desarrollo de modelos del memristor para aplicaciones en ...special mention deserves the third...
TRANSCRIPT

Desarrollo de Modelos delMemristor para Aplicaciones en
Circuitos Electronicos
Por
Arvi Naranjo Calderon
Tesis sometida como requisito parcial paraobtener el grado de
Maestro en Ciencias con Especialidad enElectronica
en el
Instituto Nacional de Astrofısica, Optica yElectronica
San Andres Cholula, Puebla
Supervisada por:
Dr. Librado Arturo Sarmiento Reyes, INAOEDra. Marina Sparvoli, UFABC
c©INAOE 2018El autor otorga al INAOE el permiso de
reproducir y distribuir copias en su totalidad o enparte de esta tesis


4

Desarrollo de Modelos del Memristor paraAplicaciones en Circuitos Electronicos
Tesis de Maestrıa
Por:
Arvi Naranjo Calderon
Asesores:
Dr. Librado Arturo Sarmiento Reyes
Dra. Marina Sparvoli
Instituto Nacional de Astrofısica Optica y Electronica
Coordinacion de Electronica
San Andres Cholula, Puebla. 5 de septiembre de 2018


i
Este trabajo presenta la culminacion e inicio de una nueva etapa de mi vida, la
cual me ha permitido tener muchas aventuras que me han hecho crecer en el area
profesional como personal. Durante esta etapa muchas personas han pasado por mi
vida dejando una huella, de gran relevancia; Por lo que agradezco primero a Dios y
a mis padres, Nancy Calderon y Abel Naranjo, por brindarme su apoyo incondicional
en cada paso de mi vida. A mi hermano Jenner Naranjo por su apoyo en el momento
oportuno.
Especial agradecimiento al Dr. Arturo Sarmiento Reyes por su asesoramiento y
direccion, ası como sus observaciones y comentarios que contribuyen en gran manera
en la elaboracion de este trabajo de tesis.
A la Dra. Marina Sparvoli, por su apoyo y orientacion durante la estancia
realizada en la Universidade Federal do ABC. A mis amigos y companeros del grupo
de trabajo CAD, INAOE; ası como mis amigos de la Juvenil.
Agradezco al Consejo Nacional de Ciencia y Tecnologıa (CONACYT) por finan-
ciar el desarrollo de este proyecto y mi formacion como maestro en ciencias.
Desarrollo de Modelos del Memristor para Aplicaciones en Circuitos Electronicos


Resumen
En la presente tesis, se han desarrollado modelos analıticos del memristor que se
pueden usar para llevar a cabo la simulacion de circuitos memristivos. Los modelos
pueden ser codificados en el lenguaje de descripcion de hardware VERILOG-A para
ser incorporados en archivos de entrada (netlist) de HSPICE, o bien codificados en
el lenguaje de descripcion en MATLAB.
Se presentan tres modelos con naturaleza diferente. Primeramente, un mo-
delo completamente analıtico para el memristor de HP para el que se obtiene
una familia de expresiones de memristancia que contienen terminos armonicos
variantes en el tiempo. El segundo modelo, asociado tambien al memristor de HP,
consiste en una funcion de rama que relaciona la carga electrica con el flujo magnetico.
Mencion especial merece el tercer modelo, pues este proviene de un dispositivo
fabricado en el Departamento de Ciencias e Ingenierıa de Materiales, en los Laborato-
rios de la Universidade Federal do ABC (UFABC), en Sao Paulo, Brasil. Mediciones,
caracterizacion y extraccion del modelo muestran excelentes concordancias.
La mayor contribucion del trabajo reside en el hecho de que se ha demostrado
que los modelos analıticos del memristor son factibles de utilizarse en la simulacion
de circuitos que exhiben caos.
[iii]


Abstract
In this dissertation, analytical models for the memristor have been developed. The
resulting models can be coded in the hardware description language VERILOG-A
to be incorporated into HSPICE input files (netlist), or encoded in the descrip-
tion language in MATLAB, in order to carry out the simulation of memristive circuits.
We introduce three different models. The first one is a fully analytical model of
the HP memristor that is recast in a family of harmonic time-dependent functions.
The second model is also associated to the HP memristor and it consists in a constitu-
tive branch relationship that relates the electric charge with the magnetic flux linkage.
Special mention deserves the third model, because it comes from device that
was actually fabricated at the facilities of the Department of Materials Science and
Engineering, of the Federal University of ABC (UFABC), in Sao Paulo, Brazil.
Measurements, characterization and the extracted model show excellent agreement.
The main contribution of the research resides in the fact it has been demonstrated
that analytical memristor models are suitable for the simulation of chaotic circuits.
[v]


Tabla de Contenido
Resumen III
Abstract V
Lista de Figuras XI
Lista de Tablas XV
1. Introduccion 1
1.1. Objetivo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2. Estructura de la Tesis . . . . . . . . . . . . . . . . . . . . . . . . . . 2
2. Fundamentos teoricos 4
2.1. Memristor y Sistemas Memristivos . . . . . . . . . . . . . . . . . . . 4
2.1.1. El Memristor de HP . . . . . . . . . . . . . . . . . . . . . . . 7
2.1.2. Huellas de Identidad del Memristor . . . . . . . . . . . . . . . 9
2.2. Otros Mem-Elementos . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.2.1. Memcapacitor . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.2.2. Meminductor . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.3. Taxonomıa de Mem-Elementos . . . . . . . . . . . . . . . . . . . . . . 15
2.4. Emulador de mem-elementos . . . . . . . . . . . . . . . . . . . . . . . 17
2.4.1. Emulador de memcapacitor . . . . . . . . . . . . . . . . . . . 18
2.4.2. Emulador de meminductor . . . . . . . . . . . . . . . . . . . . 20
3. Desarrollo de Modelos 22
3.1. Modelo Armonico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
3.2. Modelo carga-flujo . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
[vii]

viii TABLA DE CONTENIDO
4. Fabricacion de Dispositivo Memristivo 32
4.1. Dispositivos de Transicion Resistiva . . . . . . . . . . . . . . . . . . . 32
4.1.1. Fenomenos de Conmutacion Resistiva . . . . . . . . . . . . . . 35
4.2. Fabricacion del Dispositivo . . . . . . . . . . . . . . . . . . . . . . . . 37
4.2.1. Mediciones Electricas . . . . . . . . . . . . . . . . . . . . . . . 39
4.2.2. Resultados de las Mediciones Electricas . . . . . . . . . . . . . 41
4.3. Extraccion del Modelo . . . . . . . . . . . . . . . . . . . . . . . . . . 45
4.3.1. Procedimiento de Aproximacion . . . . . . . . . . . . . . . . . 48
4.3.2. Resultados de las Aproximaciones . . . . . . . . . . . . . . . . 52
5. Aplicaciones en Circuitos Caoticos 62
5.1. Circuito 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
5.1.1. Resultados de H-SPICE Usando el Modelo Armonico . . . . . 64
5.1.2. Resultados de H-SPICE Usando el Modelo Comportamental . 65
5.1.3. Resultados de MATLAB Usando el Modelo Armonico . . . . . 66
5.2. Circuito 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
5.2.1. Resultados de MATLAB Usando el Modelo q-φ . . . . . . . . 68
5.3. Circuito 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
5.3.1. Resultados de MATLAB Usando el Modelo q-φ . . . . . . . . 70
6. Conclusiones 73
Apendices 75
A. Aproximaciones 77
A.1. Aproximaciones para la zona 1 . . . . . . . . . . . . . . . . . . . . . . 77
A.2. Aproximaciones para la zona 2 . . . . . . . . . . . . . . . . . . . . . . 78
A.3. Aproximaciones para la zona 3 . . . . . . . . . . . . . . . . . . . . . . 79
A.4. Aproximaciones para la zona 4 . . . . . . . . . . . . . . . . . . . . . . 79
A.5. Aproximaciones para la zona 5 . . . . . . . . . . . . . . . . . . . . . . 80
A.6. Aproximaciones para la zona 6 . . . . . . . . . . . . . . . . . . . . . . 81
A.7. Aproximaciones para la zona 7 . . . . . . . . . . . . . . . . . . . . . . 81
A.8. Aproximaciones para la zona 8 . . . . . . . . . . . . . . . . . . . . . . 82
A.9. Aproximaciones para la zona 9 . . . . . . . . . . . . . . . . . . . . . . 83
A.10.Aproximaciones para la zona 10 . . . . . . . . . . . . . . . . . . . . . 83
Departamento de Electronica Instituto Nacional de Astrofısica, Optica y Electronica

TABLA DE CONTENIDO ix
B. Codigo de Verilog-A para el Modelo Armonico 85
B.1. Codigo para Orden 1 y k=5 . . . . . . . . . . . . . . . . . . . . . . . 85
B.2. Codigo para Orden 2 y k=5 . . . . . . . . . . . . . . . . . . . . . . . 87
B.3. Codigo para Orden 3 y k=5 . . . . . . . . . . . . . . . . . . . . . . . 89
C. Codigo de Verilog-A para el Modelo Comportamental 90
D. Circuito 1: Resultados del Modelo Armonico de Orden 2 y 3 93
D.1. Resultados con el Modelo de Orden 2 y k = 5 . . . . . . . . . . . . . 93
D.2. Resultados con el Modelo de Orden 3 y k = 5 . . . . . . . . . . . . . 94
Bibliografıa 95
Desarrollo de Modelos del Memristor para Aplicaciones en Circuitos Electronicos

x TABLA DE CONTENIDO
Departamento de Electronica Instituto Nacional de Astrofısica, Optica y Electronica
Lista de Figuras
2.1. Elementos basicos de circuito . . . . . . . . . . . . . . . . . . . . . . 5
2.2. Memristor HP. Tomada de [4] . . . . . . . . . . . . . . . . . . . . . . 7
2.3. (a) Sin aplicar voltaje, (b) Aplicando un voltaje positivo y (c) Apli-
cando un voltaje negativo . . . . . . . . . . . . . . . . . . . . . . . . 8
2.4. Estructura del Memristor de HP . . . . . . . . . . . . . . . . . . . . . 9
2.5. Lazo de histeresis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.6. Area del lazo de histeresis vs frecuencia ω . . . . . . . . . . . . . . . 11
2.7. Degradacion del area de histeresis . . . . . . . . . . . . . . . . . . . . 11
2.8. Mem-elementos y elementos de circuito basico . . . . . . . . . . . . . 12
2.9. Sımbolo del memcapacitor . . . . . . . . . . . . . . . . . . . . . . . . 13
2.10. Sımbolo del meminductor . . . . . . . . . . . . . . . . . . . . . . . . 14
2.11. Capacitancia equivalente C(t) extraıda numericamente de las senales
Vin y V2.Tomada de [19] . . . . . . . . . . . . . . . . . . . . . . . . . 17
2.12. Emulador de memcapacitor . . . . . . . . . . . . . . . . . . . . . . . 19
2.13. Emuladores de meminductor . . . . . . . . . . . . . . . . . . . . . . . 20
3.1. Funcion de ventana de Joglekar evaluada para algunos valores de k . 23
3.2. Curvas de IV y MI . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
3.3. Curvas piecewise linear . . . . . . . . . . . . . . . . . . . . . . . . . . 29
3.4. Curvas carga-flujo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
4.1. Estructura tipo capacitor . . . . . . . . . . . . . . . . . . . . . . . . . 33
4.2. Estructura planar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
4.3. Curvas I-V . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
4.4. Curva de comportamiento unipolar . . . . . . . . . . . . . . . . . . . 35
4.5. Esquema de un mecanismo de conmutacion unipolar. Tomada de [25] 36
[xi]

xii LISTA DE FIGURAS
4.6. Curvas I − V tıpica de un dispositivo bipolar . . . . . . . . . . . . . 37
4.7. Dispositivo memristivo . . . . . . . . . . . . . . . . . . . . . . . . . . 38
4.8. Proceso de recubrimiento por inmersion . . . . . . . . . . . . . . . . . 38
4.9. Busqueda de Vset y Vreset . . . . . . . . . . . . . . . . . . . . . . . . . 40
4.10. Busqueda de Vset y Vreset . . . . . . . . . . . . . . . . . . . . . . . . . 40
4.11. Rango de busqueda . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
4.12. Busqueda de parametros caracterısticos . . . . . . . . . . . . . . . . . 42
4.13. Busqueda de parametros caracterısticos . . . . . . . . . . . . . . . . . 43
4.14. Rampa de voltaje experimental . . . . . . . . . . . . . . . . . . . . . 44
4.15. Resistencia y corriente en funcion del tiempo . . . . . . . . . . . . . . 44
4.16. Mapeos de resistencia en funcion de voltaje y corriente . . . . . . . . 45
4.17. Lazo de histeresis I − V . . . . . . . . . . . . . . . . . . . . . . . . . 46
4.18. Division de R(t) en 10 zonas . . . . . . . . . . . . . . . . . . . . . . . 49
4.19. Division de R(t) en 10 zonas . . . . . . . . . . . . . . . . . . . . . . . 50
4.20. Curvas de aproximacion de resistencia y corriente . . . . . . . . . . . 53
4.21. Curvas de aproximacion de resistencia y corriente . . . . . . . . . . . 54
4.22. Curvas de aproximacion de resistencia y corriente . . . . . . . . . . . 55
4.23. Curvas de aproximacion de resistencia de las zonas 4 a la 10 . . . . . 57
4.24. Curvas de resistencia y corriente del modelo . . . . . . . . . . . . . . 60
4.25. Lazo de histeresis del modelo . . . . . . . . . . . . . . . . . . . . . . 60
5.1. Circuito 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
5.2. Emulador de memcapacitor . . . . . . . . . . . . . . . . . . . . . . . 63
5.3. Circuito caotico con el emulador del memcapacitor . . . . . . . . . . 63
5.4. Curvas y diagramas de fase con modelo de orden 1 y k=5 . . . . . . . 65
5.5. Curvas y diagramas de fase con modelo comportamental . . . . . . . 66
5.6. Diagramas de fase de las variables de estado del circuito 1 . . . . . . 66
5.7. Circuito 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
5.8. Diagramas de fase de las variables de estado del circuito 2 . . . . . . 69
5.9. Circuito 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
5.10. Diagramas de fase de las variables de estado del circuito 3 . . . . . . 70
A.1. Aproximacion de la resistencia dependiente del tiempo en la zona 1 . 77
A.2. Aproximacion de la resistencia dependiente del tiempo en la zona 2 . 78
A.3. Aproximacion de la resistencia dependiente del tiempo en la zona 3 . 79
Departamento de Electronica Instituto Nacional de Astrofısica, Optica y Electronica

