inteligencia artificial robótica - ldc.usb.vewpereira/docencia/roboticaeia/iarobotbasico.pdf ·...
TRANSCRIPT
Universidad Católica Andrés BelloDirección de Formación ContinuaEscuela de Ingeniería Informática Prof. Wílmer Pereira
Certificado de Formación ProfesionalGerencia de Proyectos de Software
Módulo IV
Inteligencia ArtificialInteligencia Artificial
RobóticaRobótica
Prof. Wílmer Pereira
Universidad Católica Andrés BelloDirección de Formación ContinuaEscuela de Ingeniería Informática Prof. Wílmer Pereira
Certificado de Formación ProfesionalGerencia de Proyectos de Software
Módulo IV
¿ Qué es un robot ?¿ Qué es un robot ?Criatura mecánica que emula
funciones de un humanoSegún T. M. Knasel, los robots se pueden clasificar por generaciones:1 (1960): Selección y colocación con manipuladores2 (1970): Servocontrol con trayectoria de ejecución programada3 (1975): Alta precisión en dispositivos de entrada ante incertidumbre4 (1985): Móviles que usan técnicas de inteligencia y vida artificial5 (1995): Espaciales y militares para ambientes de gran variabilidad
Robot industrial: manipulador automático servocontrolado, reprogramable, polivalente, capaz de posicionar y
orientar piezas, útiles o dispositivos especiales,siguiendo trayectorias variables programables
para la ejecución de tareas variadas AFNOR (Asociación Francesa de Normalización)
Universidad Católica Andrés BelloDirección de Formación ContinuaEscuela de Ingeniería Informática Prof. Wílmer Pereira
Certificado de Formación ProfesionalGerencia de Proyectos de Software
Módulo IV
Entorno de trabajo robóticoEntorno de trabajo robóticoInaccesible: factores de error como deslizamientos, roce, ruido ...No determinístico: gran cantidad de variable y/o imprevistos No episódico: problemas de decisión secuencialDinámico: procesamiento en tiempo real y con movimientoContinuo: presencia permanente de valores de entrada
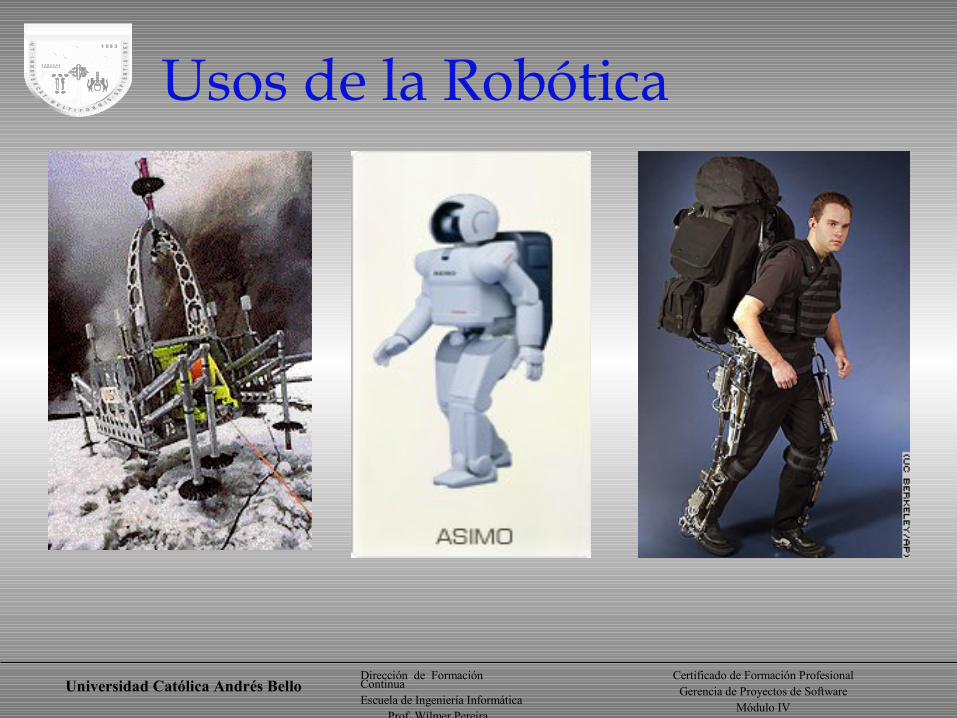
Manufactura: manipuladores nucleares e industria automotriz, ...Servicio usuario final: aspiradoras, guías de museos, mesoneros, ...Vehículos terrestres, submarinos y espacialesTelepresencia y realidad virtualExo-esqueletos
Usos de la robóticaUsos de la robótica
Universidad Católica Andrés BelloDirección de Formación ContinuaEscuela de Ingeniería Informática Prof. Wílmer Pereira
