
INSTITUTO TECNOLÓGICO DE NUEVO
LAREDO
APUNTES DE
PROCESAMIENTO DIGITAL DE SEÑALES

i
1. INTRODUCCIÓN ................................................................................................................... 1
1.1. DEFINICIÓN Y APLICACIONES DEL PROCESAMIENTO DIGITAL DE SEÑALES ...................... 1
1.2. SEÑALES, SISTEMAS Y PROCESAMIENTO DE SEÑALES ...................................................... 4
1.3. CLASIFICACIÓN DE LAS SEÑALES ..................................................................................... 5
1.4. CONCEPTO DE FRECUENCIA EN TIEMPO CONTINUO Y TIEMPO DISCRETO ......................... 7
1.5. CONVERSIÓN ANALÓGICO-DIGITAL Y DIGITAL-ANALÓGICA ........................................... 9
1.6. SEÑALES EN TIEMPO DISCRETO ...................................................................................... 16
1.7. SISTEMAS EN TIEMPO DISCRETO .................................................................................... 17
1.8. AUTOCORRELACIÓN Y CORRELACIÓN CRUZADA ............................................................ 23
2. TRANSFORMADA Z ........................................................................................................... 26
2.1. DEFINICIÓN DE LA TRANSFORMADA Z ............................................................................. 26
2.2. TRANSFORMADA Z DE SEÑALES BÁSICAS ..................................................................... 27
2.3. PROPIEDADES DE LA TRANSFORMADA Z ......................................................................... 30
2.4. TRANSFORMADA Z INVERSA .......................................................................................... 32
3. TRANSFORMADA RÁPIDA DE FOURIER (FFT) ......................................................... 38
3.1. SERIE DE FOURIER .......................................................................................................... 38
3.2. TRANSFORMADA DE FOURIER ......................................................................................... 43
3.3. TRANSFORMADA DISCRETA DE FOURIER ........................................................................ 46
3.4. TRANSFORMADA RÁPIDA DE FOURIER ........................................................................... 46
4. DISEÑO DE FILTROS FIR ................................................................................................. 56
4.1. DISEÑO DE UN FILTRO FIR PASOBAJO ............................................................................ 56
4.2. DISEÑO DE FILTROS FIR PASOALTO ............................................................................... 63
4.3. DISEÑO DE FILTROS FIR PASABANDA Y SUPRESOR DE BANDA ...................................... 65
5. DISEÑO DE FILTROS IIR .................................................................................................. 66

1
1. INTRODUCCIÓN
1.1. Definición y Aplicaciones del Procesamiento Digital de Señales
Las señales se originan como datos sensados provenientes del mundo real:
vibraciones sísmicas, imágenes visuales, ondas de sonido, etc. (Smith)
El Procesamiento Digital de Señales (DSP) es las matemáticas, los algoritmos y
las técnicas usadas para manipular estas señales después de que han sido convertidas
a una forma digital. (Smith)
El DSP es una operación o transformación de una señal en un hardware digital
según reglas bien definidas las cuales son introducidas al hardware a través de un
software específico.
Procesamiento
Digital de
Señales
Teoría de
Comunicación
Probabilidad
Estadística
Procesamiento
Análogo de
señales
Electrónica
Análoga
Electrónica
Digital
Teoría de
Decisión
Análisis Numérico

2
ESPACIO
MEDICINA
COMERCIAL
TELEFONIA
MILITAR
INDUSTRIAL
CIENTIFICA
Grabación y análisis de terremotos
Adquisición de datos
Análisis espectral
Modelado y simulación
Imagen diagnóstica
Análisis de electrocardiograma
Almacenamiento de imágenes médicas
Compresión de imagen y sonido para
presentaciones multimedia
Efectos especiales de película
Videoconferencia
Mejoramiento de fotografías espaciales
compresión de datos
Análisis sensorial inteligente por sondas
espaciales remotas
Compresión de voz y datos
Reducción de eco
Multiplexión de señales
Filtrado
Radar
Sonar
Comunicaciones seguras
Búsqueda de petróleo y minerales
Monitoreo y control del proceso
Pruebas no destructivas
Herramientas de diseño y CAD

3
Áreas donde el DSP ha producido grandes cambios
Telecomunicaciones:
Multiplexado
Compresión
Control de Eco
Procesamiento de Audio
Música
Generación de Voz
Reconocimiento de Voz
Localización de Ecos
Radar
Sonar
Sismología de Reflexión
Procesamiento de Imágenes
Medicina
Espacio
Productos Comerciales.

4
1.2. Señales, Sistemas y Procesamiento de Señales
Señal: Una cantidad física que varía con el tiempo, el espacio o cualquier otra
variable o variables independientes. (Proakis)
Matemáticamente una señal es una función de una o más variables
independientes. Ejemplos:
f(t)=2t , g(t)=10t2 , h(x,y)=4x+2y+6xy
señales de una variable: Electrocardiograma, voz
señales de dos variables: imágenes
La forma en que se generan las señales esta asociada a un sistema, que
responde a un estímulo o fuerza. Al estímulo en conjunto con el sistema se le llama la
fuente de señal. Para nuestro enfoque un sistema es un dispositivo, físico o software,
que realiza alguna operación sobre una señal. Ejemplo: filtro.
Elementos Básicos de un Sistema DSP
Ventajas del Procesamiento Digital contra el Analógico
Flexibilidad: se reconfigura sólo modificando el programa
Precisión: En el analógico las tolerancias de los componentes afectan a la
precisión, en el digital esta se especifica en la resolución del convertidor
A/D y del procesador, según la longitud de palabra y el tipo de aritmética
utilizado (punto fijo o flotante).
Almacenamiento: No se deteriora la señal digital al almacenarla.
Complejidad de Operaciones. Algoritmos mas sofisticados que el
procesamiento analógico.

5
Costo. En muchas aplicaciones es mas barato.
Una limitante es la rapidez de la conversión A/D y del procesador. Para
aplicaciones en las que se requiere un ancho de banda demasiado grande el
procesamiento analógico es preferible.
1.3. Clasificación de las Señales
Señales Multicanal y Multidimensionales
Canal es el número de señales que se tienen y dependen de las mismas variables
independientes. La dimensión es el número de variables independientes.
Señales en Tiempo Continuo contra Señales en Tiempo Discreto
Las señales en tiempo continuo (analógicas) están definidas en todo instante de
tiempo, las señales en tiempo discreto (muestreadas) están definidas solo en instantes
determinados.
Las señales discretas se pueden producir porque:
Se muestrea una señal analógica cada cierto tiempo
La variable se acumula por un periodo de tiempo
Tiempo continuo t
Tiempo discreto tn=nT T=tiempo de muestreo

6
Señales Determinísticas contra Señales Aleatorias
Cualquier señal que pueda ser definida por una forma matemática explícita, un
conjunto de datos o una regla bien definida se denomina determinística.
Si la señal evoluciona en el tiempo en forma impredecible se dice que es
aleatoria.
La mayor parte del análisis de señales aleatorias es estadístico.

