grupos continuos - ajhernan.webs.ull.es · grupos continuos antonio hernÆndez cabrera departamento...
TRANSCRIPT

Grupos Continuos
Antonio Hernández CabreraDepartamento de Física BásicaUniversidad de La LagunaTenerife. Islas Canarias
20 de febrero de 2009
2

Índice general
1. Grupos continuos 51.1. Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.1.1. Ángulos de Euler . . . . . . . . . . . . . . . . . . . . . 111.2. Grupo de Lie . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
1.2.1. De�niciones . . . . . . . . . . . . . . . . . . . . . . . . 131.2.2. Generadores in�nitesimales de los Grupos de Lie. . . . 15
1.3. Representación de Grupos: D(l) . . . . . . . . . . . . . . . . . 201.4. Grupo SO(2) . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
1.4.1. Lema de Shur . . . . . . . . . . . . . . . . . . . . . . . 261.4.2. Teorema de ortogonalidad de caracteres . . . . . . . . . 27
1.5. Grupo SO(3) . . . . . . . . . . . . . . . . . . . . . . . . . . . 281.5.1. Autovectores y autovalores . . . . . . . . . . . . . . . . 281.5.2. Normalización de los autovectores . . . . . . . . . . . . 311.5.3. Resumen . . . . . . . . . . . . . . . . . . . . . . . . . . 34
1.6. Representación Producto Directo. . . . . . . . . . . . . . . . . 361.7. Grupo de Rotación-Inversión . . . . . . . . . . . . . . . . . . . 401.8. Proyector . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 411.9. Operador de Casimir . . . . . . . . . . . . . . . . . . . . . . . 431.10. Representación explícita del SU(2) . . . . . . . . . . . . . . . 431.11. Las variables internas: el espín isotópico. . . . . . . . . . . . . 45
1.11.1. De�niciones . . . . . . . . . . . . . . . . . . . . . . . . 451.12. Creación de familias . . . . . . . . . . . . . . . . . . . . . . . 48
1.12.1. Estrañeza . . . . . . . . . . . . . . . . . . . . . . . . . 481.13. Isospín como grupo SU(2)I : Los quarks. . . . . . . . . . . . . 49
1.13.1. Los quarks . . . . . . . . . . . . . . . . . . . . . . . . . 491.13.2. Las masas de los quarks . . . . . . . . . . . . . . . . . 521.13.3. Interacciones del quark. . . . . . . . . . . . . . . . . . 52
3

4 ÍNDICE GENERAL
1.13.4. Hadrones. . . . . . . . . . . . . . . . . . . . . . . . . . 531.13.5. El color. . . . . . . . . . . . . . . . . . . . . . . . . . . 53
1.14. Interacción fuerte . . . . . . . . . . . . . . . . . . . . . . . . . 561.14.1. De�nición. . . . . . . . . . . . . . . . . . . . . . . . . . 561.14.2. Principio de la carga bariónica ó hiperacarga. . . . . . 56
1.15. Interacción débil . . . . . . . . . . . . . . . . . . . . . . . . . 561.15.1. De�nición . . . . . . . . . . . . . . . . . . . . . . . . . 571.15.2. Partículas de vida efímera o resonancias. . . . . . . . . 58
1.16. Las partículas elementales. Modelo Standard. . . . . . . . . . 581.17. El grupo SU(3)I . . . . . . . . . . . . . . . . . . . . . . . . . . 59
Capítulo 1
Grupos continuos
1.1. Introducción
Los grupos continuos son aquellos generados por transformaciones in�ni-tesimales. Por esta razón cuentan con un número in�nito de elementos, cadauno de los cuales puede etiquetarse por n parámetros reales que varían deforma contínua:
�(p1; : : : ; pn) = �(pi): (1.1)
Al conjunto de parámetros pi puede considerarsele como un vector n-dimensionalel cual puede variar continuamente dentro de un dominio dado. En estosapuntes también trataremos a los grupos en los cuales pi varía de forma con-tínua en un número �nito de regiones, pero de forma discontínua entre dichasregiones. Estos son los grupos denominados Mixtos.Para comenzar el tema recordemos los teoremas básicos de los grupos
�nitos:Teorema I: Toda representación de un grupo �nito o es irreducible, o
puede descomponerse en suma de representaciones irreducibles.Teorema II: Toda representación de un grupo �nito es equivalente a
determinada representación unitaria.Teorema III: Los elementos de matriz de dos representaciones irre-
ducibles no equivalentes de un grupo �nito son mutuamente ortogonalesTeorema IV: Cualquier función en un grupo �nito puede representarse
como suma de los elementos de matriz de todas las representaciones irre-ducibles, afectadas por sus coe�cientes correspondientes.
5

6 CAPÍTULO 1. GRUPOS CONTINUOS
Un grupo se llama continuo si el conjunto de sus elementos forma espaciotopológico.Un grupo continuo G se llama compacto si cada función f(g), continua
para todos los elementos del grupo G, está acotada.Teorema: Si G es un grupo compacto y f(g) es una función continua
arbitraria (g 2 G), dicha función puede aproximarse con cierta exactitudpor:
f(g) =nXi=1
SlXk=1
c(l)ik '
(l)ik (g) :; : n = 1; 2; 3::: (1.2)
donde '(l)ik (g) son los elementos de matriz generados por la representaciónirreducible � l del grupo G.Consideramos inicialmente que trabajamos con grupos cuyos elementos
son representables por matrices nxn. Esta consideración no es imprescindible,pero facilitará los cálculos posteriores. Denominaremos al grupo G f�; ; :::g:El grupo es continuo si cada elemento � 2 G contiene, al menos, un parámetrocontinuo:
� � �(a1; :; ai; ::; aj) ; con ai continuo (1.3)
A los parámetros discretos les llamaremos índices. Formarán, dentro de�, un subconjunto: �i = �i(a1; :::; ar)
Ejemplos:
-1. El grupo monodimensional de las transformaciones lineales.
�0 = a1x+ a2; a1 6= 0:
Este es un grupo con un sólo parámetro. Su regla de multiplicación sería
�0 = a1x+ a2�00 = b1x+ b2�000 = c1x+ c2
9=;�000 = �0 �00 =)�
c1 = b1 � a1c2 = b1a2 + b2
;
con un elemento neutro (unidad) � = e1x + e2 tal que e1 = 1 y e2 = 0.También posee elemento inverso x0 = a1x+ a2, inverso del x = a1x
0 + a2, demodo que a1 = 1=a1 y a2 = �a2=a1. Este grupo no es abeliano.- El grupo de rotaciones en torno a un eje, rotaciones axiales, recibe tam-
bién el nombre de rotaciones en el plano. El eje de rotación es perpendicular aun plano (papel) donde se mueve la partícula o punto. La rotación se describepor � = �(') donde sólo existe un parámetro '.

1.1. INTRODUCCIÓN 7
Figura 1.1: Rotación bidimensional
El grupo de rotaciones axiales
x0 = x cos'+ y sin'
y0 = �x sin'+ y cos';
tiene su parámetro acotado en 0 � ' � 2�.Regla de multiplicación: �('a) �('b) = �('a + 'b):Elemento neutro: �('e = 0):Elemento inverso ��1(') = �(�'):-Grupo de las matrices unitarias n�n con determinante 1, SU(n). Tiene
n2 � 1 parámetros. En el caso particular del SU(2), cualquier elemento delgrupo puede escribirse en términos de los tres parámetros �; �; ��
ei� cos � ei� sin ��e�i� sin � e�i� cos �
�- El conjunto de rotaciones alrededor del origen, en tres dimensiones,
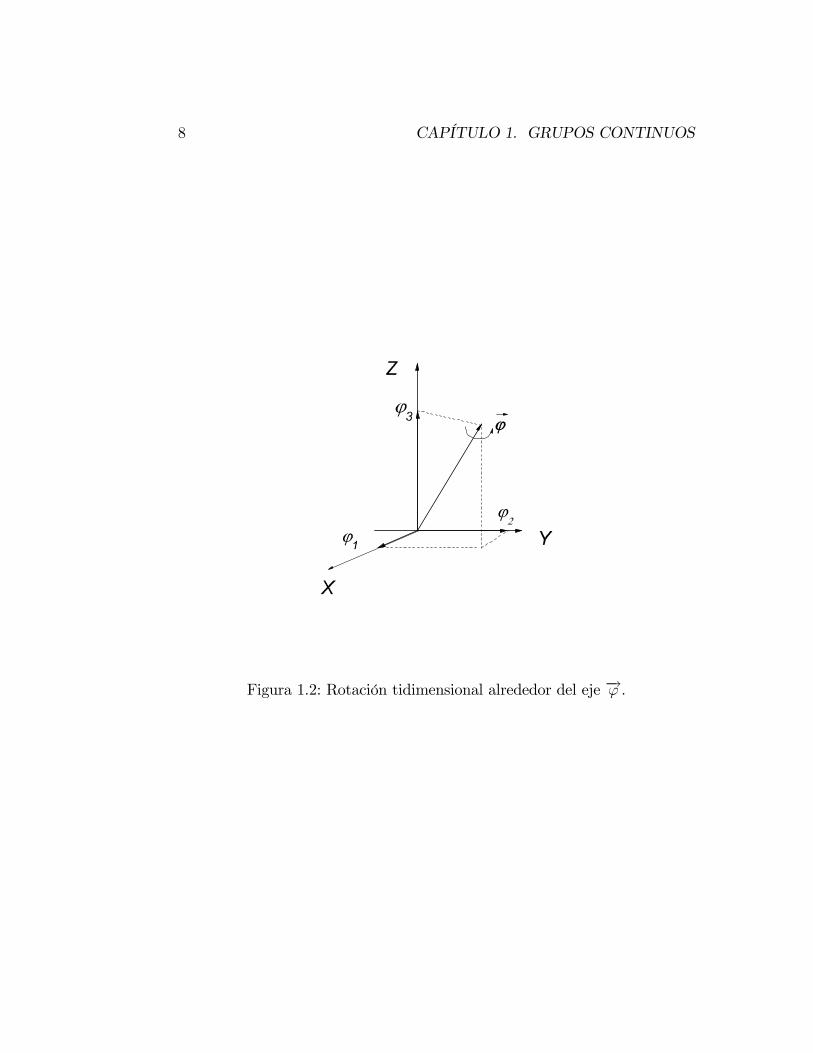
forma un grupo continuo. Un conjunto de parámetros vendría dado por losángulos de Euler. Otro conjunto de parámetros es el de�nido por el vectorangular ~', siendo los giros en el sentido de las agujas de un reloj. En estecaso existirán tres parámetros:
~' � ('1; '2; '3)
8 CAPÍTULO 1. GRUPOS CONTINUOS
Figura 1.2: Rotación tidimensional alrededor del eje �!' .

1.1. INTRODUCCIÓN 9
Figura 1.3: Rotación para � pequeños.
Si trabajamos en el espacio euclideo tridimensional: x � x(x1; x2; x3). O, enr-dimensiones: x � x(a1; :::; ar):En el grupo de las rotaciones se cumple:q
'21 + '22 + '23 < 2�
Pues ~' es un vector con dirección la del eje de rotación, y componentes, losángulos rotados. Si
p'21 + '22 + '23 > 2�, se repetiría alguna rotación.
Este grupo es isomorfo del O(3), como ya veremos. En caso de unarotación in�nitesimal, como la de la �gura 3, donde �!� = ��!n , con �!n enel plano yz, se puede descomponer R(�;�!n ) = R(� sin �; y)R(� cos �; z): Aveces se usan los ángulos de Euler (ver subapartado siguiente). Los ángulosde Euler suelen tomarse como indica la �gura 4.Una rotación arbitraria entorno a un eje�!n que no esté en ninguno de los planos cartesianos, Rot(�;�!n ) ;puede descomponerse en el producto de tres rotaciones en torno a los ejescartesianos Rot(�; z)Rot(�; y)Rot(�; z)). En este caso se proyecta �!n sobreel plano yz y se procede como en la �gura 3. En el caso de rotaciones

10 CAPÍTULO 1. GRUPOS CONTINUOS
Figura 1.4: Ángulos de Euler

1.1. INTRODUCCIÓN 11
in�nitesimales es más fácil escoger tres rotaciones en torno a los tres ejescartesianos Rot(�; z)Rot(�; y)Rot(�; x)). Sin embargo, los ángulos de Eulersiguen usándose en ingeniería por razones históricas. Muchos ingenieros aúnson creyentes.-Grupo O(n) de todas las matrices n� n reales y ortogonales. Este es un
grupo continuo mixto dado que sus matrices con determinante -1 no puedenlocalizarse mediante una variación contínua de los parámetros a partir deuna matriz de determinante +1. Si nos restringimos a las matrices con de-terminante +1 tenemos al grupo O+(n).Espacio imagen: es el subconjunto del espacio generado por los parámet-
ros, y que corresponde a valores posibles de dichos parámetos. En el grupode las rotaciones, el espacio imagen es una esfera de radio 2�.En cuanto se introduce la noción de continuidad aparece una topología
donde �n(a(n)1 ; : : : ; a
(n)r ) es un elemento del grupo si
l��mn!1
a(n)i = ai =) �n ! �
recuperándose, en el límite, a los grupos �nitos. Es decir, �n tiende a �cuando los elementos de �n tienden a los de �. En este caso tenemos un grupocontinuo. Si las operaciones en él son contínuas, el grupo es topológico.
1.1.1. Ángulos de Euler
Dados dos sistemas de coordenadas xyz y XY Z con origen común, esposible especi�car la posición de un sistema en términos del otro usando tresángulos (�; �; ) de tres maneras equivalentes, como sigue:* Estático La intersección de los planos coordenados xy y XY se llama
línea de nodos.o � ( en la primera �gura) es el ángulo entre el eje x y la línea de nodos.o � (�) es el ángulo entre el eje z y el eje Z.o (') es el ángulo entre la línea de nodos y el eje X. (Nota, sin embargo,
que la primera �gura tiene un sistema coordenado zurdo).* Ejes de rotación �jos Sean los sistemas XY Z y xyz idénticos inicial-
mente.o Rotar el sistema XY Z alrededor del eje z en �; el sistema xyz no se
mueve.o Rotarlo alrededor del eje x por �:o Rotarlo respecto al eje z por .

