ici_tema 3_2010
DESCRIPTION
CONTROLTRANSCRIPT
TEMA 3. EJECUCIÓN DE LOS SISTEMAS CON TEMA 3. EJECUCIÓN DE LOS SISTEMAS CON
INGENIERÍA DE CONTROL I EJECUCIÓN DE LOS SISTEMAS CON RETROALIMENTACIÓN
RETROALIMENTACIÓNRETROALIMENTACIÓN
CONTENIDOCONTENIDO
EFECTOS DE LA RETROALIMENTACIÓN EN LASENSIBILIDAD Y ROBUSTEZERROR DE ESTADO ESTABLEERROR DE ESTADO ESTABLECARACTERÍSTICA DE LA RESPUESTA TRANSITORIA YESTABILIDAD DE SISTEMASCRITERIO DE ESTABILIDAD DE ROUTH-HURWITZCONTROLADORES P, PI, PD, PIDSINTONIZACIÓN DE CONTROLADORES
DRS. JOSÉ DE JESÚS LIRA PÉREZ Y CIRO ALBERTO NÚÑEZ GUTIÉRREZ 1
EFECTOS DE LA RETROALIMENTACIÓN EN LA EFECTOS DE LA RETROALIMENTACIÓN EN LA
INGENIERÍA DE CONTROL I EJECUCIÓN DE LOS SISTEMAS CON RETROALIMENTACIÓN
EFECTOS DE LA RETROALIMENTACIÓN EN LA EFECTOS DE LA RETROALIMENTACIÓN EN LA SENSIBILIDAD Y ROBUSTEZSENSIBILIDAD Y ROBUSTEZ
Esta parte se refiere a la motivación para el uso deEsta parte se refiere a la motivación para el uso deretroalimentación y sus efectos en el desempeño
Las principales razones para usar retroalimentación son:
1. Reducir la sensibilidad del desempeño a variaciones de pparámetros de la planta e imperfecciones en su modelo para el diseño.
2. Reducir la sensibilidad a perturbaciones de entrada y ruido.3. Mejorar la respuesta transitoria.4. Reducir los errores en estado estable.
DRS. JOSÉ DE JESÚS LIRA PÉREZ Y CIRO ALBERTO NÚÑEZ GUTIÉRREZ 2

EFECTOS DE LA RETROALIMENTACIÓN EN LA EFECTOS DE LA RETROALIMENTACIÓN EN LA
INGENIERÍA DE CONTROL I EJECUCIÓN DE LOS SISTEMAS CON RETROALIMENTACIÓN
EFECTOS DE LA RETROALIMENTACIÓN EN LA EFECTOS DE LA RETROALIMENTACIÓN EN LA SENSIBILIDAD Y ROBUSTEZSENSIBILIDAD Y ROBUSTEZ
G G+ CR cG GCT = =Gc G
-CR
Controlador Planta1 c
TR G GH
= =+
Si GcGH >> 1
1G GCH
La sensibilidad está determinada primeramente por la GANANCIA DE LAZO GcGH
1c
c
G GCTR G GH H
= ≈ =
p p c(el producto de las funciones de transferencia alrededor del lazo)
EjemploCon retroalimentación se tiene
1 2
1 21K KC A
R K K= =
+
Si K1K2 = 1 entonces A = 0 5 Reduciendo K2 a laSi no se tuviera retroalimentación y el valor de K2 disminuyera a la mitad, C/Rdisminuye en la misma proporción
Si K1K2 = 1, entonces A = 0.5. Reduciendo K2 a lamitad se tiene A = 1/3 (67% de su valor original)
Pero si K1K2 = 9, entonces A = 0.9. Reduciendo K2a la mitad se tiene A = 0.818 (91% de su valor
i i l)
DRS. JOSÉ DE JESÚS LIRA PÉREZ Y CIRO ALBERTO NÚÑEZ GUTIÉRREZ 3
original)
La ganancia de lazo más grande ha reducido la sensibilidad

EFECTOS DE LA RETROALIMENTACIÓN EN LA EFECTOS DE LA RETROALIMENTACIÓN EN LA
INGENIERÍA DE CONTROL I EJECUCIÓN DE LOS SISTEMAS CON RETROALIMENTACIÓN
EFECTOS DE LA RETROALIMENTACIÓN EN LA EFECTOS DE LA RETROALIMENTACIÓN EN LA SENSIBILIDAD Y ROBUSTEZSENSIBILIDAD Y ROBUSTEZ
Formalmente las propiedades de sensibilidad se pueden estudiar usando la función deFormalmente las propiedades de sensibilidad se pueden estudiar usando la función desensibilidad S.Por ejemplo, la sensibilidad de la función de transferencia de lazo cerrado T a loscambios en la función de transferencia de la trayectoria hacia adelante Gf = GcG es:
/ 1 1G G G G⎛ ⎞∂ ∂ ∂
( )2/ 1 1/ 1 11
f f f f
f f f f f ff
G G G GT T TSG G T G T G G H T G HG H
⎛ ⎞∂ ∂ ∂= = = = =⎜ ⎟⎜ ⎟∂ ∂ ∂ + ++⎝ ⎠
La sensibilidad estática es el valor de S cuando s tiende a cero.Las sensibilidades dinámicas usualmente se calculan reemplazando s por jω ygraficando S como función de la frecuencia ω
Ejemplo ( )( )2
1/ 1/ 1a
K sT T A T A sSA A A Ah
τ τ+∂ ∂ += = = =∂ ∂
1KAT
s KAhτ=
+ +
( )2/ 11a A A T A T s KAhs KAh ττ∂ ∂ + ++ +
( )( )
2
2// 11
h
KAT T h T h KAhSh h T h T s KAhs KAh ττ
−∂ ∂ −= = = =∂ ∂ + ++ +1s KAhτ + + ( )
( )2// 11
T T T KAs sST T s KAhs KAh
ττ τ τ
τ τ τ ττ∂ ∂ − −
= = = =∂ ∂ + ++ +
L ibilid d táti S d d l i d l KAh i t
DRS. JOSÉ DE JESÚS LIRA PÉREZ Y CIRO ALBERTO NÚÑEZ GUTIÉRREZ 4
La sensibilidad estática Sas se reduce cuando la ganancia de lazo KAh se incrementa, pero la magnitud de Shs se aproxima a 1 y Sτs es cero.

EFECTOS DE LA RETROALIMENTACIÓN EN LA EFECTOS DE LA RETROALIMENTACIÓN EN LA
INGENIERÍA DE CONTROL I EJECUCIÓN DE LOS SISTEMAS CON RETROALIMENTACIÓN
EFECTOS DE LA RETROALIMENTACIÓN EN LA EFECTOS DE LA RETROALIMENTACIÓN EN LA SENSIBILIDAD Y ROBUSTEZSENSIBILIDAD Y ROBUSTEZ
Efecto de las perturbaciones externasD
Efecto de las perturbaciones externas
+ CE
L
++
Gc G1-
CR = 0E
G2+
1 22
1 1cG G G RG LDC
G G G H G G G H= +
+ +H 1 2 1 21 1c cG G G H G G G H+ +
2G LC E− 1 2cG G GC2
1 21 c
G LC ED G G G H D= =
+ Para H = 1 1 2
1 21c
c
G G GCR G G G H=
+
Si G G G H >> 1C L≈
1C≈
DRS. JOSÉ DE JESÚS LIRA PÉREZ Y CIRO ALBERTO NÚÑEZ GUTIÉRREZ 5
Si GcG1G2H >> 11cD G G H
≈R H≈y
EFECTOS DE LA RETROALIMENTACIÓN EN LA EFECTOS DE LA RETROALIMENTACIÓN EN LA
INGENIERÍA DE CONTROL I EJECUCIÓN DE LOS SISTEMAS CON RETROALIMENTACIÓN
EFECTOS DE LA RETROALIMENTACIÓN EN LA EFECTOS DE LA RETROALIMENTACIÓN EN LA SENSIBILIDAD Y ROBUSTEZSENSIBILIDAD Y ROBUSTEZ
Para minimizar la respuesta a las perturbaciones de entrada D, C/D debe hacerse muy pequeña,lo que se logra haciendo GcG1H muy grande en el lazo de retroalimentación entre C y el puntodonde D entra al lazo. Pero también es necesario que el sistema responda bien a la entrada R, lo
l l d G G G 1 h i d 1 A b i i l lcual se logra cuando GcG1G2 >> 1, haciendo H = 1. Ambos requerimientos se logran con un altaganancia en GcG1 , entre los puntos donde R y D entran al lazo.
La sensibilidad a perturbaciones se reduce cuando la ganancia GcG1 se incrementa
La respuesta en estado estable, para a las perturbaciones es claramente una mediciónt →∞La respuesta en estado estable, para a las perturbaciones es claramente una mediciónimportante de la calidad del sistema. Para D(s) = 1/s
t →
G L2
0 01 2
lim ( ) lim ( ) lim1t s s
c
G Lc t sC sG G G H→∞ → →
= =+
DRS. JOSÉ DE JESÚS LIRA PÉREZ Y CIRO ALBERTO NÚÑEZ GUTIÉRREZ 6

EFECTOS DE LA RETROALIMENTACIÓN EN LA EFECTOS DE LA RETROALIMENTACIÓN EN LA
INGENIERÍA DE CONTROL I EJECUCIÓN DE LOS SISTEMAS CON RETROALIMENTACIÓN
EFECTOS DE LA RETROALIMENTACIÓN EN LA EFECTOS DE LA RETROALIMENTACIÓN EN LA SENSIBILIDAD Y ROBUSTEZSENSIBILIDAD Y ROBUSTEZ
Ejemplo
Encontrar K1 y K2 para
) 0 1 0 9C Ci ) 0 01 0 99C Cii) 0.1 , 0.9iD R= = ) 0.01 , 0.99ii
D R= =
1 2
1K KC
R K K= 2
1KC
D K K=
1 21R K K+ 1 21D K K+
i) K1 = 9 , K2 = 1 ii) K1 = 99 , K2 = 1
DRS. JOSÉ DE JESÚS LIRA PÉREZ Y CIRO ALBERTO NÚÑEZ GUTIÉRREZ 7
Regresar
INGENIERÍA DE CONTROL I EJECUCIÓN DE LOS SISTEMAS CON RETROALIMENTACIÓN
ERROR DE ESTADO ESTABLEERROR DE ESTADO ESTABLE
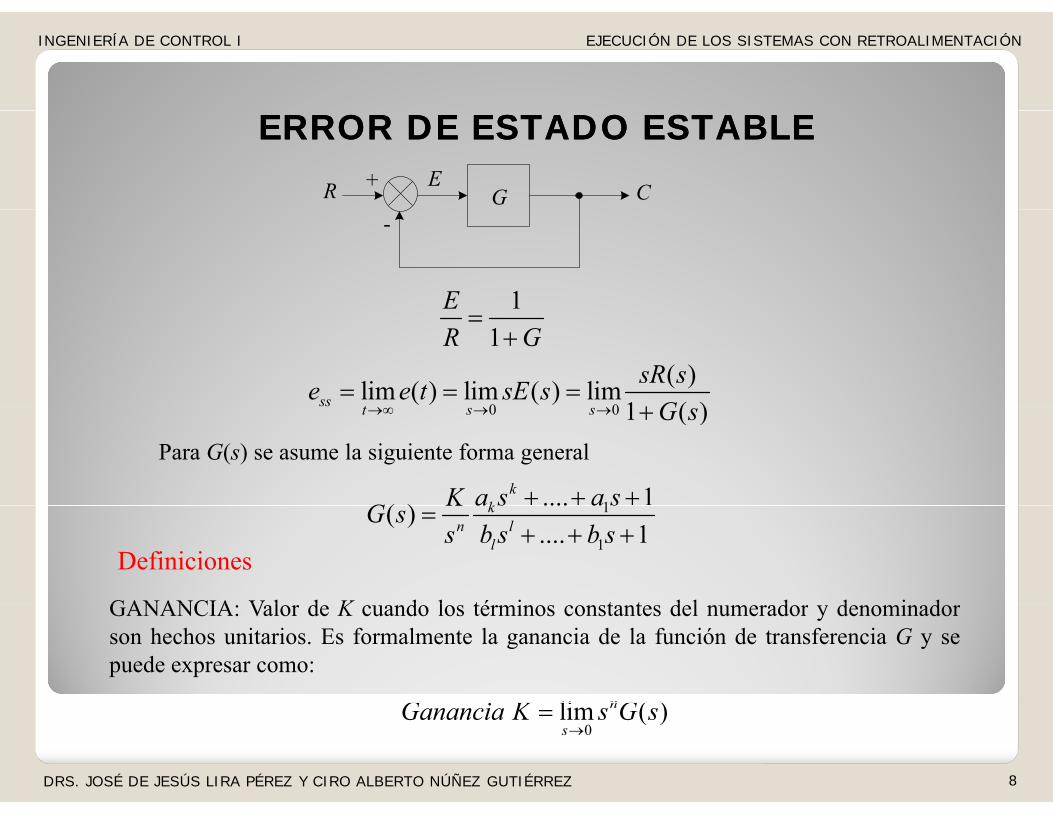
R G+ CE
-
1E 11
ER G=
+
0 0
( )lim ( ) lim ( ) lim1 ( )ss t
sR se e t sE sG
= = =+0 0 1 ( )t s s G s→∞ → → +
Para G(s) se asume la siguiente forma general
1.... 1( )k
ka s a sKG + + +1
1
....( ).... 1
kn l
l
a s a sKG ss b s b s
=+ + +
Definiciones
GANANCIA V l d K d l té i t t d l d d i dGANANCIA: Valor de K cuando los términos constantes del numerador y denominadorson hechos unitarios. Es formalmente la ganancia de la función de transferencia G y sepuede expresar como:
li ( )nG K G
DRS. JOSÉ DE JESÚS LIRA PÉREZ Y CIRO ALBERTO NÚÑEZ GUTIÉRREZ 8
0lim ( )n
sGanancia K s G s
→=

