estimaciÓn de la respuesta de un sensor … · el área de instrumentación científica en...
TRANSCRIPT
UNIVERSIDAD RICARDO PALMA FACULTAD DE INGENIERIA
ESCUELA PROFESIONAL DE INGENIERÍA ELECTRONICA
TESIS PARA OPTAR EL TÍTULO DE INGENIERO ELECTRONICA
AUTOR
Fernando Rodolfo, Raymundo Luyo
LIMA – PERÚ 2008
ESTIMACIÓN DE LA RESPUESTA DE UN
SENSOR DE TEMPERATURA A USARSE
EN LA CARGA UTIL DEL COHETE SONDA
PERUANO MEDIANTE EL FILTRO DE
KALMAN USANDO LOGICA
RECONFIGURABLE
. . 1
AGRADECIMIENTO . 4
INTRODUCCIÓN . 7
CAPITULO 1. COHETE SONDA . . 10
CAPITULO 2. ANALISIS DEL RUIDO . . 30
CAPITULO 3. SENSOR DE TEMPERATURA . 50
CAPITULO 4. FILTRO DE KALMAN . . 59
CAPITULO 5. DISPOSITIVOS DE LOGICA RECONFIGURABLE . . 76
CAPITULO 6. IMPLEMENTACION DEL FILTRO DE KALMAN EN EL FPGA . 85
CAPITULO 7. RESULTADOS Y CONCLUSIONES . 113
CAPITULO 8. CONCLUSIONES . . 114
ANEXOS . 115
REFERENCIAS BIBLIOGRÁFICAS . 175

A mis Padres Rodolfo y Margarita, por haberme apoyado desde el comienzo para salir adelante, por haberme educado para tener logros en la vida, además por haberme dado todo de si para mi educación y gracias a ellos voy a lograr un gran objetivo para nuestra familia.
AGRADECIMIENTO
A Dios por haberme guiado, ordenado y dado muchas alegrías en mi vida, gracias
por haberme dado la oportunidad de conocerte.
A mis Padres Rodolfo y Margarita, por haberme apoyado desde el comienzo para
salir adelante, por haberme educado para tener logros en la vida, además por
haberme dado todo de si para mi educación y gracias a ellos voy a lograr un gran
objetivo para nuestra familia.
A Carlos, pues siempre me admiro de lo cuan aplicado y responsable es en sus
cosas.
A Arturo Puchuri, que gracias a su perseverancia me enseño mucho sobre Dios y
su esposa Mariela Benites, que desde muy joven me ha hecho conocer a Dios,
muchas gracias.
A Brenda, ella sin ninguna duda es una persona que para mi vale mucho y que me
sabe comprender, gracias por ser alguien especial en mi vida, realmente el aliento
que me das me ayuda a superarme.
A Mis tías Maria, Karina, Vilma, Isabel, Martha, Delia y demás tíos y tías por
haberme ayudado en mi crecimiento y por enseñarme cosas de la vida.
A mi tío Luis Sanchez, por su ayuda y paciencia en los trabajos de mecánica.
A mi tío Pablo, te voy a cumplir la promesa que te hice.
A mis abuelos Paulina y Simón, por su ayuda y su abnegación con todos los
suyos.
A mis primos y primas, gracias por dejarse enseñar, mas adelante van a ver los
frutos de sus esfuerzos.
A todos mis compañeros de CONIDA, a Roberto Campos por su paciencia y su
ayuda, a Percy Paz, por sus consejos y explicaciones divertidas de física, a Juan
por su puntualidad y dedicación a sus trabajos. A Diana Vasquez y Luz Cori, por
enseñarme que las chicas son muy habilidosas en instrumentación.
A los astrónomos, Walter Guevara, Mara Pelayo, Gabriel Ferrero, Vanesa y
Hernán, pues hacían siempre un trabajo excepcional para la investigación, mucho
aprendí de ustedes.
A mis compañeros de Cidib, a Benjamin Gaspar por su amistad y ayuda en mi
crecimiento profesional, y también por la colaboración en el desarrollo del oxímetro
de pulso, a Henry Dávila por apoyarme en otras ideas para las soluciones de los
problemas de electrónica, y su forma madura de ver las cosas, a Percy
Benavente, por ayudarnos a ver las cosas del ámbito emprendedor.
Al Ing. Gustavo Roselló, por haberme dado invitado al camino de la investigación y
al desarrollo tecnológico, desde el circuito de lógica combinacional para display de
7 segmentos hasta el filtro de kalman.
Al Ing. Manuel Márquez, sin duda, los consejos y la parte teórica que nos inculco
me ayudo mucho en mi parte técnica de desarrollo de hardware analógico.
A los profesores de mi universidad, Institutos, colegios, pues cada uno de ellos me
ha enseñado algo más de los libros.
A Ana Llosa por darme confianza y por orientarme en la presentación de mi
dossier.
A Maribel Saavedra, es una profesora que realmente le importa el avance de sus
alumnos, gracias por tu amistad, siempre te voy a recordar por tu interés y
amistad.
Al profesor Michel Doisy, por darme la oportunidad de ir a Francia y estudiar en
una de las mejores escuelas de ingenieros y por apoyarme desde el comienzo
para ir a estudiar allí.
Al profesor Oscar Penny por haberme inculcado en el diseño en control
automático, en procesamiento de señales y dado una orientación y visión, también
por haberme ayudado en la comprensión del filtro de kalman, debido a su gran
experiencia en el tema.
Al Profesor, Guillermo Kemper, por su apoyo en la investigación del filtro Herrera
Bendezu y su interés en la investigación.
A David y Mary Tay, gracias por su amistad, de verdad los estimo mucho, gracias
por ser tan sencillos y serviciales.
A mi “abuelita” Julia y don Isidro Obando, por su acogedor recibimiento en su
hogar, nunca me voy a olvidar de ello, se lo aseguro.
INTRODUCCIÓN
El área de instrumentación científica en C.O.N.I.D.A. (Agencia Espacial del Perú), es la
dependencia la cual es encargada de implementar las cargas útiles de los cohetes sonda.
Una de las actividades de esta dependencia es la caracterización de la señal de los sensores
para los cohetes sonda; en esta actividad se encontró el problemas de ruido, y una de ellas
era causado por falta de puesta a tierra de los equipos (fuente de alimentación,
osciloscopios, etc.).
En el transcurso del desarrollo de la primera carga útil, se trato de eliminar el ruido con un
filtro de fase lineal y centrado en 60 Hz hecho en labview, pero el filtro no proveía del todo
una señal deseable para la caracterización.
El uso de los sensores se ha hecho muy frecuente en las aplicaciones de las investigaciones,
pero en muchos casos no se caracterizan los sensores que se usan con lo cual se tienen
malos resultados en las mediciones.
Se sabe que las hojas de datos de los sensores, nos muestran graficas de la respuesta de
estos con condiciones óptimas para su caracterización (como una excelente puesta a tierra)
ya que tienen patrones estandarizados y sin problemas de circuitos mal dimensionados
(adaptación de impedancias). Cuando se compara la respuesta real de los sensores en los
laboratorios, no se acercan a las curvas características que se proponen en las hojas de datos
ya sea por ruido o por circuitos mal dimensionados.
En la caracterización de los sensores de la carga útil del cohete sonda, se tuvo problemas de
ruido, como por ejemplo, ruido de línea, EMI, acoplamientos capacitivos e inductivos,
corrientes y voltajes parásitos entre otros, por lo que este trabajo va a poder describir estos
ruidos para poder comprenderlos, analizarlos y modelarlos.
Sabiendo que hay diferentes formas de eliminación del ruido, como por ejemplo el de
eliminación del ruido de línea por medio de circuitos con transformadores isoladores, o
filtros de línea (filtros notch) en hardware, que no son reconfigurables, y habiendo obtenido
una respuesta no optima en las caracterizaciones de los sensores con el filtro de fase lineal,
y a su vez de la influencia de otros ruidos, este trabajo propone implementar el Filtro de
Kalman, el cual usa conceptos de procesos aleatorios, en el FPGA V2P30 de lógica
reconfigurable, para estimar la señal del sensor de temperatura dentro de la señal con ruido.
Este trabajo se divide en las siguientes partes:
En el primer capitulo, tenemos los fundamentos generales de los cohetes sonda, cargas
útiles y la descripción de los ruidos que han podido afectar a la caracterización.
En el segundo capitulo, se explicará el análisis del ruido por medio de procesos
estocásticos, se dirá que tipo de ruido se esta eliminando, y también se dará un modelo para
analizarlo y por consiguiente, se van a nombrar los ruidos que se pueden encontrar en los
sistemas aerospaciales.
En el tercer capitulo, se analiza el sensor mas apropiado para este trabajo, como también se
muestra la forma de caracterización del mismo, se describirá los problemas que pasan por
la caracterización y por ultimo se mostrara el diseño de la interfase implementada del
sensor de temperatura.
En el cuarto capitulo, se explicara los fundamentos teóricos del filtro de kalman, y el
desarrollo del mismo.
En el quinto capitulo, se explicara las características de los dispositivos de lógica
reconfiguradle, como también el proceso de diseño con los FPGAs, y por último se
describirá los tipos de FPGAs para los sistemas aerospaciales.
En el sexto capitulo, se describirá la implementación del filtro de kalman en el FPGA,
empezando con el diseño de la arquitectura, después el diseño usando system generador y
se presentara la co-simulación con la tarjeta XUP2VP30.
En el séptimo capitulo se darán a conocer los resultados de las simulaciones y las co-
simulaciones que se hicieron con el hardware.
En el octavo capitulo se darán las conclusiones del presente trabajo.
Para poder complementar algunos temas teóricos y prácticos de la tesis se presentan los
siguientes apéndices.
En el apéndice A, se darán a conocer más propiedades de la media y la varianza.
En el apéndice B, se darán a conocer más propiedades de la covarianza.
En el apéndice C, se mostraran los códigos Utilizados en Matlab.
En el apéndice D, se describirá los significados del Histograma y PMF.
En el apéndice E, se explicara por medio de un ejemplo los significados de exactitud y
precisión.
En el apéndice F, Se describirán los conceptos básicos de la termocupla.
En el apéndice G, se describirá un ejemplo Implementado con un filtro de kalman.
En el apéndice H, Se mostrara como se obtiene la ganancia del filtro discreto de kalman, K.
En el apéndice I, se dará una breve introducción a los números flotantes.
En el apéndice J, se dará a conocer el Translation report y Pads.
En el apéndice K, se dará una breve introducción de importación de Cores en Simulink.
Y por ultimo se van a colocar algunos anexos del dato técnico del AD595 y un trabajo
relacionado.
CAPITULO 1. COHETE SONDA
1.1 Cohete Sonda.
El cohete sonda, es una nave que transporta instrumental de investigación astrofísica en una
trayectoria parabólica, también puede efectuar experimentos a determinadas altura (entre 40
km y 200km de altura). Se desplaza por la atmósfera debido a la fuerza de reacción que
produce su motor de propulsión, que es producto de la combustión de su combustible
sólido, la cual libera gases a velocidades muy altas, por la tobera.
En la figura 1, se muestra un cohete sonda.
Figura 1. Cohete sonda peruano.
Las aplicaciones están comprendidos en:
• Exploraciones de alta atmósfera.
La exploración o sondaje de la alta atmósfera se realiza en donde no pueden llegar los
balones (llegan solo hasta los 40 Km) ni los satélites que orbitan mas allá de 200km.
Los primeros conocimientos sobre el ambiente terrestre (ionosfera, magnetosfera, etc.)
fueron adquiridos por los Estados Unidos y la Unión soviética, en el siglo 20, en la
utilización de las versiones modificadas del misil balística V2 alemán.
• Investigación en microgravedad.
Los experimentos proveen mucha información, que incluye procesos físicos que toman
lugar en la atmósfera, como la radiación natural que se encuentra alrededor de la tierra,
proveniente del sol, de las estrellas, y las galaxias.
Es una aplicación muy reciente en la cual permite a los científicos, experimentos que
conciernen sobretodo en la ciencia de los materiales (experiencias de fusión y de
solidificación) que fueron de interés a los Estados Unidos, Japón y Europa, que usó en
1982, un programa de ese tipo con los cohetes sonda Texus, y después con los Maxus.
También se tomaron pruebas biológicas con animales como perros, ratas gatos, etc.
Más aún, los cohetes sonda proveen un costo económico en relación al test de instrumentos
de ingeniería y componentes usados en los satélites y otras naves espaciales.
Los cohetes sonda, tienen como aporte tecnológico el desarrollo de nuevas tecnologías y
materiales, lo cual es apto para la formación, investigación y entrenamiento de
profesionales y estudiantes en muchas ramas como la física, química, ingeniería
electrónica, ingeniería aeronáutica, ingeniería mecánica, ingeniería química entre otras.
Esto contribuye a la generación de recursos humanos para las exigencias del desarrollo
aerospacial.
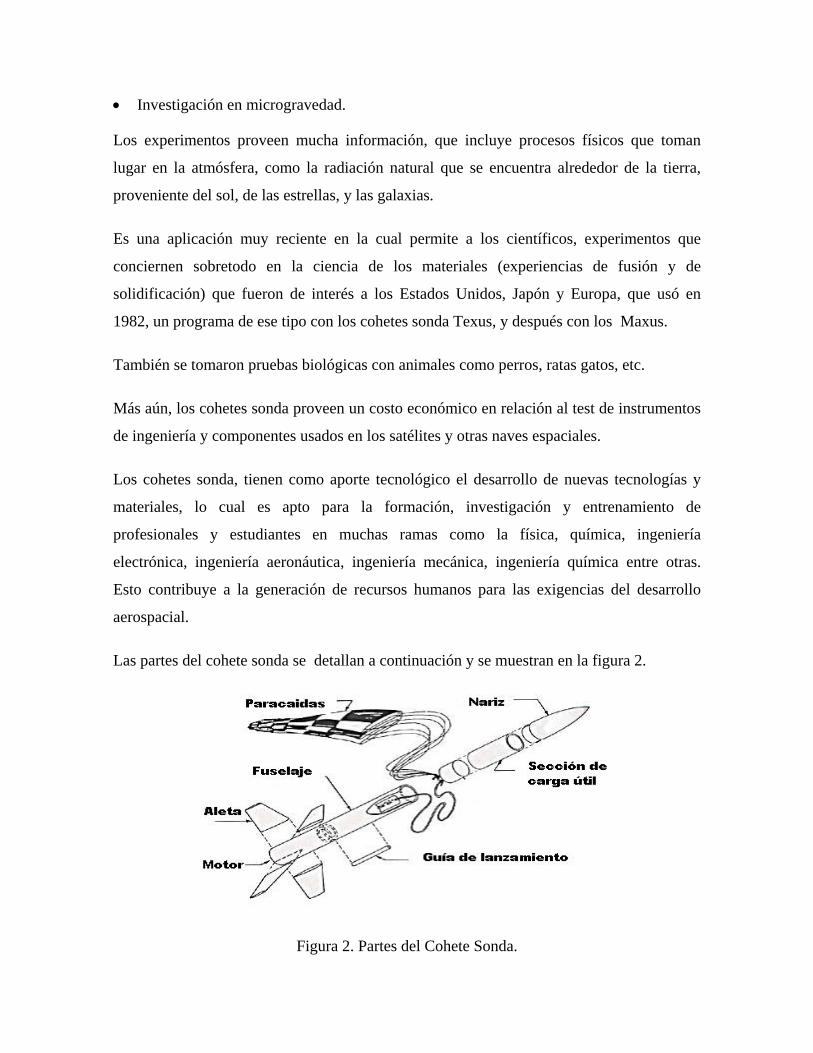
Las partes del cohete sonda se detallan a continuación y se muestran en la figura 2.
Figura 2. Partes del Cohete Sonda.
• Nariz, Puede Contener al paracaídas y el sistema de control de altitud.
• Carga útil, contiene la electrónica necesaria para adquirir datos, transmitirlos y
guardarlos.
• Sistema de control de Altitud, Controla la orientación de la carga útil usando un
microcomputador.
• Cuerda de choque, es usado para sostener a la carga útil.
• Fuselaje, es usado como revestimiento principal del cohete sonda y también para llevar
dentro el motor del cohete sonda.
• Aleta, son los elementos aerodinámicos necesarios para la estabilización estática y
automática del vuelo de un cohete.
• Motor, su principio de funcionamiento se basa en la tercera ley de newton, la cual las
partículas expulsadas por la tobera hace que haya una reacción que da lugar al
movimiento por la dirección opuesta de la nave.
• Guía de lanzamiento, se engancha sobre la rampa de lanzamiento.
• Telemetría, transmite todos los datos a la estación terrena, incluyendo los datos de
investigación, y otras señales, incluso puede recibir comando para conducir al cohete.
• Tobera: La tobera es la encargada de adaptar las presiones internas de la cámara de
combustión impartiendo velocidad a los gases eyectados, convirtiendo la presión de
gases calientes generados en la cámara de combustión de un motor cohete en energía
cinética que será útil para su propulsión, empleando finalmente la Tercera Ley de
Newton. En un motor cohete, la tobera está formada por dos conos unidos por sus
vértices, uno de ellos convergente (su diámetro mayor está orientado hacia la cámara de
combustión y su vértice apunta hacia la salida del motor) y el otro divergente (mayor en
su salida que a la entrada); la unión de ambos conos es la sección de menor superficie
de la tobera y se la llama “garganta”. Se considera que el flujo que recorre a una tobera
es compresible al moverse a velocidades supersónicas, por lo que las diferentes
secciones transversales de la tobera producen, durante el avance de los gases,
variaciones en la densidad y en la velocidad del fluido.
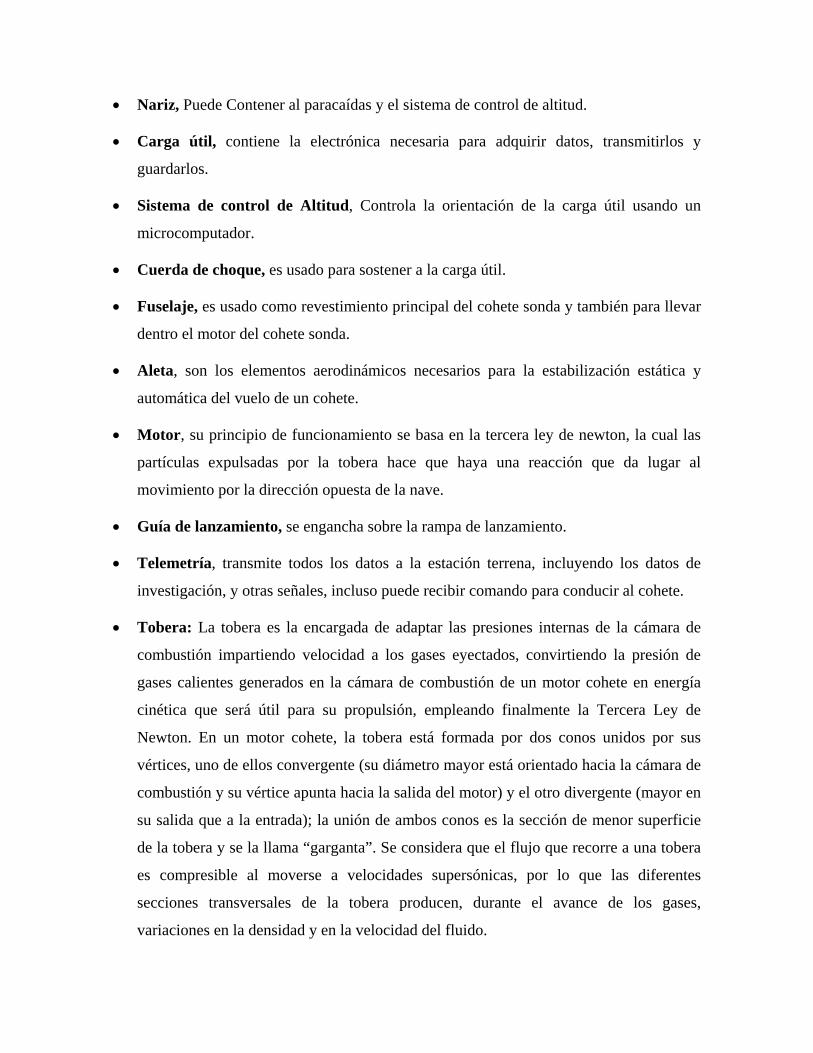
La trayectoria del cohete sonda se muestra en la figura 3.
Figura 3. Trayectoria Parabólica.
1.2 Carga Útil.
La carga útil, es la parte electrónica del cohete sonda; ella tiene por misión, la de procesar
los datos que vienen de los sensores de temperatura, presión, corriente, velocidad. También
su otra función es la de almacenar los datos recibidos y poder transmitirlos vía RF a una
estación terrena.
Muchos cohetes sonda contienen sistemas electrónicos para el momento de eyección de la
carga útil antes de que el vehículo espacial caiga a tierra.
Dependiendo de la misión se crea una carga útil, sin embargo hay algunas cosas que se
tienen en común en las cargas útiles de los cohetes.
En las siguientes figuras se muestra la carga útil del cohete sonda peruano Roberto 1, que
son adaptadas de [16].
Figura 4. Esquema de la carga útil Roberto 1.
Figura 5. Carga Útil implementada Roberto 1.
Figura 6. Otra vista de la carga Útil implementada Roberto 1.
En la figura 7 se muestra la carga útil prototipo del cohete sonda Paulet I.
Figura 7. Carga Útil implementada para el cohete sonda Paulet I.
En los elementos de la carga útil se puede mencionar los siguientes:
• Sistema de adquisición de datos.
• Sistema de Transmisión de datos.
• Sistema de eyección.
1.2.1 Sistema de adquisición de datos.
En este sistema se tiene los circuitos de acondicionamiento de señal para obtener los
valores de las mediciones de los sensores que nos dan una relación muy estrecha con un
voltaje. Estas pueden ser almacenadas en bancos de memoria para después ser analizadas
en tierra, o también pueden estar en conexión con el sistema de transmisión de datos para el
envío en tiempo de real de los mismos.
1.2.2 Sistema de Transmisión de Datos.
Generalmente en este sistema cuenta con un receptor y transmisor de datos, con la cual se
comunica con una estación terrena para las operaciones de monitoreo remoto, envió de
datos de la carga útil.
1.2.3 Sistema de eyección.
Consiste en poder eyectar a la carga útil cuando se logra el apogeo del cohete, en función
de parámetros de presión y temperatura.
1.3 Problemas de Ruido.
En la parte de instrumentación es necesario tener en cuenta las fuentes de ruido para poder
realizar adaptaciones en los circuitos de acondicionamiento de señal. Estos ruidos pueden
afectar de una manera muy significativa en la caracterización del circuito de
acondicionamiento de señal de los sensores, y algunos como el acoplamiento conductivo se
pueden evitar.
Para el presente trabajo, durante la caracterización del sensor de temperatura, se tuvo el
problema de ruido por la falta de puesta a tierra la que causa inducción de corriente que se
añade un voltaje a las mediciones de los sensores.
En los siguientes párrafos se va mostrar los tipos de ruido que existen, y a detallar su
origen.
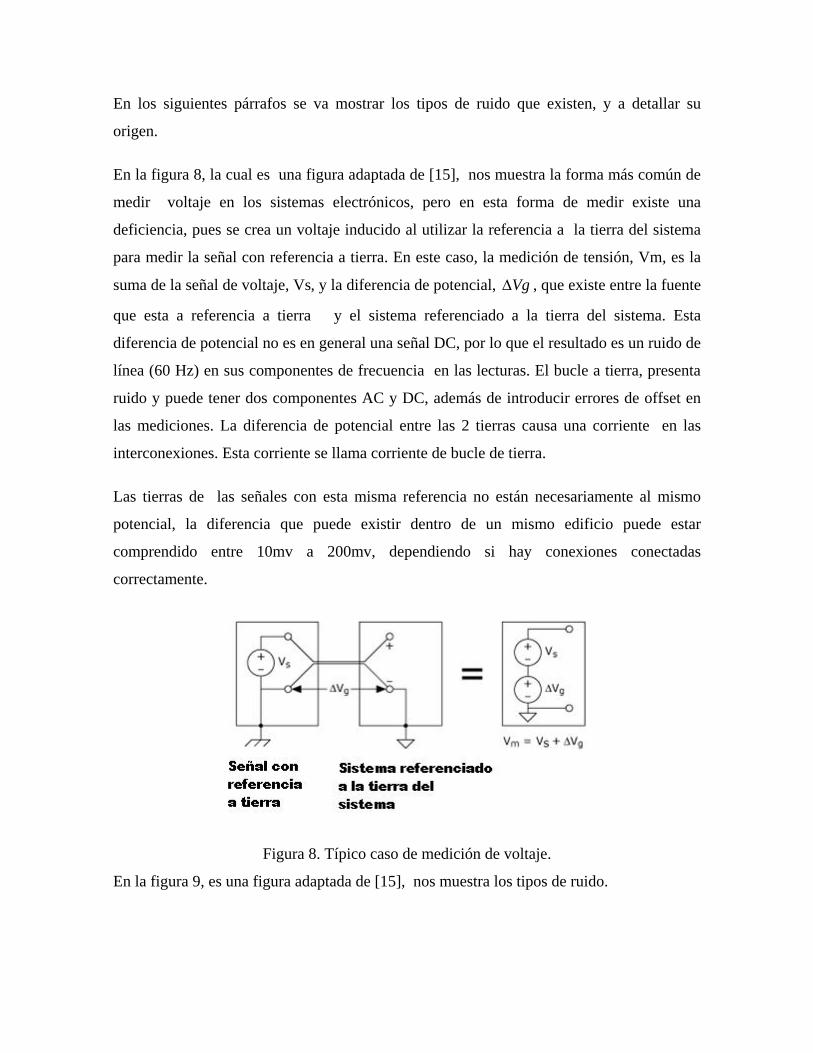
En la figura 8, la cual es una figura adaptada de [15], nos muestra la forma más común de
medir voltaje en los sistemas electrónicos, pero en esta forma de medir existe una
deficiencia, pues se crea un voltaje inducido al utilizar la referencia a la tierra del sistema
para medir la señal con referencia a tierra. En este caso, la medición de tensión, Vm, es la
suma de la señal de voltaje, Vs, y la diferencia de potencial, Vg∆ , que existe entre la fuente
que esta a referencia a tierra y el sistema referenciado a la tierra del sistema. Esta
diferencia de potencial no es en general una señal DC, por lo que el resultado es un ruido de
línea (60 Hz) en sus componentes de frecuencia en las lecturas. El bucle a tierra, presenta
ruido y puede tener dos componentes AC y DC, además de introducir errores de offset en
las mediciones. La diferencia de potencial entre las 2 tierras causa una corriente en las
interconexiones. Esta corriente se llama corriente de bucle de tierra.
Las tierras de las señales con esta misma referencia no están necesariamente al mismo
potencial, la diferencia que puede existir dentro de un mismo edificio puede estar
comprendido entre 10mv a 200mv, dependiendo si hay conexiones conectadas
correctamente.
Figura 8. Típico caso de medición de voltaje.
En la figura 9, es una figura adaptada de [15], nos muestra los tipos de ruido.
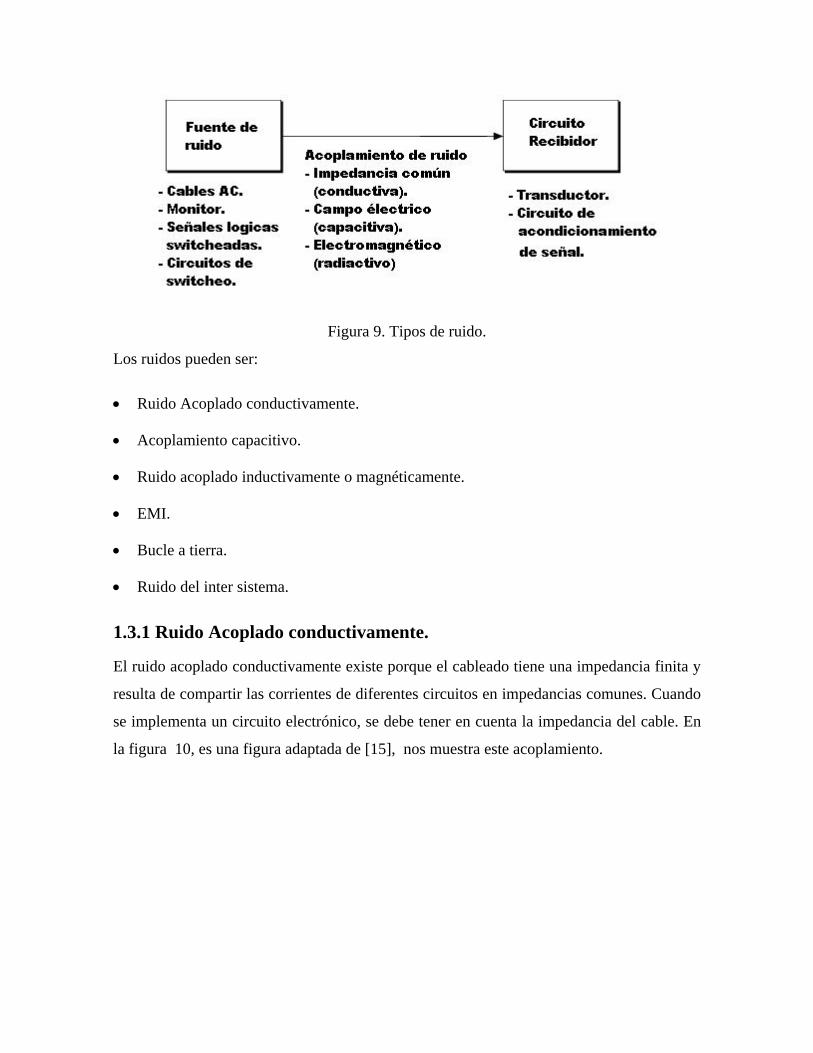
Figura 9. Tipos de ruido.
Los ruidos pueden ser:
• Ruido Acoplado conductivamente.
• Acoplamiento capacitivo.
• Ruido acoplado inductivamente o magnéticamente.
• EMI.
• Bucle a tierra.
• Ruido del inter sistema.
1.3.1 Ruido Acoplado conductivamente.
El ruido acoplado conductivamente existe porque el cableado tiene una impedancia finita y
resulta de compartir las corrientes de diferentes circuitos en impedancias comunes. Cuando
se implementa un circuito electrónico, se debe tener en cuenta la impedancia del cable. En
la figura 10, es una figura adaptada de [15], nos muestra este acoplamiento.
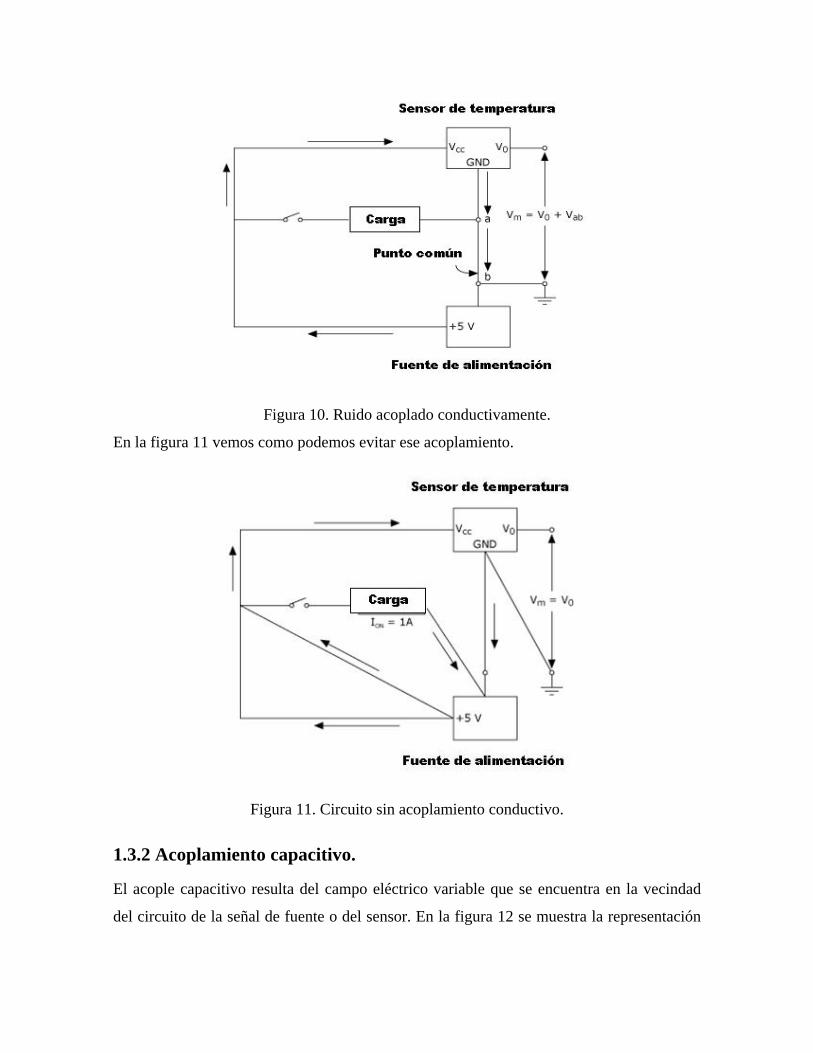
Figura 10. Ruido acoplado conductivamente.
En la figura 11 vemos como podemos evitar ese acoplamiento.
Figura 11. Circuito sin acoplamiento conductivo.
1.3.2 Acoplamiento capacitivo.
El acople capacitivo resulta del campo eléctrico variable que se encuentra en la vecindad
del circuito de la señal de fuente o del sensor. En la figura 12 se muestra la representación
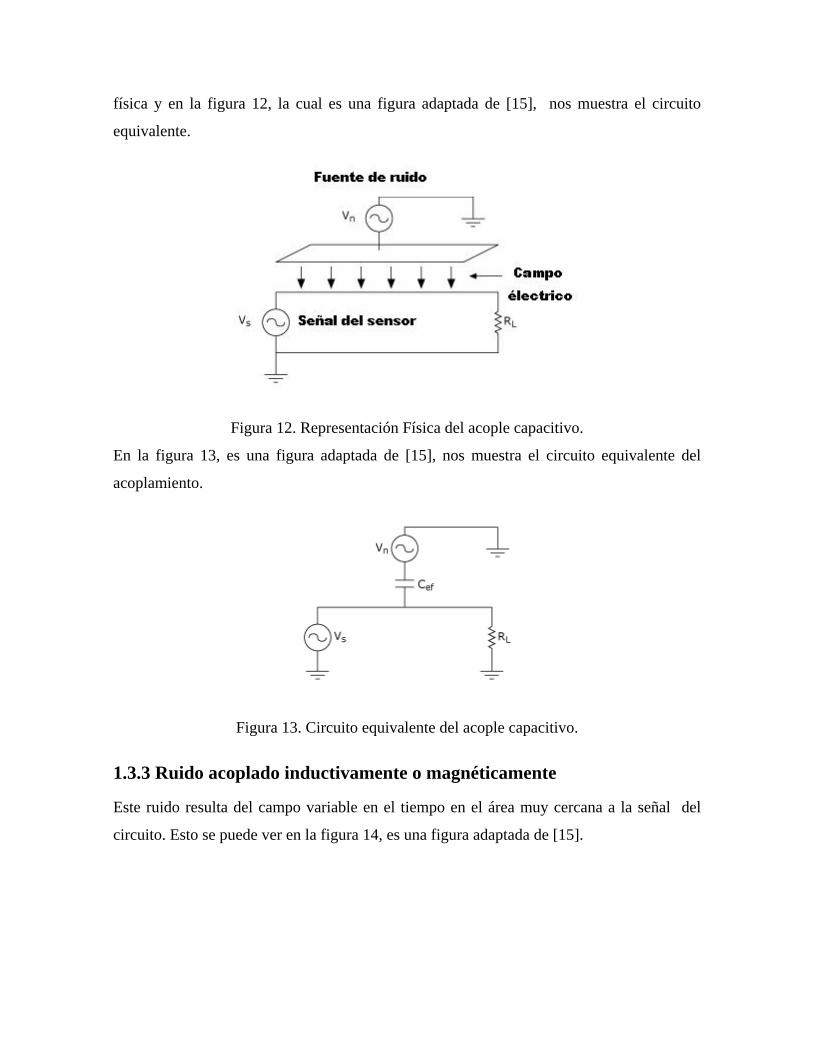
física y en la figura 12, la cual es una figura adaptada de [15], nos muestra el circuito
equivalente.
Figura 12. Representación Física del acople capacitivo.
En la figura 13, es una figura adaptada de [15], nos muestra el circuito equivalente del
acoplamiento.
Figura 13. Circuito equivalente del acople capacitivo.
1.3.3 Ruido acoplado inductivamente o magnéticamente
Este ruido resulta del campo variable en el tiempo en el área muy cercana a la señal del
circuito. Esto se puede ver en la figura 14, es una figura adaptada de [15].
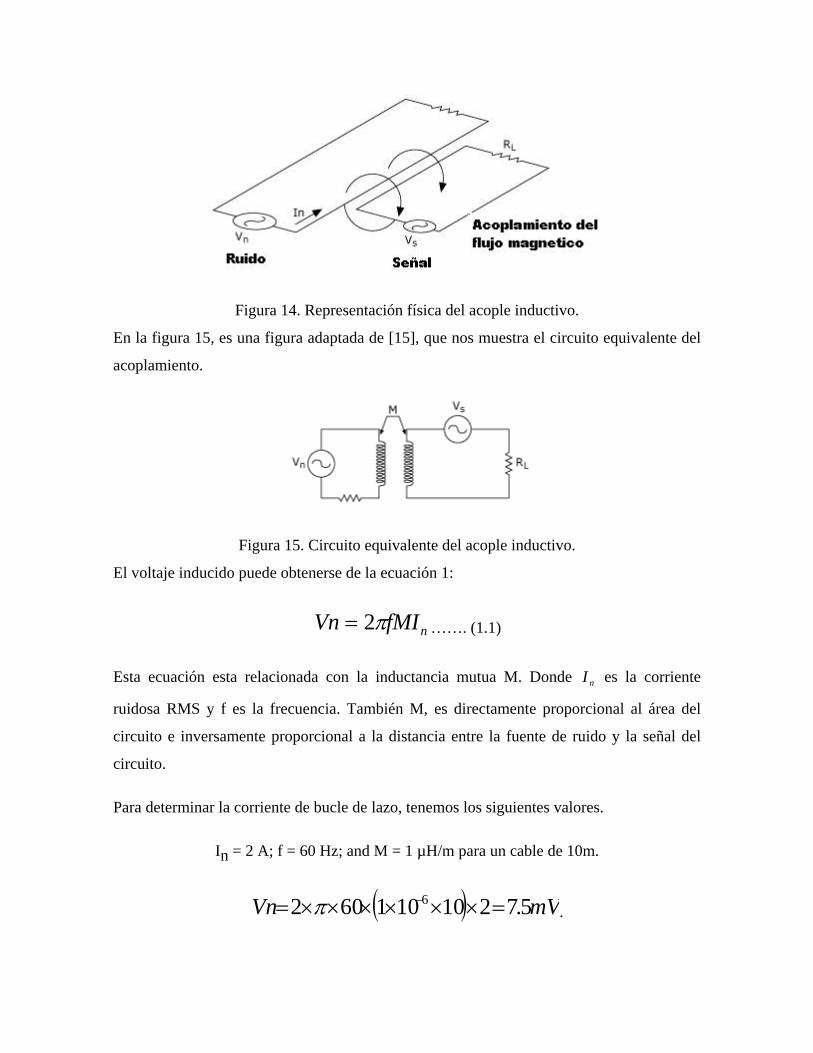
Figura 14. Representación física del acople inductivo.
En la figura 15, es una figura adaptada de [15], que nos muestra el circuito equivalente del
acoplamiento.
Figura 15. Circuito equivalente del acople inductivo.
El voltaje inducido puede obtenerse de la ecuación 1:
nfMIVn π2= ……. (1.1)
Esta ecuación esta relacionada con la inductancia mutua M. Donde nI es la corriente
ruidosa RMS y f es la frecuencia. También M, es directamente proporcional al área del
circuito e inversamente proporcional a la distancia entre la fuente de ruido y la señal del
circuito.
Para determinar la corriente de bucle de lazo, tenemos los siguientes valores.
In = 2 A; f = 60 Hz; and M = 1 µH/m para un cable de 10m.
( ) mVVn 5.7210101602 6 =××××××= −π .
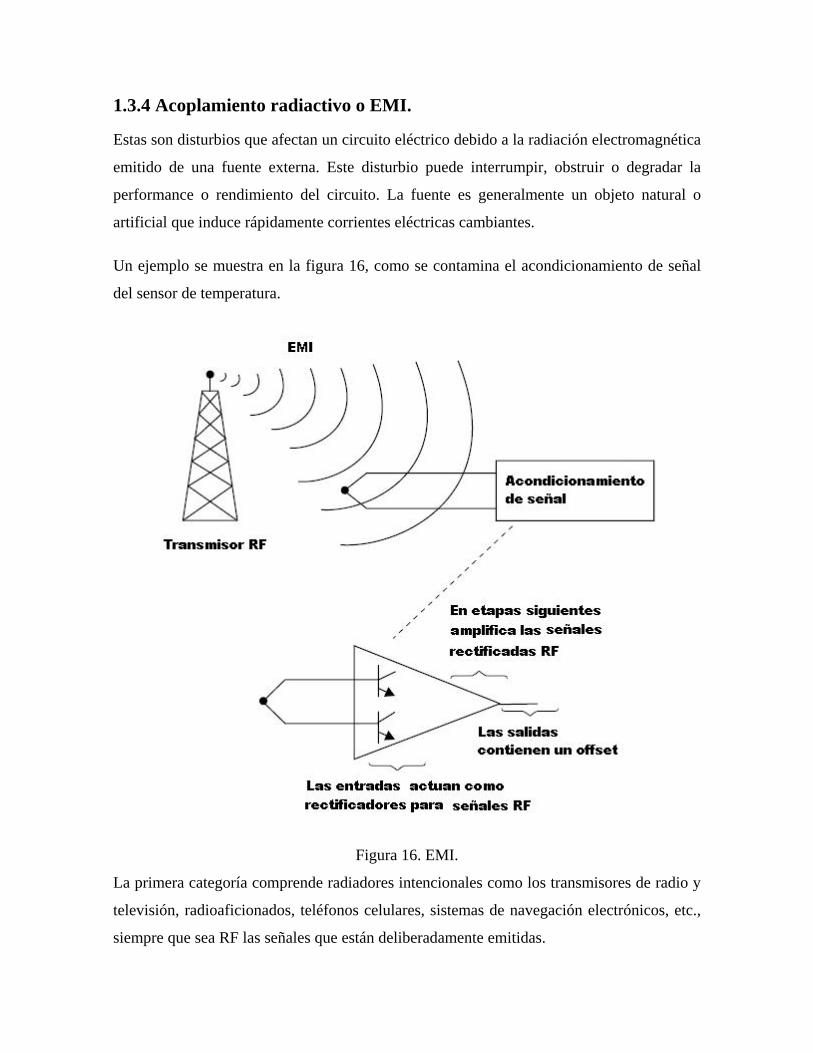
1.3.4 Acoplamiento radiactivo o EMI.
Estas son disturbios que afectan un circuito eléctrico debido a la radiación electromagnética
emitido de una fuente externa. Este disturbio puede interrumpir, obstruir o degradar la
performance o rendimiento del circuito. La fuente es generalmente un objeto natural o
artificial que induce rápidamente corrientes eléctricas cambiantes.
Un ejemplo se muestra en la figura 16, como se contamina el acondicionamiento de señal
del sensor de temperatura.
Figura 16. EMI.
La primera categoría comprende radiadores intencionales como los transmisores de radio y
televisión, radioaficionados, teléfonos celulares, sistemas de navegación electrónicos, etc.,
siempre que sea RF las señales que están deliberadamente emitidas.
La segunda categoría está compuesta por radiadores no intencionales tales como
computadoras, la televisión, equipo de música, en la parte del equipo de oficina como las
impresoras, copiadoras, máquinas de fax, luces fluorescentes, herramientas eléctricas, y las
líneas de energía. Cualquier equipo que puede ser apagado y prendido rápidamente es una
fuente de ruido potencial.
Esta categoría causa la mayoría de los problemas de los sistemas, dispositivos.
También tenemos que nombrar las fuentes naturales de EMI, como el relámpago, la
radiación cósmica, la radiación solar, y la radiación nuclear.
Los circuitos de alta impedancia son más susceptibles de acoplamiento capacitivo cerca de
los circuitos rápidos y con grandes oscilaciones de tensión, y de acoplamiento inductivo
cerca de los circuitos con rápidos cambios en grandes corrientes. Estos son transitorios
momentáneos en el voltaje y la corriente en un tiempo muy corto. Se pueden medir desde
milisegundos a nanosegundos. A menudo estos transitorios es llamado voltaje o corriente
de pico.
La mayoría de los equipos electrónicos tiene un filtro EMI en la entrada de la fuente de
alimentación. La FCC (comisión federal de comunicaciones de USA) recomienda estos
filtros para detener la mayoría de ruido llevado a cabo desde las líneas de suministro hasta
la fuente de alimentación. Lamentablemente, el ruido puede encontrar otros caminos en las
tarjetas electrónicas. La EMI puede ser radiada y puede acoplarse dentro del sistema a
través de los conectores metálicos o a través de las líneas de datos. Los cables UTP son un
probable candidato para la recolección de ruido. Esto es especialmente probable si no hay
suficiente puesta a tierra, o el cable pasa junto a una fuente de ruido.
El ruido inducido puede entrar en el sistema a través del suelo. Por el cable de tierra de las
señales eléctricas, pues estos no desaparecen misteriosamente, sino viajan por el camino de
menor resistencia y, a veces, regresan a su punto de origen como un dispositivo, la tierra e
incluso al suelo.
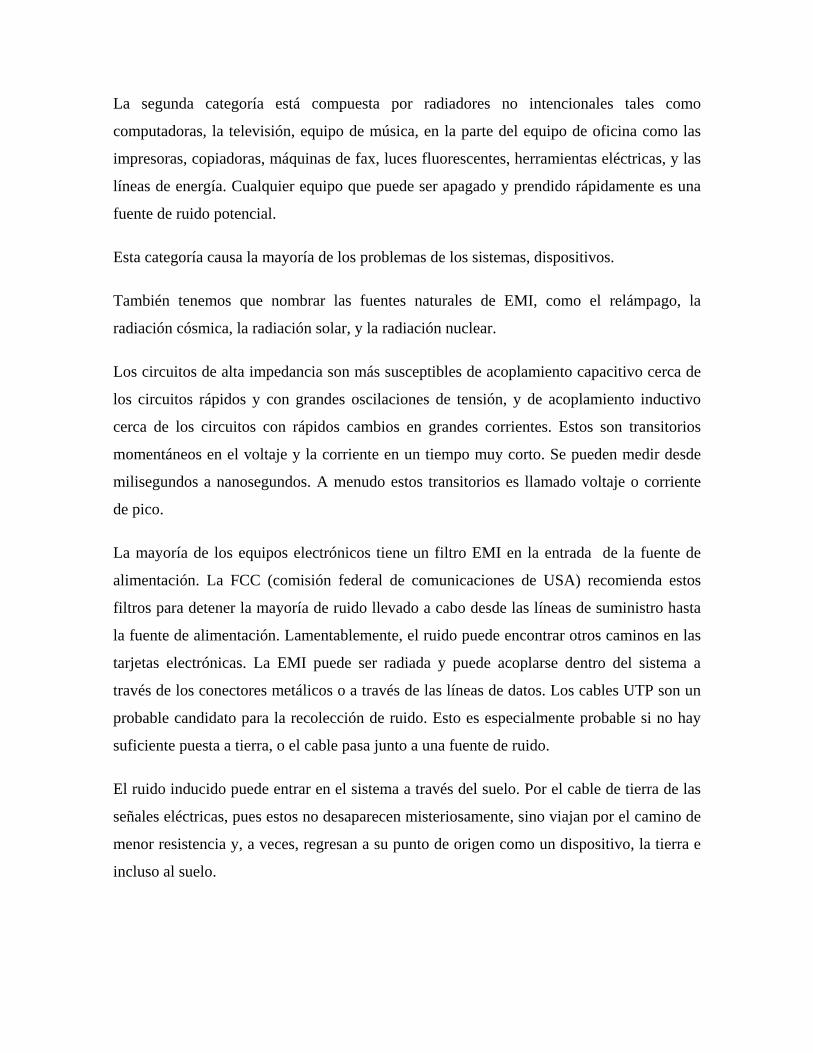
Muchos problemas en las computadoras se originan de causas eléctricas o magnéticas. Los
problemas del monitor por ejemplo a menudo son causados por campos magnéticos,
armónicos del cable neutral, o ruido eléctricos conducido o radiado.
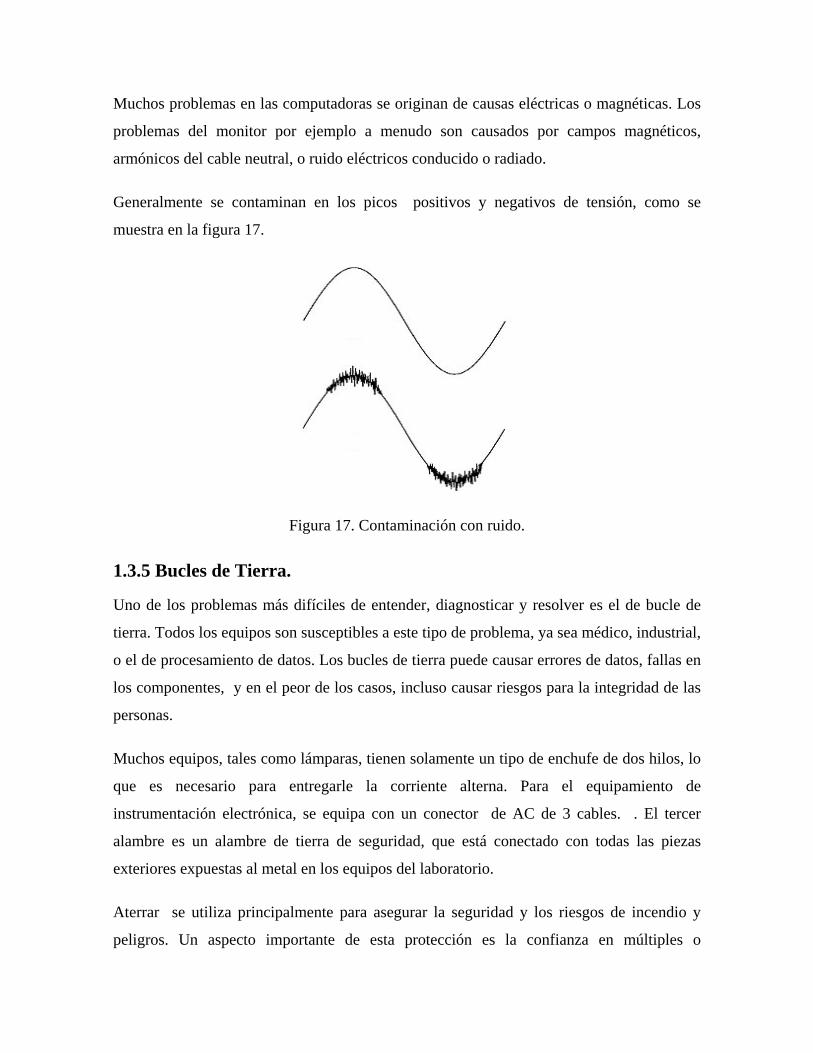
Generalmente se contaminan en los picos positivos y negativos de tensión, como se
muestra en la figura 17.
Figura 17. Contaminación con ruido.
1.3.5 Bucles de Tierra.
Uno de los problemas más difíciles de entender, diagnosticar y resolver es el de bucle de
tierra. Todos los equipos son susceptibles a este tipo de problema, ya sea médico, industrial,
o el de procesamiento de datos. Los bucles de tierra puede causar errores de datos, fallas en
los componentes, y en el peor de los casos, incluso causar riesgos para la integridad de las
personas.
Muchos equipos, tales como lámparas, tienen solamente un tipo de enchufe de dos hilos, lo
que es necesario para entregarle la corriente alterna. Para el equipamiento de
instrumentación electrónica, se equipa con un conector de AC de 3 cables. . El tercer
alambre es un alambre de tierra de seguridad, que está conectado con todas las piezas
exteriores expuestas al metal en los equipos del laboratorio.
Aterrar se utiliza principalmente para asegurar la seguridad y los riesgos de incendio y
peligros. Un aspecto importante de esta protección es la confianza en múltiples o

