implementación de filtros digitales - tecnun.es digital/tema10.pdf · digital signal processors...
TRANSCRIPT

1
5º Curso-Tratamiento Digital de Señal
Capítulo 10 : Implementación de Filtros Digitales17/11/99
ImplementaciónImplementación de de Filtros Digitales Filtros Digitales
❒❒ RealizaciónRealización de de Filtros Digitales Filtros Digitales
❒❒ EfectosEfectos de de Cuantización Cuantización
❒❒ ImplementaciónImplementación Hardware de Hardware de Filtros Digitales Filtros Digitales
❒❒ Digital Signal Processors (DSP)Digital Signal Processors (DSP)
2
5º Curso-Tratamiento Digital de Señal
Capítulo 10 : Implementación de Filtros Digitales17/11/99
RealizaciónRealización de de Filtros Digitales Filtros Digitales
❒ Hay dos formas de realizar filtros digitales: Software oHardware. En los dos casos deberemos hacer un diagrama conlas operaciones a realizar. En software se habla de undiagrama de flujo, mientras que en hardware es un diagramade bloques, que especifica los elementos del circuito y susinterconexiones.
❒ Una correcta elección del diagrama de bloques puede optimi-zar significativamente las prestaciones de la realización(tiempo de computación, memoria necesaria, minimizar losefectos de cuantización, etc).
3
5º Curso-Tratamiento Digital de Señal
Capítulo 10 : Implementación de Filtros Digitales17/11/99
RealizaciónRealización de de Filtros Digitales Filtros Digitales
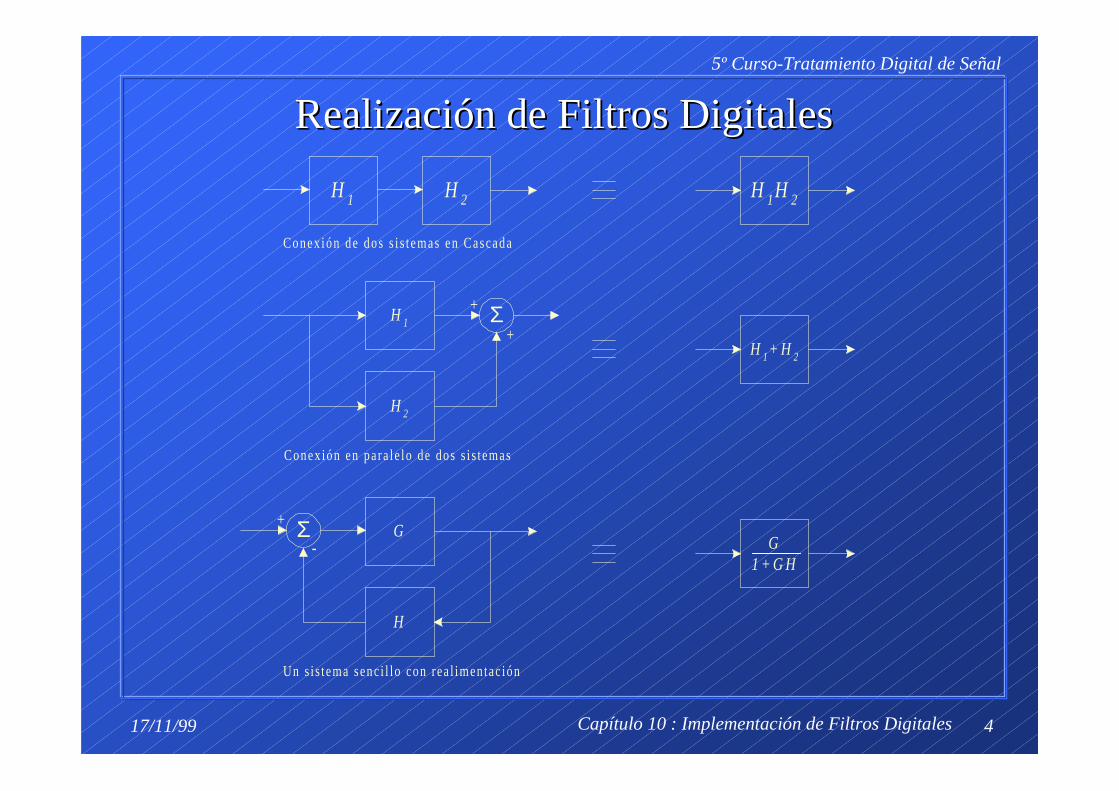
❒ Veamos algunas propiedades de los diagramas de bloques◆ Conexiones en cascada: La función de Transferencia global de una
conexión en cascada es el producto de las funciones de Transferenciaindividuales.
◆ Conexiones en paralelo: La función de Transferencia global de unaconexión en paralelo es la suma de las funciones de Transferenciaindividuales.
◆ Conexión en realimentación: La salida se realimenta en la entradadirectamente o a través de otros subsistema. La función deTransferencia global viene dada por la relación (ver figura):
( ) ( )( ) ( )
H zG z
G z H zT =+1
4
5º Curso-Tratamiento Digital de Señal
Capítulo 10 : Implementación de Filtros Digitales17/11/99
RealizaciónRealización de de Filtros Digitales Filtros Digitales
H 1 H 2 H 1H 2
H 1
H 2
ΣH 1+ H 2
+
+
GΣ+
-
H
G1 + G H
Conex ión de dos s is temas en Cascada
Conex ión en para le lo de dos s is temas
Un s is tema senc i l lo con rea l imentac ión

5
5º Curso-Tratamiento Digital de Señal
Capítulo 10 : Implementación de Filtros Digitales17/11/99
RealizaciónRealización de de Filtros Digitales Filtros Digitales
❒ Los filtros digitales pueden realizarse usando elementos co-rrespondientes a las operaciones de multiplicación, adición yalmacenaje de datos.
❒ El almacenaje de un dato significa retrasar su uso una canti-dad normalmente igual al periodo de muestreo. Este retraso serepresenta mendiante z-1 (retraso de una unidad), z-2 (dosunidades, etc).
Ax[n ] A·x [n ] z-1x [n ] x [n -1 ]
Σ+
+–
x [n ]
y [n ]
x [n ]±y[n ]
Elemen to Mu l t i p l i cador E l e m e n t o A l m a c e n a d o r
E l e m e n t o S u m a d o r

6
5º Curso-Tratamiento Digital de Señal
Capítulo 10 : Implementación de Filtros Digitales17/11/99
RealizaciónRealización de de Filtros Digitales Filtros Digitales❒ Filtros FIR (MA): Son filtros no recursivos cuya función de Transferencia
HMA(z) y su correspondiente ecuación diferencia y[n] son de la forma,
Este filtro puede realizarse utilizando el diagrama de la figura
( ) [ ] [ ] [ ] [ ]H z B B z B z y n B x n B x n B x n MMA MM
M= + + + = + − + + −− −0 1
10 1 1� �
B0
z-1
Σ
Σ
Σ
++
++
++
++
B1
B2
BM
z-1
z-1
x [n ] y [n ]
7
5º Curso-Tratamiento Digital de Señal
Capítulo 10 : Implementación de Filtros Digitales17/11/99
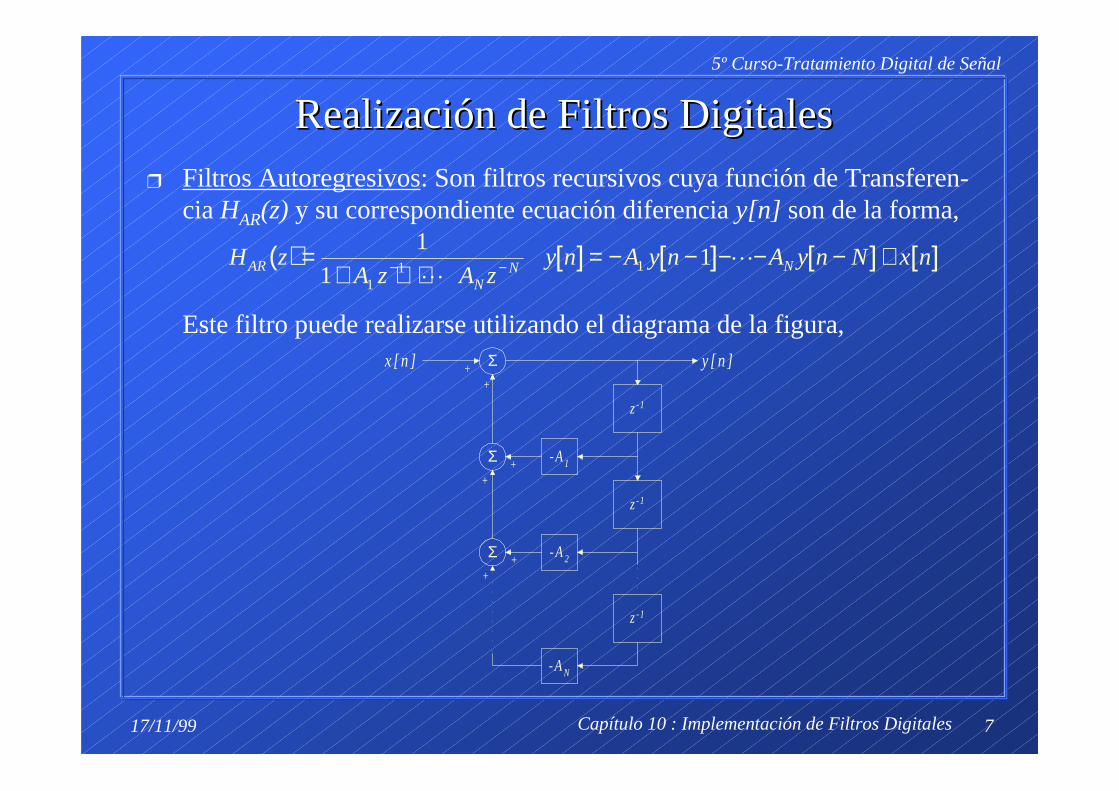
RealizaciónRealización de de Filtros Digitales Filtros Digitales❒ Filtros Autoregresivos: Son filtros recursivos cuya función de Transferen-
cia HAR(z) y su correspondiente ecuación diferencia y[n] son de la forma,
Este filtro puede realizarse utilizando el diagrama de la figura,
( ) [ ] [ ] [ ] [ ]H zA z A z
y n A y n A y n N x nARN
N N=+ + +
= − − − − − +− −1
11
11 1�
�
Σ
z-1
z-1
-A1Σ
-A2Σ
z-1
-AN
++
++
+x [n ] y [n ]+
8
5º Curso-Tratamiento Digital de Señal
Capítulo 10 : Implementación de Filtros Digitales17/11/99
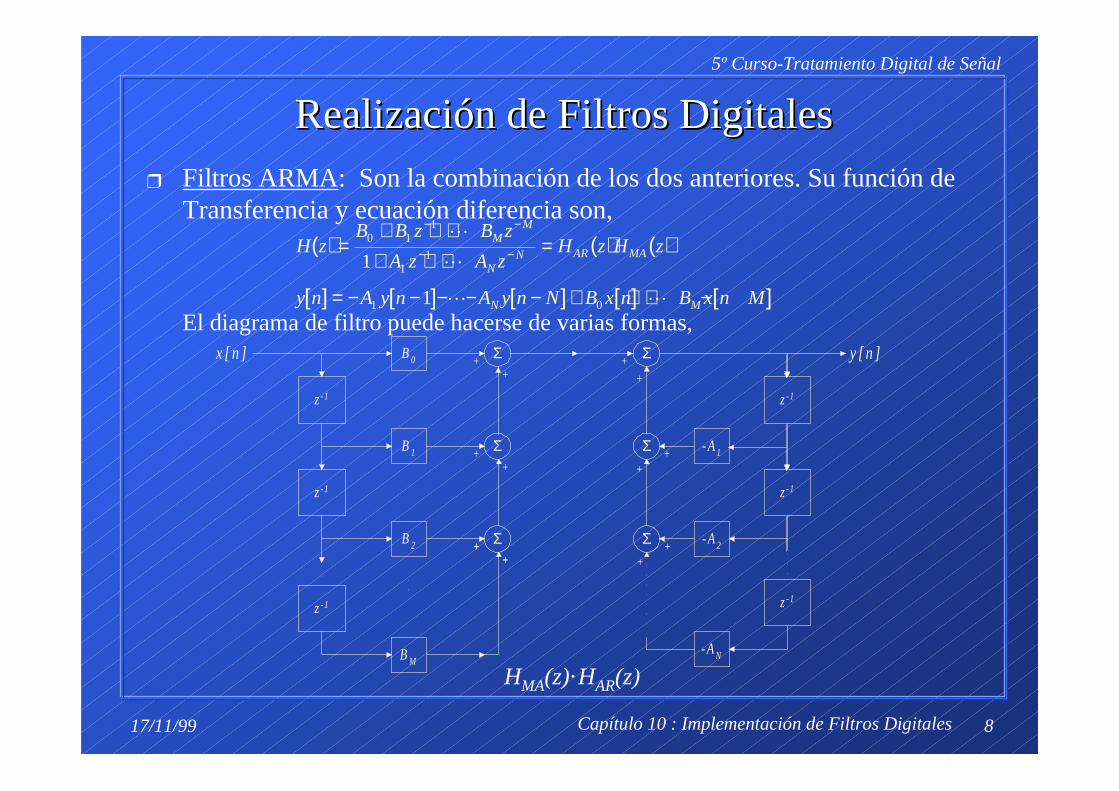
RealizaciónRealización de de Filtros Digitales Filtros Digitales❒ Filtros ARMA: Son la combinación de los dos anteriores. Su función de
Transferencia y ecuación diferencia son,
El diagrama de filtro puede hacerse de varias formas,
( ) ( ) ( )
[ ] [ ] [ ] [ ] [ ]
H zB B z B z
A z A zH z H z
y n A y n A y n N B x n B x n M
MM
NN AR MA
N M
=+ + +
+ + +=
= − − − − − + + + −
− −
− −0 1
1
11
1 0
1
1
�
�
� �
B0
z-1
Σ
Σ
Σ
++
++
++
++
B1
B2
BM
z-1
z-1
x [ n ] Σ
z-1
z-1
-A1Σ
-A2Σ
z-1
-AN
++
++
+ y [n ]+
HMA(z)·HAR(z)
9
5º Curso-Tratamiento Digital de Señal
Capítulo 10 : Implementación de Filtros Digitales17/11/99
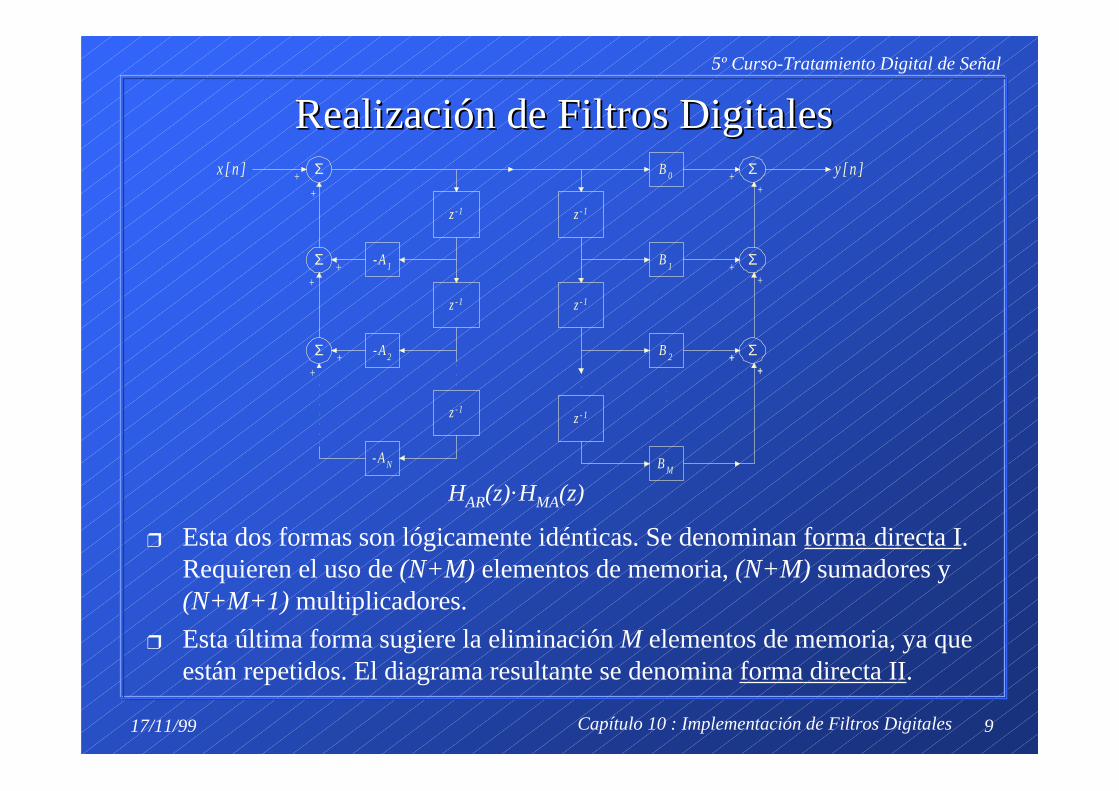
RealizaciónRealización de de Filtros Digitales Filtros Digitales
❒ Esta dos formas son lógicamente idénticas. Se denominan forma directa I.Requieren el uso de (N+M) elementos de memoria, (N+M) sumadores y(N+M+1) multiplicadores.
❒ Esta última forma sugiere la eliminación M elementos de memoria, ya queestán repetidos. El diagrama resultante se denomina forma directa II.
Σ
z-1
z-1
-A1Σ
-A2Σ
z-1
-AN
++
++
+ y [n ]B0
z-1
Σ
Σ
Σ
++
++
++
++
B1
B2
BM
z-1
z-1
x [n ]+
HAR(z)·HMA(z)

10
5º Curso-Tratamiento Digital de Señal
Capítulo 10 : Implementación de Filtros Digitales17/11/99
RealizaciónRealización de de Filtros Digitales Filtros Digitales
❒ De la forma directa II pasamos a la forma transpuesta o canónica. Consisteen sustituir los nodos por sumas, las sumas por nodos, invertir el sentidode las flechas y finalmente intercambiar los coeficientes y x[n] e y[n] .
Σ
-A1Σ
-A2Σ
-AM
++
++
+ y [n ]B0
z-1
Σ
Σ
Σ
++
++
++
++
B1
B2
BM
z-1
z-1
x [ n ]
z-1
Σ
-AN
+
Forma directa II
11
5º Curso-Tratamiento Digital de Señal
Capítulo 10 : Implementación de Filtros Digitales17/11/99
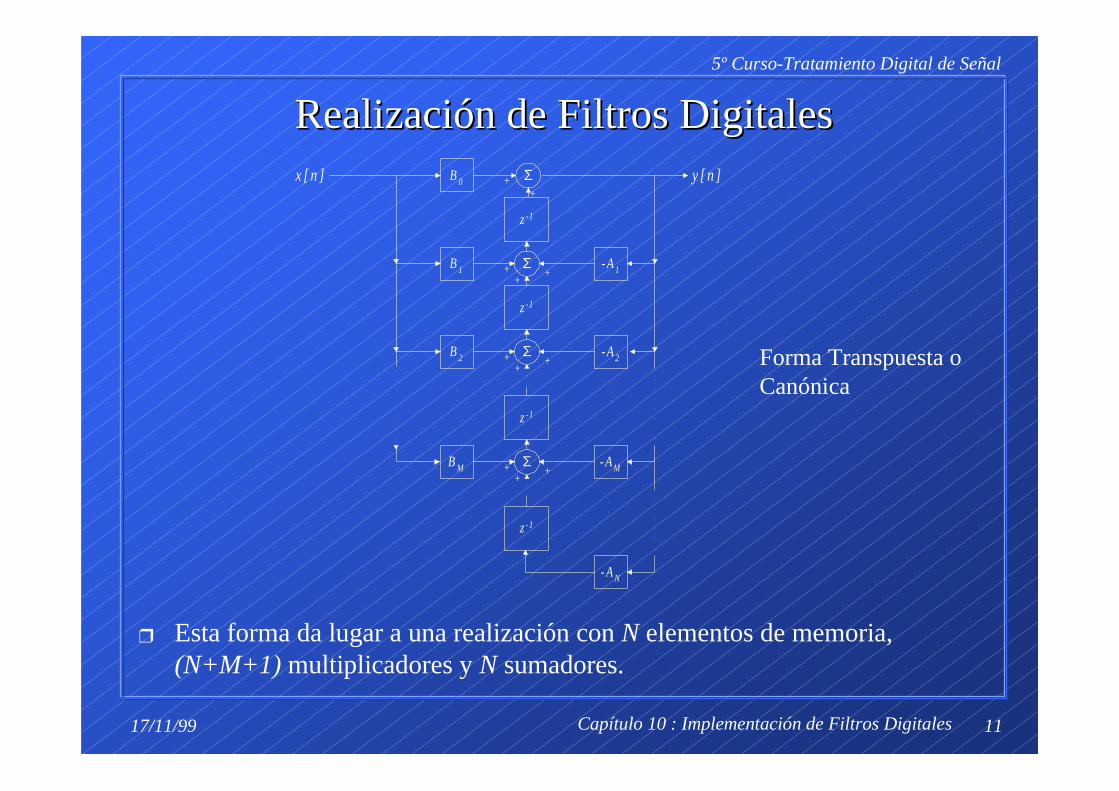
RealizaciónRealización de de Filtros Digitales Filtros Digitales
❒ Esta forma da lugar a una realización con N elementos de memoria,(N+M+1) multiplicadores y N sumadores.