12 CAPÍTULO 1. GRUPOS CONTINUOS
copy
5:pdf
Figura 1.5: Ángulos de Euler. Otra perspectiva.

1.2. GRUPO DE LIE 13
(Note que el primero y el tercer ejes son idénticos.)* Moviendo ejes de rotación Empezar con el sistemaXY Z igual al sistema
xyz.o Rotar el sistema XY Z respecto al eje Z en ; el sistema xyz no se
mueve.o Rotarlo respecto al ahora rotado eje X por �.o Rotarlo ahora respecto al doblemente rotado eje Z por �.(Nota que los ángulos están en orden inverso.)
1.2. Grupo de Lie
1.2.1. De�niciones
Un grupo continuo G es de Lie si cada elemento g 2 G puede de�nirsepor medio de un número �nito de parámetros que varíen de forma contínua.Los libros de texto sobre teoría de grupos aplicados a problemas físicos danpor sentado que todos los grupos continuos son de Lie. A saber.Tomemos los elementos x dependientes de los parámentros (a1; : : : ; ar) e
y = y(b1; : : : ; br).La operación x�y�1 = z(c1; : : : ; cr), donde las ci = fi(a1; : : : ; ar; b1; : : : ; br);
da lugar a otra de�nición alternativa de los grupos de Lie. El grupo al quepertenecen x e y es de Lie si las funciones fi son analíticas y diferenciables.Si las fi no son analíticas existe, a veces, la posibilidad de hacerlas analíticasvariando los parámetros.
EjemploSean
x(a); y(a)
z(c) = x(a) � y(b)con:
y�1(a) = y(b)) c = a� b
es decir y�1 es la inversa de la transformación y. En las rotaciones, x(') ey( ) se cumple:
z(�) = x(') � y�1( )) � = '� (1.4)
Esto se debe a que el inverso de un ángulo es igual a tomar el ángulo inicialen dirección negativa. En el caso de ángulos, � = '� es analítica.

14 CAPÍTULO 1. GRUPOS CONTINUOS
En el espacio tendremos que trabajar con matrices. Para operar x(~') cony(~ ), tendríamos que invertir la matriz que de�ne y.Casi todos los grupos en física son de Lie.Para verlo mejor, tomemos un elemento genérico de un grupo G, dado por
g(x1; : : : ; xn) = g(x), con n parámetros, donde algunos de ellos pueden variarcontínuamente. Podemos construir la tabla de multiplicación del grupo, puessi
g(x) 2 Gg(y) 2 G
�g(x1; : : : ; xn)g(y1; : : : ; yn) = g(z1; : : : ; zn); (1.5)
los n parámetros z1; : : : ; zn son funciones de x1; : : : ; xn; y1; : : : ; yn parámetros.La tabla de multiplicación constaría de n funciones reales, con 2n argumentosreales cada una:
z1 = f1(x1; : : : ; yn)...
zn = fn(x1; : : : ; yn)
(1.6)
Si las funciones fi(x; y) son contínuas y derivables, entonces G es un grupode Lie.Ejemplo 1.Consideremos el grupo de las transformaciones lineales de coordenadas
bidimensionales:x0 = ax+ by + cy0 = dx+ ey + f
Como ha de existir inversa de la transformación, ae� bd 6= 0, pues el deter-minante del sistema es: ����a b
d e
����El grupo descrito es, evidentemente, de seis parámetros.Ejemplo 2.Consideremos el grupo de las las matrices n � n unitarias unimodulares
(con determinante igual a uno): SU(n). Como comentamos antes, este grupotiene n2�1 parámetros. Veámoslo con un caso sencillo: el SU(2). Un elementocualquiera de este grupo puede ser el:
A =
�ei� cos � ei� sen ��e�i� sen � e�i� cos �
�;

1.2. GRUPO DE LIE 15
cuyo determinante es: cos2 �+sen2 � = 1. Como la conjugada transpuesta es:����e�i� cos � ei� sen �e�i� sen � ei� cos �
���� = A�1 = A+;
la matriz es unitaria. Como vemos, tienen tres parámetros reales, �; �; �.Ejemplo 3.Consideremos ahora el grupo O(n) de las matrices ortogonales reales n�
n. Si escogemos aquellas con determinante +1, el grupo se llama O+(n);por ejemplo, O(3) es el grupo de rotaciones tridimensionales. El caso O+(3)son las rotaciones propias, como veremos más adelante. Como necesitamos3 parámetros para precisar la transformación de rotación, podrían escogerselos ángulos de Euler. Este grupo tiene 1
2n(n� 1) parámetros.
Condiciones para los grupos de Lie:Dado un grupo G, con sus parámetros ya escogidos, las condiciones para
que sea grupo de Lie son:
1. x(0; : : : ; 0) = e
2. x(0; : : : ; ai; : : : ; 0) � y�1(0; : : : ; bi; : : : ; 0) = z(0; : : : ; ai � bi; : : : ; 0)
Teorema: En un grupo de Lie siempre se puede escoger los parámetros deforma que cumplan las condiciones anteriores. En dichos casos, los parámetrosse llaman normales. Todos los ejemplos mencionados los tienen así.
1.2.2. Generadores in�nitesimales de los Grupos deLie.
Tomemos un elemento x 2 G que tenga, al menos, un parámetro in�ni-tesimal. Escogemos los demás nulos por comodidad:
x = x(0; : : : ; �i; : : : ; 0) = e+ �i@
@�ix
�����i=0
+O(�2i ) (1.7)
por desarrollo de Taylor cuando �i ! 0.El miembro �i @
@�ix����i=0
es una matriz, por serlo los elementos x del grupo.
Llamarememos a esta matriz
iIk =@
@�kx
�����k=0
(1.8)
16 CAPÍTULO 1. GRUPOS CONTINUOS
La i (unidad imaginaria) se introduce en la de�nición para que los operadoresque surjan correspondan a observables físicos. Con este cambio tenemos:
x = x(0; : : : ; �i; : : : ; 0) = e+ iIk�k +O(�2i ): (1.9)
Ik recibe el nombre de Generador In�nitesimal del Grupo. La estruc-tura formada por los generadores in�nitesimales pertenece al Álgebra deLie, dentro del ámbito de la física.Si consideramos el elemento x(0; : : : ; ak; : : : ; 0), con ak �nito, entonces,
x(0; : : : ; ak; : : : ; 0) =hx(0; : : : ;
akN; : : : ; 0)
iN: (1.10)
Esta relación es cierta por la segunda condición de los Grupos de Lie:
x(0; : : : ;akN; : : : ; 0) � x(0; : : : ; ak
N; : : : ; 0)| {z }
N veces
� : : : � x(0; : : : ; akN; : : : ; 0) =
= x(0; : : : ;akN+ : : :+| {z }N veces
; : : : ; 0) = x(0; : : : ; ak; : : : ; 0): (1.11)
El elemento unidad, e, es aquel que, como ya vimos, tiene todos sus parámet-ros nulos. Entonces:
ey�1(0; : : : ; bk; : : : ; 0) = z(0; : : : ;�bk; : : : ; 0) (1.12)
ya que ey�1 = y�1.Si y = W�1, conW = W (0; : : : ; dk; : : : ; 0), entonces: y = y(0; : : : ;�dk; : : : ; 0)
y, por lo tanto,
x � y�1 = x(0; : : : ; ak; : : : ; 0)W (0; : : : ; dk; : : : ; 0)
= z(0; : : : ; ak + dk; : : : ; 0); (1.13)
pues el parámetro del producto es la suma de los parámetros de los factores.Cuando N tiende a in�nito:
l��mN!1
hx(0; : : : ;
akN; : : : ; 0)
iN= l��m
N!1
�e+ i
akNIk +O(
1
N2)
�N; (1.14)
dado que ak=N se reduce a un in�nitésimo. Por lo tanto:
l��mN!1
x(0; : : : ; ak=N; : : : ; 0) = eiakIk : (1.15)
1.2. GRUPO DE LIE 17
Así que, en general,x(0; : : : ; ak; : : : ; 0) = eiakIk ; (1.16)
donde hemos realizado el límite de una serie de matrices, con la matriz unidado identidad I = e.Más general es el caso de un elemento del grupo, x 2 G, con todas sus
componentes no nulas:
x(a1; : : : ; ar) = eiPrk=1 akIk (1.17)
Es decir, cualquier elemento de un grupo de Lie puede ser expresado por susgeneradores in�nitesimales, donde habrá el mismo número de generadoresque de parámetros.Ejemplos:a) Traslaciones monodimensionales.
Tax = x� a =)PTaf(x) = f(x+ a):
El generador in�nitesimal de este grupo será
ITf(x) = �i l��ma!0
f(x+ a)� f(x)a
= �i dfdx: (1.18)
En otras palabras, IT es proporcional al operador momento:
}IT = bp = �i} ddx: (1.19)
b) Traslaciones tridimensionales.
}ITx = bpx = �i} @@x; (1.20)
o, en general,
}ITj = bpj = �i} @
@xj: (1.21)
c) Rotaciones alrededor del eje z : SO(2).Si tenemos una función arbitraria f(') =) Izf(') = �i@f(')@'
por de�ni-ción, y
}Iz = �i}@
@'= bLz; (1.22)

18 CAPÍTULO 1. GRUPOS CONTINUOS
componente z del momento angular.Tomemos al vector ~' perpendicular al plano del papel (o de la pantalla
del ordenador). Entonces,
x(') =
�cos' sen'� sen' cos'
�2 G (1.23)
siendo ' in�nitesimal. El generador del grupo será:
iI =@x(')
@'
����'=0
=
�� sen' cos'� cos' � sen'
�=
�0 1�1 0
�) I =
�0 �ii 0
�; (1.24)
obteniendose una matriz hermítica, y que puede corresponder, como oper-ador, a un observable físico. Como
I+ =
�0 �ii 0
�= I 0 =
�0 �ii 0
�= I (1.25)
la matriz también es unitaria. Además, su determinante es 1, por lo tanto esunimodular.Vamos a comprobar que, para cualquier ', se cumple que x(') = ei'I ,
aunque este caso presenta una peculiaridad: por depender el elemento delgrupo de un sólo parámetro, las ventajas de usar el generador no van a sermuy claras.
ei'I =
1Xn=0
(i'I)n
n!= 1 + i'I +
i2'2I2
2!+i3'3I3
3!+i4'4I4
4!+ : : : (1.26)
donde hemos usado el desarrollo de la exponencial. Ahora bien,
I2 = I � I =�0 �ii 0
��0 �ii 0
�=
�1 00 1
�= e) matriz unidad (1.27)
Evidentemente, I3 = I2 � I = I; I4 = I2 � I2 = I, etc. Es decir, la clase a la

1.2. GRUPO DE LIE 19
que pertenece x(') sólo tiene dos elementos y, por lo tanto,
ei'I =
1Xn=0
(i'I)n
n!= 1 + i'I +
i2'2I2
2!+i3'3I3
3!+i4'4I4
4!+ : : : =
=
�1 00 1
�+
�0 '�' 0
�+1
2!
��'2 00 �'2
�+1
3!
�0 �'3'3 0
�+ : : : =
=
1� '2
2!+ : : : '� '3
3!+ : : :
�'+ '3
3!+ : : : 1� '2
2!+ : : :
!=
�cos' sen'� sen' cos'
�= x(') (1.28)
recordando que, donde no aparezca la matriz I, va la matriz unidad.d) Rotaciones axiales en torno a un eje arbitrario bn : SO(3):
Los elementos de este grupo dependerán de tres parámetros: x = x('1; '2; '3).Los generadores del grupo, de�nidos por
Ik = � i@
@'kx(0; : : : ; 'k; : : : ; 0)
����'k=0
(1.29)
se suelen denotar por Ik en los problemas físicos involucrados en este caso.Por lo tanto:
I1 = � i@
@'1x('1; 0; 0)
����'1=0
I2 = � i@
@'2x(0; '2; 0)
����'2=0
I3 = � i@
@'3x(0; 0; '3)
����'3=0
; (1.30)
donde ('1; 0; 0) es una rotación alrededor del eje x, de ángulo '1. Es equiv-alente a una rotación tridimensional sobre el plano yz, pues los vectores condirección x no varían. Por la misma vía se obtienen los otros elementos. Parano hacer todo el cálculo paso a paso de�nimos la matriz �ij, que tiene todossus elementos nulos menos el ij = 1, es decir,
�32 =
0@0 0 00 0 00 1 0
1A (1.31)

