desarrollo de un sistema prototipo de …
TRANSCRIPT
Desarrollo de un sistema prototipo de entrenamiento automatizado para estacionar vehículos con interfaz gráfica,
auditiva y modelo escala de automóvil, para usuarios en proceso de aprendizaje de conduccion. by Suarez P., Carlos E. is licensed under a Creative Commons Reconocimiento-NoComercial-CompartirIgual 3.0 Unported
License.
REPÚBLICA BOLIVARIANA DE VENEZUELA
UNIVERSIDAD NUEVA ESPARTA
FACULTAD DE INGENIERIA
ESCUELA DE ELECTRÓNICA
DESARROLLO DE UN SISTEMA PROTOTIPO DE ENTRENAMIENTO
AUTOMATIZADO PARA ESTACIONAR VEHÍCULOS CON INTERFAZ
GRÁFICA, AUDITIVA Y MODELO ESCALA DE AUTOMÓVIL, PARA
USUARIOS EN PROCESO DE APRENDIZAJE DE CONDUCCIÓN.
Tutor: Tesis de grado elaborado por:
Ing. Marín, Washington Br. Suárez P., Carlos E.
C.I: 17.671.970
JULIO – 2011
Caracas – Venezuela
REPÚBLICA BOLIVARIANA DE VENEZUELA
UNIVERSIDAD NUEVA ESPARTA
FACULTAD DE INGENIERIA
ESCUELA DE ELECTRÓNICA
DESARROLLO DE UN SISTEMA PROTOTIPO DE ENTRENAMIENTO
AUTOMATIZADO PARA ESTACIONAR VEHÍCULOS CON INTERFAZ
GRÁFICA, AUDITIVA Y MODELO ESCALA DE AUTOMÓVIL, PARA
USUARIOS EN PROCESO DE APRENDIZAJE DE CONDUCCIÓN.
JURADO:
______________________
Nombre y Apellido
____________________
Cédula de Identidad
______________________
Firma
JURADO:
______________________
Nombre y Apellido
______________________
Cédula de Identidad
_____________________
Firma
JULIO – 2011
Caracas – Venezuela

1
DEDICATORIA
Al único, suficiente y maravilloso Padre Celestial: tú has estado
conmigo en todo momento, eres sorprendente, toda mi capacidad proviene
de ti.
También dedico este trabajo de grado a mis padres quienes con su
amor y apoyo me han ofrecido todo lo que un hijo puede desear, le doy
gracias a Dios por tenerlos y quiero honrarlos.
Carlos Suárez
2
AGRADECIMIENTOS
Quiero empezar agradeciendo al autor de la vida, de la ciencia, de la
esperanza y del amor, a ti Padre, Hijo y Espíritu Santo, por ser mi apoyo
incondicional, has sido bueno, delante de ti rindo toda mi vida y mis logros
para darte honra, pues sin ti nada soy.
A mis amados padres Lorenzo Suarez y Eda Luz Pepper: los amo con
todo el corazón gracias por estar a mi lado, por ayudarme aun más allá de
sus deberes, definitivamente este logro se los debo a ustedes. Son mis
compañeros de tesis.
A mi hermana Laura Suarez, se que contigo siempre puedo contar,
gracias por tus consejos y tu alegría que contagian mi vida.
A mi tutor Washington Marín te agradezco por tus valiosos consejos,
correcciones y disposición, que me permitieron enfocarme y lograr la meta.
Al profesor José Luis Suarez quien me brindo sus correcciones en lo
que a metodología se refiere y por tomarse su tiempo en ayudarme en lo que
necesité.
Al profesor Héctor Rodríguez por su tiempo y la valiosa información
que compartió conmigo.
A todos lo que aportaron su grano de arena para ayudarme cuando lo
necesite, Cesar Armando Suárez, Cesar Alexander Suarez, Ileana Gómez,
Diego Rada. Gracias
Por último quiero agradecer profundamente a aquellas personas, que
en los momentos más críticos en los que pensé dejarlo todo me alentaron y
Dios los uso para darme nuevas fuerzas, Tía Zully, Memo y Tony.
Carlos Suárez
3
UNIVERSIDAD NUEVA ESPARTA
FACULTAD DE INGENIERIA
ESCUELA DE ELECTRÓNICA
AUTOR: Br. Suárez, Carlos C.I.: V-17.671.970
TUTOR: Ing. Marín, Washington
TITULO: DESARROLLO DE UN SISTEMA PROTOTIPO DE
ENTRENAMIENTO AUTOMATIZADO PARA ESTACIONAR VEHÍCULOS
CON INTERFAZ GRÁFICA, AUDITIVA Y MODELO ESCALA DE
AUTOMÓVIL, PARA USUARIOS EN PROCESO DE APRENDIZAJE DE
CONDUCCIÓN.
Palabras claves: Sistema, Entrenamiento, Software, Hardware, Interfaz, Conducción.
RESUMEN
El presente proyecto de grado tiene como objetivo desarrollar un sistema prototipo de entrenamiento automatizado para estacionar vehículos con interfaz gráfica, auditiva y modelo escala de automóvil, para usuarios en proceso de aprendizaje de conducción. Partiendo de la premisa de que el sistema debe asemejarse lo más posible a la realidad se hizo un trabajo de recolección de información que sirvió de base para establecer los parámetros y una estrategia de desarrollo para el sistema, además permitió seleccionar la tecnología necesaria para cumplir con el objetivo planteado. Luego de recolectar la información necesaria de los expertos en entrenamiento de conducción, se prosiguió a desarrollar a través de un software y hardware, una interfaz-humano máquina que facilitara las instrucciones para el aprendizaje y que cumpliera con los requerimientos y las exigencias del caso.
Luego de realizar las pruebas necesarias en el sistema se pudo comprobar su funcionabilidad y se logró proporcionar la orientación necesaria para el entrenamiento del usuario.

4
NUEVA ESPARTA UNIVERSITY
FACULTY OF ENGINEERING
SCHOOL OF ELECTRONICS
AUTHOR: Br. Suárez, Carlos C.I.: V-17.671.970
TUTOR: Ing. Marín, Washington
TITLE: DEVELOPMENT OF AN AUTOMATED PROTOTYPE SYSTEM OF
TRAINING FOR PARKING VEHICLES WITH GRAPHICAL, AURAL AND
SCALE MODEL CAR INTERFACE FOR USERS IN THE PROCESS OF
LEARNING TO DRIVE.
Key words: System, Training, Software, Hardware, Interface, Driving.
SUMMARY This degree project aims to develop a prototype system for automated training to park vehicles with a graphical, aural and scale model car interface, for users in the process of learning how to drive. Starting from the premise that the system should be as close as possible to the reality, it was done a previous work to collect basic information that helped to establish the parameters and a development strategy for the system, and allowed to select the technology needed to achieve the objective. After gathering the necessary information from the driving training experts, it was develop a human-machine interface, through a hardware and software, which provide instructions for learning, and comply with the requirements and demands of the case.
After the necessary tests on the system it was verify its functionality and achievement to provide the necessary guidance for user training.
5
ÍNDICE GENERAL
INTRODUCCIÓN ................................................................................................... 12
CAPÍTULO I........................................................................................................... 14
EL PROBLEMA DE INVESTIGACIÓN .................................................................. 14
1.1 PLANTEAMIENTO DEL PROBLEMA .................................................................................. 14
1.2 INTERROGANTE DE LA INVESTIGACION ....................................................................... 16
1.2.1 Interrogante principal ....................................................................................................... 16
1.2.2 Interrogantes secundarias .............................................................................................. 16
1.3 OBJETIVOS DE LA INVESTIGACIÓN ................................................................................ 17
1.3.1 Objetivo general ............................................................................................................... 17
1.3.2 Objetivos específicos ...................................................................................................... 17
1.4 JUSTIFICACIÓN DE LA INVESTIGACIÓN ......................................................................... 17
1.5 DELIMITACIÓN DE LA INVESTIGACIÓN........................................................................... 19
1.5.1 Delimitación Temática ..................................................................................................... 19
1.5.2 Delimitación Geográfica .................................................................................................. 19
1.5.3 Delimitación Temporal .................................................................................................... 20
1.5.4 Delimitación Técnica ....................................................................................................... 20
1.6 LIMITACIONES DE LA INVESTIGACIÓN ........................................................................... 22
CAPÍTULO II .......................................................................................................... 23
MARCO TEÓRICO ................................................................................................ 23
2.1 ANTECEDENTES DE LA INVESTIGACIÓN ....................................................................... 23
2.2 BASES TEÓRICAS ................................................................................................................. 26
2.2.1 Automatización ................................................................................................................. 26
2.2.1.1 Servosistemas............................................................................................................... 29
2.2.1.2 Sistemas adaptativos ................................................................................................... 29
2.2.1.3 Sistemas autodidácticos .............................................................................................. 30
2.2.1.4 Automatismos secuenciales ....................................................................................... 30
2.2.2 Transductores y Sensores .............................................................................................. 31
2.2.3 Microcontrolador .............................................................................................................. 39
2.2.3.1 Fabricantes de microcontroladores ........................................................................... 42
2.2.4 Motores Eléctricos ........................................................................................................... 42
2.2.5 Cámaras WEB .................................................................................................................. 47
2.2.6 Puertos salida/entrada .................................................................................................... 49
6
2.3 DEFINICION DE TÉRMINOS ................................................................................................ 55
2.4 SISTEMA DE VARIABLES .................................................................................................... 56
CAPÍTULO III ......................................................................................................... 58
MARCO METODOLÓGICO................................................................................... 58
3.1 TIPO DE INVESTIGACION ................................................................................................... 58
3.2 DISEÑO DE INVESTIGACIÓN ............................................................................................. 59
3.3 POBLACIÓN Y MUESTRA .................................................................................................... 62
3.3.1 Población .......................................................................................................................... 62
3.3.2 Muestra.............................................................................................................................. 63
3.4 TECNICAS E INSTRUMENTOS DE RECOLECCIÓN DE DATOS ................................. 64
3.5 PROCESAMIENTO Y ANALISIS DE LA INFORMACIÓN ................................................ 67
3.6 ANÁLISIS Y PRESENTACION DE RESULTADOS. .......................................................... 68
CAPÍTULO IV ........................................................................................................ 82
SISTEMA PROPUESTO ....................................................................................... 82
4.1 DIAGRAMA EN BLOQUE ...................................................................................................... 82
4.2 DIAGRAMA ESTRUCTURAL DEL SISTEMA ..................................................................... 84
4.3 MECANISMOS Y FUNCIONAMIENTO DEL SISTEMA. ................................................... 84
4.3.1 Mecanismos del automóvil: ............................................................................................ 85
4.3.2 Mecanismos del tablero de control: .............................................................................. 87
4.4 MEDICIONES Y CALCULOS GENERALES DEL SISTEMA ........................................... 90
4.4.1 Mediciones ........................................................................................................................ 90
4.4.2 Cálculos ............................................................................................................................. 91
4.5 CARACTERISTICAS Y SELECCIÓN DE LOS COMPONENTES ................................... 92
4.6 DESCRIPCION DEL SISTEMA ............................................................................................. 96
4.7 SOFTWARE ........................................................................................................................... 100
4.8 DISPOSICIÓN FÍSICA DE LOS VEHÍCULOS .................................................................. 104
4.9 RECURSOS ADMINISTRATIVOS...................................................................................... 107
4.9.1 Recursos Humanos. ...................................................................................................... 107
4.9.2 Recursos Técnicos. ....................................................................................................... 107
4.9.3 Recursos Administrativos. ............................................................................................ 108
4.10 CRONOGRAMA DE ACTIVIDADES ................................................................................ 110

7
CONCLUSIONES ................................................................................................ 111
BIBLIOGRAFIA ................................................................................................... 115
ANEXOS .............................................................................................................. 121

8
ÍNDICE DE FIGURAS
Figura N°1: Situaciones típicas de estacionado ..................................... 12
Figura N°2: Sistema de control en lazo abierto ....................................... 17
Figura N°3: Sistema de control en lazo cerrado....................................... 18
Figura N°4: Disposición para un sensor de proximidad que utiliza la luz
reflejada contra una serie de sensores .................................................... 26
Figura N°5: Esquema básico general de un microcomputador ............. 30
Figura N°6: Inductor o estator ................................................................... 34
Figura N°7: Rotor ........................................................................................ 34
Figura N°8: Motor Eléctrico AC.................................................................. 35
Figura N°9: Partes del motor Eléctrico DC ............................................... 36
Figura N°10: Captura y visualización de una cámara Web ..................... 38
Figura N°11: Puerto serial unidireccional ................................................. 40
Figura N°12: Conector DB9 tipo macho (De frente) ................................. 41
Figura N°13: Conexión USB ....................................................................... 42
Figura N°14: Topologías de conexión USB .............................................. 42
Figura N°15: Conexión paralela ................................................................. 44
Figura N°16: Tipo de sistema de entrenamiento ...................................... 59
Figura N°17: Etapa uno en la práctica de estacionado ............................ 61
Figura N°18: Etapa dos en la práctica de estacionado ............................ 62
Figura N°19: Etapa tres en la práctica de estacionado ............................ 64
9
Figura N°20: Etapa cuatro en la práctica de estacionado ....................... 65
Figura N°21: Etapa cinco en la práctica de estacionado ........................ 66
Figura N°22: Espacio ideal entre vehículos .............................................. 68
Figura N°23: Situaciones típicas para estacionar entre dos vehículos . 70
Figura N°24: Resumen de situaciones típicas.......................................... 71
Figura N°25: Diagrama en bloque del sistema prototipo ........................ 72
Figura N°26: Diagrama estructural ............................................................ 74
Figura N°27: Mecanismo de la dirección .................................................. 75
Figura N°28: Piezas de la dirección ........................................................... 76
Figura N°29: Mecanismo del tren trasero ................................................. 76
Figura N°30: Plano del tablero de control (Vista lateral) ........................ 77
Figura N°31: Plano del tablero de control (Vista superior) .................... 78
Figura N°32: Tablero de control (Vista 3D) .............................................. 78
Figura N°33: Pedal de aceleración (Vista 3D) .......................................... 79
Figura N°34: Hoja de datos de reguladores L7805 Y L7812 .................... 83
Figura N°35: Hoja de datos del Driver L293D ........................................... 84
Figura N°36: Sensor PING .......................................................................... 85
Figura N°37: Atmega 328 ............................................................................ 85
Figura N°38: Diagrama eléctrico. .............................................................. 86
Figura N°39: Software motores.................................................................. 90
Figura N°40: Software sensores ................................................................ 92
Figura N°41: Distribución de imágenes .................................................... 93
Figura N°42: Desarrollo en Visual Basic ................................................... 93
10
Figura N°43: Croquis posición frontal ...................................................... 95
Figura N°44: Croquis posición lateral ....................................................... 96
ÍNDICE DE TABLAS
Tabla N°1: Operacionalización del Sistema de Variables ........................ 46
Tabla N°2: Medición de voltajes y corrientes ........................................... 80
Tabla N°3: Cálculo de potencia.................................................................. 81
Tabla N°4: Voltajes de alimentación .......................................................... 82
Tabla N°5: Medidas a escala ...................................................................... 94
Tabla N°6: Recursos Humanos .................................................................. 97
Tabla N°7: Recursos Técnicos................................................................... 97
Tabla N°8: Recursos Administrativos ....................................................... 98
Tabla N°9: Cronograma de actividades .................................................. 100
ÍNDICE DE CUADROS
Cuadro 1: Tipo de sistema de entrenamiento ......................................... 59
Cuadro 2: Etapa uno en la práctica de estacionado ............................... 60
Cuadro 3: Etapa dos en la práctica de estacionado ................................ 62
Cuadro 4: Etapa tres en la práctica de estacionado ................................ 63
Cuadro 5: Etapa cuatro en la práctica de estacionado ............................ 64
Cuadro 6: Etapa cinco en la práctica de estacionado ............................. 66
Cuadro 7: Espacio ideal entre vehículos .................................................. 67
Cuadro 8: Situaciones típicas para estacionar entre dos vehículos ...... 69

11
Cuadro 9: Resumen de situaciones típicas ............................................. 70
ÍNDICE DE FÓRMULAS
Fórmula N°1: Tamaño de la muestra ......................................................... 53
Fórmula N°2: Voltajes para reguladores de CI ......................................... 81
12
INTRODUCCIÓN
Los medios de transporte desde hace siglos han representado una
herramienta muy útil en la movilización tanto de personas como de objetos.
Según Romero, J (Sin año):
Los sumerios proporcionan la primera evidencia arqueológica de vehículos con ruedas, sus carruajes tirados por bueyes datan de años tan remotos como el 3000 A.C.
Estos medios de transporte, fueron el producto del ingenio de individuos
que buscando el mayor confort, hallaron la manera de hacer sus vidas más
fáciles en cuanto a movilización. En aquellos tiempos los animales fueron los
primeros en ser usados como medio de transporte, muchos años después el
ser humano creó los motores de combustión interna y con ellos los primeros
automóviles que cambiaron drásticamente la forma como se transportan.
En sus principios, el estacionar los vehículos no constituía un gran
problema debido a la gran disponibilidad de áreas libres existentes producto
de la escasez de autos, situación que cambio al pasar el tiempo. Hoy en día
los autos son usados en todo el mundo por millones de personas, de ello ha
surgido la necesidad de crear lugares en donde ubicarlos (estacionamientos).
Dichos espacios en ocasiones son estrechos y de difícil acceso, a tal punto
que pone la integridad del vehículo en riesgo si no se sabe como parquear,
por lo que es necesario que el conductor desarrolle las habilidades
necesarias para estacionar.
Actualmente en el país no existe un sistema de entrenamiento
automatizado capaz de dar instrucciones para desarrollar en el usuario las
habilidades necesarias para estacionar sin poner en riesgo la integridad del
vehículo propio o de otros, así como la seguridad del conductor. Esta
situación ocasiona que los conductores novatos estacionen sólo en lugares
amplios que no requieran mucho esfuerzo, descartando posibilidades y
congestionando la circulación de vehículos en un área.
13
Partiendo de esta realidad, en la siguiente investigación se propone
resolver este problema presentando el desarrollo de un sistema prototipo de
entrenamiento automatizado capaz de dirigir con instrucciones audibles y
visuales al usuario, al tiempo que muestra las vistas de los retrovisores del
prototipo aproximándose lo más posible a la realidad, y de esta manera
desarrollar las habilidades para estacionar.
Este estudio está constituido por cuatro capítulos cuyos contenidos se
describen a continuación:
Capítulo I: se describe el problema objeto de estudio; se identifican
las interrogantes que orientaron el proceso de investigación, los objetivos, la
justificación, delimitación y limitaciones
Capítulo II: contiene el marco teórico, los antecedentes, las bases
teóricas que son necesarias para el desarrollo y total comprensión del tema
de investigación, también el sistema de variables que ayudó al desarrollo
sistemático del proyecto de investigación.
Capítulo III: se describe el tipo de investigación y el diseño, la
población y la muestra que validará metodológicamente la investigación,
además se exponen las técnicas e instrumentos de recolección de datos
junto con el procesamiento y análisis de los mismos.
Capítulo IV: En este capítulo exponen los resultados y su análisis
estadístico, un diagrama en bloques, los mecanismos y funcionamiento del
sistema, las mediciones y cálculos que posteriormente conducen a las
características y selección de los componentes, se describe el sistema y
software, se presentan los recursos y cronograma de actividades
Por último, se presentan las conclusiones y recomendaciones
de la investigación.
14
CAPÍTULO I
EL PROBLEMA DE INVESTIGACIÓN
1.1 PLANTEAMIENTO DEL PROBLEMA
En sus inicios el automóvil era adquirido por individuos privilegiados,
poseedores de riquezas, pero a través de los años se ha constituido como el
medio de transporte más común en el mundo entero. Hoy en día existen
millones de autos y miles de modelos con diferentes características,
personalizaciones y mejoras. A pesar de ello, el poder controlarlos en su
cabalidad ha constituido un problema difícil de eliminar, debido a la cantidad
de variables que toman lugar al conducir un auto. Es por ello que se han
inventado sistemas electrónicos para facilitar su uso, mejorar su
mantenimiento, proporcionar mayor seguridad a la hora de conducir y
proteger la integridad del conductor y su auto.
Uno de los sistemas electrónicos usados para facilitar el uso de
maquinaria son las simulaciones, las cuales como sistemas de entrenamiento
o enseñanza son muy útiles, prácticas y concretas. También proporciona la
ventaja de aprender de los errores sin que se vea comprometida la seguridad
del aprendiz o la integridad de la maquinaria cualquiera que sea. El
diccionario Larousse (2002) define simulador como: “aparato capaz de
reproducir el comportamiento de otro cuyo funcionamiento se quiere estudiar
o cuya utilización se quiere enseñar, o bien de un cuerpo cuya evolución se
desea seguir”. Razón por la cual es tan útil el desarrollo de un sistema que
simule de alguna manera la realidad cotidiana al estacionar un vehículo.
El desarrollo de dicho sistema ayudaría a las personas que se les
dificulta en gran manera estacionar su vehículo o simplemente no saben
cómo hacerlo, sin comprometer la integridad física del mismo. Sin la ayuda
de sistemas para estacionado el conductor se enfrentaría a problemas como

15
pérdida de tiempo y espacio, producida por intentar estacionarse en un lugar
sin éxito. También podría ocasionarse daños a sí mismo o al vehículo al no
prestarle asistencia adecuada al estacionar. Actualmente existen compañías
automovilísticas que incorporan un sistema de estacionamiento automático
como por ejemplo, BMW, Ford y Toyota, mas este sistema solo está
disponible para modelos exclusivos de dichas compañías y el mismo no
mejora las habilidades del usuario para poder estacionarse.
Se realizó una investigación preliminar con el propósito de identificar la
problemática u objeto de estudio, sus implicaciones e impacto en el contexto
en el cual se manifiesta. Se encuestó a los instructores de manejo de las
autoescuelas ubicadas en el distrito capital; quienes señalaron que en la
práctica que desarrollan para alcanzar los objetivos de los clientes no se
utiliza un sistema automatizado; realizándose las mismas utilizando
manuales instructivos y las directrices u orientaciones del instructor. Así
mismo, se logró establecer en la investigación documental realizada a través
de documentos especializados en la web y entrevistas de expertos en el área
de entrenamiento automotriz, que no existe un sistema de entrenamiento
automatizado para estacionar vehículos; determinándose en los especialistas
antes consultados su interés hacia un sistema automatizado que sirva de
apoyo para el entrenamiento y capacitación de clientes en el manejo y
estacionado de vehículos.
Por esta razón es necesaria la creación de un sistema de
entrenamiento para conductores a los que se les dificulta estacionar, que
incorpore un modelo a escala de auto el cual sería manejado a través de un
volante y dos pedales. El sistema será capaz de darle instrucciones por
medio de una interfaz grafica y auditiva, al conductor referente a cómo debe
estacionar el auto en las situaciones típicas en las que se le coloque, y
además, proporcionarle vistas laterales y traseras simulando los tres espejos
16
retrovisores de un auto normal con el fin de entrenar al usuario a
estacionarse de manera adecuada.
1.2 INTERROGANTE DE LA INVESTIGACION
1.2.1 Interrogante principal
¿Cómo desarrollar un prototipo de automóvil capaz de entrenar a un
usuario para estacionar en un ambiente realista junto con una vista
interna de los retrovisores, proporcionándole instrucciones visuales y
auditivas, interpretadas de los datos recogidos por los sensores
instalados en el prototipo?
1.2.2 Interrogantes secundarias
¿Cuáles son los sistemas electrónicos, tecnología, sistemas de control
y software que deben de considerarse en la construcción de un
sistema prototipo, que permita suministrar las instrucciones necesarias
para estacionar un auto, a las personas que no saben cómo hacerlo?
¿Cuál será la mejor forma visual de darle instrucciones al usuario del
prototipo?
¿Cómo lograr que las vistas de los retrovisores y el manejo del
prototipo sean lo más reales posibles?
¿Cuáles son las pruebas necesarias para verificar la funcionabilidad
del sistema y del prototipo?
17
1.3 OBJETIVOS DE LA INVESTIGACIÓN
1.3.1 Objetivo general
Desarrollar un sistema prototipo de entrenamiento automatizado para
estacionar vehículos con interfaz gráfica, auditiva y modelo escala de
automóvil, para usuarios en proceso de aprendizaje de conducción.
1.3.2 Objetivos específicos
Precisar el tipo y funcionamiento de los sistemas de entrenamiento
para estacionar vehículos, existentes en el mercado, a los efectos de
identificar su eficiencia en el estacionamiento automatizado de
vehículos
Determinar los procesos, las posiciones típicas de estacionado e
instrucciones operativas del sistema de entrenamiento con el propósito
de establecer el diseño de la estructura y funcionamiento del prototipo
Diseñar el sistema prototipo de entrenamiento en atención a los
indicadores de posiciones típicas de estacionado establecidas
(traducidas) en instrucciones operativas de entrenamiento
Construir el sistema prototipo en función a los parámetros definidos en
el diseño.
Probar el sistema prototipo automatizado para validar si funciona de
acuerdo a los parámetros definidos en el diseño
1.4 JUSTIFICACIÓN DE LA INVESTIGACIÓN
Palella Stracuzzi y Martins Pestana. (2006), resaltan la importancia de
la justificación de la investigación, en el siguiente planteamiento:
La justificación del estudio indica el porqué se quiere hacer esa investigación. Expresa las razones tanto personales como generales del investigador, los aportes del estudio a determinada disciplina, a la solución de problemas prácticos de tipo
18
organizacional, social, educativo, económico, cultural, entre otros. La justificación posibilita la libre expresión del investigador para dar a conocer los fundamentos que lo mueven a realizar el trabajo. Para presentar una justificación adecuada, el investigador debe preguntarse ¿Por qué es importante investigar la situación que considero problema?
La justificación señala a quiénes beneficiará el trabajo, en qué consiste ese beneficio y por qué es importante alcanzarlo. (Pág.65)
Partiendo de esta consideración teórica se procede a exponer los
distintos beneficios generados por el desarrollo de la propuesta de
investigación.
El desarrollo de este proyecto de investigación generaría el beneficio a
los conductores quienes podrán estacionarse con mayor seguridad, rapidez y
con muchas menos posibilidades de chocar o rayar sus vehículos, el de
algún tercero o atropellar a un peatón. También evitará el congestionamiento
de las calles causado por no saber estacionar adecuadamente, gracias a que
con este sistema podrá practicar y aprender la técnica correcta al estacionar
en las diferentes situaciones.
A nivel educativo se fija un precedente en el entrenamiento de
conductores, generando nuevas herramientas para el aprendizaje, lo cual da
un aporte, o beneficio intelectual a personas que están interesadas en
continuar en el desarrollo de estas tecnologías.
Se genera un avance tecnológico debido a la no existencia de
sistemas de entrenamiento automatizados que faciliten el aprendizaje a los
conductores con problemas
El hecho de poder entrenar a los conductores con el propósito de
proteger su integridad física y la del vehículo, evitará un gasto económico

19
debido a que el entrenamiento reduce las probabilidades de colisiones y
rayones en la carrocería, producto de estacionar un vehículo
El proyecto de investigación propuesto genera un aporte social
producto de la mejor utilización de los espacios para estacionar,
descongestionando las calles y avenidas.
1.5 DELIMITACIÓN DE LA INVESTIGACIÓN
Según Sabino, C. (2002), “delimitar un tema significa enfocar en
términos concretos nuestro campo de interés, especificar sus alcances,
determinar sus límites”.
Las delimitaciones de esta investigación se consideraron a partir de
los siguientes aspectos:
1.5.1 Delimitación Temática
La propuesta de investigación está enmarcada en el campo de
estudio de la ingeniería, específicamente la electrónica, en las ramas
de control, electrónica digital y analógica, de las cuales se tomarán los
datos obtenidos por el prototipo y se traducirán en instrucciones para
el usuario, utilizando programación de microcontroladores y
programas de computación.
1.5.2 Delimitación Geográfica
El desarrollo del sistema inteligente, su prototipo y las prácticas
necesarias para la culminación de la investigación y sus pruebas
necesarias se realizarán en:
1. La Universidad Nueva Esparta, ubicada en la avenida Sur 10
Los Naranjos, El Cafetal, Estado Miranda; específicamente en
los Laboratorios de la Escuela de Electrónica; debido a que en
20
sus instalaciones se encuentran los equipos y recursos
necesarios que permitirán desarrollar y validar el prototipo.
2. La Urbanización Manzanares específicamente en donde reside
el tesista, ya que en ese espacio se programará, construirá, se
harán las pruebas preliminares y se alojará el prototipo.
1.5.3 Delimitación Temporal
El diseño, desarrollo y pruebas del sistema prototipo; se
realizarán durante el período comprendido desde Mayo 2010 hasta
Febrero 2011. Tiempo en el cual se realizará la investigación
necesaria para el desarrollo del sistema, circuitos, conexiones,
interfaz, es decir, todo el hardware y software indispensable para el
funcionamiento del proyecto, cumpliendo con los objetivos planteados
en la investigación.
1.5.4 Delimitación Técnica
Es necesario especificar el alcance del presente proyecto de
investigación, el mismo se ha desglosado en aspectos que se
nombran a continuación:
El sistema prototipo solo simulará el estacionado de carrocerías
de autos tipo Sedan, la cual es una carrocería de tres volúmenes, es
decir, la tapa del maletero no incluye el vidrio trasero y está separada
de la cabina, luego está la cabina en donde se encuentran los
ocupantes y el capó; la razón de esto es debido a que es el tipo de
carrocería más común y apropiada a los fines de aprendizaje. Se
considera innecesario el entrenamiento con otros tipos de carrocerías
como Limusinas, Descapotable, Pickup, Camiones, Berlinetta, etc.,
que no son apropiadas para el aprendizaje dado que sus tamaños y
21
complicaciones al maniobrar dificultarían el aprendizaje de manera
innecesaria.
El sistema prototipo sólo simulará el estacionado de autos de
transmisión automática, debido a que no es necesario usar otro tipo de
transmisión para solucionar la problemática planteada en el proyecto
de investigación.
El sistema prototipo no guardará información de movimientos
realizados de ninguna clase, tampoco diagnosticará cual es la razón
de un estacionado fallido, por lo cual al no cumplir con las
instrucciones o no concluir bien un ejercicio de parqueo será necesario
que el instructor de manejo a cargo del sistema, vuelva a colocar el
sistema en su estado inicial, para comenzar el ejercicio nuevamente.
Tampoco será capaz de realizar un estacionado automático, ya que
solo se busca entrenar al usuario obligándolo a realizar las maniobras
necesarias para lograr el objetivo.
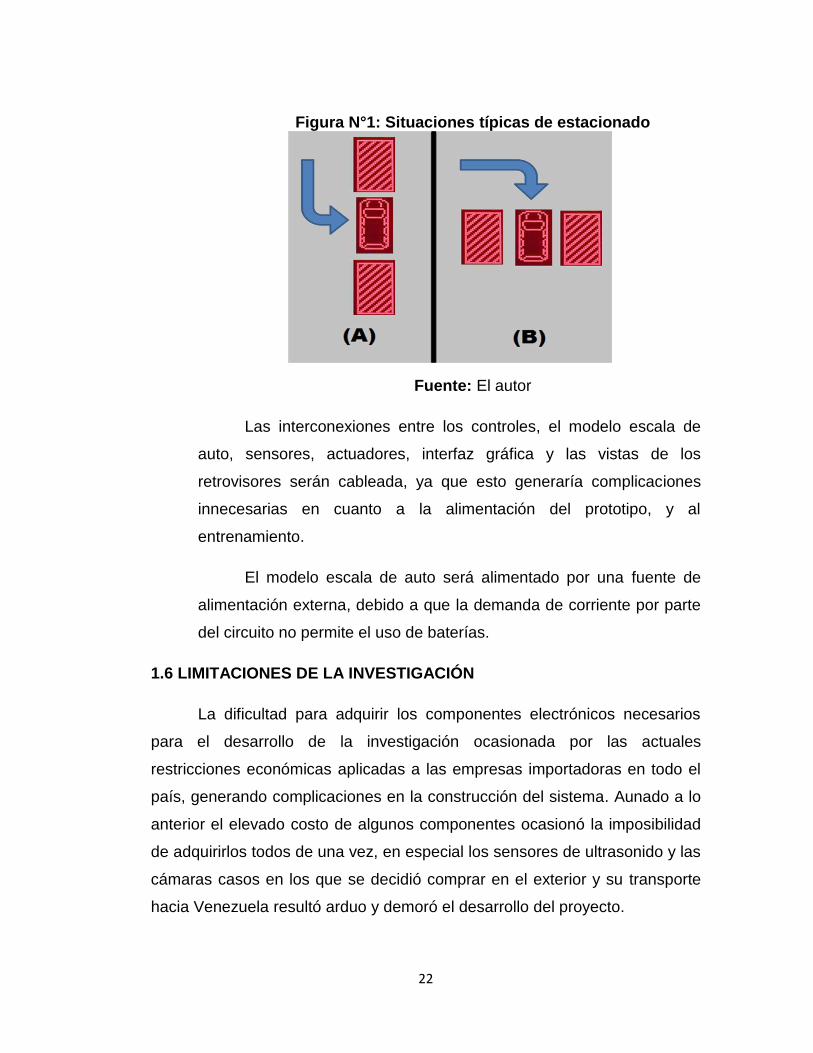
El sistema prototipo entrenará al usuario a estacionar
únicamente en dos posiciones típicas, la primera en reversa entre dos
autos estacionados en posición longitudinal (frontal) figura N°1 (A) y la
segunda en reversa entre dos autos estacionados paralelamente
(lateral) figuraN°1 (B).
El sistema prototipo no emulará ningún tipo de situación de
estacionado con inclinación.
22
Figura N°1: Situaciones típicas de estacionado
Fuente: El autor
Las interconexiones entre los controles, el modelo escala de
auto, sensores, actuadores, interfaz gráfica y las vistas de los
retrovisores serán cableada, ya que esto generaría complicaciones
innecesarias en cuanto a la alimentación del prototipo, y al
entrenamiento.
El modelo escala de auto será alimentado por una fuente de
alimentación externa, debido a que la demanda de corriente por parte
del circuito no permite el uso de baterías.
1.6 LIMITACIONES DE LA INVESTIGACIÓN
La dificultad para adquirir los componentes electrónicos necesarios
para el desarrollo de la investigación ocasionada por las actuales
restricciones económicas aplicadas a las empresas importadoras en todo el
país, generando complicaciones en la construcción del sistema. Aunado a lo
anterior el elevado costo de algunos componentes ocasionó la imposibilidad
de adquirirlos todos de una vez, en especial los sensores de ultrasonido y las
cámaras casos en los que se decidió comprar en el exterior y su transporte
hacia Venezuela resultó arduo y demoró el desarrollo del proyecto.
23
CAPÍTULO II
MARCO TEÓRICO
2.1 ANTECEDENTES DE LA INVESTIGACIÓN
Guerrero, C. (2006). “DESARROLLO DEL PROTOTIPO DE UN
DISPOSITIVO ELECTRONICO CAPAZ DE BLOQUEAR EL COMPUTADOR
EN FORMA REMOTA EN UN AREA DE ENTRE UNO (1) Y TRES (3)
METROS DE DISTANCIA, UTILIZANDO EL PUERTO USB DEL
COMPUTADOR.” Trabajo de grado realizado para la obtención del título de
ingeniero electrónico en la Universidad Nueva Esparta.
En este estudio, se busco una solución de seguridad para los
usuarios de computadoras que evitase el uso no autorizado de la misma,
mediante la implementación de un dispositivo electrónico de seguridad de
acceso por ausencia del usuario para el computador vía USB.
El sistema prototipo se desarrollo basado en las comunicaciones
inalámbricas por medio de la Radio Frecuencia (RF) y posee dos módulos:
uno para la recepción de la señal analógica e identificar la misma, el cual
estará conectado al puerto USB del computador. Y el otro, el modulo emisor
o transmisor que llevara el usuario consigo y que estará emitiendo la señal
constantemente al receptor. La función del sistema se basa en la proximidad
de los módulos, es decir, si están a una distancia de entre 1 a 3 metros el
computador estará operativo, de lo contrario el computador se bloqueará
hasta que el usuario regrese al mismo e introduzca su clave de desbloqueo.
Este trabajo de grado fue considerado como un antecedente debido a
que en la presente investigación es necesaria la comunicación USB entre las
cámaras web y el microcontrolador con la computadora, comunicación que
es muy similar en dicho trabajo de grado, ya que lograron conectar un
24
prototipo de hardware capaz de tomar datos externos, con un computador a
través de un puerto USB, datos que luego producirían una reacción en el
computador.
Bowen, L. (2007). “DESARROLLO DE UN DIRIGIBLE PROTOTIPO
AUTOMATA QUE PERMITA LA DETECCION DE INCENDIOS EN AREAS
FORESTALES.” Trabajo de grado realizado para la obtención del título de
ingeniero electrónico en la Universidad Nueva Esparta.
En esta investigación el autor propone un sistema de detección de
incendios forestales usando un dirigible prototipo autómata controlado
inalámbricamente a través de Radio Frecuencia, capaz de sobrevolar
cualquier área forestal localizada en la cobertura de sus dos emisores de RF.
El estudio responde a la necesidad de la disminución del riesgo
humano en la detección de focos de incendios forestales, disminución de
costos que implican la movilización de alto número de personas para el
patrullaje permanente en las áreas de alto riesgo, flexibilidad de movilidad del
equipo en cualquier área forestal y disminución en el esfuerzo de
mantenimiento manifestado en términos tanto de costo como de recursos
necesarios para efectuarlo.
Este trabajo aporto para el presente proyecto de investigación
elementos importantes como los sistemas de control del prototipo, mando de
los motores DC, modo de direccionamiento del vehículo y manejo de los
datos proporcionado por sensores.

