ethan fromematesjaranda.wikispaces.com/file/view/vectores en el... · web viewlos vectores son...
TRANSCRIPT

TEMA 11: VECTORES EN EL ESPACIO.PRODUCTO ESCALAR, VECTORIAL Y MIXTO
1.- Vectores en el espacio. Definiciones. 2.- Operaciones con vectores libres. 3.- Combinaciones lineales. Sistemas generadores. 4.- Dependencia e independencia lineal. 5.- Bases. Tipos de bases.6.- Sistemas de referencia afines. 7.- Operaciones con vectores expresados en coordenadas.8.- Producto escalar: definición, propiedades y aplicaciones.9.- Producto vectorial: definición, propiedades y aplicaciones.10.- Producto mixto: definición, propiedades y aplicaciones.
INTRODUCCIÓN.
Con este tema empezaremos la parte de Geometría, última de las tres en que hemos dividido el curso, y para la que nos será de gran ayuda todo lo visto en el curso anterior relativo a vectores en el plano, pues casi todo lo que veremos será una generalización de eso al caso de “tres coordena-das”, es decir, al mundo en tres dimensiones en el que vivimos: el espacio . Al margen de las pe-queñas diferencias que pueda haber sobre lo ya visto en el plano se introduce dos nuevas operacio-nes, el producto vectorial y el producto mixto, que sólo tienen sentido en tres dimensiones, por lo que será totalmente nuevo.
Dada la similitud de este tema con lo que ya vimos el año pasado, no nos recrearemos dema-siado en él, pasando rápidamente por encima de la mayoría de los contenidos y parando en aquellas cosas que realmente puedan ofrecer algún tipo de confusión (conceptos de base, dependencia e in-dependencia lineal, consecuencias de las operaciones,...). Pensemos este tema entonces como una mera introducción a la geometría. Esto no quiere decir que el tema no tenga importancia, sino todo lo contrario, éste será el tema fundamental de toda la Geometría, en el sentido de que es necesario dominar absolutamente todos los conceptos de este tema para poder seguir adelante.
1.- VECTORES EN EL ESPACIO. DEFINICIONES.
Definición:
Llamamos vector fijo al segmento orientado que tiene por origen el puno A y por extremo el punto B el extremo. Mientras no preste confusión el vector podemos expresarlo simplemente por v.
1
A
B

Elementos característicos de un vector fijo.
Módulo: Es la longitud del segmento AB. Lo representamos por .
Dirección: Es la dirección de la recta que lo contiene. Si dos vectores son paralelos, tienen la mis-ma dirección
Sentido: Es el que va del origen al extremo. Lo representamos por la punta de la flecha. Una direc-ción tiene dos sentidos.
Con lo anterior, si tenemos un vector fijo , las coordenadas de dicho vector serán las resultantes de restar las coordenadas del extremo del vector menos las coordenadas del origen. A(a1, a2, a3) B(b1, b2, b3) =( b1 - a1, b2 – a2, b3 – a3)
Ejemplo:
Si A(2,-1,3) y B(5,4,-4), entonces =(3,5,-7)
Definición
Llamamos vectores equipolentes a los vectores fijos que tienen el mismo módulo, la misma direc-ción y el mismo sentido. Es obvio que hay infinitos vectores equipolentes entre sí, basta con trasla-darlos de un lado a otro.
Ejemplo:
Si A(2,-1,3) y B(5,4,-4), entonces =(3,5,-7)
Si C(3,0,5) y D(6,5,-2), entonces =(3,5,-7)
Por tanto, los vectores y son equipolentes
Definición
Llamamos vector libre al conjunto formado por un vector fijo y todos los vectores equipolentes a él. Cualquiera de los vectores fijos es un representante.
Ejemplo:
Todos los vectores equipolentes a los vectores anteriores y nos darán como resultado (3,5,-7), por tanto hablaremos
del vector libre =(3,5,-7), sin indicar su origen ni su extremo.
2

