instituto politécnico nacional - tesis.ipn.mxtesis.ipn.mx/jspui/bitstream/123456789/12655/1/tesis...
TRANSCRIPT

INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
PREDICCIÓN DE PÉRDIDAS EN TIEMPO REAL EN EMPALMES
DE FIBRA ÓPTICA MULTIMODO DE ÍNDICE GRADUAL A TRAVÉS DE CAPTURA DE VÍDEO EN MATLAB
TESIS
QUE PARA OBTENER EL TÍTULO DE: INGENIERO EN COMUNICACIONES Y ELECTRÓNICA
PRESENTAN:
VÍCTOR GUTIÉRREZ LUNA LORENA RUTH HERNÁNDEZ GALICIA
ASESORES:DR. RAÚL CASTILLO PÉREZ
REBECA FLORES DELGADO
MEXICO, D.F. 2013

QUE PARA OBTENER EL TITULO DEPOR LA OPCIÓN DE TITULACIÓN
DEBERA (N) DESARROLLAR
INGENIERO EN COMUNICACIONES Y ELECTRÓNICA
TESIS COLECTIVA y EXAMEN ORAL INDIVIDUAL
C. VICTOR GUTIERREZ LUNAC. LORENA RUTH HERNANDEZ GALICIA
INSTITUTO POLITÉCNICO NACIONALESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELECTRICA
UNIDAD PROFESIONAL ~'ADOLFO LÓPEZ MATEOS"
REPORTE TÉCNICO
"PREDICCIÓN DE PÉRDIDAS EN TIEMPO REAL EN EMPALMES DE FIBRA ÓPTICA MUL TIMODODE ÍNDICE GRADUAL A TRAVÉS DE CAPTURA DE VÍDEO EN MATLAB"
PREDECIR LAS PÉRDIDAS EN TIEMPO REAL QUE SE GENERA EN LOS EMPALMES POR FUSIÓN DEFIBRA ÓPTICA MUL TIMODO DE ÍNDICE GRADUAL CON EL PROCESAMIENTO DE VIDEO EN MATLAB
• OBJETIVO .• INTRODUCCIÓN• JUSTIFICACIÓN• SISTEMA BÁSICO GENERAL• PROCEDIMIENTOS PRÁCTICOS DE CONECTORIZACIÓN y EMPALMES• INTERFAZ GRÁFICA DE USUARIOS (GUI)• RESULTADOS• CONCLUSIONES• ANEXOS• GLOSARIO• BIBLIOGRAFÍA / REFERENCIAS
MÉXI F. A 08 DE OCTUBRE DE 2013
ASESORES
DR. RAUL CASTILLO PEREZ ;¡".CAF Of.~JI'1 ~y , ~.'J AUtOE~~' -- .'Vi~6UA \
ING. PATRICIA LO NA RAMIREZ 1mJEFE DEL DEPARTAMENTO DE
INGENIERÍA EN COMUNICACIONES Y ELECTRONICA

Instituto Politécnico Nacional E S I M E
II | Página
AGRADECIMIENTOS:
A mi amado México, al Instituto Politécnico Nacional y aquellas instituciones que fueron mi
hogar a lo largo de mi formación profesional.
A mis padres, Braulia y Rafael, que con amor, esfuerzo e ilusiones me han apoyado
incondicionalmente en mis decisiones. A ellos, por inculcarme el valor del trabajo y la
dedicación y sobre todo por regalarme lo más valioso en el arte de la vida, principios.
A mi hermano Héctor, por hacer de mi camino algo divertido y memorable, por compartir sus
experiencias e inspirarme a creer que los sueños se pueden hacer realidad. Gracias por
confiar en mí.
Al Dr. Raúl Castillo Pérez, por su tiempo, paciencia, sentido del humor, ideas valiosas, entrega
y pasión que hoy se reflejan en esta tesis.
A los más de cien profesores que compartieron sus conocimientos con la fe y el cariño para
formar un profesionista integro al servicio de nuestro país.
A mis amigos, Donoban, Luis, Sergio, Omar, Guadalupe Hernández , Germán y a los que
conocí en Madrid, Guadalupe Berber, Sergio Correa, Iván, Ricardo y César, por todo lo vivido,
por compartir alegrías, éxitos, tristezas, desvelos, ideas y proyectos de vida. Por apoyarme en
las buenas y en las malas, darme sus consejos y críticas cuando fueron necesarias. Gracias
por permitirme entrar a su vida y que ustedes formen ahora parte de la mía.
A mi amiga, la Ing. Lorena Hernández, por darme el placer de trabajar a su lado en esta tesis,
ser una persona perseverante y tomarlo siempre con humor.
A la vida y a Dios por darme la fortuna de recibir los legados más grandes, educación y
trabajo con la convicción de poner “La técnica al servicio de la Patria”.
Gutiérrez Luna Víctor

Instituto Politécnico Nacional E S I M E
III | Página
AGRADECIMIENTOS:
Esta tesis se la dedico a Dios quien siempre me ha acompañado y guiado en cada paso que he
dado, dándome fuerzas para seguir adelante sin importar los problemas que se han
presentado.
A mis padres, Reyes y Bárbara, quienes les debo lo que soy ahora. Gracias por su apoyo,
consejos, comprensión, amor y ayudarme con los recursos necesarios para estudiar.
A mi madre Bárbara, la mejor madre del mundo, quien siempre lo ha dado todo por sus hijos.
Nunca podre pagarle todo lo que ha hecho por mí.
A mis abuelos Guadalupe y Bartolo porque me inspiraron dándome ejemplos dignos de
superación y entrega.
Al Dr. Raúl Castillo Pérez por su incondicional apoyo, por creer en nosotros. Admiro las ganas
y el esfuerzo que realiza en cada actividad.
A todos los profesores que formaron parte de mi vida académica, les debo cada
conocimiento adquirido. En especial a la Dr. Alma Alicia Benítez Pérez quien fue un gran
apoyo durante el transcurso de mis estudios.
A mi compañero de tesis Ing. Víctor Gutiérrez Luna, al cual le tengo un gran aprecio, lo
considero un gran amigo, le agradezco el apoyo y el compromiso que tuvo en cada trabajo
realizado.
A mi novio por estar conmigo siempre en las buenas y en las malas y compartir infinidad de
momentos juntos.
A cada uno de los amigos que conocí en el transcurso de la carrera, sería imposible nombrar
a cada uno. En especial a mi amigo Octavio Jaimes Botello por su sincera amistad y la
paciencia que tuvo conmigo .A mis amigos Guadalupe Berber, Sergio Correa, Iván, Ricardo y
César por compartir tantos momentos inolvidables en la experiencia que tuve en Madrid,
gracias por siempre cuidarme y apoyarme.
A mi gran país: México por brindarme las oportunidades de desarrollarme como
profesionista.
Al Instituto Politécnico Nacional fuente de la cual sacie mi sed de conocimientos y
experiencias que me seguirán por toda la vida.
A la vida.

Instituto Politécnico Nacional E S I M E
IV | Página
A todos los que directa o indirectamente ayudaron a la realización de este proyecto.
“El futuro tiene muchos nombres. Para los débiles es lo inalcanzable. Para los temerosos, lo
desconocido. Para los valientes es la oportunidad.” (Víctor Hugo)
Hernández Galicia Lorena Ruth

Instituto Politécnico Nacional E S I M E
V | Página
O B J E T I V O
Predecir las pérdidas en tiempo real que se generan en los
empalmes por fusión de fibra óptica multimodo de índice gradual
con el procesamiento de video en MATLAB.

Instituto Politécnico Nacional E S I M E
VI | Página
OBJETIVOS PARTICULARES:
1. Identificar las características generales de un sistema de comunicaciones por fibra
óptica y describir los mecanismos de conexión existentes para la misma.
2. Analizar los parámetros que producen las pérdidas en un empalme por fusión.
3. Desarrollar el algoritmo en Matlab para el cálculo predictivo en tiempo real de las
pérdidas del empalme por fusión mediante una interfaz gráfica de usuario.
4. Implementar el sistema físico que permita la utilización del algoritmo.
5. Realizar empalmes por el método de fusión y comparar la pérdida que se predice con
la pérdida medida.
HIPÓTESIS:
Es posible determinar de forma predictiva las pérdidas de un empalme por fusión en tiempo
real.
El uso de Matlab permite desarrollar un algoritmo capaz de calcular las pérdidas mediante la
interfaz de usuario y el procesamiento de video.
Será posible alcanzar predicciones de hasta +/- 0.1 dB de diferencia con la pérdida medida.

Instituto Politécnico Nacional E S I M E
VII | Página
ÍNDICE
CAPÍTULO 1: SISTEMA BÁSICO GENERAL
1.1 Conceptos básicos ............................................................................................................ 2
1.1.1 Comparación con otros medios de transmisión .................................................................. 3
1.1.2 Evolución de los sistemas de onda de luz ........................................................................... 4
1.2 Descripción del sistema óptico general ............................................................................. 6
1.2.1 Fibras ópticas como un canal de comunicación ................................................................. 6
1.2.2 Transmisores ópticos .............................................................................................................. 7
1.2.3 Receptores ópticos .................................................................................................................. 8
1.2.4 Ventaja Potenciales del uso de la fibra óptica .................................................................... 9
1.2.5 Campos de aplicación............................................................................................................. 9
1.3 Mecanismos de conexión ................................................................................................ 10
1.3.1 Conectores ....................................................................................................................... 12
1.3.2 Empalmes ......................................................................................................................... 13
1.3.2.1 Tipos de empalmes ................................................................................................. 14
1.3.2.2 Empalmes mecánicos ............................................................................................. 14
1.3.2.3 Empalmes por fusión .............................................................................................. 15
1.4 Pérdidas ......................................................................................................................... 18
1.4.1 Tipos de pérdidas existentes ......................................................................................... 18
1.4.2 Atenuación en fibras ópticas .......................................................................................... 19
1.4.3 Mecanismos de atenuación ........................................................................................... 19
1.5 Mediciones en las fibras ópticas ..................................................................................... 22
CAPÍTULO 2: PROCEDIMIENTOS PRÁCTICOS DE CONECTORIZACIÓN Y
EMPALMES
2.1 Conectorización de fibra óptica ....................................................................................... 25
2.1.1 Proceso de corte para SC .................................................................................................... 25

Instituto Politécnico Nacional E S I M E
VIII | Página
2.1.2 Proceso de corte para ST .................................................................................................... 25
2.1.3 Técnica de pulido .................................................................................................................. 26
2.2 Realización de conectorización ST ................................................................................. 28
2.3 Medición de atenuación……………..…………………………………………….………………………………………….… 33
2.3.1 Medida directa ........................................................................................................................ 34
2.3.2 Medida por inserción ............................................................................................................. 36
2.3.3 Medida por sustitución .......................................................................................................... 37
2.3.4 Selección del método de medición a utilizar ..................................................................... 38
2.3.5 Selección de la ventana de trabajo y dirección de transmisión en las fibras ............... 39
2.4 Proceso de empalme ...................................................................................................... 41
2.4.1 Cortadora FUJIKURA modelo CT-02 ................................................................................. 41
2.4.2 Cortadora MEXFO FSC-105 ................................................................................................ 42
2.4.3 Empalmadora por fusión TRITEC ....................................................................................... 43
2.5 Procedimiento práctico de empalme ............................................................................... 45
2.6 Comparacion de empalmadora TRITEC con otras empalmadoras que cuentan con
prediccion de pérdidas. ......................................................................................................... 46
CAPÍTULO 3: INTERFAZ GRÁFICA DE USUARIO (GUI)
3.1 Uso de MATLAB ............................................................................................................. 49
3.2 Guide .............................................................................................................................. 50
3.3 Interfaz gráfica de usuario (GUI) ..................................................................................... 51
3.4 Creación de la GUI en matlab ......................................................................................... 51
3.5 El entorno guide .............................................................................................................. 52
3.6 Manejo de datos entre los elementos de la aplicación y el archivo .m ............................. 55
3.7 Los componentes físicos ................................................................................................ 58
3.8 Adquisición de imágenes y video .................................................................................... 61
3.9 Configuración de la cámara ............................................................................................ 61

Instituto Politécnico Nacional E S I M E
IX | Página
3.10 Construcción de la GUI ................................................................................................. 64
3.11 Procesamiento de la imagen ......................................................................................... 67
3.12 Evaluación del corte ...................................................................................................... 70
3.13 Evaluación de la alineación ........................................................................................... 71
3.14 Evaluación de la separación ......................................................................................... 73
3.15 Lógica difusa ................................................................................................................. 74
3.16 Conjuntos difusos ........................................................................................................ 75
3.17 Tipos de sistemas de lógica difusa................................................................................ 77
3.18 Sistema basado en técnicas de Lógica Difusa .............................................................. 77
3.19 Fuzzy en MATLAB ........................................................................................................ 78
CAPÍTULO 4: RESULTADOS
4.1 Resultados de la interfaz gráfica de usuario .................................................................... 83
4.1.1 Cortes ................................................................................................................................ 86
4.1.2 Alineación ............................................................................................................................... 89
4.1.3 Separación .............................................................................................................................. 91
4.1.4 Junto ........................................................................................................................................ 91
4.1.5 Pérdidas .................................................................................................................................. 93
4.1.6 Ejecución del empalme......................................................................................................... 93
4.2 Resultados obtenidos de los empalmes realizados ......................................................... 94
4.2.1 Caso con menor error en la predicción .............................................................................. 96
4.2.2 Caso con menor exactitud en la predicción ...................................................................... 97
CONCLUSIONES ............................................................................................................... 100
Anexo A: Códigos ............................................................................................................... 102
Glosario .............................................................................................................................. 124
Biblografía / Referencias ..................................................................................................... 126

Instituto Politécnico Nacional E S I M E
X | Página
ÍNDICE DE FIGURAS
Figura 1.1. Incremento en el producto BL durante el período 1975 a 2000 a través de varias
generaciones de los sistemas de onda de luz. Se utilizan diferentes símbolos para las sucesivas
generaciones [2]…………………………………………………………………………………………………..4
Figura 1.2. Incremento de la capacidad de los sistemas de onda de luz realizados después de 1980.
Sistemas comerciales (círculos) siguen las manifestaciones de la investigación (cuadrados) con un
retraso de unos pocos años. El cambio en la pendiente después de 1992 se debe a la llegada de la
tecnología WDM…………………………………………………………………………………..………….…..5
Figura 1.3. Sistema genérico de comunicación óptica [2]………………………………….…………….….6
Figura 1.4. Componentes de un transmisor óptico [2]………………………………….…………………….7
Figura 1.5. Componentes de un receptor óptico [2]………………………………………………………….8
Figura 1. 6 Sección de un conector de férula cilíndrica [3]...............................................................13
Figura 1.7 Empalmes mecánicos empleando sustratos ranurados en V………………………………....15
Figura 1.8 Empalme con pulido giratorio…………………………………………....………………………..15
Figura 1.8 Figura 1.9 Empalme capilar………………………….…………………………………………....15
Figura 1.10. Empalmadora por fusión……………………………………....……………………………...…16
Figura 1.11. Tipos de desalineamiento mecánico que se presentan en la unión entre fibras ópticas .18
Figura 1.12 Causas que originan las pérdidas intrínsecas en la unión entre fibras……………………..19
Figura 1.13 Curva de atenuación típica de una fibra óptica expresada en dB/km en función de la
longitud de onda de la señal. Así mismo se muestran los diversos mecanismos de pérdidas y su
dependencia espectral………………………………………………………………………………………….20
Figura 1.14. Atenuación expresada en dB/km en función del ancho de banda de la señal de
información para diversos portadores metálicos y modelos de fibra óptica [3]. …………….......….22
Figura 2.1. Fibra multimodo de índice gradual………………………………………………….……………28
Figura 2.2. Desnudado de la fibra a) retirado de la cubierta de la fibra, b) medición del tamaño de los
cortes, c) corte del kevlar, d) retirado del buffer, e) retirado del buffer primario, f) limpieza………….29
Figura 2.3. Conectorización a) prueba de continuidad b) colocación de la cola del conector, c)
colocación del anillo de rebordeo, d) preparación de la resina epóxi, e) Aplicación de la resina…….30
Figura 2.4. Finalizado de conectarización a) anillo de rebordeo, b) ponchado de anillo de rebordeo,
c)gota de resina epóxica sobre base de la fibra d) Producto final………………………………………..31

Instituto Politécnico Nacional E S I M E
XI | Página
Figura 2.5. Proceso de pulido a) material de pulido, b) corte de exceso de fibra, c) humedecimiento de
lija, d) ejecución de movimientos, e) revisión de calidad de pulido, f) lijas utilizadas, g) resultado del
proceso de pulido. ………………………………………………………………………………………………33
Figura 2.6. Material utilizado a) medidor de potencia, b)generador de potencia 1300 nm, c)generador
de potencia 850 nm, d) adaptador, e) fibras bajo prueba……………………………………………...…..34
Figura 2.7. Medida Directa de atenuación……………………………………………………………………35
Figura 2.8. Medida por inserción a) Medición con la fibra corta b) Inserción de la fibra larga………...36
Figura 2.9. Medida por sustitución a) Medición con la fibra corta b) Medición de la fibra larga……….37
Figura 2.10. Medida Directa………………………………………………………………….………………...38
Figura 2.11. Medida por Inserción……………………………………………………….……………………38
Figura 2.12. Cortadora FUJIKURA modelo CT-02……………………………………….……………….…41
Figura 2.13. Cortadora MEXFO FSC-105……………………………………………….……………………42
Figura 2.14. Gráfica del funcionamiento de la empalmadora marca TRITEC modelo FASE II………..44
Figura 2.15 Proceso de empalme de una fibra óptica por medio del método de fusión a) pelado de
cubierta, b) corte de kevlar, c) corte de fibra, d) colocación de las fibras en la empalmadora, e)
resultado final…………………………………………………………………………………………………....45
Figura 2.16. Empalmadora TRITEC Fase II…………………………………………….…………………...46
Figura 2.17. Empalmadora óptica Fujikura FSM-60S………………………………..…………………….47
Figura 2.18. Empalmadora Digital KL-300T…………………………………………….………………..…..47
Figura 3.1. Ventana de inicio y arranque de Matlab 2011a……………………………………………..….49
Figura 3.2. Modos de accesar a la GUIDE de Matlab……………………………………………………....52
Figura 3.3. Ventana de inicio rápido de una GUI…………………………………………………..……… 52
Figura 3.4. Área de trabajo de GUIDE………………………………………………………………………..53
Figura 3.5. Entorno de diseño con los componentes etiquetados………………………………………..54
Figura 3.6. Menú mostrado en Property Inspector………………………………………………….……....56
Figura 3.7 Arreglo de dispositivos para la predicción de pérdidas en empalmes…………………… ..59
Figura 3.8 Estructura de la GUI diseñada para predecir pérdidas……………………………….……… 64
Figura 3.9. a) Imagen original, b) Imagen en escala de grises, c) Imagen en blanco y negro, d) imagen
rotada, e) Imagen recortada…………………………………………………………………….…………… 68
Instituto Politécnico Nacional E S I M E
XII | Página
Figura 3.10. Proceso de rotación y conversión a blanco y negro de la imagen con las fibras
separadas……………………………….……………………………………………………………………….70
Figura 3.11. Mal corte en la fibra derecha a) Fibras separadas, b) Fibras juntas…………………..…..71
Figura 3.12. Alineación de las fibras a) Buena alineación, b) mala alineación…………………………..71
Figura 3.13. Figura que muestra la influencia de las sombras en la imagen blanco y negro de la
fibra……………………………………………………………………………………………………………… 72
Figura 3.14. Fibras desalineadas: a) Antes del empalme, b) Después del empalme…………………...72
Figura 3.22.Manipulación de la lógica…………………………………………………………..……………75
Figura 3.15. Conjuntos difusos para la altura de una persona …………………………………….……..76
Figura 3.16. Conjuntos clásicos para la altura de una persona …………………………………………. 77
Figura 3.25. Sistema basado en técnicas de Lógica Difusa ……………………………………………...78
Figura 3.26. Menú principal del Fuzzy Toolbox, FIS Editor…………………………………………… …..79
Figura 3.27. Elección de Modelo………………………………………………………………………………79
Figura 3.28. Al agregar una variable, es posible visualizarla en el menú gráfico. La variable
actualmente seleccionada aparece enmarcada en rojo…………………………………………………….80
Figura 3.29. Editor de Funciones de Pertenencia, Membership Editor………………………………..….80
Figura 3.30. Editor de Reglas, Rule Editor …………………………………………………………………..81
Figura 4.1. Montaje físico de los componentes para la predicción de pérdidas………………………..83
Figura 4.2. Arreglo para medición de atenuación por método de inserción…………………………..…84
Figura 4.3. Controlador de la cámara Web Logitech 9000…………………………………………………85
Figura 4.4. Funcionamiento de la Interfaz gráfica…………………………………………………………...87
Figura 4.5. Valores obtenidos por la función m_bordes para las fibras de la Figura 4.4…………..…87
Figura 4.6. Buen corte en ambos extremos……….…………………………………………………………88
Figura 4.7 Mal corte del lado izquierdo………………………………………………………………………88
Figura 4.8. Corte derecho malo……………………………………………………………………………….89
Figura 4.9. Ambos cortes son malos……………………………………..………….…………………….…89
Figura 4.10. Buena alineación………………………………………………………………………………..90
Figura 4.11. Mala alineación………………………………………………………………………………….90
Figura 4.12. Alineación regular………………………………………………………………………………90

Instituto Politécnico Nacional E S I M E
XIII | Página
Figura 4.13. Separación de las fibras ……………………………………………………………………….91
Figura 4.14. Separación de las fibras “Junto”……………………………………………………………..92
Figura 4.15. Valores obtenidos con la función m_bordes para las fibras juntas de la Figura 4.14….92
Figura 4.16. Ejecución del empalme………………………………………………………………………….93
Figura 4.17. Empalme #23, caso con mayor exactitud de la predicción…………………………………96
Figura 4.18. Empalme #3 con menor exactitud……………………………………………………………..97
Figura 4.19. Comparación de la pérdida predicha con la pérdida medida……………………………….98
Figura 4.20. ∆predicción (error en la predicción) …………………………………………………………...99
ÍNDICE DE TABLAS
Tabla1.1: Comparación entre ventajas de los empalmes y conectores…………………………………..13
Tabla 1.2. Elementos y funciones generales de una empalmadora por fusión………………………..…17
Tabla 2.1. Mediciones obtenidas por el método de sustitución……………………………….…………..38
Tabla 2.2. Resultados obtenidos por el método de inserción……………………………….……………..39
Tabla 2.3.Valor de potencia de la fibra corta en diferentes direcciones………………………..…………40
Tabla 2. 4. Medición de atenuación de la fibra de trabajo en dos direcciones diferentes………………40
Tabla 3.1. Principales componentes de la Interfaz Gráfica de Usuario………………………………….. 55
Tabla 3.2. Valores para la altura de una persona………………………………………………………….. 76
Tabla 4.1. Mediciones de atenuación por inserción………………………………………………….……...84
Tabla 4.2. Parámetros para alineación…………………………………………………………….…………89
Tabla 4.3. Resultados obtenidos de los empalmes realizados……………………………...……………. 95
DIAGRAMAS DE FLUJO
Diagrama de Flujo 3.1. Funcionamiento general del algoritmo de predicción de pérdidas…………...60

Instituto Politécnico Nacional E S I M E
XIV | Página
Introducción

Instituto Politécnico Nacional E S I M E
XV | Página
INTRODUCCIÓN
Aunque los intentos de transmitir información por medio de la luz se remontan a la antigüedad, recientemente se ha conseguido realizar tal transmisión de modo eficiente y útil. Con el desarrollo de dispositivos y sistemas de comunicación por fibra óptica, la implementación de infraestructuras de telecomunicación ha tenido impacto en la vida cotidiana del ser humano. Así, cada vez es más común tener acceso a los beneficios que nos brindan los sistemas de comunicaciones ópticos en comparación a otros sistemas convencionales de cobre, tales como bajas pérdidas en la transmisión, gran ancho de banda, menor peso y tamaño, inmunidad a la interferencia, seguridad de la señal, abundante materia prima, entre otros. Un factor importante a considerar al momento de utilizar fibra óptica es la distancia que ésta puede alcanzar en un enlace de comunicaciones, que si bien no es infinita puede ser de decenas de kilómetros antes de colocar un repetidor. Dado que no existe una fibra óptica de longitud interminable y considerando que la misma puede romperse, existen métodos que nos permiten unir los extremos consiguiendo pérdidas relativamente bajas, tales como la conectorización y los empalmes. Los empalmes introducen menos pérdidas que los conectores y por ello son una alternativa muy utilizada. Para el empalme de fibras existen distintos métodos de empalme siendo el más común el empalme por fusión. Sin embargo, los diferentes fenómenos que pueden perjudicar la transmisión en los sistemas de esta naturaleza deben ser enfoque de estudio cuando de obtener el mayor rendimiento se trata. La empresa MathWorks ofrece MATLAB como su principal producto para computación numérica, análisis y visualización de datos a través de la manipulación de matrices. Ofrece además numerosas herramientas especiales en “Toolboxes” para resolver problemas de aplicaciones específicas, por ejemplo de control, procesamiento de señales, de imagen, redes neuronales, etc. Para poder predecir las pérdidas en los empalmes por fusión de fibras ópticas multimodo de índice gradual hemos desarrollado una interfaz gráfica de usuario a través de la programación en MATLAB, permitiéndonos evaluar los parámetros que producen las pérdidas y a partir de ellos predecir su valor utilizando lógica difusa.

Instituto Politécnico Nacional E S I M E
XVI | Página
En el Capítulo 1 del presente trabajo mencionamos los conceptos básicos de un sistema básico general de comunicación por fibra óptica, así como las técnicas de conexión más usuales, por otro lado definimos los tipos de pérdidas y los mecanismos de atenuación. Posteriormente, en el Capítulo 2 se describen los procedimientos prácticos de conectorización y empalmes, ejemplificando el método de conectorización y pulido para un conector ST-ST. En este mismo capítulo se explican los tres métodos más comunes para la medición de la atenuación y el proceso de empalme por fusión mediante una empalmadora TRITEC. Para el Capítulo 3, se hace uso de las herramientas de MATLAB en la creación de la Interfaz Gráfica de Usuario (GUI) que nos sirve para mostrar la evaluación del corte, alineación, separación de las fibras y predecir con ello las pérdidas en el empalme. Por otro lado, se explica brevemente el uso la función fuzzy y su implementación con Matlab. Una vez implementado el algoritmo, en el Capítulo 4, se reportan los resultados del funcionamiento de la interfaz gráfica de usuario y la comparación de las predicciones obtenidas con las mediciones realizadas. Finalmente se exponen las conclusiones a partir de las observaciones hechas y los resultados obtenidos a lo largo de este trabajo.
Justificación
Instituto Politécnico Nacional E S I M E
XVIII | Página
JUSTIFICACIÓN
La comunicación por fibra óptica cuenta entre sus principales ventajas la transmisión
de datos a una alta tasa de transferencia permitiendo enviar información a largas
distancias sin necesidad de repetidoras en cientos y hasta miles de kilómetros,
siendo una tecnología en constante evolución. Para conseguir mayores distancias de
transmisión se realizan empalmes que consisten en la unión de fibras ópticas a
través de distintos métodos que ofrecen menores pérdidas en comparación a otros
medios de transmisión guiados como el par trenzado y el cable coaxial.
Sin embargo, la atenuación es un factor inevitable en los empalmes que afecta la
transmisión y por ello se hace necesario elaborar herramientas que reduzcan este
problema, de tal manera que se disminuya el uso de equipos regeneradores de señal
con los beneficios económicos que eso implica.
Este trabajo ofrece un método para predecir pérdidas en empalmes por fusión a
través de un algoritmo desarrollado en MATLAB. Las pérdidas que se generan en los
empalmes se pueden estimar conociendo la separación, alineación y calidad del
corte utilizando lógica difusa, lo que representa el ahorro de tiempo y optimización de
los recursos.
Con el algoritmo desarrollado, la predicción de las pérdidas se realiza en tiempo real
adaptando una cámara web conectada a una computadora y haciendo uso de una
empalmadora convencional, lo que resulta más económico en comparación al uso de
empalmadoras que tienen esta función incluida. Así, las industrias que fabrican
empalmadoras convencionales, las instituciones de educación y aquellos que
requieran realizar un empalme tendrán la posibilidad de integrar el algoritmo
desarrollado en sus equipos.

CAPÍTULO 1|“Sistema
básico general”
1

Instituto Politécnico Nacional E S I M E
2 | Página
CAPÍTULO 1: SISTEMA BÁSICO GENERAL
1.1 Conceptos básicos
Un sistema de comunicación transmite información de un lugar a otro separado por
pocos kilómetros o por distancias transoceánicas. Dicho proceso se realiza entre un
emisor y un receptor. La información se presenta bajo la forma de diversas señales
que tienen un significado preciso para éstos. [1]
Las telecomunicaciones se definen como comunicaciones a distancia. Los sistemas
ópticos de comunicación utilizan portadoras de altas frecuencias (~100 THz) en la
región visible o del infrarrojo cercano del espectro electromagnético. A veces se
llaman sistemas de ondas de luz para distinguirlos de los sistemas de microondas,
cuya frecuencia de portadora es normalmente menor por cinco órdenes de magnitud
(~ 1 GHz). Los sistemas de comunicación por medio de fibra óptica son sistemas de
ondas de luz que emplean fibras ópticas para la transmisión de información. Estos
sistemas han sido desplegados en todo el mundo desde 1980 [2].
Con las telecomunicaciones ópticas se visualizó la idea de controlar el medio de
propagación de la luz. Fue así como se originaron las guías de onda de luz a las que
se les llamó fibras ópticas, permitiendo que las ondas luminosas se propaguen
dentro de un cilindro de vidrio extremadamente puro y no absorbente.
En 1884 un físico irlandés, John Tyndall, mostró que la luz que se propaga en un
medio con alto índice de refracción no puede penetrar en un medio que tiene un
índice más bajo, cuando esta luz llega con un ángulo suficientemente pequeño. Este
principio, conocido con el nombre de reflexión total interna es la base del
funcionamiento de una fibra óptica.
Más tarde las fibras de plástico se utilizaron en medicina para alumbrar lugares de
difícil acceso; sin embargo estas fibras eran poco eficaces. La introducción de la fibra
de una cubierta protectora de menor índice y la utilización de haces de fibras,
permitieron que esta tecnología evolucionara y llegara a aplicarse sobre todo en el
campo de la medicina. La endoscopia fue el beneficio más grande que se obtuvo de
estos progresos [1].
No fue sino hasta el año de 1966 que, gracias a una publicación científica de K. C.
Kao y G. Z. Hockman, se consideró seriamente la posibilidad de utilizar fibras como
canal de transmisión en las telecomunicaciones. Sin embargo, esta utilización
necesitaba el logro de progresos tecnológicos tanto a nivel de las fibras como de las
fuentes de luz.

