instituto politÉcnico nacional - tesis.ipn.mxtesis.ipn.mx/jspui/bitstream/123456789/12973/1/tesis...
TRANSCRIPT

INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL ADÓLFO LÓPEZ MATEOS
DEPARTAMENTO DE INGENIERÍA EN CONTROL Y AUTOMATIZACIÓN
“DISEÑO Y CONSTRUCCIÓN DEL SISTEMA DE CONTROL PARA UN INTERCAMBIADOR
DE CALOR TUBULAR”
TESIS PARA OBTENER TITULO DE
INGENIERO EN CONTROL Y AUTOMATIZACIÓN.
PRESENTAN:
EDGAR SALDAÑA ZAMORA
MARIO SANTOS ESPINOZA
HUGO ZÚÑIGA CORTES
ASESORES:
DR. ISRAEL ALVAREZ VILLALOBOS
ING. JOSÉ LUIS AGUILAR JUAREZ
MÉXICO D.F. MAYO DEL 2013

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
2 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
ÍNDICE
Resumen ............................................................................................................. 5
Introducción ......................................................................................................... 5
Objetivo ................................................................................................................ 7
Justificación ......................................................................................................... 7
Alcances y aportaciones ...................................................................................... 7
Relación de figuras .............................................................................................. 8
Relación de tablas ............................................................................................. 10
CAPÍTULO I. Intercambiador de calor. .................................................................. 11
1.1 Aplicaciones de los intercambiadores de calor. ........................................... 11
1.1.1 Tipos de intercambiadores de calor. ......................................................... 12
1.2 Leyes de la termodinámica. ......................................................................... 16
1.3 Termopares. ................................................................................................ 18
1.3.1 Efecto Seebeck...................................................................................... 18
1.3.2 Leyes fundamentales de los termopares. .............................................. 19
1.3.3 Clasificación de los termopares. ............................................................ 19
1.4 Válvulas de control. ...................................................................................... 20
1.5 Transmisores. .............................................................................................. 21
1.5.1 Tipos de transmisores ............................................................................... 22
1.5.2 Transmisor de presión. ............................................................................. 24
1.6 Supervisión, Control y Adquisición de Datos (SCADA). .............................. 24
1.6.1 Necesidades de un sistema SCADA. .................................................... 26
1.6.2 Funciones Principales de un Sistema SCADA. ..................................... 26
1.6.3 Interfaz Hombre Máquina (HMI). ........................................................... 28
1.6.4 Beneficios mediante el sistema SCADA. ............................................... 29
1.7 Control PID. ................................................................................................. 30
1.7.1 Las tres acciones del control PID. ......................................................... 32
1.8 Control difuso. .............................................................................................. 36
1.8.1 Lógica difusa. ........................................................................................ 37
1.8.2 Controladores difusos. .............................................................................. 37
1.8.3 Fusificación. ........................................................................................... 39

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
3 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
1.8.4 Evaluación de reglas. ............................................................................ 40
1.8.5 Defusificación. ....................................................................................... 40
1.9 Control en cascada. ..................................................................................... 41
CAPÍTULO 2. Instrumentación del proceso .......................................................... 44
2.1 Elección y documentación de la instrumentación para el proceso de intercambio de calor. .......................................................................................... 44
2.1.1 Intercambiador de calor tubular. ............................................................ 44
2.1.2 Termopar tipo J...................................................................................... 47
2.1.3 Transmisor de presión. .......................................................................... 49
2.1.4 Válvula. .................................................................................................. 50
2.2 Propuesta física del proceso. ....................................................................... 53
2.2.1 Instrumentos de temperatura. ................................................................ 53
2.2.2 Instrumentos de presión. ....................................................................... 55
2.2.3. Válvulas de control ............................................................................... 56
2.2.4 Tubería. ................................................................................................. 57
2.2.5. Intercambiador de calor. ....................................................................... 59
2.2.6 Esquema físico propuesto. .................................................................... 60
CAPÍTULO 3. Desarrollo de los controladores PID y difuso. ............................... 64
3.1 Estructura del controlador PID. .................................................................... 64
3.2 Programación de la interfaz gráfica del control en cascada en LabView. .... 73
3.3 Desarrollo del control difuso. ....................................................................... 77
3.3.1 Selección de las variables de entrada y salida. ..................................... 78
3.3.2 Selección de las funciones de membresía. ........................................... 79
3.3.3 Definición de reglas lingüísticas y asignación de valor de salida. .......... 83
3.4 Desarrollo de la interfaz gráfica del control difuso LabView. ........................ 88
3.4.1 Programación de la interfaz gráfica del control difuso. .......................... 91
CAPÍTULO 4. Resultados y Análisis. .................................................................... 98
4.1 Respuesta del controlador en cascada. ....................................................... 98
4.2 Respuesta del controlador difuso............................................................... 108
CAPITULO 5 Diagrama Gantt y Estudio económico. .......................................... 115
5.1 Diagrama de actividades. .......................................................................... 115
ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
4 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
5.2 Estudio económico. .................................................................................... 116
Conclusiones ....................................................................................................... 118
Recomendaciones para trabajos futuros ............................................................. 119
Bibliografía. ......................................................................................................... 120
Anexos. ............................................................................................................... 121
Anexo A. Datos del intercambiador de calor. ................................................... 121
Anexo B. Datos del transmisor de presión. ...................................................... 122
Anexo C. Datos de la válvula de control. ......................................................... 124
Anexo D. Especificaciones DAQ NI USB-6008. ............................................... 126
Anexo E. Reporte histórico. ............................................................................. 128
Anexo F. Diagramas de programación de los controladores en LabView. ....... 129
Anexo G. DTI general del proceso de intercambio de calor. ............................ 131

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
5 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
Resumen
Este documento presenta una propuesta de dos tipos de control para un prototipo de laboratorio de transferencia de calor. El desarrollo del sistema de control se basa en el monitoreo de dos variables de entrada (presión, flujo) y una variable de salida (temperatura), esto permite el uso de la estrategia de control en cascada y alternativamente el desarrollo de un controlador difuso; los cuales son realizados en el entorno de programación gráfica de LabView y una tarjeta de adquisición de datos modelo NI USB-6008, cuyas características permiten la recolección de datos de las variables y presenta su salida en formato digital a 16 bits para su posterior conversión a una señal analógica de tipo industrial (4 mA a 20 mA). El sistema SCADA recopila los datos y los muestra en una interfaz de usuario, además de generar un reporte con datos históricos y análisis de la información.
Introducción
La razón por la cual se propone en este trabajo el desarrollo de un módulo de intercambio de calor es porque es uno de los procesos más comunes a nivel industrial. Como el objetivo de todo proceso industrial es la obtención de un producto final con ciertas características, de forma que cumpla con las especificaciones y niveles de calidad exigidos por el cliente con las normas nacionales e internacionales aplicables, que en este caso lo que se busca es mantener la temperatura de salida del producto constante, dependiendo los requerimientos definidos por el usuario. Esta constancia en las propiedades del producto sólo será posible gracias a un control exhaustivo de las condiciones de operación, ya que tanto el proceso, como las condiciones del entorno y de carga son cambiantes con el paso del tiempo [2]. La misión del sistema de control en un proceso como éste es corregir las desviaciones surgidas en las variables de presión y temperatura respecto a los valores determinados en el setpoint, para conseguir las propiedades requeridas en el producto final. En un sistema de control las principales características que se deben buscar son:
1. Mantener el sistema estable, independientemente de perturbaciones y
desajustes. 2. Conseguir las condiciones de operación de forma rápida y continua. 3. Trabajar correctamente bajo una gama de condiciones operativas.
ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
6 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
4. Manejar las restricciones de equipo y proceso de forma precisa para conseguir nuestro objetivo.
La implantación de un adecuado sistema de control de proceso que se adapte a las necesidades del sistema, significará una mejora sensible de la operación dando como beneficios:
• Incremento de la productividad • Mejora de los rendimientos • Mejora de la calidad • Ahorro de energía • Seguridad operativa • Optimización de la operación del proceso • Reducción de afectaciones al ambiente [2]
Por esta razón se propone aplicar dos estrategias de control al proceso de forma independiente para definir por medio de una comparación cuál de estos es el que tiene un mejor desempeño para lograr el objetivo. El sistema de control está conformado por una serie de operaciones de medida, comparación, cálculo y corrección, que constituyen una cadena cerrada denominada lazo de control. El conjunto de elementos que hacen posible este control reciben el nombre de lazo de control y está conformado primordialmente por los siguientes elementos:
• Elementos de medida (Sensores): Generan una señal indicativa de las condiciones de proceso.
• Elementos de control (Controladores): Leen la señal de medida, comparan la variable medida con la deseada (setpoint) para determinar el error, y estabilizan el sistema realizando el ajuste necesario para reducir o eliminar el error.
• Elementos actuadores (Válvulas y otros elementos finales de control): Reciben la señal del controlador y actúan sobre el elemento final de control, de acuerdo a la señal recibida [2].
La organización de este trabajo presenta los antecedentes e información relevante en los primeros dos capítulos, posteriormente se presenta el planteamiento del problema y las especificaciones técnicas que debe satisfacer el sistema de control, en el capítulo 4 se muestran los resultados de las simulaciones de los diferentes tipos de control y la generación de los reportes de adquisición de datos, por último se aborda el estudio económico de la propuesta.

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
7 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
Objetivo
Diseñar un sistema de control con dos algoritmos de control (PID y Control Difuso), para un proceso de intercambio de calor.
Objetivos específicos.
- Realizar la instrumentación del proceso.
- Modelar el sistema y su control.
- Realizar los controladores PID y Difuso.
- Simular y obtener resultados.
Justificación
La alta demanda de sistemas de control en plantas industriales promueve la creación de dispositivos cada vez más complejos que generan mejores tiempos y formas de respuesta en el control de procesos y operaciones unitarias, es por ello que esta propuesta se enfoca en la creación de un sistema de control universal, que posea las características y bondades del controlador PID y el uso de nuevos algoritmos y técnicas de control, como lo son la lógica difusa, así mismo todo ello integrado dentro de un sistema SCADA que permite la recolección de los datos de la planta o proceso y su manejo para la generación de reportes y presentación de la información para los operadores y jefes de planta.
Alcances y aportaciones
Este trabajo tendrá un enfoque directamente orientado al diseño de dos controladores que se aplicarán de manera independiente hacia un mismo proceso (intercambiador de calor), para definir cuál de estos es el que tiene una mejor respuesta y desempeño, haciendo más eficiente el proceso. No obstante estos controladores también podrían implementarse en procesos diferentes siempre y cuando se hagan las modificaciones y consideraciones.
ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
8 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
Relación de figuras
Figura. 1.1 Intercambiador de calor de carcasa y tubos. 12 Figura. 1.2 Intercambiador de calor tipo plato. 13 Figura. 1.3 Intercambiador de calor de flujo paralelo. 13 Figura. 1.4 Intercambiador de contra flujo. 14 Figura. 1.5 Intercambiador de calor de flujo cruzado. 14 Figura. 1.6 Intercambiador regenerativo e intercambiador no-regenerativo. 15 Figura. 1.7 Esquema de un sistema SCADA (con varios clientes de
visualización). 27 Figura. 1.8 Componentes típicos de un lazo de control retroalimentado. 31 Figura. 1.9 Diagrama esquemático de un control realimentado. 31 Figura. 1.10 Control PI autoajustable. 33 Figura. 1.11 Respuesta del controlador. 35 Figura. 1.12 Representación esquemática del modelo difuso. 38 Figura. 1.13 Representación gráfica de la función de membresía para la
entrada difusa baja y el valor de pertenencia para 20 °C. 39 Figura. 1.14 Representación gráfica de la función de membresía para la
entrada difusa muy baja y el valor de pertenencia para 20 °C. 39 Figura. 1.15 Representación gráfica de la defusificación. 41 Figura 1.16 Estructura tradicional de control en cascada. 42 Figura. 2.1 Intercambiador de calor. 47 Figura. 2.2 Transmisor de presión. 50 Figura. 2.3 Válvula de control Tipo 3277 para montaje directo de
accesorios. 52 Figura. 2.4 Válvula SAMSOM modelo 3277 53 Figura. 2.5 DTI general del proceso de intercambio de calor. 60 Figura. 2.6 DTI del proceso de intercambio de calor con simbología ISA. 62 Figura. 2.7 Dimensiones sugeridas para el montaje de los elementos. 62 Figura. 3.1 Diagrama del control en cascada. 65 Figura. 3.2 Diagrama final del control en cascada. 69 Figura. 3.3 Pestaña principal de la interfase. 74 Figura. 3.4 Pestaña de sintonización de controladores PID. 75 Figura. 3.5 Pestaña de visualización de la respuesta del sistema. 75 Figura. 3.6 Diagrama del control en cascada en LabView. 76 Figura. 3.7 Diagrama final del control en cascada en LabView conectado
con la tarjeta NI USB-6008. 77 Figura. 3.8 Representación esquemática del modelo difuso. 78 Figura. 3.9 Funciones de membresía de la presión medida en un intervalo
de 0% a 100%. 80 Figura. 3.10 Funciones de membresía de la temperatura medida en un
intervalo de 0% a 100%. 81 Figura. 3.11 Funciones de membresía para la salida (apertura y cierre de la 82

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
9 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
válvula) medida en un intervalo de 0% a 100%. Figura. 3.12 Definición de las reglas lingüísticas. 83 Figura. 3.13 Asignación de salida con temperatura y presión bajas. 84 Figura. 3.14 Asignación de salida con temperatura y presión normales. 85 Figura. 3.15 Asignación de salida con temperatura y presión altas. 86 Figura. 3.16 Asignación de salida con temperatura < presión. 87 Figura. 3.17 Asignación de salida con temperatura > presión. 88 Figura. 3.18 Pestaña principal de la interfase. 89 Figura. 3.19 Pestaña de visualización de las funciones de membresía. 90 Figura. 3.20 Pestaña de visualización de la respuesta del sistema. 90 Figura. 3.21 Programa completo del controlador difuso. 91 Figura. 3.22 Rutina para la fusificación de las entradas en %. 92 Figura. 3.23 Modelo difuso. 93 Figura. 3.24 Visualización de las funciones de membresía 93 Figura. 3.25 Visualización de las funciones de membresía para
temperatura. 94 Figura. 3.26 Programa final del controlador difuso conectado con la tarjeta
NI USB-6008. 95 Figura. 3.27 Diagrama de conexión de la tarjeta NI USB-6008. 96 Figura. 3.28 Diagrama a bloques para la generación de historiales. 97 Figura. 4.1 Sintonización de los controladores del controlador en cascada. 103 Figura. 4.2 Respuesta del controlador cascada con valores ideales 103 Figura. 4.3 Salida del controlador cascada con valores ideales, reflejada
en el multímetro. 104 Figura. 4.4 Respuesta del controlador cascada con la temperatura por
debajo del valor ideal. 104 Figura. 4.5 Salida del controlador cascada con la temperatura por debajo
del valor ideal, reflejada en el multímetro. 105 Figura. 4.6 Respuesta del controlador cascada con la presión por debajo
del valor ideal. 105 Figura. 4.7 Salida del controlador cascada con la presión por debajo del
valor ideal, reflejada en el multímetro. 106 Figura. 4.8 Respuesta del controlador cascada con la temperatura
superior al valor ideal. 106 Figura. 4.9 Salida del controlador cascada con la temperatura superior al
valor ideal, reflejada en el multímetro. 107 Figura. 4.10 Respuesta del controlador cascada con la presión superior al
valor ideal. 107 Figura. 4.11 Salida del controlador cascada con la presión superior al valor
ideal, reflejada en el multímetro. 108 Figura. 4.12 Respuesta del controlador difuso con la temperatura y la
presión con la variable lingüística normal para ambas. 109 Figura. 4.13 Salida del controlador difuso con temperatura y presión con la
variable lingüística normal para ambas, reflejadas en el multímetro. 109
Figura. 4.14 Respuesta del controlador difuso con la temperatura baja. 110 Figura. 4.15 Salida del controlador difuso con la temperatura baja, reflejada 110

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
10 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
en el multímetro. Figura. 4.16 Respuesta del controlador difuso con la presión baja. 111 Figura. 4.17 Salida del controlador difuso con la presión baja, reflejada en
el multímetro. 111 Figura. 4.18 Respuesta del controlador difuso con la temperatura alta. 112 Figura. 4.19 Salida del controlador difuso con la temperatura alta, reflejada
en el multímetro. 112 Figura. 4.20 Respuesta del controlador difuso con la presión alta. 113 Figura. 4.21 Salida del controlador difuso con la presión alta, reflejada en el
multímetro. 113
Relación de tablas Tabla. 1.1 Características de ganancias del controlador. 36 Tabla. 2.1 Código de colores para termopares. 48 Tabla. 2.2 Datos técnicos del termopar tipo J. 49 Tabla. 2.3 Tabla de selección y aplicación de termopozos. 55 Tabla. 3.1 Valores de los intervalos de las variables lingüísticas de la
presión. 79 Tabla. 3.2 Datos de las funciones de membresía para la presión. 80 Tabla. 3.3 Datos teóricos de las funciones de membresía para la
temperatura. 81 Tabla. 3.4 Datos de las funciones de membresía para la presión. 82 Tabla. 5.1 Tabla de actividades. 115 Tabla. 5.2 Cotización del proyecto 116 Tabla. 5.3 Cotización de mano de obra del proyecto 117

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
11 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
CAPÍTULO I. INTERCAMBIADOR DE CALOR.
La función de un intercambiador de calor es transferir la energía calorífica de un fluido a otro. Los componentes básicos de los intercambiadores se pueden describir como un tubo por donde un fluido está pasando mientras que otro fluido circula alrededor de dicho tubo. Existen tres intercambios de calor que necesitan ser descritos:
1. Transferencia de calor convectiva del fluido hacia la pared interna del tubo. 2. Transferencia de calor conductiva a través de la pared del tubo. 3. Transferencia de calor convectiva desde la pared externa del tubo hacia el
fluido exterior [4].
1.1 Aplicaciones de los intercambiadores de calor.
Las aplicaciones de los intercambiadores de calor son muy variadas y reciben diferentes nombres:
• Intercambiador de Calor: Realiza la función doble de calentar y enfriar dos fluidos.
• Condensador: Condensa un vapor o mezcla de vapores. • Enfriador: Enfría un fluido por medio de agua. • Calentador: Aplica calor sensible a un fluido. • Rehervidor: Conectado a la base de una torre de destilación fraccionada
proporciona el calor de reebulición que se necesita para la destilación. (Los hay de termosifón, de circulación forzada, de caldera, entre otros).
• Vaporizador o evaporador: Un calentador que vaporiza parte del líquido [3]
Los intercambiadores de calor se encuentran en procesos químicos o mecánicos. Algunas de las aplicaciones más comunes se encuentran en calentamiento, ventilación, sistemas de acondicionamiento de aire, radiadores en máquinas de combustión interna, calderas, condensadores, y precalentadores o enfriamiento de fluidos.

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
12 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
1.1.1 Tipos de intercambiadores de calor.
Existen dos métodos para la construcción de intercambiadores de calor:
• Tipo Tubo (fig. 1.1) • Tipo Plato (fig.1.2)
Fig. 1.1 Intercambiador de calor de carcasa y tubos.
Estos tipos de intercambiadores están compuestos por tubos cilíndricos, montados dentro de una carcasa también cilíndrica, con el eje de los tubos paralelos al eje de la carcasa. Un fluido circula por dentro de los tubos, y el otro por el exterior (fluido del lado de la carcasa). Son el tipo de intercambiadores de calor más usado en la industria.

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
13 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
Fig.1.2 Intercambiador de calor tipo plato.
En un intercambiador de flujo paralelo el fluido con mayor temperatura y el fluido con menor temperatura fluyen en la misma dirección (fig.1.3)
Fig.1.3 Intercambiador de calor de flujo paralelo.
Q1 – Flujo 1
Q2 – Flujo 2

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
14 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
La gráfica anterior muestra como el fluido de mayor temperatura al entrar en contacto superficial con el otro fluido cede su calor, dando como resultado final una temperatura similar a la salida en ambos flujos. En un intercambiador de contraflujo el fluido con mayor temperatura y el fluido con menor temperatura fluyen paralelamente pero en sentido contrario (fig.1.4).
Fig. 1.4 Intercambiador de contra flujo.
Similar al caso anterior, la gráfica muestra que el fluido de mayor temperatura cede calor al de menor temperatura, dando como resultado que ambos tengan una temperatura similar a la salida, pero esta vez en sentido contrario.
En un intercambiador de flujo cruzado el fluido con mayor temperatura y el fluido con menor temperatura fluyen formando un ángulo de 90 °C entre ambos (fig.1.5).
Fig.1.5 Intercambiador de calor de flujo cruzado.
En este tipo de intercambiador, aunque las temperaturas de entrada y salida son iguales a los dos casos anteriores, se puede apreciar en su gráfica como el fluido de mayor temperatura sufre un cambio repentino, mientras que el otro aumenta su temperatura de una manera más suave.
ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
15 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
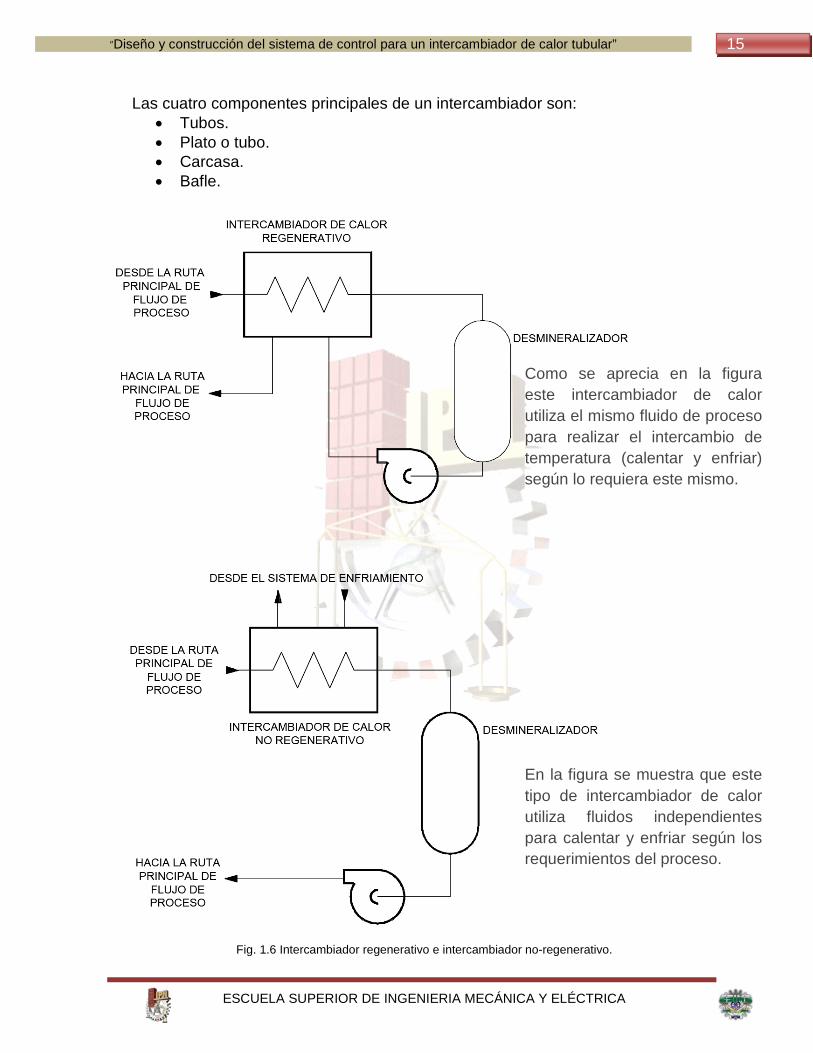
Las cuatro componentes principales de un intercambiador son: • Tubos. • Plato o tubo. • Carcasa. • Bafle.
Fig. 1.6 Intercambiador regenerativo e intercambiador no-regenerativo.
Como se aprecia en la figura este intercambiador de calor utiliza el mismo fluido de proceso para realizar el intercambio de temperatura (calentar y enfriar) según lo requiera este mismo.
En la figura se muestra que este tipo de intercambiador de calor utiliza fluidos independientes para calentar y enfriar según los requerimientos del proceso.
ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
16 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
• Los intercambiadores de un solo paso tienen fluidos que transfieren calor de uno a otro una sola vez.
• Los intercambiadores de múltiple paso tienen fluidos que transfieren calor de uno a otro más de una vez a través del uso de tubos en forma de "U" y el uso de bafles.
• Los intercambiadores de calor regenerativos usan el mismo fluido para calentar y enfriar.
• Los intercambiadores de calor no-regenerativos usan fluidos separados para calentar y enfriar [4].
1.2 Leyes de la termodinámica.
a) Primera ley de la termodinámica.
La primera ley de la termodinámica es la ley de conservación de la energía generalizada para incluir el calor como una forma de transferencia de energía.
El trabajo necesario para cambiar el estado de un sistema aislado depende únicamente de los estados inicial y final, y es independiente del método usado para realizar el cambio.
Esta ley sólo afirma que un aumento en algunas de las formas de energía debe estar acompañado por una disminución en alguna otra forma de la misma. La primera ley no produce ninguna restricción sobre los tipos de conversiones de energía que pueden ocurrir. Además no hace distinción entre el trabajo y el calor. De acuerdo con la primera ley, la energía interna de un sistema se puede incrementar ya sea agregando calor o realizando un trabajo sobre el sistema.
Pero existe una diferencia muy importante entre el trabajo y el calor que no se evidencia de la primera ley. Por ejemplo, es posible convertir completamente el trabajo en calor, pero en la práctica, es imposible convertir completamente el calor en trabajo sin modificar los alrededores.
b) Segunda ley de la termodinámica.
La segunda ley de la termodinámica establece cuales procesos de la naturaleza pueden ocurrir o no. De todos los procesos permitidos por la primera ley, solo ciertos tipos de conversión de energía pueden ocurrir. Los siguientes son algunos

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
17 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
procesos compatibles con la primera ley de la termodinámica, pero que se cumplen en un orden gobernado por la segunda ley.
Cuando dos objetos que están a diferente temperatura se ponen en contacto térmico entre sí, el calor fluye del objeto más cálido al más frío, pero nunca del más frío al más cálido.
La sal se disuelve espontáneamente en el agua, pero la extracción de la sal del agua requiere algún trabajo externo.
Cuando se deja caer una pelota de goma al piso, rebota hasta detenerse, pero el proceso inverso nunca ocurre. Todos estos son ejemplos de procesos irreversibles, es decir procesos que ocurren naturalmente en una sola dirección. Ninguno de estos procesos ocurre en el orden temporal opuesto. Si lo hicieran, violarían la segunda ley de la termodinámica. La naturaleza unidireccional de los procesos termodinámicos establece una dirección del tiempo.
La segunda ley de la termodinámica, que se puede enunciar de diferentes formas equivalentes, tiene muchas aplicaciones prácticas. Desde el punto de vista de la ingeniería, tal vez la más importante es en relación con la eficiencia limitada de las máquinas térmicas. Expresada en forma simple, la segunda ley afirma que no es posible construir una máquina capaz de convertir por completo, de manera continua, la energía térmica en otras formas de energía.
La base de esta ley es el hecho de que se mezclan partes iguales de dos gases nunca se encontraran separados de forma espontánea en un instante posterior.
c) Tercera ley de la termodinámica
El tercer principio de la termodinámica afirma que el cero absoluto no puede alcanzarse por ningún procedimiento que conste de un número finito de pasos. Es posible acercarse indefinidamente al cero absoluto, pero nunca se puede llegar a él. En el cero absoluto el sistema tiene la mínima energía mecánica posible, ya que siguiendo el primer principio de la termodinámica, si la temperatura disminuye, la energía calorífica también.
La tercera ley de la termodinámica es una extensión de la segunda ley y se relaciona con la determinación de los valores de la entropía. Hasta ahora hemos venido relacionado la entropía con el desorden molecular, cuanto mayor sea el