Certificado de Formación ProfesionalGerencia de Proyectos de Software
Módulo IV
Usos de la Robótica
Universidad Católica Andrés BelloDirección de Formación ContinuaEscuela de Ingeniería Informática Prof. Wílmer Pereira
Certificado de Formación ProfesionalGerencia de Proyectos de Software
Módulo IV
Historia de la RobóticaHistoria de la RobóticaRobot proviene de la palabra checa robota, acuñada por el escritor Karel Capek (1890-1938) en una obra de teatro.Manipuladores en la industria nuclear (1943, 2da guerra mundial) George Devol patentó un manipulador programable en 1948En 1954, R. Goertz sustituyó la transmisión mecánica por eléctricaR. Mosher, ingeniero de la General Electric, desarrollo en 1958 undispositivo a dos brazos mecánicos denominado exoesqueletoJ. Engelberger junto con G. Devol, fundan la empresa UNIMATIONen 1960 y desarrollan UNIMATE para una aplicación de fundición.En 1967 se usan robots de UNIMATION en General Motors, en 1968 en Japón y en 1970 en Europa (comprada con Westinghouse)Proyectos de control de robot por computadoras (MIT y Stanford, 1970) Masificación con la aplicación de microprocesadores en 1975 Se funda JIRA en 1972 , RIA en 1974 y 1980 la Federación Internacional de RobóticaInvestigaciones utilizando IA + robótica + vida artificial usando sensores
Universidad Católica Andrés BelloDirección de Formación ContinuaEscuela de Ingeniería Informática Prof. Wílmer Pereira
Certificado de Formación ProfesionalGerencia de Proyectos de Software
Módulo IV
Leyes de Robótica y PelículasLeyes de Robótica y Películas Isaac Asimov en “Yo robot”Un robot no puede lastimar ni permitir que sea lastimado un ser humanoUn robot debe obedecer todas las ordenes de los humanos excepto que contradigan la primera leyUn robot debe autoproteger salvo si esto entra en conflicto con las dos primeras leyes
Películas Leyenda negra Leyenda blanca2001 Odisea del Espacio Hombre BicentenarioTerminator Robot (Walt Disney)Yo Robot IA (Steven Spilberg)Matrix
Universidad Católica Andrés BelloDirección de Formación ContinuaEscuela de Ingeniería Informática Prof. Wílmer Pereira
Certificado de Formación ProfesionalGerencia de Proyectos de Software
Módulo IV
Robot
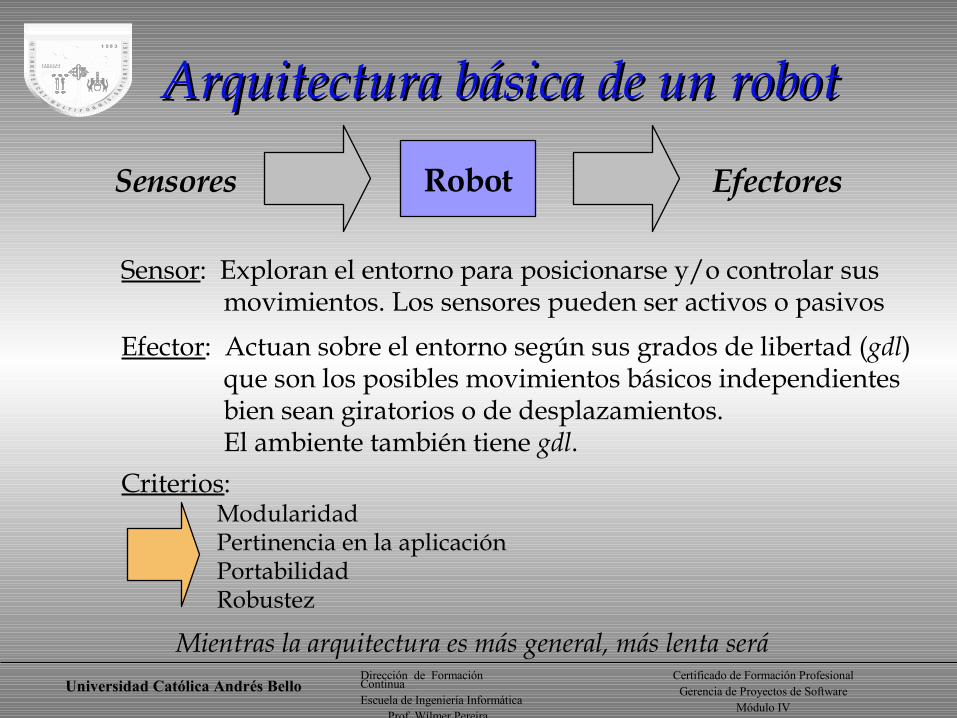
