas e igualmente equiva-
lente em acustica. De facto e imediato verifcar que, no caso em que estao aplicadas n fontes nas
coordenadas u = 1, 2, . . . , n se obtem:
Tuk (ω) =pk(ω)
pkref (ω)=
∑nu=1Hkuqu∑n
u=1Hkrefuqu(2.62)
Ao analisar-se as expressoes de transmissibilidade dois aspectos revelam-se de grande importancia.
Em primeiro, as transmissibilidades dependem da localizacao das fontes. Em segundo, quando na
presenca de mais do que uma fonte, as transmissibilidades, se obtidas por via das FRF, tambem de-
pendem da amplitude das fontes, excepto no caso particular de terem todas igual amplitude.
Nas subseccoes seguintes propoe-se uma formulacao alternativa de transmissibilidade acustica ins-
pirada no trabalho de Lage et al. [7] e considerando as pressoes impostas no domınio como fontes; ou
seja introduz-se aqui o termo matriz de transmissibilidade de pressoes (ou em ingles pressure trans-
missibility matrix). Com esta abordagem, pretende-se em primeiro lugar, desenvolver um conceito de
23

transmissibilidade NGDL, que relacione um conjunto de pressoes em varios graus de liberdade com
outro conjunto de pressoes. Trata-se de uma formulacao nova atendendo ao facto de que na literatura
apenas foram encontradas formulacoes escalares nomeadamente em [11] e [12]. Em segundo lugar,
pretende-se que este conceito seja independente de amplitudes, como sera demonstrado.
2.3.1. Transmissibilidade por via da Rigidez Dinamica
Considere-se o domınio acustico ilustrado na figura 2.5.:
Coordenadas U
Coordenadas K
Coordenadas C
𝐹𝐾
𝐹𝑈𝐹𝐶
Fig. 2.5.: Esquema do Domınio Acustico com Conjuntos de Coordenadas
Considere-se, o conjunto U como o conjunto das coordenadas onde as pressoes com uma dada am-
plitude podem ser impostas; o conjunto K como sendo o conjunto das coordenadas onde as pressoes
sao conhecidas; o conjunto C serao as demais coordenadas do sistema. A escolha da letra no con-
junto U e justificada pelo facto de que estas coordenadas serao desconhecidas (em ingles unknown)
no processo de localizacao das fontes.
Como ja foi abordado na seccao 2.2, a resposta dinamica do sistema pode ser obtida, para uma dada
frequencia ω, por:
[Z(ω)]P(ω) = F(ω) . (2.63)
Admite-se que em todos os conjuntos de coordenadas nao existem cargas acusticas aplicadas (fontes,
velocidades) ou seja o vector F = FK , FU , FCT e nulo. Neste caso particular, a solucao trivial
P = PK , PU , PCT e tambem ela um vetor nulo, e podemos reescrever o sistema 2.63 atraves das
submatrizes de cada conjunto de coordenadas:ZKK ZKU ZKC
ZUK ZUU ZUC
ZCK ZCU ZCC
PK
PU
PC
=
0
0
0
. (2.64)
Admite-se agora que uma dada amplitude de pressao PU e imposta no conjunto U , e que os conjuntos
K e C sao reagrupados num novo conjunto R. Como consequencia, a solucao ja nao e nula, e e
24

possıvel reduzir o sistema na seguinte forma: ZRR ZRU
ZUR ZUU
PR
PU
=
0
0
. (2.65)
Expandindo a primeira linha de 2.65 tem-se:
ZRRPR = −ZRU PU (2.66)
Pode-se deduzir entao uma expressao final para PR:
PR = −(ZRR)−1ZRU PU (2.67)
em que introduz-se a definicao de matriz de transmissibilidade de pressoes entre os conjuntos R e U :
TZRU = −(ZRR)−1ZRU . (2.68)
onde o ındice superior ’Z ’ indica que foi obtida pela matriz de rigidez dinamica. Esta matriz tem di-
mensao nR × nU com nR o numero de coordenadas no conjunto R e nU o numero de coordenadas no
conjunto U . No presente trabalho o interesse e obter a transmissibilidade entre o conjunto K , relativo
as pressoes conhecidas e o conjunto U (as desconhecidas). Consequentemente, para obter PK , sao
necessarias apenas nK linhas da matriz TZRU .
Analisando novamente 2.64 pode-se efectuar um raciocınio semelhante expandindo a segunda linha
do sistema, e obtendo a expressao final:
TZRU = −(ZUR)+ZUU (2.69)
onde (ZUR)+ e a matriz pseudo-inversa da matriz ZUR. No entanto, neste caso o numero de coorde-
nadas nU teria que ser maior ou igual a nR, o que em termos praticos nao e esperado.
2.3.2. Transmissibilidade por via da Matriz de Resposta em Frequencia
A resolucao equivalente do problema da equacao 2.63 e dada por:
P (ω) = [H]F (ω) (2.70)
onde H = Z−1 e a matriz de resposta em frequencia (ver seccao 2.2)). Considerem-se agora os mes-
mos tres conjuntos de coordenadas da figura 2.5. Assume-se que nao ha cargas acusticas aplicadas
no conjunto C, ou seja existem apenas cargas acusticas nos conjunto K e U . A solucao resultante
25

toma a seguinte forma: PK
PU
PC
=
HKK HKU
HUK HUU
HCK HCU
FK
FU
(2.71)
Admitindo agora que se impoe uma dada amplitude de pressao PU nas coordenas U tem-se, expan-
dindo as duas primeiras linhas de (2.71):
PK = HKKFK + HKUFU (2.72)
e:
PU = HUKFK + HUUFU (2.73)
e entao possıvel deduzir uma expressao para FU em funcao de PU :
FU = (HUU )−1(PU −HUKFK) (2.74)
e substituindo 2.74 na expressao de PK , equacao 2.72, tem-se:
PK = [HKK −HKU (HUU )−1HUK ]FK + HKU (HUU )−1PU . (2.75)
No caso particular de FK = 0 obtem-se:
PK = HKU (HUU )−1PU (2.76)
e a matriz de transmissibilidade de pressoes que relaciona os conjuntos K e U e dada por:
THKU = HKU (HUU )−1 . (2.77)
que tem dimensao nK × nU e onde o ındice superior ’H ’ indica que foi derivada da matriz de resposta
em frequencia.
Note-se que a formulacao de transmissibilidade aqui apresentada e independente de amplitudes de
pressao. Ao se considerar uma pressao harmonica imposta no conjunto U , ou seja PU = PUejωt, como
uma fonte, pode-se assumir que esta formulacao e independente de amplitudes de fonte para uma ou
multiplas fontes.
2.3.3. Aspectos Computacionais da Transmissibilidade
A matriz de rigidez dinamica Z(ω) e uma matriz simetrica e por norma esparsa, o que significa que
e populada por zeros na grande maioria da suas entradas. Existem metodos de armazenar estas
matrizes de forma que ocupem muito menos memoria do que no formato classico, simplesmente porque
e apenas necessario armazenar as entradas nao nulas e os seus ındices. Os modernos programas de
elementos finitos utilizam as matrizes no formato esparso, com vantagens obvias em casos como o
26

(a) Matriz Completa (entradas nao nulas a azul) (b) Zoom da diagonal (entradas nao nulas a azul)
Fig. 2.6.: Padrao de esparsidade de Z(ω) (dimensao 8818× 8818).No de entradas nao nulas =42755
ilustrado na figura 2.6 que exemplifica uma matriz utilizada neste trabalho e calculada no software
comercial de elementos finitos. O custo de calculo da transmissibilidade TZRU e na sua maior parte
devido a operacao de inversao da equacao 2.68, que aumenta com o a dimensao da matriz ZRR. Ja
o custo em termos de memoria do armazenamento das matrizes envolvidas na operacao, por serem
esparsas, e por comparacao significativamente mais pequeno.
O calculo da matriz de resposta em frequencia H(ω), que tem dimensao N e extremamente elevado
para grandes modelos, e portanto nao e pratica usual em problemas de elementos finitos. No entanto, e
possıvel reduzir substancialmente esse custo se for utilizada uma abordagem via decomposicao modal
para obter a matriz H(ω) ou as suas entradas (FRF). Atraves de uma analise modal (tema tratado na
literatura por exemplo em [6]) pode-se obter as frequencias de ressonancia ωn e os respectivos modos
(vectores) Φ. Devriendt et al. [11] apresenta uma formulacao apenas para casos nao-amortecidos para
obter as FRF para qualquer uma dada frequencia ω:
Hij(ω) =
N∑n=1
=Φi,n · Φj,n
mn · (ω2n − ω2)
(2.78)
onde mn e obtida da matriz de massa normalizada pelo modo n: ΦnT ·M·Φn; Φi,n e o valor do modo
n no ponto i, ωn e a frequencia de ressonancia correspondente ao modo n. Uma das vantagens desta
formulacao e que apenas um certo numero de modos N e necessario para se obterem as entradas Hij
com precisao satisfatoria. Lage et al. [7] utiliza uma formulacao similar, mas incluindo amortecimento.
Considerando que os modos Φ sejam normalizados pela matriz de massa, as matrizes que originam H
27

(K,M e C) ficam:
ΦTMΦ = I (2.79a)
ΦTKΦ = diag(ω2n) (2.79b)
ΦTCΦ = diag(2ξnωn) (2.79c)
onde ξn e o nesimo factor de amortecimento, diag indica matriz diagonal e I e a matriz identidade.
tem-se que sistema H e reduzida a seguinte forma:
H(ω) = Φ(diag(ω2n − ω2 + j2ξnωnω))−1ΦT (2.80)
e deste modo e apenas necessario o calculo da inversa de uma matriz diagonal. Note-se que esta
formulacao pressupoe amortecimento proporcional dado por C = c1K + c2M, onde as constantes c1 e
c2 sao obtidas experimentalmente. Mesmo assim a relacao 2.79c nem sempre se verifica.
A matriz H, ao contrario de Z(ω),e uma matriz densa, ou seja com a maioria das suas entradas
nao nulas. Consequentemente, armazenar este tipo de matrizes para grandes modelos de elementos
finitos (que sao usuais nas aplicacoes industriais) nao se justifica. No entanto, caso as matrizes H(ω) ja
estejam em memoria,a operacao 2.77 e pouco pesada computacionalmente, visto que as submatrizes
envolvidas sao de muito inferior dimensao do que na operacao 2.68. Tal significa que para problemas
academicos de pequena dimensao, a obtencao da transmissibilidade THKU e perfeitamente viavel.
As operacoes das equacoes 2.77 e 2.68 que permitem obter as matrizes THKU e TZ
RU respectiva-
mente foram realizadas num ambiente de programacao Matlab R©. Foi usado o operador mldivide (ou
mrdivide)) que aplica um algoritmo diferente optimizado para o tipo de matriz [29]. Por exemplo, no
caso de matrizes esparsas, quadradas e complexas utiliza um Banded Solver ou LU Solver consoante
a densidade de bandas da matriz
28

3. Metodologia
Neste capıtulo apresentam-se as metodologias propostas pelo autor para dar resposta aos desafios da
presente dissertacao.
Essencialmente foram desenvolvidas tres metodologias que foram implementadas computacional-
mente e testadas de forma preliminar. As grandezas aqui descritas como ”medidas” nao sao obtidas
experimentalmente mas sim atraves da simulacao numerica com as fontes a localizar. A parte experi-
mental nao constava do plano de trabalhos e nem haveria tempo para tal no calendario previsto de seis
meses.
As tres metodologias que se descrevem de seguida sao:
1. Localizacao com transmissibilidade escalar em domınios unidimensionais
2. Localizacao com matriz de transmissibilidade em domınios unidimensionais
3. Localizacao com matriz de transmissibilidade em domınios bidimensionais
3.1. Localizacao de fontes pontuais a uma dimensao com
transmissibilidade escalar
Neves and Maia [14] desenvolveram uma metodologia no domınio da frequencia com o objectivo de
estimar as posicoes e amplitudes de n cargas aplicadas numa estrutura, atraves do calculo das trans-
missibilidades de forcas, e sabendo as reaccoes nos apoios. O conceito proposto consiste em encontrar
o conjunto de forcas s que minimize, num intervalo de frequencias, a diferenca entre as reaccoes medi-
das e as reaccoes estimadas, devido a aplicacao dessas forcas.
Fig. 3.1.: Domınio acustico unidimensional, discretizado em 15 coordenadas(nos), indicando a coor-denada u (desconhecida) com uma fonte de amplitude Fu, e as coordenadas de pressaoconhecida k e kref (referencia) que sao usadas na transmissibilidade (equacao 2.61)
29

Na presente seccao, o objectivo passa por localizar as coordenadas (ou nos) onde estao aplicadas as
fontes acusticas pontuais, conhecendo as amplitudes de pressao em certos nos e usando a transmis-
sibilidade introduzida por Devriendt et al. [11]. Relembre-se que as expressoes que permitem obter a
transmissibilidade sao (2.61) e (2.62) respectivamente para o caso de uma ou n fontes.
Pode-se, por analogia a [14], procurar as localizacoes das fontes s que minimizem a diferenca entre
as transmissibilidades medidas, Tuk , e as transmissibilidades modeladas,T sk , calculada via um modelo
de elementos finitos. Essa diferenca e obtida por:
εsT =
nf∑n=1
[(Tuk)−(T sk)]2
, (3.1)
com nf a representar o numero de pontos de frequencia onde as variaveis serao avaliadas, e εsT e
designada como funcao de desvio (ou de erro). Como ja foi referido, as transmissibilidades medidas
tambem serao calculadas com recurso a um modelo de elementos finitos.
Se for assumido que as fontes pontuais tem amplitude Q no no s correspondente, tem-se um vector
cargas acusticas F tal que:
Fi = 0, i 6= s
Fi = jρ0ωQs, i = s(3.2)
Este problema e um problema de optimizacao, numa gama de frequencia, em que a variavel de projecto
x e a amplitude Qs da fonte e a sua localizacao:
Minimizarelementos em s ε(Qs)
Sujeito a :(Qlimite inferiors
)≤(Qs)j
(3.3)
A funcao objectivo ε(Qs) e calculada com a expressao 3.1, e e imposto um constrangimento (limite infe-
rior) de maneira a evitar valores negativos ou muito pequenos de amplitude de deslocamento que nao
interessam a solucao. Apos se efectuar uma soma em todo o intervalo de frequencias, a combinacao
de nos que tiver o menor erro acumulado e indicada como a solucao do problema. Note-se que nesta
dissertacao e utilizado um metodo intensivo que percorre todas as possıveis combinacoes. Um metodo
com optimizacao fara parte dos futuros desenvolvimentos.
3.1.1. Descricao de Algoritmo de Localizacao 1D com transmissibilidade
escalar
O algoritmo com base na subseccao 3.1 foi implementado com o software Matlab R© para localizacao de
uma (caso trivial) ou duas fontes acusticas harmonicas, com possibilidade de introducao de mais fontes
se necessario.
Este algoritmo compreende os seguintes passos:
• Introducao de dados para definir o modelo de elementos finitos (numero de elementos finitos ou
numero de elementos por comprimento de onda, propriedades do fluido, condicoes de fronteira e
30

amplitudes e localizacao das fontes);
• Introducao das pressoes conhecidas na gama de frequencia em estudo (discretizada em nf pon-
tos), para posterior calculo da respectiva transmissibilidade (medida);
• Calculo das matrizes de resposta em frequencia H(ω) para a gama de frequencia em estudo;
• Criacao de uma tabela de combinacoes possıveis de nos onde as fontes podem ser aplicadas.
Consoante o numero de fontes, na que e conhecido estarem a actuar tomadas k a k, sucessiva-
mente k = 1, 2, ... , o comando nchoosek do Matlab R© e chamado para calcular o numero total
de combinacoes npt. Desta forma, a tabela comeca com as combinacoes 1, 2, 3, 4, · · · , n que
correspondem as n coordenadas (ou nos da malha). Seguem-se as combinacoes de possıveis
localizacoes de duas fontes ou seja [1 2], [1 3], [1 4], . . . , [1 n]; [2 3], [2 4], [2 5], . . . , [2 n];...
;[n − 1 n]. Desta maneira a combinacao com o numero n + 1 esta associada as posicoes [1 2], e
a combinacao 2n e dada pelas posicoes [1 n], e assim sucessivamente. A tabela termina quanto
o numero maximo de fontes (valor pre-definido) e tratada.
• para cada combinacao de nos onde as fontes podem estar a actuar:
– introduzir os dados para o algoritmo de optimizacao: valores iniciais das variaveis de pro-
jecto (Qs), limites inferiores e limites superiores, sendo que neste trabalho utilizaram-se
10−6,10−6 e 10−4 respectivamente;
– calculo dos valores de Qs que minimizam a funcao de erro atraves e.g. da funcao fmincon
do Matlab R© (Optimization Toolbox). Esta funcao procura encontrar um mınimo constrangido
de uma funcao de multiplas variaveis, comecando numa estimativa inicial.
• criar um grafico do erro mınimo (em escala logarıtmica) para todas as combinacoes testadas,
exibindo os valores das amplitudes das fontes da combinacao desse erro, e se a identificacao foi
correcta.
A avaliacao da funcao de erro e efectuada da seguinte forma:
• inicializar o erro ε = 0
• para cada frequencia:
– Calcular as estimativas de transmissibilidades modeladas devido a introducao do conjunto
de fontes s (variaveis Qs)
– Calcular a funcao de erro (equacao 3.1), com a diferenca entre as partes reais (Re(T)) das
transmissibilidades estimadas (devido as fontes em s) e das transmissibilidades medidas.
– Actualizar o erro ε = ε+∑ε(Qs). Neste caso usa-se uma soma porque poderemos estar a
comparar mais do que uma transmissibilidade.
O desempenho e precisao do algoritmo vai depender de varios factores como numero de elementos
finitos, numero de pressoes/transmissibilidades conhecidas, valores iniciais Qs e varios parametros da
funcao fmincon que regulam o algoritmo de optimizacao. Os dois primeiros serao objecto de analise e
discussao no capıtulo 4 enquanto que os ultimos estao fora do ambito deste estudo.
31

