ies consaburum. sistemas de energÍas … · en una regulación pid, un 80% del trabajo lo realiza...
TRANSCRIPT
IES CONSABURUM.
SISTEMAS DE ENERGÍAS RENOVABLES

DEFINICIONES PREVIAS
CONTROL: Controlar un proceso consiste en mantener constantes ciertas variables en
unos valores fijados de antemano. Estas variables pueden ser: temperatura, presión,
humedad, velocidad…
UN SISTEMAS DE CONTROL es el conjunto de elementos que hacen posibles que otros
sistema o planta permanezca fiel a los valores establecidos.
REGULACIÓN: Concepto que se confunde con el control, pero que va más allá.
Regulación se refiere a cómo vamos a llevar a cabo el control.
PLANTA o SISTEMA: Elemento o equipo que queremos controlar. Por ejemplo una
caldera.
VARIABLES: Conjunto de magnitudes físicas de la planta que queremos controlar.
SENSORES: Dispositivos que nos permiten medir y valorar las variables del sistema
SEÑALES: normalmente son señales eléctricas que nos proporcionan los sensores-
CONTROLADOR: Dispositivo encargado de controlar y regular el sistema.
ACTUADORES: Elementos que siguiendo órdenes del controlador, intervienen en el
sistema para modificar las variables del mismo. Por ejemplo una resistencia eléctrica,
una válvula etc.
PERTURBACIÓN: Se trata de aquellos procesos o elementos que provocan la variación
de la variable que queremos controlar. Por ejemplo, la pérdida de calor de una
habitación de la que queremos controlar su temperatura sería una perturbación.
TIPOS RE REGULACIÓN
REGULACIÓN MANUAL: El ser humano es el que controla y regula la planta-
REGULACIÓN AUTOMÁTICA: La regulación se realiza a través de un regulador, (PLC por
ejemplo)
SISTEMAS DE CONTROL EN LAZO ABIERTO
Aquellos en los que la variable de salida (variable controlada) no tiene efecto sobre la acción
de control (variable de control).
• Características
– No se compara la salida del sistema con el valor deseado de la salida del sistema
(referencia).
– Para cada entrada de referencia le corresponde una condición de operación fijada.
– La exactitud de la salida del sistema depende de la calibración del controlador.
– En presencia de perturbaciones estos sistemas de control no cumplen su función
adecuadamente.
– El control en lazo abierto suele aparecer en dispositivos con control secuencial, en el que no
hay una regulación de variables sino que se realizan una serie de operaciones de una manera
determinada.
EJEMPLOS
Semáforo.
Un ejemplo de sistema de lazo abierto es el semáforo. La señal de entrada es el tiempo asignado
a cada luz (rojo, amarilla y verde) de cada una de las calles. El sistema cambia las luces según el
tiempo indicado, sin importar que la cantidad de tránsito varíe en las calles
Horno de microondas
En el horno de microondas las llaves o botones de control fijan las señales de entrada, siendo
la elevación de la temperatura de la comida o la cocción la salida. Si por cualquier razón la
temperatura alcanzada, o el tiempo de aplicación del microondas ha sido insuficiente, y como
consecuencia la comida no ha alcanzado las condiciones deseadas, esto no altera el ciclo de
funcionamiento; es decir que la salida no ejerce influencia sobre la entrada.
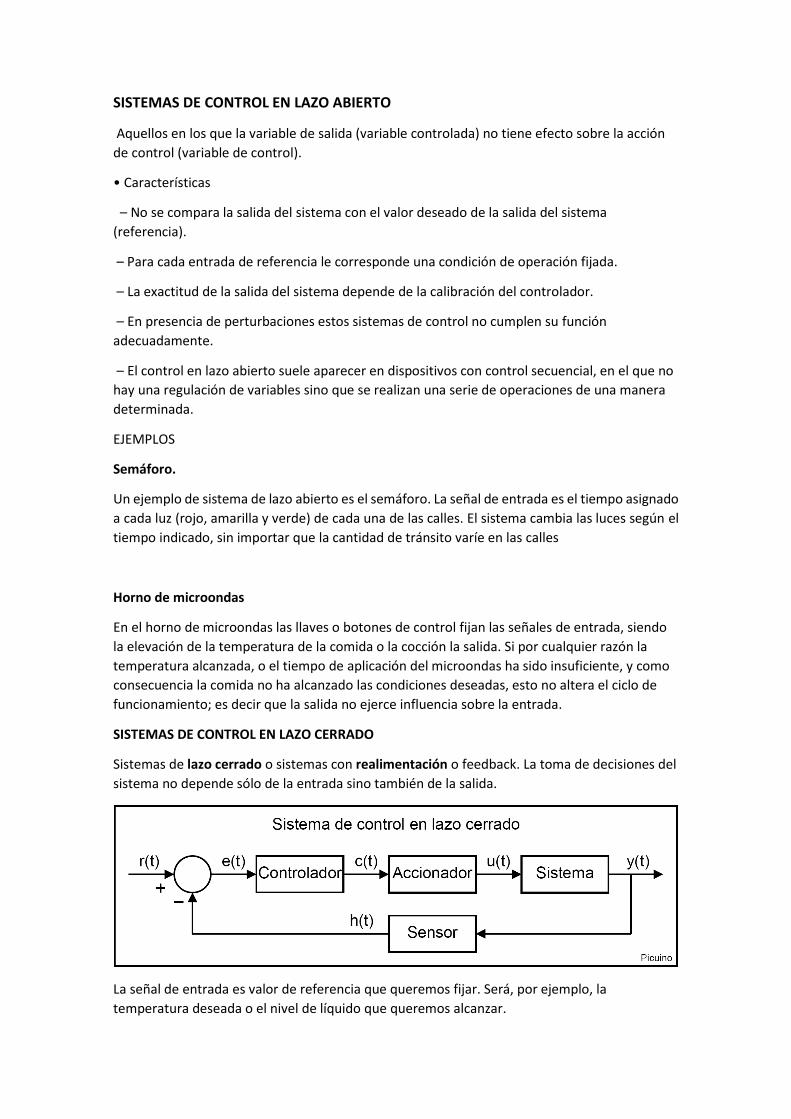
SISTEMAS DE CONTROL EN LAZO CERRADO
Sistemas de lazo cerrado o sistemas con realimentación o feedback. La toma de decisiones del
sistema no depende sólo de la entrada sino también de la salida.
La señal de entrada es valor de referencia que queremos fijar. Será, por ejemplo, la
temperatura deseada o el nivel de líquido que queremos alcanzar.