LISTA DE FIGURAS xiii
A.4. Aproximacion de la resistencia dependiente del tiempo en la zona 4 . 80
A.5. Aproximacion de la resistencia dependiente del tiempo en la zona 5 . 80
A.6. Aproximacion de la resistencia dependiente del tiempo en la zona 6 . 81
A.7. Aproximacion de la resistencia dependiente del tiempo en la zona 7 . 82
A.8. Aproximacion de la resistencia dependiente del tiempo en la zona 8 . 82
A.9. Aproximacion de la resistencia dependiente del tiempo en la zona 9 . 83
A.10.Aproximacion de la resistencia dependiente del tiempo en la zona 10 . 84
D.1. Curvas y diagramas de fase con modelo de orden 2 y k=5 . . . . . . . 93
D.2. Curvas y diagramas de fase con modelo de orden 3 y k=5 . . . . . . . 94
Desarrollo de Modelos del Memristor para Aplicaciones en Circuitos Electronicos

xiv LISTA DE FIGURAS
Departamento de Electronica Instituto Nacional de Astrofısica, Optica y Electronica
Lista de Tablas
3.1. Expresiones para los polinomios generados en Orden3 . . . . . . . . . 27
3.2. Parametros del memristor de HP . . . . . . . . . . . . . . . . . . . . 27
3.3. Parametros tıpicos del modelo homotopico . . . . . . . . . . . . . . . 27
4.1. Parametros caracterısticos del dispositivo Al/Graf/ITO . . . . . . . 43
4.2. Coeficientes de la funcion de ajuste . . . . . . . . . . . . . . . . . . . 53
4.3. Porcentaje de similitud entre los datos experimentales y la funcion de
aproximacion. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
4.4. Coeficientes de la funcion de ajuste . . . . . . . . . . . . . . . . . . . 54
4.5. Porcentaje de similitud entre los datos experimentales y la funcion de
aproximacion. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
4.6. Coeficientes de la funcion de ajuste . . . . . . . . . . . . . . . . . . . 55
4.7. Porcentaje de similitud entre los datos experimentales y la funcion de
aproximacion. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
4.8. Intervalos de tiempo del dispositivo . . . . . . . . . . . . . . . . . . . 56
4.9. Ecuaciones de ajuste correspondientes a las zonas 4-10 . . . . . . . . 56
4.10. Coeficientes de las funciones de ajuste de las zonas 4-10 . . . . . . . . 57
4.11. Porcentaje de similitud de la zona 4 a la 10 . . . . . . . . . . . . . . . 58
5.1. Esquema de resultados . . . . . . . . . . . . . . . . . . . . . . . . . . 62
5.2. Valores de los elementos del circuito caotico . . . . . . . . . . . . . . 64
5.3. Valores de los elementos del circuito caotico . . . . . . . . . . . . . . 68
5.4. Valores de los elementos del circuito caotico . . . . . . . . . . . . . . 70
A.1. Errores RMS, NRMSE y porcentaje de similitud de la resistencia en la
zona 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
[xv]
xvi LISTA DE TABLAS
A.2. Errores RMS, NRMSE y porcentaje de similitud de la resistencia en la
zona 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
A.3. Errores RMS, NRMSE y porcentaje de similitud de la resistencia en la
zona 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
A.4. Errores RMS, NRMSE y porcentaje de similitud de la resistencia en la
zona 4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
A.5. Errores RMS, NRMSE y porcentaje de similitud de la resistencia en la
zona 5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
A.6. Errores RMS, NRMSE y porcentaje de similitud de la resistencia en la
zona 6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
A.7. Errores RMS, NRMSE y porcentaje de similitud de la resistencia en la
zona 7 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
A.8. Errores RMS, NRMSE y porcentaje de similitud de la resistencia en la
zona 8 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
A.9. Errores RMS, NRMSE y porcentaje de similitud de la resistencia en la
zona 9 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
A.10.Errores RMS, NRMSE y porcentaje de similitud de la resistencia en la
zona 10 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
Departamento de Electronica Instituto Nacional de Astrofısica, Optica y Electronica
Capıtulo 1
Introduccion
La historia del desarrollo de memristor tiene dos acontecimientos importantes.
El artıculo del Prof. L.O. Chua de 1971 [1] es aclamado por unanimidad, tanto por
teoricos de circuitos como ingenieros electricos, como el primer hito en el desarrollo
de memristor. Aquı, el memristor fue presentado como el cuarto elemento basico de
circuitos que cierra el cırculo de las principales variables electricas, tension, corriente,
carga electrica y flujo magnetico.
La fabricacion real de un memristor en los Laboratorios Hewlett-Packard en 2008
constituye el segundo hito en el desarrollo de memristor [2]. Desde el advenimiento
del memristor como un dispositivo real, un impulso importante de la investigacion
se ha orientado a desarrollar aplicaciones del memristor en el diseno de circuitos y el
procesamiento de senales.
Como consecuencia, ha fomentado la investigacion y desarrollo de modelos del
memristor ası como tambien a nivel fabricacion, en el sentido de manufacturar es-
tructuras que presenten caracterısticas memristivas que sean adecuadas para alguna
aplicacion en especıfico.
Esta tesis esta enfocada al desarrollo de modelos de memristores y dispositivos
memristivos. En el aspecto matematico, se desarrollan dos modelos que se expresan en
una funcion de memristancia como funcion del tiempo y como una funcion constitutiva
de rama carga-flujo.
En el aspecto practico, se genera el modelo de un dispositivo fabricado con pelıcu-
las delgadas de grafeno depositadas sobre un substrato de aluminio y que utilizan
contactos de oxido de estano e indio (ITO).
En conjunto, los tres modelos desarrollados en el presente trabajo se aplican a la
simulacion electrica de circuitos caoticos.
[1]

2 1. Introduccion
1.1. Objetivo
El objetivo principal de esta tesis es desarrollar modelos de memristor que se
puedan utilizar en aplicaciones de caos.
Para llevarlo a cabo se plantean lo siguientes objetivos especıficos:
Desarrollar modelos analıticos del memristor para aplicaciones en circuitos que
exhiben caos.
Fabricacion de dispositivos de memoria resistiva.
Determinar el modelo de los dispositivos fabricados.
Incluir los modelos desarrollados en el presente trabajo de tesis en un ambiente
de simulacion electrica.
1.2. Estructura de la Tesis
En el capıtulo 2 se presentan los fundamentos teoricos del memristor ası como
de los sistemas memristivos. Adicionalmente se presentan otros mem-elementos tales
como el memcapacitor y el meminductor. En el capıtulo 3 se muestra el desarrollo
de dos modelos analıticos del memristor, el primero es un modelo que resulta en una
funcion armonica de memristancia, mientras que el segundo modelo esta expresado
en una funcion de rama carga-flujo.
En el capıtulo 4 se describe el trabajo de fabricacion, caracterizacion y extraccion
del modelo de un dispositivo memristivo fabricado en el Departamento de Ciencias e
Ingenierıa de Materiales, en los Laboratorio de la Universidade Federal do ABC en
Sao Paulo Brasil.
En el capıtulo 5 se presentan los resultados de los tres modelos desarrollados cuan-
do se utilizan en circuitos caoticos. Finalmente se desglosan conclusiones y trabajo a
futuro.
Departamento de Electronica Instituto Nacional de Astrofısica, Optica y Electronica


Capıtulo 2
Fundamentos teoricos
En este capıtulo se presentan, en primer lugar los conceptos fundamentales relacio-
nados con memristores y sistemas memristivos. Adicionalmente se realiza una breve
descripcion del memristor HP con la finalidad de introducir la ecuacion diferencial
que gobierna su funcionamiento.
Ası mismo, las principales senas de identidad del memristor son desglosadas con la
finalidad de establecer las propiedades que todo modelo del dispositivo debe cumplir.
Especial atencion se dedica a exponer brevemente otros mem-elementos y la ta-
xonomıa que los describe.
2.1. Memristor y Sistemas Memristivos
En el articulo inicial del Prof. L.O. Chua 1971 [1], el memristor fue introducido
como el cuarto elemento basico de circuito que cierra el ciclo alrededor de las variables
electricas fundamentales, voltaje (v), corriente (i), carga electrica (q) y flujo magnetico
(φ). El memristor posee una relacion constitutiva de rama que relaciona directamente
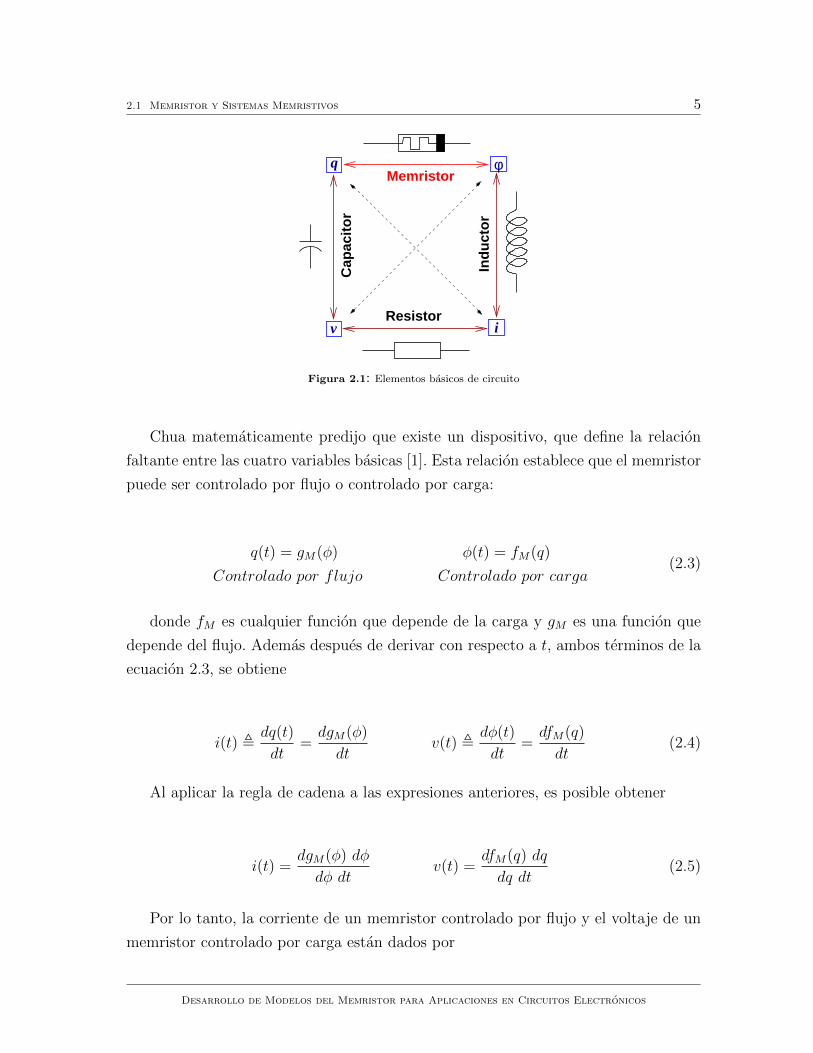
la carga electrica con el flujo magnetico, como se representa en la Figura 2.1. En este
esquema, las lıneas diagonales punteadas denotan las conocidas relaciones integrales:
q(t) =
∫ t
−∞i(τ)dτ (2.1)
φ =
∫ t
−∞v(τ)dτ (2.2)
[4]
2.1 Memristor y Sistemas Memristivos 5
Memristor
Cap
acit
or
Ind
uct
or
Resistor
φq
iv
Figura 2.1: Elementos basicos de circuito
Chua matematicamente predijo que existe un dispositivo, que define la relacion
faltante entre las cuatro variables basicas [1]. Esta relacion establece que el memristor
puede ser controlado por flujo o controlado por carga:
q(t) = gM(φ) φ(t) = fM(q)
Controlado por flujo Controlado por carga(2.3)
donde fM es cualquier funcion que depende de la carga y gM es una funcion que
depende del flujo. Ademas despues de derivar con respecto a t, ambos terminos de la
ecuacion 2.3, se obtiene
i(t) ,dq(t)
dt=dgM(φ)
dtv(t) ,
dφ(t)
dt=dfM(q)
dt(2.4)
Al aplicar la regla de cadena a las expresiones anteriores, es posible obtener
i(t) =dgM(φ) dφ
dφ dtv(t) =
dfM(q) dq
dq dt(2.5)
Por lo tanto, la corriente de un memristor controlado por flujo y el voltaje de un
memristor controlado por carga estan dados por
Desarrollo de Modelos del Memristor para Aplicaciones en Circuitos Electronicos

