1
Procesamiento Digital de SeñalProcesamiento Digital de Señal
Tema 6 : Diseño de Filtros digitales • Transformada Z
• Análisis de sistemas digitales
•Función de Transferencia
•Respuesta en Frecuencia
• Síntesis de Sistemas digitales
•Diseño de filtros FIR e IIR
• Una señal muestreada x[n]=x(nT), está definida sólo para los instantes de tiempo nT, siendo T=(1/Fs) el período de muestreo.
• La transformada Z permite expresar la secuencia de muestras x[n] en forma de un polinomio en la variable z.
–El operador z está asociados al retraso o adelanto del tiempo enmúltiplos del período de muestreo T.
–El dominio de la variable z es el plano complejo.
La Transformada ZLa Transformada Z
∑+∞
−∞=
−⋅==n
nznTxnxZzX )(]}[{)(
2
DefiniciónDefinición y y PropiedadesPropiedades
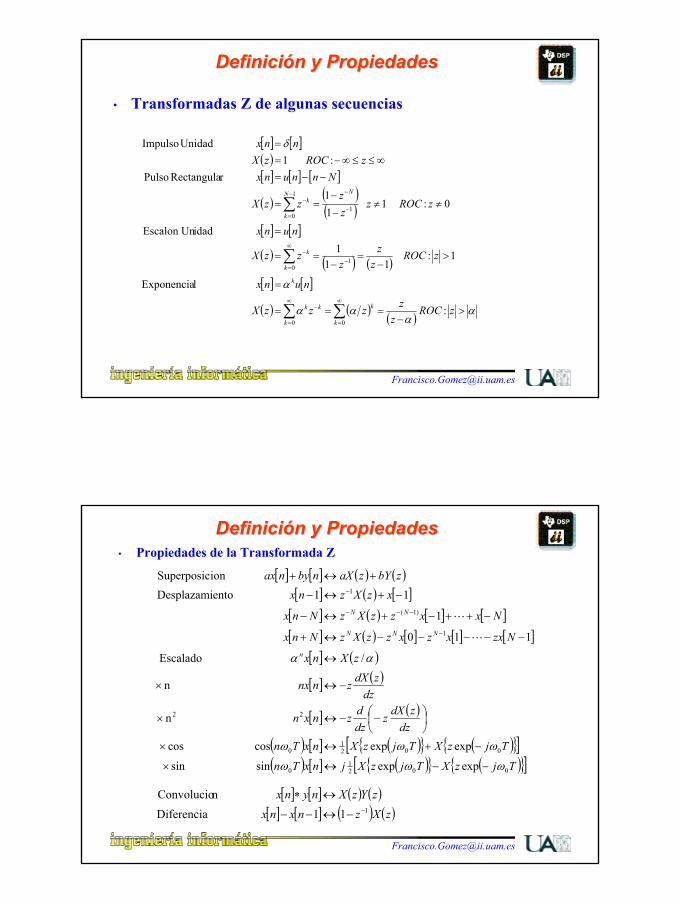
• Transformadas Z de algunas secuencias
[ ] [ ]( )[ ] [ ] [ ]
( ) ( )( )
[ ] [ ]
( ) ( ) ( )[ ] [ ]
( ) ( ) ( ) αα
αα
α
δ
>−
===
=
>−
=−
==
=
≠≠−
−==
−−=∞≤≤∞−=
=
∑∑
∑
∑
∞
=
∞
=
−
−
∞
=
−
−
−−
=
−
zROCz
zzzzX
nunx
zROCz
zz
zzX
nunx
zROCzzz
zzX
NnnunxzROCzX
nnx
k
k
k
kk
k
k
k
NN
k
k
:
lExponencia
1 : 11
1 idadEscalon Un
0 : 1 11
r Rectangula Pulso : 1
UnidadImpulso
00
10
1
1
0
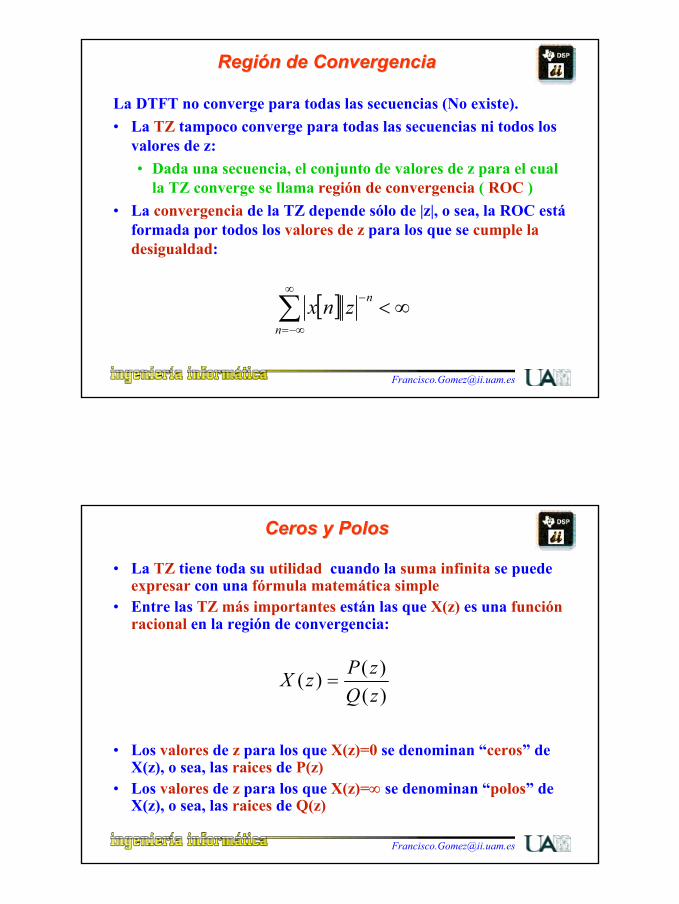
DefiniciónDefinición y y PropiedadesPropiedades• Propiedades de la Transformada Z
[ ] [ ] ( ) ( )[ ] ( ) [ ]
[ ] ( ) [ ] [ ][ ] ( ) [ ] [ ] [ ]
[ ] ( )
[ ] ( )
[ ] ( )
( ) [ ] ( ){ } ( ){ }[ ]( ) [ ] ( ){ } ( ){ }[ ]TjzXTjzXjnxTn
TjzXTjzXnxTndz
zdXzdzdznxn
dzzdXznnx
zXnx
NzxxzxzzXzNnx
NxxzzXzNnx
xzXznxzbYzaXnbynax
n
NNN
NN
0021
0
0021
0
22
1
)1(
1
expexpsin sin
expexpcos cos
n
n
/ Escalado
110
1
11 entoDesplazami ion Superposic
ωωω
ωωω
αα
−−↔×
−+↔×
−−↔×
−↔×
↔
−−−−−↔+
−++−+↔−
−+↔−
+↔+
−
−−−
−
L
L
[ ] [ ] ( ) ( )[ ] [ ] ( ) ( )zXznxnx
zYzXnynx111 Diferencia
n Convolucio−−↔−−
↔∗

3
Transformada ZTransformada Z
• La TZ de señales en tiempo discreto está relacionada con la DTFT
• Si se sustituye la variable compleja z por la variable compleja ejw, la TZ se reduce a la TF
• Cuando la TF existe, es simplemente X(z) con z=ejw lo que implica restringir a la variable z a que tenga módulo unidad
• Para |z|=1 la TZ equivale a la TF
[ ] jwn
n
jw enxeX −∞
−∞=∑=)(Transformada de Fourier de la secuencia x[n]
Transformada Z de la secuencia x[n] [ ] n
nznxzX −
∞
−∞=∑=)(
Transformada ZTransformada Z
• Como la TZ es una función de variable compleja, es conveniente describirla e interpretarla en el plano complejo z
• El contorno correspondiente a |z|=1 es una circunferencia de radio unidad
• La TZ evaluada en la circunferencia unidad es la DTFT :• z=1, w=0• z=j, w=π/2• z=-1, w=π• Se obtiene un comportamiento simétrico al evaluar la TF
desde w=π hasta w=2π si la secuencia es real.• Es periódica, con periodo 2π.