3.2. Localizacao de fontes pontuais a uma dimensao com a matriz
de transmissibilidade
Nesta seccao propoe-se estabelecer uma metodologia para localizar as coordenadas (ou nos) onde
estao aplicadas as fontes acusticas pontuais, conhecendo as amplitudes de pressao em certos nos e
usando uma matriz de transmissibilidade de pressoes (ver subseccoes 2.3.1 e 2.3.2). Relembre-se que
neste conceito as fontes sao tratadas como pressoes impostas nos nos.
Fig. 3.2.: Domınio Acustico unidimensional, discretizado em 15 coordenadas, indicando o conjunto Ucom uma amplitude (fonte) de pressao pU (triangulo verde) e conjunto K com uma pressaomedida PK(cırculo)
Recorrendo novamente ao metodo em [14], podem-se procurar as localizacoes das fontes s que mi-
nimizem a diferenca entre as amplitudes de pressao medidas (aqui indicadas com ’til’ i.e. PK), e as
amplitudes de pressao estimadas (ındice superior s i.e. P sK), atraves da transmissibilidade calculada de
um modelo de elementos finitos.
εsP =
nf∑i=1
[PK(ωi)− P sK(ωi)
]2(3.4)
com nf a representar o numero de pontos de frequencia onde as variaveis serao avaliadas, e εsP e
designada como funcao de desvio (ou de erro). Como ja foi referido, as pressoes medidas tambem
serao calculadas com recurso a um programa de elementos finitos, porem o metodo sera no futuro
testado a funcionar com pressoes medidas experimentalmente por um conjunto de microfones instala-
dos no domınio acustico real. Substituindo a pressao PK pela sua expressao de transmissibilidade na
equacao 3.4 tem-se:
εsP =
nf∑i=1
[PK(ωi)− T sKU (ωi)PU
]2(3.5)
onde T sKU calcula-se com a equacao 2.77 ou com a equacao 2.68. PU e a amplitude da pressao
imposta nas coordenadas da fonte, que e desconhecida e admite-se nao variar com a frequencia.
Neste trabalho, e introduzido outro metodo, o coeficiente de correlacao, σ, que mede a correlacao
ou dependencia estatıstica entre a pressao medida,PK , e a pressao estimada PK (como funcoes da
frequencia) e e dado por:
σ =COV (P sK , PK)√
V AR(P sK).V AR(PK)(3.6)
32

com 0 ≤ |σ| ≤ 1 em que σ = 0 traduz duas funcoes que nao tem correlacao nenhuma e σ = 1 no
caso em que tem uma correlacao perfeita. Desta forma, e possıvel utilizar uma amplitude de pressao
PU arbitraria para obter PK , porque o resultado sera sempre uma curva correlacionada com PK caso
o conjunto s correcto seja encontrado. Na seccao 4.4 do capıtulo 4 este conceito sera abordado mais
detalhadamente.
No caso mais usual, em que PK e um vector de dimensao nK e calculado um coeficiente medio:
σ =1
nK
nK∑i=1
COV (P sKi, ˜PKi
)√V AR(P sKi
).V AR( ˜PKi)
(3.7)
O conjunto s que produza σ mais elevado e considerado o conjunto de coordenadas das fontes. Tal,
como discutido em [14] , este problema resume-se a encontrar a matriz de transmissibilidade TKU tal
que permita identificar o conjunto correcto i.e. o conjunto U onde estao as fontes. Essa matriz pode
nao ser unica e ter problemas de mau condicionamento, como ja foi referido.
Mesmo atentando a possibilidade destes problemas ocorrerem, e intuitivo admitir que a performance
deste metodo e tanto melhor quanto:
• mais abrangente for a gama de frequencias utilizada
• melhor for o modelo de elementos finitos usado para extrair as transmissibilidades
• maior o numero de pressoes conhecidas(medidas), PK
No caso dos primeiros dois pontos, tem de se estabelecer um compromisso entre precisao e custo
computacional, enquanto que no ultimo ponto, depende do domınio a analisar e das coordenadas que
estao acessıveis a serem medidas. No capıtulo 4 estes pontos serao abordados.
Toda a parte de identificacao a uma dimensao foi realizada recorrendo a um codigo de elementos
finitos desenvolvido em ambiente de programacao Matlab R© (versao 2015a). O metodo de localizacao
com transmissibilidade de pressoes tambem serviu de base para a identificacao em domınios a duas
dimensoes, tema que sera desenvolvido na seccao 3.3.
3.2.1. Descricao de algoritmo de localizacao com matriz de transmissibilidade
de pressoes
O algoritmo com base na subseccao 3.2 foi implementado para a localizacao de uma ou duas fontes
acusticas harmonicas, com possibilidade de introducao de tres ou mais fontes se necessario. Este
algoritmo compreende os seguintes passos:
• Introducao de dados para definir o modelo de elementos finitos (numero total de elementos finitos
ou numero de elementos por onda, propriedades do fluido, condicoes de fronteira e amplitudes e
localizacao das fontes a localizar)
• Introducao das pressoes conhecidas, PK , na gama de frequencia em estudo (discretizada em nf
pontos).
• Calculo das matrizes de resposta em frequenciaH(ω) para a gama de frequencia em estudo.(Este
passo nao se realiza se for usada a transmissibilidade por via da rigidez dinamica TZRU ).
33

• Criacao de uma tabela de combinacoes possıveis de nos onde as fontes podem ser aplicadas.
Esta parte e identica a descrita na subseccao 3.1.1
• Definicao da amplitude PU arbitraria a aplicar na identificacao .
• Para cada combinacao de nos onde as fontes podem estar a actuar s:
– para cada frequencia ωi
∗ Calculo da matriz de transmissibilidade THKUi( ou TZRUi
), recorrendo as sub-matrizes
de H(ωi) (ou Z(ωi))
∗ Calculo da pressao estimada ,P sKi, por via da transmissibilidade
– determinacao do coeficiente de correlacao σ, entre os modulos das pressoes |P sK | e |PK |
• criar um grafico dos coeficiente de correlacao vs combinacao de nos, discriminando se a identificacao
foi correcta.
3.3. Localizacao de fontes em linha a duas dimensoes
Nesta seccao e proposta uma metodologia para localizar fontes num domınio acustico bidimensional. A
fonte em linha como ja foi referido no capıtulo 2 pode ser modelada como uma sucessao de fontes pon-
tuais em varias coordenadas ligadas entre si. Num modelo de elementos finitos as coordenadas onde
se pode impor uma pressao sao os nos de uma malha de elementos tal como no caso unidimensional.
No entanto, ao passarmos para duas dimensoes as fontes podem variar de tres formas diferentes:
• em comprimento: quantos nos da malha sao usados;
• em geometria: se sao linhas curvas ou rectas;
• em orientacao: a direccao que a linha tem relativa ao referencial (neste caso o cartesiano).
Fig. 3.3.: Divisao de malha estruturada em zonas para localizacao + possıveis orientacoes das fontesem linha
Estas variaveis acrescentam maior complexidade ao problema, sobretudo ao nıvel do custo com-
putacional e tempo. Realizar um varrimento a todas as combinacoes de coordenadas possıveis num
domınio a duas dimensoes seria incomportavel para grandes modelos, e portanto, em primeiro lugar
34

sera assumido que as fontes sao todas em linha recta e que a localizacao ira incidir sobre uma ou duas
fontes no maximo. Adicionalmente sera para ja assumido que a amplitude de pressao imposta na fonte
e constante ao longo de todos os seus nos.
Considere-se uma malha estruturada num domınio rectangular como na figura 3.3 com elementos de
forma quadrada e iguais entre si (a azul), e onde as fontes estao representadas por triangulos a preto.
Esta geometria reduz as opcoes de orientacao apenas as opcoes A,B,C e D da figura, o que limita as
combinacoes de nos que podem ser usadas. Por outro lado, ao dividir-se o domınio em zonas (nume-
radas de 1 a 4 na figura 3.3), pode-se efectuar uma primeira busca em cada zona, assumindo que um
certo conjunto de nos dessa zona a ser analisada formam uma fonte. De seguida pode-se calcular uma
transmissibilidade ”zonal” que relacione as pressoes conhecidas PK com as as pressoes impostas na
zona a ser varrida (PU ). Numa segunda fase e possıvel, se detectada uma zona potencial de conter a
fonte, realizar uma busca mais fina com todas as orientacoes possıveis e em todos os nos possıveis,
admitindo que a fonte tem as dimensoes da regiao que se esta a verificar.
No ambito desta tese, e proposta uma metodologia para a realizacao da busca menos refinada (pri-
meira parte) e a segunda parte fica fora desse ambito.
A metodologia passa pela introducao de dois conceitos: a celula de busca e a figura de busca. A
celula de busca e uma area na malha de elementos finitos, coincidente em cada iteracao com cada
zona de divisao do domınio, varrendo todas as zonas. A celula a ser aplicada e quadrada e pode
ter varias dimensoes (lado), por exemplo as celulas na figura 3.3 tem 15 elementos finitos por lado
da celula. Consoante o nıvel de refinamento que se pretende e possıvel diminuir progressivamente a
dimensao da celula de forma a varrer zonas cada vez mais pequenas do domınio.
Fig. 3.4.: Esquema do processo de localizacao com celula e figura de busca, para tres nıveis derefinamento
Na figura 3.4 pode-se observar como e efectuado o varrimento pela celula de busca, com exemplos de
varios nıveis de refinamento. A dimensao da celula de busca esta, portanto, dependente do numero de
zonas que se pretende dividir o domınio. A figura de busca e o desenho que os nos que sao assumidos
35

como fonte tem em cada celula de busca. A localizacao pode ser feita com varias figuras de busca, e
tera interesse comparar os resultados obtidos por cada uma, como sera feito no capıtulo 4.
As figuras de busca utilizadas nesta dissertacao sao escolhidas, considerando que vamos localizar
uma fonte numa malha regular tal como na figura 3.3, ou seja, so podem ter determinadas orientacoes,
e portanto as figuras que reflectem essas mesmas orientacoes:
• linhas diagonais, como nas orientacoes A e C da figura 3.3;
• linhas verticais, como nas orientacoes B e D da figura 3.3;
• combinacoes das anteriores:
– figura em cruz, tal como e apresentada na figura 3.4;
– figura em cruz (X);
• etc.
E importante sublinhar que quanto menos nos forem utilizados nas figuras, menor sera o tempo de
processamento, isto devido ao calculo da matriz inversa H−1UU que e realizado para cada frequencia, em
cada zona (ver seccao 2.3). Esta nota e aplicavel apenas no caso em que seja utilizada a transmis-
sibilidade por via da matriz de resposta em frequencia, (THKU ). Se, pelo contrario a transmissibilidade
TZRU for a utilizada, o peso computacional sera afecto ao numero de coordenadas R, que na pratica
espera-se muito superior ao numero de coordenadas no conjunto U .
3.3.1. Localizacao de duas fontes em duas dimensoes
O processo para localizacao de duas fontes em linha e ligeiramente mais complexo. As duas fontes,
cada uma nos conjuntos de coordenadas U1 e U2 respectivamente podem ter amplitudes, orientacoes
e comprimentos diferentes. Pode-se dividir o processo em duas iteracoes:
1. E realizada uma localizacao em tudo identica a como se de uma fonte se tratasse, para os varios
nıveis de refinamento desejados (e para uma dada figura de busca). Em cada zona e calculada
uma transmissibilidade entre o conjunto K e outro, aqui denominado S1.
TK→S1(3.8)
Esse processo atribui a correlacao mais elevada a uma dada zona de um dado nıvel de refina-
mento e esse zona e considerada como a zona de uma das fontes. As coordenadas utilizadas
nessa celula para o calculo da transmissibilidade sao armazenadas como o conjunto U1.
2. E realizada uma segunda localizacao em tudo identica a primeira mas desta vez calculando uma
transmissibilidade
TK→U1+S2 (3.9)
em que S2 e o conjunto usado em cada zona como usual. No fim a zona que produzir correlacao
mais elevada e considerada a zona da segunda fonte U2.
36

3.4. Implementacao da localizacao a duas dimensoes
Para se implementar esta ferramenta de localizacao foi desenvolvido um codigo em ambiente Matlab R©
que efectua uma integracao do software comercial de elementos finitos, de forma a se poder importar:
a matrizes de rigidez dinamica Z(ωi) e a solucao de pressoes conhecidas,PK(ωi) do segundo para o
primeiro; e fazer todo o pos-processamento no segundo.
Na figura 3.5 esta esquematizado todo o processo de localizacao. Este pode-se dividir em tres fases
cujo inıcio esta numerado no esquema e que podem realizar-se em tempos distintos. Cada uma delas
se inicia com um input de dados do utilizador (a cor laranja). O processo passa por varias etapas
que sao processadas nas duas plataformas (Matlab R© e o software de elementos finitos assinalados
a cinzento) e que termina com os mapas de correlacao do domınio para os nıveis de refinamento
desejados. De referir que este nıvel de refinamento relaciona-se exclusivamente com o tamanho da
celula de busca dado que o nıvel de refinamento da malha de elementos finitos se mantem o mesmo
ao longo de todo o processo.
Cálculo da Pressão P(ω𝑖) estimada pela transmissibilidade T(ω𝑖) (para cada
zona)
Construção da malha e
assemblagem das matrizes de
elementos finitos na gama ω𝑖
Cálculo da Solução de
Elementos Finitos na gama de
frequências ω𝑖
Módulo e Fase da Pressão nos nós conhecidos
Matrizes de Rigidez Dinâmica Z (ω𝑖)
• Gama de frequências- ω𝑖
• Dimensões da malha de elementos finitos
• Nível de refinação da malha
• Condições de fronteira
• Coordenadas (x,y,z) dos nós de pressão conhecida
• Coordenadas (x,y,z) dos nós na fonte
• Amplitude de pressão na fonte
Determinação da Correlação σ
(para cada zona)
Matlab™
Soft
wa
re E
.F.
Mapas de Correlação do Domínio
( FIM)
Tabela de coordenadas
(x,y,z) dos nós da malha
• Dimensão da célula de busca (por nível de refinação)
• Tipo de figura de busca
1 2
3
Terminou níveis de
refinação?
Sim
Não
Aumentar Refinação
Fig. 3.5.: Representacao esquematica do metodo de localizacao 2D
Na identificacao a duas dimensoes, foi usada a transmissibilidade por via da matriz de resposta em
frequencia THKU e, portanto, o programa desenvolvido em Matlab R© faz o calculo dessas matrizes para
37

cada frequencia, antes de calcular a transmissibilidade ”zonal”. No caso de identificacao no interior de
cabine, ja e usada a transmissibilidade por via da rigidez dinamica devido a essa matriz ja possuir uma
dimensao consideravel.
O processo de calculo da correlacao entre a pressao estimada e a pressao conhecida e em tudo
identico ao descrito para a identificacao de fontes pontuais a uma dimensao ( seccao 3.2). A unica
diferenca e que o programa cria um mapa de cores no domınio que estao associadas ao coeficiente de
correlacao, em vez de um grafico de correlacao em funcao do numero da combinacao dos nos. Estes
mapas serao abordados em detalhe no capıtulo 4 onde se apresentam os resultados.
Para concluir o capıtulo 3, e importante salientar que um dos interesses deste metodo passa por se
poder transformar num metodo hıbrido, se substituirmos a solucao das pressoes conhecidas,PK , im-
portada do software de elementos finitos pela pressao obtida por um conjunto de microfones instalados
directamente no domınio a ser estudado. Este aspecto sera importante para trabalho futuro.
38

4. Resultados e Discussao
De forma a evidenciar a adequada resposta dos metodos propostos para os objectivos desta tese,
apresentam-se os resultados dos exemplos que foram escolhidos para esse efeito. Como tal, apresentam-
se em primeiro as verificacoes ao modelo de elementos finitos e da transmissibilidade escalar, ambos
comparando com resultados existentes na literatura. Seguem-se os casos de verificacao em domınios
a uma dimensao e duas dimensoes onde se testa a metodologia de identificacao, no que se podem de-
nominar de exemplos academicos. Por fim, apresenta-se um exemplo de localizacao a duas dimensoes
num modelo muito simplificado do interior de um aviao.
A verificacao do efeito do ruıdo esta fora do ambito deste trabalho, mas devera ser realizado em
trabalho futuro.
4.1. Verificacao do modelo de elementos finitos a uma dimensao
Para iniciar este estudo procedeu-se a construcao de um modelo de elementos finitos para o caso uni-
dimensional, recorrendo ao ambiente de programacao Matlab R© (versao 2015a). O domınio e uma linha
de fluido acustico (ar) que simula um tubo com as propriedades dadas na tabela 4.1.
Como ilustra a figura 4.1, a imposicao de uma amplitude de pressao harmonica na extremidade do
tubo, origina uma onda plana que se vai propagar ate atingir a outra extremidade. Por se tratar de
uma onda plana, todas as seccoes perpendiculares ao eixo longitudinal (que coincide com a malha de
elementos finitos) vao estar a mesma pressao, e portanto, e possıvel estudar este problema como um
caso a duas dimensoes. Pela mesma razao, pode-se reduzir o problema a uma dimensao, visto que
todas as linhas perpendiculares ao eixo do rectangulo estao tambem a mesma pressao. E esse caso
unidimensional que e proposto estudar nas seccoes seguintes.
Velocidade dosom no ar-c
Densidade doAr-ρ0
Comprimento dotubo-L
Amplitude da pressaoimposta (em x=0)
344 m/s 1.21 Kg/m3 0.5 m 1 Pa
FrequenciaCondicao de fronteira(Impedanciaespecıfica Z) na extremidade x=L
Anecoica (Z = Zar = ρ0c ) Totalmente reflectiva1500 Hz 416.24 Pa.s/m ∞
Tab. 4.1.: Propriedades do Ar e do Domınio
Na fronteira a esquerda foi imposta uma pressao de 1 Pa, e a direita foram usadas as condicoes de
impedancia Z = ∞ (totalmente reflectiva) ou Zar = ρ0c (anecoica). Da analise harmonica e conside-
rando a pressao a frequencia f = 1500 Hz, obtiveram-se os resultados da figura 4.2.
39

