gps y teledeteccion
TRANSCRIPT
Serie Didáctica N° 3 Sistemas de Posicionamiento Global: Sistema GPS
Ing. Ftal Fabian Reuter – Facultad de Ciencias Forestales - UNSE I
ÍNDICE
CAPITULO I: HISTORIA DE LOS SISTEMAS DE NAVEGACIÓN
1.1. Introducción ............................................................................. 1
1.2. Observación a globos .............................................................. 2
1.3. Métodos de navegación........................................................... 3
1.3.1. Sistemas inerciales .................................................. 3
1.3.2. Radiolocalización ..................................................... 3
1.4. Sistemas basados en satélites ................................................ 5
1.4.1. Primeros satélites..................................................... 5
1.4.2 Generalidades sobre satélites................................... 5
1.4.3. Tipos de satélites ..................................................... 6
1.4.4. Posicionamiento....................................................... 6
1.5. Sistemas actuales.................................................................... 7
1.6. Sistema SLR............................................................................ 8
1.7. Sistema VLBI ...........................................................................13
1.8. Sistema TRANSIT....................................................................18
CAPITULO II: CONSTITUCIÓN Y FUNCIONAMIENTO
DEL SISTEMA GPS
2.1. Introducción ............................................................................20
2.1.1 Definición.................................................................. 21
2.2. Servicios ofrecidos por el sistema GPS...................................21
2.3. Descripción del sistema GPS ..................................................23
2.4. Sector espacial ........................................................................24
2.4.1. Satélites ...................................................................27
2.4.1.1. Satélites del bloque I.....................................27
2.4.1.2. Satélites del bloque II....................................28
2.4.1.3. Satélites del bloque II r .................................29
2.5. Sector de control......................................................................30
2.5.1. Estación maestra de control.....................................31

Serie Didáctica N° 3 Sistemas de Posicionamiento Global: Sistema GPS
Ing. Ftal Fabian Reuter – Facultad de Ciencias Forestales - UNSE II
2.5.2. Estaciones de monitoreo..........................................31
2.5.3. Estaciones de campo...............................................33
2.6. Sector de usuarios ...................................................................34
2.7. Equipo de observación. ...........................................................34
2.7.1. La antena ...................................................................34
2.7.2. El sensor: ...................................................................36
2.7.3. El controlador .............................................................37
2.8. Clasificación de los receptores GPS........................................38
2.8.1. a. Por el número de canales ....................................38
2.8.2. b. Por el tipo de canal...............................................39
2.8.3. c. Por el tipo de señal observado: ............................39
2.8.4. d. Por el método de geoposicionamiento .................40
2.8.5. e. Otras clasificaciones ............................................41
2.9. Estructura de la señal ..............................................................42
2.10. Degradación de la precisión ..................................................44
2.10.1. S/A -- Disponibilidad Selectiva ...............................46
2.10.2. A/S -- Antifraude.....................................................46
2.11. Sistemas de medida ..............................................................47
2.11.1. Pseudodistancia .....................................................47
2.11.2. Medidas de fase.....................................................49
2.12. Métodos de posicionamiento .................................................50
2.13. Método absoluto ....................................................................50
2.14. Método diferencial..................................................................50
2.14.1. a. DGPS en tiempo real .........................................51
2.14.2. b. DGPS Post-procesado .......................................52
2.14.3. c. DGPS de Campo................................................53
2.15. Método Relativo Interferómetrico...........................................53
2.16. Principios de Funcionamiento................................................54
CAPITULO III: ERRORES EN LAS OBSERVACIONES
3.1. Introducción .............................................................................58
3.2. Errores relativos al satélite.......................................................60
3.2.1. Error del reloj del satélite..........................................60
Serie Didáctica N° 3 Sistemas de Posicionamiento Global: Sistema GPS
Ing. Ftal Fabian Reuter – Facultad de Ciencias Forestales - UNSE III
3.2.2. Errores en los parámetros orbitales .........................60
3.3. Errores relativos a la propagación de la señal .........................61
3.3.1. Refracción ionosférica..............................................62
3.3.2. Refracción troposférica ............................................64
3.3.3. Disponibilidad selectiva ............................................65
3.3.4. Pérdidas de ciclos ....................................................65
3.3.5. Efecto multipath .......................................................66
3.4. Errores relativos al receptor .....................................................68
3.4.1. Error del reloj............................................................68
3.4.2. Error en el estacionamiento de la antena.................68
3.4.3. Errores en la manipulación de los equipos ..............68
3.4.4. Variación del centro radioeléctrico de la antena ......69
3.5. Dilución de la precisión ............................................................69
3.6. Conclusión ..............................................................................71
Referencias Bibliograficas ...............................................................72
Serie Didáctica N° 3 Sistemas de Posicionamiento Global: Sistema GPS
Ing. Ftal Fabian Reuter – Facultad de Ciencias Forestales - UNSE IV
PRÓLOGO
Esta serie didáctica tiene el objetivo de servir como manual técnico o guía
práctica para estudiantes o interesados en el Sistema de Posicionamiento Global
(GPS), tanto para aplicaciones técnicas en topografía, digitalización de superficies
reales, recopilación de datos para Sistemas de información Geográfica, así como
para aplicaciones personales en agrimensura, navegación aérea, marítima v
terrestre, o simplemente para actividades de recreación.
El tratamiento de los temas posee una profundidad compatible con un
nivel introductorio para estudiosos del tema, siendo de fácil comprensión para
aquellos que se inician en el mismo.
Existen temas que no se incluyen y algunos que son tratados en forma
superficial, en esta serie didáctica, a los efectos de no complicar y facilitar de esta
forma la comprension de los temas tratados.
Esta serie incluye un análisis histórico de los sistemas de
posicionamiento, que precedieron a los actualmente vigentes GPS y GLONASS.
Dada la diversidad de fabricantes y tipos de receptores GPS, esta serie
didáctica tratará de manera técnica los diferentes métodos de posicionamiento y
tratamiento de datos, así como las consideraciones necesarias para la correcta
utilización del equipamiento.
Frecuentemente, los aparatos de GPS se aplican a los trabajos de mapeo
como si fueran herramientas mágicas que se llevan al campo, se aprietan unos
botones y se toman coordenadas sin tomar en cuenta la forma en que el
instrumento trabaja o lo que éste muestra. Los aparatos de GPS NO son
mágicos.
Son simplemente instrumentos de alta tecnología que detectan señales
relativamente débiles provenientes de satélites en órbita y que hacen trilateración
algorítmica en base a las señales que reciben. Todo lo demás que el aparato
hace o representa gráficamente es simplemente aquello que el operador
programa. El viajar al campo con la noción de que el aparato de GPS ya "conoce"
los objetivos de la persona que lo maneja, producirá posiciones registradas que
no cumplen las normas necesarias para un trabajo serio de mapeo. El GPS es
una herramienta entre varias y su implementación no es necesaria, sí se puede
demostrar la efectividad en cuanto a costo o la exactitud de otros métodos menos
Serie Didáctica N° 3 Sistemas de Posicionamiento Global: Sistema GPS
Ing. Ftal Fabian Reuter – Facultad de Ciencias Forestales - UNSE V
sofisticados. Sin embargo, una vez que se ha decidido implementar esta
tecnología, el primer paso es entender como funciona y el segundo paso es
decidir como aplicarla.
Serie Didáctica N° 3 Sistemas de Posicionamiento Global: Sistema GPS
Ing. Ftal Fabian Reuter – Facultad de Ciencias Forestales - UNSE 1
CAPÍTULO I
HISTORIA DE LOS SISTEMAS DE NAVEGACIÓN
1.1. INTRODUCCIÓN
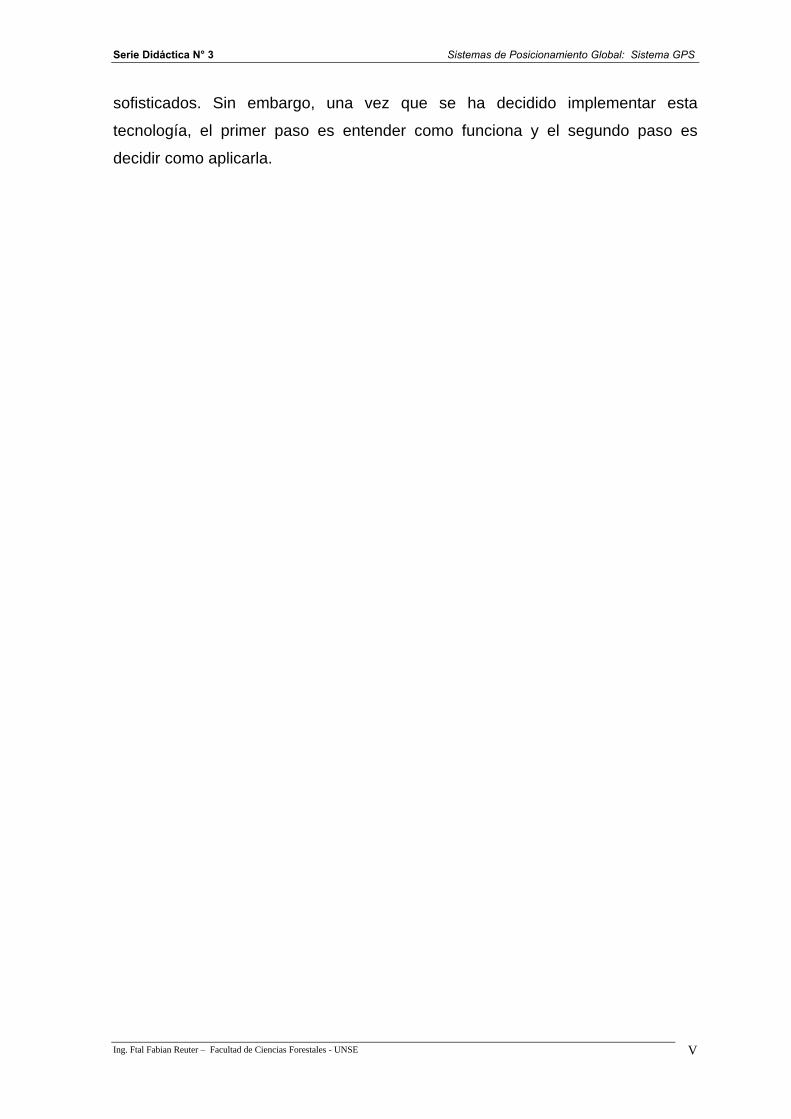
Los sistemas de navegación solucionan un problema muy antiguo en la
historia de la humanidad: La necesidad de conocer la posición sobre la superficie
terrestre. Sin esa capacidad los movimientos por tierra deberían basarse en
puntos de referencia conocidos, y los movimientos marítimos deben restringirse a
una franja de mar en que la costa sea visible.
A B
C E
Figura 1: Instrumentos usados para navegación: A Octante, B Astrolabio,
C Teodolito, D Brújula
Serie Didáctica N° 3 Sistemas de Posicionamiento Global: Sistema GPS
Ing. Ftal Fabian Reuter – Facultad de Ciencias Forestales - UNSE 2
Al principio el hombre se basó en la observación de los astros para
obtener
• Referencias espaciales: como la estrella Polar indicando el norte en el
hemisferio norte y la cruz del sur en el hemisferio sur.
• Temporales: como la altura del Sol.
Las observaciones astronómicas favorecieron el desarrollo de la
trigonometría y la geometría esférica.
Más adelante se desarrolló el astrolabio que permitió medir con mayor
precisión la altura de los astros, con lo que la medida de la posición fue mucho
más precisa.
Para obtener una buena estimación de la posición es necesario conocer
de forma fiable el tiempo, por lo que fue necesario el desarrollo de mecanismos
de relojería más precisos que la simple observación Solar.
Con el descubrimiento de la brújula la tarea de navegar mar adentro se
hizo mucho más segura.
Los métodos antiguos no permiten una gran precisión, se consiguen
mediante complejos cálculos que no los hacen útiles para posicionar vehículos a
gran velocidad, y no funcionan en todas las condiciones meteorológicas. Con la
llegada del siglo XX aparecieron nuevos sistemas de posicionamiento.
La principal fuerza de desarrollo provino, como tantas cosas en las
telecomunicaciones, de los intereses militares, que buscaban determinar la
posición de sus unidades de ataque para guiarlas hacia sus objetivos.
1.2. OBSERVACIÓN A GLOBOS
Hubo brillantes enlaces entre redes sin íntervisibilidad, como la unión
entre las redes geodésicas británica y escandinava, hecha entre las costas
escocesa y noruega, o el enlace geodésico de la isla de Córcega al continente
europeo.
Estas operaciones se hicieron observando desde ambas costas (no ínter
visibles) con una serie de teodolitos, de lectura fotográfica sincronizada por radio,
a globos sucesivamente liberados a lo largo de una línea intermedia entre ambas
costas. Así se establecía entre ambas redes, por intersección directa, una cortina
de puntos comunes con coordenadas en el sistema de cada red, pudiéndose
enlazar ambas con satisfactoria precisión.
Serie Didáctica N° 3 Sistemas de Posicionamiento Global: Sistema GPS
Ing. Ftal Fabian Reuter – Facultad de Ciencias Forestales - UNSE 3
Pero todo ello era sólo aplicable a casos aislados. Los geodestas sabían
que necesitaban algo más alto que pudiera observarse desde cualquier sitio.
1.3. MÉTODOS DE NAVEGACIÓN
Se desarrollaron dos métodos distintos de navegación de forma paralela:
Navegación inercial y radiolocalización.
1.3.1. Sistemas inerciales
Se basa en el principio de inercia y en la relación existente entre las
aceleraciones y la posición. Se usan acelerómetros y giroscopios para medir los
cambios de velocidad y dirección. Conociendo la posición inicial de partida, se
puede determinar la posición relativa.
Presentan la ventaja de que son independientes del exterior; son
autocontenidos. No se pueden interferir y por eso se han usado para guiado de
misiles y torpedos, así como de referencia auxiliar para misiles, buques y aviones
de guerra. El principal inconveniente es que el error es acumulativo por lo que las
prestaciones del sistema empeoran a medida que pasa el tiempo. Se pueden
cometer errores de hasta 2 Km. por hora de vuelo.
1.3.2. Radiolocalización
Los sistemas de radiolocalización se basan en la obtención de unas
líneas de posición midiendo la diferencia en los instantes de llegada de ondas
transmitidas por estaciones emisoras sincronizadas y de posición conocida: La
intersección de esas líneas determina la posición sobre la superficie terrestre
El geoposicionamiento utilizando ondas de radio Para mediar distancias,
fue utilizado por primera vez a finales de años 40, durante el transcurso de la
Segunda Guerra Mundial.
Serie Didáctica N° 3 Sistemas de Posicionamiento Global: Sistema GPS
Ing. Ftal Fabian Reuter – Facultad de Ciencias Forestales - UNSE 4
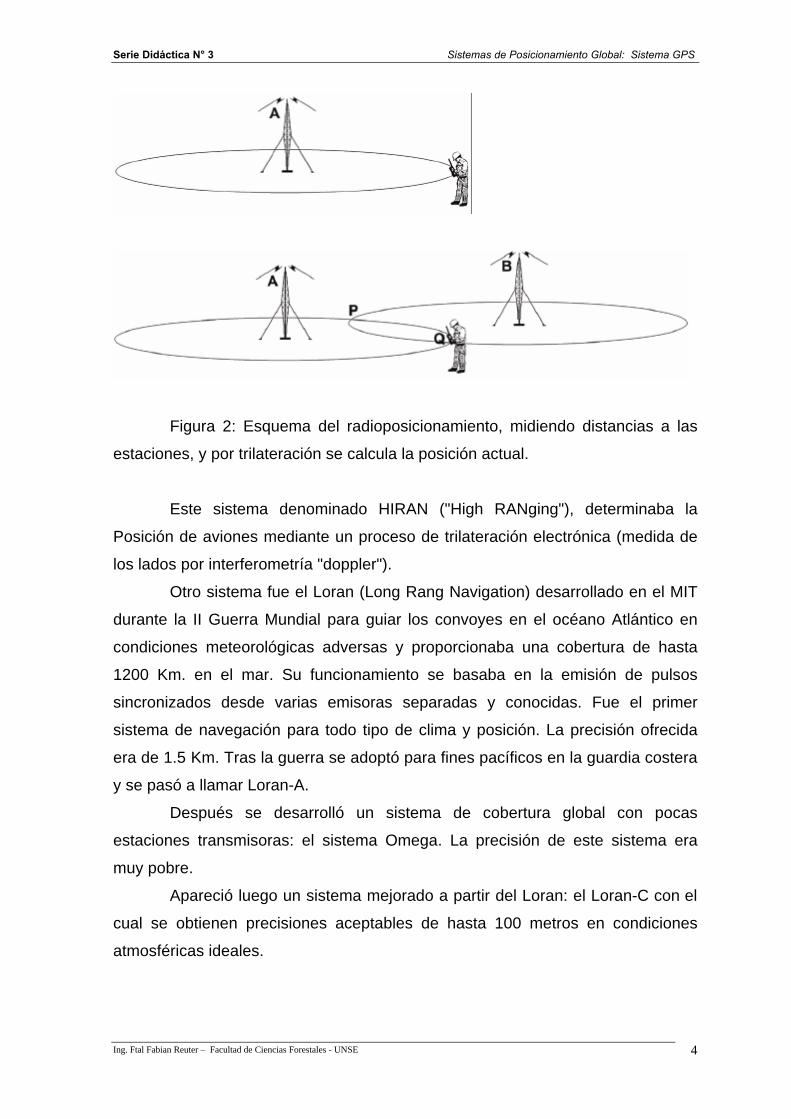
Figura 2: Esquema del radioposicionamiento, midiendo distancias a las
estaciones, y por trilateración se calcula la posición actual.
Este sistema denominado HIRAN ("High RANging"), determinaba la
Posición de aviones mediante un proceso de trilateración electrónica (medida de
los lados por interferometría "doppler").
Otro sistema fue el Loran (Long Rang Navigation) desarrollado en el MIT
durante la II Guerra Mundial para guiar los convoyes en el océano Atlántico en
condiciones meteorológicas adversas y proporcionaba una cobertura de hasta
1200 Km. en el mar. Su funcionamiento se basaba en la emisión de pulsos
sincronizados desde varias emisoras separadas y conocidas. Fue el primer
sistema de navegación para todo tipo de clima y posición. La precisión ofrecida
era de 1.5 Km. Tras la guerra se adoptó para fines pacíficos en la guardia costera
y se pasó a llamar Loran-A.
Después se desarrolló un sistema de cobertura global con pocas
estaciones transmisoras: el sistema Omega. La precisión de este sistema era
muy pobre.
Apareció luego un sistema mejorado a partir del Loran: el Loran-C con el
cual se obtienen precisiones aceptables de hasta 100 metros en condiciones
atmosféricas ideales.
Serie Didáctica N° 3 Sistemas de Posicionamiento Global: Sistema GPS
Ing. Ftal Fabian Reuter – Facultad de Ciencias Forestales - UNSE 5
1.4. SISTEMAS BASADOS EN SATÉLITES
1.4.1. Primeros satélites
En un simposium científico celebrado en Toronto en septiembre de 1957,
se presentó una comunicación sobre posibles aplicaciones geodésicas de
hipotéticos satélites artificiales.
Actitud que, desde luego, no impidió que semanas más tarde, concreta-
mente el 4 de octubre de 1957, la URSS pusiera en órbita el primer satélite
artificial de la Tierra: el Sputnik 1.
El Sputnik 1 pesaba 83 Kg. emitió señales de radio durante tres semanas.
Su órbita era bastante excéntrica, con altitudes entre 216 y 1136 Km. tenía un
período orbital de 96 minutos.
Y la historia de la Geodesia espacial comenzó, porque pronto pudieron
observar que, analizando el corrimiento Doppler de las señales radiodifundidas
desde el Sputnik 1 y recibidas en estaciones de posición conocida, era posible
establecer la órbita del satélite; una vez establecida, podía realizarse el
procedimiento al revés y obtener la situación de un receptor en distinta localiza-
ción, después de la recepción y análisis de las señales recibidas durante
diferentes y suficientes pasos del satélite.
Este procedimiento, aplicado a emisiones no especialmente idóneas para
los fines descritos, no ofrecía una elevada precisión, pero ponía de manifiesto la
viabilidad de la aplicación. Posteriormente, esta técnica, ha sido una de las
empleadas en muchos sistemas.
1.4.2. Generalidades sobre satélites
Antes de empezar con la descripción de los sistemas que han sido, o son
operativos, es conveniente hacer unas puntualizaciones sobre los tipos de
satélites, el planteamiento general del posicionamiento por satélites, y ciertos
aspectos de la propagación de las emisiones radioeléctricas.
A todos los sistemas de satélites, tras su etapa experimental, se les han
ido buscando y encontrando aplicaciones, incluso diferentes de las originales,
como posicionamiento, vigilancia, comunicaciones, Meteorología, Geodesia,
Astronomía, Geofísica, Teledetección, etc.
Serie Didáctica N° 3 Sistemas de Posicionamiento Global: Sistema GPS
Ing. Ftal Fabian Reuter – Facultad de Ciencias Forestales - UNSE 6
Esto también ocurre también con los sistemas militares, que cuando son
desclasificados, o sea, se divulga oficialmente información total o parcial sobre
sus aspectos técnicos, la comunidad científica empieza a intentar usarlos con
fines civiles.
1.4.3. Tipos de satélites
Los satélites pueden dividirse en dos clases: pasivos y activos. Los
pasivos carecen de cualquier mecanismo y de emisiones propias; sólo pueden
devolver la energía que en ellos incida, bien por simple reflexión o con prismas
retrorreflectores. Los activos pueden tener luces pulsantes de alta intensidad,
repetidores de microondas, transmisores radioeléctricos con modulaciones
diversas, radioaltímetros, sensores remotos, etc.
También poseen el adecuado sistema de producción de energía, normal-
mente con placas fotovoltaicas o paneles solares; suelen tener baterías para
almacenar la energía eléctrica y poder ser operativos cuando la Tierra eclipse la
radiación solar. Pueden disponer también de elementos para su control y
maniobra (combustible, motores cohete, etc.).
Resumiendo tenemos que con el advenimiento de la era espacial,
iniciada en 1957 con lanzamiento del satélite ruso "Sputnik", la técnica de
trilateración electrónica terrestre evolucionó hacia la trilateración espacial. En este
caso las coordenadas de los radiofaros (satélites) son determinadas por las
efemérides de estos satélites y calculadas a partir de las Leyes de Kepler, lo cual
permite determinar parámetros orbitales consistentes e instantáneos.
1.4.4. Posicionamiento
El problema del posicionamiento por satélites es siempre el mismo:
queremos obtener nuestra situación respecto al origen, o vector posición. Para
ello debemos conocer la situación del satélite respecto al origen, o vector satélite,
y obtener, a partir de nuestras observaciones, el vector observación entre el
satélite y nuestra estación. Resumiendo: debemos conocer un vector y medir otro.
El vector satélite puede ser conocido si disponemos de las efemérides,
permitiendo calcular su posición en función del tiempo. Las efemérides han de ser
facilitadas por los operadores de la constelación, tras hacer su seguimiento desde
ciertas estaciones terrestres de posiciones conocidas.
Serie Didáctica N° 3 Sistemas de Posicionamiento Global: Sistema GPS
Ing. Ftal Fabian Reuter – Facultad de Ciencias Forestales - UNSE 7
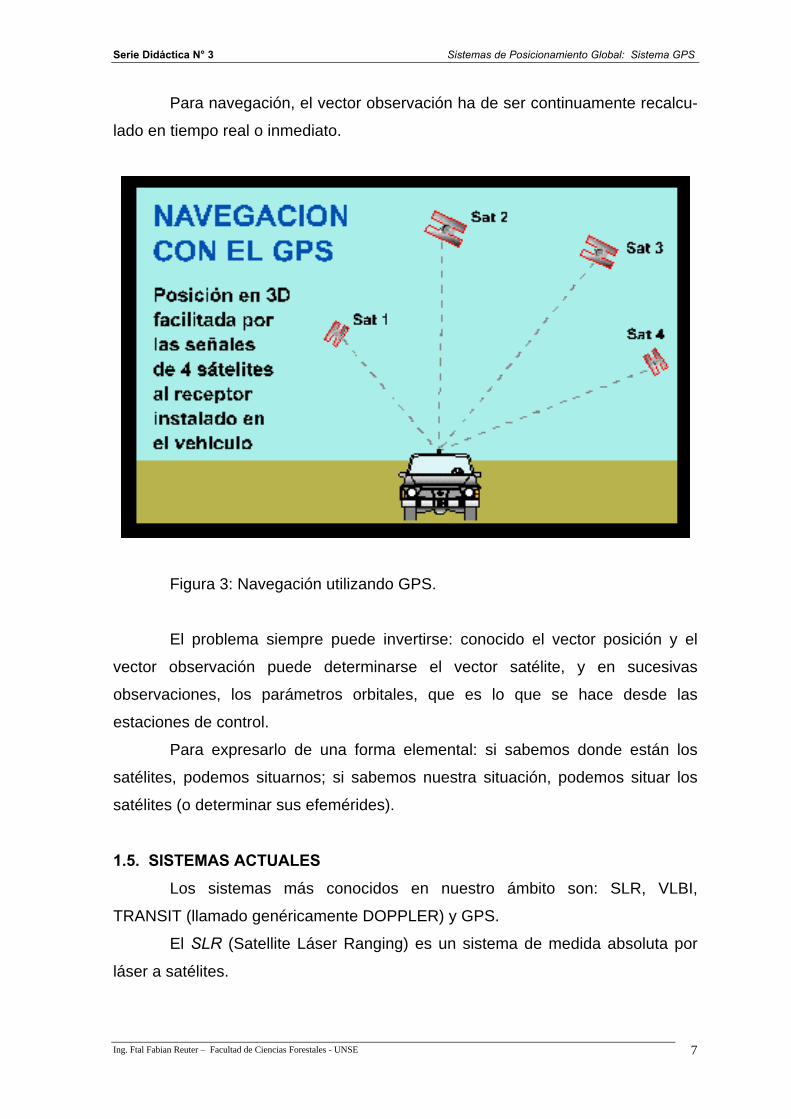
Para navegación, el vector observación ha de ser continuamente recalcu-
lado en tiempo real o inmediato.
Figura 3: Navegación utilizando GPS.
El problema siempre puede invertirse: conocido el vector posición y el
vector observación puede determinarse el vector satélite, y en sucesivas
observaciones, los parámetros orbitales, que es lo que se hace desde las
estaciones de control.
Para expresarlo de una forma elemental: si sabemos donde están los
satélites, podemos situarnos; si sabemos nuestra situación, podemos situar los
satélites (o determinar sus efemérides).
1.5. SISTEMAS ACTUALES
Los sistemas más conocidos en nuestro ámbito son: SLR, VLBI,
TRANSIT (llamado genéricamente DOPPLER) y GPS.
El SLR (Satellite Láser Ranging) es un sistema de medida absoluta por
láser a satélites.
Serie Didáctica N° 3 Sistemas de Posicionamiento Global: Sistema GPS
Ing. Ftal Fabian Reuter – Facultad de Ciencias Forestales - UNSE 8
La VLBI (Very Long Baseline Interferometry) permite calcular, por medios
interferométricos, la distancia entre los centros radioeléctricos de dos o más
radiotelescopios que observen un mismo cuásar.
La constelación TRANSIT usa el método Doppler.
El GPS, puede trabajar en sistema Doppler, en medida directa de
distancias absolutas, seudo distancias o en comparación de fase de frecuencia
de portadora.
1.6. SISTEMA SLR
El sistema SLR se basa en la medición de distancia a un satélite en
función del tiempo de tránsito de un haz láser. Los satélites utilizados en este
sistema son “pasivos”, ya que son simples esferas recubiertas de prismas de
reflexión total como los usados para distanciometría electro-óptica, aunque hay
otros satélites mixtos multifunción que, entre otros dispositivos activos, llevan
prismas reflectores pasivos utilizables en este sistema.
El instrumento de estación está constituido por un potente láser pulsante,
un reloj atómico, un contador, un fotodetector, la óptica necesaria, un ordenador y
la infraestructura mecánica de estacionamiento y puntería.
Conocida la orientación y posición aproximada de la estación y las
efemérides del satélite a observar, el ordenador calcula sus coordenadas topo
céntricas locales para el momento de la observación.
