lab 3 mecanica completo
DESCRIPTION
lab 3 de mecancica de solidos tecsup arequipaTRANSCRIPT
LABORATORIO DE MECANICA DE SOLIDOSNro. PFRPágina 1/17
Tema :CINEMATICA
Código : PG1014Semestre: IIGrupo : A
1. INTRODUCCIÓN
En el presente informe desarrollaremos el laboratorio tres del curso mecánica de sólidos. En el cual realizaremos las diversas experiencias relacionadas a la cinemática, con los temas MRU, MRUV y Caída Libre demostraremos experimentalmente la velocidad y la aceleración y las compararemos con las formulas dándonos resultados parecidos con un margen de error menos de 10%.
2. OBJETIVOS
Establecer cuáles son las características del movimiento rectilíneo con aceleración constante.
Determinar experimentalmente las relaciones matemáticas que expresan la posición, velocidad y aceleración de un móvil en función del tiempo.
Calcular la aceleración de la gravedad usando los sensores y verificar que la caída de un cuerpo no depende de su masa.
3. MATERIAL Y EQUIPOComputadora con programa Pasco Capstone
(Propia)Fig.USB link
(Propia)Fig.
Masas (Propia)Fig.
VarillasFig.
(Propia)
LABORATORIO DE MECANICA DE SOLIDOSNro. PFRPágina 2/17
Tema :CINEMATICA
Código : PG1014Semestre: IIGrupo : A
Bases (soportes) Fig.
(propia)
Polea
Carro PASCO
Sensor
CalculadoraFig.
(propia)
LABORATORIO DE MECANICA DE SOLIDOSNro. PFRPágina 3/17
Tema :CINEMATICA
Código : PG1014Semestre: IIGrupo : A
4. INDICACIONES DE SEGURIDAD
Implementos de seguridad de uso obligatorio
Análisis de Trabajo Seguro (ATS)
N° TAREAS RIESGOS IDENTIFICADOS
MEDIDAS DE CONTROL DEL RIESGO
1 Dejar las mochilas en los respectivos casilleros
Caída de lentes y objetos del alumno
Sacar los lentes antes de colocar la mochila, cerrarla bien y dirigirse a su mesa.
2 Recepción e inspección de materiales.
Caída y daños, ruptura de equipos, del piso y de lesiones al pie.
Asegurar los equipos a la base, siguiendo el correcto procedimiento, evitando el daño del mismo y del usuario.
3 Conexión de la computadora y sensores.
Recibir una descarga eléctrica al momento de conectar la computadora a la fuente de tensión o al conectar los sensores.
Verificar el buen estado de los cables antes de realizar el laboratorio así como realizar de forma cuidadosa la conexión entre el sensor y la PC.
4 Montaje del laboratorio.
Dañar algunos de los componentes por una mala ejecución
Prestar atención a las instrucciones del profesor para su correcta instalación.
5 Trabajando con fuente luminosa, sensor de luz, espejos.
Ruptura de la fuente luminosa, sensor de luz, espejos como también quemarlo por su mala aplicación.
Hacer un ajuste seguro al montaje.
6 Toma de mediciones del PASCO Capstone
Generar malos cálculos. Hacer los ajustes necesarios verificando siempre nuestra guía de trabajo.
7 Orden y limpieza. Caídas y tropezones. Tener la misma actitud para culminar el laboratorio.
8 Desconectar el equipo y apagar
Corto circuito y electrocución.
Apagar el supresor de picos y luego desconectar.
LABORATORIO DE MECANICA DE SOLIDOSNro. PFRPágina 4/17
Tema :CINEMATICA
Código : PG1014Semestre: IIGrupo : A
el supresor de picos.
5. FUNDAMENTO TEORICO
LABORATORIO DE MECANICA DE SOLIDOSNro. PFRPágina 5/17
Tema :CINEMATICA
Código : PG1014Semestre: IIGrupo : A
MRU
LABORATORIO DE MECANICA DE SOLIDOSNro. PFRPágina 6/17