20 CAPÍTULO 1. GRUPOS CONTINUOS
A través de esta matriz:
I1 = �if�23 � �32g (obteniéndose los demás por permutación)
I2 = �if�31 � �13gI3 = �if�12 � �21g; (1.32)
Cualquier rotación compuesta puede describirse por
x('1; '2; '3) = eiP3k=1 'kIk : (1.33)
Una propiedad importarte de estos grupos es que el conmutador de dos deellos genera al restante:
[Ik; Il] = iXj
�kljIj; (1.34)
donde �klj (componentes del tensor de permutaciones) vale �1 ó 0 según laspermutaciones necesarias para obtener los subíndices (si es par +1, y si esimpar -1; para índices repetidos, 0).
1.3. Representación de Grupos: D(l)
Las representaciones de los grupos son aplicaciones de la forma:
D : x 2 G �! D(x): (1.35)
D(x) viene descrita por matrices complejas n � n, y conserva las leyes delgrupo:
D(x; y) = D(x) �D(y)D(x�1) = [D (x)]�1 =) [D(x)]�1D(x) = I (1.36)
Si queremos que el grupo G sea de Lie, la representación ha de ser contínuay analítica. Es decir:
Si l��mn!1
xn = x ) l��mn!1
D(xn) = D(x): (1.37)
La representación de un grupo de Lie puede hacerse a través de la repre-sentación de sus generadores:
D [x(a1; : : : ; ar)] � Representación de un grupo de Lie. (1.38)

1.3. REPRESENTACIÓN DE GRUPOS: D(L) 21
Para un único parámetro, tenemos:
D [x(0; : : : ; ak; : : : ; 0)] = D
�hx(0; : : : ;
arN; : : : ; 0)
iN�=
�Dhx(0; : : : ;
arN; : : : ; 0)
iN�;
(1.39)debido a la primera propiedad de los grupos de Lie. Por lo tanto:
l��mN!1
h1 + iD(Ik)
akN+ : : :
iN= eiD(Ik)ak ; (1.40)
donde
D(Ik) = �i@
@akD [x(0; : : : ; ak; : : : ; 0)]
����ak=0
; (1.41)
Es decir, conociendo la matriz que representa a los generadores, podemosencontrar la matriz que representa al grupo. En general:
D [x(a1; : : : ; ar)] = eiPrk=1D(Ik)ak : (1.42)
Es importante señalar que, cuando se trate de determinar las representacionesde un grupo continuo, es su�ciente con determinar las representaciones delos operadores in�nitesimales IR puesto que una representación �nita DR(')puede obtenerse por la aplicación sucesiva de IR un gran número de veces.En física, el momento angular es una representación de las rotaciones. En elcaso de ausencia de espín, el momento angular Lk, es el generador de unarepresentación 'k. Al introducir el espín aparece el generador bivaluado Sk.La suma de ambos es el Jk, momento total.Ejemplos:a) Rotaciones axiales SO(2):
Es el grupo continuo formado por todas las rotaciones de ángulo ' (en elsentido de las agujas del reloj), alrededor del eje z. En este caso:
x(') =
�cos' sen'� sen' cos'
�: (1.43)
La representación:
D[xj'] =
0@1 0 00 ei' 00 0 e�i'
1A (1.44)

22 CAPÍTULO 1. GRUPOS CONTINUOS
cumple todos los requisitos para ser una buena representación. Podríamoshaber escogido cualquier otra. En este caso, habíamos visto que:
x(') = eiI' con I =
�0 �ii 0
�: (1.45)
Por lo tanto,
I =
�0 �ii 0
�D�! D(I) = �i @
@'D[xj']
����'=0
=
= �i
0@0 0 00 i 00 0 �i
1A =
0@0 0 00 1 00 0 �1
1A : (1.46)
Cualquier otro elemento de la representación se puede obtener por esta vía.Como:
D[xj'] = eiD(I)' ) e
0BBB@0 0 00 i' 00 0 �i'
1CCCA=
0@0 0 00 ei' 00 0 ie�i'
1A : (1.47)
En la notación de Schön�ies este grupo es el C1; y en la internacional,
1. En física, el generador in�nitesimal del grupo suele ponerse como
Iz = �i@
@'= iy
@
@x� ix @
@y=1
}bLz: (1.48)
Este grupo es abeliano y todas sus representaciones irreducibles son monodi-mensionales. Los caracteres (o matrices que representan a los elementos delgrupo) son del tipo
D�('a + 'b) = D�('a)D�('b); (1.49)
relación que sólo se cumple si D�(') = exp(c'). Si la representación esmonovaluada ha de cumplirse que D�(' + 2�) = D�('). Por lo tanto, laconstante c sólo puede tomar valores c = im, siendo m entero,
Dm� (') = eim': (1.50)

1.3. REPRESENTACIÓN DE GRUPOS: D(L) 23
El teorema de ortogonalidad de caracteres toma la formaZ 2�
0
�m�(')�m0(')d' = 2��mm0 : (1.51)
Puesto que �m(') y ��m(') son representaciones complejas conjugadas estándegeneradas respecto a la simetría de inversión temporal. Las dos puedenconsiderarse formando parte de una única representación. Hemos simpli�cadoDm� (') = �m('). La tabla de caracteres de esta representación puede ponerse
como
Representación E C(') Funciones invariantesm = 0 A1 � 1 1 z; z2; x2 + y2
�m = 1 E1 � 2 2 cos' (x; y) ; (xz; yz)�m = 2 E2 � 2 2 cos 2' (x2 � y2; xy)�m = 3 E3 � 2 2 cos 3' � � �
: (1.52)
Si, además de ser invariante bajo rotaciones, también es invariante bajo re-�exiones en cualquier plano que pase por el eje z, el grupo relevante (queahora será un grupo mixto) es el C1v (ó1m). Este grupo ya no es abeliano.Las rotaciones de ángulo ' y �' forman una clase siempre y cuando todaslas re�exiones sean de la misma clase. La tabla de caracteres será ahora
Representación E C(') �v Funciones invariantesA1 � 1 1 1 z; z2; x2 + y2
A1 � 1 1 �1 (xy0 � x0y)E1 � 2 2 cos' 0 (x; y) ; (xz; yz)E2 � 2 2 cos 2' 0 (x2 � y2; xy)
: (1.53)
Este grupo puede ampliarse incluyendo además un centro de inversión, conlo que el nuevo grupo sería el D1h (ó 1=mm) cuyos elementos serían:
E � identidadC(') � rotaciones alrededor de z�v � re�exiones en planos que pasen por zi � inversióniC(') � inversión-rotacióni�v � rotaciones de ángulo � alrededor de ejes perpendiculares a z y que

24 CAPÍTULO 1. GRUPOS CONTINUOS
pasen poe el centro de inversión. Añadiendo esto, la tabla de caracteres sería:
Representación E C(') �v i iC(') i�v�+g 1 1 1 1 1 1�+u 1 1 1 �1 �1 �1��g 1 1 �1 1 1 �1��u 1 1 �1 �1 �1 1�g 2 2 cos' 0 2 2 cos' 0�u 2 2 cos' 0 �2 �2 cos' 0�g 2 2 cos 2' 0 2 2 cos 2' 0�u 2 2 cos 2' 0 �2 �2 cos 2' 0
(1.54)
1) �; �; �; � corresponden a jmj = 0; 1; 2; 3, siéndo las mayúsculasgriegas de las funciones atómicas s; p; d; f .2) El superíndice � indica el carácter par o impar de la representación
respecto a las re�exiones �v.3) El subíndice g(u) indica el carácter par (impar) respecto a las inver-
siones.Notación:
GL(n,c): grupo de las matrices n� n con elementos complejos.
GL(n,R): idem, con elementos reales.
U(n): conjunto de matrices n� n unitarias (complejas, naturalmente).
0(n): conjunto de matrices n� n ortogonales (reales).
Al colocar una S delante de la notación anterior, exigimos, además, quesean matrices unimodulares (determinante unidad). De aquí procede la no-tación SO(n) para la rotaciones n-dimensionales.
b) Actuación sobre funciones.Sea un conjunto de funciones reales de tres variables: f(x; y; x), pudiendotener cada variable in�nitas dimensiones. Estamos llamando R o � a lo queantes era x, elemento del grupo, para no confundirnos con las coordenadas.R es para rotaciones y � para las demás operaciones in�nitesimales.La representación de un generador I3 sería:
D(I3) = �i@
@'3D (R(0; 0; '3))'3=0 : (1.55)

1.3. REPRESENTACIÓN DE GRUPOS: D(L) 25
Así que la aplicación de la representación sobre una función arbitraria sería:
D(I3)f(x; y; z) = �i @@'3
D [R(0; 0; '3)] f(x; y; z)j'3=0
= �i @@'3
f�R�1(0; 0; '3)(x; y; z)
�: (1.56)
Nota: Es decir, un operador, o elemento de un grupo, puede actuar sobre una
función arbitraria, de forma que:
�zf(x; y; z) = l��m�!0
1
�ff [x; y; (1 + �)z]� f(x; y; z)g = z
@
@zf(x; y; z): (1.57)
El generador �z es, por tanto, un operador diferencial Rz = z @@zque corre-
sponde a los generadores Iz sin la i. En nuestro caso, una rotación actuandosobre una función:
Rf(x; y; z) = f 0(x; y; z)� f(�x0) (1.58)
con �x0 = R�x. Es decir:
Rz(')f(x; y; z) = f(x cos'� y sen';�x sen'+ y cos'; z): (1.59)
Si ' = �=2, �nita:
Rzf(x; y; z) = f(�y; x; z): (1.60)
Por lo tanto, R�1(0; 0; '3)(x; y; z) es una rotación de ángulo �'3 en torno az, es decir:
R�1z ('3)(x; y; z) = (x cos'3 � y sen'3; x sen'3 + y cos'3; z) (1.61)
La coordenada z queda invariante, pero las coordenadas x; y no:�xy
�pasan a
�cos'3 � sen'3sen'3 cos'3
��xy
�=
�x cos'3 � y sen'3x sen'3 + y cos'3
�:
(1.62)

26 CAPÍTULO 1. GRUPOS CONTINUOS
Así que la aplicación de la representación sobre una función arbitraria queda:
D(I3)f(x; y; z) = �i@
@'3f(x cos'3 � y sen'3; x sen'3 + y cos'3; z)j'3=0 =
= �i��y @
@xf(x; y; z) + x
@
@yf(x; y; z)
�=
= i
�y@
@x� x @
@y
�| {z }
D(I3)
f(x; y; z) =
= f(D�1(x; y; z)) = �if�y@
@x� x @
@y
�; (1.63)
donde D(I3) es la representación del operador diferencial momento angular.Por permutaciones circulares podemos obtener los otros dos operadores.
1.4. Grupo SO(2)
Llamaremos a los elementos de este grupo R('), por ser rotaciones, donde' es el ángulo de giro y, en este caso, único parámetro existente. La repre-sentación será:
D : R(') �! D(R(')): (1.64)
Como ' es continuo, su representación también lo será. Dado que, en física, acada representación le pueden corresponder varios elementos, las representa-ciones son multivaluadas:
D : R(') �! ei�(')D(R(')) (1.65)
siempre que: ei�(') = 1:
1.4.1. Lema de Shur
Sea D una representación irreducible y M un operador (o matriz) queconmuta con todas las D de un grupo:
[M;D] = 0; 8D ) MD = DM; 8D 2 G: (1.66)
Entonces,M = � � 1: (1.67)

1.4. GRUPO SO(2) 27
Esto nos indica que las representaciones irreducibles de grupos abelianossiempre tienen dimensión 1. Como las representaciones reducibles puedenponerse en función de irreducibles, nos limitaremos a trabajar siempre conirreducibles.En el grupo SO(2), una representación cualquiera puede ser la dada por
� ��cos' sen'� sen' cos'
�; (1.68)
que es reducible. Para transformarla a irreducible utilizamos una transfor-mación de equivalencia:
�
�a 00 b
���1: (1.69)
Otra peculiaridad del grupo SO(2) es que, para que se cumpla queD(R('))�D(R('0)) = D(R('+'0)), si exigimos continuidad, sólo existe unaforma de escribirr la representación:
D(R(')) = e�': (1.70)
Esta representación es multivaluada, pues, aunque '+2� represente el mismolugar que ', e�' es bien diferente de e�('+2�). Sin embargo, si � = im, con mentero, las soluciones quedan acotadas:
eim' = eim'eim2� = eim('+2�) (1.71)
que es univaluada. Ahora bien, para m no entero, podemos tener � = is=2,con s entero, y, en este caso, la exponencial será bivaluada, dependiendode si s es par o impar. En Física sólo existen los casos de representacionesbivaluadas o univaluadas.
1.4.2. Teorema de ortogonalidad de caracteres
Como ya vimos, llamaremos �i al caracter de una representación:
1
N(G)
X�2G
��i (x)�j(x) = �ij (1.72)
para casos discretos o �nitos, donde N(G) era el número de elementos de laclase i. En grupos continuos, esto se traduce por:
1
2�
Z 2�
0
��s(')�s0(')d' = �ss0 (1.73)
28 CAPÍTULO 1. GRUPOS CONTINUOS
Para una representación bivaluada pondríamos:
1
2�
Z 2�
0
e�is2'ei
s2'0d' = �ss0 (1.74)
Vemos que el carácter coincide con la representación en este caso. Recordemosque, en general, el carácter era la traza de la matriz representación.
1.5. Grupo SO(3)
1.5.1. Autovectores y autovalores
Iremos, por sencillez, directamente a la representación de los generadores,y no de los elementos del grupo. Los elementos del grupo eran:
R(~') = eiPk 'kIk ; (1.75)
donde:[Ik; Il] = i
Xj
�kljIj: (1.76)
A través de este conmutador introduciremos otros conmutadores y gener-adores:
J0 � I3;
J� � I1 � iI2: (1.77)
Este cambio lo realizamos para simpli�car las reglas de conmutación, pues
[J0; J�] = �J�;[J+; J_] = 2J0: (1.78)
Vamos a comprobarlo:
[J0; J+] = [I3; I1 + iI2] = [I3; I1] + i[I3; I2] = iXj
�31jIj �Xj
�32jIj
= i�321I2 � �321I1 = I1 + iI2 = J+;
[J+; J_] = [I1 + iI2; I1 � iI2] = �i[I1; I2] + i[I2; I1]
= �2i[I1; I2] = �2iXj
�12jIj = �2i�123I3 = 2I3 = 2J0 (1.79)

