i concurso de tecnologia: diseÑo de una presentaciÓn impress con las fases de ... ·...
TRANSCRIPT
Cómo motivar a los estudiantes mediante actividades científicas atractivas
1
I CONCURSO DE TECNOLOGIA:
DISEÑO DE UNA PRESENTACIÓN IMPRESS CON LAS
FASES DE CONSTRUCCIÓN DEL PROYECTO TÉCNICO:
“CONSTRUCCIÓN DE UN ROBOT ANDADOR MECÁNICO”
Encarna Tronchoni García
COLEGIO LA PURÍSIMA
Torrent
Introducción :
Hoy en día la informática está presente en todo el proceso de enseñanza, todos nuestros
alumnos están acostumbrados a ver presentaciones electrónicas con Impress.org o Power
point de diferentes temas. La propuesta consiste en que ellos mismos realicen una
presentación de las diferentes fases del proyecto técnico que van a realizar durante la
primera y segunda evaluación. Con esto lo que pretendo conseguir es, por un lado
consolidar lo que son las fases de un proyecto técnico, y por otro aprender a utilizar una
herramienta que les será de mucha utilidad tanto en su vida académica como posiblemente
es su futura vida laboral.
La forma de presentarlo a los alumnos es un concurso para ver cuál es la mejor presentación
y el premio será la presentación de su trabajo el día de la jornada de puertas abiertas en el
Centro, en la que lo presentarán a todos los alumnos y a los padres que vengan.
Objetivos :
Utilizar programas de ordenador de diseño gráfico, de cálculo y recursos verbales
para comunicar ideas, soluciones técnicas, manejo de datos numéricos… valorando
la importancia de los mismos en diferentes ámbitos de la sociedad.
Participar de forma activa, tolerante y responsable en la planificación y desarrollo de
tareas en grupo desempeñando las tareas encomendadas
Emplear el ordenador como herramienta de trabajo: procesar textos, localizar
información en diferentes soportes, etc..
Conocer y aplicar las fases y elaboración de los proyectos técnicos.
Respeto por las opiniones de los demás.
Distribución de tareas y responsabilidades, cooperación y trabajo en equipo.

Cómo motivar a los estudiantes mediante actividades científicas atractivas
2
Relación del tema propuesto con el currículo del Curso :
Está relacionado con diferentes temas de la asignatura Tecnologías II de 3º ESO: Proceso de
resolución de problemas tecnológicos, Mecanismos, Aplicaciones informáticas.
Breve descripción del proyecto:
El proyecto, como he citado en la introducción, consistirá en un concurso de una
presentación Impress.org de las fases a realizar en un proyecto técnico, en este caso, como
el primer proyecto que vamos a realizar durante este curso es el de la construcción de un
robot andador mecánico, la presentación será sobre este proyecto.
Del 24 al 28 de Septiembre: Se explica la teoría de las fases de un proyecto técnico.
Primera semana de octubre: Se expone a los alumnos el concurso y las bases del
mismo.
Hasta principios de enero: Se explica la teoría de mecanismos, intercalándolas con
el tema de aplicaciones informáticas.
Hasta el 31 de enero: Realización del proyecto y toma de apuntes y de material
gráfico de la realización de éste.
Del 1 al 15 de febrero: Realización de la presentación impress de las fases del
proyecto técnico
Del 18 al 22 de febrero: Exposición y elección de la mejor presentación.
Cuestiones previas y motivadoras para los alumnos:
¿Todas las presentaciones que vemos hacen que mantengamos la atención durante
toda la exposición?
¿Utilizan las presentaciones algún tipo de “truco” para que nos fijemos en algunos
conceptos?
¿Qué tipo de música se elige en las presentaciones?
Material y recursos necesarios:
Taller de tecnología.
Aula de audiovisuales.
Sala de ordenadores.
Cámara de fotos.
