guía básica taller de robótica básica
TRANSCRIPT
Guía Básica
Taller de Robótica Básica V1
Guía de ejemplos y ejercicios básicos de programación en Visualino
con uso del robot educacional Talos UNO

Valparaíso, 2020.
Apunte de conexiones entre sensores y pines del Arduino
PIN FUNCIÓN
13 ECHO – ULTRASONIDO HCSR04
12 TRIG – ULTRASONIDO HCSR04
~11 VERDE – RGB
~10 ROJO – RGB
~ 9 AZUL – RGB
8 ZUMBADOR
7 DIRECCIÓN MOTOR DERECHO
~ 6 POTENCIA MOTOR DERECHO
~ 5 POTENCIA MOTOR IZQUIERDO
4 DIRECCIÓN MOTOR IZQUIERDO
~ 3 BOTÓN 2
2 BOTÓN 1
1 RX BLUETOOTH – HC06
0 TX BLUETOOTH – HC06
A0 SENSOR DE LINEA IZQUIERDO
A1 SENSOR DE LINEA DERECHO
A2 LDR IZQUIERDO
A3 LDR DERECHO
A4 MICRÓFONO
A5 OPCIONAL
Apuntes de movimiento
PIN FUNCIÓN ESTADO
7 DIRECCIÓN MOTOR DERECHO HIGH
~ 6 POTENCIA MOTOR DERECHO De 0 a 255 (0% a 100%)
~ 5 POTENCIA MOTOR IZQUIERDO De 0 a 255 (0% a 100%)
4 DIRECCIÓN MOTOR IZQUIERDO LOW
PIN FUNCIÓN ESTADO
7 DIRECCIÓN MOTOR DERECHO LOW
~ 6 POTENCIA MOTOR DERECHO De 0 a 255 (0% a 100%)
~ 5 POTENCIA MOTOR IZQUIERDO De 0 a 255 (0% a 100%)
4 DIRECCIÓN MOTOR IZQUIERDO HIGH
PIN FUNCIÓN ESTADO
7 DIRECCIÓN MOTOR DERECHO HIGH
~ 6 POTENCIA MOTOR DERECHO De 0 a 255 (0% a 100%)
~ 5 POTENCIA MOTOR IZQUIERDO De 0 a 255 (0% a 100%)
4 DIRECCIÓN MOTOR IZQUIERDO HIGH
PIN FUNCIÓN ESTADO
7 DIRECCIÓN MOTOR DERECHO LOW
~ 6 POTENCIA MOTOR DERECHO De 0 a 255 (0% a 100%)
~ 5 POTENCIA MOTOR IZQUIERDO De 0 a 255 (0% a 100%)
4 DIRECCIÓN MOTOR IZQUIERDO LOW
ADELANTE
ATRAS
GIRO IZQUIERDA
GIRO DERECHA

Valparaíso, 2020.
Apunte de conexiones entre sensores y pines del Arduino
Valparaíso, 2020.
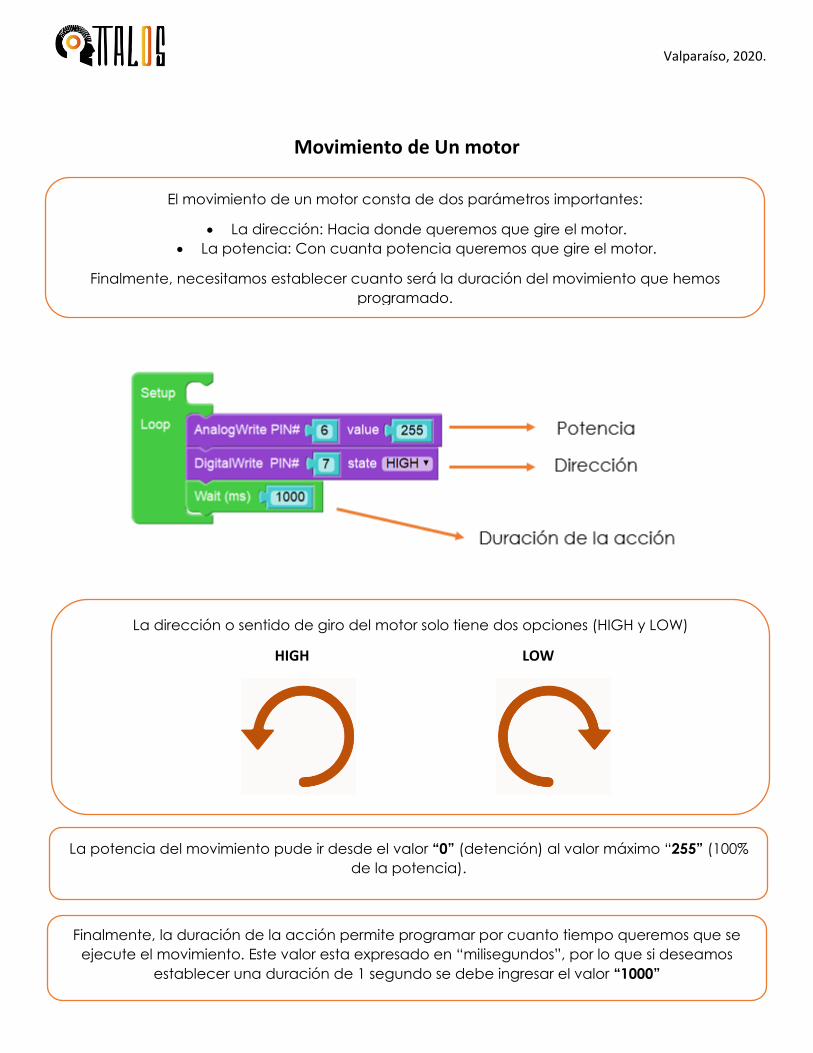
Movimiento de Un motor
El movimiento de un motor consta de dos parámetros importantes:
• La dirección: Hacia donde queremos que gire el motor.
• La potencia: Con cuanta potencia queremos que gire el motor.
Finalmente, necesitamos establecer cuanto será la duración del movimiento que hemos
programado.
La dirección o sentido de giro del motor solo tiene dos opciones (HIGH y LOW)
HIGH LOW
La potencia del movimiento pude ir desde el valor “0” (detención) al valor máximo “255” (100%
de la potencia).
Finalmente, la duración de la acción permite programar por cuanto tiempo queremos que se
ejecute el movimiento. Este valor esta expresado en “milisegundos”, por lo que si deseamos
establecer una duración de 1 segundo se debe ingresar el valor “1000”
Valparaíso, 2020.
