hexápodo robótico para muestra y uso didáctico en cursos de robótica básica por pavel hernandez...
TRANSCRIPT
INSTITUTO POLITECNICO NACIONAL
UNIDAD PROFESIONAL INTERDISCIPLINARIA DE INGENIERIA ZACATECAS
IPN-UPIIZ
AVANCES DE LA METODOLOGIA DEL DISEÑO MECATRÓNICO
-PROYECTO INTEGRADOR-
“Hexápodo Robótico para muestra y uso didáctico en cursos de Robótica
Básica”
(Metodología de Diseño Mecatrónico)
QUE PRESENTA
Pavel Hernández López
ASESOR
M. en C. Carlos Daniel Rico Mandujano
Zacatecas, Zac. Junio del 2016
1 IPN-UPIIZ
RESUMEN
En la actualidad la mecatrónica es fundamental tanto para la industria como para
la vida cotidiana con la innovación de sistemas de transporte, sistemas de
manufactura, máquinas de control numérico, nano-máquinas y por supuesto
robots.
La necesidad de crear procesos de manufactura, bienes de capital y
productos cada vez más especializados en el área industrial, así como la creación
de productos y sistemas mecánicos de uso cotidiano, ha llevado al hombre a
trabajar en forma multidisciplinaria para la creación de dichas tecnologías, en este
caso un robot hexápodo. La integración cada vez más creciente de los sistemas
diseñados y creados con la mecánica y la electrónica han llevado a la fusión de
estas disciplinas formándose una nueva llamada mecatrónica, misma que está
siendo aplicada tanto en la automatización y control de las fábricas, como en
productos y aparatos de uso cotidiano.
Palabras clave: Mecatrónica, procesos de manufactura, hexápodo, robótica.
ABSTRACT
Today mechatronics is essential for both the industry and everyday life with the
innovative transportation systems, manufacturing systems, CNC machines,
machines and nano-robots of course.
The need to create manufacturing processes, capital goods and increasingly
specialized products in the industrial area and creating products and mechanical
systems for everyday use, has led man to work in a multidisciplinary way for the
creation of such technologies in this case a hexapod. The ever-increasing
integration of systems designed and created with the mechanics and electronics
have led to the merger of these disciplines forming a new mechatronics call it being
applied in both the automation and control of the factories and products and
everyday appliances.
Keywords: Mechatronics, manufacturing processes, hexapod, robotics.
2 IPN-UPIIZ
Contenido OBJETIVO ............................................................................................................. 3
JUSTIFICACIÓN .................................................................................................... 3
INTRODUCCIÓN ................................................................................................... 4
DESARROLLO ...................................................................................................... 6
Identificación de necesidades ............................................................................. 7
Análisis del Problema ......................................................................................... 7
Definir especificaciones de diseño deseables ................................................... 12
Diseño Conceptual ........................................................................................... 14
Selección de una solución adecuada ................................................................ 34
Diseño Detallado (CAD, CAM, CAE) ................................................................. 36
Documentación ................................................................................................. 54
Construcción de Prototipo ................................................................................. 58
Pruebas ............................................................................................................ 65
CONCLUSIONES ................................................................................................ 65
FUENTES DE CONSULTA .................................................................................. 66
ANEXOS .............................................................................................................. 67
Justificación de Costos ..................................................................................... 67
3 IPN-UPIIZ
OBJETIVO
Crear un hexápodo que cumpla con las características necesarias para que
funcione como un prototipo didáctico para estudiantes de niveles básicos; para
finalmente poder usar el robot para exhibición en los talleres de robótica básica.
JUSTIFICACIÓN
Actualmente la tecnología se está convirtiendo en algo fundamental para el
desarrollo de la sociedad; sobre todo el interés de los niños por aprender a
desarrollarla. Aunque el sistema educativo de México no le ha dado la importancia
al acercamiento temprano para el desarrollo tecnológico es vital que los niños
comiencen a relacionarse con este tipo de tecnologías como lo hacen en otros
países como China, Japón, USA, etc. Es por eso que la realización del prototipo
(Robot Hexápodo) contribuirá para llamar la atención y acercar a los niños de
educación básica a disciplinas como la robótica, electrónica, diseño y sobre todo
para estimular y explotar la gran creatividad que tienen a esa edad.
4 IPN-UPIIZ
INTRODUCCIÓN
En el siguiente documento se presenta el avance de los primeros pasos de la
“Metodología de Diseño Mecatrónico”, que parte de la idea de un producto a
elaborar el cual se debe integrar por distintas disciplinas del área de Mecatrónica.
La integración de varias disciplinas es la base de un buen proyecto, es por
eso que se generó una materia curricular en los planes de estudio de Ingeniería
Mecatrónica, y su objetivo principal es hacer un prototipo que este conformado por
conocimientos adquiridos que se vienen obteniendo.
Esta unidad de aprendizaje contribuye a formar el perfil de egreso como
Ingeniero Mecatrónico, porque integra las técnicas y herramientas del diseño
mecatrónico en un proyecto de ingeniería. Asimismo, se favorecen las
competencias siguientes: resolución de problemas, toma de decisiones,
trabajo en equipo, identificación de problemas relevantes del contexto
profesional, la comunicación, la creatividad, y el pensamiento crítico; para la
solución de problemas afines al área de ingeniería.
La mecatrónica es el conjunto de la mecánica, electrónica, informática y los
sistemas de control, por lo cual el principal objetivo de la mecatrónica es el diseño
de procesos automatizados.
En la actualidad la mecatrónica es fundamental tanto para la industria como
para la vida cotidiana con la innovación de sistemas de trasporte, sistemas de
manufactura, máquinas de control numérico, nano-máquinas y por supuesto
robots.
La necesidad de crear procesos de manufactura, bienes de capital y
productos cada vez más especializados en el área industrial, así como la creación
de productos y sistemas mecánicos de uso cotidiano, ha llevado al hombre a
trabajar en forma multidisciplinaria para la creación de dichas tecnologías. La
integración cada vez más creciente de los sistemas diseñados y creados con la
mecánica y la electrónica han llevado a la fusión de estas disciplinas formándose
una nueva llamada mecatrónica, misma que está siendo aplicada tanto en la
automatización y control de las fábricas, como en productos y aparatos de uso
cotidiano.
5 IPN-UPIIZ
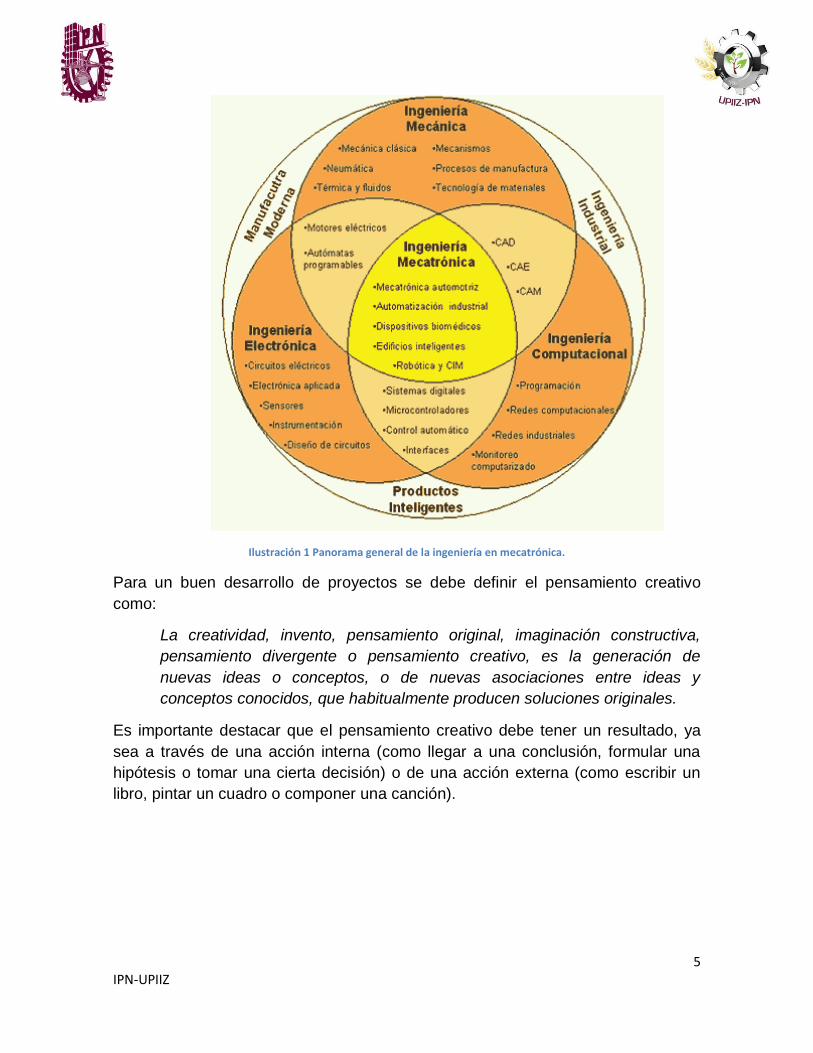
Ilustración 1 Panorama general de la ingeniería en mecatrónica.
Para un buen desarrollo de proyectos se debe definir el pensamiento creativo
como:
La creatividad, invento, pensamiento original, imaginación constructiva,
pensamiento divergente o pensamiento creativo, es la generación de
nuevas ideas o conceptos, o de nuevas asociaciones entre ideas y
conceptos conocidos, que habitualmente producen soluciones originales.
Es importante destacar que el pensamiento creativo debe tener un resultado, ya
sea a través de una acción interna (como llegar a una conclusión, formular una
hipótesis o tomar una cierta decisión) o de una acción externa (como escribir un
libro, pintar un cuadro o componer una canción).
6 IPN-UPIIZ
DESARROLLO
Para el desarrollo de este Proyecto Integrador, se debe de seguir una metodología
de diseño, la cual se basa en:
1. Identificación de necesidades
Estudio de mercado
Cliente
2. Análisis del Problema
Sub-problemas
Especificaciones de funciones principales y secundarias
(IDEF-0)
Definir características
3. Definir especificaciones de diseño
Recopilación de información
Investigación de antecedentes y problemas similares
Definición de parámetros, alcances y limitaciones (uso de
Métricas y valores)
4. Diseño Conceptual
Lluvia de Ideas
Representación general con bocetos y diagramas
Programación de Actividades con Diagrama Gantt
5. Selección de una solución adecuada
Se fijan los criterios de selección
Evaluar Soluciones
6. Diseño Detallado (CAD, CAM, CAE)
7. Documentación
8. Construcción de Prototipo
9. Pruebas
Estos pasos son fundamentales para cualquier tipo de proyecto
mecatrónico.
7 IPN-UPIIZ
Identificación de necesidades
Se detectó en las necesidades de un ámbito estudiantil básico, el interés
que un estudiante de primaria o secundaria le tiene a la Robótica; el problema se
basa en la inexistencia de una forma, tal que, se le pueda demostrar y enseñar a
un niño las bases de la Robótica sin tener material didáctico.
Es una muy buena oportunidad para para asentar conocimientos como
futuros ingenieros en Mecatronica y se desarrollen proyectos el cual consistan en
la elaboración de un robot, para después hacer demostraciones a niños
interesados por aprender a desarrollar tecnología; y contribuir en el crecimiento
educativo de un niño el cual se basa en competencias.
Se cree que el contacto del alumno con el robot es el mejor método
para aprender y entender el mundo de la robótica, ya que las prácticas
permiten simular los problemas que se va a encontrar cuando esté
trabajando con sus robots.
“No debería haber algo como matemáticas aburridas”, dijo alguna vez el
científico polaco Edsger Dijkstra.
Análisis del Problema
Como ya se mencionó, en muchas instituciones de educación básica y
sobre todo en instituciones públicas es muy complicado dar a conocer los
fundamentos de dispositivos tecnológicos (Robots) a sus estudiantes. Puesto que
los modelos educativos del país no se contemplan tales materias de aprendizaje.
Es por eso que muchas personas acuden a instituciones privadas que tienen el
recurso suficiente para poder adquirir “prototipos didácticos” y asesores
capacitados en la rama.
Para tener un buen análisis, se divide al problema en sub-problemas. En
este caso se tienen como sub-problemas: una metodóloga de diseño a seguir,
falta de divulgación para generar acercamientos y crear interés a los niños, el
costo de los cursos y materiales, la falta de componentes y elementos, y sobre
todo prototipos para muestra y uso didáctico.
8 IPN-UPIIZ
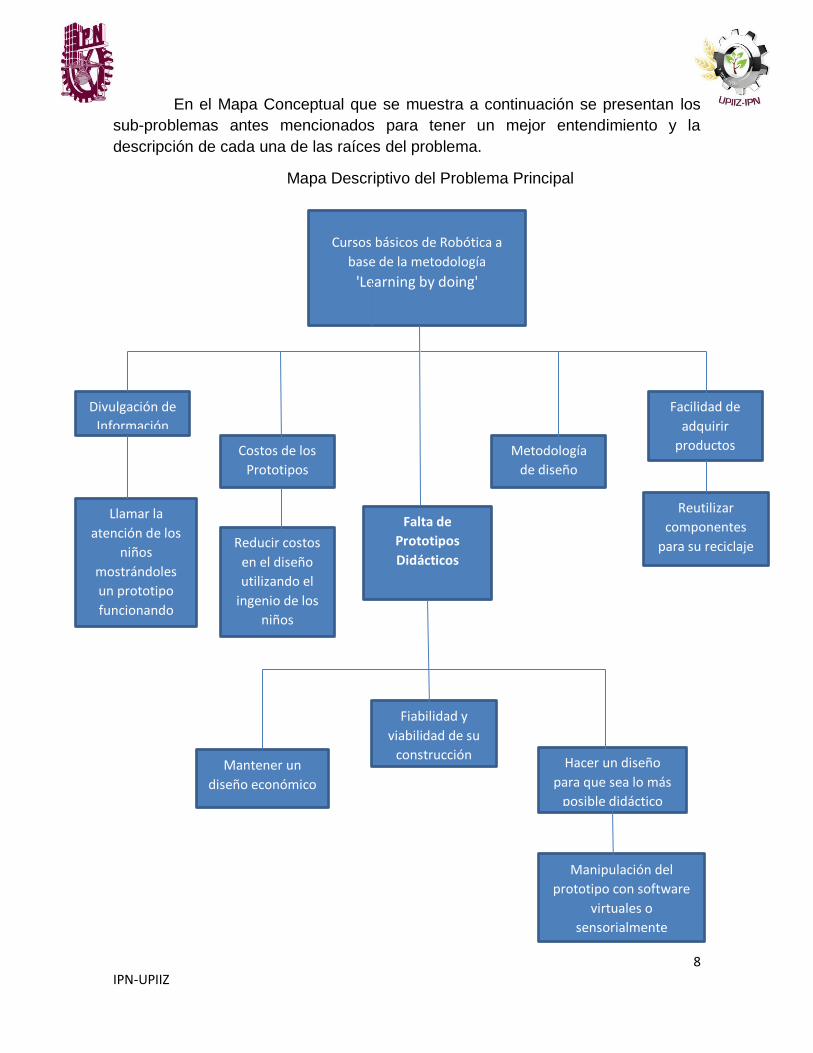
En el Mapa Conceptual que se muestra a continuación se presentan los
sub-problemas antes mencionados para tener un mejor entendimiento y la
descripción de cada una de las raíces del problema.
Mapa Descriptivo del Problema Principal
Cursos básicos de Robótica a
base de la metodología
'Learning by doing'
Falta de
Prototipos
Didácticos
Divulgación de
Información
Costos de los
Prototipos
Facilidad de
adquirir
productos Metodología
de diseño
Llamar la
atención de los
niños
mostrándoles
un prototipo
funcionando
Reducir costos
en el diseño
utilizando el
ingenio de los
niños
Reutilizar
componentes
para su reciclaje
Fiabilidad y
viabilidad de su
construcción
Hacer un diseño
para que sea lo más
posible didáctico
Mantener un
diseño económico
Manipulación del
prototipo con software
virtuales o
sensorialmente
9 IPN-UPIIZ
La divulgación de información de Robótica ha sido distorsionada y usada
para beneficios para empresas desarrolladoras de “Kits de Robótica” que los han
vuelto algo muy alejado para estudiantes por los altos costos en que están
cotizados. En muchas fuentes de consulta y sobre todo en internet se le ha hecho
una mala divulgación a los proyectos tecnológicos por la dificultad y la falta de
conocimientos avanzados, sin embargo, la robótica es una rama de la tecnología
que se puede explicar y enseñar a estudiantes de manera muy básica, fácil y
divertida.
La falta de componentes y elementos es otro sub-problema que se debe
tomar mucho en cuanta ya que son muy difíciles de conseguir, sobre todo en el
estado de Zacatecas, y es más complicado conseguir robots de muestra y
didácticos en buen precio. Se tiene como certeza que muchas personas estudien
por su cuenta los fundamentos de la robótica y construyan prototipos, empero,
para estudiantes pequeños es muy importante que se les muestre y motive con
proyectos ya terminados y funcionando.
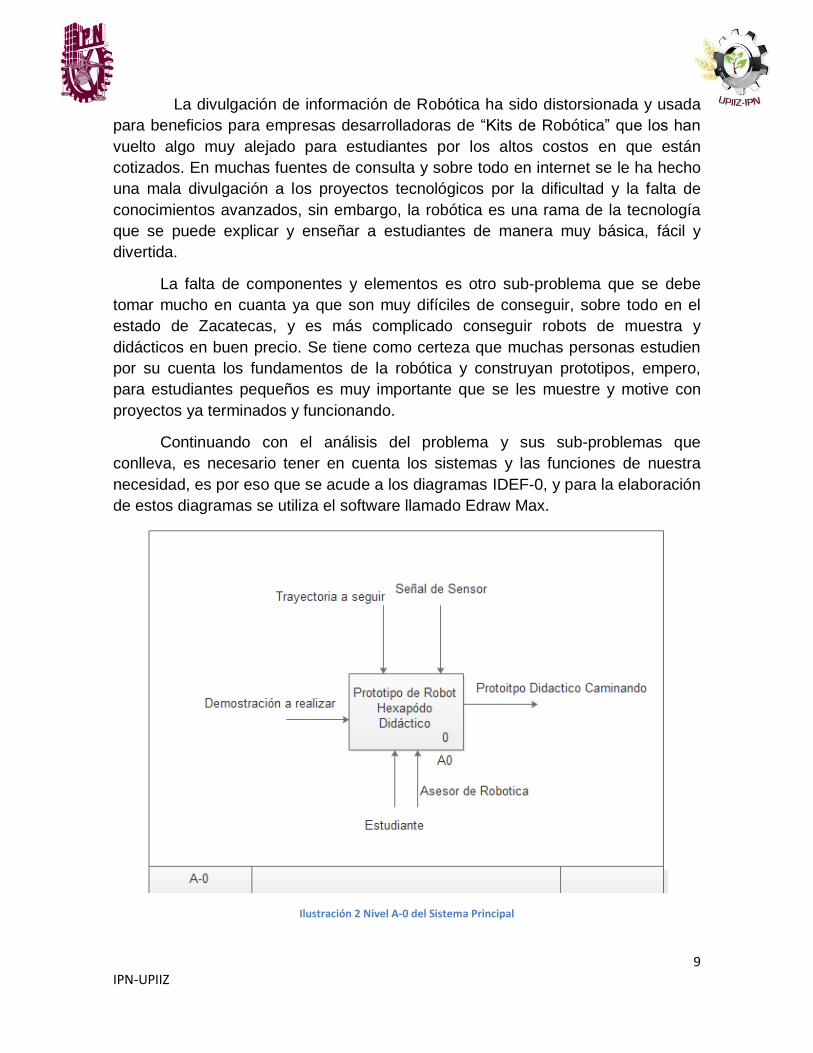
Continuando con el análisis del problema y sus sub-problemas que
conlleva, es necesario tener en cuenta los sistemas y las funciones de nuestra
necesidad, es por eso que se acude a los diagramas IDEF-0, y para la elaboración
de estos diagramas se utiliza el software llamado Edraw Max.
Ilustración 2 Nivel A-0 del Sistema Principal
10 IPN-UPIIZ
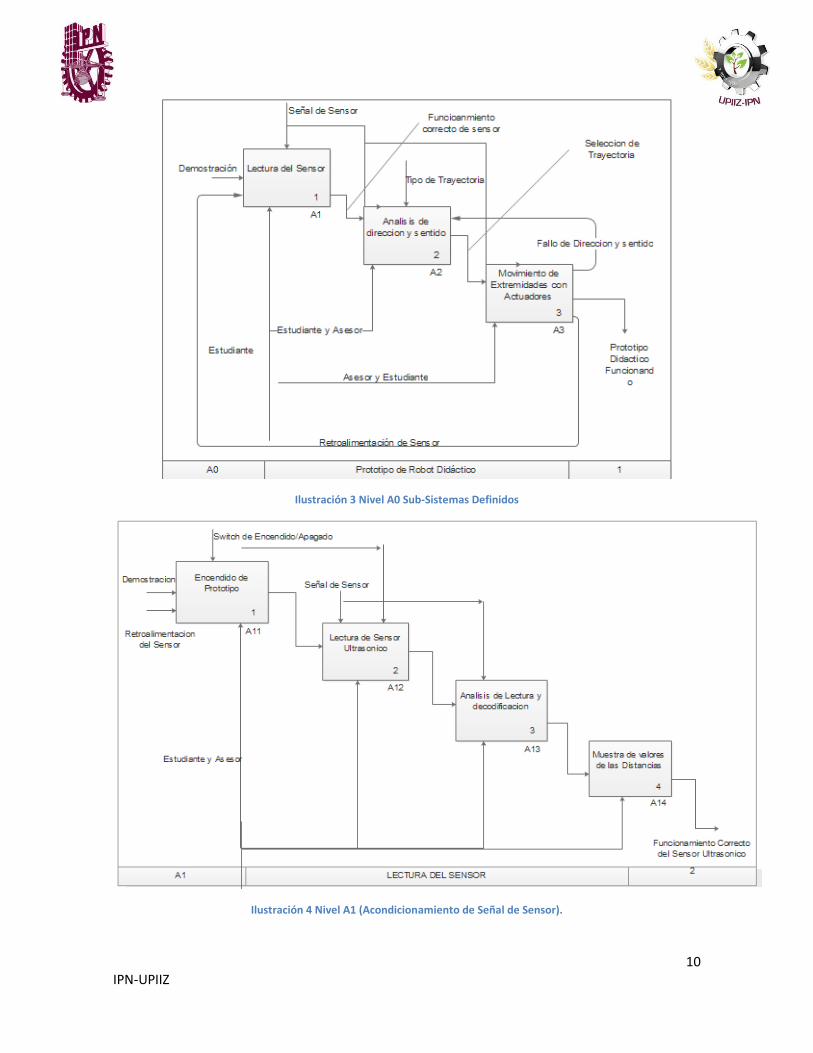
Ilustración 3 Nivel A0 Sub-Sistemas Definidos
Ilustración 4 Nivel A1 (Acondicionamiento de Señal de Sensor).

11 IPN-UPIIZ
Ilustración 5 Nivel A2 (Control).
Ilustración 6 Nivel A3 (Movimiento de Actuadores).
12 IPN-UPIIZ
Definir especificaciones de diseño deseables
No es tanto que los alumnos quieran aprender ingeniería robótica a una edad tan
precoz, sino para asimilar conceptos como trabajo en equipo y desarrollo de su
creatividad. La mayoría de los niños están para “aprender haciendo” -metodología
educativa conocida como 'learning by doing'-, y para cubrir su desarrollo
educativo.
No hace mucho tiempo, en una escuela privada de la ciudad, se decidió
implementar un curso de verano en donde se tenía contemplado un taller de
robótica; como era de esperase tuvo mucha demanda, cuando culminó el curso
los resultados fueron las creaciones de unos carritos aerodinámicos con un
pequeño motor DC y hecho con materiales reciclables. Después se citaron los
trabajos a una exposición con otra escuela, lo cual fue muy bueno porque se
compartieron prototipos con los de otras escuelas, sin embargo, la exposición era
escasa de prototipos más complejos y por lo cual los niños y demás personas se
quedaban con ganas de haber conocido e interactuar con prototipos más
avanzados.
