estudio experimental de flujo monofÁsico en...
TRANSCRIPT

ESTUDIO EXPERIMENTAL DE FLUJO MONOFÁSICO EN DUCTO CIRCULAR
HORIZONTAL BASADO EN LA TÉCNICA DE VELOCIMETRÍA POR IMAGEN DE
PARTÍCULAS
RICARDO ANDRÉS USECHE RUBIANO
Cód. U. Distrital: 20141375012 N° USP: 9230386
BOGOTÁ D.C. (Colombia)-SÃO CARLOS (Brasil)
UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS
FACULTAD TECNOLÓGICA
PROYECTO CURRICULAR DE INGENIERÍA EN MECÁNICA
UNIVERSIDAD DE SÃO PAULO USP – LABORATORIO LETeF
ABRIL-2016

ESTUDIO EXPERIMENTAL DE FLUJO MONOFÁSICO EN DUCTO CIRCULAR
HORIZONTAL BASADO EN LA TÉCNICA DE VELOCIMETRÍA POR IMAGEN DE
PARTÍCULAS
RICARDO ANDRÉS USECHE RUBIANO
Documento generado como requisito para la obtención de título de Ingeniero
Mecánico. Desarrollado durante proceso de Movilidad Académica en la
Universidad de São Paulo, Escuela de Ingeniería de São Carlos, S.P. Brasil.
Director: Pr. Oscar M. Hernández Rodríguez, Dr.
Co-Director: Marlon M. Hernández. M.C
Co-Director: John Alejandro Forero Casallas
BOGOTÁ D.C. (Colombia) - SÃO CARLOS (Brasil)
UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS
FACULTAD TECNOLÓGICA
PROYECTO CURRICULAR DE INGENIERÍA EN MECÁNICA
UNIVERSIDAD DE SÃO PAULO USP – LABORATORIO LETeF
ABRIL-2016
Bogotá D.C., Abril de 2016
NOTA DE ACEPTACIÓN
______________________________
______________________________
______________________________
______________________________
______________________________
______________________________
Firma del Jurado
AGRADECIMIENTOS
Este proyecto es el resultado de un proceso conjunto en el que participaron varias
personas. Por este motivo, agradezco especialmente al Profesor y director del
Laboratorio de Fluidos y Térmicas LETeF, de la Escuela de Ingeniería de São
Carlos, Oscar M. Hernández Rodríguez, que me permitió desarrollar este trabajo
bajo el marco del énfasis y trabajo serio del laboratorio y sus estudiantes de pos-
graduación, y proporcionó los conocimientos y recursos para ser culminado con
éxito; a Marlon Hernández y Hugo Velasco, estudiantes de doctorado del
Laboratorio con especialidad en electrónica e instrumentación, que apoyaron
constantemente y con dedicación mis actividades durante mi periodo de
investigación en el laboratorio, guiando adecuadamente en la etapa experimental,
escrita, y enfoque del proyecto; y a los colaboradores del laboratorio que dieron
soporte a los montajes y diseños propuestos para lograr mejores resultados.
Al profesor John Alejandro Forero Casallas, co-director en la Universidad Distrital,
Facultad Tecnológica, y coordinador del Proyecto curricular de Ingeniería
Mecánica, por su tiempo y disposición para acompañar y aportar a este trabajo, y
su ayuda en la culminación de este proceso de formación como ingeniero.
Por último, y no menos importante, a mi familia, que siempre me han guiado
durante mi carrera, y con su apoyo incansable y enseñanzas, han hecho de mi un
profesional y mejor persona.

CONTENIDO
Pág.
INTRODUCCIÓN ................................................................................................... 14
1. PROBLEMA .................................................................................................... 16
1.1. PLANTEAMIENTO DEL PROBLEMA ....................................................... 16
1.2. JUSTIFICACIÓN ....................................................................................... 20
1.3. OBJETIVOS .............................................................................................. 21
1.3.1. Objetivo General .................................................................................... 21
1.3.2. Objetivos Específicos ............................................................................ 22
2. MARCO REFERENCIAL Y TEÓRICO ............................................................ 23
2.1. ESTADO DEL ARTE – ANTECEDENTES ................................................ 23
2.1.1. Técnica PIV (Velocimetría por Imagen de Partículas) ........................... 23
2.2. MARCO TEÓRICO ................................................................................... 40
2.2.1. Conceptos para el análisis de velocidad en fluidos ............................... 40
2.2.2. Consideraciones ópticas ....................................................................... 44
2.2.3. Conceptualización equipo PIV ............................................................... 46
2.2.4. Método de captura y corrección de imágenes ....................................... 50
3. MARCO METODOLÓGICO ............................................................................ 53
3.1. BANCADA EXPERIMENTAL .................................................................... 53
3.2. FLUIDO DE TRABAJO ............................................................................. 67
3.3. CALIBRACIÓN DEL EQUIPO PIV ............................................................ 69
3.4. REFRACCIÓN PRESENTADA EN LA CAJA DE VISUALIZACIÓN ......... 75
3.5. PROCEDIMIENTO PARA TOMA DE DATOS .......................................... 81

4. RESULTADOS Y ANÁLISIS ............................................................................ 90
4.1. PARÁMETROS OBTENIDOS PARA TÉCNICA PIV ................................ 91
4.2. ESTUDIO EN MICRO-CANAL. ANÁLISIS PREVIO ................................. 94
4.3. ESTUDIO FLUJO LAMINAR, EN TUBO BANCADA EXPERIMENTAL .. 100
4.4. ESTUDIO FLUJO TURBULENTO, TUBO BANCADA EXPERIMENTAL 111
5. CONCLUSIONES Y TRABAJOS FUTUROS ................................................ 124
5.1. CONCLUSIONES ................................................................................... 124
5.2. TRABAJOS FUTUROS ........................................................................... 127
6. BIBLIOGRAFÍA ............................................................................................. 129
7. ANEXOS ....................................................................................................... 134
ANEXO A. PRESUPUESTO INICIAL. .............................................................. 134
ANEXO B. PLANOS DE DISEÑO. BANCADA EXPERIMENTAL .................... 135
ANEXO C. PLANOS CAJA DE VISUALIZACIÓN ............................................ 139
ANEXO D. CÓDIGO DESARROLLADO PARA OBTENCIÓN DE PERFILES DE
VELOCIDAD ..................................................................................................... 142

ÍNDICE DE FIGURAS
Pág.
Figura 1. a) superior: montaje experimental utilizado dentro de la tubería, inferior:
caja de visualización a llenar con agua. b) líneas de flujo tomadas para Re=17000.
Sección superior con método computacional, sección inferior obtenida con PIV. . 28
Figura 2. Vista esquemática del rayo de luz pasando a través de la pared del tubo.
............................................................................................................................... 29
Figura 3. Esquema de la función de correlación (c), calculada con valores reales
de dos ventanas de interrogación (a) y (b). ........................................................... 33
Figura 4. a) imagen de calibración tomada. b) región de la imagen sin tratamiento.
c) región de la imagen con tratamiento (Dewarping). ............................................ 34
Figura 5. Líneas de corrientes en el reactor airlift, y región de adquisición de
imagen con el PIV en el reactor. ............................................................................ 38
Figura 6. Esquemas perfiles de velocidad regímenes laminar y turbulento. .......... 42
Figura 7. Refracción de la luz en una pared plana................................................. 44
Figura 8. Trayectoria de rayos en un dioptrio esférico. .......................................... 45
Figura 9. Esquema de funcionamiento de un sistema PIV. ................................... 47
Figura 10. Generación de haz de láser plano con espesura despreciable. ........... 49
Figura 11. Codificación de pulsos y métodos de enmarcado. ................................ 52
Figura 12. Bancada Experimental de Fluidos MF3/09 (PP30). Laboratorio LETeF.
............................................................................................................................... 54
Figura 13. Esquema Hidráulico de la Bancada de Experimentos. ......................... 55
Figura 14. Bancada experimental. Geometría, dimensiones, y distribución de
componentes(unidades en mm)............................................................................. 58
Figura 15. Bancada Experimental. Superior: Proceso preliminar de Montaje.
Inferior: Resultado final, Bancada Terminada y Equipo PIV montado. .................. 59
Figura 16. Colmena para homogenizar el flujo. Ajustada con varales roscados.
Sellado con O-Ring Ref. 2-139. ............................................................................. 61
Figura 17. Geometría caja de visualización. .......................................................... 61
Figura 18. Pieza modelo. Para fijación de malla de puntos para calibración. ........ 62
Figura 19. Estructura para libertad de movimientos, cámara y láser (unidades en
mm). ....................................................................................................................... 64
Figura 20. Soporte comercial para Macrofotografía adaptado para movimiento del
láser, con calibrador digital dispuesto para control de avance. .............................. 65
Figura 21. Área de trabajo. Superior: disposición inicial. Inferior: carpa montada
para seguridad. ...................................................................................................... 66
Figura 22. Malla con diseño patrón para calibración de imágenes. Cuadros de
1mm x 1mm, tanto negros como blancos. ............................................................. 70
Figura 23. Disposición experimento refracción de luz. Caja y láser utilizados. ...... 76
Figura 24. Izquierda: haz de luz incidiendo en la caja de acrílico, trayectoria recta.
Derecha: haz de luz incidiendo en el centro del tubo de acrílico. .......................... 77
Figura 25. Izquierda: haz de luz incidiendo a 1,5mm del centro del tubo. Derecha:
haz de luz incidiendo a 2,5mm del centro del tubo. ............................................... 77
Figura 26. Izquierda:haz de luz incidiendo a 4,5mm del centro del tubo. Derecha:
haz de luz incidiendo a 6,5mm del centro del tubo. ............................................... 78
Figura 27. Resultados obtenidos para comportamiento de haz de luz a través de
caja ytubo de acrílico. ............................................................................................ 79
Figura 28. Izquierda: Equipo generador de haz de láser. Derecha: Tablero de
mandos. ................................................................................................................. 82
Figura 29. Izquierda: Tanque para verificación de caudal. Derecha: Llave con
movimiento de giro, para controlar llenado del tanque. ......................................... 84
Figura 30. Multi-passpostprocessing. Selección de parámetros para el post-
procesamiento durante el multi-pass. .................................................................... 86
Figura 31. Componente vectorialVx a lo largo de la línea, para 2 campos de
vectores, en flujo turbulento, con Re 7456. ............................................................ 87
Figura 32. Gráfico en coordenadas de velocidades instantáneas, para
Componente vectorial Vx a lo largo de la línea, para 2 campos de vectores, en
flujo turbulento, con Re 7456. ................................................................................ 88

Figura 33. Imagen obtenida luego de la disminución de ruido y la validación de
campos vectoriales. ............................................................................................... 88
Figura 34. Primera imagen capturada en instante de tiempo t. Identificación de
partículas (mostradas en color rojo) en micro-canal. ............................................. 94
Figura 35. Segunda imagen capturada en instante de tiempo t+∆t. Identificación de
partículas (mostradas en color rojo) en micro-canal. ............................................. 95
Figura 36. Imagen obtenida después del procesamiento con software Davis.
Vectores de velocidades para micro-canal en dirección del flujo, siendo laminar.
Área delimitada para estudio en líneas verdes. ..................................................... 96
Figura 37. Primera imagen capturada para identificación de partículas. Re=920.
Posición plano central del tubo. ........................................................................... 101
Figura 38. Vectores resultantes luego de procesamiento por correlaciones, para
Re=920. Área de visualización. Posición plano central del tubo. ......................... 102
Figura 39. Primera imagen capturada para identificación de partículas. Re=604.
Posición plano central del tubo. ........................................................................... 106
Figura 40. Vectores resultantes luego de procesamiento por correlaciones, para
Re=604. Área de visualización. Posición plano central del tubo. ......................... 107
Figura 41. Primera imagen capturada para identificación de partículas. Re=26140.
Posición plano central del tubo. ........................................................................... 112
Figura 42. Vectores resultantes luego de procesamiento por correlaciones, para
Re=26140. Área de visualización. Posición plano central del tubo. ..................... 113
Figura 43. Primera imagen capturada para identificación de partículas. Re=19440.
Posición plano central del tubo. ........................................................................... 117
Figura 44. Vectores resultantes luego de procesamiento por correlaciones, para
Re=19440. Área de visualización. Posición plano central del tubo. ..................... 118
ÍNDICE DE GRÁFICOS
Pág.
Gráfico 1. Mapeo de velocidades medias, para la posición en dirección X del pixel
10. Esbozo de perfil de velocidades en micro-canal. ............................................. 97
Gráfico 2. Gráfica de mapeo en 3-D, para cada valor de velocidad en una posición
determinada (en pixel), del área de estudio en micro-canal. ................................. 98
Gráfico 3. Perfil de velocidades final para micro-canal. Calculado con el promedio
de todos los valores hallados en cada posición, a lo largo del área de estudio. .... 99
Gráfico 4. Gráfica de mapeo en 3-D, para cada valor de velocidad (m/s) en una
posición determinada (en pixel), del área de estudio,paraRe=920. ..................... 103
Gráfico 5. Perfil de velocidades final para Re=920. Calculado con el promedio de
todos los valores hallados en cada posición a lo largo del área de estudio. Posición
central del tubo. ................................................................................................... 104
Gráfico 6. Gráfica de mapeo en 3-D, para cada valor de velocidad (m/s) en una
posición determinada (en pixel), del área de estudio, para Re=604. ................... 108
Gráfico 7. Perfil de velocidades final para Re=604. Calculado con el promedio de
todos los valores hallados en cada posición a lo largo del área de estudio. ........ 109
Gráfico 8. Gráfica de mapeo en 3-D, para cada valor de velocidad (m/s) en una
posición determinada (en pixel), del área de estudio, para Re=26140. ............... 114
Gráfico 9. Perfil de velocidades final para Re=26140. Calculado con el promedio
de todos los valores hallados en cada posición a lo largo del área de estudio. ... 115
Gráfico 10. Gráfica de mapeo en 3-D, para cada valor de velocidad (m/s) en una
posición determinada (en pixel), del área de estudio, para Re=19440. ............... 119
Gráfico 11. Perfil de velocidades final para Re=19440. Calculado con el promedio
de todos los valores hallados en cada posición a lo largo del área de estudio. ... 120
ÍNDICE DE TABLAS
Pág.
Tabla 1. Definición de parámetros PIV preliminares, para captura de imágenes en
la bancada experimental. ....................................................................................... 93
Tabla 2. Resultados estadísticos para valores de velocidad, en el área delimitada
de estudio para micro-canal. Resultados en m/s. .................................................. 97
Tabla 3. Parámetros establecidos para captura de imágenes en flujo laminar para
Re=920. Posición plano central del tubo.............................................................. 100
Tabla 4. Resultados estadísticos para valores de velocidad en el área de estudio,
para Re=920. Resultados en m/s. Posición plano central del tubo. ..................... 102
Tabla 5. Valores obtenidos como resultados, para caudal y velocidad media en
Re=920. ............................................................................................................... 105
Tabla 6. Parámetros establecidos para captura de imágenes en flujo laminar para
Re=604. Posición plano central del tubo.............................................................. 106
Tabla 7. Resultados estadísticos para valores de velocidad en el área de estudio,
para Re=604. Resultados en m/s. Posición plano central del tubo. ..................... 107
Tabla 8. Valores obtenidos como resultados, para caudal y velocidad media en
Re=604. ............................................................................................................... 110
Tabla 9. Parámetros establecidos para captura de imágenes en flujo turbulento
para Re=26140. Posición plano central del tubo. ................................................ 112
Tabla 10. Resultados estadísticos para valores de velocidad en el área de estudio,
para Re=26140. Resultados en m/s. Posición plano central del tubo. ................. 113
Tabla 11. Valores obtenidos como resultados, para caudal y velocidad media en
Re=26140. ........................................................................................................... 116
Tabla 12. Parámetros establecidos para captura de imágenes en flujo turbulento
para Re=19440. Posición plano central del tubo. ................................................ 117
Tabla 13. Resultados estadísticos para valores de velocidad en el área de estudio,
para Re=19440. Resultados en m/s. Posición plano central del tubo. ................. 118

Tabla 14. Valores obtenidos como resultados, para caudal y velocidad media en
Re=19440. ........................................................................................................... 121
Tabla 15. Recopilación de los resultados obtenidos para el estudio, para diferentes
Re. Caudal y velocidad. ....................................................................................... 123

RESUMEN
En el presente trabajo, se muestra la recopilación del estudio investigativo y
experimental del comportamiento del flujo monofásico en un ducto circular en
posición horizontal, utilizando la tecnología del equipo PIV, aplicando la técnica de
velocimetría por imagen de partículas. Los experimentos son llevados a cabo,
gracias al montaje de un tramo anexo de tubería de sección circular, de 3m de
longitud, a la Bancada de Estudios de Fluidos MF3/09 (PP30) del Laboratorio
LETeF, al cual fue adaptado también el equipo PIV. Este último, compuesto
principalmente por un láser pulsado Nd-YAG y una cámara de alta velocidad tipo
CCD, que están dispuestos para incidir en una caja de visualización de acrílico en
dos caras a 90°. Estos dos dispositivos permiten la identificación de partículas
trazadoras circulando en el agua que, siguiendo fielmente el flujo, evidencian su
comportamiento. El fluido de estudio es caracterizado. El estudio es limitado para
un rango del número de Reynolds, Re, de hasta 1800 para flujo laminar, y de 3000
hasta 40000 para flujo turbulento. Se obtienen perfiles de velocidad para
diferentes valores de Re, en el centro de la sección transversal del tubo. Las
imágenes capturadas son tratadas posteriormente en el software Davis 8.2 del
equipo, mediante correlaciones. Estos datos obtenidos, son comparados con los
calculados mediante fórmulas teóricas de dinámica de fluidos en tuberías, para su
validación.
Palabras clave: Velocimetría por Imagen de Partículas (PIV), ducto circular, perfil
de velocidades, bancada experimental.
14
INTRODUCCIÓN
Fluidos como el agua, el vapor de agua, o el aire, generalmente utilizados en
diversas aplicaciones de ingeniería, procesos industriales o manuales, entre
muchas otras, muestran su importancia en cuanto los resultados obtenidos con su
correcta manipulación.
Conocer y caracterizar su comportamiento, a través de las instalaciones y ductos
de circulación y transporte, no solo representa avances hacia nuevas tecnologías,
sino también la optimización de los procesos actuales y la disminución en el
consumo de suministros y energía.
El presente estudio plantea como objetivo, el obtener y evaluar los perfiles de
velocidad presentados por un fluido monofásico (agua), al fluir a través de un
tramo de ducto circular, sabiendo que con ellos se puede caracterizar el
comportamiento del mismo dentro de la tubería. Esto mediante la utilización de la
técnica conocida como Velocimetría por Imagen de Partículas PIV, y un equipo
sofisticado que lleva este mismo nombre, incluyendo software de procesamiento
de datos, e implementos de experimentación y captura de datos.
Es delimitado, en primer lugar, por las condiciones presentadas en el Laboratorio
de Fluidos y Térmicas LETeF, la bancada de estudio de fluidos y el equipo PIV, en
cuanto a rango de caudales, número de Reynolds, longitud del ducto, resolución
de imágenes, rapidez de procesamiento de datos, incerteza.
15
Y en segundo lugar, en cuanto al desconocimiento sobre la técnica, su aplicación
y correcta manipulación del equipo disponible en el laboratorio. Así, uno de los
objetivos será también la adquisición de experiencia en este tipo de experimentos,
para la aplicación a nuevas investigaciones.
Este trabajo tiene como base, una revisión y recopilación bibliográfica de trabajos
científicos hechos anteriormente, referenciados en Bases de Datos, con conceptos
propios del funcionamiento y formulaciones teóricas del fenómeno.
La motivación principal es el desarrollo de un montaje de óptimo rendimiento, para
el afianzamiento de conceptos, y la compilación de conocimientos adquiridos en la
formación del curso de ingeniería mecánica en general, aplicados a un proyecto
formal.
Así, el trabajo comprende tres etapas generales: el montaje de la bancada
experimental, conocimiento y calibración del equipo PIV y el procesamiento de
datos, y validación teórica de los datos adquiridos.
La complejidad de la técnica, da sustento y énfasis al proyecto, y sienta el nivel de
detalle y atención impresa en la toma de datos, procesamiento y validación. Esto
abre posibilidades para que en el laboratorio, y otros campos de estudio, se
puedan llevar a cabo nuevas investigaciones, como también revisar otras ya
realizadas, fomentando la ampliación del conocimiento ingenieril.

16
1. PROBLEMA
1.1. PLANTEAMIENTO DEL PROBLEMA
Los perfiles de velocidad de un fluido se asientan como una compilación de
información precisa para determinar el comportamiento y parámetros de flujo a
través de una tubería circular. Pueden ser aplicados y utilizados en otros estudios
y áreas del conocimiento como lo son: transferencia de calor, instrumentos de
medición de flujo volumétrico, la determinación de velocidades promedio a lo largo
de la sección del diámetro, aplicación en caracterización de flujos multifásicos en
ductos anulares, determinación de coeficientes de arrastre de ductos anulares,
entre otras. También en diversas actividades industriales tales como la extracción
de petróleo, productos petroquímicos y laboratorios de física. Por tanto es
necesario el uso de las nuevas tecnologías y el desarrollo de métodos de estudio
que faciliten su comprensión y recopilación documental, como por ejemplo la
instrumentación avanzada PIV (Velocimetría por imagen de partículas).
El modelado del comportamiento de fluidos dentro de las tuberías utilizadas para
la extracción y transporte de crudo en la industria petrolera, a través de
instalaciones que reproduzcan su funcionamiento, constituye uno de los
principales objetivos apuntados al mejoramiento y optimización de procesos, y que
traigan consigo la reducción de costos, innovación, iniciación de nuevos proyectos,
y el aprovechamiento de los recursos energéticos disponibles.
En Brasil la industria petrolera se encuentra como una de las principales
actividades económicas del país gracias a las grandes reservas en su territorio.
17
Sin embargo como se ha citado en la comunidad de esta industria1, la demanda
de productos petroquímicos cada vez a un ritmo más acelerado hace evidente una
fuerte inversión en investigación y generación de asociaciones en los próximos
años, no solo con otros gobiernos, sino también con grupos de investigación de
centros educativos, promoviendo el desarrollo de nuevas tecnologías. Es el caso
del CENPES-Centro de Pesquisas de Petrobras2, que en asociación con más de
cien universidades e institutos de investigación, desarrollan estudios en lo
referente a los avances tecnológicos y de innovación en campos como el
abastecimiento de crudo, con la revisión y mejora de la instrumentación,
automatización, control y optimización de procesos.
Con esta perspectiva, se encuentra en este ámbito académico que algunas
instituciones universitarias en Brasil cuentan con este tipo de instrumentación PIV,
en la mayoría de casos patrocinados por entes externos de la industria, que
facilitan y amplían el campo de investigación, y que muestran su adaptación a
diversas y específicas situaciones.
Una de ellas es el Laboratorio de Engenharia de Fluidos (LEF), vinculado al
Departamento de Engenharia Mecânica da PUC-Rio Universidad Pontificia
Católica de Rio de Janeiro3. Esta apoya sus investigaciones en métodos ópticos
como el PIV, en conjunción con otros equipos como el láser-Doppler, para analizar
la dinámica de flujos produciendo textos en temas de estudio como las líneas de
petróleos, flujos turbulentos bifásicos, velocimetría por imagen de partículas en
1 Revista Pet o uí i a, Pet óleo, Gas, Quí i a y E e gía, I dust ializa Hid o a u os y ga a tiza el
a aste i ie to e e géti o, las etas de B asil y la A ge ti a pa a el 2020 . Brasil, 1 de Diciembre de 2011. 2 Sitio Web Oficial, COMUNIDADE UFRJ-Centro de Pesquisas e Desenvolvimento Leopoldo AmericoMiguez
de Mello, Universidade de Rio de Janeiro, http://www.petrobras.com.br/pt/nossas-atividades/tecnologia-e-
inovacao/ 3 Laboratório de Engenharia de Fluidos, sitio web oficial, documentos e investigaciones realizadas:
http://lef. e .pu -rio.br/publicacoes/?lang=pt#teses-e-disse ta oes
18
ecocardiografia, entre otros. También la Universidade Tecnológica Federal do
Paraná, que tiene disponible para uso en investigación este equipo en las
instalaciones del LACIT (Laboratorio de Escoamento de Fluidos)4. Esta ha
desarrollado estudios como el análisis de perfiles de velocidad en tuberías con
contracciones abruptas. En entidades como el INPE (Instituto Nacional de
Pesquisas Espacias), y el INMETRO (Instituto Nacional de Metrologia, Qualidade
e Tecnologia) que en su división del Laboratorio de Caracterización de Dinámica
de Flujos de Fluidos posee esta herramienta, se utiliza en mediciones de
velocidades de flujos bifásicos complejos en líneas horizontal y vertical de interés
para la industria del petróleo5.
Uno de los puntos de importancia encontrados con estas referencias, es el hecho
que no son muchas las instituciones que pueden tener acceso a este tipo de
tecnología debido a su alto valor, además que trabajos realizados con la técnica
PIV para estudio de flujo de fluidos en aplicaciones diversas, han sido
desarrollados en un periodo no máximo de los diez últimos años, es decir, esta
técnica es utilizada recientemente mostrando aún un campo amplio de estudio.
Una de las instituciones con acceso al equipo PIV es la Escuela de Ingeniería de
São Carlos de la Universidad de São Paulo, en la que se desarrolla el presente
proyecto. Allí, otros miembros del NETeF (Núcleo de Ingeniería Térmica y Fluidos,
por sus siglas en portugués) han desarrollado trabajos experimentales y análisis
de datos, con miras a la caracterización de fluidos multifásicos en tuberías que
reproducen los fenómenos presentados en la industria del petróleo, enmarcados
en proyectos financiados por empresas del sector como PETROBRAS y STATOIL.
4 LACIT, sitio web oficial: http:// .ppge . t.utfp .edu. /la it/i dex.php?a ui o=i f ala it
5 INMETRO, sitio web oficial, http:// .i et o.go . / et ie tifi a/fluidos/la VelFluidos.asp
19
Castro M., en el 2013, desarrolló en su tesis de doctorado el estudio de la
transición presentada de patrones en flujos estratificados, utilizando la teoría de
estabilidad apropiada y datos experimentales en función de la velocidad de la
onda. Esto se relaciona a la estructura ondulatoria de la interfaz del flujo en
tuberías, observando que el fenómeno ocurre con la disminución o aumento de las
velocidades superficiales de las fases en determinados puntos. Con este se logra
ver como el fenómeno de inestabilidad es presentado en tuberías circulares, con la
ayuda de imágenes tomadas con cámaras de alta velocidad, secciones de
visualización adecuadas, programas de procesamiento de imágenes
desarrollados, conversiones y medidores de longitudes de ondas, para luego
calcular la velocidad de la onda con correlaciones cruzadas entre dos imágenes
consecutivas.
Aun viendo que la investigación desarrollada es de gran avance, no se consiguen
levantar los perfiles de velocidad del flujo. Un análisis por medio de la utilización
del PIV caracterizaría de una forma más adecuada los perfiles y campos de
velocidad presentes en el fenómeno, dando paso al hallazgo de otras magnitudes
que definirían de forma más completa el flujo presentado, por ejemplo factores de
arrastre. Ensayos posteriores se han intentado llevar a cabo en la línea de flujo
horizontal de ducto circular para abarcar estos requerimientos, sin embargo no se
ha podido adaptar ni calibrar el instrumento en la estructura para obtener
resultados favorables.
En este contexto, se pretende adquirir experiencia en el uso del equipo de
tecnología avanzada PIV, para emplearse en el Laboratorio LETeF de la
EESC/USP, en estudios y análisis de patrones de flujo en un ducto circular
horizontal y/o vertical, que reproducen el montaje y condiciones de una línea de
extracción de crudo. Este equipo es capaz de visualizar el perfil de velocidades
20
desarrollado, pero debido a que las dimensiones y disposición de las estructuras
de ensayos no promueven el entorno propicio para los experimentos, se necesita
manejar adecuadamente las variables que influyen en la obtención de datos
válidos, a través del PIV. Debido a esto, el enfoque del presente proyecto es la
obtención de un perfil de velocidades en un flujo monofásico, promoviendo el
acoplamiento de un banco de experimentos, en el cual se consiga adaptar, calibrar
y controlar el instrumento PIV, compuesto por un láser pulsado Nd-YAG, cámara
de alta velocidad tipo CCD, partículas trazadoras, y software de captura y
procesamiento de imágenes y datos experimentales obtenidos.
1.2. JUSTIFICACIÓN
En primer lugar, en un ambiente tecnológico, el proyecto se sustenta en la
pretensión de adquirir experiencia en el uso del equipo PIV dispuesto en el
laboratorio de Térmicas y Fluidos LETeF, de la Escuela de Ingeniería de São
Carlos. Esto para su aplicación en estudios en ductos circulares con miras a la
reproducción y análisis de flujos presentados en tuberías de extracción y/o
transporte de petróleo, y la obtención de perfiles y campos de velocidades. Como
ya se pudo observar es preciso que el instrumento PIV sea montado y manejado
bajo determinadas condiciones para que se obtengan resultados óptimos y
confiables, considerando variables como: su posicionamiento, movimiento relativo
entre la cámara y el láser (afectado en ocasiones por vibraciones) y la cantidad de
partículas trazadoras en el flujo, etc. Así, se promueve el montaje de una bancada
experimental de ducto circular horizontal en el cual puedan ser aplicados estos
conceptos.
21
En segundo lugar en un ámbito académico el proyecto se argumenta en la
generación de resultados de calidad, para correlacionar y evaluar trabajos
desarrollados, y promover nuevas investigaciones con la correcta utilización de la
instrumentación PIV, a ser adelantadas en las instalaciones del laboratorio LETeF.
Igualmente el presente proyecto sigue una apropiación del conocimiento de
diversas fuentes bibliográficas en las cuales han trabajado el problema, y
adaptarlo y dimensionarlo a la situación particular presentada.
Por último, en un sector económico el proyecto se valida en la aplicación de este
conocimiento adquirido y recopilado a proyecciones industriales de campo que,
basadas en la descripción adecuada de los fenómenos presentados, buscan la
optimización de procesos y la reducción de costos. Esto con el aprovechamiento
más beneficioso de la energía en sistemas de bombeo, dimensionamiento de
tuberías, etc.
1.3. OBJETIVOS
1.3.1. Objetivo General
Obtener y evaluar los perfiles de velocidad de flujo monofásico en un ducto
circular, mediante la técnica PIV.

22
1.3.2. Objetivos Específicos
Indagar y estudiar los diferentes trabajos realizados en la literatura científica
con base en instrumentación PIV de flujos en ductos.
Encontrar la velocidad o rango adecuado de velocidades en el cual se
consigue ver y describir el perfil y campo de velocidad del fluido, para el PIV
presente en el LETeF.
Adaptar y calibrar la instrumentación PIV para la obtención de perfiles de
velocidad en la bancada experimental.
Analizar las diferentes imágenes obtenidas con el PIV para caracterizar el flujo
monofásico.
Validar las mediciones obtenidas mediante el PIV con los modelos teóricos existentes en la literatura.