Instituto Politécnico Nacional E S I M E
3 | Página
1.1.1 Comparación con otros medios de transmisión
Dependiendo de la forma de conducir la señal a través del medio, los medios de
transmisión se pueden clasificar en dos grandes grupos: medios de transmisión
guiados y medios de transmisión no guiados. Por ser fibra óptica se hará la
comparación de ésta con los medios guiados.
Los medios de transmisión guiados están constituidos por un cable que se encarga
de la conducción (o guiado) de las señales desde un extremo al otro. Las principales
características de los medios guiados son el tipo de conductor utilizado, la velocidad
máxima de transmisión, las distancias máximas que puede ofrecer entre repetidores,
la inmunidad frente a interferencias electromagnéticas, la facilidad de instalación y la
capacidad de soportar diferentes tecnologías de nivel de enlace.
Dentro de los medios de transmisión guiados, los más utilizados en el campo de las
comunicaciones y la interconexión de ordenadores son:
El par trenzado: consiste en un par de hilos de cobre conductores cruzados entre sí,
con el objetivo de reducir el ruido de diafonía. A mayor número de cruces por unidad
de longitud, mejor comportamiento ante el problema de diafonía. Existen dos tipos de
par trenzado, protegido (Shielded Twisted Pair, STP) y no protegido (Unshielded
Twisted Pair, UTP). Ambos son cables de pares trenzado, pero el segundo no tiene
recubrimiento metálico externo como el primero, de modo que es más sensible a
las interferencias. Es un cable barato, flexible y sencillo de instalar [web 1].
Las aplicaciones principales en las que se hace uso de cables de par trenzado son
bucle de abonado y en redes LAN consiguiendo velocidades de varios centenares
de Mbps. Un ejemplo de este uso lo constituyen las redes 10/100/1000BASE-T.
Para señales analógicas se requieren amplificadores cada 5 o 6 kilómetros,
para señales digitales cada 2 ó 3 km. En transmisiones de señales analógicas punto
a punto, el ancho de banda puede llegar hasta 250 kHz. En transmisión de señales
digitales a larga distancia, la tasa de transmisión no es demasiado grande por lo cual
no es muy efectivo para estas aplicaciones.
Los cables de fibra óptica proporcionan una alternativa sobre el cable de par
trenzado y el cable coaxial, el cual se compone de un hilo conductor, llamado núcleo,
y una malla externa separados por un dieléctrico o aislante. Así, un cable con 8 fibras
ópticas tiene un tamaño bastante más pequeño que los cables de cobre, puede
soportar las mismas comunicaciones que 60 cables de 1623 pares de cobre o

Instituto Politécnico Nacional E S I M E
4 | Página
4 cables coaxiales de 8 tubos, todo ello con una distancia entre repetidores mucho
mayor.
Por otro lado, el peso del cable de fibra óptica es muchísimo menor que el de los
coaxiales, ya que una bobina del cable de 8 fibras antes citado puede pesar del
orden de 30 kg/km, lo que permite efectuar tendidos de 2 a 4 km de una sola vez,
mientras que en el caso de los cables de cobre no son prácticas las distancias
superiores a 250 - 300 m.
Además una ventaja adicional que tiene la fibra óptica es que tiene un ancho de
banda de varias decenas de GHz mientras que el cable coaxial tiene un ancho de banda de 400 MHz y 800 Mbps [web 2].
1.1.2 Evolución de los sistemas de onda de luz
La fase de investigación de los sistemas de comunicación de fibra óptica comenzó
alrededor de 1975. El enorme progreso realizado durante el período entre 1975 a
2000 se puede agrupar en varias generaciones distintas.Un parámetro comúnmente
utilizado para evaluar el desempeño de un sistema de comunicaciones es el producto
tasa de transmisión-distancia (BL), donde B es la tasa de transmisión y L es la
longitud de enlace.
La Figura 1.1 muestra el aumento en el producto BL durante este período de tiempo
tal como se cuantifica mediante experimentos de laboratorio diferentes. La línea recta
corresponde a una duplicación del producto BL cada año [2].
Figura 1.1. Incremento en el producto BL durante el período 1975 a 2000 a través de varias
generaciones de los sistemas de onda de luz. Se utilizan diferentes símbolos para las sucesivas
generaciones [2].

Instituto Politécnico Nacional E S I M E
5 | Página
En todas las generaciones, BL aumenta al principio, pero luego se empieza a saturar
a medida que la tecnología madura. Cada nueva generación trae consigo un cambio
fundamental que contribuye a mejorar aún más el rendimiento del sistema.
La cuarta generación de sistemas de onda de luz hace uso de la amplificación óptica
y multiplexación por división de longitud de onda (WDM) para aumentar la tasa de
bits. Como es evidente a partir de diferentes pendientes en la Figura 1.2, antes y
después de 1992, el advenimiento de la técnica WDM inició una revolución que dio
lugar a la duplicación de la capacidad del sistema cada 6 meses y condujo a
sistemas de ondas de luz que funcionan a una velocidad de bits de 10 Tb/s desde
2001.
Figura 1.2. Incremento de la capacidad de los sistemas de onda de luz realizados después de 1980. Sistemas comerciales (círculos) siguen las manifestaciones de la investigación (cuadrados) con un retraso de unos pocos años. El cambio en la pendiente después de 1992 se debe a la llegada de la tecnología WDM.
El énfasis actual de los sistemas de onda de luz WDM está en el aumento de la
capacidad de sistemas mediante la transmisión de varios canales. Con el aumento
de ancho de banda de la señal WDM, a menudo no es posible amplificar todos los
canales utilizando un solo amplificador. Como resultado, nuevos tipos de sistemas de
amplificación están siendo explorados para cubrir la región del espectro que se
extiende desde 1.45 hasta 1,62 µm [2].
La quinta generación de sistemas de comunicación de fibra óptica se refiere a
extender el rango de longitud de onda sobre la cual un sistema WDM puede
funcionar simultáneamente. La ventana de longitud de onda convencional, conocida
como banda C, cubre el rango de longitud de onda 1.53-1.57 µm. Los sistemas de

Instituto Politécnico Nacional E S I M E
6 | Página
quinta generación tratan de aumentar la velocidad de bits de cada canal. A pesar de
que la tecnología de comunicación de fibra óptica tiene apenas 25 años de edad, ha
progresado rápidamente y ha alcanzado cierto grado de madurez.
1.2 Descripción del sistema óptico general
En su forma más simple, un sistema de comunicación por fibra óptica está
constituido por tres elementos:
a) Un módulo de emisión, que tiene por función transformar la información en
forma de señal eléctrica a información en forma de luz. A este módulo se le
llamará emisor óptico.
b) Un canal de transmisión de la luz, que es la fibra óptica.
c) Un módulo de recepción, que tiene por función transformar la información
óptica recibida en información con la forma de señal eléctrica. A éste módulo
se le llamará receptor óptico [1].
El diagrama de bloques genérico de la Figura 1.3 se aplica a un sistema de
comunicación de fibra óptica, siendo el canal de comunicación un cable de fibra
óptica. Los otros dos componentes, el transmisor y el receptor óptico, están
diseñados para satisfacer las necesidades de un canal de comunicación específico.
[2]
Figura 1.3. Sistema genérico de comunicación óptica [2].
1.2.1 Fibras ópticas como un canal de comunicación
El papel de un canal de comunicación es el de transportar la señal óptica de un
transmisor hacia el receptor sin distorsionarlo. La mayoría de los sistemas de onda
de luz utilizan fibras ópticas como canal de comunicación por fibras de sílice, se
Instituto Politécnico Nacional E S I M E
7 | Página
puede transmitir la luz con pérdidas tan pequeñas como 0.2 dB/km. Incluso entonces,
la potencia óptica se reduce a sólo 1% después de 100 km. Por esta razón, las
pérdidas de fibra siguen siendo un problema importante en el diseño. Otra cuestión
importante es la dispersión de la fibra que conduce a la ampliación de los pulsos
ópticos individuales con su propagación. Si los pulsos ópticos se extienden
significativamente fuera de su ranura de transmisión asignada, la señal transmitida
será gravemente degradada y será imposible recuperar la señal original con alta
precisión [2].
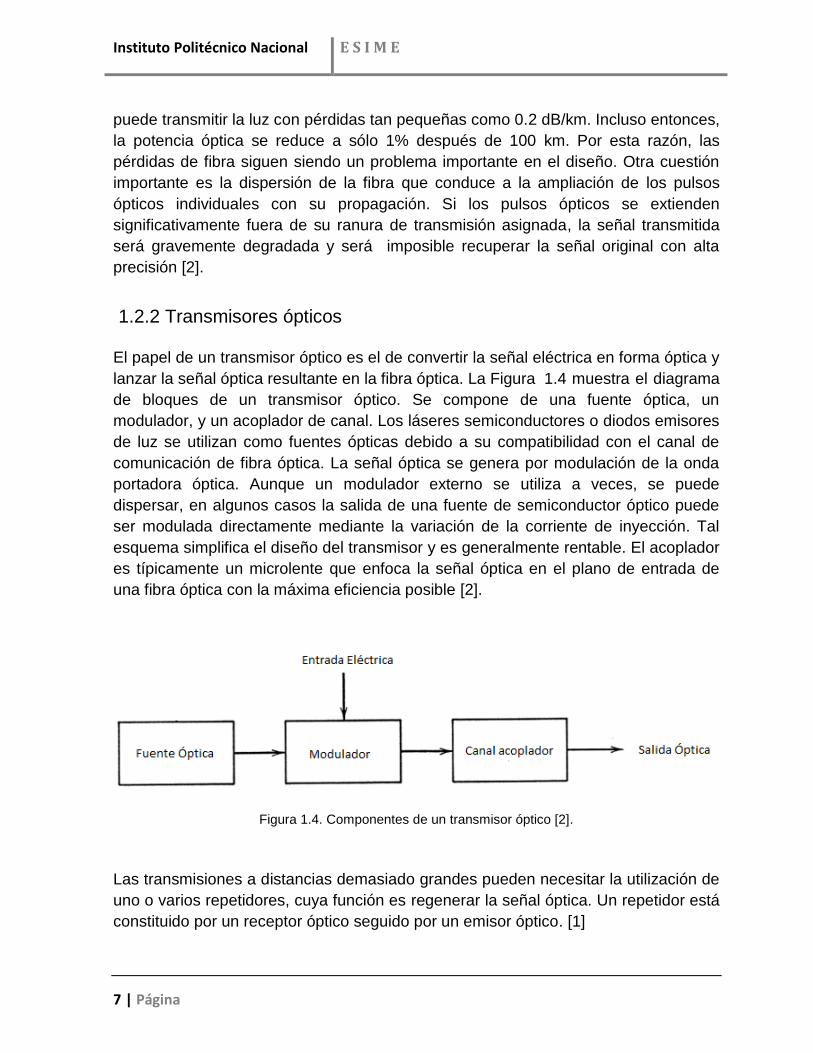
1.2.2 Transmisores ópticos
El papel de un transmisor óptico es el de convertir la señal eléctrica en forma óptica y
lanzar la señal óptica resultante en la fibra óptica. La Figura 1.4 muestra el diagrama
de bloques de un transmisor óptico. Se compone de una fuente óptica, un
modulador, y un acoplador de canal. Los láseres semiconductores o diodos emisores
de luz se utilizan como fuentes ópticas debido a su compatibilidad con el canal de
comunicación de fibra óptica. La señal óptica se genera por modulación de la onda
portadora óptica. Aunque un modulador externo se utiliza a veces, se puede
dispersar, en algunos casos la salida de una fuente de semiconductor óptico puede
ser modulada directamente mediante la variación de la corriente de inyección. Tal
esquema simplifica el diseño del transmisor y es generalmente rentable. El acoplador
es típicamente un microlente que enfoca la señal óptica en el plano de entrada de
una fibra óptica con la máxima eficiencia posible [2].
Figura 1.4. Componentes de un transmisor óptico [2].
Las transmisiones a distancias demasiado grandes pueden necesitar la utilización de
uno o varios repetidores, cuya función es regenerar la señal óptica. Un repetidor está
constituido por un receptor óptico seguido por un emisor óptico. [1]

Instituto Politécnico Nacional E S I M E
8 | Página
1.2.3 Receptores ópticos
Un receptor óptico convierte la señal óptica recibida en el extremo de salida de la
fibra en una señal eléctrica que es igual a la original. La Figura 1.5 muestra el
diagrama de bloques de un receptor óptico. Se compone de un acoplador, un
fotodetector, y un demodulador. El acoplador enfoca la señal óptica recibida en el
fotodetector. Los fotodiodos semiconductores se utilizan como fotodetectores debido
a su compatibilidad con el sistema en su conjunto. El diseño del demodulador
depende del formato de modulación utilizado por el sistema de ondas de luz. La
mayoría de los sistemas de onda de luz emplean un esquema denominado
"modulación de la intensidad con detección directa" (IM/DD). La demodulación en
este caso se realiza por un circuito de decisión que identifica bits como 1 ó 0,
dependiendo de la amplitud de la señal eléctrica. La precisión del circuito de decisión
depende de la SNR de la señal eléctrica generada en el fotodetector [2].
Figura 1.5. Componentes de un receptor óptico [2].
El rendimiento de un sistema digital de onda de luz se caracteriza a través de la tasa
de error de bit (BER). La BER se puede definir como el número de bits o bloques
incorrectamente recibidos, con respecto al total de bits o bloques enviados durante
un intervalo especificado de tiempo, es decir que una BER de 10-6 corresponde a un
promedio de un error recibido por cada millón de bits enviados. La mayoría de los
sistemas de ondas de luz especifican una BER de 10-9 como el requisito operativo, y
algunos incluso requieren una BER tan pequeña como 10-14.
Un parámetro importante para cualquier receptor es su sensibilidad. Por lo general se
define como el mínimo de potencia óptica promedio requerido para realizar una BER
de 10-9. La sensibilidad depende de la SNR, que a su vez depende de distintas

Instituto Politécnico Nacional E S I M E
9 | Página
fuentes de ruido que corrompen la señal recibida. Incluso para un receptor perfecto,
algo de ruido es introducido por el proceso de fotodetección. Esto se conoce como
ruido cuántico o ruido de disparo, ya que tiene su origen en la naturaleza de los
electrones.
1.2.4 Ventaja Potenciales del uso de la fibra óptica
Debido a sus mínimas pérdidas de señal y a sus óptimas propiedades de ancho de
banda, la fibra óptica puede ser usada en distancias más largas si la comparamos
con el cable de cobre. Su peso y tamaño reducido las hacen ideales en muchos
entornos donde el cable de cobre sería impráctico. Usando multiplexores, una sola
fibra puede reemplazar cientos de cables de cobre. Entre otras ventajas del uso de
fibra óptica tenemos aislamiento eléctrico, peso y dimensiones reducidos y que no
existe diafonía.
Gracias a la baja atenuación de las fibras actuales se puede acrecentar la distancia
entre las repetidoras en un sistema de comunicación por fibra óptica. De esta forma,
si se disminuye el número de repetidores (eliminándolos en la práctica) también se
aumenta la confiabilidad del sistema.
1.2.5 Campos de aplicación
Los campos de aplicación de las fibras ópticas son numerosos. A continuación se
enlistan los principales:
a) Telefonía:
Enlaces sin repetidoras entre centrales telefónicas.
Enlaces interurbanos con repetidoras.
Enlaces transoceánicos por cable óptico submarino.
Transmisión de datos.
Distribución de gran capacidad entre los abonados de servicios telefónicos,
videofónicos y de transmisión de datos.
b) Televisión:
Distribución por cable.
Enlaces cámara-estudio.
Teleconferencias.

Instituto Politécnico Nacional E S I M E
10 | Página
Sistemas de seguridad.
c) Informática:
Enlaces entre computadoras.
Enlace entre computadora y periféricos.
Conexión de material de oficina.
Enlaces internos de material informático.
d) Control de procedimiento e instrumentación:
Trabajo en un medio deflagrante.
Controles nucleares.
Instrumentación de medida y control.
e) Área militar
Comunicaciones tácticas.
Aviación (helicópteros, interceptores).
Marina (submarino, barcos).
Estos son los principales campos. En esta tecnología en plena evolución, todos los
días se descubren nuevas aplicaciones de las fibras ópticas.
1.3 Mecanismos de conexión
Al igual que con otros medios de transmisión, en la práctica existe la necesidad de
unir entre sí secciones o tramos longitudinales de los cables que constituyen un
enlace, así como la de proporcionar terminaciones adecuadas a éste (uniones de
fibra y fuente, uniones entre fibra y detector). Más aún, el reciente y continuo
desarrollo de nuevos componentes de fibra y su incorporación a enlaces punto a
punto y redes obliga también al empleo de esas mismas técnicas de unión [3].
Una unión es necesaria tras una ruptura en la continuidad del medio de transmisión
y, por tanto, la existencia de pérdidas en la señal es inevitable, por lo que han de
minimizarse al máximo. Aunque, las técnicas actuales de fabricación permiten la
obtención de preformas capaces de generar de forma continua hasta 200 km de
fibra, en la práctica la instalación de tramos de cable de esta longitud no es viable por
diversos motivos.
Instituto Politécnico Nacional E S I M E
11 | Página
Los empalmes y los conectores unen terminaciones de fibra óptica pero lo hacen de
diferente manera, entonces, también son usados para distintos propósitos. La unión
permanente entre dos fibras es conocida como un empalme de fibra y una conexión
desmontable entre ellas es realizada mediante el uso de un conector de fibra. En el
contexto de la electrónica, podríamos hacer la analogía de un empalme como
soldadura, y a los conectores como un enchufe. [6]
Generalmente, los conectores son usados para unir cable de fibra con el transmisor
(o el receptor), mientras que los empalmes son usados para unir segmentos de fibra
(usualmente de 5-10 km de largo).
El problema principal en el uso de empalmes y conectores está relacionado a las
pérdidas. Alguna parte de la potencia siempre se pierde debido a que las
terminaciones de las fibras nunca están perfectamente alineadas en la práctica. Las
pérdidas de empalme están por debajo de 0.1 dB y son comúnmente realizadas por
la técnica de empalmado por fusión. La pérdida en conectores es generalmente más
grande. El estado del arte para conectores provee una pérdida en promedio cerca de
los 0.3 dB [2].
La presencia y número de uniones intermedias en un enlace de comunicaciones
ópticas obedece diversos motivos, entre los que cabe destacar la distancia entre
repetidores en el enlace, el empleo de componentes de fibra, la longitud de tramos
de cable suministrados por el fabricante, y no sobrepasar la máxima longitud
continua de cable haciendo las consideraciones mecánicas y ambientales
pertinentes. [3]
Las cuatro principales razones para la unión de fibra óptica son:
1. Las fibras y los cables están limitados en longitud, entonces, eventualmente
deben ser unidas.
2. La fibra también debe ser unida para los cables de distribución y los divisores.
3. Para los puntos de transmisión y recepción, la fibra también debe ser
conectada a ese equipo.
4. Otra razón es la ruptura del cable y en consecuencia su restauración [4].
Ya que se ha establecido la necesidad de las uniones de fibras ópticas se debe
hacer que esta tarea valga la pena tratando que todas las uniones sean
mecánicamente resistentes y ópticamente con bajas pérdidas. Las uniones de fibra
deben ser capaces de soportar pruebas de estiramiento y flexión.
Para ambos casos de uniones es necesario preparar los extremos de ambas fibras
mediante técnicas especiales. Cada proceso de montaje depende del modelo de

Instituto Politécnico Nacional E S I M E
12 | Página
conector y de la técnica de realización del empalme, considerando siempre la
información suministrada por el fabricante de la fibra a la hora de caracterizar sus
pérdidas [3].
1.3.1 Conectores
Recordemos que los conectores son usados para uniones no fijas, por lo tanto, están
hechos para ser conectados y desconectadas cientos y posiblemente miles de veces.
Dado que no hay un conector ideal para cada posible situación, una amplia variedad
de estilos y tipos de conectores han sido desarrollados sobre la corta vida de las
comunicaciones por fibra.
Las uniones mediante el uso de conectores también representan complicaciones ya
que se deben conseguir tolerancias, alineamiento y pérdidas que han de mantenerse
después de sucesivas conexiones y desconexiones. Así mismo deben de protegerse
las terminaciones de las fibras que se van a unir de daños que se puedan producir
durante su manipulación, deben ser insensibles a las variaciones en la condiciones
ambientales, tener bajo costo, y soportar las características mecánicas a las que se
ve sometido el cable [3].
Los conectores pueden ser de dos tipos:
De contacto
De haz expandido.
En los de contacto, los extremos de las fibras que se van a unir se colocan muy
cerca de manera que coincidan sus ejes. En los de haz expandido se emplea una
óptica intermedia para expandir el haz saliente de la fibra transmisora y concentrarlo
posteriormente hacia el núcleo de la fibra receptora [3].
Los conectores de contacto son los más empleados en la actualidad, y pueden ser
de férula cilíndrica o biocónica. Los primeros son los más empleados
comercialmente, tanto para las fibras monomodo como para las multimodo. En la
Figura 1.6 se muestra la sección de un conector de férula cilíndrica.

Instituto Politécnico Nacional E S I M E
13 | Página
Figura 1. 6 Sección de un conector de férula cilíndrica [3].
1.3.2 Empalmes
Se define empalme o soldadura de la fibra óptica como todo aquel proceso o
dispositivo que nos permite garantizar la conexión permanente de las fibras ópticas
preservando las características de transmisión de las mismas. En los enlaces de
larga distancia, en los que es necesario el uso de fibras ópticas con muy bajo nivel
de atenuación cada empalme o conector puede llegar a contribuir de manera
significativa en las pérdidas totales del enlace e incluso llegar a plantear la
inviabilidad del mismo. Por tanto es importante la utilización de elementos de
interconexión que nos permitan minimizar al máximo las pérdidas y preservar las
características de transmisión de las fibras ópticas [5].
Típicamente, los empalmes son usados para unir longitudes de fibra fuera de
edificios, mientras que los conectores son usados en los extremos de los cables
dentro de edificios. Los empalmes deben estar incorporados en longitudes de cable
en alojamientos interiores o en cajas de empalme en exteriores; los conectores en
cambio, están regularmente ubicados en patch panels (paneles de parcheo) o unidos
a equipo en las interfaces de cable. La decisión de elección no siempre es fácil, ésta
depende de las ventajas ofrecidas por cada una de las técnicas. Las ventajas de los
empalmes y los conectores se enlistan en la Tabla 1.1 [6].
Conectores Empalmes
No son permanentes Son permanentes Simples de usar una vez montados Baja atenuación
Fácil de instalar Fácil para sellar herméticamente Permite reconfiguración fácilmente Usualmente más económico
Proporciona interfaces estándar Más compacto
Tabla1.1: Comparación entre ventajas de los empalmes y conectores.

Instituto Politécnico Nacional E S I M E
14 | Página
Puede resultar extraño ver permanente y no permanente como ventajas en cada una
de las técnicas correspondientes. Sin embargo, cada característica depende de lo
deseable en las aplicaciones. Por ejemplo, los empalmes para reparar un cable roto
bajo tierra, el cual debe ser permanente. Sin embargo no se requiere hacer uniones
permanentes entre una red de área local y las terminales que pueden ser removidas
dentro de un edificio.
Las características físicas del empalme son importantes en aplicaciones de muy
larga distancia. Los cables empalmados deben ser capaces de soportar las
condiciones hostiles del medio ambiente, por tanto deben estar alojados en carcasas
protectoras. Aunque muchas carcasas para empalmes están diseñadas para ser
reabiertas si se necesitan cambios o reparaciones, éstas pueden ser selladas
herméticamente para protegerlos contra la humedad y temperaturas extremas.
En los enlaces de corta distancia en los que se llegan a utilizar fibras plásticas con
altos valores de atenuación la contribución de los empalmes o conectores a las
pérdidas totales del enlace no adquiere un papel crítico y se toman más en cuenta
aspectos como los costos, la fiabilidad, el mantenimiento, las dificultades en la
instalación, etc. [5].
1.3.2.1 Tipos de empalmes
Existen dos tipos básicos de empalme para fibra óptica: fusión y mecánico. El
empalme por fusión derrite las terminaciones de las dos fibras juntas hasta que se
fusionan, como soldando un metal. El empalme mecánico mantiene las
terminaciones de las dos fibras juntas sin necesidad de soldarlas, usando una
abrazadera mecánica y/o pegamento. Cada una tiene sus respectivas ventajas. Los
empalmes por fusión son caros, pero no requieren casi costos de consumibles
además de que ofrecen las mejores características ópticas. Los empalmes
mecánicos requieren menos equipo, pero los costos de consumibles por empalme
son mucho más altos [6].
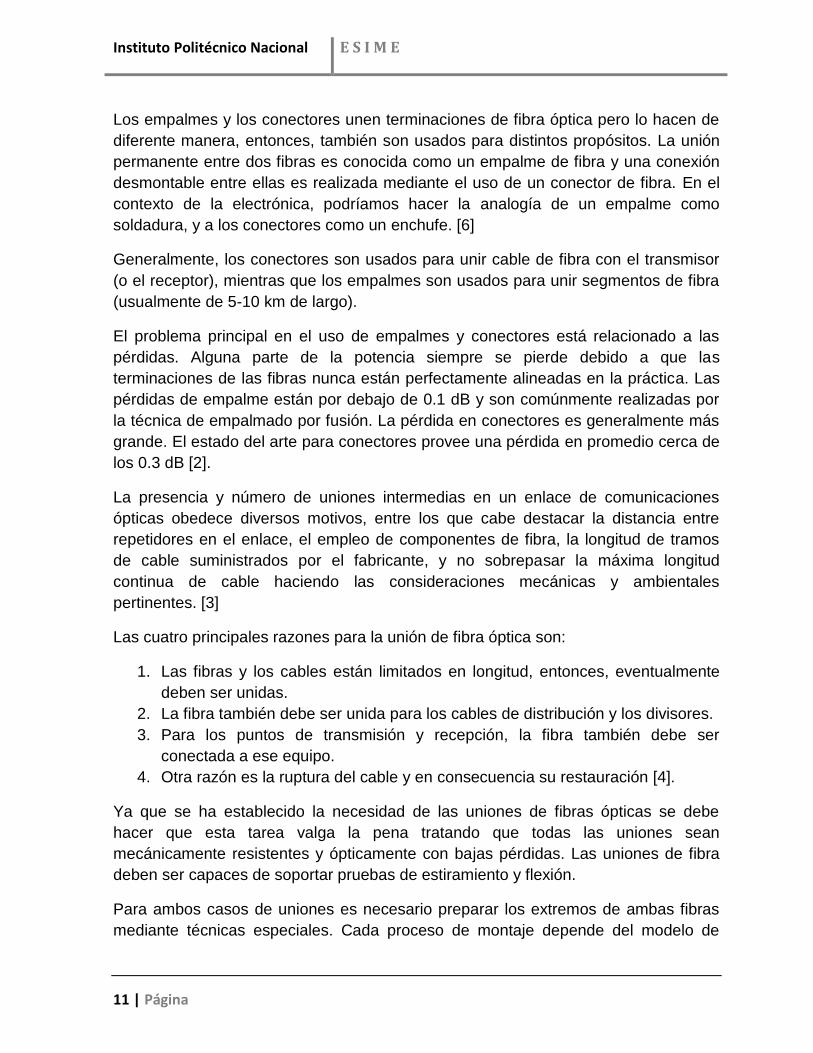
1.3.2.2 Empalmes mecánicos
En la Figura 1.7 se observa un empalme mecánico, que consiste en un tubo dividido
horizontalmente, la parte de abajo es una base tipo V y la de arriba una tapa plana.
El espacio entre ambas se llena de un gel adaptador, se insertan las fibras cortadas
Instituto Politécnico Nacional E S I M E
15 | Página
de longitud determinada y luego se cierran con unas grapas de presión que empujan
las fibras hasta juntarlas. Existen versiones planares para conexiones multifibras.
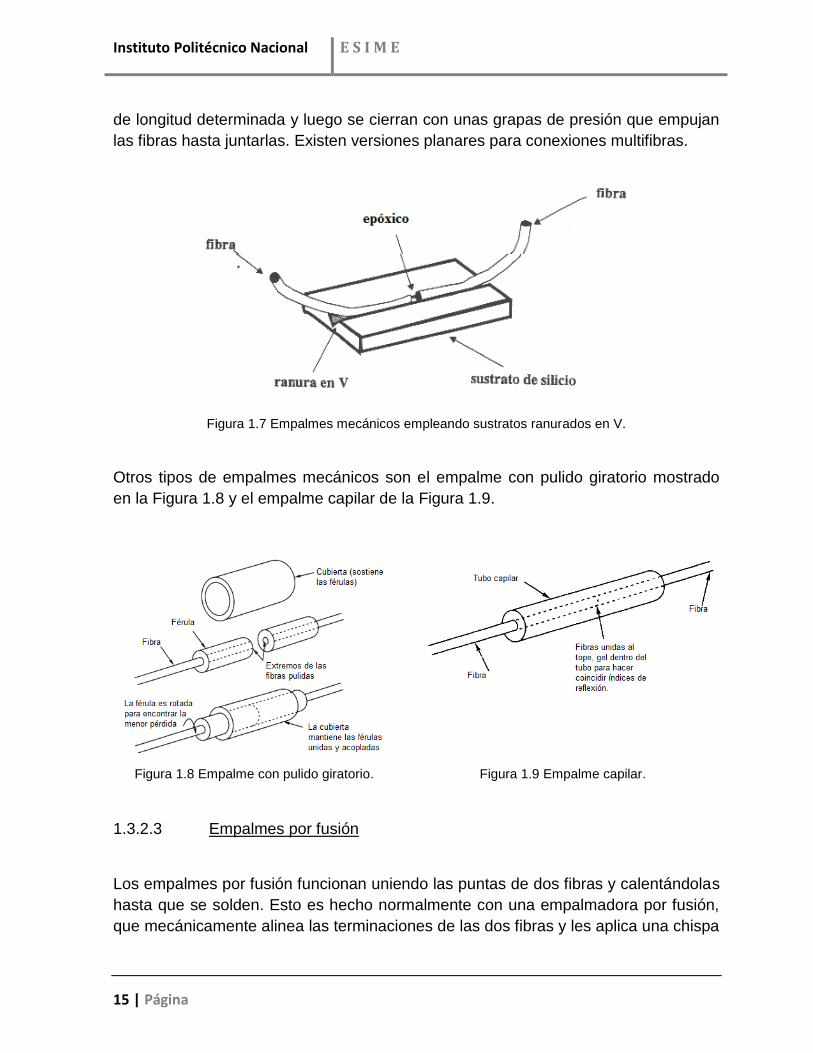
Figura 1.7 Empalmes mecánicos empleando sustratos ranurados en V.
Otros tipos de empalmes mecánicos son el empalme con pulido giratorio mostrado
en la Figura 1.8 y el empalme capilar de la Figura 1.9.
1.3.2.3 Empalmes por fusión
Los empalmes por fusión funcionan uniendo las puntas de dos fibras y calentándolas
hasta que se solden. Esto es hecho normalmente con una empalmadora por fusión,
que mecánicamente alinea las terminaciones de las dos fibras y les aplica una chispa
Figura 1.8 Empalme con pulido giratorio. Figura 1.9 Empalme capilar.

Instituto Politécnico Nacional E S I M E
16 | Página
o arco eléctrico a través de las puntas para fusionarlas. Comúnmente las
empalmadoras también incluyen instrumentos para probar la calidad del empalmado
y una pantalla para ayudar al usuario a alinear las fibras a empalmar. Las pérdidas
de un empalme típico son de 0.05 a 0.2 dB, con más de la mitad por debajo del 0.1
dB. El arreglo básico de una empalmadora de fibra se muestra en la Figura 1.10:
Figura 1.10. Empalmadora por fusión.
Cada empalmadora es diseñada de manera diferente, pero todas tienen el mismo fin
en común, producir un empalme confiable. Muchas tienen el modo automático para
asistir al operador. Son instrumentos caros, con precios que van a partir de los miles
de dólares y alcanzan las decenas de miles de dórales para los modelos más
sofisticados. Gran parte de la diferencia entre ellas es el grado de automatización y la
cantidad de instrumentación incluida. Muchos modelos comparten los siguientes
elementos claves y funciones mostrados en la Tabla 1.2 [6].
SOLDADOR POR FUSIÓN
Típicamente soldador de arco eléctrico, con electrodo y tiempo del arco ajustables por el usuario.
Las descargas calientan la unión de la fibra.

