intro robótica
TRANSCRIPT
C9 Desarrollo de sistemas C9 Desarrollo de sistemas de medida y regulación.de medida y regulación.
UD03 Introducción a la robótica.UD03 Introducción a la robótica.
UD03 Introducción a la robótica.UD03 Introducción a la robótica.
3.0 Introducción.3.0 Introducción.– Robot de la palabra de origen Robot de la palabra de origen
germánico “robat” (trabajo duro).germánico “robat” (trabajo duro).– Ahorrar tiempo i esfuerzos Ahorrar tiempo i esfuerzos
sobretodo en tareas repetitivas.sobretodo en tareas repetitivas.– Motivos económicos.Motivos económicos.– Uniformidad de la calidad de los Uniformidad de la calidad de los
productos.productos.
UD03 Introducción a la robótica.UD03 Introducción a la robótica.
3.0 Introducción.3.0 Introducción.– Concretando las ventajas que Concretando las ventajas que
ofrece la automatización...ofrece la automatización...Técnicas: uniformidad de calidad, Técnicas: uniformidad de calidad,
velocidad de trabajo elevada y velocidad de trabajo elevada y constante.constante.
Económicas: elevada productividad, Económicas: elevada productividad, sustitución mano de obra.sustitución mano de obra.
Sociales: ahorrarse trabajos sucios, Sociales: ahorrarse trabajos sucios, monótonos, duros, peligrosos, monótonos, duros, peligrosos, aumentando la seguridad.aumentando la seguridad.
UD03 Introducción a la robótica.UD03 Introducción a la robótica.
3.0 Introducción.3.0 Introducción.
– Inconvenientes:Inconvenientes: Elevado coste.Elevado coste. Excesiva flexibilidad.Excesiva flexibilidad. No siempre son la solución más rápida ni No siempre son la solución más rápida ni
rentable.rentable.
UD03 Introducción a la robótica.UD03 Introducción a la robótica.
3.0 Introducción.3.0 Introducción.– Aplicaciones industriales:Aplicaciones industriales:
Manipulación.Manipulación.(carga y descarga, paletización, (carga y descarga, paletización,
empaquetado...)empaquetado...) Aplicaciones de proceso.Aplicaciones de proceso.
(corte, deformación, recubrimiento de (corte, deformación, recubrimiento de superficies, prensado, soldadura...)superficies, prensado, soldadura...)
Montaje e inspección.Montaje e inspección.(inserción, encolado, medición, (inserción, encolado, medición,
verificación...)verificación...)
UD03 Introducción a la robótica.UD03 Introducción a la robótica.
3.1 Manipuladores y robots.3.1 Manipuladores y robots.
– Diferencias:Diferencias: Manipulador: las trayectorias vienen Manipulador: las trayectorias vienen
definidas por la estructura física del definidas por la estructura física del mismo.mismo.
Robot: las trayectorias vienen Robot: las trayectorias vienen definidas por su programación.definidas por su programación.
UD03 Introducción a la robótica.UD03 Introducción a la robótica.
3.2 Partes de un robot industrial.3.2 Partes de un robot industrial.– Tenemos dos partes muy Tenemos dos partes muy
diferenciadas, que constituyen diferenciadas, que constituyen unidades físicas diferenciadas:unidades físicas diferenciadas: Estructura mecánicaEstructura mecánica
– Estructura articulada.Estructura articulada.– Accionamientos: Motores, transmisores y Accionamientos: Motores, transmisores y
sensores (sin incluir el sistema de control sensores (sin incluir el sistema de control de los motores).de los motores).
UD03 Introducción a la robótica.UD03 Introducción a la robótica.
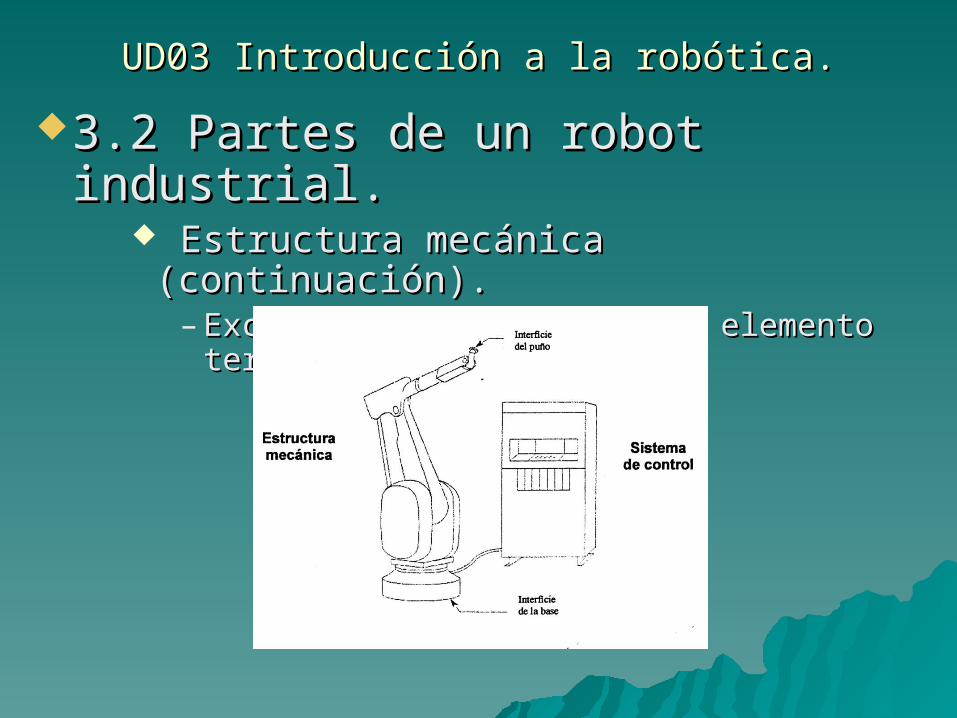
3.2 Partes de un robot industrial.3.2 Partes de un robot industrial. Estructura mecánica (continuación).Estructura mecánica (continuación).
– Dentro de la estructura mecánica podemos Dentro de la estructura mecánica podemos distinguir tres partes:distinguir tres partes:
Base: si va montada sobre un elemento Base: si va montada sobre un elemento móvil, el robot y la base pasan a móvil, el robot y la base pasan a llamarse robot móvil y base móvil.llamarse robot móvil y base móvil.
Brazo: posiciona el terminal, pero Brazo: posiciona el terminal, pero también interviene en su orientación. también interviene en su orientación. También se llama eje primario.También se llama eje primario.
Puño o brida: posiciona el elemento Puño o brida: posiciona el elemento terminal, pero también lo orienta. terminal, pero también lo orienta. Recibe el nombre de eje secundario.Recibe el nombre de eje secundario.
UD03 Introducción a la robótica.UD03 Introducción a la robótica.
3.2 Partes de un robot industrial.3.2 Partes de un robot industrial. Estructura mecánica (continuación).Estructura mecánica (continuación).
– Excluye la base móvil y el elemento Excluye la base móvil y el elemento terminal o herramienta.terminal o herramienta.
UD03 Introducción a la robótica.UD03 Introducción a la robótica. 3.2 Partes de un robot industrial.3.2 Partes de un robot industrial.
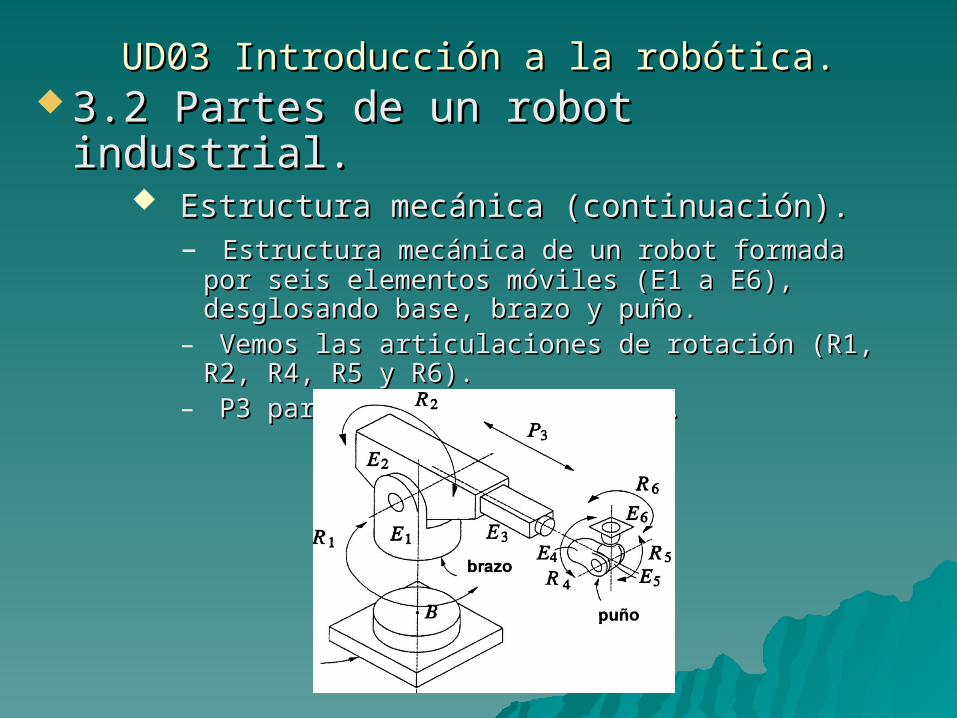
Estructura mecánica (continuación).Estructura mecánica (continuación).– Estructura mecánica de un robot formada por seis Estructura mecánica de un robot formada por seis
elementos móviles (E1 a E6), desglosando base, elementos móviles (E1 a E6), desglosando base, brazo y puño.brazo y puño.