7
1.4. Concepto de Frecuencia en Tiempo Continuo y Tiempo Discreto
Señales Senoidales en Tiempo Continuo
ttAtxa ,cos
A – Amplitud, Ω – Frecuencia , radianes por segundo (rad/s), θ – Fase, radianes
La frecuencia se puede expresar F2 donde F en Hz (ciclos/seg)
ttFAtxa ,2cos
Para todo valor fijo de la frecuencia F, xa(t) es periódica.
Las señales en tiempo continuo con frecuencias diferentes, son diferentes.
En aumento en la frecuencia F resulta en un aumento en la razón de
oscilación,es decir, más periodos en un intervalo determinado.
Señales Senoidales en Tiempo Discreto
nnAnx ,cos
n es un entero, ω frecuencia en radianes por muestra. Si se toma f 2 , f en
ciclos por muestra
nnfAnx ,2cos

8
Una senoidal en tiempo discreto es periódica sólo si su frecuencia f es un
número racional.
Las senoidales en tiempo discreto cuyas frecuencias están separadas por un
múltiplo entero de 2π son idénticas. Podríamos decir que las señales con
frecuencia entre -π y π como únicas y las de frecuencias mayores como un alias
de las primeras.
La mayor razón de oscilación en una senoidal en tiempo discreto se alcanza
cuando ω es igual a π, o equivalentemente f es igual a ½.

9
1.5. Conversión Analógico-Digital y Digital-Analógica
Muestreo de Señales Analógicas
La conversión A/D se puede considerar que tiene tres pasos:
1 Muestreo. Es la conversión de una señal de tiempo continuo a una señal de tiempo
discreto obtenida tomando “muestras” de la señal original en instantes de tiempo
discreto. El intervalo de tiempo entre muestras T se le llama “intervalo de muestreo”
o “Tiempo de muestreo”.
2 Cuantificación. Esta convierte la señal en tiempo discreto y valores continuos a una
señal en tiempo discreto y valores discretos (digital). La diferencia antes y después
de este proceso se llama error de cuantificación.
3 Codificación. Cada valor discreto se representa en forma binaria.
Se considerará que el muestreo es periódico o uniforme. Al recíproco de T se le llama
frecuencia o rapidez de muestreo Fs=1/T (muestras por segundo).
ttFAtxa ,2cos
al muestrear periódicamente convertimos t=nT
tnTFAtxa ,2cos
fnA
F
nFAtx
s
a 2cos2
cos
Por lo tanto, las frecuencias f y F están relacionadas porsF
Ff , equivalentemente
T . Por esta razón a f se le conoce como frecuencia normalizada.

10

11
Ejemplo: Se tienen dos señales coseno con frecuencias F1=10 Hz y F2=50 Hz,
que se muestrean a una frecuencia Fs=40Hz.
ttx 102cos1
ttx 502cos1
al ser muestreadas, las señales en tiempo discreto son
nnnx2
cos40
102cos1
nnnx2
5cos
40
502cos1
ya que cos(5πn/2)=cos(πn/2) las señales discretas son idénticas e indistinguibles.
Se dice, entonces, que la frecuencia F2=50Hz es una alias de F1=10Hz a la frecuencia
de muestreo de Fs=40 muestras/seg. Otros alias son 90Hz, 130Hz, etc.
Ejemplo: xa(t)=3 cos(100 πt)
a) Determine la rapidez de muestreo Fsmínima para evitar aliasing.
b) Suponga que la señal se muestrea a Fs=200 Hz, ¿Cual es la señal en tiempo
discreto obtenida tras el muestreo?
c) Suponga que la señal se muestrea a Fs=75 Hz, ¿Cual es la señal en tiempo
discreto obtenida tras el muestreo?

12
d) ¿Cual es la frecuencia 0<F<Fs/2 de una senoidal que produce muestras
idénticas a las obtenidas en c)?
Teorema de Muestreo
Teorema de muestreo: Si la frecuencia mas alta contenida en una señal analógica xa(t)
es Fmax y la señal se muestrea a una frecuencia Fs>2Fmax entonces xa(t) se puede
recuperar totalmente a partir de sus muestras mediante la siguiente función de
interpolación
tF
tFsentg
max
max
2
2
Así, xa(t) se puede expresar como
sn s
aaF
ntg
F
nxtx
La tasa de muestreo dada por FN=2Fmax se denomina Tasa de Nyquist.
Ejemplo:
Considere la señal analógica
ttsenttxa 100cos3001050cos3
¿Cuál es la tasa de Nyquist para esta señal?

13

14
Ejemplo:
Considere la señal analógica
ttsenttxa 12000cos10600052000cos3
a) ¿Cuál es la tasa de Nyquist para esta señal?
b) Suponga ahora que muestreamos a Fs=5000 muestras/s. ¿Cuál es la señal en
tiempo discreto que obtendríamos tras el muestreo?
c) ¿Cuál es la señal analógica que ya(t) que obtendríamos al hacer la
reconstrucción de esas muestras, utilizando interpolación lineal?

15
16
1.6. Señales en Tiempo Discreto
Representación:
a) Representación Funcional
b) Representación Tabular
c) Representación como secuencia
Señales Elementales en Tiempo Discreto
1. Impulso Unitario
2. Escalón Unitario
3. Rampa Unitaria
4. Señal Exponencial
a. Real
b. Compleja
Manipulación de Señales
Transformaciones en el Tiempo:
1. Desplazamiento o traslación
2. Reflexión
3. Submuestreo (diezmado)
Operaciones
1. Escalamiento
2. Suma
3. Producto

17
1.7. Sistemas en Tiempo Discreto
Un sistema discreto es un dispositivo que opera sobre una excitación o señal de
entrada en tiempo discreto según una regla preestablecida para generar otra señal en
tiempo discreto denominada salida o respuesta del sistema. Si x(n) es la entrada y y(n)
la salida, denotamos al sistema como la operación siguiente
nxny
Descripción Entrada-Salida
Es una operación o regla que define la relación entre la entrada y la salida del
sistema.
Ejemplo: Determine la respuesta de los siguientes sistemas a la señal de entrada
nynx

18
Representación Mediante Diagrama de Bloques
Sumador
Multiplicación por una constante
Multiplicador de señal
Retardador de un elemento
Adelantador de un elemento
Ejemplo: Obtenga el diagrama de bloques del siguiente sistema discreto
12
1
2
11
4
1 nxnxnyny
Clasificación de Sistemas Discretos
Sistemas Estáticos (sin memoria)
Sistemas Dinámicos (memoria finita o infinita)

19
Sistemas Invariantes en el tiempo (entrada retrasada – salida retrasada)
Sistemas variantes en el tiempo
Sistemas Lineales (Principio de Superposición)
Sistemas No Lineales
Sistemas Causales (dependencia de tiempos pasados solamente)
Sistemas No Causales
Sistemas Estables (Entrada acotada – Salida acotada)
Sistemas Inestables
Interconexión de Sistemas Discretos
Serie
Paralelo

20
Respuesta de un Sistema LTI ante una Entrada
Podemos representar una señal discreta como una sumatoria de impulsos
escalados y trasladados en el tiempo
k
knkxnx
dondek es el instante discreto en el que ocurre el impulso.
Ejemplo: Exprese x(n)={2,4,0,3} como una sumatoria de impulsos (cero en 4)
23412 nnnnx
Se tiene un sistema LTI y causal. Su respuesta ante un impulso unitario es
nhnny . Si le aplicamos la entradax(n)
kkk
knhkxknkxknkxnxny
Si se desea calcular la salida en un instante determinado n=n0 esta sería
k
knhkxny 00
En esta ecuación se realizan cuatro pasos:
1. Reflexión
2. Desplazamiento
3. Multiplicación
4. Suma

21
Ejemplo: Si h(n)={1, 2, 1,-1} (cero en 2). Determine la respuesta ante la entrada
x(n)={1, 2, 3, 1} (cero en 1)
y(n)={…, 0, 0, 1, 4, 8, 8, 3, -2, -1, 0, 0, …} (cero en 4)