Instituto Politécnico Nacional E S I M E
17 | Página
Llamas y haces infrarrojos de láseres de dioxido de carbón también son usados pero casi todas las empalmadoras comerciales utilizan arco eléctrico.
Algunas empalmadoras portatiles utilizan baterías recargables que duran unos cientos de empalmes antes de requerir ser recargadas.
MECANISMO PARA ALINEACIÓN
Alinea las terminaciones de las fibras con respecto a la posición del arco eléctrico.
Incluye montajes que sostienen la fibra en posición. Las empalmadoras más caras tienen funciones de alineación automática y de medición.
UNA CÁMARA DE VIDEO O MICROSCOPIO
Generalmente es de tipo binocular con potencia de aumento de 50 o más para que el operador pueda ver las fibras mientras las alinea.
INSTRUMENTOS DE MEDICIÓN
Para medir la potencia óptica transmitida a través de las fibras antes y después del empalme. Calibrados correctamente pueden medir el exceso de pérdidas causadas por el empalme.
Tabla 1.2. Elementos y funciones generales de una empalmadora por fusión.
En las fibras monomodo los problemas de empalme se encuentran principalmente en
su pequeño diámetro del núcleo Dn=10 μm. Esto exige contar con equipos y
mecanismos de alineamiento de las fibras con una mayor precisión.
Las pérdidas de acoplamiento se presentan en las uniones de emisor óptico a fibra,
conexiones de fibra a fibra y conexiones de fibra a fotodetector. Las pérdidas de
unión son causadas frecuentemente por una mala alineación lateral, mala alineación
de separación, mala alineación angular, acabados de superficie imperfectos y
diferencias ya sea entre núcleos o diferencia de índices, como los indicados en la
Figura 1.11 [web 3].

Instituto Politécnico Nacional E S I M E
18 | Página
Figura 1.11. Tipos de desalineamiento mecánico que se presentan en la unión entre fibras ópticas.
1.4 Pérdidas
1.4.1 Tipos de pérdidas existentes
Las pérdidas que se introducen en los enlaces de fibra óptica son de dos tipos:
a) Pérdidas por absorción
b) Pérdidas por dispersión
Las pérdidas por absorción del material de la fibra, son debido a impurezas tales
como iones metálicos, níquel, etc. ya que absorben la luz y la convierten en calor. El
vidrio ultra puro usado para fabricar las fibras ópticas es aproximadamente 99.9999%
puro. Aún así, las pérdidas por absorción entre 1 y 1000 dB/km son típicas, sin
embargo cuando estas están por encima de los 20 dB son impracticas para las
communicaciones. [web 4]
Las pérdidas por dispersión (esparcimiento) se manifiestan como reflexiones del
material, debido a las irregularidades microscópicas ocasionadas durante el proceso
de fabricación y cuando un rayo de luz se está propagando choca contra estas
impurezas y se dispersa y refleja. Otro tipo de pérdidas son las ocasionadas por
utilizar fibras con radios de núcleo diferentes, con aperturas numéricas diferentes o
con perfiles de índice diferentes. Este tipo de pérdidas se observan en la Figura 1.12.

Instituto Politécnico Nacional E S I M E
19 | Página
Figura 1.12 Causas que originan las pérdidas intrínsecas en la unión entre fibras.
1.4.2 Atenuación en fibras ópticas
Significa la disminución de potencia de la señal óptica, en proporción directa a la
longitud de fibra. La unidad utilizada para medir la atenuación en una fibra óptica es
el decibel (dB). La atenuación de la fibra se expresa en dB/km. Este valor significa la
pérdida de luz en un km.
Las fibras ópticas transportan la información empleando sus modos guiados. Su
comportamiento es, desde el punto de vista de transmisión, análogo al de los
portadores metálicos ya sean líneas de transmisión (pares o coaxiales) o guías de
onda. La diferencia radica en la naturaleza de la señal empleada para la transmisión.
Así pues, y a semejanza de los demás portadores, la fibra óptica es caracterizada
por determinados parámetros de transmisión. Estos parámetros son: la atenuación y
la constante propagación.
1.4.3 Mecanismos de atenuación
La atenuación o pérdidas que presente una fibra óptica provocan la reducción del
nivel de potencia media de la señal a medida que ésta se propaga a través de ella.
Para poder recuperar la señal con una cierta calidad, es necesario que a la entrada
del receptor óptico la señal posea un mínimo nivel de potencia óptica media.

Instituto Politécnico Nacional E S I M E
20 | Página
En consecuencia, es un factor de gran importancia ya que en determinadas
condiciones, limita la máxima distancia entre el transmisor y el receptor o entre
repetidores en un enlace de comunicaciones ópticas.
La atenuación que presenta la fibra óptica depende de la longitud de onda λ de la
señal. En la Figura 1.13 se muestra la variación de la constante de atenuación con la
longitud de onda para una fibra óptica [3].
Figura 1.13 Curva de atenuación típica de una fibra óptica expresada en dB/km en función de la
longitud de onda de la señal. Así mismo se muestran los diversos mecanismos de pérdidas y su
dependencia espectral.
Puede observarse que las pérdidas son mínimas en torno a λ = 1.55 µm, siendo su
valor de 0.2 dB/km muy próximo al límite teórico correspondiente a fibra de sílice,
cuyo valor es de 0.18 dB/km. La región de longitudes de onda próximas a 1.55 µm se
conoce como tercera ventana de transmisión o ventana de mínimas pérdidas siendo
su anchura espectral de aproximadamente 15 THz. Puede observase también un
mínimo secundario en torno a una longitud de onda próxima a 1.3 µm con pérdidas
del orden de 0.5 dB/km.
La banda de longitudes de onda en torno a dicha longitud de onda se conoce como
segunda ventana de transmisión o ventana de mínima dispersión, debido a que la
dispersión en fibra de sílice es mínima a 1.3 µm. Históricamente, sin embargo, no
fueron ninguna de estas dos ventanas las primeras en ser empleadas en
comunicaciones ópticas. Por diversos motivos entre los que cabe destacar la
disponibilidad de fuentes y detectores ópticos sensibles a dichas longitudes de
ondas, se utilizaron para los primeros sistemas de fibra óptica la banda de longitudes
de onda centradas en 0.85 µm. En dicha banda, conocida como primera ventana de
Instituto Politécnico Nacional E S I M E
21 | Página
transmisión, las pérdidas son superiores a las que presentan las dos restantes
siendo del orden de 3-5 dB/km.
Las pérdidas de una fibra óptica son el resultado de varios mecanismos de
atenuación que pueden clasificarse en dos grandes grupos. Los mecanismos
intrínsecos se deben a la naturaleza del material empleado en la fabricación de la
fibra óptica y son por tanto inevitables.
Los mecanismos extrínsecos, por el contrario, se originan como consecuencia de
factores externos al material base de la fibra, tales como la presencia de impurezas
en el núcleo introducidas en el proceso de fabricación, tendido de la fibra, etc. Este
tipo de pérdidas puede controlarse y hasta eliminarse.
Independencia de la atenuación con la frecuencia
Una de las ventajas que presenta la fibra óptica como medio de transmisión frente a
otros medios es el hecho de que las pérdidas de transmisión son independientes de
la frecuencia de la señal. Esta aseveración parece estar en contradicción con lo
mostrado en la Figura 1.13, y que la atenuación depende de la longitud de onda de
trabajo [7].
Al hablar de independencia de la atenuación con la frecuencia de la señal no nos
estamos refiriendo a las frecuencias de la portadora óptica, sino a la frecuencia de la
señal que modula dicha portadora (la señal de información es de naturaleza
electrónica en origen, y modula una portadora óptica. De esta manera la banda de
información se centra alrededor de la frecuencia de portadora). Incluso en los
sistemas que transportan más capacidad hoy en día, la banda de información no
supera los 20 GHz. Para un sistema que opere en tercera ventana a 1550 nm el
ancho de banda anterior convertida a unidades de longitud de onda es de 0.16 nm.
Esta banda es imperceptible, o dicho de otra forma, corresponde a un punto en la
escala de longitudes de onda de una curva típica de atenuación, tal y como la que se
muestra en la Figura 1.13. La conclusión, por tanto, es que las pérdidas o atenuación
dentro de la banda que ocupa la información pueden suponerse constantes.
De la observación de la Figura 1.14 puede verse que la fibra óptica, con
independencia de su perfil de índices o material base, presenta pérdidas constantes
con la frecuencia de la señal de información, y de valores en general inferiores a las
de los portadores metálicos. Estas características ventajosas de la fibra frente a los
portadores metálicos en lo referente a pérdidas le hacen el medio de transmisión
ideal para los sistemas de banda ancha y larga distancia. (No debe confundirse esta

Instituto Politécnico Nacional E S I M E
22 | Página
ventaja con la correspondiente a la gran capacidad o ancho de banda que presenta
la fibra óptica).
Figura 1.14. Atenuación expresada en dB/km en función del ancho de banda de la señal de
información para diversos portadores metálicos y modelos de fibra óptica [3].
1.5 Mediciones en las fibras ópticas
A continuación se exponen los distintos criterios de medición que se utilizan en las
fibras ópticas.
Estos criterios de medición están referidos a los tres tipos de parámetros
característicos de las fibras ópticas. Los criterios de medición se analizarán en:
Medición de los parámetros geométricos de la F.O.
Medición de los parámetros estructurales ópticos.
Medición de los parámetros fundamentales de transmisión.
Es necesario en este primer punto hacer hincapié en el hecho de que las mediciones
realizadas en las fibras ópticas tienen su significado ligado al sentido en el que se
realizó la medición.

Instituto Politécnico Nacional E S I M E
23 | Página
Se trata por tanto de medidas y valores unidireccionales que presentan variaciones
dependientes del sentido en el que se trabaje, por lo que el resultado de la medición
no es un valor exacto.
Estas variaciones son originadas por los parámetros geométricos de las fibras
ópticas.
Se trabaja siempre con los valores medios en ambos sentidos de medición y con el
valor de desviación típica de la medición.

Instituto Politécnico Nacional E S I M E
24 | Página
CAPÍTULO 2|
“Procedimientos
prácticos de
conectorización y
empalmes”

Instituto Politécnico Nacional E S I M E
25 | Página
CAPÍTULO 2 “PROCEDIMIENTOS PRÁCTICOS DE CONECTORIZACIÓN Y EMPALMES”
2.1 Conectorización de fibra óptica
La conectorización de la fibra óptica se realiza en dos etapas, la primera de ellas es
la etapa de corte y la segunda es la de pulido. La conectorización puede realizarse,
por ejemplo, para conectores ST o SC. El proceso de corte es distinto para cada uno
de ellos. A continuación explicamos los pasos correspondientes.
2.1.1 Proceso de corte para SC
En primer lugar se fija el soporte en la mesa y a continuación se coloca el
conector en él.
Utilizando la plantilla, se corta el cable de fibra a una medida de 40 mm
utilizando la herramienta necesaria. Posteriormente, se tomarán las medidas
con la plantilla del conector.
A continuación se corta la fibra por la marca realizada, para después escindir
el hilo óptico con el cortador preciso y eliminar sus impurezas con una toallita
impregnada en alcohol.
Se comprueba con un microscopio que el corte de la fibra ha sido satisfactorio.
Se introduce el extremo del cable modificado en el conector situado en el
soporte y se deja una separación de 2 mm.
En el siguiente paso se presiona el pulsador del soporte para acoplar la fibra
al conector y se crimpa el aro con la fibra y el conector, mediante la
crimpadora.
Finalmente, cortaremos los hilos protectores de la fibra con unas tijeras y
ajustaremos el extremo del conector.
2.1.2 Proceso de corte para ST
En primer lugar se fija el soporte del conector en la mesa y a continuación se
coloca cuidadosamente el conector en él.
En segundo lugar, se elige el cable de fibra óptica de 3 mm de espesor.

Instituto Politécnico Nacional E S I M E
26 | Página
Utilizando la plantilla, se corta el cable de fibra a la medida indicada en las
instrucciones del conector (4 cm).
Después de hacer las marcas en la segunda capa protectora de la fibra, se
corta por la marca y se procede a la eliminación de impurezas con una toallita
impregnada en alcohol y viendo en el microscopio que el corte de la fibra ha
sido satisfactorio.
Se introduce el extremo modificado del cable de fibra óptica en el conector
situado en el soporte y se desliza el aro hacia el conector.
A continuación se presiona el pulsador del soporte para acoplar la fibra al
conector y se poncha el aro de protección con la fibra y el conector, mediante
las pinzas de ponchado.
Finalmente se cortan los hilos protectores de la fibra con unas tijeras y se
ajusta el extremo del conector.
2.1.3 Técnica de pulido
Esta técnica de conectorización es compatible para los dos tipos de conectores, el
ST y el SC. Para su correcta elaboración es necesario seguir los pasos que se citan
a continuación:
En primer lugar, se corta la fibra aislante con el cortador correspondiente,
tomando una medida aproximada de 4 cm.
En segundo lugar, se procede a cortar el Kevlar sobrante se ayuda de unas
tijeras.
En tercer lugar, se debe quitar parte de la cubierta plástica, dejando
aproximadamente una longitud visible de éste de unos 3 cm.
Seguidamente, se limpia el hilo de fibra óptica de impurezas con una toallita
impregnada en alcohol isopropílico.
Después se procede a llenar el interior del conector con un pegamento
especial llamado rersina epóxica.
A continuación, sin dejar pasar mucho tiempo, se insertanel hilo de fibra en el
conector hasta su posterior salida por el otro extremo del mismo y se espera a
su secado.
Una vez que se haya secado, utilizando el bolígrafo de punta de diamante, se
corta la fibra que sobresalga a partir de 1 mm aproximadamente.

Instituto Politécnico Nacional E S I M E
27 | Página
Se ayuda de un disco de pulido, se empieza el proceso de pulido de la fibra
mediante la realización de “ochos” sobre las varias lijas intercambiándolas
cada cierto tiempo, comenzando siempre por la de mayor grosor.
Se ira comprobando el estado de la fibra con regularidad con un microscopio
para observar que se está realizando correctamente.
Finalmente, se tendra que medir la atenuación del cable, conectando los dos
extremos del mismo a los medidores de atenuación.
Además de los métodos para conectores ST y SC existen otros métodos de
conectorización para la fibra óptica que dependen de la marca y tipo de conector
empleado, los cuales se describen a continuación:
Epóxico (curado de 110° a 120°)
En este método se debe tener una resina y un endurecedor, que se deben mezclar
por un lapso no menor a 2 minutos, posteriormente se debe dejar reposar por un
lapso de 15 minutos antes de su aplicación y curado. Éste deberá ser a una
temperatura de 110º a 120º durante 7-8 minutos.
Crimpeado (Pre pulido)
En este método se debe contar con una pinza especial creada por AMP dado que
este proceso sólo es aplicable con su marca de conectores. En este método se
excluye el epóxico dado que el crimpeo se hace a base de presión de una
herramienta especializada.
Hot Melt (3M)
En este método el epóxico ya viene integrado en los conectores ya endurecido, el
horno sólo lo vuelve maleable para poder introducir la fibra. Posteriormente vuelve a
su estado normal para darle el terminado.
Curado en Frío (anaeróbico)
Este método es muy parecido al primero, pero en este caso sólo se mezcla la resina
y el endurecedor y no es necesario el curado ya que éste se endurecerá en un lapso
de 4 a 5 segundos dependiendo del endurecedor elegido [web 4].

Instituto Politécnico Nacional E S I M E
28 | Página
2.2 Realización de conectorización ST
Descripción de material
Para poder realizar el proceso de conectorización se necesita de material el cual se
enlista a continuación:
Chaqueta (cola) del conector
Anillo de rebordeo
Conector ST
Tapón del conector
Tubos de resina epóxica
Trozo de plástico o cartón para preparar la mezcla
Aplicador
Pinzas de poncheo
Gafas de seguridad
Se utilizó una fibra multimodo de índice gradual de 50/125 micrómetros con una
longitud de seis metros, la cual se muestra en la Figura 2.1. Para el proceso de
conectorización se recomendó en todo momento del proceso, y siempre que se
manipulo la fibra óptica desnuda, el uso gafas de seguridad, ya que la fibra óptica
puede romperse e incrustarse en la piel o en los ojos.
Para el proyecto se utilizó la fibra óptica con conectores ST, los cuales fueron
colocados en los extremos de la fibra siguiendo el proceso descrito a continuación.
Figura 2.1. Fibra multimodo de índice gradual.
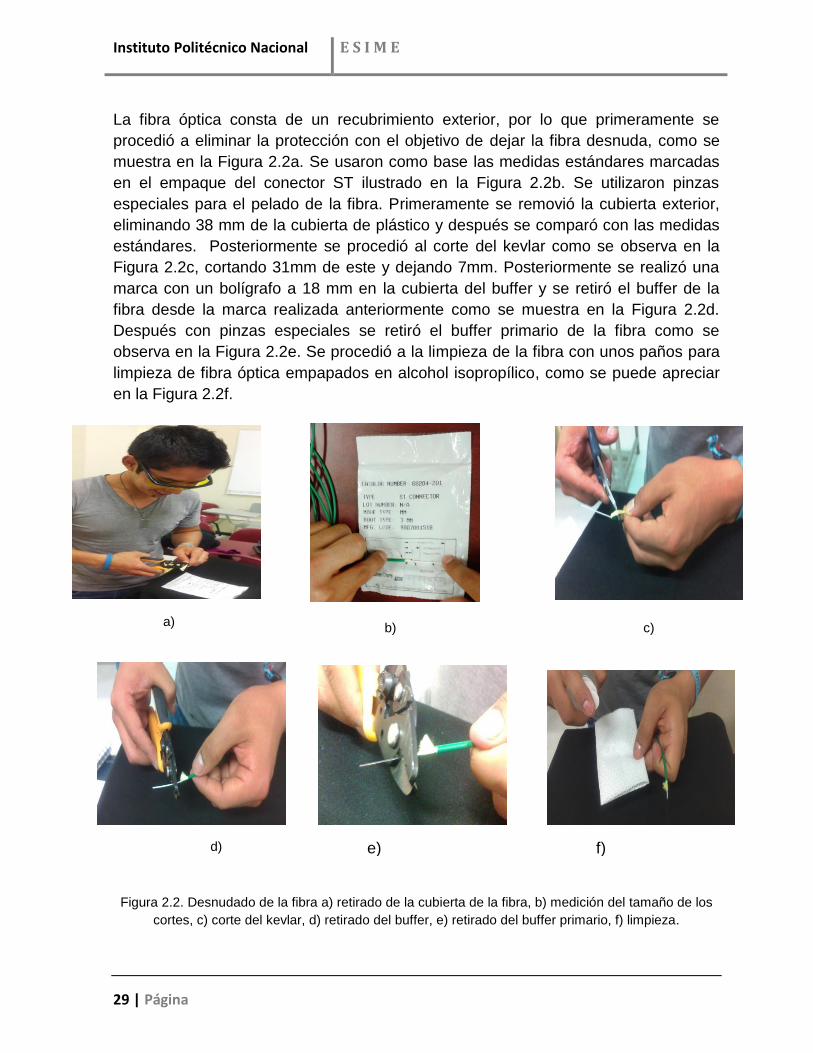
Instituto Politécnico Nacional E S I M E
29 | Página
La fibra óptica consta de un recubrimiento exterior, por lo que primeramente se
procedió a eliminar la protección con el objetivo de dejar la fibra desnuda, como se
muestra en la Figura 2.2a. Se usaron como base las medidas estándares marcadas
en el empaque del conector ST ilustrado en la Figura 2.2b. Se utilizaron pinzas
especiales para el pelado de la fibra. Primeramente se removió la cubierta exterior,
eliminando 38 mm de la cubierta de plástico y después se comparó con las medidas
estándares. Posteriormente se procedió al corte del kevlar como se observa en la
Figura 2.2c, cortando 31mm de este y dejando 7mm. Posteriormente se realizó una
marca con un bolígrafo a 18 mm en la cubierta del buffer y se retiró el buffer de la
fibra desde la marca realizada anteriormente como se muestra en la Figura 2.2d.
Después con pinzas especiales se retiró el buffer primario de la fibra como se
observa en la Figura 2.2e. Se procedió a la limpieza de la fibra con unos paños para
limpieza de fibra óptica empapados en alcohol isopropílico, como se puede apreciar
en la Figura 2.2f.
Figura 2.2. Desnudado de la fibra a) retirado de la cubierta de la fibra, b) medición del tamaño de los
cortes, c) corte del kevlar, d) retirado del buffer, e) retirado del buffer primario, f) limpieza.
a) b) c)
d) e) f) d)

Instituto Politécnico Nacional E S I M E
30 | Página
Una vez que se contó con el material necesario para realizar el armado del (pigtail)
conector se procedio a realizar las pruebas de continuidad del conector las cuales
constan de dos pasos: hacer pasar luz por el orificio del conector y observar que no
se encuentra bloqueado y hacer pasar la fibra desnuda por el orificio del conector
hasta que sea visible como se observa en la Figura 2.3a. Realizado este proceso, se
colocó la cola del conector sobre el cable de fibra óptica como se oberva en la Figura
2.3b. Una vez colocado, se continuo con el anillo de rebordeo, que al igual que la
cola del conector se hizo pasar sobre el extremo de la fibra como se ilustra en la
Figura 2.3c. No olvidemos que las gafas de seguridad se siguieron utilizando a lo
largo de todo el proceso, con lo cual ahora se procedió a preparar la resina epóxica
combinando una gota de cada uno de los tubos y mezclandolo hasta formar una
resina homogénea como se muestra en la Figura 2.3d. Una vez preparada la resina
se debieron realizar los pasos posteriores de manera rápida para evitar que la resina
se secara antes de poder aplicarla, por lo cual fue recomendable tener a la mano los
demás componentes del conector a utilizar. El siguiente paso fue la aplicación de la
resina epóxica mediante un aplicador metálico o palita en la parte interna del kevlar,
continuando con el buffer y finalmente en la fibra desnuda, procurando aplicar de
manera uniforme una ligera capa a lo largo de la fibra, esto se ilustra en la Figura
2.3e.
b) c) a)
e) d)
Figura 2.3. Conectorización a) prueba de continuidad b) colocación de la cola del conector, c)
colocación del anillo de rebordeo, d) preparación de la resina epóxi, e) Aplicación de la resina.

Instituto Politécnico Nacional E S I M E
31 | Página
Rápidamente se hizo pasar la fibra desnuda con la resina epóxica a través del
conector ST al que se le hizo previa prueba de continuidad. Al realizar este paso se
debió tener mucho cuidado ya que si la fibra se llegara a romper un segmento podría
quedarse dentro del conector, ocasionando que se bloqueara el orificio y peor aún,
sería muy difícil destapar una vez que la resina se hubiera secado. Si el proceso se
realizó correctamente se podrá ver salir la punta de la fibra a través del conector, lo
cual indicó que se debía proceder a aplicar epóxico a la cara externa del kevlar y
deslizar el anillo de rebordeo hasta chocar con el conector como se ilustra en la
Figura 2.4a. Posteriormente, se dejó secar la mezcla aplicada a la fibra y a los
diferentes componentes del conector un tiempo aproximado de 15 minutos para
proceder a ponchar el anillo de rebordeo con las pinzas correspondientes. Este
proceso se muestra en la Figura 2.4b. Al terminar este paso, se procedió a colocar la
cola del conector hasta hacerla embonar con el anillo de rebordeo. Finalmente se
colocó una pequeña gota de resina epóxica rodeando la base de la fibra óptica que
salía del conector como se muestra en la Figura 2.4c, con el propósito de realizar el
pulido sin dañarla. El producto final del proceso de conectorización es el mostrado en
la Figura 2.4d.
.
a)
b) c)
d)
Figura 2.4. Finalizado de conectarización a) anillo de rebordeo, b) ponchado de anillo de
rebordeo, c)gota de resina epóxica sobre base de la fibra d) Producto final

Instituto Politécnico Nacional E S I M E
32 | Página
2.2.1 Proceso de Pulido
Descripcion del material
Para realizar el proceso de pulido se requerirán tres lijas para fibra óptica
Lija de 5 μm
Lija de 3 μm
Lija de 1 μm
Disco de pulido
Agua
Microscopio.
Posterior al corte y contando con el material descrito y que se ilustra en la Figura
2.5a se comenzó el proceso de pulido del conector. El primer paso es cortar el
exceso de fibra saliente del conector utilizando un scribe, dejando 0.5 mm de fibra
como se muestra en la Figura 2.5b. Después se insertó la férula del conector en el
disco del tubo de pulido, se humedeció con agua un sector de la lija de 5 μm (como
se ilustra en la Figura 2.5c) y se procedió a pulir realizando movimientos suaves y
continuos, formando un ocho como se muestra en la Figura 2.5d.
Es importante revisar constantemente el proceso de pulido con el respectivo
microscopio para no sobrepasar los límites de la fibra y evitar trozar la fibra interna
del conector. El pulido de las puntas de los cabezales de los conectores ópticos, en
mucho determina la calidad de la conexión óptica. Se debe comprobar que no haya
rasguños microscópicos ni restos de goma en la férula, ni en la fibra, como se
muestra en la Figura 2.5e. En algunos casos se observó que la fibra tenía una
curvatura, una raja profunda o al revés, el extremo insuficientemente trabajado.
Se repitió el mismo procedimiento anterior con la lija de 3 μm y finalmente con la de 1
μm como se aprecia en la Figura 2.5f.
Se supervisó el estado del conector para llevar a cabo una evaluación y determinar
si fue correcto o incorrecto. Cuando el pulido se ha realizado de forma correcta, en el
microscopio se puede ver una circunferencia interior uniformemente oscura (o
uniformemente clara).
Con la ayuda de un microscopio para fibra, se verificó que el núcleo de la fibra se
encontrara libre de ralladuras, cavidades, grietas o algún borde astillado. La Figura
2.5g muestra el conector finalizado.
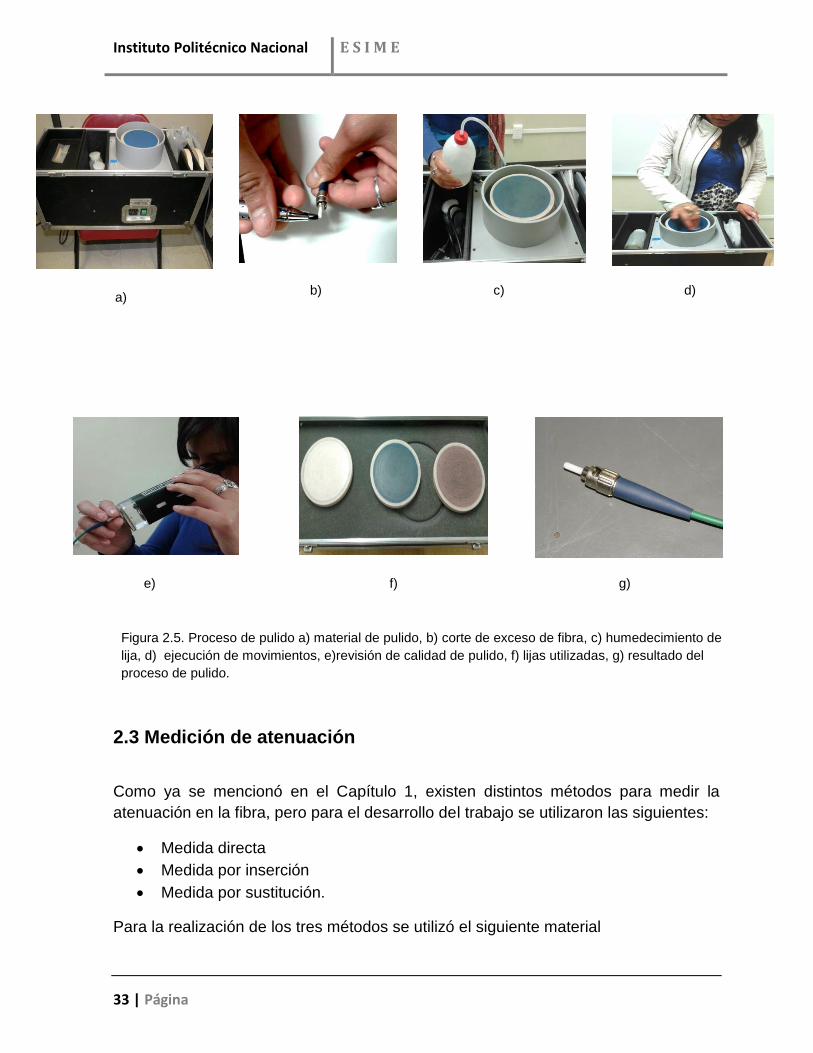
Instituto Politécnico Nacional E S I M E
33 | Página
2.3 Medición de atenuación
Como ya se mencionó en el Capítulo 1, existen distintos métodos para medir la
atenuación en la fibra, pero para el desarrollo del trabajo se utilizaron las siguientes:
Medida directa
Medida por inserción
Medida por sustitución.
Para la realización de los tres métodos se utilizó el siguiente material
Figura p
Figura 2.2p
b)
e)
a) d)
f)
c)
g)
Figura 2.5. Proceso de pulido a) material de pulido, b) corte de exceso de fibra, c) humedecimiento de
lija, d) ejecución de movimientos, e)revisión de calidad de pulido, f) lijas utilizadas, g) resultado del
proceso de pulido.