25
Fontana, A. y Rojas, F. (2009). “SISTEMA PROTOTIPO CAPAZ DE
SUMINISTRAR INFORMACION A LAS PERSONAS CON DISCAPACIDAD
VISUAL SOBRE LAS CARACTERISTICAS DE LOS PRODUCTOS Y
PRECIOS EN LOS ESTABLECIMIENTOS COMERCIALES.” Trabajo de
grado realizado para la obtención del título de ingeniero electrónico en la
Universidad Nueva Esparta.
En la presente investigación se desarrollo un prototipo capaz de
proporcionar la información de productos existentes en un comercio a un
usuario con discapacidad visual. El prototipo desarrollado en esta
investigación fue capaz de ejecutar las siguientes funciones: interactuar con
la base de datos existente en un PC, leer la información contenida en los
códigos de barras de los productos existentes en los establecimientos
comerciales y convertir las lecturas del código de barras seleccionada por los
clientes en mensajes de voz.
Esta investigación es considerada un aporte, ya que se realizó un
sistema prototipo que transformaba datos recogidos en mensajes audibles a
través de un software. También se realizó una interfaz entre el prototipo y
una computadora con una base de datos. Estos dos aspectos se asemejan
a lo que en el presente proyecto se desea lograr, transformar los datos en
instrucciones visuales y auditivas, utilizando un computador como parte de la
interfaz.
26
2.2 BASES TEÓRICAS
2.2.1 Automatización
Según el autor García, E. (Sin año)
La era moderna de la automatización comienza con la aparición, en 1775 de la máquina de vapor de simple efecto inventada por James Watt. La máquina de doble efecto de 1784 estaba provista de dos automatismos: el distribuidor de vapor y el regulador de bolas, que mantenía constante la velocidad del árbol de salida a pesar de las fluctuaciones de la carga. (Pág. 7)
En la automatización el objetivo ideal es la suspensión total o parcial
de la intervención humana en cualquiera de las tareas que se deban realizar
en un proceso, ya sea industrial, doméstico, agrícola, administrativo o
científico. La aplicación de la automatización abarca desde las tares más
sencillas, tales como regulación de temperatura o un mando secuencial de
una máquina, hasta las más complejas, tales como la dirección mediante
computador de una unidad química.
El autor mencionado con anterioridad define la automática como
La ciencia técnica de la automatización que agrupa el conjunto de las disciplinas teóricas y tecnológicas que intervienen en la concepción, la construcción y el empleo de sistemas automáticos. La automática constituye el aspecto teórico de la cibernética. Está estrechamente vinculada con las matemáticas, la estadística, la teoría de la información, la informática y técnicas de la ingeniería. (Pág. 7)
El funcionamiento de todos los sistemas automáticos está
fundamentado en la comparación de dos variables la primera es la
información de mando, la cual describe el comportamiento deseado, y la
segunda es la información de estado, la cual describe el estado de la
maquinaria en la realidad, de esta comparación se derivan las órdenes de
mando que serán proporcionadas a los accionadores que modificarán su

27
estado. Esta serie de operaciones toman lugar en una estructura de bucle
cerrado, donde un centro de operaciones de mando y control asegura el
comportamiento correcto de la instalación.
Sistema de control en lazo abierto
Los automatismos abarcan los servosistemas, los sistemas
adaptativos, los sistemas con autoaprendizaje, los automatismos
secuenciales y sistemas de lazo abierto.
Los sistemas de lazo abierto se caracterizan por que la variable
controlada, no tiene ningún efecto sobre la variable de control. Al respecto
Angulo, C (2004) refirió lo siguiente:
Es aquel esquema de control en que la salida del proceso a controlar no afecta a la acción de control, por lo que el control en lazo abierto es muy sensible a perturbaciones y variaciones. Requiere un conocimiento preciso del proceso a controlar y la garantía del correcto funcionamiento del controlador, que no tiene acceso a la salida de proceso (Pág 34)
Un buen ejemplo para comprender mejor el funcionamiento
del sistema a lazo abierto, son las lavadoras antiguas las cuales
funcionan sobre una base de tiempos que en ningun momento se
ve afectada por la variable de salida la cual es “limpieza de ropa”.
Ver figura N°3
Figura N°2: Sistema de control en lazo abierto
Fuente: Angulo, C (2004).
28
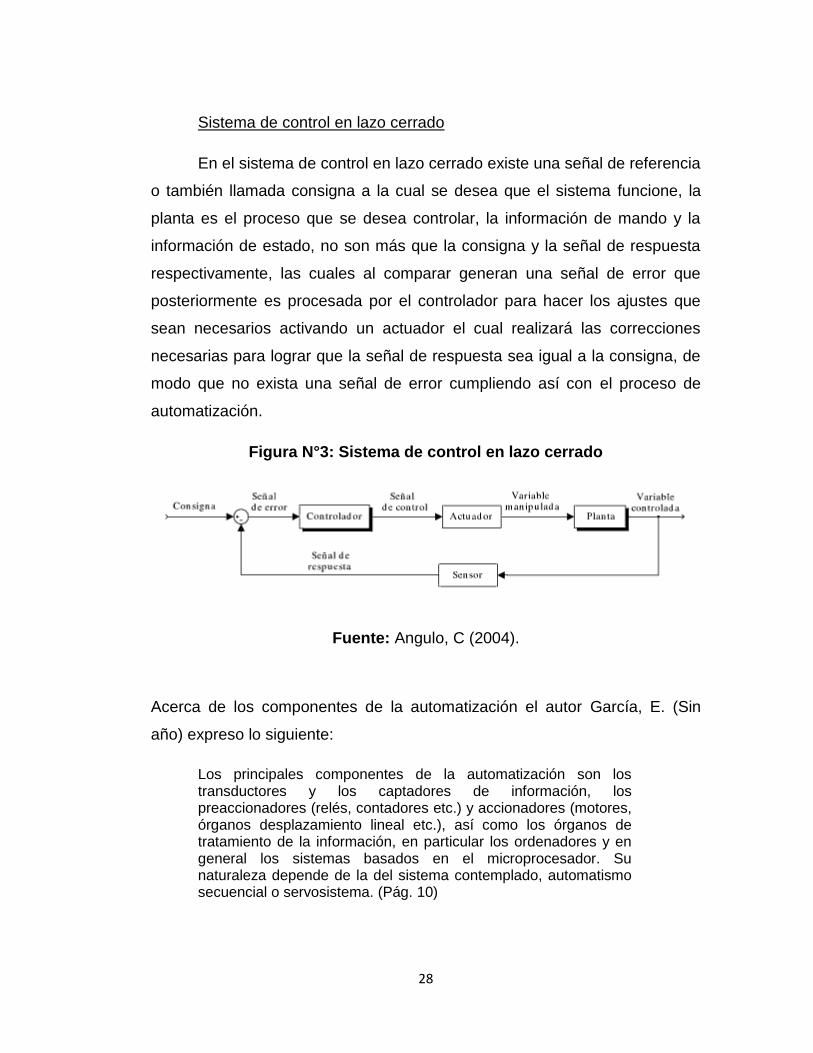
Sistema de control en lazo cerrado
En el sistema de control en lazo cerrado existe una señal de referencia
o también llamada consigna a la cual se desea que el sistema funcione, la
planta es el proceso que se desea controlar, la información de mando y la
información de estado, no son más que la consigna y la señal de respuesta
respectivamente, las cuales al comparar generan una señal de error que
posteriormente es procesada por el controlador para hacer los ajustes que
sean necesarios activando un actuador el cual realizará las correcciones
necesarias para lograr que la señal de respuesta sea igual a la consigna, de
modo que no exista una señal de error cumpliendo así con el proceso de
automatización.
Figura N°3: Sistema de control en lazo cerrado
Fuente: Angulo, C (2004).
Acerca de los componentes de la automatización el autor García, E. (Sin
año) expreso lo siguiente:
Los principales componentes de la automatización son los transductores y los captadores de información, los preaccionadores (relés, contadores etc.) y accionadores (motores, órganos desplazamiento lineal etc.), así como los órganos de tratamiento de la información, en particular los ordenadores y en general los sistemas basados en el microprocesador. Su naturaleza depende de la del sistema contemplado, automatismo secuencial o servosistema. (Pág. 10)

29
2.2.1.1 Servosistemas
En los servosistemas según García, E. (Sin año), la información de
estado toma la forma de una o varias magnitudes que caracterizan el estado
del sistema. La energía comunicada a los accionadores se dosifica según las
diferencias entre esas magnitudes y los valores deseados, y el bucle de
control actúa en tanto que un sistema de cero automático, tiende
constantemente a anular la diferencia entre el valor actual y el estado
deseado. Este principio de estado de dependencia tiende a reducir la
influencia de las perturbaciones exteriores. En los reguladores de
sostenimiento, una magnitud regulada está obligada a conservar lo mejor
posible un valor asignado a pesar de las perturbaciones, en tanto que en los
servomecanismos o reguladores de correspondencia, una magnitud de salida
debe amoldarse lo mejor posible a las evoluciones de una magnitud de
entrada.
El bucle de control de los servosistemas funciona dosificando la
cantidad de corriente o voltaje que el controlador proporciona al actuador,
cantidad que es proporcional a la señal de error, es decir, a mayor señal de
error mayor señal de control, de esta manera los servosistemas son
eficientes al percibir alteraciones externas ya que el mismo ajusta las
magnitudes de acuerdo a dichas alteraciones.
2.2.1.2 Sistemas adaptativos
Los sistemas adaptativos poseen además de la facultad de la
autocorrección de las variaciones de una serie de parámetros, una facultad
de autorregulación que les permite funcionar correctamente en condiciones

30
exteriores muy diversas. La resistencia a las perturbaciones y a las
fluctuaciones del entorno se ve así incrementada. García, E. (Sin año).
2.2.1.3 Sistemas autodidácticos
En los sistemas autodidácticos el programa de tratamiento de la
información es perfeccionado a medida que el mismo está en
funcionamiento, por autoaprendizaje. Esto se logra debido a que un
superprograma dirige el aprendizaje del sistema. Un ejemplo de este tipo de
automatismo es la identificación de formas y de los sonidos.
2.2.1.4 Automatismos secuenciales
En la presente investigación es de especial interés los automatismos
secuenciales.
El autor García, E. (Sin año), escribió acerca de los automatismos
secuenciales lo siguiente:
Es un sistema cuyo funcionamiento emplea una secuencia de fases claramente diferenciadas, según un conjunto de reglas preestablecidas. En el caso más sencillo, el final de cada fase detectado por un captador apropiado, da paso al inicio de la fase siguiente. Las condiciones de transición entre fases adoptan la forma de condiciones lógicas más o menos complejas provocando cambios de estado del sistema controlado. Los automatismos secuenciales pueden funcionar ya sea sobre la base lógica cableada, de forma específica mediante los denominados armarios de relés, que ha sido en el periodo histórico anterior mas reciente la implementación más usual de un gran número de instalaciones industriales, ya sea sobre la base de un programa registrado mediante ordenadores, autómatas programables o sistemas basados en microprocesador. (Pág. 9)

31
En los sistemas de control jerarquizado, un ordenador central determina las consignas generales comunicadas a controladores especializados que controlan los diversos elementos de la instalación. Semejante estructura descentralizada aprovecha plenamente las inmensas posibilidades brindadas por los microprocesadores. Incluso en el campo de las fabricaciones mecánicas, en el que la mayoría de los automatismos son de tipo secuencial, el ordenador ha hecho su aparición bajo la forma de los controladores numéricos de máquinas herramienta que permiten ordenar la elección, el cambio y el recorrido de las herramientas merced a un programa registrado en la memoria del ordenador (Pág 10)
Uno de los ejemplos más clásicos de automatismos
secuenciales es el ascensor, en donde la información del estado
actual del ascensor viene dado por captadores binarios o sensores,
el tratamiento de esta información es de naturaleza lógica. El
programa está diseñado sobre una estructura de sucesos
secuenciales que componen las fases operatorias del sistema,
fases relacionadas entre sí a través de reglas lógicas. Estos
sistemas son los más adecuados para procesos industriales,
especialmente los de fabricación; Esto no implica que no puedan
ser usados en procesos comunes, mientras que el proceso este
dividido en fases que se relacionan entre sí, es aplicable este
automatismo.
2.2.2 Transductores y Sensores
El autor Groover, M. (1989) define transductor como:
Un dispositivo que transforma un tipo de variable física (por ejemplo, fuerza, presión, temperatura, velocidad, caudal, etc.) en otro.
Una transformación común es la que se produce a la tensión eléctrica, y la razón por la que se realiza esta conversión es que es más fácil trabajar con la señal convertida. (Pág. 159)
32
Un sensor es un transductor que genera una señal eléctrica que
puede ser cuantificable, el mismo reacciona a algunas variables físicas de
tipo eléctrico, mecánico, térmico, químico, magnético etc. Normalmente las
señales obtenidas del sensor son de pequeña magnitud y necesitan un
acondicionamiento que amplifique y filtre su señal.
Los transductores y los sensores pueden clasificarse en dos tipos
básicos, dependiendo de la forma de la señal convertida. Los dos tipos son:
1. Transductores analógicos: los cuales proporcionan una señal
analógica continua, como por ejemplo voltaje o corriente eléctrica.
Esta señal puede ser tomada como el valor de la variable física que se
mide.
2. Transductores Digitales: estos producen una señal de salida digital, en
la forma de un conjunto de bits de estado en paralelo o formando una
serie de pulsaciones que pueden ser contadas.
En una u otra forma, las señales digitales representan el valor de la
variable medida. Los transductores digitales han llegado a ser mas
populares a causa de la facilidad con la que se pueden emplear como
instrumentos de medición independientes. Además, suelen ofrecer la
ventaja de ser más compatibles con las computadoras digitales que
los sensores analógicos en la automatización y en el control de
procesos. Groover, M. (1989)
Los sensores según sus aplicaciones se pueden dividir en las siguientes
categorías generales:
1. Sensores táctiles: son dispositivos que indican contacto, ya sea entre
ellos mismos o algún objeto solido. Estos a su vez se clasifican en dos
tipos, sensores de contacto y sensores de fuerza.
33
a. Sensores de contacto: proporcionan una señal de salida binaria
si se ha establecido un contacto con el dispositivo, no
importando la magnitud de la fuerza de contacto. Algunos
ejemplos son: interruptores de límite, microinterruptores,
interruptor de contacto eléctrico, sensores de deslizamiento y
otros similares a estos.
b. Sensores de fuerza: otras veces llamado sensores de esfuerzo
este no solo determina si ha ocurrido un contacto, sino que
determina también la magnitud de fuerza del contacto entre los
dos objetos. Esta característica del sensor es idóneo para el
agarre de objetos, debido a la capacidad de aplicación de
fuerza requerida. Ejemplos de este tipo de sensores: calibrador
de tensión, calibrador de compresión, muñeca detectora de
fuerza y sensores de array tactil.
2. Sensores de proximidad y alcance: Son dispositivos que indican
cuando un objeto esta cercano o próximo con respecto a otro. La
proximidad necesaria para la activación del sensor depende de las
características particulares del dispositivo.
Algunos de estos sensores pueden ser utilizados para medir la
distancia entre un objeto y el sensor, a estos dispositivos se le
denominan sensores de alcance. Los sensores de alcance son de
utilidad para determinar la localización de un objeto
Existen una gran variedad de tecnologías con las cuales se diseñan
sensores de proximidad y alcance, dichas tecnologías incluyen
dispositivos ópticos, técnicas de campo eléctrico y campo magnético,

34
elementos acústicos y algunas otras. Solo algunas se describirán a
continuación.
a. Sensores de infrarrojo: Pueden clasificarse en activos o
pasivos.
Los activos envían un haz de rayos infrarrojos que al golpear
contra un blanco son reflectados y captados por el sensor. Este
sensor puede emplearse no solo para detectar la presencia de
un objeto, sino para determinar la distancia a la que se
encuentra, temporizando el intervalo a partir de cuándo se
envía y se recibe la señal. Esta característica es de utilidad
para sistemas de locomoción y guiado.
Los pasivos son dispositivos que detectan radiación infrarroja
en el entorno y suelen ser utilizados en sistemas de seguridad
ya que son efectivos en la cobertura de áreas grandes en
interiores.
b. Sensores Ultrasónicos: Su funcionamiento es exactamente
igual que los sensores infrarrojos activos, la única diferencia es
que estos sensores emiten ondas ultrasónicas, luego cuentan el
tiempo que toma la onda en regresar y determinan la distancia
del objeto. La ventaja en comparación con el sensor infrarrojo
es que permite la medición de mayores distancias.
c. Sensores Inductivos: se basan en el cambio de inductancia que
provoca un objeto metálico en un campo magnético.
Los sensores de este tipo constan básicamente de una bobina
y de un imán. Cuando un objeto ferromagnético penetra o

35
abandona el campo del imán el cambio que se produce en
dicho campo induce una corriente en la bobina; el
funcionamiento es sencillo: si se detecta una corriente en la
bobina, algún objeto ferromagnético a entrado en el campo del
imán. (Departamento de Ciencia de la Computación e
Inteligencia Artificial. (Sin año).)
Una de las grandes limitaciones de este tipo de sensores es
que solo funciona con objetos ferromagnéticos, sin embargo en
la industria este tipo de material es muy habitual.
d. Sensores Capacitivos: este tipo de sensores funcionan al
alterando la capacitancia del elemento, ya sea variando el
dieléctrico entre las placas del sensor al colocar diferentes tipos
de materiales como aire, líquidos, granulados, metales,
aislantes, etc., o variando la distancia entre los dos electrodos
del capacitor variable.
3. Sensores diversos y sistemas basados en sensores: Esta
categoría cubre los restantes tipos de sensores los cuales tienen la
capacidad de detectar variables como temperatura, flujo de fluido,
presión, detección de voz, visión de máquina y otras propiedades
eléctricas.
Algunos de los sistemas que se basan en sensores permiten la
medición de distancias tales como:
a. Triangulación: Es un método óptico que permite medir la
distancia entre dos objetos de una manera sencilla. Está
conformado por una serie lineal de sensores de luz y una fuente
de luz focalizada tal como se muestra en la figura N°4

36
Figura N°4: Disposición para un sensor de proximidad que
utiliza la luz reflejada contra una serie de sensores
Fuente: Groover, M (1989)
Donde x= distancia del objeto desde el sensor.
y= distancia lateral entre la fuente de luz y el haz
de luz reflejado contra el array lineal. Esta
distancia corresponde al número de elementos
contenidos dentro del haz reflejado en el array de
sensores.
A= ángulo entre el objeto y el array de sensores
según se ilustra en la figura N°4.
Según el autor mencionado la formula que proporciona la
distancia entre el objeto y el sensor tiene la expresión siguiente:
Y el empleo de este dispositivo en la configuración mostrada se
basa en el hecho de que la superficie del objeto debe ser
paralela al array de detección.
37
En la medida en que los dos objetos se acerquen, la distancia
(y) será menor, lo cual indica que la distancia (x) también es
menor. Es un método sencillo y eficaz para la medición de
distancias.
b. Iluminación estructural: El Departamento de Ciencia de la
Computación e Inteligencia Artificial. (Sin año).nos proporciona
la siguiente explicación de iluminación estructural:
Este método se basa en la proyección de una configuración de luz sobre un conjunto de objetos, y en la utilización de la distorsión de la luz para determinar el alcance a los diferentes objetos. La configuración de luz que suele transmitirse es de forma cilíndrica. Una cámara de TV capta la distorsión que se produce en la luz ya a partir del tratamiento de las imágenes de la cámara se puede determinar la distancia del emisor de la luz a los objetos.
El principal problema con este método de medición es que
requiere un tratamiento de datos de imágenes un poco
complejo que debe ser realizado por un computador
c. Tiempo de vuelo: este método se basa en el tiempo que
transcurre entre la emisión y recepción de una onda sonora o
luminosa. Dentro de este tipo se estudiaran tres (3) métodos
diferentes
i. El Primero utiliza laser y toma el tiempo de vuelo
en el que regresa por la misma trayectoria el pulso
de luz emitido. Este tipo de sistema posee un
alcance aproximado de 4 metros y maneja una
precisión de 0,25 cm.
38
ii. El segundo también usa laser pero a diferencia
del primero se emplea un haz continuo y lo que se
mide es el desplazamiento en fase entre los haces
saliente y entrante.
iii. El tercero funciona con emisiones de ultrasonido a
las cuales se les calcula el tiempo de vuelo, con la
velocidad del sonido para el medio en el que se
esté emitiendo. El único inconveniente con este
método es que puede dar errores si la superficie
de reflexión posee entrantes o material
puntiagudo.
39
2.2.3 Microcontrolador
Los autores Valdez, F; Pallas, R. (2007). Definen el microcontrolador
como “un microcomputador realizado en un circuito integrado (chip)”.
La institución Didatec (2001) menciona que: “El Microcontrolador es un
circuito integrado (chip) que contiene memoria (para almacenar programas),
un procesador (para procesar y llevar a cabo los programas) y pines de
entrada/salida (para conectar interruptores, sensores, y dispositivos de salida
como los motores)”.
Según Bustamante, R. (2008) “Un microcontrolador es un circuito
e=integrado programable que contiene todos los componentes de un
computador, aunque limitadas prestaciones. Se emplea para controlar el
funcionamiento de una tarea determinada y, debido a su reducido tamaño,
suele ir incorporado en el propio dispositivo al que gobierna.” (pag. 16)
Razón por la cual el microcontrolador posee muchas de las mismas
cualidades que una computadora, pero sin ningún dispositivo de
comunicación con humanos como monitor, teclados o mouse.
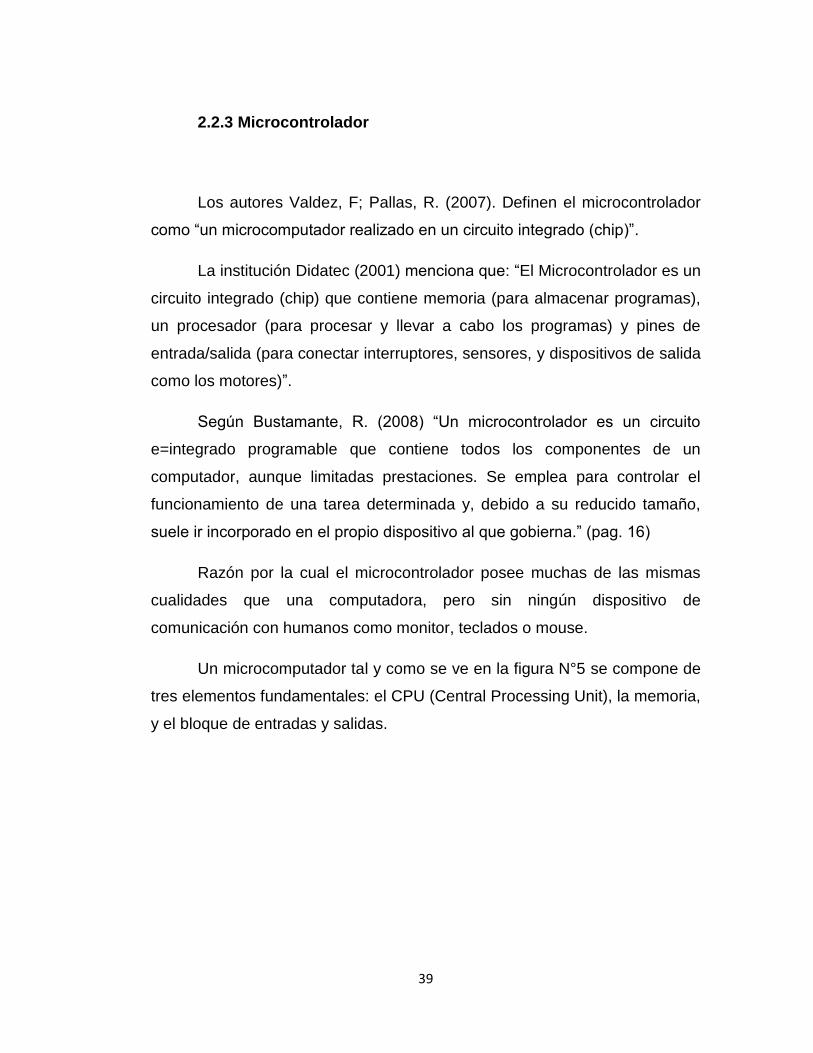
Un microcomputador tal y como se ve en la figura N°5 se compone de
tres elementos fundamentales: el CPU (Central Processing Unit), la memoria,
y el bloque de entradas y salidas.