Tema :CINEMATICA
Código : PG1014Semestre: IIGrupo : A
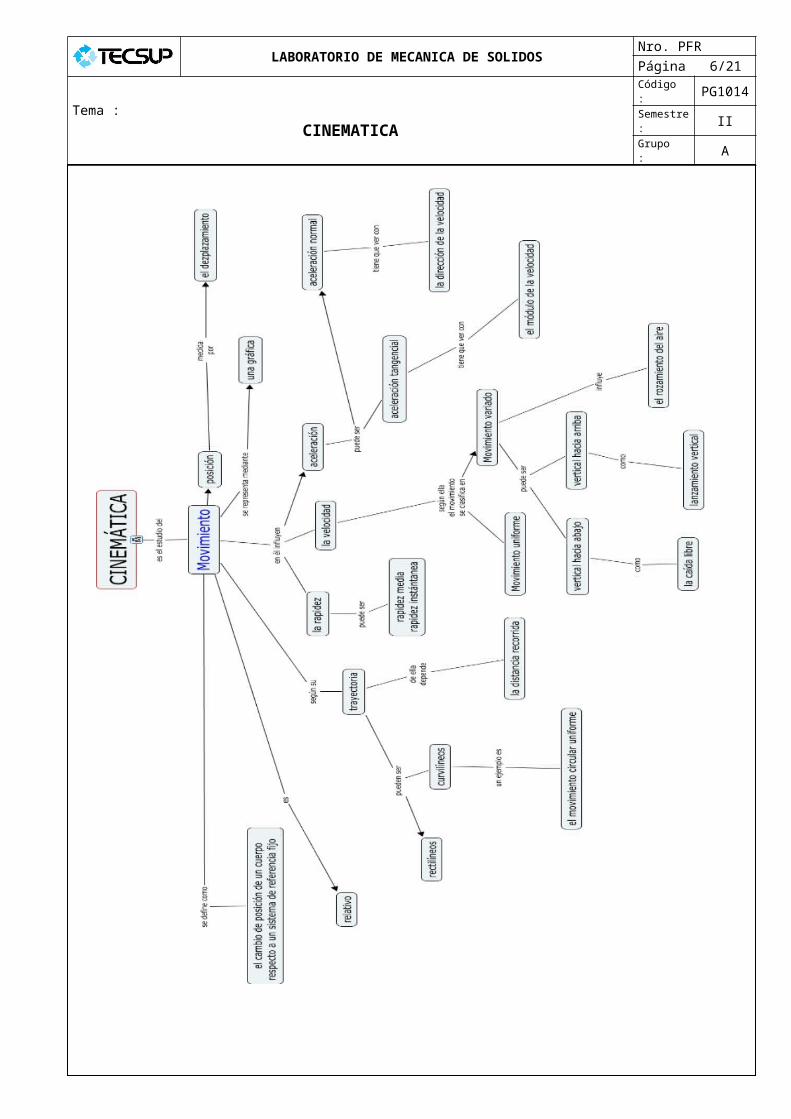
¨Un movimiento es rectilíneo cuando un móvil describe una trayectoria recta, y
es uniforme cuando su velocidad es constante en el tiempo, dado que su aceleración es nula.
Es indicado mediante el acrónimo MRU, aunque en algunos países es MRC, que significa
Movimiento Rectilíneo Constante.¨ (Maximo, 2015)
Movimiento que se realiza sobre una línea recta.
Velocidad constante; implica magnitud y dirección constantes.
La magnitud de la velocidad recibe el nombre de celeridad o rapidez.
Aceleración nula.
Sabemos que la velocidad es constante; esto significa que no existe aceleración.
La posición en cualquier instante viene dada por
.
Para una posición inicial y un tiempo inicial , ambos distintos de cero, la posición para
cualquier tiempo está dada por
MRUV
El movimiento rectilíneo uniformemente variado (MRUV), es aquel en el que un móvil se
desplaza sobre una trayectoria recta estando sometido a una aceleración constante.
Un ejemplo de este tipo de movimiento es el de caída libre vertical, en el cual la aceleración
interviniente, y considerada constante, es la que corresponde a la gravedad.
También puede definirse como el movimiento que realiza una partícula que partiendo del
reposo es acelerada por una fuerza constante.
El MRUV se tiene una aceleración constante, cuyas relaciones dinámicas y cinemáticas,
respectivamente, son:
(1)
En el movimiento rectilíneo acelerado, la aceleración instantánea es representada como la
pendiente de la recta tangente a la curva que representa gráficamente la funciónv(t).
LABORATORIO DE MECANICA DE SOLIDOSNro. PFRPágina 7/17
Tema :CINEMATICA
Código : PG1014Semestre: IIGrupo : A
La velocidad v para un instante t dado es:
(2a)
siendo la velocidad inicial.
Finalmente la posición x en función del tiempo se expresa por:
(3)
donde es la posición inicial.
Además de las relaciones básicas anteriores, existe una ecuación que relaciona entre sí el
desplazamiento y la rapidez del móvil. Ésta se obtiene despejando el tiempo de (2a) y
sustituyendo el resultado en (3):
(2b)
CAÍDA LIBRE
En física, se denomina caída libre al movimiento de un cuerpo bajo la acción exclusiva de
un campo gravitatorio. Esta definición formal excluye a todas las caídas reales influenciadas
en mayor o menor medida por la resistencia aerodinámica del aire, así como a cualquier otra
que tenga lugar en el seno de un fluido; sin embargo, es frecuente también referirse
coloquialmente a éstas como caídas libres, aunque los efectos de la viscosidad del medio no
sean por lo general despreciables.
El concepto es aplicable también a objetos en movimiento vertical ascendente sometidos a la
acción desaceleradora de la gravedad, como un disparo; o a cualquier objeto (satélites
naturales o artificiales, planetas, etc.) en órbita alrededor de un cuerpo celeste. Otros sucesos
referidos también como caída libre lo constituyen las trayectorias geodésicas en el espacio-
tiempo descritas en la teoría de la relatividad general.
Ejemplos de caída libre deportiva los encontramos en actividades basadas en dejarse caer
una persona a través de la atmósfera sin sustentación alar ni de paracaídas durante un cierto
trayecto.