Instituto Politécnico Nacional E S I M E
34 | Página
Cabe destacar que se utilizó el generador de Potencia de 1300 nm ya que se
trabajó, como ya se mencionó, con fibra multimodo de índice gradual.
2.3.1 Medida directa
Este tipo de proceso de medida generalmente se realiza en cables que ya han sido
instalados y por lo tanto ya no son accesibles en el mismo lugar los dos extremos de
la fibra. En este tipo de medida se desea medir la potencia óptica absoluta y se
necesita de un generador óptico y un medidor de potencia óptica que ya hayan sido
calibrados previamente.
a) b) c)
d) e)
Figura 2.6. Material utilizado a) medidor de potencia, b)generador de potencia 1300 nm, c)generador de
potencia 850 nm, d) adaptador, e)fibras bajo prueba.
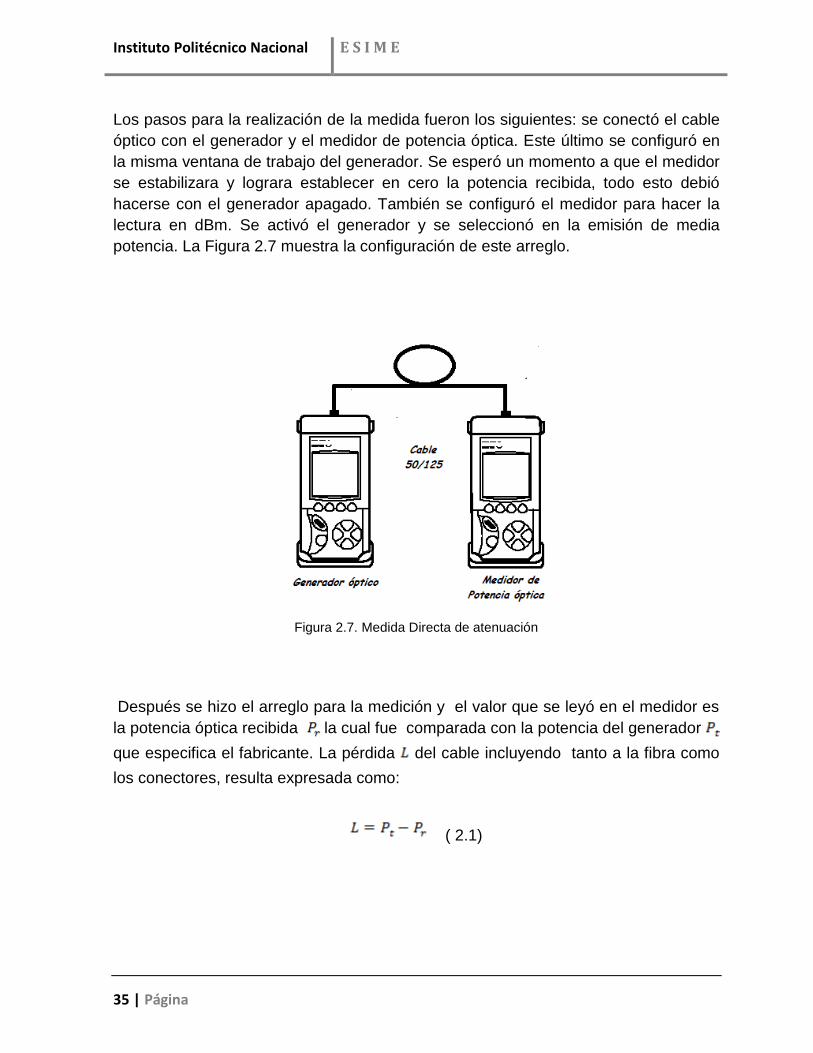
Instituto Politécnico Nacional E S I M E
35 | Página
Los pasos para la realización de la medida fueron los siguientes: se conectó el cable
óptico con el generador y el medidor de potencia óptica. Este último se configuró en
la misma ventana de trabajo del generador. Se esperó un momento a que el medidor
se estabilizara y lograra establecer en cero la potencia recibida, todo esto debió
hacerse con el generador apagado. También se configuró el medidor para hacer la
lectura en dBm. Se activó el generador y se seleccionó en la emisión de media
potencia. La Figura 2.7 muestra la configuración de este arreglo.
Figura 2.7. Medida Directa de atenuación
Después se hizo el arreglo para la medición y el valor que se leyó en el medidor es
la potencia óptica recibida la cual fue comparada con la potencia del generador
que especifica el fabricante. La pérdida del cable incluyendo tanto a la fibra como
los conectores, resulta expresada como:
( 2.1)

Instituto Politécnico Nacional E S I M E
36 | Página
2.3.2 Medida por inserción
Esta tipo de medida se realiza generalmente en los cables a instalarse, para que
sean accesibles los dos extremos de la fibra en el mismo lugar. Para la realización de
este proceso se necesita de un generador óptico, un medidor de potencia óptica, un
adaptador óptico y un cable de referencia (denominado fibra corta o fibra de
inyección) de unos metros de longitud con las mismas características del cable a
medir.
Así entonces se conectó la fibra corta al generador y al medidor de potencia óptica,
se realizó una medición directa de la fibra corta, con la emisión de media potencia,
para tomarla como potencia de referencia . Después se introdujo a través del
adaptador el cable a medir y se procedió a la lectura en el medidor de potencia
óptica. Se muestra en la Figura 2.8 el arreglo para este tipo de medición:
Para determinar la atenuación se utiliza la siguiente expresión, cabe destacar que no
se toma en cuenta la atenuación introducida por el adaptador:
( 2.2)
a) b)
Figura 2.8. Medida por inserción a) Medición con la fibra corta b)Inserción
de la fibra larga

Instituto Politécnico Nacional E S I M E
37 | Página
2.3.3 Medida por sustitución
Esta medida también se realiza en cables a instalarse para que sean accesibles en el
mismo lugar los dos extremos de la fibra. Se utiliza un generador óptico, un medidor
de potencia óptica y un cable de referencia de unos metros de longitud con las
mismas características del cable a medir.
Se conectó la fibra corta al generador y al medidor de potencia óptica y se efectuó
una medición directa de la fibra corta con la emisión de media potencia, que se tomó
como potencia de referencia . Después se conectó el cable a medir con el
generador y el medidor de potencia óptica, se realizó una medición directa con la
emisión de media potencia y ésta fue la potencia recibida , para esta medida se
realizó el arreglo que se muestra en la Figura 2.9:
Figura 2.9. Medida por sustitución a) Medición con la fibra corta b) Medición de la fibra larga
Para determinar la pérdida de la fibra se realizó la diferencia de las dos potencias
medidas como se observa en la Ecuación 2.3 y las pérdidas generadas por los
conectores fueron calculadas en ambas mediciones por lo que se anulan. Es
importante mencionar que la atenuación introducida por los pocos metros de la fibra
corta se despreció.
(2.3)
a) b)

Instituto Politécnico Nacional E S I M E
38 | Página
A continuación en las figuras 2.10 y 2.11 se muestran las imágenes de los arreglos
que se hicieron:
2.3.4 Selección del método de medición a utilizar
El método de medición directa presenta una desventaja ya que depende del
conocimiento previo de la potencia que entrega el generador. Si no se cuenta con
este dato se genera incertidumbre, lo mismo que el desgaste de las baterías del
generador, que provocaría un error en la medición.
Sin embargo el método de sustitución no depende del valor establecido por el
fabricante de la potencia que debería entregar el generador. Utilizando la fibra corta
se puede obtener una medida más precisa de la potencia otorgada por él.
En la Tabla 2.1 se muestran los resultados obtenidos con el método de sustitución.
Longitud de onda
1300 nm
-19.3. dBm
-19.2 dBm
0.1 dB
Tabla 2.1. Mediciones obtenidas por el método de sustitución
Figura 2.10. Medida
Directa
Figura 2.11. Medida por Inserción

Instituto Politécnico Nacional E S I M E
39 | Página
Se determinó que para realizar las mediciones de los experimentos de este trabajo
se utilizará el método por inserción, porque permite saber la potencia de referencia
en el inicio de cada experimento, debido a que se utilizan la fibra corta y la fibra de
trabajo al mismo tiempo. La atenuación que se obtiene de cada una de ellas es
acumulativa. Debido a esto se obtiene una medición más fiable y exacta, y no se
deja de lado la pérdida de potencia ocasionada por el acoplador tipo ST-ST para fibra
multimodo de índice gradual.
En la Tabla 2.2 se muestran los resultados obtenidos con el método de inserción.
Longitud de onda 1300 nm
-19.4 dBm
-19.8dBm
0.4 dB
Tabla 2.2. Resultados obtenidos por el método de inserción.
Las fuentes utilizadas proporcionan tres niveles de potencia: bajo, medio y alto. La
variación de la potencia no presenta diferencia en la atenuación que presenta la fibra
óptica. Se determinó realizar los experimentos en el nivel de potencia medio.
2.3.5 Selección de la ventana de trabajo y dirección de transmisión en
las fibras
Ya que se estableció el método de medición, se determinó la dirección de
transmisión de la fibra corta de tal forma que proporcionara la menor atenuación
posible. En experimentos realizados con anterioridad se ha demostrado que por
diversos factores como el transporte de la fibra, la manipulación de la misma, su
fabricación entre otros, un tramo de fibra óptica tiene diferencias en la atenuación
dependiendo de la dirección de transmisión.
Se identificó cada extremo de la fibra corta con etiquetas marcadas con ‘1’ y ‘2’, y
posteriormente se realizaron las mediciones en ambas direcciones.

Instituto Politécnico Nacional E S I M E
40 | Página
A continuación se muestran las mediciones obtenidas.
Longitud de onda 1300 nm
Potencia recibida en dirección -19.4 dBm
Potencia recibida en dirección -19.5 dBm
Tabla 2.3.Valor de potencia de la fibra corta en diferentes direcciones
Como se puede observar en la Tabla 2.3 la mayor potencia de señal se presenta en
la dirección .
Para el caso de la fibra de trabajo se identificaron sus extremos con etiquetas
marcadas con ‘A’ y ‘B’ y se midieron en ambas direcciones con la fibra corta en
dirección a una longitud de onda de 1300 nm. Los resultados obtenidos se
muestran en la Tabla 2.4.
1300 nm
Dirección
de
-19.5. dBm
-20.6 dBm
1.1 dB
Dirección
de
-19.4dBm
-20 .5dBm
1.1 dB
Tabla 2. 4. Medición de atenuación de la fibra de trabajo en dos direcciones diferentes
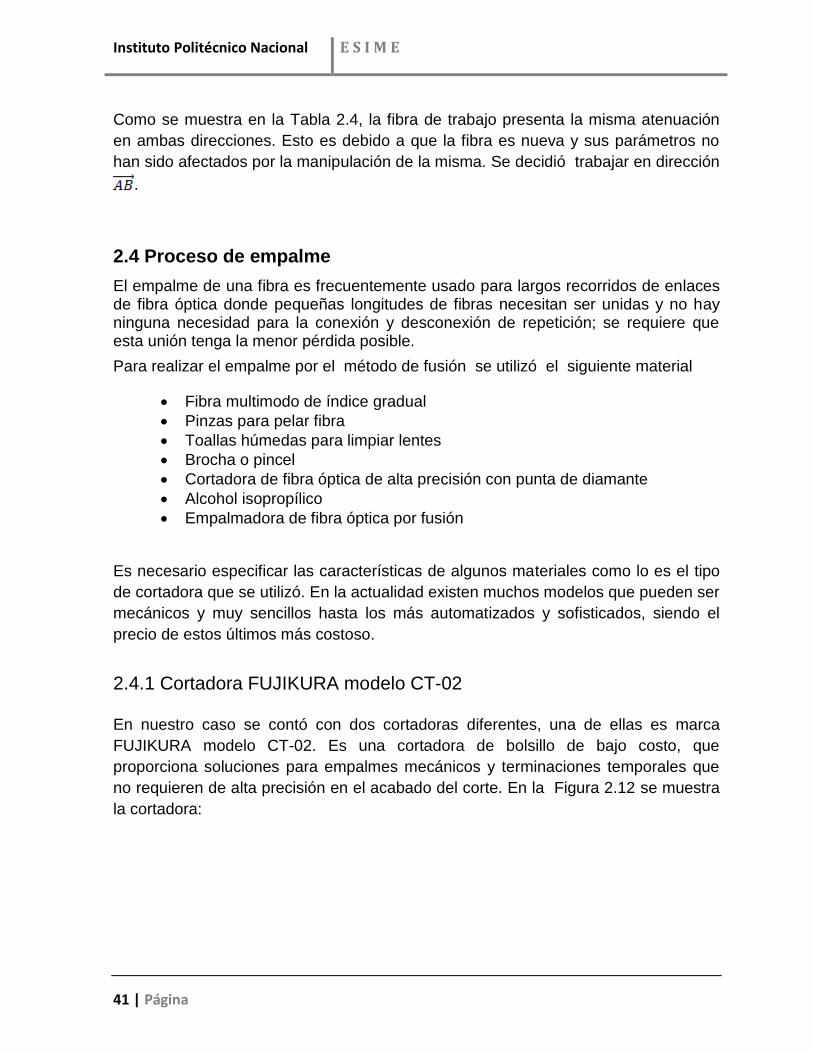
Instituto Politécnico Nacional E S I M E
41 | Página
Como se muestra en la Tabla 2.4, la fibra de trabajo presenta la misma atenuación
en ambas direcciones. Esto es debido a que la fibra es nueva y sus parámetros no
han sido afectados por la manipulación de la misma. Se decidió trabajar en dirección
.
2.4 Proceso de empalme
El empalme de una fibra es frecuentemente usado para largos recorridos de enlaces de fibra óptica donde pequeñas longitudes de fibras necesitan ser unidas y no hay ninguna necesidad para la conexión y desconexión de repetición; se requiere que esta unión tenga la menor pérdida posible.
Para realizar el empalme por el método de fusión se utilizó el siguiente material
Fibra multimodo de índice gradual
Pinzas para pelar fibra
Toallas húmedas para limpiar lentes
Brocha o pincel
Cortadora de fibra óptica de alta precisión con punta de diamante
Alcohol isopropílico
Empalmadora de fibra óptica por fusión
Es necesario especificar las características de algunos materiales como lo es el tipo
de cortadora que se utilizó. En la actualidad existen muchos modelos que pueden ser
mecánicos y muy sencillos hasta los más automatizados y sofisticados, siendo el
precio de estos últimos más costoso.
2.4.1 Cortadora FUJIKURA modelo CT-02
En nuestro caso se contó con dos cortadoras diferentes, una de ellas es marca
FUJIKURA modelo CT-02. Es una cortadora de bolsillo de bajo costo, que
proporciona soluciones para empalmes mecánicos y terminaciones temporales que
no requieren de alta precisión en el acabado del corte. En la Figura 2.12 se muestra
la cortadora:

Instituto Politécnico Nacional E S I M E
42 | Página
La forma para efectuar el corte con la cortadora CT-02 es colocar la fibra óptica
expuesta en la guía, verificando que quede completamente recta, se baja la cubierta,
que es la parte superior en donde se encuentra la cuchilla, realizando el proceso
cuidadosamente hasta que se escuche un click. El sujetador de la fibra presionará la
fibra. Se debe mantener la presión con el pulgar sobre la fibra hasta que se termine
el corte. Se baja delicadamente la cubierta de la cortadora hasta que el borde de la
cuchilla toque la parte superior de la fibra óptica. Se debe levantar la cubierta de la
fibra hasta escuchar otra vez un click y después se dobla la fibra óptica todavía en la
guía, provocando que la fibra se corte. Se retira la fibra óptica y el sobrante se
desecha en un recipiente especial para residuos de fibra óptica.
2.4.2 Cortadora MEXFO FSC-105
También se contó una cortadora de precisión de marca MEXFO modelo FSC-105
que se muestra en la siguiente figura.
Figura 2.12. Cortadora FUJIKURA modelo CT-02.
Figura 2.13. Cortadora MEXFO FSC-105.

Instituto Politécnico Nacional E S I M E
43 | Página
El procedimiento para la realización del corte con esta cortadora es el siguiente:
primeramente, se colocó el extremo de fibra óptica a cortar en la guía que
corresponde al tipo de fibra que se desea seccionar. Se cuenta con un sujetador el
cual se debe bajar para evitar que el cable se mueva durante el corte. El cable se
puede mover axialmente para dejar mayor o menor distancia de la fibra óptica
dependiendo de cómo se requiera. Ya que se obtiene la distancia requerida, se baja
el sujetador de la fibra para impedir que ésta se mueva axialmente. Después se
desliza el disco de corte en un solo movimiento, se retira el sujetador de la fibra y el
sujetador del cable para retirar el extremo cortado y se limpia la fibra con las toallitas
humedecidas con alcohol isopropilico. El sobrante de fibra óptica se deposita en un
contenedor especial para evitar que los trozos restantes de fibra óptica puedan
causar algún accidente si llegan a la basura.
2.4.3 Empalmadora por fusión TRITEC
El empalme por fusión, a grandes rasgos, consiste en unir las dos fibras fundiendo el
material de sus puntas mediante la aplicación de una fuente calorífica, que suele
estar compuesta por dos electrodos entre los cuales se produce un arco eléctrico
cuando se les aplica una fuente de alta tensión de 4000 a 5000 voltios con corriente
controlada. La potencia calorífica del arco eléctrico dependerá de la corriente que en
cada momento suministre la fuente de alta tensión.
Los empalmes por fusión se realizan utilizando una máquina a la que se suele
denominar como: empalmadora, fusionadora o máquina de empalme.
En nuestro caso se utilizó una empalmadora portátil por fusión TRITEC modelo
FASE II. Esta empalmadora cuenta con diez diferentes programas de empalme que
están pre cargados en la memoria de la misma. Además posee diez programas que
pueden ser configurados por el operador de la empalmadora donde se pueden variar
todos los parámetros que utiliza la herramienta para realizar el proceso de empalme.
La Figura 2.14, muestra cómo funciona la empalmadora y cómo actúan cada uno de
los parámetros.

Instituto Politécnico Nacional E S I M E
44 | Página
Figura 2.14. Gráfica del funcionamiento de la empalmadora marca TRITEC modelo FASE II.
Las fibras son separadas por una distancia “Gap” antes de que el arco sea
encendido. Una potencia de arco “Arc1” es entonces aplicada y sostenida por un
tiempo “Time1”. Esto empieza a fundir el vidrio de los extremos de las fibras. Al final
del tiempo “Time1” las fibras estarán casi fundidas. La potencia del arco es
incrementada hasta “Arc2a” mientras que las fibras son rápidamente empujadas una
dentro de otra, por una distancia “Stuff” y unidas nuevamente. La potencia del arco
es ajustada por “Arc2b” por un tiempo “Time2b” y posteriormente reajustada hasta
una potencia “Arc2c” y sostenida por un tiempo “Time2c” [8].
Como se ha mencionado con antelación, la fibra utilizada para el presente proyecto
es multimodo, por lo que únicamente se utilizaron los programas de la categoría
M’mode, que indica que es para fibras de esta característica.
Una vez colocados y asegurados los dos segmentos de la fibra en la empalmadora,
se enciende ésta y se selecciona el programa de empalme de acuerdo a las
características de la fibra óptica a fusionar. Posteriormente se coloca en su posición
de empalme la cubierta del arco eléctrico con el microscopio y se observan las fibras
con ayuda del mismo para verificar que el corte de las fibras cumpla con las
características aceptables. En caso de no cumplir con estas características se
deberá realizar el proceso de corte de una o ambas fibras nuevamente. Después se
aproximan las fibras por medio de las perillas de posicionamiento hasta que éstas
estén muy cercanas al contacto. Posterior a esto nos auxiliamos de los botones de
IZQUIERDA y DERECHA para juntar los extremos de la fibra con precisión. Se
recomienda que no se junten demasiado las fibras pues se pueden obtener
resultados inesperados que en su mayoría son negativos. Se presiona el botón de
ARCO DE LIMPIEZA para retirar cualquier impureza adherida a la fibra óptica y

Instituto Politécnico Nacional E S I M E
45 | Página
finalmente se presiona el botón de ARCO y podemos observar a través del
microscopio cómo la empalmadora realiza el empalme.
2.5 Procedimiento práctico de empalme
Para el proceso de empalme se siguieron los siguientes pasos: se utilizó una pinza
especial para pelar la cubierta y a cortar el kevlar. Se procede a limpiar la fibra con
un papel suave embebido en alcohol isopropílico, para nuestro caso se utilizaron
toallitas (para limpiar lentes) húmedas. Lo siguiente es realizar un corte en el ángulo
y longitud adecuados. Para realizar esta operación con éxito es imprescindible
emplear una cortadora de precisión. La colocación y ajuste en longitud de la fibra se
hizo con la mayor precisión posible. Después del corte no está de más volver a
limpiar las fibras y, cuidando de que sus extremos no rocen o toquen las partes
mecánicas, las ubicamos a izquierda y derecha de los electrodos fijándolas con los
seguros de la empalmadora siguiendo las instrucciones que se mencionaron
anteriormente en las especificaciones de la empalmadora. A continuación se muestra
el proceso completo en la Figura 2.15.
a) b) c)
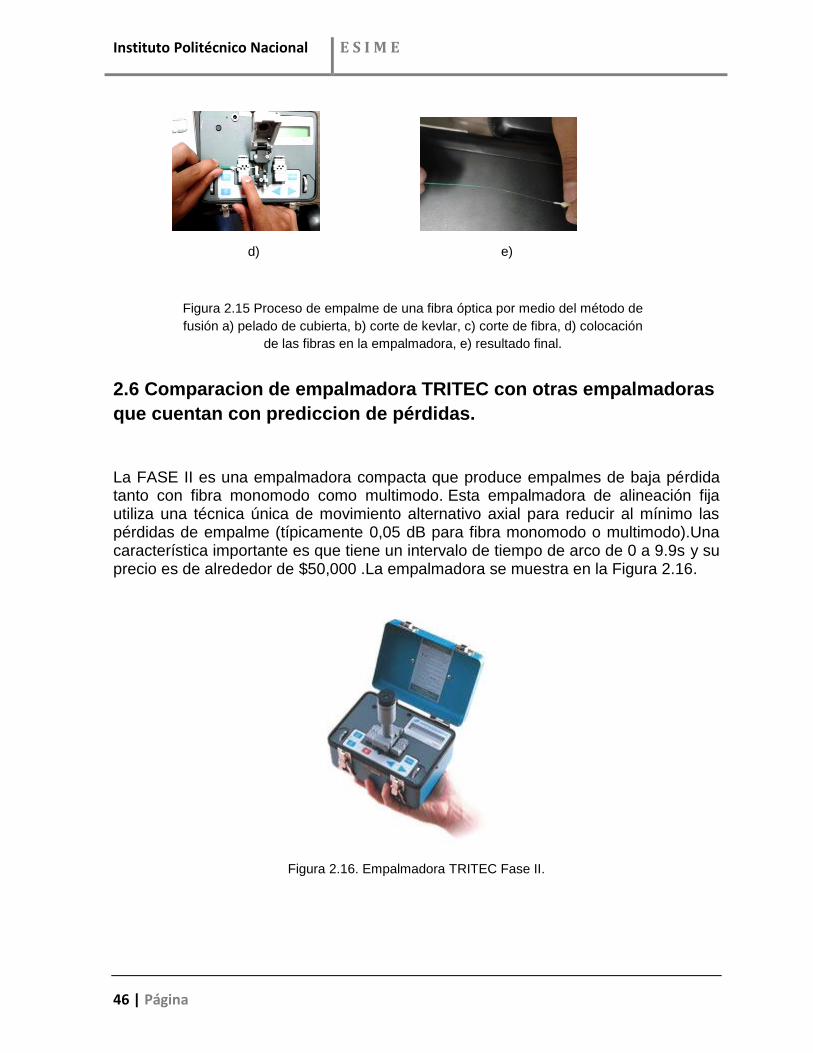
Instituto Politécnico Nacional E S I M E
46 | Página
2.6 Comparacion de empalmadora TRITEC con otras empalmadoras
que cuentan con prediccion de pérdidas.
La FASE II es una empalmadora compacta que produce empalmes de baja pérdida tanto con fibra monomodo como multimodo. Esta empalmadora de alineación fija utiliza una técnica única de movimiento alternativo axial para reducir al mínimo las pérdidas de empalme (típicamente 0,05 dB para fibra monomodo o multimodo).Una característica importante es que tiene un intervalo de tiempo de arco de 0 a 9.9s y su precio es de alrededor de $50,000 .La empalmadora se muestra en la Figura 2.16.
Figura 2.16. Empalmadora TRITEC Fase II.
Figura 2.15 Proceso de empalme de una fibra óptica por medio del método de
fusión a) pelado de cubierta, b) corte de kevlar, c) corte de fibra, d) colocación
de las fibras en la empalmadora, e) resultado final.
d) e)

Instituto Politécnico Nacional E S I M E
47 | Página
A continuación, en la Figura 2.17 se muestra la empalmadora óptica Fujikura FSM-60S que pertenece a la nueva serie de Empalmadoras FUJIKURA y utiliza el sistema de alineación PAS (Profile Alignment System) mejorado. Fusiona todos los tipos de fibra óptica, y tiene un precio de $117,500.
Figura 2.17. Empalmadora óptica Fujikura FSM-60S.
Se muestra otra empalmadora en la Figura 2.18. La Fusionadora Digital KL-300T, la
cual tiene un costo de $112,487.50 pero cabe destacar que cuenta con alineación
por núcleo PAS Technology (PAS Profile Alignment System).
Figura 2.18. Empalmadora Digital KL-300T.
En los precios nos podemos dar cuenta que estos últimos modelos de empalmadoras
son mucho más costosas que la TRITEC con la cual estamos trabajando. Así que el
método que se describirá a continuación para predecir las pérdidas de las fibras
multimodo de índice gradual será mucho menos costoso que adquirir una
empalmadora más sofisticada que ya cuenta con la predicción de pérdidas de los
empalmes por fusión.

Instituto Politécnico Nacional E S I M E
48 | Página
CAPÍTULO 3 | “ Interfaz
gráfica de usuario (GUI)”
Instituto Politécnico Nacional E S I M E
49 | Página
CAPÍTULO “3” “INTERFAZ GRÁFICA DE USUARIO (GUI)”
3.1 Uso de MATLAB
MATLAB es un medio computacional técnico, con un gran desempeño para el cálculo
numérico y de visualización. MATLAB integra análisis numérico, matrices,
procesamiento de señales y gráficas, todo esto en un ambiente donde los problemas
y soluciones son expresados tal como se escriben matemáticamente. Inicialmente
funcionaba como auxiliar en la programación de cálculo con matrices. MATLAB fue
escrito originalmente en fortran, actualmente está escrito en lenguaje C.
MATLAB es un lenguaje de programación amigable al usuario con características
más avanzadas y mucho más fáciles de usar que los lenguajes de programación
como basic, pascal o C. Para este trabajo se utilizó Matlab R2011a cuya ventana de
arranque se muestra en la Figura 3.1, la cual es una de las versiones más recientes
de este programa.
Figura 3.1. Ventana de inicio y arranque de Matlab 2011a.
MATLAB (MATrix LABoratory) es un entorno de programación basado en matrices,
ampliamente utilizado en el ámbito de la ingeniería por su versatilidad en la
resolución de cálculos numéricos sin importar cuán complejos sean. Se caracteriza
también por permitir visualizar los resultados fácilmente y de distintas formas.

Instituto Politécnico Nacional E S I M E
50 | Página
El uso de MATLAB está bastante extendido en la rama de Comunicaciones, debido a
que permite el modelado de cualquier tipo de señales por medio de funciones, las
cuales, al igual que todas las variables definidas, son representadas por matrices
numéricas, que pueden incluir elementos complejos. MATLAB además incorpora
ciertas librerías denominadas toolboxes, que no son más que conjuntos de funciones
diseñados para la resolución de problemas específicos; en particular
el Communications Toolbox y el Signal Processing Toolbox son muy útiles para
simular la generación, procesamiento, transmisión y recepción de señales.
La ventana de comandos (Command Window), ventana principal de MATLAB,
guarda cierta semejanza con el Shell de un sistema operativo ya que, al igual que
éste, permite ejecutar instrucciones, moverse entre directorios y gestionar el software
en general. Para obtener ayuda sobre el uso de funciones predefinidas puede
utilizarse la instrucción help [comando]. Siempre que una instrucción cree una
variable, la misma se almacena en el workspace. Las variables se pueden guardar
para futuras sesiones y se almacenarán en formato .mat, utilizando el comando save,
y pueden ser cargadas de nuevo utilizando el comando load.
MATLAB permite el almacenamiento de secuencias de instrucciones en archivos por
medio del editor de texto. Dichos archivos reciben el nombre de archivos .m debido a
que se guardan con esta extensión. Al ejecutar un archivo .m, se ejecutarán una por
una las instrucciones almacenadas por el mismo, lo que permite que se creen
programas y funciones capaces de cumplir tareas específicas.
3.2 Guide
Existen diferentes lenguajes de programación que permiten crear una Interfaz gráfica
tales como: C, Visual Basic, TK, etc. solo por mencionar algunos. Todos ellos
permiten usar controles y maneras de programarlos. Matlab nos permite realizar
interfaces de este tipo de una manera sencilla usando GUIDE (Graphical User
Interface Development Enviroment).
Matlab Guide es un entorno de programación grafica que ofrece Matlab para poder
realizar y ejecutar programas de simulación a medida de forma simple, tiene las
características básicas de todos los programas visuales como Visual Basic o Visual
C++ [web 6].
GUIDE es un entorno de programación visual disponible en MATLAB para realizar y
ejecutar programas que necesiten ingreso continuo de datos.

Instituto Politécnico Nacional E S I M E
51 | Página
3.3 Interfaz gráfica de usuario (GUI)
Las interfaces gráficas de usuario GUI (Graphical User Interface) es la forma en que
el usuario interactúa con el programa o el sistema operativo de una computadora.
Consiste en la creación de una aplicación que permita la interacción con el sistema
de una manera gráfica, es decir, que podrá ser utilizado por cualquier persona tenga
o no conocimientos sobre el tema. Tiene que ser lo más simple posible y fácil de
utilizar.
Para este trabajo se realizó una GUI que permitiera la visualización de las fibras
ópticas a empalmar en un AXE de video (recuadro en la pantalla) permitiendo
realizar ajustes de posicionamiento de las mismas. Así mismo, se incluyen cuadros
que muestran el estado del corte, la separación y alineación de los extremos de la
fibra, para finalmente mostrar la predicción de las pérdidas en el empalme.
3.4 Creación de la GUI en matlab
Las interfaces gráficas de usuario (GUI- Graphical User Interface), es la forma en que
el usuario interactúa con el programa o el sistema operativo de una computadora.
Una GUI contiene diferentes elementos gráficos tales como: botones, campos de
texto, menús, gráficos, etc.
La forma de implementar las GUIs con Matlab es crear objetos y definir las acciones
que cada uno va a realizar. Al usar GUIDE obtenemos dos archivos:
Archivo .fig: Contiene la descripción de los componentes que contiene la
interface.
Archivo ejecutable .m: Contiene las funciones y los controles del GUI.
Las dos partes están unidas a través de las subrutinas callback. Un callback se
define como la acción que llevará a cabo un objeto de la GUI cuando el usuario lo
active. Por ejemplo, si en una ventana existe un botón el cual al presionarlo ejecutará
una serie de acciones, a eso se le conoce como la función callback.
Una vez que se guardan los archivos desde la herramienta GUIDE, se crea el archivo
.fig y automáticamente lo hace el .m asociado, con esto podemos ejecutar el
programa en la ventana de comando de Matlab solamente escribiendo el nombre del
archivo. Por ejemplo si guardamos un archivo sumador.fig y sumador.m escribiendo
sumador en el command window y presionando Enter se ejecuta el programa.
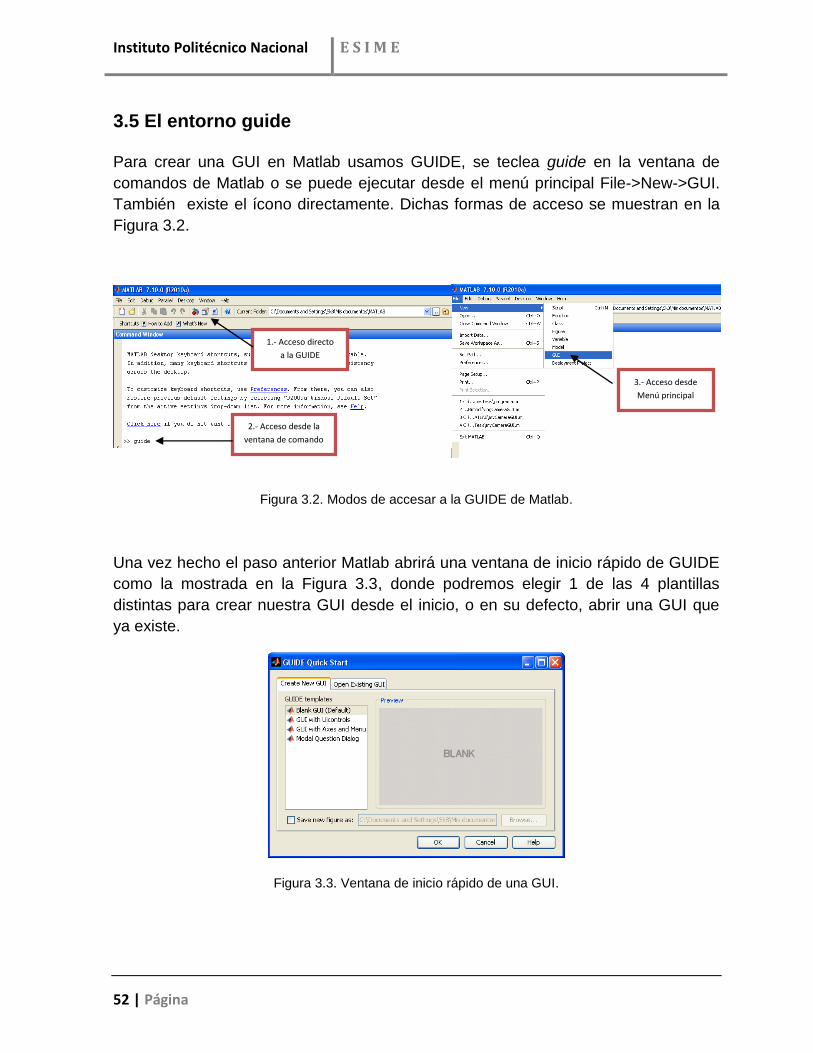
Instituto Politécnico Nacional E S I M E
52 | Página
3.5 El entorno guide
Para crear una GUI en Matlab usamos GUIDE, se teclea guide en la ventana de
comandos de Matlab o se puede ejecutar desde el menú principal File->New->GUI.
También existe el ícono directamente. Dichas formas de acceso se muestran en la
Figura 3.2.
Figura 3.2. Modos de accesar a la GUIDE de Matlab.
Una vez hecho el paso anterior Matlab abrirá una ventana de inicio rápido de GUIDE
como la mostrada en la Figura 3.3, donde podremos elegir 1 de las 4 plantillas
distintas para crear nuestra GUI desde el inicio, o en su defecto, abrir una GUI que
ya existe.
Figura 3.3. Ventana de inicio rápido de una GUI.
1.- Acceso directo
a la GUIDE
2.- Acceso desde la
ventana de comando
3.- Acceso desde
Menú principal

Instituto Politécnico Nacional E S I M E
53 | Página
Cada una de estas opciones presenta las siguientes características:
a) Blank GUI (Default): La opción de interfaz gráfica de usuario en blanco (viene
predeterminada), nos presenta un formulario nuevo, en el cual podemos diseñar
nuestro programa.
b) GUI with Uicontrols: Esta opción presenta un ejemplo en el cual se calcula la
masa, dada la densidad y el volumen, en alguno de dos sistemas de unidades.
Podemos ejecutar este ejemplo y obtener resultados.
c) GUI with Axes and Menu: Esta opción es otro ejemplo el cual contiene el menú
File con las opciones Open, Print y Close. En el formulario tiene un popup menu, un
push button y un objeto Axes, podemos ejecutar el programa eligiendo alguna de las
seis opciones que se encuentran en el menú desplegable y haciendo click en el
botón de comando.
d) Modal Question Dialog: Con esta opción se muestra en la pantalla un cuadro de
diálogo común, el cual consta de una pequeña imagen, una etiqueta y dos botones
Yes y No. Dependiendo del botón que se presione, el GUI retorna el texto
seleccionado (la cadena de caracteres ‘Yes’ o ‘No’).
Para nuestro caso partimos desde una GUI en blanco seleccionando la opción “Blank
GUI (Default)”, observando que se despliega una nueva ventana con un área de
diseño similar a la de la Figura 3.4. En la parte superior se encuentran los menús y
opciones de GUIDE, en la parte izquierda se aprecian los diferentes controles, y en la
parte central el área de diseño donde se colocan los botones, recuadros, ventanas y
ejes a controlar.
Figura 3.4. Área de trabajo de GUIDE.