Serie Didáctica N° 3 Sistemas de Posicionamiento Global: Sistema GPS
Ing. Ftal Fabian Reuter – Facultad de Ciencias Forestales - UNSE 9
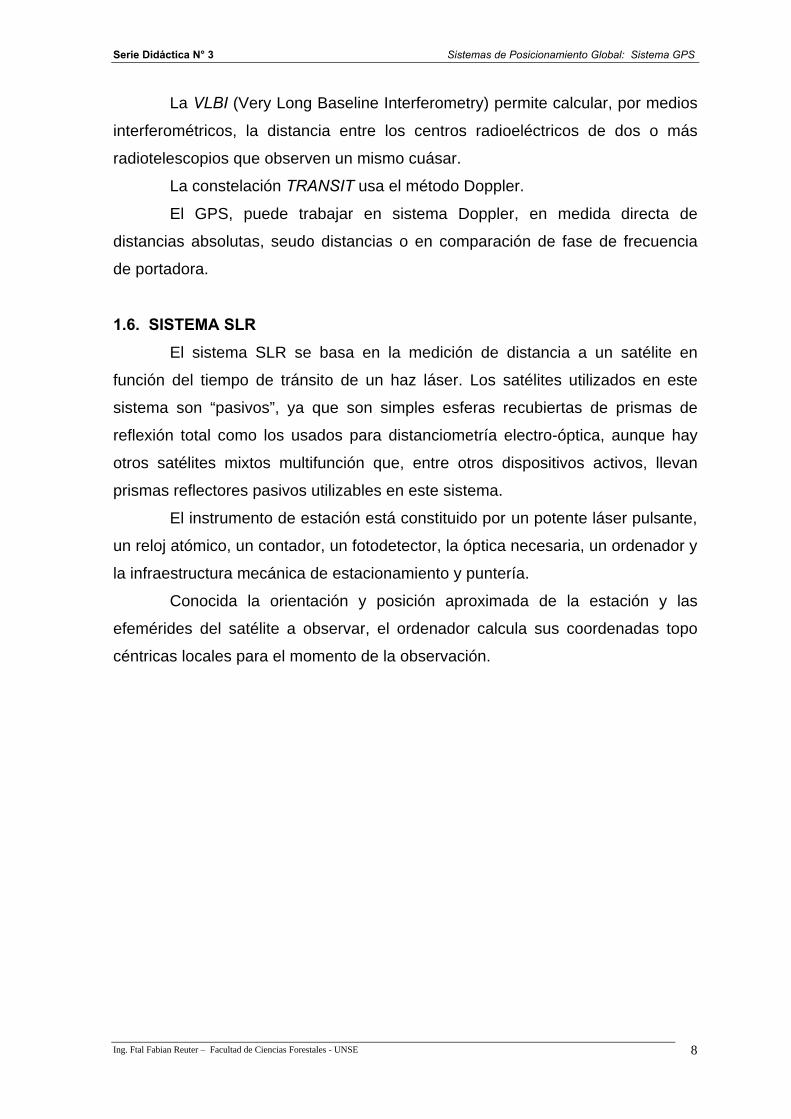
Figura 4: Constelación de Satélites SLR.
En el momento establecido, el láser produce un pulso que es enviado al
satélite, a la vez que se empieza a contar tiempo con el reloj atómico. Al llegar el
retorno se detiene la cuenta. En función del tiempo de tránsito y la velocidad de la
luz, se calcula la distancia.
Los primeros láseres, que eran de rubí, han sido casi reemplazados por
los YAG de Nd (cristal de Ytrio Aluminio Granate con iones de neodimio). Durante
150 picosegundos (lo que tarda la luz en avanzar media longitud de un cigarrillo)
emite un pulso con casi 2 GW de potencia, la potencia eléctrica media que
necesita una ciudad grande.
Serie Didáctica N° 3 Sistemas de Posicionamiento Global: Sistema GPS
Ing. Ftal Fabian Reuter – Facultad de Ciencias Forestales - UNSE 10
Hagamos la puntualización de que, aunque la energía emitida no es
especialmente cuantiosa, al tender a cero su tiempo de emisión, su potencia
tiende a infinito.
El pulso puede repetirse varias veces por segundo formando un bloque, y
una observación puede consistir en varios bloques.
Las precisiones, que eran métricas en la primera generación de
instrumentos, están actualmente a nivel de algunos centímetros.
Las correcciones a aplicar son: por movimiento relativo satélite-receptor
durante el tiempo de tránsito y refracción troposférica.
No tienen con la ionosfera el problema del retardo propio de las señales
radioeléctricas, pero a cambio exigen visibilidad directa.
a)
Serie Didáctica N° 3 Sistemas de Posicionamiento Global: Sistema GPS
Ing. Ftal Fabian Reuter – Facultad de Ciencias Forestales - UNSE 11
b)
c)
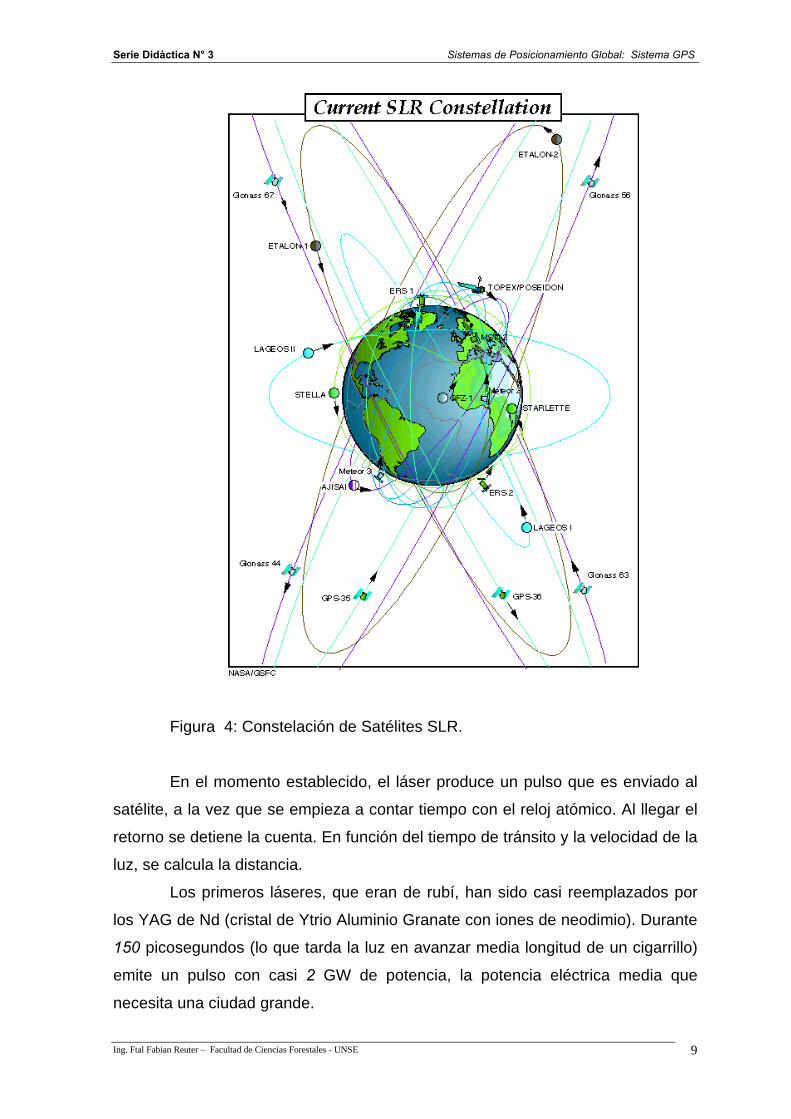
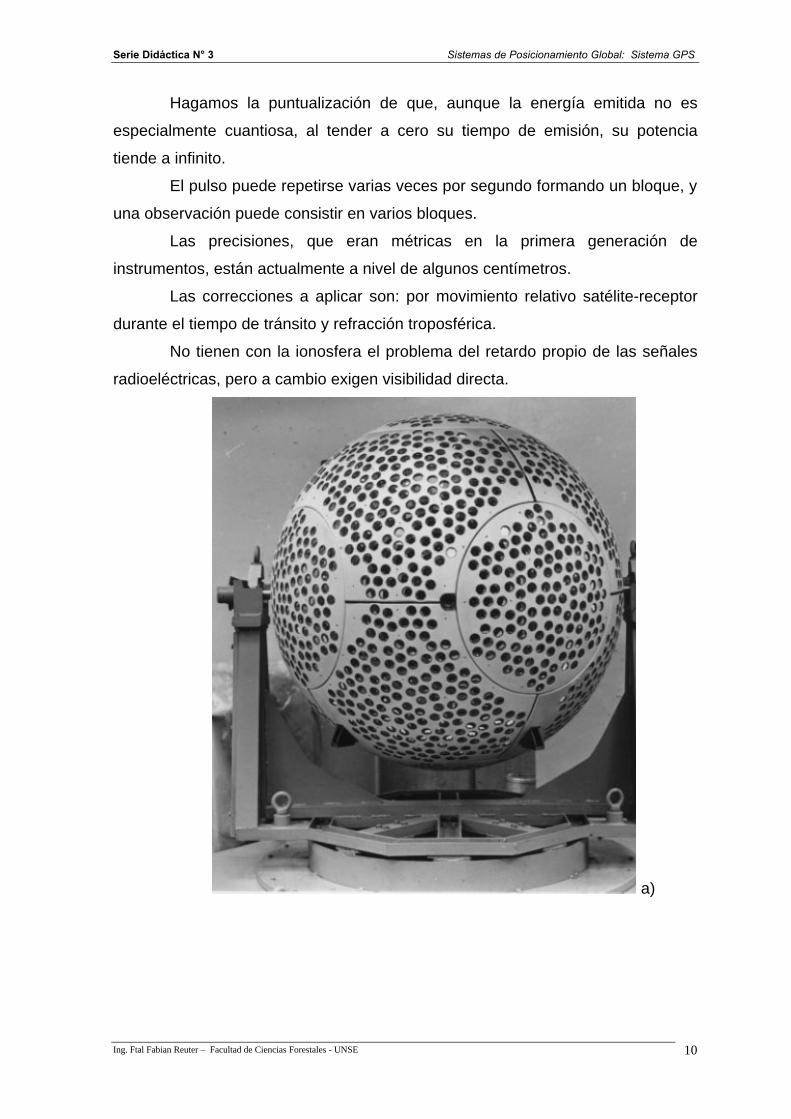
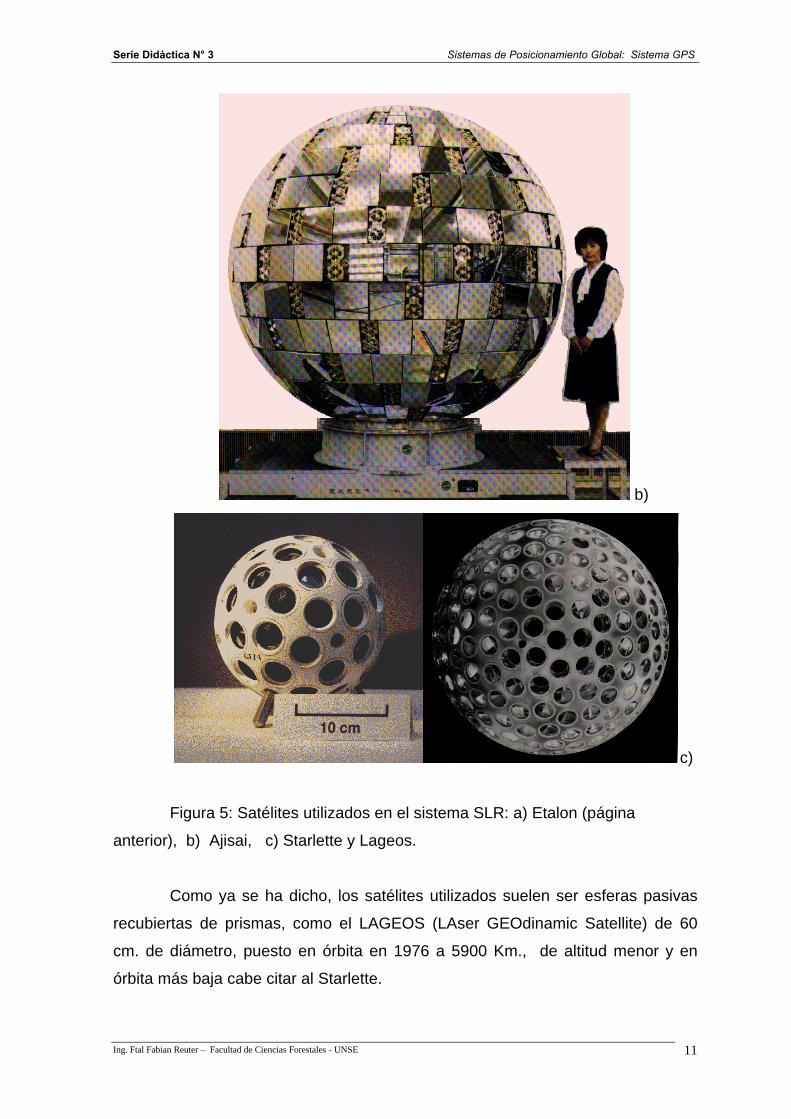
Figura 5: Satélites utilizados en el sistema SLR: a) Etalon (página
anterior), b) Ajisai, c) Starlette y Lageos.
Como ya se ha dicho, los satélites utilizados suelen ser esferas pasivas
recubiertas de prismas, como el LAGEOS (LAser GEOdinamic Satellite) de 60
cm. de diámetro, puesto en órbita en 1976 a 5900 Km., de altitud menor y en
órbita más baja cabe citar al Starlette.
Serie Didáctica N° 3 Sistemas de Posicionamiento Global: Sistema GPS
Ing. Ftal Fabian Reuter – Facultad de Ciencias Forestales - UNSE 12
Otros satélites con capacidad SLR son los Explorer, Diadem, Peole,
GEOS, AJISI, EGP, aunque pueden tener otras aplicaciones. Por ejemplo los
GEOS (Geodetic Earth Orbiting Satellite), orientada su cara activa hacia la Tierra
por mástil (o apéndice) y la actuación del gradiente de gravedad (efecto conjunto
que podría definirse como «flotación gravitatoria»), poseen balizas ópticas o
emisiones de destellos para técnicas fotográficas, prismas de reflexión total para
retorno láser, repetidor de microondas para telemetría radar y transmisor continuo
para conteo Doppler.
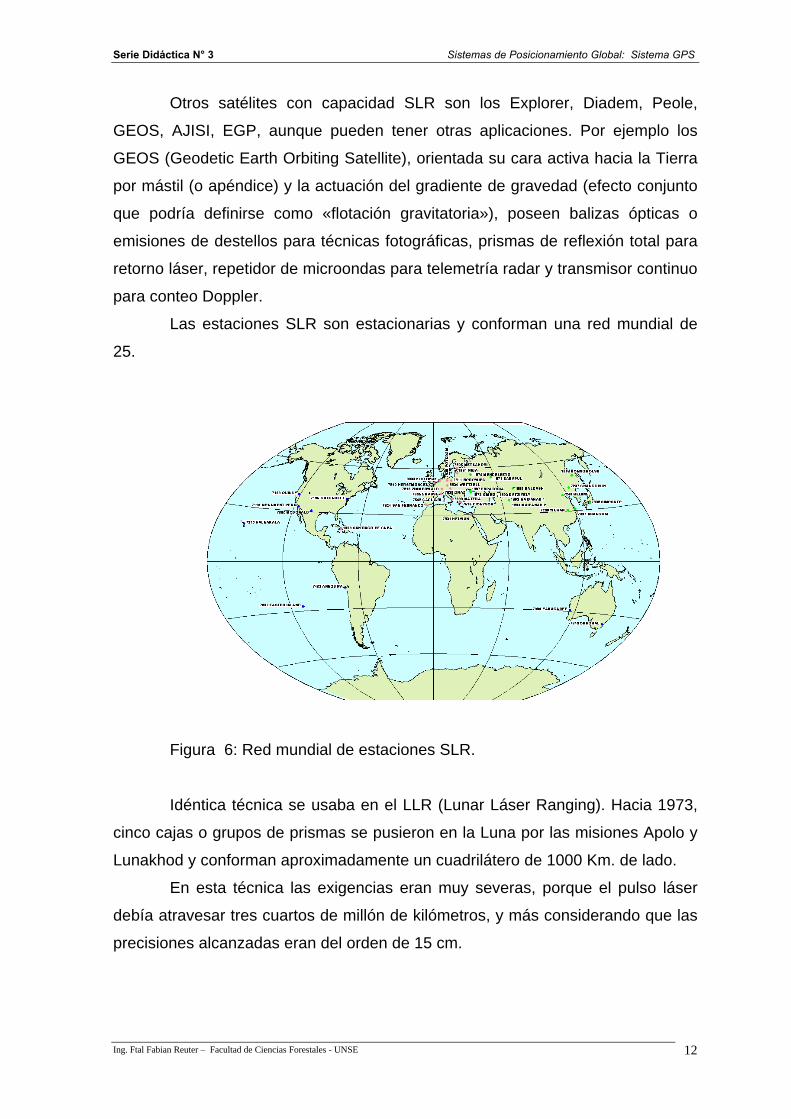
Las estaciones SLR son estacionarias y conforman una red mundial de
25.
Figura 6: Red mundial de estaciones SLR.
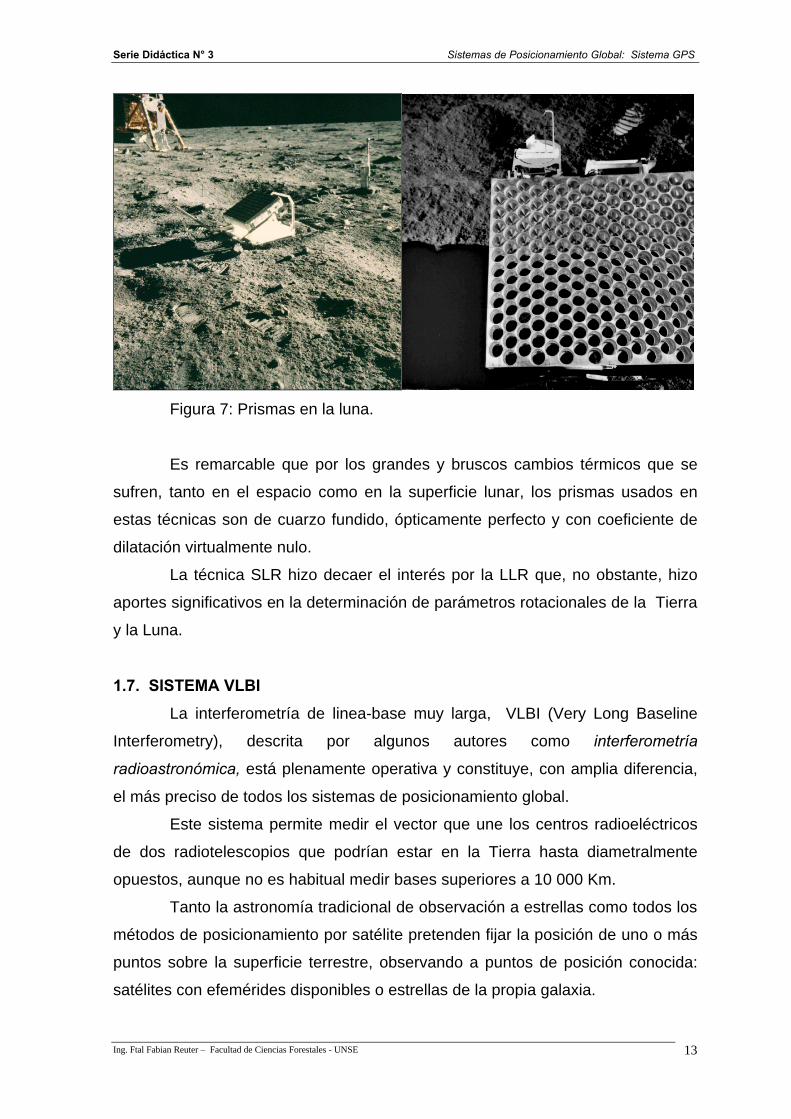
Idéntica técnica se usaba en el LLR (Lunar Láser Ranging). Hacia 1973,
cinco cajas o grupos de prismas se pusieron en la Luna por las misiones Apolo y
Lunakhod y conforman aproximadamente un cuadrilátero de 1000 Km. de lado.
En esta técnica las exigencias eran muy severas, porque el pulso láser
debía atravesar tres cuartos de millón de kilómetros, y más considerando que las
precisiones alcanzadas eran del orden de 15 cm.
Serie Didáctica N° 3 Sistemas de Posicionamiento Global: Sistema GPS
Ing. Ftal Fabian Reuter – Facultad de Ciencias Forestales - UNSE 13
Figura 7: Prismas en la luna.
Es remarcable que por los grandes y bruscos cambios térmicos que se
sufren, tanto en el espacio como en la superficie lunar, los prismas usados en
estas técnicas son de cuarzo fundido, ópticamente perfecto y con coeficiente de
dilatación virtualmente nulo.
La técnica SLR hizo decaer el interés por la LLR que, no obstante, hizo
aportes significativos en la determinación de parámetros rotacionales de la Tierra
y la Luna.
1.7. SISTEMA VLBI
La interferometría de linea-base muy larga, VLBI (Very Long Baseline
Interferometry), descrita por algunos autores como interferometría
radioastronómica, está plenamente operativa y constituye, con amplia diferencia,
el más preciso de todos los sistemas de posicionamiento global.
Este sistema permite medir el vector que une los centros radioeléctricos
de dos radiotelescopios que podrían estar en la Tierra hasta diametralmente
opuestos, aunque no es habitual medir bases superiores a 10 000 Km.
Tanto la astronomía tradicional de observación a estrellas como todos los
métodos de posicionamiento por satélite pretenden fijar la posición de uno o más
puntos sobre la superficie terrestre, observando a puntos de posición conocida:
satélites con efemérides disponibles o estrellas de la propia galaxia.
Serie Didáctica N° 3 Sistemas de Posicionamiento Global: Sistema GPS
Ing. Ftal Fabian Reuter – Facultad de Ciencias Forestales - UNSE 14
Pero si aumentamos la precisión, la posición de estos puntos de
referencia empieza a mostrar indeterminaciones. Hasta las estrellas, «fijas» para
los antiguos, resultan ya no ser tan «fijas». Es como si navegando quisiéramos
fijar nuestra posición respecto a las luces de situación de otras barcas, ancladas
en situación, aproximadamente bien conocida, pero no del todo inmóviles.
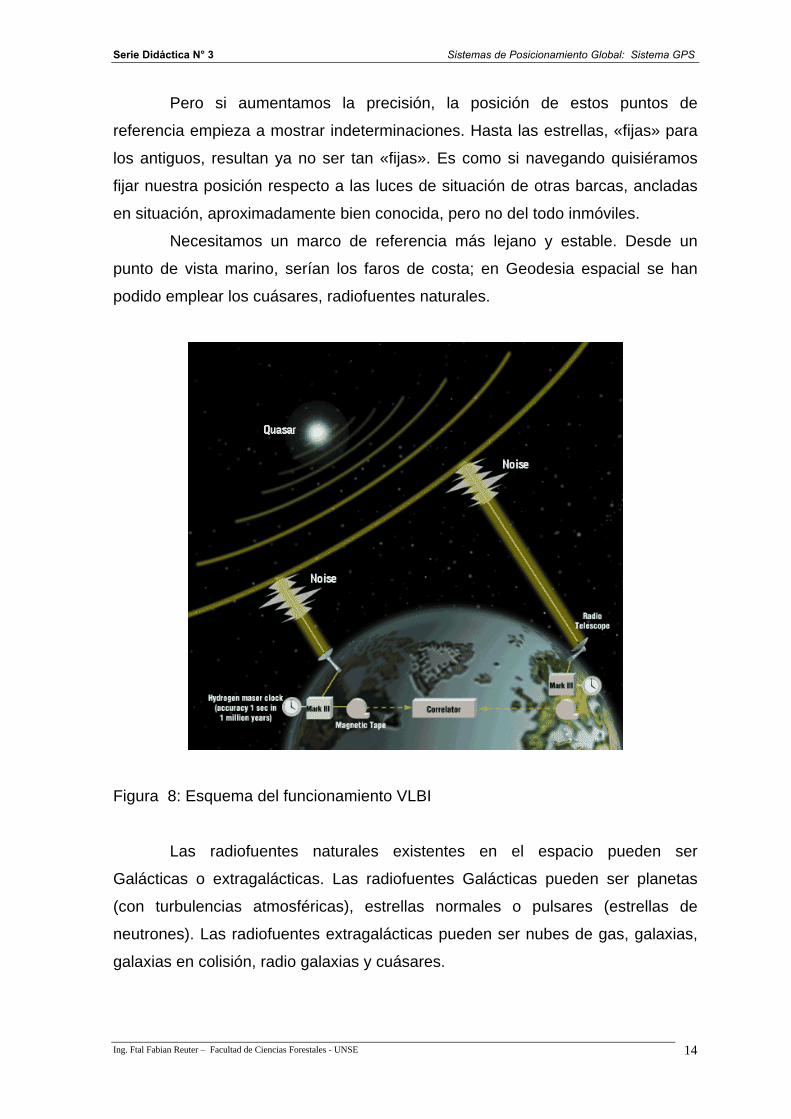
Necesitamos un marco de referencia más lejano y estable. Desde un
punto de vista marino, serían los faros de costa; en Geodesia espacial se han
podido emplear los cuásares, radiofuentes naturales.
Figura 8: Esquema del funcionamiento VLBI
Las radiofuentes naturales existentes en el espacio pueden ser
Galácticas o extragalácticas. Las radiofuentes Galácticas pueden ser planetas
(con turbulencias atmosféricas), estrellas normales o pulsares (estrellas de
neutrones). Las radiofuentes extragalácticas pueden ser nubes de gas, galaxias,
galaxias en colisión, radio galaxias y cuásares.
Serie Didáctica N° 3 Sistemas de Posicionamiento Global: Sistema GPS
Ing. Ftal Fabian Reuter – Facultad de Ciencias Forestales - UNSE 15
Los cuásares son lejanísimos (hasta 9000 millones de años luz), lo que
se ha determinado por su desplazamiento hacia el rojo, que supone velocidades
radiales de fuga de hasta 40 000 km/s.
El término CUASAR (QUASAR) es una abreviatura de CUASi estelAR
(QUASi-stellAR).
Dada su situación en los márgenes del universo, han de radiar con
potencia tan inimaginable, que, hasta hace poco, ha habido sectores científicos
que rechazaban la existencia de estos cuerpos por ser teóricamente imposibles.
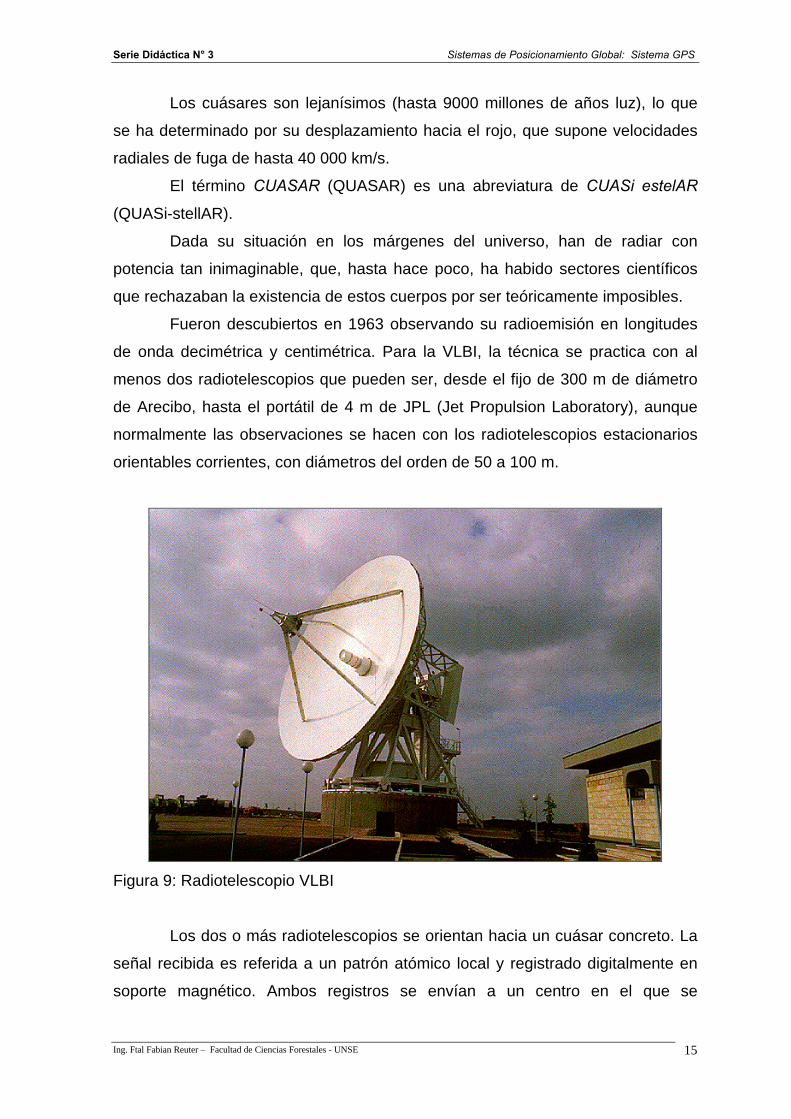
Fueron descubiertos en 1963 observando su radioemisión en longitudes
de onda decimétrica y centimétrica. Para la VLBI, la técnica se practica con al
menos dos radiotelescopios que pueden ser, desde el fijo de 300 m de diámetro
de Arecibo, hasta el portátil de 4 m de JPL (Jet Propulsion Laboratory), aunque
normalmente las observaciones se hacen con los radiotelescopios estacionarios
orientables corrientes, con diámetros del orden de 50 a 100 m.
