diseño˜de˜distancia˜mínima. •...
TRANSCRIPT

Procesamiento�de�Señales�en�Comunicaciones���������DIEC�- UNS 2
• Modulación.• Diseño�de�Distancia�Mínima.• Desempeño�en�ruido.• Detección.• Ecualización�óptima.• Ecualización�adaptiva.
Procesamiento�de�Señales�en�Comunicaciones���������DIEC�- UNS 3
• Detección�de�un�único�símbolo.• Detección�de�un�vector�señal.• Detección�de�señales�continuas�en�ruido�Gaussiano.• Detección�no�coherente�óptima.• Detección�óptima�de�PAM�con�ISI.• Detector�de�secuencias:�Algoritmo�de�Viterbi.�

Procesamiento�de�Señales�en�Comunicaciones���������DIEC�- UNS 4
Detección:�modelo�básico
• El�problema�requiere�un�modelo�estadístico:– Modelo�de�generación�de�la�señal�(determinístico).– Modelo�de�generación�del�ruido�(estocástico).
Ejemplo:�Si�������es�una�secuencia�de�símbolos,�entonces,�el�generador�de�señal�puede�ser�un�filtro�de�transmisión�discreto�equivalente,�y�el�generador�de�ruido�AWGN,�independiente�de�����
Ejemplo:�Si��������es�una�secuencia�de�bits,�el�generador�de�señal�puede�ser�un�codificador�que�produce�otra�secuencia�de�bits,�y�el�generador�de�ruido�puede�modelarse�como�un�canal�binario�simétrico (BSC).���

Procesamiento�de�Señales�en�Comunicaciones���������DIEC�- UNS 5
Detección:�modelo�básico
Para�realizar una decisión sobre con�la�observación ,�dos�métodos:
• Maximum�a�posteriori (MAP�ó Bayes)• Maximum�Likelihood�(ML):�Caso especial�de�MAP�para entradas
equiprobables.

Procesamiento�de�Señales�en�Comunicaciones���������DIEC�- UNS 6
Detección�de�un�símbolo�aislado�(cont).
La�entrada es una única variable�aleatória (o�símbolo del�alfabeto )�que pasa inhalterado al�generador de�ruido.
• Observaciones discretas:
ML�selecciona tal que maximize������������������������(no�requiere la�distribuciónde�los símbolos).
MAP�selecciona tal que maximize������������������������������������������������������� .�Minimiza en�general�la�probabilidad de�error�de�detección:

Procesamiento�de�Señales�en�Comunicaciones���������DIEC�- UNS 7
Detección�de�símbolo:�observaciones�discretas
Ejemplo:�Para�el�modelo de�ruido aditivo discreto donde y���������se�obtienen por lanzamiento de�una moneda.�i.e.
Ejemplo:�Si ahora .�Si o�����������������,�MAP�coincide�con�ML.�Pero si
entonces,�siempre selecciona .��
Procesamiento�de�Señales�en�Comunicaciones���������DIEC�- UNS 8
Detección�de�símbolo:�observaciones�discretas
Ejemplo:�(probabilidad de�error)�Si o����������������,�no�existe error�tantopara ML�como para MAP.�
Si ,�
ML�comete errores con�probabilidad 0.5,�con���������������������������,�tal que la�probabilidad de�error�es:�0.25.
MAP�comete errores con�probabilidad 0.25,�����������������������������,�tal que la�probabilidad de�error�es 0.125.���������������������

Procesamiento�de�Señales�en�Comunicaciones���������DIEC�- UNS 9
Detección�de�símbolo�(cont)
• El�modelo mas simple�que brinda observacionesdiscretas es el�canal�binario simétrico (las probabilidades condicionales se�ilustran en�la�figura)�y�está caracterízado por p,�la�probabilidad de�crossover.
Procesamiento�de�Señales�en�Comunicaciones���������DIEC�- UNS 10
Detección�de�símbolo�(cont)
MAP�minimiza�probabilidad�de�error.�
Teniendo�en�cuenta�que
como��������������������������,�la�anterior�es�máxima�si�a�su�vez�se�maximiza�la�probabilidad�de�decisión�correcta�para�cada�observación

Procesamiento�de�Señales�en�Comunicaciones���������DIEC�- UNS 11
Detección�de�símbolo:�observaciones�contínuas
El�modelo de�generación de�ruido N tiene valores de�ruido aditivo contínuode�forma�que las observaciones son�contínuas.
MAP,�������tal que maximize
ML,�������tal que maximize

Procesamiento�de�Señales�en�Comunicaciones���������DIEC�- UNS 12
Detección�de�símbolo:�observaciones�contínuas
Ejemplo:�Supongamos que A toma valores +1�y�–1�de�acuerdo a�unamoneda “cargada” tal que y����������������������������� .�
Se�observa Y=A+N con�la�pdf de�N contínua.
MAP,�Si�A=+1,�no�existe�error.�
Errores�ocurren�1/3�de�las�veces�cuando�A= -1�(y>-0.5).�
Entonces

Procesamiento�de�Señales�en�Comunicaciones���������DIEC�- UNS 13
Detección�de�símbolo:�observaciones�contínuas
Ejemplo:�Suponiendo el�mismo contexto anterior.
ML,�las�funciones�son�iguales��en�–0.5�<�y <�0.5.
Para�el�umbral�en�el�origen,�se�produce�un�error�1/6�para�cada�símbolo�posible.�
Entonces

Procesamiento�de�Señales�en�Comunicaciones���������DIEC�- UNS 14
Detección�de�un�vector�señal
Procesamiento�de�Señales�en�Comunicaciones���������DIEC�- UNS 15
Detección�de�un�vector�señal�(cont).
Ejemplo:�Una señal vectorial consistente en�un�conjunto conocido de�señalesen�ruido aditivo sigue este modelo.�El�receptor�de�distancia mínima se�podíausar en�ese caso.
Ejemplo:�Una señal vectorial con�elementos binarios como entrada a�un�canal�binario simétrico (BSC)�es un�bloque de�código binario.
El�generador de�señal acepta una entrada X y�la�mapea en�un�vector�de�señalS de�dimensión M.��La�observación es un�vector�Y.�El�ruido queda especificadopor (si las componentes son�independientes)�

Procesamiento�de�Señales�en�Comunicaciones���������DIEC�- UNS 16
Detección�de�un�vector�señal�(cont).
Detección ML:�Los�dos�modelos de�generación de�ruido con�componentes de�ruido independientes,�el�ruido aditivo Gaussiano (AWGN)�y�el�BSC,�resultanen�un�detector�ML�similar:
Seleccionar el�vector�señal que está más próximo al�vector�observación.
La�única diferencia entre los dos�casos es la�forma�en�que se�define�“distancia”:
• Euclidiana en�el�caso de�AWGN• Hamming�en�el�caso BSC
Procesamiento�de�Señales�en�Comunicaciones���������DIEC�- UNS 17
Detección�de�un�vector�señal:�ML�(cont).
Ejemplo:�Para�el�caso de�AWGN� Y =�S +�Z ,�donde el�vector�complejo Z�se�supone circularmente simétrico con�componentes no�correlacionadas (i.e.�independientes)�de�varianza .�Y tiene pdf
con
Para�una variable�Gaussiana compleja con�partes real�e�imaginaria independientesse�tiene que
Entonces:
Como�maximizar es equivalente a�minimizar ,�el�detector�ML�es equivalente a�un�detector�de�distancia mínima.

Procesamiento�de�Señales�en�Comunicaciones���������DIEC�- UNS 18
Detección�de�un�vector�señal:�ML�(cont).
Ejemplo:�Para�el�BSC�con�componentes de�ruido independientes,�lascomponentes del�vector�señal (de�dimensión M)�son�binarias.�La�pdf es
Si (distancia de�Hamming)��es el�número de�componentes en�el�que difieren e��������,�entonces
Para�p�<1/2�el�detector�ML�selecciona para minimizar

Procesamiento�de�Señales�en�Comunicaciones���������DIEC�- UNS 19
Detección�de�un�vector�señal:��(cont).
Detector�MAP:�Es�considerablemente mas complicado que el�ML�y�requiere el�conocimiento de�la�varianza del�ruido (para el�modelo AWGN)�o�la�probabilidadde�error�(para BSC).�Además se�requiere .�
Dada�la�observación y,�el�detector�MAP�selecciona tal que maximize
Ejemplo:�Para�el�caso de�AWGN,�el�detector�MAP�maximiza
Equivalente a�minimizar

Procesamiento�de�Señales�en�Comunicaciones���������DIEC�- UNS 20
Detección�de�un�vector�señal�(cont)
Probabilidad de�error�para BSC�con�detector�MLPara�el�caso de�dos�señales a�distancia (de�Hamming)�d,�suponemos
transmitida por un�BSC.�El�detector�ML�elige en�lugar de����������si los bits�recibidos en�y�determinan
menor d.�Cualquier error�que afecte una componente donde las señales son�iguales no�impactará en�d.
Suponemos (peor caso)�un�error�de�detección se�produce�siempre que los bits�de�y están equidistantes de�las dos�señales.�Entonces,�una error�de�detección ocurre si más de�t errores en�los d bits�en�que difieren las señales,�o�sea
Como�el�número de�errores en�d es binomial
Para�tres o�mas señales
Procesamiento�de�Señales�en�Comunicaciones���������DIEC�- UNS 21
Detección�de�señales�conocidas�en��AWGN
Señal recibida discreta
Caso de�ruido blanco:�Extensión del�caso vectorial para .�El�detector�ML�calcula
Equivalente a�

Procesamiento�de�Señales�en�Comunicaciones���������DIEC�- UNS 22
Detección�de�señales�conocidas�en��AWGN�(cont)
Señal recibida discreta
Procesamiento�de�Señales�en�Comunicaciones���������DIEC�- UNS 23
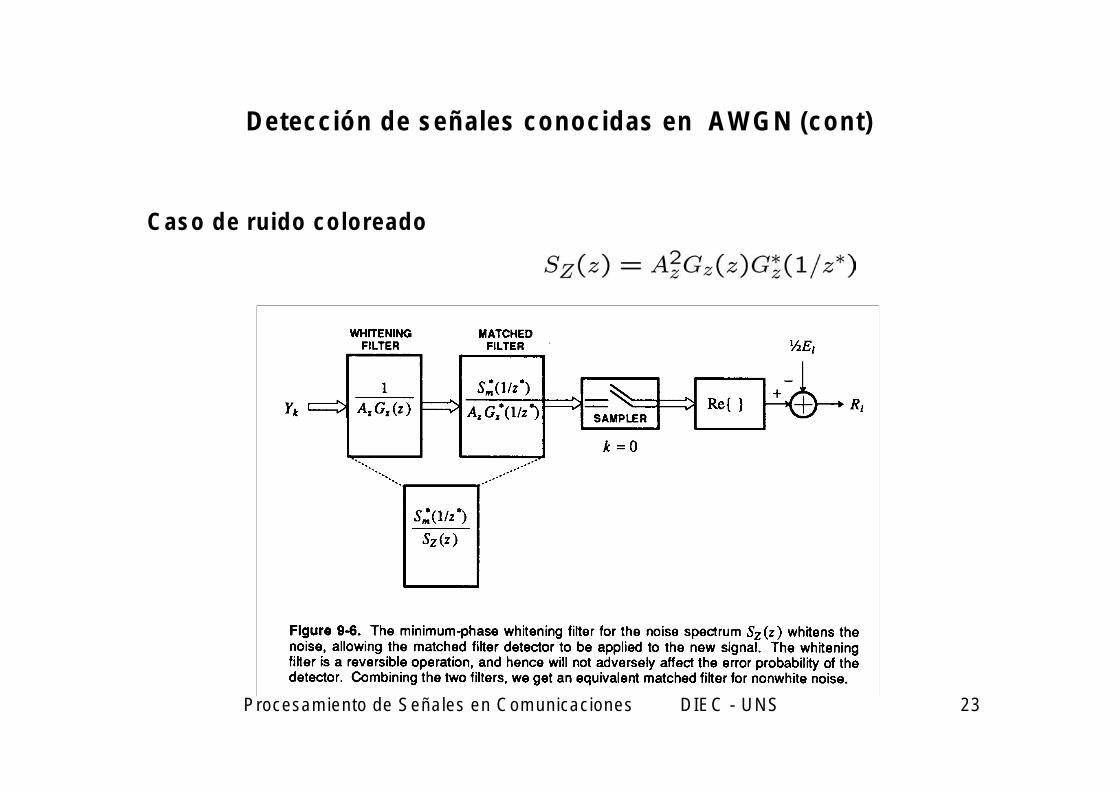
Detección�de�señales�conocidas�en��AWGN�(cont)
Caso de�ruido coloreado