6. PROCEDIMIENTO
6.1 EXPERIENCIA 1 : Movimiento Rectilíneo Uniformemente Variado
LABORATORIO DE MECANICA DE SOLIDOSNro. PFRPágina 8/17
Tema :CINEMATICA
Código : PG1014Semestre: IIGrupo : A
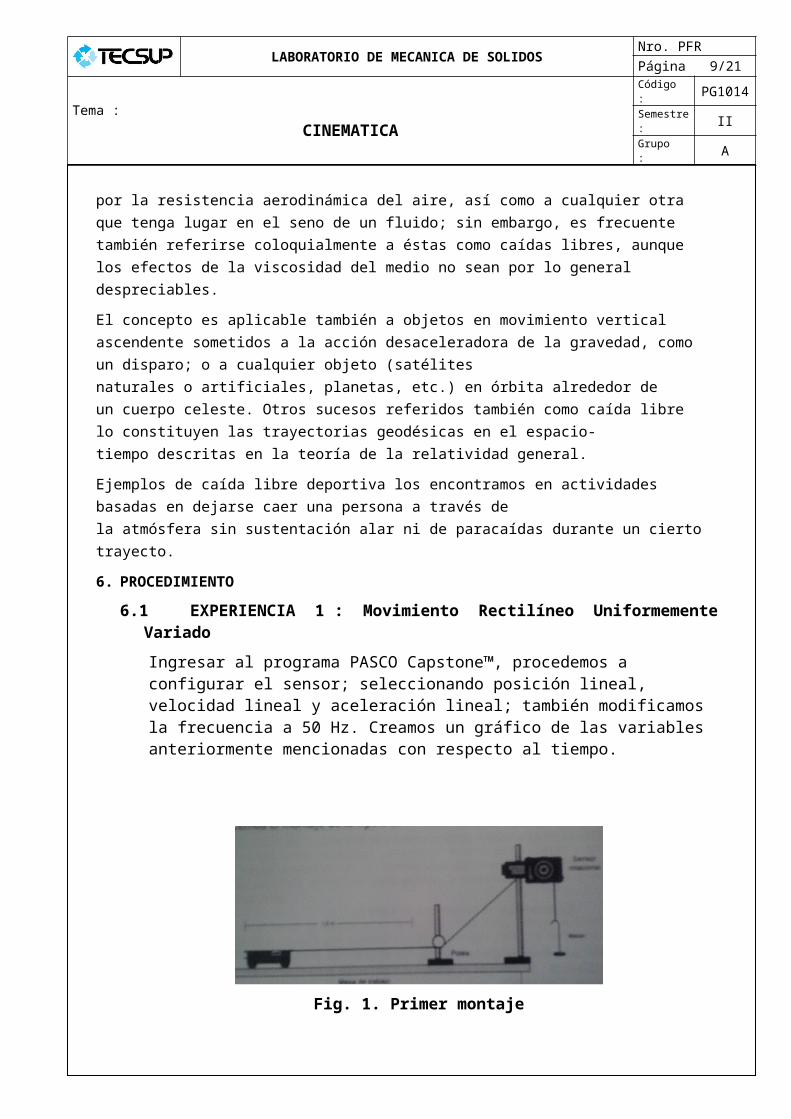
Ingresar al programa PASCO Capstone™, procedemos a configurar el sensor; seleccionando posición lineal, velocidad lineal y aceleración lineal; también modificamos la frecuencia a 50 Hz. Creamos un gráfico de las variables anteriormente mencionadas con respecto al tiempo.
Fig. 1. Primer montaje
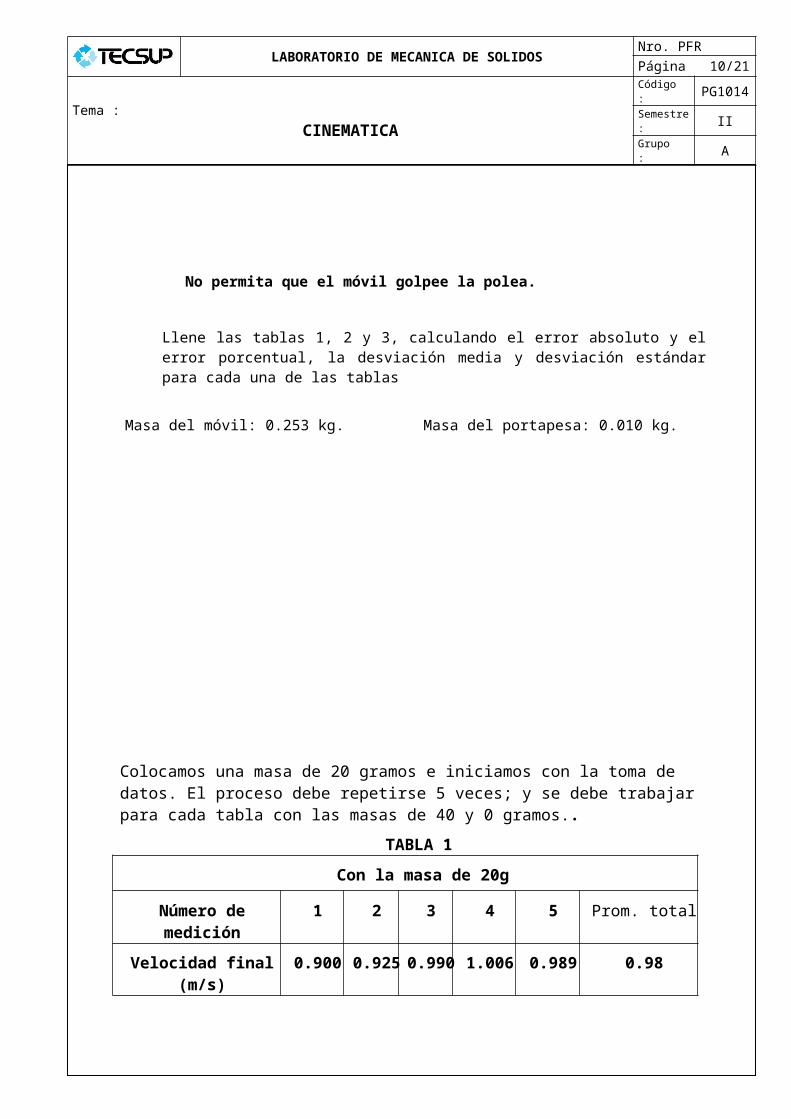
No permita que el móvil golpee la polea.
