espacio afin
TRANSCRIPT

SIMÉTRICO DE UN PUNTO RESPECTO DE UN PUNTO
PUNTO MEDIO DE DOS PUNTOS
ECUACIONES DE UNA RECTA
POSICIONES RELATIVAS DE DOS RECTAS
ECUACIONES DE UN PLANO
POSICIONES RELATIVAS DE DOS PLANOS
POSICIONES RELATIVAS DE TRES PLANOS
POSICIONES RELATIVAS DE RECTA Y PLANO
Esp
acio
Afí
n
FIN
u1
u2
u3
o
A
X
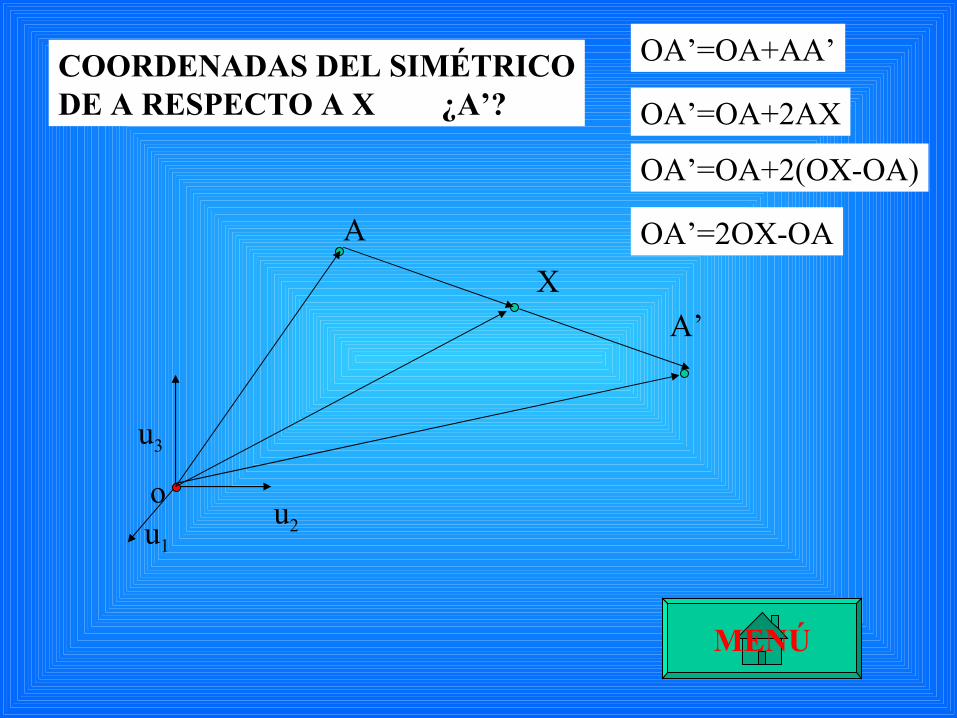
COORDENADAS DEL SIMÉTRICODE A RESPECTO A X ¿A’?
OA’=OA+AA’
OA’=OA+2AX
A’
OA’=OA+2(OX-OA)
OA’=2OX-OA
MENÚ
u1
u2
u3
o
P
M
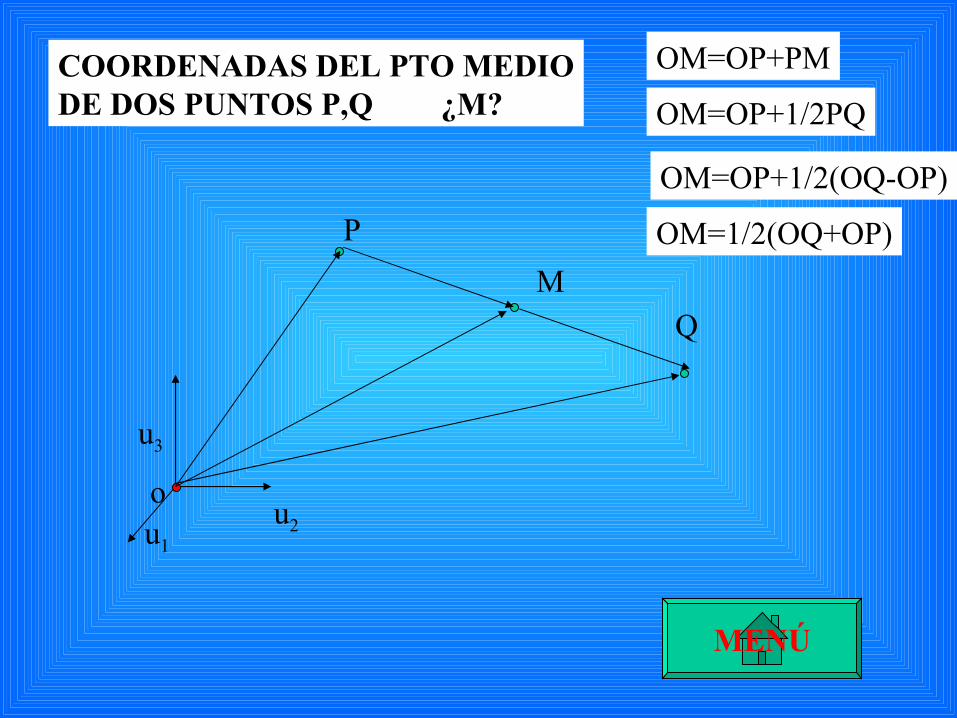
COORDENADAS DEL PTO MEDIODE DOS PUNTOS P,Q ¿M?
