espacios vectoriales básicos fileespacios vectoriales b asicos contenido, duraci on y fecha de...
TRANSCRIPT

Espacios Vectoriales Basicos
Araceli Guzman y Guillermo GarroFacultad de Ciencias
UNAM
Semestre 2017-1

Espacios Vectoriales BasicosContenido, duracion y fecha de examen
Contenido
1. Los espacios vectoriales R2 y R3.
2. Subespacios de R2. Rectas por el origen.
3. Subespacios de R3. Planos y rectas por el origen.
4. Espacios y subespacios vectoriales
5. Independencia Lineal.
6. Base y dimension.
7. Producto escalar y producto vectorial.
8. Triple producto escalar.
Duracion:
20 horas.
Fecha del examen
Viernes 14 de octubre.
Espacios Vectoriales BasicosReferencias
Referencias:
1. Preston, G. C., & Lovaglia, A. R. (1971). Modern analytic geometry. New York:HarperCollins Publishers.
2. Ramırez-Galarza, Ana I. (2013). Geometrıa analıtica: una introduccion a lageometrıa. Mexico: Las Prensas de Ciencias, UNAM.
3. Bracho, Javier (2009). Introduccion analıtica a las geometrıas. Mexico: Fondo deCultura Economica.
4. Borceux, Francis. (2014). Geometric Trilogy II: An Algebraic Approach toGeometry. Berlin: Springer.
5. Rojo, Armando O. (1995). Algebra II. Buenos Aires: El Ateneo.
Espacios Vectoriales Basicos
1. Los espacios vectoriales R2 y R3

Espacios Vectoriales Basicos1. Los espacios vectoriales R2 y R3
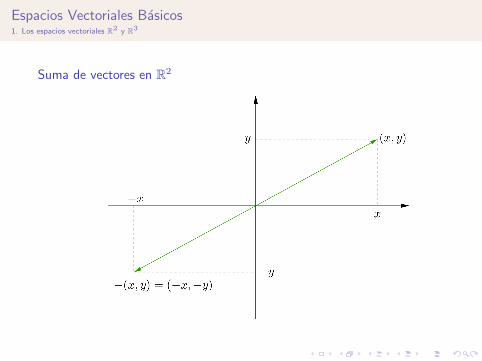
Suma de vectores en R2
Definicion
La suma vectorial de dos vectorres v = (x, y) ∈ R2 y u = (w, z) ∈ R2, es el vector
v + u = (x, y) + (w, z) := (x+ w, y + z)
Espacios Vectoriales Basicos1. Los espacios vectoriales R2 y R3
Suma de vectores en R2
Teorema
Sean v = (x, y), u = (w, z) y w = (u, v) vectores en R2. Entonces:
1. Cerradura de la suma:v + u ∈ R2.
2. La suma es conmutativa:v + u = u+ v
3. La suma es asociativa:
(v + u) +w = v + (u+w).

Espacios Vectoriales Basicos1. Los espacios vectoriales R2 y R3
Suma de vectores en R2
Demostracion.
1. Puesto que x+ w ∈ R y y + z ∈ R, se sigue
(x, y) + (w, z) = (x+ w, y + z) ∈ R2.
2. Puesto que x+ w = w + x y y + z = z + y, se sigue
(x, y) + (w, z) = (x+ w, y + z) = (w + x, z + y) = (w, z) + (x, y).
3. Puesto que (x+ w) + u = x+ (w + u) y (y + z) + v = y + (z + v),((x, y) + (w, z)
)+ (u, v) = (x+ w, y + z) + (u, v)
=((x+ w) + u, (y + z) + v
)=(x+ (w + u), y + (z + v)
)= (x, y) + (w + u, z + v)
= (x, y) +((w, z) + (u, v)
).

Espacios Vectoriales Basicos1. Los espacios vectoriales R2 y R3
La suma de vectores es asociativa
Espacios Vectoriales Basicos1. Los espacios vectoriales R2 y R3
Suma de vectores en R2
Teorema
1. El vector nulo 0 = (0, 0) es el unico elemento neutro para la suma:Para todo (a, b) ∈ R2,
∀(x, y) ∈ R2((x, y) + (a, b) = (x, y)
)⇔ (a, b) = (0, 0).
2. Todo vector en R2 tiene un unico inverso relativo a la suma:Para todo (x, y) ∈ R2,
∀(a, b) ∈ R2((x, y) + (a, b) = (0, 0)⇔ (a, b) = (−x,−y)
).
El vector (−x,−y) es el inverso (aditivo) de (x, y), y usamos la notacion−(x, y) (o bien −v).
Espacios Vectoriales Basicos1. Los espacios vectoriales R2 y R3
Suma de vectores en R2
Espacios Vectoriales Basicos1. Los espacios vectoriales R2 y R3
Suma de vectores en R2
Demostracion.
1. Obviamente, para todo (x, y) ∈ R2,
(x, y) + (0, 0) = (x+ 0, y + 0) = (x, y).
Y si (a, b) ∈ R2 es tal que para todo (x, y) ∈ R2,
(x+ a, y + b) = (x, y) + (a, b) = (x, y),
entonces, en particular, para cualquier x ∈ R y cualquier y ∈ R,
x+ a = x y y + b = y,
de modo quea = 0 y b = 0,
dado que el cero es el unico neutro para la suma en R.
Espacios Vectoriales Basicos1. Los espacios vectoriales R2 y R3
Suma de vectores en R2
Demostracion.
2. Sea (x, y) ∈ R2. Obviamente,
(x, y) + (−x,−y) = (x+ (−x), y + (−y)) = (x− x, y − y) = (0, 0).
Y si (a, b) ∈ R2 es tal que
(x+ a, y + b) = (x, y) + (a, b) = (0, 0),
entoncesx+ a = 0 y y + b = 0,
de dondex = −a y y = −b.
Esto es, (a, b) = (−x,−y).
Espacios Vectoriales Basicos1. Los espacios vectoriales R2 y R3
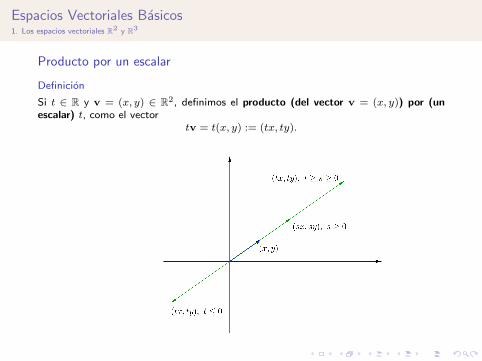
Producto por un escalar
Definicion
Si t ∈ R y v = (x, y) ∈ R2, definimos el producto (del vector v = (x, y)) por (unescalar) t, como el vector
tv = t(x, y) := (tx, ty).
Espacios Vectoriales Basicos1. Los espacios vectoriales R2 y R3
Producto por un escalar
Teorema
Sean t, s ∈ R y v = (x, y),u = (w, z) ∈ R2.
1. El producto por un escalar es un vector:
t(x, y) ∈ R2.
2. El producto por un escalar se distribuye sobre la suma de vectores:
t((x, y) + (w, z)
)= t(x, y) + t(w, z).
3. El producto por un escalar distribuye la suma de escalares:
(t+ s)(x, y) = t(x, y) + s(x, y).
4. El producto por escalares puede asociarse en cualquier forma:
(ts)(x, y) = t(s(x, y)
).
Espacios Vectoriales Basicos1. Los espacios vectoriales R2 y R3
Producto por un escalar
Demostracion.
1. Dado que tx ∈ R y ty ∈ R, tenemos,
t(x, y) = (tx, ty) ∈ R2,
2. Dado que t(x+ w) = tx+ tw y t(y + z) = ty + tz, tenemos,
t((x, y) + (w, z)
)= t(x+ w, y + z)
= (t(x+ w), t(y + z))
= (tx+ tw, ty + tz)
= (tx, ty) + (tw, tz)
= t(x, y) + t(w, z).