Arquitectura básica de un robotArquitectura básica de un robot
Sensores Efectores
Sensor: Exploran el entorno para posicionarse y/o controlar sus movimientos. Los sensores pueden ser activos o pasivos
Efector: Actuan sobre el entorno según sus grados de libertad (gdl) que son los posibles movimientos básicos independientes bien sean giratorios o de desplazamientos. El ambiente también tiene gdl.
Criterios:ModularidadPertinencia en la aplicaciónPortabilidadRobustez
Mientras la arquitectura es más general, más lenta será
Universidad Católica Andrés BelloDirección de Formación ContinuaEscuela de Ingeniería Informática Prof. Wílmer Pereira
Certificado de Formación ProfesionalGerencia de Proyectos de Software
Módulo IV
SensoresSensoresContacto: Limitados para explorarFuerza: Dificiles de manejarInfrarojos: Sensibles a la luz solar y fluorescentesCámaras: Se debe tener gran capacidad de procesamientoSonares:
Muy utilizados en navegación con pulsos > 20KHz 300 mts/seg => 1 mt en 0,006 seg
Problemas: El rayo es cónico => puede no dar la distancia más corta A ciertos ángulos de reflexión, pueden desaparecer obstáculos Múltiples rebotes => ruido => falsos obstáculos
Universidad Católica Andrés BelloDirección de Formación ContinuaEscuela de Ingeniería Informática Prof. Wílmer Pereira
Certificado de Formación ProfesionalGerencia de Proyectos de Software
Módulo IV
EfectoresEfectoresLocomoción:
Estáticamente estable (no se cae ante pausas)Dinámicamente estable (más rápido pero complejo al programar)
Manipulación:Holomónico (gdl del robot = gdl del ambiente) o no holomónicoRotatorio o Prismático (Mayor gdl son más precisos pero más
complejos de programar)Motores
Hidraulicos: Aceite mineral rápidos y gran capacidad de carga, pero ... dificil de mantenimiento y costosos
Eléctricos: Motor paso a paso precisos, fiables y silenciosos, pero ... Potencia limitada
Neumáticos: Aire a presión barato y sencillo de mantenimiento, pero ... Dificil de control continuo y ruidosos
Universidad Católica Andrés BelloDirección de Formación ContinuaEscuela de Ingeniería Informática Prof. Wílmer Pereira
Certificado de Formación ProfesionalGerencia de Proyectos de Software
Módulo IV
LegomindstormLegomindstorm
Sensores adicionales:UltrasónicosTemperaturaRotaciónCámara ...