Material para realizar el robot andador mecánico:
Material Medidas Cantidad Aplicación
Contrachapado 150x100x15 1 Cuerpo, piernas
Contrachapado 250x100x5 1 Cabeza, brazos, pies

Cómo motivar a los estudiantes mediante actividades científicas atractivas
3
Motor de engranaje 1 Motor
Cable eléctrico rojo 500 1 Cableado
Cable eléctrico negro 500 1 Cableado
Potapilas 1 Pilas
Microinterruptor de corredera 19x6 1 Interruptor
Tornillos de cabeza cilíndrica M4 x 40 2 Fijación patas
Tornillos de cabeza cilíndrica M4 x 30 4 Fijación patas
Contratuercas M4 M4 6 Fijación
Arandelas de separación M4 10 Fijación
Tornillos de contrachapado 8 Fijación pies, portapilas,
motor.
Rueda dentada de 38 dientes Φ 40 2 Engranaje
Rueda dentada de 13 dientes Φ 15 2 Engranaje
Casquillo de reducción 4/3 2 Engranaje
Diodos luminosos rojos Φ 5 2 Ojos.
Normas de seguridad:
Las normas de seguridad son las del taller de tecnología que cito a continuación:
1º.- En el aula taller NO SE PERMITE NINGÚN TIPO DE JUEGO NI DE BROMA,
por ser potencialmente peligrosos para vosotros y vuestros compañeros.
2º.- Los recursos del aula taller son limitados. La PÉRDIDA, SUSTRACCIÓN O
DETERIORO, por mal uso deliberado o actos negligentes, del material o de las
herramientas que están a vuestra disposición, serán sancionados de acuerdo con la
gravedad del hecho.
3º.- Antes de utilizar una máquina o una herramienta debes asegurarte de conocer
perfectamente su manejo. Si tienes la menor duda pregunta a tu profesor.
4º.- No realices ninguna actividad que implique un riesgo sin preguntar el
procedimiento de seguridad. El uso de máquinas como el taladro, el soldador, la pistola
de pegamento, etc., estará condicionado a la presencia del profesor durante su
manipulación.
5º.- Debes asegurarte que las piezas a cortar, a taladrar y, en general, a manipular, están
firmemente sujetas a la mesa de trabajo mediante mordazas, tornillos o gatos.
6º.- No lleves bufandas, pañuelos u otras prendas sueltas que puedan engancharse en las
máquinas que vayas a utilizar en el aula taller de Tecnología. Recógete el cabello si lo
tienes largo.
7º.- El aula taller de Tecnología debe quedar totalmente limpia y ordenada al terminar la
sesión de trabajo.

Cómo motivar a los estudiantes mediante actividades científicas atractivas
4
Procedimiento:
Para realizar el robot andador mecánico:
1. Repartir las instrucciones para realizar el robot
2. Discusión de los diferentes elementos a modificar y de los puntos clave a tener en
cuenta para la realización.
3. Reparto de tareas.
4. Realización del robot y toma gráfica y de notas de la ejecución del proyecto
mientras este se realiza.
5. Comprobación del funcionamiento y posibles reparaciones para lograrlo.
Para la realización de la presentación Impress.
1. Recuento de las diferentes notas que se han tomado durante la ejecución del
proyecto.
2. Visualización y recuento de fotografías.
3. Realización de un esquema de los que se quiere poner en la presentación.
4. Realizar la diferentes diapositivas.
5. Elegir las transiciones.
6. Elegir la música.
Para el concurso:
1. Explicar a todos los alumnos las hojas de votaciones.
2. Entregar las hojas de votaciones.
3. Realizar la visualización de las diferentes presentaciones en el aula de audiovisuales.
4. Votaciones.
Tiempo necesario para desarrollar esta práctica:
Para la realización del Robot andador mecánico: 12 sesiones de 55 minutos.
Para la realización de la presentación Impress: 9 sesiones de 55 minutos.
Para el concurso: 2 sesiones de 55 minutos.