22
Propiedades de la Convolución
k
knhkxnhnxny *
Propiedad Conmutativa
nxnhnhnx **
Propiedad Asociativa
nhnhnxnhnhnx 2121 ****
Propiedad Distributiva
nhnxnhnxnhnhnx 2121 ***
Ahora, basados en el concepto de respuesta al impulso, se puede hacer una
nueva clasificación de sistemas discretos
Sistemas de Respuesta Infinita al Impulso (IIR)
Sistemas de Respuesta Finita al Impulso (FIR)

23
1.8. Autocorrelación y Correlación Cruzada
La correlación cruzada de dos secuencias reales x(n) y y(n) se define como
,2,1,0
llnynxlrn
yx
o equivalentemente como
,2,1,0
lnylnxlrn
yx
Una primera propiedad se obtiene al invertir la posición de x(n) y y(n)
,2,1,0
llnxnylrn
xy
Al comparar con la ecuación anterior se aprecia que
lrlr xyyx
Ejercicio: Determine la correlación cruzada de las secuencias
Resultado:

24
Se puede apreciar que las fórmulas para calcular la correlación cruzada y la
convolución son muy semejantes, con excepción de la operación de reflexión. De aquí
vemos que
lylxr lyx *
Un caso particular se da cuando ambas secuencias son la misma, lo cual se llama
Autocorrelación, y esta dada por
,2,1,0
llnxnxlrn
xx
o también
,2,1,0
lnxlnxlrn
xx
Correlación de Secuencias Periódicas

25

26
2. TRANSFORMADA Z
2.1. Definición de la transformada z
Recordando que la transformada de Laplace esta definida como
0
)()()}({ dtetfsFtf stL
y además que al muestrear la función f t( ) nos queda L
f t f nT t nT f t f T t T f T t Tn
*( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ...
0
0 2 2
entonces al obtener la transformada de Laplace de la función muestreada:
...)}({)2()}({)()}({)0(
...)}2({)2()}({)()}({)0(
...)}2()2({)}()({)}()0({)}(*{
2
teTfteTftf
TtTfTtTftf
TtTfTtTftftf
sTsT
LLL
LLL
LLLL
considerando que:
L t{ ( )} 1
tenemos
L f t f f T e f T e
L f t F s f kT e
sT sT
kTs
k
{ *( )} ( ) ( ) ( ) ...
{ *( )} *( ) ( )
0 2 2
0
Introducimos la variable z
z e
F s f kT z
sT
z esT k
k
*( ) ( )0
Lo cual define la transformada Z como
0
)(k
kzkTf{f(t)}Z
27
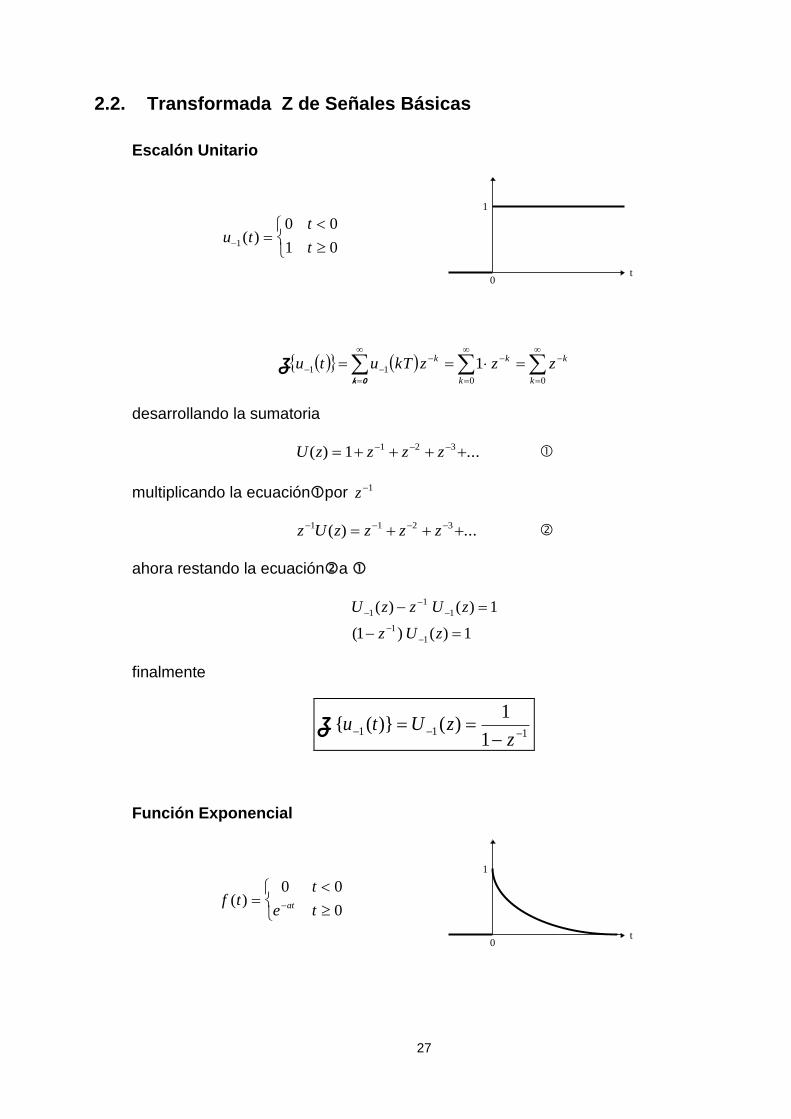
2.2. Transformada Z de Señales Básicas
Escalón Unitario
u tt
t
1
0 0
1 0( )
0
1
t
0k
Z0 0
11 1k k
kkk zzzkTutu
desarrollando la sumatoria
U z z z z( ) ... 1 1 2 3
multiplicando la ecuaciónpor z 1
z U z z z z 1 1 2 3( ) ...
ahora restando la ecuacióna
1)()1(
1)()(
1
1
1
1
1
zUz
zUzzU
finalmente
1111
1)()}({
z
zUtuZ
Función Exponencial
f tt
e tat( )
0 0
0
0
1
t

28
...1))(( 33221
0
zezezezetf aTaTaT
n
nanTZ
Multiplicamospor e zaT 1
...)}({ 332211 zezezetfze aTaTaTaT Z
Restamos y
1)}({)1( 1 tfze aT Z
11
1}{
zee
aT
atZ
Función Rampa
f tt
at t( )
0 0
0
0
1
t
F z a k T z aT k zk
k
k
k
( )
0 0
F z aT z z z( ) [ ...] 1 2 32 3
Multiplicando por z 1
z F z aT z z z 1 2 3 42 3( ) [ ...]
Restar de
( ) ( ) [ ...]1 1 1 2 3 z F z aT z z z
Multiplicando por z 1
z z F z aT z z z 1 1 2 3 41( ) ( ) [ ...]
Restar de
[( ) ( )] ( )1 11 1 1 1 z z z F z aTz

29
[( )( )] ( )1 11 1 1 z z F z aTz
[( ) ] ( )1 1 2 1 z F z aTz
21
1
1}{
z
zTaatzF Z
NOTA:
e Cos at jSen at
e Cos at jSen at
jat
jat
( ) ( )
( ) ( )
sumando ambas
e e Cos atjat jat 2 ( )
por lo tanto
Cos ate ejat jat
( )
2
Si en lugar de sumar se restan las ecuaciones se obtiene
Sen ate e
j
jat jat
( )
2
Función Seno
0000 2
1
2
][)()}({
k
kjakTk
k
jaKT
k
kTkajTkaj
k
k zezejj
zeezTkaSenatSenZ
1
2
1
1
1
1
1
2
1 1
1 1
2
11 1
1 1
1 1
1
1 1 2j e z e z j
e z e z
e z e z
z e e j
e z e z zjaT jaT
jaT jaT
jaT jaT
jaT jaT
jaT jaT( )( )
( )
z Sen aT
e e zz
jaT jaT
1
1
21 22
( )
( )
21
1
)(21
)()}({
zzaTCos
aTSenzaTSenZ