2 DTubo em 3 D
L
𝑦
𝑥
𝑧
𝑥
𝑦
Onda plana
Terminação anecóica ou reflectiva
Malha de elementos finitos
Pressão imposta na extremidade esquerda
1 D
𝑥
Fig. 4.1.: Esquema da equivalencia 3D-2D-1D do modelo de tubo de ar com pressao harmonica numtopo e terminacao anecoica ou reflectiva no outro (pontos a negro indicam os nos da malha1D)
Esta figura compara a solucao de pressao de elementos finitos nos nos com a solucao analıtica da
equacao de onda, com duas malhas diferentes, com 30 e 45 elementos finitos. A solucao analıtica esta
deduzida no anexo A e e a apresentada a vermelho.
(a) Solucao de EF vs Solucao Analıtica (Condicao de fronteirareflectiva)
(b) Solucao de EF vs Solucao Analıtica (Condicao de fronteiraanecoica)
Fig. 4.2.: Solucao de Elementos Finitos 1D
Para o caso com extremidade totalmente reflectiva, a solucao analıtica harmonica e dada por:
P (x) = cos(kx) + tan(kL) sin(kx) (4.1)
e a solucao no caso anecoico e:
P (x) = cos(kx)− j sin(kx) (4.2)
onde k = 2πf/c = 2π × 1500/344 = 27.4 m−1.
40

Note-se que na figura 4.2 esta representada a parte real da solucao de elementos finitos (no caso
reflectivo a parte imaginaria da solucao e nula).
Na malha de elementos finitos da curva a azul foram usados apenas 30 elementos finitos igualmente
espacados e na curva a verde foram usados 45. Como se pode observar a solucao de elementos finitos
aproxima-se da solucao analıtica com o aumento do numero de elementos finitos.
No entanto, e visıvel que na onda de pressao com condicao de fronteira reflectiva (4.2 a)) que para
a solucao de elementos finitos convergir em amplitude para a solucao analıtica sao necessarios mais
de 45 elementos, que neste caso corresponde a 21 elementos por comprimentos de onda (λ). Este
numero pode ser obtido com:
No de elementos/onda =No total de elementos× λ
L(4.3)
Considerando que λ = cf , para frequencias maiores o numero de elementos necessario para se obter
uma solucao aceitavel pode se tornar extremamente elevado, aumentando os custos computacionais.
Para ilustrar este facto, apresenta-se a figura 4.3, onde esta a curva de amplitude de pressao maxima
(localizada a x ≈ 0.05 m na figura 4.2 a)) em funcao do numero de elementos por comprimento de
onda; e tambem o respectivo erro relativo.
Fig. 4.3.: Convergencia da Amplitude Maxima (Condicao de Fronteira Reflectiva) no problema 1D
E possıvel extrair da figura 4.3 que, para se obter um solucao com um erro inferior a 1%, e necessaria
uma malha com 80 ou mais elementos por onda. O metodo dos elementos finitos tem esta limitacao,
e portanto, e necessario encontrar um compromisso entre a precisao que se pretende no modelo e a
dimensao do sistema que oferece essa precisao, que pode se tornar extremamente custoso em termos
computacionais. Este facto adquire ainda mais relevancia quando se esta a trabalhar com modelos
a duas e tres dimensoes onde o numero de graus de liberdade (numa malha regular) e elevada ao
quadrado e ao cubo respectivamente.
Se for escolhida uma malha com 30 elementos por onda pode-se agora verificar, com fronteira re-
41

flectiva, o erro relativo a solucao analıtica, ao longo de toda a solucao de pressao na figura 4.4 a).
Facilmente se confirma, como expectavel que o erro estara em media no erro de amplitude maxima,
neste caso 5%, e tal apenas nao se verifica perto dos valores onde a pressao e nula. O erro relativo
nao deveria ser calculado onde p ≈ 0, mesmo assim preferiu-se apresentar.
(a) Condicao de fronteira reflectiva (b) Condicao de fronteira anecoica
Fig. 4.4.: Erro da Solucao de Elementos Finitos 1D c/ 30 elementos por onda
No caso anecoico (figura 4.4 b)) o erro e inferior a 5%, como ja era expectavel, excepto nos pontos
de pressao proxima de 0 Pa, pelas razoes ja referidas.
Estes resultados estao de acordo com os obtidos por Cartaxo [30] e Cartaxo et al. [25], para a mesma
frequencia, comprimento do tubo L e amplitude de pressao imposta (em x = 0 m). O autor verificou
que, num caso de topo reflectivo, eram necessarios 36 elementos por onda para o majorante do erro
se situar nos 10% (excepto nas vizinhancas de pressao nula). No entanto o autor usou elementos tridi-
mensionais para modelar o tubo.
Em conclusao, nesta seccao comparou-se o modelo de elementos finitos desenvolvido (para uma di-
mensao) , com outro da literatura e obtiveram-se resultados concordantes. Tambem foi possıvel salien-
tar alguns aspectos como o da convergencia da solucao requerer um numero elevado de elementos por
onda; e consequentemente quanto maior a frequencia mais elementos sao necessarios. Este modelo
de elementos finitos e a base de trabalho das seccoes seguintes.
4.2. Verificacao da transmissibilidade escalar da literatura a uma
dimensao
O objectivo desta seccao e reproduzir as curvas de transmissibilidade tal como na literatura (Devriendt
et al. [11]), atraves da equacao 2.61. Para tal, modelou-se um tubo com L = 1.24 m com uma malha
uni-dimensional de 60 elementos finitos (61 nos) tal como na figura 4.5:
42

Fig. 4.5.: Esquema do modelo 1D para verificacao da transmissibilidade escalar
Seguidamente, e necessario seleccionar as coordenadas, ou nos da malha de elementos finitos de
interesse:
• No de aplicacao da fonte/no u: Escolhe-se o primeiro no da malha, x = 0
• No de pressao conhecida: Serao analisadas curvas variando a coordenada por varios pontos
xi = x1, x2, x3, x4, x5, x6 = 0.05; 0.10; 0.15; 0.20; 0.25; 0.30 × L
• No de pressao de referencia kref : x = 0
Para este caso, as curvas de transmissibilidade escalar em funcao da frequencia podem ser calcula-
das por (equacao 2.61):
Tuk =PkPkref
=P (xi)
P (x = 0)=
Hxi,x=0
Hx=0,x=0(4.4)
Na figura 4.6 estao representadas varias curvas de transmissibilidade, obtidas variando a coordenada
xi (numerada i = 1, 2, 3, 4, 5, 6). Em ambos os graficos a amplitude esta em decibel.
(a) Terminacao reflectiva (b) Terminacao anecoica
Fig. 4.6.: Curvas de transmissibilidade escalar num sistema com 60 elementos finitos
Na figura 4.6 a) podem ser observadas curvas semelhantes as obtidas por [11], onde as transmissi-
bilidades tem picos fora das frequencias de ressonancia (representadas a traco interrompido). Para um
43
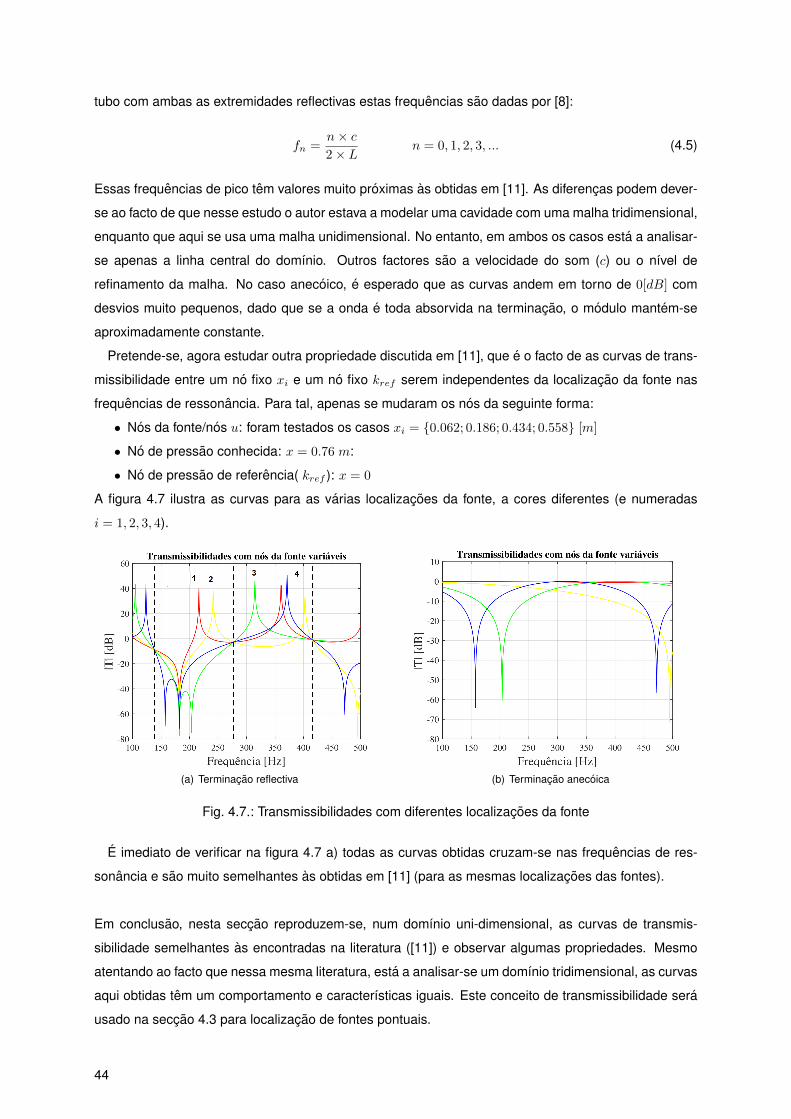
tubo com ambas as extremidades reflectivas estas frequencias sao dadas por [8]:
fn =n× c2× L
n = 0, 1, 2, 3, ... (4.5)
Essas frequencias de pico tem valores muito proximas as obtidas em [11]. As diferencas podem dever-
se ao facto de que nesse estudo o autor estava a modelar uma cavidade com uma malha tridimensional,
enquanto que aqui se usa uma malha unidimensional. No entanto, em ambos os casos esta a analisar-
se apenas a linha central do domınio. Outros factores sao a velocidade do som (c) ou o nıvel de
refinamento da malha. No caso anecoico, e esperado que as curvas andem em torno de 0[dB] com
desvios muito pequenos, dado que se a onda e toda absorvida na terminacao, o modulo mantem-se
aproximadamente constante.
Pretende-se, agora estudar outra propriedade discutida em [11], que e o facto de as curvas de trans-
missibilidade entre um no fixo xi e um no fixo kref serem independentes da localizacao da fonte nas
frequencias de ressonancia. Para tal, apenas se mudaram os nos da seguinte forma:
• Nos da fonte/nos u: foram testados os casos xi = 0.062; 0.186; 0.434; 0.558 [m]
• No de pressao conhecida: x = 0.76 m:
• No de pressao de referencia( kref ): x = 0
A figura 4.7 ilustra as curvas para as varias localizacoes da fonte, a cores diferentes (e numeradas
i = 1, 2, 3, 4).
(a) Terminacao reflectiva (b) Terminacao anecoica
Fig. 4.7.: Transmissibilidades com diferentes localizacoes da fonte
E imediato de verificar na figura 4.7 a) todas as curvas obtidas cruzam-se nas frequencias de res-
sonancia e sao muito semelhantes as obtidas em [11] (para as mesmas localizacoes das fontes).
Em conclusao, nesta seccao reproduzem-se, num domınio uni-dimensional, as curvas de transmis-
sibilidade semelhantes as encontradas na literatura ([11]) e observar algumas propriedades. Mesmo
atentando ao facto que nessa mesma literatura, esta a analisar-se um domınio tridimensional, as curvas
aqui obtidas tem um comportamento e caracterısticas iguais. Este conceito de transmissibilidade sera
usado na seccao 4.3 para localizacao de fontes pontuais.
44

4.3. Localizacao de fontes pontuais a uma dimensao com
transmissibilidade escalar
O objectivo desta seccao e estudar a aplicacao da metodologia de localizacao proposta na seccao 3.1.
Prende-se localizar uma fonte pontual num domınio, tal como o usado na seccao anterior , desta vez
com um comprimento L = 1 m, mas com os mesmos 60 elementos finitos. Numa primeira analise e
considerada uma gama de frequencias de 400− 800 Hz de forma a se varrer um intervalo que compre-
ende a formacao de aproximadamente um a dois comprimentos de onda no domınio. A configuracao
dos pontos de interesse esta explıcita na figura 4.8
Fig. 4.8.: Esquema ilustrativo da posicao da fonte (amarelo) e da posicao dos nos de pressao conhecida(cırculo) na identificacao de fonte pontual
O objectivo e, portanto, comparar uma transmissibilidade ”medida” Tuk neste caso dada por:
Tuk =PkPkref
=P (x = 0)
P (x = L)(4.6)
com transmissibilidades modeladas T sk avaliadas em todas as combinacoes possıveis da fonte
Os parametros de interesse sao:
• no de localizacao da fonte : x = L/5
• amplitude da fonte :q = 2× 10−6
• no de referencia kref : x = L
Com esta configuracao, obteve-se a transmissibilidade da figura 4.9(a traco interrompido). Estao tambem
apresentadas as curvas de pressao que lhe deram origem.
A localizacao de uma so fonte pontual e trivial, dado que e independente da amplitude da fonte. Na
figura 4.10 e possıvel observar os graficos do erro εT para cada combinacao (neste caso cada no),
produzidos com o algoritmo da subseccao 3.1.1.
Neste caso simples, o algoritmo localiza claramente a fonte, como esperado, para ambos os casos.
45

Fig. 4.9.: Curvas de pressao e curva de transmissibilidade em funcao da frequencia nos nos conheci-dos. Condicao de fronteira reflectiva
# do Nó10 20 30 40 50 60
0 (
Qs)
10-20
10-10
100
1010
Erro da identificação da fontef= 400-800 Hz, Terminação reflectiva
Erro nósErro nó (min)Nó fonte
(a) Ambas as terminacoes reflectivas
# do Nó10 20 30 40 50 60
0 (
Qs)
10-30
10-20
10-10
100
Erro da identificação da fontef= 400-800 Hz, Terminação anecóica
Erro nósErro nó (min)Nó fonte
(b) Ambas as terminacoes anecoicas
Fig. 4.10.: Erro de localizacao com uma fonte em domınio unidimensional com 61 coordenadas (nos)
4.3.1. Localizacao de duas fontes pontuais a uma dimensao
O processo de localizacao quando na presenca de duas ou mais fontes pontuais levanta uma questao
de tempo e custo computacional. O numero de combinacoes possıveis de nos onde poderao estar
fontes e proporcional tanto ao numero de elementos finitos como ao numero de fontes aplicadas. Con-
sequentemente o numero de vezes que a funcao de optimizacao tera que ser executada aumenta, au-
mentando o tempo de computacao. No caso de estudo seguinte assume-se que e conhecido que exis-
tem no maximo duas fontes no domınio. As fontes podem ter amplitudes distintas mas estao em fase.
Relembre-se que, pela expressao 2.62, se as fontes aplicadas tiverem amplitudes iguais, a identificacao
torna-se tambem independente das mesmas. Essa expressao sera a usada para calcular a transmissi-
bilidade.
A nova configuracao dos nos de interesse e:
• Nos de localizacao das fontes: x1 = L/4 e x2 = L/2
• Amplitudes das fontes: q1 = 2× 10−6 e q2 = 2× q1
• Nos para transmissibilidade: os mesmos que usadas no caso anterior: x = 0 e x = L
como se pode ver na figura 4.11.
46
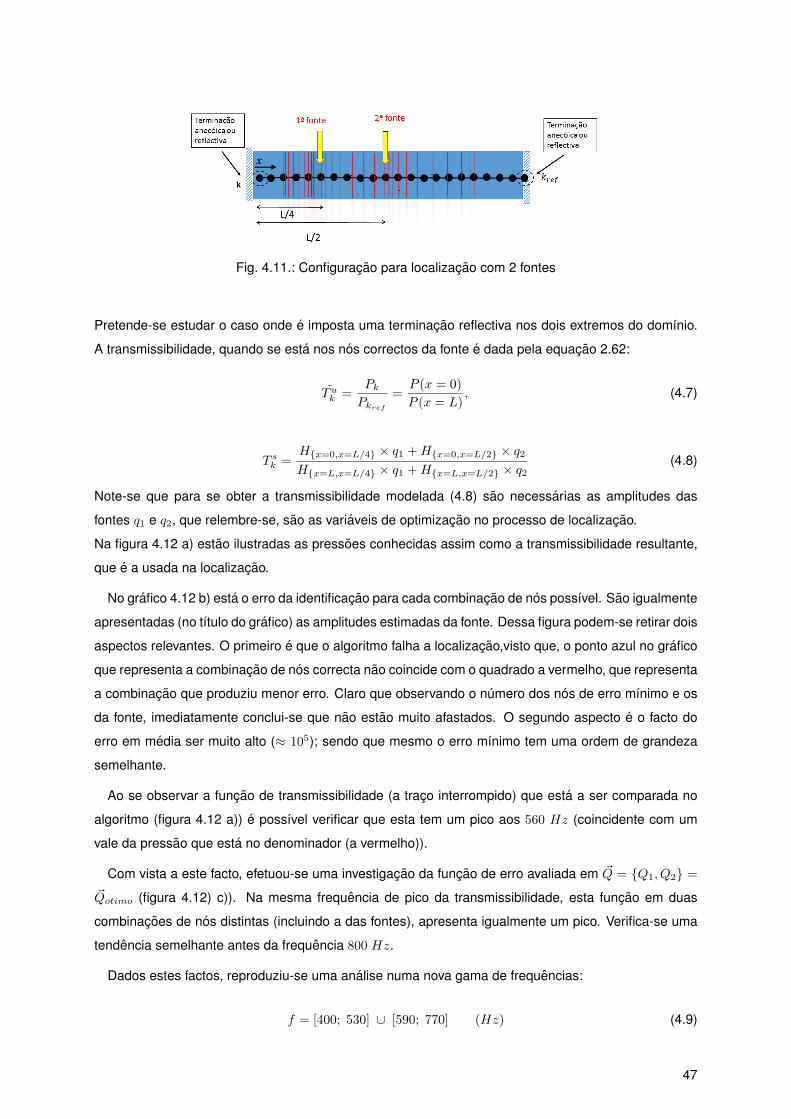
Fig. 4.11.: Configuracao para localizacao com 2 fontes
Pretende-se estudar o caso onde e imposta uma terminacao reflectiva nos dois extremos do domınio.
A transmissibilidade, quando se esta nos nos correctos da fonte e dada pela equacao 2.62:
Tuk =PkPkref
=P (x = 0)
P (x = L), (4.7)
T sk =Hx=0,x=L/4 × q1 +Hx=0,x=L/2 × q2
Hx=L,x=L/4 × q1 +Hx=L,x=L/2 × q2(4.8)
Note-se que para se obter a transmissibilidade modelada (4.8) sao necessarias as amplitudes das
fontes q1 e q2, que relembre-se, sao as variaveis de optimizacao no processo de localizacao.
Na figura 4.12 a) estao ilustradas as pressoes conhecidas assim como a transmissibilidade resultante,
que e a usada na localizacao.
No grafico 4.12 b) esta o erro da identificacao para cada combinacao de nos possıvel. Sao igualmente
apresentadas (no tıtulo do grafico) as amplitudes estimadas da fonte. Dessa figura podem-se retirar dois
aspectos relevantes. O primeiro e que o algoritmo falha a localizacao,visto que, o ponto azul no grafico
que representa a combinacao de nos correcta nao coincide com o quadrado a vermelho, que representa
a combinacao que produziu menor erro. Claro que observando o numero dos nos de erro mınimo e os
da fonte, imediatamente conclui-se que nao estao muito afastados. O segundo aspecto e o facto do
erro em media ser muito alto (≈ 105); sendo que mesmo o erro mınimo tem uma ordem de grandeza
semelhante.
Ao se observar a funcao de transmissibilidade (a traco interrompido) que esta a ser comparada no
algoritmo (figura 4.12 a)) e possıvel verificar que esta tem um pico aos 560 Hz (coincidente com um
vale da pressao que esta no denominador (a vermelho)).
Com vista a este facto, efetuou-se uma investigacao da funcao de erro avaliada em ~Q = Q1, Q2 =
~Qotimo (figura 4.12) c)). Na mesma frequencia de pico da transmissibilidade, esta funcao em duas
combinacoes de nos distintas (incluindo a das fontes), apresenta igualmente um pico. Verifica-se uma
tendencia semelhante antes da frequencia 800 Hz.
Dados estes factos, reproduziu-se uma analise numa nova gama de frequencias:
f = [400; 530] ∪ [590; 770] (Hz) (4.9)
47