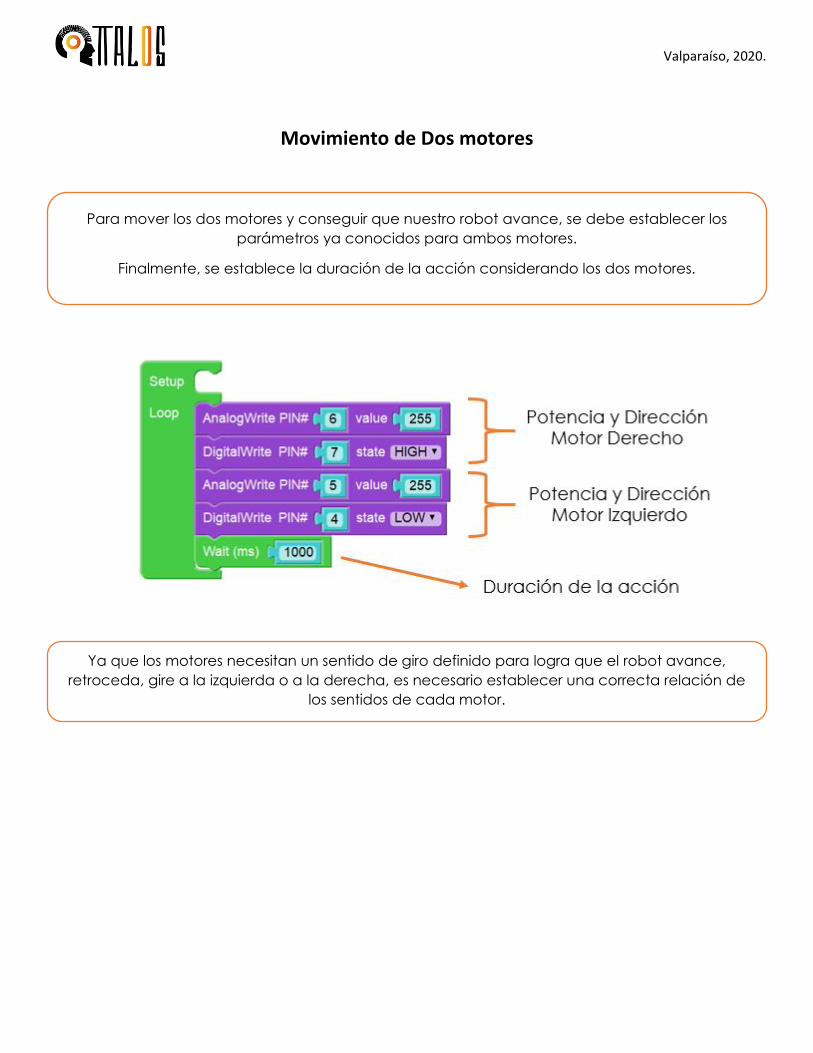
Movimiento de Dos motores
Para mover los dos motores y conseguir que nuestro robot avance, se debe establecer los
parámetros ya conocidos para ambos motores.
Finalmente, se establece la duración de la acción considerando los dos motores.
Ya que los motores necesitan un sentido de giro definido para logra que el robot avance,
retroceda, gire a la izquierda o a la derecha, es necesario establecer una correcta relación de
los sentidos de cada motor.

Valparaíso, 2020.
Ejemplo
STOP

Valparaíso, 2020.
Actuadores
Zumbador (Buzzer)
Bloque buzzer
Bloque buzzer avanzado
El robot tiene tres tipos de actuadores diferentes los cuales son: Motores, Luces Led RGB y un
Zumbador.
Estos tres componentes pueden actuar a nuestra voluntad, programando los aspectos básicos
de funcionamiento.
El zumbador o buzzer puede emitir un pitido con una frecuencia que nosotros establezcamos,
para lograr esto contamos con dos bloques que nos pueden permitir establecer el tono y la
duración del sonido.
Valparaíso, 2020.
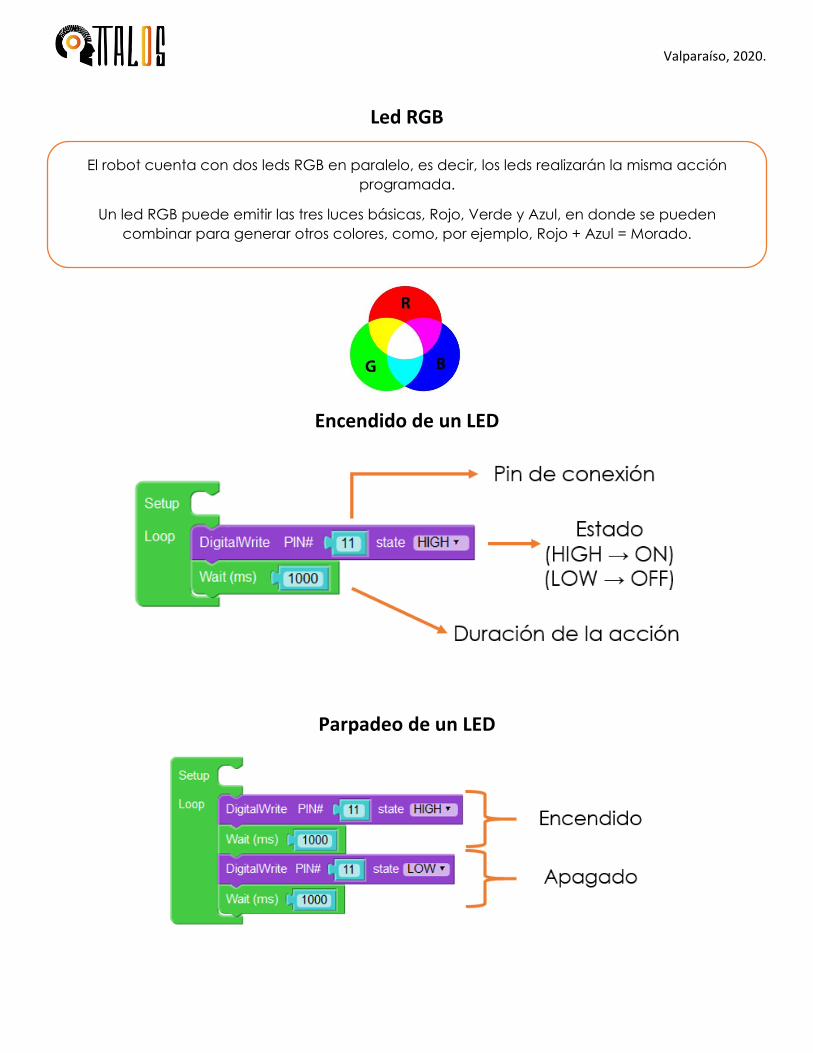
Led RGB
Encendido de un LED
Parpadeo de un LED
El robot cuenta con dos leds RGB en paralelo, es decir, los leds realizarán la misma acción
programada.