6 2. Fundamentos teoricos
i(t) =dgM(φ)
dφv(t) v(t) =
dfM(q)
dqi(t) (2.6)
Las expresiones se pueden definir como
i(t) = W (φ) v(t) v(t) = M(q) i(t) (2.7)
donde W (φ) es la memconductancia y M(q) representa la memresistancia; En
1976, Chua y Kang [3] consideraron el memristor como un caso particular de una
clase general de sistemas dinamicos, llamados sistemas memristivos que pueden ser
definidos como
x = f(x, ζ, t) y = g(x, ζ, t)ζ (2.8)
donde x representa el estado del sistema, mientras que la salida y la entrada del
sistema estan representadas por y e ζ respectivamente.
El sistema de ecuaciones 2.8 abre la posibilidad de dos tipos diferentes de sistemas
memristivos: controlados por voltaje y corriente. Los sistemas memristivos controlados
por corriente y por voltaje estan representados respectivamente por
x = f(x, i, t) x = f(x, v, t)
v = R(x, i, t)i i = G(x, v, t)v
Controlado por corriente Controlado por voltaje
(2.9)
donde v e i denotan el voltaje y la corriente, respectivamente.
En el trabajo sobre la concepcion original del memristor se demostro mediante
la construccion de modelos de laboratorio con la ayuda de circuitos activos [1]. El
mutador M-R se utilizo para transformar la curva caracterıstica v-i de la resistencia
no lineal en la curva caracterıstica q-φ correspondiente del memristor. La ausencia
de un dispositivo fısico fue la principal desventaja para demostrar las propiedades y
aplicaciones potenciales de los memristores.
Departamento de Electronica Instituto Nacional de Astrofısica, Optica y Electronica

2.1 Memristor y Sistemas Memristivos 7
2.1.1. El Memristor de HP
Sin lugar a dudas, la fabricacion del memristor en los Laboratorios Hewlett-
Packard en 2008 constituye el segundo hito en el desarrollo del memristor [2]. El
memristor de HP es un nodo (Figura 2.2) en una estructura entretejida compuesta
por una pelıcula de oxido de titanio (TiO2) entre dos electrodos de platino (Pt).
Figura 2.2: Memristor HP. Tomada de [4]
La pelıcula de TiO2 tiene dos capas: la primera actua como capa aislante, tiene
una relacion oxıgeno-titanio de 2:1, la segunda actua como conductor, tiene una
disminucion de oxıgeno de 0.5 % (TiO2−x; x = 0.005).
Las deficiencias de oxıgeno en el TiO2 se manifiestan como ”burbujas de vacancias
de oxıgeno dispersas por la capa superior Figura 2.3(a). Un voltaje positivo en el
dispositivo repele las deficiencias de oxıgeno (positivas) en la capa metalica superior
del TiO2, enviandolas a la capa aislante del TiO2, a continuacion esto hace que el
lımite entre los dos materiales se mueva hacia abajo Figura 2.3(b), aumentando
el porcentaje de conduccion del TiO2 y, por lo tanto, la conductividad de todo
el dispositivo. Cuanto mas voltaje positivo se aplica, mas conductivo se vuelve el cubo.
Un voltaje negativo en el dispositivo atrae las burbujas de oxıgeno cargadas
positivamente, sacandolas del TiO2. La cantidad del TiO2 aislante y resistivo
aumenta, lo que hace que el dispositivo sea totalmente resistente. Cuanto mas voltaje
negativo se aplica, menos conductivo se convierte el cubo.
Desarrollo de Modelos del Memristor para Aplicaciones en Circuitos Electronicos

8 2. Fundamentos teoricos
Lo que hace que este dispositivo sea especialmente memristivo es que cuando el
voltaje se desactiva, positivo o negativo, las burbujas de oxıgeno no migran. Se quedan
donde estan, lo que significa que el lımite entre las dos capas de dioxido de titanio se
queda estatica. Ası es como el memristor conserva cuanto voltaje se aplico por ultima
vez.
(a) (b) (c)
Figura 2.3: (a) Sin aplicar voltaje, (b) Aplicando un voltaje positivo y (c) Aplicando un voltaje negativo
La longitud total del dispositivo (region dopada y no dopada) esta dada por la
variable ∆, mientras que la longitud de la region dopada se denota por la variable
w. En funcion del numero de dopantes, cada region tiene una resistencia asociada.
La resistencia para la region dopada se denomina Ron (resistencia del estado ON del
dispositivo) y la asociada a la region no dopada se denomina Roff (resistencia del
estado OFF del dispositivo). La resistencia equivalente es la suma de la resistencia
total en cada region:
Req = Ronw
∆+Roff (1−
w
∆) (2.10)
La longitud w es normalizada en la forma x = w∆
, donde x se denomina la variable
de estado normalizada del memristor y puede tomar un valor entre 0− 1. La variable
x puede ser controlada por la corriente i(t) que pasa a traves del elemento, la relacion
de cambio en x(t) es directamente proporcional a la corriente.
Departamento de Electronica Instituto Nacional de Astrofısica, Optica y Electronica

2.1 Memristor y Sistemas Memristivos 9
Figura 2.4: Estructura del Memristor de HP
dx(t)
dt=µRon
∆2i(t)fw(x) (2.11)
La ecuacion diferencial no lineal 2.11 representa el modelo de arrastre que describe
el mecanismo de modulacion de la interfaz entre las areas dopadas y no dopadas del
dispositivo. En la ecuacion 2.11 µ es la movilidad de las cargas de la region dopada
y es medida en m2
V s, i(t) es un estımulo de corriente y fw(x) es la funcion de ventana
Joglekar que limita la variable de estado x.
2.1.2. Huellas de Identidad del Memristor
Las propiedades que debe cumplir un dispositivo para ser considerado un mem-
ristor, se conocen como huellas o marcas de identidad, cuyo termino en ingles es
fingerprints. Son al menos tres las caracterısticas que debe manifestar segun [4], [5]
y [6], las cuales se mencionan en los siguientes apartados.
Lazo de histeresis pellizcado (estrangulado) (V-I)
La primera huella de un memristor es el ciclo de histeresis pellizcado. El memristor
exhibe una caracterıstica unica llamada “lazo de histeresis pellizcado”que permite que
los dispositivos memristivos se distingan de los dispositivos no memristivos. Chua
en [7] ha llamado a esta caracterıstica correctamente como la huella digital de un
memristor.
Desarrollo de Modelos del Memristor para Aplicaciones en Circuitos Electronicos
10 2. Fundamentos teoricos
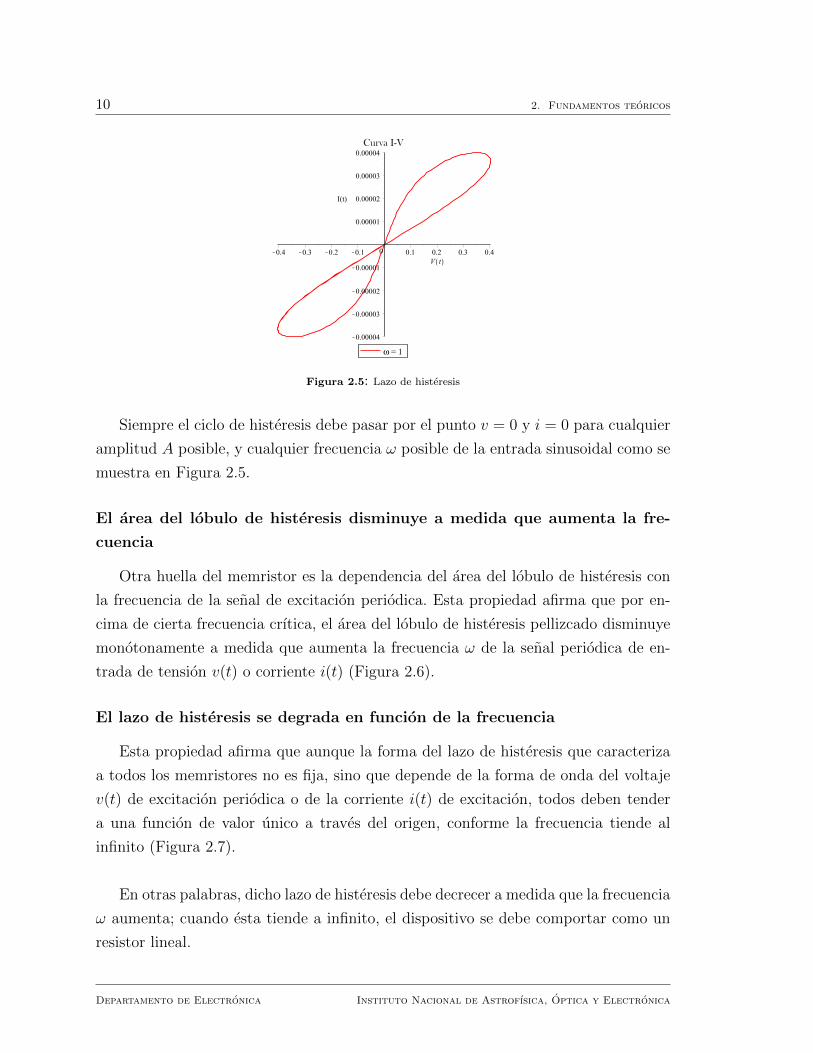
Figura 2.5: Lazo de histeresis
Siempre el ciclo de histeresis debe pasar por el punto v = 0 y i = 0 para cualquier
amplitud A posible, y cualquier frecuencia ω posible de la entrada sinusoidal como se
muestra en Figura 2.5.
El area del lobulo de histeresis disminuye a medida que aumenta la fre-
cuencia
Otra huella del memristor es la dependencia del area del lobulo de histeresis con
la frecuencia de la senal de excitacion periodica. Esta propiedad afirma que por en-
cima de cierta frecuencia crıtica, el area del lobulo de histeresis pellizcado disminuye
monotonamente a medida que aumenta la frecuencia ω de la senal periodica de en-
trada de tension v(t) o corriente i(t) (Figura 2.6).
El lazo de histeresis se degrada en funcion de la frecuencia
Esta propiedad afirma que aunque la forma del lazo de histeresis que caracteriza
a todos los memristores no es fija, sino que depende de la forma de onda del voltaje
v(t) de excitacion periodica o de la corriente i(t) de excitacion, todos deben tender
a una funcion de valor unico a traves del origen, conforme la frecuencia tiende al
infinito (Figura 2.7).
En otras palabras, dicho lazo de histeresis debe decrecer a medida que la frecuencia
ω aumenta; cuando esta tiende a infinito, el dispositivo se debe comportar como un
resistor lineal.
Departamento de Electronica Instituto Nacional de Astrofısica, Optica y Electronica