Tiempo Total: 23 sesiones de 55 minutos
Cuestiones de reflexión y conclusiones para los alumnos:
Sobre el Robot andador:
- ¿Por qué se produce el movimiento?
- ¿Qué tipo de transformación de movimiento se produce?
- ¿Puedo modificar la velocidad del Robot?¿Cómo?
Sobre la Presentación:
- ¿Cómo consigo que resulte atractiva la presentación?
- ¿Por qué ha gustado más la ganadora?.
Cómo motivar a los estudiantes mediante actividades científicas atractivas
5
Análisis del proyecto experimental:
El proyecto llevado a cabo por los alumnos ha constado de dos fases diferenciadas,
por un lado la realización del robot andador y por otra la de realizar una presentación
impress con todas las fases del trabajo.
Grupo de alumnos que lo realizan
Los alumnos que han participado en la ejecución del proyecto y posterior ejecución
han sido todos los alumnos de tercero (tanto A como B).
Se han dividido en grupos de cuatro para la fase de realización del robot, y
posteriormente estos grupos se han subdividido por parejas para la realización de la
presentación impress.
Documentación entregada a los alumnos:
A cada grupo de alumnos se les facilita:
Instrucciones: ROBOT ANDADOR MECÁNICO
Pasos a seguir en la realización del proyecto:
1. Traspasar el cuerpo y las piernas de la plantilla al contrachapado.
2. Serrar y lijar los cantos de corte.
3. Poner las piezas del cuerpo en un tornillo de banco para poderlas taladrar bien, y
hacer las perforaciones correspondientes a una profundidad de 15/20 mm.
(Asegurarse de que las perforaciones estén exactamente en línea, una opuesta a la
otra, para evitar problemas posteriores con el funcionamiento).
4. Ahora traspasar la cabeza, los brazos y los pies de la plantilla al contrachapado.
5. Serrar y lijar los cantos de corte.
6. Taladrar perforaciones de ø3mm en los pies, según se indica, y avellanar a una
profundidad de 2 mm.
Montaje:
1. Encolar la cabeza en el cuerpo (superficie de encolado con rayas).
2. Taladrar agujeros de ø4mm en ambas ruedas dentadas
3. Insertar un tornillo en cada perforación de 4 mm de las ruedas dentadas, y fijar por
delante cada una de ellas con una contratuerca.
4. Atornillar ahora ambas ruedas dentadas (15), cada una con un tornillo (11), desde
delante, y 2 arandelas de separación (13), en las perforaciones para ello previstas en
el cuerpo (abajo). Apretar el tornillo de forma que la rueda dentada pueda girar sin
juego y ligeramente.
5. Encolar los brazos como se ilustra, debajo de la apertura superior en las piernas.

Cómo motivar a los estudiantes mediante actividades científicas atractivas
6
6. Encolar los pies con la parte avellanada hacia abajo, en la parte central inferior de
las piernas.
7. Dejar secar bien la cola.
8. Encolar el segundo lado como reflejo espejo del primero.
9. De ambos lados, pasar un tornillo por la perforación superior en las piernas, y fijar
cada uno con una contratuerca en las piernas, de forma que el tornillo pueda girar
ligeramente y sin juego en la apertura.
10. En los dos tornillos poner desde ambos lados 2 arandelas de separación en las ruedas
dentadas
11. Encajar las piernas en los tornillos y fijar desde afuera con una contratuerca cada
una.
12. Al mismo tiempo, atornillar los tornillos superiores en la perforación lateral superior
en el cuerpo.
13. Medir 20 mm por ambos lados del eje del motor de engranaje, y marcar con un
rotulador permanente
14. Poner un extremo del eje en un tornillo de banco y recortar el eje en el sitio marcado
con una sierra con arco de metal.