Instituto Politécnico Nacional E S I M E
54 | Página
Para obtener la etiqueta de cada elemento de la paleta de componentes se ejecuta:
File>>Preferentes y se selecciona Show names in component palette que facilita
ubicar de manera más sencilla los íconos a utilizar en caso de no estar tan
familiarizados con el entorno de la GUI. Así se tiene la presentación como la
mostrada en la Figura 3.5:
Figura 3.5. Entorno de diseño con los componentes etiquetados.
La ventana presenta una variedad de componentes importantes para el diseño de
una interfaz gráfica. Estos componentes se muestran y describen en la Tabla 3.1
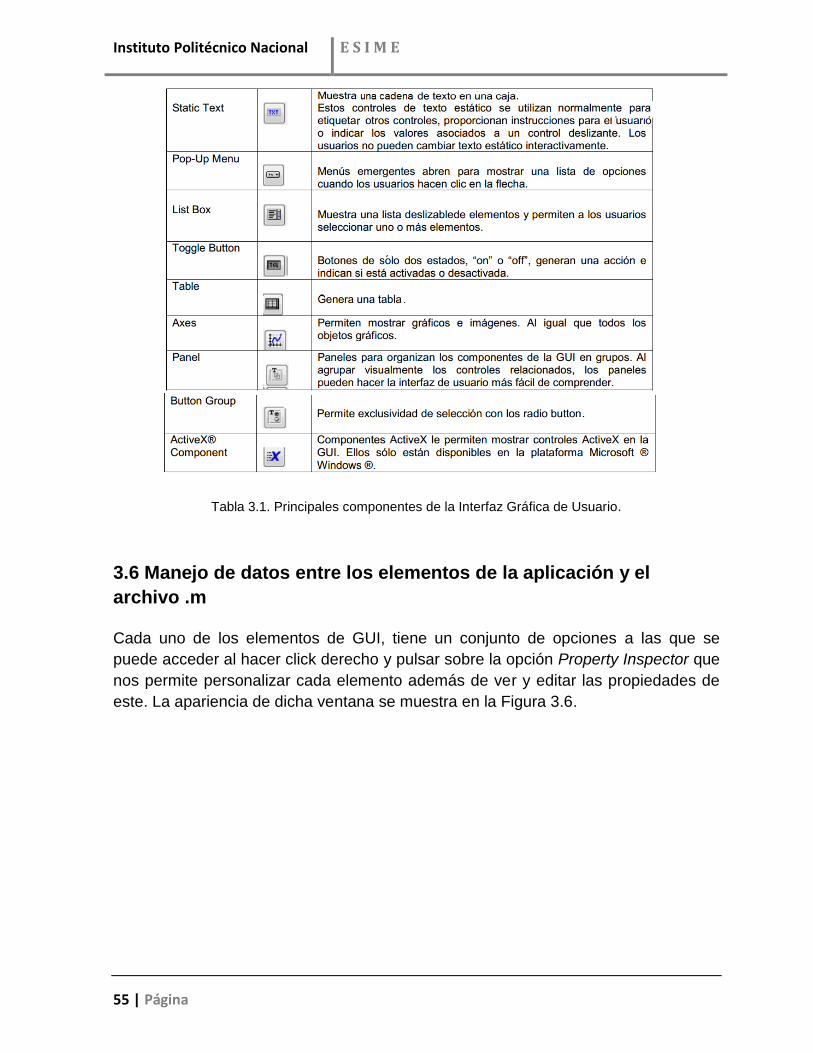
Instituto Politécnico Nacional E S I M E
55 | Página
Tabla 3.1. Principales componentes de la Interfaz Gráfica de Usuario.
3.6 Manejo de datos entre los elementos de la aplicación y el
archivo .m
Cada uno de los elementos de GUI, tiene un conjunto de opciones a las que se
puede acceder al hacer click derecho y pulsar sobre la opción Property Inspector que
nos permite personalizar cada elemento además de ver y editar las propiedades de
este. La apariencia de dicha ventana se muestra en la Figura 3.6.
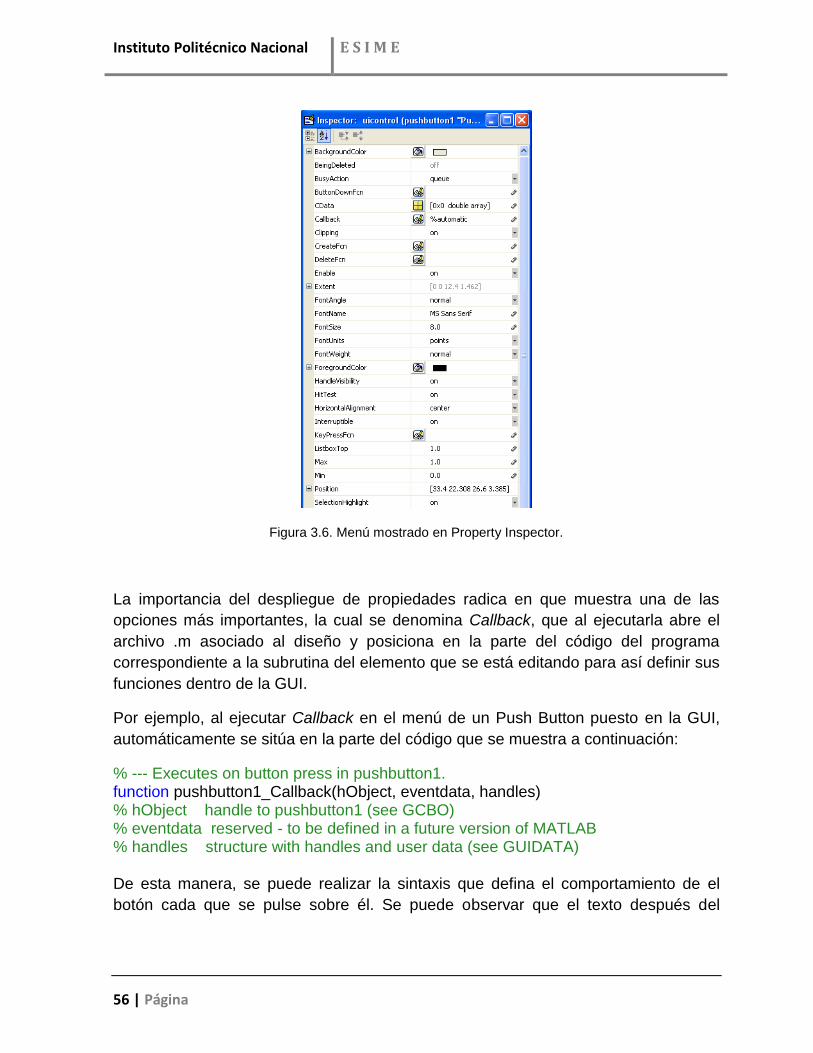
Instituto Politécnico Nacional E S I M E
56 | Página
Figura 3.6. Menú mostrado en Property Inspector.
La importancia del despliegue de propiedades radica en que muestra una de las
opciones más importantes, la cual se denomina Callback, que al ejecutarla abre el
archivo .m asociado al diseño y posiciona en la parte del código del programa
correspondiente a la subrutina del elemento que se está editando para así definir sus
funciones dentro de la GUI.
Por ejemplo, al ejecutar Callback en el menú de un Push Button puesto en la GUI,
automáticamente se sitúa en la parte del código que se muestra a continuación:
% --- Executes on button press in pushbutton1. function pushbutton1_Callback(hObject, eventdata, handles) % hObject handle to pushbutton1 (see GCBO) % eventdata reserved - to be defined in a future version of MATLAB % handles structure with handles and user data (see GUIDATA) De esta manera, se puede realizar la sintaxis que defina el comportamiento de el
botón cada que se pulse sobre él. Se puede observar que el texto después del

Instituto Politécnico Nacional E S I M E
57 | Página
símbolo % formará parte de los comentarios y algunos de ellos aparecen
automáticamente con la finalidad de saber algunas de las propiedades de la función.
Todos los valores de las propiedades de los elementos (color, valor, posición, etc.) y
los valores de las variables transitorias del programa se almacenan en una estructura
que son accedidos mediante un único y mismo identificador para todos éstos que se
asigna en:
handles.output = hObject;
Donde handles, es el identificador a los datos de la aplicación. Esta definición de
identificador para salvar los datos de la aplicación se denomina guidata y se define
mediante la sentencia:
guidata(hObject, handles);
Guidata es la función que guarda las variables y propiedades de los elementos en la
estructura de datos de la aplicación.
Esta sentencia garantiza que cualquier cambio o asignación de propiedades o
variables quede almacenado. Por ejemplo, si dentro de una subrutina una operación
dio como resultado una variable tesis para poder utilizarla desde el programa u otra
subrutina se debe guardar de la siguiente manera:
handles.tesis=tesis;
guidata(hObject,handles);
La primera línea crea la variable tesis a la estructura de datos de la aplicación
apuntada por handles y la segunda graba el valor.
La asignación u obtención de valores de los componentes se realiza mediante las
sentencias get y set. Por ejemplo si se quiere que la variable utpl tenga el valor del
slider se escribe:
utpl= get(handles.slider1,'Value');
Note que siempre se obtienen los datos a través de los identificadores handles. Para
asignar el valor de la variable utpl al statictext etiquetada como text1 escribimos:
set(handles.text1,'String',utpl);%Escribe el valor del Slider en static-text o texto estático
Instituto Politécnico Nacional E S I M E
58 | Página
3.7 Los componentes físicos
Para implementar el algoritmo se ha escogido la herramienta Matlab, debido a que
con la utilización de las toolbox “Image acquisition” y “Image Processing”, se
encuentra una gran variedad de funciones típicas de este ámbito previamente
definidas, de manera que para utilizarlas hay que aplicar una instrucción y no
desarrollar un algoritmo para la implementación de cada una. Además Matlab ofrece
una función de ayuda muy completa, con manuales y ejemplos prácticos con los que
se puede conseguir la autoformación. Para la realización del proyecto se ha
consultado constantemente la ayuda. Para más información sobre algún comando o
funcionamiento del entorno GUI utilizado en el presente trabajo, se accedió a la
ayuda que proporciona Matlab ya sea pulsando >>help desde la ventana de
comando o visitando la página oficial de Matlab www.mathworks.com/.
Image Adquisition Toolbox de Matlab nos permite realizar un amplio conjunto de
operaciones relacionadas con la adquisición de imágenes a través del registro por
ejemplo con webcams conectadas por el puerto USB, previsualizar un streaming de
video “en tiempo real”, la adquisición de fotografías mediante múltiples disparos,
ejecutar callbacks ante ciertos eventos de la adquisición, exportar datos de imagen y
video al workspace de Matlab, etcétera.
Nuestro objetivo fue la creación de un arreglo tal que permitiera la adquisición de
video, sin necesidad de ser almacenado, que pudiera mostrarse en una ventana
mediante el uso de GUI para que el usuario pudiera controlar mediante botones el
comportamiento del programa, todo con la finalidad de manipular la posición de la
fibra óptica y conocer la evaluación de algunos parámetros en tiempo real.
El arreglo de los componentes físicos utilizados para este trabajo se muestra en la
figura 3.7, donde se aprecia la facilidad con la que se implementa y utilizan los
elementos para trabajar con la fibra óptica de interés.
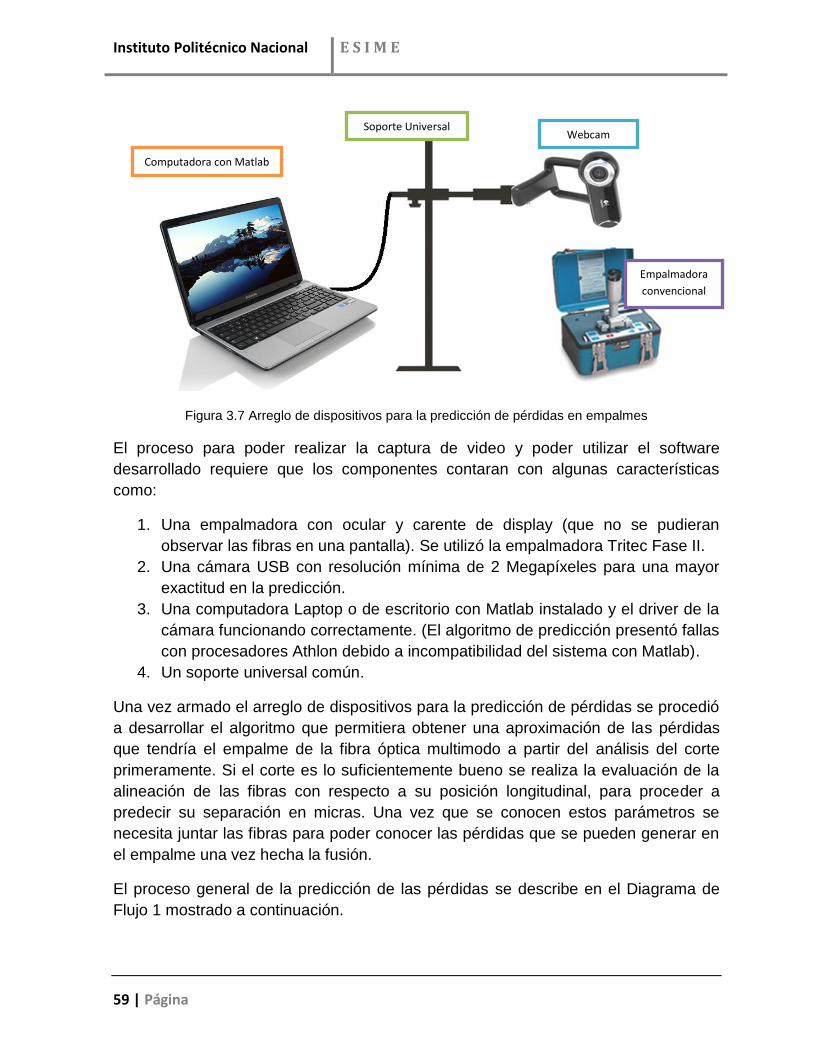
Instituto Politécnico Nacional E S I M E
59 | Página
Figura 3.7 Arreglo de dispositivos para la predicción de pérdidas en empalmes
El proceso para poder realizar la captura de video y poder utilizar el software
desarrollado requiere que los componentes contaran con algunas características
como:
1. Una empalmadora con ocular y carente de display (que no se pudieran
observar las fibras en una pantalla). Se utilizó la empalmadora Tritec Fase II.
2. Una cámara USB con resolución mínima de 2 Megapíxeles para una mayor
exactitud en la predicción.
3. Una computadora Laptop o de escritorio con Matlab instalado y el driver de la
cámara funcionando correctamente. (El algoritmo de predicción presentó fallas
con procesadores Athlon debido a incompatibilidad del sistema con Matlab).
4. Un soporte universal común.
Una vez armado el arreglo de dispositivos para la predicción de pérdidas se procedió
a desarrollar el algoritmo que permitiera obtener una aproximación de las pérdidas
que tendría el empalme de la fibra óptica multimodo a partir del análisis del corte
primeramente. Si el corte es lo suficientemente bueno se realiza la evaluación de la
alineación de las fibras con respecto a su posición longitudinal, para proceder a
predecir su separación en micras. Una vez que se conocen estos parámetros se
necesita juntar las fibras para poder conocer las pérdidas que se pueden generar en
el empalme una vez hecha la fusión.
El proceso general de la predicción de las pérdidas se describe en el Diagrama de
Flujo 1 mostrado a continuación.
Computadora con Matlab
Soporte Universal Webcam
Empalmadora
convencional

Instituto Politécnico Nacional E S I M E
60 | Página
Diagrama de Flujo 3.1. Funcionamiento general del algoritmo de predicción de pérdidas.
Evaluación del corte
de las fibras
¿Bueno? No
Evaluación de la
alineación
¿Buena o
Regular?
¿Están juntas
las fibras?
Evaluación de la
separación
Predicción de la
Atenuación
¿Suficientemente
pequeña?
Empalmar
Repetir corte derecho,
izquierdo o ambos.
Realizar realineación
manual de las fibras
Acercar más las
fibras
Inicio
Si
No
Si
Si
Si
Fin
No

Instituto Politécnico Nacional E S I M E
61 | Página
3.8 Adquisición de imágenes y video
Los seres humanos confiamos fundamentalmente en el sentido de la vista,
recogemos un 99% de la información del medio que nos rodea a partir de los ojos. El
procesamiento de imágenes es un proceso que pretende extraer información visual
de una imagen o un conjunto de imágenes para un propósito concreto.
Para este propósito por medio de algoritmos, se le “enseña” al ordenador a
interpretar la información de las imágenes y distinguir los datos válidos del fondo
para un propósito concreto, como en el caso de este proyecto, cuantificar las
pérdidas en un empalme. Esta reciente tecnología está cada vez más implantada en
la sociedad. Una utilidad que cada vez es más frecuente la podemos encontrar en el
sector de la automatización. El procesamiento de imágenes se usa para inspección y
supervisión automática en líneas de producción de grandes empresas. Este sistema
reduce mucho el error humano a la vez que proporciona estabilidad y precisión
ofreciendo continuos controles de calidad para todas las piezas, sustituyendo los
controles estadísticos [3].
El proceso de adquisición de imágenes se podría diferenciar en dos partes: una
encargada de adquirir las imágenes y otra encargada de ir almacenando los distintos
cuadros ya adquiridos en forma de imágenes. La idea es crear un sistema que sea
capaz de tomar imágenes en directo para poder ser procesadas. Este punto es
interesante ya que las imágenes en tiempo real serán necesarias para su uso
práctico en aplicaciones reales pudiendo ser utilizado en sistemas de validación
automática.
3.9 Configuración de la cámara
Como primer paso, se configura Matlab para elegir la cámara conectada vía USB (y
descartar la integrada en la Laptop) y con ella trabajar en el proceso de empalme. De
esta manera se empleó el comando imaqhwinfo para conocer la información. Matlab
irá ofreciendo la información acerca de los adaptadores disponibles en el sistema
para la adquisición de imagen. Una vez ejecutado dicho comando en la ventana de
comando, la información desplegada por Matlab es la siguiente.

Instituto Politécnico Nacional E S I M E
62 | Página
Ilustración : Configuración del adaptador.
Como se observa existen dos adaptadores instalados. Nuestro interés fue la webcam
que se encontró dentro de la denominación del adaptador ‘winvideo’. Para obtener
mayores detalles se digitó el comando correspondiente, con lo que se obtuvo:
En este caso, el dispositivo tiene los identificadores [1] y [2], el primero de la cámara
USB con la que trabajamos y el segundo de la cámara integrada en la Laptop. Por lo
tanto insertando el comando >> cam=imaqhwinfo('winvideo',1) obtuvimos información
de interés de nuestro dispositivo acerca de su configuración y otros detalles como:
Conocer otros formatos soportados por nuestro dispositivo nos brindó la oportunidad
de elegir la calidad y tamaño de imagen y con ello mejorar el tiempo de
procesamiento de la misma para satisfacer nuestras necesidades. El comando
>>cam.SupportedFormats, nos ofrece la lista de formatos soportados por la Cámara
Logitech.
>> imaqhwinfo
ans =
InstalledAdaptors: {'coreco' 'winvideo'}
MATLABVersion: '7.10 (R2010a)'
ToolboxName: 'Image Acquisition Toolbox'
ToolboxVersion: '3.5 (R2011a)'
>> imaqhwinfo('winvideo')
ans =
AdaptorDllName: [1x88 char]
AdaptorDllVersion: '3.5 (R2010a)'
AdaptorName: 'winvideo
DeviceIDs: {[1] [2]}
DeviceInfo: [1x2 struct]
>> cam=imaqhwinfo('winvideo',1)
DefaultFormat: 'RGB24_640x480'
DeviceFileSupported: 0
DeviceName: 'Logitech Webcam Pro 9000'
DeviceID: 1
ObjectConstructor: 'videoinput('winvideo', 1)'
SupportedFormats: {1x46 cell}
SupportedFormats: {1x5 cell}
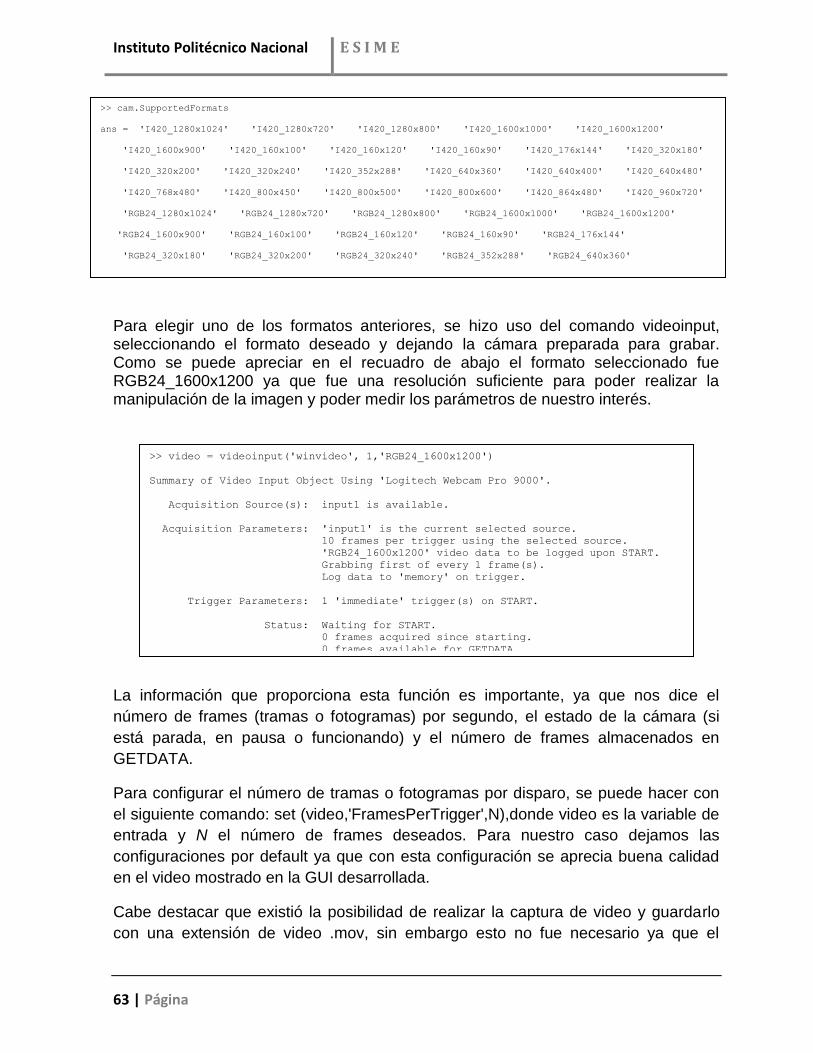
Instituto Politécnico Nacional E S I M E
63 | Página
Para elegir uno de los formatos anteriores, se hizo uso del comando videoinput, seleccionando el formato deseado y dejando la cámara preparada para grabar. Como se puede apreciar en el recuadro de abajo el formato seleccionado fue RGB24_1600x1200 ya que fue una resolución suficiente para poder realizar la manipulación de la imagen y poder medir los parámetros de nuestro interés.
La información que proporciona esta función es importante, ya que nos dice el
número de frames (tramas o fotogramas) por segundo, el estado de la cámara (si
está parada, en pausa o funcionando) y el número de frames almacenados en
GETDATA.
Para configurar el número de tramas o fotogramas por disparo, se puede hacer con
el siguiente comando: set (video,'FramesPerTrigger',N),donde video es la variable de
entrada y N el número de frames deseados. Para nuestro caso dejamos las
configuraciones por default ya que con esta configuración se aprecia buena calidad
en el video mostrado en la GUI desarrollada.
Cabe destacar que existió la posibilidad de realizar la captura de video y guardarlo
con una extensión de video .mov, sin embargo esto no fue necesario ya que el
>> cam.SupportedFormats
ans = 'I420_1280x1024' 'I420_1280x720' 'I420_1280x800' 'I420_1600x1000' 'I420_1600x1200'
'I420_1600x900' 'I420_160x100' 'I420_160x120' 'I420_160x90' 'I420_176x144' 'I420_320x180'
'I420_320x200' 'I420_320x240' 'I420_352x288' 'I420_640x360' 'I420_640x400' 'I420_640x480'
'I420_768x480' 'I420_800x450' 'I420_800x500' 'I420_800x600' 'I420_864x480' 'I420_960x720'
'RGB24_1280x1024' 'RGB24_1280x720' 'RGB24_1280x800' 'RGB24_1600x1000' 'RGB24_1600x1200'
'RGB24_1600x900' 'RGB24_160x100' 'RGB24_160x120' 'RGB24_160x90' 'RGB24_176x144'
'RGB24_320x180' 'RGB24_320x200' 'RGB24_320x240' 'RGB24_352x288' 'RGB24_640x360'
'RGB24_640x400' 'RGB24_640x480' 'RGB24_768x480' 'RGB24_800x450' 'RGB24_800x500'
'RGB24_800x600' 'RGB24_864x480' 'RGB24_960x720'
>> video = videoinput('winvideo', 1,'RGB24_1600x1200')
Summary of Video Input Object Using 'Logitech Webcam Pro 9000'.
Acquisition Source(s): input1 is available.
Acquisition Parameters: 'input1' is the current selected source.
10 frames per trigger using the selected source.
'RGB24_1600x1200' video data to be logged upon START.
Grabbing first of every 1 frame(s).
Log data to 'memory' on trigger.
Trigger Parameters: 1 'immediate' trigger(s) on START.
Status: Waiting for START.
0 frames acquired since starting.
0 frames available for GETDATA.
>>

Instituto Politécnico Nacional E S I M E
64 | Página
procesamiento de las tramas se realizó en tiempo real sin necesidad de recurrir a
imágenes o video grabado.
El programa realizado es capaz de procesar aproximadamente 50 imágenes por
segundo ejecutado desde un ordenador, y el procesado de imagen no sufre ningún
tipo de penalización en cuanto a la calidad. No obstante, el tiempo de procesamiento
está directamente relacionado al procesador del ordenador. En nuestro caso se
utilizó una computadora con procesador Intel Core i7 -2640 @ 2.80 GHz y 4.00 GB
en RAM.
3.10 Construcción de la GUI
Figura 3.8 Estructura de la GUI diseñada para predecir pérdidas.
La Figura 3.8, muestra la estructura de la GUI diseñada para predecir las pérdidas
del empalme. Esta estructura está compuesta por un Axes el cual pone en pantalla lo
capturado por la webcam, así como cinco recuadros los cuales realizan las
siguientes funciones:
1. Estado: Muestra el estado del empalme el cual puede ser alguno de los
siguientes: Listo para empalmar, Continúe con su proceso de empalme, repetir
corte izquierdo, repetir corte derecho o repetir ambos cortes, según sea el
caso.
2. Corte: Nos dice si el corte es bueno o malo según la evaluación realizada por
el programa.

Instituto Politécnico Nacional E S I M E
65 | Página
3. Alineación: Muestra si la alineación es Buena, Regular o Mala, de acuerdo al
análisis de la imagen siguiendo el algoritmo propuesto.
4. Separación: Muestra la separación en micrómetros entre los extremos de las
fibras.
5. Pérdidas: Muestra la predicción de las pérdidas en decibeles que tendrá el
empalme una vez realizada la fusión.
Además de los cinco recuadros mencionados anteriormente, la interfaz gráfica
presentada también cuenta con un botón de inicio y parada, el cual cambia de estado
entre “Iniciar análisis” y “Detener”, permitiendo o deteniendo el análisis del video
capturado de acuerdo al algoritmo diseñado cada vez que se da click sobre él.
La creación de la GUI se puede resumir en nueve pasos los cuales fueron:
1. Iniciar GUIDE y seleccionar una GUI en blanco.
2. Cambiar las propiedades de la figura con la siguiente configuración:
a. Name – cambiar a 'MyCameraGUI' b. Tag - cambiar a 'MyCameraGUI' c. Units - cambiar a o 'pixels' d. Position, Width - cambiar a 400 e. Position, Height - cambiar a 420
3. Insertar un Axes en la GUI y modificar sus propiedades con las siguientes características:
a. Tag – nombrarla 'cameraAxes' b. Units – cambiar a 'pixels' c. Position, x – cambiar a 40 d. Position, y – cambiar a 40 e. Position, Width – cambiar a 320 f. Position, Height – cambiar a 240 g. Box – cambiar a 'on' h. XTick, XTickLabel, YTick, YTickLabel – cambiar a '[]' borrando todo lo que se encuentra por default (el estado cambia automáticamente a 'manual'). 4. Insertar un Push Button dentro de la GUI y modificar sus propiedades como se
describe a continuación: a. String - Cambiar a 'Iniciar Análisis’ b. Tag – Cambiar a 'startStopCamera' c. Units – Cambiar a 'pixels' d. Position, x – cambiar a 20 e. Position, y – cambiar a 320

Instituto Politécnico Nacional E S I M E
66 | Página
f. Position, Width – cambiar a 120 g. Position, Height – cambiar a 60 5. Guardar la GUI como “My Camera GUI” para generar “myCameraGUI.m” y
proceder a la edición del código. El código inicial se muestra a continuación clc % Limpia la pantalla handles.video = videoinput('winvideo', 1,'RGB24_1600x1200'); set(handles.video,'TimerPeriod', 0.05, ... 'TimerFcn',['if(~isempty(gco)),'... 'handles=guidata(gcf);'... % Actualiza handles 'image(getsnapshot(handles.video));'... % Captura imagenes a través de
GETSNAPSHOT 'set(handles.cameraAxes,''ytick'',[],''xtick'',[]),'... % Remueve los
apóstrofos y etiquetas que son insertados IMAGE 'else '... 'delete(imaqfind);'... % Limpia y borra cualquier adquisición de objetos de
imagen 'end']); triggerconfig(handles.video,'manual'); handles.video.FramesPerTrigger = Inf; % Captura frames hasta que se detenga
manualmente % Actualiza la estructura handles guidata(hObject, handles);
% Espera a la respuesta del usuario uiwait(handles.myCameraGUI);
Notese que 'adaptorname' depende de los dispositivos conectados a la computadora con lo cual se debe primero conocer los dispositivos y nombres correspondientes antes de realizar las modificaciones pertinentes.
6. Modificar el botón de incio y parada startStopCamera como sigue: function startStopCamera_Callback(hObject, eventdata, handles) % Para iniciar o detener el programa if strcmp(get(handles.startStopCamera,'String'), 'Iniciar Análisis') % Cámara apagada. Cambia la leyenda del botón a detener e inicia la cámara.
set(handles.startStopCamera,'String', 'Detener ') start(handles.video)
…%Código del programa else %Camara prendida. Detener a cámara y cambiar la leyenda del boton. set(handles.startStopCamera,'String','Iniciar Análisis') stop(handles.video) set(handles.startAcquisition,'Enable','off'); set(handles.captureImage,'Enable','off'); end
Instituto Politécnico Nacional E S I M E
67 | Página
7. Modificar "Executes when user attempts to close myCameraGUI." como se muestra a continuación: function myCameraGUI_CloseRequestFcn(hObject, eventdata, handles) % Consejo: borre los hObject delete(hObject); delete(imaqfind);
8. Guardar las modificaciones hechas en el archivo myCameraGUI.m. 9. Definir las funciones para el procesamiento de las imágenes que componen el video (20 frames por segundo). Estas funciones se encuentran en el ANEXO 1. De esta manera queda configurada la GUI cuyo funcionamiento se determina mediante la interacción usuario-interfaz gráfica-código. La ejecución del programa puede realizarse tecleando en la ventana de comando:
>>myCameraGUI.
3.11 Procesamiento de la imagen
Los parámetros que se tienen que analizar para poder determinar la atenuación del
empalme se ejecutan por pasos donde cada uno de ellos determina si se procederá
a evaluar el siguiente, tal como se muestra en el diagrama de flujo expuesto
anteriormente.
Para poder evaluar cada uno de los parámetros con mayor precisión se consideró
una imagen que fuese previamente procesada. Para ello se convirtió la imagen a
escala de grises, después a blanco y negro, se rotó la imagen hasta posicionar las
fibras de manera horizontal y se recortó la imagen con el objetivo de trabajar
solamente con el área de interés el cual es el centro entre la separación de las fibras.
Este proceso se retoma del trabajo de Cuevas Escobar Bruno Omar y González
Fragoso Alan Michel [9]. Las figuras 3.9 a-e muestran el proceso que sigue esta
imagen una vez adquirida por la webcam.

