
Máster en Electrónica, Tratamiento de la Señal y Comunicaciones 2012/2013
3 Diseño del sistema.
Miguel Cordero Limón 39
Máster en Electrónica, Tratamiento de la Señal y Comunicaciones 2012/2013
3.1 Diseño.
3.1.1 Diseño general del sistema.
Como se comentó en el apartado 1.1, el trabajo aquí recogido es parte de un proyecto más
completo en el que se pretende desarrollar un sistema de array de antenas con conformación
digital completo. El sistema desarrollado consta del array de antenas propiamente dicho, una
cadena de RF en transmisión por cada elemento del array y un bloque de conversión
digital/analógico (un DAC por cada elemento del array) y un sistema de procesado de señal en
banda base basado en un FPGA.
La etapa de adaptación y radiofrecuencia consiste en el diseño de la electrónica comprendida
entre la interfaz de salida de la FPGA y el array de antenas. Dicha electrónica comprende los
siguientes bloques:
Banco de convertidores D/A.
Etapa de adaptación de nivel de señal.
Modulador analógico (up-converter con oscilador analógico).
Balun de antena.
En el presente trabajo únicamente se aborda el diseño del sistema de procesamiento digital en
banda base que realiza el cálculo de los pesos de conformación y multiplica la señal por los
mismos. El bloque funcional completo debería comprender los siguientes elementos:
Bloques de procesado para realizar la configuración automática del haz.
Interfaz con sistema de navegación de la aeronave (receptor GPS + IMU).
Interfaz SPI para configuración de los elementos del bloque de adaptación (principalmente
los DACs).
Transmisor de señal (fuente de información + modulador digital).
Miguel Cordero Limón 40
Máster en Electrónica, Tratamiento de la Señal y Comunicaciones 2012/2013
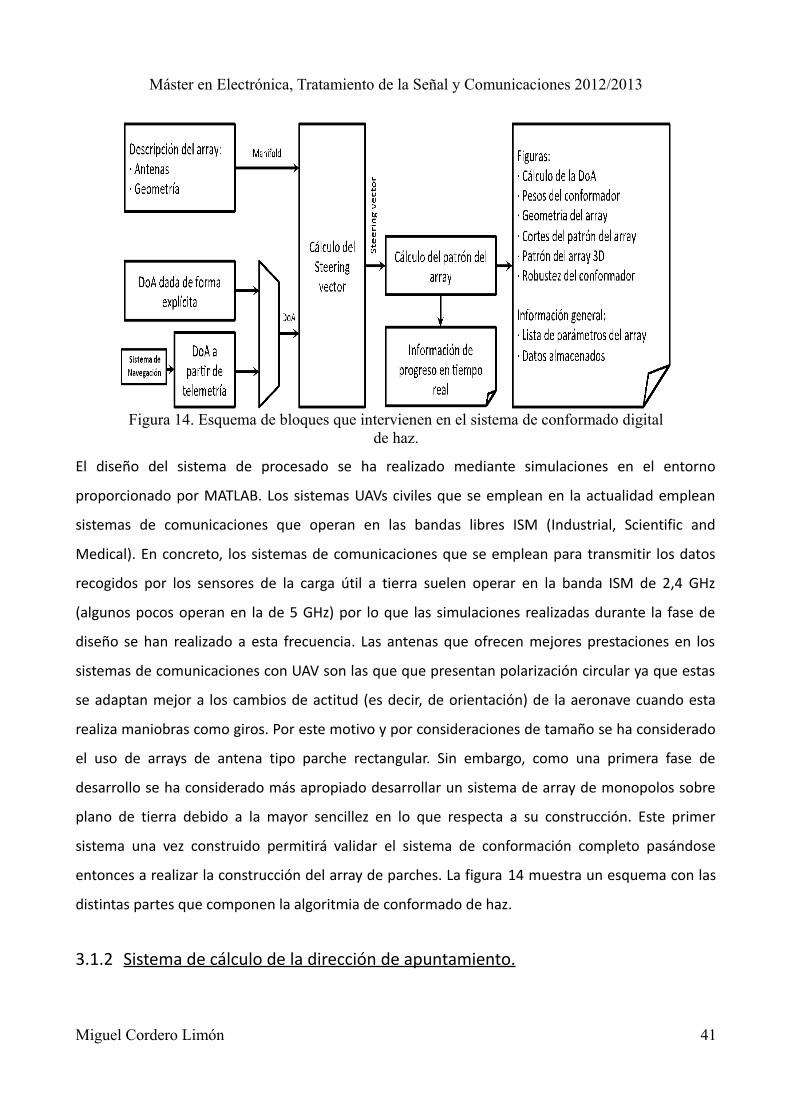
El diseño del sistema de procesado se ha realizado mediante simulaciones en el entorno
proporcionado por MATLAB. Los sistemas UAVs civiles que se emplean en la actualidad emplean
sistemas de comunicaciones que operan en las bandas libres ISM (Industrial, Scientific and
Medical). En concreto, los sistemas de comunicaciones que se emplean para transmitir los datos
recogidos por los sensores de la carga útil a tierra suelen operar en la banda ISM de 2,4 GHz
(algunos pocos operan en la de 5 GHz) por lo que las simulaciones realizadas durante la fase de
diseño se han realizado a esta frecuencia. Las antenas que ofrecen mejores prestaciones en los
sistemas de comunicaciones con UAV son las que que presentan polarización circular ya que estas
se adaptan mejor a los cambios de actitud (es decir, de orientación) de la aeronave cuando esta
realiza maniobras como giros. Por este motivo y por consideraciones de tamaño se ha considerado
el uso de arrays de antena tipo parche rectangular. Sin embargo, como una primera fase de
desarrollo se ha considerado más apropiado desarrollar un sistema de array de monopolos sobre
plano de tierra debido a la mayor sencillez en lo que respecta a su construcción. Este primer
sistema una vez construido permitirá validar el sistema de conformación completo pasándose
entonces a realizar la construcción del array de parches. La figura 14 muestra un esquema con las
distintas partes que componen la algoritmia de conformado de haz.
3.1.2 Sistema de cálculo de la dirección de apuntamiento.
Miguel Cordero Limón 41
Figura 14. Esquema de bloques que intervienen en el sistema de conformado digital de haz.