4
Región de ConvergenciaRegión de Convergencia
La DTFT no converge para todas las secuencias (No existe).• La TZ tampoco converge para todas las secuencias ni todos los
valores de z:• Dada una secuencia, el conjunto de valores de z para el cual
la TZ converge se llama región de convergencia ( ROC )• La convergencia de la TZ depende sólo de |z|, o sea, la ROC está
formada por todos los valores de z para los que se cumple la desigualdad:
[ ] ∞<−∞
−∞=∑ n
nznx
Ceros y PolosCeros y Polos
• La TZ tiene toda su utilidad cuando la suma infinita se puede expresar con una fórmula matemática simple
• Entre las TZ más importantes están las que X(z) es una función racional en la región de convergencia:
• Los valores de z para los que X(z)=0 se denominan “ceros” de X(z), o sea, las raices de P(z)
• Los valores de z para los que X(z)=∞ se denominan “polos” de X(z), o sea, las raices de Q(z)
)()()(
zQzPzX =
5
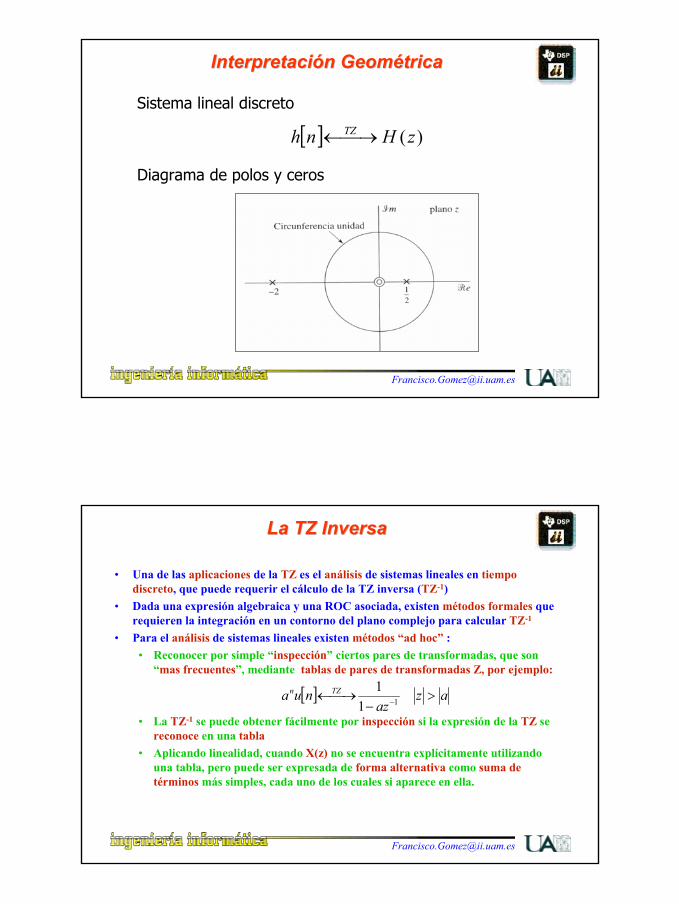
Interpretación GeométricaInterpretación Geométrica
Sistema lineal discreto
Diagrama de polos y ceros
[ ] )(zHnh TZ→←
La TZ InversaLa TZ Inversa
• Una de las aplicaciones de la TZ es el análisis de sistemas lineales en tiempo discreto, que puede requerir el cálculo de la TZ inversa (TZ-1)
• Dada una expresión algebraica y una ROC asociada, existen métodos formales que requieren la integración en un contorno del plano complejo para calcular TZ-1
• Para el análisis de sistemas lineales existen métodos “ad hoc” :• Reconocer por simple “inspección” ciertos pares de transformadas, que son
“mas frecuentes”, mediante tablas de pares de transformadas Z, por ejemplo:
• La TZ-1 se puede obtener fácilmente por inspección si la expresión de la TZ se reconoce en una tabla
• Aplicando linealidad, cuando X(z) no se encuentra explícitamente utilizando una tabla, pero puede ser expresada de forma alternativa como suma de términos más simples, cada uno de los cuales si aparece en ella.
[ ] azaz
nua TZn >−
→← −111
6
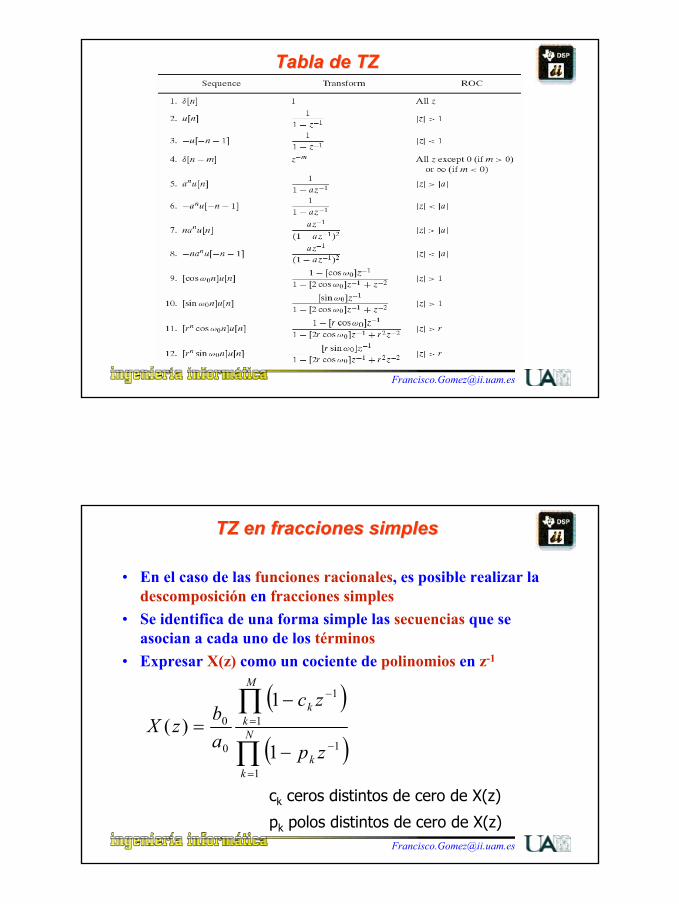
TablaTabla de TZde TZ
TZ en fracciones simplesTZ en fracciones simples
• En el caso de las funciones racionales, es posible realizar la descomposición en fracciones simples
• Se identifica de una forma simple las secuencias que se asocian a cada uno de los términos
• Expresar X(z) como un cociente de polinomios en z-1
( )
( )∏
∏
=
−
=
−
−
−= N
kk
M
kk
zp
zc