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
18 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
desorden o la libertad de movimiento de los átomos o moléculas de un sistema, mayor será la entropía de éste.
1.3 Termopares.
Un termopar es un dispositivo capaz de convertir la energía calorífica en energía eléctrica su funcionamiento se basa en los descubrimientos hechos por Seebeck en 1821 cuando hizo circular corriente eléctrica en un circuito, formado por dos metales diferentes cuyas uniones se encontraban a temperaturas diferentes, esta circulación de corriente obedece a dos efectos termoeléctricos combinados, el efecto Peltier que provoca la liberación o absorción de calor en la unión de dos metales diferentes cuando una corriente circula a través de la unión y el efecto Thompson que consiste en la liberación o absorción de calor cuando una corriente circula a través de un metal homogéneo en el que existe un gradiente de temperaturas.
La fuerza electromotriz es proporcional a la temperatura alcanzada por la unión térmica, así mismo si se resta el calentamiento óhmico, que es proporcional al cuadrado de la corriente, queda un remanente de temperatura que en un sentido de circulación de la corriente es positivo y negativo en el sentido contrario. El efecto depende de los metales que forman la unión.
La combinación de los dos efectos Peltier y Thompson, es la causa de la circulación de corriente al cerrar el circuito en el termopar. Esta corriente puede calentar el termopar y afectar la precisión en la medida de la temperatura, por lo que durante la medición debe hacerse mínimo su valor [8].
1.3.1 Efecto Seebeck.
El efecto seebeck se refiere a la emisión de electricidad en un circuito eléctrico compuesto por conductores diferentes, mientras estos tienen diferentes temperaturas. Los conductores se conectan en serie. La diferencia de temperatura causa un flujo de electrones en los conductores, se dice que el flujo inicia directamente desde el área de mayor temperatura hacia la de menor temperatura. En el punto de contacto de los conductores se presenta una diferencia de potencial. La magnitud de la termoelectricidad depende del tipo de
ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
19 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
material de los conductores, la temperatura de contacto y no depende de la temperatura que se distribuye a lo largo del conductor. [9].
1.3.2 Leyes fundamentales de los termopares.
Estudios realizados sobre el comportamiento de termopares han permitido establecer tres leyes fundamentales:
• Ley del circuito homogéneo. En un conductor metálico homogéneo no
puede sostenerse la circulación de una corriente eléctrica por la aplicación
exclusiva de calor.
• Ley de los metales intermedios. Si en un circuito de varios conductores la
temperatura es uniforme desde un punto de soldadura 'A' a otro 'B', la
suma algebraica de todas las fuerzas electromotrices es totalmente
independiente de los conductores metálicos intermedios y es la misma que
si se pusieran en contacto directo 'A' y 'B'.
• Ley de las temperaturas sucesivas. La f.e.m generada por un termopar con
sus uniones a las temperaturas T1 y T3 es la suma algebraica de la f.e.m.
del termopar con sus uniones a T1 y T2 y de la f.e.m. del mismo termopar
con sus uniones a las temperaturas T2 y T3 [8].
1.3.3 Clasificación de los termopares.
Tipo K (Cromo (Ni-Cr) Chromel / Aluminio (aleación de Ni -Al)): con una amplia variedad de aplicaciones, está disponible a un bajo costo y en una variedad de sondas. Tienen un intervalo de temperatura de -200 ºC a 1372 ºC y una sensibilidad 41 μV/°C aprox.
Tipo E (Cromo / Constatan (aleación de Cu-Ni)): No son magnéticos y gracias a su sensibilidad, son ideales para el uso en bajas temperaturas, en el ámbito criogénico. Tienen una sensibilidad de 68 μV/°C.
Tipo J (Hierro / constatan): debido a su limitado rango, el tipo J es menos popular que el K. Son ideales para usar en equipos viejos que no aceptan el uso de

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
20 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
termopares más modernos. El tipo J no puede usarse a temperaturas superiores a 760 ºC ya que una abrupta transformación magnética causa una des calibración permanente. Tienen un intervalo de -40 ºC a 750 ºC y una sensibilidad de ~52 μV/°C.
Tipo N (Nicrosil (Ni-Cr-Si / Nisil (Ni-Si)): Es adecuado para mediciones de temperatura alta gracias a su elevada estabilidad y resistencia a la oxidación de temperaturas altas, y no necesita del platino utilizado en los tipos B, R y S que son más caros.
Los termopares tipo B, R y S son los más estables, pero debido a su baja sensibilidad (10 μV/°C aprox.) generalmente son usados para medir temperaturas altas (superiores a 300 ºC).
Tipo B (Platino (Pt)-Rodio (Rh)): son adecuados para la medición de temperaturas altas, superiores a 1,800 ºC. El tipo B por lo general presentan el mismo resultado a 0 ºC y 42 ºC debido a su curva de temperatura/tensión.
Tipo R (Platino (Pt)-Rodio (Rh)): adecuados para la medición de temperaturas de hasta 1,300 ºC. Su baja sensibilidad (10 μV/°C) y su elevado precio quitan su atractivo.
Tipo S (Platino / Rodio): ideales para mediciones de temperaturas altas de hasta 1,300ºC, pero su baja sensibilidad (10 μV/°C) y su elevado precio lo convierten en un instrumento no adecuado para el uso general. Debido a su elevada estabilidad, el tipo S es utilizado para la calibración universal del punto de fusión del oro (1,064.43 °C).
Tipo T: es un termopar adecuado para mediciones en el intervalo de -200 ºC a 0 ºC. El conductor positivo está hecho de cobre y el negativo, de constatan. Los termopares con una baja sensibilidad, como en el caso de los tipos B, R y S, tienen además una resolución menor. La selección de termopares es importante para asegurarse que cubren el intervalo de temperaturas a determinar.
1.4 Válvulas de control. Las válvulas son los elementos finales de control más usuales y se les encuentra en las plantas de proceso, donde manejan los flujos para mantener en los puntos de control las variables que se deben controlar.

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
21 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
La válvula de control actúa como una resistencia variable en la línea de proceso; mediante el cambio de su apertura se modifica la resistencia al flujo y, en consecuencia, el flujo mismo.
Partes de la válvula de control.
Las válvulas de control constan básicamente de dos partes que son: la parte motriz o vástago y el cuerpo.
Actuador.
El actuador también llamado accionador o motor, puede ser neumático, eléctrico o hidráulico, pero los más utilizados son los dos primeros, por ser las más sencillas y de rápida actuaciones. Aproximadamente el 90% de las válvulas utilizadas en la industria son accionadas neumáticamente. Los actuadores neumáticos constan básicamente de un diafragma, un vástago y un resorte. Lo que se busca en un actuador de tipo neumático es que cada valor de la presión recibida por la válvula corresponda una posición determinada del vástago. Teniendo en cuenta que la gama usual de presión es de 3 psi a 15 psi en la mayoría de los actuadores se selecciona el área del diafragma y la constante del resorte de tal manera que un cambio de presión de 12 psi, produzca un desplazamiento del vástago igual al 100% del total de la carrera.
Cuerpo de la válvula.
Este está provisto de un obturador o tapón, los asientos del mismo y una serie de accesorios. La unión entre la válvula y la tubería puede hacerse por medio de bridas soldadas o roscadas directamente a la misma. El tapón es el encargado de controlar la cantidad de fluido que pasa a través de la válvula y puede accionar en la dirección de su propio eje mediante un movimiento angular. Esta unido por medio de un vástago al actuador [5].
1.5 Transmisores.
El transmisor es un instrumento que capta la variable en proceso y la transmite a distancia a un instrumento indicador o controlador; la función primordial de este dispositivo es tomar cualquier señal para convertirla en una señal normalizada adecuada para el instrumento receptor, es así como un transmisor capta señales tanto de un sensor como de un transductor, aclarando siempre que un transmisor es un transductor más no un transductor puede ser un transmisor; como ya es

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
22 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
conocido, las señales normalizadas pueden ser neumáticas cuyos valores están entre 3 psi y 15 psi, las eléctricas que son de 4 mA a 20 mA o de 0 VCD a 5 VDC, las digitales que entregan 0 v o 5 v para 0 o 1 respectivamente.
1.5.1 Tipos de transmisores
Transmisor neumático:
Se fundamentan en el principio que cumple el sistema tobera palometa que consiste en un tubo con un suministro constante de presión no superior a los 25 psi que pasa por una restricción que reduce el diámetro alrededor de 0.1 mm y que en su otro extremo se torna en forma de tobera con un diámetro de 0.25 mm - 0.5 mm que está expuesto a la atmósfera ocasionando un escape que es regulado por un obturador el cual cumple la misión de controlar el escape proporcional a la separación entre él y la tobera. La función de la tobera - obturador es que a medida que la lámina obturadora disminuya o aumente la distancia hacia la tobera ocasionara un efecto inversamente proporcional sobre la presión interna que es intermedia entre la presión atmosférica y la de suministro igual a la señal de salida del transmisor que para la tobera totalmente cerrada equivale a 15 psi y totalmente abierta a 3 psi.
Para la obtención de una salida eficiente y a causa de diminutos volúmenes de aire que se obtienen del sistema se le acopla una válvula piloto que amplifica, formando un amplificador de dos etapas.
La válvula servo-pilotada consiste en un obturador que permite el paso de dos caudales de aire, los cuales determinan la salida mediante los diferenciales de presión entre dos superficies, logrando vencer un resorte que busca mantener la válvula cerrada, aunque realmente existe una mínima abertura que es la que determina los 3 psi como salida mínima. Las funciones de la válvula son:
• Aumento del caudal suministrado o del caudal de escape para conseguir tiempos de respuesta inferiores al segundo.
• Amplificación de presión (ganancia), de cuatro a cinco para obtener la señal neumática de 3 psi - 15 psi.
Los transmisores neumáticos presentan las siguientes características:
• Un consumo de aire más bajo para el caudal nulo de salida. • Un caudal mayor de salida hacia el receptor. • Una zona muerta de presiones de salida. • Son de equilibrio de fuerzas. • Son de acción directa.

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
23 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
Transmisor electrónico:
Generalmente utilizan el equilibrio de fuerzas, el desequilibrio da lugar a una variación de posición relativa, excitando un transductor de desplazamiento tal como un detector de inductancia o un transformador diferencial como el LVDT. Un circuito oscilador asociado con cualquiera de estos detectores alimenta una unidad magnética y es así como se complementa un circuito de realimentación variando la corriente de salida en forma proporcional al intervalo de la variable en proceso. Su precisión es de 0.5 % - 1 % en una salida normalizada de 4 mA - 20 mA. Se caracterizan por el intervalo de entrada del sensor.
Transmisor inteligente:
Son aquellos instrumentos capaces de realizar funciones adicionales a la de la transmisión de la señal del proceso mediante un microprocesador incorporado. También existen dos modelos básicos de transmisores inteligentes:
• El capacitivo que consiste en un condensador compuesto de un diafragma interno que separa las placas y cuando éstas se abren es porque se realiza una presión, este diafragma se llena de aceite lo cual hace variar la distancia entre placas en no más de 0.1 mm. Luego esta señal es amplificada por un oscilador y un demodulador que entregan una señal análoga para ser convertida a digital y así ser tomada por el microprocesador.
• El semiconductor que por sus cualidades permiten que se incorpore un puente de Wheatstone en donde un microprocesador linealiza las señales y entrega la salida de 4 mA - 20 mA.
Los transmisores inteligentes permiten leer valores, configurar el transmisor, cambiar su campo de medida y diagnosticar averías, calibración y cambio de margen de medida.
Algunos transmisores gozan de auto-calibración, auto-diagnóstico de elementos electrónicos; su precisión es de 0.075 %. Monitorea las temperaturas, estabilidad, campos de medida amplios, posee costos de mantenimiento bajos, pero tiene desventajas como su lentitud, frente a variables rápidas puede presentar problemas y para el desempeño en las comunicaciones no presenta dispositivos universales, siendo, no intercambiable con otras marcas [6].

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
24 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
1.5.2 Transmisor de presión.
Los transmisores de presión son aquellos dispositivos que convierten una presión aplicada en una señal eléctrica. Esta señal se envía a los elementos receptores correspondientes que interpretan esta señal eléctrica y la utilizan para mostrar, registrar y/o cambiar la presión en el sistema que se está monitoreando.
Existen diversos tipos de transmisores de presión aunque los más comúnmente usados son los tres siguientes:
Transmisores de presión para presión diferencial.
El transmisor de presión está diseñado para aceptar una señal de presión diferencial de un elemento primario, como puede ser un medidor de caudal de placa orificio, y convertirla en una señal de salida analógica de 4 mA - 20 mA. Algunos contienen un colector de tres vías que se encuentra montado al transmisor de presión diferencial y actúa como un aislante secundario y como una válvula ecualizadora de presión para comprobar el cero del transmisor de presión diferencia. El método usado para obtener una medición de la presión diferencial es tomar una medición en la parte inferior, otra en la parte superior, siempre y cuando se trate de tanques cerrados sometidos a presión, cuando es para tanques abiertos la toma de baja presión se ventea a la atmósfera
La señal más común utilizada en aplicaciones industriales es un circuito de corriente de 2 alambres y 4 mA - 20 mA. Otras señales utilizadas incluyen 1v – 5v, 0.5v, 0v - 10v (sistema de 3 alambres) y 0 mV – 100 mV (sistema de 4 alambres). En muchos casos, el dispositivo de visualización, que está en el transmisor, puede aceptar más de un tipo de salida; por ejemplo, 4 mA - 20 mA o 0v -5v [7].
1.6 Supervisión, Control y Adquisición de Datos (SCADA).
El Control Supervisorio y de Adquisición de Datos “SCADA” (por sus siglas en inglés, Supervisory Control And Data Adquisition), es una aplicación de software diseñado con la finalidad de controlar y supervisar a distancia, el cual se basa en la adquisición de datos de procesos remotos. Los sistemas SCADA utilizan la computadora y tecnologías de comunicación para automatizar el monitoreo y el control de procesos industriales. Estos sistemas son partes integrales de la mayoría de los ambientes industriales complejos o geográficamente dispersos, ya que pueden obtener la información de una gran
ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
25 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
cantidad de fuentes rápidamente, y la presentan a un operador en una forma amigable. La información generada en el proceso productivo es enviada a diversos usuarios. Algunas de las industrias donde se utiliza SCADA son sistemas de manejo de agua, industria petrolera, energía eléctrica, señales de tráfico, sistemas de tránsito totales, sistemas de control de medio ambiente y sistemas de fabricación. El flujo de la información de los sistemas SCADA es el siguiente:
a) El Fenómeno Físico lo constituye la variable que se desea medir. Dependiendo del proceso, la naturaleza del fenómeno es muy diversa: presión, temperatura, flujo, potencia, intensidad de corriente eléctrica, tensión, pH, densidad, etc. Este fenómeno debe ser claro para el sistema SCADA y medido como una variable eléctrica, para ello se utilizan los sensores o transductores.
b) Los Sensores o Transductores convierten las variaciones el fenómeno
físico en variaciones proporcionales de una variable eléctrica. Las variables eléctricas más utilizadas son: tensión, corriente, carga, resistencia o capacitancia. Sin embargo, esta variedad de tipos de señales eléctricas debe ser procesada para ser entendida por el computador digital para lo cual se utilizan los acondicionadores de señal.
c) La función de los Acondicionadores de Señal es la de referenciar estos
cambios eléctricos a una misma escala de corriente o tensión. Además, provee aislamiento eléctrico y filtrado de la señal con el objeto de proteger al sistema de transitorios y ruidos originados en campo.
d) Acondicionada la señal, la misma se convierte en un valor digital
equivalente en el bloque de Conversión de Datos. Generalmente, esta función se lleva a cabo por un circuito de conversión analógica/digital
e) El computador almacena esta información, la cual es utilizada para su análisis y para la toma de decisiones. Simultáneamente, se muestra la información al usuario del sistema en tiempo real. Basado en la información, el operador puede tomar la decisión de realizar una acción de control sobre el proceso.
f) El operador ordena a la computadora realizar la acción sobre el proceso y
de nuevo debe convertirse la información digital a una señal eléctrica. Dicha señal eléctrica es procesada para generar una salida de control, esta parte funciona como un acondicionador de señal, la cual se escala para controlar un dispositivo dado: válvulas, bobinas, setpoint de un controlador, etc.

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
26 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
1.6.1 Necesidades de un sistema SCADA. Para que se implemente un sistema SCADA es necesario que el proceso a controlar cumpla con las siguientes características:
a) El número de variables a monitorear sea alto.
b) El proceso está geográficamente distribuido. Esta condición no es limitativa, ya que puede instalarse un SCADA para la supervisión y control de un proceso concentrado en una localidad.
c) La información del proceso se necesita en el momento en que se producen
los cambios, o sea, la información se requiere en tiempo real.
d) Optimizar y facilitar las operaciones de la planta, así como la toma de decisiones, tanto gerenciales como operativas.
e) Los beneficios obtenidos en el proceso justifican la inversión en un sistema
SCADA. Estos beneficios pueden reflejarse como aumento de la efectividad de la producción, de los niveles de seguridad, entre otros.
f) La complejidad y velocidad del proceso permiten que la mayoría de las
acciones de control sean iniciadas por un operador. En caso contrario, se requerirá de un Sistema de Control Automático, el cual lo puede constituir un Sistema de Control Distribuido, PLC´s, Controladores a Lazo Cerrado o una combinación de ellos.
1.6.2 Funciones Principales de un Sistema SCADA. Dentro de las funciones principales realizadas por un sistema SCADA están las siguientes:
a) Supervisión remota de instalaciones y equipos: Permite al operador conocer el estado de desempeño de las instalaciones y los equipos alojados en la planta, lo que permite dirigir las tareas de mantenimiento y estadística de fallas.
b) Control remoto de instalaciones y equipos: Mediante el sistema se
puede activar o desactivar los equipos remotamente (abrir válvulas, activar interruptores, arrancar motores, etc.), de manera automática y también manual. Además es posible ajustar parámetros, valores de referencia, algoritmos de control, etc.
c) Procesamiento de datos: El conjunto de datos adquiridos conforman la
información que alimenta el sistema, esta información es procesada,

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
27 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
analizada, y comparada con datos anteriores, y con datos de otros puntos de referencia, dando como resultado una información confiable y veraz.
d) Visualización gráfica dinámica: El sistema es capaz de brindar imágenes
en movimiento que representen el comportamiento del proceso, dándole al operador la impresión de estar presente dentro de una planta real. Estos gráficos también pueden corresponder a curvas de las señales analizadas en el tiempo como gráficas de tendencias.
e) Generación de reportes: El sistema permite generar informes con datos
estadísticos del proceso en un tiempo determinado por el operador.
f) Representación se señales de alarma: A través de las señales de alarma se logra alertar al operador frente a una falla o la presencia de una condición perjudicial o fuera de lo aceptable. Estas señales pueden ser tanto visuales como auditivas.
g) Almacenamiento de información histórica: Se cuenta con la opción de
almacenar los datos adquiridos, esta información puede analizarse posteriormente, el tiempo de almacenamiento dependerá del operador o del autor del programa.
h) Programación de eventos: Esta referido a la posibilidad de programar
subprogramas que brinden automáticamente reportes, estadísticas, gráfica de curvas, activación de tareas automáticas, etc.
Esquemáticamente un sistema SCADA conectado a un proceso automatizado consta de las siguientes partes vistas en la figura 1.7.
Fig. 1.7 Esquema de un sistema SCADA (con varios clientes de visualización).
Proceso (Objeto de control)
Dispositivos de adquisición de datos o Dispositivos de Control Programable
Sistema Supervisor y de Adquisición de datos. (SCADA)
Clientes de
datos
Clientes de
Visualización
Clientes de
Visualización

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
28 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
1.6.3 Interfaz Hombre Máquina (HMI).
Una interfaz hombre-máquina es un mecanismo que le permite a un operador interactuar con una máquina o proceso y determinar el estado (encendido/apagado) o magnitud de los dispositivos o variables físicas que están presentes en una planta o un proceso industrial.
Una HMI puede ser tan simple como un interruptor para encender un motor y una lámpara indicadora del estado del mismo, hasta una o varias pantallas desarrolladas en una computadora que llegan a mostrar en la pantalla del monitor representaciones esquemáticas de todo el proceso bajo supervisión, incluyendo valores en tiempo real de las variables presentes en ese momento en la planta.
Para manejar un sistema SCADA generalmente se recurre a un paquete de software especializado que funciona en la computadora central, por medio del cual se desarrolla una o varias pantallas que actúan como una interfaz gráfica entre el hombre y la máquina o el proceso. De esta forma es posible supervisar o configurar dispositivos en el proceso supervisado por medio de acciones que permiten proveer a un nivel superior administrativo información selecta que se genera en el proceso productivo.
Las funciones principales de una HMI de un SCADA son:
• Adquisición de datos. Recolección de datos de los RTU's (REMOTE TERMINAL UNIT).
• Seguimiento. Salvar los datos en una base de datos, y ponerlos a disposición de los operadores en forma de gráficos.
• Procesamiento de Alarmas. Analizar los datos recolectados de los RTU's para ver si han ocurrido condiciones anormales, y alertar a personal de operaciones sobre las mismas.
• Control. Control a Lazo Cerrado, e iniciados por operador.
• Visualizaciones. Gráficos del equipamiento actualizado para reflejar datos del campo.
• Informes. La mayoría de los sistemas SCADA tienen un ordenador dedicado a la producción de reportes conectado en red (LAN o similar) con el principal.
• Mantenimiento del Sistema Espejo, mantener un sistema idéntico con la capacidad segura de asumir el control inmediatamente si el principal falla.
ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
29 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
• Interfaces con otros sistemas. Transferencia de datos hacia y desde otros sistemas corporativos, por ejemplo, el procesamiento de órdenes de trabajo, de compra, la actualización de bases de datos, etc.
• Seguridad. Control de acceso a los distintos componentes del sistema.
• Administración y actualización de la red. Monitoreo de la red de comunicaciones.
• Administración de la Base de datos. Agregar nuevas estaciones, puntos, gráficos, puntos de cambio de alarmas, y en general, reconfigurar el sistema.
• Aplicaciones especiales. Casi todos los sistemas SCADA tendrán cierto software de aplicación especial, asociado generalmente al monitoreo y al control de la planta.
• Sistemas expertos, sistemas de modelado. Los más avanzados pueden incluir sistemas expertos incorporados, o capacidad de modelado de datos.
1.6.4 Beneficios mediante el sistema SCADA. Con el desarrollo de estos sistemas se ha logrado obtener una serie de beneficios los cuales pueden ser resumidos de la siguiente forma.
• Mejora en la productividad del personal operador, instrumentista y de mantenimiento, así como una operación con mayor seguridad.
• Menor riesgo de contaminación ambiental.
• Reducir costos; menor costo operativo, debido al menor costo de operación y mantenimiento.
• Reasignar o reducir personal.
• Menor costo de transporte por movilización de personal.
• Reducir requerimientos de control futuros.
• Mejora en el factor de servicio de los equipos e instrumentos.
• Reducción de la incidencia de fallas.
• Modernizar sistemas de control obsoletos, o basados exclusivamente en
hardware

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
30 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
• Disponibilidad de la información real para los distintos niveles de la empresa.
• Ser más competitivos y ofrecer un mejor servicio [10].
1.7 Control PID.
Aunque las nuevas teorías, y metodologías eficaces de diseño se desarrollan continuamente en el campo del control automático, los controladores Proporcional-Integral-Derivativo (PID) siguen siendo, por mucho, los controladores más ampliamente adoptados en la industria debido a la relación costo/beneficio ventajoso que son capaces de proporcionar. De hecho aunque son relativamente fáciles de usar, son capaces de proporcionar un rendimiento satisfactorio en muchas tareas de control de procesos. Es por eso que se ha consolidado en los últimos años como un controlador de realimentación estándar.
Este controlador ha ido evolucionando junto con el progreso de la tecnología de hoy en día hasta llegar al punto en que muy frecuentemente se implementa de forma digital en vez de neumática o eléctrica. Se puede encontrar en prácticamente todos los tipos de equipos de control, ya sea como un controlador independiente o como un bloque funcional de Controladores Lógicos Programables (PLC´s) y Sistemas de Control Distribuido (DCS).
En realidad, las nuevas posibilidades que ofrece el desarrollo de la tecnología digital y los paquetes de software han llevado a un crecimiento significativo de la investigación en el campo del control PID, se han desarrollado nuevas herramientas eficaces para la mejora de los métodos de análisis y diseño del algoritmo básico, así como para la mejora de las funciones adicionales que se apliquen con el algoritmo básico con el fin de aumentar su rendimiento y su facilidad de uso.
El éxito de los controladores PID también se ve reforzado por el hecho de que frecuentemente constituyen el componente fundamental de los esquemas de control más sofisticados, éste puede ser empleado cuando la ley básica de control no es suficiente para obtener los rendimientos necesarios o cuando una tarea de control más complicada es motivo de preocupación.
a) Control por realimentación.
El objetivo de un sistema de control es el de obtener una respuesta deseada para un sistema dado. Esto se puede hacer con un sistema de control de lazo abierto

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
31 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
(open-loop), donde el controlador determina la señal de control para el proceso sobre la base de la señal de referencia solamente, o con un sistema de control de lazo cerrado (close-loop), donde el controlador determina la señal de control para el proceso también mediante el uso de la medición de la salida (la señal de retroalimentación).
El control por realimentación es realmente esencial para mantener la variable de proceso cerca del valor deseado, a pesar de las perturbaciones y variaciones de la dinámica del proceso.
El sistema de control por realimentación típica se representa en el diagrama de la figura 1.8 Obviamente, el rendimiento general del sistema de control depende de la elección apropiada de cada componente. Para el propósito del diseño del control, la dinámica del actuador y el sensor son a menudo despreciados (aunque los límites de saturación del actuador tienen que ser tomadas en cuenta) y es considerado el diagrama de bloques de la figura 1.9, donde 𝑃 es el proceso, 𝐶 es el controlador, 𝐹 es un filtro de alimentación directa, 𝑃 es la señal de referencia, 𝑃 = 𝑃 − 𝐹 es la señal de error, 𝐴 es la variable manipulada (o de control), 𝐹 es la variable de proceso (o controlada), 𝐶 es una señal de perturbación cargada y 𝐶 es una señal de ruido de medición.
Fig. 1.8 Componentes típicos de un lazo de control por retroalimentación.
Fig. 1.9 Diagrama esquemático de un control retroalimentado.
𝑃𝑃𝑃𝑃𝑃𝑃𝑃 𝐶𝑃𝐶𝐶𝑃𝑃𝐶𝐶𝐶𝑃𝑃 𝐴𝑃𝐶𝐴𝐶𝐶𝑃𝑃
𝑆𝑃𝐶𝑃𝑃𝑃