Actualmente, en los programas académicos dedicados al desarrollo de
hardware y software es de vital importancia disponer de herramientas y
plataformas apropiadas para lograr un buen desarrollo de las capacidades
adquiridas en la ingeniería, a través de la teoría y con la experiencia. En el área de
la robótica, disponer de una plataforma completa, la cual contenga todos los
elementos necesarios para desarrollar una buena y completa práctica, conlleva a
una óptima familiarización entre el estudiante y el área.
Existen varias formas de clasificar robots. Desde un primer punto de vista,
podemos dividir éstos en experimentales y aplicados. La primera categoría incluye
aquellos robots de propósito general diseñados para realizar un conjunto bastante
amplio de experiencias, es decir, aquellos pensados con un estricto enfoque de
investigación. La segunda categoría abarca los robots construidos con algún
propósito específico (industrial, de exploración, etc...).
Desde otro punto de vista, se pueden encontrar robots móviles o estáticos.
Los robots industriales son fundamentalmente estáticos, es decir, incapaces de
desplazarse libremente por un entorno no limitado.
Dentro de los robots móviles, se encuentra una primera división en robots
autónomos y no-autónomos. Los primeros portan todo el software y hardware de
control sobre la estructura mecánica. Esto les da un rango de alcance limitado
13 IPN-UPIIZ
únicamente por la duración de las fuentes de alimentación que utilicen, pero
encarece y produce una mayor complejidad en el sistema.
Ahora, los robots móviles pueden clasificarse atendiendo al medio de
locomoción que utilicen. Los robots con patas permiten desplazamientos más
eficientes sobre terrenos de cualquier tipo (rugosos, con obstáculos o
desniveles,...), además de ofrecer un control de estabilidad más completo y
requerir menor potencia. Los robots con otro tipo de locomoción (ruedas,
orugas,...) simplifican el posicionamiento y los cálculos necesarios para el mismo.
Existen diversos sistemas con patas desarrollados por Universidades u otras
entidades en los años precedentes.
Continuando con la metodología, es necesario que seamos más puntuales
con las necesidades del problema, la cual, como se ha venido mencionando se
necesita crear un prototipo que tenga las siguientes necesidades y características
(métricas).
Necesidades generales:
1- Espacio de trabajo pequeño
2- Prototipo resistente y fuerte
3- Costeable
4- Costos de Mantenimiento económicos
5- Garantía
6- Prototipo para uso y muestra
Características (métricas) deseables:
1- Dimensiones generales (área de trabajo: 20x20 cm )
2- Didáctico (fácil de manipular)
3- Materiales sólidos y duros
4- Reconfigurable (Se le pueda cambiar su programación)
5- Demostrativo (Que pueda hacer múltiples movimientos)
6- Seguro contra riesgos (No correr riesgos múltiples al usarlo)
7- Económico (Que sea costeable a comparación de otros del mercado)
8- Movible (Que pueda ser trasladado fácilmente de un lugar a otro)
14 IPN-UPIIZ
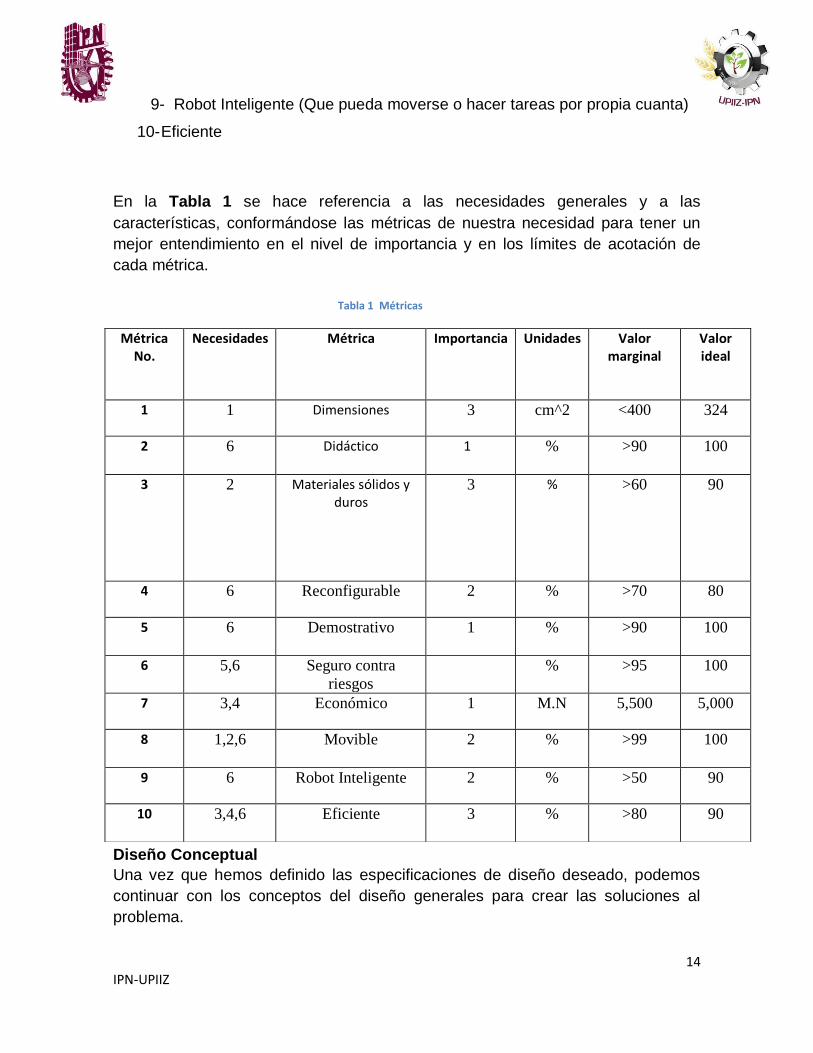
9- Robot Inteligente (Que pueda moverse o hacer tareas por propia cuanta)
10- Eficiente
En la Tabla 1 se hace referencia a las necesidades generales y a las
características, conformándose las métricas de nuestra necesidad para tener un
mejor entendimiento en el nivel de importancia y en los límites de acotación de
cada métrica.
Diseño Conceptual
Una vez que hemos definido las especificaciones de diseño deseado, podemos
continuar con los conceptos del diseño generales para crear las soluciones al
problema.
Tabla 1 Métricas
Métrica No.
Necesidades Métrica Importancia Unidades Valor marginal
Valor ideal
1 1 Dimensiones 3 cm^2 <400 324
2 6 Didáctico 1 % >90 100
3 2 Materiales sólidos y duros
3 % >60 90
4 6 Reconfigurable 2 % >70 80
5 6 Demostrativo 1 % >90 100
6 5,6 Seguro contra
riesgos
% >95 100
7 3,4 Económico 1 M.N 5,500 5,000
8 1,2,6 Movible 2 % >99 100
9 6 Robot Inteligente 2 % >50 90
10 3,4,6 Eficiente 3 % >80 90
15 IPN-UPIIZ
Reconsiderando nuestro objetivo principal:
“Crear un robot Hexápodo que cumpla con las características necesarias
para que funcione como prototipo didáctico para estudiantes de niveles básicos;
para finalmente poder usar el robot para exhibición en los talleres de robótica
básica.”
Es así como se puede considerar la meta del prototipo, la cual se basa en
construir una experiencia educativa integral orientada a desarrollar la creatividad,
valores y razonamiento de niños y jóvenes, a través de la robótica, la ciencia y la
tecnología por medio de la diversión usando un Prototipo de Robot Hexápodo.
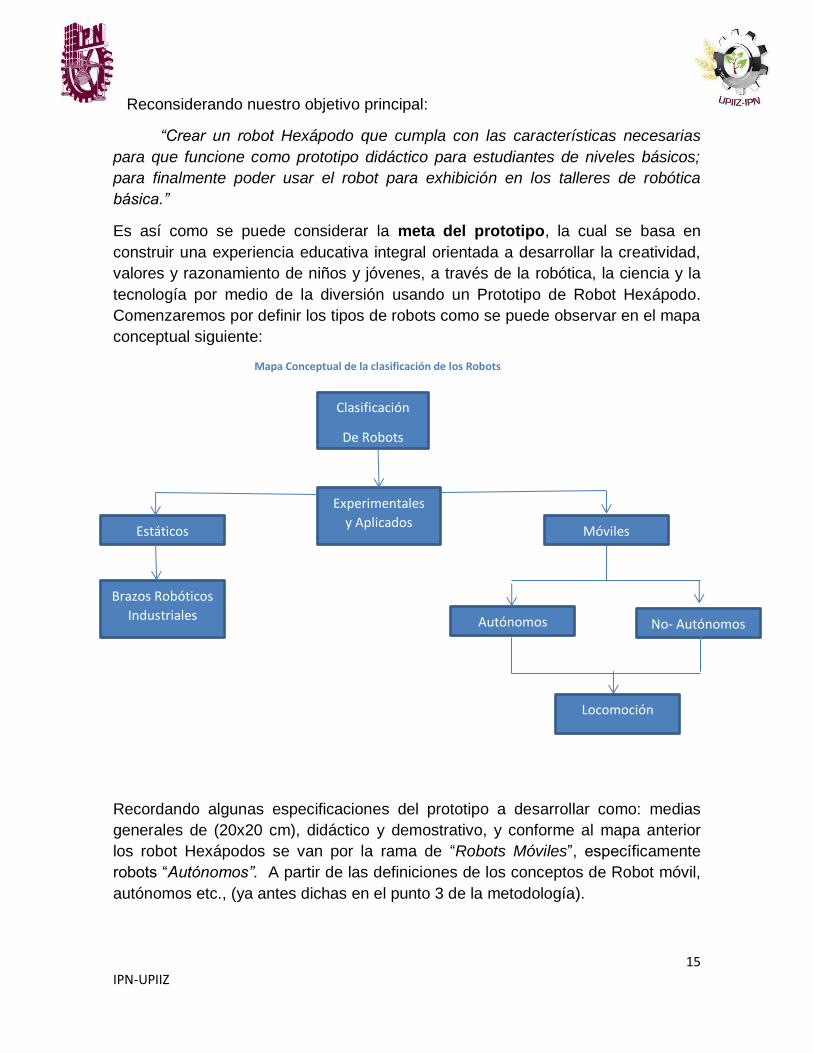
Comenzaremos por definir los tipos de robots como se puede observar en el mapa
conceptual siguiente:
Mapa Conceptual de la clasificación de los Robots
Recordando algunas especificaciones del prototipo a desarrollar como: medias
generales de (20x20 cm), didáctico y demostrativo, y conforme al mapa anterior
los robot Hexápodos se van por la rama de “Robots Móviles”, específicamente
robots “Autónomos”. A partir de las definiciones de los conceptos de Robot móvil,
autónomos etc., (ya antes dichas en el punto 3 de la metodología).
Clasificación
De Robots
Experimentales
y Aplicados Móviles Estáticos
Brazos Robóticos
Industriales No- Autónomos Autónomos
Locomoción
16 IPN-UPIIZ
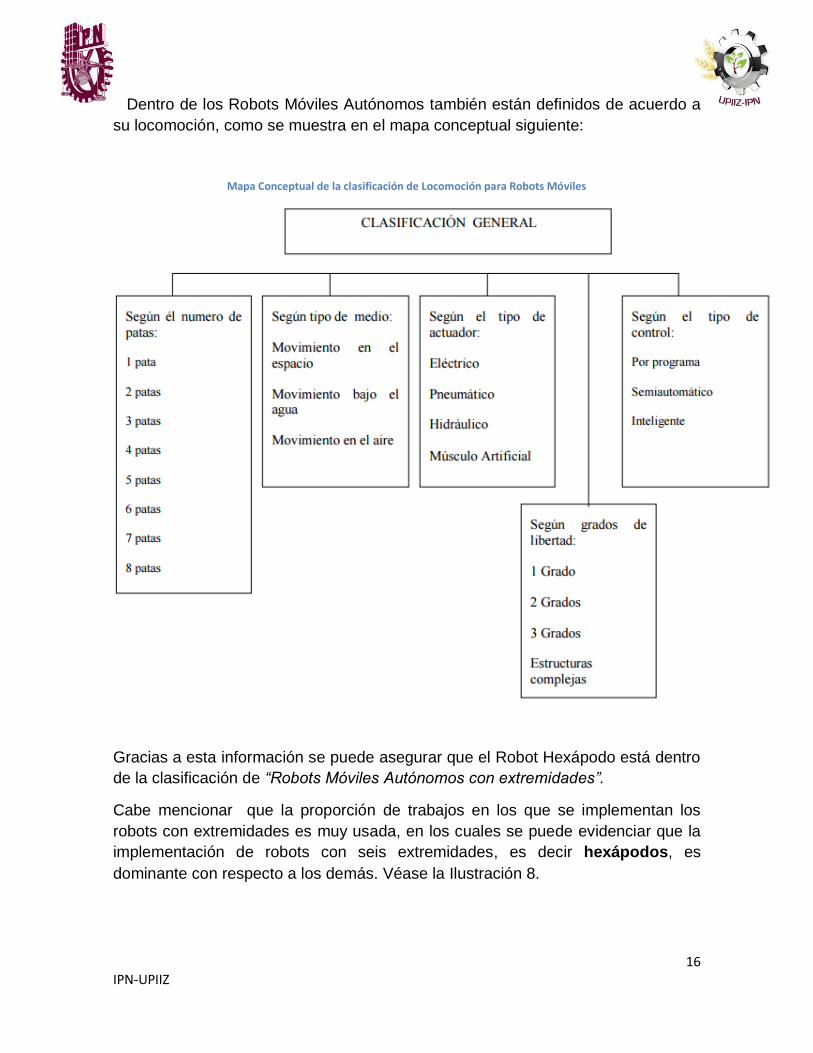
Dentro de los Robots Móviles Autónomos también están definidos de acuerdo a
su locomoción, como se muestra en el mapa conceptual siguiente:
Mapa Conceptual de la clasificación de Locomoción para Robots Móviles
Gracias a esta información se puede asegurar que el Robot Hexápodo está dentro
de la clasificación de “Robots Móviles Autónomos con extremidades”.
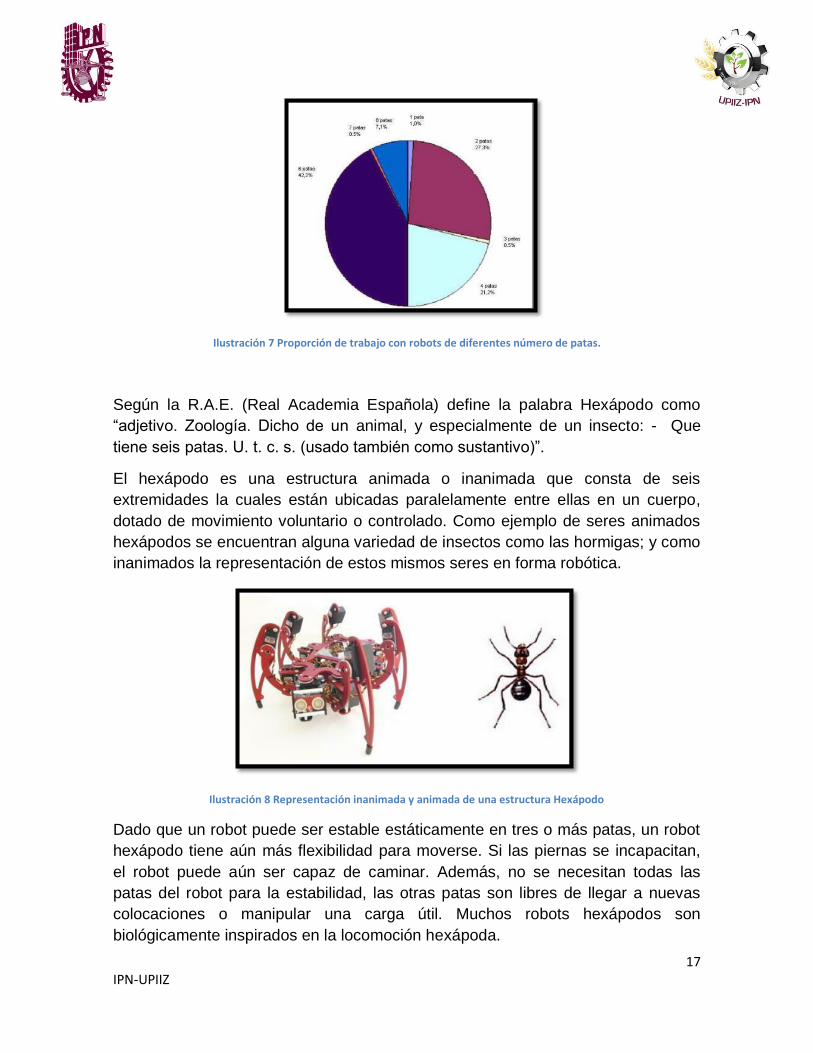
Cabe mencionar que la proporción de trabajos en los que se implementan los
robots con extremidades es muy usada, en los cuales se puede evidenciar que la
implementación de robots con seis extremidades, es decir hexápodos, es
dominante con respecto a los demás. Véase la Ilustración 8.
17 IPN-UPIIZ
Ilustración 7 Proporción de trabajo con robots de diferentes número de patas.
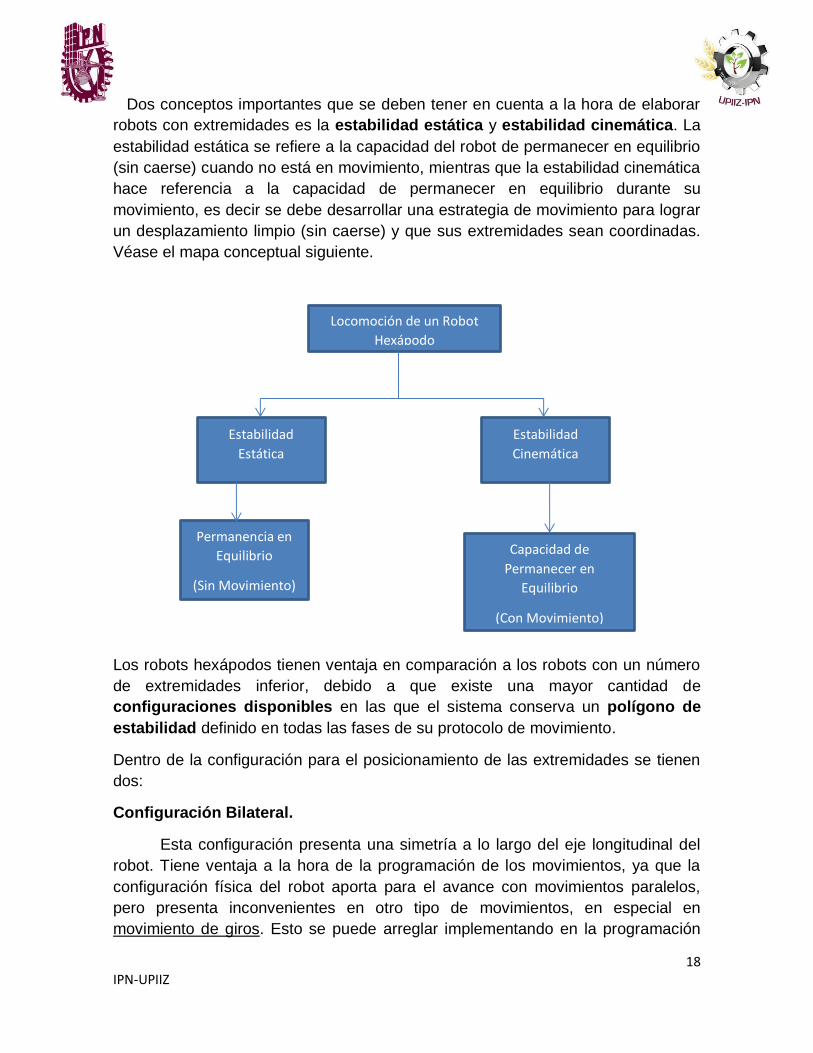
Según la R.A.E. (Real Academia Española) define la palabra Hexápodo como
“adjetivo. Zoología. Dicho de un animal, y especialmente de un insecto: - Que
tiene seis patas. U. t. c. s. (usado también como sustantivo)”.
El hexápodo es una estructura animada o inanimada que consta de seis
extremidades la cuales están ubicadas paralelamente entre ellas en un cuerpo,
dotado de movimiento voluntario o controlado. Como ejemplo de seres animados
hexápodos se encuentran alguna variedad de insectos como las hormigas; y como
inanimados la representación de estos mismos seres en forma robótica.
Ilustración 8 Representación inanimada y animada de una estructura Hexápodo
Dado que un robot puede ser estable estáticamente en tres o más patas, un robot
hexápodo tiene aún más flexibilidad para moverse. Si las piernas se incapacitan,
el robot puede aún ser capaz de caminar. Además, no se necesitan todas las
patas del robot para la estabilidad, las otras patas son libres de llegar a nuevas
colocaciones o manipular una carga útil. Muchos robots hexápodos son
biológicamente inspirados en la locomoción hexápoda.
18 IPN-UPIIZ
Dos conceptos importantes que se deben tener en cuenta a la hora de elaborar
robots con extremidades es la estabilidad estática y estabilidad cinemática. La
estabilidad estática se refiere a la capacidad del robot de permanecer en equilibrio
(sin caerse) cuando no está en movimiento, mientras que la estabilidad cinemática
hace referencia a la capacidad de permanecer en equilibrio durante su
movimiento, es decir se debe desarrollar una estrategia de movimiento para lograr
un desplazamiento limpio (sin caerse) y que sus extremidades sean coordinadas.
Véase el mapa conceptual siguiente.
Los robots hexápodos tienen ventaja en comparación a los robots con un número
de extremidades inferior, debido a que existe una mayor cantidad de
configuraciones disponibles en las que el sistema conserva un polígono de
estabilidad definido en todas las fases de su protocolo de movimiento.
Dentro de la configuración para el posicionamiento de las extremidades se tienen
dos:
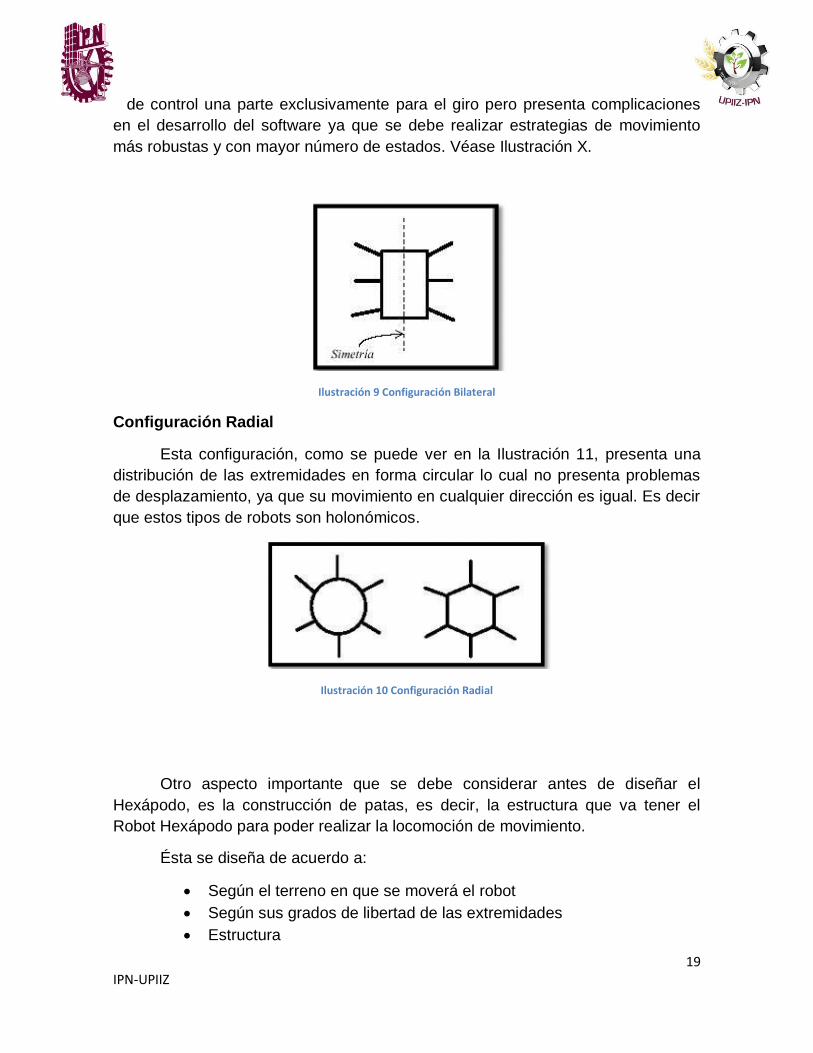
Configuración Bilateral.
