
Electricidad y Magnetismo - Grupo
21.1
Curso 2010/2011
Sistemas de Coordenadas 1
J.L. Fernández JambrinaEyM 1a-1
Tema 1: Introducción
� Concepto de campo
� Repaso de álgebra vectorial
� Sistemas de coordenadas
�Cartesiano
�Curvilíneas generalizadas: cilíndrico y esférico.
� Operadores vectoriales.
�Gradiente
�Divergencia
�Rotacional
�Derivada temporal
�Combinación de operadores: Laplaciana
�Expresiones con operadores
�Teorema de Helmholtz: fuentes de los campos.
J.L. Fernández JambrinaEyM 1a-2
Sistemas de coordenadas
• Hacen falta para describir los puntos del espacio.
• El más simple es el cartesiano:
– Al decir que un punto P tiene coordenadasx0, y0, z0 se quiere decir que está contenidoen los planos:
– Los vectores unitarios llevan la dirección y sentido en que se desplaza el punto al incrementar la coordenada correspondiente.
– Los vectores unitarios se ordenan deforma que el producto vectorial del primero por el segundo da el tercero:
» Sistema dextrógiro o a derechas
000 zzyyxx ===
dx
rd
x
rx
x
rr
=∆∆
=→∆limˆ
0
zyx ˆˆˆ =×
z z= 0
y y= 0
X
Z
Y
$x
$y
$z
P
x x= 0

Electricidad y Magnetismo - Grupo
21.1
Curso 2010/2011
Sistemas de Coordenadas 2
J.L. Fernández JambrinaEyM 1a-3
Sistema cartesiano (2)
rr
r rr l+ ∆∆∆∆
∆∆∆∆rl
O
– El vector de posición del punto es el vector que une el origen de coordenadas con el punto:
– Un desplazamiento a lo largo de una curva se puede definir por un vector:
– Si el desplazamiento es de magnitud muy pequeña (infinitesimal) se puede representar por:
» Puesto que una curva está definida por dos ecuaciones,
los tres diferenciales se pueden reducir a uno.
– La longitud del desplazamiento infinitesimal será:
zzyyxxr ˆˆˆ ++=r
222 dzdydxldldlddl ++=⋅==rrr
zzyyxxl ˆˆˆ ∆+∆+∆=∆r
zdzydyxdxld ˆˆˆ ++=r
J.L. Fernández JambrinaEyM 1a-4
Sistemas cartesiano, cilíndrico y esférico
z z= 0
y y= 0
X
Z
Y
$x
$y
$z
P
x x= 0
X
P
Y
z
ρρρρϕϕϕϕ
Z $z$ϕ
$ρ
$z
$r$ϕ
$θ
X
Y
Z
r
ϕϕϕϕ
θθθθ
θθθθ
