evaluaci on de un sistema de radio uwb para ... nacional... · uno de los retos fundamentales en el...
TRANSCRIPT

Evaluacion de un sistema de radio UWB paraposicionamiento preciso de vehıculos
Antonio R. Jimenez, Jorge Godoy, Fernando SecoCentro de Automatica y Robotica, CAR-CSIC/UPM
Ctra. Campo Real km 0.228500. Arganda del Rey. Madrid
{antonio.jimenez, jorge.godoy, fernando.seco}@csic.es
Resumen
En este trabajo presentamos la evaluacion deun equipo de balizas de radio Ultra-Wide-Band(UWB) como sistema complementario de posicio-namiento de vehıculos en entornos con pobre co-bertura GPS. La evaluacion del sistema UWB usacomo referencia verdadera un sistema RTK-GPScon precision centimetrica. Las pruebas realizadasen las pistas del CAR muestran que el sistemaUWB permite realizar mediciones de rango hasta90 metros de distancia con precision submetricaen la mayorıa de las medidas y con la aparicionde pocos outliers. Colocando 6 nodos UWB en elentorno y dos nodos en el techo de un coche, yutilizando un filtro de Kalman extendido, es po-sible localizar en 2D y en orientacion con buenaprecision (0.8 m y 10 grados, respectivamente enel 90% de los casos). El estudio marca las basespara una posible utilizacion de UWB en otros en-tornos (subterraneos o parkings) y en labores decooperacion entre vehıculos (platooning).
Palabras clave: Localizacion, medida de rangos,conduccion automatica, radio UWB, GPS dife-rencial
1. Introduccion
Uno de los retos fundamentales en el campo de losvehıculos inteligentes es conseguir un sistema delocalizacion con la suficiente precision, fiabilidady robustez. La solucion mas precisa utilizada enexteriores son los sistemas de localizacion basadosen los sistemas globales de navegacion por satelite(GNSS por sus siglas en ingles); como las redesGPS y GLONASS, operadas por EE.UU. y Rusiarespectivamente. Este tipo de soluciones estan li-mitadas por diversos efectos de interferencia, blo-queo y propagacion multitrayecto de las senalesprovenientes de los satelites, lo cual merma consi-derablemente su precision [4].
Se han propuesto diversas estrategias para conse-guir localizar en zonas cubiertas, o con poca co-bertura GPS, algunas basadas en senales de radio,acusticas, lidar o basadas en vision [5, 3]. De entre
Figura 1: Vehıculo del programa Autopia, instru-mentado con nodos UWB, utilizado para realizarlos test de posicionamiento.
ellas posiblemente la que tiene mayor potencial yque ha tenido una gran repercusion en estos anosrecientes es la tecnica UWB (Ultra-Wide-Band)[2, 7]. Con ella se consiguen precisiones del ordende 0.2 metros en condiciones LOS (Line-of-Sight).
En este trabajo presentamos la evaluacion de unequipo de balizas de radio UWB como sistemacomplementario de posicionamiento de vehıculosen entornos con pobre cobertura GPS. Se presen-ta el equipamiento utilizado para realizar los tests(seccion 2), un estudio de la precision en la me-dida de rangos (seccion 3), el metodo de posicio-namiento utilizado basado en un filtro de Kalmanextendido robustificado (seccion 4), el analisis dela precision obtenida en posicionamiento y orien-tacion (seccion 5) y unas conclusiones finales sobretrabajos futuros.
2. Descripcion del equipamiento ydel entorno de test
2.1. El equipo UWB
La tecnologıa UWB o radio impulsiva consiste enemitir pulsos RF de muy corta duracion y medir sutiempo de vuelo. Al ser emisiones muy breves uti-lizan un espectro ancho de frecuencias. Esta emi-sion espectral esta limitada y regulada (FCC) paraque no interfiera con otros equipos de medida. Laemision de estos pulsos estrechos tiene la venta-
Jornadas de Automática 2016
360
ja de que son distinguibles en recepcion inclusoen condiciones de multicamino, lo cual permite aUWB operar incluso en entornos de interior conmultiples objetos y atravesando paredes.
Existen diferentes productos comerciales UWBtales como Timedomain (www.timedomain.com),Ubisense (www.ubisense.net), Zebra(www.zebra.com), Bespoon (bespoon.com) yDecawave (www.decawave.com). Companiascomo DecaWave y BeSpoon usan el estandar deradio impulsiva IEEE 802.15.4a para definir lacapa fısica que tiene tres rangos de frecuencia: pordebajo de 1 GHz, entre 3 y 5 GHz, y entre 6 y 10GHz. Por otro lado hay companıas que no utilizanel estandar y usan soluciones propietarias, porejemplo Time Domain (PulsON -P400) y la serie7000 de Ubisense. Nosotros en este trabajo vamosa utilizar el kit TREK1000 de Decawave queutiliza el estandar.