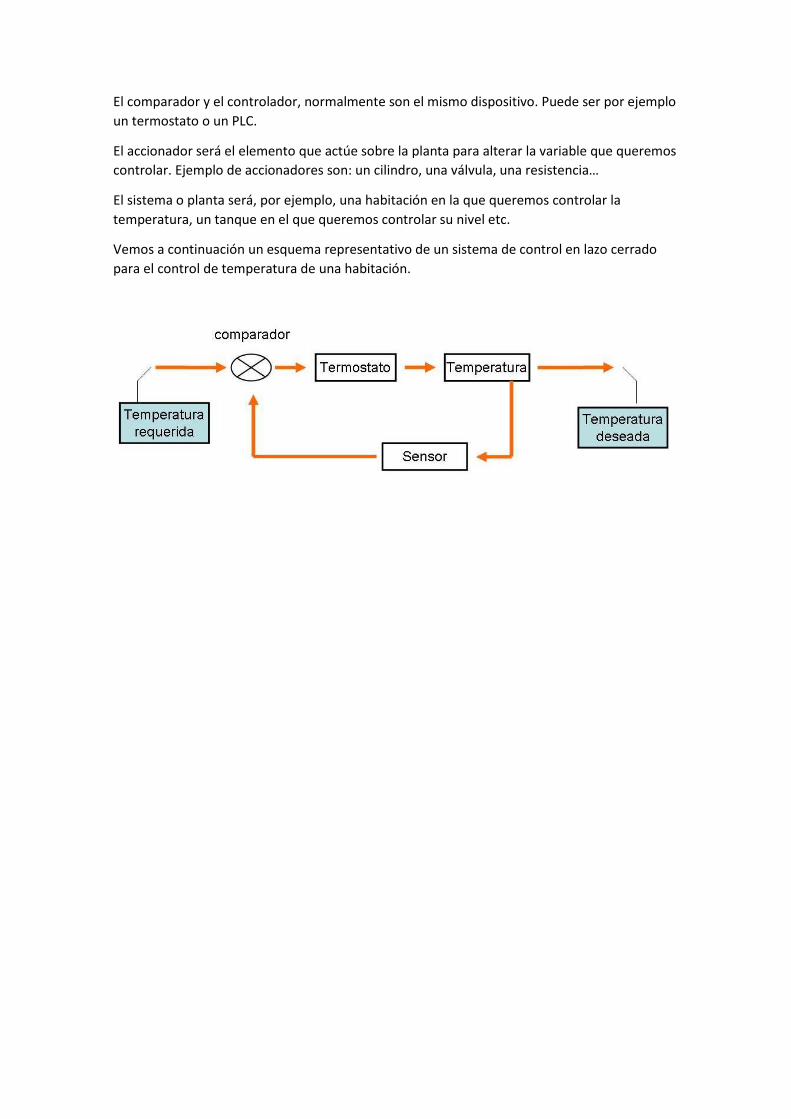
El comparador y el controlador, normalmente son el mismo dispositivo. Puede ser por ejemplo
un termostato o un PLC.
El accionador será el elemento que actúe sobre la planta para alterar la variable que queremos
controlar. Ejemplo de accionadores son: un cilindro, una válvula, una resistencia…
El sistema o planta será, por ejemplo, una habitación en la que queremos controlar la
temperatura, un tanque en el que queremos controlar su nivel etc.
Vemos a continuación un esquema representativo de un sistema de control en lazo cerrado
para el control de temperatura de una habitación.
SISTEMAS DE REGULACIÓN
En primer lugar hay que indicar que sólo es posible regular en sistemas con control en lazo
cerrado.
Tenemos varios tipos de regulación, de los cuales veremos.
- Regulación todo/nada
- Regulación proporcional.
- Regulación proporcional integral
- Regulación proporcional derivativa
- Regulación PID
- Regulación mediante tecnología Fuzzy.
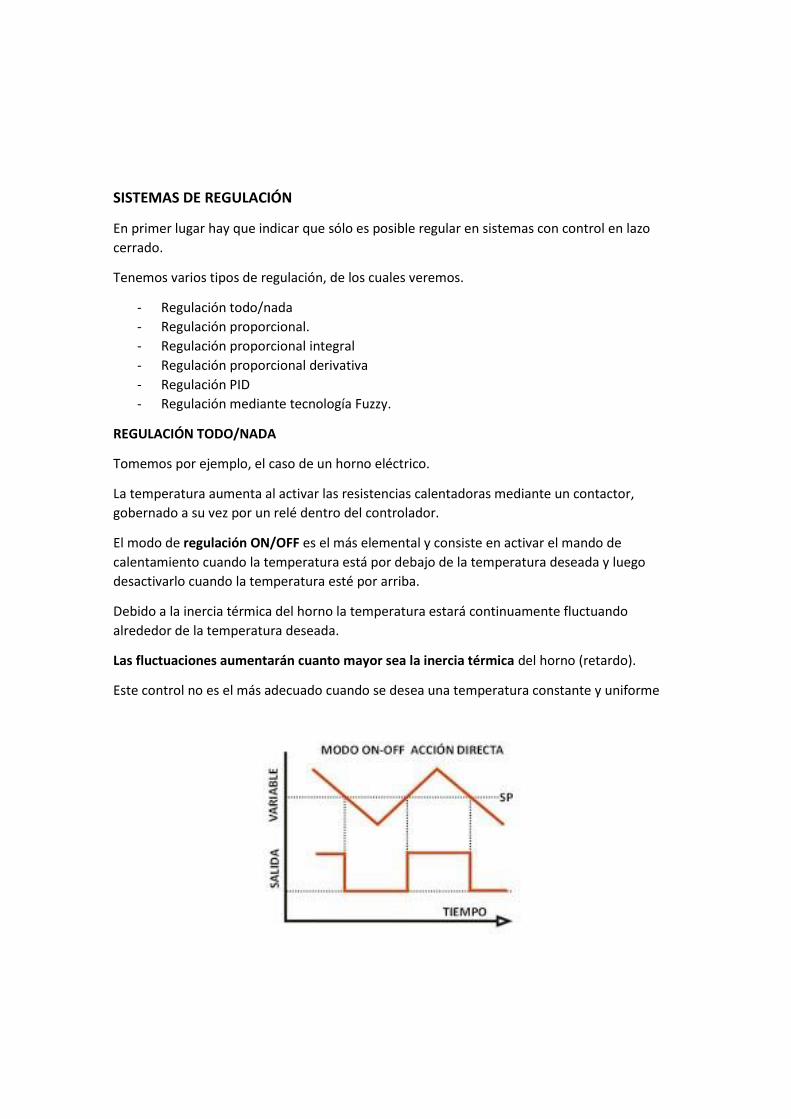
REGULACIÓN TODO/NADA
Tomemos por ejemplo, el caso de un horno eléctrico.
La temperatura aumenta al activar las resistencias calentadoras mediante un contactor,
gobernado a su vez por un relé dentro del controlador.
El modo de regulación ON/OFF es el más elemental y consiste en activar el mando de
calentamiento cuando la temperatura está por debajo de la temperatura deseada y luego
desactivarlo cuando la temperatura esté por arriba.
Debido a la inercia térmica del horno la temperatura estará continuamente fluctuando
alrededor de la temperatura deseada.
Las fluctuaciones aumentarán cuanto mayor sea la inercia térmica del horno (retardo).
Este control no es el más adecuado cuando se desea una temperatura constante y uniforme
REGULACIÓN PROPORCIONAL
Para poder controlar la temperatura con menos fluctuaciones, se debe entregar al horno una
potencia gradual, para mantenerlo a la temperatura deseada.