Un led RGB puede emitir las tres luces básicas, Rojo, Verde y Azul, en donde se pueden
combinar para generar otros colores, como, por ejemplo, Rojo + Azul = Morado.

Valparaíso, 2020.
Ejemplo
Verde
Rojo
Azul
Valparaíso, 2020.
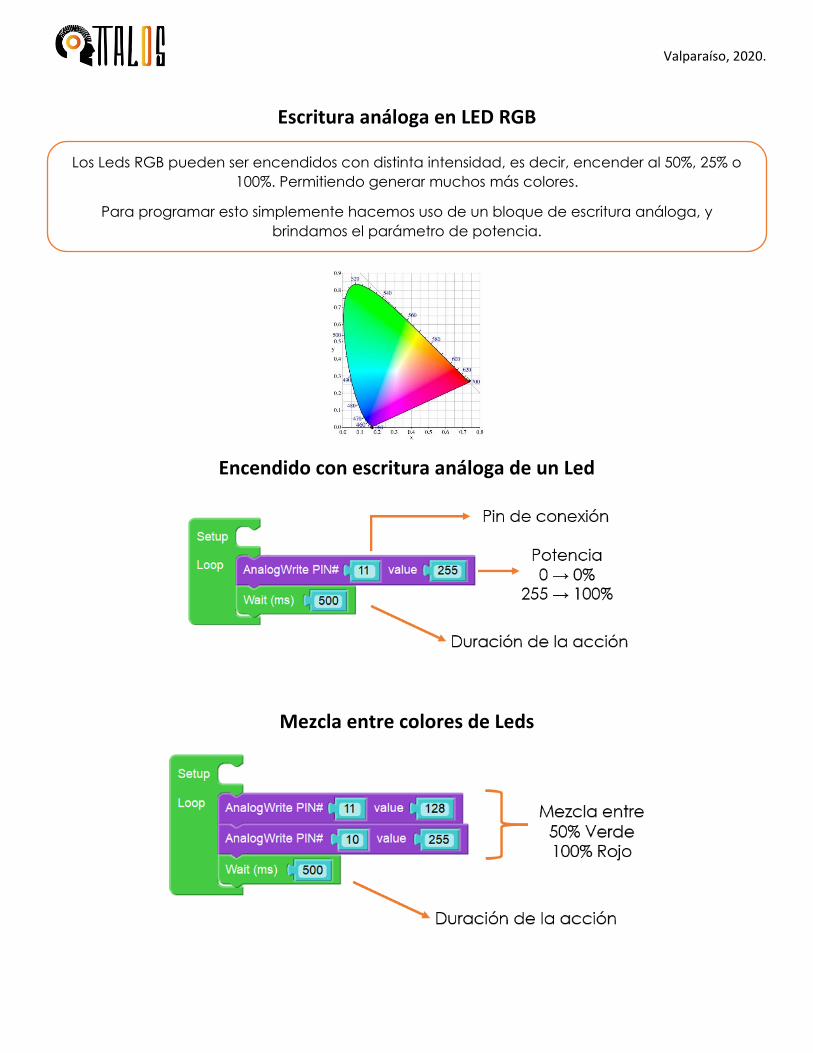
Escritura análoga en LED RGB
Encendido con escritura análoga de un Led
Mezcla entre colores de Leds
Los Leds RGB pueden ser encendidos con distinta intensidad, es decir, encender al 50%, 25% o
100%. Permitiendo generar muchos más colores.
Para programar esto simplemente hacemos uso de un bloque de escritura análoga, y
brindamos el parámetro de potencia.
Valparaíso, 2020.
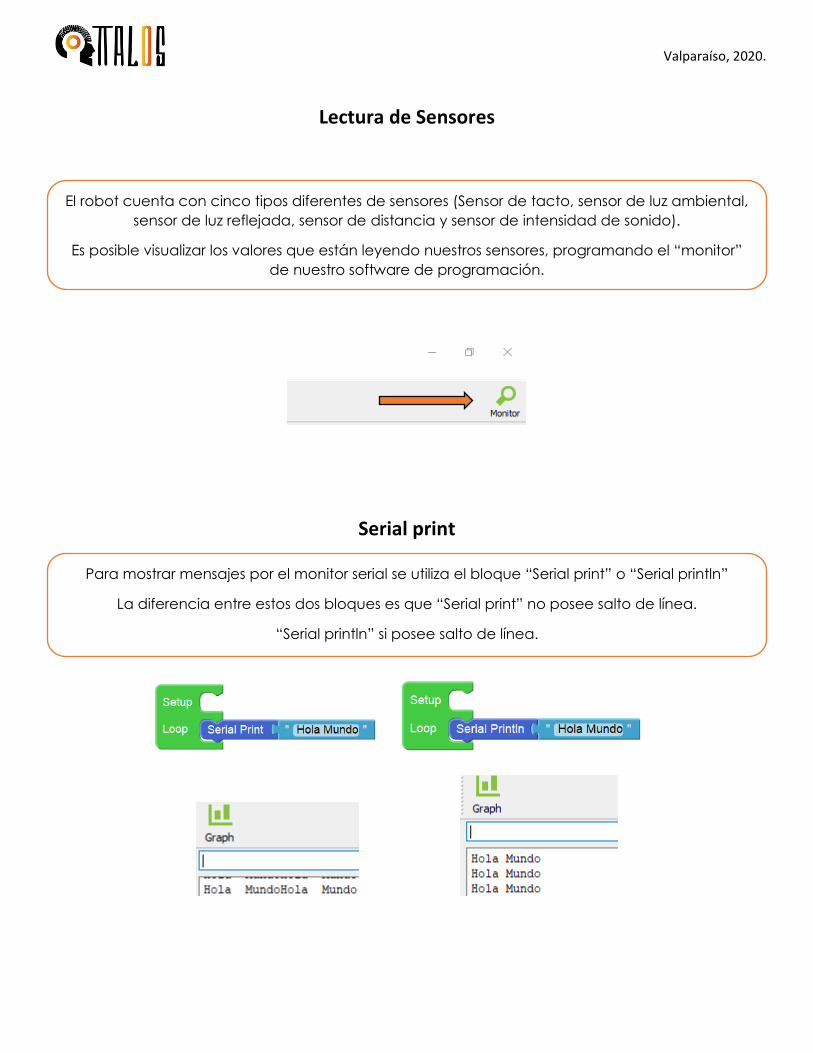
Lectura de Sensores
Serial print
El robot cuenta con cinco tipos diferentes de sensores (Sensor de tacto, sensor de luz ambiental,
sensor de luz reflejada, sensor de distancia y sensor de intensidad de sonido).