Instituto Politécnico Nacional E S I M E
68 | Página
Figura 3.9. a) Imagen original, b) Imagen en escala de grises, c) Imagen en blanco y negro, d) imagen
rotada, e) Imagen recortada
La sintaxis de la función que efectúa el cambio de una imagen RGB a escala de
grises es la siguiente:
im_gris=rgb2gray(im_rgb);
donde im_rgb es la matriz que contiene la imagen a color e im_gris es la matriz en la
que se guarda la misma imagen en escala de grises. En este caso la matriz im_gris
contiene valores enteros en el intervalo de 0 a 255.
La sintaxis de la función que realiza el cambio de una imagen en escala de grises a
una imagen en blanco y negro se presenta a continuación:
im_bn=im2bw(im_gris, nivel);
donde im_bn es la matriz en la que se salva la imagen con representación binaria, es
decir, es una matriz que contiene valores en cero para los pixeles negros y uno para
(a) (b) (c)
(d) (e)

Instituto Politécnico Nacional E S I M E
69 | Página
los blancos, im_gris es la matriz que contiene la imagen en escala de grises y nivel
es el umbral de decisión para determinar el valor binario que le corresponde.
La función para cambiar la imagen a blanco y negro provocaba problemas en la
imagen, ya que el umbral de decisión por defecto, no era el óptimo, a pesar de haber
cambiado éste a distintos valores que son confinados entre cero y uno. Sumado a
esto, la imagen tiene que ser centrada en el área del corte. Para este fin, se decidió
retomar la función de Cuevas Escobar y González Fragoso la cual pudiera quitar los
pixeles de color negro que no pertenecieran a la imagen de la fibra y que funcionase
para cualquier otra imagen sin la necesidad de cambiar el umbral de decisión de
forma manual.
Para poder centrar la imagen se tomaron como referencia los electrodos de la
empalmadora. Para este fin, se diseñó una función tal que pudiera decidir en cuál de
los siguientes casos se encontraba la imagen: a) si en la imagen se encontraban los
dos electrodos, b) si se encontraba sólo el electrodo superior, c) si se encontraba
sólo el electrodo inferior o d) ninguno de los electrodos aparece en la imagen. Así
mismo se implementó una función que identificara de manera correcta el centro de la
imagen con respecto a los cortes para cada caso [9]. En los casos en los que no
aparecen los dos electrodos se toma el centro de uno de éstos electrodos y el centro
con respecto a las fibras. Si la imagen no presenta electrodos visibles el centro de la
imagen se toma a partir de los bordes de las fibras.
Para convertir la imagen a blanco y negro se definió un umbral de decisión. Los
valores que estén por debajo de este umbral serán negros y por encima serán
blancos. De esta forma se obtiene la imagen de la Figura 3.9c.
Como parte del procesamiento de las imágenes y la obtención de los datos, las
imágenes que hasta ahora tienen cierta inclinación fueron giradas de tal forma que
las fibras se pudieran ver completamente horizontales. Para ello se utilizó una
función que hace uso de una regresión lineal para calcular el ángulo de inclinación y
girar la imagen. La sintaxis de ésta aparece a continuación:
im_rot=imrotate(imagen, ángulo);
donde im_rot es la matriz en la que se guarda la matriz imagen, ya que ha sido
girada. El giro puede ser positivo o negativo y depende del valor y el signo de ángulo.
Una vez más, como se muestra en la Figura 3.10b, la imagen girada será la imagen
completa en escala de grises, debido a que los pixeles de los bordes de la imagen
girada son rellenados con pixeles negros. Nuevamente será cortada y transformada

Instituto Politécnico Nacional E S I M E
70 | Página
a una imagen binaria con las funciones correspondientes, como podemos notar en
las Figuras 3.10c y 3.10d respectivamente.
(a)
(b)
(c)
(d)
Figura 3.10. Proceso de rotación y conversión a blanco y negro de la imagen con las fibras separadas.
3.12 Evaluación del corte
El primer parámetro es el corte de las fibras, es decir, si éste es un corte recto o
presenta inclinación con respecto al eje axial de la fibra y a partir de éste se podrá o
no continuar con la evaluación de la alineación.
Es claro que pueden presentarse cuatro casos para el corte: uno, que el corte
izquierdo esté mal; dos, que el corte derecho esté mal; tres, que los dos estén mal, y
cuarto que los dos estén bien. Así, el algoritmo desarrollado tiene la capacidad de
evaluar cada uno de los cortes de la fibra de manera individual.
La Figura 3.11a presenta el caso de un mal corte de la fibra derecha, el cual es más
apreciable cuando se acercan las fibras hasta chocar como se puede apreciar en la
Figura 3.11b. Por ello se ha configurado la GUI de forma tal que no permita evaluar
los demás parámetros si el corte en una de las fibras presenta un ángulo mayor a 5°
respecto a la sección transversal de la fibra o si el cálculo de la desviación es mayor

Instituto Politécnico Nacional E S I M E
71 | Página
a 10, ya que un mal corte produce muchas pérdidas en un empalme. Entiéndase
desviación como una medida que informa de la media de distancias que tienen los
datos respecto de su media aritmética, expresada en las mismas unidades que la
variable (micrómetros).
Figura 3.11. Mal corte en la fibra derecha a) Fibras separadas, b) Fibras juntas.
3.13 Evaluación de la alineación
La alineación es un parámetro que nos indicará que tan bien quedan acoplados los
núcleos y el recubrimiento de cada extremo de las fibras a empalmar. Si la alineación
lateral de las fibras es cercana a cero como lo muestra la Figura 3.12a, la luz podrá
continuar su camino con el mismo ángulo de incidencia y se podrá transmitir. Sin
embargo, si la alineación se comienza a alejar de este valor como se puede notar en
la Figura 3.12b, el área de transmisión se ve acortada y la atenuación de la señal se
incrementará de manera considerable. [2]
Figura 3.12. Alineación de las fibras a) Buena alineación, b) mala alineación.
(a) (b)

Instituto Politécnico Nacional E S I M E
72 | Página
Para calcular el valor de la alineación, se tomó el promedio de cada borde horizontal
y visible de las fibras. Después se realizó la diferencia de cada uno de estos y se
obtuvo nuevamente el promedio de estas diferencias, para obtener un solo valor de
alineación.
Se realizó de esta manera porque a pesar de ser la misma fibra y tener las mismas
dimensiones de núcleo y de recubrimiento, la luz juega un papel importante en los
bordes afectando en el grosor aparente del recubrimiento como se observa en la
Figura 3.13. Si sólo se toma un borde, el valor obtenido será poco confiable.
Figura 3.13. Figura que muestra la influencia de las sombras en la imagen blanco y negro de la fibra
Como se puede observar en la Figura 3.14a aparentemente no existe demasiada
desalineación entre los ejes axiales de las fibras. Sin embargo, al momento de
empalmar representará un severo problema provocando pérdidas bastante
considerables. El efecto que produce una mala alineación puede verse en la Figura
3.14b.
Figura 3.14. Fibras desalineadas: a) Antes del empalme, b) Después del empalme.
(a) (b)
Instituto Politécnico Nacional E S I M E
73 | Página
La función desarrollada para calcular la alineación fue la siguiente [9]:
function [dif]=alineacion(vposde,vposiz) % función que recibe como
argumento los vectores de bordes del recubrimiento dif=zeros(1,4); for x=1:4 % ciclo que calcula la diferencia de los bordes de la fibra
izquierda con la fibra derecha dif(x)=abs(vposde(x)-vposiz(x)); end if mean(dif)<=2 alin=0; elseif mean(dif)>2 && mean(dif)<4 alin=1; elseif mean(dif)>4 alin=2; end end
3.14 Evaluación de la separación
Dada la naturaleza del proceso de fusión que realiza la empalmadora, la separación
de las fibras es un parámetro que nos indicará que tan bueno será un empalme.
Así que los parámetros a evaluar son, la alineación de las fibras, la inclinación de
cada corte y la rugosidad de los mismos, así como la separación entre los extremos
de la fibra.
Los primeros parámetros (corte y alineación) son tomados en los bordes de la fibra.
En el caso de la separación, se tomó en cuenta el promedio de pixeles blancos o
negros a lo largo de la fibra visible en la fotografía.
Es decir, un promedio del conteo de blancos en el área en donde solo deberían
existir pixeles negros nos indica qué tan separadas están las fibras, mientras que un
promedio cercano a cero de conteo de blancos en el área del recubrimiento, indica
que las fibras están demasiado juntas, lo cual será posteriormente evaluado por el
algoritmo de predicción.
Finalmente se consideró el total de pixeles del ancho de la fibra como referencia para
establecer la separación en micrómetros de los extremos de las fibras a empalmar. A
través de una regla de tres se calcula la separación:
)=

Instituto Politécnico Nacional E S I M E
74 | Página
3.15 Lógica difusa
La lógica difusa es una extensión de la lógica tradicional (Booleana) que utiliza
conceptos de pertenencia de conjuntos más parecidos a la manera de pensar
humana. La lógica difusa (también llamada lógica borrosa o lógica heurística o "fuzzy
logic” en inglés), se basa en lo relativo de lo observado como posición diferencial,
adaptándose mejor al mundo real en el que vivimos, e incluso puede comprender y
funcionar con nuestras expresiones, del tipo "hace mucho calor", "no es muy alto", "el
ritmo del corazón está un poco acelerado", etc. [web 7].
El adjetivo “difuso'' aplicado a ellas se debe a que los valores de verdad no-
deterministas utilizados en ellas tienen, por lo general, una connotación de
incertidumbre. Un vaso medio lleno, independientemente de que también esté medio
vacío, no está lleno completamente ni está vacío completamente. Qué tan lleno
puede estar es un elemento de incertidumbre, es decir, de difusidad, entendida esta
última como una propiedad de indeterminismo.
Ahora bien, los valores de verdad asumidos por enunciados aunque no son
deterministas, no necesariamente son desconocidos. Por otra parte, desde un punto
de vista optimista, lo difuso puede entenderse como la posibilidad de asignar más
valores de verdad a los enunciados que los clásicos “falso'' o “verdadero''. Así pues,
las lógicas difusas son tipos especiales de lógicas multivaluadas.
En un sistema deductivo se distinguen enunciados “de entrada” y enunciados “de
salida''. El objetivo de todo sistema manejador de una lógica difusa es describir los
grados de los enunciados de salida en términos de los de entrada. Más aún, algunos
sistemas son capaces de refinar los grados de veracidad de los enunciados de salida
conforme se refinan los de entrada. Por estas propiedades es que ciertos sistemas
de lógica difusa aparentan una labor de aprendizaje, y son excelentes mecanismos
de control de procesos. Desde el punto de vista tecnológico, las lógicas difusas se
encuadran en el área de la llamada Inteligencia Artificial y han dado origen a
sistemas expertos de tipo difuso y a sistemas de control automático.
En la teoría de conjuntos difusos se definen también las operaciones de unión,
intersección, diferencia, negación o complemento, y otras operaciones sobre
conjuntos, en los que se basa esta lógica.
Para cada conjunto difuso, existe asociada una función de pertenencia para sus
elementos, que indican en qué medida el elemento forma parte de ese conjunto
difuso. Las formas de las funciones de pertenencia más típicas son trapezoidal, lineal
y curva.
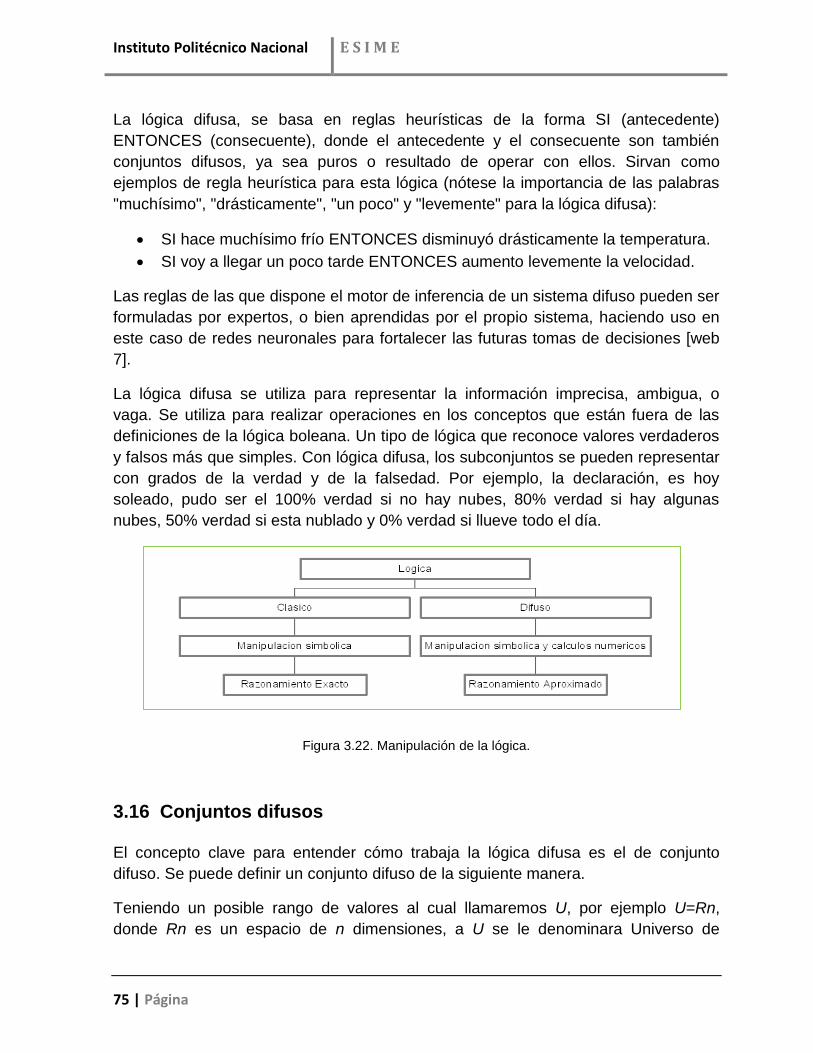
Instituto Politécnico Nacional E S I M E
75 | Página
La lógica difusa, se basa en reglas heurísticas de la forma SI (antecedente)
ENTONCES (consecuente), donde el antecedente y el consecuente son también
conjuntos difusos, ya sea puros o resultado de operar con ellos. Sirvan como
ejemplos de regla heurística para esta lógica (nótese la importancia de las palabras
"muchísimo", "drásticamente", "un poco" y "levemente" para la lógica difusa):
SI hace muchísimo frío ENTONCES disminuyó drásticamente la temperatura.
SI voy a llegar un poco tarde ENTONCES aumento levemente la velocidad.
Las reglas de las que dispone el motor de inferencia de un sistema difuso pueden ser
formuladas por expertos, o bien aprendidas por el propio sistema, haciendo uso en
este caso de redes neuronales para fortalecer las futuras tomas de decisiones [web
7].
La lógica difusa se utiliza para representar la información imprecisa, ambigua, o
vaga. Se utiliza para realizar operaciones en los conceptos que están fuera de las
definiciones de la lógica boleana. Un tipo de lógica que reconoce valores verdaderos
y falsos más que simples. Con lógica difusa, los subconjuntos se pueden representar
con grados de la verdad y de la falsedad. Por ejemplo, la declaración, es hoy
soleado, pudo ser el 100% verdad si no hay nubes, 80% verdad si hay algunas
nubes, 50% verdad si esta nublado y 0% verdad si llueve todo el día.
Figura 3.22. Manipulación de la lógica.
3.16 Conjuntos difusos
El concepto clave para entender cómo trabaja la lógica difusa es el de conjunto
difuso. Se puede definir un conjunto difuso de la siguiente manera.
Teniendo un posible rango de valores al cual llamaremos U, por ejemplo U=Rn,
donde Rn es un espacio de n dimensiones, a U se le denominara Universo de

Instituto Politécnico Nacional E S I M E
76 | Página
Discurso. En U se tendrá un conjunto difuso de valores llamado F el cual es
caracterizado por de una función de pertenencia uf tal que uf: U->[0, 1], donde uf(u)
representa el grado de pertenencia de un u que pertenece a U en el conjunto difuso
F.
Por ejemplo supongamos que se desea representar con conjuntos difusos la variable
altura de una persona. En este caso el universo de discurso será el rango de
posibles valores de la altura que tenga una persona adulta. Se escogerá un rango
entre 140 cm y 200 cm. Valores por fuera de este rango son posibles pero son muy
escasos. El universo de discurso U= [140, 200]. Para denominar los conjuntos
difusos se suele trabajar con etiquetas linguisticas similares a las que se usan de
manera coloquial. Por ejemplo, en la vida diaria decimos que una persona es Muy
Baja (MB), Baja (B), Mediana (M), Alta (Alta) y Muy Alta (MA).
Tabla 3.2. Valores para la altura de una persona.
Etiqueta Rango [min, max]
MB [140,160]
B [160,170]
M [170,180]
A [180,190]
MA [190,200]
Figura 3.15. Conjuntos difusos para la altura de una persona.

Instituto Politécnico Nacional E S I M E
77 | Página
Si para el ejemplo anterior se desea trabajar con conjuntos clásicos se tienen dos
opciones o alguien Alto (A) o Bajo (B). Se supondrá que alguien Alto si mide más de
170 cm es caso contrario es bajo.
La función de pertenencia es una curva que determina el grado de pertenencia de los
elementos de un conjunto. Se denota generalmente por μ y puede adoptar valores
entre 0 y 1.
Figura 3.16. Conjuntos clásicos para la altura de una persona.
3.17 Tipos de sistemas de lógica difusa
Los sistemas de lógica difusa tienen una estrecha relación con los conceptos difusos
tales como conjuntos difusos, variables lingüísticas y demás. Los más populares
sistemas de lógica difusa que se encuentran en la literatura se encuentran en uno de
los siguientes tipos: sistemas difusos tipo Mamdani (con fuzzificador y defuzzificador
) ó sistemas difusos tipo Takagi Sugeno [1] .
3.18 Sistema basado en técnicas de Lógica Difusa
El esquema de un sistema basado en técnicas de lógica difusa se presenta en la
Figura 3.25.

Instituto Politécnico Nacional E S I M E
78 | Página
Figura 3.25. Sistema basado en técnicas de Lógica Difusa.
Está compuesto por los siguientes bloques:
Bloque Difusor: Bloque en el que a cada variable de entrada se le asigna un grado de
pertenencia a cada uno de los conjuntos difusos que se ha considerado, mediante
las funciones características asociadas a estos conjuntos difusos. La entrada a este
bloque son valores concretos de las variables de entrada y las salidas son grados de
pertenencia a los conjuntos difusos considerados.
Bloque de Inferencia: Bloque que, mediante los mecanismos de inferencia, relaciona
conjuntos difusos de entrada y de salida y que representa a las reglas que definen el
sistema. Las entrada a este bloque son conjuntos difusos (grados de pertenencia) y
las salidas son también conjuntos difusos, asociados a la variable de salida.
Desdifusor: Bloque en el cual a partir del conjunto difuso obtenido en el mecanismo
de inferencia y mediante los métodos matemáticos de desdifusión, se obtiene un
valor concreto de la variable de respuesta, es decir, el resultado.
3.19 Fuzzy en MATLAB
Para acceder al toolbox fuzzy se digita la palabra fuzzy en la línea de comandos, en
el caso de encontrar un error, por no hallarse cargado el toolbox se debe agregar el
CD de instalación de Matlab.

Instituto Politécnico Nacional E S I M E
79 | Página
Figura 3.26. Menú principal del Fuzzy Toolbox, FIS Editor.
1.- El menú
El menú al cual se accede es el mostrado en la Figura 3.26. En el Menú 1, se
modifican los métodos de los operadores lógicos and y or, los métodos de
implicación, de agregación y de defuzificación. En el Menú 2, se podrá cambiar el
nombre de la variable que se encuentre seleccionada, por ejemplo, modificar el
nombre “input1” por “alineación”.
2 Elección de Modelo:
Para elegir el tipo de modelo a usar, Sugeno o Mamdani, se debe acceder al menú
File -> New FIS -> Mamdani (Sugeno).
Figura 3.27. Elección de Modelo.

Instituto Politécnico Nacional E S I M E
80 | Página
3. Variables y Funciones de Pertenencia:
Para agregar alguna variable, ya sea de entrada o de salida, se debe seleccionar el
menú Edit -> Add Variable -> Input (Output).
Figura 3.28. Al agregar una variable, es posible visualizarla en el menú gráfico. La variable
actualmente seleccionada aparece enmarcada en rojo.
Las funciones de pertenencia, tanto para las variables de entrada como para las de
salida, se modifican en un menú especial Membership Function Editor que aparece al
hacer doble click en la variable de interés.
Figura 3.29. Editor de Funciones de Pertenencia, Membership Editor.
En el Menú 1 de la Figura 3.29, se puede modificar el rango de la función de
pertenencia, en el cual la función estará definida. En el Menú 2, es posible modificar

Instituto Politécnico Nacional E S I M E
81 | Página
el nombre de la función de pertenencia, los parámetros de la función de pertenencia
y también su forma, siendo la forma triangular la más común.
4. Reglas del Modelo:
Para poder modificar las reglas del modelo se debe acceder al Rule Editor, haciendo
doble click sobre el modelo.
Figura 3.30. Editor de Reglas, Rule Editor.
Según el número de variables de entrada y salida que existan y sus funciones de
pertenencia será el número de reglas que es posible generar. En el Menú 1 de la
Figura 3.30 se selecciona el valor que toma la primera variable de entrada. En el
Menú 2, el valor que toma la segunda variable de entrada (si es necesario es posible
negarla marcando not). En el Menú 3, se selecciona el tipo de conexión lógica entre
ambos valores seleccionados (and, or). Finalmente, en el Menú 4, se selecciona la
salida que deberá entregar el controlador para los valores de entrada ya indicados.
Luego, se presiona el botón Add rule, y la regla es agregada.
Para Eliminar una regla basta seleccionarla y apretar el botón Delete rule. Para
modificarla se debe hacer click en el botón Change rule.
Instituto Politécnico Nacional E S I M E
82 | Página
CAPÍTULO 4|“Resultados”

Instituto Politécnico Nacional E S I M E
83 | Página
CAPÍTULO “4” “RESULTADOS”
4.1 Resultados de la interfaz gráfica de usuario
Una vez que se diseñó y elaboró la GUI se procedió a hacer la implementación
práctica en el sistema mencionado en el capítulo anterior cubriendo las
especificaciones para la computadora, la cámara web y la empalmadora con la
finalidad de conseguir el buen funcionamiento del algoritmo. El montaje se muestra
en la Figura 4.1.
Figura 4.1. Montaje físico de los componentes para la predicción de pérdidas.
Antes de poner en funcionamiento la GUI se tuvo que conocer las pérdidas que se
presentan tanto en la fibra de prueba como en la de referencia. La fibra de prueba es
la fibra que se conectorizó anteriormente y cuyo proceso se describe en el Capítulo 2
del presente trabajo. La fibra de referencia también es llamada fibra corta, ya que su
longitud es de 3 metros y sus pérdidas son prácticamente nulas.
El proceso que se utilizó para determinar la atenuación fue el de inserción ya que
presenta mayor repetitividad en las mediciones. La implementación de este arreglo
se muestra en la Figura 4.2.

Instituto Politécnico Nacional E S I M E
84 | Página
Figura 4.2. Arreglo para medición de atenuación por método de inserción.
Se utilizó una fuente MOS 1300 (segunda ventana) como fuente óptica, un medidor
de potencia óptica FIS y un adaptador ST-ST (cuyas pérdidas en este caso no se
consideraron porque son parte del método) para la conexión de la fibra corta con la
fibra larga. Una vez, que se tuvieron listos los componentes a utilizar, se realizaron
las mediciones correspondientes, las cuales se resumen en la Tabla 4.1:
Configuración de las fibras Potencia
recibida
Atenuación insertada por Fibra
Larga
(Atenuación de la fibra corta-
atenuación de las dos fibras)
Fibra corta (lado A a fuente) -19.5 dbm -
Fibra corta (lado B a fuente) -19.5 dbm -
Con dos fibras (lado B a
fuente)
-20.3 dbm 0.8 dB
Con dos fibras (lado A a
fuente)
-20 dbm 0.5 dB
Tabla 4.1. Mediciones de atenuación por inserción.

Instituto Politécnico Nacional E S I M E
85 | Página
Como se observa en la Tabla 4.1 cada una de las fibras tuvo etiquetados sus
extremos como A y B con la finalidad de realizar la medición de las pérdidas
propagando luz en dirección A a B y viceversa.
Los resultados obtenidos nos dicen que es indistinto cambiar la dirección de
propagación para la fibra corta. Sin embargo para la fibra larga se obtuvieron 0.3
decibeles menos propagando de A a B que propagando de B a A, por lo cual se
eligió la primer configuración para realizar las posteriores mediciones de las pérdidas
de los empalmes.
Conociendo las pérdidas insertadas por cada una de las fibras, se procedió a realizar
el corte de la fibra bajo prueba por la mitad con la finalidad de volver a unir estos
extremos a través del método por fusión. Posteriormente se hicieron las mediciones
de la atenuación y se compararon con las que se predijeron con el algoritmo
desarrollado. Cabe mencionar que para cada una de las pruebas se debieron
preparar previamente los extremos a través del desnudado y el corte de la fibra antes
de realizar el empalme.
Fue de mucha utilidad para la evaluación de la alineación, la separación y la
atenuación hacer uso del controlador de la webcam ya que nos dio la oportunidad de
manipular enfoque, zoom y área de visión así como ajustar brillo, contraste y
saturación beneficiándonos al momento de procesar con Matlab la imagen
capturada. El controlador de la webcam Logitech se muestra en la Figura 4.3.
Figura 4.3. Controlador de la cámara Web Logitech 9000.

Instituto Politécnico Nacional E S I M E
86 | Página
Véase que existe un parámetro llamado “Enfoque automático” el cual se activó en
cada inicio de la GUI obligándonos a realizar un renfoque manual en caso de que el
enfoque automático no fuese correcto.
Para poder ejecutar el programa desde la ventana de comando fue suficiente digitar
el comando myCameraGUI. Una vez hecho esto, se desplegó la interfaz gráfica tal
como se diseñó en el archivo .fig presionándose Inicio para poder realizar el análisis
de las imágenes obtenidas.
Una vez montados los cuatro componentes básicos y habiendo ejecutado la llamada
a la GUI, se realizó primeramente un ajuste manual del lente de la cámara con el
ocular de la empalmadora procurando que éstos no quedaran muy separados entre
sí y que tampoco quedaran áreas oscuras en los contornos de la imagen, ya que ello
provocaría inestabilidad y errores en los cálculos de la predicción.
A continuación se presentan los resultados del funcionamiento de la Interfaz Gráfica
desarrollada en este trabajo, mostrando las evaluaciones de los diferentes casos que
se pueden originar para el corte, la alineación y la separación longitudinal de los
extremos de las fibras a empalmar.
4.1.1 Cortes
El primer parámetro evaluado mediante el algoritmo es el corte, el cual funciona
mediante una función llamada m_bordes que recibe como argumentos los cuatro
vectores de los perfiles del recubrimiento, calculando así una recta de regresión para
cada perfil, basándose en los pixeles blancos y negros que conforman la imagen
capturada en el momento y procesada con la metodología descrita en el Capítulo 3.
La Figura 4.4 muestra un par de fibras a empalmar tal y como se observaron a través
de la interfaz gráfica desarrollada y en funcionamiento. El usuario puede darse
cuenta de cuán bien están sus cortes y alineación, y considerar si está preparado
para realizar el empalme.

Instituto Politécnico Nacional E S I M E
87 | Página
Figura 4.4. Funcionamiento de la Interfaz gráfica.
La imagen obtenida se binarizó, rotó y recortó como se propuso en el capítulo
anterior para proceder a ejecutar la función m_bordes y obtener la imagen mostrada
en la Figura 4.5. Nótese que en este momento las fibras aún no estaban juntas por lo
cual el programa identificaba el fin de la fibra si la posición en altura de un pixel con
respecto a otro adyacente variaba un valor de tres pixeles.
Figura 4.5. Valores obtenidos por la función m_bordes para las fibras de la Figura 4.4.

Instituto Politécnico Nacional E S I M E
88 | Página
Figura 4.7 Mal corte del lado izquierdo.
Es común que el usuario no pueda darse cuenta tan fácilmente si el corte de los
extremos es de calidad y si al momento de acercarlos la coincidencia de sus paredes
sea buena, regular o mala. Por ello es mejor hacerlo de manera automática utilizando
esta herramientas sencilla. A continuación se presentan los casos posibles para el
corte, haciendo uso de fibras cortadas erróneamente (algunas de manera muy
exagerada).
En la Figura 4.6 se muestra la evaluación de un buen corte, mientras que para el
caso de la Figura 4.7 se presenta un corte mal hecho del lado izquierdo. Como se
especificó en el Capítulo 3, si la evaluación del corte era mala en cualquiera de los
extremos no se evaluarían la alineación ni la separación y con ello no se podría
calcular las pérdidas.
Figura 4.6. Buen corte en ambos extremos.
El parámetro para poder determinar si el corte era malo o bueno fue la desviación o
el ángulo obtenido a partir de ésta, estableciendo un valor umbral de 10 para la
desviación o 4° para el ángulo formado por las caras de las fibras y su sección
transversal. Una vez sobrepasados estos valores se consideró como un mal corte.
Para determinar los valores umbrales de la desviación y del ángulo se realizaron
varias pruebas para establecer a partir de qué valor de ángulo y desviación se
consideran como malos cortes.

Instituto Politécnico Nacional E S I M E
89 | Página
Figura 4.9. Ambos cortes son malos. Figura 4.8. Corte derecho malo.
4.1.2 Alineación
Para determinar si las fibras están alineadas se utilizó la función: dif=alineacion(vposde,vposiz); la cual a su vez tiene las variables vposde y vposiz. Primeramente se determinaron los bordes de los recubrimientos de la fibra izquierda y de la fibra derecha y después se determina el promedio de cada borde de ambas fibras. Para poder hacer el cálculo de la alineación se realiza una diferencia. A continuación se muestra la Tabla 4.2 en la cual se muestran los valores que se tomaron para considerar si su alineación es buena, regular o mala.
Alineación Diferencia
Buena Menor o igual que 2
Regular Mayor a 2 y menor que 4
Mala Mayor o igual que 4
Tabla 4.2. Parámetros para alineación.
Cabe destacar que para establecer los valores que se muestran en la Tabla 4.2 se realizaron una serie de pruebas con alineaciones diferentes y en base a ello se decidió tomar esos valores.