En el ejemplo anterior del control On/Off, el relé del mando de calentamiento estará activado
100%, entregando el máximo de potencia al horno o bien desactivado sin entregar potencia.
El controlador proporcional entrega una potencia que varía en forma gradual entre 0 y 100%
según se requiera y en forma proporcional al error (SP-PV).
*SP= SET VALUE (Valor de referencia que queremos obtener).
*PV= PRESENT VALUE (Valor de la variable medida)
En el regulador proporcional se mide el error entre el valor medido y el valor deseado.
Error= PV-SP
La señal de salida del controlador vendrá dada por la siguiente expresión:
Salida=Error x Kp
Donde Kp es a constante proporcional.
Normalmente la salida es un valor porcentual que puede oscilar entre
a) -100% y 100%
b) 0 y 100%
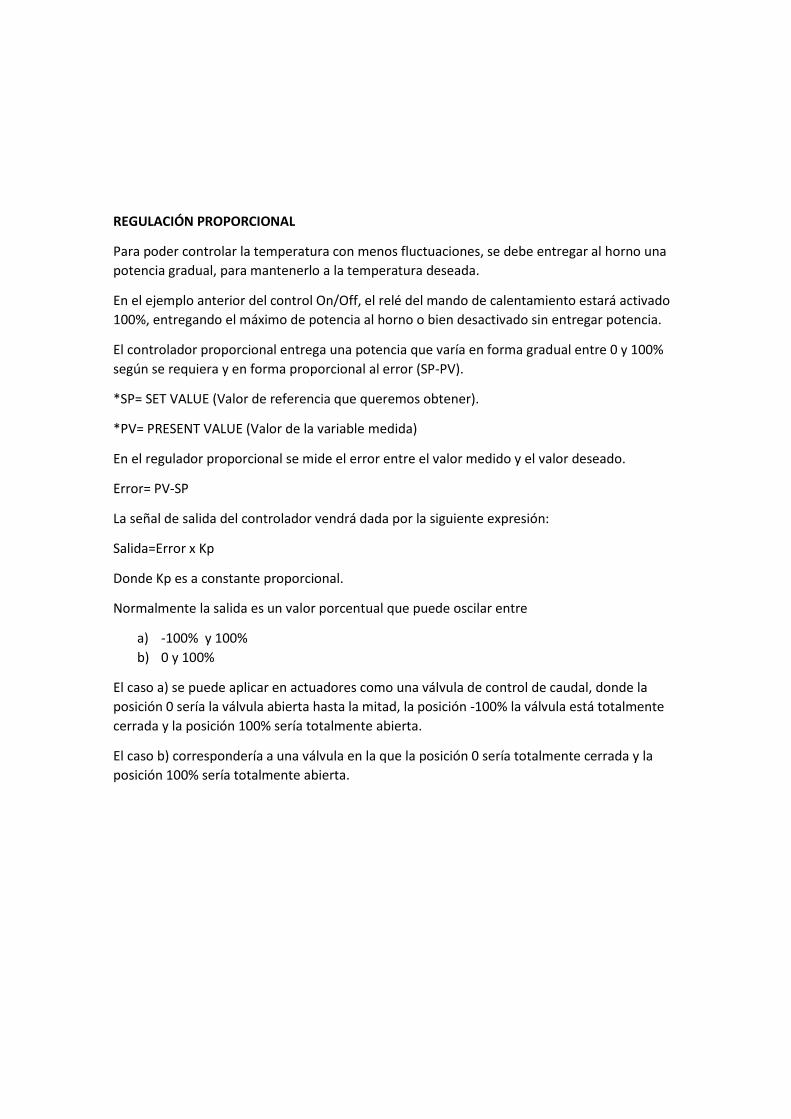
El caso a) se puede aplicar en actuadores como una válvula de control de caudal, donde la
posición 0 sería la válvula abierta hasta la mitad, la posición -100% la válvula está totalmente
cerrada y la posición 100% sería totalmente abierta.
El caso b) correspondería a una válvula en la que la posición 0 sería totalmente cerrada y la
posición 100% sería totalmente abierta.
Control Proporcional de tiempo variable (PWM)
En ocasiones no disponemos de una válvula para la regulación. Sería el caso de, por ejemplo, la
regulación de temperatura a través de resistencias eléctricas.
En este caso la resistencia sólo puede funcionar al 100% o nada, ya que una regulación de la
intensidad que pase por la resistencia no sería eficiente.
Para poder regular de forma proporcional se recurre a un control PWM (power withd
modulation, modulación por ancho de pulso).
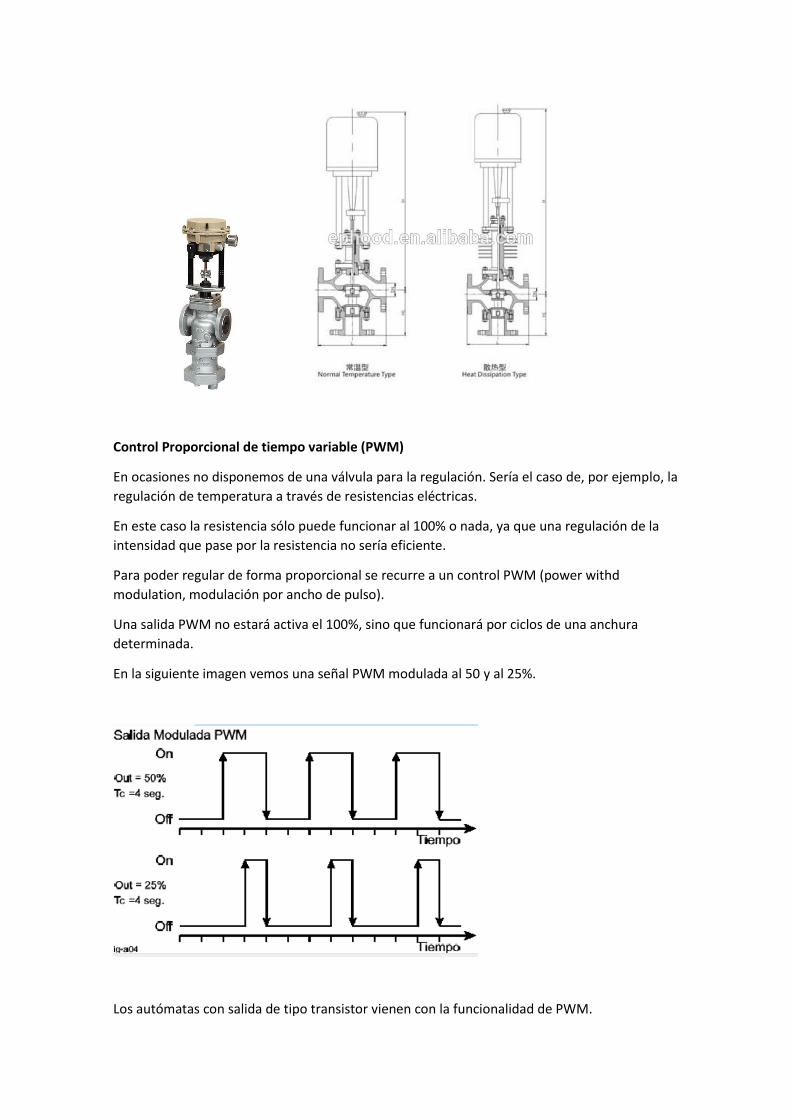
Una salida PWM no estará activa el 100%, sino que funcionará por ciclos de una anchura
determinada.