OM=OP+PM
OM=OP+1/2PQ
Q
OM=OP+1/2(OQ-OP)
OM=1/2(OQ+OP)
MENÚ
u1
u2
u3
o
A
v
X
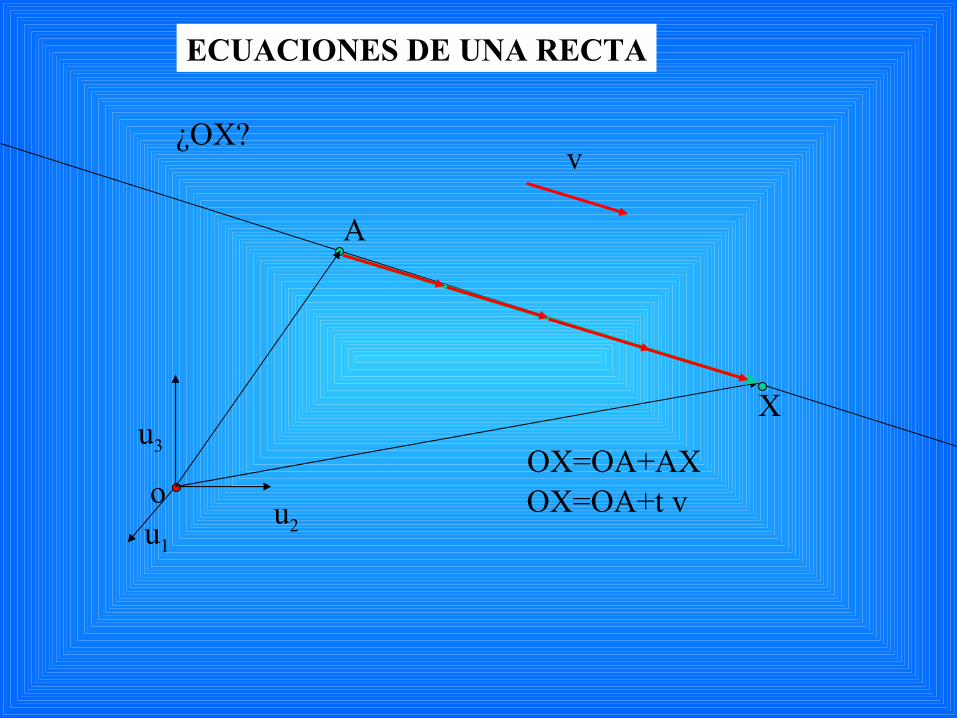
¿OX?
OX=OA+AXOX=OA+t v
ECUACIONES DE UNA RECTA

OX=OA+tv : Ecuac.Vectorial (x1, x2, x3)= (a1, a2, a3)+t (v1, v2, v3)
x1= a1+t v1
x2= a2+t v2
x3= a3+t v3
:Ecuac. Paramétricast= x1 - a1
v1
t= x2 – a2
v2
t= x3 – a3
v3 x1 - a1 = x2 – a2 = x3 – a3
V1 v2 v3
:Ecuac. Continua
Ax+By+Cz-D=0A’x+B’y+C’z+D=0
ECUACIONES DE UNA RECTA
PROBLEMAS PROPUESTOS:
1.- Determinar las ecuaciones de la recta que pasa por dos puntos dados
2.- Condiciones de incidencia punto recta
3.- Condiciones para que tres puntos estén alineados
MENÚ