Máster en Electrónica, Tratamiento de la Señal y Comunicaciones 2012/2013
El sistema de conformado necesita conocer la posición de la estación de tierra (la cual se puede
configurar antes del comienzo de la misión suponiendo que se encuentra fija como es habitual) así
como la posición y actitud de la aeronave. Estos dos últimos datos son obtenidos del sistema de
navegación de la aeronave el cual emplea un receptor GPS y un sistema de navegación inercial o
INS (Inertial Navigation System) así como un filtro extendido de Kalman o EKF (Extended Kalman
Filter) que permite fusionar de forma adecuada los datos de ambas fuentes optimizando la
precisión de la posición obtenida. A partir de esta información la unidad de procesamiento debe
calcular la dirección de apuntamiento. Este cálculo requiere de transformaciones entre distintos
sistemas de coordenadas empleando matrices de cosenos directores o DCMs (Director Cosine
Matrixes). En la actualidad se sigue trabajando en esta línea por lo que no se incluye en el presente
trabajo y se deja como línea de trabajo futura.
3.1.3 Sistema de conformación de haz.
Una vez el sistema conformador dispone de la información sobre la dirección a la que se debe
apuntar, se calculan los pesos óptimos estando estos adaptados al vector array manifold en la
dirección deseada w*=v*(ks) donde el array manifold para un geometría arbitraria viene dado
por v (k)=e− j2 πG a /λ .
3.2 Simulaciones con MATLAB.
Como se ha comentado anteriormente, las simulaciones se van a realizar a la frecuencia de 2,4 Ghz
ya que esta es la que emplean la mayoría de UAVs civiles para el enlace de baja o data link. Las
simulaciones van a considerar dos tipos de elementos de array: antenas de tipo parche
rectangulares (que son las que se emplearían en un prototipo final) y antenas de tipo monopolo
sobre plano de tierra (que son las que se emplearían en un primer prototipo para la validación del
sistema).
3.2.1 Herramientas de ArrayCalc.
Las simulaciones realizadas en MATLAB han hecho uso del toolbox gratuito ArrayCalc (también
llamado Phased Array Design Toolbox v2.4) desarrollado por Neil Tucker [2][5]. Se trata de un
Miguel Cordero Limón 42