En la siguiente imagen vemos una señal PWM modulada al 50 y al 25%.
Los autómatas con salida de tipo transistor vienen con la funcionalidad de PWM.
CONTROL PROPORCIONAL DERIVATIVO PD
Un control PD es uno proporcional al que se le agrega la capacidad de considerar también la
velocidad de la temperatura en el tiempo.
De esta forma se puede "adelantar" la acción de control del mando de salida para obtener así
una temperatura más estable.
Si la temperatura está por debajo del SP, pero subiendo muy rápidamente y se va a pasar de
largo el SP, entonces el control se adelanta y disminuye la potencia de los calefactores.
Al revés si la temperatura es mayor que el SP, la salida debería ser 0% pero si el control estima
que la temperatura baja muy rápido y se va pasar para abajo del SP, entonces le coloca algo de
potencia a la salida para ir frenando el descenso brusco.
CONTROL PROPORCIONAL INTEGRAL PI
Este control es el proporcional más la acción integral, que lo corrige tomando en cuenta la
magnitud del error y el tiempo que este ha permanecido. Para ello se le programa al control
una constante I, que es "la cantidad de veces que aumenta la acción proporcional por
segundo“.
Por muy pequeño que sea el valor programado de I, siempre corregirá el error estacionario,
pero tardará más tiempo en hacerlo.
Al revés si se programa un valor excesivo de I, entonces la acción integral tendrá mucha fuerza
en la salida y el sistema alcanzará rápidamente el SP, pero lo más probable es que siga de largo
por efectos de la inercia térmica. Entonces la acción integral (con error negativo) será en
sentido contrario, irá disminuyendo rápidamente de acuerdo al error. Como consecuencia
habrá una excesiva disminución de la potencia de salida y la temperatura probablemente baje
del SP, entrando así el sistema en un ciclo oscilatorio.
En la práctica normalmente I deberá ser grande solo en sistemas que reaccionan
rápidamente, (por ejemplo controles de velocidad de motores) y pequeño para sistemas
lentos con mucha inercia. (Por ejemplo hornos)
En general los valores de la constante I son relativamente pequeños, para la mayoría de los
sistemas el valor adecuado de I varía entre 0 y 0,08
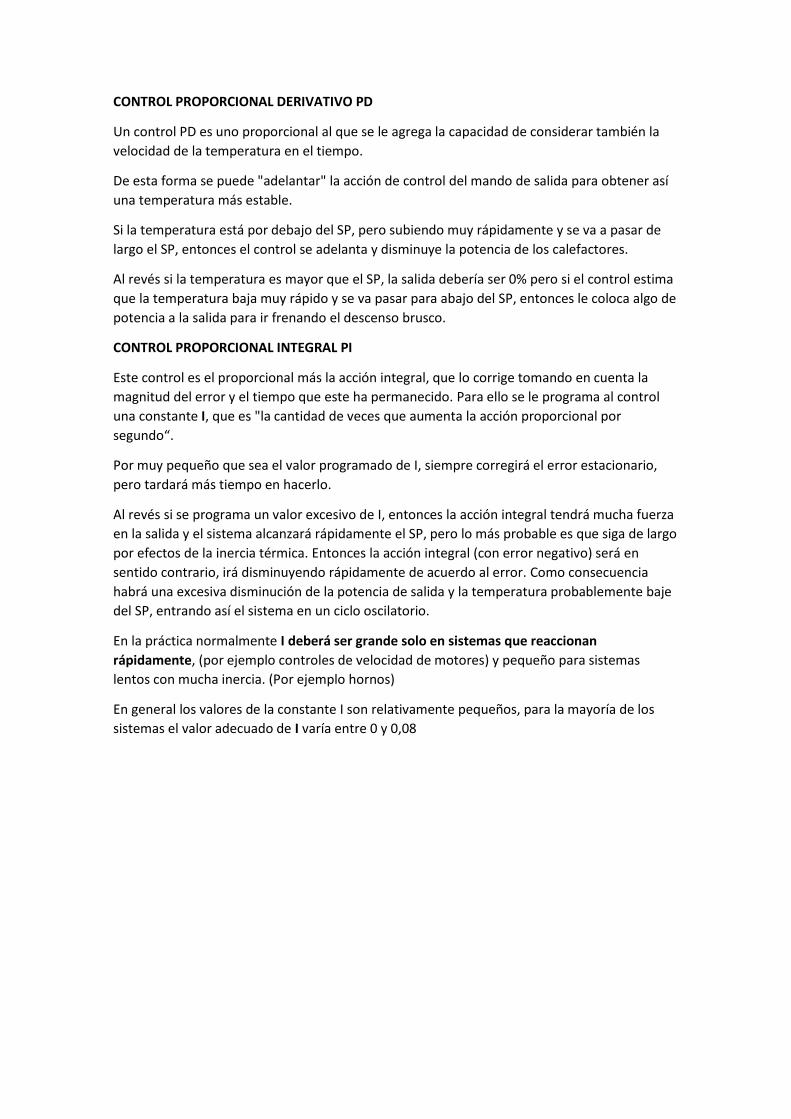
CONTROL PID
Un control PID es un controlador proporcional con acción derivativa y acción integral
simultáneamente superpuestas.
Existe un solo conjunto de valores P, D, I que darán el rendimiento óptimo para un sistema y
encontrarlos requiere: conocimientos teóricos, habilidad, experiencia y suerte
AJUSTE DE LOS VALORES PID
El ajuste de los valores P, I y D de forma matemática, requiere de un grado elevado del
conocimiento del sistema. En muchas ocasiones resultará más práctico realizar el ajuste
atendiendo a un procedimiento que viene dado por el conocimiento y por la experiencia en
estos estemas.
En una regulación PID, un 80% del trabajo lo realiza la Ganancia Proporcional, un 15% la ganancia
Integral y el 5% restante, cuando es necesario, la Ganancia Derivativa.
A continuación vemos un método práctico y eficiente en la mayoría de los casos:
1. Ajustamos las ganancias Integral y Derivativa a 0.
2. Aumentamos la Ganancia Proporcional poco a poco hasta que consigamos
aproximarnos al punto de consigna, aunque el sistema sea inestable. En este momento,
debemos reducir la Ganancia Proporcional hasta que el sistema vuelva a ser estable (no
importa que no hayamos alcanzado el punto de consigna deseado).
3. Lo más probable es que la respuesta del sistema esté por debajo o por encima del punto
de consigna deseado. Si este es el caso, habrá que aumentar la Ganancia Integral. ¡Ojo!
Si al aumentar la Ganancia Integral entramos en inestabilidad, debemos reducirla hasta
encontrar el punto de estabilidad.
4. Si aun disminuyendo la Ganancia Integral seguimos teniendo inestabilidad, debemos
aumentar ligeramente la Ganancia Derivativa.