Σ+ y [ n ]B0
z-1
Σ
Σ
Σ
+
+
+
+
B1
B2
BM
z-1
z-1
x [ n ]
-A1
-A2
-AM
z-1
-AN
+
+
++
+
+Forma Transpuesta oCanónica
12
5º Curso-Tratamiento Digital de Señal
Capítulo 10 : Implementación de Filtros Digitales17/11/99
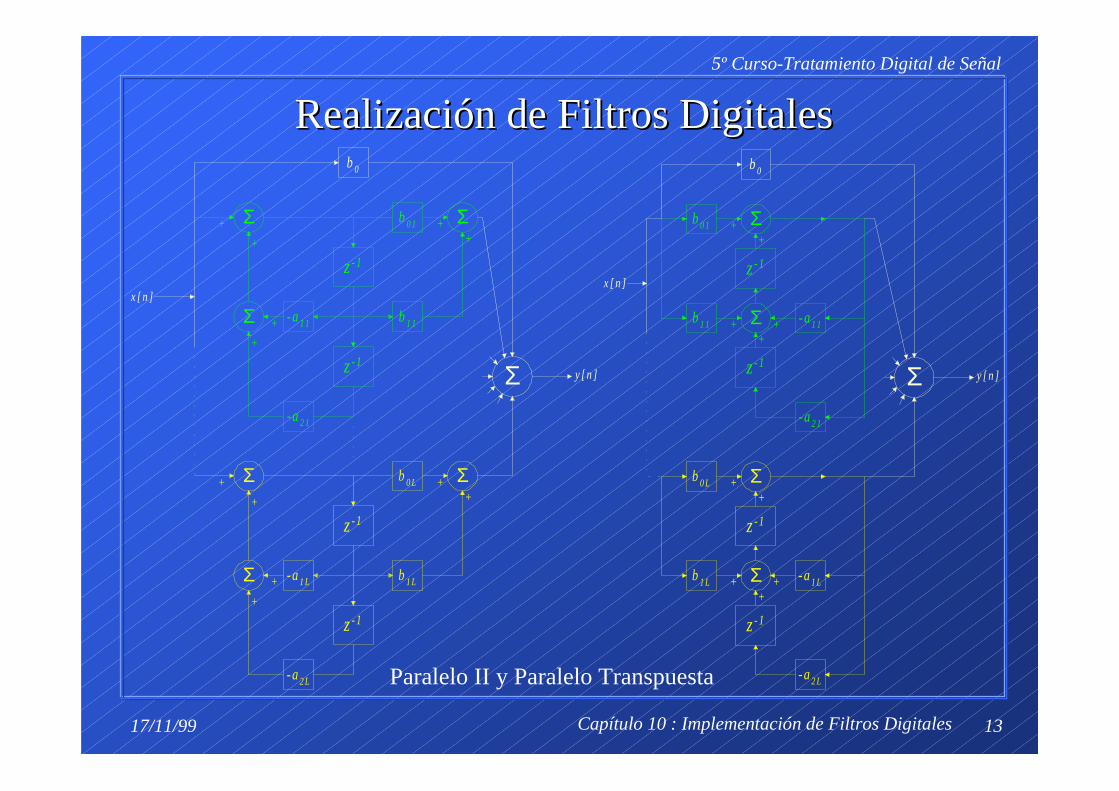
RealizaciónRealización de de Filtros Digitales Filtros Digitales❒ Las funciones de Transferencia pueden representarse mediante sumas de
fracciones parciales (en paralelo), o mediante producto de factores (encascada).
❒ Supongamos un función de Transferencia H(z), expresada como suma defracciones. Los pares de polos complejos conjugados deben ser combina-dos en términos de 2º orden,
❒ Esta función de Transferencia puede representarse a través de la formadirecta II o de la forma Transpuesta, dando lugar a las formas Paralela II yParalela Transpuesta (Figura T13).
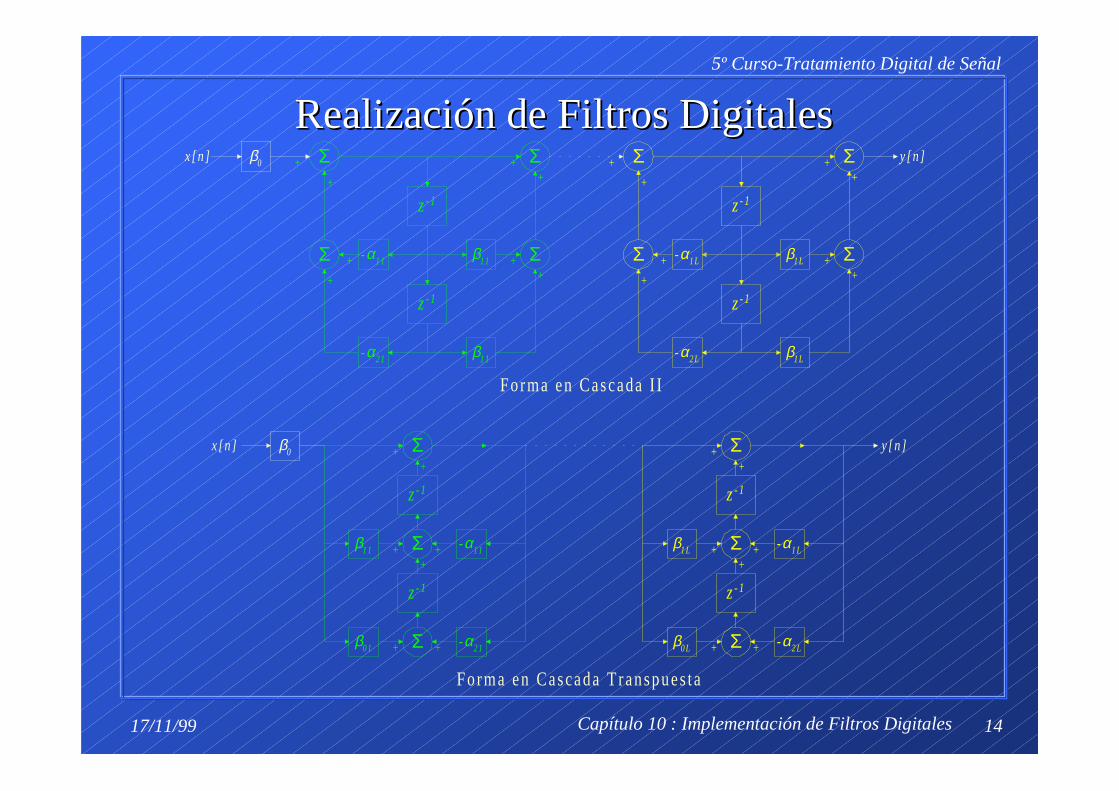
❒ La función de Transferencia puede expresarse también como producto detérminos,
lo que da lugar a las formas en cascada, Cascada II y Cascada Transpuesta(Figura T14).
( )H z bb z b
a z a zL
Ni i
i ii
L
= ++
+ += +
−
− −=∑0
11
0
22
11
1 1
1
2 int
( ) ( )H z H zz z
z zii i
i ii
L
i
L
= =+ ++ +
− −
− −==
∏∏β ββ βα α0 0
22
11
22
11
00
1
1
13
5º Curso-Tratamiento Digital de Señal
Capítulo 10 : Implementación de Filtros Digitales17/11/99
RealizaciónRealización de de Filtros Digitales Filtros Digitales
Σ b0 1
z-1
Σ
b1 1-a1 1Σ
z-1
-a2 1
+
+ ++
+
+
Σ b0 L
z-1
Σ
b1 L-a1 LΣ
z-1
-a2 L
+
+ ++
+
+
b0
Σ y [ n ]
x [ n ]
b0 1
z-1
b1 1 -a1 1Σ
z-1
-a2 1
++
+
b0
Σ y [ n ]
x [ n ]
Σ
++
b0 L
z-1
b1 L -a1 LΣ
z-1
-a2 L
++
+
Σ
++
Paralelo II y Paralelo Transpuesta
14
5º Curso-Tratamiento Digital de Señal
Capítulo 10 : Implementación de Filtros Digitales17/11/99
RealizaciónRealización de de Filtros Digitales Filtros DigitalesΣβ0
z-1
Σ
β11-α11Σ
z-1
-α21
+
+ ++
+
+
β11
Σ++
Σ
z-1
Σ
β1L-α1LΣ
z-1
-α2L
+
+ ++
+
+
β1L
Σ++
x [n ] y [n ]
β01
z-1
β11 -α11Σ
z-1
-α21
++
+
Σ
++
Σ+ +
β0x [n ]
β0L
z-1
β1L -α1LΣ
z-1
-α2L
++
+
Σ
++
Σ+ +
y [n ]
Forma en Cascada I I
Fo rma en Cascada T ranspues ta
15
5º Curso-Tratamiento Digital de Señal
Capítulo 10 : Implementación de Filtros Digitales17/11/99
EfectosEfectos de de Cuantización Cuantización❒ Cada una de estas formas tienen sus ventajas e inconvenientes en el
momento de realizar el filtro. Uno de los problemas más importantes quedebe tener en cuenta una realización son los efectos de cuantización.
❒ Los efectos de cuantización se producen al tener obligatoriamente quetruncar (o cuantizar) los coeficientes del filtro y las señales de entrada ysalida. Esta cuantización puede dar lugar a que las características del filtrorealizado difieran de las especificaciones del filtro diseñado.
❒ Los efectos de cuantización deben ser tenidos muy en cuenta cuando eldiseño se realiza en microprocesadores con aritmética de punto fijo (porejemplo, DSPs). En caso de utilizar micros de 32 bits con aritmética enpunto flotante, los efectos de cuantización pueden ser despreciados.
❒ Dividiremos los efectos de cuantización en dos partes: los debidos a lacuantización de las señales (de entrada x[n] o de salida y[n] , que incluyenlos errores de redondeo o truncamiento en las operaciones aritméticas) ylos debidos a la cuantización de los coeficientes.
16
5º Curso-Tratamiento Digital de Señal
Capítulo 10 : Implementación de Filtros Digitales17/11/99
EfectosEfectos de de Cuantización Cuantización❒ Cuantización de señales : El efecto de cuantizar la señal puede estudiarse
como el efecto de añadir un error o una señal de ruido e[n] a la salida idealdel filtro digital. Este ruido se considera como el efecto conjunto de varioserrores producidos en el procesamiento:
❒ Error de cuantización en el convertidor A/D a la entrada del filtro.◆ Errores de redondeo o truncamiento en las operaciones (multiplicacio-nes,
sumas).
◆ Error en la cuantización de la salida en el convertidor D/A (menos bits en lasalida que en las operaciones).
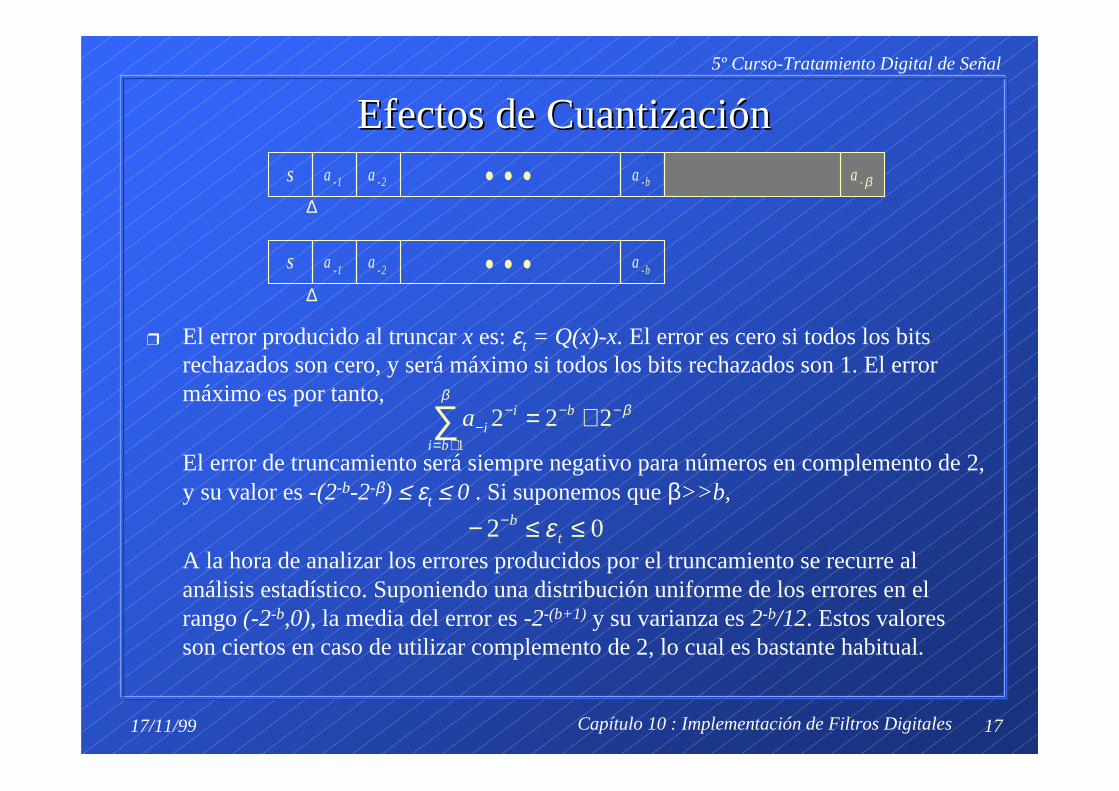
Errores de Truncamiento: Cuando se implementa un filtro en hardware (DSPs oASICs) suele ser habitual trabajar en un punto fijo ya que es considerablementemás barato en términos de área de silicio y complejidad en el diseño. Por ejemplo,las variables del filtro (entradas, salidas y coeficientes) pueden estar cuantizadas en16 bits. Al hacer una multiplicación necesitaremos 32 bits, que es posteriormentetruncado de nuevo a 16 bits. Este tipo de error puede ser analizado mejor desde unpunto de vista estadístico. Supongamos que truncamos un número de (β+1) bits a(b+1) bits, tal y como indica la figura.
17
5º Curso-Tratamiento Digital de Señal
Capítulo 10 : Implementación de Filtros Digitales17/11/99
EfectosEfectos de de Cuantización Cuantización
❒ El error producido al truncar x es: εt = Q(x)-x. El error es cero si todos los bitsrechazados son cero, y será máximo si todos los bits rechazados son 1. El errormáximo es por tanto,
El error de truncamiento será siempre negativo para números en complemento de 2,y su valor es -(2-b-2-β) ≤ εt ≤ 0 . Si suponemos que β>>b ,
A la hora de analizar los errores producidos por el truncamiento se recurre alanálisis estadístico. Suponiendo una distribución uniforme de los errores en elrango (-2-b,0), la media del error es -2-(b+1) y su varianza es 2-b/12. Estos valoresson ciertos en caso de utilizar complemento de 2, lo cual es bastante habitual.
s a - βa -ba -2a -1
∆
...s a -ba -2a -1
∆
...
∑+=
−−−− +=
ββ
1
222bi
biia
02 ≤≤− −t
b ε
18
5º Curso-Tratamiento Digital de Señal
Capítulo 10 : Implementación de Filtros Digitales17/11/99
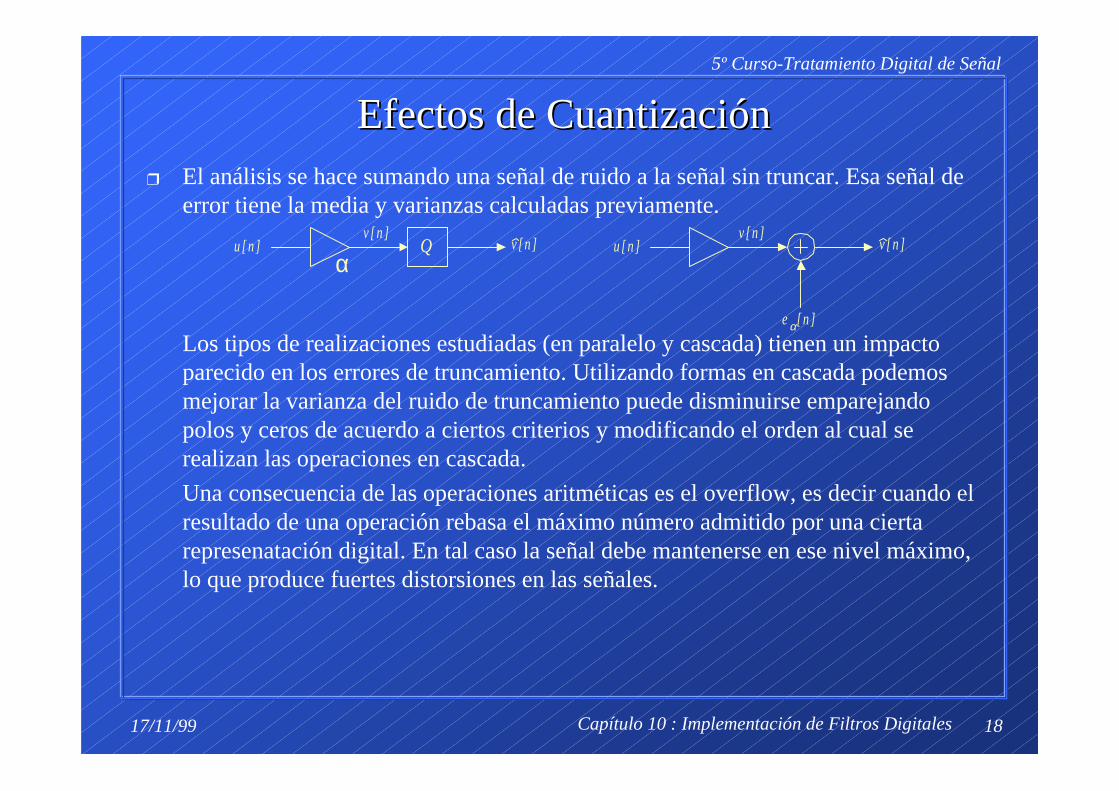
EfectosEfectos de de Cuantización Cuantización❒ El análisis se hace sumando una señal de ruido a la señal sin truncar. Esa señal de
error tiene la media y varianzas calculadas previamente.
Los tipos de realizaciones estudiadas (en paralelo y cascada) tienen un impactoparecido en los errores de truncamiento. Utilizando formas en cascada podemosmejorar la varianza del ruido de truncamiento puede disminuirse emparejandopolos y ceros de acuerdo a ciertos criterios y modificando el orden al cual serealizan las operaciones en cascada.
Una consecuencia de las operaciones aritméticas es el overflow, es decir cuando elresultado de una operación rebasa el máximo número admitido por una ciertarepresenatación digital. En tal caso la señal debe mantenerse en ese nivel máximo,lo que produce fuertes distorsiones en las señales.
Qu[n ]v [n ]
αu [n ]v [n ]
eα[ n ]
v [n ]v [n ]
19
5º Curso-Tratamiento Digital de Señal
Capítulo 10 : Implementación de Filtros Digitales17/11/99
EfectosEfectos de de Cuantización Cuantización❒ Una ventaja de la aritmética de complemento de 2 es la mostrada en el siguiente
ejemplo. Se quiere hacer la suma 0.687510+0.812510-0.562510 con un códigodigital de 5 bits en complemento de 2. La suma de los dos primeros operando daoverflow. Sin embargo, si eliminamos el bit de signo y continuamos sumando elresultado será correcto:
❒ 01011+01101=11000 Eliminamos el bit de signo porque hay overflow 01000 01000+10111=01111 Lo que equivale a 0.9375, el resultado correcto.