Procesamiento�de�Señales�en�Comunicaciones���������DIEC�- UNS 24
Detección�de�señales�conocidas�en��AWGN�(cont)
Señal�recibida�continua
Para�desarrollar�el�detector�ML�se�utiliza�una�Expansión�de�Karhunen –Loeve��
con
tal�que���������������������������������������si

Procesamiento�de�Señales�en�Comunicaciones���������DIEC�- UNS 25
Detección�de�señales�conocidas�en��AWGN�(cont)
Expandiendo�la�señal�recibida
con�
Es�un�problema�equivalente�discreto�si�se�tienen�en�cuenta�las�varianzas
diferentes,�entonces

Procesamiento�de�Señales�en�Comunicaciones���������DIEC�- UNS 26
Detección�de�señales�conocidas�en��AWGN�(cont)
Aplicando�el�detector�discreto�a�este�problema,�minimizar
para��������������������.�Equivalente�a�

Procesamiento�de�Señales�en�Comunicaciones���������DIEC�- UNS 27
Detección�de�señales�conocidas�en��AWGN�(cont)
Esto�puede�relacionarse�con�señales�continuas�usando
de�forma�que
Por�ejemplo,�si���������������������������������,��������������� tal�que�el�receptor�correlaciona�con�cada�una�de�las�señales�conocidas�
La�detección�de�una�señal�continua�(infinitas�dimensiones)�se�puede�realizar�con�un�número�finito�(L)�de�variables.
Procesamiento�de�Señales�en�Comunicaciones���������DIEC�- UNS 28
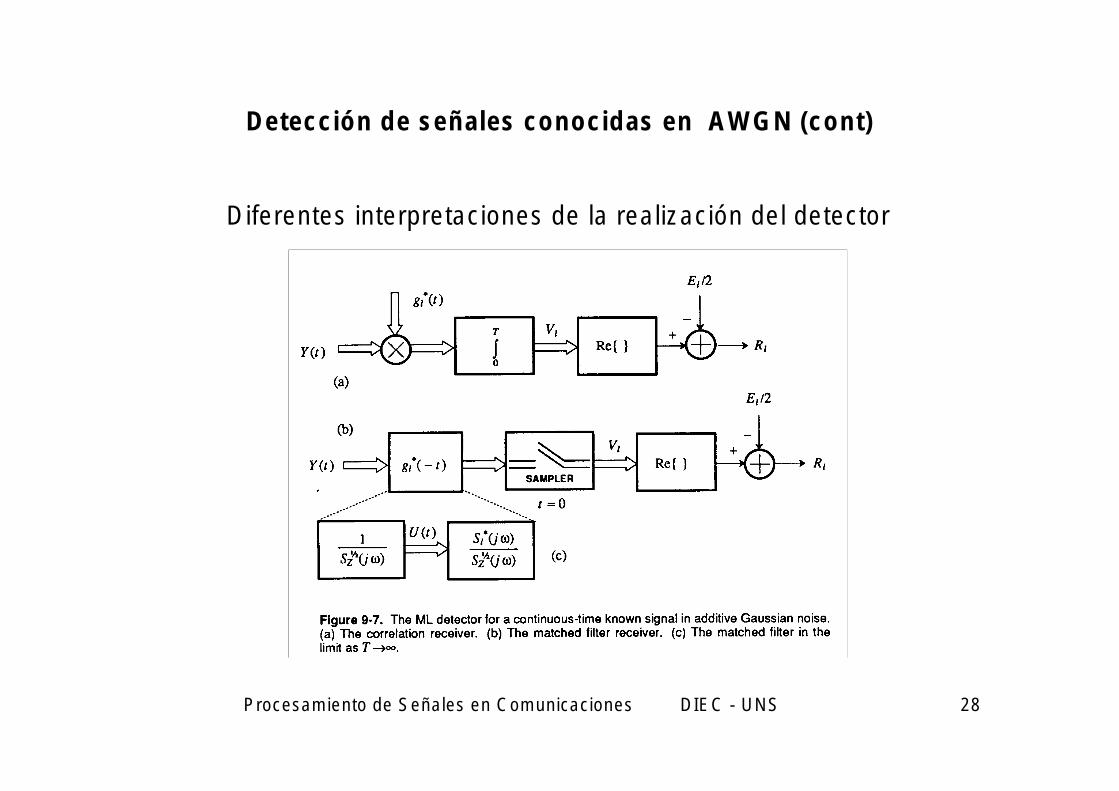
Detección�de�señales�conocidas�en��AWGN�(cont)
Diferentes interpretaciones de�la�realización del�detector

Procesamiento�de�Señales�en�Comunicaciones���������DIEC�- UNS 29
Detección�de�señales�conocidas�en��AWGN�(cont)
Estadística suficiente.

Procesamiento�de�Señales�en�Comunicaciones���������DIEC�- UNS 30
Detección�de�señales�conocidas�en��AWGN�(cont)
Generación de�una estadística suficiente:�Si es la�respuesta de�un�filtro de�blanqueo a������������,�entonces
y�tal�que
que�genera�un�subespacio de�señales�de�dimensión
Procesamiento�de�Señales�en�Comunicaciones���������DIEC�- UNS 31
Detección�de�señales�conocidas�en��AWGN�(cont)
Entonces,�en�función�de�la�nueva�base���������������������������������������������� ,�pero
Así,

Procesamiento�de�Señales�en�Comunicaciones���������DIEC�- UNS 32
Detección�de�señales�conocidas�en��AWGN�(cont)
Aplicación�de�una�estadística�suficiente:�En�base�a�la�estadística�suficiente�y�un�criterio�de�optimalidad (MAP�o�ML),�la
estructura�óptima�se�obtiene�por:
• Se�calcula�la�estadística�suficiente�de�orden�N.�Este�conjunto�de�variables
reemplaza�a�la�señal�recibida�a�los�propósitos�de�detección.
• La�estadística�suficiente�se�determinan�para�una�condición�de�ruido�
conocida�y�conjunto�de�señales�conocido.
• El�resto�de�la�estructura�del�receptor�se�determina�mediante�el�criterio�de
optimalidad aplicado�ala�estadística�suficiente�y�sus�propiedades�estadísticas.