1.5. GRUPO SO(3) 29
con J++ = J_.
Veamos que las representaciones son
D : R 2 SO(3) �! D(R); (1.80)
donde D(R) será una matriz unitaria 3� 3. Empecemos buscado una repre-sentación de Ik: D(Ik). Es mejor buscar D(J), a la que llamaremos M .Una matriz puede de�nirse como un operador en un espacio de n di-
mensiones. Por tanto, comenzaremos por de�nir una base de dicho espaciovectorial: jr >, con r = 1; : : : ; n. Las matrices Aik =< rijAjrj > representanlos elementos de la matriz A en la base jr >. En principio hemos de buscar,para nuestro caso, los elementos M jr >, siendo M �M0;M�.Nos �jamos en la matriz M0 y la representación D(R(0; 0; ')), que es un
giro alrededor del eje z, con ángulo ':
D(R(0; 0; ')) = eiD(I3)' = eiM0'; (1.81)
siendoM0 una matriz que representa a I3. Para que la representación sea uni-taria M0 ha de ser hermítica, dado que A es hermítica, U = eiA es unitaria.Por tanto, M0 es autoadjunta, y su conjunto de vectores propios M0jr >formarán base ortonormal del espacio.
M0jr >= �rjr >; (1.82)
donde � representa los autovarores y jr > sus vectores propios.Calculamos los autovalores:
D(R(0; 0; '))jr >= eiMo'jr >= ei�r'jr > : (1.83)
Para que la representación sea bivaluada �r = Sr=2, con Sr entero, por lotanto:
M0jr >=Sr2jr > (1.84)
Es decir, los autovalores de M0 son enteros y semienteros, dependiendo de siSr es par o impar.Para ver la actuación de M�jr >, utilizaremos los conmutadores:
M0(M�jr >=M0M�jr >=M�M0jr > +[M0;M�]jr >=
=M�Sr=2jr > �M�jr >=�Sr2� 1�M�jr > : (1.85)

30 CAPÍTULO 1. GRUPOS CONTINUOS
Es decir, como M0(M�jr >=�Sr2� 1�M�jr >, Sr2 � 1 también es autovalor
de M0.Vamos a cambiar la notación, simpli�cando los autovectores jSr=2 >,de
forma quejr >� jSr=2 > : (1.86)
A su vez, podemos poner que:
M�jSr=2 >= Nr�jSr=2 � 1 >; (1.87)
siendo Nr� un número real.Debido a que Sr
2corresponde a una serie de valores enteros o semienteros,
podemos poner:
Sr2= j; j � 1; j � 2; : : : ; con j entero o semientero (1.88)
Si hacemos actuar al operador,
M+jj >= N+j jj + 1 > (1.89)
donde hemos considerado que j es el mayor valor de Sr2, vemos que la situación
es absurda. Es decir:M+jj >= 0 (1.90)
y, a partir de j, no existen más estados.A su vez:
M_jj >= N�j jj � 1 >
M2_jj >= N�
j�1N�j jj � 2 >
...
Mn_jj >= N�
j N�j�1 : : : jj � n >
Mn+1_ jj >= 0: (1.91)
Este último es nulo, pues la dimensión del espacio vectorial es n, y sólo existen vectores linealmente independientes.
M_jj � n >= 0 (1.92)
Se puede demostrar que j � n = �j, cosa que no haremos por ahora.
1.5. GRUPO SO(3) 31
1.5.2. Normalización de los autovectores
Dado que
M_jj >= N�j jj � 1 > ) M+M_jj >= N�
j M+jj � 1 >= N�j N
+j�1jj >;(1.93)
y que:M� : jSr=2 >= Nr� : jSr=2 � 1 >; (1.94)
y
M+M_jj > =M_M+jj > +[M+;M_]jj >=M_j0 > +2M0jj >= 2jjj >) N�
j N+j�1 = 2j (1.95)
para j el mayor de los Sr=2.A su vez,
M+M_jSr=2 >= N�Sr=2
N+Sr=2�1jSr=2 >=M_M+jSr=2 > +2
Sr2jSr=2 >
(1.96)donde no sabemos con qué Sr=2 trabajamos. Entonces:
M+M_jSr=2 >= N+Sr=2
M_jSr=2 + 1 >= N+Sr=2
N�Sr=2�1jSr=2 > : (1.97)
Es decir:
N�Sr=2
N+Sr=2�1 = N+
Sr=2N�Sr=2+1
+ 2Sr2
(1.98)
obteniendo una relación de recurrencia donde:
N�j N
+j�1 = 2j
M++ =M_: (1.99)
Con estos datos, ya podemos obtener los factores de normalización. La matrizM+ tiene el siguiente aspecto:
M+ =
0BB@0 N+
j 0 � � � � � �0 0 N+
j+1 0 : : :� � � � � � � � � � � � � � �0 0 0 � � � N+
j+n�1
1CCA : (1.100)

32 CAPÍTULO 1. GRUPOS CONTINUOS
Y la matriz M� será:
M� =
0BBBB@0 0 0 : : : : : :N�j 0 � � � � � � � � �0 N�
j�1 0 � � � � � �0 0 N�
j�2 � � � � � �� � � � � � � � � � � � � � �
1CCCCA (1.101)
Llamaremos Sr2= m ) m�ax(m) = j. Apliquemos una matriz a un
vector cualquiera:
M�
nXm=1
vmjm >=X
vmM�jm >=X
vmN�mjm� 1 >; (1.102)
Tomamos N+m�1 = N�
m+1 para un m general.En realidad,N+
j =�N�j
��, pero como lasN�
j son números reales, llegamosa la anterior igualdad. Sustituyendo en las matrices:
N�m =
pj(j + 1)�m(m� 1)
N+m =
pj(j + 1)�m(m+ 1); (1.103)
con j � n = �j.Es posible que el alumno esté más familiarizado con la notación habitual
de Mecánica Cuántica. Vamos, por tanto, a retomarla. Sabemos que larepresentación de una rotación podía expresarse por
R(�; z) jumi = eim� jumi (1.104)
donde jumi es un autovector cualquiera del espacio de con�guración corre-spondiente a los observables momento angular. Desarrollando la exponencialen serie de Taylor para ángulos in�nitesinales,
J0 jumi = m jumi : (1.105)
Si jumi se transforma de acuerdo con la representación m-ésima, J+ jumi setransforma con la representación (m + 1)-ésima. Veamoslo haciendo actuarsucesivamente los operadores J0 y J+:
J0 (J+ jumi) = (J+ + J+J0) jumi = J+ (I + J0) jumi = (m+ 1) J+ jumi :(1.106)

1.5. GRUPO SO(3) 33
Análogamente,J0 (J� jumi) = (m� 1) J� jumi : (1.107)
Si trabajamos con representaciones �nitas, siempre habrá un valor tope dem, al que llamaremos j = m�ax (m) : Es decir, J+ juji = 0. Para detallar lasituación usaremos dos subíndices, tal que
J0 jujmi = m juj;mi ;J+ juj;ji = 0: (1.108)
Como al actuar J� sobre un vector jujmi se genera una función proporcionala juj;m�1i, entonces
juj;m�1i = �jmJ� juj;mi ;J+ juj;m�1i = �jm juj;mi : (1.109)
Escribimos �jm = cj;m�1�jm: Con esto
J+ juj;m�1i = cj;m�1�jm juj;mi == �jmJ+J� juj;mi
(de sustituir juj;m�1i )= �jm (J�J+ + 2J0) =
= �jm (J�cjm�jm+1 juj;m+1i+ 2m juj;mi)(de actuar J+ y J� sobre juj;mi)
= �jm (cjm juj;mi+ 2m juj;mi)(de actuar J� sobre juj;m+1i
= �jm (cjm + 2m) juj;mi : (1.110)
Pero, ¿cuánto vale cjm ? Hemos de resolver la ecuación cj;m�1 = cjm+2m, lacual podemos reescribir como
cjm = Aj +m(m+ 1); (1.111)
con la condición de contorno cjj = 0. Por recurrencia podemos ver que cjm =j(j + 1)�m(m+ 1). Para calcular �jm normalizamos,Z
jujmi� jujmi d� = hujmjujmi = 1; (1.112)

34 CAPÍTULO 1. GRUPOS CONTINUOS
con Zu� (J+v) d� =
Z(J�u)
� vd� : (1.113)
Por tanto,
1 =
Zu�jmujmd� = �j;m+1
Z(J�uj;m+1)
� uj;md�
= �j;m+1
Zu�j;m+1 (J+uj;m) d� =
= �j;m+1cj;m�j;m+1
Zu�j;m+1uj;m+1d� =
= �2j;m+1cj;m =)=) J+uj;m =
pj(j + 1)�m(m+ 1)uj;m+1;
=) J�uj;m =pj(j + 1)�m(m� 1)uj;m�1;
=) J0uj;m =Muj:m: (1.114)
1.5.3. Resumen
Hemos de�nido:
J� = I1 � iI2J0 = I3: (1.115)
Para un m general tenemos:
J0jm >= mjm >
J�jm >= [j(j + 1)�m(m� 1)]1=2jm� 1 > (1.116)
variando m entre j y �j. Utilizando representaciones:
D(J0)jm >= mjm >
D(J�)jm >= [j(j + 1)�m(m� 1)]1=2jm� 1 > : (1.117)
Pero aún no podemos caracterizar totalmente una base. Sin embargo, si labase es de dimensión n, sabemos que:
J_jj >� jj � 1 >J2_jj >� jj � 2 >Jn_jj >� j � j > : (1.118)

1.5. GRUPO SO(3) 35
Esta representación suele denotarse como D(j)(�;�!n ).Ejemplos:a) Si j = 0, sólo existe el estado o vector ju00i con lo generadores
J+ = J� = J0; D(0)(�;�!n ) = 1: (1.119)
b) Para j = 1=2 tendremos dos funciones��u1=2;1=2� ; ��u1=2;�1=2�, con
J0 =1
2
�1 00 �1
�; J+ =
�0 10 0
�; J� =
�0 01 0
�: (1.120)
De�niendo 2J1;2;3 = �1;2;3, matrices de Pauli,
�1 = �x =
�0 11 0
�; �2 = �y =
�0 �ii 0
�; �3 = �z =
�1 00 �1
�;
(1.121)de tal forma que
�2i = E = I=�1 00 1
�=)
D(1=2)(�; z) = exp(i�J0) =1Xn=0
�i
2�
�n1
n!�nz =
I cos �2+ i�z sin
�
2=
�ei
�2 00 e�i
�2
�: (1.122)
D(1=2)(�; y) = exp(i�Iy) =1Xn=0
�i
2�
�n1
n!�ny =
1 cos�
2+ i�y sin
�
2=
�cos �
2sin �
2
� sin �2cos �
2
�: (1.123)
Para una rotación genéricaR(�;�!n ), donde damos la rotación por los ángulosde Euler '; �; �, D(1=2)(�;�!n ) = D(1=2)(�; z)D(1=2)(�; y)D(1=2)('; z) =)
D(1=2)(�;�!n ) =�
ei=2(�+') cos �=2 ei=2(��') sin �=2�ei=2(��') sin �=2 e�i=2(�+') cos �=2
�: (1.124)
Esta es una representación como otra cualquiera entre la in�nitas posibles.

36 CAPÍTULO 1. GRUPOS CONTINUOS
c) Para j = 1, tendremos los autovectores ju1;1i ; ju1;0i ; ju1;�1i, con
J+ ju1;1i = 0 J+ ju1;0i =p2 ju1;1i J+ ju1;�1i =
p2 ju1;0i
J0 ju1;1i = ju1;1i J0 ju1;0i = 0 J0 ju1;�1i = � ju1;�1iJ� ju1;1i =
p2 ju1;0i J� ju1;1i =
p2 ju1;�1i J� ju1;�1i = 0
;
(1.125)es decir,
J+ =
0@ 0p2 0
0 0p2
0 0 0
1A ; J0 =
0@ 1 0 00 0 00 0 �1
1A ; J� =
0@ 0 0 0p2 0 0
0p2 0
1A :
(1.126)Existen funciones que se transforman como D(1). Sin ir más lejos, los armóni-cos esféricos con l = 1:
ju1i = Y 11 � x+ iy;
ju0i = Y 01 � z;
ju�1i = Y �11 � x� iy: (1.127)
1.6. Representación Producto Directo.
Supongamos que tenemos dos representaciones irreducibles de un deter-minado grupo. Supongamos que tenemos dos conjuntos de funciones fjujmigy fjvj0m�ig, las cuales se transforman de acuerdo con las representaciones ir-reducibles D(j) y D(j0). Supongamos, por sencillez, que pertenecen al grupode rotaciones SO(3). El resultado del producto de dos representaciones ir-reducibles no tiene por qué ser irreducible. pero puede descomponerse comocombinación lineal de irreducibles. El producto directo D(j) D(j0) com-prende a todos los posibles productos de fjujmig por fjvj0m�ig; tal y comosi fuera un producto tensorial jujmi jvj0m�i. Aunque D(j) D(j0) no esirreducible, puede descomponerse como
D(j) D(j0) =XJ
aJD(J); (1.128)
donde aJ = 1 y jj � j0j � J � j + j0.La forma de construir el producto directo en forma de combinación de
representaciones irreducibles es la siguiente:

1.6. REPRESENTACIÓN PRODUCTO DIRECTO. 37
1.- A partir de los (2j + 1) (2j0 + 1) productos de jujmi jvj0m�i, se clasi-�can de acuerdo con las representaciones irreducibles M = m�m�de rota-ciones en torno a Z.2.- Se selecciona el vector
��U(j+j0)(j+j0)� = jUJi = jujji jvj0j0i : Es decir, elque tiene J = j + j0 y M = J .3.- Se generan mediante el operador J� los 2j+2j0+1 vectores
��U(j+j0)M�,los cuales se transforman de acuerdo con la representación D(j+j0).4.- Se ortogonalizan todos los vectores jUJMi. Esto puede lograrse toman-
do combinaciones lineales de jujmi jvj0m0i en las que no se mezclen vectorescon diferentes M = m+m0.5.- Se toma, del resto de vectores, el que tenga mayor M , llamando M al
nuevo J , y jUJJ 0i al vector correspondiente.6.- Se genera mediante J� al resto de los 2J vectores jUJMi de la repre-
sentación D(J).7.- Se repite el proceso de 4 a 7 hasta que se cubra todo el espacio vectorial.Los vectores de las nuevas representaciones irreducibles, jUJMi, pueden
escribirse como
jUJMi =Xjj0mm0
(jj0mm0jJM) jujmi jvj0m0i : (1.129)
Muchos textos escriben jujmi jvj0m0i como hujmj vj0m0i, notación que puedeconducir a error, ya que no es el producto
Ru�jmvj0m0d� . Los coe�cientes
(jj0mm0jJM) se les conoce por coe�cientes de Wigner o de Clebsch-Gordan.Son nulos a menos quem+m0 =M . Por tanto, para fhujmj vj�m�ig ó jujmi jvj0m0i1.- Sólo existe una función conM = m+m0 = j+ j0 o conM = �(j+ j0)2.- Existen dos funciones con M = (j + j0 � 1) ó con M = �(j + j0 � 1),
a menos que j y/o j0 sean nulos3.- Existen tres funciones con M = (j + j0 � 2) ó con M = �(j + j0 � 2),
a menos que j y/o j0 sean nulos o la unidad.4.- Los valores deM tales que� jj � j0j �M � jj � j0j se hayan repetidos
2j + 1 veces si j � j0 ó 2j0 + 1 veces si j0 � j. En consecuencia, contandodirectamente,
D(j) D(j0) = D(j+j0) �D(j+j0�1) � � � � �D(jj�j0j): (1.130)
Ejemplo:Consideremos al espacio formado por los vectores (ju11i ; ju10i ; ju1�1i) y
(jv11i ; jv10i ; jv1�1i), ambos de la representación D(1). Para simpli�car, elim-inaremos j y j0 en la notación de los vectores. De la última expresión sabemos

38 CAPÍTULO 1. GRUPOS CONTINUOS
queD(1) D(1) = D(2) �D(1) �D(0): (1.131)
Vamos a determinar las nueve (9) funciones jUJMi mediante el anterior pro-cedimiento.a) Clasi�camos las funciones producto directo por sus valores de M :
M = 2 u1v1M = 1 u1v0 u0v1M = 0 u1v�1 u0v0 u�1v1M = �1 u0v�1 u�1v0M = �2 u�1v�1
: (1.132)
b) Determinamos D(2) ( para J = 2) mediante
jU2;2i = ju1i jv1i = (u1jv1) (1.133)
y aplicamos el operador J� :
J� jU2;2i = 2 jU2;1i = J� (ju1i jv1i) = (J� ju1i) jv1i+ ju1i (J_ jv1i)=p2 ju0i jv1i+
p2 ju1i jv0i =)
jU2;1i =p2
2(ju0i jv1i+ ju1i jv0i) : (1.134)
Bajamos un peldaño volviendo a aplicar J� :
J� jU2;1i =p6 jU2;0i = J�
p2
2(ju0i jv1i+ ju1i jv0i)
!=
=
p2
2[(J� ju0i) jv1i+ ju0i (J� jv1i) + (J� ju1i) jv0i+ ju1i (J� jv0i)]
=
p2
2
hp2 ju�1i jv1i+
p2 ju0i jv0i+
p2 ju0i jv0i+
p2 ju1i jv�1i
i=)
jU2;0i =p6
6(ju�1i jv1i+ 2 ju0i jv0i+ ju1i jv�1i) :(1.135)
Iguiendo el proceso,
jU2;�1i =p2
2(ju0i jv�1i+ ju�1i jv0i)
jU2;�2i = ju�1i jv�1i : (1.136)
1.6. REPRESENTACIÓN PRODUCTO DIRECTO. 39
c) Ortogonalizamos las funciones (o vectores) con J = 1, M = 1 conalguna ya generada con M = 1, como es jU21i :
hU1;1 jU2;1i = [� (hu0j hv1j) + � (hu1j hv0j)]p2
2(ju0i jv1i+ ju1i jv0i)
=
p2
2(�+ �) = 0 =) � = �� =)
jU1;1i =p2
2(ju0i jv1i � ju1i jv0i) ;(1.137)
con lo que podemos determinar la representación D(1) usando el operadorJ�.d) Determinación de D(1):
J� jU1;1i =p2 jU1;0i =
p2
2
24 p2 ju�1i jv1i+p
2 ju0i jv0i �p2 ju0i jv0i
�p2 ju1i jv � 1i
35(1.138)=) jU1;0i =
p2
2(ju�1i jv1i � ju1i jv�1i) : (1.139)
Repitiendo el proceso,
jU1;�1i =p2
2(ju�1i jv0i � ju0i jv�1i) : (1.140)
e) Ortogonalizamos la función con M = 0 a jU2;0i y jU1;0i obteniendo
jU0;0i =p3
3(ju1i jv�1i � ju0i jv0i+ ju�1i jv1i) : (1.141)
f) Los coe�cientes de Clebsch-Gordan se obtienen a través de
jUJMi ==Xjj0mm0
(jj0mm0jJM) jujmi jvj0m0i ; (1.142)
es decir,(1111j22) = 1 (1100j20) =
p63
(1101j21 =p22
(1101j11) =p22
(11� 11j20) =p66
(1100j00) =p33;
(1.143)
etc.

40 CAPÍTULO 1. GRUPOS CONTINUOS
1.7. Grupo de Rotación-Inversión
El grupo total de rotaciones, que contiene a las rotaciones propias, puedeaumentarse si se incluyen la inversión y las rotaciones impropias. Esto seconsigue mediante el producto directo del grupo de rotaciones completo por elgrupo de Inversión. El resultado es el grupoRotación-Inversión oGrupoOrtogonal Completo O(3). Este grupo admite dos representaciones. Larepresentación par es aquella en la que
D(l)+ (iR) = D
(l)+ (R); (1.144)
y la impar,D(l)� (iR) = �D
(l)� (R): (1.145)
Si consideramos una partícula aislada sin espín, la paridad de las funcionesque se transforma como D(l) viene dada por (�1)l. Para un sistema de npartículas sin espín, la paridad es
nYk=1
(�1)lk ; (1.146)
donde lk es el momento angular orbital de la partícula k-ésima.Si intrudujeramos el espín, como j pasa a tomar valores semienteros,
la ambigüedad del signo en la representación matricial oscurece la anteriordistinción (hasta ahora sencilla) entre funciones pares e impares y, aunque laparidad sigue siendo un número cuántico, su utilidad como herramienta paraidenti�car partículas casi desaparece.¿De dónde se sacaron este invento de la paridad? Ocurre que, para oper-
adores hermíticos, la representación matricial de las rotaciones ha de satis-facer que
M y =M�1: (1.147)
Supongamos una matriz hermítica unimodular. Es decir, det jM j = 1. Es decajón que
M y = M�1 =)M yM = I =) det�M yM
�= 1
=) det(M y) det(M) = (detM)2 = 1
=) detM = �1: (1.148)
Si detM = 1 =) M 2 SO(3): Si detM = �1 =) �M 2 SO(3): �M esla matriz que representa a una rotación más inversión. Cualquier matriz de

1.8. PROYECTOR 41
O(3) puede ponerse como una M 2 D(R) con R 2 SO(3), o bien como M 2D(�R) = �D(R), donde �R � iR 2 SO(3). Por tanto, O(3) = SO(3) (�1). Las matrices ortogonales corresponden a rotaciones o a rotaciones coninversión.El operador asociado (�1) = P es el llamado Paridad, el cual produce la
imagen especular de un objeto al actuar. Este operador conmuta con todaslas rotaciones y, por tanto,
D(P ) = �P1; (1.149)
es múltiplo de la unidad. Así, D(P ) � D(P ) = �2P1 = D(P 2). Como P 2 =1 =) D(1) = �2P1 = 1 =) �P = �1: Es decir, los posibles autovalores dela paridad son �1, correspondiendo a las paridades de un sistema físico.Como ya hemos comentado, si no existe espín las funciones que se trans-
forman como D(l), siendo l el momento angular, tienen paridad (�1)l yaque
par D(l)+ (iR) = D
(l)+ (R) �P = 1
impar D(l)� (iR) = �D
(l)� (R) �P = �1
; (1.150)
donde i indica inversión. Es decir, los estados de un átomo de hidrógeno,con un único electrón, tiene paridad (�1)l. Para n partículas sin espín, la
paridad esnYk=1
(�1)lk . Ya hemos mencionado que, al introducir el espín, la
paridad pierde parte de su importancia física.
1.8. Proyector
Consideremos un autovector cualquiera, jv > 6= 0, ortogonal a todos losdemás. Es decir, < mjv >= 0; 8m 6= v. Podemos construir un vector de laforma:
j' >=nX
m=1
cmjm > +cjv >; (1.151)
Llamamos proyector P a un operador tal que:
Pj' >=nX
m=1
cmjm > (1.152)

42 CAPÍTULO 1. GRUPOS CONTINUOS
Figura 1.6: El proyector
es decir:Pjv >= 0
El proyector nunca es múltiplo del operador unidad 1; P 6= ��1. Sin embargo,P conmuta con todos los J :
[P ; J+]j' >= PJ+j' > �J+Pj' > (1.153)
=X
cmPJ+jm > +cPJ+jv > +X
J+Pcmjm > �cJ+Pjv > (1.154)
Por de�nición, Pjv >= 0, por lo tanto:
[P ; J+]j' >=X
cm[j(j + 1)�m(m+ 1)]1=2Pjm+ 1 > (1.155)
�X
cm[j(j + 1)�m(m+ 1)]1=2Pjm+ 1 >= 0; (1.156)
debido a que Pjm + 1 >= jm + 1 >. Los mismo ocurre con J_ y J0. Engeneral:
[Ik;P ] = 0; (1.157)
conmutando también con sus representaciones D(R):
[P ; D(R)] = 0 (1.158)
Aplicando el lema de Schurr, los vectores jm > formarían una base completade la representación.
1.9. OPERADOR DE CASIMIR 43
1.9. Operador de Casimir
El operador de Casimir es el operador correspondiente al momento angu-lar total, ~I2, que conmuta con todos los elementos de sus grupo, donde:
~I2 =
3Xk=1
I2k ; (1.159)
que, por el Lema de Schur, es múltiplo de 1:
~I2 = �D � 1 (1.160)
Para calcular �D, aplicamos el operador a un vector cualquiera:
~I2 =3Xk=1
I2k = J20 +1
2(J+J_ + J_J+)
= J20 + J_J+ +1
2[J+; J_] = (1.161)
= J20 + J_J+ + J0 = J20 + J0 + J_J+: (1.162)
Por lo tanto:~I2jj >= J20 jj > +J0jj > +J_J+jj > : (1.163)
Pero J+jj >= 0, pues hemos tomado el mayor jm >, así que:
~I2jj >= (j2 + j)jj >= j(j + 1)jj > : (1.164)
Y, del mismo modo:~I2jm >= j(j + 1)jm > : (1.165)
1.10. Representación explícita del SU(2)
Podemos estudiar el grupo SU(2) partiendo del SU(3):
R(~') 2 SO(3) D�! D[R(~')] 2 SU(2); (1.166)
donde:D[R(~')] = ei
Pk 'kD(Ik): (1.167)

44 CAPÍTULO 1. GRUPOS CONTINUOS
En este caso, en vez de buscar D(Ik), buscaremos D(J), a los cuales llamare-mos J a secas.Dado que la base jm > podía variar de j a �j, en dos dimensiones:
j � 1 = �j ) j =1
2: (1.168)
Por lo tanto:
J0j1=2 >= 12j1=2 >
J0j � 1=2 >= �12j1=2 >
�correspondiente al espacio de los espines.
(1.169)Esta representación es bivaluada.Veamos un ejemplo. Teníamos ~'z � (0; 0; '3) rotación en torno a z:
D[R( ~'z)] = ei'3J0 ) D[R( ~'z)]j1=2 >= ei'312 j1=2 > (1.170)
Si damos un giro de 2� radianes (con lo que volvemos al mismo punto),obtenemos:
D[R( ~2�)]j1=2 >= ei�j1=2 >= �j1=2 > (1.171)
por lo que �D[R( ~2�)] varía el vector j1=2 > al �j1=2 >, en vez de dar el giroque habíamos supuesto. Habitualmente se suele escribir:
J0 =
�1=2 00 �1=2
�=1
2�3; (1.172)
siendo
�3 =
�1 00 �1
�(1.173)
el espinor.Para j = 1=2 tendremos:
J_j1=2 >= [1=2(1 + 1=2)� 1=2(1� 1=2)]1=2j � 1=2 >= j � 1=2 > (1.174)
J+j1=2 >= 0J+j � 1=2 > = [1=2(1 + 1=2) + 1=2(1� 1=2)]1=2j1=2 > (1.175)
= j1=2 > J_j � 1=2 >= 0 (1.176)
En forma matricial:
J_ =
�0 01 0
�J+ =
�0 10 0
�: (1.177)

1.11. LAS VARIABLES INTERNAS: EL ESPÍN ISOTÓPICO. 45
En términos de los spinores:
I3 =1
2�3
I1 =1
2�1
I2 =1
2�2 (1.178)
que, en su forma matricial:
�3 =
�1 00 �1
�(1.179)
�2 =
�0 �ii 0
�(1.180)
�1 =
�0 11 0
�: (1.181)
componen las denominadas Matrices de Pauli. En este caso:
D[R(~')] = e12
X'k�k: (1.182)
1.11. Las variables internas: el espín isotópi-co.
1.11.1. De�niciones
En física nuclear y de partículas existe una nueva invariancia bajo trans-formaciones de un espacio "interno", diferente del 3D, y que está asociadoa la carga. Las interacciones fuertes ligan a protones con neutrones en elnúcleo, pero son independientes de la carga. Es decir, la interacción entre dosprotones es idéntica a la interacción entre dos neutones o, incluso, a la exis-tente entre un protón y un neutrón. Por esta razón venos núcleos isóbaros enfísica nuclear. Son núcleos con diferentes números de N de neutrones y Z deprotones, pero con el mismo número atómico A = N + Z. La pequeña difer-encia de masas entre ellos es debida a la interacción electromagnética,que sí debe distinguir entre protones y neutrones.