INGENIERÍA DE CONTROL I EJECUCIÓN DE LOS SISTEMAS CON RETROALIMENTACIÓN
ERROR DE ESTADO ESTABLEERROR DE ESTADO ESTABLE
NÚMERO DE TIPO: Es el valor del entero n y representa el número de integradores en GCONSTANTE DE ERROR DE POSICIÓN K El l d l i K 0CONSTANTE DE ERROR DE POSICIÓN Kp: El valor de la ganancia K para n = 0.CONSTANTE DE ERROR DE VELOCIDAD Kv: El valor de la ganancia K para n = 1.CONSTANTE DE ERROR DE ACELERACIÓN Ka: El valor de la ganancia K para n = 2.
El error de estado estable también se puede escribir de esta manera:
( )( )lim sR se =
( )0lim
1 /ss nse
K s→ +
P j l i t d l ti 2 t d it i l d t dPor ejemplo, para un sistema del tipo 2 con una entrada rampa unitaria, el error de estado estable se puede calcular como:
( )21/li li 0
s s s( )( ) 220 0
lim lim 01 /ss s s
es KK s→ →
= = =++
DRS. JOSÉ DE JESÚS LIRA PÉREZ Y CIRO ALBERTO NÚÑEZ GUTIÉRREZ 9

INGENIERÍA DE CONTROL I EJECUCIÓN DE LOS SISTEMAS CON RETROALIMENTACIÓN
ERROR DE ESTADO ESTABLEERROR DE ESTADO ESTABLE
ERRORES DE ESTADO ESTABLE
1/R s=1
Número de tipo: n = 0 n = 1 n = 2
0 0 1/R s=
21/R s=
1 pK+
∞1K
0 0
0
31/R s=
vK1
aK∞ ∞
+ E
Ejemplos
R G+
-CE
DRS. JOSÉ DE JESÚS LIRA PÉREZ Y CIRO ALBERTO NÚÑEZ GUTIÉRREZ 10
INGENIERÍA DE CONTROL I EJECUCIÓN DE LOS SISTEMAS CON RETROALIMENTACIÓN
ERROR DE ESTADO ESTABLEERROR DE ESTADO ESTABLE
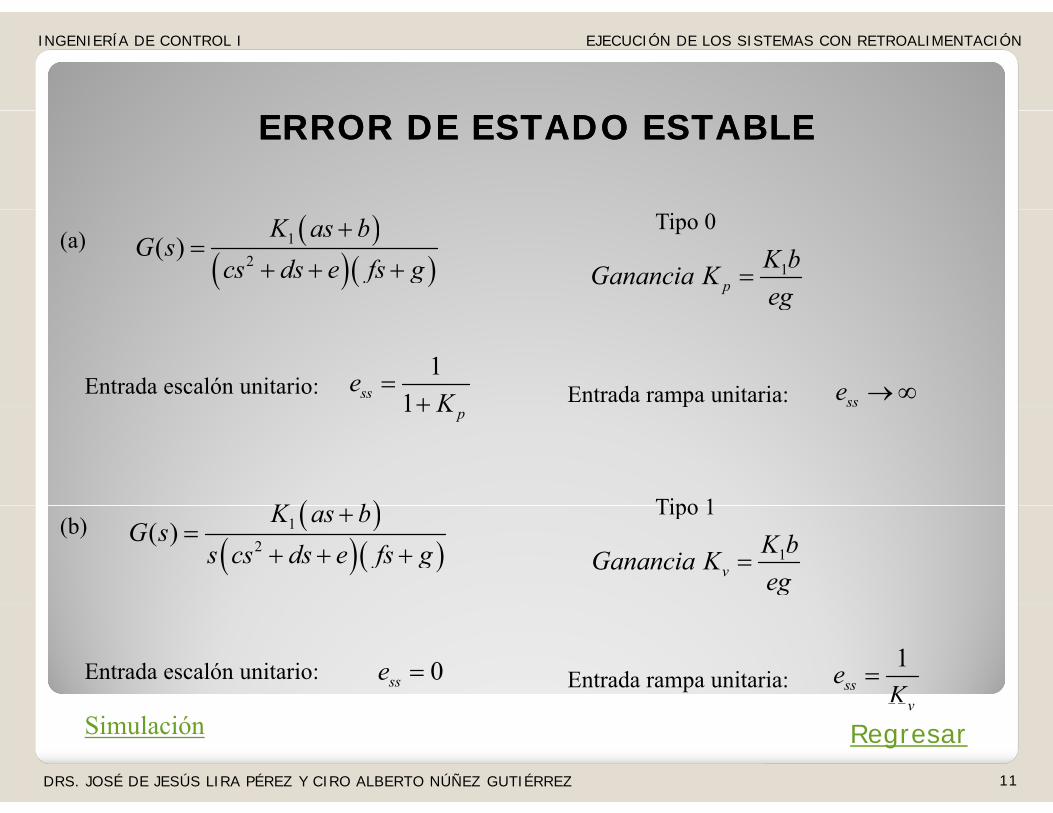
( )( )( )
12
( )K as b
G scs ds e fs g
+=
+ + +
Tipo 0
1 pK bGanancia Keg
=(a)
g
11sse
K=
+Entrada escalón unitario: Entrada rampa unitaria: sse →∞1 pK+ p ss
( )K b Tipo 1( )( )( )
12
( )K as b
G ss cs ds e fs g
+=
+ + +
Tipo 1
1 vK bGanancia Keg
=(b)
0sse =Entrada escalón unitario: Entrada rampa unitaria:1
sseK
=
DRS. JOSÉ DE JESÚS LIRA PÉREZ Y CIRO ALBERTO NÚÑEZ GUTIÉRREZ 11
RegresarvK
Simulación

CARACTERÍSTICA DE LA RESPUESTA CARACTERÍSTICA DE LA RESPUESTA
INGENIERÍA DE CONTROL I EJECUCIÓN DE LOS SISTEMAS CON RETROALIMENTACIÓN
CARACTERÍSTICA DE LA RESPUESTA CARACTERÍSTICA DE LA RESPUESTA TRANSITORIA Y ESTABILIDAD DE SISTEMASTRANSITORIA Y ESTABILIDAD DE SISTEMAS
1 2
1 2
( ) .... n
n
KK KC ss p s p s p
= + + ++ + +
( ) ( ) ( )1 1 2 2( ) exp exp .... expn nc t K p t K p t K p t= − + − + + −
El d i d d C( ) G( )R( ) ió f i i l ti té iEl denominador de C(s) = G(s)R(s) y su expansión en fracciones parciales contienen términosdebido a los polos de la entrada R(s) y a los del sistema G(s), El término debido a R(s) producela solución forzada, mientras que los polos del sistema dan la solución transitoria.
Estabilidad del sistema
DEFINICIÓN. Un sistema es estable si la solución transitoria decae a cero y es inestablesi su solución crecesi su solución crece.
TEOREMA DE ESTABILIDAD. Un sistema es estable si y sólo si todos los polos delsistema se encuentran en la mitad izquierda del plano s
DRS. JOSÉ DE JESÚS LIRA PÉREZ Y CIRO ALBERTO NÚÑEZ GUTIÉRREZ 12
q p
CARACTERÍSTICA DE LA RESPUESTA CARACTERÍSTICA DE LA RESPUESTA
INGENIERÍA DE CONTROL I EJECUCIÓN DE LOS SISTEMAS CON RETROALIMENTACIÓN
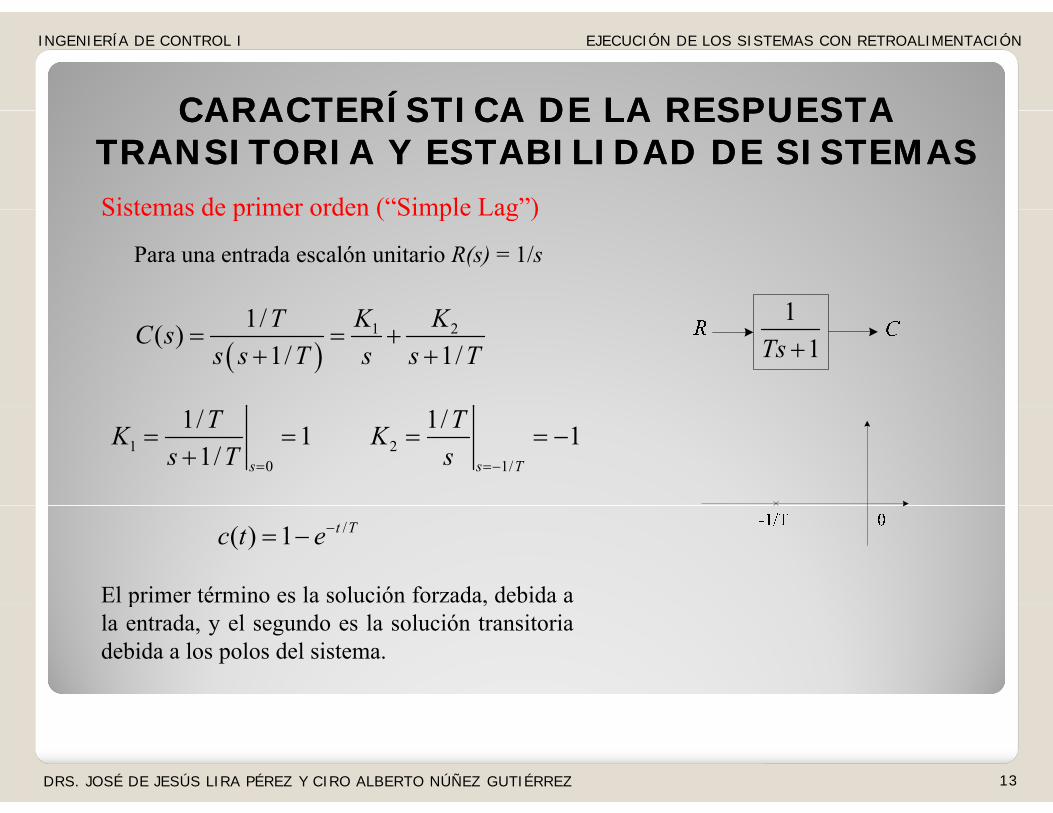
CARACTERÍSTICA DE LA RESPUESTA CARACTERÍSTICA DE LA RESPUESTA TRANSITORIA Y ESTABILIDAD DE SISTEMASTRANSITORIA Y ESTABILIDAD DE SISTEMASSistemas de primer orden (“Simple Lag”)Sistemas de primer orden ( Simple Lag )
1
Para una entrada escalón unitario R(s) = 1/s
( )1 21/( )
1/ 1/K KTC s
s s T s s T= = +
+ +
11Ts +
10
1/ 11/ s
TKs T =
= =+ 2
1/
1/ 1s T
TKs =−
= = −
/( ) 1 t Tc t e−= −
El primer término es la solución forzada, debida ap ,la entrada, y el segundo es la solución transitoriadebida a los polos del sistema.
DRS. JOSÉ DE JESÚS LIRA PÉREZ Y CIRO ALBERTO NÚÑEZ GUTIÉRREZ 13