40
Figura N°5: Esquema básico general de un
microcomputador.
Fuente: Valdez, F (2007).
Dichos elementos están interconectados entre sí con un grupo de
líneas eléctricas denominadas buses, los cuales pueden ser buses de datos,
buses de direcciones o buses de control dependiendo de la información que
estos transporten.
Los autores Valdez, F; Pallas, R. (2007). Expresan que:
La CPU es el “cerebro” del microcomputador y actua bajo el control del programa almacenado en la memoria. La CPU se ocupa básicamente de traer las instrucciones del programa desde la memoria, interpretarlas y hacer que se ejecuten. La CPU también incluye los circuitos para realizar operaciones aritméticas y lógicas elementales con los datos binarios, en la denominada Unidad Aritmética y Lógica (ALU: Arithmetic and Logic Unit).
En un microcomputador, la CPU no es otra cosa que el microprocesador, el circuito integrado capaz de realizar las funciones antes mencionadas.(Pág. 12)
41
Cronologicamente los microcontroladores aparecieron despues que
los microprocesadores y han evolucionado independientemente.
Los microcontroladores tiene una gran cantidad de aplicaciones que
van desde equipos de comunicaciones e instrumentos electronicos hasta
automocion y juguetes, es increiblemente extensa las posibles aplicaciones
de los microcontroladores.
Los autores antes mencionados expresan lo siguiente:
Los microcontroladores estan concebidos fundamentalmente para ser utilizados en aplicaciones puntuales, es decir, aplicaciones donde el microcontrolador debe realizar un péqueño numero de tareas, al menor costo posible. En estas aplicaciones, el microcontrolador ejecuta un programa almacenado permanentemente en su memoria, el cual trabaja con algunos datos almacenados temporalmente e interactua con el exterior a través de las lineas de entrada y salida que dispone. El microcontrolador es parte de la aplicación: es un controlador incrustado o embebido en la aplicación (embedded controller). En aplicaciones de cierta envergadura se utilizan varios microcontroladores, cada uno de los cuales se ocupa de un pequeño grupo de tareas. (Pág. 12)
Existen ciertas caracteristicas que hacen que microcontroladores sean
componentes deseados para realizar una gamma de acciones muy amplia.
Algunas de estas caracteristicas son mencionadas acontinuacion por los
autores Valdez, F; Pallas, R. (2007):
Recursos de entrada y salida. Más que en la capacidad de cálculo del microcontrolador, muchas veces se requiere hacer énfasis en los recursos de entrada y de salida del dispositivo, tales como el manejo individual de líneas de entrada y salida, el manejo de interrupciones, señales analógicas, etc.
Espacio optimizado. Se trata de tener en el menor espacio posible, y a un coste razonable, los elementos esenciales para desarrollar una aplicación. Dado que el número de terminales que puede tener un circuito integrado viene limitado por las dimensiones de su encapsulado, el espacio se puede optimizar

42
haciendo que unos mismos terminales realicen funciones diferentes
El microcontrolador idóneo para una aplicación. Se procura que el diseñador disponga del microcontrolador hecho a la medida de su aplicación. Por esto los fabricantes ofrecen familias de microcontroladores, compuestas por miembros que ejecutan el mismo repertorio de instrucciones pero que difieren en sus componentes de hardware (más o menos memoria, más o menos dispositivos de entrada y salida, etc.), permitiendo así que el diseñador de aplicaciones pueda elegir el microcontrolador idóneo para cada aplicación. (Pág. 12-13)
Otras caracteristicas que hacen de los microcontroladores dispositivos
deseables son su bajo consumo, seguridad en el funcionamiento del
microcontrolador y proteccion de los programas frente a copias.
2.2.3.1 Fabricantes de microcontroladores
Los microcontroladores que son de un mismo tipo se dice que son de
una misma familia, por lo general poseen el mismo CPU y tienen la misma
cantidad de instrucciones. Los miembros de un mismo tipo de familia tienen
el mismo nucleo, pero varian en el bloque de entradas y salidas y en la
memoria.
Existen muchas compañias fabricantes de microcontroladores, tal
como se muestra en el anexo 1, por lo cual el criterio de selección entre ellos
depende exclusivamente de sus prestaciones que deben ser consistentes
con los requerimientos de la aplicación a controlar y de la inclinacion del
desarrollador.
2.2.4 Motores Eléctricos
El autor Pellini, C. (Sin año). refiere lo siguiente acerca de los motores
eléctricos:
43
Los motores eléctricos son máquinas eléctricas rotatorias que transforman la energía eléctrica en energía mecánica. Debido a sus múltiples ventajas, entre las que cabe citar su economía, limpieza, comodidad y seguridad de funcionamiento, el motor eléctrico ha reemplazado en gran parte a otras fuentes de energía, tanto en la industria como en el transporte, las minas, el comercio, o el hogar.
Los motores eléctricos satisfacen una amplia gama de necesidades de servicio, desde arrancar, acelerar, mover, o frenar, hasta sostener y detener una carga. Estos motores se fabrican en potencias que varían desde una pequeña fracción de caballo hasta varios miles, y con una amplia variedad de velocidades, que pueden ser fijas, ajustables o variables. (Pág. 1)
En nuestros días los motores eléctricos son usados en todas las áreas
de actividad humana, esto gracias a la gran versatibilidad que los mismos
poseen. Las dimensiones de los motores electricos son muy variadas lo cual
permite que sean usados tanto en las tareas mas pequeñas como en las de
gran envergadura, ya que los mismos pueden llegar a generar miles de
caballos de fuerza según su especificación.
Generalmente las partes que componen un motor, esto depende de su tipo,
son la siguientes:
1. La carcasa: es la parte externa del motor que envuelve
completamente las partes electricas
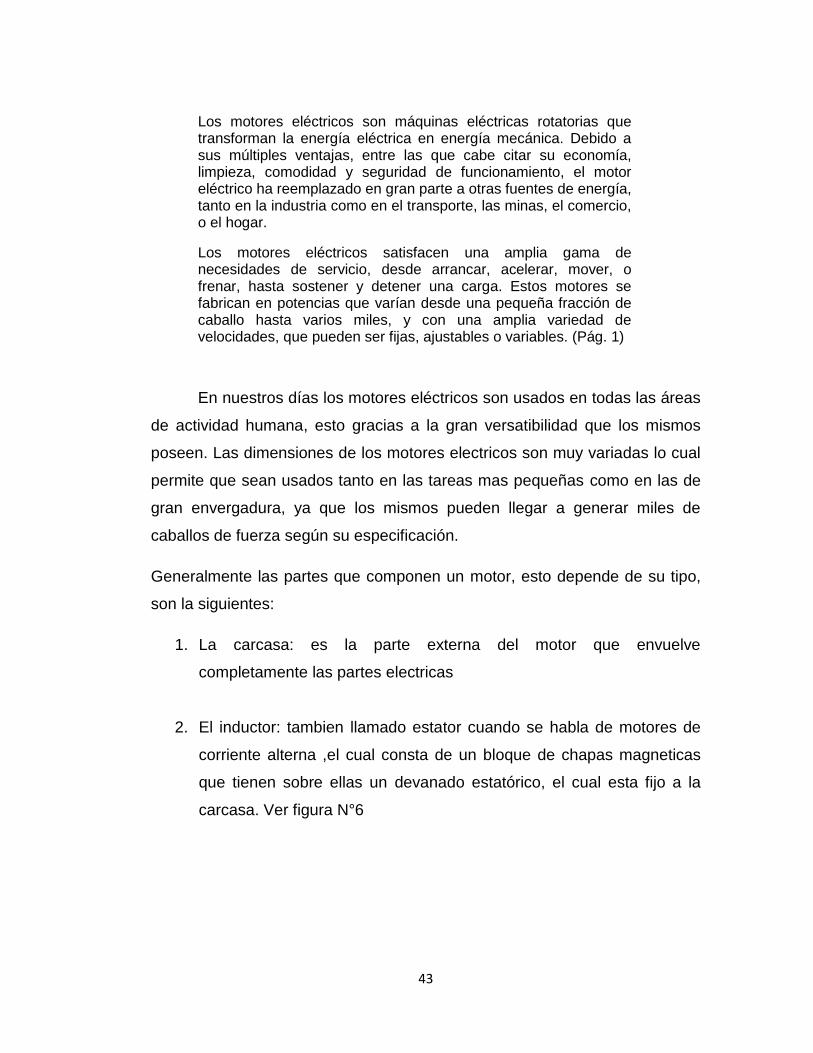
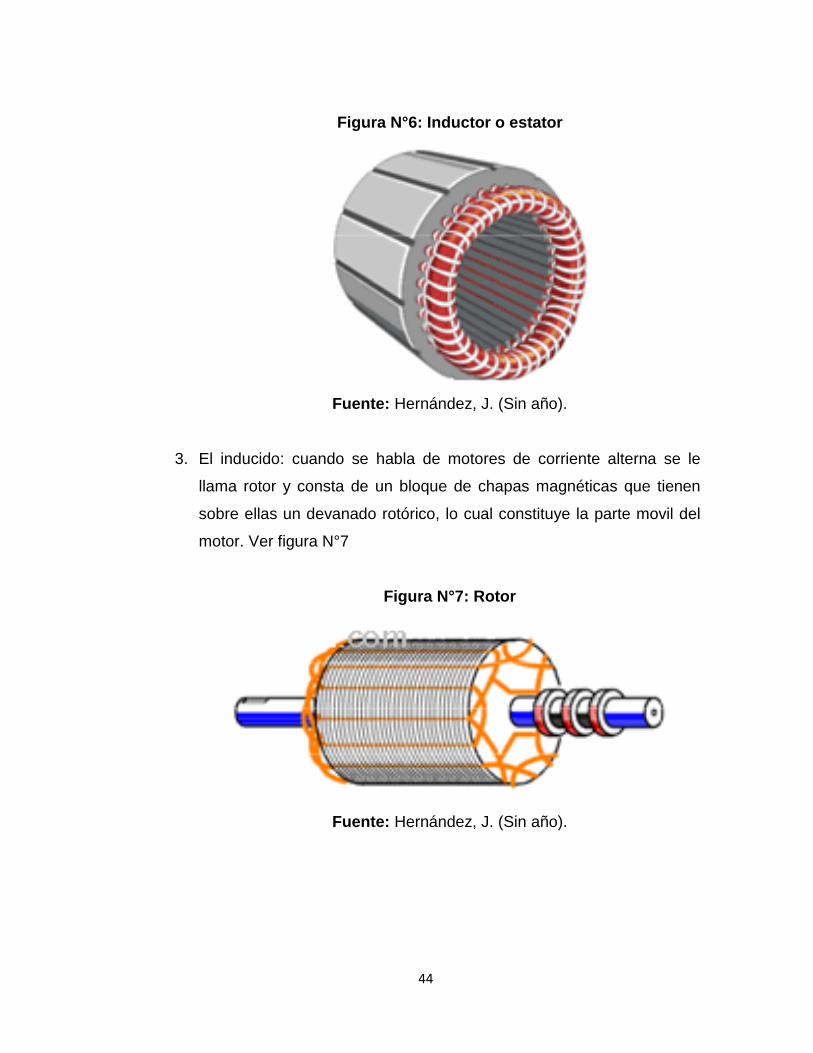
2. El inductor: tambien llamado estator cuando se habla de motores de
corriente alterna ,el cual consta de un bloque de chapas magneticas
que tienen sobre ellas un devanado estatórico, el cual esta fijo a la
carcasa. Ver figura N°6
44
Figura N°6: Inductor o estator
Fuente: Hernández, J. (Sin año).
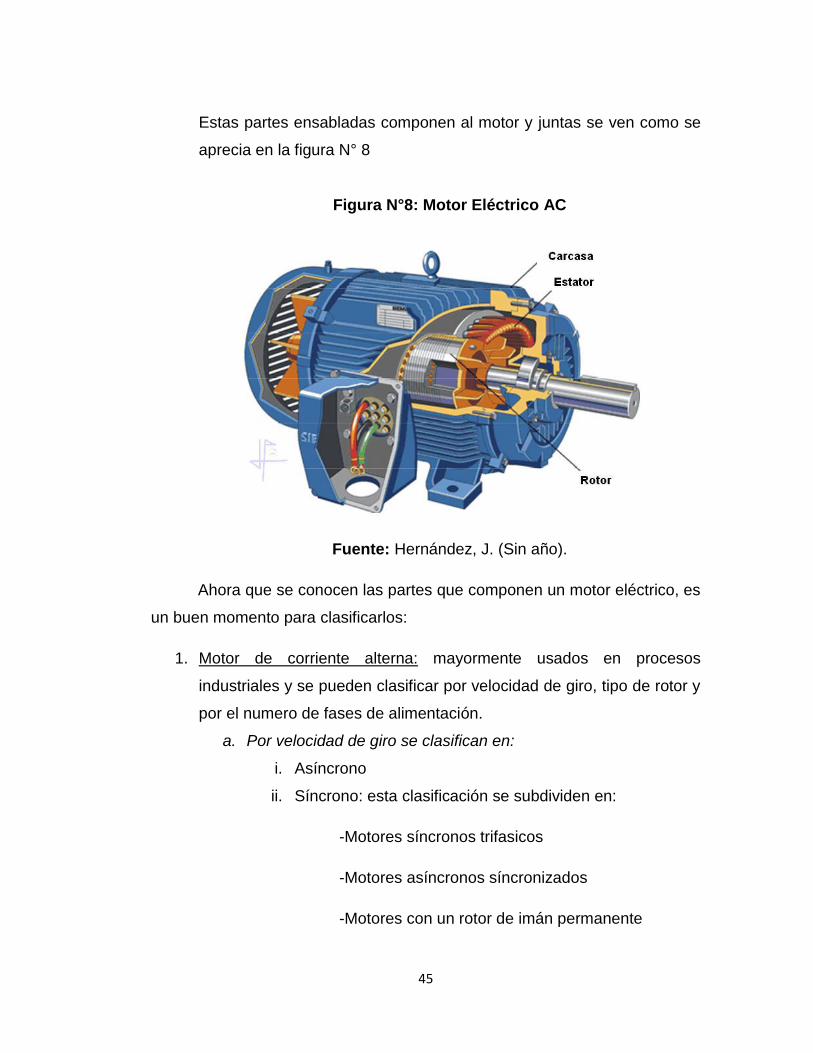
3. El inducido: cuando se habla de motores de corriente alterna se le
llama rotor y consta de un bloque de chapas magnéticas que tienen
sobre ellas un devanado rotórico, lo cual constituye la parte movil del
motor. Ver figura N°7
Figura N°7: Rotor
Fuente: Hernández, J. (Sin año).
45
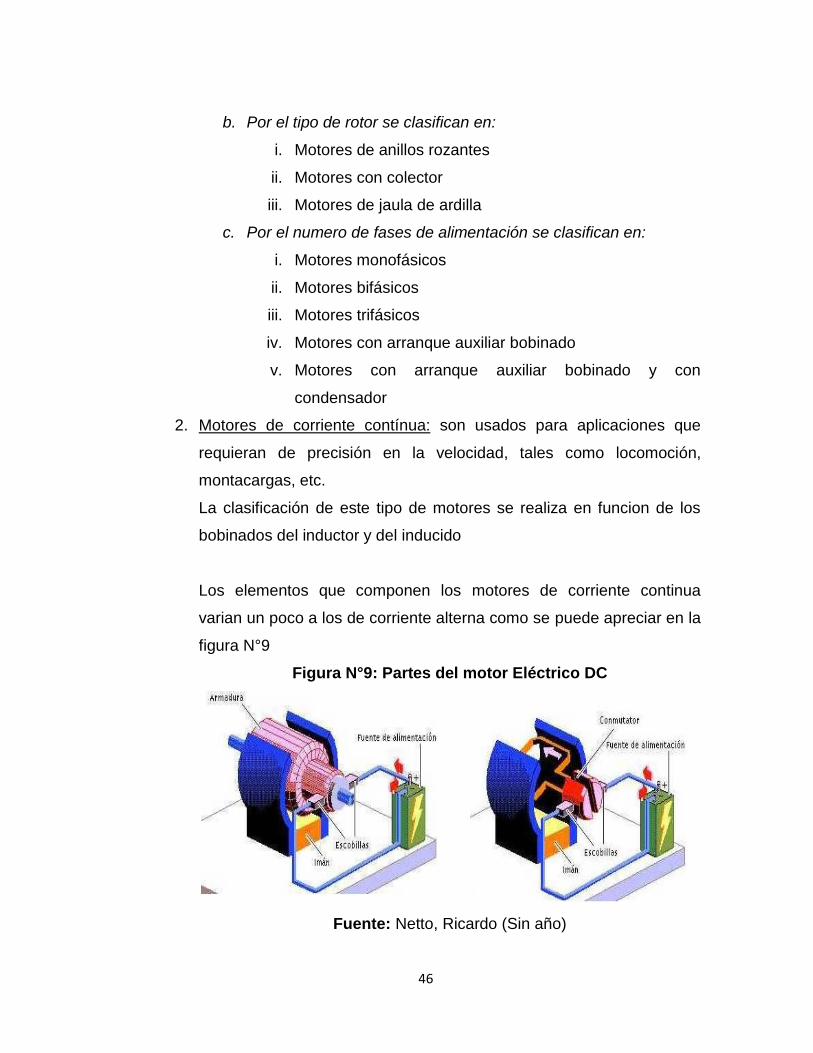
Estas partes ensabladas componen al motor y juntas se ven como se
aprecia en la figura N° 8
Figura N°8: Motor Eléctrico AC
Fuente: Hernández, J. (Sin año).
Ahora que se conocen las partes que componen un motor eléctrico, es
un buen momento para clasificarlos:
1. Motor de corriente alterna: mayormente usados en procesos
industriales y se pueden clasificar por velocidad de giro, tipo de rotor y
por el numero de fases de alimentación.
a. Por velocidad de giro se clasifican en:
i. Asíncrono
ii. Síncrono: esta clasificación se subdividen en:
-Motores síncronos trifasicos
-Motores asíncronos síncronizados
-Motores con un rotor de imán permanente
46
b. Por el tipo de rotor se clasifican en:
i. Motores de anillos rozantes
ii. Motores con colector
iii. Motores de jaula de ardilla
c. Por el numero de fases de alimentación se clasifican en:
i. Motores monofásicos
ii. Motores bifásicos
iii. Motores trifásicos
iv. Motores con arranque auxiliar bobinado
v. Motores con arranque auxiliar bobinado y con
condensador
2. Motores de corriente contínua: son usados para aplicaciones que
requieran de precisión en la velocidad, tales como locomoción,
montacargas, etc.
La clasificación de este tipo de motores se realiza en funcion de los
bobinados del inductor y del inducido
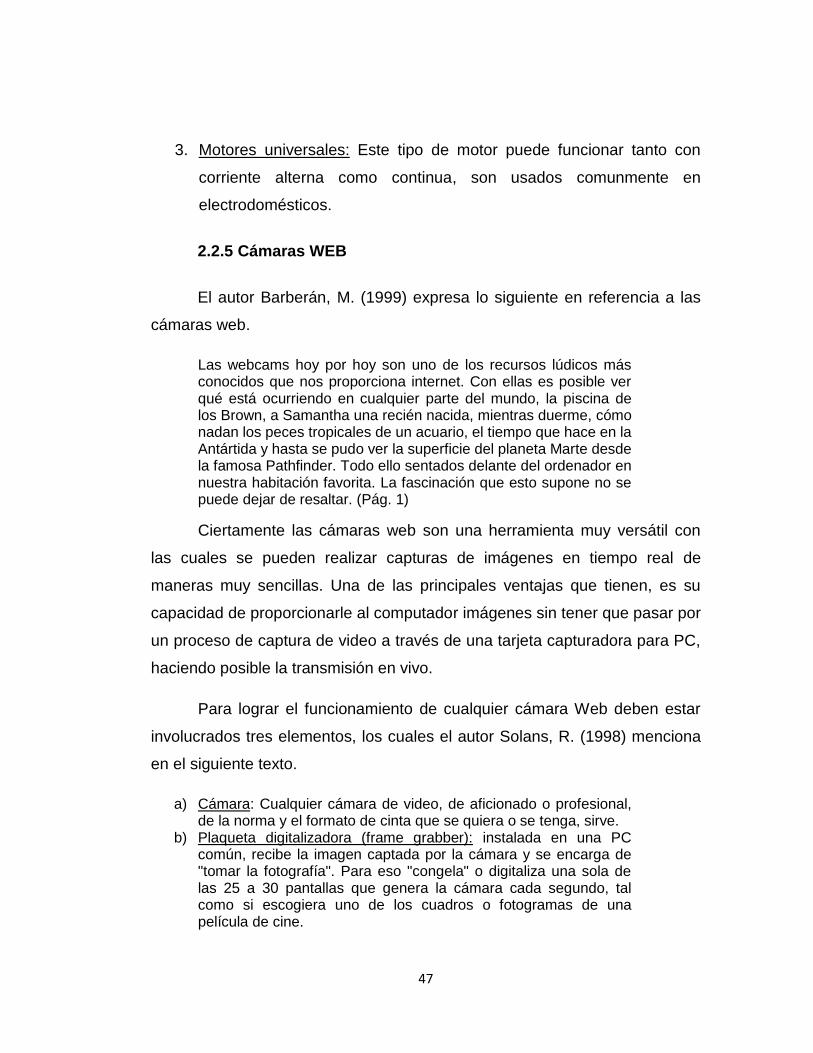
Los elementos que componen los motores de corriente continua
varian un poco a los de corriente alterna como se puede apreciar en la
figura N°9
Figura N°9: Partes del motor Eléctrico DC
Fuente: Netto, Ricardo (Sin año)
47
3. Motores universales: Este tipo de motor puede funcionar tanto con
corriente alterna como continua, son usados comunmente en
electrodomésticos.
2.2.5 Cámaras WEB
El autor Barberán, M. (1999) expresa lo siguiente en referencia a las
cámaras web.
Las webcams hoy por hoy son uno de los recursos lúdicos más conocidos que nos proporciona internet. Con ellas es posible ver qué está ocurriendo en cualquier parte del mundo, la piscina de los Brown, a Samantha una recién nacida, mientras duerme, cómo nadan los peces tropicales de un acuario, el tiempo que hace en la Antártida y hasta se pudo ver la superficie del planeta Marte desde la famosa Pathfinder. Todo ello sentados delante del ordenador en nuestra habitación favorita. La fascinación que esto supone no se puede dejar de resaltar. (Pág. 1)
Ciertamente las cámaras web son una herramienta muy versátil con
las cuales se pueden realizar capturas de imágenes en tiempo real de
maneras muy sencillas. Una de las principales ventajas que tienen, es su
capacidad de proporcionarle al computador imágenes sin tener que pasar por
un proceso de captura de video a través de una tarjeta capturadora para PC,
haciendo posible la transmisión en vivo.
Para lograr el funcionamiento de cualquier cámara Web deben estar
involucrados tres elementos, los cuales el autor Solans, R. (1998) menciona
en el siguiente texto.
a) Cámara: Cualquier cámara de video, de aficionado o profesional, de la norma y el formato de cinta que se quiera o se tenga, sirve.
b) Plaqueta digitalizadora (frame grabber): instalada en una PC común, recibe la imagen captada por la cámara y se encarga de "tomar la fotografía". Para eso "congela" o digitaliza una sola de las 25 a 30 pantallas que genera la cámara cada segundo, tal como si escogiera uno de los cuadros o fotogramas de una película de cine.
48
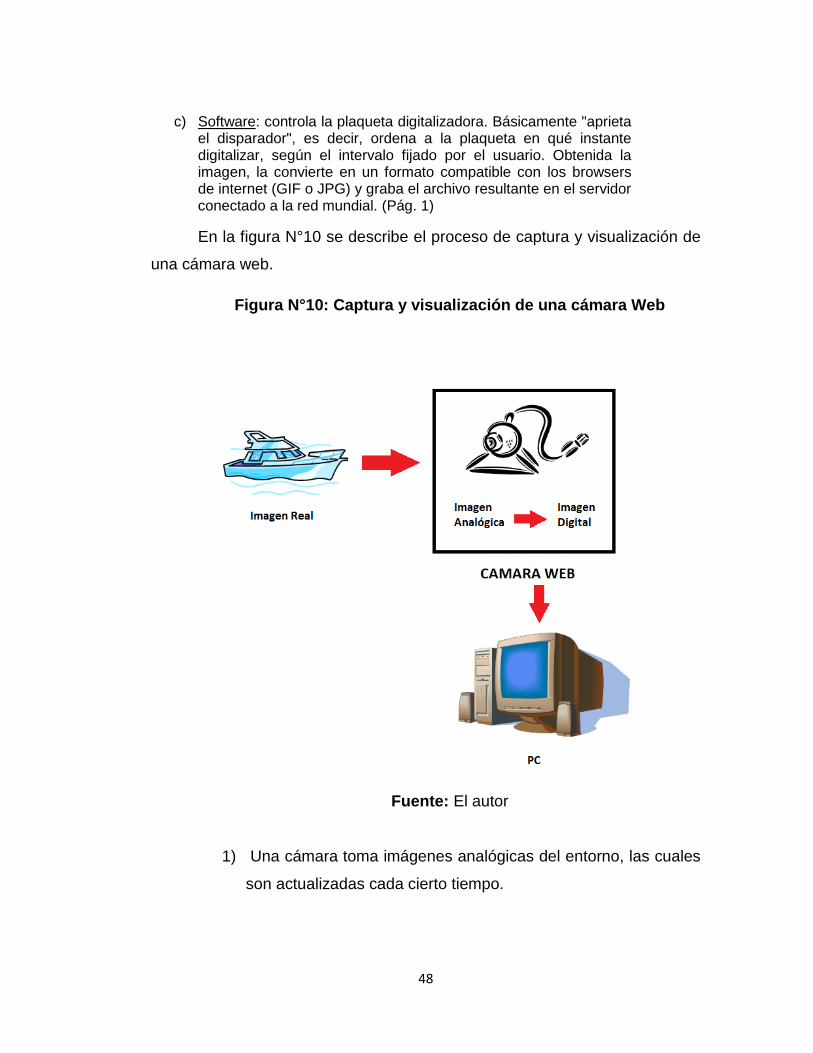
c) Software: controla la plaqueta digitalizadora. Básicamente "aprieta el disparador", es decir, ordena a la plaqueta en qué instante digitalizar, según el intervalo fijado por el usuario. Obtenida la imagen, la convierte en un formato compatible con los browsers de internet (GIF o JPG) y graba el archivo resultante en el servidor conectado a la red mundial. (Pág. 1)
En la figura N°10 se describe el proceso de captura y visualización de
una cámara web.
Figura N°10: Captura y visualización de una cámara Web
Fuente: El autor
1) Una cámara toma imágenes analógicas del entorno, las cuales
son actualizadas cada cierto tiempo.
49
2) En su interior la cámara hace una conversión de la imagen
analógica transformándola en una imagen digital o binaria.
3) Las imágenes ya transformadas en binario se pueden visualizar
en pantalla o pueden ser enviadas a una dirección URL para
que puedan ser vistas en cualquier parte del mundo a través de
internet.
Esta capacidad de digitalizar las imágenes es lo que permite obtener
tomas de cámaras web remotas, instaladas en cualquier parte del mundo.
2.2.6 Puertos salida/entrada
En el siguiente párrafo la compañía Kioskea C.A. (2008) dice que los
puertos de salida/entrada
Son elementos materiales del equipo, que permiten que el sistema se comunique con los elementos exteriores. En otras palabras, permiten el intercambio de datos, de aquí el nombre interfaz de entrada/salida (también conocida como interfaz de E/S). (Pág. 1)
Por la forma de comunicación con la unidad central los puertos de
entrada y salida se clasifican en comunicación serial, dentro de la cual se
encuentra el USB y comunicación paralela
2.2.6.1 Comunicación serial
Del mismo autor se refiere lo siguiente:
Los puertos seriales (también llamados RS-232, por el nombre del estándar al que hacen referencia) fueron las primeras interfaces que permitieron que los equipos intercambien información con el "mundo exterior". El término serial se refiere a los datos enviados mediante un solo hilo: los bits se envían uno detrás del otro (consulte la sección sobre transmisión de datos para conocer los modos de transmisión). (Pág. 1)
Los puertos seriales envían la información a través de una
cadena de bits por paquete, el tamaño de un paquete de
50
información no siempre será de 8 bits. Las cantidades de
bits por paquete más comunes son 5 ,7 y 8 bits.
La transmisión de datos se lleva a cabo asincrónicamente,
es decir, cada carácter es enviado en intervalos de tiempo
irregulares, por lo cual es necesario que se le indique al
receptor o transmisor cuando comienza un paquete de
datos y cuando finaliza, esto se logra al mandar un bit de
arranque y un bit de parada al comienzo y al final de un
paquete de información.
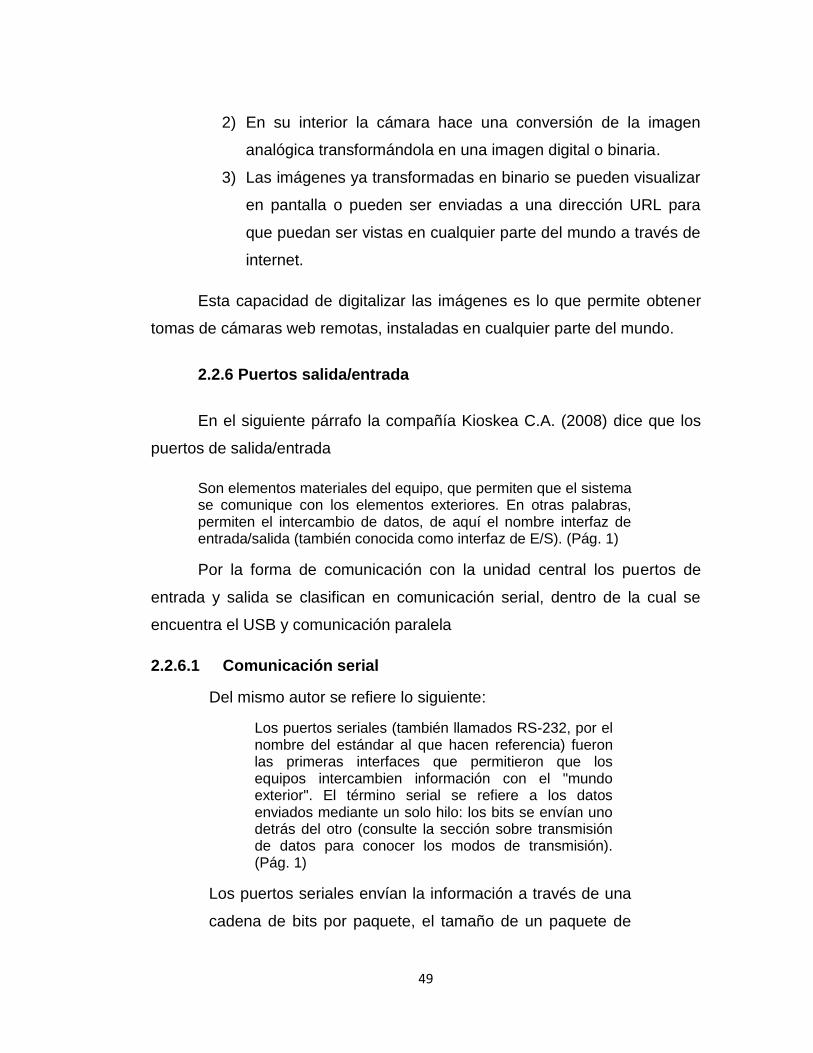
En un principio los puertos seriales solo podían enviar
datos debido a que usaban solo un canal unidireccional, tal
y como se ve en la figura N°11 por lo cual se desarrollaron
puertos bidireccionales de dos hilos que permitieran la
transmisión y recepción de datos.
Figura N°11: Puerto serial unidireccional
Fuente: Kioskea C.A. (2008)

51
Los puertos seriales se comunican comúnmente a través
de un conector de 9 pines llamado DB9, el cual se muestra
en la figura N°12
Figura N°12: Conector DB9 tipo macho (De frente)
Fuente: González R. (2010).
La descripción de los pines es la siguiente:
Pin 1 CD - detección de portadora Pin 2 RXD - recepción de datos Pin 3 TXD - Transmisión de datos Pin 4 DTR - Terminal de datos lista Pin 5 GND - Nivel de Tierra Pin 6 DSR - Fijación de datos lista Pin 7 RTS - Requerimiento de envió Pin 8 CTS - Borrar para envió Pin 9 RI – Indicador de Llamada
2.2.6.2 Comunicación USB
El bus de serie universal (USB), está basado en una
arquitectura serial. No obstante, es mucho más rápida que
la conexión serial estándar.

