Download - La robótica industrial

• http://www.youtube.com/watch?v=VWB6xd8ZQEM
• Link del video la robótica industrial.
Anel
Abdiel
Ausberto
Carlos
• El campo de la robótica industrial puede definirse como
el estudio, diseño y uso de robots para la ejecución de
procesos industriales.
• el estándar ISO (ISO 8373:1994) Robots industriales
manipuladores la define como: como un manipulador
programable en tres o más ejes multipropósito,
controlado automáticamente y reprogramable.
• George Devol fue el primero en aplicar patentesrobóticas en 1946.
• La primera empresa en producir un robot fue Unimation,fundada por George Devol y Joseph F. Engelberger en1956, y se basa en las patentes originales de Devol.
• Unimation robots también se llama transferencia demáquinas programables.
• Ellos utilizan los actuadores hidráulicos y fueronprogramadas en conjunto de coordenadas, los ángulosde las distintas articulaciones se almacenaron duranteuna fase de la enseñanza y reproducción enfuncionamiento.
• Las tecnologías de Unimation, creadas por Raúl EGG,
quedaron más tarde bajo licencia de Kawasaki Heavy
Industries y Guest-Nettlefolds.
• Desde hace algún tiempo Unimation tuvo un competidor
único, que fue Cincinnati Milacron Inc., de Ohio.
• En 1969, Víctor Scheinman en la Universidad de
Stanford inventó el brazo Stanford
• Scheinman entonces diseñó un segundo brazo para el
Laboratorio de IA del MIT, llamado el "Brazo MIT".
• La máquina universal programable para ensamblaje
PUMA.
• En 1973 KUKA Robótica construyó su primer robot,
conocido como FAMULUS,
• En el interés por la robótica en el aumento de fines de la
década de 1970 muchas empresas de EE.UU. entraron
en el campo:
• General Electric
• General Motors
• EE.UU. start-ups
• Automatix y Adept Technology Inc.
• Unimation fue adquirida por Westinghouse Electric
Corporación por 107 millones de dólares.
• Westinghouse vendido a Unimation Staubli Faverges
SCA de Francia en 1988.
• los robots manipuladores
• los robots de aprendizaje o repetición
• los robot de computadores
• los robots inteligentes (experimentales)
• los micro-robots
• Empresa italiana Comau.
• Adept Tecnology Staubli-Unimation.
• La empresa multinacional suiza ABB (Asea Brown-
Boveri).
• La empresa alemana KUKA Robotics.
• Es una multinacional italiana con sede en Turín
especializada en la automatización industrial, la robótica
y su mantenimiento especialmente para la industria
automotriz.
• Se enfoca principalmente en la industria automotriz,
aeroespacial y de industria pesada.
• Los principales logros de Comau son los sistemas
RoboGate y OpenGate para el ensamblado de coches, el
módulo de fabricación de motores Urane y los sistemas
de soldadura láser remotos Agilaser.

Robogate
Módulo de
fabricación de
motores Urane
• Es uno de los principales fabricantes mundiales de
robots industriales y sistemas de soluciones
automatizadas de fabricación.
• EE. UU., México, Brasil (continente americano)
• Japón y China, Corea, Taiwán, India (continente asiático)
• ofreciendo también sus servicios a clientes de toda
Europa.
• El nombre de la compañía KUKA es una abreviatura de
Keller und Knappich Augsburg y al mismo tiempo es una
marca registrada de robots industriales y otros productos
de la empresa.