Espacios Vectoriales Basicos1. Los espacios vectoriales R2 y R3
Producto por un escalar
Demostracion.
3. Dado que (t+ s)x = tx+ sx y (t+ s)y = ty + sy, tenemos,
(t+ s)(x, y) = ((t+ s)x, (t+ s)y)
= (tx+ sx, ty + sy)
= (tx, ty) + (sx, sy)
= t(x, y) + s(x, y)
4. Dado (ts)x = t(sx) y (ts)y = t(sy), tenemos,
(ts)(x, y) = ((ts)x, (ts)y)
= (t(sx), t(sy))
= t(sx, sy)
= t(s(x, y)).
Espacios Vectoriales Basicos1. Los espacios vectoriales R2 y R3
Teorema
Para todo v = (x, y) ∈ R2,
(a) 1(x, y) = (x, y).
(b) −1(x, y) = −(x, y).(c) 0(x, y) = (0, 0).
Demostracion.
(a) Dado que 1x = x y 1y = y, tenemos,
1(x, y) = (1x, 1y) = (x, y).
(b) Dado que −1x = −x y −1y = −y, tenemos,
−1(x, y) = (−1x,−1y) = (−x,−y) = −(x, y).
(c) Dado que 0x = 0 y 0y = 0, tenemos,
0(x, y) = (0x, 0y) = (0, 0).
Espacios Vectoriales Basicos1. Los espacios vectoriales R2 y R3
Teorema
Para todo t ∈ R y v = (x, y) ∈ R2,
t(x, y) = (0, 0)⇔ t = 0 o (x, y) = (0, 0).
Demostracion.
[⇒] Si t(x, y) = (0, 0), como t(x, y) = (tx, ty), se sigue que
tx = 0 y ty = 0,
De donde(t = 0 o x = 0) y (t = 0 o y = 0),
esto es,t = 0 o (x = 0 y y = 0),
equivalentemente,t = 0 o (x, y) = (0, 0).
[⇐] t(0, 0) = (t0, t0) = (0, 0).
Espacios Vectoriales Basicos1. Los espacios vectoriales R2 y R3
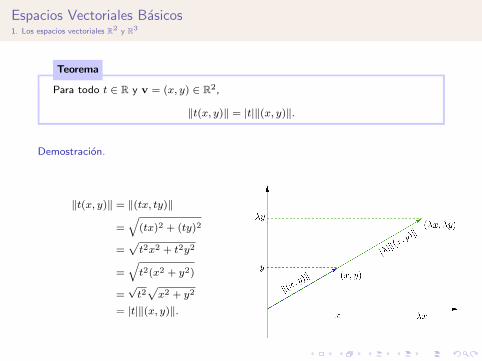
Teorema
Para todo t ∈ R y v = (x, y) ∈ R2,
‖t(x, y)‖ = |t|‖(x, y)‖.
Demostracion.
‖t(x, y)‖ = ‖(tx, ty)‖
=√
(tx)2 + (ty)2
=√
t2x2 + t2y2
=√
t2(x2 + y2)
=√t2√
x2 + y2
= |t|‖(x, y)‖.

Espacios Vectoriales Basicos1. Los espacios vectoriales R2 y R3
Definicion
La diferencia de los vectores v = (x, y) y v = (w, z) de R2, es el vector
v − u = (x, y)− (w, z) := (x, y) + (−(w, z)).

Espacios Vectoriales Basicos1. Los espacios vectoriales R2 y R3
Teorema
Si (x, y) ∈ R2 y (w, z) ∈ R2,
(x, y)− (w, z) = (x− w, y − z).
Demostracion.
(x− w, y − z) = (x+ (−w), y + (−z))= (x, y) + (−w,−z)= (x, y) + (−(w, z)).

Espacios Vectoriales Basicos1. Los espacios vectoriales R2 y R3
Recordemos...
Definicion
Si P (x, y) y Q(w, z) son puntos en R2, definimos la distancia de P a Q como
d(P,Q) =√
(x− w)2 + (y − z)2.
Teorema
Propiedades de la distancia: Para todo P , Q y R puntos en R2,
1. d(P,Q) ≥ 0 y d(P,Q) = 0 si y solo si P = Q.
2. d(P,Q) = d(Q,P ).
3. Desigualdad del triangulo:
d(P,Q) ≤ d(P,R) + d(R,Q).