52
Una característica que vale la pena resaltar acerca de la
conexión USB es que realiza la transmisión y recepción de
datos mientras proporciona voltaje de alimentación al
dispositivo conectado, este voltaje tiene un máximo de 15V
y su arquitectura se puede apreciar en la figura N° 13.
Figura N°13: Conexión USB
Fuente: Kioskea C.A. (2008)
El USB estándar permite interconectar dispositivos entre
ellos a través de una topología de bus o estrella, y lo hacen
a través de concentradores o HUB. Ver figura N°14
Figura N°14: Topologías de conexión USB
Fuente: Kioskea C.A. (2008)
Para que los dispositivos conectados a esta topología
funcionen correctamente se necesita un protocolo de
53
comunicación, la compañía Kioskea C.A. (2008) expresa
del asunto lo siguiente:
La comunicación entre el host (equipo) y los dispositivos se lleva a cabo según un protocolo (lenguaje de comunicación) basado en el principio de red en anillo. Esto significa que el ancho de banda se comparte temporalmente entre todos los dispositivos conectados. El host (equipo) emite una señal para comenzar la secuencia cada un milisegundo (ms), el intervalo de tiempo durante el cual le ofrecerá simultáneamente a cada dispositivo la oportunidad de "hablar". Cuando el host desea comunicarse con un dispositivo, transmite una red (un paquete de datos que contiene la dirección del dispositivo cifrada en 7 bits) que designa un dispositivo, de manera tal que es el host el que decide "hablar" con los dispositivos. Si el dispositivo reconoce su dirección en la red, envía un paquete de datos (entre 8 y 255 bytes) como respuesta. De lo contrario, le pasa el paquete a los otros dispositivos conectados. Los datos que se intercambian de esta manera están cifrados conforme a la codificación NRZI.
Otra característica interesante de los puertos USB es que
los mismos admiten dispositivos Plug and play de conexión
en caliente, de la misma compañía se expresa lo siguiente:
Los puertos USB admiten dispositivos Plug and play de conexión en caliente. Por lo tanto, los dispositivos pueden conectarse sin apagar el equipo (conexión en caliente). Cuando un dispositivo está conectado al host, detecta cuando se está agregando un nuevo elemento gracias a un cambio de tensión entre los hilos D+ y D-. En ese momento, el equipo envía una señal de inicialización al dispositivo durante 10 ms para después suministrarle la corriente eléctrica mediante los hilos GND y VBUS (hasta 100 mA). A continuación, se le suministra corriente eléctrica al dispositivo y temporalmente se apodera de la dirección predeterminada (dirección 0). La siguiente etapa consiste en brindarle la dirección definitiva (éste es el procedimiento de lista). Para hacerlo, el equipo interroga a los dispositivos ya conectados para poder conocer sus direcciones y asigna una nueva, que lo identifica por retorno. Una vez que cuenta con todos
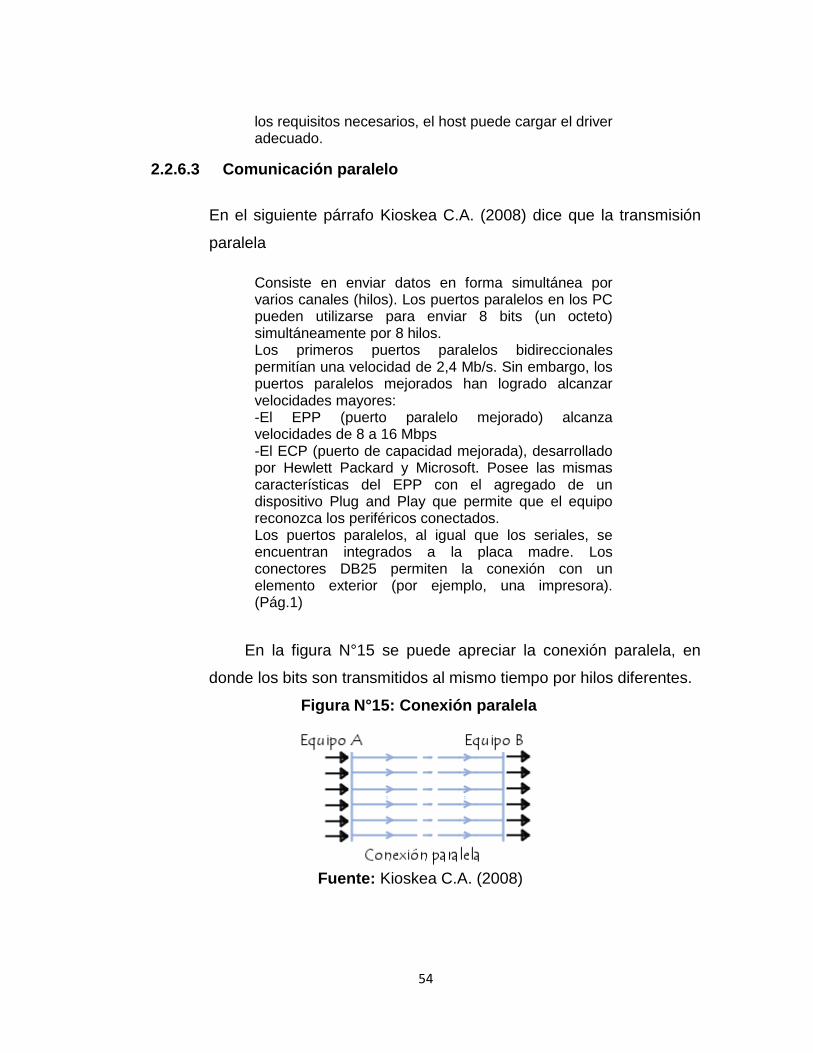
54
los requisitos necesarios, el host puede cargar el driver adecuado.
2.2.6.3 Comunicación paralelo
En el siguiente párrafo Kioskea C.A. (2008) dice que la transmisión
paralela
Consiste en enviar datos en forma simultánea por varios canales (hilos). Los puertos paralelos en los PC pueden utilizarse para enviar 8 bits (un octeto) simultáneamente por 8 hilos. Los primeros puertos paralelos bidireccionales permitían una velocidad de 2,4 Mb/s. Sin embargo, los puertos paralelos mejorados han logrado alcanzar velocidades mayores: -El EPP (puerto paralelo mejorado) alcanza velocidades de 8 a 16 Mbps -El ECP (puerto de capacidad mejorada), desarrollado por Hewlett Packard y Microsoft. Posee las mismas características del EPP con el agregado de un dispositivo Plug and Play que permite que el equipo reconozca los periféricos conectados. Los puertos paralelos, al igual que los seriales, se encuentran integrados a la placa madre. Los conectores DB25 permiten la conexión con un elemento exterior (por ejemplo, una impresora). (Pág.1)
En la figura N°15 se puede apreciar la conexión paralela, en
donde los bits son transmitidos al mismo tiempo por hilos diferentes.
Figura N°15: Conexión paralela
Fuente: Kioskea C.A. (2008)
55
2.3 DEFINICION DE TÉRMINOS
- Actuador: es un dispositivo inherentemente mecánico cuya función es
proporcionar fuerza para mover o “actuar” otro dispositivo mecánico. La
fuerza que provoca el actuador proviene de tres fuentes posibles: Presión
neumática, presión hidráulica, y fuerza motriz eléctrica (motor eléctrico o
solenoide). (Vildósola C., E. (Sin año)).
- Bit: unidad elemental de información que solamente puede tomar dos
valores distintos, para lo que generalmente se adoptan las notaciones 1 y 0.
(Diccionario el pequeño Larousse ilustrado (2002))
- Byte: son ocho bits continuos y constituye la unidad fundamental de datos.
- Circuito integrado: pastilla de silicio en la que se encuentran transistores,
diodos y resistencias formando una función electrónica compleja
miniaturizada. (Diccionario el pequeño Larousse ilustrado (2002))
- Devanado: acción de devanar. Hilo de cobre que forma parte del circuito de
ciertos aparatos o máquinas eléctricas. (Diccionario el pequeño Larousse
ilustrado (2002))
- Dieléctrico: Dícese de la sustancia aislante, capaz de mantener un campo
eléctrico en estado de equilibrio, sin que pase corriente eléctrica por él.
(Diccionario Enciclopédico Vox 1. (2009))
- Hardware: conjunto de órganos físicos de un sistema informático.
(Diccionario el pequeño Larousse ilustrado (2002))
- Software: Conjunto de programas, procesados y reglados, y eventualmente
documentación, relativos al funcionamiento de un conjunto de tratamiento de
información. (Diccionario el pequeño Larousse ilustrado (2002))

56
2.4 SISTEMA DE VARIABLES
Tabla N°1: Operacionalización del Sistema de Variables
Objetivos
Específicos Variable Dimensión Indicadores
Sub
indica
-dores
Fuente de
informa-
ción
Instrumento de
Recolección de
Datos
Precisar el tipo y
funcionamiento de los sistemas
de entrenamiento para estacionar
vehículos, existentes en el mercado, a los
efectos de identificar su
eficiencia en el estacionamiento automatizado
de vehículos
Sistemas actuales de estacionami
ento
Tipo de sistema
Automatizado
Semi-automatizado
Manual
Investigación de Campo.
Investigación documental.
Fichas técnicas
Cuestionario
Guion de observación.
Determinar los procesos, las
posiciones típicas de
estacionado e instrucciones operativas del
sistema de entrenamiento
con el propósito de establecer el
diseño de la estructura y
funcionamiento del prototipo.
Procesos Tipos de procesos
Posición inicial
Arranque
Direccionamiento de
posiciones
Estacionado del vehículo
Centímetros
Investigación documenta
Investigación de Campo.
Fichas técnicas
Cuestionario Posiciones típicas de
estacionado Criterios
Espacio entre vehículos
Ubicación de los vehículos
Instrucciones operativas del sistema
de entrenamient
o
Tipos de instrucciones
Señales auditivas
Señales visuales
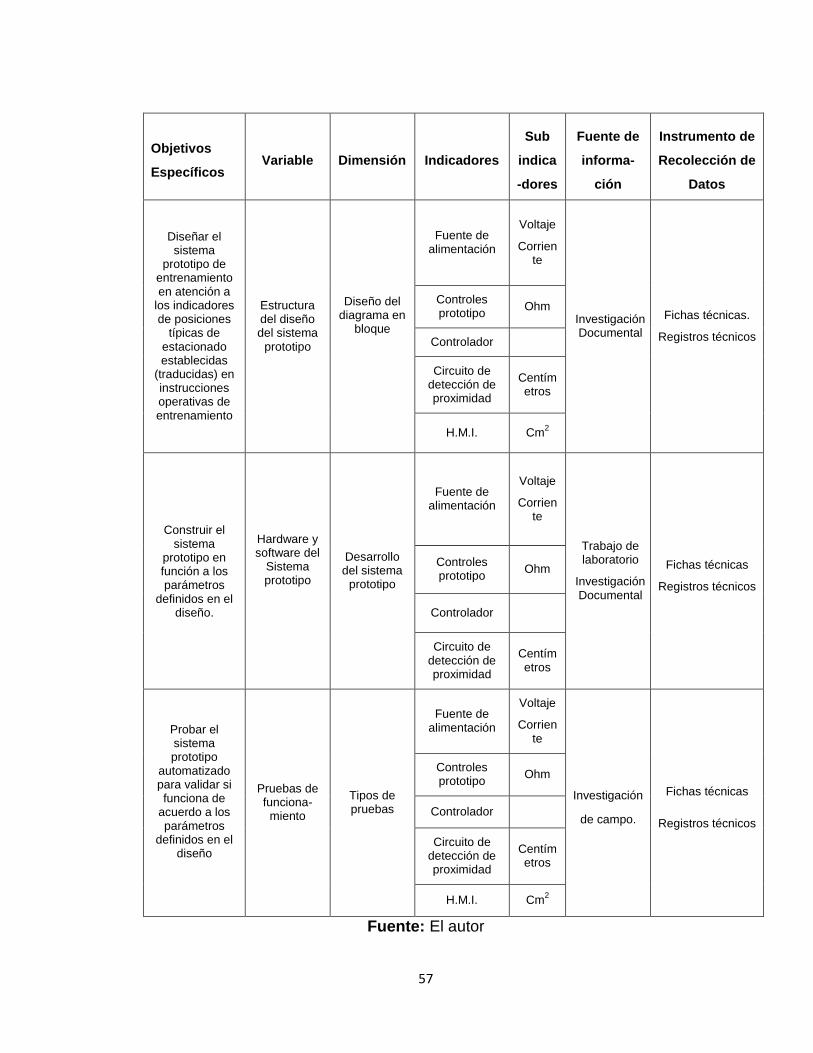
57
Objetivos
Específicos Variable Dimensión Indicadores
Sub
indica
-dores
Fuente de
informa-
ción
Instrumento de
Recolección de
Datos
Diseñar el sistema
prototipo de entrenamiento en atención a
los indicadores de posiciones
típicas de estacionado establecidas
(traducidas) en instrucciones operativas de entrenamiento
Estructura del diseño del sistema
prototipo
Diseño del diagrama en
bloque
Fuente de alimentación
Voltaje
Corriente
Investigación Documental
Fichas técnicas.
Registros técnicos
Controles prototipo
Ohm
Controlador
Circuito de detección de proximidad
Centímetros
H.M.I. Cm2
Construir el sistema
prototipo en función a los parámetros
definidos en el diseño.
Hardware y software del
Sistema prototipo
Desarrollo del sistema
prototipo
Fuente de alimentación
Voltaje
Corriente
Trabajo de laboratorio
Investigación Documental
Fichas técnicas
Registros técnicos
Controles prototipo
Ohm
Controlador
Circuito de detección de proximidad
Centímetros
Probar el sistema prototipo
automatizado para validar si funciona de
acuerdo a los parámetros
definidos en el diseño
Pruebas de funciona-
miento
Tipos de pruebas
Fuente de alimentación
Voltaje
Corriente
Investigación
de campo.
Fichas técnicas
Registros técnicos
Controles prototipo
Ohm
Controlador
Circuito de detección de proximidad
Centímetros
H.M.I. Cm2
Fuente: El autor
58
CAPÍTULO III
MARCO METODOLÓGICO
Balestrini, M. (2006), refiriéndose al marco metodológico establece:
El fin esencial del Marco Metodológico, es el de situar en el lenguaje de investigación, los métodos e instrumentos que se emplearán en la investigación planteada, desde la ubicación acerca del tipo de estudio y el diseño de investigación; su universo o población; su muestra, los instrumentos y técnicas de recolección de los datos; la medición; hasta la codificación, análisis y presentación de los datos. De esta manera, se proporcionará al lector una información detallada acerca de cómo se realizará la investigación. (p.126)
Comprendido esto se enmarcará el marco metodológico con los siguientes
aspectos:
3.1 TIPO DE INVESTIGACION
En cuanto al esquema o tipos de investigación Selltiz, C. (1976), refiere lo siguiente:
Un esquema de investigación es la preparación de las condiciones que posibilitan la recogida y análisis de los datos de tal forma que se aspire a combinar resultados relevantes en la finalidad investigadora con economía en los procedimientos. Se verá que los esquemas de investigación serán distintos según sean los objetivos de la misma. (Pág. 67)
Los objetivos de la investigación proporcionan las directrices en
cuanto al tipo de investigación, por lo tanto, mientras los objetivos cambien,
cambiará el tipo de investigación y el abordaje de la misma.
En este caso la modalidad de la investigación que se utilizará es la
denominada Proyectos Factibles, la autora Balestrini, M. (2006) dice acerca
de los proyectos factibles lo que sigue:
Están orientados a proporcionar respuestas o soluciones a problemas planteados en una determinada realidad: organizacional, social, económica, educativa, etc. En este sentido,
59
la delimitación de la propuesta final, pasa inicialmente por la realización de un diagnostico de la situación existente y la determinación de las necesidades de hecho estudiado, para formular el modelo operativo en función de las demandas de la realidad abordada.
Como consecuencia de lo anteriormente expuesto la modalidad de la
investigación es un proyecto factible, ya que se estudió el problema o la
necesidad de una realidad como lo es la falta de un sistema de
entrenamiento para usuarios en proceso de aprendizaje de conducción, esto
con el fin de proporcionar respuestas o soluciones a dichos problemas y
formular el modelo operativo en función de las demandas de la realidad
abordada.
La investigación se encuentra dentro de esta modalidad de
investigación por las siguientes causas:
I. Está orientada a proporcionar respuestas, y a ejecutar un
modelo de acción para ofrecer las soluciones a una
problemática real.
II. Los datos recolectados se recogen directamente de la realidad
en su ambiente natural, de manera cotidiana, natural,
observando, entrevistando o interrogando a las personas
involucradas en la problemática.
3.2 DISEÑO DE INVESTIGACIÓN
Alvira Martín. (1986) define el diseño de investigación como:
El plan global de investigación que integra de un modo coherente y adecuadamente correcto técnicas de recogida de datos a utilizar, análisis previstos y objetivos… el diseño de una investigación intenta dar de una manera clara y no ambigua respuestas a las preguntas planteadas en la misma. (p. 67)
60
Es importante señalar que el diseño de investigación debe definirse
con el propósito de que el mismo se adecue a los objetivos de la
investigación tanto generales como específicos, y al tipo de investigación.
Según Grajales, T. la investigación mixta se define como:
Aquella que participa de la naturaleza de la investigación documental y de la investigación de campo. (Pág. 2)
Debido a que en este proyecto se requiere tanto la investigación
documental como la investigación de campo para el cumplimiento de los
objetivos, el diseño de la investigación es mixto.
Arias, F. (1999) describe la investigación documental como:
Aquella que se basa en la obtención y análisis de datos provenientes de materiales impresos u otros tipos de documentos.
Los objetivos que se listan a continuación corresponden al tipo de
investigación documental.
Precisar el tipo y funcionamiento de los sistemas de entrenamiento
para estacionar vehículos, existentes en el mercado, a los efectos de
identificar su eficiencia en el estacionamiento automatizado de
vehículos.
Determinar los procesos, las posiciones típicas de estacionado e
instrucciones operativas del sistema de entrenamiento con el propósito
de establecer el diseño de la estructura y funcionamiento del prototipo.
Diseñar el sistema prototipo de entrenamiento en atención a los
indicadores de posiciones típicas de estacionado establecidas
(traducidas) en instrucciones operativas de entrenamiento.
La razón por la cual estos objetivos corresponden a investigación
documental es porque los instrumentos de recolección de datos a utilizar son

61
bibliografías especializadas y fichas técnicas, cumpliendo tal y como se
expresa en su definición.
Balestrini, M. (2006), describe que el diseño tipo campo:
Permite establecer una interacción entre los objetivos y la realidad de la situación de campo; observar y recolectar los datos directamente de la realidad, en su situación natural; profundizar en la comprensión de los hallazgos encontrados con la aplicación de los instrumentos; y proporcionarle al investigador una lectura de la realidad del objeto de estudio más rica en cuanto al conocimiento de la misma, para plantear hipótesis futuras en otros niveles de investigación.
Los objetivos que se listan a continuación corresponden al diseño tipo
campo:
Construir el sistema prototipo en función a los parámetros definidos en
el diseño.
Probar el sistema prototipo automatizado para validar si funciona de
acuerdo a los parámetros definidos en el diseño
La razón por la cual estos objetivos se sitúan en la clasificación de
diseño de campo no experimental es debido a que el tipo de investigación es
un proyecto factible por lo tanto, los datos y hechos son recogidos y
observados tal como se manifiestan en su ambiente natural, lo que implica
que no hay manipulación de variables a diferencia de los diseños
experimentales.
La información recopilada en la investigación de campo, se diseñó
para obtener los datos necesarios expuestos en los indicadores del cuadro
operacionalización de variables, dichos indicadores representan fases de la
metodología del desarrollo del prototipo, fases que se deben cumplir para el
buen desarrollo del proyecto de investigación.
62
3.3 POBLACIÓN Y MUESTRA
Antes de proceder a establecer la población y la muestra es de vital
importancia hacer una distinción entre los términos población y muestra.
3.3.1 Población
Gabaldon Mejia, N. (1969) expresó acerca de la población:
Estadísticamente hablando, por población se entiende un conjunto finito o infinito de personas, casos o elementos que presentan características comunes, como por ejemplo, una población puede estar constituida por los habitantes de Venezuela, por el total de vehículos de Caracas, por el número de nacimientos o defunciones de Maracay. (Pág. 7)
La población está determinada por las características comunes que
poseen, es decir precisar los atributos que los unifican y poseen todos los
miembros de la población.
La población considerada para esta investigación es una población
finita constituida por las autoescuelas de la gran de caracas. Este criterio de
selección está basado en el artículo del periódico Últimas Noticias publicado
el 27 de julio del 2008 el cual expresa textualmente:
El presidente del Instituto Nacional de Tránsito y Transporte Terrestre (INTTT) Franklin Pérez Colina, afirma que en Caracas circula, en promedio, un millón 800 mil vehículos diarios, y si además se suma la cantidad de autos que sólo pasan por la capital, la cifra asciende a dos millones 200 mil carros al día. El parque automotor de Venezuela, según el INTTT, es de cinco millones 350 mil vehículos, por lo tanto, casi la mitad de todos los carros del país se mueven todos los días por la Gran Caracas. (Pág. 1)
En razón a lo anterior se puede concluir que, las autoescuelas de la
gran Caracas, son los únicos institutos autorizados en el entrenamiento de
individuos para la conducción y estacionado de vehículos, por tanto, son la
población más representativa, la cual pudiera brindarnos una información
aceptable de acuerdo a los parámetros de la investigación.
63
Según las Páginas amarillas (2010) el número total de autoescuelas
existentes en la ciudad de Caracas es de treinta (30), las cuales conforman
la población de la investigación.
3.3.2 Muestra
Los autores Hernández Sampieri, Fernandez Collado y Baptista Lucio
definieron muestra como:
Un subgrupo de la población. Digamos que es un subconjunto de elementos que pertenecen a ese conjunto definido en sus características al que llamamos población. (p. 212)
En referencia a lo anteriormente expresado la muestra de la población es de
tipo representativa, lo cual quiere decir que permitirá hacer inferencias o
pronósticos del resto de la población, ya que sus características son similares
a las del conjunto, de este conjunto se hará un muestreo aleatorio utilizando
el azar simple para la recolección de la muestra.
Para determinar el tamaño de la muestra, se utilizó la siguiente fórmula:
Fórmula N°1: Tamaño de la muestra
n = (N. Z². p. q) / ((N-1). e + Z². p. q)
Fuente: Arias, F. (1999)
Donde
N = tamaño de la población Y = valor de la variable (por lo general es = 1) Z= Varianza tipificada (típicas 95%, Z = 2; 99%, Z = 3) S= Desviación Standard (típica 15 %) e = error muestral (típico 5 % =0,05) p = proporción de elementos que presentan la característica. (Típico 50%=0,5) q = proporción de elementos que no presentan la característica. (Típico 50%= 0,5) n = Tamaño de la muestra
64
En esta investigación los datos de la muestra son los siguientes:
N= 30 autoescuelas Z = 1,96 ~ 2 (95% confiabilidad) e = 5 % = 0,05 p = 50 % = 0,5 q = 50% = 0,5 n = ?
Entonces
n = (N. Z². p. q) / ((N-1). e + Z². p. q)
30 x (1,96)² x 0,5 x 0,5 (30-1 )x(0,05) + (1,96)²x (0,5)x(0,5)
n = 11,95 ≈ 12
3.4 TECNICAS E INSTRUMENTOS DE RECOLECCIÓN DE DATOS
Balestrini, M. (2006), menciona lo importante que es la definición de los
métodos e instrumentos de recolección de datos en el siguiente párrafo.
Otro importante aspecto a desarrollar en el Marco Metodológico del proyecto de investigación, toda vez que se ha delimitado, el tipo de investigación, su diseño, la población o universo de estudio así como su muestra; está relacionado con la definición de los métodos, instrumentos y técnicas de recolección de la información que se incorporan a lo largo de todo el proceso de investigación, en función del problema y de las interrogantes planteadas; así como, de los objetivos que han sido definidos. Por cierto, conjunto de técnicas que permitirán cumplir con los requisitos establecidos en el paradigma científico, vinculados al carácter específicos de las diferentes etapas de este proceso investigativo y especialmente referidos al momento teórico y al momento metodológico de la investigación. …Estás técnicas son diversas según el objeto a que se apliquen y no se excluyen entre sí. Todavía es preciso, por una parte, saber elegir la más adecuada y, por otra utilizarla convenientemente… (p.145)
65
Como expresa el autor mencionado en esta etapa de investigación es
necesario someter la obtención de los datos, a un proceso que permita
recontarlos y resumirlos. Esto permitirá realizar el análisis y las conclusiones.
La recolección de los datos técnicos que pertenecen al diseño de
investigación tipo campo serán recolectados a través de los instrumentos
correspondientes según sea la variable a medir, en los casos en los que se
requiera medir voltajes, corrientes, resistencias, frecuencias etc. Se utilizarán
los dispositivos comúnmente usados como multímetro, osciloscopio y otros.
Como instrumentos de recolección de datos en la población y muestra
se seleccionó la encuesta y la observación como los más adecuados, estos
permiten obtener toda la información requerida en los objetivos específicos y
en el cuadro de operacionalización de variables.
La encuesta
El autor Mendez,C.(1990) refiere acerca de la encuesta lo que sigue:
La encuesta se hace a través de formularios, los cuales tienen aplicación en aquellos problemas que se pueden investigar por métodos de observación, análisis de fuentes documentales y demás sistemas de conocimiento. La encuesta permite el conocimiento de las motivaciones, actitudes, opiniones de los individuos con relación a su objeto de investigación
La encuesta tiene el peligro de traer consigo la subjetividad y, por tanto, presunción de hechos y situaciones por quien responda. (Pág. 106)
A través de la encuesta se recogerá la información necesaria de las
personas expertas en el área de entrenamiento de conductores.
La encuesta del presente proyecto de investigación fue elaborada
prestando atención a los indicadores derivados de los objetivos específicos
los cuales se pueden encontrar en el cuadro de operacionalizacion de
variable.
66
Validez
Para la validación del instrumento de recolección de datos se empleo
la técnica de juicio de experto la cual según el autor Valbuena, P. (1982)
consiste en:
Someter a una evaluación por parte de un conjunto calificado de personas (expertos) una serie de aspectos, elementos… a los fines de obtener su opinión acerca de la validez, relevancia, factibilidad, coherencia, tipo de deficiencia. (Pág. 10)
Por lo cual, para la validación del instrumento de recolección de datos
utilizado en el presente proyecto se elaboro una certificación de validación de
instrumento de recolección de datos (anexo N°2), la cual fue entregada a un
panel de tres (3) expertos metodológicos los cuales certificaron que el
instrumento alcanzo la validez de construcción y lógica necesaria para
obtener resultados confiables. En este proceso se evaluaron los aspectos de
redacción, coherencia y efectividad en la recolección de los datos requeridos.
Luego de la validación del instrumento de recolección de datos se concreto el
modelo final de encuesta apreciado en el anexo N°3.
La observación
El autor mencionado anteriormente expreso que la observación:
Es una técnica antiquísima, cuyos primeros aportes sería imposible rastrear. A través de sus sentidos el hombre capta la realidad que lo rodea, que luego organiza intelectualmente. La observación puede definirse como el uso sistemático de nuestros sentidos en la búsqueda de los datos que necesitamos para resolver un problema de investigación. (Pág. 105)
Existen dos tipos de observación la participativa en la cual el
investigador forma parte activa del conjunto o grupo observado, tomando los
comportamientos del mismo, y la no participativa o simple en la cual el
investigador no pertenece al grupo limitándose solo a obtener la información.
67
Para esta investigación la observación será no participativa, ya que el
objeto de estudio no son grupos y la observación tiene un carácter público.
3.5 PROCESAMIENTO Y ANALISIS DE LA INFORMACIÓN
Balestrini, M. (2006), expresa que:
En el Marco Metodológico del Proyecto de Investigación, también se deberá plantear como otro aspecto constitutivo del mismo, todo lo referido al análisis e interpretación de los resultados. Al culminar la fase de recolección de la información, los datos, han de ser sometidos a un proceso de elaboración técnica, que permite recontarlos y resumirlos; antes de introducir el análisis diferenciado a partir de procedimientos estadísticos; y posibilitar la interpretación y el logro de conclusiones a través de los resultados obtenidos.
Esta etapa, de carácter técnico, pero al mismo tiempo, de mucha reflexión, involucra, la introducción de cierto tipo de operaciones ordenadas, estrechamente relacionada entre ellas, que facilitaran realizar interpretaciones significativas de los datos que se recogerán, en función de las bases teóricas que orientaran al sentido del estudio y del problema investigado.(p.169)
El proceso de codificación comienza con la transformación de los
datos en números lo cual permite categorizarlos para luego ser tabulados.
En esta investigación se codificarán los datos recogidos, técnicos o de
campo, y los teóricos provenientes de la encuesta y observación, ambos
serán tabulados para luego ser graficados, para así poder realizar
comparaciones sometiéndolos a un proceso de análisis, que permita
interpretar y lograr conclusiones a través de los resultados obtenidos.
El análisis e interpretación de los resultados provenientes de los
instrumentos de recolección creados para satisfacer los objetivos de la
investigación y el cuadro de operacionalización de variables, serán
expuestos a continuación.
68
3.6 ANÁLISIS Y PRESENTACION DE RESULTADOS.
Los resultados de este estudio se presentan desde el punto de vista
del paradigma cuantitativo y cualitativo específicamente del análisis de
contenido de la información que aportaron los integrantes de la población en
estudio seleccionada para desarrollar los indicadores establecidos en el
cuadro de operacionalizacion de variables.
Estos resultados, desde el punto de vista metodológico y técnico, son
de gran importancia; por cuanto permitieron definir los parámetros del diseño
del sistema prototipo de entrenamiento desarrollado en esta investigación. A
continuación se describen los resultados atendiendo a las preguntas
formuladas por cada indicador definido en el cuadro de variables:
Pregunta 1: Señale el tipo de sistema que implementa la autoescuela,
en la cual usted trabaja, para capacitar a los clientes en el estacionado de
vehículos. Seleccione de las alternativas que a continuación se presentan, la
respuesta que refleje la realidad donde usted presta servicio como instructor.
Manual ____ Semiautomático ____ Automático ____
Los datos que aportaron, las unidades de estudio, en el ítem del
instrumento que se les aplicó; se refleja en cifras absolutas y cifras relativas
en el siguiente cuadro.