Es posible visualizar los valores que están leyendo nuestros sensores, programando el “monitor”
de nuestro software de programación.
Para mostrar mensajes por el monitor serial se utiliza el bloque “Serial print” o “Serial println”
La diferencia entre estos dos bloques es que “Serial print” no posee salto de línea.
“Serial println” si posee salto de línea.
Valparaíso, 2020.
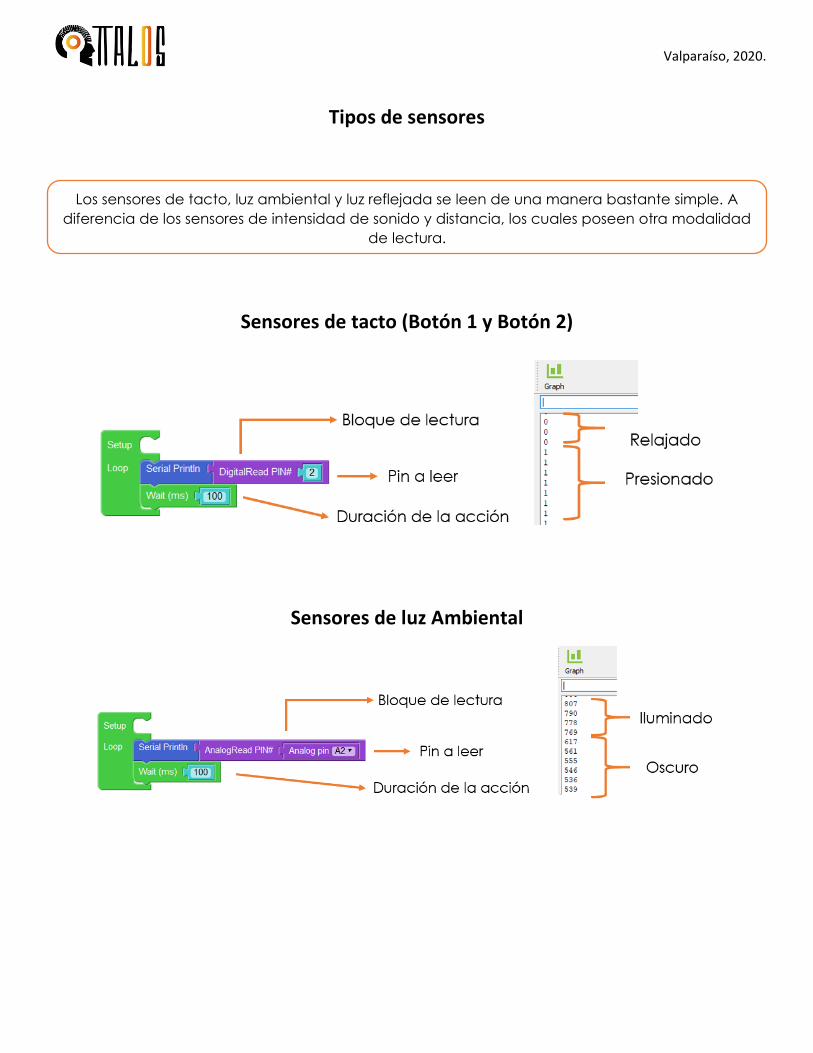
Tipos de sensores
Sensores de tacto (Botón 1 y Botón 2)
Sensores de luz Ambiental
Los sensores de tacto, luz ambiental y luz reflejada se leen de una manera bastante simple. A
diferencia de los sensores de intensidad de sonido y distancia, los cuales poseen otra modalidad
de lectura.
Valparaíso, 2020.
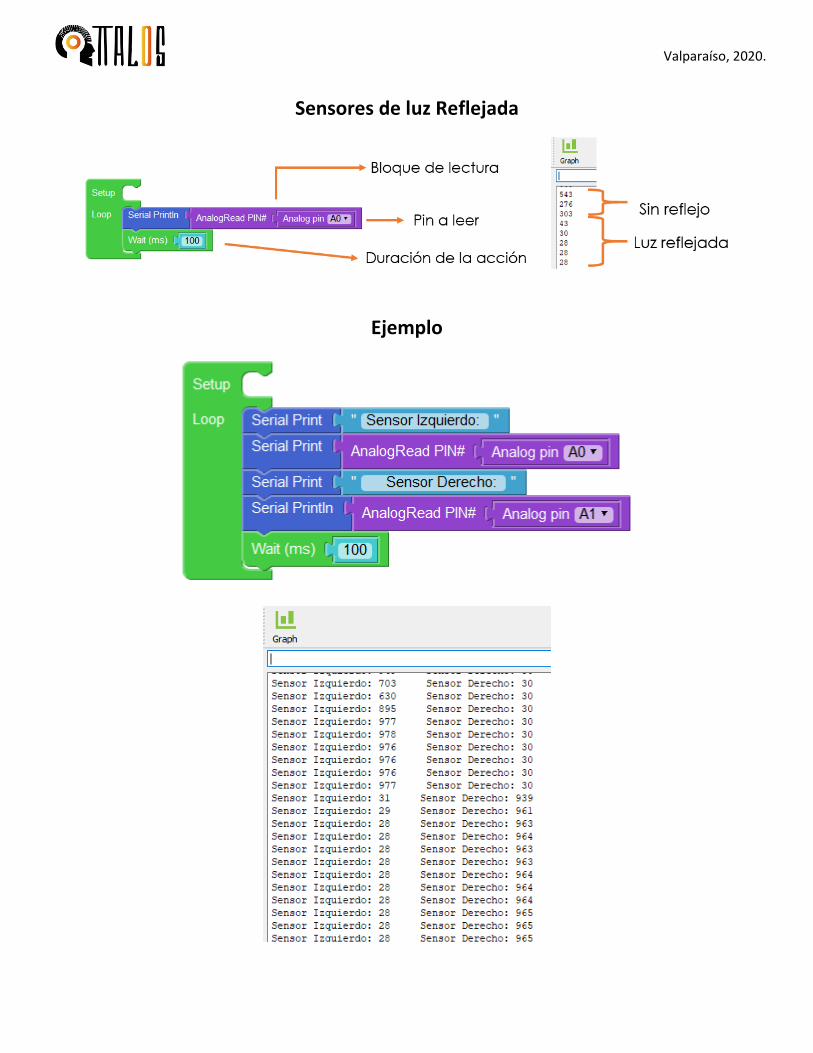
Sensores de luz Reflejada
Ejemplo
Valparaíso, 2020.