Cartesiano Cilíndrico Esférico
( )zyx ,, ( )z,,ϕρ ( )ϕθ,,r
Electricidad y Magnetismo - Grupo
21.1
Curso 2010/2011
Sistemas de Coordenadas 3
J.L. Fernández JambrinaEyM 1a-5
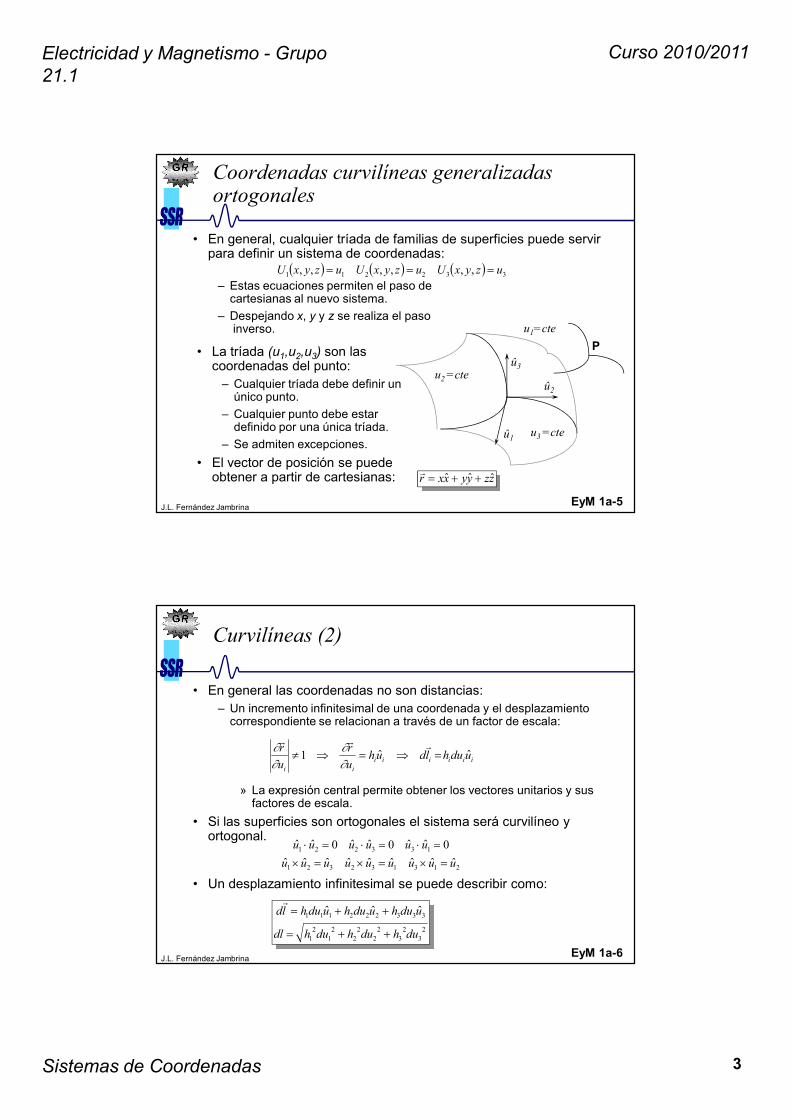
Coordenadas curvilíneas generalizadas ortogonales
• En general, cualquier tríada de familias de superficies puede servir para definir un sistema de coordenadas:
– Estas ecuaciones permiten el paso de cartesianas al nuevo sistema.
– Despejando x, y y z se realiza el pasoinverso.
( ) ( ) ( ) 332211 ,,,,,, uzyxUuzyxUuzyxU ===
u1=cte
u2 =cte
u3 =cte
P
û1
û2
û3
• La tríada (u1,u2,u3) son las coordenadas del punto:
– Cualquier tríada debe definir un único punto.
– Cualquier punto debe estar definido por una única tríada.
– Se admiten excepciones.
• El vector de posición se puede obtener a partir de cartesianas: zzyyxxr ˆˆˆ ++=
r
J.L. Fernández JambrinaEyM 1a-6
Curvilíneas (2)
• En general las coordenadas no son distancias:
– Un incremento infinitesimal de una coordenada y el desplazamiento correspondiente se relacionan a través de un factor de escala:
» La expresión central permite obtener los vectores unitarios y sus factores de escala.
• Si las superficies son ortogonales el sistema será curvilíneo y ortogonal.
• Un desplazamiento infinitesimal se puede describir como:
iiiiii
ii
uduhlduhu
r
u
rˆˆ1 =⇒=⇒≠
rrr
∂∂
∂∂
213132321
133221
ˆˆˆˆˆˆˆˆˆ
0ˆˆ0ˆˆ0ˆˆ
uuuuuuuuu
uuuuuu
=×=×=×
=⋅=⋅=⋅
2
3
2
3
2
2
2
2
2
1
2
1
333222111ˆˆˆ
duhduhduhdl
uduhuduhuduhld
++=
++=r
Electricidad y Magnetismo - Grupo
21.1
Curso 2010/2011
Sistemas de Coordenadas 4
J.L. Fernández JambrinaEyM 1a-7
Curvilíneas (3)
• Propiedad interesante:
– Es evidente que:
es decir, todos los coeficientes de transformación de los vectores unitarios de un sistema de coordenadas ortogonal en otro también ortogonal se repiten en la transformación inversa en posición traspuesta.
– Se puede definir una matriz de rotación [R] que es ortogonal (su inversa es su traspuesta).