(a) Curvas de pressao e curva de transmissibilidade nos nosconhecidos
(b) Erro de identificacao
(c) Funcao erro (em Qotimo) vs frequencia (d) Erro de identificacao c/ nova gama de frequencias
Fig. 4.12.: Erro de localizacao vs combinacoes nos nos, com duas fontes
ou seja na mesma gama anterior, excepto numa banda com ±30 Hz em torno da frequencia de pico da
funcao de erro e ate − 30 Hz da frequencia limite, onde se comeca a verificar o princıpio de outro pico.
Com este procedimento, procura-se cortar as frequencias que provocam picos de erro, de modo a se
testar a sua influencia na identificacao.
Na figura 4.12 d) pode-se observar que desta forma o algoritmo consegue identificar corretamente,
com um erro mınimo com uma ordem muito inferior (≈ 10−3). O algoritmo conseguiu tambem estimar
as amplitudes das fontes ~Q com erros de apenas 5% e 2.5% respectivamente (ver tıtulo do grafico).
De seguida efectuou-se o mesmo processo, mas desta vez com um domınio com ambas as extremi-
dades anecoicas.
Neste caso, ilustrado na figura 4.13 b), o algoritmo localiza a combinacao de nos certa, apesar de
nao estimar correctamente o valor das amplitudes q1 e q2. Analisando a figura 4.13 a) observa-se que
a curva da parte real da transmissibilidade (a traco interrompido) nao tem picos, e consequentemente
a funcao de erro tambem nao (figura 4.14).
48

(a) [Curvas de pressao e curva de transmissibilidade nos nosconhecidos
(b) Erro de identificacao
Fig. 4.13.: Erro de identificacao c/ 2 fontes, terminacoes anecoicas
Fig. 4.14.: Funcao de erro no caso anecoico, c/ 2 fontes
4.3.2. Efeito do refinamento da malha na localizacao
Apresenta-se a seguir um estudo da influencia do numero de elementos por comprimento de onda
(Neλ) no algoritmo de localizacao. Como esta explıcito no tıtulo de todos os graficos analisados ate a
este ponto, utilizou-se um valor de Neλ entre 25 e 50. Este valor varia dado que o comprimento de onda
tambem esta a variar e corresponde para este domınio a 60 elementos finitos.
A ideia central e realizar uma localizacao em que as transmissibilidades calculadas com a matriz
H(ω), que vai variando consoante o refinamento da malha, serem comparadas (na funcao de erro) com
transmissibilidades obtidas num caso com elevado refinamento. Definiu-se que nesse caso o numero
de elementos por onda seria:
60 ≤ Neλ ≤ 120 (4.10)
admitindo que, com este nıvel de refinamento, a solucao estaria muito proxima da solucao analıtica.
Continuando com localizacao de duas fontes e ambas as terminacoes reflectivas, pretende-se ana-
lisar sucessivamente casos em que se reduz progressivamente este valor ate ao limite em que ja nao
ha nos suficientes para todos os pontos relevantes (duas pressoes conhecidas e duas fontes) poderem
ser definidos e nao sejam nem coincidentes, nem adjacentes.
49
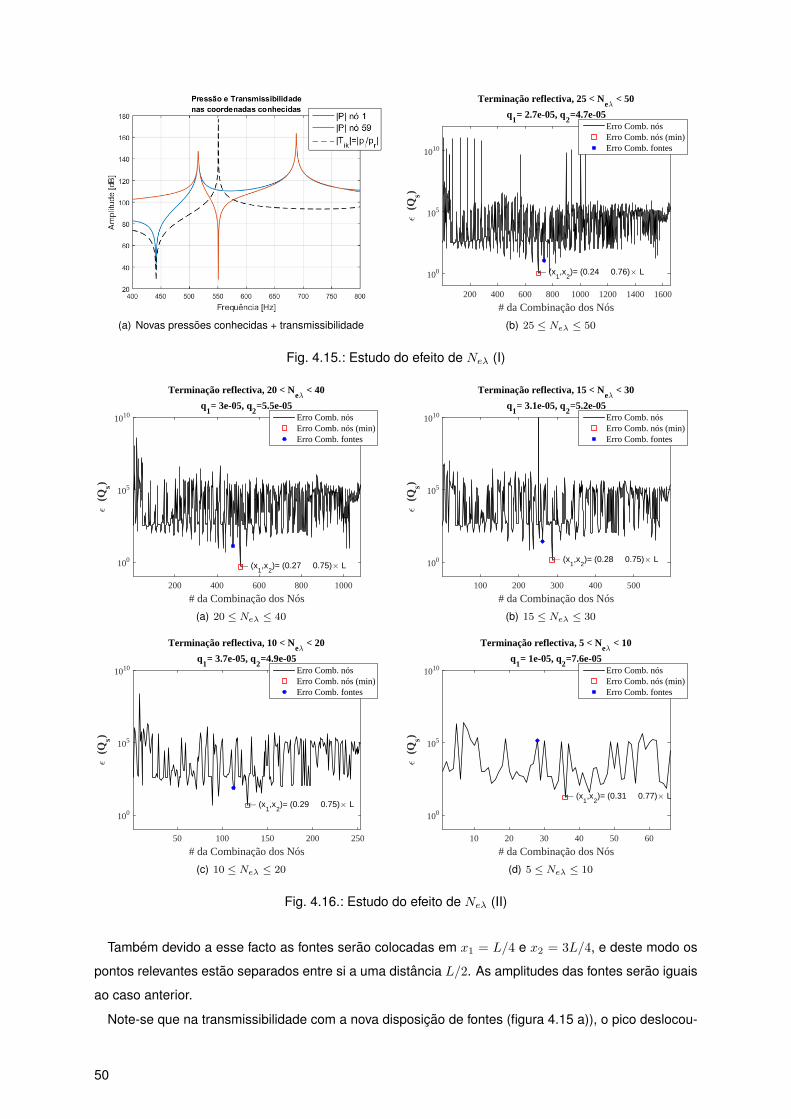
(a) Novas pressoes conhecidas + transmissibilidade
# da Combinação dos Nós200 400 600 800 1000 1200 1400 1600
0 (
Qs)
100
105
1010
A (x1,x
2)= (0.24 0.76)# L
Terminação reflectiva, 25 < Ne6
< 50
q1= 2.7e-05, q
2=4.7e-05
Erro Comb. nósErro Comb. nós (min)Erro Comb. fontes
(b) 25 ≤ Neλ ≤ 50
Fig. 4.15.: Estudo do efeito de Neλ (I)
# da Combinação dos Nós200 400 600 800 1000
0 (
Qs)
100
105
1010
A (x1,x
2)= (0.27 0.75)# L
Terminação reflectiva, 20 < Ne6
< 40
q1= 3e-05, q
2=5.5e-05
Erro Comb. nósErro Comb. nós (min)Erro Comb. fontes
(a) 20 ≤ Neλ ≤ 40
# da Combinação dos Nós100 200 300 400 500
0 (
Qs)
100
105
1010
A (x1,x
2)= (0.28 0.75)# L
Terminação reflectiva, 15 < Ne6
< 30
q1= 3.1e-05, q
2=5.2e-05
Erro Comb. nósErro Comb. nós (min)Erro Comb. fontes
(b) 15 ≤ Neλ ≤ 30
# da Combinação dos Nós50 100 150 200 250
0 (
Qs)
100
105
1010
A (x1,x
2)= (0.29 0.75)# L
Terminação reflectiva, 10 < Ne6
< 20
q1= 3.7e-05, q
2=4.9e-05
Erro Comb. nósErro Comb. nós (min)Erro Comb. fontes
(c) 10 ≤ Neλ ≤ 20
# da Combinação dos Nós10 20 30 40 50 60
0 (
Qs)
100
105
1010
A (x1,x
2)= (0.31 0.77)# L
Terminação reflectiva, 5 < Ne6
< 10
q1= 1e-05, q
2=7.6e-05
Erro Comb. nósErro Comb. nós (min)Erro Comb. fontes
(d) 5 ≤ Neλ ≤ 10
Fig. 4.16.: Estudo do efeito de Neλ (II)
Tambem devido a esse facto as fontes serao colocadas em x1 = L/4 e x2 = 3L/4, e deste modo os
pontos relevantes estao separados entre si a uma distancia L/2. As amplitudes das fontes serao iguais
ao caso anterior.
Note-se que na transmissibilidade com a nova disposicao de fontes (figura 4.15 a)), o pico deslocou-
50

se ligeiramente para os 550 Hz, alem de que nao existe o princıpio de outro pico aos 800 Hz. Levando
este facto em consideracao, a selecao da gama de frequencia foi modificada em relacao ao caso ante-
rior:
f = [400; 520] ∪ [580; 800] (Hz) (4.11)
Na figura 4.15 b)(refinamento 25 ≤ Neλ ≤ 50) verifica-se que o algoritmo falha a localizacao das
fontes nos nos exactos, mas identifica nos muito proximos. O mesmo sucede com todos os outro nıveis
de refinamento. Nos casos da figura 4.16 c) e d) o erro da localizacao da primeira fonte ja se aproxima
de 5% em relacao ao comprimento do domınio L, mas tal tambem e devido ao facto da malha ter nos
que podem nao coincidir com as coordenadas exactas das fontes.
Relativamente as amplitudes das fontes, em nenhum dos casos foi possıvel uma estimacao correcta
das mesmas. Conclui-se que para esta gama de frequencias e disposicao de fontes, nao e necessario
um numero de elementos por onda muito elevado para conseguir uma localizacao correcta.
Por ultimo e importante referir que se realizarmos o estudo oposto, ou seja aumentar o valor de
Neλ para valores incomportaveis computacionalmente, sera atingido um ponto em que os nos sao tao
proximos que identificar as fontes num no ou no imediatamente ao lado e, em termos praticos, igual-
mente aceitavel. Daı nao ser importante num numero de Neλ mınimo muito alto.
Esta seccao teve como proposito estudar o conceito de transmissibilidade da literatura ([11]), e testar
um metodo de localizacao semelhante ao referido em [14], que tambem permitisse estimar as amplitu-
des de fontes (relembre-se as variaveis da optimizacao).
Na parte de localizacao de uma fonte, foi possıvel localizar nos casos de terminacoes reflectivas e
anecoicas, sem problemas. Ja na parte de duas fontes, o algoritmo localizou a combinacao de nos perto
da exacta, no caso de terminacoes reflectivas. No entanto, foi necessario efectuar uma modificacao na
gama de frequencia para se melhorarem os resultados (tanto de localizacao como de amplitude). No
caso anecoico, foi possıvel localizar as duas fontes sem problemas.
O estudo de localizacao com mais do que uma transmissibilidade, e com numero de fontes superior a
dois, ficou fora do ambito desta tese devido ao inıcio do trabalho com uma formulacao alternativa de
transmissibilidade matricial (proposta na seccao 2.3).
No fim da seccao, efectuou-se um pequeno estudo da influencia de se diminuir o numero de elemen-
tos na malha. O algoritmo efectuou a localizacao nas coordenadas quase exactas da fonte, mas nao
estimou correctamente as amplitudes.
Outro factor ainda nao abordado ate agora foi o tempo de computacao que este algoritmo requer, que
ascende a varios minutos, quando na localizacao de duas fontes ou mais. Na presente dissertacao, o
objectivo principal passa por localizacao das fontes e nao determinacao das suas amplitudes. Por essa
razao nao se justifica utilizar este algoritmo, quando em domınios de maior dimensao (por exemplo em
casos a duas e tres dimensoes), ate porque nao se mostrou muito eficaz em certos casos.
Este problema torna-se ainda maior se considerarmos varias fontes de amplitudes diferentes, dado
que cada amplitude adicional e uma variavel de optimizacao adicional.
51

As razoes acima apresentadas foram uma motivacao acrescida as ja referidas na seccao 2.3, para
se desenvolver outro conceito de transmissibilidade e de localizacao, que sera tratado nas seccoes
seguintes.
4.4. Verificacao da matriz de transmissibilidade de pressao a uma
dimensao
Nesta seccao o objectivo e demonstrar o conceito de transmissibilidade de pressoes, e para tal modelou-
se um domınio uni-dimensional identico ao estudado na seccao 4.1, com as mesmas propriedades do
ar mas desta vez com um comprimento L = 1 m.
Para se iniciar o estudo das transmissibilidades, em primeiro lugar e necessario definir os seguintes
parametros:
• Gama de frequencia: intervalo de frequencias discretizado em nf pontos, onde em cada qual
serao avaliadas as transmissibilidades. O domınio foi construıdo com 60 elementos finitos, e
como ja foi abordado, o numero de elementos por onda e inversamente proporcional a frequencia.
O intervalo definido foi 200 − 1200 Hz , e assim esta-se a trabalhar numa gama de ≈ 17 − 103
elementos por comprimento de onda, o que compreende uma zona de erro relativo na maioria do
intervalo menor que 10 % (ver grafico (4.3). Por outro lado, e uma gama de frequencia suficiente-
mente abrangente para se apreciar varios aspectos das curvas de transmissibilidade como sera
discutido durante esta seccao.
A discretizacao foi efectuada com um espacamento de 4 rad/s entre cada ponto de frequencia nf .
Este valor permite obter uma precisao muito boa para se obter as curvas de transmissibilidade, e
e perfeitamente aceitavel por se estar a utilizar um sistema de pequena dimensao. Para sistemas
de grande dimensao, o espacamento tera de ser definido, considerando o custo computacional.
• Nos de pressao conhecida (i.e. Conjunto K) e Nos da fonte( i.e. Conjunto U : A transmissibilidade
sera usada como ja foi referido na seccao 2.3 para relacionar as pressoes num certo conjunto
K, denominadas PK com as pressoes na fonte (conjunto U ) denominadas PU . Para se iniciar
este estudo comeca-se por so uma coordenada K situada em x = L, ou seja no ultimo no da
malha e a coordenada U sera em x = 0, no primeiro no da malha, por outras palavras os nos da
extremidade do tubo.
• Amplitude de pressao nos nos da fonte-PU : Definiu-se aplicar uma pressao de 1 Pa.
52