CARACTERÍSTICA DE LA RESPUESTA CARACTERÍSTICA DE LA RESPUESTA
INGENIERÍA DE CONTROL I EJECUCIÓN DE LOS SISTEMAS CON RETROALIMENTACIÓN
CARACTERÍSTICA DE LA RESPUESTA CARACTERÍSTICA DE LA RESPUESTA TRANSITORIA Y ESTABILIDAD DE SISTEMASTRANSITORIA Y ESTABILIDAD DE SISTEMAS
/( ) 1 t Tc t e−= −
/t Te−
Constante de tiempo: Es el tiempo en segundos en que la respuesta se reduce al 36.8% de suvalor inicialvalor inicial.La constante de tiempo de un sistema de primer orden 1/(Ts +1) es T segundosEl sistema toma 4T segundos para que la respuesta decaiga al 1.8% de su valor inicial.
En un sistema de primer orden, dos características son importantes:Para estabilidad, el polo del sistema – 1/T debe estar en la mitad izquierda del plano s.Para incrementar la velocidad de respuesta del sistema (reducir su constante de tiempo T),el polo -1/T debe moverse hacia la izquierda
DRS. JOSÉ DE JESÚS LIRA PÉREZ Y CIRO ALBERTO NÚÑEZ GUTIÉRREZ 14
el polo -1/T debe moverse hacia la izquierda.Simulación
CARACTERÍSTICA DE LA RESPUESTA CARACTERÍSTICA DE LA RESPUESTA
INGENIERÍA DE CONTROL I EJECUCIÓN DE LOS SISTEMAS CON RETROALIMENTACIÓN
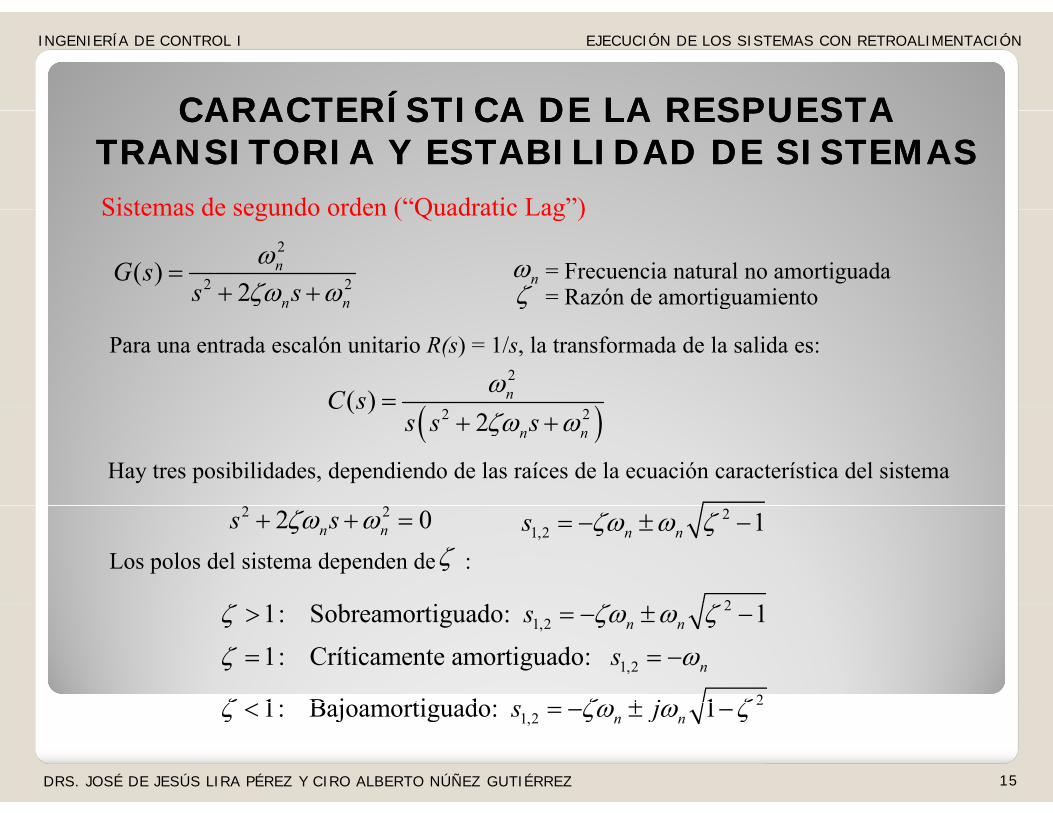
CARACTERÍSTICA DE LA RESPUESTA CARACTERÍSTICA DE LA RESPUESTA TRANSITORIA Y ESTABILIDAD DE SISTEMASTRANSITORIA Y ESTABILIDAD DE SISTEMASSistemas de segundo orden (“Quadratic Lag”)Sistemas de segundo orden ( Quadratic Lag )
2
2 2( )2
n
n n
G ss s
ωζω ω
=+ +
nω = Frecuencia natural no amortiguadaζ = Razón de amortiguamientoζ g
Para una entrada escalón unitario R(s) = 1/s, la transformada de la salida es:
( )2
( ) nC s ω=
( )2 2( )
2 n n
C ss s sζω ω+ +
Hay tres posibilidades, dependiendo de las raíces de la ecuación característica del sistema2 22 0n ns sζω ω+ + =
Los polos del sistema dependen de : ζ
2b i dζ ζ ζ
21,2 1n ns ζω ω ζ= − ± −
21,2
1,2
2
1: Sobreamortiguado: 11: Críticamente amortiguado:
1 B j ti d 1
n n
n
ss
j
ζ ζω ω ζ
ζ ω
ζ ζ ζ
> = − ± −
= = −
±
DRS. JOSÉ DE JESÚS LIRA PÉREZ Y CIRO ALBERTO NÚÑEZ GUTIÉRREZ 15
21,21: Bajoamortiguado: 1n ns jζ ζω ω ζ< = − ± −

CARACTERÍSTICA DE LA RESPUESTA CARACTERÍSTICA DE LA RESPUESTA
INGENIERÍA DE CONTROL I EJECUCIÓN DE LOS SISTEMAS CON RETROALIMENTACIÓN
CARACTERÍSTICA DE LA RESPUESTA CARACTERÍSTICA DE LA RESPUESTA TRANSITORIA Y ESTABILIDAD DE SISTEMASTRANSITORIA Y ESTABILIDAD DE SISTEMAS
j Para los polos están en ambos lados de1ζ > ω−jω
21jω ζ
Para los polos están en ambos lados de 1ζ > nωPara los polos coinciden en 1ζ = nω−
Para los polos se mueven a lo largo del 1ζ <
σ
1njω ζ−
φ
nω
p gcírculo de radio centrado en el origen
ζnω−
cosζ φ=La razón de amortiguamientoσ
nω− Para , cuando los polos son reales ydistintos la respuesta transitoria es la suma dedos exponenciales que decaen, cada una con
1ζ >
nζω−
p qsu constante de tiempo. La exponencialcorrespondiente al polo más cercano al origentiene la constante de tiempo más grande y
É( ) ( )
1/ 222 21,2 1n n ns ζω ω ζ ω⎡ ⎤= + − =⎢ ⎥⎣ ⎦
toma más tiempo en decaer. Éste es llamadoPOLO DOMINANTE, y para incrementar lavelocidad de respuesta se debe mover a la
DRS. JOSÉ DE JESÚS LIRA PÉREZ Y CIRO ALBERTO NÚÑEZ GUTIÉRREZ 16
izquierda.
CARACTERÍSTICA DE LA RESPUESTA CARACTERÍSTICA DE LA RESPUESTA
INGENIERÍA DE CONTROL I EJECUCIÓN DE LOS SISTEMAS CON RETROALIMENTACIÓN
CARACTERÍSTICA DE LA RESPUESTA CARACTERÍSTICA DE LA RESPUESTA TRANSITORIA Y ESTABILIDAD DE SISTEMASTRANSITORIA Y ESTABILIDAD DE SISTEMAS
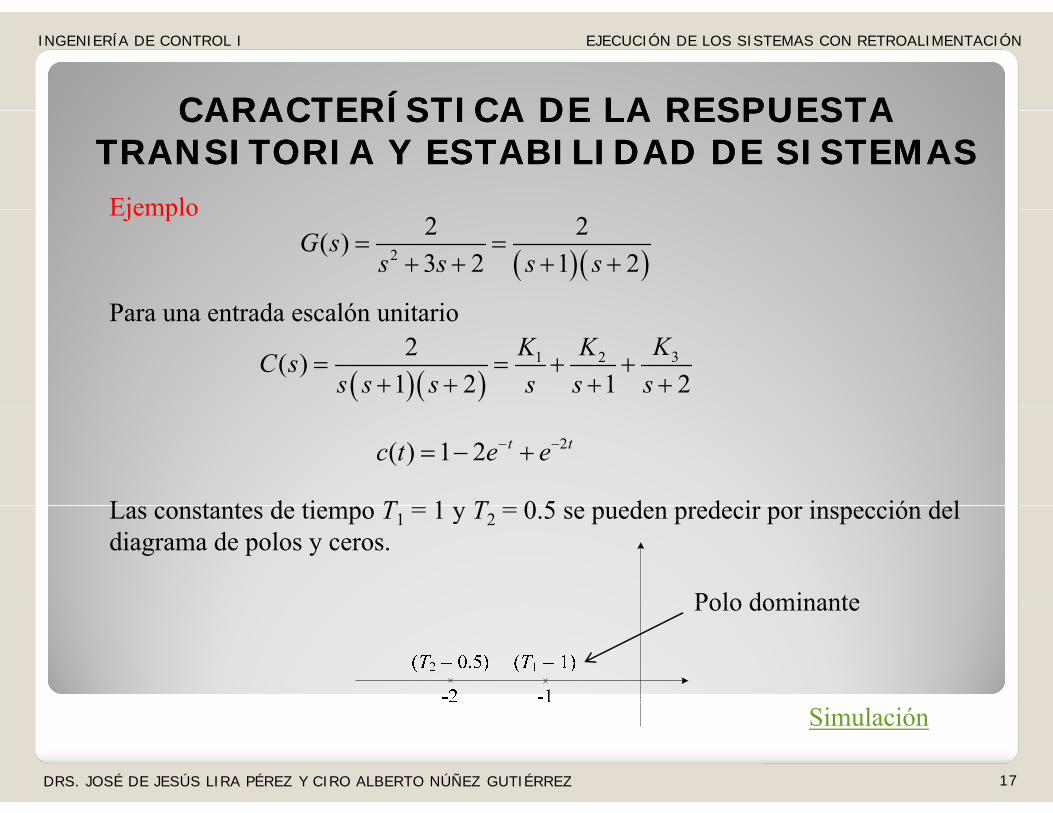
EjemploEjemplo
( )( )2
2 2( )3 2 1 2
G ss s s s
= =+ + + +
P t d ló it iPara una entrada escalón unitario
( )( )31 22( )
1 2 1 2KK KC s
s s s s s s= = + +
+ + + +
2( ) 1 2 t tc t e e− −= − +
L t t d ti T 1 T 0 5 d d i i ió d lLas constantes de tiempo T1 = 1 y T2 = 0.5 se pueden predecir por inspección del diagrama de polos y ceros.
Polo dominantePolo dominante
DRS. JOSÉ DE JESÚS LIRA PÉREZ Y CIRO ALBERTO NÚÑEZ GUTIÉRREZ 17
Simulación

CARACTERÍSTICA DE LA RESPUESTA CARACTERÍSTICA DE LA RESPUESTA
INGENIERÍA DE CONTROL I EJECUCIÓN DE LOS SISTEMAS CON RETROALIMENTACIÓN
CARACTERÍSTICA DE LA RESPUESTA CARACTERÍSTICA DE LA RESPUESTA TRANSITORIA Y ESTABILIDAD DE SISTEMASTRANSITORIA Y ESTABILIDAD DE SISTEMAS
Para la respuesta es:1ζ <Para la respuesta es: 1ζ <
( )2
2
1( ) 1 cos 11
ntnc t e tζω ω ζ θ
ζ−= + − +
−( )/ 2θ φ π= +
0.1ζ =
( )c t
ntω
DRS. JOSÉ DE JESÚS LIRA PÉREZ Y CIRO ALBERTO NÚÑEZ GUTIÉRREZ 18
Simulación
CARACTERÍSTICA DE LA RESPUESTA CARACTERÍSTICA DE LA RESPUESTA
INGENIERÍA DE CONTROL I EJECUCIÓN DE LOS SISTEMAS CON RETROALIMENTACIÓN
CARACTERÍSTICA DE LA RESPUESTA CARACTERÍSTICA DE LA RESPUESTA TRANSITORIA Y ESTABILIDAD DE SISTEMASTRANSITORIA Y ESTABILIDAD DE SISTEMAS
Constante de tiempo T: Es el tiempo en segundos para que la amplitud p p g p q pde la oscilación decaiga de su valor inicial: . Por lo tanto 1e− 1nte eζω− −=
1Tζ
= Análogo a un primer orden, la amplitud decae al 2 % de su valor i i i l 4T dnζω inicial en 4T segundos
Correlaciones entre el comportamiento dinámico y la posición de los polos1. Estabilidad absoluta: La parte real de los polos debe ser negativa para que el transitorionζω−
decaiga. Los polos deben estar en la parte izquierda del plano s.2. Estabilidad relativa: Para evitar sobretiros excesivos y comportamientos oscilatorios
indebidos , la razón de amortiguamiento debe ser adecuada.3 Constante de tiempo: Se reduce incrementando la parte real de los polos
ζ3. Constante de tiempo: Se reduce incrementando la parte real de los polos.4. Velocidad de respuesta: Se incrementa ampliando la distancia de los polos al origen.5. Frecuencia natural no amortiguada : Es igual a la distancia de los polos al origen.
Moviendo los polos radialmente ( constante) se incrementa la velocidad de respuesta
nωnω
ζmientras que el porcentaje de sobretiro se mantiene constante .
6. Frecuencia de oscilaciones transitorias : Esta frecuencia, también llamadafrecuencia de resonancia o frecuencia natural amortiguada, es igual a la parte imaginaria delos polos
21nω ζ−
DRS. JOSÉ DE JESÚS LIRA PÉREZ Y CIRO ALBERTO NÚÑEZ GUTIÉRREZ 19
Regresarlos polos.
CRITERIO DE ESTABILIDAD DE CRITERIO DE ESTABILIDAD DE
INGENIERÍA DE CONTROL I EJECUCIÓN DE LOS SISTEMAS CON RETROALIMENTACIÓN
CRITERIO DE ESTABILIDAD DE CRITERIO DE ESTABILIDAD DE ROUTHROUTH--HURWITZHURWITZ
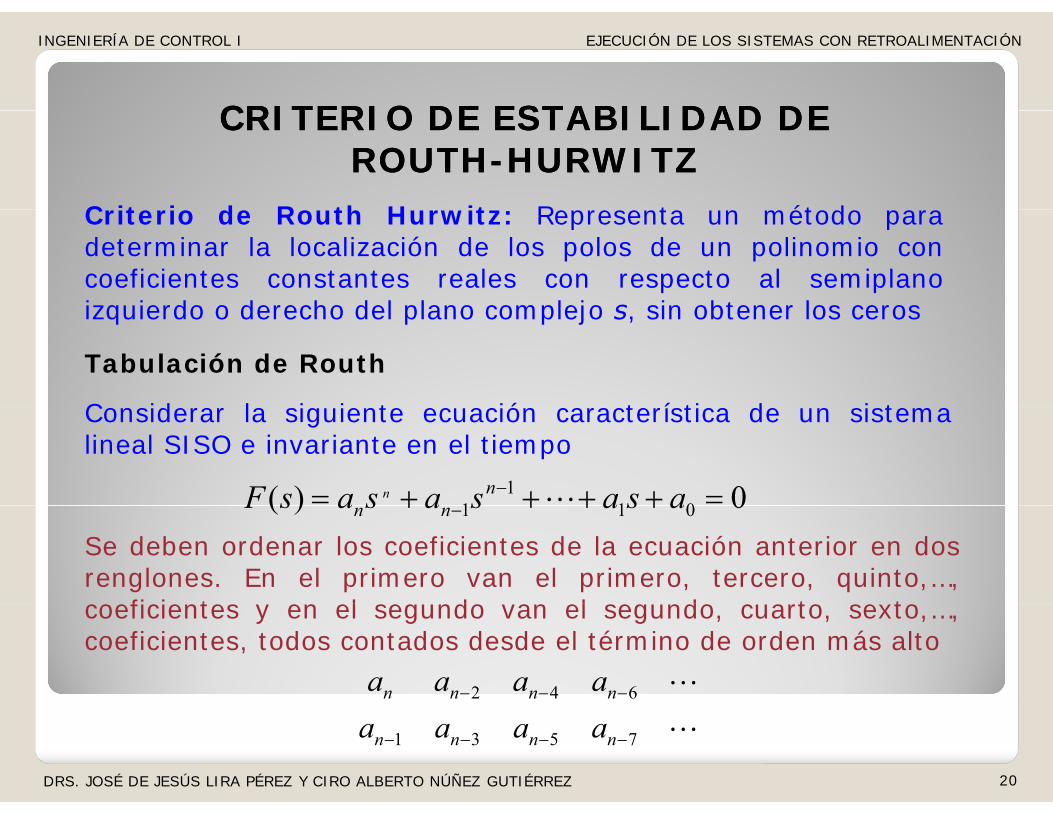
C it i d R th H it R t ét dCriterio de Routh Hurwitz: Representa un método paradeterminar la localización de los polos de un polinomio concoeficientes constantes reales con respecto al semiplanoizquierdo o derecho del plano complejo s sin obtener los cerosizquierdo o derecho del plano complejo s, sin obtener los ceros
Tabulación de Routh
C id l i i t ió t í ti d i tConsiderar la siguiente ecuación característica de un sistemalineal SISO e invariante en el tiempo
0)( 011
1 =++++= − asasasasF nn 0)( 011 ++++ − asasasasF nn
Se deben ordenar los coeficientes de la ecuación anterior en dosrenglones. En el primero van el primero, tercero, quinto,…,coeficientes y en el segundo van el segundo cuarto sextocoeficientes y en el segundo van el segundo, cuarto, sexto,…,coeficientes, todos contados desde el término de orden más alto
642 −−− nnnn aaaa
DRS. JOSÉ DE JESÚS LIRA PÉREZ Y CIRO ALBERTO NÚÑEZ GUTIÉRREZ 20
7531 −−−− nnnn aaaa