Espacios Vectoriales Basicos1. Los espacios vectoriales R2 y R3
Recordemos...
Definicion
Si v = (x, y) es un vector de R2, entonces la norma (o magnitud) de (x, y) es el numero
‖(x, y)‖ =√
x2 + y2.
Proposicion
Para todo v = (x, y) ∈ R2,
‖(x, y)‖ ≥ 0 y ‖(x, y)‖ = 0⇔ (x, y) = (0, 0).
Espacios Vectoriales Basicos1. Los espacios vectoriales R2 y R3
Tenemos entonces una relacion evidente entre norma y distancia.
Teorema
Si P (x, y) ∈ R2 y Q(w, z) ∈ R2, entonces
d(P,Q) = ‖P −Q‖.
Demostracion.
d(P,Q) =√
(x− w)2 + (y − z)2
= ‖(x− w, y − z)‖= ‖(x, y)− (w, z)‖= ‖P −Q‖.

Espacios Vectoriales Basicos1. Los espacios vectoriales R2 y R3
Teorema : Desigualdad del triangulo en norma
Para todo (x, y) ∈ R2 y (w, z) ∈ R2,
‖(x, y) + (w, z)‖ ≤ ‖(x, y)‖+ ‖(w, z)‖.
Demostracion.
Sea P (x+ w, y + z) y Q(x, y). Recordemos
d(O,P ) ≤ d(O,Q) + d(Q,P ).
Pero
d(O,P ) = ‖O − P‖ = ‖P‖ = ‖(x+ w, y + z)‖ = ‖(x, y) + (w, z)‖d(O,Q) = ‖O −Q‖ = ‖Q‖ = ‖(x, y)‖d(Q,P ) = d(P,Q) = ‖P −Q‖ = ‖(x+ w, y + z)− (x, y)‖ = ‖(w, z)‖.

Espacios Vectoriales Basicos
2. Subespacios de R2. Rectas por el origen
Espacios Vectoriales Basicos2. Subespacios de R2. Rectas por el origen
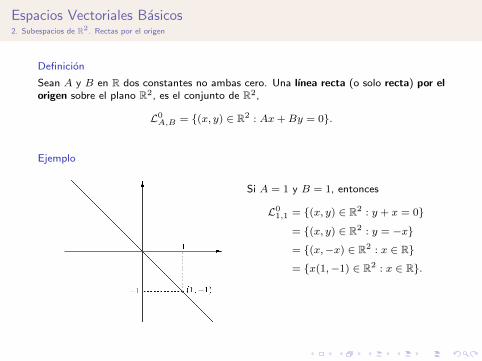
Definicion
Sean A y B en R dos constantes no ambas cero. Una lınea recta (o solo recta) por elorigen sobre el plano R2, es el conjunto de R2,
L0A,B = {(x, y) ∈ R2 : Ax+By = 0}.
Ejemplo
Si A = 1 y B = 1, entonces
L01,1 = {(x, y) ∈ R2 : y + x = 0}
= {(x, y) ∈ R2 : y = −x}
= {(x,−x) ∈ R2 : x ∈ R}
= {x(1,−1) ∈ R2 : x ∈ R}.

Espacios Vectoriales Basicos2. Subespacios de R2
Teorema
Sean A y B dos constantes no ambas cero. Existe v = (v1, v2) ∈ R2, no nulo,tal que ϕ(t) = tv es una funcion biyectiva de R sobre L0A,B .
Demostracion.
Si B = 0, entonces para todo (x, y) ∈ R2,
Ax+By = 0⇔ Ax = 0⇔ x = 0.
De modo que
L0A,0 = {(x, y) ∈ R2 : x = 0} = {(0, y) : y ∈ R} = {y(0, 1) : y ∈ R}.
Es claro entonces que ϕ(t) = t(0, 1) es una aplicacion biyectiva de R sobre L0A,0.
Espacios Vectoriales Basicos2. Subespacios de R2
Demostracion.
(Continuacion)
Si B 6= 0, entonces para todo (x, y) ∈ R2,
Ax+By = 0⇔ By = −Ax⇔ y = −A
Bx.
De modo que
L0A,B =
{(x, y) ∈ R2 : y = −
A
Bx
}=
{(x,−
A
Bx
): x ∈ R
}=
{x
(1,−
A
B
): x ∈ R
}.
Es claro entonces que ϕ(t) = t(1,−A
B
)es una aplicacion biyectiva de R sobre L0A,B .
Espacios Vectoriales Basicos2. Subespacios de R2.
Observacion
Decimos que ϕ(t) = tv es la ecuacion (o representacion) parametrica de la recta L0A,B ,y que v es el vector direccion.
Observacion
Si v es cualquier vector en R2, entonces escribimos Lv = {tv : t ∈ R}. Del teoremaanterior se sigue de inmediato que, dadas dos constantes A y B, no ambas cero, existeun vector no nulo v ∈ R2, tal que
L0A,B = {(x, y) ∈ R2 : Ax+By = 0} = {tv : t ∈ R} = Lv.
Esta igualdad es una forma explıcita de decir que ϕ(t) = tv es una representacionparametrica de la recta dada por la ecuacion Ax+By = 0.
Espacios Vectoriales Basicos2. Subespacios de R2.
Recıprocamente.
Teorema
Si v = (v1, v2) ∈ R2 es un vector no nulo, entonces existen constantes A y Bno ambas cero, tal que ϕ(t) = tv es una funcion biyectiva de R sobre L0A,B .
Demostracion.
Supongamos que v1 6= 0. Elegimos A = −v2 y B = v1. Note entonces que para todot ∈ R,
A(tv1) +B(tv2) = −tv1v2 + tv1v2 = 0.
Esto prueba que el rango de ϕ(t) = tv esta contenido en L0A,B .

Espacios Vectoriales Basicos2. Subespacios de R2.
Demostracion.
(Continuacion)
Por otra parte, para todo (x, y) ∈ R2,
(x, y) ∈ L0A,B ⇔ Ax+By = 0⇔ −v2x+ v1y = 0⇔ y =v2
v1x.
Luego, si (x, y) ∈ L0A,B , elegimos t = xv1
, de modo que
(x, y) =
(x
v1v1,
x
v1v2
)= (tv1, tv2) = t(v1, v2).
Esto prueba que ϕ(t) = tv es de hecho una aplicacion sobreyectiva de R a L0A,B .

