herramientas de simulación en terminales · pdf filefunciones de distribución...
TRANSCRIPT

Tema 5
HERRAMIENTAS DE SIMULACIÓN EN TERMINALES PORTUARIAS DE CONTENEDORES
R. Sapiña, I. Yarza, A.M. Martín-Soberón, A. Monfort, N. Monterde
Fundación Valenciaport. Sede APV, Fase III, Avda. del Muelle del Turia, s/n, 46024 Valencia. [email protected]
INTRODUCCIÓN
Las terminales portuarias de contenedores (TPCs) son una parte esencial en la cadena logística del transporte de mercancías. Estas actúan como interfaz marítimo-terrestre, proporcionando los medios y la organización necesarios para que el intercambio de las cargas entre los modos marítimo y terrestre tenga lugar en las mejores condiciones de rapidez, eficiencia, seguridad, respeto al medio ambiente y económicas. Las TPCs poseen ciertas características que les permiten alcanzar un mayor grado de sistematización que las terminales de otro tipo de mercancías, como la estandarización del elemento de transporte (el contenedor) y la estandarización en la forma de manipulación de la mercancía (Monfort et al., 2011b). Sin embargo, las TPCs son sistemas dinámicos afectados por relaciones complejas entre una gran cantidad de parámetros independientes, lo que dificulta su gestión y planificación. Por ello los planificadores y gestores de estas instalaciones requieren herramientas que les ayuden a entender y evaluar la incidencia que tendrá la puesta en marcha de futuros proyectos o iniciativas sobre el desarrollo de la actividad. Conocer cómo responderá un sistema ante una determinada acción permite elegir aquellas iniciativas que mejor satisfacen los objetivos del sistema en cuestión de acuerdo con unos criterios preestablecidos en base a sus necesidades estratégicas, en este caso, la mejora del rendimiento operacional, el incremento de la seguridad y protección, y la contribución a la sostenibilidad ambiental (Sapiña y Martín-Soberón, 2012).
Para conocer la respuesta del sistema ante una determinada acción existen diferentes métodos, por un lado la opción con resultados más realistas es realizar pruebas con el propio sistema real, pero debido a factores económicos, tiempo y recursos se suele presentar como una opción inviable.
Otros métodos se basan en la realización de un modelo conceptual simplificado del sistema real. En base a la complejidad de los modelos tradicionalmente aplicados en puertos para la planificación y gestión portuaria a todos los niveles, según Groenveld (2001) existen tres clases de modelos (Figura 1). Los modelos muy simplificados para abordar problemas de congestión aislados en instalaciones con poco tráfico, que aplican técnicas empíricas o la regla del dedo gordo (o “rule of the thumb”); para modelos simplificados para la planificación y gestión de muelle, que emplean la teoría de colas u otras técnicas de programación lineal; y finalmente modelos complejos cuando se requiere la consideración un número elevado de variables se emplea la simulación.
Figura 1: Herramientas de toma de decisiones (Groenveld, 2001).
Sistema real
Modelo conceptual
Problemas a resolver
Técnicas de programación lineal o
Teoría de colas SIMULACIÓN
Modelo simplificado
Técnicas empíricasRegla del dedo gordo
Modelo complicado
Modelo muy simplificado
Con la evolución de los ordenadores la simulación se ha convertido en una de las
técnicas más empleadas en diferentes sectores (medicina, industria, enseñanza, etc.) incluido el portuario, tanto como herramienta para la evaluación de escenarios y la toma de decisiones como para el entrenamiento y capacitación de los recursos humanos que conducen el sistema. SIMULACIÓN EN TERMINALES PORTUARIAS DE CONTENEDORES
Según la definición más formal, “la simulación es el proceso de diseñar un modelo de un sistema real y llevar a término experiencias con él, con la finalidad de comprender el comportamiento del sistema o evaluar nuevas estrategias –dentro de los límites impuestos por un cierto criterio o un conjunto de ellos– para el funcionamiento del sistema” (Shannon y Johannes, 1976).
Es decir, ante un problema a resolver, la simulación permite imitar la situación real y plantear diversos escenarios, imponiéndoles unos condicionantes y reglas, para evaluar varias alternativas y elegir la solución más conveniente sin tener que emplear el sistema real. De este modo, la simulación aplicada a las terminales portuarias de contenedores resulta ser una herramienta de ayuda a la toma de decisiones en el ámbito de la planificación y gestión de las TPCs. Generalmente la estructura de un proceso de toma de decisión contempla los siguientes pasos (Koenes, 1995; Viscencio, 2002; Anderson, Sweneey y Williams, 2004):
1. Definición del problema y de los factores que influyen en él. 2. Definición y ponderación de los criterios de decisión. 3. Planteamiento de soluciones. 4. Evaluación de las alternativas. 5. Selección de la mejor alternativa. 6. Aplicación de la solución seleccionada. 7. Evaluación de los resultados. La simulación se integra dentro de esta estructura en el punto 4, a la hora de
plantear y evaluar las posibles propuestas de solución, facilitando el estudio de conveniencia de su implementación en base a los criterios de decisión previamente definidos, convirtiéndose en una herramienta que proporciona información al experto y aumenta su nivel de conocimiento sobre las alternativas planteadas, contribuyendo de esa forma al acierto en la toma de decisiones (Monfort et al., 2012). La simulación permite, entre otras cosas:
Descubrir cómo se comporta un determinado sistema.
Explicar el comportamiento observado de un sistema.
Predecir el comportamiento futuro del sistema.
Disminuir el riesgo de error en sistemas reales.
Disminuir costos asociados a la experimentación en el sistema real.
Identificar cuellos de botella.
Estudiar y probar las alternativas de inversión.
Gestionar la toma de decisiones operativas diarias.
Mejorar la utilización de equipos.
Reducir tiempos de esperas y tamaños de colas.
Optimizar la priorización y la lógica de distribución de contenedores.
Asignación eficiente de recursos.
Estudiar y probar las diferentes configuraciones de Layout.