[ ] [ ]
[ ] [ ]TRR
RRu
u
u
z
y
x
z
y
x
u
u
u
=
=
⇒
=
−
−
1
3
2
11
3
2
1
ˆ
ˆ
ˆ
ˆ
ˆ
ˆ
ˆ
ˆ
ˆ
ˆ
ˆ
ˆ
( ) ( ) ( )( ) ( ) ( )( ) ( ) ( )
( ) ( ) ( )( ) ( ) ( )( ) ( ) ( ) 332211
332211
332211
3333
2222
1111
ˆˆˆˆˆˆˆˆˆˆ
ˆˆˆˆˆˆˆˆˆˆ
ˆˆˆˆˆˆˆˆˆˆ
ˆˆˆˆˆˆˆˆˆˆ
ˆˆˆˆˆˆˆˆˆˆ
ˆˆˆˆˆˆˆˆˆˆ
uzuuzuuzuz
uyuuyuuyuy
uxuuxuuxux
zzuyyuxxuu
zzuyyuxxuu
zzuyyuxxuu
⋅+⋅+⋅=
⋅+⋅+⋅=
⋅+⋅+⋅=
⋅+⋅+⋅=
⋅+⋅+⋅=
⋅+⋅+⋅=
J.L. Fernández JambrinaEyM 1a-8
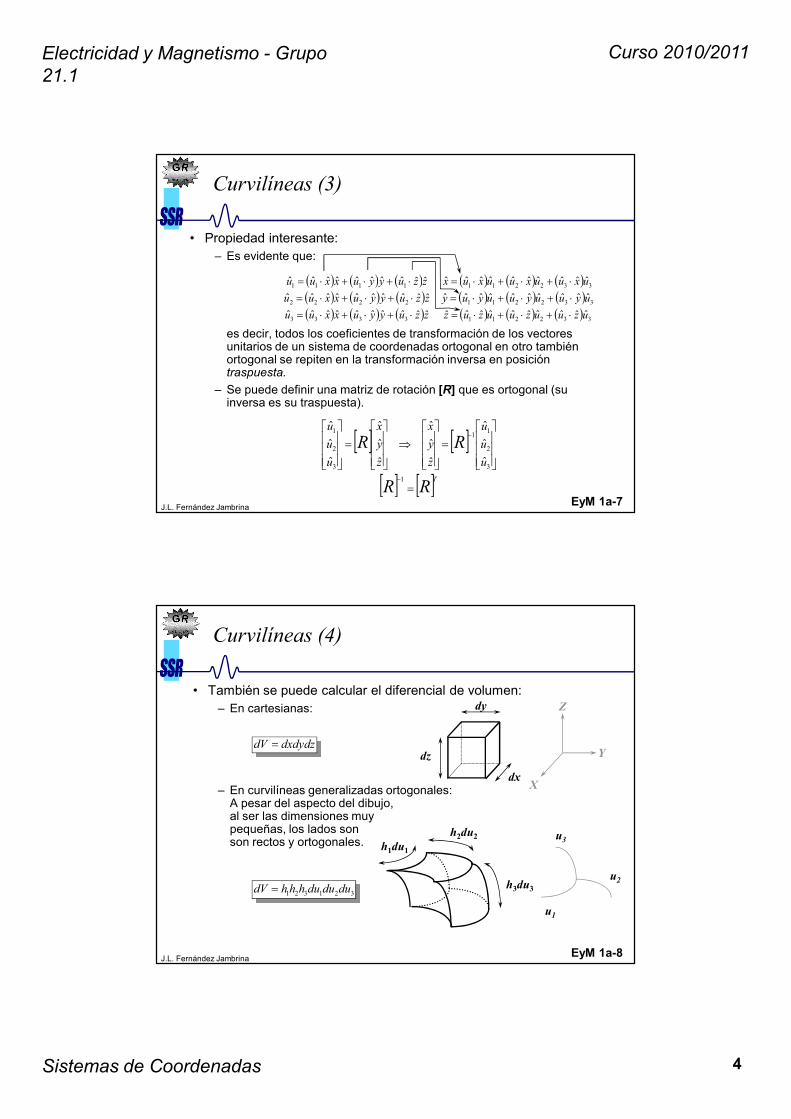
• También se puede calcular el diferencial de volumen:
– En cartesianas:
– En curvilíneas generalizadas ortogonales:A pesar del aspecto del dibujo,al ser las dimensiones muypequeñas, los lados sonson rectos y ortogonales.
