fun la serena octubre 2015 dada e mapeo en detalle de
TRANSCRIPT

89
Fundada en 1962
SOC
IEDA
D GEOLOGICA DE CH
ILE
la serena octubre 2015
Mapeo en detalle de estructuras geológicas mediante el uso de vehículos aéreos no tripulados (drones): un ejemplo en el Sistema de Falla de Atacama, norte de Chile. Rodrigo Gomila*1,2, Gloria Arancibia1,2 y Eugenio Veloso3. 1. Departamento de Ingeniería Estructural y Geotécnica, Pontificia Universidad Católica de Chile, Santiago, Chile. 2. Centro de Excelencia en Geotermia de los Andes (CEGA, FONDAP-CONICYT), Santiago, Chile. 3. Fundación Norte Sustentable/Andes Iron SpA., Avenida Cerro El Plomo 5630, Piso 19, Las Condes, Santiago, Chile. * email: [email protected] Resumen. Los recientes avances en tecnologías de adquisición de datos, tales como los vehículos aéreos no tripulados (drones) equipados con cámaras digitales de alta resolución, pueden ser usados para mejorar las bases usadas para el mapeo y caracterización de zonas de interés geológico, especialmente estructural, de manera rápida y con una alta resolución espacial. Imágenes adquiridas por medio de un cuadricóptero radiocontrolado fueron usadas para producir un orto-mosaico de alta resolución espacial a fin de caracterizar la arquitectura del área sur de la Falla Jorgillo (FJ), parte del segmento Paposo del Sistema de Falla de Atacama. En este trabajo se presentan resultados preliminares de la arquitectura de la FJ realizada por medio de campañas de terreno complementadas de una base digital de alta resolución y el posterior proceso por medio de plataformas SIG. Así, es posible distinguir y caracterizar los distintos litotipos, además de la orientación, geometría y arquitectura de elementos estructurales. Palabras Claves: Vehículo no tripulado; Drone; Mapeo de
estructuras geológicas; Foto-mosaico; Sistema de Falla de Atacama;
1 Introducción La mejora y penetración de tecnologías de vehículos aéreos no-tripulado (drones), en distintos tipos de operaciones militares, industriales, comerciales, publicitarias y de servicio público ha permitido en pocos años reducir costos y mejorar los tiempos de operación y la calidad de la información obtenida. Esto ha hecho posible contar con imágenes de elevada resolución espacial disponible mapeos y caracterización de detalle de zonas de interés geológico (Niethammer et al. 2012; Vasuki et al., 2014). Este trabajo muestra el procedimiento necesario para la implementación de una base de mapeo de alta resolución espacial (<5 cm/pixel o 20 pixeles/metro) y su uso en un mapeo geológico-estructural. El lugar escogido corresponde al área sur de la Falla Jorgillo (FJ), una falla de rumbo sinistral, localizada en Sistema de Falla de Atacama, a ca. 35 km al sur de la ciudad de Antofagasta (González, 1999; Cembrano et al., 2005). La FJ presenta una traza cóncava hacia el océano de ca. 20 km con rumbo variable entre NW–SE (extremo norte) y NNW–SSE
(extremo sur). En la zona de estudio, la FJ corta rocas cristalinas de edad Jurásica Superior – Cretácica Inferior y composición granodiorítica (González y Niemeyer, 2005). El núcleo de FJ consiste en rocas cataclásticas con potencias de hasta 70 m. La extraordinaria conservación y exposición de afloramientos, debido al clima árido a híper-árido de la zona, hacen de esta falla un excelente ejemplo para una caracterización en detalle, a modo de obtener parámetros de orientación, geometría y arquitectura. 2 Adquisición de Datos La toma de las fotografías aéreas se realizó mediante el uso de un drone cuadricóptero DJI Phantom 2 Vision+, equipado con una cámara de 14 Mpx (FC200) capaz de adquirir imágenes de 4384x3288 px (Figura 1). El tiempo de autonomía de vuelo es de ca. 20 min por cada batería, en condiciones de viento leve. Dicha autonomía desciende considerablemente si las condiciones de viento son desfavorables para el vuelo (ráfagas o viento fuerte).
Figura 1. Sistema de cuadricóptero visto en terreno, sus principales características técnicas y costo de implementación. 2.1 Parámetros de vuelo y configuración para la
obtención de orto-fotos A fin de obtener imágenes de razonablemente alta resolución espacial (<5 cm/pixel o 20 pixeles/metro), y para evitar cualquier posible obstáculo topográfico, el vuelo se realizó a una altura media de ca. 50 m sobre la superficie de despegue. Los parámetros de vuelo, y siguiendo las recomendaciones de Glowitz et al. (2015), para la correcta obtención de pares estereográficos, fueron de una velocidad de 4 m/s, con tomas cada 10 s.