El modelo: tipos de simulación Para poder realizar la experimentación de un sistema en un simulador, primero es
necesaria la construcción del modelo. La modelización se define como la abstracción de un sistema con el fin de reproducir su comportamiento en condiciones normales y

ante cualquier modificación de los parámetros que lo componen. Atendiendo a cómo se modela la realidad, existen tres tipos de simulación:
1. Simulación física: consiste en la realización de experimentos sobre un modelo material semejante a la realidad, a tamaño real o a escala (maqueta).Esta es de difícil aplicación en las TPCs ya que a tamaño real supondría la duplicidad de muchos recursos, con costes económicos y de tiempos similares a los que supondría trabajar sobre el sistema real. La realización experimentos a escala tampoco es factible, aunque en ocasiones en su fase inicial pueden desarrollarse prototipos escalados.
2. Simulación por analogía: empleada fundamentalmente en electricidad y electrónica, donde tanto el modelo como el objeto real tienen una misma o igual descripción matemática.
3. Simulación matemática: se fundamenta en modelos matemáticos para representar la realidad, ya sean analíticos o computacionales. Este es el tipo más común de simulación también se puede desagregar en:
a. Simulación de eventos discretos: este tipo de simulación tiene dos características principales, por un lado permite configurar objetos o estructura de objetos para imitar el comportamiento del sistema real, y por otro lado los eventos se acontecen a lo largo de la secuencia de tiempo. Una variante de la simulación discreta de eventos es la simulación discreta multiagente, en la que los objetos son conocidos como agentes. Mientras que en una simulación discreta de eventos los objetos sólo tienen elementos de control, en la simulación multiagente los agentes cuentan tanto con elementos de control como con métodos que definen como dicha entidad interacciona con los recursos y con otros agentes.
b. Simulación continua: resuelve las ecuaciones diferenciales que describen la evolución de un sistema utilizando ecuaciones continuas. Se emplean para simular información u objetos que evolucionan de modo continuo sin saltos de tiempo.
A su vez las simulación de eventos discretos esta divida en dos: i. Determinista: los datos necesarios para alimentar el modelo son
completamente conocidos y determinados. ii. Estocástica: los datos empleados para alimentar el modelo son
funciones de distribución probabilística y por tanto no se conocen exactamente y por tanto las soluciones son también de tipo probabilístico.
Por otro lado, atendiendo a la dependencia del tiempo, las simulaciones pueden ser:
i. Estáticas: se entiende por simulación estática la representación de un sistema para un instante dado y por tanto no reproduce una evolución en el tiempo.
ii. Dinámica: un modelo de simulación dinámica representa a un sistema en el que el tiempo es una variable de interés.
Aplicación a TPCs
Las TPCs simulan para determinar los efectos que producen en el rendimiento de la terminal los cambios en la gestión operacional ocasionados por la toma de decisiones a nivel estratégico, táctico y operativo. En consecuencia, sus criterios de decisión quedan expresados en forma de un sistema de indicadores de rendimiento operacional. En la mayoría de las TPCs las simulaciones son de tipo matemática discreta multiagente estocástica dinámica.
En las terminales, como parte de la cadena logística del contenedor, concurren múltiples agentes (Monfort et al., 2011a), tanto del negocio (agentes marítimos,
navieras, buques, aduanas, Autoridad Portuaria, etc.), como agentes de la propia estructura y operación (estibadores, trabajadores de la terminal, distintos tipos de equipos, etc.), que interactúan entre sí. Su actividad se modeliza con distribuciones de probabilidad referentes a llegadas de buques, tiempos de servicio, promedio de movimientos por hora de equipos y manipuladores, llegadas de camiones y ferrocarril, etc.; esta aleatoriedad propicia que su modelización sea estocástica y no determinista. Por último, la necesidad de que la simulación sea dinámica viene impuesta por la importancia que tiene el tiempo en la gestión de sistemas como pueden ser las terminales (Sapiña y Martín-Soberón, 2012). SIMULACIÓN COMO HERRAMIENTA DE PLANIFICACIÓN Y GESTIÓN PORTUARIA
La planificación y gestión en las Terminales Portuarias de Contenedores tiene dos facetas diferenciadas aunque evidentemente relacionadas, la empresarial, común a cualquier negocio, y la operacional, específica de la actividad.
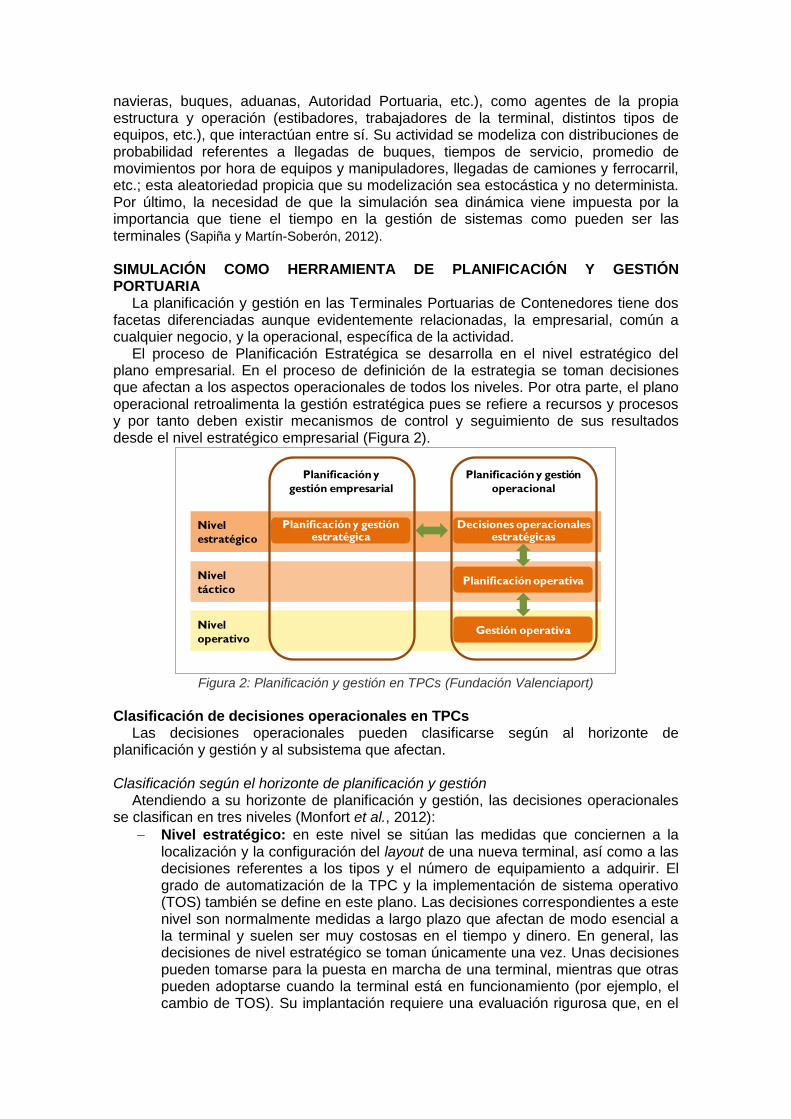
El proceso de Planificación Estratégica se desarrolla en el nivel estratégico del plano empresarial. En el proceso de definición de la estrategia se toman decisiones que afectan a los aspectos operacionales de todos los niveles. Por otra parte, el plano operacional retroalimenta la gestión estratégica pues se refiere a recursos y procesos y por tanto deben existir mecanismos de control y seguimiento de sus resultados desde el nivel estratégico empresarial (Figura 2).