2.2 Otros Mem-Elementos 11
Figura 2.6: Area del lazo de histeresis vs frecuencia ω
Figura 2.7: Degradacion del area de histeresis
2.2. Otros Mem-Elementos
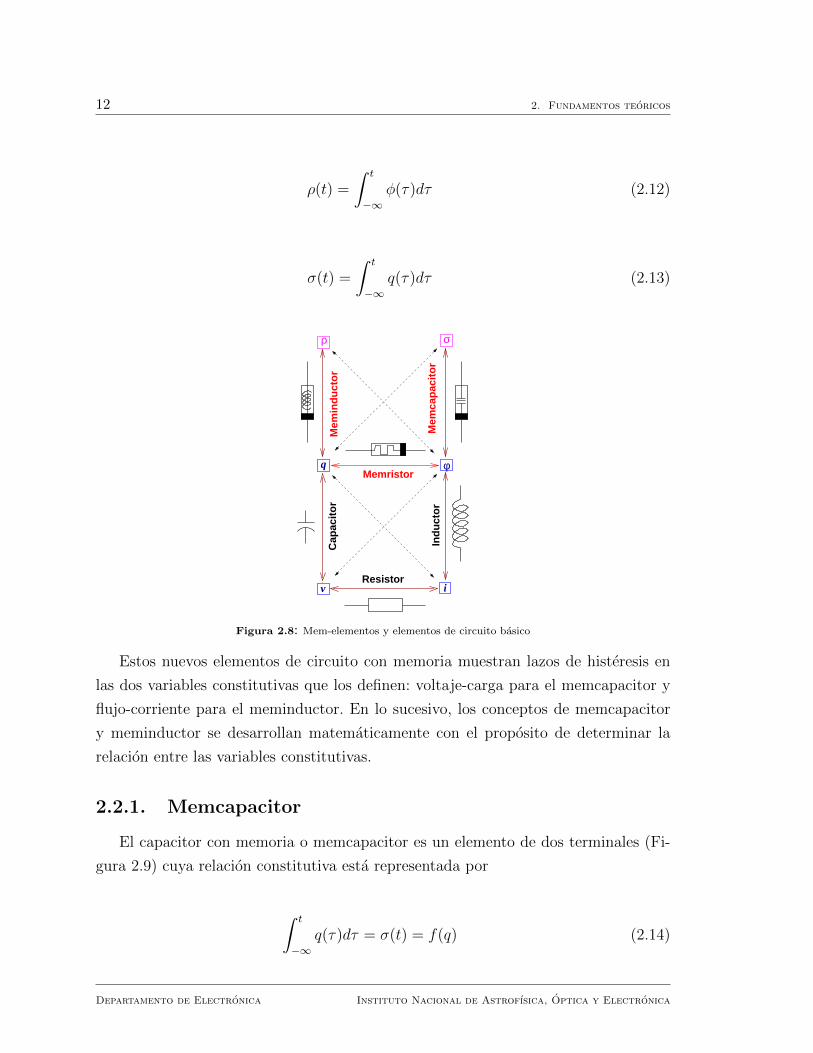
La estructura representada en la Figura 2.1 se ha extendido al llamado segundo
piso de las variables electricas mediante la adicion de otros mem-elementos, a saber, el
memcapacitor y el meminductor [8], [9], [10], [11], [12], como se muestra en la Figura
2.8. El memcapacitor relaciona la carga electrica con la variable de estado ρ, mientras
que el meminductor relaciona el flujo magnetico con la variable de estado σ. Para
estos elementos, las relaciones cruzadas son:
Desarrollo de Modelos del Memristor para Aplicaciones en Circuitos Electronicos
12 2. Fundamentos teoricos
ρ(t) =
∫ t
−∞φ(τ)dτ (2.12)
σ(t) =
∫ t
−∞q(τ)dτ (2.13)
Memristor
Cap
acit
or
Ind
uct
or
Resistor
φq
iv
ρ σM
emin
du
cto
r
Mem
cap
acit
or
Figura 2.8: Mem-elementos y elementos de circuito basico
Estos nuevos elementos de circuito con memoria muestran lazos de histeresis en
las dos variables constitutivas que los definen: voltaje-carga para el memcapacitor y
flujo-corriente para el meminductor. En lo sucesivo, los conceptos de memcapacitor
y meminductor se desarrollan matematicamente con el proposito de determinar la
relacion entre las variables constitutivas.
2.2.1. Memcapacitor
El capacitor con memoria o memcapacitor es un elemento de dos terminales (Fi-
gura 2.9) cuya relacion constitutiva esta representada por
∫ t
−∞q(τ)dτ = σ(t) = f(q) (2.14)
Departamento de Electronica Instituto Nacional de Astrofısica, Optica y Electronica

2.2 Otros Mem-Elementos 13
Figura 2.9: Sımbolo del memcapacitor
Derivando con respecto al tiempo t, ambos terminos de 2.14, se tiene que
q(t) ,dσ
dt=df(φ)
dt(2.15)
Al aplicar la regla de la cadena a la expresion anterior, es posible obtener
q(t) =df(φ) dφ
dφ dt(2.16)
La ecuacion 2.16 se puede reorganizar en dos formas diferentes
q(t) =d(σ) dφ
dφ dt
dφ
dt=dφ
dσq(t) (2.17)
Las expresiones de arriba pueden ser simplificadas como
q(t) , C(φ)v(t) v(t) , D(σ)q(t)
controlado por voltaje controlado por carga(2.18)
donde
C(φ) =dσ
dφD(σ) =
d(φ)
dσ(2.19)
se llaman memcapacitancia y memelastancia, respectivamente.
Desarrollo de Modelos del Memristor para Aplicaciones en Circuitos Electronicos

14 2. Fundamentos teoricos
2.2.2. Meminductor
El meminductor o inductor con memoria es un elemento de dos terminales (Figura
2.10) cuyas variables constitutivas estan relacionadas por
Figura 2.10: Sımbolo del meminductor
∫ t
−∞φ(τ)dτ = ρ(t) = f(q) (2.20)
Despues de aplicar algunos pasos de derivadas con respecto al tiempo t, ambos
terminos de 2.20, da como resultado
φ(t) ,dρ
dt=df(q)
dt(2.21)
La regla de la cadena se utiliza en la expresion anterior para obtener
φ(t) =df(q) dq
dq dt(2.22)
La ecuacion 2.22 se puede ordenar de dos formas diferentes
φ(t) =d(ρ) dq
dq dt
dq
dt=dq
dρφ(t) (2.23)
Estas expresiones se pueden reducir como
φ(t) , L(q)i(t) i(t) , Γ(ρ)φ(t)
controlado por corriente controlado por flujo(2.24)
donde
Departamento de Electronica Instituto Nacional de Astrofısica, Optica y Electronica

2.3 Taxonomıa de Mem-Elementos 15
L(q) =dρ
dqΓ(ρ) =
dq
dρ(2.25)
se llaman meminductance y memreluctancia, respectivamente.
2.3. Taxonomıa de Mem-Elementos
Chua propuso un Cuadrado Elemental de Elementos de Circuito que incluye los
tres elementos clasicos (resistencia, inductor y capacitor) y su memristor formu-
lado y nombrado como el cuarto elemento. Basado en la observacion de que este
cuadrangulo puede no ser simetrico, en el trabajo [12] se propone un triangulo de
elementos de circuito elemental, en el cual el memristor ası como el memcapacitor
y el meminductor lideran tres clases de elementos basicos. Ademas se encuentra
una relacion matematica intrınseca que respalda esta nueva clasificacion. Se cree
que este triangulo es conciso, matematicamente solido y esteticamente atractivo, en
comparacion con el cuadrangulo de Chua.
La importancia de encontrar una tabla correcta de elementos de circuito es
similar a la de la tabla periodica de Mendeleev de elementos quımicos en quımica y la
tabla de 61 partıculas elementales en fısica, en terminos de categorizar los elementos
existentes y predecir nuevos elementos.
En esta taxonomıa, se considera que fısicamente el flujo magnetico φ y la carga
electrica q son caracterısticas fundamentales para describir un objeto. En otras pala-
bras, se trata de caracterısticas internas asociadas con el material del dispositivo y su
mecanismo de operacion fısico. Por el contrario, el voltaje v y la corriente, podrıan
derivarse de φ y q, como v = dφdt
(Ley de Faraday) y i = dqdt
(por definicion). Aunque se
usa convenientemente en la practica, el voltaje y la corriente solo muestran medidas
externas de un objeto.
A continuacion se presentan tres evidencias de que flujo magnetico y carga electrica
son fısicamente intrınsecas y basicas
La primera evidencia es el hecho de que flujo magnetico y carga electrica exhi-
ben una funcion de memoria en un memristor, mem-capacitor o mem-inductor
Desarrollo de Modelos del Memristor para Aplicaciones en Circuitos Electronicos

16 2. Fundamentos teoricos
[17]. Esto es lo que se llama (“mem”es la abreviatura de “memoria”, matemati-
camente la integral de tiempo de i o v). Por ejemplo, en un memristor, cuando
se desconecta la alimentacion, tanto el voltaje como la corriente se vuelven cero
instantaneamente, pero el memristor no pierde su valor de φ y q [2]. En realidad,
φ y q se consideran “estados”de un memristor ideal, que mantienen el resultado
de lo que sucedio la ultima vez.
Otra evidencia es el trabajo sobre el llamado fenomeno de “Interrupcion retar-
dada”(Delayed Switching), es decir, la conmutacion de un memristor tiene lugar
con un retraso de tiempo [15]. La interpretacion fısica es que la carga o flujo
posee cierta inercia con la tendencia a permanecer inalterado (establecerse en
algun estado de equilibrio). No puede responder tan rapido como la variacion
rapida en la forma de onda de excitacion y toma siempre un intervalo de tiempo
finito pero pequeno para que el memristor cambie su valor de resistencia. No
hace falta decir que esta caracterıstica natural podrıa ser muy util en los futu-
ros paradigmas informaticos y la tecnologıa de la informacion moderna, como
memorias de computadora basadas en memristor [15], redes neuronales basadas
en memristor, y la ingenierıa neuromorfica basada en memristor [16].
La tercera evidencia es la dependencia de la frecuencia de los PHL (por sus
sigla en ingles Pinched Hysteresis Loop). A medida que la frecuencia ω de una
excitacion de v o i tienda a ∞, el ciclo de histeresis se reduce y eventualmente
se colapsa en una lınea recta a traves del origen [2], [17].
El triangulo de elementos basicos se representa en la Figura 2.11 y se cree que
son dos atributos fısicos basicos que generan elementos de circuito elementales. Al
compartir la misma unidad SI, cada vertice representa una clase de elementos basicos,
que es equivalente a un “Grupo”en la Tabla Periodica de los Elementos Quımicos de
Mendeleev. Ademas, cada vertice incluye mas subclases (equivalentes a “Perıodo”en
la Tabla de Mendeleev). En lugar de ser solo el cuarto elemento, el memristor tiene
un papel mas importante que desempenar: liderar una clase de elementos basicos.
De manera similar, el mem-capacitor y el mem-inductor conduciran otras dos clases,
como se muestra en la Figura 2.11.
Departamento de Electronica Instituto Nacional de Astrofısica, Optica y Electronica

2.4 Emulador de mem-elementos 17
Figura 2.11: Capacitancia equivalente C(t) extraıda numericamente de las senales Vin y V2.Tomada de [19]
Este triangulo tambien puede expandirse infinitamente hacia adentro y hacia
afuera para tener las contrapartes de orden superior o inferior de los vertices
(∫ ∫
,∫ ∫ ∫
, ... d2
dt2, d
3
dt3...).
2.4. Emulador de mem-elementos
Los sistemas memcapacitivos y meminductivos son dos clases recientemente
postuladas de elementos de circuito con memoria [10] que complementan la clase de
sistemas memristivos [1], [3]. Su caracterıstica principal es un ciclo de histeresis, que
puede o no pasar por el origen [10] en sus variables constitutivas (carga-voltaje para
los memcapacitores y flujo-corriente para los meminductores) cuando es impulsado
por una entrada periodica y, a diferencia de los memristores, ellos pueden almacenar
energıa.
Hasta la fecha, se han encontrado algunos sistemas para operar como memcapa-
citores y meminductores (ver [10]). Sin embargo, todavıa no estan disponibles en el
mercado, ni sus propiedades se pueden sintonizar facilmente para investigar su rol
en circuitos mas complejos. Por lo tanto, resultan altamente valiosos los emuladores
Desarrollo de Modelos del Memristor para Aplicaciones en Circuitos Electronicos

18 2. Fundamentos teoricos
electronicos de tales elementos de memoria que podrıan construirse y sintonizarse
facilmente.
Ademas existen otros tipos de emuladores descritos como: Mutadores que simulan
memcapacitores y meminductores [13] y Emulacion de memcapacitors flotantes y
meminductores usando transportadores actuales [14].
A continuacion se presentan 2 emuladores especıficos basados en topologıas con
memristor, un capacitor, un resistor y un amplificador operacional que ilustran el
funcionamiento de emulacion.
2.4.1. Emulador de memcapacitor
Este emulador consiste en un memristor M , un capacitor C1 y una resistencia R
conectados a un amplificador operacional A1, como se muestra en la Figura 2.12a.
Dado que el amplificador operacional mantiene voltajes casi iguales en sus entradas
positiva y negativa, la tension en el capacitor C1 se aplica al terminal derecho de
R. Por lo tanto, podemos pensar que un capacitor efectivo con una capacitancia
dependiente del tiempo C(t) esta conectado al terminal derecho de R, de modo que
la relacion RC(t) = RM(t)C1 se mantiene. (Teniendo en cuenta que la tension en el
capacitor VC es equivalente a la tension, V2, en la terminal negativa del amplificador
operacional.) Esto nos permite determinar la capacitancia como:
C(t) =RM(t)C1
R=
(Vin − V−)
(RdV−dt
)(2.26)
donde
RM(t) =(Vin − V−)
I=
(Vin − V−)
(C1dV−dt
)(2.27)
En el lımite R RM , obtenemos el circuito equivalente aproximado que se
muestra a la derecha de la Figura 2.12a.
Departamento de Electronica Instituto Nacional de Astrofısica, Optica y Electronica

2.4 Emulador de mem-elementos 19
(a) Memcapacitor
(b) Dependencia del tiempo de la senal de vol-taje de entrada Vin y la tension en la en-trada negativa del amplificador operacio-nal A1
(c) Capacitancia equivalente C(t) extraıdanumericamente de las senales Vin y V2a
aTomada de [19]
Figura 2.12: Emulador de memcapacitor
Para demostrar que este circuito emula el comportamiento del memcapacitor, se
ha analizado su respuesta bajo la aplicacion de una senal de onda cuadrada. Esto se
muestra en la Figura 2.12b, donde se muestra tanto la tension de entrada V in como
la tension en el terminal negativo del amplificador operacional, y en la Figura 2.12c la
capacitancia equivalente del emulador de memoria en dos valores de frecuencia de la
senal de onda cuadrada. Los lazos de histeresis claros son visibles en la capacitancia
como una funcion de la tension en el condensador VC = V−.
Tambien observamos que la histeresis de capacitancia depende de la frecuencia:
el bucle es mucho mas pequeno en la frecuencia mas alta de 8 Hz. Esta es una
manifestacion de una propiedad tıpica de los elementos del circuito de memoria [10]
que a altas frecuencias se comportan como elementos lineales.
Desarrollo de Modelos del Memristor para Aplicaciones en Circuitos Electronicos