Esta configuración presenta una simetría a lo largo del eje longitudinal del
robot. Tiene ventaja a la hora de la programación de los movimientos, ya que la
configuración física del robot aporta para el avance con movimientos paralelos,
pero presenta inconvenientes en otro tipo de movimientos, en especial en
movimiento de giros. Esto se puede arreglar implementando en la programación
Locomoción de un Robot
Hexápodo
Estabilidad
Estática
Permanencia en
Equilibrio
(Sin Movimiento)
Capacidad de
Permanecer en
Equilibrio
(Con Movimiento)
Estabilidad
Cinemática
19 IPN-UPIIZ
de control una parte exclusivamente para el giro pero presenta complicaciones
en el desarrollo del software ya que se debe realizar estrategias de movimiento
más robustas y con mayor número de estados. Véase Ilustración X.
Ilustración 9 Configuración Bilateral
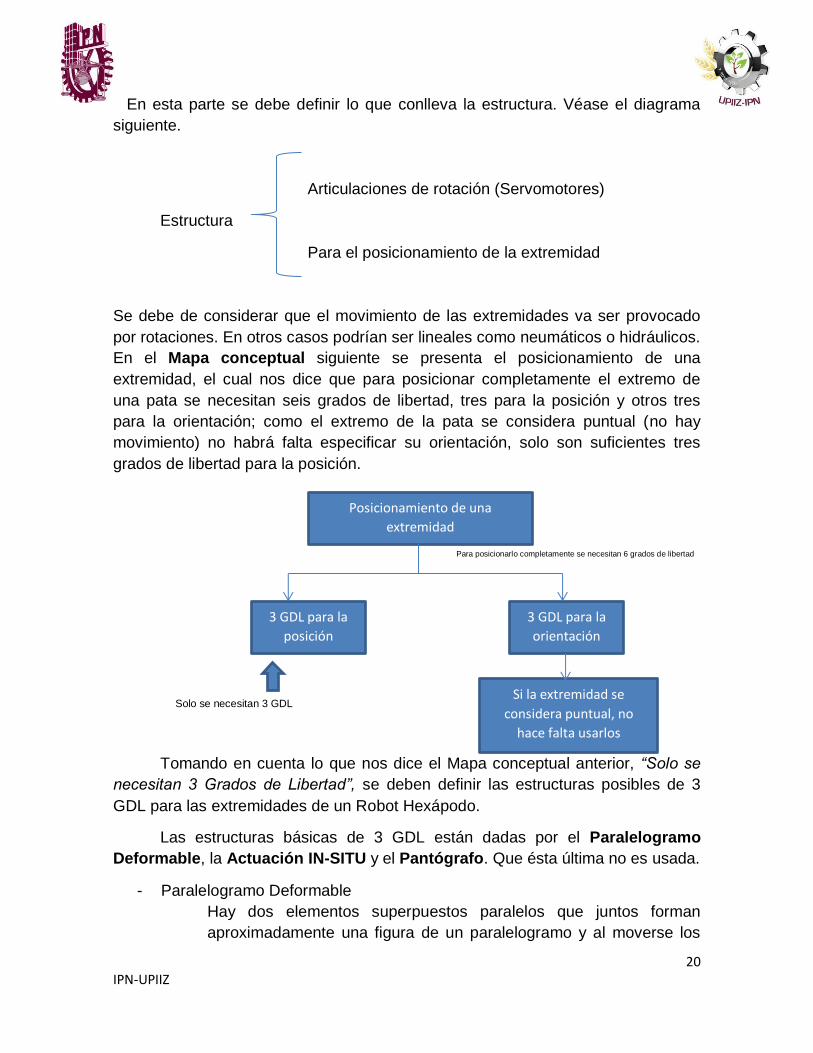
Configuración Radial
Esta configuración, como se puede ver en la Ilustración 11, presenta una
distribución de las extremidades en forma circular lo cual no presenta problemas
de desplazamiento, ya que su movimiento en cualquier dirección es igual. Es decir
que estos tipos de robots son holonómicos.
Ilustración 10 Configuración Radial
Otro aspecto importante que se debe considerar antes de diseñar el
Hexápodo, es la construcción de patas, es decir, la estructura que va tener el
Robot Hexápodo para poder realizar la locomoción de movimiento.
Ésta se diseña de acuerdo a:
Según el terreno en que se moverá el robot
Según sus grados de libertad de las extremidades
Estructura
20 IPN-UPIIZ
En esta parte se debe definir lo que conlleva la estructura. Véase el diagrama
siguiente.
Articulaciones de rotación (Servomotores)
Estructura
Para el posicionamiento de la extremidad
Se debe de considerar que el movimiento de las extremidades va ser provocado
por rotaciones. En otros casos podrían ser lineales como neumáticos o hidráulicos.
En el Mapa conceptual siguiente se presenta el posicionamiento de una
extremidad, el cual nos dice que para posicionar completamente el extremo de
una pata se necesitan seis grados de libertad, tres para la posición y otros tres
para la orientación; como el extremo de la pata se considera puntual (no hay
movimiento) no habrá falta especificar su orientación, solo son suficientes tres
grados de libertad para la posición.
Para posicionarlo completamente se necesitan 6 grados de libertad
Solo se necesitan 3 GDL
Tomando en cuenta lo que nos dice el Mapa conceptual anterior, “Solo se
necesitan 3 Grados de Libertad”, se deben definir las estructuras posibles de 3
GDL para las extremidades de un Robot Hexápodo.
Las estructuras básicas de 3 GDL están dadas por el Paralelogramo
Deformable, la Actuación IN-SITU y el Pantógrafo. Que ésta última no es usada.
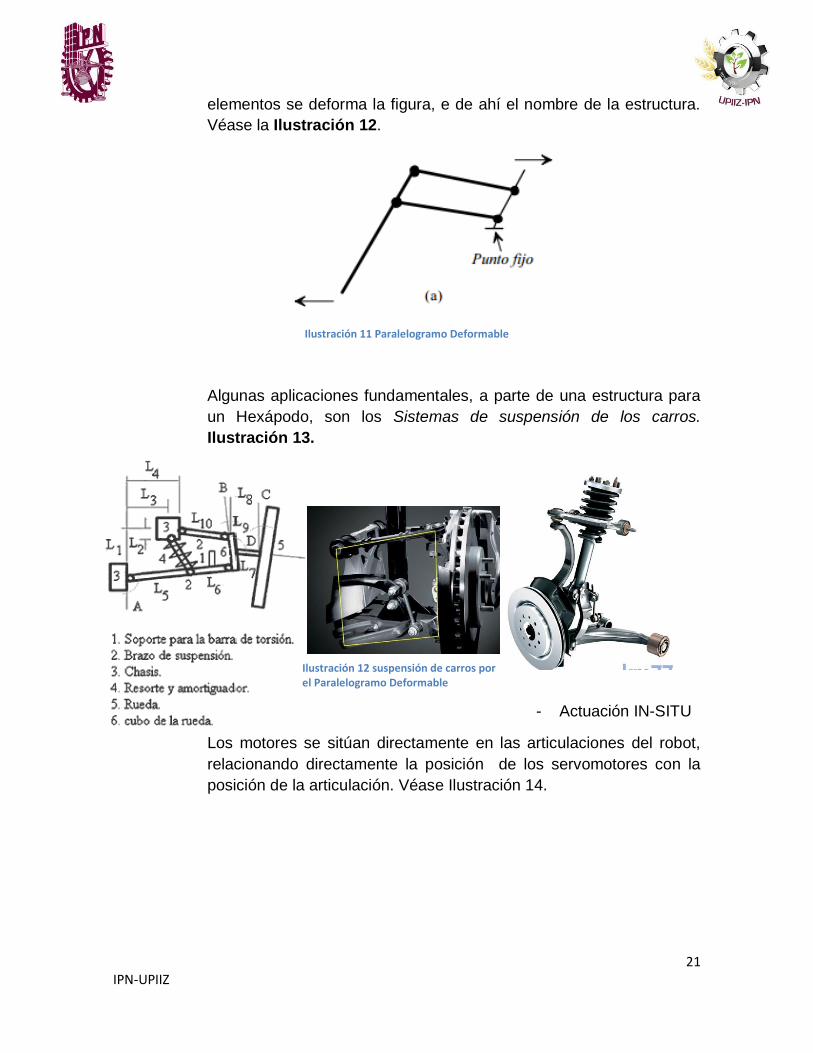
- Paralelogramo Deformable
Hay dos elementos superpuestos paralelos que juntos forman
aproximadamente una figura de un paralelogramo y al moverse los
Posicionamiento de una
extremidad
3 GDL para la
posición
3 GDL para la
orientación
Si la extremidad se
considera puntual, no
hace falta usarlos
21 IPN-UPIIZ
elementos se deforma la figura, e de ahí el nombre de la estructura.
Véase la Ilustración 12.
Ilustración 11 Paralelogramo Deformable
Algunas aplicaciones fundamentales, a parte de una estructura para
un Hexápodo, son los Sistemas de suspensión de los carros.
Ilustración 13.
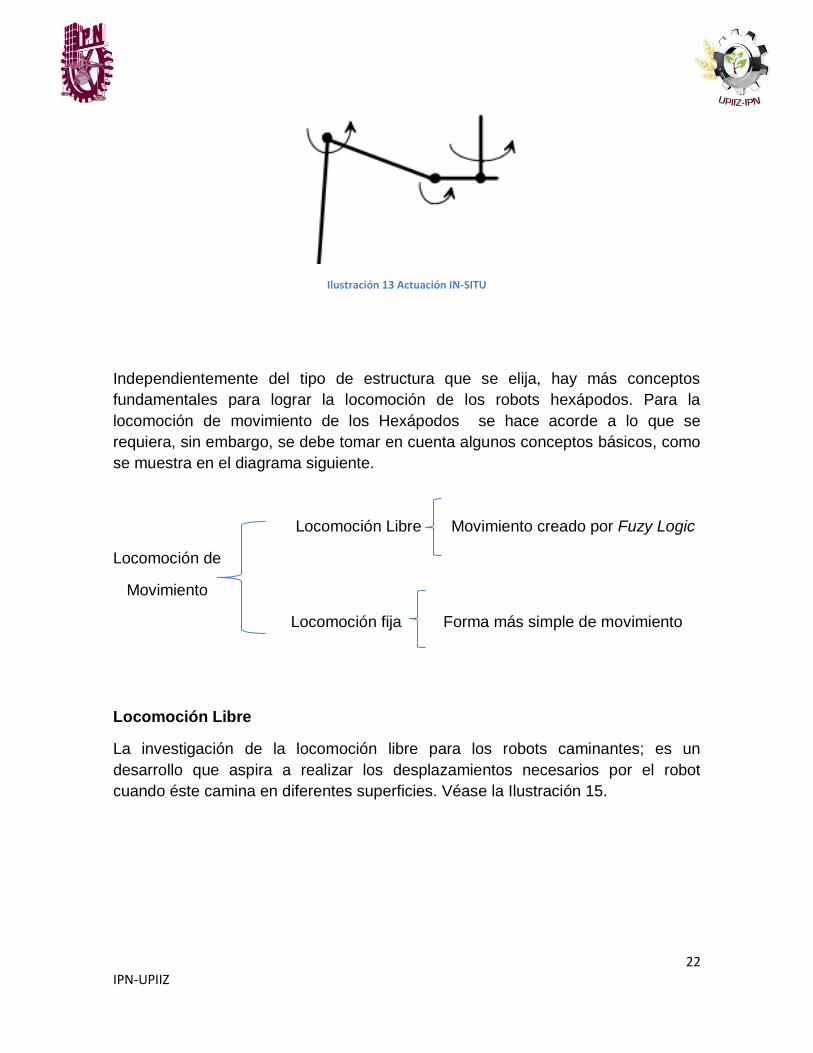
- Actuación IN-SITU
Los motores se sitúan directamente en las articulaciones del robot,
relacionando directamente la posición de los servomotores con la
posición de la articulación. Véase Ilustración 14.
Ilustración 12 suspensión de carros por el Paralelogramo Deformable
22 IPN-UPIIZ
Ilustración 13 Actuación IN-SITU
Independientemente del tipo de estructura que se elija, hay más conceptos
fundamentales para lograr la locomoción de los robots hexápodos. Para la
locomoción de movimiento de los Hexápodos se hace acorde a lo que se
requiera, sin embargo, se debe tomar en cuenta algunos conceptos básicos, como
se muestra en el diagrama siguiente.
Locomoción Libre Movimiento creado por Fuzy Logic
Locomoción de
Movimiento
Locomoción fija Forma más simple de movimiento
Locomoción Libre
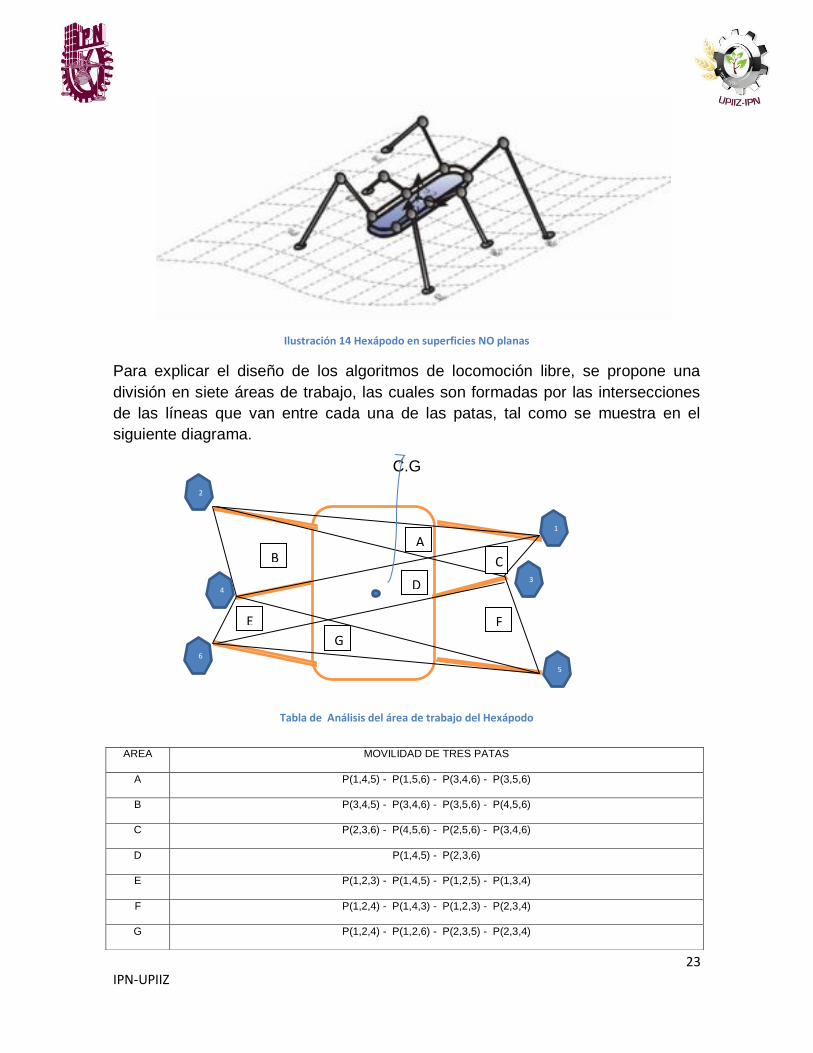
La investigación de la locomoción libre para los robots caminantes; es un
desarrollo que aspira a realizar los desplazamientos necesarios por el robot
cuando éste camina en diferentes superficies. Véase la Ilustración 15.
23 IPN-UPIIZ
Ilustración 14 Hexápodo en superficies NO planas
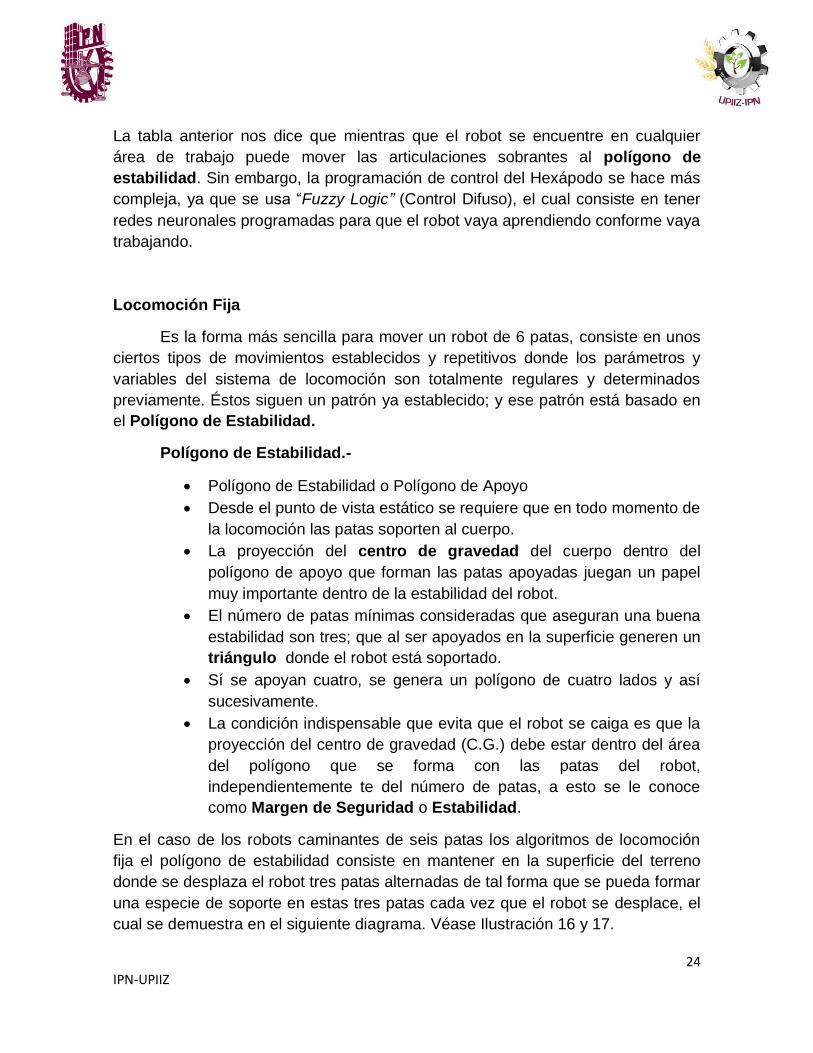
Para explicar el diseño de los algoritmos de locomoción libre, se propone una
división en siete áreas de trabajo, las cuales son formadas por las intersecciones
de las líneas que van entre cada una de las patas, tal como se muestra en el
siguiente diagrama.
C.G
Tabla de Análisis del área de trabajo del Hexápodo
AREA MOVILIDAD DE TRES PATAS
A P(1,4,5) - P(1,5,6) - P(3,4,6) - P(3,5,6)
B P(3,4,5) - P(3,4,6) - P(3,5,6) - P(4,5,6)
C P(2,3,6) - P(4,5,6) - P(2,5,6) - P(3,4,6)
D P(1,4,5) - P(2,3,6)
E P(1,2,3) - P(1,4,5) - P(1,2,5) - P(1,3,4)
F P(1,2,4) - P(1,4,3) - P(1,2,3) - P(2,3,4)
G P(1,2,4) - P(1,2,6) - P(2,3,5) - P(2,3,4)
A B C
D
E F
G
2
6
5
4
3
1
24 IPN-UPIIZ
La tabla anterior nos dice que mientras que el robot se encuentre en cualquier
área de trabajo puede mover las articulaciones sobrantes al polígono de
estabilidad. Sin embargo, la programación de control del Hexápodo se hace más
compleja, ya que se usa “Fuzzy Logic” (Control Difuso), el cual consiste en tener
redes neuronales programadas para que el robot vaya aprendiendo conforme vaya
trabajando.
Locomoción Fija
Es la forma más sencilla para mover un robot de 6 patas, consiste en unos
ciertos tipos de movimientos establecidos y repetitivos donde los parámetros y
variables del sistema de locomoción son totalmente regulares y determinados
previamente. Éstos siguen un patrón ya establecido; y ese patrón está basado en
el Polígono de Estabilidad.
Polígono de Estabilidad.-
Polígono de Estabilidad o Polígono de Apoyo
Desde el punto de vista estático se requiere que en todo momento de
la locomoción las patas soporten al cuerpo.
La proyección del centro de gravedad del cuerpo dentro del
polígono de apoyo que forman las patas apoyadas juegan un papel
muy importante dentro de la estabilidad del robot.
El número de patas mínimas consideradas que aseguran una buena
estabilidad son tres; que al ser apoyados en la superficie generen un
triángulo donde el robot está soportado.
Sí se apoyan cuatro, se genera un polígono de cuatro lados y así
sucesivamente.
La condición indispensable que evita que el robot se caiga es que la
proyección del centro de gravedad (C.G.) debe estar dentro del área
del polígono que se forma con las patas del robot,
independientemente te del número de patas, a esto se le conoce
como Margen de Seguridad o Estabilidad.
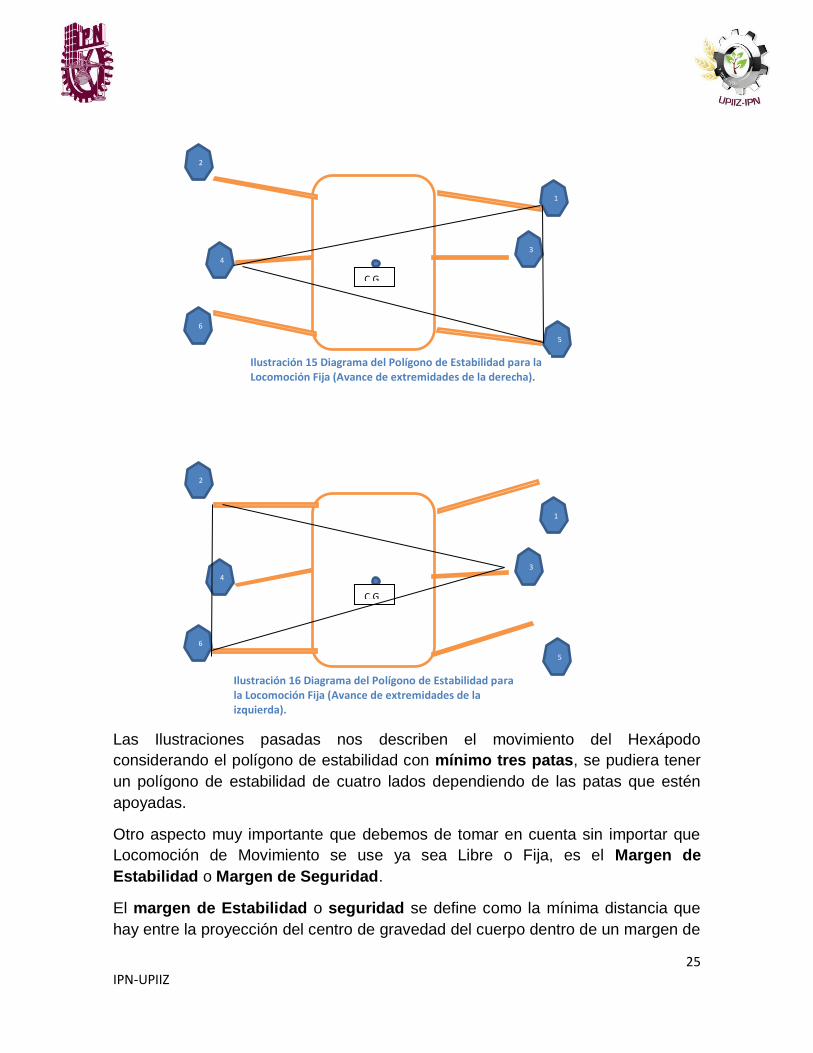
En el caso de los robots caminantes de seis patas los algoritmos de locomoción
fija el polígono de estabilidad consiste en mantener en la superficie del terreno
donde se desplaza el robot tres patas alternadas de tal forma que se pueda formar
una especie de soporte en estas tres patas cada vez que el robot se desplace, el
cual se demuestra en el siguiente diagrama. Véase Ilustración 16 y 17.