23
2. MARCO REFERENCIAL Y TEÓRICO
2.1. ESTADO DEL ARTE – ANTECEDENTES
2.1.1. Técnica PIV (Velocimetría por Imagen de Partículas)
Partiendo del hecho de haber enmarcado y dado una perspectiva del problema
estudio del presente proyecto, en esta sección se referencian trabajos existentes
relacionados al estudio de fluidos con la técnica PIV. Para su búsqueda se hace
uso de las bases de datos disponibles vía web por la Universidad de São Paulo,
no solo internacionales, sino también de la base de datos interna correspondiente
a tesis, disertaciones, relatorías, etc., teniendo en cuenta fuentes de referencia
reconocidas y aquellos en que se consiguen enmarcar las instituciones en que
fueron desarrollados.
Como se sabe, esta técnica ha sido explorada con más detalle en la última
década, así se orienta por procurar trabajos de no máximo este periodo. Los
criterios de búsqueda no solo giran en torno a hallar información relacionada con
métodos y técnicas que puedan ser sustentadas y adaptadas en el presente
proyecto (concernientes a los diferentes aspectos de la técnica PIV), sino también
se muestran trabajos ejecutados que justifican la realización del presente
proyecto, por evidenciar el hecho de promover estudios con la técnica PIV en
flujos a través de ductos circulares. Se parte desde una perspectiva internacional,
pasando por un marco nacional brasilero para culminar en un panorama local
interno en el laboratorio LETeF.
Raffel. M., en Alemania ha sido uno de los referentes principales en varias
investigaciones sobre la técnica PIV a lo largo de los últimos 20 años. Esto debido
24
a que fue de los primeros trabajos en mostrar la importancia de la técnica, y su
aplicación en diversas áreas de interés, como lo son la médica, termodinámica, y
principalmente en la investigación aerodinámica industrial. Develando el
comportamiento complejo de fluidos en estados de flujo y rangos de bajas (1 m/s)
y altas (500 m/s) velocidades.
Enumera algunos de los problemas presentados en túneles de viento para
aplicaciones industriales, entre los cuales se pueden encontrar: tiempos de reinicio
del sistema PIV, largas distancias entre la cámara y el láser incidente, altos costos
operacionales y medidas de seguridad rigurosas para el manejo de equipos.
Señala también la dificultad de reproducir estructuras y componentes utilizados en
la industria en instalaciones de laboratorio.
Uno de los puntos a rescatar, aun cuando el fluido utilizado no es el mismo que el
del presente trabajo, es el hecho de constituir la óptima y homogénea circulación
de las partículas en el sistema de distribución de éste, a lo largo del área de
sección del ducto. El tamaño de las partículas no debe afectar los componentes
del sistema. A lo largo del estudio, se desarrollan diferentes configuraciones, en
las cuales se disponen de dos a cuatro cámaras móviles, incidiendo en el área de
visualización desde diferentes ángulos, para obtener imágenes en más
dimensiones, con hasta dos componentes de la velocidad.
Investigaciones que involucran la técnica PIV han sido desarrolladas en diferentes
instituciones en el mundo. Nogueira J., en España, prestó principal interés en el
hecho de las limitaciones que presentan la resolución de métodos interactivos de
correlación de imágenes en la técnica PIV. Más específicamente en la discusión
25
de la limitante que presenta el tamaño de las ventanas de interrogación (Nogueira
& Lecuona, 2005). El concepto de ventana de interrogación hace referencia a la
imagen tomada por la cámara, que describe el movimiento seguido por la partícula
en dos instantes de tiempo diferentes t e ∆t.
En este trabajo se logró identificar que más allá del tamaño de la ventana de
interrogación, el procesamiento de estas imágenes es el que presenta el limitante
para la resolución de la correlación. Teniendo en cuenta en abarcar mayores
gradientes de desplazamiento, y mostrando que una escala de señal de entrada
menor que la ventana de interrogación, permite el procesamiento. Fueron
analizados tres métodos para detectar la información no recuperable del proceso.
El primero, enunciando el teorema de muestreo de Nyquist. Como fundamento se
describe que: dependiendo si la longitud de onda no consigue seguir los pulsos, el
sistema no podrá reconstruir la imagen por falta de información. Define que:
mínima longitud de onda = 2*distancia entre partículas en un frame. Además que
estas muestras pueden ser tomadas a través de las partículas trazadoras, y la
relación del número de partículas por pixel (ppp), o caso similar, por los vectores
de flujo en algoritmos de múltiples pases.
El segundo, con el método de correlaciones, en el cual se toma un solo valor
promedio para una determinada región, perdiendo la demás información de
valores locales. Aun cuando el tamaño de esta región varíe, los valores promedio
siguen suministrando la misma información.
26
Y el tercero, el promedio en movimiento. Es la correlación que se sigue en la
mayoría de equipos. En este caso la información es suministrada en dominios de
la frecuencia y la salida tendrá la misma frecuencia que la entrada. Es decir, una
respuesta en frecuencia representativa de la media móvil (operador lineal, a
diferencia de una sola partícula) que puede descomponerse en sus frecuencias
espaciales, tiene la capacidad de reconstruir la entrada.
Se muestran varios análisis para tamaños de onda, que varían en función del
tamaño de la ventana de interrogación, y sus respectivos errores. Encontrando
que, para longitudes de onda menores que 252 pixeles (longitudes de onda
correspondientes a 4 o 8 veces el límite de resolución), los errores relativos son
superiores al 10%. Aun, cuando se encuentra para estas longitudes de onda, que
la amplitud de salida tan solo muestra el 26% de la de entrada, ésta sigue
conteniendo la información cierta en la señal, siendo éstas menores que el tamaño
de la ventana de interrogación. Hay que anotar, que al aumentar el tamaño de la
ventana de interrogación, no se conseguirán menores pérdidas de información con
longitudes de ondas menores. Éstas vendrán dadas además de los casos
expuestos, por la inexactitud de la medida del desplazamiento de una partícula.
Uno de los hallazgos significativos, muestra que se obtienen mejores resultados
para campos vectoriales de velocidad con solo un 50% de superposición de
ventanas de interrogación (aplicable también a métodos multimalla), en
comparación con un porcentaje de 75%. Basándose en el comportamiento de
promedio móvil y relación con la posición dentro de la ventana de interrogación.
Esto conlleva a la inestabilidad a determinadas frecuencias, y una afectación
directa sobre la resolución espacial de las mediciones. Por estos resultados
prácticos la conclusión principal de la investigación es, que el tamaño de la
ventana de interrogación no es un limitante en la resolución del algoritmo

27
multipaso interactivo de la técnica PIV, sino a las limitantes del mismo algoritmo en
cuanto a la pérdida de información.
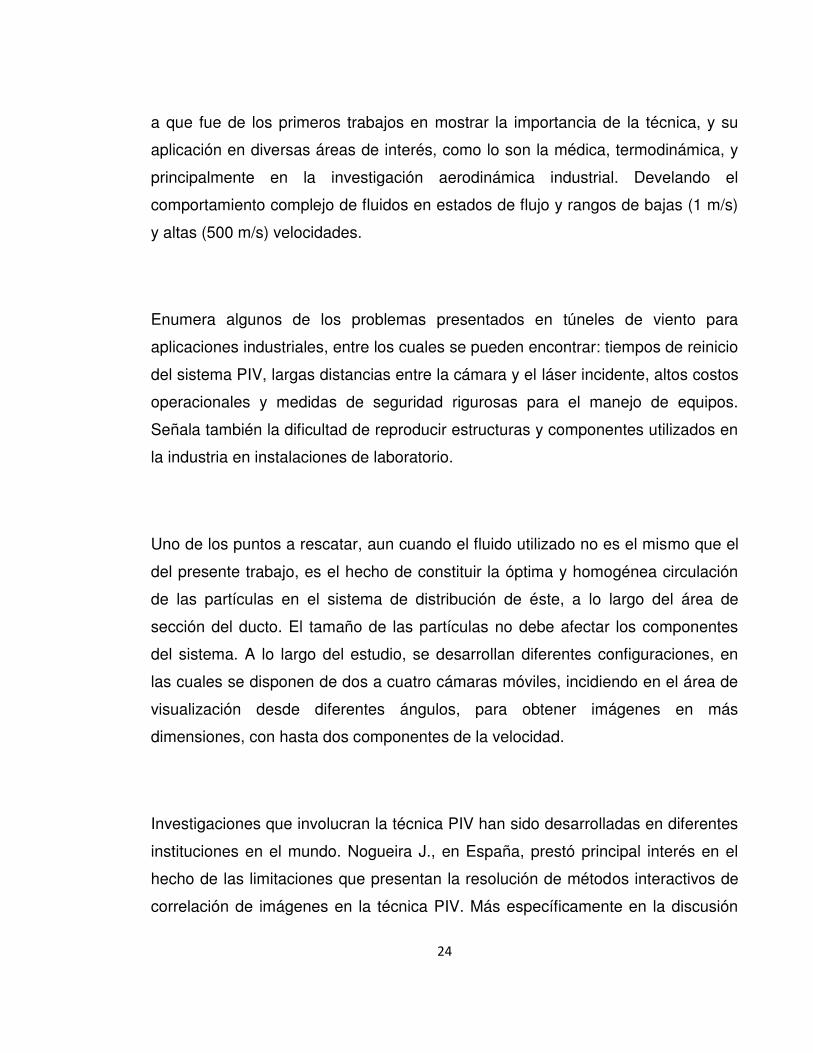
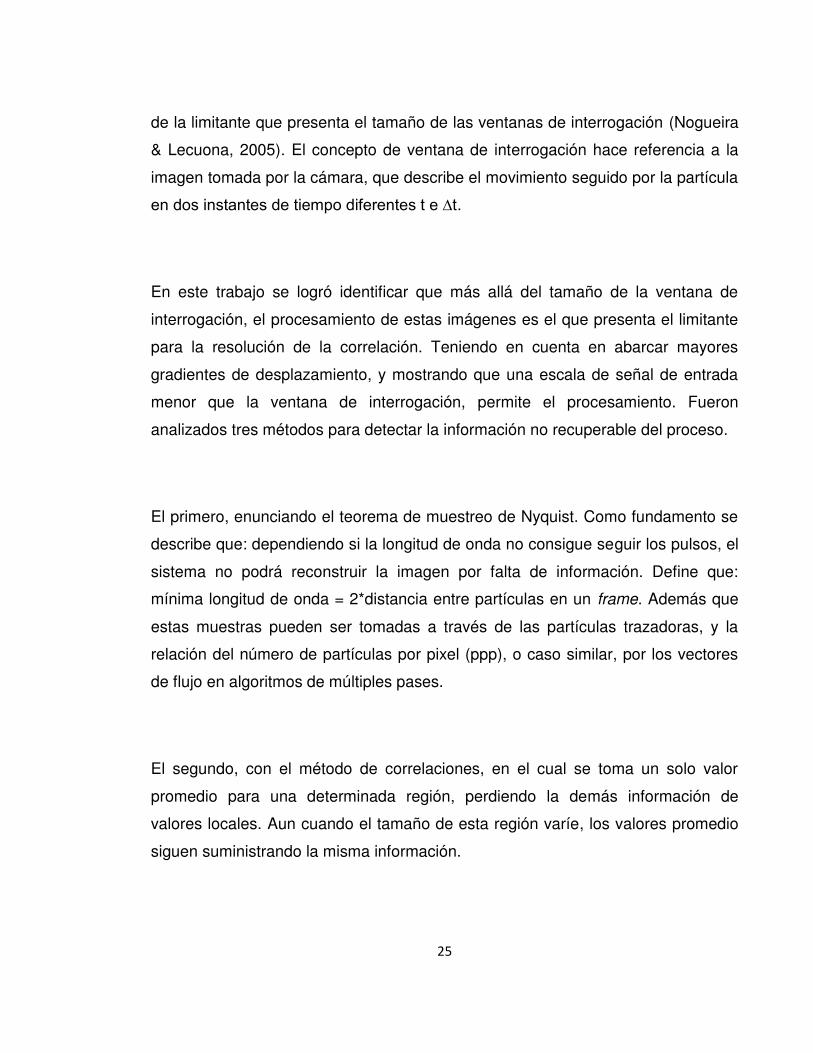
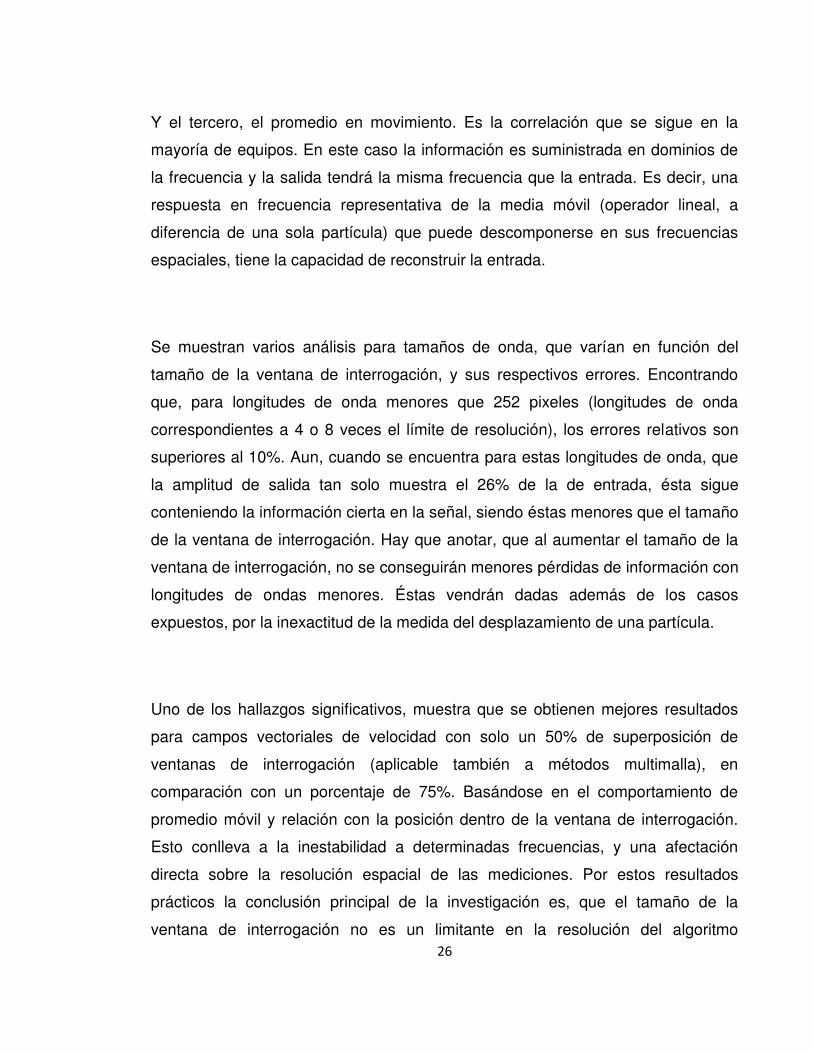
En el año 2013, en Polonia, Bogustaw J.P., se ocupó de estudiar y modelar por
medio de simulación, un flujo a través de una tubería circular de diámetro
constante de 26mm. Con bolas puestas como obstáculos, se observó cómo esta
geometría, como una función del número de Reynolds, afecta las pérdidas de
presión en flujo turbulento. Esto bajo la argumentación del aumento de la
transferencia de calor en este tipo de régimen, y su ánimo de propiciarlo dentro de
una tubería para aplicación, por ejemplo, en intercambiadores de calor.
El principal objetivo es comparar los resultados obtenidos mediante simulación por
computadora, con datos experimentales adquiridos con la técnica PIV, entre otros,
los campos de velocidad. Para ello se varían los diámetros de las bolas de 7mm a
19 mm, así como también la distancia entre ellas de 20mm a 85 mm. Este método
numérico computacional se basa en la solución de dos parámetros arbitrarios A y
B, dados en función de la geometría del sistema, y la aplicación de la formula
polinomíal de superficie.
Este trabajo se eligió debido a que, además de mostrar una aplicación interesante
de la técnica PIV, se enfoca en las distorsiones ópticas, siendo la problemática
principal que afecta la captura de imágenes, especialmente en la pared de la
tubería. En principio se describe el montaje de la bancada utilizada para el PIV. Se
incluye un tanque transparente de visualización a ser llenado con agua, colocado
alrededor del tubo, en donde estarán apuntando el láser y la cámara, Fig.1, y que
es usado para corregir las refracciones de luz al pasar por la pared del tubo.
28
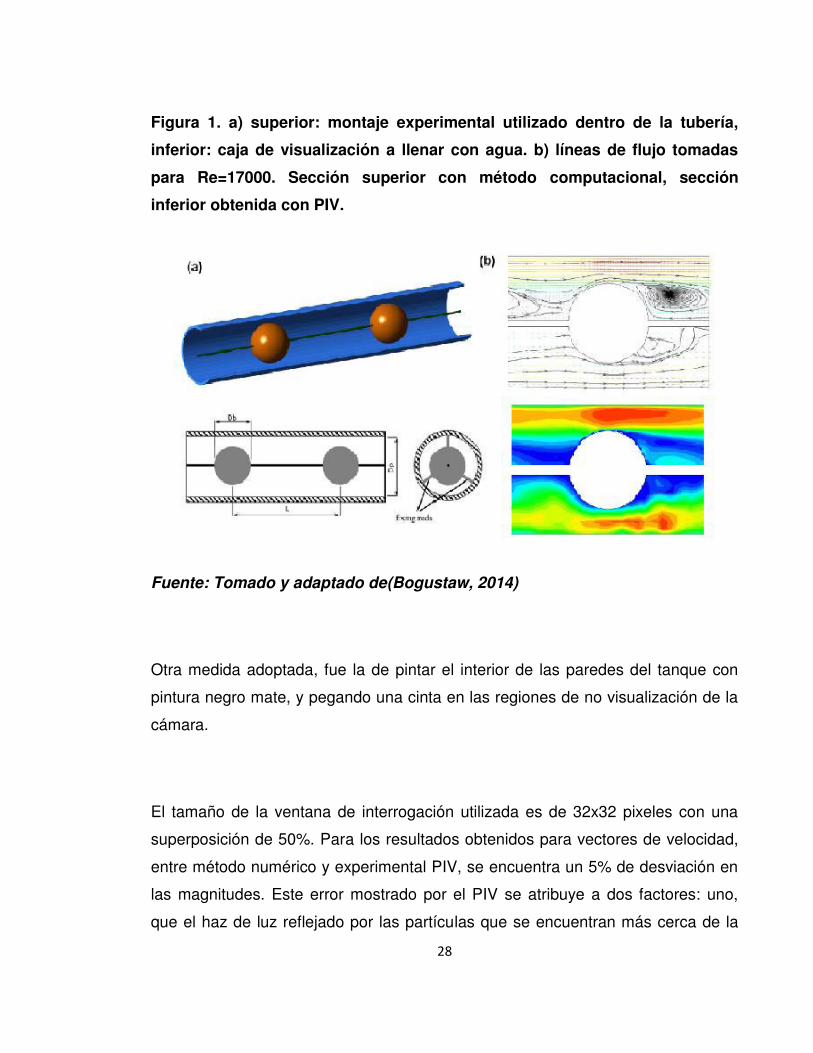
Figura 1. a) superior: montaje experimental utilizado dentro de la tubería,
inferior: caja de visualización a llenar con agua. b) líneas de flujo tomadas
para Re=17000. Sección superior con método computacional, sección
inferior obtenida con PIV.
Fuente: Tomado y adaptado de(Bogustaw, 2014)
Otra medida adoptada, fue la de pintar el interior de las paredes del tanque con
pintura negro mate, y pegando una cinta en las regiones de no visualización de la
cámara.
El tamaño de la ventana de interrogación utilizada es de 32x32 pixeles con una
superposición de 50%. Para los resultados obtenidos para vectores de velocidad,
entre método numérico y experimental PIV, se encuentra un 5% de desviación en
las magnitudes. Este error mostrado por el PIV se atribuye a dos factores: uno,
que el haz de luz reflejado por las partículas que se encuentran más cerca de la

29
pared del tubo deben atravesar una capa relativamente más gruesa de material de
la pared que aquellas que se encuentran más hacia el centro, cerca del eje del
tubo, Fig.N°2.
Figura 2. Vista esquemática del rayo de luz pasando a través de la pared del
tubo.
Fuente: Tomado de (Bogustaw, 2014)
Dos, debido a la refracción del haz al pasar por la pared y a este ángulo generado,
aun cuando pequeño, una incidencia no perpendicular. Estos fenómenos causan
una mayor distorsión de la imagen tan solo en la capa limite laminar. Aun así, los
datos obtenidos son representativos de la naturaleza cuantitativa y cualitativa del
flujo (menos en la capa limite). Para el método numérico, fue utilizado un modelo
turbulento en el código ANSYS-CFX, con el cual se obtienen datos numéricos del

30
factor de fricción, comparando con el hallado experimentalmente con la técnica
PIV. Igualmente, cómo este refleja las pérdidas de presión dentro de la tubería,
variando con la geometría del sistema y también el número de Re.
Ahora desde una perspectiva nacional brasilera, diferentes instituciones
académicas que poseen el instrumento han llevado a cabo investigaciones
diversas con la aplicación de la técnica PIV, a continuación se referencian aquellas
de mayor concordancia con el presente estudio.
Palacios S., en el año 2011 en Curitiba, llevó a cabo en su tesis doctoral, un
estudio detallado del comportamiento de un fluido newtoniano al pasar por una
contracción abrupta axisimétrica de una tubería, con la técnica por velocimetría de
partículas, PIV. En este, el autor expone cada uno de los procedimientos seguidos
para obtener con éxito la captura de imágenes con esta técnica, que aún siendo el
objetivo ser aplicada a otro tipo de geometría, pasa por el cálculo y calibración en
un ducto de sección circular uniforme.
Son evaluados flujos en regímenes laminar y turbulento a través de una
contracción con razón β = 1,97, en diferentes rangos del número de Reynolds.
Sea para el análisis de las pérdidas de presión o para los campos de velocidad, a
partir de estos, se calculan unidades derivadas como campos medios, perfiles de
velocidades, líneas de corriente y propiedades turbulentas. Estos resultados
evidencian la formación de vórtices a lo largo de la contracción, y al ser
comparados con datos existentes en la literatura, muestran buena concordancia.
31
Para las propiedades fluido mecánicas de las partículas trazadoras, además de
clasificarlas por sus propiedades y compatibilidad con diversos fluidos, examina el
análisis numérico para relacionar la velocidad de sedimentación o velocidad
gravitacional, inducida con las propiedades físicas del fluido y las partículas
(masas específicas). También, la velocidad de atraso de la partícula en relación a
la aceleración del fluido, y el tiempo de relajación de ésta, a ser utilizado en la
fórmula de Stokes:
� =
2
18 :
: ; :
:
Se pone en consideración, la estructuración del láser para la producción de un haz
de luz. La longitud de onda emitida por el láser es modificada por medio de
diferentes componentes, para poder ser captada por la cámara, generalmente
emitida en longitudes de onda de luz visible color verde.
En el modo Q-switch del equipo, el usuario puede definir el tiempo entre pulsos,
correspondiente también al tiempo de captura de imágenes por la cámara
(generalmente entre 4 ns y10 ns). Este tiempo es de especial cuidado, debe ser
corto con el fin de: capturar el movimiento de las partículas sin generar imágenes
borradas, y de evitar captar el movimiento de partículas con componentes de
velocidad saliendo del plano de iluminación entre pulsos; y largo lo suficiente para
determinar el desplazamiento de éstas.

32
En cuanto a la formación de la imagen en el sistema de la cámara, como una
aberración de lente circular, se plantean definiciones como el factor de
magnificación M (importante para los métodos de correlaciones), y el diámetro
mínimo de imagen de la partícula por efecto de la difracción:
= 2,44 # + 1 # = 0
0 =
=
Este diámetro es percibido cuando son adquiridas imágenes de partículas
pequeñas (en el orden de micras) y factores de magnificación pequeños.
En la ventana de interrogación, es medido el desplazamiento de la partícula a
través de lo que se llama correlación. La correlación de imágenes posibilita la
manipulación y tratamiento final de imágenes captadas, a fin de determinar ese
desplazamiento en un determinado tiempo ∆t. Es decir, a una imagen de entrada
se le aplica una función de transferencia y una adición de ruidos, para obtener una
imagen de salida. En esencia, mide estadísticamente el grado de igual de dos
muestras para un determinado desplazamiento, en la cual el valor más alto será
elegido como la representación del valor del desplazamiento, Fig. 3.

33
Figura 3. Esquema de la función de correlación (c), calculada con valores
reales de dos ventanas de interrogación (a) y (b).
Fuente: Tomado de (Palacios Sanchez, 2011)
Aun cuando se pueden utilizar modelos matemáticos para determinar el pico más
alto en la correlación, por ejemplo, la correlación de subpixeles, un procedimiento
más adecuado para hallar valores de desplazamiento de las partículas puede ser
aplicado por medio de las herramientas de los software incluidos en el sistema
PIV. En este caso es utilizado el programa Dynamic Studio, que aplica una
correlación adaptada, la cual incluye el método anterior, con sobre-posición de
ventanas de interrogación, el método de desplazamiento de ventanas llamado de
Offset, y el método de ventana recursiva o multipaso.
Otras correcciones que se deben aplicar a las imágenes, giran en torno a los
defectos causados por las distorsiones ópticas del sistema. Para ello, son usadas
funciones polinomiales como funciones de mapeado, que corrigen efectos como el
debido a la perspectiva, o efectos de barril (que puede asemejarse al producido
por la pared del ducto).

34
El programa Dynamic Studio cuenta con la función “Dewarping” que realiza esta
operación de mapeado. Los coeficientes a ser ingresados son obtenidos por el
método de mínimos cuadrados usando una imagen de calibración. Para este fin,
fue utilizado un patrón de calibración colocado dentro de la tubería, con el diseño
de una malla de puntos espaciados a una distancia de 1,37mm tanto en la vertical
como la horizontal, que luego de ser llenado con el fluido a ser utilizado, se toma
una imagen como la mostrada en la Fig.4 a).
Figura 4. a) imagen de calibración tomada. b) región de la imagen sin
tratamiento. c) región de la imagen con tratamiento (Dewarping).
Fuente: Tomada de (Palacios Sanchez, 2011)

35
En esta imagen, puede notarse que en la región sin tratar a) el espaciado entre
puntos tiene diferentes valores, evidenciando los efectos de distorsiones ópticas,
que son mayores cerca de las paredes del ducto. Para la imagen en b) tratada, se
corrigen estos efectos y los valores de espaciado son más uniformes, aún
mostrando un error mínimo de 6 pixeles equivalentes a 0,08 mm de espacio físico
real.
El trabajo contiene información de otros puntos relevantes para tener en cuenta en
el presente estudio. Entre las principales conclusiones se encuentra que, los
resultados obtenidos para vectores de velocidad tuvieron coherencia y buena
concordancia con los encontrados en la literatura, manifestando un
comportamiento simétrico en relación al eje principal. Son presentadas relaciones
para las velocidades axiales adimensionales máximas, en las diferentes regiones
de la contracción del ducto, en regímenes laminares como turbulentos. Así como
también, caracterización de comportamientos según los campos de velocidad,
mostrando por ejemplo las recirculaciones.
Ahora, visto el panorama internacional y nacional que se despliega frente al objeto
estudio, se consideran los trabajos desarrollados dentro de la Universidad de São
Paulo, más específicamente en la Escuela de Ingeniería de São Carlos, en el
laboratorio LETeF, que evidencian el trabajo de exploración que se ha hecho con
esta herramienta.
Ansoni J.L., desarrolló en el 2015 en su trabajo de doctorado, un estudio basado
en CDF (dinámica de fluidos computacional), para la optimización y acoplamiento
de un software abierto (PyCDF-O), con miras a aplicaciones en proyectos de
36
operación de biorreactores y fotobiorreactores FBRs(Ansoni, 2015). Se priorizó por
la optimización de las geometrías de los dos reactores para disminuir la tensión de
cizallamiento, y se estudió la afectación de esta geometría sobre la hidrodinámica
del flujo en ambos casos.
Aun cuando esta temática diverge del tema central de este proyecto, se menciona
debido a que en una de las líneas de estudio, se toma la técnica PIV como
comparativo de los resultados obtenidos para la velocidad dentro del flujo
desarrollado dentro del reactor. Además, que es el principal esbozo que se tiene
de la utilización del equipo PIV en el laboratorio.
Un reactor airlif de circulación interna de placa con capacidad de 61,5 litros, fue
montado para el estudio del mejoramiento de este tipo de reactores, con la
aplicación de CDF y la optimización de la geometría. Se utiliza agua y aire como
fluidos de interés. El tiempo de circulación es aquel para el cual un cuerpo
suspendido en el fluido consigue una circulación completa dentro del reactor, y
con el cual se puede calcular la velocidad superficial del líquido. Para su
determinación se siguió entre otras técnicas, el método de esfera, que hace uso
de esferas de densidad de aproximadamente 1 −3 (en este caso una esfera
de silicona esmaltada) y el cronometraje de tiempos en completar un ciclo de
paso.
Para la determinación de los campos vectoriales en la fase liquida, se hizo uso del
PIV. Para esto se aplicaron dos técnicas diferentes, una utilizando un sistema in-
housey el auxilio de una cámara de alta velocidad Olympus i-speed 3, y otra el
sistema comercial dado por LaVision.

37
Para la in-house, la cámara fue enfocada desde la parte lateral del tanque. Debido
a sus paredes planas, no fue necesario realizar correcciones ópticas (aun así se
tomó una imagen de calibración para la correspondencia entre pixeles y
milímetros). Las partículas utilizadas fueron las ya descritas. Para el sistema es de
importancia la iluminación, que se hizo por medio de dos lámparas LEDs de 20 W
de potencia y 2300 lumen. La velocidad de la cámara elegida, que dio mejores
resultados, fue de 50 frames por segundo. Para el procesamiento de imágenes y
obtención de campos de velocidad, fue utilizado el programa PIVLab, desarrollado
en otros estudios con MatLab, que también permite observar las características
cualitativas para ser comparadas con el método CDF.
El equipo PIV de LaVision es más robusto. El sistema es el PIV ImageProSX 5M
SYSTEM, este incluye una cámara de alta tecnología CCD modelo PCO1600,
láser pulsado doble Nd:YAG, lente óptica y el software DAVIS 8.2. Son utilizadas
partículas de vidrio huecas de 10µm a 100 µm de diámetro. La luz captada por la
lente se hace a una frecuencia de 6,9 Hz. Las imágenes capturadas son enviadas
al ordenador por medio de una placa de adquisición de señales. Para encontrar la
posición más acertada para la iluminación por medio del láser, se aplicaron varios
ensayos preliminares.
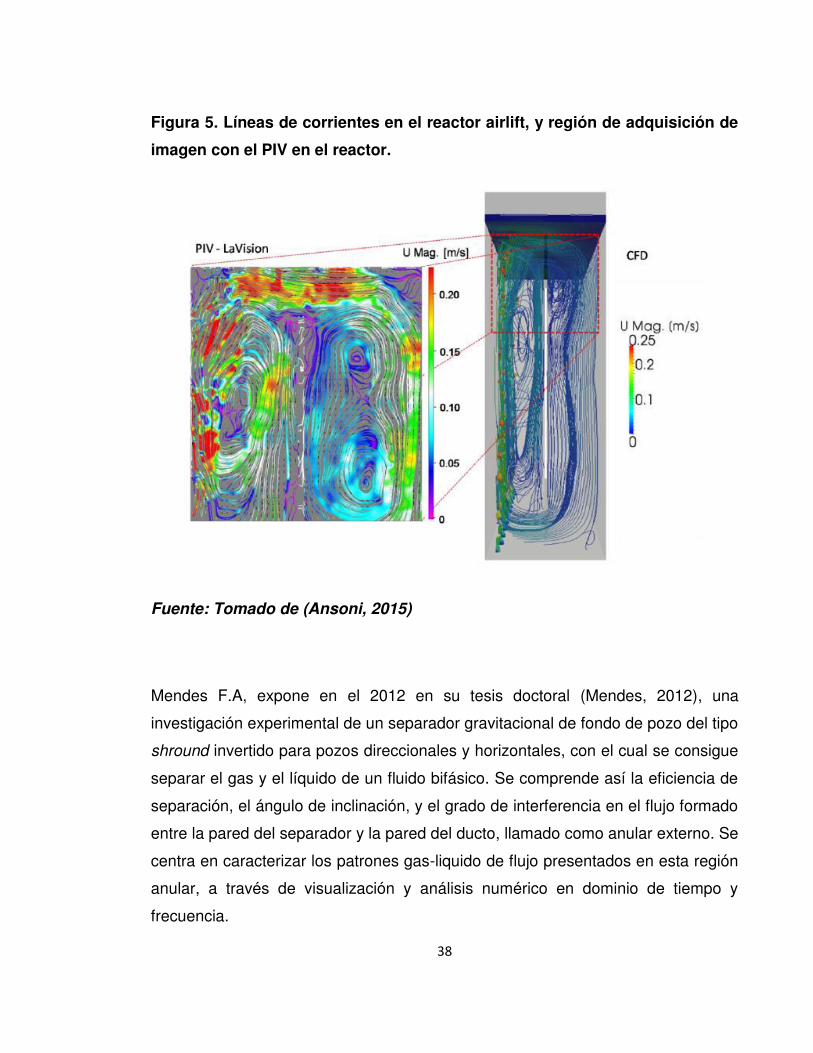
Una de las imágenes obtenidas se muestra en la Fig. 5, que permite hacer una
descripción cualitativa del comportamiento del fluido, comparando las dos
técnicas: PIV y CDF. Se presentan zonas de recirculación, y formación de vórtices.
38
Figura 5. Líneas de corrientes en el reactor airlift, y región de adquisición de
imagen con el PIV en el reactor.
Fuente: Tomado de (Ansoni, 2015)
Mendes F.A, expone en el 2012 en su tesis doctoral (Mendes, 2012), una
investigación experimental de un separador gravitacional de fondo de pozo del tipo
shround invertido para pozos direccionales y horizontales, con el cual se consigue
separar el gas y el líquido de un fluido bifásico. Se comprende así la eficiencia de
separación, el ángulo de inclinación, y el grado de interferencia en el flujo formado
entre la pared del separador y la pared del ducto, llamado como anular externo. Se
centra en caracterizar los patrones gas-liquido de flujo presentados en esta región
anular, a través de visualización y análisis numérico en dominio de tiempo y
frecuencia.
39
Como es posible puntualizar a lo largo del trabajo, se consiguen desarrollar
modelos matemáticos extensos, que representan el comportamiento del fluido en
el interior de la tubería en la zona anular (análisis fenomenológico en relación a
parámetros como las propiedades del fluido y la geometría del sistema). De la
misma manera, se logra evidenciar los diferentes patrones de flujo, como lo son:
anular, patrón bolas o bolas dispersas, pistonado. Además, de cómo éstos son
acompañados y validados con simulación por computador.
Para los ensayos experimentales se describen las instalaciones del laboratorio, las
variaciones del sistema, controles de caudales de agua y aire, así como también
los sistemas de adquisición de datos y sistemas de control.
Como resultados de esta inspección, se obtuvieron imágenes que muestran la
caracterización visual del flujo (obtenidas con cámara de alta velocidad en una
zona dispuesta para la visualización, con el montaje de caja de corrección de
defectos ópticos en el ducto). En paralelo se lleva el análisis matemático y
espectros de señales en dominios de la frecuencia, con aplicación de función de
densidad-probabilidad. Culminando con la recopilación de mapas de flujo, e
imágenes de simulación de los campos de velocidad, desarrollados con el
software comercial Ansys CFX Release 12.1(que emplea el método de volúmenes
finitos).
Describiendo las regiones presentadas dentro del ducto anular y el cambio de
dirección de vectores de velocidad, éste se muestra como una herramienta
importante para el análisis del separador, posibilitando la obtención de grandezas,
que no son posibles alcanzar experimentalmente. Como se puede notar, un

40
análisis con la técnica PIV daría una amplia visión del objeto estudio de este
trabajo, comparando los resultados obtenidos con imágenes del experimento en
curso.
Con esta compilación bibliográfica se puede resaltar que el problema estudio ha
sido abarcado ya en otras investigaciones con algunas variaciones, en miras de
aplicaciones diversas y la descripción de fenomenología de fluidos. De igual forma
se evidencia la exploración de la técnica PIV en diferentes instituciones, fuera y
dentro de Brasil. Específicamente en el Laboratorio LETeF, una aplicación del
equipo para un trabajo académico; y la promoción, gracias a tesis desarrolladas,
del empleo y adaptación más extensa de la técnica PIV en las instalaciones del
laboratorio. Esto sienta la base de la tesis del presente proyecto estudio.
2.2. MARCO TEÓRICO
A continuación se desarrollan conceptos propiamente dichos que sientan las
bases teóricas del proyecto, y dan una visión más apropiada e intuición del estudio
que se plantea.
2.2.1. Conceptos para el análisis de velocidad en fluidos
Una de las principales variables que han hecho parte de los fundamentos de la
mecánica de los fluidos (así como de la Termodinámica y la Transferencia de calor
en máquinas térmicas) es la velocidad del fluido a través de una tubería, y cómo
se desarrolla un régimen laminar o turbulento, en función y relación directa con el
número adimensional Reynolds, dimensiones y caracterización del fluido(Mott,

41
2006). Ésta es una velocidad media calculada a partir de diferentes puntos
distribuidos sobre el perfil de velocidades
Para análisis matemáticos de fluidos se pueden encontrar expresiones como las
siguientes:
Número adimensional de Reynolds: � � = =
∞∅
: : ∞ : : ∅:
Para Re menor que 2300 se tendrá un flujo laminar, para Re mayor que 4000 el
flujo será turbulento, y Re en este intervalo se señala como región crítica. Puede
verse en la Fig. 6, las curvas características de estos dos regímenes de flujo.
Estos conceptos aplicados en numerosos modelos matemáticos y empíricos,
como por ejemplo, en la ecuación de Bernoulli, ecuación de continuidad, estudio
en transferencia de calor por convección, predicción de pérdidas de carga,
factores de incrustación, y que han fundamentado la construcción de gran
cantidad de instrumentos, son aplicables en este estudio.
Por otro lado, para flujos de agua se tiene la ecuación de Hazen-Wiliams en el SI:
∞ = 0,85 0,63 0,64 :
: � − , = á ,
= ó é

42
Figura 6. Esquemas perfiles de velocidad regímenes laminar y turbulento.
Fuente: Propia del autor.
Ley de Potencia y Ley de Stokes
La magnitud del gradiente de velocidad no afecta el valor de la viscosidad
dinámica de un fluido, que tiene relación directa con la viscosidad cinemática, y
dependerá casi exclusivamente de la temperatura (evidenciado en el índice de
viscosidad VI).
Sea que los fluidos cumplen o no la expresión:
� =�� = ∙ �´ �: :
�´ ∶ ó
serán considerados como newtonianos (p.e. agua) o no newtonianos (metales
fundidos) mostrando comportamiento lineal o no, respectivamente, entre el
esfuerzo cortante y el gradiente de velocidad.