15. Desbarbar el corte con una lima de taller. Hacer lo mismo con el otro lado
16. Con unos alicates de corte lateral, hacer pequeños cortes de unos 8 mm desplazados
de forma que la rueda dentada quede bien encajada en el eje
17. En ambas ruedas dentadas pequeñas encolar un casquillo de reducción con
pegamento instantáneo.
18. Poner un poco de pegamento instantáneo en el casquillo de reducción y fijar las
ruedas dentadas con pegamento.
19. Posicionar las piernas de tal manera que los tornillos de las ruedas dentadas grandes,
que mueven las piernas, estén a 180° una de la otra.
20. Atornillar el motor de engranaje con ambas ruedas dentadas en el cuerpo, desde
delante, de tal forma que las ruedas dentadas pequeñas queden perfectamente
colocadas (los dientes deben encajar) en las ruedas dentadas grandes.
21. Al atornillar asegurarse de que el motor de engranaje quede bien fijo, y que las
piernas estén a 180°
Comprobación
Al finalizar el montaje se puede cargar el motor con tensión 3V. Para ello, poner el "+" en
el contacto inferior y "-" en el contacto superior. Si está bien ajustada la mecánica, girará el
engranaje y se empezarán a mover las piernas. Las piernas se mueven con facilidad, a 180°
una de la otra, y no se tocan.
Cableado
1. Fijar el portapilas a la parte trasera del cuerpo con 2 tornillos de contrachapado.
2. Insertar, desde adelante, el microinterruptor de corredera en la abertura para ello
prevista en la cabeza, y fijarlo con pegamento universal.
3. Insertar ambos diodos en las perforaciones para ello previstas (ø5mm), y fijarlos con
pegamento instantáneo. Asegurarse de que ambos cátodos (pata corta, lado
aplanado) apunten hacia arriba.

Cómo motivar a los estudiantes mediante actividades científicas atractivas
7
4. Pelar y estañar los extremos del resto del cable negro. Enrollar el alambre de la
misma forma en un lápiz. Estirar la bobina un poco y soldar un extremo a la
conexión izquierda del interruptor
5. Soldar el otro extremo en el ánodo del LED derecho. Colocar el alambre de forma
que sobresalga de la cabeza.
6. Cortar un trozo de 40-50mm del cable eléctrico negro, pelar por ambos lados,
estañarlos, y soldar un extremo a la conexión central del interruptor
7. Soldar el otro extremo con el cable negro del portapilas.
8. Cortar un trozo de 150 mm del cable eléctrico negro, pelar los extremos y
estañarlos. Conectar un extremo con la conexión izquierda del interruptor.
9. Pasar el otro extremo por la perforación en el cuerpo, hacia adelante. Deslizar
encima el segundo trozo de tubo del paquete del engranaje y soldar en la conexión
superior libre del motor de engranaje. Encoger el tubo en el contacto, calentando
con la pistola de aire caliente.
10. Pelar y estañar el resto del cable eléctrico rojo. Enrollar el alambre en un lápiz, para
formar una bobina. Estirar la misma un poco, y soldar los extremos del alambre a
los cátodos de los LEDs .
11. Colocar el alambre de forma que sobresalga de la cabeza.
12. Cortar un trozo de 150 mm del cable eléctrico rojo, pelarlo por ambos lados, estañar
los extremos, y soldar al cable rojo del portapilas.
13. Estirar el otro extremo hacia adelante por la perforación en el cuerpo, cortar el tubo
que está en el paquete del engranaje en dos, y deslizar una de las mitades encima del
cable rojo. Ahora soldar el cable a la conexión inferior del motor de engranaje
(hacia el cuerpo). Prestar atención a que los cables no entorpezcan las ruedas
dentadas. Deslizar el tubo de aislar sobre el contacto del motor, y calentar con una
pistola de aire caliente hasta que quede fijo.
14. Cortar un trozo de aprox. 100 mm del cable eléctrico rojo (5), pelarlo por ambos
lados y estañar los extremos. Soldar un extremo con los ánodos de los LEDs y el
otro extremo con el cable rojo del portapilas.