redundantes puesta a tierra. De esta forma, si una puesta a tierra es Extraído o desconectado
accidentalmente hay una línea de seguridad. Esta redundancia tiene un importante efecto
secundario, que puede crear bucles de tierra.
Aterrar es utilizado también para apoyar al revestimiento en las líneas de transmisión pues
proveen blindaje para evitar que las emisiones radiadas entren o salgan.
Cuando se forman bucles de tierra, la corriente que fluye en el sistema de tierra es muy
Imprevisible. Esta corriente de tierra puede ser causada por diferencias de tensión,
inducción de otros cables o dispositivos, fallas de cableado, fallas de tierra. Las corrientes
pueden ser DC, 60 Hz, o de muy alta frecuencia.
Los bucles de tierra pueden causar problemas de los equipos específicos de tres maneras:
1. Corrientes de Baja energía en las tierras generan tensiones que pueden causar errores de
datos. Estos pueden ser de baja frecuencia, como zumbidos de 60 Hz o de alta frecuencia
clasificado como ruido eléctrico.
2. Transitorios de alta energía escogen tierras de circuitos de datos en lugar de tierras de
alimentación. Estos transitorios pueden ser causadas internamente de las corrientes de
conmutación o irrupción.
Por ejemplo, la carga inicial de la entrada de los condensadores en una fuente de
alimentación, el prendido del motor inductivo, y, por supuesto, el relámpago. Estos
transitorios pueden causar daños en el equipo en los puertos, microprocesadores y casi
cualquier componente eléctrico si el aumento es lo suficientemente alto.
3. Bucles de tierra son una de las causas de ruido de modo común entre fases, neutral y
Tierra, en un sistema de distribución de energía. Este ruido se inyecta en el suministro de
energía eléctrica, que a su vez pasa a los componentes electrónicos.
1.3.6 Ruido de tierra del ínter sistema.
Las diferencias del voltaje de tierra se refieren como ruido de tierra del ínter sistema.
El ruido de tierra del ínter sistema no es igual que el ruido común, este es uno de los
malentendidos más extensos del campo de la protección de la energía de computadora.
El ruido de modo común se define como ruido que existe entre los conductores de la
energía, activo y neutral, con respecto al conductor de tierra, debido a las sobretensiones.
El ruido de tierra del ínter sistema existe entre los alambres de tierra entre las computadoras
interconectadas. Las computadoras libres que no están conectadas sin ninguna línea de
datos no pueden experimentar el ruido de tierra del ínter sistema.
Una razón dominante por la que hay tanta confusión en esta área proviene el hecho de que
el equipo de protección de la energía puede reducir ruido de modo común, pero no puede
reducir el ruido de tierra del ínter sistema correcto.
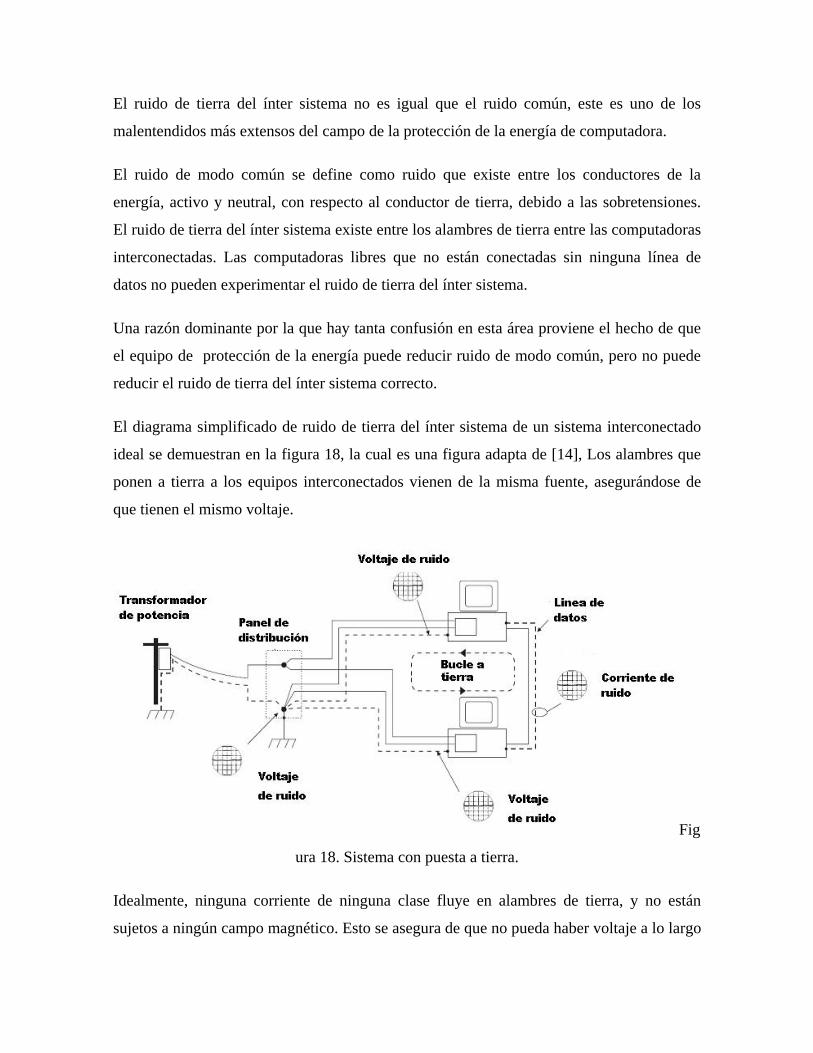
El diagrama simplificado de ruido de tierra del ínter sistema de un sistema interconectado
ideal se demuestran en la figura 18, la cual es una figura adapta de [14], Los alambres que
ponen a tierra a los equipos interconectados vienen de la misma fuente, asegurándose de
que tienen el mismo voltaje.
Fig
ura 18. Sistema con puesta a tierra.
Idealmente, ninguna corriente de ninguna clase fluye en alambres de tierra, y no están
sujetos a ningún campo magnético. Esto se asegura de que no pueda haber voltaje a lo largo
de los alambres de tierra. El resultado es que todos los puntos a lo largo de todos los
alambres de tierra están en el mismo voltaje y que no hay ruido de tierra del ínter sistema
entre los dispositivos unidos en los varios puntos a lo largo del sistema que pone a tierra.
Los osciloscopios en la figura no demuestran ningún ruido actual. Desafortunadamente, los
efectos significativos previenen la realización del panorama ideal precedente. En algunos
casos, la desviación del resultado ideal de la poder en la corrupción de los datos e incluso
daños del hardware.
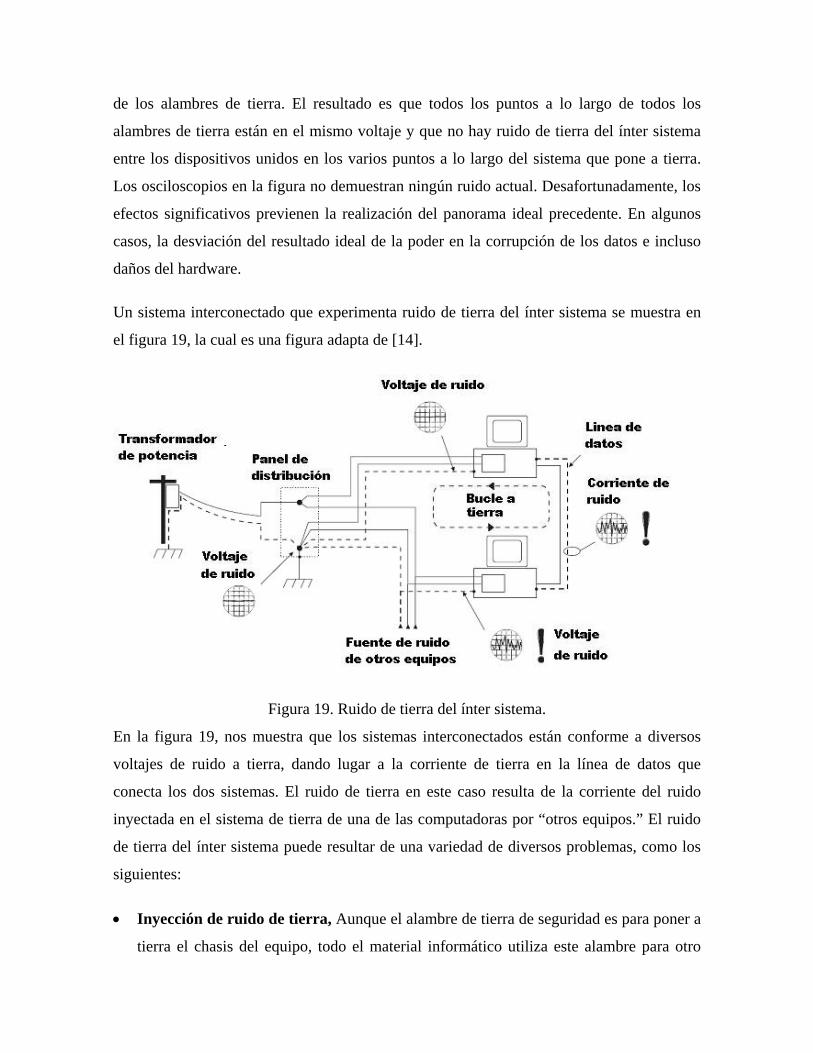
Un sistema interconectado que experimenta ruido de tierra del ínter sistema se muestra en
el figura 19, la cual es una figura adapta de [14].
Figura 19. Ruido de tierra del ínter sistema.
En la figura 19, nos muestra que los sistemas interconectados están conforme a diversos
voltajes de ruido a tierra, dando lugar a la corriente de tierra en la línea de datos que
conecta los dos sistemas. El ruido de tierra en este caso resulta de la corriente del ruido
inyectada en el sistema de tierra de una de las computadoras por “otros equipos.” El ruido
de tierra del ínter sistema puede resultar de una variedad de diversos problemas, como los
siguientes:
• Inyección de ruido de tierra, Aunque el alambre de tierra de seguridad es para poner a
tierra el chasis del equipo, todo el material informático utiliza este alambre para otro
propósito: para proporcionar un punto de referencia para filtrar hacia fuera las
emisiones indeseadas de interferencia de la radiofrecuencia de los equipos informáticos.
El ruido eléctrico de modo común y normal en la línea de energía es inyectado en la
línea de tierra por el filtro presente en la fuente de alimentación de cada computadora y
Workstation. Los supresores incorrectamente diseñados pueden contribuir a este
problema. EFECTO: Esta corriente inyectada de ruido da lugar a un voltaje del ruido
entre las referencias comunes del equipo interconectado. Porque los voltajes del ruido
llegan a ser generalmente más grandes cuando la distancia entre el equipo aumenta, las
transmisiones de datos pueden comprometerse en algunas situaciones.
• Fallas de tierra, Si los dispositivos interconectados están en diversos circuitos
eléctricos en el edificio y uno de estos circuitos es compartido por otro equipo, que
tiene una falta de aislamiento, después de las conmutación del interruptor, una corriente
de avería muy grande será inyectada en el alambre de tierra de seguridad. Esto dará
lugar a una oleada momentánea del voltaje en el material informático que es proveído
por el interruptor. El tamaño de esta oleada de voltaje puede ser de algunos voltios
sobre los picos del voltaje de la energía (120VAC o 230VAC), dependiendo de la
calidad del sistema que pone a tierra. EFECTO: Esto dará lugar a una diferencia del
voltaje entre los puntos de referencia comunes del equipo interconectado que puede
exceder fácilmente el grado del voltaje de la seguridad de la señal de los datos. La
destrucción de los conductores de la entrada-salida y de las placas base de la CPU.
• Corrientes de tierra, Éste es el problema identificado más común. Si los equipos
interconectados son provistos por diversos paneles eléctricos (cajas del interruptor) en
el mismo o diversos edificios, después muchos problemas pueden causar que el voltaje
de tierra medido en los dispositivos interconectados sean de diferentes valores.
Dependiendo de códigos eléctricos locales o nacionales, muchos cableados diversos de
los sistemas son separados entre los sub-paneles. La mayor parte de estos sistemas del
cableado de los paneles no garantizan que los voltajes de tierra provistos por los sub-
paneles sean iguales y es por ello que se crean una diferencia de potencial la cual da
origen a una corriente.
Con la descripción de los ruidos descritos, estos se suman o acoplan al sistema de medición
y generan malas mediciones no precisas y sin exactitud.
En los siguientes párrafos se va a modelar el ruido como el total de los ruidos que pudieron
haber afectado al sistema de medición.
CAPITULO 2. ANALISIS DEL RUIDO
En esta parte, se va a tratar sobre el modelamiento matemático del ruido total, los ruidos
que se describieron en la parte anterior e influyente en la señal acondicionada del sensor de
temperatura.
Es necesario saber que una señal siempre es afectada por ruido más o menos importante.
Esas fluctuaciones pueden ser diversas y son llamadas ruido eléctrico o simplemente ruido.
Algunas fluctuaciones son invisibles a los osciloscopios por el ancho de banda predefinido
en el momento de la visualización en el osciloscopio.
Una causa externa es producida cuando el ruido es afectado ya en la entrada de la señal de
un amplificador, la cual aumenta también el ruido en su salida, por ejemplo una radio capta
no solo las frecuencia de emisión de una estación radial sino también de los ruidos
industriales, el ruido cósmico y todas las otras emisiones de ondas electrónicas.
2.1. Análisis del ruido por medio de Procesos Estocásticos
La probabilidad y la estadística se utilizan en procesamiento digital de señales para
clasificar y medir las características inusuales las señales y los procesos. Por ejemplo, un
uso primario de PDS (procesamiento digital de señales) es reducir la interferencia, y otros
componentes indeseables en datos adquiridos. Estas interferencias pueden dar a lugar a las
imperfecciones en el sistema de adquisición de datos.
En los próximos párrafos se va describir el modelamiento con procesos randomicos con su
respectiva parte de estadística para el modelamiento del ruido.
Para poder avanzar con el trabajo de investigación, tenemos que saber con qué clase de
ruido estamos trabajando, por ello tenemos que saber si la señal ruidosa tiene alguna
característica para poder describir una función matemática. En la figura 20 se muestra la
señal con ruido.
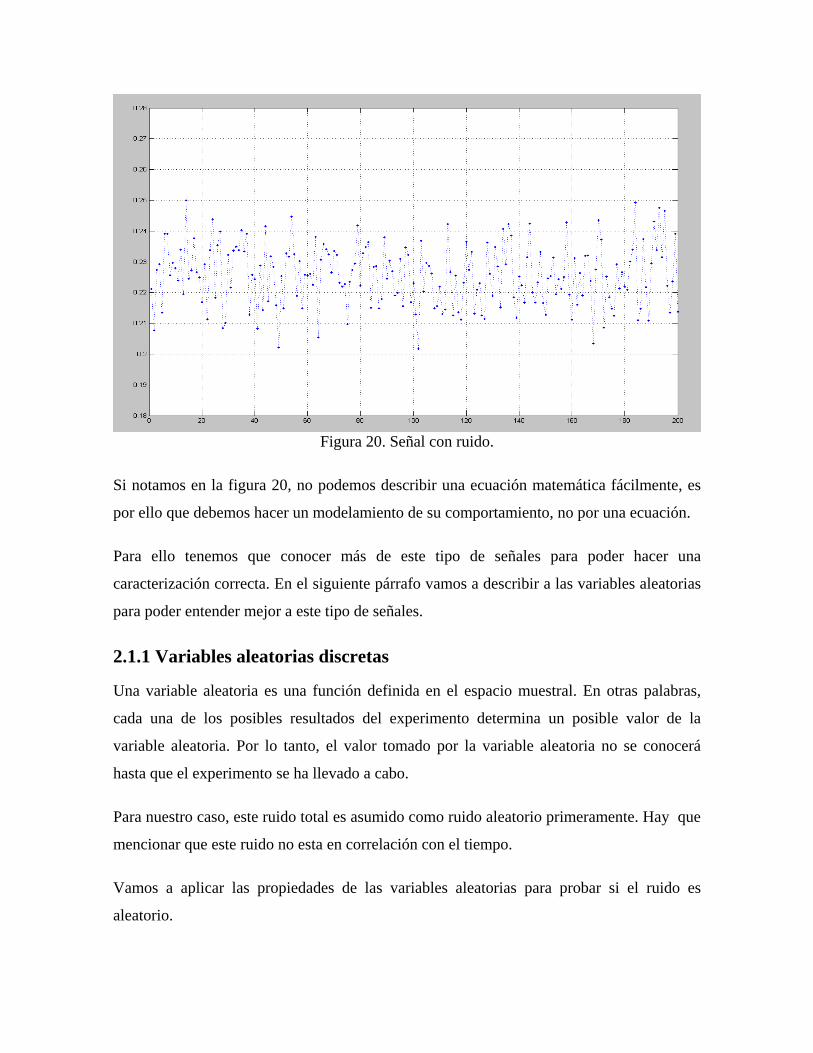
Figura 20. Señal con ruido.
Si notamos en la figura 20, no podemos describir una ecuación matemática fácilmente, es
por ello que debemos hacer un modelamiento de su comportamiento, no por una ecuación.
Para ello tenemos que conocer más de este tipo de señales para poder hacer una
caracterización correcta. En el siguiente párrafo vamos a describir a las variables aleatorias
para poder entender mejor a este tipo de señales.
2.1.1 Variables aleatorias discretas
Una variable aleatoria es una función definida en el espacio muestral. En otras palabras,
cada una de los posibles resultados del experimento determina un posible valor de la
variable aleatoria. Por lo tanto, el valor tomado por la variable aleatoria no se conocerá
hasta que el experimento se ha llevado a cabo.
Para nuestro caso, este ruido total es asumido como ruido aleatorio primeramente. Hay que
mencionar que este ruido no esta en correlación con el tiempo.
Vamos a aplicar las propiedades de las variables aleatorias para probar si el ruido es
aleatorio.
Las propiedades de una variable aleatoria son las siguientes:
• Debe ser una función.
• Si X es una variable aleatoria y x un número, entonces }{ xX ≤ es un evento, y la
probabilidad de este evento }{ xXP ≤ , es la suma de las probabilidades de los
elementos correspondientes al intervalo }{ xX ≤ .
• 0}{ =−∞=XP y 0}{ =∞=XP
Para nuestro caso del ruido, veamos si cumple esas propiedades:
• La señal con ruido de la figura 20, es una función, pues a cada elemento solo le
corresponde un valor de su rango.
• Hay elementos que pueden estar comprendido dentro un rango }{ xX ≤ , por ejemplo: si
}23.0{ =x entonces podemos definir lo siguiente: }23.0{ ≤X , lo cual es verdadero y
nos muestra que existe una cantidad de números que están dentro del rango de esta
condición.
• Para afirmar esta otra opción, 0}{ =−∞=XP y 0}{ =∞=XP debemos darnos cuenta
de los valores que esta tomando la variable aleatoria, y el conjunto que esta tomando la
señal del ruido es aproximadamente: 25.020.0 ≤≤ X , lo cual indica que la variable no
puede tomar los valores en el infinito.
Con esto ya probamos que este ruido es una variable aleatoria.
2.1.1.1 Características de las variables aleatorias discretas.
Sólo pueden tener un determinado número de resultados o de valores, y tienen una
probabilidad positiva; típicamente son valores enteros obtenidos por conteo. Por ejemplo, la
cantidad de resistencias con 10% de tolerancia.
2.1.2 Función de distribución de variables aleatorias discretas
Para entender más el comportamiento del ruido, vamos a explicar la función de
distribución de la variable aleatoria.

Es también llamado la función de probabilidad, y describe la probabilidad que la variable
X toma un valor menor o igual al número x .
}{)( xXPxFx ≤= …….. (2.1)
Las siguientes propiedades son características de las funciones de probabilidad:
• 1)(0 ≤≤ xFx
• 0)( =−∞xF
• 1)( =∞xF
• )2()( 1 xFxF xx ≤ si 21 xx ≤ .
La función de probabilidad es también llamada distribución de probabilidad, y es una lista
de probabilidades asociadas a sus posibles valores.
También se puede escribir de la siguiente manera:
∑=
−=N
iiix xxuxPxF
1)()()( ………(2.2)
En donde (.)u es la función de paso unitario.
2.1.3 El teorema del límite central.
La base matemática del análisis del ruido total que afecta a la señal se describe con el
teorema del límite central, para poder comprender y poder caracterizar el ruido total.
En su forma más simple, el teorema del límite central establece que una suma de números
aleatorios pasan a ser una distribución normal o gaussiana a la medida que más y más
números aleatorios son añadidos. El teorema del Límite central no requiere que los números
aleatorios sean de alguna distribución particular, o incluso que los números aleatorios sean
de la misma distribución.
El teorema del límite central proporciona la razón por la cual las señales distribuidas
normalmente son vistas ampliamente en la naturaleza.
Definiendo:
Sean x1, x2,........, xn, n variables aleatorias independientes idénticamente distribuidas con
media µ y varianza 2σ ambas finitas. La suma de esas variables Sn = x1+x2+ ...+ xn es
una variable aleatoria con media nµ y varianza n 2σ , entonces
2
n
n
σ
µ−= S nZ ……………………(2.3)
Se distribuye como una distribución normal , en otras palabras, el teorema expresa que
cuando n crece sin límite, la variable z tiende a distribuirse normalmente. Si las variables
no son idénticamente distribuidas, se podría demostrar igualmente que:
-
2
i
i
∑∑∑
=σµxiZ ……………………(2.4)
Se distribuye como una distribución normal, es decir que la suma de variables
independientes tiende a ser una distribución una normal que esta formada la media con una
suma de medias y una varianza con suma de varianzas.
Para nuestro caso podemos aproximarlo de esta manera:
XZ ≅ ………………(2.5)
Con ello analizamos de una manera general el ruido.
2.1.4 La media y desviación estándar de la señal con ruido.
En esta parte, vamos a describir al ruido con sus respectivos valores estadísticos, primero
vamos a describir la media y después la desviación estándar del ruido total.

2.1.4.1 La media.
Es el valor estadístico que se obtiene de añadir todos las muestras juntas de la señal
aleatoria, y dividir por N (el numero de muestras). Se escribe de la siguiente forma:
.1 1∑ −
==
N
oi ixN
u …….. (2.6)
En otras palabras, es la suma de los valores o muestras de la señal, x , con el
índice i de 0 a N - 1. Luego terminar el cálculo dividiendo la suma por N. Este es
Idéntica a la ecuación:
( )1210 ...1−++++= Nxxxx
Nu . …… (2.7)
Si la señal es una simple forma de onda repetitivas, como una condición seno o de
onda cuadrada, sus excursiones pueden ser descritos por el valor pico a pico de
amplitud.
2.1.4.2 Desviación estándar.
Lamentablemente, la mayoría de las señales adquiridas no tienen bien definido el valor pico
a pico, pero tienen un carácter aleatorio, como las señales en la figura 21, la cual es
adaptada de [7]. Para este tipo de señales se utiliza la desviación estándar, denotado por σ .
La desviación estándar es una medida de hasta qué punto la señal oscila de la media.
Como punto de partida, la expresión, uxi − , describe hasta qué punto la muestra i se
diferencia de la media. Tomamos el valor absoluto de cada
desviación.
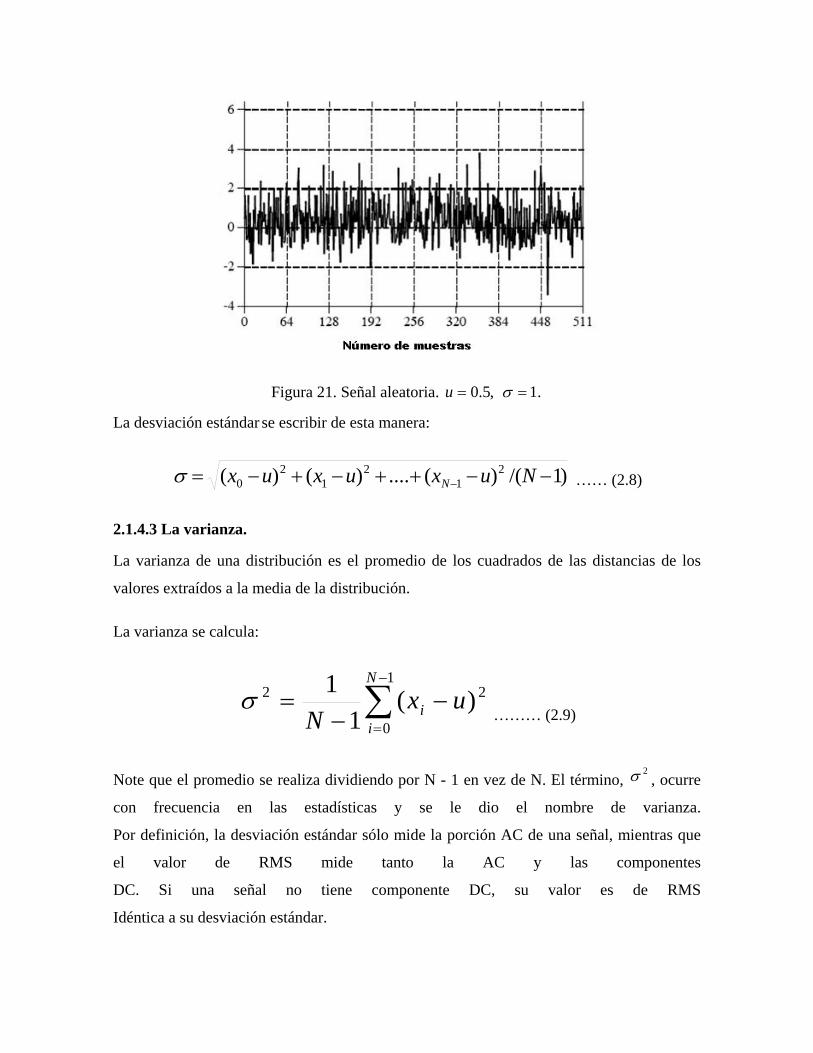
Figura 21. Señal aleatoria. .1, 5.0 == σu
La desviación estándar se escribir de esta manera:
)1/()(....)()( 21
21
20 −−++−+−= − Nuxuxux Nσ …… (2.8)
2.1.4.3 La varianza.
La varianza de una distribución es el promedio de los cuadrados de las distancias de los
valores extraídos a la media de la distribución.
La varianza se calcula:
∑−
=
−−
=1
0
22 )(1
1 N
ii ux
Nσ
……… (2.9)
Note que el promedio se realiza dividiendo por N - 1 en vez de N. El término, 2σ , ocurre
con frecuencia en las estadísticas y se le dio el nombre de varianza.
Por definición, la desviación estándar sólo mide la porción AC de una señal, mientras que
el valor de RMS mide tanto la AC y las componentes
DC. Si una señal no tiene componente DC, su valor es de RMS
Idéntica a su desviación estándar.

Para muchos casos, colocar la media y la varianza puede ocupar mucho espacio y memoria
en el hardware, la ecuación que nos ayuda a reducir hardware es:
⎥⎦
⎤⎢⎣
⎡−
−= ∑∑
−
=
−
=
21
0
1
0
22 )(11
1 N
ii
N
ii x
Nx
Nσ
……(2.10)
Es conveniente calcular la media y desviación estándar cuando hay nuevas muestras que se
adquieren
2.1.5 Caracterizando la señal.
Para nuestra señal los valores calculados son los siguientes, utilizando 11000 muestras de la
señal.
El cálculo de la media de esta señal por medio de la ecuación 2.6 es:
0.2261.11000
1 111000== ∑ −
=oi ixu
0.2261.=u
El cálculo de la varianza de esta señal por medio de la ecuación 2.9 es:
004.-1.2130e)(111000
1 111000
0
22 =−−
= ∑−
=ii uxσ
004.-1.2130e2 =σ
El cálculo de la desviación estándar por medio de la ecuación 2.8 es:
)111000/()(....)()( 21
21
20 −−++−+−= − uxuxux Nσ
0.0110.=σ
2.1.6 Métodos de análisis de las características del ruido.
Para poder entender mejor el ruido podemos analizarlo y caracterizarlo con sus métodos
estadísticos, que son la función de la densidad de la probabilidad del ruido, función de la
densidad de masa, el histograma y la función de autocorrelación.
2.1.6.1 La función de la densidad de la probabilidad (PDF)
Se denota como )(xf x , y es definido por la derivada de la función de distribución:
dxxdFxf x
x)()( = ……. (2.11)
Para el caso de las variables aleatorias discretas, su derivada es la función del impulso
unitario )(xδ , para describir las derivadas de las funciones que tienen la función de paso
unitario.
Algunas propiedades También:
• )(0 xf x≤ .
• 1)( =∫∞
∞−
dxxf x y para el caso discreto en una intervalo [a, b]:
1)( =∑b
ax xf .
• Y la probabilidad en un intervalo [a, b] es definido como:
∫=b
axx dxxfbaP )(],[ .
También llamada la función de distribución de la probabilidad, es a las señales continuas
como lo es la función de masa de la probabilidad a las señales discretas. Por ejemplo,
imagine una señal análoga al pasar a través de un convertidor de analógico a digital, dando
por resultado la señal convertida a digital de la figura 22. Para la simplicidad, asumiremos
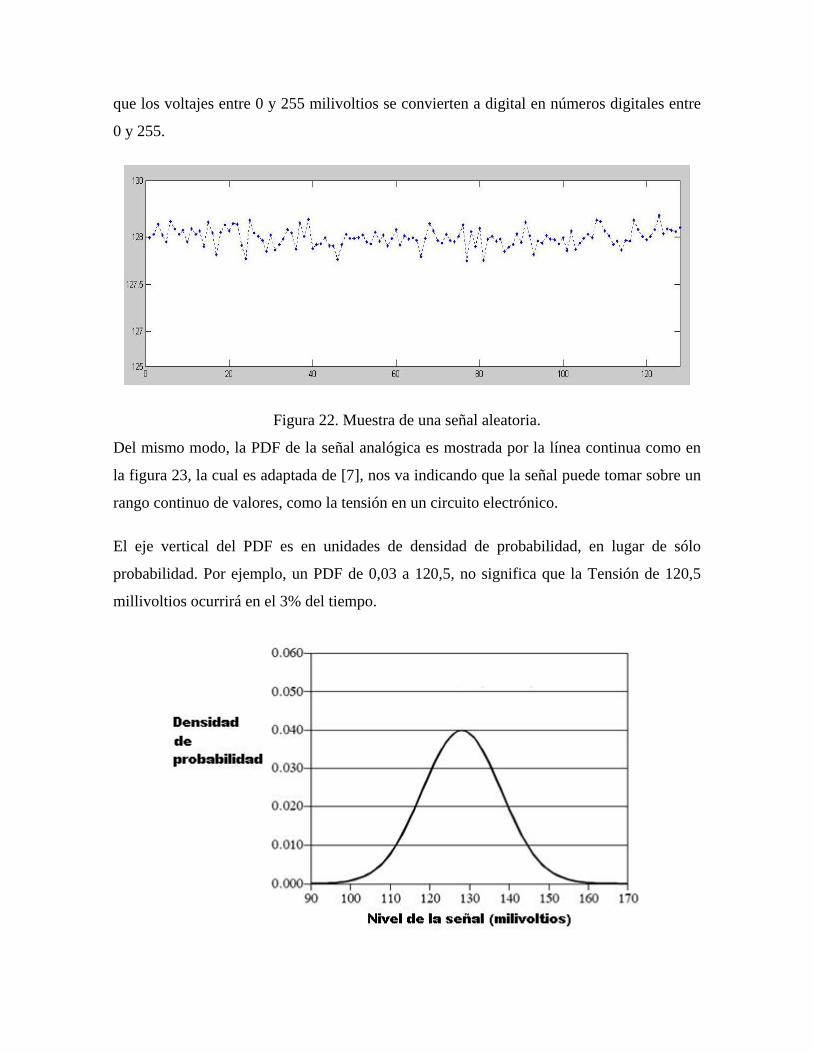
que los voltajes entre 0 y 255 milivoltios se convierten a digital en números digitales entre
0 y 255.
Figura 22. Muestra de una señal aleatoria.
Del mismo modo, la PDF de la señal analógica es mostrada por la línea continua como en
la figura 23, la cual es adaptada de [7], nos va indicando que la señal puede tomar sobre un
rango continuo de valores, como la tensión en un circuito electrónico.
El eje vertical del PDF es en unidades de densidad de probabilidad, en lugar de sólo
probabilidad. Por ejemplo, un PDF de 0,03 a 120,5, no significa que la Tensión de 120,5
millivoltios ocurrirá en el 3% del tiempo.

Figura 23. PDF de una señal aleatoria.
Para calcular una probabilidad, la densidad de probabilidad se multiplica por una serie de
Valores. Por ejemplo, la probabilidad de que la señal, en un momento determinado, Estar
entre los valores de 120 y 121 es:
( ) 03.003.0121120 =×−
La probabilidad de que la señal será de entre 120,4 y 120,5 es:
( ) 003.003.04.1205.120 =×− . Si el PDF no es constante a lo largo del rango de interés, la
multiplicación se convierte en el integral del PDF sobre el rango. En Otras palabras, el área
bajo la PDF delimitada por los valores especificados. Desde de que siempre el valor de la
señal debe ser siempre un valor, el área total bajo del PDF, de la integral de ∞− al ∞+
siempre será 1. Esto es análogo a la suma de todos los valores del PMF van a ser igual a 1,
y la suma de los valores del histograma va a ser igual a N.
Para calcular las PDFs, solo basta expandir los niveles de voltaje o del eje y hacia otro
sistema de referencia, y representar la cantidad de incidencias que ocurren en un
determinado rango de valores, la cual nos ayuda para poder graficar el PDF, y para hallar
el otro eje de coordenadas colocar la densidad de probabilidad que está en función a las
coincidencias.
En la figura 24.a y 24.b, las cuales están adaptadas de [7], se muestran 2 ejemplos de cómo
se puede calcular las PDFs.
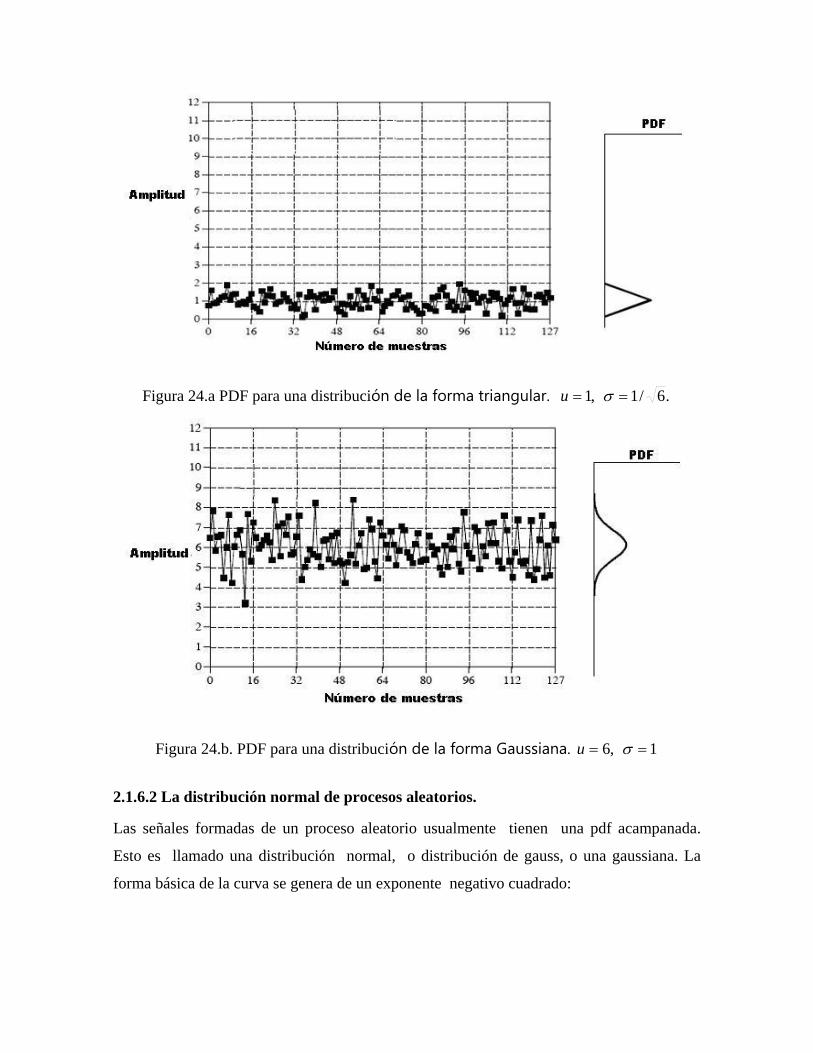
Figura 24.a PDF para una distribución de la forma triangular. .6/1, 1 == σu
Figura 24.b. PDF para una distribución de la forma Gaussiana. 1, 6 == σu
2.1.6.2 La distribución normal de procesos aleatorios.
Las señales formadas de un proceso aleatorio usualmente tienen una pdf acampanada.
Esto es llamado una distribución normal, o distribución de gauss, o una gaussiana. La
forma básica de la curva se genera de un exponente negativo cuadrado:
2
)( Xexy −= …….. (2.12)
Esta curva se puede convertir en una campana Gaussiana a agregando una media ajustable u , y una desviación estándar σ . Además, la ecuación se debe normalizar de modo que el
área total debajo de la curva sea igual a uno, un requisito de todas las funciones de
distribución de probabilidad.
Esto da lugar a la forma general de la distribución normal, a una de las más importantes
relaciones en la estadística y la probabilidad:
22 2/)(
21)( σ
σπuxexP −−=
…… (2.13)
En la figura 24.b muestra un ejemplo de curva gaussiana con una media y desviación
estándar. La media centra la curva sobre un valor particular, mientras que la desviación
estándar controla la anchura de la forma de la campana.
Una característica interesante de ser Gaussianas es que los extremos caen hacia cero muy
rápidamente, mucho más rápido que con otras funciones comunes tales como exponenciales
o 1/x.
2.1.6.3 Proceso Gaussiano.
La forma del histograma más estrecha se acerca a la forma de PDF cuando más muestras
son utilizadas. Del mismo modo, en el desarrollo de modelos de los sensores con limitados
datos, podemos obtener una distribución aproximada de ellos, no exactamente el PDF. Sin
embargo, esta medición visual es todavía útil, ya que muestra propiedades importantes de
los datos y es fácil de usar sin la complejidad de los cálculos.
En realidad, una exacta solución de este tipo de problema no existe porque, por un modelo
probabilístico, limitado de muestras de ensayo nunca podría cubrir todo el espacio de
probabilidad.
Nuestro objetivo de modelar un sistema de sensores es construir un modelo probabilístico a
través de variables aleatorias o procesos randomicos comúnmente utilizado.
El Ruido Gaussiano blanco aditivo (AWGN) es uno de los procesos más típicos aleatorios
en estos procesos de medición.
Sabiendo que hay técnicas relacionadas al AWGN que están bien desarrolladas, el cómputo
de procesamiento de estas señales sería más simplificado si los sensores de ruido de interés
sean AWGN o podría ser una aproximación como AWGN.
Por otra parte, si las características exhibidas por los datos son demasiado complejos para
ser modelada de manera fácil y el modelo de precisión no es de interés crucial, podemos
implementar la mayoría de los procesos randomicos o combinaciones de las mismas para
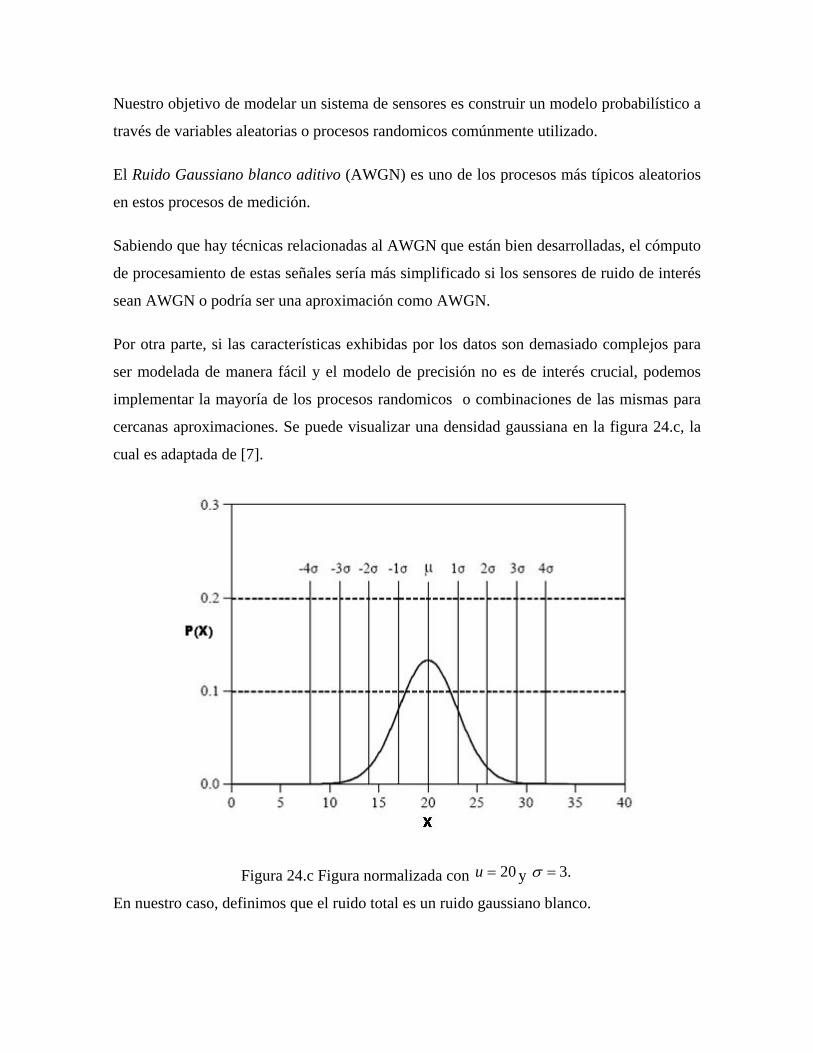
cercanas aproximaciones. Se puede visualizar una densidad gaussiana en la figura 24.c, la
cual es adaptada de [7].
Figura 24.c Figura normalizada con 20=u y .3=σ
En nuestro caso, definimos que el ruido total es un ruido gaussiano blanco.

Y la otra forma de caracterizar el ruido es por medio de la autocorrelación, en los siguientes
párrafos vamos a definir esta característica.
2.1.6.4 Autocorrelación.
Tanto en los análisis de los sistemas y de las señales, el concepto de autocorrelación
desempeña un papel importante, puesto que la función de autocorrelación de una señal
aleatoria describe la dependencia general de los valores de las muestras de un tiempo con
respecto a valores de muestras de otro tiempo.
Considere el proceso aleatorio )(tx , su función de autocorrelación es:
∫−
→∞+=
T
TTxx dttxtx
TR )()(
21lim)( ττ …….. (2.14)
Donde T es el período de muestreo.
)(τxxR , es siempre un valor real y una función con un valor máximo en 0.
Para una señal muestreada, la autocorrelación se define como sigue:
∑+−
=
−+=1
1
)1()(1)(mN
nXX mnxnx
NmR
…… (2.15)
PARA 1,...2,1 += Mm
2.1.6.5 Covarianza de una señal aleatoria
Cuando tomamos el valor esperado, o media, de un proceso aleatorio, medimos varias
características importantes de cómo se comporta el proceso en general. Sin embargo,
supongamos que tenemos varios procesos de medición aleatorios de un sistema. La
covarianza y la correlación son dos instrumentos importantes para encontrar estas
relaciones.

A continuación vamos a entrar en más detalles sobre lo que significan estas palabras y
cómo estas herramientas son útiles.
Cuando se trata de más de un proceso aleatorio, la covarianza nos da un valor que nos
muestra una idea de cuan similares son los procesos comparados.
Definición:
Una medida de hasta qué punto las desviaciones de dos o más variables o procesos se
parecen, relacionan o son se asemejan.
Para 2 procesos, X e Y, si no están estrechamente relacionados con la covarianza entonces
esta será pequeña, y si son similares entonces la covarianza será grande. Vamos a aclarar
esta declaración de
la descripción de lo que entendemos por "relacionados" y "similares".
Dos procesos están "estrechamente relacionadas" si sus distribuciones son casi iguales y
están en torno a la misma media, o muy ligeramente en ella.
Matemáticamente, la covarianza es escrita como xyσ y es definido como:
xyYX σ=),cov( ……………… (2.16)
( )( )[ ]YYXXEYX −−=),cov( ……. (2.17)
Esto puede ser reducido y reescrito de las siguientes 2 formas:
))(( yxxyxy −=σ …….. (2.18)
( )( )∫ ∫+∞
∞−
+∞
∞−
−−= dxdyyxfYYXXxy ),(σ …….. (2.19)
La propiedad para nuestro caso es la siguiente:

• Si X e Y son independientes y sin correlación o uno de ellos tiene un valor 0 de
promedio entonces:
.0=xyσ
• Covarianza de variables iguales:
)(),cov( XVarXX =
Ahora que hemos analizado el ruido, concluimos con los siguientes parámetros:
La media de esta señal es: u = 0.2261.
La varianza de esta señal es: 2σ = 1.2130e-004.
La desviación estándar es: σ = 0.0110.
El ruido total analizado, a partir de ahora se va a caracterizar por ser ruido blanco
gaussiano, por tener una distribución normal y ser aleatorio.
2.1.7 Procesos de la señal aleatoria.
Estadística es la ciencia de la interpretación de datos numéricos, como los de las señales
adquiridas. En comparación, la probabilidad se usa en PDS para entender el Proceso que
generan las señales.
Por ejemplo, la creación de unas muestras de 1000 puntos de una señal tirando una moneda
1000 veces. Si la moneda cae en cara, la muestra correspondiente es hecha al valor de 1. En
el caso de sellos se fija en cero. El proceso que ha creado esta señal tiene una media de 0,5
exactamente, determinado por la probabilidad relativa de los posibles resultados: 50% de
caras, el 50% de sellos. Sin embargo, es poco probable que el la señal de 1000 puntos tenga
una media de 0,5 exactamente. Pues en la conformación de los unos y ceros habrá una leve
diferencia cada vez que se genera la señal. Las probabilidades del proceso son constantes,
pero la estadística de la señal adquirida cambia cada vez que se repite el experimento.