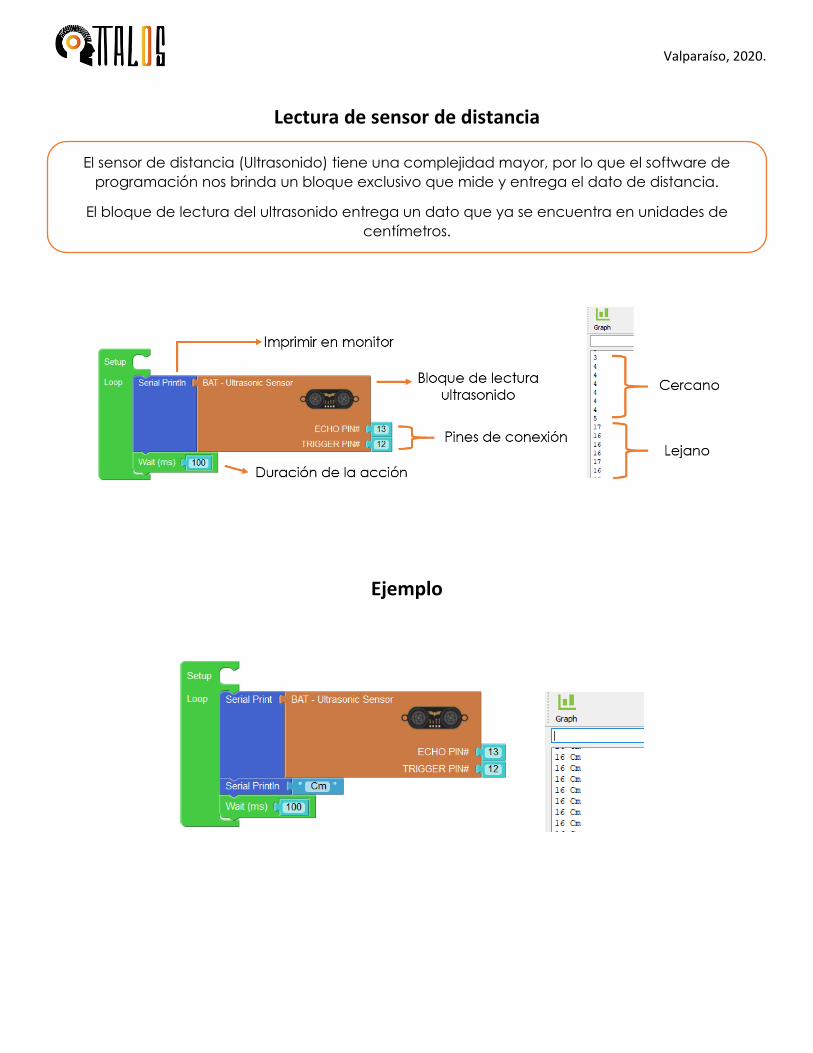
Lectura de sensor de distancia
Ejemplo
El sensor de distancia (Ultrasonido) tiene una complejidad mayor, por lo que el software de
programación nos brinda un bloque exclusivo que mide y entrega el dato de distancia.
El bloque de lectura del ultrasonido entrega un dato que ya se encuentra en unidades de
centímetros.
Valparaíso, 2020.
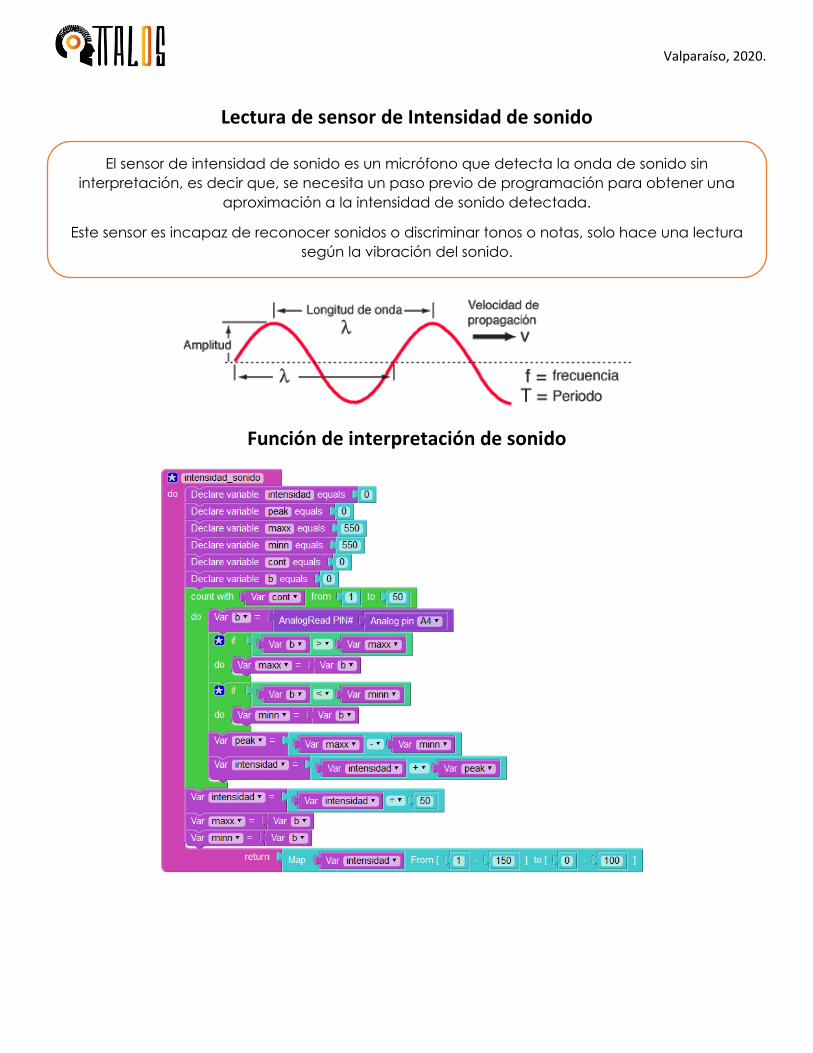
Lectura de sensor de Intensidad de sonido
Función de interpretación de sonido
El sensor de intensidad de sonido es un micrófono que detecta la onda de sonido sin
interpretación, es decir que, se necesita un paso previo de programación para obtener una
aproximación a la intensidad de sonido detectada.