Instituto Politécnico Nacional E S I M E
90 | Página
Figura 4.10. Buena alineación. Figura 4.11. Mala alineación.
Figura 4.12. Alineación regular.
En la Figura 4.10 se muestra un ejemplo de buena alineación y en la Figura 4.11
claramente se observa una mala alineación. Es importante mencionar que a pesar de
que la alineación es mala se hace la predicción de las pérdidas y es aquí donde el
usuario decidirá si realiza el empalme con las pérdidas que se predicen o decide
ajustar las fibras otra vez para obtener un mejor resultado. En la Figura 4.12 se
muestra una alineación regular presentándose el mismo caso anterior para el
usuario, donde decidirá si realiza el empalme o si intenta obtener una buena
alineación.

Instituto Politécnico Nacional E S I M E
91 | Página
Figura 4.13. Separación de las fibras.
4.1.3 Separación
Para calcular la distancia entre las fibras se usó una función a la cual definimos como separación la cual se calcula como: separación=125*(promder-promizq)/y_ref; en la cual con la función promder y promizq se obtiene el promedio de los valores del extremo de la fibra correspondiente y y_ref calcula el valor de referencia en pixeles del ancho de la fibra y esto se multiplica por 125 ya que es el ancho de la fibra desnuda. En la Figura 4.13 se observa una separación de 125 micrómetros la cual si se compara es igual al ancho de la fibra. Aquí todavía no se presenta la predicción de las perdidas porque para que se realice este proceso las fibras deben estar juntas.
4.1.4 Junto
Una vez superado el umbral de decisión (de 7 micrómetros a 2 micrómetros para
nuestras pruebas) aparece la leyenda ‘‘junto’’, y se calcula y despliega el valor de la
atenuación, como se muestra en la Figura 4.14.

Instituto Politécnico Nacional E S I M E
92 | Página
Figura 4.14. Separación de las fibras “Junto”.
En la Figura 4.15 se muestra la imagen de los valores obtenidos con la función
m_bordes de la Figura 4.4. Nótese que en este momento las fibras ya se encuentran
juntas por lo cual el programa ya no identificará el fin de la fibra.
Figura 4.15. Valores obtenidos con la función m_bordes para las fibras juntas de la Figura 4.14.

Instituto Politécnico Nacional E S I M E
93 | Página
4.1.5 Pérdidas
Para la predicción de las pérdidas se utilizó la función: atenuacion=evalfis([diftemp,
reg_perfil(1,1), reg_perfil(2,1), reg_perfil(3,1), reg_perfil(4,1), des_perfil(1),
des_perfil(2), des_perfil(3), des_perfil(4), promC_bs, promC_n, promC_bi],aten);
donde esas variables ya fueron calculadas anteriormente. En el caso de diftemp se
refiere a un promedio de la alineación; reg_perfil(1,1), reg_perfil(2,1), reg_perfil(3,1),
reg_perfil(4,1) se refieren a cada una de las pendientes; des_perfil(1), des_perfil(2),
des_perfil(3), des_perfil(4) son las desviaciones estándar y promC_bs, promC_n,
promC_bi se refieren al conteo promedio de pixeles blancos o negros existentes en
la unión de las fibras [9].
Es así como a través de fuzzy y la función aten=readfis('aprox3.fis') se establece el valor de la atenuación predicha, donde aprox3.fis es un método desarrollado en el trabajo de Bruno Cuevas y Alan González [9].
4.1.6 Ejecución del empalme
Ya que se tienen todos los parámetros anteriores desplegados en la GUI se procede
a la realización del empalme. Cabe destacar que ya que se muestra en la pantalla la
predicción de las pérdidas el usuario será el que decida si continua con el proceso de
empalme estando satisfecho con las pérdidas que se estiman o si quiere volver a
realizar el proceso para obtener otras pérdidas. En la Figura 4.16 se muestra la
ejecución del empalme.
Figura 4.16. Ejecución del empalme.

Instituto Politécnico Nacional E S I M E
94 | Página
Se debe ser muy cuidadoso al momento de manipular el equipo, ya que las
variaciones de brillo en la imagen causadas por el movimiento y vibraciones de la
cámara, producen inestabilidad en el resultado obtenido.
4.2 Resultados obtenidos de los empalmes realizados
En la Tabla 4.3 se presentan los resultados obtenidos una vez realizados los 50
empalmes por fusión. En cada uno de ellos se desnudó, cortó y limpió las fibras
antes de empalmarlas, procurando mantener las condiciones de posición en las
conexiones de la fuente óptica y del medidor para un mejor análisis al momento de
comparar los resultados.
# Prueba Condición de
separación
Predicción de pérdida
(dB)
Potencia Medida (dBm)
Pérdidas reales=
Potencia medida-Potencia
referencia (dB)
Δpérdida=|pérdida reales - predicción de
pérdida|
1 <7 8.93 40.303 20.803 11.873 2 <7 5.45 34.137 14.637 9.187 3 <7 4.82 37.728 18.228 13.408 4 <6 4.795 31.166 11.666 6.871 5 <6 2.28 30.677 11.177 8.897 6 <5 3.948 24.421 4.921 0.973 7 <5 2.7145 24.5895 5.0895 2.375 8 <4 1.87 21.933 2.433 0.563 9 <4 3.187 23.552 4.052 0.865 10 <4 2.37 22.121 2.621 0.251 11 <3 1.762 22.229 2.729 0.967 12 <3 3.54 24.713 5.213 1.673 13 <2 0.274 20.184 0.684 0.41 14 <4 1.83 20.399 0.899 0.931 15 <4 0.5183 20.2093 0.7093 0.191 16 <4 0.672 20.802 1.302 0.63 17 <4 1.735 22.907 3.407 1.672 18 <4 2.867 22.434 2.934 0.067 19 <4 3.91 24.064 4.564 0.654 20 <4 1.063 21.613 2.113 1.05 21 <4 0.725 20.656 1.156 0.431 22 <4 3 23.483 3.983 0.983 23 <4 0.72 20.164 0.664 0.056 24 <4 0.183 20.221 0.721 0.538 25 <4 0.093 20.545 1.045 0.952

Instituto Politécnico Nacional E S I M E
95 | Página
26 <4 1.3 20.942 1.442 0.142 27 <4 2.72 22.774 3.274 0.554 28 <4 1.898 21.961 2.461 0.563 29 <4 2.981 23.545 4.045 1.064 30 <4 3.19 22.987 3.487 0.297 31 <4 0.62 21.244 1.744 1.124 32 <4 3.97 23.718 4.218 0.248 33 <4 1.093 21.023 1.523 0.43 34 <4 0.087 19.767 0.267 0.18 35 <4 2.62 22.483 2.983 0.363 36 <4 1.767 21.44 1.94 0.173 37 <4 1.733 21.171 1.671 0.062 38 <4 3.91 23.902 4.402 0.492 39 <4 1.98 21.614 2.114 0.134 40 <4 0.16 20.18 0.68 0.52 41 <4 2.017 21.684 2.184 0.167 42 <4 3.917 24.891 5.391 1.474 43 <4 1.72 21.94 2.44 0.72 44 <4 0.73 20.409 0.909 0.179 45 <4 2.06 21.13 1.63 0.43 46 <4 0.871 20.795 1.295 0.424 47 <4 4.28 23.3 3.8 0.48 48 <4 1.83 21.243 1.743 0.087 49 <4 0.817 20.878 1.378 0.561 50 <4 0.727 19.982 0.482 0.245
Tabla 4.3. Resultados obtenidos de los empalmes realizados.
Como se observa, un parámetro a considerar fue el umbral de separación, es decir, a
partir de cuántas micras de separación el programa considera que las fibras están
juntas y calcula las pérdidas mostrándolas en el recuadro correspondiente de la GUI.
Se experimentó con valores de separación que van desde 7 hasta 2 micras,
ejecutando tres empalmes con separación igual a 7, dos con separación igual a 6,
dos con separación igual a 5, treinta y nueve con separación igual a cuatro y dos
igual a tres micras. Se obtuvo mayor exactitud en la predicción cuando el umbral de
separación se estableció como 4 micras.
Una vez colocadas las fibras en la empalmadora se inició el uso de la GUI
desarrollada, y en los casos en los que alguno de los extremos presentó un mal
corte, éste se tuvo que repetir hasta obtener un corte bueno o regular para poder
continuar con el análisis.
Después que las fibras se alinearon y se juntaron, se anotó en la tercera columna la
pérdida predicha por el algoritmo, ejecutándose el empalme y midiéndose las
pérdidas presentadas a lo largo de la fibra total (fibra bajo prueba + fibra corta)

Instituto Politécnico Nacional E S I M E
96 | Página
registrando esta medición en la cuarta columna. Posteriormente se calculó la pérdida
real restando la potencia en la fibra corta a la potencia medida y anotando la
diferencia en la quinta columna. Recordemos que la potencia de referencia es la
potencia medida en la fibra corta la cual tuvo valor de -19.5 dB.
Finalmente se obtuvo la diferencia entre la pérdida real y la pérdida de la predicción
anotándose en la columna denominada Δpérdida. Con esto, el 87.2% de los 39
empalmes con umbral de separación igual a cuatro presentaron Δpérdida por debajo
de un decibel.
4.2.1 Caso con menor error en la predicción
De los cincuenta empalmes realizados el empalme número 23 presentó el menor
error en la predicción, calculándose pérdidas de 0.72 dB con la GUI y midiéndose
0.664 dB lo que dio lugar a un error de 0.056 dB. Dicho empalme se muestra en la
Figura 4.17.
Figura 4.17. Empalme #23, caso con mayor exactitud de la predicción.

Instituto Politécnico Nacional E S I M E
97 | Página
Se observa en la imagen que el corte para este empalme fue evaluado como bueno,
así como también la alineación. Una vez que se acercaron los extremos de la fibra, el
programa MyCameraGUI predijo pérdidas de 0.72. Puede observarse que el
empalme se ejecutó exitosamente dando una apariencia de continuidad casi perfecta
en la fibra una vez empalmada.
4.2.2 Caso con menor exactitud en la predicción
La Figura 4.18 muestra el empalme #3 el cual tuvo la menor exactitud (mayor
diferencia respecto a la pérdida medida) de los 50 empalmes realizados,
observándose que las condiciones del corte fueron buenas pero la alineación fue
evaluada como mala. A pesar de predecir pérdidas de 4.82, al momento de
empalmar se formó una burbuja en la unión de los núcleos de la fibra pudiendo haber
sido ocasionada por alguna irregularidad en la superficie. La diferencia entre la
pérdida predicha y la medida fue de 13.408 dB.
Figura 4.18. Empalme #3 con menor exactitud.

Instituto Politécnico Nacional E S I M E
98 | Página
La gráfica de la Figura 4.19 muestra una comparación entre la pérdida predicha y la
pérdida real a lo largo de los 50 empalmes. Como se observa, se predijo y se midió
una mayor pérdida en los empalmes con umbral de separación igual a siete,
consiguiendo mejores resultados cuando el umbral se asignó de cuatro micras.
En la gráfica de la Figura 4.20 se observa la diferencia que existió entre la pérdida
calculada mediante la GUI y la pérdida real (medida). El valor máximo de dicha
diferencia se presentó en el empalme número 3 donde la pérdida es de 13.408 dB,
por otro lado el valor de predicción más preciso se consiguió en el empalme número
23 con una diferencia de 0.056 dB. Nótese en la tabla de resultados mencionada
anteriormente que la predicción puede ser menor o mayor a la pérdida medida, esto
debido a que la visión de la cámara está limitada solamente a uno de los costados de
la fibra, desconociendo si el lado opuesto tiene un mal corte u otros factores que
produzcan un mal empalme.
# Empalme
Pér
did
a (d
B)
Figura 4.19. Comparación de la pérdida predicha con la pérdida medida.
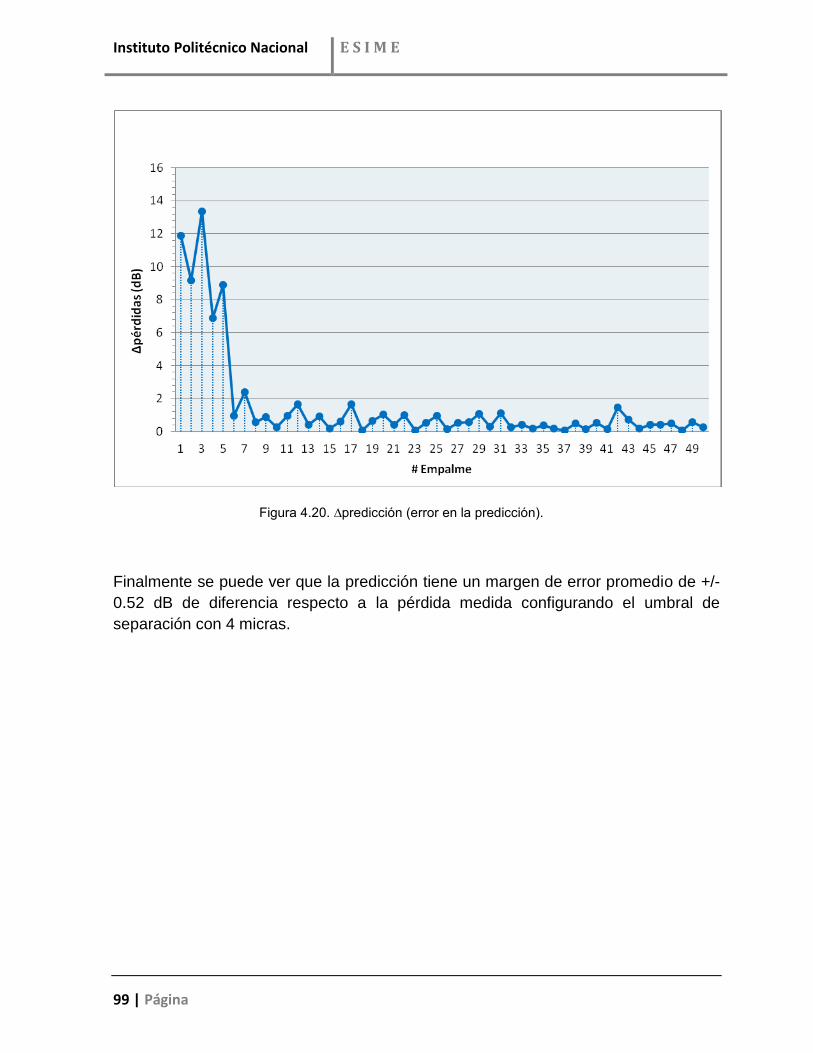
Instituto Politécnico Nacional E S I M E
99 | Página
Finalmente se puede ver que la predicción tiene un margen de error promedio de +/-
0.52 dB de diferencia respecto a la pérdida medida configurando el umbral de
separación con 4 micras.
Figura 4.20. ∆predicción (error en la predicción).

Instituto Politécnico Nacional E S I M E
100 | Página
CONCLUSIONES
Como se mencionó al inicio de este trabajo la transmisión de información por fibra
óptica puede alcanzar varias decenas de kilómetros, sin embargo, se enfrenta a
inconvenientes como es la atenuación introducida por los empalmes.
Este trabajo generó un método para optimizar empalmes hechos mediante fusión al
determinar en tiempo real y de forma predictiva las pérdidas producidas, mejorando
en tiempo y recursos las técnicas ya existentes.
Así mismo, se logró desarrollar un algoritmo capaz de evaluar los cortes, la
alineación y la separación de las fibras como parte de los factores que producen las
pérdidas, mostrándolas en una interfaz gráfica de usuario diseñada en MATLAB.
Por otro lado, se implementó el sistema físico que permitió la utilización de dicho
algoritmo, resultando ser más económico en comparación con una empalmadora con
funciones de predicción de pérdidas.
Finalmente, una vez implementadas las funciones mencionadas a lo largo de este
trabajo y usando las funciones integradas de lógica difusa de Matlab fue posible
alcanzar predicciones con diferencias por debajo del 0.1 dB comparadas con la
pérdida medida, siendo así que el valor de predicción más preciso se consiguió en el
empalme número 23 con una diferencia de 0.056 dB. Sin embargo se presentaron
casos en los que la diferencia entre predicción y medición tuvo un alto margen de
error como en el empalme número 3 donde esta diferencia es de 13.408 dB
adjudicando este resultado a que no se tiene una visión completa de todas las caras
de la fibra.
RECOMENDACIONES
Para trabajos posteriores se puede conseguir una mejor predicción de la pérdida en
los empalmes logrando un ángulo de visión más completo de la fibra y realizando la
evaluación de los parámetros a partir de éste.
El procesamiento de la imagen está basado en la correcta captura de la imagen, por
lo cual se recomienda la utilización de un sistema que intente mantener la
configuración de los componentes de manera fija para evitar desenfoques.

Instituto Politécnico Nacional E S I M E
101 | Página
Por último, la capacidad del procesador deberá ser suficientemente poderosa para
permitir evaluar los parámetros y mostrarlos en la interfaz gráfica de usuario
procurando presentar el menor retardo posible.

Instituto Politécnico Nacional E S I M E
102 | Página
Anexo A: Códigos myCameraGUI
function varargout = myCameraGUI(varargin) % MYCAMERAGUI MATLAB code for mycameragui.fig % Begin initialization code - DO NOT EDIT gui_Singleton = 1; gui_State = struct('gui_Nadme', mfilename, ... 'gui_Singleton', gui_Singleton, ... 'gui_OpeningFcn', @myCameraGUI_OpeningFcn, ... 'gui_OutputFcn', @myCameraGUI_OutputFcn, ... 'gui_LayoutFcn', [] , ... 'gui_Callback', []); if nargin && ischar(varargin{1}) gui_State.gui_Callback = str2func(varargin{1}); end
if nargout [varargout{1:nargout}] = gui_mainfcn(gui_State, varargin{:}); else gui_mainfcn(gui_State, varargin{:}); end % End initialization code - DO NOT EDIT
% --- Executes just before mycameragui is made visible. function myCameraGUI_OpeningFcn(hObject, eventdata, handles, varargin) % This function has no output args, see OutputFcn. % hObject handle to figure % eventdata reserved - to be defined in a future version of MATLAB % handles structure with handles and user data (see GUIDATA)
% Choose default command line output for mycameragui handles.output = hObject;
clc handles.video = videoinput('winvideo', 1,'RGB24_1600x1200'); set(handles.video,'TimerPeriod', 0.05, ... 'TimerFcn',['if(~isempty(gco)),'... 'handles=guidata(gcf);'... % Update handles 'image(getsnapshot(handles.video));'... % Get picture using GETSNAPSHOT and
put it into axes using IMAGE 'set(handles.cameraAxes,''ytick'',[],''xtick'',[]),'... % Remove tickmarks
and labels that are inserted when using IMAGE 'else '... 'delete(imaqfind);'... % Clean up - delete any image acquisition objects 'end']); triggerconfig(handles.video,'manual'); handles.video.FramesPerTrigger = Inf; % Capture frames until we manually
stop it % Update handles structure guidata(hObject, handles);
Instituto Politécnico Nacional E S I M E
103 | Página
% UIWAIT makes mycameragui wait for user response (see UIRESUME) uiwait(handles.myCameraGUI);
% --- Outputs from this function are returned to the command line. function varargout = myCameraGUI_OutputFcn(hObject, eventdata, handles) % varargout cell array for returning output args (see VARARGOUT); % hObject handle to figure % eventdata reserved - to be defined in a future version of MATLAB % handles structure with handles and user data (see GUIDATA)
% Get default command line output from handles structure handles.output = hObject; varargout{1} = handles.output;
% --- Executes on button press in startStopCamera. function startStopCamera_Callback(hObject, eventdata, handles) % hObject handle to startStopCamera (see GCBO) % eventdata reserved - to be defined in a future version of MATLAB % handles structure with handles and user data (see GUIDATA) %clc % Start/Stop Camera
if strcmp(get(handles.startStopCamera,'String'),'Iniciar análisis') set(handles.startStopCamera,'String','Detener') start(handles.video) im_rgb=getsnapshot(handles.video); im_gray=rgb2gray(im_rgb);%Pasando imagen RGB a escla de grises im_bne=ibn_electrodo(im_gray);%Transforma imagen a BN segun escala para
encontrar electrodos s=det_electrodo(im_bne);%Funcion que detecta la situacion de los
electrodos if s==0 %encontrando el centro de las fibras [xi,yi]=sin_electrodos(im_bne); elseif s==1 [xi,yi]=elect_sup(im_bne,im_gray); elseif s==2 [xi,yi]=elect_inf(im_bne,im_gray); elseif s==3 [xi,yi]=electrodos(im_bne,im_gray); end alto=500; ancho=800; im_cuadro=recorte(im_gray,xi,yi,ancho,alto);% recortando imagen en
escala de grises im_bnrec=bn_escala(im_cuadro);%transformando imagen a bn segun escala
de imagen recortada reg=regresion(im_bnrec,ancho,alto);%haciendo la regresión de la imagen im_rot=rotacion(im_gray,reg);%rotando la imagen en escala de grises im_rotrec=recorte(im_rot,xi,yi,ancho,alto); im_trabajo=bn_escala(im_rotrec); m_bordesini=zeros(4,ancho);
Instituto Politécnico Nacional E S I M E
104 | Página
[m_bordes,vposde,vposiz,bordede,bordeiz]=vec_bordes(im_trabajo,ancho,alto,m
_bordesini);
[vperiz1,vperiz2,vperde1,vperde2]=vec_perfil(im_trabajo,m_bordes,ancho);%ca
lcula los perfiles de las fibras
[reg_perfil,ang_perfil,des_perfil]=reg_perfiles(vperiz1,vperiz2,vperde1,vpe
rde2); varang=10; vardes=6; for contador=1:4 if isnan(ang_perfil(contador)) ang_perfil(contador)=varang+1; end if isnan(des_perfil(contador)) des_perfil(contador)=vardes+1; end end
if (des_perfil<=vardes) & (ang_perfil<=varang) set(handles.edit2,'String','Bueno') set(handles.edit5,'String','Continue con su proceso de empalme') y_ref=(vposde(4)-vposde(1) + vposiz(4)-vposiz(1))/2;%da el valor de
referencia en pixeles del ancho de la fibra (se saca el promedio) promder=800-(bordede(4)+bordede(1))/2;%Obtiene el promedio de los
valores del extremo del lado derecho de la fibra promizq=(bordeiz(4)+bordeiz(1))/2;%Obtiene el promedio de los
valores del extremo del lado izquierdo de la fibra separacion=125*(promder-promizq)/y_ref;%calcula la separación en
micrómetros aten=readfis('aprox3.fis');
while separacion>=4 %&
strcmp(get(handles.startStopCamera,'String'),'Detener') m_bordesini=m_bordes; im_rgb=getsnapshot(handles.video); im_gray=rgb2gray(im_rgb);%Pasando imagen RGB a escla de grises im_cuadro=recorte(im_gray,xi,yi,ancho,alto);% recortando imagen
en escala de grises im_bnrec=bn_escala(im_cuadro);%transformando imagen a bn segun
escala de imagen recortada im_rot=rotacion(im_gray,reg);%rotando la imagen en escala de
grises im_rotrec=recorte(im_rot,xi,yi,ancho,alto); im_trabajo=bn_escala(im_rotrec);
[m_bordes,vposde,vposiz,bordede,bordeiz]=vec_bordes(im_trabajo,ancho,alto,m
_bordesini);%calcula matriz de posiciones de las fibras así como vectores
de las mismas if vposde==0 separacion=0; set(handles.edit3,'String',separacion) else

Instituto Politécnico Nacional E S I M E
105 | Página
dif=alineacion(vposde,vposiz);%Determina si las fibras
están alineadas if mean(dif)<=2 set(handles.edit1,'String','Buena') elseif mean(dif)>2 & mean(dif)<4 set(handles.edit1,'String','Regular') elseif mean(dif)>4 set(handles.edit1,'String','Mala') end y_ref=(vposde(4)-vposde(1) + vposiz(4)-vposiz(1))/2;%da el
valor de referencia en pixeles del ancho de la fibra (se saca el promedio) promder=800-(bordede(4)+bordede(1))/2;%Obtiene el promedio
de los valores del extremo del lado derecho de la fibra promizq=(bordeiz(4)+bordeiz(1))/2;%Obtiene el promedio de
los valores del extremo del lado izquierdo de la fibra separacion=125*(promder-promizq)/y_ref;%calcula la
separación en micrómetros set(handles.edit3,'String',separacion)
end
end
[cuenta_bs,cuenta_bi,cuenta_n]=conteo_bn(im_trabajo,m_bordesini,ancho,alto)
; promC_bs=sum(cuenta_bs)/length(cuenta_bs); promC_bi=sum(cuenta_bi)/length(cuenta_bi); promC_n=sum(cuenta_n)/length(cuenta_n);
set(handles.edit3,'String','Junto') set(handles.edit5,'String','Listo para empalmar') diftemp=sum(dif)/length(dif); atenuacion=evalfis([diftemp, reg_perfil(1,1), reg_perfil(2,1),
reg_perfil(3,1), reg_perfil(4,1), des_perfil(1), des_perfil(2),
des_perfil(3), des_perfil(4), promC_bs, promC_n, promC_bi],aten); set(handles.edit4,'String',atenuacion)
elseif ((des_perfil(1:2)>vardes) | (ang_perfil(1:2)>varang)) &
((des_perfil(3:4)<=vardes) & (ang_perfil(3:4)<=varang)) set(handles.edit2,'String','Malo') set(handles.edit5,'String','Repetir corte izquierdo') set(handles.edit1,'String','-------') set(handles.edit3,'String','-------') set(handles.edit4,'String','-------')
elseif ((des_perfil(3:4)>vardes) | (ang_perfil(3:4)>varang))&
((des_perfil(1:2)<=vardes) & (ang_perfil(1:2)<=varang)) set(handles.edit2,'String','Malo') set(handles.edit5,'String','Repetir corte derecho') set(handles.edit1,'String','-------') set(handles.edit3,'String','-------') set(handles.edit4,'String','-------')
else
Instituto Politécnico Nacional E S I M E
106 | Página
set(handles.edit2,'String','Malo') set(handles.edit5,'String','Repetir ambos cortes') set(handles.edit1,'String','-------') set(handles.edit3,'String','-------') set(handles.edit4,'String','-------') end
else
% Camera is on. Stop camera and change button string. set(handles.startStopCamera,'String','Iniciar análisis') stop(handles.video) end
% --- Executes when user attempts to close myCameraGUI. function myCameraGUI_CloseRequestFcn(hObject, eventdata, handles) % Hint: delete(hObject) closes the figure delete(hObject); delete(imaqfind);
function edit1_Callback(hObject, eventdata, handles) % --- Executes during object creation, after setting all properties.
function edit1_CreateFcn(hObject, eventdata, handles) % hObject handle to edit1 (see GCBO) % Hint: edit controls usually have a white background on Windows.
if ispc && isequal(get(hObject,'BackgroundColor'),
get(0,'defaultUicontrolBackgroundColor')) set(hObject,'BackgroundColor','white'); end
function edit2_Callback(hObject, eventdata, handles) % Hints: get(hObject,'String') returns contents of edit2 as text % str2double(get(hObject,'String')) returns contents of edit2 as a
double
% --- Executes during object creation, after setting all properties. function edit2_CreateFcn(hObject, eventdata, handles) % hObject handle to edit2 (see GCBO) % Hint: edit controls usually have a white background on Windows. % See ISPC and COMPUTER. if ispc && isequal(get(hObject,'BackgroundColor'),
get(0,'defaultUicontrolBackgroundColor')) set(hObject,'BackgroundColor','white'); end
function edit3_Callback(hObject, eventdata, handles) % hObject handle to edit3 (see GCBO) % eventdata reserved - to be defined in a future version of MATLAB
function edit3_CreateFcn(hObject, eventdata, handles) % hObject handle to edit3 (see GCBO) % eventdata reserved - to be defined in a future version of MATLAB

Instituto Politécnico Nacional E S I M E
107 | Página
% Hint: edit controls usually have a white background on Windows. % See ISPC and COMPUTER.
if ispc && isequal(get(hObject,'BackgroundColor'),
get(0,'defaultUicontrolBackgroundColor')) set(hObject,'BackgroundColor','white'); end
function edit4_Callback(hObject, eventdata, handles) % hObject handle to edit4 (see GCBO) % eventdata reserved - to be defined in a future version of MATLAB % --- Executes during object creation, after setting all properties. function edit4_CreateFcn(hObject, eventdata, handles) % hObject handle to edit4 (see GCBO) % Hint: edit controls usually have a white background on Windows. % See ISPC and COMPUTER. if ispc && isequal(get(hObject,'BackgroundColor'),
get(0,'defaultUicontrolBackgroundColor')) set(hObject,'BackgroundColor','white'); end
function edit5_Callback(hObject, eventdata, handles) % hObject handle to edit5 (see GCBO) % Hints: get(hObject,'String') returns contents of edit5 as text % str2double(get(hObject,'String')) returns contents of edit5 as a
double
% --- Executes during object creation, after setting all properties. function edit5_CreateFcn(hObject, eventdata, handles) % hObject handle to edit5 (see GCBO)
% Hint: edit controls usually have a white background on Windows. % See ISPC and COMPUTER. if ispc && isequal(get(hObject,'BackgroundColor'),
get(0,'defaultUicontrolBackgroundColor')) set(hObject,'BackgroundColor','white'); end

Instituto Politécnico Nacional E S I M E
108 | Página
Conteo_bn function
[cuenta_bs,cuenta_bi,cuenta_n]=conteo_bn(im_trabajo1,m_bordes,ancho,alto) %
función que recibe como argumento la matriz de bordes, la imagen de trabajo
y sus dimensiones vector=zeros([2 4]);% instrucción que genera una matriz para guardar la
ubicación de los perfiles de las fibras for j=1:4 % Ciclo que detecta y guarda la posición de los ultimos pixeles
negros a lo largo de la fibra izquierda m=0; for i=1:ancho if m_bordes(j,i)==0 && m==0 vector(1,j)=i-10; m=1; end end end for j=1:4 % Ciclo que detecta y guarda la posición de los ultimos pixeles
negros a lo largo de la fibra izquierda m=0; for i=ancho:-1:1 if m_bordes(j,i)==0 && m==0 vector(2,j)=i+10; m=1; end end end an_f=zeros([2 6]);% instrucción que genera una matriz que identifica los
bordes de las fibras an_f(1,1)=round(mean(m_bordes(1,1:vector(1,1))));% instrucción que calcula
y guarda el promedio de la posición del borde superior del recubrimiento
superior de la fibra izquierda an_f(1,2)=round(mean(m_bordes(2,1:vector(1,2))));% instrucción que calcula
y guarda el promedio de la posición del borde inferior del recubrimiento
superior de la fibra izquierda an_f(1,3)=round(mean(m_bordes(2,1:vector(1,2))));% instrucción que calcula
y guarda el promedio de la posición del borde superior del nucleo de la
fibra izquierda an_f(1,4)=round(mean(m_bordes(3,1:vector(1,3))));% instrucción que calcula
y guarda el promedio de la posición del borde inferior del nucleo de la
fibra izquierda an_f(1,5)=round(mean(m_bordes(3,1:vector(1,3))));% instrucción que calcula
y guarda el promedio de la posición del borde superior del recubrimiento
inferior de la fibra izquierda an_f(1,6)=round(mean(m_bordes(4,1:vector(1,4))));% instrucción que calcula
y guarda el promedio de la posición del borde inferior del recubrimiento
inferior de la fibra izquierda an_f(2,1)=round(mean(m_bordes(1,vector(2,1):ancho)));% instrucción que
calcula y guarda el promedio de la posición del borde superior del
recubrimiento superior de la fibra derecha an_f(2,2)=round(mean(m_bordes(2,vector(2,2):ancho)));% instrucción que
calcula y guarda el promedio de la posición del borde inferior del
recubrimiento superior de la fibra derecha