43
En ductos circulares, para fluidos newtonianos es primordial y de gran interés
relacionar la pérdida de carga con el caudal que circula. Debido a la baja
viscosidad presentada en fluidos de este tipo, generalmente se desarrolla flujo
turbulento. La ecuación planteada por Rabinowitsch-Mooney puede ser utilizada
para describir su comportamiento (Steffe, 1996):
= 2 � → = 2 � = 2 (2
2�) 0 − 2
2 −� ��
0
0
Y anotando que en un ducto circular los esfuerzos de corte son lineales, y éste
está relacionado con la pérdida de carga en la región de la pared, se tiene, tanto
para flujo laminar como turbulento:
� =(−∆ )
2 ; =
3�3 �2(−�´) ��
0
=�´∆ 4
8 � �´ =��
Ahora, la relación para velocidad local U en un punto de la trayectoria para flujo
laminar está dada por [1]:
= 2 ∞[1 − ( 0 )2] : : 0 = á�
Y para flujo turbulento:
= ∞[1 + 1.43 + 2.15√ log10(1 − 0 )] : = ó
De igual forma, para describir el comportamiento de partículas suspendidas en un
fluido con un flujo determinado, se tiene la relación dada por el número de Stokes:
=0 �∅ 0: ó � : ∅:
Ésta relaciona el tiempo característico de una partícula y el tiempo característico
del fluido en un flujo determinado. Para números de Stoke bajos la partícula se

44
comporta como el fluido, y para valores altos el movimiento de la partícula
predomina y sigue la dirección de caída6.
2.2.2. Consideraciones ópticas
La refracción es el cambio de velocidad que experimenta la luz al pasar de un
medio a otro. Este cambio de velocidad se manifiesta por una variación en la
dirección de propagación en todos los casos, excepto cuando el rayo incidente es
normal a la superficie de separación de los medios. Ángulos de incidencia (ε) y de
Refracción (ε’) son los formados por los rayos incidente (I) y refractado (R), con la
normal (N) a la superficie en el punto de incidencia (S), Fig. 7.
Figura 7. Refracción de la luz en una pared plana
Ley de Refracción: ��´
=´
=´
= � = ´ �´
esta expresion es conocida tambien como Ley de Snell.
Fuente: Tomado y adaptado de Elementos de Física Óptica. Gan. 2ª Edición.
El índice de refracción absoluto de una sustancia, es el cociente de dividir la
velocidad de la luz en el vacío, por la velocidad de la luz en ella;n es siempre
6 Nú e o de “tokes, Li o Ro e t Mott. “e ió : A ast e de f i ió so e esfe as e Flujo La i a .
Pág.530.
45
mayor que la unidad, puesto que v es menor que c. El índice de refracción del aire
se puede considerar como la unidad.
Si c, v y v’ son respectivamente las velocidades de propagación de la luz en el
vacío y en los medios 1 y 2, los índices de refracción de estos últimos tienen por
valor:
n = c/v y n’ = c/v’.
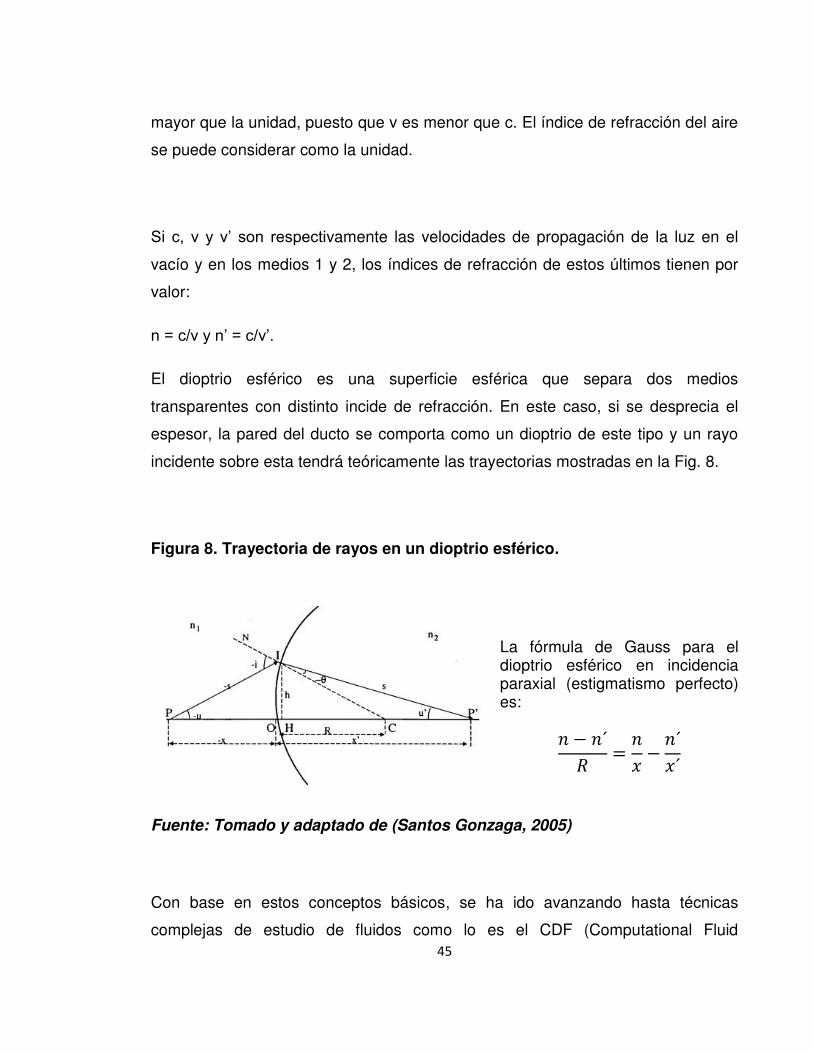
El dioptrio esférico es una superficie esférica que separa dos medios
transparentes con distinto incide de refracción. En este caso, si se desprecia el
espesor, la pared del ducto se comporta como un dioptrio de este tipo y un rayo
incidente sobre esta tendrá teóricamente las trayectorias mostradas en la Fig. 8.
Figura 8. Trayectoria de rayos en un dioptrio esférico.
La fórmula de Gauss para el dioptrio esférico en incidencia paraxial (estigmatismo perfecto) es: − ´
= � − ´�´
Fuente: Tomado y adaptado de (Santos Gonzaga, 2005)
Con base en estos conceptos básicos, se ha ido avanzando hasta técnicas
complejas de estudio de fluidos como lo es el CDF (Computational Fluid

46
Dynamics) que permite remplazar los modelos matemáticos de Ecuaciones
Diferenciales. Este tipo de métodos muestra ventajas considerables frente a
modelos reales, obteniendo resultados propicios siempre y cuando se controlen
adecuadamente, entre otras: variables de modelamiento, discretización,
estabilidad de esquemas numéricos, y predicción de tiempos (Ferzigerand & Peric,
1996).
2.2.3. Conceptualización equipo PIV
La técnica de Velocimetría por Imagen de Partículas, es un método no intrusivo
que permite caracterizar el comportamiento de un fluido de forma cualitativa y
cuantitativa en dimensiones espacio-temporales, con el auxilio de un conjunto de
elementos de alta tecnología visual, electrónica, láser y procesamiento de datos
(Adrian & Westerweel, 2011). Se llama no intrusiva porque no es preciso introducir
en el fluido sensores o elementos que interfieran con su flujo normal. Se evidencia
como especial, el hecho de la utilización de partículas llamadas trazadoras, que
por su tamaño microscópico permiten, no solo que sigan la dinámica del flujo, sino
que también por el material del cual están compuestas, la reflexión de luz para ser
capturada por un medio visual.
Es posible obtener datos correspondientes a velocidades instantáneas en el perfil
de velocidades de un fluido, así como la producción de campos vectoriales
representativos de la velocidad en regiones del flujo. Las características
mostradas en esta sección no describen a detalle el funcionamiento del equipo, se
tienen en cuenta solo algunas consideraciones generales y esquemáticas,
sabiendo que para el proyecto es preciso una recopilación más densa. De forma
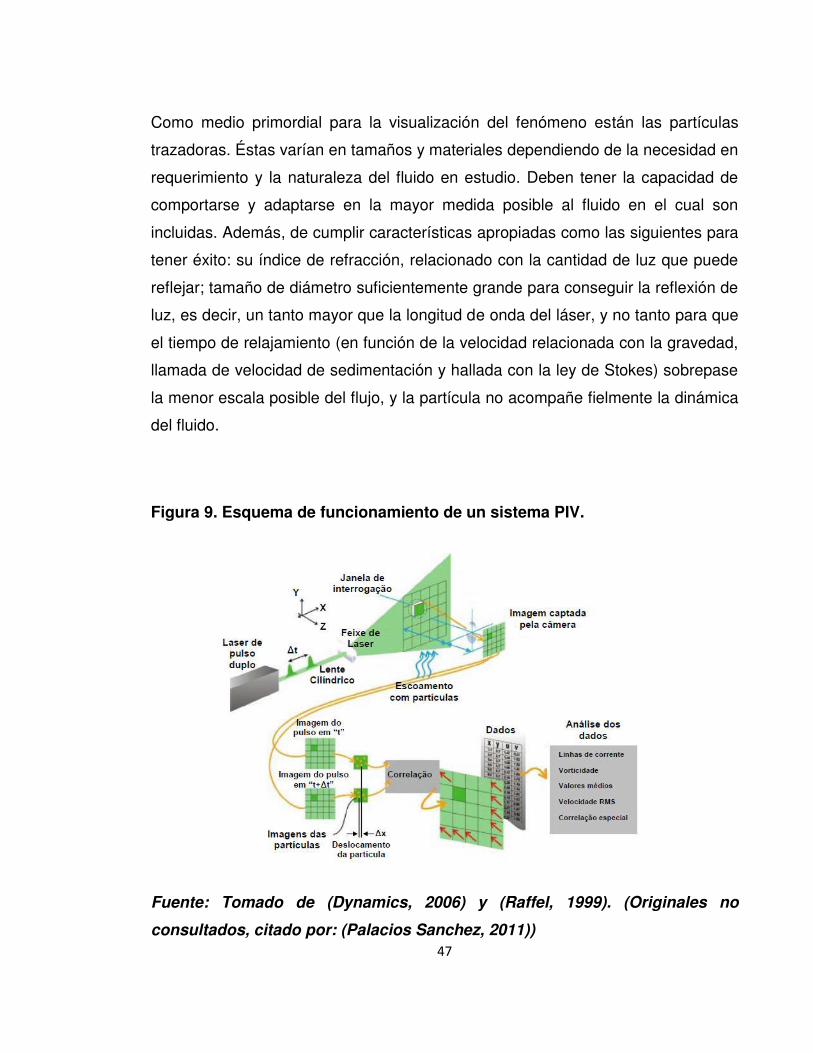
general, el sistema PIV, Fig.9, se describe en los párrafos siguientes.
47
Como medio primordial para la visualización del fenómeno están las partículas
trazadoras. Éstas varían en tamaños y materiales dependiendo de la necesidad en
requerimiento y la naturaleza del fluido en estudio. Deben tener la capacidad de
comportarse y adaptarse en la mayor medida posible al fluido en el cual son
incluidas. Además, de cumplir características apropiadas como las siguientes para
tener éxito: su índice de refracción, relacionado con la cantidad de luz que puede
reflejar; tamaño de diámetro suficientemente grande para conseguir la reflexión de
luz, es decir, un tanto mayor que la longitud de onda del láser, y no tanto para que
el tiempo de relajamiento (en función de la velocidad relacionada con la gravedad,
llamada de velocidad de sedimentación y hallada con la ley de Stokes) sobrepase
la menor escala posible del flujo, y la partícula no acompañe fielmente la dinámica
del fluido.
Figura 9. Esquema de funcionamiento de un sistema PIV.
Fuente: Tomado de (Dynamics, 2006) y (Raffel, 1999). (Originales no
consultados, citado por: (Palacios Sanchez, 2011))

48
La técnica de PIV cuenta con una cámara de alta velocidad con tecnología CCD o
CMOS (según sea el tipo), que permite capturar dos imágenes diferentes
consecutivas con un espaciado en nanosegundos entre ellas. Con estas se
consigue acompañar el movimiento a alta velocidad de una partícula trazadora
siguiendo el flujo del fluido. Este tipo de cámaras difieren de tecnologías más
antiguas que tenían la incapacidad de capturar en una imagen (llamada de marco)
solo un punto de luz reflejado por la partícula. Estas agrupaban en un solo marco
dos pulsos de luz de la partícula, y se obtenían por medio de correlaciones los
vectores de velocidad, hecho que acaecía en errores más elevados, por la
incerteza de verificar si los dos pulsos pertenecían a la misma partícula. Sin
embargo, se limitan por el número de disparos que pueden realizar debido a la
transferencia de datos al ordenador.
La tecnología CCD (Charge Coupled Device, superior a la CMOS (Complementary
metal-oxide-semiconductor)) en esencia, se constituye de pequeños
condensadores enlazados en un circuito integrado. Su función es acumular cargas
eléctricas (con apróx. una eficiencia del 70%) en cada una de estas celdas,
llamadas de pixeles, que son provenientes y dependen del haz de luz (fotones
convertidos en electrones). Luego, esta es transformada en voltajes que
corresponden a tonos diferentes de una escala de color gris en la imagen. Una
medida importante es la distancia entre centros de dos pixeles consecutivos, que
está alrededor de 10 µm. Esta estructura compleja, acaece en equipos de tamaño
y peso considerables.
El haz de luz de alta potencia y pulso corto, es generado por un láser
generalmente del tipo Nd:YAG (cristal compuesto de granate de itrio y aluminio
dopado con neodimio). Este emite luz con longitud de onda de 1064 nm en la
franja infrarroja, filtrada en pasa banda para aislar armónicos de 532 nm (luz
49
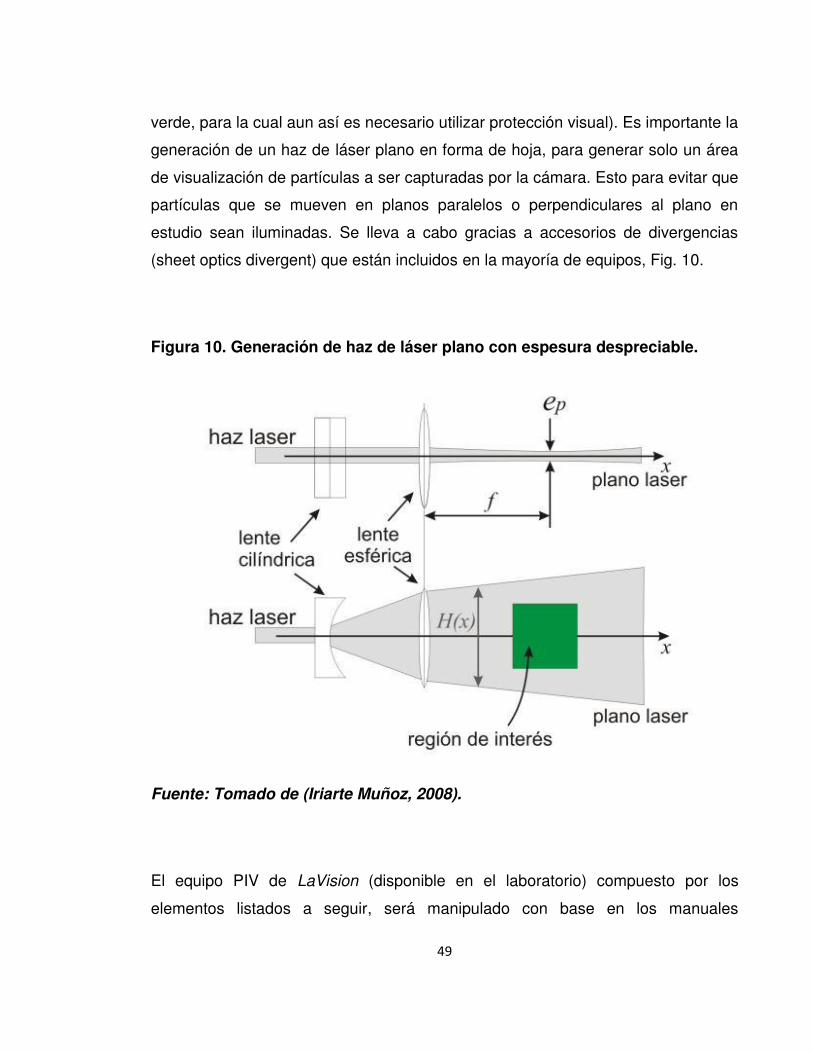
verde, para la cual aun así es necesario utilizar protección visual). Es importante la
generación de un haz de láser plano en forma de hoja, para generar solo un área
de visualización de partículas a ser capturadas por la cámara. Esto para evitar que
partículas que se mueven en planos paralelos o perpendiculares al plano en
estudio sean iluminadas. Se lleva a cabo gracias a accesorios de divergencias
(sheet optics divergent) que están incluidos en la mayoría de equipos, Fig. 10.
Figura 10. Generación de haz de láser plano con espesura despreciable.
Fuente: Tomado de (Iriarte Muñoz, 2008).
El equipo PIV de LaVision (disponible en el laboratorio) compuesto por los
elementos listados a seguir, será manipulado con base en los manuales
50
suministrados por el fabricante, y la información documentada en el proceso de
revisión científica (Hernandez Cely, 2015):
Láser pulsado Nd:YAG de dos cavidades Dual Power100-50 (LitronLáser), de
longitud de onda λ=532 nm (luz verde), con frecuencia máxima de pulsación de
15Hz e potencia máxima de 77.1 mJ por pulso. Proveído con un accesorio óptico
para realizar la modificación del haz del láser, a fin de obtener una hoja o plano de
espesor menor que el original, necesario para este tipo de experimentos.
Cámara CCD modelo ImagerProSX 5M, con 2448 x 2050 pixeles de resolución
máxima, salida digital de 12 bits, con velocidad de captura máxima de 14,2 frames
por segundo, tamaño de pixel de 3,45 x 3,45 µ 2, y tiempo mínimo entre
imágenes de 600 ns.
Programa DaVis 8.2. Software para captura e procesamiento de imágenes, así
como para pos-procesamiento de vectores de velocidad obtenidos.
Y por último, partículas trazadoras, referencia GlassHollowspheres 110P8, en una
cantidad de 1kg disponible para utilizar.
2.2.4. Método de captura y corrección de imágenes
La forma en la cual son iluminadas las partículas trazadoras al seguir el flujo, y
como estas son capturadas por la cámara en una o varias imágenes, define los

51
diferentes métodos de análisis y adquisición de imágenes en la técnica PIV. Los
pulsos del láser son función del tiempo, y según sea el caso, se pueden tener
entre otros, los patrones mostrados en Fig. 11.
Los dos métodos más utilizados son: multiframe/single Pulse (proporciona una
imagen para cada pulso de iluminación) y el single frame/multipulse (proporciona
el movimiento de una partícula en una sola imagen). Es de gran importancia: el
valor ∆t que define el tiempo entre pulsos dados, para poder capturar dos
imágenes consecutivas, y el rango de velocidades que pueden ser medidos; así
como también el tiempo de duración de un pulso. La validez de las medidas de
velocidad depende, tanto de la exactitud de la medida de desplazamiento de la
partícula ∆x, así como del tiempo de paso ∆t. Para tales mediciones, las imágenes
son subdivididas en las llamadas ventanas de interrogación (Ronald, 1991), que
contienen un grupo determinado de partículas, y gracias al software incorporado
en los sistemas PIV, es posible encontrar el valor máximo presentado que
corresponde al desplazamiento medio de las partículas.
Para este método, se encuentran procedimientos como la correlación por
interpolación de sub-pixeles, la correlación adaptada o la sobre-posición de
ventanas de interrogación (interrogación y offset). Además de esta corrección, se
hace necesario también aplicar una corrección debido a distorsiones ópticas
presentadas en los elementos del sistema. Para ello, son utilizados patrones de
medición que proveen imágenes de calibración y comparación de distorsiones
finales.

52
Figura 11. Codificación de pulsos y métodos de enmarcado.
Fuente: Tomado y adaptado de (Ronald, 1991)
53
3. MARCO METODOLÓGICO
Como ya se ha descrito el contexto en el cual se enmarca este proyecto y los
objetivos a lograr, éste requiere procedimientos minuciosos sustentados y guiados
hacia la eficacia. Tener el manejo adecuado de cada uno de los factores
influyentes garantiza resultados favorables. Esta preocupación, es esencial para
cada una de las etapas del proceso, tanto en su planteamiento como en su
desarrollo.
Como estancia preliminar, y como una de las etapas que sientan la base para el
éxito del proyecto, se encuentra la documentación puntualizada de los trabajos
realizados en otras instituciones del sector, y en el mismo LETeF, sobre la
manipulación, aplicación, calibración y demás factores, para el uso de la
tecnología PIV, y sus diferentes componentes. Es de gran importancia que ésta
revisión literaria sea detallada, apuntando a encontrar métodos, ventajas,
dificultades presentadas, variaciones, tratamientos, manuales, elementos
utilizados etc., que hayan sido explorados, para reproducir aquellos que se
encuentren pertinentes en el actual estudio. Será enfocada en la búsqueda de
trabajos que tengan condiciones similares, y que puedan servir como apoyo
técnico, por ejemplo, estudios en ductos circulares, tratamientos de imágenes por
medio de software de la misma particularidad, tamaños y materiales de partículas
trazadoras utilizadas, entre otras, por medio de las bases de datos disponibles en
la institución.
3.1. BANCADA EXPERIMENTAL
Como parte de la metodología propuesta en el trabajo experimental, para alcanzar
los objetivos nombrados, con el uso y correcta calibración de los dispositivos que
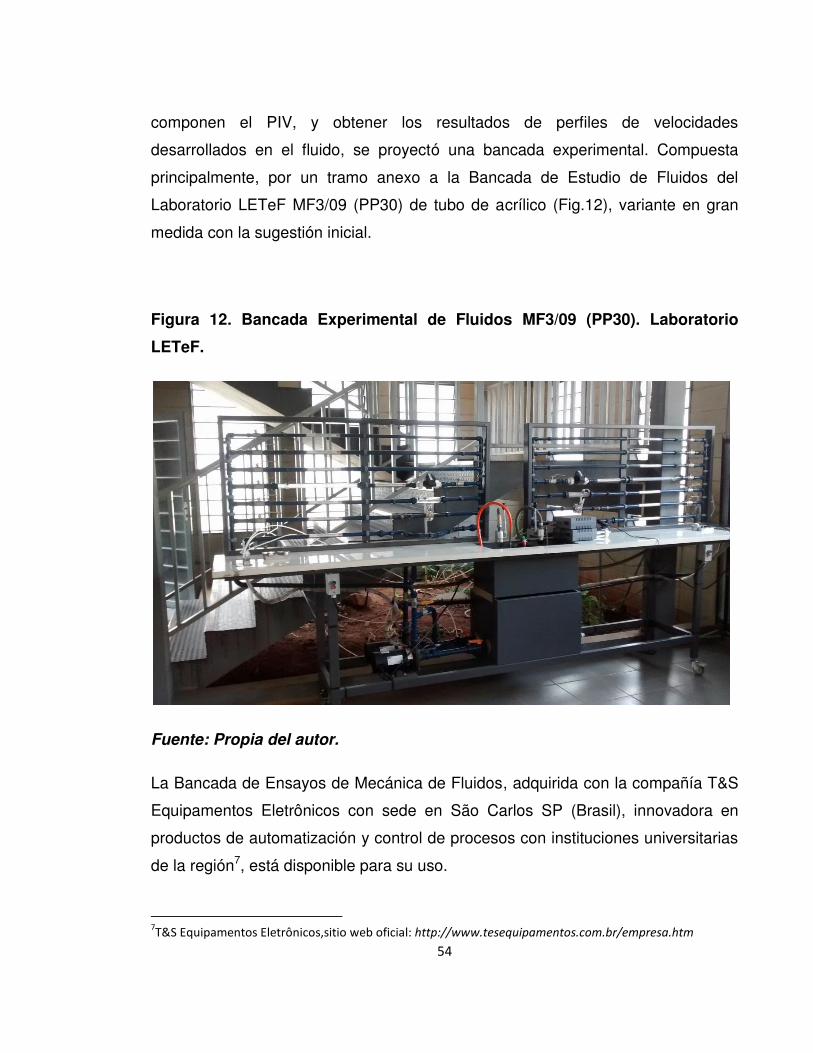
54
componen el PIV, y obtener los resultados de perfiles de velocidades
desarrollados en el fluido, se proyectó una bancada experimental. Compuesta
principalmente, por un tramo anexo a la Bancada de Estudio de Fluidos del
Laboratorio LETeF MF3/09 (PP30) de tubo de acrílico (Fig.12), variante en gran
medida con la sugestión inicial.
Figura 12. Bancada Experimental de Fluidos MF3/09 (PP30). Laboratorio
LETeF.
Fuente: Propia del autor.
La Bancada de Ensayos de Mecánica de Fluidos, adquirida con la compañía T&S
Equipamentos Eletrônicos con sede en São Carlos SP (Brasil), innovadora en
productos de automatización y control de procesos con instituciones universitarias
de la región7, está disponible para su uso.
7T&S Equipamentos Eletrônicos,sitio web oficial: http://www.tesequipamentos.com.br/empresa.htm
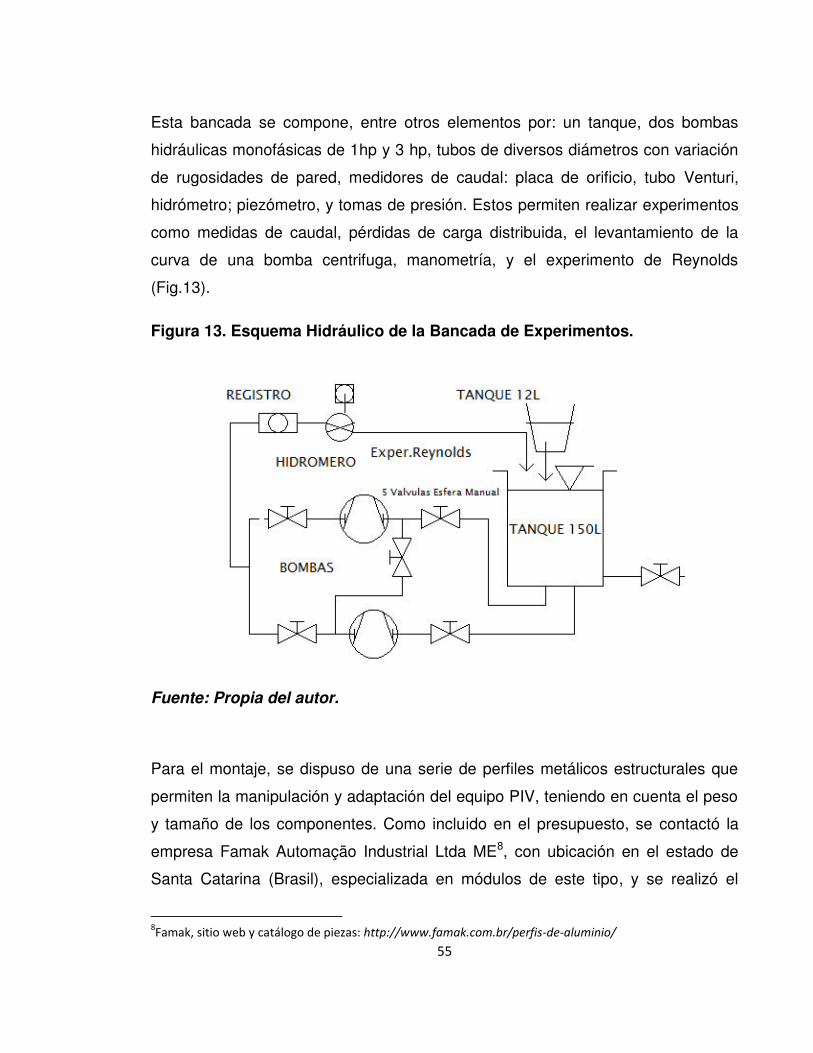
55
Esta bancada se compone, entre otros elementos por: un tanque, dos bombas
hidráulicas monofásicas de 1hp y 3 hp, tubos de diversos diámetros con variación
de rugosidades de pared, medidores de caudal: placa de orificio, tubo Venturi,
hidrómetro; piezómetro, y tomas de presión. Estos permiten realizar experimentos
como medidas de caudal, pérdidas de carga distribuida, el levantamiento de la
curva de una bomba centrifuga, manometría, y el experimento de Reynolds
(Fig.13).
Figura 13. Esquema Hidráulico de la Bancada de Experimentos.
Fuente: Propia del autor.
Para el montaje, se dispuso de una serie de perfiles metálicos estructurales que
permiten la manipulación y adaptación del equipo PIV, teniendo en cuenta el peso
y tamaño de los componentes. Como incluido en el presupuesto, se contactó la
empresa Famak Automação Industrial Ltda ME8, con ubicación en el estado de
Santa Catarina (Brasil), especializada en módulos de este tipo, y se realizó el
8Famak, sitio web y catálogo de piezas: http://www.famak.com.br/perfis-de-aluminio/
56
pedido de las unidades señaladas a detalle, con valores en Reales (Brasileño), en
el Anexo A, de facturas de compra.
El presupuesto destinado para esta compra, y demás implementos necesarios,
está dado por medio del laboratorio LETeF y por la Fundação para o Incremento
da Pesquisa e do Aperfeiçoamento IndustrialFIPAI, con sede en São Carlos S.P.
(Brasil) y vinculación con la EESC, ubicada en la Rua Miguel Petroni, 625, órgano
precursor de la fomentación del desarrollo tecnológico en instituciones
educativas9.
En el inicio del proyecto, se dio como solución el montaje del equipo PIV alrededor
del tubo del experimento de Reynolds de la Bancada Original, Por medio de una
estructura con libertad de giro, para variar la inclinación de la cámara y el láser; y
movimientos laterales y transversales, se pretendía controlar y mantener la
relación de 90° entre los planos de captura de imágenes e incidencia del láser.
El cambio realizado tuvo en cuenta dos argumentos: el primero, el hecho que los
tubos paralelos hacia arriba y hacia abajo del tubo del experimento de Reynolds,
impedían la correcta posición de la cámara y el láser. Y el segundo y fundamental
que, para que el flujo de un fluido en una tubería este totalmente desarrollado, es
necesario que el fluido recorra una longitud mínima del tubo, obtenido de la
formulación mostrada a seguir(White, 2002), que relaciona el diámetro y el número
de Re correspondiente, sea este para flujo laminar o turbulento.
. = 0,055 ∗ ∗
9 FIPAI, sitio web oficial: http://www.fipai.org.br/