Procesamiento�de�Señales�en�Comunicaciones���������DIEC�- UNS 33
Detección�de�señales�conocidas�en��AWGN�(cont)
Estadística suficiente de�una señal pasabanda.�
De�la�ecuación�integral�se�tiene�también
tal�que
o�en�términos�de�señales�bandabase

Procesamiento�de�Señales�en�Comunicaciones���������DIEC�- UNS 34
Detección�de�señales�conocidas�en��AWGN�(cont)
Estadística suficiente de�una señal pasabanda:�Dos�realizaciones.�

Procesamiento�de�Señales�en�Comunicaciones���������DIEC�- UNS 35
Detección�de�señales�conocidas�en��AWGN�(cont)
Estadística suficiente de�una señal pasabanda:
Reducción en�el�número de�variables.�

Procesamiento�de�Señales�en�Comunicaciones���������DIEC�- UNS 36
Detección�óptima�no�coherente
Utilización de�los resultados anteriores cuando no�se�conoce la�fase delconjunto de�señales transmitidas.
Con�la�estadística�suficiente
que�se�puede�escribir�como
Procesamiento�de�Señales�en�Comunicaciones���������DIEC�- UNS 37
Detección�óptima�no�coherente�(cont)
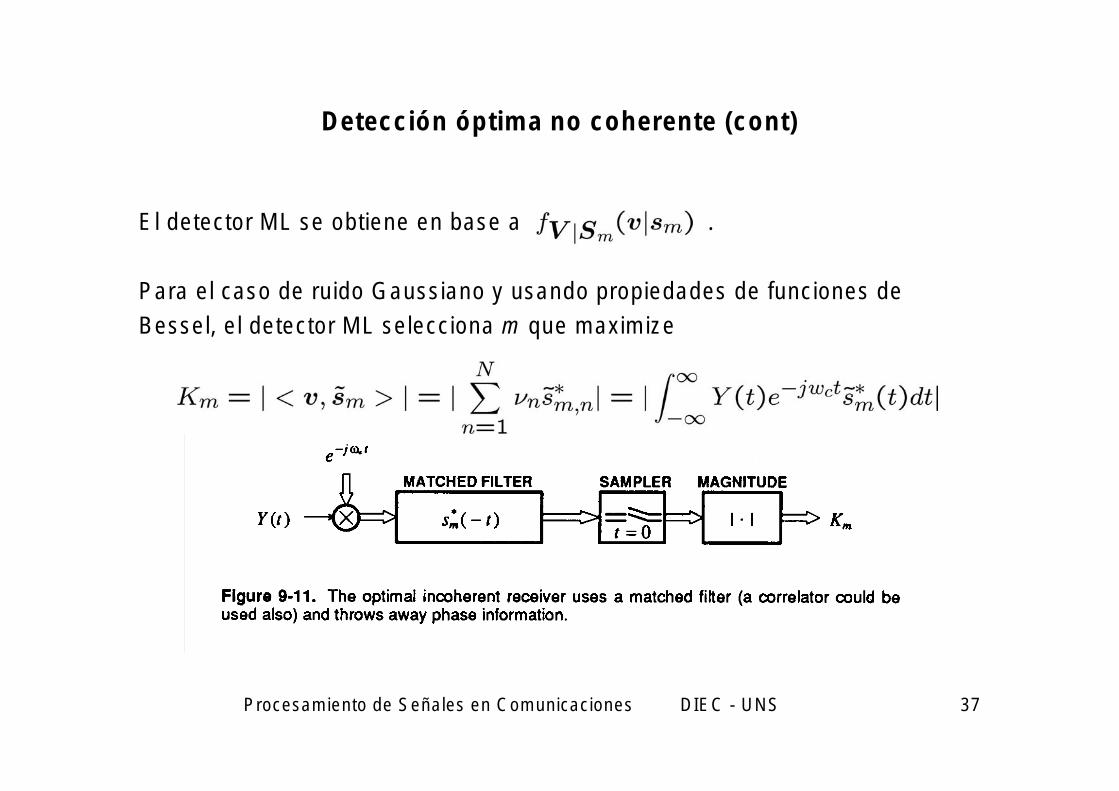
El�detector�ML�se�obtiene en�base�a����������������������������.
Para�el�caso de�ruido Gaussiano y�usando propiedades de�funciones deBessel,�el�detector�ML�selecciona m que maximize

Procesamiento�de�Señales�en�Comunicaciones���������DIEC�- UNS 38
Detección�óptima�no�coherente�(cont)
Ejemplo:�FSK�binaria con��������������������������������y��
Procesamiento�de�Señales�en�Comunicaciones���������DIEC�- UNS 39
Detección�óptima�no�coherente�(cont)
Probabilidad de�error:�A�partir de�la�estadística suficiente y�la�métrica
Ejemplo FSK:�Si las señales son�ortogonales,
entonces .
Suponiendo transmitida,