2.- Operaciones con vectores libres.
Suma de vectores (geométricamente)
Para sumar dos vectores , , podemos hacerlo de dos maneras:
1.- Desde un punto cualquiera del plano, colocamos un vector equipolente a y, a partir del extremo de éste, colocamos otrovector equipolente a de manera que coincida el extremo del primero con el origen del segundo. La suma es el vector que tiene como origen el origen del primero y como extremo el extremo del segundo.
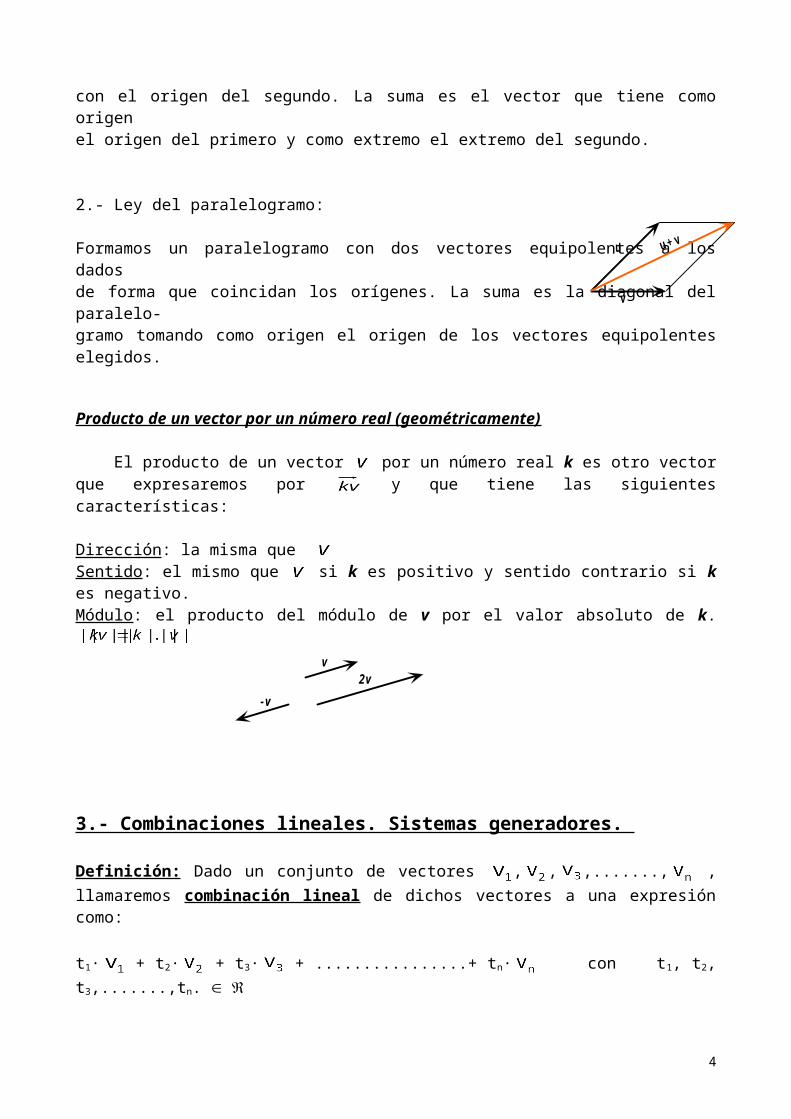
2.- Ley del paralelogramo:
Formamos un paralelogramo con dos vectores equipolentes a los dados de forma que coincidan los orígenes. La suma es la diagonal del paralelo-gramo tomando como origen el origen de los vectores equipolentes elegidos.
Producto de un vector por un número real (geométricamente)
El producto de un vector por un número real k es otro vector que expresaremos por y que tiene las siguientes características:
Dirección: la misma que Sentido: el mismo que si k es positivo y sentido contrario si k es negativo.Módulo: el producto del módulo de v por el valor absoluto de k.
3.- Combinaciones lineales. Sistemas generadores.
Definición: Dado un conjunto de vectores , , ,......., , llamaremos combinación lineal de di-chos vectores a una expresión como:
t1· + t2· + t3· + ................+ tn· con t1, t2, t3,.......,tn.
Un vector diremos que es combinación lineal de los anteriores si podemos encontrar números rea-les t1, t2, t3,.......,tn tal que se puede escribir de la forma:
= t1· + t2· + t3· + ................+ tn·Ejemplo :
3
uv
u + v
u
v
u + v
v
-v
2v
Dados los vectores y , entonces el vector es una combinación lineal de ya que Definición: Llamaremos sistema generador de un espacio a un conjunto de vectores tal que cual-quier otro vector se puede expresar como combinación lineal de ellos. El nombre mismo nos lo dice todo, pues podemos decir que dicho conjunto de vectores ‘genera’ el espacio, es decir que con ellos podemos conseguir cualquier otro vector sin más que multiplicarlos por números y sumarlos.
Importante: En , se necesitan al menos tres vectores para poder ser sistema generador.
Ejemplos:
El sistema formado por los vectores SI es un sistema generador
El sistema formado por los vectores NO es un sistema generador
El sistema formado por los vectores NO es un sistema generador
4.- Dependencia e independencia lineal.
Definición: Dado un conjunto de vectores , diremos que dichos vectores son linealmente dependientes cuando alguno de ellos se pueda expresar en función de los otros, o también, cuando alguno de ellos sea combinación lineal de los otros o, equivalentemente, si existen
, alguno de ellos distinto de 0, tal que:
Ejemplo:
Dados los vectores , podemos observar que el vector se obtiene a partir
de los otros dos de la siguiente forma: o equivalentemente, , por tanto, los vectores son linealmente dependientes.
Además, si hubiésemos estudiado el rango de la matriz formada por dichos vectores, veríamos que su rango es 2:
Rg A = 2 porque la fila 3ª es el doble de la 1ª más la 2ª.
4

Definición: Diremos que dichos vectores son linealmente independientes cuando ninguno de ellos se pueda expresar en función de los otros, o también, cuando ninguno de ellos sea combinación lineal de los otros o, equivalentemente, si la única forma de conseguir que:
es cuando
Ejemplo:
Dados los vectores , puede comprobarse que ninguno es combinación de los otros
dos y para ello basta ver que su rango es 3, es decir el siguiente determinante es distinto de 0:
Importante: Elegido un conjunto cualquiera de vectores de , entre ellos, hay como mucho tres vectores independientes
5.- Bases. Tipos de bases.
A partir de los conceptos anteriores podemos dar la definición de base de un espacio, que es el con-cepto fundamental de la geometría analítica:
Definición: Diremos que un conjunto de vectores { , , ,......., } forman una base de un es-pacio vectorial si es a la vez un sistema generador y son linealmente independientes.
Importante: Una base de está formada por tres vectores independientes.
O lo que es lo mismo, tres vectores del espacio, no coplanarios, forman una base porque cualquier otro vector se puede expresar como combinación lineal de ellos.
Ejemplos:
es una base de ya que está formada por tres vectores independien-tes (basta ver que su rango es tres)
es la base canónica de . Al referirnos a ella la denotaremos como
Definición: Teniendo en cuenta que cualquier otro vector del espacio se puede escribir como com-binación lineal de los vectores de la base, si tengo un vector cualquiera existirán t1, t2, t3,.......,tn. , tal que:
= t1· + t2· + t3· + ................+ tn·
5