69
Cuadro 1: Tipo de sistema de entrenamiento
ALTERNATIVAS ƒi PORCENTAJE
Manual 11 92%
Semiautomático 0 0%
Automático 1 8%
Total 12 100%
Fuente: El autor
Las cifras relativas reflejadas en el cuadro 1 se representan en un
gráfico de sectores; a los efectos de visualizar el comportamiento del
indicador.
Figura N°16: Tipo de sistema de entrenamiento
Como se puede apreciar en la figura anterior un 92% de los
instructores de manejo, encuestados, respondieron que el tipo de sistema o
la forma en cómo la autoescuela entrena a los clientes en la práctica del
estacionado, es de tipo manual, solo el 8% respondió que el sistema de
entrenamiento aplicado en la autoescuela es automático.
Manual
Semiautomático
Automático
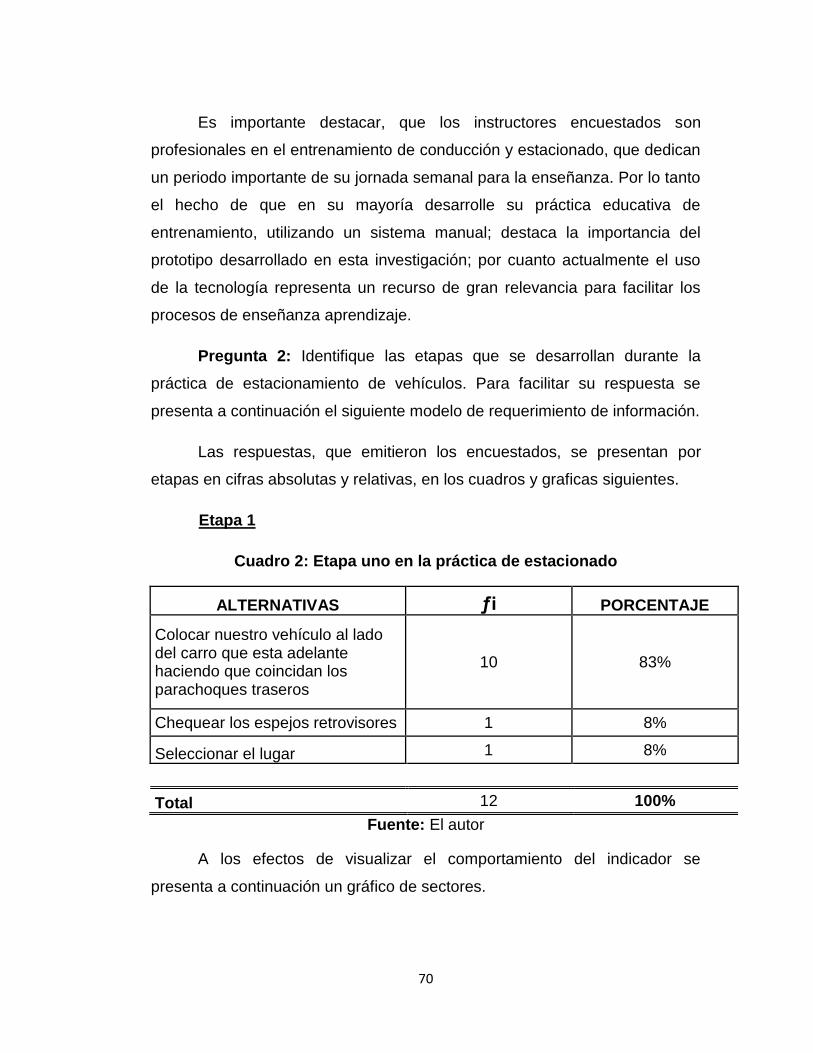
70
Es importante destacar, que los instructores encuestados son
profesionales en el entrenamiento de conducción y estacionado, que dedican
un periodo importante de su jornada semanal para la enseñanza. Por lo tanto
el hecho de que en su mayoría desarrolle su práctica educativa de
entrenamiento, utilizando un sistema manual; destaca la importancia del
prototipo desarrollado en esta investigación; por cuanto actualmente el uso
de la tecnología representa un recurso de gran relevancia para facilitar los
procesos de enseñanza aprendizaje.
Pregunta 2: Identifique las etapas que se desarrollan durante la
práctica de estacionamiento de vehículos. Para facilitar su respuesta se
presenta a continuación el siguiente modelo de requerimiento de información.
Las respuestas, que emitieron los encuestados, se presentan por
etapas en cifras absolutas y relativas, en los cuadros y graficas siguientes.
Etapa 1
Cuadro 2: Etapa uno en la práctica de estacionado
ALTERNATIVAS ƒi PORCENTAJE
Colocar nuestro vehículo al lado del carro que esta adelante haciendo que coincidan los parachoques traseros
10 83%
Chequear los espejos retrovisores 1 8%
Seleccionar el lugar 1 8%
Total 12 100%
Fuente: El autor
A los efectos de visualizar el comportamiento del indicador se
presenta a continuación un gráfico de sectores.
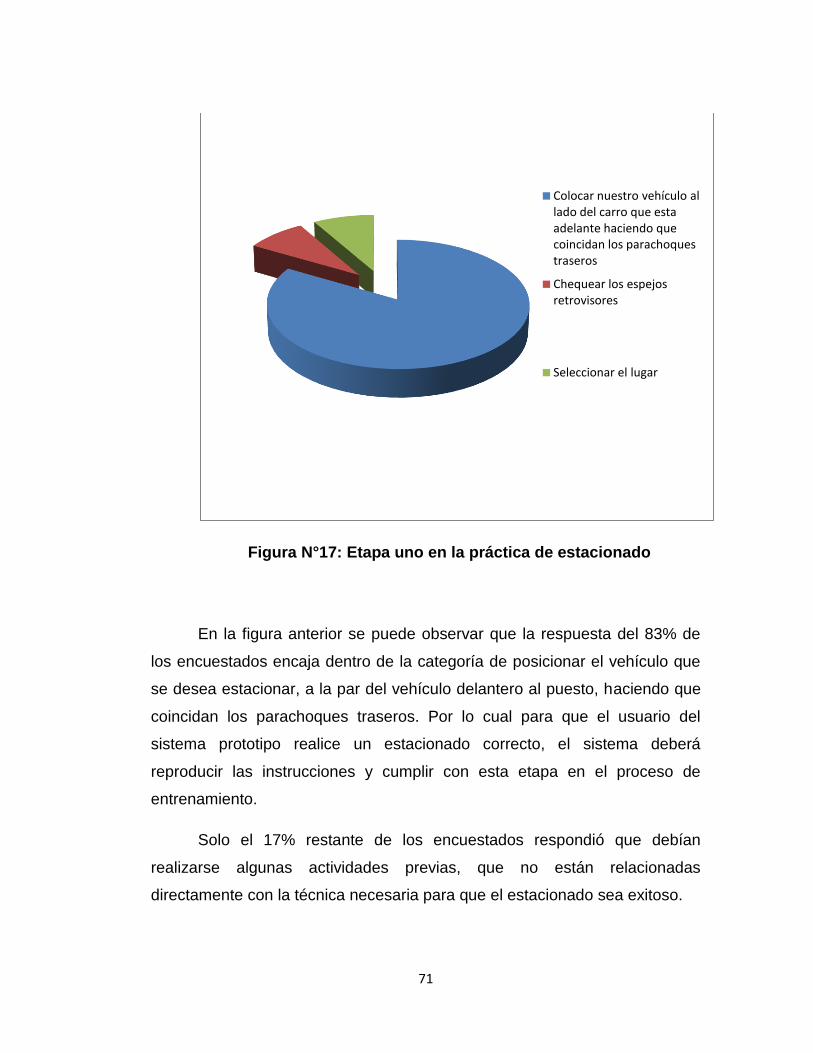
71
Figura N°17: Etapa uno en la práctica de estacionado
En la figura anterior se puede observar que la respuesta del 83% de
los encuestados encaja dentro de la categoría de posicionar el vehículo que
se desea estacionar, a la par del vehículo delantero al puesto, haciendo que
coincidan los parachoques traseros. Por lo cual para que el usuario del
sistema prototipo realice un estacionado correcto, el sistema deberá
reproducir las instrucciones y cumplir con esta etapa en el proceso de
entrenamiento.
Solo el 17% restante de los encuestados respondió que debían
realizarse algunas actividades previas, que no están relacionadas
directamente con la técnica necesaria para que el estacionado sea exitoso.
Colocar nuestro vehículo al lado del carro que esta adelante haciendo que coincidan los parachoques traseros
Chequear los espejos retrovisores
Seleccionar el lugar
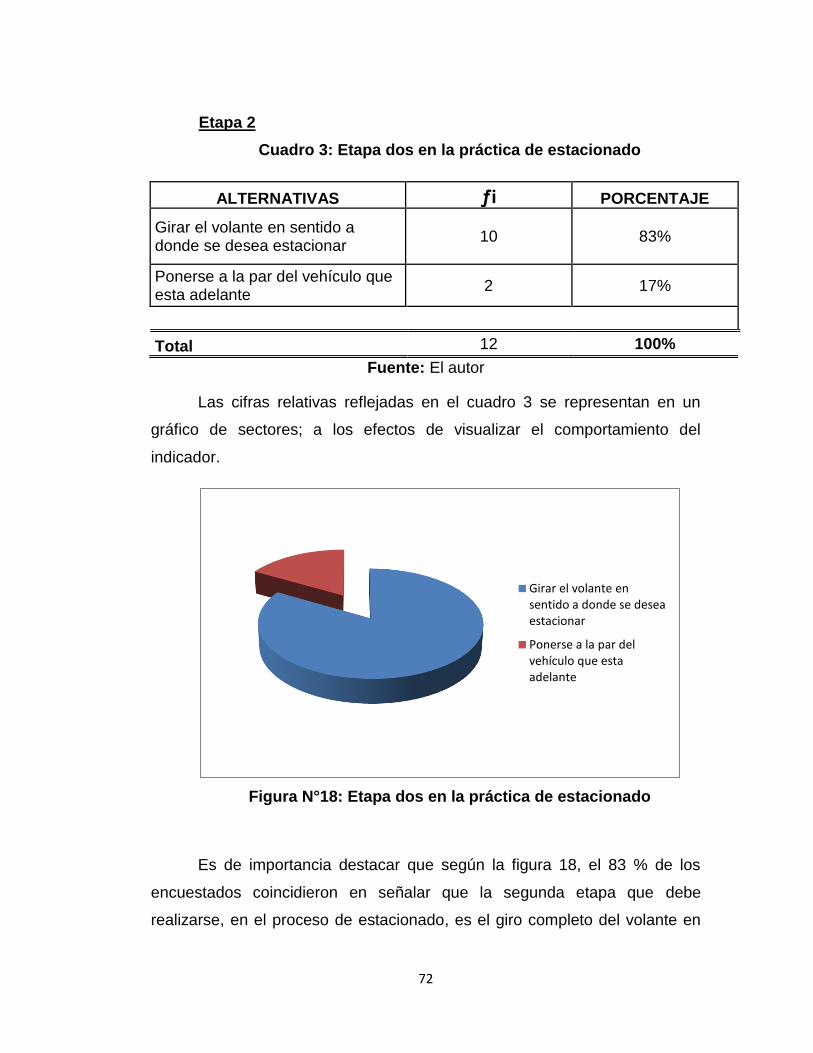
72
Etapa 2
Cuadro 3: Etapa dos en la práctica de estacionado
ALTERNATIVAS ƒi PORCENTAJE
Girar el volante en sentido a donde se desea estacionar
10 83%
Ponerse a la par del vehículo que esta adelante
2 17%
Total 12 100%
Fuente: El autor
Las cifras relativas reflejadas en el cuadro 3 se representan en un
gráfico de sectores; a los efectos de visualizar el comportamiento del
indicador.
Figura N°18: Etapa dos en la práctica de estacionado
Es de importancia destacar que según la figura 18, el 83 % de los
encuestados coincidieron en señalar que la segunda etapa que debe
realizarse, en el proceso de estacionado, es el giro completo del volante en
Girar el volante en sentido a donde se desea estacionar
Ponerse a la par del vehículo que esta adelante
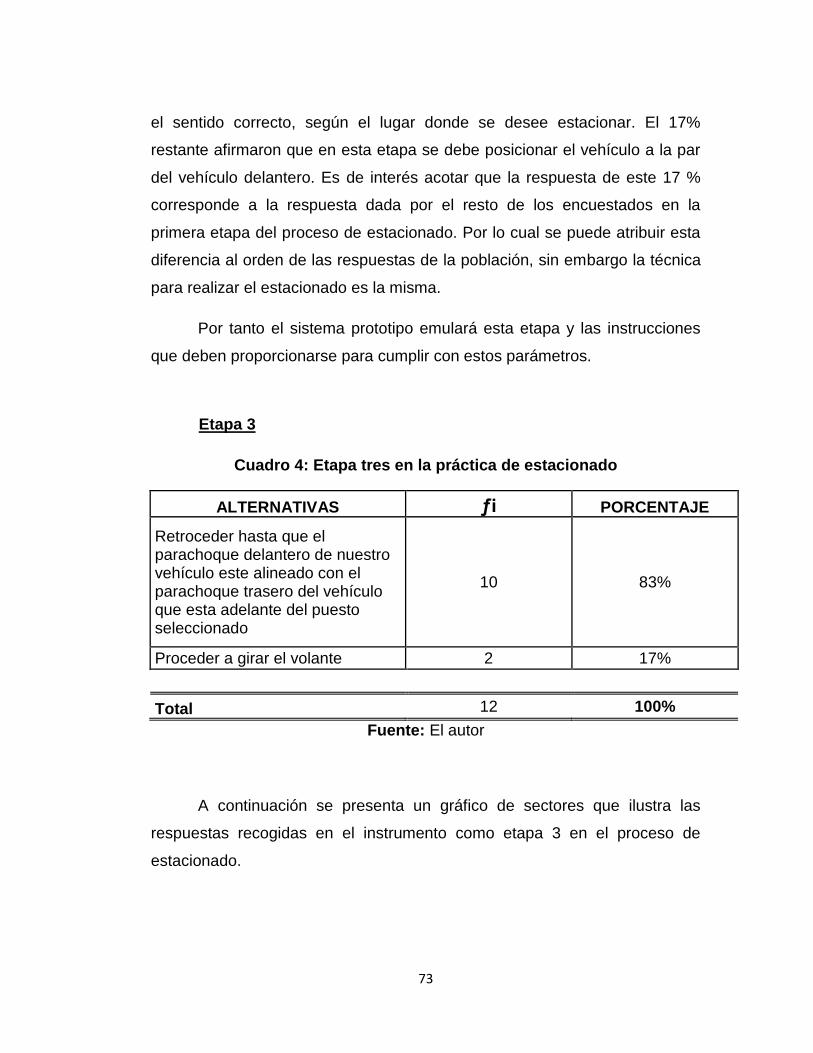
73
el sentido correcto, según el lugar donde se desee estacionar. El 17%
restante afirmaron que en esta etapa se debe posicionar el vehículo a la par
del vehículo delantero. Es de interés acotar que la respuesta de este 17 %
corresponde a la respuesta dada por el resto de los encuestados en la
primera etapa del proceso de estacionado. Por lo cual se puede atribuir esta
diferencia al orden de las respuestas de la población, sin embargo la técnica
para realizar el estacionado es la misma.
Por tanto el sistema prototipo emulará esta etapa y las instrucciones
que deben proporcionarse para cumplir con estos parámetros.
Etapa 3
Cuadro 4: Etapa tres en la práctica de estacionado
ALTERNATIVAS ƒi PORCENTAJE
Retroceder hasta que el parachoque delantero de nuestro vehículo este alineado con el parachoque trasero del vehículo que esta adelante del puesto seleccionado
10 83%
Proceder a girar el volante 2 17%
Total 12 100%
Fuente: El autor
A continuación se presenta un gráfico de sectores que ilustra las
respuestas recogidas en el instrumento como etapa 3 en el proceso de
estacionado.

74
Figura N°19: Etapa tres en la práctica de estacionado
Podemos observar que en la figura N°19 el 83% de los encuestados
respondieron que la etapa tres corresponde al proceso en el cual el aprendiz
retrocede el vehículo hasta el punto en el que, más o menos, el parachoque
delantero del vehículo a estacionar, se encuentra alineado con el parachoque
trasero del vehículo delantero al espacio en el cual se desea entrar. Por tanto
en el momento en el que el prototipo a escala se encuentre en estas
condiciones deberá brindar la orientación correspondiente a esta etapa para
realizar la maniobra correcta de estacionado.
Etapa 4
Cuadro 5: Etapa cuatro en la práctica de estacionado
ALTERNATIVAS ƒi PORCENTAJE
Girar el volante en sentido contrario y seguir retrocediendo
10 83%
Ejecutar la maniobra sin olvidar los retrovisores
2 17%
Total 12 100%
Fuente: El autor
Retroceder hasta que el parachoque delantero de nuestro vehículo este alineado con el parachoque trasero del vehiculo que esta adelante del puesto seleccionado
Proceder a girar el volante
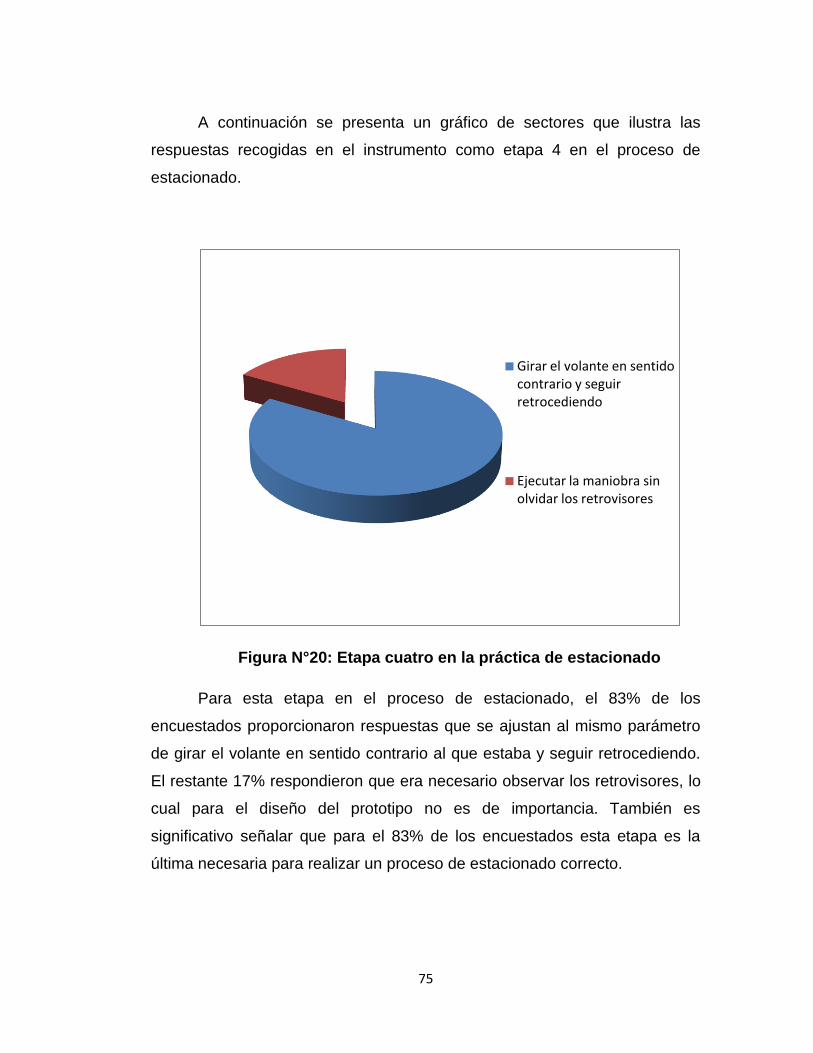
75
A continuación se presenta un gráfico de sectores que ilustra las
respuestas recogidas en el instrumento como etapa 4 en el proceso de
estacionado.
Figura N°20: Etapa cuatro en la práctica de estacionado
Para esta etapa en el proceso de estacionado, el 83% de los
encuestados proporcionaron respuestas que se ajustan al mismo parámetro
de girar el volante en sentido contrario al que estaba y seguir retrocediendo.
El restante 17% respondieron que era necesario observar los retrovisores, lo
cual para el diseño del prototipo no es de importancia. También es
significativo señalar que para el 83% de los encuestados esta etapa es la
última necesaria para realizar un proceso de estacionado correcto.
Girar el volante en sentido contrario y seguir retrocediendo
Ejecutar la maniobra sin olvidar los retrovisores

76
Etapa 5
Cuadro 6: Etapa cinco en la práctica de estacionado
ALTERNATIVAS ƒi PORCENTAJE
Terminar de posicionar el vehículo enderezando el volante.
1 8%
Evitar golpear a los otros vehículos cercanos a la maniobra
1 8%
Total 2 16%
Fuente: El autor
Figura N°21: Etapa cinco en la práctica de estacionado
En esta etapa solo el 16% de los encuestados consideraron necesaria
otra indicación, las cuales como se puede apreciar en el grafico anterior
están divididas en 8% cada una.
Terminar de posicionar el vehículo enderezando el volante.
Evitar golpear a los otros vehículos cercanos a la maniobra

77
Pregunta 3: Qué criterios según su experiencia profesional en el
entrenamiento de clientes en el manejo y correcto estacionado de vehículos,
son requeridos para el desarrollo eficiente de esta práctica. Para facilitar su
respuesta se presenta a continuación el siguiente modelo de requerimiento
de información.
Cabe destacar que los integrantes de la muestra encuestada, aportó la
siguiente información, en los siguientes criterios definidos por el investigador:
Criterio 1: Espacio ideal que se debe observar para estacionar un
vehículo sin riesgo de un siniestro por colisión con un objeto físico fijo en la
infraestructura donde se realiza la práctica. Seleccione la(s) opciones que a
su juicio son adecuadas para lograr un estacionado correcto.
Entre 4mt a 5mt _______ Entre 6mt a 7mt _______
Entre 5mt a 6mt _______ Entre 7mt a 8mt _______
La información que registraron los informantes claves encuestados, se
clasificó y representó en el siguiente cuadro:
Cuadro 7: Espacio ideal entre vehículos
ALTERNATIVAS ƒi PORCENTAJE
Entre 4mt a 5 mt 3 25%
Entre 5mt a 6mt 8 67%
Entre 6mt a 7mt 1 8%
Entre 7mt a 8mt 0 0%
Total 12 100%
Fuente: El autor
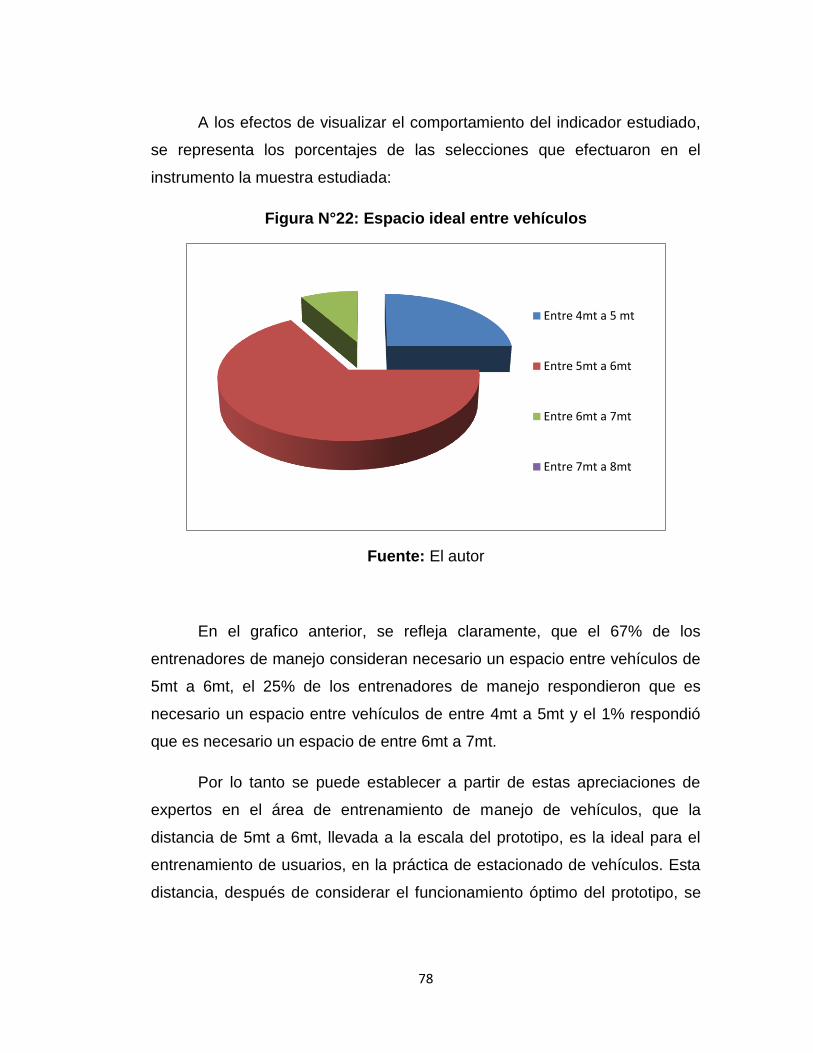
78
A los efectos de visualizar el comportamiento del indicador estudiado,
se representa los porcentajes de las selecciones que efectuaron en el
instrumento la muestra estudiada:
Figura N°22: Espacio ideal entre vehículos
Fuente: El autor
En el grafico anterior, se refleja claramente, que el 67% de los
entrenadores de manejo consideran necesario un espacio entre vehículos de
5mt a 6mt, el 25% de los entrenadores de manejo respondieron que es
necesario un espacio entre vehículos de entre 4mt a 5mt y el 1% respondió
que es necesario un espacio de entre 6mt a 7mt.
Por lo tanto se puede establecer a partir de estas apreciaciones de
expertos en el área de entrenamiento de manejo de vehículos, que la
distancia de 5mt a 6mt, llevada a la escala del prototipo, es la ideal para el
entrenamiento de usuarios, en la práctica de estacionado de vehículos. Esta
distancia, después de considerar el funcionamiento óptimo del prototipo, se
Entre 4mt a 5 mt
Entre 5mt a 6mt
Entre 6mt a 7mt
Entre 7mt a 8mt
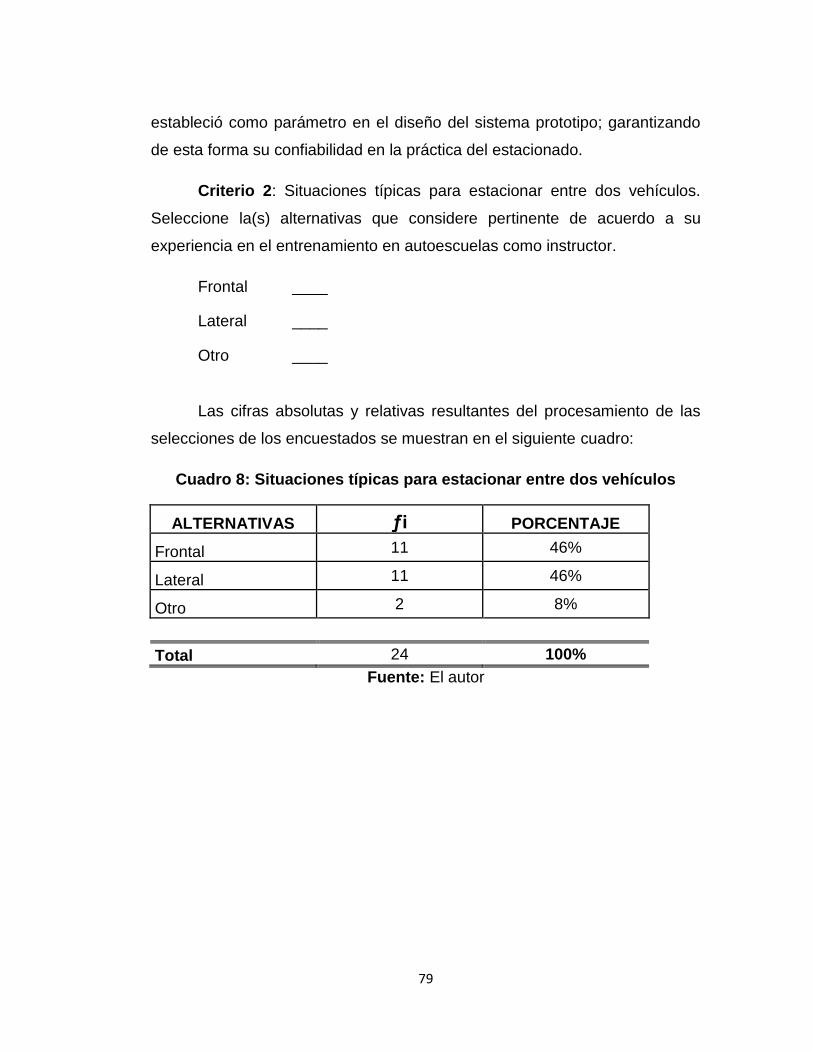
79
estableció como parámetro en el diseño del sistema prototipo; garantizando
de esta forma su confiabilidad en la práctica del estacionado.
Criterio 2: Situaciones típicas para estacionar entre dos vehículos.
Seleccione la(s) alternativas que considere pertinente de acuerdo a su
experiencia en el entrenamiento en autoescuelas como instructor.
Frontal ____
Lateral ____
Otro ____
Las cifras absolutas y relativas resultantes del procesamiento de las
selecciones de los encuestados se muestran en el siguiente cuadro:
Cuadro 8: Situaciones típicas para estacionar entre dos vehículos
ALTERNATIVAS ƒi PORCENTAJE
Frontal 11 46%
Lateral 11 46%
Otro 2 8%
Total 24 100%
Fuente: El autor
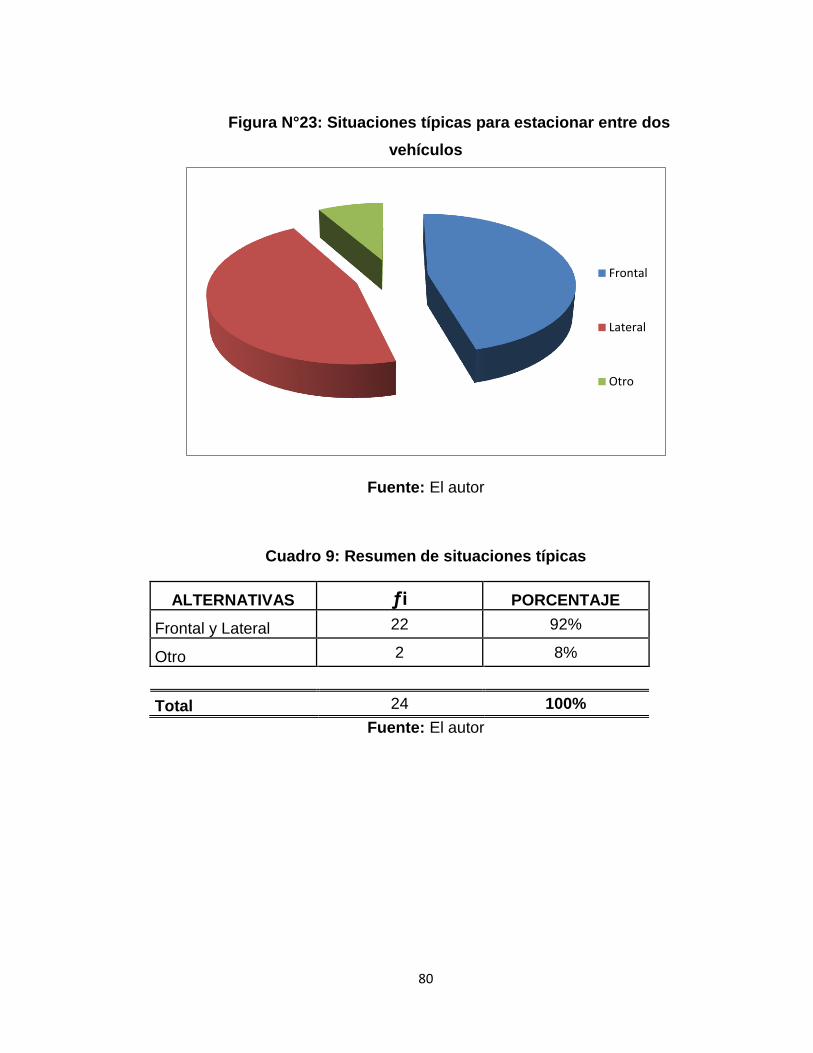
80
Figura N°23: Situaciones típicas para estacionar entre dos
vehículos
Fuente: El autor
Cuadro 9: Resumen de situaciones típicas
ALTERNATIVAS ƒi PORCENTAJE
Frontal y Lateral 22 92%
Otro 2 8%
Total 24 100%
Fuente: El autor
Frontal
Lateral
Otro
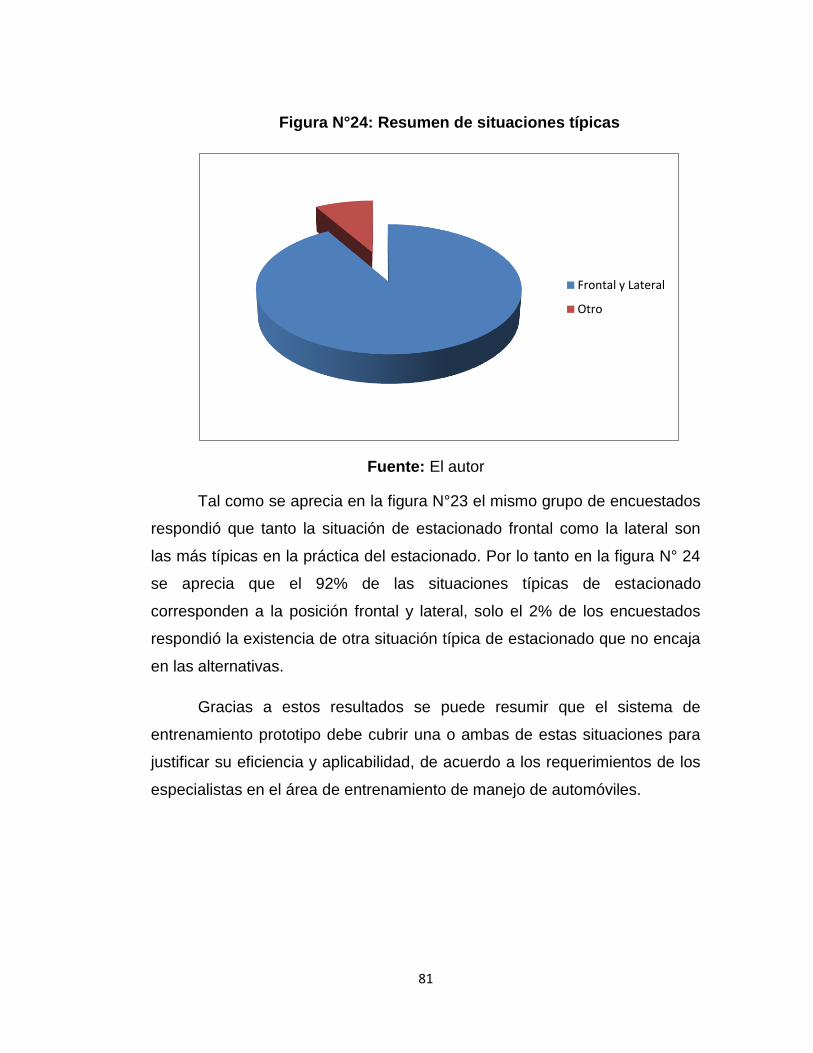
81
Figura N°24: Resumen de situaciones típicas
Fuente: El autor
Tal como se aprecia en la figura N°23 el mismo grupo de encuestados
respondió que tanto la situación de estacionado frontal como la lateral son
las más típicas en la práctica del estacionado. Por lo tanto en la figura N° 24
se aprecia que el 92% de las situaciones típicas de estacionado
corresponden a la posición frontal y lateral, solo el 2% de los encuestados
respondió la existencia de otra situación típica de estacionado que no encaja
en las alternativas.
Gracias a estos resultados se puede resumir que el sistema de
entrenamiento prototipo debe cubrir una o ambas de estas situaciones para
justificar su eficiencia y aplicabilidad, de acuerdo a los requerimientos de los
especialistas en el área de entrenamiento de manejo de automóviles.
Frontal y Lateral
Otro
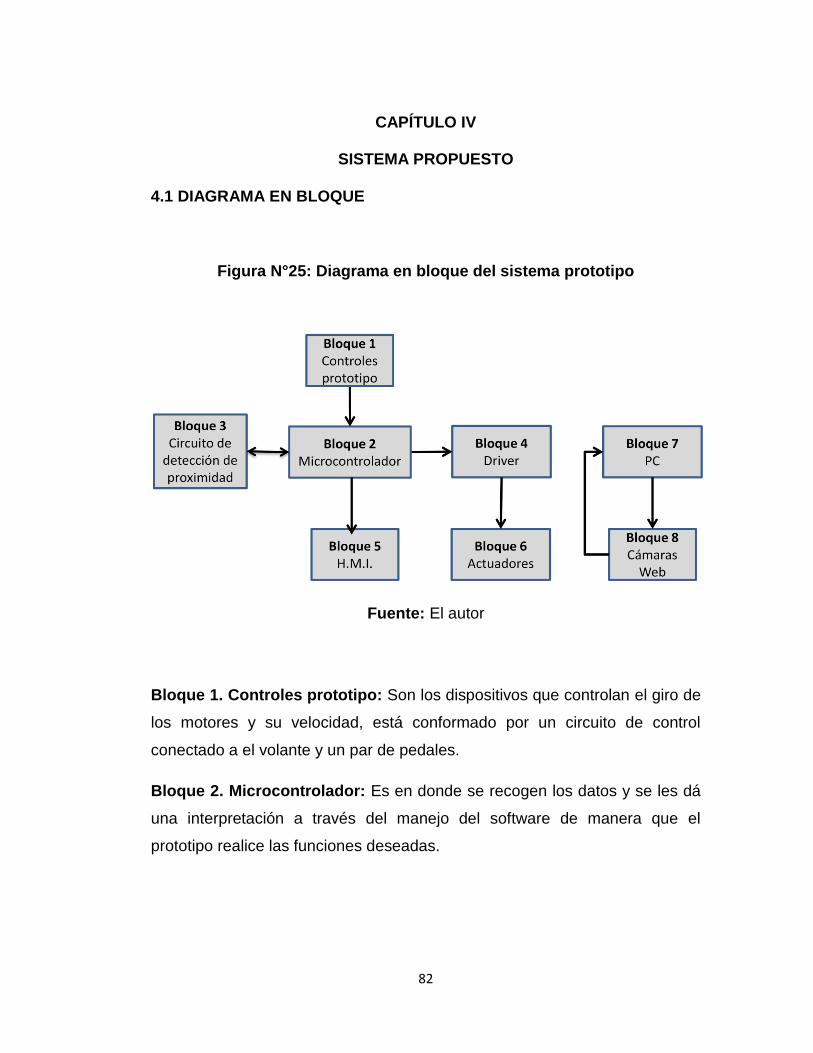
82
CAPÍTULO IV
SISTEMA PROPUESTO
4.1 DIAGRAMA EN BLOQUE
Figura N°25: Diagrama en bloque del sistema prototipo
Fuente: El autor
Bloque 1. Controles prototipo: Son los dispositivos que controlan el giro de
los motores y su velocidad, está conformado por un circuito de control
conectado a el volante y un par de pedales.
Bloque 2. Microcontrolador: Es en donde se recogen los datos y se les dá
una interpretación a través del manejo del software de manera que el
prototipo realice las funciones deseadas.
83
Bloque 3. Circuito de detección de proximidad: Esta conformado por los
sensores de ultrasonido que proporcionarán una variación de ancho de pulso
proporcional a la distancia a la cual se encuentre de un obstáculo
Bloque 4. Driver: Son los componentes, con los cuales se controlan los
actuadores o motores del prototipo. Ejemplo de esto son el circuito integrado
del servomotor y el puente H o driver L293D
Bloque 5. H.M.I.: human machine interface (H.M.I). Su traducción Interfaz
humano máquina se corresponde a todos los aparatos con los cuales el
humano puede alterar un sistema. También son los dispositivos usados para
mostrar los resultados de un proceso de información.
Bloque 6. Actuadores: No son más que los motores que dan movimiento al
auto escala.
Bloque 7. PC: conformado por el CPU y monitor. En esta etapa es donde se
le dan las vistas de los retrovisores al usuario.
Bloque 8. Cámaras Web: estas son tres (3) cámaras que lleva el prototipo
las cuales proporcionan de vistas laterales y trasera al conductor del
prototipo.