Fig. 4.17.: Esquema de transmissibilidade matricial com dimensao 1× 1
Dadas estas condicoes, e possıvel definir uma transmissibilidade, que sera obtida por via da resposta
em frequencia, THKU como deduzido na seccao 2.3. Esta transmissibilidade dado o conjunto K e U
terem ambos dimensoes nU = nK = 1, e um escalar, especificamente dada por:
Tx=L;x=0 = Hx=L;x=0 ×H−1x=0,x=0 (4.12)
onde os ındices estao em termos de coordenadas no eixo dos xx. Note-se que esta formulacao e
igual a transmissibilidade da literatura ([11]) quando (na notacao da equacao 2.61) a coordenada u e a
mesma que a coordenada kref e no caso de uma so fonte.
Por sua vez a transmissibilidade de pressoes pode ser comparada com a transmissibilidade obtida
com a solucao analıtica que, no caso de dimensao 1 e recordando a definicao da seccao 2.3 pode ser
obtida com:
THKU =PKPU
=Px=L
Px=0(4.13)
Ao se calcular o modulo das transmissibilidades em funcao da frequencia wi, obtem-se os graficos da
figura 4.18. Apresenta-se tambem o erro entre a transmissibilidade THKU e a analıtica.
Frequência [Hz]200 300 400 500 600 700 800 900 1000 1100 1200
|T| [
dB]
0
20
40
60
80
Sol. EF: HKU
HUU-1
Sol. Analitica:PK
/PU
Frequência [Hz]200 300 400 500 600 700 800 900 1000 1100 1200
Err
o
10-5
100
105
(a) Condicao de fronteira reflectiva
Frequência [Hz]200 300 400 500 600 700 800 900 1000 1100 1200
|T| [
dB]
-0.06
-0.04
-0.02
0
Sol. EF: HKU
HUU-1
Sol. Analitica:PK
/PU
Frequência [Hz]200 300 400 500 600 700 800 900 1000 1100 1200
Err
o
10-10
10-5
100
(b) Condicao de fronteira anecoica
Fig. 4.18.: Transmissibilidade obtida C/ Solucao Analıtica vs obtida c/ Matriz H(ω)
53

Nos graficos da figura 4.18 a), caso reflectivo, e possıvel observar os seguintes aspectos:
• Nas frequencias mais baixas a curva a preto sobrepoe-se a curva a vermelho (traco misto) e nas
mais altas as duas comecam a separar-se, inclusive no ultimo pico existe ja um desfasamento
entre as duas. Este efeito vai de encontro ao que ja foi discutido na seccao anterior, ou seja com
o aumento da frequencia a precisao do modelo de elementos finitos diminui. Ao se observar o
grafico do erro (abaixo) este efeito nao e tao perceptıvel mas nota-se uma tendencia de o erro
medio aumentar com a frequencia
• As duas curvas apresentam picos que se repetem periodicamente em frequencias que nao as de
ressonancia, como previsto (ver equacao 4.5). O erro e, naturalmente, de ordem varias vezes
superior nessas frequencias devido ao aumento do numero de condicionamento da matriz, mas
fora das sua proximidades esta compreendido entre os 10−5 Pa e os 10−2 Pa o que atesta a
validade do modelo de transmissibilidade.
No caso anecoico ,4.18 b), e possıvel verificar, que a diferenca entre as curvas oscila periodicamente
entre 0 dB e ≈ 0.5 dB e tem tambem uma tendencia de crescimento com a frequencia. No grafico do
erro verifica-se que este nao excede os 10−3 Pa aproximadamente, o que e satisfatorio para esta gama
de frequencias.
Seguidamente pretende-se analisar a transmissibilidade, num caso ligeiramente mais complexo, ao
se introduzir duas coordenadas U e duas coordenada K. A transmissibilidade deixa assim de ser um
escalar e passa a ser uma matriz com dimensoes 2× 2.
Fig. 4.19.: Esquema de Transmissibilidade 2x2
A nova configuracao e a seguinte:
• Coordenadas K: x = L/3 e x = 2L/3
• Coordenadas U : x = 0 e x = L
• Coordenadas R: Todas as coordenadas excepto U
e a matriz de transmissibilidade THKU e:
THKU =
T11 T12
T21 T22
= HKUH−1UU =
Hx=L/3;x=0 Hx=L/3;x=L
Hx=2L/3;x=0 Hx=2L/3;x=L
Hx=0;x=0 Hx=0;x=L
Hx=L;x=0 Hx=L;x=L
−1
(4.14)
enquanto que a matriz TZRU obtem-se com o mesmo raciocınio. Dado TZRU ser de dimensao nR × nU ,
54

apos o seu calculo extraem-se apenas as linhas correspondentes as coordenadas K (ver subseccao
2.3.1).
O objectivo e obter as curvas das quatro entradas da matriz de transmissibilidade (T1,1,T2,1,T1,2,T2,2)
e analisa-las quanto ao modulo e tambem a fase. Adicionalmente tambem se pretende comparar a
transmissibilidade por via da matriz H(ω), THKU e a por via da matriz de rigidez dinamica, TZRU . Estes
resultados estao apresentados nas figuras 4.20 e 4.21.
Frequência [Hz]200 300 400 500 600 700 800 900 1000 1100 1200
|T| [
dB]
-100
-50
0
50
Err
o
10-15
10-10
10-5
100T
KUH T
RUZ Erro
Frequência [Hz]200 300 400 500 600 700 800 900 1000 1100 1200
T [
º]
0
50
100
150
200
Err
o
-1
-0.5
0
0.5
1
(a) T1,1
Frequência [Hz]200 300 400 500 600 700 800 900 1000 1100 1200
|T| [
dB]
-100
-50
0
50
Err
o
10-15
10-10
10-5
100T
KUH T
RUZ Erro
Frequência [Hz]200 300 400 500 600 700 800 900 1000 1100 1200
T [
º]
0
50
100
150
200
Err
o
-1
-0.5
0
0.5
1
(b) T2,1
Fig. 4.20.: Modulo e Fase de THKU (ω) vs TZRU (ω)-I
Frequência [Hz]200 300 400 500 600 700 800 900 1000 1100 1200
|T| [
dB]
-100
-50
0
50
Err
o
10-15
10-10
10-5
100T
KUH T
RUZ Erro
Frequência [Hz]200 300 400 500 600 700 800 900 1000 1100 1200
T [
º]
0
50
100
150
200
Err
o
-1
-0.5
0
0.5
1
(a) T1,2
Frequência [Hz]200 300 400 500 600 700 800 900 1000 1100 1200
|T| [
dB]
-100
-50
0
50
Err
o
10-15
10-10
10-5
100T
KUH T
RUZ Erro
Frequência [Hz]200 300 400 500 600 700 800 900 1000 1100 1200
T [
º]
0
50
100
150
200
Err
o
-1
-0.5
0
0.5
1
(b) T2,2
Fig. 4.21.: Modulo e Fase de THKU (ω) vs TZRU (ω)-II
Analisando a fase de todas as entradas Ti,j , e claro que a fase (graficos em baixo) vai oscilar entre
patamares de 0o e 180o e as mudancas ocorrem as mesmas frequencias dos picos e vales do modulo.
E tambem visıvel que as curvas de modulo obtidas por ambos os metodos diferem apenas numa ordem
de grandeza aproximadamente entre 10−12 e 10−15, o que se considera ser explicado pelos erros de
arredondamento devido a precisao de vırgula utilizada pelo Matlab R© (dupla precisao de vırgula flutu-
ante). Isto excepto em zonas proximas das frequencias de pico, como e expectavel. O erro das curvas
de fase e sempre nulo porque a parte imaginaria, neste caso e nula e portanto a fase toma sempre o
valor 180o ou 0o (ver definicao de fase na seccao 2.3).
55

Finalmente, apresentam-se os graficos das pressoes calculadas com a solucao usual de elementos
finitos e as obtidas via transmissibilidade, na situacao de se aplicar uma pressao de amplitude de 3 Pa
e 1 Pa nos nos U :
Frequência [Hz]200 300 400 500 600 700 800 900 1000 1100 1200
|P| [
dB]
-100
-50
0
50
100
Err
o
10-15
10-10
10-5
100
Pres. c/ solu. usual de EF Pres. c/ TKUH Erro
Frequência [Hz]200 300 400 500 600 700 800 900 1000 1100 1200
P [
º]
0
50
100
150
200
Err
o
-1
-0.5
0
0.5
1
(a) Modulo e fase em x = L/3
Frequência [Hz]200 300 400 500 600 700 800 900 1000 1100 1200
|P| [
dB]
-100
-50
0
50
100
Err
o
10-15
10-10
10-5
100
Pres. c/ solu. usual de EF Pres. c/ TKUH Erro
Frequência [Hz]200 300 400 500 600 700 800 900 1000 1100 1200
P [
º]
0
50
100
150
200
Err
o
-1
-0.5
0
0.5
1
(b) Modulo e fase em x = 2L/3
Fig. 4.22.: Comparacao de pressao obtida por THKU (ω) c/ Solucao de Elementos finitos
Da figura 4.22 pode-se concluir que as curvas de pressao coincidem na fase, e no modulo tem um
desvio devido a erros de arredondamento.
4.4.1. Demonstracao de Localizacao com Transmissibilidade de Pressoes
O objectivo e agora explicar o processo de localizacao com o conceito de transmissibilidade estudado
no inıcio desta seccao. O processo de identificacao segue a metodologia da seccao 3.2. Pretende-se
localizar uma fonte pontual com amplitude de 3 Pa, como ilustrado na figura 4.23.
Fig. 4.23.: Esquema de localizacao de uma fonte c/ transmissibilidade de pressoes
Dada a curva de pressao com a frequencia na gama 200 − 1200 Hz no no da terminacao (no K),
pretende-se obter a correlacao da mesma com a curva de pressao estimada, calculada via THKU , na
mesma gama. Os resultados tanto para o caso de terminacao anecoica ou reflectiva, estao represen-
tados na figura 4.24. Arbitrou-se uma amplitude pU = 1 Pa para a localizacao. O grafico representa o
coeficiente de correlacao (σ) para cada combinacao de fontes possıvel. Como se considerou que existe
no maximo uma fonte, as combinacoes correspondem aos numeros dos nos da malha.
56

# Nó10 20 30 40 50 60
<
0
0.2
0.4
0.6
0.8
1
1.2
Correlação da localização da fontef= 200-1200 Hz
< nós< Max. (nó)Nó da fonte
(a) Terminacao reflectiva
# Nó10 20 30 40 50 60
<
0
0.2
0.4
0.6
0.8
1
1.2
Correlação da localização da fontef= 200-1200 Hz
< nós< Max. (nó)Nó da fonte
(b) Terminacao anecoica
Fig. 4.24.: Graficos de σ obtidos na localizacao de uma fonte pontual com transmissibilidade depressoes
Nos dois casos a identificacao foi correcta. Note-se que no caso anecoico utilizou-se a parte real
e nao o modulo das curvas de pressao conhecida e estimada. A razao de tal opcao prende-se com
o facto de que no caso anecoico o modulo (medido em K) e sempre igual a amplitude imposta (ver
equacao 4.2) e portanto constante com a frequencia. A parte real, ja tem uma curva variavel com a
frequencia (ver figura 4.25 b)).. Esta questao so sucede em domınios perfeitamente anecoicos.
Na figura 4.25 a) pode-se observar, para o caso com terminacao reflectiva, a curva de pressao co-
nhecida PK(ω) (a traco cheio) e a curva que se obteve na identificacao (a traco interrompido). Adicional-
mente tambem esta representada a curva que se obteria se a identificacao fosse efectuada arbitrando
uma pressao de 2 Pa em vez de 1 Pa. Observa-se que desta forma o metodo funciona sempre in-
dependentemente da amplitude que se arbitre para a identificacao, porque a curva obtida tera sempre
forma identica (logo correlacao) com a curva da pressao PK . Na figura 4.25 b) estao representadas as
mesmas curvas mas , no caso de terminacao anecoica e usando a parte real das curvas de pressao.
Frequência [Hz]200 400 600 800 1000 1200
|P| [
dB]
0
10
20
30
40
50
60
70
80
90
Demonstração do método c/ correlaçãof= 200-1200 Hz
PK
P c/ TKUH , p
U=2 Pa
P c/ TKUH ,p
U=1 Pa
(a) Terminacao reflectiva (usando |P |)Frequência [Hz]
200 400 600 800 1000 1200
|P| [
dB]
-3
-2
-1
0
1
2
3
Demonstração do método c/ correlaçãof= 200-1200 Hz
PK
P c/ TKUH , p
U=2 Pa
P c/ TKUH ,p
U=1 Pa
(b) Terminacao anecoica (usando Re(P ))
Fig. 4.25.: Curvas de pressao conhecida, PK e de pressao estimada P sK , no metodo de identificacao
57
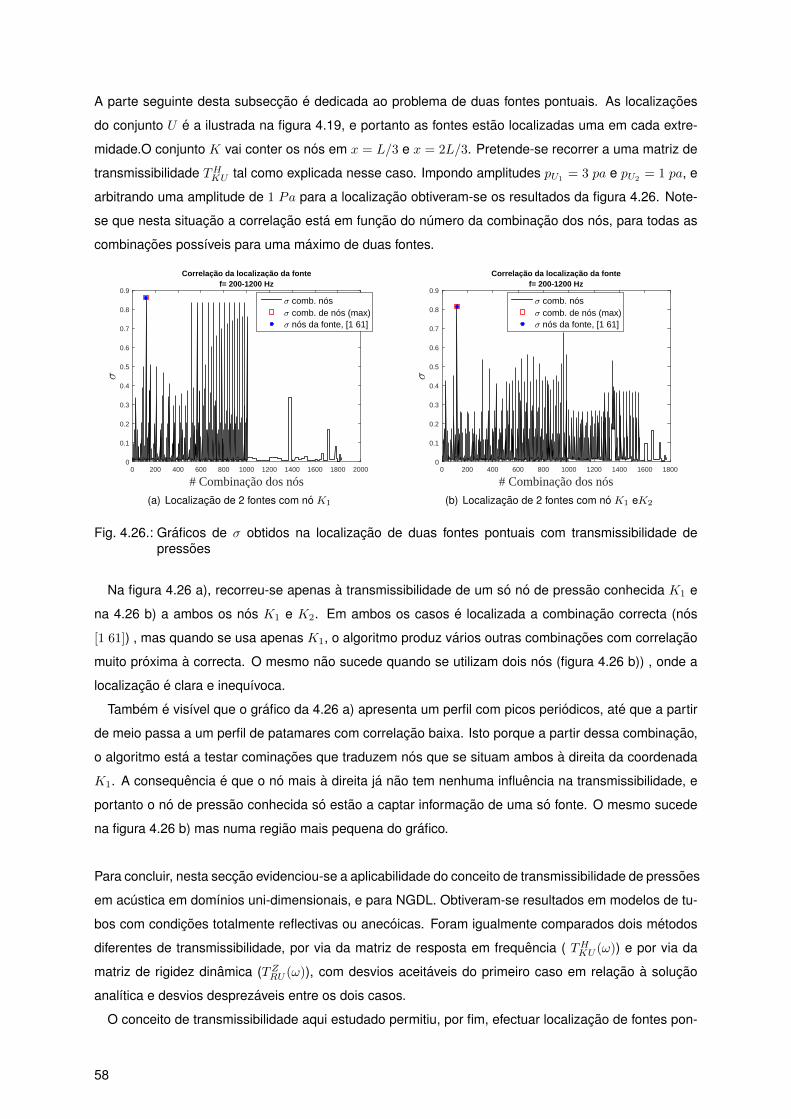
A parte seguinte desta subseccao e dedicada ao problema de duas fontes pontuais. As localizacoes
do conjunto U e a ilustrada na figura 4.19, e portanto as fontes estao localizadas uma em cada extre-
midade.O conjunto K vai conter os nos em x = L/3 e x = 2L/3. Pretende-se recorrer a uma matriz de
transmissibilidade THKU tal como explicada nesse caso. Impondo amplitudes pU1= 3 pa e pU2
= 1 pa, e
arbitrando uma amplitude de 1 Pa para a localizacao obtiveram-se os resultados da figura 4.26. Note-
se que nesta situacao a correlacao esta em funcao do numero da combinacao dos nos, para todas as
combinacoes possıveis para uma maximo de duas fontes.
# Combinação dos nós0 200 400 600 800 1000 1200 1400 1600 1800 2000
<
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
Correlação da localização da fontef= 200-1200 Hz
< comb. nós< comb. de nós (max)< nós da fonte, [1 61]
(a) Localizacao de 2 fontes com no K1
# Combinação dos nós0 200 400 600 800 1000 1200 1400 1600 1800
<
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
Correlação da localização da fontef= 200-1200 Hz
< comb. nós< comb. de nós (max)< nós da fonte, [1 61]
(b) Localizacao de 2 fontes com no K1 eK2
Fig. 4.26.: Graficos de σ obtidos na localizacao de duas fontes pontuais com transmissibilidade depressoes
Na figura 4.26 a), recorreu-se apenas a transmissibilidade de um so no de pressao conhecida K1 e
na 4.26 b) a ambos os nos K1 e K2. Em ambos os casos e localizada a combinacao correcta (nos
[1 61]) , mas quando se usa apenas K1, o algoritmo produz varios outras combinacoes com correlacao
muito proxima a correcta. O mesmo nao sucede quando se utilizam dois nos (figura 4.26 b)) , onde a
localizacao e clara e inequıvoca.
Tambem e visıvel que o grafico da 4.26 a) apresenta um perfil com picos periodicos, ate que a partir
de meio passa a um perfil de patamares com correlacao baixa. Isto porque a partir dessa combinacao,
o algoritmo esta a testar cominacoes que traduzem nos que se situam ambos a direita da coordenada
K1. A consequencia e que o no mais a direita ja nao tem nenhuma influencia na transmissibilidade, e
portanto o no de pressao conhecida so estao a captar informacao de uma so fonte. O mesmo sucede
na figura 4.26 b) mas numa regiao mais pequena do grafico.
Para concluir, nesta seccao evidenciou-se a aplicabilidade do conceito de transmissibilidade de pressoes
em acustica em domınios uni-dimensionais, e para NGDL. Obtiveram-se resultados em modelos de tu-
bos com condicoes totalmente reflectivas ou anecoicas. Foram igualmente comparados dois metodos
diferentes de transmissibilidade, por via da matriz de resposta em frequencia ( THKU (ω)) e por via da
matriz de rigidez dinamica (TZRU (ω)), com desvios aceitaveis do primeiro caso em relacao a solucao
analıtica e desvios desprezaveis entre os dois casos.
O conceito de transmissibilidade aqui estudado permitiu, por fim, efectuar localizacao de fontes pon-
58

tuais em casos simples tal como na seccao 4.3. Tal permite tornar viavel a aplicacao deste conceito em
domınios de duas dimensoes, tema que sera objecto de estudo na seccao seguinte.
4.5. Transmissibilidade de pressao a duas dimensoes
O estudo da transmissibilidade a duas dimensoes foi realizado recorrendo ao software comercial de
elementos finitos. Em primeiro lugar foi modelado um domınio, cuja finalidade e simular o tubo de ar se-
melhante ao da seccao 4.1 a duas dimensoes. Para tal, utilizaram-se elementos finitos do tipo FLUID29
disponıveis no software comercial. Estes elementos sao quadrilateros (ou triangulos) com quatro (ou
tres) nos, e possibilidade de tres graus de liberdade por no ( translacoes nas direcoes cartesianas x,
y, e pressao), mas neste caso so os graus de liberdade de pressao ficaram ativos. Sao elementos que
utilizam funcoes de forma lineares e estao ilustrados na figura 4.27 [31].
ρ0 [Kg/m3] 1.21c [m/s] 344L [m] 1h [m] 0.2
Fig. 4.27.: Parametros do Ar e da Malha 2D
As propriedades do ar e dimensoes do domınio (superfıcie), sendo L o comprimento e h a largura estao
na figura 4.27.
A malha, representada na figura 4.28 foi construıda de forma regular , e de modo a que os elementos
sejam todos quadrados iguais entre si.
Fig. 4.28.: Malha 2D com 60× 12 elementos finitos
De seguida aplica-se uma pressao harmonica de amplitude P = 1 Pa nos nos da seccao a uma
distancia y = L/3. Esses nos estao representados como uma linha triangulos verdes na figura 4.28. O
objectivo e obter-se uma solucao que seja uma onda plana tanto para a esquerda como para a direita
( e nao e simetrica em relacao a seccao onde esta aplicada a pressao). Na figura 4.29 e possıvel
observar a solucao para a frequencia f = 1500 Hz. A condicao de fronteira em ambas as extremidades
do tubo e totalmente reflectiva.
59