A t1, t2, t3,.......,tn. le llamaremos coordenadas del vector en dicha base, y podremos ex-presarlo como = (t1, t2, t3,.......,tn.).
Ejemplo:
Dada la base , el vector se puede expresar como:
= , por tanto las coordenadas de respecto a la base B son (1,2,3)
Ejemplo:
Dada la base , el vector se puede expresar como:
= , por tanto las coordenadas de respecto a la base B2 son (2,-1,1)
Por tanto, un mismo vector tiene diferentes coordenadas según se refiera a una base u otra.
Realmente, cuando hablamos de las coordenadas de un vector cualquiera, sin darnos cuenta, esta-mos expresando ese vector respecto a la base canónica {(1, 0, 0), (0, 1, 0), (0, 0, 1)}, que es la que utilizamos habitualmente. Ejemplo:
(4, -2, 5) = 4·(1, 0, 0) –2·(0, 1, 0) + 5·(0, 0, 1)
Definición:
Diremos que una base es Base ortogonal cuando los vectores que la forman son perpendiculares dos a dos.
Ejemplo:
Los vectores son perpendiculares dos a dos
Definición:
Diremos que una base es Base ortonormal cuando los vectores que la forman son perpendiculares dos a dos y, además, son unitarios (su módulo vale 1).
Ejemplo:
La base canónica es una base ortonormal. Se expresa por .
6
i
j
k