20 2. Fundamentos teoricos
2.4.2. Emulador de meminductor
Por otro lado, la estructura de este emulador es similar a la estructura de un
girador con un memristor que reemplaza una resistencia, y la inductancia equivalente
esta dada por L(t) = RRM(t)C1, como es evidente en la Figura 2.13a. En ambos
casos, la dependencia del tiempo de la capacitancia equivalente, C, y la inductancia,
L, se debe a la dependencia del tiempo de RM .
En la Figura 2.13b se ve claramente que la forma de la senal Vin (que en este caso
es igual a la tension en el inductor equivalente VL) depende de la polaridad del voltaje
aplicado. Dado que el estado del memristor en el emulador del meminductor cambia
rapidamente, la inductancia equivalente L conmuta entre dos valores lımite, como se
muestra esquematicamente en la Figura 2.13c.
(a) Meminductor
(b) Dependencia del tiempo de la senal de tension deentrada Vin y la tension V2 = VL en la entradanegativa del amplificador operacional A1
(c) Histeresis del meminductor dibujado con induc-tancia L obtenida usando ajustes exponencialesa senales V2, como se muestra en (b)a
aTomada de [19]
Figura 2.13: Emuladores de meminductor
Departamento de Electronica Instituto Nacional de Astrofısica, Optica y Electronica


Capıtulo 3
Desarrollo de Modelos
En este capıtulo se trata el desarrollo de dos modelos de memristores. El primero se
enfoca a obtener una expresion para la memristancia que permita la relacion ohmica
voltaje-corriente en el dispositivo. El segundo esta enfocado a obtener la relacion
constitutiva de rama del memristor directamente en el plano carga-flujo.
3.1. Modelo Armonico
El origen de partida es la ecuacion diferencial de arrastre no lineal que rige el
comportamiento fısico del dispositivo [1], [20] y que se define en la ecuacion 3.1.
dx(t)
dt= γ1ωRon sin(ωt)fw(x) (3.1)
donde x(t) es la variable de estado normalizada (x = w∆
), ∆ ([m]) es la longitud
total del material semiconductor, y Ron es la resistencia del estado ON. Ademas γ1
esta dada como:
γ1 =µAp
∆2ω(3.2)
Ap es la amplitud de la senal sinusoidal de prueba, y µ es la movilidad de las
cargas [ m2
V s].
La funcion de ventana fw(x) debe ser una funcion limitada entre 0 y 1 tanto
en su dominio como en su rango, tambien en los lımites la funcion debe exhibir un
[22]

3.1 Modelo Armonico 23
estrangulamiento, para modelar el desplazamiento nulo de la resistencia de estado ON
e interfaz de resistencia de estado OFF. Se han reportado varias funciones de ventana
en la literatura [25], [26] y [27]. Todos ellos apuntan a lograr una normalizacion de
la variable de estado preservando el comportamiento fısico de la resistencia. En este
trabajo se utilizara la funcion de ventana de Joglekar [21] que esta dada por:
fw(x) = 1− (2x− 1)2k (3.3)
donde k controla el nivel de linealidad. Cuando k incrementa la linealidad in-
crementa en un rango de 0 a 1 para x, ademas la funcion es simetrica en ambas
direcciones, como se muestra graficamente en la Figura 3.1, donde es evaluada para
varios valores de k.
Figura 3.1: Funcion de ventana de Joglekar evaluada para algunos valores de k
Encontrar una solucion numerica a la ecuacion 3.1 tiene varias deficiencias no solo
en cuanto a la precision y la estabilidad de los algoritmos numericos, sino tambien
a la falta de comprension en la solucion y, por lo tanto, en el comportamiento de la
resistencia. Por lo tanto, se preve una solucion simbolica.
Se ha encontrado una solucion completamente simbolica para la ecuacion diferen-
cial ordinaria en 3.1 al usar el metodo de perturbacion homotopica (HPM por sus
siglas en ingles Homotopy Perturbation Method) de [23], [24]. El HPM introduce un
parametro homotopico p que toma valores que van desde 0 hasta 1.
Desarrollo de Modelos del Memristor para Aplicaciones en Circuitos Electronicos

24 3. Desarrollo de Modelos
Partiendo de la teorıa de metodo de perturbacion homotopica (HPM), considera-
mos una ecuacion no lineal general en la forma
A(u)− f(r) = 0, r ∈ Ω, (3.4)
con las siguientes condiciones de limite
B(u,∂u
∂η) = 0, r ∈ Γ, (3.5)
donde A es un operador diferencial general, f(t) es una funcion analıtica conocida,
B es un operador de lımites, Γ es el lımite del dominio Ω y ∂u∂η
denota diferenciacion a
lo largo de la normal extraıda de Ω. En la mayorıa de los casos, el operador A se puede
dividir en dos operadores, es decir, L y N , que representan los operadores lineales y
no lineales, respectivamente. Por lo tanto, la ecuacion 3.4 puede ser reescrita como:
L(u) +N(u)− f(t) = 0 (3.6)
En un sentido amplio, una homotopıa se puede construir de la siguiente forma
H(v, p) = (1− p)[L(v)− L(u0)] + p[L(v) +N(v)− f(t)] = 0 (3.7)
donde p es un parametro homotopico, cuyos valores oscilan entre 0 y 1, u0 es la
primera aproximacion a la solucion de la ecuacion 3.6 que satisface las condiciones de
lımite. Supongamos que la solucion para la ecuacion 3.7 se puede escribir como una
serie de potencias de p
v = v0 + v1p+ v2p2 + v3p
3 + ...+ vnpn (3.8)
donde v0, v1, v2, ... son funciones que se determinaran a partir del procedimiento
HPM.
Departamento de Electronica Instituto Nacional de Astrofısica, Optica y Electronica

3.1 Modelo Armonico 25
Sustituyendo la ecuacion 3.8 en la ecuacion 3.7 e igualando potencias identicas
de p, es posible obtener los valores para la secuencia v0, v1, v2, ...
Cuando p −→ 1, genera la solucion aproximada para la ecuacion 3.5 en la forma
u(t) = lımp→1
v = v0 + v1 + v2 + v3 + ...+ vn (3.9)
Un parametro importante que intervine en la complejidad de la solucion simbolica
es n, que se define como el orden de la homotopıa.
Solucion de la Ecuacion diferencial de arrastre no-lineal
Se hallo solucion de la ecuacion 3.1 con la ayuda del metodo de perturbacion
homotopica, que da como resultado la aproximacion de n-esimo orden de la variable
de estado del memristor. Sin embargo para obtener el comportamiento de la mem-
ristancia, se sustituye la solucion de la variable de estado x(t) en la memristancia
que esta dada por la expresion 2.10 asociada a la estructura de resistores acoplados,
que se repite por conveniencia, por lo que la memristancia tambien tendra diferentes
ordenes de aproximacion.
Meq = Ronx(t) +Roff [1− x(t)]
Como se explico anteriormente, el orden de aproximacion dependera de la potencia
usada en p de la formulacion homotopica. Para este caso de estudio se usaran las
aproximaciones de primer (n = 1), segundo (n = 2) y tercer (n = 3) orden de la
memristancia en forma simbolica.
En primer lugar, la expresion totalmente simbolica para el modelo de memristor
armonico de orden 1 y cualquier valor k de la funcion de ventana, esta dada por:
Desarrollo de Modelos del Memristor para Aplicaciones en Circuitos Electronicos

26 3. Desarrollo de Modelos
Mo1kn = R2onfwnγ1(α− 1) [−1 + cos(ωt)] +Rinit
fwn = fw(Xo)|k=n = 1− (2Xo− 1)(2n)
Rinit = [Xo+ α(1−Xo)]Ron
(3.10)
En este modelo, Xo es la condicion inicial de la variable de estado, γ1 = µAp∆2ω
y
α =Roff
Ron. Se puede obtener una expresion similar para el modelo armonico de orden
2:
Mo2kn = Mo1kn+
R3onfwnf
′wnγ2
1(α− 1)[−3
4+ cos(ωt)− (1
4) cos(2ωt)
]f ′wn
= −4n(2Xo− 1)2n−1
(3.11)
Para el modelo armonico de orden 3, la memristancia se expresa como:
Mo3kn = Mo2kn
+R4onfwnf
′′wnγ3
1Pxo3kn(Xo)(α− 1)
[554− 5
36cos (ωt) +
118
cos (2ωt)− 1108
cos (3ωt)
]
f ′wn= −4n(2Xo− 1)2n−1
f ′′wn= −8n(2n− 1)(2Xo− 1)2(n−1)
(3.12)
Vale la pena observar que las ecuaciones (3.10 - 3.12) poseen una estructura anida-
da, es decir, los modelos con armonicos de orden superior se definen a partir de las
expresiones de los modelos de orden inferior.
Departamento de Electronica Instituto Nacional de Astrofısica, Optica y Electronica

3.1 Modelo Armonico 27
Ademas la memristancia de orden 3 contiene un polinomio Pxo3kn, el cual
cambia con respecto al valor de k. En la Tabla 3.1 se presentan los polinomios
correspondientes a los valores de k en el rango de 1 a 7.
k Pxo3kn(Xo)
1 (6Xo2 − 6Xo+ 1)
2 (28Xo4 − 56Xo3 + 42Xo2 − 14Xo+ 1)
3 (352Xo6 − 1056Xo5 + 1320Xo4 − 880Xo3 + 330Xo2 − 66Xo+ 3)
4 (480Xo8 − 1920Xo7 + 3360Xo6 − 3360Xo5 + 2100Xo4 − 840Xo3 + 210Xo2 − 30Xo+ 1)
5(9728Xo10 − 48640Xo9 + 109440Xo8 − 145920Xo7 + 127680Xo6 − 76608Xo5 + 31920Xo4
−9120Xo3 + 1710Xo2 − 190Xo+ 5)
6
23552Xo12 − 141312Xo11 + 388608Xo10 − 647680Xo9
+728640Xo8 − 582912Xo7 + 340032Xo6 − 145728Xo5 + 45540Xo4
−10120Xo3 + 1518Xo2 − 138Xo+ 3
7
221184Xo14 − 1548288Xo13 + 5031936Xo12 − 10063872Xo11 + 13837824Xo10
−13837824Xo9 + 10378368Xo8 − 5930496Xo7 + 2594592Xo6 − 864864Xo5
+216216Xo4 − 39312Xo3 + 4914Xo2 − 378Xo+ 7
Tabla 3.1: Expresiones para los polinomios generados en Orden3
Los valores de los parametros utilizados en las expresiones anteriores corresponden
a los valores tıpicos del memristor HP y del modelo homotopico, mostrados en las
Tablas 3.2 y 3.3 respectivamente.
Parametro Valor
µ 10−10 cm2 s−1 V−1
Ron 100 Ω
Roff 40 14 kΩ
∆ 10 nm
α 160
Tabla 3.2: Parametros del memristor de HP
Parametro Valor
Ap 40 µ A
Xo 0.1
Tabla 3.3: Parametros tıpicos del modelo homotopico
Desarrollo de Modelos del Memristor para Aplicaciones en Circuitos Electronicos

28 3. Desarrollo de Modelos
Caracterizacion del Modelo
En esta seccion se presentan algunos graficos correspondientes a los modelos men-
cionados anteriormente, los cuales fueron evaluados en k = 5; en la Figura 3.2a se
muestra una comparacion de las curvas corriente-voltaje para los ordenes de memris-
tancia 1, 2 y 3, y como es de notarse el modelo de Orden 2 cruza momentaneamente a
los cuadrantes 2 y 4 lo que implica un comportamiento parcialmente activo. Ademas
puede observarse en la Figura 3.2b cuando la memristancia se hace activa.
(a) (b)
Figura 3.2: Curvas de IV y MI
Sin embargo los modelos de Orden 1 y 3 son completamente pasivos.
3.2. Modelo carga-flujo
En esta seccion, se muestra la generacion del modelo de memristor que mas se ape-
ga a la definicion original de Chua [1], i.e. el modelo que se representa a traves de una
funcion continua constitutiva de rama que relaciona las dos variables fundamentales:
carga electrica y flujo magnetico.
El punto de partida es el par de expresiones lineales a tramos (en ingles piecewise
linear, PWL) provenientes de [22]. Dichas expresiones se muestran a continuacion:
qη+ = 0.00422344 + 0.00503125φ+ 0.00496875 |φ− 0.85| (3.13)
Departamento de Electronica Instituto Nacional de Astrofısica, Optica y Electronica

3.2 Modelo carga-flujo 29
qη− = 0.00422344 + 0.00503125φ+ 0.00496875 |φ− 0.85| (3.14)
donde η ilustra la direccion del desplazamiento de la carga electrica. Las expresio-
nes 3.13 y 3.14 se grafican en el plano q-φ y se muestran en las Figuras 3.3a y 3.3b,
respectivamente.
(a) η positivo (b) η negativo
Figura 3.3: Curvas piecewise linear
Como las ecuaciones 3.13 y 3.14 son validas para direcciones complementarias del
desplazamiento, a traves de la suma aritmetica de las mismas se obtiene una sola
expresion de memristancia:
q(φ) = 0.01006250φ− 0.00496875 |φ+ 0.85|+ 0.00496875 |φ− 0.85| (3.15)
En la Figura 3.4a se muestra graficamente la ecuacion anterior.
Desarrollo de Modelos del Memristor para Aplicaciones en Circuitos Electronicos