46 CAPÍTULO 1. GRUPOS CONTINUOS
La invariancia bajo el intercambio p ! n, conocida como simetría decarga, no acaba con la simetría de las interacciones fuertes. De hecho, esinvariante bajo el grupo más amplio de rotaciones en el espacio del espínisotópico.El protón y el neutrón se consideran como las componentes arriba y abajo
de otro objeto más general de dos componentes o manifestaciones N = (p; n),el nucleón. Análogamente a lo que ocurre en el espacio ordinario, asoci-amos al nucleón los valores �1
2(autovalores) del nuevo operador de rotación
isotópica �3, o I3. Es el tercero de los operadores Ik que forman un álgebraSO(3)I y que conmutan como
[Ii; Ij] = i"ijkIk: (1.183)
La carga Q no coincide con I3 sino que
Q = I3 +1
2Y; (1.184)
donde Q = 1 para el protón y Q = 0 para el neutrón. En el caso de nucleonesel artefacto Y , conocido como hipercarga, es Y = 1.Para otros multipletes la hipercarga Y toma diferentes valores. Como
el espectro de I3 es simétrico, 12Y es siempre el promedio de la carga delmultiplete.El operador Hamiltoniano de la interacción fuerte conmuta no sólo
con el operador I3, sino también con las otras componentes de modo quehH;�!Ii=�!0 . Es decir, las interacciones fuertes son invariantes bajo el
grupo completo de rotaciones isotópicas SO (3)I . La representación ir-reducible se etiqueta por el número cuántico total de isospín I, conmultiplicidad 2I + 1, con I3 comprendido entre �I e I, enteros.Las partículas que interactúan mediante la interacción fuerte son los
hadrones. Estos forman multipletes de isospín. Ya hemos visto el caso delos nucleones con I3 = �1
2
�de I = 1
2
�e Y = 1. Otro ejemplo es el de la
partícula conocida como pión (�), con tres estados de carga. Correspondenal triplete I = 1 (�+; �0; ��1), con Y = 0. La simetría de este triplete seobserva a nivel del espectro de forma que las masas correspondientes son casiidénticas: m (��) = 139;6 MeV/c2, m (�0) = 135;0 MeV/c2. Existen otrosmuchos dobletes y tripletes que se clasi�can en función de las masas.La invariancia en este nuevo espacio asociado a la carga se demuestra en
experimentos de dispersión (scattering). Sea T es un operador escalar tal que
hIf ; I3f jT jIi; I3ii = TI�IiIf �I3iI3f ; (1.185)

1.11. LAS VARIABLES INTERNAS: EL ESPÍN ISOTÓPICO. 47
donde los subíndices i; f aluden a los estados inicial y �nal. La anteriorexpresión indica que las amplitides de la dispersión para los distintos modosde carga pueden ponerse en función de las autoamplitudes TI . Si tomamos elcaso de la llamada dispersión �N , por ejemplo, los estados inicial y �nal estánformados por, cada uno, por un multiplete con Ia = 1 y otro con Ib = 1
2. De
ellos tenemos que I = IaIb, con representaciones irreducibles I = 32; 12. Así,
todas las posibles amplitudes de dispersión para las distintas con�guracionesde carga se expresan mediante las amplitudes T3=2; T1=2. Por ejemplo,
T��0p �! �+n
�=p2�T�n0p �! n0p
�� T
�n+n �! n+n
��(1.186)
corresponde a la reacción de intercambio de carga �0p �! �+n lograda porlas reacciones elásticas n0p �! n0p y n+n �! n+n. Así, podemos construirlos estados de isospín. Para I = 3
2; I3 =
32, tenemos que����32 ; 32
�=���+p� : (1.187)
Haciendo actuar el operador de aniquilación I�;����32 ; 12�=
p3
3
�p2���0p�+ ���+n�� (1.188)
y ����12 ; 12�=
p3
3
����0p�� ���+n�� ; (1.189)
que puede escribirse como���0p� =
p3
3
�p2
����32 ; 12�+
����12 ; 12��
;
���+n� =
p3
3
�����32 ; 12��p2
����12 ; 12��
; (1.190)
de donde ya podemos deducir las amplides de dispersión:�0pjT j�+n
�=
p2
3
�T3=2 � T1=2
��0pjT j�+n
�=
p2
3
�T3=2 + T1=2
�; (1.191)
etc.

48 CAPÍTULO 1. GRUPOS CONTINUOS
1.12. Creación de familias
De este modo van creándose una serie de multipletes de carga que songrupos de partículas idénticas que se diferencian por su estado de carga:
�unico hiper�on �0
doblete nucleones [p; n] mesones [K+; K�]triplete piones [n+; n0; n�] hiperones [�+;�0;��]cuarteto resonancias [�+�;�+;�0;��]
son resonanciaspi�on� nucle�onicas:
(1.192)En vez de hablar de número de partículas en un multiplete, los listos pre�erendecir "proyecciones de espín isotópico.en el multiplete, que es una lindezapedagógica.Como ya hemos contado, el espín isotópico se conserva en las inter-
acciones fuertes como la p+ �� �! n+ �0. Podemos construir una tablade familias:
carga -1 0 1nucleones n phiperón � �0
hiperones �� �0 �+
zetas �� �0
: (1.193)
Durante un tiempo se tomó la carga media de la familia para mencionarla.En los nucleones sería 1
2. En los piones sería 0. Para las partículas � sería
�12.
1.12.1. Estrañeza
Es la diferencia duplicada entre la carga media de la familia en estudio y lacarga media nucleónica. Es decir, para los nucleones sería s=2
�12� 1
2
�= 0.
Para las partículas �, s = 2��12� 1
2
�= �2. Ya tenemos cuatro carac-
terísticas para identi�car partículas: espín, masa, carga y estrañeza. Conesto podemos generar armarios donde colocarlas. El armario sería la masa.Habrían tres armarios. Uno para bariones (masa pesada), otro para mesones(masa intermedia) y otro para leptones ( partículas anorexicas). El espíndeterminaría en qué alacena del armario se coloca la individua.

1.13. ISOSPÍN COMO GRUPO SU(2)I : LOS QUARKS. 49
1.13. Isospín como grupo SU(2)I: Los quarks.
1.13.1. Los quarks
Supongamos que protones y neutrones están formados por conjuntos deentidades más elementales con cargas no enteras. La idea original fué de Gell-Mann, quién sacó el término quarks de la obra Finnegans wake, de J. Joyce.En en poema donde alude a la fuga de Tristán e Isolda de la corte del reyMarcos. En la huida por mar, al ver a tres gaviotas, Tristán exclama: ¡onequark, two quarks, three quarks! Al parecer, Joyce quería decir salvaje conel término. Vaya usted a saber, ya que Joyce llegó a mezclar términos deunos 200 idiomas en Finnegans wake. Si alguna vez se encuentran sin nadaque hacer pueden intentar leer a Joyce. Es posible que acaben demenciados.A propósito, y ya que estamos ejerciendo de cultos, Tristán era sobrino deMarcos, anciano rey de Irlanda. Isolda era la esposa de éste último, peroamante del primero, como corresponde. Pero este cuento es muy anterior aJoyce y ya Wagner lo había popularizado a través de su ópera Tristán eIsolda. Y es la tercera vez que mencionamos a Wagner ¿recuerdan?La invariancia de isospín a nivel de los hadrones se entiende ahora como
una re�exión entre dos sabores del quark que construirán a los nucleones.Serán los quarks u y d (de up y down) que se transforman como el doblete
q =
�ud
�(1.194)
bajo el grupo SU(2)I . Así, u corresponde a I3 = 12y d a I3 = �1
2. Los
nucleones proceden de las combinaciones
p = uud
n = udd: (1.195)
Vemos que cada nucleón, cuya hipercarga es Y = 1, está formado por tresquarks, cuya hipercarga ha de ser 1
3:
Q = I +1
2Y =)
Qu =1
2+1
6=2
3;
Qd = �12+1
6= �1
3: (1.196)

50 CAPÍTULO 1. GRUPOS CONTINUOS
En términos de la teoría de grupos, las combinaciones de quarks corre-sponden a términos en la serie de coe�cientes de Clebsch-Gordan para elproducto directo 1
2 1
2 1
2= 3
2� 1
2� 1
2. Para ello se hace primero el producto
12 1
2= 1� 0, multiplicándose después otra vez por 1
2:
El cuento anterior se mantiene para el espín corriente y moliente. Porlo tanto, los quarks son fermiones de espín 1
2, y la combinación de tres
quarks puede tener espín total s = 32, como ocurre con la partícula delta
(�), detectable en la dispersión ��p mediante � (��p) = 19(�+p) ; ó s = 1
2,
para el nucleón.Habíamos hablado del pión. Este está tanbién formado por quarks, pero
de forma distinta, a través de un quark y un antiquak. Los antiquark tambiénforman su doblete de isospín
q =
��du
�; (1.197)
donde el signo (�) se explicará después. Hay tres estados de carga que danlos piones y son las combinaciones
�+ = �ud;
�0 =1p2
�uu� dd
�;
�� = du; (1.198)
que corresponden a la primera posibilidad de descomposición 12 1
2= 1� 0.
El resto de posibilidades las cumple la partícula �. Una vez más, el hechode que el pión tenga espín nulo (bosones) se obtiene por la combinación desingletes de los espines de quark y antiquark.Aún existe otro quark adicional denominado �, y que se introduce para
que pueda aparecer la estrañeza s (no confundir con el espín). Podíamosencuadrar los quarks como
s�{mbolo carga estra~neza hipercargau � p 2
30 1
3
d � n �13
0 13
� �13
�1 13
; (1.199)

1.13. ISOSPÍN COMO GRUPO SU(2)I : LOS QUARKS. 51
o
Sabor Masa (GeV=c)2 Carga elect:u(arriba) 0;001� 0;005 +2=3d(abajo) 0;003� 0;01 �1=3c(encanto) 1;15� 1;35 +2=3s(estra~neza) 0;075� 0;170 �1=3t(tope) 174;3� 5;1 +2=3b(fondo) 4;0� 4;4 �1=3
TABLA de quarks. La carga eléctrica está expresada en unidades de
la carga del protón
es decir, en el protón no interviene � ya que su estrañeza es 0. La notaciónintroduce a veces confusión. Como vemos, algunos autores optan por llamar au como p y a d como n. El caso del protón, ppn, ó uud será el de carga +1, no
bariónico 1, espín 1/2, sin intervención de la estrañeza: p = p " p " n #. Nuncapueden haber tres quarks idénticos debido a los espines, ya que interviene elPrincipio de Exclusión. Recordemos que p y n tienen distintas cargas.Veamos que ocurre en función del espín total: Si S = 1=2, tenemos las
opciones
p # n " n " p " p " n # doblete nucleónicop " n " � # �0
n " n # � " p " n # � " p " p # � " ��;�0;�+
n " � " � # p " � " � # ��;�+
: (1.200)
Como vemos, algo falla. Si el espín fuera S = 3=2,
ppp ppn pnn nnnpp� pn� nn�
p�� n�����
; (1.201)
que corresponden a
estrañezaN�++ N�+ N� N�� 0
��+ �� ��� -1�� ��� -2
� -3
; (1.202)
52 CAPÍTULO 1. GRUPOS CONTINUOS
donde � indica que es un estado de excitación ó resonancia.Los quarks p; n son más ligeros que el �.Los bosones se forman con un quark y un antiquark para que la carga
bariónica resultante sea 0: pp; nn; ��; p�; p�, etc. Por ejemplo, el mesón �+
está formado por p " n #, cuya carga es 2=3+1=3 = 1, con estrañeza 0+0 = 0.El mesón estraño k+ está formado por p�.
En la representación de los quarks la invarianza de isospín tiene un origendinámico: se supone que los quarks interactúan intercambiando gluones g,con espín 1. Es decir, con bosones. Su propiedad fundamental es que su sabores neutro: I = 0. En la interación triple, q+qg se conserva el isospín de losquarks. De hecho, la interacción es invariante bajo SU(2)I , grupo que mezclalos sabores del espinor de los quarks de acuerdo con q �! Uq o q+ �! q+U+,dejando invariante al gluón.
1.13.2. Las masas de los quarks
Las masas de los quarks están indicadas como "masa aproximada". Esmuy difícil determinar la masa, o incluso de�nir qué se entiende por masade un quark, dado que un quark no se puede aislar. Esto es especialmentecierto para la generación más ligera (u, d), ya que la mayor parte de la masade sus compuestos (como protones y neutrones) no proviene de la masa delos quarks, sino de la energía de con�namiento:
mup +mup +mdown 6= mprot�on;
0;005 + 0;005 + 0;01 6= 0;938 GeV/c2:
1.13.3. Interacciones del quark.
Los quarks tiene, como vemos, carga eléctrica. Por lo tanto, sufren inter-acciones electromagnéticas.Los quarks tienen carga de color, de modo que sufren las interacciones
fuertes. Las interacciones fuertes dan lugar a que los quarks se combinen for-mando hadrones. A su vez, las interacciones fuertes residualesmantienena los hadrones unidos para formar núcleos.Los diferentes tipos de quarks (u, d, c,...) se denominan sabores. El sabor
sólo se modi�ca mediante las interacciones débiles. Poe ejemplo,
p+(u; u; d) +K0(d; s) = �0(d; s; u) + �+(u; d): (1.203)