El componente base del kit (chip DW1000) permi-te obtener una precision en la medida del tiempode vuelo, usando emision de ida y vuelta (TWR oTwo-Way-Ranging), que redunda en una precisionen rango de±10 cm. Una distancia maxima de me-dida de hasta 300 metros es posible en condicionesideales (sin obstaculos ni reflectores cercanos).
Disponemos para los tests de 8 nodos UWB(Fig.2), cada uno contiene el chip DW1000, unprocesador STM32F105 ARM Cortex M3 y unaantena omnidireccional. Los nodos pueden ser con-figurados como anchor o como tag a traves de uninterruptor. Los nodos tipo anchor pueden medirla distancia a cada uno de los tags, y se comuni-can entre ellos para compartir los rangos medidos.Un dispositivo externo (por ejemplo un PC) pue-de conectarse a uno de los anchors por USB pararecolectar los rangos entre cada tag y cada anchor.
Como configuracion adicional de los nodos, es esposible elegir la frecuencia central de emision (4GHz o 6.5 GHz) y las tasas de transmision de da-tos (110 kbps o 6.8 Mbps). Nosotros utilizamos laconfiguracion por defecto (4 GHz y 110 kbps) quees la recomendada para operacion a larga distan-cia. Una tasa de medida de rangos entre anchorsy tags de 3.5 Hz es esperable segun el fabricante.
2.2. El equipo RTK-DGPS y el vehıculoAutopia
El vehıculo empleado como plataforma de prue-ba cuenta con un receptor GNSS modelo Trim-ble BD960 con capacidad de realizar correccionesdiferenciales en la medida desde estaciones de re-ferencia y a traves de alguno de los sistemas deaumentacion disponibles por satelite (e.g. WAAS,EGNOS). En cada ciclo de medida, el receptor
Figura 2: Detalle de uno de los nodos UWB de De-cawave (tags) distribuidos por el entorno de test.
trasmite a traves de una interfaz Ethernet un con-junto de mensajes codificados de acuerdo al proto-colo NMEA-0183 [6]. En concreto, se emplean trestipos de mensajes: (i) GPGGA, que contiene infor-macion del posicionamiento, incluyendo la calidadde la medida y el numero de satelites utilizados;(ii) GPVTG, con informacion de la velocidad yorientacion del vehıculo; y (iii) GPGST, con lasestadısticas de error para la medida recibida.
Dado que la motivacion principal de este traba-jo es la caracterizacion del sistema UWB para lalocalizacion de vehıculos, el receptor se ha configu-rado para utilizar correcciones diferenciales desdeuna estacion de referencia ubicada en las instala-ciones del CAR [1]. De esta forma la medida delreceptor tiene una precision centimetrica.
2.3. Distribucion de nodos UWB
De los 8 nodos UWB hemos configurado 6 comotags y 2 como anchors. Los 6 tags se colocan sobreunas bases verticales a 1.7 metros de altura y sedistribuyen junto a las pistas privadas del centroCAR. Los dos anchors se colocan sobre la baca enel techo del coche separados entre sı una distanciad1 de 0,83 metros y a una altura respecto al sue-lo de 1,7 metros. De esta forma tendremos 6 tagsnumerados como T 0, T 1,..T 5 y 2 anchors numera-dos A0 y A1 colocados a la izquierda y derecha delvehıculo tal y como se ve en la Figura 3.
Los tags en el entorno estan en las posiciones(T 0=[-93.63 -39.83], T 1=[-48.96 -53.87], T 2=[-9.84 -63.47], T 3=[-6.88 -4.06], T 4=[-49.97 -1.86],T 5=[-90.64 1.78]) en un sistema de referencia cu-yo origen esta en el punto global UTM [458965.88
Jornadas de Automática 2016
361

Figura 3: Detalle de la instalacion de dos no-dos UWB (anchors) sobre el frontal del techo delvehıculo. Observese la posicion retrasada de la an-tena GPS.
4462547.73], estando los ejes X e Y orientados ha-cia el Este y Norte respectivamente.
Los anchors en el techo estan adelantados una dis-tancia d2 de 1,05 metros sobre la ubicacion de laantena GPS. Esta geometrıa se tendra en cuen-ta posteriormente para poder estimar los erroresde rango y de posicion, ası como para formular elfiltro de Kalman de seguimiento del vehıculo.
2.4. Recorridos realizados con el vehıculo
Se han realizado 3 recorridos diferentes por las pis-tas de prueba (ver Figura 4). El recorrido 1 con-siste en una trayectoria en forma de rectanguloincluida dentro del area cubierta por los 6 tags. Elrecorrido 2 es similar en cuanto a dimensiones pe-ro mas complejo ya que ademas incluye recorridospor una rotonda dentro de este recinto rectangu-lar. El recorrido 3 realiza un ocho conformado pordos rectangulos, uno de ellos el mismo del recorri-do 1 y otro rectangulo adicional ubicado al norte yfuera de la zona de despliegue de los 6 tags. En to-dos los casos la mayor distancia entre tag y anchores de menos de 125 metros.