abzX
1
1
1
1
0
0
1
1)(
ck ceros distintos de cero de X(z)
pk polos distintos de cero de X(z)
7
TZ en fracciones simplesTZ en fracciones simples
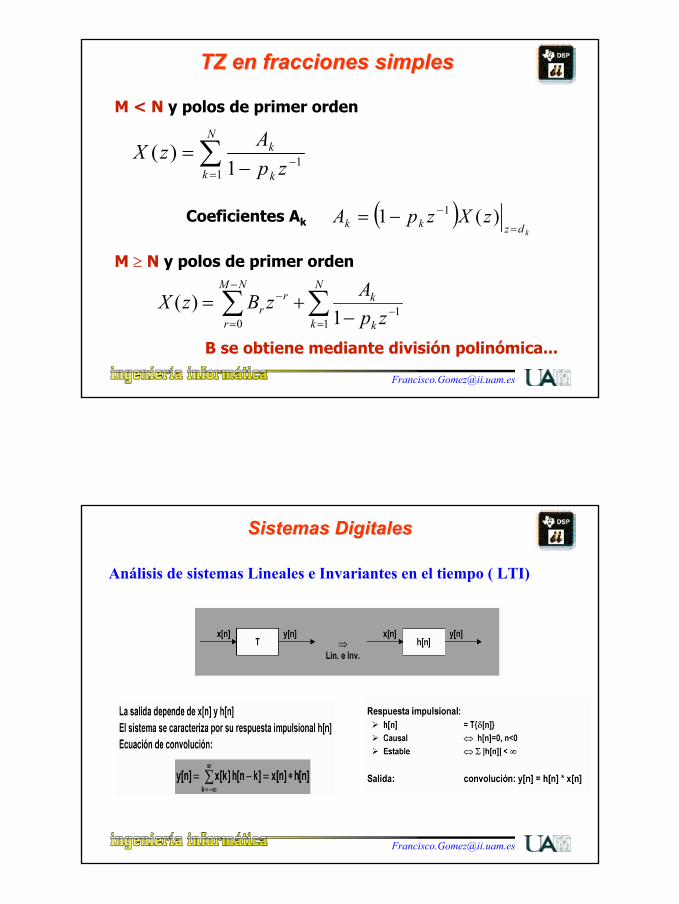
M < N y polos de primer orden
∑=
−−=
N
k k
k
zpAzX
111
)(
Coeficientes Ak ( )kdzkk zXzpA
=
−−= )(1 1
M ≥ N y polos de primer orden
∑∑=
−
−
=
−
−+=
N
k k
kNM
r
rr zp
AzBzX1
10 1
)(
B se obtiene mediante división polinómica...
Análisis de sistemas Lineales e Invariantes en el tiempo ( LTI)
Sistemas DigitalesSistemas Digitales

8
Sistema LTI: Función de Transferencia.
Sistemas DigitalesSistemas Digitales
Sistemas caracterizados por ecuaciones en diferencias finitasFunción de transferencia. H(z):
Sistemas DigitalesSistemas Digitales
9
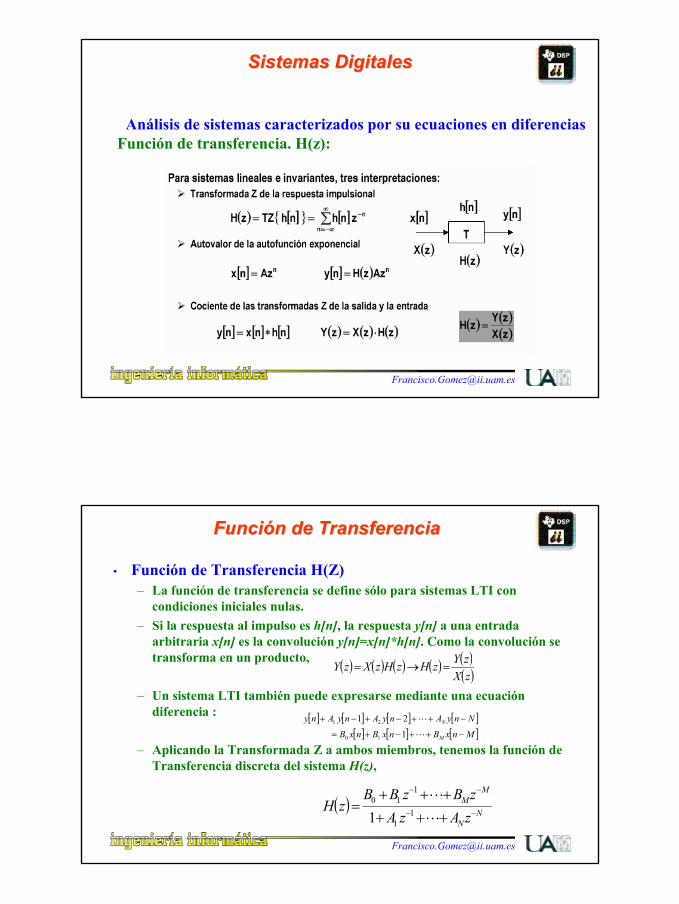
Análisis de sistemas caracterizados por su ecuaciones en diferenciasFunción de transferencia. H(z):
Sistemas DigitalesSistemas Digitales
Función de TransferenciaFunción de Transferencia
• Función de Transferencia H(Z)– La función de transferencia se define sólo para sistemas LTI con
condiciones iniciales nulas.– Si la respuesta al impulso es h[n], la respuesta y[n] a una entrada
arbitraria x[n] es la convolución y[n]=x[n]*h[n]. Como la convolución se transforma en un producto,
– Un sistema LTI también puede expresarse mediante una ecuación diferencia :
– Aplicando la Transformada Z a ambos miembros, tenemos la función de Transferencia discreta del sistema H(z),
( ) ( ) ( ) ( ) ( )( )zXzYzHzHzXzY =→=
[ ] [ ] [ ] [ ][ ] [ ] [ ]MnxBnxBnxB
NnyAnyAnyAny
M
N
−++−+=
−++−+−+
L
L
1
21
10
21
( ) NN
MM
zAzAzBzBB
zH −−
−−
+++
+++=
L
L1
1
110
1

10
FunciónFunción de de TransferenciaTransferencia
• Expresando la función de Transferencia de forma factorizada,
– Se denominan polos del sistema a los valores p1,p2,...,pN. Determinan la forma de la respuesta del sistema (modos naturales del sistema).
– Los ceros del sistema (z1,z2,...,zM) determinan las frecuencias bloqueadas por el sistema.
• El plano z y la estabilidad del sistema– La estabilidad de un sistema LTI discreto requiere que la respuesta al
impulso h[n] sea absolutamente sumable (integrable en continuo). Esto quiere decir que h[n]=0 en n=∞. Para ello es necesario que los polos de la función de transferencia H(z) estén todos dentro del círculo unidad en el plano z (|pi|<1). Esto evita que la respuesta tenga exponenciales crecientes.