30 3. Desarrollo de Modelos
(a) Piecewise linear (b) Continuo
Figura 3.4: Curvas carga-flujo
Como nuestro objetivo es obtener una funcion continua carga-flujo, recurrimos a
utilizar un procedimiento de ajuste de curvas para generar una expresion polinomica
de la memristancia, haciendo uso del programa matematico MAPLE. Con la finalidad
de mantener un balance entre complejidad y semejanza entre la funcion PWL y la
aproximacion continua, se lleva a cabo el ajuste a un polinomio de orden 3, lo que
resulta en el modelo siguiente:
q(φ) = 0.002φ3 − 6.76461 · 10−15 φ2 − 3 · 10−9 φ (3.16)
La Figura 3.4b muestra la caracterıstica del modelo en el plano q-φ.
Modelos desarrollados
Las expresiones 3.10–3.12 y 3.16 representan en resumen los objetivos asociados
a la generacion de modelos analıticos del memristor del presente trabajo.
Por un lado, las expresiones 3.10–3.12 representan modelos del memristor en forma
de funciones de memristancia dependientes del tiempo.
Por otro lado, la expresion 3.16 representa el modelo del memristor en el plano
carga-flujo.
Departamento de Electronica Instituto Nacional de Astrofısica, Optica y Electronica


Capıtulo 4
Fabricacion de Dispositivo
Memristivo
Este capıtulo trata del proceso de fabricacion de un dispositivo memristivo que
fue llevado a cabo en el Departamento de Ciencias e Ingenierıa de Materiales, en los
Laboratorio de la Universidade Federal do ABC (UFABC), en Sao Paulo, Brasil. Para
ello, en la primera seccion se presenta un breve resumen del fenomeno de transicion
resistiva. La segunda seccion presenta el proceso de fabricacion y de medicion para
obtener las caracterısticas electricas del dispositivo. Finalmente, la extraccion del
modelo es materia de estudio en la tercera seccion.
4.1. Dispositivos de Transicion Resistiva
Existen dos tipos de transicion resistiva: la transicion resistiva unipolar y bipolar
[28] las cuales se comentan mas adelante. Usualmente, el fenomeno fısico denominado
Transicion Resistiva (en ingles Resistive Switching y abreviado como RS), se basa
en el hecho de que la resistencia de un dielectrico sufre cambios en respuesta a un
campo electrico externo fuerte. Este cambio se puede asociar a la transicion de nivel
logico. El proceso de RS es reversible y puede reproducirse varias veces. Tıpicamente,
el cambio en la resistencia es no volatil. La conmutacion resistiva ocurre gracias al
cambio de resistividad del material debido a la formacion de un filamento entre los
contactos del dispositivo. El nivel logico alto se puede asignar a una baja resistividad,
mientras que una alta resistividad caracterizara el nivel logico bajo.
Por otro lado el fenomeno de ruptura dielectrica, que da como resultado una
[32]

4.1 Dispositivos de Transicion Resistiva 33
reduccion permanente de la resistencia (y en muchos casos, dano irreversible en la
muestra) por lo que ya no es posible volver al estado original.
Los dispositivos tıpicos para aplicaciones RS presentan una configuracion de dos
terminales tipo capacitor, como se muestra en la Figura 4.1, donde una pelıcula
delgada de material aislante se intercala entre los electrodos superior e inferior. Esta
configuracion de tipo condensador es conveniente, ya que un gran campo electrico
(tıpicamente 10 % de la fuerza dielectrica [29], que en muchos solidos es del orden de
10-100 MVm
) se puede aplicar facilmente. Dicha configuracion es relativamente facil de
fabricar, lo cual representa una gran ventaja de cara a la fabricacion de dispositivos
RRAM practicos. Sin embargo, debido a la simpleza del dispositivo resulta difıcil
llevar a cabo el analisis de los cambios internos durante RS.
Figura 4.1: Estructura tipo capacitor
En contraposicion existe la estructura de tipo planar mostrada en la Figura 4.2,
formada por dos electrodos localizados sobre el aislante, en sus extremos. Esta estruc-
tura es util si se desean observar cambios estructurales en el material como respuesta
a un voltaje de polarizacion aplicado durante el proceso RS [30], [31].
Figura 4.2: Estructura planar
La Figura 4.3 muestra las curvas I − V que exhibe el funcionamiento de RS. La
resistencia del estado prıstino de una muestra es tıpicamente mas alta que los otros
estados. Sin embargo, bajo una gran tension externa, Vext, el dispositivo entra en un
estado de baja resistencia (LRS por sus siglas en ingles Low Resistance State). Este
Desarrollo de Modelos del Memristor para Aplicaciones en Circuitos Electronicos

34 4. Fabricacion de Dispositivo Memristivo
proceso se llama “electro-formado”o “formacion”, indicado por la curva verde en la
Figura 4.3, y el voltaje requerido se denomina “voltaje de formacion”, Vforming.
Despues del proceso de formacion, la resistencia del dispositivo puede conmutar
entre el estado de baja resistencia LRS y un estado de alta resistencia (HRS por sus
siglas en ingles High Resistance State) controlado por Vext. En el LRS, a medida que
Vext aumenta, se produce un aumento repentino de la resistencia, como lo muestra la
curva roja en la Figura 2.5. Esto se conoce como el proceso de reset”, y el voltaje
correspondiente se denomina “voltaje reset”, Vreset. Cuando incrementamos el Vext
desde cero una vez mas, el dispositivo puede volver a cambiar al LRS cuando Vext
alcanza el Vset, como se muestra en la curva azul de la Figura 2.5. Este proceso se
llama proceso de “set”.
El LRS resultante despues de la operacion set tambien es estable, y los procesos
de conmutacion de set y reset se pueden repetir muchas veces. Aunque los valores de
resistencia de LRS y HRS siempre van acompanados de fluctuaciones considerables,
la magnitud del cambio en la resistencia se mantiene dentro de lımites bien definidos.
Por lo tanto los estados LRS y HRS se pueden usar como estados binarios para
aplicaciones de memoria no volatil.
Figura 4.3: Curvas I-V
Departamento de Electronica Instituto Nacional de Astrofısica, Optica y Electronica

4.1 Dispositivos de Transicion Resistiva 35
4.1.1. Fenomenos de Conmutacion Resistiva
Un esquema de clasificacion para RS es util para obtener una comprension profun-
da de la fısica de los fenomenos RS. Se clasificaron los RS en dos grupos: unipolares
y bipolares. Las conmutaciones unipolares y bipolares muestran al menos dos estados
estables sin una polarizacion aplicada, y por lo tanto, son adecuadas para aplica-
ciones de memoria no volatil. A continuacion se presenta un breve resumen de las
particularidades de cada uno.
Comportamiento Unipolar
La Figura 4.4 muestra una relacion I−V tıpica para la conmutacion unipolar. Este
es el proceso de reset durante el cual normalmente no se requiere el lımite de corriente,
porque el alto valor de resistencia del HRS autolimitara el flujo de corriente. El HRS
tambien es metaestable y permanece durante un largo perıodo de tiempo sin voltaje
aplicado. Cuando se aplica un Vext positivo a la muestra en el HRS, se produce una
reduccion abrupta de la resistencia en Vset, y la muestra entra de nuevo en el LRS.
Figura 4.4: Curva de comportamiento unipolar
Este es el proceso set durante el cual los lımites de corriente deben ser establecidos.
Tıpicamente, el set es mas grande que el Vreset. Se debe tener en cuenta que, para la
conmutacion unipolar, la curva I-V es simetrica respecto a Vext. Es decir, cuando
se aplica un voltaje negativo, tambien se producen procesos de restablecimiento y
establecimiento similares. Por lo tanto, los pulsos de voltaje externos con una sola
polaridad son suficientes en las operaciones reales del dispositivo. Esta es la razon por
la cual dicha RS se llama “unipolar”.
Desarrollo de Modelos del Memristor para Aplicaciones en Circuitos Electronicos
36 4. Fabricacion de Dispositivo Memristivo
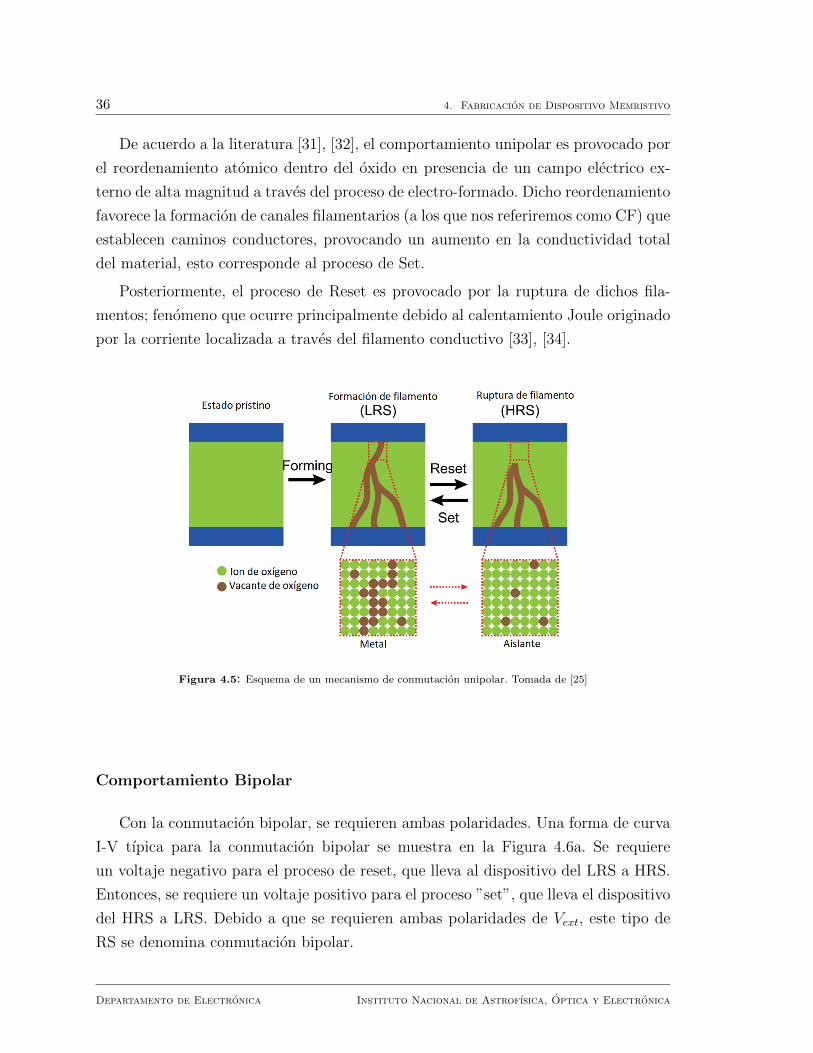
De acuerdo a la literatura [31], [32], el comportamiento unipolar es provocado por
el reordenamiento atomico dentro del oxido en presencia de un campo electrico ex-
terno de alta magnitud a traves del proceso de electro-formado. Dicho reordenamiento
favorece la formacion de canales filamentarios (a los que nos referiremos como CF) que
establecen caminos conductores, provocando un aumento en la conductividad total
del material, esto corresponde al proceso de Set.
Posteriormente, el proceso de Reset es provocado por la ruptura de dichos fila-
mentos; fenomeno que ocurre principalmente debido al calentamiento Joule originado
por la corriente localizada a traves del filamento conductivo [33], [34].
Figura 4.5: Esquema de un mecanismo de conmutacion unipolar. Tomada de [25]
Comportamiento Bipolar
Con la conmutacion bipolar, se requieren ambas polaridades. Una forma de curva
I-V tıpica para la conmutacion bipolar se muestra en la Figura 4.6a. Se requiere
un voltaje negativo para el proceso de reset, que lleva al dispositivo del LRS a HRS.
Entonces, se requiere un voltaje positivo para el proceso ”set”, que lleva el dispositivo
del HRS a LRS. Debido a que se requieren ambas polaridades de Vext, este tipo de
RS se denomina conmutacion bipolar.
Departamento de Electronica Instituto Nacional de Astrofısica, Optica y Electronica

4.2 Fabricacion del Dispositivo 37
(a) (b)
Figura 4.6: Curvas I − V tıpica de un dispositivo bipolar
Se debe tener en cuenta que hay dos tipos de posible conmutacion bipolar. La
Figura 4.6a muestra una curva I-V en la cual el proceso de reset (set) ocurre con un
voltaje negativo (positivo). Tal esquema se denomina conmutacion bipolar “figura de
ocho”, ya que la curva I-V correspondiente sigue el patron de escribir el numero 8.
Algunos sistemas de conmutacion bipolar emplean un voltaje positivo para el proceso
de reset y un sesgo negativo para el proceso set, como se muestra esquematicamente
en la Figura 4.6b. La curva I-V correspondiente se denomina curva de conmutacion
bipolar de “figura de ocho”.
4.2. Fabricacion del Dispositivo
Los dispositivos memristivos manufacturados durante la estancia en la UFABC son
en realidad memorias resistivas, las cuales estan fabricadas en forma de sandwich. So-
bre un substrato de vidrio se colocan contactos de aluminio a traves de evaporacion,
posteriormente se depositan pelıculas delgadas de grafeno con proceso llamado recu-
brimiento por inmersion y finalmente so colocan contactos de ITO (oxido de estano
e indio) como se muestra en la Figura 4.7.
El deposito de grafeno se realizo de la siguiente manera: las pelıculas delgadas
se obtienen mediante la tecnica de recubrimiento por inmersion. El aparato de
recubrimiento por inmersion consiste basicamente en una abrazadera que sujeta el
substrato y se sumerge en una solucion de grafeno a base de agua.
Desarrollo de Modelos del Memristor para Aplicaciones en Circuitos Electronicos