❒ Una forma de evitar el overflow multiplicar las operaciones por un factor que eviteel overflow. Este factor debe ser lógicamente menor que 1, lo que emperorarelación señal ruido del filtro. Vimos en el capítulo 5 que la relación señal-ruido enuna señal cuantizada es,
❒ Ps es la potencia de la señal de entrada, D es el fondo de escala y b es el número debits. Ps es proporcional a la varianza de la señal, σx
2. Si multiplicamos la señal porun factor A, la potencia de la señal será A2σx
2. Sustituyendo en la ecuación vemosque si A>1, mejora la SNRQ, pero se corre el peligro de producir overflow. Por elcontrario, un valor de A<1, evita el overflow pero empeora la SNRQ.
bDPSNR sQ 6log208.10log10 +−+=
20
5º Curso-Tratamiento Digital de Señal
Capítulo 10 : Implementación de Filtros Digitales17/11/99
EfectosEfectos de de Cuantización Cuantización
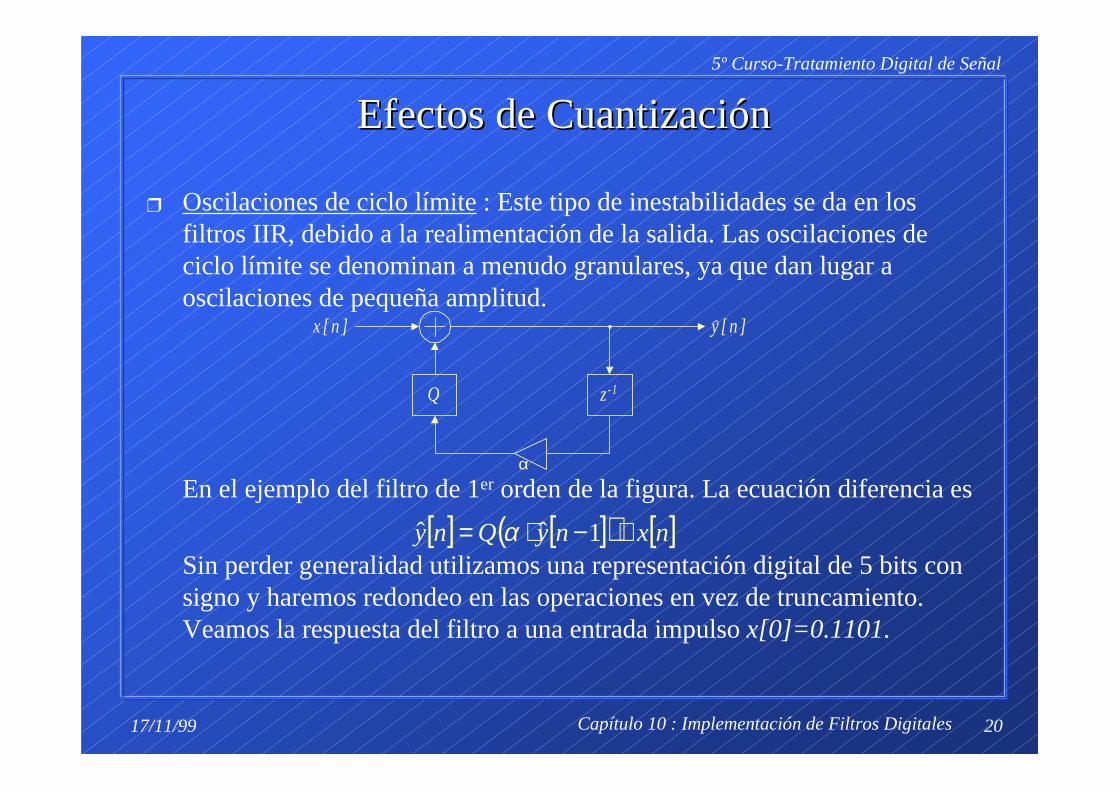
❒ Oscilaciones de ciclo límite : Este tipo de inestabilidades se da en losfiltros IIR, debido a la realimentación de la salida. Las oscilaciones deciclo límite se denominan a menudo granulares, ya que dan lugar aoscilaciones de pequeña amplitud.
En el ejemplo del filtro de 1er orden de la figura. La ecuación diferencia es
Sin perder generalidad utilizamos una representación digital de 5 bits consigno y haremos redondeo en las operaciones en vez de truncamiento.Veamos la respuesta del filtro a una entrada impulso x[0]=0.1101.
Q z-1
α
x [n ] y [n ]
[ ] [ ]( ) [ ]nxnyQny +−⋅= 1ˆˆ α

21
5º Curso-Tratamiento Digital de Señal
Capítulo 10 : Implementación de Filtros Digitales17/11/99
EfectosEfectos de de Cuantización Cuantización
α=0.1011, y[-1] = 0 α=1.1011, y[-1] = 0
n αy[n-1] y[n] αy[n-1] y[n]
0 0 0.1101 0 0.1101
1 0.10001111 0.1001 1.1000111 1.1001
2 0.01100011 0.0110 0.0110001 0.0110
3 0.01000010 0.0100 1.0100001 1.0100
4 0.00101100 0.0011 0.0010110 0.0011
5 0.00100001 0.0010 1.0010000 1.0010
6 0.00010110 0.0001 0.0001011 0.0001
7 0.00001011 0.0001 1.0000101 1.0001
8 0.00001011 0.0001 0.0000101 0.0001
22
5º Curso-Tratamiento Digital de Señal
Capítulo 10 : Implementación de Filtros Digitales17/11/99
EfectosEfectos de de Cuantización Cuantización
❒ Para los dos valores de α se observa que cuando α>0, la salida tiende a un valorconstante distinto de cero, mientras que si α<0, la salida oscila entre dos valores.Esto se debe a que el sistema tiene un polo efectivo en el círculo unidad. En estecaso el sistema tiene un polo en z=1 para α>0, y en z=-1 para α<0. Esto implica
El error de cuantización debido al redondeo es
Con esta fórmula tenemos delimitado el rango de variación de los ciclos límite. Portanto, utilizar un mayor número de bits de cuantización disminuye la amplitud delciclo límite. Esto no es siempre posible, por lo que existen técnicas de eliminaciónde los ciclos límites basadas en realizaciones en espacio de estado.
[ ]( ) [ ][ ]
<−−>−
=−⋅0,1ˆ
0,1ˆ1ˆ
αα
αny
nynyQ
[ ]( ) [ ]
[ ] ( ).121ˆ
expresión,anterior la dosustituyeny ,2
1ˆ1ˆ
αδ
δαα
−≤−
≤−⋅−−⋅
ny
nynyQ
23
5º Curso-Tratamiento Digital de Señal
Capítulo 10 : Implementación de Filtros Digitales17/11/99
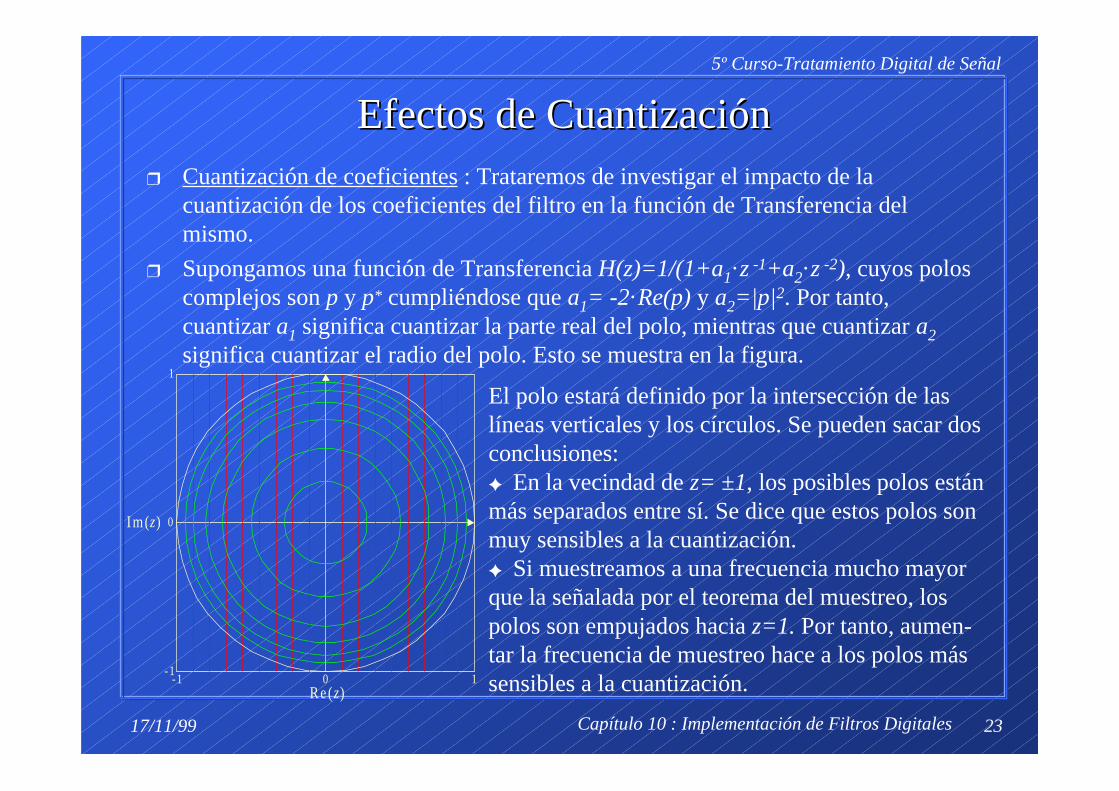
EfectosEfectos de de Cuantización Cuantización❒ Cuantización de coeficientes : Trataremos de investigar el impacto de la
cuantización de los coeficientes del filtro en la función de Transferencia delmismo.
❒ Supongamos una función de Transferencia H(z)=1/(1+a1·z -1+a2·z -2), cuyos poloscomplejos son p y p* cumpliéndose que a1= -2·Re(p) y a2=|p|2. Por tanto,cuantizar a1 significa cuantizar la parte real del polo, mientras que cuantizar a2
significa cuantizar el radio del polo. Esto se muestra en la figura.
El polo estará definido por la intersección de laslíneas verticales y los círculos. Se pueden sacar dosconclusiones:✦ En la vecindad de z= ±1, los posibles polos estánmás separados entre sí. Se dice que estos polos sonmuy sensibles a la cuantización.✦ Si muestreamos a una frecuencia mucho mayorque la señalada por el teorema del muestreo, lospolos son empujados hacia z=1. Por tanto, aumen-tar la frecuencia de muestreo hace a los polos mássensibles a la cuantización.Re(z)
Im(z) 0
-1
1
-1 10
24
5º Curso-Tratamiento Digital de Señal
Capítulo 10 : Implementación de Filtros Digitales17/11/99
EfectosEfectos de de Cuantización Cuantización◆ Para sistemas de mayor orden es previsible que la sensibilidad de los coefi-
cientes vaya a peor, por lo que realizar filtros que contegan polos (filtros IIR)de forma directa (formas directa I o II) no es aconsejable. Los coeficientes enestas forman no nos dicen nada acerca de la situación de sus polos y muchomenos acerca de las consecuencias de su cuantización.
◆ La solución es, lógicamente, utilizar las formas Paralelo o Cascada para tenerun mayor control sobre la situación de los polos al cuantizar.
◆ Estudiamos ahora el efecto de la cuantización sobre los ceros. En el caso defiltros FIR (compuesto exclusivamente por ceros), sabemos que se caracteri-zan por ser de fase lineal. Esto es debido a que los coeficientes son simétricos(o asimétricos). Por tanto cuantizar los coeficientes no va a variar la linealidadde fase del filtro.
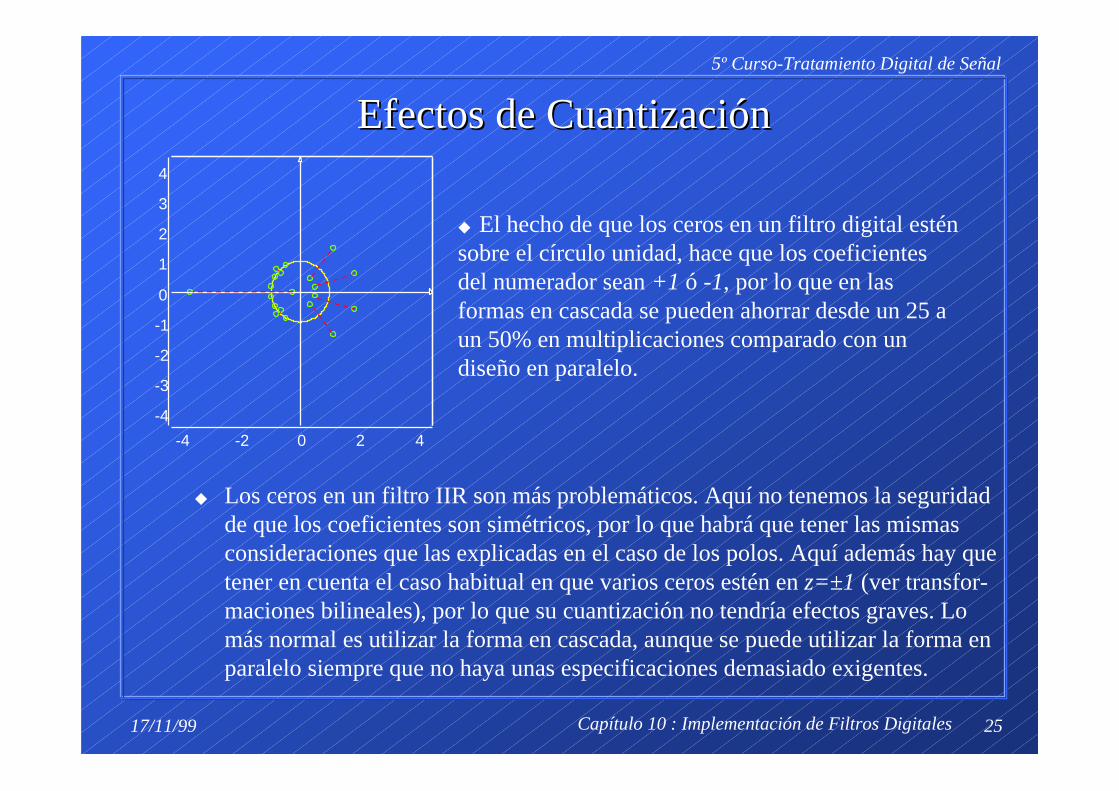
◆ Lo que si variará es la magnitud de la respuesta. Se puede demostrar que losceros de un filtro FIR o bien están sobre la circunferencia de radio 1, o estánen parejas con radios recíprocos (ver figura T24). Por tanto, en los filtros FIRlo normal es utilizar la forma directa (I o II). También se podría utilizar laforma en cascada pero se utiliza menos.
25
5º Curso-Tratamiento Digital de Señal
Capítulo 10 : Implementación de Filtros Digitales17/11/99
EfectosEfectos de de Cuantización Cuantización
◆ Los ceros en un filtro IIR son más problemáticos. Aquí no tenemos la seguridadde que los coeficientes son simétricos, por lo que habrá que tener las mismasconsideraciones que las explicadas en el caso de los polos. Aquí además hay quetener en cuenta el caso habitual en que varios ceros estén en z=±1 (ver transfor-maciones bilineales), por lo que su cuantización no tendría efectos graves. Lomás normal es utilizar la forma en cascada, aunque se puede utilizar la forma enparalelo siempre que no haya unas especificaciones demasiado exigentes.
-4 -2 0 2 4
-4
-3
-2
-1
0
1
2
3
4
◆ El hecho de que los ceros en un filtro digital esténsobre el círculo unidad, hace que los coeficientesdel numerador sean +1 ó -1, por lo que en lasformas en cascada se pueden ahorrar desde un 25 aun 50% en multiplicaciones comparado con undiseño en paralelo.
26
5º Curso-Tratamiento Digital de Señal
Capítulo 10 : Implementación de Filtros Digitales17/11/99
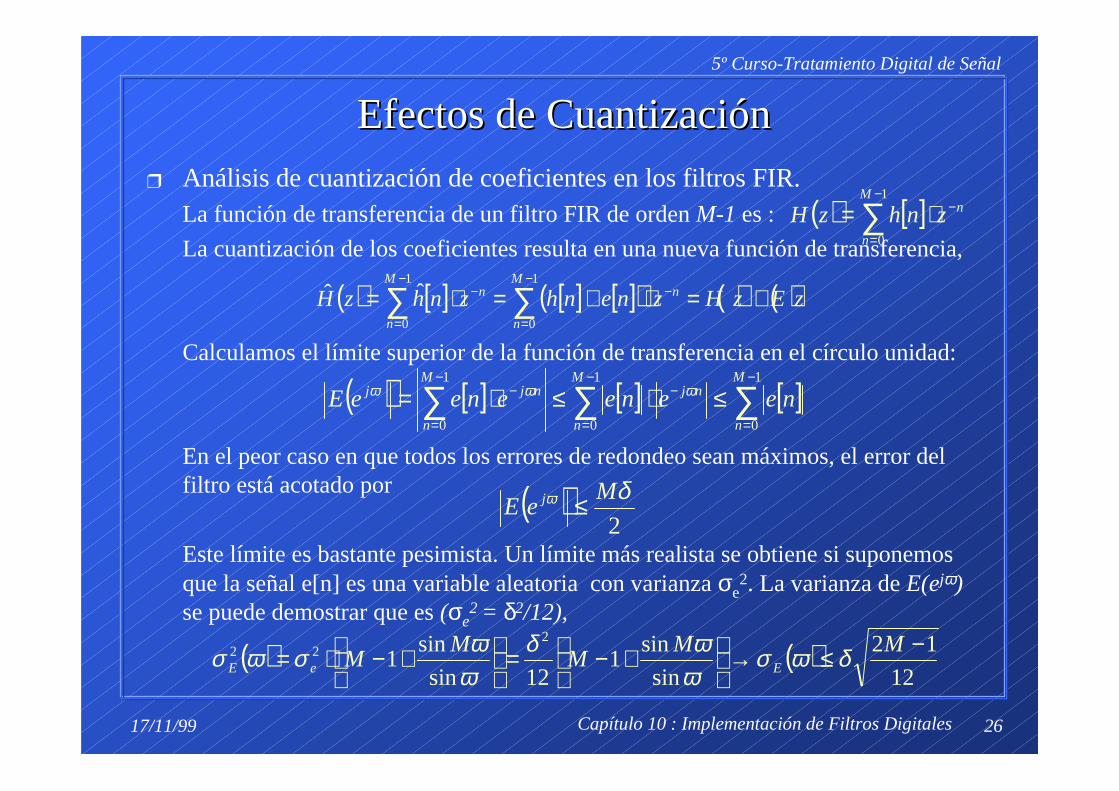
EfectosEfectos de de Cuantización Cuantización❒ Análisis de cuantización de coeficientes en los filtros FIR. La función de transferencia de un filtro FIR de orden M-1 es :
La cuantización de los coeficientes resulta en una nueva función de transferencia,
Calculamos el límite superior de la función de transferencia en el círculo unidad:
En el peor caso en que todos los errores de redondeo sean máximos, el error delfiltro está acotado por
Este límite es bastante pesimista. Un límite más realista se obtiene si suponemosque la señal e[n] es una variable aleatoria con varianza σe
2. La varianza de E(ejω)se puede demostrar que es (σe
2 = δ2/12),
( ) [ ]∑−
=
−⋅=1
0
M
n
nznhzH
( ) [ ] [ ] [ ]( ) ( ) ( )zEzHznenhznhzHM
n
nM
n
n +=⋅+=⋅= ∑∑−
=
−−
=
−1
0
1
0
ˆˆ
( ) ( )12
12
sin
sin1
12sin
sin1
222 −≤→
+−=
+−⋅= MM
MM
M EeE δωσωωδ
ωωσωσ
( ) [ ] [ ] [ ]∑∑∑−
=
−
=
−−
=
− ≤⋅≤⋅=1
0
1
0
1
0
M
n
M
n
njM
n
njj neeneeneeE ωωω
( )2
δω MeE j ≤
27
5º Curso-Tratamiento Digital de Señal
Capítulo 10 : Implementación de Filtros Digitales17/11/99
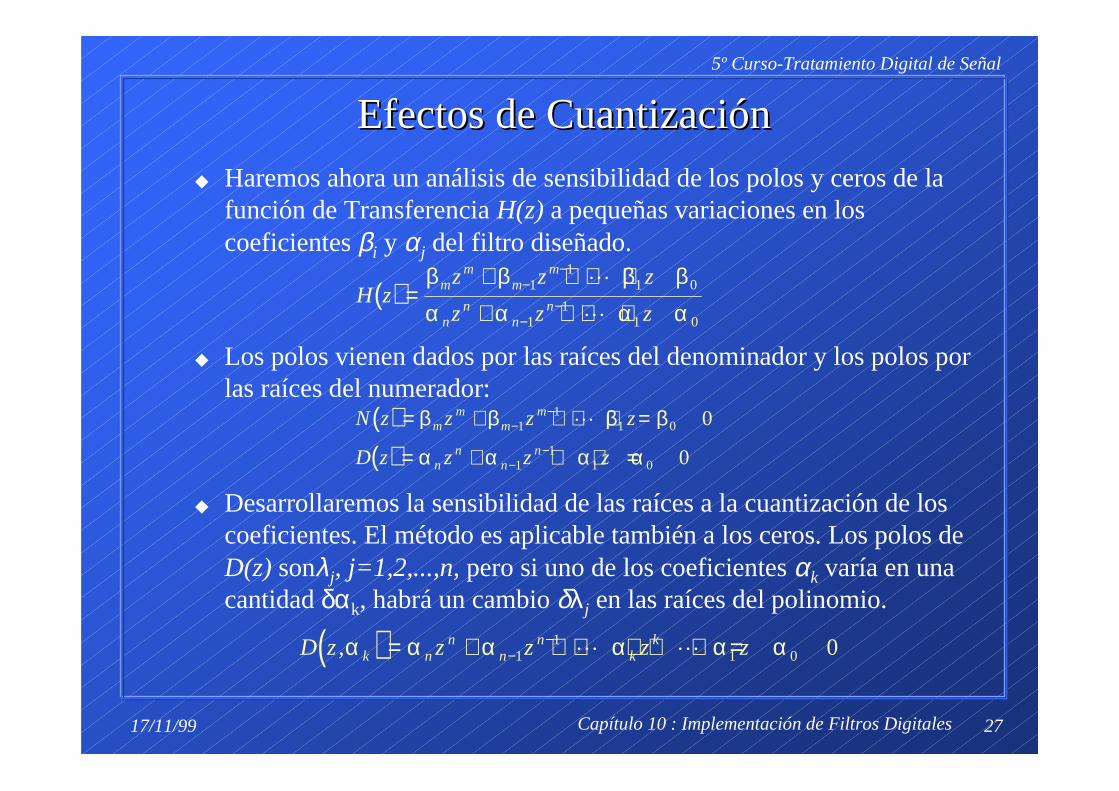
EfectosEfectos de de Cuantización Cuantización◆ Haremos ahora un análisis de sensibilidad de los polos y ceros de la
función de Transferencia H(z) a pequeñas variaciones en loscoeficientes βi y αj del filtro diseñado.