Ahora, llega el momento de comprobar si los ajustes que hemos realizado son los correctos.
Para ello, tenemos que introducir una inestabilidad en el sistema (podemos mover el varillaje
de la regulación de velocidad, aplicar un pulso de carga,...) y debemos observar la respuesta del
sistema.
Si la respuesta ante la perturbación no es correcta, debemos repetir los pasos 2 a 4 hasta que
consigamos el resultado deseado.
TUTORIAL DE LÓGICA FUZZY
l. DEFINICIÓN DE LÓGICA FUZZY
La lógica Booleana es conocida como la más precisa de todas las ciencias y disciplinas teóricas. La mayoría
de las ciencias modernas y matemáticas se basan en sus principios. A pesar de las ventajas de su exactitud,
la lógica Boolena tiene la desventaja de no poder reproducir los patrones del pensamiento humano.
Es así, como a mediados de los años sesenta, el profesor Lotfi Zadeth de la universidad de
California en Berkeley, pretendiendo suplir esta deficiencia de la lógica tradicional, crea la que hoy se
denomina como lógica fuzzy.
Como disciplina teórica matemática, la lógica fuzzy está diseñada para reaccionar a cambios continuos
de la variable a ser controlada y se diferencia con la lógica Booleana por no estar restringida a dos
únicos valores de O y 1. En su lugar permite valores parciales y multivalores de verdad. Se puede
afirmar que la lógica Booleana es un caso especial de la lógica fuzzy. Esta disciplina es especialmente
ventajosa para problemas que no puedan ser fácilmente representadas por modelos matemáticos debido
a que los datos están incompletos o por que el proceso es muy complejo.
El lenguaje del mundo real usado en control fuzzy permite a los programadores incorporar la lógica
ambigua de los humanos dentro de la computadora. El uso de modelos lingüísticos en lugar de modelos
matemáticos mejora grandemente la transparencia del sistema y facilita las potenciales modificaciones.
La lógica fuzzy intenta controlar procesos, capturando el conocimiento que los especialistas poseen de su
experiencia real, sin tener que modelar el sistema.
II. TIPOS DE INCERTEZA
Esta sección presenta los principios de la lógica fuzzi y es básica para entender el mecanismo por el cual
trabaja el sistema de lógica fuzzy.
Muchas disciplinas matemáticas tratan con la descripción de incerteza, tales como la teoría de la
probabilidad, la teoría de la información y la teoría del conjunto fuzzy. Es más conveniente
clasificarlos por el tipo de incerteza que tratan. A continuación vamos a considerar sólo dos tipos de
incerteza: Estocástica y Léxica.
2.1 Incerteza Estocástica
La incerteza estocástica trata con la incerteza hacia la ocurrencia de un cierto evento. El siguiente es
un ejemplo de este caso:
La probabilidad de dar en el blanco es 0.8
El evento en sí mismo, dar en el blanco está bien definido. La incerteza surge como consecuencia de
que sí el blanco será o no alcanzado. Esta incerteza es cuantificada por un grado de probabilidad.
En el caso que se analiza, la probabilidad es de 0.8. Combinación de oraciones similares podrían ser
procesadas usando métodos estocásticos.
2.2 lncerteza Léxica o Imprecisión
Un tipo diferente de incerteza es aquel basado en el lenguaje de comunicación de los humanos,
también denominado incerteza léxica o imprecisión. Este tipo de incerteza trata con la imprecisión
que es propio en la mayoría de palabras humanas usadas para evaluar conceptos y derivar
conclusiones.
Aunque la mayoría de conceptos no son definidos con precisión, los humanos pueden usarlos
para evaluar situaciones muy complejas. Usando abstracción y pensando en analogías, una pocas
oraciones describirán contextos complejos que sería muy duro de modelar con precisión matemática.
Como ejemplo, consideremos la siguiente oración:
Probablemente daremos en el blanco.
A primera vista, es muy similar a la primera oración. Sin embargo, hay una significativa diferencia que
se refiere a la forma de expresar la probabilidad. Mientras en la primera oración, la probabilidad es
expresada en un sentido matemático, en la segunda la probabilidad es más bien percibida
en lugar de cuantificada matemáticamente.
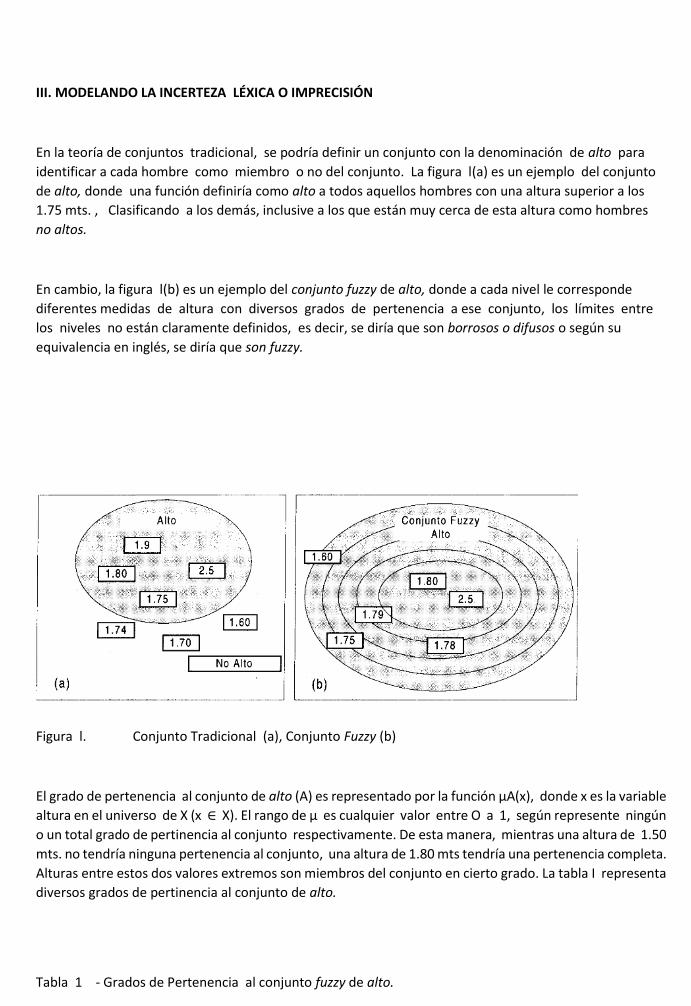
III. MODELANDO LA INCERTEZA LÉXICA O IMPRECISIÓN
En la teoría de conjuntos tradicional, se podría definir un conjunto con la denominación de alto para
identificar a cada hombre como miembro o no del conjunto. La figura l(a) es un ejemplo del conjunto
de alto, donde una función definiría como alto a todos aquellos hombres con una altura superior a los
1.75 mts. , Clasificando a los demás, inclusive a los que están muy cerca de esta altura como hombres
no altos.
En cambio, la figura l(b) es un ejemplo del conjunto fuzzy de alto, donde a cada nivel le corresponde
diferentes medidas de altura con diversos grados de pertenencia a ese conjunto, los límites entre
los niveles no están claramente definidos, es decir, se diría que son borrosos o difusos o según su
equivalencia en inglés, se diría que son fuzzy.