Espacios Vectoriales Basicos2. Subespacios de R2.
Demostracion.
(Continuacion)
Por ultimo, si t, s ∈ R yϕ(t) = ϕ(s),
entonces(tv1, tv2) = (sv1, sv2),
de donde, en particular,tv1 = sv1,
de donde s = t. Esto prueba que ϕ es inyectiva.
El caso v2 6= 0 es analogo.

Espacios Vectoriales Basicos2. Subespacios de R2.
Observacion
Se sigue de inmediato que, dado un vector no nulo v, existen constantes A y B noambas cero, tales que
L0A,B = {(x, y) ∈ R2 : Ax+By} = {tv : t ∈ R} = Lv.
Esto es, geometricamente toda aplicacion parametrica de la forma ϕ(t) = tv, donde ves un vector no nulo, es una recta que pasa por el origen.

Espacios Vectoriales Basicos2. Subespacios de R2.
Ejemplo
Consideremos la ecuacion
3x−2
7y = 0. (1)
¿Cual es el vector direccion de esta recta?
Solucion.
Hacemos A = 3 y B = − 27
. Cualquiermultiplo no nulo del vector(
1,−A
B
)=
(1,
21
2
)es un vector direccion para la recta dadapor la ecuacion (??).
Espacios Vectoriales Basicos2. Subespacios de R2.
Ejemplo
Describe de la forma Ax + By = 0 la recta que tiene por vector direccion el vector(− 2
3,− 1
2
).
Solucion.
Si hacemos
A0 = −(−1
2
)=
1
2y B0 = −
2
3,
entonces la ecuacion
A0x+B0y = 0, es decir,1
2x−
2
3y = 0,
tiene representacion parametrica
t
(−2
3,−
1
2
).
De hecho, si c 6= 0, la ecuacion
c
2x−
2c
3y = 0,
tiene la misma representacion parametrica.

Espacios Vectoriales Basicos2. Subespacios de R2
Definicion
Un subconjunto V de R2 es un subespacio (vectorial) si
1. 0 ∈ V .
2. Para todo v ∈ V y todo t ∈ R,tv ∈ V.
3. Para todo v ∈ V y u ∈ V ,v + u ∈ V.
Espacios Vectoriales Basicos2. Subespacios de R2
Teorema
V ⊂ R2 es un subespacio si y solo si, V = {0}, o bien V = R2, o bien V es unarecta que pasa por el origen.
Demostracion.
Claramente, si V es el conjunto {0}, o bien R2, entonces es un subespacio de R2.
Si V es la recta Lv (con v 6= 0), entonces los elementos de V son de la forma tv, cont ∈ R. Entonces
0 = 0v ∈ Lv.
Desde luego, para todo t ∈ R y s ∈ R, si u = sv ∈ Lv, entonces
tu = t(sv) = (ts)v ∈ Lv.
Finalmente, para todo t ∈ R y s ∈ R, si u = tv ∈ Lv y w = sv ∈ Lv, entonces
u+w = tv + sv = (t+ s)v ∈ Lv.
Por tanto V = Lv es un subespacio de R2
Espacios Vectoriales Basicos2. Subespacios de R2
Teorema
V ⊂ R2 es un subespacio si y solo si, V = {0}, o bien V = R2, o bien V es unarecta que pasa por el origen.
Demostracion.
Claramente, si V es el conjunto {0}, o bien R2, entonces es un subespacio de R2.
Si V es la recta Lv (con v 6= 0), entonces los elementos de V son de la forma tv, cont ∈ R.
Entonces0 = 0v ∈ Lv.
Desde luego, para todo t ∈ R y s ∈ R, si u = sv ∈ Lv, entonces
tu = t(sv) = (ts)v ∈ Lv.
Finalmente, para todo t ∈ R y s ∈ R, si u = tv ∈ Lv y w = sv ∈ Lv, entonces
u+w = tv + sv = (t+ s)v ∈ Lv.
Por tanto V = Lv es un subespacio de R2