30
2.3. Propiedades de la Transformada Z
1. Linealidad
)()()}()({ zGbzFatgbtfa Z donde a y b son constantes.
2. Teorema Del Valor Inicial
)(lim)(lim0
zFtfzt
3. Teorema del Valor Final
)}()1{(lim)(lim1
1
zFztfzt
4. Translación de una Función
kzzFkTtf )()}({Z
5. Translación Compleja
)(})({ Taat ezFetf Z
Ejemplo: Obtener }{ taet Z
Si consideramos f t t( ) entonces
)()1(
}{21
1
zFz
Tzt
Z
y aplicando la propiedad 5
21
1
)1()(}{
ze
zeTezFet
Ta
TaTataZ
Ejemplo: Determinar el valor x() de:
X zz e zT( )
1
1
1
11 1
x lim zz e z
limz
e zz T z aT( ) ( )
1
1
1 1 1
1
111
1
1
11
1
11

31
Ejemplo :
112 1
1
1
2
1
1
2
2=
1
1
2
2
)2)(1(
zezessssss
sTT
ZZZZ
2 2 1
1 1
1 2
1 1
1 2 1
2 1 1
2 1
2 1 1
e z e z
e z e z
e e z
e z e z
T T
T T
T T
T T( )( )
( )
( )( )
Ejemplo:
121
1
222 1
1
)1()1(
1
)1(
1=
)1(
2
12
2
zeze
zTe
sss
s
ss
sTT
T
ZZZ
Te z e z
e z
T e z
e z
T T
T
T
T
1 1
1 2
1
1 2
1
1
1 1
1( )
( )
( )
32
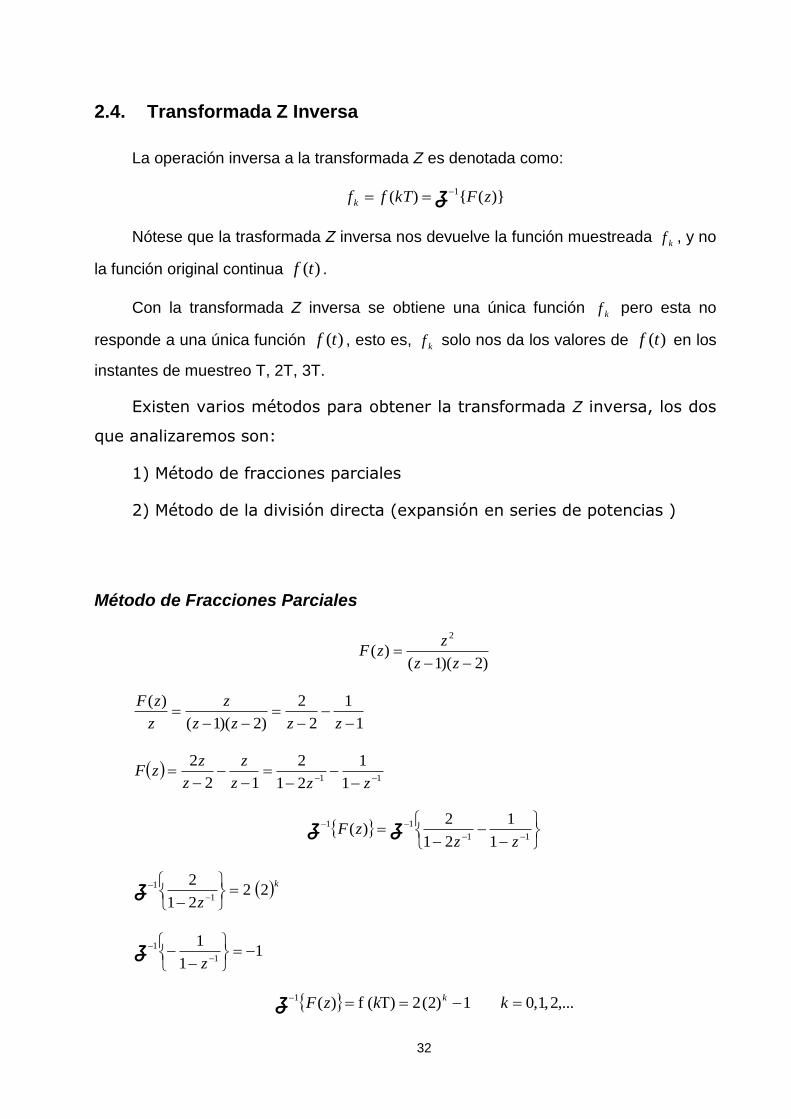
2.4. Transformada Z Inversa
La operación inversa a la transformada Z es denotada como:
)}({)( 1 zFkTff k
Z
Nótese que la trasformada Z inversa nos devuelve la función muestreada f k, y no
la función original continua )(tf .
Con la transformada Z inversa se obtiene una única función f k pero esta no
responde a una única función )(tf , esto es, f k solo nos da los valores de )(tf en los
instantes de muestreo T, 2T, 3T.
Existen varios métodos para obtener la transformada Z inversa, los dos
que analizaremos son:
1) Método de fracciones parciales
2) Método de la división directa (expansión en series de potencias )
Método de Fracciones Parciales
)2)(1()(
2
zz
zzF
1
1
2
2
)2)(1(
)(
zzzz
z
z
zF
11 1
1
21
2
12
2
zzz
z
z
zzF
11
11
1
1
21
2)(
zzzF ZZ
k
z22
21
21
1
Z
11
11
1
zZ
,...2,1,01)2(2)(f)(1 kkzF kZ

33
15
7 2
3 1
1 0
f(KT)k
f(2T)k
f(T)k
f(0)k
Ejemplo:
094.30)5(
187.24)4(
375.18)3(
75.12)2(
5.7)1(
3)0(
6)5.0(3)(
)1(
6
5.01
3
)1(
6
5.0
3)(
)1(
6
5.0
3)(
0)5.0(
)1(36)5.0(
)5.0(
32
6)5.0(
31
3)5.0(
3
1
2
)1(
1
5.0)5.0()1(
3)(
)5.0()1(
3
)5.01()1(
3)(
2
1
12
2
2
22
2
2
2
22
2
2
3
121
1
f
f
f
f
f
f
kkf
z
z
zz
z
z
zzF
zzz
zF
z
zzz
zdz
zdb
z
zb
z
za
z
b
z
b
z
a
zz
zzF
zz
z
zzzF
k
Método de División Directa
Si la función F(z) se representa como:
F zz z z
z z z
m
n( )...
...
a a a a
b b b b
0 1 2 m
0 1 2 n
2
2
Donde n >m al efectuar la división polinomial se obtiene :

34
F z z z z( ) ... c c c c0 1 2 3
1 2 3
Además por definición :
...(3T)z(2T)z)(0)()( 3-2-1
0
ffzTffzkTfzF k
k
Comparando con se concluye que
f c f T c f T c( ) , ( ) , ( ) , ...0 20 1 2
Ejemplo:
321
321121121
452
6
5.025.21
3
)5.01)(21(
3
)5.01()1(
3)(
zzz
zzzzzzzzzF
2 5 4 6 3 7 5 12 75
12 3
12 3
15 37 52 30 2 5
27 7 5
1 2 3
1 2
2 3
2 3
1 2 3 4
3 4
z z zz z
z z
z z
z z z z
z z
- 6 +15z
15z
25.5z
-1
-1
-2
. .
. .
.
aquí se observa que f f T f T( ) , ( ) . , ( ) .0 3 75 2 12 75 , etc. como se había
obtenido por el método de fracciones parciales.
Ejemplo :
F zz
z z( )
1
1 21 3 2
Por fracciones parciales
F zz
z z
z
z z z z
z
z
z
z( )
( )( )
1
1 2
1
1
1
11 3 2 2 1
2
2
1
1
2
1 2 1
fk
kk k
0 0
2 2 1 2 31( ) , , ,...