◆ Los polos vienen dados por las raíces del denominador y los polos porlas raíces del numerador:
◆ Desarrollaremos la sensibilidad de las raíces a la cuantización de loscoeficientes. El método es aplicable también a los ceros. Los polos deD(z) sonλj, j=1,2,...,n, pero si uno de los coeficientes αk varía en unacantidad δαk, habrá un cambio δλj en las raíces del polinomio.
( )H zz z z
z z z
mm
mm
nn
nn
=+ + + +
+ + + +−
−
−−
β β β β
α α α α1
11 0
11
1 0
�
�
( )( )
N z z z z
D z z z z
mm
mm
nn
nn
= + + + + =
= + + + =−
−
−−
β β β β
α α α α1
11 0
11
1 0
0
0
�
( )D z z z z zk nn
nn
kk,α α α α α α= + + + + + + =−
−1
11 0 0� �
28
5º Curso-Tratamiento Digital de Señal
Capítulo 10 : Implementación de Filtros Digitales17/11/99
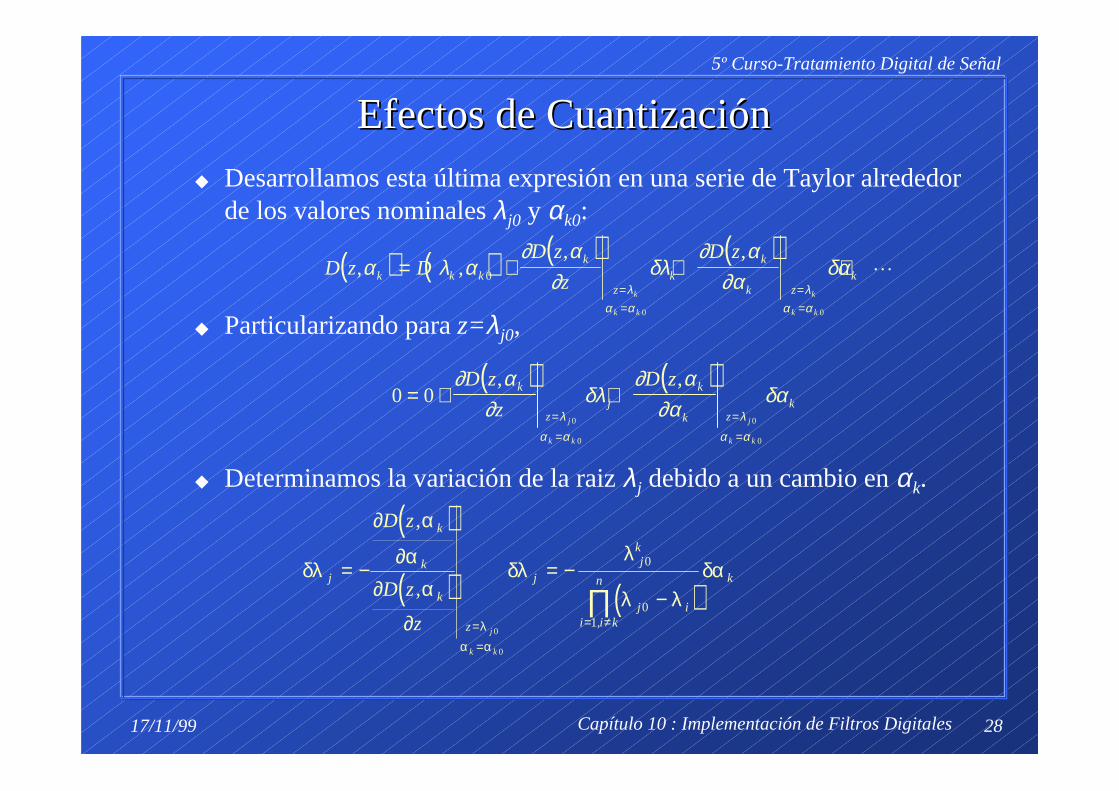
EfectosEfectos de de Cuantización Cuantización◆ Desarrollamos esta última expresión en una serie de Taylor alrededor
de los valores nominales λj0 y αk0:
◆ Particularizando para z=λj0,
◆ Determinamos la variación de la raiz λj debido a un cambio en αk.
( ) ( ) ( ) ( )D z D
D z
z
D zk k k
k
zk
k
k zk
k
k k
k
k k
, ,, ,
α λ α∂ α
∂δλ
∂ α∂α
δαλ
α αλ
α α
= + + +==
==
0
0 0
�
( ) ( )0 0
0
0
0
0
= + +=
=
=
=
∂ α∂
δλ∂ α
∂αδα
λα α
λα α
D z
z
D zk
zj
k
k zk
j
k k
j
k k
, ,
( )
( ) ( )δλ
∂ α
∂α∂ α
∂
δλλ
λ λδα
λα α
j
k
k
k
z
jj
k
j ii i k
n k
D z
D z
z j
k k
= − = −−
==
= ≠∏
,
,
,0
0
0
01

29
5º Curso-Tratamiento Digital de Señal
Capítulo 10 : Implementación de Filtros Digitales17/11/99
EfectosEfectos de de Cuantización Cuantización◆ De la ecuación anterior se puede sacar como conclusión
✦ El coeficiente más sensitivo será siempre α0 (β0).
✦ La sensibilidad aumenta cuando las raíces se encuentran muy agrupadas,incrementándose fuertemente si el orden del sistema n es grande.
30
5º Curso-Tratamiento Digital de Señal
Capítulo 10 : Implementación de Filtros Digitales17/11/99
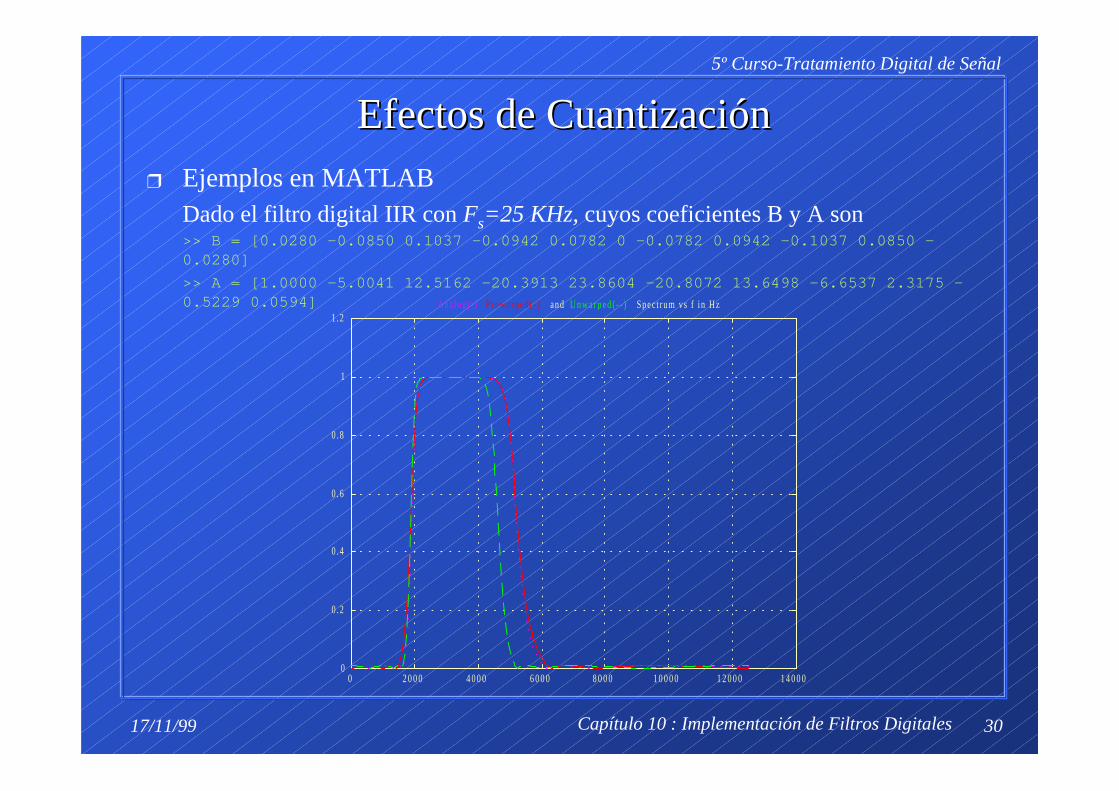
EfectosEfectos de de Cuantización Cuantización❒ Ejemplos en MATLAB Dado el filtro digital IIR con Fs=25 KHz, cuyos coeficientes B y A son >> B = [0.0280 -0.0850 0.1037 -0.0942 0.0782 0 -0.0782 0.0942 -0.1037 0.0850 -
0.0280]
>> A = [1.0000 -5.0041 12.5162 -20.3913 23.8604 -20.8072 13.6498 -6.6537 2.3175 -0.5229 0.0594]
0 2 0 0 0 4 0 0 0 6 0 0 0 8 0 0 0 1 0 0 0 0 1 2 0 0 0 1 4 0 0 00
0 .2
0 .4
0 .6
0 .8
1
1 .2Ana log( : ) P rewarped( - ) and Unwarped( - - ) Spec t rum vs f in Hz
31
5º Curso-Tratamiento Digital de Señal
Capítulo 10 : Implementación de Filtros Digitales17/11/99
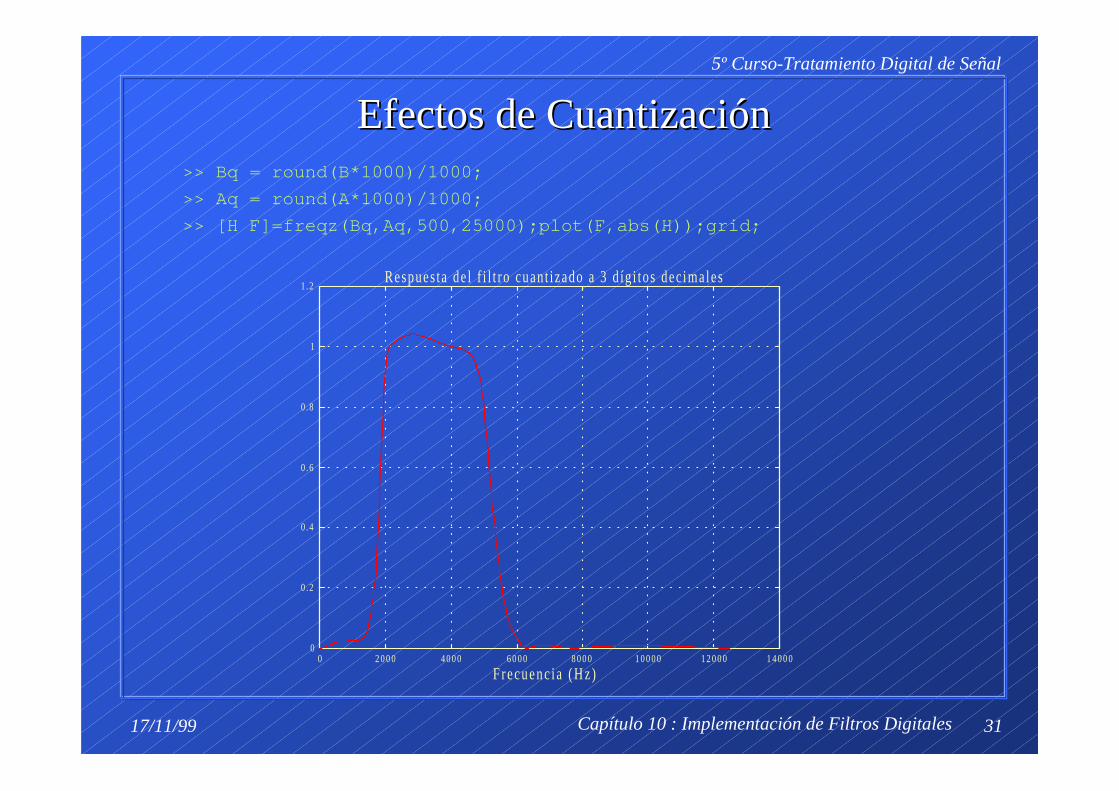
EfectosEfectos de de Cuantización Cuantización >> Bq = round(B*1000)/1000;
>> Aq = round(A*1000)/1000;
>> [H F]=freqz(Bq,Aq,500,25000);plot(F,abs(H));grid;
0 2 0 0 0 4 0 0 0 6 0 0 0 8 0 0 0 1 0 0 0 0 1 2 0 0 0 1 4 0 0 00
0.2
0.4
0.6
0.8
1
1.2Respuesta de l f i l t ro cuant izado a 3 d ígi tos dec imales
Frecuenc ia (Hz )

32
5º Curso-Tratamiento Digital de Señal
Capítulo 10 : Implementación de Filtros Digitales17/11/99
EfectosEfectos de de Cuantización Cuantización >> [Z P K]=tf2zp(B,A);
>> SOS = zp2sos(Z,P,K,’down’);SOSq=round(SOS*1000)/1000;M=size(SOS,1);
>> Ht=ones(500,1);for i=1:M;Bsosq=SOSq(i,1:3);Asosq=SOSq(i,4:6);[HF]=freqz(Bsosq,Asosq,500,25000);Ht=H.*Ht;end;
>> plot(F,abs(Ht));grid;
0 2 0 0 0 4 0 0 0 6 0 0 0 8 0 0 0 1 0 0 0 0 1 2 0 0 0 1 4 0 0 00
0.2
0.4
0.6
0.8
1
1.2
Real izac ión de f i l t ro con Secc iones de 2º Orden ycoef ic ientes cuant izados con 3 dec imales
Frecuenc ia (Hz)
33
5º Curso-Tratamiento Digital de Señal
Capítulo 10 : Implementación de Filtros Digitales17/11/99
ImplementaciónImplementación Hardware Hardware
Ful lAdde r
D
DIFF
C A R R Y
IN1
IN2
C L R
Ful lAdde r
D
S U M
C A R R Y
IN1
IN2
C L R
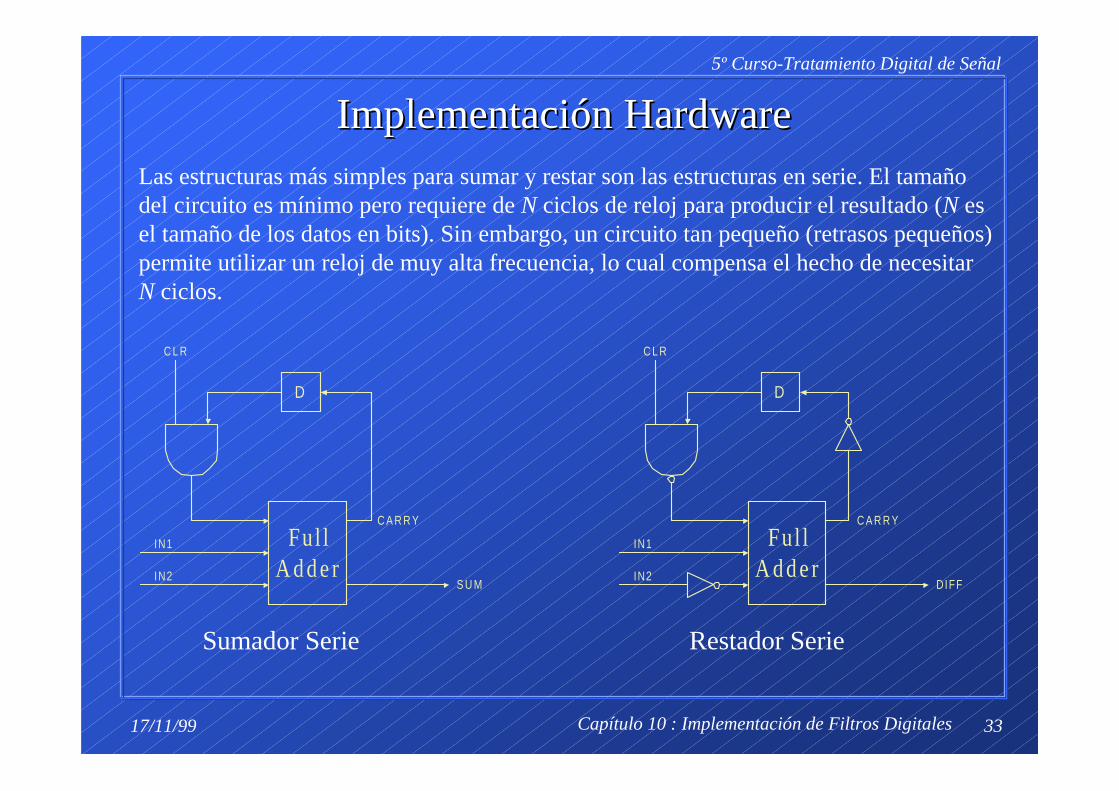
Sumador Serie Restador Serie
Las estructuras más simples para sumar y restar son las estructuras en serie. El tamañodel circuito es mínimo pero requiere de N ciclos de reloj para producir el resultado (N esel tamaño de los datos en bits). Sin embargo, un circuito tan pequeño (retrasos pequeños)permite utilizar un reloj de muy alta frecuencia, lo cual compensa el hecho de necesitarN ciclos.

