guadalupe munoz mart~ ¶inez enero 2008 · un sistema de coordenadas rectangulares es aquel para el...
TRANSCRIPT

CALCULO VECTORIAL
GUADALUPE MUNOZ MARTINEZ
Enero 2008

2

Capıtulo 1
INTRODUCCION
1.1. Numeros Reales
Numeros naturales N, son los sımbolos que se usan para contar los ele-mentos de un conjunto. 1, 2, 3, · · ·Numeros Enteros Z se clasifican en positivos, negativos y cero y se generanal anteponer a cada numero natural un signo + o −. −3,−2,−1, 0, 1, 2 etc.
Numeros racionales Q se conocen tambien como fracciones y son aquellosque se escriben de la forma p
q donde p y q son enteros (q 6= 0). p se llamanumerador y q denominador.
Numeros irracionales I son aquellos que no se pueden escribir de la formapq donde p y q son enteros. π,
√2, e.
El conjunto de todos los numeros racionales e irracionales se llama conjuntode los numeros reales R. Ası, R = Q ∪ I .
1.1.1. Representacion Geometrica de los numeros reales
La representacion geometrica de los numeros reales se hace sobre una rectanumerica, asignando a cada numero un punto y solo uno sobre la misma. A estarelacion entre numero y punto se le llama correspondencia biunıvoca o uno auno.
Si se escribe a ∈ R, quiere decir que a es un elemento del conjunto R, esdecir, que a es un numero real.
El valor absoluto de un numero a se escribe |a| y se define como
|a| ={
a si a ≥ 0−a si a ≤ 0
}(1.1)
Para el valor absoluto de dos numeros se cumple la desigualdad
|a + b| ≤ |a|+ |b| (1.2)
3

4 CAPITULO 1. INTRODUCCION
Figura 1.1: Representacion geometrica de R.
Figura 1.2: Semirrectas positiva y negativa.
1.2. SISTEMAS COORDENADOS
Para localizar una configuracion geometrica es necesario definir una formade referencia. Entre las formas de referencia mas simples estan los sistemasde coordenadas cartesianas. La caracterıstica principal de estos sistemas es laasociacion de cada punto que compone una lınea recta con la totalidad de losnumeros reales, es decir, se hace corresponder a cada numero real un puntounico sobre la recta y viceversa.
Considerese una recta X y un punto O en ella denominado origen. El puntoO divide a la recta en dos semirrectas, la parte a la izquierda de O se lla-mara semirrecta negativa y la parte a la derecha de O semirrecta positiva.
Escogiendo sobre la semirrecta positiva un punto A puede definirse la unidadde longitud para la recta como el segmento OA.
∣∣OA∣∣ = 1.
Una vez establecida la unidad de longitud se colocan marcas consecutivascon espacios entre ellas iguales a esta longitud obteniendose ası una graduacionde la recta.
Para relacionar los puntos de la recta X con un conjunto de numeros reales
Figura 1.3: Unidad de longitud.

1.2. SISTEMAS COORDENADOS 5
Figura 1.4: Recta graduada.
se escoge un punto P sobre ella y se define el numero x asociado a P mediantela formula
x =OP∣∣OA
∣∣ (1.3)
si P se encuentra sobre la semirrecta positiva. Para un punto Q en la semir-recta negativa, la coordenada x correspondiente estara definida por
x = − OQ∣∣OA∣∣ (1.4)
Figura 1.5: Puntos en las semirrectas positiva y negativa.
Generalmente se coloca una punta de flecha en el extremo derecho de lasemirrecta positiva, que indica el sentido positivo de la recta, en vez de lossignos + y −.
A cada numero real x le corresponde uno y solo uno de los puntos de X.Esta asociacion de puntos de X y el conjunto de los numeros reales define unSistema Coordenado del espacio Unidimensional constituido precisamente porlos puntos de X, tambien llamado Recta Numerica.
Figura 1.6: Puntos en las semirrectas positiva y negativa.

6 CAPITULO 1. INTRODUCCION
Se pueden definir sobre este espacio operaciones de adicion y sustraccioncomo:
z = x± y =OP∣∣OA
∣∣ ±OQ∣∣OA
∣∣ (1.5)
Es decir, la adicion o sustraccion de dos reales se representa sobre la rectacolocandose primero a una distancia OP del origen y avanzando a partir delpunto P una distancia OQ. La posicion final correspondera a la suma P + Q, o,z = x + y.
1.2.1. SISTEMA BIDIMENSIONAL
Esta idea puede extenderse asociando ahora el conjunto de puntos del planocon el conjunto de numeros reales trazando dos rectas [X1] y [X2] que se cortanen el punto 0.
Figura 1.7: Ejes coordenados en un espacio bidimensional.
En cada recta se construye un sistema coordenado unidimensional, aunquelas unidades en cada una no necesariamente son iguales, generalmente, por co-modidad, se consideran de la misma magnitud.
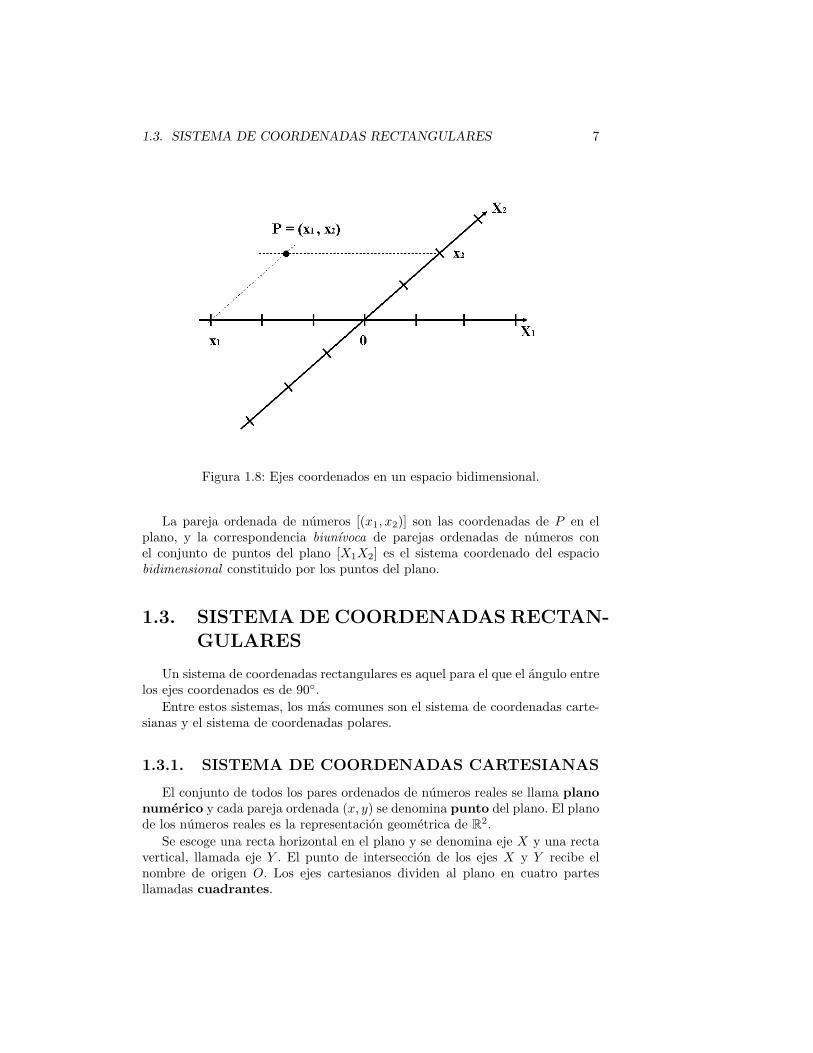
Un par de tales rectas con puntos A y B marcados en ellas forman los ejescoordenados [X1] y [X2]. A cada punto P del plano de ejes coordenados se asociauna pareja ordenada de numeros reales [x1, x2] determinada como sigue:
Se traza una lınea que pase por P paralela al eje [X2], el punto [M1] dondecorta con el eje [X1] determina la coordenada [x1] de P , mientras que la coorde-nada [x2] se obtiene trazando una lınea paralela a [X1] que pase por P y cortea [X2] en [M2].
1.3. SISTEMA DE COORDENADAS RECTANGULARES 7
Figura 1.8: Ejes coordenados en un espacio bidimensional.
La pareja ordenada de numeros [(x1, x2)] son las coordenadas de P en elplano, y la correspondencia biunıvoca de parejas ordenadas de numeros conel conjunto de puntos del plano [X1X2] es el sistema coordenado del espaciobidimensional constituido por los puntos del plano.
1.3. SISTEMA DE COORDENADAS RECTAN-GULARES
Un sistema de coordenadas rectangulares es aquel para el que el angulo entrelos ejes coordenados es de 90◦.
Entre estos sistemas, los mas comunes son el sistema de coordenadas carte-sianas y el sistema de coordenadas polares.
1.3.1. SISTEMA DE COORDENADAS CARTESIANAS
El conjunto de todos los pares ordenados de numeros reales se llama planonumerico y cada pareja ordenada (x, y) se denomina punto del plano. El planode los numeros reales es la representacion geometrica de R2.
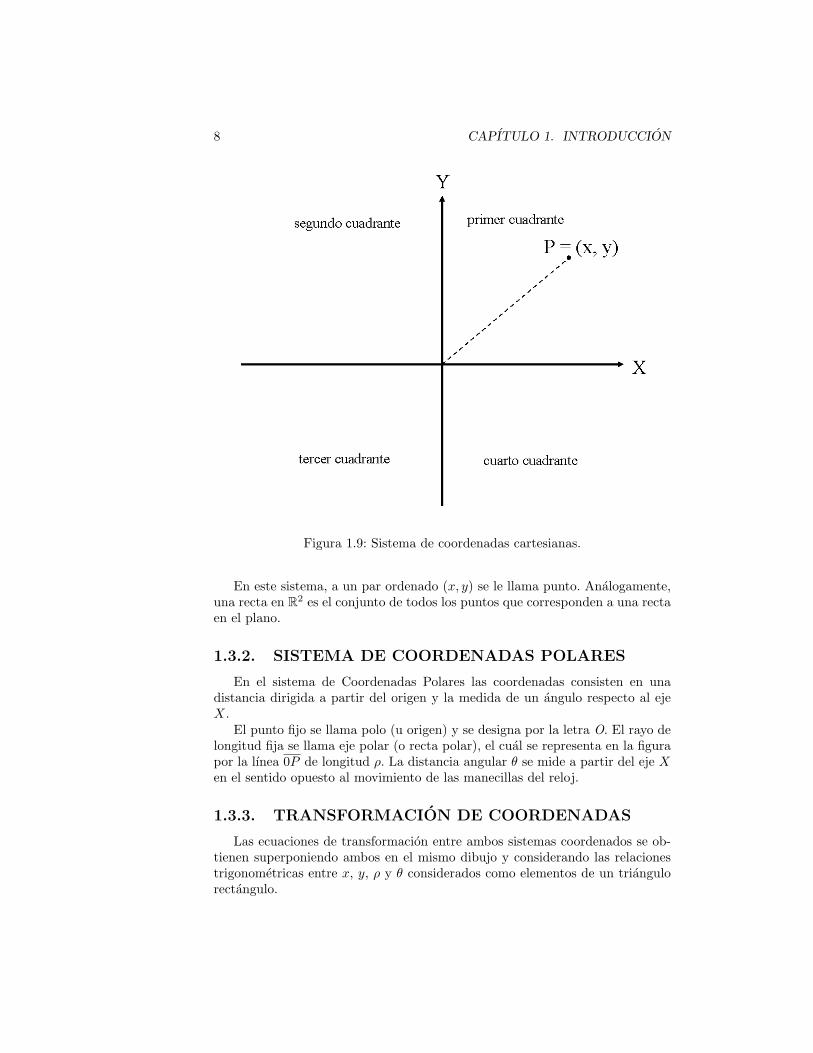
Se escoge una recta horizontal en el plano y se denomina eje X y una rectavertical, llamada eje Y . El punto de interseccion de los ejes X y Y recibe elnombre de origen O. Los ejes cartesianos dividen al plano en cuatro partesllamadas cuadrantes.
8 CAPITULO 1. INTRODUCCION
Figura 1.9: Sistema de coordenadas cartesianas.
En este sistema, a un par ordenado (x, y) se le llama punto. Analogamente,una recta en R2 es el conjunto de todos los puntos que corresponden a una rectaen el plano.
1.3.2. SISTEMA DE COORDENADAS POLARES
En el sistema de Coordenadas Polares las coordenadas consisten en unadistancia dirigida a partir del origen y la medida de un angulo respecto al ejeX.
El punto fijo se llama polo (u origen) y se designa por la letra O. El rayo delongitud fija se llama eje polar (o recta polar), el cual se representa en la figurapor la lınea 0P de longitud ρ. La distancia angular θ se mide a partir del eje Xen el sentido opuesto al movimiento de las manecillas del reloj.
1.3.3. TRANSFORMACION DE COORDENADAS
Las ecuaciones de transformacion entre ambos sistemas coordenados se ob-tienen superponiendo ambos en el mismo dibujo y considerando las relacionestrigonometricas entre x, y, ρ y θ considerados como elementos de un triangulorectangulo.