Figura 9: Radiotelescopio VLBI
Los dos o más radiotelescopios se orientan hacia un cuásar concreto. La
señal recibida es referida a un patrón atómico local y registrado digitalmente en
soporte magnético. Ambos registros se envían a un centro en el que se
Serie Didáctica N° 3 Sistemas de Posicionamiento Global: Sistema GPS
Ing. Ftal Fabian Reuter – Facultad de Ciencias Forestales - UNSE 16
correlacionan, pudiendo determinarse en cada momento el retardo entre la
llegada del frente plano de la señal a un radiotelescopio y la llegada al otro. Este
retardo permite establecer la componente del vector que une ambas estaciones,
en la dirección de llegada de la señal.
Se hacen múltiples determinaciones a diferentes- cuásares.
La técnica VLBI arranca en 1977 cuando el Servicio Nacional de Geode-
sia de EE.UU., tras los trabajos del Instituto de Tecnología de Massachussets y
del Centro Goddard para Vuelos Espaciales, estableció tres observatorios para
medidas exclusivamente geodésicas.
Desde 1984 la técnica se ha desarrollado y expandido, habiendo en la
actualidad radiotelescopios dedicados a esta técnica en todo el mundo.
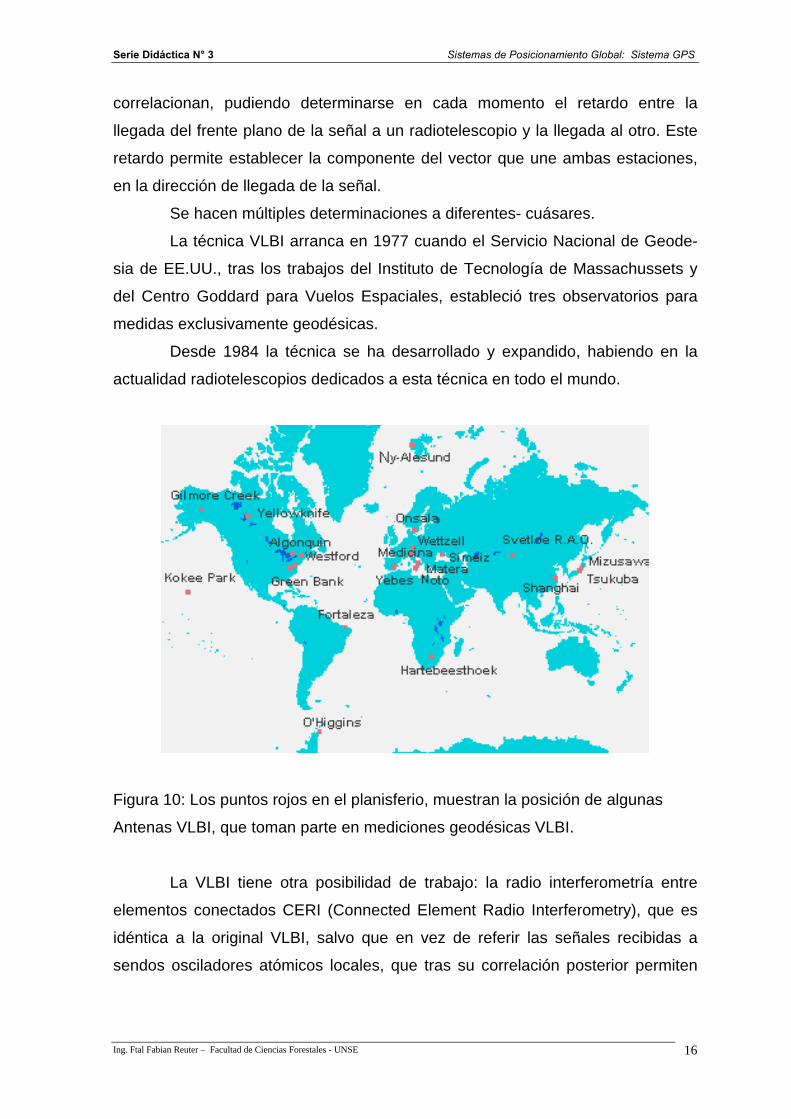
Figura 10: Los puntos rojos en el planisferio, muestran la posición de algunas
Antenas VLBI, que toman parte en mediciones geodésicas VLBI.
La VLBI tiene otra posibilidad de trabajo: la radio interferometría entre
elementos conectados CERI (Connected Element Radio Interferometry), que es
idéntica a la original VLBI, salvo que en vez de referir las señales recibidas a
sendos osciladores atómicos locales, que tras su correlación posterior permiten
Serie Didáctica N° 3 Sistemas de Posicionamiento Global: Sistema GPS
Ing. Ftal Fabian Reuter – Facultad de Ciencias Forestales - UNSE 17
acceder a una escala de tiempos común, se conectan ambos receptores,
trabajando en una base común de tiempos.
Se han hecho trabajos en EE.UU. y Gran Bretaña entre radiotelescopios
interconectados por microondas, con separaciones entre 2,9 y 35 Km.
Estas técnicas permiten el establecimiento de una red mundial, increíble-
mente precisa, que actualmente constituye un marco de referencia absoluto.
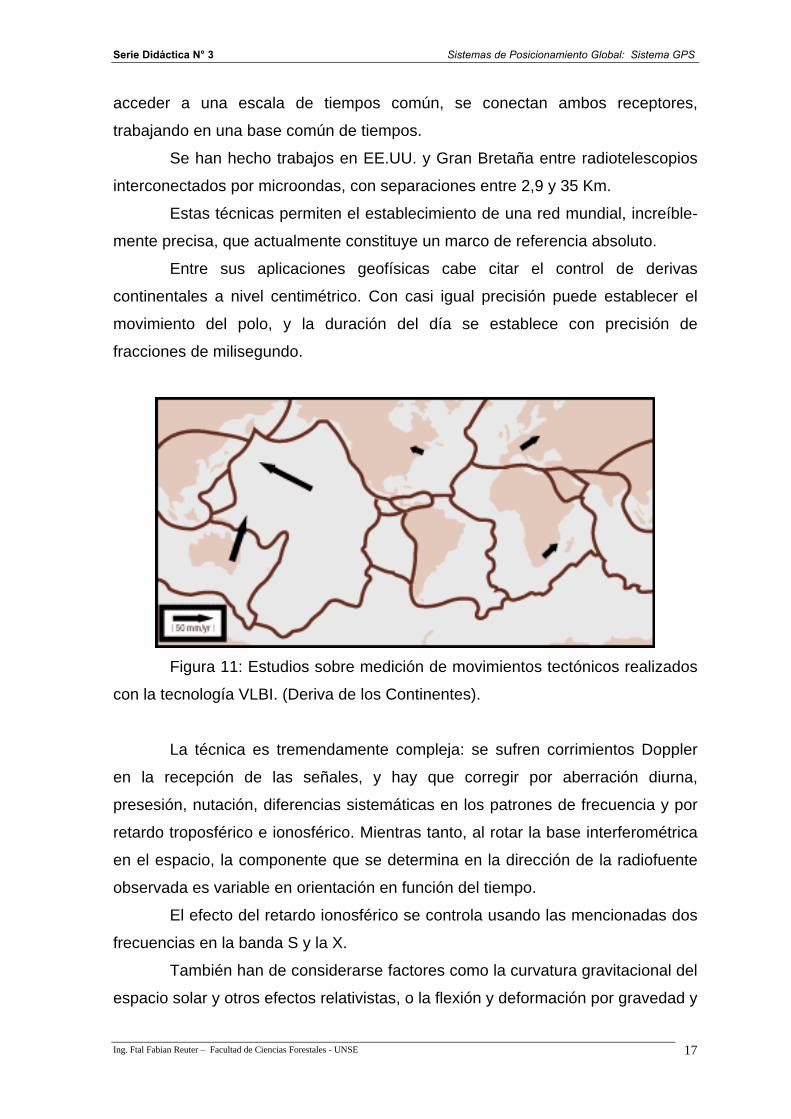
Entre sus aplicaciones geofísicas cabe citar el control de derivas
continentales a nivel centimétrico. Con casi igual precisión puede establecer el
movimiento del polo, y la duración del día se establece con precisión de
fracciones de milisegundo.
Figura 11: Estudios sobre medición de movimientos tectónicos realizados
con la tecnología VLBI. (Deriva de los Continentes).
La técnica es tremendamente compleja: se sufren corrimientos Doppler
en la recepción de las señales, y hay que corregir por aberración diurna,
presesión, nutación, diferencias sistemáticas en los patrones de frecuencia y por
retardo troposférico e ionosférico. Mientras tanto, al rotar la base interferométrica
en el espacio, la componente que se determina en la dirección de la radiofuente
observada es variable en orientación en función del tiempo.
El efecto del retardo ionosférico se controla usando las mencionadas dos
frecuencias en la banda S y la X.
También han de considerarse factores como la curvatura gravitacional del
espacio solar y otros efectos relativistas, o la flexión y deformación por gravedad y
Serie Didáctica N° 3 Sistemas de Posicionamiento Global: Sistema GPS
Ing. Ftal Fabian Reuter – Facultad de Ciencias Forestales - UNSE 18
temperatura de cada antena receptora, que cambia de situación el centro
radioeléctrico al que se refieren las observaciones, así como la posible
geodinámica local, no necesariamente óptima, ya que la ubicación de los
radiotelescopios se establece principalmente con criterios de apantallamiento
natural de perturbaciones radioeléctricas, preferentemente en zonas hondas
rodeadas de alturas que formen como un circo.
1.8. SISTEMA TRANSIT
Una constelación de satélites artificiales puesta en órbita con la finalidad
especifica de geoposicionamiento por ondas electromagnéticas emitidas por
satélites, fue el sistema NNSS / TRANSIT (Navy Navigation Satellite System) que
utilizó los satélites norteamericanos de la constelación TRANSIT (1960, operativo
desde 1964).
Este sistema nació con un diseño de la Universidad John Hapkins para la
U.S. Navy estadounidense en 1958, para ayuda de navegación a navíos, y sobre
todo, para poder ser utilizados por submarinos atómicos lanzadores de misiles.
Para hacer un lanzamiento con éxito es esencial que el submarino lanzador
conozca su posición exactamente
También fue ampliamente utilizado para aplicaciones geodésicas en el
mundo entero. Estaba compuesto por 8 satélites activos con un peso de sólo 61
Kg. en órbitas polares elípticas (casi circulares), con una altitud media de 1100
Km. con un Período orbital de 107 minutos.
Este sistema fue el predecesor inmediato del GPS. De hecho se mantuvo
activo hasta mediados de 1993.
El sistema funciona midiendo el desplazamiento o corrimiento Doppler
(Doppler shift) que es la variación aparente en el valor de la frecuencia en función
de la velocidad de acercamiento o alejamiento de la fuente emisora.
El efecto Doppler-Fizeau fue descubierto en el siglo XIX. Cuando la
fuente emisora de un tren de ondas, sean ópticas, acústicas o radioeléctricas,
disminuye su distancia a un observador, la frecuencia recibida es aparentemente
mayor que la real. Si la fuente se aleja, la frecuencia es menor, y si la distancia
permanece constante, la frecuencia coincide.
En este sistema los satélites siguen una órbita baja y transmiten
continuamente una misma frecuencia. Debido al movimiento orbital, desde tierra
Serie Didáctica N° 3 Sistemas de Posicionamiento Global: Sistema GPS
Ing. Ftal Fabian Reuter – Facultad de Ciencias Forestales - UNSE 19
se perciben unos desplazamientos Doppler de la señal. Conociendo las
coordenadas y esas desviaciones de frecuencia se puede conocer la posición del
observador
El Bloque Soviético tiene un sistema equivalente llamado TSICADA.
El sistema, como un todo poseía dos grandes problemas:
• No proporcionaba una cobertura mundial total
• Había un lapso de tiempo considerable entre las pasadas sucesivas de
los satélites para un mismo punto en la Tierra.
De hecho, para obtener una posición precisa, se necesitaban de dos a
tres días estacionados en un mismo punto, para obtener las coordenadas de ese
Punto con un desvío padrón de 10 a 3 metros para posiciones asoladas y de
cerca de 1 metro, usando técnica de translocación.
Como dijimos el inconveniente principal es que la medida es lenta y hay
que esperar a que el satélite pase por encima del área en la que se está (hasta
unos 30 minutos). No es válida para vehículos móviles como aviones, misiles, etc.
Es remarcable que el sistema Doppler permitió, tras casi 100 años de
lentos progresos en la Geodesia, una nueva y más precisa determinación de la
forma de la Tierra.
Actualmente, destacan el sistema europeo de satélites de navegación
Marecs (1981), destinado a mejorar las comunicaciones e incrementar la
seguridad de la navegación marítima.
Serie Didáctica N° 3 Sistemas de Posicionamiento Global: Sistema GPS
Ing. Ftal Fabian Reuter – Facultad de Ciencias Forestales - UNSE 20
CAPÍTULO II
CONSTITUCIÓN Y FUNCIONAMIENTO DEL SISTEMA GPS
2.1. INTRODUCCIÓN
En 1963 la Fuerza Aérea de los EE.UU. inició un ambicioso proyecto
conocido por "Proyecto 621B" para desarrollar un sistema de navegación
tridimensional basado en satélites artificiales.
Poco después la Marina de los EE.UU. emprendió otro proyecto similar
conocido como "Timation". Ambos proyectos convergieron finalmente en el
sistema NAVSTAR-GPS, el 17 de Agosto de 1974.
El objetivo inicial era la consecución de un sistema exclusivamente militar,
pero el excesivo coste obligó a que se permitiera el uso civil del sistema para que
fuera aprobado el presupuesto por el Congreso de los EE.UU. (El coste final del
proyecto ascendió a unos 10.000 millones de dólares).
El Sistema NAVSTAR / GPS fue desarrollado para sustituir el sistema
TRANSIT.
Esta sustitución tenia que ser realizada para posibilitar la corrección de
los dos grandes problemas del NNSS, ofreciendo en cualquier punto de la tierra y
a cualquier hora del día, respuestas para tres preguntas básicas:
a) ¿Cuál es la posición?
b) ¿En que tiempo se está trabajando?
c) ¿Cuál es su dirección y velocidad?
Las respuestas precisas, en tiempo real, debían ser decodificadas por
receptores para aplicaciones militares.
En 1973 el JPO ("Joint Program Office") subordinado al Comando de la
División de Sistemas Espaciales de la USAF ("United States Air Force) recibió la
misión del DoD ("Department of Defense") de establecer, desarrollar, testar,
adquirir y emplear un sistema de posicionamiento espacial para aplicaciones
militares, capaz de generar una red de coordenadas para misiles, tomando en
cuenta el proyecto de "Guerra de las Galaxias".
Serie Didáctica N° 3 Sistemas de Posicionamiento Global: Sistema GPS
Ing. Ftal Fabian Reuter – Facultad de Ciencias Forestales - UNSE 21
El sistema de posicionamiento global NAVSTAR / GPS (Navigation
System Using Timing and Ranging / Global Positioning System) es el proyecto
espacial más caro de la historia de la humanidad y fue desarrollado por el
Departamento de Defensa de los EE.UU. Su finalidad era meramente militar, y
perseguía dotar a las tropas y dispositivos militares de una referencia espacial y
temporal precisa. Se trata de un sistema de posicionamiento perfecto que ofrece
servicio en toda la superficie del planeta y durante 24 horas al día.
La serie se inició con el lanzamiento un sólo satélite, el 22 de febrero de
1978. En 1986 se dio luz verde al desarrollo completo del sistema y aunque en
1991 el sistema NAVSTAR-GPS aún no estaba operativo al 100% demostró su
potencialidad en la Guerra del Golfo Pérsico que constituyó un campo de pruebas
inmejorable. El enorme éxito que obtuvo el sistema en aquel conflicto (el mundo
entero se sorprendió de la precisión con que se dirigían los misiles a sus
objetivos) aceleró el desarrollo final del proyecto.
2.1.1 Definición GPS: Global Positioning System, sistema de posicionamiento con
satélites, que desde sus orígenes en 1973 ha supuesto una revolución frente a
las técnicas utilizadas en Geodesia Clásica. Mediante el tratamiento de los
observables GPS, que consisten en medidas de fase, tiempo y pseudodistancias,
se puede conocer la posición en post-proceso de la antena del receptor, que
vendrán dadas en el sistema de referencia WGS 84, por lo que habrá que realizar
una transformación de este sistema al sistema de referencia local que se precise
2.2. SERVICIOS OFRECIDOS POR EL SISTEMA GPS
Las características del sistema GPS se pueden agrupar en unos pocos
puntos:
• Determinación de la posición tridimensional. Con tres coordenadas:
latitud, longitud, altura sobre el nivel del mar, o cualesquiera.
• Determinación tridimensional de la velocidad.
• Determinación del tiempo exacto con un error de un microsegundo.
• Cobertura global las 24 horas del día.
• Alta fiabilidad.
• Independencia de transmisores terrestres.
Serie Didáctica N° 3 Sistemas de Posicionamiento Global: Sistema GPS
Ing. Ftal Fabian Reuter – Facultad de Ciencias Forestales - UNSE 22
• Gran precisión en todo tipo de condiciones atmosféricas.
• Evaluación de la precisión conseguida.
• Versátil y válido para todo tipo de usuarios.
El sistema GPS es capaz de precisiones asombrosas: en teoría se podría
conocer la situación con un error de 3 cm. mediante técnicas de enganche en
fase. Para vehículos estas técnicas son complejas de conseguir, por lo que se
usa el método "estándar" de enganche al código transmitido; de esta manera se
podrían conseguir precisiones de 3 metros.
La generalización del acceso a esta precisión supone un compromiso
para la seguridad nacional, por lo que se procedió a modificar el sistema en varios
aspectos.
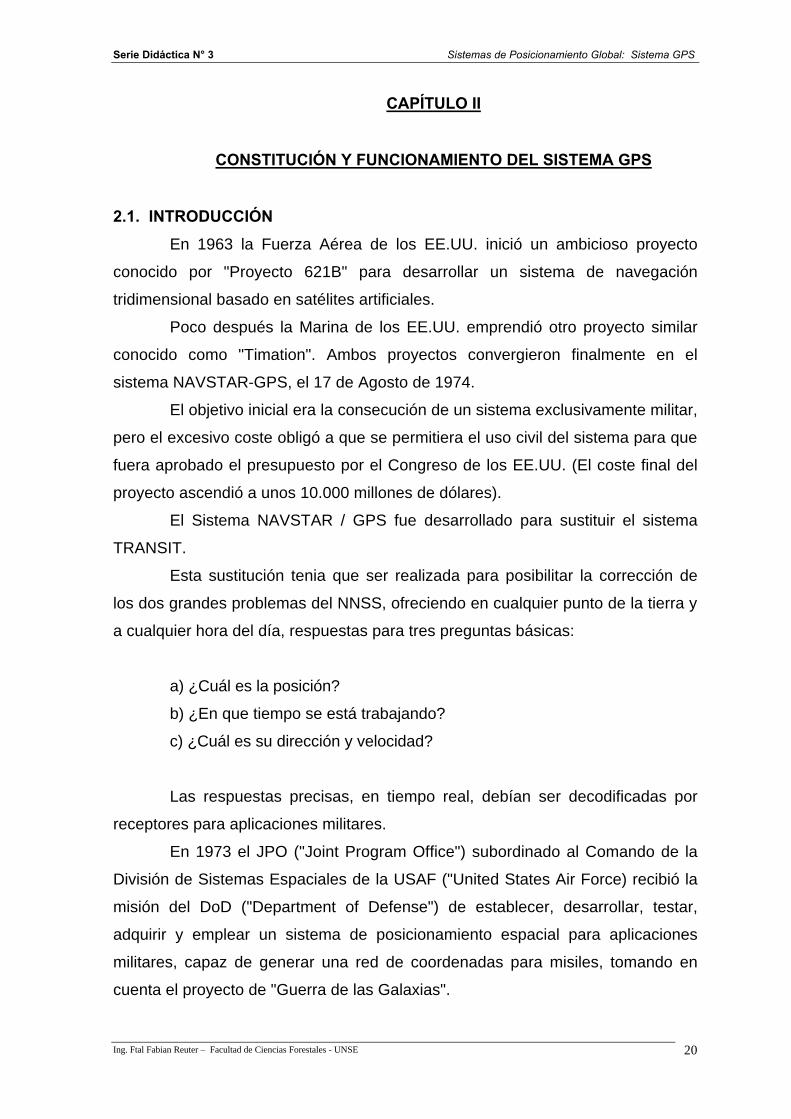
Para adaptar el sistema GPS a los usuarios civiles se crearon dos tipos
de servicio:
SPS (Standard Positioning Service)
PPS (Precise Positioning Service)
La diferencia entre ambos es que el SPS permite 10 veces menor
precisión y fiabilidad que el PPS. Ésta limitación es inherente al sistema.
Figura 12: SPS orientado a uso civiles.
Serie Didáctica N° 3 Sistemas de Posicionamiento Global: Sistema GPS
Ing. Ftal Fabian Reuter – Facultad de Ciencias Forestales - UNSE 23
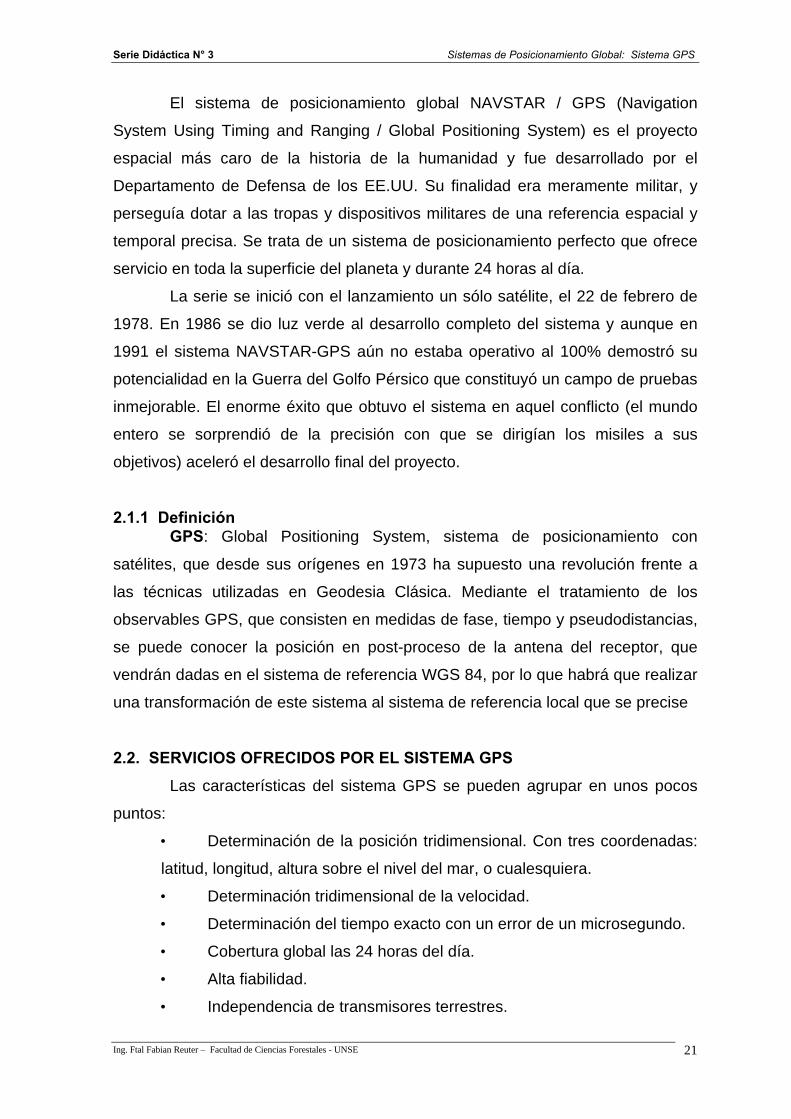
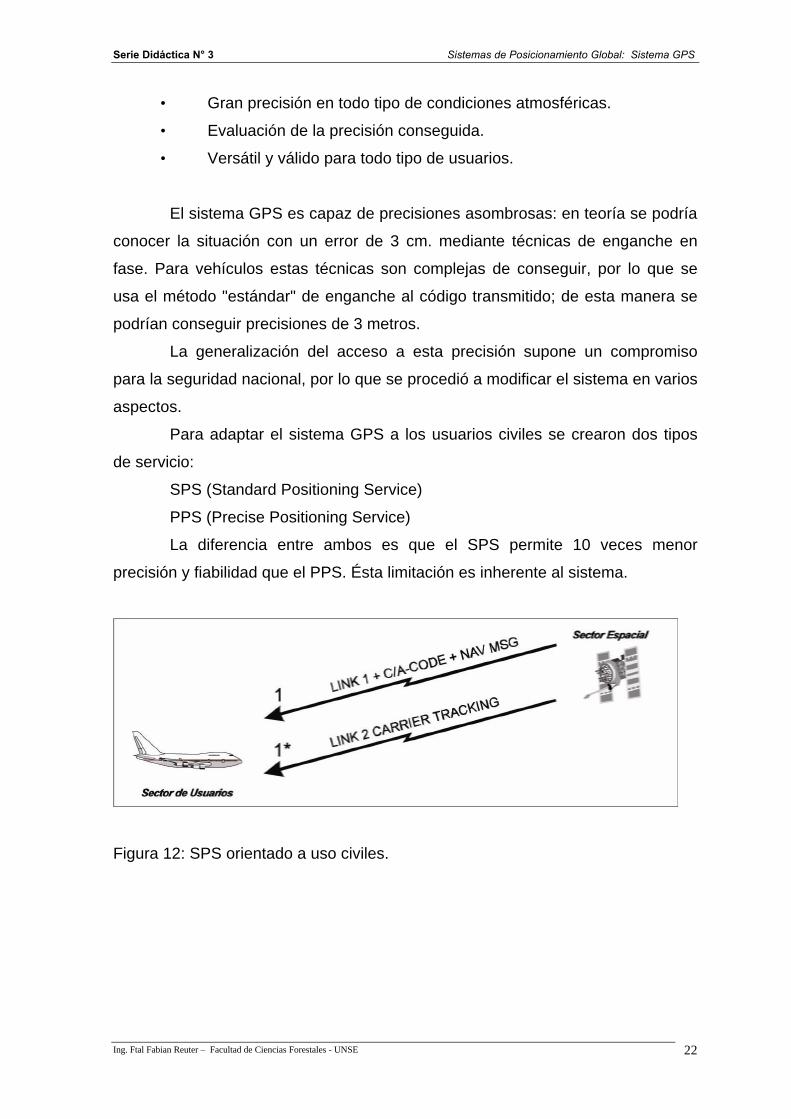
Figura 13: PPS orientado a usos militares.
Las primeras pruebas demostraron que el sistema era mejor de lo que se
diseñó en un principio, por lo que se decidió empeorar las características de
forma premeditada transmitiendo información falsa desde los satélites para
permitir una precisión en el servicio SPS de unos 100 metros el 90% del tiempo,
lo que es suficiente para navegación pero no para dirección de armas.