Procesamiento�de�Señales�en�Comunicaciones���������DIEC�- UNS 40
Detección�óptima�para�PAM�con�ISI
Extensión�de�resultados�anteriores:
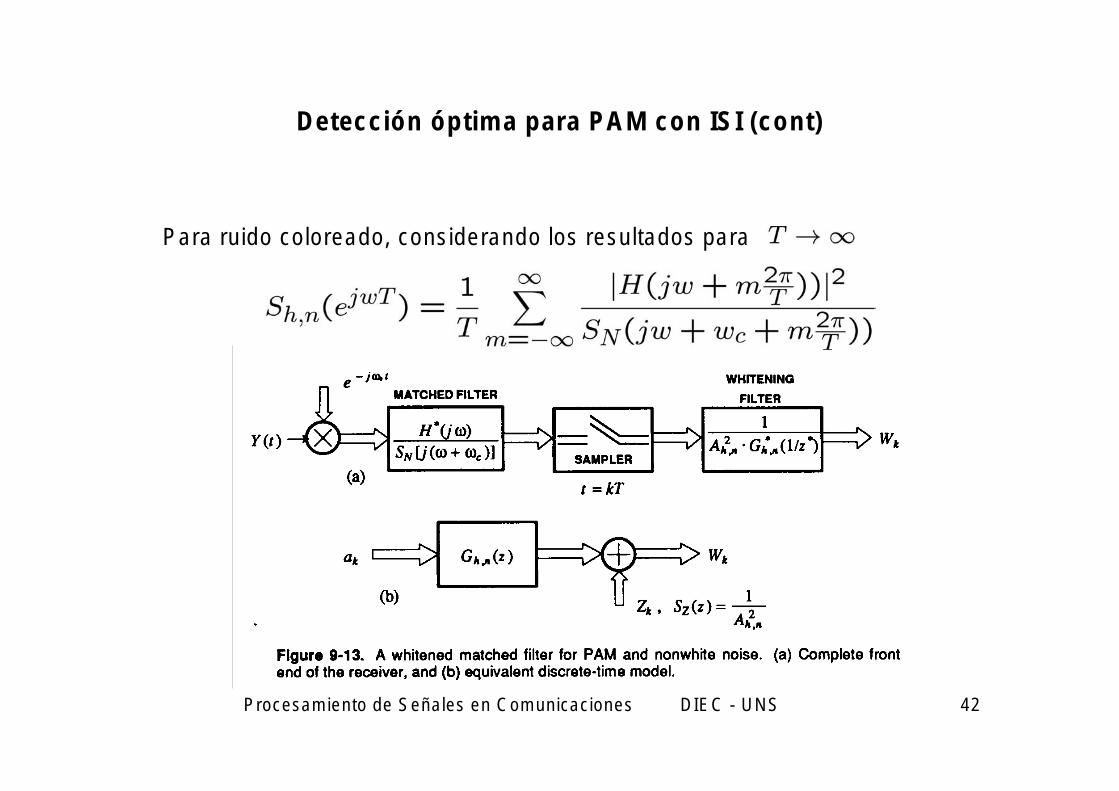
• La�salida�del�WMF�es�una�estadística�suficiente�para�la�señal�recibida�(con�cualquier�criterio).
• El�receptor�de�distancia�mínima�es�el�detector�ML�para�un�conjunto�de��������������señales�conocidas�en�una�secuencia�de��������símbolos:�el�detector�de�secuencia�ML�(MLSD).
• Estos�resultados�se�extienden�para�el�caso�de�ruido�coloreado�y�enparticular�los�asociados�al�WMF.
Procesamiento�de�Señales�en�Comunicaciones���������DIEC�- UNS 41
Detección�óptima�para�PAM�con�ISI�(cont)
Salida�del�WMF�como�estadística�suficiente:�Si�la�señal�recibida�es�unasecuencia�de�K símbolos,�cada�uno�de�un�alfabeto�de�tamaño�M,
Suponiendo�N(t) blanco,�esta�puede�interpretarse�como�una�parte�de�las�de�un�conjunto�de��������������������señales,�para�las�que�una�estadística�suficiente�es
donde
Procesamiento�de�Señales�en�Comunicaciones���������DIEC�- UNS 42
Detección�óptima�para�PAM�con�ISI�(cont)
Para�ruido�coloreado,�considerando�los�resultados�para�

Procesamiento�de�Señales�en�Comunicaciones���������DIEC�- UNS 43
Detección�óptima�para�PAM�con�ISI�(cont)
Detector�de�secuencias�de�ML.�Para�el�equivalente�discreto�de�la�figura�anterior�el�detector�ML�fue�obtenido
antes.�Se�elige�la�secuencia�que�minimiza
• El�criterio�MLSD�es�equivalente�a�un�criterio�de�señal�continua
• Usando�el�WMF�como�estadística�suficiente�el�criterio�es�óptimo�en�sentido�ML.

Procesamiento�de�Señales�en�Comunicaciones���������DIEC�- UNS 44
Detección�de�secuencias:�Algoritmo�de�Viterbi
Cuando�la�señal�corresponde�a�una�secuencia�de�K símbolos�y�se�tieneun�alfabeto�de�tamaño�M,�el�número�total�de�señales�es�
En�consecuencia,�complejidad�crece�exponencialmente�con�el�tiempo�(tiempo�es�proporcional�a�K).
Una�aplicación�práctica�requiere�la�complejidad�sea�lineal�(lo�que�corresponde�a�una�velocidad�de�cómputo�fija).
Detección�de�secuencias.Algoritmo�de�Viterbi
Decodificación�convolucional.