CRITERIO DE ESTABILIDAD DE CRITERIO DE ESTABILIDAD DE
INGENIERÍA DE CONTROL I EJECUCIÓN DE LOS SISTEMAS CON RETROALIMENTACIÓN
CRITERIO DE ESTABILIDAD DE CRITERIO DE ESTABILIDAD DE ROUTHROUTH--HURWITZHURWITZ
El siguiente paso es formar el arreglo de ecuaciones en la siguiente forma:El siguiente paso es formar el arreglo de ecuaciones en la siguiente forma: suponer una ecuación de sexto orden
01
12
23
34
45
56
6 asasasasasasa ++++++6
6 4 2 05
5 3 1
6 4 6 2 6 0
0
1 1 1
s a a a as a a a
a a a a a a− − −6 4 6 2 6 040
5 3 5 1 55 5 5
5 15 3 53
1 1 1 00
01 1 1 0 0
a a a a a as A B a
a a a a aa a a
a aa a as C D
= = =
− − −= = =
0
020
0 00
01 1 1 0 00 0
s C DA aA B AA A A
A B A a As E a
C D C CC C C− − −
= = =
1
0
1 0 0 0C D
s FE aE
−=
DRS. JOSÉ DE JESÚS LIRA PÉREZ Y CIRO ALBERTO NÚÑEZ GUTIÉRREZ 21
000
1 0 0 00
E as a
FF−
=

CRITERIO DE ESTABILIDAD DE CRITERIO DE ESTABILIDAD DE
INGENIERÍA DE CONTROL I EJECUCIÓN DE LOS SISTEMAS CON RETROALIMENTACIÓN
CRITERIO DE ESTABILIDAD DE CRITERIO DE ESTABILIDAD DE ROUTHROUTH--HURWITZHURWITZ
De la tabulación anterior, el último paso en la aplicacióndel criterio es:
Investigar los signos de los coeficientes de la primera columna(sombreada) y se obtienen las siguientes conclusiones: Las(sombreada) y se obtienen las siguientes conclusiones: Lasraíces de la ecuación están todas en el semiplano izquierdo delplano s si todos los elementos de la primera columna de latabulación de Routh son del mismo signo. El número degcambios de signos en los elementos de la primera columna esigual al número de raíces con partes reales positivas en elsemiplano derecho de s
DRS. JOSÉ DE JESÚS LIRA PÉREZ Y CIRO ALBERTO NÚÑEZ GUTIÉRREZ 22
CRITERIO DE ESTABILIDAD DE CRITERIO DE ESTABILIDAD DE
INGENIERÍA DE CONTROL I EJECUCIÓN DE LOS SISTEMAS CON RETROALIMENTACIÓN
CRITERIO DE ESTABILIDAD DE CRITERIO DE ESTABILIDAD DE ROUTHROUTH--HURWITZHURWITZ
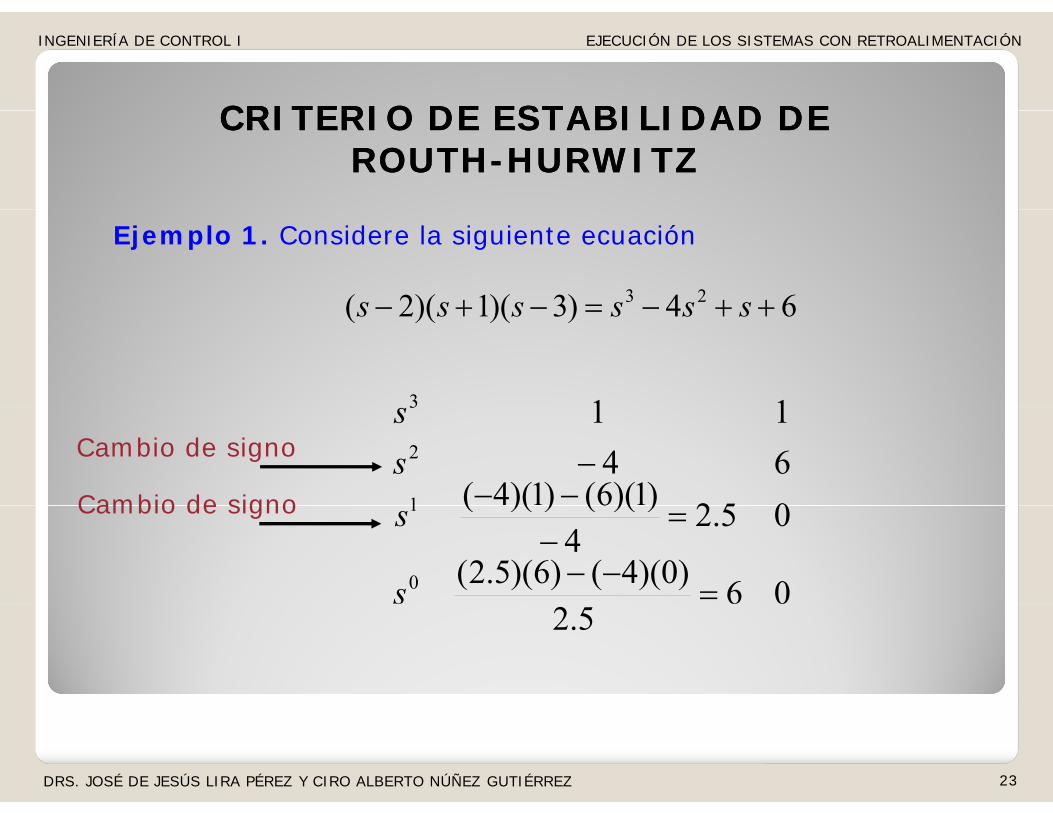
Ejemplo 1. Considere la siguiente ecuación
64)3)(1)(2( 23 ++−=−+− ssssss 64)3)(1)(2( ++−=−+− ssssss
113
052)1)(6()1)(4(6411
1
2
3
−−−s
sCambio de signo
Cambio de signo
06)0)(4()6)(5.2(
05.24
))(6())((
0
1
=−−
=−
s
sCambio de signo
5.2
DRS. JOSÉ DE JESÚS LIRA PÉREZ Y CIRO ALBERTO NÚÑEZ GUTIÉRREZ 23

CRITERIO DE ESTABILIDAD DE CRITERIO DE ESTABILIDAD DE
INGENIERÍA DE CONTROL I EJECUCIÓN DE LOS SISTEMAS CON RETROALIMENTACIÓN
CRITERIO DE ESTABILIDAD DE CRITERIO DE ESTABILIDAD DE ROUTHROUTH--HURWITZHURWITZ
Ejemplo 2. Considere la siguiente ecuación
010532 234 =++++ ssss 010532 ++++ ssss
10324s
0107)5)(2()3)(1(051
2
3
ss
−=−Cambio de signo
0043.67
)10)(1()5)(7(
01071
1s
s
=−−
=g
Cambio de signo
00107
0s−
DRS. JOSÉ DE JESÚS LIRA PÉREZ Y CIRO ALBERTO NÚÑEZ GUTIÉRREZ 24