Facilidades de software:Programación visual orientado a eventos
• Procesamiento concurrente en tiempo real• Únicas variables internas: contador y reloj• Ciclos de ejecución controlados por eventos• Comunicación entre RCX’s a través del puerto infrarojo
Firmwares en Java, C, VisualBasic, etc.Extensiones para diseñar criaturas, robots deportistas y módulos espaciales
Kit robótico básico con hardware configurable y software para programar aplicaciones móviles
Universidad Católica Andrés BelloDirección de Formación ContinuaEscuela de Ingeniería Informática Prof. Wílmer Pereira
Certificado de Formación ProfesionalGerencia de Proyectos de Software
Módulo IV
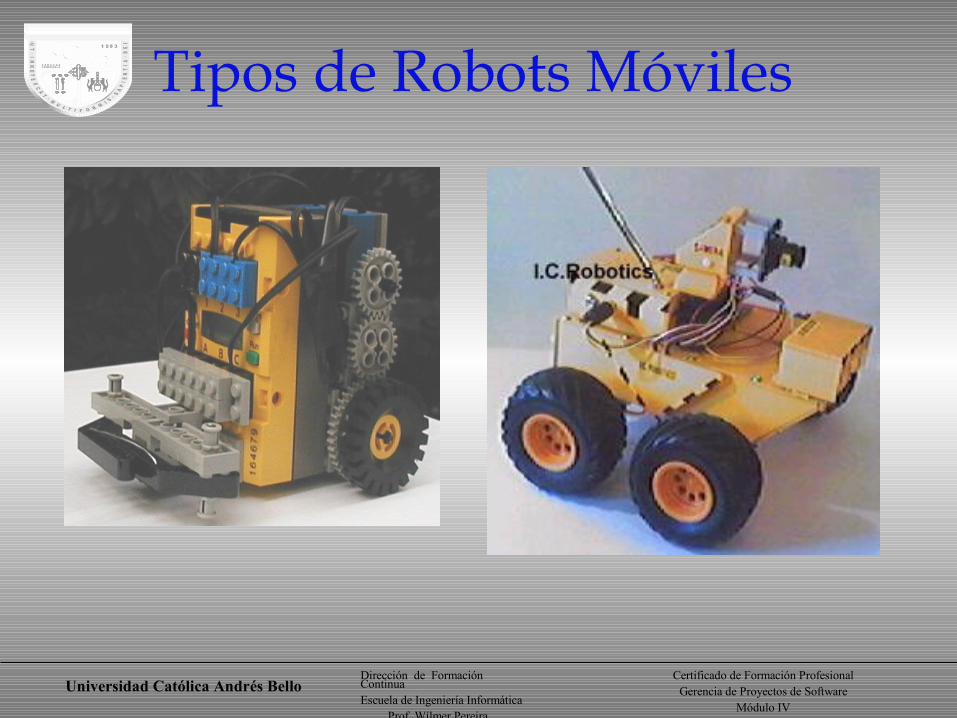
Tipos de Robots Móviles
Universidad Católica Andrés BelloDirección de Formación ContinuaEscuela de Ingeniería Informática Prof. Wílmer Pereira
Certificado de Formación ProfesionalGerencia de Proyectos de Software
Módulo IV
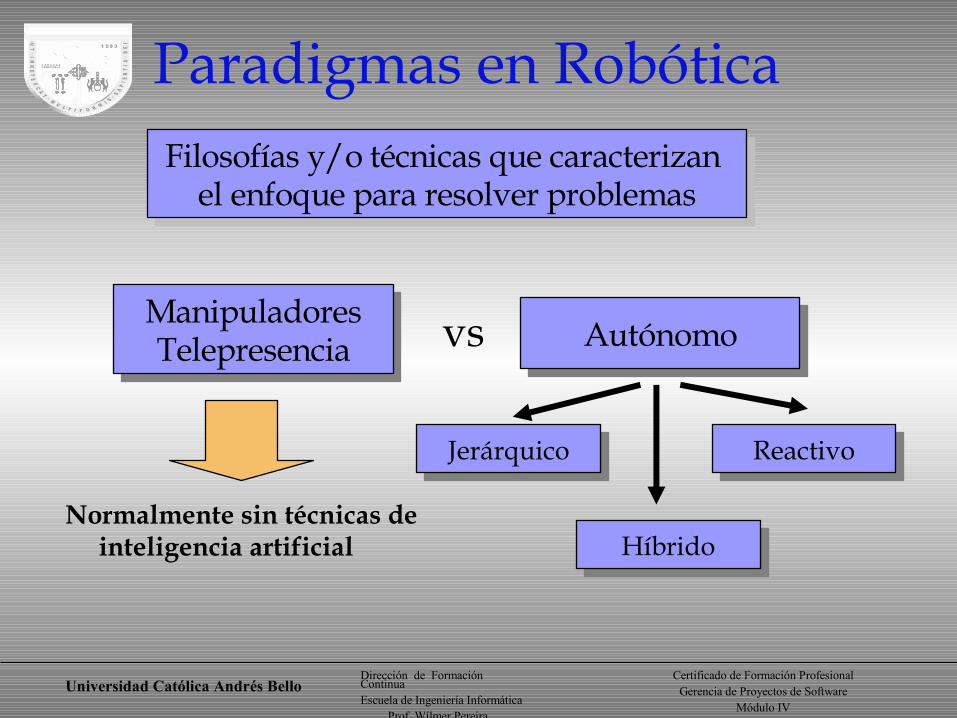
Paradigmas en Robótica