Este sensor es incapaz de reconocer sonidos o discriminar tonos o notas, solo hace una lectura
según la vibración del sonido.
Valparaíso, 2020.
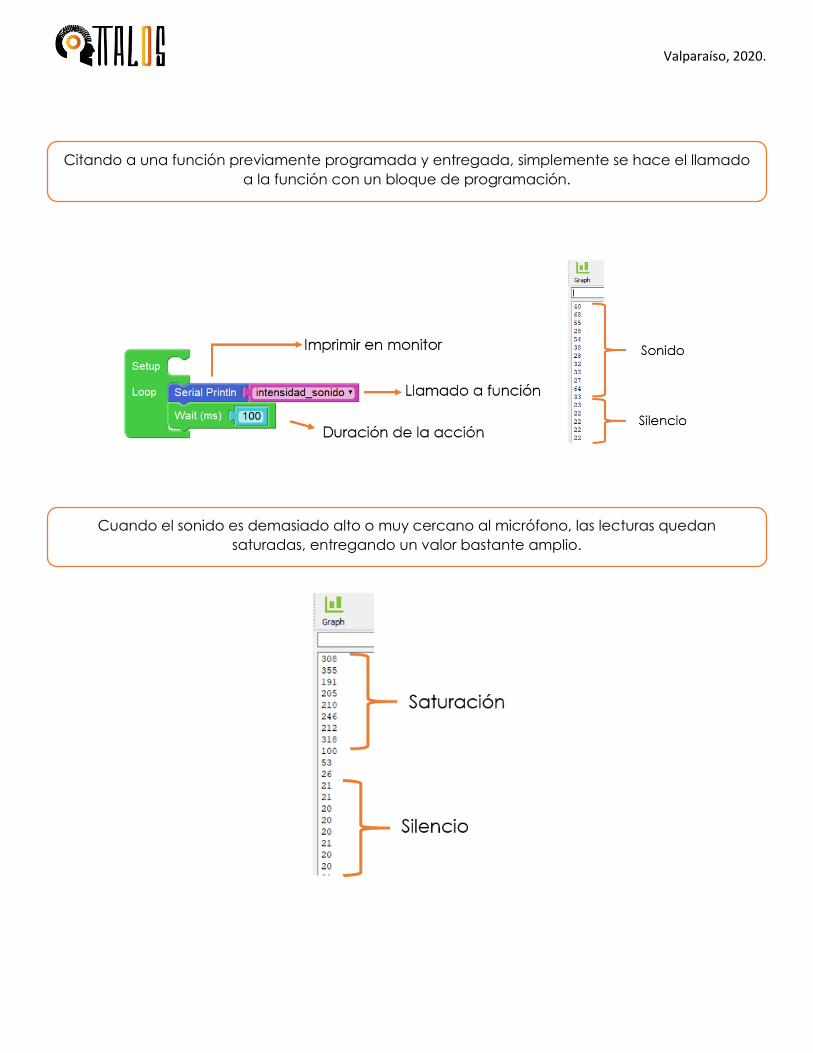
Citando a una función previamente programada y entregada, simplemente se hace el llamado
a la función con un bloque de programación.
Cuando el sonido es demasiado alto o muy cercano al micrófono, las lecturas quedan
saturadas, entregando un valor bastante amplio.
Valparaíso, 2020.
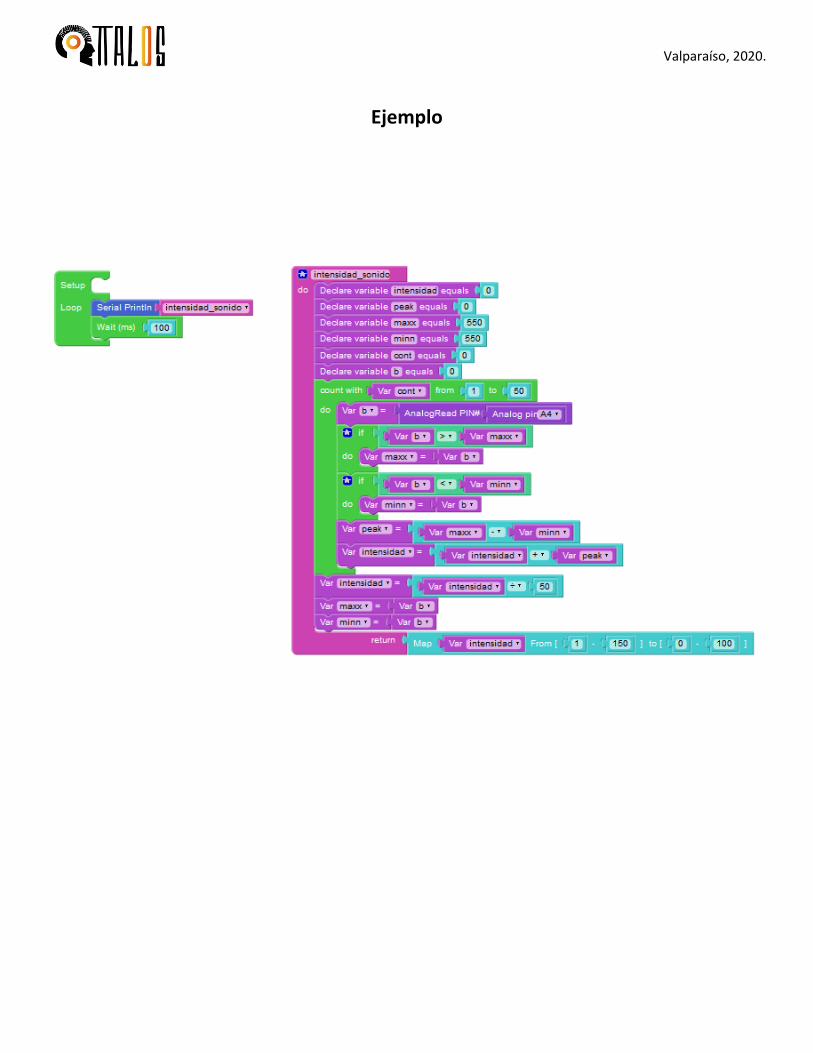
Ejemplo
Valparaíso, 2020.