CRITERIO DE ESTABILIDAD DE CRITERIO DE ESTABILIDAD DE
INGENIERÍA DE CONTROL I EJECUCIÓN DE LOS SISTEMAS CON RETROALIMENTACIÓN
CRITERIO DE ESTABILIDAD DE CRITERIO DE ESTABILIDAD DE ROUTHROUTH--HURWITZHURWITZ
Casos especiales:
1) Cuando el primer elemento en cualquiera de los renglones de la tabulación es cero.
2) L l t ló t d 2) Los elementos en un renglón son todos cero
En el primer caso, si aparece un cero, losEn el primer caso, si aparece un cero, loselementos del siguiente renglón serían . Pararesolver entonces se propone un número arbitrariopequeño y positivo ε y después se continúa con la
∞
p q y p y ptabulación
DRS. JOSÉ DE JESÚS LIRA PÉREZ Y CIRO ALBERTO NÚÑEZ GUTIÉRREZ 25
CRITERIO DE ESTABILIDAD DE CRITERIO DE ESTABILIDAD DE
INGENIERÍA DE CONTROL I EJECUCIÓN DE LOS SISTEMAS CON RETROALIMENTACIÓN
CRITERIO DE ESTABILIDAD DE CRITERIO DE ESTABILIDAD DE ROUTHROUTH--HURWITZHURWITZ
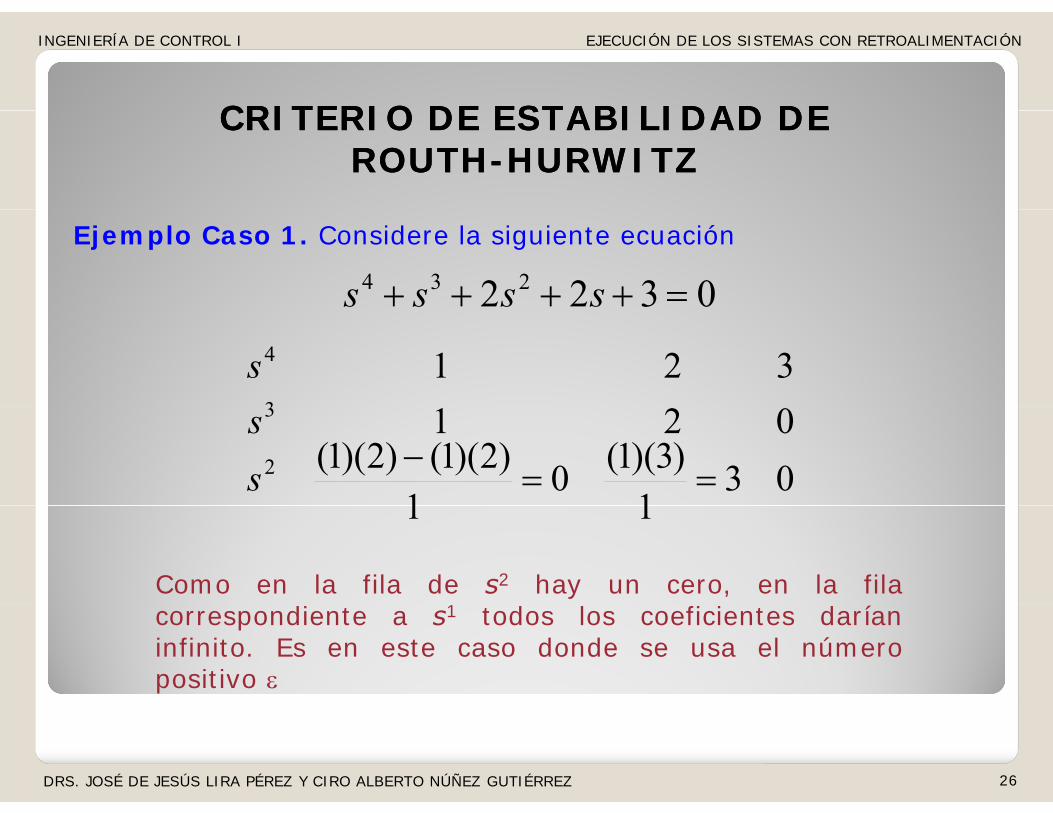
Ejemplo Caso 1. Considere la siguiente ecuación
0322 234 =++++ ssss
3213
4s
031
)3)(1(01
)2)(1()2)(1(021
2
3
==−s
s
11
Como en la fila de s2 hay un cero, en la filaícorrespondiente a s1 todos los coeficientes darían
infinito. Es en este caso donde se usa el númeropositivo ε
DRS. JOSÉ DE JESÚS LIRA PÉREZ Y CIRO ALBERTO NÚÑEZ GUTIÉRREZ 26
CRITERIO DE ESTABILIDAD DE CRITERIO DE ESTABILIDAD DE
INGENIERÍA DE CONTROL I EJECUCIÓN DE LOS SISTEMAS CON RETROALIMENTACIÓN
CRITERIO DE ESTABILIDAD DE CRITERIO DE ESTABILIDAD DE ROUTHROUTH--HURWITZHURWITZ
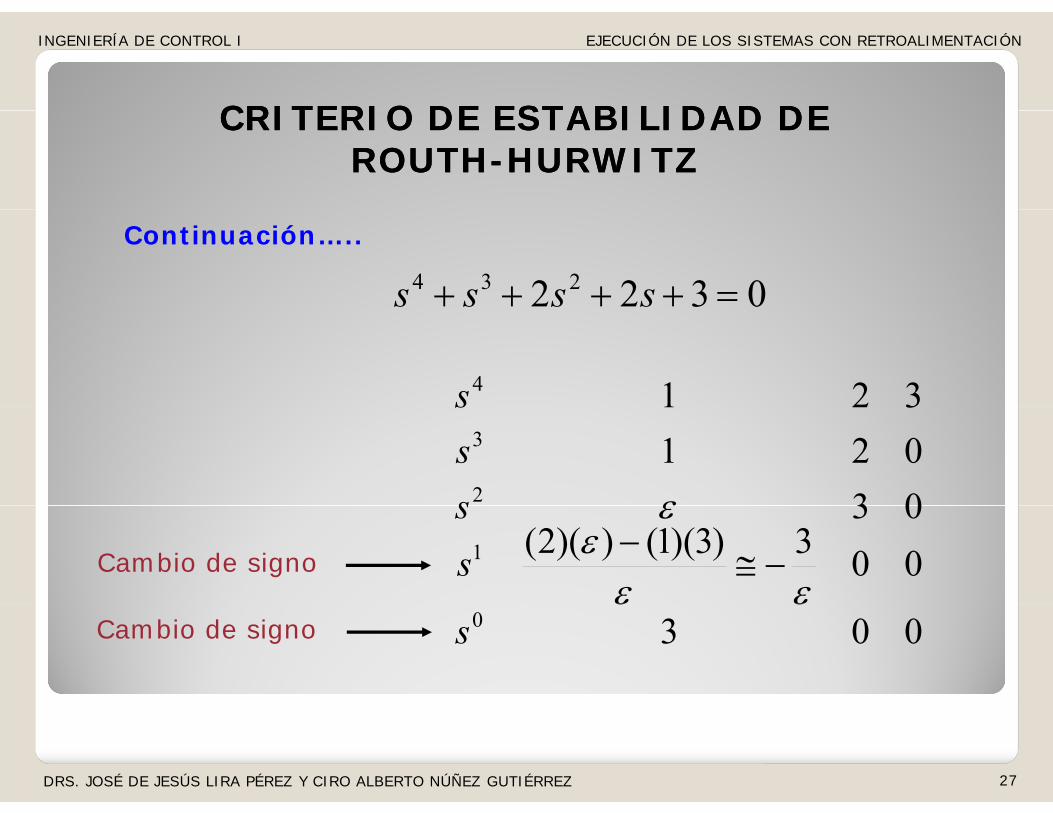
0322 234 =++++ ssssContinuación…..
3214s
03021321
2
3
sss
ε003)3)(1())(2(03
1ss
εεε
ε−≅
−Cambio de signo
0030sεε
Cambio de signo
DRS. JOSÉ DE JESÚS LIRA PÉREZ Y CIRO ALBERTO NÚÑEZ GUTIÉRREZ 27

CRITERIO DE ESTABILIDAD DE CRITERIO DE ESTABILIDAD DE
INGENIERÍA DE CONTROL I EJECUCIÓN DE LOS SISTEMAS CON RETROALIMENTACIÓN
CRITERIO DE ESTABILIDAD DE CRITERIO DE ESTABILIDAD DE ROUTHROUTH--HURWITZHURWITZ
Caso especial 2: queda un renglón de ceros
Solución:
a) Formar la ecuación auxiliar A(s)=0 mediante el uso de loscoeficientes del renglón que se encuentra justo antes del renglónde cerosde ceros.
b) Tomar la derivada de la ecuación auxiliar con respecto de s, estoes: dA(s)/ds=0.
c) Reemplazar el renglón de ceros con los coeficientes de dA(s)/ds=0.
d) Continuar con la tabulación de Routh en la forma usual con elló d fi i l d l ló dnuevo renglón de coeficientes reemplazando el renglón de ceros.
e) Interpretar en la forma usual el cambio de signos.
DRS. JOSÉ DE JESÚS LIRA PÉREZ Y CIRO ALBERTO NÚÑEZ GUTIÉRREZ 28
CRITERIO DE ESTABILIDAD DE CRITERIO DE ESTABILIDAD DE
INGENIERÍA DE CONTROL I EJECUCIÓN DE LOS SISTEMAS CON RETROALIMENTACIÓN
CRITERIO DE ESTABILIDAD DE CRITERIO DE ESTABILIDAD DE ROUTHROUTH--HURWITZHURWITZ
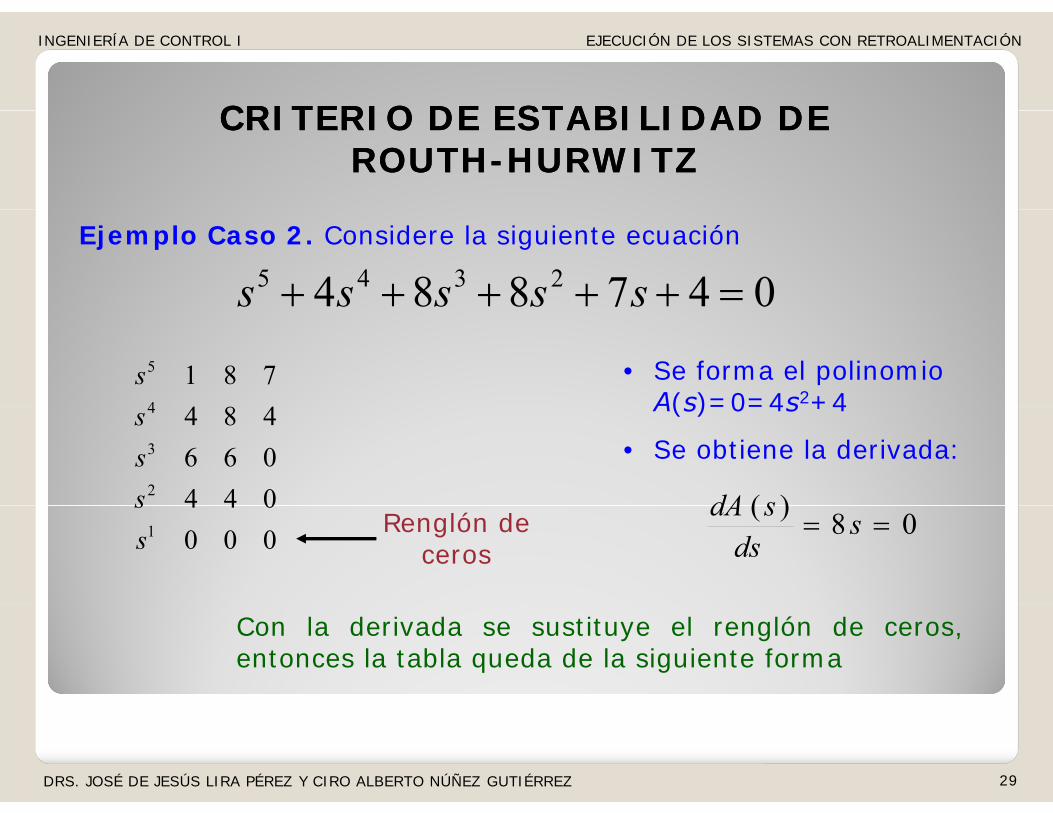
Ejemplo Caso 2. Considere la siguiente ecuación
047884 2345 =+++++ sssss
484781
4
5s • Se forma el polinomio A(s)=0=4s2+4
044066484
2
3
4
sss A(s) 0 4s +4
• Se obtiene la derivada:
)( sdA000044
1ss
Renglón de ceros
08)(== s
dssdA
Con la derivada se sustituye el renglón de ceros,entonces la tabla queda de la siguiente forma
DRS. JOSÉ DE JESÚS LIRA PÉREZ Y CIRO ALBERTO NÚÑEZ GUTIÉRREZ 29

CRITERIO DE ESTABILIDAD DE CRITERIO DE ESTABILIDAD DE
INGENIERÍA DE CONTROL I EJECUCIÓN DE LOS SISTEMAS CON RETROALIMENTACIÓN
CRITERIO DE ESTABILIDAD DE CRITERIO DE ESTABILIDAD DE ROUTHROUTH--HURWITZHURWITZ
Continuación…..
047884 2345 =+++++ sssss
7815s
066484
3
4
ss
008044
1
2
ss
08)(== ssdA
004008
0ss 08 == s
ds
DRS. JOSÉ DE JESÚS LIRA PÉREZ Y CIRO ALBERTO NÚÑEZ GUTIÉRREZ 30

CRITERIO DE ESTABILIDAD DE CRITERIO DE ESTABILIDAD DE
INGENIERÍA DE CONTROL I EJECUCIÓN DE LOS SISTEMAS CON RETROALIMENTACIÓN
CRITERIO DE ESTABILIDAD DE CRITERIO DE ESTABILIDAD DE ROUTHROUTH--HURWITZHURWITZ
Este criterio puede ayudar a encontrar los coeficientes para estabilidad de un controlador en lazo cerrado.
S l i t i i tSea el sistema siguiente:
11U s Y s∑ 6
1)3)(2(
12 −+
=+− ssss∑
Kp
DRS. JOSÉ DE JESÚS LIRA PÉREZ Y CIRO ALBERTO NÚÑEZ GUTIÉRREZ 31

CRITERIO DE ESTABILIDAD DE CRITERIO DE ESTABILIDAD DE
INGENIERÍA DE CONTROL I EJECUCIÓN DE LOS SISTEMAS CON RETROALIMENTACIÓN
CRITERIO DE ESTABILIDAD DE CRITERIO DE ESTABILIDAD DE ROUTHROUTH--HURWITZHURWITZ
Se desea conocer el valor mínimo de Kp para garantizar estabilidad al sistema en lazo cerrado
La función de transferencia en lazo cerrado es:
( ) ( ) 1Y s G s2( ) 1 ( ) ( ) 6 pU s H s G s s s K
= =+ + − +
2 1 ( 6 )ps K− +1 1 00 ( 6 ) 0p
ss K− +
E t di ió d b á 6 0
6pK
K
⇒ − + >
∴ >
Esta condición deberá cumplirse para que no haya cambio de signo Simulación
DRS. JOSÉ DE JESÚS LIRA PÉREZ Y CIRO ALBERTO NÚÑEZ GUTIÉRREZ 32
Regresar6pK∴ >
INGENIERÍA DE CONTROL I EJECUCIÓN DE LOS SISTEMAS CON RETROALIMENTACIÓN
CONTROLADORES P, PI, PD, PIDCONTROLADORES P, PI, PD, PID
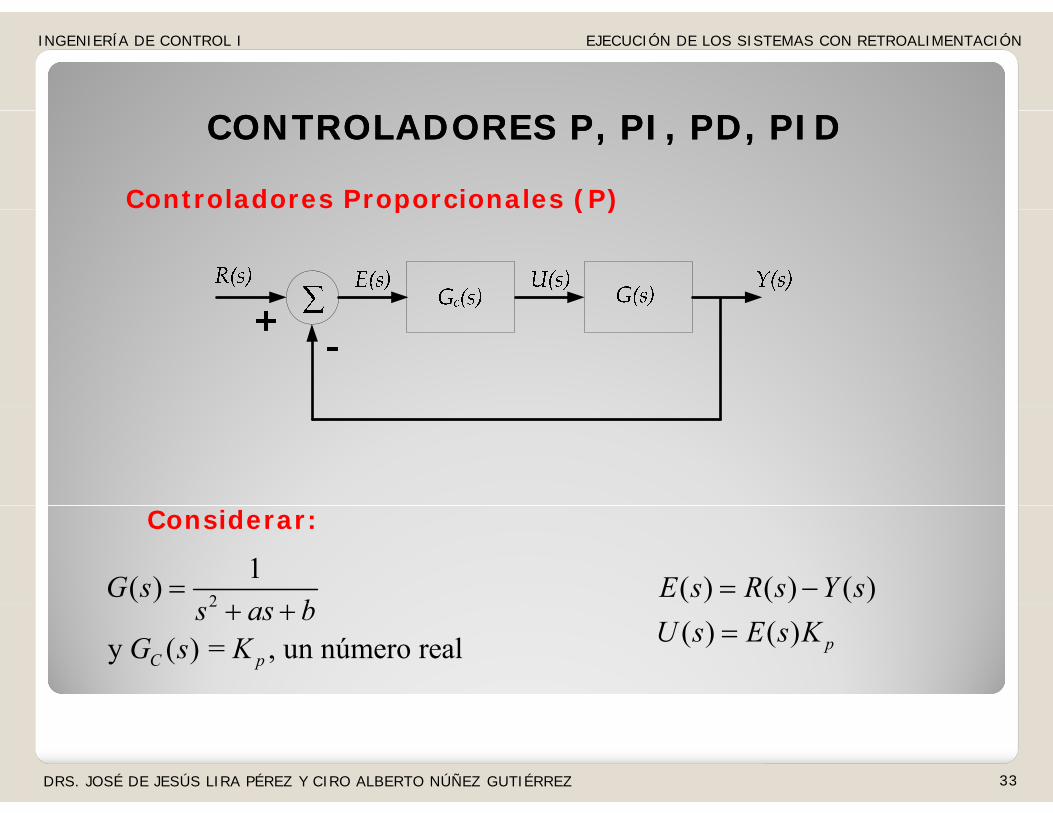
Controladores Proporcionales (P)p ( )
Considerar:
2
1( )G sb
= ( ) ( ) ( )E s R s Y s= −2
y ( ) = , un número realC p
s as bG s K
+ +( ) ( ) pU s E s K=
DRS. JOSÉ DE JESÚS LIRA PÉREZ Y CIRO ALBERTO NÚÑEZ GUTIÉRREZ 33