1.3. SISTEMA DE COORDENADAS RECTANGULARES 9
Figura 1.10: Sistema de coordenadas polares.
Ası, de la figura 1.11, dadas las coordenadas cartesianas de un punto P , lascoordenadas polares se obtienen mediante las relaciones:
ρ =√
x2 + y2
θ = tan yx
(1.6)
mientras que, en el sentido inverso, es decir, si se conocen las coordenadaspolares de P , las coordenadas cartesianas se obtienen de:
x = ρcosθy = ρsinθ
(1.7)
EJERCICIOSI. Dar un ejemplo de un sistema coordenado en dos dimensiones (distinto de
los anteriores). Especificar las coordenadas y dar las ecuaciones de transforma-cion para los sistemas mencionados.
II. Para cada punto P localizar los puntos solicitados:(a). El punto Q tal que la lınea PQ sea perpendicular al eje X y sea bisecada
por el.(b). El punto R tal que la lınea PR sea perpendicular al eje Y y sea bisecada
por el.

10 CAPITULO 1. INTRODUCCION
Figura 1.11: Transformacion de coordenadas.
(c). El punto T tal que la lınea PT sea perpendicular a la recta de 45◦ (ybisecada por ella) que pasa por el origen y biseca a los cuadrantes primero ytercero.
1.P(1,-2) 4.P(-2,-2)2.P(-2,2) 5.P(-1,-3)3.P(2,2) 6.P(0,-3)III. Trace las graficas:1.y = 2x− 1 4.y = |x− 5|2.y = 4x− 3 5.y = −|x|+ 23.y = 5 6.x = 3IV. Localice el punto P en el plano y encuentre sus coordenadas cartesianas:1.P(4, 1
4π) 4.P(2, 43π)
2.P(3, −23 π) 5.P(
√2, −1
4 π)3.P(−4, 5
6π) 6.P(3, 32π)
V. Localice el punto P en el plano y encuentre las coordenadas polares delmismo:
1.P(2,6) 4.P(-5,0)2.P(1,-1) 5.P(0,-2)

1.3. SISTEMA DE COORDENADAS RECTANGULARES 11
3.P(√
3,1) 6.P(3,-3)
1.3.4. SISTEMA TRIDIMENSIONAL
La extension de esta representacion de puntos a un espacio tridimensional sehace trazando tres rectas no coplanarias [X1X2X3] que se cortan en el punto O.En cada recta se establece un sistema coordenado y se asocia a cada punto Puna terna ordenada de numeros [(x1, x2, x3)]determinada por la interseccion conlos ejes de tres planos trazados por P paralelamente a los planos coordenados[X1X2] , [X2X3] y [X1X3] .
Figura 1.12: Ejes coordenados en un espacio tridimensional.
Los sistemas coordenados descritos se llaman Sistemas Cartesianos Oblicuos.En el caso de que los ejes coordenados X1, X2 y X3 se corten en angulos
rectos, se dice que el sistema coordenado es Ortogonal Cartesiano o RectangularCartesiano.
Comunmente se denomina a los ejes [X1, X3] y [X3], como X, Y y Z respec-tivamente y se acostumbra elegir a los ejes de manera que formen un sistemaderecho. Esto quiere decir que para un observador que mire en la direccion deOZ, el sentido del arco menor de un punto sobre OX a un punto sobre OY esel de las manecillas del reloj.
1.3.5. SISTEMA DE COORDENADAS CARTESIANAS
El sistema de coordenadas cartesianas en tres dimensiones es una gener-alizacion del sistema en 2D, agregando a este un eje perpendicular al plano

12 CAPITULO 1. INTRODUCCION
formado por los ejes X y Y , como se muestra en la figura 1.13.
Figura 1.13: Ejes coordenados en un espacio tridimensional.
Las coordenadas de un punto P , son entonces la triada P (x, y, z).
1.3.6. SISTEMA DE COORDENADAS CILINDRICAS
El sistema de coordenadas cilındricas consiste en radios concentricos quetienen como eje de simetrıa al eje Z. La primera coordenada asignada a unpunto P es justamente el radio del cilindro, denotado por la letra griega ρ, lasiguiente coordenada en una medida angular, tomada a partir del eje X en elsentido contrario de las manecillas del reloj, llamada θ y la ultima es la alturarespecto al plano XY , denotada por z (figura 1.14).
Una vez conocidas las coordenadas cartesianas de un punto P , las coorde-nadas cilındricas se obtienen mediante las relaciones:
ρ =√
x2 + y2
θ = tan yx
z = z(1.8)

1.3. SISTEMA DE COORDENADAS RECTANGULARES 13
Figura 1.14: Sistema de coordenadas cilındricas.
mientras que, en el sentido inverso, es decir, si se conocen las coordenadascilındricas de P , las coordenadas cartesianas se obtienen de:
x = rcosθy = rsinθ
z = z(1.9)
1.3.7. SISTEMA DE COORDENADAS ESFERICAS
Para el sistema de coordenadas esfericas se toman ahora esfericas concentri-cas (con centro en el origen del sistema). La primera coordenada correspondeal radio de la esfera r, la siguiente al angulo de apertura θ, medido nuevamentea partir del eje X y la tercera coordenada es tambien un angulo que se miderespecto al eje Z, figura 1.15.
De forma similar al caso anterior, conocidas las coordenadas cartesianasde un punto P , las coordenadas esfericas se obtienen mediante las siguientesrelaciones relaciones:

14 CAPITULO 1. INTRODUCCION
Figura 1.15: Ejes coordenados en un espacio tridimensional.
r =√
x2 + y2 + z2
θ = tan yx
φ = cos−1( z√x2+y2+z2
)(1.10)
mientras que, en el sentido inverso, es decir, si se conocen las coordenadasesfericas de P , las coordenadas cartesianas se obtienen de:
x = rcosθsinφy = rsinθsinφ
z = rcosφ(1.11)
Capıtulo 2
ALGEBRA VECTORIAL
2.1. DEFINICION DE VECTOR
Se llamara vector a cualquier segmento lineal dirigido. La longitud del vectorse denotara por la palabra magnitud. Ası, un vector estara caracterizado pormagnitud, direccion y sentido.
Para representar un vector usaremos la notacion A o−→A .
La magnitud sera un numero real no negativo, que se representara por |−→A |o A.
Podemos distinguir entonces dos conceptos fısicos distintos, las magnitudesescalares y las magnitudes vectoriales. Es decir, aquellas cantidades que puedencaracterizarse exclusivamente por un numero se denominan magnitudes es-calares, mientras que las que requieren una representacion vectorial para cono-cerse completamente seran llamadas magnitudes vectoriales. Ası, conceptos fısicoscomo rapidez, temperatura, distancia, p y e, representan cantidades escalares;por otro lado, la velocidad, aceleracion y fuerza son ejemplos de magnitudesvectoriales.
2.2. IGUALDAD ENTRE VECTORES
Se dice que dos vectores son iguales sı y solamente sı tienen la misma mag-nitud, direccion y sentido. Y se escribira
−→A =
−→B (2.1)
2.3. MULTIPLICACION POR UN ESCALAR
Se define el producto de un vector−→A por un numero real x como un nuevo
vector x−→A paralelo al vector
−→A y cuya magnitud ha sido multiplicada por un
factor x.
15

16 CAPITULO 2. ALGEBRA VECTORIAL
Figura 2.1: Caracterısticas de un vector.
Figura 2.2: Igualdad entre dos vectores.

2.3. MULTIPLICACION POR UN ESCALAR 17
Figura 2.3: Multiplo de un vector
−→B = x
−→A (2.2)
Al multiplicar un vector por el escalar −1 se obtiene el negativo de este, quees un vector de igual magnitud y direccion pero de sentido opuesto.
−−→A = (−1)−→A (2.3)
La suma de estos dos vectores sera igual al vector cero.
−→A +
(−−→A
)= 0 (2.4)
El producto de un vector por un escalar cumple las propiedades:
x(y−→A
)= (xy)
−→A = xy
−→A (2.5)
(x + y)−→A = x
−→A + y
−→A (2.6)
−→0−→A =
−→0 (2.7)
Ademas, dos vectores son paralelos sı y solamente sı, uno de ellos puedeescribirse como un multiplo del otro, es decir,

18 CAPITULO 2. ALGEBRA VECTORIAL
Figura 2.4: Negativo de un vector
Figura 2.5: Igualdad entre dos vectores.

2.4. ADICION Y SUSTRACCION DE VECTORES 19
Figura 2.6: Adicion Vectorial.
2.4. ADICION Y SUSTRACCION DE VECTORES
Considerense dos vectores−→A y
−→B , se define la suma de estos como el vector−→
C que resulta al colocar el punto inicial del vector−→B sobre el punto final del
vector−→A y unir, el origen de
−→A , con la punta de
−→B . La suma de dos vectores
como resultado un vector y se escribe−→A +
−→B =
−→C .
La relacion entre−→A ,
−→B y
−→C , esta dada por la ley de los cosenos:
donde α, es el angulo entre los vectores−→Ay
−→C .
C2 = A2 + B2 − 2AB cos α
La adicion de vectores cumple las siguientes propiedades:
−→A +
−→B =
−→B +
−→A (2.8)(−→
A +−→B
)+−→C =
−→A +
(−→B +
−→C
)(2.9)
−→0 +
−→A =
−→A (2.10)
x(−→
A +−→B
)= x
−→A + x
−→B (2.11)
La sustraccion de dos vectores−→A y
−→B , equivale a agregar al vector
−→A , el
vector −−→B , es decir a sumar la primero el negativo del segundo. Geometrica-mente puede construirse el vector
−→C =
−→A −−→B colocando a ambos vectores de

20 CAPITULO 2. ALGEBRA VECTORIAL
Figura 2.7: Sustraccion de vectores.
manera que sus puntos iniciales coincidan y trazando un tercer vector que vayadel punto terminal de
−→A al punto terminal de
−→B .
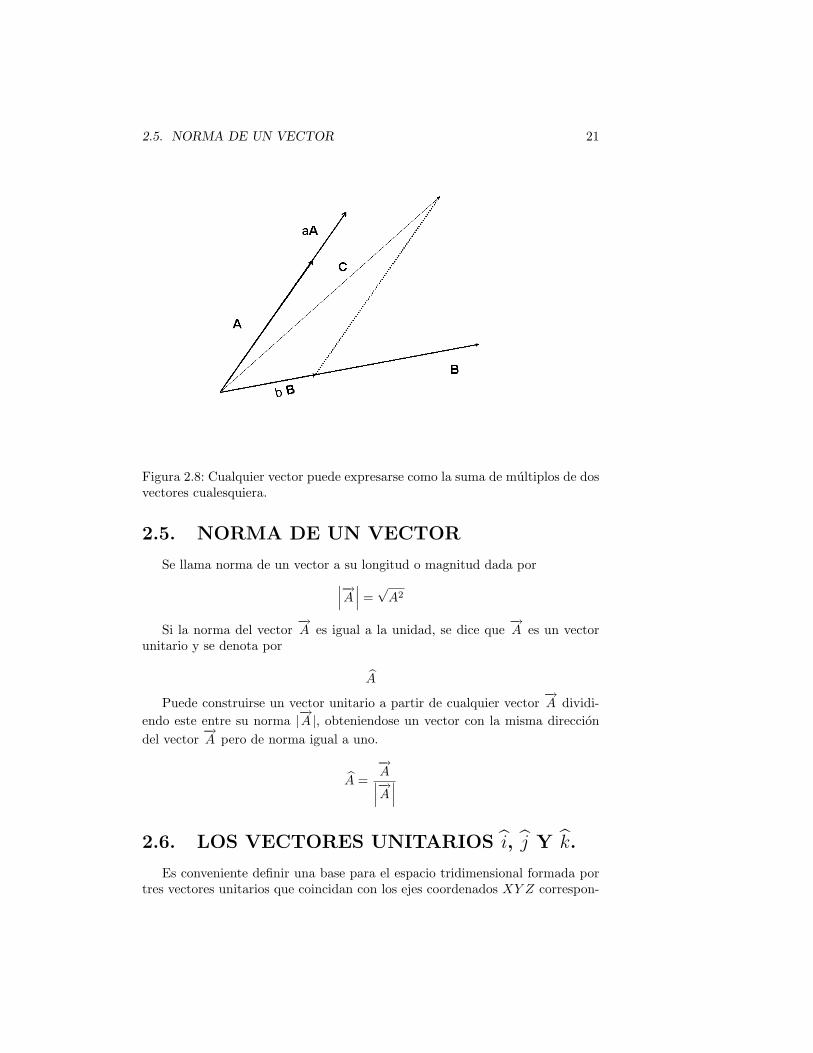
En general, a partir de dos vectores no colineales puede escribirse cualquierotro vector como la suma de multiplos de los dos primeros, es decir, sı
−→A y
−→B
son no colineales, podemos escribir un vector−→C cualquiera como
−→C = a
−→A +b
−→B ,
donde a y b son escalares. Para esto se colocan los vectores−→A ,
−→B y
−→C en el
mismo punto inicial u origen y se construyen las proyecciones de−→C sobre la
lınea OA y OB, de donde se obtienen los vectores a−→A y b
−→B que al sumarse dan
como resultado el vector−→C .
−→C = a
−→A + b
−→B.
Los escalares a y b tienen valores unicos para−→A y
−→B dados. La magnitud
del vector−→C puede encontrarse utilizando la ley de los cosenos. Si el angulo
entre los vectores−→A y
−→B es de 90◦, la magnitud estara dada por
C2 = A2 + B2
Al sistema formado por los vectores−→A y
−→B se le denomina vectores base
para el espacio bidimensional. Puede generalizarse este concepto a un espaciotridimensional construyendo una base a partir de tres vectores no coplanarioscon origen comun.
2.5. NORMA DE UN VECTOR 21
Figura 2.8: Cualquier vector puede expresarse como la suma de multiplos de dosvectores cualesquiera.
2.5. NORMA DE UN VECTOR
Se llama norma de un vector a su longitud o magnitud dada por∣∣∣−→A
∣∣∣ =√
A2
Si la norma del vector−→A es igual a la unidad, se dice que
−→A es un vector
unitario y se denota por
A
Puede construirse un vector unitario a partir de cualquier vector−→A dividi-
endo este entre su norma |−→A |, obteniendose un vector con la misma direcciondel vector
−→A pero de norma igual a uno.
A =−→A∣∣∣−→A
∣∣∣
2.6. LOS VECTORES UNITARIOS i, j Y k.
Es conveniente definir una base para el espacio tridimensional formada portres vectores unitarios que coincidan con los ejes coordenados XY Z correspon-

22 CAPITULO 2. ALGEBRA VECTORIAL
Figura 2.9: Vectores unitarios en un sistema de ejes cartesiano.
dientes al Sistema Cartesiano derecho, es decir, se construyen tres vectores i, jy k que sean colineales a los ejes X, Y y Z respectivamente y cuya magnitudsea igual a la unidad.
A la base formada por estos tres vectores se le denomina base canonica.
2.7. COMPONENTES DE UN VECTOR
Cualquier vector −→r , en el espacio tridimensional, puede escribirse como lasuma de tres vectores que son multiplos de los vectores de la base canonica i, jy k.
−→r = xi + yj + zk
Los vectores xi, yj y zk se llaman vectores componentes y los escalares x,y y z son las componentes de −→r en el Espacio Euclidiano Tridimensional yrepresentan las proyecciones de −→r sobre los ejes X, Y y Z respectivamente.
Ası −→r se conoce como el vector de posicion del punto P con coordenadas(x, y, z).
EL VECTOR QUE UNE DOS PUNTOS
Dados dos puntos P y P ′, puede trazarse el vector −→v con inicio en P y finalen P ′, donde se escribe
−−→PP ′ en lugar de −→v .