Figura 2: Planificación y gestión en TPCs (Fundación Valenciaport)
Clasificación de decisiones operacionales en TPCs
Las decisiones operacionales pueden clasificarse según al horizonte de planificación y gestión y al subsistema que afectan. Clasificación según el horizonte de planificación y gestión
Atendiendo a su horizonte de planificación y gestión, las decisiones operacionales se clasifican en tres niveles (Monfort et al., 2012):
Nivel estratégico: en este nivel se sitúan las medidas que conciernen a la localización y la configuración del layout de una nueva terminal, así como a las decisiones referentes a los tipos y el número de equipamiento a adquirir. El grado de automatización de la TPC y la implementación de sistema operativo (TOS) también se define en este plano. Las decisiones correspondientes a este nivel son normalmente medidas a largo plazo que afectan de modo esencial a la terminal y suelen ser muy costosas en el tiempo y dinero. En general, las decisiones de nivel estratégico se toman únicamente una vez. Unas decisiones pueden tomarse para la puesta en marcha de una terminal, mientras que otras pueden adoptarse cuando la terminal está en funcionamiento (por ejemplo, el cambio de TOS). Su implantación requiere una evaluación rigurosa que, en el
Nivel
táctico
Nivel
operativo
Planificación operativa
Gestión operativa
Nivel
estratégico
Planificación y gestión estratégica
Decisiones operacionales estratégicas
Planificación y
gestión empresarial
Planificación y gestión
operacional

caso de que la terminal no sea nueva, contemple cómo afecta la medida al funcionamiento de la terminal, es decir se deberá analizar qué ocurre durante la puesta en marcha de la medida hasta que esté completamente operativa.
Nivel táctico: en este nivel se decide sobre el uso del espacio de la terminal (zonificación), y se definen unas normas generales de asignación de recursos a las tareas, así como el trazado de los recorridos de los equipos de transporte horizontal. Estas decisiones suelen estar vigentes durante varios meses, o como mínimo, semanas y constituyen los criterios generales de funcionamiento. En este nivel se realiza la planificación de la operativa con la información previa que mandan otros agentes de la cadena logístico-portuaria.
Nivel operativo: el nivel operativo comprende la gestión operativa, es decir la asignación de equipos concretos para realizar cada actividad y se generan los planes de trabajo específicos de cada uno. Algunas decisiones deben tomarse al inicio de las operaciones y otras mientras se ejecutan los procesos, en general en segundos, considerando el estado real de la TPC en ese momento.
Estos tres niveles de planificación y gestión se estudian por separado aunque, las decisiones tomadas en niveles superiores influyen sobre los niveles inferiores y los problemas de los niveles inferiores pueden modificar medidas de rango superior.
Clasificación por subsistemas
Las decisiones operacionales también pueden clasificarse atendiendo al subsistema al que afectan de los cuatro en los que puede dividirse una TPC (Figura 3):
1. El subsistema de carga y descarga de buques o de línea de atraque es el encargado de resolver la interfaz marítima, con todos los aspectos de infraestructura y equipamiento que ello conlleva (muelle, medios de carga y descarga, etc.), y las relaciones, con los agentes implicados.
2. El subsistema de almacenamiento normalmente ocupa la mayor parte de la superficie de la terminal y su función es la de depósito temporal de las mercancías, permitiendo acompasar el ritmo de las entradas y salidas de contenedores en la terminal. La disposición de este subsistema y su extensión condicionan y dependen del tiempo de estancia, del volumen de tráfico, del equipamiento principal y de la lógica operacional (sentidos de circulación, alturas operativas, zonificaciones) que empleen.
3. El subsistema de recepción y entrega integrado por las puertas terrestres para camión y ferrocarril, equipadas con aquellas instalaciones que se dispongan para facilitar la captación del alto volumen de información que se adquiere en esta zona, y por los espacios y equipos necesarios para realizar la operación.
4. El subsistema de interconexión es el que asegura el transporte de las mercancías entre los subsistemas anteriores, este subsistema engloba la solución tecnológica adoptada en cada caso para los movimientos físicos y de información que se precisan. En función de la tipología de la terminal y del equipo del subsistema de almacenamiento, se empleará una determinada maquinaria para cada uno de los movimientos y para el transporte interno de la mercancía.

Figura 3: Subsistemas de una terminal (Monfort et al.,2011a)
La morfología de estos subsistemas varía dependiendo de la tipología de la
terminal. En cualquier caso debe recordarse que la modelización por subsistemas es una simplificación conceptual y que en realidad la terminal funciona como un sistema integrado y por eso un problema localizado puede afectar al resto de la actividad.
Clasificación de decisiones operacionales en TPCs según subsistemas y horizontes de planificación y gestión
Atendiendo a estos dos criterios de clasificación de decisiones operacionales en TPCs, estas quedarían ordenadas según las Figura 4.