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
32 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
1.7.1 Las tres acciones del control PID.
La aplicación de una ley de control PID consiste en aplicar adecuadamente la suma de los tres tipos de acciones de control: una acción proporcional, una acción integral y una acción derivativa.
a) Acción Proporcional.
La acción de control proporcional es proporcional al error según la expresión:
𝐴(𝐶) = 𝐾𝑝𝑃(𝐶) = 𝐾𝑝𝑃(𝐶) − 𝐹(𝐶) (1.1)
Donde 𝐾𝑝 es la ganancia proporcional. Implementa la operación típica de incrementar la variable de control cuando el error de control es grande (con el signo apropiado). La función de transferencia de un controlador proporcional puede ser derivada trivialmente como:
𝐶(𝑃) = 𝐾𝑝 (1.2)
El principal inconveniente de la utilización de un controlador proporcional puro es que se produce un error de estado estacionario. Vale la pena señalar que esto ocurre incluso si el proceso presenta una dinámica de integración (si su función de transferencia tiene un polo en el origen del plano complejo), en caso de que se produzca una perturbación de carga constante. Esto motiva la adición de un término de restablecimiento 𝐴𝑏
𝐴(𝐶) = 𝐾𝑝𝑃(𝐶) + 𝐴𝑏 (1.3)
El valor de 𝐴𝑏 puede fijarse a un nivel constante (por lo general al (𝐴𝑚𝑎𝑥 + 𝐴𝑚𝑖𝑛)/2) o se puede ajustar manualmente hasta que se reduzca el error de estado estacionario a cero. Vale la pena señalar que en los productos comerciales la ganancia proporcional a menudo se sustituye por la banda proporcional 𝑃𝐵, que es el rango de error que provoca un cambio de la gama completa de la variable de control:
𝑃𝐵 = 100𝐾𝑝
(1.4)
b) Acción Integral.
La acción integral es proporcional a la integral del error de control, es decir, es

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
33 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
𝐴(𝐶) = 𝐾𝑖 ∫ 𝑃(𝜏)𝐶𝜏𝑡0 (1.5)
Donde 𝐾𝑖 es la ganancia integral. Parece que la acción integral está relacionada con los valores anteriores del error de control. La función de transferencia correspondiente es:
𝐶(𝑃) = 𝐾𝑖𝑠 (1.6)
La presencia de un polo en el origen del plano complejo permite la reducción a cero del error de estado estacionario cuando se aplica una señal de referencia de paso (step) o una perturbación. En otras palabras, la acción integral es capaz de ajustar automáticamente el valor correcto de la 𝐴𝑏 en (1.3), de manera que el error de estado estacionario es cero. Este hecho se muestra en la figura 1.10, donde la función de transferencia resultante es:
𝐶(𝑃) = 𝐾𝑝 1 + 1𝑇𝑖𝑠 (1.7)
Se produce un controlador PI. Por esta razón, la acción integral es también llamada a menudo reajuste automático. Por lo tanto, el uso de una acción proporcional en relación a una acción integral de un regulador PI, resuelve los principales problemas de la respuesta oscilatoria asociada a un controlador On-Off y del error de estado estacionario asociado a un controlador proporcional puro.
Fig. 1.10 Control PI auto ajustable.
c) Acción Derivativa.
Mientras que la acción proporcional se basa en el valor actual del error de control y la acción integral se basa en los valores pasados del error de control, la acción derivativa se basa en los valores futuros predichos del error de control. Una ley ideal del control derivativo puede expresarse como:
𝐴(𝐶) = 𝐾𝑑𝑑𝑒(𝑡)𝑑𝑡
(1.8)
𝐾𝑝
1𝑇𝑖𝑃 + 1
𝑃 𝐴
−
+

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
34 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
Donde 𝐾𝑑 es la ganancia derivada. La función de transferencia del controlador correspondiente es:
𝐶(𝑃) = 𝐾𝑑𝑃 (1.9)
Para entender mejor el significado de la acción derivativa, vale la pena considerar los dos primeros términos del desarrollo de la serie de Taylor del error de control en tiempo de 𝑇𝑑 adelantado:
𝑃(𝐶 + 𝑇𝑑)
𝑃(𝐶 + 𝑇𝑑) ≃ 𝑃(𝐶) + 𝑇𝑑𝑑𝑒(𝑡)𝑑𝑡
(1.10)
Si se considera una ley de control proporcional para esta expresión:
𝐴(𝐶) = 𝐾𝑝 𝑃(𝐶) + 𝑇𝑑𝑑𝑒(𝑡)𝑑𝑡
(1.11)
Naturalmente, esto resulta en un controlador PD. Por consiguiente, la variable de control en el tiempo 𝐶 se basa en el valor predicho del error de control en el tiempo 𝐶 + 𝑇𝑑. Por esta razón, la acción derivada también se llama control de anticipación.
Parece que la acción derivativa tiene una gran potencialidad en la mejora del rendimiento de control, ya que puede anticipar una curva incorrecta del error de control y contrarrestarla por ello [1].
Un control PID se basa en un modelo matemático riguroso de algún proceso lineal o lineal dentro de un intervalo. Estos modelos se desarrollan ya sea por Root-Locus, ubicación de polos, o algún otro método, y si la planta se puede representar por un sistema de primer orden con retardo como:
𝐺(𝑃) = ℯ(−𝑠𝑇0) 1(1+𝑠𝑇) (1.12)
El diseño del controlador puede ser realizado de manera empírica (sin conocimiento del modelo), mediante el método de Ziegler-Nichols o algún derivado de éste, y se pueden asignar los coeficientes proporcional, integral y derivativo del controlador del sistema. Un control PID lee un valor de entrada o del sensor de entrada, aplica los algoritmos de control, definidos y produce una salida específica como señal actuante o como entrada a un actuador. La salida del sistema es medida por el sensor de entrada, y el proceso se repite indefinidamente.
El controlador PID clásico tiene la forma:
ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
35 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
𝐴 = 𝐾𝑝𝑃 + 1𝑇𝑖∫ 𝑃𝐶𝐶 + 𝑇𝑑
𝑑𝑒𝑑𝑡
𝑡0 (1.13)
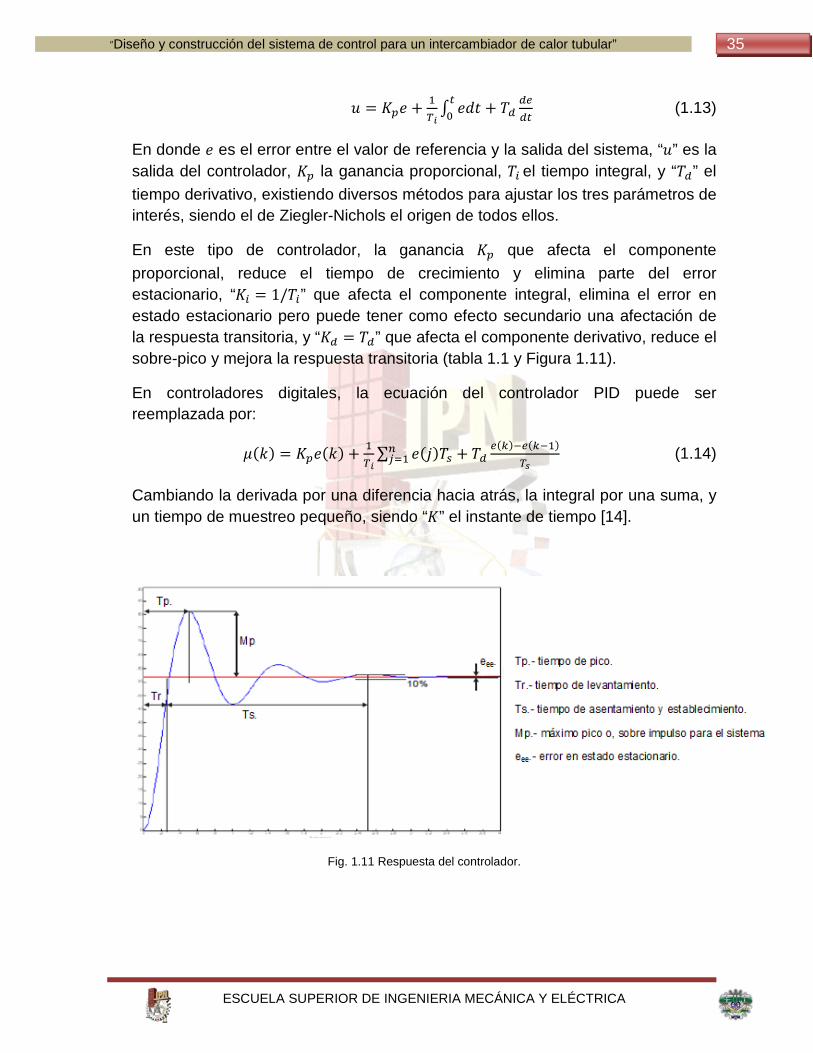
En donde 𝑃 es el error entre el valor de referencia y la salida del sistema, “𝐴” es la salida del controlador, 𝐾𝑝 la ganancia proporcional, 𝑇𝑖 el tiempo integral, y “𝑇𝑑” el tiempo derivativo, existiendo diversos métodos para ajustar los tres parámetros de interés, siendo el de Ziegler-Nichols el origen de todos ellos.
En este tipo de controlador, la ganancia 𝐾𝑝 que afecta el componente proporcional, reduce el tiempo de crecimiento y elimina parte del error estacionario, “𝐾𝑖 = 1/𝑇𝑖” que afecta el componente integral, elimina el error en estado estacionario pero puede tener como efecto secundario una afectación de la respuesta transitoria, y “𝐾𝑑 = 𝑇𝑑” que afecta el componente derivativo, reduce el sobre-pico y mejora la respuesta transitoria (tabla 1.1 y Figura 1.11).
En controladores digitales, la ecuación del controlador PID puede ser reemplazada por:
𝜇(𝑘) = 𝐾𝑝𝑃(𝑘) + 1𝑇𝑖∑ 𝑃(𝐴)𝑇𝑠 + 𝑇𝑑
𝑒(𝑘)−𝑒(𝑘−1)𝑇𝑠
𝑛𝑗=1 (1.14)
Cambiando la derivada por una diferencia hacia atrás, la integral por una suma, y un tiempo de muestreo pequeño, siendo “𝐾” el instante de tiempo [14].
Fig. 1.11 Respuesta del controlador.

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
36 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
Tabla. 1.1 Características de ganancias del controlador.
𝑇𝑟 𝑀𝑝 𝑇𝑠 𝑃𝑒𝑒 𝐾𝑝 Disminuye Aumenta Poco Efecto Disminuye 𝐾𝑖 Disminuye Aumenta Aumenta Elimina 𝐾𝑑 Poco Efecto Disminuye Disminuye Poco Efecto
1.8 Control difuso.
El desarrollo del control difuso tiene, su origen en los sistemas basados en reglas para la toma de decisiones y en la lógica difusa para la evaluación de aquellas. Los controladores difusos, al igual que otros, toman los valores de las variables de entrada, realizan algún procedimiento con ellas, deciden como modificar las variables de salida y lo realizan, afectando estas últimas a la planta. La diferencia esencial es que no procesan ecuaciones ni tablas, procesan reglas para decidir cómo cambiar las salidas. Esto lo hace una tecnología muy accesible, ya que las reglas están más cerca del sentido común que de las ecuaciones y los modelos. Este método de procesamiento de reglas está vinculado con los sistemas expertos, uno de los beneficios de la Inteligencia Artificial. Estos sistemas nacieron como consecuencia natural del desarrollo de esta disciplina, ya que era necesario agregar a los programas ese conocimiento y experiencia, que el experto humano tiene para resolver un determinado problema. Estos programas de computadora, utilizan conocimiento y algún tipo de mecanismo de inferencia para resolver un tipo de problema en especial, con el objetivo de obtener resultados parecidos a los del experto humano, no sólo en cuanto a la conclusión final, sino también a la forma en que se llega a la misma. Los problemas atacados con esta técnica son entre otros, los de diagnóstico médico, planeadores de trayectoria, controladores de tráfico, acceso inteligente a bases de datos. Este conocimiento consta de hechos y heurística, siendo los primeros la información pública y generalmente disponible, para la resolución de un problema en particular, mientras que la heurística, es más privativa del experto, es justamente ese conocimiento en particular que lo hace destacarse en su tarea. Cuando este conocimiento está expresado como reglas del tipo:
• SI antecedente ENTONCES consecuente. • SI condición ENTONCES acción.
Entonces se dice que es un sistema basado en reglas.

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
37 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
En cuanto al mecanismo de inferencia, es la parte de control del programa, encargada de procesar las reglas contenidas en la base de conocimiento, tomando en cuenta los datos nuevos y el estado del sistema, y producir como resultado, un cambio nuevo en el estado del mismo para así comenzar un ciclo nuevo. En general la evaluación de las reglas se realiza utilizando lógica aristotélica, la cual es muy rígida y por lo tanto a veces es difícil representar el conocimiento del experto mediante este paradigma. Para ello basta con tratar de describir con un conjunto de reglas, el conocimiento necesario para realizar una tarea sencilla y cotidiana como por ejemplo, la de estacionar un vehículo. Es en este punto donde comienza a cobrar importancia la lógica difusa, ya que enseguida se trataran de esbozar reglas con calificativos no demasiado precisos, tales como, si el móvil está muy cerca del cajón... entonces..., o si el ángulo es pequeño... entonces ..., o si... entonces girar un poco a la izquierda, etc [15].
1.8.1 Lógica difusa. A mediados de la década del 60 el Profesor Lotfi Zadeh, de la Universidad de California en Berkeley, introdujo su teoría de los conjuntos difusos, donde la idea de pertenencia de un elemento a un determinado conjunto no era, ya pertenece o no pertenece, sino que pertenece en un cierto grado. Las funciones que vinculan al elemento con su grado de pertenencia, se llaman funciones de membresía. Basándose sobre esta idea, se construyó nuevamente toda la teoría de conjuntos, redefiniendo inclusión, unión, operadores lógicos (AND, OR), otras operaciones y sus propiedades. En lo referente a la lógica, aparecen nuevas alternativas respecto de la lógica tradicional, puesto que, al evaluar una proposición, ya no es verdadera o falsa sino que la misma tiene un cierto grado de veracidad, y que a su vez depende del grado de veracidad de sus premisas. De aquí que al utilizar lógica difusa en la evaluación de reglas, todas las reglas cuyas premisas tengan algún grado de veracidad, influirán también en cierto grado a la solución del problema. Por lo que toda regla que sepa algo opina [15].
1.8.2 Controladores difusos. Los controladores difusos, igual que otros controladores, toman el valor de las variables de entrada, procesan, y actúan sobre sus salidas a fin de controlar la planta. En el control difuso se utilizan sistemas basados en reglas, que emplean lógica difusa, como elemento central.

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
38 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
Dado su estado, y los valores de las variables de entrada, estos sistemas evalúan la veracidad de cada regla, y así, toman decisión sobre los cambios a realizar en las variables de salida. Una vez actualizadas las mismas, estas producirán un cambio sobre la planta, luego se vuelven a obtener los valores de las variables de entrada, comenzando un nuevo ciclo. Al utilizar este tipo de resolución de problemas, es importante observar que lo que se está procesando no son ya ecuaciones, números o tablas reales sino, reglas, en las que se procesan variables tales como: “SI la temperatura es baja ENTONCES aumente el ciclo de actividad del calefactor” Tal tipo de procesamiento está mucho más cercano al razonamiento del experto humano, ya que permite realizar operaciones usando palabras o frases coloquiales como: más bajo, subir un poquito, etc. Este proceso cíclico puede ser dividido en tres grandes partes, fusificación, evaluación de reglas y defusificación como se aprecia en la fig 1.12.
Fig. 1.12 Representación esquemática del modelo difuso.
El controlador difuso funciona como uno convencional puesto que a partir de la entrada, por medio de algún algoritmo, genera una salida, llamándose este proceso inferencia difusa y se lleva a cabo en tres partes:
• Fusificación, donde la señal de entrada real es convertida en un valor difuso.
• Evaluación mediante reglas, en donde los valores de la salida difusos se calculan.
• Defusificación, donde el valor de la salida difusa se convierte a un valor de salida real.
𝐹𝐴𝑃𝐹𝐹𝐹𝑃𝐶𝑃𝐹ó𝐶 𝐴𝐴𝐴𝑃𝐶𝑃
𝑃𝑃𝑃𝑃𝑃𝑃𝑃
𝑆𝑃𝐶𝑃𝑃𝑃
𝑆𝐶𝐶𝐹𝐶𝐶 +
−
𝐼𝐶𝐹𝑃𝑃𝑃𝐶𝑃𝐹𝐶 𝐷𝑃𝐹𝐴𝑃𝐹𝐹𝐹𝑃𝐶𝑃𝐹ó𝐶
𝐵𝐶𝑃𝑃 𝐶𝑃 𝑃𝑃𝐶𝑃𝑃𝐹𝑐𝐹𝑃𝐶𝐶𝑃
𝐹𝐴𝐹𝐹𝐹

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
39 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
1.8.3 Fusificación. Esta es la primera parte del proceso, donde luego del procedimiento convencional de adquirir los valores de las variables del sistema y calcular otras, se procede a calcular el grado de pertenencia de tales variables a todos los posibles conjuntos difusos (entradas) que se le han asignado. Tomando como ejemplo otra vez la variable temperatura, con un valor de 20 °C, se cuantifica su grado de pertenencia a los conjuntos representados con las siguientes etiquetas lingüísticas, muy bajo, bajo, templado, alto y muy alto. Para ello se debe haber definido, para cada una de las etiquetas, una función de membresía, que define qué valores de la variable temperatura les pertenecen y con qué grado. Las funciones de membresía permiten cuantificar los conceptos que representan las etiquetas. En la fig. 1.13 se puede apreciar la función de membresía para la entrada difusa baja, y el valor de pertenencia para 20 °C.
Fig. 1.13 Representación gráfica de la función de membresía para la entrada difusa baja y el valor de
pertenencia para 20 °C.
Si ahora se realiza el mismo procedimiento para muy baja, se verá que también, para 20 °C, es parcialmente muy baja (fig.1.14).
Fig. 1.14 Representación gráfica de la función de membresía para la entrada difusa muy baja y el valor de
pertenencia para 20°C.

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
40 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
Al finalizar este proceso, queda asignado a cada entrada difusa, el grado de pertenencia del valor actual de la variable que le corresponde.
1.8.4 Evaluación de reglas. Una vez realizada la fusificación, se está en condiciones de evaluar los antecedentes de las reglas, obteniendo el grado de verdad o “peso”, para cada una de ellas. Si se tiene una regla como la siguiente: SI la temperatura es baja ENTONCES aumente el ciclo de actividad del calefactor. El peso de la regla estará dado por la veracidad de sus antecedentes. Se asigna directamente como peso, el grado de pertenencia del valor leído de temperatura a la etiqueta lingüística baja. En el caso de antecedentes de reglas con conectivos lógicos Y, como por ejemplo: SI la temperatura es baja Y el cambio de temperatura es ligeramente creciente ENTONCES aumente el ciclo de actividad del calefactor. La regla será tan verdadera como lo sea el menos verdadero de sus antecedentes, es decir, se le asigna a la regla como peso, el menor de los grados de pertenencia de las variables de los antecedentes a las respectivas etiquetas lingüísticas. Este proceso se realiza para cada una de las reglas del sistema, quedando luego de este ciclo cada regla con su peso correspondiente, por lo que ahora se trabaja con los consecuentes de las mismas. Así como para las variables de entrada, a cada variable de salida le corresponde un grupo de Funciones de membresía, representadas con etiquetas lingüísticas. Cada una de ellas es una salida difusa (subirlo mucho, subirlo, bajarlo, bajarlo mucho). A cada una de las salidas difusas se le asigna como valor, o grado de aplicabilidad, el máximo valor entre todas las reglas que la mencionan, de manera que al finalizar toda la evaluación, queda cada salida difusa con su valor.
1.8.5 Defusificación. Para el ejemplo se toma la forma más simple de función de membresía, esta es la que considera a un solo elemento del universo de discurso perteneciente totalmente al conjunto. Este tipo de funciones se denominan semifallo (fig. 1.15).
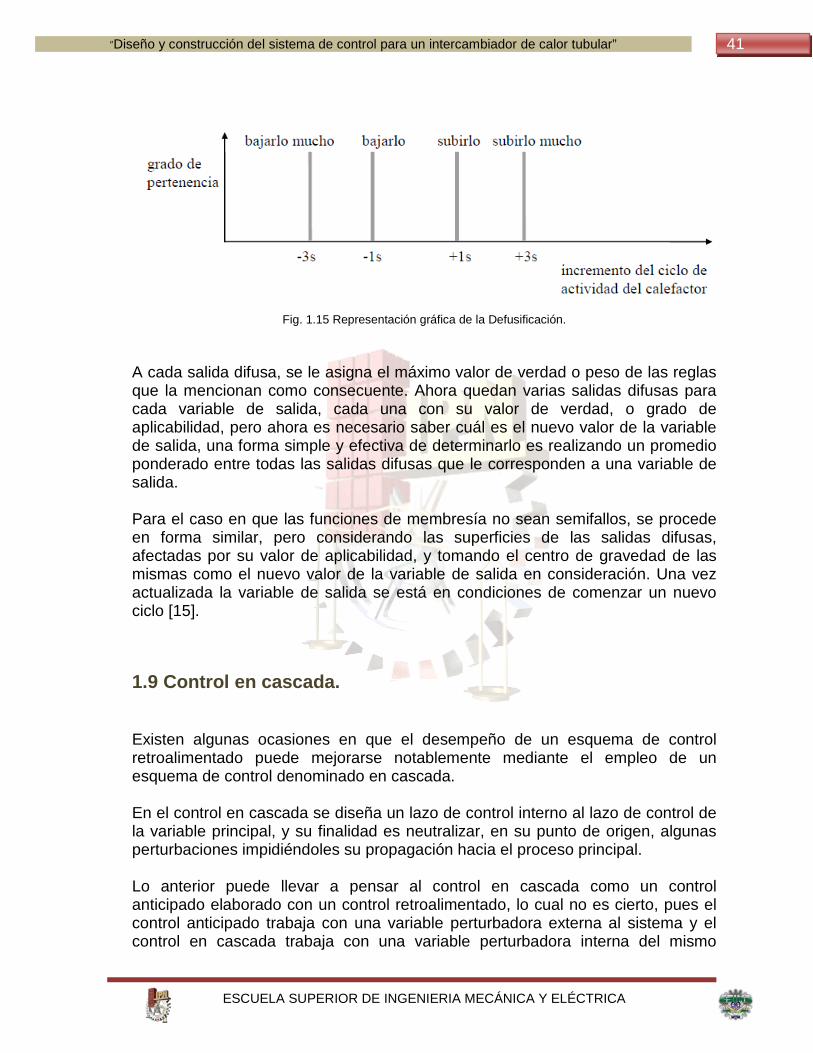
ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
41 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
Fig. 1.15 Representación gráfica de la Defusificación.
A cada salida difusa, se le asigna el máximo valor de verdad o peso de las reglas que la mencionan como consecuente. Ahora quedan varias salidas difusas para cada variable de salida, cada una con su valor de verdad, o grado de aplicabilidad, pero ahora es necesario saber cuál es el nuevo valor de la variable de salida, una forma simple y efectiva de determinarlo es realizando un promedio ponderado entre todas las salidas difusas que le corresponden a una variable de salida. Para el caso en que las funciones de membresía no sean semifallos, se procede en forma similar, pero considerando las superficies de las salidas difusas, afectadas por su valor de aplicabilidad, y tomando el centro de gravedad de las mismas como el nuevo valor de la variable de salida en consideración. Una vez actualizada la variable de salida se está en condiciones de comenzar un nuevo ciclo [15].
1.9 Control en cascada.
Existen algunas ocasiones en que el desempeño de un esquema de control retroalimentado puede mejorarse notablemente mediante el empleo de un esquema de control denominado en cascada. En el control en cascada se diseña un lazo de control interno al lazo de control de la variable principal, y su finalidad es neutralizar, en su punto de origen, algunas perturbaciones impidiéndoles su propagación hacia el proceso principal. Lo anterior puede llevar a pensar al control en cascada como un control anticipado elaborado con un control retroalimentado, lo cual no es cierto, pues el control anticipado trabaja con una variable perturbadora externa al sistema y el control en cascada trabaja con una variable perturbadora interna del mismo

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
42 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
sistema. Una de sus principales aplicaciones es en procesos donde la variable manipulada es un fluido de servicio (como el agua o el vapor) sometido a perturbaciones. El control en cascada envuelve la instalación de un lazo realimentado dentro de otro. En el control en cascada la salida del controlador del lazo externo o principal, llamado el controlador maestro, fija el punto de referencia del controlador del lazo interno o secundario, llamado el controlador esclavo [11].
Fig. 1.16 Estructura tradicional de control en cascada. El Control en cascada es a menudo usado para controlar un proceso en forma más precisa. En el control en cascada, una segunda variable es monitoreada en adición con la primera variable controlada. Esta segunda variable refleja rápidamente cualquier cambio en el ambiente del proceso [11]. Características del Control en Cascada:
• El sistema bajo control puede dividirse en dos procesos más simples, para cerrar alrededor de ellos los lazos de control principal y secundario.
• El lazo secundario incluye el mayor número de perturbaciones sin llegar a
decrecer demasiado su velocidad de respuesta.
• El lazo secundario es de respuesta más rápida. Como regla práctica el proceso secundario debe tener respuesta dinámica no mayor de 1/3 del tiempo de respuesta del proceso primario.
• La variable secundaria seleccionada debe proporcionar estabilidad al
control primario con la ganancia más alta posible.
• Los puntos de consigna de la variable secundaria, deben estar relacionadas directamente con los de la primera y de ser posible su relación debe estar representada por una recta.
𝐶𝑃𝐶𝐶𝑃𝑃𝐶𝐶𝐶𝑃𝑃1 𝐶𝑃𝐶𝐶𝑃𝑃𝐶𝐶𝐶𝑃𝑃2 𝑃𝐶𝐶𝐶𝐶𝐶2 𝑃𝐶𝐶𝐶𝐶𝐶1
𝑆2
𝑆1
𝐴1 𝐶1 𝐶2
𝑃𝑃𝐶𝑠𝑃𝐹𝐶𝐶 𝑃𝐶𝐶𝐹𝐶𝐶