Máster en Electrónica, Tratamiento de la Señal y Comunicaciones 2012/2013
conjunto de funciones MATLAB que permiten realizar el cálculo de patrones de radiación de arrays
de antenas. El array se define indicando el patrón de radiación del elemento individual, la
geometría del array (es decir, la posición de cada elemento del array) y la frecuencia de portadora.
El toolbox está especialmente orientado al cálculo de patrones de campo lejano sin prestar
atención a los parámetros eléctricos. En este sentido, la mayor carencia del modelo de simulación
implementado en el toolbox ArrayCalc es que no tiene en cuenta el acoplamiento mutuo entre
antenas. Sin embargo, una vez modelado el acomplamiento mutuo es sencillo de incorporar al
toolbox (se trata simplemente de una matriz de corrección del manifold en la que se escriben los
coeficientes de acoplo mutuo, de valor comprendido entre -1 y 1). La mayor dificultad estriba
precisamente en el modelado de este efecto. En el presente trabajo el efecto del acomplamiento
mutuo entre elementos del array no se ha tenido en cuenta.
La información en ArrayCalc se gestiona mediante de variables globales que pueden ser accedidas
por todas las funciones. El uso de variables globales es un arma de doble filo. Por una parte resulta
muy práctico poder disponer de la información completa del modelo desde cualquier nivel
jerárquico de ejecución del código. En contrapartida, la realización de nuevas funciones y la
modificación de las ya existentes está sujeta al formato de los datos almacenados en dichas
variables, y requiere de un especial cuidado a la hora de programar ya que la información
manejada por una función es accesible por todas las demás, por lo que hay que procurar no
alterarla más de lo requerido por la propia utilidad de la función. Asimismo hay que tener cuidado
de no enmascarar las variables globales declarando variables locales con el mismo nombre en las
funciones que hagan uso de ellas. Para que un script que haga uso de las funciones de ArrayCalc se
ejecute correctamente es imprescindible que las variables globales se encuentren definidas. Para
ello la primera función que debe ser llamada es init, la cual se encarga de declarar todas las
variables globales iniciándolas a su valor por defecto. A partir de ahí el usuario puede asignar los
valores que necesite para llevar a cabo su simulación.
A continuación se describen las variables globales más importante del ArrayCalc. La descripción del
array se almacena en una matriz denominada array_config. En ella figuran las posiciones de cada
uno de los elementos, la matriz de rotación que indica la orientación de cada elemento con
respecto a su posición por defecto y el coeficiente de conformado de haz aplicado a cada
elemento. En este sentido, resulta sencillo realizar conformado de haz, ya que únicamente hay que
Miguel Cordero Limón 43

Máster en Electrónica, Tratamiento de la Señal y Comunicaciones 2012/2013
alterar el valor de las posiciones adecuadas en la matriz array_config. Esta matriz contiene a su vez
N matrices de dimensiones 3 x 5 (una para cada elementos del array) las cuales presentan la
siguiente estructura:
array_config=[L M N Xoff AmpO P Q Yoff PhaR S T Zoff Eltype]
• [L M NO P QR S T ] = matriz de rotación 3D (matriz DCM).
• [Xoff, Yoff, Zoff] = vector de posición del elemento.
• Amp = amplitud de la señal del elemento [V].
• Pha = fase de la señal del elemento [rad].
• Eltype = tipo de elemento.
Otras variables globales importantes que se emplean el ArrayCalc son:
• freq_config. Frecuencia de análisis del sistema de array [Hz].
• velocity_config. Velocidad de la onda en el medio [m/s]2.
• range_config. Radio de la esfera en cuya superficie se calculará el patrón de radiación [m].
El valor por defecto son 999 m.
Los modelos de radiación de cada elemento se definen en funciones MATLAB en el directorio
Element_models. El prototipo de estas funciones presenta la forma [Etot,
Cpflag]=nombremodelo(theta,phi) de modo que ante una pareja de ángulos de elevación y acimut
devuelve el valor de la magnitud del campo en esa diirección (a una distancia igual al valor de la
variable range_config). Por otro lado, a los distintos tipos de elementos también se les asocia un
modelo geométrico (archivo nombremodelo_geom.m) que únicamente se emplea para la
representación gráfica del aspecto físico del mismo. Los modelos incluidos por defecto en
2 Útil para simular sistemas de array para procesamiento de sonido en aire o agua ya que ArrayCalc se orienta a sistemas de procesamiento de array no exclusivamente de arrays de antenas.
Miguel Cordero Limón 44