90
ST 1 TECTÓNICA Y DEFORMACIÓN CORTICAL ANDINA
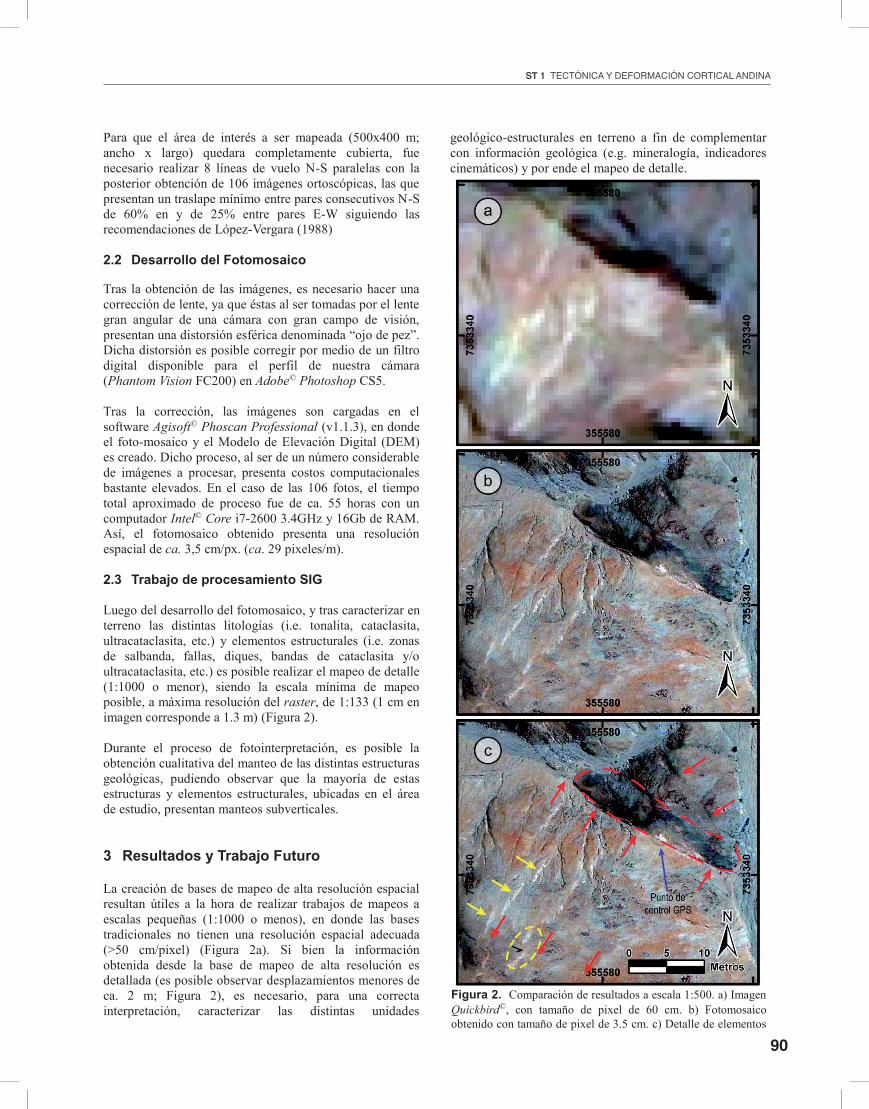
Para que el área de interés a ser mapeada (500x400 m; ancho x largo) quedara completamente cubierta, fue necesario realizar 8 líneas de vuelo N-S paralelas con la posterior obtención de 106 imágenes ortoscópicas, las que presentan un traslape mínimo entre pares consecutivos N-S de 60% en y de 25% entre pares E-W siguiendo las recomendaciones de López-Vergara (1988) 2.2 Desarrollo del Fotomosaico Tras la obtención de las imágenes, es necesario hacer una corrección de lente, ya que éstas al ser tomadas por el lente gran angular de una cámara con gran campo de visión, presentan una distorsión esférica denominada “ojo de pez”. Dicha distorsión es posible corregir por medio de un filtro digital disponible para el perfil de nuestra cámara (Phantom Vision FC200) en Adobe© Photoshop CS5. Tras la corrección, las imágenes son cargadas en el software Agisoft© Phoscan Professional (v1.1.3), en donde el foto-mosaico y el Modelo de Elevación Digital (DEM) es creado. Dicho proceso, al ser de un número considerable de imágenes a procesar, presenta costos computacionales bastante elevados. En el caso de las 106 fotos, el tiempo total aproximado de proceso fue de ca. 55 horas con un computador Intel© Core i7-2600 3.4GHz y 16Gb de RAM. Así, el fotomosaico obtenido presenta una resolución espacial de ca. 3,5 cm/px. (ca. 29 pixeles/m). 2.3 Trabajo de procesamiento SIG Luego del desarrollo del fotomosaico, y tras caracterizar en terreno las distintas litologías (i.e. tonalita, cataclasita, ultracataclasita, etc.) y elementos estructurales (i.e. zonas de salbanda, fallas, diques, bandas de cataclasita y/o ultracataclasita, etc.) es posible realizar el mapeo de detalle (1:1000 o menor), siendo la escala mínima de mapeo posible, a máxima resolución del raster, de 1:133 (1 cm en imagen corresponde a 1.3 m) (Figura 2). Durante el proceso de fotointerpretación, es posible la obtención cualitativa del manteo de las distintas estructuras geológicas, pudiendo observar que la mayoría de estas estructuras y elementos estructurales, ubicadas en el área de estudio, presentan manteos subverticales. 3 Resultados y Trabajo Futuro La creación de bases de mapeo de alta resolución espacial resultan útiles a la hora de realizar trabajos de mapeos a escalas pequeñas (1:1000 o menos), en donde las bases tradicionales no tienen una resolución espacial adecuada (>50 cm/pixel) (Figura 2a). Si bien la información obtenida desde la base de mapeo de alta resolución es detallada (es posible observar desplazamientos menores de ca. 2 m; Figura 2), es necesario, para una correcta interpretación, caracterizar las distintas unidades
geológico-estructurales en terreno a fin de complementar con información geológica (e.g. mineralogía, indicadores cinemáticos) y por ende el mapeo de detalle.
