erp tema 10 ici unidad 4
TRANSCRIPT
Universidad de OrienteNúcleo de Monagas
Ingeniería de SistemasCursos Especiales de Grado
Área: Automatización y Control de Procesos Industriales
Instrumentación de Control Industrial
ACTUADORES ELECTRICOS
Equipo: ERPAugusta J. López R.Nicolás H. Mekari L.
Tutor: Ing. Edgar Goncalves
Maturín, Octubre 2014
CONTENIDO
INTRODUCCIÓN
ACTUADORES ELECTRICOS
TIPOS
PARTES COMUNES
CONCLUSIÓN
REFERENCIAS
INTRODUCCIÓN
Los actuadores son elementos importantes en la industria ya que debido a ellos es posible que los robots puedan realizar diversas tareas ya que su misión es generar el movimiento de los elementos de estos según las órdenes dadas por una unidad de control, cada uno de los sistemas presentan características, aplicaciones ventajas y desventajas las cuales deben ser tomadas en cuenta para un determinado fin.
ACTUADORES ELECTRICOS
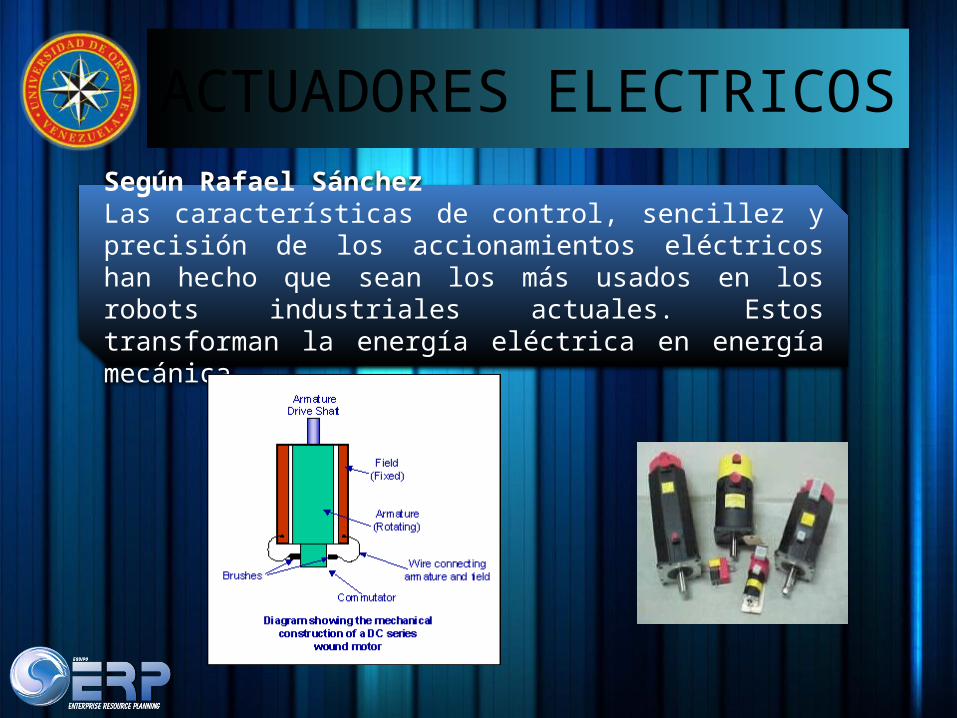
Según Rafael SánchezLas características de control, sencillez y precisión de los accionamientos eléctricos han hecho que sean los más usados en los robots industriales actuales. Estos transforman la energía eléctrica en energía mecánica.

TIPOS
• Monofásicos• Trifásicos
Motores de Corriente Alterna
• Bobinados en Derivación
• Bobinados en Serie• Excitación
Independiente
Motores de Corriente Continua
Motores Paso a Paso
Servomotores
Motores Universales

TIPOS
MOTORES DE CORRIENTE ALTERNA• Son en general motores robustos sencillos,
compactos y que necesitan poco mantenimiento. Además suelen ser más baratos que los motores de corriente continua para potencias equivalentes, se consideran los motores industriales por excelencia
Motores de CA
Monofásicos
Síncronos Asíncronos
Trifásicos

SÍNCRONOS
• Este tipo de motor trabaja siempre a velocidad fija aun cuando varíe la carga.
ASÍNCRONOS
• Son motores que trabajan bajo una velocidad aproximadamente fija, aunque varíe la carga, ya que el punto de funcionamiento del motor se encuentra en una zona en donde la curva es vertical. Son los motores más ampliamente utilizados.
TIPOS
MONOFÁSICOS
Este tipo de motores posee una fase y un neutro. Sirven únicamente para potencias pequeñas o medias. Poseen inconveniente de necesitar un arrancador. Pueden ser de dos tipos Síncronos y Asíncronos.
TIPOS
TRIFÁSICOS
Estos motores presentan las mismas características que los monofásicos, con la única diferencia que se pueden poner en marcha sin necesidad de un arrancador. Cabe destacar que estos se construyen para potencias mayores.