34
5º Curso-Tratamiento Digital de Señal
Capítulo 10 : Implementación de Filtros Digitales17/11/99
ImplementaciónImplementación Hardware Hardware
HalfAdder
AB
SC o
FullAdder
AB
SC o
C i
FullAdder
AB
SC o
C i
FullAdder
AB
SC o
C i
A 0B 0
A 3 A 2 A 1B 3 B 2 B 1
S 3 S 2 S 1 S 0
C
Sumador4 bits
A 0B 3 B 2 B 1 B 0 A 3 A 2 A 1 C i
C o S 3 S 2 S 1 S 0
A 3 B 0B 1B 2B 3A 0A 1A 2
R 0R 3 R 2 R 1
5V
Sumador Paralelo (Carry Propagate) Restador Paralelo (Carry Propagate)
Los sumadores (restadores) en paralelo más senci-llos son los que propagan las llevadas (carrypropagate o ripple carry) de un bit a otro. Comocontrapartida producen los retrasos más largos.
35
5º Curso-Tratamiento Digital de Señal
Capítulo 10 : Implementación de Filtros Digitales17/11/99
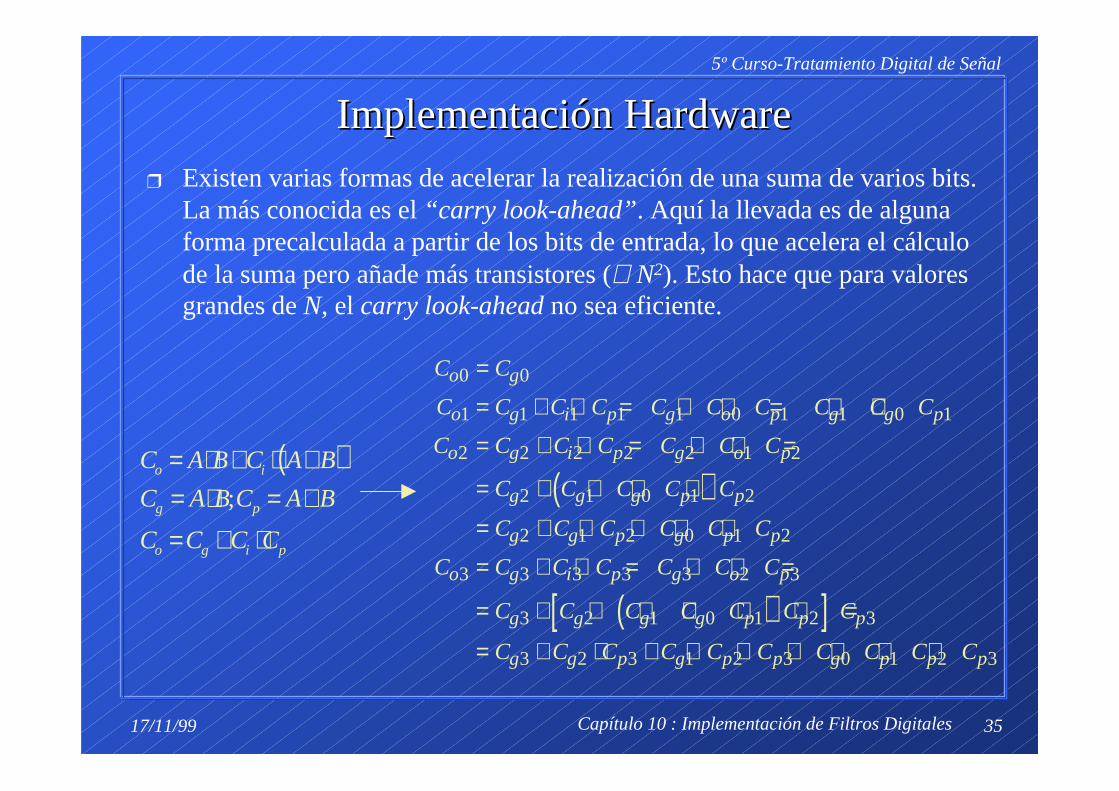
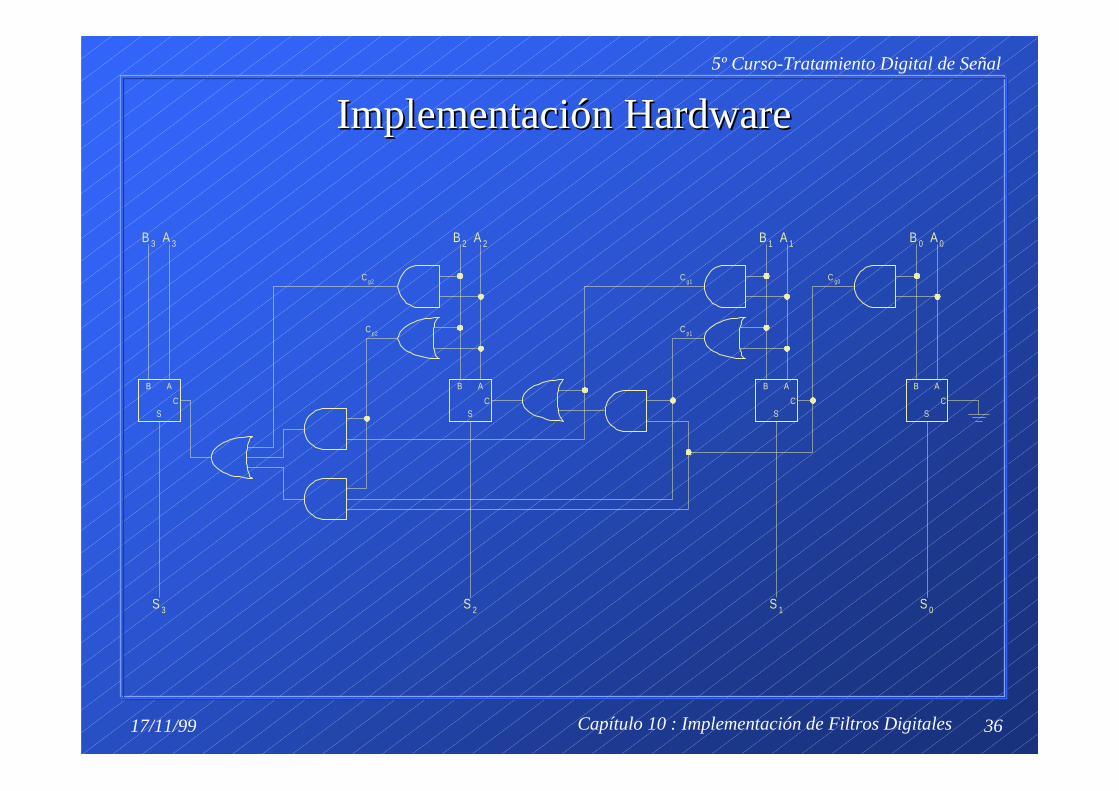
ImplementaciónImplementación Hardware Hardware❒ Existen varias formas de acelerar la realización de una suma de varios bits.
La más conocida es el “carry look-ahead”. Aquí la llevada es de algunaforma precalculada a partir de los bits de entrada, lo que acelera el cálculode la suma pero añade más transistores (∝ N2). Esto hace que para valoresgrandes de N, el carry look-ahead no sea eficiente.
( )
pigo
pg
io
CCCC
BACBAC
BACBAC
⋅+=
+=⋅=+⋅+⋅=
; ( )
( )[ ]
C C
C C C C C C C C C C
C C C C C C C
C C C C C
C C C C C C
C C C C C C C
C C C C C C C
C C
o g
o g i p g o p g g p
o g i p g o p
g g g p p
g g p g p p
o g i p g o p
g g g g p p p
g
0 0
1 1 1 1 1 0 1 1 0 1
2 2 2 2 2 1 2
2 1 0 1 2
2 1 2 0 1 2
3 3 3 3 3 2 3
3 2 1 0 1 2 3
3
=
= + ⋅ = + ⋅ = + ⋅
= + ⋅ = + ⋅ =
= + + ⋅ ⋅
= + ⋅ + ⋅ ⋅
= + ⋅ = + ⋅ =
= + + + ⋅ ⋅ ⋅ =
= + g p g p p g p p pC C C C C C C C2 3 1 2 3 0 1 2 3⋅ + ⋅ ⋅ + ⋅ ⋅ ⋅
36
5º Curso-Tratamiento Digital de Señal
Capítulo 10 : Implementación de Filtros Digitales17/11/99
ImplementaciónImplementación Hardware Hardware
B 0B 3
AB
SC
AB
SC
C g0C g1
C p1
AB
SC
AB
SC
C p2
C g2
A 3 B 2 A 2 B 1 A 1 A 0
S 3 S 2 S 1 S 0
37
5º Curso-Tratamiento Digital de Señal
Capítulo 10 : Implementación de Filtros Digitales17/11/99
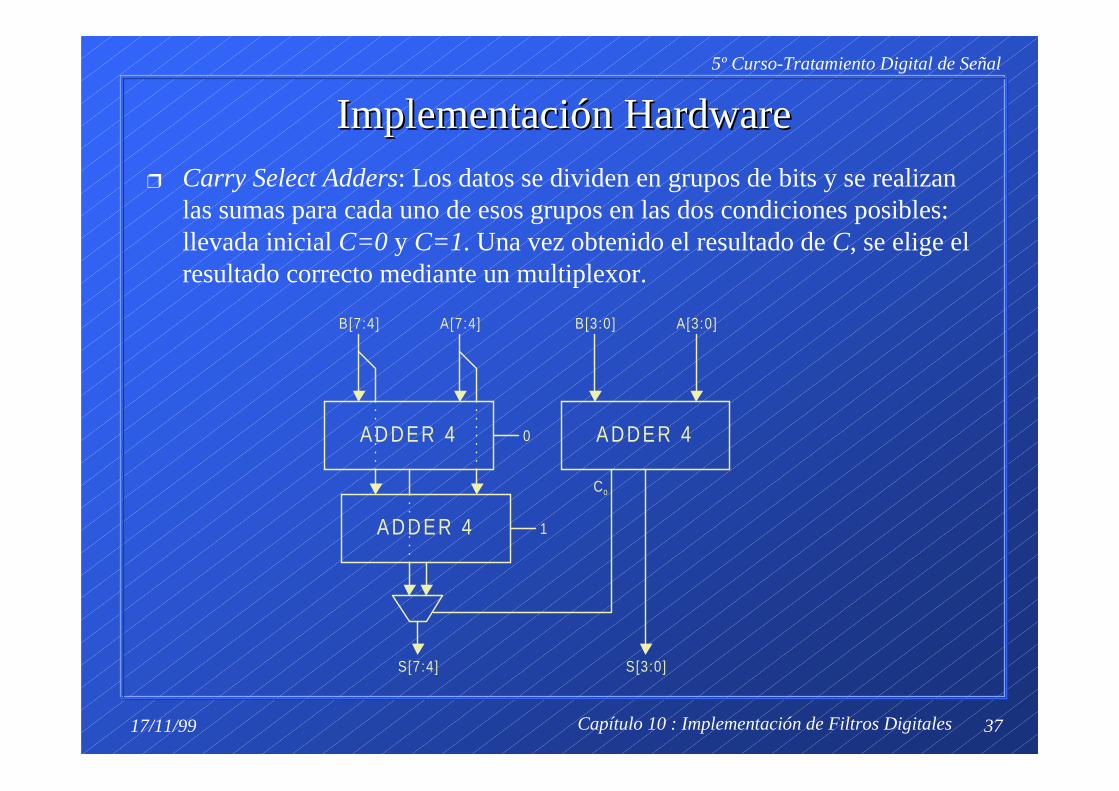
ImplementaciónImplementación Hardware Hardware❒ Carry Select Adders: Los datos se dividen en grupos de bits y se realizan
las sumas para cada uno de esos grupos en las dos condiciones posibles:llevada inicial C=0 y C=1. Una vez obtenido el resultado de C, se elige elresultado correcto mediante un multiplexor.
A D D E R 4
A D D E R 4
A D D E R 4
A[3:0]B[3:0]
S[3:0]
B[7:4] A[7:4]
S[7:4]
0
1
Co
38
5º Curso-Tratamiento Digital de Señal
Capítulo 10 : Implementación de Filtros Digitales17/11/99
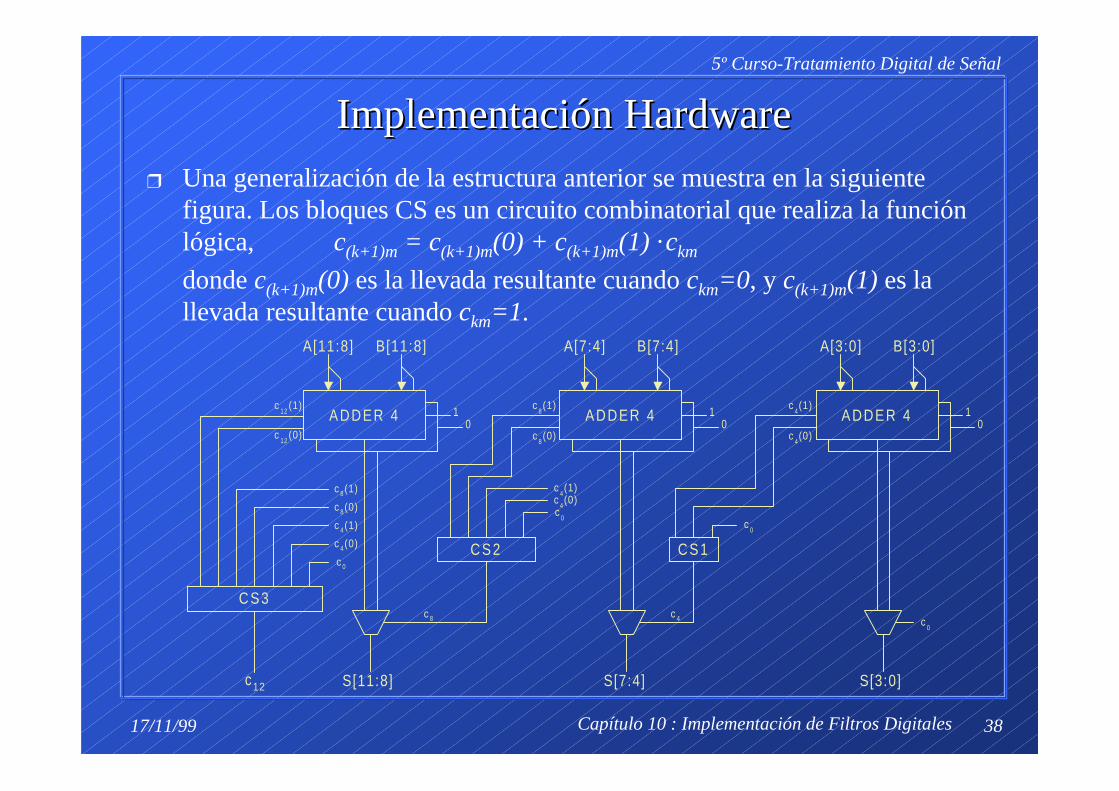
ImplementaciónImplementación Hardware Hardware❒ Una generalización de la estructura anterior se muestra en la siguiente
figura. Los bloques CS es un circuito combinatorial que realiza la funciónlógica, c(k+1)m = c(k+1)m(0) + c(k+1)m(1) ·ckm
donde c(k+1)m(0) es la llevada resultante cuando ckm=0, y c(k+1)m(1) es lallevada resultante cuando ckm=1.
ADDER 4
A[11:8] B[11:8]
10
c12
(1)
c12
(0)
ADDER 4
A[7:4] B[7:4]
10
c8(1)
c8(0)
ADDER 4
A[3:0] B[3:0]
10
c4(1)
c4(0)
S[11:8] S[7:4] S[3:0]
C S 1
c0
c0
C S 2
c0
c4(0)
c4(1)
C S 3
c 0
c 4(0)
c 4 (1)
c 8 (0)
c 8 (1)
c12
c 4c 8
39
5º Curso-Tratamiento Digital de Señal
Capítulo 10 : Implementación de Filtros Digitales17/11/99
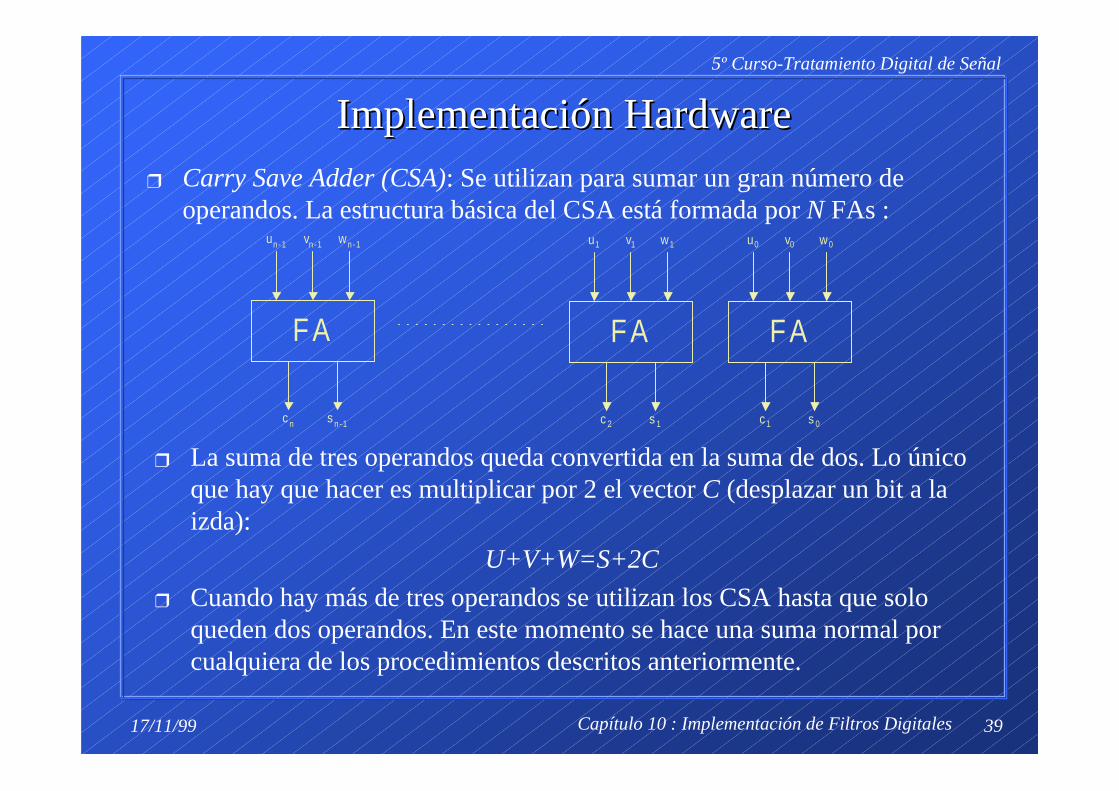
ImplementaciónImplementación Hardware Hardware❒ Carry Save Adder (CSA): Se utilizan para sumar un gran número de
operandos. La estructura básica del CSA está formada por N FAs :
FA
un-1 wn-1vn-1
c n s n-1
FA
u1 w1v1
c 2 s 1
FA
u0 w0v0
c 1 s 0
❒ La suma de tres operandos queda convertida en la suma de dos. Lo únicoque hay que hacer es multiplicar por 2 el vector C (desplazar un bit a laizda):
U+V+W=S+2C
❒ Cuando hay más de tres operandos se utilizan los CSA hasta que soloqueden dos operandos. En este momento se hace una suma normal porcualquiera de los procedimientos descritos anteriormente.
