Recomendación UIT-R M.1849-1 (09/2015)
Aspectos técnicos y operacionales de los radares meteorológicos en tierra
Serie M
Servicios móviles, de radiodeterminación, de aficionados y otros servicios
por satélite conexos
ii Rec. UIT-R M.1849-1
Prólogo
El Sector de Radiocomunicaciones tiene como cometido garantizar la utilización racional, equitativa, eficaz y económica
del espectro de frecuencias radioeléctricas por todos los servicios de radiocomunicaciones, incluidos los servicios por
satélite, y realizar, sin limitación de gamas de frecuencias, estudios que sirvan de base para la adopción de las
Recomendaciones UIT-R.
Las Conferencias Mundiales y Regionales de Radiocomunicaciones y las Asambleas de Radiocomunicaciones, con la
colaboración de las Comisiones de Estudio, cumplen las funciones reglamentarias y políticas del Sector de
Radiocomunicaciones.
Política sobre Derechos de Propiedad Intelectual (IPR)
La política del UIT-R sobre Derechos de Propiedad Intelectual se describe en la Política Común de Patentes
UIT-T/UIT-R/ISO/CEI a la que se hace referencia en el Anexo 1 a la Resolución UIT-R 1. Los formularios que deben
utilizarse en la declaración sobre patentes y utilización de patentes por los titulares de las mismas figuran en la dirección
web http://www.itu.int/ITU-R/go/patents/es, donde también aparecen las Directrices para la implementación de la Política
Común de Patentes UIT-T/UIT-R/ISO/CEI y la base de datos sobre información de patentes del UIT-R sobre este asunto.
Series de las Recomendaciones UIT-R
(También disponible en línea en http://www.itu.int/publ/R-REC/es)
Series Título
BO Distribución por satélite
BR Registro para producción, archivo y reproducción; películas en televisión
BS Servicio de radiodifusión (sonora)
BT Servicio de radiodifusión (televisión)
F Servicio fijo
M Servicios móviles, de radiodeterminación, de aficionados y otros servicios por satélite conexos
P Propagación de las ondas radioeléctricas
RA Radioastronomía
RS Sistemas de detección a distancia
S Servicio fijo por satélite
SA Aplicaciones espaciales y meteorología
SF Compartición de frecuencias y coordinación entre los sistemas del servicio fijo por satélite y del
servicio fijo
SM Gestión del espectro
SNG Periodismo electrónico por satélite
TF Emisiones de frecuencias patrón y señales horarias
V Vocabulario y cuestiones afines
Nota: Esta Recomendación UIT-R fue aprobada en inglés conforme al procedimiento detallado en la
Resolución UIT-R 1.
Publicación electrónica
Ginebra, 2017
UIT 2017
Reservados todos los derechos. Ninguna parte de esta publicación puede reproducirse por ningún procedimiento sin previa autorización
escrita por parte de la UIT.
Rec. UIT-R M.1849-1 1
RECOMENDACIÓN UIT-R M.1849-1*
Aspectos técnicos y operacionales de los radares meteorológicos en tierra
(2009-2015)
Cometido
Esta Recomendación aborda las características técnicas y de funcionamiento más importantes de los radares
meteorológicos, describe los productos conexos proporcionados, destaca sus principales especificidades,
discute los efectos de la interferencia sobre los radares meteorológicos y desarrolla los correspondientes
criterios de protección contra la interferencia. El texto se limita a los radares meteorológicos en tierra y no
incluye los radares de perfil del viento, que también se utilizan a efectos meteorológicos y que quedan cubiertos
en otra Recomendación del UIT-R.
Palabras clave
Radar, meteorológico, protección
Abreviaturas/Glosario
CASA Centro para la teledetección adaptativa conjunta de la atmósfera (Centre for
collaborative adaptive sensing of the atmosphere)
GC Ocupación del suelo (Ground clutter)
Pd Probabilidad de detección (Probability of detection)
PRF Frecuencia de repetición de impulsos (Pulse repetition frequency)
PRT Tiempo de repetición de impulsos (Pulse repetition time)
SAR Radar v de apertura sintética (Synthetic aperture radar)
VAD Presentación de acimut vertical (Vertical azimuth display)
VCP Diagrama de cobertura de volumen (Volume coverage pattern)
WTC Eco de turbinas eólicas (Wind turbine clutter)
La Asamblea de Radiocomunicaciones de la UIT,
considerando
a) que las características del radar relativas a la antena, a la propagación de la señal, a la
detección del blanco y a la gran anchura de banda necesaria para realizar sus funciones son óptimas
en ciertas bandas de frecuencias;
b) que se necesitan unas determinadas características técnicas y de funcionamiento
representativas de los radares meteorológicos para determinar la posibilidad de introducir nuevos
tipos de sistemas en bandas de frecuencias en los que funcionan los radares meteorológicos;
c) que se necesitan procedimientos y metodologías para analizar la compatibilidad entre los
radares meteorológicos y los otros servicios a que está atribuida la banda de frecuencias;
d) que las características técnicas y de funcionamiento de los radares meteorológicos son
específicas comparadas con otros tipos de radar y justifican una Recomendación UIT-R separada;
* Esta Recomendación debe señalarse a la atención de la Organización Meteorológica Mundial (OMM).
2 Rec. UIT-R M.1849-1
e) que los radares meteorológicos funcionan principalmente en las bandas de frecuencias
2 700-2 900 MHz, 5 250-5 725 MHz y 9 300-9 500 MHz;
f) que los radares meteorológicos son estaciones de observación fundamentales utilizadas para
realizar predicciones meteorológicas y supervisar el medio ambiente;
g) que los radares meteorológicos desempeñan un papel fundamental a la hora de proporcionar
avisos de condiciones climatológicas severas inminentes, tales como inundaciones, ciclones, tifones
y huracanes, que pueden poner en peligro a la población y dañar infraestructuras económicas
estratégicas;
h) que la aplicación de criterios de protección exige considerar la inclusión del carácter
estadístico de los criterios y otros elementos de la metodología para llevar a cabo los estudios de
compatibilidad (por ejemplo, sistema de exploración de la antena y pérdidas en el trayecto de
propagación). En futuras revisiones de esta Recomendación pueden incluirse nuevos desarrollos de
estas consideraciones estadísticas, según el caso,
reconociendo
a) que el número 5.423 del Reglamento de Radiocomunicaciones (RR) señala que los radares
meteorológicos instalados en tierra en la banda de frecuencias 2 700-2 900 MHz están autorizados a
funcionar sobre una base de igualdad con las estaciones del servicio de radionavegación aeronáutica;
b) que el número 5.452 del RR señala que los radares meteorológicos instalados en tierra en la
banda de frecuencias 5 600-5 650 MHz están autorizados a funcionar sobre una base de igualdad con
las estaciones del servicio de radionavegación marítima;
c) que el número 5.475B del RR señala que los radares meteorológicos instalados en tierra en
la banda de frecuencias 9 300-9 500 MHz tienen prioridad sobre cualquier otro uso de
radiolocalización,
observando
a) que la Recomendación UIT-R M.1461 también se utiliza como orientación para analizar la
compatibilidad entre los radares y los otros servicios a que está atribuida la banda de frecuencias;
b) que los criterios de protección del radar dependen de los tipos específicos de señales
interferentes, tales como las descritas en el Anexo 1,
recomienda
1 que al realizar estudios de compartición se consideren los aspectos técnicos y operacionales
de los radares meteorológicos descritos en el Anexo 1 y las características que figuran en el Anexo 2;
2 que los criterios de protección combinados para los radares meteorológicos en tierra sean una
I/N de –10 dB.
Anexo 1
Aspectos técnicos y operacionales de los radares meteorológicos en tierra
1 Introducción
Los radares meteorológicos en tierra se utilizan para la meteorología operacional y la predicción del
tiempo, la investigación atmosférica y la navegación marítima y aeronáutica y desempeñan un papel
fundamental en los procesos de alerta de fenómenos meteorológicos e hidrológicos inmediatos. Estos
Rec. UIT-R M.1849-1 3
radares también funcionan de manera continua las 24 horas al día. Las redes de radares
meteorológicos representan la última línea de detección de eventos climáticos que pueden provocar
pérdidas de vida y propiedad a causa de inundaciones repentinas o intensas tormentas.
La teoría de funcionamiento y los productos generados por los radares meteorológicos son muy
distintos a los de otros radares. Es importante entender estas diferencias a la hora de evaluar la
compatibilidad entre los radares meteorológicos y otros servicios a los que está atribuida la banda de
frecuencias. Las características técnicas y operacionales de los radares meteorológicos dan lugar a
distintos efectos relativos a la interferencia admisible en comparación con otros sistemas de radar.
2 Resumen
Los radares meteorológicos se utilizan para determinar las condiciones de la atmósfera a fin de
efectuar previsiones meteorológicas rutinarias, detectar condiciones climatológicas extremas,
detectar vientos y precipitaciones, estimar las precipitaciones, detectar condiciones de congelamiento
en aeronaves y prevenir contra situaciones climatológicas extremas en la navegación.
Los radares meteorológicos transmiten impulsos con polarización horizontal que miden la dimensión
horizontal de una nube (agua de la nube y hielo de la nube) y la precipitación (nieve, granizo y
partículas de hielo y lluvia).
Los radares polarimétricos, también llamados radares de doble polarización, transmiten impulsos con
polarización tanto horizontal como vertical. Estos radares proporcionan una mejora significativa en
la estimación de la intensidad de lluvia, la clasificación de las precipitaciones, la calidad de los datos
y la detección de peligros meteorológicos con respecto a los sistemas no polarimétricos.
Los radares meteorológicos no constituyen un servicio de radiocomunicaciones individual en el
UIT-R sino que forman parte del servicio de radiolocalización y/o radionavegación en el RR. La
determinación de si se refiere a radiolocalización y/o radionavegación depende de la forma en que se
utilice el radar correspondiente. Un radar meteorológico en tierra utilizado para investigación de la
atmósfera o previsiones meteorológicas funcionará en el servicio de radiolocalización. Un radar
meteorológico a bordo de aeronaves comerciales funcionará bajo el servicio de radionavegación. Un
radar meteorológico en tierra también puede explotarse en el servicio de radionavegación si, por
ejemplo, se emplea por el control de tráfico aéreo para encaminar las aeronaves en caso de
condiciones climatológicas adversas. En consecuencia, los radares meteorológicos pueden funcionar
en una gran variedad de bandas de frecuencias atribuidas a los servicios de radiolocalización y
radionavegación siempre que su utilización sea coherente con la definición del servicio de
radiocomunicaciones. El RR contiene tres referencias específicas a los radares meteorológicos en el
Cuadro de atribución de bandas de frecuencias. Las tres referencias figuran en notas asociadas a las
bandas de frecuencias 2 700-2 900 MHz (número 5.423 del RR), 5 600-5 650 MHz (número 5.452
del RR) y 9 300-9 500 MHz (número 5.475 del RR).
2.1 Ecuación del radar para un solo blanco1
Los radares meteorológicos no realizan seguimientos de blancos puntuales. No obstante, la ecuación
del radar puede adaptarse para su utilización por estos radares meteorológicos. La cantidad de
potencia devuelta tras una exploración de volumen llevada a cabo por un radar meteorológico
determina si los fenómenos climatológicos serán detectables. La ecuación de alcance del radar
1 La información sobre estas ecuaciones y la obtención de las mismas aparece en YAU, M. K. y ROGERS,
R. R. [1 de enero de 1989] A Short Course in Cloud Physics, Capítulo 11.

4 Rec. UIT-R M.1849-1
expresa la relación entre la potencia devuelta por un blanco y las características del blanco en
particular y el radar de transmisión.
El blanco puntual típico tendrá las siguientes variables de la ecuación del radar:
PR: potencia recibida por el radar
PT: potencia de cresta transmitida por el radar
AT: área del blanco
R: distancia del banco al radar
G: ganancia de la antena de transmisión.
Estas variables se combinan para establecer la ecuación general del radar para un blanco puntual:
TT
R Ar
GPP
43
22
4
La anterior ecuación supone radiación isótropa y dispersión isótropa. Sin embargo, la mayoría de los
blancos no dispersan la radiación incidente de manera isótropa y, por consiguiente, es necesario
contar con la sección transversal de la retrodispersión, σ, del blanco:
43
22
4 r
GPP T
R
2.2 Ecuación del radar meteorológico
Una vez obtenida la ecuación para un solo blanco puntual, el siguiente paso es editar la ecuación
anterior para incluir los blancos de los radares meteorológicos. Las gotas de lluvia, los copos de nieve
y las partículas de nube son ejemplos de una importante clase de blancos de radar, conocidos como
blancos distribuidos.
Los impulsos de radar incidentes crean el volumen de resolución transmitido del radar meteorológico
iluminando simultáneamente el volumen que contiene las partículas de precipitación. La potencia
media recibida de los blancos de precipitación da lugar a la siguiente ecuación, donde Σσ es la suma
de las secciones transversales de retrodispersión de todas las partículas que se encuentran en el interior
del volumen de resolución.
n
TR
r
GPP
43
22
4
Como el volumen del haz del radar continúa aumentando al incrementarse la distancia, el haz del
radar incluye cada vez más blancos. El volumen definido del haz del radar es equivalente a:
22
2hr
V
donde h = cτ es la longitud del impulso y θ es la anchura de haz de la antena. Combinando la ecuación
general del radar con el volumen del haz del radar, se obtiene como sigue la potencia media devuelta:
224
2
43
22hr
r
GPP T
R

Rec. UIT-R M.1849-1 5
siendo η la reflectividad del radar por unidad de volumen. Sin embargo, en la anterior ecuación se ha
supuesto que la ganancia de antena es uniforme en sus límites de 3 dB, lo cual no es cierto.
Suponiendo un diagrama de haz Gaussiano, el volumen efectivo se define de forma más adecuada
mediante el diagrama del haz del radar en vez de en el interior de los límites de 3 dB. Utilizando un
diagrama de haz Gaussiano, la potencia media devuelta pasa a ser:
22
222
)2(1n0241 r
hGPP T
R
Considerando una sola partícula esférica de pequeño tamaño comparada con la longitud de onda del
radar, puede representarse la sección transversal de retrodispersión mediante la fórmula
224/64 orK , siendo K el índice de refracción complejo y ro el radio de la esfera. Las partículas
de precipitación que son lo suficientemente pequeñas como para poder aplicar la ley de dispersión de
Rayleigh se conocen con el nombre de dispersores de Rayleigh. Las gotas de lluvia y los copos de
nieve se consideran dispersores de Rayleigh medidos con aproximación precisa cuando la longitud
de onda del radar se encuentra entre 5 cm y 10 cm, que es la longitud de onda de funcionamiento
común de la mayoría de los radares meteorológicos. Para una longitud de onda de 3 cm, puede seguir
siendo útil la dispersión aproximada, pero es menos precisa.
Para un grupo de gotas esféricas, pequeñas en comparación con la longitud de onda del radar, la
potencia media devuelta pasa a ser:
n
oT
R rKr
GPP 62
4
5
43
22
644
donde Σ es un sumatorio del radio esférico para cada uno de los dispersores de precipitación.
Haciendo (D/2)6 igual 6or , la potencia media devuelta puede reflejarse en términos de diámetros de
gota para dispersores esféricos:
n
TR DK
r
GPP 62
2
5
43
2
4
Por consiguiente, para dispersores esféricos considerablemente más pequeños que la longitud de onda
del radar, la potencia media recibida por el radar meteorológico se determina mediante las
características del radar, el alcance, el índice de refracción del dispersor (|K|2) y el diámetro del
dispersor (D6).
Por último, el factor de reflectividad del blanco, Z, puede expresarse como Z = ΣV D6 = ∫ N(D)D6dD,
siendo ΣV el sumatorio a lo largo de una unidad de volumen y N(D)D6 el número de dispersores por
unidad de volumen. La forma final de la ecuación de radar para radares meteorológicos, incluidas las
correcciones introducidas previamente para representar un diagrama de haz Gaussiano, pasa a ser:
2
2
2
223
)2(1n0241 r
ZK
GPcP T
R
3 Principios generales de los radares meteorológicos
Los radares meteorológicos llevan a cabo fundamentalmente dos tipos de mediciones:
– mediciones de precipitación;
6 Rec. UIT-R M.1849-1
– mediciones de viento.
Estas mediciones se realizan en una rejilla de píxeles que permiten una presentación cartográfica de
los eventos meteorológicos antes indicados.
3.1 Ejemplo de funcionamiento de radar meteorológico en la banda de
frecuencias 2,7-2,9 GHz
El radar 1 del Anexo 2, Cuadro 1, es un sistema representativo de radares meteorológicos que
funcionan en frecuencias en torno a 2,8 GHz. La curva de 0 dBz para este radar intersecta el nivel de
ruido del receptor (–113 dBm)) a una distancia de 200 km.
3.1.1 Estimación de la precipitación
Los radares representativos que funcionan cerca de 2,8 GHz utilizan una variedad de fórmulas
reflectividad-alcance (Z-R) y reflectividad-intensidad de lluvia (Z-S) para estimar la precipitación.
Dependiendo del algoritmo específico, puede variar el efecto de la interferencia sobre el alcance
operacional.
Ejemplo de funcionamiento de radar meteorológico en la banda de frecuencias 5,6-5,65 GHz
Normalmente, la cobertura del radar se extiende más allá de los 200 km, presentando una resolución
de píxeles de 1 km × 1 km. En algunos casos, se presenta una rejilla más detallada de 250 m × 250 m
píxeles.
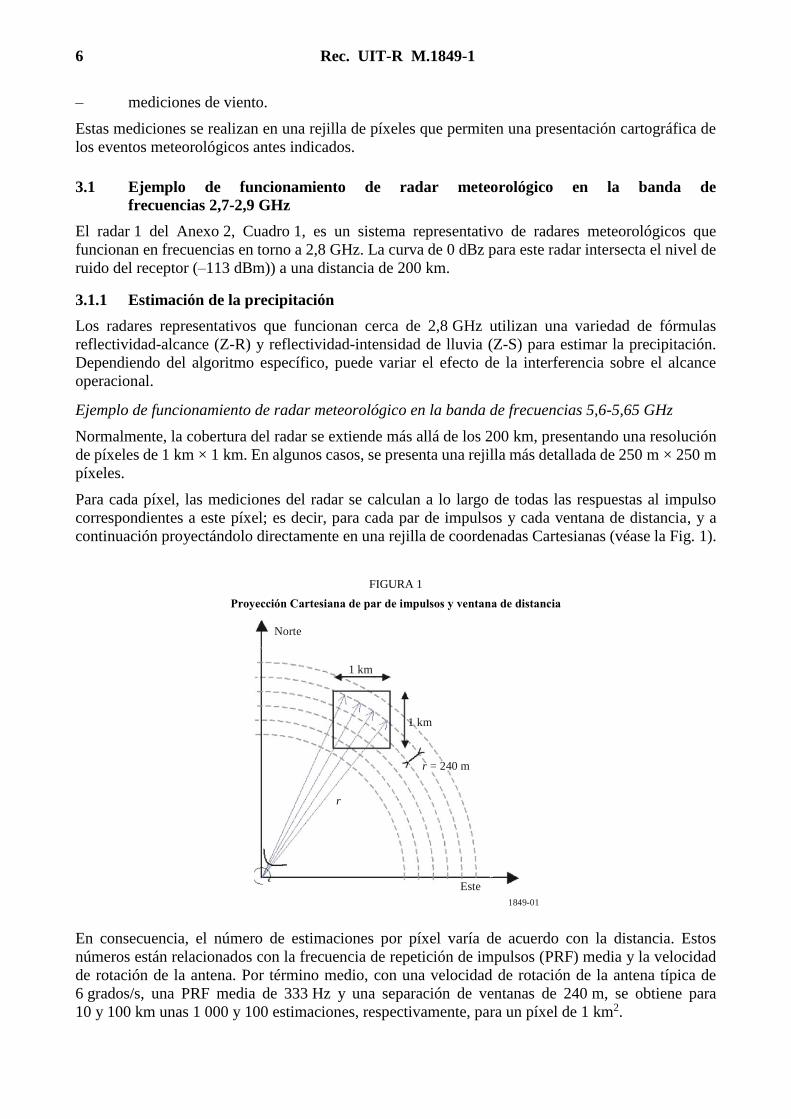
Para cada píxel, las mediciones del radar se calculan a lo largo de todas las respuestas al impulso
correspondientes a este píxel; es decir, para cada par de impulsos y cada ventana de distancia, y a
continuación proyectándolo directamente en una rejilla de coordenadas Cartesianas (véase la Fig. 1).
FIGURA 1
Proyección Cartesiana de par de impulsos y ventana de distancia
1849-01
Norte
1 km
1 km
Este
r
r = 240 m
En consecuencia, el número de estimaciones por píxel varía de acuerdo con la distancia. Estos
números están relacionados con la frecuencia de repetición de impulsos (PRF) media y la velocidad
de rotación de la antena. Por término medio, con una velocidad de rotación de la antena típica de
6 grados/s, una PRF media de 333 Hz y una separación de ventanas de 240 m, se obtiene para
10 y 100 km unas 1 000 y 100 estimaciones, respectivamente, para un píxel de 1 km2.
Rec. UIT-R M.1849-1 7
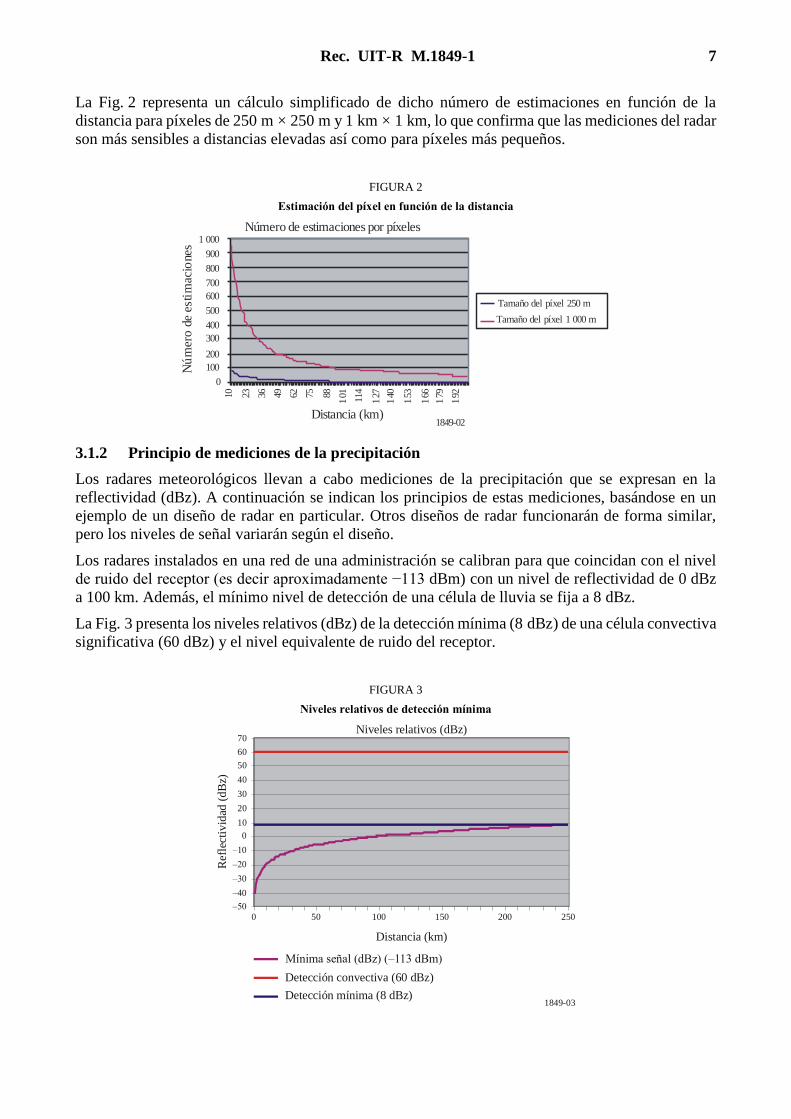
La Fig. 2 representa un cálculo simplificado de dicho número de estimaciones en función de la
distancia para píxeles de 250 m × 250 m y 1 km × 1 km, lo que confirma que las mediciones del radar
son más sensibles a distancias elevadas así como para píxeles más pequeños.
FIGURA 2
Estimación del píxel en función de la distancia
1849-02
Número de estimaciones por píxeles
100
200
300
400
500
600
700
800
900
Distancia (km)
Tamaño del píxel 250 m
Tamaño del píxel 1 000 m
0
1 000
Nú
mer
o de
est
imac
ione
s
10 23 36 49 62 75 88
101 114
127
140
153
166
179
192
3.1.2 Principio de mediciones de la precipitación
Los radares meteorológicos llevan a cabo mediciones de la precipitación que se expresan en la
reflectividad (dBz). A continuación se indican los principios de estas mediciones, basándose en un
ejemplo de un diseño de radar en particular. Otros diseños de radar funcionarán de forma similar,
pero los niveles de señal variarán según el diseño.