ManipuladoresTelepresencia Autónomovs
Jerárquico
Híbrido
Reactivo
Normalmente sin técnicas de inteligencia artificial
Filosofías y/o técnicas que caracterizan el enfoque para resolver problemas
Universidad Católica Andrés BelloDirección de Formación ContinuaEscuela de Ingeniería Informática Prof. Wílmer Pereira
Certificado de Formación ProfesionalGerencia de Proyectos de Software
Módulo IV
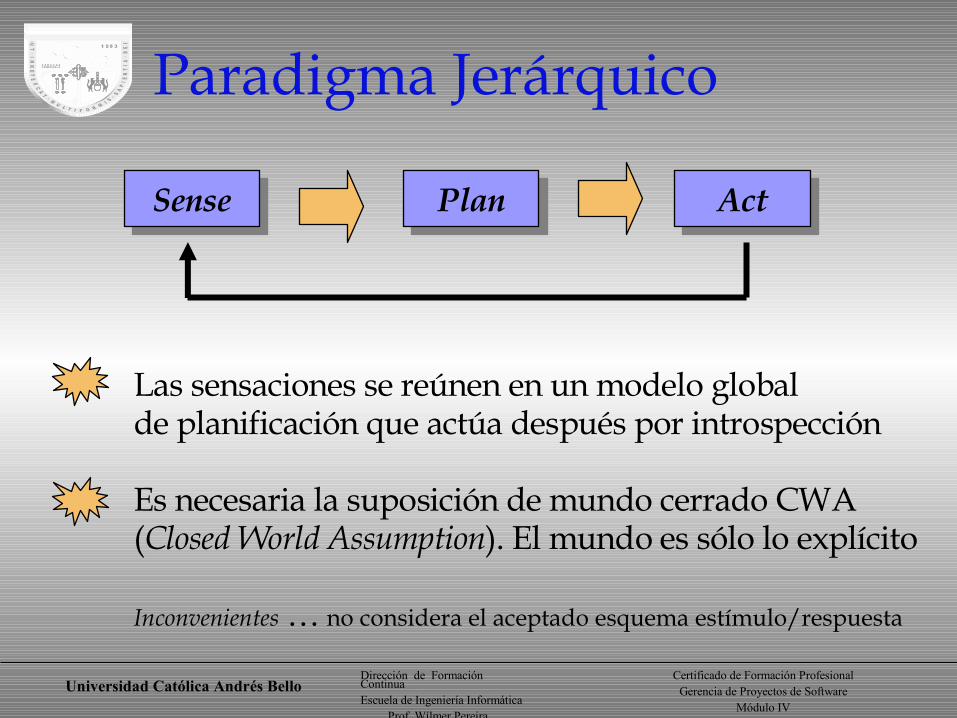
Paradigma Jerárquico
Sense Plan Act
Las sensaciones se reúnen en un modelo global de planificación que actúa después por introspección
Es necesaria la suposición de mundo cerrado CWA(Closed World Assumption). El mundo es sólo lo explícito
Inconvenientes … no considera el aceptado esquema estímulo/respuesta
Universidad Católica Andrés BelloDirección de Formación ContinuaEscuela de Ingeniería Informática Prof. Wílmer Pereira
Certificado de Formación ProfesionalGerencia de Proyectos de Software
Módulo IV
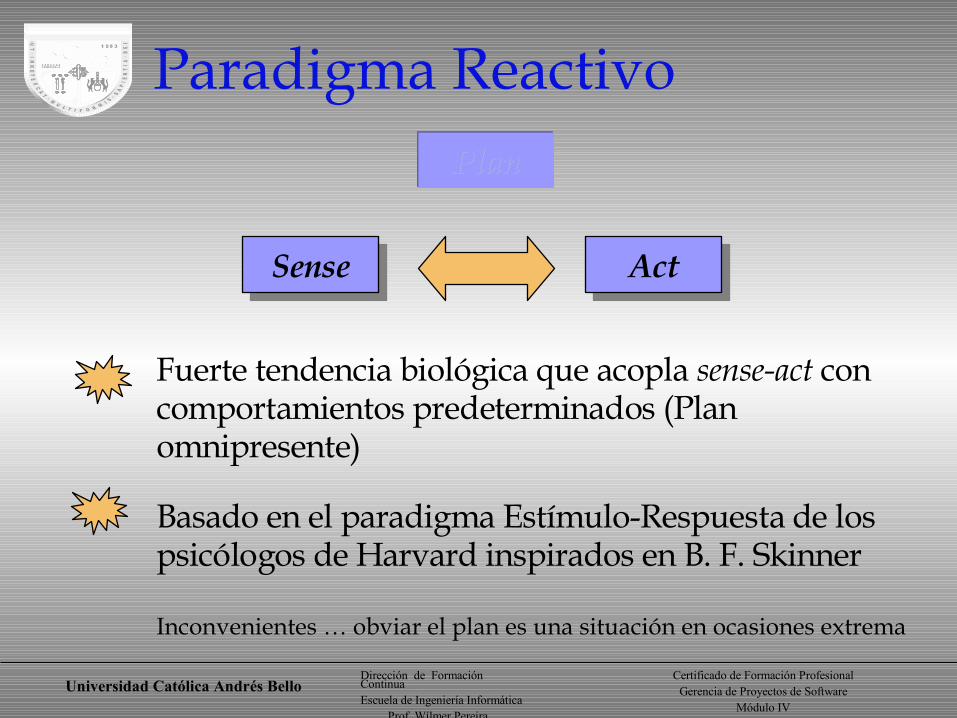