15. Cortar el cable rojo del portapilas a unos 20 mm, pelarlo y estañar los extremos
pelados.

Cómo motivar a los estudiantes mediante actividades científicas atractivas
8
Plantillas para la realización del proyecto (sujetas a modificaciones)
a) Esquema eléctrico:
b) Plantillas:
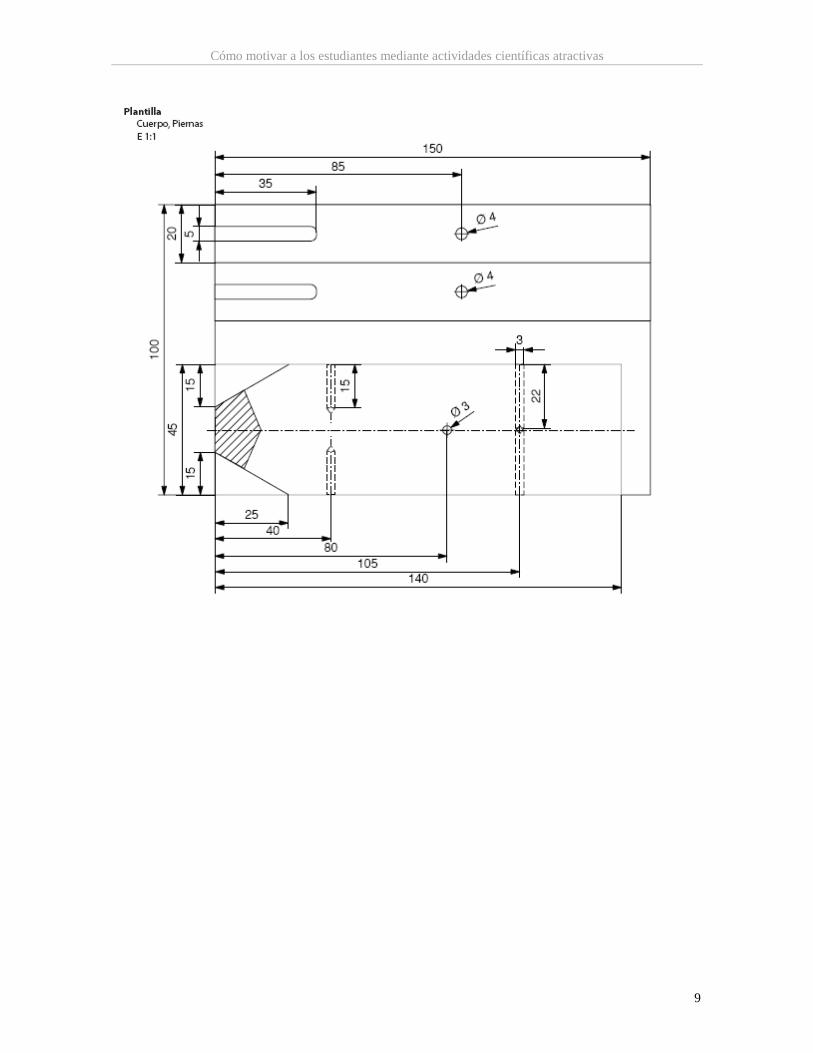
Cómo motivar a los estudiantes mediante actividades científicas atractivas
9

Cómo motivar a los estudiantes mediante actividades científicas atractivas
10
Cómo motivar a los estudiantes mediante actividades científicas atractivas
11
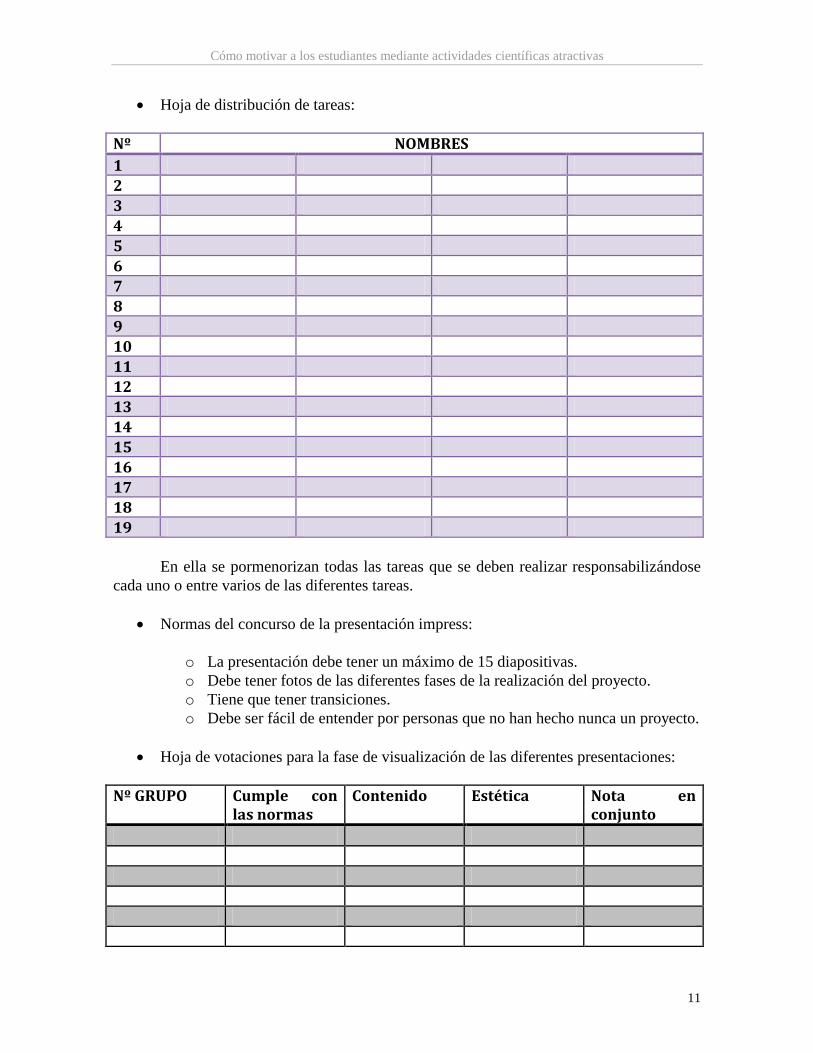
Hoja de distribución de tareas:
Nº NOMBRES
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
En ella se pormenorizan todas las tareas que se deben realizar responsabilizándose
cada uno o entre varios de las diferentes tareas.
Normas del concurso de la presentación impress:
o La presentación debe tener un máximo de 15 diapositivas.
o Debe tener fotos de las diferentes fases de la realización del proyecto.
o Tiene que tener transiciones.
o Debe ser fácil de entender por personas que no han hecho nunca un proyecto.
Hoja de votaciones para la fase de visualización de las diferentes presentaciones:
Nº GRUPO Cumple con las normas
Contenido Estética Nota en conjunto

Cómo motivar a los estudiantes mediante actividades científicas atractivas
12
Instrucciones dadas a los alumnos para rellenarlas:
o La puntuación en cada una de las columnas debe ser de 0 a 5, teniendo en cuenta
que 0 es no haber hecho nada y 5 que está muy bien.
o En la columna de normas se debe puntuar si han cumplido con las normas
entregadas por la profesora.
o En la columna de contenido se puntuará si están todas las fases importantes de la
ejecución del proyecto.
o En la columna de estética, se puntuará si hay transiciones, cómo están colocadas
las fotos, así como la estética general del proyecto.
o En la columna de nota del conjunto se debe de dar la nota general teniendo en
cuenta todos los aspectos.
Resultado
El resultado final del trabajo ha sido :
16 Robots andadores, de los cuales han funcionado correctamente 12.
32 Presentaciones impress de la ejecución y fases del proyecto técnico, de las cuales
28 están aprobadas.