2.3. DESCRIPCIÓN DEL SISTEMA GPS
A continuación vamos a describir las generalidades del sistema GPS y
sus características más importantes. Para ello, debemos dividir el sistema en tres
sectores fundamentales y dependientes entre sí, el sector espacial, el sector de
control y el sector de usuarios.
Serie Didáctica N° 3 Sistemas de Posicionamiento Global: Sistema GPS
Ing. Ftal Fabian Reuter – Facultad de Ciencias Forestales - UNSE 24
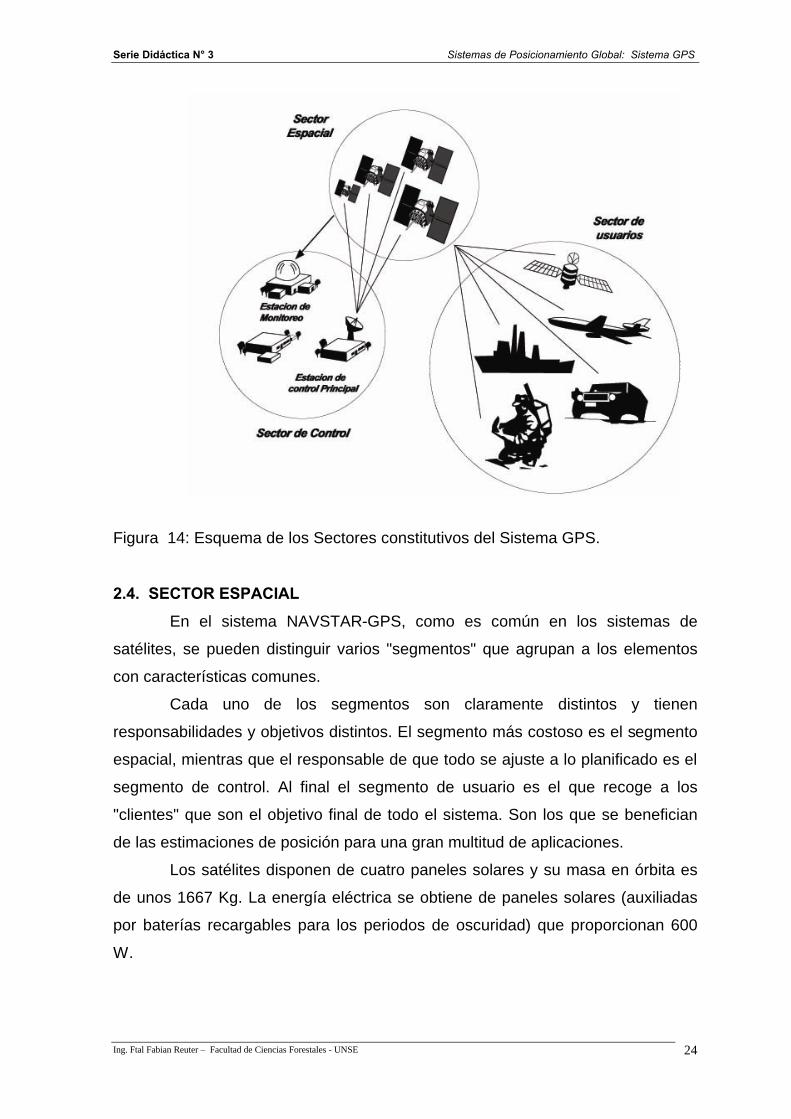
Figura 14: Esquema de los Sectores constitutivos del Sistema GPS.
2.4. SECTOR ESPACIAL
En el sistema NAVSTAR-GPS, como es común en los sistemas de
satélites, se pueden distinguir varios "segmentos" que agrupan a los elementos
con características comunes.
Cada uno de los segmentos son claramente distintos y tienen
responsabilidades y objetivos distintos. El segmento más costoso es el segmento
espacial, mientras que el responsable de que todo se ajuste a lo planificado es el
segmento de control. Al final el segmento de usuario es el que recoge a los
"clientes" que son el objetivo final de todo el sistema. Son los que se benefician
de las estimaciones de posición para una gran multitud de aplicaciones.
Los satélites disponen de cuatro paneles solares y su masa en órbita es
de unos 1667 Kg. La energía eléctrica se obtiene de paneles solares (auxiliadas
por baterías recargables para los periodos de oscuridad) que proporcionan 600
W.
Serie Didáctica N° 3 Sistemas de Posicionamiento Global: Sistema GPS
Ing. Ftal Fabian Reuter – Facultad de Ciencias Forestales - UNSE 25
Los satélites del segundo bloque, lanzados tras 1992 tienen la posibilidad
de enlaces transversales entre ellos, permitiendo la intercomunicación entre
satélites.
Disponen de cohetes propulsores para corregir su posición orbital durante
su vida útil.
Cada satélite lleva relojes atómicos de Cesio y Rubidio, La sincronización
de los relojes y de las frecuencias del sistema GPS se realizan desde el
Segmento Terrestre del sistema.
Como dato curioso es que dada la extrema exactitud precisada, hay que
considerar los efectos relativistas provocados por la gran velocidad de los
satélites y por la diferente gravedad existente a 20169 Km. de la Tierra.
Relatividad Especial: Debido a la velocidad relativa entre los relojes de la
Tierra y los que están en los satélites, el reloj del satélite observado desde la
Tierra va más lento de lo previsto.
Relatividad General: El satélite está situado en un campo gravitatorio más
tenue que en la Tierra, por lo que su reloj irá levemente más rápido que en la
Tierra.
Ambos efectos se cancelan si la órbita tuviera un radio 1.5 veces el radio
terrestre, pero como es de casi 4 veces, los relojes de los satélites van más
rápido que los terrestres. Si no se corrigiera ese efecto habría desfases de 38
microsegundos cada día, lo que provocaría un error en la posición de 11 Km.
Actualmente, la puesta en servicio de cada satélite lanzado con los Delta
se hace en varias fases: La primera y segunda etapa del cohete, ambas de
propelente sólido, sitúan la tercera etapa y su carga útil (satélite) en una órbita
elíptica.
Serie Didáctica N° 3 Sistemas de Posicionamiento Global: Sistema GPS
Ing. Ftal Fabian Reuter – Facultad de Ciencias Forestales - UNSE 26
Figura 15: Cohete Delta utilizado para colocar en orbita a los satélites GPS.
Activando la tercera etapa se aumenta el apogeo de la órbita hasta el
valor final de 20 180 Km. de altitud,
Se desensambla y desecha entonces la tercera etapa, ya inútil, y se
activa el cohete de inserción que lleva el propio satélite, entrando en una órbita
casi definitiva, que finalmente se retoca con los cohetes de maniobra del satélite
hasta establecer la órbita de servicio. Allí es sometido a las necesarias pruebas y
manipulaciones por el centro de control. En un plazo de 30 a 45 días, el satélite
es activado, ya en la órbita y posición de servicio previstas, y se declara
operativo.
Existen otros satélites en órbitas de aparcamiento, desactivadas y
disponibles como reserva («spares»).
Serie Didáctica N° 3 Sistemas de Posicionamiento Global: Sistema GPS
Ing. Ftal Fabian Reuter – Facultad de Ciencias Forestales - UNSE 27
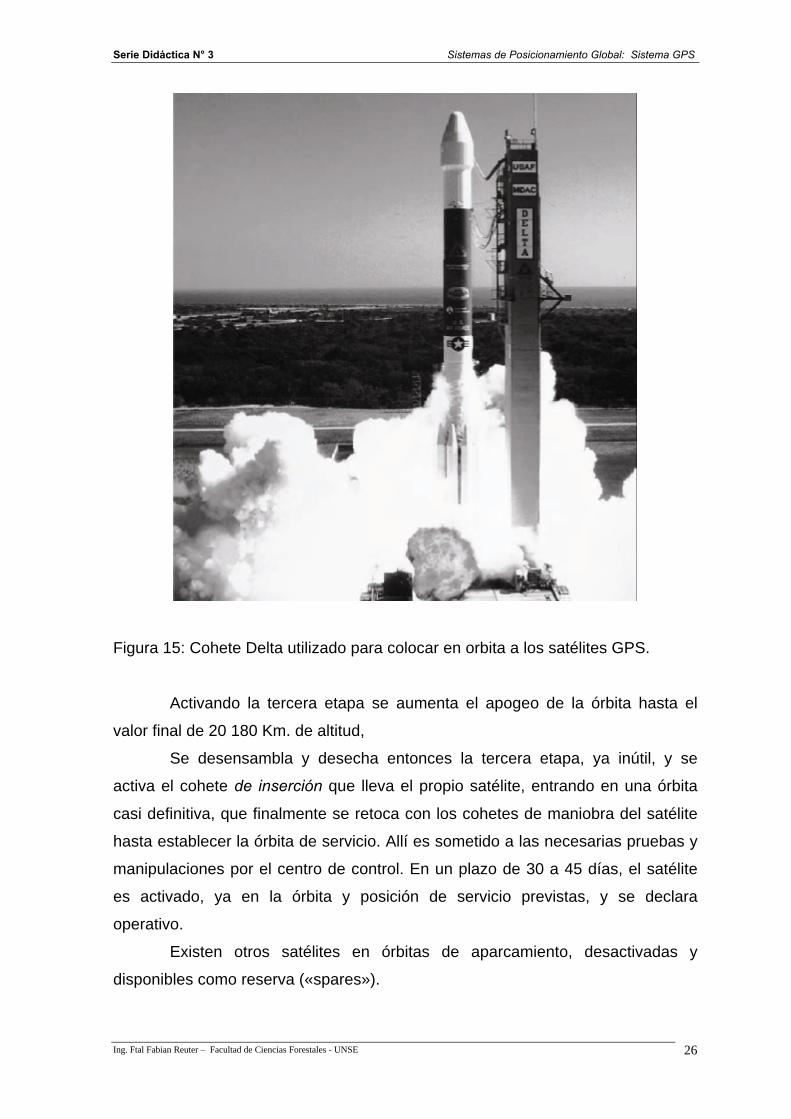
Cada órbita o plano orbital se identifica por una letra. Los planos orbitales
son: A, B, C, D, E y F; cada posición del satélite en la órbita se identifica por un
número. Las posibles posiciones de un satélite de servicio en una órbita son: 1, 2,
3 y 4.
Figura 16: Disposición esquemática de la configuración orbital de los
satélites GPS. 6 orbitas de 4 satélites cada una.
Evidentemente las combinaciones de los planos orbitales A, B, C, D, E y
F con las posiciones orbitales 1, 2, 3 y 4, nos ofrecen las 24 posibles ubicaciones
de cada uno de los satélites previstos.
2.4.1. Satélites
Los satélites de la constelación NAVSTAR son identificados de diversos
modos:
• Por su número NAVSTAR (SVN).
• Por su código de ruido seudo aleatorio (PRN). En los códigos que
transmiten que identifican a cada satélite de la constelación.
• Por su número orbital. Un ejemplo sería el satélite 3D, que corresponde al
satélite número tres del plano orbital D.
Serie Didáctica N° 3 Sistemas de Posicionamiento Global: Sistema GPS
Ing. Ftal Fabian Reuter – Facultad de Ciencias Forestales - UNSE 28
2.4.1.1. Satélites del bloque I: Pesan cerca de 845 Kg. y miden en tomo
de 5 metros con los paneles solares abiertos, fueron lanzados 11 satélites de este
bloque por los cohetes portadores ATLAS-F desde la base USAF de
VANDERBERG - CALIFORNIA, durante el periodo de 1978 a 1985. Con,
excepción de la falla de un "booster" en 1981, todos los otros entraron en
operación satisfactoriamente. Tenían paneles solares con 400 vatios de potencia.
De los 10 satélites operacionales que lo componían, 4 llevaban oscilador de
cuarzo, 3 con reloj atómico de rubidio y 3 con reloj atómico de cesio. Su vida
media fue de 5 años.
Hoy en día todos los satélites de este bloque ya fueron sustituidos.
Figura 17: Satélite GPS del Bloque I
2.4.1.2. Satélites del bloque II: Los 28 satélites de este bloque
Comenzaron a ser lanzados el 14 de febrero de 1989, desde el Centro Espacial
Kennedy en la Base de la USAF de Cabo cañaveral en La Florida - EUA. Tenían
un costo aproximado de USS 50.000.000 (cincuenta millones de dólares) Por
unidad. Cada satélite de este bloque, tiene un peso de más de 1500 Kg. Todos
incorporan osciladores atómicos.
Existe una importante diferencia entre los satélites de los bloques I y II.
Los satélites del Bloque II fueron construidos de un modo que permite la
degradación de la precisión obtenida por el Código de Acceso Libre (C/A) y la
limitación de acceso al código de Precisión (P). Este hecho, impuesto por el DoD
Serie Didáctica N° 3 Sistemas de Posicionamiento Global: Sistema GPS
Ing. Ftal Fabian Reuter – Facultad de Ciencias Forestales - UNSE 29
para la apertura del sistema a la comunidad internacional, alteró drásticamente el
mercado de receptores en todo el mundo, obligando a los científicos a desarrollar
técnicas de geoposicionamiento que posibiliten dar una solución a estas
restricciones.
Figura 18: Esquema de un Satélite GPS correspondiente al bloque II
El 26 de noviembre de 1990 se lanzó el décimo satélite del bloque II,
modelo mayor y más pesado (930 Kg.), que inauguraba una nueva serie, la II-A,
que incorpora mayor ayuda para la navegación, varias mejoras de producción y
una superior vida útil. También se inauguró un nuevo tipo de cohete más potente
para lanzarle: El Delta 2.
2.4.1.3. Satélites del bloque IIr: La denominación -R- se refiere a la
palabra "Replacement" o sustitución. Los satélites del bloque IIR están
planificados para ser un total de 32 unidades, comenzaron a ser lanzados a partir
de 1995 por los transbordadores espaciales. Cada vehículo transportaría en
principio, tres satélites reduciéndose así los costos operacionales de lanzamiento.
La gran novedad de estos satélites es la inclusión de un MASER a
hidrógeno ("Microwave Amplification by Stimulated Emission of Radiation" -
Serie Didáctica N° 3 Sistemas de Posicionamiento Global: Sistema GPS
Ing. Ftal Fabian Reuter – Facultad de Ciencias Forestales - UNSE 30
análogo del láser en la región visible del espectro electromagnético), lo que
aumentará sensiblemente la precisión del reloj interno del satélite, permitiendo
incluso una mayor penetración de la señal en la vegetación.
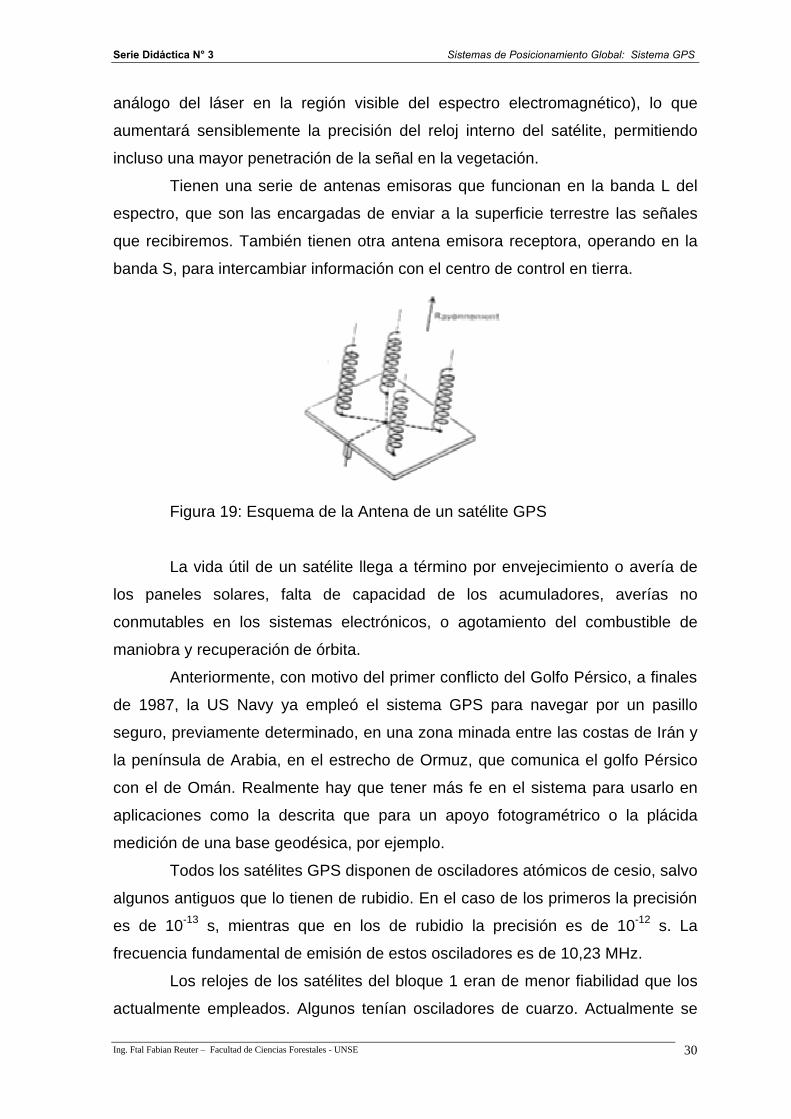
Tienen una serie de antenas emisoras que funcionan en la banda L del
espectro, que son las encargadas de enviar a la superficie terrestre las señales
que recibiremos. También tienen otra antena emisora receptora, operando en la
banda S, para intercambiar información con el centro de control en tierra.
Figura 19: Esquema de la Antena de un satélite GPS
La vida útil de un satélite llega a término por envejecimiento o avería de
los paneles solares, falta de capacidad de los acumuladores, averías no
conmutables en los sistemas electrónicos, o agotamiento del combustible de
maniobra y recuperación de órbita.
Anteriormente, con motivo del primer conflicto del Golfo Pérsico, a finales
de 1987, la US Navy ya empleó el sistema GPS para navegar por un pasillo
seguro, previamente determinado, en una zona minada entre las costas de Irán y
la península de Arabia, en el estrecho de Ormuz, que comunica el golfo Pérsico
con el de Omán. Realmente hay que tener más fe en el sistema para usarlo en
aplicaciones como la descrita que para un apoyo fotogramétrico o la plácida
medición de una base geodésica, por ejemplo.
Todos los satélites GPS disponen de osciladores atómicos de cesio, salvo
algunos antiguos que lo tienen de rubidio. En el caso de los primeros la precisión
es de 10-13 s, mientras que en los de rubidio la precisión es de 10-12 s. La
frecuencia fundamental de emisión de estos osciladores es de 10,23 MHz.
Los relojes de los satélites del bloque 1 eran de menor fiabilidad que los
actualmente empleados. Algunos tenían osciladores de cuarzo. Actualmente se
Serie Didáctica N° 3 Sistemas de Posicionamiento Global: Sistema GPS
Ing. Ftal Fabian Reuter – Facultad de Ciencias Forestales - UNSE 31
usan dos o cuatro osciladores atómicos por satélite (que pueden ser de rubidio o
de cesio, uno de los cuales es seleccionado desde la Estación Maestra de Control
para dar servicio.
El funcionamiento de un reloj atómico se basa en la transición entre
niveles de energía de átomos concretos. La transición produce una oscilación de
frecuencia muy precisa que se usa para controlar por realimentación (feedback)
un oscilador piezoeléctrico de cuarzo, cuya frecuencia así estabilizada es la
realmente utilizada, siendo normal ajustarla en valores redondeados: 10 MHz, por
ejemplo.
El reloj u oscilador de servicio de un satélite GPS provee una frecuencia
fundamental de 10,23 MHz sobre la que se estructura todo el conjunto de la señal
radiodifundida por el satélite.
2.5. SECTOR DE CONTROL
Está constituido por cinco estaciones de control repartidas alrededor del
mundo y con coordenadas muy precisas. Todas ellas reciben continuamente las
señales GPS con receptores de 2 frecuencias y provistos de osciladores de cesio,
también se registran, de forma precisa, otra serie de parámetros como presión y
temperatura que afectan de manera muy importante a la propagación de la
información que se recibe de los satélites.
Las principales tareas de este Sistema de Control son: determinar de
forma precisa la órbita de cada satélite; determinar por medio de modelos
matemáticos la predicción de estas órbitas; sincronización permanente de los
sistemas de relojes de los satélites; transferencia de datos actualizados de
efemérides para cada "buffer” de los satélites; control de la degradación de la
señal (S/A y A/S); corrección del posicionamiento de los satélites por comandos
desde tierra; control de lanzamiento de nuevos satélites para, la manutención de
la constelación.
2.5.1. Estación maestra de control
En un inicio estaba situada en la Base de la Fuerza Aérea de los Estados
Unidos en VANDENBERG - CALIFORNIA, hoy en día le estación maestra se
localiza en la Base FALCON de la USAF en COLORADO SPRINGS -
COLORADO.
Serie Didáctica N° 3 Sistemas de Posicionamiento Global: Sistema GPS
Ing. Ftal Fabian Reuter – Facultad de Ciencias Forestales - UNSE 32
Esta estación, además de monitorear los satélites que pasan por los EUA,
reúne los datos de las estaciones de monitoreo y campo, procesando y
generando los datos que efectivamente son transmitidos a los satélites.
Figura 20: Estación Maestra de Control
Todos estos datos se trasmiten a la estación principal situada en
Colorado Spring (USA) en donde se procesa la información, obteniendo de esta
manera todas las posiciones de los satélites en sus órbitas (sus efemérides) y los
estados de los relojes que llevan cada uno de ellos para que con posterioridad los
mismos satélites radiodifundan dicha información a los usuarios potenciales.
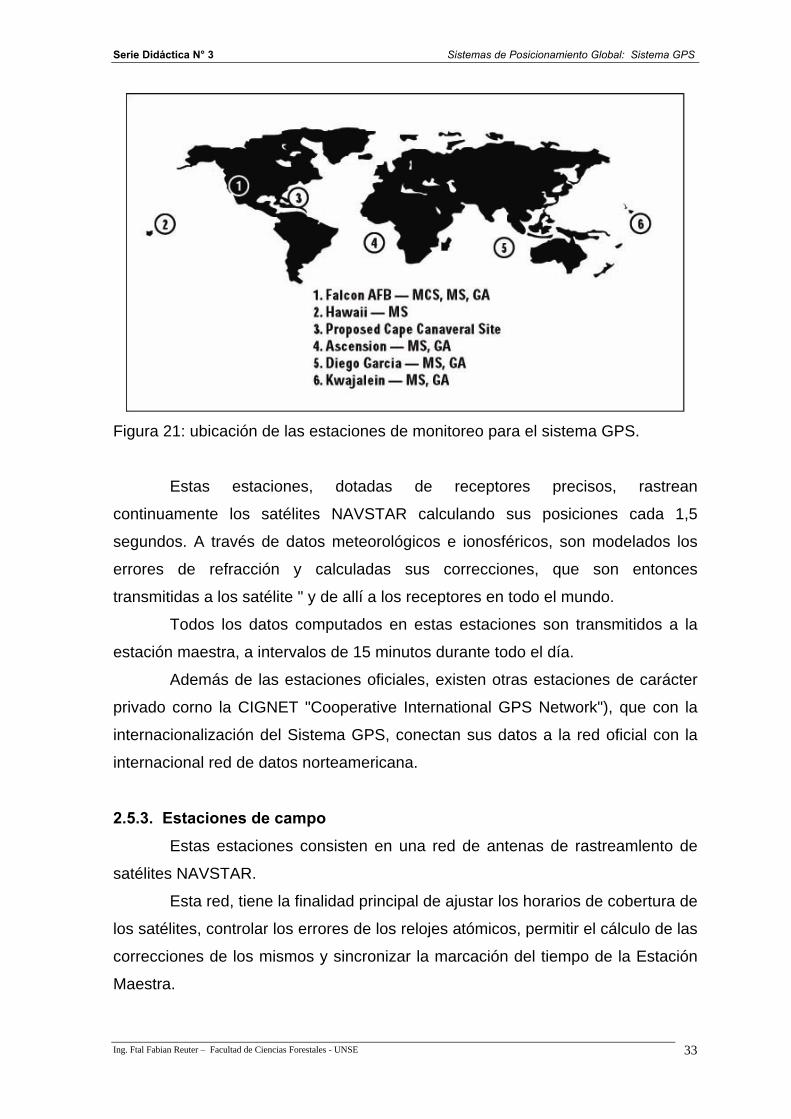
2.5.2. Estaciones de monitoreo
Existen cinco estaciones de monitoreo Incluyendo la estación maestra:
HAWAI -Pacífico oriental
COLORADO SPRINGS
ISLA DE LA Ascensión, en el Atlántico Sur
DIEGO GARCÍA, en el Océano Índico
KWAJALEIN, en el Océano Pacifico occidental
Serie Didáctica N° 3 Sistemas de Posicionamiento Global: Sistema GPS
Ing. Ftal Fabian Reuter – Facultad de Ciencias Forestales - UNSE 33
Figura 21: ubicación de las estaciones de monitoreo para el sistema GPS.
Estas estaciones, dotadas de receptores precisos, rastrean
continuamente los satélites NAVSTAR calculando sus posiciones cada 1,5
segundos. A través de datos meteorológicos e ionosféricos, son modelados los
errores de refracción y calculadas sus correcciones, que son entonces
transmitidas a los satélite " y de allí a los receptores en todo el mundo.
Todos los datos computados en estas estaciones son transmitidos a la
estación maestra, a intervalos de 15 minutos durante todo el día.
Además de las estaciones oficiales, existen otras estaciones de carácter
privado corno la CIGNET "Cooperative International GPS Network"), que con la
internacionalización del Sistema GPS, conectan sus datos a la red oficial con la
internacional red de datos norteamericana.
2.5.3. Estaciones de campo
Estas estaciones consisten en una red de antenas de rastreamlento de
satélites NAVSTAR.
Esta red, tiene la finalidad principal de ajustar los horarios de cobertura de
los satélites, controlar los errores de los relojes atómicos, permitir el cálculo de las
correcciones de los mismos y sincronizar la marcación del tiempo de la Estación
Maestra.
Serie Didáctica N° 3 Sistemas de Posicionamiento Global: Sistema GPS
Ing. Ftal Fabian Reuter – Facultad de Ciencias Forestales - UNSE 34
Figura 22: Estación de Campo
Estas estaciones de seguimiento (láser, radar y ópticas), tienen como
objetivo especifico la obtención de efemérides que no estén afectadas por la
disponibilidad selectiva, denominadas precisas, y que están al alcance del usuario
a través de organismos científicos como el IGS (International Geodinamic
Service) o el NGS (National Geodetic Survey). Con ellas, tenemos la seguridad de
posicionarnos en el sistema WGS84 con los errores típicos del sistema.
La precisión nominal de estas efemérides prevista, permite la
determinación de la posición de un satélite con error menor de 1 m en sentido
radial, 7 m a lo largo de la trayectoria y 3 m transversalmente.
La precisión final alcanzable depende de la exactitud de las efemérides.
Es posible usar efemérides calculadas a posteriori, llamadas efemérides
precisas, obtenidas por observación de los satélites desde puntos de situación
muy exactamente conocida, usualmente puntos con coordenadas obtenidas por
sistemas VLBI o SLR.
2.6. SECTOR DE USUARIOS
El segmento de usuario consiste en los aparatos receptores sobre la
Tierra, así como por el software necesario para la comunicación del receptor con
el ordenador y el post-procesado de la información para la obtención de los
resultados.
El equipo de usuario es un dispositivo pasivo en el sentido de que sólo
recibe información de los satélites, cuya misión es obtener la señal de los
Serie Didáctica N° 3 Sistemas de Posicionamiento Global: Sistema GPS
Ing. Ftal Fabian Reuter – Facultad de Ciencias Forestales - UNSE 35
satélites, la demodulan y extraen la información de efemérides de los satélites, de
correcciones, etc. y presentan la información al usuario final.
El sistema GPS permite que la localización de cada usuario la conozca
solamente el usuario debido a que no se emite ningún tipo de señal, con lo que la
privacidad del servicio se garantiza.
En el equipo se suelen incluir accesorios y pequeño material auxiliar,
como acoplamientos de estacionamiento, trípode, placa de estacionamiento
sobre pilar, cables especiales, cinta métrica, barómetro y sicrómetro (para control
meteorológico), etc., así como patrones exteriores de frecuencia y otros
elementos, en aplicaciones especiales.