Procesamiento�de�Señales�en�Comunicaciones���������DIEC�- UNS 45
Detección�de�secuencias:�Algoritmo�de�Viterbi
Generador�en�base�a�una�máquina�de�estados�finitos:�
El�algoritmo�de�Viterbi es�aplicable�cuando,– La�componente�de�ruido�en�cada�muestra�es�independiente.– La�señal�se�genera�mediante�una�máquina�de�estados�finitos�(cadena�de�
Markov homogénea).– Para�maximizar�la�probabilidad�de�detección�se�utiliza�ML.
Transiciones�de�estado�
Procesamiento�de�Señales�en�Comunicaciones���������DIEC�- UNS 46
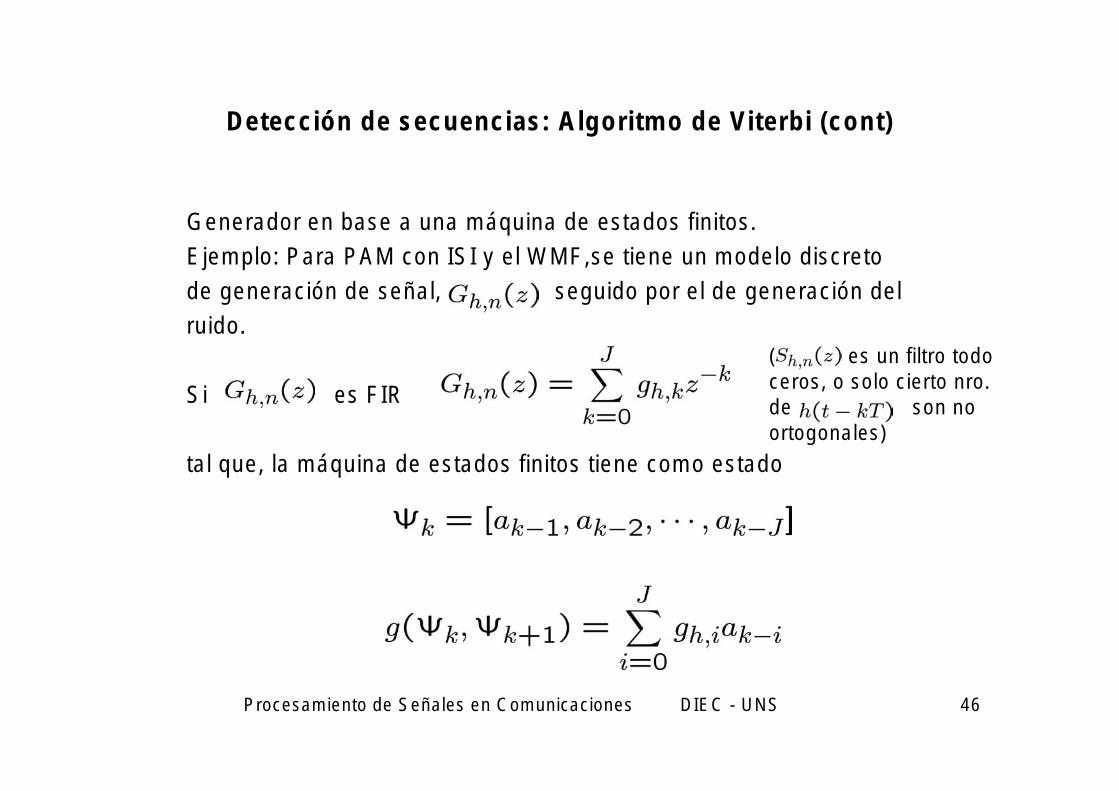
Detección�de�secuencias:�Algoritmo�de�Viterbi (cont)
Generador�en�base�a�una�máquina�de�estados�finitos.Ejemplo:�Para�PAM�con�ISI�y�el�WMF,se tiene�un�modelo�discreto�
de�generación�de�señal,�����������������seguido�por�el�de�generación�delruido.
Si�������������������es�FIR�
tal�que,�la�máquina�de�estados�finitos�tiene�como�estado
(������������es�un�filtro�todo�ceros,�o�solo�cierto�nro.�de��������������������son�no�ortogonales)
Procesamiento�de�Señales�en�Comunicaciones���������DIEC�- UNS 47
Detección�de�secuencias:�Algoritmo�de�Viterbi (cont)
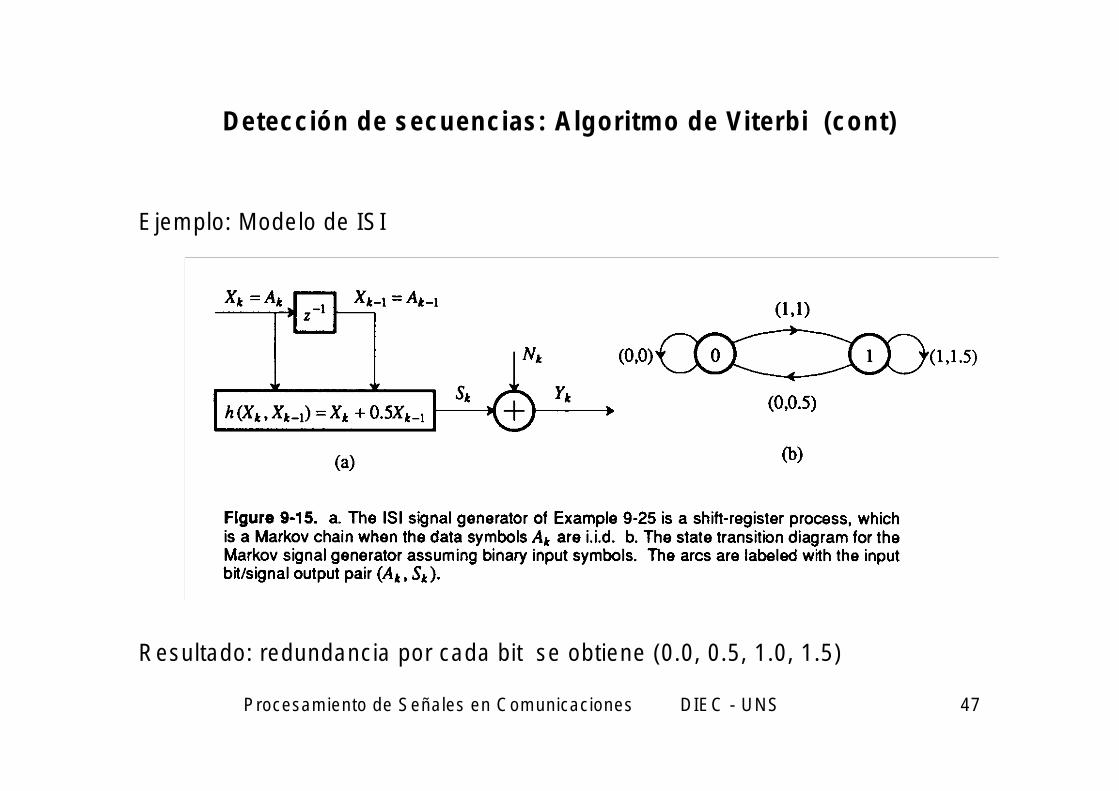
Ejemplo:�Modelo�de�ISI
Resultado:�redundancia�por�cada�bit se�obtiene�(0.0,�0.5,�1.0,�1.5)