Llene las tablas 1, 2 y 3, calculando el error absoluto y el error porcentual, la desviación media y desviación estándar para cada una de las tablas
Masa del móvil: 0.253 kg. Masa del portapesa: 0.010 kg.
Colocamos una masa de 20 gramos e iniciamos con la toma de datos. El proceso debe repetirse 5 veces; y se debe trabajar para cada tabla con las masas de 40 y 0 gramos..
LABORATORIO DE MECANICA DE SOLIDOSNro. PFRPágina 9/17
Tema :CINEMATICA
Código : PG1014Semestre: IIGrupo : A
TABLA 1
Con la masa de 20g
Número de medición 1 2 3 4 5 Prom. total
Velocidad final (m/s) 0.900 0.925 0.990 1.006 0.989 0.98
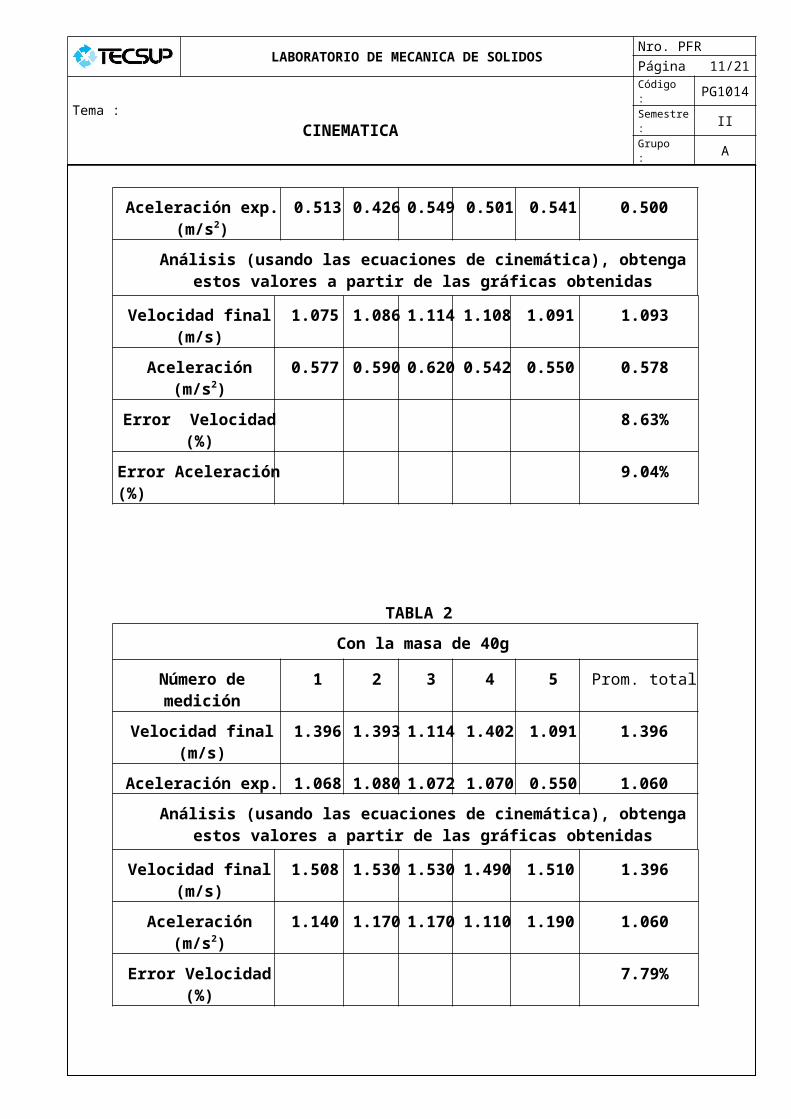
Aceleración exp.(m/s2) 0.513 0.426 0.549 0.501 0.541 0.500
Análisis (usando las ecuaciones de cinemática), obtenga estos valores a partir de las gráficas obtenidas
Velocidad final (m/s) 1.075 1.086 1.114 1.108 1.091 1.093
Aceleración (m/s2) 0.577 0.590 0.620 0.542 0.550 0.578
Error Velocidad (%) 8.63%
Error Aceleración (%) 9.04%
TABLA 2
Con la masa de 40g
Número de medición 1 2 3 4 5 Prom. total