Curvilíneas (4)
dy
dz
dxX
Z
YdzdydxdV =
u2
u1
u3h2du2
h3du3
h1du1
321321 dududuhhhdV =
Electricidad y Magnetismo - Grupo
21.1
Curso 2010/2011
Sistemas de Coordenadas 5
J.L. Fernández JambrinaEyM 1a-9
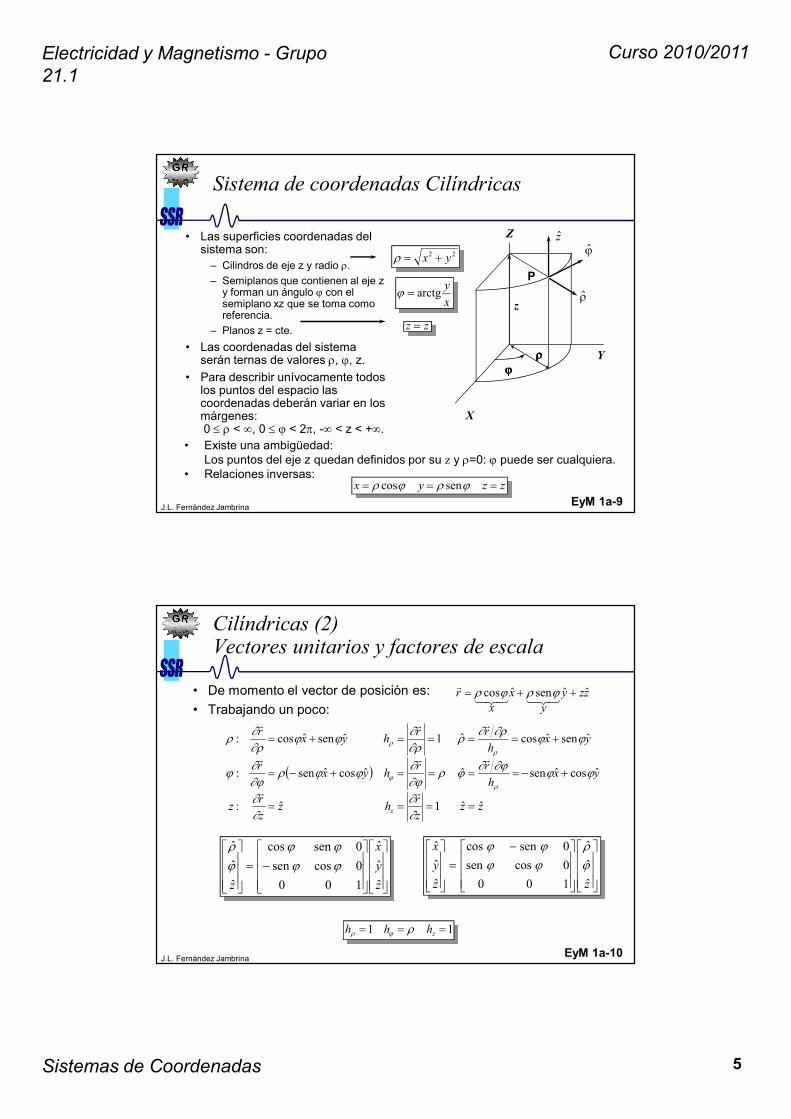
Sistema de coordenadas Cilíndricas
• Las superficies coordenadas del sistema son:
– Cilindros de eje z y radio ρ.
– Semiplanos que contienen al eje z y forman un ángulo ϕ con el semiplano xz que se toma como referencia.
– Planos z = cte.
• Las coordenadas del sistema serán ternas de valores ρ, ϕ, z.