– Vemos las articulaciones de rotación (R1, R2, R4, Vemos las articulaciones de rotación (R1, R2, R4, R5 y R6).R5 y R6).
– P3 para movimientos lineales.P3 para movimientos lineales.
UD03 Introducción a la robótica.UD03 Introducción a la robótica. 3.2 Partes de un robot industrial.3.2 Partes de un robot industrial.
Sistema de control.Sistema de control.– Se agrupa generalmente en una unidad de control.Se agrupa generalmente en una unidad de control.– Conjunto de dispositivos electrónicos e Conjunto de dispositivos electrónicos e
informáticos.informáticos.– Funciones de control y ejecución.Funciones de control y ejecución.– Control de accionamientos.Control de accionamientos.– Generar trayectorias.Generar trayectorias.– También puede ser capaz de generar tareas.También puede ser capaz de generar tareas.– Consta de 6 subsistemas:Consta de 6 subsistemas:
Ordenador.Ordenador. Panel de control.Panel de control. Controlador de posición.Controlador de posición. Amplificador.Amplificador. Unidad de E/S.Unidad de E/S. Dispositivo de control manual.Dispositivo de control manual.
UD03 Introducción a la robótica.UD03 Introducción a la robótica.
3.2 Partes de un robot industrial.3.2 Partes de un robot industrial. Sistema de control (continuación).Sistema de control (continuación).
– Ordenador:Ordenador: Es el cerebro del robot, recoge información de Es el cerebro del robot, recoge información de
los otros elementos y genera ordenes junto con los otros elementos y genera ordenes junto con el programa.el programa.
Supervisa errores y genera mensajes para el Supervisa errores y genera mensajes para el control manual.control manual.
La tarea principal es ejecutar ordenes de La tarea principal es ejecutar ordenes de posicionamiento.posicionamiento.
Procesa una intensa información de Procesa una intensa información de coordenadascoordenadas
UD03 Introducción a la robótica.UD03 Introducción a la robótica. 3.2 Partes de un robot industrial.3.2 Partes de un robot industrial.
Sistema de control (continuación).Sistema de control (continuación).– Panel de control:Panel de control:
Facilitar el ajuste de los modos de Facilitar el ajuste de los modos de funcionamiento.funcionamiento.
Arrancar/parar el robot.Arrancar/parar el robot. Visualizar las condiciones de funcionamiento.Visualizar las condiciones de funcionamiento. Varia para cada robot:Varia para cada robot:
- ON/OFF alimentación- ON/OFF alimentación- ON/OFF ciclo del robot.- ON/OFF ciclo del robot.- Acuse de recibo de - Acuse de recibo de
errores.errores.- Pulsador de emergencia.- Pulsador de emergencia.- Hasta pantalla adicional.- Hasta pantalla adicional.- Tareas de programación - Tareas de programación
con teclado con teclado adicional.adicional.
UD03 Introducción a la robótica.UD03 Introducción a la robótica. 3.2 Partes de un robot industrial.3.2 Partes de un robot industrial.
Sistema de control (continuación).Sistema de control (continuación).– Controlador de posición:Controlador de posición:
Cada uno de los ejes es supervisado por su Cada uno de los ejes es supervisado por su controlador de posición.controlador de posición.
Compara la posición real con la predefinida por Compara la posición real con la predefinida por el ordenador.el ordenador.
Calcula la variable de manipulación del Calcula la variable de manipulación del accionador o servoamplificador.accionador o servoamplificador.
La variable incluye la velocidad y el La variable incluye la velocidad y el movimiento.movimiento.
Si detecta errores detiene el robot. Por ejemplo Si detecta errores detiene el robot. Por ejemplo no haber realizado un recorrido de referéncia.no haber realizado un recorrido de referéncia.
UD03 Introducción a la robótica.UD03 Introducción a la robótica.
3.2 Partes de un robot industrial.3.2 Partes de un robot industrial. Sistema de control (continuación).Sistema de control (continuación).
– Amplificador:Amplificador: Cada eje tiene asignado uno.Cada eje tiene asignado uno. Alimentar el motor con la tensión adecuada (de Alimentar el motor con la tensión adecuada (de
acuerdo a la velocidad).acuerdo a la velocidad). Existen servo-amplificadores para medir la Existen servo-amplificadores para medir la
velocidad real en caso de carga excesiva.velocidad real en caso de carga excesiva. Si no se puede alcanzar la velocidad prefijada, Si no se puede alcanzar la velocidad prefijada,
se emite una señal de error.se emite una señal de error.
UD03 Introducción a la robótica.UD03 Introducción a la robótica. 3.2 Partes de un robot industrial.3.2 Partes de un robot industrial.
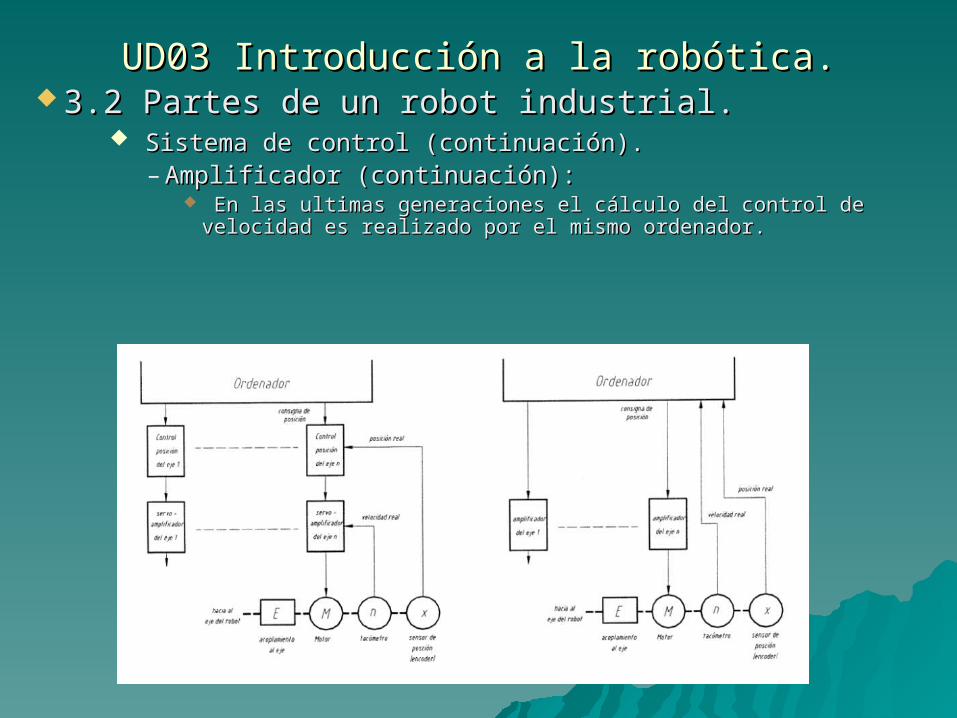
Sistema de control (continuación).Sistema de control (continuación).– Amplificador (continuación):Amplificador (continuación):
En las ultimas generaciones el cálculo del control de velocidad es En las ultimas generaciones el cálculo del control de velocidad es realizado por el mismo ordenador.realizado por el mismo ordenador.
UD03 Introducción a la robótica.UD03 Introducción a la robótica.
3.2 Partes de un robot industrial.3.2 Partes de un robot industrial. Sistema de control (continuación).Sistema de control (continuación).