25 IPN-UPIIZ
Las Ilustraciones pasadas nos describen el movimiento del Hexápodo
considerando el polígono de estabilidad con mínimo tres patas, se pudiera tener
un polígono de estabilidad de cuatro lados dependiendo de las patas que estén
apoyadas.
Otro aspecto muy importante que debemos de tomar en cuenta sin importar que
Locomoción de Movimiento se use ya sea Libre o Fija, es el Margen de
Estabilidad o Margen de Seguridad.
El margen de Estabilidad o seguridad se define como la mínima distancia que
hay entre la proyección del centro de gravedad del cuerpo dentro de un margen de
C.G
2
6
5
4
3
1
C.G
2
6
5
4
3
1
Ilustración 15 Diagrama del Polígono de Estabilidad para la Locomoción Fija (Avance de extremidades de la derecha).
Ilustración 16 Diagrama del Polígono de Estabilidad para la Locomoción Fija (Avance de extremidades de la izquierda).
26 IPN-UPIIZ
seguridad y la frontera que existe en cada uno de los lados del polígono de
apoyo, generando instantáneamente dicho margen en base al estado actual de la
configuración del robot.
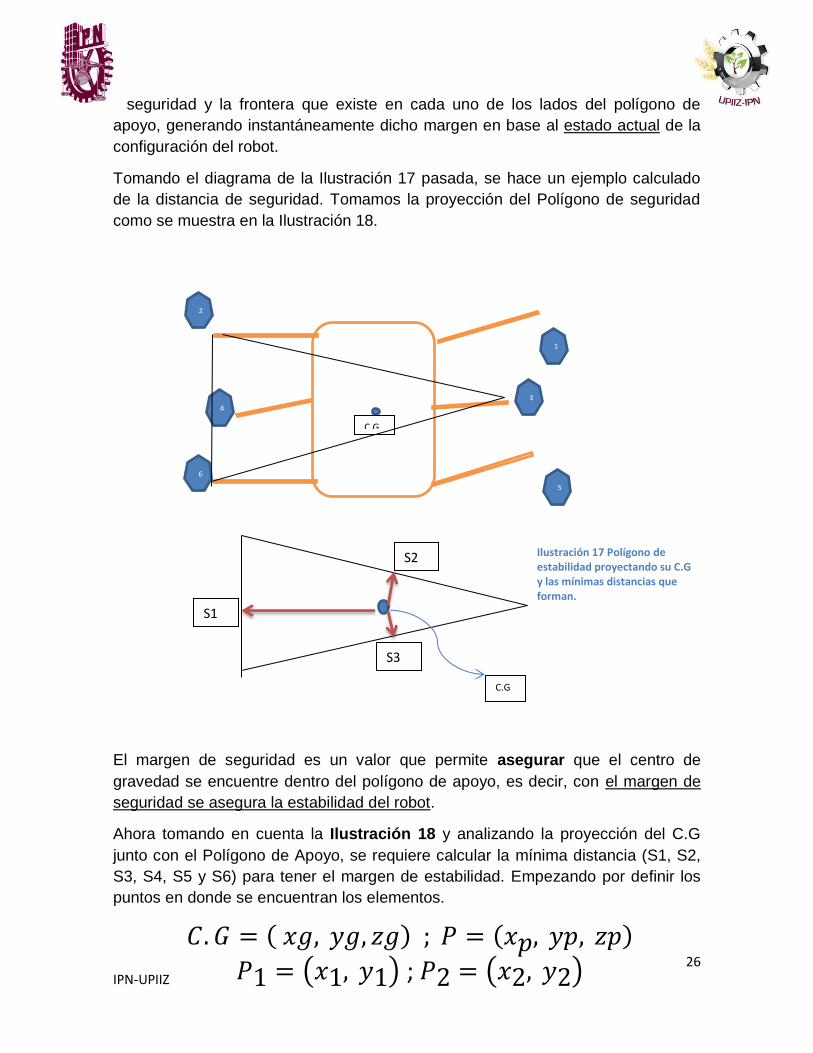
Tomando el diagrama de la Ilustración 17 pasada, se hace un ejemplo calculado
de la distancia de seguridad. Tomamos la proyección del Polígono de seguridad
como se muestra en la Ilustración 18.
El margen de seguridad es un valor que permite asegurar que el centro de
gravedad se encuentre dentro del polígono de apoyo, es decir, con el margen de
seguridad se asegura la estabilidad del robot.
Ahora tomando en cuenta la Ilustración 18 y analizando la proyección del C.G
junto con el Polígono de Apoyo, se requiere calcular la mínima distancia (S1, S2,
S3, S4, S5 y S6) para tener el margen de estabilidad. Empezando por definir los
puntos en donde se encuentran los elementos.
C.G
2
6
5
4
3
1
C.G
S1
S3
S2 Ilustración 17 Polígono de estabilidad proyectando su C.G y las mínimas distancias que forman.
𝐶. 𝐺 = ( 𝑥𝑔, 𝑦𝑔, 𝑧𝑔) ; 𝑃 = (𝑥𝑝, 𝑦𝑝, 𝑧𝑝)
𝑃1 = (𝑥1, 𝑦1) ; 𝑃2 = (𝑥2, 𝑦2)

27 IPN-UPIIZ
Debe de quedar claro que los puntos están dados en un sistema de referencia
inercial, de tal forma que:
Y utilizando la ecuación de una recta:
Por tanto:
Ya que el Hexápodo no tiene movimientos en el eje Z, se considera nuestro
sistema en solo dos ejes (x, y). Por tanto la ecuación de S queda como:
y
S = √(𝑥𝑔 − 𝑥𝑝)2 + (𝑦𝑔 − 𝑦𝑝)2 + (𝑧𝑔 − 𝑧𝑝)2
𝐴𝑥 + 𝐵𝑦 + 𝐶𝑧 + 𝐷 = 0
𝑆 = |𝐴𝑥 + 𝐵𝑦 + 𝐶𝑧 + 𝐷|
√𝐴2 + 𝐵2 + 𝐶2⁄
𝑆 = √(𝑥𝑔 − 𝑥𝑝)2 + (𝑦𝑔 − 𝑦𝑝)2
𝑌𝑝 = (𝑥𝑔 − 𝑥𝑝)(𝑥1 − 𝑥2)
𝑦2 − 𝑦1+ 𝑦𝑔
𝑋𝑝 = 𝑐1(𝑥2 − 𝑥1)(𝑦2 − 𝑦1)
𝑐2[(𝑦2 − 𝑦1)2 + (𝑥2 − 𝑥1)2]
𝑑𝑜𝑛𝑑𝑒:
c1 = [(𝑦𝑔 − 𝑦1)(𝑥2 − 𝑥1) + 𝑥1](𝑦2 − 𝑦1)3 + 𝑥𝑔(𝑥2 − 𝑥1)2
𝑐2 = (𝑥2 − 𝑥1)(𝑦2 − 𝑦1)
28 IPN-UPIIZ
Para por fin llegar al teorema de máximos y mínimos, donde se calcula nuestra
distancia mínima que va regir el margen de seguridad mínimo.
Bien, ahoya ya se tienen los diseños conceptuales, es más sencillos que las ideas
para las soluciones al problema se generan más rápido. Es por eso que a partir de
este punto se inició con las soluciones generales, y gracias a la lluvia de ideas se
generaron 4 soluciones posibles. La cuales se enlistan a continuación.
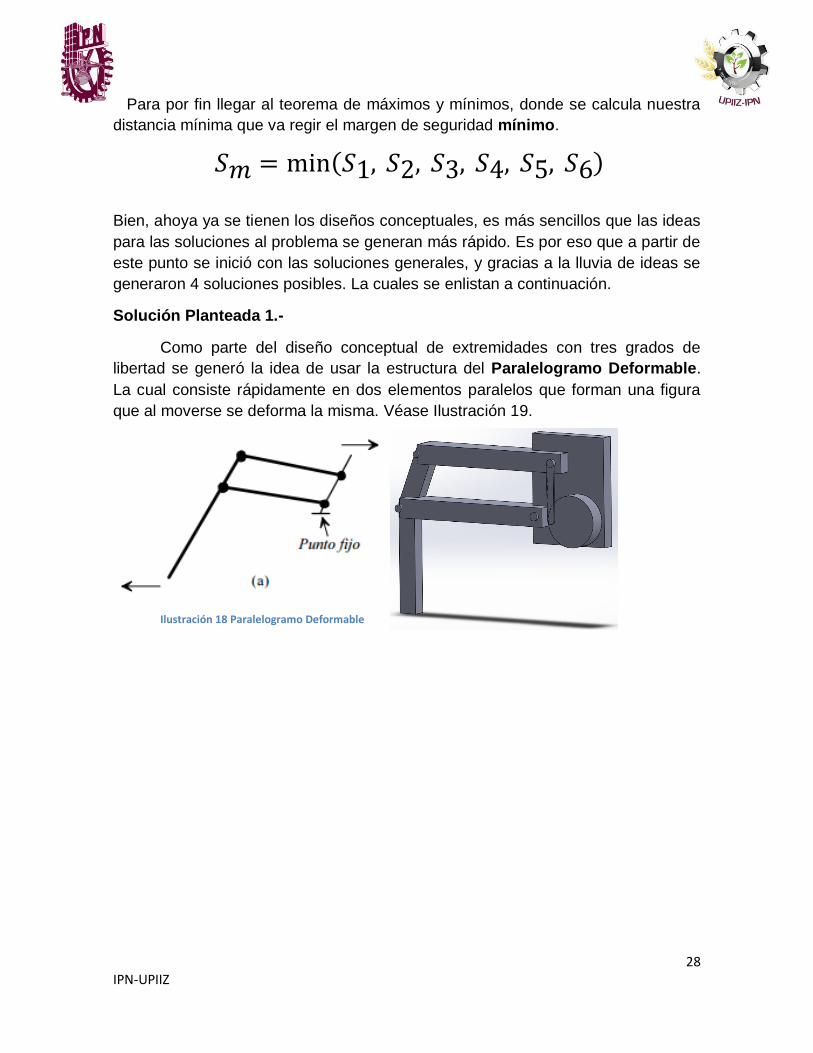
Solución Planteada 1.-
Como parte del diseño conceptual de extremidades con tres grados de
libertad se generó la idea de usar la estructura del Paralelogramo Deformable.
La cual consiste rápidamente en dos elementos paralelos que forman una figura
que al moverse se deforma la misma. Véase Ilustración 19.
Ilustración 18 Paralelogramo Deformable
𝑆𝑚 = min (𝑆1, 𝑆2, 𝑆3, 𝑆4, 𝑆5, 𝑆6)
29 IPN-UPIIZ
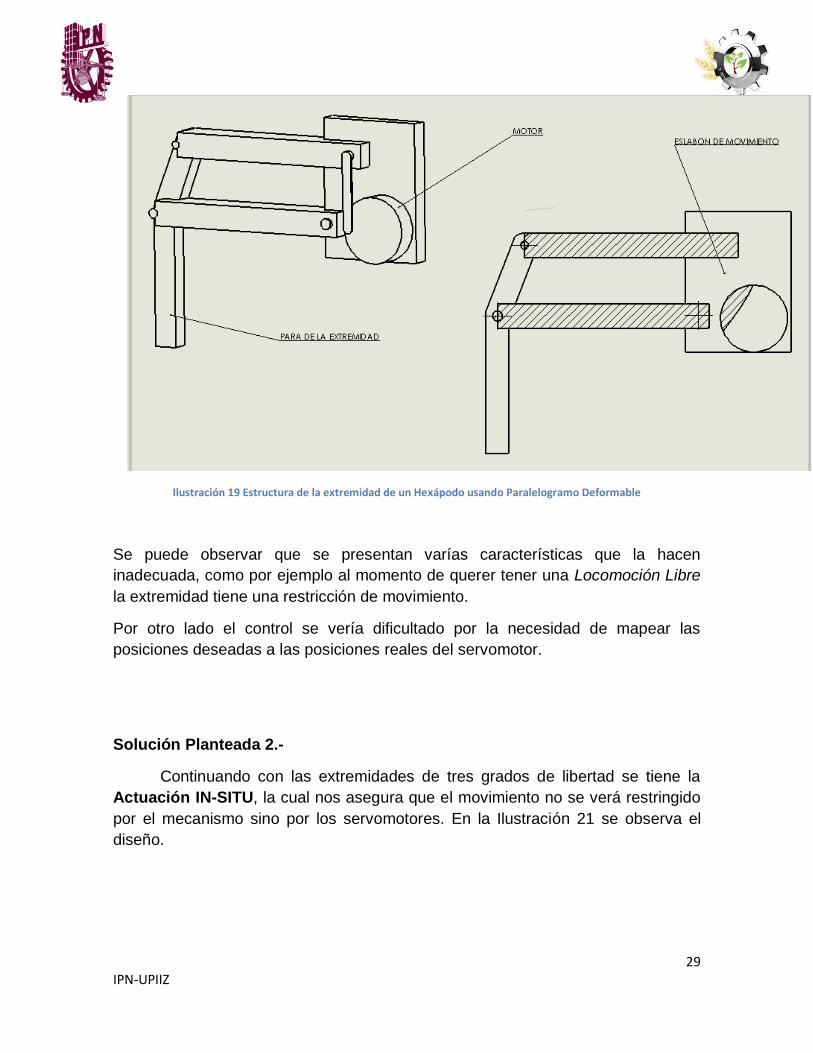
Ilustración 19 Estructura de la extremidad de un Hexápodo usando Paralelogramo Deformable
Se puede observar que se presentan varías características que la hacen
inadecuada, como por ejemplo al momento de querer tener una Locomoción Libre
la extremidad tiene una restricción de movimiento.
Por otro lado el control se vería dificultado por la necesidad de mapear las
posiciones deseadas a las posiciones reales del servomotor.
Solución Planteada 2.-
Continuando con las extremidades de tres grados de libertad se tiene la
Actuación IN-SITU, la cual nos asegura que el movimiento no se verá restringido
por el mecanismo sino por los servomotores. En la Ilustración 21 se observa el
diseño.
30 IPN-UPIIZ
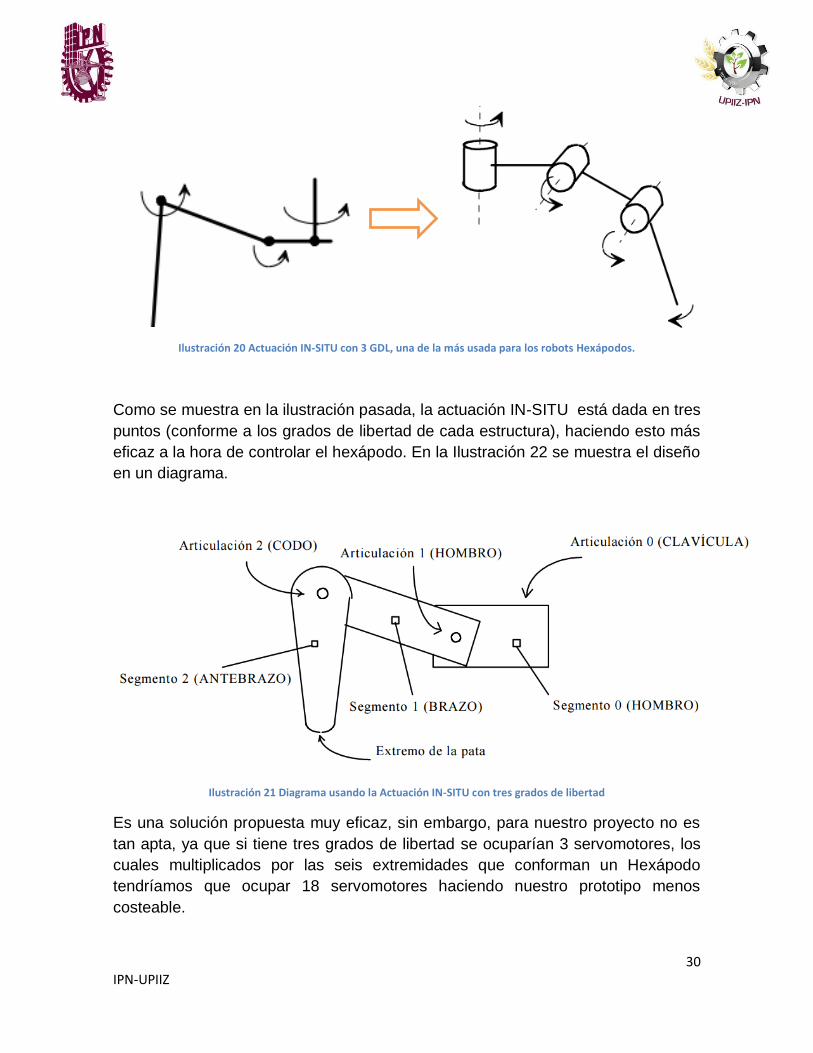
Ilustración 20 Actuación IN-SITU con 3 GDL, una de la más usada para los robots Hexápodos.
Como se muestra en la ilustración pasada, la actuación IN-SITU está dada en tres
puntos (conforme a los grados de libertad de cada estructura), haciendo esto más
eficaz a la hora de controlar el hexápodo. En la Ilustración 22 se muestra el diseño
en un diagrama.
Ilustración 21 Diagrama usando la Actuación IN-SITU con tres grados de libertad
Es una solución propuesta muy eficaz, sin embargo, para nuestro proyecto no es
tan apta, ya que si tiene tres grados de libertad se ocuparían 3 servomotores, los
cuales multiplicados por las seis extremidades que conforman un Hexápodo
tendríamos que ocupar 18 servomotores haciendo nuestro prototipo menos
costeable.
31 IPN-UPIIZ
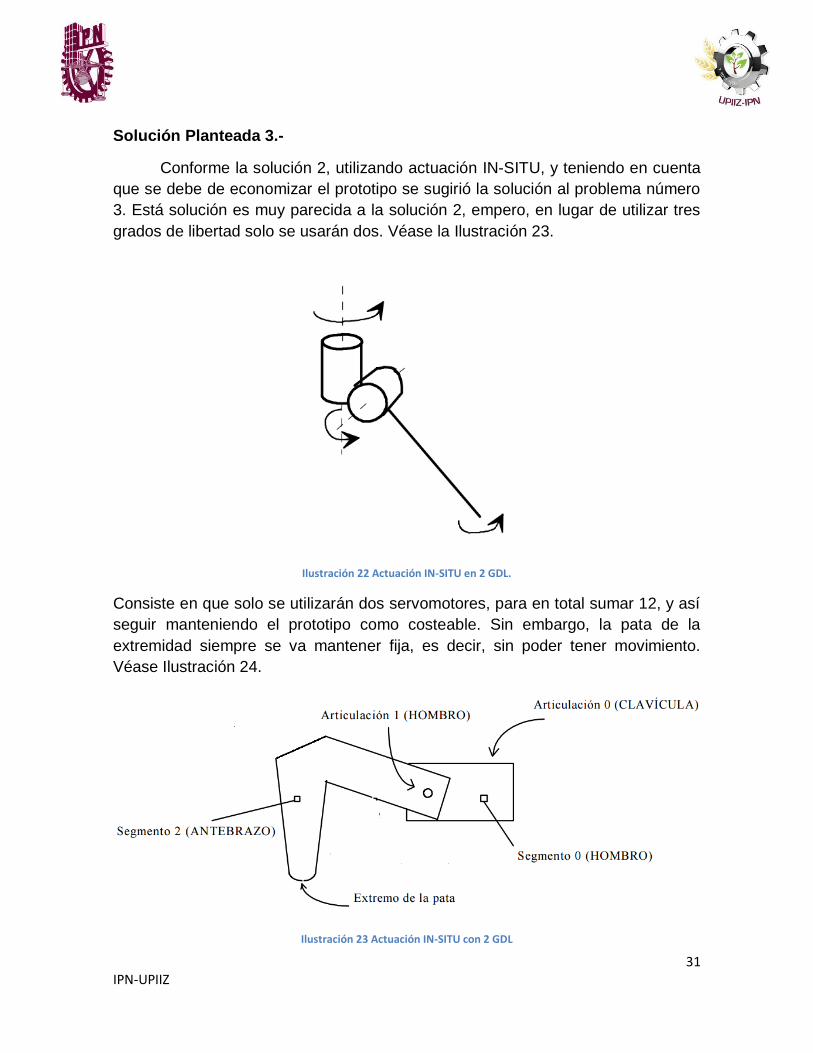
Solución Planteada 3.-
Conforme la solución 2, utilizando actuación IN-SITU, y teniendo en cuenta
que se debe de economizar el prototipo se sugirió la solución al problema número
3. Está solución es muy parecida a la solución 2, empero, en lugar de utilizar tres
grados de libertad solo se usarán dos. Véase la Ilustración 23.
Ilustración 22 Actuación IN-SITU en 2 GDL.
Consiste en que solo se utilizarán dos servomotores, para en total sumar 12, y así
seguir manteniendo el prototipo como costeable. Sin embargo, la pata de la
extremidad siempre se va mantener fija, es decir, sin poder tener movimiento.
Véase Ilustración 24.