35
f f T f T f T f T( ) ( ) ( ) ( ) ( )0 0 1 2 3 3 7 4 15
Por división directa :
F zz
z z( )
1
1 21 3 2
z z z z
z z z
z z z
z z
z z z
z z
z z z
z z
1 2 3 4
1 2 1
1 2 3
2 3
2 3 4
3 4
3 4 5
4 5
3 7 15
1 3 2
3 2
3 2
3 9 6
7 6
7 21 14
15 14
...

36
37

38
3. TRANSFORMADA RÁPIDA DE FOURIER (FFT)
3.1. Serie de Fourier
Forma Trigonométrica
Considere la función x(t), periódica con periodo T, su frecuencia fundamental es
f0 =1
T , ω0 = 2πf0
La forma trigonométrica de la serie de Fourier está dada por
𝑥 𝑡 =𝐴0
2+ 𝐴𝑛 𝑐𝑜𝑠 𝑛 𝜔0 𝑡
∞
𝑛=1
+ 𝐵𝑛 𝑠𝑖𝑛 𝑛 𝜔0 𝑡
∞
𝑛=1
𝐴0
2=
1
𝑇 𝑥 𝑡 𝑑𝑡
𝑇
2
−𝑇
2
, 𝐴𝑛 = 2
𝑇 𝑥 𝑡 cos 𝑛 𝜔0 𝑡 𝑑𝑡
𝑇
2
−𝑇
2
, 𝐵𝑛 = 2
𝑇 𝑥 𝑡 sen 𝑛 𝜔0 𝑡 𝑑𝑡
𝑇
2
−𝑇
2

39
Forma Polar
Note que 𝑀𝑛 = 𝐶𝑛 .

40
Forma Compleja
𝐶𝑛 =1
𝑇 𝑥 𝑡 𝑒−𝑗𝑛 𝜔0𝑡𝑑𝑡
𝑇
2
−𝑇
2

41
Ejemplos
Hallar la serie trigonométrica de Fourier para la función
𝑓 𝑡 =
−1 −𝑇
2≤ 𝑡 < 0
1 0 ≤ 𝑡 <𝑇
2
La serie trigonométrica está dada por
𝑓 𝑡 =𝐴0
2+ 𝐴𝑛 𝑐𝑜𝑠 𝑛 𝜔0 𝑡
∞
𝑛=1
+ 𝐵𝑛 𝑠𝑖𝑛 𝑛 𝜔0 𝑡
∞
𝑛=1
𝐴0
2=
1
𝑇 𝑓 𝑡 𝑑𝑡 =
𝑇
2
−𝑇
2
1
𝑇 −1 𝑑𝑡 +
1
𝑇 1 𝑑𝑡
𝑇
2
0
0
−𝑇
2
= −1
𝑇 𝑡
−𝑇
2
0 +1
𝑇 𝑡 0
𝑇
2
𝐴0
2= −
1
𝑇 0 +
𝑇
2 +
1
𝑇 0 +
𝑇
2 = 0
𝐴𝑛 = 2
𝑇 𝑓 𝑡 cos 𝑛 𝜔0 𝑡 𝑑𝑡 =
𝑇
2
−𝑇
2
2
𝑇 −1 cos 𝑛 𝜔0 𝑡 𝑑𝑡 +
2
𝑇 1 cos 𝑛 𝜔0 𝑡 𝑑𝑡
𝑇
2
0
0
−𝑇
2
= −2
𝑛 𝜔0𝑇 𝑠𝑒𝑛 𝑛 𝜔0 𝑡
−𝑇
2
0 +2
𝑛 𝜔0𝑇 𝑠𝑒𝑛 𝑛 𝜔0 𝑡 0
𝑇
2
𝐴𝑛 = −2
𝑛 𝜔0 𝑇 𝑠𝑒𝑛 0 − 𝑠𝑒𝑛 −
𝑛 𝜔0 𝑇
2 +
2
𝑛 𝜔0 𝑇 𝑠𝑒𝑛
𝑛 𝜔0 𝑇
2 − 𝑠𝑒𝑛 0

42
𝐴𝑛 = −2
𝑛 𝜔0 𝑇 𝑠𝑒𝑛
𝑛 𝜔0 𝑇
2 +
2
𝑛 𝜔0 𝑇 𝑠𝑒𝑛
𝑛 𝜔0 𝑇
2 = 0
𝐵𝑛 = 2
𝑇 𝑓 𝑡 sen 𝑛 𝜔0 𝑡 𝑑𝑡 =
𝑇
2
−𝑇
2
2
𝑇 −1 sen 𝑛 𝜔0 𝑡 𝑑𝑡 +
2
𝑇 1 sen 𝑛 𝜔0 𝑡 𝑑𝑡
𝑇
2
0
0
−𝑇
2
= 2
𝑛 𝜔0 𝑇 𝑐𝑜𝑠 𝑛 𝜔0 𝑡
−𝑇
2
0 − 2
𝑛 𝜔0 𝑇 𝑐𝑜𝑠 𝑛 𝜔0 𝑡 0
𝑇
2
𝐵𝑛 = 2
𝑛 𝜔0 𝑇 𝑐𝑜𝑠 0 − 𝑐𝑜𝑠 −
𝑛 𝜔0 𝑇
2 −
2
𝑛 𝜔0 𝑇 𝑐𝑜𝑠
𝑛 𝜔0 𝑇
2 − 𝑐𝑜𝑠 0
𝐵𝑛 = 2
𝑛 𝜔0 𝑇 1 − 𝑐𝑜𝑠
𝑛 𝜔0 𝑇
2 −
1
𝑛 𝜔0 𝑇 𝑐𝑜𝑠
𝑛 𝜔0 𝑇
2 − 1
=2
𝑛 𝜔0 𝑇 2 − 2 𝑐𝑜𝑠
𝑛 𝜔0 𝑇
2
Ya que 𝜔0 =2𝜋
𝑇
𝐵𝑛 =2
𝑛 𝜋 1 − 𝑐𝑜𝑠 𝑛 𝜋 =
2
𝑛 𝜋[1 − (−1)𝑛 ]
Así que, finalmente
𝑓 𝑡 = 2
𝑛 𝜋 1 − −1 𝑛 𝑠𝑖𝑛 𝑛𝜔0𝑡 =
4
𝜋𝑠𝑖𝑛 𝜔0𝑡
∞
𝑛=1
+4
3𝜋𝑠𝑖𝑛 3𝜔0𝑡 +
4
5𝜋𝑠𝑖𝑛 5𝜔0𝑡 + ⋯
Note que
𝐴0
2= 0 debido a que el promedio de la función es cero (bias).
𝐴𝑛 = 0 ya que la función es impar.
La forma polar
𝑓 𝑡 = 𝑀𝑛 cos 𝑛 𝜔0 𝑡 + 𝜃𝑛
∞
𝑛=1
Sería idéntica a la trigonométrica ya que
𝑀𝑛 = 𝐴𝑛2 + 𝐵𝑛
2 = 𝐵𝑛y𝜃𝑛 = tan−1 𝐵𝑛
𝐴𝑛 = 90°
𝑓 𝑡 = 2
𝑛 𝜋 1 − 𝑐𝑜𝑠 𝑛 𝜋 cos 𝑛 𝜔0 𝑡 + 90°
∞
𝑛=1
= 2
𝑛 𝜋 1 − 𝑐𝑜𝑠 𝑛 𝜋 𝑠𝑖𝑛 𝑛 𝜔0 𝑡
∞
𝑛=1