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
43 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
44 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
CAPÍTULO 2. INSTRUMENTACIÓN DEL PROCESO
2.1 Elección y documentación de la instrumentación para el proceso de intercambio de calor.
Para que el proceso diseñado y descrito anteriormente funcione de forma óptima se deben seleccionar los elementos adecuados para cada parte del mismo, a continuación se detalla cada uno de ellos.
2.1.1 Intercambiador de calor tubular.
Para desarrollar la metodología para el análisis y diseño de un proceso intercambio de calor, se atiende primero el problema de la transferencia de calor del fluido interno en el tubo hacia el fluido externo en la carcasa del intercambiador.
Los intercambiadores de calor tubulares consisten en un grupo de tubos serpentines concéntricos arrollados en espiral, por lo general conectados por múltiples (concentradores), sumergidos en un tanque o una coraza. Se emplean tubos con aletas para incrementar la superficie de transferencia de calor.
Están construidos de uno o más serpentines de tubos desnudos o con aletas, encerrados en una cubierta de acero soldada. El agua de condensación circula por el interior del serpentín mientras que el refrigerante gaseoso entra por la parte superior de la cubierta, y al ponerse en contacto con los serpentines, le cede el calor y se condensa. El refrigerante líquido cae al fondo de la cubierta que hace de recibidor.
a) Instructivo de operación.
• Verificar que todas las válvulas del sistema estén cerradas. • Abrir la válvula de alimentación general del agua al sistema. • Abrir las válvulas de alimentación de agua a los tanques de camisa y
serpentín hasta que se llenen.
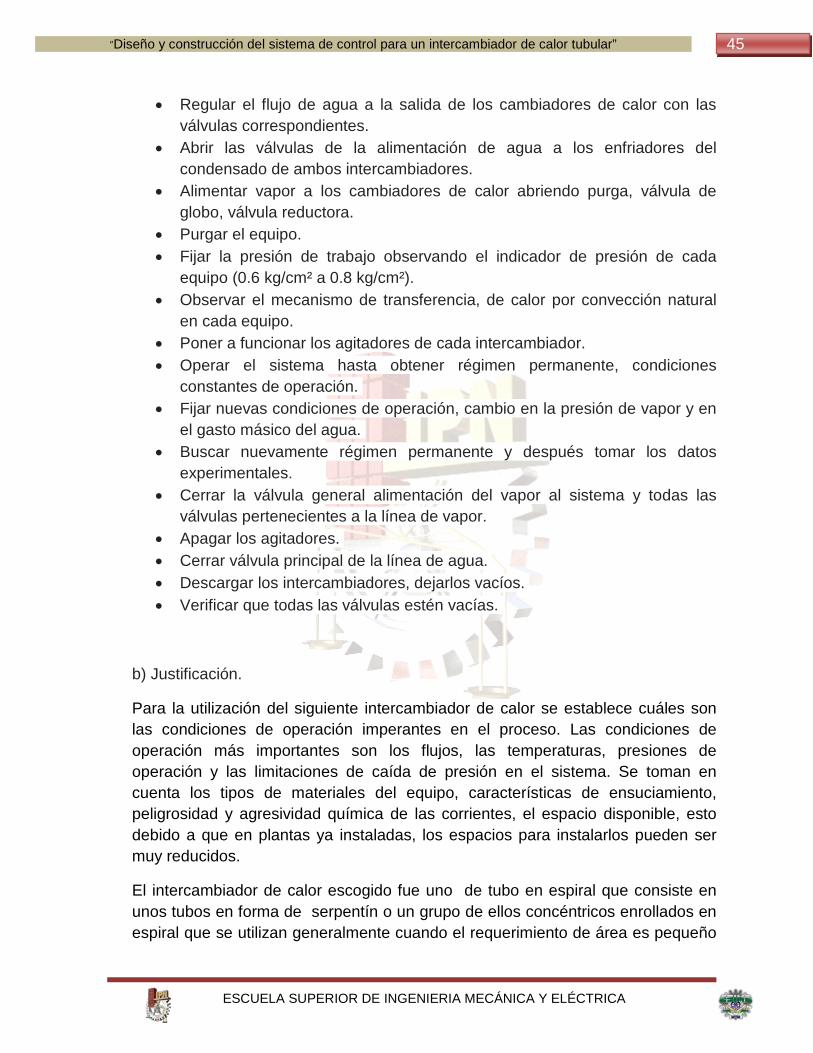
ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
45 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
• Regular el flujo de agua a la salida de los cambiadores de calor con las válvulas correspondientes.
• Abrir las válvulas de la alimentación de agua a los enfriadores del condensado de ambos intercambiadores.
• Alimentar vapor a los cambiadores de calor abriendo purga, válvula de globo, válvula reductora.
• Purgar el equipo. • Fijar la presión de trabajo observando el indicador de presión de cada
equipo (0.6 kg/cm² a 0.8 kg/cm²). • Observar el mecanismo de transferencia, de calor por convección natural
en cada equipo. • Poner a funcionar los agitadores de cada intercambiador. • Operar el sistema hasta obtener régimen permanente, condiciones
constantes de operación. • Fijar nuevas condiciones de operación, cambio en la presión de vapor y en
el gasto másico del agua. • Buscar nuevamente régimen permanente y después tomar los datos
experimentales. • Cerrar la válvula general alimentación del vapor al sistema y todas las
válvulas pertenecientes a la línea de vapor. • Apagar los agitadores. • Cerrar válvula principal de la línea de agua. • Descargar los intercambiadores, dejarlos vacíos. • Verificar que todas las válvulas estén vacías.
b) Justificación.
Para la utilización del siguiente intercambiador de calor se establece cuáles son las condiciones de operación imperantes en el proceso. Las condiciones de operación más importantes son los flujos, las temperaturas, presiones de operación y las limitaciones de caída de presión en el sistema. Se toman en cuenta los tipos de materiales del equipo, características de ensuciamiento, peligrosidad y agresividad química de las corrientes, el espacio disponible, esto debido a que en plantas ya instaladas, los espacios para instalarlos pueden ser muy reducidos.
El intercambiador de calor escogido fue uno de tubo en espiral que consiste en unos tubos en forma de serpentín o un grupo de ellos concéntricos enrollados en espiral que se utilizan generalmente cuando el requerimiento de área es pequeño

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
46 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
(menos de 2 m2). Se pueden utilizar tanto para calentamiento como enfriamiento, así como para condensación o vaporización, por su amplio rango de operación de presión y temperatura.
El intercambiador de calor es uno de los dispositivos que permiten realizar dicha tarea, esto es necesario para comprender cómo funcionan y operan los controladores mostrados durante este trabajo y proponer cuál de los dos controladores es el que se adecua más al mejor desempeño de este proceso.
De una manera general la utilización de un intercambiador de calor abarca los siguientes puntos:
• Calentar un fluido frío mediante un fluido con mayor temperatura. • Reducir la temperatura de un fluido mediante un fluido con menor
temperatura. • Llevar al punto de ebullición a un fluido mediante un fluido con mayor
temperatura. • Condensar un fluido en estado gaseoso por medio de un fluido frío. • Llevar al punto de ebullición a un fluido mientras se condensa un fluido
gaseoso con mayor temperatura.
Se escogió el siguiente intercambiador de calor basado en las características del proceso tales como es el diámetro de tubería, el tipo de fluido que se maneja y el tamaño del intercambiador, todo esto basado en unas dimensiones que logren hacer funcional el proceso pero que no lo haga de gran tamaño.
Éste intercambiador de calor está hecho de a base de tubos de titanio puro y una avanzada inyección de PVC, lo que lo provee de buena resistencia a la corrosión.
El tubo de titanio ha pasado la prueba de presión de 4.5 Mpa y control de fugas muchas veces.
Está diseñado para funcionar de manera correcta en diversos ambientes, tales como:
• enfriadores o calefactores industriales de agua • hoteles • hospitales
Características:
• Fabricado a base de tubo de titanio e inyección de plastico PVC, con una buena capacidad de resistencia.
• Diseño compacto con una alta eficiencia de transferencia de calor.

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
47 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
• Temperatura de trabajo de -10 °C a 60 °C. • Intervalo de trabajo de 0.5 hp a 60 hp (2.5 Kw a 300 kW)
Fig. 2.1. Intercambiador de calor.
2.1.2 Termopar tipo J.
En Instrumentación industrial, los termopares son ampliamente usados como sensores de temperatura. Son económicos, intercambiables, tienen conectores estándar y son capaces de medir un amplio rango de temperaturas.
La salida de un termopar es una pequeña señal, así que es susceptible de error por ruido eléctrico.
Cuando las uniones de dos conductores se unen por sus extremos para formar un circuito, y se colocan en gradiente de temperatura, se manifiesta un flujo de calor y un flujo de electrones conocido como corriente Seebeck expuesto en el capítulo uno.

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
48 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
a) Código de colores.
Tabla. 2.1 código de colores para termopares.
b) Justificación.
La utilización del siguiente termopar se basó en la los requerimientos del rango de operación del proceso para el módulo de intercambio de calor, ya que está diseñado para la realización de prácticas para la materia de control de procesos, el rango de operación se encuentra de 0°C y 800 °C el rango de temperatura ideal que para uso práctico en el módulo se pretende trabajar con temperaturas que vayan desde los 0 a los 80 °C de igual manera otro aspecto por el cual se escogió un termopar tipo J por su bajo costo y su accesibilidad.
Se debe considerar también las Gamas de temperaturas (límites altos y bajos) que deben ser medidas. El ambiente o la atmósfera que el termopar será expuesto, esto es importante porque los metales usados en la construcción del termopar reaccionan diferentemente en diversos ambientes. Los metales que

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
49 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
trabajan bien en un ambiente, fallarán rápidamente en otro ambiente en la misma temperatura, la limitación física del espacio, método de instalación y tipo de conexión del instrumento deseado son algunas consideraciones que se toman en cuenta para la selección de este termopar
c) Datos técnicos.
Tabla. 2.2 Datos técnicos del termopar tipo J.
Característica. Operación o material Salida. 4 – 20mA.
TIPO J. Fierro-Constantan.
TEMPERATURA. -40-700°C.
2.1.3 Transmisor de presión.
El transmisor es un dispositivo que detecta la variable de un proceso a través de un sensor y tiene una salida la cual varía su valor solamente como una función predeterminada de la variable del proceso.
Los transmisores son instrumentos que captan la variable de proceso y la transmiten a distancia a un instrumento receptor indicador, registrador, controlador o combinación de estos. Existen varios tipos de señales de transmisión: neumáticas, electrónicas, digitales, hidráulicas y telemétricas. Según el tipo de señal se clasificarán los transmisores.
a) Función.
El transmisor de presión está diseñado para aceptar una señal de presión diferencial de un elemento primario, como puede ser un medidor de caudal de placa orificio o un Gilflo, y convertirla en una señal de salida analógica de 4-20 mA. La estructura de tres vías se suministra montado al transmisor de presión diferencial y actúa como un aislante secundario y como una válvula ecualizadora de presión para comprobar el cero del transmisor de presión diferencial.
b) Justificación
El alcance de la automatización en las aplicaciones móviles y fijas está aumentando considerablemente. La manipulación eficaz de las máquinas y los

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
50 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
sistemas depende cada vez más de controles electrónicos integrales, lo que conllevará el aumento de la demanda de sensores y transmisores.
Con el objeto de minimizar los gastos, maximizar el rendimiento necesario y cubrir las necesidades de control para esta aplicación, se escogió el siguiente transmisor el cual por su diminuto tamaño lo hace perfecto para nuestro proceso. De igual manera este transmisor cubre con los requerimientos de salida analógica para la normalización con nuestra señal de control.
Fig. 2.2 transmisor de presión.
2.1.4 Válvula.
Una válvula es un dispositivo mecánico con el cual se puede iniciar, detener o regular la circulación (paso) de líquidos o gases mediante una pieza movible que abre, cierra u obstruye en forma parcial uno o más orificios o conductos. Las válvulas son unos de los instrumentos de control más esenciales en la industria. Debido a su diseño y materiales, las válvulas pueden abrir y cerrar, conectar y desconectar, regular, modular o aislar una enorme serie de líquidos y gases, desde los más simples hasta los más corrosivos o tóxicos.
a) Justificación.
Los ingenieros de proceso son quienes asumen la responsabilidad de establecer los parámetros de diseño del proceso como son la temperatura, presión, flujo, procedimientos para arranque y paro, etc.

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
51 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
No todos los actuadores tienen la misma funcionalidad sobre un proceso común o diferente de otro, de acuerdo con los diferentes actuadores que existen cada actuador tiene una tarea en específico, en el proceso que muestra este trabajo está basado en la fluidez de un vapor de agua, lo que nos inclina a utilizar una válvula para el control de apertura o cierre de esta misma, basado en la obtención de datos proporcionados por el mismo proceso.
De igual manera muchas veces se encontrará más de un tipo de válvulas para un trabajo específico. Cuando todos los factores, como materiales de construcción, rendimiento, capacidad para presión y temperatura y disponibilidad son iguales, se debe seleccionar la válvula de menor precio.
Se tiene en cuenta las presiones y temperaturas máximas de operación, los materiales de construcción, las tolerancias para corrosión y cualesquiera otros factores que influyan de manera importante en nuestro proceso
La válvula mostrada a continuación (fig. 2.3) se escoge por los rangos de operación, diámetro de tubería, tipo de cuerpo, mantenimiento, tipo de conexión, tipo de fluido a controlar, etc.
b) Especificaciones técnicas.
Principio de funcionamiento. La presión de mando pst ejerce una fuerza F = pst * A en la superficie de la membrana (2), que los resortes del accionamiento (4) equilibran. La cantidad y pretensión de los resortes determina el margen de la presión nominal, en función de la carrera nominal. La carrera es proporcional a la presión de mando pst. El sentido de actuación del vástago del accionamiento (7) depende de la posición de montaje de los resortes y de la conexión de la presión de mando (1).El acoplamiento (8) une el vástago del accionamiento (7) con el vástago del obturador de la válvula. El limitador de carrera ajustable es apropiado para los accionamientos con superficie de membrana de 120, 240, 350,355, 700 o 750 cm². La carrera se reduce en hasta un 50% en ambas direcciones (vástago entrando o saliendo) y queda fijada. Posición de seguridad del accionamiento: "Vástago saliendo del accionamiento por fuerza de los resortes", al disminuir la presión sobre la membrana o al fallar la energía auxiliar, la fuerza de los resortes empuja el vástago del accionamiento a su posición final inferior, o" Vástago entrando al accionamiento por fuerza de los resortes": al disminuir la presión

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
52 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
sobre la membrana o al fallar la energía auxiliar, la fuerza de los resortes empuja el vástago hacia el interior del accionamiento y en esta posición la válvula queda cerrada.
Fig. 2.3 válvula de control Tipo 3277 para montaje directo de accesorios. Partes:
1. Conexión de la presión de mando. 2. Membrana. 3. Desaireación. 4. Resortes. 5. Carcasas de accionamiento. 6. Tuerca anular. 7. Vástago del accionamiento. 8. Acoplamiento. 11. Puente.
Los accionamientos neumáticos Tipo 3271 y Tipo 3277 con membrana enrollable y resortes internos se caracterizan por:
• Altura reducida. • Elevadas fuerzas de empuje, junto con una elevada velocidad. • Escaso rozamiento. • Diversidad de márgenes de presión nominal al cambiar la cantidad de
resortes o la pretensión de los mismos. • No se necesitan herramientas especiales para invertir el sentido de
actuación ni para cambiar el margen de presión nominal (igual para la ejecución con volante manual).
• Temperaturas de servicio de –60 hasta +120 °C.

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
53 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
• Montaje directo de accesorios en el puente del accionamiento Tipo 3277 con toma de carrera protegida.
Fig. 2.4 Actuador de la válvula SAMSOM modelo 3277, 355 cm²
2.2 Propuesta física del proceso.
Especificaciones generales de instalación.
Este capítulo está basado en las especificaciones de INSTRUMENTOS Y DISPOSITIVOS DE CONTROL (Parte 11) NORMA No. 2.618.02, especificaciones generadas por petróleos mexicanos que conforman la instalación en proyectos y el las Guías técnicas de construcción Instalaciones hidráulicas sanitarias y especiales del Instituto Mexicano del Seguro Social (IMSS).
2.2.1 Instrumentos de temperatura. F. 01 Todos !os termómetros y elementos primarios de medición de temperatura
deberán instalarse en termopozos.
F. 02 Para la instalación de termopozos en recipientes se utilizarán boquillas con brida de 38 mm (1 1/2”) de diámetro a la cual se unirá una brida de reducción preparada para conexión de accesorios con rosca de 25 mm (1") de diámetro.
F. 03 Para la instalación de termopozos en líneas de proceso se utilizarán coples con rosca de 25 mm (1") de diámetro de las características especificadas para el tramo de tubería en que se hace la instalación, con

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
54 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
excepción de los siguientes servicios:
a) Cuando el contenido de hidrógeno en el fluido de proceso excede el 5%en volumen.
b) Cuando la tubería es de aleación no requiere prueba de impacto.
c) Cuando el fluido de proceso es tóxico o corrosivo.
d) Cuando la temperatura es mayor de 3600 °C y/o cuando la presión excede a 50 Kg/cm2.
En los servicios mencionados la instalación de termopozos se hará de acuerdo a lo especificado en el párrafo F.02.
F. 04 Todas las instalaciones de termopozos en que se utilicen boquillas con brida deberán indicarse claramente en los diagramas de flujo de tubería e instrumentación.
F. 05 Los termopozos para cambiadores de calor se instalarán utilizando las conexiones previstas en las boquillas del proceso excepto cuando éstas sean menores de 76 mm (3”) de diámetro o se especifique instalación en boquilla con brida, en cuyo caso la instalación deberá hacerse, en las líneas de proceso unidas al cambiador.
F. 06 La instalación de termopozos en líneas de proceso deberá quedar en el segmento
a) inferior al diámetro horizontal de la tubería.
Se sabe que el termopozo es un elemento de conexión a proceso tal que, protegerá al elemento primario de temperatura de los agentes corrosivos, abrasivos que este elemento no podría resistir por sí mismo, el termopozo puede adoptar varias configuraciones. En la siguiente tabla (2.3) se muestra solo dos industrias y el tipo de material y la aplicación dada para la selección del termopozo. Basado en estas aplicaciones se elegirá el termopozo.
ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
55 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
Tabla 2.3 Tabla de selección y aplicación de termopozos.
INDUSTRIA. APLICACIÓN. TUBO O VAINA.
Tratamientos térmicos
Recocido. Inconel o hierro Carburación. Inconel Templado: Hierro forjado <700 C Inconel o hierro 700 a 1100 C Cerámico o pirómetro de radiación >1100 C Hierro
Baños de sales. Inconel, hierro o pirómetro de radiación
Hierro y acero
Hornos de soplado Inconel o hierro o carbono de silicio Hogar. Inconel o pirómetros de radiación Tecbo. Pirómetro de radiación Calderas de recuperación. Inconelo hierro
Fosos de recalentamiento. Cerámico y carburo de silicio o pirómetro de radiación
<1100 C Inconel o hierro >1100 C Patanquilla, calentamientos de planchas y soldadura a tope. <1100 C >1100 C Soldadura fuerte.
2.2.2 Instrumentos de presión.
De acuerdo al apartado “E” de las especificaciones de INSTRUMENTOS Y DISPOSITIVOS DE CONTROL (Parte 11) NORMA No. 2.618.02 de Petróleos Mexicanos se menciona la instalación de instrumentos de presión de la siguiente manera.
E.01.a Las tomas de presión para transmisores de presión en las líneas de proceso serán coples con rosca de 25 mm (1") de diámetro de las características especificadas para el tramo de tubería en que se hace la instalación. Para recipientes se utilizará boquilla con brida de 38 mm (1
ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
56 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
1/2”) de diámetro a la cual se unirá una brida ciega preparada para instalación de accesorios de 19 mm (3/4") de diámetro.
E.01.b Las instalaciones para transmisores de presión deberán incluir una válvula de bloqueo conectada directamente a la toma de presión.
E.01.c La conexión entre el transmisor y la válvula de bloqueo se hará utilizando accesorios de compresión de sello hermético y tubo flexible de acero inoxidable sin costura de 13 mm (1/2”) de diámetro y 0.89 mm (0.035") de espesor de pared.
El transmisor de presión “PMI094” de IFM electronics, se propone debido a su pequeño tamaño y reducido costo, además de proporcionar una salida analógica estandarizada (4-20 mA) lo que facilita su operación.
Para el montaje del elemento sensor de presión (transmisor) en la tubería se tomaron en cuenta las especificaciones del propio fabricante el cual facilita un manual de instrucciones, en el que menciona que su instalación debe ser lo más cercano posible a la fuente que otorga la variable medida, en este caso la válvula SAMSON.
2.2.3. Válvulas de control
J.01 Las válvulas de control serán instaladas de acuerdo a los dibujos certificados del fabricante y teniendo como referencia los arreglos mostrados en los dibujos de tubería e instrumentos.
J.02 Cuando se muestren arreglos de tubería para válvulas de control con derivación (by-pass) en los diagramas de flujo de tubería e instrumentación, la instalación de las válvulas que integran dicho arreglo deberá hacerse en forma compacta y de preferencia con acceso desde el nivel del piso.
J.03 En general las válvulas de control para las cuales no se muestren arreglos con derivación, deberán suministrarse con volante de operación manual
J.04 Todas las válvulas de control deberán instalarse de preferencia en posición tal que permita el paso horizontal del fluido (con el actuador hacia arriba) y deberán tener acceso desde el piso, plataformas o escaleras fijas

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
57 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
J.05 En la instalación de válvulas de control se deberán tener en cuenta todos los accesorios adicionales mostrados en los diagramas de flujo de tubería e instrumentación (drenajes, venteos, etc.).
J.06 Todas las válvulas de control deberán quedar sostenidas por la misma tubería en que se instalan o soportadas mediante elementos adicionales de refuerzo que no deberán interferir el mecanismo de actuación de la válvula.
En el control automático de los procesos industriales, la válvula de control juega un papel muy importante en el bucle de regulación. Realiza la función de variar el caudal de fluido de control que modifica a su vez el valor de la variable medida comportándose como un orificio de área continuamente variable. Dentro del bucle de control tiene tanta importancia como el elemento primario, el transmisor y el controlador.
Al no haber normas que especifiquen distancias de instalación de válvulas en la planta o proceso, estas se definen por el área de trabajo, la recomendación que se obtiene de esta norma es en cuanto a tener una distancia con suficiente espacio para dar mantenimiento, mencionando que en este caso lo más conveniente para este proceso de intercambio de calor, es que la válvula este más cercano posible al mismo para evitar pérdidas de presión a través de este espacio.
2.2.4 Tubería.
Basado en el tomo 3 de “Guías Técnicas de Construcción, Instalaciones hidráulicas sanitarias y especiales, del Instituto Mexicano del Seguro Social (IMSS), se toman en cuenta algunas apartados sobre la instalación y distribución de tubería.
• Apartado B.02. Generalidades.
A. Las instalaciones hidráulicas, en función del tipo de fluido que conducen se clasifican en:
a) De agua fría. b) De agua helada y retorno c) De agua helada y retorno, para servicios d) De agua caliente y retorno, para calefacción e) De protección contra incendio

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
58 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
f) De riego y toma municipal g) Vapor y retorno de condensadores.
• Tipos de Tubería.
B. Los materiales a emplear en cada una de las redes hidráulicas en función
del fluido a conducir y lo señalado por el proyecto podrán ser:
a. De cobre (en sus distintos tipo). b. De fierro galvanizado roscable c. De PVC (Policlorudo de vinilio). d. De asbesto cemento. e. De acero soldable cedula 40 y 80. f. De fierro negro roscable.
• Apartado B.07 Generalidades de redes de vapor.
El vapor se obtiene de la aplicación de energía térmica por medio de equipos generadores de vapor (calderas).
B.07.01
Las tuberías de vapor para y condensados deberán aislarse térmicamente empleando tubos preformados de fibra de vidrio de acuerdo a Guías Técnicas de Construcción.
Tomando en cuenta los siguientes apartados, la selección de la tubería para esta propuesta de trabajo es de acero inoxidable o tubo galvanizado, ya que al ser materiales resistentes a la corrosión y de bajo costo para fines académicos se tomara en cuenta la utilización de alguno de estos tipos de materiales y no considerando la siguiente guía técnica.
El diámetro de tubería será de 1 pulgada, basado en la entrada de la válvula y del intercambiador de calor.

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
59 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
2.2.5. Intercambiador de calor.
Elemento de calefacción constituido por un haz de tubos de cobre tipo k o acero estirado en frio vuelta en “U” que se emplea para el calentamiento de agua por medio de vapor.
• Apartado H.07.03 Generalidades.
A. Podrán ser de tipo inmersión o interiores instalados dentro del tanque de agua caliente y sumergida en el agua.
B. Podrán ser también del tipo: exteriores o instantáneos, cuando estén fuera del tanque de agua caliente pero cerca de él, sin formar parte del mismo.
C. El equipo deberá de tener una placa metálica con letras y números a golpe, con los siguientes datos.
1. Nombre o razón social del fabricante. 2. Modelo tipo. 3. Capacidad. 4. Superficie de calefacción del elemento (𝑐2). 5. Presión del vapor a utilizar ( 𝐾𝑔
𝑐𝑚2). D. El fabricante entregara la placa de la Secretaria del Trabajo y Previsión
Social, la que certifica que se cumple con los datos y servicios.
E. El intercambiador de calor se colocará sobre una estructura acuñada de una manera que no esté fija, la dilatación del intercambiador de calor es la que se toma en cuenta para un montaje fijo.
La propuesta de instalación del intercambiador de calor basado en los apartados anteriores y en base a los requerimientos de operación que necesitamos será tomada en cuenta para futuros avances a este proyecto. De no cumplir con los requerimientos que se propone puede ser modificado o cambiado por otro intercambiador que se adecue más a las necesidades del proyecto.

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
60 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
2.2.6 Esquema físico propuesto.
Se menciona que al tratarse de un módulo práctico y propuesta para los laboratorios de I.C.A. se omitieron algunos elementos de las normas mencionadas anteriormente, esto, para disminuir costos y espacio de instalación.
Las distancias se decidieron bajo los criterios de espacio para un mantenimiento cómodo, funcionamiento adecuado para este proceso y dimensiones de los elementos.
Al igual se propone que toda la tubería sea de 1” de acero inoxidable para evitar corrosión como se muestra en la figura 2.5.
Fig. 2.5 DTI general del proceso de intercambio de calor.

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
61 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
Dónde:
EA-001 Tanque de almacenamiento de agua. GA-001 Bomba de agua. EI-001 Intercambiador de calor de tubos y coraza. EE-001 Enfriador (solo aire). EC-001 Calentador de resistencia eléctrica. PIT Transmisor indicador de presión. TE Elemento de temperatura (sensor). TY Posicionador (transductor I/P). TV Válvula control de temperatura. FE Elemento de flujo (placa de orificio). FY Posicionador (transductor I/P). FV Válvula de control de flujo. FSL Interruptor por bajo flujo. FIC Controlador indicador de flujo. LIT Transmisor indicador de nivel. LV Válvula control de nivel. LIC Controlador indicador de nivel. OIC Controlador indicador de tensión.
UIC Controlador indicador multivariable (control de temperatura compensado por presión).
VE Elemento de vibración (sensor). VT Transmisor de vibración. VIC Controlador indicador de vibración. VSHH Interruptor por muy alta vibración. PBA Botón de arranque. PBB Botón de paro. XL Indicador luminoso.
La instrumentación y los equipos de este paquete son informativos con relación a lo mínimo necesario para el desarrollo eficiente del intercambio de calor, más no limitativos para su realización en trabajos futuros.
Para el desarrollo de los controladores (PID y difuso) marcados para este trabajo, solo se considerará la parte marcada como límite de intercambiador de calor.