Los recorridos se han realizado a una velocidadlenta de unos 2.2 m/s (8 km/h) a fin de evitarerrores en la medida provocados por los retardosen la captura de datos UWB por el puerto serie,que pueden alcanzar hasta 0.4 segundos.
3. Estudio de la precision en lamedida de rangos con UWB
En esta seccion queremos ver la precision que con-seguimos midiendo rangos con el equipo UWB.Como, gracias al GPS, conocemos con precisionla posicion y la orientacion del coche (salidas di-rectas del sistema GPS) , y ademas sabemos laposicion exacta de los tags UWB (calibrados con
-100 -80 -60 -40 -20 0
Este (metros)
-70
-60
-50
-40
-30
-20
-10
0
10
20
Nor
te (
met
ros)
Recorrido: 1
0
1
2
34
5
Vehicle trajectoryStarting/ending pointUWB TagsRoad limits
−100 −90 −80 −70 −60 −50 −40 −30 −20 −10 0
−60
−50
−40
−30
−20
−10
0
10
20
0
1
2
34
5
Este (metros)
Nor
te (
met
ros)
Recorrido: 2
Vehicle trajectoryStarting/ending pointUWB TagsRoad limits
−100 −80 −60 −40 −20 0
−60
−40
−20
0
20
40
60
0
1
2
345
Este (metros)
Nor
te (
met
ros)
Recorrido: 3
Vehicle trajectoryStarting/ending pointUWB TagsRoad limits
Figura 4: Pista de prueba del CAR, posicion debalizas UWB y los 3 recorridos realizados.
Jornadas de Automática 2016
362
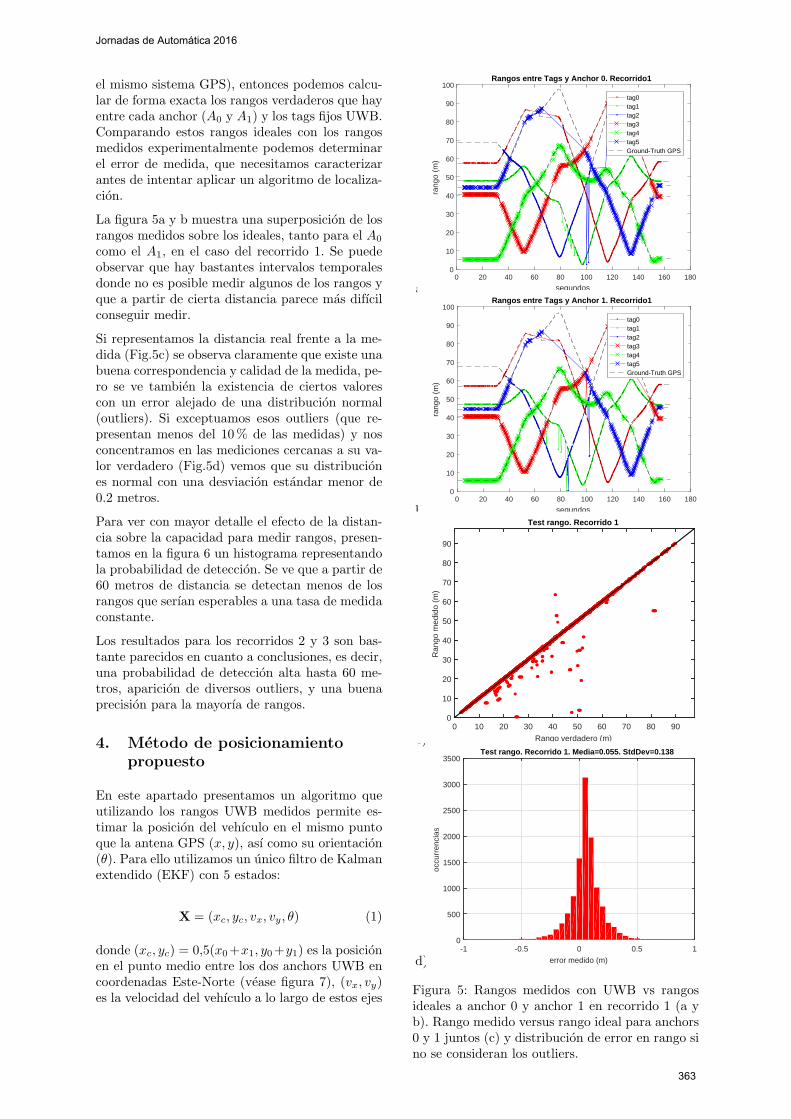
el mismo sistema GPS), entonces podemos calcu-lar de forma exacta los rangos verdaderos que hayentre cada anchor (A0 y A1) y los tags fijos UWB.Comparando estos rangos ideales con los rangosmedidos experimentalmente podemos determinarel error de medida, que necesitamos caracterizarantes de intentar aplicar un algoritmo de localiza-cion.