57
. = 4,4 ∗ 16 ∗
donde d es el diámetro del tubo y Re el número de Reynolds considerado. En el
presente proyecto, fue seleccionado un tubo de acrílico con diámetro interno de
21,1 mm, que da continuidad a la línea del tubo de experimentos, en conjunto con
los otros componentes. Además, los valores del número de Reynolds están en el
rango adecuado, para no alcanzar aquellos en que se presenta régimen de
transición. Así, para flujo laminar se considera Re ≤ 1800 y para flujo turbulento
3000 ≤ Re ≤40000.
Después de sustituir estos valores en las ecuaciones, es perceptible que la
longitud crítica se da para el máximo valor de Re de 1800 en flujo laminar. Así, se
define que para cumplir con la condición de desarrollo del flujo en régimen laminar,
es necesaria una longitud mínima del tubo de 2,09 m. Éste es admisible también
para el régimen turbulento, que necesita solo de 0,5m para el máximo valor de Re.
En consecuencia, en el final de este tramo de tubo, es colocada una caja de
visualización, formada de un cubo de acrílico macizo, que permite la visualización
adecuada de la luz reflejada por las partículas trazadoras con la incidencia del
láser, actuando como filtro de defectos ópticos, al paso de ésta por el fluido y la
pared del ducto. Una representación general a escala del montaje final de la
bancada, es mostrada en la Fig. 14, y los planos generados en el diseño con
detalles, adjuntos en el Anexo B. El resultado final es mostrado en la Fig. 15.
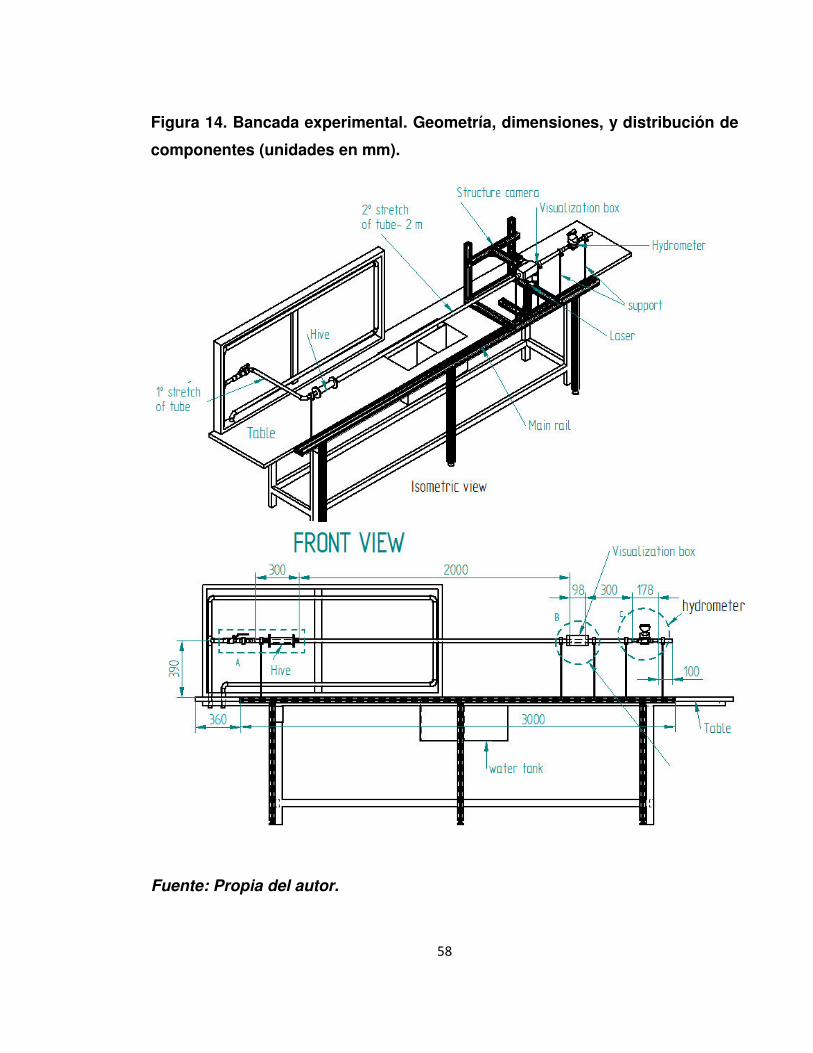
58
Figura 14. Bancada experimental. Geometría, dimensiones, y distribución de
componentes (unidades en mm).
Fuente: Propia del autor.

59
Figura 15. Bancada Experimental. Superior: Proceso preliminar de Montaje.
Inferior: Resultado final, Bancada Terminada y Equipo PIV montado.
Fuente: Propia del autor.
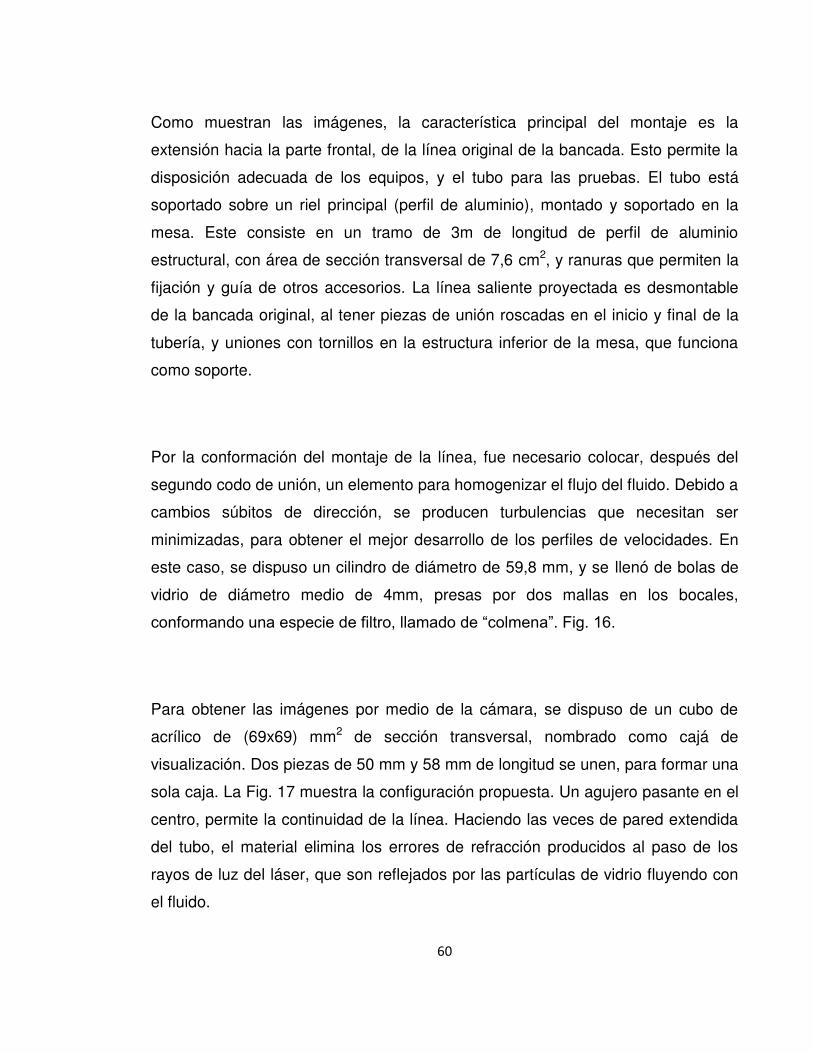
60
Como muestran las imágenes, la característica principal del montaje es la
extensión hacia la parte frontal, de la línea original de la bancada. Esto permite la
disposición adecuada de los equipos, y el tubo para las pruebas. El tubo está
soportado sobre un riel principal (perfil de aluminio), montado y soportado en la
mesa. Este consiste en un tramo de 3m de longitud de perfil de aluminio
estructural, con área de sección transversal de 7,6 cm2, y ranuras que permiten la
fijación y guía de otros accesorios. La línea saliente proyectada es desmontable
de la bancada original, al tener piezas de unión roscadas en el inicio y final de la
tubería, y uniones con tornillos en la estructura inferior de la mesa, que funciona
como soporte.
Por la conformación del montaje de la línea, fue necesario colocar, después del
segundo codo de unión, un elemento para homogenizar el flujo del fluido. Debido a
cambios súbitos de dirección, se producen turbulencias que necesitan ser
minimizadas, para obtener el mejor desarrollo de los perfiles de velocidades. En
este caso, se dispuso un cilindro de diámetro de 59,8 mm, y se llenó de bolas de
vidrio de diámetro medio de 4mm, presas por dos mallas en los bocales,
conformando una especie de filtro, llamado de “colmena”. Fig. 16.
Para obtener las imágenes por medio de la cámara, se dispuso de un cubo de
acrílico de (69x69) mm2 de sección transversal, nombrado como cajá de
visualización. Dos piezas de 50 mm y 58 mm de longitud se unen, para formar una
sola caja. La Fig. 17 muestra la configuración propuesta. Un agujero pasante en el
centro, permite la continuidad de la línea. Haciendo las veces de pared extendida
del tubo, el material elimina los errores de refracción producidos al paso de los
rayos de luz del láser, que son reflejados por las partículas de vidrio fluyendo con
el fluido.

61
Figura 16. Colmena para homogenizar el flujo. Ajustada con varales
roscados. Sellado con O-Ring Ref. 2-139.
Fuente: Propia del autor.
Figura 17. Geometría caja de visualización.
Fuente: Propia del autor.
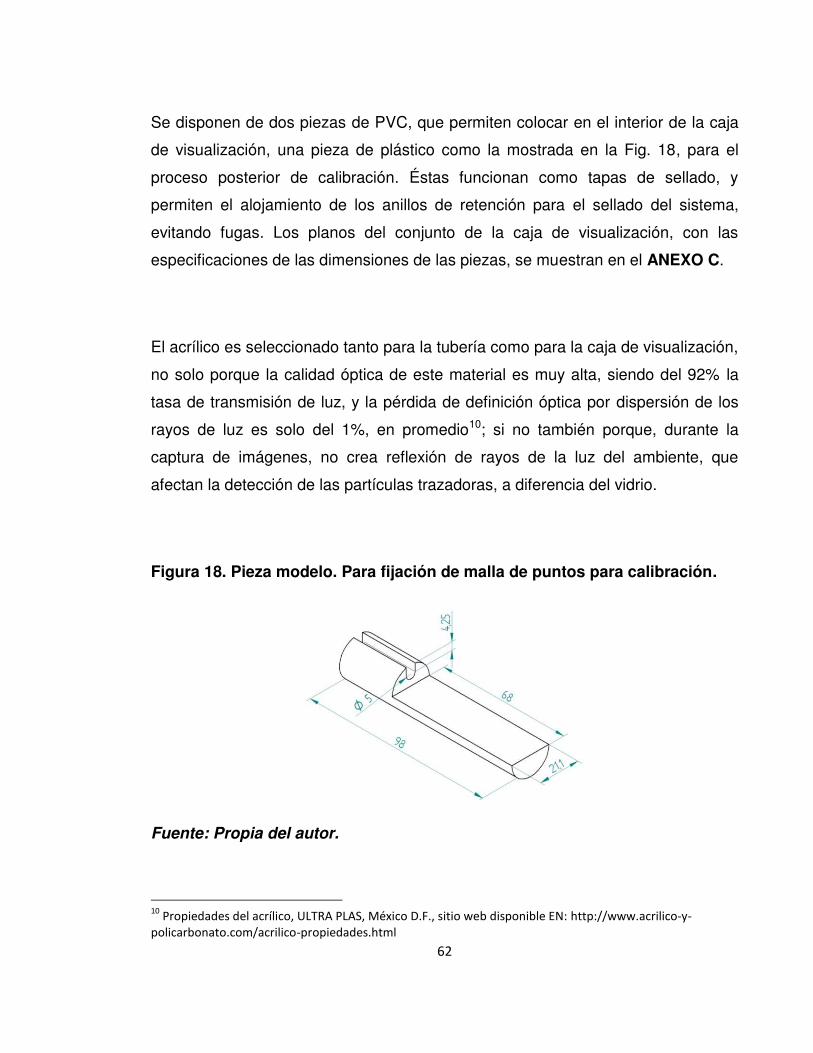
62
Se disponen de dos piezas de PVC, que permiten colocar en el interior de la caja
de visualización, una pieza de plástico como la mostrada en la Fig. 18, para el
proceso posterior de calibración. Éstas funcionan como tapas de sellado, y
permiten el alojamiento de los anillos de retención para el sellado del sistema,
evitando fugas. Los planos del conjunto de la caja de visualización, con las
especificaciones de las dimensiones de las piezas, se muestran en el ANEXO C.
El acrílico es seleccionado tanto para la tubería como para la caja de visualización,
no solo porque la calidad óptica de este material es muy alta, siendo del 92% la
tasa de transmisión de luz, y la pérdida de definición óptica por dispersión de los
rayos de luz es solo del 1%, en promedio10; si no también porque, durante la
captura de imágenes, no crea reflexión de rayos de la luz del ambiente, que
afectan la detección de las partículas trazadoras, a diferencia del vidrio.
Figura 18. Pieza modelo. Para fijación de malla de puntos para calibración.
Fuente: Propia del autor.
10
Propiedades del acrílico, ULTRA PLAS, México D.F., sitio web disponible EN: http://www.acrilico-y-
policarbonato.com/acrilico-propiedades.html

63
Esta pieza de plástico es utilizada como modelo de calibración, tal que, en la base
recta mecanizada, se fija una malla con un diseño patrón, que permite observar la
distorsión de las imágenes capturadas por la cámara (producida por la curvatura
del agujero de centro), y realizar su posterior corrección al ser procesadas con el
software, estableciendo un patrón de calibración. Ésta malla tiene un diseño como
especificado en el subcapítulo 3.3.
La abertura en la parte superior, está dispuesta para que la pieza de plástico
(modelo) con la malla, y así el tubo, permanezcan llenos completamente de agua,
y se logre un modelaje correcto, sabiendo que las fotos serán tomadas en esta
condición.
En la pieza de mayor longitud (58mm), estará incidiendo el haz de luz del láser, y
la cámara. Esta longitud es puesta en consideración, con el fin de permitir la
captura total del perfil de velocidades desarrollado por el fluido, y depende de
cómo son abordadas otras variables. Entre estas están: el ángulo de apertura del
haz de luz del láser; la velocidad máxima media del fluido (que también afecta el
∆t del intervalo entre la captura de dos imágenes) que estará dada por el sistema
de la línea de experimentos; la distancia focal de la cámara; y el tamaño de la
ventana de interrogación elegida.
Así, para poder mantener un control más preciso de las distancias de incidencia
de la cámara y del láser, en relación al eje del tubo, se dispuso de una estructura
compuesta por piezas de perfil estructural de 40mm x 40mm de sección
transversal. Fig. 19. Ésta permite el desplazamiento, tanto de la cámara como del
láser, en tres direcciones diferentes: para arriba y para abajo, frente y atrás, y a
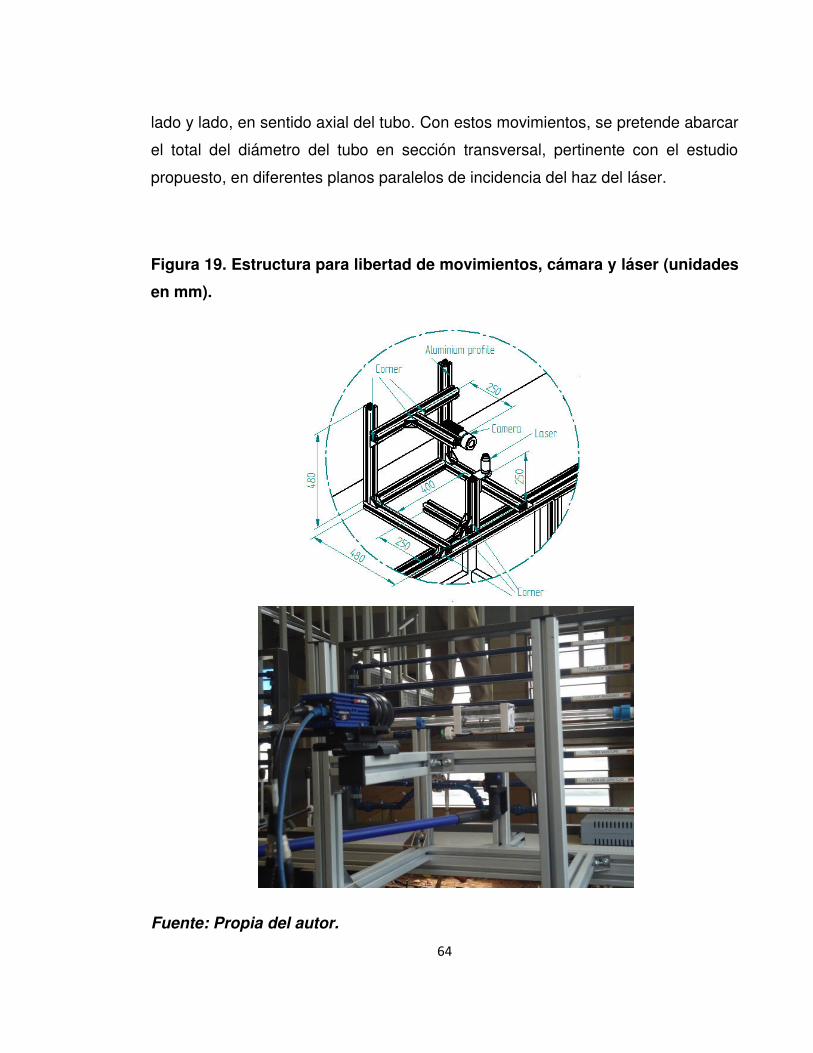
64
lado y lado, en sentido axial del tubo. Con estos movimientos, se pretende abarcar
el total del diámetro del tubo en sección transversal, pertinente con el estudio
propuesto, en diferentes planos paralelos de incidencia del haz del láser.
Figura 19. Estructura para libertad de movimientos, cámara y láser (unidades
en mm).
Fuente: Propia del autor.

65
Sin embargo, como puede observarse en la Figura 20, fue necesario adquirir dos
rieles o soportes para cámaras comerciales, para que los ajustes de movimientos
y enfoque, tanto de la cámara como del láser, estuvieran de acuerdo con las
magnitudes manejadas en el montaje. Por ejemplo, para abarcar el diámetro del
tubo, según la incidencia propuesta en diferentes planos para el láser, es preciso
hacerlo en avances pequeños en grandezas de orden de mm. Para ello, se
acoplaron dos rieles para Macrofotografía, de dos ejes y cuatro caminos, que
permiten el control suave y preciso en cuatro direcciones independientes, en un
recorrido máximo de 15 cm. El ajuste y fijación de la cámara y el láser, se hace
mediante tornillos de 1/4 de pulgada. Además, los movimientos realizados por
cada uno de los soportes son verificados con la adaptación de un Calibrador Pie
de Rey digital.
Figura 20. Soporte comercial para Macrofotografía adaptado para
movimiento del láser, con calibrador digital dispuesto para control de
avance.
Fuente: Propia del autor.
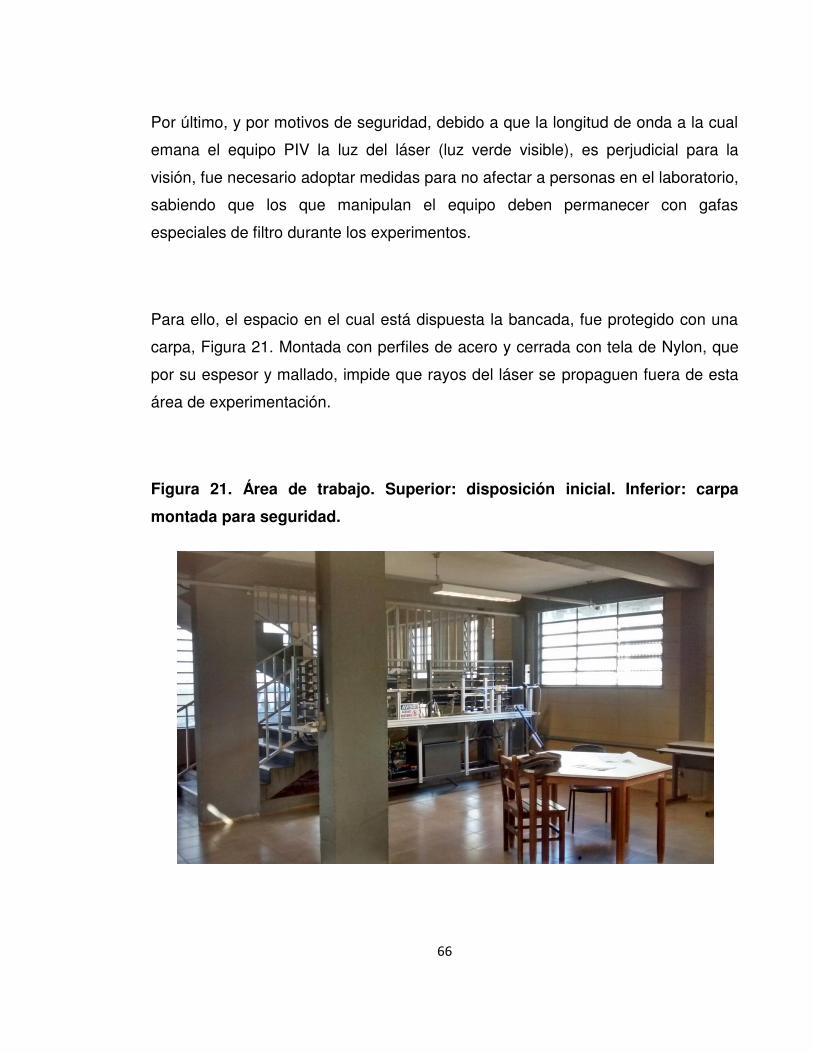
66
Por último, y por motivos de seguridad, debido a que la longitud de onda a la cual
emana el equipo PIV la luz del láser (luz verde visible), es perjudicial para la
visión, fue necesario adoptar medidas para no afectar a personas en el laboratorio,
sabiendo que los que manipulan el equipo deben permanecer con gafas
especiales de filtro durante los experimentos.
Para ello, el espacio en el cual está dispuesta la bancada, fue protegido con una
carpa, Figura 21. Montada con perfiles de acero y cerrada con tela de Nylon, que
por su espesor y mallado, impide que rayos del láser se propaguen fuera de esta
área de experimentación.
Figura 21. Área de trabajo. Superior: disposición inicial. Inferior: carpa
montada para seguridad.
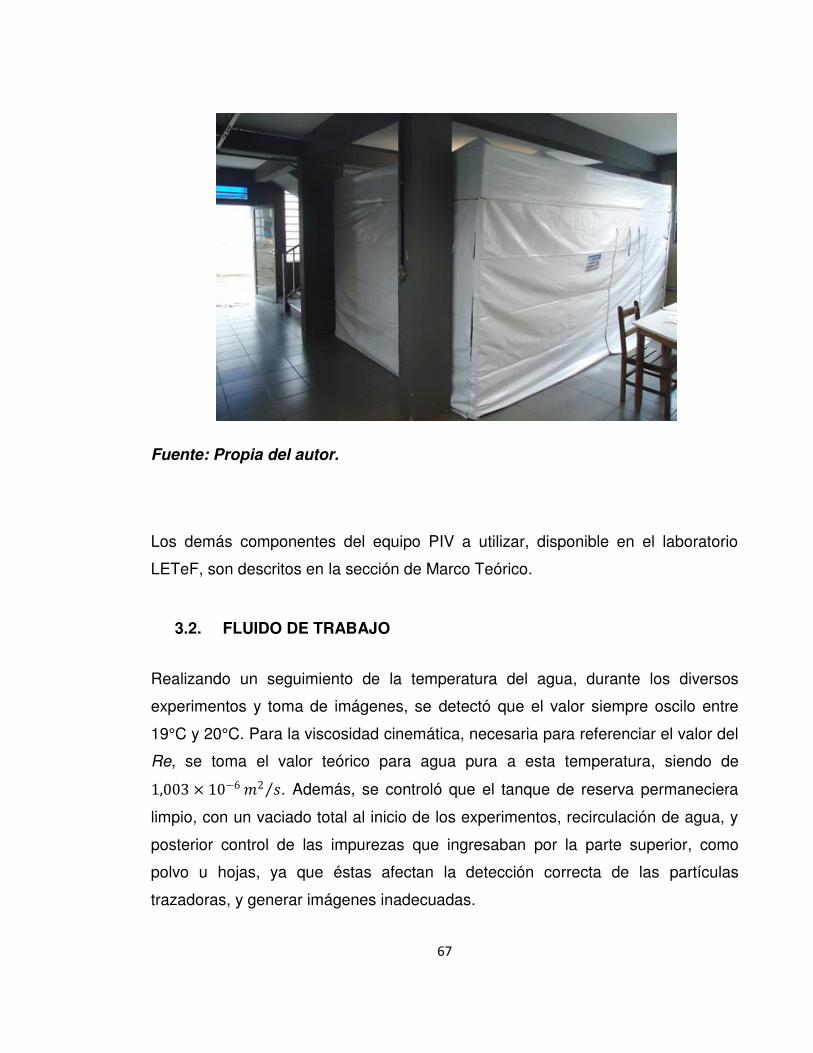
67
Fuente: Propia del autor.
Los demás componentes del equipo PIV a utilizar, disponible en el laboratorio
LETeF, son descritos en la sección de Marco Teórico.
3.2. FLUIDO DE TRABAJO
Realizando un seguimiento de la temperatura del agua, durante los diversos
experimentos y toma de imágenes, se detectó que el valor siempre oscilo entre
19°C y 20°C. Para la viscosidad cinemática, necesaria para referenciar el valor del
Re, se toma el valor teórico para agua pura a esta temperatura, siendo de
1,003 × 10−6 2 . Además, se controló que el tanque de reserva permaneciera
limpio, con un vaciado total al inicio de los experimentos, recirculación de agua, y
posterior control de las impurezas que ingresaban por la parte superior, como
polvo u hojas, ya que éstas afectan la detección correcta de las partículas
trazadoras, y generar imágenes inadecuadas.

68
Un aspecto importante en cuanto al fluido, son las partículas trazadoras que se le
adicionan, siendo éstas las que permiten observar y describir el comportamiento
de éste, en la medida que sigan apropiadamente o no el flujo presentado. Para
ello, se hace una revisión de la velocidad de sedimentación que presentan, que
depende del diámetro de estas partículas, como referenciado en el capítulo de
Marco Teórico, para la Ley de Stokes. Así, es comprobado si el diámetro de las
partículas es el adecuado.
Según las notas del fabricante, las partículas trazadoras utilizadas, que están
incluidas con el equipo PIV, son esferas huecas de vidrio, y entre las
propiedades11, se especifica que el diámetro medio de éstas es de 10 µm. Así,
aplicando la fórmula referenciada para tiempo de relajación, con las propiedades
del fluido a 20°C:
= 10 = 10 × 10−6 ; = 11003
; = 998,23
;
= 1,102 × 10−3 2
� =
2
18= 6,1 × 10−6
Como puede verse, este valor es casi despreciable, por tanto las partículas siguen
fielmente el flujo del fluido, para cualquier rango de velocidades. Otra
demostración puede hacerse con la velocidad de sedimentación, teniendo:
11
Propiedades: Potters Industries Sphericel® 110P8 Hollow Glass Spheres, MatWeb Material Property Data,
sitio web disponible EN: http://www.matweb.com/search/datasheet.aspx

69
= 2( − )
18= 5,03 × 10−6 /
Éste también un valor muy pequeño, siendo una unidad exponencial menor que
los valores de velocidades estudiados, y puede despreciarse el efecto de
sedimentación que causa el peso de las partículas y, por la fuerza de arrastre que
ejerce el fluido sobre las partículas de vidrio hueco, se da por hecho que éstas
siguen fielmente el comportamiento del flujo desarrollado dentro de la tubería.
3.3. CALIBRACIÓN DEL EQUIPO PIV
Una de las etapas primordiales para obtener datos veraces con el equipo PIV, es
la del tratamiento de imágenes, y la aplicación de correcciones y final calibración,
para las distorsiones presentadas al paso de la luz del láser por la pared del tubo y
la caja de visualización.
Como mencionado anteriormente, fue dispuesto al interior del tubo, en la posición
de la caja de visualización, una pequeña pieza de plástico que permite la fijación
de una malla para la calibración con un patrón específico, mostrado en la Figura
22. Éste fue impreso en una hoja de acetato para que la tinta no se diluyera con el
paso del agua.
El proceso de calibración descrito a continuación, fue el seguido durante el
procesamiento de imágenes, y es una compilación del tutorial dispuesto en el
manual Imaging Tools, incluido con el equipo de LaVision. Este proceso es
importante entre otros motivos porque: debe ser determinada la razón de escala
pixel/mm, y la corrección de las imágenes que presentan distorsiones con la
proyección en perspectiva, por el lente de la cámara y la curvatura del tubo.

70
Figura 22. Malla con diseño patrón para calibración de imágenes. Cuadros de
1mm x 1mm, tanto negros como blancos.
Fuente: Propia del autor.
Entre las consideraciones iníciales para el proceso de calibración, la más
importante y cuidadosa es el hecho de mantener constante la posición de la
cámara (distancia focal entre el tubo y la lente). Tanto en la captura de la primera
imagen de la malla de calibración, como después de haber retirado esta pieza de
la línea, para proceder a capturar las imágenes en las que se identifica el trazador
en el fluido. Si no se realiza este proceso con atención, se presentarían errores de
focalización, y la calibración no sería correcta.
Para comenzar, es definida la escala de las imágenes capturadas mm/pixel en la
interfaz Scaling, que será aplica en las demás imágenes, y por tanto es guardada
con anticipación. Para esto son necesarios dos pasos: la captura de la imagen
para escala (o su importación); y la designación interactiva de la relación mm/pixel,
ingresando directamente los valores, o mediante clics sobre la imagen.