INGENIERÍA DE CONTROL I EJECUCIÓN DE LOS SISTEMAS CON RETROALIMENTACIÓN
CONTROLADORES P, PI, PD, PIDCONTROLADORES P, PI, PD, PID
2( )( )p
p p
KK G s KY s s as b+ +
2
2
( )( ) 1 ( ) 1
p p
pp p
s as bKR s K G s s as b K
s as b
+ += = =+ + + ++
+ +
La ecuación característica es:
2 1 0( ) 0ps as b K s+ + + =Esta es una ecuación
cuadrática de la forma: Ax2+Bx+C=0
DRS. JOSÉ DE JESÚS LIRA PÉREZ Y CIRO ALBERTO NÚÑEZ GUTIÉRREZ 34

INGENIERÍA DE CONTROL I EJECUCIÓN DE LOS SISTEMAS CON RETROALIMENTACIÓN
CONTROLADORES P, PI, PD, PIDCONTROLADORES P, PI, PD, PID
Solucionando la ecuación anterior queda
2 4( )pa a b K− ± − +
( )1,2
2
2si 4 entonces habrá parte imaginaria
p
p
s
b K a
=
+ >( ) p g
si tiende a p
pK
K
∞
1 2, ps j K=
Lo anterior se interpreta como que para valores muy grandes Lo anterior se interpreta como que para valores muy grandes de Kp, se pueden originar oscilaciones en el sistema
DRS. JOSÉ DE JESÚS LIRA PÉREZ Y CIRO ALBERTO NÚÑEZ GUTIÉRREZ 35

INGENIERÍA DE CONTROL I EJECUCIÓN DE LOS SISTEMAS CON RETROALIMENTACIÓN
CONTROLADORES P, PI, PD, PIDCONTROLADORES P, PI, PD, PID
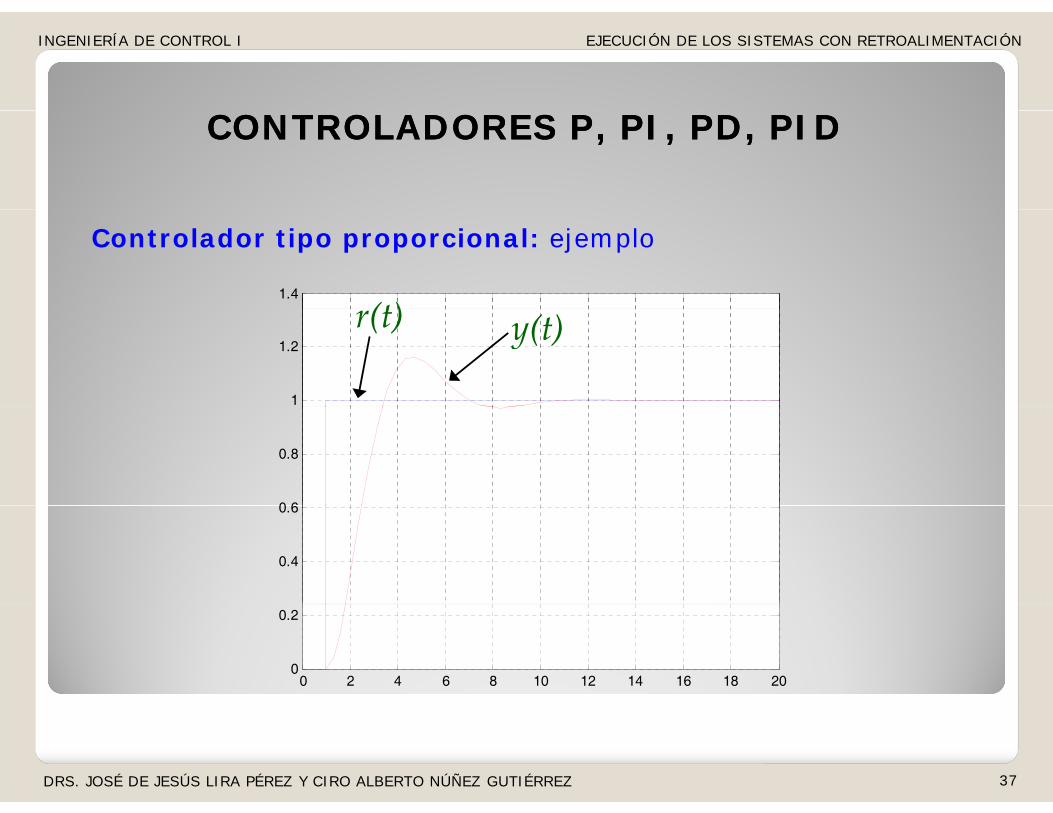
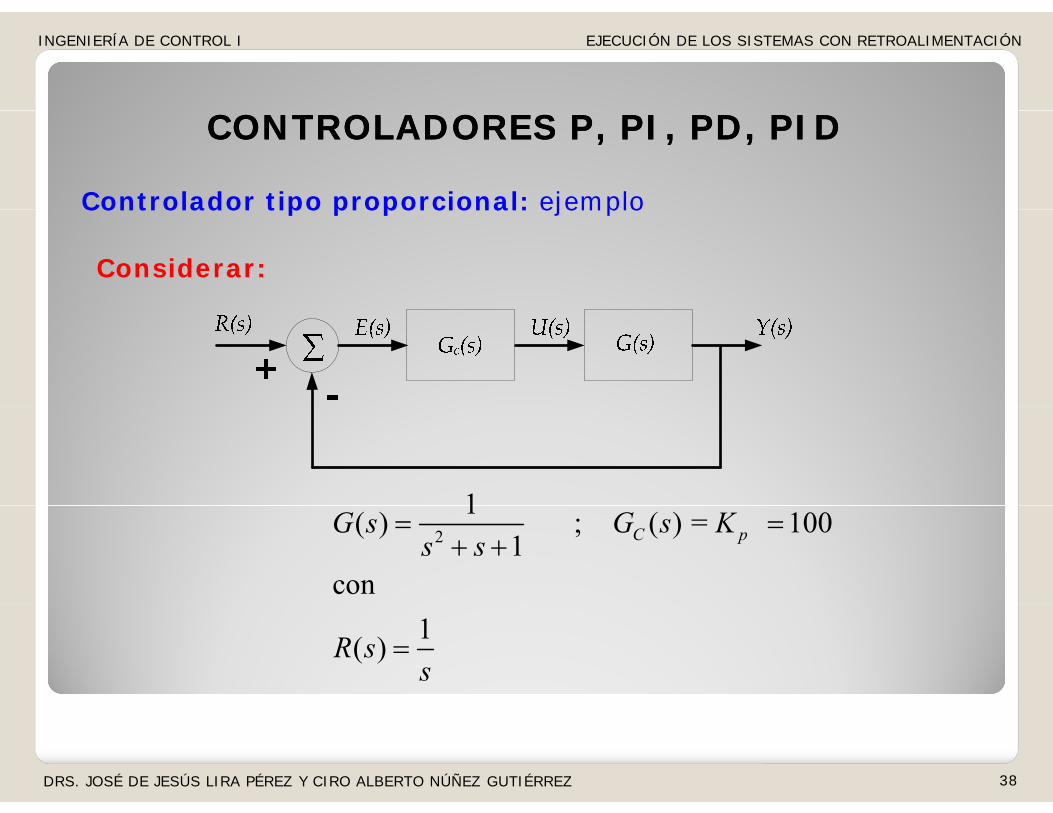
Controlador tipo proporcional: ejemploControlador tipo proporcional: ejemplo
Considerar:
sG 1)( =
conss
sG
1
1)( 2 ++=
ssR 1)( =
DRS. JOSÉ DE JESÚS LIRA PÉREZ Y CIRO ALBERTO NÚÑEZ GUTIÉRREZ 36
INGENIERÍA DE CONTROL I EJECUCIÓN DE LOS SISTEMAS CON RETROALIMENTACIÓN
CONTROLADORES P, PI, PD, PIDCONTROLADORES P, PI, PD, PID
Controlador tipo proporcional: ejemplo
1.4
(t)
1
1.2
r(t) y(t)
0 6
0.8
0.4
0.6
0 2 4 6 8 10 12 14 16 18 200
0.2
DRS. JOSÉ DE JESÚS LIRA PÉREZ Y CIRO ALBERTO NÚÑEZ GUTIÉRREZ 37
INGENIERÍA DE CONTROL I EJECUCIÓN DE LOS SISTEMAS CON RETROALIMENTACIÓN
CONTROLADORES P, PI, PD, PIDCONTROLADORES P, PI, PD, PID
Controlador tipo proporcional: ejemploControlador tipo proporcional: ejemplo
Considerar:
12
1( ) ; ( ) = 1001
con
C pG s G s Ks s
= =+ +
1( )R ss
=
DRS. JOSÉ DE JESÚS LIRA PÉREZ Y CIRO ALBERTO NÚÑEZ GUTIÉRREZ 38

INGENIERÍA DE CONTROL I EJECUCIÓN DE LOS SISTEMAS CON RETROALIMENTACIÓN
CONTROLADORES P, PI, PD, PIDCONTROLADORES P, PI, PD, PID
1 8
2
Controlador tipo proporcional: ejemplo
1.4
1.6
1.8 r(t)y(t)
0.8
1
1.2
0.4
0.6
0 2 4 6 8 10 12 14 16 18 200
0.2
DRS. JOSÉ DE JESÚS LIRA PÉREZ Y CIRO ALBERTO NÚÑEZ GUTIÉRREZ 39
INGENIERÍA DE CONTROL I EJECUCIÓN DE LOS SISTEMAS CON RETROALIMENTACIÓN
CONTROLADORES P, PI, PD, PIDCONTROLADORES P, PI, PD, PID
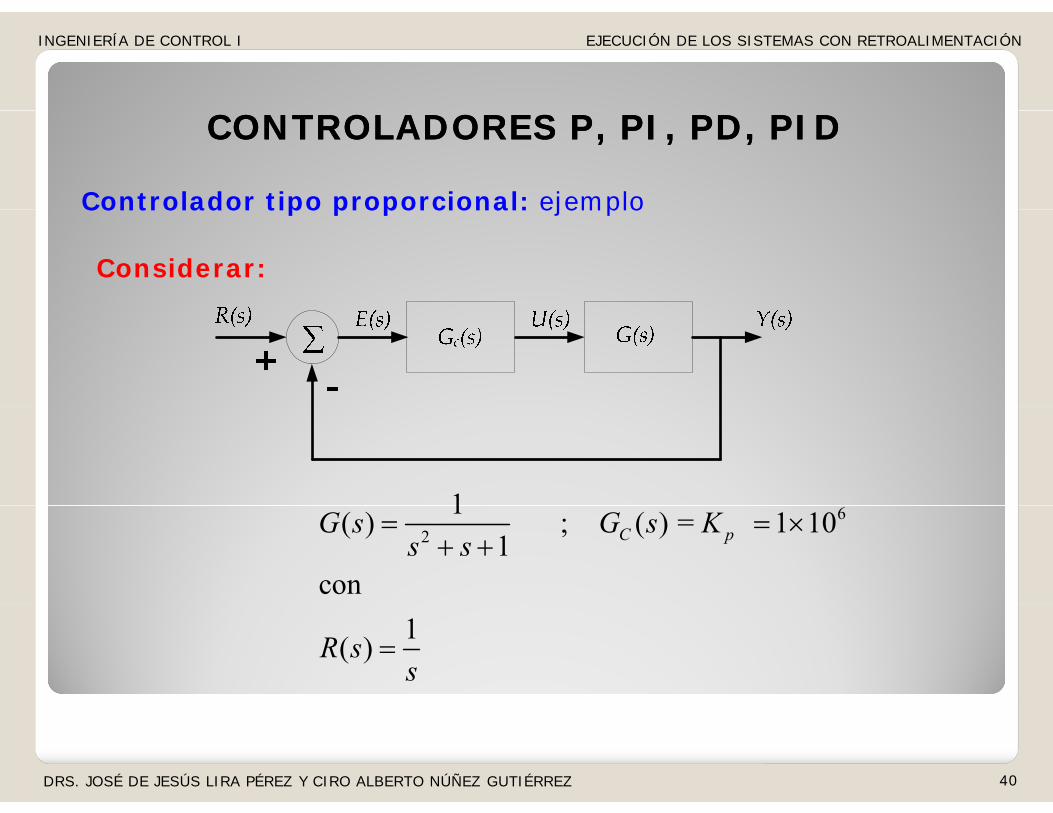
Controlador tipo proporcional: ejemploControlador tipo proporcional: ejemplo
Considerar:
1 62
1( ) ; ( ) = 1 101
con
C pG s G s Ks s
= = ×+ +
1( )R ss
=
DRS. JOSÉ DE JESÚS LIRA PÉREZ Y CIRO ALBERTO NÚÑEZ GUTIÉRREZ 40