– Dispositivo de E/S:Dispositivo de E/S: En la ejecución de tareas el robot funciona En la ejecución de tareas el robot funciona
conjuntamente con los dispositivos periféricos.conjuntamente con los dispositivos periféricos. Puede ser necesario por ejemplo detectar la Puede ser necesario por ejemplo detectar la
presencia de una pieza y sujetarla mediante un presencia de una pieza y sujetarla mediante un cilindro de fijación.cilindro de fijación.
El ordenador mediante la unidad de salidas El ordenador mediante la unidad de salidas emitirá la orden de sujeciónemitirá la orden de sujeción
UD03 Introducción a la robótica.UD03 Introducción a la robótica.
3.2 Partes de un robot industrial.3.2 Partes de un robot industrial. Sistema de control (continuación).Sistema de control (continuación).
– Dispositivo de control manual:Dispositivo de control manual: Permite al usuario posicionar el robot sin la necesidad de Permite al usuario posicionar el robot sin la necesidad de
un programa.un programa. También la programación de secuencias sencillas.También la programación de secuencias sencillas. No todo el juego completo de instrucciones puede No todo el juego completo de instrucciones puede
introducirse a través del control manual.introducirse a través del control manual. Recibe mensajes de error.Recibe mensajes de error. Al habilitarlo queda limitada la máxima velocidad del Al habilitarlo queda limitada la máxima velocidad del
robot.robot. Pueden tener joystick, pulsador de emergencia...Pueden tener joystick, pulsador de emergencia...
UD03 Introducción a la robótica.UD03 Introducción a la robótica.
3.3 Clasificación de los robots industriales...3.3 Clasificación de los robots industriales... Primera clasificación en función de la Primera clasificación en función de la
estructura articulada del brazo.estructura articulada del brazo.– El conjunto de los elementos y articulaciones o ejes El conjunto de los elementos y articulaciones o ejes
primarios.primarios.– Solo unas cuantas soluciones han obtenido una Solo unas cuantas soluciones han obtenido una
confirmación en la práctica.confirmación en la práctica.– Los nombres vienen dados en algunos casos por el Los nombres vienen dados en algunos casos por el
espacio de trabajo de los mismos (el conjunto de espacio de trabajo de los mismos (el conjunto de puntos del espacio donde el robot es capaz de situar puntos del espacio donde el robot es capaz de situar su elemento terminal).su elemento terminal).
UD03 Introducción a la robótica.UD03 Introducción a la robótica.
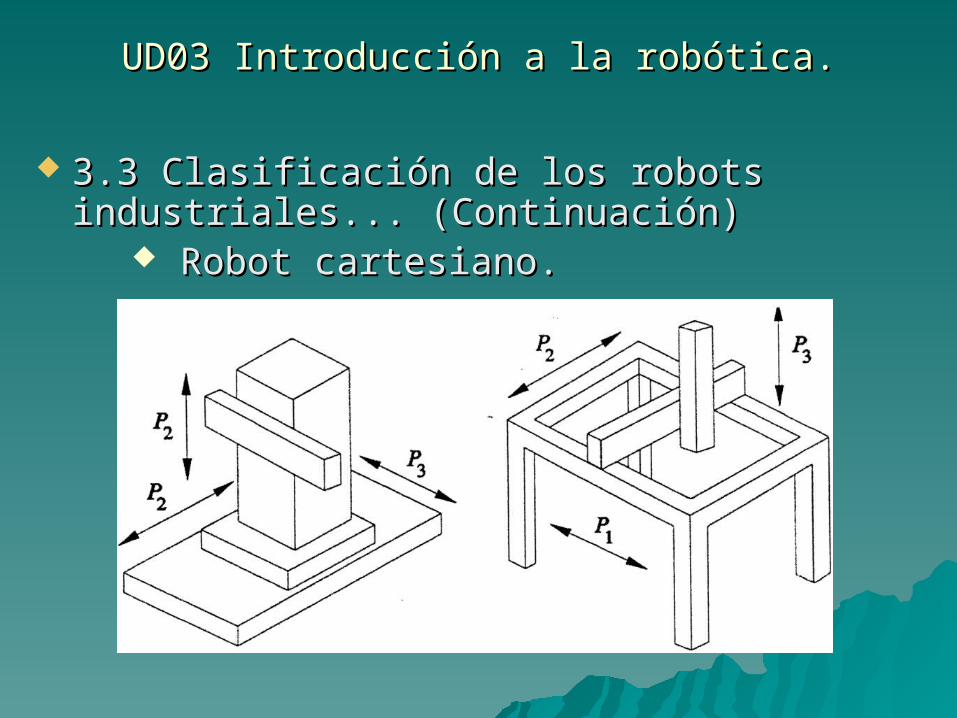
3.3 Clasificación de los robots industriales...3.3 Clasificación de los robots industriales... Robot cartesiano:Robot cartesiano:
– Formado por articulaciones prismáticas.Formado por articulaciones prismáticas.– Muy robustos, sin problemas de carga.Muy robustos, sin problemas de carga.– Voluminosos y con mantenimiento elevado (sobretodo de las guías).Voluminosos y con mantenimiento elevado (sobretodo de las guías).– El control suele ser simple.El control suele ser simple.– Se puede añadir algún elemento que añada algún eje de rotación.Se puede añadir algún elemento que añada algún eje de rotación.– Aplicaciones de paletización y preparación de productos.Aplicaciones de paletización y preparación de productos.
UD03 Introducción a la robótica.UD03 Introducción a la robótica.
3.3 Clasificación de los robots industriales... 3.3 Clasificación de los robots industriales... (Continuación)(Continuación)
Robot cartesiano.Robot cartesiano.
UD03 Introducción a la robótica.UD03 Introducción a la robótica.
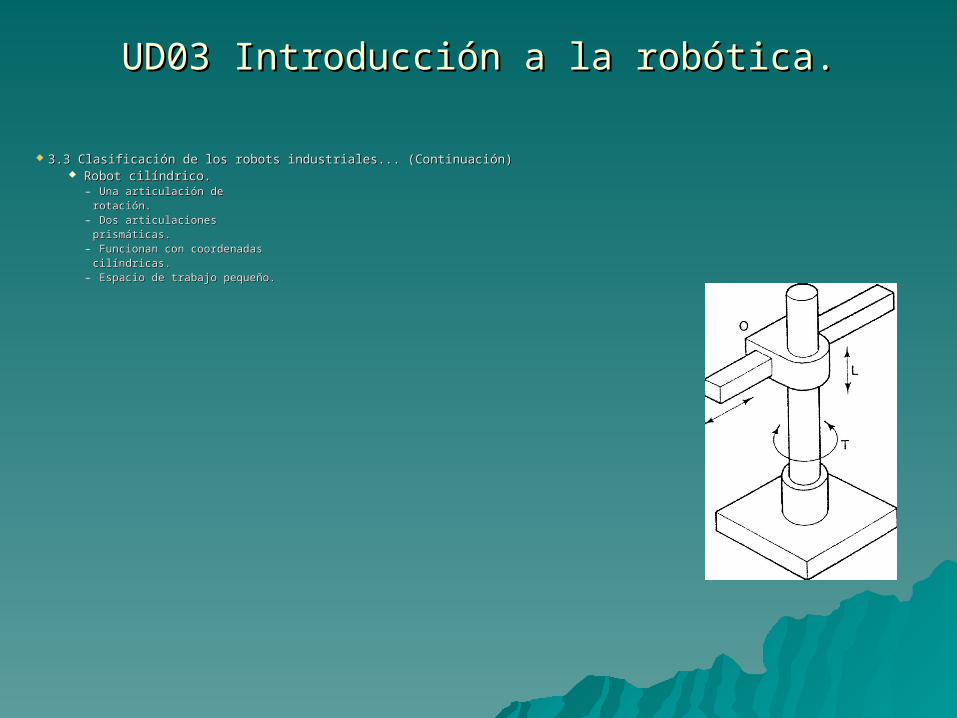
3.3 Clasificación de los robots industriales... (Continuación)3.3 Clasificación de los robots industriales... (Continuación) Robot cilíndrico.Robot cilíndrico.
– Una articulación de Una articulación de rotación.rotación.
– Dos articulaciones Dos articulaciones prismáticas.prismáticas.
– Funcionan con coordenadas Funcionan con coordenadas cilíndricas.cilíndricas.
– Espacio de trabajo pequeño.Espacio de trabajo pequeño.
UD03 Introducción a la robótica.UD03 Introducción a la robótica.