; ;
(Nota: En el espacio hay infinitas bases ortogonales y ortonormales. Ya veremos m´s adelante como hallarlas).
6.- Sistemas de referencia afines.
Definición: Llamaos sistema de referencia afín al conjunto formado por:
I. Un punto fijo O del espacio, llamado origen.II. Una base cualquiera de dicho espacio.
Nosotros, para facilitar nuestras operaciones, tomamos tradicionalmente el punto O(0,0,0) y como base, la base canónica , por eso, un sistema de referencia en el espacio, queda expresado en la forma siguiente:
Elegido un sistema de referencia, a cada punto P (x,y,z) del espacio se le asocia el vector que recibe el nombre de vector de posición.
Expresando el vector como combinaciónlineal de los vectores que forman la base, existen tres números reales x, y, z tales que
.
Los números x, y, z reciben el nombre de coordenadas del vector y dicho vector se puede expre-sar simplemente así:
Está claro entonces que, en nuestro sistema de referencia , las coordenadas del pun-to coinciden con las de su vector de posición.
7.- Operaciones con vectores expresados en coordenadas.
Suma analítica de vectores
Para sumar dos vectores analíticamente, sumamos cada coordenada del primer vector, por la corres-pondiente coordenada del segundo vector.
Ejemplo: Si y , entonces
7
ij
kO
P
Producto analítico de un vector por un número real
Para multiplicar un vector por un número real, se multiplica cada una de las coordenadas del vector por dicho número.
Ejemplo:
Siendo , el producto de por 3, será:
8.- Producto escalar: definición, propiedades y aplicaciones.
(Nota: Vamos a iniciar con este apartado la parte del tema dedicado a las operaciones digamos “especiales” pues se da por seguro que todos conocen las operaciones ‘básicas’, es decir, la suma de vectores y el producto de un vector por un número, así como la representación gráfica de ellas.)
Definición: Dados dos vectores y , llamamos producto escalar de esos dos vectores a:
=
Propiedades del producto escalar
1.- Conmutativa: =
2.- Asociativa respecto a los escalares: (k· ) = k·( )
3.- (ya que )
4.- Si = 0 ó = 0 Þ = 0.
5.- Si ¹ 0 y ¹ 0 entonces = 0 Û ^ ,
(es decir que el producto escalar de dos vectores (distintos de 0) es 0 sí y sólo sí esos dos vectores son perpendiculares). Esto es sencillo de ver a partir de la definición y es una propiedad fundamen-tal que utilizaremos en multitud de ocasiones.
6.- Distributiva respecto a la suma de vectores: ( + ) = +
Expresión en coordenadas del producto escalar:
8
Si = (x1, y1, z1) y = (x2, y2, z2) son dos vectores cuyas coordenadas están expresadas respecto a una base ortonormal (por ejemplo la base canónica), entonces:
= x1·x2 + y1·y2 + z1·z2
Demostración
Antes de nada fijémosnos en los productos escalares de los vectores de la base canónica:
(todo por la propia definición)
Aplicando las propiedades del producto escalar y las expresiones de esos vectores respecto a la base canónica, tendremos:
= (x1, y1, z1)·(x2, y2, z2)=(x1· + y1· + z1· ) (x2· + y2· + z2· ) =x1·x2·+x1·y2· +x1·z2· +y1·x2· +y1·y2· +y1·z2· +z1·x2· + z1·y2· + z1·z2·
pero, teniendo en cuenta los productos escalares de los vectores de la base canónica, nos queda:
= x1·x2 + y1·y2 + z1·z2
(Esta expresión es la que utilizaremos normalmente para multiplicar escalarmente dos vectores pues casi siempre conoceremos sus coordenadas).
Ejemplo:
Si y , entonces
Aplicaciones del producto escalar:
1.- Para comprobar si una base es ortogonal u ortonormal.
Si B ( , , ) es una base ortogonal de vectores entonces debe cumplir que:
=0 = 0 = 0
Si B ( , , ) es una base ortonormal de vectores entonces, además, debe cumplir que:
=1 = 1 = 1
=0 = 0 = 0
2.- Para hallar el módulo de un vector en coordenadas:
Sabemos que , así si = (x1, y1, z1), teniendo en cuenta la expresión en coordenadas del producto escalar:
9
Esto es lo que se preveía, ya que si observamos la figura, el módulodel vector , se obtiene aplicando dos veces el teorema de Pitágoras.Así es como tradicionalmente se calcula y no con el producto escalar.
Ejemplo:
Calcula el módulo del vector
3.- Para calcular el ángulo que forman dos vectores:
A partir de la definición de producto escalar podemos despejar el coseno:
De ahí tenemos que:
Ángulo que forman y = = arcos
Ejemplo:
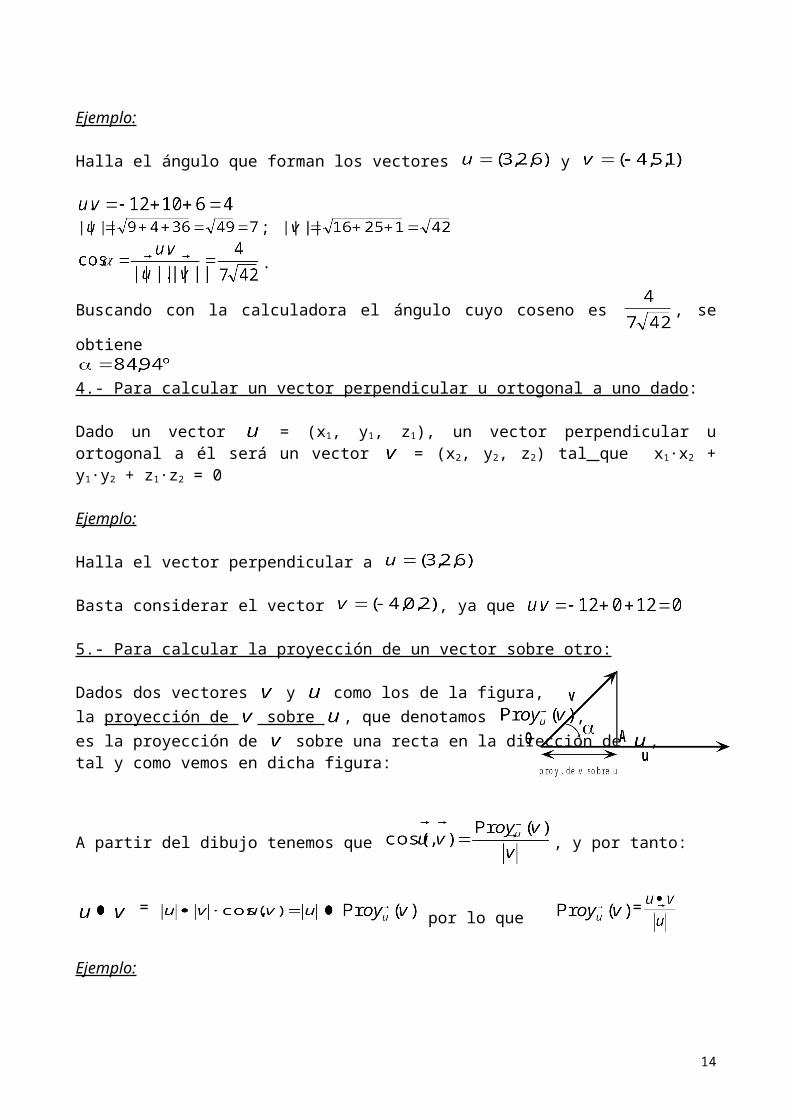
Halla el ángulo que forman los vectores y
;
.
Buscando con la calculadora el ángulo cuyo coseno es , se obtiene
4.- Para calcular un vector perpendicular u ortogonal a uno dado:
Dado un vector = (x1, y1, z1), un vector perpendicular u ortogonal a él será un vector = (x2, y2, z2) tal que x1·x2 + y1·y2 + z1·z2 = 0
Ejemplo:
Halla el vector perpendicular a
Basta considerar el vector , ya que
5.- Para calcular la proyección de un vector sobre otro:
Dados dos vectores y como los de la figura, la proyección de sobre , que denotamos , es la proyección de sobre una recta en la dirección de ,
10
x
y
z
1x1y
1zv
21
21 yx
21
21
21|||| zyxv

tal y como vemos en dicha figura:
A partir del dibujo tenemos que , y por tanto:
= por lo que =
Ejemplo:
Halla la proyección ortogonal del vector sobre
Solución:
El ángulo que forman los vectores es agudo(ya que el producto escalar es positivo)
Þ Þ (que es la medida del segmento x)
Dividimos el vector v por su módulo a fin de obtener un vector de la misma dirección y sentido pe-ro de módulo unidad:
;
Finalmente, el vector unitario obtenido lo multiplicamos por
9.- Producto vectorial. Propiedades y aplicaciones.
Definición : Dados dos vectores y , llamaremos producto vectorial de esos dos vectores, y lo denotaremos a otro vector que cumpla lo siguiente:
Módulo: Dirección: Perpendicular al plano determinado por los vectores y a .Sentido: El del avance de un sacacorchos que gira de a por el camino más corto. (Regla de la mano derecha)
11
R eg la d e la m a n o d erech a
u
v
vu
h