Los radares instalados en una red de una administración se calibran para que coincidan con el nivel
de ruido del receptor (es decir aproximadamente −113 dBm) con un nivel de reflectividad de 0 dBz
a 100 km. Además, el mínimo nivel de detección de una célula de lluvia se fija a 8 dBz.
La Fig. 3 presenta los niveles relativos (dBz) de la detección mínima (8 dBz) de una célula convectiva
significativa (60 dBz) y el nivel equivalente de ruido del receptor.
FIGURA 3
Niveles relativos de detección mínima
1849-03
Niveles relativos (dBz)
–20
–10
0
10
20
30
40
50
60
Distancia (km)
–50
70
Ref
lect
ivid
ad (
dB
z)
200
–30
–40
50 1500 250100
Mínima señal (dBz) (–113 dBm)
Detección mínima (8 dBz)
Detección convectiva (60 dBz)
8 Rec. UIT-R M.1849-1
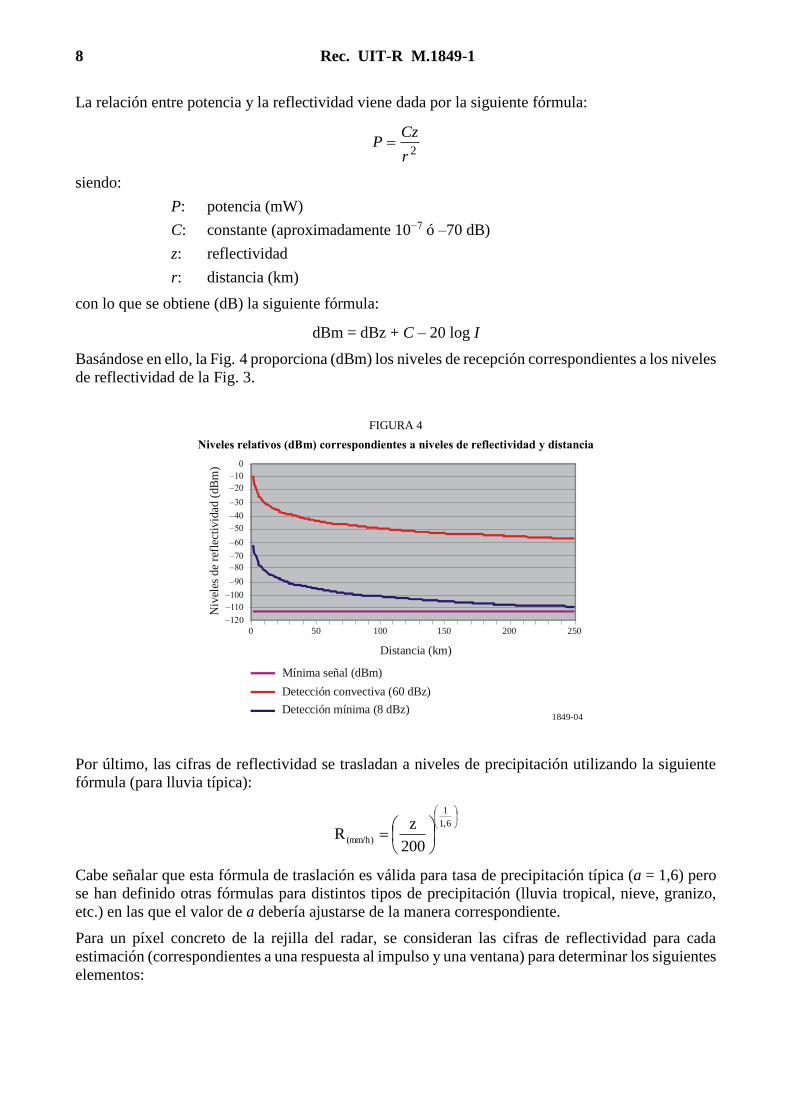
La relación entre potencia y la reflectividad viene dada por la siguiente fórmula:
2r
CzP
siendo:
P: potencia (mW)
C: constante (aproximadamente 10−7 ó –70 dB)
z: reflectividad
r: distancia (km)
con lo que se obtiene (dB) la siguiente fórmula:
dBm = dBz + C – 20 log I
Basándose en ello, la Fig. 4 proporciona (dBm) los niveles de recepción correspondientes a los niveles
de reflectividad de la Fig. 3.
FIGURA 4
Niveles relativos (dBm) correspondientes a niveles de reflectividad y distancia
1849-04
Distancia (km)
Niv
eles
de
refl
ecti
vid
ad (
dB
m)
Mínima señal (dBm)
Detección mínima (8 dBz)
Detección convectiva (60 dBz)
20050 1500 250100
–90
–80
–120
0
–100
–110
–60
–50
–70
–30
–20
–40
–10
Por último, las cifras de reflectividad se trasladan a niveles de precipitación utilizando la siguiente
fórmula (para lluvia típica):
6,1
1
(mm/h)200
zR
Cabe señalar que esta fórmula de traslación es válida para tasa de precipitación típica (a = 1,6) pero
se han definido otras fórmulas para distintos tipos de precipitación (lluvia tropical, nieve, granizo,
etc.) en las que el valor de a debería ajustarse de la manera correspondiente.
Para un píxel concreto de la rejilla del radar, se consideran las cifras de reflectividad para cada
estimación (correspondientes a una respuesta al impulso y una ventana) para determinar los siguientes
elementos:
Rec. UIT-R M.1849-1 9
– la media (dBz) a lo largo de todas las estimaciones;
– la desviación típica.
Las respuestas de la célula de lluvia se caracterizan por una cierta variabilidad que se utiliza para
discriminarlas del eco parásito, utilizando el valor de desviación típica.
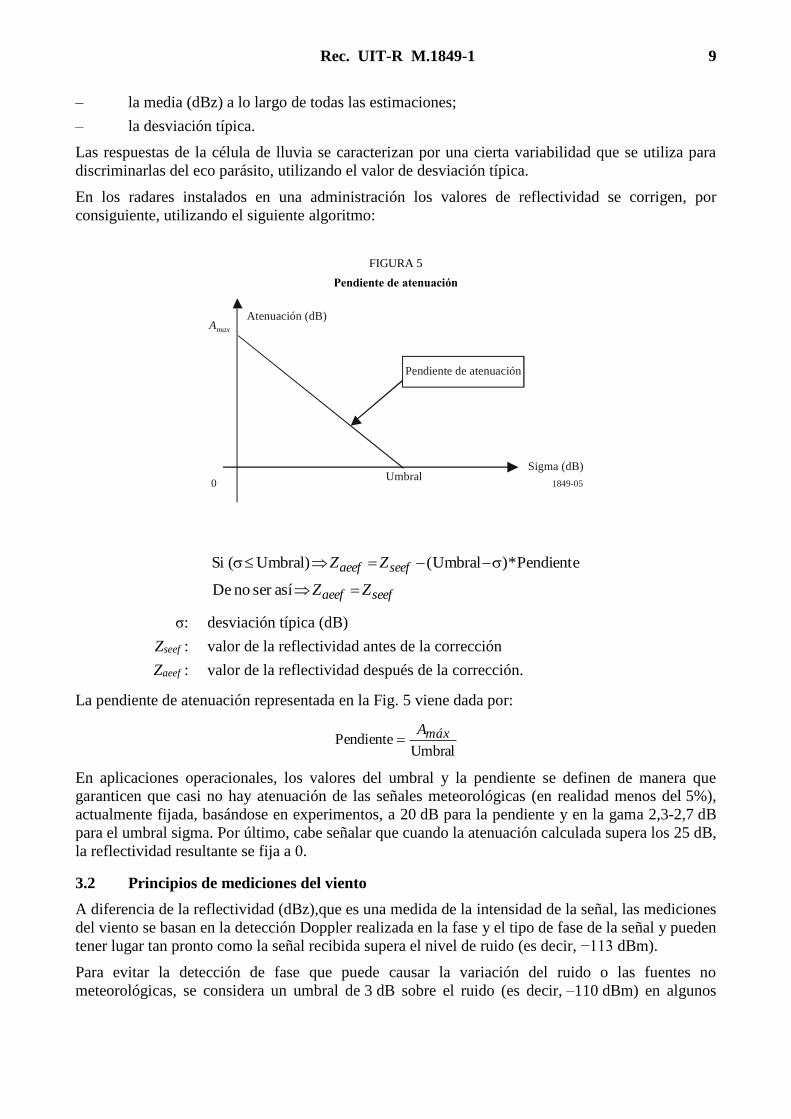
En los radares instalados en una administración los valores de reflectividad se corrigen, por
consiguiente, utilizando el siguiente algoritmo:
FIGURA 5
Pendiente de atenuación
1849-05
0
Pendiente de atenuación
Umbral
Atenuación (dB)
Sigma (dB)
Amax
seefaeef
seefaeef
ZZ
ZZ
asíser no De
Pendiente*)Umbral()Umbral( Si
σ: desviación típica (dB)
Zseef : valor de la reflectividad antes de la corrección
Zaeef : valor de la reflectividad después de la corrección.
La pendiente de atenuación representada en la Fig. 5 viene dada por:
Umbral
Pendiente máxA
En aplicaciones operacionales, los valores del umbral y la pendiente se definen de manera que
garanticen que casi no hay atenuación de las señales meteorológicas (en realidad menos del 5%),
actualmente fijada, basándose en experimentos, a 20 dB para la pendiente y en la gama 2,3-2,7 dB
para el umbral sigma. Por último, cabe señalar que cuando la atenuación calculada supera los 25 dB,
la reflectividad resultante se fija a 0.
3.2 Principios de mediciones del viento
A diferencia de la reflectividad (dBz),que es una medida de la intensidad de la señal, las mediciones
del viento se basan en la detección Doppler realizada en la fase y el tipo de fase de la señal y pueden
tener lugar tan pronto como la señal recibida supera el nivel de ruido (es decir, −113 dBm).
Para evitar la detección de fase que puede causar la variación del ruido o las fuentes no
meteorológicas, se considera un umbral de 3 dB sobre el ruido (es decir, –110 dBm) en algunos
10 Rec. UIT-R M.1849-1
radares, mientras que otros radares meteorológicos son capaces de procesar niveles de S/N hasta
valores comprendidos entre –3 dB y –6 dB.
Cabe señalar igualmente que dichas mediciones se llevan a cabo en condiciones de lluvia y de cielo
despejado. En el primer caso, los niveles de recepción son similares a los descritos por la Fig. 2
mientras que en condiciones de cielo despejado, puede observarse fácilmente que los niveles de
reflectividad correspondientes son muy bajos y no permitirían realizar mediciones de viento a
distancias superiores a unos 30 a 50 km.
Para cada estimación (correspondiente a una respuesta al impulso y una ventana), las cifras de fase y
reflectividad se consideran como un vector y, para un píxel determinado de la rejilla del radar, el
vector de viento resultante se obtiene como la combinación de todos los vectores sencillos.
Ello significa que la fase de cada estimación se equilibra con el correspondiente módulo de
reflectividad y que una sola estimación que presenta una elevada reflectividad (es decir el vector
módulo) puede controlar la medición del píxel.
Las mediciones del viento se utilizan para obtener dos conjuntos distintos de productos del viento:
– la velocidad radial en la rejilla del radar, similar a la pantalla de precipitación;
– la presentación de acimut vertical (VAD), en la cual el conjunto de los datos (para todas las
altitudes) en un radio de unos pocos kilómetros o unas pocas decenas de kilómetros se integra
para calcular el perfil del viento en dirección vertical al radar.
3.3 Ejemplo de funcionamiento de radar meteorológico en partes de la gama de frecuencias
8,5-10,5 GHz
Los radares meteorológicos que funcionan en partes de la gama de frecuencias 8,5-10,5 GHz (es
decir, en longitudes de onda de 2,5 cm a 4 cm) pueden detectar partículas más pequeñas. Estos radares
meteorológicos generalmente se emplean para estudios sobre desarrollo de nubes debido a su
capacidad para detectar partículas de agua muy pequeñas y precipitación muy ligera. Tienen un
alcance típico de 30 km para blancos de precipitación de 10 dBz y funcionan con unos niveles de
potencia relativamente baja (por ejemplo, 12 kW).
Las redes de radares que funcionan en partes de la gama de frecuencias 8,5-10,5 GHz también se
están investigando como un medio para complementar los actuales sistemas de radares
meteorológicos detectando señales precursoras de fenómenos meteorológicos severos.
«Un inconveniente de utilizar radares que funcionan en partes de la gama de frecuencias 8-12 GHz
para detección de fenómenos meteorológicos es el volumen de atenuación de señal que puede
experimentarse debido a la lluvia. Esta atenuación es especialmente severa en caso de lluvia moderada
a intensa, donde el factor de reflectividad es mayor de 40 dBz. Mientras el radar pueda obtener una
señal detectable a pesar de la atenuación, pueden realizarse mediciones de velocidad y pueden
aplicarse estimaciones de la tasa de atenuación para corregir los valores de reflectividad. Las
mediciones polarimétricas dobles pueden ser especialmente eficaces para corregir la atenuación. (Por
ejemplo, Lim y Chandrasekar, 2005).»
Una vez que la señal atenuada cae por debajo del valor de sensibilidad del radar, no pueden obtenerse
mediciones de la velocidad. Cuando no se dispone de estas mediciones queda muy comprometida la
capacidad del radar para detectar condiciones meteorológicas peligrosas.
Será preciso realizar estudios analíticos adicionales y mediciones de campo para cuantificar las
repercusiones de la interferencia localizada sobre estos sistemas y determinar la magnitud de los
niveles de I/N requeridos para proteger estos sistemas.
Rec. UIT-R M.1849-1 11
4 Comparación de radares meteorológicos con otros radares
La mayoría de los radares se utilizan para la detección y seguimiento de los bancos puntuales que se
encuentran dentro del alcance de detección del radar. En comparación, los radares meteorológicos no
se concentran en la detección de blancos discretos. Miden toda la atmósfera en torno al radar. Se
procesan los retornos procedentes de cada intervalo a lo largo de cada radial para proporcionar una
medición completa de la atmósfera, lo que normalmente se denomina exploración de volumen. Por
esta razón, generalmente no se emplea el término probabilidad de detección (pd) para caracterizar los
radares meteorológicos. De hecho, una ausencia de retorno de señal también constituye información
para el usuario de datos pues indica que existen unas condiciones atmosféricas despejadas.
Como señala el término exploración de volumen, el radar realiza una exploración del volumen
atmosférico para crear una representación completa de las condiciones atmosféricas. Si bien muchos
tipos de radares realizan un seguimiento de blancos discretos para obtener información (velocidad,
sección trasversal del radar, etc.) a partir de las características de los impulsos de retorno, son estas
características las que utiliza un radar meteorológico para proporcionar casi toda la información. A
menos que el cielo esté absolutamente despejado, los radares meteorológicos reciben y procesan
retornos de casi todos los intervalos a lo largo de un radial.
Los criterios para la evaluación operacional de un sistema de radar meteorológico típico incluyen:
a) aspectos técnicos;
b) características de los avisos, y
c) calidad y fiabilidad de los productos derivados.
Los aspectos técnicos incluyen factores tales como cobertura a altitudes específicas, resolución
espacial y temporal, sensibilidad, cobertura Doppler y disponibilidad del radar. Las características del
aviso pueden considerarse como una medida objetiva pero, de hecho, están directamente vinculadas
con la capacidad de detección. La calidad y fiabilidad de los productos derivados fundamentales
(reflectividad, velocidad radial media y anchura espectral) tienen influencia sobre la capacidad de
proporcionar avisos de condiciones meteorológicas peligrosas y previsiones meteorológicas
oportunas y precisas.
4.1 Especificidades con respecto a los criterios de protección
En el caso de radares que realizan seguimientos de blancos discretos, se supone aceptable un valor de
I/N = −6 dB, lo que da lugar a una reducción del 6% del alcance de detección. De hecho, la señal
recibida por estos radares es proporcional a 1/r4 (siendo r la distancia), y por consiguiente la distancia
en el espacio libre obtenible es proporcional a la 4ª raíz de la relación S/N resultante. Una I/N = −6 dB
corresponde a un incremento de 1 dB en la potencia de ruido y un factor de 1,26 en potencia. Por lo
tanto, el alcance en el espacio libre resultante se reduce por un factor de 1/(1,261/4), o 1/1,06; es decir,
una reducción en la capacidad de alcance de aproximadamente el 6%.
Para los radares meteorológicos, la situación es distinta en el caso de blancos ampliados ya que
normalmente la precipitación ocupa todo el haz estrecho del radar. Utilizando la ecuación del radar
desarrollada en el § 2.2, los blancos ampliados dan lugar a una señal recibida proporcional a 1/r² y un
alcance en espacio libre proporcional a la raíz cuadrada de la relación S/N resultante. En tales casos,
una reducción similar de la capacidad de alcance del 6% aceptable para los radares meteorológicos
requiere un factor de interferencia de potencia de 1,12 (en vez de 1,26 para otros tipos de radar), lo
que corresponde a un incremento del ruido de 0,5 dB y da lugar a una I/N = −10 dB.
En el § 8 aparece una detallada justificación de este criterio.
12 Rec. UIT-R M.1849-1
4.2 Especificidades con respecto a esquemas de emisión y estrategias de exploración
Para garantizar el procesamiento en la exploración del volumen (normalmente en una gama de
15 minutos), los radares meteorológicos utilizan una cierta variedad de esquemas de emisión distintos
a diferentes elevaciones empleando conjuntos de diversas anchuras de impulso, PRF y velocidades
de rotación, en lo que se denomina «estrategias de exploración». Desafortunadamente no hay
esquemas típicos ya que varían basándose en un cierto número de factores tales como las capacidades
del radar y el entorno del radar para los productos meteorológicos requeridos.
Esto se ha confirmado realizando una encuesta sobre los radares meteorológicos en la banda C en
Europa que ha demostrado la existencia de amplias gamas de parámetros de esquemas de emisión
distintos:
– Elevación operacional entre 0° y 90°.
– Anchuras de impulso entre 0,5 y 2,5 μs (para radares operacionales). Los radares existentes
son capaces de trabajar con impulsos de anchura de hasta 3,3 μs para impulsos sin comprimir,
mientras que algunos radares utilizan compresión de impulsos con una anchura de impulso
de unos 40 μs que se espera aumentar hasta 100 μs en el futuro.
– Frecuencia de repetición de impulsos (PRF) entre 250 y 1 200 Hz (para radares
operacionales). Los radares existentes son capaces de funcionar con una PRF de hasta
2 400 Hz.
– Velocidad de rotación entre 1 y 6 rpm.
– Utilización en un radar determinado de distintos esquemas de emisión que combinan
diferentes anchuras de impulso y PRF y, en particular, la utilización de PRF fija, escalonada
o entrelazada (es decir, distintas PRF dentro de un solo esquema).
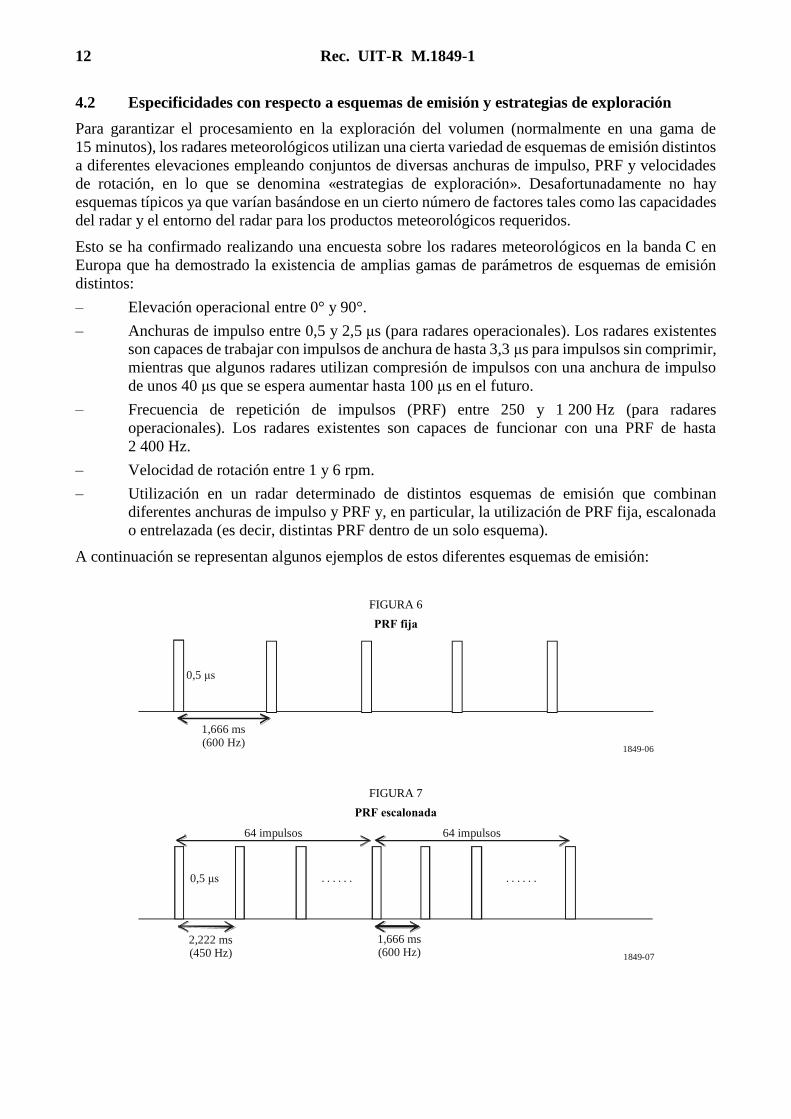
A continuación se representan algunos ejemplos de estos diferentes esquemas de emisión:
FIGURA 6
PRF fija
1849-06
0 5 , μs
1 666 ms,
(600 Hz)
FIGURA 7
PRF escalonada
. . . . . .
. . . . . .
1849-07
2 222 ms,(450 Hz)
64 impulsos 64 impulsos
0 5 , μs
1 666 ms,(600 Hz)
Rec. UIT-R M.1849-1 13
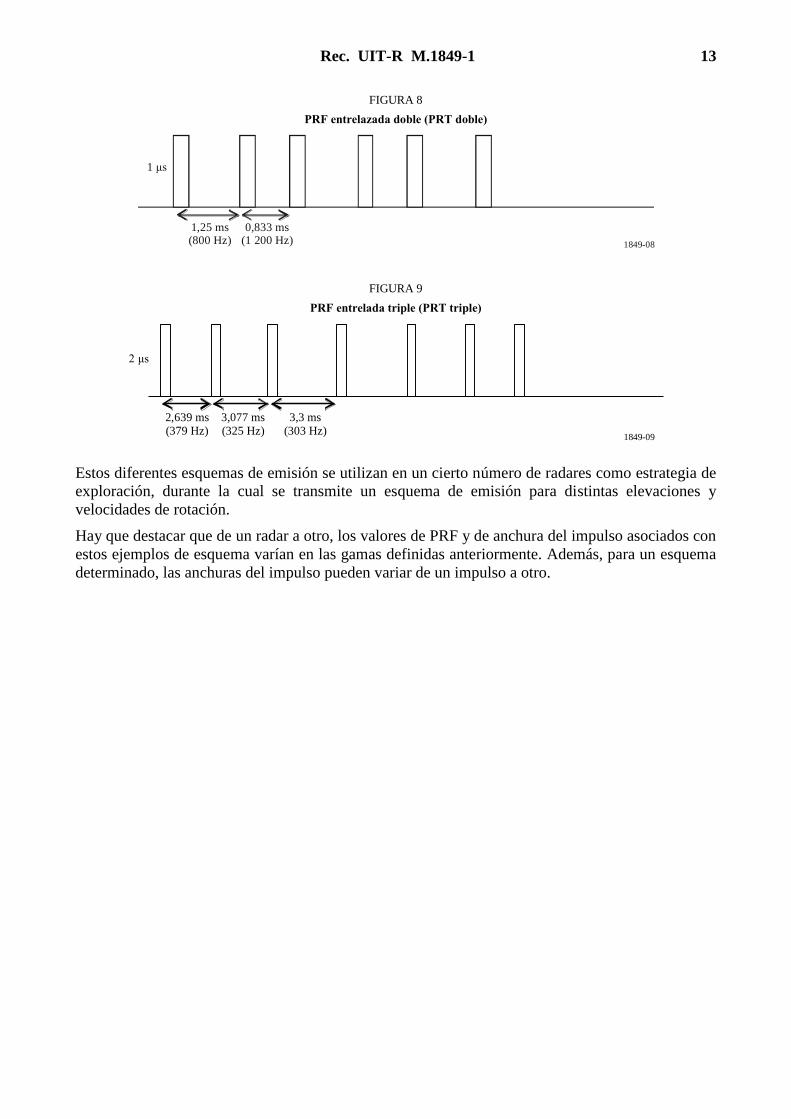
FIGURA 8
PRF entrelazada doble (PRT doble)
1849-08
μs1
1 25 ms,(800 Hz)
0 833 ms,(1 200 Hz)
FIGURA 9
PRF entrelada triple (PRT triple)
1849-09
2 μs
2 639 ms,(379 Hz)
3 077 ms,(325 Hz)
3 3 ms,(303 Hz)
Estos diferentes esquemas de emisión se utilizan en un cierto número de radares como estrategia de
exploración, durante la cual se transmite un esquema de emisión para distintas elevaciones y
velocidades de rotación.