Esta irregularidad al azar encontrada en datos reales es llamada por los nombres tales como:
variación estadística, fluctuación estadística, y ruido estadístico.
En las Figuras 25.a y 25.b, las cuales son adaptadas de [7], nos muestran las variaciones en
estas señales son un resultado del proceso aleatorio de las estadísticas, pues es fácil darnos
cuenta que estos cambios no son demasiado grandes por el azar, y debe ser relacionado con
el proceso. Los procesos que cambian sus características de este modo se llaman no
estacionarios. En la figura 25.a, el cambio está en la desviación estándar y la media. En la
figura 25.b, la desviación estándar sigue siendo un valor constante, mientras que la media
cambia de un valor de cero a dos
Figura 25.a Cambio de la media y la desviación estándar.
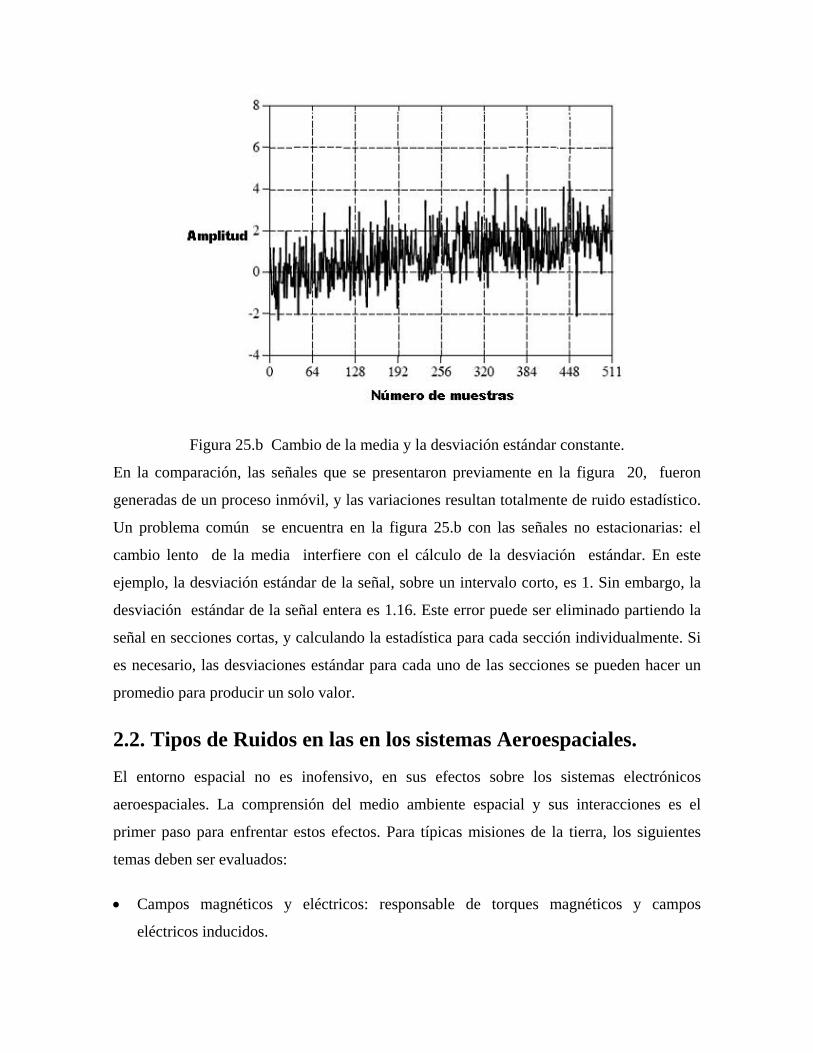
Figura 25.b Cambio de la media y la desviación estándar constante.
En la comparación, las señales que se presentaron previamente en la figura 20, fueron
generadas de un proceso inmóvil, y las variaciones resultan totalmente de ruido estadístico.
Un problema común se encuentra en la figura 25.b con las señales no estacionarias: el
cambio lento de la media interfiere con el cálculo de la desviación estándar. En este
ejemplo, la desviación estándar de la señal, sobre un intervalo corto, es 1. Sin embargo, la
desviación estándar de la señal entera es 1.16. Este error puede ser eliminado partiendo la
señal en secciones cortas, y calculando la estadística para cada sección individualmente. Si
es necesario, las desviaciones estándar para cada uno de las secciones se pueden hacer un
promedio para producir un solo valor.
2.2. Tipos de Ruidos en las en los sistemas Aeroespaciales.
El entorno espacial no es inofensivo, en sus efectos sobre los sistemas electrónicos
aeroespaciales. La comprensión del medio ambiente espacial y sus interacciones es el
primer paso para enfrentar estos efectos. Para típicas misiones de la tierra, los siguientes
temas deben ser evaluados:
• Campos magnéticos y eléctricos: responsable de torques magnéticos y campos
eléctricos inducidos.
• Radiación UV: responsable de fotoelectrones y los cambios a largo plazo en las
propiedades de los materiales;
• Radiación IR: conductor de los efectos térmicos.
• Cinturones de Radiación;
• Entorno de partículas (los desechos y micro meteoritos).
La principal preocupación de las interacciones es entonces:
• Los efectos de la radiación acumulativa.
• Un eventos UPSET.
• Latch up.
• Cargas de Superficie.
• Cargas al Interior.
• Pérdida de energía.
• Superficie de degradación y erosión.
• Los desechos espaciales e impactos de los micrometeoritos.
• Efectos térmicos, como la disipación de energía que aumenta.
• El cambio de los voltajes offset en los OPAMS.
CAPITULO 3. SENSOR DE TEMPERATURA
Este sensor deberá detectar los cambios de temperatura como función de la altitud, y
fricción con el aire. Al igual que en los acelerómetros, poco se dispone de datos de la
temperatura que la carga útil que experimentara. Esta información será ideal para los
futuros vuelos, a fin de diseñar futuras cargas útiles que pueden funcionar perfectamente en
las temperaturas de vuelo.
3.1 Análisis del Sensor.
En el año 1956, con 2 lanzamientos de cohetes de la NACA, nombre antecesor de la
NASA, se hizo en mediciones de temperatura en la superficie de la nariz del cohete, en la
cual se obtuvieron un pico de temperatura de 1200 F (648.88 C) a una altura de 18.288 Km.
Como el cohete viaja rápidamente, hay consideraciones que se deben tener en cuenta, por
ejemplo, a altas velocidades, el calentamiento aerodinámico puede derretir la estructura del
cohete. Es debido a que se incrementa la fricción experimentada por el cohete a altas
velocidades.
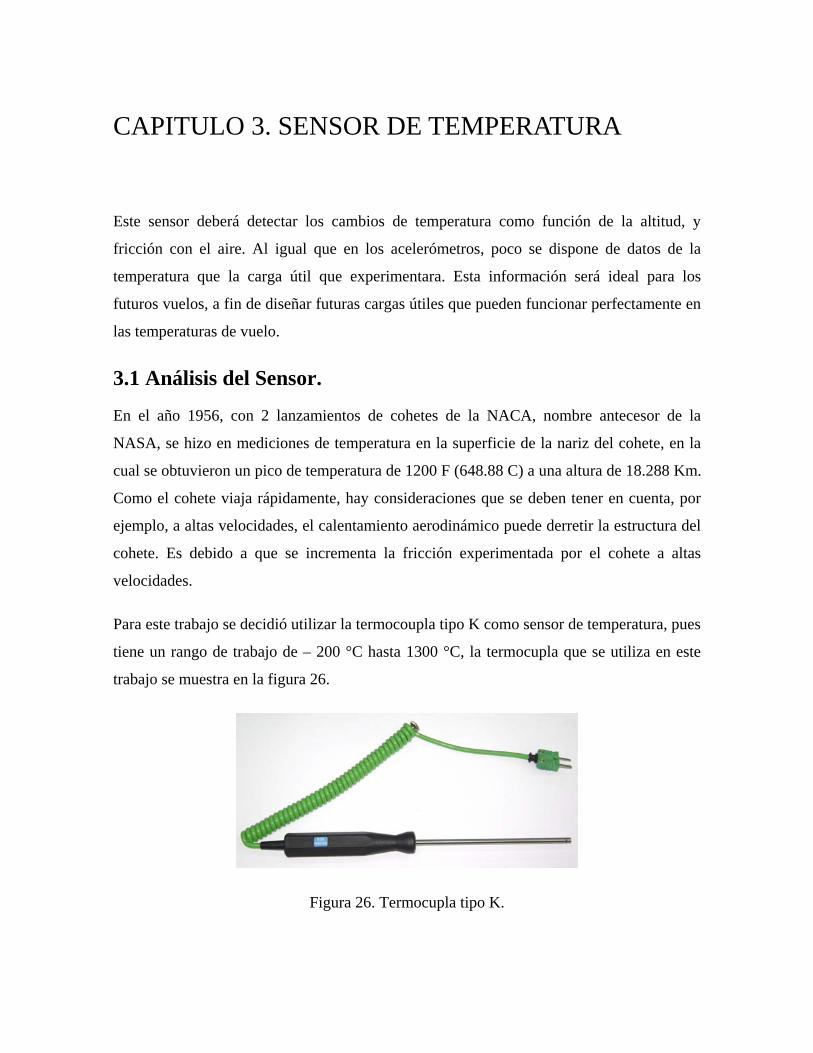
Para este trabajo se decidió utilizar la termocoupla tipo K como sensor de temperatura, pues
tiene un rango de trabajo de – 200 °C hasta 1300 °C, la termocupla que se utiliza en este
trabajo se muestra en la figura 26.
Figura 26. Termocupla tipo K.
3.2 Caracterización del sensor.
El sensor de temperatura debe operar en los rangos de trabajo que se van a requerir, esto
conlleva a tener un óptimo circuito de acondicionamiento de señal para la termocupla de
de chromel – Ahlumel tipo k, por lo que se debe pensar en resolver problemas de
acondicionamiento para los buenos resultados de las mediciones.
Para poder realizar la caracterización el sensor de temperatura, es necesario hacer una breve
descripción del circuito de acondicionamiento de señal, el AD595.
3.2.1 Funcionamiento del Circuito
3.2.1.1 Circuito Integrado AD595
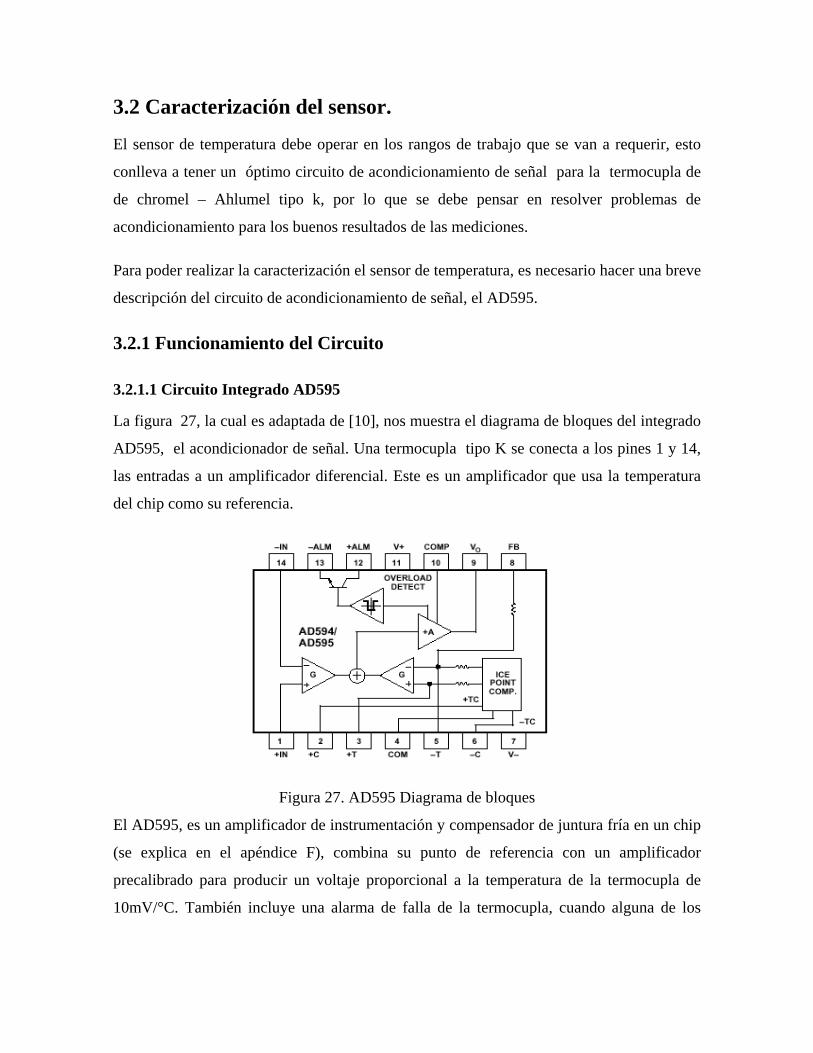
La figura 27, la cual es adaptada de [10], nos muestra el diagrama de bloques del integrado
AD595, el acondicionador de señal. Una termocupla tipo K se conecta a los pines 1 y 14,
las entradas a un amplificador diferencial. Este es un amplificador que usa la temperatura
del chip como su referencia.
Figura 27. AD595 Diagrama de bloques
El AD595, es un amplificador de instrumentación y compensador de juntura fría en un chip
(se explica en el apéndice F), combina su punto de referencia con un amplificador
precalibrado para producir un voltaje proporcional a la temperatura de la termocupla de
10mV/°C. También incluye una alarma de falla de la termocupla, cuando alguna de los
conectores de la termocupla se abre, tiene una salida de alarma, que se puede manejar con
voltaje TTL.
En operación normal, la salida del amplificador principal es conectado a la red de
retroalimentación, Las señales de la termocupla están aplicadas a la etapa de entrada del
AD595, de un amplificador de ganancia G, y después amplificados por el amplificador
principal de ganancia A. La salida del amplificador principal es retroalimentado a una
segunda etapa diferencial en la conexión invertida del amplificador. La señal de
retroalimentación es amplificada por esta etapa y es también aplicada a la entrada del
amplificador principal a través de un circuito de suma. Esta inversión hace que el
amplificador cause la retroalimentación para reducir la señal de diferencia a un pequeño
valor.
Los amplificadores diferenciales son hechos para acoplar y que tengan las mismas
ganancias G. Como resultado, la señal de retroalimentación que deben ser aplicados al
amplificador diferencial de la derecha va a acoplar precisamente a la entrada de la señal de
la termocupla cuando la señal de la diferencia es reducida a cero.
El valor de la temperatura que obtiene el AD595 es proporcional a 10 mV/°C, para una
termocupla tipo k.
3.3 Posibles problemas de ruido al sensor.
• Para la caracterización del sensor de temperatura con este circuito se necesita de un
ambiente que mantenga una temperatura constante, la cual evite las corrientes de aire
que puedan alterar la temperatura.
• Se necesita que la punta sea lo mas sensible posible para respuestas mas rápidas. Para
esto se relacionan el área del la punta del sensor con el tiempo de respuesta. Es decir a
mayor área menor sensibilidad y a menor área mayor sensibilidad y por lo tanto mayor
velocidad de respuesta.
3.4 Diseño de la Interfase para el sensor de temperatura.
Para esta parte, se necesitaba conocer las conexiones y dimensiones del integrado, por lo
cual se recurrió a su datasheet, la cual nos muestra todo lo requerido para poder realizar el
circuito impreso para el circuito de acondicionamiento de señal y la termocupla.
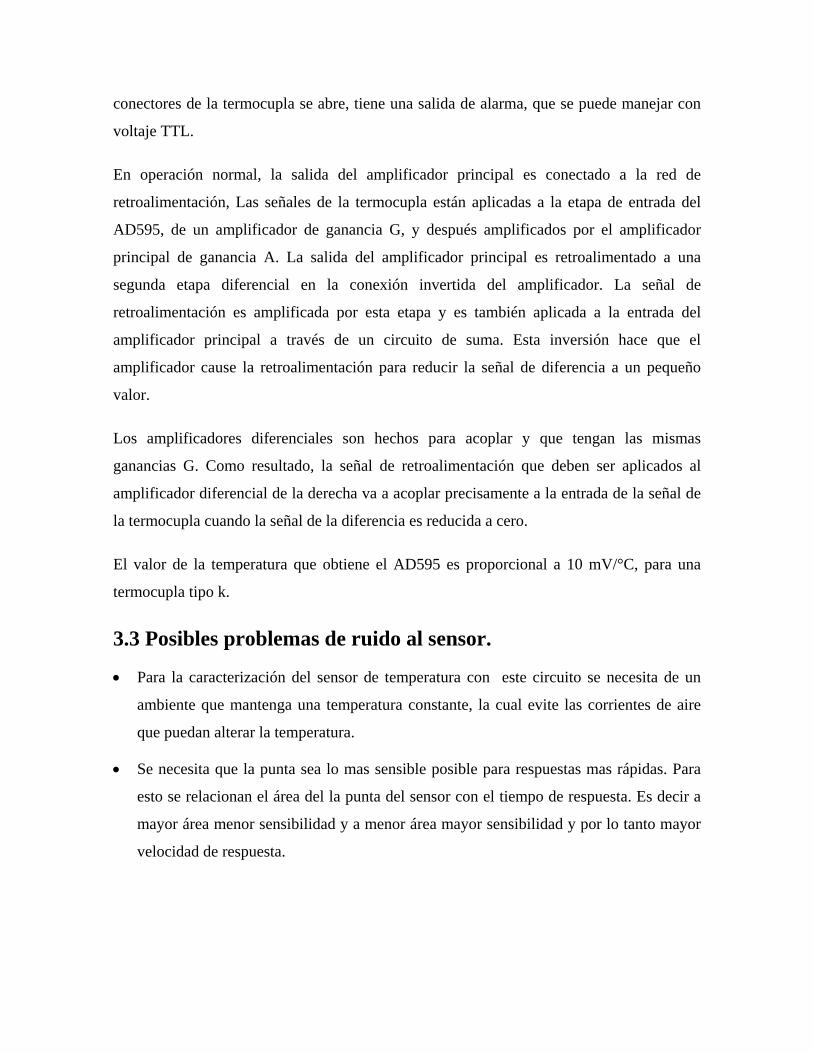
En la figura 28, la cual es adaptada de [10], se muestra una posibilidad de hacer el circuito
impreso, con una sola fuente de operación.
Figura 28. Conexión básica, con una sola fuente de operación.
Con el diagrama mostrado en la figura anterior, se hizo el circuito esquemático en el
programa ORCAD 9.1, con el ORCAD Capture, para el circuito de acondicionamiento de
señal AD595 y del sensor de temperatura.
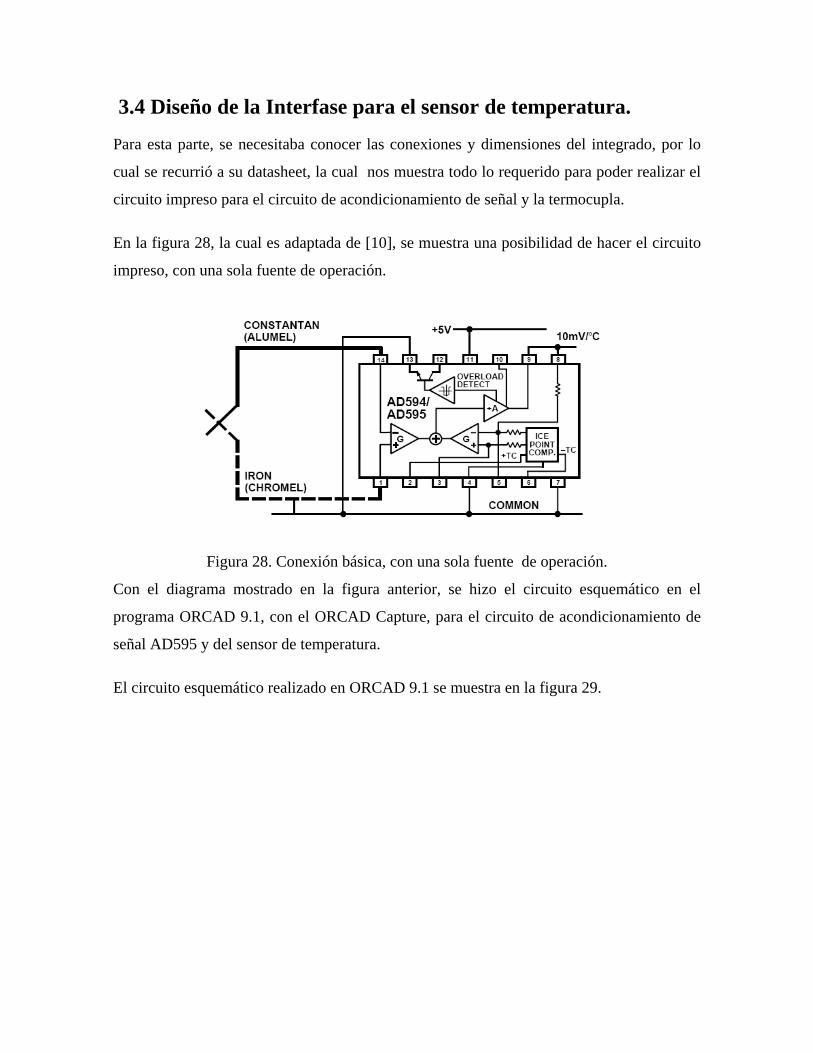
El circuito esquemático realizado en ORCAD 9.1 se muestra en la figura 29.
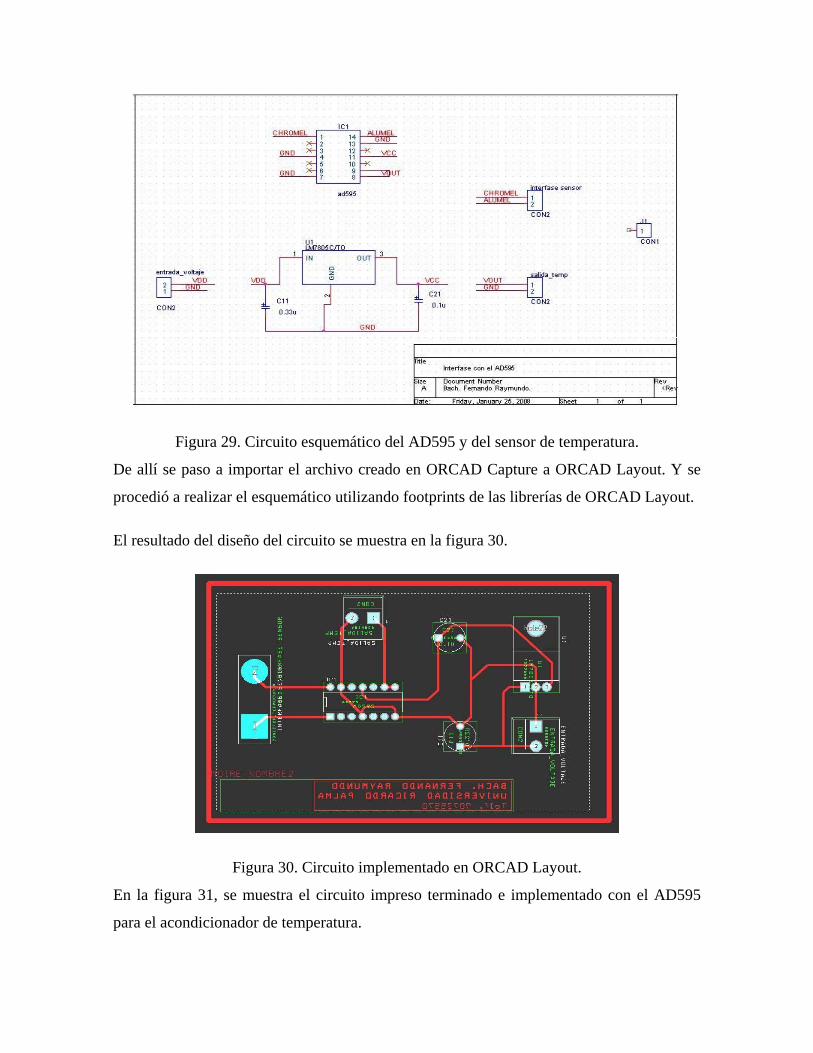
Figura 29. Circuito esquemático del AD595 y del sensor de temperatura.
De allí se paso a importar el archivo creado en ORCAD Capture a ORCAD Layout. Y se
procedió a realizar el esquemático utilizando footprints de las librerías de ORCAD Layout.
El resultado del diseño del circuito se muestra en la figura 30.
Figura 30. Circuito implementado en ORCAD Layout.
En la figura 31, se muestra el circuito impreso terminado e implementado con el AD595
para el acondicionador de temperatura.
Figura 31. Circuito impreso de acondicionamiento de señal para la termocupla tipo K.
3.5 Procedimiento de la caracterización del sensor de
temperatura.
En esta parte ya tenemos construido el circuito impreso del acondicionador de señal,
también se dispone de una termocupla tipo K y de un patrón de temperatura, en ese caso un
termómetro de mercurio, para realizar la caracterización. Todas estas herramientas son
necesarias para poder hacer la caracterización del sensor de temperatura.
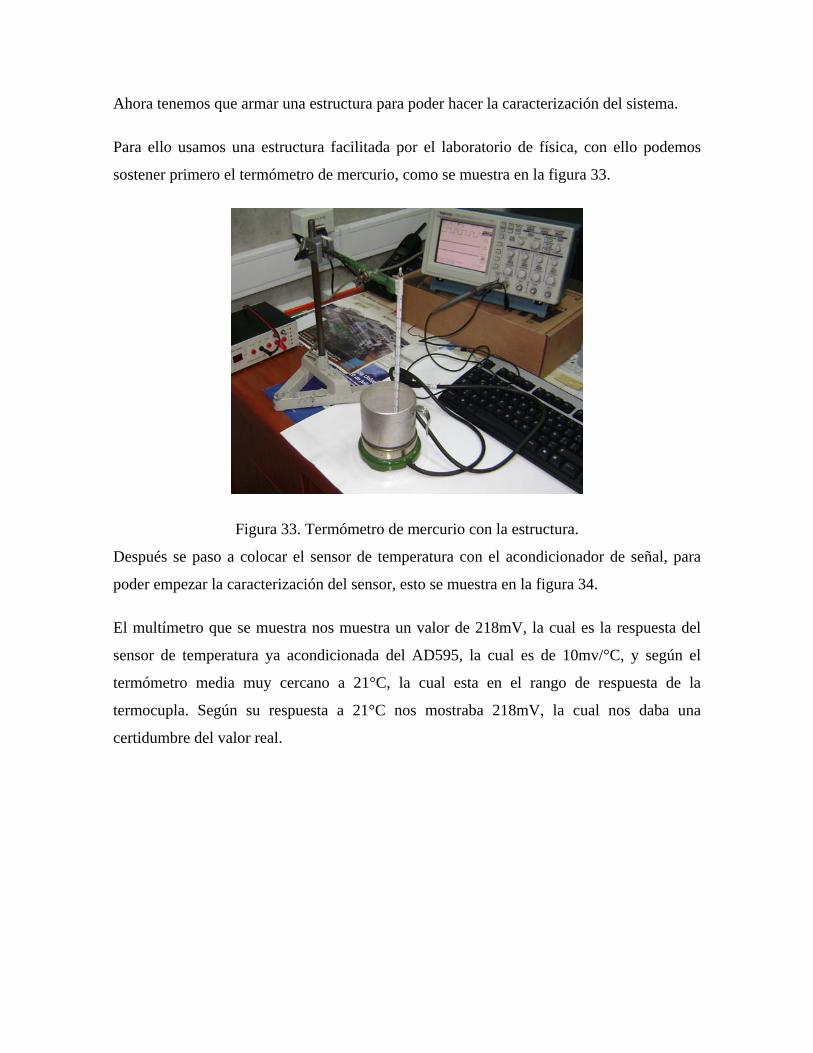
En la figura 32, se muestra el sensor de temperatura conectado a la tarjeta acondicionadora
para el sensor.
Figura 32. Circuito del acondicionador mas la termocupla.
Ahora tenemos que armar una estructura para poder hacer la caracterización del sistema.
Para ello usamos una estructura facilitada por el laboratorio de física, con ello podemos
sostener primero el termómetro de mercurio, como se muestra en la figura 33.
Figura 33. Termómetro de mercurio con la estructura.
Después se paso a colocar el sensor de temperatura con el acondicionador de señal, para
poder empezar la caracterización del sensor, esto se muestra en la figura 34.
El multímetro que se muestra nos muestra un valor de 218mV, la cual es la respuesta del
sensor de temperatura ya acondicionada del AD595, la cual es de 10mv/°C, y según el
termómetro media muy cercano a 21°C, la cual esta en el rango de respuesta de la
termocupla. Según su respuesta a 21°C nos mostraba 218mV, la cual nos daba una
certidumbre del valor real.
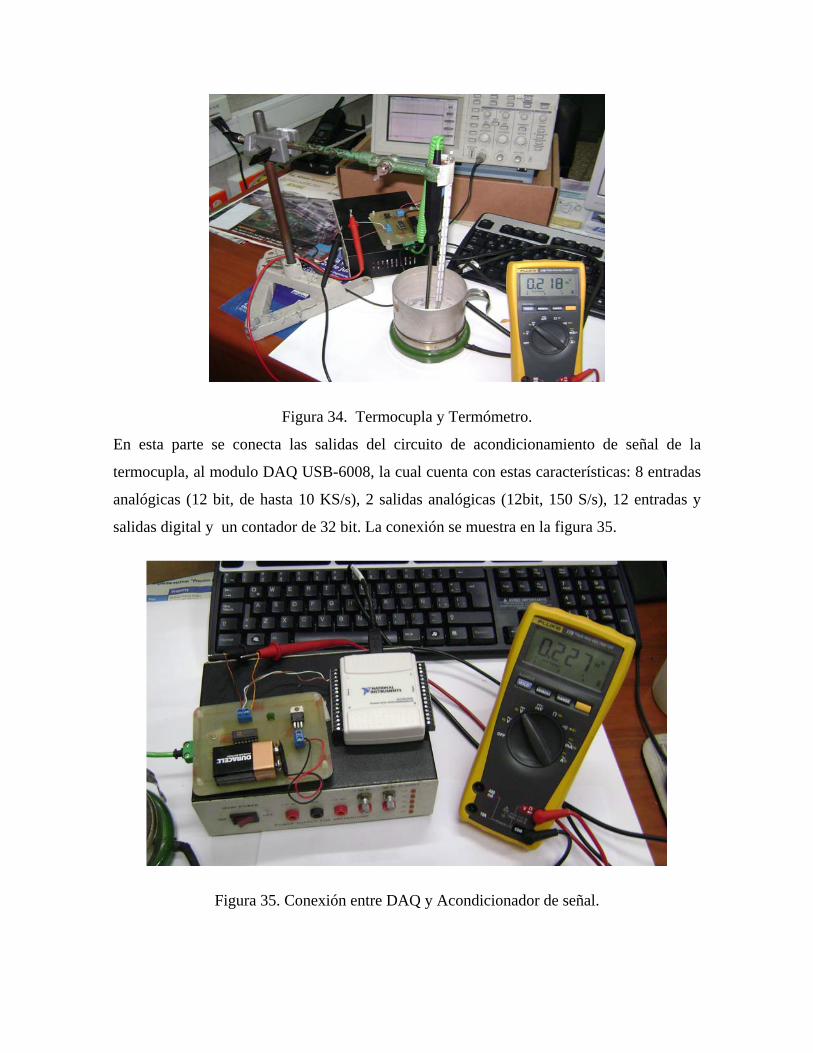
Figura 34. Termocupla y Termómetro.
En esta parte se conecta las salidas del circuito de acondicionamiento de señal de la
termocupla, al modulo DAQ USB-6008, la cual cuenta con estas características: 8 entradas
analógicas (12 bit, de hasta 10 KS/s), 2 salidas analógicas (12bit, 150 S/s), 12 entradas y
salidas digital y un contador de 32 bit. La conexión se muestra en la figura 35.
Figura 35. Conexión entre DAQ y Acondicionador de señal.
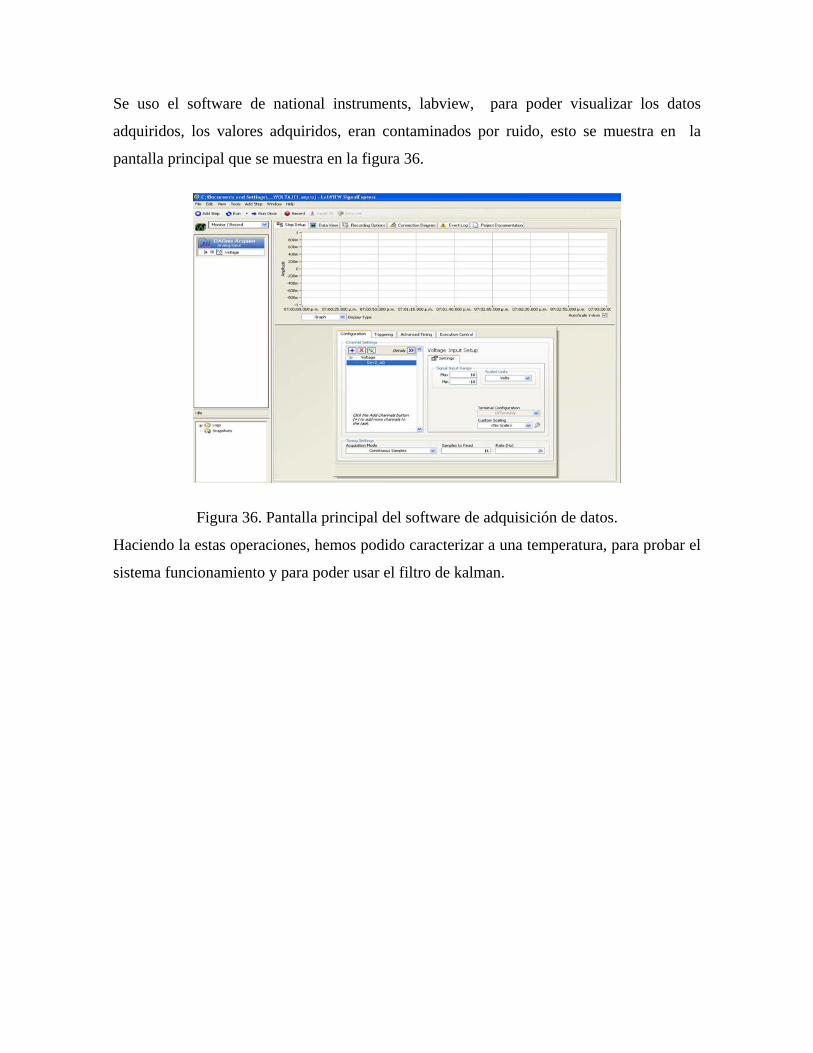
Se uso el software de national instruments, labview, para poder visualizar los datos
adquiridos, los valores adquiridos, eran contaminados por ruido, esto se muestra en la
pantalla principal que se muestra en la figura 36.
Figura 36. Pantalla principal del software de adquisición de datos.
Haciendo la estas operaciones, hemos podido caracterizar a una temperatura, para probar el
sistema funcionamiento y para poder usar el filtro de kalman.
CAPITULO 4. FILTRO DE KALMAN
Debido a las caracterizaciones que se realizaron para la carga útil, se vio como se infiltraba
el ruido en las mediciones, entonces como un medio de solución para poder estimar el valor
real del sensor de temperatura, se va a usar el estimador óptimo de kalman para poder
estimar la señal del sensor de temperatura de la señal con ruido.
4.1. Introducción y Características
Al momento de realizar un análisis o el diseño de un controlador, el ingeniero tiene a su
disposición conocimientos previos derivados de los SISTEMAS DETERMINISTICOS, y
de TEORIAS DE CONTROL. Con ello no bastaría para poder hacer un modelo del
sistema, por eso es necesario ver el problema de otra manera, a través de procesos
estocásticos.
Se van a mostrar las falencias de los sistemas deterministicos, por ejemplo, dado un sistema
físico, puede ser un avión, un proceso químico o la economía nacional, un ingeniero
primero desarrolla un modelo matemático que representa adecuadamente muchos aspectos
del comportamiento del sistema. A través de la física, con las leyes fundamentales, y el
testeo empírico, trata de establecer las interrelaciones entre variables de interés, entradas a
el sistema y salidas del sistema.
Con ese modelo matemático, y las herramientas provistas por el sistema y teorías de
control, el ingeniero es capaz de investigar la estructura del sistema y los modos de
respuesta, si es deseado, puede diseñar compensadores que alteren las características y
controladores que proveen apropiadas entradas para generar respuestas deseadas al sistema.
Para observar el comportamiento del sistema actual, los sensores son construidos para que
den señales de salidas de datos proporcionales a algunas variables de interés. Estas salidas
de señal y las señales de entradas conocidas al sistema son la única información que es
directamente discernible acerca del comportamiento del sistema. Más aún si un controlador
realimentado es diseñado, la salida del sensor es la única entrada al controlador.
A continuación se presentan los 3 casos en donde los sistemas deterministicos y las teorías
de control no proveen un significado suficiente de realización del diseño.
Primer caso, Ningún modelo matemático es perfecto, cualquier modelo representa, solo esas
características del interés para el propósito del ingeniero. El objetivo del modelo es de
representar el modo crítico o dominante de la respuesta del sistema, entonces muchos
efectos son a sabiendas dejados de modelar. De hecho, los modelos usados para generar
procesadores de datos online o controladores deben ser reducidos a solo a modelos básicos
en orden de generar un algoritmo computacional factible.
Incluso en los efectos los cuales son modelados son necesariamente aproximados por un
modelo matemático. Las leyes físicas Newtonianas, son aproximaciones adecuadas debido
a que nosotros no estamos acostumbrados a interactuar a la velocidad de la luz. Es a
menudo el caso que esas leyes proveen estructuras adecuadas, pero varios parámetros
dentro de la estructura que nos son determinados absolutamente. Además, hay muchas
fuentes de incertidumbre en cualquier modelo de un sistema.
Segundo caso, son los disturbios, puesto que los sistemas dinámicos son manejados no solo
por nuestras entradas de control, sino por disturbancias que no se pueden controlar o
modelar deterministicamente. Si un piloto trata de comandar una orientación angular en su
avión, la respuesta actual va a diferir de la expectación debido al golpe del viento, la
imprecisión de control del actuador de superficie y aun su inestabilidad para generar
exactamente la respuesta deseable de sus propios brazos y manos en la palanca de control.
Ultimo caso, los sensores de los modelos deterministicos no proveen datos perfectos y
completos acerca de un sistema. Primero, ellos generalmente no proveen toda la
información que quisiéramos saber, algunos pueden ser limitados y tener zonas muertas de
sensado.
En otras situaciones, un número de sensores diferentes dan señales funcionalmente
relacionadas, y se puede después ayudar a generar una mejor estimación de las variables de
interés basadas en particularmente en datos redundantes. Los sensores no proveen
exactamente lecturas de cantidades deseables, pero si introducen sus propias distorsiones y
dinamismos de sistemas. Más aún, esos componentes siempre se corrompen con el ruido.
Como se pudo analizar de los párrafos anteriores, es inadecuado asumir el conocimiento
perfecto de todas las cantidades necesarias para describir un completo sistema y asumir el
perfecto control sobre el sistema.
4.2 Desarrollo del filtro Kalman.
En los siguientes párrafos se va describir el estimador lineal óptimo de Kalman, llamado
también el filtro de kalman.
4.2.1 Filtro de Kalman.
El filtro de kalman es un algoritmo de procesamiento de datos recursivo óptimo. Para
entender esto, vamos a definir óptimo, dependiendo sobre el criterio escogido para evaluar
el funcionamiento del algoritmo.
Un aspecto de ser ÓPTIMO es que el filtro de kalman incorpora toda la información que se
le pueda ser proveer. Procesa todas las medidas disponibles, sin mirar su precisión, para
estimar el valor actual de las variables de interés, con el uso del conocimiento del sistema y
las dinámicas de los sensores, la descripción estadística de los ruidos del sistema, errores de
medida, los modelos dinámicos inciertos, y cualquier información disponible acerca de las
condiciones de las variables de interés. Por ejemplo, para determinar la velocidad de un
avión, se puede usar un radar doppler, o las indicaciones de un sistema de navegación
inercial, o el pitot y la presión estática y la información del viento en los sistemas de datos.
Más bien que ignorar cualquiera de esas salidas, el filtro de kalman puede ser construido
para combinar todo los datos y el conocimiento de las dinámicas de los varios sistemas
para generar una buena estimación general de la velocidad.
La palabra RECURSIVO significa, a diferencia de ciertas conceptos de procesamiento de
datos, que el filtro de kalman no requiere toda los datos previos requeridos se mantengan
almacenados y reprocesados cada vez que una nueva medida sea tomada. Este concepto es
de vital importancia para la practicidad de la implementación del filtro.
El filtro es actualmente un ALGORITMO DE PROCESAMIENTO DE DATOS, a pesar de la
típica connotación del filtro como caja negra conteniendo redes eléctricas, el hecho es que
muchas aplicaciones, el filtro es solo un programa de computadora en un procesador
central. Como eso, esto inherentemente incorpora medidas discretas en el tiempo.
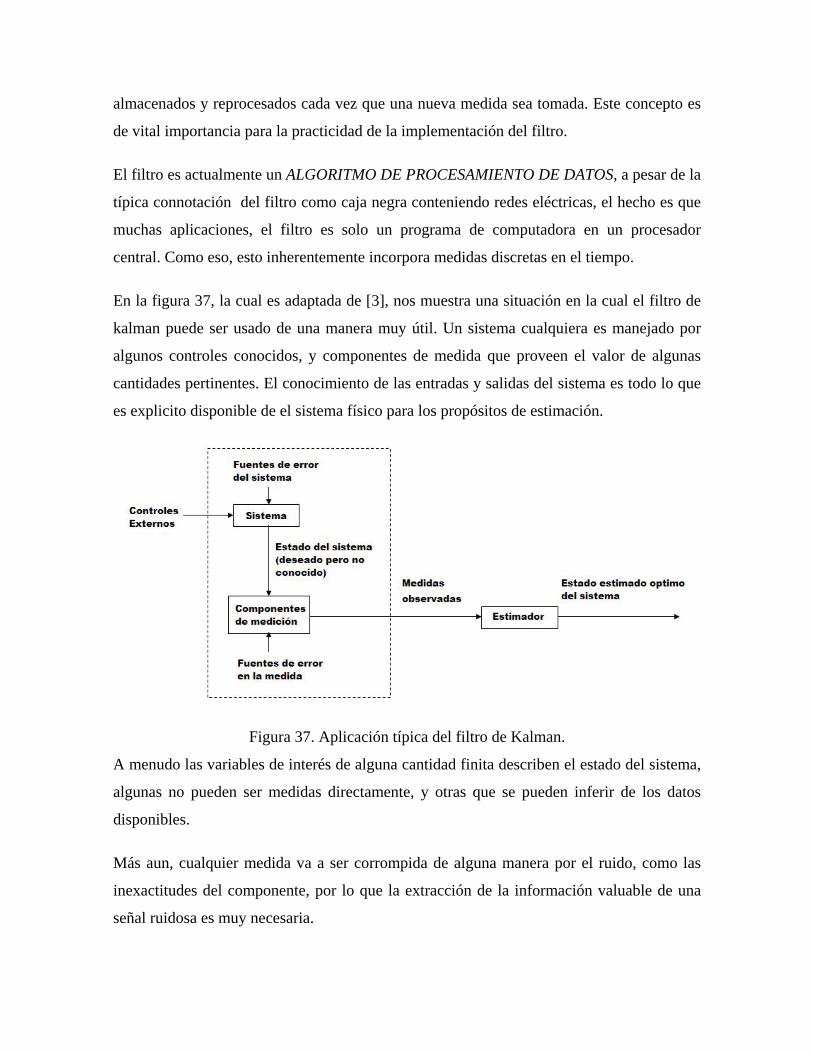
En la figura 37, la cual es adaptada de [3], nos muestra una situación en la cual el filtro de
kalman puede ser usado de una manera muy útil. Un sistema cualquiera es manejado por
algunos controles conocidos, y componentes de medida que proveen el valor de algunas
cantidades pertinentes. El conocimiento de las entradas y salidas del sistema es todo lo que
es explicito disponible de el sistema físico para los propósitos de estimación.
Figura 37. Aplicación típica del filtro de Kalman.
A menudo las variables de interés de alguna cantidad finita describen el estado del sistema,
algunas no pueden ser medidas directamente, y otras que se pueden inferir de los datos
disponibles.
Más aun, cualquier medida va a ser corrompida de alguna manera por el ruido, como las
inexactitudes del componente, por lo que la extracción de la información valuable de una
señal ruidosa es muy necesaria.
Hay muchos sensores, que tienen sus propias dinámicas particulares y errores
característicos, que proveen alguna información acerca una variable particular, y podría ser
deseable de combinar esas salidas en una manera optima y sistemática.
El filtro de kalman combina todas las medidas de los datos, además con un previo
conocimiento acerca de los componentes del sistema, para producir un estimado de las
variables deseables en una manera en la cual el error es minimizado estadísticamente.
Conceptualmente, cualquier tipo de filtro trata de obtener una estimación óptima de las
cantidades deseadas de un ambiente ruidoso, OPTIMO, significa que minimiza el error en
algún aspecto. Hay muchas maneras para llegar a este objetivo.
Después, nosotros queremos propagar la DENSIDAD DE PROBABILIDAD, de las
cantidades deseadas, condicionado en el conocimiento del dato actual proveniente de los
componentes de medida.
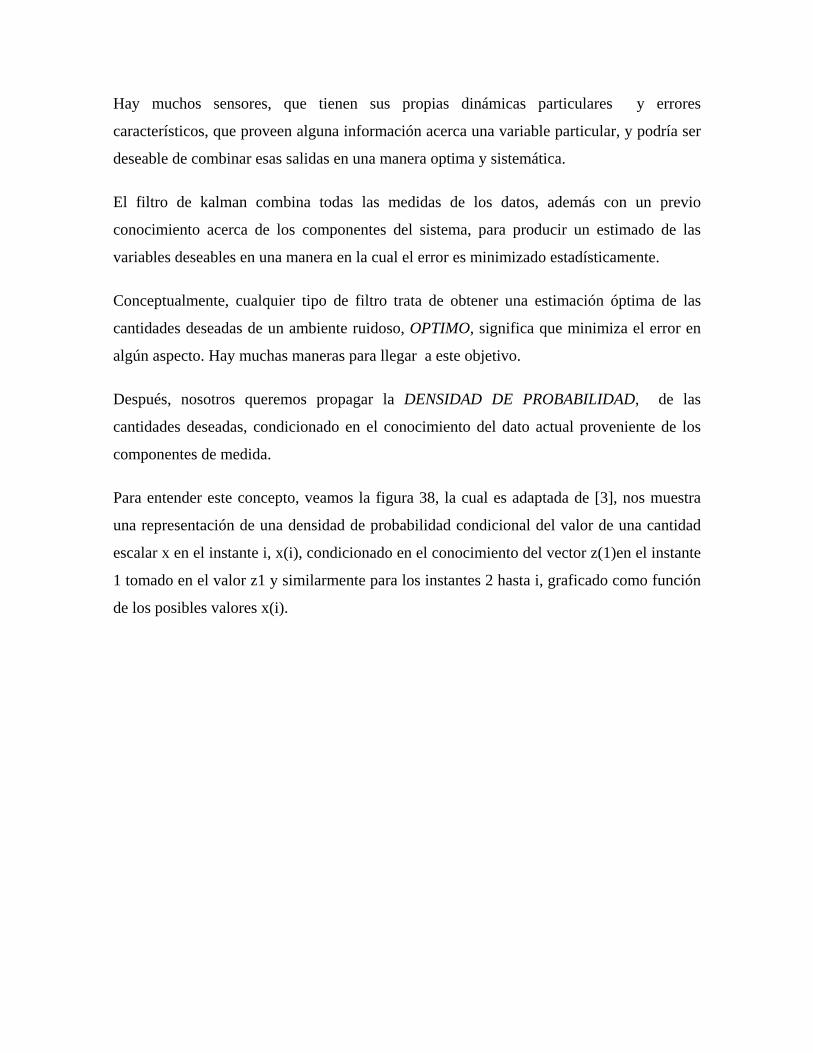
Para entender este concepto, veamos la figura 38, la cual es adaptada de [3], nos muestra
una representación de una densidad de probabilidad condicional del valor de una cantidad
escalar x en el instante i, x(i), condicionado en el conocimiento del vector z(1)en el instante
1 tomado en el valor z1 y similarmente para los instantes 2 hasta i, graficado como función
de los posibles valores x(i).
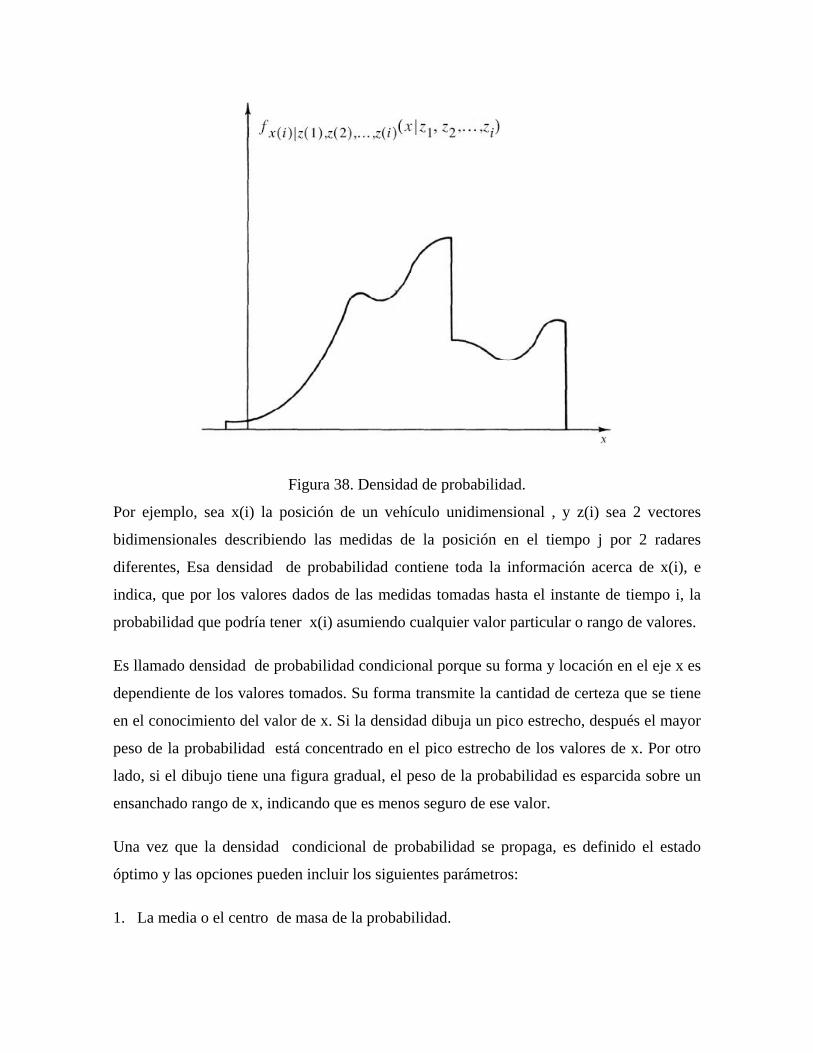
Figura 38. Densidad de probabilidad.
Por ejemplo, sea x(i) la posición de un vehículo unidimensional , y z(i) sea 2 vectores
bidimensionales describiendo las medidas de la posición en el tiempo j por 2 radares
diferentes, Esa densidad de probabilidad contiene toda la información acerca de x(i), e
indica, que por los valores dados de las medidas tomadas hasta el instante de tiempo i, la
probabilidad que podría tener x(i) asumiendo cualquier valor particular o rango de valores.
Es llamado densidad de probabilidad condicional porque su forma y locación en el eje x es
dependiente de los valores tomados. Su forma transmite la cantidad de certeza que se tiene
en el conocimiento del valor de x. Si la densidad dibuja un pico estrecho, después el mayor
peso de la probabilidad está concentrado en el pico estrecho de los valores de x. Por otro
lado, si el dibujo tiene una figura gradual, el peso de la probabilidad es esparcida sobre un
ensanchado rango de x, indicando que es menos seguro de ese valor.
Una vez que la densidad condicional de probabilidad se propaga, es definido el estado
óptimo y las opciones pueden incluir los siguientes parámetros:
1. La media o el centro de masa de la probabilidad.
2. La moda, el valor de que tenga la mayor probabilidad, ubicándose en el pico de la densidad.
3. La mediana, el valor de x que tiene la mitad de peso de la probabilidad ligado a la derecha e izquierda de la densidad condicional de probabilidad.
El filtro de kalman efectúa la propagación de la densidad de probabilidad condicional para
problemas en la cual, el sistema puede ser descrito a través de un modelo lineal y en el cual
el sistema y los ruidos de medida son gausianos y blancos. Bajos estas condicionales, la
media, la moda, la mediana son virtualmente una opción razonable para un estimado
optimo del valor de x.
4.2.2 Presunciones básicas.
En este punto es útil mirar a las 3 presunciones básicas en la formulación del filtro de
kalman. En una primera inspección, ellos aparecen ser restrictivos e irreales. Para despejar
cualquier malentendido, esta sección va discutir brevemente las implicaciones físicas de
esas presunciones.
4.2.2.1 Sistema Lineal.
Un modelo de sistema lineal es justificable por muchas razones:
A menudo un modelo lineal es adecuado para propósitos específicos, y cuando las no
linealidades existen, la típica ingeniería tiende a linealizar en un punto nominal o
trayectoria, obteniendo un modelo de perturbación o un modelo de error.
Los sistemas lineales son deseables porque son más fáciles de manipular con herramientas
de ingeniería, y la teoría de sistemas lineales (ecuaciones diferenciales) es mucha más
completa y practica que la no lineal. El hecho es que hay muchas aplicaciones que usan el
filtro de kalman extendido a algunas aplicaciones no lineales en el desarrollo de los filtros
no lineales, pero esos son considerados solo si los modelos lineales son probados
inadecuados.
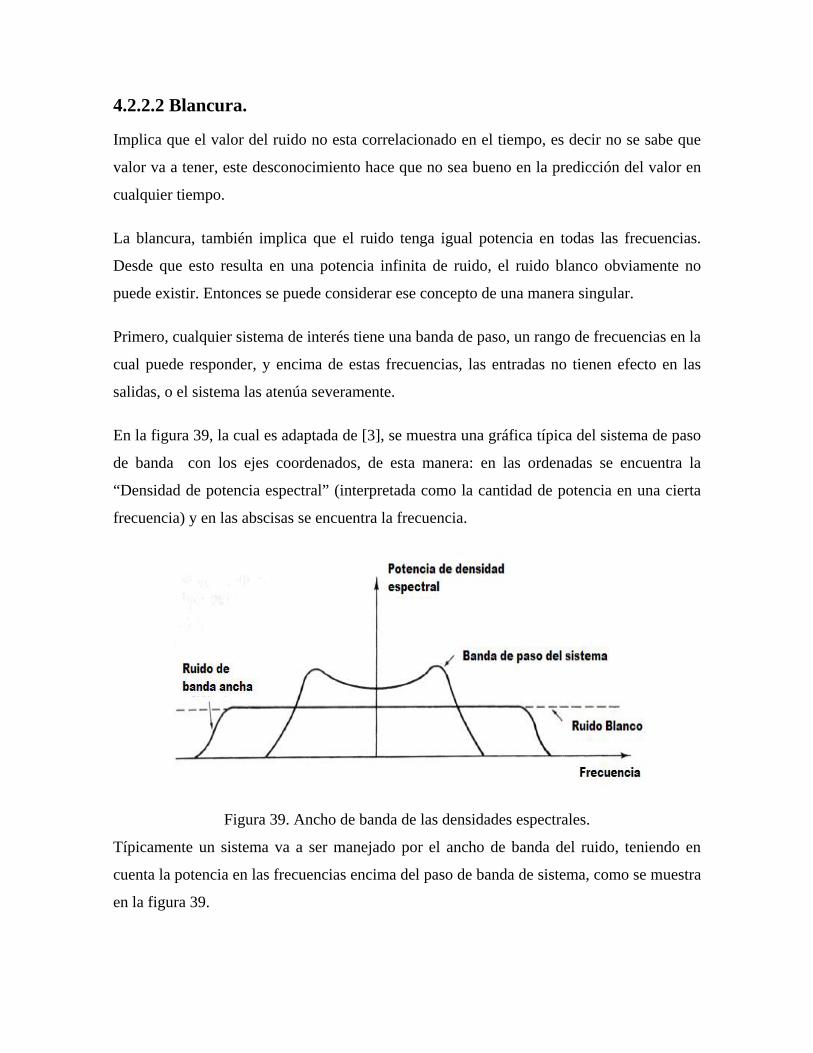
4.2.2.2 Blancura.
Implica que el valor del ruido no esta correlacionado en el tiempo, es decir no se sabe que
valor va a tener, este desconocimiento hace que no sea bueno en la predicción del valor en
cualquier tiempo.
La blancura, también implica que el ruido tenga igual potencia en todas las frecuencias.
Desde que esto resulta en una potencia infinita de ruido, el ruido blanco obviamente no
puede existir. Entonces se puede considerar ese concepto de una manera singular.
Primero, cualquier sistema de interés tiene una banda de paso, un rango de frecuencias en la
cual puede responder, y encima de estas frecuencias, las entradas no tienen efecto en las
salidas, o el sistema las atenúa severamente.
En la figura 39, la cual es adaptada de [3], se muestra una gráfica típica del sistema de paso
de banda con los ejes coordenados, de esta manera: en las ordenadas se encuentra la
“Densidad de potencia espectral” (interpretada como la cantidad de potencia en una cierta
frecuencia) y en las abscisas se encuentra la frecuencia.
Figura 39. Ancho de banda de las densidades espectrales.
Típicamente un sistema va a ser manejado por el ancho de banda del ruido, teniendo en
cuenta la potencia en las frecuencias encima del paso de banda de sistema, como se muestra
en la figura 39.
En el mismo dibujo, un ruido blanco puede extender su potencia constante en todas las
frecuencias. Ahora dentro de la banda de paso del sistema de interés, el ruido blanco
ficticio se coloca y tiene mayor ancho de banda que del sistema, entonces el modelo del
ruido blanco es “adecuado” y usado. Esto nos lleva a que las matemáticas involucradas en
el filtro son simplificadas (hecho que nos lo hace mas tratable) reemplazando el real ancho
de banda del ruido con un ruido blanco ficticio, el cual desde el punto de vista del sistema,
es idéntico.
Donde la blancura se refiere al tiempo o la frecuencia de un ruido, la guasianidad tiene
que ver con su amplitud. Además, en cualquier punto en el tiempo, la densidad de
probabilidad de una amplitud del ruido gaussiano tiene una forma de campana. Esto
puede justificarse físicamente por el hecho que el sistema o ruido medido es típicamente
causado por un número de pequeñas fuentes. Esto se definió anteriormente en el teorema
del límite central.
4.2.2.3 Densidad Gaussiana.
Hay también una práctica justificación para las densidades gaussianas, similar a la blancura,
esto hace que las matemáticas sean más tratables, pero más que eso, típicamente un
ingeniero va a saber en mayor grado, las estadísticas de primer y segundo orden (media y la
varianza o desviación estándar) del ruido del proceso. En la ausencia de cualquiera de las
estadísticas de mayor orden, es mejor asumir la densidad gaussiana. Las estadísticas del
primer y segundo orden determinan completamente la densidad gaussiana, no como otras
densidades que requieren estadísticas de mayor orden para especificar su forma
enteramente.
Las presunciones particulares, son hechas por los objetivos que se quieren alcanzar, y por
ese motivo esencial, los modelos son desarrollados. Si nuestro objetivo es simplemente
construir modelos descriptivos, no podemos confinar nuestra atención a sistemas lineales
manejados por ruido blanco. Más bien, tendríamos que buscar el modelo, de alguna
manera, que mejor encaje a los datos generados por el mundo real. Por ello se construyen
estimadores y controladores basados en los modelos de sistemas que manejan esas
asumpciones.

Afortunadamente, la clase de modelos que llevan a matemáticas tratables también proveen
representación adecuada para muchas aplicaciones de interés. Después, la estructura del
modelo se va extender a algún lugar para alargar el rango de la aplicabilidad, pero el
requerimiento de la utilidad del modelo para el diseño de un estimador o de un controlador
va a ser una influencia dominante en la manera en la cual las extensiones son hechas.
4.3 Ecuaciones del proceso.
El filtro de Kalman tiene como prioridad estimar el estado kx de un proceso en tiempo
discreto, el cual es dominado por una ecuación de diferencias Lineal estocástica de la
siguiente forma:
111 −−− ++= kkkk wBuAxx . …….(4.1)
con una medida Z, que es
kkk vHxZ += . ………. (4.2)
Las variables aleatorias kw y kv
representan el error del proceso y de la medida
respectivamente. Se asume que no están correlacionadas con el tiempo y son
independientes entre ellas, que tienen una distribución de probabilidad normal:
),0()( QNwp ≅ ….. (4.3)
),0()( RNvp ≅ ….. (4.4)
Esto quiere decir que tienen una distribución normal, con media 0 y con una desviación
estándar de Q y R, respectivamente.
En la práctica las matrices de covarianza de la perturbación del proceso, Q ,y de la
perturbación de la medida, R, podrían cambiar en el tiempo, por simplicidad en general se
asumen que son constantes.

La matriz A tiene una dimensión nn× y relaciona el estado previo k-1 con el estado
actual k. La matriz B, se relaciona con la entrada de control y la matriz H de dimensión
nm× relaciona el estado con la medición kZ.
Estas matrices pueden cambiar en el tiempo, pero en general se asumen como constantes.
4.3.1 Origen computacional del filtro.
Se define el estado estimado, a priori en K, con una raya encima, el conocimiento del
proceso antes de k, y definimos nuestro estado a posteriori en k dada la medición. Entonces
podemos definir los errores de estimación a priori y a posteriori.
−− −≡ kkk xxe ˆ …………(4.5)
kkk xxe ˆ−≡ ……… (4.6)
La covarianza del error del estado estimado a priori, es entonces:
][ Tkkk eeEP −−− = ……. (4.7)
Y La covarianza del error del estado estimado a posteriori, es entonces:
][ Tkkk eeEP = …….. (4.8)
Por medio de las ecuaciones del filtro Kalman, empezamos con el objetivo de encontrar una
ecuación que calcula el estado estimado a posteriori como una combinación lineal de una
estimación a priori y de manera ponderada de diferencias entre la medición actual y la
predicción de la medición.
)ˆ(ˆˆ −− −+= kkkk xHzKxx ….. (4.9)

La diferencia en la ecuación (4.9) es llamada innovación en la medición, o el residuo, que
refleja la discrepancia entre la medición y la medición actual. Un resido de cero significa
que los dos están completamente cercanos.
La matriz K en la ecuación (4.9) es elegida para ser la ganancia o la mezcla que minimiza
el error a posteriori de la covarianza (4.8). Esta minimización se puede lograr incorporando
en la ecuación (4.9) en ke , de la ecuación (4.6) y después lo que se incorporo en la
definición anterior, se incluye en la ecuación (4.8), para después hacer un procedimiento
que se va a describir en el apéndice H, para entonces resolviendo para K, se tiene la
siguiente expresión:
)(
)( 1
RHHPHP
RHHPHPK
Tk
Tk
Tk
Tkk
+=
+=
−
−
−−−
….. (4.10)
En cuanto a la ecuación (4.10) vemos que a medida que la covarianza del error de medición
se aproxima a cero, R , la ganancia K tiende a la inversa de H.
1
0lim −
→=
−HKk
Rk
Por otra parte, como la estimación de la covarianza del error a priori , −
kP , se aproxima a
cero, la ganancia K tiende a cero.
0lim0
=→−
kP
Kk
Un significado de K, es entender que la covarianza del error de medición se aproxima a
cero, entonces la medición real kZ es de más "confianza", mientras que la medida
predecida −kxHˆ es menos confiable. Por otra parte, como la estimación de la covarianza

del error a priori, −
kP , se aproxima a cero la medición real kZ es cada vez menos
confiable, mientras que la medición predecida −kxHˆ es mas confiable.
4.3.2 Los orígenes probabilísticos del filtro.
La justificación de la ecuación (4.9) se basa en la probabilidad de la estimación a priori
condicionado en todas las mediciones anteriores.
kk xxE ˆ][ = ….. (4.11)
kT
kkkk PxxxxE =−− ])ˆ)(ˆ[( ……. (4.12)
El estado estimado a posteriori en la ecuación (4.9) corresponde a la media (el primer
momento) y es distribuido normalmente si las condiciones en las ecuaciones (4.3) y (4.4) se
cumplen. La estimación de la covarianza del error a posteriori (4.8) refleja la varianza del
estado de distribución (el segundo no momento central). En otras palabras:
PxNxxxxExENzxp
kk
Tkkkkkkk
) ,ˆ( ]))ˆ)(ˆ[(],[()|(
=−−≈
…. (4.13)
Vemos que al final se convierte en una distribución normal con media kx̂ y desviación
estándar kP .
4.4 El algoritmo discreto del filtro de kalman.
El filtro de Kalman estima un proceso utilizando una forma de control de retroalimentación,
en otras palabras, estima el estado del proceso en algún momento en el tiempo y entonces
obtiene la retroalimentación por medio de los datos observados.
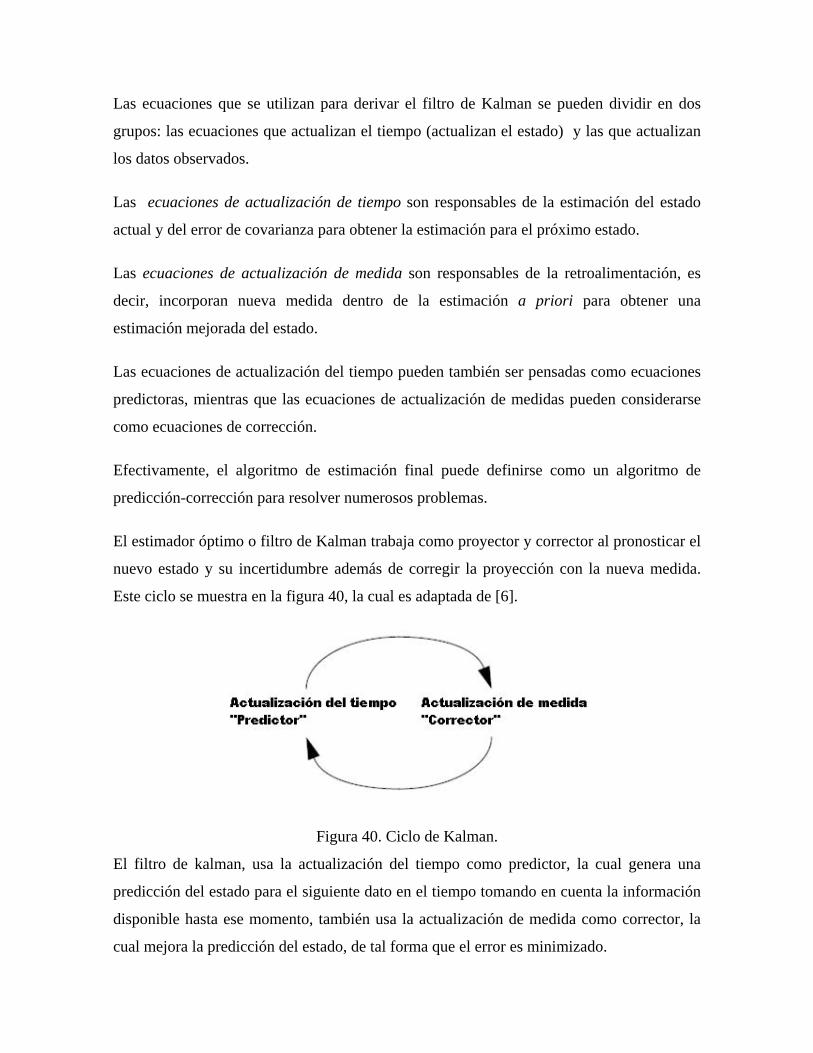
Las ecuaciones que se utilizan para derivar el filtro de Kalman se pueden dividir en dos
grupos: las ecuaciones que actualizan el tiempo (actualizan el estado) y las que actualizan
los datos observados.
Las ecuaciones de actualización de tiempo son responsables de la estimación del estado
actual y del error de covarianza para obtener la estimación para el próximo estado.
Las ecuaciones de actualización de medida son responsables de la retroalimentación, es
decir, incorporan nueva medida dentro de la estimación a priori para obtener una
estimación mejorada del estado.
Las ecuaciones de actualización del tiempo pueden también ser pensadas como ecuaciones
predictoras, mientras que las ecuaciones de actualización de medidas pueden considerarse
como ecuaciones de corrección.
Efectivamente, el algoritmo de estimación final puede definirse como un algoritmo de
predicción-corrección para resolver numerosos problemas.
El estimador óptimo o filtro de Kalman trabaja como proyector y corrector al pronosticar el
nuevo estado y su incertidumbre además de corregir la proyección con la nueva medida.
Este ciclo se muestra en la figura 40, la cual es adaptada de [6].
Figura 40. Ciclo de Kalman.
El filtro de kalman, usa la actualización del tiempo como predictor, la cual genera una
predicción del estado para el siguiente dato en el tiempo tomando en cuenta la información
disponible hasta ese momento, también usa la actualización de medida como corrector, la
cual mejora la predicción del estado, de tal forma que el error es minimizado.

A continuación se muestra las ecuaciones que gobiernan en la parte predictora de estado:
111ˆˆ −−−− ++= kkkk wBuxAx . …… (4.14)
QAAPP Tkk += −
−1 . ……. (4.15)
Por medio de estas ecuaciones podemos proyectar el estado hacia delante de k-1 a k.
1)( −−− += RHHPHPK Tk
Tkk . ……(4.16)
)ˆ(ˆˆ kkkkk xHzKxx −− −+= . ……. (4.17)
kkk PHKIP −−= )( . ……… (4.18)
La primera tarea durante la actualización de la medición es calcular la ganancia de Kalman,
K. El siguiente paso es medir el proceso para obtener y después generar una estimación del
estado a posteriori mediante la incorporación de la medición en la ecuación (4.17). El paso
final es obtener la estimación del error de la covarianza a posteriori vía la ecuación (4.18).
Después de cada actualización en la medición y el tiempo, el proceso se repite con las
estimaciones anteriores a posteriori utilizadas para proyectar o predecir las nuevas
estimaciones a priori.
Este carácter recursivo es una de las características muy significativas del filtro Kalman lo
cual lo hace practico en las implementaciones que los filtros de Wiener, que está diseñado
para operar en todos los datos directamente de cada estimación. El filtro de Kalman usa su
recursividad para la estimación actual en base a todas las mediciones anteriores. En la
figura 41 se ofrece un panorama completo del funcionamiento del filtro, esta figura es
adaptada de [6].
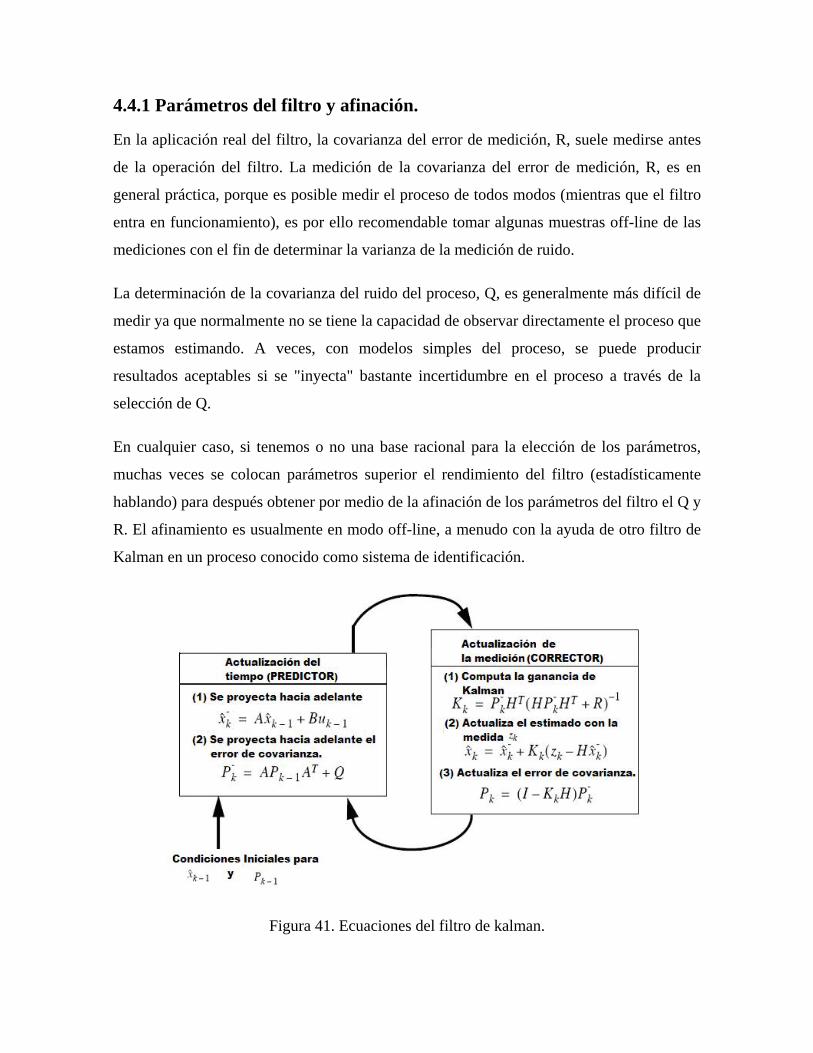
4.4.1 Parámetros del filtro y afinación.
En la aplicación real del filtro, la covarianza del error de medición, R, suele medirse antes
de la operación del filtro. La medición de la covarianza del error de medición, R, es en
general práctica, porque es posible medir el proceso de todos modos (mientras que el filtro
entra en funcionamiento), es por ello recomendable tomar algunas muestras off-line de las
mediciones con el fin de determinar la varianza de la medición de ruido.
La determinación de la covarianza del ruido del proceso, Q, es generalmente más difícil de
medir ya que normalmente no se tiene la capacidad de observar directamente el proceso que
estamos estimando. A veces, con modelos simples del proceso, se puede producir
resultados aceptables si se "inyecta" bastante incertidumbre en el proceso a través de la
selección de Q.
En cualquier caso, si tenemos o no una base racional para la elección de los parámetros,
muchas veces se colocan parámetros superior el rendimiento del filtro (estadísticamente
hablando) para después obtener por medio de la afinación de los parámetros del filtro el Q y
R. El afinamiento es usualmente en modo off-line, a menudo con la ayuda de otro filtro de
Kalman en un proceso conocido como sistema de identificación.
Figura 41. Ecuaciones del filtro de kalman.