38 4. Fabricacion de Dispositivo Memristivo
Figura 4.7: Dispositivo memristivo
El proceso de recubrimiento por inmersion puede separarse en cinco etapas (Figura
4.8):
En la primera etapa se encuentra la inmersion, donde el sustrato se sumerge
en la solucion que contiene la solucion de grafeno a una velocidad constante
(preferiblemente sin oscilaciones) como se muestra en la Figura 4.8a.
En la segunda etapa del proceso el sustrato permanece dentro de la solucion
durante 30 segundos.
Tercera etapa llamada deposito: una capa delgada se deposita sobre el substrato
mientras se levanta. El retiro del substrato se lleva a cabo a una velocidad
constante para evitar cualquier fluctuacion.
Cuarta etapa drenaje: el exceso de lıquido se drenara de la superficie como se
muestra en la Figura 4.8c.
Finalmente en la quinta etapa se evapora el solvente del lıquido con la ayuda
de una lampara halogena de 150 W Figura 4.8d.
(a) (b) (c) (d)
Figura 4.8: Proceso de recubrimiento por inmersion
Departamento de Electronica Instituto Nacional de Astrofısica, Optica y Electronica

4.2 Fabricacion del Dispositivo 39
Posteriormente este proceso se repetira tres veces hasta obtener una capa fina
de grafeno. Se estimo que el numero de inmersiones optimo es de tres (∼ 30 nm
cada capa, medido por microscopıa electronica de barrido). Despues del deposito
de pelıculas delgadas, se colocaron los contactos de aluminio e ITO por medio de
evaporacion (∼ 430nm), respectivamente.
4.2.1. Mediciones Electricas
Los dispositivos medidos presentan caracterısticas de transicion resistiva unipolar,
por lo que su caracterizacion esta dividida en dos pasos generales:
Busqueda de Caracterısticas
Los parametros principales son el Vset, Vreset y los valores de resistencia de los
estados resistivos de baja resistencia (LRS) y alta resistencia (HRL).
Mediciones de Manera Cıclica
Ya que para este punto se conoce el valor de ambos voltajes de transicion (Vset,
Vreset), se realizan barridos de forma consecutiva cuyo valor asegure el cambio
de estado resistivo de manera cıclica y con ello obtener el lazo de histeresis en
el plano i–v, particularidad del memristor.
Los barridos de voltaje fueron realizados utilizando una fuente I − V modelo HP
4140b controlada por Labview. Cabe aclarar que al mismo tiempo que se aplica el
voltaje, la fuente es capaz de tomar automaticamente las mediciones de corriente de
los dispositivos.
1. Busqueda de Caracterısticas
De entrada se sabe que el dispositivo bajo caracterizacion es del tipo unipolar.
Para averiguar algunas de las caracterısticas se realizaran barridos de voltaje que
permitan obtener los valores de conmutacion Vset, Vreset y las resistencias de estado
LRS y HRS. Para hallar estas caracterısticas, las mediciones se realizaron siguiendo
el esquema de medicion descrito a continuacion:
Voltaje de Pendiente Positiva Se realiza un barrido de voltaje como se muestra
en la Figura 4.9a. Con este barrido se espera encontrar Vset y Vreset con signo
Desarrollo de Modelos del Memristor para Aplicaciones en Circuitos Electronicos

40 4. Fabricacion de Dispositivo Memristivo
positivo. Cuando V (t) = Vreset la corriente a traves del dispositivo debe dismi-
nuir abruptamente, como en la Figura 4.9b, senal de que se ha realizado una
transicion al estado de alta resistencia.
(a) Voltaje aplicado (b) cuerva i− vFigura 4.9: Busqueda de Vset y Vreset
Voltaje de Pendiente Negativa Se invierte el barrido de voltaje, como lo mues-
tra la Figura 4.10a. Con esto se desea investigar los voltajes Vset y Vreset que
tiene signo negativo. El dispositivo debe mostrar una transicion al estado de
alta resistencia cuando el voltaje externo aplicado sea V (t) = Vreset. Esto se
ve reflejado en el decremento de la corriente a traves del dispositivo, como lo
muestra la Figura 4.10b.
(a) Voltaje aplicado (b) cuerva i− vFigura 4.10: Busqueda de Vset y Vreset
Departamento de Electronica Instituto Nacional de Astrofısica, Optica y Electronica

4.2 Fabricacion del Dispositivo 41
2. Mediciones de Manera Cıclica
Una vez que se tiene una estimacion de los parametros caracterısticos del dispositi-
vo, se aplican barridos de voltaje de una extension que asegure transiciones resistivas,
como se muestra en el esquema de la Figura 4.11a.
(a) Voltaje aplicado (b) Curva i− v
Figura 4.11: Rango de busqueda
Se emplean dos barridos consecutivos como se muestra en la Figura 4.11a. Lo que
en el plano v(t)–t es el periodo de una senal triangular, en el plano i–v provoca las
transiciones resistivas que forman un ciclo completo del lazo de histeresis estrangulado
en el origen, como se muestra en la Figura 4.11b.
4.2.2. Resultados de las Mediciones Electricas
Los resultados mostrados en esta seccion se obtuvieron despues de llevar a
cabo los pasos mencionados en la seccion de mediciones electricas al dispositivo de
Al/Graf/ITO.
Como se indico en la seccion anterior, las mediciones fueron obtenidas utilizando
una fuente HP 4140b; esta fuente posee caracterısticas que son muy adecuadas para
la caracterizacion electrica de dispositivos. La configuracion utilizada para esta fuente
fue en “modo fuente de voltaje”, cuyas caracterısticas son:
Desarrollo de Modelos del Memristor para Aplicaciones en Circuitos Electronicos

42 4. Fabricacion de Dispositivo Memristivo
Provee una senal de voltaje de manera discreta en las terminales del dispositivo.
Deja fluir una “corriente de sensado”a traves del dispositivo, a la cual se le
puede configurar un lımite; si este lımite es alcanzado durante las mediciones,
el voltaje aplicado tambien esta limitado.
Con los resultados obtenidos de las mediciones de corriente y voltaje se obtiene
el valor de la resistencia del dispositivo.
Resultados de la Busqueda de Caracterısticas
En esta seccion se determinan los parametros caracterısticos del dispositivo de
Al/graf/ITO; de modo que se realizan barridos individuales buscando transiciones
resistivas.
Un barrido de voltaje con pendiente positiva es aplicado en las terminales del
dispositivo (Figura 4.12a). Mientras el barrido de voltaje se lleva a cabo, en el dispo-
sitivo sucede una transicion al estado de baja resistencia (LRS) y al estado de alta
resistencia (HRS) (Figura 4.12b); posteriormente, se aplica un barrido de voltaje con
pendiente negativa (Figuras 4.13a), este barrido de voltaje provoca las transiciones de
estado de baja resistencia (LRS) y estado de alta resistencia (HRS) (Figura 4.13b).
(a) Voltaje aplicado (b) Transicion resistiva
Figura 4.12: Busqueda de parametros caracterısticos
Departamento de Electronica Instituto Nacional de Astrofısica, Optica y Electronica
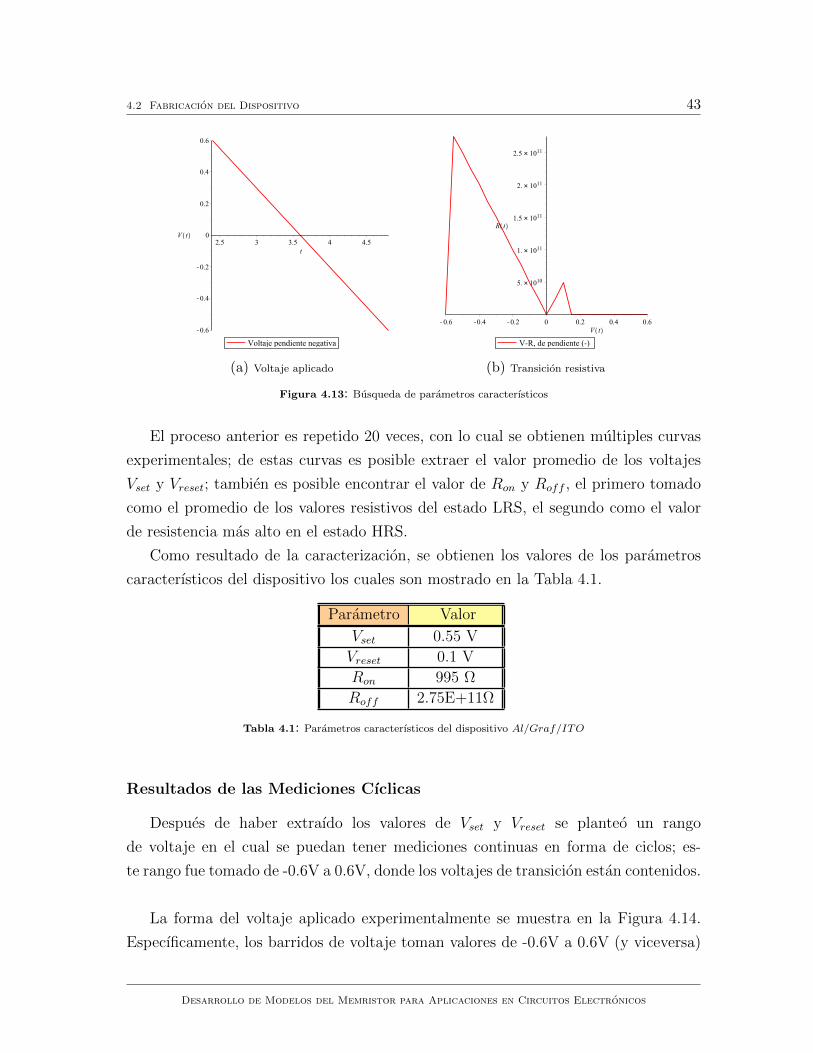
4.2 Fabricacion del Dispositivo 43
(a) Voltaje aplicado (b) Transicion resistiva
Figura 4.13: Busqueda de parametros caracterısticos
El proceso anterior es repetido 20 veces, con lo cual se obtienen multiples curvas
experimentales; de estas curvas es posible extraer el valor promedio de los voltajes
Vset y Vreset; tambien es posible encontrar el valor de Ron y Roff , el primero tomado
como el promedio de los valores resistivos del estado LRS, el segundo como el valor
de resistencia mas alto en el estado HRS.
Como resultado de la caracterizacion, se obtienen los valores de los parametros
caracterısticos del dispositivo los cuales son mostrado en la Tabla 4.1.
Parametro Valor
Vset 0.55 V
Vreset 0.1 V
Ron 995 Ω
Roff 2.75E+11Ω
Tabla 4.1: Parametros caracterısticos del dispositivo Al/Graf/ITO
Resultados de las Mediciones Cıclicas
Despues de haber extraıdo los valores de Vset y Vreset se planteo un rango
de voltaje en el cual se puedan tener mediciones continuas en forma de ciclos; es-
te rango fue tomado de -0.6V a 0.6V, donde los voltajes de transicion estan contenidos.
La forma del voltaje aplicado experimentalmente se muestra en la Figura 4.14.
Especıficamente, los barridos de voltaje toman valores de -0.6V a 0.6V (y viceversa)
Desarrollo de Modelos del Memristor para Aplicaciones en Circuitos Electronicos

44 4. Fabricacion de Dispositivo Memristivo
Figura 4.14: Rampa de voltaje experimental
en incrementos de 100 mV cada 0.1 segundo, para la muestra de Al/Graf/ITO.
Las graficas de las Figuras 4.15a y 4.15b muestran la resistencia y la corriente en
funcion del tiempo.
(a) Curva R− t (b) Curva I − t
Figura 4.15: Resistencia y corriente en funcion del tiempo
Se puede identificar que durante la primera seccion del grafico de la Figura 4.15a
la resistencia se mantiene constante lo que esta relacionado con el comportamiento
lineal de la corriente como se percibe hasta el tiempo 0.8 en el grafico de la Figura
4.15b, la siguiente no linealidad muestra el cambio al estado de baja resistencia LRS
y posteriormente debido a que la corriente se mantiene y el voltaje sigue aumentando,
Departamento de Electronica Instituto Nacional de Astrofısica, Optica y Electronica