Fig. 4.29.: Solucao de elementos finitos 2D de Onda Plana (escala de cores em Pa)
E possıvel comparar esta solucao com a curva de pressao obtida via solucao analıtica a uma dimensao.
Para tal, consideram-se as solucoes de duas ondas com origem em x = L/3: uma que se propaga para
a esquerda e outra para a direita. Esta solucao pode ser comparada com a pressao na linha que divide
o tubo ao meio ( a traco interrompido na figura 4.29), como se pode observar na figura (4.30.
y [m]0 0.2 0.4 0.6 0.8 1
P [P
a]
-1.5
-1
-0.5
0
0.5
1
1.5Pressão c/ AnsysPressão c/ Sol. Analítica 1D
Fig. 4.30.: Solucao de elementos finitos 2D vs. Solucao Analıtica 1D
Para se demonstrar a aplicabilidade do conceito de transmissibilidade a duas dimensoes propoe-se
estudar as transmissibilidades com os pressupostos da tabela 4.2;
Linha (nos) de pressaoconhecida (PK)
Linha (nos) de aplicacaoda pressao (fonte) (PU )
Amplitude depressao imposta pu
y=0 , y=L y=L/3 1 PaDimensao K − nK Dimensao U − nU Gama de frequencias
26 13 200 Hz - 1200Hz
Tab. 4.2.: Dados utilizados no modelo para a Transmissibilidade 2D
ou seja tal, como no caso unidimensional e conhecida a pressao nas extremidades do tubo. De
referir que neste caso, pelo facto de se estar a analisar um modelo muito maior que no caso uni-
dimensional, optou-se por usar um intervalo de discretizacao da gama de frequencias de 10 Hz. Com
isto a vantagem e rapidez no calculo, com compromisso nas curvas de transmissibilidade. No, entanto,
60

como se vai analisar adiante, com esta discretizacao e possıvel obter resultados satisfatorios.
Seguidamente, pretende-se obter a transmissibilidade THKU , atraves da formulacao do capıtulo 2
seccao 2.3; e que nesta situacao, sera uma matriz de dimensao 26 × 13. Se for selecionado apenas
um no Ki do conjunto PK , podem-se extrair as transmissibilidades da matriz THKU que correspondem
as entradas da linha Ki da mesma matriz. Essa linha tera dimensao nU . Para exemplificar, o no esco-
lhido sera o de coordenada (x, y) = (h/2, 0) (na extremidade esquerda do tubo, a meia altura) e serao
representadas as entradas da matriz correspondentes a tres dos nos da linha de aplicacao da pressao,
respectivamente para x = 0, x = h/2 e x = h. O esquema da figura 4.31 permite a visualizacao de
todos estes pontos.
Fig. 4.31.: Esquema do tubo 2D com os pontos de interesse
Desta forma, e possıvel obter os graficos da figura 4.32, onde se apresenta o modulo da transmissi-
bilidade (em cima) e fase (em baixo) em funcao da frequencia. Os tıtulos dos graficos apresentam-se
em termos das coordenadas dos pontos ou seja T(xK ,yK);(xU ,yU ). E de referir que a fase das transmis-
sibilidades oscila entre patamares de 0o e 180o, ocorrendo as transicoes na frequencia onde existe um
pico (ou vale) no modulo, tal como no caso uni-dimensional. Estes picos ocorrem fora das frequencias
de ressonancia, que para um domınio em duas dimensoes sao dadas por [8]:
fn =c
2
√(mL
)2
+(nh
)2
m,n = 0, 1, 2, 3, . . . (4.15)
Este comportamento da fase e esperado quando nao existe parte imaginaria na transmissibilidade. Por
simetria do sistema relativamente ao seu eixo longitudinal, as transmissibilidades em relacao aos outros
nos do conjunto U sao semelhantes as apresentadas.
A figura 4.33 exibe uma comparacao da pressao obtida pela solucao usual de elementos finitos com
a pressao obtida com a matriz transmissibilidade TKU . A primeira e a calculada directamente pelo
software de elementos finitos e a segunda e calculada atraves da matriz de rigidez dinamica exportada
do mesmo software para o programa em Matlab R©.
Como e visıvel as curvas de pressao tanto para a amplitude como para a fase coincidem (graficos
em cima). A diferenca esta na ordem 10−16 a 10−12 para a amplitude, com a excepcao dos pontos na
vizinhanca das frequencias de pico , e e nula para a fase.
61

Fig. 4.32.: Transmissibilidades de pressao para caso de onda plana-modulo(em cima) e fase(em baixo)
Fig. 4.33.: Comparacao das pressoes obtidas pela solucao de elementos finitos vs obtida pelatransmissibilidade
62

No primeiro caso, tal e explicavel pelos erros de arredondamento e no segundo devido a nao haver
parte imaginaria as duas solucoes sao iguais, tal como no caso uni-dimensional.
Dado estar verificada a aplicacao do conceito de transmissibilidade em casos de onda plana, pode-
se apresentar um caso para uma onda nao plana. Tal significa que o problema que sera estudado
nao e o de um tubo mas sim de um domınio bidimensional com as mesmas dimensoes , mas onde a
propagacao nao se da por ondas planas.
Para o novo problema, adotam-se as mesmas condicoes do caso anterior mas, a pressao harmonica
(de igual amplitude) e aplicada numa linha na mesma coordenada y = L/3 que se estende apenas ate
meio do tubo (x = h/2). Sao apresentados dois casos: um com extremidades reflectivas e outro com
extremidades anecoicas, respectivamente nas figuras 4.34 e 4.35. As paredes superior e inferior do
tubo sao em ambos os casos reflectivas e as fontes estao representadas a preto.
Fig. 4.34.: Solucao 2D c/ pressao imposta em y=L/3,x=0 a h/2, f=1500 Hz.Condicao de fronteira refletivanas extremidades (escala de cores em Pa)
Fig. 4.35.: Solucao 2D c/ pressao imposta em y=L/3,x=0 a h/2, f=1500 Hz. Condicao de fronteiraanecoica nas extremidades (escala de cores em Pa)
E imediato concluir que em nenhum dos casos a solucao apresenta uma onda plana.
De seguida apresentam-se as transmissibilidades tal como no caso da onda plana, ou seja com o
mesmo ponto de pressao conhecida K, e em relacao aos pontos U em x = 0 e x = h/2. Analisando as
figuras 4.36 e 4.37, verifica-se que no caso anecoico, a fase ja varia de forma diferente do que no caso
de extremidades reflectivas. Este comportamento e esperado devido ao facto da transmissibilidade ter
parte imaginaria que foi introduzida pela impedancia que se utilizou para criar a condicao de fronteira
anecoica.
63

Fig. 4.36.: Transmissibilidades de pressao para caso de onda nao plana(Modulo e Fase).Extremidadesreflectivas
Fig. 4.37.: Transmissibilidades de pressao para caso de onda nao plana(Modulo e Fase). Extremidadesanecoicas
64

Para concluir apresenta-se de novo uma comparacao da pressao obtida com a solucao de elementos
finitos e a transmissibilidade tanto para o caso de extremidades reflectivas com o caso anecoico.
Fig. 4.38.: Comparacao da pressao no ponto (x, y) = (0, h/2). Solucao de elementos finitos vs pressaoobtida c/ transmissibilidade(onda nao plana, extremidades reflectivas)
E possıvel, mais uma vez, observar que para o caso reflectivo o erro esta na ordem dos 10−12
em media, excepto nas frequencias onde a curva do modulo apresenta picos. No entanto, nessas
frequencias o erro nao excede os 10−9. Observando a figura 4.39 conclui-se que para o modulo e
para a fase, a diferenca entre as duas solucoes nao excede a ordem de 10−10. Estes erros, tal como
no caso uni-dimensional (seccao 4.4), sao associados aos arredondamentos das operacoes em vırgula
flutuante que se tem de realizar na matriz Z(ω) e na matriz HUU , para obter as transmissibilidades THKU .
Nesta seccao ficou verificado o funcionamento do conceito de transmissibilidade NGDL, em domınios
a duas dimensoes, em casos de onda plana e nao plana. Foi possıvel observar varios exemplos de
transmissibilidade em funcao da frequencia, com dois tipos de condicoes de fronteira: anecoica e total-
mente reflectiva. Por fim, compararam-se curvas de pressao extraıdas do software de elementos finitos,
com as curvas obtidas via transmissibilidade. Os desvios encontrados entre as duas solucoes sao os
expectaveis, e devidos ao arredondamento dos diferentes metodos numericos. Estao ambos proximos
da ordem da dupla precisao de vırgula flutuante.
Conclui-se, portanto, que e possıvel ao ter acesso as matrizes de rigidez dinamica de um modelo de
elementos finitos nas varias frequencias, de poder obter as transmissibilidades em duas dimensoes.
65

Fig. 4.39.: Comparacao da pressao no ponto (x, y) = (0, h/2). Solucao de elementos finitos vs pressaoobtida c/ transmissibilidade(onda nao plana, extremidades anecoicas)
4.6. Identificacao de fontes em linha a duas dimensoes
A localizacao em duas dimensoes foi estudada num domınio igual ao modelado na seccao 4.5, com
dimensoes e propriedades do ar identicas as da figura 4.27. Inicialmente impoe-se uma fonte em linha
diagonal (\) com tres nos (ou largura de dois elementos) de comprimento e amplitude 3 Pa, como vista
na figura 4.40. As condicoes de fronteira impostas podem tambem ser observadas na mesma figura.
Fig. 4.40.: Malha 2D com 60× 12 elementos finitos para identificacao
Esta disposicao de condicoes de fronteira foi construıda de modo a obter-se um domınio sem sime-
trias, para que nao exista outra localizacao de fonte que produza a mesma pressao nos nos conhecidos,
ou seja, para que o problema inverso tenha uma solucao unica. Um exemplo de solucao de pressao
para esta localizacao de fontes esta ilustrada na figura 4.41. O conjunto de nos de pressao conhecida,
PK e o mesmo que na seccao 4.5, ou seja os nos nas extremidades do tubo.
66

Fig. 4.41.: Exemplo de distribuicao de pressoes (parte real) para, f=1500 Hz (escala de cores em Pa)
De seguida serao apresentadas, a tıtulo de exemplo, as pressoes (modulo) conhecidas, em funcao
da frequencia, nos nos dos quatro cantos da superfıcie:
Fig. 4.42.: Curvas de pressoes conhecidas PK para identificacao 2D (em quatro pontos)
Os modulos das pressoes ,|PK |, na gama de frequencias 200− 1200 Hz, foram mais uma vez utiliza-
das para comparar (via correlacao) com as pressoes obtidas com o conceito de transmissibilidade de
zona, de acordo com o procedimento do capıtulo 3, seccao 3.3. Seguindo o mesmo procedimento, e
proposta uma divisao do domınio em 18 zonas quadradas de lado 6 elementos para se efectuar uma
busca a cada zona, como se pode observar na figura 4.43 Este conjunto de zonas foi desenhado admi-
tindo que a fonte em linha nao esta localizada nas imediacoes ate 3 elementos das duas linhas de nos
de pressao conhecida (como esta identificado na figura 4.43).
Ao se implementar esta divisao do domınio em zonas para identificacao, existe a possibilidade (alta)
de a fonte se situar na fronteira ou cruzando duas zonas diferentes, como sucede neste exemplo em
67

Fig. 4.43.: Configuracao de zonas de busca para identificacao 2D
que a fonte esta nas zonas 12 e 14.
O objectivo e identificar as zonas onde a fonte esta localizada, variando o tamanho da celula de
busca, ou seja, refinando a area que se esta a varrer, e tambem variando a figura de busca( tal como
explicado na seccao 3.3). Para este caso, foram testadas uma figura em linha horizontal, linha vertical,
linha diagonal (/) e linha diagonal (\), uma cruz (+) e finalmente uma cruz(×). Os resultados sao
representados em mapas (que correspondem a area do domınio), em que cada zona (quadrado) tem
uma cor associada ao coeficiente de correlacao obtido nessa zona.
(a) Localizacao de fonte c/ linha horizontal (b) Localizacao de fonte c/ linha vertical
Fig. 4.44.: Mapas de correlacao (por celula) do domınio 2D (I)
Os mapas estao apresentados por ordem crescente do nıvel de refinamento, ou seja, no primeiro
mapa tem-se o teste com a celula de busca maior, em que as zonas sao as apresentadas na figura
4.43. No terceiro tem-se o teste com a celula mais pequena em que a area tera uma configuracao de
6 × 27 zonas. Na barra lateral em cada grafico pode ser consultada a escala de cores. As zonas em
68
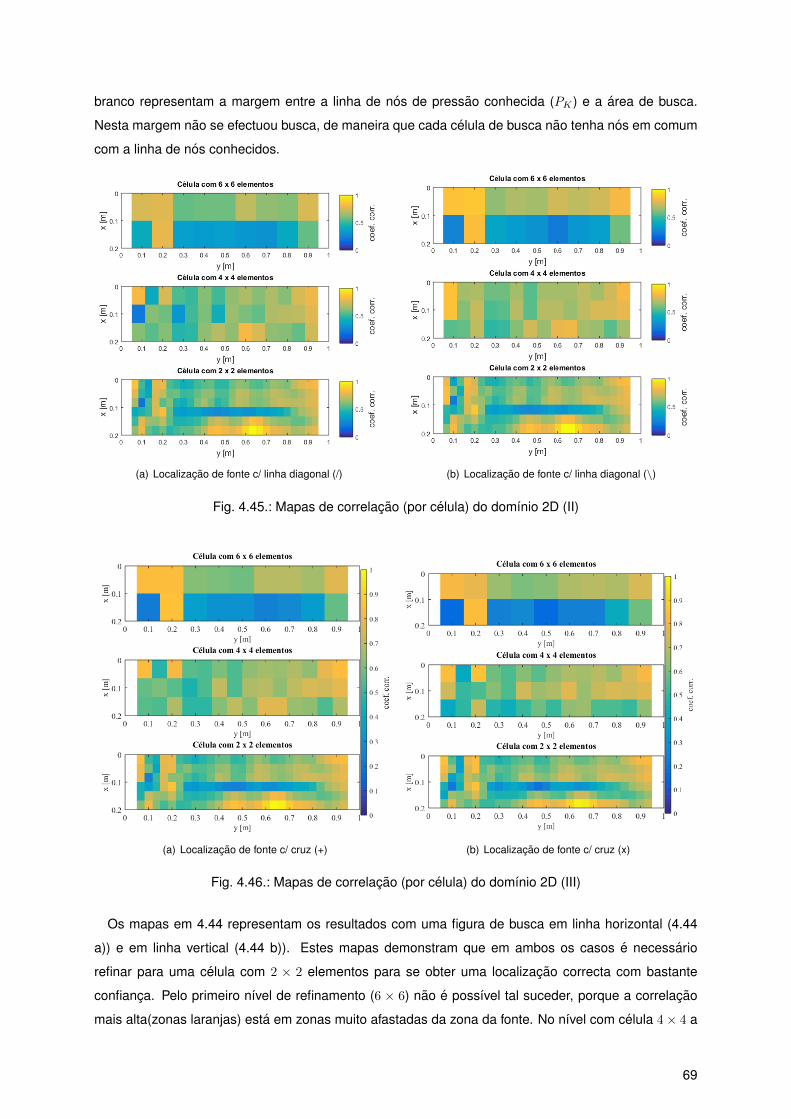
branco representam a margem entre a linha de nos de pressao conhecida (PK) e a area de busca.
Nesta margem nao se efectuou busca, de maneira que cada celula de busca nao tenha nos em comum
com a linha de nos conhecidos.
(a) Localizacao de fonte c/ linha diagonal (/) (b) Localizacao de fonte c/ linha diagonal (\)
Fig. 4.45.: Mapas de correlacao (por celula) do domınio 2D (II)
(a) Localizacao de fonte c/ cruz (+) (b) Localizacao de fonte c/ cruz (x)
Fig. 4.46.: Mapas de correlacao (por celula) do domınio 2D (III)
Os mapas em 4.44 representam os resultados com uma figura de busca em linha horizontal (4.44
a)) e em linha vertical (4.44 b)). Estes mapas demonstram que em ambos os casos e necessario
refinar para uma celula com 2 × 2 elementos para se obter uma localizacao correcta com bastante
confianca. Pelo primeiro nıvel de refinamento (6 × 6) nao e possıvel tal suceder, porque a correlacao
mais alta(zonas laranjas) esta em zonas muito afastadas da zona da fonte. No nıvel com celula 4× 4 a
69

