etapa 3...•velocidad •torque •control de velocidad bloque de commando dc motor conexión entre...
TRANSCRIPT

ETAPA 3ESTRUCTURAS BÁSICAS DE PROGRAMACIÓN
Presentación de apoyo
FUNCIONAMIENTO DE UN ROBOT
Sensores: le permiten darse
cuenta de su entorno y envían información
al controlador
Controlador: procesa la información que recibe y transforma
en acciones
Actuadores: mecanismos que le
permiten comunicarse e inferir
en su entorno.
Un Robot está compuesto principalmente por:

FUNCIONAMIENTO BÁSICO
Dispositivos de entrada:
se generan a través de los sensores
Dispositivos de procesamiento:
en las computadoras es el CPU, en los robots se les llama controladores
Dispositivos de salida: pueden ser actuadores
como motores, servomotores , luces
leds, bocinas, etc
Programa
Entorno

ESTRUCTURAS DE PROGRAMACIÓN
ProgramaciónSecuencial:
es indicarle al robotpaso a paso lasacciones que va aejecutar.
01ProgramaciónCondicional:
cuando se evalúa unacondición que puede sercontestada comoverdadera o falsa
02Programación Cíclica:
cuando una parte delprograma se repitelas veces que seindique en el mismoprograma
03

ESTRUCTURAS DE PROGRAMACIÓN SECUENCIAL

PROGRAMA
• Programa: es el conjunto de instrucciones , comandos , ordenes o procedimientos escritos en un lenguaje de programacion para que una computadora pueda relizar una tarea determinada de manera correctay rápida.
• Un programa de calidad debe tener condiciones como:
✓ exacto
✓ claro
✓ eficiente
✓ portable
PROGRAMACIÓN
Metodología o proceso para construir unprograma. Durante este proceso, elprograma es escrito acorde a una sintaxisde un lenguaje de proramacion.

DESARROLLO DE LOS PROGRAMAS
Fase 1.Definicion del problema: Delimitar el problema o tarea que
se resolverá.
Fase 2. Análisis de el problema : identificar
los datos entrada-proceso-salida del
programa.
Fase 3. Diseño : elaborar el algoritmo ,
diagrama de flujo y prueba de escritorio.
Fase 4 . Codificación: escribir una sintaxis adecuada según el
lenguaje de programación elegido.
Fase 5. Depuración: corrección de errores
Fase 6. Documentación :
realización de manual de usuario y manual
técnico
Fase 7. Implementación del programa: descargar
los programas realizados
Fase 8. Mantenimiento de el programa :
adecuar los programas según las
necesidades.

LENGUAJE DE PROGRAMACIÓN
Es un conjunto de símbolos ,vocablos, y reglas (sintaxis)que controlan elcomportamiento físico ylógico de una computadora.