Máster en Electrónica, Tratamiento de la Señal y Comunicaciones 2012/2013
ArrayCalc son: iso (isótropa), patchr (parche rectangular), patchc (parche circular), dipole (dipolo
horizontal), dipoleg (dipolo horizontal sobre plano de tierra), helix (hélice), aprect (apertura
rectangular), apcirc (apertura circular), wgr (guía de onda rectangular), wgc (guía de onda circular),
dish (parabólica). Para terminar de ilustrar estos modelos, se puede considerar como ejemplo el
modelo del dipolo de longitud finita:
• Valor teórico del campo radiado: ⃗Etot= jηI 0 e− jkr
2π r[cos (kl /2cos (θ))−cos (kl / 2)
sen(θ)] θ⃗ .
• Valor devuelto por la función de ArrayCalc: Etot=cos(kl /2 cos(θ))−cos (kl /2)
sen (θ).
ArrayCalc proporciona una amplia variedad de funciones para gestionar los arrays de antenas,
desde su descripción geométrica hasta la representación del patrón de radiación de varias formas
posibles. Las rutinas de cálculo del toolbox imprimen información del estado de la simulación por
la línea de comandos en tiempo de ejecución. Esta información de progreso resulta de utilidad
para estimar el tiempo de espera de las simulaciones. Adicionalmente, gran cantidad de datos
pueden ser impresos por línea de comandos, ofreciendo una primera vista de los resultados
obtenidos en el conformado de haz.
El primer paso para realizar las simulaciones consiste en definir el array existiendo dos formas de
hacerlo. La forma básica consiste en definir el array de forma “manual” indicando las posiciones
del array elemento a elemento empleando la función place_element(n,xr,yr,zr,x,y,z,eltype,Pwr,Pha)
cuyas entradas son el índice del elemento (0 si se añade como elemento siguiente a un array
existente), las rotaciones del elemento respecto a los ejes de coordenadas, las coordenadas
cartesianas de la posición del elemento, el tipo de antena y la potencia y fase del peso del
conformador correspondiente al elemento Otras funciones que se emplean para definir el array
son move_array y centre_array (esta última mueve el array de forma que la distancia media de
todos sus elementos al origen de coordenadas sea nulo). Cuando se define el array elemento a
elemento es posible definir arrays con cualquier geometría e incluso con distintos tipos de
elementos. La otra forma de definir un array es empleando una geometría típica en la que todos
los elementos del array son del mismo tipo. Las funciones que pueden emplearse son:
• single_element(x,y,z,eltype,Pwr,Pha): sitúa una antena en la posición dada con la
orientación por defecto.
Miguel Cordero Limón 45

Máster en Electrónica, Tratamiento de la Señal y Comunicaciones 2012/2013
• rect_array(nx,ny,sx,sy,eltype,Erot): define un array rectangular siendo nx el número de
elementos en la dirección x y ny el número de elementos en la dirección y. El espaciado
entre elementos viene dado por sx y sy.
• circ_array(nr, nrg, sr, srng, eltype): define un array circular con uno o varios anillos siendo
nr el número de elementos del primer anillo y nrg número de anillos. El espaciado entre
elementos de cada anillo viene dado por sr mientras que el espaciado entre anillos queda
determinado por srng.
Además de estas geometrías que por defecto permite crear ArrayCalc, en el presente trabajo se ha
definido una función para crear arrays hexagonales que será una de las geometrías que se
analizarán. El prototipo de esta función viene dado por hex_array(nelem,celmnt,spacing,eltype)
donde el parámetro celmnt indica si se incluye o no un elemento central.
Una vez definido el array se puede proceder a realizar sobre él los cálculos pertinentes. Array Calc
proporciona funciones que permiten calcular el patrón de radiación en una dirección concreta, el
corte del patrón de radiación en un ángulo de elevación o acimut determinado o el patrón de
radiación completo.
Por brevedad, a continuación se van a enumerar los prototipos de las funciones más empleadas
(toda la información sobre estas funciones pueden encontrarse en el manual de uso de ArrayCalc
[6] y en las ayudas asociadas a las funciones que pueden obtenerse con el comando help de
MATLAB):
• Función que calcula el patrón de radiación en una dirección concreta.
directivity = calc_directivity(deltheta, delphi)
• Función que calcula el patrón de radiación realizando un barrido en el ángulo de elevación
manteniendo el ángulo de acimut.
[theta, pwrdBn] = calc_theta(thetamin, thetastep, thetamax, phi_val, polarisation,
normalise).
• Función que representa el patrón de radiación correspondiente a un corte en el ángulo de
acimut indicado.
[thetacut, Emulti] = theta_cut(thetamin, thetastep, thetamax, phi_val).
Miguel Cordero Limón 46