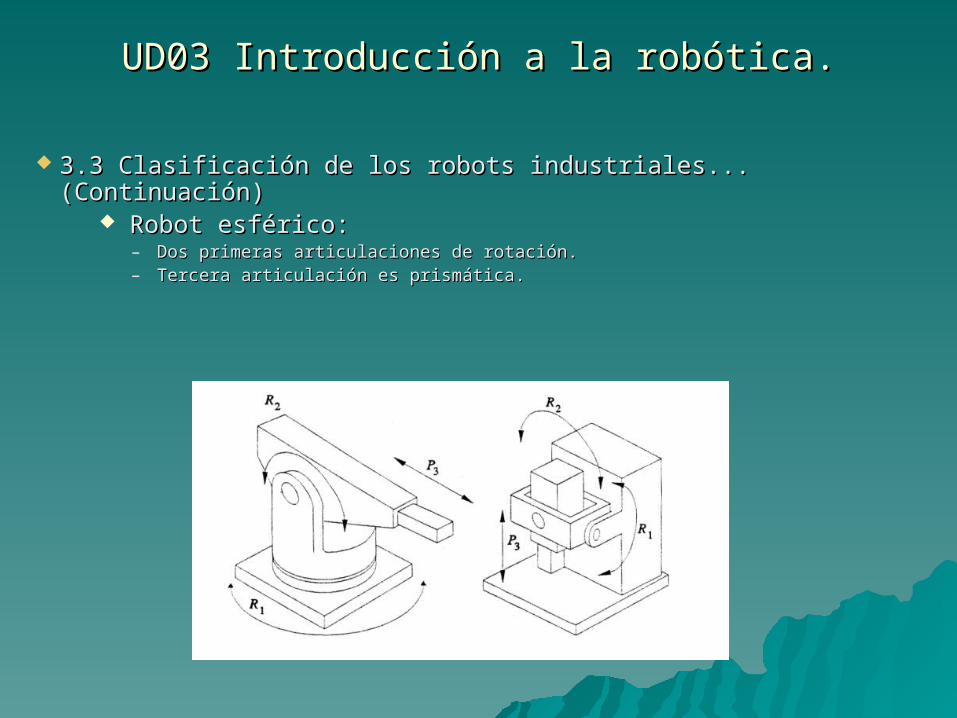
3.3 Clasificación de los robots industriales... (Continuación)3.3 Clasificación de los robots industriales... (Continuación) Robot esférico:Robot esférico:
– Dos primeras articulaciones de rotación.Dos primeras articulaciones de rotación.– Tercera articulación es prismática.Tercera articulación es prismática.
UD03 Introducción a la robótica.UD03 Introducción a la robótica.
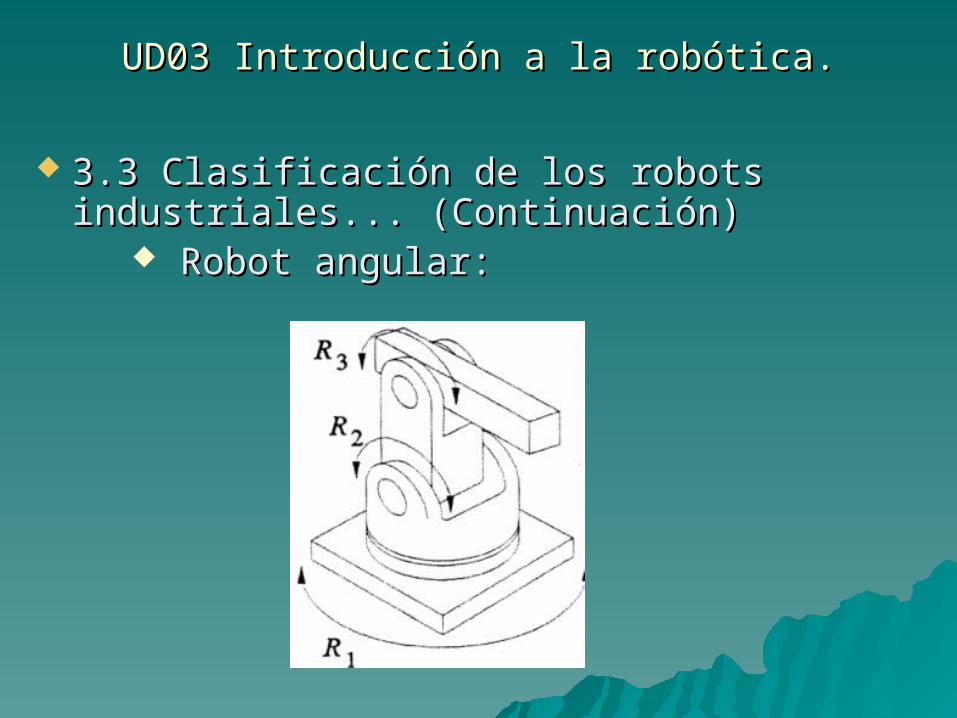
3.3 Clasificación de los robots industriales... (Continuación)3.3 Clasificación de los robots industriales... (Continuación) Robot angular:Robot angular:
– Tres o mas articulaciones de rotación.Tres o mas articulaciones de rotación.– El primero en sentido vertical.El primero en sentido vertical.– Los dos siguientes en paralelos entre ellos en sentido horizontal.Los dos siguientes en paralelos entre ellos en sentido horizontal.– Son fáciles de construir pero presentan problemas de cargas, de inercias y errores de posicionamiento.Son fáciles de construir pero presentan problemas de cargas, de inercias y errores de posicionamiento.– Presentan gran accesibilidad.Presentan gran accesibilidad.– Poco intuitivo.Poco intuitivo.– Sistema de control complejo.Sistema de control complejo.– Aplicaciones principales en la industria del automóvil.Aplicaciones principales en la industria del automóvil.
UD03 Introducción a la robótica.UD03 Introducción a la robótica.
3.3 Clasificación de los robots industriales... 3.3 Clasificación de los robots industriales... (Continuación)(Continuación)
Robot angular:Robot angular:
UD03 Introducción a la robótica.UD03 Introducción a la robótica.
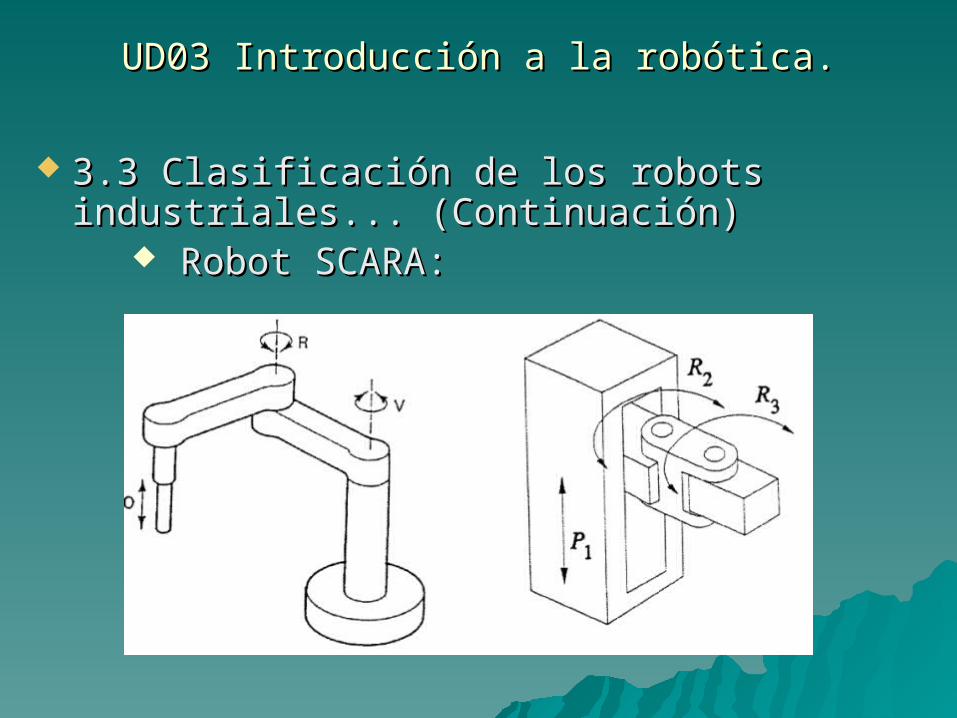
3.3 Clasificación de los robots industriales... (Continuación)3.3 Clasificación de los robots industriales... (Continuación) Robot SCARA:Robot SCARA:
– Dos articulaciones de rotación y una prismática.Dos articulaciones de rotación y una prismática.– Las dos articulaciones de rotación tienen ejes de rotación y traslación paralelos y verticales.Las dos articulaciones de rotación tienen ejes de rotación y traslación paralelos y verticales.– Bastante flexible en las direcciones X e Y.Bastante flexible en las direcciones X e Y.– Selective Compliance Automatic Robot Arm.Selective Compliance Automatic Robot Arm.– También se conoce como robot de brazo horizontal articulado,También se conoce como robot de brazo horizontal articulado,– Robot muy rápido y preciso.Robot muy rápido y preciso.