(Nota: A partir de esta definición hay que notar la gran diferencia con el producto escalar visto ante-riormente, y es que el producto vectorial de dos vectores ¡es un vector!, mientras que el producto escalar de dos vectores es un número.)
Propiedades del producto vectorial:
1.- Si o Þ
2.- Si y , entonces Û y son proporcionales, es decir si son paralelos. (= t· , con t ).
3.- El producto vectorial es anticonmutativo, es decir,
4.- Distributiva respecto a la suma de vectores:
5.- Asociativa respecto al producto por escalares (números):
6.- El producto vectorial, en general, no es asociativo, es decir:
Expresión analítica del producto vectorial :
Hasta ahora hemos hablado de cómo es el producto vectorial y de sus propiedades, pero no de cómo calcularlo. Veamos entonces cómo es su expresión en coordenadas a partir de los vectores que mul-tiplicamos.
Dados dos vectores y , el producto vectorial de esos vectores, en coor-denadas, viene dado por:
Para ello, previamente vamos a ver cuáles son los productos vectoriales de los vectores de la base canónica
Por tanto, dados dos vectores y , éstas son sus coordenadas respecto a la base canónica, es decir:
,
que equivale a decir,
, o mejor,
12

(Nota: De forma práctica podemos calcularlo de la siguiente forma: .
Lo anterior hay que tomarlo como una ‘regla mnemotécnica’, pues eso no es un verdadero determinante (no tiene sentido un determinante con números y vectores) y hay que calcularlo desarrollándolo por los elementos de la pri-mera fila.)
Ejemplo:
1. Calcula el producto vectorial de los vectores y
Conviene colocar el primer vector y debajo de este el segundo:
13
Interpretación geométrica del producto vectorial:
“El módulo del producto vectorial es el área del paralelogramo que ambos vectores forman”.
Basta darse cuenta que el área del paralelogramo es:
Área paralelogramo = Base x altura
Pero como la base es y la altura , tenemos que:
Área paralelogramo = Base x altura =
Aplicaciones del producto vectorial
1.- Para calcular el área de un paralelogramo
Basta recordar lo anteriormente dicho, es decir, que el módulo del producto vectorial es el área del paralelogramo que ambos vectores forman.
Ejemplo:
Dados los vectores , halla el área del paralelogramo que determinan.
Teniendo en cuenta que el área del paralelogramo que determinan es el módulo del producto vecto-rial:
Área = por lo que Área =
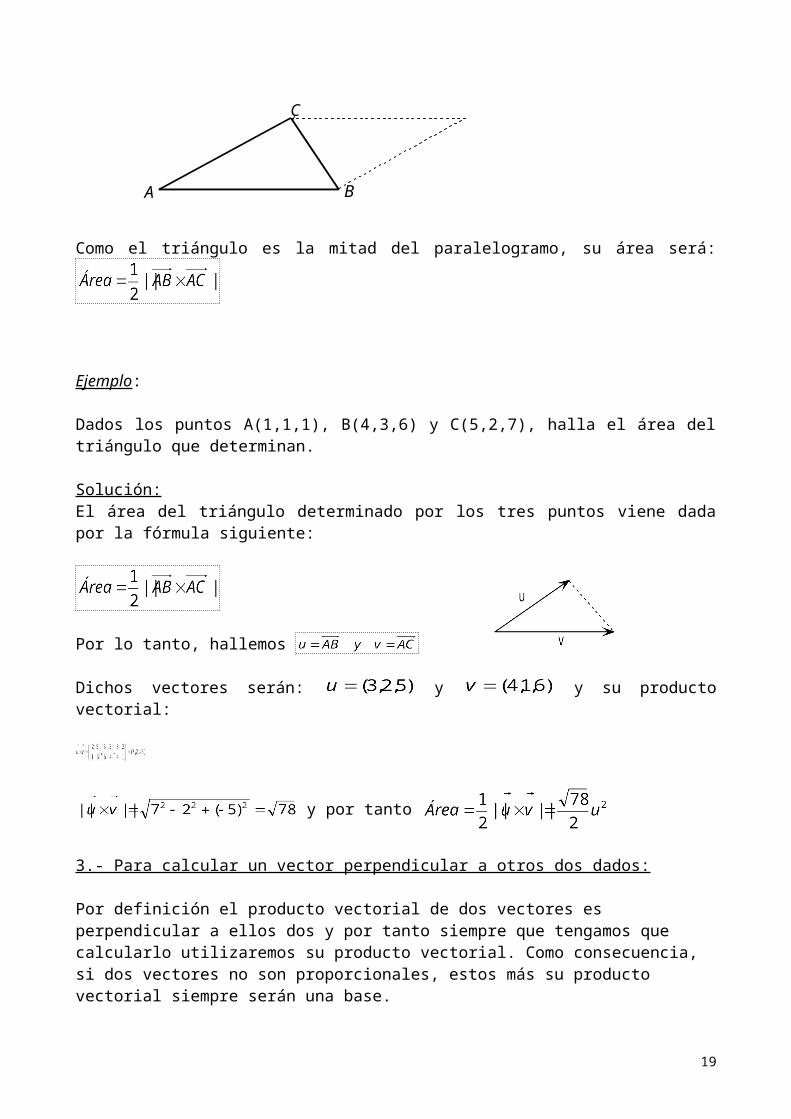
2.- Para calcular el área de un triángulo:Dado el triángulo de vértices A, B y C, los vectores y determinan un paralelogramo cuya área es el módulo del producto vectorial.
Como el triángulo es la mitad del paralelogramo, su área será:
Ejemplo:
Dados los puntos A(1,1,1), B(4,3,6) y C(5,2,7), halla el área del triángulo que determinan.
14
u
v
vu
h
A B
C