Motores de CC
Bobinados en Derivación
Con Escotilla Sin Escotilla
Bobinados en Serie
Excitación Independiente
TIPOS
MOTORES DE CORRIENTE CONTINUA• Estos motores son pesados, caros, y necesitan bastante
mantenimiento, debido al chisporroteo continuo de las escobillas, No obstante eran la mejor opción para las aplicaciones que necesitaban controlar la velocidad y/o el para hasta que se desarrolló el variador de frecuencias, aparato que subsana estas carencias de los motores asíncronos
CON ESCOBILLAS
• Estos, presentan inconvenientes en cuanto al mantenimiento, ya que las bobinas chisporrotean constantemente y se desgastan.
SIN ESCOBILLAS
• Presentan un menor costo de mantenimiento al funcionar sin escobillas. Se utilizan para aparatos tales como ventiladores.
TIPOS
Bobinados en Derivación
Este tipo de motores presentan la excitación bobinada en paralelo, por lo que la caída de la tensión es la misma que la del motor. Pueden ser de dos tipos: con escobillas o sin escobillas.

TIPOS
BOBINADOS EN SERIE
Este tipo de motores presenta la excitación bobinada en serie, por o que la caída de la excitación no es fija. Al igual que los motores con excitación en paralelo pueden ser con escobillas o sin escobillas. Su velocidad varia con la carga ya que, su excitación se encuentra en serie
EXCITACIÓN INDEPENDIENTE
Este tipo de motores presenta la alimentación del devanado inductor mediante una fuente de alimentación externa a la maquina. Por este motivo, es muy fácil controlar su velocidad variando únicamente la corriente de excitación.
TIPOS
MOTORES PASO A PASO• Son dispositivos electromagnéticos,
rotativos, incrementales que convierten pulsos digitales en rotación mecánica.
SERVOMOTORES• Es un motor de corriente continua, que tiene la
capacidad de ubicarse en cualquier posición, dentro de su rango de operación y mantenerse estable en dicha posición. Está conformado por un motor, una caja reductora y un circuito de control
PARTES COMUNES
Sistema de "llave de seguridad"
• Este método de llave de seguridad para la retención de las tapas del actuador, usa una cinta cilíndrica flexible de acero inoxidable en una ranura de deslizamiento labrada a máquina
Piñón Con Ranura
• Esta ranura en la parte superior del piñón provee una transmisión autocentrante, directa para indicadores de posición e interruptores de posición, eliminando el uso de bridas de acoplamiento.
Cojinetes De Empalme
• Estos cojinetes de empalme barrenados y enroscados sirven para simplificar el acoplamiento de accesorios a montar en la parte superior.

PARTES COMUNES
Muñoneras
• Una muñonera de nuevo diseño y de máxima duración, permanentemente lubricada, resistente a la corrosión y de fácil reemplazo, extiende la vida del actuador en las aplicaciones más severas.
Construcción
• Se debe proveer fuerza máxima contra abolladuras, choques y fatiga. Su piñón y cremallera debe ser de gran calibre, debe ser labrado con maquinaria de alta precisión, y elimina el juego para poder obtener posiciones precisas.
Revestimiento
• Un revestimiento doble, para proveer extra protección contra ambientes agresivos

PARTES COMUNES
Muñoneras radiales y de carga del piñón
• Muñoneras reemplazables que protegen contra cargas verticales. Muñoneras radiales soportan toda carga radial.
Sellos del piñón (superior e inferior)
• Los sellos del piñón están posicionados para minimizar todo hueco posible, para proteger contra la corrosión.
Resortes indestructibles de seguridad en caso de falla
• Estos resortes son diseñados y fabricados para nunca fallar y posteriormente son protegidos contra la corrosión. Los resortes son clasificados y asignados de forma particular para compensar la pérdida de memoria a la cual está sujeta todo resorte; para una verdadera confianza en caso de falla en el suministro de aire

CONCLUSIÓN
• La estructura de un actuador eléctrico es simple en comparación con la de los actuadores hidráulicos y neumáticos, ya que sólo se requieren de energía eléctrica como fuente de poder. Como se utilizan cables eléctricos para transmitir electricidad y las señales, es altamente versátil y prácticamente no hay restricciones respecto a la distancia entra la fuente de poder y el actuador. Existe una gran cantidad de modelos y es fácil utilizarlos con motores eléctricos estandarizados según la aplicación.

REFERENCIAS BIBLIOGAFICAS
• Sanchez, R. Accionamientos y actuadores Eléctricos. [Documento en Línea] (Consultado el 30 de octubre de 2014) Disponible en: http://www.uhu.es/rafael.sanchez/ingenieriamaquinas/carpetaapuntes.htm/Apuntes%20Tema%206%20nuevo%20formato.pdf

GRACIAS POR SU ATENCIÓN