guia de usuario 3 - 4
TRANSCRIPT

Colegio Nacional Nicolas Esguerra
Edificamos Futuro
Lego mindstorms Manual De Usuario NXT 2.0
Parte 1 de 4
Nicolas Fonseca Fonseca
Marlon Garcia Rojas
Códigos: 09 & 10
Profesor:
John Caraballo

Sensor acústico:
Ver:Se puede probar el sensor acústico en el NXT con esta aplicación:
El sensor acústico detecta todo tipo de sonidos, desde los que escuchamos claramente (dBA) y los que no escuchamos (dB) que son muy altos o muy bajos para el oído humano.
El sensor mide los niveles acústicos por medio de porcentajes siendo 10% a 30% una conversación normal o música a un volumen normal y más de 30% gritos o música muy alta.
Conectando el sensor acústico al NXT podemos programarlo para que su comportamiento cambie cuando se activa el sensor acústico.

Al igual que con el sensor táctil podemos probarlo usando Try Me, crear programas usando el sensor con NXT program y crear un registro de datos con NXT Data log.
Sensor Fotosensible:
Programas:
Ver:Podemos probar que el sensor funcione correctamente usan el programa View.
El sensor fotosensible detecta la luminosidad del lugar y la de superficies de colores.
El sensor fotosensible nos permite programar el robot para que cambie cuando se activa el sensor fotosensible.

Detectar luz ambiental:Al detectar luz ambiental obtenemos una lectura más completa de lo que hay enfrente.
Otras opciones son usar los programas Try Me, NXT program y NXT data log; de los cuales ya se han explicado sus funciones.
Sensor Ultrasónico:
El sensor ultrasónico permite al robot medir distancias entre objetos, detectar movimiento y así evitar los objetos.
El sensor hace lo mismo que las orejas de un murciélago: mide la distancia calculando el tiempo que tarda en llegar y regresar una onda de sonido.

El sensor detecta los objetos midiéndolo en centímetros y pulgadas. Mide fácilmente objetos duros y grandes, pero se le dificulta más con objetos suaves como telas, pequeños o curvados.
Ver:Se puede probar la distancia que el sensor mide usando View.
Usa también los otros programas como Try Me, NXT program y NXT data log.
Servemotor Interactivo:
Programe el robot para que mida distancias y así cambie cuando el sensor se activa.
Los servemotores son los que se encargan de darle movimiento al robot.