• Para describir unívocamente todos los puntos del espacio las coordenadas deberán variar en los márgenes: 0 ≤ ρ < ∞, 0 ≤ ϕ < 2π, -∞ < z < +∞.
zz =
x
yarctg=ϕ
22 yx +=ρ
• Existe una ambigüedad:
Los puntos del eje z quedan definidos por su z y ρ=0: ϕ puede ser cualquiera.
• Relaciones inversas:
X
P
Y
z
ρρρρϕϕϕϕ
Z $z$ϕ
$ρ
zzyx === ϕρϕρ sencos
J.L. Fernández JambrinaEyM 1a-10
Cilíndricas (2)Vectores unitarios y factores de escala
• De momento el vector de posición es:
• Trabajando un poco:
zzy
y
x
x
r ˆˆsenˆcos ++=321321
rϕρϕρ
( )
zzz
rhz
z
rz
yxh
rrhyx
r
yxh
rrhyx
r
zˆˆ1ˆ:
ˆcosˆsenˆˆcosˆsen:
ˆsenˆcosˆ1ˆsenˆcos:
====
+−====+−=
+====+=
∂∂
∂∂
ϕϕ∂ϕ∂
ϕρ∂ϕ∂
ϕϕρ∂ϕ∂
ϕ
ϕϕ∂ρ∂
ρ∂ρ∂
ϕϕ∂ρ∂
ρ
ρϕ
ρρ
rr
rrr
rrr
−=
z
y
x
z ˆ
ˆ
ˆ
100
0cossen
0sencos
ˆ
ˆ
ˆ
ϕϕϕϕ
ϕρ
−
=
zz
y
x
ˆ
ˆ
ˆ
100
0cossen
0sencos
ˆ
ˆ
ˆ
ϕρ
ϕϕϕϕ
11 === zhhh ρϕρ
Electricidad y Magnetismo - Grupo
21.1
Curso 2010/2011
Sistemas de Coordenadas 6
J.L. Fernández JambrinaEyM 1a-11
Cilíndricas (3)Vector de posición y diferenciales
• Vector de posición:
– La dependencia con ϕ está implícita dentro de :