Figura 2. Comparación de resultados a escala 1:500. a) Imagen Quickbird©, con tamaño de pixel de 60 cm. b) Fotomosaico obtenido con tamaño de pixel de 3.5 cm. c) Detalle de elementos

91
AT 1 GeoloGía ReGional y Geodinámica andina
estructurales observables en (b). Las flechas rojas representan trazas de falla; flechas amarillas corresponde a dique félsico NE-SW con resaltos horizontales y potencia <1 m (no observable en a); Nótese el desplazamiento aparente sinistral que no es apreciable en (a), marcado en círculo segmentado amarillo. Además, es posible observar dique máfico NW-SE (marcado por línea segmentada roja) el que no es distinguible en (a). Los resultados obtenidos, al trabajar con las imágenes de alta resolución espacial, han permitido (1) identificar elementos estructurales (fallas, bandas de deformación, contactos litológicos, entre otros) con precisión y detalle, los que de otra forma no habrían sido detectados debido a la menor resolución de las imágenes satelitales disponibles; (2) estimar con exactitud los desplazamientos aparentes y potencias de dichos elementos estructurales y, (3) estimar de manera cualitativa sus respectivos manteos (Figura 2c). Todo lo anterior presenta ventajas significativas en comparación al mapeo tradicional realizado en base a imágenes satelitales. Este trabajo abre la posibilidad de realizar caracterizaciones geológico-estructurales basadas en el análisis de imágenes y DEM para, virtualmente, cualquier terreno. Para esto, es necesario implementar metodologías de análisis como las ya mostradas por Vasuki et al. 2014. Esto para facilitar y reducir, tanto los tiempos de terreno como los de análisis de gabinete. Cabe destacar que la literatura correspondiente al uso y desarrollo de vehículos aéreos no tripulados en el campo de las Geociencias corresponde, en su mayoría, a trabajos realizados a partir de los primeros años de esta década, en donde muchos de ellos se encuentran en páginas web, en proceso de desarrollo tecnológico e implementación, en las áreas de industria del petróleo y academia (i.e. American Association of Petroleum Geologists; http://www.aapg.org/ y Mansfield University; http://geoggeol.mansfield.edu/, por nombrar algunos). Esto muestra que el uso de este tipo de tecnologías es ya una valiosa herramienta en la adquisición de datos espaciales, permitiendo caracterizaciones de detalle del terreno y por ende ayudando a un mejor entendimiento geológico de la zona de interés. Agradecimientos Los autores quisieran agradecer al Grupo de Geociencias PUC por su constante apoyo y entusiasmo en el desarrollo de este proyecto. Referencias Cembrano, J., Gonzalez, G., Arancibia, G., Ahumada, I., Olivares, I.,
Herrera, V. 2005. Fault zone development and strain partitioning in an extensional strike‐slip duplex: a case study from the Mesozoic Atacama Fault System, Northern Chile. Tectonophysics 400, 105–125.
Glowitz, W., Shears, A., Bagg, J. 2015. Mapping Aplications of Unmaned Aerial Vehicles (“Drones”). In: Showcase of Student Scholarship. Mansfield University.
González, G. 1999. Mecanismo y profundidad de emplazamiento del
Plutón de Cerro Cristales, Cordillera de la Costa, Antofagasta, Chile. Revista Geológica de Chile. Vol. 26. No. 1. p.43-66.
Gonzalez, G. and Niemeyer, H. 2005. Cartas Antofagasta y Punta
Tetas, Región Antofagasta. Servicio Nacional de Geología y Minería, Carta Geológica de Chile, Serie Geología Básica 89: 35, escala 1:100.000
López Vergara, M.L. 1988. Manual de Fotogeología (3ra ed). CIEMAT. 488 p. Madrid. Niethammer, U; James, M.R.; Rothmund, S.; Travelletti, J.; Joswig,
M. 2012. UAV-based remote sensing of the Super-Sauze landslide: Evaluation and results. Engineering Geology 128. 2–11.
Vasuki, Y.; Holden, E.; Kovesi, P.; Micklethwaite, S. 2014. Semi-
automatic mapping of geological Structures using UAV-based photogrammetric data: An image analysis approach. Computers & Geosciences 69. 22–32.