Figura l. Conjunto Tradicional (a), Conjunto Fuzzy (b)
El grado de pertenencia al conjunto de alto (A) es representado por la función µA(x), donde x es la variable
altura en el universo de X (x ∈ X). El rango de µ es cualquier valor entre O a 1, según represente ningún
o un total grado de pertinencia al conjunto respectivamente. De esta manera, mientras una altura de 1.50
mts. no tendría ninguna pertenencia al conjunto, una altura de 1.80 mts tendría una pertenencia completa.
Alturas entre estos dos valores extremos son miembros del conjunto en cierto grado. La tabla I representa
diversos grados de pertinencia al conjunto de alto.
Tabla 1 - Grados de Pertenencia al conjunto fuzzy de alto.
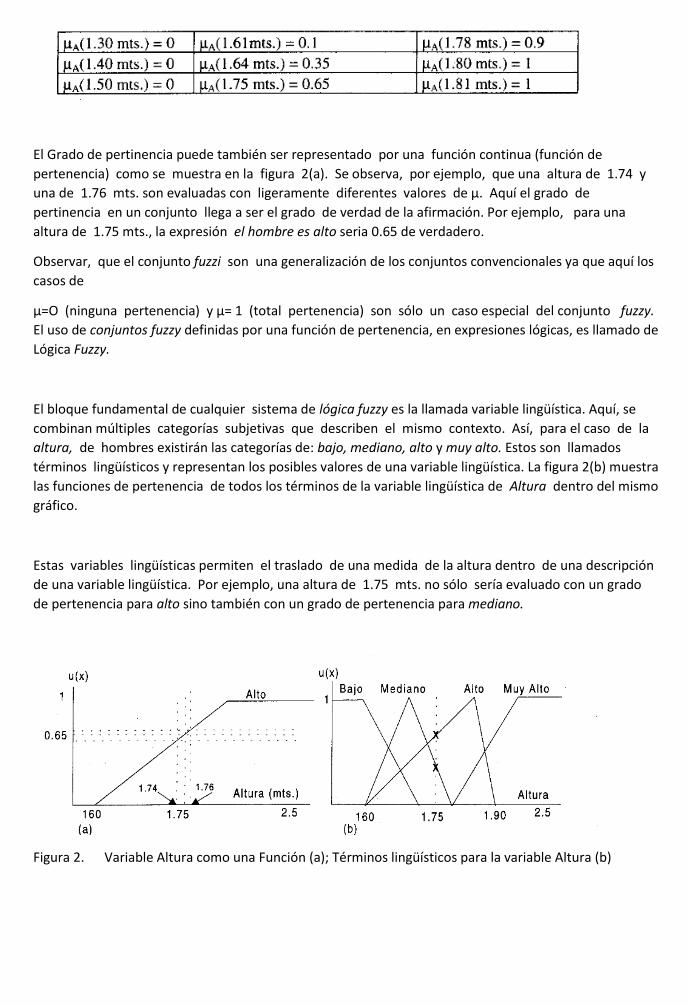
El Grado de pertinencia puede también ser representado por una función continua (función de
pertenencia) como se muestra en la figura 2(a). Se observa, por ejemplo, que una altura de 1.74 y
una de 1.76 mts. son evaluadas con ligeramente diferentes valores de µ. Aquí el grado de
pertinencia en un conjunto llega a ser el grado de verdad de la afirmación. Por ejemplo, para una
altura de 1.75 mts., la expresión el hombre es alto seria 0.65 de verdadero.
Observar, que el conjunto fuzzi son una generalización de los conjuntos convencionales ya que aquí los
casos de
µ=O (ninguna pertenencia) y µ= 1 (total pertenencia) son sólo un caso especial del conjunto fuzzy.
El uso de conjuntos fuzzy definidas por una función de pertenencia, en expresiones lógicas, es llamado de
Lógica Fuzzy.
El bloque fundamental de cualquier sistema de lógica fuzzy es la llamada variable lingüística. Aquí, se
combinan múltiples categorías subjetivas que describen el mismo contexto. Así, para el caso de la
altura, de hombres existirán las categorías de: bajo, mediano, alto y muy alto. Estos son llamados
términos lingüísticos y representan los posibles valores de una variable lingüística. La figura 2(b) muestra
las funciones de pertenencia de todos los términos de la variable lingüística de Altura dentro del mismo
gráfico.
Estas variables lingüísticas permiten el traslado de una medida de la altura dentro de una descripción
de una variable lingüística. Por ejemplo, una altura de 1.75 mts. no sólo sería evaluado con un grado
de pertenencia para alto sino también con un grado de pertenencia para mediano.
Figura 2. Variable Altura como una Función (a); Términos lingüísticos para la variable Altura (b)
IV. SISTEMA FUZZY
Definiciones
Función de Pertenencia - Define a un conjunto fuzzy mapeando entrada abruptas de su dominio hasta
su Grado de Pertinencia. En la Figura 2(b) tenemos las funciones de pertenencia: Bajo, Mediano, Alto,
Muy Alto.
Grado de Pertenencia - grado al cual una entrada abrupta es compatible con una función de
pertenencia, el cual puede tomar valores dentro de un valor predeterminado entre O y 1. En la
figura 2(a) la entrada abrupta de 1.75 mts, tiene un grado de pertenencia con la función alto igual a
0.65.
Etiqueta - Nombre descriptivo usado para identificar una función de pertenencia. En la figura 2(b)
tenemos los nombres: Bajo, Mediano, Alto, Muy Alto.
Entradas Abruptas - Diferentes valores discretos de la variable del sistema, en la figura 2(b) se puede ver
por ejemplo: 1.60, 1.75, 1.80, 2.5.
Rango/Dominio - Intervalo sobre la cual una función de pertenencia es mapeada. En la figura 2(b), el
dominio de la función de pertenencia Alto es de. 1.60 a 1.9 mis. y su rango es de 0.3 mts.
Universo de Discurso - Rango de todos los valores posibles de la variable del sistema, en la
figura 2(b) es de 0 a 2.5.
5.2 Etapas de un Sistema Fuzzy
Un sistema fuzzy consta de tres etapas: '
- Fuzryfication
- Reglas de Evaluación
- Defuzzification
5.2. 1 Furzyfication
Esta etapa calcula el grado de pertenencia que podría tener una entrada abrupta a una o a varias
funciones de pertenencia de una variable, el resultado se denomina entrada fuzzy. El procedimiento
puede representarse como en la figura 3.
Figura 3 - Etapa de Fuzzyfication
Para transformar las entradas abruptas en entradas fuzzy, primero se debe determinar las funciones de
pertenencia de la variable. Una vez realizado esto, la entrada abrupta es comparada con la
función de pertenencia correspondiente produciendo valores de entrada fuzzy.
Para ilustrar el proceso de Fuzzyfication, observemos lo que sucedería en un supuesto sistema de
regadío, en donde el control fuzzy tendría por finalidad la de controlar el tiempo de regadío de la
superficie de un terreno dependiendo de la temperatura del aire y de la humedad del suelo. Este
sistema básicamente estaría constituido por dos variables de entrada (Humedad del sucio y
Temperatura del aire) y una variable de salida (Tiempo de regadío).