84
4.2 DIAGRAMA ESTRUCTURAL DEL SISTEMA
Figura N°26: Diagrama estructural
Fuente: El autor
Como se puede apreciar en la figura N°26 el sistema de
entrenamiento cuenta con un prototipo de automóvil el cual posee los
circuitos de control de los motores, los sensores ultrasónicos de proximidad y
las cámaras, dispositivos que son controlados por los microcontroladores,
exceptuando las cámaras, las cuales son operadas por el PC. Los controles
y HMI están conformados por componentes electrónicos acoplados a piezas
de utilería, tales como el volante y los pedales, los cuales se elaboraron para
darle al usuario una apariencia realista. También en este tablero se
encuentran las señales visuales que se proporcionaran al usuario para
brindarle las instrucciones necesarias para un estacionado correcto.
4.3 MECANISMOS Y FUNCIONAMIENTO DEL SISTEMA.
La descripción de los mecanismos y su funcionamiento del sistema de
entrenamiento se podrían describir en dos etapas, la primera es la

85
correspondiente al automóvil prototipo y la segunda es la correspondiente al
tablero de control.
4.3.1 Mecanismos del automóvil:
La dirección del auto prototipo es controlada a través de un
servomotor, la razón de esto es que los servomotores permiten controlar los
grados de giro de las ruedas permitiendo tener un mejor control. El
servomotor del prototipo se encuentra acoplado al tren delantero el cual a su
vez se acopla a las ruedas, tal como se puede apreciar en la figura N° 27.
Figura N°27: Mecanismo de la dirección
Fuente: El autor
En la siguiente figura se pueden apreciar las piezas necesarias para
lograr el giro de las ruedas delanteras.

86
Figura N°28: Piezas de la dirección
Fuente: El autor
Los mecanismos del tren trasero vinieron incorporados al chasis del
auto prototipo y consta del motor DC acoplado a una caja reductora que en
su interior tiene unos engranajes que aumentan el torque y lo transmiten a
las ruedas traseras. Ver figura N°29.
Figura N°29: Mecanismo del tren trasero
Fuente: El autor
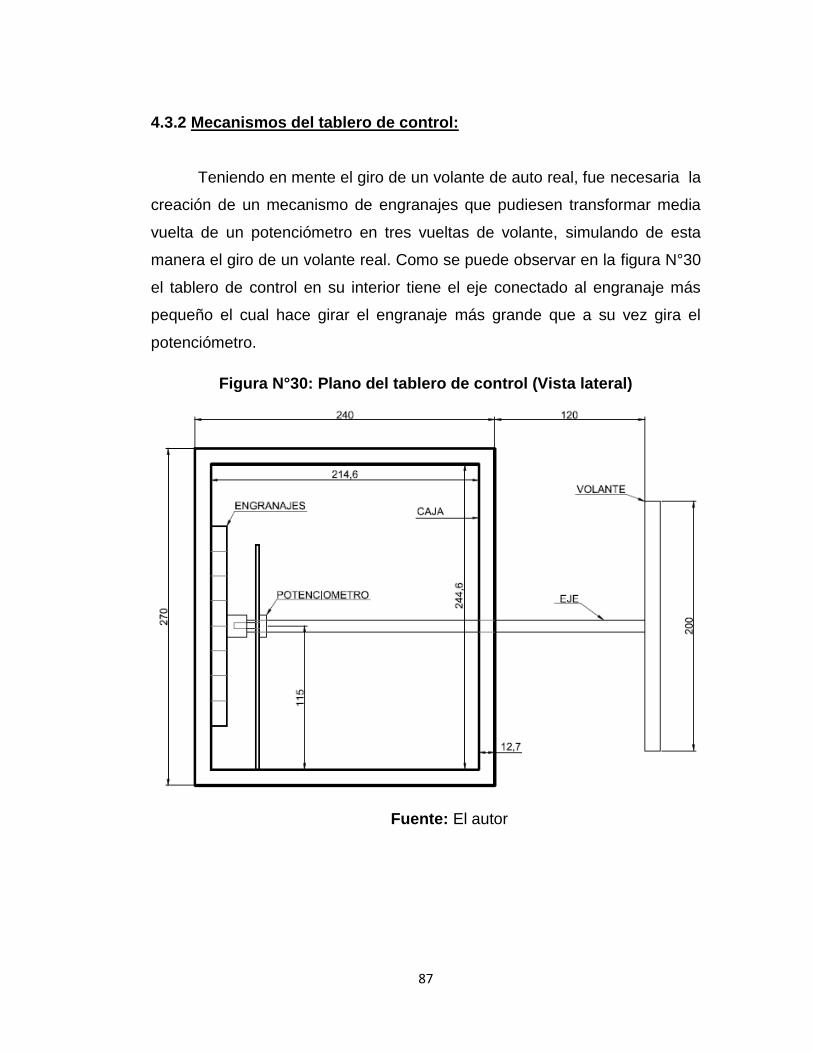
87
4.3.2 Mecanismos del tablero de control:
Teniendo en mente el giro de un volante de auto real, fue necesaria la
creación de un mecanismo de engranajes que pudiesen transformar media
vuelta de un potenciómetro en tres vueltas de volante, simulando de esta
manera el giro de un volante real. Como se puede observar en la figura N°30
el tablero de control en su interior tiene el eje conectado al engranaje más
pequeño el cual hace girar el engranaje más grande que a su vez gira el
potenciómetro.
Figura N°30: Plano del tablero de control (Vista lateral)
Fuente: El autor
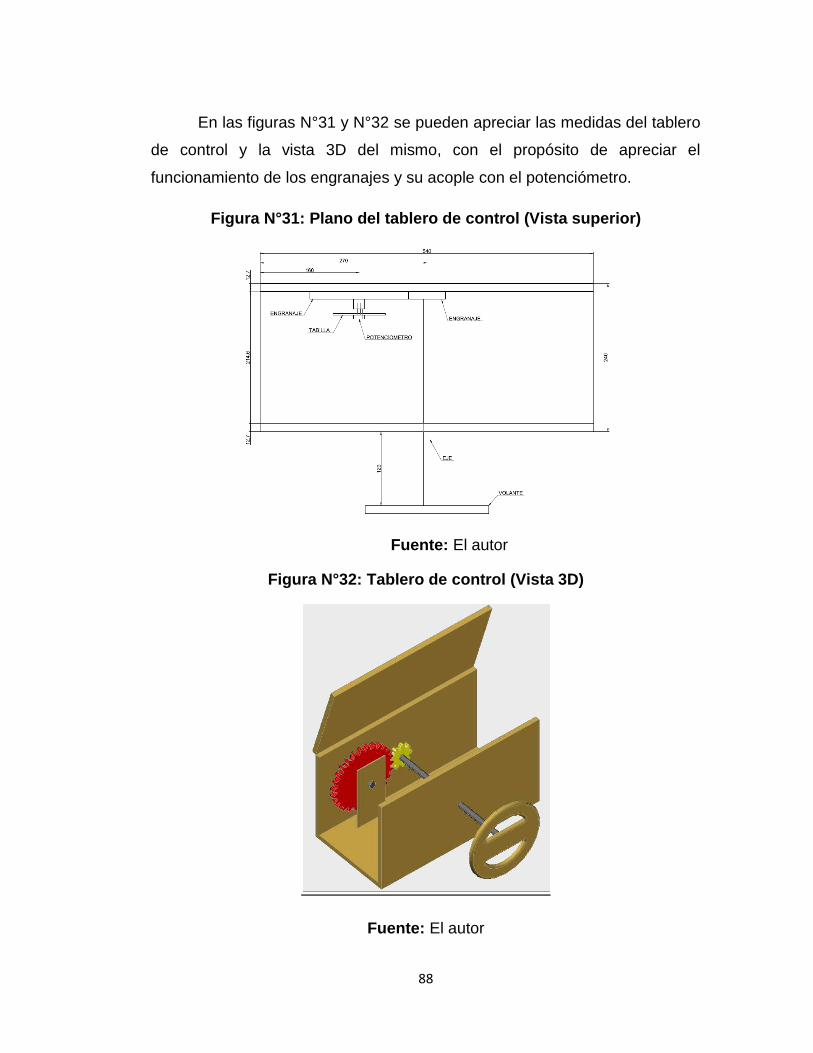
88
En las figuras N°31 y N°32 se pueden apreciar las medidas del tablero
de control y la vista 3D del mismo, con el propósito de apreciar el
funcionamiento de los engranajes y su acople con el potenciómetro.
Figura N°31: Plano del tablero de control (Vista superior)
Fuente: El autor
Figura N°32: Tablero de control (Vista 3D)
Fuente: El autor
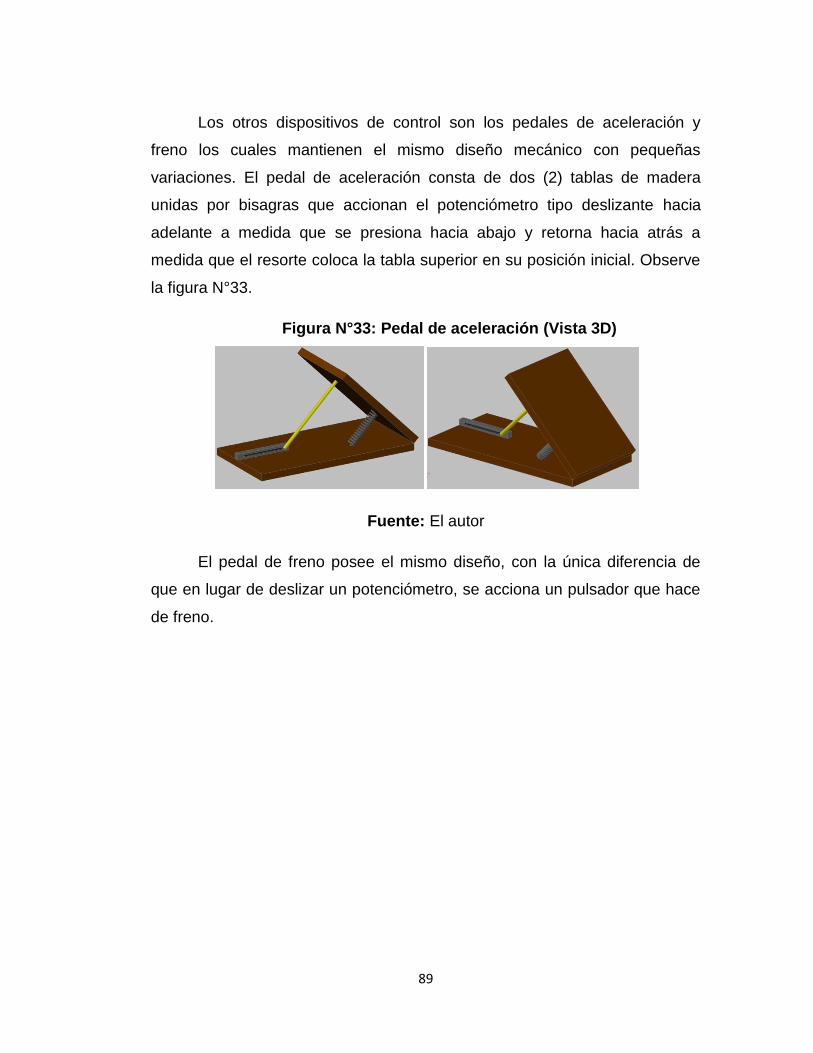
89
Los otros dispositivos de control son los pedales de aceleración y
freno los cuales mantienen el mismo diseño mecánico con pequeñas
variaciones. El pedal de aceleración consta de dos (2) tablas de madera
unidas por bisagras que accionan el potenciómetro tipo deslizante hacia
adelante a medida que se presiona hacia abajo y retorna hacia atrás a
medida que el resorte coloca la tabla superior en su posición inicial. Observe
la figura N°33.
Figura N°33: Pedal de aceleración (Vista 3D)
Fuente: El autor
El pedal de freno posee el mismo diseño, con la única diferencia de
que en lugar de deslizar un potenciómetro, se acciona un pulsador que hace
de freno.
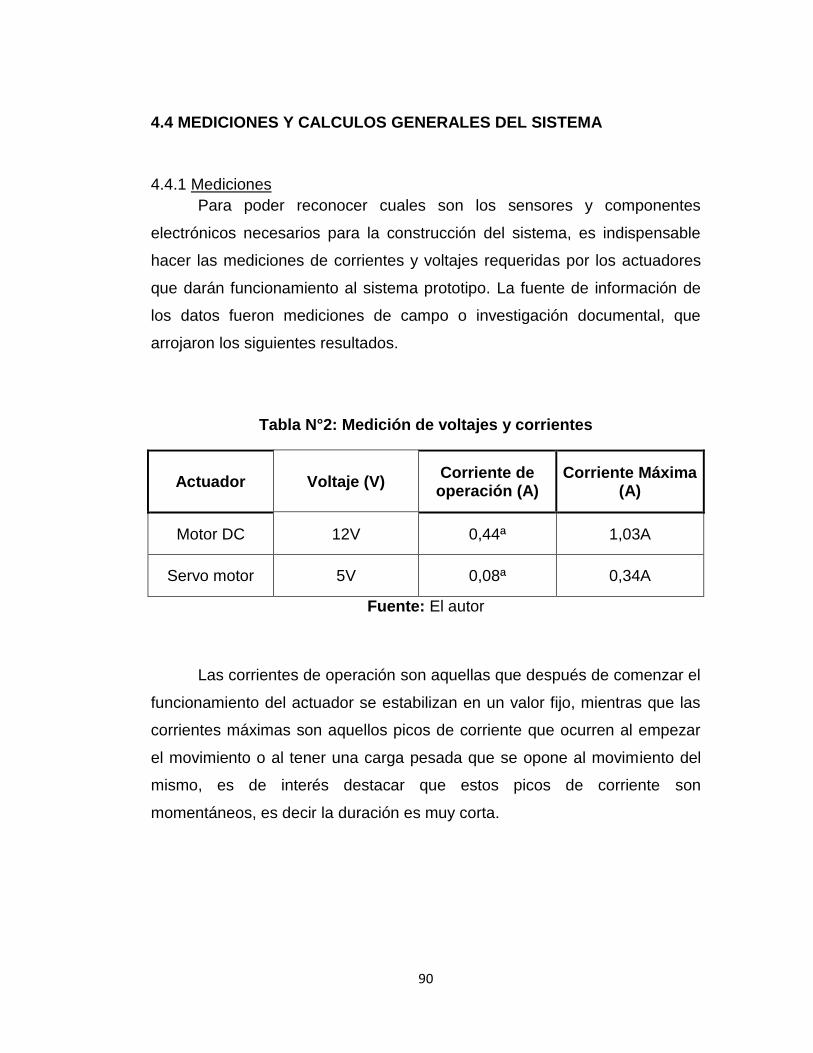
90
4.4 MEDICIONES Y CALCULOS GENERALES DEL SISTEMA
4.4.1 Mediciones
Para poder reconocer cuales son los sensores y componentes
electrónicos necesarios para la construcción del sistema, es indispensable
hacer las mediciones de corrientes y voltajes requeridas por los actuadores
que darán funcionamiento al sistema prototipo. La fuente de información de
los datos fueron mediciones de campo o investigación documental, que
arrojaron los siguientes resultados.
Tabla N°2: Medición de voltajes y corrientes
Actuador Voltaje (V) Corriente de operación (A)
Corriente Máxima (A)
Motor DC 12V 0,44ª 1,03A
Servo motor 5V 0,08ª 0,34A
Fuente: El autor
Las corrientes de operación son aquellas que después de comenzar el
funcionamiento del actuador se estabilizan en un valor fijo, mientras que las
corrientes máximas son aquellos picos de corriente que ocurren al empezar
el movimiento o al tener una carga pesada que se opone al movimiento del
mismo, es de interés destacar que estos picos de corriente son
momentáneos, es decir la duración es muy corta.
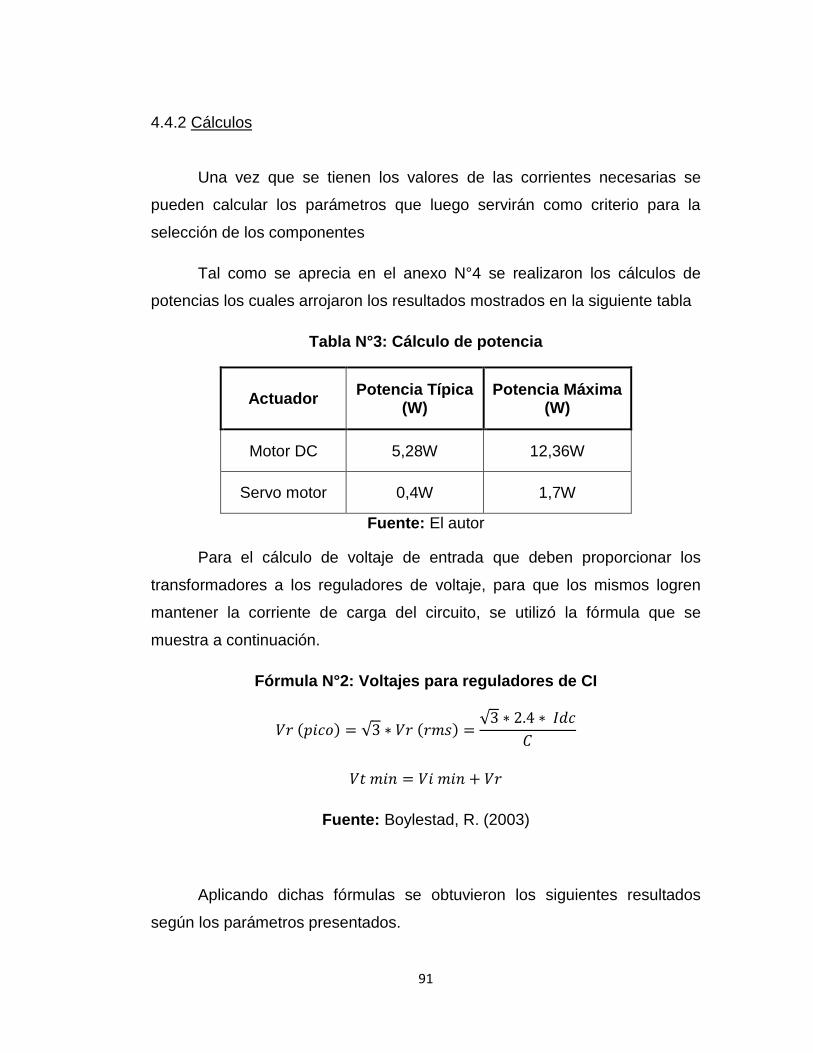
91
4.4.2 Cálculos
Una vez que se tienen los valores de las corrientes necesarias se
pueden calcular los parámetros que luego servirán como criterio para la
selección de los componentes
Tal como se aprecia en el anexo N°4 se realizaron los cálculos de
potencias los cuales arrojaron los resultados mostrados en la siguiente tabla
Tabla N°3: Cálculo de potencia
Actuador Potencia Típica
(W) Potencia Máxima
(W)
Motor DC 5,28W 12,36W
Servo motor 0,4W 1,7W
Fuente: El autor
Para el cálculo de voltaje de entrada que deben proporcionar los
transformadores a los reguladores de voltaje, para que los mismos logren
mantener la corriente de carga del circuito, se utilizó la fórmula que se
muestra a continuación.
Fórmula N°2: Voltajes para reguladores de CI
Fuente: Boylestad, R. (2003)
Aplicando dichas fórmulas se obtuvieron los siguientes resultados
según los parámetros presentados.
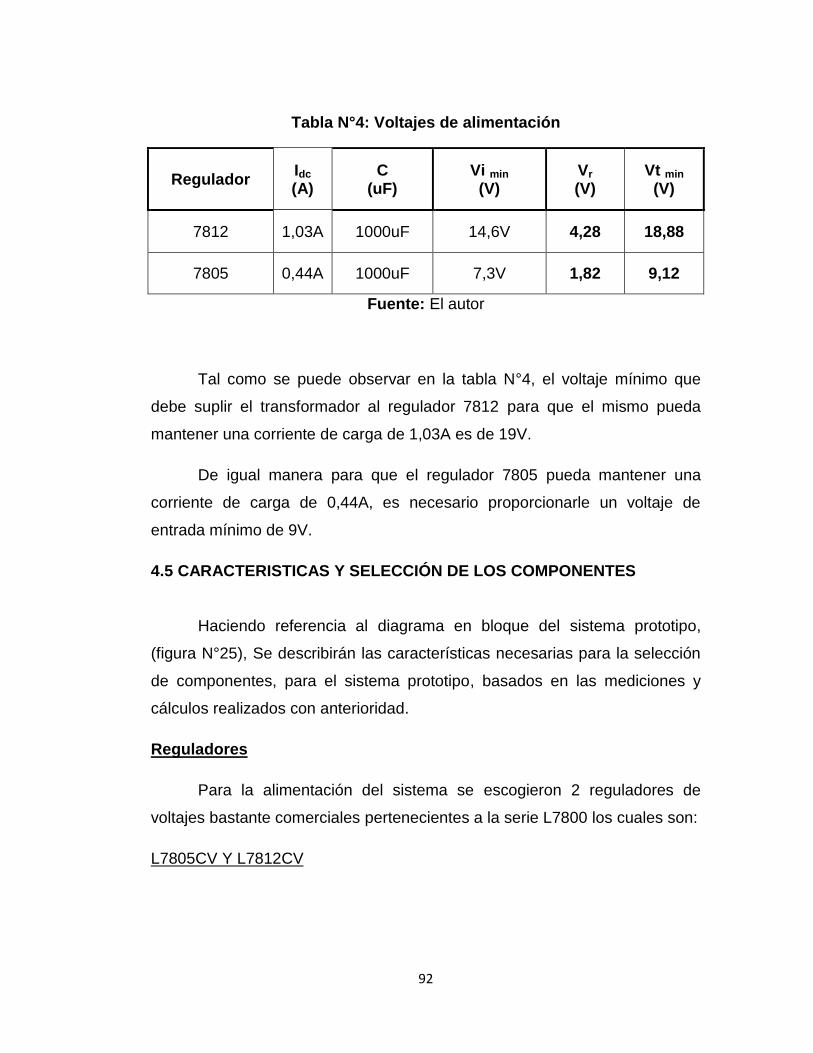
92
Tabla N°4: Voltajes de alimentación
Regulador Idc
(A) C
(uF) Vi min (V)
Vr (V)
Vt min (V)
7812 1,03A 1000uF 14,6V 4,28 18,88
7805 0,44A 1000uF 7,3V 1,82 9,12
Fuente: El autor
Tal como se puede observar en la tabla N°4, el voltaje mínimo que
debe suplir el transformador al regulador 7812 para que el mismo pueda
mantener una corriente de carga de 1,03A es de 19V.
De igual manera para que el regulador 7805 pueda mantener una
corriente de carga de 0,44A, es necesario proporcionarle un voltaje de
entrada mínimo de 9V.
4.5 CARACTERISTICAS Y SELECCIÓN DE LOS COMPONENTES
Haciendo referencia al diagrama en bloque del sistema prototipo,
(figura N°25), Se describirán las características necesarias para la selección
de componentes, para el sistema prototipo, basados en las mediciones y
cálculos realizados con anterioridad.
Reguladores
Para la alimentación del sistema se escogieron 2 reguladores de
voltajes bastante comerciales pertenecientes a la serie L7800 los cuales son:
L7805CV Y L7812CV
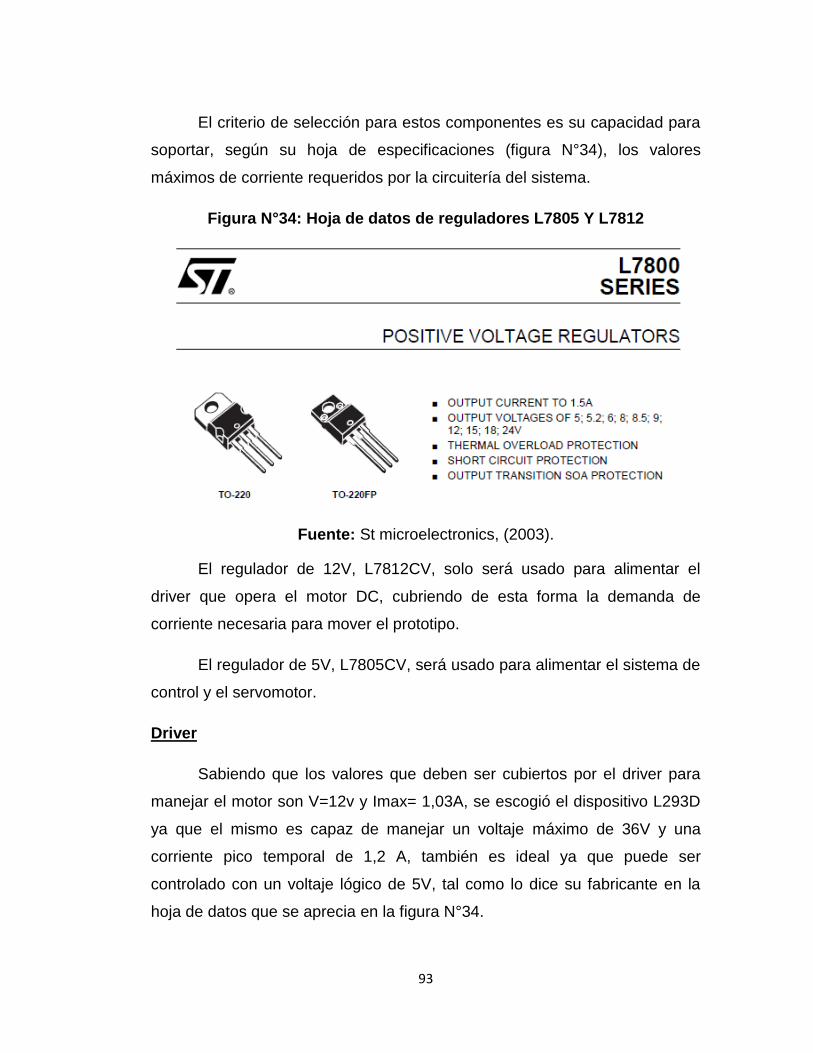
93
El criterio de selección para estos componentes es su capacidad para
soportar, según su hoja de especificaciones (figura N°34), los valores
máximos de corriente requeridos por la circuitería del sistema.
Figura N°34: Hoja de datos de reguladores L7805 Y L7812
Fuente: St microelectronics, (2003).
El regulador de 12V, L7812CV, solo será usado para alimentar el
driver que opera el motor DC, cubriendo de esta forma la demanda de
corriente necesaria para mover el prototipo.
El regulador de 5V, L7805CV, será usado para alimentar el sistema de
control y el servomotor.
Driver
Sabiendo que los valores que deben ser cubiertos por el driver para
manejar el motor son V=12v y Imax= 1,03A, se escogió el dispositivo L293D
ya que el mismo es capaz de manejar un voltaje máximo de 36V y una
corriente pico temporal de 1,2 A, también es ideal ya que puede ser
controlado con un voltaje lógico de 5V, tal como lo dice su fabricante en la
hoja de datos que se aprecia en la figura N°34.

94
Figura N°35: Hoja de datos del Driver L293D
Fuente: SGS ThomsonMicroelectronics (1996).
Sensores
Sabiendo que los sensores son una parte muy importante del sistema
y que estos son los que proporcionan la información en cuanto a la posición
del vehículo prototipo con respecto al entorno, se decidió usar sensores de
ultrasonido, ya que en general estos tienen un rango de medición mayor que
los de infrarrojo. En el particular se escogió el sensor Ping del fabricante
Parallax, el cual como se aprecia en la hoja del fabricante mostrada en la
figura N°36 posee un rango de medición desde 2 cm a 3 mt, y además ya
esta acondicionado para trabajar directamente con los microcontroladores.
95
Figura N°36: Sensor PING
Fuente: Parallax inc. (2009).
Microcontrolador
La elección del microcontrolador depende exclusivamente de sus
prestaciones que deben ser consistentes con los requerimientos de la
aplicación a controlar y de la inclinacion del desarrollador, en el presente
proyecto se escogió el microcontrolador Atmega328 (Figura N°37), ya que el
mismo posee 6 salidas PWM que facilitan el control de los motores, de las
señales visuales y auditivas. El entorno de desarrollo es más amigable y
tiene una poderosa herramienta que permite que el PC pueda interactuar
directamente con el microcontrolador, a través de una comunicación USB,
mientras que este permanece en funcionamiento. Debido a que uno de los
lenguajes de programación del microcontrolador está basado en Leguaje C,
es de mayor comprensión para personas inexpertas en la programación de
bajo nivel, lo cual podría facilitar la reprogramación o ajuste posterior que se
desee.
Figura N°37: Atmega 328
Fuente: Parallax inc. (2009).

96
4.6 DESCRIPCION DEL SISTEMA
Figura N°38: Diagrama eléctrico.
Fuente: El autor
Regulación del voltaje
En esta etapa se encuentran los reguladores de voltaje que
suministran la energía a todos los componentes del sistema. Está compuesto
por dos (2) fuentes la primera regulada a +5V que alimenta el circuito de
detección de proximidad y los controles del prototipo, y la segunda regulada
+12V que alimenta al motor a través del driver.
Dentro del diagrama circuital los reguladores de voltaje se encuentran en la
esquina superior derecha junto con sus conectores tipo jack y
97
condensadores cuya función consiste en filtrar los ruidos sobre todo a altas
frecuencias y estabilizar el voltaje que se suministra al circuito.
Instrumentos de control
Para los controles del prototipo (bloque 2) se utilizaron tres (5)
componentes pasivos los cuales son: un (1) switch de dos posiciones,
encargado de seleccionar cual es la situación típica de estacionado en la que
se desea entrenar, un (1) switch tres posiciones que cumple con la función
de palanca de cambio, el cual al energizarlo, simula los cambios de drive,
neutro y retroceso. Otros componentes usados para el control del prototipo
fueron dos (2) potenciómetros, uno de ellos es deslizante el cual acoplado
mecánicamente funciona como pedal de aceleración para el motor, el otro es
rotatorio el cual acoplado mecánicamente fue usado para mover la dirección
del prototipo a través de un servomotor. Por último un (1) pulsador acoplado
a un pedal encargado del apagado del motor en caso de que el usuario
desee frenar el prototipo.
Control
En esta etapa tenemos el componente principal encargado de
controlar todo el proceso de estacionado y manejo del prototipo. Tal como se
puede apreciar en la figura N°38 El control del sistema del prototipo se llevo
a cabo con 2 microcontroladores Atmega328, el primero que se encuentra en
la parte superior de la figura N°38, hace las conversiones A/D de los
potenciómetros y a través de programación genera un ancho de pulso
proporcional al valor de voltaje de entrada, el cual da velocidad al motor. La
otra conversión es para proporcionarle al servomotor la posición correcta en
la cual se considere necesaria para el movimiento de la dirección. Este

98
microcontrolador también controla todo lo referente a los cambios, es decir,
drive, neutro y retroceso.
El segundo microcontrolador que se encuentra en la parte inferior
central, controla los sensores y proporciona las instrucciones al usuario a
través de la interfaz humano-máquina.
Estos dos permanecen conectados entre sí para lograr que con cada
modificación de los controles se tenga una respuesta coherente por parte del
sistema.
Circuito de detección de proximidad
Está conformado por los sensores de ultrasonido los cuales una vez
activados emiten una onda de ultrasonido que es reflectada en cualquier
obstáculo que se encuentre en la trayectoria de la misma, al regresar la onda
reflectada se puede conocer la distancia, ya que el sensor emite un pulso
positivo proporcional al tiempo de eco, tiempo que es usado dentro de la
programación para determinar la distancia de separación entre el objeto y el
sensor.
De esta forma el circuito de detección proporciona al sistema la
información referente a la posición del vehículo prototipo, respecto al
entorno, la cual tiene que debe ser procesada para generar instrucciones de
entrenamiento, para el usuario del sistema.
Activación de actuadores
Esta parte del sistema corresponde a los bloques 5 y 7 los cuales
cumplen con la función de energizar los actuadores. Uno de los actuadores
es manejado por el chip L293D, el cual en la figura N°38, se encuentra en la
esquina superior derecha.