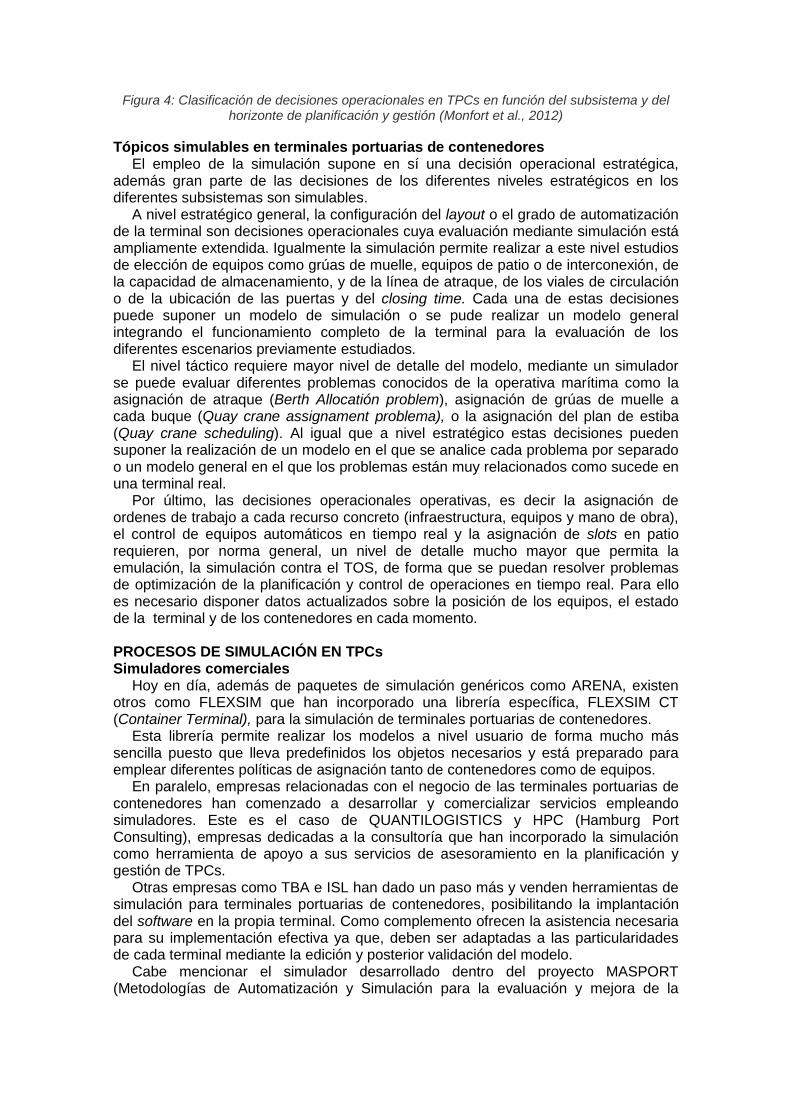
Figura 4: Clasificación de decisiones operacionales en TPCs en función del subsistema y del horizonte de planificación y gestión (Monfort et al., 2012)
Tópicos simulables en terminales portuarias de contenedores El empleo de la simulación supone en sí una decisión operacional estratégica,
además gran parte de las decisiones de los diferentes niveles estratégicos en los diferentes subsistemas son simulables.
A nivel estratégico general, la configuración del layout o el grado de automatización de la terminal son decisiones operacionales cuya evaluación mediante simulación está ampliamente extendida. Igualmente la simulación permite realizar a este nivel estudios de elección de equipos como grúas de muelle, equipos de patio o de interconexión, de la capacidad de almacenamiento, y de la línea de atraque, de los viales de circulación o de la ubicación de las puertas y del closing time. Cada una de estas decisiones puede suponer un modelo de simulación o se pude realizar un modelo general integrando el funcionamiento completo de la terminal para la evaluación de los diferentes escenarios previamente estudiados.
El nivel táctico requiere mayor nivel de detalle del modelo, mediante un simulador se puede evaluar diferentes problemas conocidos de la operativa marítima como la asignación de atraque (Berth Allocatión problem), asignación de grúas de muelle a cada buque (Quay crane assignament problema), o la asignación del plan de estiba (Quay crane scheduling). Al igual que a nivel estratégico estas decisiones pueden suponer la realización de un modelo en el que se analice cada problema por separado o un modelo general en el que los problemas están muy relacionados como sucede en una terminal real.
Por último, las decisiones operacionales operativas, es decir la asignación de ordenes de trabajo a cada recurso concreto (infraestructura, equipos y mano de obra), el control de equipos automáticos en tiempo real y la asignación de slots en patio requieren, por norma general, un nivel de detalle mucho mayor que permita la emulación, la simulación contra el TOS, de forma que se puedan resolver problemas de optimización de la planificación y control de operaciones en tiempo real. Para ello es necesario disponer datos actualizados sobre la posición de los equipos, el estado de la terminal y de los contenedores en cada momento.
PROCESOS DE SIMULACIÓN EN TPCs Simuladores comerciales
Hoy en día, además de paquetes de simulación genéricos como ARENA, existen otros como FLEXSIM que han incorporado una librería específica, FLEXSIM CT (Container Terminal), para la simulación de terminales portuarias de contenedores.
Esta librería permite realizar los modelos a nivel usuario de forma mucho más sencilla puesto que lleva predefinidos los objetos necesarios y está preparado para emplear diferentes políticas de asignación tanto de contenedores como de equipos.
En paralelo, empresas relacionadas con el negocio de las terminales portuarias de contenedores han comenzado a desarrollar y comercializar servicios empleando simuladores. Este es el caso de QUANTILOGISTICS y HPC (Hamburg Port Consulting), empresas dedicadas a la consultoría que han incorporado la simulación como herramienta de apoyo a sus servicios de asesoramiento en la planificación y gestión de TPCs.
Otras empresas como TBA e ISL han dado un paso más y venden herramientas de simulación para terminales portuarias de contenedores, posibilitando la implantación del software en la propia terminal. Como complemento ofrecen la asistencia necesaria para su implementación efectiva ya que, deben ser adaptadas a las particularidades de cada terminal mediante la edición y posterior validación del modelo.
Cabe mencionar el simulador desarrollado dentro del proyecto MASPORT (Metodologías de Automatización y Simulación para la evaluación y mejora de la

capacidad, rendimiento y nivel de servicio de terminales PORTuarias de contenedores), que a continuación se detalla. Desarrollo de una herramienta de simulación como apoyo a la planificación y gestión de TPCs: el proyecto MASPORT
Con financiación del Plan Nacional de I+D+i 2008-2011, se conformó un consorcio para desarrollar el proyecto MASPORT−Metodologías de Automatización y Simulación para la evaluación y mejora de la capacidad, rendimiento y nivel de servicio de terminales PORTuarias de contenedores. Uno de los cinco objetivos de dicho proyecto era el desarrollo y aplicación de una herramienta de simulación para TPCs que facilitará la detección y resolución de los cuellos de botella relacionados con la explotación de las TPCs y el ensayo de innovaciones tecnológicas y otras alternativas de planificación y explotación, a corto y medio plazo.