Espacios Vectoriales Basicos2. Subespacios de R2
Teorema
V ⊂ R2 es un subespacio si y solo si, V = {0}, o bien V = R2, o bien V es unarecta que pasa por el origen.
Demostracion.
Claramente, si V es el conjunto {0}, o bien R2, entonces es un subespacio de R2.
Si V es la recta Lv (con v 6= 0), entonces los elementos de V son de la forma tv, cont ∈ R. Entonces
0 = 0v ∈ Lv.
Desde luego, para todo t ∈ R y s ∈ R, si u = sv ∈ Lv, entonces
tu = t(sv) = (ts)v ∈ Lv.
Finalmente, para todo t ∈ R y s ∈ R, si u = tv ∈ Lv y w = sv ∈ Lv, entonces
u+w = tv + sv = (t+ s)v ∈ Lv.
Por tanto V = Lv es un subespacio de R2
Espacios Vectoriales Basicos2. Subespacios de R2
Teorema
V ⊂ R2 es un subespacio si y solo si, V = {0}, o bien V = R2, o bien V es unarecta que pasa por el origen.
Demostracion.
Claramente, si V es el conjunto {0}, o bien R2, entonces es un subespacio de R2.
Si V es la recta Lv (con v 6= 0), entonces los elementos de V son de la forma tv, cont ∈ R. Entonces
0 = 0v ∈ Lv.
Desde luego, para todo t ∈ R y s ∈ R, si u = sv ∈ Lv, entonces
tu = t(sv) = (ts)v ∈ Lv.
Finalmente, para todo t ∈ R y s ∈ R, si u = tv ∈ Lv y w = sv ∈ Lv, entonces
u+w = tv + sv = (t+ s)v ∈ Lv.
Por tanto V = Lv es un subespacio de R2
Espacios Vectoriales Basicos2. Subespacios de R2
Teorema
V ⊂ R2 es un subespacio si y solo si, V = {0}, o bien V = R2, o bien V es unarecta que pasa por el origen.
Demostracion.
Claramente, si V es el conjunto {0}, o bien R2, entonces es un subespacio de R2.
Si V es la recta Lv (con v 6= 0), entonces los elementos de V son de la forma tv, cont ∈ R. Entonces
0 = 0v ∈ Lv.
Desde luego, para todo t ∈ R y s ∈ R, si u = sv ∈ Lv, entonces
tu = t(sv) = (ts)v ∈ Lv.
Finalmente, para todo t ∈ R y s ∈ R, si u = tv ∈ Lv y w = sv ∈ Lv, entonces
u+w = tv + sv = (t+ s)v ∈ Lv.
Por tanto V = Lv es un subespacio de R2
Espacios Vectoriales Basicos2. Subespacios de R2
Teorema
V ⊂ R2 es un subespacio si y solo si, V = {0}, o bien V = R2, o bien V es unarecta que pasa por el origen.
Demostracion.
Claramente, si V es el conjunto {0}, o bien R2, entonces es un subespacio de R2.
Si V es la recta Lv (con v 6= 0), entonces los elementos de V son de la forma tv, cont ∈ R. Entonces
0 = 0v ∈ Lv.
Desde luego, para todo t ∈ R y s ∈ R, si u = sv ∈ Lv, entonces
tu = t(sv) = (ts)v ∈ Lv.
Finalmente, para todo t ∈ R y s ∈ R, si u = tv ∈ Lv y w = sv ∈ Lv, entonces
u+w = tv + sv = (t+ s)v ∈ Lv.
Por tanto V = Lv es un subespacio de R2
Espacios Vectoriales Basicos2. Subespacios de R2
Demostracion.
(Continuacion)
Supongamos que V es un subespacio de R2 y que {0} 6= V .
Sea v = (v1, v2) ∈ V , v 6= 0. Digamos v1 6= 0.
Supongamos que existe u = (u1, u2) ∈ V tal que u /∈ Lv (es decir u no es multiploescalar de v). En particular,
v1u2 − u1v2 6= 0.
(En efecto, si v1u2 − u1v2 = 0, entonces v1u2 = v2u1, de donde
u = (u1, u2) =u1
v1(v1, v2) ,
es decir, u es un multiplo escalar de v, lo cual es una contradiccion.)
Espacios Vectoriales Basicos2. Subespacios de R2
Demostracion.
(Continuacion)
Supongamos que V es un subespacio de R2 y que {0} 6= V .
Sea v = (v1, v2) ∈ V , v 6= 0. Digamos v1 6= 0.
Supongamos que existe u = (u1, u2) ∈ V tal que u /∈ Lv (es decir u no es multiploescalar de v). En particular,
v1u2 − u1v2 6= 0.
(En efecto, si v1u2 − u1v2 = 0, entonces v1u2 = v2u1, de donde
u = (u1, u2) =u1
v1(v1, v2) ,
es decir, u es un multiplo escalar de v, lo cual es una contradiccion.)

Espacios Vectoriales Basicos2. Subespacios de R2
Demostracion.
(Continuacion)
Supongamos que V es un subespacio de R2 y que {0} 6= V .
Sea v = (v1, v2) ∈ V , v 6= 0. Digamos v1 6= 0.
Supongamos que existe u = (u1, u2) ∈ V tal que u /∈ Lv (es decir u no es multiploescalar de v). En particular,
v1u2 − u1v2 6= 0.
(En efecto, si v1u2 − u1v2 = 0, entonces v1u2 = v2u1, de donde
u = (u1, u2) =u1
v1(v1, v2) ,
es decir, u es un multiplo escalar de v, lo cual es una contradiccion.)
Espacios Vectoriales Basicos2. Subespacios de R2
Demostracion.
(Continuacion)
Supongamos que V es un subespacio de R2 y que {0} 6= V .
Sea v = (v1, v2) ∈ V , v 6= 0. Digamos v1 6= 0.
Supongamos que existe u = (u1, u2) ∈ V tal que u /∈ Lv (es decir u no es multiploescalar de v). En particular,
v1u2 − u1v2 6= 0.
(En efecto, si v1u2 − u1v2 = 0, entonces v1u2 = v2u1, de donde
u = (u1, u2) =u1
v1(v1, v2) ,
es decir, u es un multiplo escalar de v, lo cual es una contradiccion.)
Espacios Vectoriales Basicos2. Subespacios de R2
Demostracion.
(Continuacion)
De modo que, por la Regla de Cramer, si (x, y) es cualquier punto en R2, el sistema dedos ecuaciones en dos variables t y s:
x = tv1 + su1
y = tv2 + su2
tiene una unica solucion (t0, s0).
Luego,
(x, y) = (t0v1 + s0u1, t0v2 + s0u2) = t0(v1, v2) + s0(u1, u2) = t0v + s0u,
y como, claramente
t0v ∈ Lv = {tv : t ∈ R} ⊂ V y s0u ∈ Lu = {su : s ∈ R} ⊂ V,
se sigue que (x, y) ∈ V y por tanto R2 = V .

Espacios Vectoriales Basicos2. Subespacios de R2
Demostracion.
(Continuacion)
De modo que, por la Regla de Cramer, si (x, y) es cualquier punto en R2, el sistema dedos ecuaciones en dos variables t y s:
x = tv1 + su1
y = tv2 + su2
tiene una unica solucion (t0, s0).
Luego,
(x, y) = (t0v1 + s0u1, t0v2 + s0u2) = t0(v1, v2) + s0(u1, u2) = t0v + s0u,
y como, claramente
t0v ∈ Lv = {tv : t ∈ R} ⊂ V y s0u ∈ Lu = {su : s ∈ R} ⊂ V,
se sigue que (x, y) ∈ V y por tanto R2 = V .
Espacios Vectoriales Basicos2. Subespacios de R2
Demostracion.
(Continuacion)
De modo que, por la Regla de Cramer, si (x, y) es cualquier punto en R2, el sistema dedos ecuaciones en dos variables t y s:
x = tv1 + su1
y = tv2 + su2
tiene una unica solucion (t0, s0).
Luego,
(x, y) = (t0v1 + s0u1, t0v2 + s0u2) = t0(v1, v2) + s0(u1, u2) = t0v + s0u,
y como, claramente
t0v ∈ Lv = {tv : t ∈ R} ⊂ V y s0u ∈ Lu = {su : s ∈ R} ⊂ V,
se sigue que (x, y) ∈ V y por tanto R2 = V .