( ) ( ) ( )( ) ( )N
MN
N
MM
pzpzzzzzK
zAzAzBzBB
zH−−−−
=+++
+++= −−
−−
L
L
L
L
1
11
1
110
1
Función de TransferenciaFunción de Transferencia
– La estabilidad de una función de Transferencia puede determinarse simplemente inspeccionando los coeficientes del denominador de la función de Transferencia. Para ello, debe estar en forma de términos de 2º Orden,
– Para cada uno de los términos de 2º Orden se calcula las raíces (λ1i y λ2i) del denominador,
– Para las raíces del polinomio y los coeficientes se cumple,
– La raíces deben estar dentro del círculo unidad, por lo que |λ1i| <1 y |λ2i| <1. Esto implica que el coeficiente |α2i|<1.
( ) ( )( ) int
1
02
21
1
22
11
0 21 ,
11
+
=
++++
== ∏−
=−−
−− NLzzzza
zDzNzH
L
i ii
ii
ααββ
( ) ( ) ( )12
11
22
11 111 −−−− −⋅−=++= zzzzzD iiiii λλαα
( )iii
iii
212
211
λλαλλα
⋅=+−=
11
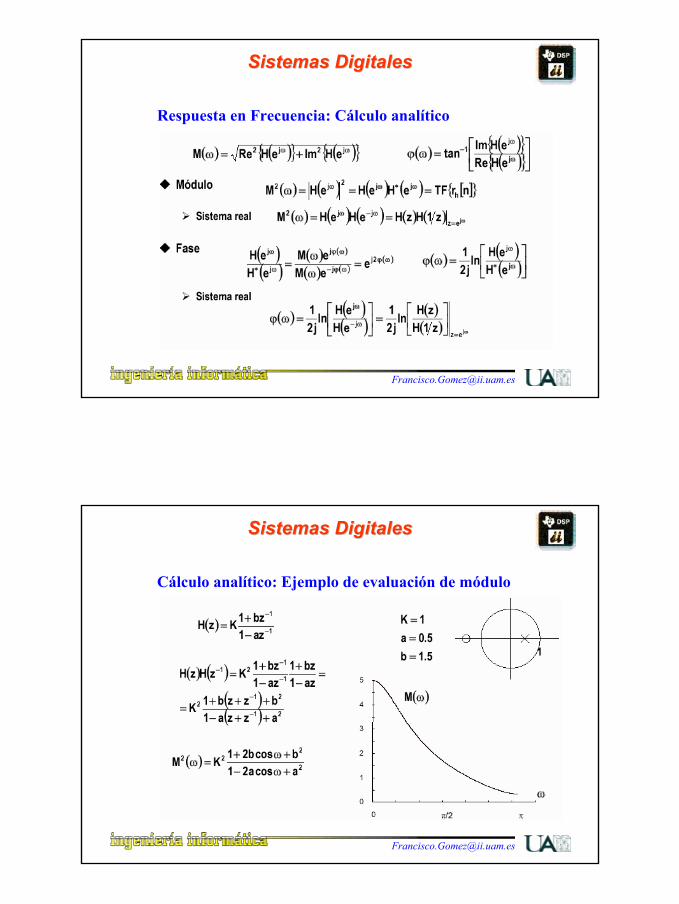
Respuesta en Frecuencia: Cálculo analítico
Sistemas DigitalesSistemas Digitales
Cálculo analítico: Ejemplo de evaluación de módulo
Sistemas DigitalesSistemas Digitales

12
Cálculo analítico: Ejemplo de evaluación de fase
Sistemas DigitalesSistemas Digitales
Cálculo analítico: contribución de ceros y polos
Sistemas DigitalesSistemas Digitales

13
Cálculo analítico: contribución de ceros
Sistemas DigitalesSistemas Digitales
Cálculo analítico: contribución de ceros
Sistemas DigitalesSistemas Digitales
14
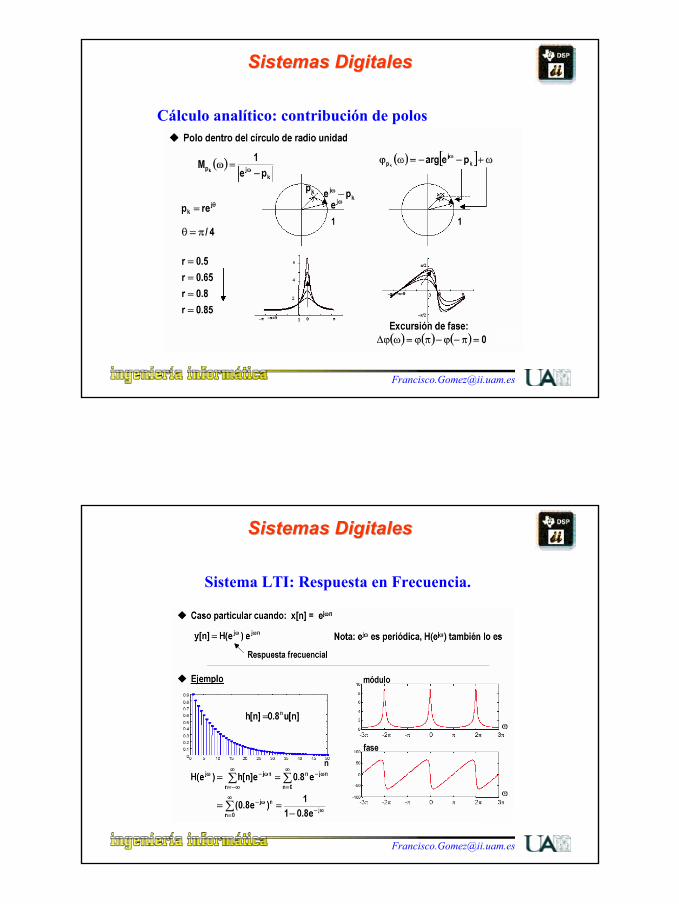
Cálculo analítico: contribución de polos
Sistemas DigitalesSistemas Digitales
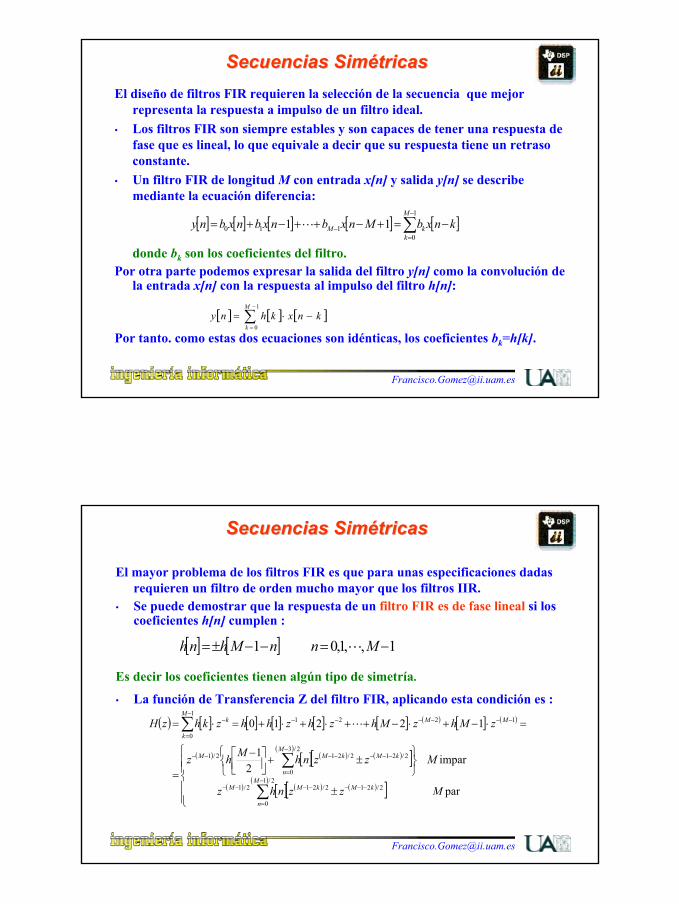
Sistema LTI: Respuesta en Frecuencia.