Hay que destacar que de un radar a otro, los valores de PRF y de anchura del impulso asociados con
estos ejemplos de esquema varían en las gamas definidas anteriormente. Además, para un esquema
determinado, las anchuras del impulso pueden variar de un impulso a otro.

14 Rec. UIT-R M.1849-1
A continuación figura un ejemplo de estrategia de exploración:
FIGURA 10
1849-10
Calibración del ruido
Configuración 1
Configuración 2
Configuración 3
Estrategia de exploración típica (tiempo total en torno a 15 minutos):
- 1 barrido para una elevación de 0,8° con configuración 2 (2 rpm) (30 s)- 1 barrido con elevación de 10° para calibración de ruido (3 rpm) (20 s)- 12 barridos para elevaciones de 37, 29, 23, 21, 19, 17, 15, 13, 11, 9,5, 8,5 y 6,5° con configuraciones 3
(3,167 rpm) (19 s/vuelta) (3 mín 47 s total)- 1 barrido para una elevación de 0,8° con configuración 2 (2 rpm) (0,5 mín)- 2 barridos para elevaciones de 6,5 y 5,5° con configuraciones 3 (3,167 rpm) (19 s/vuelta) (38 s total)
- 5 barridos para elevaciones de 4,5, 3,5, 2,5, 1,5 y 0,5° con configuraciones 3 (3 rpm) (20 s/vuelta) (40 s total)- 4 barridos para elevaciones de 0,5, 1,5, 2,5 y 3,5° con configuración 1 (2 rpm) (2 mín)- 1 barrido para elevación de 0,8° con configuración 2 (2 rpm) (30 s)- 2 barridos para elevaciones de 3,5 y 4,5° con configuración 1 (2 rpm) (60 s)- 1 barrido para elevación de 10,5° con configuración 3 (3 rpm) (20 s)- 1 barrido para elevación de 1,3° con configuración 2 (3 rpm) (20 s)- 1 barrido para elevación de 0,8° con configuración 2 (2 rpm) (30 s)- 1 barrido para elevación de 10° con calibración de ruido (3 rpm) (20 s)
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15Tiempo (mín)
Ele
vac
ión (
gra
do
s)
35
30
25
20
15
10
5
Rec. UIT-R M.1849-1 15
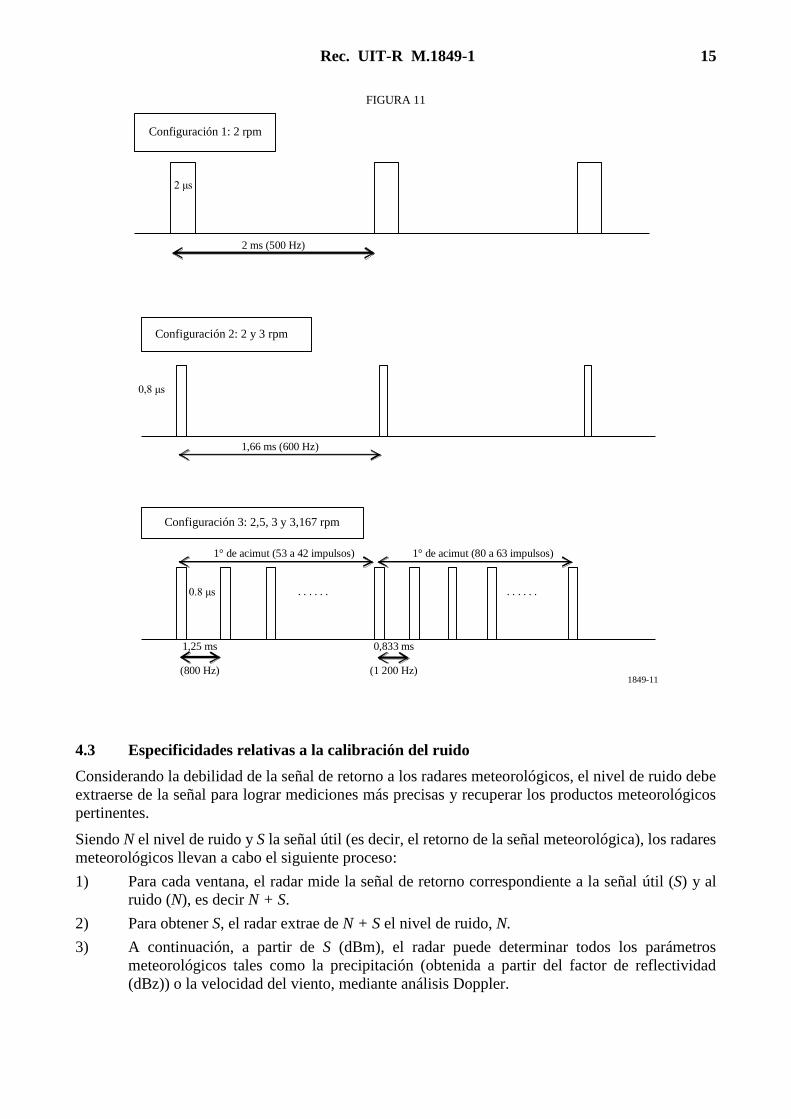
FIGURA 11
. . . . . . . . . . . .
1849-11
Configuración 1: 2 rpm
2 μs
2 ms (500 Hz)
1° de acimut (53 a 42 impulsos) 1° de acimut (80 a 63 impulsos)
1,66 ms (600 Hz)
Configuración 2: 2 y 3 rpm
Configuración 3: 2,5, 3 y 3,167 rpm
0,8 μs
0.8 μs
1,25 ms
(800 Hz)
0,833 ms
(1 200 Hz)
4.3 Especificidades relativas a la calibración del ruido
Considerando la debilidad de la señal de retorno a los radares meteorológicos, el nivel de ruido debe
extraerse de la señal para lograr mediciones más precisas y recuperar los productos meteorológicos
pertinentes.
Siendo N el nivel de ruido y S la señal útil (es decir, el retorno de la señal meteorológica), los radares
meteorológicos llevan a cabo el siguiente proceso:
1) Para cada ventana, el radar mide la señal de retorno correspondiente a la señal útil (S) y al
ruido (N), es decir N + S.
2) Para obtener S, el radar extrae de N + S el nivel de ruido, N.
3) A continuación, a partir de S (dBm), el radar puede determinar todos los parámetros
meteorológicos tales como la precipitación (obtenida a partir del factor de reflectividad
(dBz)) o la velocidad del viento, mediante análisis Doppler.
16 Rec. UIT-R M.1849-1
Para obtener los parámetros meteorológicos más precisos, la señal S debe ser lo más precisa posible,
lo que significa que es fundamental lograr una adecuada calibración del ruido del radar.
Esta calibración del ruido, también denominada «Verificación cero» se lleva a cabo por tanto de
manera periódica, ya sea durante las emisiones regulares del radar (por estimación) o durante periodos
específicos de tiempo (véase el ejemplo de estrategia de exploración) durante los cuales se mide el
ruido.
En muchos casos, esta medición del ruido se realiza sin ninguna emisión del radar (en particular esto
tendría repercusiones en el diseño de ciertos sistemas radioeléctricos destinados a detectar la señal
del radar para reducir la interferencia).
En todos los casos, la interferencia recibida durante la calibración para comprobación del ruido
perturbará toda la recopilación de datos hasta que se efectúe la siguiente calibración sin interferencia.
5 Modos operacionales para radares meteorológicos
El típico radar meteorológico Doppler funciona en dos modos seleccionables: modo en cielo
despejado y modo en precipitación. El primero exige una selección manual por parte del usuario. El
modo precipitación puede seleccionarse manualmente en cualquier instante durante el
funcionamiento o puede accionarse automáticamente siempre que el radar meteorológico detecte
precipitación (basándose en unos valores predeterminados y en una cobertura de zona de
reflectividad). Por regla general, los radares meteorológicos aprovechan ambos modos.
5.1 Modo en cielo despejado
El modo en cielo despejado proporciona a los radares meteorológicos la posibilidad de detectar signos
tempranos de actividad de precipitación.
Existen ciertas variables en la velocidad de bajo nivel y la densidad del aire que permiten detectar la
posibilidad de precipitación. El radar utiliza una velocidad de exploración lenta junto con una
frecuencia de repetición de impulsos (PRF) baja para lograr una capacidad de alta sensibilidad. Esta
alta sensibilidad es ideal para detectar los pequeños cambios en las condiciones atmosféricas a largas
distancias. El modo en cielo despejado es especialmente útil cuando hay poca o ninguna actividad
convectiva en la gama de transmisión del radar y se adapta idealmente a la detección de signos que
indican que se está desarrollando una tormenta u otros tipos de fenómenos climatológicos severos.
La elevada sensibilidad del radar meteorológico se debe al diagrama de exploración de volumen en
el modo en cielo despejado. Seleccionando un diagrama en el modo cielo despejado, la antena del
radar es capaz de permanecer durante un amplio periodo de tiempo en cualquier volumen de espacio
determinado y recibir múltiples señales de retorno permitiendo a la vez el funcionamiento con un bajo
nivel de S/N. La utilización de una anchura de impulso amplia y una baja PRF proporciona
aproximadamente una potencia de eco de 8 dB para un dBz determinado de reflectividad.
5.2 Modo precipitación
El modo precipitación tiene un objetivo distinto que el modo en cielo despejado. La velocidad de
exploración en modo precipitación es función del ángulo de elevación. Esta dependencia permite el
mayor número posible de ángulos de elevación en el muestreo del volumen de radar total. El modo
precipitación aprovecha los diagramas de cobertura de volumen para implementar distintos tipos de
estrategias de exploración (véase un ejemplo en el § 4.2) con distinto muestreo de elevación. Los
fenómenos meteorológicos supervisados normalmente en modo precipitación van asociados con el
desarrollo de precipitaciones en que intervienen tormentas convectivas (lluvias torrenciales, granizo,
tormentas severas, tornados, etc.) y sistemas sinópticos a gran escala.
Rec. UIT-R M.1849-1 17
6 Productos de datos de radar meteorológico
Para ofrecer una mejor comprensión de los radares meteorológicos a efectos de análisis de
interferencia y gestión del espectro, hay que considerar dos categorías de productos de datos de radar
meteorológico: productos de datos de base y productos de datos derivados.
6.1 Productos de datos de base de radar meteorológico convencional
Un radar meteorológico Doppler genera tres categorías de productos de datos de base a partir de los
retornos de señal: reflectividad de base, velocidad radial media y anchura del espectro. Todos los
productos de nivel más elevado se generan a partir de estos tres productos de base. La precisión del
producto de base se especifica a menudo como un requisito de calidad fundamental para el diseño del
radar. Sin la precisión requerida a este bajo nivel, no puede lograrse la precisión del producto derivado
a nivel más elevado. En un previo estudio realizado por el UIT-R sobre radares meteorológicos, la
influencia de la interferencia permisible sobre los datos del producto de base se utilizó para establecer
los criterios de protección. Por ejemplo, se empleó un radar representativo con las precisiones de
datos de base que aparecen en el Cuadro 1 en un estudio destinado a determinar la relación
interferencia/ruido que hacía que el radar no satisficiera sus requisitos de diseño. En el punto 8.3 y en
el Anexo 1 al Informe UIT-R M.2136 se abordan los detalles para determinar los criterios de
protección del radar meteorológico.
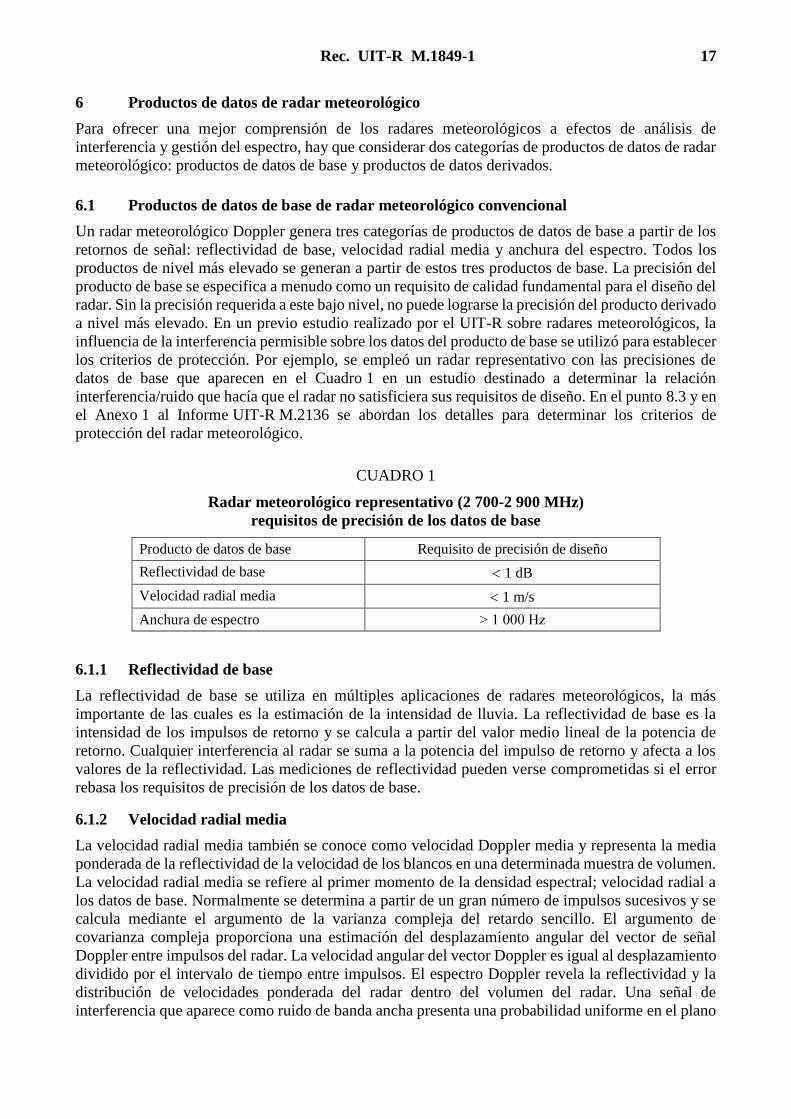
CUADRO 1
Radar meteorológico representativo (2 700-2 900 MHz)
requisitos de precisión de los datos de base
Producto de datos de base Requisito de precisión de diseño
Reflectividad de base 1 dB
Velocidad radial media 1 m/s
Anchura de espectro ˃ 1 000 Hz
6.1.1 Reflectividad de base
La reflectividad de base se utiliza en múltiples aplicaciones de radares meteorológicos, la más
importante de las cuales es la estimación de la intensidad de lluvia. La reflectividad de base es la
intensidad de los impulsos de retorno y se calcula a partir del valor medio lineal de la potencia de
retorno. Cualquier interferencia al radar se suma a la potencia del impulso de retorno y afecta a los
valores de la reflectividad. Las mediciones de reflectividad pueden verse comprometidas si el error
rebasa los requisitos de precisión de los datos de base.
6.1.2 Velocidad radial media
La velocidad radial media también se conoce como velocidad Doppler media y representa la media
ponderada de la reflectividad de la velocidad de los blancos en una determinada muestra de volumen.
La velocidad radial media se refiere al primer momento de la densidad espectral; velocidad radial a
los datos de base. Normalmente se determina a partir de un gran número de impulsos sucesivos y se
calcula mediante el argumento de la varianza compleja del retardo sencillo. El argumento de
covarianza compleja proporciona una estimación del desplazamiento angular del vector de señal
Doppler entre impulsos del radar. La velocidad angular del vector Doppler es igual al desplazamiento
dividido por el intervalo de tiempo entre impulsos. El espectro Doppler revela la reflectividad y la
distribución de velocidades ponderada del radar dentro del volumen del radar. Una señal de
interferencia que aparece como ruido de banda ancha presenta una probabilidad uniforme en el plano
18 Rec. UIT-R M.1849-1
complejo y, en consecuencia, no introduce una rotación sistemática del vector Doppler ni afecta a la
estimación. Sin embargo, la aleatoriedad de las señales compuestas más la interferencia aumenta la
varianza de la estimación de la señal Doppler.
6.1.3 Anchura del espectro
En el diseño de los radares meteorológicos, la anchura del espectro se calcula a partir de la correlación
de retardo sencilla suponiendo una densidad espectral Gaussiana. Se trata de una medida de la
dispersión de velocidades dentro del volumen de muestra del radar y es la desviación típica del
espectro de velocidad. La anchura espectral depende de los gradientes de reflectividad y velocidad a
través del volumen de impulso y de la turbulencia dentro del volumen de impulso [Doviak y Zrnic,
1984]2. No se realiza una promediación de las muestras utilizadas en los cálculos de anchura del
espectro. Sin embargo hay una acumulación de las partes real e imaginaria de las series de muestras;
es decir, las muestras tomadas a lo largo del radial.
6.2 Productos de radares meteorológicos con polarización doble
6.2.1 Reflectividad diferencial
La reflectividad diferencial es un producto asociado con los radares meteorológicos polarimétricos y
se trata de la relación entre los retornos de potencia horizontal y vertical reflejados. Entre otras cosas,
es un buen indicador de la forma de la gota. A su vez, esta forma es una buena estimación del tamaño
medio de la gota.
6.2.2 Coeficiente de correlación
El coeficiente de correlación es un producto del radar meteorológico polarimétrico y se trata de una
correlación estadística entre los retornos de potencia horizontal y vertical reflejados. El coeficiente
de correlación describe las similaridades en las características de retrodispersión de los ecos con
polarización horizontal y vertical. Es un buen indicador de las regiones donde se produce una
combinación de tipos de precipitación, tales como lluvia y nieve.
6.2.3 Relación de despolarización lineal
Otro producto de radar polarimétrico es la relación de despolarización lineal, que se trata de la
relación de un retorno de potencia vertical procedente de un impulso horizontal o un retorno de
potencia horizontal procedente de un impulso vertical. También es un buen indicador de las regiones
donde aparecen combinaciones de tipos de precipitación.
2 DOVIAK, R. J. y ZRNIC. D. S. [1984] Doppler and Weather Observations. Academic Press, Inc.
San Diego, Estados Unidos de América.
Rec. UIT-R M.1849-1 19
6.2.4 Fase diferencial específica
La fase diferencial específica es también un producto del radar meteorológico polarimétrico. Se trata
de una comparación de la diferencia de fase de retorno entre los impulsos horizontal y vertical. Esta
diferencia de fase viene causada por la diferencia en el número de ciclos de onda (o longitudes de
onda) a lo largo del trayecto de propagación para las ondas polarizadas horizontal y verticalmente.
No debe confundirse con el desplazamiento de frecuencia Doppler que viene provocado por el
movimiento de las partículas de nube y de la precipitación. A diferencia de la reflectividad diferencial,
del coeficiente de correlación y de la relación de despolarización lineal, todos ellos dependientes de
la potencia reflejada, la fase diferencial específica es «efecto de propagación». También es una buena
estimación de la intensidad de lluvia.
6.3 Productos de datos derivados
Utilizando los productos de datos de base, el procesador elabora productos de datos derivados de
nivel más elevado para el usuario del radar. Este texto no abordará estos productos de datos derivados
en detalle pues varían de un radar a otro y su número es bastante elevado. Para garantizar la precisión
de los productos de datos derivados, deben mantenerse también con precisión los productos de datos
de base.
7 Diagramas de antena y dinámica de antena
Los radares meteorológicos normalmente utilizan antenas de reflector parabólico que producen un
diagrama de antena de haz estrecho. Los diagramas de antena normalizados de la UIT para antenas
parabólicas no son aplicables a antenas utilizadas en los radares de meteorología puesto que el
diagrama de haz principal generado a menudo es mucho más amplio que el diagrama de haz estrecho
real. La utilización de un diagrama de antena más ancho proporciona generalmente resultados de
compartición, lo que supone más problemas de interferencia significativa que un diagrama de antena
preciso.
7.1 Movimiento de la antena en la exploración de volumen
La cobertura horizontal y vertical requerida para que una exploración de volumen produzca un corte
de elevación se logra girando la antena en el plano horizontal con un ángulo de elevación constante.
La elevación de la antena se aumenta un valor previamente fijado tras cada corte de elevación. El
corte de elevación más baja oscila normalmente entre 0º y 1º y la elevación más elevada se encuentra
en la gama de 20º a 30º, aunque algunas aplicaciones pueden utilizar elevaciones de hasta 60º. La
velocidad de rotación de la antena varía dependiendo de las condiciones meteorológicas y de los
productos requeridos en ese instante. Tanto la velocidad de rotación como la gama de elevación,
etapas de elevación intermedia y frecuencia de repetición de impulsos se ajustan para obtener una
calidad óptima. Una velocidad de rotación de antena baja proporciona un tiempo de inactividad largo
en cada radial para lograr la máxima sensibilidad.
Una elevada velocidad de rotación de antena permite al operador generar una exploración de volumen
en un corto periodo de tiempo cuando conviene cubrir todo el volumen lo más rápidamente posible.
La variación de los pasos de elevación y de la velocidad de rotación puede dar lugar a unos tiempos
de adquisición de exploración de volumen que van desde un minuto hasta 15 minutos. Los largos
periodos de tiempo para una exploración de volumen completa, en comparación con otros radares
que giran con una elevación constante, hacen necesario realizar simulaciones dinámicas más largas
para obtener muestras de resultados que sean significativamente estadísticos.
20 Rec. UIT-R M.1849-1
7.2 Otras estrategias de movimiento de antena
Los radares meteorológicos también utilizan otras estrategias de movimiento de antena para
aplicaciones especiales e investigación. Las exploraciones de sector se emplean para obtener parte de
un corte de elevación. Las exploraciones de volumen de sector realizan una exploración de volumen
para una fracción de los 360º de acimut cuando la antena toma múltiples cortes de elevación. El tercer
modo mantiene la antena a un acimut y elevación constantes para supervisar un punto específico en
la atmósfera. Estas tres estrategias permiten al operador del radar concentrarse en una parte específica
de la atmósfera.
7.3 Diagramas de antena
Siempre que sea posible, deben llevarse a cabo estudios de compartición utilizando el diagrama de
antena real del radar sometido a estudio, pero en los casos en que no se dispone de datos sobre dicho
diagrama, sería conveniente contar con un conjunto genérico de curvas o fórmulas para obtener las
características representativas de la antena.
Actualmente se utilizan tres modelos matemáticos para diagramas de antena de radar en los análisis
de interferencia con los radares indicados en las Recomendaciones UIT-R F.1245, UIT-R M.1652 y
UIT-R F.699. Aunque son representativas de antenas parabólicas, estas Recomendaciones suelen
sobrestimar la anchura de haz de un diagrama de antena de haz estrecho, similar a los que se utilizan
normalmente en los radares meteorológicos.
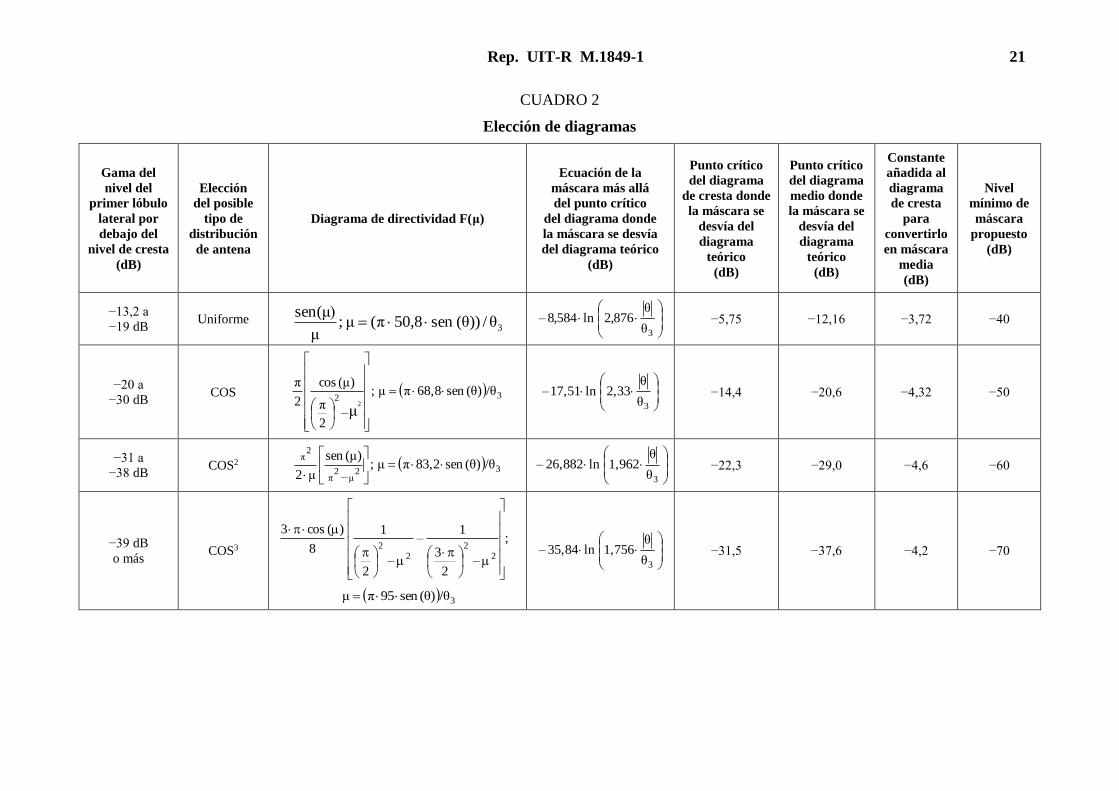
Actualmente no hay ninguna ecuación del diagrama de radiación de antena de radar definida en el
UIT-R para representar dichas antenas de haz estrecho. Si es necesario, podrían utilizarse modelos de
diagrama de radiación de antena generalizados, como los indicados en el Cuadro 2 y en ausencia de
datos medidos, para realizar análisis de interferencia en que intervenga una sola fuente de
interferencia o múltiples fuentes de interferencia; véase asimismo la Recomendación UIT-R M.1851.