Bajo condiciones en donde Q y R son constantes, ambas estimaciones de la covarianza
del error de kPy la ganancia de Kalman K se estabilizarán rápidamente y luego se
mantendrán constantes. Si este es el caso, estos parámetros pueden ser pre-calculado
corriendo el filtro off-line.
CAPITULO 5. DISPOSITIVOS DE LOGICA
RECONFIGURABLE
Los FPGA fueron introducidos por Xilinx en la mitad de 1980. Ellos difieren de los CPLDs
en la arquitectura, por su tecnología de almacenamiento, número de características internas,
y el costo, y tienen por objeto la aplicación de alto rendimiento, de circuitos de gran
tamaño. Estos tienen bloques de lógica interna que se pueden interconectar mediante
software de desarrollo.
5.1. Características principales.
Algunas ventajas de los FPGAs son:
• Reprogramables.
• Flexibles.
• Costes de desarrollo más baratos.
• Tiempo de desarrollo es menor.
Es cierto que en comparación con los ASICs, en forma general, consumen mayor potencia
y en algunos casos son más lentos.
Los FPGAs son en su mayoría volátiles, ya que hacen uso de la SRAM para almacenar las
conexiones, por lo cual una configuración ROM es necesaria para cargar las
interconexiones en el encendido. Hay por ejemplo, algunos FPGAs no volátiles que usan
antifusibles (anti-fuses).
La arquitectura básica de una FPGA se ilustra en la figura 42, la cual es adaptada de [8], y
consiste en matrices de CLBs (Configurable Logic Blocks – Bloques lógicos
reconfigurables), interconectadas por un conjunto de matrices switches o interruptores.
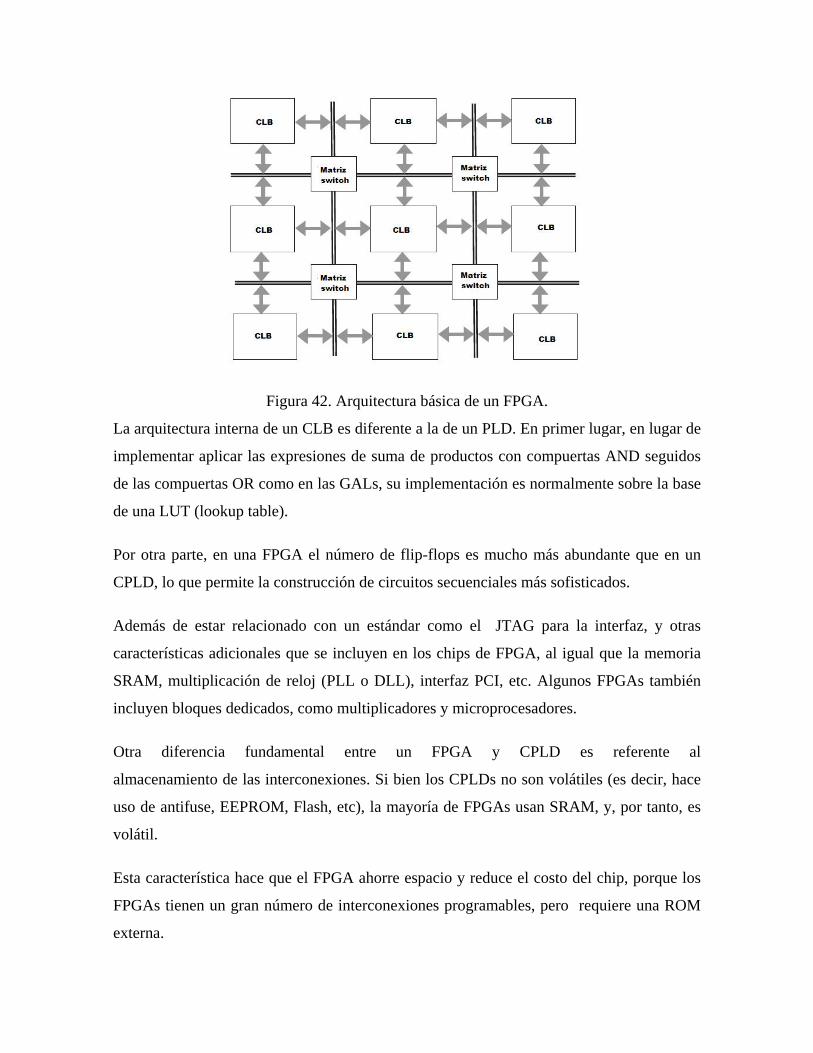
Figura 42. Arquitectura básica de un FPGA.
La arquitectura interna de un CLB es diferente a la de un PLD. En primer lugar, en lugar de
implementar aplicar las expresiones de suma de productos con compuertas AND seguidos
de las compuertas OR como en las GALs, su implementación es normalmente sobre la base
de una LUT (lookup table).
Por otra parte, en una FPGA el número de flip-flops es mucho más abundante que en un
CPLD, lo que permite la construcción de circuitos secuenciales más sofisticados.
Además de estar relacionado con un estándar como el JTAG para la interfaz, y otras
características adicionales que se incluyen en los chips de FPGA, al igual que la memoria
SRAM, multiplicación de reloj (PLL o DLL), interfaz PCI, etc. Algunos FPGAs también
incluyen bloques dedicados, como multiplicadores y microprocesadores.
Otra diferencia fundamental entre un FPGA y CPLD es referente al
almacenamiento de las interconexiones. Si bien los CPLDs no son volátiles (es decir, hace
uso de antifuse, EEPROM, Flash, etc), la mayoría de FPGAs usan SRAM, y, por tanto, es
volátil.
Esta característica hace que el FPGA ahorre espacio y reduce el costo del chip, porque los
FPGAs tienen un gran número de interconexiones programables, pero requiere una ROM
externa.
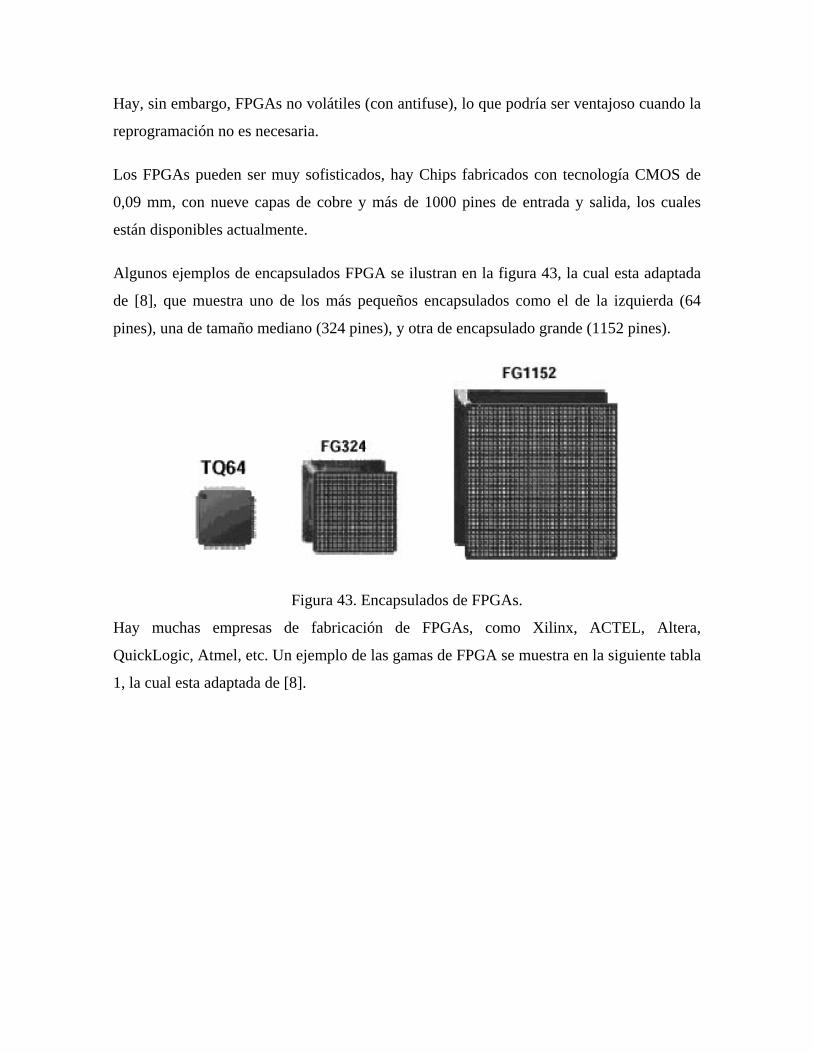
Hay, sin embargo, FPGAs no volátiles (con antifuse), lo que podría ser ventajoso cuando la
reprogramación no es necesaria.
Los FPGAs pueden ser muy sofisticados, hay Chips fabricados con tecnología CMOS de
0,09 mm, con nueve capas de cobre y más de 1000 pines de entrada y salida, los cuales
están disponibles actualmente.
Algunos ejemplos de encapsulados FPGA se ilustran en la figura 43, la cual esta adaptada
de [8], que muestra uno de los más pequeños encapsulados como el de la izquierda (64
pines), una de tamaño mediano (324 pines), y otra de encapsulado grande (1152 pines).
Figura 43. Encapsulados de FPGAs.
Hay muchas empresas de fabricación de FPGAs, como Xilinx, ACTEL, Altera,
QuickLogic, Atmel, etc. Un ejemplo de las gamas de FPGA se muestra en la siguiente tabla
1, la cual esta adaptada de [8].
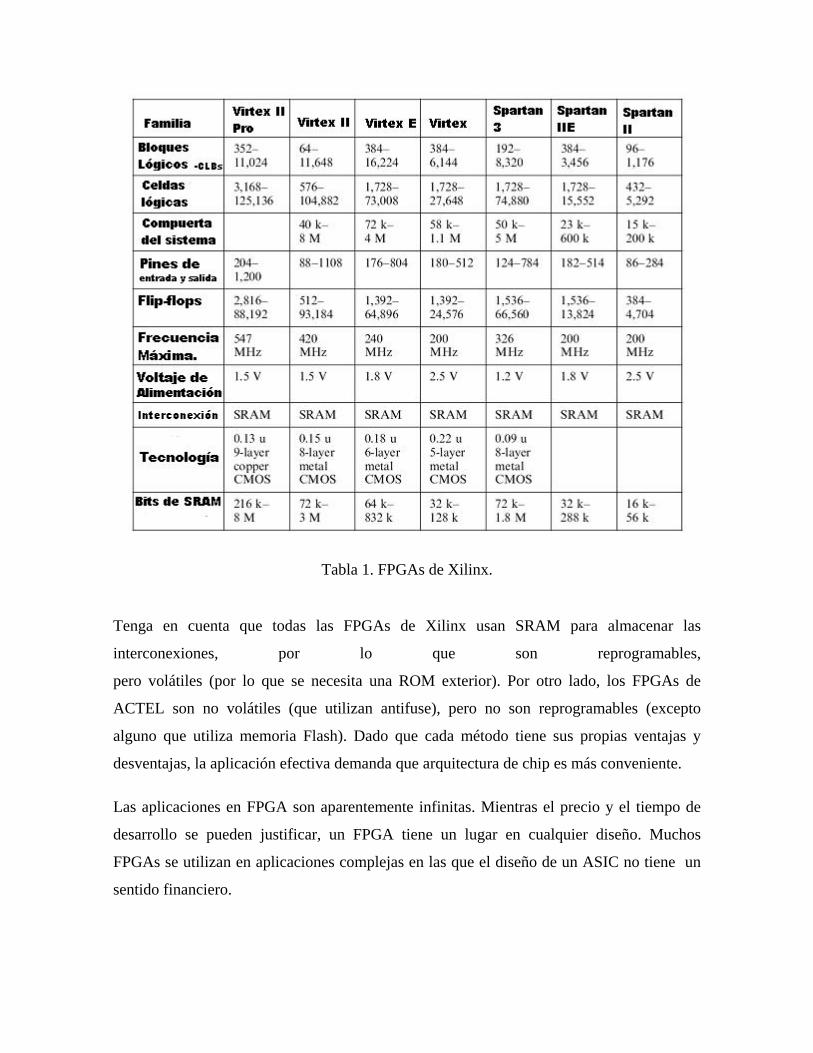
Tabla 1. FPGAs de Xilinx.
Tenga en cuenta que todas las FPGAs de Xilinx usan SRAM para almacenar las
interconexiones, por lo que son reprogramables,
pero volátiles (por lo que se necesita una ROM exterior). Por otro lado, los FPGAs de
ACTEL son no volátiles (que utilizan antifuse), pero no son reprogramables (excepto
alguno que utiliza memoria Flash). Dado que cada método tiene sus propias ventajas y
desventajas, la aplicación efectiva demanda que arquitectura de chip es más conveniente.
Las aplicaciones en FPGA son aparentemente infinitas. Mientras el precio y el tiempo de
desarrollo se pueden justificar, un FPGA tiene un lugar en cualquier diseño. Muchos
FPGAs se utilizan en aplicaciones complejas en las que el diseño de un ASIC no tiene un
sentido financiero.
Como por ejemplo: en equipo de redes, de imágenes médicas, de defensa y aeroespacial,
son algunas de las áreas de aplicación que cuentan con una gran cantidad de diseños en
FPGA.
En cuanto a las medianas y grandes aplicaciones, los FPGAs son vistos como una forma de
prototipo para un determinado circuito y para luego convertirse en ASICs cuando alcanzan
un cierto umbral. En otras palabras, una FPGA se puede personalizar con la intención de
convertirse en un ASIC. Altera es un fabricante de FPGA que ofrece un plan de trabajo a un
ASIC estructurado.
Para muchas aplicaciones se usan también los microcontroladores y microprocesadores, sin
embargo, a menudo no cumplen con las necesidades exactas del diseñador. Por el contrario
los FPGAs dan paso a los diseñadores la flexibilidad casi ilimitada. Un microcontrolador
básico, como por ejemplo un ARM 7 o 8051, puede ser incluido en un diseño y, a
continuación, cualquier periférico puede agregarse, siempre y cuando la FPGA sea lo
suficientemente grande.
5.2 Proceso de diseño en los FPGAs.
Hay tres enfoques utilizados en diseño de los FPGA. El primero es por medio de circuitos
esquemáticos, la cual es la más sencilla y más centrada en diseño de hardware. Se trata de
esquemáticos de circuitos que se introducen dentro de un FPGA usando las herramientas de
diseño. Aunque es visual, este enfoque es la menos flexible y no permite la fácil migración
de una plataforma FPGA a otro.
El segundo es el uso de HDL o lenguaje de descripción de hardware, que son lenguajes de
idiomas específicos para el desarrollo de FPGAs y ASICs, y es más abstracta para un
diseño de ingeniería. Muchos diseños basados en FPGA son completados con el HDL, pues
hay varios vendedores que usan componentes que necesitan un controlador especifico, la
salida clásica es un desarrollo de estos controladores por medio de HDL. Una de las
principales ventajas de HDL es que el diseño es más portátil y flexible que la del
esquemático.
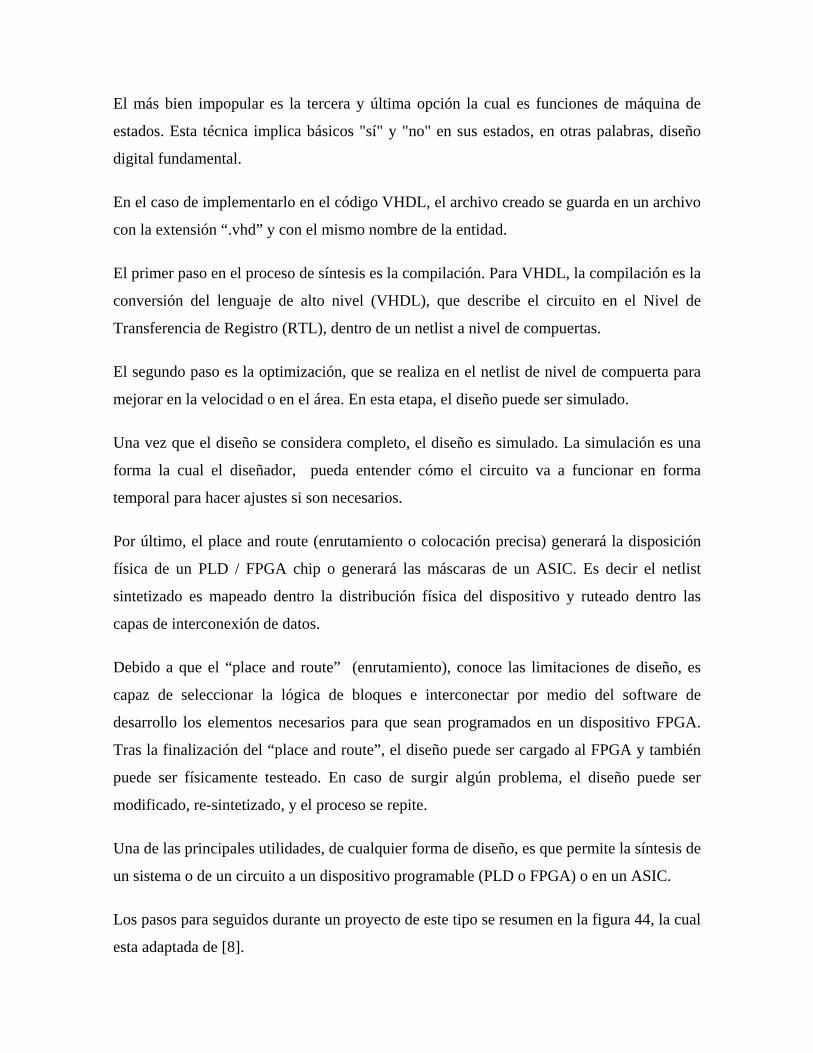
El más bien impopular es la tercera y última opción la cual es funciones de máquina de
estados. Esta técnica implica básicos "sí" y "no" en sus estados, en otras palabras, diseño
digital fundamental.
En el caso de implementarlo en el código VHDL, el archivo creado se guarda en un archivo
con la extensión “.vhd” y con el mismo nombre de la entidad.
El primer paso en el proceso de síntesis es la compilación. Para VHDL, la compilación es la
conversión del lenguaje de alto nivel (VHDL), que describe el circuito en el Nivel de
Transferencia de Registro (RTL), dentro de un netlist a nivel de compuertas.
El segundo paso es la optimización, que se realiza en el netlist de nivel de compuerta para
mejorar en la velocidad o en el área. En esta etapa, el diseño puede ser simulado.
Una vez que el diseño se considera completo, el diseño es simulado. La simulación es una
forma la cual el diseñador, pueda entender cómo el circuito va a funcionar en forma
temporal para hacer ajustes si son necesarios.
Por último, el place and route (enrutamiento o colocación precisa) generará la disposición
física de un PLD / FPGA chip o generará las máscaras de un ASIC. Es decir el netlist
sintetizado es mapeado dentro la distribución física del dispositivo y ruteado dentro las
capas de interconexión de datos.
Debido a que el “place and route” (enrutamiento), conoce las limitaciones de diseño, es
capaz de seleccionar la lógica de bloques e interconectar por medio del software de
desarrollo los elementos necesarios para que sean programados en un dispositivo FPGA.
Tras la finalización del “place and route”, el diseño puede ser cargado al FPGA y también
puede ser físicamente testeado. En caso de surgir algún problema, el diseño puede ser
modificado, re-sintetizado, y el proceso se repite.
Una de las principales utilidades, de cualquier forma de diseño, es que permite la síntesis de
un sistema o de un circuito a un dispositivo programable (PLD o FPGA) o en un ASIC.
Los pasos para seguidos durante un proyecto de este tipo se resumen en la figura 44, la cual
esta adaptada de [8].
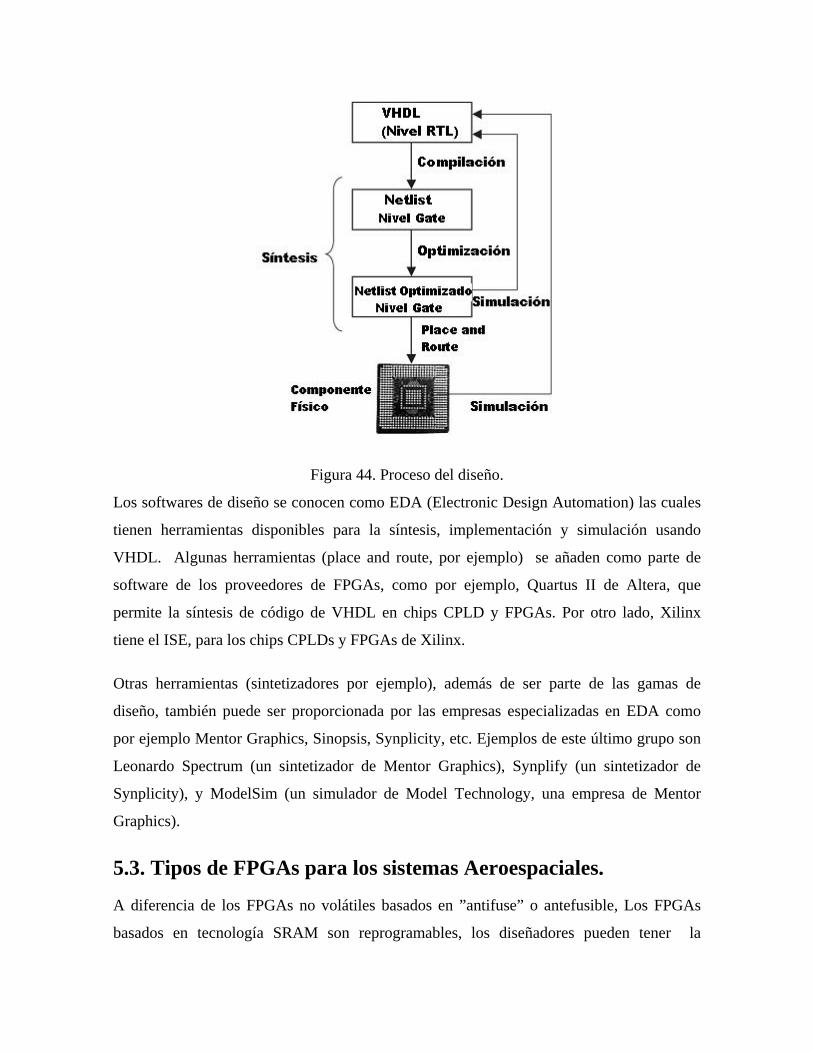
Figura 44. Proceso del diseño.
Los softwares de diseño se conocen como EDA (Electronic Design Automation) las cuales
tienen herramientas disponibles para la síntesis, implementación y simulación usando
VHDL. Algunas herramientas (place and route, por ejemplo) se añaden como parte de
software de los proveedores de FPGAs, como por ejemplo, Quartus II de Altera, que
permite la síntesis de código de VHDL en chips CPLD y FPGAs. Por otro lado, Xilinx
tiene el ISE, para los chips CPLDs y FPGAs de Xilinx.
Otras herramientas (sintetizadores por ejemplo), además de ser parte de las gamas de
diseño, también puede ser proporcionada por las empresas especializadas en EDA como
por ejemplo Mentor Graphics, Sinopsis, Synplicity, etc. Ejemplos de este último grupo son
Leonardo Spectrum (un sintetizador de Mentor Graphics), Synplify (un sintetizador de
Synplicity), y ModelSim (un simulador de Model Technology, una empresa de Mentor
Graphics).
5.3. Tipos de FPGAs para los sistemas Aeroespaciales.
A diferencia de los FPGAs no volátiles basados en ”antifuse” o antefusible, Los FPGAs
basados en tecnología SRAM son reprogramables, los diseñadores pueden tener la
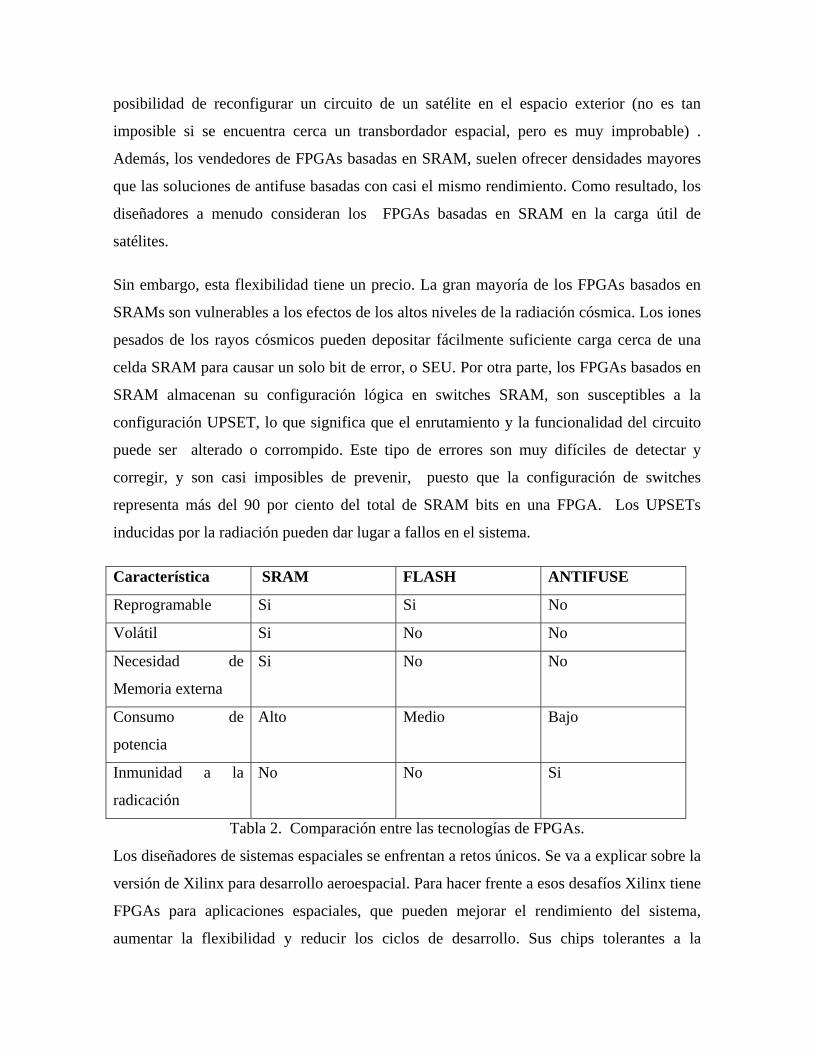
posibilidad de reconfigurar un circuito de un satélite en el espacio exterior (no es tan
imposible si se encuentra cerca un transbordador espacial, pero es muy improbable) .
Además, los vendedores de FPGAs basadas en SRAM, suelen ofrecer densidades mayores
que las soluciones de antifuse basadas con casi el mismo rendimiento. Como resultado, los
diseñadores a menudo consideran los FPGAs basadas en SRAM en la carga útil de
satélites.
Sin embargo, esta flexibilidad tiene un precio. La gran mayoría de los FPGAs basados en
SRAMs son vulnerables a los efectos de los altos niveles de la radiación cósmica. Los iones
pesados de los rayos cósmicos pueden depositar fácilmente suficiente carga cerca de una
celda SRAM para causar un solo bit de error, o SEU. Por otra parte, los FPGAs basados en
SRAM almacenan su configuración lógica en switches SRAM, son susceptibles a la
configuración UPSET, lo que significa que el enrutamiento y la funcionalidad del circuito
puede ser alterado o corrompido. Este tipo de errores son muy difíciles de detectar y
corregir, y son casi imposibles de prevenir, puesto que la configuración de switches
representa más del 90 por ciento del total de SRAM bits en una FPGA. Los UPSETs
inducidas por la radiación pueden dar lugar a fallos en el sistema.
Característica SRAM FLASH ANTIFUSE
Reprogramable Si Si No
Volátil Si No No
Necesidad de
Memoria externa
Si No No
Consumo de
potencia
Alto Medio Bajo
Inmunidad a la
radicación
No No Si
Tabla 2. Comparación entre las tecnologías de FPGAs.
Los diseñadores de sistemas espaciales se enfrentan a retos únicos. Se va a explicar sobre la
versión de Xilinx para desarrollo aeroespacial. Para hacer frente a esos desafíos Xilinx tiene
FPGAs para aplicaciones espaciales, que pueden mejorar el rendimiento del sistema,
aumentar la flexibilidad y reducir los ciclos de desarrollo. Sus chips tolerantes a la
radiación están basados en FPGAs Virtex, los cuales tienen encapsulados especiales, y
reúnen las condiciones para los requerimientos del espacio.
La gama de los FPGAs Virtex-4QV, se muestran en la figura 45, la cual esta adaptada de
[12], y la inmunidad ante TID (total ionizing dose) y SEL (single-event latch-up) están
garantizadas. Xilinx fue pionera en la aplicación de SRAM basadas en FPGAs en alta
radiación, que caracteriza y reporta resultados con SEU (single-event upset).
Figura 45. Virtex-4QV para diferentes aplicaciones aeroespaciales.
CAPITULO 6. IMPLEMENTACION DEL FILTRO
DE KALMAN EN EL FPGA
Para la implementación del filtro, es necesario conocer el proceso de diseño con FPGAs,
utilizando la herramienta system generator de xilinx, la cual nos dará un mejor panorama
del diseño final.
6.1 SYSTEM GENERATOR.
Los FPGAs son ampliamente utilizados para PDS de alto rendimiento. La Plataforma de
FPGAs Virtex II de Xilinx, se ha convertido rápidamente en la principal plataforma de alto
rendimiento para aplicaciones de PDS.
El System Generator de Xilinx llena el vacío entre la versión abstracta de un diseño de PDS
y su aplicación efectiva en un FPGA de Xilinx. El System Generator de PDS desarrollado
en colaboración con MathWorks, permite a los diseñadores implementar sistemas de alto
rendimiento de PDS en FPGAs de Xilinx utilizando el Simulink de MATLAB. Las
capacidades incluyen la Co-Simulación, Hardware in the loop (HIL), y la capacidad para
estimar los recursos del FPGA dentro de Simulink. En la figura 46, se muestra la pantalla
principal de Matlab.
Figura 46. Pantalla principal de Matlab.
Al utilizar Simulink de Matlab, es necesario estar familiarizado con los Toolbox de esta
herramienta, puesto que System generator se va colocar como una de ellas. Esta
herramienta simplificadora permite a los diseñadores utilizar el software de desarrollo ISE,
que sirve para la síntesis de VHDL, la cual es llamada desde Matlab por System Generator
para la compilación, ruteo y mapeo en el FPGA, la cual puede ser implementada
directamente en el FPGA desde Matlab.
En la figura 47, se muestra el toolbox de simulink en donde aparece el blockset de xilinx.
Figura 47. Blockset de Xilinx.
El System Generator provee una simulación que se proporciona a través de hardware co-
simulation. La herramienta crea automáticamente una plataforma de simulación de
hardware para un diseño hecho con el blockset de Xilinx, la que se puede ejecutar en más
de 20 hardwares.
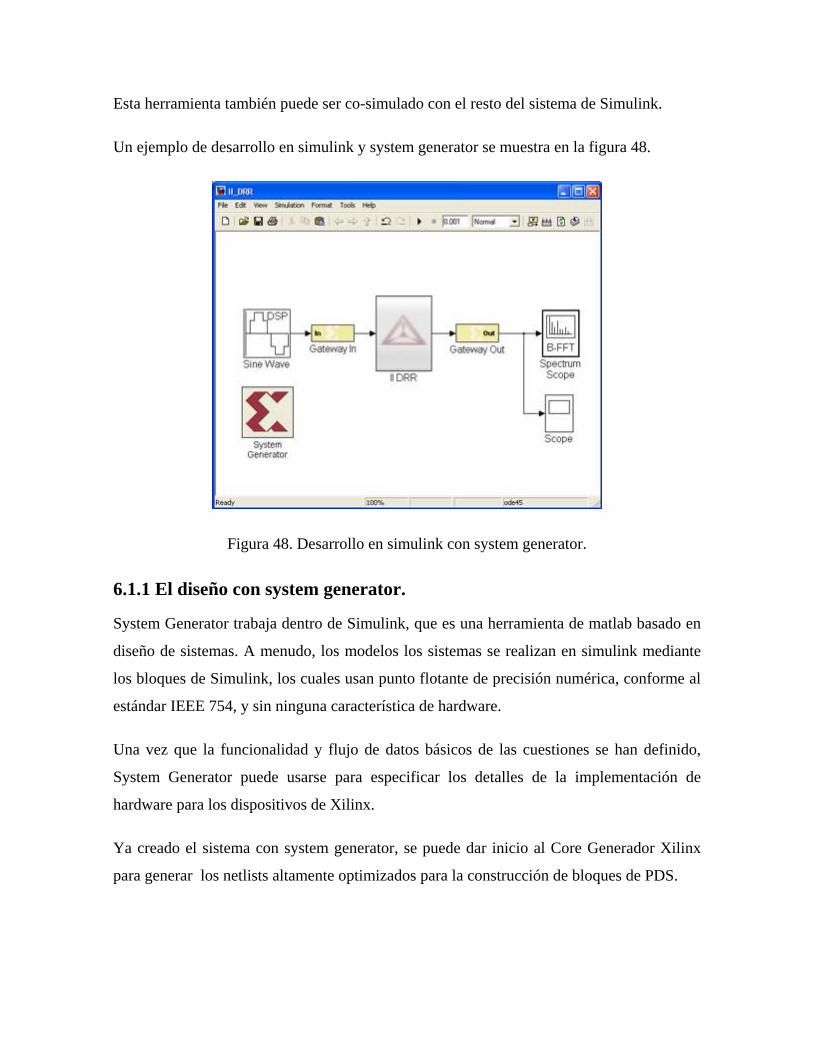
Esta herramienta también puede ser co-simulado con el resto del sistema de Simulink.
Un ejemplo de desarrollo en simulink y system generator se muestra en la figura 48.
Figura 48. Desarrollo en simulink con system generator.
6.1.1 El diseño con system generator.
System Generator trabaja dentro de Simulink, que es una herramienta de matlab basado en
diseño de sistemas. A menudo, los modelos los sistemas se realizan en simulink mediante
los bloques de Simulink, los cuales usan punto flotante de precisión numérica, conforme al
estándar IEEE 754, y sin ninguna característica de hardware.
Una vez que la funcionalidad y flujo de datos básicos de las cuestiones se han definido,
System Generator puede usarse para especificar los detalles de la implementación de
hardware para los dispositivos de Xilinx.
Ya creado el sistema con system generator, se puede dar inicio al Core Generador Xilinx
para generar los netlists altamente optimizados para la construcción de bloques de PDS.
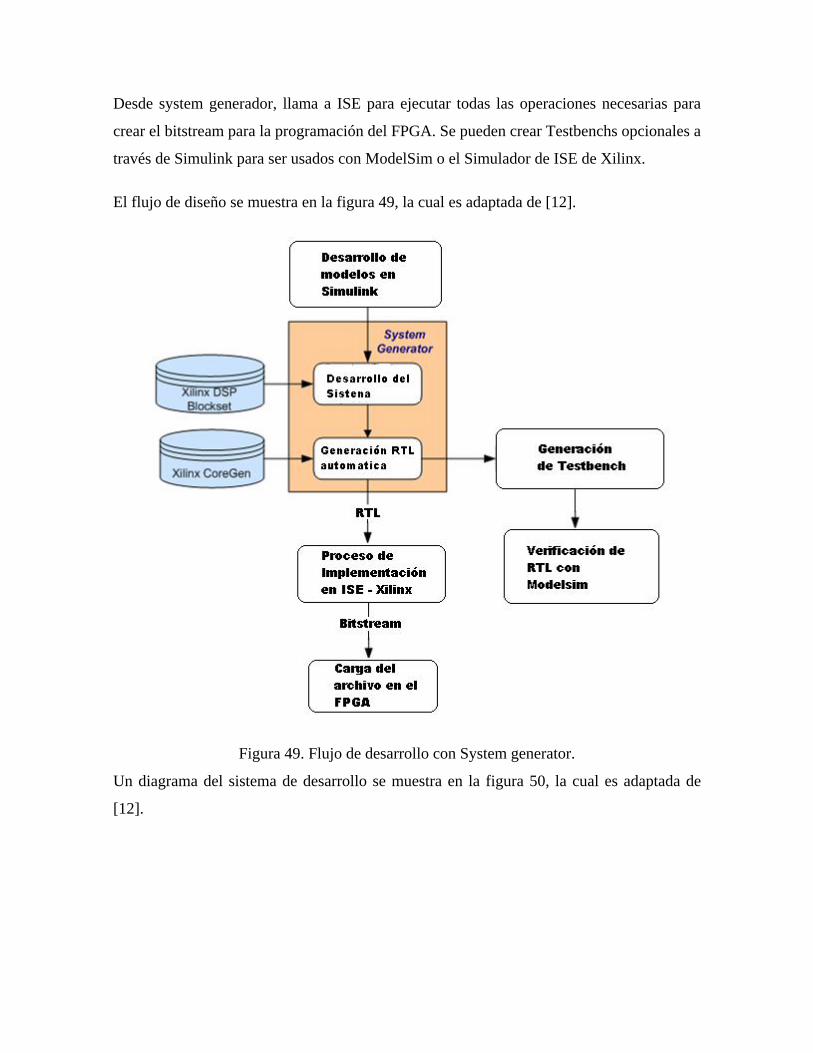
Desde system generador, llama a ISE para ejecutar todas las operaciones necesarias para
crear el bitstream para la programación del FPGA. Se pueden crear Testbenchs opcionales a
través de Simulink para ser usados con ModelSim o el Simulador de ISE de Xilinx.
El flujo de diseño se muestra en la figura 49, la cual es adaptada de [12].
Figura 49. Flujo de desarrollo con System generator.
Un diagrama del sistema de desarrollo se muestra en la figura 50, la cual es adaptada de
[12].
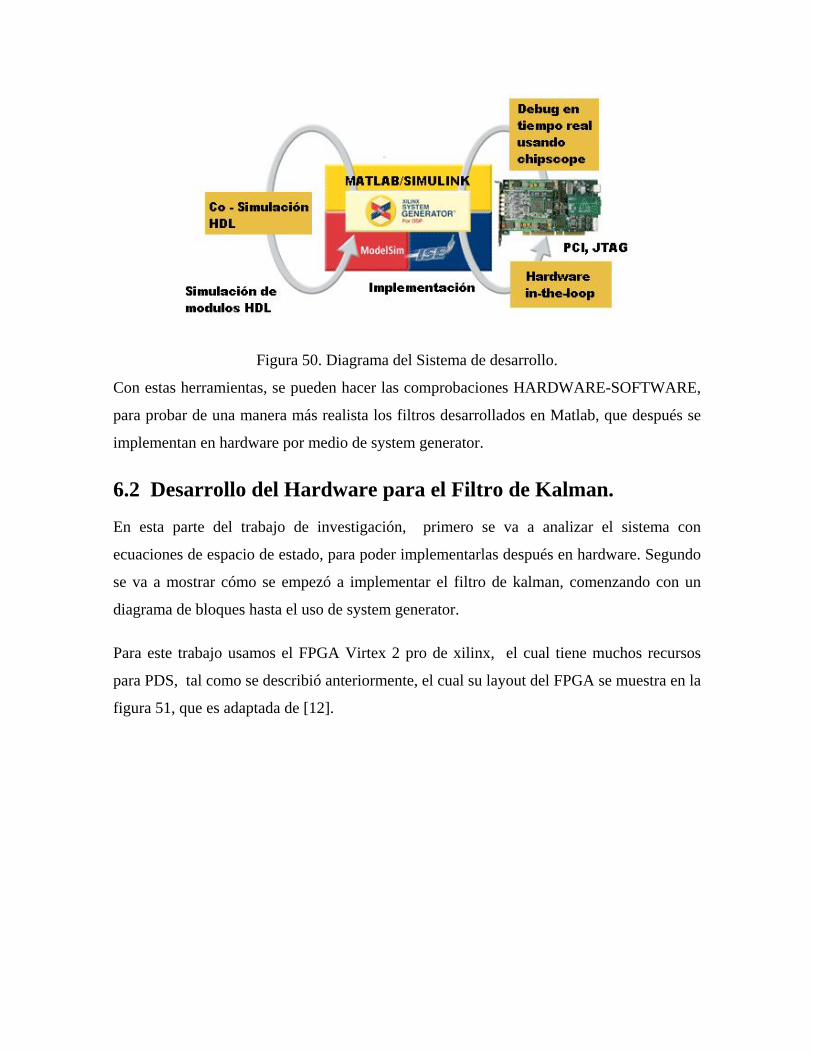
Figura 50. Diagrama del Sistema de desarrollo.
Con estas herramientas, se pueden hacer las comprobaciones HARDWARE-SOFTWARE,
para probar de una manera más realista los filtros desarrollados en Matlab, que después se
implementan en hardware por medio de system generator.
6.2 Desarrollo del Hardware para el Filtro de Kalman.
En esta parte del trabajo de investigación, primero se va a analizar el sistema con
ecuaciones de espacio de estado, para poder implementarlas después en hardware. Segundo
se va a mostrar cómo se empezó a implementar el filtro de kalman, comenzando con un
diagrama de bloques hasta el uso de system generator.
Para este trabajo usamos el FPGA Virtex 2 pro de xilinx, el cual tiene muchos recursos
para PDS, tal como se describió anteriormente, el cual su layout del FPGA se muestra en la
figura 51, que es adaptada de [12].
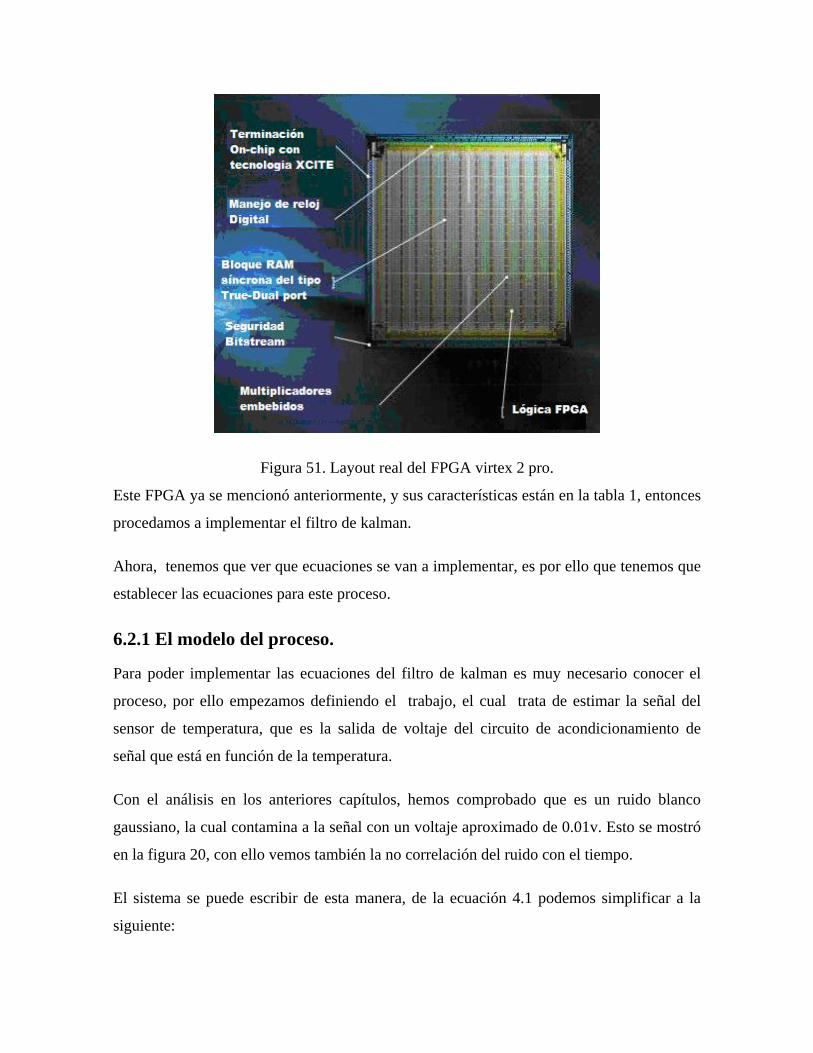
Figura 51. Layout real del FPGA virtex 2 pro.
Este FPGA ya se mencionó anteriormente, y sus características están en la tabla 1, entonces
procedamos a implementar el filtro de kalman.
Ahora, tenemos que ver que ecuaciones se van a implementar, es por ello que tenemos que
establecer las ecuaciones para este proceso.
6.2.1 El modelo del proceso.
Para poder implementar las ecuaciones del filtro de kalman es muy necesario conocer el
proceso, por ello empezamos definiendo el trabajo, el cual trata de estimar la señal del
sensor de temperatura, que es la salida de voltaje del circuito de acondicionamiento de
señal que está en función de la temperatura.
Con el análisis en los anteriores capítulos, hemos comprobado que es un ruido blanco
gaussiano, la cual contamina a la señal con un voltaje aproximado de 0.01v. Esto se mostró
en la figura 20, con ello vemos también la no correlación del ruido con el tiempo.
El sistema se puede escribir de esta manera, de la ecuación 4.1 podemos simplificar a la
siguiente:

kkk wAxx += −1 ……. (6.1)
Y para el caso de la medición se escribe de esta manera de la ecuación 4.2:
kkk vxz += ……. (6.2)
Nuestro objetivo es el de estimar el estado, y viendo que no hay entrada de control
podemos colocar ( 1=A ). Nuestra medición de ruido es de manera directa, entonces 1=H
6.2.2 Las ecuaciones y los parámetros del filtro.
Nuestras ecuaciones de tiempo de actualización son
1ˆˆ −− = kk xx ……… (6.3)
QPP kk += −−
1 . ………(6.4)
Y nuestras ecuaciones de medida de actualización son:
)( RPPKk
kk += −
−
. ……………. (6.5)
)ˆ(ˆˆ kkkkk xzKxx −− −+= . …….. (6.6)
kkk PKP −−= )1( . ……………(6.7)
Analizando el proceso, la varianza es muy pequeña, (pero para afinar el filtro de
kalman ciertamente se podría dejar el valor de 0=Q , pero podemos colocar un
valor más pequeño con 00001.0=Q para obtener un mejor resultado, pues
nos da mayor flexibilidad.
Se sabe que el verdadero valor randomica tiene una distribución estándar de probabilidad
normal, por lo que podemos comenzar con un valor de inicio para x , haciéndolo de esta
manera: 0ˆ 1 =−kx .
Del mismo modo tenemos que elegir un valor inicial para P. Si estuviéramos absolutamente
seguros de que nuestra estimación inicial era correcta entonces 0ˆ =x . Sin embargo,
dada la incertidumbre en nuestra estimación inicial, la elección podría causar que el filtro se
demore en el procesamiento, aunque la alternativa no es crítica, podríamos elegir un
0=P , y sabiendo que el valor P del filtro a la larga convergen.
6.2.3 Implementación del filtro de kalman en el FPGA.
Como ya tenemos el proceso modelado con las respectivas ecuaciones, ahora con ello
podemos realizar una arquitectura característica que envuelva rapidez y área para poder
implementar el filtro discreto de kalman.
Primero, las ecuaciones deben usar un tipo de formato, lo cual se escogió un formato de
punto flotante de 64 bits, por tener muchas ventajas con respecto a los punto fijo, también
es necesario tener un conocimiento previo de los cálculos con punto flotante en hardware,
como también tener un conocimiento previo de usar el punto flotante en Matlab.
Entonces empezamos haciendo una arquitectura que nos describa las ecuaciones del filtro
discreto de kalman, que trabajen en forma paralela como se muestra en la figura 52.
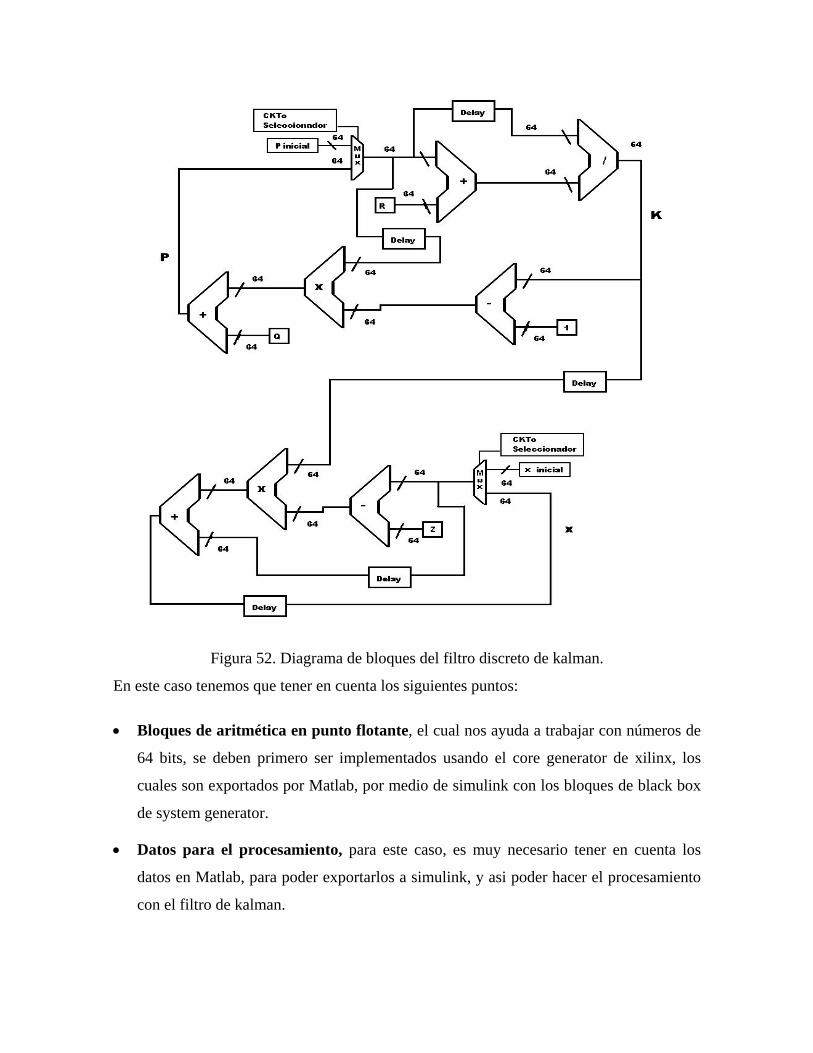
Figura 52. Diagrama de bloques del filtro discreto de kalman.
En este caso tenemos que tener en cuenta los siguientes puntos:
• Bloques de aritmética en punto flotante, el cual nos ayuda a trabajar con números de
64 bits, se deben primero ser implementados usando el core generator de xilinx, los
cuales son exportados por Matlab, por medio de simulink con los bloques de black box
de system generator.
• Datos para el procesamiento, para este caso, es muy necesario tener en cuenta los
datos en Matlab, para poder exportarlos a simulink, y asi poder hacer el procesamiento
con el filtro de kalman.
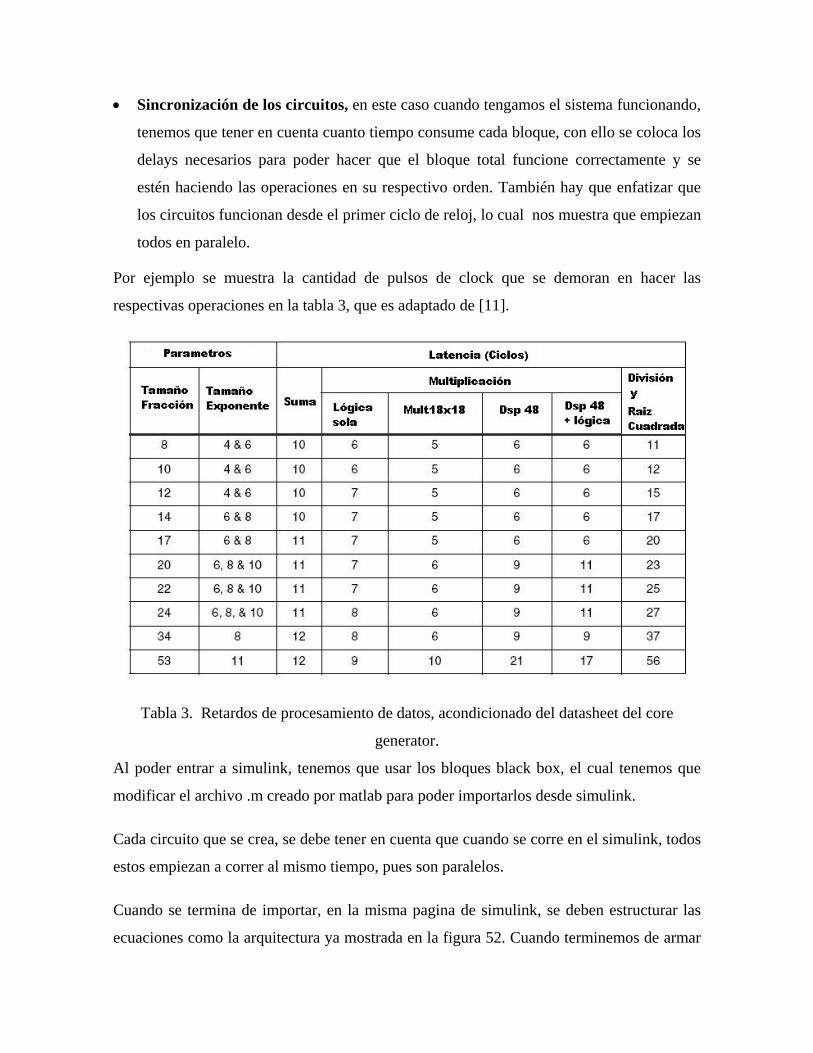
• Sincronización de los circuitos, en este caso cuando tengamos el sistema funcionando,
tenemos que tener en cuenta cuanto tiempo consume cada bloque, con ello se coloca los
delays necesarios para poder hacer que el bloque total funcione correctamente y se
estén haciendo las operaciones en su respectivo orden. También hay que enfatizar que
los circuitos funcionan desde el primer ciclo de reloj, lo cual nos muestra que empiezan
todos en paralelo.
Por ejemplo se muestra la cantidad de pulsos de clock que se demoran en hacer las
respectivas operaciones en la tabla 3, que es adaptado de [11].
Tabla 3. Retardos de procesamiento de datos, acondicionado del datasheet del core
generator.
Al poder entrar a simulink, tenemos que usar los bloques black box, el cual tenemos que
modificar el archivo .m creado por matlab para poder importarlos desde simulink.
Cada circuito que se crea, se debe tener en cuenta que cuando se corre en el simulink, todos
estos empiezan a correr al mismo tiempo, pues son paralelos.
Cuando se termina de importar, en la misma pagina de simulink, se deben estructurar las
ecuaciones como la arquitectura ya mostrada en la figura 52. Cuando terminemos de armar
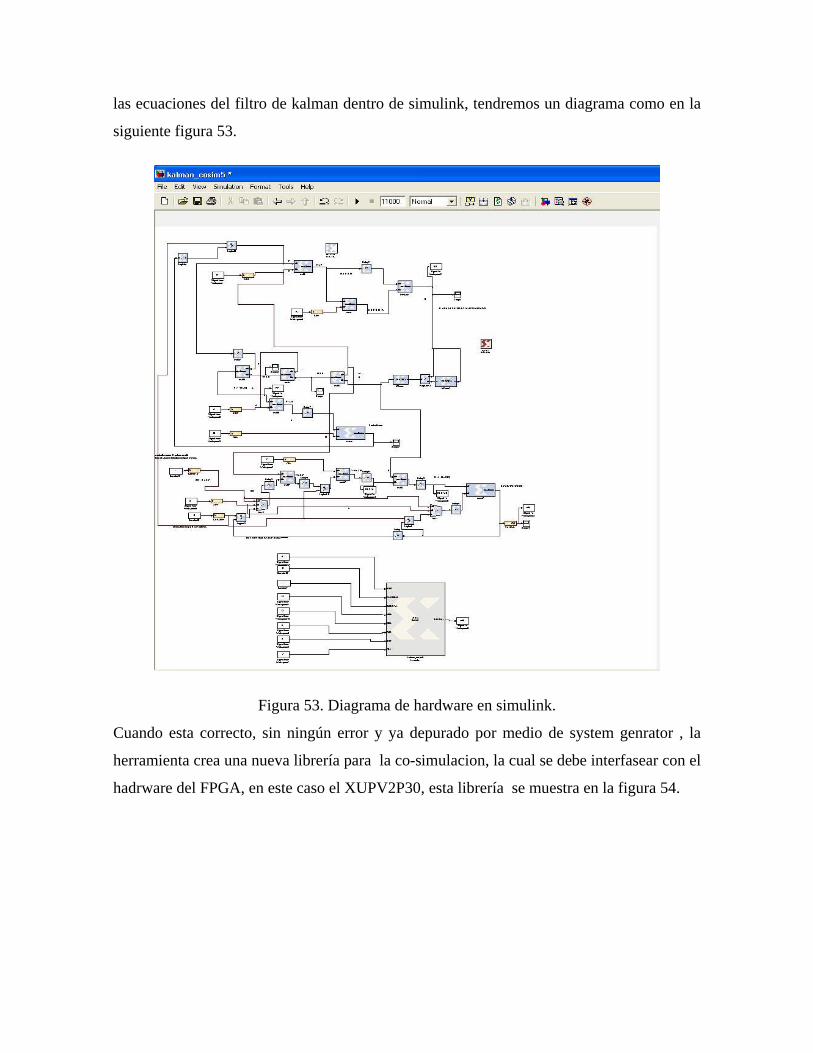
las ecuaciones del filtro de kalman dentro de simulink, tendremos un diagrama como en la
siguiente figura 53.
Figura 53. Diagrama de hardware en simulink.
Cuando esta correcto, sin ningún error y ya depurado por medio de system genrator , la
herramienta crea una nueva librería para la co-simulacion, la cual se debe interfasear con el
hadrware del FPGA, en este caso el XUPV2P30, esta librería se muestra en la figura 54.
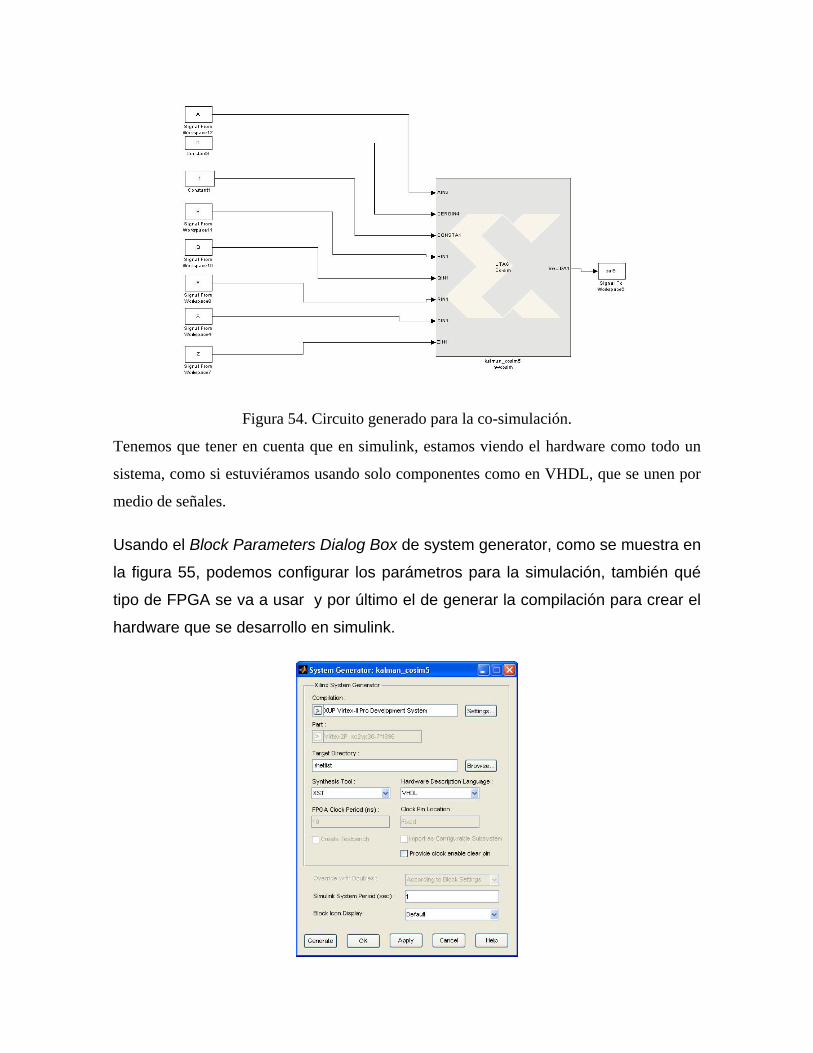
Figura 54. Circuito generado para la co-simulación.
Tenemos que tener en cuenta que en simulink, estamos viendo el hardware como todo un
sistema, como si estuviéramos usando solo componentes como en VHDL, que se unen por
medio de señales.
Usando el Block Parameters Dialog Box de system generator, como se muestra en
la figura 55, podemos configurar los parámetros para la simulación, también qué
tipo de FPGA se va a usar y por último el de generar la compilación para crear el
hardware que se desarrollo en simulink.