Sistemas DigitalesSistemas Digitales

15
Respuesta en Frecuencia: Interpretación
Sistemas DigitalesSistemas Digitales
Respuesta en Frecuencia
Respuesta en Frecuencia: Propiedades
Sistemas DigitalesSistemas Digitales

16
DiseñoDiseño de de FiltrosFiltros DigitalesDigitales
•• FiltrosFiltros FIRFIR–– SecuenciasSecuencias SimétricasSimétricas: : FaseFase lineallineal–– TécnicasTécnicas de de DiseñoDiseño de de FiltrosFiltros FIRFIR
•• MétodoMétodo de de laslas Series de FourierSeries de Fourier•• MétodoMétodo de de MuestreoMuestreo en en FrecuenciaFrecuencia
•• FiltrosFiltros IIR: De IIR: De analógicoanalógico a digital a digital
Estructuras para la realización de un sistema FIR:
Diagrama de bloques
La respuesta al impulso es h[n]= bn para 0 ≤ n ≤ M-1, h[n]=0, para el resto.
SISTEMA no recursivo
Sea un sistema LTI con ecuación (EDF) característica
Sistemas DigitalesSistemas Digitales
17
SecuenciasSecuencias SimétricasSimétricasEl diseño de filtros FIR requieren la selección de la secuencia que mejor
representa la respuesta a impulso de un filtro ideal.• Los filtros FIR son siempre estables y son capaces de tener una respuesta de
fase que es lineal, lo que equivale a decir que su respuesta tiene un retraso constante.
• Un filtro FIR de longitud M con entrada x[n] y salida y[n] se describe mediante la ecuación diferencia:
donde bk son los coeficientes del filtro.Por otra parte podemos expresar la salida del filtro y[n] como la convolución de
la entrada x[n] con la respuesta al impulso del filtro h[n]:
Por tanto. como estas dos ecuaciones son idénticas, los coeficientes bk=h[k].
[ ] [ ] [ ] [ ] [ ]∑−
=− −=+−++−+=
1
0110 11
M
kkM knxbMnxbnxbnxbny L
[ ] [ ] [ ]∑−
=
−⋅=1
0
M
k
knxkhny
Secuencias SimétricasSecuencias Simétricas
El mayor problema de los filtros FIR es que para unas especificaciones dadas requieren un filtro de orden mucho mayor que los filtros IIR.
• Se puede demostrar que la respuesta de un filtro FIR es de fase lineal si los coeficientes h[n] cumplen :
Es decir los coeficientes tienen algún tipo de simetría.
• La función de Transferencia Z del filtro FIR, aplicando esta condición es :
[ ] [ ] 1,,1,0 1 −=−−±= MnnMhnh L
( ) [ ] [ ] [ ] [ ] [ ] ( ) [ ] ( )
( ) [ ] ( ) ( )[ ]( )
( ) [ ] ( ) ( )[ ]( )
par
impar 2
1
12210
2/1
0
2/212/212/1
2/3
0
2/212/212/1
12211
0
±
±+
−
=
=⋅−+⋅−++⋅+⋅+=⋅=
∑
∑
∑
−
=
−−−−−−−
−
=
−−−−−−−
−−−−−−−
=
−
Mzznhz
MzznhMhz
zMhzMhzhzhhzkhzH
M
n
kMkMM
M
n
kMkMM
MMM
k
k L

18
Secuencias SimétricasSecuencias Simétricas
• La longitud N de una secuencia simétrica puede ser par o impar. Esto significa que el punto medio cae en un punto de la secuencia si N es impar y entre dos puntos si N es par. Como hay dos tipos de simetría (par o impar), se tiene cuatro posibles tipos de secuencias simétricas, las cuales se muestran en la Tabla junto con la DFT de cada secuencia.
Secuencias Simétricas L=½(N-1), M=½N, F es la frecuecia digital=f/fs, donde fs es la frecuencia de muestreo
Tipo Simetría N H(F) |H(0)| |H(½)| 1 Par Impar [ ] [ ] ( )h h k k F
k
L0 2 21
+=∑ cos π [ ] [ ]h h k
k
L0 21
+=∑ [ ] ( ) [ ]h h kk
k
L0 2 11
+ −=∑
2 Par Par [ ] ( )[ ]2 2 2 121
h k k F kk
M cos π −=∑ [ ]2
1h k
k
L
=∑ 0
3 Impar Impar [ ] ( )−=∑j h k k F
k
L2 21
sin π 0 0
4 Impar Par [ ] ( )[ ]− −=∑j h k k F k
k
M2 2 2 121
sin π 0 ( ) [ ]− −=∑2 1
1k
k
M h k 4
Secuencias SimétricasSecuencias Simétricas
• Se pueden sacar las siguientes conclusiones acerca de la aplicabilidad de cada una de los tipos de secuencia.– Para las secuencias del tipo 2 |H(½)|=0, por lo que sólo pueden ser
utilizadas para filtros pasabaja y pasabanda.– Las secuencias del tipo 3 (|H(0)|=0=|H(½)|) sólo pueden ser utilizadas para
filtros pasabanda.– Las secuencias tipo 4 (|H(0)|=0) son apropiadas para filtros pasaalta y
pasabanda.– La secuencia tipo 1 puede implementar cualquier tipo de filtro. Es el único
tipo capaz de realizar filtros parabanda.
Aplicaciones de las Secuencias Simétricas Tipo |H(F)| Aplicación
1 Todo tipo de filtros 2 |H(½)=0| Sólo LP y BP 3 |H(0)|=0=|H(½)| Sólo BP 4 |H(0)=0| Sólo HP y BP

19
Secuencias SimétricasSecuencias Simétricas
• Todos los filtros FIR anteriores son de fase lineal– El retardo introducido es el mismo para todas las frecuencias.– La simetría presente en todos ellos reduce el coste computacional a la mitad.
• Un sistema de fase lineal satisface en general:
• Se define el retardo de grupo como:
• Un retardo de grupo constante implica que el filtro retrasa por igual todas las componentes en frecuencia de la señal.
• Un sistema que retarda M muestras:
( ) ( ) )( βα +−⋅= wjjwjw eeHeH
( ) ατ =−= )}({)( jweHfasedwdw
( )( ) constante con MeeH
zzHjwMjw
M
==
=−
−
τ
TécnicasTécnicas de de DiseñoDiseño de de FiltrosFiltros FIRFIR
Hay diferentes métodos de diseño de filtros FIR:Método de las Series de Fourier.Método del Muestreo en Frecuencia.