Espacios Vectoriales Basicos
3. Subespacios de R3. Planos y rectas por el
origen.
Espacios Vectoriales Basicos3. Subespacios de R3. Planos y rectas por el origen.
Definicion
Sean A, B y C constantes, no todas cero. Una plano por el origen sobre R3, es elconjunto
P0A,B,C = {(x, y, z) ∈ R3 : Ax+By + Cz = 0}.
Ejemplo
Sean A = B = C = 1. Entonces
P01,1,1 = {(x, y, z) ∈ R3 : x+ y + z = 0}
= {(x, y, z) ∈ R3 : z = −x− y}
= {(x, y,−x− y) : x ∈ R2 ∧ y ∈ R2}
= {(x, 0,−x) + (0, y,−y) : x ∈ R2 ∧ y ∈ R2}
= {x(1, 0,−1) + y(0, 1,−1) : x ∈ R2 ∧ y ∈ R2}.

Espacios Vectoriales Basicos3. Subespacios de R3. Planos y rectas por el origen.
Teorema
Sean A, B y C constantes no todas cero. Existen vectores u y v en R3 no nulostales que ϕ(s, t) = su+ tv es una funcion biyectiva de R2 en P0
A,B,C .
Demostracion.
Si C = 0, entonces para todo (x, y, z) ∈ R3,
Ax+By + Cz = 0⇔ Ax+By = 0.
Existe entonces un vector u = (u1, u2) ∈ R2 no nulo tal que ϕ(s) = su = (su1, su2)es una funcion biyectiva de R sobre {(x, y) ∈ R2 : Ax + By = 0}. Definimos u =(u1, u2, 0) y v = (0, 0, 1). Y sea
ϕ(s, t) = su+ tv = (su1, su2, t), s, t ∈ R.
Es claro entonces que ϕ es una funcion biyectiva de R2 sobre P0A,B,0.

Espacios Vectoriales Basicos3. Subespacios de R3. Planos y rectas por el origen.
Demostracion.
(Continuacion)
Si C 6= 0, entonces para todo (x, y, z) ∈ R3,
Ax+By + Cz = 0⇔ z = −A
Cx−
B
Cy
De donde,
P0A,B,C =
{(x, y, z) ∈ R3 : z = −
A
Cx−
B
Cy
}=
{(x, y,−
A
Cx−
B
Cy
)∈ R3 : (x, y) ∈ R2
}=
{x
(1, 0,−
A
C
)+ y
(0, 1,−
B
C
): (x, y) ∈ R2
}.
Es claro entonces que ϕ(s, t) = s(1, 0,−A
C
)+ t(0, 1,−B
C
)es una funcion biyectiva
de R2 sobre P0A,B,C .
Espacios Vectoriales Basicos3. Subespacios de R3. Planos y rectas por el origen.
Observacion
Decimos que ϕ(s, t) = su+ tv es la ecuacion (o representacion) parametrica del planoL0A,B , y que u y v son los vectores generadores.
Observacion
Si u y v son vectores en R3, entonces escribimos Pu,v = {su+ tv : (s, t) ∈ R2}. Delteorema anterior se sigue de inmediato que, dadas tres constantes A, B y C, no todascero, existen vectores no nulos u y v en R3, tales que
P0A,B,C = {(x, y, z) ∈ R3 : Ax+By + Cz = 0} = {su+ tv : (s, t) ∈ R2} = Pu,v.
Esta igualdad es una forma explıcita de decir que ϕ(s, t) = su+tv es una representacionparametrica de la recta dada por la ecuacion Ax+By + Cz = 0.
Espacios Vectoriales Basicos3. Subespacios de R3. Planos y rectas por el origen.
Ejemplo
¿Cual es la ecuacion parametrica del plano que pasa por el origen dado por la ecuacion
−3x+1
2y − z = 0?
Solucion.
De acuerdo a la prueba del teorema anterior, los vectores generadores son
u =
(1, 0,−
−3−1
)= (1, 0,−3) y v =
(0, 1,−
(1/2)
−1
)=
(0, 1,
1
2
).
Por lo tanto, la ecuacion parametrica del plano es
ϕ(s, t) = s(1, 0,−3) + t
(0, 1,
1
2
)=
(s, t,−3s+
1
2t
).
Espacios Vectoriales Basicos3. Subespacios de R3. Planos y rectas por el origen.
Recıprocamente...
Teorema
Si u y v son vectores en R3 no nulos, entonces existen A, B y C constantes notodas cero tales que ϕ(s, t) = su+ tv es una funcion biyectiva de R2 en P0
A,B,C .
Demostracion.
Ver tarea.
Espacios Vectoriales Basicos3. Subespacios de R3. Planos y rectas por el origen.
Observacion
Se sigue de inmediato que, dado dos vectores no nulos u y v, existen constantes A, By C no todas cero, tales que
P0A,B,C = {(x, y, z) ∈ R3 : Ax+By + Cz = 0} = {su+ tv : (s, t) ∈ R2} = Pu,v.
Esto es, geometricamente toda aplicacion parametrica de la forma ϕ(s, t) = su + tv,donde u y v son vectores no nulos, es un plano en el espacio que pasa por el origen.
Espacios Vectoriales Basicos3. Subespacios de R3. Planos y rectas por el origen.
Definicion
Dado un vector v ∈ R3 no nulo, el conjunto
Lu = {tu : t ∈ R},
es una lınea recta (o simplemente recta) por el origen.
Ejemplo
Sea u = (4,−3, 2). Geometricamente, la recta Lu son todos los puntos
Lu = {(4t,−3t, 2t) ∈ R3 : t ∈ R}.
Espacios Vectoriales Basicos3. Subespacios de R3. Planos y rectas por el origen.
Teorema
Sea u un vector no nulo de R3. Sean v y w vectores de R3 no nulos y no multilosescalares de u. Entonces
Lu = Pu,v ∩ Pu,w.
Demostracion.
Podemos ilustrar la prueba con un caso particular. Sea u = (1, 1, 1). Hacemos v =(0, 0, 1) y w = (1, 0, 0). De modo que
Pu,v = {(s, s, s+ t) : (s, t) ∈ R2} y Pu,w = {(s+ t, s, s) : (s, t) ∈ R2}.
De modo que, para todo (s, t) ∈ R2,
(s, s, s+ t) = (s+ t, s, s) ⇔ s = s+ t ⇔ t = 0.
Es decir,
Pu,v ∩ Pu,w = {(s, s, s) : s ∈ R} = {s(1, 1, 1) : s ∈ R} = Lu.
Espacios Vectoriales Basicos3. Subespacios de R3. Planos y rectas por el origen.
Definicion
Un subconjunto V de R3 es un subespacio (vectorial) si
1. 0 ∈ V .
2. Para todo v ∈ V y todo t ∈ R,tv ∈ V.
3. Para todo v ∈ V y u ∈ V ,v + u ∈ V.