Sensor de rotación integrado:El servemotor cuenta con un sensor que mide la rotación del aparato con una precisión de +/- un grado. Si le pedimos que gire 180 grados, dará medio gira sin mayor problema.
Ver:
Se puede probar las distancias que recorre el robot usando la aplicación View
Los diferentes programas de uso permiten programar al robot para moverse suavemente ajustando la potencia y la velocidad.
Estructura del servemotor
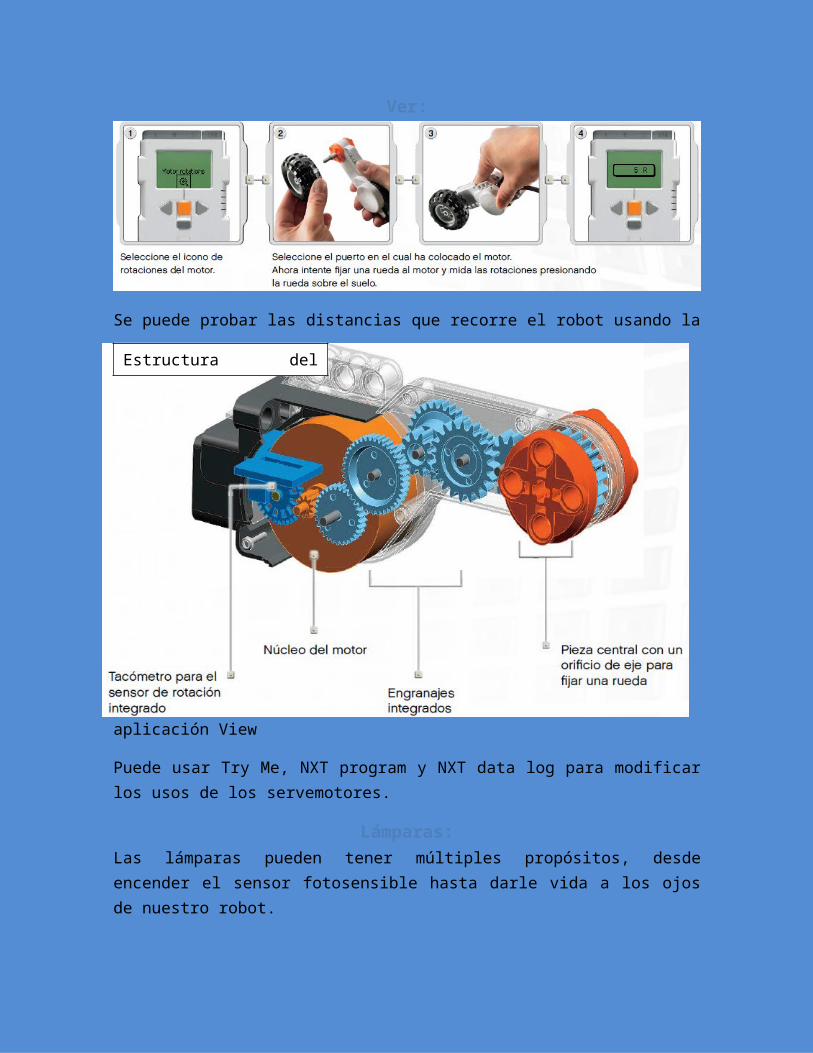
Puede usar Try Me, NXT program y NXT data log para modificar los usos de los servemotores.