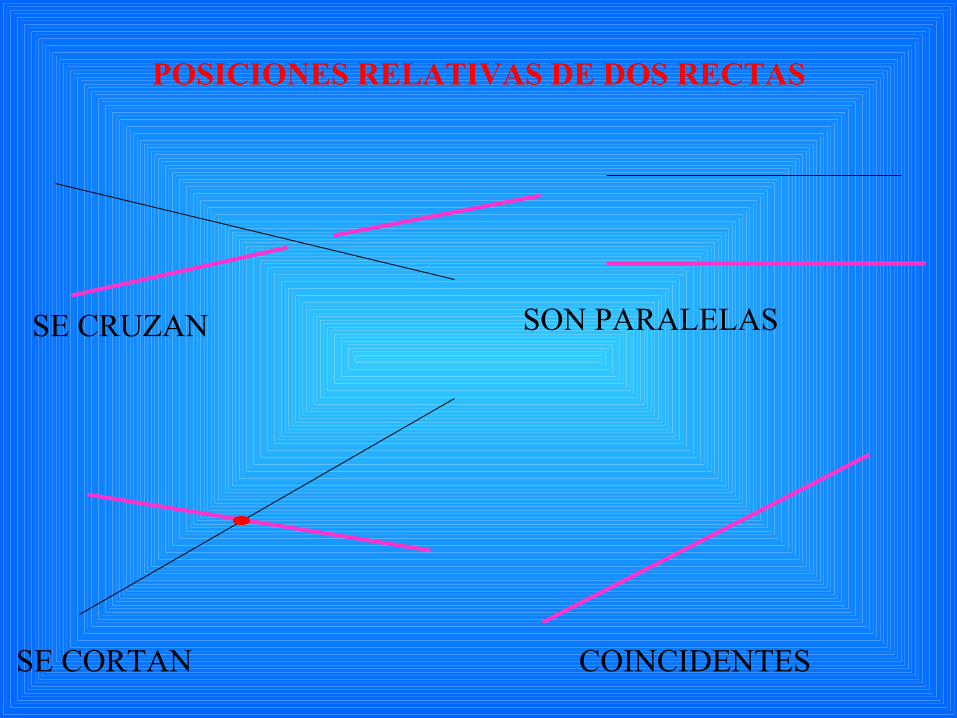
POSICIONES RELATIVAS DE DOS RECTAS
SE CRUZAN SON PARALELAS
SE CORTAN COINCIDENTES
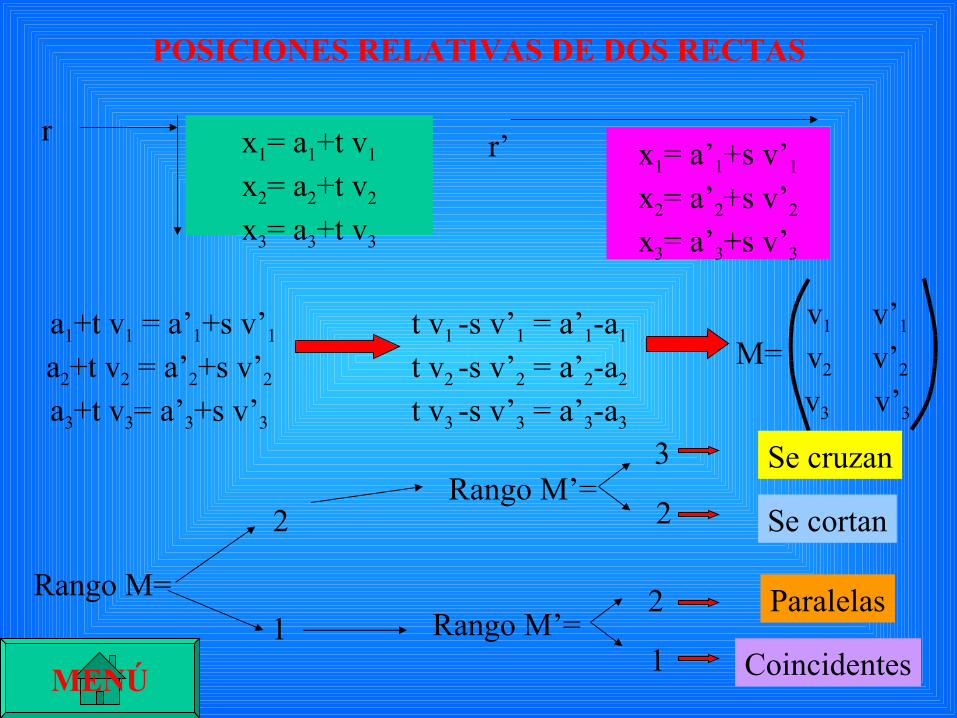
POSICIONES RELATIVAS DE DOS RECTAS
x1= a1+t v1
x2= a2+t v2
x3= a3+t v3
rx1= a’1+s v’1
x2= a’2+s v’2
x3= a’3+s v’3
r’
a1+t v1 = a’1+s v’1
a2+t v2 = a’2+s v’2
a3+t v3= a’3+s v’3
t v1 -s v’1 = a’1-a1
t v2 -s v’2 = a’2-a2
t v3 -s v’3 = a’3-a3
v1 v’1
v2 v’2
v3 v’3
M=
Rango M=
2Rango M’=
3 Se cruzan
2 Se cortan
1 Rango M’=2
1
Paralelas
CoincidentesMENÚ

u1
u2
u3
o
A
X
ECUACIONES DE UN PLANO OX=OA+AX
AX=t u+ s v
OX=OA+ t u+ svv
u
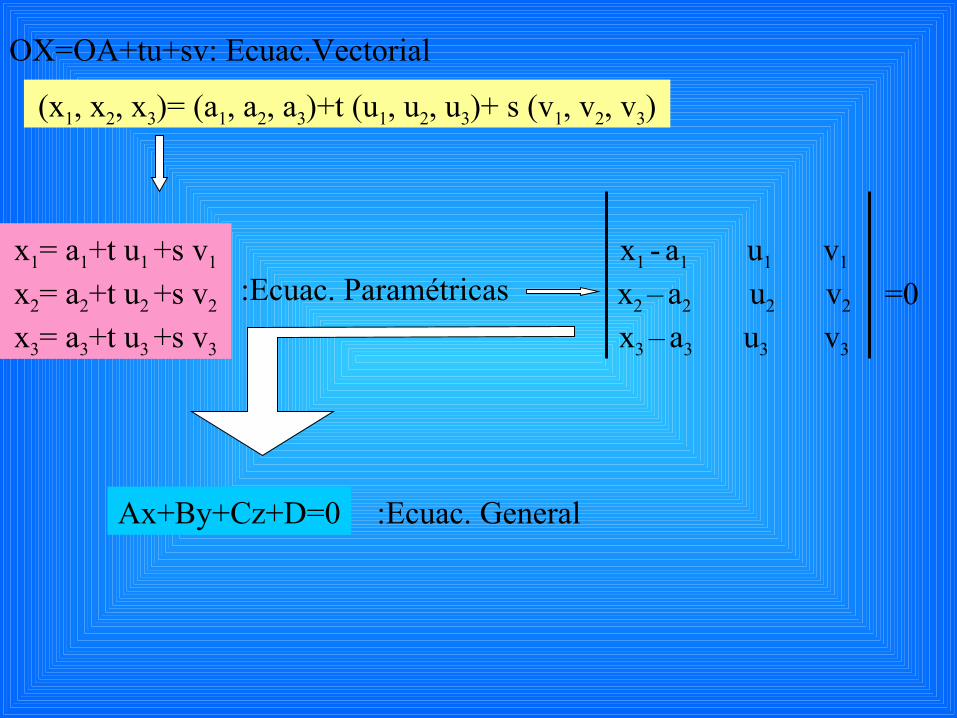