La figura 5a y b muestra una superposicion de losrangos medidos sobre los ideales, tanto para el A0
como el A1, en el caso del recorrido 1. Se puedeobservar que hay bastantes intervalos temporalesdonde no es posible medir algunos de los rangos yque a partir de cierta distancia parece mas difıcilconseguir medir.
Si representamos la distancia real frente a la me-dida (Fig.5c) se observa claramente que existe unabuena correspondencia y calidad de la medida, pe-ro se ve tambien la existencia de ciertos valorescon un error alejado de una distribucion normal(outliers). Si exceptuamos esos outliers (que re-presentan menos del 10% de las medidas) y nosconcentramos en las mediciones cercanas a su va-lor verdadero (Fig.5d) vemos que su distribuciones normal con una desviacion estandar menor de0.2 metros.
Para ver con mayor detalle el efecto de la distan-cia sobre la capacidad para medir rangos, presen-tamos en la figura 6 un histograma representandola probabilidad de deteccion. Se ve que a partir de60 metros de distancia se detectan menos de losrangos que serıan esperables a una tasa de medidaconstante.
Los resultados para los recorridos 2 y 3 son bas-tante parecidos en cuanto a conclusiones, es decir,una probabilidad de deteccion alta hasta 60 me-tros, aparicion de diversos outliers, y una buenaprecision para la mayorıa de rangos.
4. Metodo de posicionamientopropuesto
En este apartado presentamos un algoritmo queutilizando los rangos UWB medidos permite es-timar la posicion del vehıculo en el mismo puntoque la antena GPS (x, y), ası como su orientacion(θ). Para ello utilizamos un unico filtro de Kalmanextendido (EKF) con 5 estados:
X = (xc, yc, vx, vy, θ) (1)
donde (xc, yc) = 0,5(x0+x1, y0+y1) es la posicionen el punto medio entre los dos anchors UWB encoordenadas Este-Norte (vease figura 7), (vx, vy)es la velocidad del vehıculo a lo largo de estos ejes
a)0 20 40 60 80 100 120 140 160 180
segundos
0
10
20
30
40
50
60
70
80
90
100
rang
o (m
)
Rangos entre Tags y Anchor 0. Recorrido1
tag0tag1tag2tag3tag4tag5Ground-Truth GPS
b)0 20 40 60 80 100 120 140 160 180
segundos
0
10
20
30
40
50
60
70
80
90
100
rang
o (m
)
Rangos entre Tags y Anchor 1. Recorrido1
tag0tag1tag2tag3tag4tag5Ground-Truth GPS
c)0 10 20 30 40 50 60 70 80 90
Rango verdadero (m)
0
10
20
30
40
50
60
70
80
90
Ran
go m
edid
o (m
)
Test rango. Recorrido 1
d)-1 -0.5 0 0.5 1
error medido (m)
0
500
1000
1500
2000
2500
3000
3500
occu
rren
cias
Test rango. Recorrido 1. Media=0.055. StdDev=0.138
Figura 5: Rangos medidos con UWB vs rangosideales a anchor 0 y anchor 1 en recorrido 1 (a yb). Rango medido versus rango ideal para anchors0 y 1 juntos (c) y distribucion de error en rango sino se consideran los outliers.
Jornadas de Automática 2016
363

0 10 20 30 40 50 60 70 80 90
Rango (m)
0
20
40
60
80
100
Pro
babi
lidad
(%
%)
Probabilidad de deteccion. Recorrido1
Figura 6: Probabilidad de deteccion y medida deun rango UWB segun aumenta la distancia.
Este (X)
No
rte
(Y
)
0
A0
d1
d2
(x, y)
(x0, y
0)
(xc, y
c)
(xi, yi)Ti
A1
(x1, y
1)
r0
i
r1
i
rc
i
θc
i
θ
Figura 7: Esquema con la ubicacion de los 2 an-chors UWB (A0 y A1) y la antena GPS sobre eltecho del coche, y rangos medidos a un tag UWBcualquiera T i.
Este-Norte, y θ la orientacion del vehıculo respectoal eje del Este (que no es exactamente igual alheading o direccion de avance).