• Diferencial de longitud (vector):
• Diferencial de longitud (escalar):
• Diferencial de volumen:
( ) ( ) zz
yyxx
r ˆ
ˆ
ˆcosˆsensen
ˆ
ˆsenˆcoscos +++−=44 344 2132144 344 21321
rϕϕρϕϕρϕϕρϕϕρ zzr ˆˆ += ρρ
r
zdzddld ˆˆˆ ++= ϕϕρρρr
2222 dzdddl ++= ϕρρ
dzdddV ϕρρ=
$ρ ( ) ( ) zzzr ˆˆ,, += ϕρρϕρr
J.L. Fernández JambrinaEyM 1a-12
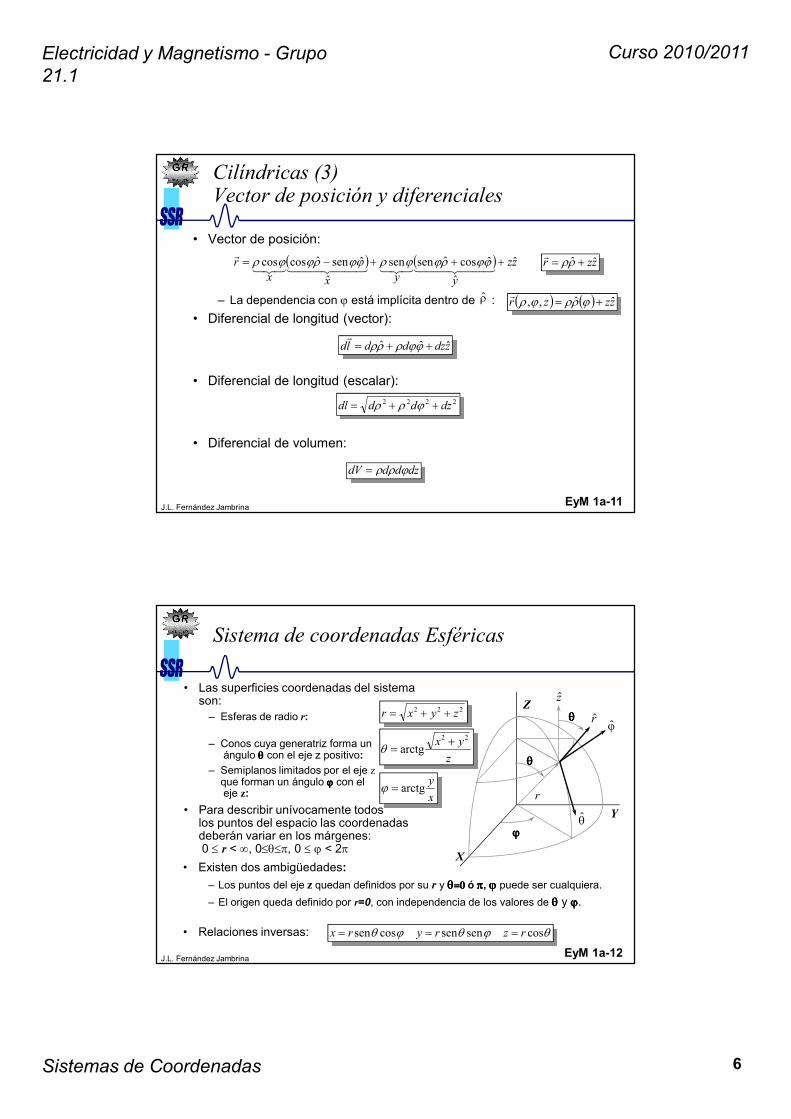
Sistema de coordenadas Esféricas
• Las superficies coordenadas del sistema son:
– Esferas de radio r:
– Conos cuya generatriz forma unángulo θθθθ con el eje z positivo:
– Semiplanos limitados por el eje zque forman un ángulo ϕϕϕϕ con eleje z:
• Para describir unívocamente todoslos puntos del espacio las coordenadas deberán variar en los márgenes: 0 ≤ r < ∞, 0≤θ≤π, 0 ≤ ϕ < 2π
z
yx 22
arctg+
=θ
x
yarctg=ϕ
222 zyxr ++=
• Existen dos ambigüedades:
– Los puntos del eje z quedan definidos por su r y θθθθ=0 =0 =0 =0 ó ππππ, ϕϕϕϕ puede ser cualquiera.
– El origen queda definido por r=0, con independencia de los valores de θθθθ y ϕϕϕϕ.
• Relaciones inversas: θϕθϕθ cossensencossen rzryrx ===