Figura 55. Parámetros del Block Parameters Dialog Box de system generator.
Si hay errores en el hardware que se crea por medio de ISE de Xilinx, se pueden corregir
también en simulink. Cuando el hardware esta creado, nos aparece una librería nueva para
poder hacer la co-simulación con la tarjeta XUP2VP30 de Xilinx, la que se muestra en la
figura 56.
Figura 56. Tarjeta de desarrollo XUP2VP30.
Para hacer la co-simulación tenemos que cambiar de parámetros para poder llevar a cabo el
trabajo, tal como se muestra en la figura 57.
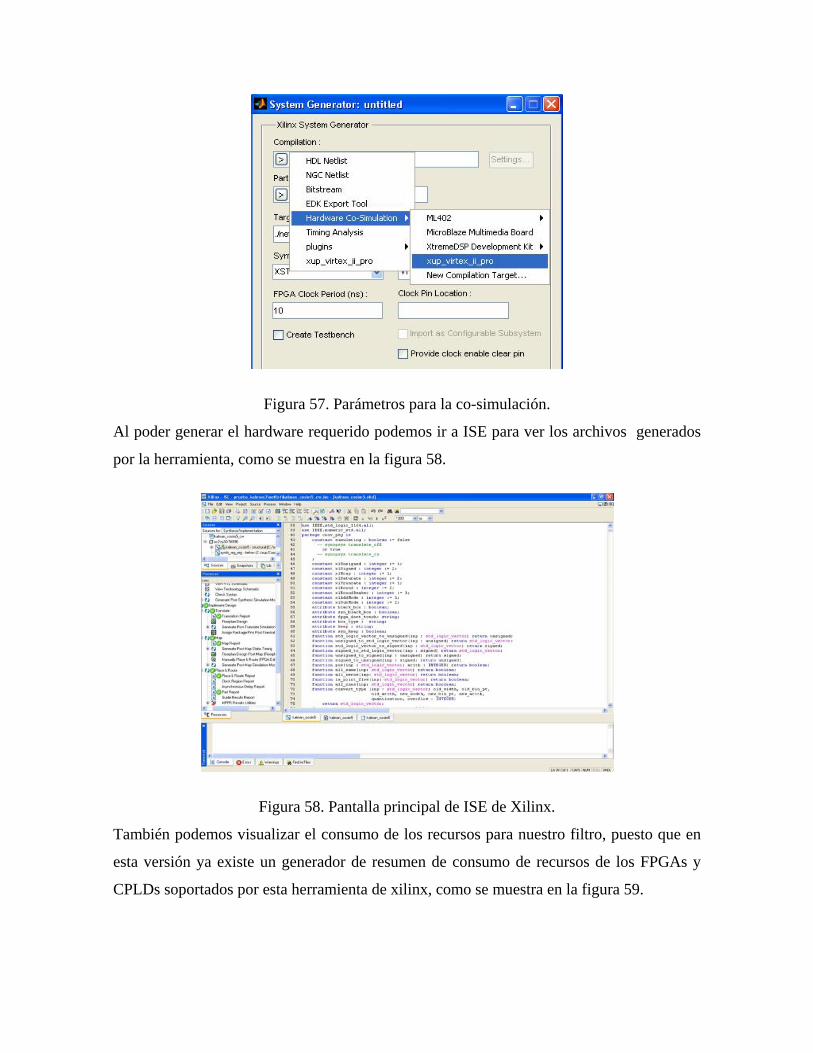
Figura 57. Parámetros para la co-simulación.
Al poder generar el hardware requerido podemos ir a ISE para ver los archivos generados
por la herramienta, como se muestra en la figura 58.
Figura 58. Pantalla principal de ISE de Xilinx.
También podemos visualizar el consumo de los recursos para nuestro filtro, puesto que en
esta versión ya existe un generador de resumen de consumo de recursos de los FPGAs y
CPLDs soportados por esta herramienta de xilinx, como se muestra en la figura 59.
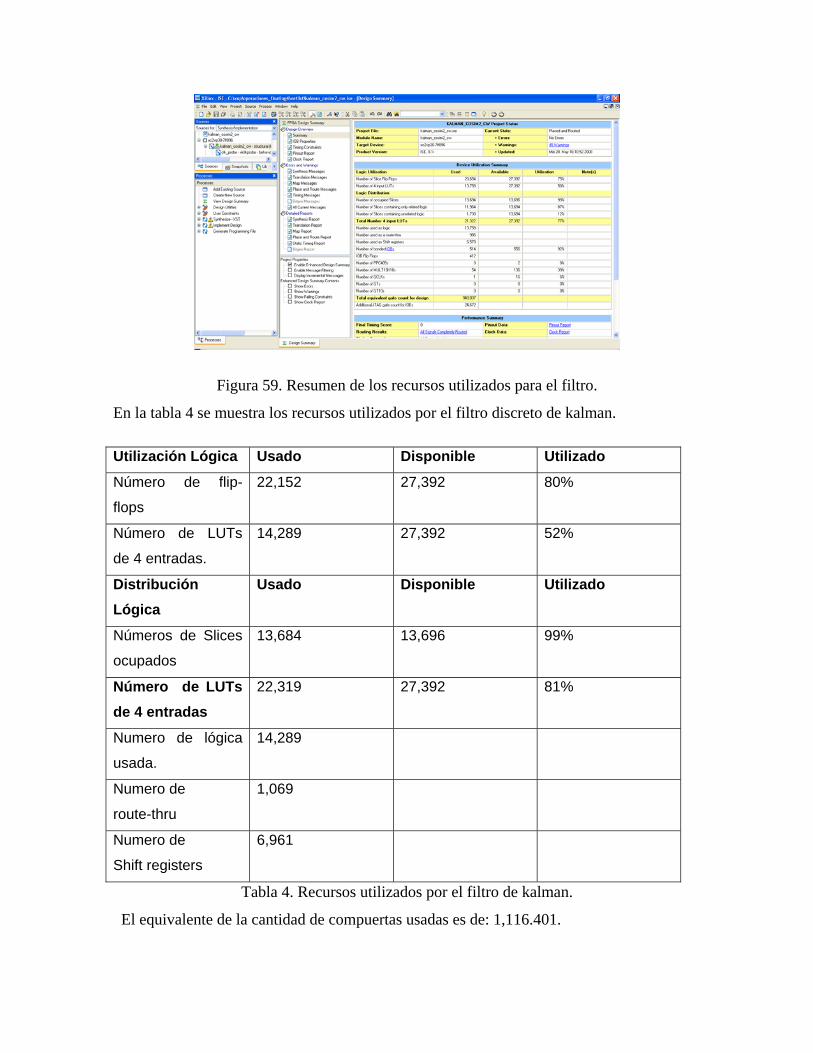
Figura 59. Resumen de los recursos utilizados para el filtro.
En la tabla 4 se muestra los recursos utilizados por el filtro discreto de kalman.
Utilización Lógica Usado Disponible Utilizado
Número de flip-
flops
22,152 27,392 80%
Número de LUTs
de 4 entradas.
14,289 27,392 52%
Distribución Lógica
Usado Disponible Utilizado
Números de Slices
ocupados
13,684 13,696 99%
Número de LUTs de 4 entradas
22,319 27,392 81%
Numero de lógica
usada. 14,289
Numero de
route-thru
1,069
Numero de
Shift registers
6,961
Tabla 4. Recursos utilizados por el filtro de kalman.
El equivalente de la cantidad de compuertas usadas es de: 1,116.401.
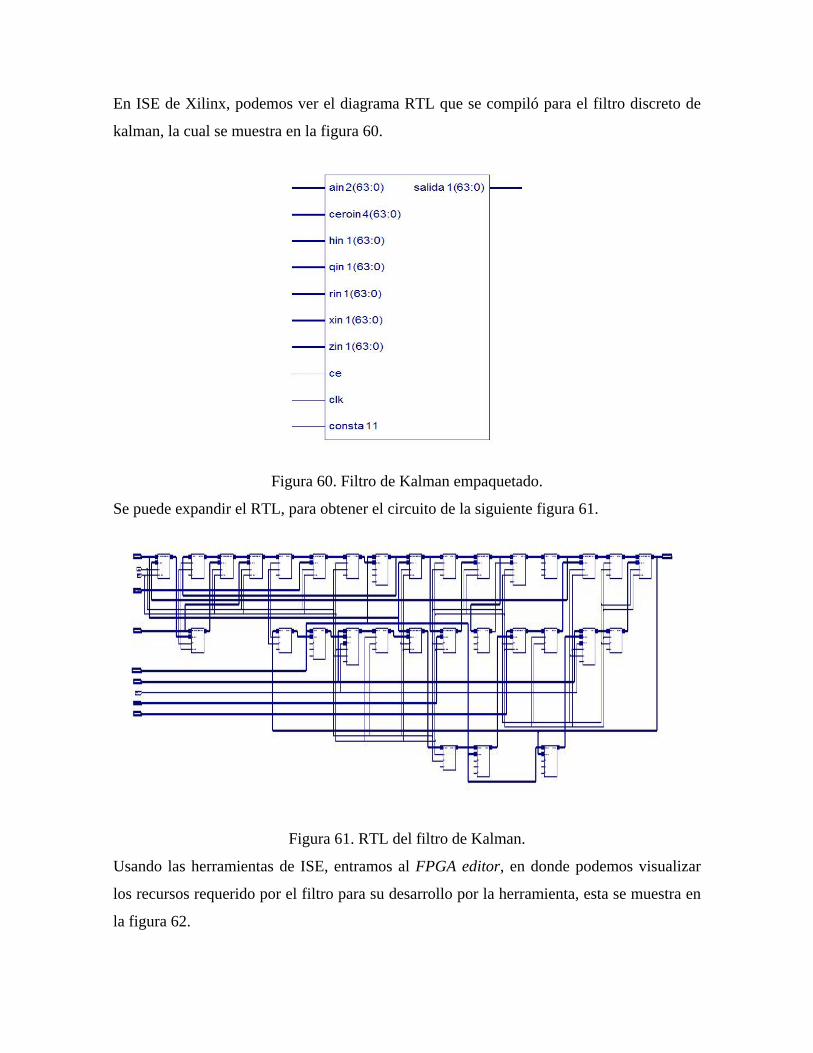
En ISE de Xilinx, podemos ver el diagrama RTL que se compiló para el filtro discreto de
kalman, la cual se muestra en la figura 60.
Figura 60. Filtro de Kalman empaquetado.
Se puede expandir el RTL, para obtener el circuito de la siguiente figura 61.
Figura 61. RTL del filtro de Kalman.
Usando las herramientas de ISE, entramos al FPGA editor, en donde podemos visualizar
los recursos requerido por el filtro para su desarrollo por la herramienta, esta se muestra en
la figura 62.

Figura 62. Layout total del filtro de Kalman.
Expandiendo dentro del layout, podemos ver lo siguiente, como se muestra en la figura 63.
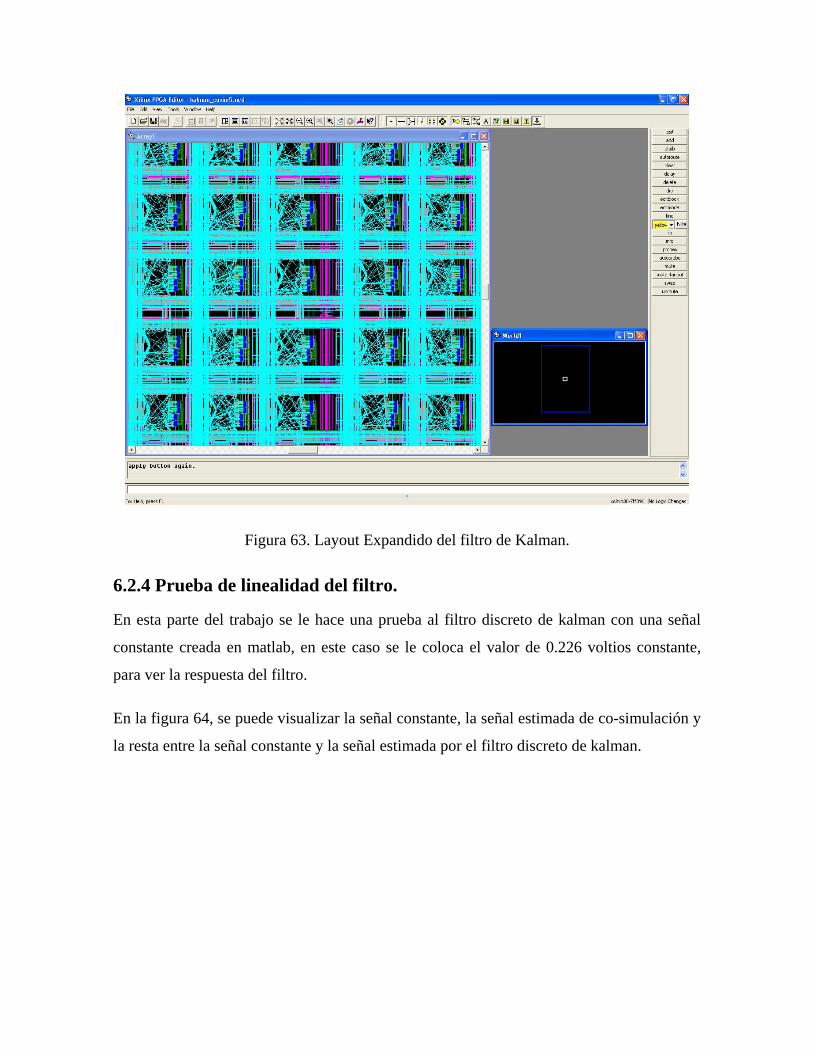
Figura 63. Layout Expandido del filtro de Kalman.
6.2.4 Prueba de linealidad del filtro.
En esta parte del trabajo se le hace una prueba al filtro discreto de kalman con una señal
constante creada en matlab, en este caso se le coloca el valor de 0.226 voltios constante,
para ver la respuesta del filtro.
En la figura 64, se puede visualizar la señal constante, la señal estimada de co-simulación y
la resta entre la señal constante y la señal estimada por el filtro discreto de kalman.
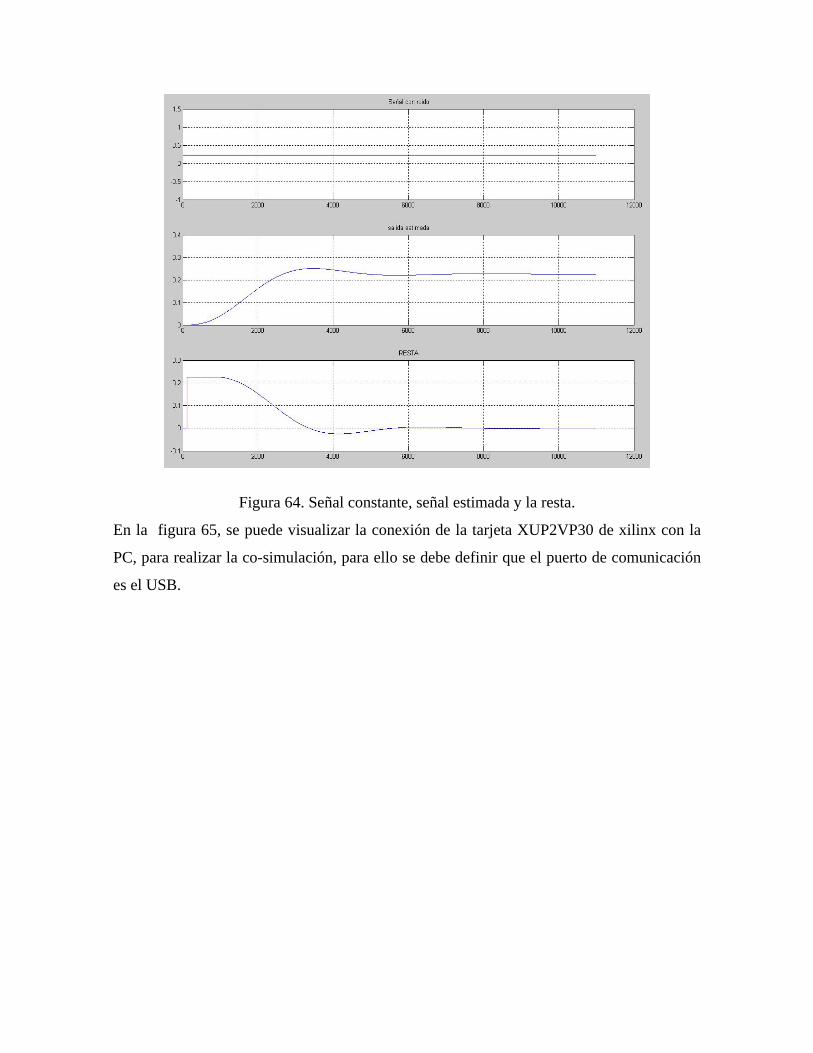
Figura 64. Señal constante, señal estimada y la resta.
En la figura 65, se puede visualizar la conexión de la tarjeta XUP2VP30 de xilinx con la
PC, para realizar la co-simulación, para ello se debe definir que el puerto de comunicación
es el USB.

Figura 65. Sistema de co-simulación entre la XUP2VP30 y la PC.
Al termino de la co-simulación podemos observar la respuesta mediante matlab, la señal
co-simulada y la señal constante en la misma gráfica para su comparación en el tiempo, tal
como se muestra en la figura 66.
Figura 66. Entrada constante y señal co-simulada.

Al analizar la gráfica anterior, vemos que la señal estimada sigue a la señal constante por lo
cual se concluye que el filtro de kalman es lineal.
En la siguiente figura, podemos visualizar una versión mas ampliada de la grafica anterior
como se muestra en la figura 67.
Figura 67. Versión ampliada de las señales.
En la figura 68, podemos visualizar como los parámetros del filtro de kalman evolucionan
con respecto al tiempo.

Figura 68. Evolución de los parámetros del filtro.
Al inicio, inicializamos los filtros con valores fijos: K=0 y P=0, Lo cual evolucionan en el
tiempo, llegando a un valor constante al momento de que la señal está estimada de una
manera óptima.
Si vemos más en detalle en la figura, podemos apreciar como las señales están en forma de
escalera, esto se debe a que hay registros o delays que mantienen los datos hasta que se
pueda obtener la respuesta de un bloque para poder hacer la operación.
6.3 Estimación de la respuesta del sensor de temperatura.
En esta parte del trabajo vamos a visualizar el funcionamiento implementado del filtro
discreto de kalman, usando las medidas que se tienen en matlab, con ello vamos a ver el
funcionamiento real tanto en software como en hardware del filtro de kalman.
Para esa temperatura medida por medio de la termocupla y comparada con la del patrón y a
través del circuito de acondicionamiento de señal, podemos ver como esta contaminada la

señal de la termocupla con un ruido aleatorio, así mismo podemos visualizar la dispersión
de las medidas, como se muestra en la figura 69.
Figura 69. Señal contaminada con ruido blanco gaussiano.
Así mismo, como ya hemos definido al ruido en los capítulos anteriores, vamos a ver
histograma de la señal con ruido contaminada, se nota que tiene una distribución gaussiana,
esto se muestra en la figura 70.
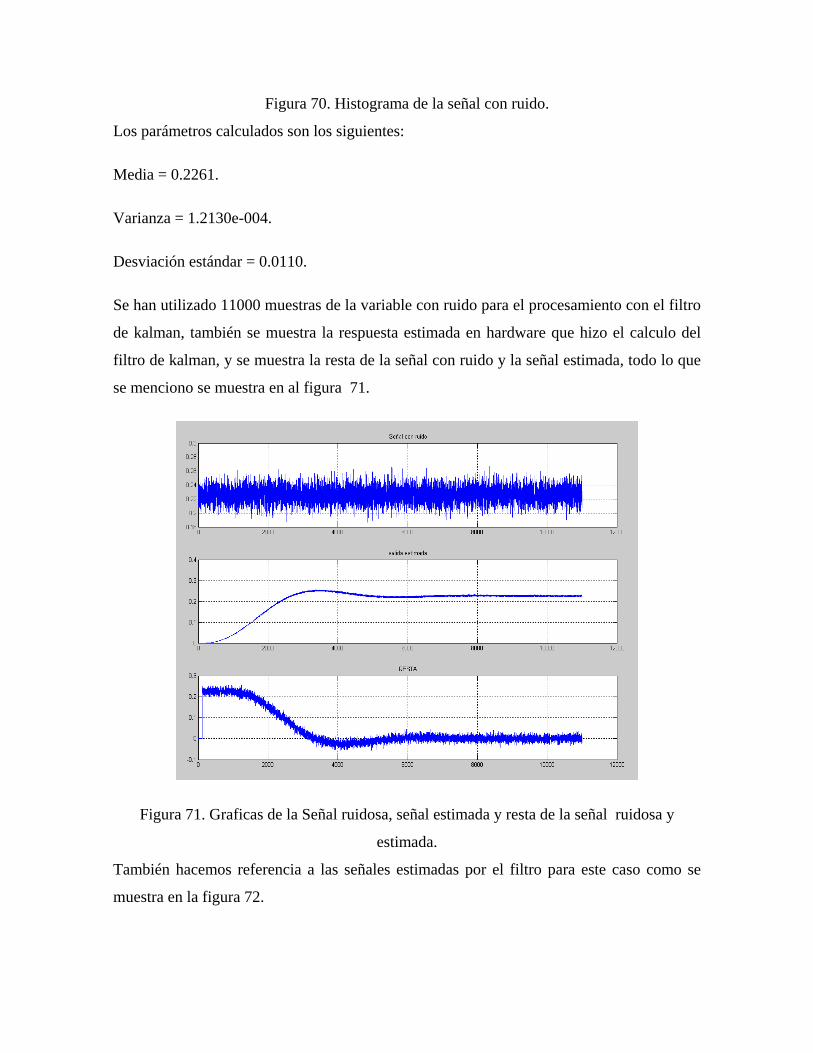
Figura 70. Histograma de la señal con ruido.
Los parámetros calculados son los siguientes:
Media = 0.2261.
Varianza = 1.2130e-004.
Desviación estándar = 0.0110.
Se han utilizado 11000 muestras de la variable con ruido para el procesamiento con el filtro
de kalman, también se muestra la respuesta estimada en hardware que hizo el calculo del
filtro de kalman, y se muestra la resta de la señal con ruido y la señal estimada, todo lo que
se menciono se muestra en al figura 71.
Figura 71. Graficas de la Señal ruidosa, señal estimada y resta de la señal ruidosa y
estimada.
También hacemos referencia a las señales estimadas por el filtro para este caso como se
muestra en la figura 72.
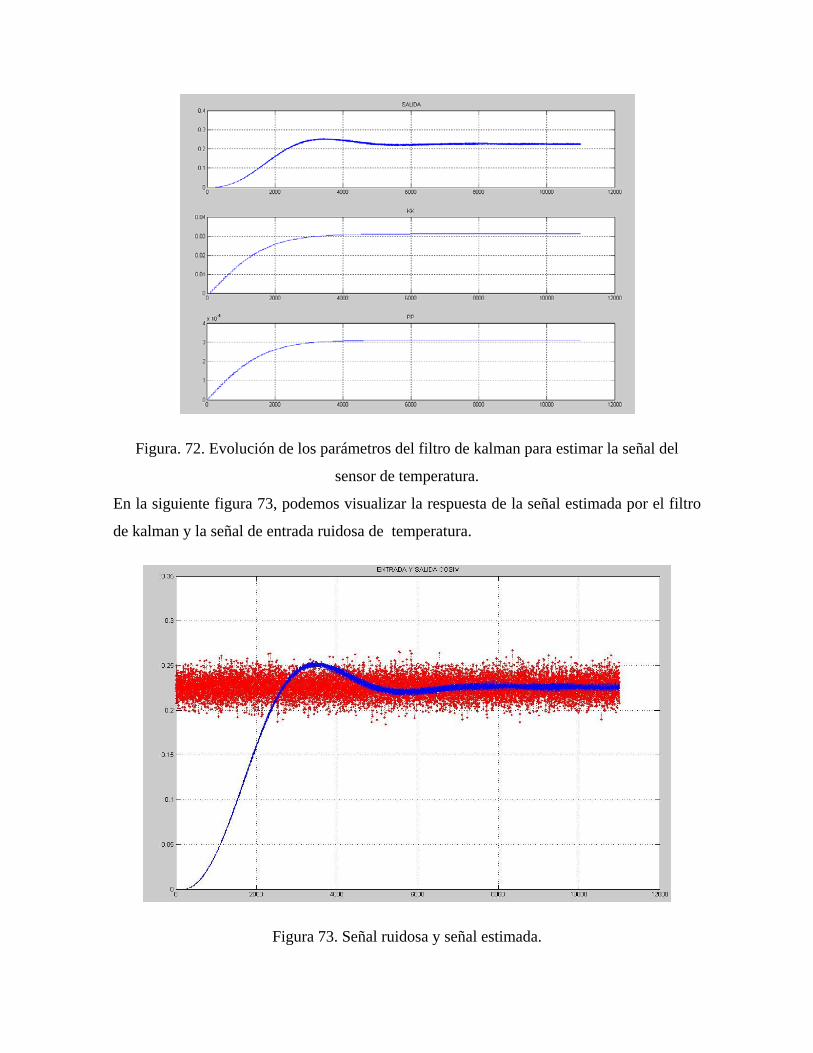
Figura. 72. Evolución de los parámetros del filtro de kalman para estimar la señal del
sensor de temperatura.
En la siguiente figura 73, podemos visualizar la respuesta de la señal estimada por el filtro
de kalman y la señal de entrada ruidosa de temperatura.
Figura 73. Señal ruidosa y señal estimada.
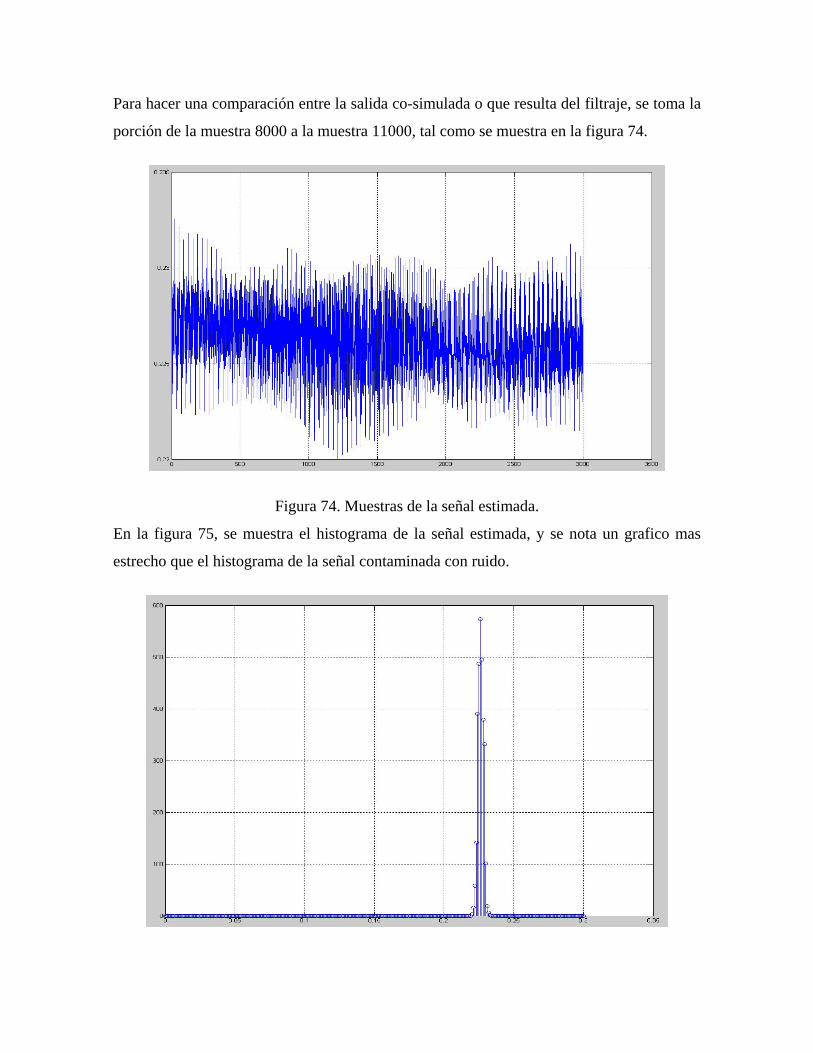
Para hacer una comparación entre la salida co-simulada o que resulta del filtraje, se toma la
porción de la muestra 8000 a la muestra 11000, tal como se muestra en la figura 74.
Figura 74. Muestras de la señal estimada.
En la figura 75, se muestra el histograma de la señal estimada, y se nota un grafico mas
estrecho que el histograma de la señal contaminada con ruido.
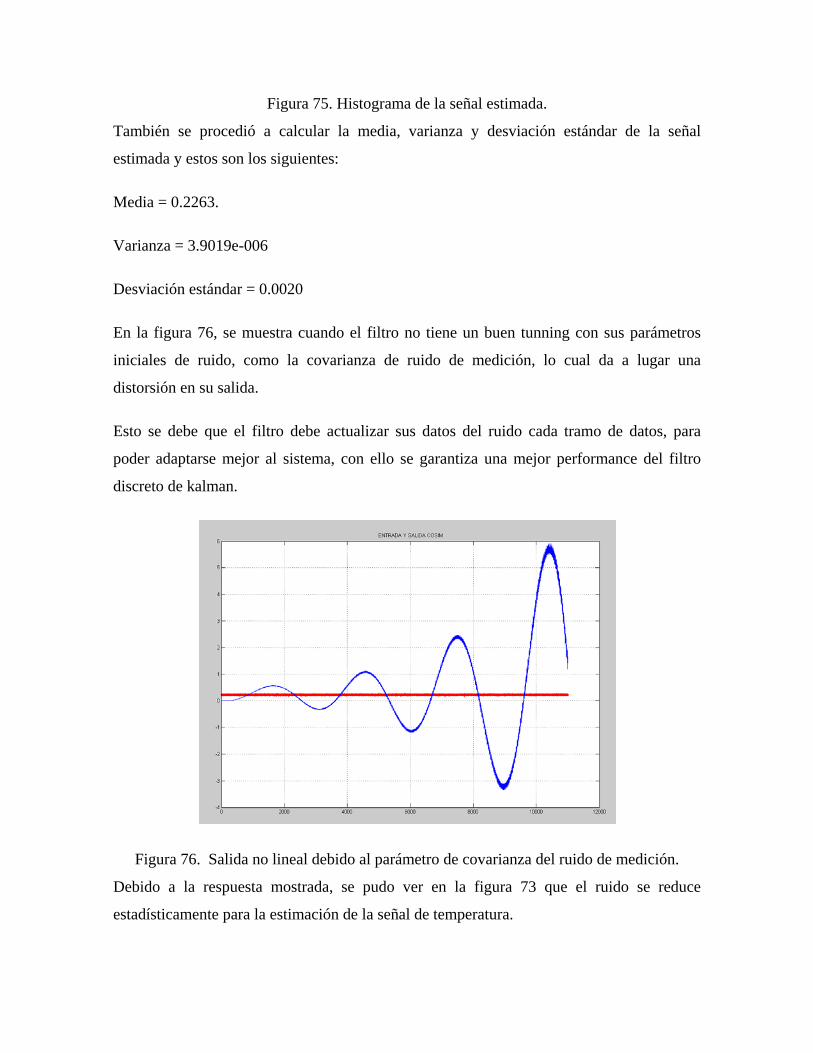
Figura 75. Histograma de la señal estimada.
También se procedió a calcular la media, varianza y desviación estándar de la señal
estimada y estos son los siguientes:
Media = 0.2263.
Varianza = 3.9019e-006
Desviación estándar = 0.0020
En la figura 76, se muestra cuando el filtro no tiene un buen tunning con sus parámetros
iniciales de ruido, como la covarianza de ruido de medición, lo cual da a lugar una
distorsión en su salida.
Esto se debe que el filtro debe actualizar sus datos del ruido cada tramo de datos, para
poder adaptarse mejor al sistema, con ello se garantiza una mejor performance del filtro
discreto de kalman.
Figura 76. Salida no lineal debido al parámetro de covarianza del ruido de medición.
Debido a la respuesta mostrada, se pudo ver en la figura 73 que el ruido se reduce
estadísticamente para la estimación de la señal de temperatura.
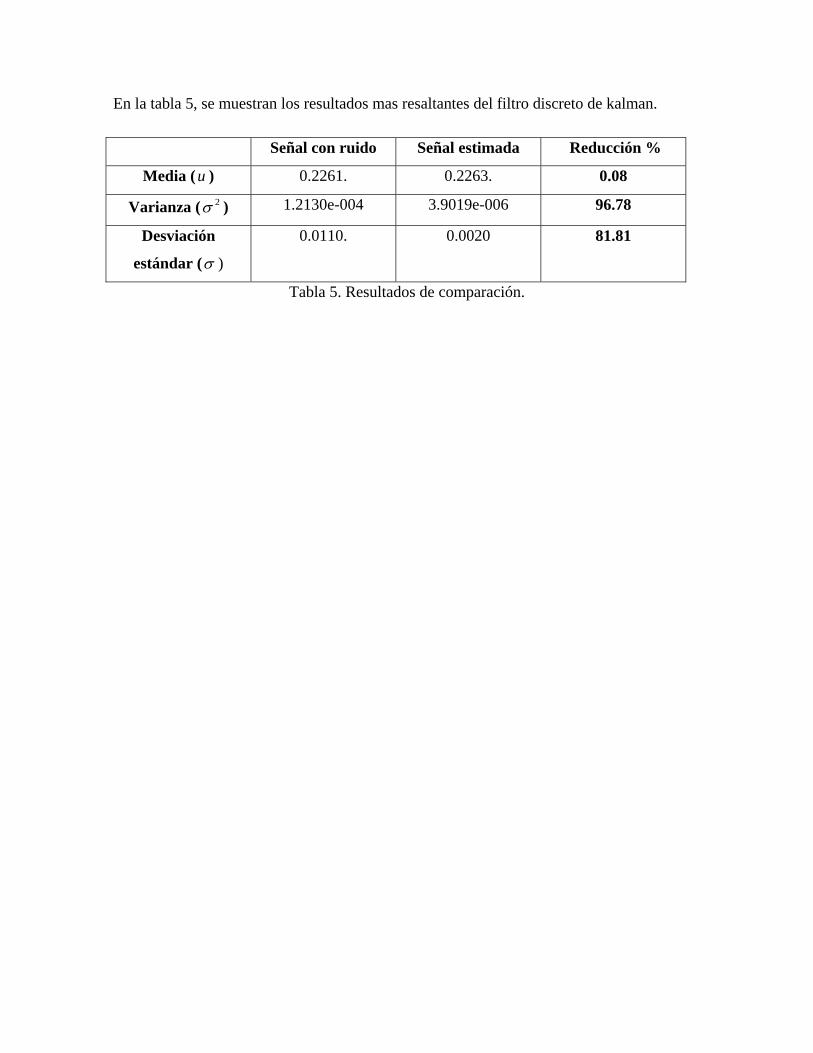
En la tabla 5, se muestran los resultados mas resaltantes del filtro discreto de kalman.
Señal con ruido Señal estimada Reducción %
Media (u ) 0.2261. 0.2263. 0.08
Varianza ( 2σ ) 1.2130e-004 3.9019e-006 96.78
Desviación
estándar (σ )
0.0110. 0.0020 81.81
Tabla 5. Resultados de comparación.
CAPITULO 7. RESULTADOS Y
CONCLUSIONES
En los siguientes párrafos se van a detallar los resultados que se tuvo en la implementación del
filtro en el FPGA.
Se pudo describir el ruido total como una suma de ruidos que afectan a la medición de
temperatura, con lo cual se pudo modelar el ruido total como un ruido blanco gaussiano, por medio
del teorema del límite central.
Se implementó una tarjeta impresa para el circuito de acondicionamiento del sensor de
temperatura, con la cual se caracterizó el sensor de temperatura en base al algoritmo de kalman.
Se diseñó una arquitectura que trabaje en forma paralela, para que sea mas rápida.
Se implementó el filtro de kalman en el FPGA virtex 2 pro de xilinx, teniendo en cuenta una
frecuencia de 100Mhz.
El filtro de kalman ocupa un poco mas del 80% de lo recursos del FPGA virtex 2 pro.
Se probó que estima la señal con menor desviación estándar y varianza, con lo cual la señal se
acerca mas a la señal deseada, pues se redujo la desviación estándar en mas del 80%.
CAPITULO 8. CONCLUSIONES Las siguientes conclusiones se derivaron del trabajo, y estas son:
Se debe tener presente de contar con un laboratorio con un suministro principal, y que cuente
con pocos equipos posibles para hacer las caracterizaciones de los sensores.
Se debe hacer un estudio previo de la señal que se va a evaluar, para poder sacar sus parámetros
estadísticos.
El modelamiento matemático del ruido y el teorema del límite central nos sirve para tener en cuenta
más ruidos infiltrados que puedan añadirse al ruido total.
Para poder mejorar en performance del filtro se debe tener en cuenta un porcentaje de área de
mapeo de 80%.
Se debe tener en cuenta, los tiempos de procesamiento de las bloques del filtro, para utilizar tener
en cuenta un delay necesario, con lo cual se va a poder hacer los cálculos con los verdaderos
valores.
Se podría optimizar el filtro, usando parámetros de enrutamiento previos en el momento del mapeo
del filtro en el FPGA, pero seria necesario tener en cuenta un chip con mayor capacidad de
integración.
Para sistemas no lineales se puede pensar en el filtro de kalman extendido o los filtros alfa beta.
Se puede implementar hardware por medio de simulink en FPGA, con lo cual se puede probar los
sistemas creados en matlab, para el complemento del aprendizaje del investigador.

ANEXOS
APENDICE A. La media y la varianza.
Media:
∫∞+
∞−
=
==
dxxxf
XEXtu
)(
)( )(
Varianza :
∫∞+
∞−
−=
−=
=
dxxfXx
XEXEXVar
)()(
]])[[( )(
2
2
2σ
APENDICE B. Propiedades de la covarianza.
Propiedades de la covarianza:
• Si X e Y son independientes y sin correlación o uno de ellos tiene un valor 0 de
promedio entonces:
.0=xyσ
• Si x e y son ortogonales, entonces:
])[][( YEXExy −=σ.
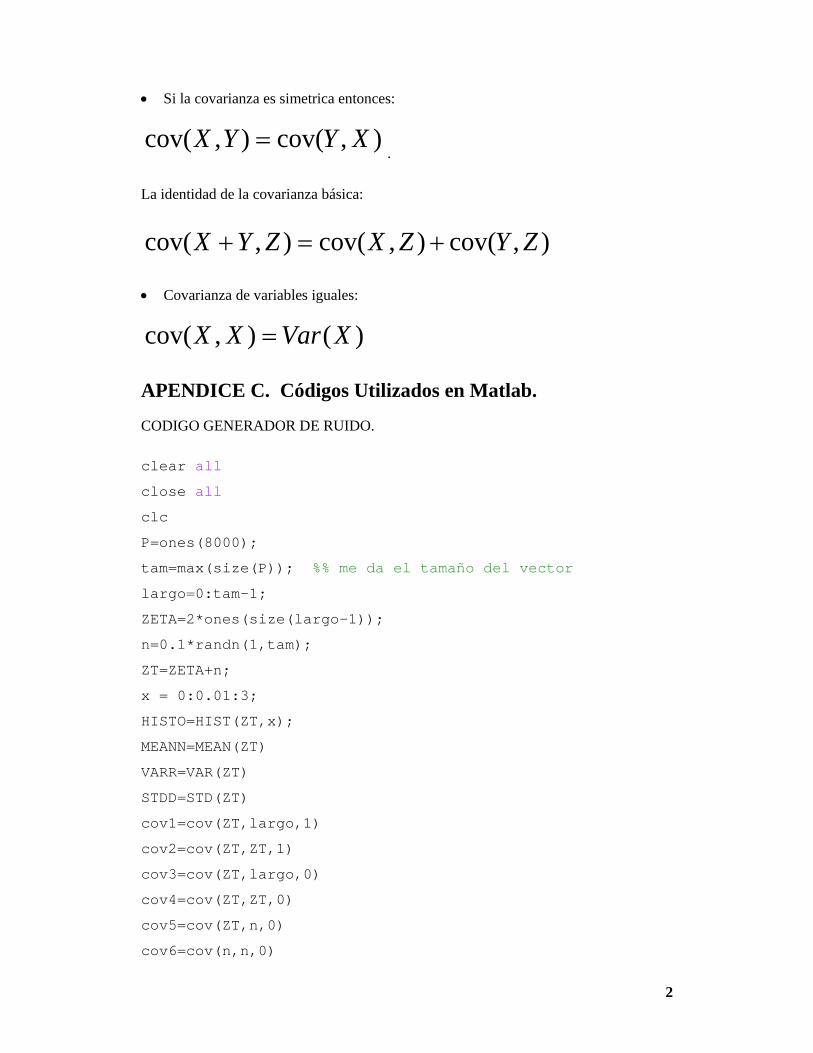
2
• Si la covarianza es simetrica entonces:
),cov(),cov( XYYX =.
La identidad de la covarianza básica:
),cov(),cov(),cov( ZYZXZYX +=+
• Covarianza de variables iguales:
)(),cov( XVarXX =
APENDICE C. Códigos Utilizados en Matlab.
CODIGO GENERADOR DE RUIDO.
clear all
close all
clc
P=ones(8000);
tam=max(size(P)); %% me da el tamaño del vector
largo=0:tam-1;
ZETA=2*ones(size(largo-1));
n=0.1*randn(1,tam);
ZT=ZETA+n;
x = 0:0.01:3;
HISTO=HIST(ZT,x);
MEANN=MEAN(ZT)
VARR=VAR(ZT)
STDD=STD(ZT)
cov1=cov(ZT,largo,1)
cov2=cov(ZT,ZT,1)
cov3=cov(ZT,largo,0)
cov4=cov(ZT,ZT,0)
cov5=cov(ZT,n,0)
cov6=cov(n,n,0)
3
figure(1)
plot(ZT)
GRID
figure(2)
plot(x,HISTO)
GRID
figure(3)
stem(x,HISTO)
GRID
CODIGO GENERADOR DE SEÑAL RUIDOSA.
clear all
close all
clc
P=ones(11000);
tam=max(size(P)); %% me da el tamaño del vector
largo=0:tam-1;
Q10=0.00001*ones(size(largo-1));
H10=1*ones(size(largo-1));
A10=1*ones(size(largo-1));
R10=0.01*ones(size(largo-1));
X10=0*ones(size(largo-1));
xm=0;
Q1=num2hex(Q10);
Q=hex2dec(Q1);
H1=num2hex(H10);
H=hex2dec(H1);
A1=num2hex(A10);
A=hex2dec(A1);
R1=num2hex(R10);
R=hex2dec(R1);
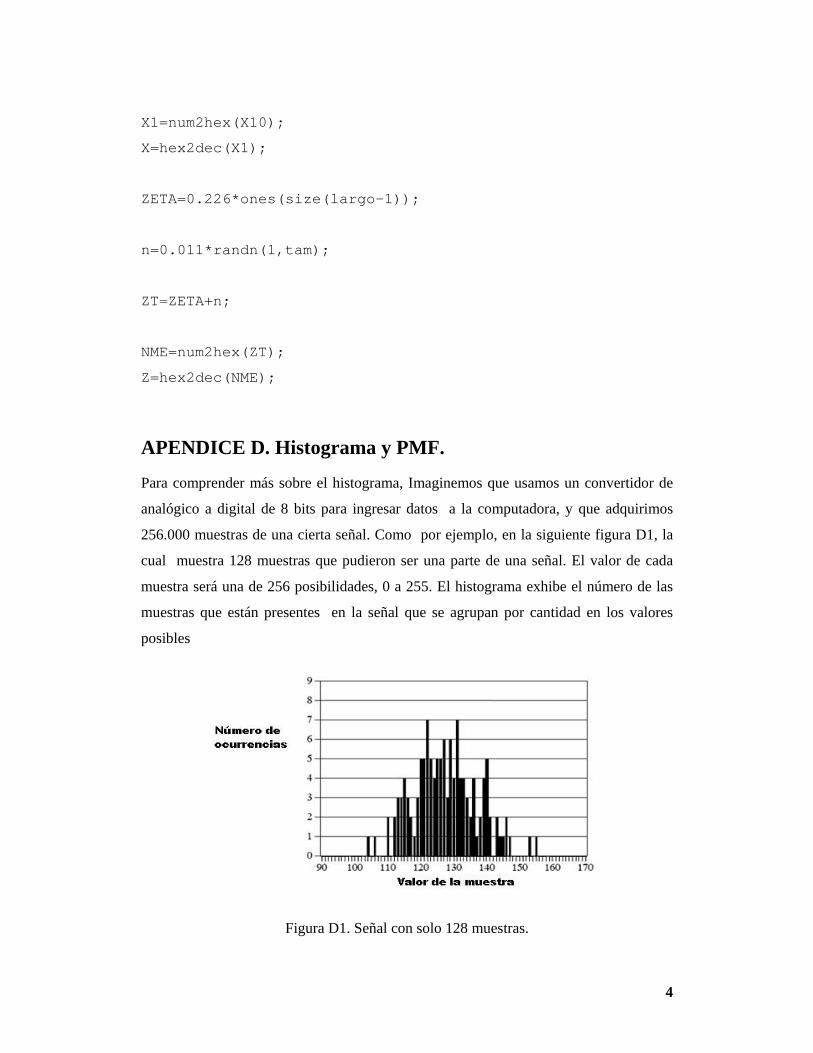
4
X1=num2hex(X10);
X=hex2dec(X1);
ZETA=0.226*ones(size(largo-1));
n=0.011*randn(1,tam);
ZT=ZETA+n;
NME=num2hex(ZT);
Z=hex2dec(NME);
APENDICE D. Histograma y PMF.
Para comprender más sobre el histograma, Imaginemos que usamos un convertidor de
analógico a digital de 8 bits para ingresar datos a la computadora, y que adquirimos
256.000 muestras de una cierta señal. Como por ejemplo, en la siguiente figura D1, la
cual muestra 128 muestras que pudieron ser una parte de una señal. El valor de cada
muestra será una de 256 posibilidades, 0 a 255. El histograma exhibe el número de las
muestras que están presentes en la señal que se agrupan por cantidad en los valores
posibles
Figura D1. Señal con solo 128 muestras.
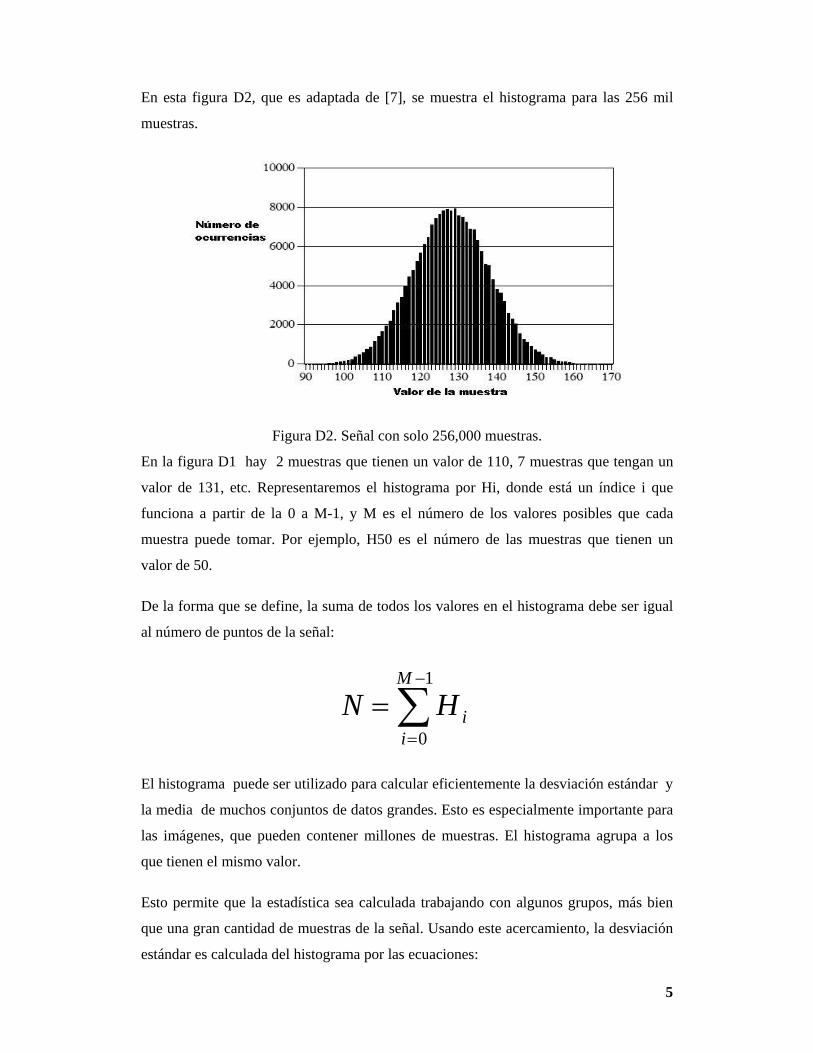
5
En esta figura D2, que es adaptada de [7], se muestra el histograma para las 256 mil
muestras.
Figura D2. Señal con solo 256,000 muestras.
En la figura D1 hay 2 muestras que tienen un valor de 110, 7 muestras que tengan un
valor de 131, etc. Representaremos el histograma por Hi, donde está un índice i que
funciona a partir de la 0 a M-1, y M es el número de los valores posibles que cada
muestra puede tomar. Por ejemplo, H50 es el número de las muestras que tienen un
valor de 50.
De la forma que se define, la suma de todos los valores en el histograma debe ser igual
al número de puntos de la señal:
∑−
=
=1
0
M
iiHN
El histograma puede ser utilizado para calcular eficientemente la desviación estándar y
la media de muchos conjuntos de datos grandes. Esto es especialmente importante para
las imágenes, que pueden contener millones de muestras. El histograma agrupa a los
que tienen el mismo valor.
Esto permite que la estadística sea calculada trabajando con algunos grupos, más bien
que una gran cantidad de muestras de la señal. Usando este acercamiento, la desviación
estándar es calculada del histograma por las ecuaciones:
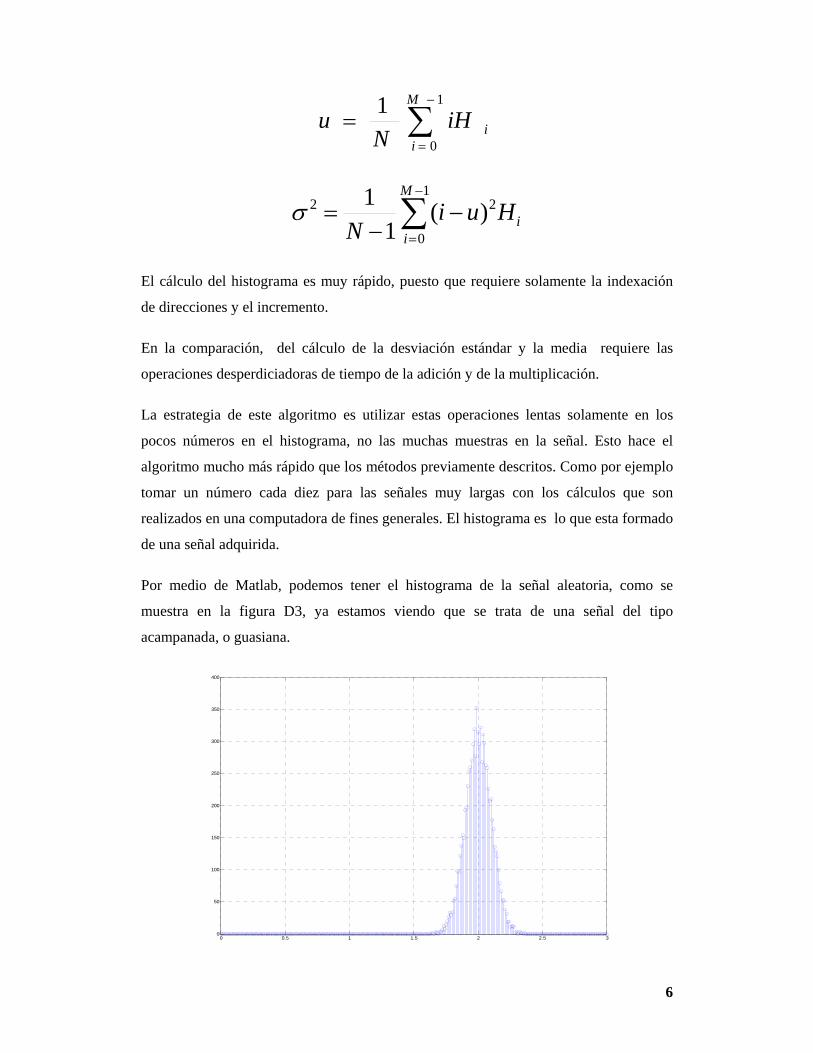
6
∑−
=
=1
0
1 M
iiiH
Nu
i
M
iHui
N ∑−
=
−−
=1
0
22 )(1
1σ
El cálculo del histograma es muy rápido, puesto que requiere solamente la indexación
de direcciones y el incremento.
En la comparación, del cálculo de la desviación estándar y la media requiere las
operaciones desperdiciadoras de tiempo de la adición y de la multiplicación.
La estrategia de este algoritmo es utilizar estas operaciones lentas solamente en los
pocos números en el histograma, no las muchas muestras en la señal. Esto hace el
algoritmo mucho más rápido que los métodos previamente descritos. Como por ejemplo
tomar un número cada diez para las señales muy largas con los cálculos que son
realizados en una computadora de fines generales. El histograma es lo que esta formado
de una señal adquirida.
Por medio de Matlab, podemos tener el histograma de la señal aleatoria, como se
muestra en la figura D3, ya estamos viendo que se trata de una señal del tipo
acampanada, o guasiana.
0 0.5 1 1.5 2 2.5 30
50
100
150
200
250
300
350
400
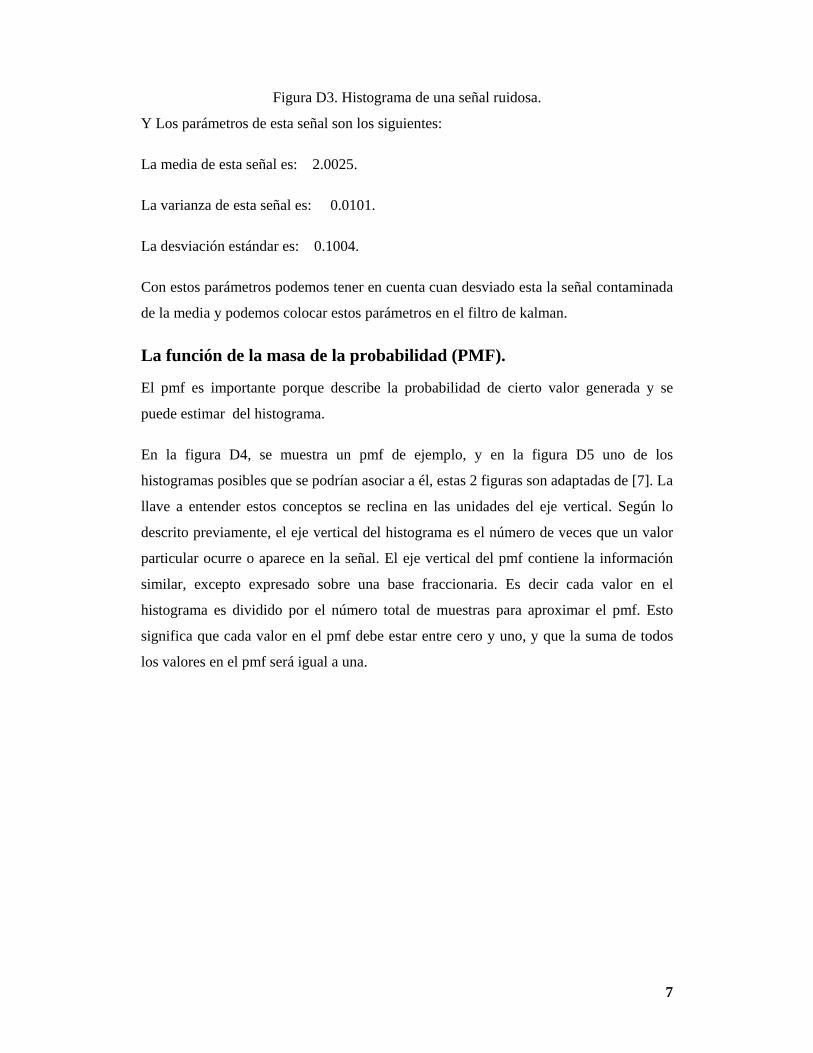
7
Figura D3. Histograma de una señal ruidosa.
Y Los parámetros de esta señal son los siguientes:
La media de esta señal es: 2.0025.
La varianza de esta señal es: 0.0101.
La desviación estándar es: 0.1004.
Con estos parámetros podemos tener en cuenta cuan desviado esta la señal contaminada
de la media y podemos colocar estos parámetros en el filtro de kalman.
La función de la masa de la probabilidad (PMF).
El pmf es importante porque describe la probabilidad de cierto valor generada y se
puede estimar del histograma.
En la figura D4, se muestra un pmf de ejemplo, y en la figura D5 uno de los
histogramas posibles que se podrían asociar a él, estas 2 figuras son adaptadas de [7]. La
llave a entender estos conceptos se reclina en las unidades del eje vertical. Según lo
descrito previamente, el eje vertical del histograma es el número de veces que un valor
particular ocurre o aparece en la señal. El eje vertical del pmf contiene la información
similar, excepto expresado sobre una base fraccionaria. Es decir cada valor en el
histograma es dividido por el número total de muestras para aproximar el pmf. Esto
significa que cada valor en el pmf debe estar entre cero y uno, y que la suma de todos
los valores en el pmf será igual a una.
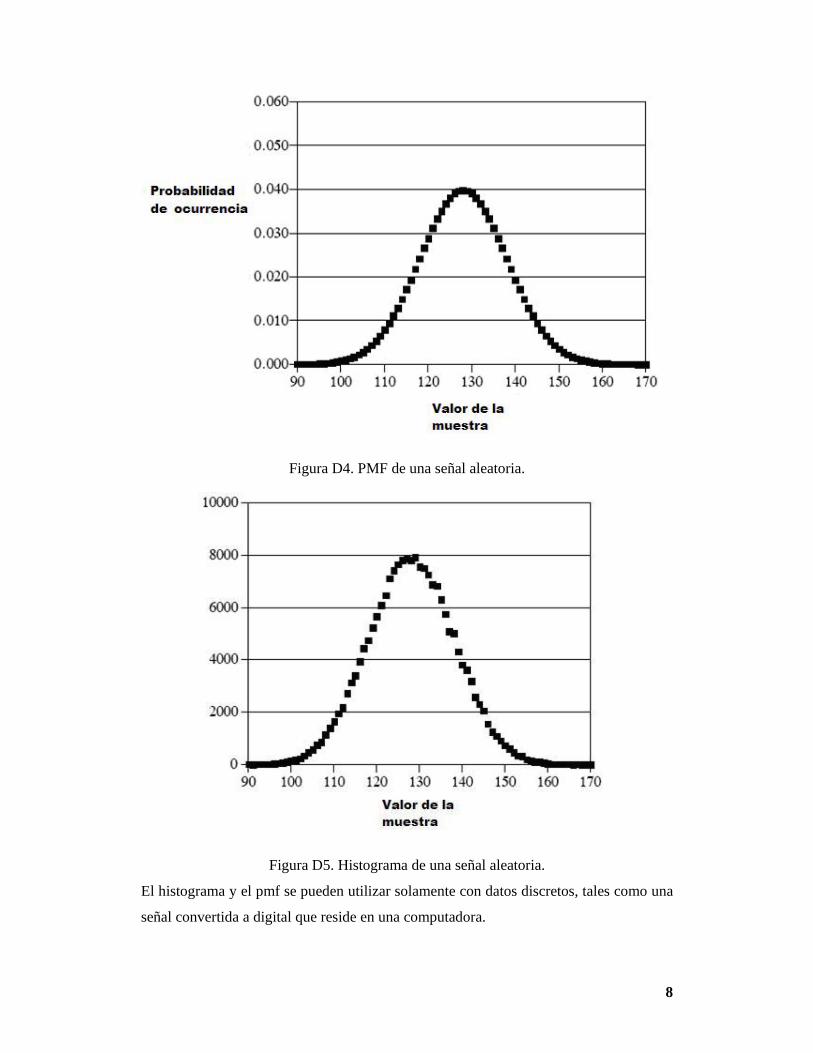
8
Figura D4. PMF de una señal aleatoria.
Figura D5. Histograma de una señal aleatoria.
El histograma y el pmf se pueden utilizar solamente con datos discretos, tales como una
señal convertida a digital que reside en una computadora.
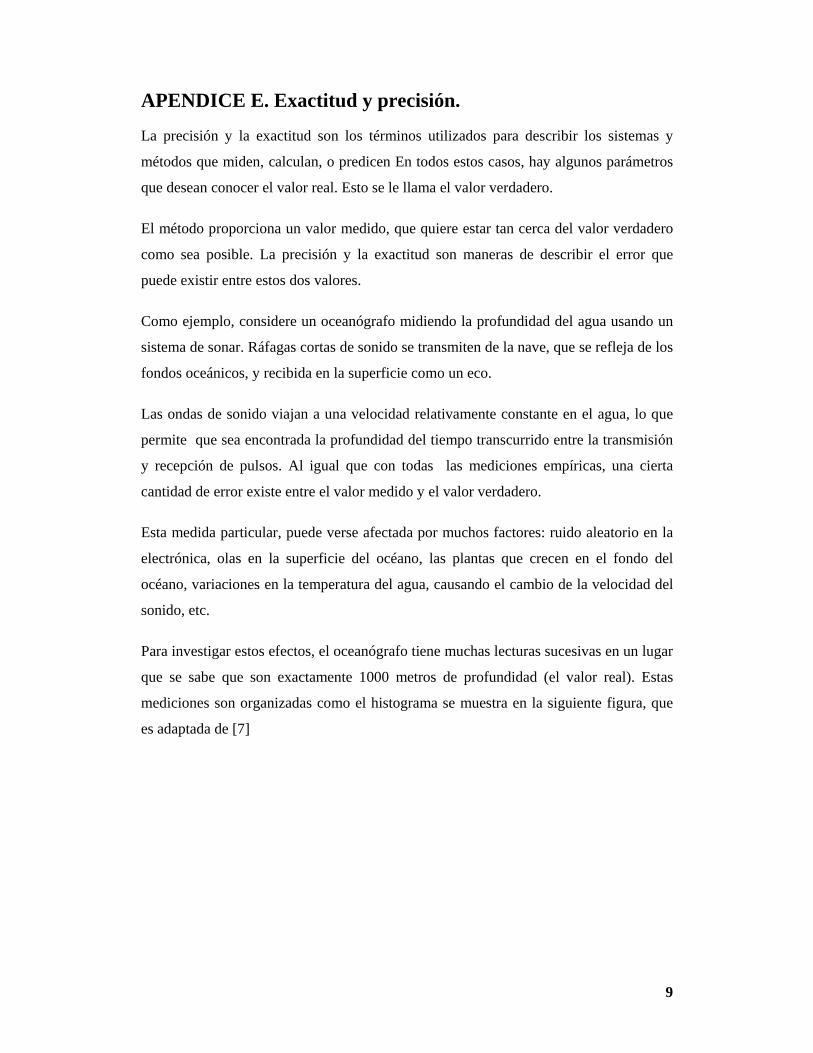
9
APENDICE E. Exactitud y precisión.
La precisión y la exactitud son los términos utilizados para describir los sistemas y
métodos que miden, calculan, o predicen En todos estos casos, hay algunos parámetros
que desean conocer el valor real. Esto se le llama el valor verdadero.
El método proporciona un valor medido, que quiere estar tan cerca del valor verdadero
como sea posible. La precisión y la exactitud son maneras de describir el error que
puede existir entre estos dos valores.
Como ejemplo, considere un oceanógrafo midiendo la profundidad del agua usando un
sistema de sonar. Ráfagas cortas de sonido se transmiten de la nave, que se refleja de los
fondos oceánicos, y recibida en la superficie como un eco.
Las ondas de sonido viajan a una velocidad relativamente constante en el agua, lo que
permite que sea encontrada la profundidad del tiempo transcurrido entre la transmisión
y recepción de pulsos. Al igual que con todas las mediciones empíricas, una cierta
cantidad de error existe entre el valor medido y el valor verdadero.
Esta medida particular, puede verse afectada por muchos factores: ruido aleatorio en la
electrónica, olas en la superficie del océano, las plantas que crecen en el fondo del
océano, variaciones en la temperatura del agua, causando el cambio de la velocidad del
sonido, etc.
Para investigar estos efectos, el oceanógrafo tiene muchas lecturas sucesivas en un lugar
que se sabe que son exactamente 1000 metros de profundidad (el valor real). Estas
mediciones son organizadas como el histograma se muestra en la siguiente figura, que
es adaptada de [7]
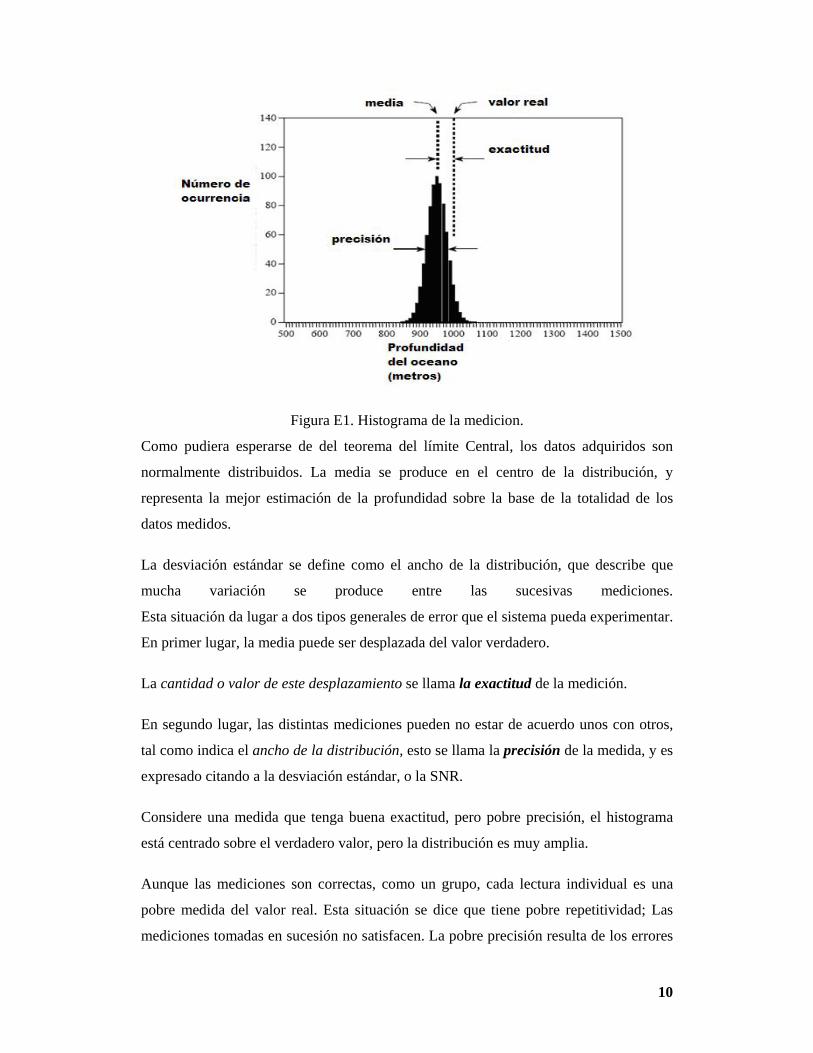
10
Figura E1. Histograma de la medicion.
Como pudiera esperarse de del teorema del límite Central, los datos adquiridos son
normalmente distribuidos. La media se produce en el centro de la distribución, y
representa la mejor estimación de la profundidad sobre la base de la totalidad de los
datos medidos.
La desviación estándar se define como el ancho de la distribución, que describe que
mucha variación se produce entre las sucesivas mediciones.
Esta situación da lugar a dos tipos generales de error que el sistema pueda experimentar.
En primer lugar, la media puede ser desplazada del valor verdadero.
La cantidad o valor de este desplazamiento se llama la exactitud de la medición.
En segundo lugar, las distintas mediciones pueden no estar de acuerdo unos con otros,
tal como indica el ancho de la distribución, esto se llama la precisión de la medida, y es
expresado citando a la desviación estándar, o la SNR.
Considere una medida que tenga buena exactitud, pero pobre precisión, el histograma
está centrado sobre el verdadero valor, pero la distribución es muy amplia.
Aunque las mediciones son correctas, como un grupo, cada lectura individual es una
pobre medida del valor real. Esta situación se dice que tiene pobre repetitividad; Las
mediciones tomadas en sucesión no satisfacen. La pobre precisión resulta de los errores
11
aleatorios. Este es el nombre dado a los errores que cambian en el tiempo La medida
cuando esta es repetida.
Promediar varias mediciones siempre va a mejorar la precisión. En resumen, la
precisión es una medida del ruido aleatorio.
Ahora, imagine que es una medida muy precisa, pero tiene una pobre precisión. Este
Hace que el histograma muy delgadas, pero no centrado sobre el verdadero valor.
Las sucesivas lecturas están cerca al valor, pero todos ellos tienen un gran error. La
pobre exactitud resulta de los errores sistemáticos. Estos son los errores que vienen a ser
repetidos en exactamente la misma manera, cada vez que se realiza la medición.
La precisión suele depender de la forma de cómo se calibra el sistema.
Por ejemplo, En la medición de la profundidad del océano, el parámetro que se mide
directamente es el tiempo transcurrido. Esto se convierte en profundidad por un
procedimiento de calibración que relaciona los milisegundos a metros.
Esto puede ser tan simple como multiplicar por una fija velocidad, o tan complicado
como decenas de correcciones de segundo orden.
Promediar las mediciones individuales no hace nada para mejorar la precisión. En
resumen, la exactitud es una medida de calibración.
En la práctica hay muchas formas de que la precisión y la exactitud pueden ser
Entrelazados. Por ejemplo, imaginar la construcción de un amplificador electrónico con
resistencias del 1%. Esta tolerancia indica que el valor de cada resistencia será dentro de
1% del valor declarado en una amplia gama de condiciones, como la temperatura,
Humedad, la edad, etc. Este error en la resistencia producirá un correspondiente error en
la ganancia del amplificador. ¿Este error es un problema de exactitud o Precisión?
La respuesta depende de la forma de cómo se toma las mediciones. Por ejemplo,
Supongamos que queremos construir un amplificador y probar varias veces durante
unos minutos.
El error de la ganancia permanece constante con cada prueba, y se puede concluir que el
problema es la exactitud.
12
En comparación, supongamos que deseamos construir mil amplificadores. La ganancia
del dispositivo a dispositivo va a fluctuar aleatoriamente, y el problema parece ser de
precisión. Del mismo modo, cualquiera de estos amplificadores mostrará obtener
fluctuaciones de ganancia en respuesta a la temperatura y cambios ambientales. Una vez
más, el problema se llama precisión.
En el momento de decidir qué nombre usar para llamar al problema, hágase dos
preguntas. La primera: ¿promediando las sucesivas lecturas van a proporcionar una
mejor medición? Si es Sí, es el error de precisión, si es no, lo llaman la exactitud.
Segundo: ¿la calibración corrige el error? Si la respuesta es sí, lo llama exactitud, y si es
no, lo llaman precisión. Esto tiene relación con la forma de cómo será calibrado el
dispositivo, y con qué frecuencia se hará.
APENDICE F. Conceptos básicos de la termocupla.
Las termocuplas son baratas y resistentes, tienen razonablemente
buena estabilidad a largo plazo. Debido a su pequeño tamaño,
responde con rapidez y son buenas opciones donde una respuesta rápida es importante.
Funcionan en temperaturas criogénicas hasta temperaturas de Jet-engine (tobera de
escape del motor) y dan una razonable linealidad y precisión.
Debido a que el número de electrones libres en un trozo de metal depende en tanto la
temperatura y la composición del metal, dos piezas de distintos metales en contacto
isotérmico y exhibirá una diferencia de potencial que esta en función de la temperatura,
como se muestra en la Figura F1, la cual es adaptada de [10]. El resultado depende de la
tensión las temperaturas, T1 y T2.
Desde que la termocupla es básicamente un componente de medida diferencial en lugar
de un dispositivo de medición absoluta, una temperatura de referencia es necesaria para
saber el voltaje de uno de los metales, entonces la temperatura del otro metal es inferida
de la tensión de salida.
Las termocuplas son hechas de materiales especialmente seleccionados que han sido
exhaustivamente caracterizados en términos de tensión frente a la temperatura.
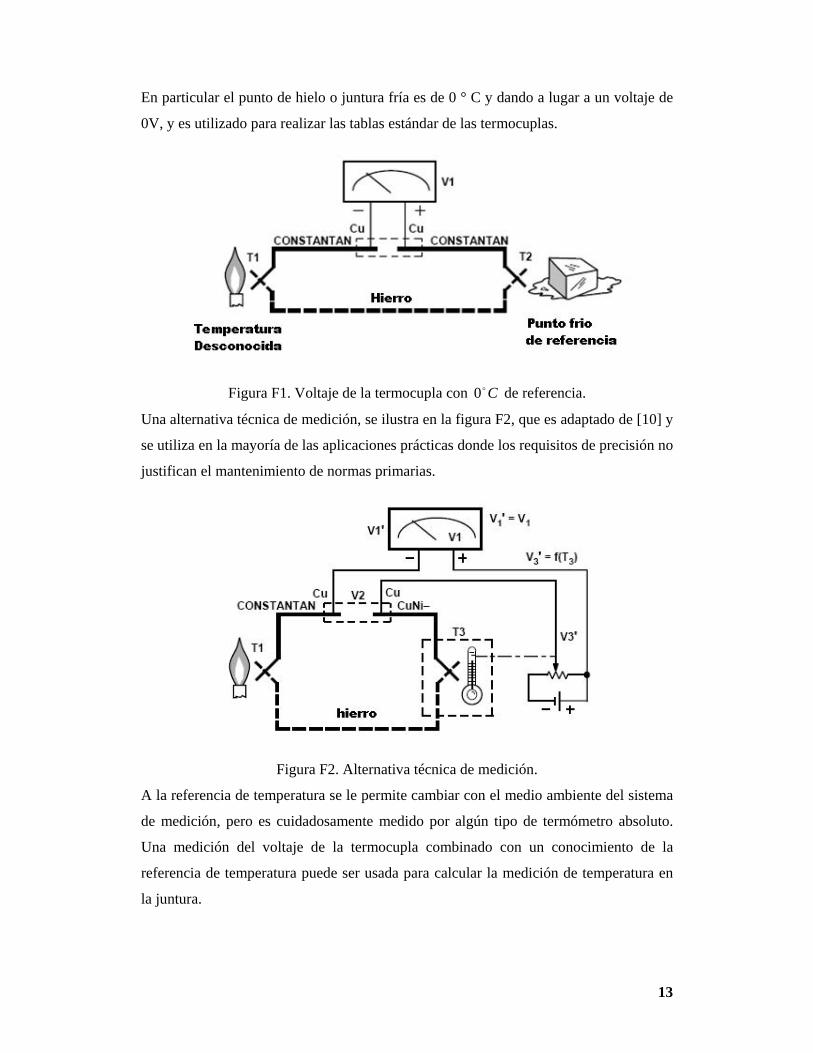
13
En particular el punto de hielo o juntura fría es de 0 ° C y dando a lugar a un voltaje de
0V, y es utilizado para realizar las tablas estándar de las termocuplas.
Figura F1. Voltaje de la termocupla con Co0 de referencia.
Una alternativa técnica de medición, se ilustra en la figura F2, que es adaptado de [10] y
se utiliza en la mayoría de las aplicaciones prácticas donde los requisitos de precisión no
justifican el mantenimiento de normas primarias.
Figura F2. Alternativa técnica de medición.
A la referencia de temperatura se le permite cambiar con el medio ambiente del sistema
de medición, pero es cuidadosamente medido por algún tipo de termómetro absoluto.
Una medición del voltaje de la termocupla combinado con un conocimiento de la
referencia de temperatura puede ser usada para calcular la medición de temperatura en
la juntura.