99
Este chip es comandado directamente por el microcontrolador, con
tres (3) bit de información, dos (2) para determinar el sentido de giro y uno (1)
para el habilitador o enable; variando a través de PWM la entrada del enable
se puede tener control de la velocidad del motor.
El otro actuador es el servomotor, el cual es alimentado directamente
por el regulador L7805 y a través del microcontrolador se genera el ancho de
pulso necesario para controlar la posición del mismo, según la medición
analógica correspondiente al potenciómetro acoplado al giro del volante.
Tanto el driver L293D como el servomotor están separados de la tierra
de los microcontroladores con unos optoacopladores 4N35 que están
conectados a sus entradas.
Interfaz Humano-Maquina (H.M.I.)
En esta etapa es donde se encuentran los bloques 6, 8 y 9. Aquí es
donde el usuario interactúa con el sistema y donde recibe las instrucciones
del mismo. Esta interfaz esta combinada con las señales visuales y las
auditivas ambas necesarias para guiar al usuario en el proceso de
estacionado. Las señales visuales se suministran a través de ocho (8) leds,
posicionados en el tablero de control, y las cámaras Web brindan la vista de
los retrovisores del auto prototipo.
Las señales auditivas son producidas en el microcontrolador, el cual
varía la frecuencia de una onda cuadrática a medida que la distancia entre el
sensor y el obstáculo, disminuye o aumenta. De esta forma el sistema
interpreta las distancias que registran los sensores, para advertir al usuario
de la proximidad y ejecutar las instrucciones a tiempo.
La onda generada por el microcontrolador es amplificada por un
circuito compuesto por un amplificador de audio LM386N y una bocina, con
la finalidad de escuchar mejor las variaciones de sonido.
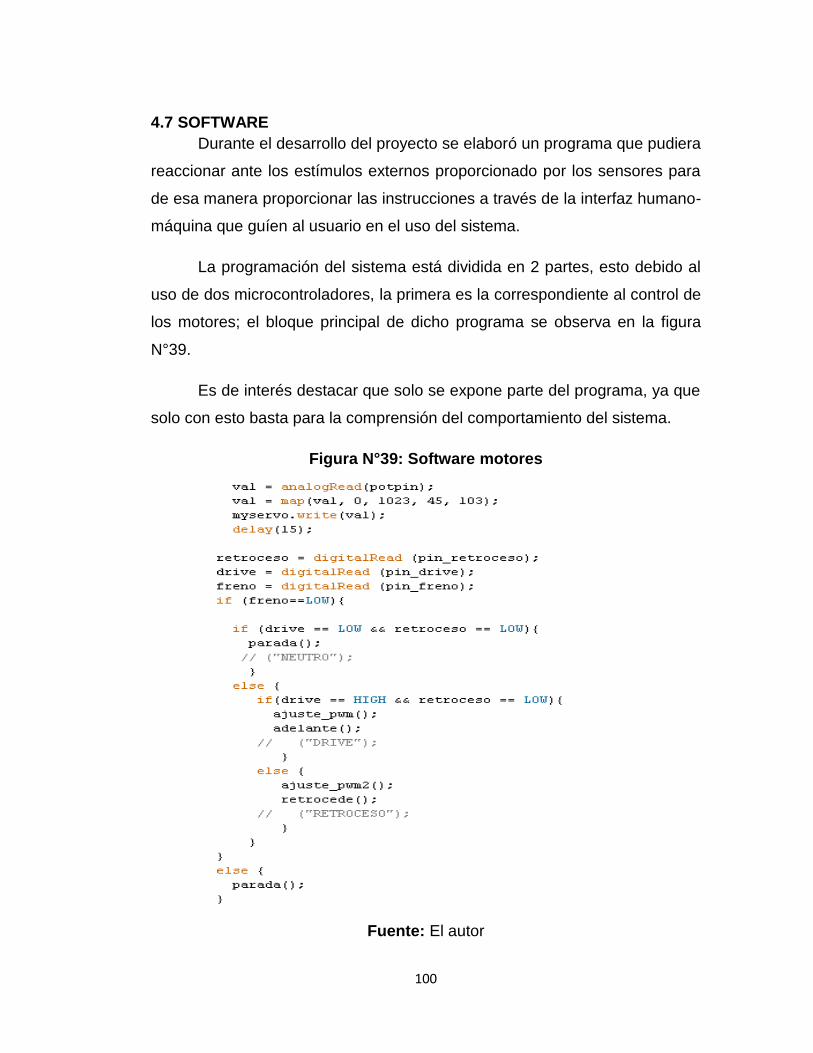
100
4.7 SOFTWARE
Durante el desarrollo del proyecto se elaboró un programa que pudiera
reaccionar ante los estímulos externos proporcionado por los sensores para
de esa manera proporcionar las instrucciones a través de la interfaz humano-
máquina que guíen al usuario en el uso del sistema.
La programación del sistema está dividida en 2 partes, esto debido al
uso de dos microcontroladores, la primera es la correspondiente al control de
los motores; el bloque principal de dicho programa se observa en la figura
N°39.
Es de interés destacar que solo se expone parte del programa, ya que
solo con esto basta para la comprensión del comportamiento del sistema.
Figura N°39: Software motores
Fuente: El autor

101
Este programa lo primero que hace es una conversión A/D del
potenciómetro que funciona como volante, esta da como resultado un valor
de 10 bits el cual se mapea, es decir se escalan a un valor entre 0 y 180,
para luego asignar esos valores al servomotor que se moverá entre 0 y 1800.
Luego de esto se leen los bits en los pines de retroceso, drive y freno,
para así determinar el sentido de giro del motor, si este se encuentra en
neutro, o esta accionado el freno. Dependiendo de los valores de estos bits
se llaman a las funciones adelante, retrocede o parada las cuales en su
interior determinan el valor del PWM del acelerador, comandando de esta
manera el Driver L293D para hacer girar el motor o detenerlo según sea el
caso.
La segunda parte del software es la correspondiente al manejo de los
sensores y las señales que se generan para darle las instrucciones al
usuario, el funcionamiento general se puede apreciar en la figura N°40
Después de haber definido las variables lo primero que el programa
realiza es entrar en un bloque de comparación switch case, donde cada
“case” corresponde a una etapa del estacionado o situación de estacionado
diferente. En su interior cada “case” hace un chequeo del estado de los
controles para poder proporcionarle las instrucciones correctas al usuario a
través de la H.M.I., luego se revisan los sensores para determinar la distancia
de cada uno de ellos, para después hacer las comparaciones y proporcionar
las instrucciones que debe seguir el usuario para realizar un estacionado
exitoso, según la etapa en la que se encuentre dentro del programa.

102
Figura N°40: Software sensores
Fuente: El autor
Para el manejo de las cámaras Web se desarrolló una aplicación de
Windows en la plataforma de Visual Basic, la cual permitió la visualización de
las cámaras como si las mismas fueran espejos retrovisores, lo cual brindó
una experiencia más realista de entrenamiento. Con el manejo correcto de
los puertos USB del computador se pudo establecer la visualización de las

103
tres (3) cámaras en la aplicación. La distribución de las imágenes de las
cámaras dentro de la aplicación se puede apreciar en la figura N°41
Figura N°41: Distribución de imágenes
Fuente: El autor
Los recuadros verdes corresponden a los retrovisores izquierdo, y
derecho, y como se aprecia en la figura N°42, a medida que se programaba
se agregaban cada una de las imágenes capturadas por las cámaras,
completando así la interfaz humano-maquina.
Figura N°42: Desarrollo en Visual Basic
Fuente: El autor
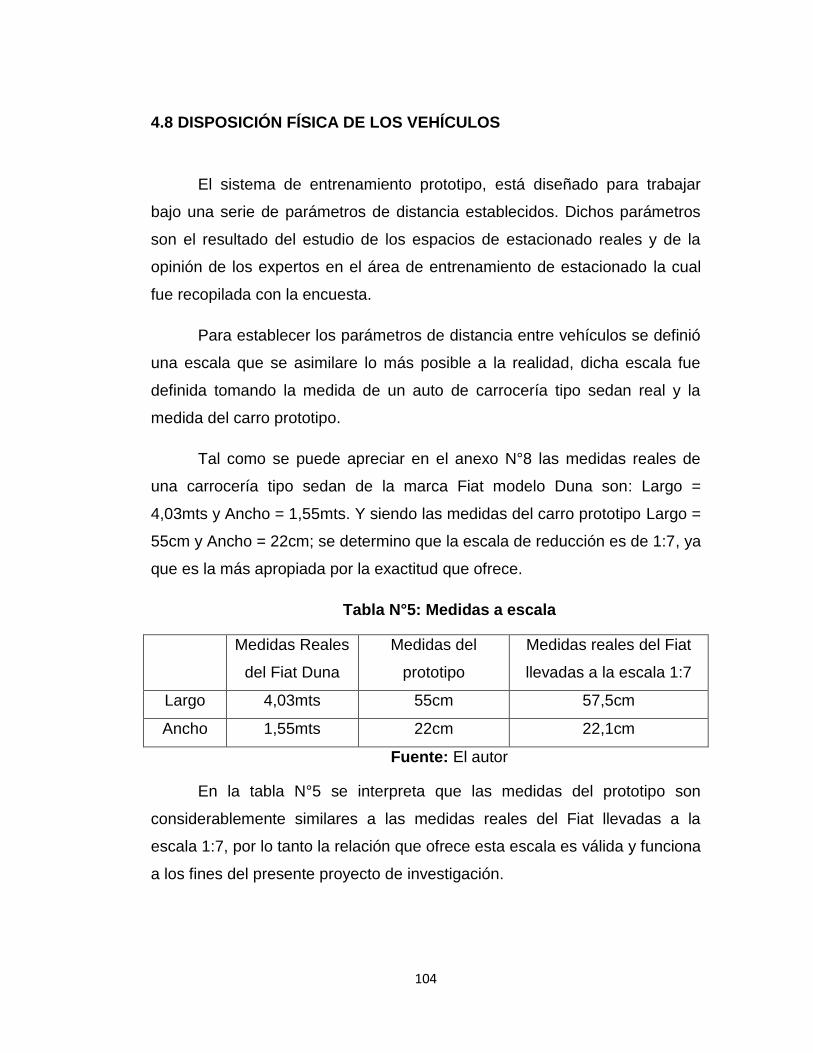
104
4.8 DISPOSICIÓN FÍSICA DE LOS VEHÍCULOS
El sistema de entrenamiento prototipo, está diseñado para trabajar
bajo una serie de parámetros de distancia establecidos. Dichos parámetros
son el resultado del estudio de los espacios de estacionado reales y de la
opinión de los expertos en el área de entrenamiento de estacionado la cual
fue recopilada con la encuesta.
Para establecer los parámetros de distancia entre vehículos se definió
una escala que se asimilare lo más posible a la realidad, dicha escala fue
definida tomando la medida de un auto de carrocería tipo sedan real y la
medida del carro prototipo.
Tal como se puede apreciar en el anexo N°8 las medidas reales de
una carrocería tipo sedan de la marca Fiat modelo Duna son: Largo =
4,03mts y Ancho = 1,55mts. Y siendo las medidas del carro prototipo Largo =
55cm y Ancho = 22cm; se determino que la escala de reducción es de 1:7, ya
que es la más apropiada por la exactitud que ofrece.
Tabla N°5: Medidas a escala
Medidas Reales
del Fiat Duna
Medidas del
prototipo
Medidas reales del Fiat
llevadas a la escala 1:7
Largo 4,03mts 55cm 57,5cm
Ancho 1,55mts 22cm 22,1cm
Fuente: El autor
En la tabla N°5 se interpreta que las medidas del prototipo son
considerablemente similares a las medidas reales del Fiat llevadas a la
escala 1:7, por lo tanto la relación que ofrece esta escala es válida y funciona
a los fines del presente proyecto de investigación.

105
Posición frontal
Para determinar el espacio requerido para estacionar un vehículo en la
posición frontal se recurrió a un panel de expertos en el área de
entrenamiento de conducción y estacionado, quienes en una encuesta
elaborada para el presente proyecto de investigación, respondieron que era
necesario un espacio de entre 5 a 6mts. Este espacio en la escala 1:7
instaurada para el presente proyecto equivale a un valor de 71,42cm a
85,71cm. Por tanto el espacio de 79 cm definido para la disposición de los
vehículos en la posición frontal está dentro de los parámetros reales
definidos por los expertos. Ver figura N° 43.
Figura N°43: Croquis posición frontal
Fuente: El autor

106
Posición lateral
En cuanto al espacio requerido para estacionar un vehículo en
la posición lateral el autor Neufert, E. (2004) menciona lo siguiente:
Las plazas de aparcamiento para turismos deben ser mayores o iguales a 5,00mts de longitud y 2,30mts de anchura, para turismos de minusválidos prever una anchura mayor o igual a 3,50mts. (Pág. 378)
Ya que la medida máxima permitida para plazas de aparcamiento
laterales tiene una anchura de 3,5mts, lo cual en escala equivale a 51cm, se
encuentra que el espacio de 51cm establecido para la disposición de los
vehículos en la posición lateral esta dentro de los parámetros reales de las
normativas arquitectónicas y urbanísticas. Ver figura N°44.
Figura N°44: Croquis posición lateral
Fuente: El autor
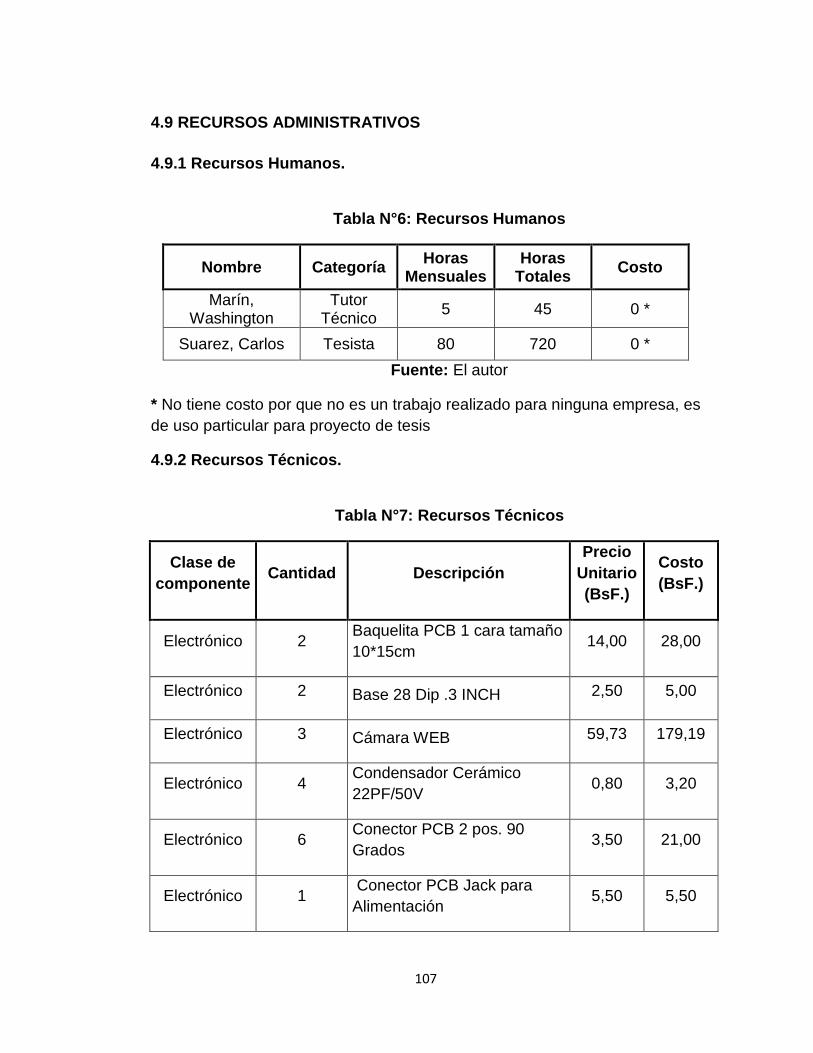
107
4.9 RECURSOS ADMINISTRATIVOS
4.9.1 Recursos Humanos.
Tabla N°6: Recursos Humanos
Nombre Categoría Horas
Mensuales Horas
Totales Costo
Marín, Washington
Tutor Técnico
5 45 0 *
Suarez, Carlos Tesista 80 720 0 *
Fuente: El autor
* No tiene costo por que no es un trabajo realizado para ninguna empresa, es
de uso particular para proyecto de tesis
4.9.2 Recursos Técnicos.
Tabla N°7: Recursos Técnicos
Clase de
componente Cantidad Descripción
Precio
Unitario
(BsF.)
Costo
(BsF.)
Electrónico 2 Baquelita PCB 1 cara tamaño
10*15cm 14,00 28,00
Electrónico 2 Base 28 Dip .3 INCH 2,50 5,00
Electrónico 3 Cámara WEB 59,73 179,19
Electrónico 4 Condensador Cerámico
22PF/50V 0,80 3,20
Electrónico 6 Conector PCB 2 pos. 90
Grados 3,50 21,00
Electrónico 1 Conector PCB Jack para
Alimentación 5,50 5,50
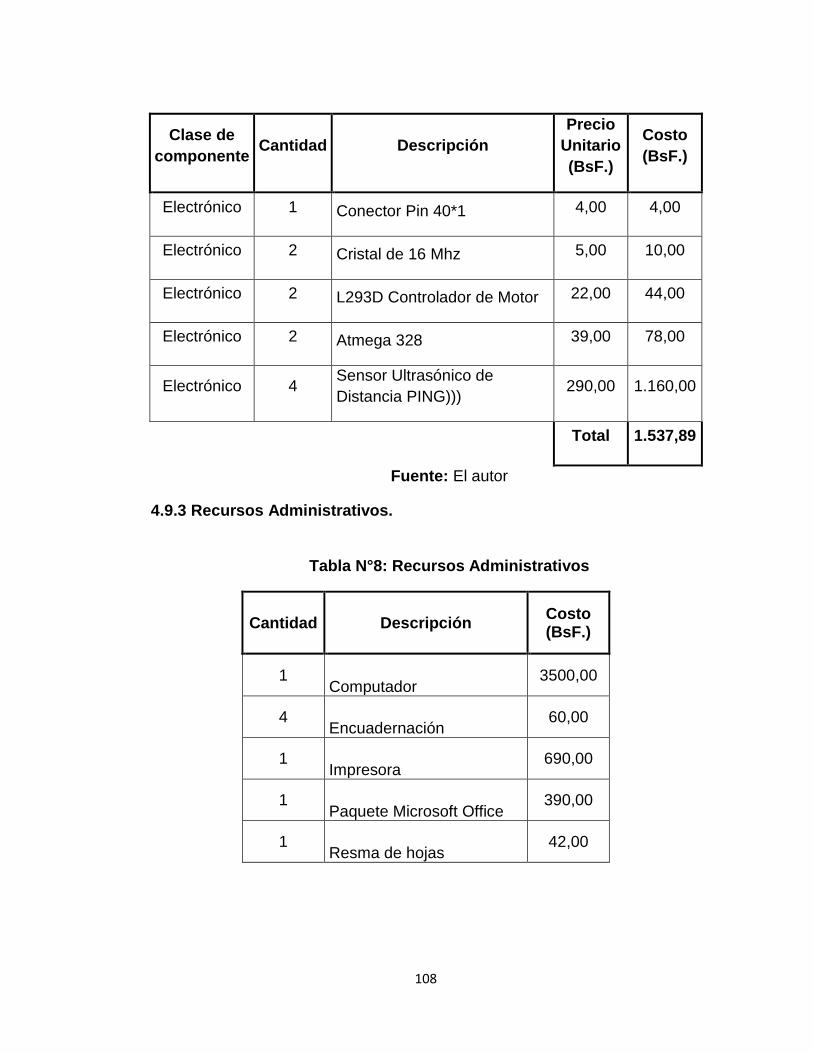
108
Clase de
componente Cantidad Descripción
Precio
Unitario
(BsF.)
Costo
(BsF.)
Electrónico 1 Conector Pin 40*1 4,00 4,00
Electrónico 2 Cristal de 16 Mhz 5,00 10,00
Electrónico 2 L293D Controlador de Motor 22,00 44,00
Electrónico 2 Atmega 328 39,00 78,00
Electrónico 4 Sensor Ultrasónico de
Distancia PING))) 290,00 1.160,00
Total 1.537,89
Fuente: El autor
4.9.3 Recursos Administrativos.
Tabla N°8: Recursos Administrativos
Cantidad Descripción Costo (BsF.)
1 Computador
3500,00
4 Encuadernación
60,00
1 Impresora
690,00
1 Paquete Microsoft Office
390,00
1 Resma de hojas
42,00
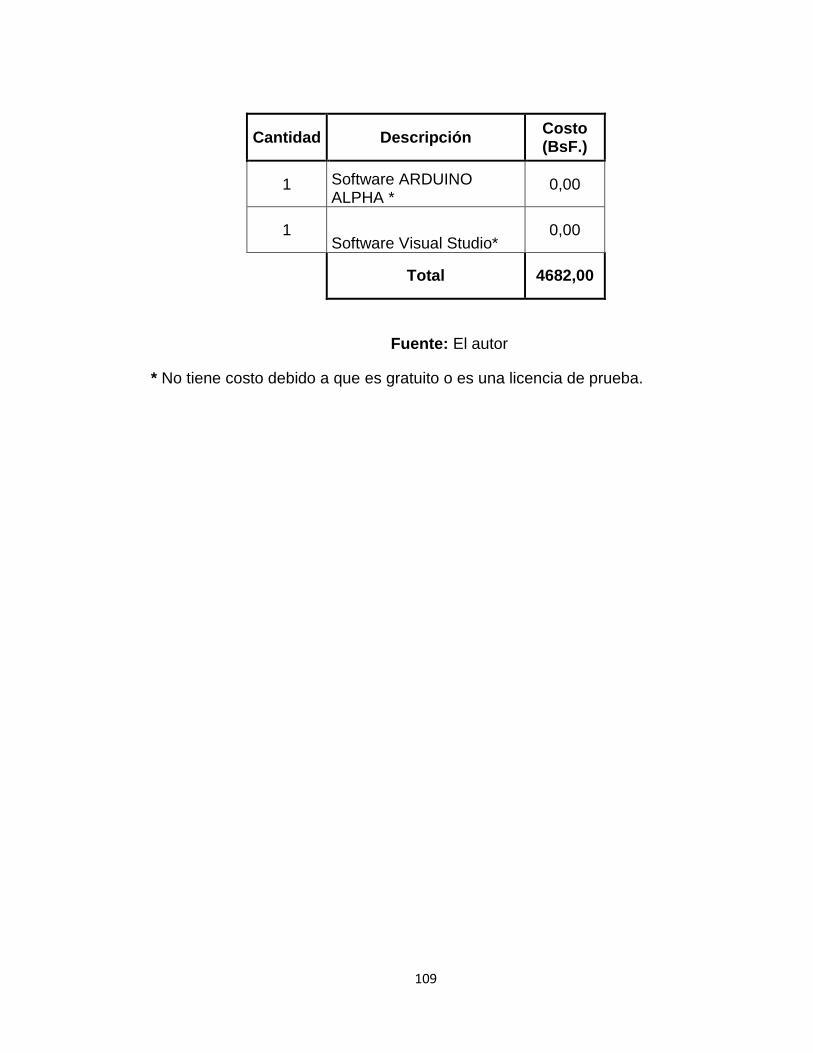
109
Cantidad Descripción Costo (BsF.)
1 Software ARDUINO ALPHA *
0,00
1 Software Visual Studio*
0,00
Total 4682,00
Fuente: El autor
* No tiene costo debido a que es gratuito o es una licencia de prueba.
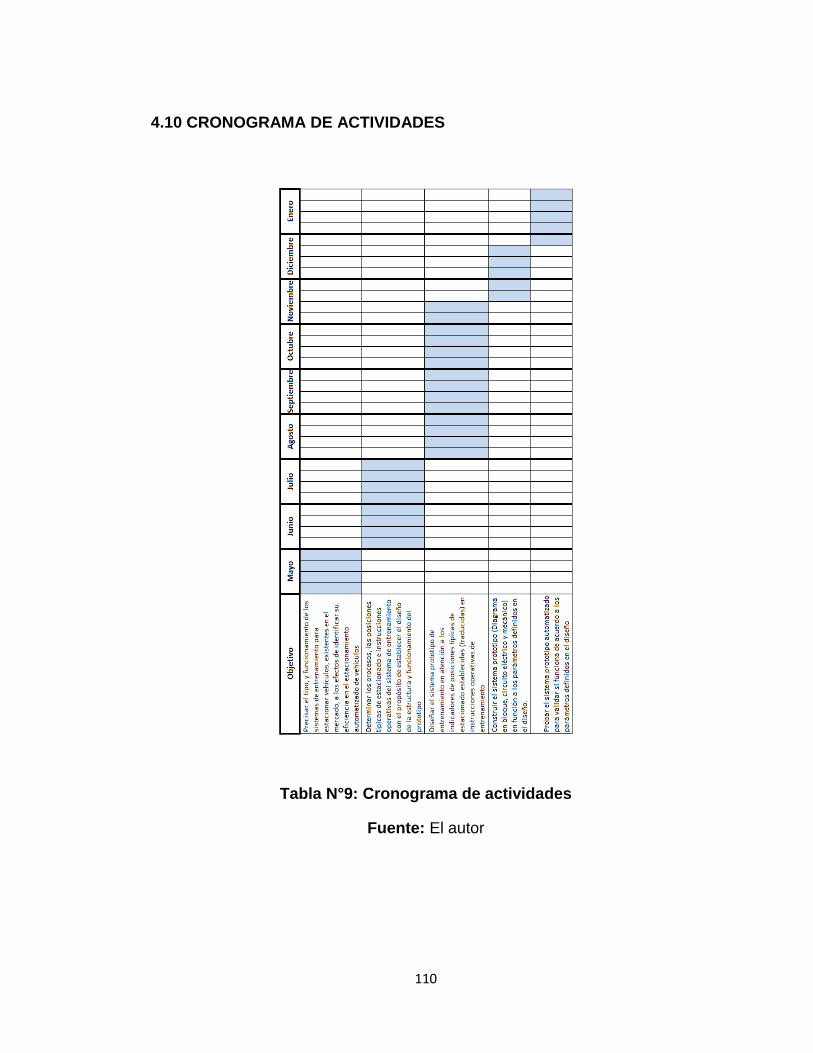
110
4.10 CRONOGRAMA DE ACTIVIDADES
Tabla N°9: Cronograma de actividades
Fuente: El autor
111
CONCLUSIONES
En el presente trabajo de investigación, se estableció como objetivo
general: Desarrollar un sistema prototipo de entrenamiento automatizado
para estacionar vehículos con interfaz gráfica, auditiva y modelo escala de
automóvil, para usuarios en proceso de aprendizaje de conducción.
Luego de llevar a cabo las encuestas, previamente validadas, a los
instructores de manejo de las autoescuelas, se puede concluir que la
presente investigación, categorizada como proyecto factible, es una
propuesta que se adapta a las necesidades y requerimientos de los
instructores de manejo, mejorando así las técnicas de enseñanza para el
estacionado de vehículos tipo sedan. Además este proyecto permitió
profundizar sobre este tema y generar conocimientos que llevan a las
conclusiones que se presentan a continuación.
Siendo el primer y segundo objetivo de carácter investigativo, en la
etapa preliminar a la construcción del sistema prototipo de entrenamiento, se
procedió a investigar los sistemas de entrenamiento existentes en el
estacionado de vehículos, y a determinar cuáles son las etapas, posiciones
típicas e instrucciones operativas necesarias a tener en cuenta, para la
correcta selección de materiales en el desarrollo exitoso del proyecto. En
dicho proceso de investigación se recurrió a la revisión de manuales técnicos
y aplicación de cuestionarios a expertos en el entrenamiento de conducción y
estacionado, información que resultó valiosa para establecer el diseño de la
estructura, funcionamiento del prototipo y elección de los componentes
necesarios para su construcción, en función de los parámetros extraídos de
la realidad.
Los objetivos tercero y cuarto corresponden al diseño y construcción
del sistema prototipo los cuales se elaboraron en función de los parámetros y
112
especificaciones estipuladas, como lo son las etapas e instrucciones
necesarias que debe reproducir el sistema de entrenamiento para un
correcto estacionado, así como también los parámetros de distancias
extraídos de la realidad y llevados a la escala del prototipo.
Para el diseño y construcción del hardware, dentro del cual están
implícitos los controles e interfaz humano-máquina, se debe destacar que se
prestó mucha atención a las encuestas realizadas para conocer cuáles son
las necesidades del alumno, en cuanto a direccionamiento se refiere. Es por
esta razón que se decidió fabricar un tablero de control hecho de madera, ya
que era la mejor y más económica elección, con seis (6) señalizaciones las
cuales son: avanza, retrocede, giro a derecha, giro a izquierda, stop y go. A
través de las cuales el microcontrolador brinda las instrucciones para un
estacionado exitoso, basado en los parámetros extraídos de la encuesta.
Sobre este tablero de control se proporcionan a través de un monitor la
visualización de las cámaras web colocadas en el prototipo.
También se fabricaron los controles del prototipo procurando que los
mismos se asemejasen lo más posible a los reales prestando especial
atención al número de vueltas de un volante real, y características de un
pedal de aceleración.
Para el diseño y construcción del software, fue necesario establecer
mediciones de distancias aproximadas, que sirvieran como indicadores en el
proceso de estacionado, para derivar de estos el momento en el cual las
instrucciones deben ser proporcionadas al usuario, instrucciones que fueron
obtenidas con el instrumento de recolección de datos aplicado a los
instructores de manejo. También se prestó atención al comportamiento de la
aceleración no provocada de un motor de auto, para lograr obtenerla en el
prototipo a través de modulación de ancho de pulso programada en el
microcontrolador.
113
El cumplimiento de los objetivos específicos anteriores, han arrojado
como resultado el desarrollo de un prototipo que refleja la solución del
problema planteado en la investigación, junto con su objetivo general de
forma satisfactoria, por lo cual se alcanzó con la meta establecida en el
último objetivo especifico el cual consistió en probar el sistema prototipo
automatizado para validar si funciona de acuerdo a los parámetros definidos
en el diseño. De esta manera la presente investigación ha solucionado el
problema planteado, de una forma novedosa, utilizando tecnología de punta
y ampliando la gama de posibilidades en el área de entrenamiento de
estacionado, ya que no existe en el mercado otro sistema de entrenamiento
automatizado que cumpla las funciones que ejecuta el prototipo desarrollado
en esta investigación. Por tanto dicho producto tecnológico, debe ser
sometido a un riguroso proceso de validación por autoridades competentes
en el área, a los efectos de lograr el desarrollo de un sistema definitivo que
pueda ser introducido en el mercado para cumplir con la función tan
importante de entrenar a individuos en el aparcamiento de vehículos.
Por último, es de señalar que el presente proyecto de investigación
aporto a nivel profesional una buena experiencia en cuanto al tratamiento y
manejo de cómo ejecutar y cumplir con las diferentes etapas de un proyecto,
además de los conocimientos adquiridos en cuanto a la programación de
microcontroladores y manejo de Visual Basic. Asimismo, dicho proyecto,
ayudo a proporcionar soluciones creativas para la utilización efectiva de los
recursos materiales utilizados y en la generación de ideas para la
construcción y solución de problemas en el desarrollo del sistema de
entrenamiento. Adicionalmente, es de hacer notar la consideración y
utilización efectiva de la debida orientación docente y apoyo del personal
profesional y con experiencia en diferentes áreas.
114
RECOMENDACIONES
Para el uso del sistema prototipo se recomienda brindar capacitación
al personal encargado de operarlo, esto para la completa comprensión de
sus funciones e interpretación de las señales auditivas y visuales.
Con el propósito de ofrecer una mejor experiencia para el aprendiz se
recomienda:
1. Fabricar mejores pedales de control de aceleración y frenado,
hechos de plástico, de menor tamaño, y capaces de ofrecer la
resistencia real que posee un acelerador al ser presionado.
2. Usar un volante de tamaño real, acolchonado, y acoplarlo
mecánicamente de manera que al girarlo, se sienta resistencia al
movimiento tal como ocurre en un auto real.
3. Mostrar las instrucciones visuales y auditivas por medio del
computador de manera que no sea necesaria una interfaz humano-
maquina tan grande, siendo así, el sistema contaría solamente de
los controles, prototipo y computador.
4. Usar cámaras analógicas junto con una tarjeta capturadora para el
computador, ya que de esta manera se mejoraría la calidad de la
imagen que simulan los retrovisores, debido a que la velocidad de
refrescamiento de las imágenes es mayor, ofreciendo así una
mejor experiencia.
5. El acondicionamiento de un espacio para el funcionamiento del
prototipo, en un entorno similar a una calle con vehículos de la
misma escala.
115
BIBLIOGRAFIA
Alvira, M. (1986). Diseños de investigación social: Criterios operativos.
España. Editorial Alianza
Angulo Bahón,C; Raya Giner, C (2004).Tecnología de sistemas de
control. Barcelona. Edicions UPC.
Arias, Fidias. (1999). El proyecto de investigación. Guía para su
elaboración. 3ra. Ed. Caracas. Editorial Episteme
Balestrini Acuña, M. (2006). Como se elabora el proyecto de
investigación. Caracas. Editorial Textos.
Boylestad, R. (2003). Electrónica: teoría de circuitos y dispositivos
electrónicos. México. Editorial Prentice Hall. Pág 863
Carratalá Garcia, E y otros (2002). El pequeño Larousse ilustrado.
Colombia. Editorial Spes Editorial, S.L.
Diccionario Enciclopédico Vox 1. (2009). Larousse Editorial, S.L.
Gabaldon Mejia, N. (1969). Algunos conceptos de muestreo. Caracas,
Universidad Central de Venezuela, Instituto de investigaciones
Económicas y Sociales, Serie Estadística N°1 Pág. 7
García Moreno, E. (Sin año). Automatización de procesos industriales.
Valencia .Editorial Servicio de Publicaciones
Groover, Mikell P.; Weiss, Mitchell; Nagel, Roger N.; Odrey, Nicholas
G. (1989). Robótica Industrial. Tecnología, programación y
aplicaciones. España. Editorial Mc. Graw Hill
Hernandez Sampieri, R.; Fernandez Collado C.; Baptista Lucio P.
(1994). Metodología de la Investigacion. Colombia. Editorial McGraw-
Hill.
Mendez,C.(1990). Metodologia. Guía para elaborar diseños de
investigación en ciencias. Colombia. Editorial McGraw-Hill.
116
Neufert, E. (2004). Arte de proyectar en arquitectura. Editorial
Blackwell Science
Palella Stracuzzi, S. y Martins Pestana,F.(2006). Metodología de la
investigación cuantitativa. Caracas: Editorial FEDUPEL.
Sabino, C. (2002). El proceso de la investigación científica. México.
Editorial LIMUSA
Selltiz, C.; Jahoda, M.; Deutsch, M. y Cook, S.W. (1976). Métodos de
Investigación en las Relaciones Sociales. Madrid-España. Ediciones
Rialp.
Valbuena, P. (1982). Curso intensivo sobre administración y
seguimiento de programas de desarrollo educativo. Técnicas e
instrumentos de evaluación. Venezuela, Caracas. Instituto
Internacional de Planteamiento de la Educación.
Valdez, F; Pallas, R. (2007). Microcontroladores: Fundamentos y
aplicaciones con PIC. España. 3Q editorial.
117
REFERENCIAS DE INTERNET
Barberán, Manuel (1999). Como funciona una Webcam. [Documento
en línea] Disponible en:
http://www.ctv.es/areas/comofunciona/multimedia/3.htm. [Consultado
el 15 de abril de 2010]
Bustamante, R. (2008) Métodos y técnicas para los diseños y
construcción de tecnologías modernas [Documento en línea]
Disponible en:
http://ares.unimet.edu.ve/didactica/fped51/index_archivos/page1105.ht
m. [Consultado el 3 de marzo de 2010]
Departamento de Ciencia de la Computación e Inteligencia Artificial.
(Sin año).Sensores externos. [Documento en línea] Disponible en:
http://www.dccia.ua.es/dccia/inf/asignaturas/ROB/optativos/Sensores/e
xternos.html. [Consultado el 3 de marzo de 2010]
Kioskea C.A. (2008). Puerto serial y puerto paralelo. [Documento en
línea] Disponible en: http://es.kioskea.net/contents/pc/serie.php3.
[Consultado el 15 de abril de 2010]
Didatec (2001). ¿Qué es un microcontrolador?. [Documento en
línea] Disponible en: http://www.didatec.es/Curso-i2.htm. [Consultado
el 9 de marzo de 2011]
Fiat Group Automobiles S.p.A. (2007). Dimensiones del Fiat Duna.
[Documento en línea] Disponible en:
http://www.fiatduna.com.ar/dimensiones-del-fiat-duna-vt68.html.
[Consultado el 9 de marzo de 2011]
González Raúl (2010). Conector Serial COM 1 o Conector DB9.
[Documento en línea] Disponible en:
http://pcexpertos.com/2010/01/conector-serial-com-1-o-conector-
db9.html [Consultado el 15 de abril de 2010]
118
Grajales, T (2000). Tipos de investigación [Documento en línea]
Disponible en: http://tgrajales.net/investipos.pdf [Consultado el 15 de
abril de 2010]
Hernández, J. (Sin año). El motor asíncrono. [Documento en línea]
Disponible en:
http://www.tuveras.com/maquinaasincrona/motorasincrono1.htm.
[Consultado el 14 de abril de 2010]
Netto, Ricardo (Sin año) Motores de corriente continua. [Documento
en línea] Disponible en:
http://www.fisicanet.com.ar/fisica/electrotecnia/ap10_motor_de_corrien
te_continua.php. [Consultado el 15 de abril de 2010]
Páginas amarillas. Autoescuelas. [Documento en línea] Disponible
en:
http://www.pac.com.ve/index.php?option=com_jumi&fileid=9&Itemid=1
19&keyword=autoescuelas&ubicacion=caracas [Consultado el 12 de
abril de 2010]
Parallax Inc. (2009). Ultrasonic Distance Sensor [Documento en
línea] Disponible en:
http://www.parallax.com/Portals/0/Downloads/docs/prod/acc/28015-
PING-v1.6.pdf. [Consultado el 24 de marzo de 2011]
Pellini, Claudio. (Sin año). El motor eléctrico. [Documento en línea]
Disponible en:
http://www.portalplanetasedna.com.ar/motor_electrico.htm.[Consultado
el 14 de abril de 2010]
Romero, J; (Sin año). La rueda. [Documento en línea] Disponible en:
http://www.educaciontecnologica.cl/rueda2.htm. [Consultado el 22 de
febrero de 2010]
SGS ThomsonMicroelectronics (1996). Driver L239D [Documento en
línea] Disponible en:
119
http://www.datasheetcatalog.org/datasheet/SGSThomsonMicroelectro
nics/mXyzuxsr.pdf. [Consultado el 24 de marzo de 2011]
Solans, Roberto (1998). ¿Que es una webcam?. [Documento en
línea] Disponible en:
http://www.ctv.es/areas/comofunciona/multimedia/3.htm. [Consultado
el 15 de abril de 2010]
St microelectronics (2003). Positive voltage regulator [Documento en
línea] Disponible en:
http://www.datasheetcatalog.org/datasheet/stmicroelectronics/2143.pdf
. [Consultado el 24 de marzo de 2011]
Últimas Noticias (2008.). En Caracas circula casi la mitad de los
carros del país. [Documento en línea] Disponible en:
http://www.guia.com.ve/noticias/?id=26429 [Consultado el 12 de abril
de 2010]
Vildósola C., E. (Sin año). Actuadores. [Documento en línea]
Disponible en:
http://www.aie.cl/files/file/comites/ca/abc/actuadores.pdf. [Consultado
el 2 de marzo de 2010]
120
REFERENCIAS DE TRABAJOS DE GRADO
Bowen, L. (2007). “DESARROLLO DE UN DIRIGIBLE PROTOTIPO
AUTOMATA QUE PERMITA LA DETECCION DE INCENDIOS EN
AREAS FORESTALES.” Trabajo de grado, Universidad Nueva
Esparta.
Fontana, A. y Rojas, F. (2009). “SISTEMA PROTOTIPO CAPAZ DE
SUMINISTRAR INFORMACION A LAS PERSONAS CON
DISCAPACIDAD VISUAL SOBRE LAS CARACTERISTICAS DE LOS
PRODUCTOS Y PRECIOS EN LOS ESTABLECIMIENTOS
COMERCIALES.” Trabajo de grado, Universidad Nueva Esparta.
Guerrero, C. (2006). “DESARROLLO DEL PROTOTIPO DE UN
DISPOSITIVO ELECTRONICO CAPAZ DE BLOQUEAR EL
COMPUTADOR EN FORMA REMOTA EN UN AREA DE ENTRE
UNO (1) Y TRES (3) METROS DE DISTACIA, UTILIZANDO EL
PUERTO USB DEL COMPUTADOR.” Trabajo de grado, Universidad
Nueva Esparta
121
ANEXOS
122
ANEXO N° 1
Fabricantes de microcontroladores
123