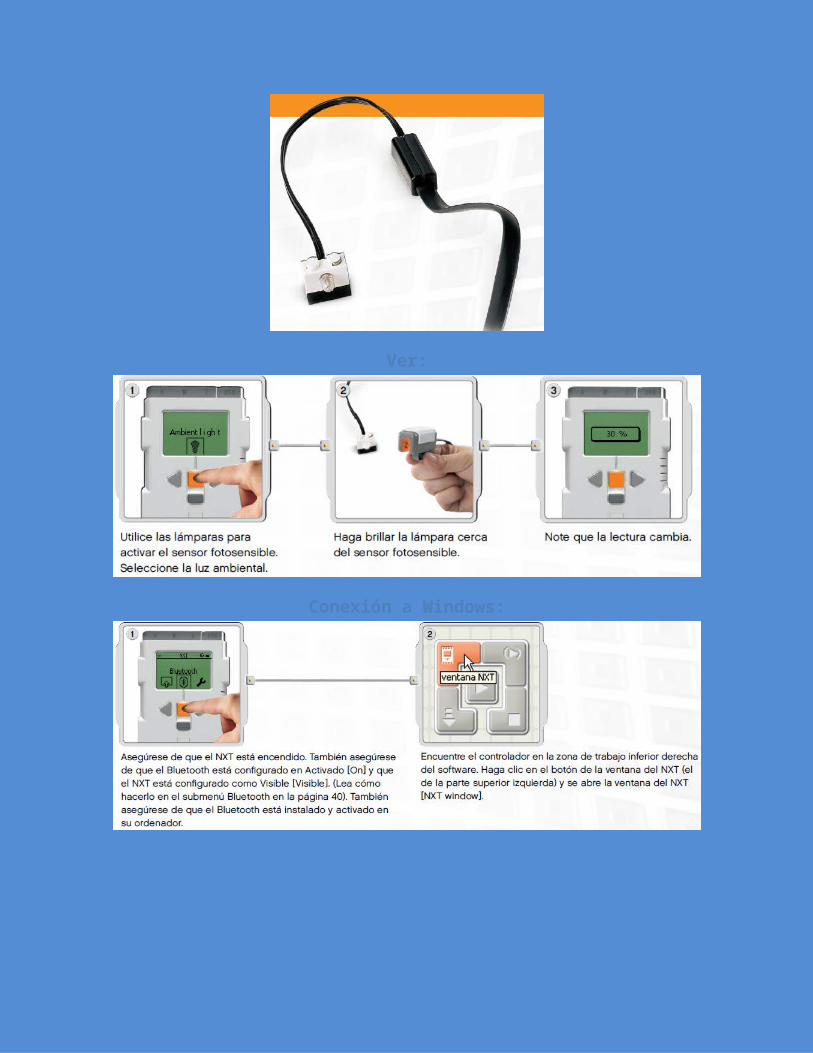
Lámparas:Las lámparas pueden tener múltiples propósitos, desde encender el sensor fotosensible hasta darle vida a los ojos de nuestro robot.
Ver:
Conexión a Windows:
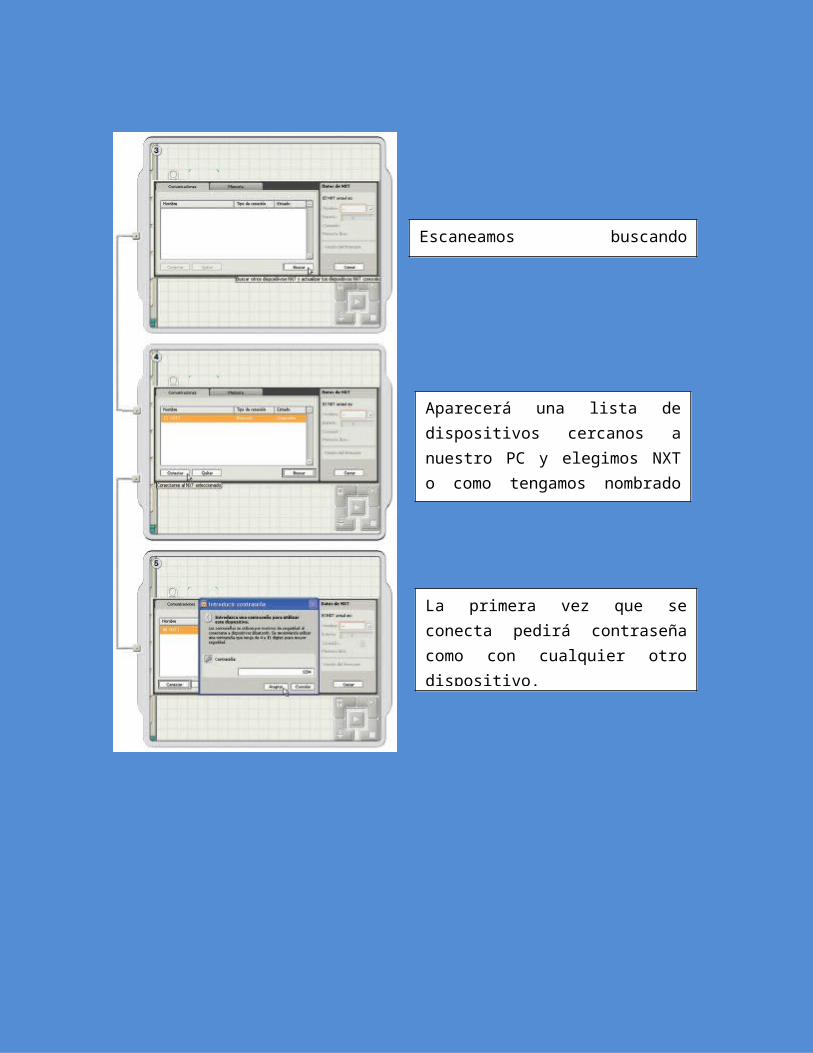
Escaneamos buscando dispositivos.
Aparecerá una lista de dispositivos cercanos a nuestro PC y elegimos NXT o como tengamos nombrado nuestro ladrillo.
La primera vez que se conecta pedirá contraseña como con cualquier otro dispositivo.
También ponemos la contraseña en el NXT.
Y ahora los dos dispositivos pueden compartir datos.