Este proyecto dio como resultado un editor morfológico y de experimentos que permite implementar una TPCs con el software Flexsim para la evaluación de alternativas en función de diferentes niveles de abstracción. Niveles de abstracción de un modelo de simulación
A la hora de realizar un modelo de simulación es necesario tener claro la finalidad y los resultados que se esperan obtener, es un error habitual pretender obtener un modelo lo más preciso posible sin tener en cuenta sus objetivos o usos. Por este motivo en el proyecto MASPORT se identificaron hasta 5 niveles de abstracción (Navarro et al., 2009) para el desarrollo del modelo de simulación.
El nivel de abstracción no es más que el detalle con el que se reproduce el comportamiento de un sistema ante un conjunto de experimentos. Por lo tanto el modelo está asociado siempre a las respuestas que se pretendan extraer de él; es decir, el nivel de detalle en los componentes y su comportamiento vendrá determinado por el uso que se quiera hacer del mismo.
El nivel 1, “Operativa de puertas: gestión discreta”, supone la abstracción de todos los componentes internos de una TPC. De este modo la terminal se modela de forma similar a un almacén simple, donde todos los objetos de un mismo tipo (buques, camiones, contenedores, etc.) se tratan de una forma homogénea.
Figura 5: Nivel 1 de abstracción de simulación de una TPC (Monfort et al., 2012)
El nivel 2, “Operativa de puertas: gestión continua”, añade el detalle de la operativa de puertas tanto marítimas como terrestres. Los modelos con este nivel de detalle utilizan funciones de distribución continuas que modelizan el número de movimiento por hora de los equipos y algoritmos de asignación de la línea de atraque y asignación del número de grúas y equipos de recepción y entrega.
Puerta marítima
Puerta terrestre
camiones
Puerta terrestre
ferrocarril

Figura 6: Nivel 2 de abstracción de simulación de una TPC (Monfort et al., 2012)
En el nivel 3, “Comportamiento de patio”, se modela el patio dividiéndolo en
diferentes zonas con estrategias de almacenamiento y operativa diferentes, reflejando con una mayor fidelidad la gestión de patio de la TPC por áreas diferenciadas para exportación, importación, vacíos o transbordos. Las diferentes zonas tienen características propias que hacen que los parámetros o características de explotación como los tiempos de estancia del contenedor, sean distintos y deban ser modelados de forma particular. Para modelar la operativa de patio a este nivel, cada zona de la terminal se considera como un almacén homogéneo donde se apilan contenedores de un tipo determinado.
Figura 7: Nivel 3 de abstracción de simulación de una TPC (Monfort et al., 2012)
El nivel 4, “Operativa a nivel de bloque”, es el siguiente paso en la definición del
nivel de detalle en la operación de patio. En este nivel se tienen en cuenta las características de almacenamiento del patio, lo que significa que se consideran la distribución en planta y características de los bloques, las pilas de contenedores y las calles de patio. Sin embargo los contenedores no tienen una identidad propia diferenciada dentro de un servicio, por lo que ciertas operaciones como remociones o housekeeping se modelan como funciones de eficiencia o mediante un incremento en los tiempos de servicio. A este nivel comienza a estudiarse el tráfico interno de patio.
Carga y
descarga
Recepción y
entrega
Zona 2
Zona 3
Zona 1

Figura 8: Nivel 4 de abstracción de simulación de una TPC (Monfort et al., 2012)
Con el nivel 5, “Operativa TOS”, se obtiene el máximo grado de detalle. Cada
contenedor tiene todas las características que permitirían conectar el simulado con el sistema operativo de la terminal (TOS) e interaccionar con él como si fuese la propia terminal real. Este nivel de detalle requiere de ciertas funciones que por lo general necesitan de la intervención de un operador o técnico, lo que hace muy complejo la simulación durante largos periodos de tiempo.
El nivel de detalle y el horizonte temporal de la simulación objetivo depende de los elementos que se quieran analizar y de las respuestas que se pretendan obtener. En función de los requisitos del nivel de detalle y el horizonte temporal se debe definir un nivel de abstracción adecuado para el modelo. Proceso de simulación
Sin embargo la identificación del sistema y la definición del modelo son solamente las primeras etapas del proceso de simulación. El primero de los paso del proceso de simulación es (1) el análisis del sistema real con el fin de determinar la interacción del mismo con los otros sistemas, sus restricciones, las variables que dentro de este interactúan y sus interrelaciones, las decisiones a evaluar y los resultados que se esperan obtener. A partir de esta información es posible (2) formular el modelo apropiado para el sistema. En la simulación matemática esta etapa consiste en definir los parámetros que forman parte de él y formular las relaciones básicas entre los mismos para su posterior (3) implementación en el ordenador mediante el lenguaje de programación predefinido por el simulador. En paralelo, para este tipo de simulaciones, debe llevarse a cabo la (4) recolección de datos relativos a las variables y los resultados deseados del modelo. Tras la (5) verificación del modelo, que consiste en comprobar que el modelo simulado cumple con los requisitos de diseño para los que se elaboró, la ejecución del modelo empleando los datos recopilados permitirá la (6) validación del mismo, identificando sus deficiencias, es decir, las diferencias entre los resultados arrojados por este y la realidad. Para esta etapa crítica del proceso, en el caso de las terminales suele recurrirse a comprobar la exactitud con que se predicen datos históricos y a la opinión de expertos sobre los resultados de la simulación. Únicamente cuando el modelo ha sido validado se realiza la fase de (7) experimentación consistente en generar resultados y en realizar un análisis de sensibilidad de los mismos para su posterior (8) interpretación, lo que en definitiva permitirá la toma de decisiones. En la última etapa, (9) documentación, debe generarse tanto informes de tipo técnico con los resultados obtenidos en la simulación, como un manual del usuarios que facilite la interpretación del modelo (Coss, 2003).