El primer paso consiste en asignar, dentro del Universo de Discurso, Etiquetas a cada variable. Así para
la variable de entrada Temperatura del Aire, se podría asignar las siguientes Etiquetas:
CONGELADO, FRIO, NORMAL, TIBIO, CALIENTE
Mientras, para el caso de la variable de entrada Humedad del Suelo, las etiquetas podrían ser:
SECA, HÚMEDA, MOJADA
Luego definimos para estas etiquetas las funciones de pertenencia como se muestra en la figura 4. El
eje Y (µ) de la figura 4 se refiere al grado de pertenencia para la cual los valores de entrada abrupta

pertenecen a cada función de pertenencia. Así, por ejemplo, las entradas fuzzy para una temperatura
de 33ºC y I l % de acuerdo a la figura 4 serán:
- La temperatura es tibia con un grado de verdad de 0.2
- La temperatura escaliente con un grado de verdad de 0.46
- La humedad del suelo es seca con un grado de verdad de 0.25
- La humedad del suelo es húmeda con un grado de verdad de 0.75
Figura 4. Funciones de Pertenencia para las variables: Temperatura del Aire (a) y Humedad del suelo
(b)
5.1.2 Reglas de Evaluación
En la segunda etapa del procesamiento de la lógica fuzzy, llamada Regla de Evaluación o de Inferencia
fuzzy, el controlador fuzzy usa reglas lingüísticas sobre los resultados que fueron generados en la etapa
de Fuzzyfication (denominados entradas fuzzy). El procedimiento puede representarse como en la figura
5.

Las reglas fuzzy son sentencias Si-Entonces (lf-Then) que describen la acción a ser tomada en
respuesta a varias entradas fuzzy. Las reglas están confinadas a un predefinido conjunto de términos
lingüísticos y cuya sintaxis es la siguiente:
IF Antecedente 1 AND Antecedente 2 ... Then Consecuente 1 AND Consecuente 2 ... donde, AND es
uno de los operadores de la lógica fuzzy.
El Antecedente tiene el siguiente formato:
Variable de Entrada= Etiqueta [la temperatura (variable) es caliente (etiqueta)]
El consecuente está en la forma de:
Variable de Salida= Etiqueta [la duración de regadío (variable) es prolongada (etiqueta)]
Las reglas siguen el sentido común del comportamiento del sistema y son escritos en términos de las
etiquetas de las funciones de pertenencia.
Para el sistema del ejemplo, de dos entradas y una salida, las reglas pueden ser representadas por la
matriz de la figura 6, en donde se observa las etiquetas de las variables de entrada Temperatura y
Humedad y las etiquetas de la variable de salida (Duración de Regadío) las cuales son: corto, medio y
prolongado.
Figura 6. Reglas posibles para el Sistema de Regadío.
De acuerdo a esta matriz, para el sistema en total existirán 15 reglas posibles, pero para nuestro ejemplo,
sólo serán disparadas las reglas cuyos antecedentes fueron calculadas en la etapa de fuzzification
(fig.4) y que involucra a 4 etiquetas, dos de la variable temperatura: tibio, caliente y dos de la variable
humedad del suelo: seca y húmeda. Entonces con estas etiquetas, como se puede deducir de la figura
6, sólo serán posibles las siguientes reglas:
REGLA1 IF la temperatura es caliente AND la humedad es seca, THEN la duración es prolongada
REGLA2 IF la temperatura es tibia AND la humedad es húmeda, THEN la duración es media.
REGLA3 IF la temperatura es tibia AND la humedad es seca, THEN la duración es prolongada
REGLA4 IF la temperatura es caliente AND la humedad es húmeda, THEN la duración es media
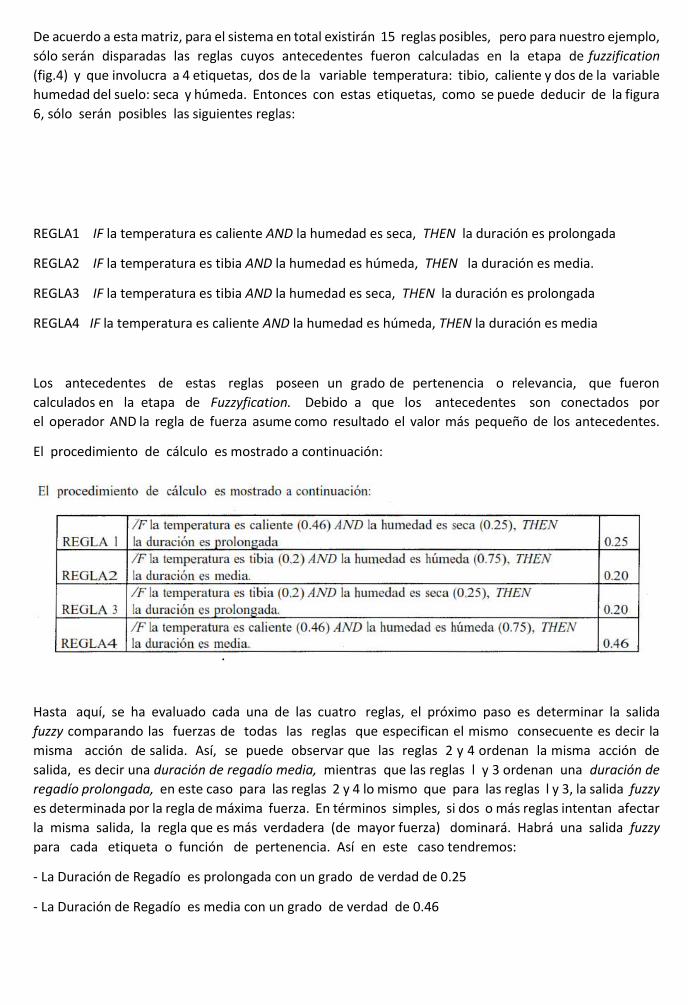
Los antecedentes de estas reglas poseen un grado de pertenencia o relevancia, que fueron
calculados en la etapa de Fuzzyfication. Debido a que los antecedentes son conectados por
el operador AND la regla de fuerza asume como resultado el valor más pequeño de los antecedentes.
El procedimiento de cálculo es mostrado a continuación:
Hasta aquí, se ha evaluado cada una de las cuatro reglas, el próximo paso es determinar la salida
fuzzy comparando las fuerzas de todas las reglas que especifican el mismo consecuente es decir la
misma acción de salida. Así, se puede observar que las reglas 2 y 4 ordenan la misma acción de
salida, es decir una duración de regadío media, mientras que las reglas l y 3 ordenan una duración de
regadío prolongada, en este caso para las reglas 2 y 4 lo mismo que para las reglas l y 3, la salida fuzzy
es determinada por la regla de máxima fuerza. En términos simples, si dos o más reglas intentan afectar
la misma salida, la regla que es más verdadera (de mayor fuerza) dominará. Habrá una salida fuzzy
para cada etiqueta o función de pertenencia. Así en este caso tendremos:
- La Duración de Regadío es prolongada con un grado de verdad de 0.25
- La Duración de Regadío es media con un grado de verdad de 0.46
El método de regla de evaluación usada aquí es llamado inferencia MIN-MAX, ya que toma el
mínimo de los antecedentes para determinar la fuerza de cada regla y toma la regla más fuerte para
cada consecuente, los cuales determinan las salidas fuzzy.