$z
$r$ϕ
$θ
X
Y
Z
r
ϕϕϕϕ
θθθθ
θθθθ
Electricidad y Magnetismo - Grupo
21.1
Curso 2010/2011
Sistemas de Coordenadas 7
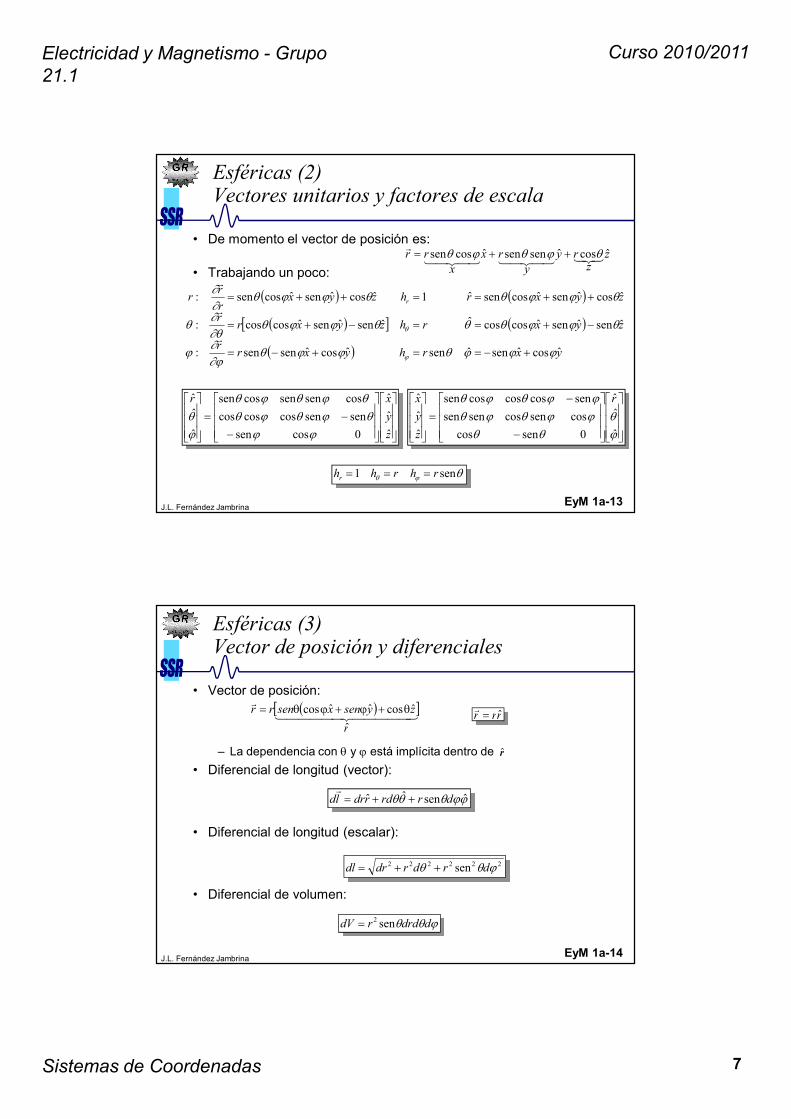
J.L. Fernández JambrinaEyM 1a-13
zz
ry
y
rx
x
rr ˆcosˆsensenˆcossen 3214342143421
rθϕθϕθ ++=
( ) ( )
( )[ ] ( )
( ) yxrhyxrr
zyxrhzyxrr
zyxrhzyxr
rr r
ˆcosˆsenˆsenˆcosˆsensen:
ˆsenˆsenˆcoscosˆˆsenˆsenˆcoscos:
ˆcosˆsenˆcossenˆ1ˆcosˆsenˆcossen:
ϕϕϕθϕϕθ∂ϕ∂
ϕ
θϕϕθθθϕϕθ∂θ∂
θ
θϕϕθθϕϕθ∂∂
ϕ
θ
+−==+−=
−+==−+=
++==++=
r
r
r
−
−=
z
y
xr
ˆ
ˆ
ˆ
0cossen
sensencoscoscos
cossensencossen
ˆ
ˆ
ˆ
ϕϕθϕθϕθ
θϕθϕθ
ϕθ
−
−
=
ϕθ
θθϕϕθϕθϕϕθϕθ
ˆ
ˆ
ˆ
0sencos
cossencossensen
sencoscoscossen
ˆ
ˆ
ˆ r
z
y
x
θϕθ sen1 rhrhhr ===
Esféricas (2)Vectores unitarios y factores de escala
• De momento el vector de posición es:
• Trabajando un poco:
J.L. Fernández JambrinaEyM 1a-14
Esféricas (3)Vector de posición y diferenciales
• Vector de posición:
– La dependencia con θ y ϕ está implícita dentro de
• Diferencial de longitud (vector):
• Diferencial de longitud (escalar):
• Diferencial de volumen:
rrr ˆ=r
ϕϕθθθ ˆsenˆˆ drrdrdrld ++=r