14
Es una práctica habitual, sin embargo, es para utilizar un método
termoeléctrico para medir la temperatura de referencia y para arreglar su voltaje de
salida a fin de que corresponda a una termocupla referenciada a 0°C. Esta tensión es
simplemente añadida al voltaje de la termocupla y la
suma corresponde con el voltaje estándar para una termocupla referenciada a un punto
de hielo.
Por otro lado, la sensibilidad de temperatura de los circuitos de transistores integrados
de silicio son bastantes predecibles y repetibles.
Esta sensibilidad es explotada en el AD594/AD595 para producir un voltaje de
temperatura relacionado para compensar la referencia de "hielo" de una termocupla tal
como se muestra en la figura F3, que es adaptado de [10].
Figura F3. Conectando las junturas isotermales.
Dado que la compensación es en la referencia de juntura, es a menudo conveniente para
formar la referencia de "juntura" conectar
directamente al cableado del circuito. Por lo tanto, siempre y cuando estas conexiones y
la compensación son a la misma temperatura no va a haber error en el resultado.
APENDICE G. Implementación de un filtro de kalman.
Para ver cómo funciona el filtro de kalman, se va a describir un ejemplo, en este caso,
un simple sensor provee datos de una variable simple de la posición, pero la
determinación de una posición escogida nos conlleva a la probabilidad de una posición

15
exacta, lo cual es un concepto familiar que rápidamente permite las dinámicas del
sistema que pueden ser incorporadas al problema.
Supongamos que está perdido en el mar durante la noche y no tiene idea de su
ubicación. Entonces toma una estrella brillante para establecer su posición (por la
simplicidad, considerar una locación unidimensional). En algún tiempo t1 se determinas
la locación que es z1. Sin embargo, porque el componente de medida presenta
inexactitudes, el error humano, y otras cosas más, el resultado de la medida va a ser
incierta. Entonces, decide que la precisión es como la desviación estándar 1zσ (o
equivalentemente, la varianza o la estadística de segundo orden 12
zσ ).
Además puede establecer que la probabilidad condicional de x(t1), es decir la posición
en el tiempo t1, condicionado en la observación en el valor observado de la medida z1
como se muestra en la figura G1. Es una grafica de )1|()1()|1( zxf tztx como función
de la ubicación x, la cual nos muestra la probabilidad de estar en cualquier ubicación,
basado en la medidas que se tomaron.
Note que 1zσ es una medida directa de la incertidumbre: si es grande el 1zσ , entonces
es más ancho el pico de probabilidad, con lo cual se esparce la probabilidad sobre el
rango de valores de x. Para la densidad gaussiana, el 68.3% de la probabilidad está
dentro de la banda de σ unidades en cada lado de la media, como se muestra en la
figura G1, que es adaptado de [3].

16
Figura G1. Densidad condicional de la posición basado en el valor medido 1Z .
Basado en la densidad de probabilidad condicional, la mejor estimación es:
1)1(ˆ ztx =
Y la varianza del error en el estimado es:
122 )1( zx t σσ =
Notar que x̂ es ambos la moda (pico) y la mediana (valor con la mitad del peso de la
probabilidad en cada lado), como bien la media (centro de masa).
Ahora, un navegador entrenado toma valores independientes después de la medición
hecha, en el tiempo 12 tt ≅ (entonces la verdadera posición no ha cambiado del todo), y
obtiene una media z2 con una varianza de 2zσ . Este navegador tiene una habilidad
mayor, asume que la varianza en esta medida es de algún modo más pequeña que el del
primero. En la figura G2, que es adaptado de [3], se representa la densidad condicional
de la posición en el tiempo t2, basado solo en el valor de medida z2. Se nota que el pico
es angosto debido a la varianza pequeña, indicando que se esta mas cercano a la
posición basado en la medida.
Figura G2. Segunda medición.

17
En este punto, se tienen 2 medidas disponibles para estimar la posición. El
siguiente paso es combinar estos datos, entonces basado en las asumpciones
hechas, en donde la densidad condicional de la posición en el tiempo 12 tt ≅ ,
x(t2), dados z1 y z2, nos lleva a una densidad gaussiana con media u y una
varianza σ como se muestra en la figura G3, adaptado de [3].
Figura G3. Densidad condicional basada en los datos de 1Z y 2Z .
Con:
[ ] [ ])/1()/1(/1
2)/(1)/22
21
2
22
21
21
22
21
22
zz
zzzzzz zzuσσσ
σσσσσσ
+=
+++(=
Note que en la ecuación anterior, σ es menos que 1zσ o 2zσ , es decir que la
incertidumbre en la posición estimada ha sido decrementada combinando las 2
medidas de información.
Dado esta densidad, el mejor estimado es:
utx =)2(ˆ
Con un error de varianza 2σ . Más aun, es la máxima vecindad estimada, y el
estimado más cercano a la realidad.
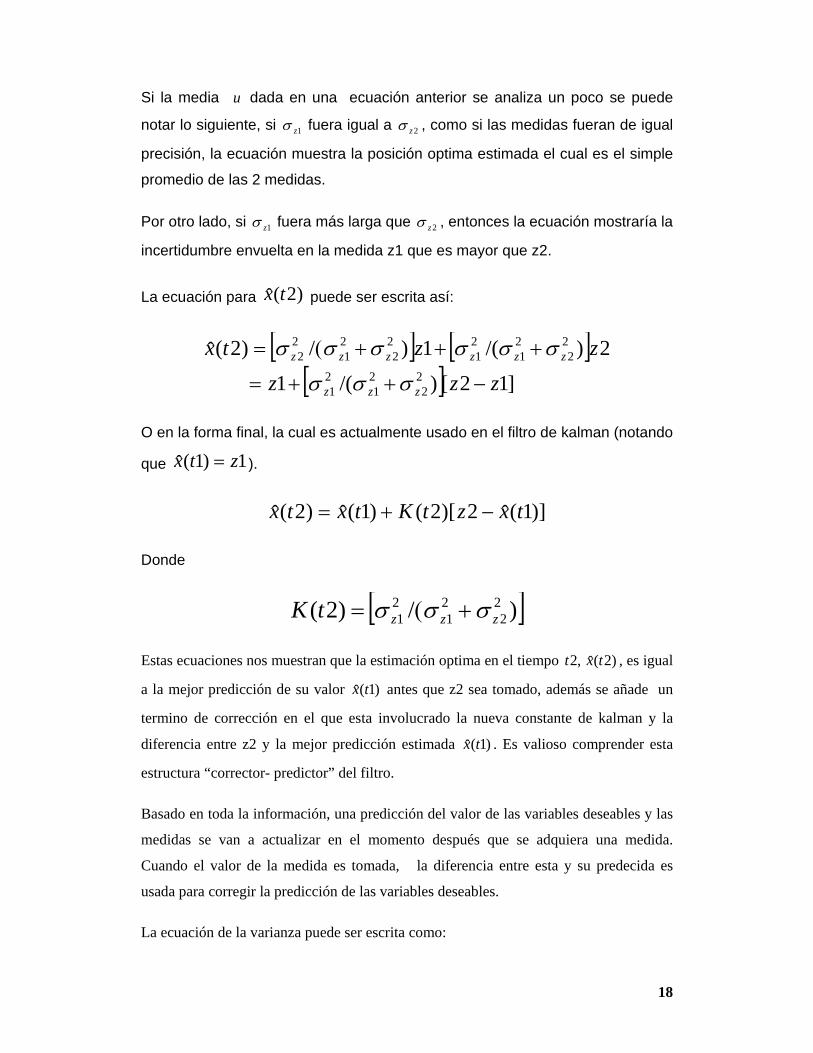
18
Si la media u dada en una ecuación anterior se analiza un poco se puede
notar lo siguiente, si 1zσ fuera igual a 2zσ , como si las medidas fueran de igual
precisión, la ecuación muestra la posición optima estimada el cual es el simple
promedio de las 2 medidas.
Por otro lado, si 1zσ fuera más larga que 2zσ , entonces la ecuación mostraría la
incertidumbre envuelta en la medida z1 que es mayor que z2.
La ecuación para )2(ˆ tx puede ser escrita así:
[ ] [ ][ ] ]12[)/(1
2)/(1)/)2(ˆ22
21
21
22
21
21
22
21
22
zzz
zztx
zzz
zzzzzz
−++=
+++(=
σσσ
σσσσσσ
O en la forma final, la cual es actualmente usado en el filtro de kalman (notando
que 1)1(ˆ ztx = ).
)]1(ˆ2)[2()1(ˆ)2(ˆ txztKtxtx −+=
Donde
[ ])/)2( 22
21
21 zzztK σσσ +(=
Estas ecuaciones nos muestran que la estimación optima en el tiempo )2(ˆ, 2 txt , es igual
a la mejor predicción de su valor )1(ˆ tx antes que z2 sea tomado, además se añade un
termino de corrección en el que esta involucrado la nueva constante de kalman y la
diferencia entre z2 y la mejor predicción estimada )1(ˆ tx . Es valioso comprender esta
estructura “corrector- predictor” del filtro.
Basado en toda la información, una predicción del valor de las variables deseables y las
medidas se van a actualizar en el momento después que se adquiera una medida.
Cuando el valor de la medida es tomada, la diferencia entre esta y su predecida es
usada para corregir la predicción de las variables deseables.
La ecuación de la varianza puede ser escrita como:

19
)1()2()1()2( 222 ttKtt xxx σσσ −=
Notar que los valores de )2(ˆ tx y )2(2 txσ expresan toda la información en
)2,1|()2(),1(|)2( zzxf tztztx . Indicándolo de otra manera, por la propagación de esas 2
variables, la densidad condicional de la posición en el tiempo t2, dado z1 y z2 es
completamente especificado.
APENDICE H: Encontrando la ganancia del filtro de kalman
K.
Para empezar, vamos a definir los errores de nuestra estimación. Habrá dos errores, un
error a priori, −je , y un error a posteriori, je . Cada uno se define como la diferencia
entre el valor real de jx y la estimación (ya sea a priori o a posteriori).
−− −= kkk xxe ˆ …………. (H.1).
kkk xxe ˆ−= …………… (H.2).
Asociado con cada uno de estos errores es un error cuadrático medio, su varianza está
dada por:
}){( 2−− = kk eEP ………………………(H.3).
}){( 2kk eEP = ……………………..... (H.4).
donde el operador {}E representa la media, o promedio. Estas definiciones se utilizan
para el cálculo de la cantidad k.
El filtro de Kalman minimiza la varianza a posteriori, jP , eligiendo adecuadamente el
valor de k. Empezamos por la sustitución en la ecuación E.2 en la ecuación E.4, se tiene
lo siguiente:

20
})ˆ{( 2kkk xxEP −= ……… (H.5)
}))ˆ(ˆ{( 2−− −+−=k
xHzKxxEP kkkk ……………(H.6)
Para encontrar el valor de k que minimiza la varianza diferenciamos esta expresión con
respecto a k e igualando a cero.
)}ˆ)(ˆ(ˆ{(20
0}))ˆ(ˆ{( 2
−−−
−−
−−+−==>
=∂
−+−∂=
∂∂
kkxHzxHzKxxE
KxHzKxxE
KP
kkkk
kkkkk
})ˆ(ˆ)ˆ(
ˆˆˆ{20222
2
−−−
−−−
+−+
−−+−=
kkkk
kkkkkkk
xKHxKHzxH
xHxzxKHKzzxzxEkk
……… (H.7)
Aprovechamos esta última expresión y la utilizamos para resolver k.
})ˆ(ˆ2{
})ˆ(ˆˆ{222
2
−−
−−−
+−+−−
=kk
xHzxHzExHxHxzxzxEK
kk
kkkkkkk………….. (H.8)
Esta expresión es todavía bastante complicado. Para simplificar, vamos a
considerar el numerador y el denominador por separado.
Comenzamos con el numerador, de esta manera:
} )ˆ(ˆˆˆ)((
} )ˆ(ˆ)(ˆ)({
} )ˆ(ˆˆ{
22
2
2
−−−−
−−−
−−−
+−−−+=
+−+−+=
+−−=
kkkkxHxHxvxxHxvxxHE
xHxHxvHxxvHxxE
xHxHxzxzxEnumerador
kkkkkk
kkkkkkkkk
kkkkkkk
)} ˆ()ˆ(ˆ2)(( 22 −−− −++− kkkkkk xxvxHxHxxHEk …. (H.9)

21
La medición de ruido, v , no esta en correlación ni con la entrada, ni la
estimación a priori de x , por lo tanto:
0)}({)}ˆ({ ==− −−kkkkk evExxvE
Esto simplifica la expresión para el numerador, entonces:
} ){(})ˆ{(
} )ˆ(ˆ2){(
} )ˆ(ˆ2)({
22
22
22
−−
−−
−−
=−=
+−=
+−=
kk
kk
eHExxHE
xxxxHE
xHxHxxHEnumerador
k
kk
kkkk
−kHP …… (H.10)
Ahora, de la misma manera, considerar el denominador.
} )ˆ(ˆ2ˆ2 2{
} )ˆ()(ˆ2){(
} )ˆ(ˆ2{
222222
222
222
−−−
−−
−−
+−−++=
++−+=
+−=
kkkkkkkk
kkkk
kkkk
xHvxHxxHvvHxxHE
xHvHxxHvHxE
xHzxHzEinadorDenom
k
kk
} )ˆ( 2)ˆ(ˆ2{ 222222kkkkk vxxHvxHxxHxHE
kkk
−−− −+++− ……. (H.11)
Una vez más, podemos utilizar la condición de ortogonalidad, entonces para establecer
el último termino a cero, por lo tanto:
} {})ˆ(ˆ2{
} )ˆ(ˆ2{ 222222
222222
kkk
kkkkk
vExHxxHxHE
vxHxxHxHEinadorDenom
kk++−=
++−=−−
−−
RPHk+−2
…… (H.12)

22
Utilizando la expresión para el numerador y denominador, por último, se consigue una
simple expresión de k:
2 RPHHP
Kk
k
+= −
−
…… (H.12)
APENDICE I. Números con punto flotante.
El CORE emplea la representación de punto flotante del estándar IEEE-754 para
diversos tamaños de representación de números. Cuando los tamaños estándar son
elegidos, el formato y valores especiales empleados son idénticos a la descrita por el
estándar IEEE-754.
Dos parámetros han sido adoptado para propósitos de generalizar el formato procesado
por el CORE de punto flotante.
Esto especifica el formato del ancho total y el ancho de la parte fraccionaria. Por
estándar, el tipo de precisión simple tiene como formato de ancho 32 bits y la fracción
es de 24 bits de ancho, el formato se muestra en la figura I1, que es adaptada de [11].
Un número de punto flotante se representa mediante un signo ('s'), un exponente ('E') y
una fracción 1
,....,,, 3210 −fwbbbbb .
El valor de un número de punto flotante está dado por: ......2)1(1210 −
−fw
Es bbbb
I1. Formato de los números de punto flotante.
Como 0b es una constante, sólo la parte fraccional se mantiene, es decir:
1...... 321 −
=fwbbbbf
. Para ello se requiere sólo 1−fw bits.

23
De los restantes bits, un bit se emplea para representar el signo, y
fe www −= representan los bits del exponente.
En el campo del exponente, emplea un valor entero sin signo para la representación,
cuyo valor está dado por:
∑−
=
=1
2ew
oi
iiee
El valor del exponente, E, se obtiene de esta manera, 12 −−= eweE .
En realidad, fw no es la longitud de la palabra de la fracción, sino la fracción con el bit
escondido 0b .
Valores especiales
Una serie de valores, se han reservado para la representación de números especiales,
tales como: No es un número (NaN), Infinity (∞ ), cero (0) y los números en general.
Estos valores especiales se resumen en la Tabla 1, que es adaptada de [11].
Tabla I.1 Valores especiales.
Tenga en cuenta que en el cuadro 1 el bit de signo no está definido cuando el resultado
es un NaN. Por otra parte, cero y el infinito tienen signo.
Siempre que sea posible, el signo se maneja de la misma manera como número finito.
24
Estándar IEEE-754
El CORE de Xilinx de punto flotante cumple con gran parte del estándar IEEE-754.
Pero usa desviaciones para compensar en recursos.
El CORE de Xilinx de punto flotante soporta una gran variedad de longitud de fracción
y exponente que los definidos en el estándar IEEE-754.
Formatos estándar comúnmente aplicadas por los procesadores programables:
• Formato Único o simple: utiliza 32 bits, con una fracción de 24 bits y 8 bits
exponente.
• Formato doble: utiliza 64 bits y 53 bits de fracción y 11 bits de exponente.
Los formatos estándar menos usados son los siguientes:
• Extendida único o simple: tamaños de 43 bits y superiores.
• Extendida Doble: tamaños de 79 bits y superiores.
Actualmente, sólo el modo de redondeo “redondea al mas cercano”, tal como se
define en el estándar IEEE-754, es soportado en este trabajo.
La especificación del estándar IEEE-754 requiere de señalización. Sin embargo, el
CORE de Xilinx de punto flotante sólo admite NaNs. Cuando un NaN se presenta como
uno de los operandos al CORE, el resultado va a ser un NaN.
APENDICE J: Translation report y Pads. Release 8.1i ngdbuild I.24
Copyright (c) 1995-2005 Xilinx, Inc. All rights reserved.
Command Line: ngdbuild -intstyle ise -dd _ngo -nt timestamp -i -p
xc2vp30-ff896-7 kalman_cosim5.ngc kalman_cosim5.ngd
Reading NGO file 'C:/xup/Copia de prueba_kalman3/netlist/kalman_cosim5.ngc' ...
Loading design module "C:\xup\Copia de
prueba_kalman3\netlist/division_flot64.ngc"...
Loading design module "C:\xup\Copia de
prueba_kalman3\netlist/multiplicacion_point_v1_0.ngc"...
Loading design module "C:\xup\Copia de
prueba_kalman3\netlist/resta_point_v1_0.ngc"...
Loading design module "C:\xup\Copia de
prueba_kalman3\netlist/suma_point_v1_0.ngc"...
25
Checking timing specifications ...
Checking expanded design ...
NGDBUILD Design Results Summary:
Number of errors: 0
Number of warnings: 0
Total memory usage is 210556 kilobytes
Writing NGD file "kalman_cosim5.ngd" ...
Writing NGDBUILD log file "kalman_cosim5.bld"...
PADS: #Release 8.1i - par I.24
#Copyright (c) 1995-2005 Xilinx, Inc. All rights reserved.
#Sat May 24 11:51:16 2008
#
## NOTE: This file is designed to be imported into a spreadsheet program
# such as Microsoft Excel for viewing, printing and sorting. The |
# character is used as the data field separator. This file is also designed
# to support parsing.
#
#INPUT FILE: kalman_cosim5_map.ncd
#OUTPUT FILE: kalman_cosim5_pad.csv
#PART TYPE: xc2vp30
#SPEED GRADE: -7
#PACKAGE: ff896
#
# Pinout by Pin Number:
#
# -----,-----,-----,-----,-----,-----,-----,-----,-----,-----,-----,-----,-----,-----,-----,-----,
Pin Number,Signal Name,Pin Usage,Pin Name,Direction,IO Standard,IO Bank Number,Drive (mA),Slew Rate,Termination,IOB
Delay,Voltage,Constraint,DCI Value,IO Register,Signal Integrity,
A2,,,VCCAUX,,,,,,,,2.5,,,,,
A3,qin1<1>,IOB,IO_L01N_2/VRP_2,INPUT,LVCMOS25,2,,,,IFD,,,,YES,NONE,
A4,,GTIPAD,RXNPAD9,UNUSED,,,,,,,,,,,,
A5,,GTIPAD,RXPPAD9,UNUSED,,,,,,,,,,,,
A6,,GTOPAD,TXPPAD9,UNUSED,,,,,,,,,,,,
A7,,GTOPAD,TXNPAD9,UNUSED,,,,,,,,,,,,
A8,xin1<29>,IOB,IO_L44N_1,INPUT,LVCMOS25,1,,,,NONE,,,,NO,NONE,
A9,,,GND,,,,,,,,,,,,,
A10,ceroin4<23>,IOB,IO_L53_1/No_Pair,INPUT,LVCMOS25,1,,,,NONE,,,,NO,NONE,
A11,,GTIPAD,RXNPAD7,UNUSED,,,,,,,,,,,,
A12,,GTIPAD,RXPPAD7,UNUSED,,,,,,,,,,,,
A13,,GTOPAD,TXPPAD7,UNUSED,,,,,,,,,,,,
A14,,GTOPAD,TXNPAD7,UNUSED,,,,,,,,,,,,
A15,,,VCCAUX,,,,,,,,2.5,,,,,
A16,,,VCCAUX,,,,,,,,2.5,,,,,
A17,,GTIPAD,RXNPAD6,UNUSED,,,,,,,,,,,,
A18,,GTIPAD,RXPPAD6,UNUSED,,,,,,,,,,,,
A19,,GTOPAD,TXPPAD6,UNUSED,,,,,,,,,,,,