θ3 es el ancho de haz de potencia media (grados).
Rep. UIT-R M.1849-1 21
CUADRO 2
Elección de diagramas
Gama del
nivel del
primer lóbulo
lateral por
debajo del
nivel de cresta
(dB)
Elección
del posible
tipo de
distribución
de antena
Diagrama de directividad F(μ)
Ecuación de la
máscara más allá
del punto crítico
del diagrama donde
la máscara se desvía
del diagrama teórico
(dB)
Punto crítico
del diagrama
de cresta donde
la máscara se
desvía del
diagrama
teórico
(dB)
Punto crítico
del diagrama
medio donde
la máscara se
desvía del
diagrama
teórico
(dB)
Constante
añadida al
diagrama
de cresta
para
convertirlo
en máscara
media
(dB)
Nivel
mínimo de
máscara
propuesto
(dB)
−13,2 a
−19 dB Uniforme
−5,75 −12,16 −3,72 −40
−20 a
−30 dB COS
−14,4 −20,6 −4,32 −50
−31 a
−38 dB COS2
−22,3 −29,0 −4,6 −60
−39 dB
o más COS3
−31,5 −37,6 −4,2 −70
3θ
θ876,2ln584,8–
32/θ)(θsen68,8πμ;
–2
π
)μ(cos
2
π
μ2
3θ
θ2,33ln17,51–
32μ
2π
2π
/θ)θ(sen83,2πμ;–
)μ(sen
μ2
3θ
θ1,962ln26,882–
;
–2
3
1–
–2
1
8
)(cos3
22
22
3/θ)(θsen95πμ
3θ
θ1,756ln35,84–
3θ/))θ(sen50,8π(μ;μ
μ)(sen
22 Rec. UIT-R M.1849-1
8 Efectos de la interferencia y del ruido solar sobre los radares meteorológicos
La determinación de los efectos de la interferencia sobre los radares utilizados para detectar blancos
puntuales es bastante directa. Pueden realizarse pruebas introduciendo blancos conocidos simulados
en el radar y determinar visualmente el nivel de interferencia en el cual los blancos se pierden o se
generan blancos falsos. La inspección visual de los productos de datos derivados obtenida de una
exploración de volumen de un radar meteorológico, como aparece en la consola del operador, no
proporciona indicación evidente sobre si la interferencia ha degradado el comportamiento del radar.
Por ejemplo, si la interferencia causase una desviación de 1 dB en los datos de reflectividad de base,
ello no será evidente en una presentación gráfica de la intensidad de lluvia. Sin embargo, si la
interferencia está presente en una gran parte de la exploración del volumen, cada uno de los intervalos
resultará afectado en el volumen correspondiente. El efecto acumulativo se traduce en una
sobrestimación significativa de la intensidad de lluvia en una región geográfica.
Todos los radares meteorológicos experimentan destellos solares durante los periodos de la salida y
la puesta del sol. Aparece un destello solar siempre que el haz principal de la antena se alinea con el
sol durante una exploración de volumen. El efecto de los destellos solares, en el caso particular de los
radares meteorológicos, produce una pérdida total de datos a lo largo de uno o dos radiales en
dirección al sol. Cabe señalar que la predictibilidad de los destellos solares permite calibrar en acimut
la dirección de puntería de los radares.
Los efectos del sol son perjudiciales, pero predecibles. Con otras formas de interferencia y ruido el
emplazamiento y la intensidad son desconocidos y no pueden predecirse o solventarse fácilmente
mediante procesamiento o mediante la interpretación del operador.
Los productos de base son afectados por la interferencia de dos formas distintas. En primer lugar, los
valores pueden desviarse, lo que disminuye la precisión del sistema, y en segundo lugar, la varianza
de los resultados puede resultar modificada. En presencia de interferencia, la reflectividad es sensible
a la desviación, la velocidad radial media es sensible a los errores de varianza y la anchura del espectro
viene afectada tanto por la desviación como por los errores de varianza. Para la anchura del espectro,
los errores debidos a las desviaciones son más significativos que los debidos a la varianza porque la
desviación, o desplazamiento, representa un error en la medición de la velocidad, mientras que la
varianza supone simplemente una incertidumbre en las velocidades medidas.
8.1 Repercusión de la interferencia sobre los modos de funcionamiento
En modo de cielo despejado, la relación señal/ruido de los retornos es la más baja y los datos son más
vulnerables a su degradación debido a la interferencia. Normalmente, con funcionamiento en cielo
despejado, el meteorólogo busca los signos iniciales de convección puesto que ello puede desembocar
en condiciones climatológicas extremas y posiblemente en tornados. La detección del fenómeno de
convección exige detectar líneas finas causadas por los dispersores que indican fronteras de
discontinuidad que dan lugar a la convección. La anchura de estas áreas de convección a menudo es
del orden de uno o dos radiales en anchura y la interferencia a lo largo de estos radiales impediría su
detección. Por lo tanto, la interferencia, incluso durante periodos de tiempo muy breves, podría dar
lugar a pérdidas de detección de fenómenos meteorológicos extremos. Si esta información se pierde
a lo largo de un radial crítico durante una exploración de volumen, la detección se retrasará del orden
de 10 minutos hasta que la exploración del volumen devuelva la posición de la antena a esa zona de
la atmósfera.
El modo de precipitación es el más exigente en términos de comunicaciones, generación de productos
de radar y procesamiento y presentación al usuario. En este modo, casi todos los algoritmos se basan
en los datos de base de reflectividad, velocidad media y anchura del espectro para generar los
productos derivados utilizados por el operador.
Rec. UIT-R M.1849-1 23
8.2 Repercusión de la interferencia sobre los productos de base
Los productos de base son afectados por la interferencia de dos formas distintas. En primer lugar los
valores pueden desviarse, lo cual disminuye la precisión del sistema y, en segundo lugar, la variación
de los resultados puede resultar modificada. En presencia de interferencia, la reflectividad es sensible
a las desviaciones, la velocidad radial media es sensible a los errores de varianza y la anchura del
espectro viene afectada tanto por las desviaciones como por los errores de varianza. Para la anchura
del espectro, los errores debidos a las desviaciones son más significativos que los debidos a la
varianza porque las desviaciones, o desplazamientos, representan un error en la medición de la
velocidad, mientras que la varianza representa simplemente una incertidumbre en las velocidades
medidas.
La reflectividad se calcula a partir de una media lineal de la potencia. En algunos radares
meteorológicos se efectúan estimaciones de reflectividad para intervalos que abarcan 250 m de
profundidad y la anchura de un radial (aproximadamente 1,0º en acimut). Estos sistemas realizan una
media de los intervalos para producir una estimación de la reflectividad a intervalos específicos. Este
promedio de cuatro a uno puede reducir aún más los efectos de la interferencia que se producen en
un solo impulso. La próxima generación de sistemas de radares meteorológicos tiene previsto añadir
un producto de reflectividad con «súper-resolución», que eliminará las estimaciones de reflectividad
media producidas a intervalos de 250 m. Adicionalmente, el radial se reducirá a la mitad (0,5º), y
utilizará únicamente la mitad de las muestras. El resultado total será la disminución del tamaño de la
muestra por un factor de ocho. Por consiguiente, la interferencia puede ser más pronunciada en el
producto de reflectividad con «súper-resolución» que en las estimaciones actuales.
Para los momentos Doppler los efectos de la interferencia son no lineales. La velocidad se calcula a
partir del argumento complejo de la covarianza y la anchura del espectro a partir de la autocorrelación.
Una combinación de señal e interferencia no representa una escala lineal como sucede con la media
para la reflectividad. Estas estimaciones se derivan de la acumulación de mediciones de señal
consistentes en obtención de información tanto de magnitud como del ángulo de fase. Las fuentes de
interferencia probablemente presentarán fases aleatorias con respecto a la señal coherente del radar
de meteorología y su contribución a la precisión de la estimación es difícil de predecir.
En términos de anchura del espectro, la interferencia introduce una desviación y un aumento en la
varianza de las estimaciones de anchura del espectro. La desviación en la estimación es más
perjudicial que el incremento en la varianza.
Deben especificarse los errores de medición de manera que las observaciones del radar puedan
asimilarse adecuadamente a fin de realizar una previsión meteorológica numérica. Existen dos
aspectos relacionados con este problema:
1) errores en las mediciones originales dentro de cada volumen de impulso del radar que vienen
causadas en parte por las señales interferentes; y
2) representación de las estimaciones de datos del radar utilizadas en el proceso de asimilación.
Para velocidades radiales, la primera fuente de error depende de la intensidad de la señal de retorno
y la dispersión o anchura del espectro de velocidad Doppler. A su vez, la anchura espectral depende
fundamentalmente de los gradientes de reflectividad y velocidad en el interior y a través del volumen
del impulso y de la turbulencia dentro de dicho volumen [Doviak y Zrnic, 1984]. Las estimaciones
de estos errores son complicadas por el hecho de que los propios componentes necesarios para
efectuar una estimación fiable del error simplemente se miden y, por consiguiente, presentan
incertidumbres inherentes.
24 Rec. UIT-R M.1849-1
Se ha planteado el concepto de que para una determinada célula de resolución de alcance, los radares
meteorológicos realizan una media de los retornos de múltiples impulsos durante el tiempo de
inactividad de un radial. Se ha sugerido que en el caso en el que una interferencia se produce durante
un breve intervalo del tiempo de inactividad del radial, el efecto de la misma será promediado con los
retornos de los impulsos sin interferencia, reduciendo de esa forma los efectos de la misma. Por
ejemplo, si el radar funciona con una relación de interferencia/ruido muy inferior a −10 dB, pero este
valor de −10 dB se supera durante un breve periodo de tiempo (pequeño porcentaje del tiempo de
inactividad del radial), el efecto de la interferencia se promediará con los retornos sin interferencia.
Si se viola el valor I/N de –10 dB, pero no por un elevado nivel de interferencia, el resultado posible
es que la desviación de la reflectividad de los retornos promediados puede permanecer dentro del
objetivo de diseño de un radar determinado. Desafortunadamente, este método sólo puede ser eficaz
si la señal o señales interferentes son coherentes a lo largo del tiempo de inactividad. Como esto no
sucede muy a menudo, puede que las técnicas de promediación no sean las más eficaces para reducir
los efectos de interferencia en los momentos Doppler. Sin embargo, con la excepción de los radares
meteorológicos que utilizan procesamiento espectral, la promediación puede ser un método muy
eficaz de disminuir la interferencia dado que la interferencia media a lo largo del tiempo de
inactividad presenta un valor de I/N inferior a –10 dB.
Como se ha explicado en el § 4.2, una relación I/N = −6 dB da lugar a una reducción en la capacidad
de alcance de aproximadamente el 12% para los radares meteorológicos y el 6% para otros radares.
Por otro lado, dicha reducción de la capacidad de alcance del 6% (que también está relacionada con
una degradación del 11% de la cobertura de zona) estaría relacionada con un incremento del ruido de
unos 0,5 dB en los radares meteorológicos, lo que corresponde a un valor I/N = –10 dB.
Recientemente se han llevado a cabo pruebas para apoyar dicho valor de I/N de −10 dB en caso de
interferencia constante (véase el Anexo 2 al Informe UIT-R M.2136).
La influencia de la interferencia en los productos de los radares meteorológicos polarimétricos o de
polarización doble, tales como la reflectividad diferencial, el coeficiente de correlación, la relación
de despolarización lineal y la fase diferencial específica, necesita estudios adicionales desde una
perspectiva matemática y basada en mediciones a fin de cuantificar los niveles de criterios de
protección necesarios para garantizar que los productos del radar polarimétrico no se ven
comprometidos por la interferencia.
Puede concluirse que la interferencia causada a los radares meteorológicos debe minimizarse con el
objetivo de reducir o evitar todo tipo de interferencias. A diferencia de los sistemas de comunicación
que utilizan redundancia y corrección de errores, los radares meteorológicos no pueden recuperar la
información perdida. Sin embargo, al considerar la utilización de las características del radar para los
estudios de compartición realizados por el UIT-R, deben tenerse en cuenta otros factores que se
abordan en los siguientes puntos.
8.3 Obtención matemática de los criterios de protección de los radares meteorológicos
Los radares meteorológicos llevan a cabo tres mediciones básicas que, junto con la información del
operador, se utilizan para obtener los productos meteorológicos. Los tres productos de base a partir
de los cuales se obtienen otros productos son la reflectividad del volumen, la velocidad radial y la
anchura del espectro.
En el § 2 del Anexo 1 al Informe UIT-R M.2136 figura una detallada discusión de los criterios de
interferencia del radar meteorológico obtenidos matemáticamente para estos tres productos, apoyados
por resultados de pruebas que validan estas conclusiones.
Rec. UIT-R M.1849-1 25
Si bien es conveniente, y a menudo se hace, no puede aplicarse con precisión un solo valor de criterio
de protección a todos los radares meteorológicos que funcionan en una sola banda. Estos radares están
diseñados con distintos objetivos de funcionamiento y optimizados para unas condiciones
meteorológicas específicas. La precisión de los productos de base y la mínima relación señal/ruido
del radar, S/N, varían según las aplicaciones del mismo. Cuanto menor sea el valor de la mínima S/N
utilizada por el radar menor será el criterio de protección requerido.
El procesamiento de la señal elimina muchos de los efectos del ruido del sistema del radar de las
mediciones de reflectividad y anchura del espectro. Como resultado, algunos sistemas pueden ofrecer
estimaciones de estos productos para niveles de señal por debajo del nivel de ruido de los receptores.
El operador del radar selecciona el umbral señal/ruido3, SNR, que en algunos sistemas oscila entre –
12 dB y 6 dB.
El radar meteorológico típico utilizado en los ejemplos que aparecen en el § 2 del Anexo 1 al Informe
UIT-R M.2136 proporciona mediciones útiles hasta valores SNR de –3 dB. La interferencia a este
nivel de señal y por encima degradará la calidad de los productos de base, lo que pone en evidencia
la necesidad de establecer una relación I/N que proteja la integridad de estos productos.
Conociendo las especificaciones técnicas y los requisitos de precisión de los datos de base de un radar
meteorológico determinado pueden obtenerse los valores teóricos de I/N necesarios para garantizar
que los productos de base no quedan comprometidos en cuanto a desvíos y varianza.
8.4 Tipos de posible interferencia
La interferencia experimentada por los radares meteorológicos puede ser de distintos tipos:
– constante;
– variable en el tiempo;
– impulsiva.
Como primer paso, se propone determinar la influencia de una interferencia constante
correspondiente a un criterio de protección de I/N = –10 dB, y a continuación evaluar el posible
criterio de protección para las otras fuentes de interferencia con objeto de asegurar un nivel similar
de degradación en el comportamiento del radar.
8.4.1 Repercusión de una interferencia constante
Un criterio de protección de I/N = –10 dB corresponde a un incremento de ruido o energía de 0,5 dB.
Partiendo del principio de que los radares se calibran a fin de que coincidan con el nivel del ruido del
receptor (es decir, unos –113 dBm) para un nivel de reflectividad 0 dBz a 100 km, un incremento del
ruido cambia las condiciones nominales del radar, disminuyendo su alcance.
Basándose en ello, y suponiendo una cobertura actual de los radares meteorológicos típicos que
funcionan en la gama de frecuencias 5 250-5 725 MHz que se extiende aproximadamente hasta
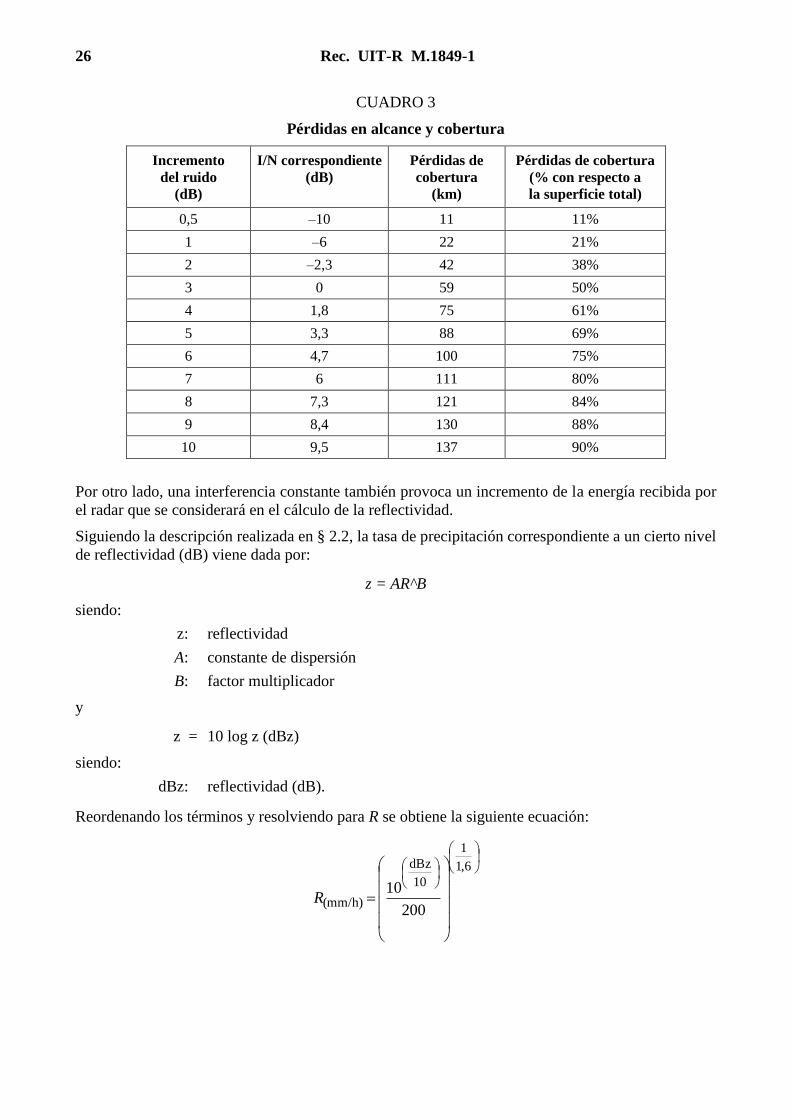
200 km, el Cuadro 3 resume las pérdidas en alcance y cobertura en función del valor I/N y del
incremento del ruido.
3 El umbral SNR es el nivel más bajo para el cual se procesa la señal de retorno.
26 Rec. UIT-R M.1849-1
CUADRO 3
Pérdidas en alcance y cobertura
Incremento
del ruido
(dB)
I/N correspondiente
(dB)
Pérdidas de
cobertura
(km)
Pérdidas de cobertura
(% con respecto a
la superficie total)
0,5 –10 11 11%
1 –6 22 21%
2 –2,3 42 38%
3 0 59 50%
4 1,8 75 61%
5 3,3 88 69%
6 4,7 100 75%
7 6 111 80%
8 7,3 121 84%
9 8,4 130 88%
10 9,5 137 90%
Por otro lado, una interferencia constante también provoca un incremento de la energía recibida por
el radar que se considerará en el cálculo de la reflectividad.
Siguiendo la descripción realizada en § 2.2, la tasa de precipitación correspondiente a un cierto nivel
de reflectividad (dB) viene dada por:
z = AR^B
siendo:
z: reflectividad
A: constante de dispersión
B: factor multiplicador
y
z = 10 log z (dBz)
siendo:
dBz: reflectividad (dB).
Reordenando los términos y resolviendo para R se obtiene la siguiente ecuación:
6,1
1
10
dBz
)(mm/h200
10R
Rec. UIT-R M.1849-1 27
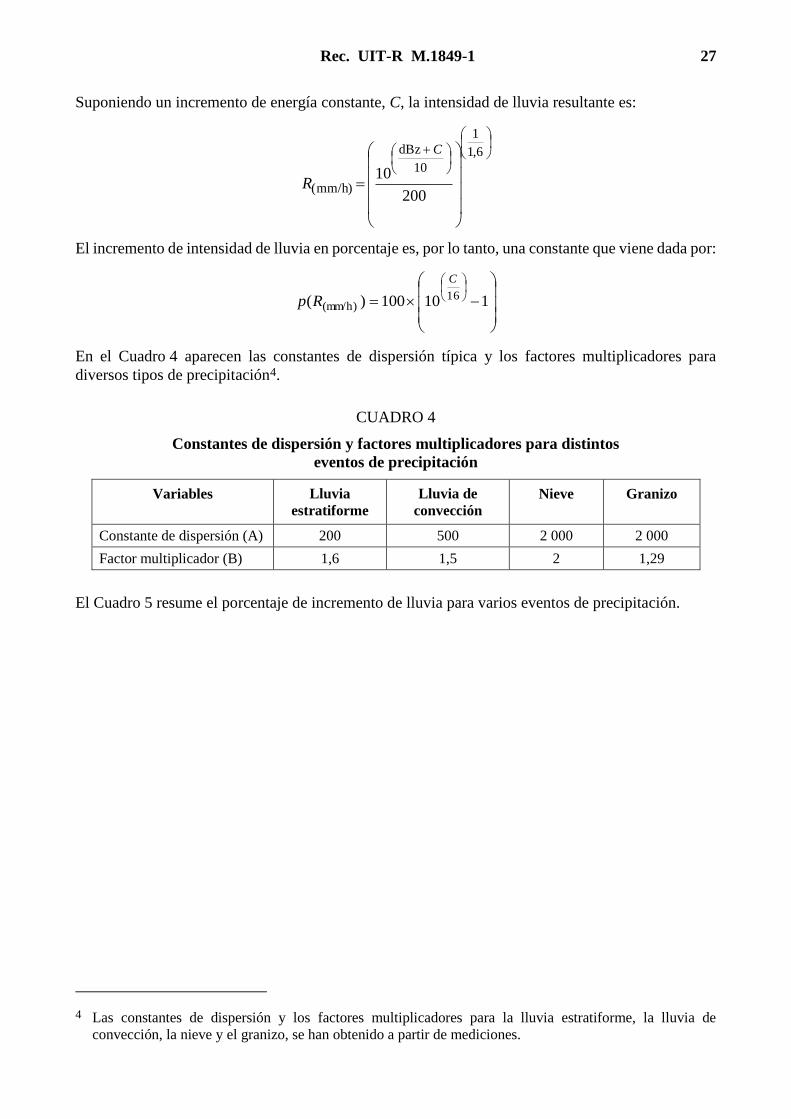
Suponiendo un incremento de energía constante, C, la intensidad de lluvia resultante es:
6,1
1
10
dBz
)mm/h(200
10
C
R
El incremento de intensidad de lluvia en porcentaje es, por lo tanto, una constante que viene dada por:
110100)( 16(mm/h)
C
Rp
En el Cuadro 4 aparecen las constantes de dispersión típica y los factores multiplicadores para
diversos tipos de precipitación4.