Procesamiento�de�Señales�en�Comunicaciones���������DIEC�- UNS 48
Detección�de�secuencias:�Algoritmo�de�Viterbi (cont)
Ejemplo:�Codificación�convolucional
Procesamiento�de�Señales�en�Comunicaciones���������DIEC�- UNS 49
Detección�de�secuencias:�Algoritmo�de�Viterbi (cont)
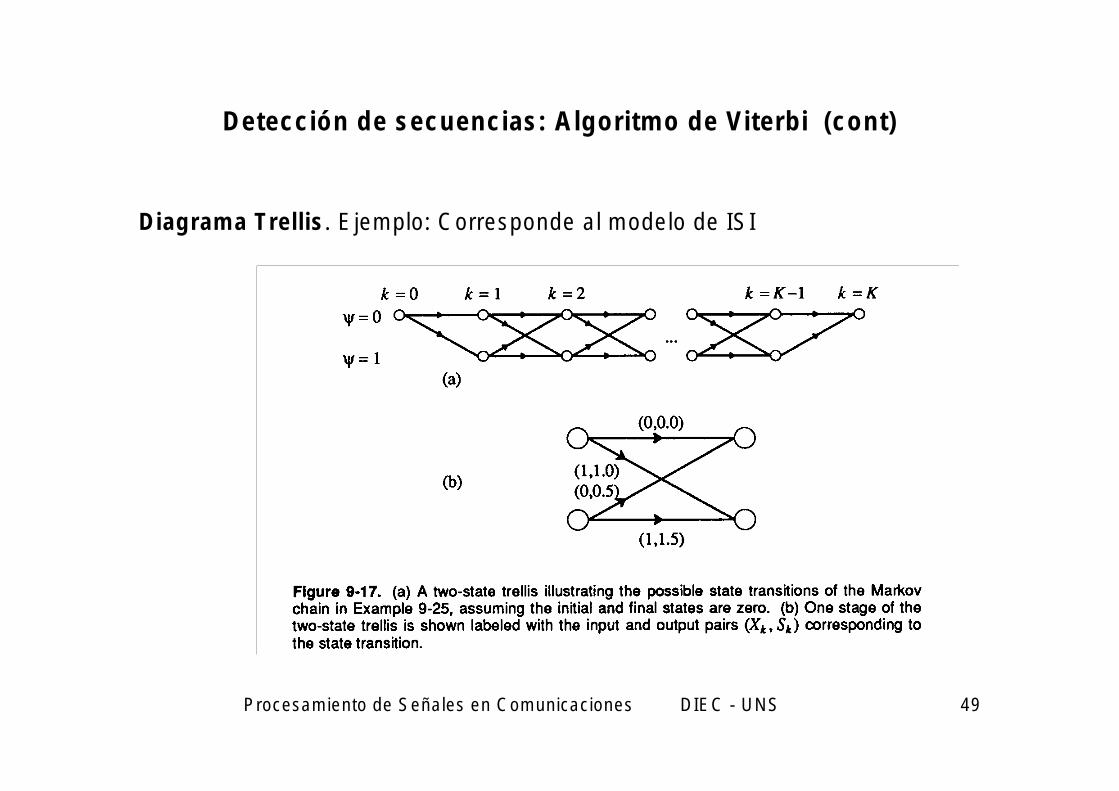
Diagrama�Trellis.�Ejemplo:�Corresponde�al�modelo�de�ISI

Procesamiento�de�Señales�en�Comunicaciones���������DIEC�- UNS 50
Detección�de�secuencias:�Algoritmo�de�Viterbi (cont)
Detectores�de�secuencia�ML�y�MAP.�Diseñar�detector�de�la�secuenciade�estados��������,�entrada���������,�salida�������,��o�camino�por�la�trellis (todos
equivalentes)�en�base�a�observaciones���������ruidosas.
Ejemplo:
En�el�caso�Gaussiano el�detector�ML�selecciona�la�señal���������que�minimiza�la�distancia�euclidiana�������������������������������� ,�donde���������es�laobservación.
Ejemplo:�Para�el�BSC,�el�detector�ML�minimiza�

Procesamiento�de�Señales�en�Comunicaciones���������DIEC�- UNS 51
Detección�de�secuencias:�Algoritmo�de�Viterbi (cont)
Para�relacionar�las�distancias�con�la�trellis,�cada�rama�determina�un�par��������������
que�permite�definir�la�métrica�de�rama.�La�suma�de�las�métricas�de�rama�es�la�métrica�de�camino.�Se�busca�la�menor�métrica�de�camino�para�todas�las�secuencias.
En�cada�nodo�de�la�trellis,�el�camino�de�menor�métrica�(parcial)�se�denomina�camino�superviviente�(�el�número�de�candidatos�es�M).
El�algoritmo�de�Viterbi encuentra�el�camino�con�la�menor�métrica�de�camino�computando�las�métricas�de�rama�secuencialmente reteniendo�solo�los�caminos�supervivientes.

Procesamiento�de�Señales�en�Comunicaciones���������DIEC�- UNS 52
Detección�de�secuencias:�Algoritmo�de�Viterbi (cont)
Ejemplo:�Modelo�de�ISI
La�secuencia�recibida�es
(0.2,0.6,0.9,0.1)
La�secuencia�detectada�ML�
por�símbolo:�(0,1,1,0)
La�secuencia�detectada�por
MLSD:�(0,1,0,0)

Procesamiento�de�Señales�en�Comunicaciones���������DIEC�- UNS 53
Detección�de�secuencias:�Algoritmo�de�Viterbi (cont)
El�algoritmo�no�determina�el�camino�óptimo�hasta�llegar�al�nodo�terminal�dela�trellis (se�introduce�un�retardo�considerable).
Para�el�ejemplo�anterior,�cuando�k�>=�2 todos�los�caminos�supervivientescoinciden�desde k=0 a�k=1.�La�decisión�ML�se�puede�realizar�a�partir�de�k=2 (no�es�necesario�esperar�hasta�el�nodo�terminal�de�la�trellis).
Cuando�todos�los�caminos�supervivientes�hasta k coinciden�con�los�de�d-k,se�dice�que�los�caminos convergieron�a�profundidad d.�Como�la�
convergencia�puede�no�ocurrir,�se�puede�truncar�el�algoritmo�a�profundidadd (decisión�por�la�menor�métrica�en�k�en�base�a�caminos�de�longitud�d).
Entonces�retardo�solo�de�profundidad�d.

Procesamiento�de�Señales�en�Comunicaciones���������DIEC�- UNS 54
Detección�de�secuencias:�Algoritmo�de�Viterbi (cont)
Probabilidad�de�error�de�secuencia,�probabilidad�que�uno�o�mas estados�de�la�trellis
estén�en�error�(independientemente�del�número).
Esta�probabilidad�de�error�está dominada�por�el�camino�de�menor�distancia�alcorrecto.
Cuando�la�longitud�de�la�secuencia�K es�grande�el�número�de�caminos�a�distancia�mínima�crece,�tanto�que�la�probabilidad�de�error�� 1!
En�general,�en�aplicaciones�prácticas�es�más�útil�conocer�la�probabilidad�de�error��de�bit o�de�símbolo,�cuya�relación�con�la�de�error�de�secuencia�no�es�trivial.
Una�forma�es�calcular�la�probabilidad�de�error�de�secuencia�por�unidad�de�tiempo�y�luego
Relacionarla�con�la�probabilidad�de�error�de�bit o�símbolo.