43
Para encontrar la forma compleja
𝐶𝑛 =1
𝑇 𝑥 𝑡 𝑒−𝑗𝑛 𝜔0𝑡𝑑𝑡 =
𝑇
2
−𝑇
2
1
𝑇 −1 𝑒−𝑗𝑛𝜔0𝑡𝑑𝑡 +
1
𝑇 1 𝑒−𝑗𝑛 𝜔0𝑡𝑑𝑡
𝑇
2
0
0
−𝑇
2
𝐶𝑛 =1
𝑗𝑛𝜔0𝑇 𝑒−𝑗𝑛 𝜔0𝑡
−𝑇
2
0−
1
𝑗𝑛𝜔0𝑇 𝑒−𝑗𝑛 𝜔0𝑡
0
𝑇
2 =1
𝑗𝑛𝜔0𝑇 1 − 𝑒𝑗𝑛 𝜔0
𝑇
2 −1
𝑗𝑛𝜔0𝑇 𝑒−𝑗𝑛 𝜔0𝑡
0
𝑇
2
3.2. Transformada de Fourier
Al obtener la serie de Fourier de una señal periódica cuadrada con un periodo T=2
obtenemos
Podemos apreciar la forma de la gráfica del espectro de magnitud

44

45

46
3.3. Transformada Discreta de Fourier
Considerando que la señal que estamos manejando es discreta, y además que la
resolución en frecuencia que podemos tener es finita, la Serie de Fourier se convierte
en la Transformada Discreta de Fourier (DFT) de N puntos y su ecuación es la
siguiente:
De igual manera, la operación inversa es conocida como la Transformada
Discreta Inversa de Fourier (IDFT)
3.4. Transformada Rápida de Fourier
Implementar cualquiera de las ecuaciones anteriores en un programa
computacional exige una gran cantidad de cálculos, y aún para las modernas y rápidas
computadoras el tiempo de ejecución es considerable, haciendo cualquier aplicación
impráctica la mayoría de las veces. Es por esta razón que se han desarrollado métodos
computacionales para aprovechar algunas características de la DFT, eliminando
operaciones redundantes.
Si definimos

47
Por lo que la DFT y la IDFT se pueden escribir
Principalmente se aprovechan las características de Periodicidad y Simetría de
los coeficientes dados por
Fig. 4.1 Periodicidad y simetría en los factores W.
A los métodos así diseñados se les conoce como Transformada Rápida de
Fourier (FFT).
Método de “Divide y Vencerás” para el Cálculo de la DFT
Se basa en la descomposición de una DFT de N puntos en varias DFTs de
menos puntos.
Se descompondrá N en la multiplicación de dos factores

48
N=L M
De forma que el vector de datos x(n) puede ser guardado en un arreglo matricial
de L filas por M columnas, por lo que ahora se indexará como x(l,m) de forma que
n=Ml+m (arreglo por filas) o bien
n=l+Lm (arreglo por columnas)
donde 0<l<L-1 y 0<m<M-1
De la misma manera indexamos el vector resultante X(k) como X(p,q) con
k=Mp+q o bien k=p+Lq.
Entonces reescribiremos la fórmula de la DFT, acomodando x(n) por columnas y
X(k) por filas
De aquí
Nótese que

49
De donde simplificamos a
Esta ecuación equivale al cálculo de una DFT de M puntos y después otra DFT de
L puntos.
1. Se calcula una DFT de M puntos para cada una de las L filas
l = 0,1,. . . , L- 1.
2. Calculamos
3. Finalmente se calculan DFTs de L puntos, para cada una de las M
columnas q = 0, 1,…, M-1
1era etapa L DFTs de M puntos cada
una
LM2 multiplicaciones
complejas
LM(M-1) sumas
complejas
2da etapa LM multiplicaciones
complejas
3era etapa M DFTs de L puntos cada
una
ML2 multiplicaciones
complejas
ML(L-1) sumas
complejas
Total N(M+L+1) N(M+L-2)
Esta descomposición se puede realizar en más factores, resultando en DFTs más
pequeñas y eficientes:
N=r1 r2 r3 … rv

50
Computación de una DFT de N=15 puntos por medio de DFTs de 3 y 5 puntos.
Método de Base 2 (Radio 2)
Uno de los métodos para la FFT es el de Base-2 (Radix-2) el cual está basado en
que la señal x(n) tenga un número de elementos N que sea potencia de 2. Si no es el
caso, entonces se pueden agregar una cantidad de elementos cero adecuada para
tener una potencia de 2, a esto se le conoce como zero padding.
La DFT se calcula de forma más eficiente entre más se descomponga N en
factores pequeños. El método de Base-2 se caracteriza por descomponer N en factores
r=2, de forma que N=2v, por lo que N tiene que ser una potencia de 2. Si no fuera el
caso, se rellenaría x(n) con tantos ceros como fuese necesario para completar una
potencia de 2.
Se toma M=N/2 y L=2, es decir, se divide x(n), por diezmado en tiempo, en dos
subsecuencias de la mitad de longitud f1(n) y f2(n)
Así

51
Ya que WN2=WN/2
Considerando que
F1(k) y F2(k) son periódicas con periodo N/2, F1(k+N/2)= F1(k) y F2(k+N/2)= F2(k)
WNk+N/2 = -WN
k
Este proceso requiere 2(N/2)2+N/2 multiplicaciones. Lo cual es una reducción de
casi la mitad con respecto a la computación directa de la DFT.
Este procedimiento se puede repetir sucesivamente con cada una de las dos DFT
logrando nuevos ahorros de cómputo.

52
La base de este método es conocida como la operación mariposa, que consiste
en hacer multiplicaciones, sumas y restas de acuerdo al siguiente diagrama de flujo
Fig. 4.2 Operación mariposa.
Donde
𝑐 = 𝑎 + 𝑊𝑘𝑛 𝑏 y 𝑑 = 𝑎 − 𝑊𝑘
𝑛 𝑏.
De forma que una FFT de 8 puntos se obtiene según el siguiente diagrama (x es
la señal original y X es su correspondiente transformada):

53
Fig. 4.3 Operaciones para una FFT de 8 puntos.
Note que para que los resultados se obtengan ordenados, los datos de la señal
x(n) se ordenan previamente en forma de bit inverso, esto es, él número
correspondiente a la posición de cada dato se escribe en forma binaria, se invierte el
orden de los 0’s y 1’s y esto dará la nueva posición.