CUADRO 4
Constantes de dispersión y factores multiplicadores para distintos
eventos de precipitación
Variables Lluvia
estratiforme
Lluvia de
convección
Nieve Granizo
Constante de dispersión (A) 200 500 2 000 2 000
Factor multiplicador (B) 1,6 1,5 2 1,29
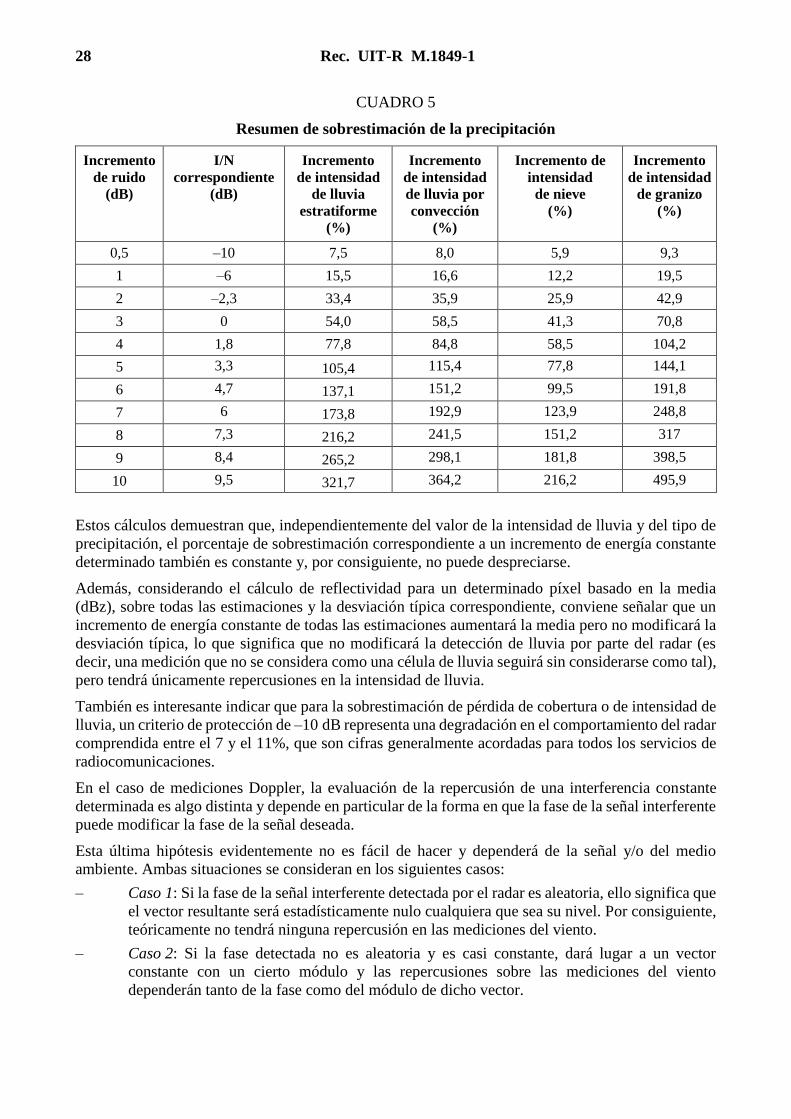
El Cuadro 5 resume el porcentaje de incremento de lluvia para varios eventos de precipitación.
4 Las constantes de dispersión y los factores multiplicadores para la lluvia estratiforme, la lluvia de
convección, la nieve y el granizo, se han obtenido a partir de mediciones.
28 Rec. UIT-R M.1849-1
CUADRO 5
Resumen de sobrestimación de la precipitación
Incremento
de ruido
(dB)
I/N
correspondiente
(dB)
Incremento
de intensidad
de lluvia
estratiforme
(%)
Incremento
de intensidad
de lluvia por
convección
(%)
Incremento de
intensidad
de nieve
(%)
Incremento
de intensidad
de granizo
(%)
0,5 –10 7,5 8,0 5,9 9,3
1 –6 15,5 16,6 12,2 19,5
2 –2,3 33,4 35,9 25,9 42,9
3 0 54,0 58,5 41,3 70,8
4 1,8 77,8 84,8 58,5 104,2
5 3,3 105,4 115,4 77,8 144,1
6 4,7 137,1 151,2 99,5 191,8
7 6 173,8 192,9 123,9 248,8
8 7,3 216,2 241,5 151,2 317
9 8,4 265,2 298,1 181,8 398,5
10 9,5 321,7 364,2 216,2 495,9
Estos cálculos demuestran que, independientemente del valor de la intensidad de lluvia y del tipo de
precipitación, el porcentaje de sobrestimación correspondiente a un incremento de energía constante
determinado también es constante y, por consiguiente, no puede despreciarse.
Además, considerando el cálculo de reflectividad para un determinado píxel basado en la media
(dBz), sobre todas las estimaciones y la desviación típica correspondiente, conviene señalar que un
incremento de energía constante de todas las estimaciones aumentará la media pero no modificará la
desviación típica, lo que significa que no modificará la detección de lluvia por parte del radar (es
decir, una medición que no se considera como una célula de lluvia seguirá sin considerarse como tal),
pero tendrá únicamente repercusiones en la intensidad de lluvia.
También es interesante indicar que para la sobrestimación de pérdida de cobertura o de intensidad de
lluvia, un criterio de protección de –10 dB representa una degradación en el comportamiento del radar
comprendida entre el 7 y el 11%, que son cifras generalmente acordadas para todos los servicios de
radiocomunicaciones.
En el caso de mediciones Doppler, la evaluación de la repercusión de una interferencia constante
determinada es algo distinta y depende en particular de la forma en que la fase de la señal interferente
puede modificar la fase de la señal deseada.
Esta última hipótesis evidentemente no es fácil de hacer y dependerá de la señal y/o del medio
ambiente. Ambas situaciones se consideran en los siguientes casos:
– Caso 1: Si la fase de la señal interferente detectada por el radar es aleatoria, ello significa que
el vector resultante será estadísticamente nulo cualquiera que sea su nivel. Por consiguiente,
teóricamente no tendrá ninguna repercusión en las mediciones del viento.
– Caso 2: Si la fase detectada no es aleatoria y es casi constante, dará lugar a un vector
constante con un cierto módulo y las repercusiones sobre las mediciones del viento
dependerán tanto de la fase como del módulo de dicho vector.
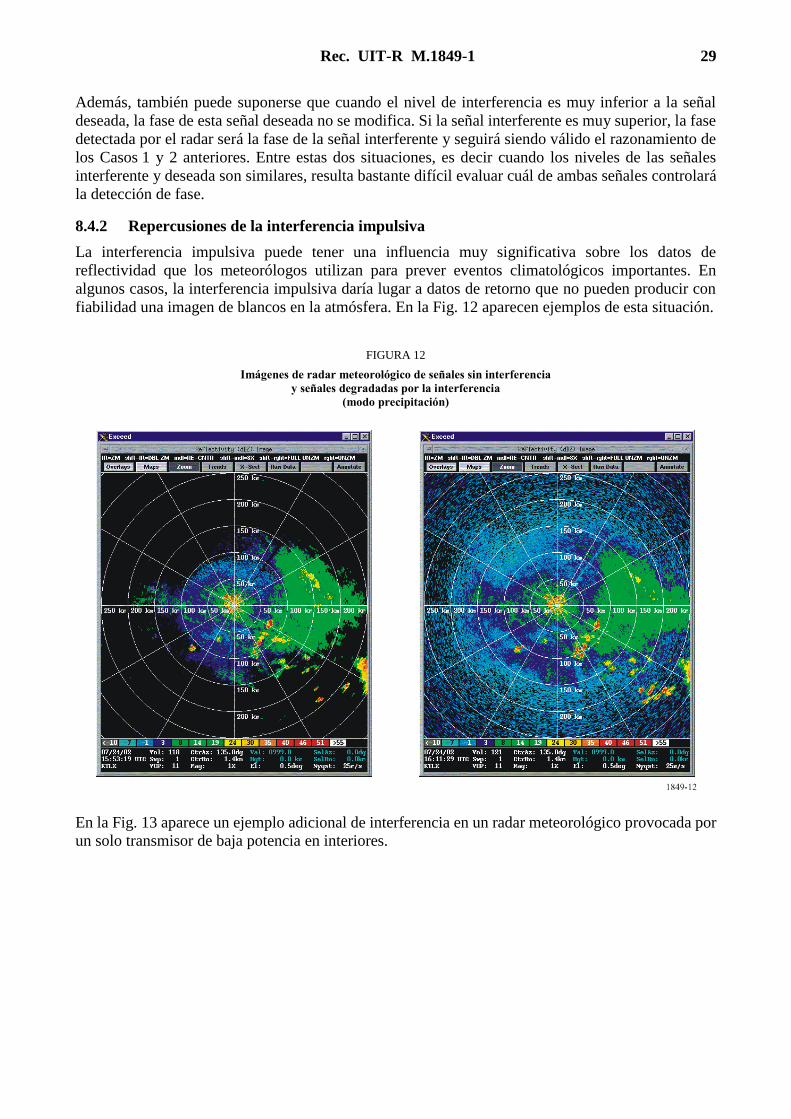
Rec. UIT-R M.1849-1 29
Además, también puede suponerse que cuando el nivel de interferencia es muy inferior a la señal
deseada, la fase de esta señal deseada no se modifica. Si la señal interferente es muy superior, la fase
detectada por el radar será la fase de la señal interferente y seguirá siendo válido el razonamiento de
los Casos 1 y 2 anteriores. Entre estas dos situaciones, es decir cuando los niveles de las señales
interferente y deseada son similares, resulta bastante difícil evaluar cuál de ambas señales controlará
la detección de fase.
8.4.2 Repercusiones de la interferencia impulsiva
La interferencia impulsiva puede tener una influencia muy significativa sobre los datos de
reflectividad que los meteorólogos utilizan para prever eventos climatológicos importantes. En
algunos casos, la interferencia impulsiva daría lugar a datos de retorno que no pueden producir con
fiabilidad una imagen de blancos en la atmósfera. En la Fig. 12 aparecen ejemplos de esta situación.
FIGURA 12
Imágenes de radar meteorológico de señales sin interferencia
y señales degradadas por la interferencia
(modo precipitación)
En la Fig. 13 aparece un ejemplo adicional de interferencia en un radar meteorológico provocada por
un solo transmisor de baja potencia en interiores.
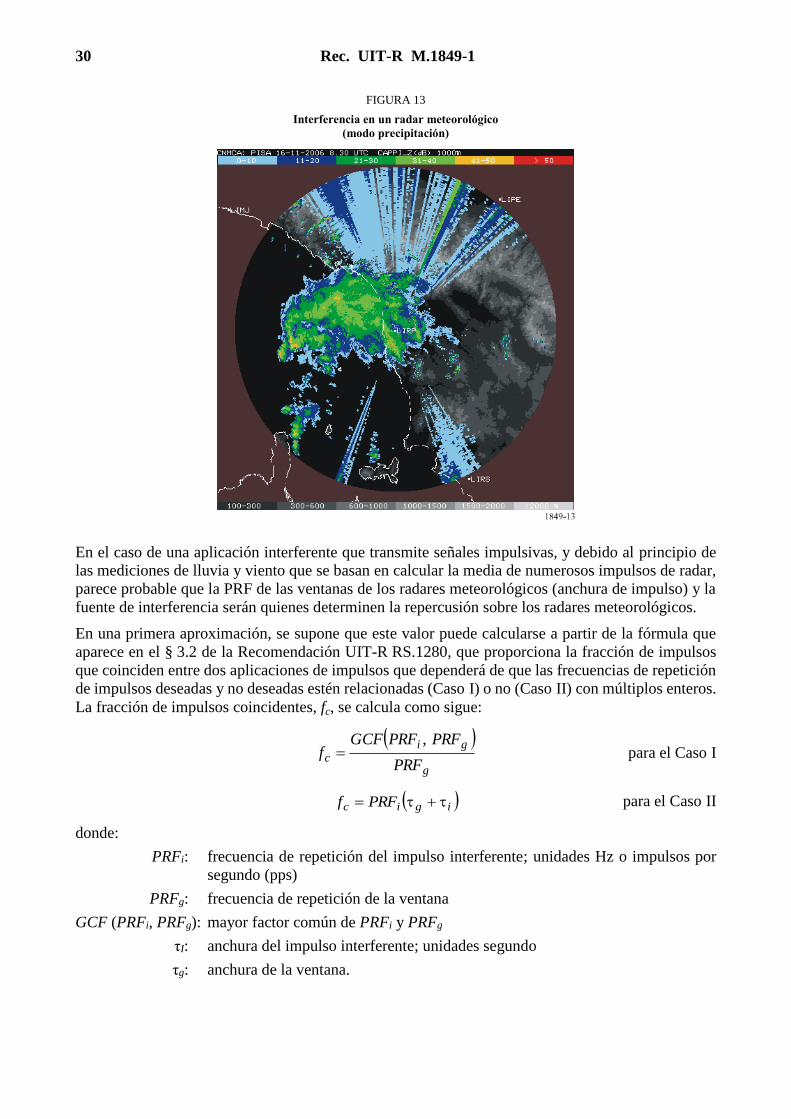
30 Rec. UIT-R M.1849-1
FIGURA 13
Interferencia en un radar meteorológico
(modo precipitación)
En el caso de una aplicación interferente que transmite señales impulsivas, y debido al principio de
las mediciones de lluvia y viento que se basan en calcular la media de numerosos impulsos de radar,
parece probable que la PRF de las ventanas de los radares meteorológicos (anchura de impulso) y la
fuente de interferencia serán quienes determinen la repercusión sobre los radares meteorológicos.
En una primera aproximación, se supone que este valor puede calcularse a partir de la fórmula que
aparece en el § 3.2 de la Recomendación UIT-R RS.1280, que proporciona la fracción de impulsos
que coinciden entre dos aplicaciones de impulsos que dependerá de que las frecuencias de repetición
de impulsos deseadas y no deseadas estén relacionadas (Caso I) o no (Caso II) con múltiplos enteros.
La fracción de impulsos coincidentes, fc, se calcula como sigue:
g
gic
PRF
PRFPRFGCFf
, para el Caso I
igic PRFf para el Caso II
donde:
PRFi: frecuencia de repetición del impulso interferente; unidades Hz o impulsos por
segundo (pps)
PRFg: frecuencia de repetición de la ventana
GCF (PRFi, PRFg): mayor factor común de PRFi y PRFg
τI: anchura del impulso interferente; unidades segundo
τg: anchura de la ventana.
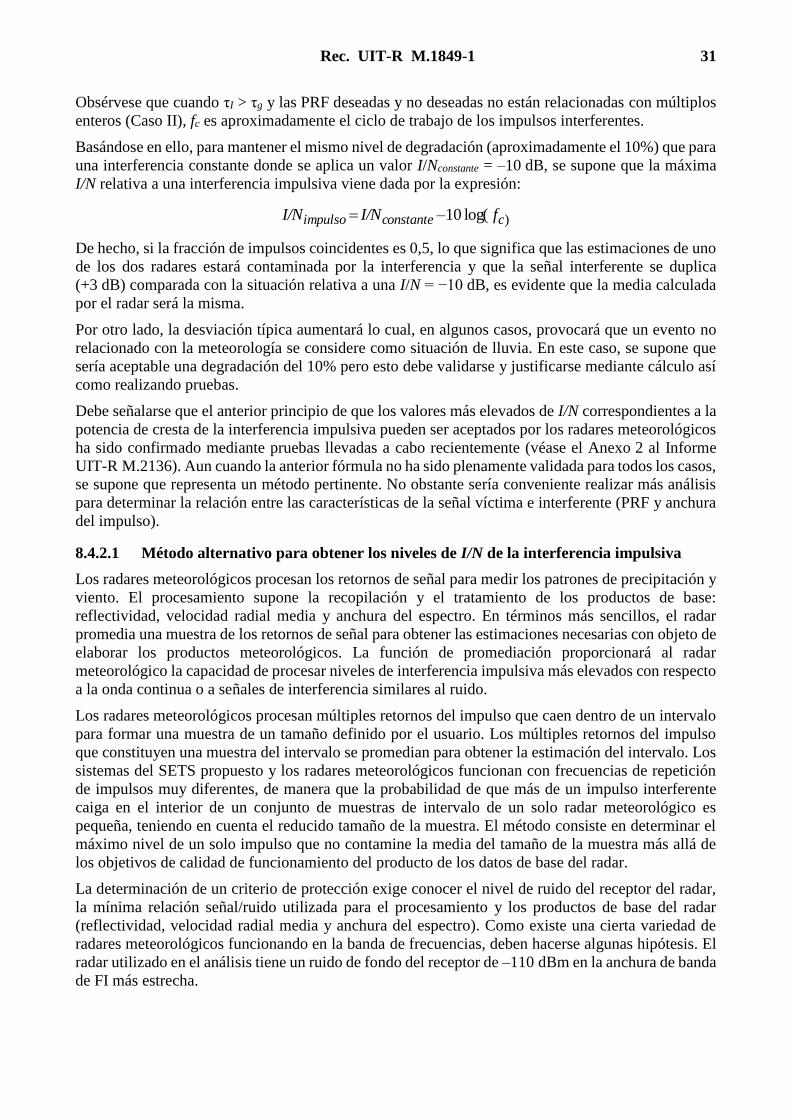
Rec. UIT-R M.1849-1 31
Obsérvese que cuando τI > τg y las PRF deseadas y no deseadas no están relacionadas con múltiplos
enteros (Caso II), fc es aproximadamente el ciclo de trabajo de los impulsos interferentes.
Basándose en ello, para mantener el mismo nivel de degradación (aproximadamente el 10%) que para
una interferencia constante donde se aplica un valor I/Nconstante = –10 dB, se supone que la máxima
I/N relativa a una interferencia impulsiva viene dada por la expresión:
)log(10– cconstanteimpulso fI/NI/N
De hecho, si la fracción de impulsos coincidentes es 0,5, lo que significa que las estimaciones de uno
de los dos radares estará contaminada por la interferencia y que la señal interferente se duplica
(+3 dB) comparada con la situación relativa a una I/N = −10 dB, es evidente que la media calculada
por el radar será la misma.
Por otro lado, la desviación típica aumentará lo cual, en algunos casos, provocará que un evento no
relacionado con la meteorología se considere como situación de lluvia. En este caso, se supone que
sería aceptable una degradación del 10% pero esto debe validarse y justificarse mediante cálculo así
como realizando pruebas.
Debe señalarse que el anterior principio de que los valores más elevados de I/N correspondientes a la
potencia de cresta de la interferencia impulsiva pueden ser aceptados por los radares meteorológicos
ha sido confirmado mediante pruebas llevadas a cabo recientemente (véase el Anexo 2 al Informe
UIT-R M.2136). Aun cuando la anterior fórmula no ha sido plenamente validada para todos los casos,
se supone que representa un método pertinente. No obstante sería conveniente realizar más análisis
para determinar la relación entre las características de la señal víctima e interferente (PRF y anchura
del impulso).
8.4.2.1 Método alternativo para obtener los niveles de I/N de la interferencia impulsiva
Los radares meteorológicos procesan los retornos de señal para medir los patrones de precipitación y
viento. El procesamiento supone la recopilación y el tratamiento de los productos de base:
reflectividad, velocidad radial media y anchura del espectro. En términos más sencillos, el radar
promedia una muestra de los retornos de señal para obtener las estimaciones necesarias con objeto de
elaborar los productos meteorológicos. La función de promediación proporcionará al radar
meteorológico la capacidad de procesar niveles de interferencia impulsiva más elevados con respecto
a la onda continua o a señales de interferencia similares al ruido.
Los radares meteorológicos procesan múltiples retornos del impulso que caen dentro de un intervalo
para formar una muestra de un tamaño definido por el usuario. Los múltiples retornos del impulso
que constituyen una muestra del intervalo se promedian para obtener la estimación del intervalo. Los
sistemas del SETS propuesto y los radares meteorológicos funcionan con frecuencias de repetición
de impulsos muy diferentes, de manera que la probabilidad de que más de un impulso interferente
caiga en el interior de un conjunto de muestras de intervalo de un solo radar meteorológico es
pequeña, teniendo en cuenta el reducido tamaño de la muestra. El método consiste en determinar el
máximo nivel de un solo impulso que no contamine la media del tamaño de la muestra más allá de
los objetivos de calidad de funcionamiento del producto de los datos de base del radar.
La determinación de un criterio de protección exige conocer el nivel de ruido del receptor del radar,
la mínima relación señal/ruido utilizada para el procesamiento y los productos de base del radar
(reflectividad, velocidad radial media y anchura del espectro). Como existe una cierta variedad de
radares meteorológicos funcionando en la banda de frecuencias, deben hacerse algunas hipótesis. El
radar utilizado en el análisis tiene un ruido de fondo del receptor de –110 dBm en la anchura de banda
de FI más estrecha.

32 Rec. UIT-R M.1849-1
La mínima relación señal/ruido probablemente es el valor más difícil de determinar sin referencia a
radares específicos. Para radares que funcionan en la banda de frecuencias 2 700-2 900 MHz son
típicos unos valores de relación señal/ruido de 0 a 3 dB, ya que los radares a las frecuencias más bajas
funcionan normalmente para la detección en distancias largas. Los radares meteorológicos que
funcionan en la banda de frecuencias 9 300-9 500 MHz se utilizan normalmente para una detección
de menor alcance y mayor resolución y pueden funcionar con mayores valores mínimos de la relación
señal/ruido. Para este análisis, una S/N de +3 dB y un ruido de fondo de –110 dBm dan lugar a los
valores de los requisitos de precisión del producto de los datos de base que aparecen en el Cuadro 6.
CUADRO 6
Requisitos de precisión de los datos
Requisitos de precisión de los datos de base
Estimación de la reflectividad 1 dB
Estimación de velocidad 1 m/s
Estimación de la anchura del espectro 1 000 Hz
Como muestra el Cuadro 6, el máximo límite de desviación de la reflectividad para el radar
meteorológico utilizado en este ejemplo se supone que es 1 dB, lo que se traduce en una relación
entre la interferencia y la mínima señal, I/S, de 0,26 o una relación de potencia de 1,26. Se supondrá
un tamaño de muestra de la reflectividad de 25. Un tamaño de muestra mayor de 25 es posible,
reduciendo más los efectos de un solo impulso, pero este tamaño también incrementa la probabilidad
de que se produzca un segundo impulso interferente en la misma muestra.
8.4.2.2 Cálculo de I/N para una fuente interferente impulsiva (un solo impacto)
8.4.2.2.1 Hipótesis
– El mínimo nivel de señal recuperado normalmente tiene una relación señal/ruido de 2 dB.
– La desviación depende de la relación entre las potencias medias de la señal y la interferencia.
Por lo tanto, depende tanto del nivel de interferencia como del número de «impactos» en el
periodograma de estimación.
– El máximo nivel de interferencia para la reflectividad se define mediante la desviación de
reflectividad.
– Una desviación de reflectividad (Rb) de 1 dB proporciona una relación de potencia de 1,2589.
Relación de potencia = 10(Rb/10) = 10(0,1) = 1,2589
Sustrayendo la relación de potencia sin desviación de la relación de potencia en la cual se produce
una desviación de 1 dB se obtiene una relación interferencia/señal de 0,2589.
2589,012589,11010/ )10/()10/( RbRbSI
El nivel de la potencia de interferencia puede calcularse mediante la siguiente fórmula:
IL = (Ns) (I/S) = (16) (0,2589) = 4,14
Este valor corresponde a una señal de 6,17 dB.
IL (dB) = 10 log (4,14) = 6,17 dB

Rec. UIT-R M.1849-1 33
Para una relación señal/ruido de 3 dB, I/N se calcula como sigue:
I/N = 6,17 dB + 3 dB = 9,17 dB
Combinando estos factores en una función que describe I/N en relación con Ns, I/N y Rb se obtiene
una ecuación que proporciona el máximo valor de I/N requerido para un solo «impacto»:
NSSINNI s /)]/()[(log10/
donde:
Ns: número de muestras en la estimación
Smp: potencia media de la señal
S/N: relación señal/ruido en el receptor
I/S: relación interferencia/señal
e I/S se expresa como:
101010/10/ nfb NRSI
donde:
Rb: desviación de la reflectividad
Nnf: nivel de ruido de fondo normalizado.
Combinando las ecuaciones se obtiene:
NSNRNNI nfbs /]10/(10[–]10/(10[log10/
A continuación figura un ejemplo de cálculo basado en las hipótesis anteriores.
8.4.2.2.2 Ejemplo de cálculo
Hipótesis:
Ns = 16
S/N = 3 dB
Rb = 1 dB
Nnf = 0 dB5
NSNRNNI nfbs /]10/(10[–]10/(10[log10/
dB17,93]10/0(10[–]10/1(10[16log10/ NI
8.4.3 Repercusiones de una interferencia variable en el tiempo
Las Figs. 14 y 15 describen la posible interferencia causada por un sistema de radar de abertura
sintética (SAR) a un radar meteorológico y presenta una interferencia variable en el tiempo.
5 En este ejemplo, el nivel de ruido de fondo se ha normalizado al nivel de la señal sin desviación y se ha
fijado a 0 dB.