71
Luego de conectada la cámara, la imagen es captura presionando en TakeImage
y Grab. La interfaz GDI permite seleccionar la cámara conectada, el tiempo de
exposición, disparo externo, y fuente de luz (láser).Es importante, que ni la cámara
ni el tubo presenten vibraciones o movimientos, al momento de la captura.
Ahora, para definir la escala mm/pixel, se procede de la siguiente forma
(observando directamente la imagen para su manipulación): seleccionar dos
puntos coordenados sobre la imagen; luego elegir el modo en el que está dada la
distancia (dirección), sea ésta vertical, horizontal o en diagonal; y por último,
especificar la distancia en mm (que debe ser conocida) a la cual corresponde la
selección. El primer punto seleccionado se define como el nuevo origen de
coordenadas; para una buena calibración pero mala definición del punto de origen,
puede cambiarse este punto de origen, conservando la calibración. También está
la posibilidad de definir manualmente la escala mm/pixel, que debe ser conocida,
mediante acceso con el botón derecho. Luego de aceptar, esta escala es definida,
y será aplicada a todo proceso en la interfaz dewarping.
Este proceso puede ser reiniciado, para definir una nueva escala. En la opción
finalizar, la escala actual queda definida y será aplicada para todo procesamiento
de imágenes. Un cuadro de dialogo se abre, y se debe elegir entre cuatro
opciones posibles, según sea el caso: para aplicar o no la escala definida a el
proyecto actual, abrir un nuevo proyecto, sobrescribir la escala, o cancelar el
proceso y reiniciar.
La interfaz dewarping del software del equipo, permite almacenar diferentes
calibraciones realizadas, y modificar en cualquier momento las propiedades
72
establecidas inicialmente en cada una de ellas, mediante la función adecuada.
Siendo posible, llamar una determinada calibración realizada con anterioridad,
para aplicarla a una o varias imágenes capturadas. Éste permite modificar
propiedades de las imágenes capturadas, como color o zoom, ir de paso a paso
de forma dinámica, y ver las imágenes capturadas para comparaciones.
Al ingresar al cuadro de dialogo de calibración, se procede de la siguiente forma:
1. Definir la configuración experimental, es seleccionada la opción 2: 1 cámara
(2D)
2. Se define el sistema de coordenadas, en este caso diestro; y el número de
vistas, siendo elegida 1. Se debe tener en cuenta que, si la posición de la
malla de calibración, no puede ser colocada en la misma posición en la cual
serán capturadas las imágenes, este desplazamiento puede ser ingresado
en este cuadro de dialogo, y se redefinirá el origen de calibración. Este
punto es importante, porque permite corregir el montaje propuesto en el
experimento, debido al hecho de que la pieza de plástico dispuesta dentro
del tubo, mantiene la malla de calibración siempre justo en el centro del
tubo, y al realizar desplazamientos para que el haz de luz del láser forme
planos de iluminación en diferentes posiciones, desplazadas determinadas
distancias desde el centro, no coincidirían en el mismo plano, provocando
errores futuros.
3. En este paso, son suministradas las dimensiones de la malla de calibración
utilizada, siendo que es un patrón creado, y por tanto, se deben suministrar
los parámetros apropiados para que el software los reconozca, entre ellos
distancia entre puntos y sus medidas.
4. En este punto, es necesario tomar la imagen de la malla de calibración, o
importar la imagen tomada anteriormente, para la definición de la escala.
Así mismo, pueden ser modificados los parámetros de tiempo de exposición

73
de la cámara y el láser, interfaz automático o manual, fuente de luz. Al ser
definidas la cantidad de vistas seleccionadas para cada cámara (en este
caso 1), el nombre de la cámara se pondrá de color verde,
5. Ahora, son definidos tres puntos o marcas de la imagen, para que pueda
comenzarse el proceso de búsqueda de puntos o marcas automático. Para
ello, es posible hacerlo de tres formas: a) oprimir en la opción All
cameras/viewspara que el proceso de redefinición de marcas sea
automático; b) presionar el botón Shown camera/views para redefinir las
marcas en la imagen mostrada en la pantalla; c) elegir la opción tableentry
para ingresar una tabla correspondiente a una cámara, y redefinir las tres
marcas. Luego, las instrucciones del proceso son mostradas: se debe elegir
una primera marca de referencia, luego elegir la marca a la derecha de
ésta, y luego otra marca en la parte superior a la primera. Antes de ir al
siguiente paso, se debe asegurar que las marcas se encuentran en el plano
frontal. El proceso se puede detener en cualquier momento con la tecla
ESC o el botón STOP.
6. En este paso, el software encuentra todas las marcas de la malla
automáticamente, presionando en el botón Startsearch. De 20 a 30 marcas
serán suficientes, teniendo en cuenta que las marcas deben cubrir toda el
área de trabajo (en excepción para la opción pinhole). Esta área puede ser
modificada manualmente oprimiendo la opción correspondiente, y limitando
el polígono con la tecla “C” del teclado.
7. La función de mapeo se ajusta a las marcas encontradas, sea para realizar
la calibración por polinomio o por la opción pinhole. Para iniciar el proceso
automático de calibración, es suficiente presionar el botón Startcalibration.
La desviación media de las posiciones de las marcas, a la malla ideal, se
muestran en una tabla a la derecha de la interfaz. Para una cámara de
aproximadamente 2 Megapixeles, un valor inferior a 1 pixel de desviación
es bueno, menor que 0,3 pixel excelente, y mayor que 2 pixeles debe ser
74
corregido. En este caso se tiene en cuenta, que la cámara utilizada en el
PIV es de aproximadamente 5 Megapixeles.
8. En este último paso, son evaluados visualmente los resultados de las
imágenes ajustadas. Una rejilla roja es creada, y se superpone en la misma
imagen. Ésta debe pasar por el centro de todas las marcas. Algunos
criterios son tenidos en cuenta para determinar si la calibración es correcta,
en los cuales la distancia z entre planos debe ser igual a 0. Para corrección
de imágenes, el cálculo de deformación de la cámara y el software puede
corregir movimientos de 0,05 pixel. Los resultados de los parámetros más
importantes son mostrados en una tabla (en la parte derecha de la interfaz).
Luego, se elige la opción Finish de la barra de herramienta, para aceptar la
calibración lograda, si se tiene la certeza de estar correcta. Así, es posible elegir
entre 4 opciones: si aplicar esta calibración al proyecto actual con modificaciones,
o sin modificaciones; abrir un nuevo proyecto; o desechar el proceso realizado
anteriormente. Al terminar, se regresa a la ventana principal del proyecto.
Continuando con el proyecto, se puede seleccionar en mantener esta calibración
realizada.
Debe tenerse en cuenta, que para la toma de imágenes, la iluminación externa
sea la apropiada, para no generar contrastes defectuosos y por ende imágenes
oscuras, que también, pueden ser generadas por tiempos muy cortos de
exposición de la luz del láser. Además, el proceso de calibración se complica
cuando, la malla de calibración tiene demasiados puntos, y todos no pueden ser
detectados. El software presenta una corrección posible, delimitando el número de
marcas.

75
3.4. REFRACCIÓN PRESENTADA EN LA CAJA DE VISUALIZACIÓN
Más allá de los objetivos planteados para la obtención de perfiles de velocidad,
con la incidencia del haz de luz del láser en un único plano, ubicado en el centro
del tubo en sentido axial, se buscó obtener imágenes para cuando el haz de luz
incide en otra posición, sea desplazándose hacia atrás o hacia adelante en
pequeños intervalos, abarcando el diámetro del tubo en sección transversal.
Sabiendo que la luz presenta una refracción al atravesar una superficie, que en
este caso es la caja de visualización de acrílico, la pared del tubo (acrílico) y el
fluido circulando por su interior. Además, que no es posible observar el
comportamiento del haz emanado por el equipo PIV, debido a que es perjudicial
para la vista y se debe utilizar gafas especiales que filtran esta longitud de onda
(luz verde). Se dispuso del siguiente experimento, para caracterizar las
desviaciones presentes en estas superficies al paso de la luz, y proponer las
correcciones pertinentes para obtener planos de iluminación del láser en el interior
del tubo, que sean paralelos al plano de captura de imágenes con la cámara.
Se diseñó una caja, con las mismas dimensiones de la caja de visualización
montada en la línea de experimentación, que permite una mejor manipulación, y
observar el comportamiento de la luz del láser, desde la perspectiva del plano de
la sección transversal del tubo. Fabricada con paredes de acrílico de 3 mm, tiene
fijado en el centro un pequeño tramo de tubo de acrílico de 2mm de espesor, con
diámetro interno de 21,1 mm. Esta caja es llenada con una mezcla de agua y
glicerina, en porcentaje en volumen de 30% y 70% respectivamente, que conserva
un índice de refracción de 1,47 muy similar al del acrílico de 1,49, y representa las
condiciones de estudio en la bancada.

76
Para cuantificar los desplazamientos o distorsiones presentes, son colocadas
hojas milimetradas en la base de la caja, y en la parte posterior de ésta, donde
impacta el haz de luz del láser. El láser utilizado, genera un haz puntual de
diámetro 0,4mm, con longitud de onda de 650nm± 10, en espectro rojo visible.
Figura 23. Los resultados obtenidos son generados, tras la cuidadosa observación
de forma directa de la trayectoria del haz de luz, y los acercamientos de las fotos
capturadas, en el computador. Además, teniendo presente que este haz sea
paralelo a la base de apoyo de la caja.
Las imágenes tomadas desde arriba, para diferentes desplazamientos del haz de
luz, son mostradas en las Figuras 24, 25 y 26.
Figura 23. Disposición experimento refracción de luz. Caja y láser utilizados.
Fuente: Propia del autor.

77
Figura 24. Izquierda: haz de luz incidiendo en la caja de acrílico, trayectoria
recta. Derecha: haz de luz incidiendo en el centro del tubo de acrílico.
Fuente: Propia del autor.
Figura 25. Izquierda: haz de luz incidiendo a 1,5 mm del centro del tubo.
Derecha: haz de luz incidiendo a 2,5 mm del centro del tubo.
Fuente: Propia del autor.
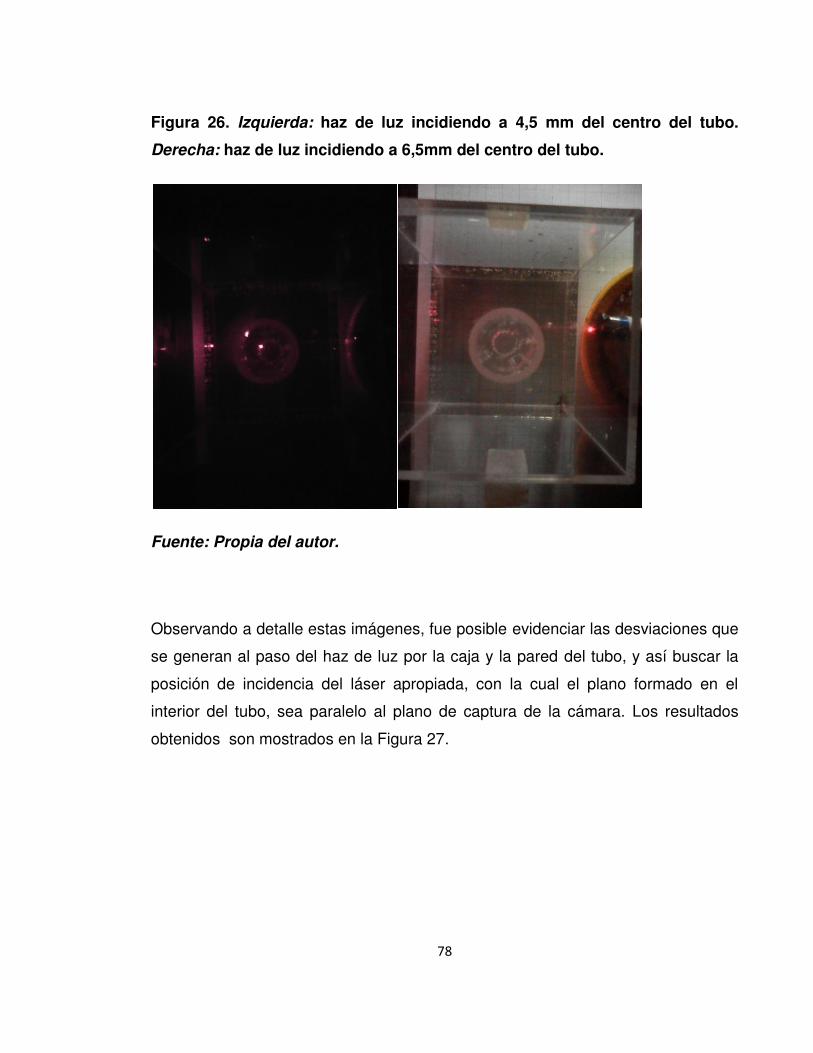
78
Figura 26. Izquierda: haz de luz incidiendo a 4,5 mm del centro del tubo.
Derecha: haz de luz incidiendo a 6,5mm del centro del tubo.
Fuente: Propia del autor.
Observando a detalle estas imágenes, fue posible evidenciar las desviaciones que
se generan al paso del haz de luz por la caja y la pared del tubo, y así buscar la
posición de incidencia del láser apropiada, con la cual el plano formado en el
interior del tubo, sea paralelo al plano de captura de la cámara. Los resultados
obtenidos son mostrados en la Figura 27.
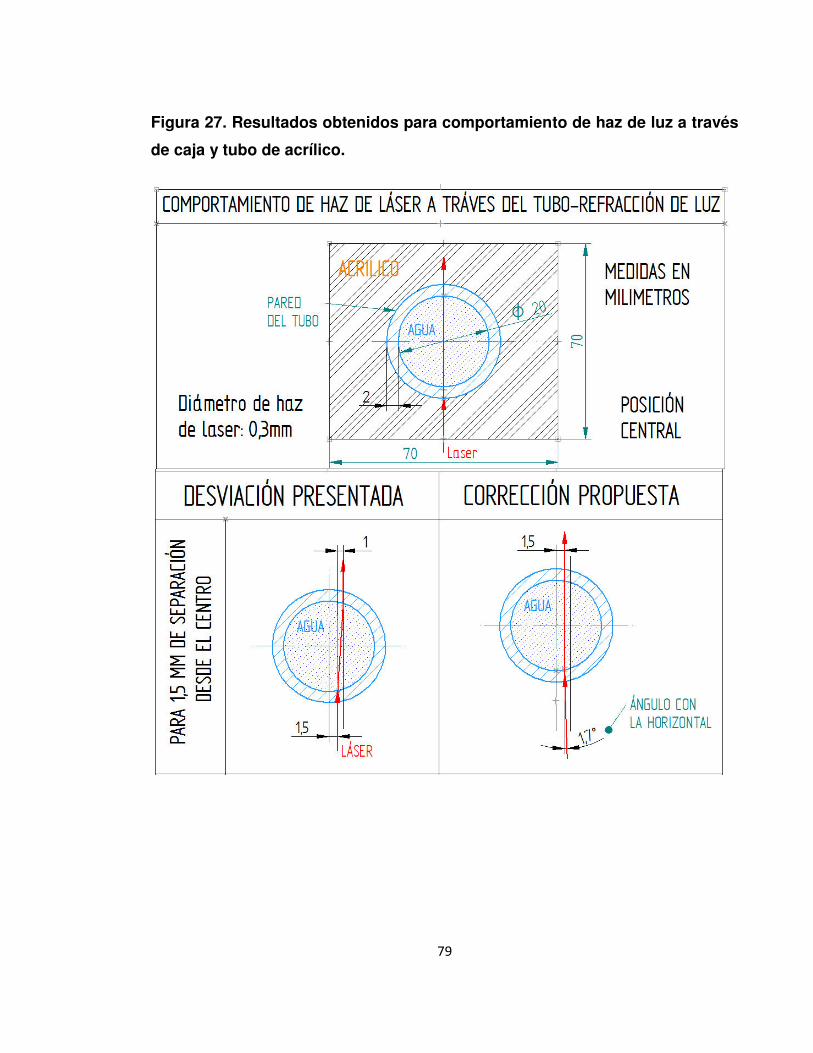
79
Figura 27. Resultados obtenidos para comportamiento de haz de luz a través
de caja y tubo de acrílico.

80
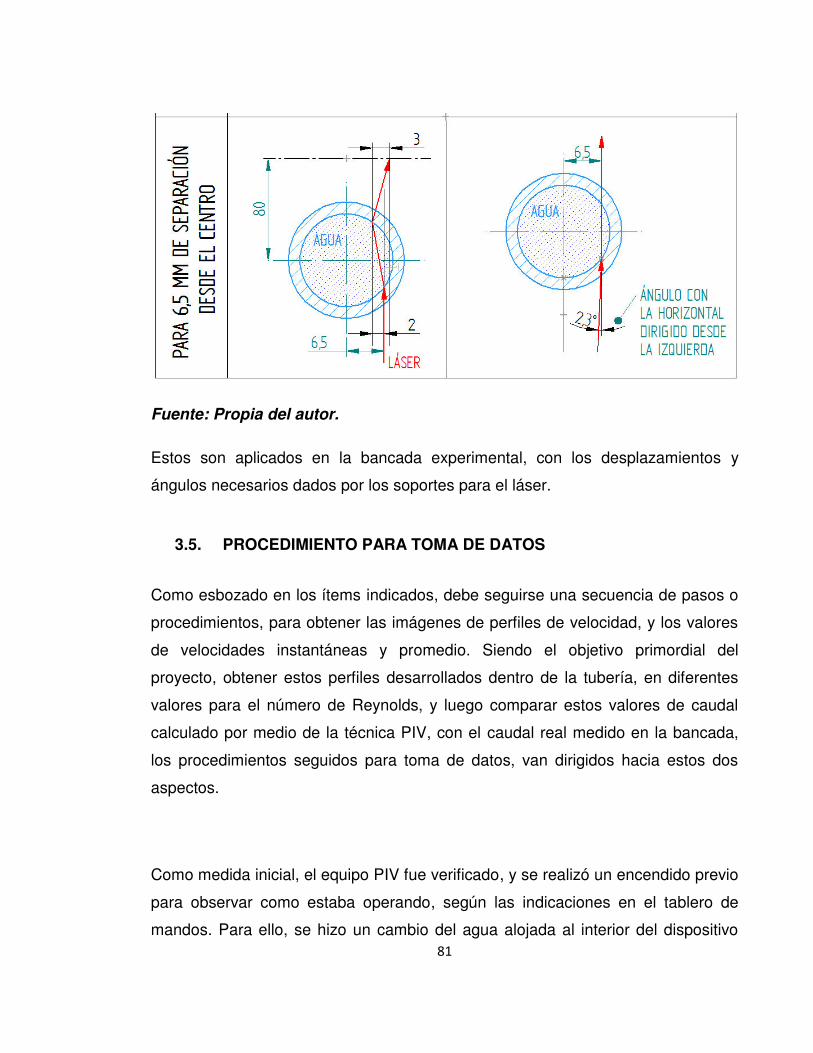
81
Fuente: Propia del autor.
Estos son aplicados en la bancada experimental, con los desplazamientos y
ángulos necesarios dados por los soportes para el láser.
3.5. PROCEDIMIENTO PARA TOMA DE DATOS
Como esbozado en los ítems indicados, debe seguirse una secuencia de pasos o
procedimientos, para obtener las imágenes de perfiles de velocidad, y los valores
de velocidades instantáneas y promedio. Siendo el objetivo primordial del
proyecto, obtener estos perfiles desarrollados dentro de la tubería, en diferentes
valores para el número de Reynolds, y luego comparar estos valores de caudal
calculado por medio de la técnica PIV, con el caudal real medido en la bancada,
los procedimientos seguidos para toma de datos, van dirigidos hacia estos dos
aspectos.
Como medida inicial, el equipo PIV fue verificado, y se realizó un encendido previo
para observar como estaba operando, según las indicaciones en el tablero de
mandos. Para ello, se hizo un cambio del agua alojada al interior del dispositivo

82
generador del haz del láser, utilizada para refrigeración, y para mantener la
temperatura del equipo estable. Fig. 28. El agua utilizada es agua destilada. El
procedimiento de vaciado y llenado, tanto del tanque de reserva como de las
tuberías y filtro, fue seguido según el manual de operación del equipo.
Figura 28. Izquierda: Equipo generador de haz de láser. Derecha: Tablero de
mandos.
Fuente: Propia del autor.
Ahora, cada grupo de imágenes tomadas para un determinado valor del número
de Reynolds, en una posición establecida de incidencia del láser hacia el tubo, fue
desarrollado con la siguiente secuencia:
En primer lugar, posicionar la pieza de plástico (con la malla de calibración fijada)
dentro de la caja de visualización, sellar la caja para vedar el circuito, e iniciar la
83
circulación del agua mediante el encendido de la(s) bomba(s). En este momento
se verifica que no hallan fugas y que, la circulación del agua no genere vibraciones
considerables que pueden afectar la calidad de las imágenes. Luego, es realizado
el posicionamiento de la cámara y láser, mediante la estructura dispuesta y los
soportes para cámaras, buscando que el plano de iluminación del láser sobre el
tubo, sea paralelo al plato de captura de la cámara. La posición y ángulo de
incidencia del láser, para las diferentes distancias desde el centro del tubo, están
dispuestos según lo recopilado para la refracción, presente en la caja de acrílico,
en la sección 3.4.
Aquí, se busca el mejor enfoque de la cámara, y la imagen de la malla patrón para
la calibración es capturada. Esto teniendo en cuenta un buen contraste de luz, y
verificando que la pieza de plástico permita que la base recta este paralela al
plano de captura. Luego, es seguido el proceso de calibración sintetizado en la
sección 3.3.
Como paso siguiente, es retirada la pieza de calibración de la caja de
visualización, teniendo muy presente que la posición del tubo en referencia a la
cámara y el láser se mantenga, para no perder el proceso realizado anteriormente.
Hecho esto, comienza el proceso de búsqueda del caudal adecuado, entregado
por las bombas, para obtener el número de Reynolds correspondiente, sea para
flujo laminar o turbulento. Esta fase es realizada, mediante la regulación de la
válvula de paso (válvula de mariposa), dispuesta en la tubería después de que el
fluido sale de las bombas, y antes de pasar al tramo de tubería diseñada.
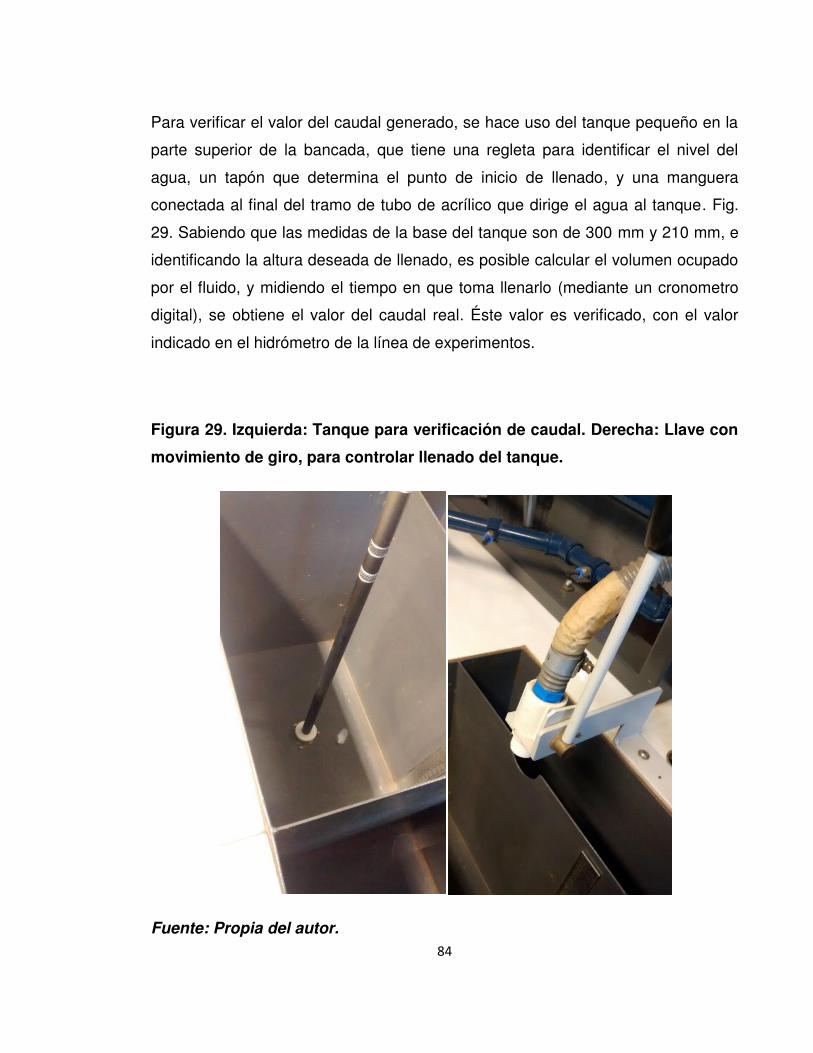
84
Para verificar el valor del caudal generado, se hace uso del tanque pequeño en la
parte superior de la bancada, que tiene una regleta para identificar el nivel del
agua, un tapón que determina el punto de inicio de llenado, y una manguera
conectada al final del tramo de tubo de acrílico que dirige el agua al tanque. Fig.
29. Sabiendo que las medidas de la base del tanque son de 300 mm y 210 mm, e
identificando la altura deseada de llenado, es posible calcular el volumen ocupado
por el fluido, y midiendo el tiempo en que toma llenarlo (mediante un cronometro
digital), se obtiene el valor del caudal real. Éste valor es verificado, con el valor
indicado en el hidrómetro de la línea de experimentos.
Figura 29. Izquierda: Tanque para verificación de caudal. Derecha: Llave con
movimiento de giro, para controlar llenado del tanque.
Fuente: Propia del autor.

85
En este punto, conociendo el valor de caudal, y por ende, el número de Re, es
necesario controlar el ∆t de captura entre cada frame, para los diferentes valores
de Re, para que el desplazamiento generado para las partículas sea menor de ¼
del tamaño de la ventana de interrogación, y no se pierda el movimiento total de
las partículas. Así como también, el valor ∆t de tiempo de exposición del haz de
láser sobre las partículas trazadoras. Además, del tamaño de las ventanas de
interrogación. Esto se hace a través del programa Davis 8.2 disponible.
Realizadas correctamente estas etapas anteriores, se procede con la toma de
imágenes (siguiendo el método multiframe/single Pulse, que es controlado por
medio del software), verificando detalladamente la cantidad de trazador adecuada
por el volumen total de agua, para lograr imágenes de calidad. Además, de la
distancia apropiada del láser al tubo, para que el plano generado abarque toda el
área en la cual se identifica el desplazamiento total de las partículas, así como su
espesor, para que no se presenten iluminaciones inadecuadas, y sea posible
abarcar mayor cantidad de planos.
Consecuentemente, para cada imagen capturada, son aplicadas: tanto las
correcciones referentes a la calibración guardada al inicio (teniendo en cuenta la
calibración, para cada grupo de imágenes); y las correlaciones en el software
Davis, para el traslapo de imágenes, para obtener los perfiles de velocidades. Esto
siguiendo las indicaciones del manual del equipo, y eligiendo un traslapo de 70%
entre cada par de ventanas de interrogación.
Para el post-procesamiento de las imágenes, es utilizada la función Multi-pass
postprocessing del software Davis. Figura 30. En este pueden definirse los
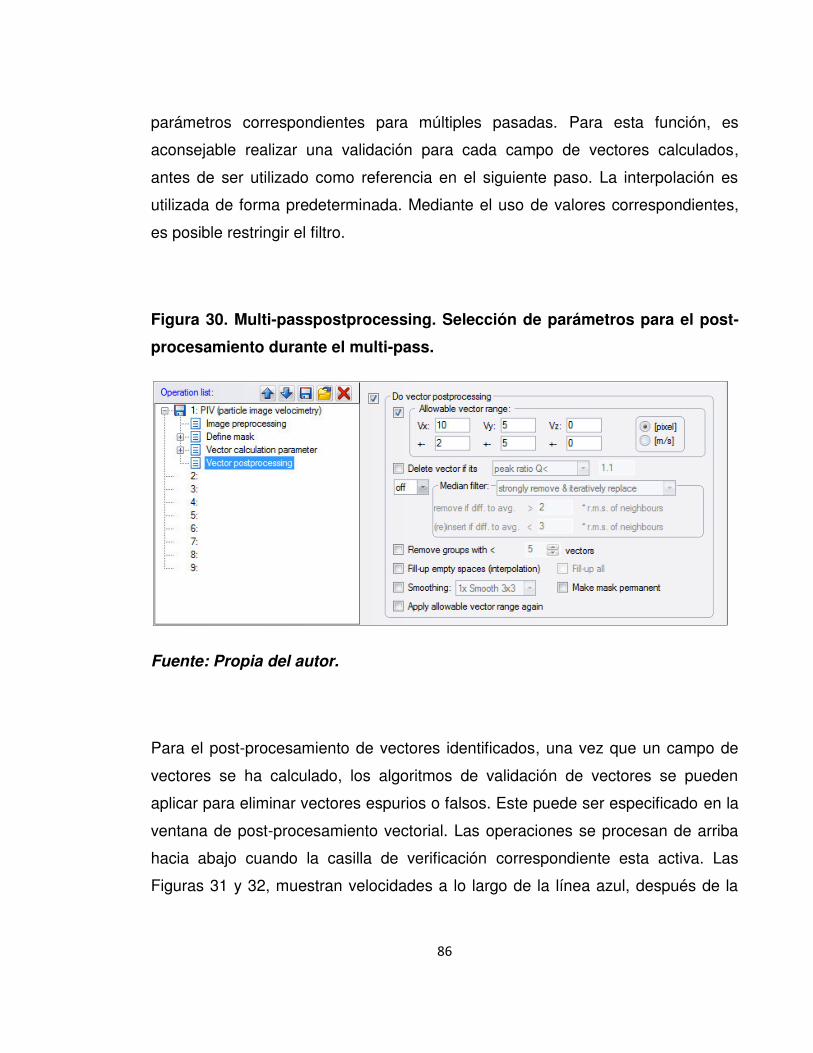
86
parámetros correspondientes para múltiples pasadas. Para esta función, es
aconsejable realizar una validación para cada campo de vectores calculados,
antes de ser utilizado como referencia en el siguiente paso. La interpolación es
utilizada de forma predeterminada. Mediante el uso de valores correspondientes,
es posible restringir el filtro.
Figura 30. Multi-passpostprocessing. Selección de parámetros para el post-
procesamiento durante el multi-pass.
Fuente: Propia del autor.
Para el post-procesamiento de vectores identificados, una vez que un campo de
vectores se ha calculado, los algoritmos de validación de vectores se pueden
aplicar para eliminar vectores espurios o falsos. Este puede ser especificado en la
ventana de post-procesamiento vectorial. Las operaciones se procesan de arriba
hacia abajo cuando la casilla de verificación correspondiente esta activa. Las
Figuras 31 y 32, muestran velocidades a lo largo de la línea azul, después de la
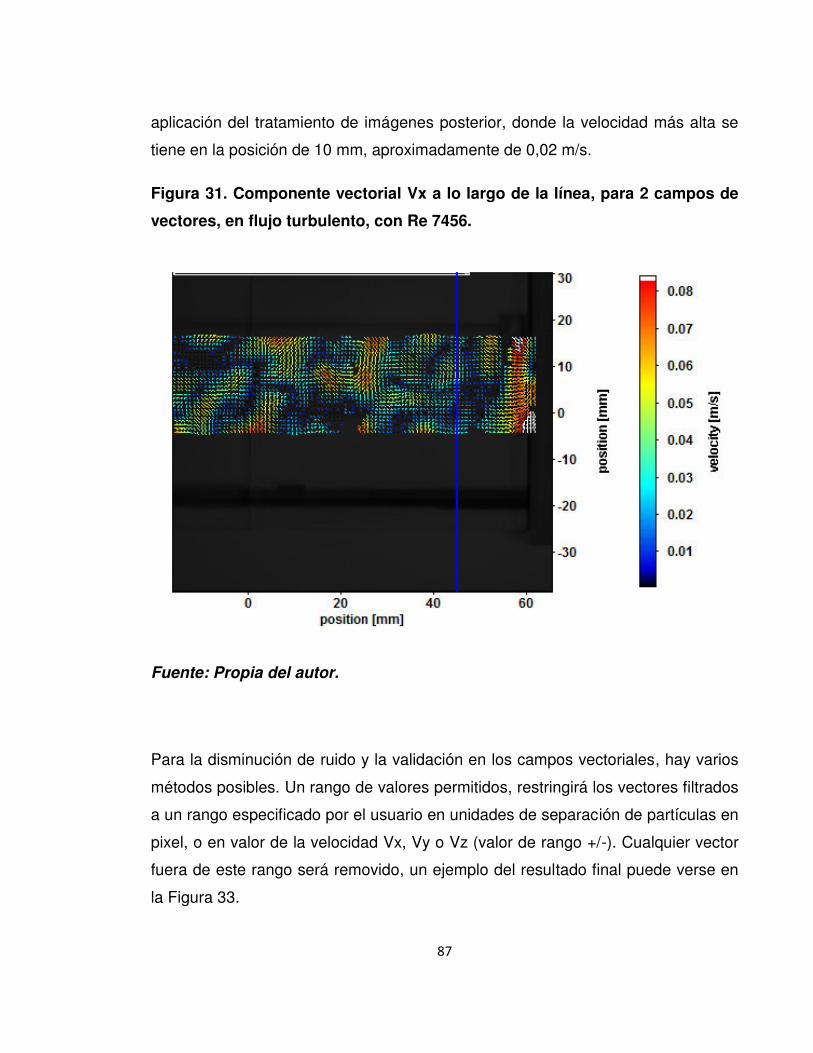
87
aplicación del tratamiento de imágenes posterior, donde la velocidad más alta se
tiene en la posición de 10 mm, aproximadamente de 0,02 m/s.
Figura 31. Componente vectorial Vx a lo largo de la línea, para 2 campos de
vectores, en flujo turbulento, con Re 7456.
Fuente: Propia del autor.
Para la disminución de ruido y la validación en los campos vectoriales, hay varios
métodos posibles. Un rango de valores permitidos, restringirá los vectores filtrados
a un rango especificado por el usuario en unidades de separación de partículas en
pixel, o en valor de la velocidad Vx, Vy o Vz (valor de rango +/-). Cualquier vector
fuera de este rango será removido, un ejemplo del resultado final puede verse en
la Figura 33.

88
Figura 32. Gráfico en coordenadas de velocidades instantáneas, para
Componente vectorial Vx a lo largo de la línea, para 2 campos de vectores,
en flujo turbulento, con Re 7456.
Fuente: Propia del autor.
Figura 33. Imagen obtenida luego de la disminución de ruido y la validación
de campos vectoriales.
Fuente: Propia del autor.