40
5º Curso-Tratamiento Digital de Señal
Capítulo 10 : Implementación de Filtros Digitales17/11/99
ImplementaciónImplementación Hardware Hardware
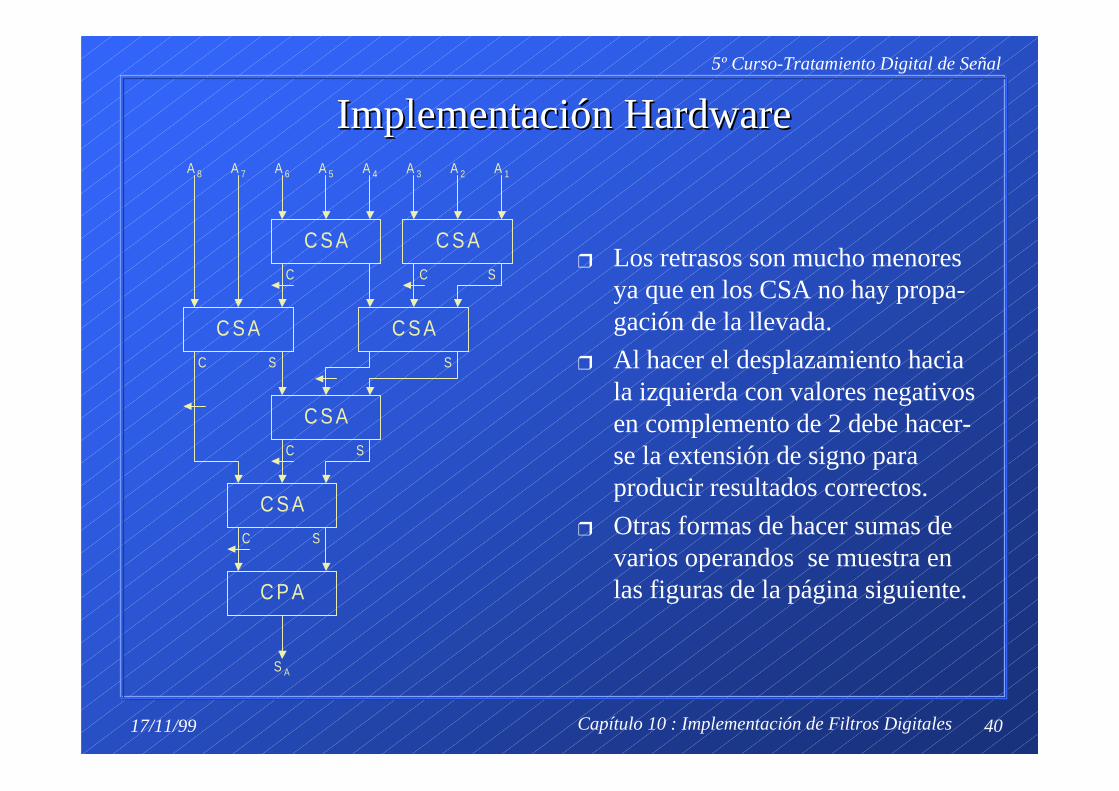
❒ Los retrasos son mucho menoresya que en los CSA no hay propa-gación de la llevada.
❒ Al hacer el desplazamiento haciala izquierda con valores negativosen complemento de 2 debe hacer-se la extensión de signo paraproducir resultados correctos.
❒ Otras formas de hacer sumas devarios operandos se muestra enlas figuras de la página siguiente.
C S A C S A
C S A C S A
C S A
C S A
C P A
C S
S
S
S S
C
C
C
C
S A
A 1A 8 A 7 A 6 A 5 A 4 A 3 A 2
41
5º Curso-Tratamiento Digital de Señal
Capítulo 10 : Implementación de Filtros Digitales17/11/99
ImplementaciónImplementación Hardware Hardware
C P A
R E G
A k
S A
CLK
C L R
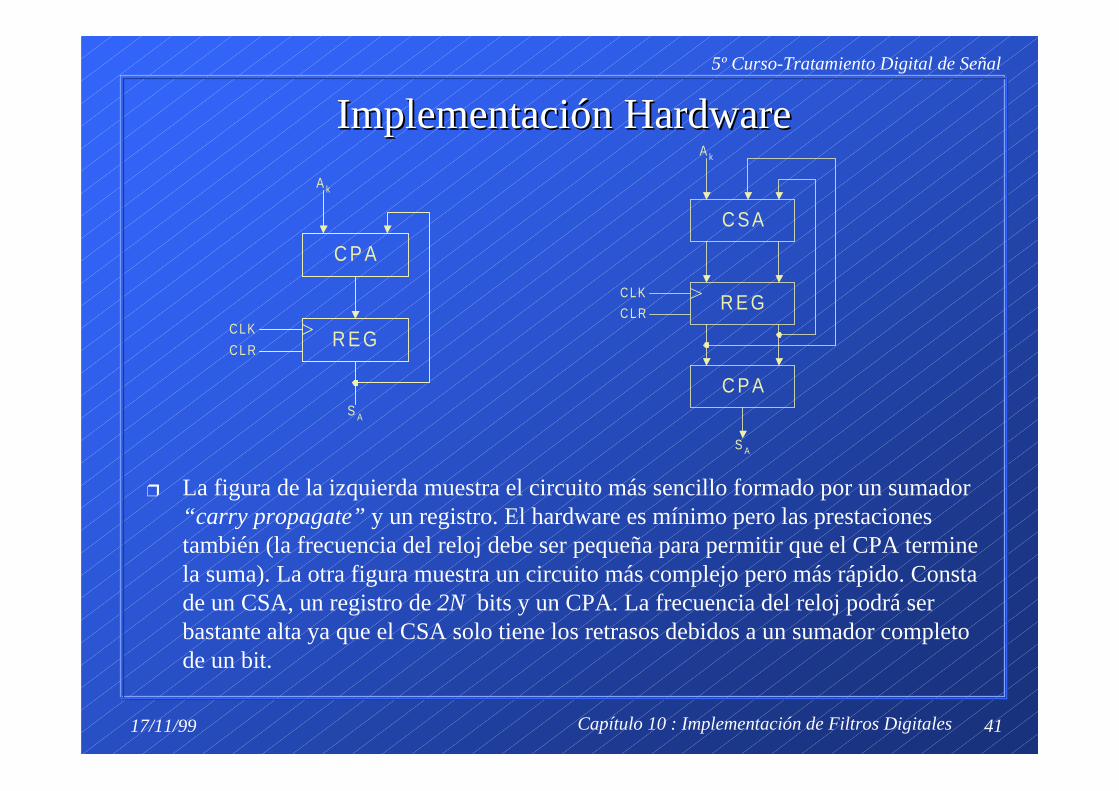
❒ La figura de la izquierda muestra el circuito más sencillo formado por un sumador“carry propagate” y un registro. El hardware es mínimo pero las prestacionestambién (la frecuencia del reloj debe ser pequeña para permitir que el CPA terminela suma). La otra figura muestra un circuito más complejo pero más rápido. Constade un CSA, un registro de 2N bits y un CPA. La frecuencia del reloj podrá serbastante alta ya que el CSA solo tiene los retrasos debidos a un sumador completode un bit.
C S A
R E GC L K
C L R
C P A
A k
S A
42
5º Curso-Tratamiento Digital de Señal
Capítulo 10 : Implementación de Filtros Digitales17/11/99
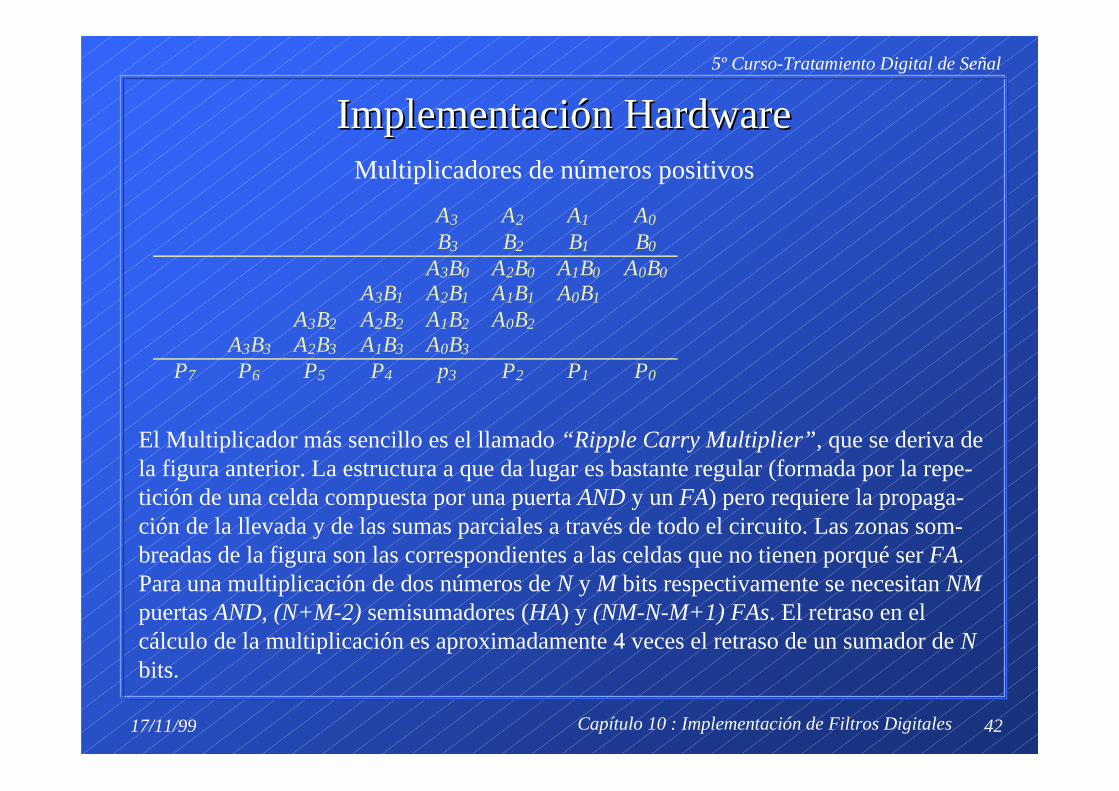
ImplementaciónImplementación Hardware HardwareMultiplicadores de números positivos
A3 A2 A1 A0
B3 B2 B1 B0
A3B0 A2B0 A1B0 A0B0
A3B1 A2B1 A1B1 A0B1
A3B2 A2B2 A1B2 A0B2
A3B3 A2B3 A1B3 A0B3
P7 P6 P5 P4 p3 P2 P1 P0
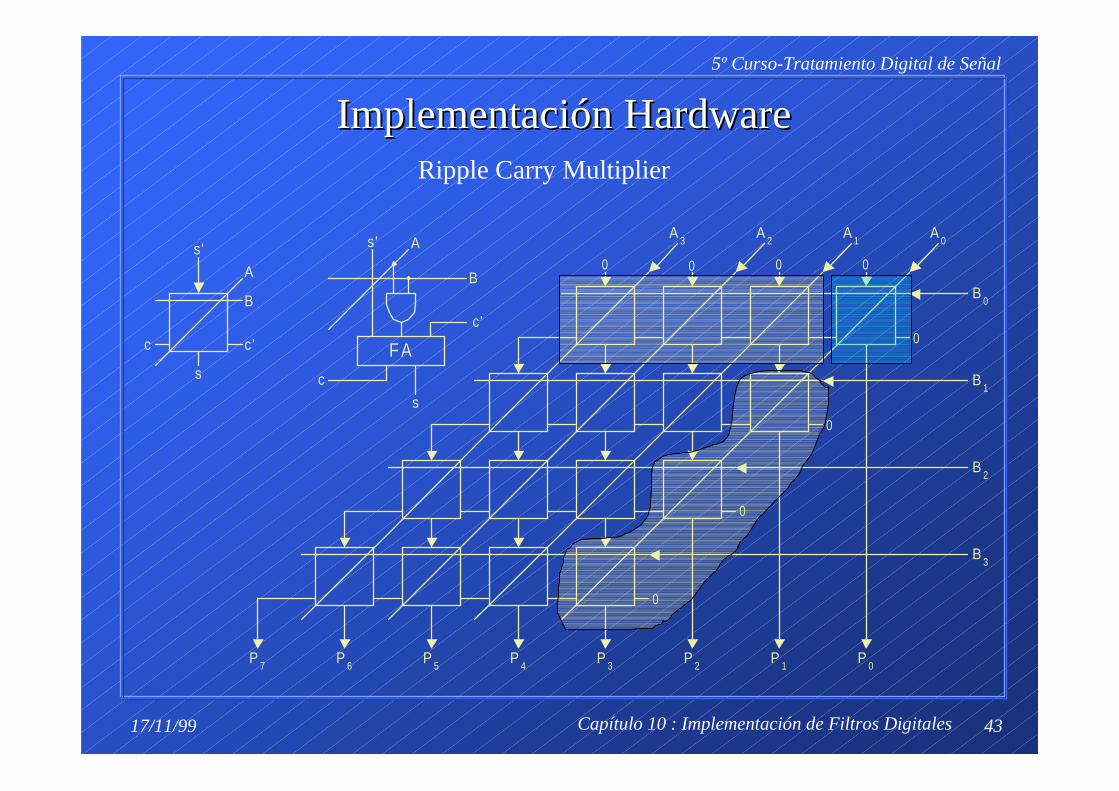
El Multiplicador más sencillo es el llamado “Ripple Carry Multiplier” , que se deriva dela figura anterior. La estructura a que da lugar es bastante regular (formada por la repe-tición de una celda compuesta por una puerta AND y un FA) pero requiere la propaga-ción de la llevada y de las sumas parciales a través de todo el circuito. Las zonas som-breadas de la figura son las correspondientes a las celdas que no tienen porqué ser FA.Para una multiplicación de dos números de N y M bits respectivamente se necesitan NMpuertas AND, (N+M-2) semisumadores (HA) y (NM-N-M+1) FAs. El retraso en elcálculo de la multiplicación es aproximadamente 4 veces el retraso de un sumador de Nbits.
43
5º Curso-Tratamiento Digital de Señal
Capítulo 10 : Implementación de Filtros Digitales17/11/99
ImplementaciónImplementación Hardware Hardware
B0
B2
B3
B1
A3
A0
A1
A2
00 0 0
0
0
0
0
P0
P7
P6
P5
P4
P3
P2
P1
B
A
s'
c'c
sF A
B
A
c'
s'
c
s
Ripple Carry Multiplier

44
5º Curso-Tratamiento Digital de Señal
Capítulo 10 : Implementación de Filtros Digitales17/11/99
ImplementaciónImplementación Hardware Hardware
A 3 A 0A 1A 2
B 3
B 2
B 1
B 0
0
0
0
0
0 00 0000
A D D E R
P 0P 7 P 6 P 5 P 4 P 3 P 2 P 1
La propagación de la llevada se realiza desdeuna fila a otra posterior y no entre celdas de lamisma fila, por lo que hay que hacer una sumafinal. El retraso en el cálculo es ~ 3 veces elretraso de un sumador de N bits.
Carry Save Multipliers
45
5º Curso-Tratamiento Digital de Señal
Capítulo 10 : Implementación de Filtros Digitales17/11/99
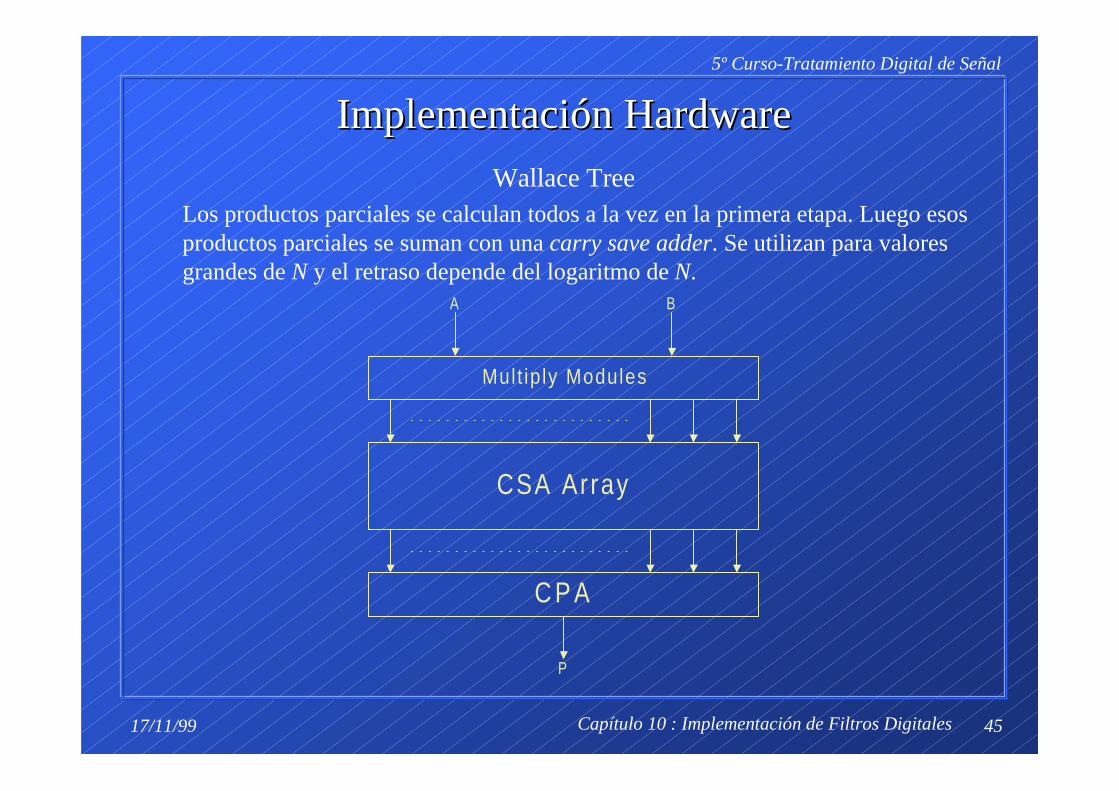
ImplementaciónImplementación Hardware HardwareWallace Tree
Los productos parciales se calculan todos a la vez en la primera etapa. Luego esosproductos parciales se suman con una carry save adder. Se utilizan para valoresgrandes de N y el retraso depende del logaritmo de N.