INGENIERÍA DE CONTROL I EJECUCIÓN DE LOS SISTEMAS CON RETROALIMENTACIÓN
CONTROLADORES P, PI, PD, PIDCONTROLADORES P, PI, PD, PID
Controlador tipo proporcional: ejemplo
2
y(t)
1.4
1.6
1.8
r(t)
y(t)
0 8
1
1.2
( )
0.4
0.6
0.8
0 2 4 6 8 10 12 14 16 18 200
0.2
DRS. JOSÉ DE JESÚS LIRA PÉREZ Y CIRO ALBERTO NÚÑEZ GUTIÉRREZ 41

INGENIERÍA DE CONTROL I EJECUCIÓN DE LOS SISTEMAS CON RETROALIMENTACIÓN
CONTROLADORES P, PI, PD, PIDCONTROLADORES P, PI, PD, PID
Controladores Proporcional-Integral (PI)p g ( )
( ) ( ) c iu K e t K e t dt= + ∫K Ks z+( ) i i
c c cc
K Ks zG s K K zs s K
+= + = =
Considere que el número de tipo de la planta, esto es, el número de integradores enConsidere que el número de tipo de la planta, esto es, el número de integradores enG, es cero. Entonces con un control P, el sistema es tipo 0 y tiene un error de estadoestable a una entrada escalón.Adicionando el control I, el sistema se cambia de tipo 0 a 1 y por lo tanto tiene un
DRS. JOSÉ DE JESÚS LIRA PÉREZ Y CIRO ALBERTO NÚÑEZ GUTIÉRREZ 42
, p y perror de estado estable cero ante una entrada escalón.
INGENIERÍA DE CONTROL I EJECUCIÓN DE LOS SISTEMAS CON RETROALIMENTACIÓN
CONTROLADORES P, PI, PD, PIDCONTROLADORES P, PI, PD, PID
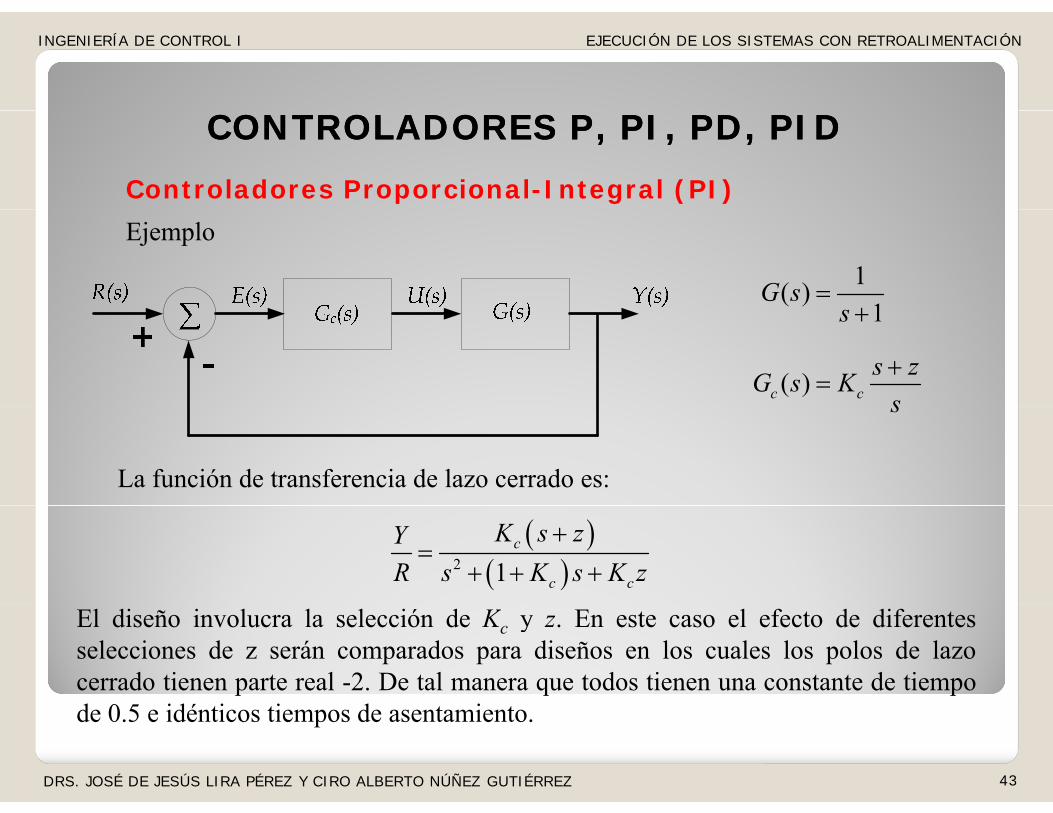
Controladores Proporcional-Integral (PI)
Ejemplo
1( )1
G s =+
( )c cs zG s K
s+
=
1s +
s
La función de transferencia de lazo cerrado es:
( )( )2 1
c
c c
K s zYR s K s K z
+=
+ + +
El diseño involucra la selección de Kc y z. En este caso el efecto de diferentesselecciones de z serán comparados para diseños en los cuales los polos de lazocerrado tienen parte real -2. De tal manera que todos tienen una constante de tiempo
DRS. JOSÉ DE JESÚS LIRA PÉREZ Y CIRO ALBERTO NÚÑEZ GUTIÉRREZ 43
de 0.5 e idénticos tiempos de asentamiento.
INGENIERÍA DE CONTROL I EJECUCIÓN DE LOS SISTEMAS CON RETROALIMENTACIÓN
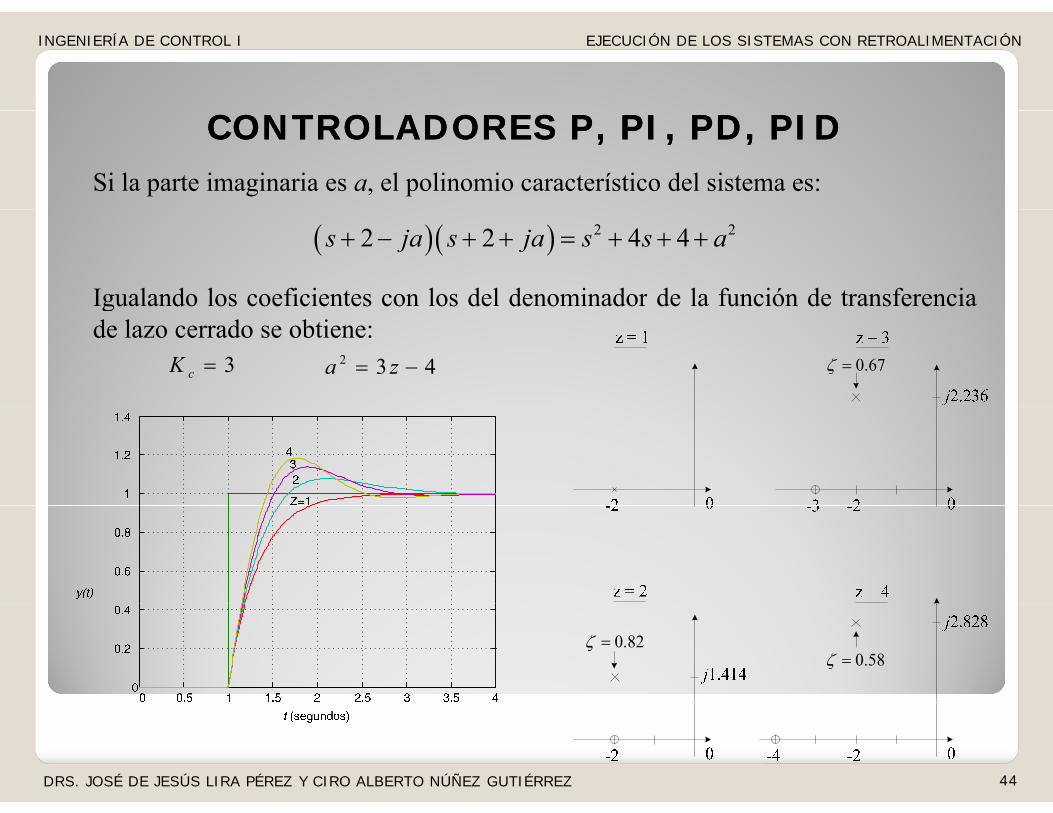
CONTROLADORES P, PI, PD, PIDCONTROLADORES P, PI, PD, PIDSi la parte imaginaria es a, el polinomio característico del sistema es:
( )( ) 2 22 2 4 4s ja s ja s s a+ − + + = + + +
Igualando los coeficientes con los del denominador de la función de transferenciagde lazo cerrado se obtiene:
3cK = 2 3 4a z= − 0.67ζ =
0.82ζ =0.58ζ =
DRS. JOSÉ DE JESÚS LIRA PÉREZ Y CIRO ALBERTO NÚÑEZ GUTIÉRREZ 44

INGENIERÍA DE CONTROL I EJECUCIÓN DE LOS SISTEMAS CON RETROALIMENTACIÓN
CONTROLADORES P, PI, PD, PIDCONTROLADORES P, PI, PD, PID
Controladores Proporcional-Integral (PI)
Ejemplo
( )( )1( )
1 0 5 1G s
s s=
+ +
( )c cs zG s K
s+
=
( )( )1 0.5 1s s+ +
s
La ganancia de lazo es:
La función de transferencia de lazo cerrado es:
( )( )2
1 2c cs zG G K
s s s+
=+ +
La función de transferencia de lazo cerrado es:
( )( )3 20 5 1 5 1
cK s zYR s s K s K z
+=
+ + + +
DRS. JOSÉ DE JESÚS LIRA PÉREZ Y CIRO ALBERTO NÚÑEZ GUTIÉRREZ 45
( )0.5 1.5 1 c cR s s K s K z+ + + +

INGENIERÍA DE CONTROL I EJECUCIÓN DE LOS SISTEMAS CON RETROALIMENTACIÓN
CONTROLADORES P, PI, PD, PIDCONTROLADORES P, PI, PD, PID
Controladores Proporcional-Derivativo (PD)p ( )
( ) ( )c du K e t K e t= +
( ) K( )( ) cc c d d
d
KG s K K s K s z zK
= + = + =
Si la planta es del tipo 0, con o sin control derivativo, el sistema seguirá siendo tipo 0i d t i d K P l t t t d ló lcon una ganancia determinada por Kc. Por lo tanto, para una entrada escalón la
adición de la acción de control D no tiene efecto en el error de estado estable. Sinembargo, éste se reduce indirectamente, ya que la adición de D mejora laestabilidad relativa y por lo tanto permite que K sea tan grande como un control P
DRS. JOSÉ DE JESÚS LIRA PÉREZ Y CIRO ALBERTO NÚÑEZ GUTIÉRREZ 46
estabilidad relativa y por lo tanto permite que Kc sea tan grande como un control Psolo.