Sense Act
Paradigma ReactivoPlanPlan
Fuerte tendencia biológica que acopla sense-act con comportamientos predeterminados (Plan omnipresente)
Basado en el paradigma Estímulo-Respuesta de los psicólogos de Harvard inspirados en B. F. Skinner
Inconvenientes … obviar el plan es una situación en ocasiones extrema
Universidad Católica Andrés BelloDirección de Formación ContinuaEscuela de Ingeniería Informática Prof. Wílmer Pereira
Certificado de Formación ProfesionalGerencia de Proyectos de Software
Módulo IV
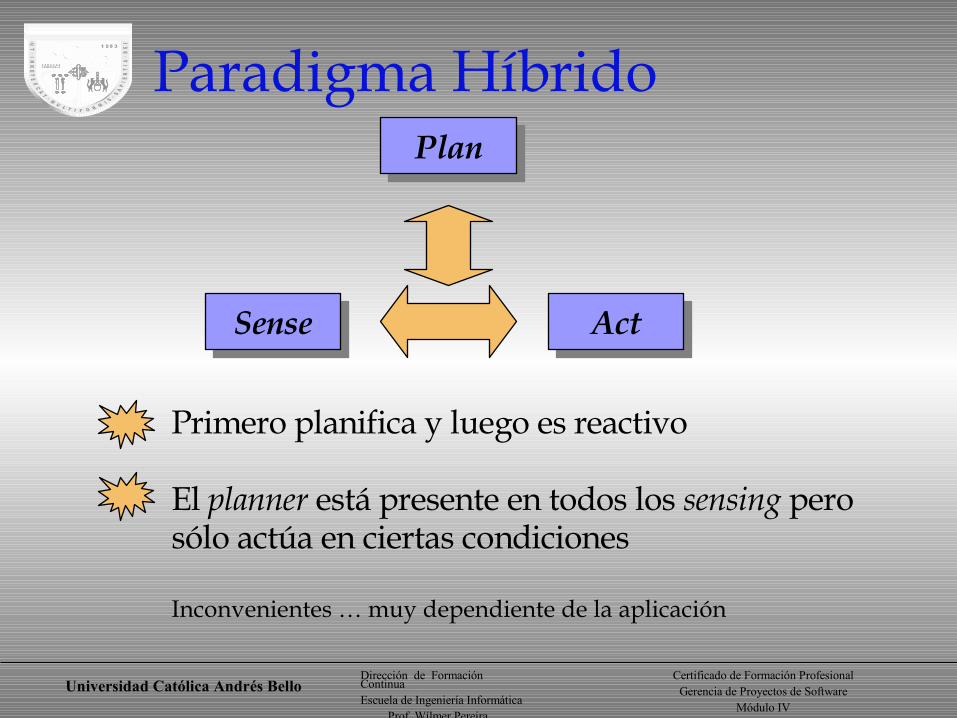
Sense Act
Plan
Paradigma Híbrido
Primero planifica y luego es reactivo
El planner está presente en todos los sensing pero sólo actúa en ciertas condiciones
Inconvenientes … muy dependiente de la aplicación
Universidad Católica Andrés BelloDirección de Formación ContinuaEscuela de Ingeniería Informática Prof. Wílmer Pereira
Certificado de Formación ProfesionalGerencia de Proyectos de Software
Módulo IV