Ilustración 23 Actuación IN-SITU con 2 GDL
32 IPN-UPIIZ
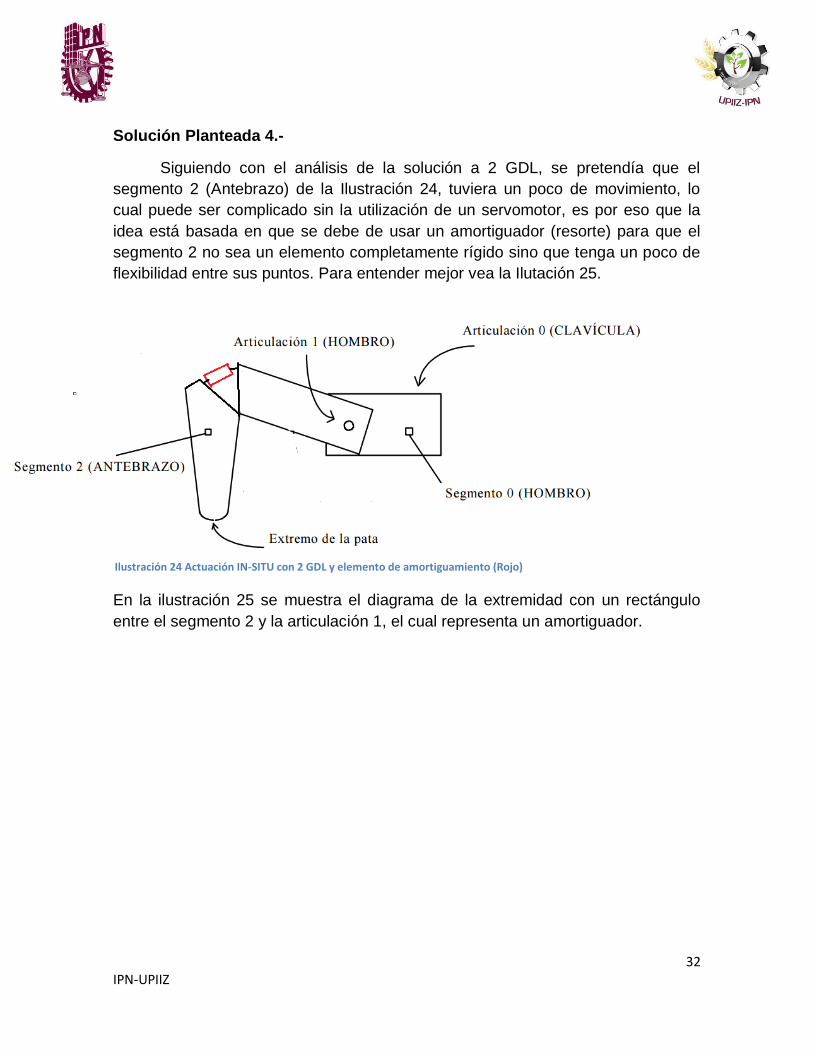
Solución Planteada 4.-
Siguiendo con el análisis de la solución a 2 GDL, se pretendía que el
segmento 2 (Antebrazo) de la Ilustración 24, tuviera un poco de movimiento, lo
cual puede ser complicado sin la utilización de un servomotor, es por eso que la
idea está basada en que se debe de usar un amortiguador (resorte) para que el
segmento 2 no sea un elemento completamente rígido sino que tenga un poco de
flexibilidad entre sus puntos. Para entender mejor vea la Ilutación 25.
En la ilustración 25 se muestra el diagrama de la extremidad con un rectángulo
entre el segmento 2 y la articulación 1, el cual representa un amortiguador.
Ilustración 24 Actuación IN-SITU con 2 GDL y elemento de amortiguamiento (Rojo)
33 IPN-UPIIZ
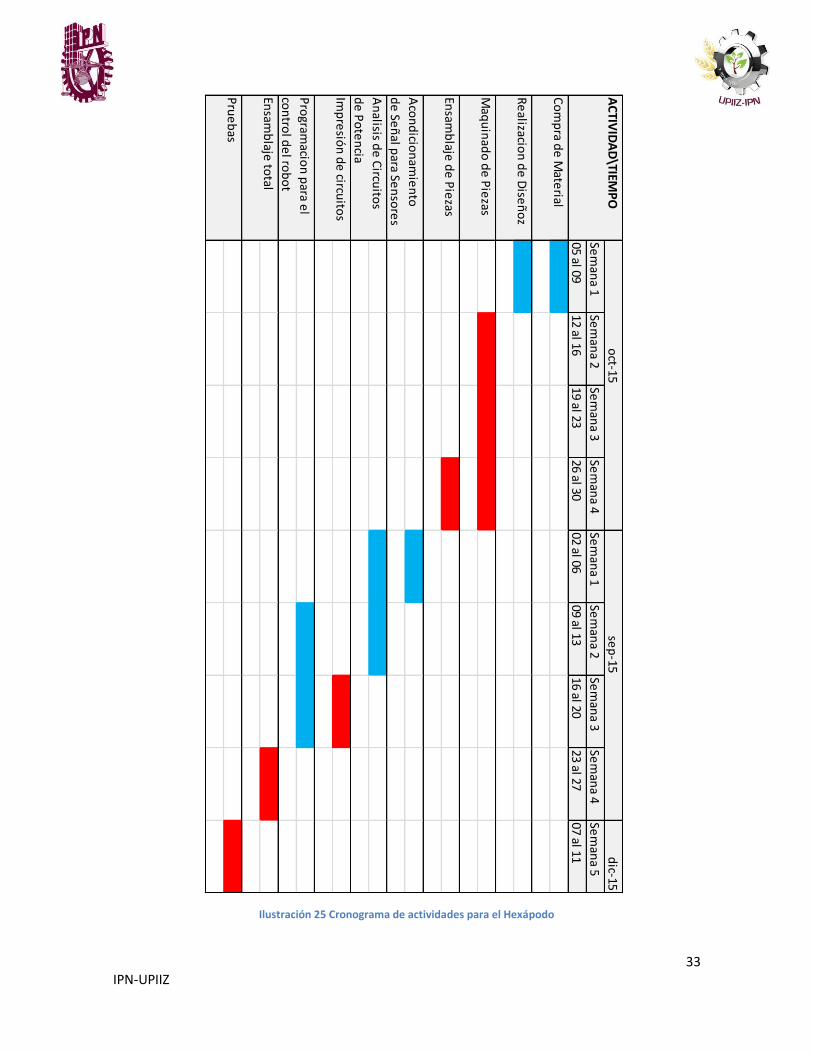
Ilustración 25 Cronograma de actividades para el Hexápodo
AC
TIVID
AD
\TIEMP
Oo
ct-15se
p-15
dic-15
Sem
ana 1
Sem
ana 2
Sem
ana 3
Sem
ana 4
Sem
ana 1
Sem
ana 2
Sem
ana 3
Sem
ana 4
Sem
ana 5
05 al 0912 al 16
19 al 2326 al 30
02 al 0609 al 13
16 al 2023 al 27
07 al 11
Co
mp
ra de
Mate
rial
Re
alizacion
de
Dise
ño
z
Maq
uin
ado
de
Pie
zas
Ensam
blaje
de
Pie
zas
Aco
nd
icion
amie
nto
de
Señ
al para Se
nso
res
An
alisis de
Circu
itos
de
Po
ten
cia
Imp
resió
n d
e circu
itos
Pro
gramacio
n p
ara el
con
trol d
el ro
bo
t
Ensam
blaje
total
Pru
eb
as
34 IPN-UPIIZ
Selección de una solución adecuada
En este punto de la metodología del diseño vamos a considerar varios puntos a
tratar para la mejora de las soluciones posibles, es decir, en base a tablas de
pertenencias y de selección encontraremos la solución que necesitamos.
El rendimiento del robot estará determinado por el uso que se le dé al mismo, pero
en general será un autómata que sus funciones estarán en excelentes condiciones
iniciales, tanto en su programación como en su circuitería.
La fiabilidad como en todo sistema mecánico-electrónico el riesgo de algún tipo de
falla es posible, empero, con el trabajo y la investigación se espera reducir este
tipo de fallas a probabilidades mínimas, en caso de aun así encontrarse algún tipo
de falla, el manual será claro para resolverlas.
La seguridad en el robot, el hexápodo robótico contara con medidas de seguridad
para el operario, para evitar accidentes tanto en la persona como en el proceso
que se va a realizar, como medida principal contaremos con un botón de paro de
emergencia, para que en caso de que surja cualquier anomalía durante el
proceso, este pueda ser desactivado de manera instantánea.
En cuanto a la mantenibilidad se refiere, va a ser muy accesible para un técnico
capacitado e inclusive para uno no tan capacitado, ya que en el manual se dirán
todas las posibles fallas, cada uno de los componentes del robot, y los diagramas
para posibles ajustes, mejoramiento, etc.
Así producir un completo mantenimiento correctivo o preventivo.
A nivel de escalabilidad, aun no estamos claros sobre los riesgos que hay de
hacerle modificaciones para optimizar el desarrollo del producto, es decir que tan
estable se comportara la programación del sistema a los cambios, así como si
estos al modificarlos el funcionamiento merme la calidad del producto.
En caso de un deterioro por tiempo de vida, es decir, por desgaste común del
trabajo, podrá ser perfectamente desmontable para que así las piezas que aun
funcionen de manera adecuada puedan ser reutilizadas, ya sea para otro prototipo
o alguna otra utilidad de la cual la empresa pueda requerir. Este punto no estará
en nuestra ponderación.
La usabilidad será para procesos didácticos, ya que no va a contar con las
dimensiones necesarias para trabajar en la industria, únicamente contara con
funciones para exhibición con cosas pequeñas.
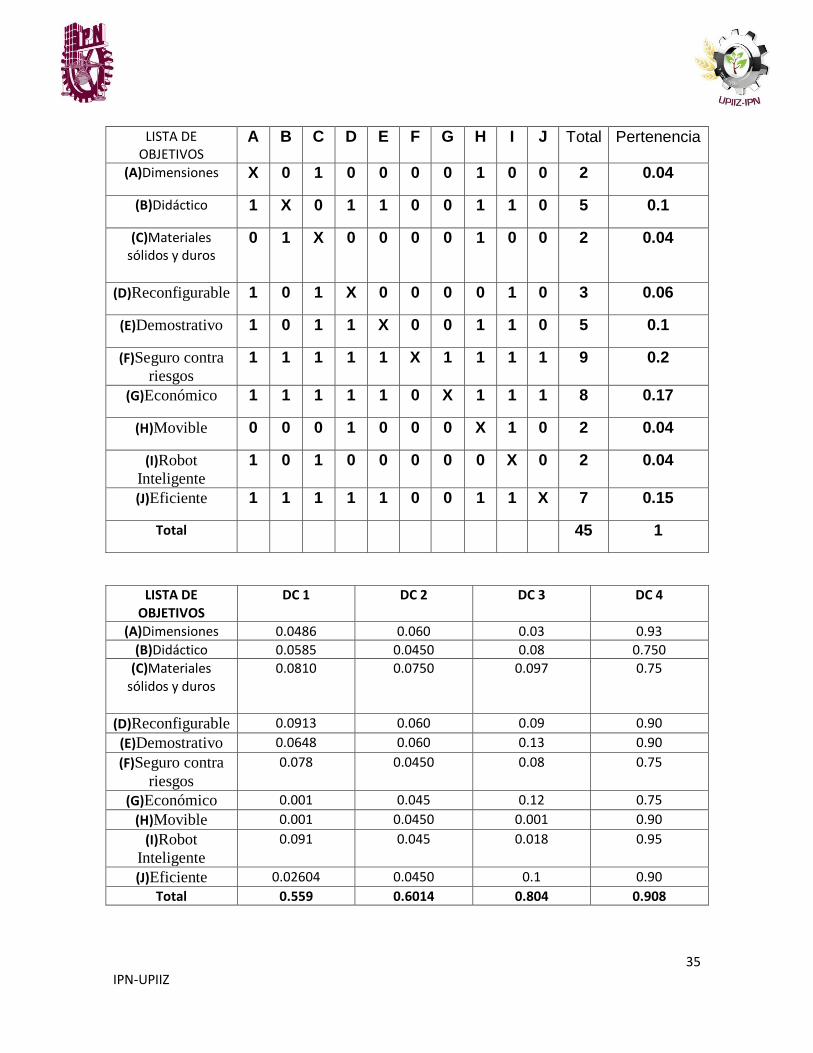
Considerando estos puntos se construyó esta tabla de pertenencias.
35 IPN-UPIIZ
LISTA DE OBJETIVOS
A B C D E F G H I J Total Pertenencia
(A)Dimensiones X 0 1 0 0 0 0 1 0 0 2 0.04
(B)Didáctico 1 X 0 1 1 0 0 1 1 0 5 0.1
(C)Materiales sólidos y duros
0 1 X 0 0 0 0 1 0 0 2 0.04
(D)Reconfigurable 1 0 1 X 0 0 0 0 1 0 3 0.06
(E)Demostrativo 1 0 1 1 X 0 0 1 1 0 5 0.1
(F)Seguro contra
riesgos
1 1 1 1 1 X 1 1 1 1 9 0.2
(G)Económico 1 1 1 1 1 0 X 1 1 1 8 0.17
(H)Movible 0 0 0 1 0 0 0 X 1 0 2 0.04
(I)Robot
Inteligente
1 0 1 0 0 0 0 0 X 0 2 0.04
(J)Eficiente 1 1 1 1 1 0 0 1 1 X 7 0.15
Total 45 1
LISTA DE OBJETIVOS
DC 1 DC 2 DC 3 DC 4
(A)Dimensiones 0.0486 0.060 0.03 0.93
(B)Didáctico 0.0585 0.0450 0.08 0.750
(C)Materiales sólidos y duros
0.0810 0.0750 0.097 0.75
(D)Reconfigurable 0.0913 0.060 0.09 0.90
(E)Demostrativo 0.0648 0.060 0.13 0.90
(F)Seguro contra
riesgos
0.078 0.0450 0.08 0.75
(G)Económico 0.001 0.045 0.12 0.75
(H)Movible 0.001 0.0450 0.001 0.90
(I)Robot
Inteligente
0.091 0.045 0.018 0.95
(J)Eficiente 0.02604 0.0450 0.1 0.90
Total 0.559 0.6014 0.804 0.908
36 IPN-UPIIZ
Observando las Tablas anteriores se concluye que la opción más útil para
nuestras métricas es la numero 4.
Diseño Detallado (CAD, CAM, CAE)
Una vez habiendo completado el paso 5 de la metodología del diseño mecatrónico
procederemos a realizar un dibujo y bocetos detallados de nuestro prototipo el
cual corresponde a nuestro siguiente paso.
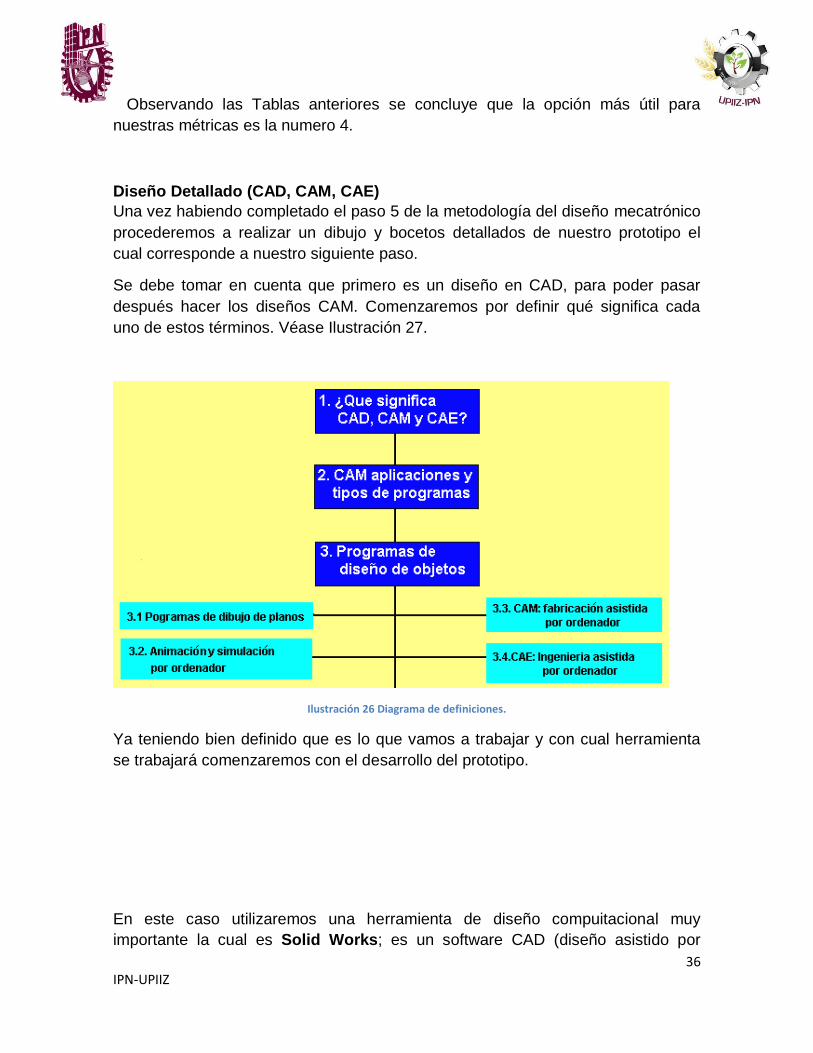
Se debe tomar en cuenta que primero es un diseño en CAD, para poder pasar
después hacer los diseños CAM. Comenzaremos por definir qué significa cada
uno de estos términos. Véase Ilustración 27.
Ilustración 26 Diagrama de definiciones.
Ya teniendo bien definido que es lo que vamos a trabajar y con cual herramienta
se trabajará comenzaremos con el desarrollo del prototipo.
En este caso utilizaremos una herramienta de diseño compuitacional muy
importante la cual es Solid Works; es un software CAD (diseño asistido por
37 IPN-UPIIZ
computadora) para modelado mecánico en 3D, desarrollado en la actualidad por
SolidWorks Corp., una filial de Dassault Systèmes, S.A. (Suresnes, Francia), para
el sistema operativo Microsoft Windows. Su primera versión fue lanzada al
mercado en 1995 con el propósito de hacer la tecnología CAD más accesible.
A partir del diseño conceptual elegido trabajaremos en el diseño detallado, y para
esto tendremos que empezar con pieza por pieza. Solo se describirá una parte de
todas las piezas a diseñar.
En el entendido de poder darnos una idea tomando en cuenta la teoría que se vio
anteriormente se hace la base del hexápodo primero.
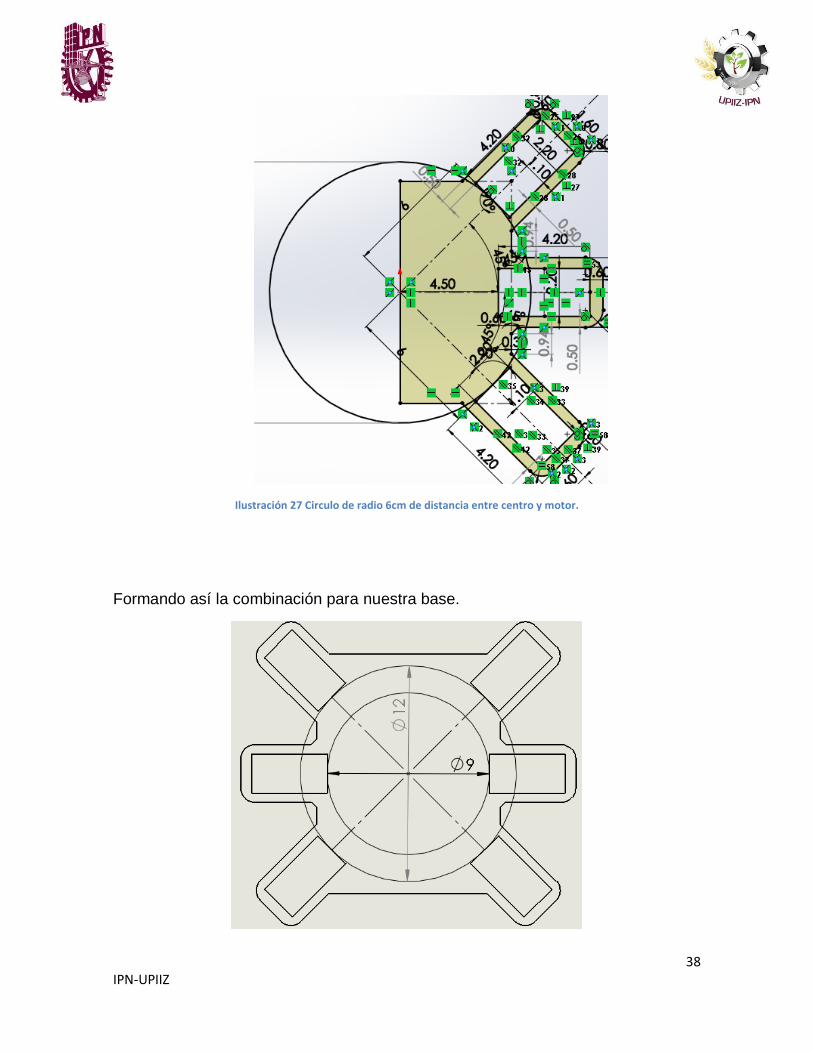
1. Base
Como se había mencionado, la base de un hexápodo puede variar de
muchas formas dependiendo del diseñador y de la estética que se le desea
dar al prototipo, sin embargo, siempre nos debemos acotar a dos diseños
fundamentales que son el bilateral y el radial. En nuestro diseño se pensó
que tuviera el mejor movimiento posible, para esto el que tiene más
facilidad de movimiento es la configuración radial, empero, esta nos hace
nuestra base muy ancha de los lados, es por eso que optamos por hacer
una combinación de ambas configuraciones tomando 4 patas extremas
como radiales una de otra y las de en medio hacerlas un poco más chicas
para que se vuelva delgada la estructura. En la Ilustración 28 se muestra el
círculo que forman las 4 patas y las otras forman un radio menos entre
ambas. Cabe mencionar que dentro de la base irán 6 servomotores.
38 IPN-UPIIZ
Ilustración 27 Circulo de radio 6cm de distancia entre centro y motor.
Formando así la combinación para nuestra base.

39 IPN-UPIIZ
Ilustración 28 Base final para hexápodo.
2. Eslabones portadores de Servomotores
Para esto es necesario como en la base haber obtenido las medidas
correctas de los servomotores que vamos a trabajar. En un principio el
desarrollo del diseño conto un poco de trabajo para dar el movimiento y
ensamblaje que se requiere, entonces se recurrió a lo más sencillo, una
pata de cualquier animal, la cual se conforma por un “hombro”, “codo” y
palma de la “mano”. En este caso este es como el hombro del prototipo.
(Ilustración 30).
En esta pieza se debía contemplar que para evitar un servomotor de más se
pondrá un elemento resistivo y así convertir en un sistema sub-actuado.
40 IPN-UPIIZ
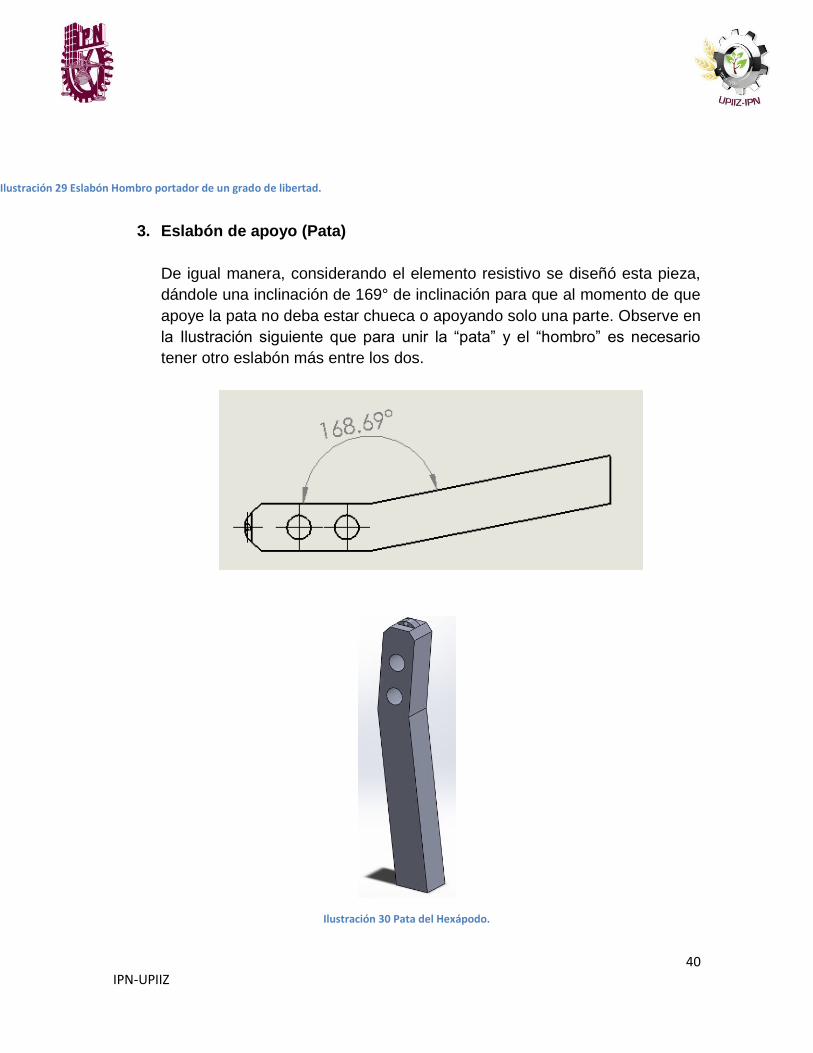
3. Eslabón de apoyo (Pata)
De igual manera, considerando el elemento resistivo se diseñó esta pieza,
dándole una inclinación de 169° de inclinación para que al momento de que
apoye la pata no deba estar chueca o apoyando solo una parte. Observe en
la Ilustración siguiente que para unir la “pata” y el “hombro” es necesario
tener otro eslabón más entre los dos.