Solución:El área del triángulo determinado por los tres puntos viene dada por la fórmula siguiente:
Por lo tanto, hallemos
Dichos vectores serán: y y su producto vectorial:
y por tanto
3.- Para calcular un vector perpendicular a otros dos dados:
Por definición el producto vectorial de dos vectores es perpendicular a ellos dos y por tanto siempre que tengamos que calcularlo utilizaremos su producto vectorial. Como consecuencia, si dos vecto-res no son proporcionales, estos más su producto vectorial siempre serán una base.
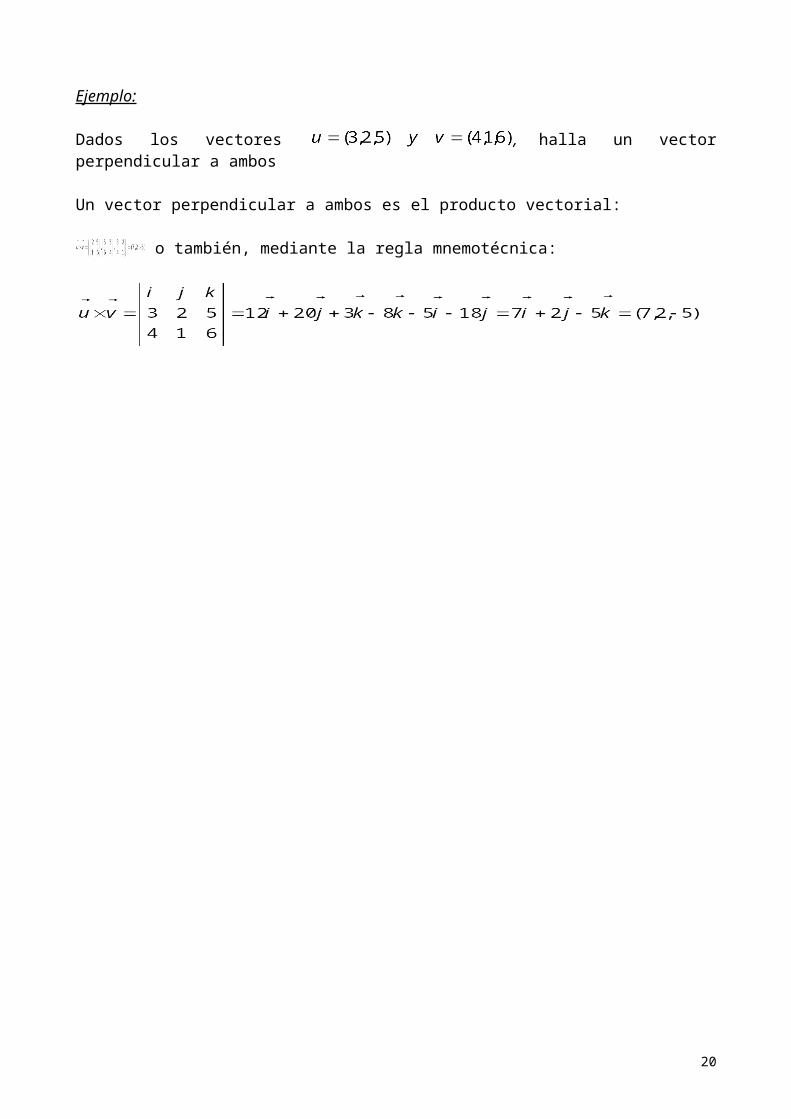
Ejemplo:
Dados los vectores , halla un vector perpendicular a ambos
Un vector perpendicular a ambos es el producto vectorial:
o también, mediante la regla mnemotécnica:
15

10.- Producto mixto: definición, propiedades y aplicaciones.
Definición: Dados tres vectores , y , llamamos producto mixto de esos tres vectores, y lo denotaremos , al número que se obtiene al realizar el producto escalar del primero por el producto vectorial de los otros dos:
=
Expresión analítica del producto mixto:
Dada una base ortonormal B( ), y tres vectores , y , entonces:
= = =
=
Por tanto, = , es decir, para hallar el producto mixto de tres vectores basta
calcular el determinante al que dan lugar una vez puestos en su orden oportuno.
Ejemplo:
Dados los vectores y , halla el producto mixto :
Propiedades del producto mixto:
(Nota: todas las propiedades siguientes son consecuencia directa de las propiedades vistas para los determinantes.)
1.- El producto mixto cambia de signo si intercambiamos dos de los vectores entre sí, es decir:
= = =
2.- Como consecuencia de lo anterior, teniendo en cuenta que intercambiamos dos veces tenemos que:
= =
3.- Distributiva respecto de la suma de vectores: = +
4.- Si es un número real, entonces: = = =
16