Los equipos están en continuo desarrollo y su evolución es comparable a
la experimentada en informática durante las dos últimas décadas para los
ordenadores personales, aunque probablemente más dinámica.
2.7. EQUIPO DE OBSERVACIÓN.
Lo componen la antena, el sensor y la unidad de control o controlador.
2.7.1. Antena
Es el elemento al cual viene siempre referido nuestro posicionamiento,
está conectada a través de un preamplificador al receptor, directamente o
mediante cable. La misión de la antena es la de convertir la energía
electromagnética que recibe en corriente eléctrica que a su vez pasa al receptor.
El receptor consta de una serie de elementos que se encargan de la
recepción de las radiofrecuencias enviadas por los satélites. Además suelen
poseer diferentes canales para seguir simultáneamente a varios satélites, un
procesador interno con su correspondiente soporte lógico, una unidad de
memoria para el almacenamiento de la información, teclado de control, pantalla
de comunicación con el usuario, diferentes conectores para funciones varias y
una fuente de alimentación interna o externa.
La función de una antena es convertir una corriente eléctrica en una
radiación electromagnética y viceversa. La antena (emisora) de los satélites hace
lo primero y la de nuestros instrumentos (receptora) lo segundo.

Serie Didáctica N° 3 Sistemas de Posicionamiento Global: Sistema GPS
Ing. Ftal Fabian Reuter – Facultad de Ciencias Forestales - UNSE 36
La corriente eléctrica inducida en nuestra antena por las señales radiadas
recibidas, posee toda la información modulada sobre ellas. Hay diversos tipos de
antenas: dipolo, dipolo curvado, cónico-espiral, helicoidal, plana, etc.
El punto que realmente se posiciona es el centro radioeléctrico de la
antena, que no suele coincidir con el mecánico o físico, generando un error
residual por excentricidad que puede valer unos milímetros y es denominado en
textos ingleses como antenna phase center ambiguity.
Casi todos los fabricantes recomiendan una orientación aproximada
común para las antenas en caso de posicionamiento preciso relativo. Se trata de
evitar este error, normalmente despreciable, pero que no hay por qué asumir,
dada su fácil compensación; para ello el fabricante monta en el interior de todas
las carcasas el elemento físico receptor en la misma posición respecto a alguna
referencia exterior del conjunto.
Todas las antenas suelen llevar un plano de tierra que evite la recepción
de señales reflejadas en el suelo u objetos cercanos que empeoran la precisión
de observación
Cada tipo comercializado de antena tiene sus características,
frecuentemente adaptadas a aplicaciones concretas que el fabricante especifica.
Figura 23: Equipo GPS, Antena + sensor
Serie Didáctica N° 3 Sistemas de Posicionamiento Global: Sistema GPS
Ing. Ftal Fabian Reuter – Facultad de Ciencias Forestales - UNSE 37
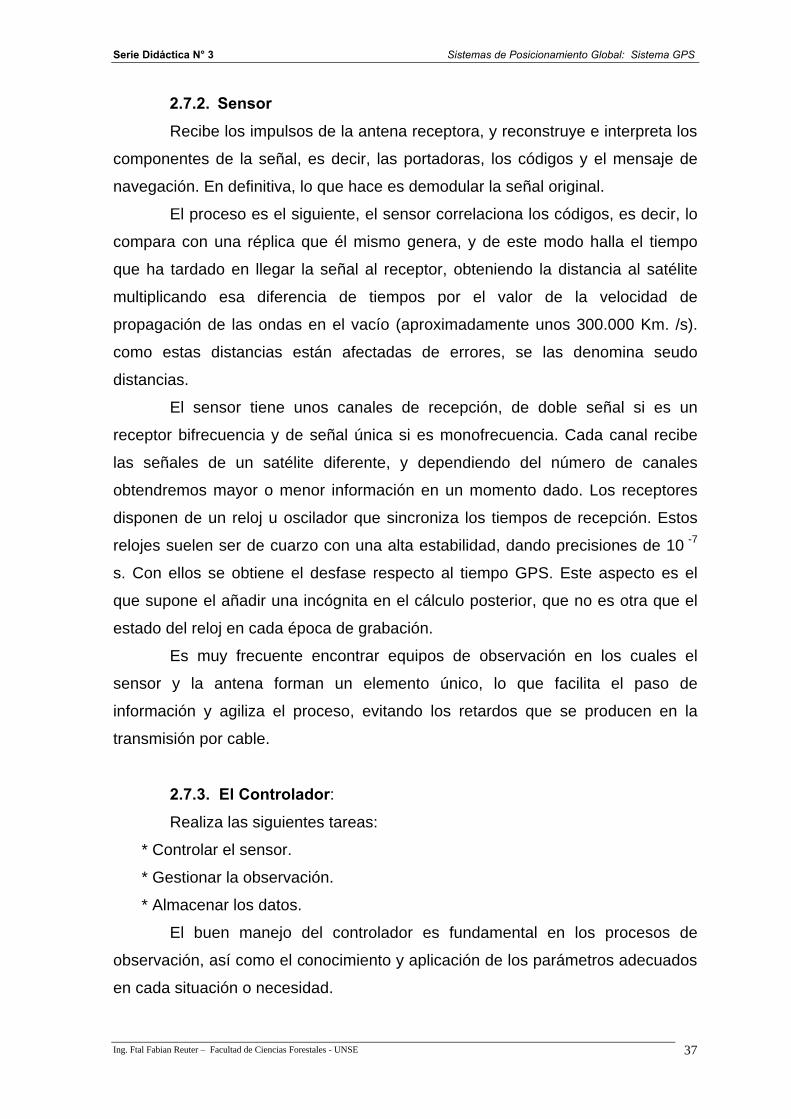
2.7.2. Sensor
Recibe los impulsos de la antena receptora, y reconstruye e interpreta los
componentes de la señal, es decir, las portadoras, los códigos y el mensaje de
navegación. En definitiva, lo que hace es demodular la señal original.
El proceso es el siguiente, el sensor correlaciona los códigos, es decir, lo
compara con una réplica que él mismo genera, y de este modo halla el tiempo
que ha tardado en llegar la señal al receptor, obteniendo la distancia al satélite
multiplicando esa diferencia de tiempos por el valor de la velocidad de
propagación de las ondas en el vacío (aproximadamente unos 300.000 Km. /s).
como estas distancias están afectadas de errores, se las denomina seudo
distancias.
El sensor tiene unos canales de recepción, de doble señal si es un
receptor bifrecuencia y de señal única si es monofrecuencia. Cada canal recibe
las señales de un satélite diferente, y dependiendo del número de canales
obtendremos mayor o menor información en un momento dado. Los receptores
disponen de un reloj u oscilador que sincroniza los tiempos de recepción. Estos
relojes suelen ser de cuarzo con una alta estabilidad, dando precisiones de 10 -7
s. Con ellos se obtiene el desfase respecto al tiempo GPS. Este aspecto es el
que supone el añadir una incógnita en el cálculo posterior, que no es otra que el
estado del reloj en cada época de grabación.
Es muy frecuente encontrar equipos de observación en los cuales el
sensor y la antena forman un elemento único, lo que facilita el paso de
información y agiliza el proceso, evitando los retardos que se producen en la
transmisión por cable.
2.7.3. El Controlador:
Realiza las siguientes tareas:
* Controlar el sensor.
* Gestionar la observación.
* Almacenar los datos.
El buen manejo del controlador es fundamental en los procesos de
observación, así como el conocimiento y aplicación de los parámetros adecuados
en cada situación o necesidad.
Serie Didáctica N° 3 Sistemas de Posicionamiento Global: Sistema GPS
Ing. Ftal Fabian Reuter – Facultad de Ciencias Forestales - UNSE 38
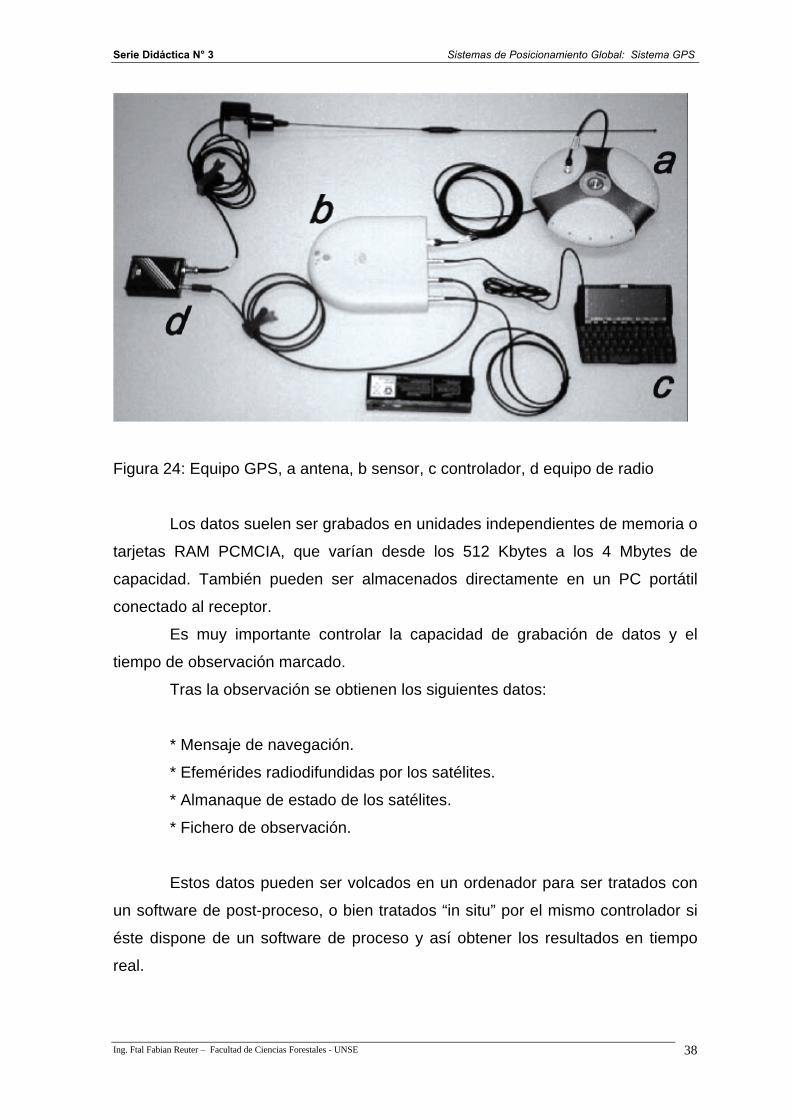
Figura 24: Equipo GPS, a antena, b sensor, c controlador, d equipo de radio
Los datos suelen ser grabados en unidades independientes de memoria o
tarjetas RAM PCMCIA, que varían desde los 512 Kbytes a los 4 Mbytes de
capacidad. También pueden ser almacenados directamente en un PC portátil
conectado al receptor.
Es muy importante controlar la capacidad de grabación de datos y el
tiempo de observación marcado.
Tras la observación se obtienen los siguientes datos:
* Mensaje de navegación.
* Efemérides radiodifundidas por los satélites.
* Almanaque de estado de los satélites.
* Fichero de observación.
Estos datos pueden ser volcados en un ordenador para ser tratados con
un software de post-proceso, o bien tratados “in situ” por el mismo controlador si
éste dispone de un software de proceso y así obtener los resultados en tiempo
real.
Serie Didáctica N° 3 Sistemas de Posicionamiento Global: Sistema GPS
Ing. Ftal Fabian Reuter – Facultad de Ciencias Forestales - UNSE 39
El usuario debe saber que los datos citados anteriormente pueden ser
transformados a un formato estándar independiente en modo ASCII para
insertarlos y ser tratados por cualquier software de proceso de datos GPS. Este
formato es el denominado RINEX, que en la actualidad ya figura como RINEX-2,
con la posibilidad de incluir observaciones realizadas a través de la constelación
GLONASS.
2.8. CLASIFICACIÓN DE LOS RECEPTORES GPS
2.8.1. Por el número de canales:
1) Monocanales - Poseen un único canal que se mueve de un satélite
para otro. Poseen menos circuitos y son más baratos. Sin embargo son mas
lentos en la actualización de las coordenadas, mas imprecisos y susceptibles a la
interrupción del rastreamiento. ("cycle slip").
1) Multicanales (físicos o lógicos) - Con el aumento del número de
canales, la capacidad de rastrear varios satélites de forma simultánea aumenta,
lo que mejora la precisión y torna el receptor menos susceptible a "cycle slips".
2.8.2. Por el tipo de canal:
Secuenciales - En los receptores de canales secuenciales cada canal
rastrea un único satélite por vez, saltando para el próximo tan pronto tenga
almacenado datos suficientes par el cálculo de la posición.
Multiplexados - Son análogos a los secuenciales, con la diferencia que
son capaces de moverse de un satélite para otro con mucha rapidez. Exigen
circuitos mas complejos y consecuentemente son mas precisos y mas caros.
2.8.3. Por el tipo de señal observado:
1Receptores de seudo-distancia por el código C/A:
Estos receptores, generalmente leves y portátiles necesitan poca energía
para su funcionamiento y hacen uso solamente del SPS. Son usados
normalmente para la navegación (aérea, marítima y terrestre), posicionamiento
grosero y DGPS cuando están adaptados para ello. Trabajando en el modo
Serie Didáctica N° 3 Sistemas de Posicionamiento Global: Sistema GPS
Ing. Ftal Fabian Reuter – Facultad de Ciencias Forestales - UNSE 40
DGPS pueden ejecutar la digitalización de superficies reales con precisiones en
movimiento de1 a 10 metros, en dependencia de la geometría de los satélites.
2. Receptores del código. C/A y Portadoras L1 y L2:
Son receptores geodésicos que exigen post-procesamiento para el
cálculo de coordenadas, precisas. Son utilizados siempre en pares para la
determinación de "líneas de base".
(Obs.: "Líneas de Base" son los vectores AX, AY, AZ entre las estaciones
donde se localizan los receptores GPS). Poseen relojes internos de alta precisión,
motivo por el cual garantizan precisiones de orden centimétrico en la
determinación de la posición. Determinan velocidades muy precisas. Son mas
robustos que los receptores de seudo-distancia, y poseen puertos RS-232 para la
conexión con microcomputadoras. Son muy caros y exigen personal habilitado
para su operación. Constituyen excelentes equipos para la digitalización de
superficies reales con alta precisión (2 a 20 cm.).
3 Receptores de seudo-distancia por el código. :
Construidos específicamente para aplicaciones militares, normalmente
estos receptores atienden todas las especificaciones en este sentido. Para su
funcionamiento exigen que se coloque un AOC ("Auxiliary Output Chip") para la
decodificación del código Y, cuando el dispositivo antifraude ("Anti-Spoofing")
esta activado. Su comercialización es restringida a los países autorizados por
DoD ("Department of Defense") de los Estados Unidos.
Receptores de seudo - distancias C/A y P (Y) portadoras L1 y L2:
Son los receptores mas completos y mas caros disponibles
comercialmente, utilizados para determinar las coordenadas de líneas de base
superiores a 100 Km., pueden alcanzar hasta cerca de 1.500 Km. Son apropiados
Para el control de vuelos fotogramétricos y su precisión es sub-centimétrica.
Exigen software muy complejos son utilizados para la reformulación de
redes planimétricas de primer orden e investigaciones del Geoidal. También se
emplean para apoyar la mapificación sistemática de países. Pueden ejecutar
digitalizaciones de la superficie real, sin embargo la relación costo / beneficio
tiene que ser optimada para, esos casos.
A pesar de que este tipo de receptor posee un dispositivo de
almacenamiento del código P en ambas frecuencias portadoras, el mismo solo es
utilizado por el método de cuadratura de la señal (literalmente elevando la señal
Serie Didáctica N° 3 Sistemas de Posicionamiento Global: Sistema GPS
Ing. Ftal Fabian Reuter – Facultad de Ciencias Forestales - UNSE 41
al cuadrado) para determinar de forma muy precisa la posición, aunque en la
forma post-procesada. Funcionan en pares y son excesivamente caros.
2.8.4. Por el método de geoposicionamiento
1- Absoluto: Receptores del Código C/A, leves y portátiles que hacen uso
del SPS, o sea, utilizan el Código C/A para la medición de la distancia satélite
receptor. Poseen funciones básicas de navegación y registro de puntos por
medias. Su precisión obedece las reglas del SPS.
2 - Diferenciales: Receptores absolutos con la capacidad de almacenar
los datos de la posición en archivos de computadoras para correcciones
diferenciales. Pueden poseer un dispositivo de conexión vía radio utilizando el
protocolo RTCM SC-104, lo que permitiría precisiones de 5 a 2 metros en tiempo
real. Funcionan en pares, estando un receptor fijo, estacionado en un punto de
coordenadas de referencia y otro móvil, determinando posiciones o digitalizando
elementos en el terreno, como perímetros, líneas abiertas o áreas cerradas.
3 Relativos o Interferométricos: Receptores que almacenan datos de las
frecuencias portadoras L1 o L2 y códigos C/A y P. Pueden ser conectados vía
radio, a través de una técnica Llamada RTK ("Real Time Kinematic") con un
protocolo análogo al RTCM SC-104. Destinados a aplicaciones geodésicas,
utilizan la fase de las portadoras L1 L2 para determinar distancias. Utilizan
software complejo y brindan precisiones centimétricas o subcentimétricas. Se
prestan para levantamiento, cinemáticos de alta precisión, como vuelos
fotogramétricos y o digitalización de superficie real.
2.8.5. Otras clasificaciones
Algunas están en función de sus características en:
- Navegación. Reciben únicamente observables de código (tiempos). Son
los instrumentos menos precisos, aunque su evolución está siendo espectacular.
Sus aplicaciones más comunes son la navegación, catastro, GIS y
levantamientos de escalas menores de 1/ 5000 en los más sofisticados.
- Monofrecuencia. Reciben las observables de código y fase de la
portadora L1. La precisión de estos instrumentos ya es significativa, y son de
aplicación topográfica y geodésica en pequeñas distancias (hasta 100 Km.).
Serie Didáctica N° 3 Sistemas de Posicionamiento Global: Sistema GPS
Ing. Ftal Fabian Reuter – Facultad de Ciencias Forestales - UNSE 42
- Bifrecuencia. Reciben las observables de código y fase de las
portadoras L1 y L2. La precisión y el rendimiento son mucho mayores debido a la
posibilidad de combinar los datos y formar en post-proceso combinaciones de
observables que agilizan el cálculo y eliminan los errores de retardo atmosférico.
Están indicados para trabajos de precisión y allí donde el rendimiento y
los buenos resultados requeridos sean máximos.
Finalmente es posible hacer una clasificación de acuerdo a la. comunidad
de usuarios:
- Receptores de uso militar - receptores de uso civil
- Receptores de navegación
- Receptores de determinación de tiempo - receptores geodésicos.
2.9. ESTRUCTURA DE LA SEÑAL
Cada satélite va provisto de un reloj-oscilador que provee una frecuencia
fundamental de 10,23 MHz, sobre la que se estructura todo el conjunto de la
señal radiodifundida por el satélite.
El satélite emite información sobre dos portadoras, la primera es el
resultado de multiplicar la fundamental por 154 (1575.42 MHz) y se denomina L1.
La segunda, utiliza un factor de 120 (1227.60 MHz) y se denomina L2.
El término "L" viene determinado porque los valores usados están en la
banda L de radiofrecuencias que abarca desde 1 GHz a 2 GHz (1000 a 2000
MHz). El poder utilizar las 2 frecuencias permite determinar por comparación de
sus retardos diferentes, el retardo ionosférico, difícilmente predecible por otros
sistemas.
Sobre estas dos portadoras se envía una información modulada
compuesta por dos códigos y un mensaje, generados también a partir de la
frecuencia fundamental correspondiente.
Serie Didáctica N° 3 Sistemas de Posicionamiento Global: Sistema GPS
Ing. Ftal Fabian Reuter – Facultad de Ciencias Forestales - UNSE 43
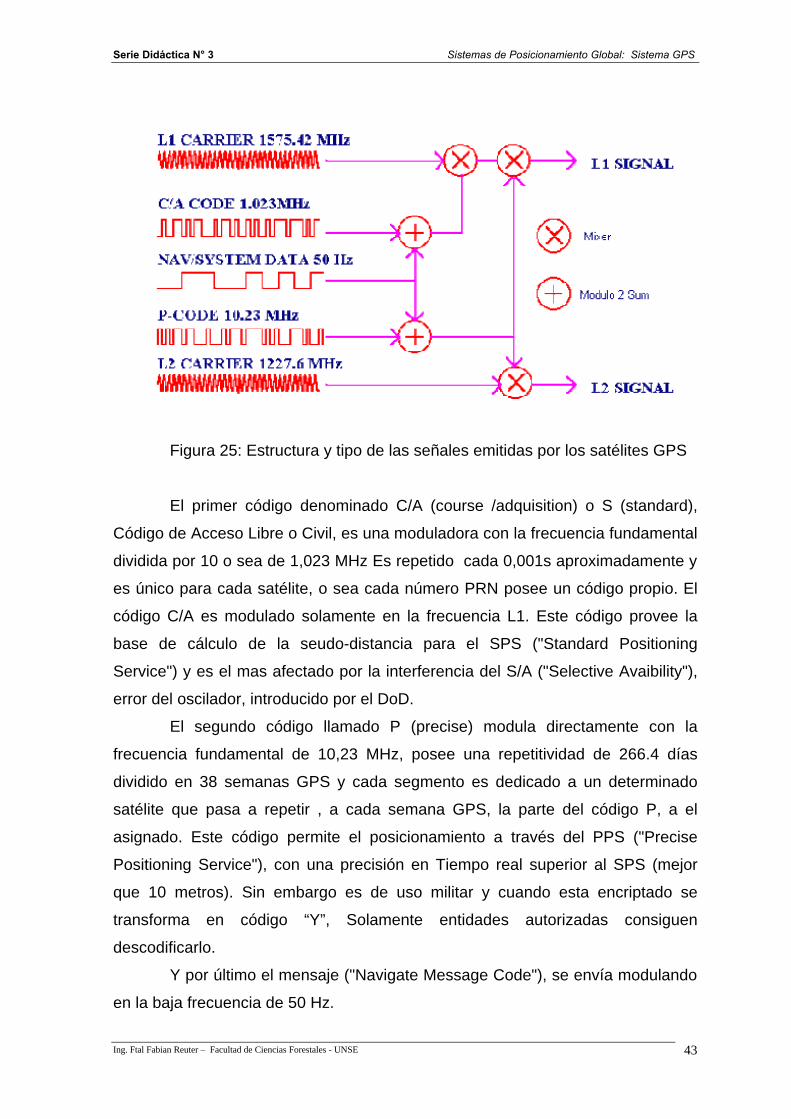
Figura 25: Estructura y tipo de las señales emitidas por los satélites GPS
El primer código denominado C/A (course /adquisition) o S (standard),
Código de Acceso Libre o Civil, es una moduladora con la frecuencia fundamental
dividida por 10 o sea de 1,023 MHz Es repetido cada 0,001s aproximadamente y
es único para cada satélite, o sea cada número PRN posee un código propio. El
código C/A es modulado solamente en la frecuencia L1. Este código provee la
base de cálculo de la seudo-distancia para el SPS ("Standard Positioning
Service") y es el mas afectado por la interferencia del S/A ("Selective Avaibility"),
error del oscilador, introducido por el DoD.
El segundo código llamado P (precise) modula directamente con la
frecuencia fundamental de 10,23 MHz, posee una repetitividad de 266.4 días
dividido en 38 semanas GPS y cada segmento es dedicado a un determinado
satélite que pasa a repetir , a cada semana GPS, la parte del código P, a el
asignado. Este código permite el posicionamiento a través del PPS ("Precise
Positioning Service"), con una precisión en Tiempo real superior al SPS (mejor
que 10 metros). Sin embargo es de uso militar y cuando esta encriptado se
transforma en código “Y”, Solamente entidades autorizadas consiguen
descodificarlo.
Y por último el mensaje ("Navigate Message Code"), se envía modulando
en la baja frecuencia de 50 Hz.
Serie Didáctica N° 3 Sistemas de Posicionamiento Global: Sistema GPS
Ing. Ftal Fabian Reuter – Facultad de Ciencias Forestales - UNSE 44
Es también conocido como Código de Efemérides, navegación y
Correcciones o código D.
El mensaje viene modulado sobre ambas portadoras tiene una duración
de 12 m. y 30 s. debido principalmente a su longitud y su baja velocidad de
transmisión. La información que contiene viene referida a:
* Precisión y estado del satélite (salud, en terminología GPS), ya que
los satélites pueden encontrarse "sanos" o "enfermos" (inoperantes).
*Antigüedad de la información y de las efemérides radiodifundidas.
Almanaque y el estado de los relojes
*Un modelo ionosférico, para el cálculo de los retardos
Información UTC (tiempo-hora universal)
*Dos claves: - TLM, de telemetría, por si la órbita del satélite sufre
alguna manipulación desde tierra.
HOW, que da acceso, para los usuarios autorizados, al código P.
Al conectar un receptor, el código D es el primero a ser interpretado,
generando internamente en el receptor el almanaque de efemérides de los
satélites, permitiendo al rastreador realizar la búsqueda de todos los satélites
disponibles para la posición geográfica donde se encuentra el equipamiento.
Los códigos sirven fundamentalmente para posicionamiento absoluto y
son usados principalmente en navegación. El C/A ofrece precisiones nominales
decamétricas y se usa en el posicionamiento estándar SPS (Standard Positioning
Service). El P ofrece precisiones nominales métricas y se usa en el
posicionamiento preciso PPS (Precise Positioning Service).
El mensaje aporta toda la información necesaria para los usuarios del
sistema.
Los códigos consisten en una secuencia de dígitos binarios o bits (ceros y
unos). La modulación de las portadoras con éstos códigos general un ruido
electrónico que, en principio, no sigue ninguna ley y parece aleatorio, pero en
realidad sus secuencias están establecidas mediante unos desarrollos
polinómicos, este fenómeno se conoce con el término ruido seudo-aleatorio
(Pseudo Random Noise, PRN), y tiene la característica de que puede
correlacionarse con una réplica generada por otro instrumento.
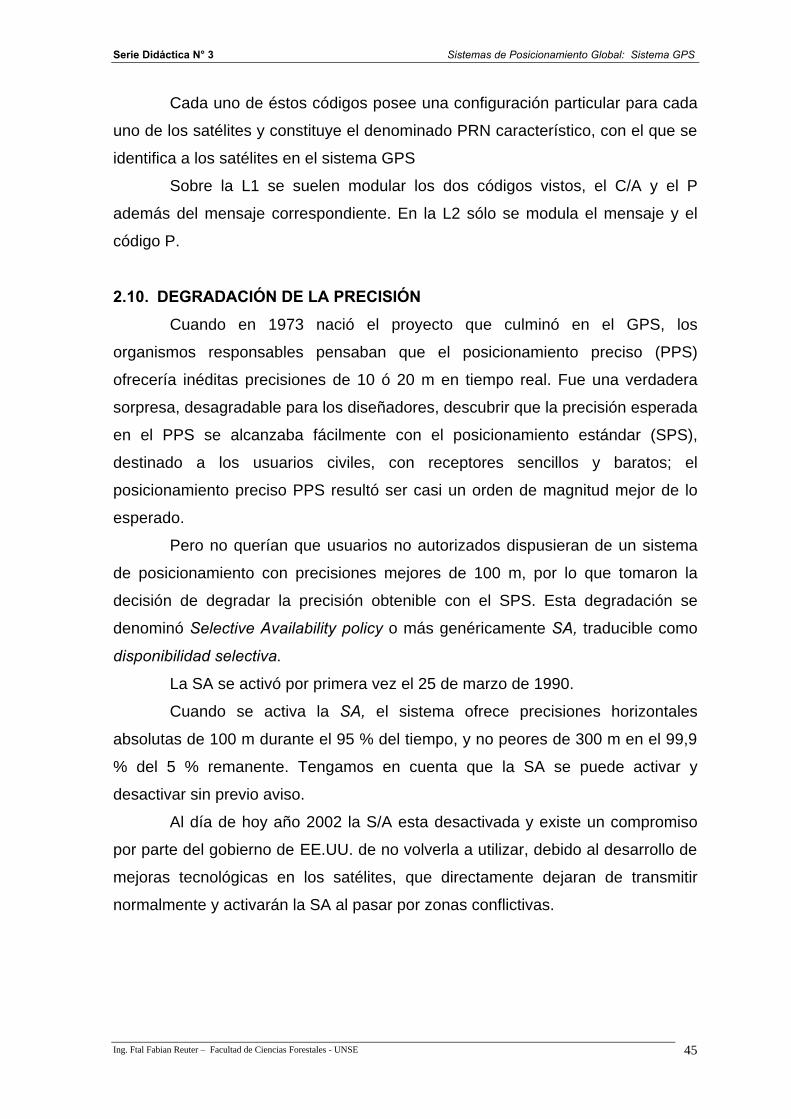
Serie Didáctica N° 3 Sistemas de Posicionamiento Global: Sistema GPS
Ing. Ftal Fabian Reuter – Facultad de Ciencias Forestales - UNSE 45
Cada uno de éstos códigos posee una configuración particular para cada
uno de los satélites y constituye el denominado PRN característico, con el que se
identifica a los satélites en el sistema GPS
Sobre la L1 se suelen modular los dos códigos vistos, el C/A y el P
además del mensaje correspondiente. En la L2 sólo se modula el mensaje y el
código P.