Máster en Electrónica, Tratamiento de la Señal y Comunicaciones 2012/2013
• Función que calcula el patrón de radiación realizando un barrido en el ángulo de acimut
manteniendo el ángulo de elevación.
[phi, pwrdBn] = calc_phi(phimin, phistep, phimax, theta_val, polarisation, normalise).
• Función que representa el patrón de radiación correspondiente a un corte en el ángulo de
elevación indicado.
[phicut, Emulti] = phi_cut(phimin, phistep, phimax, theta_val).
3.2.2 Resultados de las simulaciones.
3.2.2.1 Patrones de elementos.
En la simulaciones se van a considerar tanto elementos de tipo parche rectangular como
elementos de tipo monopolo sobre plano de tierra. Como se indicó en el apartado 3.2.1, ArrayCalc
no proporciona un modelo de elemento para monopolo sobre plano de tierra. Por este motivo fue
necesario crear un modelo nuevo. El modelo desarrollado se basó en el empleado por el Phased
Array System Toolbox de MATLAB [7] el cual expresa el campo radiado por un monopolo sobre
plano de tierra infinito como Etot=cos (ϕ / 4−π)sen (2θ) , cuando θ<π/2 siendo el campo
nulo para valores θ≥π/ 2 .
Con el objetivo de ilustrar la forma de los patrones obtenidos con ambos modelos se han simulado
elementos individuales de cada tipo. En la figura 15 se muestra el patrón de radiación obtenido
para un monopolo de longitud λ /4 sobre plano de tierra infinito.
Miguel Cordero Limón 47

Máster en Electrónica, Tratamiento de la Señal y Comunicaciones 2012/2013
Como puede observarse, el patrón del monopolo sobre plano de tierra presenta un nulo en
θ=0 por lo que por el principio de multiplicación de patrones el patrón de radiación del array
tendrá siempre un nulo en esa posición. Esto implica que, cuando se emplea para la comunicación
de UAVs civiles con tierra, la ganancia del enlace cuando el UAV se encuentra justo encima de la
estación de tierra es muy reducida lo que podría causar problemas en la comunicación. Sin
embargo, en la práctica el tiempo que el UAV puede encontrarse encima de la estación de tierra es
reducido en el caso de UAVs de ala fija aunque podría ser más prolongado en el caso de UAVs de
ala rotatoria realizando hovering justo encima de la estación de tierra. Aún así, cuando el UAV se
encuentra encima de la estación de tierra (ángulo de elevación nulo) la distancia que los separa
suele ser pequeña (coincidente con la altura relativa) en comparación con la distancia existente
cuando el ángulo de elevación es mayor (UAV alejado hacia el horizonte) por lo que la ganancia
puede ser suficiente para que el enlace se establezca.
Miguel Cordero Limón 48
Figura 15. Patrón de radiación de una antena de tipo monopolo sobre plano de tierra.