zona com correlacao mais alta ja e a correcta, mas nao tem uma correlacao tao proxima de σ = 1 como
no nıvel 2× 2 elementos.
Nos mapas 4.45 (figuras em linhas diagonais), verifica-se que apenas com um refinamento de nıvel
2×2 elementos e possıvel obter uma identificacao inequıvoca da fonte. A figura de busca (\) tem assim
uma performance inferior a da figura em 4.44 a), mesmo tendo uma orientacao igual a da fonte!
Para finalizar, os mapas 4.46 mostra os resultados para as figuras em cruz. Note-se que estas figuras
sao combinacoes das figuras em linha diagonal, vertical e horizontal. De uma forma geral, em ambas
as figuras, so se obtem uma identificacao precisa com o nıvel de refinamento com celula de 2 × 2
elementos.
4.6.1. Localizacao de duas fontes em linha
O objectivo passa agora por localizar duas fontes em linha em simultaneo num domınio identico (e com
as mesmas condicoes de fronteira) ao da figura 4.40.O processo e o descrito na subseccao 3.3.1 e,
neste caso optou-se por usar apenas uma figura de busca em (x). Na figura 4.47 esta ilustrada a nova
solucao de pressao para: fonte em cima (vertical) com cinco nos (quatro elementos) de comprimento e
2 Pa de amplitude; fonte em baixo (diagonal) com tres nos e 3 Pa de amplitude.
Fig. 4.47.: Distribuicao de pressao (parte real) a 1500 Hz, c/ duas fontes (a preto)
(a) 1a iteracao (b) 2a iteracao
Fig. 4.48.: Localizacao de fonte acustica em 2D c/ 2 fontes e 3 nıveis de refinamento (aumentando decima para baixo)
70

A figura (mapas) 4.48 a) apresenta a primeira iteracao do processo (com o conjunto S1), onde a fonte
mais comprida foi localizada com sucesso. O nıvel de refinamento dois (celula 4× 4) que tem tamanho
igual ao da mesma fonte foi o identificado com mais alta correlacao, e logo assumido como o conjunto
U1. Fazendo uma segunda iteracao com um conjunto U1 + S2, uma nova procura e efectuada (figura
4.48 b)). Esta segunda iteracao localizou como zona de correlacao mais alta uma zona adjacente a
zona onde esta a fonte. O valor de correlacao foi alto σ = 0.97 e o nıvel de refinamento, e mais uma vez
de largura igual ao da fonte mais pequena.
Em conclusao, demonstrou-se nesta seccao que e possıvel assegurar uma identificacao da zona onde
se encontra uma fonte em linha, mas em geral e necessario utilizar uma celula de busca de lado com
dimensao igual ao comprimento da fonte, para se obter uma identificacao com precisao. As celulas com
dimensao superior (4 × 4 e 6 × 6), na maioria dos casos, nao permitiram uma localizacao inequıvoca.
Tambem se verificou que nao foi possıvel aferir a orientacao geometrica da fonte com as das figuras de
busca aqui experimentadas, mesmo no caso de figuras com orientacao igual a da linha da fonte. Como
tal, mais testes serao necessarios para estudar este aspecto.
Na localizacao de duas fontes, verificou-se que o metodo com duas iteracoes identifica satisfatoria-
mente as zonas (exactas ou adjacentes) e os tamanhos das fontes. Mais testes serao necessarios
em trabalho futuro com domınios maiores (relativamente a dimensao das fontes) e por exemplo com
amplitudes de ordens de grandeza diferente entre cada fonte.
4.7. Identificacao de fontes harmonicas no interior de aviao por
domınios a duas dimensoes
A abordagem a identificacao de fontes harmonicas em interiores de aviao, sera realizada atraves da
modelacao de um troco de fuselagem em duas dimensoes, de forma muito simplificada. Ao se observar
figura 4.49, que representa uma seccao transversal de um aviao ATR 72 ([32]), e possıvel obter, atraves
do corte AB da figura, uma seccao longitudinal. Na malha da figura 4.50 esta apresentada uma seccao
longitudinal ja modelada em elementos finitos.
A malha foi construıda o mais regular possıvel e foi parametrizada em funcao dos parametros:
espacamento entre cadeiras, altura por cima dos assentos e altura dos assentos (em ingles seat pitch,
headroom height e seat height). Valores tıpicos para avioes da gama do ATR 72 foram retirados da
literatura [33] e utilizados nesta malha, podendo ser consultados na tabela 4.3. A malha foi refinada
de forma a que a fronteira a esquerda tivesse 80 elementos finitos, e o refinamento das outras linhas
da malha foi feita em funcao desse comprimento, de forma a que os elementos tivessem as melhores
proporcoes (racio de comprimento-largura) possıveis. Isto nao evitou que fossem necessarios alguns
elementos triangulares. Apos a construcao de uma seccao que equivale a um assento e possıvel re-
produzir a malha dessa seccao e construir uma malha com N assentos a definir pelo utilizador (neste
caso N = 3). O resultado final foi uma malha com um total 8390 elementos finitos (FLUID 29).
71

Fig. 4.49.: Seccao Transversal da Fuselagem de um ATR 72 [32]
Fig. 4.50.: Malha 2D do troco de seccao longitudinal do interior de cabine de aviao
72
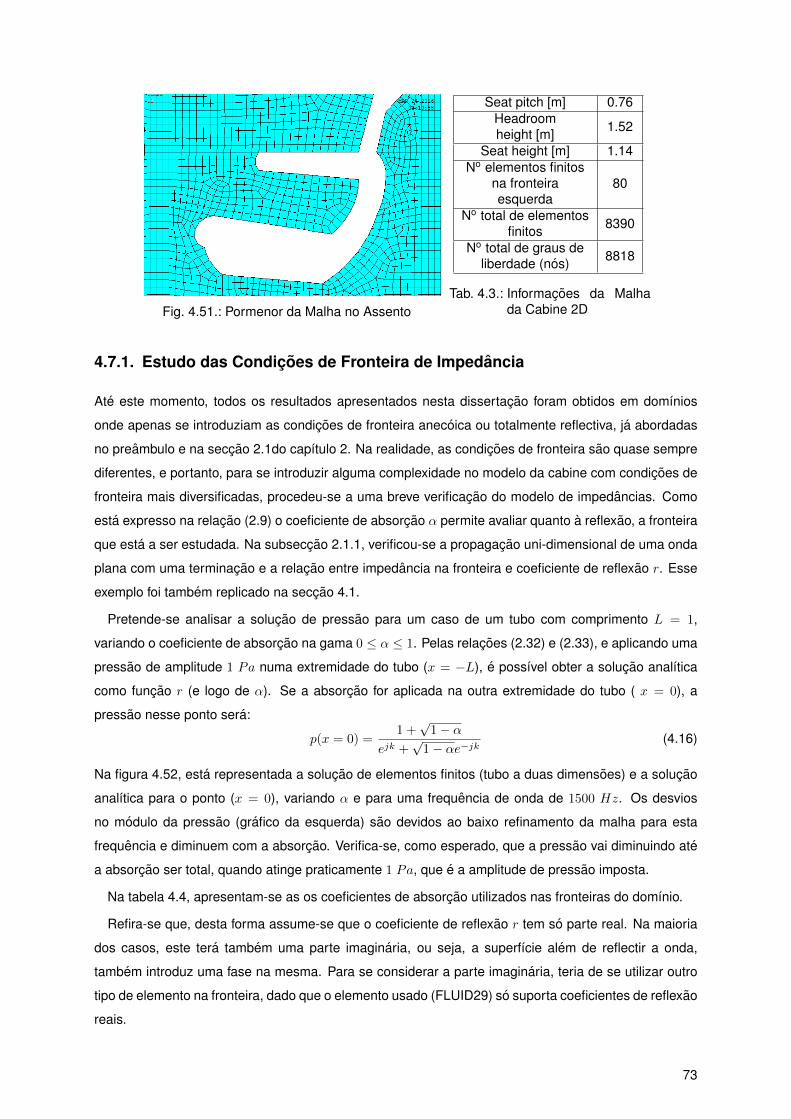
Fig. 4.51.: Pormenor da Malha no Assento
Seat pitch [m] 0.76Headroomheight [m] 1.52
Seat height [m] 1.14No elementos finitos
na fronteiraesquerda
80
No total de elementosfinitos 8390
No total de graus deliberdade (nos) 8818
Tab. 4.3.: Informacoes da Malhada Cabine 2D
4.7.1. Estudo das Condicoes de Fronteira de Impedancia
Ate este momento, todos os resultados apresentados nesta dissertacao foram obtidos em domınios
onde apenas se introduziam as condicoes de fronteira anecoica ou totalmente reflectiva, ja abordadas
no preambulo e na seccao 2.1do capıtulo 2. Na realidade, as condicoes de fronteira sao quase sempre
diferentes, e portanto, para se introduzir alguma complexidade no modelo da cabine com condicoes de
fronteira mais diversificadas, procedeu-se a uma breve verificacao do modelo de impedancias. Como
esta expresso na relacao (2.9) o coeficiente de absorcao α permite avaliar quanto a reflexao, a fronteira
que esta a ser estudada. Na subseccao 2.1.1, verificou-se a propagacao uni-dimensional de uma onda
plana com uma terminacao e a relacao entre impedancia na fronteira e coeficiente de reflexao r. Esse
exemplo foi tambem replicado na seccao 4.1.
Pretende-se analisar a solucao de pressao para um caso de um tubo com comprimento L = 1,
variando o coeficiente de absorcao na gama 0 ≤ α ≤ 1. Pelas relacoes (2.32) e (2.33), e aplicando uma
pressao de amplitude 1 Pa numa extremidade do tubo (x = −L), e possıvel obter a solucao analıtica
como funcao r (e logo de α). Se a absorcao for aplicada na outra extremidade do tubo ( x = 0), a
pressao nesse ponto sera:
p(x = 0) =1 +√
1− αejk +
√1− αe−jk
(4.16)
Na figura 4.52, esta representada a solucao de elementos finitos (tubo a duas dimensoes) e a solucao
analıtica para o ponto (x = 0), variando α e para uma frequencia de onda de 1500 Hz. Os desvios
no modulo da pressao (grafico da esquerda) sao devidos ao baixo refinamento da malha para esta
frequencia e diminuem com a absorcao. Verifica-se, como esperado, que a pressao vai diminuindo ate
a absorcao ser total, quando atinge praticamente 1 Pa, que e a amplitude de pressao imposta.
Na tabela 4.4, apresentam-se as os coeficientes de absorcao utilizados nas fronteiras do domınio.
Refira-se que, desta forma assume-se que o coeficiente de reflexao r tem so parte real. Na maioria
dos casos, este tera tambem uma parte imaginaria, ou seja, a superfıcie alem de reflectir a onda,
tambem introduz uma fase na mesma. Para se considerar a parte imaginaria, teria de se utilizar outro
tipo de elemento na fronteira, dado que o elemento usado (FLUID29) so suporta coeficientes de reflexao
reais.
73

,
0 0.5 1
|P|(x
=0)
[Pa]
0.8
0.9
1
1.1
1.2
1.3
1.4
1.5
1.6
1.7
1.8Sol. Ansys Sol. Analítica
,
0 0.5 1
P(x
=0)
[º]
-180
-175
-170
-165
-160
-155
-150
-145
-140
-135
-130
Fig. 4.52.: Estudo do efeito do coeficiente deabsorcao: Sol. software de elementosfinitos 2D vs Sol. Analıtica 1D
Coeficiente de absorcao nafronteira direita-α1
1
Coeficiente de absorcaono chao-α2
0.8
Coeficiente de absorcao nafronteira esquerda-α3
1
Coeficiente de absorcaono tecto α4
0.35
Coeficiente de absorcaonas cadeiras-α5
0.5
Tab. 4.4.: Coeficientes de Absorcao naCabine
Outra aproximacao que sera feita e manter os coeficientes de absorcao constantes com a variacao
da frequencia. Na realidade estes dependem fortemente da frequencia; como tal os valores da tabela
foram escolhidos simplesmente assumindo, que os materiais tem uma capacidade de absorcao por
ordem decrescente: fronteira esquerda e direita (anecoico), chao, cadeiras e tecto. Esta aproximacao
tambem advem do facto de que nao foram encontradas tabelas de propriedades acusticas de materiais
especıficos de interiores de aeronaves.
4.7.2. Resultados de Localizacao
Apos a construcao da malha e definicao das condicoes de fronteira, apresenta-se na figura 4.54 a
solucao de pressao, com uma fonte em linha no chao da cabine (y = 0). A fonte tem uma amplitude de
8 Pa e perfaz uma linha em 0.71 m ≤ x ≤ 0.81 m, ou seja tem um comprimento de 10 cm.
Frequência [Hz]200 300 400 500 600 700 800 900 1000
|P| [
dB]
-20
-10
0
10
Pressão |PK
|
Frequência [Hz]200 300 400 500 600 700 800 900 1000
|P| [
dB]
-40
-20
0
20
Pressão |PK
|
Fig. 4.53.: Exemplos de curvas de pressao (modulo) no conjunto K (linha vertical por cima do assento adireita em x = 2.28 m), para identificacao na cabine. Grafico em cima, no ponto y = 1.52 m.Grafico em baixo no ponto y = 1.14 m
74
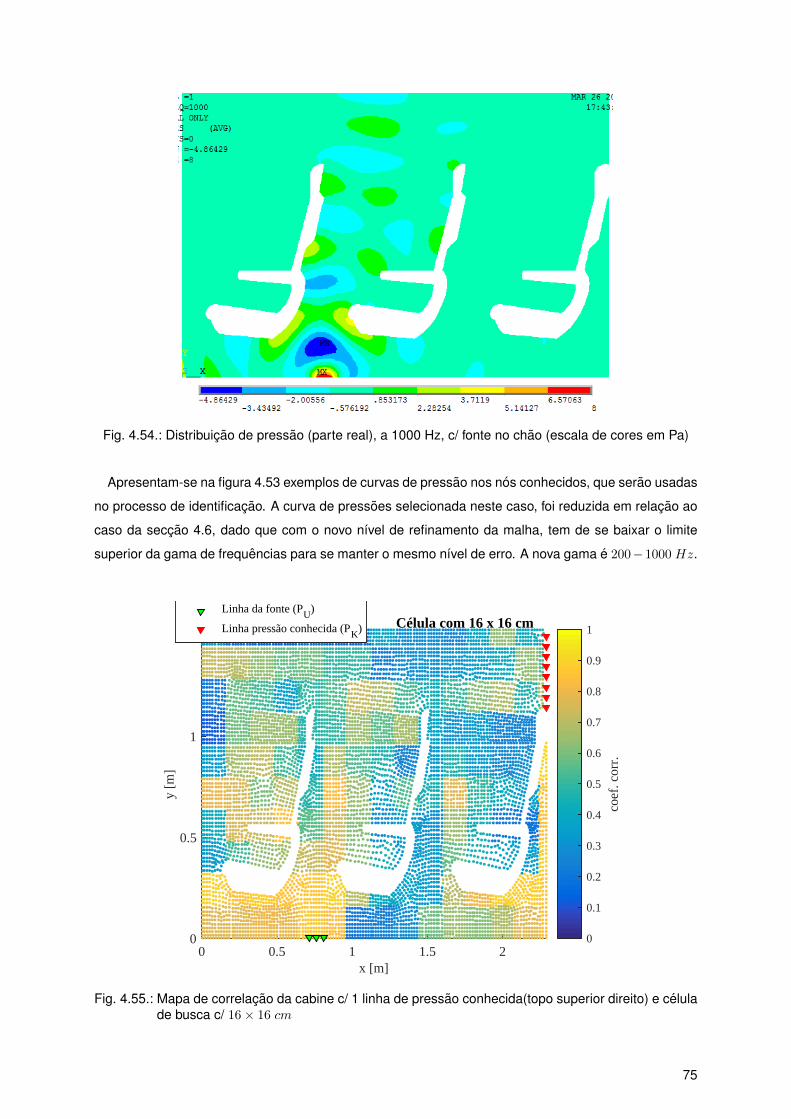
Fig. 4.54.: Distribuicao de pressao (parte real), a 1000 Hz, c/ fonte no chao (escala de cores em Pa)
Apresentam-se na figura 4.53 exemplos de curvas de pressao nos nos conhecidos, que serao usadas
no processo de identificacao. A curva de pressoes selecionada neste caso, foi reduzida em relacao ao
caso da seccao 4.6, dado que com o novo nıvel de refinamento da malha, tem de se baixar o limite
superior da gama de frequencias para se manter o mesmo nıvel de erro. A nova gama e 200−1000 Hz.
x [m]0 0.5 1 1.5 2
y [m
]
0
0.5
1
1.5Célula com 16 x 16 cm
Linha da fonte (PU)
Linha pressão conhecida (PK)co
ef. c
orr.
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Fig. 4.55.: Mapa de correlacao da cabine c/ 1 linha de pressao conhecida(topo superior direito) e celulade busca c/ 16× 16 cm
75