2.8. PRODUCTO ESCALAR 23
Figura 2.10: Coordenadas del vector en un sistema Cartesiano.
2.7.1. INDEPENDENCIA LINEAL
2.8. PRODUCTO ESCALAR
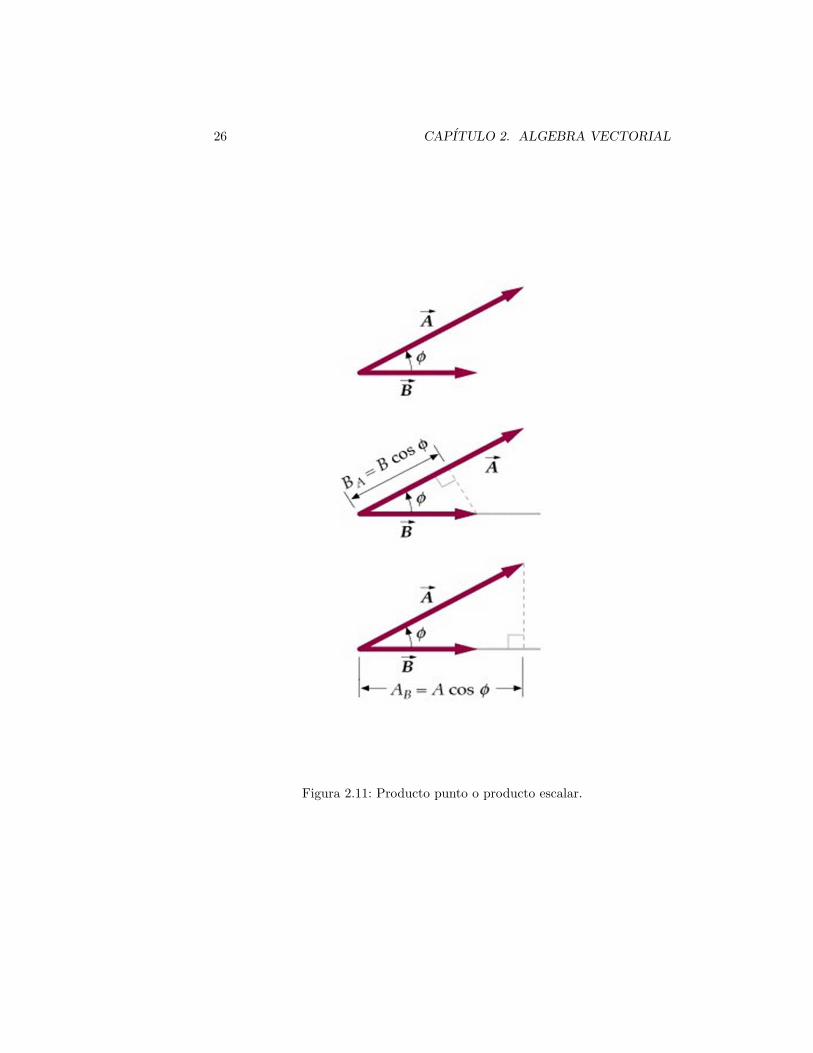
Se define el producto punto o producto escalar entre dos vectores−→A y
−→B
como la proyeccion de−→A sobre
−→B , multiplicada por la magnitud de
−→B , es decir,
−→A · −→B = AB cos θ
El producto escalar cumple las siguientes propiedades:
−→A · −→B =
−→B · −→A−→
A ·(−→
B +−→C
)=
−→A · −→B +
−→A · −→C
m(−→
A · −→B)
=(m−→A
)· −→B =
−→A ·
(m−→B
)=
(−→A · −→B
)m
i · i = j · j = k · k = 1i · j = j · k = k · i = 0
−→A · −→B = a1b1 + a2b2 + a3b3−→A · −→A = A2 = a2
1 + a22 + a2
3∣∣∣−→A∣∣∣ =
√(−→A · −→A
)
−→A · −→B = 0 ⇒ −→
A ⊥ −→B

24 CAPITULO 2. ALGEBRA VECTORIAL
Con−→A = a1i + a2j + a3k y
−→B = b1i + b2j + b3k.
2.9. PRODUCTO VECTORIAL
Se define el producto escalar de dos vectores−→A y
−→B como un vector per-
pendicular al paralelogramo que se construye al colocar los dos vectores con unorigen comun y de magnitud igual al area de dicho paralelogramo; la direcciondel vector resultante estara dada por la regla de la mano derecha.
−→A ×−→B = AB sin θ.
El producto vectorial cumple las siguientes propiedades:
−→A ×−→B = −−→B ×−→A
−→A ×
(−→B +
−→C
)=
−→A ×−→B +
−→A ×−→C
m(−→
A ×−→B)
=(m−→A
)×−→B =
−→A ×
(m−→B
)=
(−→A ×−→B
)m
i× i = j × j = k × k =−→0
i× j = k, j × k = i, k × i = j
j × i = −k, k × j = −i, i× k = −j
2.10. PRODUCTOS TRIPLES
A partir de los productos escalar y vectorial definidos anteriormente se for-man los llamados productos triples que tienen caracterısticas utiles. Para tresvectores
−→A ,
−→B y
−→C se verifican las siguientes propiedades:
1. (−→A · −→B )
−→C 6= −→
A (−→B · −→C ) Triple producto escalar
2.−→A ·
(−→B ×−→C
)=−→B · (−→C ×−→A ) =
−→C · (−→A ×−→B ) =
∣∣∣∣∣∣
A1A2A3
B1B2B3
C1C2C3
∣∣∣∣∣∣
3.−→A ×
(−→B ×−→C
)6= (
−→A ×−→B )×−→C Triple producto vectorial
4.−→A ×
(−→B ×−→C
)= (
−→A · −→C )
−→B − (
−→A · −→B )
−→C
(−→A ×−→B )×−→C = (
−→A · −→C )
−→B − (
−→B · −→C )
−→A

2.10. PRODUCTOS TRIPLES 25
2.10.1. VOLUMEN FORMADO POR TRES VECTORES
2.10.2. APLICACIONES DE LOS PRODUCTOS ENTREVECTORES
ECUACIONES DE PLANOS
DISTANCIA DE UN PUNTO A UN PLANO
ECUACIONES DE RECTAS
APLICACIONES DEL PRODUCTO ESCALAR
APLICACIONES DEL PRODUCTO VECTORIAL
26 CAPITULO 2. ALGEBRA VECTORIAL
Figura 2.11: Producto punto o producto escalar.

2.10. PRODUCTOS TRIPLES 27
Figura 2.12: Producto cruz o vectorial.
Figura 2.13: Producto cruz o vectorial.
28 CAPITULO 2. ALGEBRA VECTORIAL

Capıtulo 3
FUNCION VECTORIALDE VARIABLE ESCALAR
3.1. CAMPOS ESCALARES Y VECTORIALES
3.1.1. CAMPO ESCALAR
Si se asigna a cada punto (x, y, z) de una R region en el espacio, un numerodado por la funcion escalar φ (x, y, z); se dice que φ define un campo en R.
3.1.2. CAMPO VECTORIAL
Un campo vectorial−→A esta definido para la totalidad de los vectores
−→A (x, y, z)
asignados a cada punto (x, y, z)de una region R del espacio.
Ejemplo
1. La densidad en un fluido es un campo escalar.2. El campo magnetico terrestre es un campo vectorial.3. La temperatura de un gas es un campo escalar.4. El campo gravitacional del Sol, es un campo vectorial.
3.2. FUNCION VECTORIAL DE VARIABLEESCALAR
Si un vector−→f (t), tiene por componentes funciones unıvocas o uniformes de
una variable real t se dice−→f (t) que es una funcion vectorial de t.
Ası, en un sistema coordenado rectangular
−→f (t) = f1(t)i + f2(t)j + f3(t)k
29