Máster en Electrónica, Tratamiento de la Señal y Comunicaciones 2012/2013
En el caso de un elemento de tipo parche se ha empleado una constante dieléctrica relativa de 2,5
(los valores típicos para una antena de tipo parche se encuentran entre 2,2 y 12), una anchura del
parche de λ /2 y un grosor del sustrato de 0,508 cm = 0,0406 λ (el grosor del sustrato
típicamente se encuentra entre 0,003 λ y 0,05 λ ) [8]. En la figura 16 se muestra el diagrama
de radiación obtenido para el mismo. Como puede observarse, en este caso el patrón no presenta
ningún nulo en la dirección θ=0 por lo que esta antena es más apropiada en los casos en los
que la línea de vista entre transmisor y receptor pueda encontrarse en esa dirección. Otro aspecto
que se puede apreciar es la menor ganancia de la antena de tipo parche comparada con el
monopolo sobre plano de tierra en direcciones en las que θ>30º aproximadamente (el patrón
de radiación del monopolo es más achatado que el del parche). El monopolo sobre plano de tierra
tiene mejores prestaciones cuando la línea de vista entre transmisor y receptor se encuentra más
cerca del plano horizontal.
Miguel Cordero Limón 49
Figura 16. Patrón de radiación de una antena de parche rectangular.

Máster en Electrónica, Tratamiento de la Señal y Comunicaciones 2012/2013
3.2.2.2 Geometrías de array.
En primer lugar vamos a determinar la capacidad de apuntamiento de arrays con distintas
geometrías. Dado que en este apartado no se desea analizar los efectos de los distintos tipos de
antena, se va a emplear una antena isótropa (el efecto de emplear otros tipos de antenas consiste
en multiplicar el factor de array por el patrón de la antena). Asimismo, indicar que se ha elegido
emplear un array de 8 elementos ya que se considera que es un buen compromiso entre capacidad
de conformado y complejidad del sistema (aunque habría que estudiar cada caso particular con
mayor detalle). Las geometrías de array que se van analizar son las de un array lineal, un array
rectangular, un array circular, un array hexagonal y un array hexagonal con elemento central, todos
ellos con una separación entre elementos uniforme e igual a λ /2 . El hecho de comparar un
array hexagonal con y sin elemento central permite extrapolar las conclusiones al caso de arrays
circulares y rectangulares con elemento central. Para que el análisis no sea sesgado, se van a
considerar el apuntamiento en dos direcciones diferentes de elevación (ya que las características
de conformado varían en mayor medida en esa dirección):
• Acimut de 90º y una elevación de 45º.
• Acimut de 90º y una elevación de 10º.
La tabla 2 muestra las ganancias de los patrones de radiación obtenidos con las distintas
geometrías en el primer caso (acimut de 90º y una elevación de 45º) mientras que en la tabla 3 se
muestran los valores correspondientes al segundo caso (acimut 90º y elevación de 10º). Por
brevedad, en este capítulo únicamente se representan los patrones de radiación para el caso de un
apuntamiento de 90º de acimut y 45º de elevación para las distintas geometrías de array (ver
figuras 17, 18, 19, 20 y 21). En el anexo A se muestran los patrones de radiación obtenidos para el
resto de casos. Es importante notar que todos los patrones de radiación incluidos en el presente
documento se representan en unidades logarítmicas.
Miguel Cordero Limón 50

Máster en Electrónica, Tratamiento de la Señal y Comunicaciones 2012/2013
Lineal Rectangular Circular HexagonalHexagonal con
central
Ganancia en dirección deseada
9,02 dBi 8,41 dBi 8,75 dBi 7,35 dBi 8,09 dBi
Tabla 2. Ganancias obtenidas para las distintas geometrías con apuntamiento en la dirección acimut 90º y elevación 45º.
Lineal Rectangular Circular HexagonalHexagonal con
central
Ganancia en dirección deseada
9,02 dBi 10,08 dBi 8,56 dBi 8,74 dBi 9,28 dBi
Tabla 3. Ganancias obtenidas para las distintas geometrías con apuntamiento en la dirección acimut 90º y elevación 10º.
Como puede observarse las ganancias obtenidas en la dirección de apuntamiento en el caso del
array lineal y el circular experimentan poca variación al cambiar el ángulo de elevación lo que no
ocurre con el resto de arrays. En el resto de arrays la ganancia en la dirección de apuntamiento
sufre una mayor variación ante cambios en la elevación de apuntamiento. En la práctica interesa
Miguel Cordero Limón 51
Figura 17. Diagrama de radiación de array lineal apuntando en la dirección acimut 90º y elevación 45º.