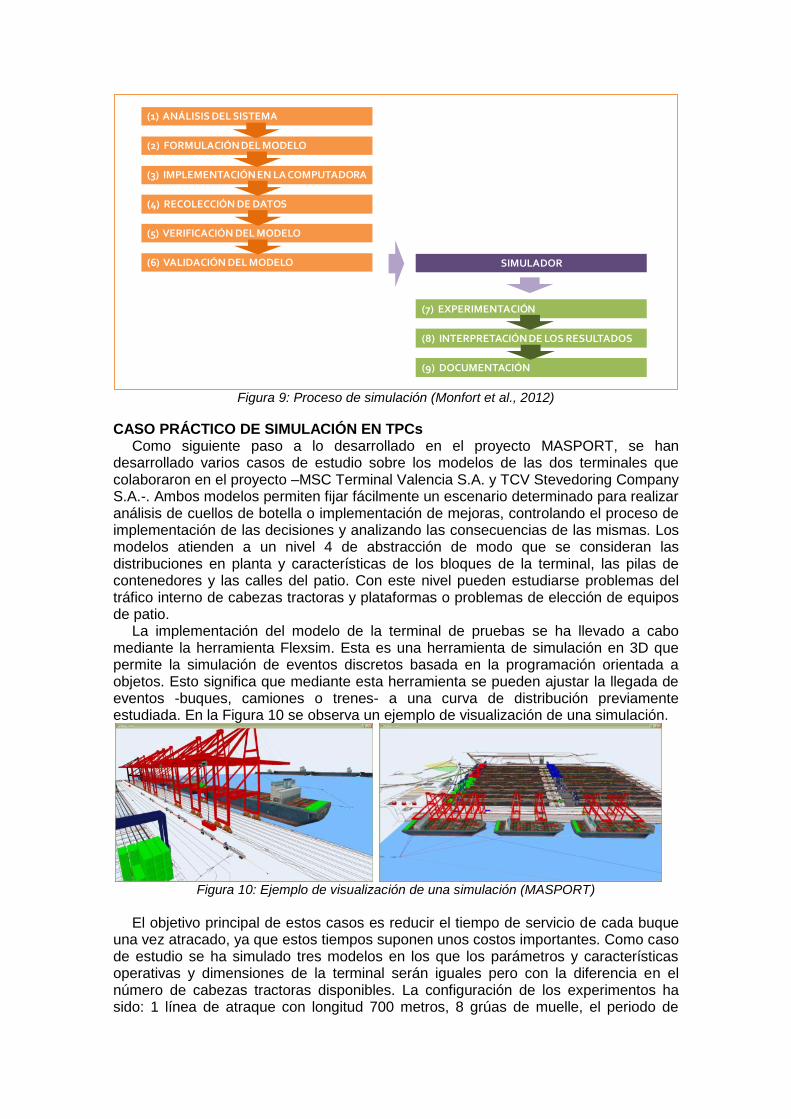
Figura 9: Proceso de simulación (Monfort et al., 2012)
CASO PRÁCTICO DE SIMULACIÓN EN TPCs Como siguiente paso a lo desarrollado en el proyecto MASPORT, se han
desarrollado varios casos de estudio sobre los modelos de las dos terminales que colaboraron en el proyecto –MSC Terminal Valencia S.A. y TCV Stevedoring Company S.A.-. Ambos modelos permiten fijar fácilmente un escenario determinado para realizar análisis de cuellos de botella o implementación de mejoras, controlando el proceso de implementación de las decisiones y analizando las consecuencias de las mismas. Los modelos atienden a un nivel 4 de abstracción de modo que se consideran las distribuciones en planta y características de los bloques de la terminal, las pilas de contenedores y las calles del patio. Con este nivel pueden estudiarse problemas del tráfico interno de cabezas tractoras y plataformas o problemas de elección de equipos de patio.
La implementación del modelo de la terminal de pruebas se ha llevado a cabo mediante la herramienta Flexsim. Esta es una herramienta de simulación en 3D que permite la simulación de eventos discretos basada en la programación orientada a objetos. Esto significa que mediante esta herramienta se pueden ajustar la llegada de eventos -buques, camiones o trenes- a una curva de distribución previamente estudiada. En la Figura 10 se observa un ejemplo de visualización de una simulación.
Figura 10: Ejemplo de visualización de una simulación (MASPORT)
El objetivo principal de estos casos es reducir el tiempo de servicio de cada buque
una vez atracado, ya que estos tiempos suponen unos costos importantes. Como caso de estudio se ha simulado tres modelos en los que los parámetros y características operativas y dimensiones de la terminal serán iguales pero con la diferencia en el número de cabezas tractoras disponibles. La configuración de los experimentos ha sido: 1 línea de atraque con longitud 700 metros, 8 grúas de muelle, el periodo de
(1) ANÁLISIS DEL SISTEMA
(2) FORMULACIÓN DEL MODELO
(3) IMPLEMENTACIÓN EN LA COMPUTADORA
(4) RECOLECCIÓN DE DATOS
(5) VERIFICACIÓN DEL MODELO
(6) VALIDACIÓN DEL MODELO
(7) EXPERIMENTACIÓN
(8) INTERPRETACIÓN DE LOS RESULTADOS
(9) DOCUMENTACIÓN
SIMULADOR

simulación se ha fijado de 1 año (525600 min.) y el periodo de warm-up de 1 mes (43200 min.),con un número de 15 réplicas.