54
4.4 Ordenamiento de bit inverso.
Este método, que no es el único FFT, reduce considerablemente el número de
operaciones, y por lo tanto el tiempo de ejecución, con respecto al cálculo directo de la
DFT.
4.5 Comparación de la cantidad de operaciones entre el cálculo directo de la DFT y la FFT

55
Fig. 4.6 Diagrama de flujo general del algoritmo FFT de radio 2.

56
4. DISEÑO DE FILTROS FIR
4.1. Diseño de un Filtro FIR Pasobajo
Se desea calcular los coeficientes de un filtro de pasobajo digital FIR, con una
frecuencia de corte Fc=200Hz, utilizando una ventana Blackman y un ancho en la
banda de transición de 100Hz. La frecuencia de muestreo es fs=1000 M/s.
El ancho en la banda de transición, BW, expresado en frecuencia normalizada
con la frecuencia de muestreo es
1.01000
100BW
Para la ventana Blackman, el ancho de la banda de transición, expresada en
términos de la longitud del filtro M, es M
BW12
, en frecuencia normalizada (si fs=2π)
es M
BW6
de donde la longitud del filtro es 601.0
66
BWM .
La ventana Blackman tiene la siguiente ecuación
MiM
i
M
iiB ,,1,0,
4cos08.0
2cos5.042.0)(
y su forma se muestra en la figura 1
Fig. 1 Ventana Blackman
0 10 20 30 40 50 600
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1Ventana Blackman

57
La respuesta para un filtro pasobajo idea, con cero ancho de la banda de
transición, está dada por la función Sinc
,2,1,0,
2sini
i
iFc
la cual no es causal y además es infinita por ambos extremos, por lo que es necesario
recortarla a M datos y además se recorre a la derecha para estar centrada en M/2.
MiM
i
MiFc
,,1,0,
2
22sin
La forma de la función Sinc modificada se muestra en la figura 2. Fc, la frecuencia
de corte del filtro, debe ser sustituido en frecuencia normalizada, esto es
2.01000
200cF
Fig. 2 Función Sinc modificada.
Para disminuir el rizado en la respuesta del filtro producido por la truncación
(Fenómeno de Gibss) se multiplica la función Sinc por una función ventana que atenúe
sus extremos, en este caso la Blackman, dando como resultado la ecuación para los
coeficientes del filtro
0 10 20 30 40 50 60-0.4
-0.2
0
0.2
0.4
0.6
0.8
1Sinc

58
MiM
i
M
i
Mi
MiF
Kih
c
,,1,0,4
cos08.02
cos5.042.0
2
22sin
)(
K es un factor necesario para lograr la ganancia deseada en la banda de paso, para
este ejemplo esa ganancia es unitaria (0 dB). Inicialmente se puede tomar K=1 y
calcular los coeficientes. Como se desea un filtro pasobajo la suma de los valores de
los coeficientes debe ser 1 (o la ganancia deseada en la banda de paso), si no es así
se dividen todos los coeficientes entre la suma total de ellos (en este ejemplo K=
3.141655602301966), obteniendo los coeficientes finales. Se debe tener cuidado en el
término h(M/2), el cual aparentemente se indetermina por la división, pero es igual a
K2πFc.
Los coeficientes del filtro, que son la respuesta al impulso del filtro, se muestran
en la figura 3.
Fig 3. Respuesta al impulso del filtro pasobajo.
Los coeficientes resultantes son mostrados a continuación. Note que la precisión
de los coeficientes es importante para una respuesta correcta del filtro. También note
que son simétricos, lo cual nos da el mismo defasamiento para cualquier frecuencia.
0 10 20 30 40 50 60-0.1
-0.05
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4Sinc con Ventana Blackman (Coeficientes del filtro)

59
Coef. del 0 al 19
0.000000000000000
-0.000010343373656
-0.000026793454823
0.000063702781699
0.000195114400770
-0.000000000000000
-0.000507225987798
-0.000461958652354
0.000655445255445
0.001461525868174
-0.000000000000000
-0.002598671515230
-0.002086828380550
0.002673910668839
0.005477120220697
-0.000000000000000
-0.008519804532084
-0.006488887206858
0.007948180811951
0.015682177893114
Coef. del 20 al 39
-0.000000000000000
-0.023181012636192
-0.017451273686986
0.021380438168477
0.042847131752802
-0.000000000000000
-0.070406420286926
-0.059885681866652
0.091877934752337
0.301366226364990
0.399991985281630
0.301366226364990
0.091877934752337
-0.059885681866652
-0.070406420286926
-0.000000000000000
0.042847131752802
0.021380438168477
-0.017451273686986
-0.023181012636192
Coef. del4 0 al 59
-0.000000000000000
0.015682177893114
0.007948180811951
-0.006488887206858
-0.008519804532084
-0.000000000000000
0.005477120220697
0.002673910668839
-0.002086828380550
-0.002598671515230
-0.000000000000000
0.001461525868174
0.000655445255445
-0.000461958652354
-0.000507225987798
-0.000000000000000
0.000195114400770
0.000063702781699
-0.000026793454823
-0.000010343373656
Para observar la respuesta en frecuencia del filtro, se puede obtener la FFT del
vector de coeficientes, normalizando el eje de la frecuencia. También se puede utilizar
las funciones freqz o fvtool de Matlab.
Fig. 4 Respuesta en frecuencia del filtro (en dB).
0 50 100 150 200 250 300 350 400 450
-120
-100
-80
-60
-40
-20
0
Frequency (Hz)
Magnitu
de (
dB
)
Magnitude Response (dB)
60
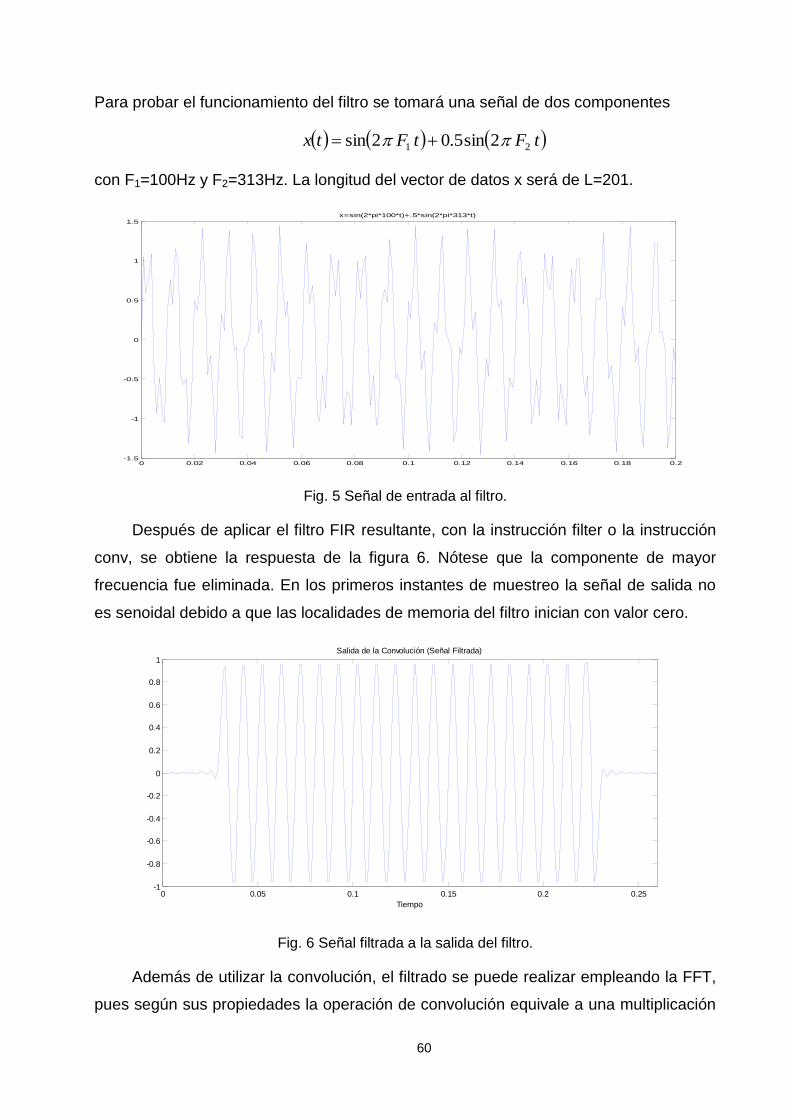
Para probar el funcionamiento del filtro se tomará una señal de dos componentes
tFtFtx 21 2sin5.02sin
con F1=100Hz y F2=313Hz. La longitud del vector de datos x será de L=201.
Fig. 5 Señal de entrada al filtro.
Después de aplicar el filtro FIR resultante, con la instrucción filter o la instrucción
conv, se obtiene la respuesta de la figura 6. Nótese que la componente de mayor
frecuencia fue eliminada. En los primeros instantes de muestreo la señal de salida no
es senoidal debido a que las localidades de memoria del filtro inician con valor cero.
Fig. 6 Señal filtrada a la salida del filtro.
Además de utilizar la convolución, el filtrado se puede realizar empleando la FFT,
pues según sus propiedades la operación de convolución equivale a una multiplicación
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.2-1.5
-1
-0.5
0
0.5
1
1.5x=sin(2*pi*100*t)+.5*sin(2*pi*313*t)
0 0.05 0.1 0.15 0.2 0.25-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1Salida de la Convolución (Señal Filtrada)
Tiempo