O processo de identificacao aqui utilizado e semelhante ao processo da seccao 4.6. No entanto, como
a malha da cabine nao e estruturada, nao e possıvel utilizar figuras de busca da mesma forma, e
portanto a celula de busca inclui todos todos os nos no seu interior a serem assumidos como fonte.
Foi introduzida outra diferenca neste processo. Neste estudo os calculos foram efectuados recorrendo
a uma so linha de nos de pressao conhecida PK , no topo direito da cabine, mas tambem com duas
linhas, sendo a segundo na topo esquerdo. Na figura 4.55, apresenta-se o caso em que se faz uma
busca com uma celula quadrada de 16× 16 cm com uma so linha de pressoes conhecidas.
E imediato de verificar que com esta configuracao nao e possıvel de todo localizar a fonte, dado que
por um lado ha uma regiao muito grande de cor laranja (correlacao ≈ 0.8) que envolve a linha da fonte.
Por outro existem tambem outras regioes com correlacoes semelhantes, mas afastadas da zona da
fonte.
x [m]0 0.5 1 1.5 2
y [m
]
0
0.5
1
1.5Célula com 16 x 16 cm
Linha da fonte (PU)
Linha pressão conhecida (PK)
coef
. cor
r.
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Fig. 4.56.: Mapa de correlacao da cabine c/ 2 linhas de pressao conhecida (topos superiores direito eesquerdo) e celula de busca c/ 16× 16 cm
Seguidamente, pretende-se introduzir a segunda linha de pressao conhecida, mantendo o refina-
mento (tamanho da celula de busca). A consequencia tal como se ve na figura (4.56), e que o resultado
modifica-se completamente. Existe agora apenas uma regiao com alta correlacao que envolve a linha
da fonte. No entanto, ainda nao e suficientemente localizada para se localizar a fonte com precisao.
Diminuindo o tamanho da celula de busca e de novo com uma so linha de pressao conhecida, (figura
4.57) e possıvel obter um nıvel de correlacao ligeiramente mais alto (amarelo intenso) na zona da fonte,
relativamente ao caso da figura 4.55. Contudo, o algoritmo continua a atribuir uma correlacao muito alta
noutra zonas.
76

x [m]0 0.5 1 1.5 2
y [m
]
0
0.5
1
1.5Célula com 8 x 8 cm
Linha da fonte (PU)
Linha pressão conhecida (PK)
coef
. cor
r.
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Fig. 4.57.: Mapa de correlacao da cabine c/ 1 linha de pressao conhecida (topo superior direito) e celulade busca c/ 8× 8 cm
x [m]0 0.5 1 1.5 2
y [m
]
0
0.5
1
1.5Célula com 8 x 8 cm
Linha da fonte (PU)
Linha pressão conhecida (PK)
coef
. cor
r.
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Fig. 4.58.: Mapa de correlacao da cabine c/ 2 linhas de pressao conhecida (topos superiores direito eesquerdo) e celula de busca c/ 8× 8 cm
Analisando agora a situacao com celula 8×8 cm (figura 4.58), verifica-se que se obteve uma correlacao
superior na zona da fonte em relacao ao caso da figura 4.56. Contudo, com excepcao desse fator, o
77

mapa de correlacao nao apresenta grandes diferencas, o que e indicativo de que ter mais do que uma
linha de pressoes tem mais influencia do que o refinamento da celula de busca.
Nesta seccao exemplificou-se o funcionamento do metodo de localizacao em duas dimensoes, numa
geometria mais complexa do que na seccao 4.6, e com diferentes condicoes de fronteira. Este modelo
procura com muitas aproximacoes simular, o que pode ser a identificacao em interiores de aeronaves.
Foram testados dois tipos de celulas de busca, uma mais refinada que outra, e tambem o efeito de se
utilizar uma so linha de pressoes conhecidas, ou usar duas em localizacoes diametralmente opostas.
Verificou-se que o segundo fator tem grande influencia em reduzir a zona com mais alta correlacao,
aproximando-a a dimensao da fonte.
78

5. Conclusoes
Este trabalho, teve como principal objectivo, demonstrar que e possıvel, com um metodo simples, loca-
lizar fontes acusticas harmonicas em ambientes interiores, dadas certas condicoes. Este metodo esta
assente no conceito de transmissibilidade de n graus de liberdade, que foi recentemente testado em
casos de dinamica estrutural como mostra a literatura.
Numa primeira fase da dissertacao, procedeu-se a algumas verificacoes do modelo de elementos fi-
nitos desenvolvido e respectiva comparacao com a literatura disponıvel. Seguidamente, e tendo apenas
como base de trabalho os metodos de localizacao estudados em mecanica, procurou-se aplicar esses
metodos no, tambem ele recente, conceito de transmissibilidade em acustica, para deteccao de fontes
pontuais.
Identificaram-se algumas dificuldades e problemas e testou-se esse metodo a influencia de algumas
frequencias de pico bem como ao refinamento da malha de elementos finitos. No entanto, concluiu-
se que o metodo que se baseava em optimizacao e tambem incluıa a determinacao das amplitudes
da fonte, tinha um custo computacional que nao se justificava. Partindo desse ponto, foi decidido de-
senvolver um metodo que envolvesse comparar pressoes em funcao da frequencia, em oposicao a
transmissibilidades em funcao da frequencia. Este novo metodo tambem tracava uma analogia com a
transmissibilidade de deslocamentos ja estudada na literatura, para o caso mecanico. O novo conceito
permitia igualmente, uma transmissibilidade independente de amplitudes de fonte e que relacionasse
um conjunto de n pressoes conhecidas com outro conjunto de pressoes, que podiam estar nas coorde-
nadas da fonte. Por fim, este conceito simplificava a forma de se modelar uma fonte, que se assumiu a
partir desse ponto ser uma pressao imposta num certo conjunto de coordenadas.
A metodologia foi entao aplicada em domınios unidimensionais e bidimensionais, para localizacao de
fontes pontuais e lineares, respectivamente. De inıcio, foram aplicadas somente condicoes de fronteira
anecoica e totalmente reflectiva. No primeiro caso, obteve-se uma deteccao nos nos exactos, atraves
de uma busca extensiva a todos os nos do modelo de elementos finitos, e nao se verificaram os pro-
blemas que surgiram com o primeiro conceito de transmissibilidade. Relativamente ao segundo, foi
possıvel localizar fontes atraves de um busca por areas do domınio que se baseava num conceito de
transmissibilidade zonal. Esta abordagem permite um custo computacional bastante inferior ao de uma
busca extensiva por todos os graus de liberdade.
Os testes ate aqui referidos, permitiram experimentar a metodologia num modelo de elementos finitos,
consideravelmente mais pesado, e com condicoes de fronteira com varios coeficientes de absorcao. O
modelo permitia representar de forma muito simplificada o que podera ser um processo de deteccao
num interior de aeronave real. A metodologia provou-se eficaz para detectar uma fonte em linha, sendo
79

que o tempo de computacao revelou-se bastante superior, na ordem de horas e nao de minutos (nos
nıveis de refinamento mais altos).
A principal conclusao que se retira deste trabalho, e que o metodo aqui proposto demonstra bastante
potencial para continuar a ser desenvolvido e testado. Por um lado para procurar tornar o metodo mais
eficiente do ponto de vista computacional. Para tal, uma abordagem como a analise modal, tal como
e feito na literatura ([7]) e uma hipotese. Seria de grande interesse que se iniciasse um estudo expe-
rimental, tambem como foi feito em [7], para se poder observar se e possıvel obter transmissibilidades
experimentalmente com o novo conceito. Tambem teria igual importancia testar o facto deste metodo
poder ser hıbrido. Neste trabalho, o conjunto de pressoes designadas como pressoes conhecidas foi
obtido via um modelo de elementos finitos, mas a verdadeira vantagem seria combinar os elementos
finitos com as pressoes medidas no domınio real.
Dado se ter testado, com esta dissertacao, a validade deste metodo em casos simples, e possıvel es-
tende-lo e melhora-lo para este poder ser efectivamente utilizado em aplicacoes concretas na industria
aeronautica.
5.1. Trabalho Futuro
O trabalho desenvolvido nesta dissertacao focou-se essencialmente em demonstrar o funcionamento
do metodo a uma ou duas dimensoes. Ficaram, portanto, em aberto varias questoes, que poderao ser
objecto de trabalho futuro, e que algumas delas, por falta de tempo nao puderam ser abordadas nesta
tese. Estre elas destacam-se nomeadamente:
• Extensao do conceito de transmissibilidade a domınios tridimensionais com modelos de elemen-
tos finitos
• Desenvolvimento teorico e aplicacao com elementos finitos de casos em que exista interacao
fluıdo e estrutura;
• Complementacao do modelo teorico com um modelo experimental, em semelhanca com o que foi
estudado por Lage et al. [7] com as transmissibilidade de forcas e deslocamentos;
• Estudo da possibilidade do conceito de transmissibilidade poder ser aplicado em fontes do tipo
impulso (ou outras que nao harmonicas);
• Aplicacao deste conceito, em termos de modelos de elementos finitos mais complexos ou em
termos experimentais, em ambientes reais de interiores de aviao;
• Desenvolvimento de um metodo de localizacao que integra o conceito de transmissibilidade e
outros metodos ja existentes, de forma a melhorar o seu desempenho.
80

Referencias
[1] Ritu and S. K. Dhull. Review on acoustic source localization techniques. European Journal of
Advances in Engineering and Technology, 2(9):72–77, 2015.
[2] J. W. Wind. Acoustic Source Localization, Exploring Theory and Practice. PhD thesis, Universiteit
Twente, Enschede, The Netherlands, 2009.
[3] P. Bestagini, M. Compagnoni, F. Antonacci, A. Sarti, and S. Tubaro. Tdoa-based acoustic source
localization in the space–range reference frame. Multidim Syst Sign Process, 25(2):337–359, 2014.
[4] M.V.S. Lima, W.A. Martins, L.O. Nunes, L.W.P. Biscainho, T. N. Ferreira, M.V.M. Costa, and B. Lee.
A volumetric srp with refinement step for sound source localization. IEEE Signal Processing Letters,
22(8):1098–1103, 2015.
[5] R. Visser. Acoustic source localization based on pressure and particle velocity measurements. In
The 32nd International Congress and Exposition on Noise Control Engineering, Seogwipo, Korea,
August 2003.
[6] S. S. Rao. Mechanical Vibrations. Prentice Hall, fifth edition edition, 2010.
[7] Y.E. Lage, M.M. Neves, N.M.M Maia, and D. Tcherniak. Force transmissibility versus displa-
cement transmissibility. Journal of Sound and Vibration, 333(2014):5708–5722, 2014. DOI:
http://dx.doi.org/10.1016/j.jsv.2014.05.038.
[8] C.Q. Howard and B. S. Cazzolato. Acoustic Analyses Using MATLAB and ANSYS. CRC Press,
2015.
[9] C.Q. Howard. Coupled structural - acoustic analysis using ansys. Technical report, The University
of Adelaide, March 2000.
[10] N.M.M. Maia, A.P.V. Urgueira, and R.A.B. Almeida. Whys and wherefores of transmissibility, chap-
ter 10, pages 187 – 216. InTech, 2011.
[11] C. Devriendt, F. Presezniak, and G. De sitter. Operational acoustic modal analysis using transmis-
sibility measurements. In The Sixteenth International Congress on Sound and Vibration, Krakow,
July 2009.
[12] L.L.R. Curling and M.P. Paıdoussis. A discrete method for the acoustic transmissibility of a pressure
transducer-in-capsule arrangement. Mech. Syst. Sign. Proc., 9(3):225 – 241, 1995.
81

[13] Y. E. Lage, N.M.M. Maia, and M.M. Neves. Force magnitude reconstruction using the force trans-
missibility concept. Hindawi Publishing Corporation Shock and Vibration Volume 2014, April 2014.
Article ID 905912, 9 pages http://dx.doi.org/10.1155/2014/905912.
[14] M. M. Neves and N. M. M. Maia. Estimation of applied forces using the transmissibility concept. In
Proceedings of ISMA2010 including USD2010, Leuven, 2010.
[15] T. Kletschkowski. Inverse noise source identification in an aircraft cabin. University of Applied
Sciences Hamburg, 2013.
[16] M. Weber, T. Kletschkowski, and D. Sachau. Identification of noise sources by means of inverse
finite element method using measured data. In Acosutics’08, Paris, 2008.
[17] K.B. Ginn. Architectural Acoustics. Bruel Kjaer, November 1978.
[18] ANSYS Mechanical APDL Acoustic Analysis Guide. ANSYS, Inc., 2013. Release 15.0 .
[19] L. E. Kinsler, A. R. Frey, A. B. Coppens, and J. V. Sanders. Fundamentals of Acoustics. John Willey
Sons, Inc, USA, 2000.
[20] F. J. P. Lau. Elementos de aeroacustica. February 2009.
[21] R. Duraiswami. The wave and helmholtz equations. CMSC828D notes (adapted from material
written with Nail Gumerov). Work in progress, February 2006.
[22] W. Desmet and D. Vandepitte. Finite element method in acoustics. ISAAC 13- International Seminar
on Applied Acoustics, Leuven, 2002. ISBN 90-73802-73-3.
[23] J. Lehtinen. Time-domain numerical solution of the wave equation. February 2003.
[24] J.N. Reddy. An Introduction to the Finite Element Method. McGraw-Hill, third edition, 2006.
[25] A.M. Cartaxo, M.M. Neves, S.Gerges, and J.Coelho. Verification and validation of a fluid-structure
interaction model used to characterize sound attenuation by a periodically spaced array of cylinder
elements. In The Sixteenth International Congress on Sound and Vibration, Krakow, July 2009.
[26] I. Babuska, F.Ihlenburg, T.Strouboulis, and S.K. Gangaraj. Aposteriori error estimation for finite
element solutions of helmholtz equation - part ii: Estimation of the pollution error. Technical report,
Department of Aerospace Engineering Texas AM Universitv, August 1996.
[27] F.Ihlenburg and I. Babuska. Finite element solution of the helmholtz equation with high wavenumber
1. the h version of the fem. . Comput. Math. Appl, 30(9):9 – 37, 1995.
[28] C. Devriendt and P. Guillaume. The use of transmissibility measurements in output-only modal
analysis. Mechanical Systems and Signal Processing, 21(2007):2689–2696, 2007.
[29] Mathworks. (2015). User’s guide (r2015a). Obtido a 12 de Maio,2015 em
http://www.mathworks.com/help/matlab/ref/mldivide.html.
82

[30] A. M. Cartaxo. Caracterizacao de filtros acusticos baseada no metodo dos elementos finitos.
Master’s thesis, Instituto Superior Tecnico, Outubro 2007.
[31] Mechanical APDL Theory Reference. ANSYS, Inc., 2014. Release 16.0.
[32] M. F. Nita. Aircraft design studies based on the atr 72. Hamburg University of Applied Sciences,
2008.
[33] T.C. Corke. Design of Aircraft. Prentice Hall, 2003.
83


A. Anexo
A.1. Solucao Analıtica Harmonica de Onda Plana em Domınio
Unidimensional
Para se iniciar a deducao considera-se a equacao 2.32, mas neste caso num domınio x ∈ [0;L].
Considerando que se impoe uma pressao de 1 Pa em x = 0 tem-se:
p(0) = 1 = C1e−jk(0) + C2e
jk(0) → 1 = C1 + C2 (A.1)
Recorrendo a equacao da impedancia para qualquer ponto 2.7, e substituindo a expressao A.1 em Z
resulta:
Z = ρ0cC1e
−jkx + (1− C1)ejkx
C1e−jkx − (1− C1)ejkx(A.2)
onde no denominador se introduziu a formula da velocidade vx (2.31). Uma terminacao reflectiva em L
implica que Z(L)→∞, ou seja o denominador de tem de tender para zero i.e.:
C1e−jkL + (1− C1)ejkL = 0→ C1 =
ejkL
ejkL + e−jkL(A.3)
desenvolvendo A.3 em funcao de C1 obtem-se:
C1 =cos(kL) + j sin(kL)
cos(kL) + j sin(kL) + cos(−kL) + j sin(−kL)=
1
2+j tan(kL)
2(A.4)
Pode-se agora substituir A.4 em A.1: obtem-se:
C2 =1
2− j tan(kL)
2(A.5)
Finalmente, substituindo C1 e C2 em 2.32 resulta:
p(x) =(1
2+j tan(kL)
2
)e−jkx +
(1
2− j tan(kL)
2
)ejkx =(1
2+j tan(kL)
2
)(cos(−kx) + j sin(−kx)
)+(1
2− j tan(kL)
2
)(cos(kx) + j sin(kx)
) (A.6)
E obtem-se a expressao final:
p(x) = cos(kx) + tan(kL) sin(kx) (A.7)
85

Para se obter a expressao para uma terminacao anecoica, implica impor Z(L)/Z0 = 1 na equacao ou
seja, igualar impedancia na terminacao a impedancia especıfica do fluido. Dividindo A.2 por Z0 = ρ0c
obtem-se:
Z(L) =C1e
−jkL + (1− C1)ejkL
C1e−jkL − (1− C1)ejkL= 1 (A.8)
Analisando a expressao A.8, verifica-se que para ser valida implica que C1 = 1 o que pela sua vez
implica, pela equacao A.1 que C2 = 0. Substituindo de novo em (2.32) resulta a expressao final 2.32:
p(x) = e−jk(x) = cos(kx)− j sin(kx) (A.9)
86