Método de las Series de FourierEl método se basa en seleccionar la respuesta a impulso hN[n] como una versión truncada
de la respuesta a impulso h[n] de un filtro ideal con repuesta en frecuencia H(F).Proceso de Diseño de Filtros FIR por este método:
• Normalización de frecuencias por la frecuencia de muestreo.• Conversión de especificaciones a la de un Prototipo de Filtro Pasobajo.• Truncamiento de la respuesta a impulso de un filtro ideal h[n]=2FCsinc(2nFC)
a hN[n] de longitud N. El orden del filtro es N-1.• Selecionar una ventana w[n] de N puntos para obtener hw[n]=hN[n]·w[n]• Convertir del Protipo de Filtro Pasobajo al Filtro deseado hF[n].• Retrasar hF[n] para asegurarse que el filtro es causal.
20
Técnicas de Diseño de Filtros FIRTécnicas de Diseño de Filtros FIR
• Se pretende realizar un filtro pasobajo ideal (digital) con una frecuencia de corte Fc, tal y como indica la figura y respuesta en fase lineal.
FFc-Fc
|H(F)|
1
0.50.5
La respuesta en frecuencia deseada es :
( )
>≤
=−−
0 2/)1(2
c
cNFj
d FFFFe
FHπ
Se calcula la Transformada inversa de Fourier discreta de Hd(F):
[ ] ( )
−−=
=
−
−
−
−
=
−−⋅
−
−−
−=
=
−−−
==⋅=−
−
−−
− −
−
−−
∫ ∫
nNFF
nNF
nNFFnNF
nNj
j
enNj
dFedFeFHF
nh
cc
c
c
cc
F
F
nNFjF
F
nNFjFnj
ds
c
c
c
c
212sinc2
212
212sin
22
12sin
212
2
212
11 21221
21
212
2
π
ππ
π
π
πππ
Técnicas de Diseño de Filtros FIRTécnicas de Diseño de Filtros FIR
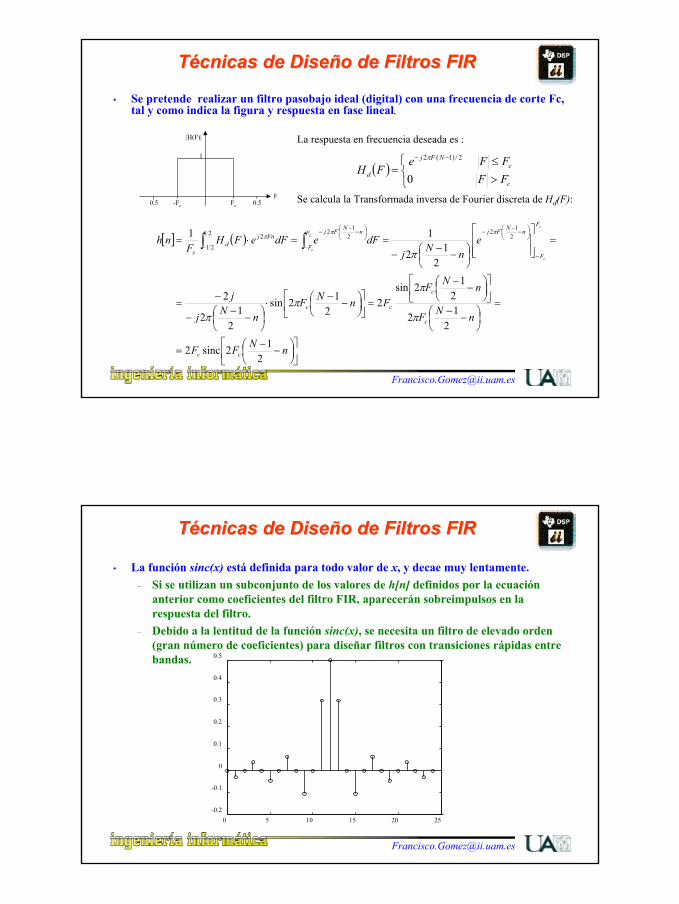
• La función sinc(x) está definida para todo valor de x, y decae muy lentamente. – Si se utilizan un subconjunto de los valores de h[n] definidos por la ecuación
anterior como coeficientes del filtro FIR, aparecerán sobreimpulsos en la respuesta del filtro.
– Debido a la lentitud de la función sinc(x), se necesita un filtro de elevado orden (gran número de coeficientes) para diseñar filtros con transiciones rápidas entre bandas.
0 5 10 15 20 25-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
21
Técnicas de Diseño de Filtros FIRTécnicas de Diseño de Filtros FIR
– Necesidad de utilizar ventanas espectrales : El truncamiento de h[n]equivale a multiplicar h[n] por una ventana rectangular w[n] de longitud N. El espectro de hN[n]=h[n]·w[n] es la convolución de H(F) y W(F). La función W(F) va a producir rizados y sobreimpulsos en la señal de salida. Para reducir los efectos de un truncamiento abrupto se utilizan ventanas espectrales que tienden a suavizar esos efectos.
– Las ventanas más comúnmente utilizadas en el diseño de filtros FIR son vonHann, Hamming y Kaiser..
– De los espectros de las ventanas se considera:• El ancho del lóbulo principal y el de transición decrece al aumentar N.• La amplitud de los lóbulos de los lados permanece constante con N.
– Idealmente el espectro de una ventana debe estar confinado en el lóbulo principal, sin casi energía en los lóbulos de los lados.
Técnicas de Diseño de Filtros FIRTécnicas de Diseño de Filtros FIR
Ejemplo: Diseñar un filtro FIR pasobajo con una frecuencia de corte de 5KHz y una frecuencia de muestreo de 20KHz.