61
en el dominio de la frecuencia. El espectro de la señal original es mostrado en la Figura
7 y el de la respuesta del filtro en la figura 8.. Las dos crestas corresponden a las
componentes de frecuencia de 100 y 313 Hz.
Fig. 7 Señal original x antes de ser filtrada.
Fig. 8. Respuesta en frecuencia del filtro pasobajo.
Después de multiplicar las FFT’s de la señal de entrada y la del filtro se obtiene la
FFT de la salida filtrada, figura 9. Nótese que para realizar la multiplicación ambas
FFTs deben tener la misma longitud N, por lo que ambos vectores, x y h, se rellenan
con ceros. Esta longitud debe ser mayor que la longitud del filtro M mas la longitud de
la señal L menos 1, ya que ese es el tamaño de la convolución resultante, M+L-1.
0 50 100 150 200 250 300 350 400 450 5000
10
20
30
40
50
60
70
80
90
100
Frecuencia
Magnitud
Espectro de la Señal Original
0 50 100 150 200 250 300 350 400 450 5000
0.2
0.4
0.6
0.8
1
1.2
1.4Respuesta en Frecuencia del Filtro (Escala Lineal)
Frecuencia (Hz)
Gan
anci
a

62
Fig. 9 Producto del espectro de la señal por el del filtro.
La señal de salida se obtiene realizando la IFFT del resultado obtenido, recuerde
que solo los primeros M+L-1 elementos de la IFFT corresponden a la señal filtrada, el
resto se debe al rellenado con ceros. La figura 10 muestra la IFFT resultante, igual al
de la figura 6.
Fig. 10 Resultado de la convolución por FFT.
El filtrado de señales de gran longitud se realiza seccionando el vector de datos
original en lotes de longitud L. Después se realiza el filtrado por FFT, lo cual dará como
resultado lotes de señal filtrada con longitud N>L+M-1, por lo que parte de los datos se
traslaparán. Estos datos deben ser sumados aprovechando la propiedad de linealidad
del filtro.
0 50 100 150 200 250 300 350 400 450 5000
10
20
30
40
50
60
70
80
90
100 Producto de las FFT's del Filtro y la Señal
Frecuencia
Magnitud
0 0.05 0.1 0.15 0.2 0.25-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1Salida de la Convolución por FFT
Tiempo
Mag
nitu
d

63
4.2. Diseño de Filtros FIR Pasoalto
Ya que se ha diseñado un filtro de pasobajo con frecuencia de corte Fc, este
puede ser convertido a uno pasoalto empleando uno de los siguientes métodos:
Inversión Espectral
A los coeficientes del filtro FIR de pasobajo se les cambia el signo, después se
suma 1 al coeficiente central. Esta modificación produce un efecto sobre la respuesta
en frecuencia del filtro de tal forma que lo invierte verticalmente, por lo que ahora los
coeficientes resultantes corresponden a un filtro pasoalto con frecuencia de corte Fc.
Las figuras 11 y 12 muestran la respuesta al impulso y la característica en frecuencia
del nuevo filtro.
Fig. 11 Respuesta al impulso del filtro pasoalto por inversión espectral.
Fig. 12 Respuesta en frecuencia del filtro pasoalto por inversión espectral.
0 10 20 30 40 50 60-0.4
-0.2
0
0.2
0.4
0.6
0.8
1Coeficientes del filtro con inversión espectral
0 50 100 150 200 250 300 350 400 450 5000
0.2
0.4
0.6
0.8
1
1.2
1.4
Frecuencia (Hz)
Gan
anci
a
Respuesta en Frecuencia del Filtro con Inversión Espectral

64
Reflexión Espectral
A los coeficientes del filtro FIR pasobajo se les cambia el signo alternadamente,
esto es, solo se cambian los coeficientes de las posiciones 1, 3, 5, etc. Este cambio
produce una reflexión horizontal en el espectro del filtro, entre frecuencia 0 y Fs/2. De
esta manera, el filtro pasoalto resultante tiene una frecuencia de corte Fs/2-Fc.
Fig. 13 Respuesta al impulso del filtro pasoalto por reflexión espectral.
Fig. 14 Respuesta en frecuencia del filtro pasoalto por reflexión espectral.
0 10 20 30 40 50 60-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4Coeficientes del Filtro con Reflexión Espectral
0 50 100 150 200 250 300 350 400 450 5000
0.2
0.4
0.6
0.8
1
1.2
1.4Respuesta en la frecuecia del filtro con reflexión espectral

65
4.3. Diseño de Filtros FIR Pasabanda y Supresor de Banda
Un filtro pasabanda se puede obtener mediante la aplicación en serie de un filtro
pasobajo y uno pasoalto. Los coeficientes filtro equivalente se calculan
convolucionando los coeficientes de ambos filtros.
Fig.15 Obtención de un filtro pasabanda.
Un filtro supresor de banda se logra mediante la aplicación en paralelo de un filtro
paso bajo y uno pasoalto. Los coeficientes del filtro equivalente se calculan sumando
los coeficientes de ambos filtros, que deben ser de la misma longitud. Otra forma de
diseñar este filtro es aplicando la inversión espectral a un filtro supresor de banda.
Fig 16. Filtro supresor de banda obtenido por inversión espectral del filtro de la fig. 15.
0 50 100 150 200 250 300 350 400 450 5000
0.5
1
1.5Filtro Pasobajo
0 50 100 150 200 250 300 350 400 450 5000
0.5
1
1.5Filreo Pasoalto
0 50 100 150 200 250 300 350 400 450 5000
0.5
1
1.5
Frecuencia
Filtro Pasabada
0 50 100 150 200 250 300 350 400 450 5000
0.2
0.4
0.6
0.8
1
1.2
1.4
Frecuencia
Gan
anci
a
Filtro Supresor de Banda

66
5. DISEÑO DE FILTROS IIR

67