Para estos tres casos se utiliza la forma clásica de asignación de recursos en las terminales portuarias, las manos. En estos casos se ha propuesto 3 configuraciones diferentes de 5,6 y 7 camiones por grúa. A continuación se muestran las tablas extraídas de los tres casos de tiempos de espera de buques en cola (minutos), productividad por metro de línea de atraque al año (contenedores/metro al año) y productividad de cada grúa (contenedores/hora). Caso 1. Configuración por manos (5 camiones por grúa)
Media Desv. Tip. Intervalo de confianza (95%) Min Max
2559 787 2123-2995 1629 4911 Tabla 1: Tiempo de espera de buques en cola caso 1 (MASPORT)
Media Desv. Tip. Intervalo de confianza (95%) Min Max
1108 59 1076-1141 995 1231 Tabla 2: Productividad por metro de línea de atraque caso 1 (MASPORT)
Grúa Media Desv, Tip, Intervalo de confianza (95%) Min Max
1 33,2 1,8 32,3-34,2 29,3 37,4
2 33,2 1,6 32,3-34,1 30,7 35,7
3 33,6 2,1 32,4-34,8 30,9 36,9
4 33,9 1,3 33,2-34,6 32,3 36,4
5 33,7 1 33,1-34,2 31,6 34,9
6 34,4 1,4 33,6-35,2 32,3 38,1
7 33,8 1,2 33,1-34,4 31,1 35,8
8 33,2 2,1 32,1-34,4 30,4 37 Tabla 3: Productividad por grúa caso 1 (MASPORT)
Caso 2. Configuración por manos (6 camiones por grúa)
Media Desv. Tip. Intervalo de confianza (95%) Min Max
1995 623 1650-2340 1105 3411 Tabla 4: Tiempo de espera de buques en cola caso2 (MASPORT)
Media Desv. Tip. Intervalo de confianza (95%) Min Max
1131 64 1095-1166 1046 1266 Tabla 5: Productividad por metro de línea de atraque caso 2 (MASPORT)
Grúa Media Desv, Tip, Intervalo de confianza (95%) Min Max
1 33,6 1,4 35,3-36,9 33,2 39,4
2 36,1 1,8 35,1-37,1 32,7 39,4
3 36,1 1,6 35,3-37,1 33 38,5
4 36,2 1,6 35,3-37,1 34 39
5 36,1 1,4 35,3-36,9 33,7 38,5
6 35,9 1,7 35-36,8 33,8 38,9
7 36,3 1,5 35,5-37,2 33,9 40,4
8 36,12 1,9 35,1-37,2 32,6 39,5 Tabla 6: Productividad por grúa caso 2 (MASPORT)
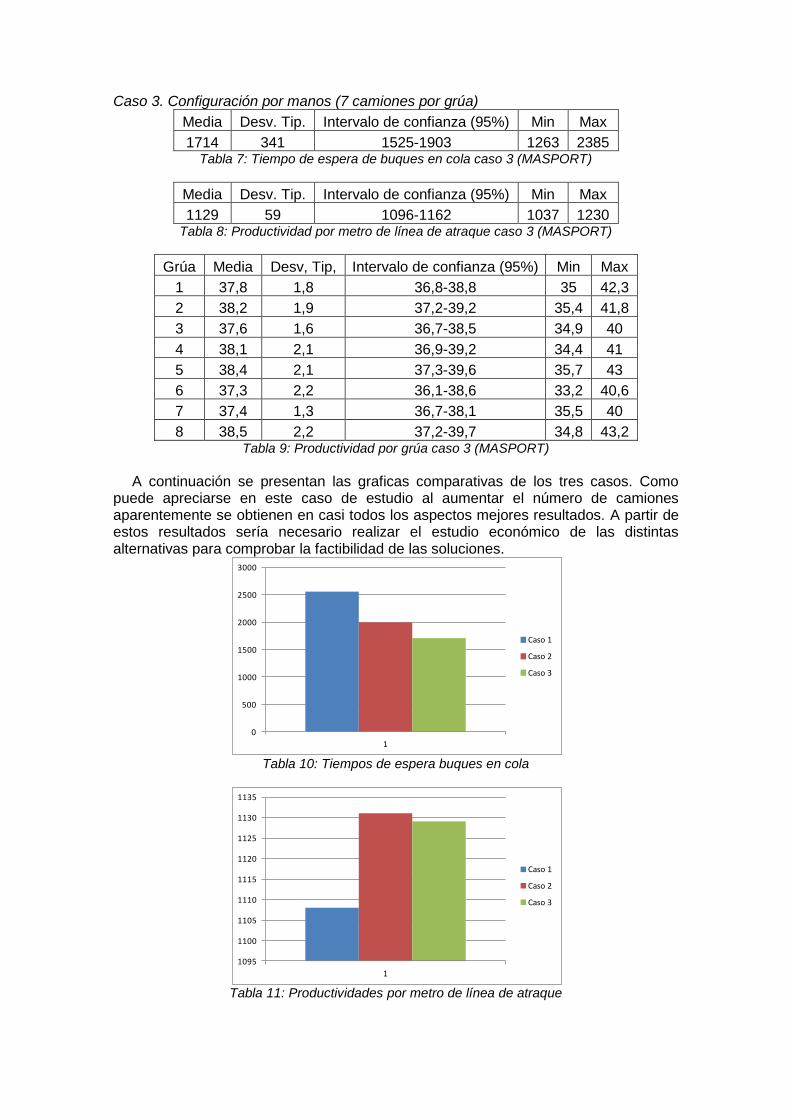
Caso 3. Configuración por manos (7 camiones por grúa)
Media Desv. Tip. Intervalo de confianza (95%) Min Max
1714 341 1525-1903 1263 2385 Tabla 7: Tiempo de espera de buques en cola caso 3 (MASPORT)
Media Desv. Tip. Intervalo de confianza (95%) Min Max
1129 59 1096-1162 1037 1230 Tabla 8: Productividad por metro de línea de atraque caso 3 (MASPORT)
Grúa Media Desv, Tip, Intervalo de confianza (95%) Min Max
1 37,8 1,8 36,8-38,8 35 42,3
2 38,2 1,9 37,2-39,2 35,4 41,8
3 37,6 1,6 36,7-38,5 34,9 40
4 38,1 2,1 36,9-39,2 34,4 41
5 38,4 2,1 37,3-39,6 35,7 43
6 37,3 2,2 36,1-38,6 33,2 40,6
7 37,4 1,3 36,7-38,1 35,5 40
8 38,5 2,2 37,2-39,7 34,8 43,2 Tabla 9: Productividad por grúa caso 3 (MASPORT)
A continuación se presentan las graficas comparativas de los tres casos. Como
puede apreciarse en este caso de estudio al aumentar el número de camiones aparentemente se obtienen en casi todos los aspectos mejores resultados. A partir de estos resultados sería necesario realizar el estudio económico de las distintas alternativas para comprobar la factibilidad de las soluciones.