5- Tres vectores son linealmente dependientes (o son coplanarios) Û =0
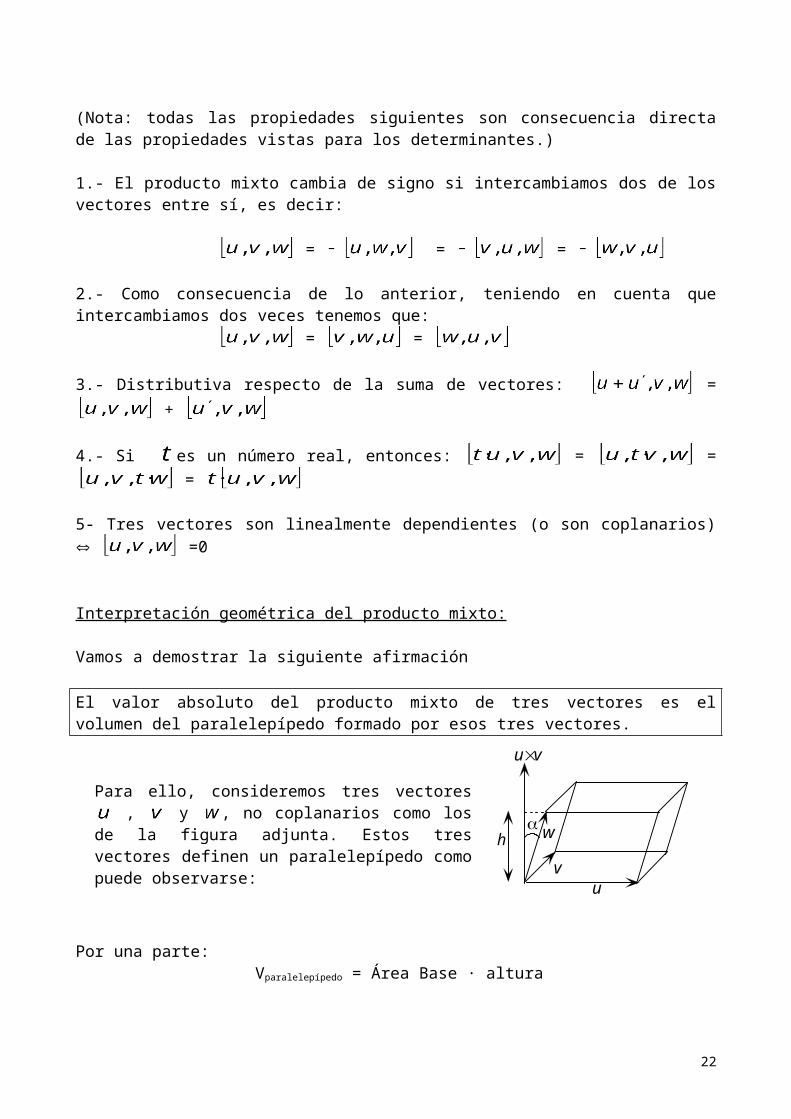
Interpretación geométrica del producto mixto:
Vamos a demostrar la siguiente afirmación
El valor absoluto del producto mixto de tres vectores es el volumen del paralelepípedo formado por esos tres vectores.
Para ello, consideremos tres vectores , y , no copla-narios como los de la figura adjunta. Estos tres vectores definen un paralelepípedo como puede observarse:
Por una parte: Vparalelepípedo = Área Base · altura
Por otra parte:
Pero como: es el área de la base de paralelepípedo y , entonces, ambas expresiones son idénticas, por lo que:
= Volumen del paralelepípedo.
Aplicaciones del producto mixto.
Para calcular el volumen de un paralelepípedo
Basta aplicar lo anterior, es decir, que el valor absoluto del producto mixto de tres vectores es el vo-lumen del paralelepípedo formado por esos tres vectores.
Ejemplo:
Dados los vectores y , halla el volumen del paralelepípedo que determinan.
Para calcular el volumen de un tetraedro
El volumen del tetraedro es
17
uv
w
vu
h

Ejemplo:
Dados los vectores y halla el volumen del tetraedro que determinan.
18
Ejercicios resueltos
1.- Determina el valor de t para que los vectores de coordenadas (1, 1, t), (0, t, 1-t) y (1, -2, t) sean linealmente dependientes).
Solución:Si son linealmente dependientes, uno de ellos, se podrá expresar como combinación lineal de los otros restantes, por tanto,(1, 1, t) = (0, t, 1-t) + (1, -2, t)Y de aquí se obtiene:
y de aquí resulta Si Y si t = 1, = 3La relación de dependencia es , es decir,
2.- ¿Puede haber dos vectores u y v tales que y ?
Solución:Si es el ángulo que forman, de la definición de producto escalar, se obtiene:
Y entonces, Dicha relación es imposible porque
3.- Halla el valor de a para que los vectores y , sean perpendiculares.
Solución:Para que sean perpendiculares, el producto escalar ha de ser nulo, por tanto,
Þ y de aquí se obtiene a = 16
4.- Halla un vector w cuyo módulo sea 4 y además perpendicular a y
Sabemos que el producto vectorial de dos vectores es un vector perpendicular a cada uno de ellos, Por tanto, Lo dividimos por su módulo para obtener un vector de módulo unidad:
es perpendicular a u y a v.
;
El vector unitario obtenido lo multiplicamos por 4 y obtenemos el vector buscado:
5.- Comprueba si los vectores (1, 2, 3), (4, 5, 6) y (7, 8, 9) de son linealmente independientes.
Solución:Una forma de verlo es formar una matriz y aplicar la reducción de Gauss. Si se llega a una matriz escalonada, es decir, que tenga por debajo de la diagonal principal todo ceros pero que ninguna fila de la matriz sea nula, entonces los vectores dados son linealmente independientes.
19
Ninguna fila es nula y por debajo de la diagonal principal todo son ceros. Los vectores dados son li-nealmente independientes.Otra forma de verlo es hallar el determinante de la matriz y si es distinto de cero, los vectores son li-nealmente independientes.
6.- Consideremos el conjunto de los polinomios de grado dos con una indeterminada. Dichos poli-nomios pueden ser considerados como vectores. Estudia si los polinomios
y son linealmente dependientes o independientes.
Solución:Los polinomios dados podemos expresarlos en la forma siguiente:A = (1, -1, 4), B = (3, 6, 2) y C = (2, 10, -4)Si aplicamos el método de Gauss, resulta:
Para pasar de la segunda a la tercera matriz, la segunda fila la hemos multiplicado 4 y la tercera fila por 3.Hemos llegado a tres filas, ninguna de ellas nulas, y todo ceros por debajo de la diagonal principal.Los polinomios dados son linealmente independientes.
7.- El vector está dado en la base canónica. Halla sus componentes respecto de la base
Solución:
Esto nos lleva al siguiente sistema de ecuaciones:
Sumando la 1ª ecuación, cambiada de signo a las otras dos,Þ y entonces
Si el valor de lo llevamos a la 1ª ecuación del sistema inicial, El vector v queda expresado en función de los elementos que forman la base en la forma siguiente:
8.- Estudia si los vectores (1, 1, 0), (0,1, 1) y (2, 1, 1) forman una base de
Solución:Hemos de saber que: Dos vectores linealmente independientes de forman una base de Tres vectores linealmente independientes de forman una base de . Etc.
20