Máster en Electrónica, Tratamiento de la Señal y Comunicaciones 2012/2013
que la ganancia de apuntamiento sea elevada en todas las direcciones por lo que se considera que
los arrays lineales y circulares son los que mejores características tienen para un array de antenas
embarcado en un UAV. De entre ellos, el array que ofrece una mayor ganancia en cada dirección es
el array lineal (con ganancia de 9,02 dBi y en cada caso ). Si el criterio de elección de una geometría
de array se fundamentara únicamente en la capacidad de apuntamiento (es decir, la ganancia en
las direcciones deseadas), está claro que la geometría de array a elegir sería la geometría lineal. Sin
embargo, los arrays lineales presentan unas dimensiones mucho mayores que los arrays planares
lo que provoca que no puedan ser embarcados en los UAVs civiles convencionales ya que estos
imponen importantes limitaciones de tamaño y peso. Si consideramos la frecuencia de trabajo que
se ha adoptado de 2,4 Ghz, un array lineal de 8 elementos con una separación entre elementos de
λ /2 ocuparía una longitud de 0.875 m, mientras que un array circular equivalente con un radio
de λ /2 ocuparía un área aproximada de 0,125 x 0,125 m. Otro motivo para el uso de arrays
planares (es decir, aquellos con geometrías en 2D), es su uso en la estimación de la dirección de
llegada de señales interferentes. Las señales interferentes provocan una degradación de la calidad
del enlace de comunicaciones por lo que la dirección de llegada estimada (DOA, Direction of
Arrival) puede emplearse para conformar el patrón de forma que sea nulo (o casi nulo) en esa
dirección y así mitigar el efecto de los interferentes. Los arrays lineales no son los más apropiados
para esta aplicación debido a su simetría lo que provoca que solo puedan estimar la componente
de elevación del ángulo de llegada (AOA, Angle of Arrival) de la señal interferente. Para este uso los
arrays planares presentan mejores características ya que estos sí pueden distinguir señales
interferentes con DOAs con la misma elevación y distinto acimut y viceversa. Además como hemos
visto de entre los arrays planares el que presenta mejor capacidad de apuntamiento es el array
circular. Por este motivo los arrays de antenas empleados en aplicaciones como radares
embarcados hacen uso de arrays circulares [9].
De la comparativa entre las ganancias obtenidas para los arrays hexagonales se puede apreciar
como el uso de un elemento central incrementa la ganancia del sistema en las direcciones de
apuntamiento. Sin embargo, para poder emplear un elemento central en un array de 8 elementos
como el que se está analizando requeriría que el número de elementos que se encuentran en la
periferia del array fuera impar lo cual supone una dificultad añadida a la hora de construir el array
y que dificulta la ubicación precisa de los elementos en la posición que les corresponde lo cual
Miguel Cordero Limón 52

Máster en Electrónica, Tratamiento de la Señal y Comunicaciones 2012/2013
puede provocar desviaciones del comportamiento real del array con respecto al teórico. La
alternativa consiste en incrementar en uno el número de elementos del array (permaneciendo el
número de elementos periféricos como par) pero ello supondría aumentar el número de
elementos del array en uno.
Los motivos que se acaban de indicar hacen que se opte por el diseño del array circular sin
elemento central para la antena embarcada en el UAV en este diseño.
Miguel Cordero Limón 53
Figura 18. Diagrama de radiación de array circular apuntando en la dirección acimut 90º y elevación
45º.

Máster en Electrónica, Tratamiento de la Señal y Comunicaciones 2012/2013
Miguel Cordero Limón 54
Figura 20. Diagrama de radiación de array hexagonal apuntando en la dirección acimut 90º y elevación 45º.
Figura 19. Diagrama de radiación de array rectangular apuntando en la dirección acimut 90º y
elevación 45º.