26
A20,,GTOPAD,TXNPAD6,UNUSED,,,,,,,,,,,,
A21,salida1<9>,IOB,IO_L53_0/No_Pair,OUTPUT,LVCMOS25,0,12,SLOW,NONE**,,,,,NO,NONE,
A22,,,GND,,,,,,,,,,,,,
A23,zin1<62>,IOB,IO_L44P_0,INPUT,LVCMOS25,0,,,,IFD,,,,YES,NONE,
A24,,GTIPAD,RXNPAD4,UNUSED,,,,,,,,,,,,
A25,,GTIPAD,RXPPAD4,UNUSED,,,,,,,,,,,,
A26,,GTOPAD,TXPPAD4,UNUSED,,,,,,,,,,,,
A27,,GTOPAD,TXNPAD4,UNUSED,,,,,,,,,,,,
A28,salida1<4>,IOB,IO_L01N_7/VRP_7,OUTPUT,LVCMOS25,7,12,SLOW,NONE**,,,,,NO,NONE,
A29,,,VCCAUX,,,,,,,,2.5,,,,,
AA1,salida1<44>,IOB,IO_L51N_3/VREF_3,OUTPUT,LVCMOS25,3,12,SLOW,NONE**,,,,,NO,NONE,
AA2,,DIFFM,IO_L54P_3,UNUSED,,3,,,,,,,,,,
AA3,rin1<32>,IOB,IO_L48N_3,INPUT,LVCMOS25,3,,,,IFD,,,,YES,NONE,
AA4,rin1<44>,IOB,IO_L48P_3,INPUT,LVCMOS25,3,,,,IFD,,,,YES,NONE,
AA5,rin1<45>,IOB,IO_L44N_3,INPUT,LVCMOS25,3,,,,IFD,,,,YES,NONE,
AA6,xin1<44>,IOB,IO_L44P_3,INPUT,LVCMOS25,3,,,,NONE,,,,NO,NONE,
AA7,rin1<47>,IOB,IO_L38N_3,INPUT,LVCMOS25,3,,,,IFD,,,,YES,NONE,
AA8,rin1<11>,IOB,IO_L38P_3,INPUT,LVCMOS25,3,,,,IFD,,,,YES,NONE,
AA9,,,VCCO_3,,,3,,,,,2.50,,,,,
AA10,,,VCCO_4,,,4,,,,,2.50,,,,,
AA11,,,VCCO_4,,,4,,,,,2.50,,,,,
AA12,,,VCCO_4,,,4,,,,,2.50,,,,,
AA13,,,VCCO_4,,,4,,,,,2.50,,,,,
AA14,,,VCCO_4,,,4,,,,,2.50,,,,,
AA15,,,VCCO_4,,,4,,,,,2.50,,,,,
AA16,,,VCCO_5,,,5,,,,,2.50,,,,,
AA17,,,VCCO_5,,,5,,,,,2.50,,,,,
AA18,,,VCCO_5,,,5,,,,,2.50,,,,,
AA19,,,VCCO_5,,,5,,,,,2.50,,,,,
AA20,,,VCCO_5,,,5,,,,,2.50,,,,,
AA21,,,VCCO_5,,,5,,,,,2.50,,,,,
AA22,,,VCCO_6,,,6,,,,,2.50,,,,,
AA23,hin1<32>,IOB,IO_L38P_6,INPUT,LVCMOS25,6,,,,IFD,,,,YES,NONE,
AA24,hin1<63>,IOB,IO_L38N_6,INPUT,LVCMOS25,6,,,,NONE,,,,NO,NONE,
AA25,xin1<46>,IOB,IO_L44P_6,INPUT,LVCMOS25,6,,,,NONE,,,,NO,NONE,
AA26,ceroin4<46>,IOB,IO_L44N_6,INPUT,LVCMOS25,6,,,,NONE,,,,NO,NONE,
AA27,salida1<57>,IOB,IO_L48P_6,OUTPUT,LVCMOS25,6,12,SLOW,NONE**,,,,,NO,NONE,
AA28,hin1<44>,IOB,IO_L48N_6,INPUT,LVCMOS25,6,,,,IFD,,,,YES,NONE,
AA29,hin1<40>,IOB,IO_L54P_6,INPUT,LVCMOS25,6,,,,IFD,,,,YES,NONE,
AA30,hin1<47>,IOB,IO_L51N_6/VREF_6,INPUT,LVCMOS25,6,,,,IFD,,,,YES,NONE,
AB1,rin1<46>,IOB,IO_L51P_3,INPUT,LVCMOS25,3,,,,IFD,,,,YES,NONE,
AB2,rin1<35>,IOB,IO_L45N_3/VREF_3,INPUT,LVCMOS25,3,,,,IFD,,,,YES,NONE,
AB3,rin1<39>,IOB,IO_L46N_3,INPUT,LVCMOS25,3,,,,IFD,,,,YES,NONE,
AB4,rin1<34>,IOB,IO_L46P_3,INPUT,LVCMOS25,3,,,,IFD,,,,YES,NONE,
AB5,rin1<16>,IOB,IO_L40N_3,INPUT,LVCMOS25,3,,,,IFD,,,,YES,NONE,
AB6,rin1<24>,IOB,IO_L40P_3,INPUT,LVCMOS25,3,,,,IFD,,,,YES,NONE,
AB7,rin1<9>,IOB,IO_L32N_3,INPUT,LVCMOS25,3,,,,IFD,,,,YES,NONE,
AB8,rin1<1>,IOB,IO_L32P_3,INPUT,LVCMOS25,3,,,,IFD,,,,YES,NONE,
AB9,,,VCCO_3,,,3,,,,,2.50,,,,,
AB10,,,VCCO_4,,,4,,,,,2.50,,,,,
AB11,,,VCCO_4,,,4,,,,,2.50,,,,,
AB12,,,VCCO_4,,,4,,,,,2.50,,,,,
AB13,,,VCCO_4,,,4,,,,,2.50,,,,,
AB14,ain2<16>,IOB,IO_L49N_4,INPUT,LVCMOS25,4,,,,IFD,,,,YES,NONE,
AB15,ain2<24>,IOB,IO_L67N_4,INPUT,LVCMOS25,4,,,,IFD,,,,YES,NONE,
AB16,ain2<41>,IOB,IO_L67P_5,INPUT,LVCMOS25,5,,,,IFD,,,,YES,NONE,
AB17,ain2<51>,IOB,IO_L49P_5,INPUT,LVCMOS25,5,,,,IFD,,,,YES,NONE,
AB18,,,VCCO_5,,,5,,,,,2.50,,,,,
27
AB19,,,VCCO_5,,,5,,,,,2.50,,,,,
AB20,,,VCCO_5,,,5,,,,,2.50,,,,,
AB21,,,VCCO_5,,,5,,,,,2.50,,,,,
AB22,,,VCCO_6,,,6,,,,,2.50,,,,,
AB23,hin1<21>,IOB,IO_L32P_6,INPUT,LVCMOS25,6,,,,IFD,,,,YES,NONE,
AB24,hin1<22>,IOB,IO_L32N_6,INPUT,LVCMOS25,6,,,,IFD,,,,YES,NONE,
AB25,ceroin4<45>,IOB,IO_L40P_6,INPUT,LVCMOS25,6,,,,NONE,,,,NO,NONE,
AB26,xin1<45>,IOB,IO_L40N_6,INPUT,LVCMOS25,6,,,,NONE,,,,NO,NONE,
AB27,hin1<50>,IOB,IO_L46P_6,INPUT,LVCMOS25,6,,,,IFD,,,,YES,NONE,
AB28,hin1<41>,IOB,IO_L46N_6,INPUT,LVCMOS25,6,,,,IFD,,,,YES,NONE,
AB29,xin1<36>,IOB,IO_L45N_6/VREF_6,INPUT,LVCMOS25,6,,,,NONE,,,,NO,NONE,
AB30,xin1<55>,IOB,IO_L51P_6,INPUT,LVCMOS25,6,,,,NONE,,,,NO,NONE,
AC1,,,GND,,,,,,,,,,,,,
AC2,rin1<36>,IOB,IO_L45P_3,INPUT,LVCMOS25,3,,,,IFD,,,,YES,NONE,
AC3,rin1<31>,IOB,IO_L43N_3,INPUT,LVCMOS25,3,,,,IFD,,,,YES,NONE,
AC4,rin1<33>,IOB,IO_L43P_3,INPUT,LVCMOS25,3,,,,IFD,,,,YES,NONE,
AC5,rin1<30>,IOB,IO_L35N_3,INPUT,LVCMOS25,3,,,,IFD,,,,YES,NONE,
AC6,rin1<2>,IOB,IO_L35P_3,INPUT,LVCMOS25,3,,,,IFD,,,,YES,NONE,
AC7,,,CCLK,,,,,,,,,,,,,
AC8,,,DONE,,,,,,,,,,,,,
AC9,,DIFFS,IO_L02N_4/D0,UNUSED,,4,,,,,,,,,,
AC10,rin1<55>,IOB,IO_L07N_4,INPUT,LVCMOS25,4,,,,IFD,,,,YES,NONE,
AC11,rin1<62>,IOB,IO_L37N_4,INPUT,LVCMOS25,4,,,,IFD,,,,YES,NONE,
AC12,rin1<57>,IOB,IO_L43N_4,INPUT,LVCMOS25,4,,,,IFD,,,,YES,NONE,
AC13,ain2<15>,IOB,IO_L46N_4,INPUT,LVCMOS25,4,,,,IFD,,,,YES,NONE,
AC14,ain2<8>,IOB,IO_L49P_4,INPUT,LVCMOS25,4,,,,IFD,,,,YES,NONE,
AC15,ain2<1>,IOB,IO_L67P_4,INPUT,LVCMOS25,4,,,,IFD,,,,YES,NONE,
AC16,ain2<40>,IOB,IO_L67N_5,INPUT,LVCMOS25,5,,,,IFD,,,,YES,NONE,
AC17,ain2<50>,IOB,IO_L49N_5,INPUT,LVCMOS25,5,,,,IFD,,,,YES,NONE,
AC18,zin1<35>,IOB,IO_L46P_5,INPUT,LVCMOS25,5,,,,IFD,,,,YES,NONE,
AC19,zin1<34>,IOB,IO_L43P_5,INPUT,LVCMOS25,5,,,,IFD,,,,YES,NONE,
AC20,ain2<53>,IOB,IO_L37P_5,INPUT,LVCMOS25,5,,,,IFD,,,,YES,NONE,
AC21,ain2<56>,IOB,IO_L07P_5,INPUT,LVCMOS25,5,,,,IFD,,,,YES,NONE,
AC22,,DIFFM,IO_L02P_5/D7,UNUSED,,5,,,,,,,,,,
AC23,,,M2,,,,,,,,,,,,,
AC24,,,M1,,,,,,,,,,,,,
AC25,hin1<23>,IOB,IO_L35P_6,INPUT,LVCMOS25,6,,,,IFD,,,,YES,NONE,
AC26,hin1<29>,IOB,IO_L35N_6,INPUT,LVCMOS25,6,,,,IFD,,,,YES,NONE,
AC27,salida1<34>,IOB,IO_L43P_6,OUTPUT,LVCMOS25,6,12,SLOW,NONE**,,,,,NO,NONE,
AC28,hin1<43>,IOB,IO_L43N_6,INPUT,LVCMOS25,6,,,,IFD,,,,YES,NONE,
AC29,ceroin4<36>,IOB,IO_L45P_6,INPUT,LVCMOS25,6,,,,NONE,,,,NO,NONE,
AC30,,,GND,,,,,,,,,,,,,
AD1,rin1<28>,IOB,IO_L42N_3,INPUT,LVCMOS25,3,,,,IFD,,,,YES,NONE,
AD2,rin1<43>,IOB,IO_L42P_3,INPUT,LVCMOS25,3,,,,IFD,,,,YES,NONE,
AD3,rin1<48>,IOB,IO_L37N_3,INPUT,LVCMOS25,3,,,,IFD,,,,YES,NONE,
AD4,rin1<49>,IOB,IO_L37P_3,INPUT,LVCMOS25,3,,,,IFD,,,,YES,NONE,
AD5,,DIFFS,IO_L05N_3,UNUSED,,3,,,,,,,,,,
AD6,rin1<6>,IOB,IO_L05P_3,INPUT,LVCMOS25,3,,,,IFD,,,,YES,NONE,
AD7,,,PWRDWN_B,,,,,,,,,,,,,
AD8,rin1<13>,IOB,IO_L05_4/No_Pair,INPUT,LVCMOS25,4,,,,IFD,,,,YES,NONE,
AD9,,DIFFM,IO_L02P_4/D1,UNUSED,,4,,,,,,,,,,
AD10,rin1<19>,IOB,IO_L07P_4/VREF_4,INPUT,LVCMOS25,4,,,,IFD,,,,YES,NONE,
AD11,rin1<58>,IOB,IO_L37P_4,INPUT,LVCMOS25,4,,,,IFD,,,,YES,NONE,
AD12,rin1<60>,IOB,IO_L43P_4,INPUT,LVCMOS25,4,,,,IFD,,,,YES,NONE,
AD13,ain2<13>,IOB,IO_L46P_4,INPUT,LVCMOS25,4,,,,IFD,,,,YES,NONE,
AD14,ain2<30>,IOB,IO_L68N_4,INPUT,LVCMOS25,4,,,,IFD,,,,YES,NONE,
AD15,ain2<27>,IOB,IO_L73N_4,INPUT,LVCMOS25,4,,,,IFD,,,,YES,NONE,
AD16,ain2<39>,IOB,IO_L73P_5,INPUT,LVCMOS25,5,,,,IFD,,,,YES,NONE,
28
AD17,ain2<48>,IOB,IO_L68P_5,INPUT,LVCMOS25,5,,,,IFD,,,,YES,NONE,
AD18,zin1<37>,IOB,IO_L46N_5,INPUT,LVCMOS25,5,,,,IFD,,,,YES,NONE,
AD19,zin1<44>,IOB,IO_L43N_5,INPUT,LVCMOS25,5,,,,IFD,,,,YES,NONE,
AD20,ain2<62>,IOB,IO_L37N_5,INPUT,LVCMOS25,5,,,,IFD,,,,YES,NONE,
AD21,hin1<54>,IOB,IO_L07N_5/VREF_5,INPUT,LVCMOS25,5,,,,NONE,,,,NO,NONE,
AD22,,DIFFS,IO_L02N_5/D6,UNUSED,,5,,,,,,,,,,
AD23,consta1,IOB,IO_L05_5/No_Pair,INPUT,LVCMOS25,5,,,,NONE,,,,NO,NONE,
AD24,,,M0,,,,,,,,,,,,,
AD25,,DIFFM,IO_L05P_6,UNUSED,,6,,,,,,,,,,
AD26,,DIFFS,IO_L05N_6,UNUSED,,6,,,,,,,,,,
AD27,hin1<31>,IOB,IO_L37P_6,INPUT,LVCMOS25,6,,,,IFD,,,,YES,NONE,
AD28,ceroin4<63>,IOB,IO_L37N_6,INPUT,LVCMOS25,6,,,,NONE,,,,NO,NONE,
AD29,hin1<37>,IOB,IO_L42P_6,INPUT,LVCMOS25,6,,,,IFD,,,,YES,NONE,
AD30,hin1<39>,IOB,IO_L42N_6,INPUT,LVCMOS25,6,,,,IFD,,,,YES,NONE,
AE1,rin1<29>,IOB,IO_L39N_3/VREF_3,INPUT,LVCMOS25,3,,,,IFD,,,,YES,NONE,
AE2,rin1<21>,IOB,IO_L39P_3,INPUT,LVCMOS25,3,,,,IFD,,,,YES,NONE,
AE3,rin1<15>,IOB,IO_L33N_3/VREF_3,INPUT,LVCMOS25,3,,,,IFD,,,,YES,NONE,
AE4,rin1<8>,IOB,IO_L33P_3,INPUT,LVCMOS25,3,,,,IFD,,,,YES,NONE,
AE5,rin1<14>,IOB,IO_L31N_3,INPUT,LVCMOS25,3,,,,IFD,,,,YES,NONE,
AE6,,,GND,,,,,,,,,,,,,
AE7,rin1<17>,IOB,IO_L08N_4,INPUT,LVCMOS25,4,,,,IFD,,,,YES,NONE,
AE8,rin1<10>,IOB,IO_L08P_4,INPUT,LVCMOS25,4,,,,IFD,,,,YES,NONE,
AE9,rin1<54>,IOB,IO_L44N_4,INPUT,LVCMOS25,4,,,,IFD,,,,YES,NONE,
AE10,rin1<61>,IOB,IO_L44P_4,INPUT,LVCMOS25,4,,,,IFD,,,,YES,NONE,
AE11,ain2<6>,IOB,IO_L47N_4,INPUT,LVCMOS25,4,,,,IFD,,,,YES,NONE,
AE12,ain2<5>,IOB,IO_L47P_4,INPUT,LVCMOS25,4,,,,IFD,,,,YES,NONE,
AE13,,,GND,,,,,,,,,,,,,
AE14,ain2<19>,IOB,IO_L68P_4,INPUT,LVCMOS25,4,,,,IFD,,,,YES,NONE,
AE15,ain2<20>,IOB,IO_L73P_4,INPUT,LVCMOS25,4,,,,IFD,,,,YES,NONE,
AE16,ain2<21>,IOB,IO_L73N_5,INPUT,LVCMOS25,5,,,,IFD,,,,YES,NONE,
AE17,ain2<23>,IOB,IO_L68N_5,INPUT,LVCMOS25,5,,,,IFD,,,,YES,NONE,
AE18,,,GND,,,,,,,,,,,,,
AE19,zin1<45>,IOB,IO_L47N_5,INPUT,LVCMOS25,5,,,,IFD,,,,YES,NONE,
AE20,zin1<43>,IOB,IO_L47P_5,INPUT,LVCMOS25,5,,,,IFD,,,,YES,NONE,
AE21,ain2<61>,IOB,IO_L44N_5,INPUT,LVCMOS25,5,,,,IFD,,,,YES,NONE,
AE22,ain2<60>,IOB,IO_L44P_5,INPUT,LVCMOS25,5,,,,IFD,,,,YES,NONE,
AE23,salida1<60>,IOB,IO_L08N_5,OUTPUT,LVCMOS25,5,12,SLOW,NONE**,,,,,NO,NONE,
AE24,hin1<55>,IOB,IO_L08P_5,INPUT,LVCMOS25,5,,,,NONE,,,,NO,NONE,
AE25,,,GND,,,,,,,,,,,,,
AE26,hin1<19>,IOB,IO_L31N_6,INPUT,LVCMOS25,6,,,,IFD,,,,YES,NONE,
AE27,hin1<26>,IOB,IO_L33P_6,INPUT,LVCMOS25,6,,,,IFD,,,,YES,NONE,
AE28,hin1<25>,IOB,IO_L33N_6/VREF_6,INPUT,LVCMOS25,6,,,,IFD,,,,YES,NONE,
AE29,hin1<34>,IOB,IO_L39P_6,INPUT,LVCMOS25,6,,,,IFD,,,,YES,NONE,
AE30,hin1<35>,IOB,IO_L39N_6/VREF_6,INPUT,LVCMOS25,6,,,,IFD,,,,YES,NONE,
AF1,rin1<3>,IOB,IO_L36N_3,INPUT,LVCMOS25,3,,,,IFD,,,,YES,NONE,
AF2,rin1<40>,IOB,IO_L36P_3,INPUT,LVCMOS25,3,,,,IFD,,,,YES,NONE,
AF3,rin1<27>,IOB,IO_L34N_3,INPUT,LVCMOS25,3,,,,IFD,,,,YES,NONE,
AF4,rin1<26>,IOB,IO_L34P_3,INPUT,LVCMOS25,3,,,,IFD,,,,YES,NONE,
AF5,,,GND,,,,,,,,,,,,,
AF6,rin1<0>,IOB,IO_L31P_3,INPUT,LVCMOS25,3,,,,IFD,,,,YES,NONE,
AF7,,DIFFM,IO_L01P_4/INIT_B,UNUSED,,4,,,,,,,,,,
AF8,rin1<59>,IOB,IO_L38N_4,INPUT,LVCMOS25,4,,,,IFD,,,,YES,NONE,
AF9,rin1<53>,IOB,IO_L38P_4,INPUT,LVCMOS25,4,,,,IFD,,,,YES,NONE,
AF10,rin1<52>,IOB,IO_L39N_4,INPUT,LVCMOS25,4,,,,IFD,,,,YES,NONE,
AF11,ain2<4>,IOB,IO_L50_4/No_Pair,INPUT,LVCMOS25,4,,,,IFD,,,,YES,NONE,
AF12,ain2<3>,IOB,IO_L56N_4,INPUT,LVCMOS25,4,,,,IFD,,,,YES,NONE,
AF13,ain2<12>,IOB,IO_L56P_4,INPUT,LVCMOS25,4,,,,IFD,,,,YES,NONE,
AF14,ain2<29>,IOB,IO_L69N_4,INPUT,LVCMOS25,4,,,,IFD,,,,YES,NONE,
29
AF15,ain2<47>,IOB,IO_L74N_4/GCLK3S,INPUT,LVCMOS25,4,,,,IFD,,,,YES,NONE,
AF16,ain2<37>,IOB,IO_L74P_5/GCLK4P,INPUT,LVCMOS25,5,,,,IFD,,,,YES,NONE,
AF17,ain2<28>,IOB,IO_L69P_5,INPUT,LVCMOS25,5,,,,IFD,,,,YES,NONE,
AF18,ain2<49>,IOB,IO_L56N_5,INPUT,LVCMOS25,5,,,,IFD,,,,YES,NONE,
AF19,ain2<32>,IOB,IO_L56P_5,INPUT,LVCMOS25,5,,,,IFD,,,,YES,NONE,
AF20,ain2<33>,IOB,IO_L50_5/No_Pair,INPUT,LVCMOS25,5,,,,IFD,,,,YES,NONE,
AF21,ain2<57>,IOB,IO_L39P_5,INPUT,LVCMOS25,5,,,,IFD,,,,YES,NONE,
AF22,ain2<59>,IOB,IO_L38N_5,INPUT,LVCMOS25,5,,,,IFD,,,,YES,NONE,
AF23,ain2<54>,IOB,IO_L38P_5,INPUT,LVCMOS25,5,,,,IFD,,,,YES,NONE,
AF24,,DIFFS,IO_L01N_5/RDWR_B,UNUSED,,5,,,,,,,,,,
AF25,hin1<20>,IOB,IO_L31P_6,INPUT,LVCMOS25,6,,,,IFD,,,,YES,NONE,
AF26,,,GND,,,,,,,,,,,,,
AF27,hin1<27>,IOB,IO_L34P_6,INPUT,LVCMOS25,6,,,,IFD,,,,YES,NONE,
AF28,hin1<24>,IOB,IO_L34N_6,INPUT,LVCMOS25,6,,,,IFD,,,,YES,NONE,
AF29,xin1<60>,IOB,IO_L36P_6,INPUT,LVCMOS25,6,,,,NONE,,,,NO,NONE,
AF30,hin1<28>,IOB,IO_L36N_6,INPUT,LVCMOS25,6,,,,IFD,,,,YES,NONE,
AG1,rin1<7>,IOB,IO_L06N_3,INPUT,LVCMOS25,3,,,,IFD,,,,YES,NONE,
AG2,rin1<25>,IOB,IO_L06P_3,INPUT,LVCMOS25,3,,,,IFD,,,,YES,NONE,
AG3,rin1<20>,IOB,IO_L04N_3,INPUT,LVCMOS25,3,,,,IFD,,,,YES,NONE,
AG4,,,GND,,,,,,,,,,,,,
AG5,,DIFFS,IO_L02N_3,UNUSED,,3,,,,,,,,,,
AG6,,DIFFS,IO_L01N_4/DOUT,UNUSED,,4,,,,,,,,,,
AG7,,DIFFS,IO_L03N_4/D2,UNUSED,,4,,,,,,,,,,
AG8,rin1<18>,IOB,IO_L06N_4/VRP_4,INPUT,LVCMOS25,4,,,,IFD,,,,YES,NONE,
AG9,,,GND,,,,,,,,,,,,,
AG10,rin1<56>,IOB,IO_L39P_4,INPUT,LVCMOS25,4,,,,IFD,,,,YES,NONE,
AG11,ain2<14>,IOB,IO_L53_4/No_Pair,INPUT,LVCMOS25,4,,,,IFD,,,,YES,NONE,
AG12,,,GND,,,,,,,,,,,,,
AG13,ain2<2>,IOB,IO_L57N_4,INPUT,LVCMOS25,4,,,,IFD,,,,YES,NONE,
AG14,ain2<25>,IOB,IO_L69P_4/VREF_4,INPUT,LVCMOS25,4,,,,IFD,,,,YES,NONE,
AG15,ain2<26>,IOB,IO_L74P_4/GCLK2P,INPUT,LVCMOS25,4,,,,IFD,,,,YES,NONE,
AG16,ain2<45>,IOB,IO_L74N_5/GCLK5S,INPUT,LVCMOS25,5,,,,IFD,,,,YES,NONE,
AG17,ain2<38>,IOB,IO_L69N_5/VREF_5,INPUT,LVCMOS25,5,,,,IFD,,,,YES,NONE,
AG18,ain2<31>,IOB,IO_L57P_5,INPUT,LVCMOS25,5,,,,IFD,,,,YES,NONE,
AG19,,,GND,,,,,,,,,,,,,
AG20,ain2<34>,IOB,IO_L53_5/No_Pair,INPUT,LVCMOS25,5,,,,IFD,,,,YES,NONE,
AG21,ain2<55>,IOB,IO_L39N_5,INPUT,LVCMOS25,5,,,,IFD,,,,YES,NONE,
AG22,,,GND,,,,,,,,,,,,,
AG23,,DIFFM,IO_L06P_5/VRN_5,UNUSED,,5,,,,,,,,,,
AG24,,DIFFM,IO_L03P_5/D5,UNUSED,,5,,,,,,,,,,
AG25,,DIFFM,IO_L01P_5/CS_B,UNUSED,,5,,,,,,,,,,
AG26,,DIFFS,IO_L02N_6,UNUSED,,6,,,,,,,,,,
AG27,,,GND,,,,,,,,,,,,,
AG28,,DIFFS,IO_L04N_6,UNUSED,,6,,,,,,,,,,
AG29,hin1<57>,IOB,IO_L06P_6,INPUT,LVCMOS25,6,,,,NONE,,,,NO,NONE,
AG30,hin1<56>,IOB,IO_L06N_6,INPUT,LVCMOS25,6,,,,NONE,,,,NO,NONE,
AH1,,DIFFS,IO_L03N_3/VREF_3,UNUSED,,3,,,,,,,,,,
AH2,,DIFFM,IO_L03P_3,UNUSED,,3,,,,,,,,,,
AH3,,,GND,,,,,,,,,,,,,
AH4,,DIFFM,IO_L04P_3,UNUSED,,3,,,,,,,,,,
AH5,,DIFFM,IO_L02P_3,UNUSED,,3,,,,,,,,,,
AH6,,,GNDA16,,,,,,,,,,,,,
AH7,,DIFFM,IO_L03P_4/D3,UNUSED,,4,,,,,,,,,,
AH8,rin1<23>,IOB,IO_L06P_4/VRN_4,INPUT,LVCMOS25,4,,,,IFD,,,,YES,NONE,
AH9,ain2<18>,IOB,IO_L45N_4,INPUT,LVCMOS25,4,,,,IFD,,,,YES,NONE,
AH10,ain2<10>,IOB,IO_L48N_4,INPUT,LVCMOS25,4,,,,IFD,,,,YES,NONE,
AH11,ain2<11>,IOB,IO_L48P_4,INPUT,LVCMOS25,4,,,,IFD,,,,YES,NONE,
AH12,,,GNDA18,,,,,,,,,,,,,
30
AH13,ain2<0>,IOB,IO_L57P_4/VREF_4,INPUT,LVCMOS25,4,,,,IFD,,,,YES,NONE,
AH14,,,GND,,,,,,,,,,,,,
AH15,ain2<36>,IOB,IO_L75N_4/GCLK1S,INPUT,LVCMOS25,4,,,,IFD,,,,YES,NONE,
AH16,ain2<44>,IOB,IO_L75P_5/GCLK6P,INPUT,LVCMOS25,5,,,,IFD,,,,YES,NONE,
AH17,,,GND,,,,,,,,,,,,,
AH18,ain2<22>,IOB,IO_L57N_5/VREF_5,INPUT,LVCMOS25,5,,,,IFD,,,,YES,NONE,
AH19,,,GNDA19,,,,,,,,,,,,,
AH20,ain2<63>,IOB,IO_L48N_5,INPUT,LVCMOS25,5,,,,IFD,,,,YES,NONE,
AH21,rin1<63>,IOB,IO_L48P_5,INPUT,LVCMOS25,5,,,,IFD,,,,YES,NONE,
AH22,zin1<33>,IOB,IO_L45P_5,INPUT,LVCMOS25,5,,,,IFD,,,,YES,NONE,
AH23,,DIFFS,IO_L06N_5/VRP_5,UNUSED,,5,,,,,,,,,,
AH24,,DIFFS,IO_L03N_5/D4,UNUSED,,5,,,,,,,,,,
AH25,,,GNDA21,,,,,,,,,,,,,
AH26,,DIFFM,IO_L02P_6,UNUSED,,6,,,,,,,,,,
AH27,,DIFFM,IO_L04P_6,UNUSED,,6,,,,,,,,,,
AH28,,,GND,,,,,,,,,,,,,
AH29,,DIFFM,IO_L03P_6,UNUSED,,6,,,,,,,,,,
AH30,,DIFFS,IO_L03N_6/VREF_6,UNUSED,,6,,,,,,,,,,
AJ1,,,VCCAUX,,,,,,,,2.5,,,,,
AJ2,,,GND,,,,,,,,,,,,,
AJ3,,DIFFS,IO_L01N_3/VRP_3,UNUSED,,3,,,,,,,,,,
AJ4,,,AVCCAUXRX16,,,,,,,,2.5,,,,,
AJ5,,,VTRXPAD16,,,,,,,,,,,,,
AJ6,,,AVCCAUXTX16,,,,,,,,2.5,,,,,
AJ7,,,VTTXPAD16,,,,,,,,,,,,,
AJ8,rin1<5>,IOB,IO_L09N_4,INPUT,LVCMOS25,4,,,,IFD,,,,YES,NONE,
AJ9,ain2<17>,IOB,IO_L45P_4/VREF_4,INPUT,LVCMOS25,4,,,,IFD,,,,YES,NONE,
AJ10,ain2<7>,IOB,IO_L54N_4,INPUT,LVCMOS25,4,,,,IFD,,,,YES,NONE,
AJ11,,,AVCCAUXRX18,,,,,,,,2.5,,,,,
AJ12,,,VTRXPAD18,,,,,,,,,,,,,
AJ13,,,AVCCAUXTX18,,,,,,,,2.5,,,,,
AJ14,,,VTTXPAD18,,,,,,,,,,,,,
AJ15,ain2<43>,IOB,IO_L75P_4/GCLK0P,INPUT,LVCMOS25,4,,,,IFD,,,,YES,NONE,
AJ16,ain2<46>,IOB,IO_L75N_5/GCLK7S,INPUT,LVCMOS25,5,,,,IFD,,,,YES,NONE,
AJ17,,,AVCCAUXRX19,,,,,,,,2.5,,,,,
AJ18,,,VTRXPAD19,,,,,,,,,,,,,
AJ19,,,AVCCAUXTX19,,,,,,,,2.5,,,,,
AJ20,,,VTTXPAD19,,,,,,,,,,,,,
AJ21,ain2<42>,IOB,IO_L54P_5,INPUT,LVCMOS25,5,,,,IFD,,,,YES,NONE,
AJ22,zin1<42>,IOB,IO_L45N_5/VREF_5,INPUT,LVCMOS25,5,,,,IFD,,,,YES,NONE,
AJ23,ain2<52>,IOB,IO_L09P_5,INPUT,LVCMOS25,5,,,,IFD,,,,YES,NONE,
AJ24,,,AVCCAUXRX21,,,,,,,,2.5,,,,,
AJ25,,,VTRXPAD21,,,,,,,,,,,,,
AJ26,,,AVCCAUXTX21,,,,,,,,2.5,,,,,
AJ27,,,VTTXPAD21,,,,,,,,,,,,,
AJ28,,DIFFS,IO_L01N_6/VRP_6,UNUSED,,6,,,,,,,,,,
AJ29,,,GND,,,,,,,,,,,,,
AJ30,,,VCCAUX,,,,,,,,2.5,,,,,
AK2,,,VCCAUX,,,,,,,,2.5,,,,,
AK3,,DIFFM,IO_L01P_3/VRN_3,UNUSED,,3,,,,,,,,,,
AK4,,GTIPAD,RXNPAD16,UNUSED,,,,,,,,,,,,
AK5,,GTIPAD,RXPPAD16,UNUSED,,,,,,,,,,,,
AK6,,GTOPAD,TXPPAD16,UNUSED,,,,,,,,,,,,
AK7,,GTOPAD,TXNPAD16,UNUSED,,,,,,,,,,,,
AK8,rin1<4>,IOB,IO_L09P_4/VREF_4,INPUT,LVCMOS25,4,,,,IFD,,,,YES,NONE,
AK9,,,GND,,,,,,,,,,,,,
AK10,ain2<9>,IOB,IO_L54P_4,INPUT,LVCMOS25,4,,,,IFD,,,,YES,NONE,
AK11,,GTIPAD,RXNPAD18,UNUSED,,,,,,,,,,,,
31
AK12,,GTIPAD,RXPPAD18,UNUSED,,,,,,,,,,,,
AK13,,GTOPAD,TXPPAD18,UNUSED,,,,,,,,,,,,
AK14,,GTOPAD,TXNPAD18,UNUSED,,,,,,,,,,,,
AK15,,,VCCAUX,,,,,,,,2.5,,,,,
AK16,,,VCCAUX,,,,,,,,2.5,,,,,
AK17,,GTIPAD,RXNPAD19,UNUSED,,,,,,,,,,,,
AK18,,GTIPAD,RXPPAD19,UNUSED,,,,,,,,,,,,
AK19,,GTOPAD,TXPPAD19,UNUSED,,,,,,,,,,,,
AK20,,GTOPAD,TXNPAD19,UNUSED,,,,,,,,,,,,
AK21,ain2<35>,IOB,IO_L54N_5,INPUT,LVCMOS25,5,,,,IFD,,,,YES,NONE,
AK22,,,GND,,,,,,,,,,,,,
AK23,ain2<58>,IOB,IO_L09N_5/VREF_5,INPUT,LVCMOS25,5,,,,IFD,,,,YES,NONE,
AK24,,GTIPAD,RXNPAD21,UNUSED,,,,,,,,,,,,
AK25,,GTIPAD,RXPPAD21,UNUSED,,,,,,,,,,,,
AK26,,GTOPAD,TXPPAD21,UNUSED,,,,,,,,,,,,
AK27,,GTOPAD,TXNPAD21,UNUSED,,,,,,,,,,,,
AK28,ce_1,IOB,IO_L01P_6/VRN_6,INPUT,LVCMOS25,6,,,,NONE,,,,NO,NONE,
AK29,,,VCCAUX,,,,,,,,2.5,,,,,
B1,,,VCCAUX,,,,,,,,2.5,,,,,
B2,,,GND,,,,,,,,,,,,,
B3,qin1<25>,IOB,IO_L01P_2/VRN_2,INPUT,LVCMOS25,2,,,,IFD,,,,YES,NONE,
B4,,,AVCCAUXRX9,,,,,,,,2.5,,,,,
B5,,,VTRXPAD9,,,,,,,,,,,,,
B6,,,AVCCAUXTX9,,,,,,,,2.5,,,,,
B7,,,VTTXPAD9,,,,,,,,,,,,,
B8,qin1<54>,IOB,IO_L44P_1,INPUT,LVCMOS25,1,,,,IFD,,,,YES,NONE,
B9,ceroin4<11>,IOB,IO_L47N_1,INPUT,LVCMOS25,1,,,,NONE,,,,NO,NONE,
B10,ceroin4<8>,IOB,IO_L50_1/No_Pair,INPUT,LVCMOS25,1,,,,NONE,,,,NO,NONE,
B11,,,AVCCAUXRX7,,,,,,,,2.5,,,,,
B12,,,VTRXPAD7,,,,,,,,,,,,,
B13,,,AVCCAUXTX7,,,,,,,,2.5,,,,,
B14,,,VTTXPAD7,,,,,,,,,,,,,
B15,clk_1,IOB,IO_L74N_1/GCLK1P,INPUT,LVCMOS25,1,,,,NONE,,,,NO,NONE,
B16,ceroin4<42>,IOB,IO_L74P_0/GCLK6S,INPUT,LVCMOS25,0,,,,NONE,,,,NO,NONE,
B17,,,AVCCAUXRX6,,,,,,,,2.5,,,,,
B18,,,VTRXPAD6,,,,,,,,,,,,,
B19,,,AVCCAUXTX6,,,,,,,,2.5,,,,,
B20,,,VTTXPAD6,,,,,,,,,,,,,
B21,xin1<2>,IOB,IO_L50_0/No_Pair,INPUT,LVCMOS25,0,,,,NONE,,,,NO,NONE,
B22,xin1<3>,IOB,IO_L47P_0,INPUT,LVCMOS25,0,,,,NONE,,,,NO,NONE,
B23,zin1<32>,IOB,IO_L44N_0,INPUT,LVCMOS25,0,,,,IFD,,,,YES,NONE,
B24,,,AVCCAUXRX4,,,,,,,,2.5,,,,,
B25,,,VTRXPAD4,,,,,,,,,,,,,
B26,,,AVCCAUXTX4,,,,,,,,2.5,,,,,
B27,,,VTTXPAD4,,,,,,,,,,,,,
B28,xin1<49>,IOB,IO_L01P_7/VRN_7,INPUT,LVCMOS25,7,,,,NONE,,,,NO,NONE,
B29,,,GND,,,,,,,,,,,,,
B30,,,VCCAUX,,,,,,,,2.5,,,,,
C1,qin1<18>,IOB,IO_L04P_2,INPUT,LVCMOS25,2,,,,IFD,,,,YES,NONE,
C2,qin1<19>,IOB,IO_L04N_2/VREF_2,INPUT,LVCMOS25,2,,,,IFD,,,,YES,NONE,
C3,,,GND,,,,,,,,,,,,,
C4,qin1<51>,IOB,IO_L06N_2,INPUT,LVCMOS25,2,,,,IFD,,,,YES,NONE,
C5,qin1<43>,IOB,IO_L03N_2,INPUT,LVCMOS25,2,,,,IFD,,,,YES,NONE,
C6,,,GNDA9,,,,,,,,,,,,,
C7,xin1<7>,IOB,IO_L08N_1,INPUT,LVCMOS25,1,,,,NONE,,,,NO,NONE,
C8,qin1<53>,IOB,IO_L38N_1,INPUT,LVCMOS25,1,,,,IFD,,,,YES,NONE,
C9,qin1<34>,IOB,IO_L47P_1,INPUT,LVCMOS25,1,,,,IFD,,,,YES,NONE,
C10,ceroin4<26>,IOB,IO_L56P_1,INPUT,LVCMOS25,1,,,,NONE,,,,NO,NONE,
32
C11,ceroin4<16>,IOB,IO_L56N_1,INPUT,LVCMOS25,1,,,,NONE,,,,NO,NONE,
C12,,,GNDA7,,,,,,,,,,,,,
C13,salida1<53>,IOB,IO_L68N_1,OUTPUT,LVCMOS25,1,12,SLOW,NONE**,,,,,NO,NONE,
C14,,,GND,,,,,,,,,,,,,
C15,salida1<52>,IOB,IO_L74P_1/GCLK0S,OUTPUT,LVCMOS25,1,12,SLOW,NONE**,,,,,NO,NONE,
C16,ceroin4<39>,IOB,IO_L74N_0/GCLK7P,INPUT,LVCMOS25,0,,,,NONE,,,,NO,NONE,
C17,,,GND,,,,,,,,,,,,,
C18,xin1<9>,IOB,IO_L68P_0,INPUT,LVCMOS25,0,,,,NONE,,,,NO,NONE,
C19,,,GNDA6,,,,,,,,,,,,,
C20,ceroin4<9>,IOB,IO_L56P_0,INPUT,LVCMOS25,0,,,,NONE,,,,NO,NONE,
C21,zin1<36>,IOB,IO_L56N_0,INPUT,LVCMOS25,0,,,,IFD,,,,YES,NONE,
C22,zin1<31>,IOB,IO_L47N_0,INPUT,LVCMOS25,0,,,,IFD,,,,YES,NONE,
C23,ceroin4<31>,IOB,IO_L38P_0,INPUT,LVCMOS25,0,,,,NONE,,,,NO,NONE,
C24,salida1<3>,IOB,IO_L08P_0,OUTPUT,LVCMOS25,0,12,SLOW,NONE**,,,,,NO,NONE,
C25,,,GNDA4,,,,,,,,,,,,,
C26,salida1<49>,IOB,IO_L03N_7,OUTPUT,LVCMOS25,7,12,SLOW,NONE**,,,,,NO,NONE,
C27,salida1<51>,IOB,IO_L06N_7,OUTPUT,LVCMOS25,7,12,SLOW,NONE**,,,,,NO,NONE,
C28,,,GND,,,,,,,,,,,,,
C29,salida1<23>,IOB,IO_L04N_7/VREF_7,OUTPUT,LVCMOS25,7,12,SLOW,NONE**,,,,,NO,NONE,
C30,salida1<8>,IOB,IO_L04P_7,OUTPUT,LVCMOS25,7,12,SLOW,NONE**,,,,,NO,NONE,
D1,qin1<48>,IOB,IO_L31P_2,INPUT,LVCMOS25,2,,,,IFD,,,,YES,NONE,
D2,qin1<36>,IOB,IO_L31N_2,INPUT,LVCMOS25,2,,,,IFD,,,,YES,NONE,
D3,qin1<35>,IOB,IO_L06P_2,INPUT,LVCMOS25,2,,,,IFD,,,,YES,NONE,
D4,,,GND,,,,,,,,,,,,,
D5,qin1<5>,IOB,IO_L03P_2,INPUT,LVCMOS25,2,,,,IFD,,,,YES,NONE,
D6,,,NC,,,,,,,,,,,,,
D7,qin1<24>,IOB,IO_L08P_1,INPUT,LVCMOS25,1,,,,IFD,,,,YES,NONE,
D8,qin1<58>,IOB,IO_L38P_1,INPUT,LVCMOS25,1,,,,IFD,,,,YES,NONE,
D9,,,GND,,,,,,,,,,,,,
D10,qin1<62>,IOB,IO_L37N_1,INPUT,LVCMOS25,1,,,,IFD,,,,YES,NONE,
D11,qin1<57>,IOB,IO_L43N_1,INPUT,LVCMOS25,1,,,,IFD,,,,YES,NONE,
D12,,,GND,,,,,,,,,,,,,
D13,xin1<53>,IOB,IO_L68P_1,INPUT,LVCMOS25,1,,,,NONE,,,,NO,NONE,
D14,ceroin4<53>,IOB,IO_L67N_1,INPUT,LVCMOS25,1,,,,NONE,,,,NO,NONE,
D15,ceroin4<6>,IOB,IO_L73N_1,INPUT,LVCMOS25,1,,,,NONE,,,,NO,NONE,
D16,xin1<52>,IOB,IO_L73P_0,INPUT,LVCMOS25,0,,,,NONE,,,,NO,NONE,
D17,zin1<27>,IOB,IO_L67P_0,INPUT,LVCMOS25,0,,,,IFD,,,,YES,NONE,
D18,xin1<11>,IOB,IO_L68N_0,INPUT,LVCMOS25,0,,,,NONE,,,,NO,NONE,
D19,,,GND,,,,,,,,,,,,,
D20,zin1<10>,IOB,IO_L43P_0,INPUT,LVCMOS25,0,,,,IFD,,,,YES,NONE,
D21,salida1<39>,IOB,IO_L37P_0,OUTPUT,LVCMOS25,0,12,SLOW,NONE**,,,,,NO,NONE,
D22,,,GND,,,,,,,,,,,,,
D23,salida1<16>,IOB,IO_L38N_0,OUTPUT,LVCMOS25,0,12,SLOW,NONE**,,,,,NO,NONE,
D24,salida1<31>,IOB,IO_L08N_0,OUTPUT,LVCMOS25,0,12,SLOW,NONE**,,,,,NO,NONE,
D25,,,DXN,,,,,,,,,,,,,
D26,salida1<10>,IOB,IO_L03P_7,OUTPUT,LVCMOS25,7,12,SLOW,NONE**,,,,,NO,NONE,
D27,,,GND,,,,,,,,,,,,,
D28,xin1<51>,IOB,IO_L06P_7,INPUT,LVCMOS25,7,,,,NONE,,,,NO,NONE,
D29,hin1<15>,IOB,IO_L31N_7,INPUT,LVCMOS25,7,,,,IFD,,,,YES,NONE,
D30,hin1<16>,IOB,IO_L31P_7,INPUT,LVCMOS25,7,,,,IFD,,,,YES,NONE,
E1,qin1<15>,IOB,IO_L34P_2,INPUT,LVCMOS25,2,,,,IFD,,,,YES,NONE,
E2,qin1<13>,IOB,IO_L34N_2/VREF_2,INPUT,LVCMOS25,2,,,,IFD,,,,YES,NONE,
E3,qin1<42>,IOB,IO_L33P_2,INPUT,LVCMOS25,2,,,,IFD,,,,YES,NONE,
E4,qin1<39>,IOB,IO_L33N_2,INPUT,LVCMOS25,2,,,,IFD,,,,YES,NONE,
E5,,,GND,,,,,,,,,,,,,
E6,qin1<4>,IOB,IO_L01P_1/VRN_1,INPUT,LVCMOS25,1,,,,IFD,,,,YES,NONE,
E7,qin1<44>,IOB,IO_L01N_1/VRP_1,INPUT,LVCMOS25,1,,,,IFD,,,,YES,NONE,
E8,qin1<50>,IOB,IO_L03P_1,INPUT,LVCMOS25,1,,,,IFD,,,,YES,NONE,
33
E9,qin1<30>,IOB,IO_L03N_1/VREF_1,INPUT,LVCMOS25,1,,,,IFD,,,,YES,NONE,
E10,qin1<61>,IOB,IO_L37P_1,INPUT,LVCMOS25,1,,,,IFD,,,,YES,NONE,
E11,salida1<13>,IOB,IO_L43P_1,OUTPUT,LVCMOS25,1,12,SLOW,NONE**,,,,,NO,NONE,
E12,ceroin4<13>,IOB,IO_L46P_1,INPUT,LVCMOS25,1,,,,NONE,,,,NO,NONE,
E13,ceroin4<33>,IOB,IO_L46N_1,INPUT,LVCMOS25,1,,,,NONE,,,,NO,NONE,
E14,ceroin4<52>,IOB,IO_L67P_1,INPUT,LVCMOS25,1,,,,NONE,,,,NO,NONE,
E15,ceroin4<38>,IOB,IO_L73P_1,INPUT,LVCMOS25,1,,,,NONE,,,,NO,NONE,
E16,ceroin4<47>,IOB,IO_L73N_0,INPUT,LVCMOS25,0,,,,NONE,,,,NO,NONE,
E17,salida1<18>,IOB,IO_L67N_0,OUTPUT,LVCMOS25,0,12,SLOW,NONE**,,,,,NO,NONE,
E18,ceroin4<62>,IOB,IO_L46P_0,INPUT,LVCMOS25,0,,,,NONE,,,,NO,NONE,
E19,zin1<30>,IOB,IO_L46N_0,INPUT,LVCMOS25,0,,,,IFD,,,,YES,NONE,
E20,zin1<8>,IOB,IO_L43N_0,INPUT,LVCMOS25,0,,,,IFD,,,,YES,NONE,
E21,ceroin4<2>,IOB,IO_L37N_0,INPUT,LVCMOS25,0,,,,NONE,,,,NO,NONE,
E22,ceroin4<49>,IOB,IO_L03P_0/VREF_0,INPUT,LVCMOS25,0,,,,NONE,,,,NO,NONE,
E23,salida1<33>,IOB,IO_L03N_0,OUTPUT,LVCMOS25,0,12,SLOW,NONE**,,,,,NO,NONE,
E24,hin1<53>,IOB,IO_L01P_0/VRN_0,INPUT,LVCMOS25,0,,,,NONE,,,,NO,NONE,
E25,hin1<52>,IOB,IO_L01N_0/VRP_0,INPUT,LVCMOS25,0,,,,NONE,,,,NO,NONE,
E26,,,GND,,,,,,,,,,,,,
E27,hin1<14>,IOB,IO_L33N_7,INPUT,LVCMOS25,7,,,,IFD,,,,YES,NONE,
E28,hin1<13>,IOB,IO_L33P_7,INPUT,LVCMOS25,7,,,,IFD,,,,YES,NONE,
E29,hin1<11>,IOB,IO_L34N_7/VREF_7,INPUT,LVCMOS25,7,,,,IFD,,,,YES,NONE,
E30,hin1<10>,IOB,IO_L34P_7,INPUT,LVCMOS25,7,,,,IFD,,,,YES,NONE,
F1,zin1<2>,IOB,IO_L37P_2,INPUT,LVCMOS25,2,,,,IFD,,,,YES,NONE,
F2,zin1<5>,IOB,IO_L37N_2,INPUT,LVCMOS25,2,,,,IFD,,,,YES,NONE,
F3,qin1<32>,IOB,IO_L36P_2,INPUT,LVCMOS25,2,,,,IFD,,,,YES,NONE,
F4,qin1<14>,IOB,IO_L36N_2,INPUT,LVCMOS25,2,,,,IFD,,,,YES,NONE,
F5,,,TDO,,,,,,,,,,,,,
F6,,,GND,,,,,,,,,,,,,
F7,qin1<37>,IOB,IO_L02P_1,INPUT,LVCMOS25,1,,,,IFD,,,,YES,NONE,
F8,qin1<0>,IOB,IO_L02N_1,INPUT,LVCMOS25,1,,,,IFD,,,,YES,NONE,
F9,qin1<59>,IOB,IO_L07P_1,INPUT,LVCMOS25,1,,,,IFD,,,,YES,NONE,
F10,qin1<60>,IOB,IO_L07N_1,INPUT,LVCMOS25,1,,,,IFD,,,,YES,NONE,
F11,ceroin4<21>,IOB,IO_L48P_1,INPUT,LVCMOS25,1,,,,NONE,,,,NO,NONE,
F12,xin1<16>,IOB,IO_L48N_1,INPUT,LVCMOS25,1,,,,NONE,,,,NO,NONE,
F13,,,GND,,,,,,,,,,,,,
F14,ceroin4<30>,IOB,IO_L49N_1,INPUT,LVCMOS25,1,,,,NONE,,,,NO,NONE,
F15,xin1<8>,IOB,IO_L75N_1/GCLK3P,INPUT,LVCMOS25,1,,,,NONE,,,,NO,NONE,
F16,xin1<39>,IOB,IO_L75P_0/GCLK4S,INPUT,LVCMOS25,0,,,,NONE,,,,NO,NONE,
F17,xin1<32>,IOB,IO_L49P_0,INPUT,LVCMOS25,0,,,,NONE,,,,NO,NONE,
F18,,,GND,,,,,,,,,,,,,
F19,ceroin4<3>,IOB,IO_L48P_0,INPUT,LVCMOS25,0,,,,NONE,,,,NO,NONE,
F20,zin1<38>,IOB,IO_L48N_0,INPUT,LVCMOS25,0,,,,IFD,,,,YES,NONE,
F21,salida1<32>,IOB,IO_L07P_0,OUTPUT,LVCMOS25,0,12,SLOW,NONE**,,,,,NO,NONE,
F22,xin1<5>,IOB,IO_L07N_0,INPUT,LVCMOS25,0,,,,NONE,,,,NO,NONE,
F23,salida1<17>,IOB,IO_L02P_0,OUTPUT,LVCMOS25,0,12,SLOW,NONE**,,,,,NO,NONE,
F24,xin1<10>,IOB,IO_L02N_0,INPUT,LVCMOS25,0,,,,NONE,,,,NO,NONE,
F25,,,GND,,,,,,,,,,,,,
F26,,,TDI,,,,,,,,,,,,,
F27,hin1<6>,IOB,IO_L36N_7,INPUT,LVCMOS25,7,,,,IFD,,,,YES,NONE,
F28,hin1<8>,IOB,IO_L36P_7,INPUT,LVCMOS25,7,,,,IFD,,,,YES,NONE,
F29,hin1<2>,IOB,IO_L37N_7,INPUT,LVCMOS25,7,,,,IFD,,,,YES,NONE,
F30,zin1<56>,IOB,IO_L37P_7,INPUT,LVCMOS25,7,,,,IFD,,,,YES,NONE,
G1,qin1<12>,IOB,IO_L40P_2,INPUT,LVCMOS25,2,,,,IFD,,,,YES,NONE,
G2,ceroin4<14>,IOB,IO_L40N_2/VREF_2,INPUT,LVCMOS25,2,,,,NONE,,,,NO,NONE,
G3,salida1<14>,IOB,IO_L39P_2,OUTPUT,LVCMOS25,2,12,SLOW,NONE**,,,,,NO,NONE,
G4,qin1<2>,IOB,IO_L39N_2,INPUT,LVCMOS25,2,,,,IFD,,,,YES,NONE,
G5,qin1<29>,IOB,IO_L02P_2,INPUT,LVCMOS25,2,,,,IFD,,,,YES,NONE,
G6,qin1<6>,IOB,IO_L02N_2,INPUT,LVCMOS25,2,,,,IFD,,,,YES,NONE,
34
G7,,,TCK,,,,,,,,,,,,,
G8,ceroin4<24>,IOB,IO_L05_1/No_Pair,INPUT,LVCMOS25,1,,,,NONE,,,,NO,NONE,
G9,ceroin4<18>,IOB,IO_L06N_1,INPUT,LVCMOS25,1,,,,NONE,,,,NO,NONE,
G10,qin1<55>,IOB,IO_L09N_1/VREF_1,INPUT,LVCMOS25,1,,,,IFD,,,,YES,NONE,
G11,qin1<56>,IOB,IO_L39N_1,INPUT,LVCMOS25,1,,,,IFD,,,,YES,NONE,
G12,ceroin4<48>,IOB,IO_L45N_1/VREF_1,INPUT,LVCMOS25,1,,,,NONE,,,,NO,NONE,
G13,xin1<23>,IOB,IO_L54N_1,INPUT,LVCMOS25,1,,,,NONE,,,,NO,NONE,
G14,ceroin4<20>,IOB,IO_L49P_1,INPUT,LVCMOS25,1,,,,NONE,,,,NO,NONE,
G15,zin1<55>,IOB,IO_L75P_1/GCLK2S,INPUT,LVCMOS25,1,,,,IFD,,,,YES,NONE,
G16,ceroin4<7>,IOB,IO_L75N_0/GCLK5P,INPUT,LVCMOS25,0,,,,NONE,,,,NO,NONE,
G17,zin1<24>,IOB,IO_L49N_0,INPUT,LVCMOS25,0,,,,IFD,,,,YES,NONE,
G18,zin1<25>,IOB,IO_L54P_0,INPUT,LVCMOS25,0,,,,IFD,,,,YES,NONE,
G19,zin1<26>,IOB,IO_L45P_0/VREF_0,INPUT,LVCMOS25,0,,,,IFD,,,,YES,NONE,
G20,salida1<2>,IOB,IO_L39P_0,OUTPUT,LVCMOS25,0,12,SLOW,NONE**,,,,,NO,NONE,
G21,zin1<48>,IOB,IO_L09P_0/VREF_0,INPUT,LVCMOS25,0,,,,IFD,,,,YES,NONE,
G22,ceroin4<60>,IOB,IO_L06P_0,INPUT,LVCMOS25,0,,,,NONE,,,,NO,NONE,
G23,xin1<31>,IOB,IO_L05_0/No_Pair,INPUT,LVCMOS25,0,,,,NONE,,,,NO,NONE,
G24,,,PROG_B,,,,,,,,,,,,,
G25,hin1<60>,IOB,IO_L02N_7,INPUT,LVCMOS25,7,,,,NONE,,,,NO,NONE,
G26,hin1<61>,IOB,IO_L02P_7,INPUT,LVCMOS25,7,,,,NONE,,,,NO,NONE,
G27,hin1<4>,IOB,IO_L39N_7,INPUT,LVCMOS25,7,,,,IFD,,,,YES,NONE,
G28,hin1<3>,IOB,IO_L39P_7,INPUT,LVCMOS25,7,,,,IFD,,,,YES,NONE,
G29,salida1<5>,IOB,IO_L40N_7/VREF_7,OUTPUT,LVCMOS25,7,12,SLOW,NONE**,,,,,NO,NONE,
G30,xin1<42>,IOB,IO_L40P_7,INPUT,LVCMOS25,7,,,,NONE,,,,NO,NONE,
H1,,,GND,,,,,,,,,,,,,
H2,xin1<26>,IOB,IO_L43N_2,INPUT,LVCMOS25,2,,,,NONE,,,,NO,NONE,
H3,xin1<38>,IOB,IO_L42P_2,INPUT,LVCMOS25,2,,,,NONE,,,,NO,NONE,
H4,qin1<23>,IOB,IO_L42N_2,INPUT,LVCMOS25,2,,,,IFD,,,,YES,NONE,
H5,qin1<47>,IOB,IO_L32P_2,INPUT,LVCMOS25,2,,,,IFD,,,,YES,NONE,
H6,qin1<38>,IOB,IO_L32N_2,INPUT,LVCMOS25,2,,,,IFD,,,,YES,NONE,
H7,,,VBATT,,,,,,,,,,,,,
H8,,,TMS,,,,,,,,,,,,,
H9,ceroin4<32>,IOB,IO_L06P_1,INPUT,LVCMOS25,1,,,,NONE,,,,NO,NONE,
H10,qin1<52>,IOB,IO_L09P_1,INPUT,LVCMOS25,1,,,,IFD,,,,YES,NONE,
H11,qin1<63>,IOB,IO_L39P_1,INPUT,LVCMOS25,1,,,,IFD,,,,YES,NONE,
H12,qin1<49>,IOB,IO_L45P_1,INPUT,LVCMOS25,1,,,,IFD,,,,YES,NONE,
H13,ceroin4<29>,IOB,IO_L54P_1,INPUT,LVCMOS25,1,,,,NONE,,,,NO,NONE,
H14,ceroin4<35>,IOB,IO_L57N_1/VREF_1,INPUT,LVCMOS25,1,,,,NONE,,,,NO,NONE,
H15,xin1<30>,IOB,IO_L69N_1/VREF_1,INPUT,LVCMOS25,1,,,,NONE,,,,NO,NONE,
H16,xin1<33>,IOB,IO_L69P_0/VREF_0,INPUT,LVCMOS25,0,,,,NONE,,,,NO,NONE,
H17,zin1<29>,IOB,IO_L57P_0/VREF_0,INPUT,LVCMOS25,0,,,,IFD,,,,YES,NONE,
H18,zin1<49>,IOB,IO_L54N_0,INPUT,LVCMOS25,0,,,,IFD,,,,YES,NONE,
H19,ceroin4<51>,IOB,IO_L45N_0,INPUT,LVCMOS25,0,,,,NONE,,,,NO,NONE,
H20,salida1<7>,IOB,IO_L39N_0,OUTPUT,LVCMOS25,0,12,SLOW,NONE**,,,,,NO,NONE,
H21,ceroin4<10>,IOB,IO_L09N_0,INPUT,LVCMOS25,0,,,,NONE,,,,NO,NONE,
H22,xin1<18>,IOB,IO_L06N_0,INPUT,LVCMOS25,0,,,,NONE,,,,NO,NONE,
H23,,,HSWAP_EN,,,,,,,,,,,,,
H24,,,DXP,,,,,,,,,,,,,
H25,zin1<61>,IOB,IO_L32N_7,INPUT,LVCMOS25,7,,,,IFD,,,,YES,NONE,
H26,zin1<60>,IOB,IO_L32P_7,INPUT,LVCMOS25,7,,,,IFD,,,,YES,NONE,
H27,salida1<47>,IOB,IO_L42N_7,OUTPUT,LVCMOS25,7,12,SLOW,NONE**,,,,,NO,NONE,
H28,salida1<35>,IOB,IO_L42P_7,OUTPUT,LVCMOS25,7,12,SLOW,NONE**,,,,,NO,NONE,
H29,xin1<58>,IOB,IO_L43N_7,INPUT,LVCMOS25,7,,,,NONE,,,,NO,NONE,
H30,,,GND,,,,,,,,,,,,,
J1,zin1<7>,IOB,IO_L46N_2/VREF_2,INPUT,LVCMOS25,2,,,,IFD,,,,YES,NONE,
J2,salida1<41>,IOB,IO_L43P_2,OUTPUT,LVCMOS25,2,12,SLOW,NONE**,,,,,NO,NONE,
J3,xin1<17>,IOB,IO_L48P_2,INPUT,LVCMOS25,2,,,,NONE,,,,NO,NONE,
J4,salida1<12>,IOB,IO_L48N_2,OUTPUT,LVCMOS25,2,12,SLOW,NONE**,,,,,NO,NONE,
35
J5,qin1<41>,IOB,IO_L38P_2,INPUT,LVCMOS25,2,,,,IFD,,,,YES,NONE,
J6,qin1<40>,IOB,IO_L38N_2,INPUT,LVCMOS25,2,,,,IFD,,,,YES,NONE,
J7,qin1<28>,IOB,IO_L05P_2,INPUT,LVCMOS25,2,,,,IFD,,,,YES,NONE,
J8,xin1<13>,IOB,IO_L05N_2,INPUT,LVCMOS25,2,,,,NONE,,,,NO,NONE,
J9,,,VCCO_2,,,2,,,,,2.50,,,,,
J10,,,VCCO_1,,,1,,,,,2.50,,,,,
J11,,,VCCO_1,,,1,,,,,2.50,,,,,
J12,,,VCCO_1,,,1,,,,,2.50,,,,,
J13,,,VCCO_1,,,1,,,,,2.50,,,,,
J14,xin1<48>,IOB,IO_L57P_1,INPUT,LVCMOS25,1,,,,NONE,,,,NO,NONE,
J15,xin1<6>,IOB,IO_L69P_1,INPUT,LVCMOS25,1,,,,NONE,,,,NO,NONE,
J16,salida1<30>,IOB,IO_L69N_0,OUTPUT,LVCMOS25,0,12,SLOW,NONE**,,,,,NO,NONE,
J17,zin1<39>,IOB,IO_L57N_0,INPUT,LVCMOS25,0,,,,IFD,,,,YES,NONE,
J18,,,VCCO_0,,,0,,,,,2.50,,,,,
J19,,,VCCO_0,,,0,,,,,2.50,,,,,
J20,,,VCCO_0,,,0,,,,,2.50,,,,,
J21,,,VCCO_0,,,0,,,,,2.50,,,,,
J22,,,VCCO_7,,,7,,,,,2.50,,,,,
J23,xin1<4>,IOB,IO_L05N_7,INPUT,LVCMOS25,7,,,,NONE,,,,NO,NONE,
J24,salida1<29>,IOB,IO_L05P_7,OUTPUT,LVCMOS25,7,12,SLOW,NONE**,,,,,NO,NONE,
J25,hin1<5>,IOB,IO_L38N_7,INPUT,LVCMOS25,7,,,,IFD,,,,YES,NONE,
J26,hin1<7>,IOB,IO_L38P_7,INPUT,LVCMOS25,7,,,,IFD,,,,YES,NONE,
J27,salida1<0>,IOB,IO_L48N_7,OUTPUT,LVCMOS25,7,12,SLOW,NONE**,,,,,NO,NONE,
J28,zin1<9>,IOB,IO_L48P_7,INPUT,LVCMOS25,7,,,,IFD,,,,YES,NONE,
J29,zin1<28>,IOB,IO_L43P_7,INPUT,LVCMOS25,7,,,,IFD,,,,YES,NONE,
J30,zin1<57>,IOB,IO_L46N_7/VREF_7,INPUT,LVCMOS25,7,,,,IFD,,,,YES,NONE,
K1,salida1<50>,IOB,IO_L46P_2,OUTPUT,LVCMOS25,2,12,SLOW,NONE**,,,,,NO,NONE,
K2,ceroin4<0>,IOB,IO_L49N_2,INPUT,LVCMOS25,2,,,,NONE,,,,NO,NONE,
K3,xin1<20>,IOB,IO_L51P_2,INPUT,LVCMOS25,2,,,,NONE,,,,NO,NONE,
K4,xin1<14>,IOB,IO_L51N_2,INPUT,LVCMOS25,2,,,,NONE,,,,NO,NONE,
K5,zin1<4>,IOB,IO_L45P_2,INPUT,LVCMOS25,2,,,,IFD,,,,YES,NONE,
K6,zin1<3>,IOB,IO_L45N_2,INPUT,LVCMOS25,2,,,,IFD,,,,YES,NONE,
K7,qin1<3>,IOB,IO_L35P_2,INPUT,LVCMOS25,2,,,,IFD,,,,YES,NONE,
K8,qin1<33>,IOB,IO_L35N_2,INPUT,LVCMOS25,2,,,,IFD,,,,YES,NONE,
K9,,,VCCO_2,,,2,,,,,2.50,,,,,
K10,,,VCCO_1,,,1,,,,,2.50,,,,,
K11,,,VCCO_1,,,1,,,,,2.50,,,,,
K12,,,VCCO_1,,,1,,,,,2.50,,,,,
K13,,,VCCO_1,,,1,,,,,2.50,,,,,
K14,,,VCCO_1,,,1,,,,,2.50,,,,,
K15,,,VCCO_1,,,1,,,,,2.50,,,,,
K16,,,VCCO_0,,,0,,,,,2.50,,,,,
K17,,,VCCO_0,,,0,,,,,2.50,,,,,
K18,,,VCCO_0,,,0,,,,,2.50,,,,,
K19,,,VCCO_0,,,0,,,,,2.50,,,,,
K20,,,VCCO_0,,,0,,,,,2.50,,,,,
K21,,,VCCO_0,,,0,,,,,2.50,,,,,
K22,,,VCCO_7,,,7,,,,,2.50,,,,,
K23,hin1<12>,IOB,IO_L35N_7,INPUT,LVCMOS25,7,,,,IFD,,,,YES,NONE,
K24,hin1<9>,IOB,IO_L35P_7,INPUT,LVCMOS25,7,,,,IFD,,,,YES,NONE,
K25,hin1<0>,IOB,IO_L45N_7,INPUT,LVCMOS25,7,,,,IFD,,,,YES,NONE,
K26,zin1<53>,IOB,IO_L45P_7,INPUT,LVCMOS25,7,,,,IFD,,,,YES,NONE,
K27,hin1<18>,IOB,IO_L51N_7,INPUT,LVCMOS25,7,,,,IFD,,,,YES,NONE,
K28,hin1<17>,IOB,IO_L51P_7,INPUT,LVCMOS25,7,,,,IFD,,,,YES,NONE,
K29,zin1<23>,IOB,IO_L49N_7,INPUT,LVCMOS25,7,,,,IFD,,,,YES,NONE,
K30,zin1<14>,IOB,IO_L46P_7,INPUT,LVCMOS25,7,,,,IFD,,,,YES,NONE,
L1,xin1<35>,IOB,IO_L52N_2/VREF_2,INPUT,LVCMOS25,2,,,,NONE,,,,NO,NONE,
L2,ceroin4<43>,IOB,IO_L49P_2,INPUT,LVCMOS25,2,,,,NONE,,,,NO,NONE,
36
L3,,,GND,,,,,,,,,,,,,
L4,qin1<11>,IOB,IO_L54P_2,INPUT,LVCMOS25,2,,,,IFD,,,,YES,NONE,
L5,xin1<12>,IOB,IO_L54N_2,INPUT,LVCMOS25,2,,,,NONE,,,,NO,NONE,
L6,,,GND,,,,,,,,,,,,,
L7,qin1<26>,IOB,IO_L41P_2,INPUT,LVCMOS25,2,,,,IFD,,,,YES,NONE,
L8,ceroin4<15>,IOB,IO_L41N_2,INPUT,LVCMOS25,2,,,,NONE,,,,NO,NONE,
L9,,,VCCO_2,,,2,,,,,2.50,,,,,
L10,,,VCCO_2,,,2,,,,,2.50,,,,,
L11,,,GND,,,,,,,,,,,,,
L12,,,VCCINT,,,,,,,,1.5,,,,,
L13,,,VCCINT,,,,,,,,1.5,,,,,
L14,,,VCCINT,,,,,,,,1.5,,,,,
L15,,,VCCINT,,,,,,,,1.5,,,,,
L16,,,VCCINT,,,,,,,,1.5,,,,,
L17,,,VCCINT,,,,,,,,1.5,,,,,
L18,,,VCCINT,,,,,,,,1.5,,,,,
L19,,,VCCINT,,,,,,,,1.5,,,,,
L20,,,GND,,,,,,,,,,,,,
L21,,,VCCO_7,,,7,,,,,2.50,,,,,
L22,,,VCCO_7,,,7,,,,,2.50,,,,,
L23,salida1<26>,IOB,IO_L41N_7,OUTPUT,LVCMOS25,7,12,SLOW,NONE**,,,,,NO,NONE,
L24,zin1<52>,IOB,IO_L41P_7,INPUT,LVCMOS25,7,,,,IFD,,,,YES,NONE,
L25,,,GND,,,,,,,,,,,,,
L26,zin1<58>,IOB,IO_L54N_7,INPUT,LVCMOS25,7,,,,IFD,,,,YES,NONE,
L27,zin1<59>,IOB,IO_L54P_7,INPUT,LVCMOS25,7,,,,IFD,,,,YES,NONE,
L28,,,GND,,,,,,,,,,,,,
L29,salida1<58>,IOB,IO_L49P_7,OUTPUT,LVCMOS25,7,12,SLOW,NONE**,,,,,NO,NONE,
L30,salida1<19>,IOB,IO_L52N_7/VREF_7,OUTPUT,LVCMOS25,7,12,SLOW,NONE**,,,,,NO,NONE,
M1,xin1<47>,IOB,IO_L52P_2,INPUT,LVCMOS25,2,,,,NONE,,,,NO,NONE,
M2,zin1<15>,IOB,IO_L55N_2,INPUT,LVCMOS25,2,,,,IFD,,,,YES,NONE,
M3,zin1<0>,IOB,IO_L57P_2,INPUT,LVCMOS25,2,,,,IFD,,,,YES,NONE,
M4,xin1<50>,IOB,IO_L57N_2,INPUT,LVCMOS25,2,,,,NONE,,,,NO,NONE,
M5,zin1<54>,IOB,IO_L47P_2,INPUT,LVCMOS25,2,,,,IFD,,,,YES,NONE,
M6,salida1<28>,IOB,IO_L47N_2,OUTPUT,LVCMOS25,2,12,SLOW,NONE**,,,,,NO,NONE,
M7,ceroin4<40>,IOB,IO_L44P_2,INPUT,LVCMOS25,2,,,,NONE,,,,NO,NONE,
M8,ceroin4<17>,IOB,IO_L44N_2,INPUT,LVCMOS25,2,,,,NONE,,,,NO,NONE,
M9,,,VCCO_2,,,2,,,,,2.50,,,,,
M10,,,VCCO_2,,,2,,,,,2.50,,,,,
M11,,,VCCINT,,,,,,,,1.5,,,,,
M12,,,GND,,,,,,,,,,,,,
M13,,,GND,,,,,,,,,,,,,
M14,,,GND,,,,,,,,,,,,,
M15,,,GND,,,,,,,,,,,,,
M16,,,GND,,,,,,,,,,,,,
M17,,,GND,,,,,,,,,,,,,
M18,,,GND,,,,,,,,,,,,,
M19,,,GND,,,,,,,,,,,,,
M20,,,VCCINT,,,,,,,,1.5,,,,,
M21,,,VCCO_7,,,7,,,,,2.50,,,,,
M22,,,VCCO_7,,,7,,,,,2.50,,,,,
M23,ceroin4<58>,IOB,IO_L44N_7,INPUT,LVCMOS25,7,,,,NONE,,,,NO,NONE,
M24,salida1<61>,IOB,IO_L44P_7,OUTPUT,LVCMOS25,7,12,SLOW,NONE**,,,,,NO,NONE,
M25,zin1<63>,IOB,IO_L47N_7,INPUT,LVCMOS25,7,,,,IFD,,,,YES,NONE,
M26,hin1<1>,IOB,IO_L47P_7,INPUT,LVCMOS25,7,,,,IFD,,,,YES,NONE,
M27,salida1<42>,IOB,IO_L57N_7,OUTPUT,LVCMOS25,7,12,SLOW,NONE**,,,,,NO,NONE,
M28,salida1<21>,IOB,IO_L57P_7,OUTPUT,LVCMOS25,7,12,SLOW,NONE**,,,,,NO,NONE,
M29,zin1<12>,IOB,IO_L55N_7,INPUT,LVCMOS25,7,,,,IFD,,,,YES,NONE,
M30,xin1<27>,IOB,IO_L52P_7,INPUT,LVCMOS25,7,,,,NONE,,,,NO,NONE,
37
N1,qin1<46>,IOB,IO_L58N_2/VREF_2,INPUT,LVCMOS25,2,,,,IFD,,,,YES,NONE,
N2,salida1<22>,IOB,IO_L55P_2,OUTPUT,LVCMOS25,2,12,SLOW,NONE**,,,,,NO,NONE,
N3,xin1<24>,IOB,IO_L60P_2,INPUT,LVCMOS25,2,,,,NONE,,,,NO,NONE,
N4,xin1<43>,IOB,IO_L60N_2,INPUT,LVCMOS25,2,,,,NONE,,,,NO,NONE,
N5,xin1<0>,IOB,IO_L53P_2,INPUT,LVCMOS25,2,,,,NONE,,,,NO,NONE,
N6,salida1<25>,IOB,IO_L53N_2,OUTPUT,LVCMOS25,2,12,SLOW,NONE**,,,,,NO,NONE,
N7,salida1<43>,IOB,IO_L50P_2,OUTPUT,LVCMOS25,2,12,SLOW,NONE**,,,,,NO,NONE,
N8,salida1<24>,IOB,IO_L50N_2,OUTPUT,LVCMOS25,2,12,SLOW,NONE**,,,,,NO,NONE,
N9,,,VCCO_2,,,2,,,,,2.50,,,,,
N10,,,VCCO_2,,,2,,,,,2.50,,,,,
N11,,,VCCINT,,,,,,,,1.5,,,,,
N12,,,GND,,,,,,,,,,,,,
N13,,,GND,,,,,,,,,,,,,
N14,,,GND,,,,,,,,,,,,,
N15,,,GND,,,,,,,,,,,,,
N16,,,GND,,,,,,,,,,,,,
N17,,,GND,,,,,,,,,,,,,
N18,,,GND,,,,,,,,,,,,,
N19,,,GND,,,,,,,,,,,,,
N20,,,VCCINT,,,,,,,,1.5,,,,,
N21,,,VCCO_7,,,7,,,,,2.50,,,,,
N22,,,VCCO_7,,,7,,,,,2.50,,,,,
N23,xin1<61>,IOB,IO_L50N_7,INPUT,LVCMOS25,7,,,,NONE,,,,NO,NONE,
N24,salida1<15>,IOB,IO_L50P_7,OUTPUT,LVCMOS25,7,12,SLOW,NONE**,,,,,NO,NONE,
N25,salida1<11>,IOB,IO_L53N_7,OUTPUT,LVCMOS25,7,12,SLOW,NONE**,,,,,NO,NONE,
N26,zin1<13>,IOB,IO_L53P_7,INPUT,LVCMOS25,7,,,,IFD,,,,YES,NONE,
N27,ceroin4<61>,IOB,IO_L60N_7,INPUT,LVCMOS25,7,,,,NONE,,,,NO,NONE,
N28,zin1<16>,IOB,IO_L60P_7,INPUT,LVCMOS25,7,,,,IFD,,,,YES,NONE,
N29,xin1<15>,IOB,IO_L55P_7,INPUT,LVCMOS25,7,,,,NONE,,,,NO,NONE,
N30,zin1<46>,IOB,IO_L58N_7/VREF_7,INPUT,LVCMOS25,7,,,,IFD,,,,YES,NONE,
P1,xin1<40>,IOB,IO_L58P_2,INPUT,LVCMOS25,2,,,,NONE,,,,NO,NONE,
P2,ceroin4<41>,IOB,IO_L85P_2,INPUT,LVCMOS25,2,,,,NONE,,,,NO,NONE,
P3,xin1<21>,IOB,IO_L85N_2,INPUT,LVCMOS25,2,,,,NONE,,,,NO,NONE,
P4,ceroin4<22>,IOB,IO_L87P_2,INPUT,LVCMOS25,2,,,,NONE,,,,NO,NONE,
P5,xin1<28>,IOB,IO_L87N_2,INPUT,LVCMOS25,2,,,,NONE,,,,NO,NONE,
P6,,,GND,,,,,,,,,,,,,
P7,zin1<6>,IOB,IO_L59P_2,INPUT,LVCMOS25,2,,,,IFD,,,,YES,NONE,
P8,qin1<45>,IOB,IO_L59N_2,INPUT,LVCMOS25,2,,,,IFD,,,,YES,NONE,
P9,zin1<1>,IOB,IO_L56N_2,INPUT,LVCMOS25,2,,,,IFD,,,,YES,NONE,
P10,,,VCCO_2,,,2,,,,,2.50,,,,,
P11,,,VCCINT,,,,,,,,1.5,,,,,
P12,,,GND,,,,,,,,,,,,,
P13,,,GND,,,,,,,,,,,,,
P14,,,GND,,,,,,,,,,,,,
P15,,,GND,,,,,,,,,,,,,
P16,,,GND,,,,,,,,,,,,,
P17,,,GND,,,,,,,,,,,,,
P18,,,GND,,,,,,,,,,,,,
P19,,,GND,,,,,,,,,,,,,
P20,,,VCCINT,,,,,,,,1.5,,,,,
P21,,,VCCO_7,,,7,,,,,2.50,,,,,
P22,zin1<47>,IOB,IO_L56N_7,INPUT,LVCMOS25,7,,,,IFD,,,,YES,NONE,
P23,zin1<22>,IOB,IO_L59N_7,INPUT,LVCMOS25,7,,,,IFD,,,,YES,NONE,
P24,salida1<20>,IOB,IO_L59P_7,OUTPUT,LVCMOS25,7,12,SLOW,NONE**,,,,,NO,NONE,
P25,,,GND,,,,,,,,,,,,,
P26,ceroin4<37>,IOB,IO_L87N_7,INPUT,LVCMOS25,7,,,,NONE,,,,NO,NONE,
P27,zin1<18>,IOB,IO_L87P_7,INPUT,LVCMOS25,7,,,,IFD,,,,YES,NONE,
P28,ceroin4<5>,IOB,IO_L85N_7,INPUT,LVCMOS25,7,,,,NONE,,,,NO,NONE,
38
P29,ceroin4<4>,IOB,IO_L85P_7,INPUT,LVCMOS25,7,,,,NONE,,,,NO,NONE,
P30,zin1<17>,IOB,IO_L58P_7,INPUT,LVCMOS25,7,,,,IFD,,,,YES,NONE,
R1,,,VCCAUX,,,,,,,,2.5,,,,,
R2,ceroin4<25>,IOB,IO_L88N_2/VREF_2,INPUT,LVCMOS25,2,,,,NONE,,,,NO,NONE,
R3,qin1<20>,IOB,IO_L90P_2,INPUT,LVCMOS25,2,,,,IFD,,,,YES,NONE,
R4,qin1<31>,IOB,IO_L90N_2,INPUT,LVCMOS25,2,,,,IFD,,,,YES,NONE,
R5,xin1<54>,IOB,IO_L89P_2,INPUT,LVCMOS25,2,,,,NONE,,,,NO,NONE,
R6,ceroin4<54>,IOB,IO_L89N_2,INPUT,LVCMOS25,2,,,,NONE,,,,NO,NONE,
R7,xin1<22>,IOB,IO_L86P_2,INPUT,LVCMOS25,2,,,,NONE,,,,NO,NONE,
R8,xin1<41>,IOB,IO_L86N_2,INPUT,LVCMOS25,2,,,,NONE,,,,NO,NONE,
R9,zin1<11>,IOB,IO_L56P_2,INPUT,LVCMOS25,2,,,,IFD,,,,YES,NONE,
R10,,,VCCO_2,,,2,,,,,2.50,,,,,
R11,,,VCCINT,,,,,,,,1.5,,,,,
R12,,,GND,,,,,,,,,,,,,
R13,,,GND,,,,,,,,,,,,,
R14,,,GND,,,,,,,,,,,,,
R15,,,GND,,,,,,,,,,,,,
R16,,,GND,,,,,,,,,,,,,
R17,,,GND,,,,,,,,,,,,,
R18,,,GND,,,,,,,,,,,,,
R19,,,GND,,,,,,,,,,,,,
R20,,,VCCINT,,,,,,,,1.5,,,,,
R21,,,VCCO_7,,,7,,,,,2.50,,,,,
R22,zin1<21>,IOB,IO_L56P_7,INPUT,LVCMOS25,7,,,,IFD,,,,YES,NONE,
R23,zin1<19>,IOB,IO_L86N_7,INPUT,LVCMOS25,7,,,,IFD,,,,YES,NONE,
R24,zin1<20>,IOB,IO_L86P_7,INPUT,LVCMOS25,7,,,,IFD,,,,YES,NONE,
R25,zin1<50>,IOB,IO_L89N_7,INPUT,LVCMOS25,7,,,,IFD,,,,YES,NONE,
R26,xin1<37>,IOB,IO_L89P_7,INPUT,LVCMOS25,7,,,,NONE,,,,NO,NONE,
R27,salida1<36>,IOB,IO_L90N_7,OUTPUT,LVCMOS25,7,12,SLOW,NONE**,,,,,NO,NONE,
R28,salida1<45>,IOB,IO_L90P_7,OUTPUT,LVCMOS25,7,12,SLOW,NONE**,,,,,NO,NONE,
R29,zin1<41>,IOB,IO_L88N_7/VREF_7,INPUT,LVCMOS25,7,,,,IFD,,,,YES,NONE,
R30,,,VCCAUX,,,,,,,,2.5,,,,,
T1,,,VCCAUX,,,,,,,,2.5,,,,,
T2,salida1<54>,IOB,IO_L88P_2,OUTPUT,LVCMOS25,2,12,SLOW,NONE**,,,,,NO,NONE,
T3,ceroin4<50>,IOB,IO_L88N_3,INPUT,LVCMOS25,3,,,,NONE,,,,NO,NONE,
T4,qin1<27>,IOB,IO_L88P_3,INPUT,LVCMOS25,3,,,,IFD,,,,YES,NONE,
T5,qin1<16>,IOB,IO_L89N_3,INPUT,LVCMOS25,3,,,,IFD,,,,YES,NONE,
T6,qin1<10>,IOB,IO_L89P_3,INPUT,LVCMOS25,3,,,,IFD,,,,YES,NONE,
T7,qin1<22>,IOB,IO_L86N_3,INPUT,LVCMOS25,3,,,,IFD,,,,YES,NONE,
T8,ceroin4<28>,IOB,IO_L86P_3,INPUT,LVCMOS25,3,,,,NONE,,,,NO,NONE,
T9,,DIFFS,IO_L59N_3,UNUSED,,3,,,,,,,,,,
T10,,,VCCO_3,,,3,,,,,2.50,,,,,
T11,,,VCCINT,,,,,,,,1.5,,,,,
T12,,,GND,,,,,,,,,,,,,
T13,,,GND,,,,,,,,,,,,,
T14,,,GND,,,,,,,,,,,,,
T15,,,GND,,,,,,,,,,,,,
T16,,,GND,,,,,,,,,,,,,
T17,,,GND,,,,,,,,,,,,,
T18,,,GND,,,,,,,,,,,,,
T19,,,GND,,,,,,,,,,,,,
T20,,,VCCINT,,,,,,,,1.5,,,,,
T21,,,VCCO_6,,,6,,,,,2.50,,,,,
T22,hin1<62>,IOB,IO_L59N_6,INPUT,LVCMOS25,6,,,,NONE,,,,NO,NONE,
T23,xin1<56>,IOB,IO_L86P_6,INPUT,LVCMOS25,6,,,,NONE,,,,NO,NONE,
T24,salida1<38>,IOB,IO_L86N_6,OUTPUT,LVCMOS25,6,12,SLOW,NONE**,,,,,NO,NONE,
T25,xin1<62>,IOB,IO_L89P_6,INPUT,LVCMOS25,6,,,,NONE,,,,NO,NONE,
T26,salida1<48>,IOB,IO_L89N_6,OUTPUT,LVCMOS25,6,12,SLOW,NONE**,,,,,NO,NONE,
39
T27,salida1<6>,IOB,IO_L88P_6,OUTPUT,LVCMOS25,6,12,SLOW,NONE**,,,,,NO,NONE,
T28,ceroin4<56>,IOB,IO_L88N_6,INPUT,LVCMOS25,6,,,,NONE,,,,NO,NONE,
T29,zin1<40>,IOB,IO_L88P_7,INPUT,LVCMOS25,7,,,,IFD,,,,YES,NONE,
T30,,,VCCAUX,,,,,,,,2.5,,,,,
U1,qin1<17>,IOB,IO_L90N_3,INPUT,LVCMOS25,3,,,,IFD,,,,YES,NONE,
U2,qin1<8>,IOB,IO_L87N_3/VREF_3,INPUT,LVCMOS25,3,,,,IFD,,,,YES,NONE,
U3,ceroin4<12>,IOB,IO_L87P_3,INPUT,LVCMOS25,3,,,,NONE,,,,NO,NONE,
U4,salida1<40>,IOB,IO_L85N_3,OUTPUT,LVCMOS25,3,12,SLOW,NONE**,,,,,NO,NONE,
U5,qin1<7>,IOB,IO_L85P_3,INPUT,LVCMOS25,3,,,,IFD,,,,YES,NONE,
U6,,,GND,,,,,,,,,,,,,
U7,,DIFFS,IO_L56N_3,UNUSED,,3,,,,,,,,,,
U8,,DIFFM,IO_L56P_3,UNUSED,,3,,,,,,,,,,
U9,xin1<25>,IOB,IO_L59P_3,INPUT,LVCMOS25,3,,,,NONE,,,,NO,NONE,
U10,,,VCCO_3,,,3,,,,,2.50,,,,,
U11,,,VCCINT,,,,,,,,1.5,,,,,
U12,,,GND,,,,,,,,,,,,,
U13,,,GND,,,,,,,,,,,,,
U14,,,GND,,,,,,,,,,,,,
U15,,,GND,,,,,,,,,,,,,
U16,,,GND,,,,,,,,,,,,,
U17,,,GND,,,,,,,,,,,,,
U18,,,GND,,,,,,,,,,,,,
U19,,,GND,,,,,,,,,,,,,
U20,,,VCCINT,,,,,,,,1.5,,,,,
U21,,,VCCO_6,,,6,,,,,2.50,,,,,
U22,hin1<59>,IOB,IO_L59P_6,INPUT,LVCMOS25,6,,,,NONE,,,,NO,NONE,
U23,hin1<45>,IOB,IO_L56P_6,INPUT,LVCMOS25,6,,,,IFD,,,,YES,NONE,
U24,hin1<48>,IOB,IO_L56N_6,INPUT,LVCMOS25,6,,,,IFD,,,,YES,NONE,
U25,,,GND,,,,,,,,,,,,,
U26,salida1<27>,IOB,IO_L85P_6,OUTPUT,LVCMOS25,6,12,SLOW,NONE**,,,,,NO,NONE,
U27,salida1<62>,IOB,IO_L85N_6,OUTPUT,LVCMOS25,6,12,SLOW,NONE**,,,,,NO,NONE,
U28,ceroin4<27>,IOB,IO_L87P_6,INPUT,LVCMOS25,6,,,,NONE,,,,NO,NONE,
U29,salida1<37>,IOB,IO_L87N_6/VREF_6,OUTPUT,LVCMOS25,6,12,SLOW,NONE**,,,,,NO,NONE,
U30,salida1<46>,IOB,IO_L90N_6,OUTPUT,LVCMOS25,6,12,SLOW,NONE**,,,,,NO,NONE,
V1,qin1<9>,IOB,IO_L90P_3,INPUT,LVCMOS25,3,,,,IFD,,,,YES,NONE,
V2,qin1<21>,IOB,IO_L60N_3,INPUT,LVCMOS25,3,,,,IFD,,,,YES,NONE,
V3,,DIFFS,IO_L58N_3,UNUSED,,3,,,,,,,,,,
V4,xin1<19>,IOB,IO_L58P_3,INPUT,LVCMOS25,3,,,,NONE,,,,NO,NONE,
V5,,DIFFS,IO_L55N_3,UNUSED,,3,,,,,,,,,,
V6,hin1<42>,IOB,IO_L55P_3,INPUT,LVCMOS25,3,,,,IFD,,,,YES,NONE,
V7,ceroin4<44>,IOB,IO_L53N_3,INPUT,LVCMOS25,3,,,,NONE,,,,NO,NONE,
V8,ceroin4<55>,IOB,IO_L53P_3,INPUT,LVCMOS25,3,,,,NONE,,,,NO,NONE,
V9,,,VCCO_3,,,3,,,,,2.50,,,,,
V10,,,VCCO_3,,,3,,,,,2.50,,,,,
V11,,,VCCINT,,,,,,,,1.5,,,,,
V12,,,GND,,,,,,,,,,,,,
V13,,,GND,,,,,,,,,,,,,
V14,,,GND,,,,,,,,,,,,,
V15,,,GND,,,,,,,,,,,,,
V16,,,GND,,,,,,,,,,,,,
V17,,,GND,,,,,,,,,,,,,
V18,,,GND,,,,,,,,,,,,,
V19,,,GND,,,,,,,,,,,,,
V20,,,VCCINT,,,,,,,,1.5,,,,,
V21,,,VCCO_6,,,6,,,,,2.50,,,,,
V22,,,VCCO_6,,,6,,,,,2.50,,,,,
V23,salida1<59>,IOB,IO_L53P_6,OUTPUT,LVCMOS25,6,12,SLOW,NONE**,,,,,NO,NONE,
V24,xin1<59>,IOB,IO_L53N_6,INPUT,LVCMOS25,6,,,,NONE,,,,NO,NONE,
40
V25,hin1<36>,IOB,IO_L55P_6,INPUT,LVCMOS25,6,,,,IFD,,,,YES,NONE,
V26,hin1<51>,IOB,IO_L55N_6,INPUT,LVCMOS25,6,,,,IFD,,,,YES,NONE,
V27,salida1<63>,IOB,IO_L58P_6,OUTPUT,LVCMOS25,6,12,SLOW,NONE**,,,,,NO,NONE,
V28,hin1<58>,IOB,IO_L58N_6,INPUT,LVCMOS25,6,,,,NONE,,,,NO,NONE,
V29,salida1<1>,IOB,IO_L60N_6,OUTPUT,LVCMOS25,6,12,SLOW,NONE**,,,,,NO,NONE,
V30,zin1<51>,IOB,IO_L90P_6,INPUT,LVCMOS25,6,,,,IFD,,,,YES,NONE,
W1,,DIFFS,IO_L57N_3/VREF_3,UNUSED,,3,,,,,,,,,,
W2,ceroin4<19>,IOB,IO_L60P_3,INPUT,LVCMOS25,3,,,,NONE,,,,NO,NONE,
W3,salida1<55>,IOB,IO_L52N_3,OUTPUT,LVCMOS25,3,12,SLOW,NONE**,,,,,NO,NONE,
W4,,DIFFM,IO_L52P_3,UNUSED,,3,,,,,,,,,,
W5,rin1<50>,IOB,IO_L50N_3,INPUT,LVCMOS25,3,,,,IFD,,,,YES,NONE,
W6,rin1<51>,IOB,IO_L50P_3,INPUT,LVCMOS25,3,,,,IFD,,,,YES,NONE,
W7,rin1<38>,IOB,IO_L47N_3,INPUT,LVCMOS25,3,,,,IFD,,,,YES,NONE,
W8,rin1<37>,IOB,IO_L47P_3,INPUT,LVCMOS25,3,,,,IFD,,,,YES,NONE,
W9,,,VCCO_3,,,3,,,,,2.50,,,,,
W10,,,VCCO_3,,,3,,,,,2.50,,,,,
W11,,,VCCINT,,,,,,,,1.5,,,,,
W12,,,GND,,,,,,,,,,,,,
W13,,,GND,,,,,,,,,,,,,
W14,,,GND,,,,,,,,,,,,,
W15,,,GND,,,,,,,,,,,,,
W16,,,GND,,,,,,,,,,,,,
W17,,,GND,,,,,,,,,,,,,
W18,,,GND,,,,,,,,,,,,,
W19,,,GND,,,,,,,,,,,,,
W20,,,VCCINT,,,,,,,,1.5,,,,,
W21,,,VCCO_6,,,6,,,,,2.50,,,,,
W22,,,VCCO_6,,,6,,,,,2.50,,,,,
W23,hin1<46>,IOB,IO_L47P_6,INPUT,LVCMOS25,6,,,,IFD,,,,YES,NONE,
W24,hin1<49>,IOB,IO_L47N_6,INPUT,LVCMOS25,6,,,,IFD,,,,YES,NONE,
W25,ceroin4<57>,IOB,IO_L50P_6,INPUT,LVCMOS25,6,,,,NONE,,,,NO,NONE,
W26,xin1<57>,IOB,IO_L50N_6,INPUT,LVCMOS25,6,,,,NONE,,,,NO,NONE,
W27,xin1<63>,IOB,IO_L52P_6,INPUT,LVCMOS25,6,,,,NONE,,,,NO,NONE,
W28,ceroin4<59>,IOB,IO_L52N_6,INPUT,LVCMOS25,6,,,,NONE,,,,NO,NONE,
W29,salida1<56>,IOB,IO_L60P_6,OUTPUT,LVCMOS25,6,12,SLOW,NONE**,,,,,NO,NONE,
W30,xin1<1>,IOB,IO_L57N_6/VREF_6,INPUT,LVCMOS25,6,,,,NONE,,,,NO,NONE,
Y1,,DIFFM,IO_L57P_3,UNUSED,,3,,,,,,,,,,
Y2,,DIFFS,IO_L54N_3,UNUSED,,3,,,,,,,,,,
Y3,,,GND,,,,,,,,,,,,,
Y4,rin1<12>,IOB,IO_L49N_3,INPUT,LVCMOS25,3,,,,IFD,,,,YES,NONE,
Y5,rin1<41>,IOB,IO_L49P_3,INPUT,LVCMOS25,3,,,,IFD,,,,YES,NONE,
Y6,,,GND,,,,,,,,,,,,,
Y7,rin1<22>,IOB,IO_L41N_3,INPUT,LVCMOS25,3,,,,IFD,,,,YES,NONE,
Y8,rin1<42>,IOB,IO_L41P_3,INPUT,LVCMOS25,3,,,,IFD,,,,YES,NONE,
Y9,,,VCCO_3,,,3,,,,,2.50,,,,,
Y10,,,VCCO_3,,,3,,,,,2.50,,,,,
Y11,,,GND,,,,,,,,,,,,,
Y12,,,VCCINT,,,,,,,,1.5,,,,,
Y13,,,VCCINT,,,,,,,,1.5,,,,,
Y14,,,VCCINT,,,,,,,,1.5,,,,,
Y15,,,VCCINT,,,,,,,,1.5,,,,,
Y16,,,VCCINT,,,,,,,,1.5,,,,,
Y17,,,VCCINT,,,,,,,,1.5,,,,,
Y18,,,VCCINT,,,,,,,,1.5,,,,,
Y19,,,VCCINT,,,,,,,,1.5,,,,,
Y20,,,GND,,,,,,,,,,,,,
Y21,,,VCCO_6,,,6,,,,,2.50,,,,,
Y22,,,VCCO_6,,,6,,,,,2.50,,,,,
41
Y23,hin1<30>,IOB,IO_L41P_6,INPUT,LVCMOS25,6,,,,IFD,,,,YES,NONE,
Y24,hin1<33>,IOB,IO_L41N_6,INPUT,LVCMOS25,6,,,,IFD,,,,YES,NONE,
Y25,,,GND,,,,,,,,,,,,,
Y26,ceroin4<34>,IOB,IO_L49P_6,INPUT,LVCMOS25,6,,,,NONE,,,,NO,NONE,
Y27,xin1<34>,IOB,IO_L49N_6,INPUT,LVCMOS25,6,,,,NONE,,,,NO,NONE,
Y28,,,GND,,,,,,,,,,,,,
Y29,hin1<38>,IOB,IO_L54N_6,INPUT,LVCMOS25,6,,,,IFD,,,,YES,NONE,
Y30,ceroin4<1>,IOB,IO_L57P_6,INPUT,LVCMOS25,6,,,,NONE,,,,NO,NONE,
# -----,-----,-----,-----,-----,-----,-----,-----,-----,-----,-----,-----,-----,-----,-----,-----,
#
#* Default value.
#** This default Pullup/Pulldown value can be overridden in Bitgen.
#****** Special VCCO requirements may apply. Please consult the device
# family datasheet for specific guideline on VCCO requirements.
#
#
APENDICE
Release 8.1i Map I.24
Xilinx Mapping Report File for Design 'kalman_cosim5'
Design Information
------------------
Command Line : C:\Xilinx\bin\nt\map.exe -ise C:/xup/Copia de
prueba_kalman3/netlist/prueba_kalman3/netlist/kalman_cosim5_cw.ise -intstyle ise
-p xc2vp30-ff896-7 -cm area -pr b -k 4 -c 100 -tx off -o kalman_cosim5_map.ncd
kalman_cosim5.ngd kalman_cosim5.pcf
Target Device : xc2vp30
Target Package : ff896
Target Speed : -7
Mapper Version : virtex2p -- $Revision: 1.34 $
Mapped Date : Sat May 24 11:35:42 2008
Design Summary
--------------
Number of errors: 0
Number of warnings: 2
Logic Utilization:
Number of Slice Flip Flops: 20,909 out of 27,392 76%
Number of 4 input LUTs: 13,768 out of 27,392 50%
Logic Distribution:
Number of occupied Slices: 13,694 out of 13,696 99%
Number of Slices containing only related logic: 11,602 out of 13,694 84%
Number of Slices containing unrelated logic: 2,092 out of 13,694 15%
*See NOTES below for an explanation of the effects of unrelated logic
Total Number 4 input LUTs: 21,715 out of 27,392 79%
Number used as logic: 13,768
Number used as a route-thru: 986
Number used as Shift registers: 6,961
Number of bonded IOBs: 515 out of 556 92%
IOB Flip Flops: 412
Number of PPC405s: 0 out of 2 0%
Number of MULT18X18s: 54 out of 136 39%
Number of GCLKs: 1 out of 16 6%
Number of GTs: 0 out of 8 0%
42
Number of GT10s: 0 out of 0 0%
Total equivalent gate count for design: 974,649
Additional JTAG gate count for IOBs: 24,720
Peak Memory Usage: 604 MB
NOTES:
Related logic is defined as being logic that shares connectivity - e.g. two
LUTs are "related" if they share common inputs. When assembling slices,
Map gives priority to combine logic that is related. Doing so results in
the best timing performance.
Unrelated logic shares no connectivity. Map will only begin packing
unrelated logic into a slice once 99% of the slices are occupied through
related logic packing.
Note that once logic distribution reaches the 99% level through related
logic packing, this does not mean the device is completely utilized.
Unrelated logic packing will then begin, continuing until all usable LUTs
and FFs are occupied. Depending on your timing budget, increased levels of
unrelated logic packing may adversely affect the overall timing performance
of your design.
Table of Contents
-----------------
Section 1 - Errors
Section 2 - Warnings
Section 3 - Informational
Section 4 - Removed Logic Summary
Section 5 - Removed Logic
Section 6 - IOB Properties
Section 7 - RPMs
Section 8 - Guide Report
Section 9 - Area Group Summary
Section 10 - Modular Design Summary
Section 11 - Timing Report
Section 12 - Configuration String Information
Section 13 - Additional Device Resource Counts
Section 1 - Errors
------------------
Section 6 - IOB Properties
--------------------------
+------------------------------------------------------------------------------------------------------------------------+
| IOB Name | Type | Direction | IO Standard | Drive | Slew | Reg (s) | Resistor | IOB |
| | | | | Strength | Rate | | | Delay |
+------------------------------------------------------------------------------------------------------------------------+
| ain2<0> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| ain2<1> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| ain2<2> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
43
| ain2<3> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| ain2<4> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| ain2<5> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| ain2<6> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| ain2<7> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| ain2<8> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| ain2<9> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| ain2<10> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| ain2<11> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| ain2<12> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| ain2<13> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| ain2<14> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| ain2<15> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| ain2<16> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| ain2<17> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| ain2<18> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| ain2<19> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| ain2<20> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| ain2<21> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| ain2<22> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| ain2<23> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| ain2<24> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| ain2<25> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| ain2<26> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| ain2<27> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| ain2<28> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| ain2<29> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| ain2<30> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| ain2<31> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |

44
| ain2<32> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| ain2<33> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| ain2<34> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| ain2<35> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| ain2<36> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| ain2<37> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| ain2<38> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| ain2<39> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| ain2<40> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| ain2<41> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| ain2<42> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| ain2<43> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| ain2<44> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| ain2<45> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| ain2<46> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| ain2<47> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| ain2<48> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| ain2<49> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| ain2<50> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| ain2<51> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| ain2<52> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| ain2<53> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| ain2<54> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| ain2<55> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| ain2<56> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| ain2<57> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| ain2<58> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| ain2<59> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| ain2<60> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| ain2<61> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| ain2<62> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| ain2<63> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| ce_1 | IOB | INPUT | LVCMOS25 | | | | | |
| ceroin4<0> | IOB | INPUT | LVCMOS25 | | | | | |
| ceroin4<1> | IOB | INPUT | LVCMOS25 | | | | | |
| ceroin4<2> | IOB | INPUT | LVCMOS25 | | | | | |
| ceroin4<3> | IOB | INPUT | LVCMOS25 | | | | | |
| ceroin4<4> | IOB | INPUT | LVCMOS25 | | | | | |
45
| ceroin4<5> | IOB | INPUT | LVCMOS25 | | | | | |
| ceroin4<6> | IOB | INPUT | LVCMOS25 | | | | | |
| ceroin4<7> | IOB | INPUT | LVCMOS25 | | | | | |
| ceroin4<8> | IOB | INPUT | LVCMOS25 | | | | | |
| ceroin4<9> | IOB | INPUT | LVCMOS25 | | | | | |
| ceroin4<10> | IOB | INPUT | LVCMOS25 | | | | | |
| ceroin4<11> | IOB | INPUT | LVCMOS25 | | | | | |
| ceroin4<12> | IOB | INPUT | LVCMOS25 | | | | | |
| ceroin4<13> | IOB | INPUT | LVCMOS25 | | | | | |
| ceroin4<14> | IOB | INPUT | LVCMOS25 | | | | | |
| ceroin4<15> | IOB | INPUT | LVCMOS25 | | | | | |
| ceroin4<16> | IOB | INPUT | LVCMOS25 | | | | | |
| ceroin4<17> | IOB | INPUT | LVCMOS25 | | | | | |
| ceroin4<18> | IOB | INPUT | LVCMOS25 | | | | | |
| ceroin4<19> | IOB | INPUT | LVCMOS25 | | | | | |
| ceroin4<20> | IOB | INPUT | LVCMOS25 | | | | | |
| ceroin4<21> | IOB | INPUT | LVCMOS25 | | | | | |
| ceroin4<22> | IOB | INPUT | LVCMOS25 | | | | | |
| ceroin4<23> | IOB | INPUT | LVCMOS25 | | | | | |
| ceroin4<24> | IOB | INPUT | LVCMOS25 | | | | | |
| ceroin4<25> | IOB | INPUT | LVCMOS25 | | | | | |
| ceroin4<26> | IOB | INPUT | LVCMOS25 | | | | | |
| ceroin4<27> | IOB | INPUT | LVCMOS25 | | | | | |
| ceroin4<28> | IOB | INPUT | LVCMOS25 | | | | | |
| ceroin4<29> | IOB | INPUT | LVCMOS25 | | | | | |
| ceroin4<30> | IOB | INPUT | LVCMOS25 | | | | | |
| ceroin4<31> | IOB | INPUT | LVCMOS25 | | | | | |
| ceroin4<32> | IOB | INPUT | LVCMOS25 | | | | | |
| ceroin4<33> | IOB | INPUT | LVCMOS25 | | | | | |
| ceroin4<34> | IOB | INPUT | LVCMOS25 | | | | | |
| ceroin4<35> | IOB | INPUT | LVCMOS25 | | | | | |
| ceroin4<36> | IOB | INPUT | LVCMOS25 | | | | | |
| ceroin4<37> | IOB | INPUT | LVCMOS25 | | | | | |
| ceroin4<38> | IOB | INPUT | LVCMOS25 | | | | | |
| ceroin4<39> | IOB | INPUT | LVCMOS25 | | | | | |
| ceroin4<40> | IOB | INPUT | LVCMOS25 | | | | | |
| ceroin4<41> | IOB | INPUT | LVCMOS25 | | | | | |
| ceroin4<42> | IOB | INPUT | LVCMOS25 | | | | | |
| ceroin4<43> | IOB | INPUT | LVCMOS25 | | | | | |
| ceroin4<44> | IOB | INPUT | LVCMOS25 | | | | | |
| ceroin4<45> | IOB | INPUT | LVCMOS25 | | | | | |
| ceroin4<46> | IOB | INPUT | LVCMOS25 | | | | | |
| ceroin4<47> | IOB | INPUT | LVCMOS25 | | | | | |
| ceroin4<48> | IOB | INPUT | LVCMOS25 | | | | | |
| ceroin4<49> | IOB | INPUT | LVCMOS25 | | | | | |
| ceroin4<50> | IOB | INPUT | LVCMOS25 | | | | | |
| ceroin4<51> | IOB | INPUT | LVCMOS25 | | | | | |
| ceroin4<52> | IOB | INPUT | LVCMOS25 | | | | | |
| ceroin4<53> | IOB | INPUT | LVCMOS25 | | | | | |
| ceroin4<54> | IOB | INPUT | LVCMOS25 | | | | | |
| ceroin4<55> | IOB | INPUT | LVCMOS25 | | | | | |
| ceroin4<56> | IOB | INPUT | LVCMOS25 | | | | | |
| ceroin4<57> | IOB | INPUT | LVCMOS25 | | | | | |
| ceroin4<58> | IOB | INPUT | LVCMOS25 | | | | | |
| ceroin4<59> | IOB | INPUT | LVCMOS25 | | | | | |
| ceroin4<60> | IOB | INPUT | LVCMOS25 | | | | | |
| ceroin4<61> | IOB | INPUT | LVCMOS25 | | | | | |
| ceroin4<62> | IOB | INPUT | LVCMOS25 | | | | | |
46
| ceroin4<63> | IOB | INPUT | LVCMOS25 | | | | | |
| clk_1 | IOB | INPUT | LVCMOS25 | | | | | |
| consta1 | IOB | INPUT | LVCMOS25 | | | | | |
| hin1<0> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| hin1<1> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| hin1<2> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| hin1<3> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| hin1<4> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| hin1<5> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| hin1<6> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| hin1<7> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| hin1<8> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| hin1<9> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| hin1<10> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| hin1<11> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| hin1<12> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| hin1<13> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| hin1<14> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| hin1<15> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| hin1<16> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| hin1<17> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| hin1<18> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| hin1<19> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| hin1<20> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| hin1<21> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| hin1<22> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| hin1<23> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| hin1<24> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| hin1<25> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| hin1<26> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| hin1<27> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
47
| | | | | | | INFF2 | | |
| hin1<28> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| hin1<29> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| hin1<30> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| hin1<31> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| hin1<32> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| hin1<33> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| hin1<34> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| hin1<35> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| hin1<36> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| hin1<37> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| hin1<38> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| hin1<39> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| hin1<40> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| hin1<41> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| hin1<42> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| hin1<43> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| hin1<44> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| hin1<45> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| hin1<46> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| hin1<47> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| hin1<48> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| hin1<49> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| hin1<50> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| hin1<51> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| | | | | | | INFF2 | | |
| hin1<52> | IOB | INPUT | LVCMOS25 | | | | | |
| hin1<53> | IOB | INPUT | LVCMOS25 | | | | | |
| hin1<54> | IOB | INPUT | LVCMOS25 | | | | | |
| hin1<55> | IOB | INPUT | LVCMOS25 | | | | | |
| hin1<56> | IOB | INPUT | LVCMOS25 | | | | | |
| hin1<57> | IOB | INPUT | LVCMOS25 | | | | | |
| hin1<58> | IOB | INPUT | LVCMOS25 | | | | | |
| hin1<59> | IOB | INPUT | LVCMOS25 | | | | | |
| hin1<60> | IOB | INPUT | LVCMOS25 | | | | | |
48
| hin1<61> | IOB | INPUT | LVCMOS25 | | | | | |
| hin1<62> | IOB | INPUT | LVCMOS25 | | | | | |
| hin1<63> | IOB | INPUT | LVCMOS25 | | | | | |
| qin1<0> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| qin1<1> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| qin1<2> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| qin1<3> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| qin1<4> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| qin1<5> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| qin1<6> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| qin1<7> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| qin1<8> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| qin1<9> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| qin1<10> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| qin1<11> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| qin1<12> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| qin1<13> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| qin1<14> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| qin1<15> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| qin1<16> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| qin1<17> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| qin1<18> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| qin1<19> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| qin1<20> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| qin1<21> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| qin1<22> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| qin1<23> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| qin1<24> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| qin1<25> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| qin1<26> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| qin1<27> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| qin1<28> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| qin1<29> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| qin1<30> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| qin1<31> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| qin1<32> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| qin1<33> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| qin1<34> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| qin1<35> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| qin1<36> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| qin1<37> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| qin1<38> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| qin1<39> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| qin1<40> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| qin1<41> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| qin1<42> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| qin1<43> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| qin1<44> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| qin1<45> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| qin1<46> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| qin1<47> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| qin1<48> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| qin1<49> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| qin1<50> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| qin1<51> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| qin1<52> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| qin1<53> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| qin1<54> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
49
| qin1<55> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| qin1<56> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| qin1<57> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| qin1<58> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| qin1<59> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| qin1<60> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| qin1<61> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| qin1<62> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| qin1<63> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| rin1<0> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| rin1<1> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| rin1<2> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| rin1<3> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| rin1<4> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| rin1<5> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| rin1<6> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| rin1<7> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| rin1<8> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| rin1<9> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| rin1<10> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| rin1<11> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| rin1<12> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| rin1<13> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| rin1<14> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| rin1<15> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| rin1<16> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| rin1<17> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| rin1<18> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| rin1<19> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| rin1<20> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| rin1<21> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| rin1<22> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| rin1<23> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| rin1<24> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| rin1<25> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| rin1<26> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| rin1<27> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| rin1<28> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| rin1<29> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| rin1<30> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| rin1<31> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| rin1<32> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| rin1<33> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| rin1<34> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| rin1<35> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| rin1<36> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| rin1<37> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| rin1<38> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| rin1<39> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| rin1<40> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| rin1<41> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| rin1<42> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| rin1<43> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| rin1<44> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| rin1<45> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| rin1<46> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| rin1<47> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| rin1<48> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
50
| rin1<49> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| rin1<50> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| rin1<51> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| rin1<52> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| rin1<53> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| rin1<54> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| rin1<55> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| rin1<56> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| rin1<57> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| rin1<58> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| rin1<59> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| rin1<60> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| rin1<61> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| rin1<62> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| rin1<63> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| salida1<0> | IOB | OUTPUT | LVCMOS25 | 12 | SLOW | | | |
| salida1<1> | IOB | OUTPUT | LVCMOS25 | 12 | SLOW | | | |
| salida1<2> | IOB | OUTPUT | LVCMOS25 | 12 | SLOW | | | |
| salida1<3> | IOB | OUTPUT | LVCMOS25 | 12 | SLOW | | | |
| salida1<4> | IOB | OUTPUT | LVCMOS25 | 12 | SLOW | | | |
| salida1<5> | IOB | OUTPUT | LVCMOS25 | 12 | SLOW | | | |
| salida1<6> | IOB | OUTPUT | LVCMOS25 | 12 | SLOW | | | |
| salida1<7> | IOB | OUTPUT | LVCMOS25 | 12 | SLOW | | | |
| salida1<8> | IOB | OUTPUT | LVCMOS25 | 12 | SLOW | | | |
| salida1<9> | IOB | OUTPUT | LVCMOS25 | 12 | SLOW | | | |
| salida1<10> | IOB | OUTPUT | LVCMOS25 | 12 | SLOW | | | |
| salida1<11> | IOB | OUTPUT | LVCMOS25 | 12 | SLOW | | | |
| salida1<12> | IOB | OUTPUT | LVCMOS25 | 12 | SLOW | | | |
| salida1<13> | IOB | OUTPUT | LVCMOS25 | 12 | SLOW | | | |
| salida1<14> | IOB | OUTPUT | LVCMOS25 | 12 | SLOW | | | |
| salida1<15> | IOB | OUTPUT | LVCMOS25 | 12 | SLOW | | | |
| salida1<16> | IOB | OUTPUT | LVCMOS25 | 12 | SLOW | | | |
| salida1<17> | IOB | OUTPUT | LVCMOS25 | 12 | SLOW | | | |
| salida1<18> | IOB | OUTPUT | LVCMOS25 | 12 | SLOW | | | |
| salida1<19> | IOB | OUTPUT | LVCMOS25 | 12 | SLOW | | | |
| salida1<20> | IOB | OUTPUT | LVCMOS25 | 12 | SLOW | | | |
| salida1<21> | IOB | OUTPUT | LVCMOS25 | 12 | SLOW | | | |
| salida1<22> | IOB | OUTPUT | LVCMOS25 | 12 | SLOW | | | |
| salida1<23> | IOB | OUTPUT | LVCMOS25 | 12 | SLOW | | | |
| salida1<24> | IOB | OUTPUT | LVCMOS25 | 12 | SLOW | | | |
| salida1<25> | IOB | OUTPUT | LVCMOS25 | 12 | SLOW | | | |
| salida1<26> | IOB | OUTPUT | LVCMOS25 | 12 | SLOW | | | |
| salida1<27> | IOB | OUTPUT | LVCMOS25 | 12 | SLOW | | | |
| salida1<28> | IOB | OUTPUT | LVCMOS25 | 12 | SLOW | | | |
| salida1<29> | IOB | OUTPUT | LVCMOS25 | 12 | SLOW | | | |
| salida1<30> | IOB | OUTPUT | LVCMOS25 | 12 | SLOW | | | |
| salida1<31> | IOB | OUTPUT | LVCMOS25 | 12 | SLOW | | | |
| salida1<32> | IOB | OUTPUT | LVCMOS25 | 12 | SLOW | | | |
| salida1<33> | IOB | OUTPUT | LVCMOS25 | 12 | SLOW | | | |
| salida1<34> | IOB | OUTPUT | LVCMOS25 | 12 | SLOW | | | |
| salida1<35> | IOB | OUTPUT | LVCMOS25 | 12 | SLOW | | | |
| salida1<36> | IOB | OUTPUT | LVCMOS25 | 12 | SLOW | | | |
| salida1<37> | IOB | OUTPUT | LVCMOS25 | 12 | SLOW | | | |
| salida1<38> | IOB | OUTPUT | LVCMOS25 | 12 | SLOW | | | |
| salida1<39> | IOB | OUTPUT | LVCMOS25 | 12 | SLOW | | | |
| salida1<40> | IOB | OUTPUT | LVCMOS25 | 12 | SLOW | | | |
| salida1<41> | IOB | OUTPUT | LVCMOS25 | 12 | SLOW | | | |
| salida1<42> | IOB | OUTPUT | LVCMOS25 | 12 | SLOW | | | |
51
| salida1<43> | IOB | OUTPUT | LVCMOS25 | 12 | SLOW | | | |
| salida1<44> | IOB | OUTPUT | LVCMOS25 | 12 | SLOW | | | |
| salida1<45> | IOB | OUTPUT | LVCMOS25 | 12 | SLOW | | | |
| salida1<46> | IOB | OUTPUT | LVCMOS25 | 12 | SLOW | | | |
| salida1<47> | IOB | OUTPUT | LVCMOS25 | 12 | SLOW | | | |
| salida1<48> | IOB | OUTPUT | LVCMOS25 | 12 | SLOW | | | |
| salida1<49> | IOB | OUTPUT | LVCMOS25 | 12 | SLOW | | | |
| salida1<50> | IOB | OUTPUT | LVCMOS25 | 12 | SLOW | | | |
| salida1<51> | IOB | OUTPUT | LVCMOS25 | 12 | SLOW | | | |
| salida1<52> | IOB | OUTPUT | LVCMOS25 | 12 | SLOW | | | |
| salida1<53> | IOB | OUTPUT | LVCMOS25 | 12 | SLOW | | | |
| salida1<54> | IOB | OUTPUT | LVCMOS25 | 12 | SLOW | | | |
| salida1<55> | IOB | OUTPUT | LVCMOS25 | 12 | SLOW | | | |
| salida1<56> | IOB | OUTPUT | LVCMOS25 | 12 | SLOW | | | |
| salida1<57> | IOB | OUTPUT | LVCMOS25 | 12 | SLOW | | | |
| salida1<58> | IOB | OUTPUT | LVCMOS25 | 12 | SLOW | | | |
| salida1<59> | IOB | OUTPUT | LVCMOS25 | 12 | SLOW | | | |
| salida1<60> | IOB | OUTPUT | LVCMOS25 | 12 | SLOW | | | |
| salida1<61> | IOB | OUTPUT | LVCMOS25 | 12 | SLOW | | | |
| salida1<62> | IOB | OUTPUT | LVCMOS25 | 12 | SLOW | | | |
| salida1<63> | IOB | OUTPUT | LVCMOS25 | 12 | SLOW | | | |
| xin1<0> | IOB | INPUT | LVCMOS25 | | | | | |
| xin1<1> | IOB | INPUT | LVCMOS25 | | | | | |
| xin1<2> | IOB | INPUT | LVCMOS25 | | | | | |
| xin1<3> | IOB | INPUT | LVCMOS25 | | | | | |
| xin1<4> | IOB | INPUT | LVCMOS25 | | | | | |
| xin1<5> | IOB | INPUT | LVCMOS25 | | | | | |
| xin1<6> | IOB | INPUT | LVCMOS25 | | | | | |
| xin1<7> | IOB | INPUT | LVCMOS25 | | | | | |
| xin1<8> | IOB | INPUT | LVCMOS25 | | | | | |
| xin1<9> | IOB | INPUT | LVCMOS25 | | | | | |
| xin1<10> | IOB | INPUT | LVCMOS25 | | | | | |
| xin1<11> | IOB | INPUT | LVCMOS25 | | | | | |
| xin1<12> | IOB | INPUT | LVCMOS25 | | | | | |
| xin1<13> | IOB | INPUT | LVCMOS25 | | | | | |
| xin1<14> | IOB | INPUT | LVCMOS25 | | | | | |
| xin1<15> | IOB | INPUT | LVCMOS25 | | | | | |
| xin1<16> | IOB | INPUT | LVCMOS25 | | | | | |
| xin1<17> | IOB | INPUT | LVCMOS25 | | | | | |
| xin1<18> | IOB | INPUT | LVCMOS25 | | | | | |
| xin1<19> | IOB | INPUT | LVCMOS25 | | | | | |
| xin1<20> | IOB | INPUT | LVCMOS25 | | | | | |
| xin1<21> | IOB | INPUT | LVCMOS25 | | | | | |
| xin1<22> | IOB | INPUT | LVCMOS25 | | | | | |
| xin1<23> | IOB | INPUT | LVCMOS25 | | | | | |
| xin1<24> | IOB | INPUT | LVCMOS25 | | | | | |
| xin1<25> | IOB | INPUT | LVCMOS25 | | | | | |
| xin1<26> | IOB | INPUT | LVCMOS25 | | | | | |
| xin1<27> | IOB | INPUT | LVCMOS25 | | | | | |
| xin1<28> | IOB | INPUT | LVCMOS25 | | | | | |
| xin1<29> | IOB | INPUT | LVCMOS25 | | | | | |
| xin1<30> | IOB | INPUT | LVCMOS25 | | | | | |
| xin1<31> | IOB | INPUT | LVCMOS25 | | | | | |
| xin1<32> | IOB | INPUT | LVCMOS25 | | | | | |
| xin1<33> | IOB | INPUT | LVCMOS25 | | | | | |
| xin1<34> | IOB | INPUT | LVCMOS25 | | | | | |
| xin1<35> | IOB | INPUT | LVCMOS25 | | | | | |
| xin1<36> | IOB | INPUT | LVCMOS25 | | | | | |
52
| xin1<37> | IOB | INPUT | LVCMOS25 | | | | | |
| xin1<38> | IOB | INPUT | LVCMOS25 | | | | | |
| xin1<39> | IOB | INPUT | LVCMOS25 | | | | | |
| xin1<40> | IOB | INPUT | LVCMOS25 | | | | | |
| xin1<41> | IOB | INPUT | LVCMOS25 | | | | | |
| xin1<42> | IOB | INPUT | LVCMOS25 | | | | | |
| xin1<43> | IOB | INPUT | LVCMOS25 | | | | | |
| xin1<44> | IOB | INPUT | LVCMOS25 | | | | | |
| xin1<45> | IOB | INPUT | LVCMOS25 | | | | | |
| xin1<46> | IOB | INPUT | LVCMOS25 | | | | | |
| xin1<47> | IOB | INPUT | LVCMOS25 | | | | | |
| xin1<48> | IOB | INPUT | LVCMOS25 | | | | | |
| xin1<49> | IOB | INPUT | LVCMOS25 | | | | | |
| xin1<50> | IOB | INPUT | LVCMOS25 | | | | | |
| xin1<51> | IOB | INPUT | LVCMOS25 | | | | | |
| xin1<52> | IOB | INPUT | LVCMOS25 | | | | | |
| xin1<53> | IOB | INPUT | LVCMOS25 | | | | | |
| xin1<54> | IOB | INPUT | LVCMOS25 | | | | | |
| xin1<55> | IOB | INPUT | LVCMOS25 | | | | | |
| xin1<56> | IOB | INPUT | LVCMOS25 | | | | | |
| xin1<57> | IOB | INPUT | LVCMOS25 | | | | | |
| xin1<58> | IOB | INPUT | LVCMOS25 | | | | | |
| xin1<59> | IOB | INPUT | LVCMOS25 | | | | | |
| xin1<60> | IOB | INPUT | LVCMOS25 | | | | | |
| xin1<61> | IOB | INPUT | LVCMOS25 | | | | | |
| xin1<62> | IOB | INPUT | LVCMOS25 | | | | | |
| xin1<63> | IOB | INPUT | LVCMOS25 | | | | | |
| zin1<0> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| zin1<1> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| zin1<2> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| zin1<3> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| zin1<4> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| zin1<5> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| zin1<6> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| zin1<7> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| zin1<8> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| zin1<9> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| zin1<10> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| zin1<11> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| zin1<12> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| zin1<13> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| zin1<14> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| zin1<15> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| zin1<16> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| zin1<17> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| zin1<18> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| zin1<19> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| zin1<20> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| zin1<21> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| zin1<22> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| zin1<23> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| zin1<24> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| zin1<25> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| zin1<26> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| zin1<27> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| zin1<28> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| zin1<29> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| zin1<30> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
53
| zin1<31> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| zin1<32> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| zin1<33> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| zin1<34> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| zin1<35> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| zin1<36> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| zin1<37> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| zin1<38> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| zin1<39> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| zin1<40> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| zin1<41> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| zin1<42> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| zin1<43> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| zin1<44> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| zin1<45> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| zin1<46> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| zin1<47> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| zin1<48> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| zin1<49> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| zin1<50> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| zin1<51> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| zin1<52> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| zin1<53> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| zin1<54> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| zin1<55> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| zin1<56> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| zin1<57> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| zin1<58> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| zin1<59> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| zin1<60> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| zin1<61> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| zin1<62> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
| zin1<63> | IOB | INPUT | LVCMOS25 | | | INFF1 | | IFD |
+------------------------------------------------------------------------------------------------------------------------+
Section 7 - RPMs
----------------
Section 8 - Guide Report
------------------------
Guide not run on this design.
Section 9 - Area Group Summary
------------------------------
No area groups were found in this design.
Section 10 - Modular Design Summary
-----------------------------------
Modular Design not used for this design.
Section 11 - Timing Report
--------------------------
This design was not run using timing mode.
Section 12 - Configuration String Details
--------------------------
Use the "-detail" map option to print out Configuration Strings
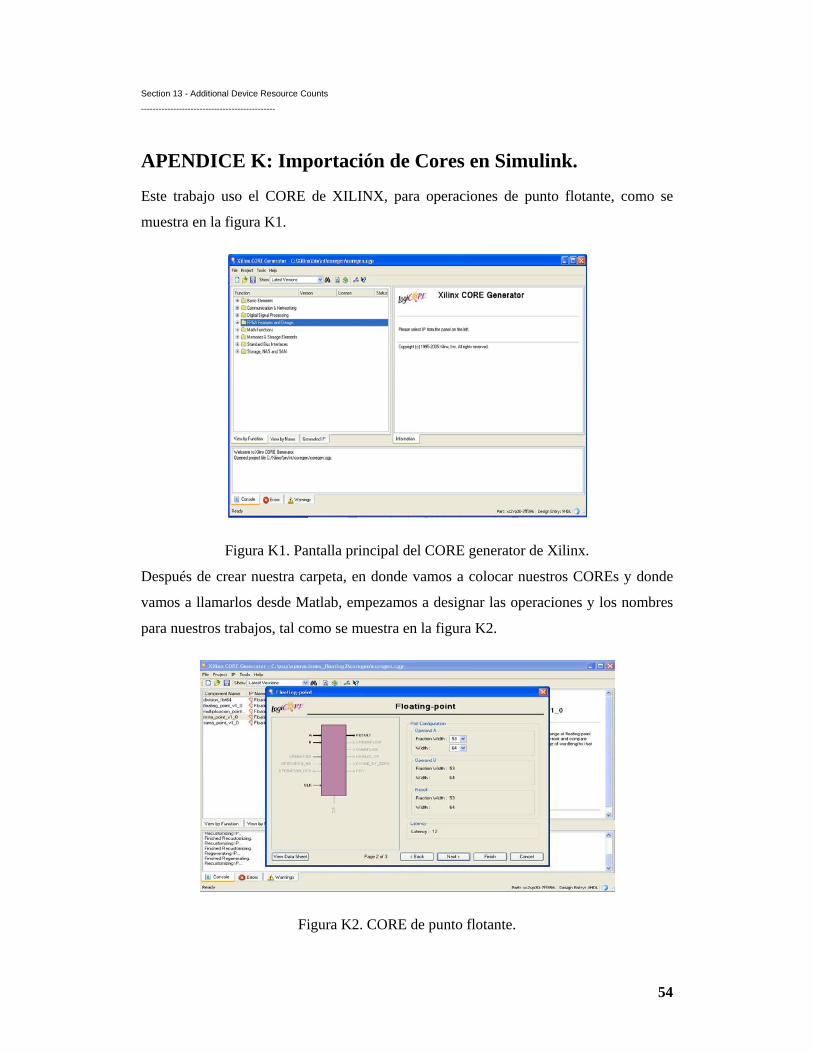
54
Section 13 - Additional Device Resource Counts
----------------------------------------------
APENDICE K: Importación de Cores en Simulink.
Este trabajo uso el CORE de XILINX, para operaciones de punto flotante, como se
muestra en la figura K1.
Figura K1. Pantalla principal del CORE generator de Xilinx.
Después de crear nuestra carpeta, en donde vamos a colocar nuestros COREs y donde
vamos a llamarlos desde Matlab, empezamos a designar las operaciones y los nombres
para nuestros trabajos, tal como se muestra en la figura K2.
Figura K2. CORE de punto flotante.
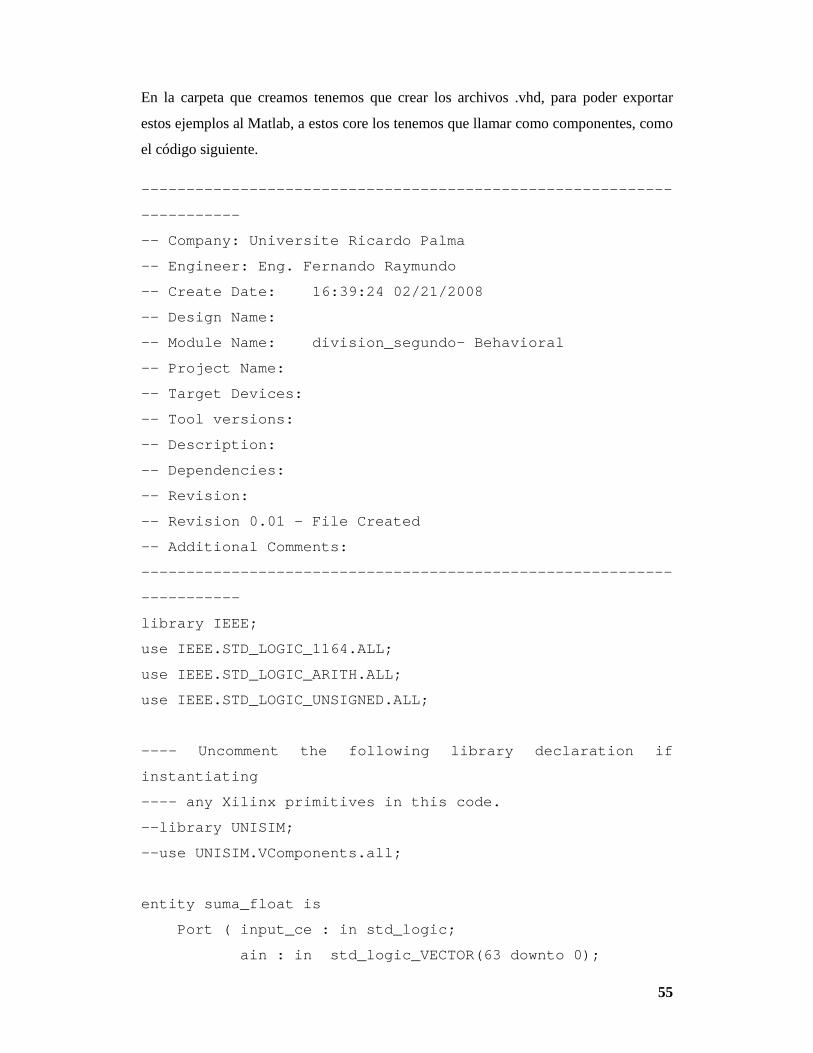
55
En la carpeta que creamos tenemos que crear los archivos .vhd, para poder exportar
estos ejemplos al Matlab, a estos core los tenemos que llamar como componentes, como
el código siguiente.
-----------------------------------------------------------
-----------
-- Company: Universite Ricardo Palma
-- Engineer: Eng. Fernando Raymundo
-- Create Date: 16:39:24 02/21/2008
-- Design Name:
-- Module Name: division_segundo- Behavioral
-- Project Name:
-- Target Devices:
-- Tool versions:
-- Description:
-- Dependencies:
-- Revision:
-- Revision 0.01 - File Created
-- Additional Comments:
-----------------------------------------------------------
-----------
library IEEE;
use IEEE.STD_LOGIC_1164.ALL;
use IEEE.STD_LOGIC_ARITH.ALL;
use IEEE.STD_LOGIC_UNSIGNED.ALL;
---- Uncomment the following library declaration if
instantiating
---- any Xilinx primitives in this code.
--library UNISIM;
--use UNISIM.VComponents.all;
entity suma_float is
Port ( input_ce : in std_logic;
ain : in std_logic_VECTOR(63 downto 0);
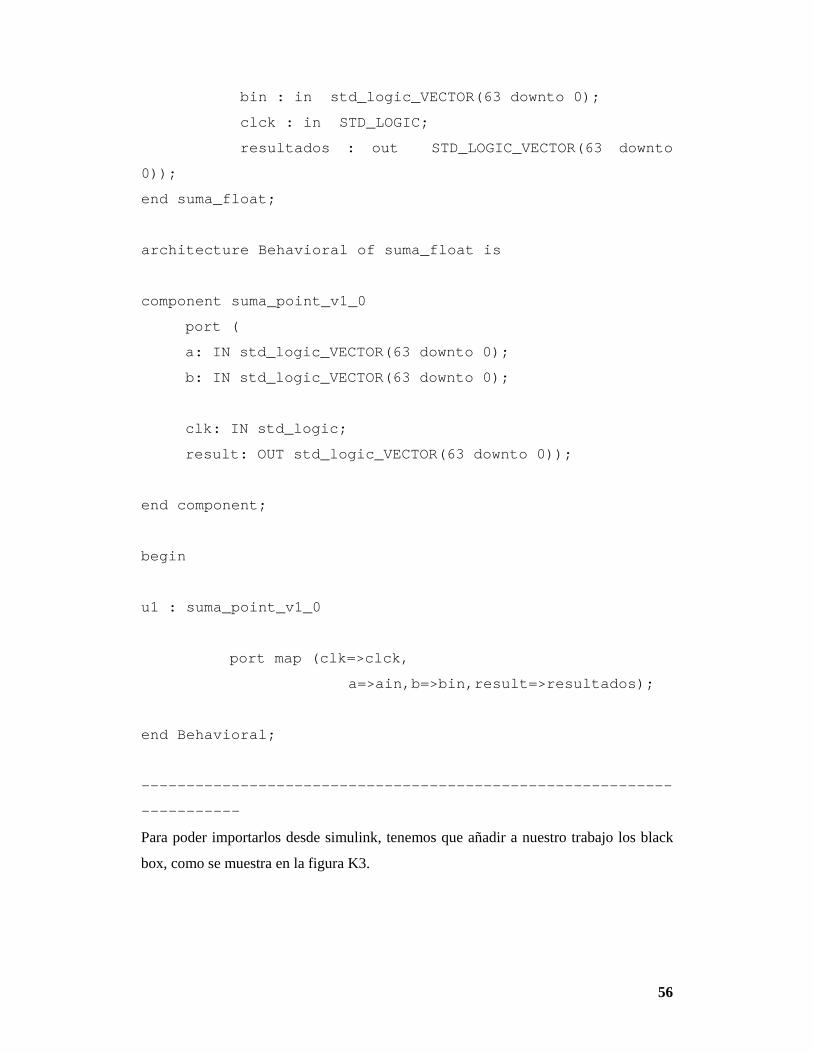
56
bin : in std_logic_VECTOR(63 downto 0);
clck : in STD_LOGIC;
resultados : out STD_LOGIC_VECTOR(63 downto
0));
end suma_float;
architecture Behavioral of suma_float is
component suma_point_v1_0
port (
a: IN std_logic_VECTOR(63 downto 0);
b: IN std_logic_VECTOR(63 downto 0);
clk: IN std_logic;
result: OUT std_logic_VECTOR(63 downto 0));
end component;
begin
u1 : suma_point_v1_0
port map (clk=>clck,
a=>ain,b=>bin,result=>resultados);
end Behavioral;
-----------------------------------------------------------
-----------
Para poder importarlos desde simulink, tenemos que añadir a nuestro trabajo los black
box, como se muestra en la figura K3.
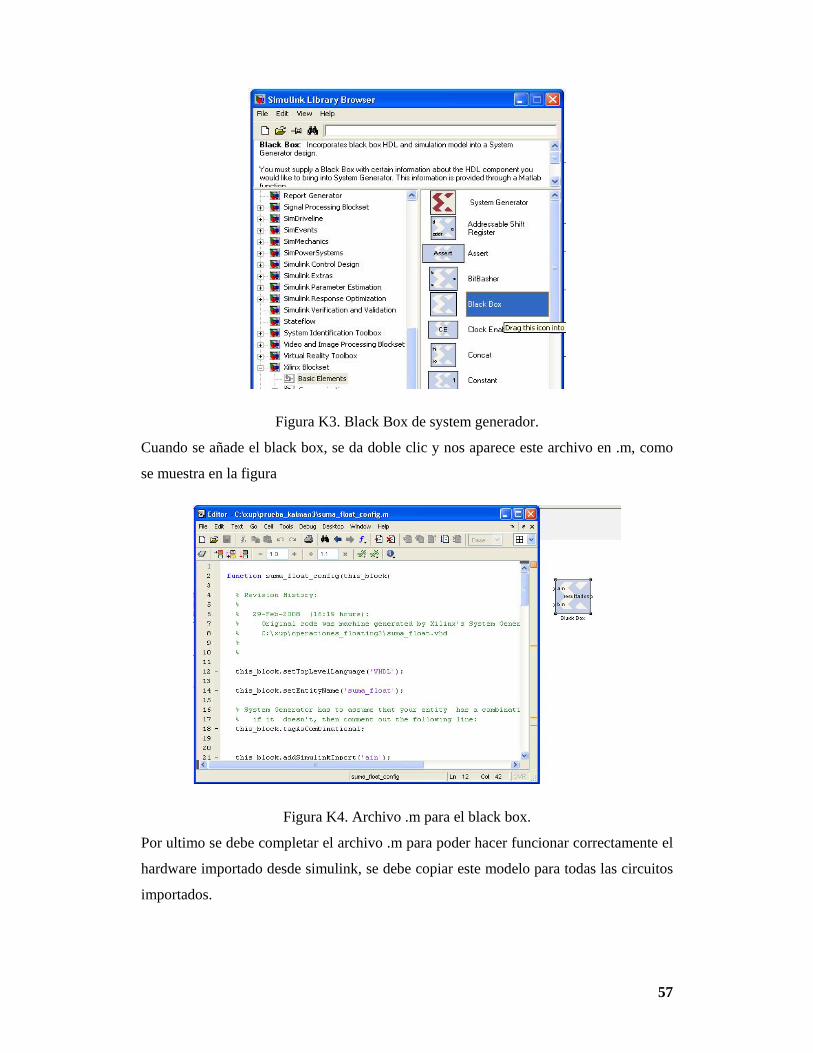
57
Figura K3. Black Box de system generador.
Cuando se añade el black box, se da doble clic y nos aparece este archivo en .m, como
se muestra en la figura
Figura K4. Archivo .m para el black box.
Por ultimo se debe completar el archivo .m para poder hacer funcionar correctamente el
hardware importado desde simulink, se debe copiar este modelo para todas las circuitos
importados.
58
function suma_float_config(this_block)
% Revision History:
%
% 29-Feb-2008 (16:19 hours):
% Original code was machine generated by Xilinx's
System Generator after parsing
% C:\xup\operaciones_floating3\suma_float.vhd
this_block.setTopLevelLanguage('VHDL');
this_block.setEntityName('suma_float');
% System Generator has to assume that your entity has a
combinational feed through;
% if it doesn't, then comment out the following line:
this_block.tagAsCombinational;
this_block.addSimulinkInport('ain');
this_block.addSimulinkInport('bin');
this_block.addSimulinkOutport('resultados');
resultados_port = this_block.port('resultados');
% -----------------------------
if (this_block.inputTypesKnown)
% do input type checking, dynamic output type and
generic setup in this code block.
if (this_block.port('ain').width ~= 64);
this_block.setError('Input data type for port "ain"
must have width=64.');
end
if (this_block.port('bin').width ~= 64);
this_block.setError('Input data type for port "bin"
must have width=64.');
59
end
end % if(inputTypesKnown)
% -----------------------------
% -----------------------------
if (this_block.inputRatesKnown)
inputRates = this_block.inputRates;
uniqueInputRates = unique(inputRates);
outputRate = uniqueInputRates(1);
for i = 2:length(uniqueInputRates)
if (uniqueInputRates(i) ~= Inf)
outputRate = gcd(outputRate,uniqueInputRates(i));
end
end % for(i)
for i = 1:this_block.numSimulinkOutports
this_block.outport(i).setRate(outputRate);
end % for(i)
end % if(inputRatesKnown)
% -----------------------------
% Add addtional source files as needed.
% |-------------
% | Add files in the order in which they should be
compiled.
% | If two files "a.vhd" and "b.vhd" contain the
entities
% | entity_a and entity_b, and entity_a contains a
% | component of type entity_b, the correct sequence of
% | addFile() calls would be:
% | this_block.addFile('b.vhd');
% | this_block.addFile('a.vhd');
% |-------------
% this_block.addFile('');

60
% this_block.addFile('');
this_block.addFile('suma_float.vhd');
this_block.addFile('coregen\suma_point_v1_0.ngc');
this_block.addFile('coregen\suma_point_v1_0.vhd');
return;
Con ello se garantiza el funcionamiento del filtro con todos sus circuitos.
REFERENCIAS BIBLIOGRÁFICAS
Fuentes Bibliográficas
Grewal, Mohinder S., and Angus P. Andrews. Kalman Filtering Theory and Practice. Prentice Hall,
1993.
Kalman, R. E., A New Approach to Linear Filtering and Prediction Problems, Transaction of the
ASME—Journal of Basic Engineering, pp. 35-45 (March 1960), 1960.
Maybeck, Peter S., Stochastic Models, Estimation, and Control, Volume 1, Academic Press, Inc.
,1979.
Sorenson, H. W., Least-Squares estimation: from Gauss to Kalman, IEEE Spectrum, vol. 7, pp. 63-
68, 1970.
Leonard A. McGee, Stanley Schmidt , Discovery of the Kalman Filter as a practical Tool for
aerospace and industry”. Nasa echnical Memorandum 86847.
Greg Welch, Gary Bishop, An introduction to the kalman Filter, Siggraph, 2001.
Steven W. Smith, The Scientist and Engineer's Guide to Digital Signal Processing,
Hard Cover, 1997.
Volnei A. Pedroni, Circuit Design With VHDL, Editorial MIT Press, 2004.
A. Granados Ly, Diseño Digital con VHDL, Inictel, 2004.
Fuentes de Información Electrónica
E XILINX, http://www.xilinx.com.
THE MATH WORKS, http://www.mathworks.com/
INTER – SYSTEM GROUND
,http://www.apcmedia.com/salestools/FLUU-5T3TLT_R1_EN.pdf/
NATIONAL INSTRUMENTS, http://www.ni.com/
CONIDA, Agencia Espacial del Perú, http://www.conida.gob.pe/