Ilustración 30 Pata del Hexápodo.
Ilustración 29 Eslabón Hombro portador de un grado de libertad.

41 IPN-UPIIZ
4. Eslabón Intermedio para la sujeción de la pata y el hombro
Debemos hacer un eslabón para que estos dos elementos estén unidos y
también para poder colocar el elemento amortiguador. La solución estuvo
en colocar un eslabón con movimiento que solo lo detenga el elemento
amortiguador.
5. Extremidad Ensamblada
Entre las piezas desarrolladas anteriormente se puede armar ya la
extremidad completa del Hexápodo Robótico la cual es el diseño final de
nuestro prototipo y tomando en cuenta el servomotor y el elemento
amortiguador.
Ilustración 31 Extremidad completa

42 IPN-UPIIZ
Teniendo ya hecha la extremidad y teniendo la base lista podemos hacer el
ensamble competo del hexápodo robótico ya considerando nuestros 12
servomotores, el sensor ultrasónico y nuestra tarjeta de programación LaunchPad
de Texas Instruments.
6. Sujetadores de los Servomotores
Para le transmisor de movimiento de los servomotores se van a utilizar los
sujetadores que son los que nos van a transmitir el movimiento utilizando la
configuración IN-SITU para nuestro 2 grados de libertad por extremidad
formando 12 grados de libertad en todo nuestro prototipo.
Ilustración 32 Sujetado de un Servomotor.
7. Ensamble Completo del Hexápodo Robótico
Ya teniendo una extremidad acabada se pasa a realizar el ensamblaje
completo tomando 12 veces el mismo diseño de la extremidad y utilizando
todos los demás elementos que lo conforman.

43 IPN-UPIIZ
Ilustración 33 Con una área de trabajo real de 32 x 29 cm y una altura aproximada de 13 cm.

44 IPN-UPIIZ
Ilustración 34 Hexápodo Robótico
Para el desarrollo con herramientas CAM es necesario definir primero códigos de
programación para una Fresadora CNC Hass. Véase Ilustración 36.
Ilustración 35 Fresadora CNC Hass
Características de la máquina
45 IPN-UPIIZ
- Fresadora Toolroom; 30" x 12" x16" (762 x 305 x 406 mm), cono
ISO 40, accionamiento vectorial de 7,5 hp (5,6 kW), 4.000 rpm,
carenado completo, Sistema de Programación Intuitivo, bomba de
refrigeración, memoria de programación de 1 MB, llave para
bloquear la memoria, monitor LCD de color de 15" y puerto USB.
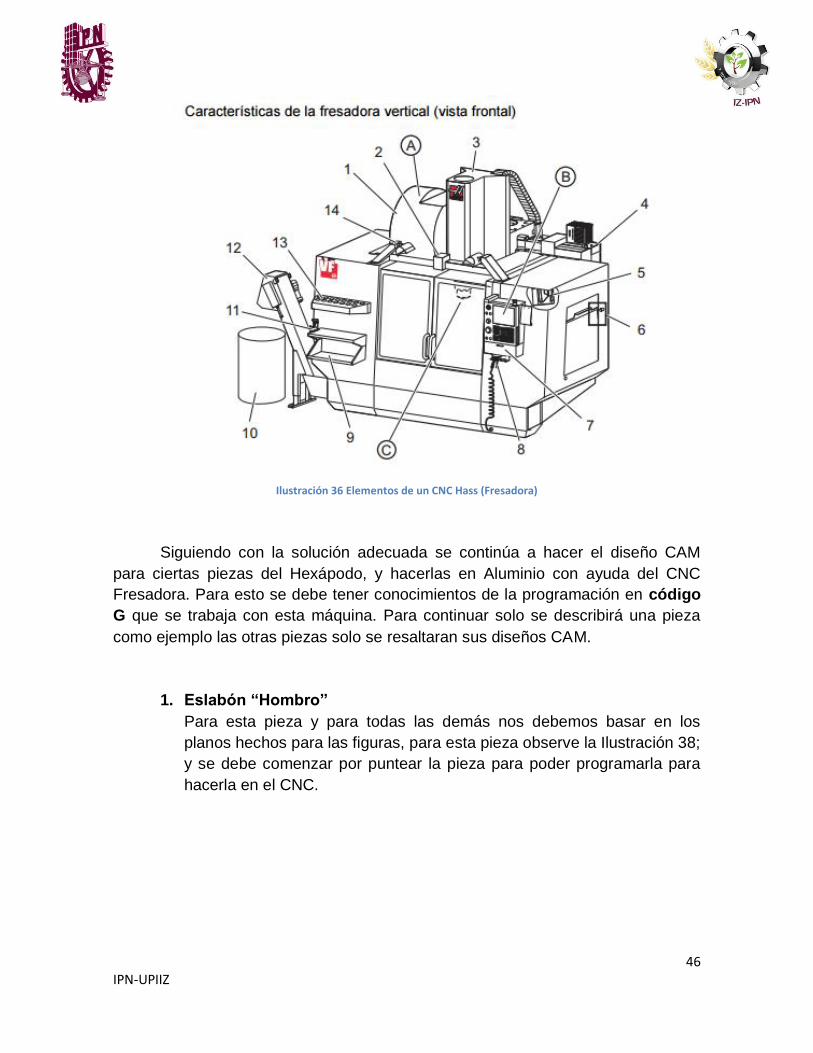
Los componentes que conforman la maquina son los siguientes enumerados para
la Ilustración 37.
1. Cambiador de herramientas de montaje lateral (Intercambiable)
2. Puerta automática con servo (Intercambiable)
3. Conjunto del husillo (Intercambiable)
4. Caja de control eléctrico
5. Luz de trabajo (Intercambiable)6. Controles de ventana
7. Bandeja de almacenamiento
8. Pistola de aire comprimido
9. Mesa de trabajo delantera
10. Contenedor de virutas
11. Tornillo de banco para sostener herramienta
12. Extractor de virutas (Intercambiable)
13. Bandeja de herramientas
14. Luces de alta intensidad (2X) (Intercambiable)
46 IPN-UPIIZ
Ilustración 36 Elementos de un CNC Hass (Fresadora)
Siguiendo con la solución adecuada se continúa a hacer el diseño CAM
para ciertas piezas del Hexápodo, y hacerlas en Aluminio con ayuda del CNC
Fresadora. Para esto se debe tener conocimientos de la programación en código
G que se trabaja con esta máquina. Para continuar solo se describirá una pieza
como ejemplo las otras piezas solo se resaltaran sus diseños CAM.
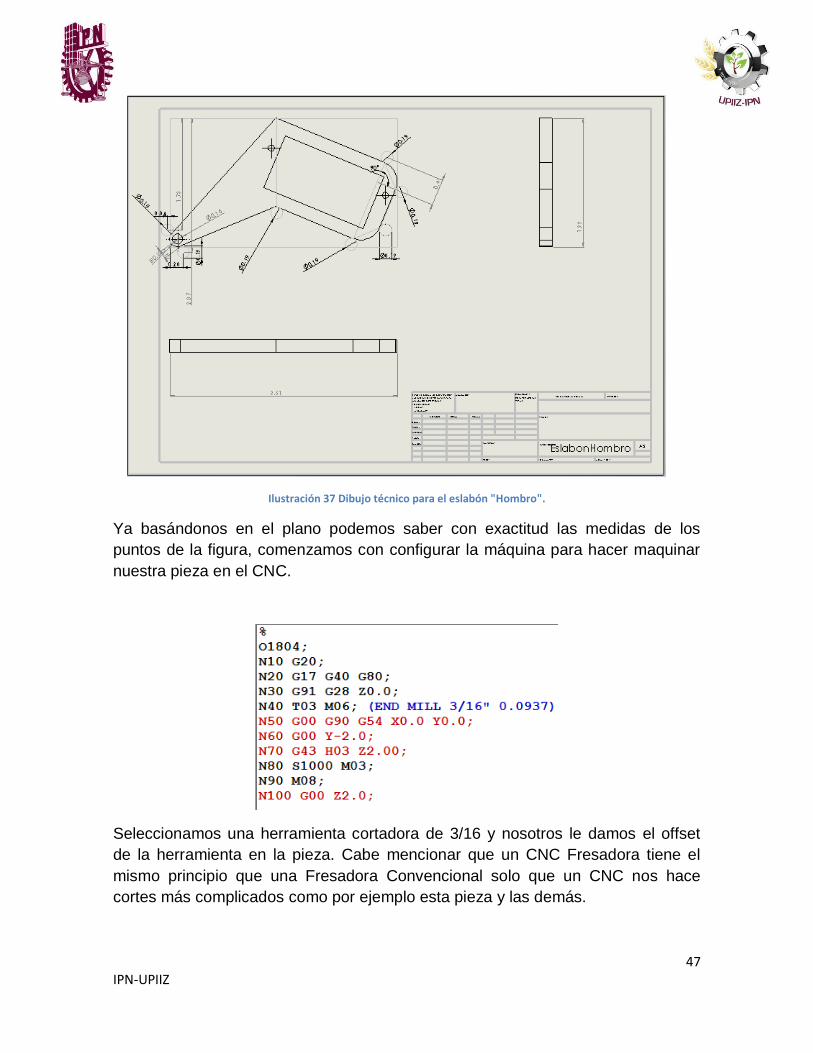
1. Eslabón “Hombro”
Para esta pieza y para todas las demás nos debemos basar en los
planos hechos para las figuras, para esta pieza observe la Ilustración 38;
y se debe comenzar por puntear la pieza para poder programarla para
hacerla en el CNC.
47 IPN-UPIIZ
Ilustración 37 Dibujo técnico para el eslabón "Hombro".
Ya basándonos en el plano podemos saber con exactitud las medidas de los
puntos de la figura, comenzamos con configurar la máquina para hacer maquinar
nuestra pieza en el CNC.
Seleccionamos una herramienta cortadora de 3/16 y nosotros le damos el offset
de la herramienta en la pieza. Cabe mencionar que un CNC Fresadora tiene el
mismo principio que una Fresadora Convencional solo que un CNC nos hace
cortes más complicados como por ejemplo esta pieza y las demás.
48 IPN-UPIIZ
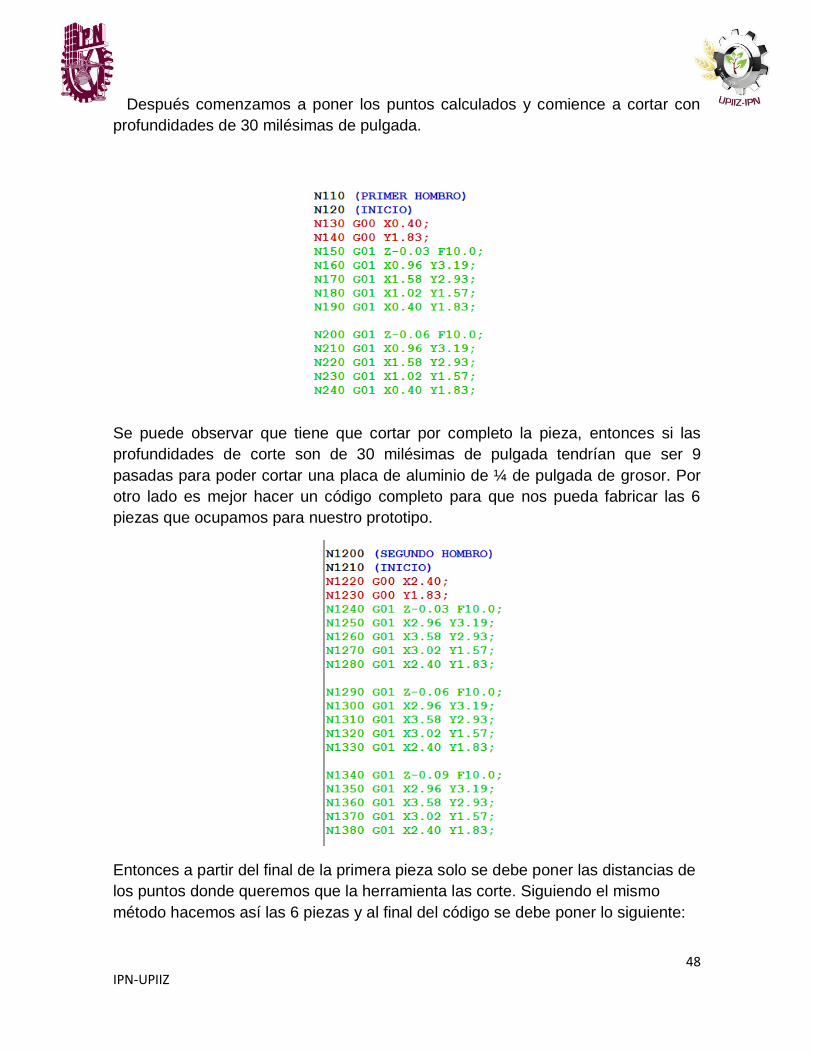
Después comenzamos a poner los puntos calculados y comience a cortar con
profundidades de 30 milésimas de pulgada.
Se puede observar que tiene que cortar por completo la pieza, entonces si las
profundidades de corte son de 30 milésimas de pulgada tendrían que ser 9
pasadas para poder cortar una placa de aluminio de ¼ de pulgada de grosor. Por
otro lado es mejor hacer un código completo para que nos pueda fabricar las 6
piezas que ocupamos para nuestro prototipo.
Entonces a partir del final de la primera pieza solo se debe poner las distancias de
los puntos donde queremos que la herramienta las corte. Siguiendo el mismo
método hacemos así las 6 piezas y al final del código se debe poner lo siguiente:
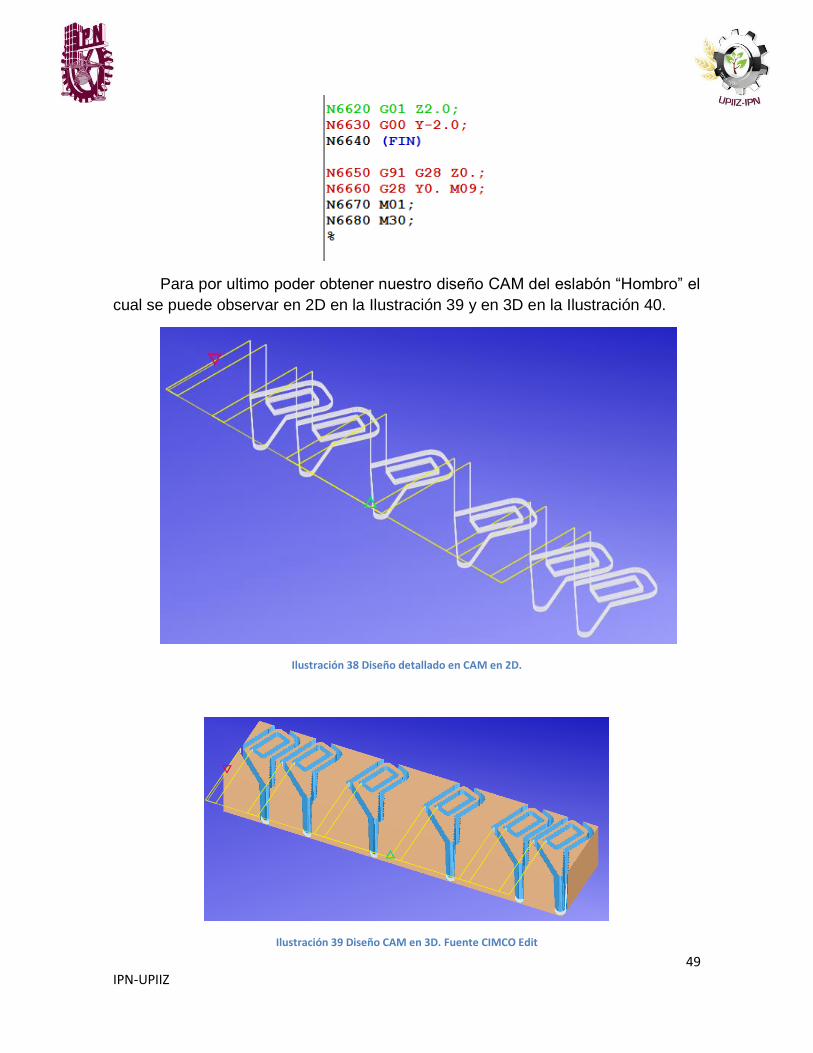
49 IPN-UPIIZ
Para por ultimo poder obtener nuestro diseño CAM del eslabón “Hombro” el
cual se puede observar en 2D en la Ilustración 39 y en 3D en la Ilustración 40.
Ilustración 38 Diseño detallado en CAM en 2D.
Ilustración 39 Diseño CAM en 3D. Fuente CIMCO Edit
50 IPN-UPIIZ
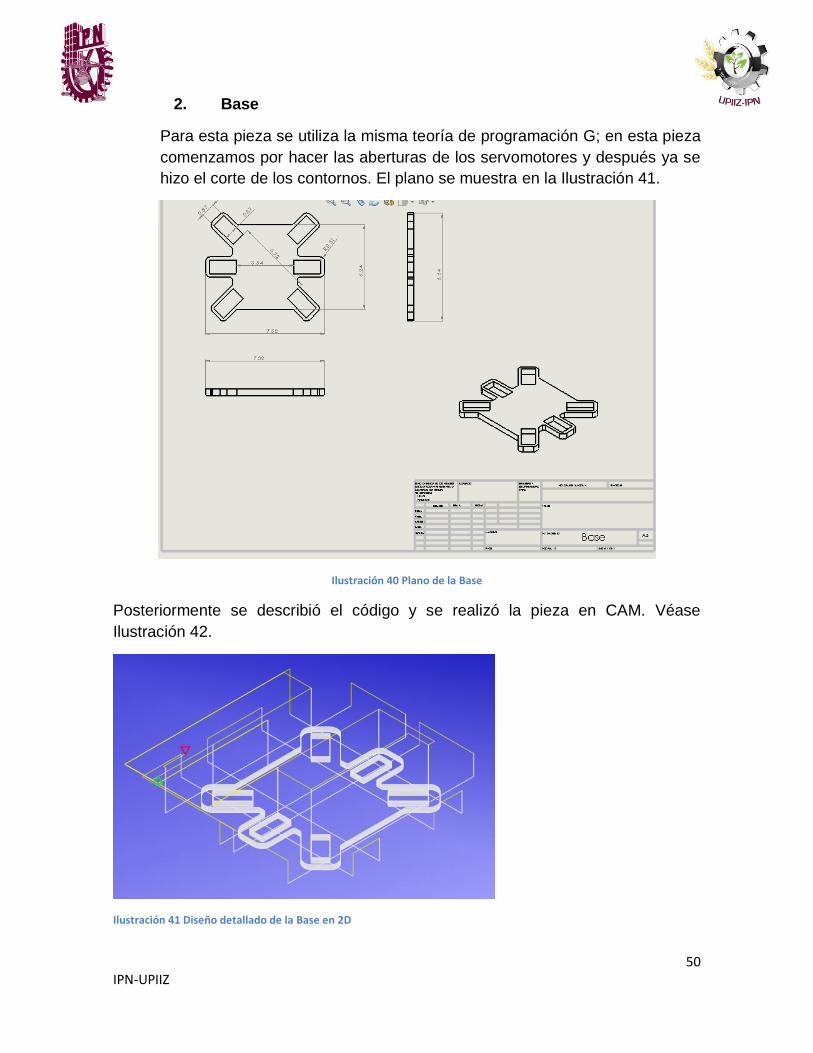
2. Base
Para esta pieza se utiliza la misma teoría de programación G; en esta pieza
comenzamos por hacer las aberturas de los servomotores y después ya se
hizo el corte de los contornos. El plano se muestra en la Ilustración 41.
Ilustración 40 Plano de la Base
Posteriormente se describió el código y se realizó la pieza en CAM. Véase
Ilustración 42.
Ilustración 41 Diseño detallado de la Base en 2D
51 IPN-UPIIZ
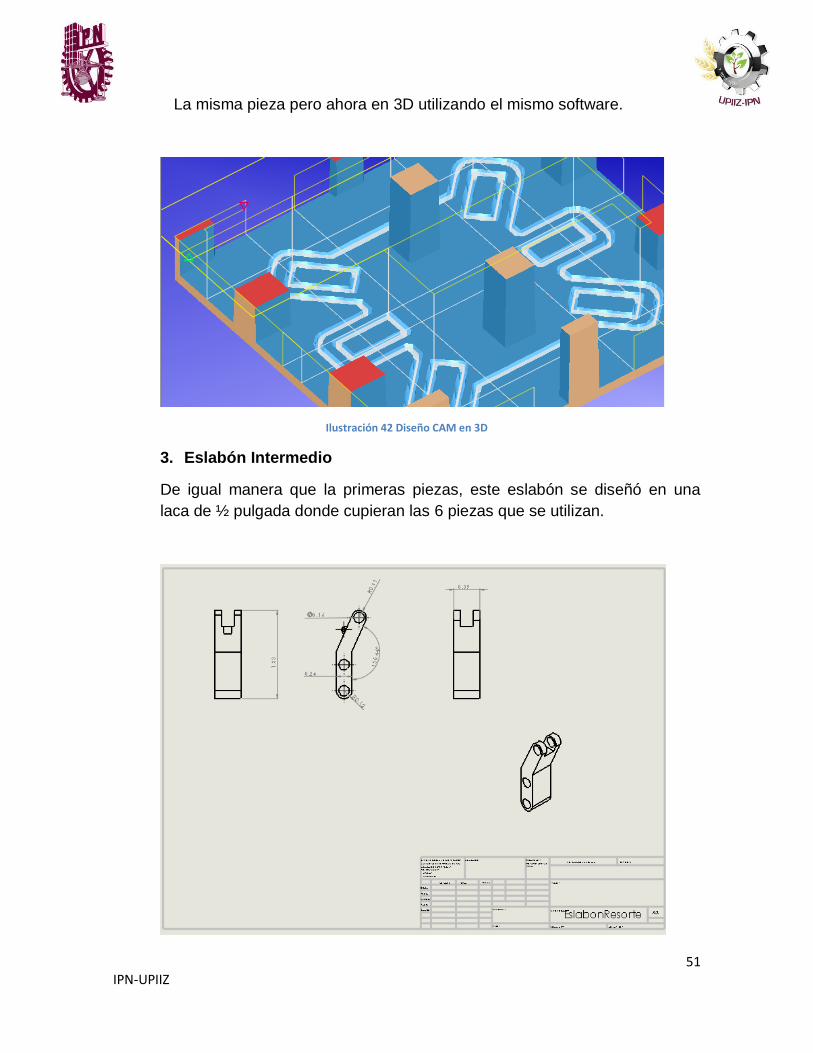
La misma pieza pero ahora en 3D utilizando el mismo software.
Ilustración 42 Diseño CAM en 3D
3. Eslabón Intermedio
De igual manera que la primeras piezas, este eslabón se diseñó en una
laca de ½ pulgada donde cupieran las 6 piezas que se utilizan.

52 IPN-UPIIZ
Ilustración 43 Diseño detallado CAM en 3D y 2D respectivamente.