UD03 Introducción a la robótica.UD03 Introducción a la robótica.
3.3 Clasificación de los robots industriales... 3.3 Clasificación de los robots industriales... (Continuación)(Continuación)
Robot SCARA:Robot SCARA:
UD03 Introducción a la robótica.UD03 Introducción a la robótica.
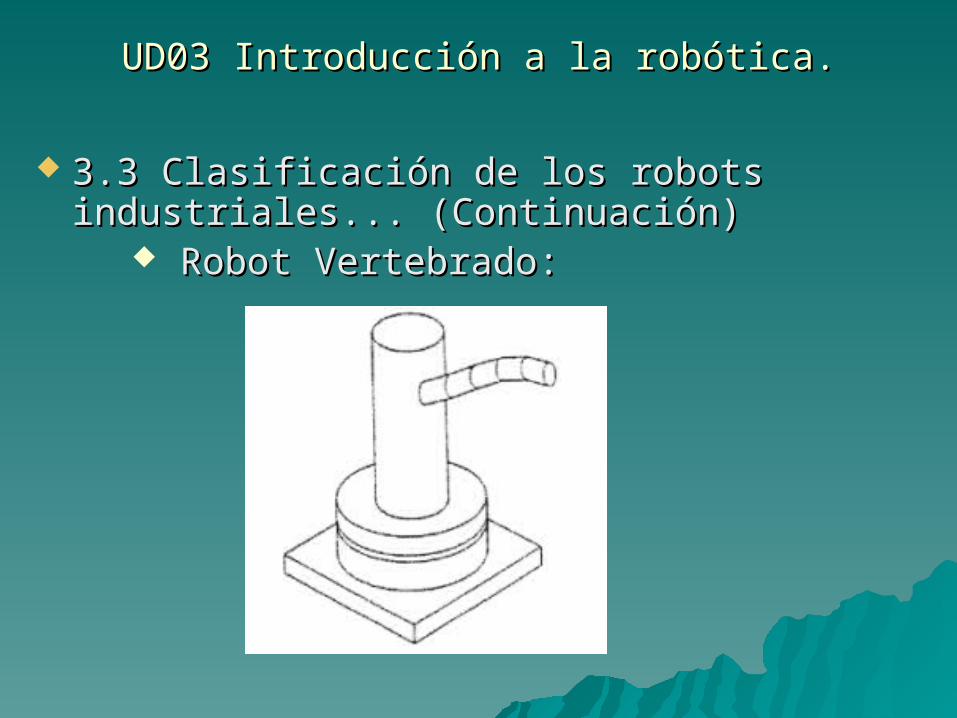
3.3 Clasificación de los robots industriales... (Continuación)3.3 Clasificación de los robots industriales... (Continuación) Robot Vertebrado:Robot Vertebrado:
– Numero elevado de componentes.Numero elevado de componentes.– Cada uno pivota sobre el elemento anterior.Cada uno pivota sobre el elemento anterior.– Mucha movilidad.Mucha movilidad.– Se monta en el extremo de otro robot, normalmente angular.Se monta en el extremo de otro robot, normalmente angular.– O como una verdadera trompa de elefante.O como una verdadera trompa de elefante.– Controles muy complicados.Controles muy complicados.
UD03 Introducción a la robótica.UD03 Introducción a la robótica.
3.3 Clasificación de los robots industriales... 3.3 Clasificación de los robots industriales... (Continuación)(Continuación)
Robot Vertebrado:Robot Vertebrado:
UD03 Introducción a la robótica.UD03 Introducción a la robótica. 3.4 Características de los robots.3.4 Características de los robots.
– La capacidad de su terminal para situarse en un La capacidad de su terminal para situarse en un punto y con una orientación determinada.punto y con una orientación determinada.
– Las principales características que nos permiten Las principales características que nos permiten seleccionar el robot adecuado para una seleccionar el robot adecuado para una aplicación concreta son:aplicación concreta son: 3.4.1 Espacio de trabajo:3.4.1 Espacio de trabajo:
– Viene configurado por los puntos donde el robot Viene configurado por los puntos donde el robot puede posicionar su elemento terminal.puede posicionar su elemento terminal.
– El volumen descrito por el robot cuando tiene sus El volumen descrito por el robot cuando tiene sus elementos extendidos al máximo.elementos extendidos al máximo.
– Depende:Depende: De la configuración del robot.De la configuración del robot. De su tamaño.De su tamaño. De las limitaciones físicas impuestas (topes, De las limitaciones físicas impuestas (topes,
espacio accesible...)espacio accesible...)
UD03 Introducción a la robótica.UD03 Introducción a la robótica. 3.4 Características de los robots.3.4 Características de los robots.
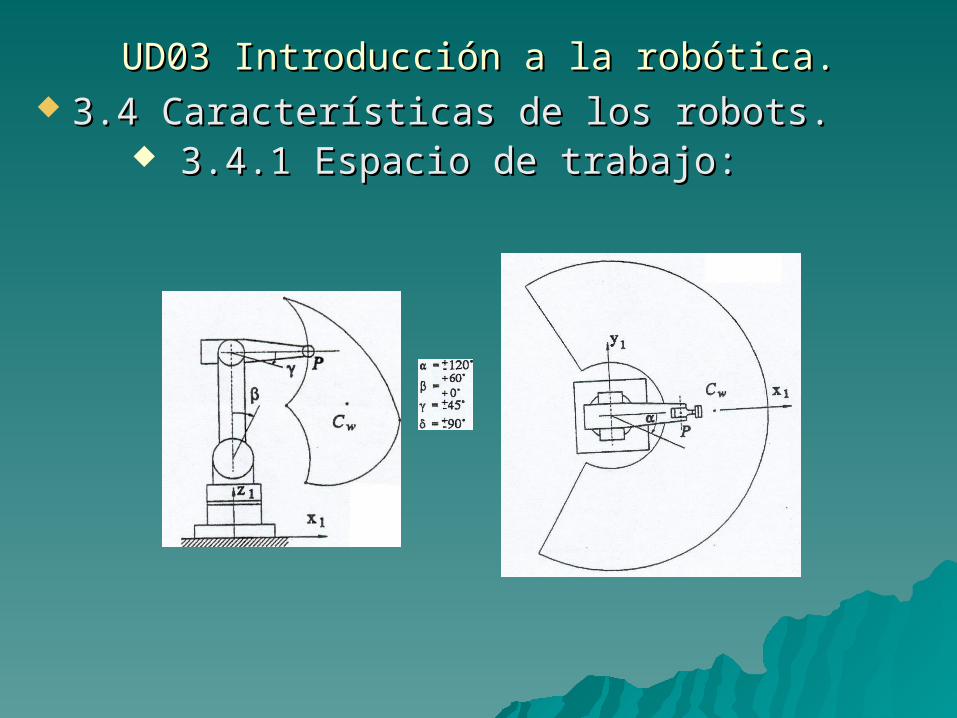
3.4.1 Espacio de trabajo:3.4.1 Espacio de trabajo:– El fabricante nos da el espacio de trabajo El fabricante nos da el espacio de trabajo
del robot sin la herramienta.del robot sin la herramienta.– Suele tomar el punto de referencia del Suele tomar el punto de referencia del
puño, que es donde irá fijada la puño, que es donde irá fijada la herramienta.herramienta.
– Este punto de referencia viene dado por Este punto de referencia viene dado por los dos primeros ejes del puño. O bien, en los dos primeros ejes del puño. O bien, en el caso de que no intersecten, por un el caso de que no intersecten, por un punto definido sobre el primer eje del puño punto definido sobre el primer eje del puño (en la figura punto P)(en la figura punto P)
– De esta forma el espacio de trabajo es De esta forma el espacio de trabajo es intrínseco al robot independientemente de intrínseco al robot independientemente de la aplicación concreta que se le dé.la aplicación concreta que se le dé.
UD03 Introducción a la robótica.UD03 Introducción a la robótica. 3.4 Características de los robots.3.4 Características de los robots.