2.10. DEGRADACIÓN DE LA PRECISIÓN
Cuando en 1973 nació el proyecto que culminó en el GPS, los
organismos responsables pensaban que el posicionamiento preciso (PPS)
ofrecería inéditas precisiones de 10 ó 20 m en tiempo real. Fue una verdadera
sorpresa, desagradable para los diseñadores, descubrir que la precisión esperada
en el PPS se alcanzaba fácilmente con el posicionamiento estándar (SPS),
destinado a los usuarios civiles, con receptores sencillos y baratos; el
posicionamiento preciso PPS resultó ser casi un orden de magnitud mejor de lo
esperado.
Pero no querían que usuarios no autorizados dispusieran de un sistema
de posicionamiento con precisiones mejores de 100 m, por lo que tomaron la
decisión de degradar la precisión obtenible con el SPS. Esta degradación se
denominó Selective Availability policy o más genéricamente SA, traducible como
disponibilidad selectiva.
La SA se activó por primera vez el 25 de marzo de 1990.
Cuando se activa la SA, el sistema ofrece precisiones horizontales
absolutas de 100 m durante el 95 % del tiempo, y no peores de 300 m en el 99,9
% del 5 % remanente. Tengamos en cuenta que la SA se puede activar y
desactivar sin previo aviso.
Al día de hoy año 2002 la S/A esta desactivada y existe un compromiso
por parte del gobierno de EE.UU. de no volverla a utilizar, debido al desarrollo de
mejoras tecnológicas en los satélites, que directamente dejaran de transmitir
normalmente y activarán la SA al pasar por zonas conflictivas.
Serie Didáctica N° 3 Sistemas de Posicionamiento Global: Sistema GPS
Ing. Ftal Fabian Reuter – Facultad de Ciencias Forestales - UNSE 46
Figura 26: Desvíos en posición X, Y antes y después de desactivar la S/A
Existen básicamente dos métodos de degradación de la precisión,
introducidos por las señales transmitidas por los satélites e impuestos por el DoD:
• S/A (“Selective Availability" - Disponibilidad Selectiva)
• A/S ("Anti- Spoofing" - Antifraude)
2.10.1. S/A - Disponibilidad Selectiva
Los satélites del Bloque II fueron equipados con dispositivos que
posibilitan la variación de frecuencia del oscilador que genera el Código C/A.
Existen dos formas de hacer efectivo la S/A:
1) la primera es la variación directa de la frecuencia generadora del
Código C/A por el oscilador de a bordo, lo cual, causa una imprecisión en la
medida de la seudo-distancia, entre la antena del receptor y el satélite, y se refleja
en la precisión de la coordenada calculada por el receptor. Esta variación de
frecuencia causada por el oscilador, es seudo-aleatoria, de tal manera que, el
cómputo de medias disminuye, pero no elimina el error.
2) la segunda es la introducción en el "buffer" del satélite, de efemérides
erradas. De esta forma, el satélite Informa vía Código D, su posición con un error,
lo cual se refleja en la imprecisión de la coordenada calculada por el receptor.
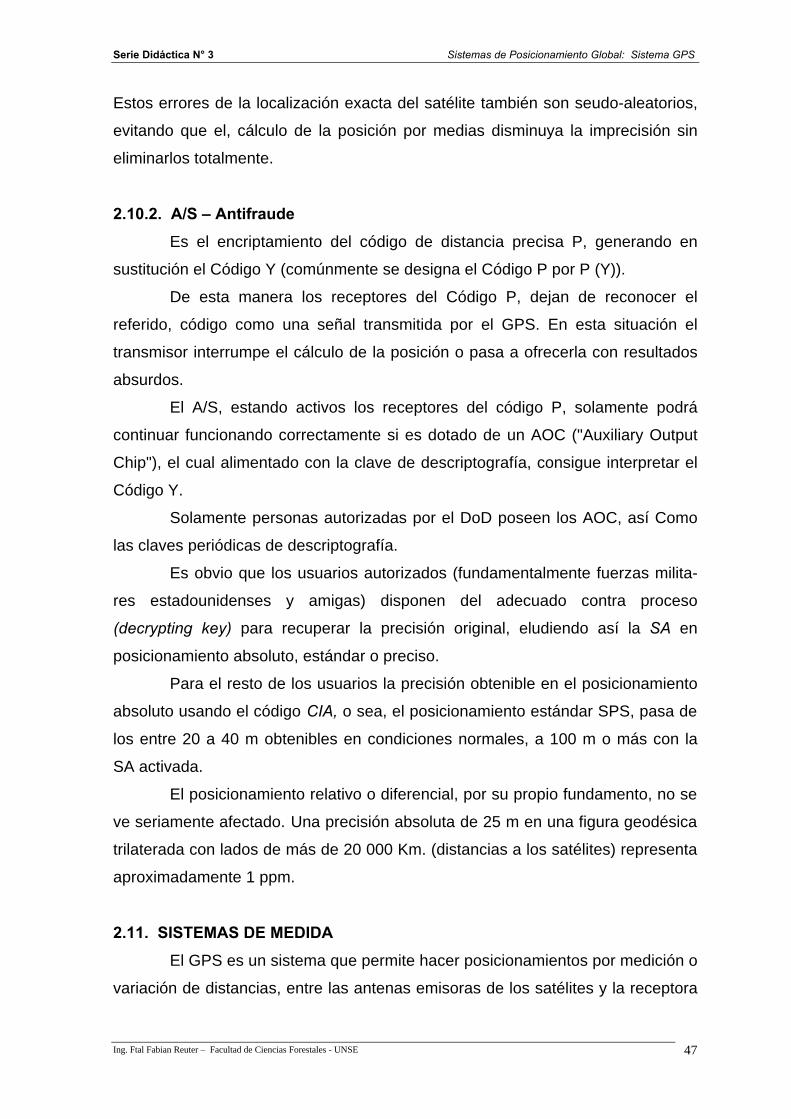
Serie Didáctica N° 3 Sistemas de Posicionamiento Global: Sistema GPS
Ing. Ftal Fabian Reuter – Facultad de Ciencias Forestales - UNSE 47
Estos errores de la localización exacta del satélite también son seudo-aleatorios,
evitando que el, cálculo de la posición por medias disminuya la imprecisión sin
eliminarlos totalmente.
2.10.2. A/S – Antifraude
Es el encriptamiento del código de distancia precisa P, generando en
sustitución el Código Y (comúnmente se designa el Código P por P (Y)).
De esta manera los receptores del Código P, dejan de reconocer el
referido, código como una señal transmitida por el GPS. En esta situación el
transmisor interrumpe el cálculo de la posición o pasa a ofrecerla con resultados
absurdos.
El A/S, estando activos los receptores del código P, solamente podrá
continuar funcionando correctamente si es dotado de un AOC ("Auxiliary Output
Chip"), el cual alimentado con la clave de descriptografía, consigue interpretar el
Código Y.
Solamente personas autorizadas por el DoD poseen los AOC, así Como
las claves periódicas de descriptografía.
Es obvio que los usuarios autorizados (fundamentalmente fuerzas milita-
res estadounidenses y amigas) disponen del adecuado contra proceso
(decrypting key) para recuperar la precisión original, eludiendo así la SA en
posicionamiento absoluto, estándar o preciso.
Para el resto de los usuarios la precisión obtenible en el posicionamiento
absoluto usando el código CIA, o sea, el posicionamiento estándar SPS, pasa de
los entre 20 a 40 m obtenibles en condiciones normales, a 100 m o más con la
SA activada.
El posicionamiento relativo o diferencial, por su propio fundamento, no se
ve seriamente afectado. Una precisión absoluta de 25 m en una figura geodésica
trilaterada con lados de más de 20 000 Km. (distancias a los satélites) representa
aproximadamente 1 ppm.
2.11. SISTEMAS DE MEDIDA
El GPS es un sistema que permite hacer posicionamientos por medición o
variación de distancias, entre las antenas emisoras de los satélites y la receptora
Serie Didáctica N° 3 Sistemas de Posicionamiento Global: Sistema GPS
Ing. Ftal Fabian Reuter – Facultad de Ciencias Forestales - UNSE 48
del equipo. Existen dos posibilidades principales de funcionamiento, mediante
Pseudodistancias o por medidas de fase.
2.11.1. Pseudodistancia
El método de Pseudodistancias es propio de la técnica GPS. Se trata de
una auténtica trilateración tridimensional, que sitúa a la estación de observación,
en la intersección de las esferas con centro en el satélite y radio correspondiente
a la distancia entre las antenas de los satélites y el receptor, medida por este.
La pseudodistancia se podría definir como el desplazamiento temporal
necesario para correlar una réplica del código GPS, generado en el receptor, con
la señal procedente del satélite y multiplicado por la velocidad de la luz.
El satélite emite uno de los códigos, el receptor tiene en su memoria la
estructura de dicho código y genera una réplica exacta, modulando la señal
recibida con la réplica inversa del código.
NAVSTAR GPS es un sistema de medición de distancias de vía única, lo
cual significa que las señales son transmitidas solamente por satélite. La
observación fundamental, es el tiempo de propagación de señal entre la antena
del satélite y la antena receptora.
Se denomina distanciometría de vía única a la comparación entre la
lectura del reloj de la antena transmisora y la lectura del reloj de la antena del
receptor.
Figura 27: Señales GPS
Serie Didáctica N° 3 Sistemas de Posicionamiento Global: Sistema GPS
Ing. Ftal Fabian Reuter – Facultad de Ciencias Forestales - UNSE 49
Si ambos códigos están precisamente sincronizados, el código
desaparecerá dejando a la portadora limpia. Para sincronizar la réplica con el
original recibido, el instrumento empieza a aplicar un retardo hasta que la
anulación se produce. El tiempo del retardo nos permite calcular una distancia
que no será precisamente la existente, ya que no conocemos el estado del reloj
del receptor.
Por lo general no se puede asumir que los dos relojes se hallen
exactamente sincronizados. El tiempo de propagación de señal observado incluye
por lo tanto un error sistemático de sincronización (Bias de tiempo). Distancias
con este error sistemático (bias) se llaman también seudo distancias
(pseudoranges). Por lo consiguiente, se puede considerar como principio
fundamental de observación del sistema GPS, la determinación de seudo
distancias.
La precisión de posicionamiento que nos ofrece este método es de
aproximadamente un 1% del periodo entre sucesivas épocas de un código. Así
para el código P, cuyas épocas son de 0,1 microsegundo (por lo que la precisión
de medida será de 1 nanosegundo), al multiplicar dicho factor por la velocidad de
la luz, obtendremos una precisión de distancia de 30 cm. en tiempo real. Para el
código C/A, cuya precisión es diez veces menor a la del código P, obtendremos
unos errores de unos 3 m.
2.11.2. Medidas de fase.
El método de medidas de fase es el que permite obtener mayor precisión.
Su fundamento es el siguiente: partiendo de una frecuencia de referencia
obtenida del oscilador que controla el receptor, se compara con la portadora
demodulada que se ha conseguido tras la correlación, controlándose así, en fase,
la emisión radioeléctrica realizada desde el satélite con frecuencia y posición
conocidas. Cuando esta emisión llega a la antena, su recorrido corresponde a un
número entero de longitudes de onda (denominado N o ambigüedad) mas una
cierta parte de longitud de onda cuyo observable (o momento exacto de recepción
por parte de la antena) puede variar entre 0 y 360º . Tenemos pues, una
frecuencia y cierta parte de la longitud de onda conocidas, y la ambigüedad
(Número entero de las longitudes de onda) por conocer. La resolución de la
ambigüedad se realiza en base a un extenso proceso de cálculo, que además nos
Serie Didáctica N° 3 Sistemas de Posicionamiento Global: Sistema GPS
Ing. Ftal Fabian Reuter – Facultad de Ciencias Forestales - UNSE 50
resolverá el estado de los relojes y por supuesto los incrementos de coordenadas
entre estaciones. Una vez obtenidos dichos valores, la resolución interna que nos
proporcione el sistema, será de orden submilimétrico, aunque diversas fuentes de
error limiten la precisión operativa a centímetros, siempre en función de las
técnicas de observación empleadas.
Debe destacarse que es fundamental en el sistema no perder el
seguimiento de la fase para que la ambigüedad inicial no pueda variar. Si hay
alguna pérdida de recepción por cualquier causa, la cuenta de ciclos se rompe
(Cicle Slip), perdiendo este método toda su eficacia. Esta pérdida de ciclos puede
ocurrir por muchas causas desde el paso de un avión, disturbios ionosféricos, u
obstrucciones físicas importantes (edificios, etc.). Podremos comprender,
entonces, la dificultad de trabajar en zonas próximas a arbolados, tendidos
eléctricos, torres, edificios, etc., limitando las aplicaciones de éste método en
tiempo real.
2.12. MÉTODOS DE POSICIONAMIENTO
2.13. MÉTODO ABSOLUTO
Como fue señalado, el método de posicionamiento absoluto se obtiene a
partir de los códigos de pseudo-distancia ("Ranging Codes") C/A y P. Estos
códigos binarios son transmitidos por los satélites y también generados en el
receptor, para posteriormente ser comparados.
Como estos códigos son transmitidos por ondas electromagnéticas y
estas viajan aproximadamente a la velocidad de la luz (c), entonces es posible
medir la distancia (instantánea) entre el satélite y la antena del rastreador a partir
de la simple ecuación de movimiento: de esta manera, se puede medir fácilmente
la distancia entre los satélites rastreados y la antena del receptor, además se
presupone que exista sincronismo entre el reloj del satélite y el reloj del receptor.
2.14. MÉTODO DIFERENCIAL
El método de Posicionamiento Diferencial, es aquel en que las posiciones
absolutas obtenidas por un receptor móvil, son corregidas por un otro receptor
fijo, estacionado en un punto de coordenadas de referencia. En este proceso, son
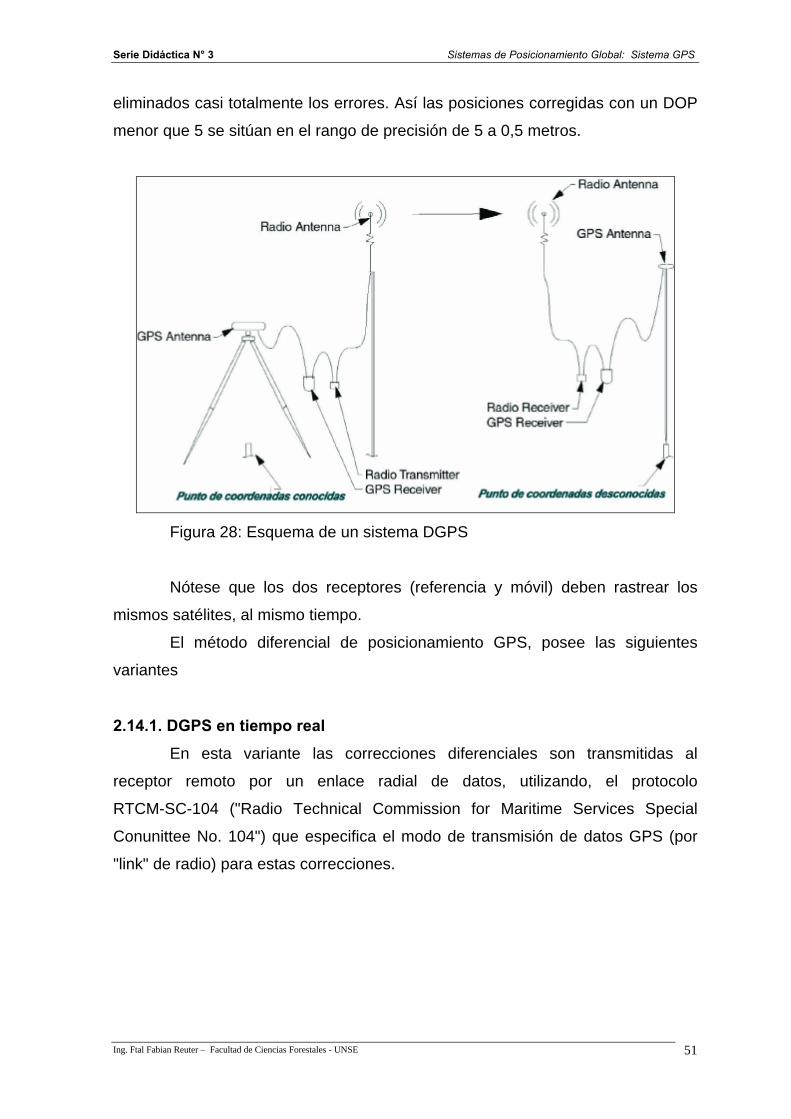
Serie Didáctica N° 3 Sistemas de Posicionamiento Global: Sistema GPS
Ing. Ftal Fabian Reuter – Facultad de Ciencias Forestales - UNSE 51
eliminados casi totalmente los errores. Así las posiciones corregidas con un DOP
menor que 5 se sitúan en el rango de precisión de 5 a 0,5 metros.
Figura 28: Esquema de un sistema DGPS
Nótese que los dos receptores (referencia y móvil) deben rastrear los
mismos satélites, al mismo tiempo.
El método diferencial de posicionamiento GPS, posee las siguientes
variantes
2.14.1. DGPS en tiempo real
En esta variante las correcciones diferenciales son transmitidas al
receptor remoto por un enlace radial de datos, utilizando, el protocolo
RTCM-SC-104 ("Radio Technical Commission for Maritime Services Special
Conunittee No. 104") que especifica el modo de transmisión de datos GPS (por
"link" de radio) para estas correcciones.
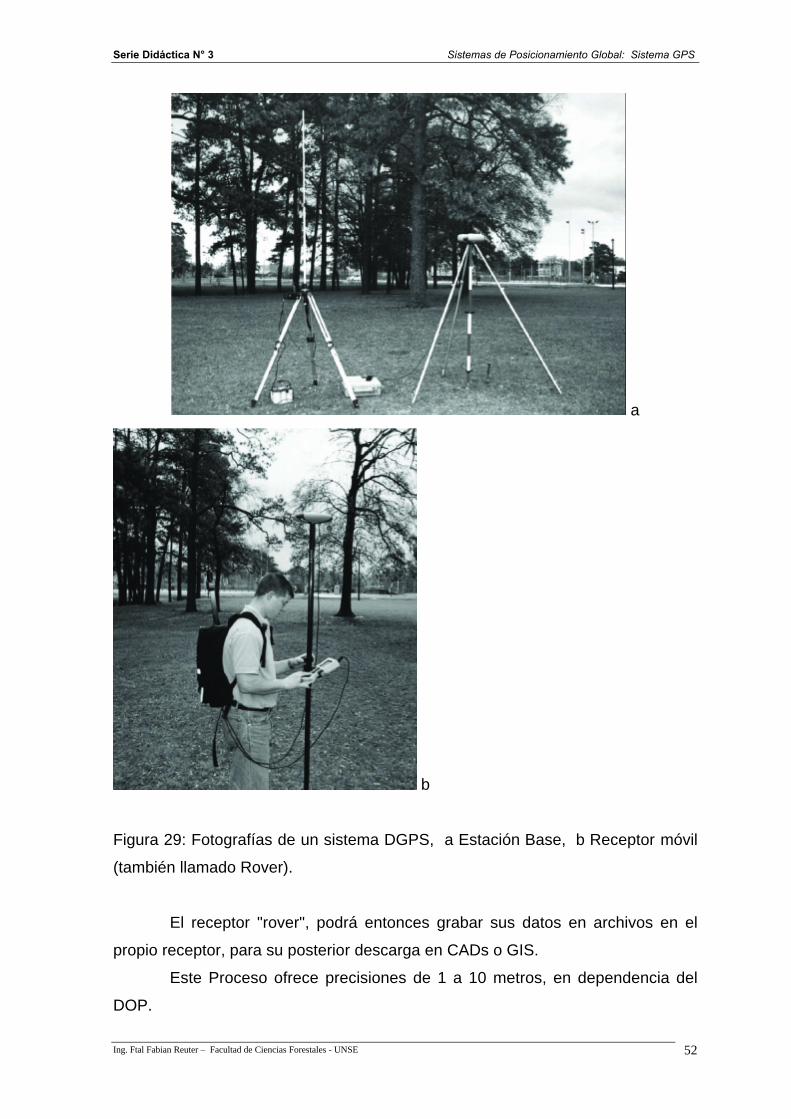
Serie Didáctica N° 3 Sistemas de Posicionamiento Global: Sistema GPS
Ing. Ftal Fabian Reuter – Facultad de Ciencias Forestales - UNSE 52
a
b
Figura 29: Fotografías de un sistema DGPS, a Estación Base, b Receptor móvil
(también llamado Rover).
El receptor "rover", podrá entonces grabar sus datos en archivos en el
propio receptor, para su posterior descarga en CADs o GIS.
Este Proceso ofrece precisiones de 1 a 10 metros, en dependencia del
DOP.
Serie Didáctica N° 3 Sistemas de Posicionamiento Global: Sistema GPS
Ing. Ftal Fabian Reuter – Facultad de Ciencias Forestales - UNSE 53
2.14.2. DGPS Post-procesado
En esta variante no existe enlace de radio entre los receptores fijo y móvil.
La corrección diferencial se hace posteriormente con los datos descargados de
los receptores y procesados por un software propio. La gran ventaja de este
proceso en relación al anterior es que el usuario tiene un control total sobre los
puntos que están sufriendo corrección diferencial, a través de filtros como el
número DOP del "rover", desviación típica de las pseudo - distancias medidas por
el receptor remoto, intensidad de la señal de determinado satélite (evitando
ruidos). El usuario puede además eliminar uno u otro punto, o un grupo de
elementos Registrados, por no satisfacer la precisión del proyecto en que se esta
trabajando. La otra gran ventaja es con respecto a los costos. El DGPS
postprocesado no necesita del "link" de radio, ya cual es una gran ventaja cuando
las distancias son muy grandes, ya que el costo de un Transmisor - receptor es
mayor que el costo del propio receptor GPS.
2.14.3. DGPS de Campo
Esta tercera variante del DGPS es una alternativa para quien posee solo
receptores absolutos. La precisión oscila entre los 15 y 10 metros y es ejecutado
de la siguiente manera:
o Se estaciona un receptor absoluto en un punto de coordenadas
conocidas.
o Se combinan las horas minutos y segundos (las correcciones
diferenciales varían a cada 15 segundos) en los cuales se grabarán
los puntos, tanto en el receptor fijo, cuanto en el móvil (debe ser el
mismo horario para ambos).
o Después de la operación de campo, para cada punto grabado en la
base se calculan las diferencias simples Ap, Ak y AH, para cada
horario combinado.
o Se verifica si los satélites recibidos por el receptor base fueron los
mismos para el receptor "rover" en cada horario que los puntos
fueron grabados (esta información es coman entre todos los
receptores, en la grabación de coordenadas de puntos grabados y
nominados).
Serie Didáctica N° 3 Sistemas de Posicionamiento Global: Sistema GPS
Ing. Ftal Fabian Reuter – Facultad de Ciencias Forestales - UNSE 54
o Se eliminan entonces los puntos que no satisfacen la condición
anterior.
o Para el resto de los puntos se aplican entonces las diferencias
calculadas para cada punto/horario.
2.15. MÉTODO RELATIVO INTERFEROMÉTRICO
Hasta el momento se describió el posicionamiento GPS utilizando los
códigos de pseudo-distancia C/A y P como elementos para el cálculo de las
distancias receptor - satélite capaz de resolver las ecuaciones de trilateración
espacial.
El Método Relativo Interferométrico es por amplio margen el mas preciso
de todas las técnicas de geoposicionamiento GPS. Se basa en la medida de las
distancias receptor satélite, no por la comparación de los "ranging-codes", sino
por el cúmulo de las distancias a través de la propia onda portadora mediante
procesos interferométricos.
Los cálculos interferométricos se basan en las diferencias de fase de
portadoras L1 y L2, dejando el satélite y llegando a la antena del receptor.
Modelando estas diferencias de fase se calcula el número entero de
longitudes de onda entre el receptor y el satélite, conocido como "ambigüedad
entera". Calculando las ambigüedades para cada satélite, basta multiplicar estos
enteros por la longitud de onda X, de cada portadora, sumándose a continuación
las diferencias de fase, para obtener entonces no las pseudo-distancias, sino la
verdadera distancia entre el receptor y el satélite, para cada instante.
2.16. PRINCIPIOS DE FUNCIONAMIENTO
Aunque pueda parecer improbable, la idea general detrás del GPS es
utilizar los satélites en el espacio como puntos de referencia para posicionarnos
aquí en la tierra.
Esto se logra mediante una muy exacta, medición de nuestra distancia
hacia al menos tres satélites, lo que nos permite "triangular" nuestra posición en
cualquier parte de la tierra.
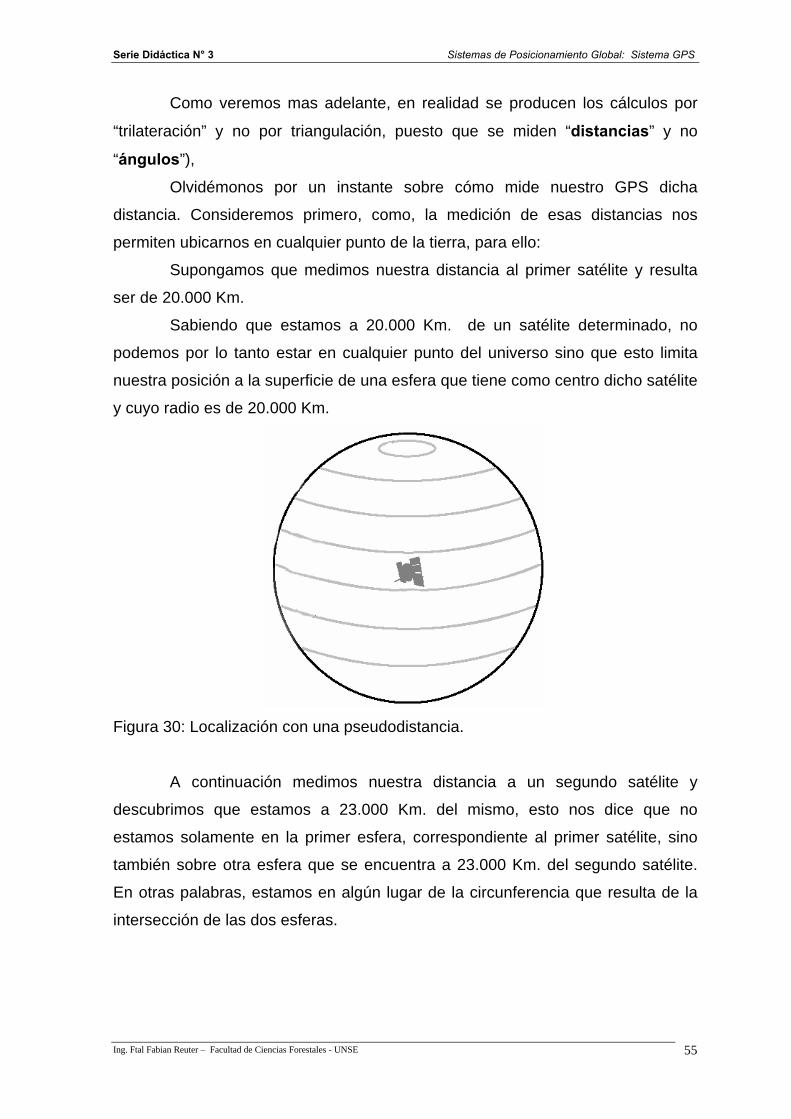
Serie Didáctica N° 3 Sistemas de Posicionamiento Global: Sistema GPS
Ing. Ftal Fabian Reuter – Facultad de Ciencias Forestales - UNSE 55
Como veremos mas adelante, en realidad se producen los cálculos por
“trilateración” y no por triangulación, puesto que se miden “distancias” y no
“ángulos”),
Olvidémonos por un instante sobre cómo mide nuestro GPS dicha
distancia. Consideremos primero, como, la medición de esas distancias nos
permiten ubicarnos en cualquier punto de la tierra, para ello:
Supongamos que medimos nuestra distancia al primer satélite y resulta
ser de 20.000 Km.