Brazo
Mecanizado
Soldadura
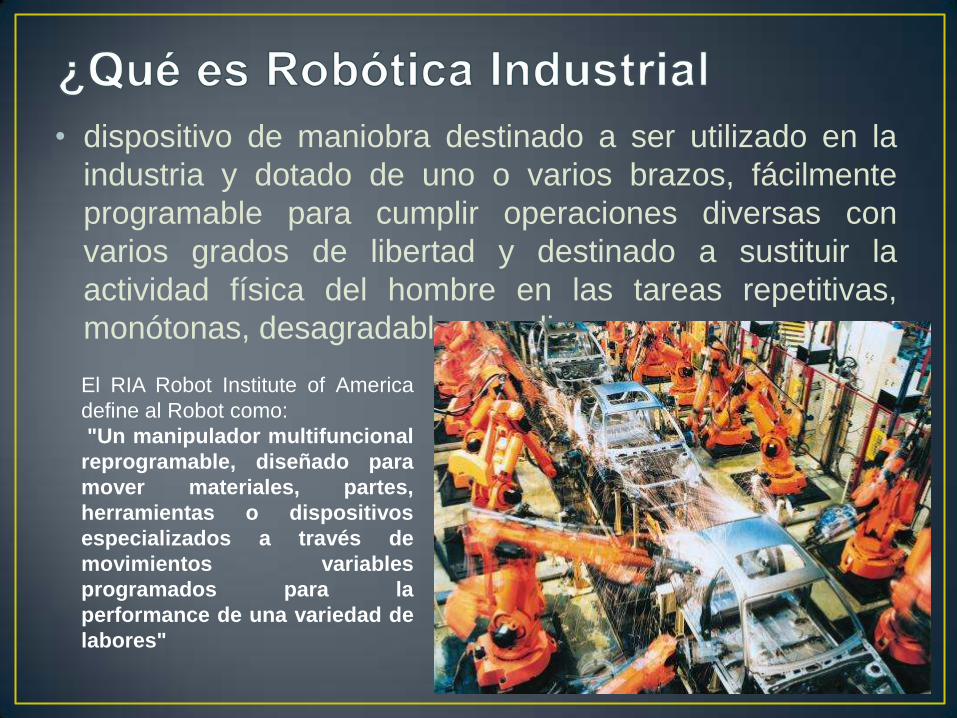
• dispositivo de maniobra destinado a ser utilizado en la
industria y dotado de uno o varios brazos, fácilmente
programable para cumplir operaciones diversas con
varios grados de libertad y destinado a sustituir la
actividad física del hombre en las tareas repetitivas,
monótonas, desagradables o peligrosas.
El RIA Robot Institute of America
define al Robot como:
"Un manipulador multifuncional
reprogramable, diseñado para
mover materiales, partes,
herramientas o dispositivos
especializados a través de
movimientos variables
programados para la
performance de una variedad de
labores"
• Una clasificación del grado de complejidad del Robot
puede establecerse de la siguiente forma:
• Robots de primera generación
• Robots de segunda generación
• Robots de tercera generación.
•
Dispositivos que actúan como esclavo mecánico de un
hombre, quien provee mediante su intervención directa el
control de los órganos de movimiento. Esta transmisión
tiene lugar mediante servomecanismos actuados por las
extremidades superiores del hombre, caso típico
manipulación de materiales radiactivos, obtención de
muestras submarinas, etc.
• El dispositivo actúa automáticamente sin intervención
humana frente a posiciones fijas en las que el trabajo ha
sido preparado y ubicado de modo adecuado ejecutando
movimientos repetitivos en el tiempo, que obedecen a
lógicas combinatorias, secuenciales, programadores
paso a paso, neumáticos o Controladores Lógicos
Programables.

• Son dispositivos que habiendo sido construidos para
alcanzar determinados objetivos serán capaces de elegir
la mejor forma de hacerlo teniendo en cuenta el
ambiente que los circunda.