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
62 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
Fig. 2.6 DTI del proceso de intercambio de calor con simbología ISA.
La figura 2.6 muestra los elementos que se utilizaran para lograr el control en el intercambiador de calor con simbología ISA, esto con el propósito de identificar donde se harán las tomas de las variables medidas, así como el tipo de conexión que tendrán para generar el bucle de control, todo esto para lograr el desarrollo de los controladores que se presenta en el siguiente capítulo.
Fig. 2.7 Dimensiones sugeridas para el montaje de los elementos.

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
63 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
En la figura 2.7 se pueden apreciar las dimensiones propuestas para el desarrollo del módulo, las cuales se definieron y justificaron bajo las características establecidas por los fabricantes así como las normas necesarias para su implementación, descritas en los subcapítulos anteriores.

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
64 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
CAPÍTULO 3. DESARROLLO DE LOS CONTROLADORES PID Y DIFUSO.
En este capítulo se muestra el desarrollo de los controladores PID y difuso los cuales están diseñados para controlar la temperatura del producto, a la salida del intercambiador de calor bajo las características expuestas en el capítulo anterior.
3.1 Estructura del controlador PID.
Para el desarrollo del control PID se propone una estructura de control en cascada debido a que durante el transcurso del proceso pueden presentarse fluctuaciones (perturbaciones) en el flujo de vapor y por ello la cantidad de vapor que pasa a través de la válvula puede ser diferente de la cantidad de vapor demandada por el controlador. Como resultado el flujo de vapor no sería el deseado, por lo que el controlador solo se percataría de esta situación hasta que la temperatura del producto no sea igual a la designada en el setpoint. Por ello para la realización de la estructura de control en cascada, se adiciono un transmisor de presión para monitorear la presión del vapor a la salida de la válvula en la entrada de flujo de vapor del intercambiador de calor, y un controlador PID, que tendrá que configurarse como PI, para manipular la posición de la válvula, el sistema de control de presión, crea ahora un segundo lazo de control realimentado (esclavo). El propósito de este controlador adicional consiste en ejercer acción de control de manera prácticamente inmediata cuando existan variaciones en el flujo de vapor solicitado por el controlador primario. El primer lazo realimentado (maestro) está todavía basado en la temperatura del producto a la salida del intercambiador de calor. Sin embargo, en lugar de posicionar directamente la válvula de vapor, la salida del controlador primario es ahora usada para ajustar el punto de referencia del controlador secundario. Entonces es este segundo controlador quien regula la válvula como se aprecia en la figura 3.1.

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
65 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
Fig. 3.1 diagrama del control en cascada. El regulador externo (controlador1) fija la consigna del regulador interno (controlador2) cuyo objetivo es
corregir el caudal de vapor del cambio en la presión de salida de la válvula antes de que afecte de forma significativa la temperatura.
Como resultado de esta combinación de sistemas de control, el lazo secundario hace la mayoría del trabajo encargándose de mantener una temperatura constante del producto. En contraste, el lazo primario actúa cuando existen disturbios o cambios en la carga dentro del proceso, debido a esto el punto de referencia del controlador secundario necesita estar cambiado por la acción del controlador primario. Una vez que definimos la estructura del control en cascada se prosigue a la determinación de las funciones de transferencia características de las plantas que quedan determinadas de la siguiente forma: Para la obtención de la función de trasferencia que representa al intercambiador de calor partimos de la ecuación característica para balance de energía (ecuación 3.1).
Q = UA𝚫𝐓 (3.1)
Dónde: Q = Coeficiente de Transferencia de Calor U = Coeficiente global de transferencia de calor A = Área de transferencia de calor ΔT = Temperatura del intercambiador de calor (Tf – Ti)
𝐶𝑃𝐶𝐶𝑃𝑃𝐶𝐶𝐶𝑃𝑃1 𝐶𝑃𝐶𝐶𝑃𝑃𝐶𝐶𝐶𝑃𝑃2 𝑉á𝐶𝑙𝐴𝐶𝐶1 𝑃𝐶𝐶𝐶𝐶𝐶1
𝑆𝑃𝐶𝑃𝑃𝑃 𝐶𝑃 𝑠𝑃𝑃𝑃𝐹ó𝐶
𝑃𝑃𝐶𝑃𝑃𝑃 𝐶𝑃 𝐶𝑃𝑃𝑐𝑠𝑃𝑃𝐶𝐶𝐴𝑃𝐶
𝐴1 𝐶1 𝐶2 𝑃𝑃𝐶𝑠𝑃𝐹𝐶𝐶 𝑃𝐶𝐶𝐹𝐶𝐶
+ -
+ - +
+ +

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
66 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
Para determinar la ecuación diferencial que modela los flujos que están presentes en el intercambiador de calor se tienen que considerar los siguientes términos conceptuales:
• Calor que entra por flujo = 𝐹𝑖ℎ𝑇𝑖𝜌 = 𝐹𝑖𝐶𝑝𝑎𝑇𝑖𝜌 = 𝑇𝑠 • Calor suministrado por el fluido = 𝑄 = 𝑈𝐴𝛥𝑇 • calor que sale por flujo = 𝐹0ℎ𝑇0𝜌 =𝐹0𝐶𝑝𝑎𝑇0𝜌 = 𝑇𝑠𝑃 • calor que se acumula = 𝜌 𝑑(𝑉ℎ𝑇)
𝑑𝑡 = 𝜌𝐶𝑝𝑎
𝑑(𝑉𝑇)𝑑𝑡
= 𝑑(𝑇𝑃)𝑑𝑡
Dónde: 𝐹𝑖= Flujo inicial 𝐹𝑜= Flujo final ℎ𝑇𝑖 = Entalpia del fluido a la entrada ℎ𝑇𝑜= Entalpía del fluido a la salida 𝐶𝑝𝑎= Calor específico del fluido 𝐶𝑝𝑎𝑇𝑖= Calor específico del fluido a la entrada 𝐶𝑝𝑎𝑇𝑜 = Calor específico del fluido a la salida 𝜌 = densidad del fluido V = Volumen del intercambiador Por lo cual la ecuación característica para el fluido a calentar queda expresada como:
𝑑(𝑇𝑝)𝑑𝑡
= (Tpo − Tp) + UA𝚫𝐓 (3.2)
Como el calor que se acumula varia con respecto al tiempo y como el área de transferencia de calor, así como la diferencia de temperaturas (𝚫𝐓) son constantes se considera:
𝜏𝑠 𝑑(𝑇𝑝)𝑑𝑡
; 𝜏𝑠 = 𝐶𝐹𝑃𝑐𝑠𝑃, A𝚫𝐓 = 𝐊𝟏 La Ec. (3.2) se puede escribir como:
𝜏𝑠 𝑑(𝑇𝑝)𝑑𝑡
= (Tpo − Tp) + K1U (3.3) Agrupando términos se tiene:
𝜏𝑠 𝑑(𝑇𝑝)
𝑑𝑡+ Tp = Tpo + K1U (3.4)
ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
67 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
En el estado estacionario, la Ec. (3.4) será:
𝜏𝑠𝑃 𝑑(𝑇𝑝𝑠)𝑑𝑡
+ Tps = Tpos + K1Us (3.5) Donde el subíndice s indica al estado estacionario. Restando la Ec. (3.5) de la Ec. (3.4) se tiene:
𝜏𝑠 𝑑(𝑇𝑝 − 𝑇𝑝𝑠)𝑑𝑡
+ (Tp − Tps) = (Tpo − Tpos) + K1(U − Us) (3.6)
Definiendo las variables de desviación para el intercambiador de calor:
(Tp − Tps) = Tp (U − Us) = 𝑈
Además, Tpo = Tpos ya que la temperatura de salida es la misma en cualquier instante. Con lo cual la Ec. (3.6) será:
𝜏𝑠 𝑑(𝑇𝑝)𝑑𝑡
+ Tp = K1U (3.7)
Aplicando la transformada de Laplace a la Ec. (3.7) se tiene:
𝜏𝑠[ Tp (s) – Tp (0) ] + Tp (s) = k1 U(s) (3.8) Donde Tp (0) = 0, ya que en el tiempo cero recién se inicia el proceso y no hay variación del estado estacionario (las variables de desviación para t = 0 son 0). Simplificando la Ec. (3.8) se tiene:
Tp(S)U(s)
= K1τps +1
(3.9)
Dónde: τp = Constante de tiempo del proceso k1 = Ganancia al estado estacionario Usando el mismo procedimiento para el fluido de calentamiento y aplicando la propiedad de traslación de la transformada, para lo cual se sabe que:
𝜏𝑙 𝑑(𝑇𝑣)𝑑𝑡
= (Tvo − Tv) + UA𝚫𝐓 (3.10) Se tiene que la función de transferencia para el fluido de calentamiento es:
U(s)Tv(S)
= K2τvs +1
(3.11)

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
68 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
Como los dos fluidos se tienen al mismo tiempo en el intercambiador de calor, se considera que los procesos se llevan a cabo en serie, por lo cual la función de transferencia total del intercambiador de calor será el producto de las funciones de transferencia individuales, y haciendo, τv = t1 y τp = t2, se tiene:
Tp(s)Tv(S)
= k1𝑘2(τ1s +1)(τ2s +1)
(3.12)
La Ec. (3.12), relaciona la variable de salida Tp (variable controlada) a la variable regulada Tv, donde τ1 y τ2 son las constantes características de tiempo del proceso. Esta función de transferencia es de segundo orden debido a que el producto de dos ecuaciones de primer orden produce una de segundo orden sobreamortiguado. Dadas las características y propiedades del modelo anterior, el cual podemos reescribir de la siguiente forma:
𝑇𝑝(𝑠)𝑇𝑣(𝑠)
= 𝑘1𝑘2𝜏1𝜏2𝑠2+(𝜏1+𝜏2)𝑠+1
(3.13)
Y dividiendo entre 𝜏1𝜏2 se tiene:
𝑇𝑝(𝑠)𝑇𝑣(𝑠)
=𝑘1𝑘2𝜏1 𝜏2
𝑠2+(𝜏1+𝜏2)𝜏1𝜏2
𝑠+ 1𝜏1𝜏2
(3.14)
Por último escrito en términos de los parámetros de los sistemas de segundo orden se tiene:
𝑇𝑝(𝑠)𝑇𝑣(𝑠)
= 𝐾𝜔𝑛2
𝑠2+2𝜁𝜔𝑛𝑠+𝜔𝑛2 (3.15)
Dónde:
𝐾 ≔ 𝑘1𝑘2
𝜔𝑛2 ≔1𝜏1𝜏2

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
69 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
2𝜁𝜔𝑛 ≔(𝜏1+ 𝜏2)𝜏1𝜏2
; 2𝜁𝜔𝑛 ∶= (𝜏1+ 𝜏2)𝜔𝑛2 ;
𝜁 ∶=
𝜔𝑛2
(𝜏1+ 𝜏2) Como la apertura y cierre de la válvula (variable manipulada) es la que determina la cantidad de vapor necesario para obtener la temperatura del producto deseada, la válvula se define como nuestra planta número dos por lo tanto es representada por la función de transferencia básica de primer orden la cual esta expresada por [12]:
𝐺(𝑃) = 1(𝑇𝑆+1)
(3.16)
El último elemento a considerar en los lazos de control corresponde a los sensores de medición. Estos elementos no son considerados para representarse en la forma de función de transferencia, por tanto la retroalimentación existente es unitaria; esto debido a que la ganancia del sensor no afecta a la dinámica del proceso; además la constante de tiempo τ se obtiene mediante conocimiento empírico (experiencia), por lo cual se propone la unidad al no contar con dicho conocimiento [13]. Una vez asignados los modelos de las plantas y sabiendo que los controladores serán controladores de proceso PID se determina la estructura final en cascada fig. 3.2.
Fig. 3.2 diagrama final del control en cascada.
𝐶1 𝐶2
𝑃𝐶𝐶𝐹𝐶𝐶 𝑃𝑃𝐶𝑠𝑃𝐹𝐶𝐶 𝐴2 𝐴1 𝑘2 𝑤𝐶2
𝑃2 + 2 𝜉 𝑤𝐶 𝑃 + 𝑤𝐶2
𝑘1𝜏𝑠 + 1
𝑃𝐼 𝑃𝐼𝐷
𝐶𝑃𝐶𝐶𝑃𝑐𝐹𝑃𝑃𝑃 𝐶𝑃 𝑠𝑃𝑃𝑃𝐹ó𝐶
𝑃𝑃𝐶𝑃𝑃𝑃 𝐶𝑃 𝐶𝑃𝑃𝑐𝑠𝑃𝑃𝐶𝐶𝐴𝑃𝐶
+ - + -
+
+ +
+
ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
70 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
Nota: debido a que el controlador se desarrollará mediante el software de programación LabView, se considerará la ecuación característica del PID académico con el que cuenta dicho software de programación, la cual trabaja con una constante proporcional 𝐾𝑃, un tiempo integral 𝑇𝑖 y un tiempo derivativo 𝑇𝑑. Por último determinamos la función de transferencia característica del control en cascada quedando definida de la siguiente manera:
𝑃𝐼 ∗ 𝐾1
𝜏𝑠+1 (3.17)
Dónde:
𝑃𝐼 = 𝐾𝑃 +𝐾𝑃𝑇𝑖𝑆
Realizando el producto de la planta dos con el controlador se tiene:
𝐾1 (𝐾𝑃+𝐾𝑃𝑇𝑖𝑆
)
𝜏𝑆+1∗ 𝑆𝑆
= 𝐾1(𝐾𝑃𝑆+
𝐾𝑃𝑇𝑖
)
𝜏𝑠2+𝑆 (3.18)
Para poder eliminar la retroalimentación del transmisor de presión se sabe que:
𝐺11 + 𝐺1 ∗ 𝐺2
Donde 𝐺1es la ecuación 3.18 y 𝐺2 = 1, porque se considera que el transmisor están bien acondicionado a través del software y hardware por lo que no aporta una dinámica significativa al sistema. Realizando la ecuación se tiene:
𝐾1(𝐾𝑃𝑆+𝐾𝑃𝑇𝑖
)
𝜏𝑠2+𝑆
1 + 𝐾1𝐾𝑃𝑆+
𝐾𝑃𝑇𝑖
𝜏𝑠2+𝑆 ∗ (1)

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
71 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
=
𝐾1(𝐾𝑃𝑆+𝐾𝑃𝑇𝑖
)
𝜏𝑠2+𝑆(𝜏𝑆2+𝑆)+𝐾1(𝐾𝑃𝑆+
𝐾𝑃𝑇𝑖
)
𝜏𝑠2+𝑆
=𝐾1(𝐾𝑃𝑆+
𝐾𝑃𝑇𝑖
)
𝜏𝑠2+(𝐾1𝐾𝑃+1)𝑆+𝐾1𝐾𝑃𝑇𝑖
(3.19)
Posteriormente para poder realizar la reducción de los bloques tenemos que multiplicar la ecuación 3.19 por el controlador uno y multiplicarlo por la planta dos, ya que estos elementos se tienen en serie, quedando de la siguiente manera:
𝑃𝐼𝐷 ∗𝐾1(𝐾𝑃𝑆+𝐾𝑃
𝑇𝐹)
𝜏𝑃2+𝐾1𝐾𝑃+1𝑆+𝐾1𝐾𝑃𝑇𝐹
∗ 𝐾2𝜔𝐶2
𝑆2+2𝜁𝜔𝐶𝑆+𝜔𝐶2 (3.20)
Dónde:
𝑃𝐼𝐷 = 𝐾𝑃 +1𝑇𝑖𝑆
+ 𝑇𝑑𝑆
Realizando el producto del controlador uno con la ecuación 3.19 y sustituyendo al PID por su ecuación se tiene:
(𝐾𝑃2 +1𝑇𝑖2𝑆
+ 𝑇𝑑2𝑆) ∗𝐾1 𝐾𝑃𝑆 + 𝐾𝑃
𝑇𝐹
𝜏𝑃2 + (𝐾1𝐾𝑃 + 1)𝑆 +𝐾1𝐾𝑃𝑇𝐹
=(𝐾𝑃2 + 1
𝑇𝑖2𝑆+ 𝑇𝑑2𝑆) ∗ [𝐾1 𝐾𝑃𝑆 + 𝐾𝑃
𝑇𝐹]
𝜏𝑃2 + (𝐾1𝐾𝑃 + 1)𝑆 +𝐾1𝐾𝑃𝑇𝐹
∗𝑆𝑆
=(𝐾𝑃2𝑆 + 1
𝑇𝑖2+ 𝑇𝑑2𝑆2) ∗ [𝐾1 𝐾𝑃𝑆2 + 𝐾𝑃
𝑇𝐹𝑆]
𝜏𝑃3 + (𝐾1𝐾𝑃 + 1)𝑆2 +𝐾1𝐾𝑃𝑇𝐹
𝑆

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
72 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
=𝐾1[𝐾𝑃𝐾𝑃2𝑆3 + 𝐾𝑃𝐾𝑃2
𝑇𝐹𝑆2 + 𝐾𝑃
𝑇𝑖2𝑆2 + 𝐾𝑃
𝑇𝐹𝑇𝐹2𝑆 + 𝐾𝑃𝑇𝑑2𝑆4 +
𝐾𝑃𝑇𝐶2𝑇𝐹
𝑆3]
𝜏𝑃3 + (𝐾1𝐾𝑃 + 1)𝑆2 +𝐾1𝐾𝑃𝑇𝐹
𝑆
=𝐾1[𝐾𝑃𝑇𝑑2𝑆4+(𝐾𝑃𝐾𝑃2+
𝐾𝑃𝑇𝑑2𝑇𝑖
)𝑆3+(𝐾𝑃𝐾𝑃2𝑇𝑖+𝐾𝑃𝑇𝑖2
)𝑆2+ 𝐾𝑃𝑇𝑖𝑇𝑖2
𝑆]
𝜏𝑠3+(𝐾1𝐾𝑃+1)𝑆2+𝐾1𝐾𝑃𝑇𝑖𝑆
(3.21)
Ahora se multiplica la ecuación 3.21 por la planta dos como se menciona en la ecuación 3.20 quedando:
𝐾1[𝐾𝑃𝑇𝑑2𝑆4+(𝐾𝑃𝐾𝑃2+𝐾𝑃𝑇𝑑2𝑇𝑖
)𝑆3+(𝐾𝑃𝐾𝑃2𝑇𝑖+𝐾𝑃𝑇𝑖2
)𝑆2+ 𝐾𝑃𝑇𝑖𝑇𝑖2
𝑆]
𝜏𝑠3+(𝐾1𝐾𝑃+1)𝑆2+𝐾1𝐾𝑃𝑇𝑖𝑆
∗ 𝐾2𝜔𝑛2
𝑆2+2𝜁𝜔𝑛𝑆+𝜔𝑛2
(3.22)
Realizando el producto de la ecuación 3.22 se tiene:
𝐾2𝜔𝑛2𝐾1[𝐾𝑃𝑇𝑑2𝑆4 + (𝐾𝑃𝐾𝑃2 + 𝐾𝑃𝑇𝑑2𝑇𝑖
)𝑆3 + (𝐾𝑃𝐾𝑃2𝑇𝑖
+ 𝐾𝑃𝑇𝑖2
)𝑆2 + 𝐾𝑃𝑇𝑖𝑇𝑖2
𝑆]
𝜏𝑃5 + 2𝜏𝜁𝜔𝑛𝑆4 + 𝜏𝜔𝑛2𝑆3 + (𝐾1𝐾𝑃 + 1)𝑆4 + (2𝐾1𝐾𝑃𝜁𝜔𝑛 + 2𝜁𝜔𝑛)𝑆3 + (𝐾1𝐾𝑃𝜔𝑛2 + 𝜔𝑛2)𝑆2 + 𝐾1𝐾𝑃𝑇𝑖
𝑆3 + 2 𝐾1𝐾𝑃𝑇𝑖
𝜁𝜔𝑛𝑆2 + 𝐾1𝐾𝑃𝑇𝑖
𝜔𝑛2𝑆
=𝐾2𝜔𝐶
2𝐾1[𝐾𝑃𝑇𝐶2𝑆4 + (𝐾𝑃𝐾𝑃2 + 𝐾𝑃𝑇𝐶2
𝑇𝐹)𝑆3 + (𝐾𝑃𝐾𝑃2
𝑇𝐹+ 𝐾𝑃
𝑇𝐹2)𝑆2 + 𝐾𝑃
𝑇𝐹𝑇𝐹2𝑆]
𝜏𝑃5 + (2𝜏𝜁𝜔𝑛 + 𝐾1𝐾𝑃 + 1)𝑆4 + (𝜏𝜔𝑛2+2𝐾1𝐾𝑃𝜁𝜔𝑛 + 2𝜁𝜔𝑛 + 𝐾1𝐾𝑃𝑇𝐹
)𝑆3 + (𝐾1𝐾𝑃𝜔𝑛2 + 𝜔𝑛2 + 2 𝐾1𝐾𝑃𝑇𝐹
𝜁𝜔𝑛)𝑆2 + 𝐾1𝐾𝑃𝑇𝐹
𝜔𝑛2𝑆
Ecuación (3.23)
Por último eliminamos el lazo de realimentación del sensor de temperatura bajo el criterio anterior para eliminar el lazo de realimentación del transmisor, partiendo de:
𝐺11 + 𝐺1 ∗ 𝐺2
Donde 𝐺1es igual a la ecuación 3.23. Para tener un desarrollo práctico al resolver la ecuación se tiene:
𝐺1 =𝛼𝛽
ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
73 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
Por lo tanto se tiene:
𝛼𝛽
1+𝛼𝛽∗1=
𝛼𝛽
𝛽+𝛼𝛽
= 𝛼𝛽+𝛼
(3.24)
Dónde:
α = 𝐾2𝜔𝑛2𝐾1[𝐾𝑃𝑇𝑑2𝑆4 + (𝐾𝑃𝐾𝑃2 + 𝐾𝑃𝑇𝑑2𝑇𝑖
)𝑆3 + (𝐾𝑃𝐾𝑃2𝑇𝑖
+ 𝐾𝑃𝑇𝑖2
)𝑆2 + 𝐾𝑃𝑇𝑖𝑇𝑖2
𝑆]
β = 𝜏𝑃5 + (2𝜏𝜁𝜔𝑛 + 𝐾1𝐾𝑃 + 1)𝑆4 + (𝜏𝜔𝑛2+2𝐾1𝐾𝑃𝜁𝜔𝑛 + 2𝜁𝜔𝑛 + 𝐾1𝐾𝑃𝑇𝐹
)𝑆3 +
(𝐾1𝐾𝑃𝜔𝑛2 + 𝜔𝑛2 + 2 𝐾1𝐾𝑃𝑇𝐹
𝜁𝜔𝑛)𝑆2 + 𝐾1𝐾𝑃𝑇𝐹
𝜔𝑛2𝑆
Para sintonizar nuestros controladores es recomendable primero sintonizar los controles internos (lazo de control esclavo), para posterior mente sintonizar el controlador exterior. Revisar la referencia No [16] para la sintonización de los controladores, ya que esta depende de los datos característicos de los elementos presentes por cada proceso.
3.2 Programación de la interfaz gráfica del control en cascada en LabView.
Una interfaz se utiliza para que el usuario visualice de forma amigable el comportamiento de las variables del sistema (temperatura y presión) así como el tipo de comportamiento que tiene el sistema en tiempo real.
La interfaz gráfica que se generó cuenta con tres pestañas de visualización para el usuario. La pestaña principal del usuario (fig. 3.3.) En dicha figura se muestra por medio de indicadores el porcentaje de apertura y cierre de la válvula, las lecturas reales del sensor de temperatura y el transmisor de presión, estos valores a su vez son representados gráficamente mediante un manómetro para el transmisor de presión y un termómetro para el termopar, también cuenta con un control numérico para que el usuario asigne el valor de consigna (setpoint) para el proceso y por ultimo un botón de paro para que el usuario detenga el proceso cuando lo desee y al mismo tiempo se crea el historial en un archivo de texto, el cual cuanta con una plantilla previamente definida.

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
74 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
Fig. 3.3 pestaña principal de la interfaz.
En la siguiente pestaña mostrada en la fig. 3.4, se muestran los valores para la sintonización de los dos controladores PID de la estructura de control en cascada.

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
75 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
Fig. 3.4 pestaña de sintonización de controladores PID.
En la tercera pestaña del programa se muestra de manera gráfica el comportamiento de la temperatura medida, la presión medida y la acción del controlador del sistema ya con el controlador sintonizado como se muestra en la fig. 3.5.
Fig. 3.5 pestaña de visualización de la respuesta del sistema.

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
76 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
Para la programación de los algoritmos del control en cascada en Labview, se utilizó el Control Design Toolkit que nos permite la utilización de bloques para la construcción de las funciones de transferencia, los controladores y nos presenta las gráficas de respuesta mediante el uso de las herramientas de simulación. Programación grafica aplicados para el desarrollo del control en cascada propuesto anteriormente (fig 3.6).
Fig. 3.6 diagrama del control en cascada en LabView.

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
77 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
Lo último para el desarrollo de la programación de la interfaz gráfica es la conexión con la tarjeta de adquisición de datos, para la cual se eligió el modelo NI USB 6008, donde la programación del control en cascada se ve modificada quedando el diagrama de la siguiente manera (figura 3.7).
Fig. 3.7 diagrama final del control en cascada en LabView conectado con la tarjeta NI USB-6008.
3.3 Desarrollo del control difuso.
Lo que se pretende con el controlador difuso es remplazar los dos controladores PID de la estructura de control en cascada mostrado en la figura 3.2 quedando definido como se muestra en la figura 3.8.