La posicion del centro de la antena GPS (x, y), quese encuentra retrasada una distancia d2 = 1, 05 m,se obtendrıa, una vez estimada la orientacion y laposicion central de las antenas UWB, ası:
[x, y] = [xc − d2 cos(θ), yc − d2 sin(θ)] (2)
4.1. Modelo de movimiento
El modelo de movimiento utilizado es uno de velo-cidad constante con cambios de velocidad y girosdel vehıculo modelados como ruido de aceleracion(a) y de velocidad de rotacion (vθ), estando es-tos ultimos desacoplados (aproximacion valida abajas velocidades como en los experimentos reali-zados). Ası:
X = f(xc, yc, vx, vy, θ) + ga(a) + gθ(vθ) (3)
El modelo en tiempo discreto serıa:
Xk+1 =
xk+1c
yk+1c
vk+1x
vk+1y
θk+1
=
xkc + vkxdt+
akdt2
2
ykc + vkydt+akdt2
2
vkx + akdtvky + akdtθk + vkθdt
(4)
donde la matriz de transicion de estados del filtrode Kalman es
F =
1 0 dt 0 00 1 0 dt 00 0 1 0 00 0 0 1 00 0 0 0 1
(5)
y donde Ga = [dt2
2 , dt2
2 , dt, dt, 0]′ y Gθ =[0, 0, 0, 0, dt]′.
Por tanto la matriz de covarianza del proceso omodelo de movimiento a utilizar en el EKF es:
Q = GaqaG′a +GθqθG
′θ =
dt4
4 0 dt3
2 0 0
0 dt4
4 0 dt3
2 0dt3
2 0 dt2 0 0
0 dt3
2 0 dt2 00 0 0 0 qθ/qa
qa
(6)
donde qa y qθ son las covarianzas del ruido en ace-leracion y en rotacion respectivamente.
El robustecimiento del filtro de Kalman para evi-tar los outliers mas significativos se hace recha-zando las actualizaciones del filtro cuando la in-novacion (discrepancia entre el rango predicho yel medido), medida como una distancia de Maha-lanobis, es superior a un cierto umbral. De estaforma se eliminan buena parte de los outliers.
4.2. Modelo de medida
Las medidas disponibles son rangos que llegan alos 2 anchors de forma dispersa procedentes dediferentes tags, por tanto diferenciamos entre elrango del tag T i al anchor A0 (ri0) y el rango deltag T i al anchor A1 (ri1). De esta forma el ran-go experimental medido rij entre anchor j y tagi dependera de la posicion del punto medio entreanchors (xc, yc) y la rotacion θ del vehıculo de estaforma:
Jornadas de Automática 2016
364
rij =√(xc − xi)2 + (yc − yi)2+s·d1/2·sin(θ−θic)
(7)
donde la posicion de los tags T i es (xi, yi) (i=0..5),el ındice de los anchor j puede valer 0 o 1, s esun signo que vale 1 si j=1 y -1 si j=0, d1 es ladistancia entre anchors (d1=0.83 m), y θij es elangulo respecto al Este de la lınea que pasa por eltag T i y el centro de los anchors (xc, yc); es decir:
θic = arctan( yc−yi
xc−xi ).
Para obtener la matriz de observacion H del unicofiltro de Kalman utilizado, derivamos este mode-lo de medida (eq. 7) respecto a los terminos delestado (xc, yc, vx, vy, θ), obteniendo:
H =
xc−xi
ric+
s·d1/2·cos(θ−θic)·(yc−yi)
(ric)2
yc−yi
ric− s·d1/2·cos(θ−θi
c)·(xc−xi)(ric)
2
00s · d1/2 · cos(θ − θic)
′
(8)
donde H es una matriz de dimension variable contantas filas como rangos medidos y tantas colum-nas como los estados estimados (5); ric es el rangoentre el tag T i y el centro de los anchors, es decir:ric =
√(xc − xi)2 + (yc − yi)2.
5. Estudio de la precicion en laestimacion de la posicion yorientacion del vehıculo
En esta seccion vamos a mostrar la calidad de lasestimaciones de posicionamiento y de orientacionque hemos podido obtener usando las medidas delos dispositivos UWB y el filtro de Kalman exten-dido descrito en la seccion anterior.