OX=OA+tu+sv: Ecuac.Vectorial
(x1, x2, x3)= (a1, a2, a3)+t (u1, u2, u3)+ s (v1, v2, v3)
x1= a1+t u1 +s v1
x2= a2+t u2 +s v2
x3= a3+t u3 +s v3
:Ecuac. Paramétricasx1 - a1 u1 v1
x2 – a2 u2 v2
x3 – a3 u3 v3
Ax+By+Cz+D=0
=0
:Ecuac. General

u1
u2
u3
o
A
X
ECUACIÓN NORMAL DE UN PLANO n AX= 0
n (OX-OA)=0n
Si sup. Una base ortonormal:
n1(x-a1)+ n2(y-a2)+ n3(z-a3)=0 n1x+ n2y+ n3z+(-n1a1-n2a2 -n3a3)=0
Ax+By+Cz+D=0

PROBLEMAS PROPUESTOS:
1.- Determinar las ecuaciones del plano determinado por tres puntos no alineados
2.- Condiciones de incidencia punto plano
3.- Condiciones para que cuatro puntos sean coplanarios
u1
u2
u3
o
A
X
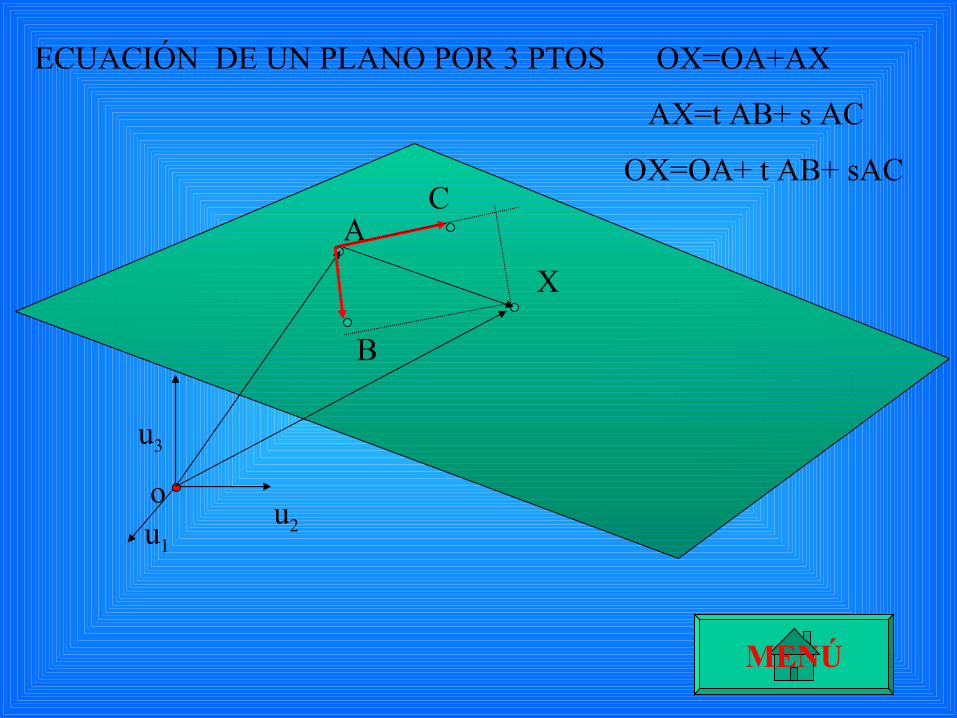
ECUACIÓN DE UN PLANO POR 3 PTOS OX=OA+AX
AX=t AB+ s AC
OX=OA+ t AB+ sAC
B
C
MENÚ
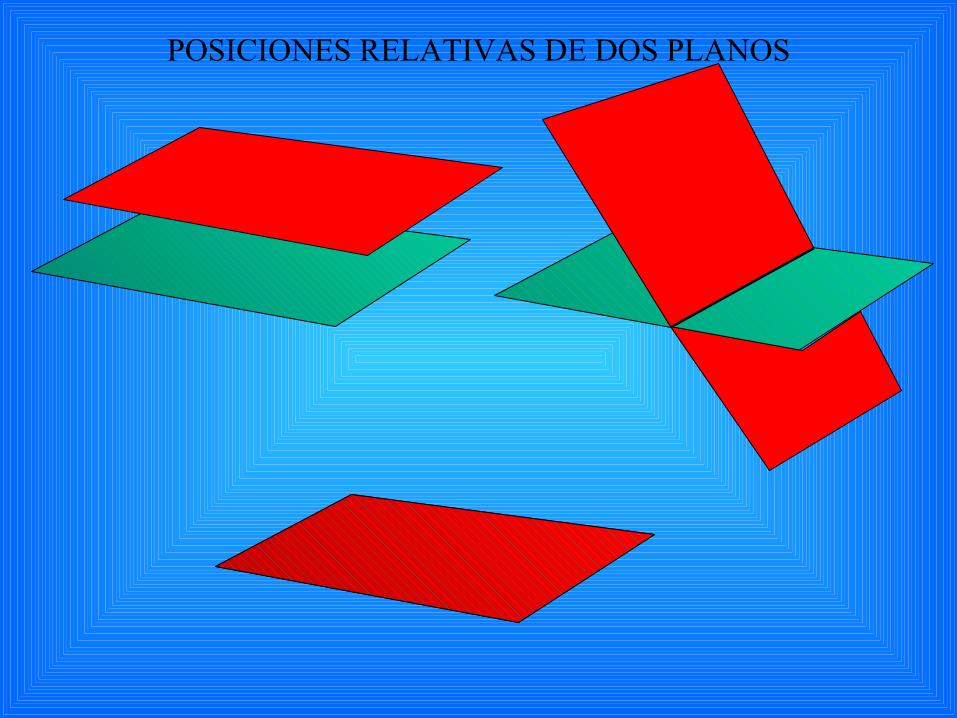
POSICIONES RELATIVAS DE DOS PLANOS
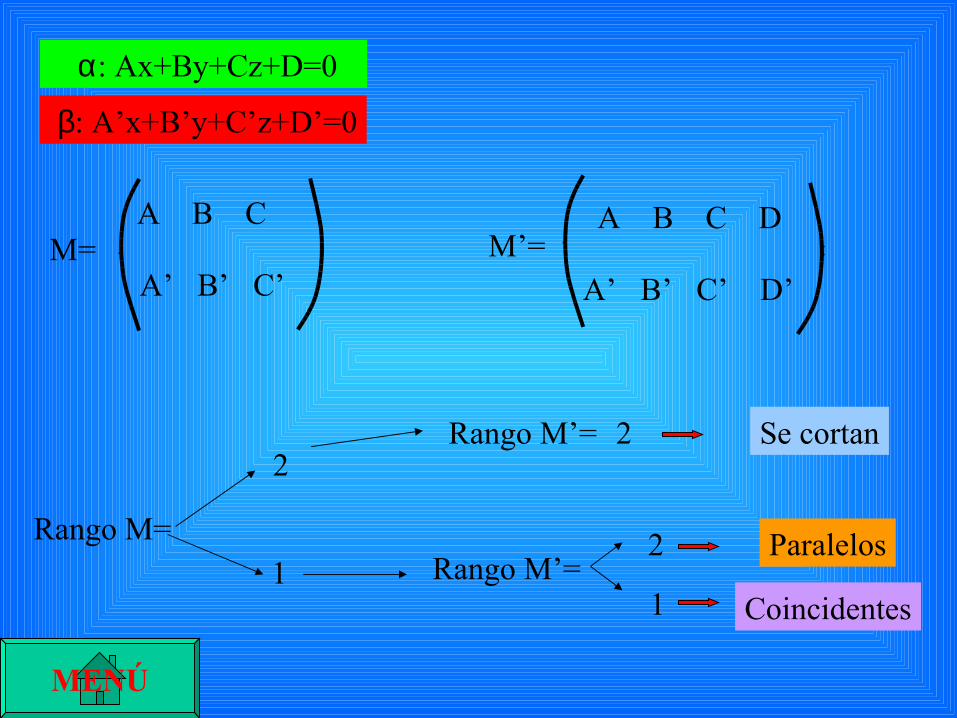
α: Ax+By+Cz+D=0
β: A’x+B’y+C’z+D’=0
M=A B C
A’ B’ C’M’=
Rango M=
2Rango M’= 2 Se cortan
1 Rango M’=2
1
Paralelos
Coincidentes
A B C D
A’ B’ C’ D’
MENÚ
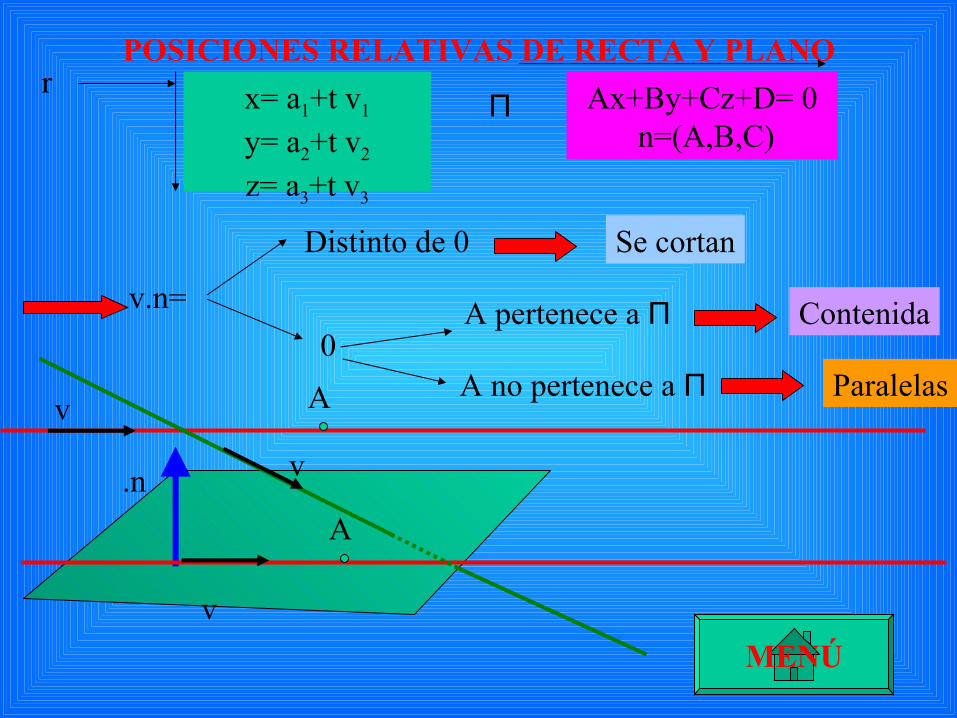
POSICIONES RELATIVAS DE RECTA Y PLANO
x= a1+t v1
y= a2+t v2
z= a3+t v3
r Ax+By+Cz+D= 0 n=(A,B,C)
Π
Distinto de 0 Se cortan
0Paralelas
Contenidav.n=
A
A pertenece a Π
A no pertenece a Π
A
MENÚ
.n
v
v
v