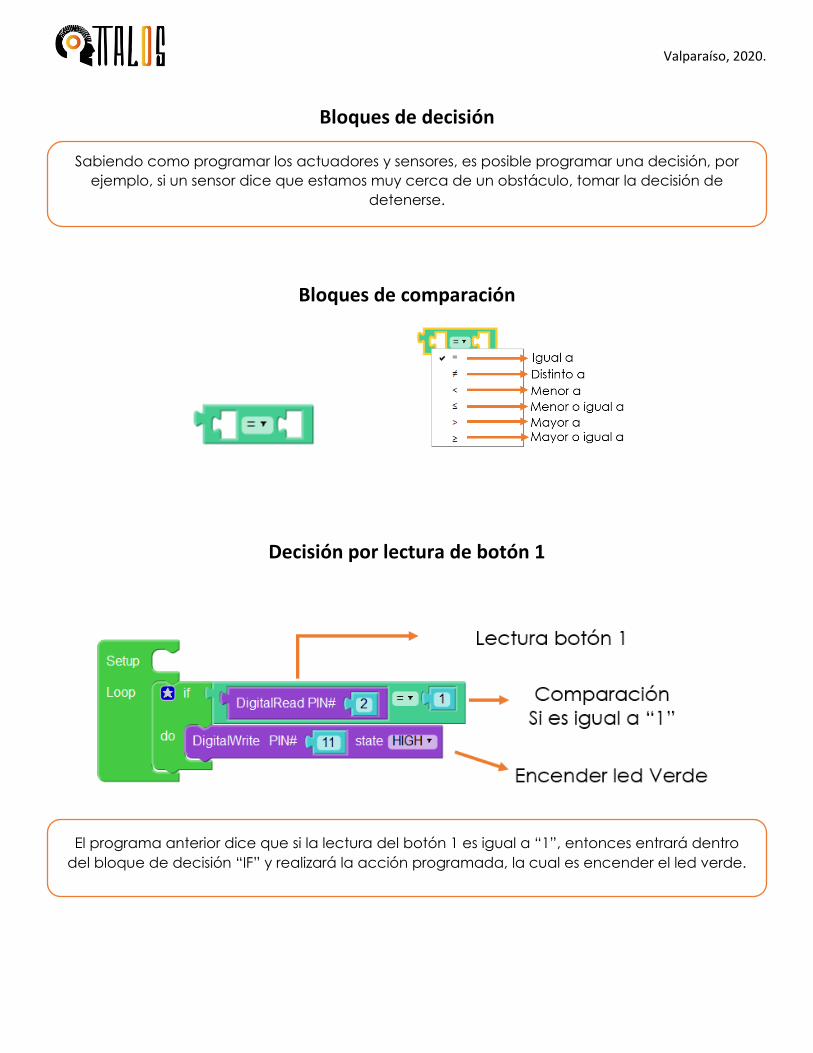
Bloques de decisión
Bloques de comparación
Decisión por lectura de botón 1
Sabiendo como programar los actuadores y sensores, es posible programar una decisión, por
ejemplo, si un sensor dice que estamos muy cerca de un obstáculo, tomar la decisión de
detenerse.
Para lograr la decisión es necesario comparar datos, por ejemplo, si la distancia es mayor, es
menor o es igual.
El programa anterior dice que si la lectura del botón 1 es igual a “1”, entonces entrará dentro
del bloque de decisión “IF” y realizará la acción programada, la cual es encender el led verde.
Valparaíso, 2020.
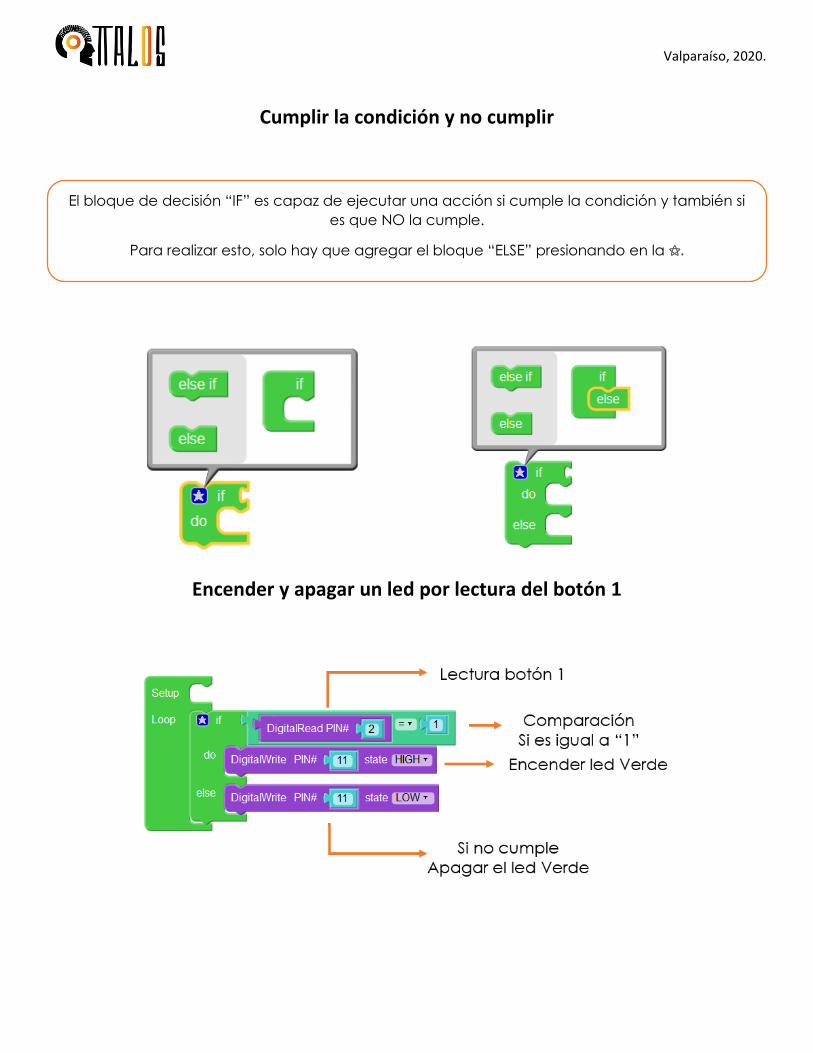
Cumplir la condición y no cumplir
Encender y apagar un led por lectura del botón 1
El bloque de decisión “IF” es capaz de ejecutar una acción si cumple la condición y también si
es que NO la cumple.