30 CAPITULO 3. FUNCION VECTORIAL DE VARIABLE ESCALAR
en donde f1(t), f2(t), y f3(t) son funciones reales o escalares llamadas compo-nentes de
−→f (t).
3.2.1. LIMITE
Sea−→f (t) una funcion vectorial definida para todos los valores de t en cualquier
vecindad de algun punto t0, excepto posiblemente para el valor t0. Se dice queun vector −→a es el vector lımite de
−→f (t) cuanto t tiende a t0, sı y solo sı, para
cada numero real ε > o, existe un numero δ > 0 que cumple que∣∣∣−→f (t)−−→a
∣∣∣ < ε ⇔ 0 < |t− t0| < δ
Se dice que−→f (t) tiende a −→a cuando t tiende a t0 y se denota por
lımt→t0
−→f (t) = −→a
o
−→f (t) → −→a cuando t → t0
Puede ser que cuando t tienda t0 los valores−→f (t) no se acerquen a un numero
particular, se dice en este caso que el lımite no existe.
3.2.2. CONTINUIDAD
Sea−→f (t) una funcion vectorial de variable real, se dice que
−→f (t) es continua
t0 sı y solo sı
lımt→t0
−→f (t) = t0
Si−→f (t) es continua en todo punto t de
−→f (t) se dice simplemente continua.
Por el contrario, existe algun punto t1 para el que−→f (t) no es contınua se dice
que−→f (t) es discontınua en el punto t1.
3.3. DERIVACION
Una forma de obtener informacion acerca de una funcion es utilizando suderivada. Una funcion diferenciable es aquella cuya grafica no esta “rota”, esdecir, que es continua. Esto implica que debe tener bien definido un plano tan-gente a la grafica en cada punto. No debe tener dobleces, esquinas o picos. Lagrafica debe ser suave. Para conocer el comportamiento de la funcion en difer-entes direcciones es conveniente definir las derivadas parciales de la misma. Paraello partiremos de la derivada de un vector.
Sea−→f (t) un vector que depende de un escalar t. Se define la derivada de
−→f
respecto de t como

3.3. DERIVACION 31
Figura 3.1: Lımite de una funcion.
d−→f
dt= lım4t→0
4−→f4t
= lım4t→0
−→f (t +4t)−−→f (t)
4t=−→f ′ ,
si el lımite existe.Sı a su vez,
−→f ′ es una funcion que depende de t, puede encontrarse su derivada
nuevamente si el lımite existe para−→f ′ . A esta se le llama la segunda derivada
de−→f y se denota por d2−→f
dt2 o−→f ′′.
3.3.1. PROPIEDADES DE LAS DERIVADAS DE FUN-CIONES VECTORIALES DE VARIABLE ESCALAR
Sı−→f y −→g son funciones vectoriales diferenciables respecto de t y φ es una
funcion escalar diferenciable respecto de la variable escalar t, entonces se cumple:

32 CAPITULO 3. FUNCION VECTORIAL DE VARIABLE ESCALAR
Figura 3.2: Funcion discontinua.
d
dt
(−→f +−→g
)=
d−→f
dt+
d−→gdt
, (3.1)
d
dt
(φ−→f
)= φ
d−→f
dt+
dφ
dt
−→f , (3.2)
d
dt
(−→f · −→g
)=
−→A·d
−→B
dt+
d
dt
−→f · −→g , (3.3)
d
dt
(−→f ×−→g
)=
−→f × d−→g
dtu+
d
dt
−→f ×−→g , (3.4)
3.4. EXTREMOS DE FUNCIONES VECTO-RIALES
Sea−→f (t) una funcion vectorial definida para t ∈ [a, b] ⊂ R, si
−→f ′(t0) = 0 se
dice que−→f (t) tiene un valor extremo en t0.

3.4. EXTREMOS DE FUNCIONES VECTORIALES 33
Para determinar si se trata de un maximo o un mınimo local se emplea elcriterio de la segunda derivada segun el cual:
Si f ′(t0) = 0 y f ′′(t0) < 0 entonces f(t) tiene un maximo local en t0 ySi f ′(t0) = 0 y f ′′(t0) > 0 entonces f(t) tiene un mınimo local en t0.

34 CAPITULO 3. FUNCION VECTORIAL DE VARIABLE ESCALAR

Capıtulo 4
FUNCION ESCALAR DEUN VECTOR
4.1. DEFINICION
Sea φ la funcion que representa a un campo escalar definido para todoslos puntos de un espacio. Si −→r es el vector de posicion, se dice que φ(−→r ) esuna funcion que depende de una variable vectorial. Ya que −→r (x, y, z) a su vez,puede escribirse como una funcion de una o mas variables escalares, φ(x, y, z)es tambien una funcion de varias variables.
4.1.1. CURVAS Y SUPERFICIES DE NIVEL
La region U ∈ Rn formada por todos los puntos P con vectores de posicion−→r para los cuales se cumple que φ(−→r ) = C, donde C es un valor constante, sedenomina region de nivel para el campo escalar φ. Si n = 1, la region de nivelse llama curva de nivel ; si n = 2 se le llama superficie de nivel.
4.2. LIMITE Y CONTINUIDAD
Los conceptos de lımite y continuidad para funciones escalares de variablevectorial son analogos a los aplicados para funciones vectoriales que se estudi-aron en el capıtulo anterior, teniendo en cuenta unicamente las propiedades delas variables vectoriales involucradas.
4.3. DERIVADAS PARCIALES
Sı φ es una funcion escalar que depende de mas de una variable, digamos dex, y y z, se definen las derivadas parciales de φ con respecto a cada una de lasvariables como
35

36 CAPITULO 4. FUNCION ESCALAR DE UN VECTOR
∂φ
∂x= lım4x→0
4φ
4x= lım4x→0
φ (x +4x, y, z)− φ (x, y, z)4x
,
∂φ
∂y= lım4y→0
4φ
4y= lım4y→0
φ (x, y +4y, z)− φ (x, y, z)4x
,
∂φ
∂z= lım4z→0
4φ
4z= lım4z→0
φ (x, y, z +4z)− φ (x, y, z)4z
,
respectivamente, en caso de que los lımites existan.
4.3.1. DERIVADAS PARCIALES DE ORDEN SUPERI-OR
Si las derivadas parciales de la funcion φ existen y son a su vez derivables, sedefinen las segundas derivadas parciales, respecto a cada una de las variables,como:
∂2φ
∂x2=
∂
∂x
(∂φ
∂x
), ∂2φ
∂x∂y = ∂∂x
(∂φ∂y
),
∂2φ
∂x∂z=
∂
∂x
(∂φ
∂z
)
∂2φ
∂y∂x=
∂
∂y
(∂φ
∂x
), ∂2φ
∂y2 = ∂∂y
(∂φ∂y
),
∂2φ
∂y∂z=
∂
∂y
(∂φ
∂z
)
∂2φ
∂z∂y=
∂
∂z
(∂φ
∂y
), ∂2φ
∂z∂x = ∂∂z
(∂φ∂x
),
∂2φ
∂z2=
∂
∂z
(∂φ
∂z
)
Si a su vez, las segundas derivadas parciales son derivables pueden o calcu-larse las terceras derivadas parciales de forma similar. Ası se sigue derivandouna funcion escalar hasta el orden en que sea posible.
PROPIEDADES DE LAS DERIVADAS PARCIALES
Sı φ y ψ son funciones escalares derivables respecto de x y y, entonces secumple:
∂
∂x(φ + ψ) =
∂φ
∂x+
∂ψ
∂x, (4.1)
∂
∂x(φψ) = φ
∂ψ
∂x+
∂φ
∂xψ. (4.2)
4.3.2. DIFERENCIAL DE UNA FUNCION ESCALAR
Se dice que una funcion escalar es diferenciable si existen las derivadas par-ciales con respecto de cada una de las variables de las que depende. Ası, se definela diferencial de φ por

4.4. OPERADOR NABLA 37
dφ =∂φ
∂xdx +
∂φ
∂ydy +
∂φ
∂zdz (4.3)
4.4. OPERADOR NABLA
Se define el operador vectorial nabla, denotado por−→5 como:
−→∇ ≡ ∂
∂xi +
∂
∂yj +
∂
∂zk (4.4)
y se utiliza principalmente en tres casos, cada uno relacionado con los distintosproductos definidos para un campo vectorial
4.5. GRADIENTE
Sı es φ una funcion escalar derivable definida en cada punto (x, y, z) de unaregion del espacio,
−→∇φ =∂φ
∂xi +
∂φ
∂yj +
∂φ
∂zk (4.5)
es un campo vectorial que resulta de calcular cada una de las parciales de lafuncion φ y que indica la direccion en la que aumenta φ
4.6. DERIVADA DIRECCIONAL
Considerese un campo escalar en el espacio, dado por φ (x, y, z) , las derivadasparciales de φ son las razones de cambio de φ en las direcciones de los ejescoordenados X, Y y Z.
De manera general, puede conocerse el cambio de la funcion a lo largo decualquier otra direccion, definiendo la derivada direccional para esta.
Si −→u = u1i + u2j + u3k,
4.7. MAXIMOS Y MINIMOS
Una funcion escalar de variable vectorial tiene un maximo local en P0 sif(x, y, z) ≤ f(x0, y0, z0) cuando (x, y, z) en una vecindad de de P0. El valorf(x0, y0, z0) es el maximo local. De manera analoga, si f(x, y, z) ≥ f(x0, y0, z0)para P (x, y, z) en una vecindad de P0 se dice entonces que f(x0, y0, z0) es unmınimo local.
Si estas desigualdades se cumplen para todos los puntos (x, y, z) del dominiode f , entonces f tiene un maximo absoluto (o mınimo absoluto) en (x0, y0, z0).
Las rectas tangentes a la superficie (o curva) que representa a la funcion endichos puntos tienen pendiente 0, es decir, las derivadas parciales de la funcionen dichos puntos existen y se cumple que:

38 CAPITULO 4. FUNCION ESCALAR DE UN VECTOR
∂f
∂x= 0,
∂f
∂y= 0, (4.6)
A los puntos donde f donde sus derivadas parciales son iguales a cero se lesdenomina puntos de inflexion o puntos crıticos.
4.8. EXTREMOS PARA FUNCIONES DE DOSO MAS VARIABLES
Los puntos “crıticos” o extremos de funciones de una variable, f(x), sonaquellos en los que la funcion alcanza los valores mas altos o mas pequenosdentro de un intervalo en el que dicha funcion es contınua. Si la funcion esdecreciente para los puntos anteriores al valor mınimo despues de alcanzarlo estaempezara a crecer; si por el contrario la funcion es creciente, al llegar al puntomas alto comenzara a decrecer. Ya que justamente en estos puntos extremosla funcion cambia de forma, su derivada pasara de valores negativos (asociadoscon la pendiente de la recta tangente a f(x) en cada punto), a valores positivospara el caso de un mınimo; y de valores positivos a negativos para un maximo.
Es entonces, precisamente en los puntos extremos, que la derivada de lafuncion toma el valor de cero. Ası, se dice que una funcion f(x), contınua en unintervalo (a, b) tiene un punto extremo (mınimo o maximo local) en un puntox0, sı f(x0)′ = 0. Para determinar la naturaleza del punto extremo, es decir,si se trata de un mınimo o maximo se considera ahora la segunda derivada.Como se menciono anteriormente, despues de “pasar” un mınimo local la funcioncomienza a aumentar su valor, en dicho caso la segunda derivada de la funcion( o la derivada de la derivada de f(x)) tendra un valor positivo en el puntoextremo. Si se trata de un maximo local la segunda derivada tendra un valornegativo.
En el caso de funciones de mas de una variable existe una analogıa al casoanterior, sin embargo debe considerarse que la funcion no tiene una sola deriva-da, sino que ahora deberan tomarse en cuenta las derivadas parciales respecto acada una de las variables involucradas. Ası, si f(x1, x2, x3, ..., xn) diferenciableen un intervalo dado, puede decirse que la funcion tiene un punto extremo enun punto (x10, x20, x30, ..., xn0) sı
∂f(x10, x20, x30, ..., xn0)∂x1
= 0,
∂f(x10, x20, x30, ..., xn0)∂x2
= 0,
∂f(x10, x20, x30, ..., xn0)∂x3
= 0,
...∂f(x10, x20, x30, ..., xn0)
∂xn= 0.

4.8. EXTREMOS PARA FUNCIONES DE DOS O MAS VARIABLES 39
Un teorema de utilidad en esta parte es el de la igualdad de las parcialescruzadas:
Si f(x, y) es una funcion dos veces diferenciable, entonces las derivadas par-ciales son iguales,
∂2f(x, y)∂x∂y
=∂2f(x, y)
∂y∂x
Como podra notarse, el criterio de la segunda derivada empleado en funcionesde una sola variable no puede emplearse de la misma forma para funciones dedos o mas variables, ya que en este caso debe considerarse el comportamientode la funcion al variar cada una de ellas por separado. Para conocer entonces lanaturaleza de los puntos crıticos se utilizan otros criterios relacionados tambiencon las segundas derivadas.
4.8.1. CRITERIO DE LA SEGUNDA DERIVADA
Sea f (x, y) una funcion contınua con segundas derivadas parciales tambiencontınuas en un disco con centro en (a, b) y para la que ∂f(a,b)
∂x = ∂f(a,b)∂y = 0, es
decir, (a, b) es un punto crıtico, entonces(i) Sı D > 0 y ∂2f(a,b)
∂x2 > 0, entonces f(a, b) es un mınimo local,
(ii) Sı D > 0 y ∂2f(a,b)∂x2 < 0, entonces f(a, b) es un maximo local,
(iii) Sı D < 0 y ∂2f(a,b)∂x2 > 0, entonces f(a, b) es un punto silla,
(iv) Sı D = 0 el criterio no proporciona informacion.Donde el discrimiante, D, esta definido por
D = D (a, b) =(
∂2f(a, b)∂x2
)(∂2f(a, b)
∂y2
)−
(∂2f(x, y)
∂x∂y
)2
4.8.2. METODO DE LOS MULTIPLICADORES DE LA-GRANGE
En algunos casos es necesario maximizar o minimizar una funcion sujeta aciertas restricciones o condiciones adicionales. El metodo de los Multiplicadoresde Lagrange se emplea precisamente para encontrar los puntos donde la funciontiene un maximo o mınimo local dentro de una restriccion dada.
TEOREMASean f : U ⊂ Rn → R y g : U ⊂ Rn → R funciones con valores reales dadas.
Sean x0 ∈ U y g(x0) = c , y sea S el conjunto de curvas de nivel de g con valorreal c.
Si f (x1, x2...xn) restringida a S, tiene un maximo o un mınimo local en S,en (x10 , x20 ...xn0) entonces existe un numero real λ tal que
−→∇f(x0, y0, zo) = λ−→∇g(x0, y0, zo) (4.7)

40 CAPITULO 4. FUNCION ESCALAR DE UN VECTOR
∂f
∂x1= λ
∂g
∂x1,
∂f
∂x2= λ
∂g
∂x2,
...∂f
∂xn= λ
∂g
∂xn
EJEMPLOSupongase que entre todas las cajas rectangulares con area de superficie fija
de 10m2 , hay una caja con el mayor volumen posible. Hallar sus dimensionesSolucion.Sı x, y y z con las longitudes de los lados, x ≥ 0, y ≥ 0 y z ≥ 0 respectiva-
mente el volumen estara dado por V = f(x, y, z).La superficie de la caja es la suma de las superficies de cada cara.
A = 2xy + 2yz + 2xz = 2 (xy + yz + xz) = 10m2
de donde la ecuacion de restriccion, g (x, y, z) sera
g (x, y, z) = xy + yz + xz − 5,
5 = xy + yz + xz
y las identidades correspondientes son
∂f
∂x= yz = λ
∂g
∂x= λ (y + z) ,
∂f
∂y= xz = λ
∂g
∂y= λ (x + z) ,
∂f
∂z= xy = λ
∂g
∂z= λ (x + y) .
de donde se tiene un conjunto de cuatro ecuaciones con cuatro incognitas.Resolviendo el sistema (despejando λ en 1 y sust. en 2 y 3) se tiene
x = y = z =
√53,
λ =12
√53.
Ası el punto en el que la funcion del volumen tiene un maximo es(√
53 ,
√53 ,
√53
),
por lo que, las dimensiones de la caja deberan ser√
53 ,
√53 ,
√53 .

4.8. EXTREMOS PARA FUNCIONES DE DOS O MAS VARIABLES 41
4.8.3. DOS RESTRICCIONES
Sea f una funcion escalar con un punto crıtico en P0 = (x0, y0, zo), y sean gy h dos funciones de restriccion para f , entonces se cumple que:
−→∇f(x0, y0, zo) = λ−→∇g(x0, y0, zo) + µ
−→∇h(x0, y0, zo), (4.8)

42 CAPITULO 4. FUNCION ESCALAR DE UN VECTOR
Capıtulo 5
FUNCION VECTORIALDE UN VECTOR
5.1. DEFINICION
Sea−→F (−→r ) una funcion definida en U ⊂ Rm → Rn donde m > 1 y n > 1, se
dice entonces que−→F es una funcion vectorial de variable vectorial.
Toda funcion vectorial−→F (−→r ) puede escribirse en terminos de sus compo-
nentes. Para el sistema de coordenadas cartesianas se tiene:
−→F (−→r ) = F1(−→r )i + F2(−→r )j + F3(−→r )k
Dado que cada una de las componentes de−→F , Fi son funciones escalares de
variable vectorial, se manejan de la misma forma que en el capıtulo anterior.
5.2. LIMITE Y CONTINUIDAD
El lımite de una funcion vectorial−→F (−→r ) que depende de un vector existe
en el punto dado por −→r0 si existe el lımite en ese punto para cada una de lasfunciones componente Fi.
La definicion del Lımite y continuidad de funciones vectoriales de variablevectorial, se hace de forma analoga a las funciones escalares de variable vectorial.
De manera semejante, una funcion−→F (−→r ) es contınua en un punto P0 con
vector de posicion −→r0 , si las funciones componentes son todas contınuas en dichopunto.
5.3. DERIVADA
Se define la derivada de una funcion vectorial−→F (−→r ) respecto a la variable
vectorial −→r como:
43