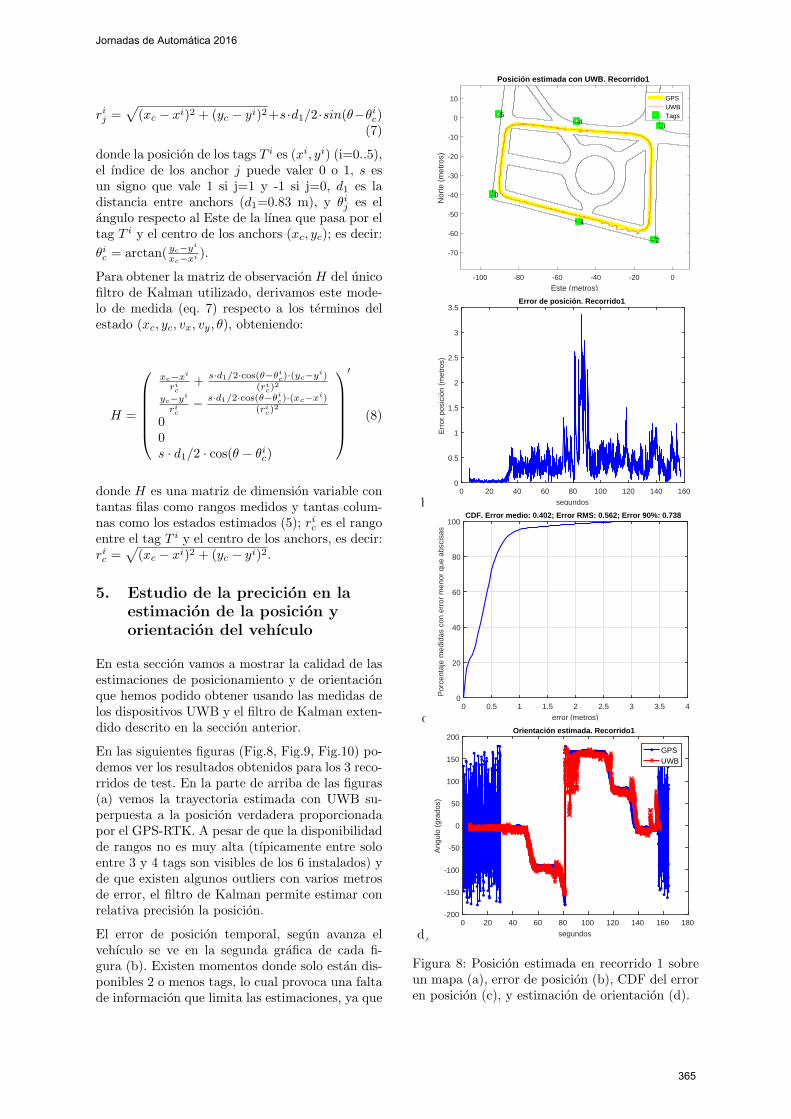
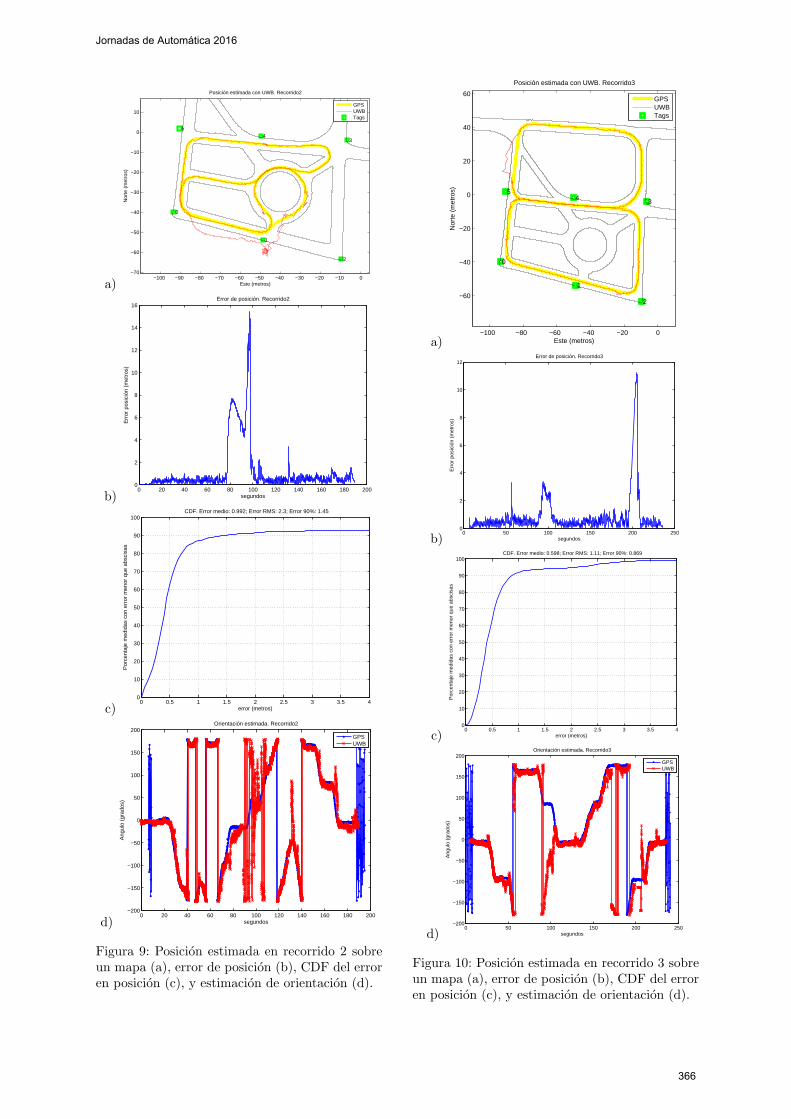
En las siguientes figuras (Fig.8, Fig.9, Fig.10) po-demos ver los resultados obtenidos para los 3 reco-rridos de test. En la parte de arriba de las figuras(a) vemos la trayectoria estimada con UWB su-perpuesta a la posicion verdadera proporcionadapor el GPS-RTK. A pesar de que la disponibilidadde rangos no es muy alta (tıpicamente entre soloentre 3 y 4 tags son visibles de los 6 instalados) yde que existen algunos outliers con varios metrosde error, el filtro de Kalman permite estimar conrelativa precision la posicion.