Sabiendo que estamos a 20.000 Km. de un satélite determinado, no
podemos por lo tanto estar en cualquier punto del universo sino que esto limita
nuestra posición a la superficie de una esfera que tiene como centro dicho satélite
y cuyo radio es de 20.000 Km.
Figura 30: Localización con una pseudodistancia.
A continuación medimos nuestra distancia a un segundo satélite y
descubrimos que estamos a 23.000 Km. del mismo, esto nos dice que no
estamos solamente en la primer esfera, correspondiente al primer satélite, sino
también sobre otra esfera que se encuentra a 23.000 Km. del segundo satélite.
En otras palabras, estamos en algún lugar de la circunferencia que resulta de la
intersección de las dos esferas.
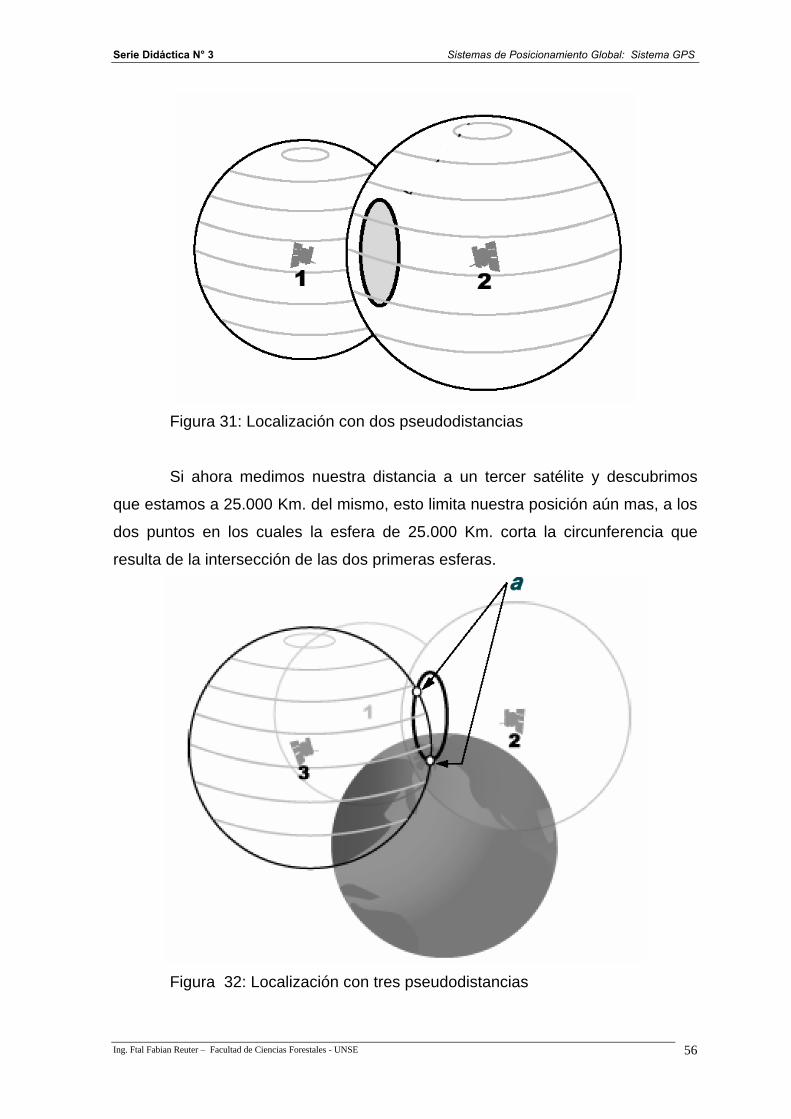
Serie Didáctica N° 3 Sistemas de Posicionamiento Global: Sistema GPS
Ing. Ftal Fabian Reuter – Facultad de Ciencias Forestales - UNSE 56
Figura 31: Localización con dos pseudodistancias
Si ahora medimos nuestra distancia a un tercer satélite y descubrimos
que estamos a 25.000 Km. del mismo, esto limita nuestra posición aún mas, a los
dos puntos en los cuales la esfera de 25.000 Km. corta la circunferencia que
resulta de la intersección de las dos primeras esferas.
Figura 32: Localización con tres pseudodistancias
Serie Didáctica N° 3 Sistemas de Posicionamiento Global: Sistema GPS
Ing. Ftal Fabian Reuter – Facultad de Ciencias Forestales - UNSE 57
O sea, que midiendo nuestra distancia a tres satélites limitamos nuestro
posicionamiento a solo dos puntos posibles. (Puntos “a” de la figura 32).
Para decidir cual de ellos es nuestra posición verdadera, podríamos
efectuar una nueva medición a un cuarto satélite. Pero normalmente uno de los
dos puntos posibles resulta ser muy improbable por su ubicación demasiado
lejana de la superficie terrestre y puede ser descartado sin necesidad de
mediciones posteriores.
El problema es que el método para estimar la distancia hasta un satélite
depende en extremo de la calidad de los relojes empleados para medir el tiempo.
Los factores que afectan a la medida de la distancia son:
El desfase en el reloj del receptor (que suele ser de calidad media)
puede provocar un apreciable error de distancia.
Los errores en el reloj del satélite suelen ser despreciables, pero
también hay que considerarlos.
La propagación a través de la atmósfera produce un retardo variable
debido a que la refracción que provoca varía de forma poco predecible.
Por estas razones lo que un receptor mide a partir de las señales
recibidas son pseudodistancias, en las que se incluye un error provocado por las
derivas de reloj del usuario, los retardos variables de la ionosfera, etc.
Para el receptor hay 4 incógnitas a resolver: las tres coordenadas de su
posición, y la diferencia entre su reloj local y el tiempo universal GPS.
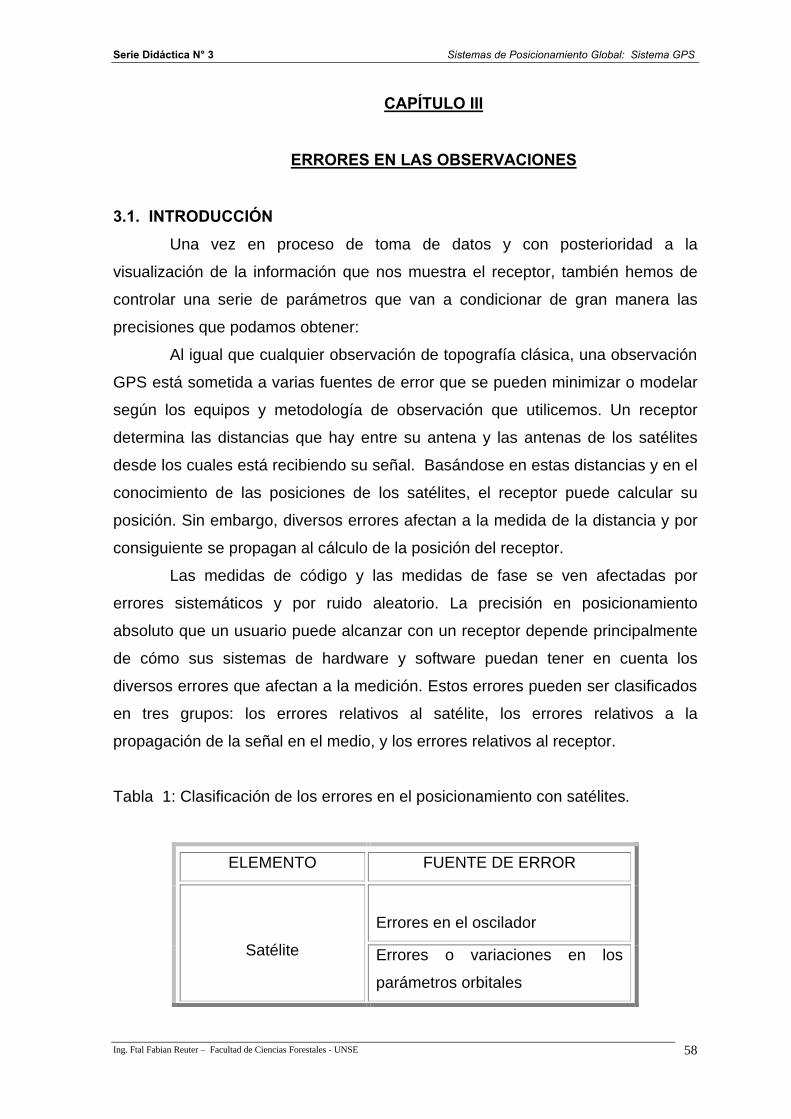
Serie Didáctica N° 3 Sistemas de Posicionamiento Global: Sistema GPS
Ing. Ftal Fabian Reuter – Facultad de Ciencias Forestales - UNSE 58
CAPÍTULO III
ERRORES EN LAS OBSERVACIONES
3.1. INTRODUCCIÓN
Una vez en proceso de toma de datos y con posterioridad a la
visualización de la información que nos muestra el receptor, también hemos de
controlar una serie de parámetros que van a condicionar de gran manera las
precisiones que podamos obtener:
Al igual que cualquier observación de topografía clásica, una observación
GPS está sometida a varias fuentes de error que se pueden minimizar o modelar
según los equipos y metodología de observación que utilicemos. Un receptor
determina las distancias que hay entre su antena y las antenas de los satélites
desde los cuales está recibiendo su señal. Basándose en estas distancias y en el
conocimiento de las posiciones de los satélites, el receptor puede calcular su
posición. Sin embargo, diversos errores afectan a la medida de la distancia y por
consiguiente se propagan al cálculo de la posición del receptor.
Las medidas de código y las medidas de fase se ven afectadas por
errores sistemáticos y por ruido aleatorio. La precisión en posicionamiento
absoluto que un usuario puede alcanzar con un receptor depende principalmente
de cómo sus sistemas de hardware y software puedan tener en cuenta los
diversos errores que afectan a la medición. Estos errores pueden ser clasificados
en tres grupos: los errores relativos al satélite, los errores relativos a la
propagación de la señal en el medio, y los errores relativos al receptor.
Tabla 1: Clasificación de los errores en el posicionamiento con satélites.
ELEMENTO FUENTE DE ERROR
Errores en el oscilador
Satélite
Errores o variaciones en los
parámetros orbitales
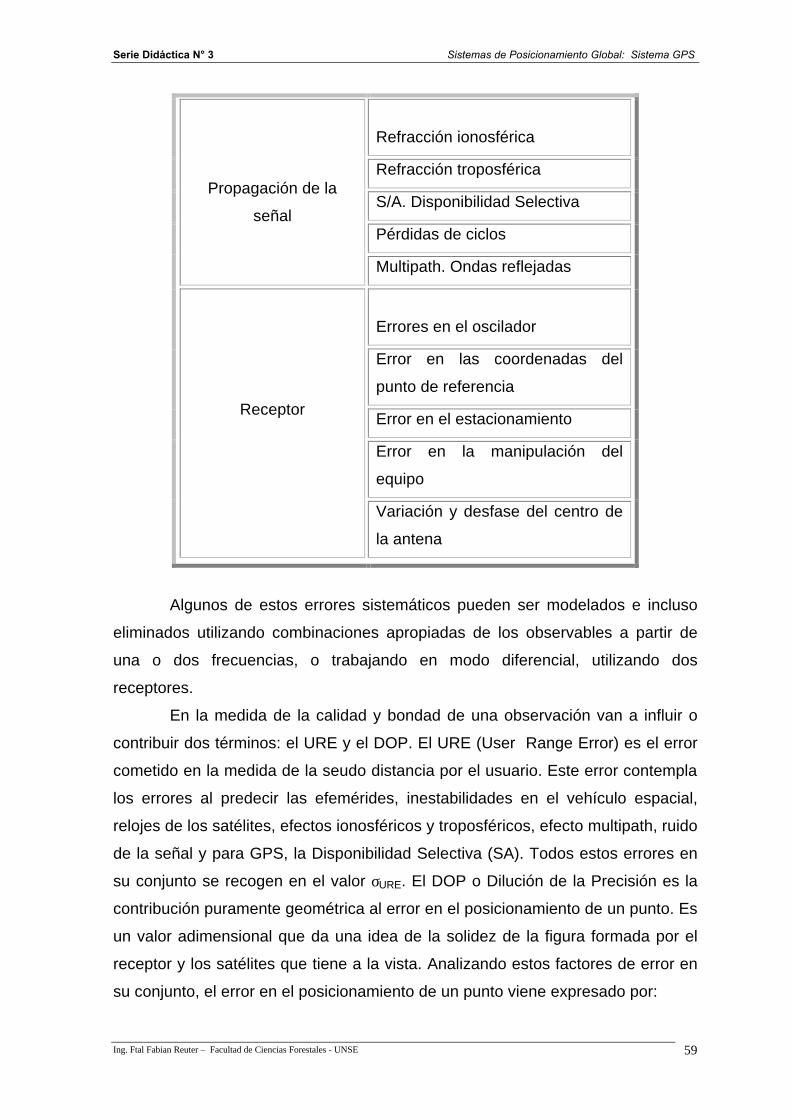
Serie Didáctica N° 3 Sistemas de Posicionamiento Global: Sistema GPS
Ing. Ftal Fabian Reuter – Facultad de Ciencias Forestales - UNSE 59
Refracción ionosférica
Refracción troposférica
S/A. Disponibilidad Selectiva
Pérdidas de ciclos
Propagación de la
señal
Multipath. Ondas reflejadas
Errores en el oscilador
Error en las coordenadas del
punto de referencia
Error en el estacionamiento
Error en la manipulación del
equipo
Receptor
Variación y desfase del centro de
la antena
Algunos de estos errores sistemáticos pueden ser modelados e incluso
eliminados utilizando combinaciones apropiadas de los observables a partir de
una o dos frecuencias, o trabajando en modo diferencial, utilizando dos
receptores.
En la medida de la calidad y bondad de una observación van a influir o
contribuir dos términos: el URE y el DOP. El URE (User Range Error) es el error
cometido en la medida de la seudo distancia por el usuario. Este error contempla
los errores al predecir las efemérides, inestabilidades en el vehículo espacial,
relojes de los satélites, efectos ionosféricos y troposféricos, efecto multipath, ruido
de la señal y para GPS, la Disponibilidad Selectiva (SA). Todos estos errores en
su conjunto se recogen en el valor σURE. El DOP o Dilución de la Precisión es la
contribución puramente geométrica al error en el posicionamiento de un punto. Es
un valor adimensional que da una idea de la solidez de la figura formada por el
receptor y los satélites que tiene a la vista. Analizando estos factores de error en
su conjunto, el error en el posicionamiento de un punto viene expresado por:
Serie Didáctica N° 3 Sistemas de Posicionamiento Global: Sistema GPS
Ing. Ftal Fabian Reuter – Facultad de Ciencias Forestales - UNSE 60
Error rms de posición = σURE · DOP
3.2. ERRORES RELATIVOS AL SATÉLITE
3.2.1. Error del reloj del satélite
La sincronización de los relojes y la de las frecuencias del sistema GPS
se realizan desde el Segmento Terrestre del sistema. Todas las frecuencias de
los satélites están sincronizadas con los relojes de los satélites, y la mayor
desviación diaria permitida de la frecuencia de reloj es de 10-12 MHz (o lo que es
lo mismo: una millonésima de Hz.). Dada la extrema exactitud precisada, como
citamos anteriormente, hay que considerar los efectos relativistas provocados por
la gran velocidad de los satélites y por la diferente gravedad existente a 20169
Km. de la Tierra.
Este error es el desfase que tiene el reloj del satélite respeto al Tiempo.
Los satélites llevan relojes atómicos con osciladores de cesio y de rubidio, sin
embargo ningún reloj, incluso el atómico es perfecto.
Los errores en los osciladores de los satélites pueden eliminarse
mediante las correcciones enviadas en el mensaje de navegación que recibe el
receptor, y que son calculadas y actualizadas por las estaciones de seguimiento.
Para cada reloj de satélite se determina su desfase para una época
inicial, y los coeficientes de la marcha o deriva del estado del reloj. Estos
parámetros se graban en el correspondiente satélite y se incluyen en el mensaje
de navegación que manda el satélite. Pero aunque el receptor aplique las
correcciones para el error del reloj del satélite, sigue permaneciendo un pequeño
error residual estimado en unos 10 nanosegundos o menos, y que es debido a la
imposibilidad de predecir exactamente la marcha del estado del reloj del satélite.
3.2.2. Errores en los parámetros orbitales
Para calcular su posición, el receptor debe conocer las posiciones de los
satélites. Las estaciones de seguimiento registran datos de seudo distancia y
medidas de fase que mandan a la Estación de Control principal, donde con un
sofisticado software se predicen las futuras posiciones orbitales de los satélites,
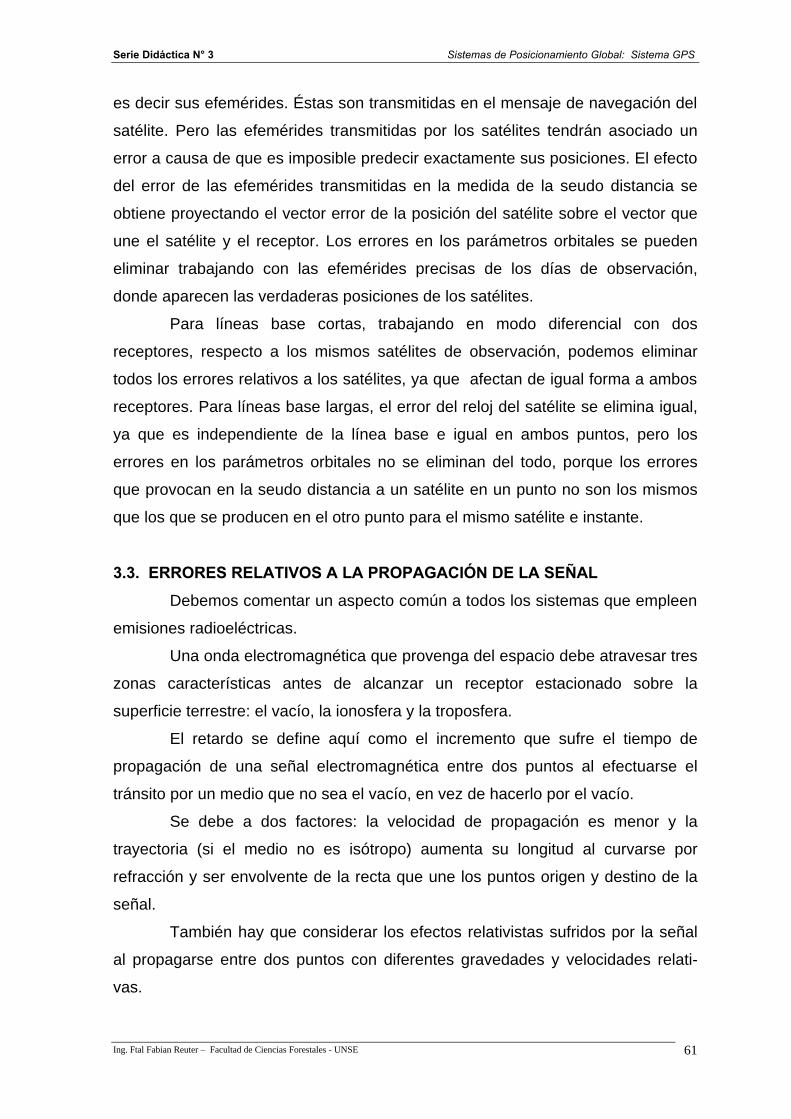
Serie Didáctica N° 3 Sistemas de Posicionamiento Global: Sistema GPS
Ing. Ftal Fabian Reuter – Facultad de Ciencias Forestales - UNSE 61
es decir sus efemérides. Éstas son transmitidas en el mensaje de navegación del
satélite. Pero las efemérides transmitidas por los satélites tendrán asociado un
error a causa de que es imposible predecir exactamente sus posiciones. El efecto
del error de las efemérides transmitidas en la medida de la seudo distancia se
obtiene proyectando el vector error de la posición del satélite sobre el vector que
une el satélite y el receptor. Los errores en los parámetros orbitales se pueden
eliminar trabajando con las efemérides precisas de los días de observación,
donde aparecen las verdaderas posiciones de los satélites.
Para líneas base cortas, trabajando en modo diferencial con dos
receptores, respecto a los mismos satélites de observación, podemos eliminar
todos los errores relativos a los satélites, ya que afectan de igual forma a ambos
receptores. Para líneas base largas, el error del reloj del satélite se elimina igual,
ya que es independiente de la línea base e igual en ambos puntos, pero los
errores en los parámetros orbitales no se eliminan del todo, porque los errores
que provocan en la seudo distancia a un satélite en un punto no son los mismos
que los que se producen en el otro punto para el mismo satélite e instante.
3.3. ERRORES RELATIVOS A LA PROPAGACIÓN DE LA SEÑAL
Debemos comentar un aspecto común a todos los sistemas que empleen
emisiones radioeléctricas.
Una onda electromagnética que provenga del espacio debe atravesar tres
zonas características antes de alcanzar un receptor estacionado sobre la
superficie terrestre: el vacío, la ionosfera y la troposfera.
El retardo se define aquí como el incremento que sufre el tiempo de
propagación de una señal electromagnética entre dos puntos al efectuarse el
tránsito por un medio que no sea el vacío, en vez de hacerlo por el vacío.
Se debe a dos factores: la velocidad de propagación es menor y la
trayectoria (si el medio no es isótropo) aumenta su longitud al curvarse por
refracción y ser envolvente de la recta que une los puntos origen y destino de la
señal.
También hay que considerar los efectos relativistas sufridos por la señal
al propagarse entre dos puntos con diferentes gravedades y velocidades relati-
vas.
Serie Didáctica N° 3 Sistemas de Posicionamiento Global: Sistema GPS
Ing. Ftal Fabian Reuter – Facultad de Ciencias Forestales - UNSE 62
Figura 33: Representación esquemática de la influencia atmosférica en las
señales provenientes de los satélites GPS.
La velocidad de propagación de la señal es crítica para cualquier sistema
de medida de distancias. Esta velocidad multiplicada por el intervalo de tiempo en
que se propagó la señal nos da una medida de la distancia. Si una onda
electromagnética se propaga por el vacío, su velocidad de propagación, sea cual
sea su frecuencia es la velocidad de la luz (c). Sin embargo, en el caso de
observaciones GPS o GLONASS, las señales deben atravesar las capas de la
atmósfera hasta llegar al receptor posicionado sobre la superficie de la tierra. Las
señales interaccionan con partículas cargadas, que provocan un cambio en la
velocidad y dirección de propagación, es decir, las señales son refractadas.
3.3.1. Refracción ionosférica.
Una de las principales causas de error es la refracción provocada por la
ionosfera y la troposfera. Las diferencias de tiempo son variables y poco
previsibles, y pueden ser tan costosas en distancia como 100 metros (con un
valor s de 20-30 metros de día y 3-6 metros de noche), pero si se utilizan dos
frecuencias distintas se puede estimar el efecto real
La Ionosfera es aquella región de la atmósfera comprendida entre 100 y
1000 Km. de altitud, donde las radiaciones solares y otras radiaciones ionizan una
porción de las moléculas gaseosas liberando electrones, que interfieren en la
propagación de ondas de radio.
Serie Didáctica N° 3 Sistemas de Posicionamiento Global: Sistema GPS
Ing. Ftal Fabian Reuter – Facultad de Ciencias Forestales - UNSE 63
La Ionosfera es un medio disperso para ondas de radio, por lo tanto su
índice de refracción es función de la frecuencia de la onda. También es función
de la densidad de electrones, y en menor grado, de la intensidad del campo
magnético de la tierra.
Este error es negativo para la medida de fase (se produce un avance de
la portadora y se miden distancias más pequeñas), y positivo para las seudo
distancias (se produce un retardo y se miden distancias más largas), pero tienen
el mismo valor absoluto.
El error es proporcional a la densidad de electrones (TEC-Total Electron
Content) a lo largo del camino seguido por la señal, y está en función del
cuadrado de la longitud de la onda (inversamente proporcional al cuadrado de la
frecuencia de la portadora). Este error varía espacial y temporalmente, es decir,
para cada punto según su latitud y longitud, y momento de la observación. Se
pueden utilizar modelos ionosféricos, que establecen la distribución del TEC, pero
estas concentraciones de electrones son irregulares y poco predecibles, por lo
que cualquier modelo ionosférico es sólo una aproximación. El TEC es función del
cambio constante en la ionización solar, de la actividad magnética, de los ciclos
de las manchas solares, hora del día, lugar de observación, y dirección del
camino de la señal.
Debido a la dificultad de encontrar un modelo satisfactorio, se emplea un
método más eficiente para eliminar la refracción ionosférica que es la utilización
de dos señales con diferentes frecuencias. Como el retardo depende de la
longitud de la onda, será distinto para cada frecuencia y podremos observar un
retardo diferencial entre ambas, que será mayor cuanto mayor sea el retardo
ionosférico sufrido, siendo por tanto este deducible.
También se pueden utilizar combinaciones de las observables que por su
naturaleza estén libres del efecto ionosférico. Tal es el caso de la combinación de
fases llamada “combinación libre de efecto ionosférico”, lo que se pretende es
obtener coeficientes para que los valores del efecto ionosférico que sufren
ambas portadoras sea eliminado.
La eliminación de la refracción ionosférica es la mayor ventaja de la
combinación lineal libre de efecto ionosférico, pero el término libre de efecto
ionosférico no es del todo correcto, ya que para su obtención hay que considerar
algunas aproximaciones.
Serie Didáctica N° 3 Sistemas de Posicionamiento Global: Sistema GPS
Ing. Ftal Fabian Reuter – Facultad de Ciencias Forestales - UNSE 64
Si sólo se registran medidas en una sola frecuencia, tanto en seudo
distancias como en medida de fase, entonces se tiene que emplear un
procedimiento alternativo para eliminar el efecto ionosférico. Normalmente se
usan modelos empíricos para corregir el efecto, en los que se modela el TEC en
función del tiempo, lugar de observación y dirección de la señal. En el mensaje de
navegación se incluyen unos parámetros para tal modelo. Usando este modelo se
pueden llegar a reducir en un 50% los efectos de la Ionosfera.
El retardo ionosférico depende del ángulo de elevación del satélite,
siendo menor en el cenit, y mayor cuando disminuye el ángulo de elevación. En
observaciones nocturnas, los niveles de TEC son menores que durante el día, lo
que implica un menor error en la seudo distancia.
Pero después de la aplicación del modelo empírico transmitido puede
quedar algún error ionosférico residual que afectará principalmente a la
componente altimétrica del punto y a la estimación del error del reloj del receptor.
Este error contribuye poco a la posición planimétrica cuando la
concentración de electrones encima del receptor es uniforme.
3.3.2. Refracción troposférica
La Troposfera es la última zona o capa de la atmósfera (hasta unos 80
Km., pero sólo en los últimos 40 se producen retardos significativos), donde se
produce retardo y donde las temperaturas decrecen con el incremento de altura.
El espesor de la Troposfera no es el mismo en todas las zonas. La
presencia de átomos y moléculas neutros en la Troposfera afecta a las señales
de propagación electromagnética.
La desventaja está en que no es posible eliminar la refracción troposférica
con medidas en las dos frecuencias.
Se puede mejorar el cálculo del retardo troposférico tomando datos
meteorológicos en el lugar de observación.
El gradiente térmico admite modelación con precisión aceptable, pero el
principal problema está en la forma de modelar el vapor de agua, que tiene una
irregular distribución. El simple uso de medidas meteorológicas en superficie no
puede dar la precisión alcanzable con los radiómetros de vapor de agua. Estos
instrumentos miden la radiación basal que se recibe desde el espacio en la
Serie Didáctica N° 3 Sistemas de Posicionamiento Global: Sistema GPS
Ing. Ftal Fabian Reuter – Facultad de Ciencias Forestales - UNSE 65
dirección de la observación, y son capaces de medir el contenido de vapor de
agua en la atmósfera.