Cuestiones de reflexión y conclusiones para los alumnos:
Sobre el Robot andador:
- ¿Por qué se produce el movimiento?
- ¿Qué tipo de transformación de movimiento se produce?
- ¿Puedo modificar la velocidad del Robot?¿Cómo?
Sobre la Presentación:
- ¿Cómo consigo que resulte atractiva la presentación?
- ¿Por qué ha gustado más la ganadora?.
Respuestas de los alumnos:
Sobre el Robot andador:
- ¿Por qué se produce el movimiento?
INICIAL FINAL
BIEN MAL NS/NC BIEN MAL NS/NC
65% 25% 10% 85% 9% 6%

Cómo motivar a los estudiantes mediante actividades científicas atractivas
13
- ¿Qué tipo de transformación de movimiento se produce?
INICIAL FINAL
BIEN MAL NS/NC BIEN MAL NS/NC
50% 20% 30% 90% 5% 5%
- ¿Puedo modificar la velocidad del Robot?
INICIAL FINAL
BIEN MAL NS/NC BIEN MAL NS/NC
75% 10% 15% 95% 0% 5%
- ¿Cómo?
El 95% han respondido correctamente puesto que durante la ejecución del proyecto,
estuvieron cambiando las ruedas de engranaje.
El 5% restante son aquellas personas que no se implicaron en las práctica y algún
alumno con necesidades educativas especiales.
Sobre la presentación:
- ¿Cómo consigo que resulte atractiva la presentación?
Todos los alumnos han llegado a la misma conclusión: cuantas más imágenes,
transiciones y colores atractivos consiguen que la gente se fije más.
- ¿Por qué ha gustado más la ganadora?.
La ganadora cumplía con todas las especificaciones requeridas, además de que se
habían preocupado mucho por todos los detalles.

Cómo motivar a los estudiantes mediante actividades científicas atractivas
14
Conclusiones del proyecto:
1. Grado de consecución de los objetivos propuestos
Los objetivos del proyecto realizado han sido cumplidos. Los alumnos
participaron activamente y se planificaron y distribuyeron las tareas, además
recordaron las fases del proyecto técnico y tomaron datos de forma gráfica para la
posterior presentación impress. También entre todos solucionaron los diferentes
problemas que fueron surgiendo durante la ejecución del proyecto y que hacían que
el robot no funcionara.
Por otro lado cuando se acabo la fase de realización del proyecto técnico han
utilizado el ordenador y han aprendido a manejar el impress como herramienta de
trabajo.
2. Capacidades pretendidas y desarrolladas.
Han sido capaces de trabajar en grupo, y aprender a distribuirse las tareas,
aunque ha habido dos grupos que no han funcionado y en consecuencia no
han conseguido acabar el robot y la presentación.
3. Capacidades pretendidas y no desarrolladas
Sólo la mitad de los alumnos han aprendido a realizar la presentación
impress utilizando todo lo estudiado en el tema, la mayoría han optado por
realizar lo mínimo.
4. Una vez realizada la práctica, ¿mejoran los alumnos su aprendizaje en las clases
“ordinarias”?
Sí, puesto que han observado en el taller los diferentes tipos de movimientos,
y han realizado un montaje eléctrico partiendo de un circuito.
5. ¿Establecen relaciones los alumnos con otros contenidos curriculares tanto de
materias científicas como de otras que no lo son?
Los alumnos han aprendido que los trabajos se pueden presentar utilizando
otros medios que no son los que estaban utilizando hasta ahora.

Cómo motivar a los estudiantes mediante actividades científicas atractivas
15
ANEXO I
PRESENTACIÓN

Cómo motivar a los estudiantes mediante actividades científicas atractivas
16
ANEXO II
Fotos de la ejecución del Robot.
Cómo motivar a los estudiantes mediante actividades científicas atractivas
17