Máster en Electrónica, Tratamiento de la Señal y Comunicaciones 2012/2013
3.2.2.3 Número de elementos.
El número de elementos del array determina los grados de libertad del conformador por lo que
disponer de un mayor número de elementos permite mejorar la resolución del sistema (es decir,
reducir el ancho del haz). Por otro lado, el tener un mayor número de elementos permite
aumentar la ganancia del sistema ya que se captura una mayor cantidad de energía de la onda
electromagnética. Obviamente, el uso de un mayor número de elementos también implica un
aumento de la complejidad, coste, peso y volumen del sistema ya que por cada elemento es
necesario disponer de una cadena de RF y un módulo de conversión analógico-digital (además de
la propia antena). Por ello, es necesario alcanzar una solución de compromiso. En las figuras 22 y
23 se muestran los patrones de radiación obtenidos para dos sistemas de array circulares de 10 y 6
elementos isótropos respectivamente (todos los patrones de radiación representados en este
trabajo están normalizados).
Miguel Cordero Limón 55
Figura 21. Diagrama de radiación de array hexagonal con elemento central apuntando en la dirección acimut 90º y
elevación 45º.

Máster en Electrónica, Tratamiento de la Señal y Comunicaciones 2012/2013
Miguel Cordero Limón 56
Figura 22. Patrón de radiación obtenido con una array circular de 10 elementos isótropos.
Figura 23: Patrón de radiación obtenido con una array circular de 6 elementos isótropos.

Máster en Electrónica, Tratamiento de la Señal y Comunicaciones 2012/2013
Con el objetivo de conseguir una capacidad de apuntamiento y ganancia adecuadas así como
mantener un nivel de complejidad, coste, volumen y peso del sistema aceptables se ha
considerado emplear un array de 8 elementos.
3.2.2.4 Tipos de elementos.
Como se analizó en el apartado 2.2.3, cuando los elementos del array no son isótropos el patrón
de radiación resultante se obtiene como la multiplicación del patrón de radiación considerando los
elementos del array isótropos y el patrón de radiación de un elemento aislado. Los pesos del
conformador se obtenían adaptándolos al vector array manifold por lo que eran independientes
del patrón de la antena: w*=v*(ks) . El efecto del patrón de radiación de la antena queda por
tanto fuera del alcance del conformador. En las figuras 24 y 25 se muestran los patrones de
radiación obtenidos usando un array circular de 8 elementos de tipo monopolo sobre plano de
tierra y parche rectangular.
Como se presentó en el apartado 3.1.1, en el primer prototipo se ha decidido emplear elementos
Miguel Cordero Limón 57
Figura 24: Patrón de radiación de un array circular de 8 elementos de tipo monopolo sobre plano de tierra

Máster en Electrónica, Tratamiento de la Señal y Comunicaciones 2012/2013
de tipo monopolo sobre plano de tierra (siendo el plano de tierra el fuselaje de la aeronave) y en
un prototipo más avanzado se emplearían elementos de tipo parche ya que esto permitirá reducir
el tamaño y peso del sistema.
3.3 Resumen.
En el presente capítulo se ha presentado el proyecto en el cual se enmarca el presente trabajo el
cual trata de diseñar e implementar un primer prototipo de sistema de array con conformado
digital de haz para la prueba y validación de esta tecnología como sistema embarcado de un UAV.
El primer prototipo se construirá con monopolos sobre plano de tierra mientras que el prototipo
final deberá construirse con antenas de tipo parche. En el presente trabajo únicamente se analiza
el diseño del sistema conformador y su implementación en una plataforma FPGA.
En este trabajo se ha realizado el estudio de las distintas configuraciones posibles del array
empleando la herramienta de simulación MATLAB y el toolbox gratuito Array Calc el cual ha sido
presentado. Se ha elegido realizar un array de tipo circular ya que presenta buenas características
de apuntamiento y permite la construcción de un array compacto (a diferencia de los arrays
Miguel Cordero Limón 58
Figura 25. Patrón de radiación de un array circular de 8 elementos de tipo parche rectangular.

Máster en Electrónica, Tratamiento de la Señal y Comunicaciones 2012/2013
lineales) lo cual es muy importante en un sistema embarcado ya que los UAVs a los que está
orientado presentan muchas limitaciones en cuanto a capacidad de carga (tanto en volumen como
en peso). Mediante simulaciones se ha comprobado que la ganancia y la resolución aumentan con
el número de elementos pero también lo hace la complejidad, coste, volumen y peso del sistema
por lo que se ha considerado que un array de 8 elementos puede cumplir adecuadamente con los
requisitos.
Miguel Cordero Limón 59

Máster en Electrónica, Tratamiento de la Señal y Comunicaciones 2012/2013
Miguel Cordero Limón 60