1.13. ISOSPÍN COMO GRUPO SU(2)I : LOS QUARKS. 53
Todos los quarks del miembro derecho también están en el izquierdo. Sinembargo, cuando un quark emite un bosón (virtual) W+ o W 0cambia sucarga eléctrica y, por lo tanto, su sabor. La interacción débil dominante esla que involucra transiciones entre quarks de la misma generación (la mismacarga). Hay procesos raros entre quarks +2/3 y quarks -1/3.
1.13.4. Hadrones.
Los quarks son animales gregarios que sólo existen en manada con otrosquarks. Como hemos visto, los quaks tienen carga fraccionaria. En la prác-tica no se pueden observar directamente estas cargas fraccionarias ya quelos quarks nunca están solos, sino formando partículas complejas llamadashadrones. Éstos siempre tienen carga entera, suma de la de los quarks que loscon�guran. Igualmente, aunque los quarks tienen carga de color, los hadronestienen color neutro. La masa de un hadrón nunca es igual a la suma de lasmasas de losm quarks que lo forman.Existen dos clases de hadrones:
Bariones:
Son los hadrones formados por tres quarks (qqq), tales como los protones(uud) y los neutrones (udd).
Mesones:
Son los hadrones formados por un quark (q) y un antiquark (q), como elpión negativo ��(ud).
1.13.5. El color.
Los quarks y los gluones son partículas con carga de color. Al igual quelas partículas cargadas eléctricamente interactúan intercambiando fotones,las partículas con carga de color interactúan intercambiando gluones. Estaes la interacción fuerte. En esta interacción las partículas con color suelenquedarse pegadas entre sí.La diferencia fundamental entre las interacciones fuerte y electromagnéti-
ca consiste en que los portadores de la fuerza fuerte (gluones) tienen cargade color, mientras que los fotones no tienen carga de color (ni eléctrica). Dos

54 CAPÍTULO 1. GRUPOS CONTINUOS
o más quarks, cuando están muy próximos, intercambian gluones automáti-camente, generando el campo de fuerza de color, enormemente fuerte, yque liga a los quarks.
Campo de fuerza de color (CROMODINÁMICA).
Como hemos mencionado, dentro de un hadrón los quarks intercambiangluones como locos. Estos gluones que mantienen unidos a los quarks son losque forman el campo de fuerza de color. Si, dentro de un hadrón, alejamos aun quark de sus amiguitos, el campo de fuerza de color se estira. A medida queobligamos a los miembros de la banda a separarse, se va añadiendo energíaal campo de fuerza de color. Como si los quarks estuvieran unidos por goma.Llega un momento en que es más favorable energéticamente que se rompa elcampo transformando energía en masa, y creando dos nuevos quarks. Así serelaja el campo de fuerza de color. Los quarks no pueden vivir solitos porquenecesitan el campo de fuerza de color con otros amiguitos. Que bonitos sonel amor y la amistad.
La libertad asintótica.
Cuando la distancia que separa dos quarks se hace muy pequeña, la in-tensidad de la interacción fuerte disminuye. Los quarks, cuando están muypróximos, se comportan como si fueran libres. Este comportamiento matri-monial fué descubierto por Politzer, Wilczek y Gross (premios Nobel 2004).Existen tres cargas de color y las correspondientes de anticolor (color
complementario). Los quarks no son de ideas �jas y cambian constantementede color cuando intercambian gluones. Cada quark tiene una de las tres cargasde color, y su antiquark la complementaria. Sin embargo, los gluones tienenpares color/anticolor, aunque no obligatoriamente del mismo color. No esnecesario que tengan el par rojo/antirojo. Puede ser rojo/antiazul. A pesarde que hay nueve combinanciones de pares color/anticolor, una de ellas sedesecha por estrañas consideraciones de simetría. Uno se pregunta ¿Cómo unbarión, formado por tres quarks, es incoloro?La carga de color se conserva siempre. Cuando un quark emite o
absorve un gluón, el color del quark tiene que variar para que se conservela carga de color. Si un quark rojo"se transforma en uno .azul.emitiendo ungluón rojo/antiazul", el color neto sigue siendo rojo". Dentro de un hadrónlos quarks emiten y absorven gluones constantemente, por lo que no es posi-
1.13. ISOSPÍN COMO GRUPO SU(2)I : LOS QUARKS. 55
ble ver el color de un quark. Pero el hadrón tendrá siempre color neutro paraser observable.Debido a que aún quedaban confusos los espines y el principiode exclusión, apareció una propuesta posterior compuesta por 12 quarks. Esdecir, los quarks deben tener otro número cuántico interno. Vimos que elprotón estaba con�gurado por p " p " n #, violando el mencionado principio.Por ello se intrudujo el color, el cual marca en cierta forma a los quarks.Existen tres variantes que son azul, rojo y amarillo. De los tres quarks origi-nales pasamos a nueve. Finalmente se añadió un cuarto color para obtener losdoce quarks pertinentes. Estos doce elementos suelen agruparse ahora como4 aromas y 3 colores. Como puede verse, un galimatías, pues llegan a sobrarposibilidades. Esto da lugar al principio de incoloración.
Principio de Incoloración.
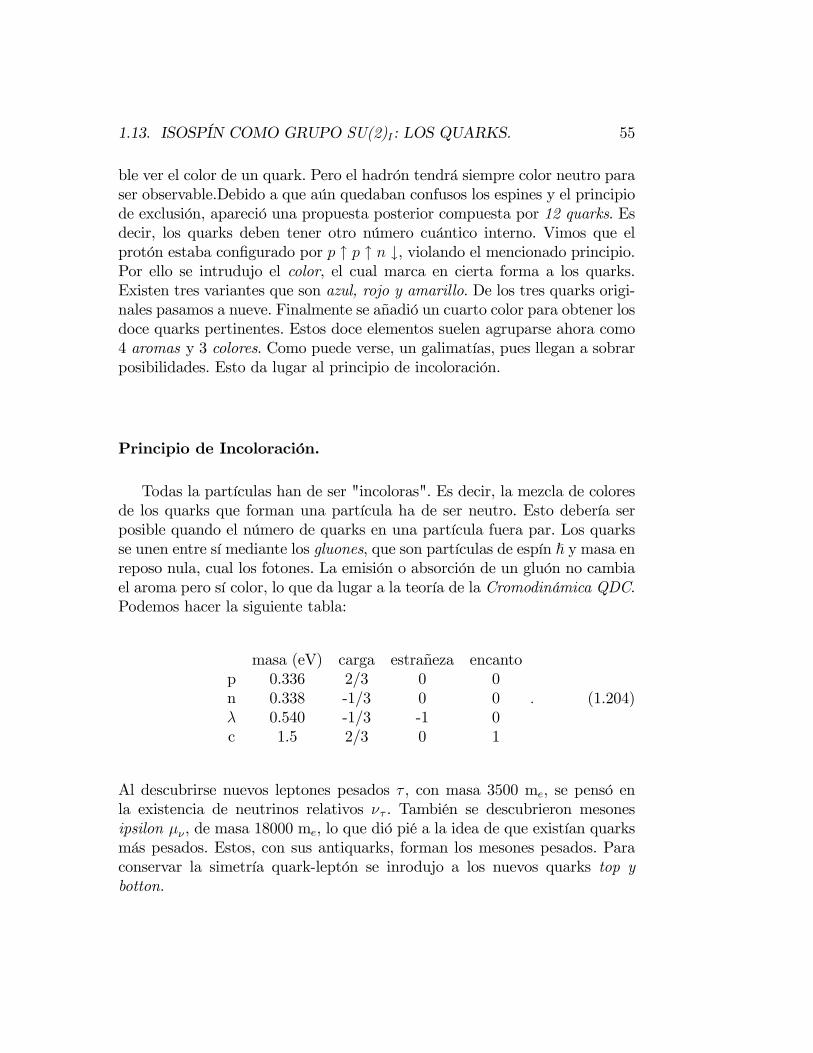
Todas la partículas han de ser "incoloras". Es decir, la mezcla de coloresde los quarks que forman una partícula ha de ser neutro. Esto debería serposible quando el número de quarks en una partícula fuera par. Los quarksse unen entre sí mediante los gluones, que son partículas de espín } y masa enreposo nula, cual los fotones. La emisión o absorción de un gluón no cambiael aroma pero sí color, lo que da lugar a la teoría de la Cromodinámica QDC.Podemos hacer la siguiente tabla:
masa (eV) carga estrañeza encantop 0.336 2/3 0 0n 0.338 -1/3 0 0� 0.540 -1/3 -1 0c 1.5 2/3 0 1
: (1.204)
Al descubrirse nuevos leptones pesados � , con masa 3500 me, se pensó enla existencia de neutrinos relativos �� . También se descubrieron mesonesipsilon �� , de masa 18000 me, lo que dió pié a la idea de que existían quarksmás pesados. Estos, con sus antiquarks, forman los mesones pesados. Paraconservar la simetría quark-leptón se inrodujo a los nuevos quarks top ybotton.

56 CAPÍTULO 1. GRUPOS CONTINUOS
1.14. Interacción fuerte
1.14.1. De�nición.
Es la que mantiene unidos a los nucleones [p; n]. Para ser más precisos,es la que produce el intercambio protón-neutrón
p+ ! n+ A+; (1.205)
idea original de Yukawa. La diferencia de masas o energías viene dada por�E = mAc
2 = }�t, siendo �t = l0
c, y l0 el tamaño del núcleo. Por lo tanto,
mA =}l0c. Esta partícula A puede corresponder con alguno de los mesones
[�+; �0; ��] ó [�+; �0; ��]. Debido a las masas, sabemos que son los segundos.La estrañeza se conserva en las interacciones fuertes.
1.14.2. Principio de la carga bariónica ó hiperacarga.
La diferencia entre el número de bariones y antibariones en una reacciónes invariante.
1.15. Interacción débil
Hay otra interacción que neceita explicación: la débil. Uno se pregunta:si hay 6 tipos de quarks y 6 tipos de leptones, entonces ¿por qué solo existemateria estable en este cochino mundo formada por sólo los dos tipos dequarks más livianos (up y down), y por el leptón más ligero (electrón)?.Pues la interacción débil es la responsable de que quarks y leptones pesadosdecaigan para producir quarks y leptones mas ligeros. Pero en más cantidad,claro está.Cuando un quark o leptón cambian de tipo (un muón transformándose en
electrón) se dice que cambia de sabor. Pues todos los cambios de sabor losproduce la interacción débil. Las partículas portadoras de esta interacción sonlos bosones W+;W�;Z. El modelo Standard agrupa a la interacción débilcon la electromagnética en la interacción electrodébil. Las interaccionesdébiles se detectaron en trabajos sobre radioactividad.