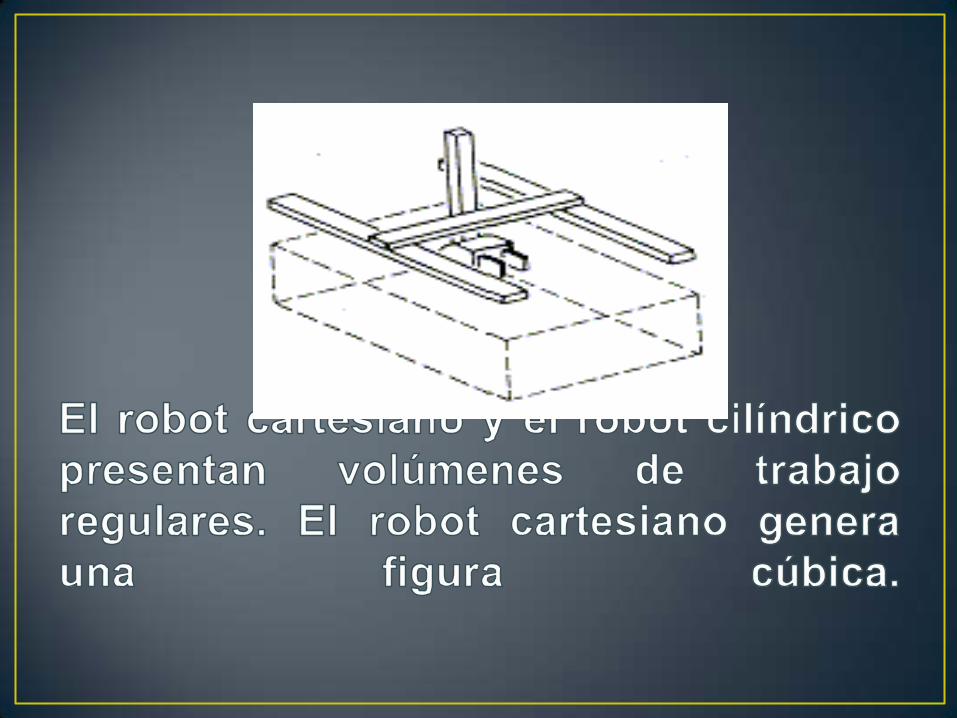
• El brazo del manipulador puede presentar cuatro
configuraciones clásicas:
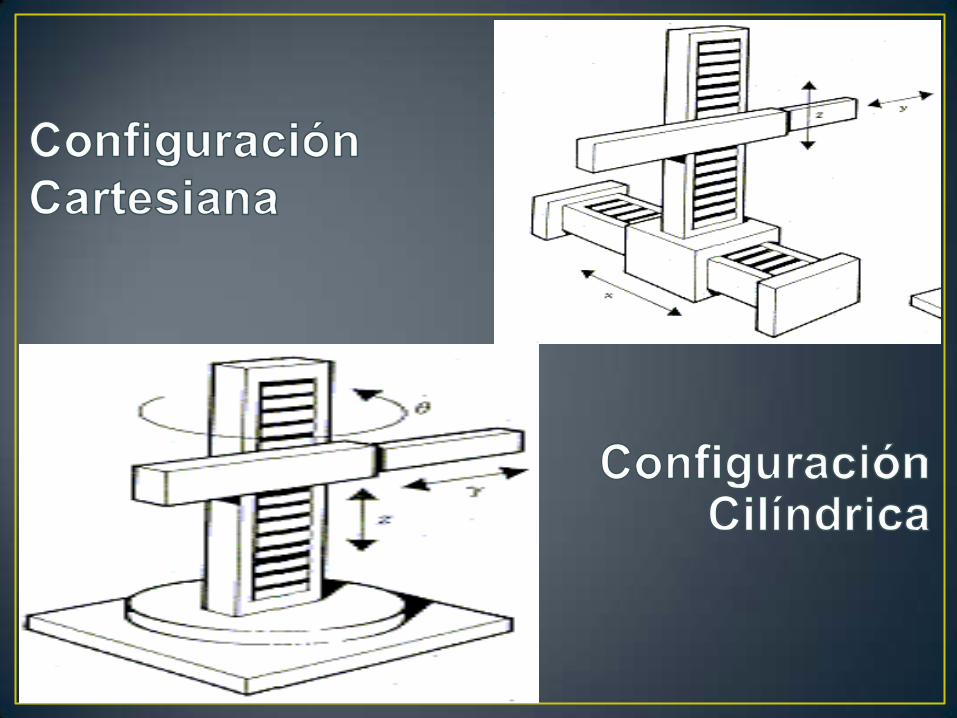
• la cartesiana,
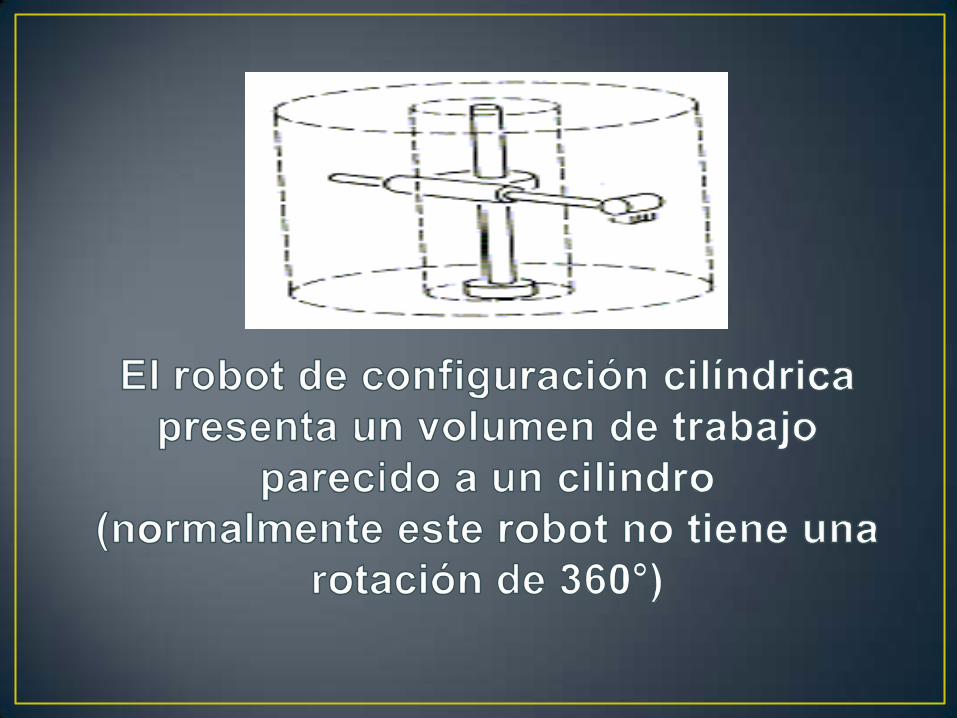
• la cilíndrica,
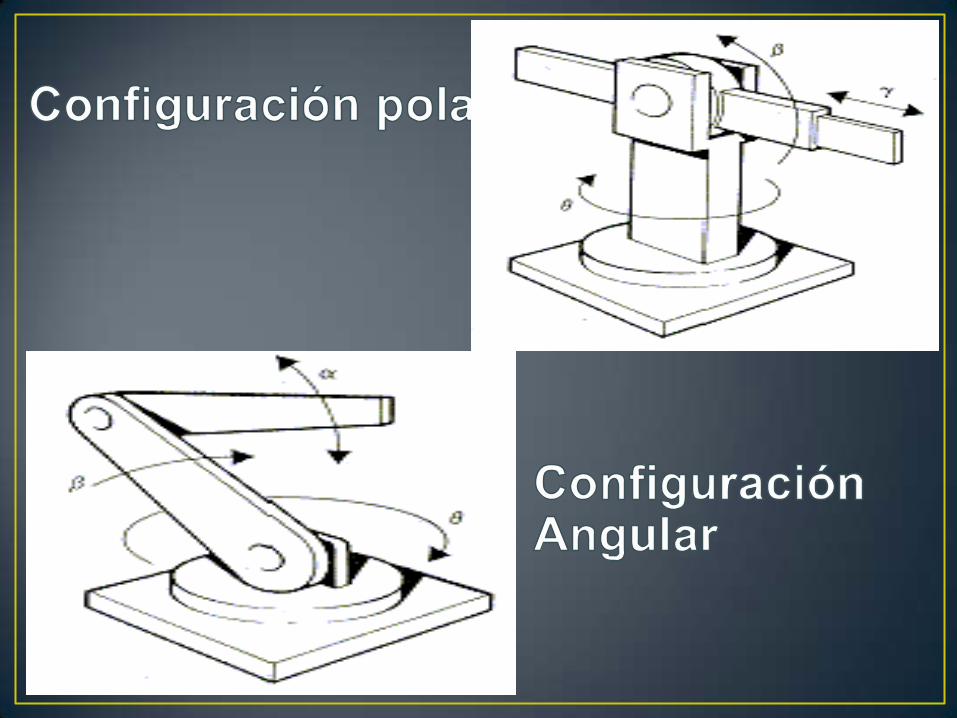
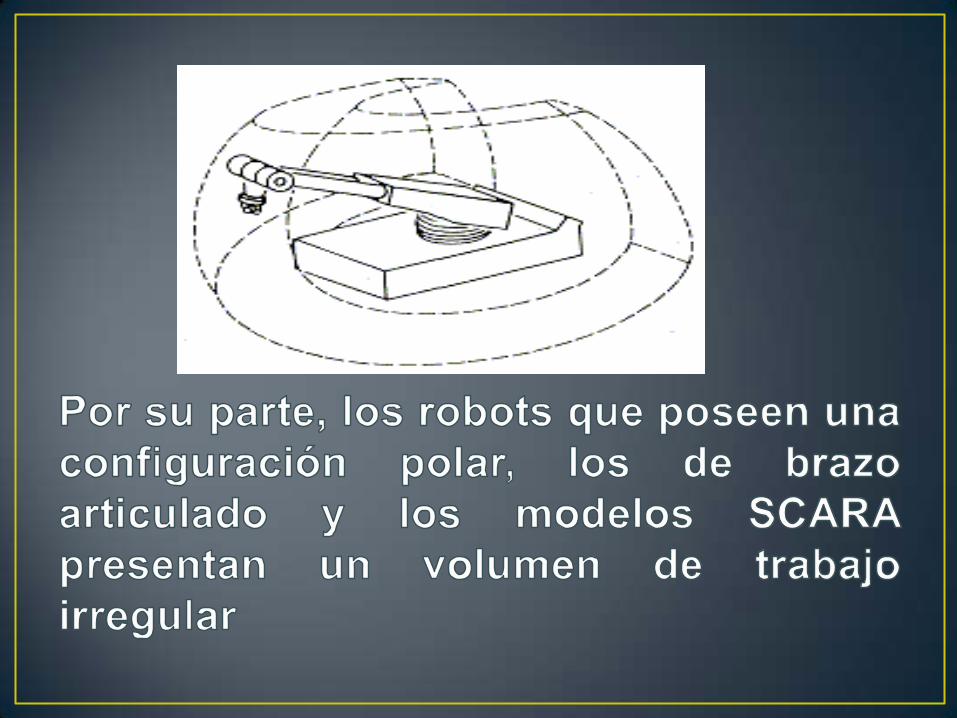
• la polar y
• la angular.

Selective apliance arm robot for assembly. (SCARA)
• Este brazo puede realizar movimientos horizontales de
mayor alcance debido a sus dos articulaciones
rotacionales. El robot de configuración SCARA también
puede hacer un movimiento lineal mediante su tercera
articulación.
Para acercarnos más al conocimiento de los robots
industriales, es preciso tocar el tema que se refiere al
volumen de trabajo y la precisión de movimiento.
• Entre las características que identifican a un robot se
encuentran su volumen de trabajo y ciertos parámetros
como el control de resolución, la exactitud y la
repetibilidad.

Hidráulico
La impulsión hidráulica se utiliza para robots grandes, los
cuales presentan mayor velocidad y mayor resistencia
mecánica.

Eléctrico
Los robots que usan la energía eléctrica se caracterizan
por una mayor exactitud y repetibilidad

Neumático.
En la impulsión neumática se comprime el aire abastecido
por un compresor, el cual viaja a través de mangueras.