89
Finalmente, los valores calculados para los caudales, obtenidos con la técnica
PIV, son comparados con el valor de Q (caudal) real, medido con el llenado del
tanque. Los valores de caudal para el PIV, son calculados tanto en flujo laminar
como turbulento, siguiendo el planteamiento teórico de la Ley de la Potencia
(como expuesta en el capítulo de Marco Teórico) con valores de velocidades
instantáneas, que deriva en la ecuación o Ley de Poiseuille, conociendo el valor
de la velocidad promedio, en este caso dada por el software luego de realizado el
post-procesamiento.
La incerteza de los resultados arrojados por el equipo PIV es difícil de cuantificar,
sin embargo, se controlan en la mayor medida posible las variables descritas con
anterioridad, involucradas con el proceso, para disminuir los errores en la captura
de imágenes, y datos finales. Así como también, realizar la captura de la mayor
cantidad de imágenes posibles para cada valor de Re, hasta obtener el valor más
próximo al de caudal real, medido con el llenado del tanque. La incerteza
presentada, en la determinación del valor de Re para la toma de imágenes,
depende de las mediciones de Q, y diámetro del tubo.
90
4. RESULTADOS Y ANÁLISIS
En este capítulo, son presentados los resultados obtenidos para el estudio, según
los objetivos propuestos. Luego de seguir lo expuesto en el Marco Metodológico, e
iniciar y desarrollar los experimentos, se obtuvieron las imágenes en las que se
identifican las partículas trazadoras dispuestas en el fluido (agua), mostradas para
cada caso en diferentes valores del número de Re. Después de realizado: el filtro
de calibración, correlaciones y post-procesamiento, se obtienen las imágenes que
revelan los vectores de velocidades para partículas identificas en un tiempo t y ∆t.
Para cada uno de estos análisis, son especificados los parámetros ingresados en
el software, involucrados con las variables de la técnica PIV. Son expuestos los
valores estadísticos arrojados por el software, para las componentes de estos
vectores de velocidad.
Mediante un código desarrollado en el programa MatLab (que genera una matriz
media, sea en la posición X o Y) (ANEXO D), son procesados los datos
adquiridos, para obtener gráficamente los perfiles de velocidades en una
determinada posición (a lo largo del área de visualización), en dirección radial para
el tubo en estudio. Así, con todos estos mapeos para cada posición, es posible
construir una gráfica en 3-D que muestra de forma compilada la información. Para
por último, obtener la gráfica de las velocidades promedio calculadas, y mostrar el
perfil de velocidades final.
Como paso final, con este valor de velocidad media, es posible obtener el valor
para caudal calculado con la técnica PIV, y compararlo con el caudal real

91
calculado mediante la observación de llenado del tanque, y verificado con el
hidrómetro de la tubería.
4.1. PARÁMETROS OBTENIDOS PARA TÉCNICA PIV
Luego de comenzar a desarrollar los experimentos, se identificaron los siguientes
parámetros preliminares, correspondientes al equipo PIV, más oportunos para
capturar imágenes de calidad con la detección de las partículas trazadoras,
derivando en mejores perfiles de velocidad.
Una de los resultados significativos, es la identificación de la cantidad de trazador
utilizado en la bancada, dado en masa, para la cantidad de agua circulante en el
experimento. Esto teniendo en cuenta, que la ventana de interrogación elegida, no
estuviera saturada de partículas, ni tampoco presentara escasez en la cantidad de
éstas. Así, se obtuvo que al adicionar 10 gramos del trazador utilizado (esferas
huecas de vidrio, detalladas en la sección 3.2) en el tanque de almacenamiento,
con un volumen de 150 litros, las partículas eran identificadas adecuadamente, y
repercutían en bueno procesamiento de datos para los vectores de velocidades.
Luego de realizar el proceso de calibración, se obtuvo que la escala preliminar
definida para aplicar a las demás imágenes tomadas, para procesamiento, sea de
0,034 mm/pixel. Este valor varía en algunas milésimas, para diferentes grupos de
imágenes tomadas.
De igual forma, también se halló que el tamaño propicio para la ventana de
interrogación, con la cual las correlaciones y traslapos al 70% presentaban
92
mejores resultados, fue para dimensiones de 24 pixel x 24 pixel. Esto resulta en
vectores con separación de 0,4 mm entre sí. El área total de visualización para
captura de imágenes para la cámara, es de forma rectangular con dimensiones
82,33 mm x 69,26 mm.
La cantidad de imágenes necesarias, para obtener imágenes de calidad, es de 50
a 200 para flujo laminar, y de 1 000 a 3 000 para flujo turbulento.
En cuanto al láser, el espesor óptimo encontrado para la incidencia sobre el tubo,
e iluminación de las partículas trazadoras, es de 1mm. Fue utilizada en una
frecuencia de 7 Hz (que resulta en la independencia de las muestras de
velocidad), y en modo de baja potencia, con valor de 20 mJ/pulso (antes de la
óptica de formación de hojas).
También se definió, que el tiempo entre frames inicial (cada imagen capturada con
la cámara, para identificación de partículas), así como para los dos pulsos de
incidencia del láser (ya que están coordinados) sea de 30 ms (30 000 µs). Este
valor varia, dependiendo del número de Reynolds en estudio, procurando que el
desplazamiento máximo de las partículas, en cada caso, sea de ¼ del tamaño de
la ventana de interrogación, como visto en la recopilación bibliográfica.
Mediante la utilización del software, son aplicadas técnicas de detección de
valores atípicos estándar, como el filtro de mediana local, la relación de pico de
correlación umbral, entre otros. Estos valores encontrados son reemplazados:
primero mediante picos de correlación de orden superior, y luego por interpolación.

93
Finalmente es aplicado un filtro de suavizado de vector (mejora de definición y
detalle de la imagen) 9x9 (filtro que aplica campana Gaussiana para 2-D). En
promedio, el número de vectores interpolados no era mayor de varios puntos
porcentuales, siendo un poco menor en la mayor parte del flujo y cerca de la
interfaz, y un poco mayor en la región próxima a la pared.
En la siguiente Tabla 1, se muestra en síntesis los valores preliminares de los
parámetros encontrados.
Tabla 1. Definición de parámetros PIV preliminares, para captura de
imágenes en la bancada experimental.
Parámetro Valor establecido
Cantidad de trazador 10 gramos para un tanque de 150 litros
Escala: longitud real -imagen 0,034 mm/pixel.
Ventana de interrogación Tamaño: 24 x 24 pixel
Traslapo: 70% y 75%
Área total de visualización 82,33mm x 69,26mm
Cantidad de imágenes, flujo: Laminar: 50 a 200
Turbulento: 1 000 a 3 000
Láser Espesor: 1mm
Frecuencia: 7 Hz
Potencia: 20mJ/pulso
Distancia al centro del tubo:15cm
Tiempo entre frames y pulsos 30 ms (30 000 µs)
Distancia de la cámara al centro del tubo
45cm
Fuente: Propia del autor.

94
4.2. ESTUDIO EN MICRO-CANAL. ANÁLISIS PREVIO
Para comprobar el alcance y funcionamiento del equipo PIV, su montaje, y la
metodología de procesamiento y captura de imágenes, se realizó un análisis
previo en un micro-canal con diámetro de 0,06 mm, por el cual circulaba agua. Los
resultados obtenidos son mostrados a continuación.
En la Figura 34, se muestra la primera imagen capturada por el equipo PIV en el
instante de tiempo t, en la que son identificadas las partículas trazadoras dentro
del fluido.
Figura 34. Primera imagen capturada en instante de tiempo t. Identificación
de partículas (mostradas en color rojo) en micro-canal.
Fuente: Propia del autor.

95
Ya en la Figura 35, se muestra la imagen capturada en el instante de tiempo t+∆t,
donde son identificadas las mismas partículas trazadoras, pero desplazadas una
determinada distancia.
Figura 35. Segunda imagen capturada en instante de tiempo t+∆t.
Identificación de partículas (mostradas en color rojo) en micro-canal.
Fuente: Propia del autor.
El tiempo de adquisición entre cada imagen es de 668,4 µs, y el tiempo total de
grabación de imágenes es de 638,252 ms. El valor escala para procesamiento es
de 0,003 mm/pixel. El procesamiento realizado a estas imágenes fue de Multiplass
de 64 x 64 a un traslapo de 75%. La imagen resultante, en la que son construidos
los vectores de velocidad, es mostrada en la Figura 36. Como puede observarse,
todos los vectores están en la misma dirección, siendo que se tiene un flujo

96
laminar. El tamaño de la imagen es de 85 pixel x 65 pixel. En ésta, es delimitada
un área de procesamiento para el software, mostrada en la misma figura (líneas
verdes).
Figura 36. Imagen obtenida después del procesamiento con software Davis.
Vectores de velocidades para micro-canal en dirección del flujo, siendo
laminar. Área delimitada para estudio en líneas verdes.
Fuente: Propia del autor.
Luego de continuar el procesamiento de la imagen, en el área definida, son
obtenidos los resultados estadísticos mostrados en la Tabla 2, en cuanto a las
componentes de las velocidades, medias en ejes X y Y, y las desviaciones
estándar (stdev) para cada valor. Todos los valores en unidades de m/s.
Después, utilizando el código en el programa MatLab, se obtiene el valor de
velocidades medias, en este caso en la posición del 10° pixel en dirección X,
mostrada en el Gráfico 1, que dibuja el perfil de velocidades.
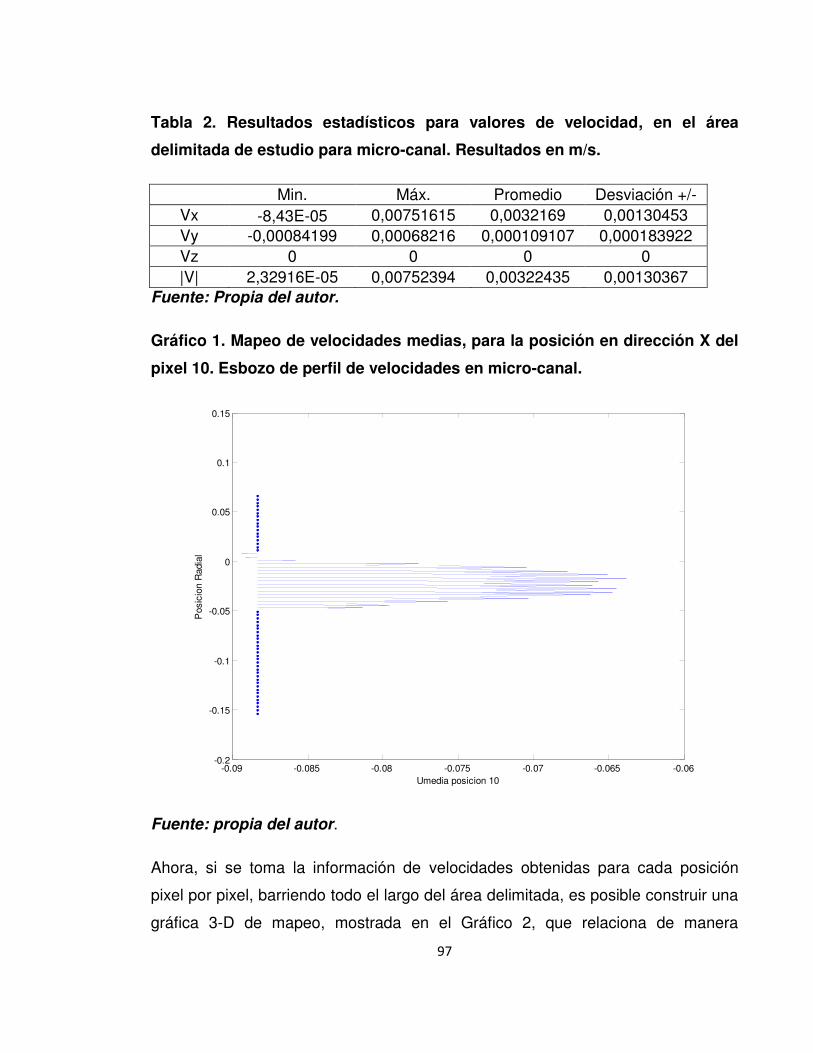
97
Tabla 2. Resultados estadísticos para valores de velocidad, en el área
delimitada de estudio para micro-canal. Resultados en m/s.
Min. Máx. Promedio Desviación +/- Vx -8,43E-05 0,00751615 0,0032169 0,00130453 Vy -0,00084199 0,00068216 0,000109107 0,000183922 Vz 0 0 0 0 |V| 2,32916E-05 0,00752394 0,00322435 0,00130367
Fuente: Propia del autor.
Gráfico 1. Mapeo de velocidades medias, para la posición en dirección X del
pixel 10. Esbozo de perfil de velocidades en micro-canal.
Fuente: propia del autor.
Ahora, si se toma la información de velocidades obtenidas para cada posición
pixel por pixel, barriendo todo el largo del área delimitada, es posible construir una
gráfica 3-D de mapeo, mostrada en el Gráfico 2, que relaciona de manera
-0.09 -0.085 -0.08 -0.075 -0.07 -0.065 -0.06-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
Umedia posicion 10
Posic
ion R
adia
l

98
simplificada, valores de velocidades correspondientes (dadas en m/s) a cada
posición en pixel tanto en dirección X como en dirección Y.
Gráfico 2. Gráfica de mapeo en 3-D, para cada valor de velocidad en una
posición determinada (en pixel), del área de estudio en micro-canal.
Fuente: Propia del autor.
010
2030
4050
6070
0
20
40
60
80
100
-1
0
1
2
3
4
5
6
x 10-3
Posición en pixeles Y
X: 29
Y: 54
Z: 0.004407
Posición en pixeles X
Perf
il de V
elo
cid
ad
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
x 10-3
0
10
20
30
40
50
60
70
0
20
40
60
80
100
-5
0
5
10
x 10-3
Posición en pixeles Y
X: 29
Y: 54
Z: 0.004407
Posición en pixeles X
Perf
il de V
elo
cid
ad
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
x 10-3
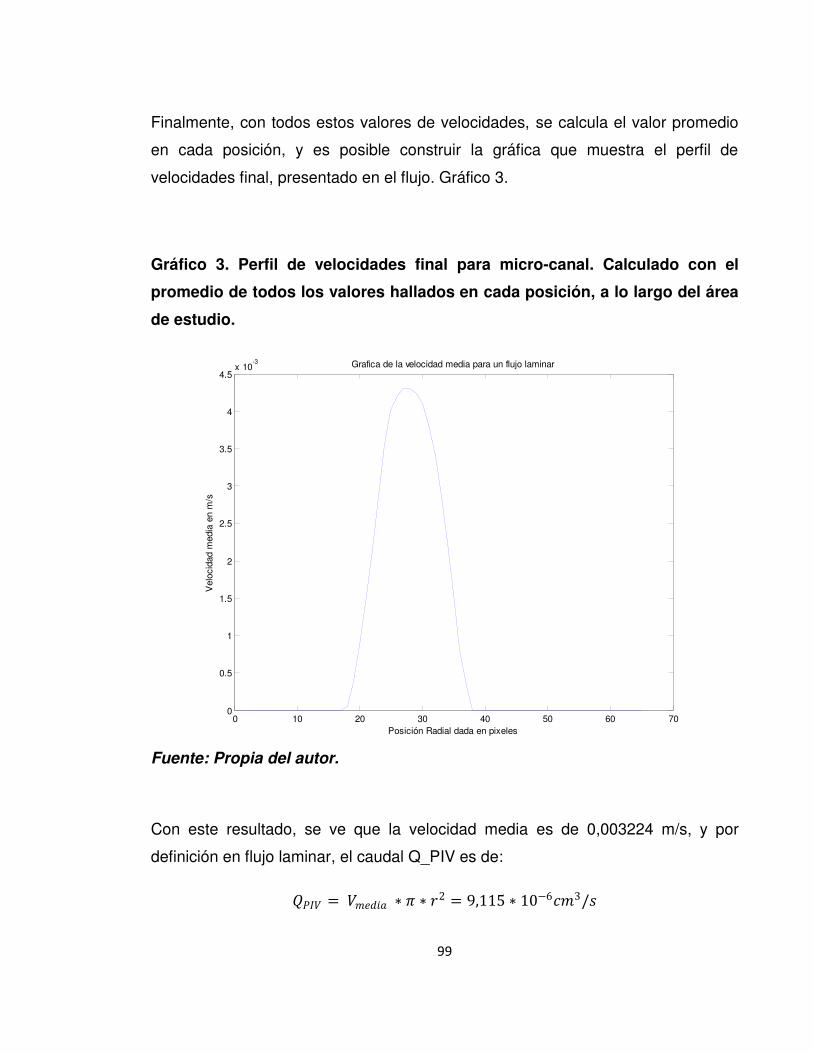
99
Finalmente, con todos estos valores de velocidades, se calcula el valor promedio
en cada posición, y es posible construir la gráfica que muestra el perfil de
velocidades final, presentado en el flujo. Gráfico 3.
Gráfico 3. Perfil de velocidades final para micro-canal. Calculado con el
promedio de todos los valores hallados en cada posición, a lo largo del área
de estudio.
Fuente: Propia del autor.
Con este resultado, se ve que la velocidad media es de 0,003224 m/s, y por
definición en flujo laminar, el caudal Q_PIV es de:
= ∗ ∗ 2 = 9,115 ∗ 10−6 3/
0 10 20 30 40 50 60 700
0.5
1
1.5
2
2.5
3
3.5
4
4.5x 10
-3
Posición Radial dada en pixeles
Velo
cid
ad m
edia
en m
/s
Grafica de la velocidad media para un flujo laminar
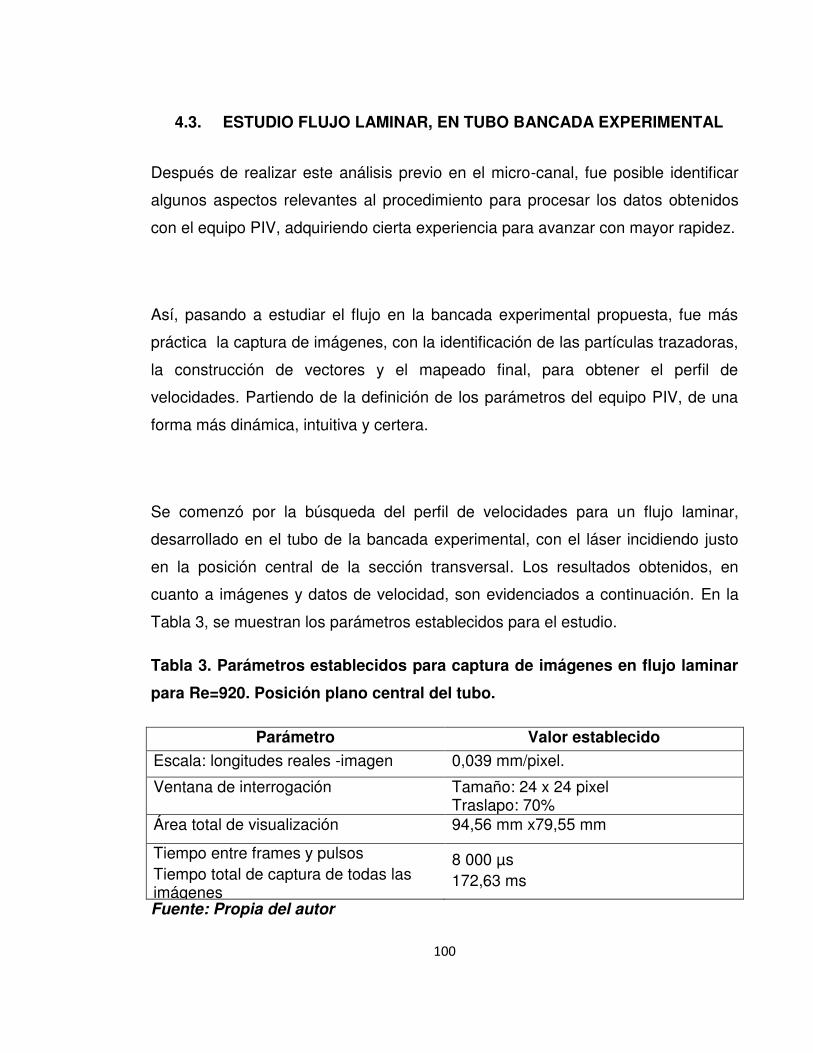
100
4.3. ESTUDIO FLUJO LAMINAR, EN TUBO BANCADA EXPERIMENTAL
Después de realizar este análisis previo en el micro-canal, fue posible identificar
algunos aspectos relevantes al procedimiento para procesar los datos obtenidos
con el equipo PIV, adquiriendo cierta experiencia para avanzar con mayor rapidez.
Así, pasando a estudiar el flujo en la bancada experimental propuesta, fue más
práctica la captura de imágenes, con la identificación de las partículas trazadoras,
la construcción de vectores y el mapeado final, para obtener el perfil de
velocidades. Partiendo de la definición de los parámetros del equipo PIV, de una
forma más dinámica, intuitiva y certera.
Se comenzó por la búsqueda del perfil de velocidades para un flujo laminar,
desarrollado en el tubo de la bancada experimental, con el láser incidiendo justo
en la posición central de la sección transversal. Los resultados obtenidos, en
cuanto a imágenes y datos de velocidad, son evidenciados a continuación. En la
Tabla 3, se muestran los parámetros establecidos para el estudio.
Tabla 3. Parámetros establecidos para captura de imágenes en flujo laminar
para Re=920. Posición plano central del tubo.
Parámetro Valor establecido
Escala: longitudes reales -imagen 0,039 mm/pixel.
Ventana de interrogación Tamaño: 24 x 24 pixel Traslapo: 70%
Área total de visualización 94,56 mm x79,55 mm
Tiempo entre frames y pulsos Tiempo total de captura de todas las imágenes
8 000 µs 172,63 ms
Fuente: Propia del autor

101
En la Figura 37, se observa la primera imagen obtenida para la identificación de
las partículas. En ésta se puede observar las partículas acompañando el fluido.
Figura 37. Primera imagen capturada para identificación de partículas.
Re=920. Posición plano central del tubo.
Fuente: Propia del autor
En la Figura 38, se muestran los vectores obtenidos luego del procesamiento de
correlaciones y traslapos. Es posible observar que todos los vectores resultantes
tienen la misma dirección en sentido del flujo, con algunas desviaciones.
Ya en la Tabla 4, son consolidados los valores estadísticos arrojados por el
software Davis, en cuanto a las componentes de velocidades, sus respectivas
desviaciones estándar, y valor absoluto para la velocidad media.

102
Figura 38. Vectores resultantes luego de procesamiento por correlaciones,
para Re=920. Área de visualización. Posición plano central del tubo.
Fuente: Propia del autor.
Tabla 4. Resultados estadísticos para valores de velocidad en el área de
estudio, para Re=920. Resultados en m/s. Posición plano central del tubo.
Min. Máx. Promedio Desviación +/- Vx -0,01473 0,0862448 0,0421098 0,020491 Vy -0,0313436 0,0382249 0,0038443 0,00752464 Vz 0 0 0 0 |V| 0,00190393 0,086938 0,0437114 0,0188064
Fuente: Propia del autor.

103
Radio en Pixeles Longitud
Horizontal en X
Recopilando todos los valores de velocidades obtenidas, pixel por pixel a lo largo
del área de visualización, se construyen las gráficas 3D mostradas en el Gráfico 4.
Gráfico 4. Gráfica de mapeo en 3-D, para cada valor de velocidad (m/s) en
una posición determinada (en pixel), del área de estudio, para Re=920.
Fuente: Propia del autor.
020
4060
80100
0
20
40
60
80
100
-0.05
0
0.05
0.1
0.15
Longitud Horizontal en x
Flujo laminar
Radio en pixeles
Velo
cid
ad a
xia
l
0
5
10
15
20
25 0
10
20
30
40
50-0.05
0
0.05
0.1
0.15
0
0.01
0.02
0.03
0.04
0.05
0.06
0.07

104
El perfil de velocidades resultante, con los valores promedio calculados, es
mostrado en el Gráfico 5.
Gráfico 5. Perfil de velocidades final para Re=920. Calculado con el promedio
de todos los valores hallados en cada posición a lo largo del área de estudio.
Posición central del tubo.
Fuente: Propia del autor.
Por último, como planteado en los objetivos, son comparados los dos valores de
caudal, tanto real como el calculado con el equipo PIV. Según el seguimiento
hecho durante el experimento, en el llenado del tanque, para una altura de 60mm
en el tanque superior (con medidas de base antes especificadas, de 300mm x
210mm) fue lograda en un tiempo de 254,4 segundos. Así, el caudal real medido
es:
0
0,005
0,01
0,015
0,02
0,025
0,03
0,035
0,04
0,045
0,05
0,055
0,06
0,065
0,07
0 5 10 15 20 25
Radio en pixel
Ve
loci
da
d A
xia
l
[m
/s]
105
= =0,3 ∗ 0,21 ∗ 0,06
254,4 = 1,4858 ∗ 10−5 3/
Ahora, para el caudal calculado con el PIV, se toma el valor de la velocidad media
dada por el software (que se extrae también con el cálculo de velocidades
promedio con el código de MatLab), de 0,0437m/s. Con este valor, y siguiendo la
formulación de la Ley de Poiseuille, se tiene que:
= ∗ ∗ 2 = ∗ 0,0437 ∗ 0,01055 2 = 1,5280 ∗ 10−5 3/
Los valores de caudal y velocidades medias, con sus respectivas desviaciones,
son presentados en la Tabla 5.
Tabla 5. Valores obtenidos como resultados, para caudal y velocidad media
en Re=920.
Valor Real medido Valor calculado
PIV Error Relativo %
Caudal Q [m/s] 1,4858 ∗ 10−5 1,5280 ∗ 10−5 2,84
Velocidad media [m/s] 0,0425 0,0437 2,82
Fuente: Propia del autor.
De igual forma, es presentado a continuación el estudio experimental realizado
para un valor de Re=604. Flujo laminar, también en el plano centro del tubo. En la
Tabla 6, son recopilados los parámetros elegidos. En la Figura 39, se observa la
primera imagen obtenida para la identificación de las partículas. En la Figura 40,
son mostrados los vectores construidos tras las correlaciones de las imágenes. Ya
en la Tabla 7, son consolidados los valores estadísticos arrojados por el software
Davis, en cuanto a las componentes de velocidades, sus respectivas desviaciones
estándar, y valor absoluto para la velocidad media.

106
Tabla 6. Parámetros establecidos para captura de imágenes en flujo laminar
para Re=604. Posición plano central del tubo.
Parámetro Valor establecido
Escala: longitudes reales -imagen 0,038 mm/pixel.
Ventana de interrogación Tamaño: 24 x 24 pixel Traslapo: 70%
Área total de visualización 91,91 mm x77,32 mm
Tiempo entre frames y pulsos Tiempo total de captura de todas las imágenes
8 000 µs 749,5 ms
Fuente: Propia del autor
Figura 39. Primera imagen capturada para identificación de partículas.
Re=604. Posición plano central del tubo.
Fuente: Propia del autor.
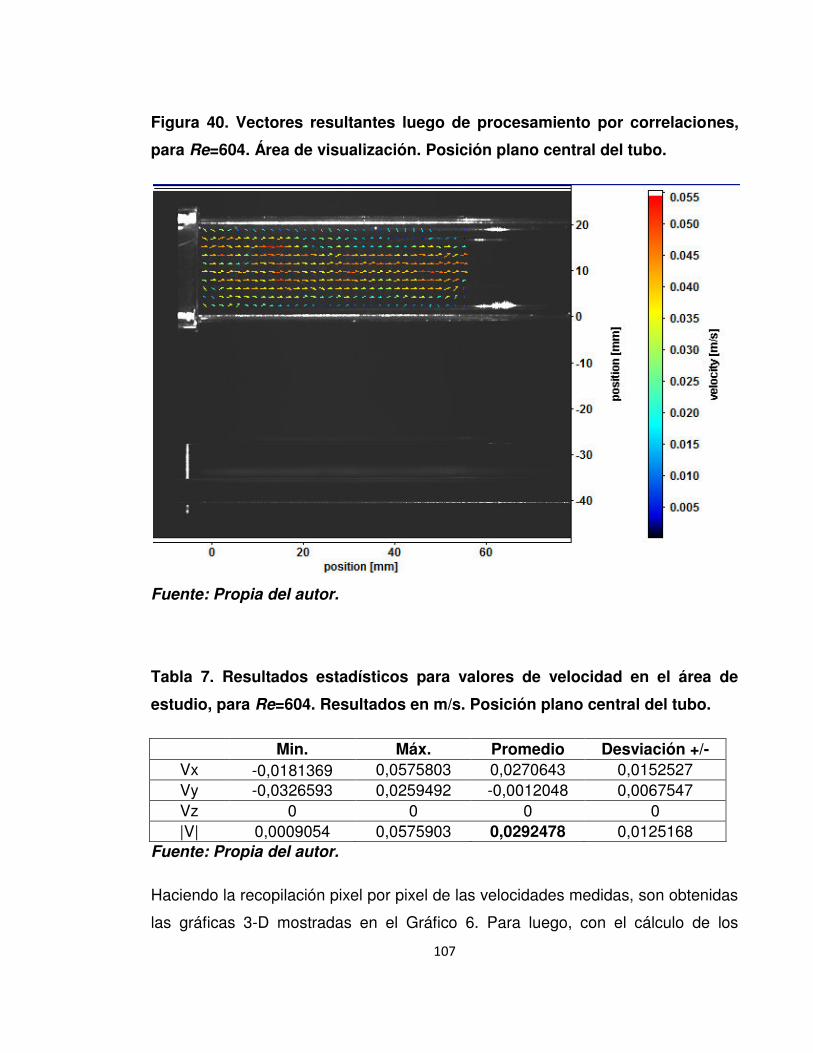
107
Figura 40. Vectores resultantes luego de procesamiento por correlaciones,
para Re=604. Área de visualización. Posición plano central del tubo.
Fuente: Propia del autor.
Tabla 7. Resultados estadísticos para valores de velocidad en el área de
estudio, para Re=604. Resultados en m/s. Posición plano central del tubo.
Min. Máx. Promedio Desviación +/- Vx -0,0181369 0,0575803 0,0270643 0,0152527 Vy -0,0326593 0,0259492 -0,0012048 0,0067547 Vz 0 0 0 0 |V| 0,0009054 0,0575903 0,0292478 0,0125168
Fuente: Propia del autor.
Haciendo la recopilación pixel por pixel de las velocidades medidas, son obtenidas
las gráficas 3-D mostradas en el Gráfico 6. Para luego, con el cálculo de los
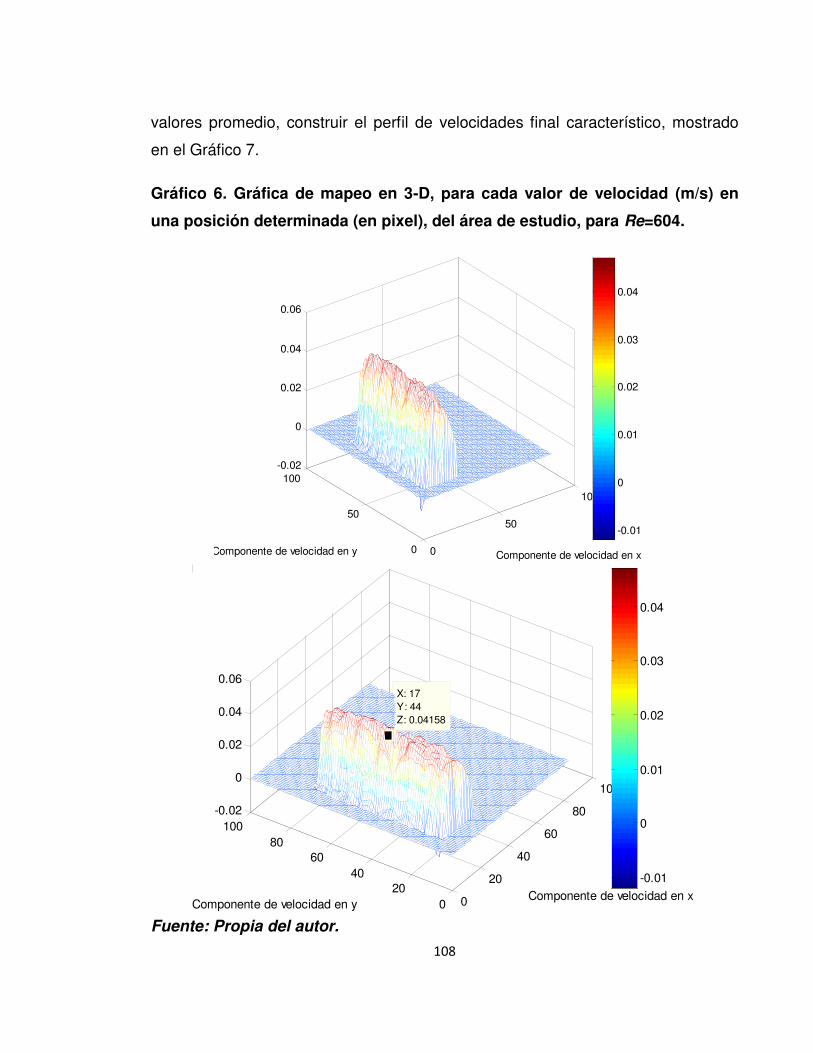
108
valores promedio, construir el perfil de velocidades final característico, mostrado
en el Gráfico 7.
Gráfico 6. Gráfica de mapeo en 3-D, para cada valor de velocidad (m/s) en
una posición determinada (en pixel), del área de estudio, para Re=604.
Fuente: Propia del autor.
0
50
100
0
50
100
-0.02
0
0.02
0.04
0.06
Componente de velocidad en xComponente de velocidad en y
-0.01
0
0.01
0.02
0.03
0.04
0
20
40
60
80
100
0
20
40
60
80
100
-0.02
0
0.02
0.04
0.06
Componente de velocidad en x
X: 17
Y: 44
Z: 0.04158
Componente de velocidad en y
-0.01
0
0.01
0.02
0.03
0.04

109
Gráfico 7. Perfil de velocidades final para Re=604. Calculado con el promedio
de todos los valores hallados en cada posición a lo largo del área de estudio.
Fuente: Propia del autor.
Igual que con el estudio anterior, se muestra tanto el caudal real como el caudal
calculado mediante la técnica PIV. En este caso, el tanque superior llevó para
llenarse, a una altura de 60mm, un tiempo de 376,2 segundos. Por tanto, el caudal
real será:
= =0,3 ∗ 0,21 ∗ 0,06
376,2 = 1,0048 ∗ 10−5 3/
Ahora, sabiendo que la velocidad dada por el equipo PIV es de 0,0292 m/s, se
calcula el caudal correspondiente, así:
0
0,005
0,01
0,015
0,02
0,025
0,03
0,035
0,04
0,045
0 5 10 15 20 25
Ve
loci
da
d a
xia
l [m
/s]
Radio en pixel
110
= ∗ ∗ 2 = ∗ 0,0292 ∗ 0,01055 2 = 1,0210 ∗ 10−5 3/
La recopilación de los valores encontrados, es mostrada en la Tabla 8.
Tabla 8. Valores obtenidos como resultados, para caudal y velocidad media
en Re=604.
Valor Real medido Valor calculado
PIV Error Relativo %
Caudal Q [m/s] 1,0048 ∗ 10−5 1,0210 ∗ 10−5 1,61
Velocidad media [m/s] 0,0287 0,0292 1,74
Fuente: Propia del autor.
Para estos dos casos en flujo laminar, en los que el láser incidía en un plano que
pasa justo por el centro del tubo (vista axial), puede verse que los valores
obtenidos de caudal con la técnica PIV, son muy próximos a los valores reales
medidos con el llenado del tanque. Siendo que los valores para las desviaciones
son bajos, muestran que el procedimiento llevado a cabo para toma de imágenes
y procesamiento posterior, fue el adecuado, y se logró disminuir al máximo el error
inherente en la técnica PIV. También, puede ser inferida la efectividad del código
desarrollado en MatLab, que además de construir gráficos 3-D que muestran de
forma clara el fenómeno en estudio; permite obtener como resultado final el perfil
de velocidades desarrollado en los determinados flujos, teniendo en cuenta una
desviación para el valor de velocidad media, ya que se consideran en este caso,
todos los valores (como los que son igual a cero) arrojados por el software,
influyendo la media calculada.