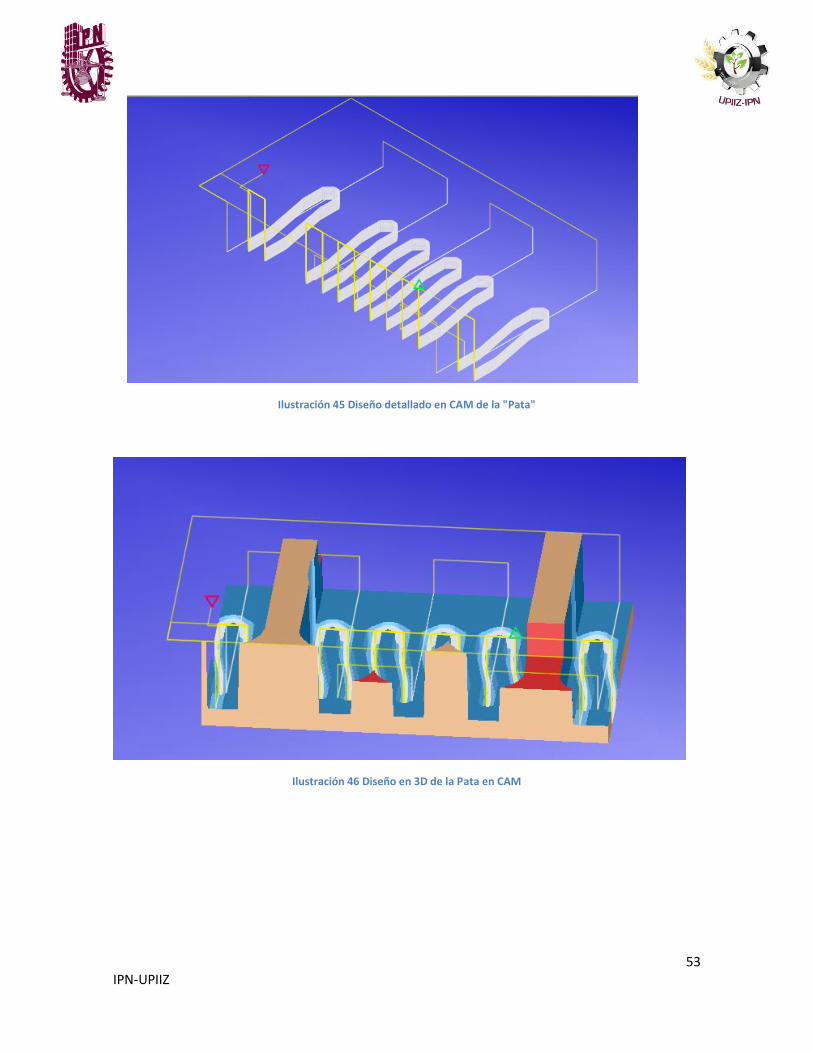
4. Eslabones de apoyo “Patas”
Como se hizo anteriormente se hicieron las 6 piezas en una sola placa
de ½ de pulgada haciendo 16 pasadas de 30 milésimas de pulgada para
la profundidad.
Ilustración 44 Plano de la pieza "Pata".
53 IPN-UPIIZ
Ilustración 45 Diseño detallado en CAM de la "Pata"
Ilustración 46 Diseño en 3D de la Pata en CAM
54 IPN-UPIIZ
Documentación
Antes de comenzar a construir el prototipo es necesario documentar aspectos
importantes del Hexápodo Robótico; como la programación y sus componentes
electrónicos el cual va contener.
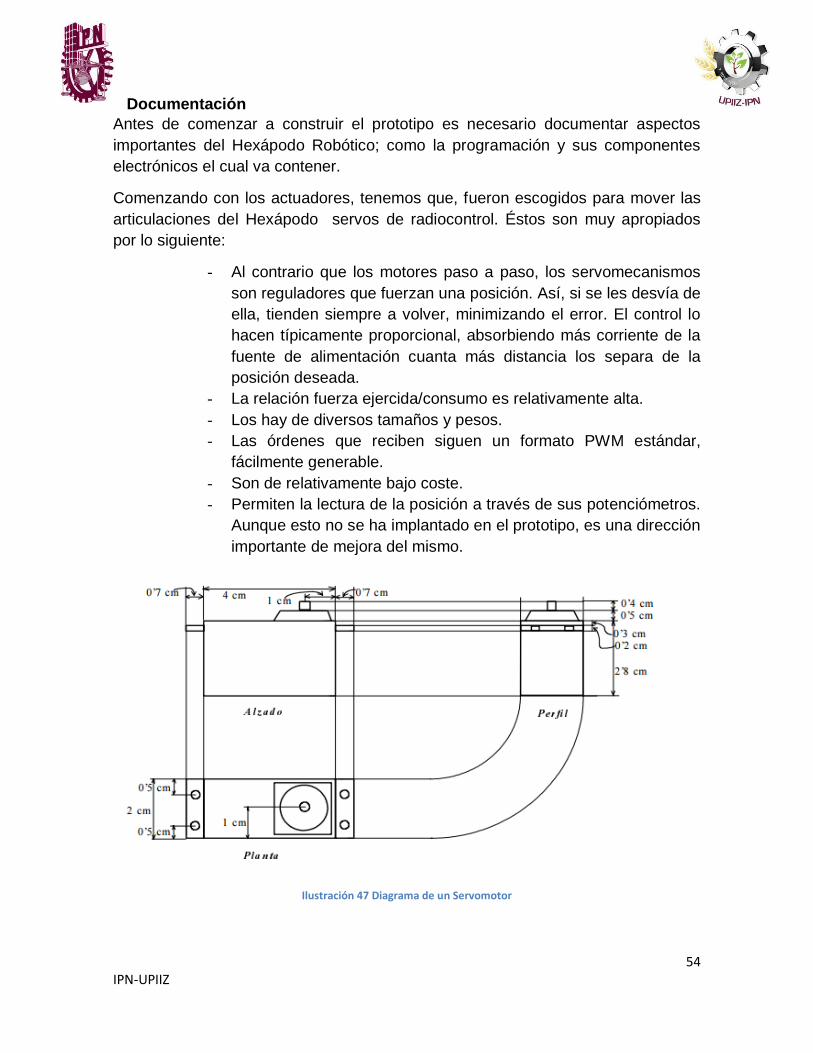
Comenzando con los actuadores, tenemos que, fueron escogidos para mover las
articulaciones del Hexápodo servos de radiocontrol. Éstos son muy apropiados
por lo siguiente:
- Al contrario que los motores paso a paso, los servomecanismos
son reguladores que fuerzan una posición. Así, si se les desvía de
ella, tienden siempre a volver, minimizando el error. El control lo
hacen típicamente proporcional, absorbiendo más corriente de la
fuente de alimentación cuanta más distancia los separa de la
posición deseada.
- La relación fuerza ejercida/consumo es relativamente alta.
- Los hay de diversos tamaños y pesos.
- Las órdenes que reciben siguen un formato PWM estándar,
fácilmente generable.
- Son de relativamente bajo coste.
- Permiten la lectura de la posición a través de sus potenciómetros.
Aunque esto no se ha implantado en el prototipo, es una dirección
importante de mejora del mismo.
Ilustración 47 Diagrama de un Servomotor

55 IPN-UPIIZ
Para el control del Hexapodo tendremos que usar un Microcontrolador de Texas
Instruments, llamado LaunchPad MSP430Gxx.
En este capítulo se describe el aspecto electrónico del control del robot. Se
diseñaron varios prototipos de circuitos capaces de generar y mantener las ondas
que los servos aceptan como señales de posicionamiento. Estas ondas, llamadas
PWM, codifican un dato numérico que indica al servo la posición absoluta a la que
debe desplazarse y en la que debe permanecer mientras la onda no cambie. Este
micro incluye toda la lógica de selección de servos y generación de ondas PWM.
También se detallan en este capítulo los problemas encontrados con la
alimentación de servos y controladora, y cómo se solucionaron. Por último se
presenta un estudio con en el que se enumeran las características de dos tarjetas
de entrada/salida con las que se hicieron pruebas de envío y recepción de
órdenes entre el ordenador y la controladora.
56 IPN-UPIIZ
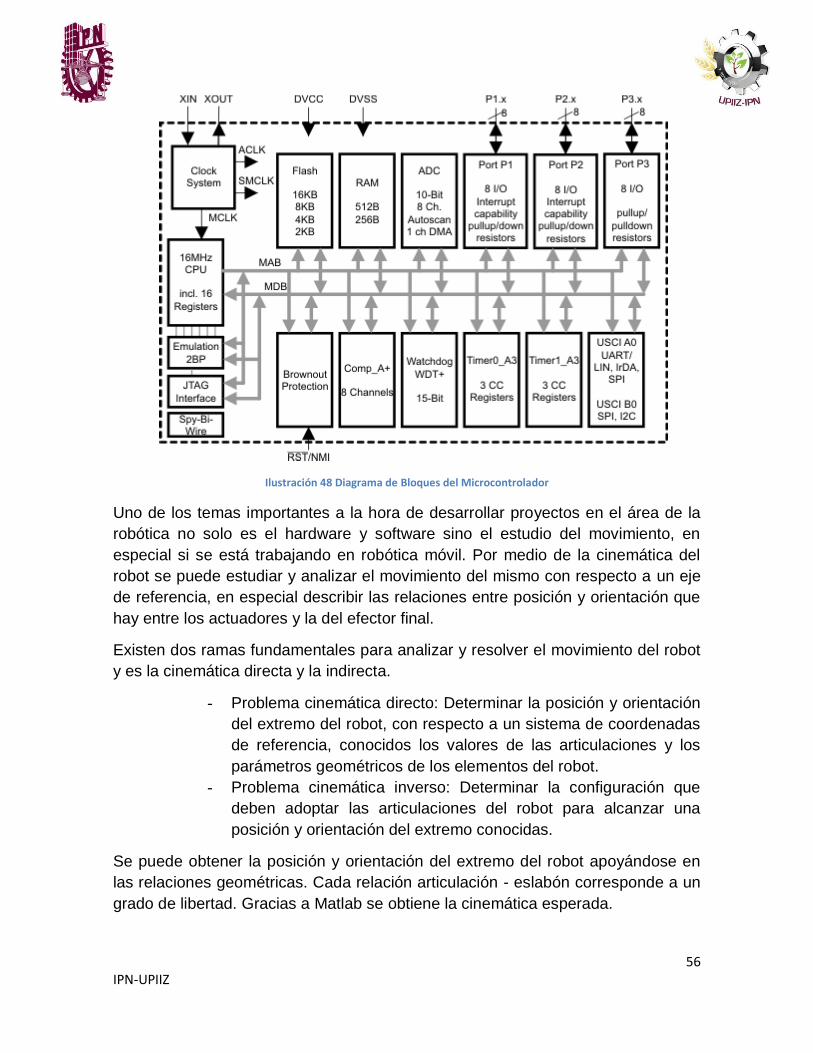
Ilustración 48 Diagrama de Bloques del Microcontrolador
Uno de los temas importantes a la hora de desarrollar proyectos en el área de la
robótica no solo es el hardware y software sino el estudio del movimiento, en
especial si se está trabajando en robótica móvil. Por medio de la cinemática del
robot se puede estudiar y analizar el movimiento del mismo con respecto a un eje
de referencia, en especial describir las relaciones entre posición y orientación que
hay entre los actuadores y la del efector final.
Existen dos ramas fundamentales para analizar y resolver el movimiento del robot
y es la cinemática directa y la indirecta.
- Problema cinemática directo: Determinar la posición y orientación
del extremo del robot, con respecto a un sistema de coordenadas
de referencia, conocidos los valores de las articulaciones y los
parámetros geométricos de los elementos del robot.
- Problema cinemática inverso: Determinar la configuración que
deben adoptar las articulaciones del robot para alcanzar una
posición y orientación del extremo conocidas.
Se puede obtener la posición y orientación del extremo del robot apoyándose en
las relaciones geométricas. Cada relación articulación - eslabón corresponde a un
grado de libertad. Gracias a Matlab se obtiene la cinemática esperada.
57 IPN-UPIIZ
Ilustración 49 Cinemática con ayuda de MatLab
Para los circuitos impresos se tomó los diagramas con el programa Proteus, el
cual se pasó el gerber para generar e imprimir los circuitos que se muestran a
continuación.
58 IPN-UPIIZ
Construcción de Prototipo
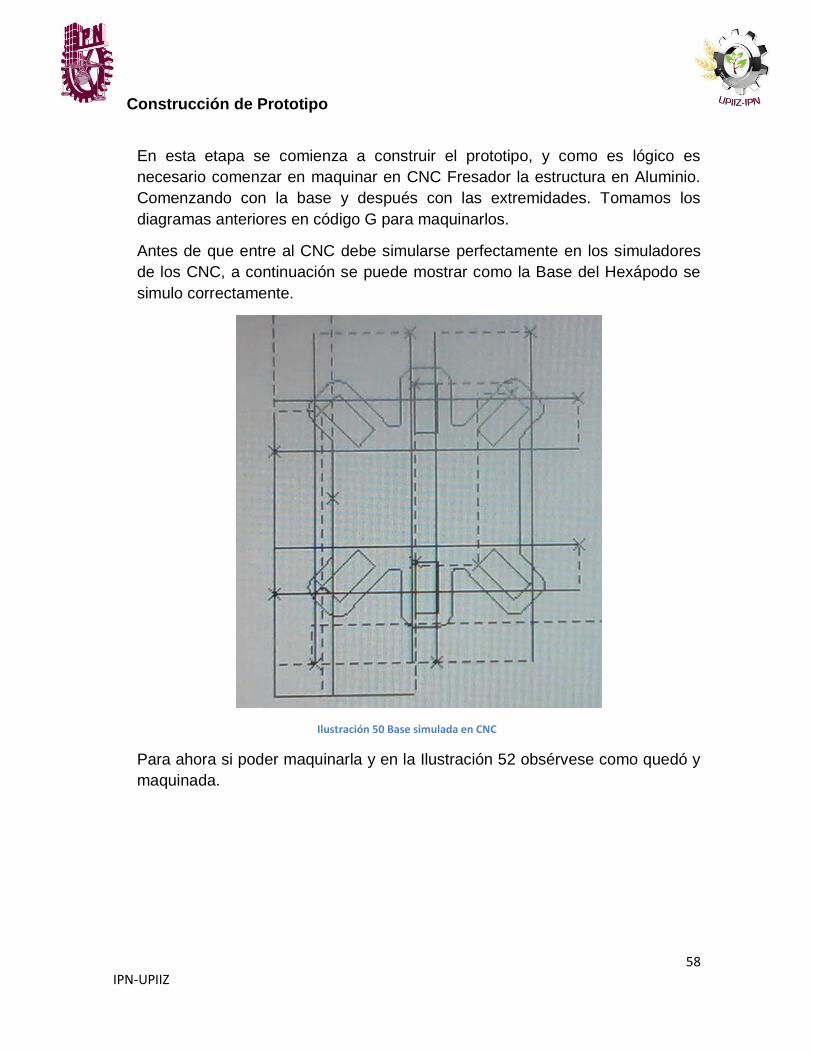
En esta etapa se comienza a construir el prototipo, y como es lógico es
necesario comenzar en maquinar en CNC Fresador la estructura en Aluminio.
Comenzando con la base y después con las extremidades. Tomamos los
diagramas anteriores en código G para maquinarlos.
Antes de que entre al CNC debe simularse perfectamente en los simuladores
de los CNC, a continuación se puede mostrar como la Base del Hexápodo se
simulo correctamente.
Ilustración 50 Base simulada en CNC
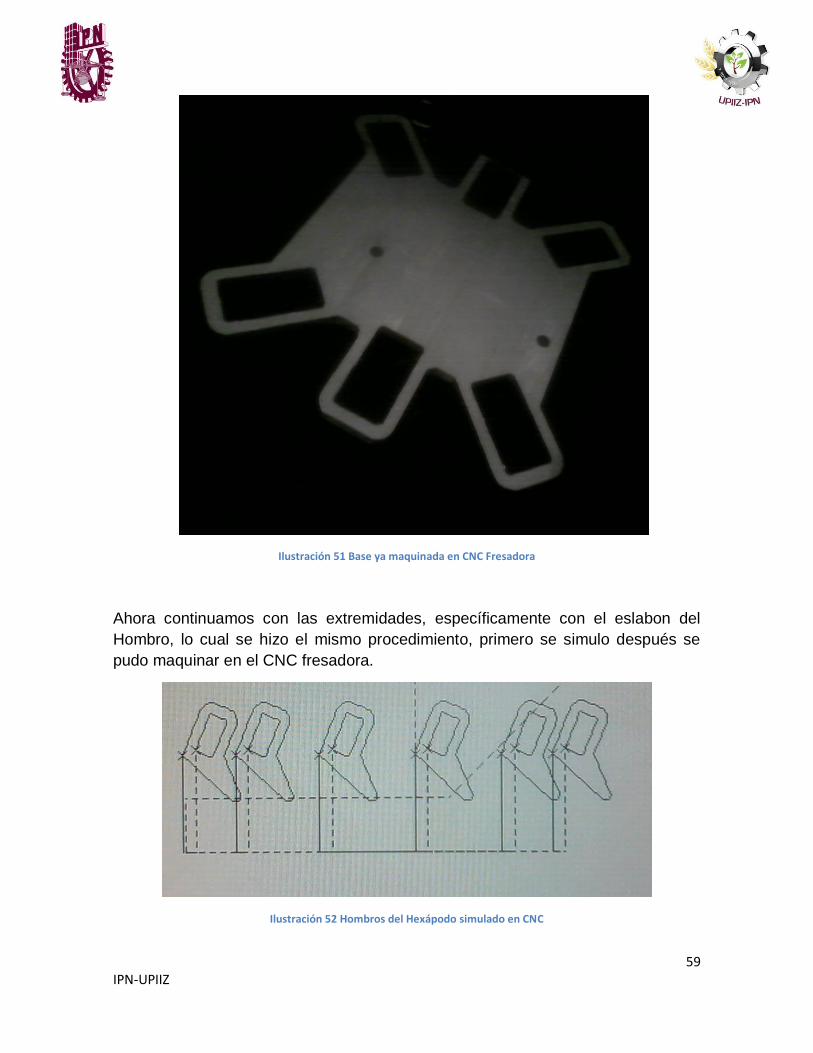
Para ahora si poder maquinarla y en la Ilustración 52 obsérvese como quedó y
maquinada.
59 IPN-UPIIZ
Ilustración 51 Base ya maquinada en CNC Fresadora
Ahora continuamos con las extremidades, específicamente con el eslabon del
Hombro, lo cual se hizo el mismo procedimiento, primero se simulo después se
pudo maquinar en el CNC fresadora.
Ilustración 52 Hombros del Hexápodo simulado en CNC
60 IPN-UPIIZ
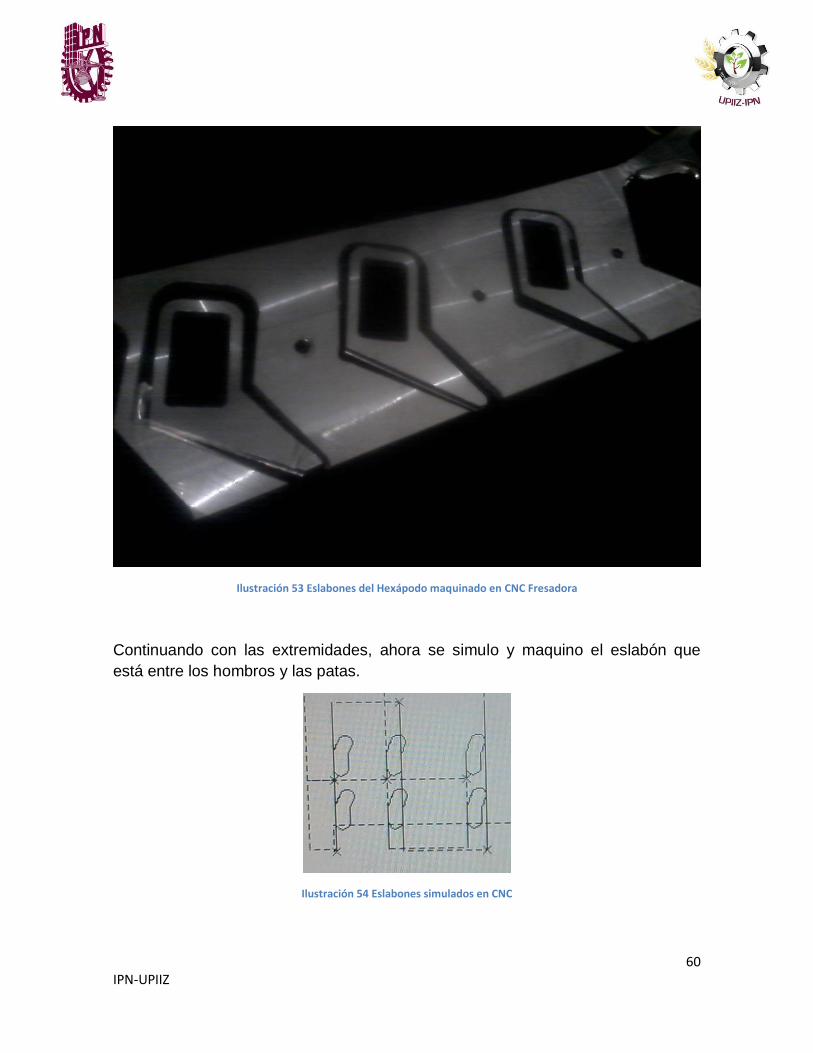
Ilustración 53 Eslabones del Hexápodo maquinado en CNC Fresadora
Continuando con las extremidades, ahora se simulo y maquino el eslabón que
está entre los hombros y las patas.