LENGUAJE DE PROGRAMACIÓNESTRUCTURADO POR BLOQUES
Contiene una sección de Códigoque permite que grupos desentencias sean tratados comosi fueran una sola.
MOTORES DC
El motor de corriente directa o continua es una máquina que convierte energíaeléctrica en mecánica provocando un movimiento rotatorio gracias a la acciónde el campo magnético.
Parámetros de motores DC
• Voltaje de operación
• Corriente de operación
• Velocidad
• Torque
• Control de Velocidad
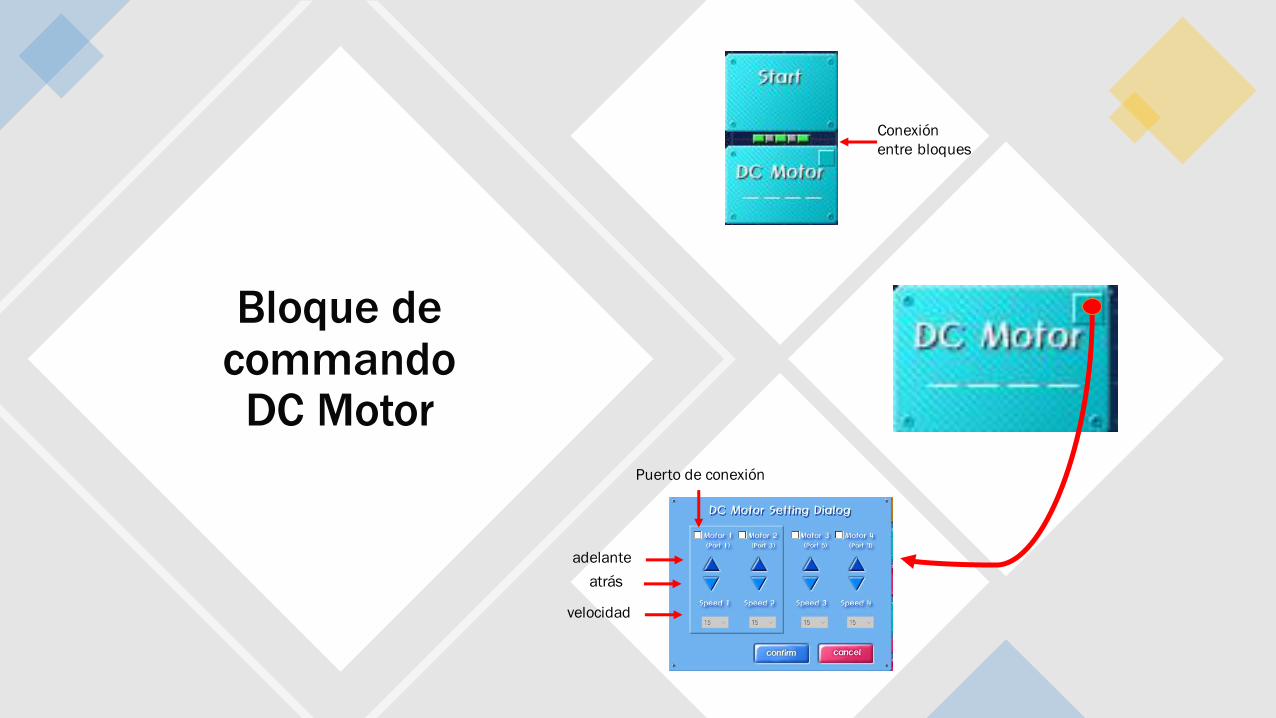
Bloque de commando DC Motor
Conexión
entre bloques
adelante
atrás
velocidad
Puerto de conexión
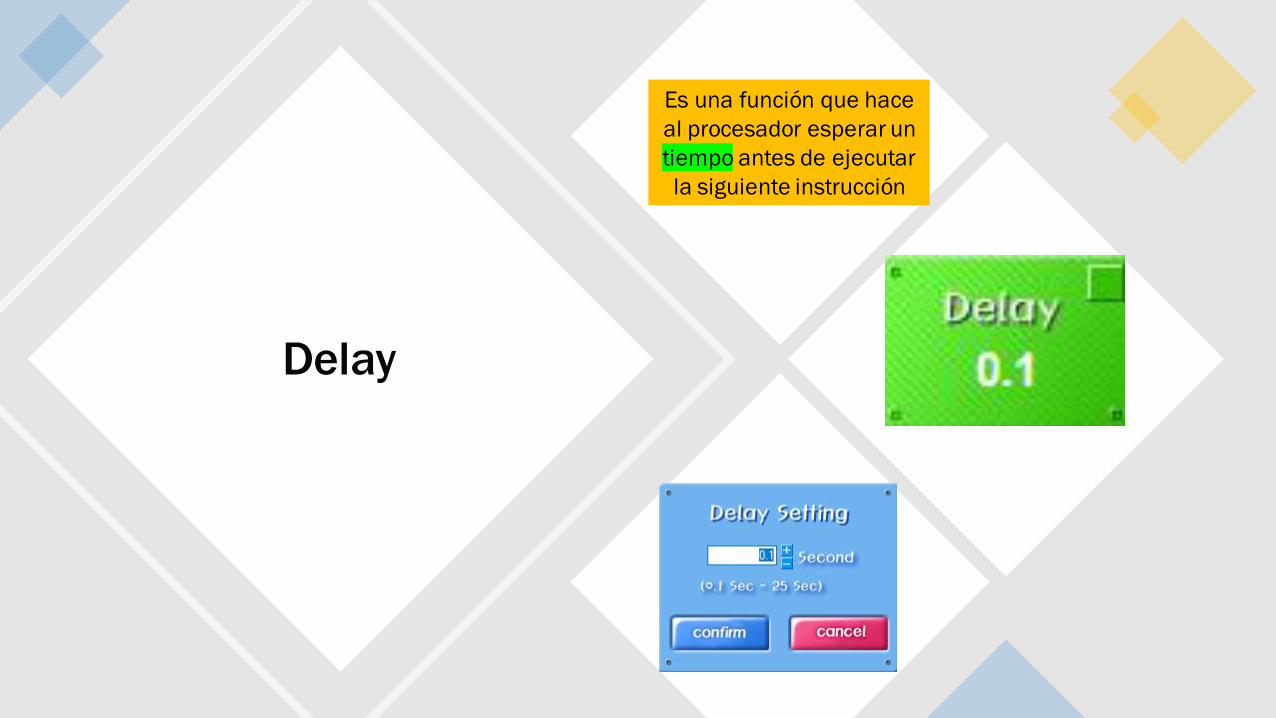
Delay
Es una función que hace
al procesador esperar un
tiempo antes de ejecutar
la siguiente instrucción

Delay
Es una función que hace
al procesador esperar un
tiempo antes de ejecutar
la siguiente instrucción
Movimiento
Cinemática:
Estudia el movimiento de losmecanismos en el espacio yla magnitud utilizada es eldesplazamiento. Grados de
libertad
Eslabón
Articulaciones

Servomotor
Es un motor de corrientecontinua, que tiene la capacidadde ser controlado y mantenerseestable en cualquier posicióndentro de su rango de ioperacion,generalmente 180 grados.

BIBLIOGRAFÍA
• Introducción a la Robótica, Raúl Gallegos, Diana Rodríguez, Alejandro Ojeda,Karla Quiroga, Iván Zaleta, Ediciones de Laurel, S.A. de C.V.,2019