1.15. INTERACCIÓN DÉBIL 57
1.15.1. De�nición
Son aquellas en las que intervienen neutrinos y cambia la estrañeza, co-mo es la desintegración �. Recordemos que la estrañeza se conserva en lasinteracciones fuertes y electromagnéticas. Los neutrinos son unos artefac-tos curiosos que no tienen imagen especular (Drácula debió ser un neutrinoenorme). Fué Madame Wu la que analizó la ruptura de la simetría espec-ular. Existen neutrinos electrónicos y mesónicos. Reacciones típicas dondeintervienen neutrinos son:
�� �! e� + � + �;
K+ �! �+ + �;
K+ �! �+ + � + �0;
K+ �! e+ + � + �0;
n �! p+ e� + �;
n+ e+ � p+ �: (1.206)
En las interacciones débiles siempre participan 4 fermiones de espín }=2:Seagrupan por pares de una partícula cargada y otra neutra. Aparecen las dudasen reacciones como �+ �! �++��, donde falta un fermión. Lo que realmenteocurre es que �+ �! p + n (mediante una interacción fuerte)�! �+ + ��,mediante la débil.Hagamos un cuadro de los intermediarios en las interacciones:
Interacción partícula alcanceElectromagnética fotón 1
Fuerte mesones � 10�13cmDébil ¿bosones intermedios? 10�15cm
; (1.207)
donde el alcance o radio de interacción es del orden de 1mpotador
� }mc:
Posteriormente Weinberg y Salam (1973) parieron la Teoría Electrodébil,que es renormalizable con bosones neutros dando lugar a corrientes neutras.Es decir, aparecen singularidades que pueden evitarse, cosa que no ocurrecon bosones vectoriales pesados. Un caso donde interviene un bosón neutroes
�� + p �! �� + n+ �+; (1.208)
con intervención de un bosón neutro W . En electrodinámica, la fuente queemite y absorbe fotones es la corriente. En la interacción débil son los bosones

58 CAPÍTULO 1. GRUPOS CONTINUOS
neutros que generan corrientes neutras (movimiento de partículas no car-gadas). El fotón y el bosón W tienen el mismo espín (momento propio de lacantidad de movimiento). Resulta curioso que los mesones � se comportan deforma idéntica en cualquier interaccción excepto la electromagnética. Estosbosones no son más que tres manifestaciones de carga de la misma entidad,como la Virgen. No hay Virgen del Pino, del Rocio, etc, sino millones demanifestaciones de carga de la misma entidad: Astarté, Isthar, Isis. O sea,la triple diosa madre. Existe un problema: el fotón no tiene masa en reposo,pero los bosones W y Z pesan como 80 protones. Weinberg no introdujo lamasa del bosón en sus ecuaciones, siendo las partículas simétricas respectoa las masas. La ruptura expontánea de esta simetría da lugar a las distintasmasas.
1.15.2. Partículas de vida efímera o resonancias.
Son partículas con una vida media de 10�23s. Se obtienen bombardean-do hidrógeno con mesones �+. Estos se dispersan con mayor intensidad a200�106 eV (200 MeV) de forma
�+ + p+ �! �++ �! �+ + p+; (1.209)
siendo �++ una resonancia. Otro caso es
K� + p+ �! ��+ + �� �! �0 + �+ + ��; (1.210)
donde ��+ es una resonancia.A las resonancias se les considera como patícuals diferentes a leptones,
mesones y bariones.
1.16. Las partículas elementales. Modelo Stan-dard.
Las partículas fundamentales de la materia son seis quarks y seis leptones(y sus correspondientes antipartículas). El electromagnetismo y la fuerza dé-bil son mediados por los bosones gauge del modelo Glashow-Weinberg-Salam(g;W�; Z). La fuerza fuerte se atribuye a los ocho gluones de la cromodinámi-

1.17. EL GRUPO SU(3)I 59
ca cuántica.
1.17. El grupo SU(3)IHaciendo un resúmen, vemos que, en la representación de los quarks, la
invariancia de isospín tiene un origen dinámico. Se supone que los quarksinteractúan entre sí intercambiando gluones g, con isospín 1. Es decir, sonbosones. Su propiedad fundamental es que su sabor es neutro. En particular,I = 0. En la interacción triple q+qg se conserva el isospín de los quarks. Dehecho, la interacción es invariante bajo el grupo SU(2)I , el cual mezcla lossabores del espinor de los quarks de acuerdo con q �! Uq y q+ �! q+U+,dejando invariante al gluón.La invariancia SU(2)I del isospín tiene una extensión natural en el caso
donde estén involucrados más de dos sabores. Por lo menos existen tres tiposde quarks: estrañeza s, encanto c y fondo b. cada uno acarrea un númerocuántico aditivo que se conserva bajo interacciones fuertes. Con estos quarksadicionales la acción (vertex) fundamental es + g, donde es el vectorcolumna (u � p; d � n; s; c; b). Es invariante bajo transformaciones más am-plias �! U , siendo U cualquier matriz de transformación que representea un elemento del grupo SU(Nf )I , siendo Nf el número de sabores, cinco esnuestro caso. Sin embargo, no lo son bajo interacciones débiles y electromag-néticas debido a las masas de los quarks.A medida que los aceleradores han ido aumentando su energía han apare-
cido un montón de partículas nuevas, algunas con vida relativamente larga

60 CAPÍTULO 1. GRUPOS CONTINUOS
Figura 1.7: El noneto seudoescalar del SU(3)
(10�8 s). La cantidad que se produce es consistente con la interacción fuerte.Sin embargo, desaparecen por el mismo mecanismo. La explicación se achaca,supuestamente, a un nuevo número cuántico que ya hemos mencionado: laestrañeza, que se conserva en las interacciones fuertes.Las partículas se producen esencialmente por pares ss, cuya carga to-
tal neta es nula. Pueden producirse rápidamente pero decaer débilmente.Gradualmente empezaron a aparecer multipletes de partículas con diferenteisospín I y estrañeza S, pero con las mismas propiedades espaciales, momen-to angular intrínseco (espín) J y paridad P (debida a la re�exión espacialx �! �x). Los multipletes tienen, como ya hemos avanzado, casi la mismacarga, aunque con diferencias mayores en un 20% que en el caso del isospína solas. Los multipletes mejor establecidos son:1- EL mesón seudoescalar P, con espín-paridad JP = 0�, y formado por
�(�+; �0; ��), k(k+; k�), k(k0; k�), � y �0, con un total de 9 partículas. Se
pueden dibujar en el espacio (I3; Y ):La hipercarga de los mesones es equiva-lente a la estrañeza pues
S = Y +B;
siendo B el número bariónico. Para los mesones B = 0 y pueden construirse
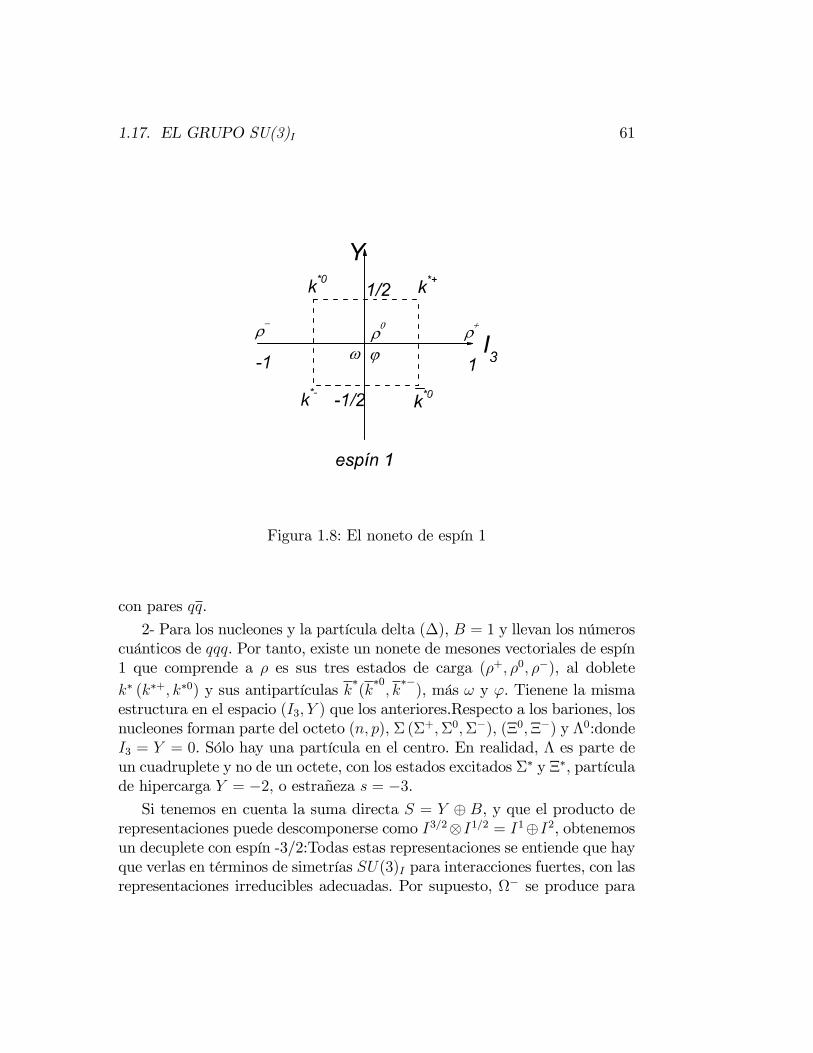
1.17. EL GRUPO SU(3)I 61
Figura 1.8: El noneto de espín 1
con pares qq.
2- Para los nucleones y la partícula delta (�), B = 1 y llevan los númeroscuánticos de qqq. Por tanto, existe un nonete de mesones vectoriales de espín1 que comprende a � es sus tres estados de carga (�+; �0; ��), al dobletek� (k�+; k�0) y sus antipartículas k
�(k�0; k��), más ! y '. Tienene la misma
estructura en el espacio (I3; Y ) que los anteriores.Respecto a los bariones, losnucleones forman parte del octeto (n; p), � (�+;�0;��), (�0;��) y �0:dondeI3 = Y = 0. Sólo hay una partícula en el centro. En realidad, � es parte deun cuadruplete y no de un octete, con los estados excitados �� y ��, partículade hipercarga Y = �2, o estrañeza s = �3.Si tenemos en cuenta la suma directa S = Y � B, y que el producto de
representaciones puede descomponerse como I3=2I1=2 = I1�I2, obtenemosun decuplete con espín -3/2:Todas estas representaciones se entiende que hayque verlas en términos de simetrías SU(3)I para interacciones fuertes, con lasrepresentaciones irreducibles adecuadas. Por supuesto, � se produce para
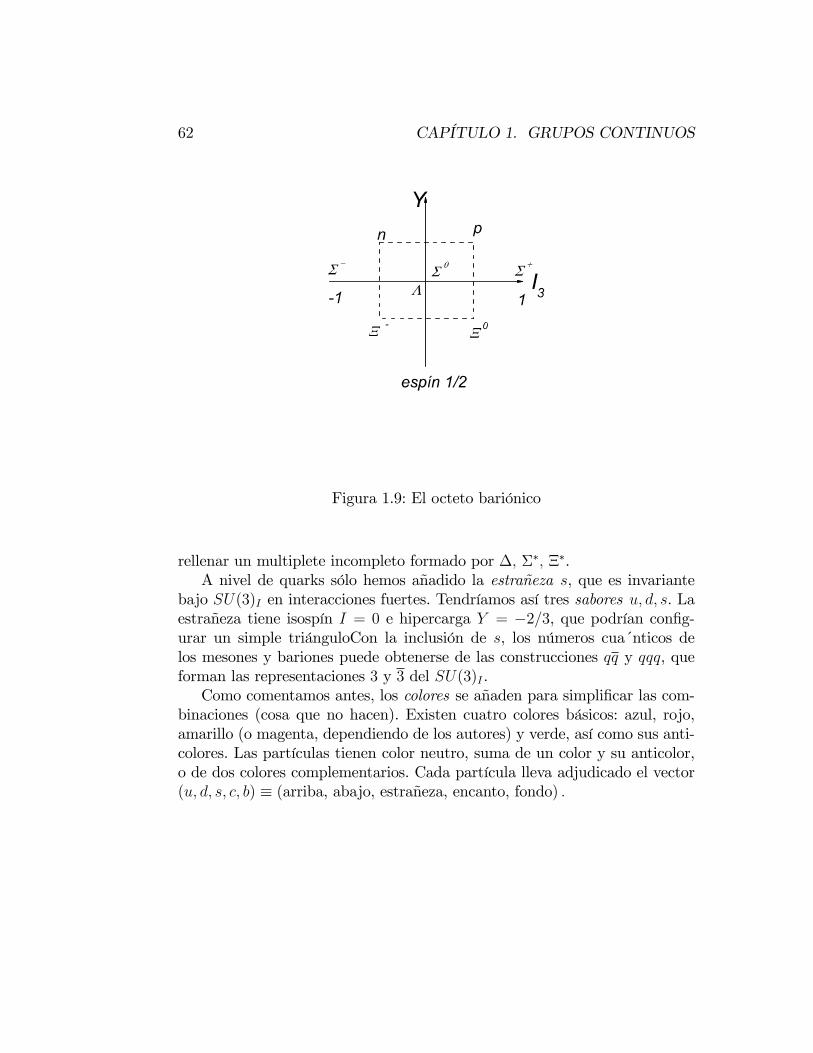
62 CAPÍTULO 1. GRUPOS CONTINUOS
Figura 1.9: El octeto bariónico
rellenar un multiplete incompleto formado por �; ��; ��.A nivel de quarks sólo hemos añadido la estrañeza s, que es invariante
bajo SU(3)I en interacciones fuertes. Tendríamos así tres sabores u; d; s. Laestrañeza tiene isospín I = 0 e hipercarga Y = �2=3, que podrían con�g-urar un simple triánguloCon la inclusión de s, los números cua´nticos delos mesones y bariones puede obtenerse de las construcciones qq y qqq, queforman las representaciones 3 y 3 del SU(3)I .Como comentamos antes, los colores se añaden para simpli�car las com-
binaciones (cosa que no hacen). Existen cuatro colores básicos: azul, rojo,amarillo (o magenta, dependiendo de los autores) y verde, así como sus anti-colores. Las partículas tienen color neutro, suma de un color y su anticolor,o de dos colores complementarios. Cada partícula lleva adjudicado el vector(u; d; s; c; b) � (arriba, abajo, estrañeza, encanto, fondo) :

1.17. EL GRUPO SU(3)I 63
Figura 1.10: El decuplete de espín 3/2

64 CAPÍTULO 1. GRUPOS CONTINUOS
Figura 1.11: Los quarks en el espacio (I3; Y ).
Bibliografía
[1] L.M. Falikov, Group theory and its physical applications (Univ. ChicagoPress, 1985).
[2] H.F. Jones, Groups, representations and physics, (IOPP, Bristol, 1996).
[3] J.F. Cornwell, Group theory in physics, (Academic Press, Londres,1985)Lecons sur la Théorie des Groupes et les Symmétries des Partic-ules Elémentaires", H. Bacry.
[4] R. Gilmore, Lie groups, Lie algebras, and some of their applications (J.Wiley & Sons, NY, 1974).
[5] E. Wigner, Group Theory and its application to quantum mechanics ofatomic spectra (Academic Press, NY, 1959).
[6] M. Hammermesh, Group Theory and its Applications to Physical Prob-lems (Dover Publications, 1989).
[7] J.P. Elliott, P.G. Dawber, Symmetry in physics, Vol. 1 (Oxford UniversityPress, 1979).
65