hN[n]=2FCsinc(2nFC)=2·(5/20)·sinc(2n5/20)=0.5·sinc(0.5n).(a) Con N=9, -4≤n≤4, y una ventana tipo Bartlett definida por:
Para que el filtro sea causal tendremos que retrasar 4 muestreos, por lo que el filtro a aplicar es:
Como el primer muestreo de hW[n]=0,
(b) Con N=6, -2.5≤ n≤ 2.5 y una ventana vonHann
[ ] ( ) [ ]{ } { }[ ]{ } { }[ ]{ } [ ] [ ]{ } { }0,0265.0,0,2387.0,5.0,2387.0,0,0265.0,0
0,1061.0,0,3183.0,5.0,3183.0,0,1061.0,0
0,1,2,3,4,3,2,1,01/22 41
−−==
−−=
=→−−=
nwnhnh
nh
nwNnnw
NW
N
( )75431
75431
0265.02387.05.02387.00265.0
00265.002387.05.02387.000265.00−−−−−
−−−−−
−+++−=
=+−+++++−=
zzzzz
zzzzzzH
( ) 6432 0265.02387.05.02387.00265.0 −−−− −+++−= zzzzzH
[ ] ( )[ ][ ]{ } { }[ ]{ } { }[ ]{ } [ ] [ ]{ } { }
( ) 321 0518.04072.04072.00518.0
0,0518.0,4072.0,4072.0,0518.0,0
09.0,1501.0,4502.0,4502.0,1501.0,09.00,3455.0,9045.0,9045.0,3455.0,0
12cos5.05.0
−−− +++=
==
−−=
=−+=
zzzzH
nwnhnh
nhnw
Nnnw
NW
N
π
22
Técnicas de Diseño de Filtros FIRTécnicas de Diseño de Filtros FIR
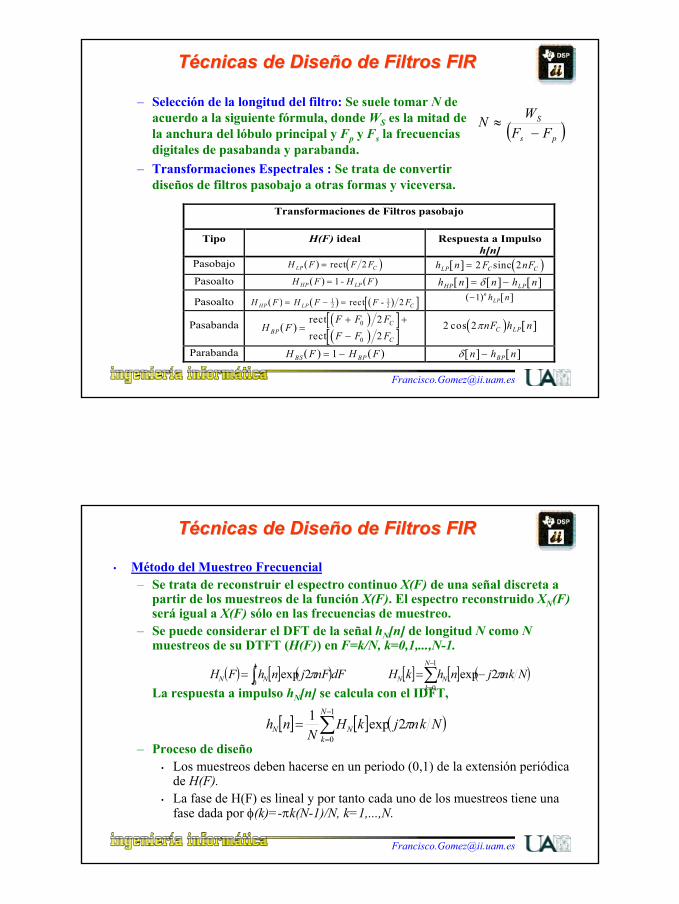
– Selección de la longitud del filtro: Se suele tomar N de acuerdo a la siguiente fórmula, donde WS es la mitad de la anchura del lóbulo principal y Fp y Fs la frecuencias digitales de pasabanda y parabanda.
– Transformaciones Espectrales : Se trata de convertir diseños de filtros pasobajo a otras formas y viceversa.
( )ps
S
FFWN−
≈
Transformaciones de Filtros pasobajo
Tipo H(F) ideal Respuesta a Impulso h[n]
Pasobajo ( ) ( )H F F FLP C= rect 2 [ ] ( )h n F nFLP C C= 2 2sinc
Pasoalto ( ) ( )H F H FHP LP= 1 - [ ] [ ] [ ]h n n h nHP LP= −δ
Pasoalto ( ) ( ) ( )[ ]H F H F F FHP LP C= − =12
12 2rect - ( ) [ ]−1 n
LPh n
Pasabanda ( )( )[ ]( )[ ]H FF F FF F FBP
C
C
=+ +
−
rectrect
0
0
22
( ) [ ]2 2cos πnF h nC LP
Parabanda ( ) ( )H F H FBS BP= −1 [ ] [ ]δ n h nBP−
Técnicas de Diseño de Filtros FIRTécnicas de Diseño de Filtros FIR
• Método del Muestreo Frecuencial– Se trata de reconstruir el espectro continuo X(F) de una señal discreta a
partir de los muestreos de la función X(F). El espectro reconstruido XN(F)será igual a X(F) sólo en las frecuencias de muestreo.
– Se puede considerar el DFT de la señal hN[n] de longitud N como Nmuestreos de su DTFT (H(F)) en F=k/N, k=0,1,...,N-1.
La respuesta a impulso hN[n] se calcula con el IDFT,
– Proceso de diseño• Los muestreos deben hacerse en un periodo (0,1) de la extensión periódica
de H(F).• La fase de H(F) es lineal y por tanto cada uno de los muestreos tiene una
fase dada por φ(k)=-πk(N-1)/N, k=1,...,N.
( ) [ ] ( ) [ ] [ ] ( )∑∫−
=
−==1
0
1
02exp 2exp
N
kNNNN NknjnhkHdFnFjnhFH ππ
[ ] [ ] ( )∑−
=
=1
0
2exp1 N
kNN NknjkH
Nnh π

23
Técnicas de Diseño de Filtros FIRTécnicas de Diseño de Filtros FIR
– Se combinan las ventajas del diseño con ventanas y el método de muestreo en frecuencia para tener un método de diseño de filtros de respuesta en frecuencia arbitraria.
– Se muestrea la respuesta frecuencial deseada con un número alto de puntos (M=512). Hacemos el IDFT y obtenemos la respuesta h[n].
• h[n] es demasiado largo, así que se trunca a una secuencia más pequeña con una ventana.
• Si el diseño no cumple las especificaciones – se cambia N, – se cambia el ancho de pasabanda o se ajustan los muestreos en la
zona de transición.
Sistemas DigitalesSistemas Digitales
Comparación FIR/IIR

24
Filtros IIRFiltros IIR-- Del diseño Analógico al DigitalDel diseño Analógico al Digital
• Técnicas de diseño de filtros IIR – Mediante métodos de diseño analógico, seguido de una transformación
del plano s (dominio de Laplace) al plano z– Diseñar un prototipo de filtro pasobajo digital y hacer las oportunas
transformaciones • Diseño analógico
– Ejemplo de este método para el diseño de filtros pasobajo. El proceso se basa en el diseño de filtros analógicos para luego transformarlo al dominio discreto.
– El diseño analógico se realiza a partir de unas especificaciones como las dadas en la figura.
δ1 es el rizado de pasabanda.δ2 es el rizado de parabandafp es la frecuencia límite de pasabanda.fs es la frecuencia límite de parabanda.
Filtros IIRFiltros IIR-- Aprox. Aprox. ButterworthButterworth
– Se parte de un prototipo de filtro pasobajo normalizado en el que se usa una frecuencia ν normalizada. Para otro tipo de filtro se requerirá la consiguiente transformación de frecuencia. Para ese filtro pasobajo normalizado la función de Transferencia es
donde Ln(ν ) es un polinomio de grado n.