3.4.1 Espacio de trabajo:3.4.1 Espacio de trabajo:
UD03 Introducción a la robótica.UD03 Introducción a la robótica. 3.4 Características de 3.4 Características de
los robots.los robots. 3.4.1 Espacio de 3.4.1 Espacio de
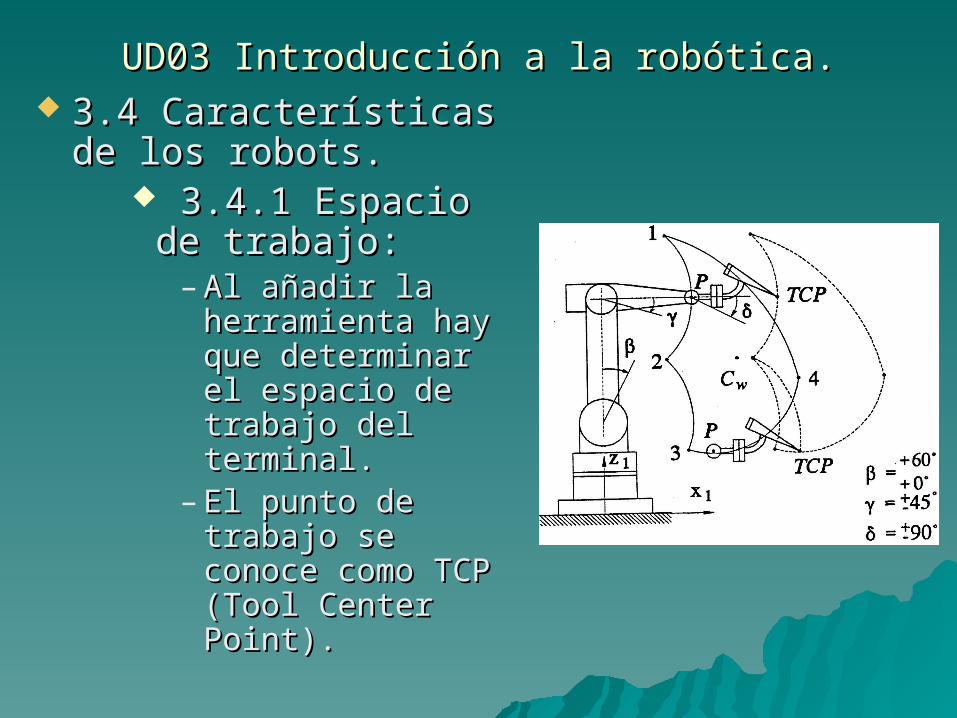
trabajo:trabajo:– Al añadir la Al añadir la
herramienta hay herramienta hay que determinar el que determinar el espacio de trabajo espacio de trabajo del terminal.del terminal.
– El punto de trabajo El punto de trabajo se conoce como se conoce como TCP (Tool Center TCP (Tool Center Point).Point).
UD03 Introducción a la robótica.UD03 Introducción a la robótica. 3.4 Características de los robots.3.4 Características de los robots.
3.4.2 Accesibilidad3.4.2 Accesibilidad– Hace referencia a la capacidad del robot para orientar el Hace referencia a la capacidad del robot para orientar el
elemento terminal en una dirección determinada, dentro del elemento terminal en una dirección determinada, dentro del espacio de trabajo, gracias a las posibilidades de giro de los ejes.espacio de trabajo, gracias a las posibilidades de giro de los ejes.
– Por ejemplo:Por ejemplo:Un grado de accesibilidad 1, representa que solo podemos Un grado de accesibilidad 1, representa que solo podemos
acceder de una manera.acceder de una manera.Normalmente, cuanto más exterior es el punto al que Normalmente, cuanto más exterior es el punto al que
queremos acceder, más pequeño es el grado de accesibilidad.queremos acceder, más pequeño es el grado de accesibilidad.
UD03 Introducción a la robótica.UD03 Introducción a la robótica. 3.4 Características de los robots.3.4 Características de los robots.
3.4.3 Grados de libertad3.4.3 Grados de libertad– Para definir la posición de un objeto, si nos basamos en un Para definir la posición de un objeto, si nos basamos en un
sistema de coordenadas cartesiano, basta con definir las tres sistema de coordenadas cartesiano, basta con definir las tres coordenadas del punto respecto los ejes de referencia.coordenadas del punto respecto los ejes de referencia.
– Pero para definir correctamente la posición de un robot, Pero para definir correctamente la posición de un robot, también necesitamos la orientación del elemento terminal.también necesitamos la orientación del elemento terminal.
– Por lo tanto para definir completamente la posición del Por lo tanto para definir completamente la posición del elemento terminal necesitamos seis variables, tres referentes a elemento terminal necesitamos seis variables, tres referentes a su posición y tres referentes a su orientación.su posición y tres referentes a su orientación.
UD03 Introducción a la robótica.UD03 Introducción a la robótica. 3.4 Características de los robots.3.4 Características de los robots.
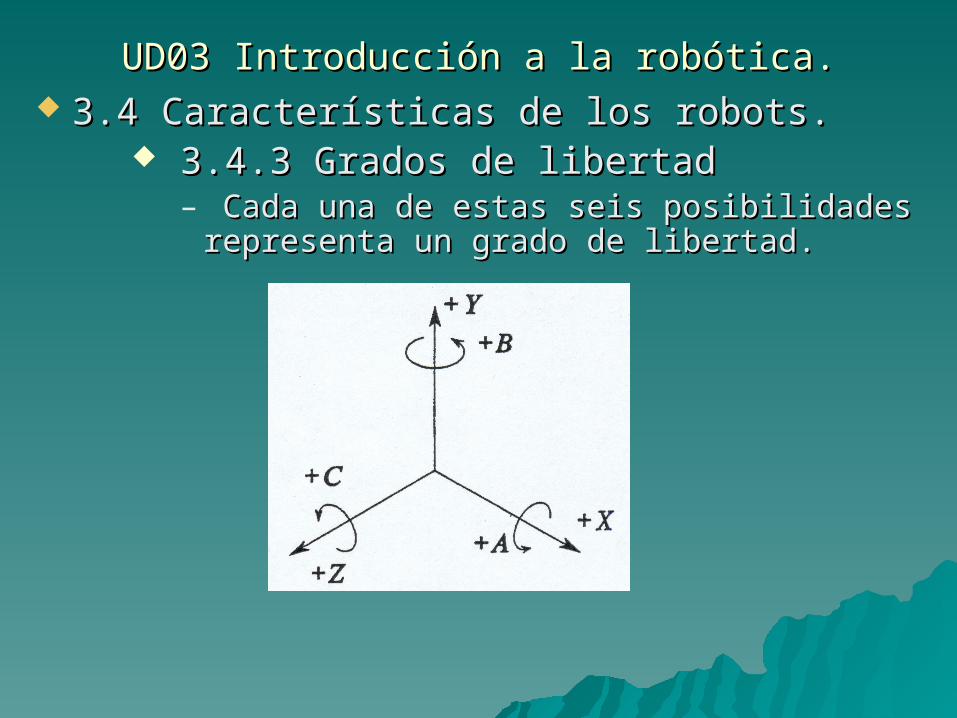
3.4.3 Grados de libertad3.4.3 Grados de libertad– Cada una de estas seis posibilidades Cada una de estas seis posibilidades
representa un grado de libertad.representa un grado de libertad.
UD03 Introducción a la robótica.UD03 Introducción a la robótica. 3.4 Características de los robots.3.4 Características de los robots.
3.4.4 Características estáticas3.4.4 Características estáticas– Precisión: Precisión:
Es la diferencia entre la posición deseada o de consigna y el valor medio de los valores obtenidos en el Es la diferencia entre la posición deseada o de consigna y el valor medio de los valores obtenidos en el movimiento.movimiento.
Nos da una medida de la capacidad del robot de cumplir con la posición deseada.Nos da una medida de la capacidad del robot de cumplir con la posición deseada. Depende de varios factores (la carga, velocidades de acercamiento/posicionado, calidad constructiva del Depende de varios factores (la carga, velocidades de acercamiento/posicionado, calidad constructiva del
robot...).robot...). Origina los mapas de error.Origina los mapas de error.
UD03 Introducción a la robótica.UD03 Introducción a la robótica.
3.4 Características de los robots.3.4 Características de los robots. 3.4.4 Características estáticas3.4.4 Características estáticas
– Repetibilidad: Repetibilidad: La variación que presenta la posición La variación que presenta la posición
cuando el manipulador se mueve cuando el manipulador se mueve repetidamente al mismo punto.repetidamente al mismo punto.