Ilustración 54 Eslabones simulados en CNC
61 IPN-UPIIZ
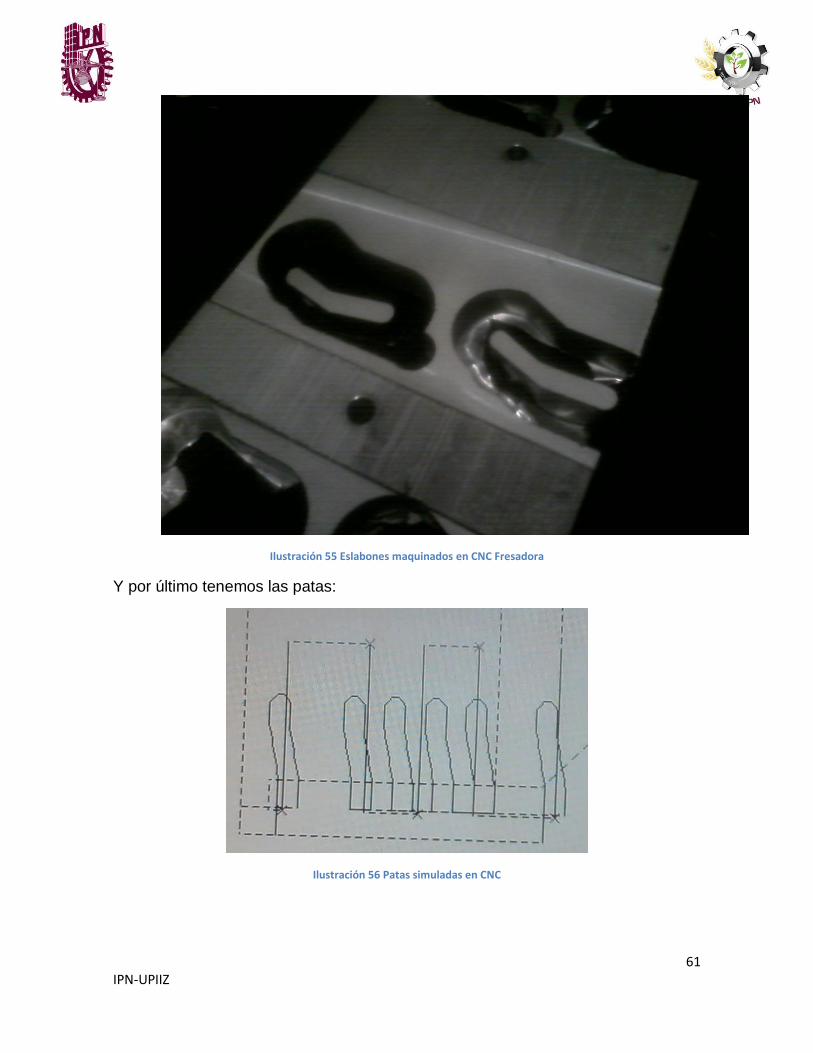
Ilustración 55 Eslabones maquinados en CNC Fresadora
Y por último tenemos las patas:
Ilustración 56 Patas simuladas en CNC
62 IPN-UPIIZ
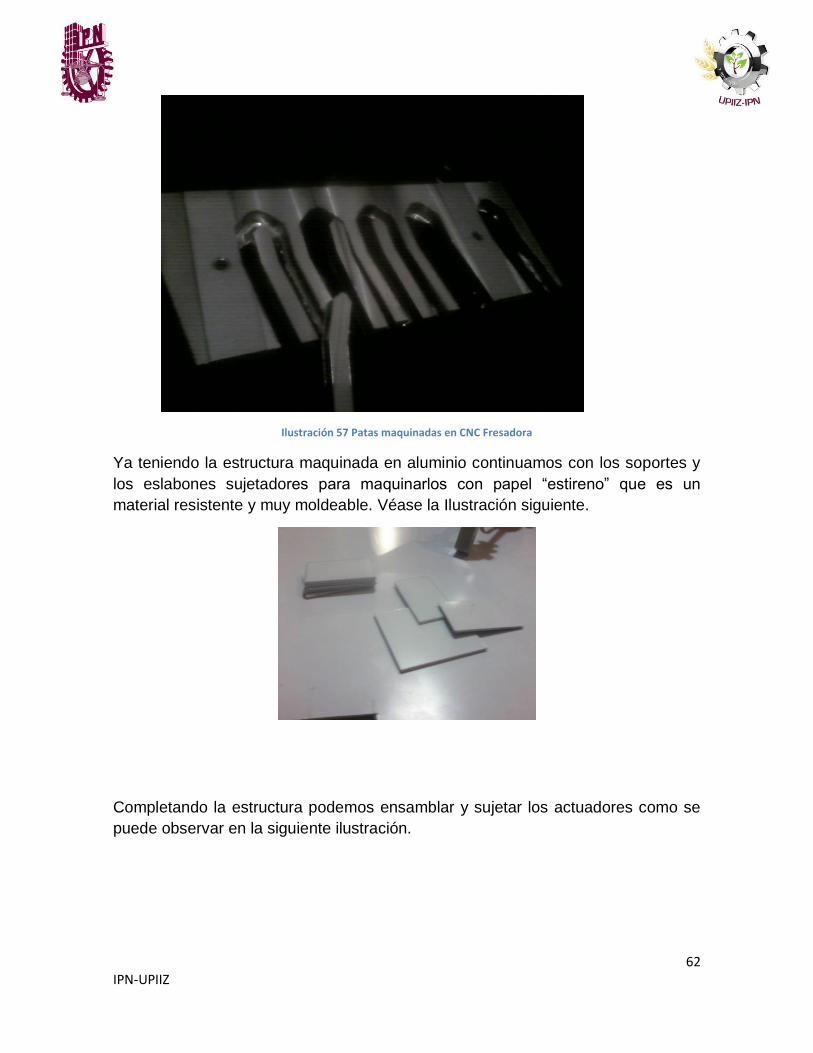
Ilustración 57 Patas maquinadas en CNC Fresadora
Ya teniendo la estructura maquinada en aluminio continuamos con los soportes y
los eslabones sujetadores para maquinarlos con papel “estireno” que es un
material resistente y muy moldeable. Véase la Ilustración siguiente.
Completando la estructura podemos ensamblar y sujetar los actuadores como se
puede observar en la siguiente ilustración.

63 IPN-UPIIZ
Ilustración 58 Extremidad con Servomotores montados
Y por último se fabrica los circuitos impresos para el hexápodo y toda esta listo
para tener el prototipo final. Véase Ilustraciones siguientes.
Ilustración 59 Circuitos. Diagramas en Proteus y ya impresos.

64 IPN-UPIIZ
Ilustración 60 Estructura terminada

65 IPN-UPIIZ
Pruebas
Ilustración 61 Hexápodo Final
CONCLUSIONES
No se puede entender y comprender la tecnología con solo verla teóricamente, es
necesario practicarla, aplicarla, encontrar los problemas y detalles que la
conforman y lo importante de todo es saber resolverlos; es lo que se pretende con
este prototipo para que los niños se acerquen a la gran tecnología.
Por otra parte con este proyecto, y como estudiante me eh llenado de más
información para poder solventar, resolver y documentar un proyecto de esta
magnitud.
66 IPN-UPIIZ
FUENTES DE CONSULTA
[1] http://www.contigosalud.com/la-importancia-del-aprendizaje-en-edad-temprana
[2] http://www.robodacta.mx/index.php?dispatch=products.view&product_id=553
[3] http://www.jecsa.com.mx/index.php/productos
[4] http://www.robodacta.mx/index.php?dispatch=products.view&product_id=201 y
http://www.robodacta.mx/index.php?dispatch=products.view&product_id=753
[5] http://www.ti.com/ww/en/launchpad/launchpads-msp430-msp-
exp430g2.html#tabs
[6] https://www.robodacta.mx/index.php?dispatch=products.view&product_id=1086
[7] http://articulo.mercadolibre.com.mx/MLM-513013649-robot-hexapodo-con-18-
servomotores-y-controladora-_JM
[8] http://es.aliexpress.com/popular/hexapod-robot-kit.html
[9] http://es.aliexpress.com/store/product/Robo-Soul-CR-6-Hexapod-Robtics-Six-
legged-18DOF-Spider-Robot-Kit-w-LD-2015-Digital/1391641_2022911690.html
67 IPN-UPIIZ
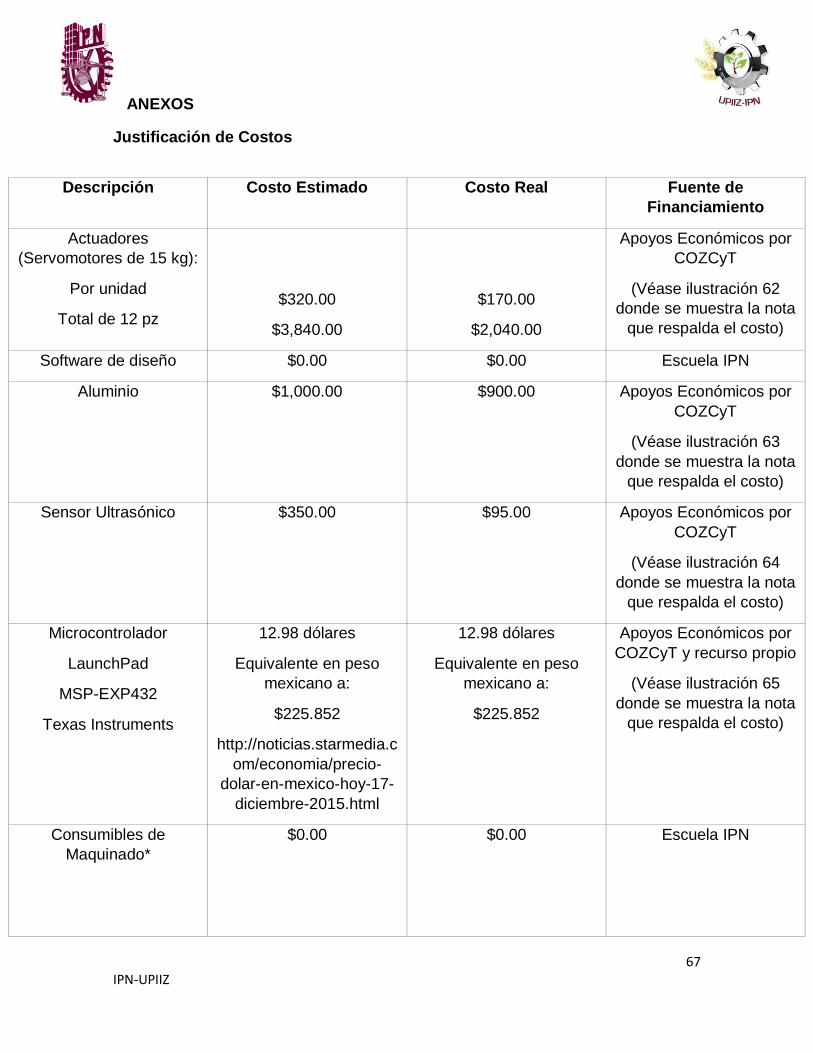
ANEXOS
Justificación de Costos
Descripción Costo Estimado Costo Real Fuente de
Financiamiento
Actuadores
(Servomotores de 15 kg):
Por unidad
Total de 12 pz
$320.00
$3,840.00
$170.00
$2,040.00
Apoyos Económicos por
COZCyT
(Véase ilustración 62
donde se muestra la nota
que respalda el costo)
Software de diseño $0.00 $0.00 Escuela IPN
Aluminio $1,000.00 $900.00 Apoyos Económicos por
COZCyT
(Véase ilustración 63
donde se muestra la nota
que respalda el costo)
Sensor Ultrasónico $350.00 $95.00 Apoyos Económicos por
COZCyT
(Véase ilustración 64
donde se muestra la nota
que respalda el costo)
Microcontrolador
LaunchPad
MSP-EXP432
Texas Instruments
12.98 dólares
Equivalente en peso
mexicano a:
$225.852
http://noticias.starmedia.c
om/economia/precio-
dolar-en-mexico-hoy-17-
diciembre-2015.html
12.98 dólares
Equivalente en peso
mexicano a:
$225.852
Apoyos Económicos por
COZCyT y recurso propio
(Véase ilustración 65
donde se muestra la nota
que respalda el costo)
Consumibles de
Maquinado*
$0.00 $0.00 Escuela IPN
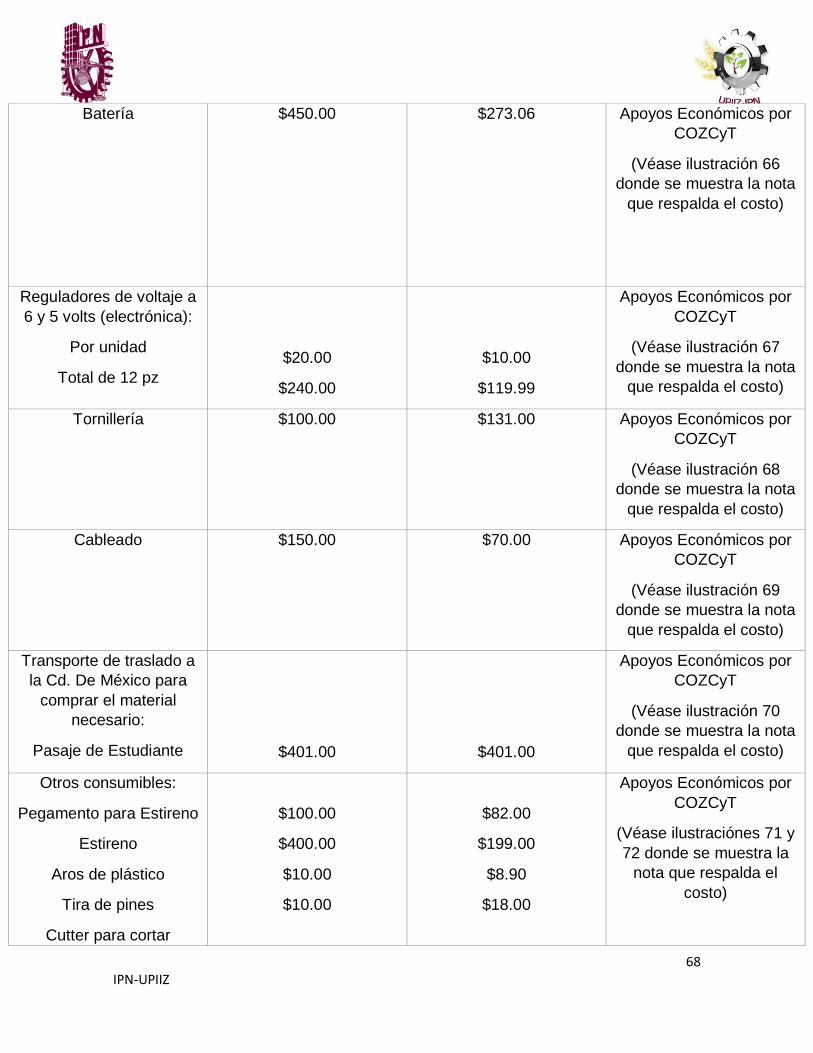
68 IPN-UPIIZ
Batería
$450.00 $273.06 Apoyos Económicos por
COZCyT
(Véase ilustración 66
donde se muestra la nota
que respalda el costo)
Reguladores de voltaje a
6 y 5 volts (electrónica):
Por unidad
Total de 12 pz
$20.00
$240.00
$10.00
$119.99
Apoyos Económicos por
COZCyT
(Véase ilustración 67
donde se muestra la nota
que respalda el costo)
Tornillería $100.00 $131.00 Apoyos Económicos por
COZCyT
(Véase ilustración 68
donde se muestra la nota
que respalda el costo)
Cableado $150.00 $70.00 Apoyos Económicos por
COZCyT
(Véase ilustración 69
donde se muestra la nota
que respalda el costo)
Transporte de traslado a
la Cd. De México para
comprar el material
necesario:
Pasaje de Estudiante
$401.00
$401.00
Apoyos Económicos por
COZCyT
(Véase ilustración 70
donde se muestra la nota
que respalda el costo)
Otros consumibles:
Pegamento para Estireno
Estireno
Aros de plástico
Tira de pines
Cutter para cortar
$100.00
$400.00
$10.00
$10.00
$82.00
$199.00
$8.90
$18.00
Apoyos Económicos por
COZCyT
(Véase ilustraciónes 71 y
72 donde se muestra la
nota que respalda el
costo)
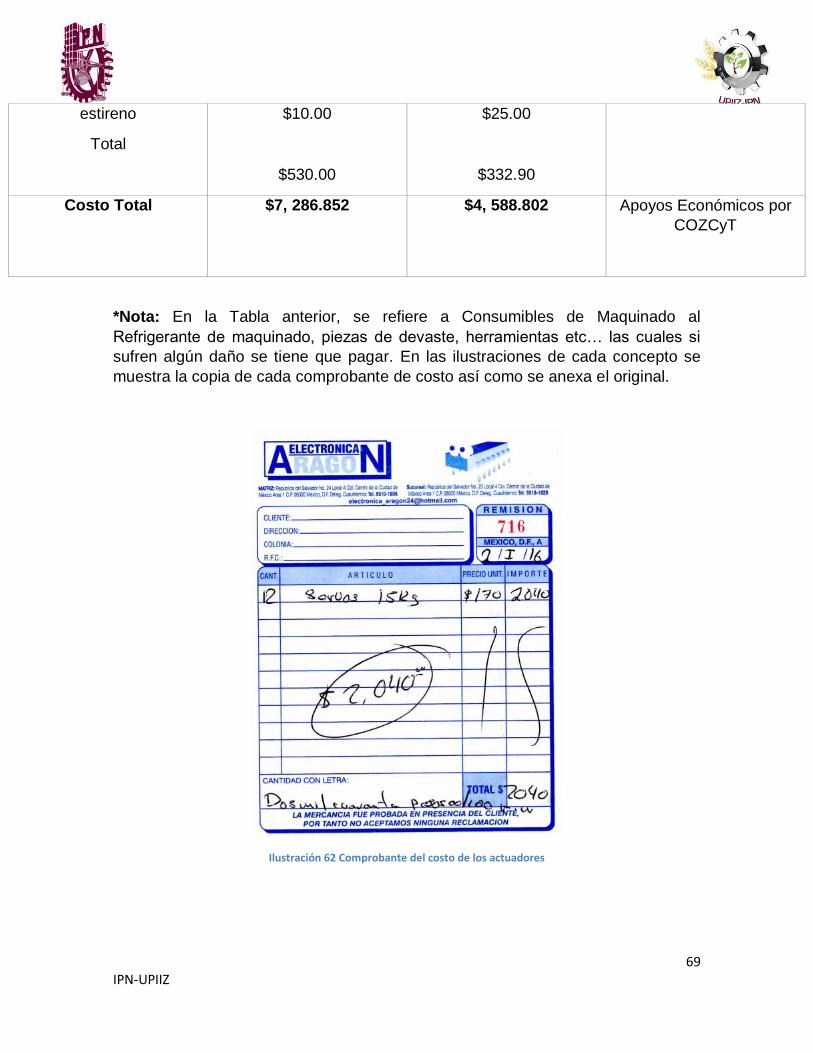
69 IPN-UPIIZ
estireno
Total
$10.00
$530.00
$25.00
$332.90
Costo Total $7, 286.852 $4, 588.802 Apoyos Económicos por
COZCyT
*Nota: En la Tabla anterior, se refiere a Consumibles de Maquinado al
Refrigerante de maquinado, piezas de devaste, herramientas etc… las cuales si
sufren algún daño se tiene que pagar. En las ilustraciones de cada concepto se
muestra la copia de cada comprobante de costo así como se anexa el original.
Ilustración 62 Comprobante del costo de los actuadores
70 IPN-UPIIZ
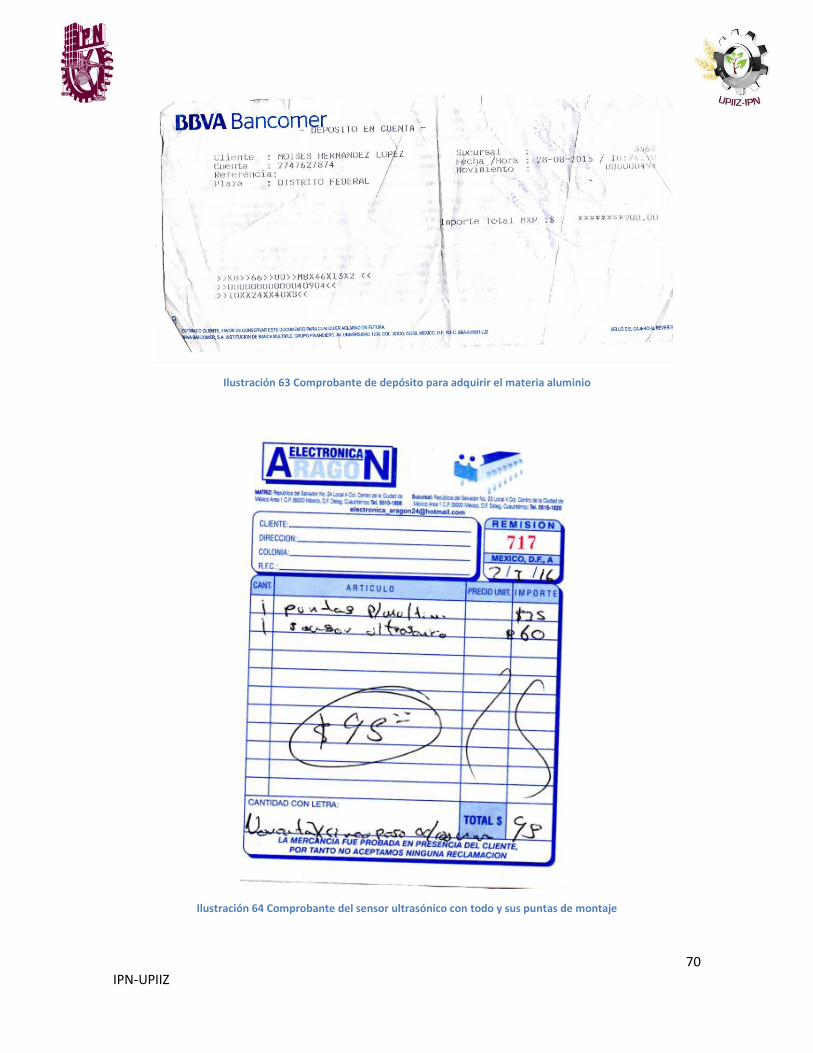
Ilustración 63 Comprobante de depósito para adquirir el materia aluminio
Ilustración 64 Comprobante del sensor ultrasónico con todo y sus puntas de montaje
71 IPN-UPIIZ
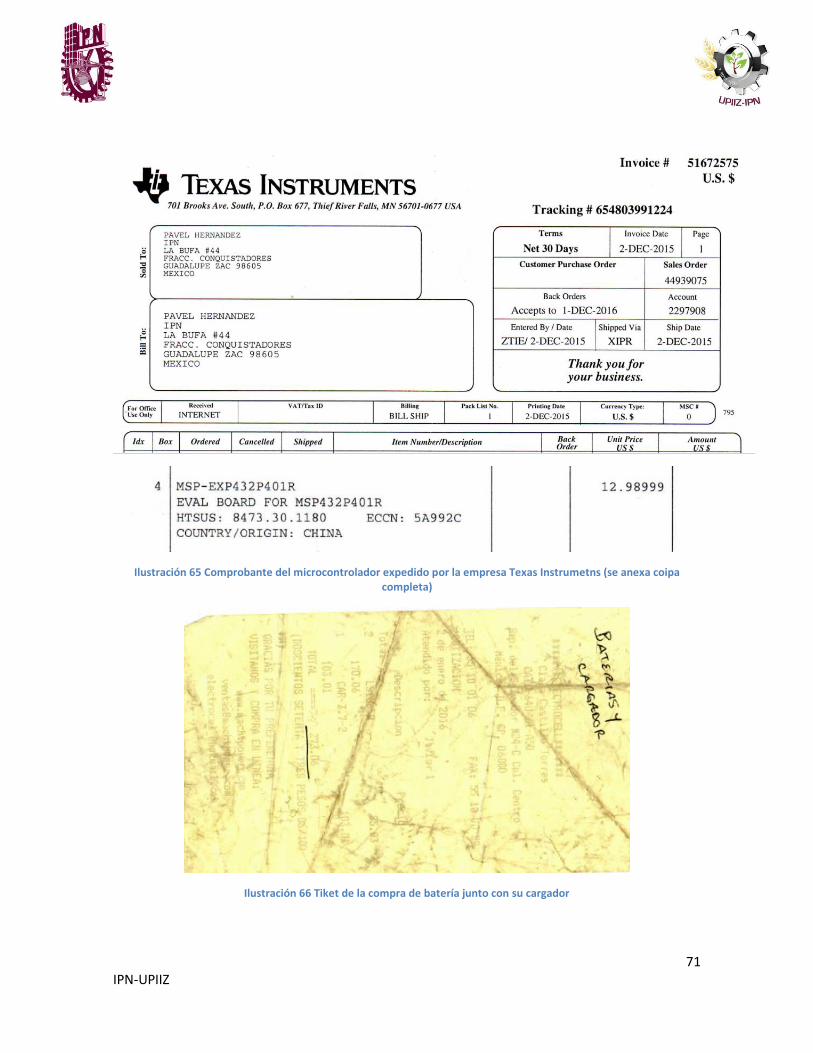
Ilustración 65 Comprobante del microcontrolador expedido por la empresa Texas Instrumetns (se anexa coipa completa)
Ilustración 66 Tiket de la compra de batería junto con su cargador
72 IPN-UPIIZ
Ilustración 67 Tiket de la compra de partes electrónicas
Ilustración 68 Nota de la compra de tornillos para el ensamble del prototipo
73 IPN-UPIIZ
Ilustración 69 Cableado para la alimentación y señales eléctricas de todo el prototipo
Ilustración 70 Boleto pagado de transporte al DF para comprar los componentes necesarios y reducir costos, el pasaje es medio por presentar credencial de estudiante
74 IPN-UPIIZ
Ilustración 71 Otros comprobantes de pines para soldar y placa fenólica de cobre, así como también aros de plástico
75 IPN-UPIIZ
Ilustración 72 Comporbantes de pegamentos para el estireno