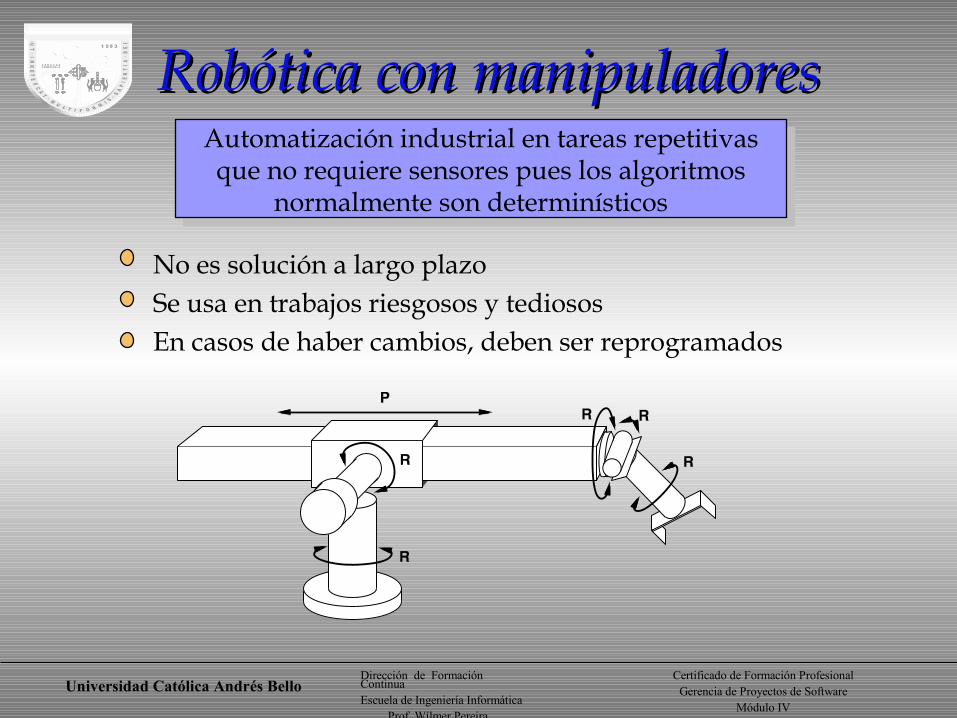
Robótica con manipuladoresRobótica con manipuladores
No es solución a largo plazoSe usa en trabajos riesgosos y tediososEn casos de haber cambios, deben ser reprogramados
Automatización industrial en tareas repetitivasque no requiere sensores pues los algoritmos
normalmente son determinísticos
Universidad Católica Andrés BelloDirección de Formación ContinuaEscuela de Ingeniería Informática Prof. Wílmer Pereira
Certificado de Formación ProfesionalGerencia de Proyectos de Software
Módulo IV
Integración de Paradigmas: Robótica Espacial
La robótica espacial integra todos los paradigmas pues debe ser autónomo y también es posible la telepresencia
Rovers recientes Spirit y Opportunity (Enero 2004) activosmás del tiempo previsto
IDEA = Agentes Inteligentes de Ejecución Instalable, futuros robots en el Centro Ames (NASA), en Silicon Valley.
Capsula Huygens de la misión Cassini, que se posó en Titán (una de las lunas de Jupiter)
Multiagentes