ϕθθ ddrdrdV sen2=
( )[ ]44444 344444 21
r
r
zysenxsenrr
ˆ
ˆcosˆˆcos θ+ϕ+ϕθ=
222222 sen ϕθθ drdrdrdl ++=
$r
Electricidad y Magnetismo - Grupo
21.1
Curso 2010/2011
Sistemas de Coordenadas 8
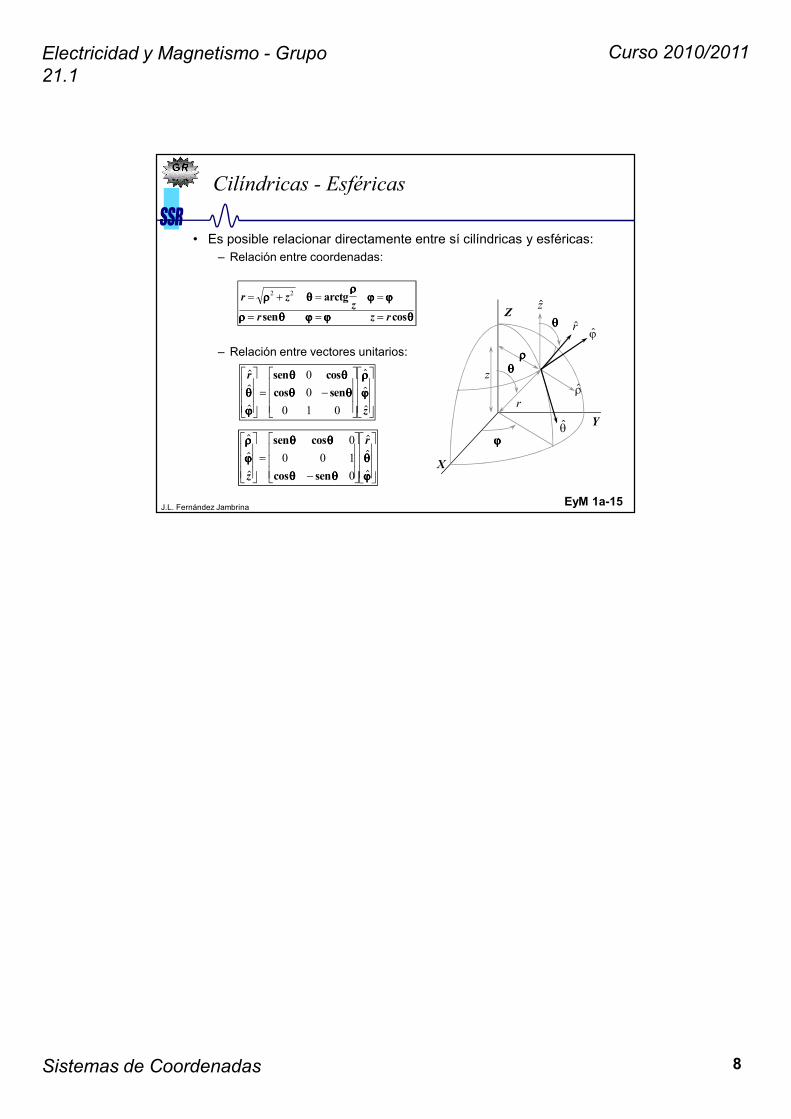
J.L. Fernández JambrinaEyM 1a-15
Cilíndricas - Esféricas
• Es posible relacionar directamente entre sí cilíndricas y esféricas:
– Relación entre coordenadas:
– Relación entre vectores unitarios:
r zz
r z r
= + = =
= = =
ρρρρ θθθθρρρρ
ϕϕϕϕ ϕϕϕϕ
ρρρρ θθθθ ϕϕϕϕ ϕϕϕϕ θθθθ
2 2arctg
sen cos
$
$
$
sen cos
cos sen
$
$
$
r
z
θθθθ
ϕϕϕϕ
θθθθ θθθθ
θθθθ θθθθ
ρρρρ
ϕϕϕϕ
= −
0
0
0 1 0
$
$
$
sen cos
cos sen
$
$
$
ρρρρ
ϕϕϕϕ
θθθθ θθθθ
θθθθ θθθθ
θθθθ
ϕϕϕϕz
r
=
−
0
0 0 1
0
$z
$r
$ρ
$ϕ
$θ
X
Y
Z
r
ϕϕϕϕ
θθθθ
θθθθρρρρ
z

![@chemjozvehkonkurmag.ir/dl/98/05/soalat-faslbafasl-shimi-konkur98... · 2019-07-25 · X W V U d c b U U U X ] \ [ Z Y U U a ` _ ^ D G E T S $ R Q P O $ N I L B $ M L K $ J I H G](https://cdn.vdocuments.co/doc/165x107/5e5bed8c698e5569cb59f91c/-2019-07-25-x-w-v-u-d-c-b-u-u-u-x-z-y-u-u-a-d-g-e-t-s-r-q-p-o-.jpg)