Para realizar esto, solo hay que agregar el bloque “ELSE” presionando en la ⚝.
Valparaíso, 2020.
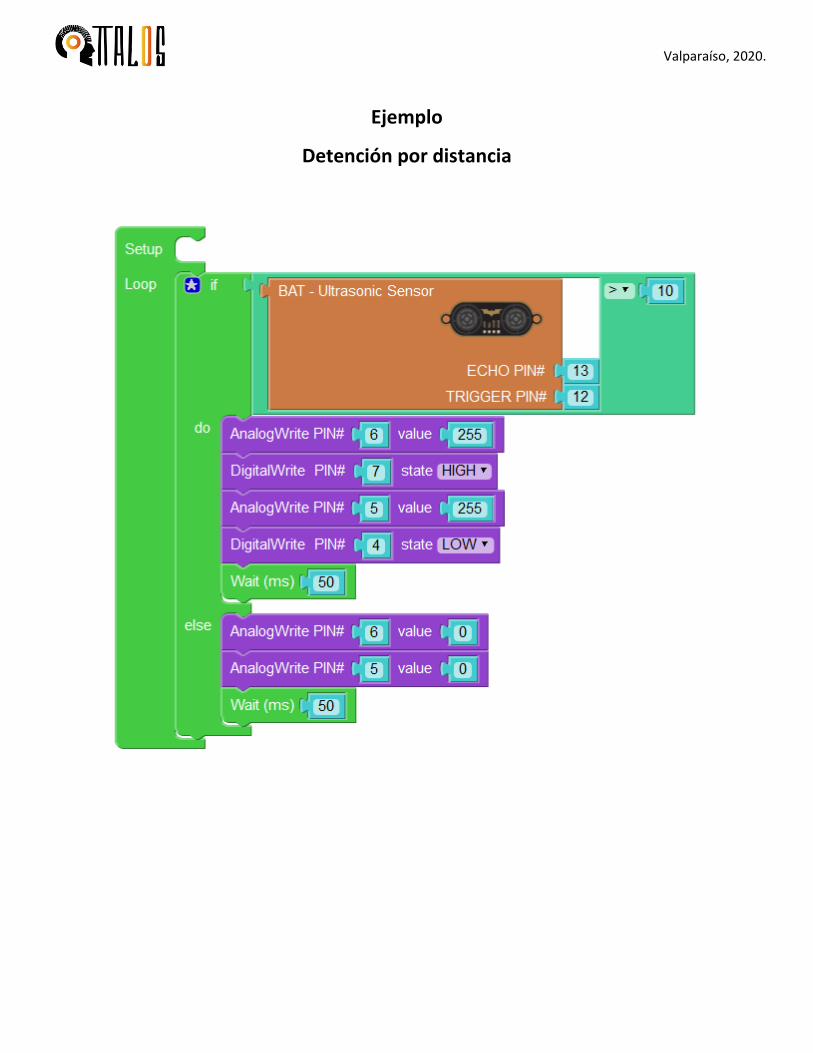
Ejemplo
Detención por distancia
Valparaíso, 2020.
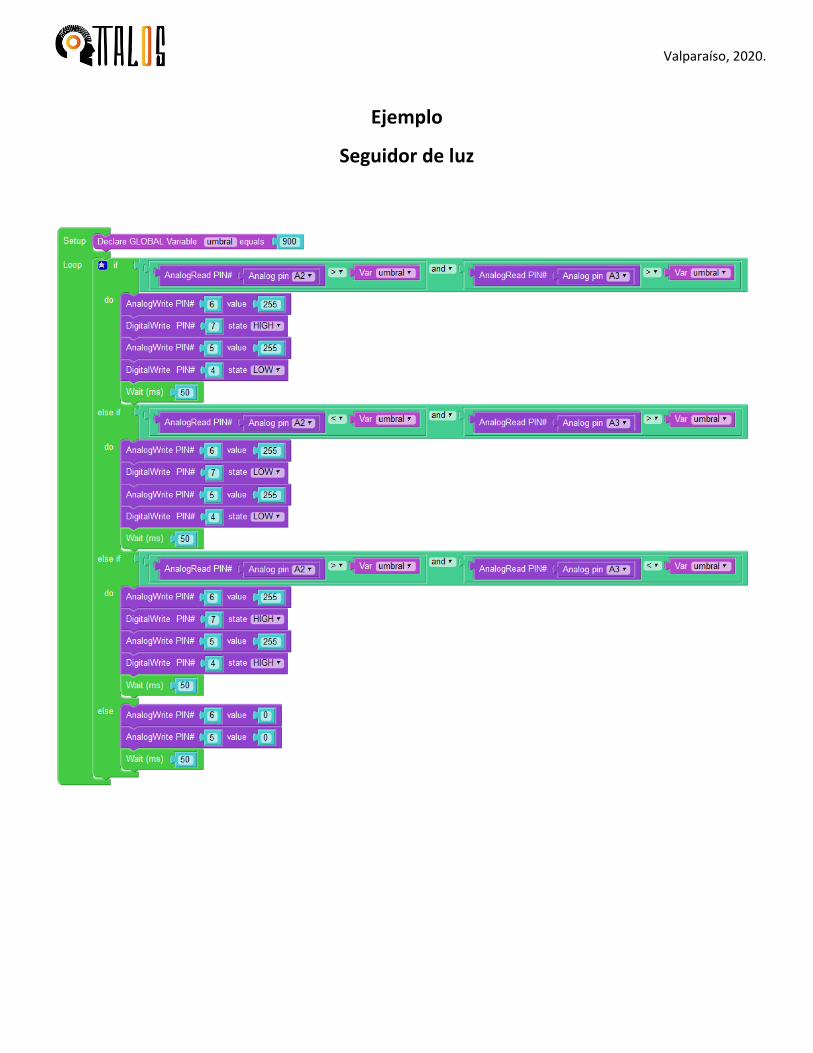
Ejemplo
Seguidor de luz