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
78 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
Fig. 3.8 Representación esquemática del modelo difuso.
3.3.1 Selección de las variables de entrada y salida.
Para la realización del controlador difuso primeramente se tienen que identificar las variables involucradas en el proceso que describen la dinámica del sistema. En este caso el sistema cuenta con dos variables principales que son la temperatura y la presión como ya se mencionó en capítulos anteriores. El valor de estas variables es obtenido a través de mediciones realizadas directamente en el proceso.
Una vez definidas las variables de entrada lo siguiente que se realizara será darles una asignación lingüística, es decir asignarles un adjetivo que representa la condición o el estado en el que se encuentran estas variables. Para este caso por el comportamiento de las variables del sistema se eligieron tres:
• Baja • Normal • Alta
Donde los rangos de operación de temperatura son determinados automáticamente cuando el usuario asigna su valor de consigna (setpoint).
Los rangos de operación para la presión fueron definidos por la presión mínima y máxima que soporta el actuador (0 a 6 bar.), que a su vez es representada de 0 a 100 % para generar el grado de pertenencia de cada variable lingüística quedando definidas de la siguiente manera:
𝐹𝐴𝑃𝐹𝐹𝐹𝑃𝐶𝑃𝐹ó𝐶 𝐴𝐴𝐴𝑃𝐶𝑃
𝑃𝑃𝑃𝑃𝑃𝑃𝑃
𝑇𝑃𝑃𝑐𝑃𝑠𝐶𝑃
𝑆𝐶𝐶𝐹𝐶𝐶 +
−
𝐼𝐶𝐹𝑃𝑃𝑃𝐶𝑃𝐹𝐶 𝐷𝑃𝐹𝐴𝑃𝐹𝐹𝐹𝑃𝐶𝑃𝐹ó𝐶
𝐵𝐶𝑃𝑃 𝐶𝑃 𝑃𝑃𝐶𝑃𝑃𝐹𝑐𝐹𝑃𝐶𝐶𝑃
𝐹𝐴𝐹𝐹𝐹
𝑇𝑃𝐶𝐶𝑃𝑐𝐹𝑃𝑃𝑃 𝐶𝑃 𝑠𝑃𝑃𝑃𝐹ó𝐶
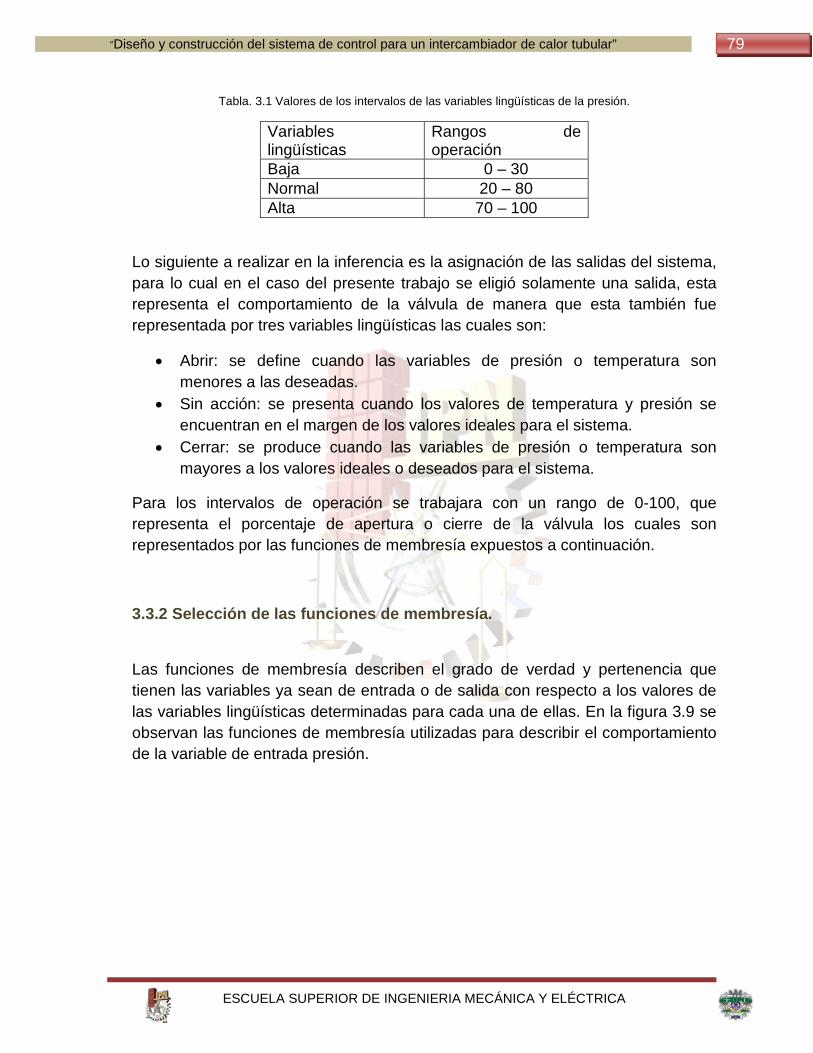
ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
79 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
Tabla. 3.1 Valores de los intervalos de las variables lingüísticas de la presión.
Variables lingüísticas
Rangos de operación
Baja 0 – 30 Normal 20 – 80 Alta 70 – 100
Lo siguiente a realizar en la inferencia es la asignación de las salidas del sistema, para lo cual en el caso del presente trabajo se eligió solamente una salida, esta representa el comportamiento de la válvula de manera que esta también fue representada por tres variables lingüísticas las cuales son:
• Abrir: se define cuando las variables de presión o temperatura son menores a las deseadas.
• Sin acción: se presenta cuando los valores de temperatura y presión se encuentran en el margen de los valores ideales para el sistema.
• Cerrar: se produce cuando las variables de presión o temperatura son mayores a los valores ideales o deseados para el sistema.
Para los intervalos de operación se trabajara con un rango de 0-100, que representa el porcentaje de apertura o cierre de la válvula los cuales son representados por las funciones de membresía expuestos a continuación.
3.3.2 Selección de las funciones de membresía.
Las funciones de membresía describen el grado de verdad y pertenencia que tienen las variables ya sean de entrada o de salida con respecto a los valores de las variables lingüísticas determinadas para cada una de ellas. En la figura 3.9 se observan las funciones de membresía utilizadas para describir el comportamiento de la variable de entrada presión.

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
80 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
Fig. 3.9 Funciones de membresía de la presión medida en un rango de 0 – 100%.
Se seleccionaros las formas gaussianas debido a que la variación de la presión será de forma paulatina y no tendrá cambios drásticos. De esta manera la selección para la variable lingüística baja parte de que para el sistema el grado de verdad máximo de esta condición se presenta cuando el valor es cero (0%), y de ahí va decreciendo a partir del valor de 12% y conforme va creciendo su magnitud va disminuyendo de forma paulatina hasta que su grado de pertenencia tenga el valor de cero lo que sucede cuando alcanza el valor del 50%.
La función de membresía de la variable lingüística normal parte del grado de verdad cero cuando este tiene un valor del 0%, de este punto va creciendo conforme va creciendo su magnitud hasta que alcanza su valor máximo cuando llega al 50%, este valor se considera el valor óptimo para nuestro sistema. Una vez que se rebasa este valor comienza a descender su grado de verdad hasta convertirse una vez más en cero cuando alcanza el valor del 100%.
La función de membresía de la variable lingüística alta parte del grado de verdad cero cuando este tiene un valor del 50%, y de este punto va creciendo conforme va creciendo su magnitud hasta que alcanza su valor máximo cuando llega al valor del 100%. En la tabla 3.2, se describen las formas y los valores de los intervalos de cada una de las funciones de membresía descritos anteriormente para la presión.
Tabla. 3.2 datos de las funciones de membresía para la presión.
Variable Función de membresía Intervalo % Baja Gaussiana 0 – 30
Normal Gaussiana 20 -80 Alta Gaussiana 70 -100

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
81 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
Para el caso de la temperatura las funciones de membresía se muestra en la figura 3.10, para el caso del análisis la funciones de membresía se consideraron igual a las utilizadas para la presión, aunque en realidad las funciones de membresía para la temperatura serán dinámicas ya que cambiaran con relación al valor del setpoint ingresado por el usuario en la interfaz gráfica.
Fig. 3.10 Funciones de membresía teóricos de la temperatura medida en un rango de 0 – 100%.
En la tabla 3.3, se describen las formas y los valores de los intervalos de cada una de las funciones de membresía descritos anteriormente para la temperatura, esto es de manera teórica ya que el usuario determina las funciones de membresía con relación a los valores ingresados en la interfaz gráfica.
Tabla. 3.3 datos teóricos de las funciones de membresía para la temperatura.
Variable Función de membresía Intervalo % Baja Gaussiana 0 – 30
Normal Gaussiana 20 -80 Alta Gaussiana 70 -100
El siguiente paso para el modelado difuso es la selección de las funciones de membresía de la salida (% de apertura de la válvula) que para efectos prácticos también se consideró un rango de 0 – 100%. Estas funciones se escogieron triangulares ya que el comportamiento que se desea para la apertura y cierre de la válvula sea lineal y el ajuste sea lo más pronto posible, estas se pueden apreciar en la figura 3.11.

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
82 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
Fig. 3.11 Funciones de membresía para la salida (apertura y cierre de la válvula) medida en un rango de 0 – 100%.
De esta manera la selección para la variable lingüística cerrar parte de que para el sistema el grado de verdad máximo de esta condición se presenta cuando el valor es cero (0%), y de ahí va decreciendo conforme va creciendo su magnitud de forma lineal hasta que su grado de pertenencia tenga el valor de cero lo que sucede cuando alcanza el valor del 50%.
La función de membresía de la variable lingüística sin acción parte del grado de verdad cero cuando este tiene un valor del 0%, de este punto va creciendo conforme va creciendo su magnitud hasta que alcanza su valor máximo cuando llega al 50%, una vez que se rebasa este valor comienza a descender su grado de verdad hasta convertirse una vez más en cero cuando alcanza el valor del 100%.
La función de membresía de la variable lingüística abrir parte del grado de verdad cero cuando este tiene un valor del 50%, y de este punto va creciendo de forma lineal conforme va creciendo su magnitud hasta que alcanza su valor máximo cuando llega al valor del 100%. En la tabla 3.4 se describen las formas y los valores de los intervalos de cada una de las funciones de membresía descritos anteriormente para la salida.
Tabla. 3.4 datos de las funciones de membresía para la presión.
Variable Función de membresía Intervalo %
Baja Triangular 0 – 30 Normal Triangular 20 -80
Alta Triangular 70 -100
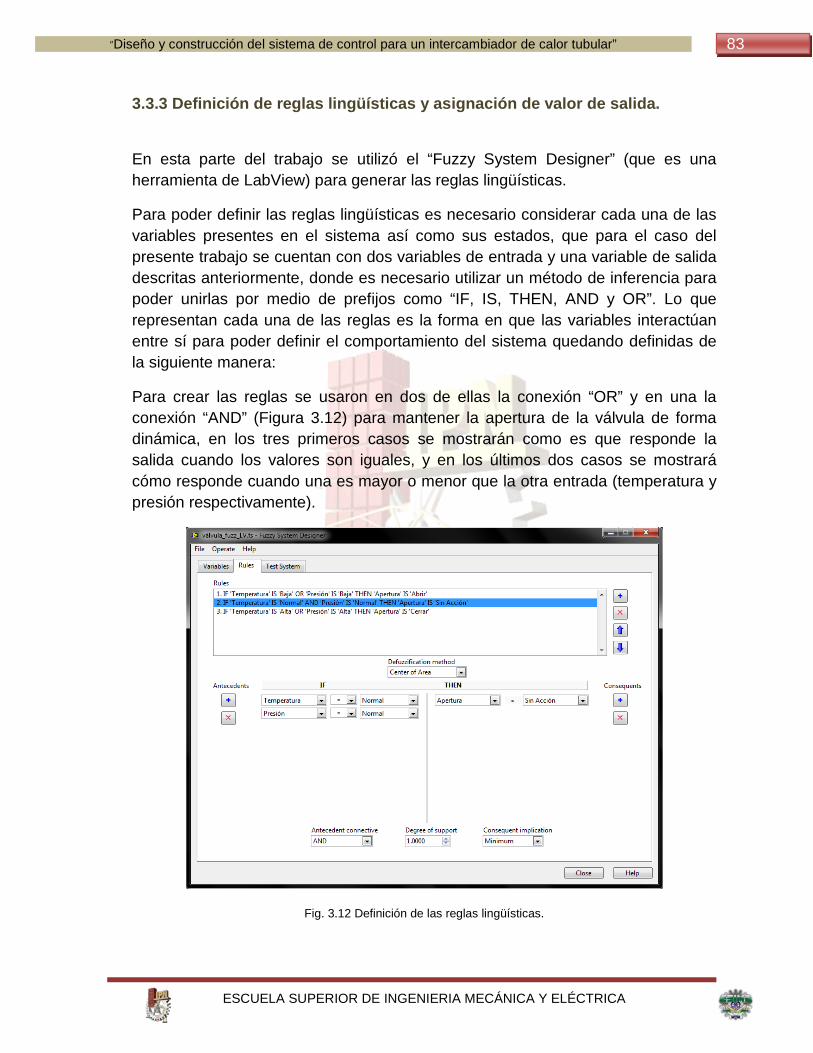
ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
83 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
3.3.3 Definición de reglas lingüísticas y asignación de valor de salida.
En esta parte del trabajo se utilizó el “Fuzzy System Designer” (que es una herramienta de LabView) para generar las reglas lingüísticas.
Para poder definir las reglas lingüísticas es necesario considerar cada una de las variables presentes en el sistema así como sus estados, que para el caso del presente trabajo se cuentan con dos variables de entrada y una variable de salida descritas anteriormente, donde es necesario utilizar un método de inferencia para poder unirlas por medio de prefijos como “IF, IS, THEN, AND y OR”. Lo que representan cada una de las reglas es la forma en que las variables interactúan entre sí para poder definir el comportamiento del sistema quedando definidas de la siguiente manera:
Para crear las reglas se usaron en dos de ellas la conexión “OR” y en una la conexión “AND” (Figura 3.12) para mantener la apertura de la válvula de forma dinámica, en los tres primeros casos se mostrarán como es que responde la salida cuando los valores son iguales, y en los últimos dos casos se mostrará cómo responde cuando una es mayor o menor que la otra entrada (temperatura y presión respectivamente).
Fig. 3.12 Definición de las reglas lingüísticas.

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
84 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
En la figura 3.13 se puede apreciar como cuando, tanto la temperatura y la presión son lo más bajas posibles en el rango, la apertura de la válvula alcanza su valor máximo, que es 83.1104, y además se muestra el peso de las reglas en la parte inferior, en este caso la regla que tiene mayor peso es la regla número 1:
“IF “temperatura” IS “Baja” OR “Presión” IS “Baja” THEN “Apertura” IS “Abrir”
Cabe señalar que el peso de las reglas se establece en una escala de 0 a 1 (ya definida por el “Fuzzy System Designer”), siendo 1 el valor que indica el mayor peso, o en otras palabras la mayor importancia de la regla, ya que en ocasiones alguna regla puede tener el mayor peso y otra regla puede estar con un peso menor (de acuerdo al grado de pertenencia) y esto es lo que por medio de la defusificación se traduce como la respuesta de la salida.
Fig. 3.13 Asignación de salida con la temperatura y presión bajas.
En la imagen siguiente (Figura 3.14) se puede apreciar como cuando la temperatura y la presión son normales, la apertura de la válvula no necesita ninguna acción de control, por lo que se la respuesta de salida se expresa como

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
85 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
“Sin Acción” y la apertura de la válvula permanece en 50, al igual que en la imagen anterior se muestra el peso de las reglas en la parte inferior, en este caso la regla que tiene mayor peso es la regla número 2:
“IF “temperatura” IS “Normal” AND “Presión” IS “Normal” THEN “Apertura” IS “Sin
Acción”
Fig. 3.14 Asignación de salida con la temperatura y presión normales.
La siguiente ilustración (Figura 3.15) muestra que cuando la temperatura y la presión son altas, la apertura de la válvula debe de alcanzar su valor mínimo, lo que se expresa como “Cerrar” en la respuesta de salida, alcanzando por ende su valor de apertura mínimo que es 16.8897, y de igual manera se muestra el peso de las reglas en la parte inferior, en este caso la regla que tiene mayor peso es la regla número 3:
“IF “temperatura” IS “Alta” OR “Presión” IS “Alta” THEN “Apertura” IS “Cerrar”
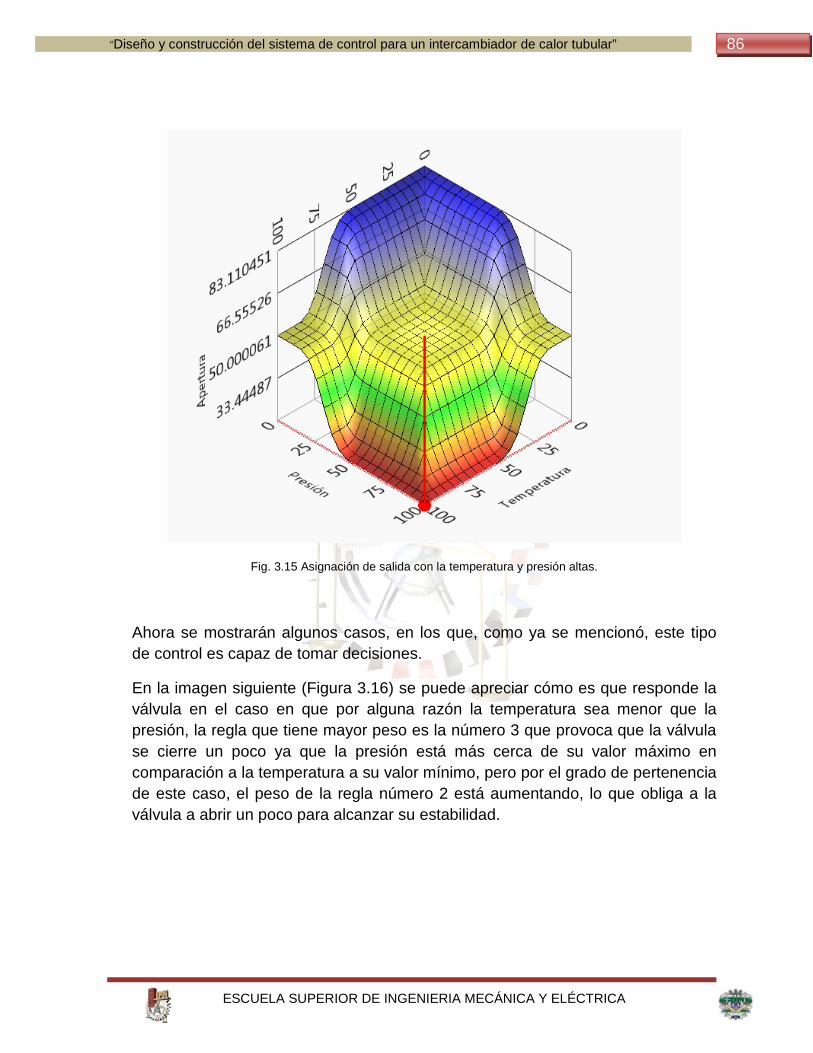
ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
86 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
Fig. 3.15 Asignación de salida con la temperatura y presión altas.
Ahora se mostrarán algunos casos, en los que, como ya se mencionó, este tipo de control es capaz de tomar decisiones.
En la imagen siguiente (Figura 3.16) se puede apreciar cómo es que responde la válvula en el caso en que por alguna razón la temperatura sea menor que la presión, la regla que tiene mayor peso es la número 3 que provoca que la válvula se cierre un poco ya que la presión está más cerca de su valor máximo en comparación a la temperatura a su valor mínimo, pero por el grado de pertenencia de este caso, el peso de la regla número 2 está aumentando, lo que obliga a la válvula a abrir un poco para alcanzar su estabilidad.
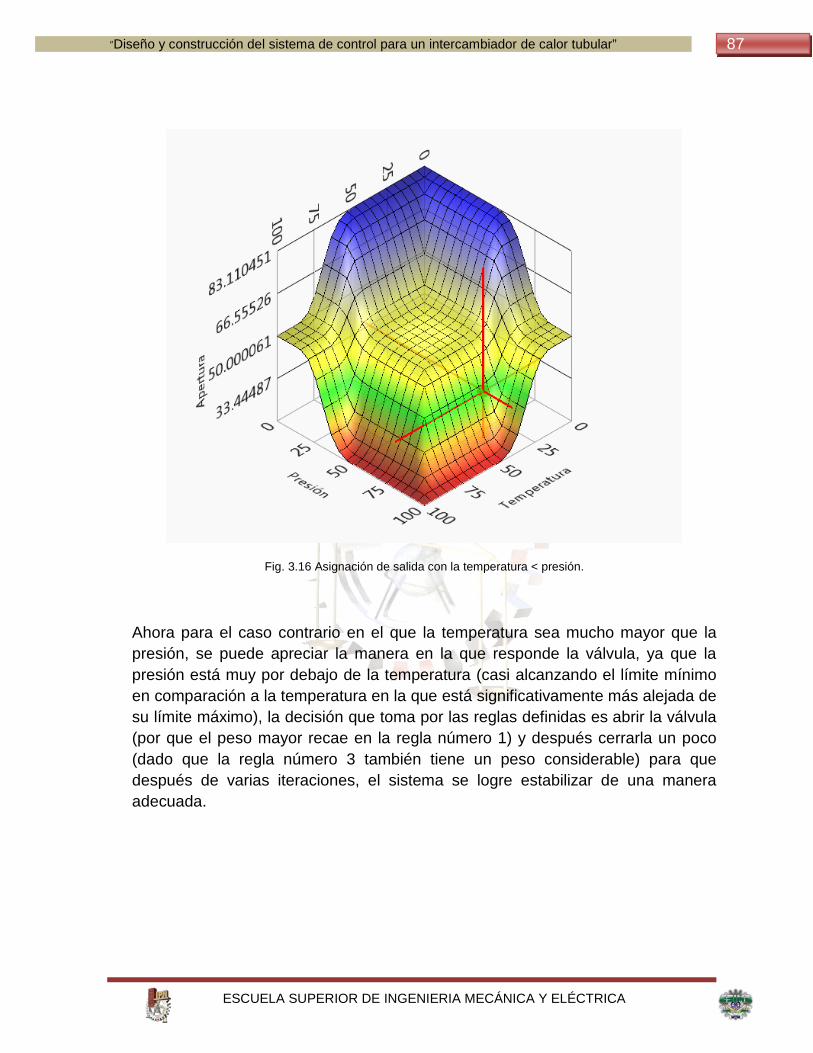
ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
87 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
Fig. 3.16 Asignación de salida con la temperatura < presión.
Ahora para el caso contrario en el que la temperatura sea mucho mayor que la presión, se puede apreciar la manera en la que responde la válvula, ya que la presión está muy por debajo de la temperatura (casi alcanzando el límite mínimo en comparación a la temperatura en la que está significativamente más alejada de su límite máximo), la decisión que toma por las reglas definidas es abrir la válvula (por que el peso mayor recae en la regla número 1) y después cerrarla un poco (dado que la regla número 3 también tiene un peso considerable) para que después de varias iteraciones, el sistema se logre estabilizar de una manera adecuada.

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
88 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
Fig. 3.17 Asignación de salida con la temperatura > presión.
3.4 Desarrollo de la interfaz gráfica del control difuso LabView.
La interfaz gráfica que se generó para el controlador difuso cuenta con tres pestañas de visualización para el usuario. La pestaña principal del usuario se muestra en la fig. 3.18. En dicha figura el usuario podrá ingresar los valores mínimo y máximo del rango de temperatura y presión del sistema, se muestra por medio de indicadores el valor del span, el porcentaje de apertura de la válvula, las lecturas reales del sensor de temperatura y del transmisor de presión, estos valores a su vez son representados gráficamente mediante un manómetro para el transmisor de presión y un termómetro para el termopar, indicadores luminosos los cuales indican cuando la temperatura es baja, normal y alta, también cuenta con un control numérico para que el usuario asigne el valor de consigna (setpoint) para el proceso y por ultimo un botón de paro para que el usuario detenga el proceso cuando lo desee y de igual manera como en el controlador en cascada se genera el historial donde se puede observar el comportamiento de las variables presentes en el proceso.

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
89 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
Fig. 3.18 pestaña principal de la interface.
En la siguiente pestaña mostrada en la fig. 3.19, se muestran los gráficos de las funciones de membresía para la presión, la temperatura y la válvula, además el usuario puede apreciar los valores en porcentaje del valor medido de presión, de temperatura y el del setpoint, así como los puntos para generar la función de membresía Gaussiana para el valor lingüístico normal de la temperatura y por ultimo un indicador luminoso para ver si el controlador funciona.
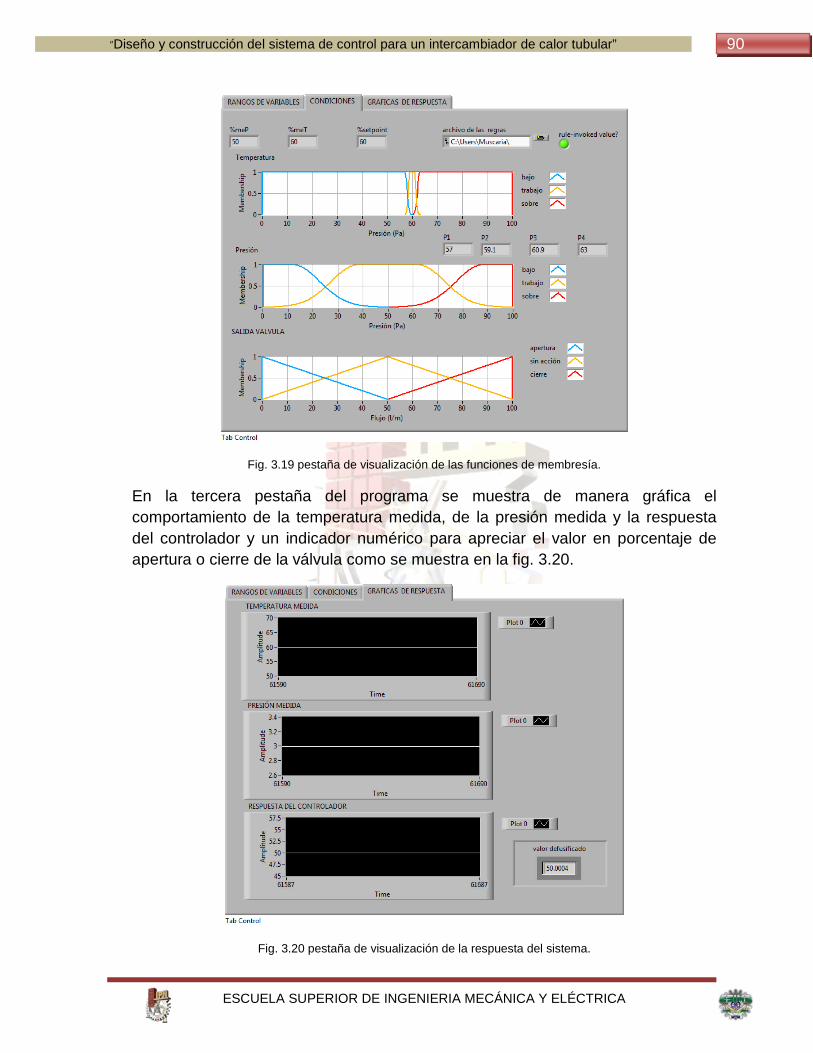
ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
90 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
Fig. 3.19 pestaña de visualización de las funciones de membresía.
En la tercera pestaña del programa se muestra de manera gráfica el comportamiento de la temperatura medida, de la presión medida y la respuesta del controlador y un indicador numérico para apreciar el valor en porcentaje de apertura o cierre de la válvula como se muestra en la fig. 3.20.
Fig. 3.20 pestaña de visualización de la respuesta del sistema.

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
91 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
3.4.1 Programación de la interfaz gráfica del control difuso.
Fig. 3.21 programa completo del controlador difuso.
Para el desarrollo del programa del controlador difuso primeramente se programó una rutina para la fusificación la cual se aprecia del lado izquierdo de la figura 3.21, esta rutina toma los valores medidos (temperatura y presión) además del setpoint y saca su porcentaje con relación a los rangos establecidos por el usuario para la temperatura y la presión. Esto se hace para generar una superficie (X, Y) donde los valores medidos puedan interactuar entre sí, figura 3.22.