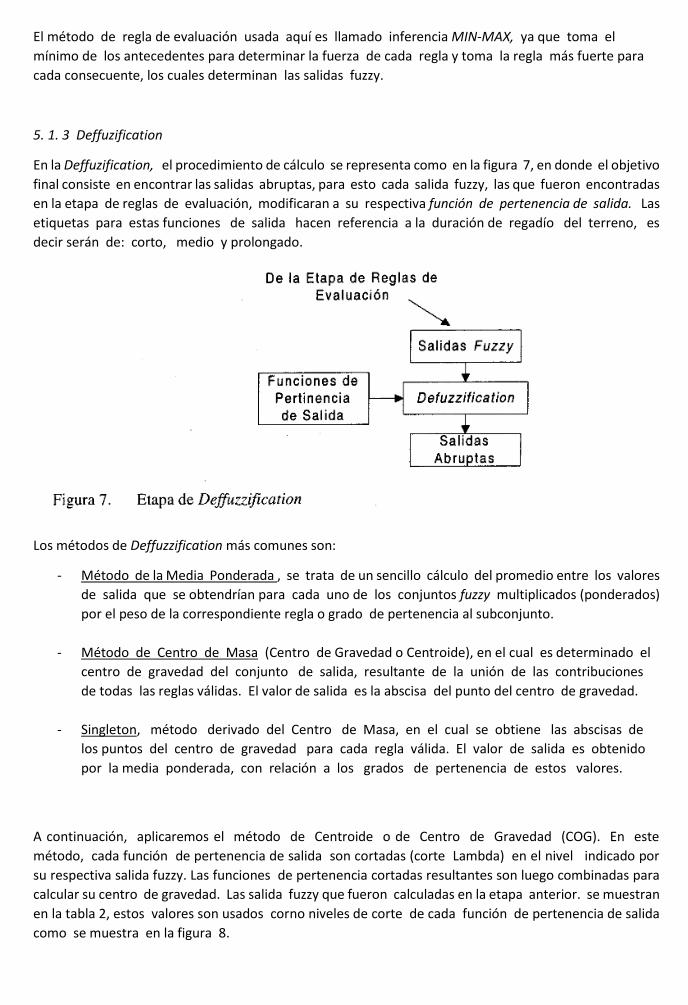
5. 1. 3 Deffuzification
En la Deffuzification, el procedimiento de cálculo se representa como en la figura 7, en donde el objetivo
final consiste en encontrar las salidas abruptas, para esto cada salida fuzzy, las que fueron encontradas
en la etapa de reglas de evaluación, modificaran a su respectiva función de pertenencia de salida. Las
etiquetas para estas funciones de salida hacen referencia a la duración de regadío del terreno, es
decir serán de: corto, medio y prolongado.
Los métodos de Deffuzzification más comunes son:
- Método de la Media Ponderada , se trata de un sencillo cálculo del promedio entre los valores
de salida que se obtendrían para cada uno de los conjuntos fuzzy multiplicados (ponderados)
por el peso de la correspondiente regla o grado de pertenencia al subconjunto.
- Método de Centro de Masa (Centro de Gravedad o Centroide), en el cual es determinado el
centro de gravedad del conjunto de salida, resultante de la unión de las contribuciones
de todas las reglas válidas. El valor de salida es la abscisa del punto del centro de gravedad.
- Singleton, método derivado del Centro de Masa, en el cual se obtiene las abscisas de
los puntos del centro de gravedad para cada regla válida. El valor de salida es obtenido
por la media ponderada, con relación a los grados de pertenencia de estos valores.
A continuación, aplicaremos el método de Centroide o de Centro de Gravedad (COG). En este
método, cada función de pertenencia de salida son cortadas (corte Lambda) en el nivel indicado por
su respectiva salida fuzzy. Las funciones de pertenencia cortadas resultantes son luego combinadas para
calcular su centro de gravedad. Las salida fuzzy que fueron calculadas en la etapa anterior. se muestran
en la tabla 2, estos valores son usados corno niveles de corte de cada función de pertenencia de salida
como se muestra en la figura 8.
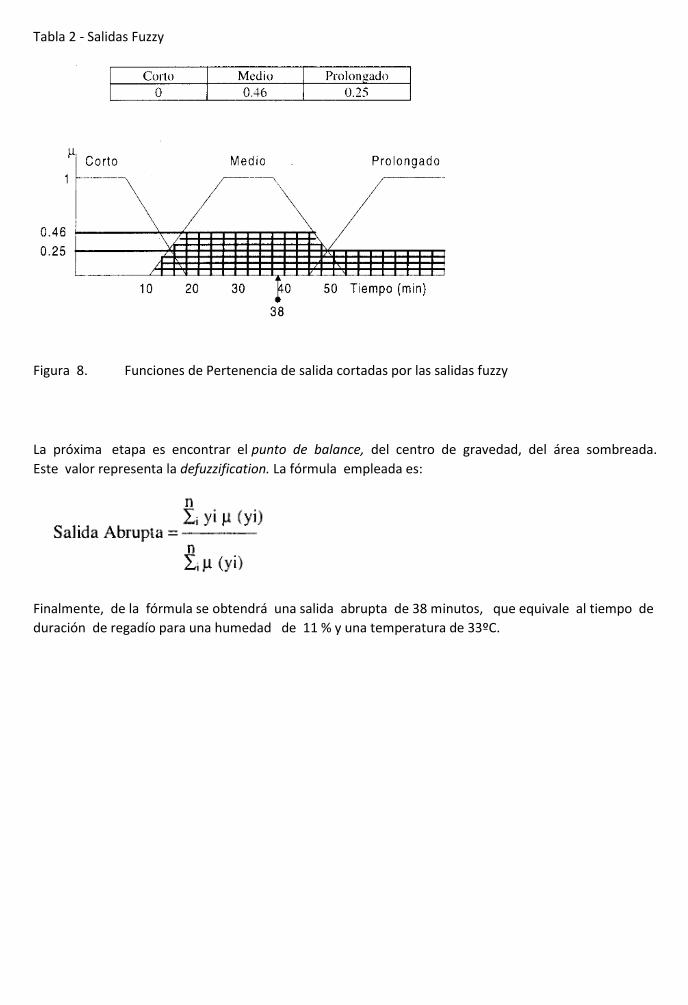
Tabla 2 - Salidas Fuzzy
Figura 8. Funciones de Pertenencia de salida cortadas por las salidas fuzzy
La próxima etapa es encontrar el punto de balance, del centro de gravedad, del área sombreada.
Este valor representa la defuzzification. La fórmula empleada es:
Finalmente, de la fórmula se obtendrá una salida abrupta de 38 minutos, que equivale al tiempo de
duración de regadío para una humedad de 11 % y una temperatura de 33ºC.