111
Más allá de las buenas imágenes aquí recopiladas, en las que se identifican
claramente las partículas trazadoras, para posterior construcción de vectores, se
debe mencionar que para ello fue necesario realizar diferentes capturas
preliminares, en oportunidades considerables, para conseguir el enfoque
adecuado de éstas. Para ello, se varió tanto la posición de la cámara y su
distancia con respecto al tubo, como la iluminación suministrada por el láser, en
intensidad y distancia.
Con las imágenes que muestran los vectores resultantes, es posible observar el
comportamiento general del fluido, en que todas las partículas tienen el mismo
sentido en dirección al flujo. Aquellas que tienen una mayor velocidad son
identificadas en el centro del tubo, mientras que en cercanías a la pared la
velocidad de estas disminuye considerablemente.
4.4. ESTUDIO FLUJO TURBULENTO, TUBO BANCADA EXPERIMENTAL
De la misma manera que para flujo laminar, son presentados a continuación dos
casos con el estudio experimental realizado en flujo turbulento en la bancada
propuesta.
En primer lugar, para un valor de Re=26140. Flujo turbulento, también en el plano
centro del tubo. En la Tabla 9, son recopilados los parámetros elegidos. En la
Figura 41, se observa la primera imagen obtenida para la identificación de las
partículas. En la Figura 42, son mostrados los vectores construidos tras las
correlaciones de las imágenes. Ya en la Tabla 10, son consolidados los valores
estadísticos arrojados por el software Davis, en cuanto a las componentes de
velocidades, sus respectivas desviaciones estándar, y valor absoluto para la
velocidad media.
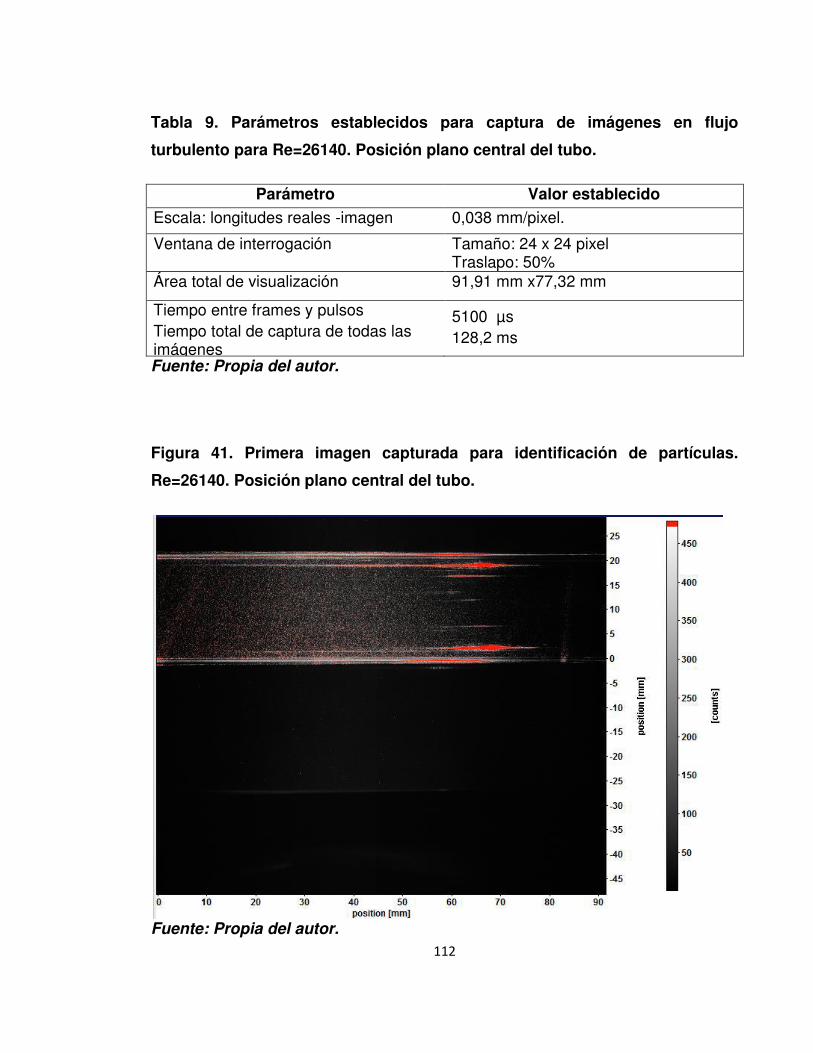
112
Tabla 9. Parámetros establecidos para captura de imágenes en flujo
turbulento para Re=26140. Posición plano central del tubo.
Parámetro Valor establecido
Escala: longitudes reales -imagen 0,038 mm/pixel.
Ventana de interrogación Tamaño: 24 x 24 pixel Traslapo: 50%
Área total de visualización 91,91 mm x77,32 mm
Tiempo entre frames y pulsos Tiempo total de captura de todas las imágenes
5100 µs 128,2 ms
Fuente: Propia del autor.
Figura 41. Primera imagen capturada para identificación de partículas.
Re=26140. Posición plano central del tubo.
Fuente: Propia del autor.
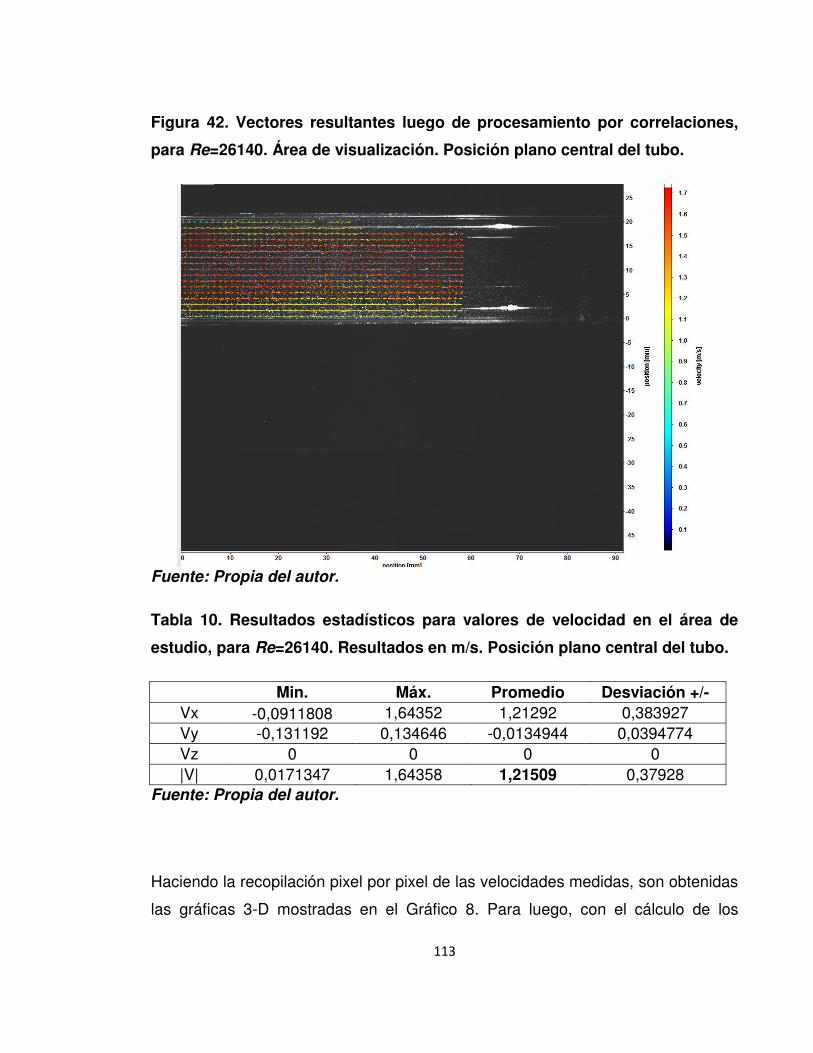
113
Figura 42. Vectores resultantes luego de procesamiento por correlaciones,
para Re=26140. Área de visualización. Posición plano central del tubo.
Fuente: Propia del autor.
Tabla 10. Resultados estadísticos para valores de velocidad en el área de
estudio, para Re=26140. Resultados en m/s. Posición plano central del tubo.
Min. Máx. Promedio Desviación +/- Vx -0,0911808 1,64352 1,21292 0,383927 Vy -0,131192 0,134646 -0,0134944 0,0394774 Vz 0 0 0 0 |V| 0,0171347 1,64358 1,21509 0,37928
Fuente: Propia del autor.
Haciendo la recopilación pixel por pixel de las velocidades medidas, son obtenidas
las gráficas 3-D mostradas en el Gráfico 8. Para luego, con el cálculo de los

114
Longitud Horizontal en X Radio en pixeles
valores promedio, construir el perfil de velocidades final característico, mostrado
en el Gráfico 9.
Gráfico 8. Gráfica de mapeo en 3-D, para cada valor de velocidad (m/s) en
una posición determinada (en pixel), del área de estudio, para Re=26140.
Fuente: Propia del autor.
0 20 40 60 80 100
0
50
100-0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6

115
Gráfico 9. Perfil de velocidades final para Re=26140. Calculado con el
promedio de todos los valores hallados en cada posición a lo largo del área
de estudio.
Fuente: Propia del autor.
Igual que con el estudio de flujo laminar, se muestra tanto el caudal real como el
caudal calculado mediante la técnica PIV. En este caso, el tanque superior llevó
para llenarse, a una altura de 200mm, un tiempo de 29 segundos. Por tanto, el
caudal real será:
= =0,3 ∗ 0,21 ∗ 0,2
29 = 4,3448 ∗ 10−4 3/
0
0,2
0,4
0,6
0,8
1
1,2
1,4
1,6
1,8
0 5 10 15 20 25 30
Ve
loci
da
d a
xia
l [m
/s]
Radio en pixel

116
Ahora, sabiendo que la velocidad dada por el equipo PIV es de 1,2151m/s, se
calcula el caudal correspondiente, así:
= ∗ ∗ 2 = ∗ 1,2151 ∗ 0,01055 2 = 4,2488 ∗ 10−4 3/
La recopilación de los valores encontrados, es mostrada en la Tabla 11.
Tabla 11. Valores obtenidos como resultados, para caudal y velocidad media
en Re=26140.
Valor Real medido Valor calculado
PIV Error Relativo %
Caudal Q [m/s] 4,3448 ∗ 10−4 4,2488 ∗ 10−4 2,21
Velocidad media [m/s] 1,2425 1,2151 2,21
Fuente: Propia del autor.
Siguiendo los mismo lineamientos, se presenta a seguir el estudio experimental
realizado para un valor de Re=19440. Flujo turbulento, también en el plano centro
del tubo. En la Tabla 12, son recopilados los parámetros elegidos. En la Figura 43,
se observa la primera imagen obtenida para la identificación de las partículas. En
la Figura 44, son mostrados los vectores construidos tras las correlaciones de las
imágenes. Ya en la Tabla 13, son consolidados los valores estadísticos arrojados
por el software Davis, en cuanto a las componentes de velocidades, sus
respectivas desviaciones estándar, y valor absoluto para la velocidad media.
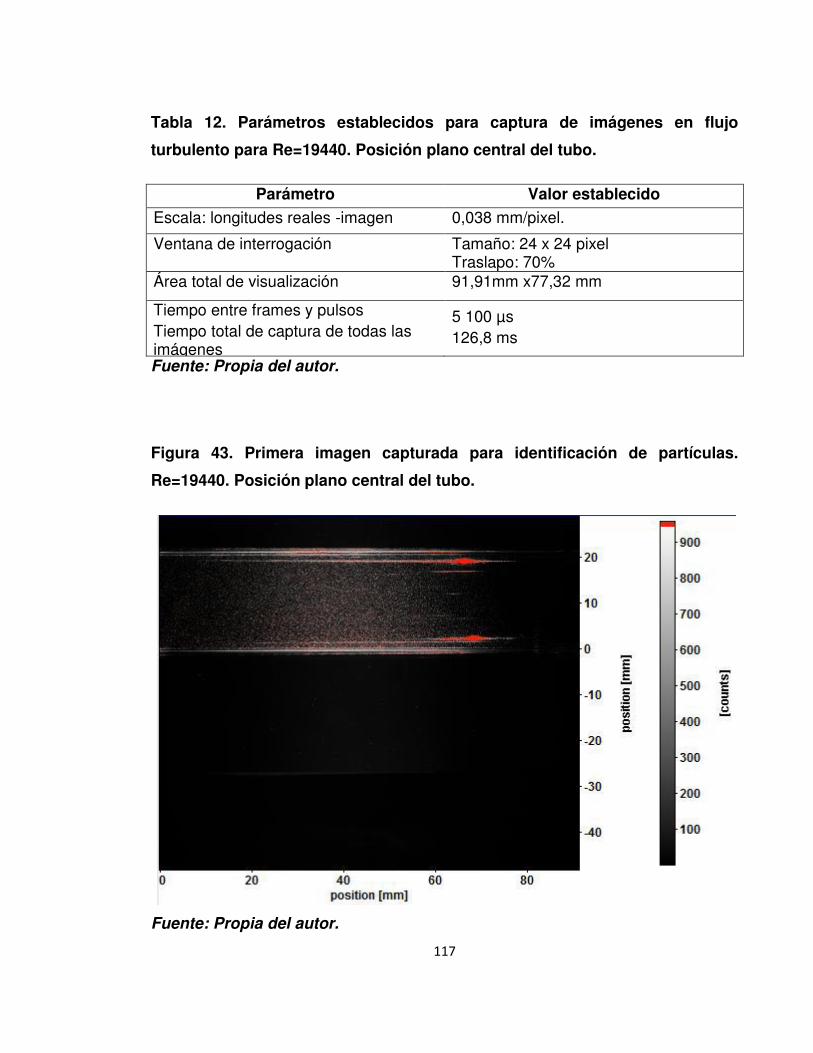
117
Tabla 12. Parámetros establecidos para captura de imágenes en flujo
turbulento para Re=19440. Posición plano central del tubo.
Parámetro Valor establecido
Escala: longitudes reales -imagen 0,038 mm/pixel.
Ventana de interrogación Tamaño: 24 x 24 pixel Traslapo: 70%
Área total de visualización 91,91mm x77,32 mm
Tiempo entre frames y pulsos Tiempo total de captura de todas las imágenes
5 100 µs 126,8 ms
Fuente: Propia del autor.
Figura 43. Primera imagen capturada para identificación de partículas.
Re=19440. Posición plano central del tubo.
Fuente: Propia del autor.
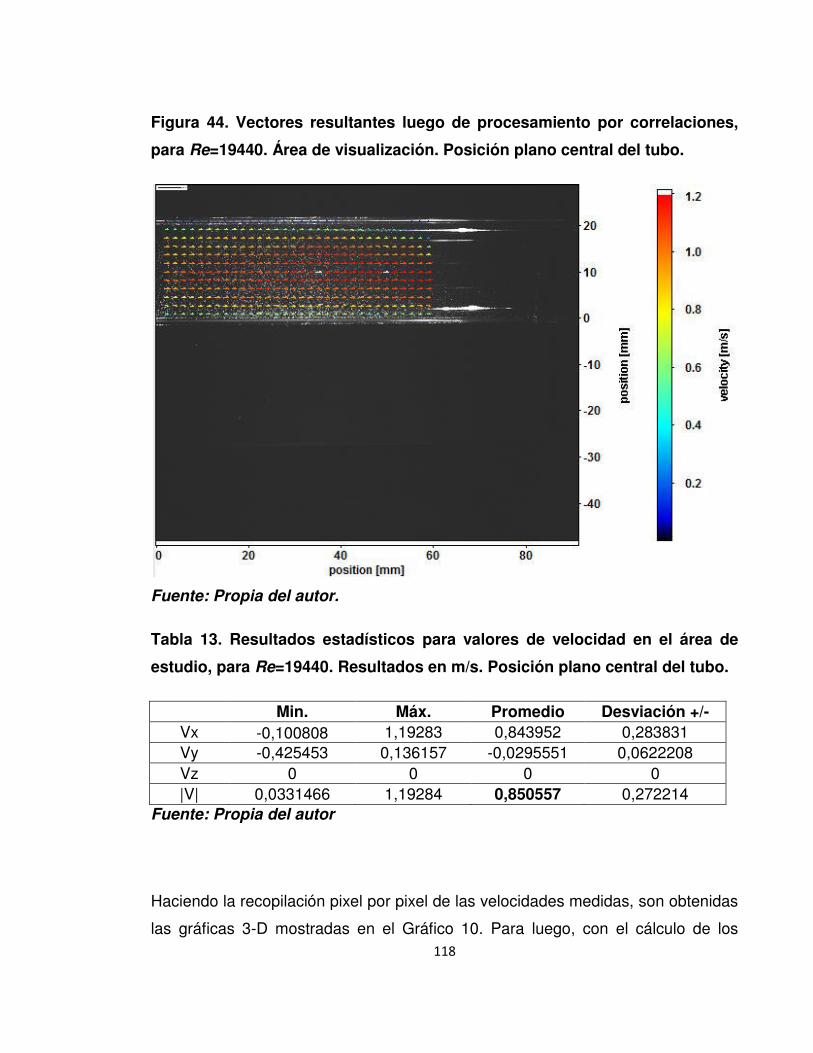
118
Figura 44. Vectores resultantes luego de procesamiento por correlaciones,
para Re=19440. Área de visualización. Posición plano central del tubo.
Fuente: Propia del autor.
Tabla 13. Resultados estadísticos para valores de velocidad en el área de
estudio, para Re=19440. Resultados en m/s. Posición plano central del tubo.
Min. Máx. Promedio Desviación +/-
Vx -0,100808 1,19283 0,843952 0,283831 Vy -0,425453 0,136157 -0,0295551 0,0622208 Vz 0 0 0 0 |V| 0,0331466 1,19284 0,850557 0,272214
Fuente: Propia del autor
Haciendo la recopilación pixel por pixel de las velocidades medidas, son obtenidas
las gráficas 3-D mostradas en el Gráfico 10. Para luego, con el cálculo de los
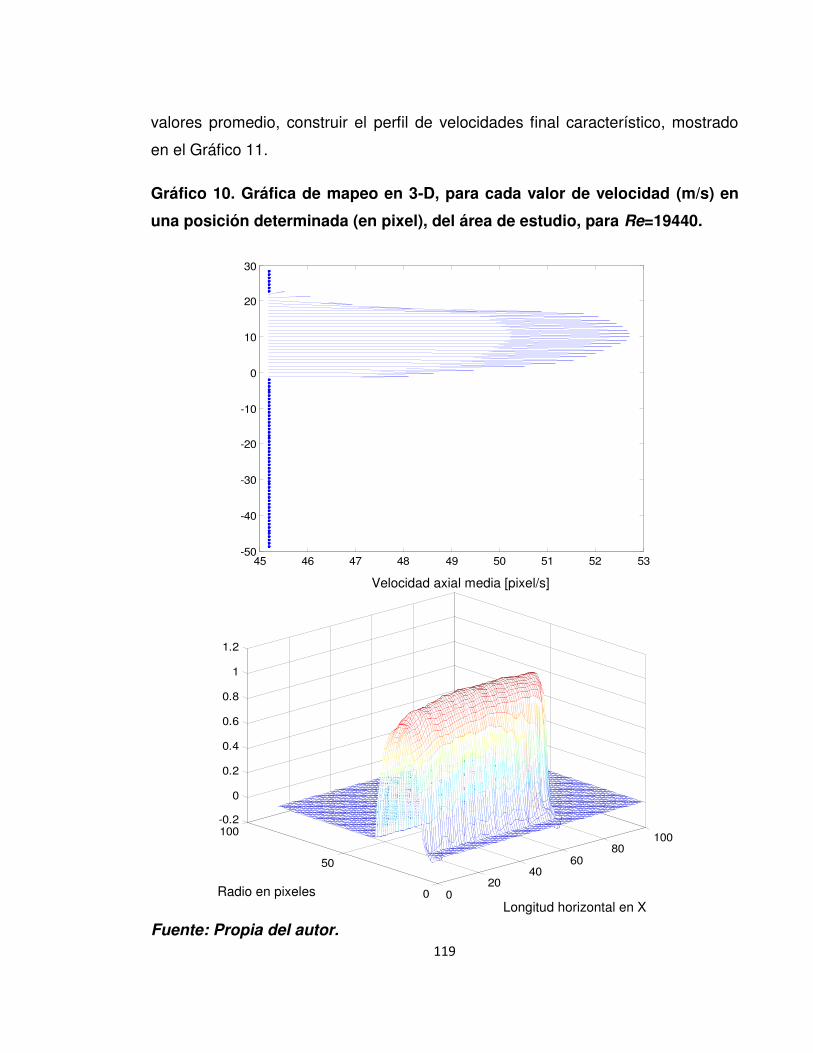
119
Velocidad axial media [pixel/s]
Longitud horizontal en X Radio en pixeles
valores promedio, construir el perfil de velocidades final característico, mostrado
en el Gráfico 11.
Gráfico 10. Gráfica de mapeo en 3-D, para cada valor de velocidad (m/s) en
una posición determinada (en pixel), del área de estudio, para Re=19440.
Fuente: Propia del autor.
45 46 47 48 49 50 51 52 53-50
-40
-30
-20
-10
0
10
20
30
020
4060
80100
0
50
100-0.2
0
0.2
0.4
0.6
0.8
1
1.2
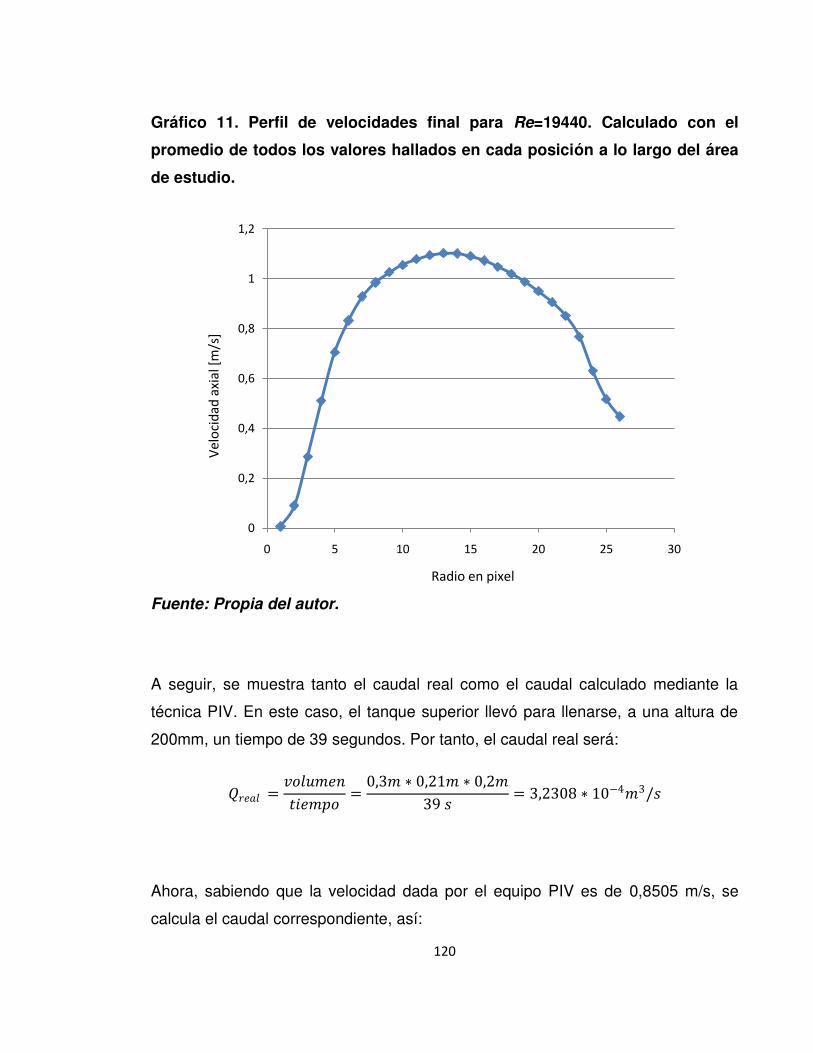
120
Gráfico 11. Perfil de velocidades final para Re=19440. Calculado con el
promedio de todos los valores hallados en cada posición a lo largo del área
de estudio.
Fuente: Propia del autor.
A seguir, se muestra tanto el caudal real como el caudal calculado mediante la
técnica PIV. En este caso, el tanque superior llevó para llenarse, a una altura de
200mm, un tiempo de 39 segundos. Por tanto, el caudal real será:
= =0,3 ∗ 0,21 ∗ 0,2
39 = 3,2308 ∗ 10−4 3/
Ahora, sabiendo que la velocidad dada por el equipo PIV es de 0,8505 m/s, se
calcula el caudal correspondiente, así:
0
0,2
0,4
0,6
0,8
1
1,2
0 5 10 15 20 25 30
Ve
loci
da
d a
xia
l [m
/s]
Radio en pixel
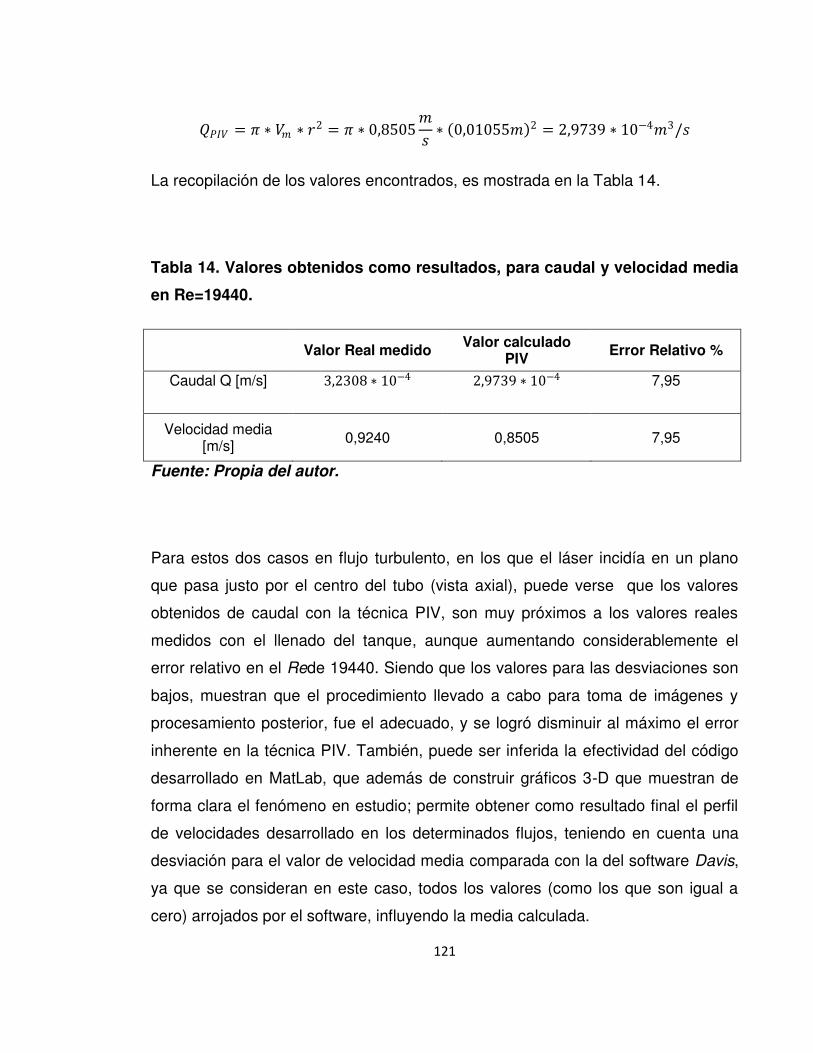
121
= ∗ ∗ 2 = ∗ 0,8505 ∗ 0,01055 2 = 2,9739 ∗ 10−4 3/
La recopilación de los valores encontrados, es mostrada en la Tabla 14.
Tabla 14. Valores obtenidos como resultados, para caudal y velocidad media
en Re=19440.
Valor Real medido Valor calculado
PIV Error Relativo %
Caudal Q [m/s] 3,2308 ∗ 10−4 2,9739 ∗ 10−4 7,95
Velocidad media [m/s] 0,9240 0,8505 7,95
Fuente: Propia del autor.
Para estos dos casos en flujo turbulento, en los que el láser incidía en un plano
que pasa justo por el centro del tubo (vista axial), puede verse que los valores
obtenidos de caudal con la técnica PIV, son muy próximos a los valores reales
medidos con el llenado del tanque, aunque aumentando considerablemente el
error relativo en el Rede 19440. Siendo que los valores para las desviaciones son
bajos, muestran que el procedimiento llevado a cabo para toma de imágenes y
procesamiento posterior, fue el adecuado, y se logró disminuir al máximo el error
inherente en la técnica PIV. También, puede ser inferida la efectividad del código
desarrollado en MatLab, que además de construir gráficos 3-D que muestran de
forma clara el fenómeno en estudio; permite obtener como resultado final el perfil
de velocidades desarrollado en los determinados flujos, teniendo en cuenta una
desviación para el valor de velocidad media comparada con la del software Davis,
ya que se consideran en este caso, todos los valores (como los que son igual a
cero) arrojados por el software, influyendo la media calculada.