El efecto del retardo ionosférico y el troposférico debido al vapor de agua
sobre las emisiones de la banda radioeléctrica es menor cuanto mayor sea la
frecuencia, o cuanto menor sea la longitud de la onda. La refracción ionosférica y
troposférica puede ser eliminada trabajando en modo diferencial, pero esto es
sólo cierto para líneas base pequeñas, donde las medidas de distancias satélite-
receptor se ven afectadas de igual forma por la refracción. De otro modo, ya
vimos que la refracción ionosférica puede ser eliminada utilizando una adecuada
combinación de datos en doble frecuencia.
3.3.3. Disponibilidad selectiva
Existen dos formas de hacer efectivo la S/A:
1) La primera es la variación directa de la frecuencia generadora del
Código C/A
2) La segunda es la introducción en el "buffer" del satélite, de
efemérides erradas.
La Disponibilidad Selectiva supone una alteración o manipulación de la
información que los satélites de la constelación GPS envían a los usuarios en su
mensaje de navegación, manipulación que realiza el Departamento de Defensa
de los Estados Unidos (DoD). Se actúa sobre los estados de los relojes y
parámetros orbitales. Trabajando con posicionamiento relativo o diferencial se
puede eliminar este error.
3.3.4. Pérdidas de ciclos
Las pérdidas de ciclos (cycle slips), suponen un salto en el registro de las
medidas de fase, producido por alguna interrupción o pérdida de la señal enviada
por el satélite. Estas pérdidas de ciclos pueden ser causadas por la obstrucción
de la señal del satélite debido a la presencia de árboles, edificios, puentes,
montañas, etc. Esta causa es la más frecuente, pero también pueden ser debidas
a una baja calidad señal-ruido, debido a unas malas condiciones ionosféricas,
efecto multipath, receptores en movimiento, o baja elevación del satélite. Otra
causa puede ser un fallo en el software del receptor, que conduce a un
procesamiento incorrecto de la señal. Una última causa de pérdida de ciclo,
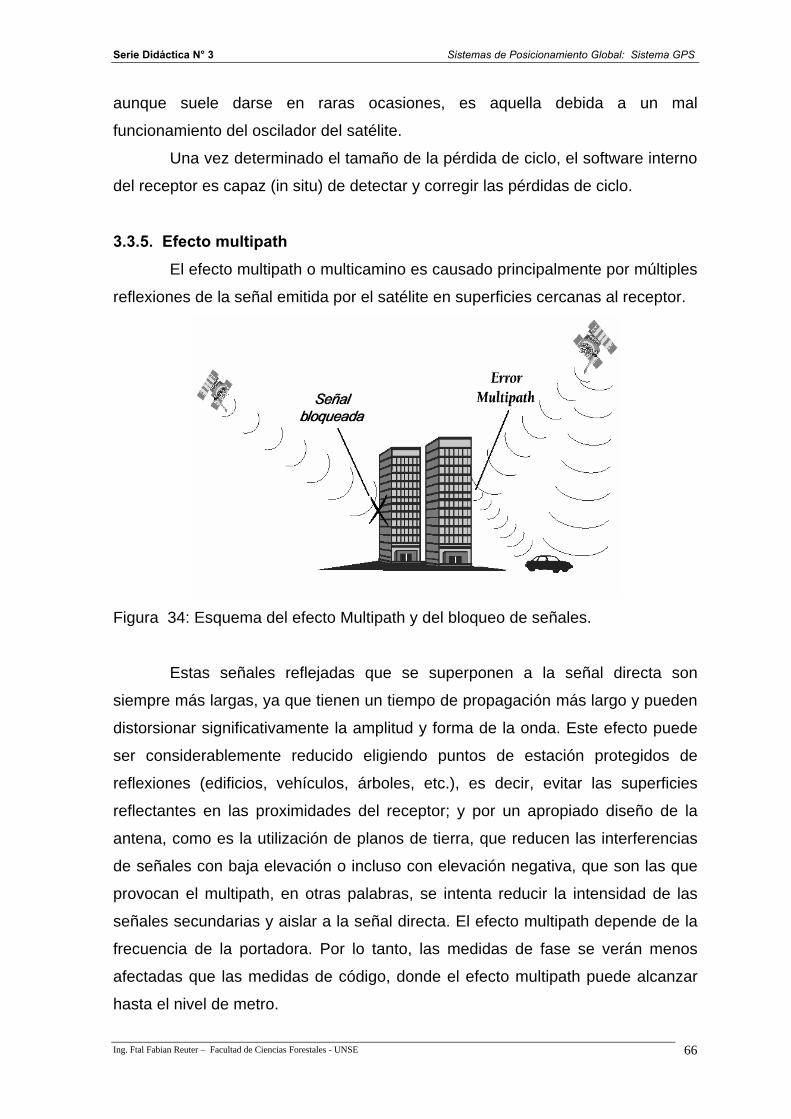
Serie Didáctica N° 3 Sistemas de Posicionamiento Global: Sistema GPS
Ing. Ftal Fabian Reuter – Facultad de Ciencias Forestales - UNSE 66
aunque suele darse en raras ocasiones, es aquella debida a un mal
funcionamiento del oscilador del satélite.
Una vez determinado el tamaño de la pérdida de ciclo, el software interno
del receptor es capaz (in situ) de detectar y corregir las pérdidas de ciclo.
3.3.5. Efecto multipath
El efecto multipath o multicamino es causado principalmente por múltiples
reflexiones de la señal emitida por el satélite en superficies cercanas al receptor.
Figura 34: Esquema del efecto Multipath y del bloqueo de señales.
Estas señales reflejadas que se superponen a la señal directa son
siempre más largas, ya que tienen un tiempo de propagación más largo y pueden
distorsionar significativamente la amplitud y forma de la onda. Este efecto puede
ser considerablemente reducido eligiendo puntos de estación protegidos de
reflexiones (edificios, vehículos, árboles, etc.), es decir, evitar las superficies
reflectantes en las proximidades del receptor; y por un apropiado diseño de la
antena, como es la utilización de planos de tierra, que reducen las interferencias
de señales con baja elevación o incluso con elevación negativa, que son las que
provocan el multipath, en otras palabras, se intenta reducir la intensidad de las
señales secundarias y aislar a la señal directa. El efecto multipath depende de la
frecuencia de la portadora. Por lo tanto, las medidas de fase se verán menos
afectadas que las medidas de código, donde el efecto multipath puede alcanzar
hasta el nivel de metro.
Serie Didáctica N° 3 Sistemas de Posicionamiento Global: Sistema GPS
Ing. Ftal Fabian Reuter – Facultad de Ciencias Forestales - UNSE 67
La propagación multipath afecta tanto las mediciones de código como las
de diferencia de fase. Se han registrado en observaciones con código P con
variaciones de 1 a 3 m en un ambiente favorable y de 4 a 5 m en un ambiente
con muchas reflexiones. Bajo las peores condiciones de recepción el multipath de
la señal del código puede causar que se pierda el bloqueo de fase en el receptor.
Muchos cycle slips son producto de efectos multipath.
El multipath de la señal del código se torna particularmente crítico cuando
se usa la técnica de combinación de código y portadora para la resolución de
ambigüedades. Los efectos multipath tienen que ser tomados en cuenta con el
creciente uso de receptores de código P en levantamientos precisos y rápidos.
A causa de la geometría de los satélites que va cambiando, el efecto
multipath también va variando.
El efecto multipath en los resultados de posición puede ser minimizado
con observaciones de un periodo de tiempo más extenso. Esto no es posible en
mediciones cinemáticas o estáticas rápidas. Investigaciones han demostrado un
error muy alto, causado por multipath, de hasta ±15 cm. Por ello es importante
evitar la propagación multipath.
Para minimizar los efectos se pueden tomar las siguientes medidas:
• Seleccionar las estaciones de observación con cuidado, evitando
reflectores cercanos
• Usar antenas diseñadas con cuidado (microstrip, choke, cavity backed),
empleando planchas de base de antena
• Usar material absorbente cerca de la antena.
3.4. ERRORES RELATIVOS AL RECEPTOR.
3.4.1. Error del reloj
Dado que en la información que nos llega de los satélites, estos nos
transmiten el tiempo exacto en el que empezaron a emitir su mensaje codificado,
y que los receptores miden, también, el tiempo exacto en el que recibieron cada
señal, podremos calcular una medida de distancia entre el receptor y el satélite,
conociendo la velocidad de propagación de la onda y el tiempo transcurrido desde
Serie Didáctica N° 3 Sistemas de Posicionamiento Global: Sistema GPS
Ing. Ftal Fabian Reuter – Facultad de Ciencias Forestales - UNSE 68
que se emitió la señal hasta que fue recibida. El problema surgirá cuando los
relojes del satélite y el receptor no marquen el mismo tiempo.
Notemos lo importante que es te tema que un microsegundo de desfase
se traduce en un error de 300 metros en la medición de la distancia.
Cuando un receptor recibe una señal de un satélite, en ese momento su
reloj interno tendrá un desfase o error con respecto a la Escala de Tiempo. Este
error afectará a todas las medidas de seudo distancias realizadas para cada
época.
Los errores en los osciladores de los receptores los podemos eliminar
trabajando con posicionamiento relativo por medidas de fase, planteando las
ecuaciones de dobles diferencias.
3.4.2. Error en el estacionamiento de la antena
Los errores en el estacionamiento de la antena tienen menos influencia y
las exigencias de estacionamiento son muy inferiores a las de los instrumentos de
observación clásica. No necesitan una altísima estabilidad, ya que pequeños
desplazamientos, vibraciones o torsiones en nada afectan a la observación de las
señales de los satélites.
3.4.3. Errores en la manipulación de los equipos
Los errores de manipulación se producen cuando no se siguen las
instrucciones del fabricante del instrumento o cuando éstas suelen descuidarse
cuando se trabaja rutinariamente. Por ejemplo, es importante no comenzar una
observación hasta que no se hayan sincronizado perfectamente todos los
satélites, ya que lo único que estaremos haciendo es introducir ruido a la
observación.
3.4.4. Variación del centro radioeléctrico de la antena
La variación y desfase del centro de la antena se debe a la falta de
coincidencia entre el centro radioeléctrico o punto que realmente se posiciona, ya
que es el punto al que llega la señal; y el centro mecánico o físico, generando un
error residual por excentricidad que puede ser de unos milímetros. Para evitar
este error en posicionamiento relativo se recomienda una orientación aproximada
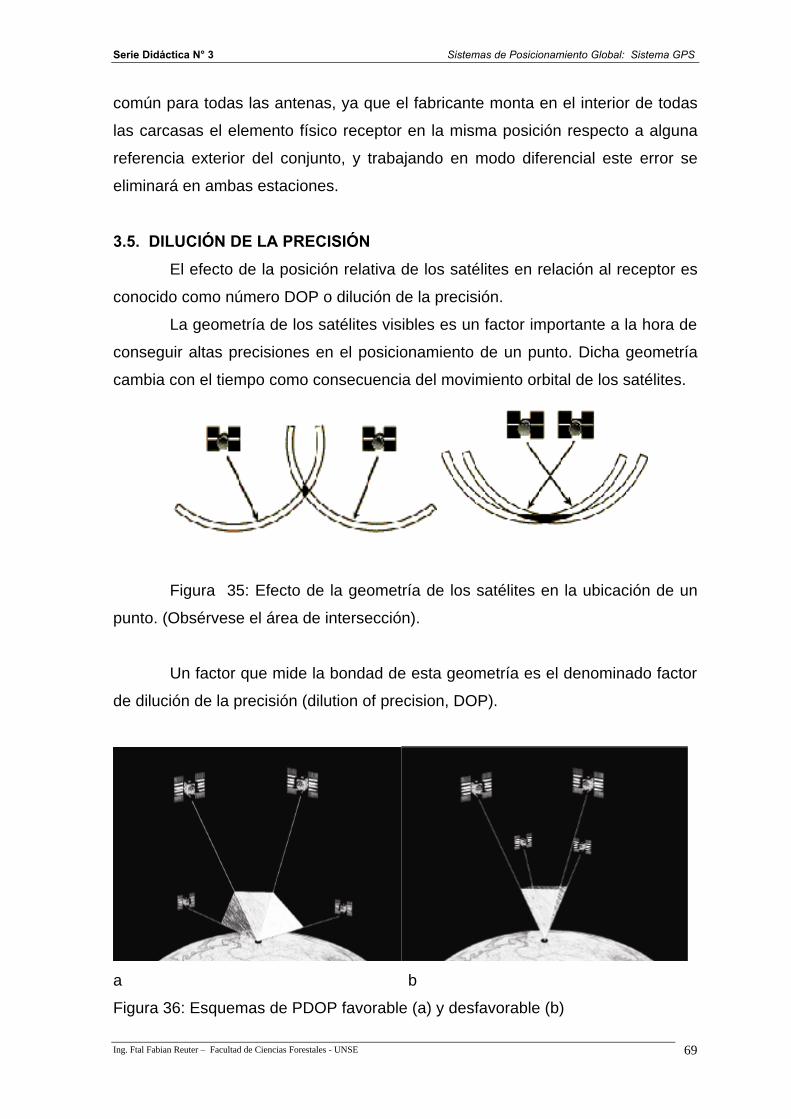
Serie Didáctica N° 3 Sistemas de Posicionamiento Global: Sistema GPS
Ing. Ftal Fabian Reuter – Facultad de Ciencias Forestales - UNSE 69
común para todas las antenas, ya que el fabricante monta en el interior de todas
las carcasas el elemento físico receptor en la misma posición respecto a alguna
referencia exterior del conjunto, y trabajando en modo diferencial este error se
eliminará en ambas estaciones.
3.5. DILUCIÓN DE LA PRECISIÓN
El efecto de la posición relativa de los satélites en relación al receptor es
conocido como número DOP o dilución de la precisión.
La geometría de los satélites visibles es un factor importante a la hora de
conseguir altas precisiones en el posicionamiento de un punto. Dicha geometría
cambia con el tiempo como consecuencia del movimiento orbital de los satélites.
Figura 35: Efecto de la geometría de los satélites en la ubicación de un
punto. (Obsérvese el área de intersección).
Un factor que mide la bondad de esta geometría es el denominado factor
de dilución de la precisión (dilution of precision, DOP).
a b
Figura 36: Esquemas de PDOP favorable (a) y desfavorable (b)
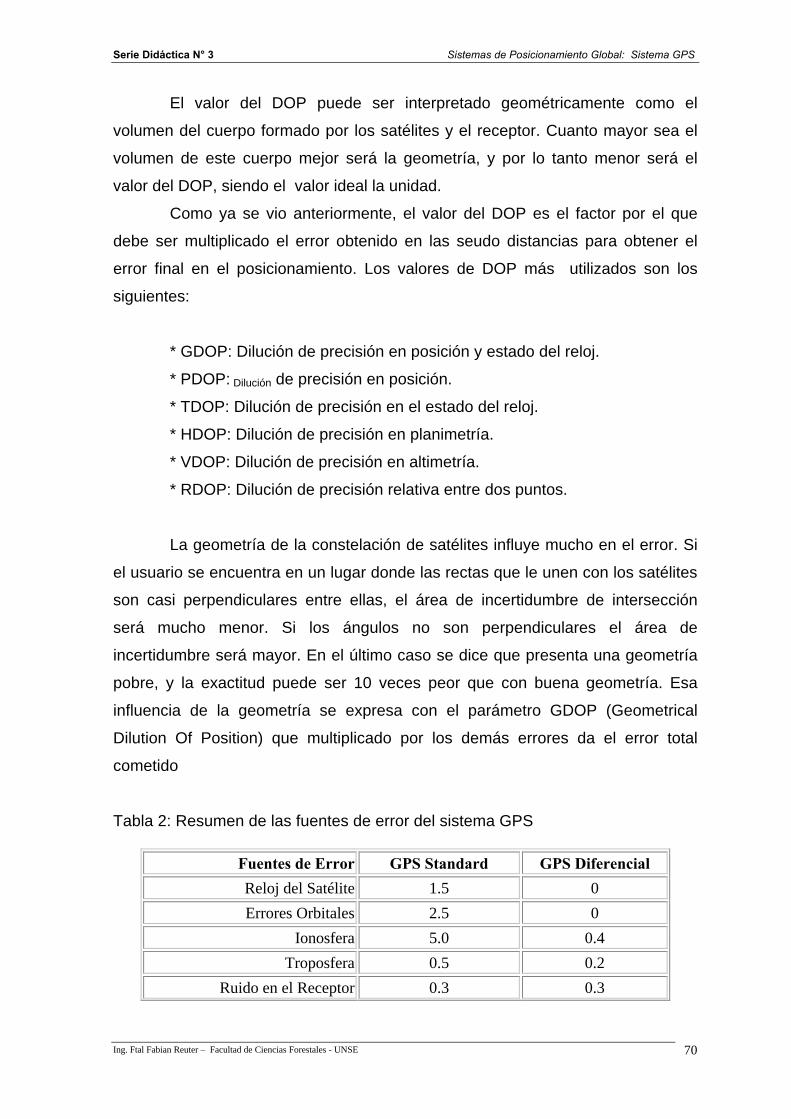
Serie Didáctica N° 3 Sistemas de Posicionamiento Global: Sistema GPS
Ing. Ftal Fabian Reuter – Facultad de Ciencias Forestales - UNSE 70
El valor del DOP puede ser interpretado geométricamente como el
volumen del cuerpo formado por los satélites y el receptor. Cuanto mayor sea el
volumen de este cuerpo mejor será la geometría, y por lo tanto menor será el
valor del DOP, siendo el valor ideal la unidad.
Como ya se vio anteriormente, el valor del DOP es el factor por el que
debe ser multiplicado el error obtenido en las seudo distancias para obtener el
error final en el posicionamiento. Los valores de DOP más utilizados son los
siguientes:
* GDOP: Dilución de precisión en posición y estado del reloj.
* PDOP: Dilución de precisión en posición.
* TDOP: Dilución de precisión en el estado del reloj.
* HDOP: Dilución de precisión en planimetría.
* VDOP: Dilución de precisión en altimetría.
* RDOP: Dilución de precisión relativa entre dos puntos.
La geometría de la constelación de satélites influye mucho en el error. Si
el usuario se encuentra en un lugar donde las rectas que le unen con los satélites
son casi perpendiculares entre ellas, el área de incertidumbre de intersección
será mucho menor. Si los ángulos no son perpendiculares el área de
incertidumbre será mayor. En el último caso se dice que presenta una geometría
pobre, y la exactitud puede ser 10 veces peor que con buena geometría. Esa
influencia de la geometría se expresa con el parámetro GDOP (Geometrical
Dilution Of Position) que multiplicado por los demás errores da el error total
cometido
Tabla 2: Resumen de las fuentes de error del sistema GPS
Fuentes de Error GPS Standard GPS Diferencial
Reloj del Satélite 1.5 0
Errores Orbitales 2.5 0
Ionosfera 5.0 0.4
Troposfera 0.5 0.2
Ruido en el Receptor 0.3 0.3
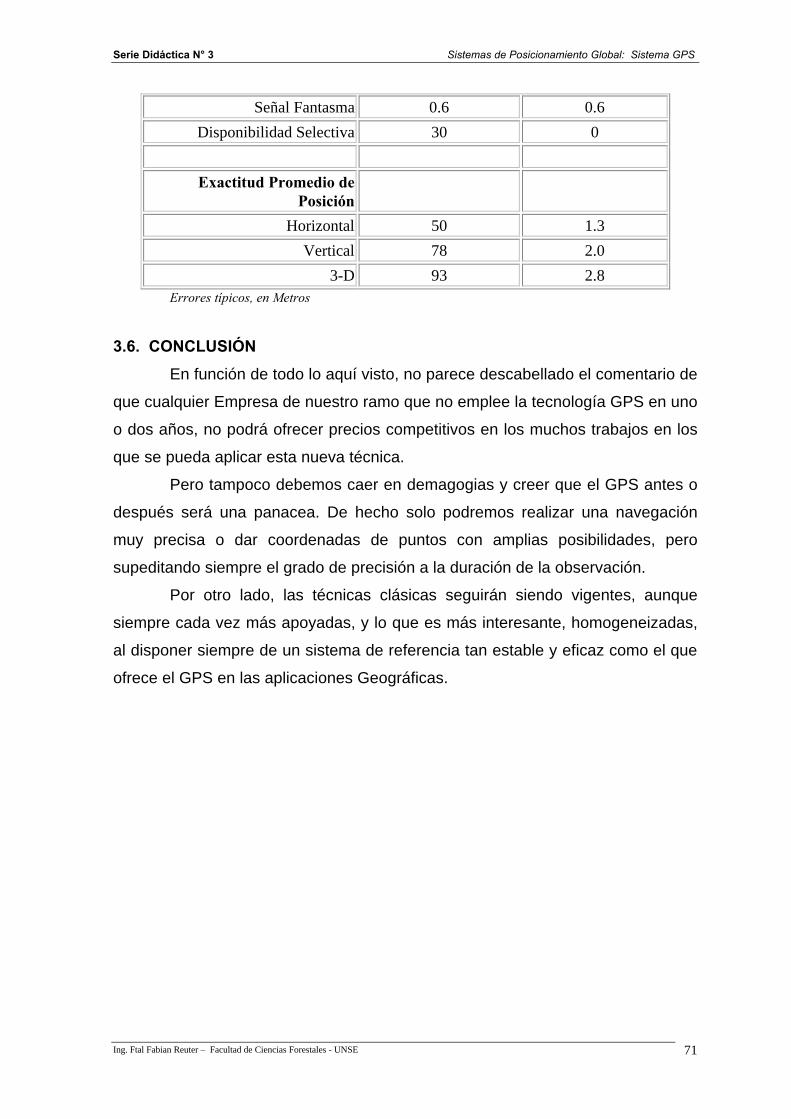
Serie Didáctica N° 3 Sistemas de Posicionamiento Global: Sistema GPS
Ing. Ftal Fabian Reuter – Facultad de Ciencias Forestales - UNSE 71
Señal Fantasma 0.6 0.6
Disponibilidad Selectiva 30 0
Exactitud Promedio de Posición
Horizontal 50 1.3
Vertical 78 2.0
3-D 93 2.8 Errores típicos, en Metros
3.6. CONCLUSIÓN
En función de todo lo aquí visto, no parece descabellado el comentario de
que cualquier Empresa de nuestro ramo que no emplee la tecnología GPS en uno
o dos años, no podrá ofrecer precios competitivos en los muchos trabajos en los
que se pueda aplicar esta nueva técnica.
Pero tampoco debemos caer en demagogias y creer que el GPS antes o
después será una panacea. De hecho solo podremos realizar una navegación
muy precisa o dar coordenadas de puntos con amplias posibilidades, pero
supeditando siempre el grado de precisión a la duración de la observación.
Por otro lado, las técnicas clásicas seguirán siendo vigentes, aunque
siempre cada vez más apoyadas, y lo que es más interesante, homogeneizadas,
al disponer siempre de un sistema de referencia tan estable y eficaz como el que
ofrece el GPS en las aplicaciones Geográficas.
Serie Didáctica N° 3 Sistemas de Posicionamiento Global: Sistema GPS
Ing. Ftal Fabian Reuter – Facultad de Ciencias Forestales - UNSE 72
REFERENCIAS BIBLIOGRÁFICAS
Basics of High-Precision Global Positioning System, JAVAD 1998.
TOPCON.
Cordova, E. V., 1992, La Fotografía Aerea y su aplicación a estudios
geológicos y geomorfológicos. Universidad Mayor de San Andrés. Tomo I, La
Paz, Bolivia. 823p.
Documentos de Internet publicados por el Laboratorio Lincoln de
Massachusetts, el Coordinational Scientific Information Center ruso y por el DLR-
DFD Neustrelitz Remote Sensing Ground Station en Alemania, Noviembre 1997.
Franco, Antonio Rodríguez, precisión en la determinación de la altitud por
los gps's, Junio 1999
Garcia del Poso, A., et al. 1992. GPS. La nueva era de la Topografía.
Editorial Ciencias Sociales. Madrid, España.
Gil Perez Fraile, L., 1997, Como utilizar un GPS. Editorial Risko. Madrid,
España.32 p.
GPS Electronics innovations and features, 2000, Topcon Positioning
System.
GPS Guide for beginners, 2000, Garmin Corporation.www.garrmin.com
Hofmann-Wenllenhof, B., 1994, GPS Theory and Practice, Springer
Holanda Blas, M.P., Bermejo Ortega, J.C., Hernanz Villalba, P., Gómez
Sánchez, F., Madrid 1997, Estudio de la precisión que el sistema GPS
proporciona en cada una de sus cinco observables y comportamiento de las
Serie Didáctica N° 3 Sistemas de Posicionamiento Global: Sistema GPS
Ing. Ftal Fabian Reuter – Facultad de Ciencias Forestales - UNSE 73
mismas en función de diversos condicionantes para la medida de líneas base en
un amplio rango de distancias.
Holanda Blas, Mª Paz, Bermejo Ortega Juan Carlos, 1998 GPS &
GLONASS descripción y aplicaciones madrid, 67 pag.
Introduction to the Russian GLObal NAvigation Satellite System
GLONASS, 2000, German Aerospace Center.
Langley, R., GPS Receiver System Noise, in GPS World of June 1997.
Langley, R., Review and Update of GPS and GLONASS, in GPS World of
July 1997.
Langley, R., The GPS Error Budget, in GPS World of March 1997.
Leick, A., 1996, GPS Satellite Surveying, Wiley-Interscience, New York.
Manual de operaciones Magellan GPS ProMARK X. 1995. Magellan
systems corporation. U.S.A.
Mikhail, E. M., 1981, Analysis and Adjustment of Survey Measurement,
Van Nostrand Reinhold, New York.
Moldes, F. J.,1995, Tecnología de los Sistemas de Informacion
Geográfica, Editorial Ra-ma. Madrid, España,185 p.
Núñez-García, A.,Valbuena Durán, J.L., Velasco Gómez, J., 1992, GPS
La Nueva Era de la Topografía, Ediciones de las Ciencias Sociales, Madrid.
Puch, C., 2000, Manual Práctico de GPS, Introduccion al sistema global
de Posicion. Editorial Desnivel. Madrid, España. 189 p.
Serie Didáctica N° 3 Sistemas de Posicionamiento Global: Sistema GPS
Ing. Ftal Fabian Reuter – Facultad de Ciencias Forestales - UNSE 74
Scanvic, J. Y. 1989, Teledetección Aplicada.. Editorial Paraninfo. Madrid,
España. 200 p
Surveying with TPS, August 14, 2000, Topcon Positioning System
http://www.javad.com.
Trimble Navigation Limited, Como funciona el sistema GPS, en cinco
pasos lógicos, 1999.
Links referidos al tema
Base de datos de imagenes en http://www.oso.chalmers.se/~geo/glonass.html
http:// lareg.ensg.ign.frige
http:// www.glonass.org
http://cddis.gsfc.nasa.gov/920_1/SGAPO.html (sistema VLBI)
http://personales.mundivia.es/edomenecht/docs/gpsweb/introgps/introgps.htm
http://satnav.atc.ll.mit.edu/papers/LLjournal/Misra.html
http://satnav.atc.ll.mit.edu/papers/PZ90-WGS84/PZ90-WGS84.html
http://www.aerocivil.gov.co/telecom/cns/cns.htm
http://www.al-top.com/al_top/Gps-art.htm , 2000, Curso de Introduccion al GPS,
AGUSTIN LOPEZ DOVAL , AL-TOP, TOPOGRAFIA, S.A.
http://www.gva.es/icv/GLOSARIO.HTM Instituto Cartográfico Valenciano.
http://www.humanas.unal.edu.co/geografia/geotest/estudiantes/estudiantes.htm
Serie Didáctica N° 3 Sistemas de Posicionamiento Global: Sistema GPS
Ing. Ftal Fabian Reuter – Facultad de Ciencias Forestales - UNSE 75
http://www.imasd-tecnologia.com/imasd/mayo00/0500ti1.htm
http://www.isa.cie.uva.es/gps/GPSindex.html
http://www.tel.uva.es/~jpozdom/telecomunicaciones/tutorial/contenido.html
Integrated Use of GPS and GLONASS: Transformation between WGS 84 and PZ-
90