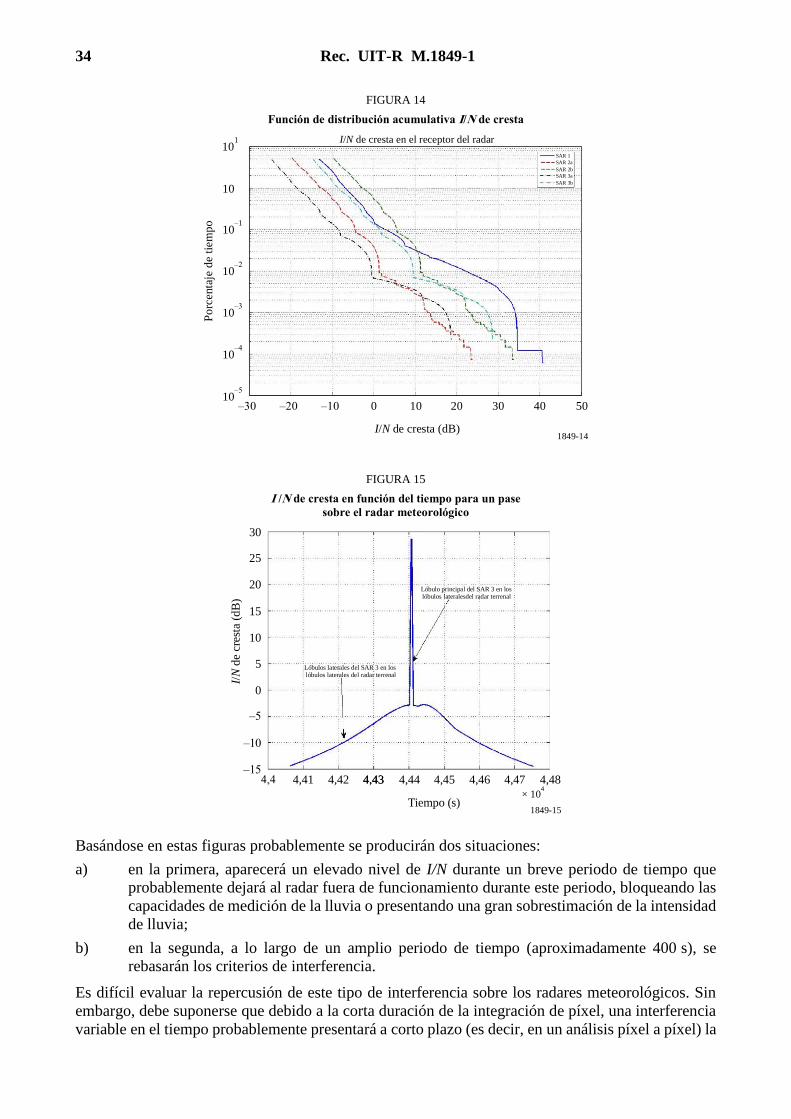
34 Rec. UIT-R M.1849-1
FIGURA 14
Función de distribución acumulativa I/N de cresta
1849-14
Po
rcenta
je d
e ti
em
po
101
10
101–
10–2
10–3
10–4
10–5
–30 –20 –10 0 10 20 30 40 50
/ de cresta (dB)I N
SAR 3b
SAR 3a
SAR 2b
SAR 2a
SAR 1
/ de cresta en el receptor del radarI N
FIGURA 15
I /N de cresta en función del tiempo para un pase
sobre el radar meteorológico
1849-15
IN/
de
cres
ta (
dB
)
30
10
0
–5
Tiempo (s)
Lóbulo principal del SAR 3 en los lateralesdel radar terrenallóbulos
20
25
15
5
–15
–10
4,41 4,42 4.43 4,44 4,454,43 4,46 4,47 4,48
Lóbulos laterales del SAR 3 en losdel radar terrenal lóbulos laterales
× 104
Basándose en estas figuras probablemente se producirán dos situaciones:
a) en la primera, aparecerá un elevado nivel de I/N durante un breve periodo de tiempo que
probablemente dejará al radar fuera de funcionamiento durante este periodo, bloqueando las
capacidades de medición de la lluvia o presentando una gran sobrestimación de la intensidad
de lluvia;
b) en la segunda, a lo largo de un amplio periodo de tiempo (aproximadamente 400 s), se
rebasarán los criterios de interferencia.
Es difícil evaluar la repercusión de este tipo de interferencia sobre los radares meteorológicos. Sin
embargo, debe suponerse que debido a la corta duración de la integración de píxel, una interferencia
variable en el tiempo probablemente presentará a corto plazo (es decir, en un análisis píxel a píxel) la
Rec. UIT-R M.1849-1 35
misma repercusión que una interferencia constante (impulsiva o no) como la descrita en los § 8.4.1
y 8.4.2. Determinar la influencia de una interferencia variable en el tiempo caso a caso y píxel a píxel
no es una tarea fácil.
Reconociendo la necesidad de realizar análisis más detallados, cabe señalar que un nivel I/N de 30 dB
(sin tener en cuenta el aspecto impulsivo de la emisión del SAR) que aparecería en la situación 1
puede producir en una zona determinada una gran sobrestimación de la intensidad de lluvia
instantánea, lo que contaminará las estadísticas de lluvia a largo plazo (de 1 hora hasta varios días)
que se utilizan en los procesos de alerta hidrológica. Una duración temporal de la interferencia de
unos 400 s corresponde aproximadamente a 7 rotaciones del radar y se relaciona con los lóbulos
laterales del radar. En este caso, serán impactados un gran número de píxeles (y, por consiguiente,
una amplia zona geográfica) a lo largo de varias exploraciones, haciendo imposible la aproximación
de los píxeles. El tamaño de la zona geográfica depende evidentemente del nivel de interferencia que
se supone impacta por primera vez en el borde de la zona de cobertura del radar. Incluso una ligera
interferencia puede presentar una pérdida de cobertura de varias decenas en porcentaje.
Determinar la influencia de la interferencia variable en el tiempo no es tarea fácil y exige un análisis
caso a caso que debe tener en cuenta los resultados de simulación dinámica sobre los que se aplicarán
los criterios de interferencia utilizados para las fuentes de interferencia constantes o impulsivas.
8.5 Conclusiones sobre los criterios de protección de los radares meteorológicos
Aunque los requisitos de protección para los radares meteorológicos dependen fundamentalmente de
sus características y especificaciones, el análisis desarrollado anteriormente en el § 8, y los elementos
que figuran en el Informe UIT-R M.2136, consideran las repercusiones tanto en el alcance de los
radares como en la precisión de los productos de base y confirman que, para una interferencia
constante, corresponde un valor de I/N = −10 dB y, en consecuencia, debe utilizarse dicho valor para
garantizar la protección de los radares meteorológicos. Este criterio es coherente con las actuales
Recomendaciones del UIT-R.
Los análisis y pruebas de interferencia impulsiva han demostrado que, dependiendo de las
características del sistema transmisor y víctima (fundamentalmente la PRF y la anchura del impulso),
una mayor I/N está relacionada con la potencia de cresta de la interferencia impulsiva. A la espera de
nuevos estudios, puede aplicarse uno de los métodos descritos en el § 8.4.2 o en el § 8.4.2.1 para
obtener una aproximación adecuada.
Actualmente, no se ha desarrollado aún una fórmula genérica para la interferencia variable en el
tiempo. Dependiendo de que la fuente de interferencia sea continua o impulsiva, a corto plazo
(impactos en los radiales del radar) o a largo plazo (exploración del volumen total), los análisis deben
realizarse caso por caso y partiendo de resultados de simulaciones dinámicas, teniendo en cuenta los
criterios antes mencionados para la interferencia constante o similar a impulsos.
9 Repercusiones de las turbinas eólicas
Para efectuar una previsión meteorológica precisa, los radares meteorológicos se diseñan para realizar
observaciones en bandas de altitudes relativamente estrechas. Debido a la sensibilidad de los radares,
si las turbinas eólicas aparecen en línea de visibilidad directa con una instalación de un radar
meteorológico, pueden bloquear la propagación de las señales del radar causando retornos del eco de
reflectividad y produciendo ecos de radar inducidos por la turbulencia. Estos mecanismos de
interferencia pueden dar lugar a estimaciones del radar falsas relativas a la acumulación de
precipitaciones, falsas alarmas de tornados y mesociclos, identificación errónea de las características
de las tormentas e identificación incorrecta de las células de las tormentas. Además, los mecanismos
de interferencia pueden degradar el funcionamiento del radar e influir negativamente en las
previsiones meteorológicas y funciones de aviso.
36 Rec. UIT-R M.1849-1
9.1 Enmascaramiento
Todo accidente o estructura geográfica que se encuentre entre el radar y el blanco provocará un efecto
de ensombrecimiento o enmascaramiento. Es posible que, dependiendo de su tamaño, las turbinas
eólicas causen efectos de apantallamiento que pueden variar dependiendo de las dimensiones de la
turbina, del tipo del radar transmisor y de las características del mismo (altura, ángulo de las aspas,
velocidad de rotación y posición relativa del radar con respecto a la turbina).
9.2 Ecos parásitos
Los retornos del radar pueden ser recibidos por cualquier superficie reflectora del radar. En ciertas
zonas geográficas, o bajo condiciones meteorológicas particulares, el comportamiento del radar puede
resultar negativamente afectado por retornos no deseados que pueden enmascarar los blancos de
interés. Tales retornos no deseados se conocen como ecos parásitos del radar. Para las previsiones
meteorológicas, las turbinas eólicas situadas en las proximidades de un radar meteorológico pueden
dar lugar a problemas operacionales.
Las señales de los ecos parásitos producidos por el terreno presentan una gran reflectividad, un
desplazamiento Doppler casi nulo, una pequeña anchura del espectro y están sistemáticamente
localizadas. Comparados con los ecos parásitos producidos por el terreno que aparecen normalmente,
la interferencia causada por las turbinas eólicas representan un reto mucho más difícil. Las reflexiones
directas serán recibidas tanto por la torre (estacionaria) como por las aspas (no estacionarias). Al igual
que los ecos parásitos producidos por el terreno, la señal de ecos parásitos producidos por la turbina
eólica (WTC) sigue teniendo una reflectividad bastante elevada con una posible modulación debida
a la rotación de las aspas, lo que provoca una variación sistemática de la sección transversal del radar.
El desplazamiento Doppler se verá afectado por varios factores, incluida la velocidad de rotación de
las aspas y la orientación del rotor con respecto al haz del radar. La velocidad Doppler debe
encontrarse en un máximo cuando el rotor está orientado 90º con respecto a la línea de visibilidad del
radar y debe ser casi cero cuando el rotor está frente al radar o de espaldas a él. Como el volumen de
resolución del radar probablemente englobará toda la estructura de la turbina eólica cabe esperar que
la anchura del espectro aumente de manera significativa. Ello se debe a la rotación de las aspas
enfrentadas o de espaldas al radar. La existencia de múltiples turbinas dentro de un volumen de
resolución tendría como consecuencia exacerbar este efecto.
9.3 Energía de retrodispersión procedente de remolinos turbulentos
Además de las señales de los ecos parásitos producidos por la turbina eólica a causa de las reflexiones
provocadas por las turbinas eólicas reales, puede observarse energía de retrodispersión procedente de
remolinos turbulentos producidos por los parques eólicos. Cabe esperar que estos ecos presenten
características similares a la retrodispersión en cielo despejado causada por las discontinuidades en
el índice de refracción en la escala Bragg del radar. Estos ecos cambiarán de dirección en el parque
eólico y probablemente tendrán una reflectividad mucho menor en comparación con las reflexiones
directas procedentes de las turbinas. No obstante, pueden aumentar significativamente la zona de
cobertura del radar afectada por los ecos parásitos de las turbinas eólicas y, por consiguiente,
exacerbar el problema.
9.4 Ejemplos de ecos parásitos causados por turbinas eólicas
En la Fig. 16 se representa la forma en que un parque eólico (conjunto de turbinas eólicas) aparece
en la pantalla de presentación de un radar meteorológico. (Se trata de una imagen de reflectividad que
muestra los retornos procedentes de un parque eólico situado aproximadamente a 40 km al sudeste
del radar meteorológico.)
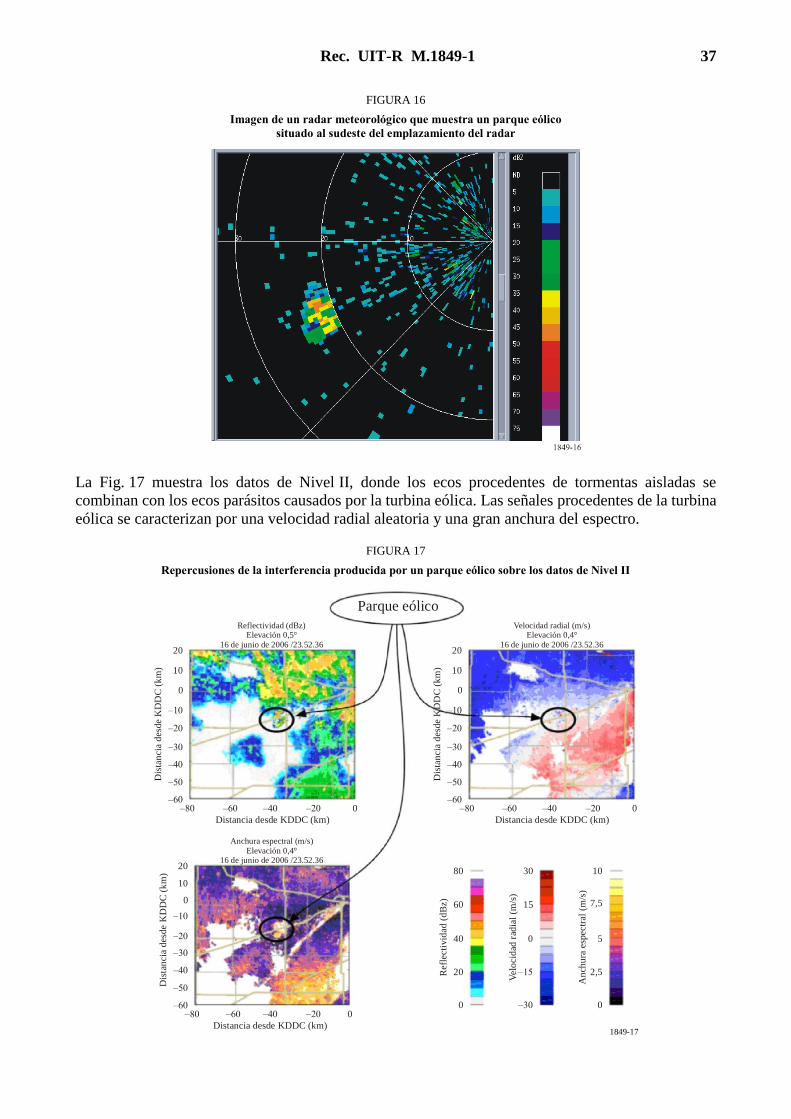
Rec. UIT-R M.1849-1 37
FIGURA 16
Imagen de un radar meteorológico que muestra un parque eólico
situado al sudeste del emplazamiento del radar
La Fig. 17 muestra los datos de Nivel II, donde los ecos procedentes de tormentas aisladas se
combinan con los ecos parásitos causados por la turbina eólica. Las señales procedentes de la turbina
eólica se caracterizan por una velocidad radial aleatoria y una gran anchura del espectro.
FIGURA 17
Repercusiones de la interferencia producida por un parque eólico sobre los datos de Nivel II
1849-17
Parque eólico
Distancia desde KDDC (km)
–80 –60 –40 –20 0
Distancia desde KDDC (km) Distancia desde KDDC (km)
–10
–20
–40
–60
–50
–30
0
10
20
Dis
tan
cia
desd
e K
DD
C (
km
)
80
40
60
20
0
Dis
tan
cia
desd
e K
DD
C (
km
)
–10
–20
–40
–60
–50
–30
0
10
20
Dis
tan
cia
des
de K
DD
C (
km
)
Ref
lecti
vid
ad
(d
Bz)
30
0
15
–15
–30
Velo
cid
ad r
adia
l (m
/s)
10
5
7,5
2,5
0
An
chu
ra e
spec
tral
(m
/s)
Reflectividad (dBz)Elevación 0,5°
16 de junio de 2006 /23.52.36
Velocidad radial (m/s)Elevación 0,4°
16 de junio de 2006 /23.52.36
Anchura espectral (m/s)Elevación 0,4°
16 de junio de 2006 /23.52.36
–10
–20
–40
–60
–50
–30
0
10
20
–80 –60 –40 –20 0–80 –60 –40 –20 0
38 Rec. UIT-R M.1849-1
Sin previo conocimiento, sería muy difícil distinguir entre los ecos parásitos producidos por las
turbinas eólicas y las tormentas. Como las aspas giran en un sentido o en otro con respecto al radar,
cabe esperar una velocidad Doppler con un valor medio casi cero. Unas anchuras del espectro grandes
reducirán la precisión de las estimaciones de la velocidad Doppler, como queda ilustrado en la Fig. 17
por pequeñas desviaciones con respecto al cero.
9.5 Repercusiones de los ecos parásitos producidos por turbinas eólicas sobre el
funcionamiento de los radares meteorológicos y las precisiones en las previsiones
meteorológicas
Se han realizado estudios de funcionamiento real que ilustran la influencia de los WTC sobre los
radares meteorológicos. Estos estudios han demostrado que los parques eólicos pueden tener un
efecto muy significativo sobre dichos radares y, por tanto, pueden degradar las previsiones de
importantes fenómenos meteorológicos.
Los análisis han demostrado claramente que los ecos parásitos producidos por una turbina eólica
estarán presentes en una amplia zona acimutal (varias decenas de grados) comparada con la dirección
de la turbina eólica, incluso a grandes distancias. Por consiguiente, no puede despreciarse la
repercusión de las turbinas eólicas sobre la reflectividad en el funcionamiento de los radares
meteorológicos.
Los análisis han puesto en evidencia que la repercusión de una sola turbina eólica sobre el modo
Doppler de un radar meteorológico es muy significativa, en particular a distancias inferiores a 10 km
en las que todos los datos serán erróneos para cualquier acimut.
Se necesitará algún método para reducir los WTC a fin de proteger los radares meteorológicos contra
la interferencia perjudicial procedente de los parques eólicos.
Antes de llegar a conclusiones definitivas sobre los medios de reducir los WTC, deben analizarse
estudios adicionales sobre estos ecos parásitos con objeto de entender completamente el grado de
influencia de los WTC sobre los radares meteorológicos. Una vez definido este punto, puede ser
necesario establecer métodos para reducir los WTC teniendo en cuenta el crecimiento esperado de
los sistemas de generación de energía eólica.
A la espera de los resultados de los estudios en curso sobre reducción de la interferencia de los WTC
causada a los radares meteorológicos, la solución actual para evitar o limitar las repercusiones de los
parques eólicos consiste en garantizar unas ciertas distancias de separación entre los dos sistemas.
Por ejemplo, algunos países europeos están considerando actualmente las siguientes
recomendaciones:
a) Ninguna turbina eólica debe instalarse a una distancia de la antena del radar inferior a:
– 5 km para los radares que funcionan en la gama de frecuencias 5 250-5 725 MHz;
– 10 km para los radares que funcionan en la banda de frecuencias 2 700-2 900 MHz.
b) Los proyectos de los parques eólicos deben someterse a un estudio de las repercusiones que
causarán en distancias inferiores a:
– 20 km para radares que funcionan en la gama de frecuencias 5 250-5 725 MHz;
– 30 km para los radares que funcionan en la banda de frecuencias 2 700-2 900 MHz.
10 Pruebas precedentes de sistemas de radares meteorológicos
Se han realizado pruebas sobre radares meteorológicos con objeto de determinar los criterios de
protección del radar. El procedimiento y la metodología de análisis de los datos se han definido
detalladamente en el Anexo 1 al Informe UIT-R M.2136. La prueba consistió en introducir una señal
interferente en el receptor a un nivel conocido. Se permitió al radar realizar una exploración de
Rec. UIT-R M.1849-1 39
volumen parcial (1 ó 2 rotaciones de antena) o total sin que estuviese presente la interferencia. A
continuación el radar se ajustó para que llevase a cabo esa misma exploración de volumen parcial o
total una vez introducida la señal interferente en el trayecto de recepción mediante un combinador de
RF. Se almacenaron en un disco los datos de productos de base obtenidos de la exploración de
volumen sin interferencia y de la exploración de volumen parcial o total con interferencia. Estas
exploraciones de volumen alternativas sin interferencia y total o completa con interferencia se
llevaron a cabo para unos niveles de señal interferente que proporcionaban unas relaciones
interferencia/ruido I/N, entre +6 dB y –15 dB.
A continuación se analizaron los datos realizando una comparación a lo largo de cada radial del
intervalo sin interferencia y el intervalo con interferencia. A partir de los datos obtenidos se pudo
determinar el nivel de I/N para el cual la interferencia provoca que la precisión de los productos de
base se salga fuera de los límites aceptables.
Esta prueba dio orientaciones sobre la manera de mejorar estas pruebas. La prueba, descrita en el
Anexo 1 al Informe UIT-R M.2136, se llevó a cabo con los datos recogidos del radar de la atmósfera.
Se hizo la hipótesis de que las condiciones de la atmósfera no cambiarían de forma significativa
durante los 3 a 5 minutos necesarios para realizar las exploraciones de volumen sin interferencia y
con interferencia parcial o total. El análisis de los datos puso en evidencia que esta hipótesis no
siempre fue correcta.
Es importante observar que en una amplia gama de radares meteorológicos la sensibilidad a la
interferencia puede variar ya que los niveles de interferencia tolerables de cada uno de los radares
dependen de la mínima relación señal/ruido de interés, de la desviación estimada y de los requisitos
en el comportamiento de la varianza.
Recientemente se han llevado a cabo nuevas pruebas de interferencia para determinar, en un tipo de
radar meteorológico que funciona en la gama de frecuencias 5 250-5 725 MHz, la sensibilidad a la
interferencia correspondiente a distintas señales de interferencia (constante, onda continua o FM e
impulsiva) que confirmaron el análisis descrito en el § 8, así como pruebas precedentes relativas a
radares meteorológicos que funcionan en la banda de frecuencias 2 700-2 900 MHz. Un resumen de
estos resultados de prueba aparece en el Anexo 2 al Informe UIT-R M.2136.
11 Futuras pruebas
Los futuros métodos de prueba deben examinar la utilización de un sistema de adquisición y
regeneración de la señal en los que pueda capturarse, digitalizarse y almacenarse en un disco las
señales de FI del radar o las señales I y Q. Las señales de una sola exploración de volumen sin
interferencia pueden capturarse y digitalizarse.
Con la utilización de generadores de forma de onda arbitraria y un generador de señal de RF, la señal
del radar recibida digitalizada puede reproducirse e introducirse en el receptor del radar todas las
veces necesarias para llevar a cabo la prueba, simulando las señales de retorno procedentes de la
atmósfera. Este método puede proporcionar condiciones de prueba idénticas para las exploraciones
de volumen sin interferencia y las exploraciones de volumen parcial o completas con interferencia.
Para evaluar y confirmar la susceptibilidad de los radares meteorológicos a este tipo de interferencia
puede que sea necesario realizar pruebas con interferencia de tipo impulsivo y/o interferencia variable
en el tiempo. Esta prueba debe realizarse para radares meteorológicos tanto no polarimétricos (con
polarización horizontal) como polarimétricos (con polarización horizontal y vertical).
40 Rec. UIT-R M.1849-1
12 Modelos de propagación
En los puntos precedentes se ha discutido la necesidad de minimizar la cantidad de interferencia
admisible recibida por los radares meteorológicos. Sin embargo, también se ha reconocido que deben
considerarse los modelos de propagación cuando se realizan estudios de compartición y que los
modelos de propagación más avanzados, tales como los que figuran en las Recomendaciones
UIT-R P.452 y UIT-R P.526, proporciona los resultados más precisos para estos estudios. Estos
modelos de propagación avanzados requieren la utilización de un valor de rebasamiento distinto
al 0,0%. Se necesitan nuevos estudios para definir mejor la viabilidad de utilizar estos modelos de
propagación avanzados y la forma en que deben aplicarse adecuadamente los resultados en los
estudios de compartición.
13 Futuras tendencias
Se está mejorando constantemente el hardware de los sistemas de los radares meteorológicos de varias
administraciones. La siguiente mejora será el radar polarimétrico que añade polarización vertical a
las actuales ondas del radar que emplean polarización horizontal.
También se están aplicando técnicas adicionales para mejorar el comportamiento de los radares
meteorológicos. Entre estas técnicas cabe citar varios algoritmos para resolver las ambigüedades de
alcance/velocidad, aumentar la velocidad y adquisición de datos, reducir los efectos de las señales
parásitas, disminuir los ecos parásitos y procesar de manera más eficaz las señales a fin de
proporcionar estimaciones meteorológicas lo más precisas posibles. Otros trabajos incluyen la
utilización combinada de radares meteorológicos y de perfil del viento. También se están estudiando
los efectos del rayo y sus peligros para determinar si puede predecirse su inicio y terminación.