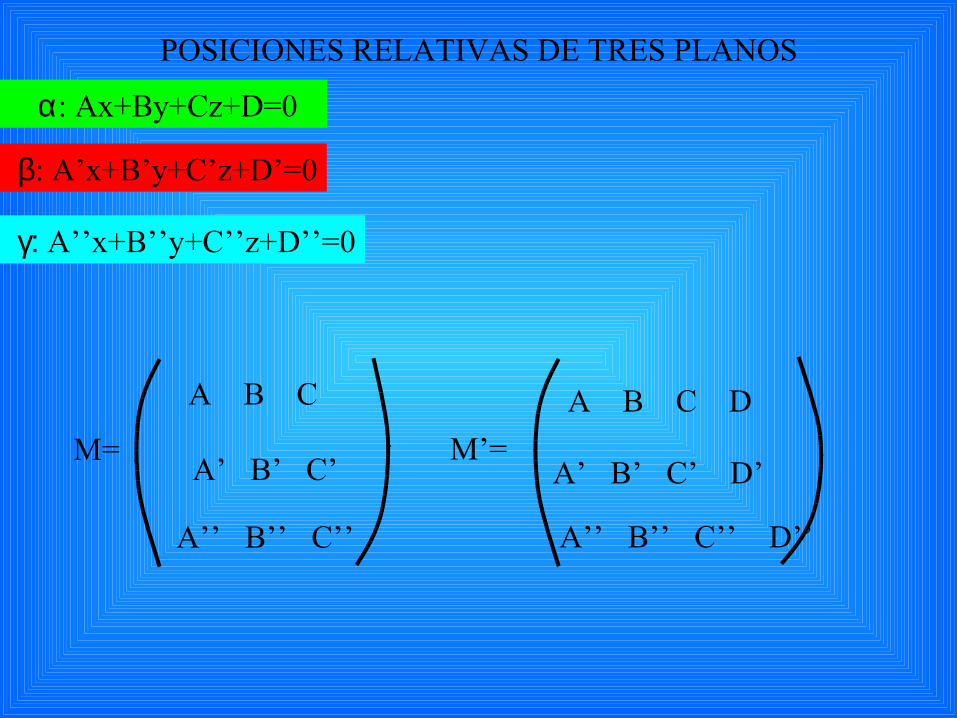
α: Ax+By+Cz+D=0
β: A’x+B’y+C’z+D’=0
M= M’=
A B C
A’ B’ C’
A’’ B’’ C’’
A B C D
A’ B’ C’ D’
A’’ B’’ C’’ D’’
γ: A’’x+B’’y+C’’z+D’’=0
POSICIONES RELATIVAS DE TRES PLANOS

Rango M=
3
2
IRango M’=3
Rango M’=3
Rango M’=2
Rango M’=2
Rango M’=1
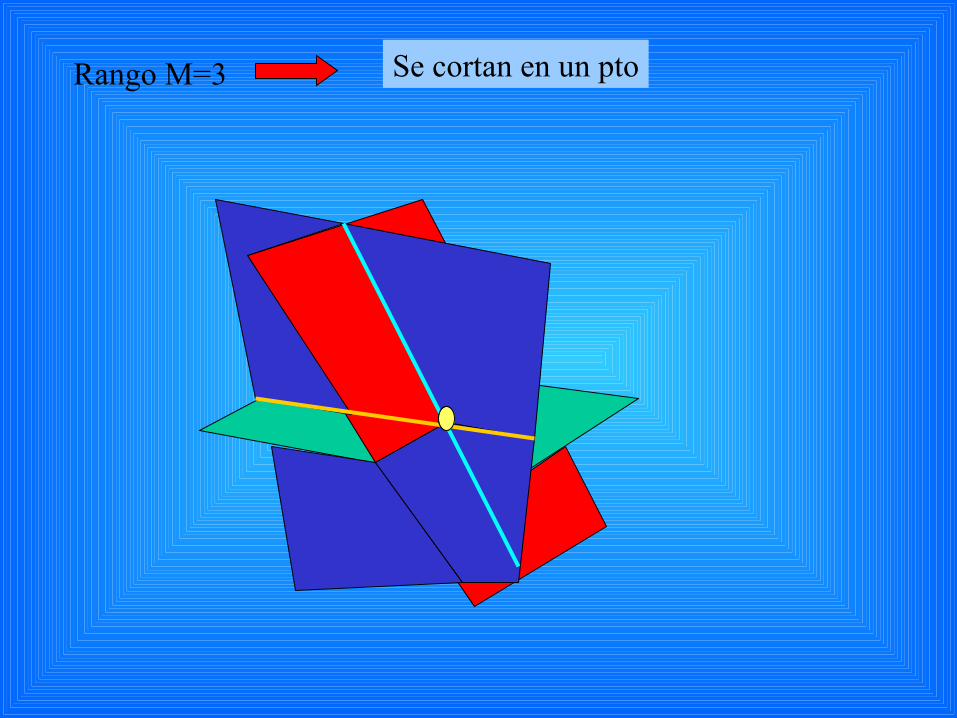
Rango M=3 Se cortan en un pto
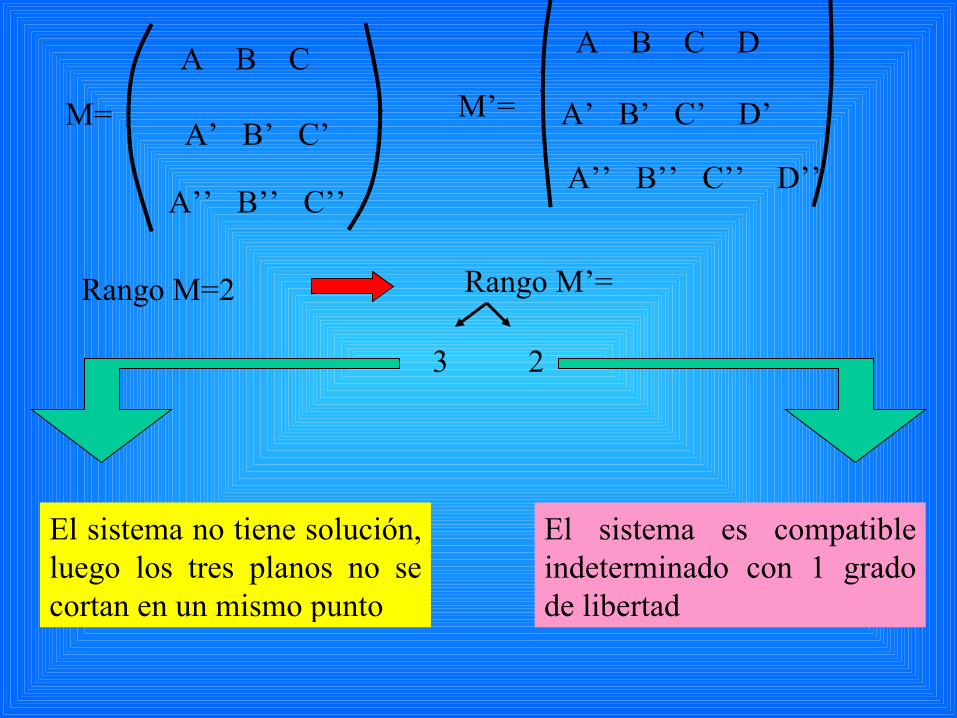
Rango M=2 Rango M’=
El sistema no tiene solución, luego los tres planos no se cortan en un mismo punto
M= M’=
A B C
A’ B’ C’
A’’ B’’ C’’
A B C D
A’ B’ C’ D’
A’’ B’’ C’’ D’’
3 2
El sistema es compatible indeterminado con 1 grado de libertad