Procesamiento�de�Señales�en�Comunicaciones���������DIEC�- UNS 55
Detección�de�secuencias:�Algoritmo�de�Viterbi (cont)
Eventos�de�error.��Si�������������es�la�secuencia�correcta�de�estados�y��������� la�
seleccionada�por�el�algoritmo�de�Viterbi,�estas�convergerán�y�divergerán varias�veces.
Cada�separación�(o�divergencia)�se�denomina�evento�de�error.�La�longitud�de�unevento�de�error�es�el�número�de�nodos�incorrectos�en�el�camino.
Ejemplo:
Procesamiento�de�Señales�en�Comunicaciones���������DIEC�- UNS 56
Detección�de�secuencias:�Algoritmo�de�Viterbi (cont)
Un�evento�de�error�tiene�uno�o�más�errores�de�símbolo.
Se�puede�mostrar�que�la�probabilidad�de�error�de�símbolo�está dominada�porla�probabilidad�del�evento�de�error�de�distancia�mínima�(en�SNR�altas).
Un�procedimiento�para�obtener�la�distancia�a�cualquier�evento�de error��supone
rotular�cada�rama�de�la�trellis con�su�métrica�de�distancia�al�cuadrado�(esta�sería
la�métrica�de�rama�para�el�canal�sin�ruido).
La�distancia�del�evento�de�error�es�la�distancia�del�camino�correspondiente.

Procesamiento�de�Señales�en�Comunicaciones���������DIEC�- UNS 57
Detección�de�secuencias:�Algoritmo�de�Viterbi (cont)
Ejemplo:�Para�el�modelo�de�ISI,�
La�distancia�del�1er�evento�es������������(distancia�mínima,�mas�probable)�y�
la�del�segundo�evento�es������������.�Entonces,�se�puede�mostrar que
Procesamiento�de�Señales�en�Comunicaciones���������DIEC�- UNS 58
Detección�de�secuencias:�Algoritmo�de�Viterbi (cont)
• En�el�ejemplo�la�distancia�mínima�se�obtuvo�por�inspección.
• El�propio�algoritmo�de�Viterbi puede�utilizarse�para�hallar�la�distancia�mínima�de�eventos�de�error�a�la�secuencia�correcta.
• Con�el�algoritmo,�se�excluye�el�superviviente�en�cada�etapa.�De�las��remanentes,�el��superviviente�en�cada�nodo�determina�un�evento�de�error.�Almacenando�los�eventos�de�error�de�distancia�mínima,�cuando�todos�los�supervivientes�tengan�una�métrica�parcial�mayor�que�esa�mínima,�se�encontró la�distancia�mínima�del�evento�de�error�para�esa�secuencia�correcta.
• En�general�es�la�distancia�mínima�global�la�que�domina�la�probabilidad�de�error,�no�la��distancia�mínima�a�un�camino�particular�de�la�trellis.�Usualmente�no�es�necesario�analizar�todos�los�caminos�correctos�para�hallar�la�distancia�mínima.

Procesamiento�de�Señales�en�Comunicaciones���������DIEC�- UNS 59
Detección�de�secuencias:�Algoritmo�de�Viterbi (cont)
Cálculo�de�la�distancia�mínima�para�ISI.�En�lugar�de�calcular�todos�los�eventos�de�
error�y�en�función�de�ellos�el�de�distancia�mínima,�uso�del�modelo�de�máquina�de�estados�finitos�para�la�ISI�para�simplificar.
Se�define�un�símbolo�de�error������������������������������,�entonces�la�distancia�mínima�estádada�por
sobre�símbolos�de�error�no�nulos.Para�utilizar�Viterbi,�se�asume������������������FIR,�tal�que
Procesamiento�de�Señales�en�Comunicaciones���������DIEC�- UNS 60
Detección�de�secuencias:�Algoritmo�de�Viterbi (cont)
La�sumatoria�en�m�es�finita�(aunque�en�la�práctica�se�tienen�valores�de�K�grandes).
La�minimización�se�realiza�por�Viterbi sobre�una�trellis con�estados�
y�ramas�de�métrica���������������������������������������
En�general,�si�el�tamaño�del�alfabeto�original�es�M,�el�del�alfabeto�de�símbolos�de�errorpuede�ser�M�x�M.
Ejemplo:�Si�los�símbolos�son�reales,�M es�impar�tal�que�[-(M-1)/2,�(M-1)/2],�el�rango�delos�símbolos�de�error�es�[-(M-1),(M-1)],�o�sea�(2M-1)�valores�distintos�(mucho�menorque�MxM).
Lógicamente,�la�métrica�de�cada�rama�es�independiente�de�otras�ramas�(no�de�paresde�ramas�como�el�camino�correcto�y�el�camino�de�error).

Procesamiento�de�Señales�en�Comunicaciones���������DIEC�- UNS 61
Detección�de�secuencias:�Algoritmo�de�Viterbi (cont)
Ejemplo:�Para�el�modelo�de�ISI,�la�métrica�de�rama�es���������������������������������.�Si�los�símbolos�son�binarios�(0,1),�los�símbolos�de�error�serán�(0,�+/-1).
Procesamiento�de�Señales�en�Comunicaciones���������DIEC�- UNS 62
Detección�de�secuencias:�Algoritmo�de�Viterbi (cont)
El�coeficiente�C�que�completa�el�análisis�de�probabilidad�de�error�se�obtienede
donde�A es�el�conjunto�de�caminos���������que�definen�un�evento�de�error�de
distancia�mínima�y�B es�el�conjunto�de�eventos�de�error�que�tienen�distancia
Mínima.
Procesamiento�de�Señales�en�Comunicaciones���������DIEC�- UNS 63
Detección�de�secuencias:�Algoritmo�de�Viterbi (cont)
Ejemplo:�Para�el�modelo�de�ISI,�independientemente�de�la�trayectoria�correcta,�existe�
solo�un�evento�de�error�de�distancia�mínima�que�puede�comenzar�en�cualquierinstante.
Si�������������������������(con�prob.�½),�el�evento�de�error�es�el�superior�y�corresponde�a����.�Si����������������������(también�con�prob.�½)�es�posible�el�evento�de�
error�inferior����������������������.
Entonces,�P=1.
Como�el�evento�de�error�incluye�un�símbolo�de�error,
y�como�existe�un�único�evento�de�error�de�distancia�mínima��posible�por�cada�caminocorrecto�de�la�trellis,�R=1.�Entonces�C=1 y