Interesa que el robot sea repetitivo.Interesa que el robot sea repetitivo. No se da siempre por el juego de No se da siempre por el juego de
engranajes, errores de posicionado...engranajes, errores de posicionado...
UD03 Introducción a la robótica.UD03 Introducción a la robótica. 3.4 Características de los robots.3.4 Características de los robots.
3.4.4 Características estáticas3.4.4 Características estáticas– Resolución:Resolución:
Es la mínima distancia que puede ser Es la mínima distancia que puede ser garantizada para mover el elemento garantizada para mover el elemento terminal.terminal.
El incremento de movimiento más El incremento de movimiento más pequeño que puede realizar el robot.pequeño que puede realizar el robot.
Muchas veces depende de la resolución Muchas veces depende de la resolución del sistema de control.del sistema de control.
Cuanto mayor sea el número de bits del Cuanto mayor sea el número de bits del procesador digital, mayor será la procesador digital, mayor será la resolución.resolución.
UD03 Introducción a la robótica.UD03 Introducción a la robótica. 3.4 Características de los robots.3.4 Características de los robots.
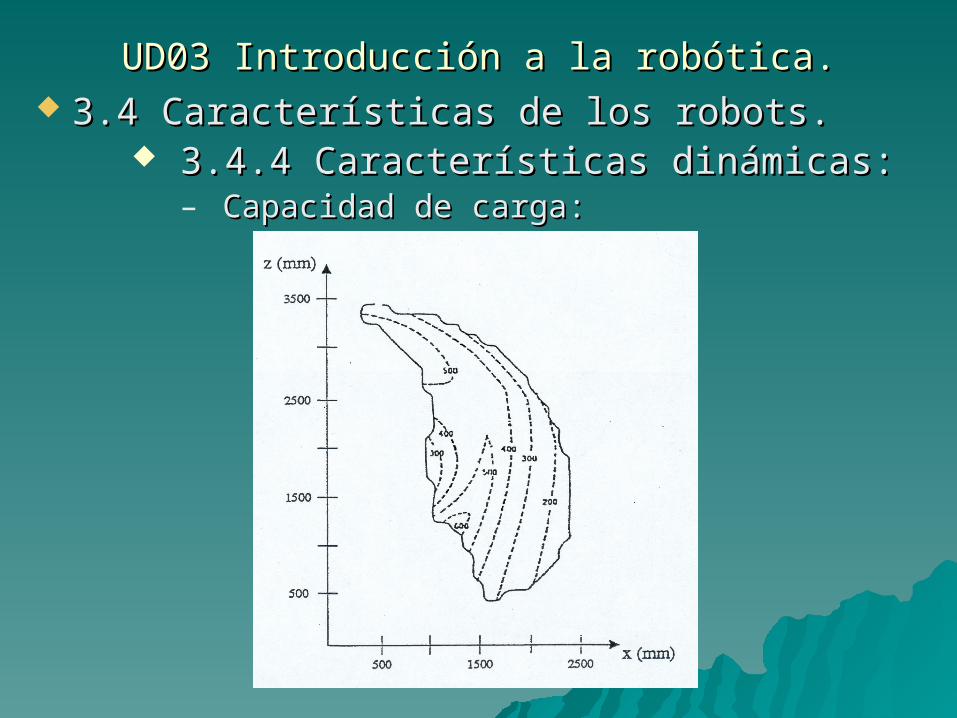
3.4.4 Características dinámicas:3.4.4 Características dinámicas:– Capacidad de carga:Capacidad de carga:
La carga nominal de un robot, es la carga La carga nominal de un robot, es la carga máxima que se puede aplicar en el puño, en máxima que se puede aplicar en el puño, en condiciones normales de funcionamiento (en condiciones normales de funcionamiento (en cuanto a velocidades y aceleraciones) sin que se cuanto a velocidades y aceleraciones) sin que se desgaste ninguna de las prestaciones del robot.desgaste ninguna de las prestaciones del robot.
Tenemos que tener en cuenta términos como el Tenemos que tener en cuenta términos como el par o la inercia.par o la inercia.
Depende, entre otros factores del tamaño del Depende, entre otros factores del tamaño del robot, de su configuración, de su construcción...robot, de su configuración, de su construcción...
Debemos tener en cuenta el peso de la Debemos tener en cuenta el peso de la herramienta.herramienta.
UD03 Introducción a la robótica.UD03 Introducción a la robótica. 3.4 Características de los robots.3.4 Características de los robots.
3.4.4 Características dinámicas:3.4.4 Características dinámicas:– Capacidad de carga:Capacidad de carga:
UD03 Introducción a la robótica.UD03 Introducción a la robótica.
3.4 Características de los robots.3.4 Características de los robots. 3.4.4 Características dinámicas:3.4.4 Características dinámicas:
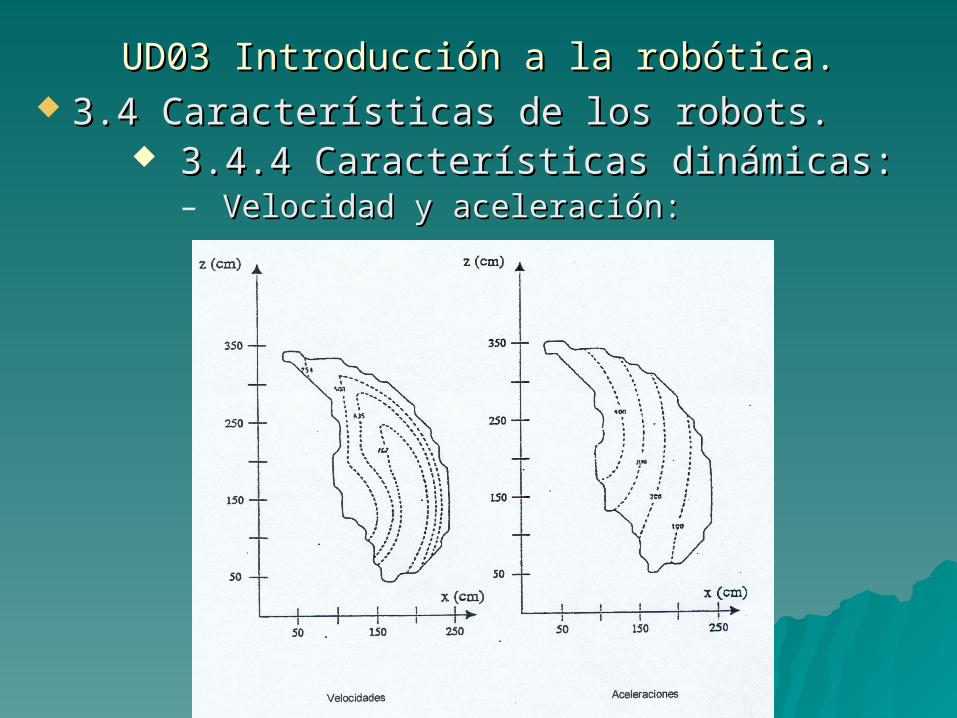
– Velocidad y aceleración:Velocidad y aceleración: Hacen referencia al extremo del robot y Hacen referencia al extremo del robot y
limitan los movimientos a realizar.limitan los movimientos a realizar. La velocidad tiene un influencia decisiva La velocidad tiene un influencia decisiva
en la evaluación de los tiempos en en la evaluación de los tiempos en grandes desplazamientos.grandes desplazamientos.
La aceleración es fundamental en La aceleración es fundamental en desplazamientos cortos.desplazamientos cortos.
UD03 Introducción a la robótica.UD03 Introducción a la robótica. 3.4 Características de los robots.3.4 Características de los robots.
3.4.4 Características dinámicas:3.4.4 Características dinámicas:– Velocidad y aceleración:Velocidad y aceleración:
UD03 Introducción a la robótica.UD03 Introducción a la robótica. 3.5 3.5 Articulaciones y accionamientos de los robots.Articulaciones y accionamientos de los robots.
– Cada eje recibe las fuerzas y pares del siguiente eje Cada eje recibe las fuerzas y pares del siguiente eje o de la brida de la herramienta y transmite las o de la brida de la herramienta y transmite las fuerzas y pares hacia el eje anterior o hacia la base fuerzas y pares hacia el eje anterior o hacia la base del robot.del robot.
– Dentro de la estructura del brazo, podemos distinguir Dentro de la estructura del brazo, podemos distinguir tres partes principales:tres partes principales:
La carcasa: aloja el sistema accionador y el La carcasa: aloja el sistema accionador y el sistema de guías o articulaciones y además sistema de guías o articulaciones y además soporta todas las fuerzas y pares.soporta todas las fuerzas y pares.