Mult ip ly Modules
CSA Array
C P A
A B
P
46
5º Curso-Tratamiento Digital de Señal
Capítulo 10 : Implementación de Filtros Digitales17/11/99
ImplementaciónImplementación Hardware Hardware
Mult ip l icandShif t Left
64 bi ts
64-b i t ALU
ProductWr i te
Mult ipl ierShif t Right
64 bi ts
32 bi ts
Contro l
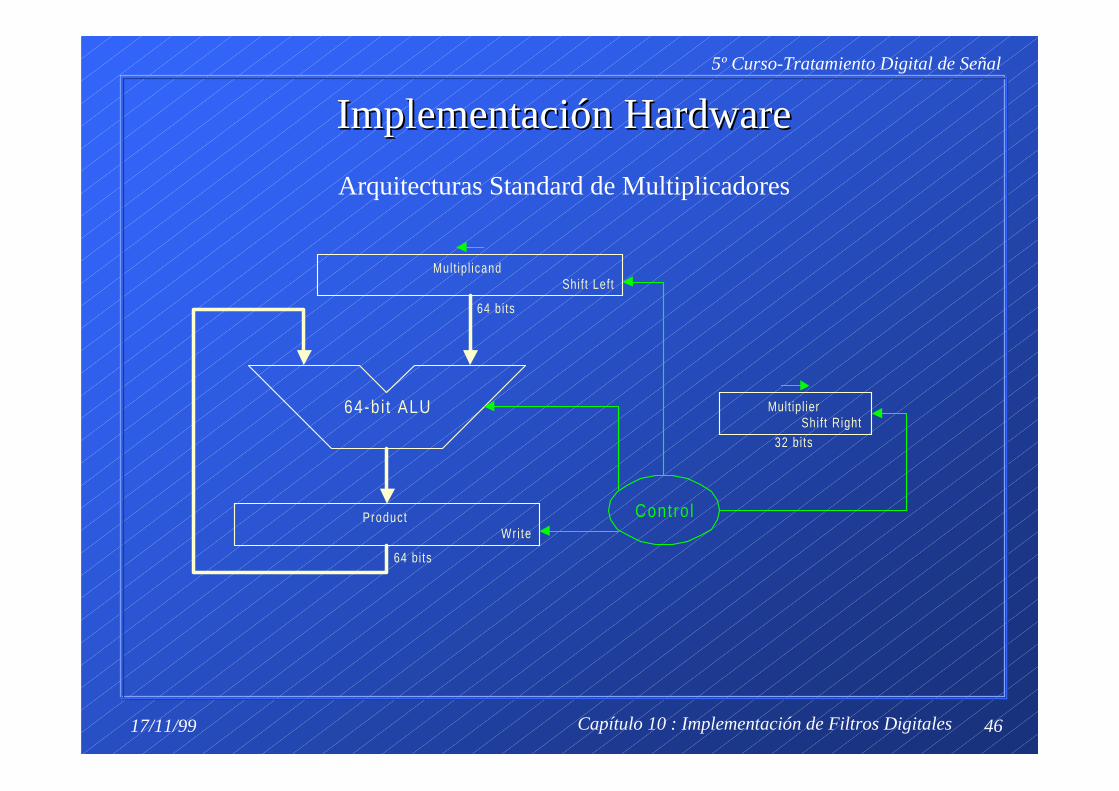
Arquitecturas Standard de Multiplicadores
47
5º Curso-Tratamiento Digital de Señal
Capítulo 10 : Implementación de Filtros Digitales17/11/99
ImplementaciónImplementación Hardware Hardware
Multipl icand
32 bits
32-bi t ALU
Shift RightProduct
Wri te
MultiplierShift Right
64 bits
32 bits
Control
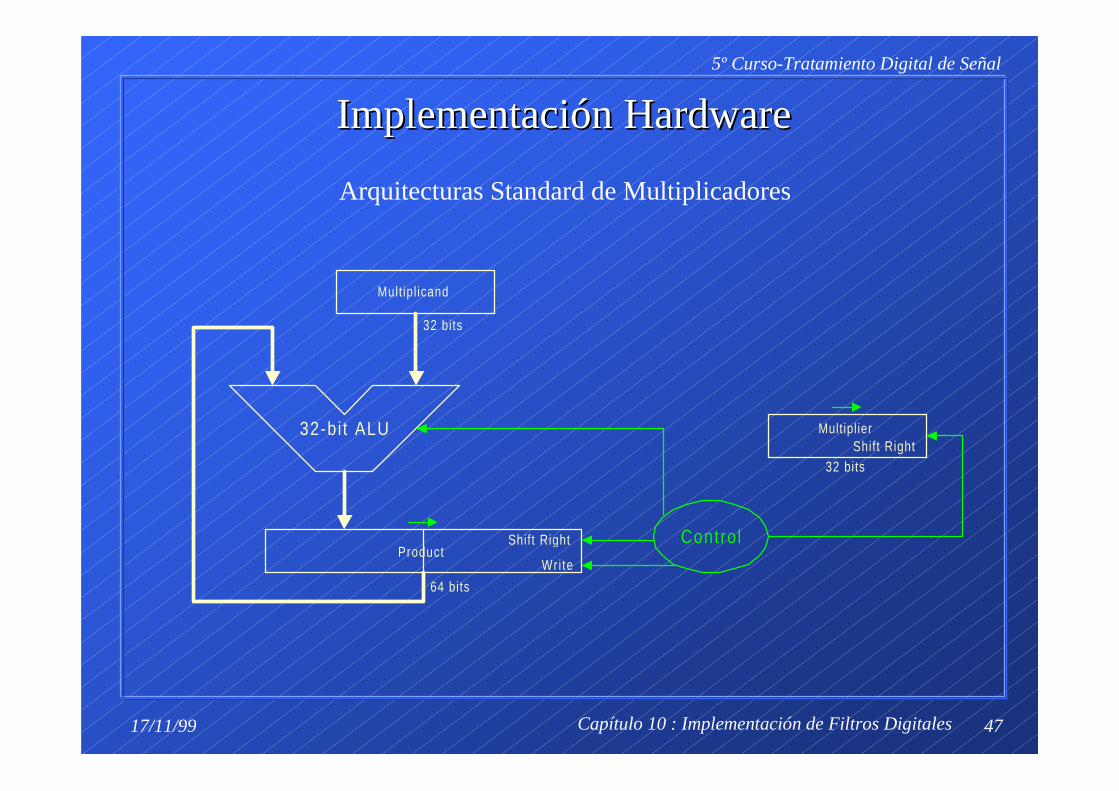
Arquitecturas Standard de Multiplicadores
48
5º Curso-Tratamiento Digital de Señal
Capítulo 10 : Implementación de Filtros Digitales17/11/99
Implementación Implementación HardwareHardware
Mult ipl icand
32 bits
32-bi t ALU
Shift RightProduct
Wr i te
64 bits
Control
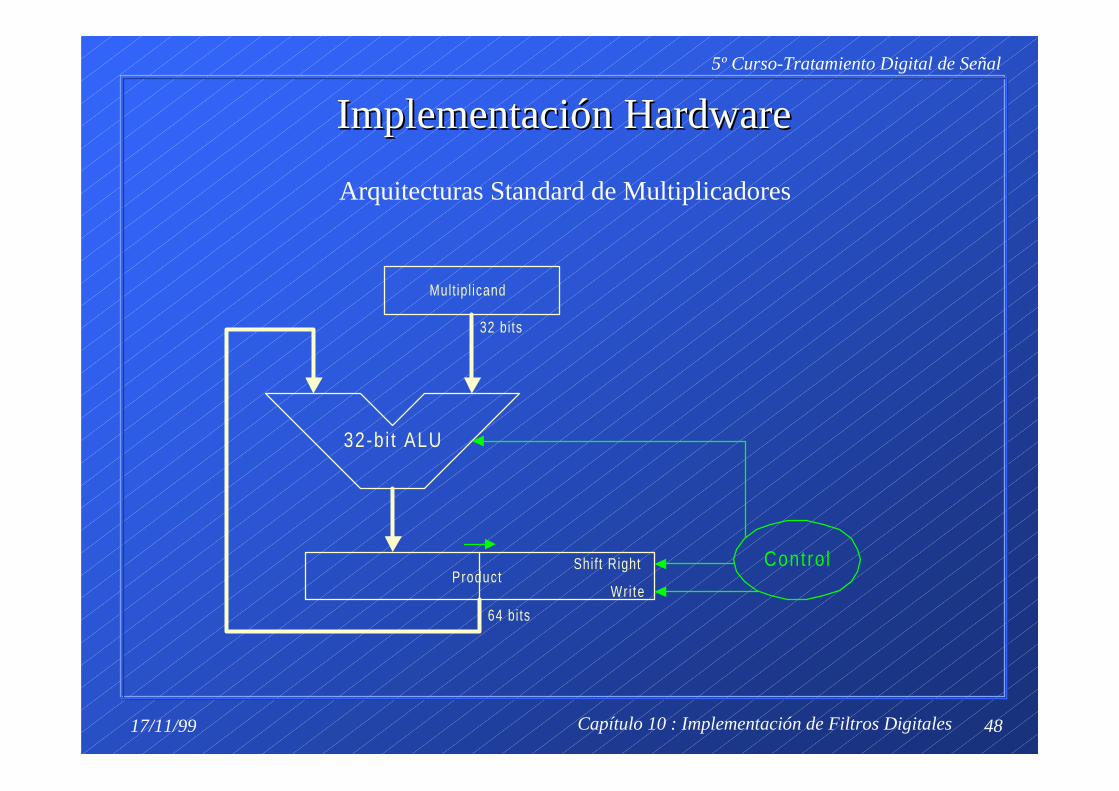
Arquitecturas Standard de Multiplicadores
49
5º Curso-Tratamiento Digital de Señal
Capítulo 10 : Implementación de Filtros Digitales17/11/99
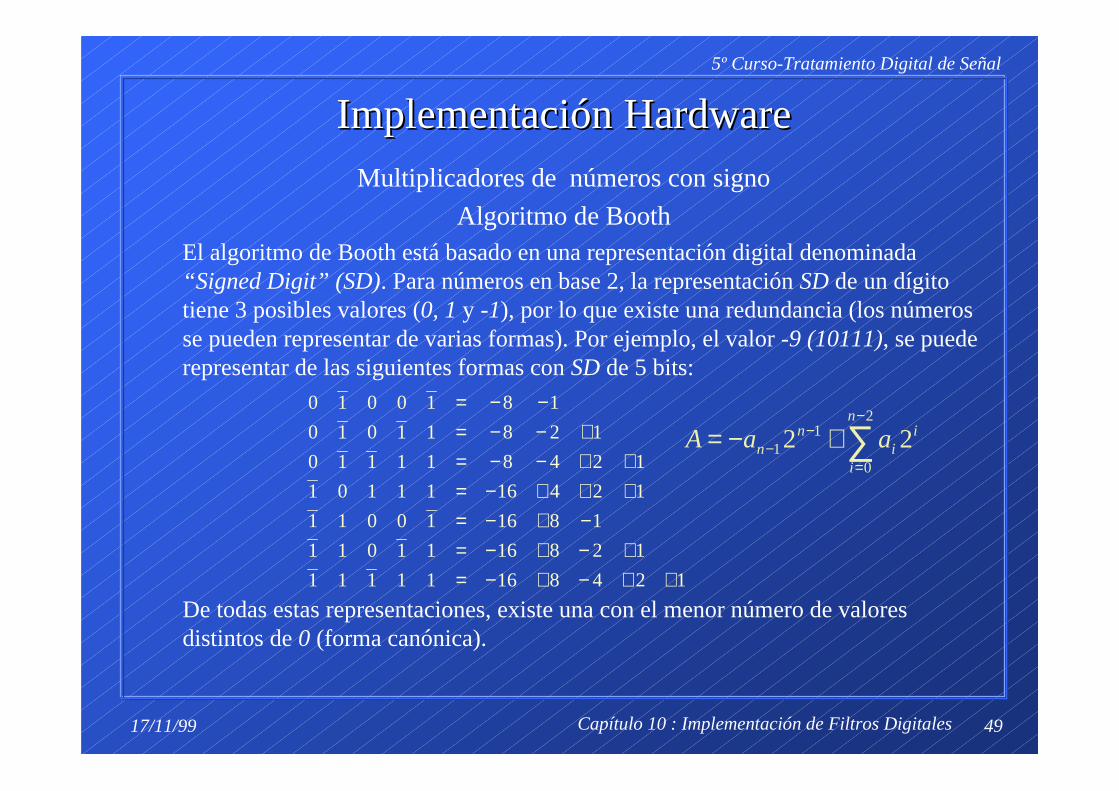
Implementación Implementación HardwareHardwareMultiplicadores de números con signo
Algoritmo de BoothEl algoritmo de Booth está basado en una representación digital denominada“Signed Digit” (SD). Para números en base 2, la representación SD de un dígitotiene 3 posibles valores (0, 1 y -1), por lo que existe una redundancia (los númerosse pueden representar de varias formas). Por ejemplo, el valor -9 (10111), se puederepresentar de las siguientes formas con SD de 5 bits:
De todas estas representaciones, existe una con el menor número de valoresdistintos de 0 (forma canónica).
∑−
=
−− +−=
2
0
11 22
n
i
ii
nn aaA
12481611111
1281611011
181610011
1241611101
124811110
12811010
1810010
++−+−=+−+−=
−+−=+++−=++−−=
+−−=−−=

50
5º Curso-Tratamiento Digital de Señal
Capítulo 10 : Implementación de Filtros Digitales17/11/99
ImplementaciónImplementación Hardware Hardware❒ Un número digital se convierte a SD en forma canónica (CSD) observando
cadenas de 1s en la representación digital normal (complemento de 2).
❒ Una cadena de 1s puede convertirse a CSD de la siguiente forma:… 0 0 1 1 1 1 … 1 1 0 0 … --> … 0 1 0 0 0 0 … 0 1 0 0 …
1 1 1 … 1 1 0 0 … --> 0 0 0 … 0 1 0 0 …
❒ Utilizando esta recodificación, podemos modificar la forma de multiplicar.Supongamos que queremos multiplicar A (an-1,…,a0) por B, los pasos arealizar son los siguientes:
✦ Si ai=0 y ai-1=0, sumar 0 a P
✦ Si ai=0 y ai-1=1, sumar B a P
✦ Si ai=1 y ai-1=0, resta B de P
✦ Si ai=1 y ai-1=1, suma 0 a P

51
5º Curso-Tratamiento Digital de Señal
Capítulo 10 : Implementación de Filtros Digitales17/11/99
ImplementaciónImplementación Hardware Hardware❒ Ejemplo: Multiplicar -6 (1010) por -5 (1011)
P A0000 10100000 1010 a0=a-1=0, sumar 0
0000 0101 Desplazar un bit a la izquierda
+0101 a0=0,a-1=1, restar B (1011)
0101 01010010 1010 Desplazar un bit a la izquierda
+1011 a0=1,a-1=0, sumar B (1011)
1101 10101110 1101 Desplazar un bit a la izquierda (extensión de signo)
+0101 a0=0,a-1=1, restar B (1011)
0011 11010001 1110 Desplazar un bit a la izquierda
52
5º Curso-Tratamiento Digital de Señal
Capítulo 10 : Implementación de Filtros Digitales17/11/99
Digital Signal ProcessorsDigital Signal Processors
¿Qué distingue a un DSP de otros micros de propósito general?◆ ALU flexible y rápida: las operaciones estandard (bit a bit, suma, etc),
multiplicaciones, multiplicaciones con acumulación y desplazamientosarbitrarios deben ser realizados en un ciclo de reloj.
◆ Rango dinámico extendido para multiplicaciones+acumulación, deforma que no ocurra overflow.