Instituto Politécnico Nacional E S I M E
109 | Página
an_f(2,3)=round(mean(m_bordes(2,vector(2,2):ancho)));% instrucción que
calcula y guarda el promedio de la posición del borde superior del nucleo
de la fibra derecha an_f(2,4)=round(mean(m_bordes(3,vector(2,3):ancho)));% instrucción que
calcula y guarda el promedio de la posición del borde inferior del nucleo
de la fibra derecha an_f(2,5)=round(mean(m_bordes(3,vector(2,3):ancho)));% instrucción que
calcula y guarda el promedio de la posición del borde superior del
recubrimiento inferior de la fibra derecha an_f(2,6)=round(mean(m_bordes(4,vector(2,4):ancho)));% instrucción que
calcula y guarda el promedio de la posición del borde inferior del
recubrimiento inferior de la fibra derecha for i=1:alto % ciclo que detecta la posición del primer pixel del borde
superior del recubrimiento superior de la fibra izquierda if im_trabajo1(i,1)==0 break; end end dif=i; g=abs(dif-m_bordes(1,1));% instrucción que calcula la diferencia de
posición de las fibras entre la imagen de las fibras separadas y la imagen
con las fibras juntas if m_bordes(1,1)<=dif %condición que suma o resta la diferencia de posición
de las fibras entre las dos imagenes an_f=an_f+g; else an_f=an_f-g; end pixin=zeros([1 6]);% instrucción que genera la matriz que guarda el ancho
de los recubrimientos y del nucleo if an_f(1,1)>=an_f(2,1) % condición que asegura tomar el valor interno del
borde superior del recubrimiento superior pixin(1)=an_f(1,1); else pixin(1)=an_f(2,1); end if an_f(1,2)<=an_f(2,2) % condición que asegura tomar el valor interno del
borde inferior del recubrimiento superior pixin(2)=an_f(1,2); else pixin(2)=an_f(2,2); end if an_f(1,3)>=an_f(2,3) % condición que asegura tomar el valor interno del
borde superior del nucleo pixin(3)=an_f(1,3); else pixin(3)=an_f(2,3); end if an_f(1,4)<=an_f(2,4) % condición que asegura tomar el valor interno del
borde inferior del nucleo pixin(4)=an_f(1,4); else pixin(4)=an_f(2,4); end

Instituto Politécnico Nacional E S I M E
110 | Página
if an_f(1,5)>=an_f(2,5) % condición que asegura tomar el valor interno del
borde superior del recubrimiento inferior pixin(5)=an_f(1,5); else pixin(5)=an_f(2,5); end if an_f(1,6)<=an_f(2,6) % condición que asegura tomar el valor interno del
borde inferior del recubrimiento inferior pixin(6)=an_f(1,6); else pixin(6)=an_f(2,6); end cuenta_bs=zeros([1,(pixin(2)-pixin(1))]);% instrucción que genera un vector
para el conteo de pixeles blancos en el recubrimiento superior for j=pixin(1)+1:pixin(2) % ciclo que detecta los pixeles blancos en el
recubrimiento superior for i=1:ancho if im_trabajo1(j,i)==1 cuenta_bs(j-pixin(1))=cuenta_bs(j-pixin(1))+1; end end end cuenta_bi=zeros([1,(pixin(6)-pixin(5))]);% instrucción que genera un vector
para el conteo de pixeles blancos en el recubrimiento inferior for j=(pixin(5)+1):pixin(6) % ciclo que detecta los pixeles blancos en el
recubrimiento inferior for i=1:ancho if im_trabajo1(j,i)==1 cuenta_bi(j-pixin(5))=cuenta_bi(j-pixin(5))+1; end end end cuenta_n=zeros([1,(pixin(4)-pixin(3))]);% instrucción que genera un vector
para el conteo de pixeles negros en el nucleo for j=(pixin(3)+1):pixin(4) % ciclo que detecta los pixeles negros en el
nucleo for i=1:ancho if im_trabajo1(j,i)==0 cuenta_n(j-pixin(3))=cuenta_n(j-pixin(3))+1; end end end end

Instituto Politécnico Nacional E S I M E
111 | Página
alineacion
function [dif]=alineacion(vposde,vposiz) % función que recibe como
argumento los vectores de bordes del recubrimiento dif=zeros(1,4); for x=1:4 % ciclo que calcula la diferencia de los bordes de la fibra
izquierda con la fibra derecha dif(x)=abs(vposde(x)-vposiz(x)); end if mean(dif)<=2 alin=0; elseif mean(dif)>2 && mean(dif)<4 alin=1; elseif mean(dif)>4 alin=2; end end
bn_escala
function [im_bnrec]=bn_escala(im_cuadro) % % función que recibe como
argumento la imagen recortada nsup=max(im_cuadro);% instrucción que encuentra el pixel mas claro de cada
fila nsupre=max(nsup);% instrucción que encuentra el pixel mas claro de todas
las filas nmin=min(im_cuadro);% instrucción que encuentra el pixel mas oscuro de cada
fila nminre=min(nmin);% instrucción que encuentra el pixel mas oscuro de todas
las filas a=2/3; escala=round((nsupre-nminre)*a);% proporciona la escala para el umbral de
decisión tam=size(im_cuadro); im_bnrec=ones([tam(1) tam(2)]);% instrucción que genera una nueva imagen en
blanco for i=1:tam(2) % ciclo que convierte la imagen en escala de grises a blanco
y negro y la guarda en la nueva imagen for j=1:tam(1) if im_cuadro(j,i)<=escala im_bnrec(j,i)=0; else im_bnrec(j,i)=1; end end end end

Instituto Politécnico Nacional E S I M E
112 | Página
det_electrodo function [f]=det_electrodo(im_bn)% crea la función m=0;%bandera que indica si existe o no un electrodo electsup=0;% variable que indica que en la imagen se ve el electrodo
superior electinf=0;% variable que indica que en la imagen se ve el electrodo
inferior for i=500:1100 if im_bn(1,i)==0 && m==0; electsup=1; break end end m=0; for i=500:1100 if im_bn(1200,i)==0 && m==0; electinf=2; break end end f=electsup+electinf;%variable que indica 0 si no hay electrodos 1 si esta
el electrodo superior 2 si es el electrodo inferior y 3 si son los dos
electrodos end
elect_inf
function [xi,yi]=elect_inf(im_bne,im_gray)% recibe como argumento la imagen
a escala de grises y la imagen binaria donde se percibe con facilidad el
electrodo inferior im_bn=im2bw(im_gray);% se convierte la imagen en escala de grises a imagen
binaria con respecto al umbral de descición por defecto para localizar las
fibras m=0; pixeliz=0; pixelde=0; for i=500:1100 % ciclo que realiza un barrido para localizar los extremos
del electrodo inferior if im_bne(1200,i)==0 && m==0; pixeliz=i; m=1; elseif im_bne(1200,i)==1 && m==1; pixelde=i-1; m=2; end end xi=round((pixelde-pixeliz)/2+pixeliz);% instruccion que determina el punto
medio en la separación de las fibras pixelsup=0;

Instituto Politécnico Nacional E S I M E
113 | Página
for j=1200:-1:1 % ciclo que realiza un barrido para localizar la punta del
electrodo if im_bn(j,xi)==1 pixelsup=j; break end end pixelsup=pixelsup-20;% se decrementa en veinte pixeles para crear cierta
vecindad debido a la inclinación de la imagen for i=xi:-1:1 % ciclo que detecta el primer pixel negro de la fibra
izquierda pudiendo ser del borde superior o el borde inferior for j=1:pixelsup if im_bn(j,i)==0 y1=j; break end end end for i=xi+1:1600 % ciclo que detecta el primer pixel negro de la fibra
derecha pudiendo ser del borde superior o el borde inferior for j=pixelsup:-1:1 if im_bn(j,i)==0 y2=j; break end end end yi=round(y1/2+y2/2);% instrucción que obtiene el punto medio del grosor de
las fibras end
elect_sup
function [xi,yi]=elect_sup(im_bne,im_gray)% recibe como argumento la imagen
a escala de grises y la imagen binaria donde se percibe con facilidad el
electrodo superior im_bn=im2bw(im_gray);% se convierte la imagen en escala de grises a imagen
binaria con respecto al umbral de descición por defecto para localizar las
fibras m=0; pixeliz=0; pixelde=0; for i=500:1100 % ciclo que realiza un barrido para localizar los extremos
del electrodo if im_bne(1,i)==0 && m==0; pixeliz=i; m=1; elseif im_bne(1,i)==1 && m==1; pixelde=i-1; m=2;

Instituto Politécnico Nacional E S I M E
114 | Página
end end xi=round((pixelde-pixeliz)/2+pixeliz);% instruccion que determina el punto
medio en la separación de las fibras pixelsup=0; for j=1:1200 % ciclo que realiza un barrido para localizar la punta del
electrodo if im_bn(j,xi)==1 pixelsup=j; break end end pixelsup=pixelsup+20;% se incrementa en veinte pixeles para crear cierta
vecindad debido a la inclinación de la imagen for i=xi:-1:1 % ciclo que detecta el primer pixel negro de la fibra
izquierda pudiendo ser del borde superior o el borde inferior for j=pixelsup:1200 if im_bn(j,i)==0 y1=j; break end end end for i=xi+1:1600 % ciclo que detecta el primer pixel negro de la fibra
derecha pudiendo ser del borde superior o el borde inferior for j=1200:-1:pixelsup if im_bn(j,i)==0 y2=j; break end end end yi=round(y1/2+y2/2);% instrucción que obtiene el punto medio del grosor de
las fibras end
electrodos
function [xi,yi]=electrodos(im_bne,im_gray)% recibe como argumento la
imagen a escala de grises y la imagen binaria donde se percibe con
facilidad el electrodo inferior m=0; pixeliz=0; pixelde=0; im_bn=im2bw(im_gray);% se convierte la imagen en escala de grises a imagen
binaria con respecto al umbral de descición por defecto para localizar las
fibras for i=500:1100 % ciclo que realiza un barrido para localizar los extremos
del electrodo superior if im_bne(1,i)==0 && m==0; pixeliz=i; m=1; elseif im_bne(1,i)==1 && m==1;

Instituto Politécnico Nacional E S I M E
115 | Página
pixelde=i-1; m=2; end end mitades=ceil((pixelde-pixeliz)/2+pixeliz);% instruccion que determina el
punto medio del grosor del electrodo superior mitadei=0; m=0; for i=500:1100 % ciclo que realiza un barrido para localizar los extremos
del electrodo inferior if im_bne(1200,i)==0 && m==0; pixeliz=i; m=m+1; elseif im_bne(1200,i)==1 && m==1; pixelde=i-1; m=m+1; end end mitadei=ceil((pixelde-pixeliz)/2+pixeliz);% instruccion que determina el
punto medio del grosor del electrodo inferior xi=round((mitades/2+mitadei/2));% instruccion que determina el punto medio
en la separación de las fibras m=0; for j=1:1200 % ciclo que realiza un barrido para localizar la punta del
electrodo superior if im_bn(j,mitades)==1 && m==0; pixelsup=j; m=1; end end m=0; for j=1200:-1:1 % ciclo que realiza un barrido para localizar la punta del
electrodo inferior if im_bn(j,mitadei)==1 && m==0; pixelinf=j; m=1; end end yi=round((pixelsup/2+pixelinf/2));% instrucción que obtiene el punto medio
de la imagen de forma vertical end
ibn_electrodo
function [im_bn]=ibn_electrodo(im_gray)% crea la funcion im_bn=zeros([1200 1600]);% genera una matriz para minimizar el tiempo de
procesamiento if im_gray(1200,400)<=im_gray(1,400)%define que pixel, cercano a los
electrodos, es más obscuro escala=im_gray(1200,400)-1; else escala=im_gray(1,400)-1; end

Instituto Politécnico Nacional E S I M E
116 | Página
for i=1:1600 %cambia a blanco o negro según sea el caso con respecto al
umbral de decision for j=1:1200 if im_gray(j,i)<=escala im_bn(j,i)=0; else im_bn(j,i)=1; end end end end
recorte
function [im_cuadro]=recorte(im_gray,x1,y1,ancho,alto)% función que recibe
como argumento la imagen a escala de grises, las coordenadas del centro de
la imagen y las dimenciones de la nueva imagen xi=round(x1-ancho/2);% instruccion que define el punto inicial x yi=round(y1-alto/2);% instruccion que define el punto inicial y im_cuadro=ones([alto ancho],'uint8');% instruccion que crea una matriz del
tipo de dato con el que se almacenan las imagenes for i=1:ancho %ciclo que recorta la imagen for j=1:alto im_cuadro(j,i)=im_gray(yi+j,xi+i); end end end
reg_perfiles
function[reg_perfil,ang_perfil,des_perfil]=reg_perfiles(vperiz1,vperiz2,vpe
rde1,vperde2) % función que recibe como argumentos los cuatro vectores de
los perfiles del recubrimiento reg_perfil(1,1:2)=polyfit(1:length(vperiz1),vperiz1,1);% instrucción que
calcula los coeficientes de la recta de la regresión del perfil del
recubrimiento superior de la fibra izquierda ang_perfil(1)=abs(atand(reg_perfil(1,1)));%instruccion que calcula el
angulo de inclinacion del corte en el recubrimiento superior de la fibra
izquierda des_perfil(1)=std(vperiz1);%instruccion que calcula la desviación estandar
del corte en el recubrimiento superior de la fibra izquierda reg_perfil(2,1:2)=polyfit(1:length(vperiz2),vperiz2,1);% instrucción que
calcula los coeficientes de la recta de la regresión del perfil del
recubrimiento inferior de la fibra izquierda ang_perfil(2)=abs(atand(reg_perfil(2,1)));%instruccion que calcula el
angulo de inclinacion del corte en el recubrimiento inferior de la fibra
izquierda des_perfil(2)=std(vperiz2);%instruccion que calcula la desviación estandar
del corte en el recubrimiento inferior de la fibra izquierda

Instituto Politécnico Nacional E S I M E
117 | Página
reg_perfil(3,1:2)=polyfit(1:length(vperde1),vperde1,1);% instrucción que
calcula los coeficientes de la recta de la regresión del perfil del
recubrimiento superior de la fibra derecha ang_perfil(3)=abs(atand(reg_perfil(3,1)));%instruccion que calcula el
angulo de inclinacion del corte en el recubrimiento superior de la fibra
derecha des_perfil(3)=std(vperde1);%instruccion que calcula la desviación estandar
del corte en el recubrimiento superior de la fibra derecha reg_perfil(4,1:2)=polyfit(1:length(vperde2),vperde2,1);% instrucción que
calcula los coeficientes de la recta de la regresión del perfil del
recubrimiento inferior de la fibra derecha ang_perfil(4)=abs(atand(reg_perfil(4,1)));%instruccion que calcula el
angulo de inclinacion del corte en el recubrimiento inferior de la fibra
derecha des_perfil(4)=std(vperde2);%instruccion que calcula la desviación estandar
del corte en el recubrimiento inferior de la fibra derecha end
regresion
function[reg]=regresion(im_bnrec, ancho, alto) % función que recibe como
argumento la imagen recortada en formato binario, y las dimensiones de la
misma vrot=zeros([1 ancho]);% instrucción que genera el vector para la regresion for i=1:ancho % ciclo que obtiene el arreglo de la posición del primer
pixel negro a lo largo de la parte superior de las fibras m=0; for j=1:alto if im_bnrec(j,i)==0 && m==0; vrot(i)=j; m=1; end end end for i=1:ancho % ciclo que obtiene los vectores para la regresión lineal if abs(vrot(i)-vrot(i+1))<3 vecy(i)=alto-vrot(i); vecx(i)=i; elseif abs(vrot(i)-vrot(i+1))>=3 break; end end reg=polyfit(vecx,vecy,1);% instrucción que obtiene los coeficientes de la
recta obtenida end

Instituto Politécnico Nacional E S I M E
118 | Página
rotacion
function[im_rot]=rotacion(im_gray,reg); % función que recibe como argumento
la imagen completa en escala de grises y los coeficientes de la recta ang=abs(atand(reg(1,1)));% instrucción que calcula el ángulo de giro if reg(1,1)<=0 % condición que determina si el ángulo es positivo o
negativo im_rot=imrotate(im_gray,ang);% instrucción que que gira la imagen para
angulo positivo else ang=360-ang; im_rot=imrotate(im_gray,ang);% instrucción que que gira la imagen para
angulo negativo end end
sin_electrodos
function [xi,yi]=sin_electrodos(im_bn)% crea la función x1=0; x2=0; y1=0; y2=0; for j=1:1200 % secuencia que encuentra el primer pixel que delimita a la
fibra por la parte superior del lado izquierdo if im_bn(j,1)==0 y1=j; break end end for j=1200:-1:1% secuencia que encuentra el primer pixel que delimita a la
fibra por la parte inferior del lado izquierdo if im_bn(j,1600)==0 y2=j; break end end vec=zeros(1,1600); for i=1:1600 %secuencia para guardar la posición de cada pixel de borde
superior de la fibra m=0; for j=1:1200 if im_bn(j,i)==0 && m==0 vec(i)=i; m=1; end end end m=0; for i=1:1600 % secuencia para guardar la posición del borde de la parte
superior en la fibra izquierda y del borde inferior de la fibra derecha

Instituto Politécnico Nacional E S I M E
119 | Página
if vec(i)==0 && m==0 x1=i-1; m=1; elseif vec(i)>0 && m==1 x2=i; break end end xi=round(x2/2+x1/2);% instrucción que determina el punto medio en la
separación de las fibras yi=round(y2/2+y1/2);% instrucción que determina el punto medio del grosor
de las fibras end
vec_bordes
function [m_bordes,vposde,vposiz]=vec_bordes(im_trabajo,ancho,alto) %
función que recibe como argumento la imagen de trabajo y sus dimensiones m_bordes=zeros([4 ancho]);%instrucción que genera la matriz de bordes de
las fibras for i=1:ancho % ciclo que detecta y almacena los bordes del recubrimiento
superior de las fibras m=0; for j=1:alto if im_trabajo(j,i)==0 && m==0; m_bordes(1,i)=j; m=1; elseif im_trabajo(j,i)==1 && m==1; m_bordes(2,i)=j-1; m=2; end end end for i=1:ancho % ciclo que detecta y almacena los bordes del recubrimiento
inferior de las fibras m=0; for j=alto:-1:1 if im_trabajo(j,i)==0 && m==0; m_bordes(4,i)=j; m=1; elseif im_trabajo(j,i)==1 && m==1; m_bordes(3,i)=j+1; m=2; end end end
ac=zeros([1 4]); cont=zeros([1 4]); for j=1:4 % ciclo que determina los bordes de los recubrimientos de la
fibra izquierda for i=1:ancho if abs(m_bordes(j,i+1)-m_bordes(j,i))<3 ac(j)=ac(j)+m_bordes(j,i);

Instituto Politécnico Nacional E S I M E
120 | Página
cont(j)=cont(j)+1; else break; end end end vposiz=zeros([1 4]); for j=1:4 % ciclo que calcula el promedio de cada borde de la fibra
izquierda vposiz(j)=ceil(ac(j)/cont(j)); end ac=zeros([1 4]); cont=zeros([1 4]); for j=1:4 % ciclo que determina los bordes de los recubrimientos de la
fibra derecha for i=ancho:-1:1 if abs(m_bordes(j,i)-m_bordes(j,i-1))<3 ac(j)=ac(j)+m_bordes(j,i); cont(j)=cont(j)+1; else break; end end end vposde=zeros([1 4]); for j=1:4 % ciclo que calcula el promedio de cada borde de la fibra derecha vposde(j)=ceil(ac(j)/cont(j)); end end
vec_perfil
function
[vperiz1,vperiz2,vperde1,vperde2]=vec_perfil(im_trabajo,m_bordes,ancho) %
función que recibe como argumento la imagen de trabajo, la matriz de bordes
y el ancho de la imagen for j=1:ancho % ciclo que calcula la longitud del borde superior del
recubrimiento superior de la fibra izquierda if abs(m_bordes(1,j)-m_bordes(1,j+1))>=3 break end end auxiz1=m_bordes(1:1,1:j);% vector auxiliar para definir el grosor del
recubrimiento superior de la fibra izquierda miz1=max(auxiz1);%instrucción que identifica la fila en la que todos los
pixeles serán negros for j=1:ancho % ciclo que calcula la longitud del borde inferior del
recubrimiento superior de la fibra izquierda if abs(m_bordes(2,j)-m_bordes(2,j+1))>=3 break end end auxiz2=zeros(1,j); for x=1:j % vector auxiliar para definir el grosor del recubrimiento
superior del recubrimiento de la fibra izquierda
Instituto Politécnico Nacional E S I M E
121 | Página
auxiz2(x)=m_bordes(2,x); end miz2=min(auxiz2);%instrucción que identifica la fila en la que todos los
pixeles serán negros for j=1:ancho % ciclo que calcula la longitud del borde superior del
recubrimiento inferior de la fibra izquierda if abs(m_bordes(3,j)-m_bordes(3,j+1))>=3 break end end auxiz3=zeros(1,j); for x=1:j % vector auxiliar para definir el grosor del recubrimiento
inferior del recubrimiento de la fibra izquierda auxiz3(x)=m_bordes(3,x); end miz3=max(auxiz3);%instrucción que identifica la fila en la que todos los
pixeles serán negros for j=1:ancho % ciclo que calcula la longitud del borde inferior del
recubrimiento inferior de la fibra izquierda if abs(m_bordes(4,j)-m_bordes(4,j+1))>=3 break end end auxiz4=zeros(1,j); for x=1:j % vector auxiliar para definir el grosor del recubrimiento
inferior del recubrimiento de la fibra izquierda auxiz4(x)=m_bordes(4,x); end miz4=min(auxiz4);%instrucción que identifica la fila en la que todos los
pixeles serán negros grosorfi1=miz2-miz1; grosorfi2=miz4-miz3; for j=ancho:-1:1 % ciclo que calcula la longitud del borde superior del
recubrimiento superior de la fibra derecha if abs(m_bordes(1,j)-m_bordes(1,j-1))>=3 break end end auxde1=zeros(1,ancho-j); c=0; for x=j:ancho % vector auxiliar para definir el grosor del recubrimiento
superior del recubrimiento de la fibra derecha c=c+1; auxde1(c)=m_bordes(1,x); end mde1=max(auxde1);%instrucción que identifica la fila en la que todos los
pixeles serán negros for j=ancho:-1:1 % ciclo que calcula la longitud del borde inferior del
recubrimiento superior de la fibra derecha if abs(m_bordes(2,j)-m_bordes(2,j-1))>=3 break end end auxde2=zeros(1,ancho-j); c=0;
Instituto Politécnico Nacional E S I M E
122 | Página
for x=j:ancho % vector auxiliar para definir el grosor del recubrimiento
superior del recubrimiento de la fibra derecha c=c+1; auxde2(c)=m_bordes(2,x); end mde2=min(auxde2);%instrucción que identifica la fila en la que todos los
pixeles serán negros for j=ancho:-1:1 % ciclo que calcula la longitud del borde superior del
recubrimiento inferior de la fibra derecha if abs(m_bordes(3,j)-m_bordes(3,j-1))>=3 break end end auxde3=zeros(1,ancho-j); c=0; for x=j:ancho % vector auxiliar para definir el grosor del recubrimiento
inferior del recubrimiento de la fibra derecha c=c+1; auxde3(c)=m_bordes(3,x); end mde3=max(auxde3);%instrucción que identifica la fila en la que todos los
pixeles serán negros for j=ancho:-1:1 % ciclo que calcula la longitud del borde inferior del
recubrimiento inferior de la fibra derecha if abs(m_bordes(4,j)-m_bordes(4,j-1))>=3 break end end auxde4=zeros(1,ancho-j); c=0; for x=j:ancho % vector auxiliar para definir el grosor del recubrimiento
inferior del recubrimiento de la fibra derecha c=c+1; auxde4(c)=m_bordes(4,x); end mde4=min(auxde4);%instrucción que identifica la fila en la que todos los
pixeles serán negros grosorfd1=mde2-mde1; grosorfd2=mde4-mde3; vperiz1=zeros(1,grosorfi1);%instrucciones que generan los vectores para los
perfiles de las fibras vperiz2=zeros(1,grosorfi2); vperde1=zeros(1,grosorfd1); vperde2=zeros(1,grosorfd2); c=0; for j=miz1:1:miz2 % ciclo que genera el vector del perfil del recubrimiento
superior de la fibra izquierda c=c+1; m=0; for i=1:ancho if im_trabajo(j,i)==1 && m==0; vperiz1(c)=i-1; m=1; end end

Instituto Politécnico Nacional E S I M E
123 | Página
end c=0; for j=miz3:1:miz4 % ciclo que genera el vector del perfil del recubrimiento
inferior de la fibra izquierda c=c+1; m=0; for i=1:ancho if im_trabajo(j,i)==1 && m==0; vperiz2(c)=i-1; m=1; end end end c=0; for j=mde1:1:mde2 % ciclo que genera el vector del perfil del recubrimiento
superior de la fibra derecha c=c+1; m=0; for i=ancho:-1:1 if im_trabajo(j,i)==1 && m==0; vperde1(c)=i; m=1; end end end c=0; for j=mde3:1:mde4 % ciclo que genera el vector del perfil del recubrimiento
inferior de la fibra derecha c=c+1; m=0; for i=ancho:-1:1 if im_trabajo(j,i)==1 && m==0; vperde2(c)=i; m=1; end end end end
Instituto Politécnico Nacional E S I M E
124 | Página
Glosario Atenuación
Es la reducción de nivel de una señal, cuando pasa a través de un elemento de un
circuito, o la reducción en nivel de la energía de vibración, cuando pasa a través de
una estructura.
Axes
Permiten mostrar gráficos e imágenes, al igual que todos los objetos gráficos en
MATLAB.
BER
Bit Error Ratio (BER) traducido como Tasa de error de bit, es,
en telecomunicaciones, el número de bits o bloques incorrectamente recibidos, con
respecto al total de bits o bloques enviados durante un intervalo especificado de
tiempo.
Detector
El término detector hace referencia a aquel dispositivo capaz de detectar o percibir
cierto fenómeno físico.
Dispersión
Fenómeno por el cual un rayo de luz blanca que incide en un prisma u otro objeto
óptico adecuado, forma un espectro a la salida.
Fibra monomodo
Una fibra monomodo es una fibra óptica en la que sólo se propaga un modo de luz.
Fibra multimodo
Una fibra multimodo es aquella en la que los haces de luz pueden circular por más
de un modo o camino. Esto supone que no llegan todos a la vez. Una fibra multimodo
puede tener más de mil modos de propagación de luz. Las fibras multimodo se usan
comúnmente en aplicaciones de corta distancia, menores a 2 km, es simple de
diseñar y económico.
Fibra óptica
Instituto Politécnico Nacional E S I M E
125 | Página
La fibra óptica es una delgada hebra de vidrio o silicio fundido que conduce la luz.
Fibra óptica multimodo índice gradual
En este tipo de fibra óptica, el núcleo está constituido de varias capas concéntricas
de material óptico con diferentes índices de refracción, causando que el rayo de
luz de refracte poco a poco mientras viaja por el núcleo, pareciendo que el rayo se
curva
Fotodiodo
Este detector de luz es un conversor de corriente a voltaje.
Interfaz gráfica
Una interfaz gráfica es cualquier medio por el cual uno puede interactuar con una
computadora a través de algún tipo de software gráfico. Comúnmente, esto se
consigue a través del control mediante el teclado y el mouse de cursores, menús,
ventanas, íconos y cajas de diálogo, pero puede tomar cualquier forma imaginable.
Interferencia
Alteración en la recepción de una señal mediante la introducción de otra extraña o
perturbadora:
Medio de transmisión
Es el canal que permite la transmisión de información entre dos terminales de
un sistema de transmisión.
Preforma
Grandes tubos de vidrio que reproducen a escala macroscópica la estructura de la
fibra. Son la base para la fabricación de la fibra óptica.
SNR
La relación señal/ruido (en inglés Signal to noise ratio SNR o S/N) se define como el
margen que hay entre la potencia de la señal que se transmite y la potencia del ruido
que la corrompe. Este margen es medido en decibelios.
Patch-Panels
Son estructuras metálicas con placas de circuitos que
permiten interconexión entre equipos. Un Patch-Panel posee una determinada
Instituto Politécnico Nacional E S I M E
126 | Página
cantidad de puertos (RJ-45 End-Plug), donde cada puerto se asocia a una
placa de circuito, la cual a su vez se propaga en pequeños conectores
de cerdas (o dientes - mencionados con anterioridad). En estos
conectores es donde se ponchan las cerdas de los cables provenientes de los
cajetines u otros Patch-Panels.
Pixel
Un píxel o pixel (México)1 , plural píxeles, (acrónimo del inglés picture element,
‘elemento de imagen’) es la menor unidad homogénea en color que forma parte de
una imagen digital, ya sea esta una fotografía, un fotograma de video o un gráfico.
Predicción
Es simplemente el anuncio anticipado de un suceso. Pronóstico es
la predicción fundada en observaciones, en conjeturas y en apariencias externas.
Umbral
El umbral es la cantidad mínima de señal que ha de estar presente para ser
registrada por un sistema.
Biblografía / Referencias
[1] PIERRE Nerou Jean, “Introducción a las telecomunicaciones por fibras ópticas” Trillas, 1991 (p.13, p.25) [2] GOVIND P. Agrawal, “Fiber-OpticCommunicationSystems”, Editorial Wiley, 4th Edition, 2010 [3] CAMPMANY José, F. Javier Fraile Pelaez; Javier Marti, “Dispositivos de Comunicaciones Ópticas”, Editorial SINTESIS, 1999 [4] DELMAR, “Fiber OpticsTechnician’s Manual”, 2nd Ed. 2001 [5] MARTIN Sanz José, “Comunicaciones ópticas”, Editorial Thomson Paraninfo, 1996

Instituto Politécnico Nacional E S I M E
127 | Página
[6] HECHT Jeff, “Understanding Fiber Optics”, Editorial Sams, 5th Edition, 2002 [7] [11] WILLIAM B. Jones Jr., “Introduction to optical fiber communication systems”, Oxford University Press, Primera Edición, Estados Unidos, 1988. [8] Manual de la Empalmadora TRITEC FASE II Fusion Splicer. [9] CUEVAS Escobar Bruno Omar, González Fragoso Alan Michel, Tesis de Licenciatura “Predicción Mediante el Uso de Lógica Difusa de Atenuación en Empalmes por fusión de fibra óptica de índice gradual a través del procesamiento de imágenes de alta resolución”, 2012, Dr. Castillo Pérez Raúl [web 1] http://mediosdetransmicionpame.wikispaces.com/ 27 Septiembre 2012, 15:36 hrs. [web 2] http://proyectosteceme.blogspot.mx/2008/09/ventajas-de-la-fibra-ptica-ante-otros.html 26 de Octubre 2012, 22:48 hrs [web 3] http://www.textoscientificos.com/redes/fibraoptica/empalmes-conexiones, 09
Noviembre 2012, 13:21 hrs
[web 4] http://www.textoscientificos.com/redes/fibraoptica/propiedades-tranmision,
consultado 19 Noviembre 2012, 15:51 hrs
[web 5] http://www.foro.fibremex.com/print.php?id=44 , consultado el 27 Noviembre
de 2012, 18:13 hrs.
[web 6] http://fisica.udea.edu.co/~labgicm/Curso%20FPGA_2011/2012_Interfaz%20
grafica%20en%20Guide%20Matlab.pdf, consultado el 9 de Enero de 2013, 20:35 hrs.
[web 7] http://profesores.elo.utfsm.cl/~tarredondo/info/soft-comp/Introduccion%20a%20la%20Logica%20Difusa.pdf, consultado el 16 de Febrero de 2013, 20:35 hrs.