Velocidad final (m/s) 1.396 1.393 1.114 1.402 1.091 1.396
Aceleración exp. 1.068 1.080 1.072 1.070 0.550 1.060
Análisis (usando las ecuaciones de cinemática), obtenga estos valores a partir de las gráficas obtenidas
Velocidad final (m/s) 1.508 1.530 1.530 1.490 1.510 1.396
Aceleración (m/s2) 1.140 1.170 1.170 1.110 1.190 1.060
Error Velocidad (%) 7.79%
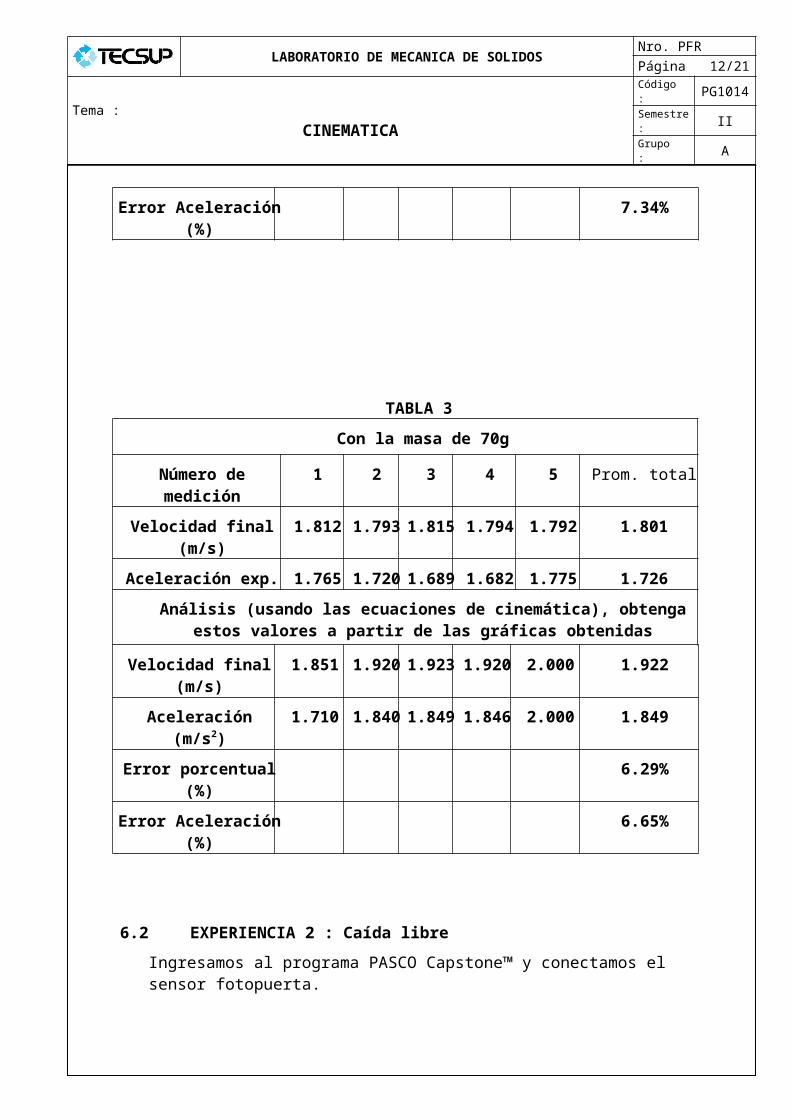
Error Aceleración (%) 7.34%
TABLA 3
LABORATORIO DE MECANICA DE SOLIDOSNro. PFRPágina 10/17
Tema :CINEMATICA
Código : PG1014Semestre: IIGrupo : A
Con la masa de 70g
Número de medición 1 2 3 4 5 Prom. total
Velocidad final (m/s) 1.812 1.793 1.815 1.794 1.792 1.801
Aceleración exp. 1.765 1.720 1.689 1.682 1.775 1.726
Análisis (usando las ecuaciones de cinemática), obtenga estos valores a partir de las gráficas obtenidas
Velocidad final (m/s) 1.851 1.920 1.923 1.920 2.000 1.922
Aceleración (m/s2) 1.710 1.840 1.849 1.846 2.000 1.849
Error porcentual (%) 6.29%
Error Aceleración (%) 6.65%
6.2 EXPERIENCIA 2 : Caída libre
Ingresamos al programa PASCO Capstone™ y conectamos el sensor fotopuerta.