124
Fuente: Valdez, F (2007).

125
ANEXO N° 2
CERTIFICACION DE VALIDACION DE INSTRUMENTO
Quien suscribe ________________________________ titulando la cedula
de identidad N_____________________ hace constar por medio de la
presente, que forme parte del juicio de experto que tuvo la responsabilidad
de evaluar el instrumento de recolección de datos, diseñado por el Br.
Suarez, Carlos – CI 17.671.970, de la escuela de electrónica para desarrollar
el trabajo de grado titulado: “DESARROLLO DE UN SISTEMA PROTOTIPO
DE ENTRENAMIENTO AUTOMATIZADO PARA ESTACIONAR
VEHÍCULOS CON INTERFAZ GRÁFICA, AUDITIVA Y MODELO ESCALA
DE AUTOMÓVIL, PARA USUARIOS EN PROCESO DE APRENDISAJE DE
CONDUCCIÓN.” Destacando que durante este proceso el instrumento
alcanzo la validez de construcción y lógica necesaria para obtener resultados
confiables.
Atentamente
__________________________________
126
ANEXO N° 3
Universidad Nueva Esparta Escuela de Ingeniería Electrónica Br. Suárez P., Carlos E., C.I. 17.671.970
MODELO DE ENCUESTA
Introducción:
La presente encuesta se diseño para utilizarse como herramienta de
recolección de datos para la tesis de pregrado que lleva como título:
“Desarrollo de un sistema prototipo de entrenamiento automatizado
para estacionar vehículos con interfaz gráfica, auditiva y modelo escala
de automóvil, para usuarios en proceso de aprendizaje de
conducción.”, para optar por el título de Ingeniero Electrónico en la
Universidad Nueva Esparta.
Instrucciones: aprendiz
Marque con una X la respuesta de su preferencia o escriba su respuesta en
el espacio dado, según sea el caso.
1. Señale el tipo de sistema que implementa la autoescuela, en la cual
usted trabaja, para capacitar a los clientes en el estacionado de
vehículos. Seleccione de las alternativas que a continuación se
presentan, la respuesta que refleje la realidad donde usted presta
servicio como instructor
Manual ____ Semiautomático ____ Automático ____
127
2. Identifique las etapas que se desarrollan durante la práctica de
estacionamiento de vehículos. Para facilitar su respuesta se presenta
a continuación el siguiente modelo de requerimiento de información.
Etapa 1:
________________________________________________________
Objetivo que se persigue con dicha etapa:
________________________________________________________
Instrucciones establecidas para ejecutar dicha etapa:
________________________________________________________
Etapa 2:
________________________________________________________
Objetivo que se persigue con dicha etapa:
________________________________________________________
Instrucciones establecidas para ejecutar dicha etapa:
________________________________________________________
Etapa 3:
________________________________________________________
Objetivo que se persigue con dicha etapa:
________________________________________________________
Instrucciones establecidas para ejecutar dicha etapa:
________________________________________________________
Etapa 4:
128
________________________________________________________
Objetivo que se persigue con dicha etapa:
________________________________________________________
Instrucciones establecidas para ejecutar dicha etapa:
________________________________________________________
Etapa 5:
________________________________________________________
Objetivo que se persigue con dicha etapa:
________________________________________________________
Instrucciones establecidas para ejecutar dicha etapa:
________________________________________________________
3. Qué criterios según su experiencia profesional en el entrenamiento de
clientes en el manejo y correcto estacionado de vehículos, son
requeridos para el desarrollo eficiente de esta práctica. Para facilitar
su respuesta se presenta a continuación el siguiente modelo de
requerimiento de información.
Criterio 1: Espacio ideal que se debe observar para estacionar un
vehículo sin riesgo de un siniestro por colisión con un objeto físico fijo
en la infraestructura donde se realiza la práctica. Seleccione la(s)
opciones que a su juicio son adecuadas para lograr un estacionado
correcto.
Entre 4mt a 5mt _______ Entre 6mt a 7mt _______
Entre 5mt a 6mt _______ Entre 7mt a 8mt _______
129
Criterio 2: Situaciones típicas para estacionar entre dos vehículos.
Seleccione la(s) alternativas que considere pertinente de acuerdo a su
experiencia en el entrenamiento en autoescuelas como instructor.
Frontal ____
Lateral____
Otro____
130
ANEXO N° 4
Pmax(motor)= 1,03 x 12 = 12,36W
Ptípica(motor)= 0,44 x 12 = 5,28W
Pmax(servomotor)= 0,34 x 5 = 1,7W
Ptípica(servomotor)= 0,08 x 5 = 0,4W
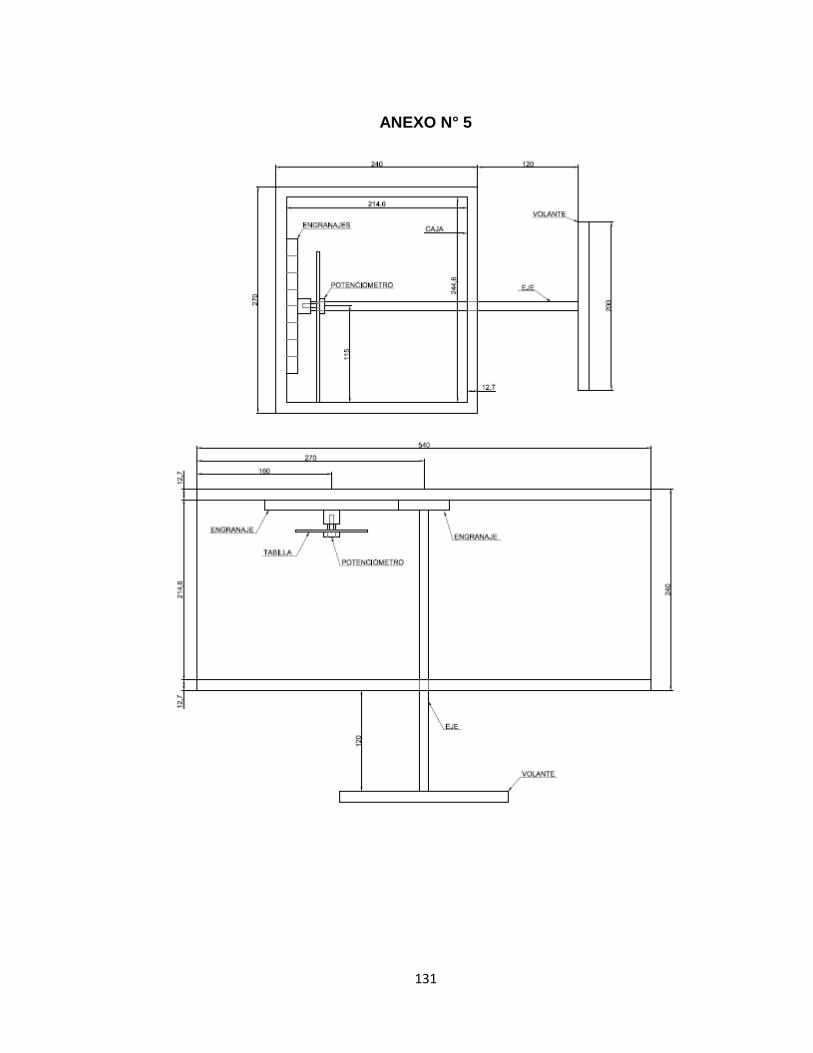
131
ANEXO N° 5
132
ANEXO N° 6

133
ANEXO N° 7

134
ANEXO N° 8
Fuente: Fiat Group Automobiles S.p.A. (2007).

135
ANEXO N° 9
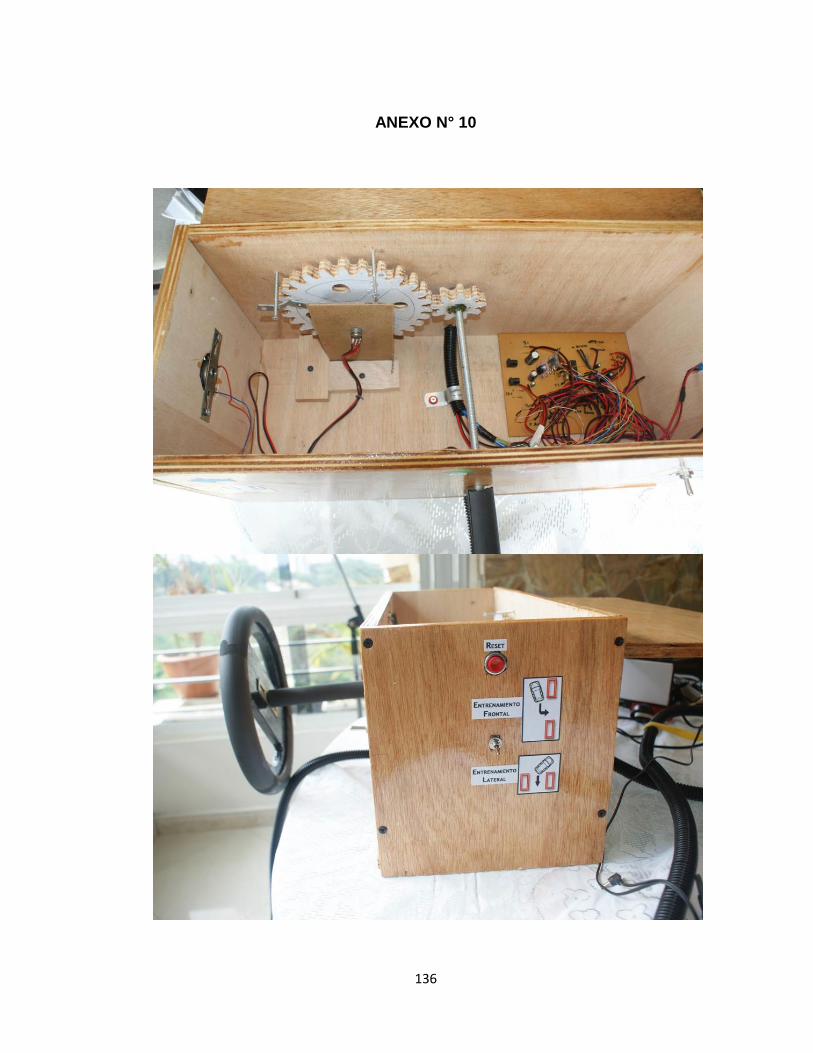
136
ANEXO N° 10
137
ANEXO N° 11
138
ANEXO N° 12
ANEXO N° 13

139
ANEXO N° 14
140
ANEXO N° 15

141
ANEXO N° 16
142
143
ANEXO N° 17
144
145
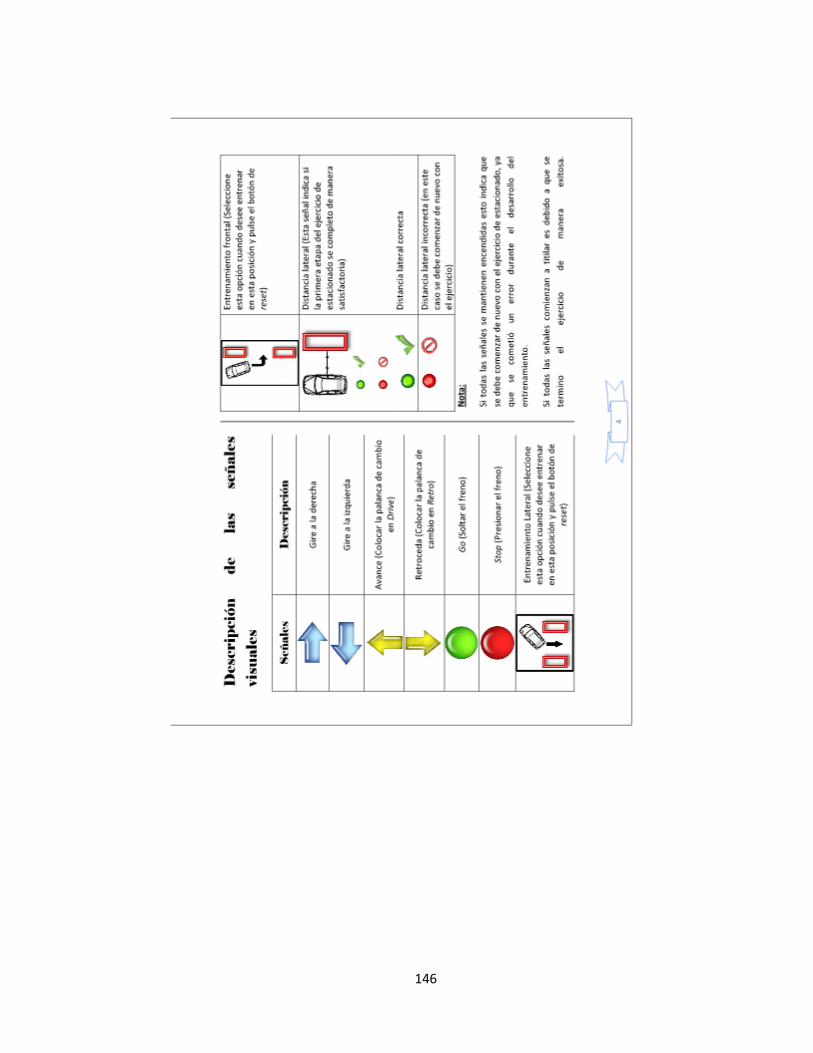
146
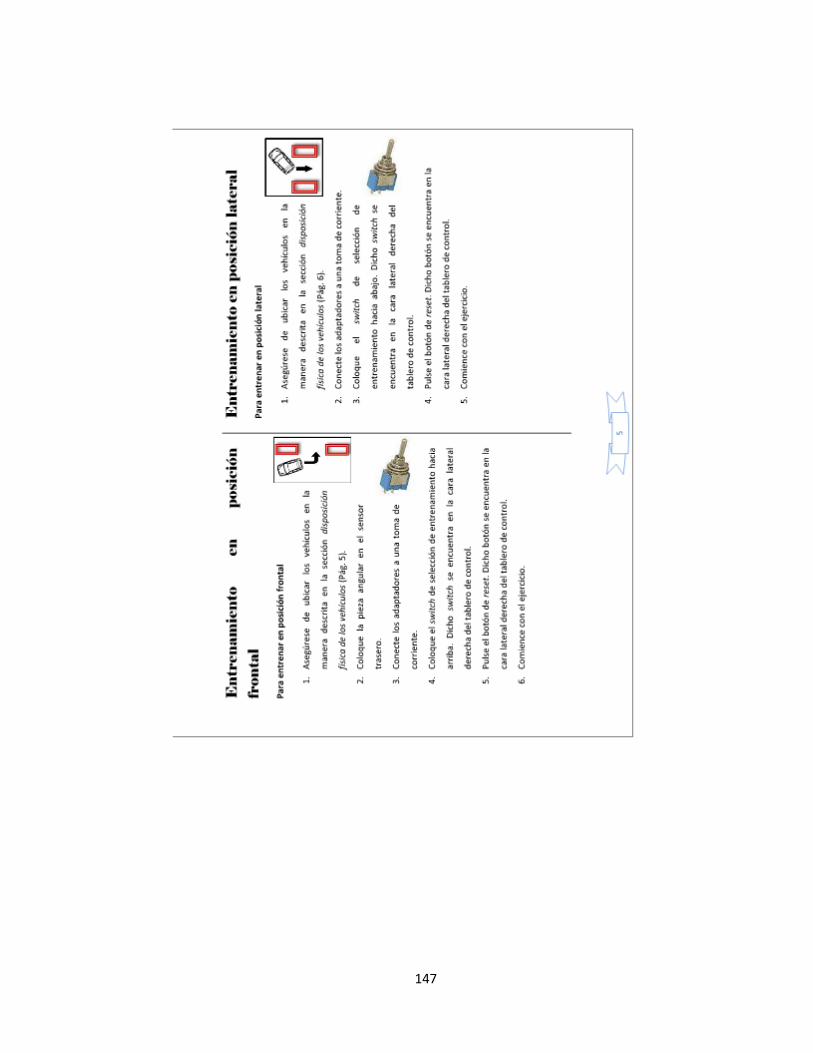
147
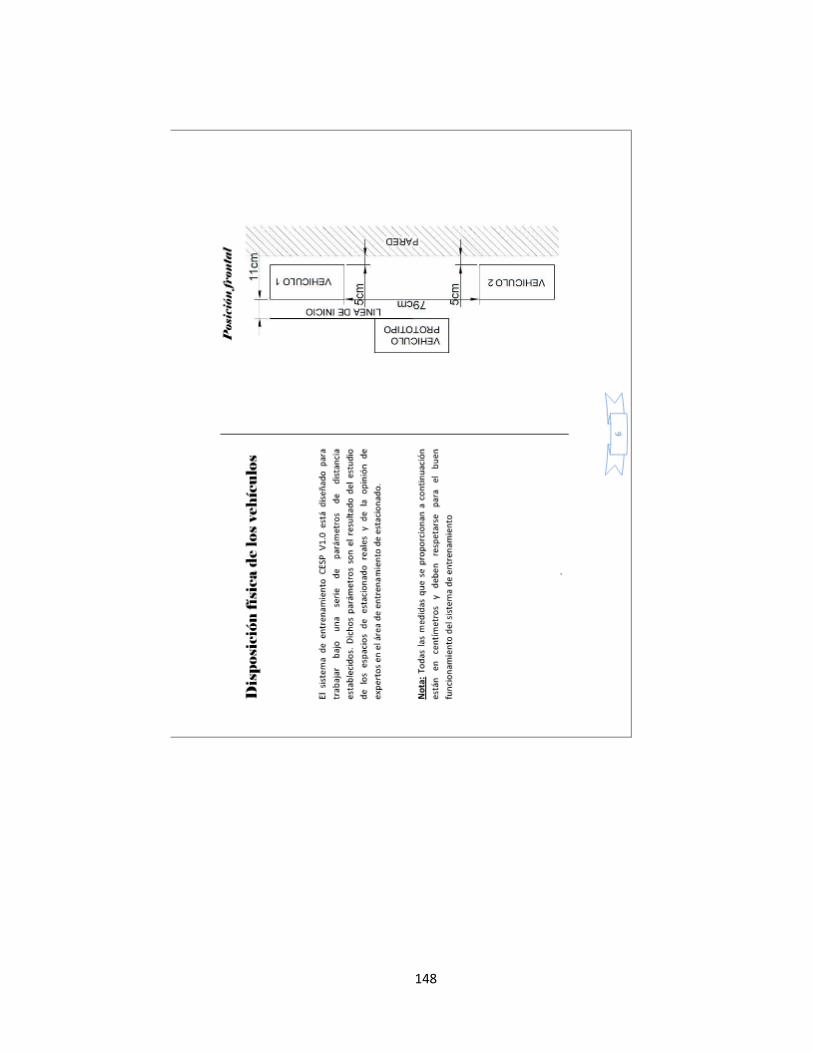
148
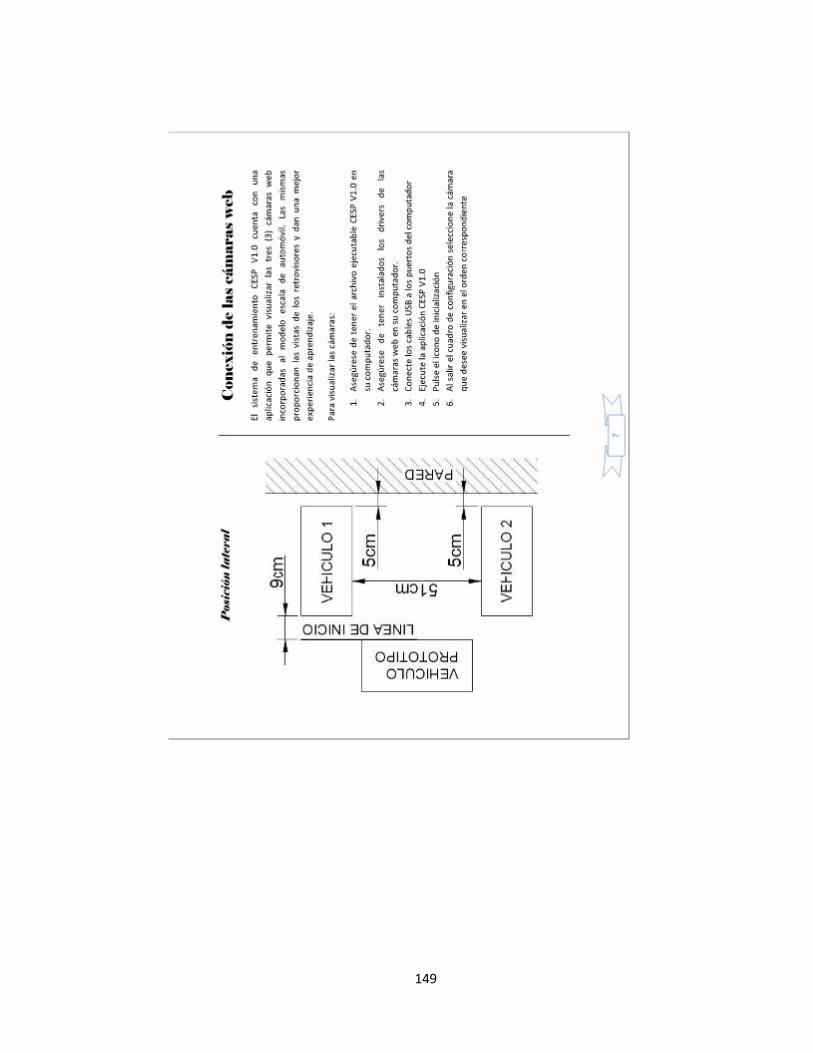
149
150
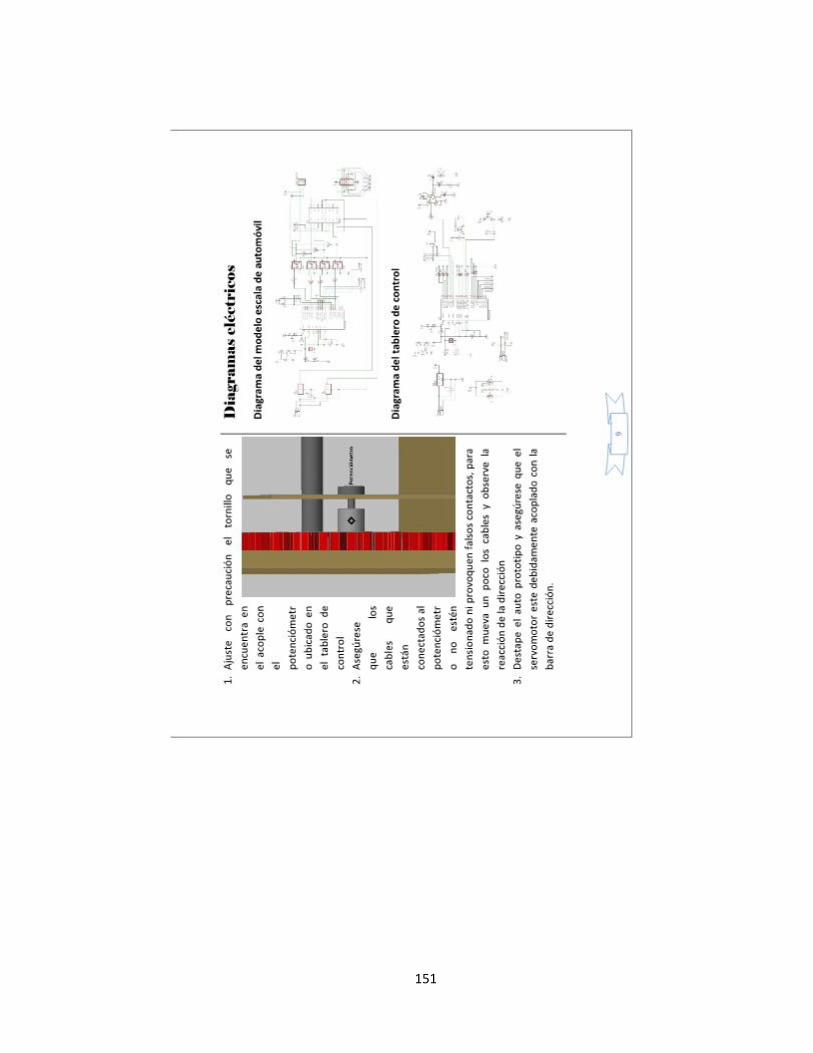
151