El error de posicion temporal, segun avanza elvehıculo se ve en la segunda grafica de cada fi-gura (b). Existen momentos donde solo estan dis-ponibles 2 o menos tags, lo cual provoca una faltade informacion que limita las estimaciones, ya que
a)-100 -80 -60 -40 -20 0
Este (metros)
-70
-60
-50
-40
-30
-20
-10
0
10
Nor
te (
met
ros)
Posición estimada con UWB. Recorrido1
0
1
2
34
5
GPSUWBTags
b)0 20 40 60 80 100 120 140 160
segundos
0
0.5
1
1.5
2
2.5
3
3.5
Err
or p
osic
ión
(met
ros)
Error de posición. Recorrido1
c)0 0.5 1 1.5 2 2.5 3 3.5 4
error (metros)
0
20
40
60
80
100
Por
cent
aje
med
idas
con
err
or m
enor
que
abs
cisa
s
CDF. Error medio: 0.402; Error RMS: 0.562; Error 90%: 0.738
d)0 20 40 60 80 100 120 140 160 180
segundos
-200
-150
-100
-50
0
50
100
150
200
Ang
ulo
(gra
dos)
Orientación estimada. Recorrido1
GPSUWB
Figura 8: Posicion estimada en recorrido 1 sobreun mapa (a), error de posicion (b), CDF del erroren posicion (c), y estimacion de orientacion (d).
Jornadas de Automática 2016
365
a)−100 −90 −80 −70 −60 −50 −40 −30 −20 −10 0
−70
−60
−50
−40
−30
−20
−10
0
10
0
1
2
34
5
Este (metros)
Nor
te (
met
ros)
Posición estimada con UWB. Recorrido2
GPSUWBTags
b)0 20 40 60 80 100 120 140 160 180 200
0
2
4
6
8
10
12
14
16
segundos
Err
or p
osic
ión
(met
ros)
Error de posición. Recorrido2
c)0 0.5 1 1.5 2 2.5 3 3.5 4
0
10
20
30
40
50
60
70
80
90
100
error (metros)
Por
cent
aje
med
idas
con
err
or m
enor
que
abs
cisa
s
CDF. Error medio: 0.992; Error RMS: 2.3; Error 90%: 1.45
d)0 20 40 60 80 100 120 140 160 180 200
−200
−150
−100
−50
0
50
100
150
200
Ang
ulo
(gra
dos)
segundos
Orientación estimada. Recorrido2
GPSUWB
Figura 9: Posicion estimada en recorrido 2 sobreun mapa (a), error de posicion (b), CDF del erroren posicion (c), y estimacion de orientacion (d).
a)−100 −80 −60 −40 −20 0
−60
−40
−20
0
20
40
60
0
1
2
345
Este (metros)
Nor
te (
met
ros)
Posición estimada con UWB. Recorrido3
GPSUWBTags
b)0 50 100 150 200 250
0
2
4
6
8
10
12
segundos
Err
or p
osic
ión
(met
ros)
Error de posición. Recorrido3
c)0 0.5 1 1.5 2 2.5 3 3.5 4
0
10
20
30
40
50
60
70
80
90
100
error (metros)
Por
cent
aje
med
idas
con
err
or m
enor
que
abs
cisa
s
CDF. Error medio: 0.598; Error RMS: 1.11; Error 90%: 0.869
d)0 50 100 150 200 250
−200
−150
−100
−50
0
50
100
150
200
Ang
ulo
(gra
dos)
segundos
Orientación estimada. Recorrido3
GPSUWB
Figura 10: Posicion estimada en recorrido 3 sobreun mapa (a), error de posicion (b), CDF del erroren posicion (c), y estimacion de orientacion (d).
Jornadas de Automática 2016
366

aumentan de incertidumbre al basarse la salida delfiltro de Kalman en una prediccion de los estadossin apenas actualizaciones con medidas de rango.El error medio de posicion en todos los recorri-dos es de 0.4, 0.99 y 0.60 metros respectivamente.Siendo el error RMS de 0.73, 1.45 y 1.11 metros,respectivamente. La distribucion de este error in-tegrada se puede ver en la graficas (c) de las figu-ras como una distribucion acumulativa del error(CDF -Cumulative Distribution Function).