( )( )
HLn
νν
22
11
=+
ffsfp
δ2
11−δ 1
|H(f)|
Pasabanda
Parabanda
Banda deTransición
25
Filtros IIRFiltros IIR-- Aprox. Aprox. ButterworthButterworth
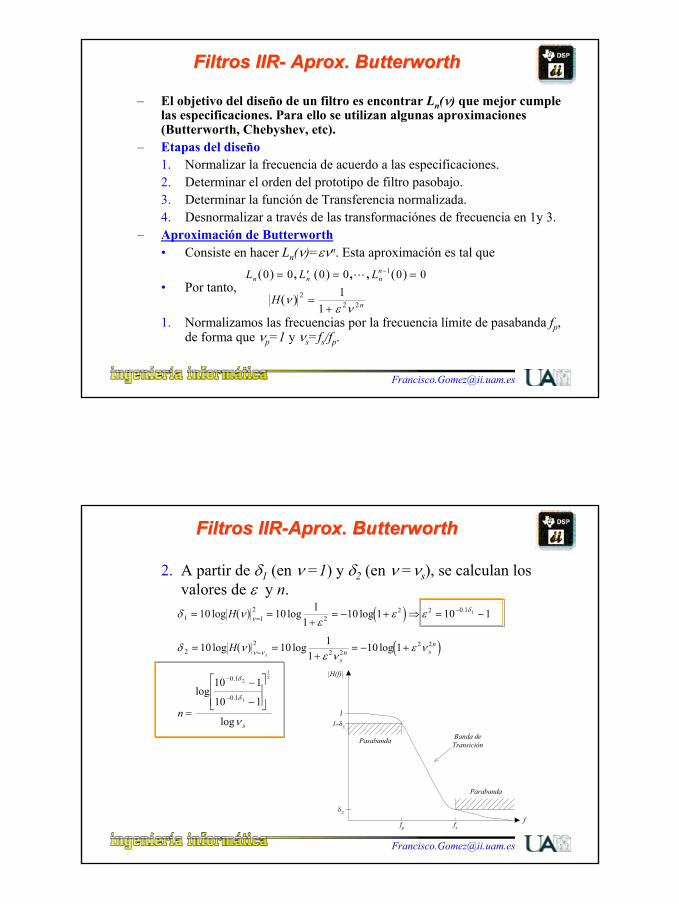
– El objetivo del diseño de un filtro es encontrar Ln(ν) que mejor cumple las especificaciones. Para ello se utilizan algunas aproximaciones (Butterworth, Chebyshev, etc).
– Etapas del diseño1. Normalizar la frecuencia de acuerdo a las especificaciones.2. Determinar el orden del prototipo de filtro pasobajo.3. Determinar la función de Transferencia normalizada.4. Desnormalizar a través de las transformaciónes de frecuencia en 1y 3.
– Aproximación de Butterworth• Consiste en hacer Ln(ν)=ενn. Esta aproximación es tal que
• Por tanto,
1. Normalizamos las frecuencias por la frecuencia límite de pasabanda fp, de forma que νp=1 y νs=fs/fp.
( ) ( ) ( )L L Ln n nn0 0 0 0 0 01= ′ = =−, , ,L
( )H nνε ν
22 2
11
=+
FiltrosFiltros IIRIIR--AproxAprox. Butterworth. Butterworth
2. A partir de δ1 (en ν =1) y δ2 (en ν =νs), se calculan losvalores de ε y n.
ffsfp
δ2
11−δ 1
|H(f)|
Pasabanda
Parabanda
Banda deTransición
( ) ( )
( ) ( )
δ νε
ε ε
δ νε ν
ε ν
ν
νδ
ν ν
δ
δ
1 12
22 2 0 1
22
2 22 2
0 1
0 1
10 10 11
10 1 10 1
10 10 11
10 1
10 1
10 1
1
2
1
12
= =+
= − + ⇒ = −
= =+
= − +
=
−
−
=−
=
−
−
log log log
log log log
log
log
.
.
.
H
H
n
ss
n sn
s

26
Filtros IIRFiltros IIR--Aprox. Aprox. ButterworthButterworth
3. Filtro de Butterworth Normalizado : se normaliza con respecto a la frecuencia ν3 (|H(ν3)|2= ½).
– Función de Transferencia Normalizada. Se trata de determinar HN(s) a partir de |HN(ν)|2.
• Reemplazado νN2 por -s2.
• Los polos se calculan de
( ) ( ) ( )( )
H s H s Hs
N s nN
− = =+ −= −
νν 2 2
2
2
11
( ) ( ) ( )
( ) ( )[ ]
( )[ ] ( )
( ) ( ) ( ) ( )( ) ( )
( )
1 0 1 1 1
2 1 1 2 22 1
21 2 2
1
2 2 2
2
2
2 2
2 212
+ − = ⇒ − = − ⇒ − = −
− = − =
= + =−
=
= + = + + + = − + ⇒
= − =
= + =
s s p
j n p j k k n
p j kn
k N
p j j j
p
n n nk
n
kn
k k k
k k k k k k k
k k k k
k k k
exp exp , , ,
exp , , ,
cos sin sin cos
sin cos
π π
θ θ π
σ ω θ θ θ θ
σ θ ω θ
σ ω
π
π π
donde
L
L
Filtros IIRFiltros IIR--Aprox. Aprox. ButterworthButterworth
• Estos resultados muestran que:– Los polos normalizados están sobre un círculo de radio 1 en el plano s.– Los polos están equiespaciados π/n radianes con θk=(2k-1)π/2n, donde θk se
mide con respecto al eje positivo del eje jω.– Los polos nunca estarán sobre el eje jω (2k-1 nunca puede ser par).– Si n es impar, siempre hay un par de polos reales en s=±1.
σ
jω
10.5-1 -0.5 0
1
0.5
0
-0.5
-1
Polos de Butterworth : n=4
σ
jω
10.5-1 -0.5 0
1
0.5
0
-0.5
-1
Polos de Butterworth : n=5

27
Filtros IIRFiltros IIR--Método IMétodo I--Aprox. Aprox. ButterworthButterworth
4. Desnormalización : Si |H(ν)|2=|HN(ν/ν3)|2, entonces H(s)=HN(s/ν3). Si desnormalizamos H(s) a HA(s)=H(s/ωp), HA(s) cumple las especificaciones dadas. Estos es equivalente a desnormalizardirectamente HN(s) a HA(s)=HN(s/ωpν3).
– Filtro Pasoalto de Butterworth• Se hace la transformación ν→1/ν, lo que da lugar a
|HHP(ν)|2=|HLP(1/ν)|2. También equivale a hacer 1-|HLP(ν)|2
( )( )
( )1 1 11 1
11 1
12
2
2
2 22
− = −+
=+
=+
=H HLP n
n
n n LPνν
νν ν
ν
Filtros IIRFiltros IIR
– Una vez diseñado el filtros analógicos se transforma las funciones de Transferencia de los filtros del plano s al plano z.
– Hay varios métodos para transformar una función de s en otra función de z. Son de especial interés las transformaciones que hagan que la función en zsea también racional. Esto hace que las transformaciones sean sólo aproximaciones.
– Otros métodos de diseño de filtros IIR :• Igualar las respuestas temporales como un impuso, un escalón, una rampa,
etc. (Transformación Invariante a la Respuesta).• Igualar términos en una H(s) factorizada (Transformada Z Pareada).• Conversión de ecuaciones diferenciales a ecuaciones diferencia utilizando
operadores diferencia.• Integración numérica de ecuaciones diferenciales usando algoritmos de
integración.• Aproximaciones racionales a z→ exp(sts) o s→ (1/ts)ln(z).

28
http://www.tecnun.com/asignaturas/tratamiento%20digital/TEMA9/transparencias de Andoni Irizar
Apuntes en WEB : Digital Signal Processing and Spectral Analysis by Abdhelhak Zoubir
http://www.ece.curtin.edu.au/~dsp304/docs/notes/manuscript.pdfIntroduction to Digital Filters Julius O. Smith III
http://www-ccrma.stanford.edu/~jos/filters/
FUNDAMENTALS OF SIGNALS AND SYSTEMSUSING THE WEB AND MATLAB SECOND EDITION, EDWARD W. KAMEN AND BONNIE S. HECK 2000 By Prentice-Hall, Inc. http://users.ece.gatech.edu:80/~bonnie/book/
ReferenciasReferencias