44 CAPITULO 5. FUNCION VECTORIAL DE UN VECTOR
−→F ′(−→r ) =
d−→F (−→r )d−→r = lım
4−→r →0
4−→F4−→r = lım
4−→r →0
−→F (−→r +4−→r )−−→F (−→r )
4−→r (5.1)
Dado que a su vez −→r es una funcion que depende de varias variables, esdecir, −→r (x, y, z) en el sistema de coordenadas cartesianas, entonces se empleala regla de la cadena, o sea:
d−→F (−→r )du
=d−→F (−→r )d−→r
d−→r (u)du
(5.2)
5.3.1. MATRIZ JACOBIANA
Para funciones escalares diferencialbles u (x, y, z), v (x, y, z) y w (x, y, z).
[∇u∇v∇w] =
∣∣∣∣∣∣∣
∂u∂x
∂u∂y
∂u∂z
∂v∂x
∂v∂y
∂v∂z
∂w∂x
∂w∂y
∂w∂z
∣∣∣∣∣∣∣se llama el Jacobiano de u, v y w y se denota por
J
[(u, v, w)(x, y, z)
]=
∣∣∣∣∂ (u, v, w)∂ (x, y, z)
∣∣∣∣
PROPIEDADES DE LAS DERIVADAS PARCIALES
Sı−→A y
−→B son funciones vectoriales diferenciables respecto de u, v y w, y φ
es una funcion escalar diferenciable respecto de u, entonces se cumple:
∂
∂u
(−→A +
−→B
)=
∂−→A
∂u+
∂−→B
∂u, (5.3)
∂
∂u
(φ−→A
)= φ
∂−→A
∂u+
∂φ
∂u
−→A, (5.4)
∂
∂u
(−→A · −→B
)=
−→A·∂
−→B
∂u+
∂
∂u
−→A · −→B, (5.5)
∂
∂u
(−→A ×−→B
)=
−→A × ∂
−→B
∂u+
∂
∂u
−→A ×−→B,
∂2
∂v∂u
(−→A · −→B
)=
∂
∂v
(−→A·∂
−→B
∂u+
∂
∂u
−→A · −→B
)=−→A· ∂
2−→B∂v∂u
+∂
∂v
−→A · ∂
∂u
−→B +
∂2−→A∂v∂u
· −→B +∂
∂u
−→A · ∂
∂v
−→B.(5.6)
5.3.2. DIFERENCIAL DE UN VECTOR
Se dice que un vector es diferenciable si existen las derivadas parciales conrespecto de cada una de las variables de las que depende. Ası, se define ladiferencial de
−→A por

5.3. DERIVADA 45
d−→A =
∂−→A
∂xdx +
∂−→A
∂ydy +
∂−→A
∂zdz (5.7)
5.3.3. DIVERGENCIA Y ROTACIONAL
Divergencia
Si −→A (t) = A1(x, y, z)i + A2(x, y, z)j + A3(x, y, z)k
la divergencia de−→A es el campo escalar
−→∇ · −→A =∂A1
∂xi +
∂A2
∂yj +
∂A3
∂zk (5.8)
Considerese que−→A es el campo de velocidad de un fluido, entonces
−→∇ · −→Arepresenta la tasa de expansion por unidad de volumen bajo el flujo de dichofluido. Si
−→∇ · −→A < 0 entonces el fluido se esta comprimiendo.
Rotacional
Para un campo vectorial−→A , el rotacional se define como:
−→∇ ×−→A =
∣∣∣∣∣∣
i j k∂∂x
∂∂y
∂∂z
A1 A2 A3
∣∣∣∣∣∣(5.9)
=(
∂A3
∂y− ∂A2
∂z
)i +
(∂A1
∂z− ∂A3
∂x
)j +
(∂A2
∂x− ∂A1
∂y
)k
El rotacional solo esta definido en el espacio tridimensional.

46 CAPITULO 5. FUNCION VECTORIAL DE UN VECTOR
Capıtulo 6
INTEGRACIONVECTORIAL
6.1. INTEGRAL DE RIEMANN
La medida del area de una figura es el numero que representa el tamano dela region encerrada por la misma. Para un polıgono puede definirse el area comola suma de las areas de los triangulos en que puede dividirse. En general, parala region R acotada por el eje X, las rectas x = a y x = b y la curva que tienepor ecuacion y = f(x) donde f es una funcion continua en el intervalo cerrado[a, b] la medida del area se denominara A.
Se define primero una region poligonal contenida en R, dividiendo el intervalocerrado [a,b] en n subintervalos de longitud igual (por simplicidad) ∆x de laforma
∆x =(b− a)
n, (6.1)
Los puntos extremos de estos intervalos se denotaran por x0, x1, x2, x3, ...xn−1, xn
6.2. INTEGRAL DE LINEA
Sea −→r (u) = x (u) i + y (u) j + z (u) k el vector de posicion de (x, y, z) de lospuntos de una curva C que pasa por P1 y P2 correspondientes a u = u1 y u = u2
respectivamente. Supongase que C se compone de un numero finito de arcos enlos que −→r (u) tiene derivada contınua. Sea
−→A (x, y, z) = A1i + A2j + A3k una
funcion vectorial de posicion definida y contınua a lo largo de C. La integral dela componente tangencial de
−→A segun C desde P1 hasta P2 dada por
∫ P2
P1
−→A · d−→r =
∫
C
−→A · d−→r =
∫
C
A1dx + A2dy + A3dz
47

48 CAPITULO 6. INTEGRACION VECTORIAL
es un ejemplo de integral de lınea. En general, las integrales que incluyen vec-tores de desplazamiento diferencial d−→r se llaman integrales de lınea; otros casospueden ser:
∫
C
φd−→r ,
∫
C
−→A × d−→r ,
donde φ es una funcion escalar para la cual
∫
C
φd−→r =∫
C
φ(dxi + dyj + dzk
)= i
∫
C
φdx + j
∫
C
φdy + k
∫
C
φdz.
La curva C forma una trayectoria cerrada si P1 = P2. En este casola integralse denota por
∮
C
φd−→r .
Si C es una curva plana cerrada simple y la direccion de integracion puededescribirse se usan los sımbolos:
∮
C+
φd−→r ,
o∮
C−φd−→r ,
si el sentido en que se recorre C es contrario al de las manecillas del reloj parael primer caso o el mismo para el segundo.
6.2.1. EJEMPLOS
6.3. INTEGRAL DE SUPERFICIE
Sea S una de las dos caras de una superficie considerada positiva de maneraarbitraria. Un vector unitario n normal en un punto cualquiera de la cara positi-va de S se llama vector unitario normal exterior. Si d
−→S es un vector que apunta
en la direccion de n y tiene como modulo dS, ası, d−→S = ndS. Las integrales que
incluyen vectores de superficie diferencial d−→S se llaman integrales de superficie.
Las integrales de superficie son:∫∫
S
φd−→S ,
6.4. INTEGRAL DE VOLUMEN 49
∫∫
S
−→A · d−→S
y∫∫
S
−→A × d
−→S ,
cada una de las cuales esta sobre una superficie S que puede estar abierta ocerrada. Si S es una superficie cerrada, las integrales anteriores se expresan
∫∫
S
φd−→S ,
∫∫
S
−→A · d−→S ,
∫∫
S
−→A × d
−→S ,
Para superficies cerradas se supone que la direccion positiva de la normalesta dirigida hacia afuera de la superficie. La integral de superficie de un campovectoral
−→f se llama el flujo de
−→f a traves de S y se representa por
∫∫
S
−→f · d−→S =
∫∫
S
−→f · ndS =
∫∫
S
−→f · n dxdy∣∣∣n · k
∣∣∣
6.3.1. EJEMPLOS
P19 S, P20S, P21S, P22S, P23S,
6.3.2. CAMBIO DE VARIABLE PARA INTEGRALESDOBLES
Sean R y S regiones en el plano XY y UV respectivamente que estanrelacionadas por medio de las ecuaciones de transformacion x = g (u, v) yy = h (u, v) . Si φ (x, y), funcion escalar, es contınua en R y g y h tienen derivadasparciales contınuas en S y J
[(u,v)(x,y)
]=
∣∣∣∂(u,v)∂(x,y)
∣∣∣ no es nulo en S, entonces
∫∫
R
φ (x, y) dA =∫∫
S
φ (g (u, v) , h (u, v)) Jdudv =∫∫
S
φ (g (u, v) , h (u, v))∣∣∣∣∂ (u, v)∂ (x, y)
∣∣∣∣ dudv
6.4. INTEGRAL DE VOLUMEN
De forma analoga a las integrales de lınea y de superficie, las integrales devolumen son aquellas que involucran un diferencial de volumen dV multiplicadopor una funcion escalar φ o vectorial
−→A de la forma
∫∫∫
V
φdV,

50 CAPITULO 6. INTEGRACION VECTORIAL
o ∫∫∫
V
−→AdV

Capıtulo 7
TEOREMASINTEGRALES
7.1. TEOREMA DE LA DIVERGENCIA DEGAUSS
Sean, V el volumen limitado por una superficie cerrada S y−→A una funcion
vectorial de posicion con derivadas continuas; entonces∫∫∫
V
∇ · −→AdV =∫∫
S
−→A · ndS =
∫∫
S
−→A · d−→S
siendo n la normal exterior a S (positiva).
7.2. TEOREMA DEL ROTACIONAL DE STOKES
Sea S una superficie abierta de dos caras, C una curva cerrada simple situadasobre la superficie anterior y
−→A una funcion vectorial con derivadas continuas.
∮
C
−→A · d−→r =
∫∫
S
(−→∇ ×−→A)· ndS =
∫∫
S
(−→∇ ×−→A)· d−→S
en donde C se recorre en el sentido positivo. El sentido de circulacion de C espositivo cuando un observador que recorra la periferia de S en dicho sentidoy con su cabeza apuntando hacia la normal exterior a S, deja la superficie encuestion a su izquierda.
7.3. TEOREMA DE GREEN EN EL PLANO
Sea S una region cerrada del plano XY limitada por una curva simple cerradaC, y M y N dos funciones contınuas de x e y con derivadas continuas en R;entonces
51

52 CAPITULO 7. TEOREMAS INTEGRALES
∮
C
Mdx + Ndy =∫∫
R
(∂N
∂x− ∂M
∂y
)dxdy =
∫∫
S
(−→∇ ×−→A)· d−→S
cuando C se recorre en el sentido positivo (contrario a las manecillas del reloj).