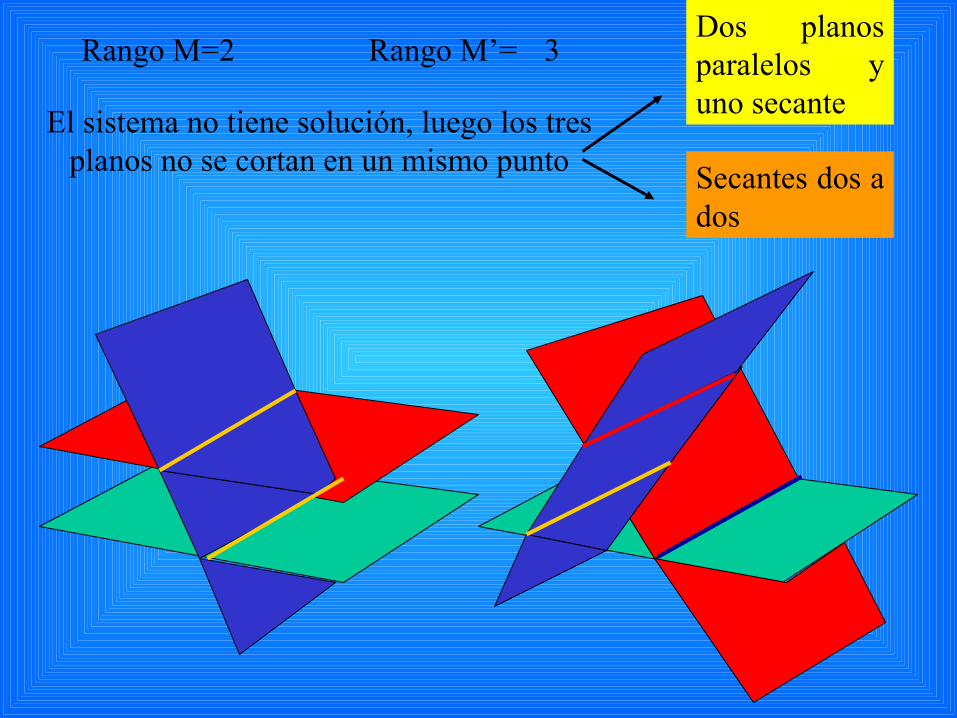
Rango M=2 Rango M’=
El sistema no tiene solución, luego los tresplanos no se cortan en un mismo punto
Dos planos paralelos y uno secante
Secantes dos a dos
3

Rango M=2 Rango M’=
M= M’=
A B C
A’ B’ C’
A’’ B’’ C’’
A B C D
A’ B’ C’ D’
A’’ B’’ C’’ D’’
2El sistema es compatible indeterminado con 1 grado de libertad
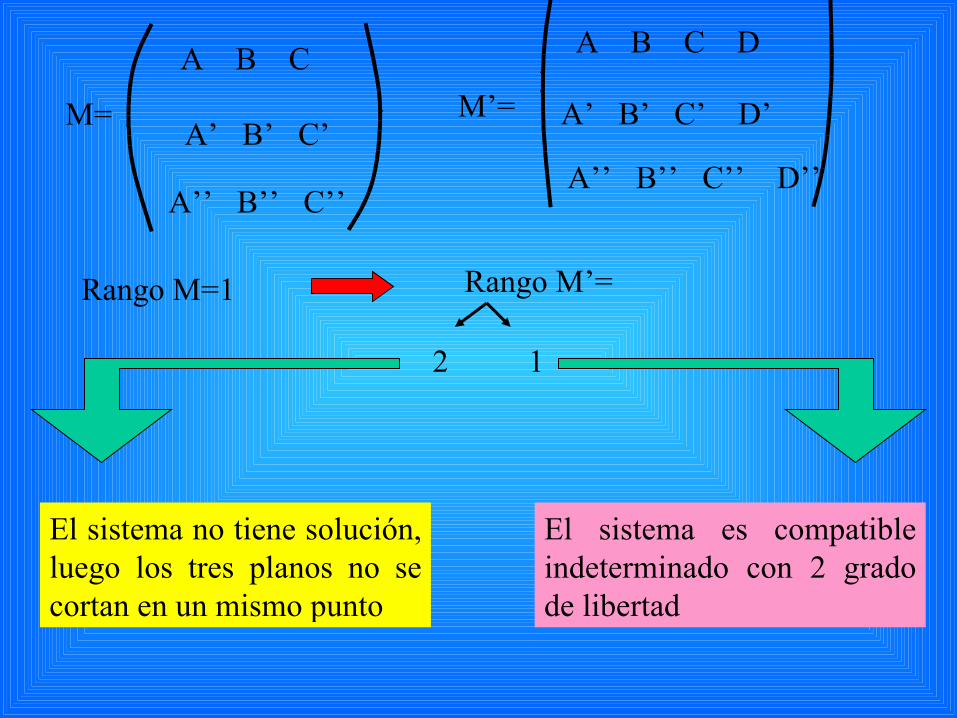
Rango M=1 Rango M’=
El sistema no tiene solución, luego los tres planos no se cortan en un mismo punto
M= M’=
A B C
A’ B’ C’
A’’ B’’ C’’
A B C D
A’ B’ C’ D’
A’’ B’’ C’’ D’’
2 1
El sistema es compatible indeterminado con 2 grado de libertad