Las articulaciones: guían a los ejes a lo largo de Las articulaciones: guían a los ejes a lo largo de su movimiento.su movimiento.
Los accionamientos: convierten la energía Los accionamientos: convierten la energía (eléctrica, neumática o hidráulica) en energía (eléctrica, neumática o hidráulica) en energía mecánica.mecánica.
UD03 Introducción a la robótica.UD03 Introducción a la robótica. 3.5 Articulaciones y accionamientos de los robots.3.5 Articulaciones y accionamientos de los robots.
– 3.5.1 Articulaciones3.5.1 Articulaciones Los robots industriales utilizan básicamente Los robots industriales utilizan básicamente
articulaciones que aportan un grado de movilidad. Ya articulaciones que aportan un grado de movilidad. Ya que son más fiables i precisas.que son más fiables i precisas.
– Articulaciones de rotación.Articulaciones de rotación.– Articulaciones prismáticas.Articulaciones prismáticas.
En algunos casos se combinan estas articulaciones.En algunos casos se combinan estas articulaciones.– Articulaciones de rotación y traslación combinadas.Articulaciones de rotación y traslación combinadas.– Articulaciones esféricas (rotulas).Articulaciones esféricas (rotulas).
Donde tiene especial importancia la configuración de las Donde tiene especial importancia la configuración de las articulaciones es en el puño.articulaciones es en el puño.
– Existen configuraciones de puños de un eje, dos ejes o Existen configuraciones de puños de un eje, dos ejes o tres.tres.
UD03 Introducción a la robótica.UD03 Introducción a la robótica.
3.5 Articulaciones y accionamientos de los robots.3.5 Articulaciones y accionamientos de los robots.– 3.5.2 Accionamientos3.5.2 Accionamientos
El robot necesita elementos motores que conviertan en El robot necesita elementos motores que conviertan en movimiento una serie de señales de control.movimiento una serie de señales de control.
Debe ser capaz de situar el elemento terminal en una Debe ser capaz de situar el elemento terminal en una posición determinada con la velocidad y precisión posición determinada con la velocidad y precisión especificadas.especificadas.
Comprende:Comprende:– Actuador: produce el movimiento.Actuador: produce el movimiento.
Neumáticos, hidráulicos y eléctricos.Neumáticos, hidráulicos y eléctricos.– Las transmisiones: acoplamiento entre el actuador y el eje.Las transmisiones: acoplamiento entre el actuador y el eje.– Los sensores: miden la velocidad y posición real.Los sensores: miden la velocidad y posición real.– El controlador: gobernar el actuador en función de la El controlador: gobernar el actuador en función de la
consigna de posición y el valor real del eje.consigna de posición y el valor real del eje.
UD03 Introducción a la robótica.UD03 Introducción a la robótica.
3.6 3.6 Programación de los robots.Programación de los robots.– 3.6.1 Métodos de programación:3.6.1 Métodos de programación:
Programación gestual (por guiado):Programación gestual (por guiado):– Es un tipo de programación on-line.Es un tipo de programación on-line.– Es fácil de utilizar por cualquier persona.Es fácil de utilizar por cualquier persona.– Frecuentemente hay que parar la producción.Frecuentemente hay que parar la producción.– Suele estar limitado en cuanto a funciones a realizar.Suele estar limitado en cuanto a funciones a realizar.– Para trabajos sencillos, repetitivos y no muy complejos.Para trabajos sencillos, repetitivos y no muy complejos.
Programación gestual activa (teach-in): el robot Programación gestual activa (teach-in): el robot industrial se mueve por medio de la unidad de industrial se mueve por medio de la unidad de instrucción.instrucción.
Programación gestual pasiva (play-back): el operador Programación gestual pasiva (play-back): el operador posiciona el robot con las propias manos. El programa posiciona el robot con las propias manos. El programa generalmente no puede corregirse. El robot, a menudo generalmente no puede corregirse. El robot, a menudo suele ser pesado.suele ser pesado.
UD03 Introducción a la robótica.UD03 Introducción a la robótica.
3.6 3.6 Programación de los robots.Programación de los robots.– 3.6.1 Métodos de programación:3.6.1 Métodos de programación:
Programación textual (por lenguaje):Programación textual (por lenguaje):– Es un tipo de programación off-line.Es un tipo de programación off-line.– Ventajas:Ventajas:
Se optimizan las prestaciones y especificaciones del Se optimizan las prestaciones y especificaciones del robot.robot.
– Inconvenientes:Inconvenientes: Experiencia en técnicas de programación.Experiencia en técnicas de programación. Hay que prever eventos posibles.Hay que prever eventos posibles. Los programas requieren un número elevado de Los programas requieren un número elevado de
instrucciones.instrucciones. Programación gráfica:Programación gráfica:
– Parte de la programación textual y permite la simulación Parte de la programación textual y permite la simulación gráfica del programa introducido.gráfica del programa introducido.
UD03 Introducción a la robótica.UD03 Introducción a la robótica.
3.6 3.6 Programación de los robots.Programación de los robots.– 3.6.2 Niveles de programación:3.6.2 Niveles de programación:
Nivel de articulación.Nivel de articulación.– Describir las diferentes posiciones que han de adoptar Describir las diferentes posiciones que han de adoptar
los ejes.los ejes. Nivel de terminal.Nivel de terminal.
– Describir y definir los diferentes movimientos y Describir y definir los diferentes movimientos y posiciones que debe realizar el elemento terminal.posiciones que debe realizar el elemento terminal.
Nivel del objeto.Nivel del objeto.– Describiendo las operaciones que ha de realizar el robot.Describiendo las operaciones que ha de realizar el robot.
Nivel de objetivo.Nivel de objetivo.– Describir en términos de resultados que se quieren Describir en términos de resultados que se quieren
obtener. Se aplica para gestionar sistemas obtener. Se aplica para gestionar sistemas automatizados complejos y requiere recursos basados automatizados complejos y requiere recursos basados en inteligencia artificial.en inteligencia artificial.
Los dos primeros son a nivel robot y los otros dos a Los dos primeros son a nivel robot y los otros dos a nivel tarea.nivel tarea.
UD03 Introducción a la robótica.UD03 Introducción a la robótica.
3.6 3.6 Programación de los robots. Programación de los robots. – 3.6.3 Lenguajes de programación.3.6.3 Lenguajes de programación.
Cada fabricante desarrolla el suyo:Cada fabricante desarrolla el suyo:– BAPS (Bosch), ARLA (Asea), SRCL (Siemens)...BAPS (Bosch), ARLA (Asea), SRCL (Siemens)...– Lenguajes de alto nivel como el lenguaje C, requieren Lenguajes de alto nivel como el lenguaje C, requieren
librerías específicas.librerías específicas.– Lenguajes nuevos basados en operaciones básicas de Lenguajes nuevos basados en operaciones básicas de
programación.programación.– La no uniformidad de lenguajes provoca tener que La no uniformidad de lenguajes provoca tener que
adaptarse al lenguaje específico de cada fabricante.adaptarse al lenguaje específico de cada fabricante.
UD03 Introducción a la robótica.UD03 Introducción a la robótica. 3.6 3.6 Programación de los robots. Programación de los robots.
– 3.6.4 Programación de movimientos.3.6.4 Programación de movimientos. En el caso de la paletización la trayectoria del En el caso de la paletización la trayectoria del
punto origen al destino no es importante.punto origen al destino no es importante. Pero en el caso por ejemplo de pegar una etiqueta, Pero en el caso por ejemplo de pegar una etiqueta,
la trayectoria y la velocidad son importantes.la trayectoria y la velocidad son importantes. Los requerimientos máximos aparecerán cuando la Los requerimientos máximos aparecerán cuando la
trayectoria a recorrer se conoce solo trayectoria a recorrer se conoce solo aproximadamente.aproximadamente.
De los ejemplos anteriores surgen tres tipos de De los ejemplos anteriores surgen tres tipos de control de movimiento:control de movimiento:
– Control punto a punto (PTP): se mueve punto a punto Control punto a punto (PTP): se mueve punto a punto sin mantener un trayectoria conocida.sin mantener un trayectoria conocida.
– Control continua (CP): se mueve con la ayuda de una Control continua (CP): se mueve con la ayuda de una ruta específica.ruta específica.
– Control adaptativo: adapta su trayectoria a la Control adaptativo: adapta su trayectoria a la realidad actual, basándose en mediciones.realidad actual, basándose en mediciones.