Tabla 10: Tiempos de espera buques en cola
Tabla 11: Productividades por metro de línea de atraque
0
500
1000
1500
2000
2500
3000
1
Caso 1
Caso 2
Caso 3
1095
1100
1105
1110
1115
1120
1125
1130
1135
1
Caso 1
Caso 2
Caso 3
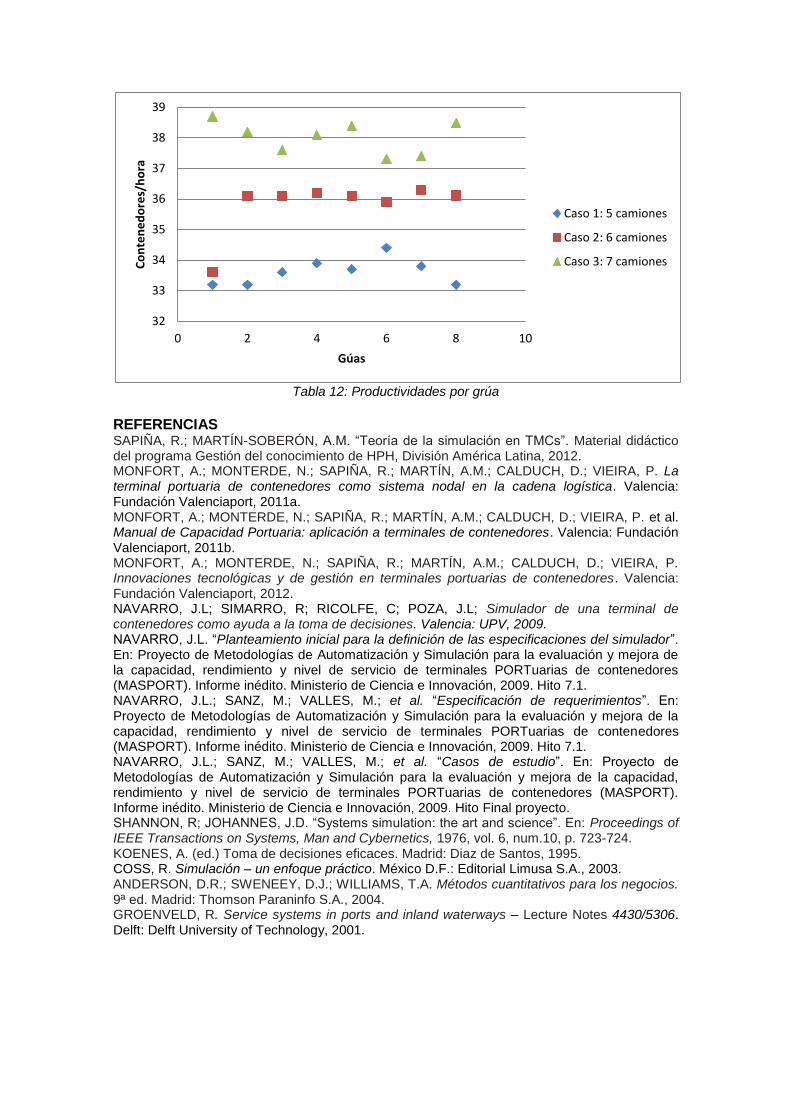
Tabla 12: Productividades por grúa
REFERENCIAS SAPIÑA, R.; MARTÍN-SOBERÓN, A.M. “Teoría de la simulación en TMCs”. Material didáctico del programa Gestión del conocimiento de HPH, División América Latina, 2012. MONFORT, A.; MONTERDE, N.; SAPIÑA, R.; MARTÍN, A.M.; CALDUCH, D.; VIEIRA, P. La terminal portuaria de contenedores como sistema nodal en la cadena logística. Valencia: Fundación Valenciaport, 2011a. MONFORT, A.; MONTERDE, N.; SAPIÑA, R.; MARTÍN, A.M.; CALDUCH, D.; VIEIRA, P. et al. Manual de Capacidad Portuaria: aplicación a terminales de contenedores. Valencia: Fundación Valenciaport, 2011b. MONFORT, A.; MONTERDE, N.; SAPIÑA, R.; MARTÍN, A.M.; CALDUCH, D.; VIEIRA, P. Innovaciones tecnológicas y de gestión en terminales portuarias de contenedores. Valencia: Fundación Valenciaport, 2012. NAVARRO, J.L; SIMARRO, R; RICOLFE, C; POZA, J.L; Simulador de una terminal de contenedores como ayuda a la toma de decisiones. Valencia: UPV, 2009. NAVARRO, J.L. “Planteamiento inicial para la definición de las especificaciones del simulador”. En: Proyecto de Metodologías de Automatización y Simulación para la evaluación y mejora de la capacidad, rendimiento y nivel de servicio de terminales PORTuarias de contenedores (MASPORT). Informe inédito. Ministerio de Ciencia e Innovación, 2009. Hito 7.1. NAVARRO, J.L.; SANZ, M.; VALLES, M.; et al. “Especificación de requerimientos”. En: Proyecto de Metodologías de Automatización y Simulación para la evaluación y mejora de la capacidad, rendimiento y nivel de servicio de terminales PORTuarias de contenedores (MASPORT). Informe inédito. Ministerio de Ciencia e Innovación, 2009. Hito 7.1. NAVARRO, J.L.; SANZ, M.; VALLES, M.; et al. “Casos de estudio”. En: Proyecto de Metodologías de Automatización y Simulación para la evaluación y mejora de la capacidad, rendimiento y nivel de servicio de terminales PORTuarias de contenedores (MASPORT). Informe inédito. Ministerio de Ciencia e Innovación, 2009. Hito Final proyecto. SHANNON, R; JOHANNES, J.D. “Systems simulation: the art and science”. En: Proceedings of IEEE Transactions on Systems, Man and Cybernetics, 1976, vol. 6, num.10, p. 723-724. KOENES, A. (ed.) Toma de decisiones eficaces. Madrid: Diaz de Santos, 1995. COSS, R. Simulación – un enfoque práctico. México D.F.: Editorial Limusa S.A., 2003. ANDERSON, D.R.; SWENEEY, D.J.; WILLIAMS, T.A. Métodos cuantitativos para los negocios. 9ª ed. Madrid: Thomson Paraninfo S.A., 2004. GROENVELD, R. Service systems in ports and inland waterways – Lecture Notes 4430/5306. Delft: Delft University of Technology, 2001.
32
33
34
35
36
37
38
39
0 2 4 6 8 10
Co
nte
ne
do
res/
ho
ra
Gúas
Caso 1: 5 camiones
Caso 2: 6 camiones
Caso 3: 7 camiones