INGENIERÍA DE CONTROL I EJECUCIÓN DE LOS SISTEMAS CON RETROALIMENTACIÓN
CONTROLADORES P, PI, PD, PIDCONTROLADORES P, PI, PD, PID
Controladores Proporcional-Derivativo (PD)
Ejemplo
( )( )1( )
1 0 5 1G s
s s=
+ +
( )c c dG s K K s= +
( )( )1 0.5 1s s+ +
La ganancia de lazo con z = Kc/Kd es:
La función de transferencia de lazo cerrado es:
( )( )2
1 2c ds zG G K
s s+
=+ +
Tipo 0 con ganancia Kc
La función de transferencia de lazo cerrado es:
( )( )2
2 /3 2 2 2
d c dK s K KYR s K s K
+=
+ + + +
DRS. JOSÉ DE JESÚS LIRA PÉREZ Y CIRO ALBERTO NÚÑEZ GUTIÉRREZ 47
( )3 2 2 2d cR s K s K+ + + +
INGENIERÍA DE CONTROL I EJECUCIÓN DE LOS SISTEMAS CON RETROALIMENTACIÓN
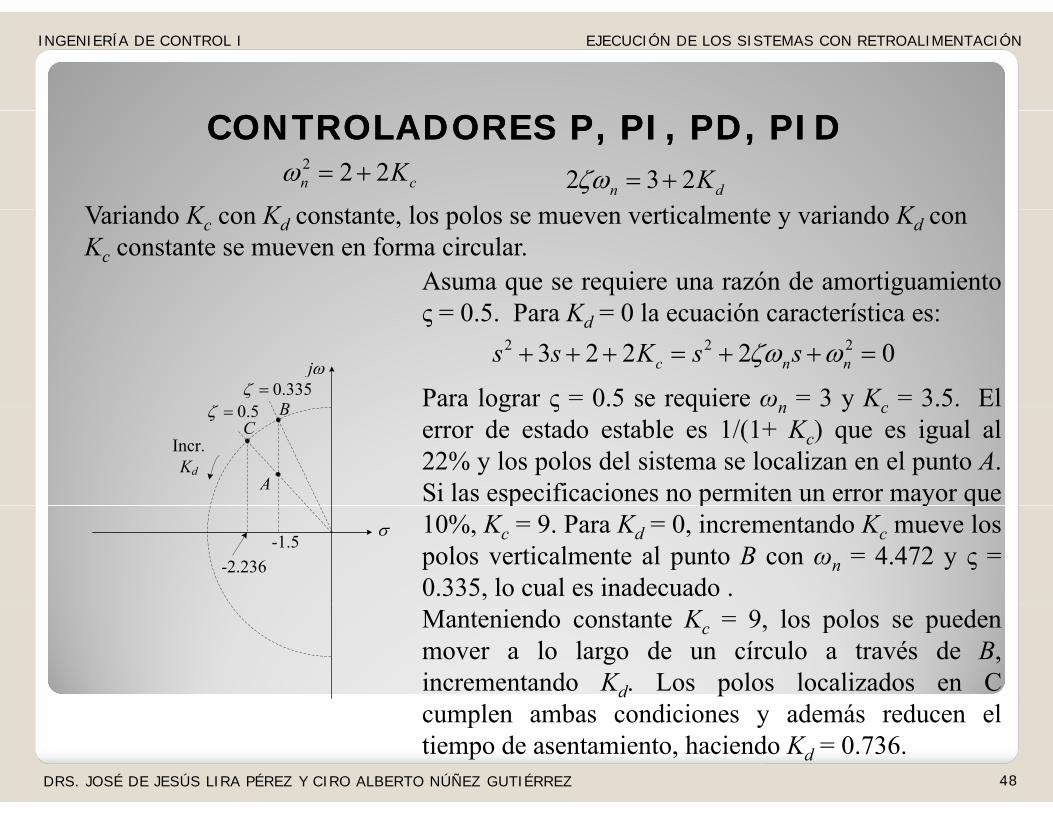
CONTROLADORES P, PI, PD, PIDCONTROLADORES P, PI, PD, PID2 2 2n cKω = + 2 3 2n dKζω = +
V i d K K t t l l ti l t i d KVariando Kc con Kd constante, los polos se mueven verticalmente y variando Kd con Kc constante se mueven en forma circular.
Asuma que se requiere una razón de amortiguamiento0 5 P K 0 l ió t í ti
jω
B0.335ζ =
0 5ζ
ς = 0.5. Para Kd = 0 la ecuación característica es:2 2 23 2 2 2 0c n ns s K s sζω ω+ + + = + + =
Para lograr ς = 0.5 se requiere ωn = 3 y Kc = 3.5. El
A
BC
Incr.Kd
0.5ζ =g ς q n y c
error de estado estable es 1/(1+ Kc) que es igual al22% y los polos del sistema se localizan en el punto A.Si las especificaciones no permiten un error mayor que
σ-1.5
-2.236
p p y q10%, Kc = 9. Para Kd = 0, incrementando Kc mueve lospolos verticalmente al punto B con ωn = 4.472 y ς =0.335, lo cual es inadecuado .Manteniendo constante Kc = 9, los polos se puedenmover a lo largo de un círculo a través de B,incrementando Kd. Los polos localizados en C
DRS. JOSÉ DE JESÚS LIRA PÉREZ Y CIRO ALBERTO NÚÑEZ GUTIÉRREZ 48
cumplen ambas condiciones y además reducen eltiempo de asentamiento, haciendo Kd = 0.736.
INGENIERÍA DE CONTROL I EJECUCIÓN DE LOS SISTEMAS CON RETROALIMENTACIÓN
CONTROLADORES P, PI, PD, PIDCONTROLADORES P, PI, PD, PID
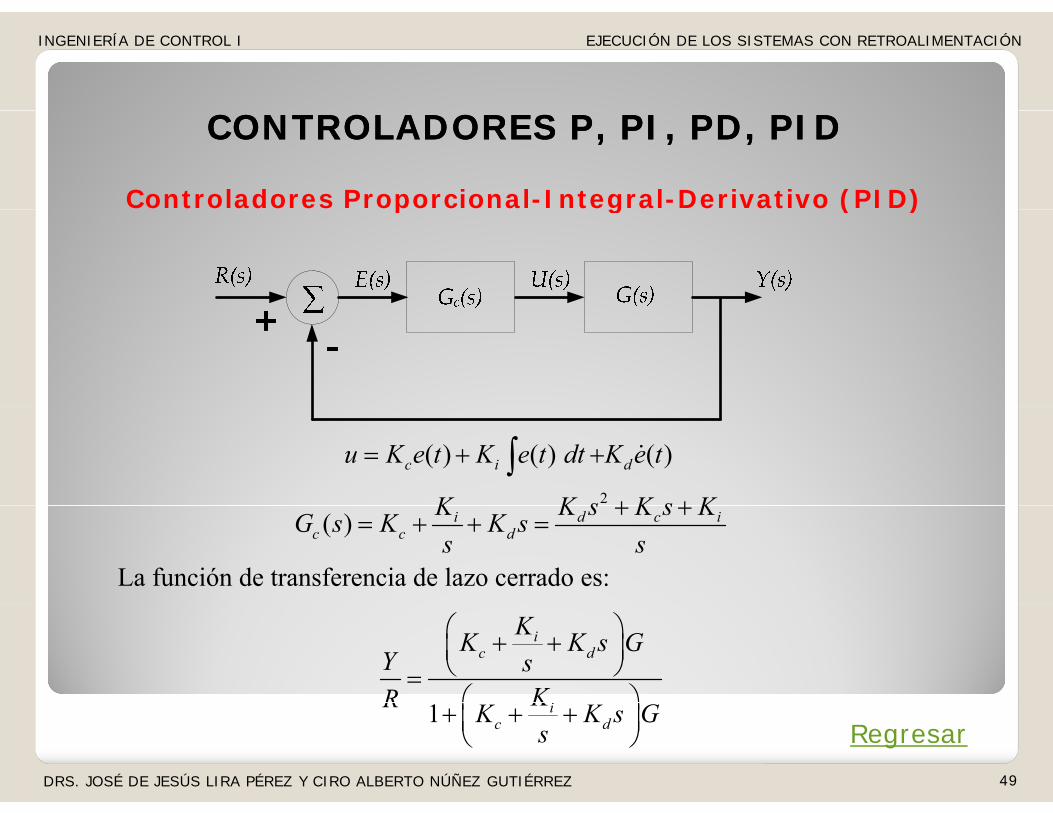
Controladores Proporcional-Integral-Derivativo (PID)p g ( )
( ) ( ) ( )c i du K e t K e t dt K e t= + +∫2K K s K s K+ +( ) i d c i
c c dK K s K s KG s K K ss s
+ += + + =
La función de transferencia de lazo cerrado es:
ic d
i
KK K s GY s
KR
⎛ ⎞+ +⎜ ⎟⎝ ⎠=⎛ ⎞
DRS. JOSÉ DE JESÚS LIRA PÉREZ Y CIRO ALBERTO NÚÑEZ GUTIÉRREZ 49
1 ic d
KR K K s Gs
⎛ ⎞+ + +⎜ ⎟⎝ ⎠ Regresar

ÓÓ
INGENIERÍA DE CONTROL I EJECUCIÓN DE LOS SISTEMAS CON RETROALIMENTACIÓN
SINTONIZACIÓN DE CONTROLADORESSINTONIZACIÓN DE CONTROLADORES
Es importante resaltar que el uso de controladores en la práctica no depende dep q p pencontrar los valores de Kc, Kd y Ki por medios analíticos. En lugar de eso, hayun conjunto de procedimientos establecidos para sintonizar un controladordespués de su instalación.
Dos métodos de sintonización de Ziegler y Nichols son muy populares. Ellosproveen valores iníciales que se afinan por simulación o sintonización en-sitio.Estos métodos se basan en experimentos y análisis y son especialmenteEstos métodos se basan en experimentos y análisis y son especialmenteconvenientes si el modelo matemático de la planta no está disponible.
Ambas reglas de sintonización están diseñadas para un sobretiro de 25% en lat t d ti lórespuesta a una entrada tipo escalón.
Primero considere el Método de Último Ciclo. Con sólo acción de controlproporcional presente, la ganancia Kc se incrementa a la ganancia crítica Ku,donde la salida muestra oscilaciones sostenidas de un periodo medido Tu. Seproponen los siguientes ajustes del controlador:
DRS. JOSÉ DE JESÚS LIRA PÉREZ Y CIRO ALBERTO NÚÑEZ GUTIÉRREZ 50
ÓÓ
INGENIERÍA DE CONTROL I EJECUCIÓN DE LOS SISTEMAS CON RETROALIMENTACIÓN
SINTONIZACIÓN DE CONTROLADORESSINTONIZACIÓN DE CONTROLADORES
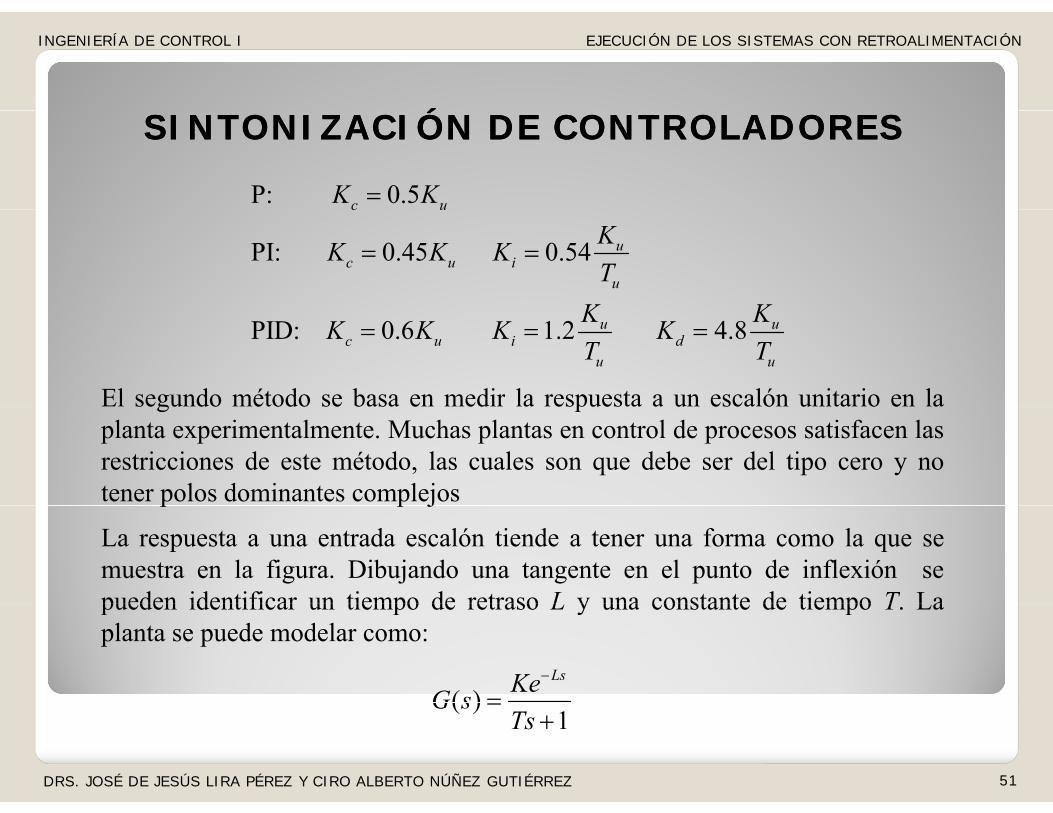
P: 0.5c uK K=
PI: 0.45 0.54
c u
uc u i
u
KK K KT
K K
= =
PID: 0.6 1.2 4.8u uc u i d
u u
K KK K K KT T
= = =
El segundo método se basa en medir la respuesta a un escalón unitario en lag pplanta experimentalmente. Muchas plantas en control de procesos satisfacen lasrestricciones de este método, las cuales son que debe ser del tipo cero y notener polos dominantes complejosp p j
La respuesta a una entrada escalón tiende a tener una forma como la que semuestra en la figura. Dibujando una tangente en el punto de inflexión sepueden identificar un tiempo de retraso L y una constante de tiempo T Lapueden identificar un tiempo de retraso L y una constante de tiempo T. Laplanta se puede modelar como:
( )LsKeG s
−
=
DRS. JOSÉ DE JESÚS LIRA PÉREZ Y CIRO ALBERTO NÚÑEZ GUTIÉRREZ 51
( )1
G sTs
=+

ÓÓ
INGENIERÍA DE CONTROL I EJECUCIÓN DE LOS SISTEMAS CON RETROALIMENTACIÓN
SINTONIZACIÓN DE CONTROLADORESSINTONIZACIÓN DE CONTROLADORES
Con este modelo, los parámetros sugeridos son:
P:
PI: 0 9 0 27
cTKL
T TK K
=
= = 2
2
PI: 0.9 0.27
PID: 1.2 0.6 0.6
c i
c i d
K KL LT TK K K TL L
= =
= = =L L
En ambos métodos, si el sobretiro esconsiderado demasiado grande, se debeng ,llevar a cabo sintonizaciones adicionales paramejorar la estabilidad relativa.
DRS. JOSÉ DE JESÚS LIRA PÉREZ Y CIRO ALBERTO NÚÑEZ GUTIÉRREZ 52
Regresar