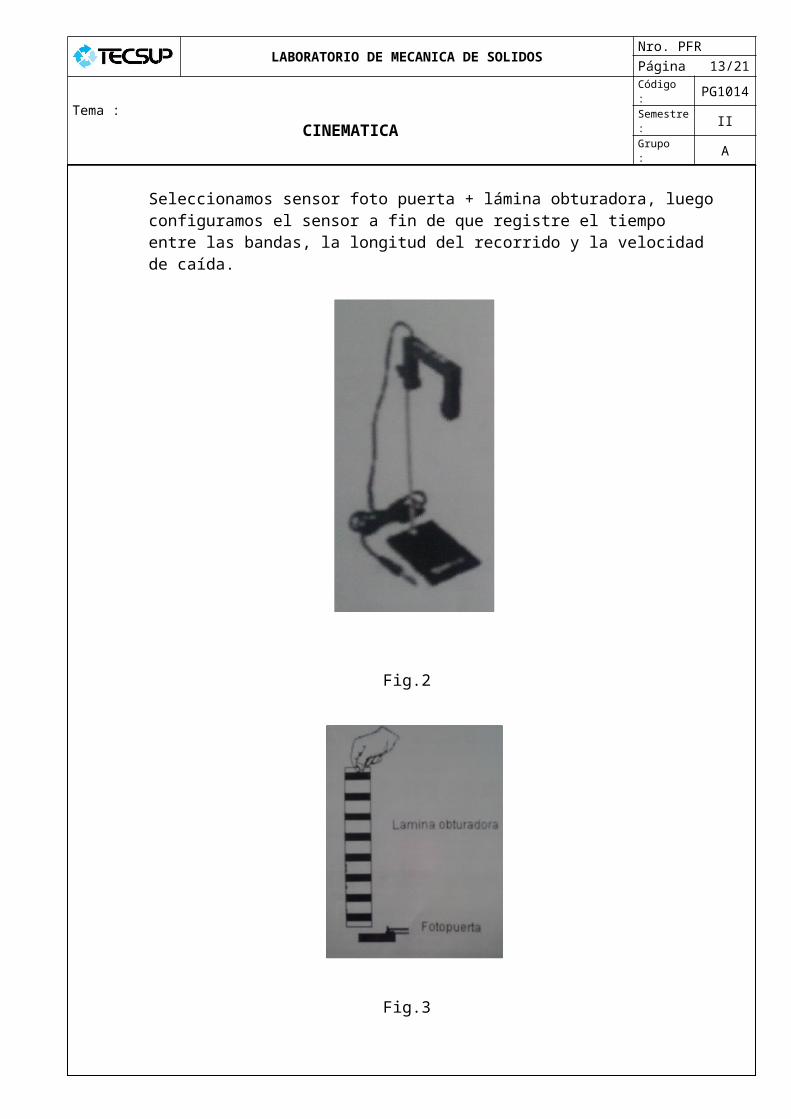
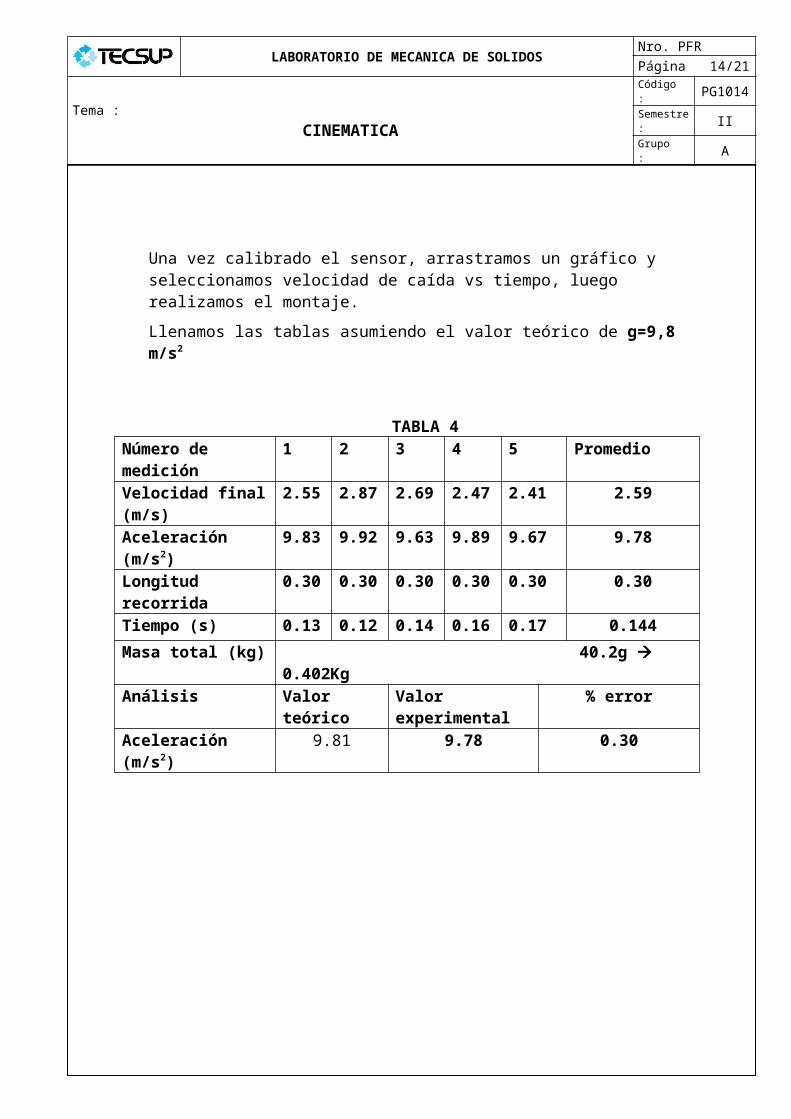
Seleccionamos sensor foto puerta + lámina obturadora, luego configuramos el sensor a fin de que registre el tiempo entre las bandas, la longitud del recorrido y la velocidad de caída.