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
92 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
Fig. 3.22 Rutina para la fusificación de las entradas en %.
Esta rutina envía los datos de los valores medidos al modelo difuso creado a través de la secuencia mostrada en la figura 3.23 este modelo se hace para poder evaluar los valores de las variables de entrada mediante el proceso de inferencia asignado en el archivo cargado, así como para obtener el valor a la salida del sistema.

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
93 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
Fig. 3.23 modelo difuso.
El programa también permite visualizar las funciones de membresía generadas en el archivo fs. Cargado al modelo difuso a través de la rutina mostrada en la figura 3.24. Con esta rutina se puede ver de manera gráfica una de las variables del sistema con sus funciones de membresía, esta rutina se repitió para la variable de salida del sistema.
Fig. 3.24 Visualización de las funciones de membresía.
A su vez también se tiene una rutina para generar y reescribir las funciones de membresía asignadas para la temperatura, ya que esta se modificara con relación a los datos ingresados por el usuario la cual se puede apreciar en la figura 3.25.

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
94 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
Fig. 3.25 Visualización de la función de membresía para la temperatura.
Lo último para el desarrollo de la programación de la interfaz gráfica al igual que en el control en cascada, es la conexión con la tarjeta de adquisición de datos, para la cual se eligió el modelo NI USB 6008, donde la programación del control en cascada se ve modificada quedando el diagrama como se muestra en la figura 3.26.

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
95 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
Fig. 3.26 programa final del controlador difuso conectado con la tarjeta NI USB-6008.
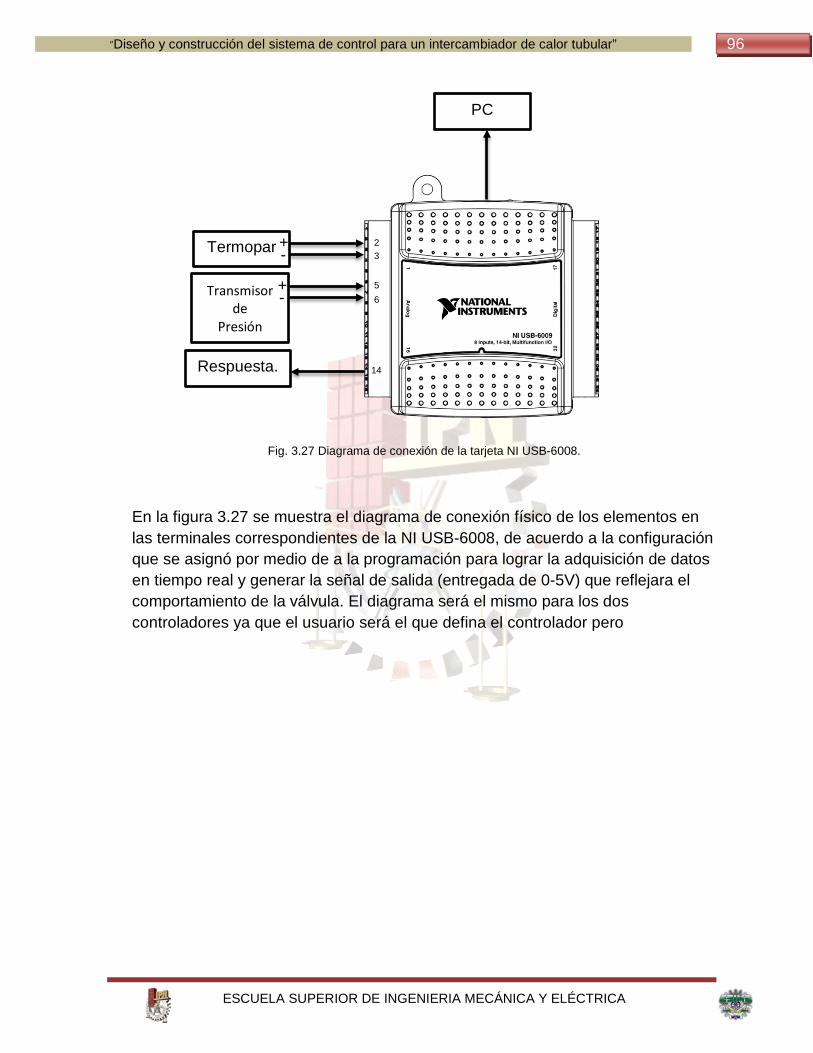
ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
96 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
Fig. 3.27 Diagrama de conexión de la tarjeta NI USB-6008.
En la figura 3.27 se muestra el diagrama de conexión físico de los elementos en las terminales correspondientes de la NI USB-6008, de acuerdo a la configuración que se asignó por medio de a la programación para lograr la adquisición de datos en tiempo real y generar la señal de salida (entregada de 0-5V) que reflejara el comportamiento de la válvula. El diagrama será el mismo para los dos controladores ya que el usuario será el que defina el controlador pero
Termopar + -
Transmisor de
Presión
+ -
Respuesta.
PC
2 3
5 6
14

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
97 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
Fig. 3.28 Diagrama a bloques para la generación de historiales.
En la figura 3.28 se muestra el diagrama elaborado dentro de la programación de cada controlador para la generación de reportes, donde se reproduce el comportamiento de las variables durante la operación del proceso. El historial se genera cada vez que el operador detiene el programa, este se visualiza en un documento de Word lo que lo hace accesible, de fácil comprensión y nos da la posibilidad de generar una biblioteca virtual ya que estos datos son necesarios si se desea generar un programa de mantenimiento.

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
98 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
CAPÍTULO 4. RESULTADOS Y ANÁLISIS.
En este capítulo se presentan los resultados obtenidos por ambos controladores descritos en el capítulo tres, así como el análisis para determinar cuál de ellos tiene una mejor acción de control. Por lo cual la temperatura a la que se debe de obtener el producto será de 60 °C, esto se estableció bajo las características de operación del intercambiador de calor descritas en el capítulo dos.
Las especificaciones de control para evaluar el desempeño de los controladores son:
• La respuesta del controlador con relación al comportamiento de la temperatura y la presión.
• El comportamiento de la salida del controlador que se verá reflejado en la apertura y cierre de la válvula de control.
Para ello los resultados se analizarán por medio de un ejemplo empezando por el controlador en cascada ya que en este se tienen que hacer más consideraciones y posteriormente el controlador difuso.
4.1 Respuesta del controlador en cascada.
Para poder trabajar de manera ideal el controlador en cascada es necesario conocer algunos parámetros de la planta para lograr una buena sintonización de los controladores (PI y PID) como se mencionó en el capítulo tres. Para lo cual se proponen los siguientes:
𝜏 = 1; 𝜁 = 42√5
; 𝜔𝑛 = √5; 𝐾1 = 1; 𝐾2 = 0.2; 2 𝜁𝜔𝐶 = 4
Lo primero que se tiene que hacer para lograr que el controlador en cascada tenga un desempeño ideal es la sintonización de los controladores, para lo cual se recomienda primero sintonizar el lazo interno y posteriormente el lazo externo, por ello se retomará el polinomio característico de la ecuación que describe el lazo interno del controlador en cascada descrita en el capítulo tres (Ec.3.19) y sustituyendo los valores de los parámetros antes mencionados como se muestra a continuación.

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
99 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
𝐾1(𝐾𝑃𝑆 + 𝐾𝑃𝑇𝑖
)
𝜏𝑃2 + (𝐾1𝐾𝑃 + 1)𝑆 + 𝐾1𝐾𝑃𝑇𝑖
Polinomio característico:
𝜏𝑃2 + (𝐾1𝐾𝑃 + 1)𝑆 +𝐾1𝐾𝑃𝑇𝑖
Sustituyendo los parámetros se tiene:
1 ∗ 𝑃2 + (1 ∗ 𝐾𝑃 + 1)𝑆 + 1 ∗ 𝐾𝑃𝑇𝑖
Resolviendo las operaciones se obtiene:
𝑃2 + (𝐾𝑃 + 1)𝑆 + 𝐾𝑃𝑇𝑖
(4.1)
Como se desea que el lazo interno tenga un comportamiento críticamente amortiguado se propone 𝑆2 + 4𝑆 + 4 donde los polos son:
𝑃1 = −2 ; 𝑃2 = −2
Posterior mente para lograr dicho comportamiento igualamos la ecuación 4.1 con los términos de la ecuación propuesta para poder conocer la constante proporcional (𝐾𝑝) y el tiempo integrativo (𝑇𝑖) para realizar la sintonización del controlador interno (PI).
𝑆2 = 1; 𝐾𝑝 + 1 = 4; 𝐾𝑃𝑇𝑖
= 2
Resolviendo para 𝐾𝑝se tiene:
𝐾𝑝 = 4 − 1
𝐾𝑝 = 3
Resolviendo para 𝑇𝑖 se tiene:
3𝑇𝑖
= 2 ; 32
= 𝑇𝑖
𝑇𝑖 = 1.5
Una vez que se conocen los valores para la sintonización del lazo interno proseguimos con la sintonización del lazo externo, donde retomamos la ecuación

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
100 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
característica del controlador en cascada (Ec. 3.24) y se sustituyen los parámetros definidos para la planta como se muestra a continuación:
𝛼𝛽 + 𝛼
Dónde:
α = 𝐾2𝜔𝑛2𝐾1[𝐾𝑃𝑇𝑑2𝑆4 + (𝐾𝑃𝐾𝑃2 + 𝐾𝑃𝑇𝑑2𝑇𝑖
)𝑆3 + (𝐾𝑃𝐾𝑃2𝑇𝑖
+ 𝐾𝑃𝑇𝑖2
)𝑆2 + 𝐾𝑃𝑇𝑖𝑇𝑖2
𝑆]
β = 𝜏𝑃5 + (2𝜏𝜁𝜔𝑛 + 𝐾1𝐾𝑃 + 1)𝑆4 + (𝜏𝜔𝑛2+2𝐾1𝐾𝑃𝜁𝜔𝑛 + 2𝜁𝜔𝑛 + 𝐾1𝐾𝑃𝑇𝐹
)𝑆3 +
(𝐾1𝐾𝑃𝜔𝑛2 + 𝜔𝑛2 + 2 𝐾1𝐾𝑃𝑇𝐹
𝜁𝜔𝑛)𝑆2 + 𝐾1𝐾𝑃𝑇𝐹
𝜔𝑛2𝑆
Sustituyendo por los valores de los parámetros se obtiene:
α = (0.2 ∗ 5 ∗ 1)[3 ∗ 𝑇𝐶2𝑆4 + (3 ∗ 𝐾𝑃2 +
3𝑇𝐶2
1.5)𝑆3 + (
3𝐾𝑃2
1.5+
3
𝑇𝐹2)𝑆2 +
3
1.5 ∗ 𝑇𝐹2𝑆]
α = 3𝑇𝐶2𝑆4 + (3𝐾𝑃2 + 2𝑇𝐶2)𝑆3 + (2𝐾𝑃2 +
3
𝑇𝐹2)𝑆2 +
2
𝑇𝐹2𝑆
β = 1 ∗ 𝑃5 + (2 ∗ 1 ∗ 0.894 ∗ √5 + 1 ∗ 3 + 1)𝑆4 + (1
∗ 5+2 ∗ 1 ∗ 3 ∗ 0.894 ∗ √5 + 2 ∗ 0.894 ∗ √5 +1 ∗ 3
1.5)𝑆
3
+ (1 ∗ 3 ∗ 5
+ 5 + 2 ∗1 ∗ 3
1.5∗ 0.894 ∗ √5)𝑆2 +
1 ∗ 3
1.5∗ 5𝑆
β = 𝑃5 + (7.998)𝑆4 + (22.996)𝑆3 + (27.996)𝑆2 + 10𝑆
Polinomio característico (β + α) por lo cual se suma y agrupa el polinomio quedando definido como:
(β + α) = 𝑃5 + (7.998 + 3𝑇𝐶2)𝑆4 + (22.996 + 3𝐾𝑃2 + 2𝑇𝐶2)𝑆3 + (27.996 + 2𝐾𝑃2 +3
𝑇𝐹2)𝑆2 + (10 +
2
𝑇𝐹2)𝑆 (4.2)
Como se propone que la planta tenga un comportamiento críticamente amortiguado se propone 𝑆5 + 8𝑆4 + 29𝑆3 + 54𝑆2 + 48𝑆 + 16 para que el sistema tenga el comportamiento deseado. Posteriormente para lograr dicho

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
101 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
comportamiento se iguala la ecuación 4.2 con los términos de la ecuación propuesta para poder conocer la constante proporcional (𝐾𝑝2), el tiempo integrativo (𝑇𝑖2) y el tiempo derivativo (𝑇𝑑2) para realizar la sintonización del controlador externo (PID).
+(7.998 + 3𝑇𝐶2)𝑆4 + (22.996 + 3𝐾𝑃2 + 2𝑇𝐶2)𝑆3 + (27.996 + 2𝐾𝑃2 +3𝑇𝐹2
)𝑆2 + (10
+2𝑇𝐹2
)𝑆
𝑆5 = 1; 7.998 + 3𝑇𝐶2 = 8; 22.996 + 3𝐾𝑃2 + 2𝑇𝐶2 = 29;
27.996 + 2𝐾𝑃2 + 3𝑇𝐹2
= 54; 10 + 2𝑇𝐹2
= 48; 16
Resolviendo para 𝑇𝑖2 del término lineal se obtiene:
10 +2𝑇𝐹2
= 48
𝑇𝑖2 =2
48 − 10
𝑇𝑖2 = 0.0526
Resolviendo para 𝐾𝑝2 del término cuadrático se obtiene:
27.996 + 2𝐾𝑃2 +3𝑇𝐹2
= 54
2𝐾𝑠2 = 54 −3𝑇𝐹2
− 27.996
2𝐾𝑠2 = −30.034
𝐾𝑝2 =−30.034
2
𝑘𝑝2 = −15.01
Como no se tienen ganancias negativas se toma el valor absoluto de 𝑘𝑝2 teniendo:
𝑘𝑝2 = 15.01

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
102 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
Resolviendo para 𝑇𝑑2 del término cubico se obtiene:
22.996 + 3𝐾𝑃2 + 2𝑇𝐶2 = 29
2𝑇𝐶2 = 29 − 22.996 − 3𝐾𝑃2
2𝑇𝐶2 = −39.026
𝑇𝑑2 =−39.026
2
𝑇𝑑2 = −19.513
Como no se tienen ganancias negativas se toma el valor absoluto de 𝑘𝑝2 teniendo:
𝑇𝑑2 = 19.513
Una vez que se obtienen los valores para sintonizar los controladores se sustituye en la interface gráfica del controlador en cascada (figura 4.1).
Para apreciar la respuesta del controlador la temperatura medida se pondrá en estado ideal (igual al setpoint), por debajo del valor ideal y superior a este, también se modificará el valor de la presión para así apreciar el comportamiento del controlador en estos parámetros mostrados en las figuras 4.2, 4.4, 4.6, 4.8 y 4.10. Para la salida del controlador esta se establecerá de 0 – 5V ya que es la tensión que entrega a la salida la tarjeta NI USB-6008, por lo cual para poder apreciar su comportamiento se utilizará un multímetro donde se verá el comportamiento de la salida del controlador, esto se puede observar en las figuras 4.3, 4.5, 4.7, 4.9 y 4.11

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
103 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
Fig. 4.1 Sintonización de los controladores del controlador en cascada.
Fig. 4.2 Respuesta del controlador cascada con los valores ideales.

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
104 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
Fig. 4.3 Salida del controlador cascada con los valores ideales, reflejada en el multímetro.
Como se observa en las figuras anteriores con los valores de la temperatura y la presión ideales, la respuesta del controlador se mantiene constante esto se verá reflejado a la salida con una apertura del 50% de la válvula, por lo que el voltaje de salida se encuentra a la mitad de su valor.
Fig. 4.4 Respuesta del controlador cascada con la temperatura por debajo del valor ideal.
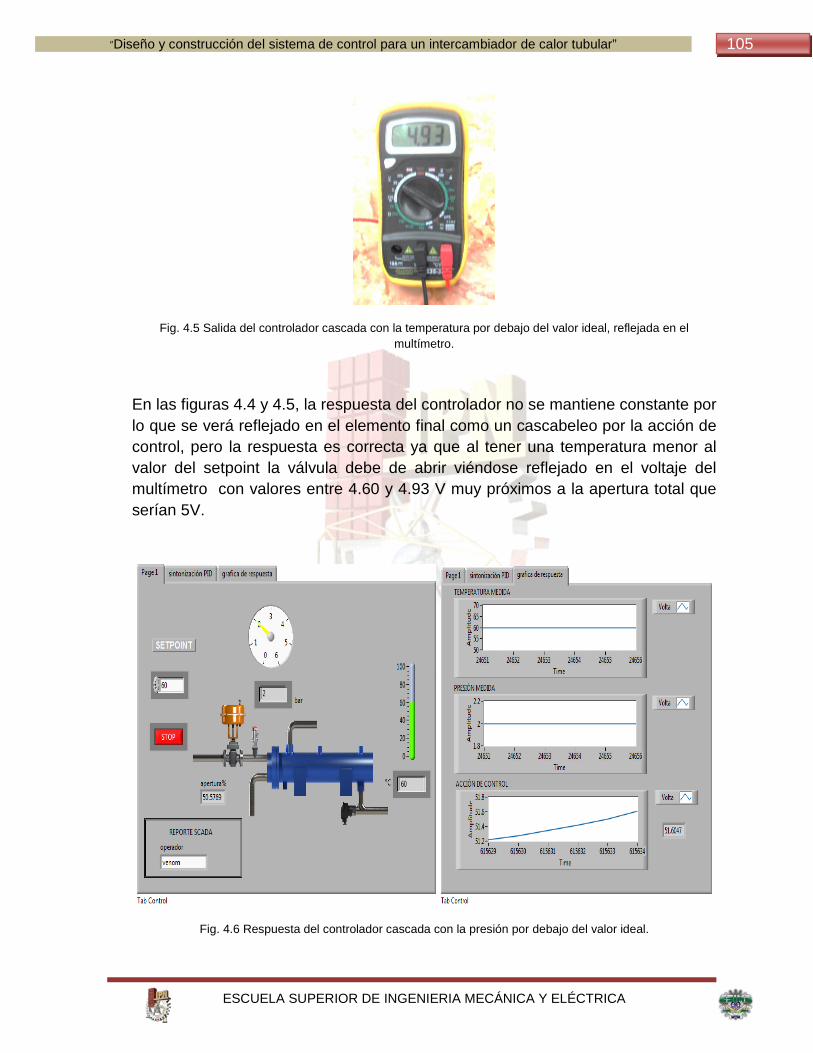
ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
105 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
Fig. 4.5 Salida del controlador cascada con la temperatura por debajo del valor ideal, reflejada en el multímetro.
En las figuras 4.4 y 4.5, la respuesta del controlador no se mantiene constante por lo que se verá reflejado en el elemento final como un cascabeleo por la acción de control, pero la respuesta es correcta ya que al tener una temperatura menor al valor del setpoint la válvula debe de abrir viéndose reflejado en el voltaje del multímetro con valores entre 4.60 y 4.93 V muy próximos a la apertura total que serían 5V.
Fig. 4.6 Respuesta del controlador cascada con la presión por debajo del valor ideal.

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
106 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
Fig. 4.7 Salida del controlador cascada con la presión por debajo del valor ideal, reflejada en el multímetro.
En las figuras4.6 y 4.7 la respuesta es correcta ya que al tener una disminución en la presión la válvula tiene que abrir para hacer esta corrección antes de que afecte de manera directa la temperatura del producto, aunque la apertura no tiene que ser tan drástica como en la temperatura, por ello el valor en el multímetro es mayor que al valor ideal pero no esta tan próximo al valor máximo de 5V que sería el cierre total de la válvula.
Fig. 4.8 Respuesta del controlador cascada con la temperatura superior al valor ideal.

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
107 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
Fig. 4.9 Salida del controlador cascada con la temperatura superior al valor ideal, reflejada en el multímetro.
Como se observa en las figuras 4.8 y 4.9, la respuesta del controlador no se mantiene constante, aunque la acción de control es la correcta ya que al tener el valor de la temperatura superior al valor del setpoint esta debe de cerrar la válvula lo que se ve reflejado en el multímetro como un cierre total ya que marca a la salida del controlador 0V.
Fig. 4.10 Respuesta del controlador cascada con la presión superior al valor ideal.

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
108 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
Fig. 4.11 Salida del controlador cascada con la presión superior al valor ideal, reflejada en el multímetro.
Como se observa en las figuras 4.10 y 4.11 la acción de control es la correcta ya que al tener una variación elevada en el valor de la presión esta debe de cerrar la válvula lo que se ve reflejado en el multímetro como un valor menor al ideal pero no tan bajo como el valor del cierre total esto se ve reflejado en el multímetro con un valor de 2.16V.
4.2 Respuesta del controlador difuso.
Para trabajar con el controlador difuso de manera ideal no es necesario hacer tantas consideraciones como en el controlador en cascada, pero para poder apreciar la respuesta del controlador difuso la temperatura y la presión medidas se pondrán en cada una de las variables lingüísticas asignadas para estas (normal, alta y baja) y así poder apreciar el comportamiento del controlador en estos parámetros, mostrados en las figuras 4.12, 4.14, 4.16, 4.18 y 4.20. Para la salida del controlador está se estableció igual que en el controlador en cascada de 0 – 5V, por lo cual para poder apreciar su comportamiento se utilizó un multímetro donde se verá el comportamiento de la salida del controlador como se observa en las figuras 4.13, 4.15, 4.17, 4.19 y 4.21.
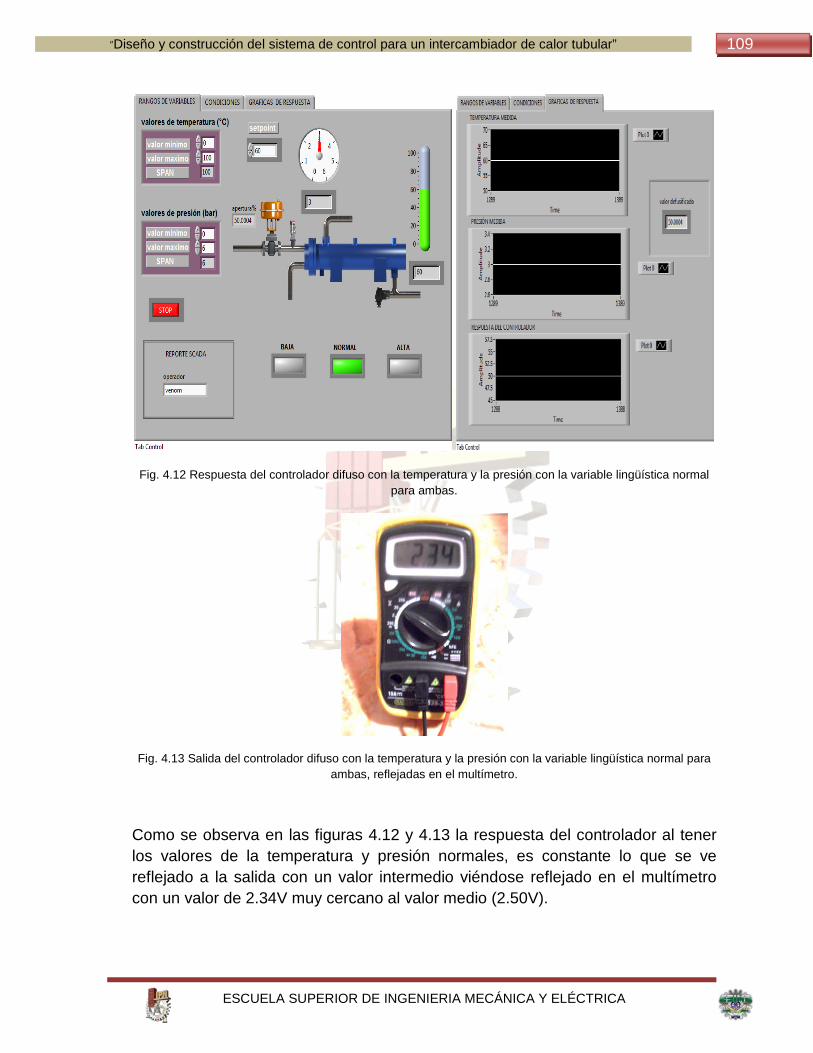
ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
109 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
Fig. 4.12 Respuesta del controlador difuso con la temperatura y la presión con la variable lingüística normal para ambas.
Fig. 4.13 Salida del controlador difuso con la temperatura y la presión con la variable lingüística normal para ambas, reflejadas en el multímetro.
Como se observa en las figuras 4.12 y 4.13 la respuesta del controlador al tener los valores de la temperatura y presión normales, es constante lo que se ve reflejado a la salida con un valor intermedio viéndose reflejado en el multímetro con un valor de 2.34V muy cercano al valor medio (2.50V).

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
110 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
Fig. 4.14 Respuesta del controlador difuso con la temperatura baja.
Fig. 4.15 Salida del controlador difuso con la temperatura baja, reflejada en el multímetro.
Como se observa en las figuras 4.14 y 4.15 la respuesta del controlador correcta ya que el tener la temperatura baja el controlador manda una señal de apertura que se observa constante y no es tan drástica como la que se observó en el controlador en cascada con estas condiciones, viendo reflejada la salida con un valor de 3.27V en el multímetro.

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
111 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
Fig. 4.16 Respuesta del controlador difuso con la presión baja.
Fig. 4.17 Salida del controlador difuso con la presión baja, reflejada en el multímetro.
Al igual que en las figuras anteriores en las figuras 4.16 y 4.17 la respuesta del controlador es correcta ya que el tener un descenso en la presión el controlador manda una señal de apertura no tan amplia como en la temperatura pero si lo suficiente como para lograr la corrección en la presión, viendo reflejada la salida del controlador en el multímetro con un valor de 2.77V.

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
112 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
Fig. 4.18 Respuesta del controlador difuso con la temperatura alta.
Fig. 4.19 Salida del controlador difuso con la temperatura alta, reflejada en el multímetro.
Como se observa en las figuras 4.18 y 4.19 la respuesta del controlador es la correcta porque al tener el valor de la temperatura alta, el controlador manda una señal de cierre no tan amplia como la que se observa en el controlador en cascada, pero si lo suficiente como para lograr la corrección en el valor de la temperatura, viéndose reflejada la salida del controlador en el multímetro con un valor de 1.17V en el multímetro.

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
113 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
Fig. 4.20 Respuesta del controlador difuso con la presión alta.
Fig. 4.21 Salida del controlador difuso con la presión alta, reflejada en el multímetro.
Al igual que en las figuras anteriores en las figuras 4.20 y 4.21 la respuesta del controlador es la ideal ya que el tener un incremento en la presión el controlador manda una señal de cierre no tan amplia como en la temperatura pero si lo suficiente como para lograr la corrección en la presión, viendo reflejada la salida del controlador en el multímetro con un valor de 2.08V.

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
114 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
Como se puede apreciar en las figuras anteriores el controlador difuso responde mejor al haber una disminución o un incremento en los valores medidos en el proceso (temperatura y presión), ya que su respuesta es más suave y constante a diferencia de la respuesta del controlador en cascada, porque a pesar de tener una acción de control correcta esta tiene muchas variaciones por la ley de control lo que puede provocar un desgaste más rápido en nuestro elemento final de control, lo que se evita al utilizar el controlador difuso.