Finalmente la estimacion de la orientacion delvehıculo se muestra en las figuras 8 a 10 en lagrafica inferior (d), junto con el heading, o anguloen la direccion de avance, generado por el GPS. Seaprecia que al principio del recorrido con el cocheparado el heading del GPS es totalmente ruidoso(ya que no hay movimiento y no se puede estimarhacia donde avanza el coche). Sin embargo la esti-macion de orientacion basada en UWB es bastantecorrecta (aspecto que se ve claro en la Fig.8d). Du-rante la fase de movimiento del vehıculo la orien-tacion es bastante similar al heading (ya que elcoche se mueve siempre hacia delante), salvo enlas zonas donde la falta de suficientes medidas co-rrectas de rango es patente, que afecta tanto a laestimacion de posicion como a la de orientacion.
6. Conclusiones
En este trabajo se ha presentado una evaluacionexperimental de un sistema de radio UWB paralocalizar vehıculos en entornos donde el posicio-namiento con GPS pueda no estar disponible oeste degradado. Hemos realizado un analisis a ni-vel de medida de rangos de la capacidad de medidaentre pares de nodos UWB, y hemos visto que sibien existen medidas erroneas (outliers) y un ran-go de operacion limitado a partir de 60 metros, esposible medir en general con precisiones submetri-cas (desviacion estandar menor de 0.2 metros) ladistancia entre nodos. Planteando un filtro de Kal-man extendido para obtener la posicion y orienta-cion del vehıculo ha sido posible determinar conbastante precision dichas estimaciones (errores deposicion menores a 0.7 metros en el 90% de loscasos) eliminando gran parte de los outliers. Losmayores errores de posicion y orientacion han ocu-rrido cuando solo tenıamos 2 o menos tags UWB ala vista. En estos casos la trilateracion no es posi-ble por falta de informacion sensorial y es normalque el filtro diverja al usar solo predicciones basa-das en los estados previos.
Como trabajo futuro esta previsto analizar el efec-to de subir ligeramente la posicion de los anchorsUWB sobre el techo del vehıculo o aumentar la al-tura de las bases de los anchors, para de esta formaver si se maximizarıa el rango de medida y la pro-
babilidad de deteccion. Un importante trabajo fu-turo consiste en extender el uso del sistema UWBal posicionamiento relativo entre vehıculos, con elfin de evaluar la aplicabilidad de estos sistemasen la gestion de maniobras cooperativas, como esel caso de la formacion de pelotones (platooning).Ası mismo, se plantea aprovechar la informacionde sensores adicionales de la plataforma de prue-ba (odometrıa y unidades inerciales) para mejorarel filtrado de la localizacion y evaluar el desem-peno en entornos donde la localizacion por GPSes inviable, como es el caso de tuneles y zonassubterraneas.
Agradecimientos
Los autores quieren agradecer la ayuda financie-ra recibida de los proyectos LORIS (TIN2012-38080-C04-04), TARSIUS (TIN2015-71564-C4-2-R (MINECO/FEDER)), TCAP-AUTO (RTC-2015-3942-4 (MINECO/FEDER)) y NAVEGASE(DPI2014-53525-C3-3-R (MINECO)).
Referencias
[1] J. Godoy, V. Milanes, J. Rastelli, J. Villagra,T. de Pedro, C. Gonzalez. Implementacionde un sistema de localizacion para vehıculossin conductor, Seminario Anual de Automati-ca, Electronica Industrial e Intrumentacion2010.
[2] I. Guvenc, C. C. Chong, F. Watanabe,“NLOS identification and mitigation forUWB localization systems,” IEEE WirelessCommunications and Networking Conferen-ce, WCNC, 2007, pp. 1573–1578.
[3] A.R. Jimenez, F. Seco, C. Prieto, J. Roa, Tec-nologıas sensoriales de localizacion para en-tornos inteligentes, I Congreso espanol de in-formatica-Simposio de Computacion Ubicuae Inteligencia Ambiental, UCAmI2005, 2005,pp. 75-86.
[4] E. Kaplan, C. Hegarty. Understanding GPS:Principles and applications. Artech House1996.
[5] R. Mautz, Indoor Positioning Technologies.ETH Zurich, PhD thesis, 2012.
[6] National Marine Electronics Association(U.S.). Standard for Interfacing Marine Elec-tronic Devices 2002.
[7] F. G. H. Nurminen, T. Ardeshiri, R. Piche,“A NLOS-robust TOA positioning filter ba-sed on a skew- t measurement noise model,”in International Conference on Indoor Posi-tioning and Indoor Navigation (IPIN), 2015,no. October, pp. 13–16.
Jornadas de Automática 2016
367