◆ Carga de operandos en un ciclo de reloj, lo que significa un direccio-namiento flexible para varias memorias de datos.
◆ Hardware específico que permita el almacenamiento circular.
◆ No son necesarias instrucciones adicionales (condiciones, comparacio-nes) para bucles y saltos.
53
5º Curso-Tratamiento Digital de Señal
Capítulo 10 : Implementación de Filtros Digitales17/11/99
Digital Signal ProcessorsDigital Signal Processors
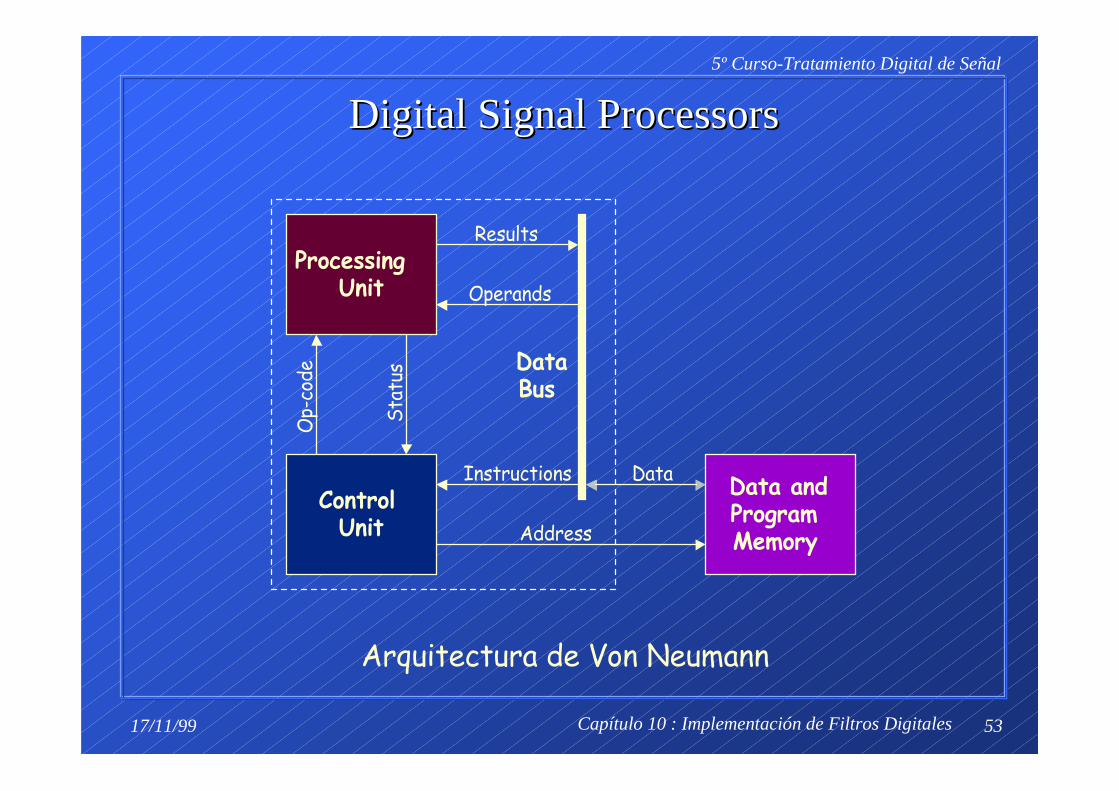
3URFHVVLQJ8QLW
&RQWURO8QLW
2S�FRGH
'DWD�DQG3URJUDP0HPRU\
6WDWXV
5HVXOWV
2SHUDQGV
,QVWUXFWLRQV
$GGUHVV
'DWD
'DWD%XV
$UTXLWHFWXUD�GH�9RQ�1HXPDQQ
54
5º Curso-Tratamiento Digital de Señal
Capítulo 10 : Implementación de Filtros Digitales17/11/99
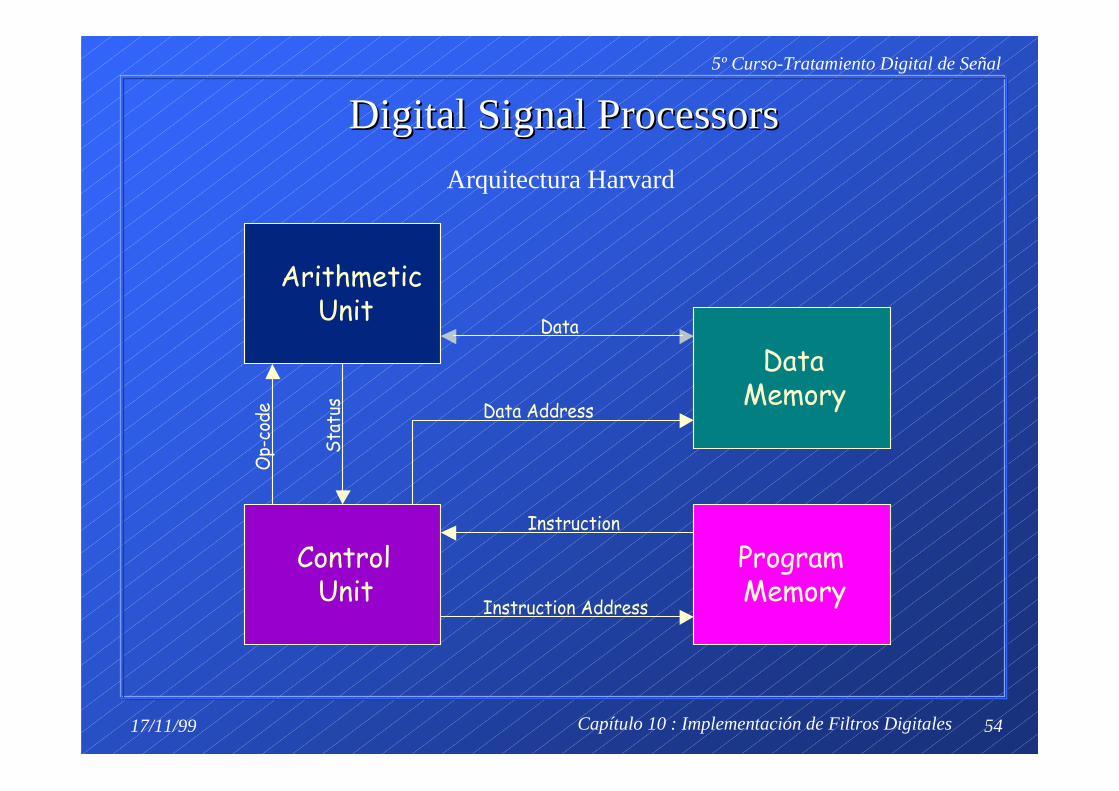
Arquitectura Harvard
Digital Signal ProcessorsDigital Signal Processors
$ULWKPHWLF8QLW
&RQWURO8QLW
3URJUDP0HPRU\
'DWD0HPRU\
'DWD
'DWD�$GGUHVV
,QVWUXFWLRQ
,QVWUXFWLRQ�$GGUHVV
6WDWXV
2S�FRGH

55
5º Curso-Tratamiento Digital de Señal
Capítulo 10 : Implementación de Filtros Digitales17/11/99
Digital Signal ProcessorsDigital Signal Processors
,QVWUXFWLRQ�6HTXHQFHU
,QVWUXFWLRQ�0HPRU\
,QVWUXFWLRQ�5HJLVWHU
,QVWUXFWLRQ�'HFRGHU
$GGUHVV�*HQHUDWLRQ�8QLW
'DWD�0HPRU\
'DWD�3DWK�3URFHVVLQJ�8QLW�
,QVWUXFWLRQ�6WUHDP 'DWD�6WUHDP
56
5º Curso-Tratamiento Digital de Señal
Capítulo 10 : Implementación de Filtros Digitales17/11/99
Digital Signal ProcessorsDigital Signal Processors
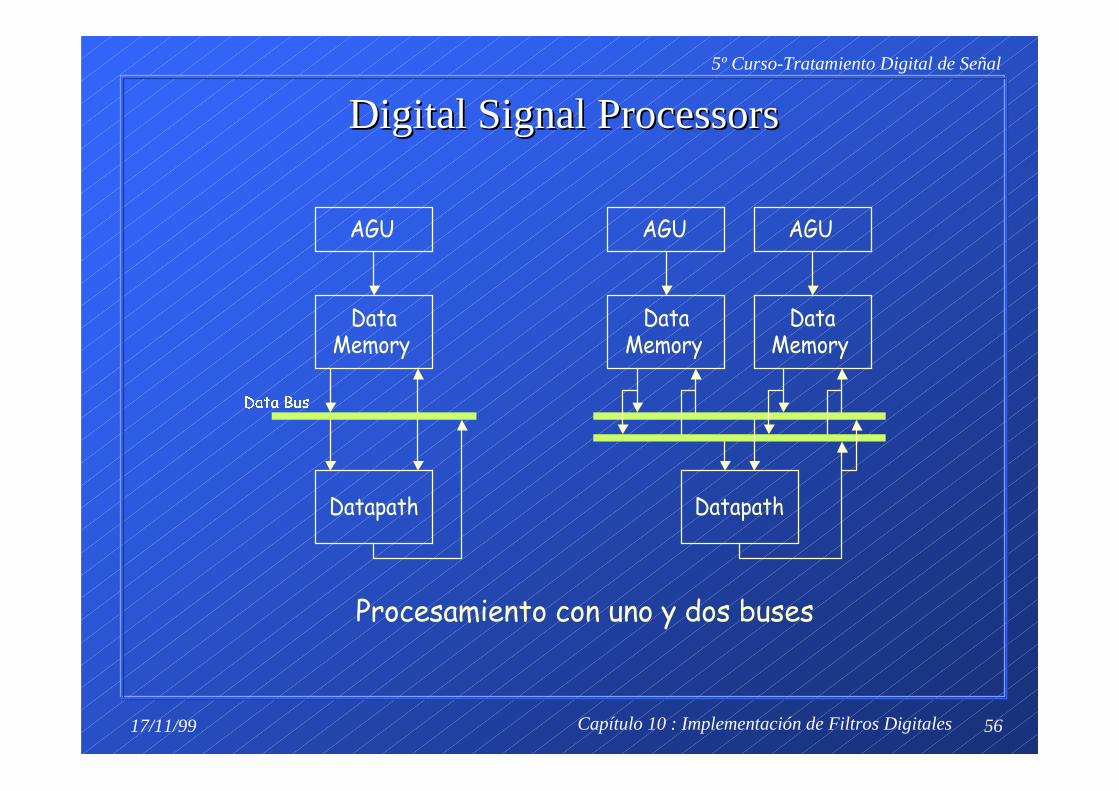
$*8
'DWD0HPRU\
'DWDSDWK
'DWD %XV
3URFHVDPLHQWR�FRQ�XQR�\�GRV�EXVHV
'DWDSDWK
'DWD0HPRU\
'DWD0HPRU\
$*8$*8
57
5º Curso-Tratamiento Digital de Señal
Capítulo 10 : Implementación de Filtros Digitales17/11/99
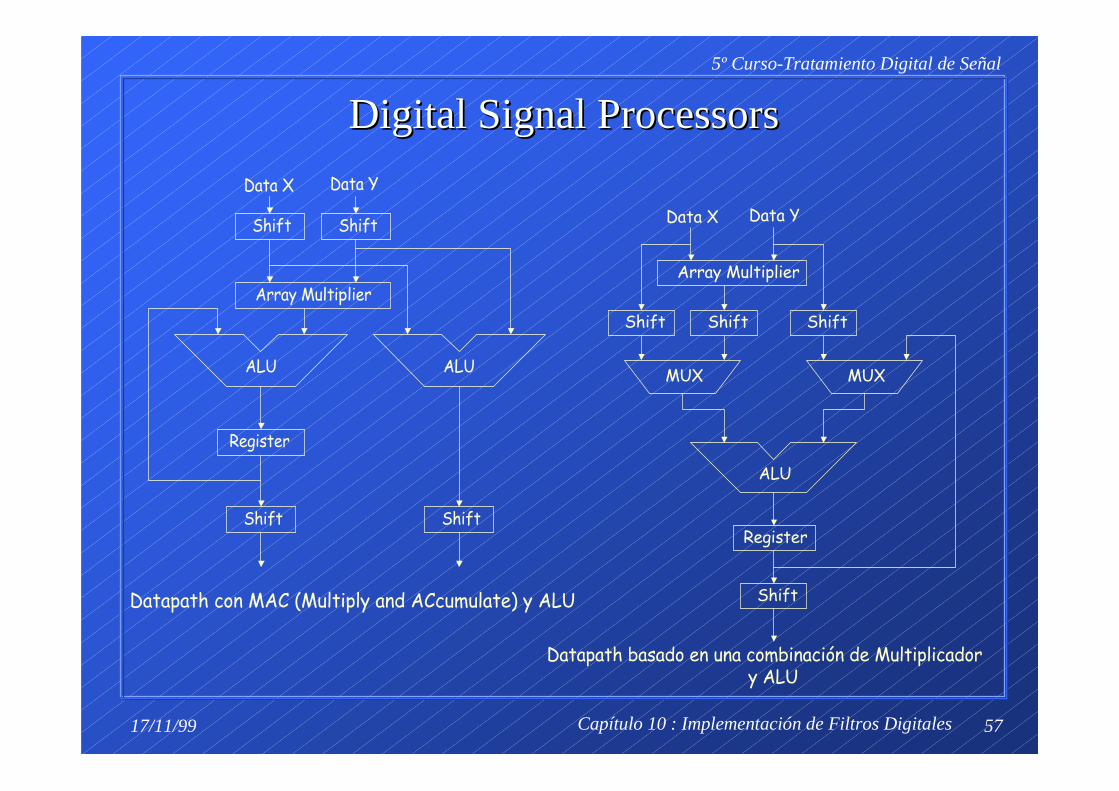
Digital Signal ProcessorsDigital Signal Processors
$UUD\�0XOWLSOLHU
6KLIW
$/8
5HJLVWHU
'DWD�; 'DWD�<
'DWDSDWK�FRQ�0$&��0XOWLSO\�DQG�$&FXPXODWH��\�$/8
$/8
6KLIW
6KLIW6KLIW
$UUD\�0XOWLSOLHU
6KLIW
08;
$/8
5HJLVWHU
'DWD�; 'DWD�<
'DWDSDWK�EDVDGR�HQ�XQD�FRPELQDFLyQ�GH�0XOWLSOLFDGRU\�$/8
6KLIW
6KLIW6KLIW
08;
58
5º Curso-Tratamiento Digital de Señal
Capítulo 10 : Implementación de Filtros Digitales17/11/99
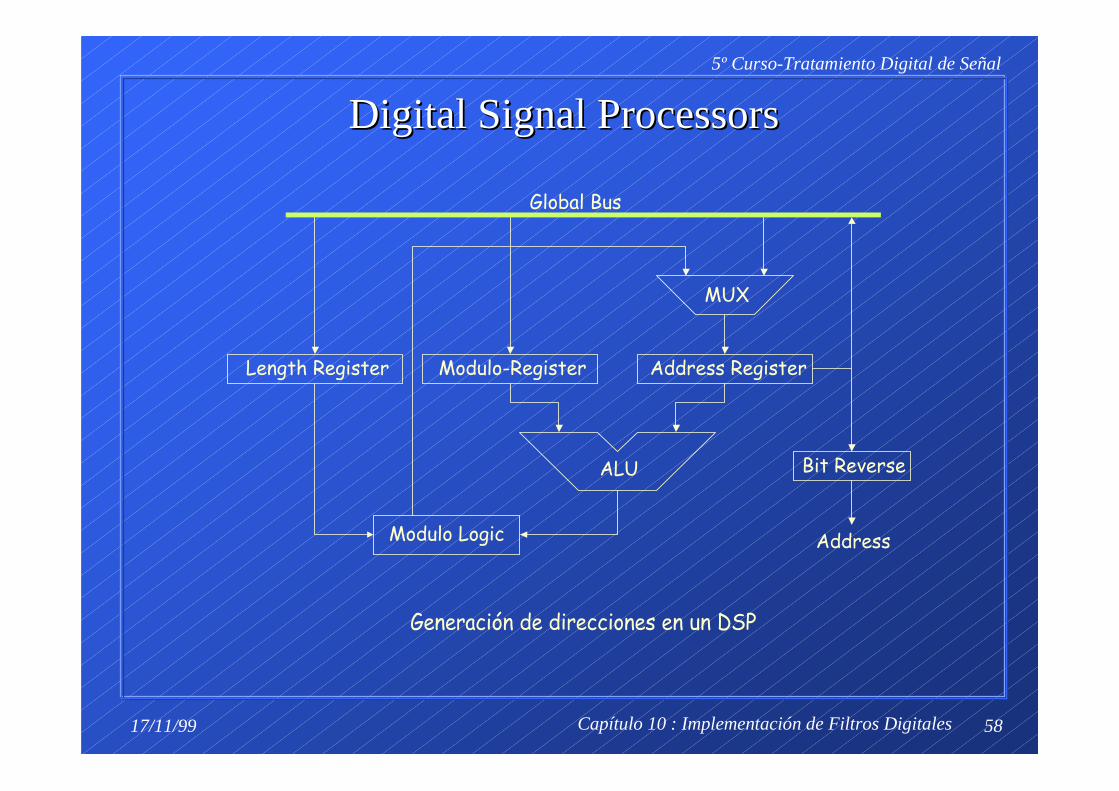
Digital Signal ProcessorsDigital Signal Processors
0RGXOR�5HJLVWHU
%LW�5HYHUVH$/8
0RGXOR�/RJLF
*HQHUDFLyQ�GH�GLUHFFLRQHV�HQ�XQ�'63
$GGUHVV�5HJLVWHU/HQJWK�5HJLVWHU
08;
*OREDO�%XV
$GGUHVV
59
5º Curso-Tratamiento Digital de Señal
Capítulo 10 : Implementación de Filtros Digitales17/11/99
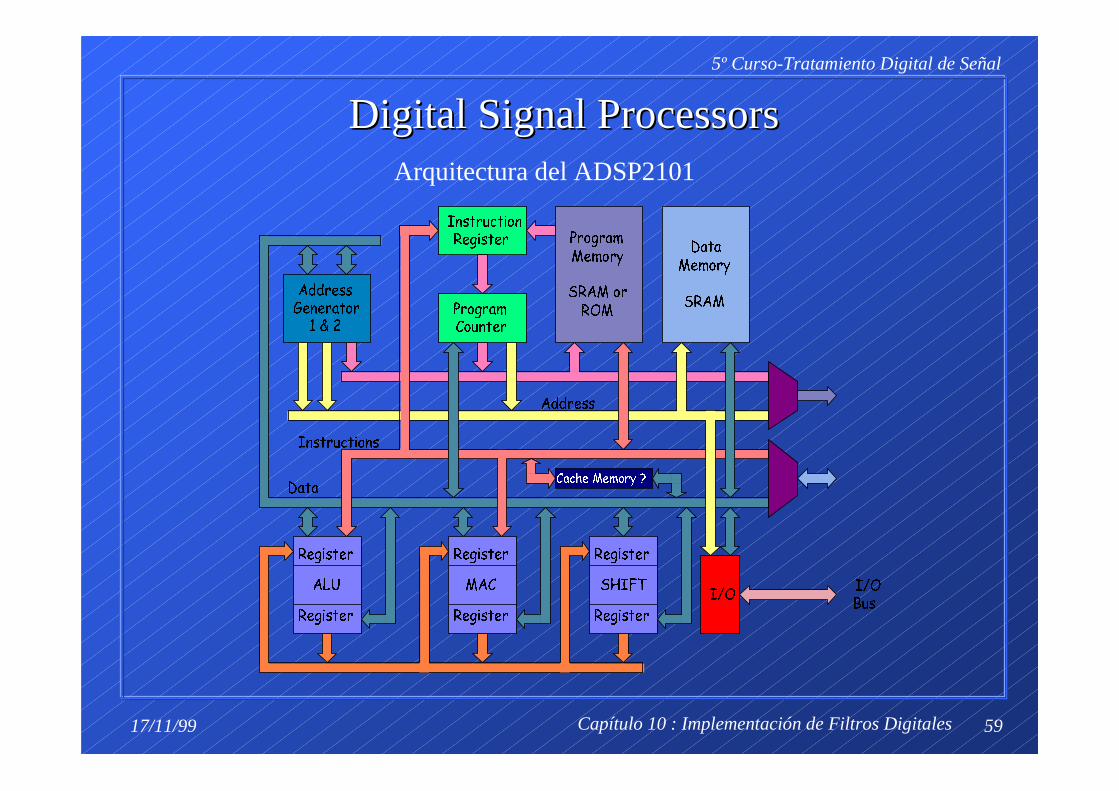
Digital Signal ProcessorsDigital Signal Processors
$GGUHVV*HQHUDWRU
� �3URJUDP&RXQWHU
,QVWUXFWLRQ5HJLVWHU 3URJUDP
0HPRU\
65$0 RU520
'DWD0HPRU\
65$0
5HJLVWHU
$/8
5HJLVWHU
5HJLVWHU
0$&
5HJLVWHU
5HJLVWHU
6+,)7
5HJLVWHU
,�2
&DFKH 0HPRU\ "
,�2%XV
'DWD
,QVWUXFWLRQV
$GGUHVV
Arquitectura del ADSP2101
60
5º Curso-Tratamiento Digital de Señal
Capítulo 10 : Implementación de Fil tros Digitales17/11/99
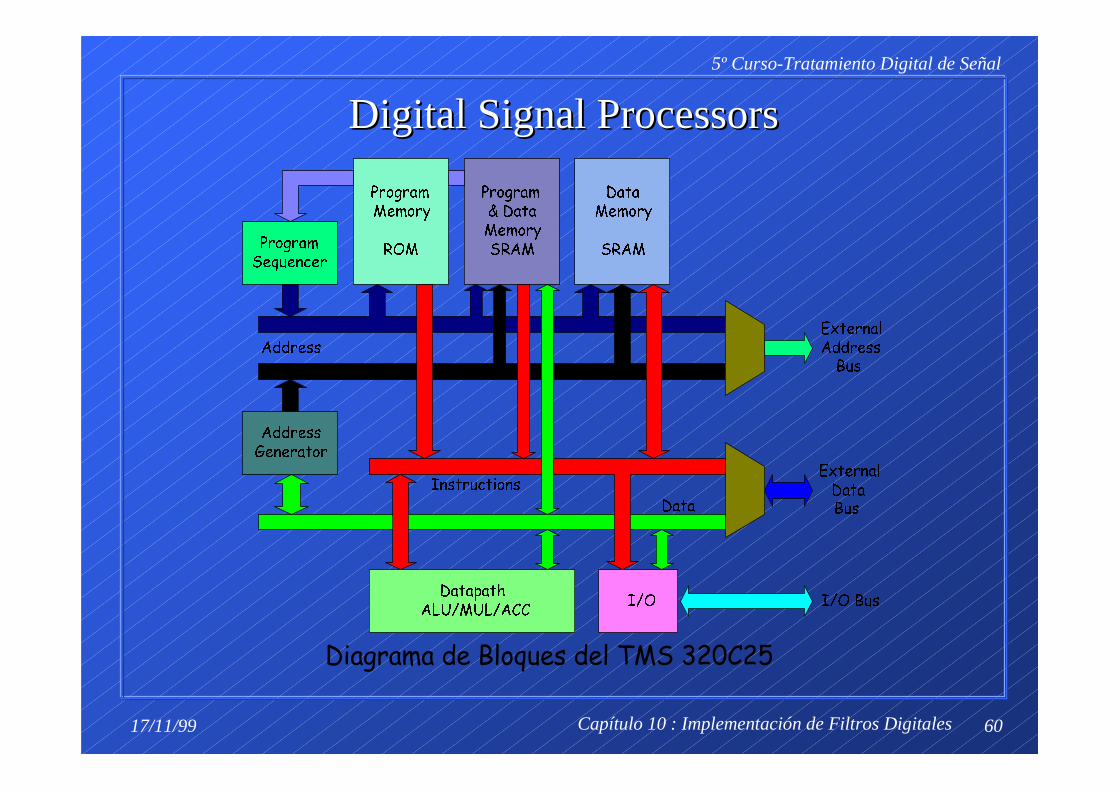
Digital Signal ProcessorsDigital Signal Processors
$GGUHVV*HQHUDWRU
3URJUDP 'DWD0HPRU\65$0
'DWD0HPRU\
65$0
3URJUDP0HPRU\
5203URJUDP6HTXHQFHU
'DWDSDWK$/8�08/�$&&
,�2
$GGUHVV
,QVWUXFWLRQV
'DWD
,�2 %XV
([WHUQDO$GGUHVV%XV
([WHUQDO'DWD%XV
'LDJUDPD�GH�%ORTXHV�GHO�706����&��

61
5º Curso-Tratamiento Digital de Señal
Capítulo 10 : Implementación de Fil tros Digitales17/11/99
Digital Signal ProcessorsDigital Signal Processors

62
5º Curso-Tratamiento Digital de Señal
Capítulo 10 : Implementación de Fil tros Digitales17/11/99
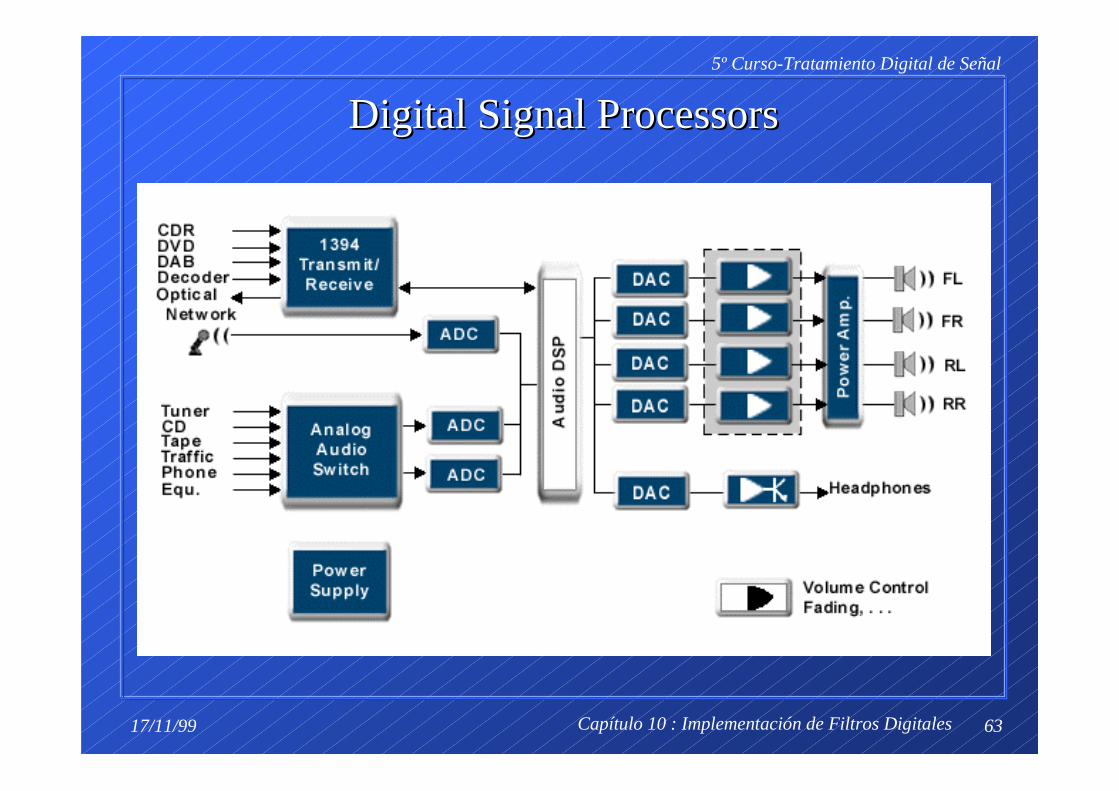
Digital Signal ProcessorsDigital Signal Processors
63
5º Curso-Tratamiento Digital de Señal
Capítulo 10 : Implementación de Fil tros Digitales17/11/99
Digital Signal ProcessorsDigital Signal Processors