Los investigadores empezarán a adaptar en breve la tecnología de radares con sistemas controlados
por fase para su utilización en aplicaciones de supervisión del clima. El sistema controlado por fase
sustituirá a las antenas parabólicas orientadas de forma mecánica mediante un sistema de antenas
orientadas electrónicamente. Este cambio permitirá realizar estrategias de exploración más flexibles
y actualizaciones más rápidas de las condiciones meteorológicas cambiantes. Las primeras pruebas
sobre sistemas de radares controlados por fase han sido muy prometedoras. La tecnología de sistema
controlado por fase aumentará la comprensión básica de la evolución de las tormentas, lo que a su
vez facilitará la creación de modelos informáticos mejorados, previsiones más precisas y alertas más
tempranas. Además, esta tecnología presenta la posibilidad de incrementar el tiempo de antelación
con que puede avisarse de la llegada de un tornado mucho más allá de la actual media de 13 minutos.
Estos sistemas controlados por fase no exigen ningún cambio en la potencia de salida del transmisor
ni en los requisitos de espectro de los actuales sistemas de antenas. Las mejoras del sistema se
implementan de forma más económica mejorando los subsistemas de procesamiento del receptor y la
señal. Aunque no se espera que puedan implementarse estos sistemas controlados por fase antes de
los próximos diez años, existe la posibilidad de que la versión mejorada de este sistema (si se
implementa) no utilice el transmisor existente que se sustituirá por módulos distribuidos de
transmisión/recepción en el sistema controlado por fase.
Existe la posibilidad de instalar un CASA (Center for collaborative adaptive sensing of the
atmosphere, Centro para la teledetección adaptativa conjunta de la atmósfera) basado en los sistemas
de radar meteorológico en banda X en la banda de 8 000 MHz a 12 000 MHz del espectro de
frecuencias. La Fundación Nacional de Ciencias estableció un nuevo centro de investigación de
ingeniería para la detección adaptativa conjunta de la atmósfera (CASA) en septiembre de 2003 a fin
de desarrollar adaptadores pequeños y de bajo coste para la teledetección de alta resolución de la
atmósfera inferior. Las condiciones meteorológicas en la troposfera inferior están extremadamente
submuestreadas lo que impide realizar previsiones y establecer modelos en la región donde se
desarrollan las tormentas. Los radares CASA de alta densidad espacial tendrán la posibilidad de
Rec. UIT-R M.1849-1 41
detectar fenómenos meteorológicos evolutivos en la región de la atmósfera inferior que se encuentran
a menudo por debajo de la actual cobertura del radar Doppler operacional (es decir, los primeros tres
kilómetros). Los radares CASA se instalarán en mástiles utilizados para telefonía celular u otra
infraestructura existente con grandes capacidades de transmisión de datos. A diferencia de las actuales
redes de radar preprogramadas, los radares CASA se comunicarán entre sí y adaptarán sus estrategias
de detección en respuesta directa a las evoluciones meteorológicas y a las cambiantes necesidades de
los usuarios. Estos datos del radar pueden incorporarse en modelos de predicción meteorológica
numéricos para obtener una inicialización de datos más completa.
Debe realizarse un seguimiento de estas futuras tendencias y, a medida que evolucione la tecnología,
tendrán repercusiones sobre cualquier futura estrategia para reducir la interferencia y sobre las
definiciones de los criterios de protección.
14 Conclusiones
Los radares meteorológicos en tierra funcionan y procesan las señales de manera diferente a otros
radares y producen productos muy distintos a los de otros tipos de radares. Estas diferencias pueden
afectar la forma de realizar los análisis de interferencia y la manera en que deben evaluarse los
resultados de los análisis.
Los radares meteorológicos en tierra son específicos y utilizan estrategias de desplazamiento de
antena distintas para realizar una exploración del volumen atmosférico alrededor del radar donde se
está midiendo una representación completa de las condiciones atmosféricas. En comparación, la
mayoría de los otros tipos de radares realizan seguimientos de blancos discretos y sólo interesan las
señales de retorno para las células de distancia asociadas con los blancos. En los radares
meteorológicos se procesan todas las células de distancia en todos los radiales.
Anexo 2
Características de los radares meteorológicos
1 Radares meteorológicos en la banda de frecuencias 2 700-2 900 MHz
Las características técnicas de los radares meteorológicos representativos que funcionan en la
banda de frecuencias 2 700-2 900 MHz aparecen en el Cuadro 1. Sin embargo, el radar 1 puede
funcionar hasta 3 000 MHz. Se trata de los sistemas de radares meteorológicos primarios utilizados
para las actividades de planificación de vuelos. En todo el mundo se ubican a menudo en aeropuertos
y proporciona evaluaciones precisas de las condiciones meteorológicas empleadas para gestionar las
operaciones de vuelo. Estos radares funcionan 24 horas al día.
El radar 1 utiliza una tecnología de radar Doppler para observar la presencia y calcular la velocidad
y dirección de movimiento de elementos meteorológicos importantes tales como tornados, huracanes
y tormentas violentas. Este radar 1 también proporciona una medición cuantitativa en la zona de
precipitación que desempeña un papel importante en la previsión hidrológica. Las capacidades de
detección del desplazamiento y aparición de fenómenos meteorológicos importantes ofrecidas por
este radar contribuyen a aumentar la precisión y oportunidad de los servicios de aviso. El radar 1
sobresale en la detección temprana de vientos perjudiciales y en la estimación de intensidades de
lluvia que se utilizan para la previsión de crecidas en los ríos e inundaciones.
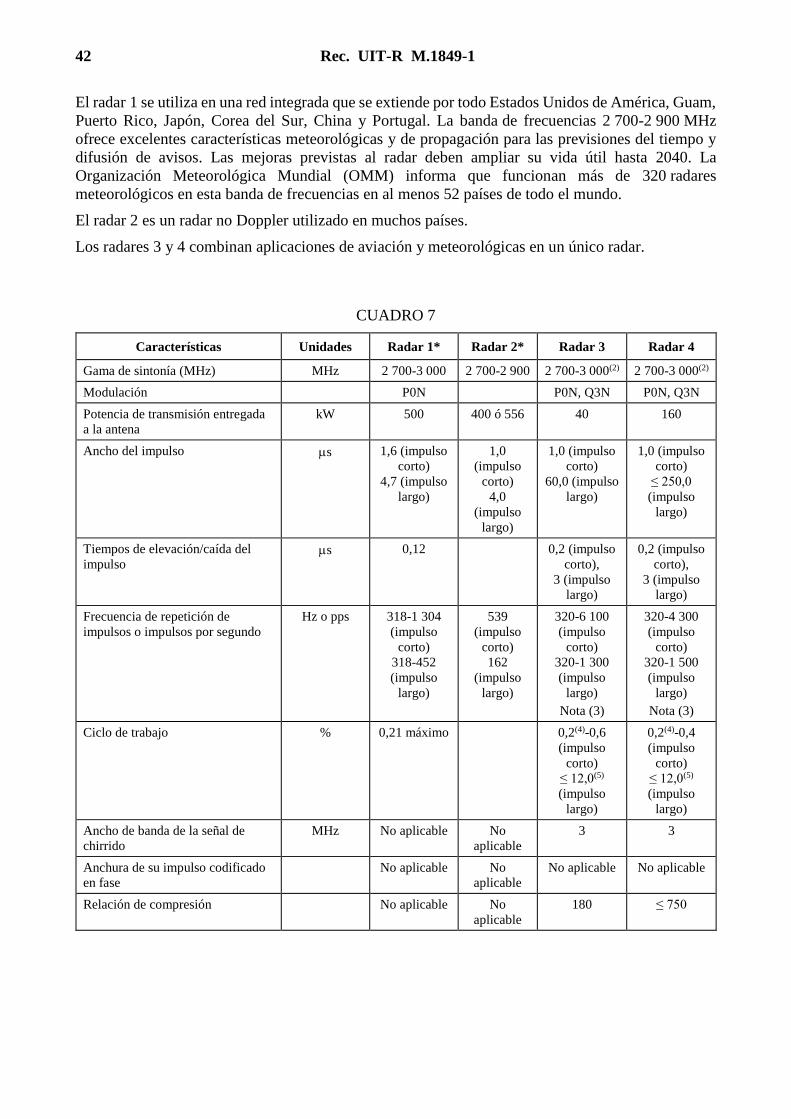
42 Rec. UIT-R M.1849-1
El radar 1 se utiliza en una red integrada que se extiende por todo Estados Unidos de América, Guam,
Puerto Rico, Japón, Corea del Sur, China y Portugal. La banda de frecuencias 2 700-2 900 MHz
ofrece excelentes características meteorológicas y de propagación para las previsiones del tiempo y
difusión de avisos. Las mejoras previstas al radar deben ampliar su vida útil hasta 2040. La
Organización Meteorológica Mundial (OMM) informa que funcionan más de 320 radares
meteorológicos en esta banda de frecuencias en al menos 52 países de todo el mundo.
El radar 2 es un radar no Doppler utilizado en muchos países.
Los radares 3 y 4 combinan aplicaciones de aviación y meteorológicas en un único radar.
CUADRO 7
Características Unidades Radar 1* Radar 2* Radar 3 Radar 4
Gama de sintonía (MHz) MHz 2 700-3 000 2 700-2 900 2 700-3 000(2) 2 700-3 000(2)
Modulación P0N P0N, Q3N P0N, Q3N
Potencia de transmisión entregada
a la antena
kW 500 400 ó 556 40 160
Ancho del impulso s 1,6 (impulso
corto)
4,7 (impulso
largo)
1,0
(impulso
corto)
4,0
(impulso
largo)
1,0 (impulso
corto)
60,0 (impulso
largo)
1,0 (impulso
corto)
≤ 250,0
(impulso
largo)
Tiempos de elevación/caída del
impulso s 0,12 0,2 (impulso
corto),
3 (impulso
largo)
0,2 (impulso
corto),
3 (impulso
largo)
Frecuencia de repetición de
impulsos o impulsos por segundo
Hz o pps 318-1 304
(impulso
corto)
318-452
(impulso
largo)
539
(impulso
corto)
162
(impulso
largo)
320-6 100
(impulso
corto)
320-1 300
(impulso
largo)
Nota (3)
320-4 300
(impulso
corto)
320-1 500
(impulso
largo)
Nota (3)
Ciclo de trabajo % 0,21 máximo 0,2(4)-0,6
(impulso
corto)
≤ 12,0(5)
(impulso
largo)
0,2(4)-0,4
(impulso
corto)
≤ 12,0(5)
(impulso
largo)
Ancho de banda de la señal de
chirrido
MHz No aplicable No
aplicable
3 3
Anchura de su impulso codificado
en fase
No aplicable No
aplicable
No aplicable No aplicable
Relación de compresión No aplicable No
aplicable
180 ≤ 750
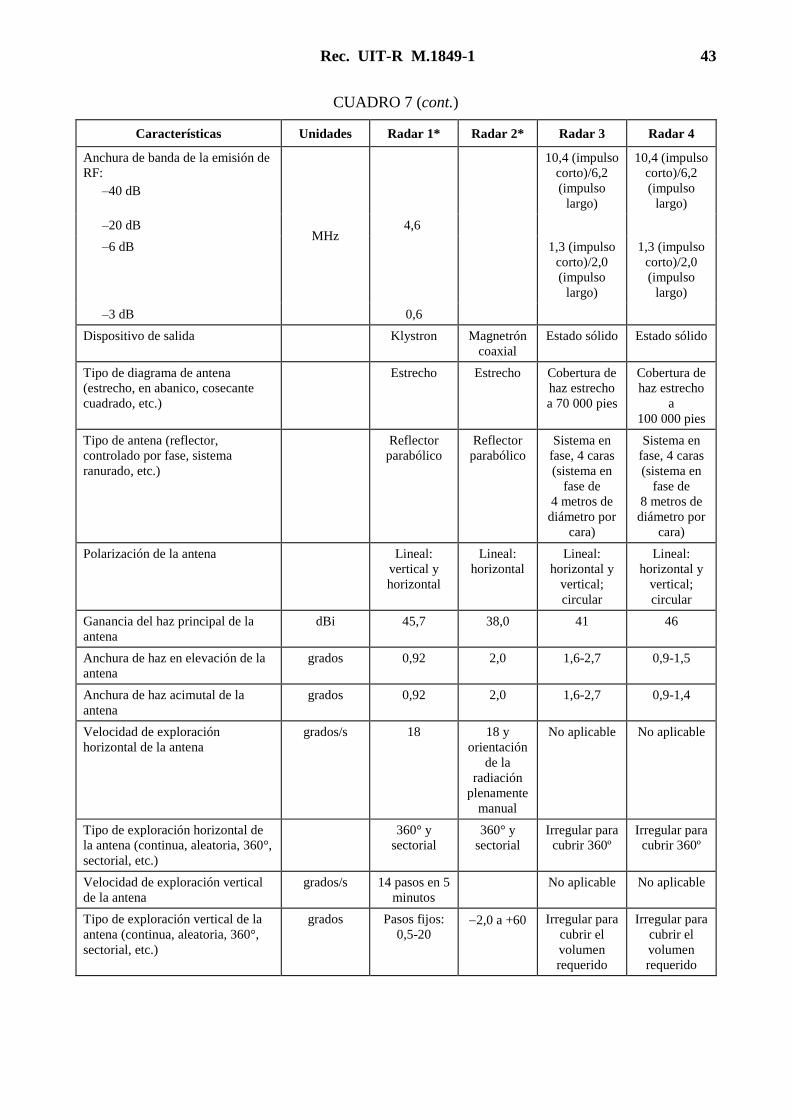
Rec. UIT-R M.1849-1 43
CUADRO 7 (cont.)
Características Unidades Radar 1* Radar 2* Radar 3 Radar 4
Anchura de banda de la emisión de
RF:
–40 dB
MHz
10,4 (impulso
corto)/6,2
(impulso
largo)
10,4 (impulso
corto)/6,2
(impulso
largo)
–20 dB 4,6
–6 dB 1,3 (impulso
corto)/2,0
(impulso
largo)
1,3 (impulso
corto)/2,0
(impulso
largo)
–3 dB 0,6
Dispositivo de salida Klystron Magnetrón
coaxial
Estado sólido Estado sólido
Tipo de diagrama de antena
(estrecho, en abanico, cosecante
cuadrado, etc.)
Estrecho Estrecho Cobertura de
haz estrecho
a 70 000 pies
Cobertura de
haz estrecho
a
100 000 pies
Tipo de antena (reflector,
controlado por fase, sistema
ranurado, etc.)
Reflector
parabólico
Reflector
parabólico
Sistema en
fase, 4 caras
(sistema en
fase de
4 metros de
diámetro por
cara)
Sistema en
fase, 4 caras
(sistema en
fase de
8 metros de
diámetro por
cara)
Polarización de la antena Lineal:
vertical y
horizontal
Lineal:
horizontal
Lineal:
horizontal y
vertical;
circular
Lineal:
horizontal y
vertical;
circular
Ganancia del haz principal de la
antena
dBi 45,7 38,0 41 46
Anchura de haz en elevación de la
antena
grados 0,92 2,0 1,6-2,7 0,9-1,5
Anchura de haz acimutal de la
antena
grados 0,92 2,0 1,6-2,7 0,9-1,4
Velocidad de exploración
horizontal de la antena
grados/s 18 18 y
orientación
de la
radiación
plenamente
manual
No aplicable No aplicable
Tipo de exploración horizontal de
la antena (continua, aleatoria, 360°,
sectorial, etc.)
360° y
sectorial
360° y
sectorial
Irregular para
cubrir 360º
Irregular para
cubrir 360º
Velocidad de exploración vertical
de la antena
grados/s 14 pasos en 5
minutos
No aplicable No aplicable
Tipo de exploración vertical de la
antena (continua, aleatoria, 360°,
sectorial, etc.)
grados Pasos fijos:
0,5-20 2,0 a +60 Irregular para
cubrir el
volumen
requerido
Irregular para
cubrir el
volumen
requerido

44 Rec. UIT-R M.1849-1
CUADRO 7 (fin)
Características Unidades Radar 1* Radar 2* Radar 3 Radar 4
Niveles del lóbulo lateral de la
antena (SL) (1er lóbulo lateral y
lóbulos laterales distantes)
dBi 20 +15
(estimado)
17 en
transmisión
25 en
recepción
17 en
transmisión
25 en
recepción
Altura de la antena m 30 30 Variable Variable
Ancho de banda IF del receptor MHz 0,63 a –3 dB 0,25 a –3 dB
(impulso
largo)
0,5 a –3 dB
(impulso
corto)
1,2 a –6 dB
(impulso
corto)
1,8 a –6 dB
(impulso
largo)
1,2 a –6 dB
(impulso
corto)
1,6 a –6 dB
(impulso
largo)
Factor de ruido del receptor dB 2,1 9,0 < 6 < 6
Mínima señal discernible dBm
dBm/M
Hz
–115 110 –110 –110
Punto de compresión de ganancia
1 dB en la etapa de entrada del
receptor
dBm –17 32 10 10
Nivel de saturación de sintonía del
receptor
dBm –10 No aplicable No aplicable
Ancho de banda a 3 dB en RF del
receptor
MHz 1,6 0,5
(impulso
largo)
1,5
(impulso
corto)
200 300
Niveles de saturación en RF y FI
del receptor y tiempos de
recuperación
dBm
µs
–10,
1
13
< 0,5
13
< 0,5
Anchura de banda de filtrado
Doppler
Hz 95(1)
(estimación)
Características de rechazo de
interferencia
Distribución geográfica En todo el mundo
Fracción de tiempo en utilización % 100
(1) Supresión del filtrado Doppler y del impulso de saturación.
(2) Gama de sintonización de 2,7-2,9 GHz cuando se realiza la función de radionavegación aeronáutica.
(3) FRI muy elevadas utilizadas sólo con grandes ángulos de elevación.
(4) El ciclo de trabajo de un impulso corto es del 0,2% en el barrido con la elevación más baja (horizonte).
(5) La combinación del ancho del impulso y la FRI se ajustará para mantener el ciclo de trabajo por debajo del 12%.
2 Radares meteorológicos en la gama de frecuencias 5 250-5 725 MHz
Los radares meteorológicos a bordo de aeronaves y en tierra funcionan en la gama de
frecuencias 5 250-5 850 MHz. Las características técnicas de los radares en tierra figuran en el
Cuadro 8.
Cabe observar que algunos servicios meteorológicos explotan radares no giratorios específicos en
esta gama de frecuencias para realizar un seguimiento y localizar radiosondas que no tienen
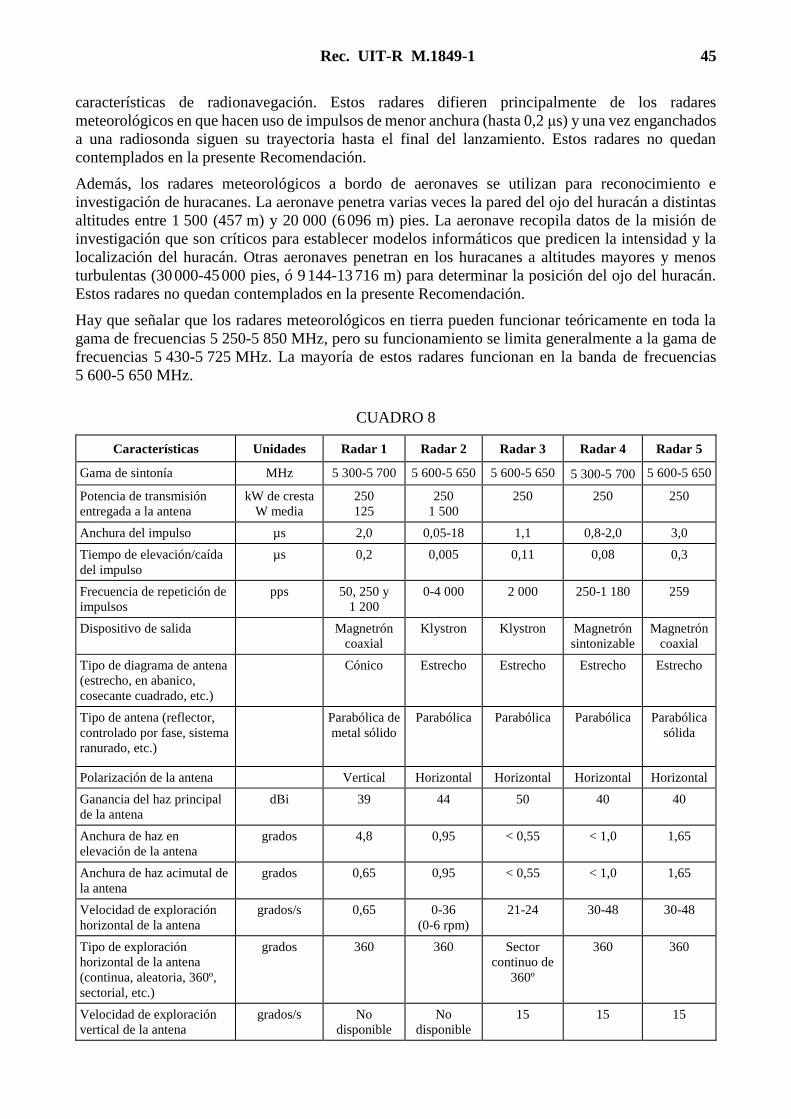
Rec. UIT-R M.1849-1 45
características de radionavegación. Estos radares difieren principalmente de los radares
meteorológicos en que hacen uso de impulsos de menor anchura (hasta 0,2 μs) y una vez enganchados
a una radiosonda siguen su trayectoria hasta el final del lanzamiento. Estos radares no quedan
contemplados en la presente Recomendación.
Además, los radares meteorológicos a bordo de aeronaves se utilizan para reconocimiento e
investigación de huracanes. La aeronave penetra varias veces la pared del ojo del huracán a distintas
altitudes entre 1 500 (457 m) y 20 000 (6 096 m) pies. La aeronave recopila datos de la misión de
investigación que son críticos para establecer modelos informáticos que predicen la intensidad y la
localización del huracán. Otras aeronaves penetran en los huracanes a altitudes mayores y menos
turbulentas (30 000-45 000 pies, ó 9 144-13 716 m) para determinar la posición del ojo del huracán.
Estos radares no quedan contemplados en la presente Recomendación.
Hay que señalar que los radares meteorológicos en tierra pueden funcionar teóricamente en toda la
gama de frecuencias 5 250-5 850 MHz, pero su funcionamiento se limita generalmente a la gama de
frecuencias 5 430-5 725 MHz. La mayoría de estos radares funcionan en la banda de frecuencias
5 600-5 650 MHz.
CUADRO 8
Características Unidades Radar 1 Radar 2 Radar 3 Radar 4 Radar 5
Gama de sintonía MHz 5 300-5 700 5 600-5 650 5 600-5 650 5 300-5 700 5 600-5 650
Potencia de transmisión
entregada a la antena
kW de cresta
W media
250
125
250
1 500
250 250 250
Anchura del impulso µs 2,0 0,05-18 1,1 0,8-2,0 3,0
Tiempo de elevación/caída
del impulso
µs 0,2 0,005 0,11 0,08 0,3
Frecuencia de repetición de
impulsos
pps 50, 250 y
1 200
0-4 000 2 000 250-1 180 259
Dispositivo de salida Magnetrón
coaxial
Klystron Klystron Magnetrón
sintonizable
Magnetrón
coaxial
Tipo de diagrama de antena
(estrecho, en abanico,
cosecante cuadrado, etc.)
Cónico Estrecho Estrecho Estrecho Estrecho
Tipo de antena (reflector,
controlado por fase, sistema
ranurado, etc.)