Capıtulo 8
COORDENADASCURVILINEAS
Como se estudio en anteriormente, las coordenadas x, y y z de un pun-to P con respecto a un sistema coordenado XY Z estan determinadas por lasintersecciones entre cada uno de los ejes con el plano formado por los otros dos.
Considerese primero un sistema Cartesiano con ejes X, Y y Z; y las coor-denadas de un punto P con respecto a este sistema (x, y, z). Pueden tenersesistemas en los cuales los ejes coordenados no esten representados necesaria-mente por lıneas rectas sino, en general cualquier curva.
Para alguno de estos sistemas con ejes U ,V y W , en el mismo espacio, cor-respondera tambien al punto P una triada de coordenadas, digamos (u, v, w).
Ambas triadas estan relacionadas entre sı por un sistema de ecuaciones dela forma
x = x (u, v, w)y = y (u, v, w)z = z (u, v, w)
que son las ecuaciones de transformacion del nuevo sistema UV W al sistemaoriginal XY Z. O, inversamente
u = u (x, y, z)v = v (x, y, z)w = w (x, y, z)
En el nuevo sistema las coordenadas se determinaran tambien por la inter-seccion entre los ejes coordenados y los planos formados por ellos. Se dice que(u.v.w) son las coordenadas curvilenas que corresponden al punto P (x, y, z) .
53

54 CAPITULO 8. COORDENADAS CURVILINEAS
EJERCICIO
Escribir las ecuaciones de transformacion para los sistemas cilındrico y esferi-co
1). Hallar las coordenadas cilındricas para el punto cuyas coordenadas carte-sianas rectangulares son
(−√3,−1, 2).
Solucion: El punto se muestra en la figura , la primera coordenada estara da-
da por ρ =√(−√3
)2+ (−1)2 = 2 . Por otro lado, para θ se tiene tan θ = −1
−√3=
13
√3 = . 577 35; θ = arctan
(13
√3)
= 16π, como π < θ < 3
2π entonces θ = 76π. Fi-
nalmente z = z = 2. Ası, las coordenadas del punto(−√3,−1, 2
)en el sistema
cilındrico seran(2, 7
6π, 2).
2). (a) Hallar las coordenadas cilındricas de (6, 6, 8) y localizar el punto. (b)Si un punto tiene coordenadas cilındricas
(8, 2π
3 ,−3), ¿cuales son sus coorde-
nadas cartesianas? Localizarlo.Solucion:(a) En este caso ρ =
√(6)2 + (6)2 = 6
√2, θ = arctan
(66
)= π
4 y z = z = 8.Ası, las coordenadas cilındricas son
(6√
2, π4 , 8
).
(b) Para esta parte
x = r cos θ = 8 cos2π
3= −8
2= −4,
y = r sin θ = 8 sin2π3
= 8√
32
= 4√
3,
y z = z = −3, de donde las coordenadas cartesianas del punto son:(−4, 4
√3,−3
).
3). (a) Hallar las coordenadas esfericas de (1,−1, 1).(b) Hallar las coordenadas cartesianas de
(3, π
6 , π4
).
Solucion:(a)
r =√
x2 + y2 + z2 =√
(1)2 + (−1)2 + (1)2 =√
3,
θ = π + arctan(y
x
)= π + arctan
(−11
)= π − π
4=
3π
4,
y
φ = cos−1(z
r
)= cos−1
(1√3
)≈ 0,955 ≈ 54,74◦.
(b)
x = r sin θ cosφ = 3 sin(π
4
)cos
(π
6
)= 3
(1√2
) (√3
2
)=
3√
32√
2,
y = r sin θ sin φ = 3 sin(π
4
)sin
(π
6
)= 3
(1√2
)(12
)=
32√
2,

8.1. VECTORES UNITARIOS EN COORDENADAS CURVILINEAS 55
y
z = r cos θ = 3 cos(π
4
)= 3
(1√2
)=
3√
22
,
8.1. VECTORES UNITARIOS EN COORDE-NADAS CURVILINEAS
En la practica es conveniente definir vectores unitarios asociados a un sistemacoordenado. Para el sistema rectangular XY Z, se definieron tres vectores en ladireccion de cada uno de los ejes coordenados de norma uno, de manera quecualquier vector pudiera escribirse como la suma de tres vectores paralelos acada eje.
−→r = xi + yj + zk (8.1)
En el caso de coordenadas curvilıneas, la direccion de los ejes no es necesari-amente constante, por lo que se definiran los vectores unitarios como vectorestangentes a cada uno de los ejes curvilıneos dados por la derivada del vector deposicion en el sistema curvilıneo con respecto a cada una de las coordenadas
ei =∂−→r∂qi
||∂−→r ∂qi||pues la derivada de una funcion es precisamente un vector perpendicular adicha funcion en la direccion del eje correspondiente. El sentido de los vectoresunitarios es el de crecimiento de los ejes coordenados correspondientes. Ası, paraun sistema con ejes U , V y W el vector unitario correspondiente al eje U es
eu =∂−→r∂u
||∂−→r ∂u||Puede escribirse
∂−→r∂u
= hieu
en donde el coeficiente se llama “factor de forma” y esta dado por
hi = ||∂−→r ∂u||
EJERCICIO
Determinar los vectores unitarios par los sistemas cilındrico y esferico

56 CAPITULO 8. COORDENADAS CURVILINEAS
8.2. ELEMENTO DE ARCO Y ELEMENTODE VOLUMEN
El elemento de longitud de arco ds se determina a partir de
ds2 = d−→r · d−→r
En coordenadas rectangulares
ds2 = dx2 + dy2 + dz2
En general, en coordenadas curvilıneas se tiene
d−→r =∂−→r∂u
du +∂−→r∂v
dv +∂−→r∂w
dw
d−→r = hudueu + hvdvev + hwdwew
Para sistemas ortogonales
eu · eu = eu · eu = eu · eu = 1
yeu · ev = ev · ew = ew · eu = 0
ası que
ds2 = h2udu2 + h2
vdv2 + h2wdw2
El elemento de arco a lo largo de la curva U es ds = hudu , pues v y w sonconstantes. Similarmente ds = hvdv y ds = hwdw son las diferenciales de arcoa lo largo de v y w respectivamente.
EJERCICIO
Escribir la diferencial de arco en coordenadas cilındricas y esfericas.Por otra parte, el elemento de volumen para un sistema ortogonal estara dado
por
dV = |(hudueu) · (hvdvev)× (hwdwew)| = huhvhwdudvdw
ya que
|eu · ev × ew| = 1

8.3. GRADIENTE, DIVERGENCIA Y ROTACIONAL EN COORDENADAS CURVILINEAS57
8.3. GRADIENTE, DIVERGENCIA Y ROTA-CIONAL EN COORDENADAS CURVILINEAS
En general, para cualquier sistema de coordenadas curvilıneas (u, v, w), conφ una funcion escalar y
−→A = A1eu + A2ev + A3ew una funcion vectorial; las
expresiones para el gradiente, la divergencia y el rotacional seran:1.−→∇φ = 1
hu
∂φ∂u eu + 1
hv
∂φ∂v ev + 1
hw
∂φ∂w ew,
2.−→∇ · −→A = 1
huhvhw
[∂
∂u (hvhwA1) + ∂∂v (huhwA2) + ∂
∂w (huhvA3)],
3.−→∇ ×−→A = 1
huhvhw
∣∣∣∣∣∣
hueu hv ev hwew∂
∂u∂∂v
∂∂w
huA1 hvA2 hwA3
∣∣∣∣∣∣,
4. ∇2φ = 1huhvhw
[∂
∂u
(hvhw
hu
∂φ∂u
)+ ∂
∂v
(huhw
hv
∂φ∂v
)+ ∂
∂w
(huhv
hw
∂φ∂w
)].
8.4. JACOBIANO
Para funciones escalares diferenciables u (x, y, z), v (x, y, z) y w (x, y, z).
[∇u∇v∇w] =
∣∣∣∣∣∣∣
∂u∂x
∂u∂y
∂u∂z
∂v∂x
∂v∂y
∂v∂z
∂w∂x
∂w∂y
∂w∂z
∣∣∣∣∣∣∣se llama el Jacobiano de u, v y w y se denota por
J
[(u, v, w)(x, y, z)
]=
∣∣∣∣∂ (u, v, w)∂ (x, y, z)
∣∣∣∣