Fig.2
LABORATORIO DE MECANICA DE SOLIDOSNro. PFRPágina 11/17
Tema :CINEMATICA
Código : PG1014Semestre: IIGrupo : A
Fig.3
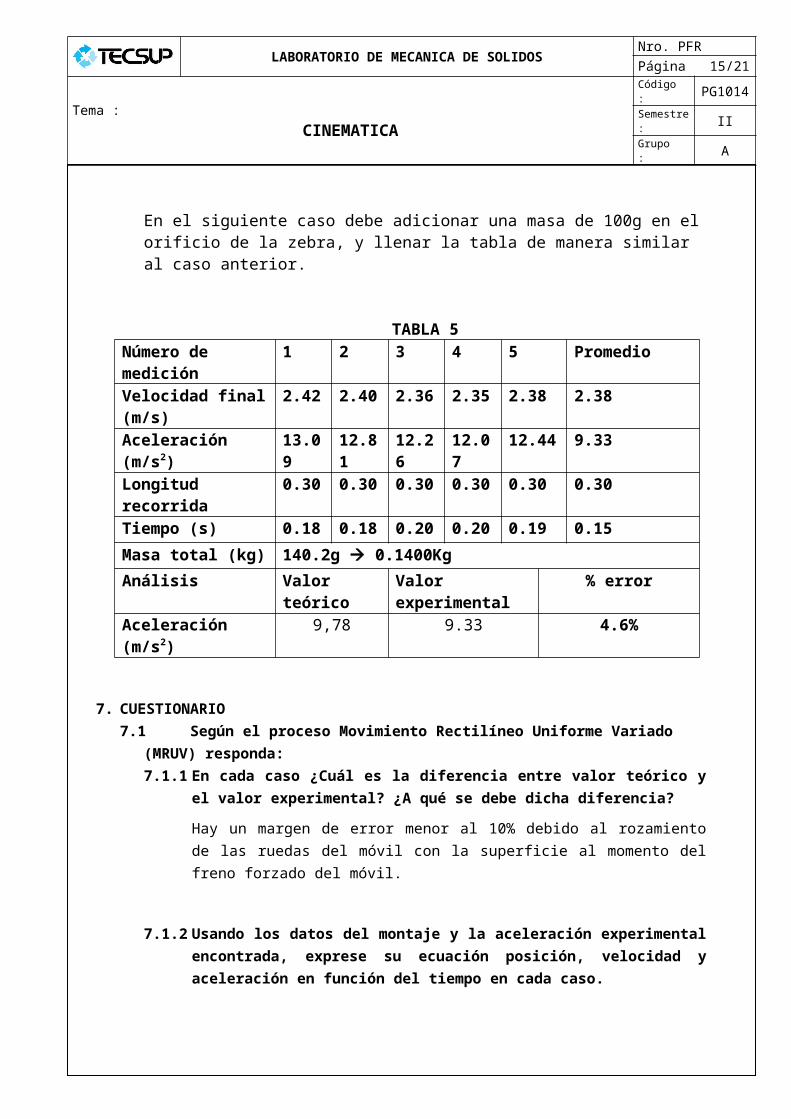
Una vez calibrado el sensor, arrastramos un gráfico y seleccionamos velocidad de caída vs tiempo, luego realizamos el montaje.
Llenamos las tablas asumiendo el valor teórico de g=9,8 m/s2
TABLA 4Número de medición 1 2 3 4 5 Promedio
Velocidad final (m/s) 2.55 2.87 2.69 2.47 2.41 2.59
Aceleración (m/s2) 9.83 9.92 9.63 9.89 9.67 9.78
Longitud recorrida 0.30 0.30 0.30 0.30 0.30 0.30
Tiempo (s) 0.13 0.12 0.14 0.16 0.17 0.144
Masa total (kg) 40.2g 0.402Kg
Análisis Valor teórico Valor experimental % error
Aceleración (m/s2) 9.81 9.78 0.30
En el siguiente caso debe adicionar una masa de 100g en el orificio de la zebra, y llenar la tabla de manera similar al caso anterior.
LABORATORIO DE MECANICA DE SOLIDOSNro. PFRPágina 12/17
Tema :CINEMATICA
Código : PG1014Semestre: IIGrupo : A
TABLA 5Número de medición 1 2 3 4 5 Promedio
Velocidad final (m/s) 2.42 2.40 2.36 2.35 2.38 2.38
Aceleración (m/s2) 13.09 12.81 12.26 12.07 12.44 9.33
Longitud recorrida 0.30 0.30 0.30 0.30 0.30 0.30
Tiempo (s) 0.18 0.18 0.20 0.20 0.19 0.15
Masa total (kg) 140.2g 0.1400Kg
Análisis Valor teórico Valor experimental % error
Aceleración (m/s2) 9,78 9.33 4.6%
7. CUESTIONARIO
7.1 Según el proceso Movimiento Rectilíneo Uniforme Variado (MRUV) responda:
7.1.1 En cada caso ¿Cuál es la diferencia entre valor teórico y el valor
experimental? ¿A qué se debe dicha diferencia?
Hay un margen de error menor al 10% debido al rozamiento de las ruedas del
móvil con la superficie al momento del freno forzado del móvil.