Parabólica de
metal sólido
Parabólica Parabólica Parabólica Parabólica
sólida
Polarización de la antena Vertical Horizontal Horizontal Horizontal Horizontal
Ganancia del haz principal
de la antena
dBi 39 44 50 40 40
Anchura de haz en
elevación de la antena
grados 4,8 0,95 < 0,55 < 1,0 1,65
Anchura de haz acimutal de
la antena
grados 0,65 0,95 < 0,55 < 1,0 1,65
Velocidad de exploración
horizontal de la antena
grados/s 0,65 0-36
(0-6 rpm)
21-24 30-48 30-48
Tipo de exploración
horizontal de la antena
(continua, aleatoria, 360º,
sectorial, etc.)
grados 360 360 Sector
continuo de
360º
360 360
Velocidad de exploración
vertical de la antena
grados/s No
disponible
No
disponible
15 15 15
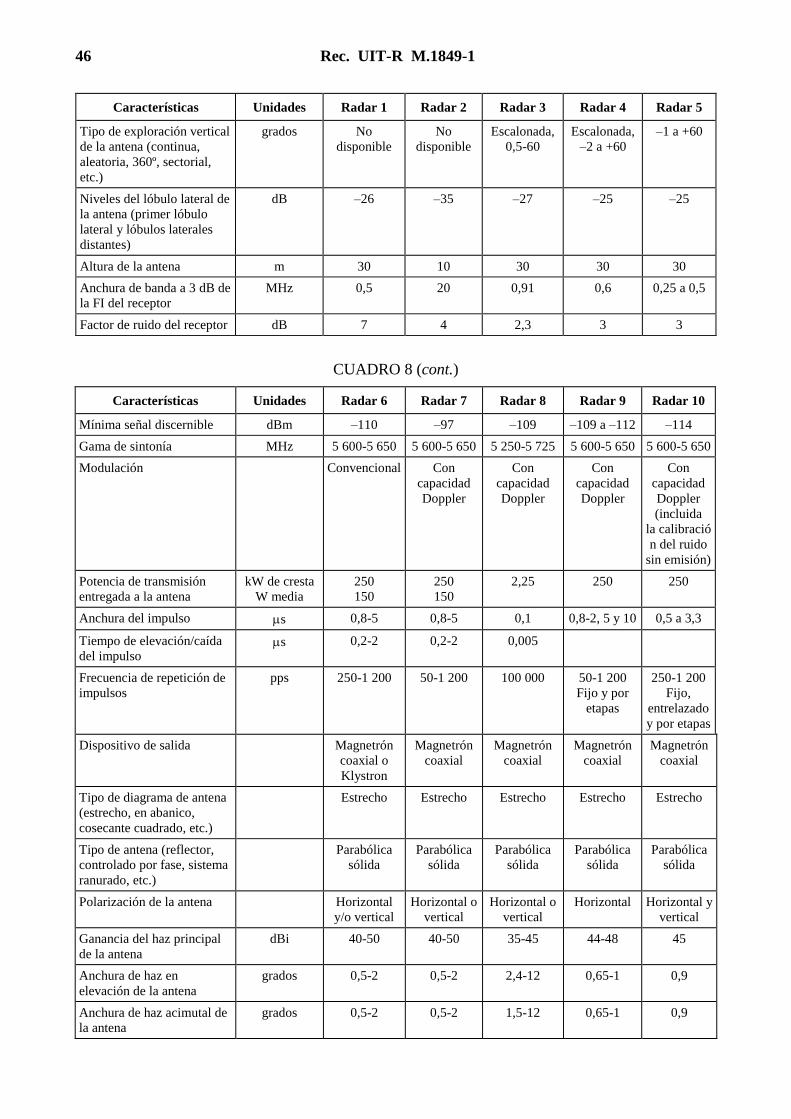
46 Rec. UIT-R M.1849-1
Características Unidades Radar 1 Radar 2 Radar 3 Radar 4 Radar 5
Tipo de exploración vertical
de la antena (continua,
aleatoria, 360º, sectorial,
etc.)
grados No
disponible
No
disponible
Escalonada,
0,5-60
Escalonada,
–2 a +60
–1 a +60
Niveles del lóbulo lateral de
la antena (primer lóbulo
lateral y lóbulos laterales
distantes)
dB –26 –35 –27 –25 –25
Altura de la antena m 30 10 30 30 30
Anchura de banda a 3 dB de
la FI del receptor
MHz 0,5 20 0,91 0,6 0,25 a 0,5
Factor de ruido del receptor dB 7 4 2,3 3 3
CUADRO 8 (cont.)
Características Unidades Radar 6 Radar 7 Radar 8 Radar 9 Radar 10
Mínima señal discernible dBm –110 –97 –109 –109 a –112 –114
Gama de sintonía MHz 5 600-5 650 5 600-5 650 5 250-5 725 5 600-5 650 5 600-5 650
Modulación Convencional Con
capacidad
Doppler
Con
capacidad
Doppler
Con
capacidad
Doppler
Con
capacidad
Doppler
(incluida
la calibració
n del ruido
sin emisión)
Potencia de transmisión
entregada a la antena
kW de cresta
W media
250
150
250
150
2,25 250 250
Anchura del impulso s 0,8-5 0,8-5 0,1 0,8-2, 5 y 10 0,5 a 3,3
Tiempo de elevación/caída
del impulso s 0,2-2 0,2-2 0,005
Frecuencia de repetición de
impulsos
pps 250-1 200 50-1 200 100 000 50-1 200
Fijo y por
etapas
250-1 200
Fijo,
entrelazado
y por etapas
Dispositivo de salida Magnetrón
coaxial o
Klystron
Magnetrón
coaxial
Magnetrón
coaxial
Magnetrón
coaxial
Magnetrón
coaxial
Tipo de diagrama de antena
(estrecho, en abanico,
cosecante cuadrado, etc.)
Estrecho Estrecho Estrecho Estrecho Estrecho
Tipo de antena (reflector,
controlado por fase, sistema
ranurado, etc.)
Parabólica
sólida
Parabólica
sólida
Parabólica
sólida
Parabólica
sólida
Parabólica
sólida
Polarización de la antena Horizontal
y/o vertical
Horizontal o
vertical
Horizontal o
vertical
Horizontal Horizontal y
vertical
Ganancia del haz principal
de la antena
dBi 40-50 40-50 35-45 44-48 45
Anchura de haz en
elevación de la antena
grados 0,5-2 0,5-2 2,4-12 0,65-1 0,9
Anchura de haz acimutal de
la antena
grados 0,5-2 0,5-2 1,5-12 0,65-1 0,9
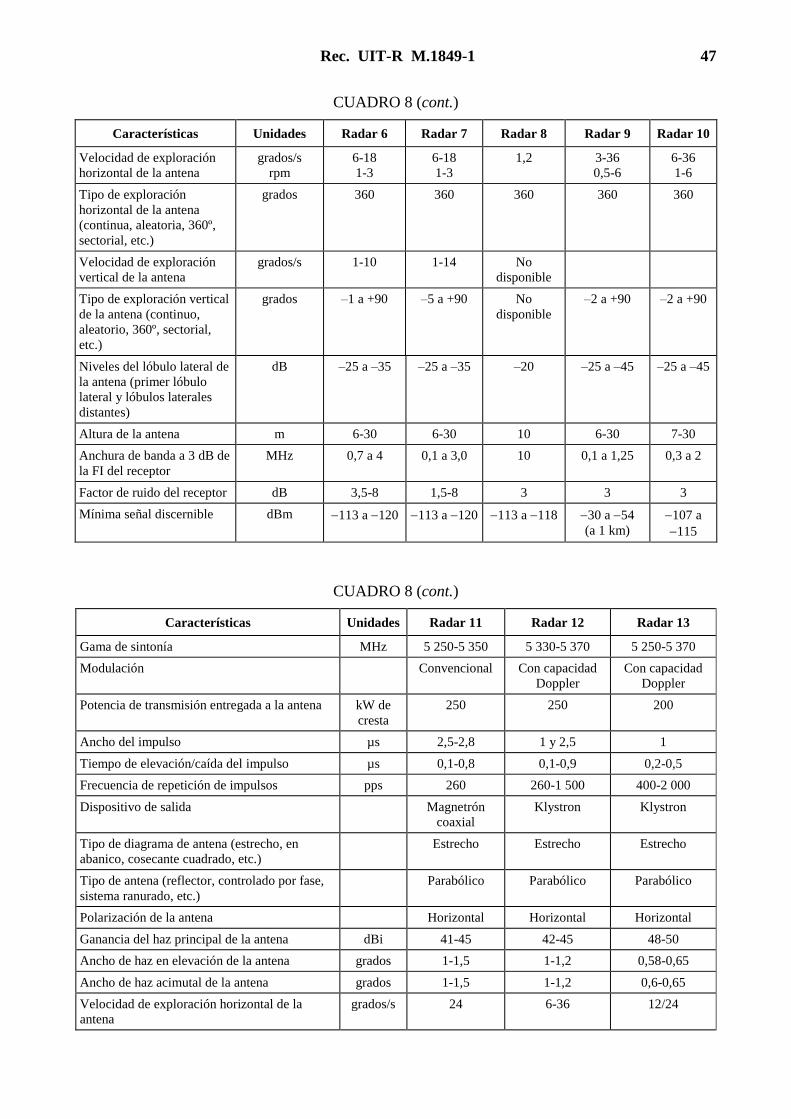
Rec. UIT-R M.1849-1 47
CUADRO 8 (cont.)
Características Unidades Radar 6 Radar 7 Radar 8 Radar 9 Radar 10
Velocidad de exploración
horizontal de la antena
grados/s
rpm
6-18
1-3
6-18
1-3
1,2 3-36
0,5-6
6-36
1-6
Tipo de exploración
horizontal de la antena
(continua, aleatoria, 360º,
sectorial, etc.)
grados 360 360 360 360 360
Velocidad de exploración
vertical de la antena
grados/s 1-10 1-14 No
disponible
Tipo de exploración vertical
de la antena (continuo,
aleatorio, 360º, sectorial,
etc.)
grados –1 a +90 –5 a +90 No
disponible
–2 a +90 –2 a +90
Niveles del lóbulo lateral de
la antena (primer lóbulo
lateral y lóbulos laterales
distantes)
dB –25 a –35 –25 a –35 –20 –25 a –45 –25 a –45
Altura de la antena m 6-30 6-30 10 6-30 7-30
Anchura de banda a 3 dB de
la FI del receptor
MHz 0,7 a 4 0,1 a 3,0 10 0,1 a 1,25 0,3 a 2
Factor de ruido del receptor dB 3,5-8 1,5-8 3 3 3
Mínima señal discernible dBm 113 a 120 113 a 120 113 a 118 30 a 54
(a 1 km)
107 a
115
CUADRO 8 (cont.)
Características Unidades Radar 11 Radar 12 Radar 13
Gama de sintonía MHz 5 250-5 350 5 330-5 370 5 250-5 370
Modulación Convencional Con capacidad
Doppler
Con capacidad
Doppler
Potencia de transmisión entregada a la antena kW de
cresta
250 250 200
Ancho del impulso µs 2,5-2,8 1 y 2,5 1
Tiempo de elevación/caída del impulso µs 0,1-0,8 0,1-0,9 0,2-0,5
Frecuencia de repetición de impulsos pps 260 260-1 500 400-2 000
Dispositivo de salida Magnetrón
coaxial
Klystron Klystron
Tipo de diagrama de antena (estrecho, en
abanico, cosecante cuadrado, etc.)
Estrecho Estrecho Estrecho
Tipo de antena (reflector, controlado por fase,
sistema ranurado, etc.)
Parabólico Parabólico Parabólico
Polarización de la antena Horizontal Horizontal Horizontal
Ganancia del haz principal de la antena dBi 41-45 42-45 48-50
Ancho de haz en elevación de la antena grados 1-1,5 1-1,2 0,58-0,65
Ancho de haz acimutal de la antena grados 1-1,5 1-1,2 0,6-0,65
Velocidad de exploración horizontal de la
antena
grados/s 24 6-36 12/24
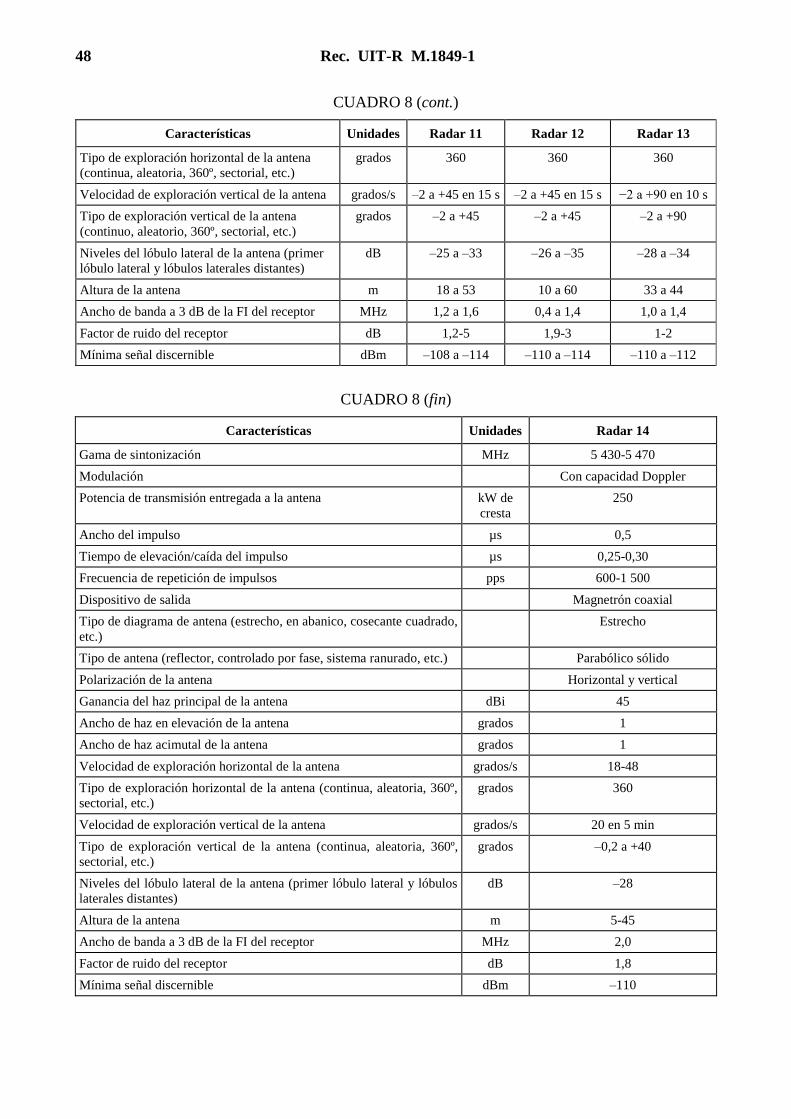
48 Rec. UIT-R M.1849-1
CUADRO 8 (cont.)
Características Unidades Radar 11 Radar 12 Radar 13
Tipo de exploración horizontal de la antena
(continua, aleatoria, 360º, sectorial, etc.)
grados 360 360 360
Velocidad de exploración vertical de la antena grados/s –2 a +45 en 15 s –2 a +45 en 15 s −2 a +90 en 10 s
Tipo de exploración vertical de la antena
(continuo, aleatorio, 360º, sectorial, etc.)
grados –2 a +45 –2 a +45 –2 a +90
Niveles del lóbulo lateral de la antena (primer
lóbulo lateral y lóbulos laterales distantes)
dB –25 a –33 –26 a –35 –28 a –34
Altura de la antena m 18 a 53 10 a 60 33 a 44
Ancho de banda a 3 dB de la FI del receptor MHz 1,2 a 1,6 0,4 a 1,4 1,0 a 1,4
Factor de ruido del receptor dB 1,2-5 1,9-3 1-2
Mínima señal discernible dBm –108 a –114 –110 a –114 –110 a –112
CUADRO 8 (fin)
Características Unidades Radar 14
Gama de sintonización MHz 5 430-5 470
Modulación Con capacidad Doppler
Potencia de transmisión entregada a la antena kW de
cresta
250
Ancho del impulso µs 0,5
Tiempo de elevación/caída del impulso µs 0,25-0,30
Frecuencia de repetición de impulsos pps 600-1 500
Dispositivo de salida Magnetrón coaxial
Tipo de diagrama de antena (estrecho, en abanico, cosecante cuadrado,
etc.)
Estrecho
Tipo de antena (reflector, controlado por fase, sistema ranurado, etc.) Parabólico sólido
Polarización de la antena Horizontal y vertical
Ganancia del haz principal de la antena dBi 45
Ancho de haz en elevación de la antena grados 1
Ancho de haz acimutal de la antena grados 1
Velocidad de exploración horizontal de la antena grados/s 18-48
Tipo de exploración horizontal de la antena (continua, aleatoria, 360º,
sectorial, etc.)
grados 360
Velocidad de exploración vertical de la antena grados/s 20 en 5 min
Tipo de exploración vertical de la antena (continua, aleatoria, 360º,
sectorial, etc.)
grados –0,2 a +40
Niveles del lóbulo lateral de la antena (primer lóbulo lateral y lóbulos
laterales distantes)
dB –28
Altura de la antena m 5-45
Ancho de banda a 3 dB de la FI del receptor MHz 2,0
Factor de ruido del receptor dB 1,8
Mínima señal discernible dBm –110
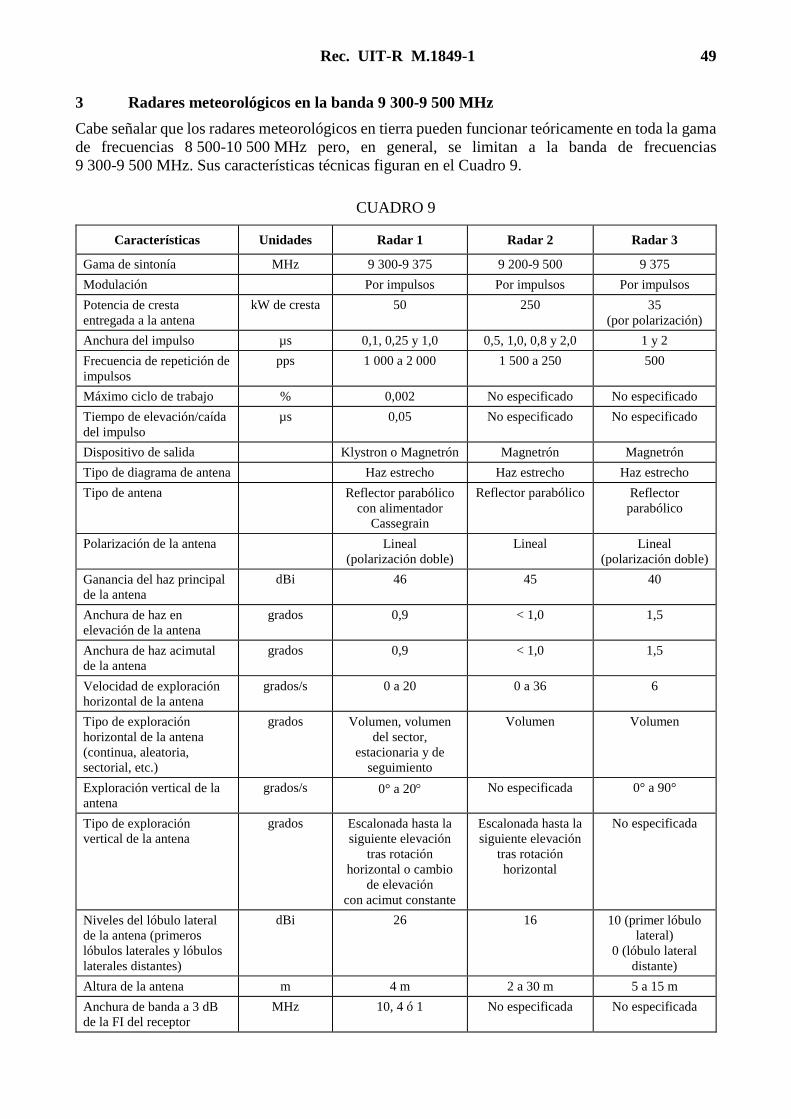
Rec. UIT-R M.1849-1 49
3 Radares meteorológicos en la banda 9 300-9 500 MHz
Cabe señalar que los radares meteorológicos en tierra pueden funcionar teóricamente en toda la gama
de frecuencias 8 500-10 500 MHz pero, en general, se limitan a la banda de frecuencias
9 300-9 500 MHz. Sus características técnicas figuran en el Cuadro 9.
CUADRO 9
Características Unidades Radar 1 Radar 2 Radar 3
Gama de sintonía MHz 9 300-9 375 9 200-9 500 9 375
Modulación Por impulsos Por impulsos Por impulsos
Potencia de cresta
entregada a la antena
kW de cresta 50 250 35
(por polarización)
Anchura del impulso µs 0,1, 0,25 y 1,0 0,5, 1,0, 0,8 y 2,0 1 y 2
Frecuencia de repetición de
impulsos
pps 1 000 a 2 000 1 500 a 250 500
Máximo ciclo de trabajo % 0,002 No especificado No especificado
Tiempo de elevación/caída
del impulso
µs 0,05 No especificado No especificado
Dispositivo de salida Klystron o Magnetrón Magnetrón Magnetrón
Tipo de diagrama de antena Haz estrecho Haz estrecho Haz estrecho
Tipo de antena Reflector parabólico
con alimentador
Cassegrain
Reflector parabólico Reflector
parabólico
Polarización de la antena Lineal
(polarización doble)
Lineal Lineal
(polarización doble)
Ganancia del haz principal
de la antena
dBi 46 45 40
Anchura de haz en
elevación de la antena
grados 0,9 < 1,0 1,5
Anchura de haz acimutal
de la antena
grados 0,9 < 1,0 1,5
Velocidad de exploración
horizontal de la antena
grados/s 0 a 20 0 a 36 6
Tipo de exploración
horizontal de la antena
(continua, aleatoria,
sectorial, etc.)
grados Volumen, volumen
del sector,
estacionaria y de
seguimiento
Volumen Volumen
Exploración vertical de la
antena
grados/s 0° a 20 No especificada 0° a 90°
Tipo de exploración
vertical de la antena
grados Escalonada hasta la
siguiente elevación
tras rotación
horizontal o cambio
de elevación
con acimut constante
Escalonada hasta la
siguiente elevación
tras rotación
horizontal
No especificada
Niveles del lóbulo lateral
de la antena (primeros
lóbulos laterales y lóbulos
laterales distantes)
dBi 26 16 10 (primer lóbulo
lateral)
0 (lóbulo lateral
distante)
Altura de la antena m 4 m 2 a 30 m 5 a 15 m
Anchura de banda a 3 dB
de la FI del receptor
MHz 10, 4 ó 1 No especificada No especificada
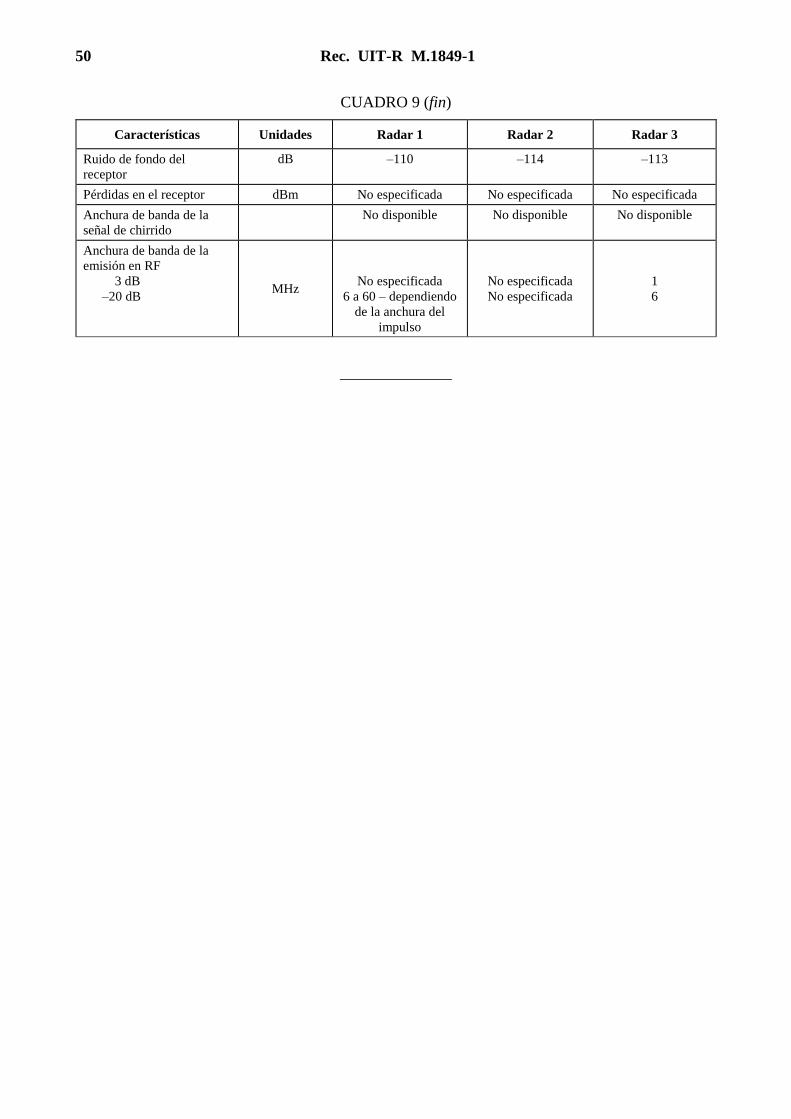
50 Rec. UIT-R M.1849-1
CUADRO 9 (fin)
Características Unidades Radar 1 Radar 2 Radar 3
Ruido de fondo del
receptor
dB –110 –114 –113
Pérdidas en el receptor dBm No especificada No especificada No especificada
Anchura de banda de la
señal de chirrido
No disponible No disponible No disponible
Anchura de banda de la
emisión en RF
3 dB
–20 dB MHz
No especificada
6 a 60 – dependiendo
de la anchura del
impulso
No especificada
No especificada
1
6
______________