Espacios Vectoriales Basicos3. Subespacios de R3. Planos y rectas por el origen.
Teorema
Un subconjunto V de R3 es un subespacio, si y solo si, V = {0} o V = R3, obien V es una recta por el origen o un plano por el origen.
Demostracion.
Si V = {0} o V = R3, entonces V es un subespacio de R3, y si V es una recta o unplano, es facil verificar que V es tambien un subespacio de R3 en tales casos.
Sea ahora V ⊂ R3 un subespacio de R3. Entonces {0} ⊂ V .
Si V 6= {0}, entonces
existe u = (u1, u2, u3) ∈ V , u 6= 0.
Digamos u3 6= 0 (los otro casos son analogos). Note que Lu ⊂ V .

Espacios Vectoriales Basicos3. Subespacios de R3. Planos y rectas por el origen.
Teorema
Un subconjunto V de R3 es un subespacio, si y solo si, V = {0} o V = R3, obien V es una recta por el origen o un plano por el origen.
Demostracion.
Si V = {0} o V = R3, entonces V es un subespacio de R3, y si V es una recta o unplano, es facil verificar que V es tambien un subespacio de R3 en tales casos.
Sea ahora V ⊂ R3 un subespacio de R3. Entonces {0} ⊂ V .
Si V 6= {0}, entonces
existe u = (u1, u2, u3) ∈ V , u 6= 0.
Digamos u3 6= 0 (los otro casos son analogos). Note que Lu ⊂ V .
Espacios Vectoriales Basicos3. Subespacios de R3. Planos y rectas por el origen.
Teorema
Un subconjunto V de R3 es un subespacio, si y solo si, V = {0} o V = R3, obien V es una recta por el origen o un plano por el origen.
Demostracion.
Si V = {0} o V = R3, entonces V es un subespacio de R3, y si V es una recta o unplano, es facil verificar que V es tambien un subespacio de R3 en tales casos.
Sea ahora V ⊂ R3 un subespacio de R3. Entonces {0} ⊂ V .
Si V 6= {0}, entonces
existe u = (u1, u2, u3) ∈ V , u 6= 0.
Digamos u3 6= 0 (los otro casos son analogos). Note que Lu ⊂ V .
Espacios Vectoriales Basicos3. Subespacios de R3. Planos y rectas por el origen.
Demostracion.
(Continuacion)
Si V no es una recta, entonces en particular,
existe v = (v1, v2, v3) ∈ V tal que v /∈ Lu.
Luego,u2v3 − v2u3 6= 0 o bien v1u3 − u1v3 6= 0.
En efecto, si suponemos que
u2v3 − v2u3 = 0 = v1u3 − u1v3,
entoncesu2v3 = v2u3 y v1u3 = u1v3,
de donde(v1, v2, v3) =
v3
u3(u1, u2, u3),
es decir, v ∈ Lu. Contradiccion.
Supondremos entonces que u2v3 − v2u3 6= 0 (el caso v1u3 − u1v3 6= 0 es analogo).

Espacios Vectoriales Basicos3. Subespacios de R3. Planos y rectas por el origen.
Demostracion.
(Continuacion)
Si V no es una recta, entonces en particular,
existe v = (v1, v2, v3) ∈ V tal que v /∈ Lu.
Luego,u2v3 − v2u3 6= 0 o bien v1u3 − u1v3 6= 0.
En efecto, si suponemos que
u2v3 − v2u3 = 0 = v1u3 − u1v3,
entoncesu2v3 = v2u3 y v1u3 = u1v3,
de donde(v1, v2, v3) =
v3
u3(u1, u2, u3),
es decir, v ∈ Lu. Contradiccion.
Supondremos entonces que u2v3 − v2u3 6= 0 (el caso v1u3 − u1v3 6= 0 es analogo).

Espacios Vectoriales Basicos3. Subespacios de R3. Planos y rectas por el origen.
Demostracion.
(Continuacion)
Si V no es una recta, entonces en particular,
existe v = (v1, v2, v3) ∈ V tal que v /∈ Lu.
Luego,u2v3 − v2u3 6= 0 o bien v1u3 − u1v3 6= 0.
En efecto, si suponemos que
u2v3 − v2u3 = 0 = v1u3 − u1v3,
entoncesu2v3 = v2u3 y v1u3 = u1v3,
de donde(v1, v2, v3) =
v3
u3(u1, u2, u3),
es decir, v ∈ Lu. Contradiccion.
Supondremos entonces que u2v3 − v2u3 6= 0 (el caso v1u3 − u1v3 6= 0 es analogo).

Espacios Vectoriales Basicos3. Subespacios de R3. Planos y rectas por el origen.
Demostracion.
(Continuacion)
Si V no es una recta, entonces en particular,
existe v = (v1, v2, v3) ∈ V tal que v /∈ Lu.
Luego,u2v3 − v2u3 6= 0 o bien v1u3 − u1v3 6= 0.
En efecto, si suponemos que
u2v3 − v2u3 = 0 = v1u3 − u1v3,
entoncesu2v3 = v2u3 y v1u3 = u1v3,
de donde(v1, v2, v3) =
v3
u3(u1, u2, u3),
es decir, v ∈ Lu. Contradiccion.
Supondremos entonces que u2v3 − v2u3 6= 0 (el caso v1u3 − u1v3 6= 0 es analogo).