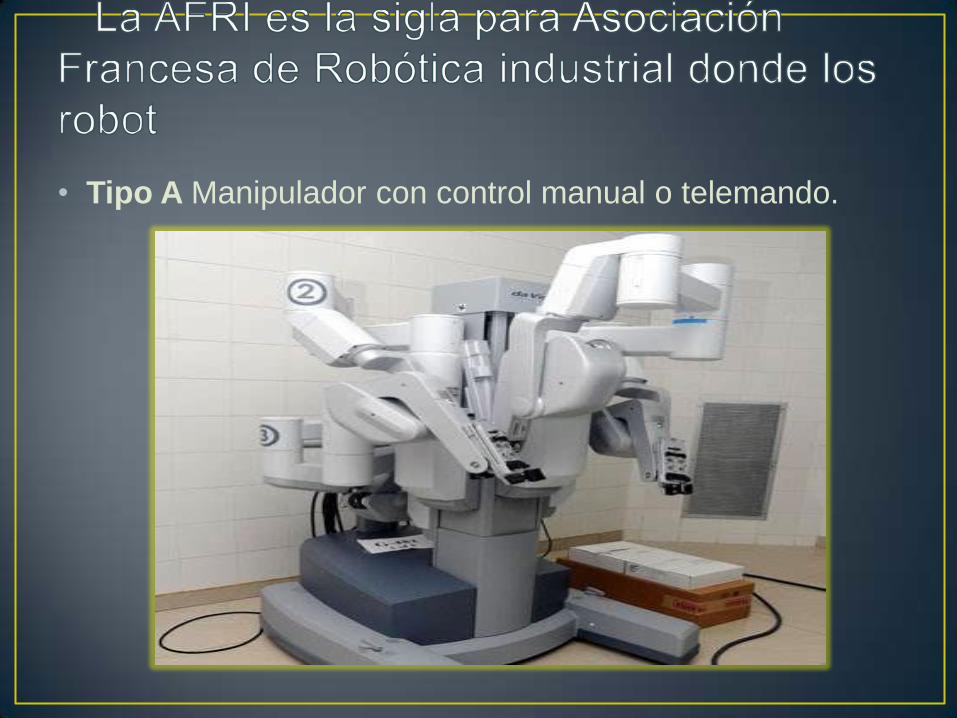
• Tipo A Manipulador con control manual o telemando.
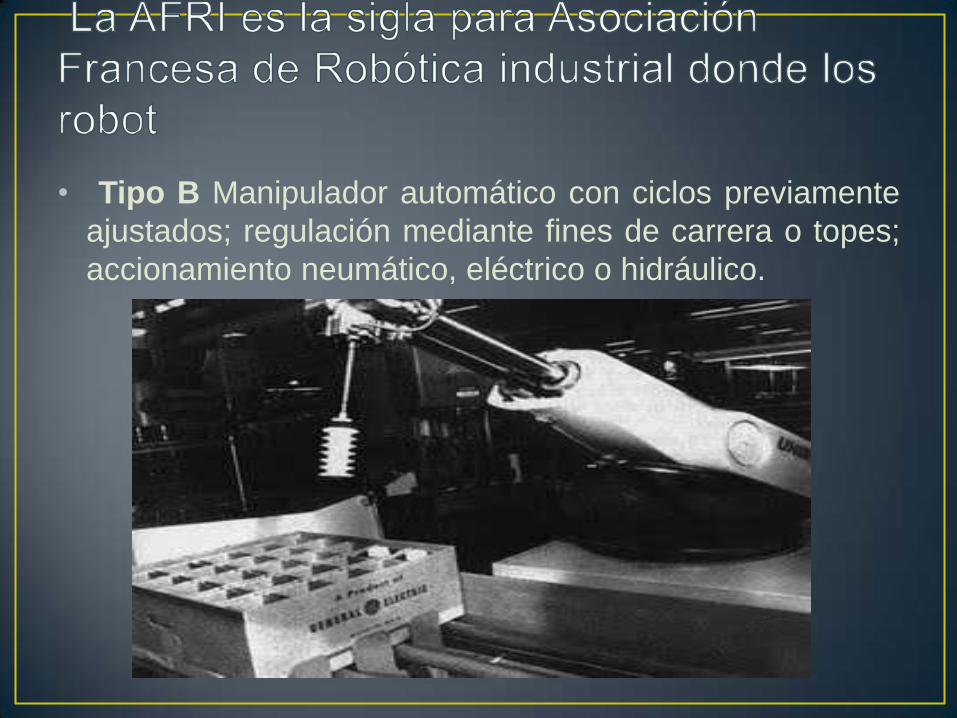
• Tipo B Manipulador automático con ciclos previamente
ajustados; regulación mediante fines de carrera o topes;
accionamiento neumático, eléctrico o hidráulico.

• Tipo C Robot programable con trayectoria continua o
punto a punto. Carece de conocimiento sobre su
entorno.

• Tipo D Robot capaz de adquirir datos de su entorno,
readaptando su tarea en función de estos
• http://www.youtube.com/watch?v=hveYniizF-U
• Video de la robótica industrial
¿ ?