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
115 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
CAPITULO 5 DIAGRAMA GANTT Y ESTUDIO ECONÓMICO.
Los siguientes diagramas de actividades proporcionan una descripción gráfica y la programación temporal de todas las actividades en base a este proyecto. Este diagrama es la representación gráfica del tiempo que dedicamos a cada una de las tareas de manera concreta, siendo útil para mostrar la relación que existe entre el tiempo dedicado a una tarea.
Cada tarea es representada por una línea de color en cada una de las filas del diagrama, mientras que las columnas representan el tiempo (días, semanas y horas) como se muestra a continuación en las siguientes tablas:
5.1 Diagrama de actividades.
5.1 Tabla de actividades
2012 2013
Actividades 30 32 34 36 38 40 42 44 46 48 50 52 2 4 6 8 10 12 14 16 18
Investigación documental.
Organización de la información.
Planteamiento del problema.
Desarrollo de la propuesta de solución
Implementación y experimentación
Obtención y análisis de resultados.
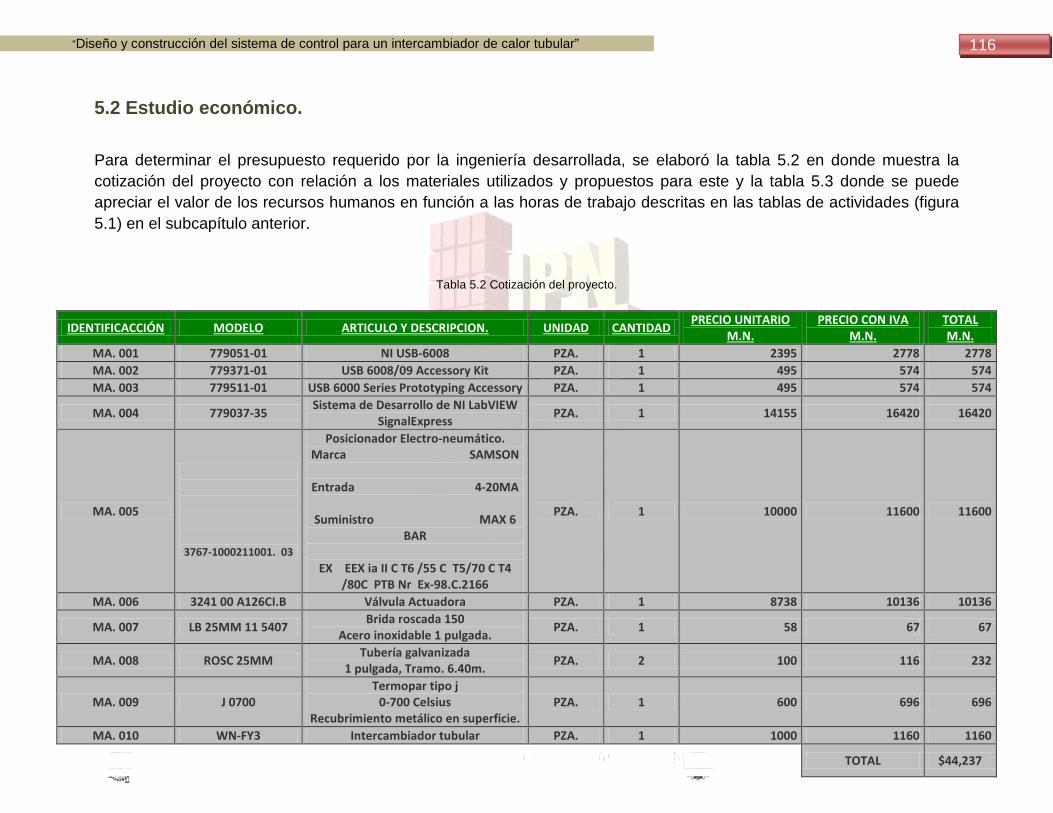
ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
116 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
5.2 Estudio económico.
Para determinar el presupuesto requerido por la ingeniería desarrollada, se elaboró la tabla 5.2 en donde muestra la cotización del proyecto con relación a los materiales utilizados y propuestos para este y la tabla 5.3 donde se puede apreciar el valor de los recursos humanos en función a las horas de trabajo descritas en las tablas de actividades (figura 5.1) en el subcapítulo anterior.
Tabla 5.2 Cotización del proyecto.
IDENTIFICACCIÓN MODELO ARTICULO Y DESCRIPCION. UNIDAD CANTIDAD PRECIO UNITARIO M.N.
PRECIO CON IVA M.N.
TOTAL M.N.
MA. 001 779051-01 NI USB-6008 PZA. 1 2395 2778 2778 MA. 002 779371-01 USB 6008/09 Accessory Kit PZA. 1 495 574 574 MA. 003 779511-01 USB 6000 Series Prototyping Accessory PZA. 1 495 574 574
MA. 004 779037-35 Sistema de Desarrollo de NI LabVIEW SignalExpress PZA. 1 14155 16420 16420
MA. 005
3767-1000211001. 03
Posicionador Electro-neumático. Marca SAMSON
Entrada 4-20MA
Suministro MAX 6
BAR
EX EEX ia II C T6 /55 C T5/70 C T4 /80C PTB Nr Ex-98.C.2166
PZA. 1 10000 11600 11600
MA. 006 3241 00 A126CI.B Válvula Actuadora PZA. 1 8738 10136 10136
MA. 007 LB 25MM 11 5407 Brida roscada 150 Acero inoxidable 1 pulgada. PZA. 1 58 67 67
MA. 008 ROSC 25MM Tubería galvanizada 1 pulgada, Tramo. 6.40m. PZA. 2 100 116 232
MA. 009 J 0700 Termopar tipo j
0-700 Celsius Recubrimiento metálico en superficie.
PZA. 1 600 696 696
MA. 010 WN-FY3 Intercambiador tubular PZA. 1 1000 1160 1160
TOTAL $44,237

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
117 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
Tabla 5.3 Cotización de los recursos humanos de proyecto
Agregar quien realiza la instalación
Debido a que el módulo propuesto en éste trabajo es un primer y único prototipo el costo para la elaboración del mismo será elevado ya que el precio de los productos se manejaron por unidad, además de que se han considerado los precios de los recursos humanos con relación a los precios estándares en el mercado.
NOMBRE Y PUESTO UNIDAD CANTIDAD PRECIO UNITARIO USD. PRECIO FINAL USD.
Ing. Control y diseño. Hr. 40 80 x 1hr. 3,200
Ing. Dibujante y programador.
Hr. 30 50 x 1hr. 1,500
Ing. Instrumentista y Administrador. Hr. 80 80 x 1hr. 6,400
TOTAL 11,100

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
118 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
CONCLUSIONES
Este trabajo presenta el desarrollo de un sistema de control basado en dos teorías que son: control en cascada y lógica difusa. El desarrollo de los controladores provee de un resultado de carácter general que permite su incorporación a otros tipos de procesos mediante ligeras modificaciones a los parámetros de los controladores, tales modificaciones se pueden realizar desde la interfaz hombre máquina que se realizó y la cual es de fácil acceso y está organizada de forma amigable y minimalista sin dejar de lado el hecho de que provea la información necesaria y pertinente para el operador y el sistema de adquisición de datos.
El control en cascada tiene un resultado satisfactorio para el control de temperatura del intercambiador y permite la modificación de la sintonización a través de la interfaz; el controlador difuso proporciona una técnica alternativa de control para este mismo proceso y permite conocer una forma heurística de control basado en variables de tipo lingüísticas que hacen más natural el control y entendimiento del proceso. Pese a que el controlador difuso no presenta un desempeño significativamente mejor que el control en cascada cabe mencionar que este control difuso no presenta pequeñas variaciones (chatering) como el otro tipo de control, lo cual evita el desgaste de la válvula, ampliando su vida útil y reducción del mantenimiento.
Los resultados obtenidos son satisfactorios y fácilmente reproducibles y sirven como base para el desarrollo de la planta prototipo del laboratorio de control de procesos.

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
119 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
RECOMENDACIONES PARA TRABAJOS FUTUROS
Se propone la implementación con la planta piloto y el análisis de resultados de experimentación para corridas con diferentes condiciones del proceso, así mismo se prevé este controlador pueda ser instalado dentro de un gabinete que cumpla con las especificaciones para el proceso y cumpla con las normativas presentadas en este trabajo.
Puede desarrollarse también la implementación netamente electrónica de esta propuesta mediante una tarjeta FPGA y tener un control sin conexión a la computadora.
Todo trabajo es perfectible, sin duda hay algunas adecuaciones que se pueden hacer para mejorar esta propuesta, pero las antes mencionadas son en el corto plazo.

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
120 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
BIBLIOGRAFÍA.
[1] Antonio Visiolini, Ed. Springer, 2006, Practica l PID Control.
[2] Guerrero Chango Pablo Cesar, López Chango Julio Alberto, Quito Febrero 2009, DISEÑO Y CONSTRUCCIÓN DE UN SISTEMA DE CONTROL DE NIVEL POR DIFERENCIAL DE PRESIÓN. Obtención de título de tecnólogo, Quito Perú.
[3] DISEÑO DE EQUIPOS E INSTALACIONES, TEMA 7, INTERCAMBIADORES DECALOR, p. 2-3.
[4] O. A. Jaramillo, Centro de Investigación en Energía, Universidad Nacional Autónoma de México, noviembre /20/ 2007INTERCAMBIADORES DE CALOR, p.3-8.
[5] Enrique José Caroli Valvulas: Instrumentación y control <http://www.monografias.com/trabajos11/valvus/valvus.shtml> [acceso 7 / 03 / 2013]
[6] http://www.ecured.cu/index.php/Transmisor [acceso 7 / 03 / 2013]
[7] Flexilatina de Colombia, 2011, Transmisores de presión <http://www.flexilatina.com/transmisores-de-presion.html> [acceso 20 / 04 / 2013]
[8] Termopares <http://www.industriaynegocios.cl/Academicos/AlexanderBorger/Docts%20Docencia/Seminario%20de%20Aut/trabajos/Trabajos%202005/Temperatura/termopares.htm> [acceso 5 / 01 /2013]
[9] Adhz, 17 agosto 2011, Efecto Seebeck <http://clubensayos.com/Tecnolog%C3%ADa/Efecto-Seebeck/43165.html> [acceso 1 / 03 / 2013]
[10] Boyer S.A., Editorial: Research Triangle Park
SCADA: Supervisory Control and Data Adquisition,
[11] Jorge Cosco Grimaney (2011) ESTRATEGIAS DE CONTROL, Universidad nacional de ingeniería Lima Perú. [12] Benjamín C. Kuo, Editorial: PEARSON, Séptima Edición año 2009. Sistemas de Control Automático
[13] Smith-Corripio, Editorial Limusa, año 1991.Control automático de procesos.
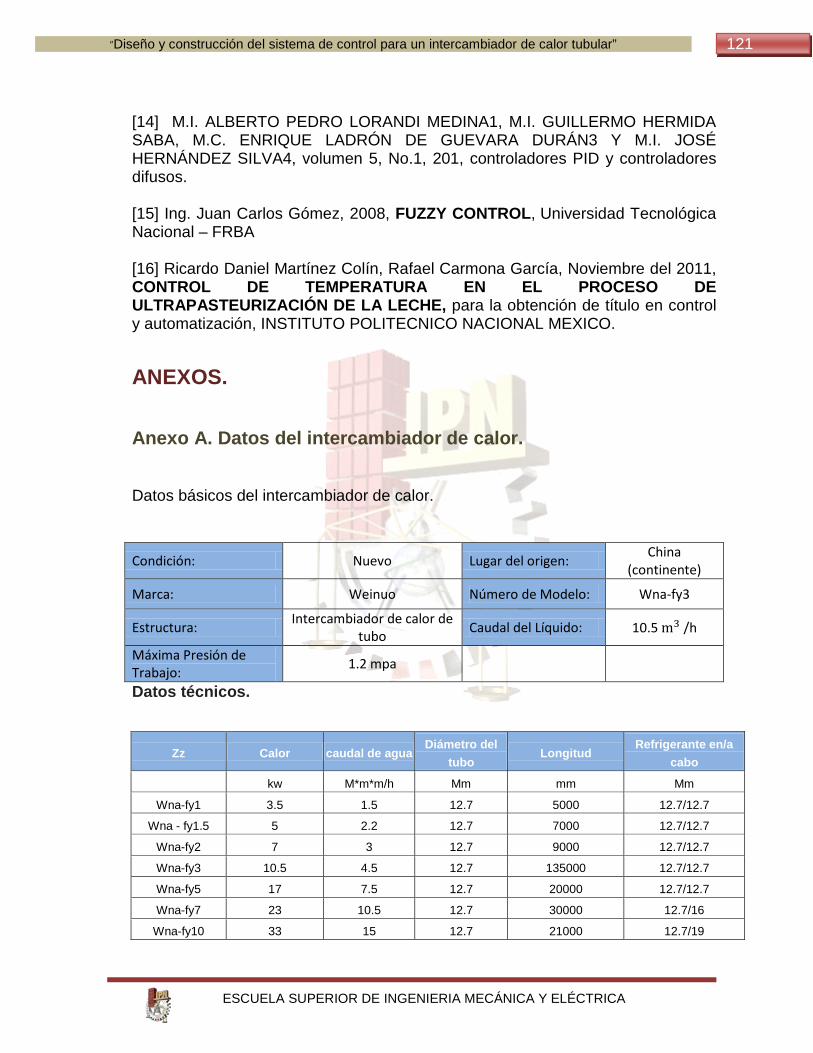
ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
121 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
[14] M.I. ALBERTO PEDRO LORANDI MEDINA1, M.I. GUILLERMO HERMIDA SABA, M.C. ENRIQUE LADRÓN DE GUEVARA DURÁN3 Y M.I. JOSÉ HERNÁNDEZ SILVA4, volumen 5, No.1, 201, controladores PID y controladores difusos. [15] Ing. Juan Carlos Gómez, 2008, FUZZY CONTROL, Universidad Tecnológica Nacional – FRBA [16] Ricardo Daniel Martínez Colín, Rafael Carmona García, Noviembre del 2011, CONTROL DE TEMPERATURA EN EL PROCESO DE ULTRAPASTEURIZACIÓN DE LA LECHE, para la obtención de título en control y automatización, INSTITUTO POLITECNICO NACIONAL MEXICO.
ANEXOS.
Anexo A. Datos del intercambiador de calor.
Datos básicos del intercambiador de calor.
Datos técnicos.
Zz Calor caudal de agua Diámetro del
tubo Longitud
Refrigerante en/a cabo
kw M*m*m/h Mm mm Mm
Wna-fy1 3.5 1.5 12.7 5000 12.7/12.7
Wna - fy1.5 5 2.2 12.7 7000 12.7/12.7
Wna-fy2 7 3 12.7 9000 12.7/12.7
Wna-fy3 10.5 4.5 12.7 135000 12.7/12.7
Wna-fy5 17 7.5 12.7 20000 12.7/12.7
Wna-fy7 23 10.5 12.7 30000 12.7/16
Wna-fy10 33 15 12.7 21000 12.7/19
Condición: Nuevo Lugar del origen: China (continente)
Marca: Weinuo Número de Modelo: Wna-fy3
Estructura: Intercambiador de calor de tubo Caudal del Líquido: 10.5 m3 /h
Máxima Presión de Trabajo: 1.2 mpa

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
122 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
Datos de operación.
Anexo B. Datos del transmisor de presión.
Datos básicos del transmisor de presión.
Características del producto
Sensor combinado para diagnóstico de bombas y control de presión
Conexión por conector
Conexión de proceso: para adaptador Aseptoflex
para una perfecta estanqueidad
Carcasa giratoria en 350°
Punto cero y margen ajustables
Función programable
2 salidas OUT1 = diagnóstico de bombas OUT2 = control de presión
Display alfanumérico de 4 dígitos
Rango de medición: -1,00...10,00 bar / -14,5...145,0 psi / -0,100...1,000 MPa
Aplicación
Aplicación
Tipo de presión: presión relativa Aplicaciones asépticas, fluidos viscosos y líquidos con gran contenido de
partículas sólidas Fluidos líquidos y gaseosos
Resistencia a la presión 50 bar 725 psi 5 MPa
Presión de rotura mín. 150 bar 2175 psi 15 MPa
Temperatura del fluido [°C] -25...125 (145 max. 1h)
Datos eléctricos
Alimentación DC PNP
Condiciones aplicables
Presión máxima Rango de temperatura de operación Medio (Liquido)
En titanio 4.5Mpa -20°C~80°C R22/R134a/R407c/R410a
Dentro de la carcasa 0.4—1Mpa 0°C~50°C(PVC) 0°C~70°C(PPR) -15°C~120
(aceroinoxidable) Agua/Agua de mar/
Anticongelante

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
123 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
Tensión de alimentación [V] 18...32 DC
Consumo [mA] < 50
Resistencia de aislamiento [MΩ] > 100 (500 V DC)
Clase de protección III
Protección contra inversiones de polaridad Sí
Salidas
Salida
2 salidas OUT1 = diagnóstico de bombas
OUT2 = control de presión
Función de salida
1 x normalmente abierto / normalmente cerrado programable + 1 x normalmente abierto / normalmente cerrado programable o 1 x analógica
(4...20 / 20...4 mA, graduada)
Corriente de salida [mA] 250
Caída de tensión [V] < 2
Protección contra cortocircuitos Pulsada
Resistente a sobrecargas Sí
Frecuencia de conmutación [Hz] 350 (OUT2)
Salida analógica I: 4...20 mA (Ineg: 20...4 mA)
Carga máx. [Ω] I / Ineg: max. (Ub - 10 V) x 50
Rango de configuración / medición
Rango de medición -1,00...10,00 bar -14,5...145,0 psi -0,100...1,000 MPa
Margen de ajuste
Punto de consigna alto, SP -0,98...10,00 bar -14,2...145,0 psi -0,098...1,000 MPa
Punto de consigna bajo, rP -1,00...9,98 bar -14,5...144,7 psi -0,100...0,998 MPa
Punto inicial analógico, ASP -1,00...7,25 bar -14,5...105,1 psi -0,100...0,725 MPa
Punto final analógico AEP 1,50...10,00 bar 21,8...145,0 psi 0,150...1,000 MPa
en intervalos de 0,01 bar 0,1 psi 0,001 MPa
Configuración de fábrica
OU1 = Fnc; OU2 = I ASP = 0,00 bar; AEP = 10,00 bar

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
124 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
Anexo C. Datos de la válvula de control.
Hoja de datos para VÁLVULA de control.
GENERAL 1. FV-001 2. No. DE LINEA AG-001 3. CEDULA Ó ESPESOR 40 4. DTI 5. MODO DE CONTROL MODULANTE
CUERPO 6. TIPO DE CUERPO GLOBO BOLA 7. TAMAÑO DEL CUERPO PUERTO 1 plg 8. GUÍAS No. DE
PÚERTOS POR
PROVEEDOR POR
PROVEEDOR
9. CONEXIONES Y RÉGIMEN ROSCADA 10. MATERIAL DEL CUERPO AC. AL CARBÓN 11. MATERIAL DE EMPAQUES PTFE 12. LUBRICADOR VALV. DE
AISLAMIENTO ---- ---- ---- ----
13. TIPO DE BONETE BRIDADO 14. FORMA DE INTERIORES IGUAL PORCENTAJE 15. EL FLUJO TIENDE A POR PROVEEDOR 16. MATERIAL DE INTERIORES AC. INOXIDABLE 316 (NOTA 1) 17. ASIENTO / TAPÓN /
BOLA MAT. FLECHA AC.
INOXIDABLE 316
(NOTA 1)
AC. INOXIDABLE
(NOTA 1)
18. CLASE CIERRE ANSI IV ANSI IV 19. NIVEL MÁXIMO DE RUIDO dB @ 1m 85 (NOTA 3) 20. DISEÑO A PRUEBA DE FUEGO ---- ----
ACTUADOR 21. MARCA SAMSON POR PROVEEDOR 22. MODELO 3277 POR PROVEEDOR 23. TIPO DIAFRAGMA / RESORTE PISTÓN 24. CIERRA A (PSIG) ABRE A (PSIG) 0 25. POSICIÓN A FALLA 26. TIPO DE VOLANTE ---- --- 27. LOCALIZACIÓN DEL VOLANTE ---- ----
POSICIONADOR 28. SEÑAL DE ENTRADA DEL CONTROLADOR ---- 29. MARCA/MODELO SAMSON 3767 ---- 30. FILTRO
REG. MANÓMETROS
BY PASS SI SI NO ---- ---- ----
31. SEÑAL DE SALIDA HART ---- 32. PRESIÓN DE SUMINISTRO NEUMÁTICO 90 PSIG ----
CONDICIONES DE OPERACIÓN 33. FLUIDO vapor
34. ESTADO LÍQUIDO 35. UNIDADES DE FLUJO (GAS) - 36. UNIDADES DE FLUJO (LIQUIDO) 37. FLUJO MAX. MIN. 3.6 0.9 38. FLUJO MAX. NORMAL 3.6 3.0 39. PRESION DE ENTRADA
MIN. Kg/cm2 ΔP
40. PRESION DE ENTRADA MAX. Kg/cm2
ΔP MAX
41. MÁXIMA ΔP AL CIERRE 42. TEMPERATURA MAX. NORMAL °C 90 20

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
125 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
°C 43. GRAV. ESPEC. OPER.
GAS GRAV. ESPEC. OPER. LIQ.
1
44. PESO MOLEC. (GAS) PESO MOLEC. (LIQ.)
18
45. VISC. OPER. Cp (LIQ) % VAPORIZACIÓN 1 - 46. % SOBRECAL. % SOLIDOS - 47. PRES. VAPOR Kg/cm2
ABS PRES. CRITICA Kg/cm2
-
48. VISC. OPER. (cP) (GAS) - 49. FACTOR DE COMPRESIBILIDAD Z - 50. Cp/Cv - 51. NIVEL DE RUIDO CALCULADO dB 52. Cv(MAX) CALCULADO 53. Cv(NOR) CALCULADO 54. Cv VÁLVULA --- 12 55. FABRICANTE POR PROVEEDOR POR PROVEEDOR 56. MODELO POR PROVEEDOR POR PROVEEDOR NOTAS
1. DEBE CUMPLIR CON NORMA NACE MR0175/ISO 15156 MÁS RECIENTE EDICIÓN 2. EN CASO DE QUE LA VÁLVULA PRESENTE PROBLEMAS DE CAVITACIÓN O FLASHEO, EL PROVEEDOR DEBERÁ SUMINISTRAR LOS MATERIALES Y ACCESORIOS INTERNOS NECESARIOS PARA ATENUARLOS. 3. EN CASO DE QUE LA VÁLVULA REBASE LOS LIMITES DE RUIDO PERMISIBLES, EL PROVEEDOR DEBERÁ SUMINISTRAR LOS ACCESORIOS INTERNOS NECESARIOS PARA ATENUARLO.

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
126 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
Anexo D. Especificaciones DAQ NI USB-6008.
Tarjeta de adquisición de datos NI USB-6008.

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
127 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
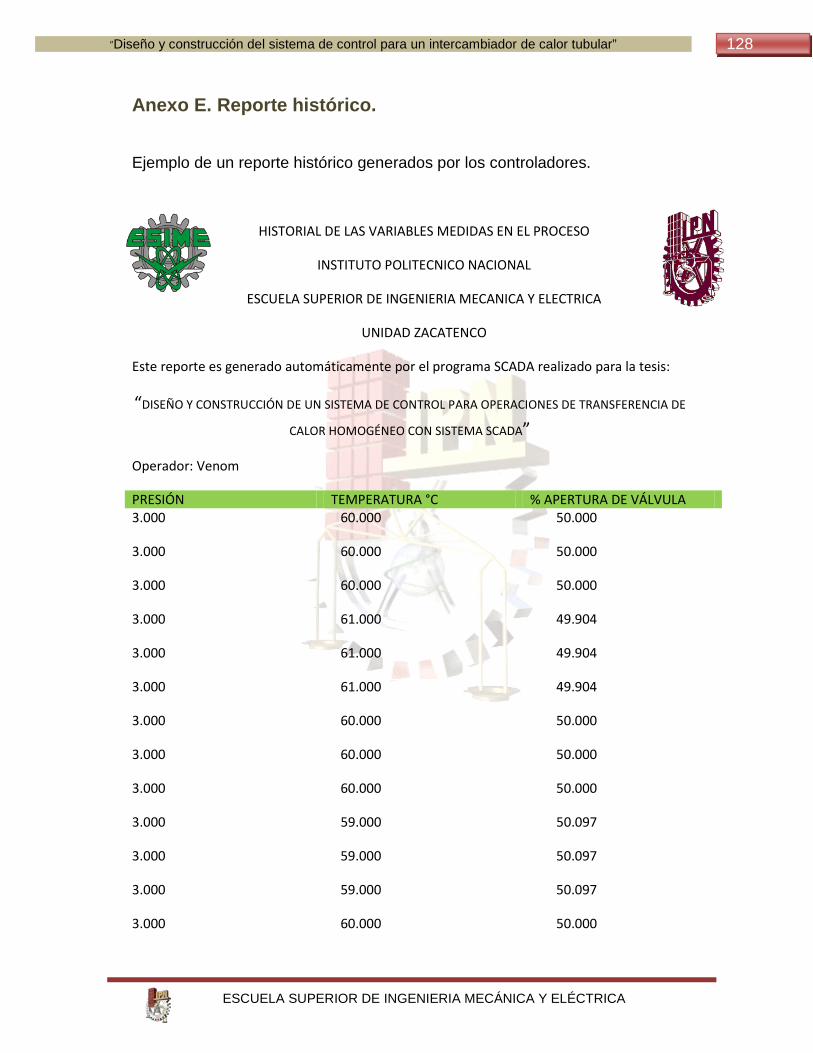
ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
128 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
Anexo E. Reporte histórico.
Ejemplo de un reporte histórico generados por los controladores.
HISTORIAL DE LAS VARIABLES MEDIDAS EN EL PROCESO
INSTITUTO POLITECNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERIA MECANICA Y ELECTRICA
UNIDAD ZACATENCO
Este reporte es generado automáticamente por el programa SCADA realizado para la tesis:
“DISEÑO Y CONSTRUCCIÓN DE UN SISTEMA DE CONTROL PARA OPERACIONES DE TRANSFERENCIA DE
CALOR HOMOGÉNEO CON SISTEMA SCADA”
Operador: Venom
PRESIÓN TEMPERATURA °C % APERTURA DE VÁLVULA 3.000 60.000 50.000
3.000 60.000 50.000
3.000 60.000 50.000
3.000 61.000 49.904
3.000 61.000 49.904
3.000 61.000 49.904
3.000 60.000 50.000
3.000 60.000 50.000
3.000 60.000 50.000
3.000 59.000 50.097
3.000 59.000 50.097
3.000 59.000 50.097
3.000 60.000 50.000

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
129 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
Anexo F. Diagramas de programación de los controladores en LabView.
Programación del controlador cascada.

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
130 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
Programación del controlador difuso.

ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
131 “Diseño y construcción del sistema de control para un intercambiador de calor tubular”
Anexo G. DTI general del proceso de intercambio de calor.