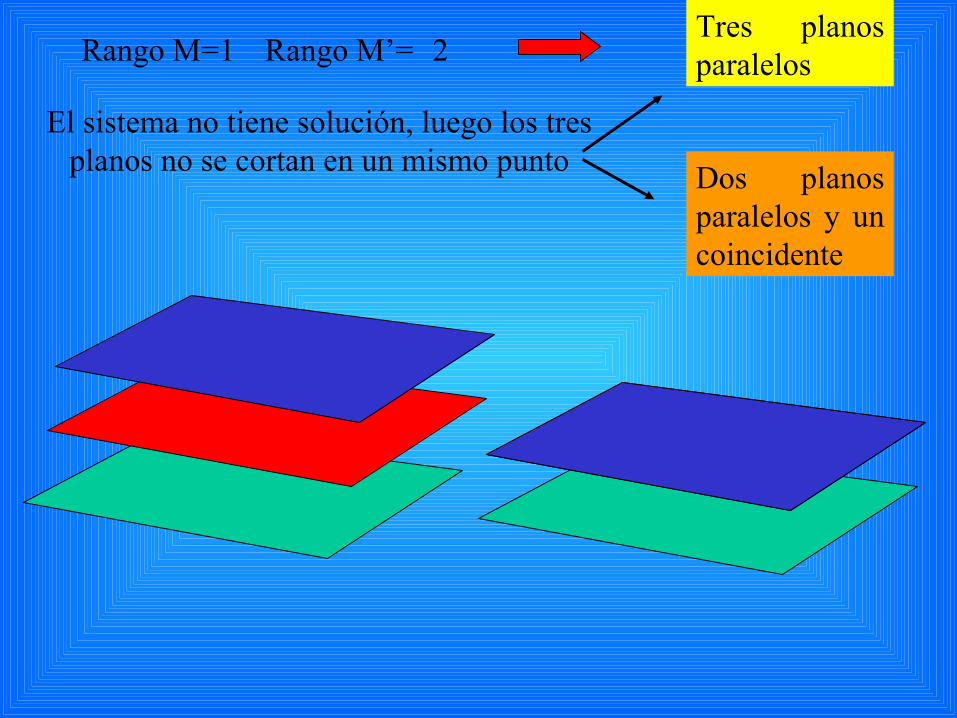
Rango M=1 Rango M’=
El sistema no tiene solución, luego los tresplanos no se cortan en un mismo punto
Tres planos paralelos
Dos planos paralelos y un coincidente
2
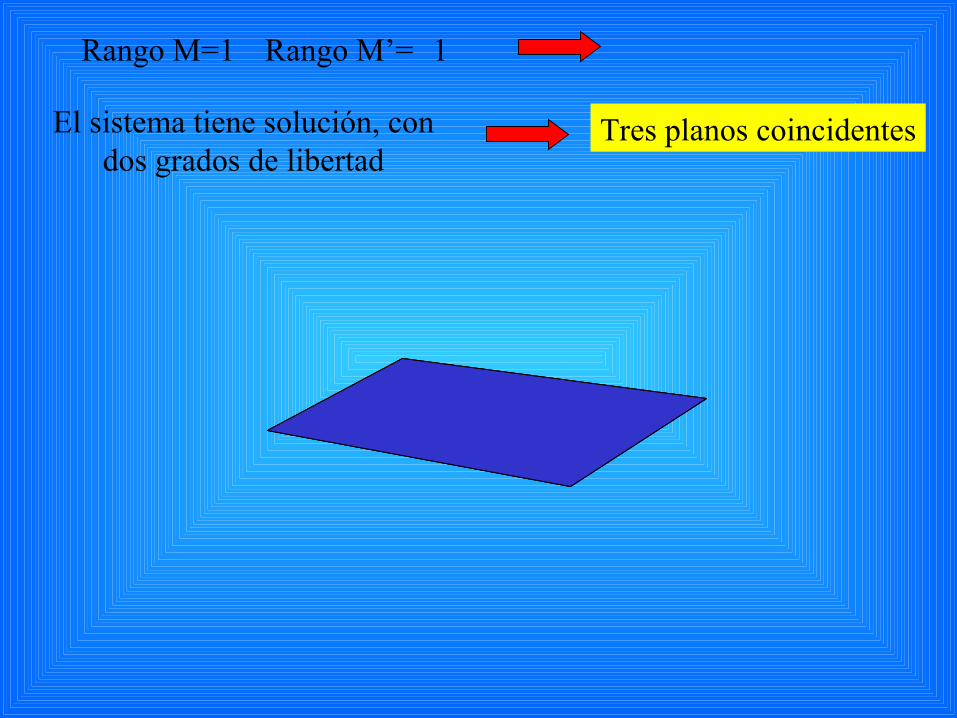
Rango M=1 Rango M’=
El sistema tiene solución, con dos grados de libertad
Tres planos coincidentes
1

HAZ DE PLANOS POR UNA RECTA
r=
Ax+By+Cz+D=0A’x+B’y+C’z+D’=0
Ax+By+Cz+D=0A’x+B’y+C’z+D=0
A’’x+B’’y+C’’z+D’’=0
El sistema tiene solución con un grado
de libertad.
A’’x+B’’y+C’’z+D’’=0Es combinación lineal
de las otras dos
A’’x+B’’y+C’’z+D’’=λ(Ax+By+Cz+D)+ µ(A’x+B’y+C’z+D’)=0 MENÚ