7.1.2 Usando los datos del montaje y la aceleración experimental encontrada,
exprese su ecuación posición, velocidad y aceleración en función del
tiempo en cada caso.
x (t )= (0.980−0 )2
.1.860
V f=0±0.506 .1.860
a (t )=0.9801.860
7.1.3 Describa las características del montaje que permite justificar su
clasificación como movimiento rectilíneo con aceleración constante.
LABORATORIO DE MECANICA DE SOLIDOSNro. PFRPágina 13/17
Tema :CINEMATICA
Código : PG1014Semestre: IIGrupo : A
La masa de trabajo no se encuentra en un equilibrio perfecto
La cuerda junto con las poleas se encuentra desniveladas con respecto al carril
7.1.4 ¿En que medida la fuerza de fricción afecta a la experiencia? Justifique
Se ve reflejada en el margen de error ya que se ignora el coeficiente de
rozamiento
7.1.5 Muestre y analice tres aplicaciones de MRUV a su especialidad
El tiempo en que se demora la llegada de los camiones mineros
La velocidad en la cual se va a colocar la faja transportadora
La aceleración a la cual se deben poner las maquinas transportadoras.
7.2 Según el proceso Caída Libre responda:
7.2.1 Según lo obtenido en la Tabla 4 y Tabla 5 represente las ecuaciones de posición y velocidad de cada experiencia.
V f=0±9.81×0.144
Vf=0±9.81×0.15
h=(2.59+0)
2×0.144
h=(2.38+0)
2×0.15
7.2.2 Explique según los datos obtenidos en el experimento ¿Cuál es la evidencia que verifica que la caída de los cuerpos no depende de su masa?
El margen de error al comparar los resultados obtenidos de forma experimental y teórica, siendo esta menor al 10%
7.2.3 Despreciando las dimensiones de la regla en el experimento, pronostique su posición y su velocidad en los instantes 5 y 6 segundos de su caída.
t=5 s t=6ss(5)=1.55m s(6)=2.13 m
LABORATORIO DE MECANICA DE SOLIDOSNro. PFRPágina 14/17
Tema :CINEMATICA
Código : PG1014Semestre: IIGrupo : A
v(5)= 12.13m/s v(t)= 14.556 m/s
7.2.4 Para el experimento ¿Son despreciables los efectos de la fuerza de fricción con el aire? Fundamente
No puede haber fricción con el aire debido a que no hay una fuerza que se oponga.
7.2.5 ¿Qué causas se puede atribuir al porcentaje de error?
El aire y la fuerza de gravedad que depende del lugar donde se realiza la experiencia esta van a variar.
7.2.6 Exprese las ecuaciones de Caída Libre considerando los valores obtenidos
h=(2.38±0)
2.0.150
h=(2.59±0)
2.0.144
8. APLICACIÓN USANDO MATLAB
Los problemas a continuación se desarrollan en Matlab y se presentara en el código en el informe.
PROBLEMA 01. Un avión jet se aproxima para aterrizar con una rapidez de 100m/s y una aceleración con una magnitud máxima de 5.00 m/s2 conforme llega al reposo.
a) Desde el instante cuando el avión toca la pista, ¿Cuál es el intervalo de tiempo mínimo necesario antes de que llegue al reposo?
b) ¿Este avión puede aterrizar en el aeropuerto de una pequeña isla tropical donde la pista mide 0.800 Km de largo?. Explique su respuesta.
LABORATORIO DE MECANICA DE SOLIDOSNro. PFRPágina 15/17
Tema :CINEMATICA
Código : PG1014Semestre: IIGrupo : A
PROBLEMA 02. Un electrón en un tubo de rayos catódicos acelera desde una rapidez de 2.00x104 m/s a 6.00x 106 m/s en 1.50 cm.
a) ¿En qué intervalo de tiempo el electrón recorre estos 1.50cm?b) ¿Cuál es su aceleración?
9. OBSERVACIONES
Podemos observar que los gráficos dados en el Pasco Capstone registran los datos experimentales como la aceleración, velocidad y el tiempo.
Tendremos que calcular un margen de error menor al 10% entre el valor teorico y valor experimental.
Cerciorarse que el móvil no golpee la polea ya que puede dañarlo. Al momento de no usar el móvil, voltearlo para que este no avance. Asegurar las masas con cinta adhesiva.
10. CONCLUSIONES Determinamos el valor experimental de la gravedad y la comparamos con la
de la teórica y nos damos cuenta que es muy parecida. En la Caída libre no se toma en cuenta la resistencia del aire. No tomamos en cuenta la fricción en la experiencia de MRUV.
LABORATORIO DE MECANICA DE SOLIDOSNro. PFRPágina 16/17
Tema :CINEMATICA
Código : PG1014Semestre: IIGrupo : A
Todo cuerpo que hace caída libre lo hace de forma vertical. No consideramos el peso del móvil.
I. Bibliografía
(s.f.). Recuperado el 28 de marzo de 2015Maximo, A. (8 de Septiembre de 2015). Wikipedia. Recuperado el 9 de Septiembre de
2015, de Wikipedia: https://es.wikipedia.org/wiki/Movimiento_rectil%C3%ADneo_uniforme
ROMERO, G. D. (2001). FÍSICA. LIMA: COVEÑAS S.A.C.
LABORATORIO DE ONDAS Y CALOROCE- Rev1.0Página 17/17