En nuestro caso si los vectores dados son linealmente independientes formarán una base:
Hemos llegado a una matriz con la tercera fila nula, los vectores dados son linealmente dependien-tes y, por tanto, no forman una base de
9.- Nos dan los vectores y Halla:a) Valor absoluto del producto mixto de a, b y c y da su significado geométrico.b) Ángulo que forman b y c.c) Razona si forman una base y, en caso afirmativo, halla las coordenadas del vector
en dicha base.
Solución
a)
Valor absoluto del producto mixto es El valor absoluto del producto mixto es el volumen del paralelepípedo definido por los s tres vecto-res.
b) Para calcular el ángulo que forman b y c aplicamos la definición de producto escalar: y de aquí
Si , entonces = 90º
c) Podemos hacerlo por el método de Gauss o bien por determinantes. Si el determinante es distinto de cero, los vectores son linealmente independientes.
Y como estamos en los vectores forman una base. Esto significa que cualquier otro vector se puede expresar como combinación lineal de ellos. Si queremos hallar las coordenadas de
respecto de la base, escribimos: y ello nos lleva al sistema siguiente
Þ = 1; = 1; = 0 que son las coordenadas buscadas.
10.- Dados los vectores y halla el área del triángulo que determinan.
Solución:El área del triángulo determinado por dos vectores viene dada por la fórmula siguiente:
21
Hemos de hallar, por tanto, el producto vectorial de los dos vectores dados:
11.- Dados los vectores y halla el volumen del tetraedro que determinan.
Solución:
El volumen del tetraedro es
del producto mixto tomado enen valor absoluto.
12.- Halla un vector unitario que tenga la misma dirección que
Solución:
Dado un vector u, entonces el vector es unitario.
Módulo de u:
Por tanto, será unitario (modulo1) y de la misma dirección que u.
13.- Prueba que el producto escalar de dos vectores u y v, es igual al módulo de uno de ellos por la proyección del otro sobre el.
Solución:
luego
22

En el caso de que el ángulo sea obtuso se obtiene :
Los ángulos y son suplementariospor tanto,
donde es la proyección de v sobre u
es decir,
Observación importante:Cuando el producto escalar es positivo, el ángulo es agudoCuando el producto es negativo, el ángulo es obtuso.
14.- Halla la proyección ortogonal del vector sobre
Solución:
El ángulo que forman los vectores es agudo
Þ Þ (que es la medida del segmento x)
Dividimos el vector v por su módulo a fin de obtener un vector de la misma dirección y sentido pe-ro de módulo unidad:
;
Finalmente, el vector unitario obtenido lo multiplicamos por
23

Ejercicios propuestos
1.- Determinar los valores del parámetro a, para los cuales forman base de los vectores
Sol. Para todo valor de a distinto de y de 1
2.- En el conjunto se consideran los vectores siguientes: Prueba que son linealmente dependientes y encuentra la relación de dependencia.
Sol. Basta comprobar que el determinante es nulo
3.- Sean los siguientes vectores de Determina el valor numérico del parámetro a para que sean linealmente dependientes y encuentra una relación de dependencia.
Sol. a = 2
4.- Dados los vectores Halla los valores de a para que A se pueda expresar como combinación lineal de B y de C
Sol. a = 3
5.- Dados los vectores se pide:a) ¿Son linealmente independientes?b) Escribe un vector w tal que sean linealmente independientes.c) Encuentra un vector t, tal que sean linealmente dependientes.
Sol. a) Son l.i. porque sus coordenadas no son proporcionalesb) Puede ser, por ejemplo, Aplíquese primero el método de Gaussc) Basta tomar una combinación lineal de los vectores dados.
6.- Prueba que los vectores son una base de Halla las componentes del vector en esta base.
Sol. Como son tres vectores, basta probar que son l.i. (determinante ¹0)
7.- Determina la expresión general de los vectores de que son combinación lineal de los vectores
Sol.
8.- Los vectores y están expresados en una base ortonormal. Calcula: y
Sol. ; ;
24

9.- Sean u y v tales que y que forman un ángulo de 45º. Calcula de modo que sea perpendicular a u
Sol.
10.- dados los vectores y halla la proyección ortogonal de v sobre u.
Sol.
11.- Dados los vectores y determina:Su producto mixtoVolumen del paralelepípedo determinado por ellos.
Sol.
25