Espacios Vectoriales Basicos3. Subespacios de R3. Planos y rectas por el origen.
Demostracion.
(Continuacion)
Note que Pu,v ⊂ V .
Si V no es un plano, entonces en particular,
existe w = (w1, w2, w3) ∈ V tal que w /∈ Pu,v.
Supongamos que∣∣∣∣∣∣u1 v1 w1
u2 v2 w2
u3 v3 w3
∣∣∣∣∣∣ := u1 (v2w3 − w2v3)− v1 (u2w3 − w2u3) + w1(u2v3 − v2u3) = 0.
Entonces,w1 = s0u1 + t0v1,
donde
s0 = −v2w3 − w2v3
u2v3 − v2u3y t0 =
u2w3 − w2u3
u2v3 − v2u3

Espacios Vectoriales Basicos3. Subespacios de R3. Planos y rectas por el origen.
Demostracion.
(Continuacion)
Note que Pu,v ⊂ V .
Si V no es un plano, entonces en particular,
existe w = (w1, w2, w3) ∈ V tal que w /∈ Pu,v.
Supongamos que∣∣∣∣∣∣u1 v1 w1
u2 v2 w2
u3 v3 w3
∣∣∣∣∣∣ := u1 (v2w3 − w2v3)− v1 (u2w3 − w2u3) + w1(u2v3 − v2u3) = 0.
Entonces,w1 = s0u1 + t0v1,
donde
s0 = −v2w3 − w2v3
u2v3 − v2u3y t0 =
u2w3 − w2u3
u2v3 − v2u3
Espacios Vectoriales Basicos3. Subespacios de R3. Planos y rectas por el origen.
Demostracion.
(Continuacion)
Note que Pu,v ⊂ V .
Si V no es un plano, entonces en particular,
existe w = (w1, w2, w3) ∈ V tal que w /∈ Pu,v.
Supongamos que∣∣∣∣∣∣u1 v1 w1
u2 v2 w2
u3 v3 w3
∣∣∣∣∣∣ := u1 (v2w3 − w2v3)− v1 (u2w3 − w2u3) + w1(u2v3 − v2u3) = 0.
Entonces,w1 = s0u1 + t0v1,
donde
s0 = −v2w3 − w2v3
u2v3 − v2u3y t0 =
u2w3 − w2u3
u2v3 − v2u3

Espacios Vectoriales Basicos3. Subespacios de R3. Planos y rectas por el origen.
Demostracion.
(Continuacion)
Note que Pu,v ⊂ V .
Si V no es un plano, entonces en particular,
existe w = (w1, w2, w3) ∈ V tal que w /∈ Pu,v.
Supongamos que∣∣∣∣∣∣u1 v1 w1
u2 v2 w2
u3 v3 w3
∣∣∣∣∣∣ := u1 (v2w3 − w2v3)− v1 (u2w3 − w2u3) + w1(u2v3 − v2u3) = 0.
Entonces,w1 = s0u1 + t0v1,
donde
s0 = −v2w3 − w2v3
u2v3 − v2u3y t0 =
u2w3 − w2u3
u2v3 − v2u3
Espacios Vectoriales Basicos3. Subespacios de R3. Planos y rectas por el origen.
Demostracion.
(Continuacion) Pero es facil comprobar que
w2 = s0u2 + t0v2 y w3 = s0u3 + t0v3,
de manera que w = s0u+ t0v. Una contradiccion.
Por lo tanto, ∣∣∣∣∣∣u1 v1 w1
u2 v2 w2
u3 v3 w3
∣∣∣∣∣∣ 6= 0.
Y por la Regla de Cramer, para cualquier (x, y, z) ∈ R3 existe (s0, t0, r0) ∈ R3 (unico)tal que
x = s0u1 + t0v1 + r0w1
y = s0u2 + t0v2 + r0w2
z = s0u3 + t0v3 + r0w3
Espacios Vectoriales Basicos3. Subespacios de R3. Planos y rectas por el origen.
Demostracion.
(Continuacion) Pero es facil comprobar que
w2 = s0u2 + t0v2 y w3 = s0u3 + t0v3,
de manera que w = s0u+ t0v. Una contradiccion.
Por lo tanto, ∣∣∣∣∣∣u1 v1 w1
u2 v2 w2
u3 v3 w3
∣∣∣∣∣∣ 6= 0.
Y por la Regla de Cramer, para cualquier (x, y, z) ∈ R3 existe (s0, t0, r0) ∈ R3 (unico)tal que
x = s0u1 + t0v1 + r0w1
y = s0u2 + t0v2 + r0w2
z = s0u3 + t0v3 + r0w3

Espacios Vectoriales Basicos3. Subespacios de R3. Planos y rectas por el origen.
Demostracion.
(Continuacion) Pero es facil comprobar que
w2 = s0u2 + t0v2 y w3 = s0u3 + t0v3,
de manera que w = s0u+ t0v. Una contradiccion.
Por lo tanto, ∣∣∣∣∣∣u1 v1 w1
u2 v2 w2
u3 v3 w3
∣∣∣∣∣∣ 6= 0.
Y por la Regla de Cramer, para cualquier (x, y, z) ∈ R3 existe (s0, t0, r0) ∈ R3 (unico)tal que
x = s0u1 + t0v1 + r0w1
y = s0u2 + t0v2 + r0w2
z = s0u3 + t0v3 + r0w3

Espacios Vectoriales Basicos3. Subespacios de R3. Planos y rectas por el origen.
Demostracion.
(Continuacion)
Esto es
(x, y, z) = s0(u1, u2, u3) + t0(v1, v2, v3) + r0(w1, w2, w3)
= s0u+ t0v + r0w.
Es claro entonces (x, y, z) ∈ V . De donde R3 ⊂ V . Ası que R3 = V .