122
Como pude notarse en las gráficas, las curvas dibujadas, aunque no muestran una
buena asimetría, evidencian un perfil más plano que el obtenido para flujo laminar,
concordando con la teoría clásica de fluidos para flujo turbulento.
Para este caso de flujo turbulento, como ya se tenía un buen enfoque y
disposición del equipo en la bancada, fue posible obtener resultados favorables
con menos intentos para captura de imágenes e identificación de las partículas, en
comparación con el flujo laminar.
Con las imágenes que muestran los vectores resultantes, es posible observar el
comportamiento general del fluido, en que todas las partículas tienen el mismo
sentido en dirección al flujo. A diferencia de lo ocurrido en flujo laminar, para los
dos flujos turbulentos estudiados, la cantidad de partículas que presentan
velocidades altas es mayor, estando muy próximas a la pared del tubo. Esto
evidencia el cambio brusco de una velocidad nula del fluido (en cercanía a la
pared) a velocidades altas, en una menor distancia (medida en dirección radial).
Aquellas partículas que tienen una mayor velocidad son identificadas en el centro
del tubo.
En la Tabla 15, son sintetizados los resultados hallados, para los cuatro casos de
flujos estudiados.
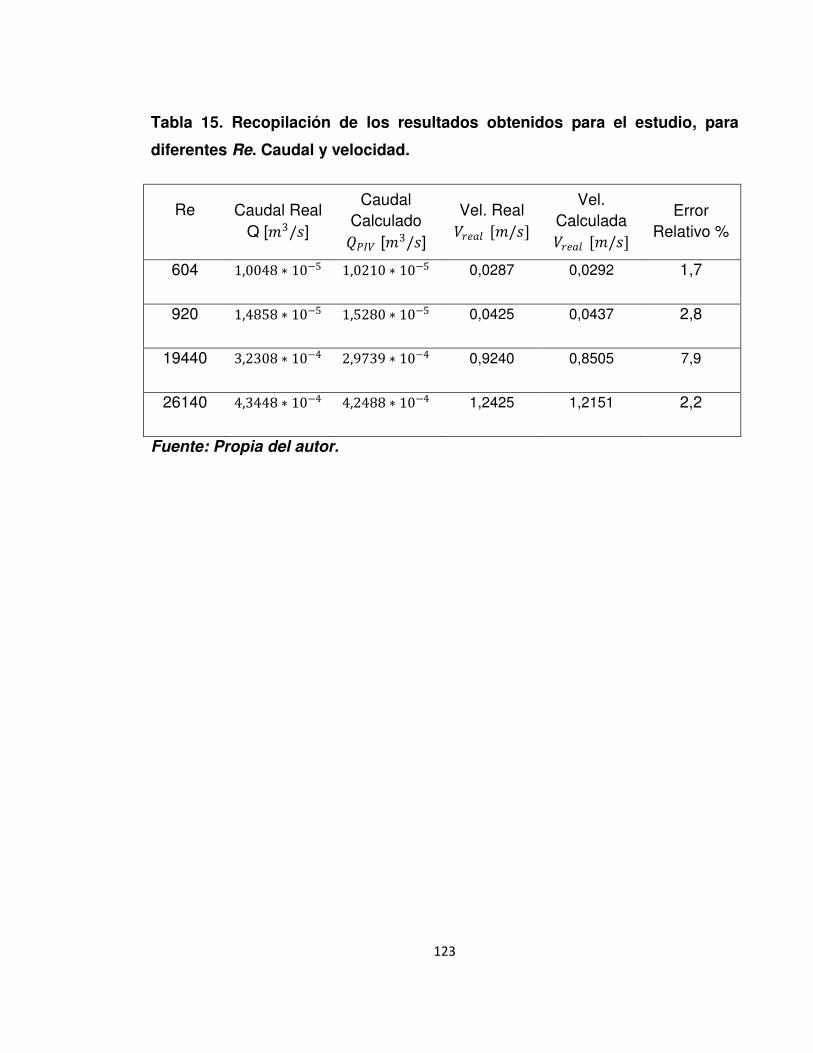
123
Tabla 15. Recopilación de los resultados obtenidos para el estudio, para
diferentes Re. Caudal y velocidad.
Re Caudal Real Q [ 3/ ]
Caudal Calculado
[ 3/ ]
Vel. Real [ / ]
Vel. Calculada
[ / ]
Error Relativo %
604 1,0048 ∗ 10−5 1,0210 ∗ 10−5 0,0287 0,0292 1,7
920 1,4858 ∗ 10−5 1,5280 ∗ 10−5 0,0425 0,0437 2,8
19440 3,2308 ∗ 10−4 2,9739 ∗ 10−4 0,9240 0,8505 7,9
26140 4,3448 ∗ 10−4 4,2488 ∗ 10−4 1,2425 1,2151 2,2
Fuente: Propia del autor.
124
5. CONCLUSIONES Y TRABAJOS FUTUROS
5.1. CONCLUSIONES
Luego de presentados los resultados del trabajo experimental realizado, la
principal conclusión hace referencia al cumplimiento del objetivo general
planteado, en cuanto a que se obtuvieron los perfiles de velocidad desarrollados
en un flujo monofásico (en este caso agua) en la bancada experimental diseñada,
para cuatro valores diferentes del número de Reynolds: 604, 920,19440, 26140.
Este hecho evidencia y valida, que el equipo PIV utilizado fue correctamente
calibrado y montado en el estudio del flujo en el tubo circular horizontal. Además,
que el procedimiento llevado a cabo, tanto para el post-procesamiento de datos en
el software Davis, como para el tratamiento de valores de velocidad instantáneos
en cada posición radial, con el código desarrollado en MatLab, fue el adecuado.
Conllevando a resultados en concordancia con la teoría clásica de fluidos, en
cuanto a perfiles de velocidad en flujos laminar y turbulento, y valores de caudal y
velocidad media, con errores relativos por debajo del 3%, exceptuando el caso
para Re = 19440, con un error aproximado del 8%, que aun así es bajo,
considerando todas las fuentes de incerteza del estudio realizado. Por lo tanto, se
concluye que las etapas y procedimientos aquí expuestos, los parámetros y
algoritmos de post-procesamiento definidos, pueden ser utilizados y aplicados
para obtener los perfiles de velocidad (y así caracterizar el comportamiento del
flujo) en otra estructura o bancada de estudio, con tubo circular, teniendo en
cuenta en aplicar las equivalencias necesarias en cuanto a dimensiones, fluido, y
rangos de velocidad.
125
Del mismo modo, con el desarrollo del estudio experimental, se pudo inferir las
siguientes conclusiones:
Las investigaciones y trabajos consultados, aportaron una base confiable, y
contribuyeron como guía para la adaptación del equipo PIV a la bancada
propuesta, además, del entendimiento de la técnica, e informaciones
puntuales para delimitar el problema estudio.
Uno de los parámetros más relevantes encontrado, fue el de la cantidad de
trazador necesario para una determinada cantidad de fluido, con el cual se
logran imágenes de calidad, y la correcta identificación de partículas para
procesamiento. En este caso, de 10 gramos de trazador (partículas de
vidrio huecas, de diámetro medio de 10µm) para un tanque de agua de 150
litros.
El uso del elemento designado como colmena, permitió mitigar los efectos
de turbulencia del fluido generados por la bomba y los cambios de dirección
en la tubería. Así, se desarrolló un flujo homogéneo, logrando, en conjunto
con la longitud del tubo definida de 3m, perfiles de velocidad totalmente
desarrollados al paso del fluido por la posición donde estaba dispuesta la
caja de visualización.
El cubo de acrílico macizo, designado como caja de visualización, promovió
el ambiente correcto para disminuir los efectos de refracción de la luz
(reflejada por las partículas trazadoras) a su paso, y así, capturar imágenes
de calidad para realizar una calibración valida y un post-procesamiento
exitoso.
Durante el proceso de calibración previa, y toma de imágenes inicial, se
identificó que la caja de visualización propuesta con dos piezas
independientes, que eran unidas y selladas posteriormente, generaban
distorsiones y ruido a los datos obtenidos. Por tanto, este prototipo se
cambió por una sola pieza de acrílico macizo, con la misma longitud final de
108mm. Esto favoreció la identificación de las partículas trazadoras, al

126
aumentar el área de visualización y captura para la cámara. Además,
amplió el rango de velocidades de análisis, que para el presente estudio,
resultó en valores finales de: una velocidad mínima de 0,0287 m/s, y
máxima de 1,2425 m/s. Hay que señalar que estos valores se ven
influenciados, además de las condiciones inherentes al equipo PIV, a los
elementos dispuestos en la bancada, como por ejemplo, la válvula de paso
en la tubería, que no permite un control preciso del paso del fluido.
De acuerdo al estudio planteado, para la captura de perfiles de velocidad en
diferentes planos equidistantes, barriendo todo el diámetro del tubo (vista
transversal), se vio limitado su cumplimiento en el marco de este proyecto,
debido a la cantidad de datos para procesamiento, y el tiempo que ello
conllevaría, traspasando el cronograma propuesto y el incumplimiento de
los objetivos principales. Su alcance se limitó a encontrar el
comportamiento de refracción de un haz de luz (de láser comercial) al pasar
por las superficies involucradas en este estudio, y las correcciones
necesarias para obtener planos paralelos (en el interior del tubo) al plano de
captura de imágenes de la cámara, sentando la base para futuras pruebas
con este objetivo.
Así, en concordancia con la propuesta inicial de este trabajo, más allá de que se
lograron algunos aportes adicionales significativos a la información encontrada en
la literatura con referencia a la técnica PIV, y se reafirmaron algunos otros
aspectos hallados; se logró superar la inconveniencia presente en el laboratorio
LETeF para alcanzar resultados fiables, en estudio de fluidos, con la técnica PIV y
el equipo disponible en las instalaciones. Este hecho permitirá su adaptación a
otras estructuras del laboratorio, como la línea horizontal, la línea vertical, o la
línea de estudios que incluye el separador de fluidos (tubo con inclinaciones), para
desarrollar nuevas investigaciones y validar pasados estudios realizados.
127
5.2. TRABAJOS FUTUROS
Luego de culminado el proyecto, y observando de forma sintetizada y global el
trabajo realizado, se tiene una mejor perspectiva del tema tratado. Por tanto, se
plantean los siguientes temas, que pueden ser desarrollados en trabajos contiguos
a éste:
Realizar la captura de imágenes en diferentes planos, barriendo todo el
diámetro del tubo de estudio. Moviendo el láser de posición con relación al
centro, con ayuda de los soportes dispuestos en la bancada. Esto siguiendo
los resultados hallados para el comportamiento de refracción del haz del
láser, al pasar por la caja de acrílico y la pared del tubo. Luego, realizar el
procesamiento adecuado, obtener los perfiles de velocidades y caracterizar
el flujo no solo en un plano central, sino en diferentes planos, logrando una
visualización global del comportamiento presentado.
Captura de imágenes a lo largo de todo el tubo, con la función de traslapo
de imágenes en diferentes posiciones, indicado para el equipo, para
identificar como se va desarrollando el perfil de velocidades en
determinadas distancias, y verificar la longitud de tubería calculada; así
como también, conocer el grado de afectación de cambios bruscos de
dirección de la tubería, como por ejemplo, después del segundo codo y al
pasar por la colmena.
Realizar en la bancada experimental propuesta, análisis de flujo bifásico,
con la incorporación de línea de aire, para reconocer el comportamiento de
perfiles de velocidad para dos fases, y tener una visión preliminar del
trabajo a ser desarrollado en el separador, en las instalaciones del
laboratorio. Esto con una entrada de inyección de aire en el inicio de la
tubería, y con medidores de presión y válvulas adecuadas.
Realizar una simulación por computadora, utilizando un software
especializado, en la que se representen las condiciones del presente
128
experimento, en cuanto valores de números de Reynolds, velocidades,
geometrías, etc., para obtener esquemas detallados en 3-D del desarrollo
del perfil de velocidades dentro de la tubería, y compararlo con los
resultados obtenidos en este trabajo. Esto permitiría comparar las dos
técnicas, y definir el alcance y grado de precisión de cada una de ellas.
129
6. BIBLIOGRAFÍA
Adrian, R. J., & Westerweel, J. (2011). Particle Image Velocimetry. Cambridge
University Press , 286.
Alves Mendes, F. A. (2012). Estudo experimental, simulação numérica e
modelagem fenomenologica da separação gravitacional de gas no fundo de poços
direcionais. . São Carlos, São Paulo, Brasil: EESC.
Ansoni, J. L. (2015). METODOLOGIA PARA PROJETO DE BIORREATORES
INDUSTRIAIS VIA OTIMIZAÇÃO MULTIOBJETIVOS COM BASE EM
PARÂMETROS DE DESEMPENHO CÁLCULADOS POR TÉCNICAS DE
SIMULAÇÃO NUMÉRICA.Tesis de Doctorado. Sao Carlos, Sao Paulo, Brasil:
Universidad de São Paulo, Escola de Engenharia de São Carlos.
Ashwood, A. C., & Vanden Hogen, S. J. (5 de Septiembre de 2014). A multiphase,
micro-scale PIV measurement technique for liquid film. International Journal of
Multiphase Flow , pág. 13.
Ayati, A. A., Kolaas, J., Jensen, A., & Johnson, G. W. (30 de Marzo de 2015).
Combined simultaneous two-phase PIV and interface elevation. International
Journal of Multiphase Flow , pág. 14.
Birvalski, M., Tummers, M. J., Delfos, R., & Henkes, R. (17 de Marzo de 2014).
PIV measurements of waves and turbulence in stratified horizontal. International
Journal of Multiphase Flow, 161, pág. 13.
Bogustaw, J. (2014). NUMERICAL STUDY OF THE THERMO-HYDRAULIC
CHARACTERISTICS IN A CIRCULAR TUBE WITH BALL TURBULATORS. PART
1: PIV EXPERIMENTS AND A PRESSURE DROP. Elsevier, 74, 59.

130
CASTAÑEDA, C., & POSSE, Á. (2011). Normas de Presentación para Trabajos
Escritos. Corporación de Estudios Tecnológicos del Norte del Valle, Cartago.
Castro, M. (2013). FENÔMENO DE TRANSIÇÃO ESPACIAL DO ESCOAMENTO
ÓLEO PESADO-AGUA NO PADRÃO DE ESTRATIFICADO. Tesis de Doctorado.
São Carlos, São Paulo, Brasil: Universidade de São Paulo, Escola de Engenharia
de São Carlos.
Dynamics, D. (2006). 2D PIV REFERENCE MANUAL. 2ª Ed. Skovlunde,
Denmark.
Ferzigerand, J. H., & Peric, M. (1996). COMPUTATIONAL METHODS FOR FUID
DYNAMICS. Springer .
Franklin, E. d. (2010). Guia PIV - Version Provisoria. Guia, Universidad de
Campinas, Campinas.
Geremias, M. F. (2010). Levantamento de Perfis de Velocidades em Escoamento
Estratificado Líquido-líquido via Velocimetria por Imagem de Partículas (PIV). São
Carlos, São Paulo, Brasil: EESC-USP.
Hernandez Cely, M. M. (2015). TRATAMENTO E ANÁLISE DE DADOS OBTIDOS
ATRAVÉS DE INSTRUMENTAÇÃO AVANÇADA PARA ESTUDO DE
ESCOAMENTO BIFÁSICO EM DUTOS DE GEOMETRIA ANULAR. Texto de
Qualificação de Doctorado. São Carlos, São Paulo, Brasil: Escola de Engenharia
de São Carlos USP.
ICONTEC. (2008). NORMA TÉCNICA COLOMBIANA - NTC 1486.
Documentación, Presentación de tesis, trabajos de grado y otros trabajos de
investigación. Norma, Bogotá D.C.

131
Iriarte Muñoz, J. M. (2008). VELOCIMETRÍA PIV EN TIEMPO REAL BASADA EM
LÓGICA PROGRAMABLE FPGA. São Carlos de Bariloche: Proyecto Integrador
de la Carrera de Ingeniería Nuclear.
Kvon, A., Lee, ,. Y., Cheema, T. A., & Park, C. W. (31 de Marzo de 2014).
Development of dual micro-PIV system for. IOP Publishing, Measurement Science
and Technology , 12.
Mataix, C. (1986). MECÁNICA DE FLUIDOS Y MAQUINAS HIDRÁULICAS (Vol.
2). Madrid, España: El Castillo.
MatWeb. (1996). MatWeb Material Property Data. Recuperado el 23 de Marzo de
2016, de http://www.matweb.com/search/datasheet.aspx?matguid
Mendes, A. F. (2012). ESTUDO EXPERIMENTAL, SIMULAÇÃONUMÉRICA E
MODELAGEM FENOMENOLÓGICA DA SEPARAÇÃO GRAVITACIONAL DE
GÁS NO FUNDO DE POÇOS DIRECIONAIS. Tesis de Doctorado. São Carlos,
São Paulo, Brasil: Universidad de São Paulo, Escola de Engenharia de São
Carlos.
Morgan, R. G., Markides, C. N., Zadrazil, I., & Hewitt, G. F. (26 de Septiembre de
2012). Characteristics of horizontal liquid–liquid flows in a circular pipe using.
International Journal of Multiphase Flow , pág. 20.
Mott, R. L. (2006). MECÁNICA DE FLUIDOS (Vol. 6). Bogotá, Universidad de
Dayton: Pearson.
Nogueira, J., & Lecuona, A. (2005). LIMITS ON THE RESOLUTION OF
CORRELATION PIV ITERATIVE METHODS. FUNDAMENTALS. Springer-Verlag.,
39.

132
Nordin, N., Othman, S., Raghavan, V. R., & Abdul Karim, Z. A. (Agosto de 2012).
Verification of 3-D Stereoscopic PIV Operation. International Journal of
Engineering & Technology IJET-IJENS, 12 (04), pág. 8.
Palacios Sanchez, F. M. (2011). ESTUDO EXPERIMENTAL DO ESCOAMENTO
DE FLUIDO NEWTONIANO EM CONTRAÇÃO ABRUPTA AXISSIMÉTRICA COM
A TÉCNICA DE VELOCIMETRIA POR IMAGEM DE PARTÍCULAS.Tesis de Pós-
Graduación.Curitiba, Paraná, Brasil.
Park, J., Im, S., Sung, H. J., & Park, J. J. (4 de Marzo de 2014). PIV
measurements of flow around an arbitrarily moving free. Springer-Verlag , 16.
Raffel, M. (Enero de 1999). PARTICLE IMAGE VELOCIMETRY IN
AERODYNAMICS: TECHNOLOGY AND APPLICATIONS IN WINDS TUNNELS.
Springer-Verlag , 229-244.
Rojas, O. (2012). Introducción a la Reologia. Escuesla de Ingenieria Quimica,
Universidad de Los Andes, Laboratorio FIRP. Merida, Venezuela: Universidad de
Los Andes.
Ronald, J. A. (1991). PARTICLE IMAGING TECHNIQUES FOR EXPERIMENTAL
FLUID MECHANICS.Deparment of Theoretical and Applied Mechanics. Urbana,
Illinois: University of Illinois.
Sanal, I., Hosseini, A., & Zihnioglu, N. Ö. (16 de 12 de 2014). Particle image
velocimetry (PIV) to evaluate fresh and hardened state. Construction and Building
Materials , pág. 14.
Santos Gonzaga, A. C. (2005). A GEOMETRIA DA ÓPTICA GEOMÉTRICA E DA
ÓPTICA FÍSICA. (19, Trad.) Brasilia, Brasilia, Brasil.
Steffe, J. F. (1996). Rheological Methods in Food Process Engineering (Vol. 2).
Still Valey. Michigan State University. Dept., USA: Freeman Press.

133
Tokarev, M. P., Sharaborin, D. K., Lobasov, A. S., Chikishev, L. M., Dulin, V. M., &
Markovich, D. M. (23 de Abril de 2015). 3D velocity measurements in a premixed.
IOP Publishing Measurement Science and Technology , 14.
Vera Cartes, L. (s.f.). Sistema de Bibliotecas UACh. Recuperado el Diciembre de
2015, de
http://www.biblioteca.uach.cl/meson_ayuda/manuales/normas_redaccion_referenci
as_bibliograficas_uach.pdf
White, F. M. (2002). Mecânica dos Fluidos (Vol. 4). Rio de Janeiro, Brasil:
McGraw-Hill.
Yataghene, M., Francine, F., & Jack, L. (08 de Mayo de 2011). Flow patterns
analysis using experimental PIV technique inside scraped surface. Applied
Thermal Engineering , pág. 14.
134
7. ANEXOS
ANEXO A. PRESUPUESTO INICIAL.
Orden de compra por Famak para montaje de Bancada Experimental. Precios en
Real Brasileño, convertir a COP según la tasa de cambio del día.

Ricardo U.Dibujado
Comprobado
Salvo indicación contrariacotas en milímetrosángulos en grados
tolerancias ±0,5 y ±1º
Nombre Fecha
EESC - USP São PauloBancada PIV
A4 Plano Nº1 Rev
Archivo: Conjunto Montaje Final.dft
Escala 1:20
20/07/2015NETeF
A
B c
1:20
3000
Visualization box39
0
300
98
DETALLE A1:10
DETALLE B1:5
300
2000
Table
water tank
Soporte
Soporte conabrazadera
FRONT VIEW
360 DETALLE C1:5
hydrometer
Caixa devisualização
178
100
Colmeia
Hive
AN
EX
O B
. PL
AN
OS
DE
DIS
EÑ
OB
AN
CA
DA
EX
PE
RIM
EN
TA
L. V
IST
A P
RIN
CIP
AL
135
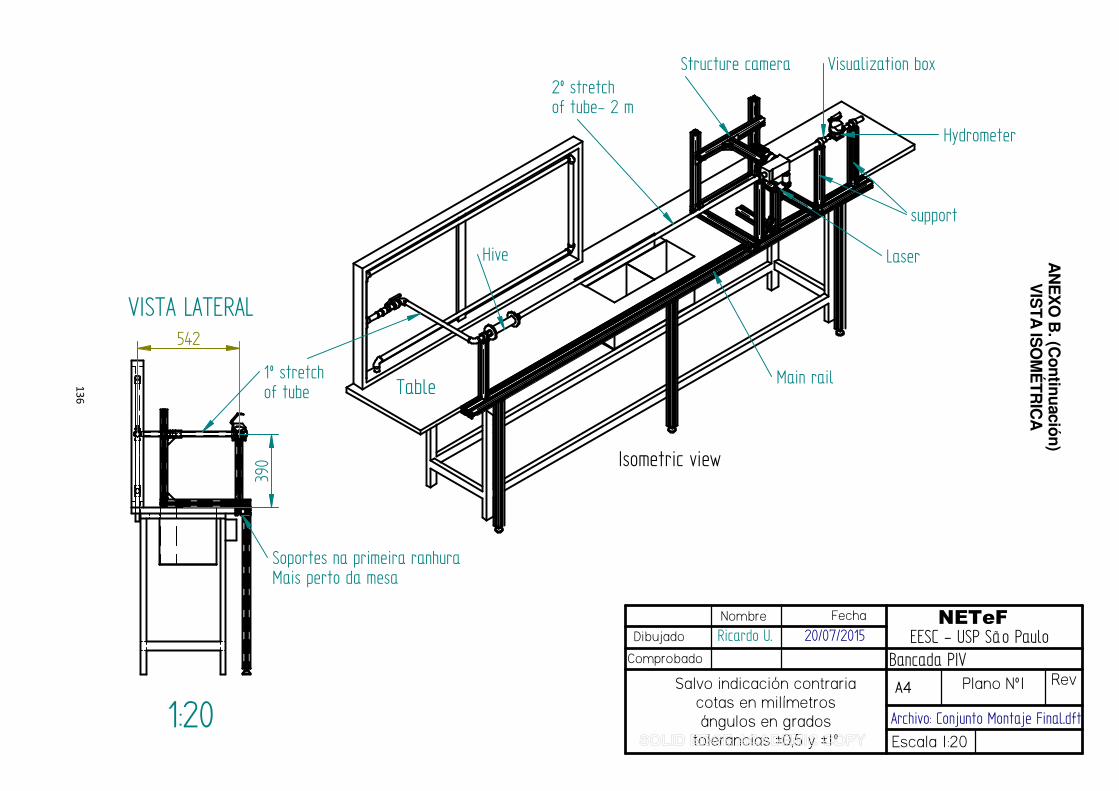
Ricardo U.Dibujado
Comprobado
Salvo indicación contrariacotas en milímetrosángulos en grados
tolerancias ±0,5 y ±1º
Nombre Fecha
EESC - USP São PauloBancada PIV
A4 Plano Nº1 Rev
Archivo: Conjunto Montaje Final.dft
Escala 1:20
20/07/2015NETeF
1:20
Table
Hive
Visualization box
Hydrometer
Main rail
542
390
Soportes na primeira ranhuraMais perto da mesa
1º stretchof tube
2º stretchof tube- 2 m
VISTA LATERAL
Isometric view
Structure camera
Laser
support
AN
EX
O B
. (Co
ntin
uació
n)
VIS
TA
ISO
MÉ
TR
ICA
136
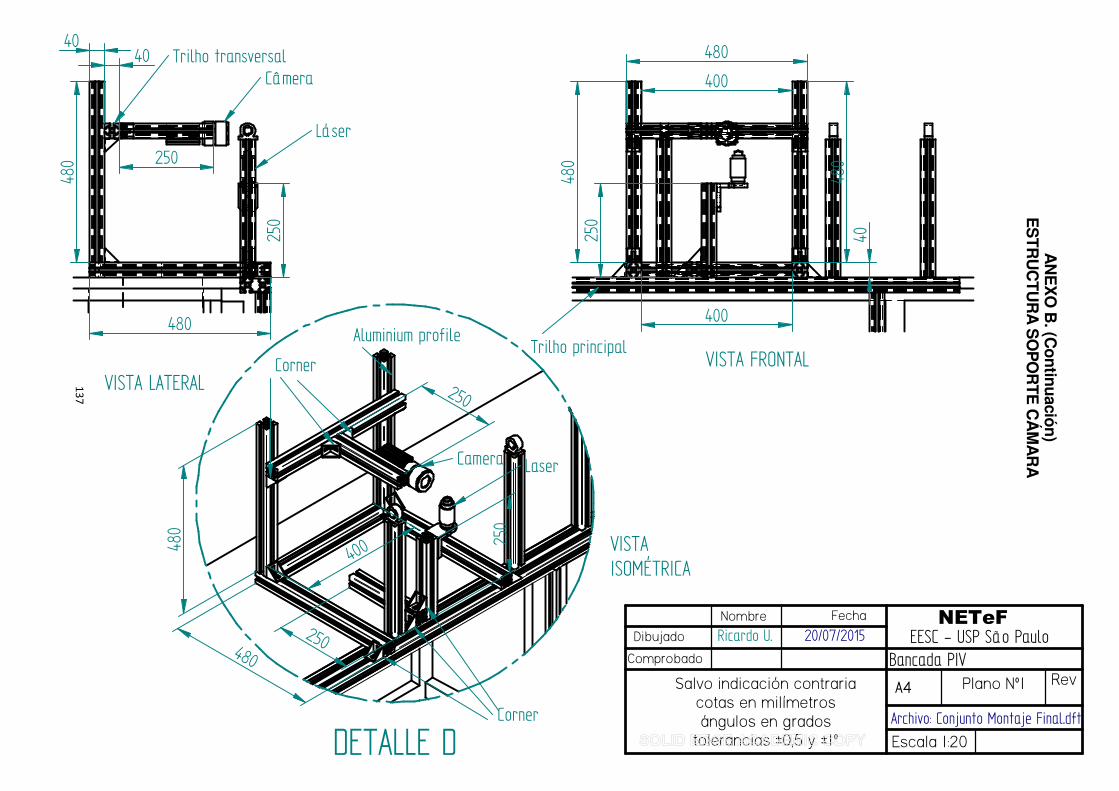
Ricardo U.Dibujado
Comprobado
Salvo indicación contrariacotas en milímetrosángulos en grados
tolerancias ±0,5 y ±1º
Nombre Fecha
EESC - USP São PauloBancada PIV
A4 Plano Nº1 Rev
Archivo: Conjunto Montaje Final.dft
Escala 1:20
20/07/2015NETeF
DETALLE D
480
480
250
480
400
Trilho principal
480
250
250
Trilho transversalCâmera
Láser
480
480
480
400
250
250
LaserCamera
4040
40
Corner
Corner
400
VISTA LATERAL
VISTAISOMÉTRICA
VISTA FRONTAL
250
Aluminium profile
AN
EX
O B
. (Co
ntin
uació
n)
ES
TR
UC
TU
RA
SO
PO
RT
E C
ÁM
AR
A
137

Ricardo U.Dibujado
Comprobado
Salvo indicación contrariacotas en milímetrosángulos en grados
tolerancias ±0,5 y ±1º
Nombre Fecha
EESC - USP São PauloBancada PIV
A4 Plano Nº1 Rev
Archivo: Conjunto Montaje Final.dft
Escala 1:20
20/07/2015NETeF
98
30
R10
,55
10,25
3,5
R 2,5
4,25
6
68
21,1
O5
4,25
98
AN
EX
O B
. (Co
ntin
uació
n)
PIE
ZA
DE
PL
ÁS
TIC
O P
AR
A C
AL
IBR
AC
IÓN
138

Ricardo U.Dibujado
Comprobado
Salvo indicación contrariacotas en milímetrosángulos en grados
tolerancias ±0,2 y ±1º
Nombre Fecha
EESC-USP São Carlos
Peça Acrilico 1
A4 Nº1 Rev
Archivo: Acrilico 1.dft
Escala 1:1
NETeF17/07/2015
1:2 1:2
A
A
O5 x4
O19,05
O41
,05
O37
,05
69
77
CORTE A-A
5
2
25,4
50 5069
50
69
69
AN
EX
O C
. PL
AN
OS
CA
JA D
E V
ISU
AL
IZA
CIÓ
N P
IEZ
A 1
139

Ricardo U.Dibujado
Salvo indicación contrariacotas en milímetrosángulos en grados
tolerancias ±0,5 y ±1º
Nombre Fecha
EESC - USP São Carlos
Peça acrilico 2
A4 Nº2 Rev
Archivo: Acrilico 2.dft
Escala 1:1
9/02/16NETeF
O25
,4
O19
,05
69
69
A
ACORTE A-A
O5 x458
5
AN
EX
O C
. (Co
ntin
uació
n)
PIE
ZA
2
140

Ricardo U.Dibujado
Comprobado
Aprobado 1
Aprobado 2
Salvo indicación contrariacotas en milímetrosángulos en grados
tolerancias ±0,5 y ±1º
Nombre Fecha
EESC - USP São Carlos
Peça tampa de PVC
A4 Plano Nº 1 Rev
Archivo: PVC tampa.dft
Escala 1:1
17/07/2015NETeF
A
ACORTE A-A
20
O25
,4
O39
,4
O43
,4
O 5 x475
75
2
58
50
69
69
75
75
20 20
O 25,1
AN
EX
O C
. (Co
ntin
uació
n)
PIE
ZA
3. Tap
a de P
VC
141
142
ANEXO D. CÓDIGO DESARROLLADO PARA OBTENCIÓN DE PERFILES DE VELOCIDAD
[arquivo, pathname] = uigetfile('*.txt', 'C:\Users\Usuario\Desktop\2.37minutos\datos'); arquivos = dir(strcat(pathname,'\*.txt')); narquivos = size(arquivos); narquivos = narquivos(1); for k = 1:narquivos arquivo = arquivos(k).name; fid=fopen(strcat(pathname,arquivo)); A = textscan(fid,'%s %s %s %s','Delimiter','\t','HeaderLines',1); fclose(fid); [l,c] = size (A{1}); fori = 1:4 for j = 1:l A{i}{j} = str2double(strrep(A{i}{j},',','.')); end A{i} = cell2mat(A{i}); end A=cell2mat(A); lx=1; ly=1; xant=-999.9; fori = 1:l x = A(i,1); y = A(i,2); vx = A(i,3); vy = A(i,4); if (x <xant) lx = 1; ly = ly + 1; end X(lx,ly) = x; Y(lx,ly) = y; U(lx,ly) = vx; V(lx,ly) = vy; xant = x; lx = lx+1; end lx=lx-1; fid=fopen(strcat(pathname,'Uvectors_',arquivo),'wt'); fprintf(fid,'\t%g',X(:,1)); fprintf(fid,'\n'); for j=1:ly fprintf(fid,'%g\t',Y(1,j)); fprintf(fid,'%g\t',U(:,j)); fprintf(fid,'\n'); end fclose(fid);
143
fid=fopen(strcat(pathname,'Vvectors_',arquivo),'wt'); fprintf(fid,'\t%g',X(:,1)); fprintf(fid,'\n'); for j=1:ly fprintf(fid,'%g\t',Y(1,j)); fprintf(fid,'%g\t',V(:,j)); fprintf(fid,'\n'); end fclose(fid); if (k==1) Umedio = U*(1/narquivos); Vmedio = V*(1/narquivos); else Umedio = Umedio+U*(1/narquivos); Vmedio = Vmedio+V*(1/narquivos); end clearvarsUV; end fid=fopen(strcat(pathname,'Umean_vectors.txt'),'wt'); fprintf(fid,'\t%g',X(:,1)); fprintf(fid,'\n'); for j=1:ly fprintf(fid,'%g\t',Y(1,j)); fprintf(fid,'%g\t',Umedio(:,j)); fprintf(fid,'\n'); end fclose(fid); fid=fopen(strcat(pathname,'Vmean_vectors.txt'),'wt'); fprintf(fid,'\t%g',X(:,1)); fprintf(fid,'\n'); for j=1:ly fprintf(fid,'%g\t',Y(1,j)); fprintf(fid,'%g\t',Vmedio(:,j)); fprintf(fid,'\n'); end fclose(fid); prompt = 'What is the desired column to plot velocity vectors?'; c = input(prompt,'s'); figure; if (c==':') quiver(X,Y,Umedio,Vmedio); else c = str2double(c); quiver(squeeze(X(c,:)),squeeze(Y(c,:)),squeeze(Umedio(c,:)),squeeze(Vmedio(c,:))); end