4.3 Extraccion del Modelo 45
hace la transicion al estado de alta resistencia HRS.
Con los resultados obtenidos de las mediciones experimentales de resistencia, co-
rriente y voltaje contra tiempo se pueden obtener graficas de forma parametrica,
estas nos permiten observar el comportamiento de la resistencia contra las variables
electricas relacionada con el dispositivo, como lo son el voltaje y la corriente. Se es-
tablecen tres tipos de graficos: resistencia contra voltaje, resistencia contra corriente
y finalmente corriente contra voltaje.
Las Figuras 4.16a, 4.16b y 4.17 muestran las graficas parametricas mencionadas
anteriormente, el grafico con mayor relevancia es la Figura 4.17 ya que muestra las
caracterısticas en el plano corriente-voltaje.
(a) Curva R− V (b) Curva R− I
Figura 4.16: Mapeos de resistencia en funcion de voltaje y corriente
Es interesante notar que el dispositivo de Al/Graf/ITO muestra dentro de sus
caracterısticas en el plano I-V el lazo de histeresis, que como ya se menciono anterior-
mente es una de las principales caracterısticas que presenta y define a un memristor,
por lo que se concluye que este dispositivo que ha sido caracterizado puede ser clasi-
ficado como un memristor.
4.3. Extraccion del Modelo
Hoy en dıa el modelado matematico tiene una gran importancia en todas las
ramas de la ciencia; la ingenierıa, y la electronica no son la excepcion. El objetivo
principal del modelado en el campo de la electronica es predecir con precision el
Desarrollo de Modelos del Memristor para Aplicaciones en Circuitos Electronicos

46 4. Fabricacion de Dispositivo Memristivo
Figura 4.17: Lazo de histeresis I − V
comportamiento de los circuitos electronicos, lo que permite evaluar un circuito sin ne-
cesidad de su implementacion; esto es esencial durante la fase de diseno de un circuito.
La funcion principal de cualquier modelo de dispositivo es codificar el conoci-
miento de un dispositivo y representarlo de una forma util. Ademas del nivel de
abstraccion de la representacion matematica, sera la fuente y el alcance de este
conocimiento lo que determinara el uso potencial de un modelo. Esta idea permite
clasificar la desconcertante variedad de representaciones de modelos que son de
uso practico en el campo de la electronica en dos grupos principales: los modelos
comportamentales y los modelos estructurales [9].
Los modelos comportamentales se basan en la obtencion de valores que toman
las variables dependientes de un sistema en funcion de la variable independiente. En
general son de naturaleza discreta y pueden dividirse en dos tipos:
Modelos de interpolacion: Se basan en el almacenamiento de datos discretos
de las variables independientes y dependientes, para despues aplicar un esque-
ma de interpolacion que exprese el comportamiento entre cada par de puntos
obtenidos.
Modelos de ajuste de curvas: Estos modelos son expresados usualmente de forma
analıtica y el valor de sus parametros suele ser determinado en funcion de un
Departamento de Electronica Instituto Nacional de Astrofısica, Optica y Electronica

4.3 Extraccion del Modelo 47
criterio de ajuste que minimiza la diferencia entre el comportamiento observado
y el comportamiento previsto.
En otras palabras, los modelos comportamentales se basan principalmente en in-
formacion extraıda de la “observacion”del fenomeno.
Por otra parte, los modelos estructurales incluyen algun tipo de informacion pre-
via, que en el caso de la electronica, proviene del dominio de la fısica de estado solido,
util para considerar la estructura interna de los dispositivos. Los modelos estructurales
tambien pueden ser divididos en dos tipos:
Modelos fısicos: Son expresados principalmente por un conjunto de ecuaciones
diferenciales parciales que modelan los procesos fısicos basicos en los dispositivos
de estado solido. La forma de estas ecuaciones puede ser utilizada para describir
varios dispositivos y se vuelve especıfico en el momento en el que se agregan
los parametros de algun dispositivo en particular. Este tipo de modelos proveen
conocimiento sobre los procesos internos en un dispositivo.
Modelos matematicos analıticos: Estos modelos estan constituidos por un con-
junto de relaciones funcionales que describen de forma analıtica el comporta-
miento de un dispositivo utilizando un numero limitado de parametros estruc-
turales relacionados con el dispositivo.
Dicho lo anterior en esta seccion se presenta la extraccion de un modelo mem-
ristivo comportamental basado en el ajuste de curvas experimentales de resistencia
en funcion del tiempo obtenidos del dispositivo de Al/Graf/ITO, debido a la
factibilidad que este tiene.
La ecuacion utilizada para el ajuste de curva es una funcion polinomica de n-esimo
grado en funcion del tiempo.
Como criterio de ajuste se utilizo la reduccion del error cuadratico medio norma-
lizado en el rango de la variable independiente experimental de la resistencia, lo que
permite elegir un polinomio cuyo ajuste presente una “buena” similitud con los datos
experimentales, al mismo tiempo que se evitan efectos no-lineales de otra ındole.
Desarrollo de Modelos del Memristor para Aplicaciones en Circuitos Electronicos

48 4. Fabricacion de Dispositivo Memristivo
4.3.1. Procedimiento de Aproximacion
A causa de la no linealidad y los cambios abruptos de la curva de resistencia en
funcion del tiempo es difıcil hallar un polinomio que se ajuste bien a la curva en su
totalidad.
En vista de este inconveniente, la curva de resistencia extraıda del dispositivo de
manera experimental, sera dividida en 10 zonas de analisis como se muestra en la
Figura 4.18. De este modo, la curva de resistencia del dispositivo de Al/Graf/ITO
sera expresada matematicamente por la funcion definida a trozos:
R(t) =
R1(t) Zona 1
R2(t) Zona 2
R3(t) Zona 3...
...
R10(t) Zona 10
(4.1)
Donde cada funcion Ri(ti) tendra la forma polinomica de la ecuacion 4.2.
Ri(ti) = A0it0 + A1it
1 + A2it2 + · · ·+ Ani
tn (4.2)
De esta manera se buscara que cada funcion Ri(t) se ajuste individualmente de
la mejor manera posible a los datos experimentales de las zonas de interes. Poste-
riormente se podra notar que el grado de similitud entre la funcion de ajuste 4.2 y
los datos experimentales esta directamente vinculado con el numero de terminos que
contenga el polinomio, y en consecuencia ligado al grado de la funcion.
Como proposito primario, se pretende hallar una funcion analıtica que describa
el comportamiento de la resistencia en funcion del tiempo. Previamente, a traves de
esta, se pretende hallar una expresion para la corriente la cual es facil de obtener por
la Ley Ohm. Con esto es facil obtener el lazo de histeresis memristivo.
Aproximacion de la Curva de Resistencia
Sobre la base de las consideraciones anteriores se pretende encontrar el comporta-
miento de la resistencia en cada una de las 10 zonas descritas anteriormente, en primer
Departamento de Electronica Instituto Nacional de Astrofısica, Optica y Electronica

4.3 Extraccion del Modelo 49
Figura 4.18: Division de R(t) en 10 zonas
lugar deben calcularse los coeficientes (A0i , A1i , ..., Ani) de la funcion Ri(t) correspon-
diente; es por ello que es necesario un sistema de ecuaciones donde las incognitas sean
dichos coeficientes.
Para plantear el sistema de ecuaciones mencionado, se toman puntos en el tiempo,
t0 ,t1 ,t2 ,...,tn, distribuidos equidistantemente sobre el intervalo que abarque la zona
de analisis como lo muestra la Figura 4.19. Cada punto en el tiempo ti corresponde un
valor de resistencia experimental obtenidos con las mediciones de la seccion anterior.
De manera que, por cada ti se puede formular una ecuacion, igualando el valor de
resistencia experimental, Re(ti), a la ecuacion de ajuste en la zona de interes evaluada
en ese mismo instante de tiempo, Ri(ti).
Re(t) = A0it0i + A1it
1i + A2it
2i + · · ·+ Ani
tni (4.3)
Para hallar los coeficientes del polinomio de la ecuacion 4.3, se formulan tantas
ecuaciones como incognitas se tengan:
Eq0: R1(t0) = A0it00 +A1it
10 +A2it
20 + ...+Ani
tn0Eq1: R2(t1) = A0it
01 +A1it
11 +A2it
21 + ...+Ani
tn1Eq2: R3(t2) = A0it
02 +A1it
12 +A2it
22 + ...+Anit
n2
......
Eqn: Rn(tn) = A0it0n +A1it
1n +A2it
2n + ...+Ani
tnn
(4.4)
Desarrollo de Modelos del Memristor para Aplicaciones en Circuitos Electronicos

50 4. Fabricacion de Dispositivo Memristivo
Figura 4.19: Division de R(t) en 10 zonas
Donde A0, A1, ..., An son las incognitas. Ademas es posible reescribir el sistema
separando con coeficientes con notacion matricial:
Re(t0)
Re(t1)
Re(t2)...
Re(tn)
=
t00 t10 t20 · · · tn0t01 t11 t21 · · · tn1t02 t12 t22 · · · tn2...
......
......
t0n t1n t2n · · · tnn
A0i
A1i
A2i
...
Ani
(4.5)
Una vez obtenidos los valores numericos de todas las incognitas, ya se cuenta con
una ecuacion que se aproxima a la resistencia de la zona deseada y que pasa por los
valores Re(t0), Re(t1), Re(t2), y Re(tn).
Ademas debe notarse que el porcentaje de aproximacion a los valores experimen-
tales esta relacionado con el valor de orden n del polinomio, es decir si n = 1 se
necesitaran de dos ecuaciones para las dos incognitas (A0 y A1), en consecuencia es
conveniente investigar que valor de n presenta el maximo error permitido ası como el
porcentaje de mayor similitud respecto a los valores experimentales.
Aproximacion de la Curva de Corriente
Debido a que la resistencia y el voltaje estan relacionados en cada instante de
tiempo, resulta sencillo obtener la curva de corriente a traves de la Ley de Ohm:
Departamento de Electronica Instituto Nacional de Astrofısica, Optica y Electronica

4.3 Extraccion del Modelo 51
I(t) =V (t)
R(t)(4.6)
Donde V (t) es el voltaje aplicado que es expresado como:
V (t) =
0.5t - 0.6 0 ≤ t ≤ T
2
-0.5t + 1.8 T2≤ t ≤ T
y R(t) es la resistencia del dispositivo en funcion del tiempo.
Sin embargo, como se menciona anteriormente, la corriente queda dividida en
zonas debido a la representacion de la curva de resistencia; es decir en una ecuacion
no lineal a tramos.
Criterio de eleccion de las funciones
La eleccion de las curvas de ajuste es determinada con base a una figura de merito
que muestra el porcentaje de similitud (S), entre los datos experimentales y la funcion
de aproximacion. Esta figura de merito esta dada como:
S = 100 (1−NRMSE) (4.7)
donde NRMSE es el error cuadratico medio normalizado (por sus siglas en ingles,
Normalized Root Mean Square Error), y RMSE por sus siglas en ingles, Root Mean
Square Error. Esta normalizacion se realizo con respecto al rango que abarcan los
datos de la variable dependiente, en este caso la resistencia dependiente del tiempo.
Por lo tanto el NRMSE esta dado por:
NRMSE =RMSE
ymax − ymin(4.8)
de igual manera, el RMSE puede ser calculado por:
RMSE =
√∑ni=1(yi − yi)2
n(4.9)
Desarrollo de Modelos del Memristor para Aplicaciones en Circuitos Electronicos

52 4. Fabricacion de Dispositivo Memristivo
donde yi es el vector de datos experimentales, y es un vector generado a partir
de los valores del polinomio de ajuste Ri y n es el numero total de muestras. La
eleccion de la funcion de aproximacion adecuada se realizo, en primera instancia, con
base al comportamiento cualitativo de la curva, y posteriormente con base al valor
de S. En el Apendice A se muestran las curvas de las nueve primeras aproximaciones
(n = 2− 10) y los valores de RMSE, NRSME y S correspondientes.
4.3.2. Resultados de las Aproximaciones
Posteriormente se llevo a cabo la metodologıa mencionada en la seccion anterior.
Se hallaron las ecuaciones de aproximacion de las curvas de resistencia y corriente
correspondientes a las zonas de analisis.
En esta seccion se presentaran los resultados obtenidos, primeramente se presen-
tara el analisis detallado de las primeras tres zonas y las restantes seran presentadas de
manera resumida, ademas se presenta el modelo unificado del dispositivo memristivo.
Zona 1
El intervalo de tiempo que comprnde la zona 1 es de t = 0 a t = 0.9. La ecuacion
4.10 corresponde a la funcion de ajuste de la resistencia en funcion del tiempo de
la zona 1, en la Tabla 4.2 se colocan los valores numericos de los coeficientes de la
funcion para su facil observacion.
R1 = (14.87234575 t10 − 195.3488560 t9 + 2846.043527 t8 − 7722.856825 t7
+9317.769693 t6 − 6077.573620 t5 + 2267.606161 t4 − 476.7356694 t3
+51.49831871 t2 − 2.171343260 t+ 0.99458) · kΩ
(4.10)
Los resultados obtenidos del calculo del error cuadratico medio, el error cuadratico
medio normalizado y el porcentaje de similitud de la zona de interes se muestran en
la Tabla 4.3
Las grafica 4.20a muestra el ajuste de la funcion de resistencia donde la curva color
rojo representa la curva del modelo de aproximacion, en la Figura 4.20b muestra la
curva de ajuste de la corriente.
Departamento de Electronica Instituto Nacional de Astrofısica, Optica y Electronica
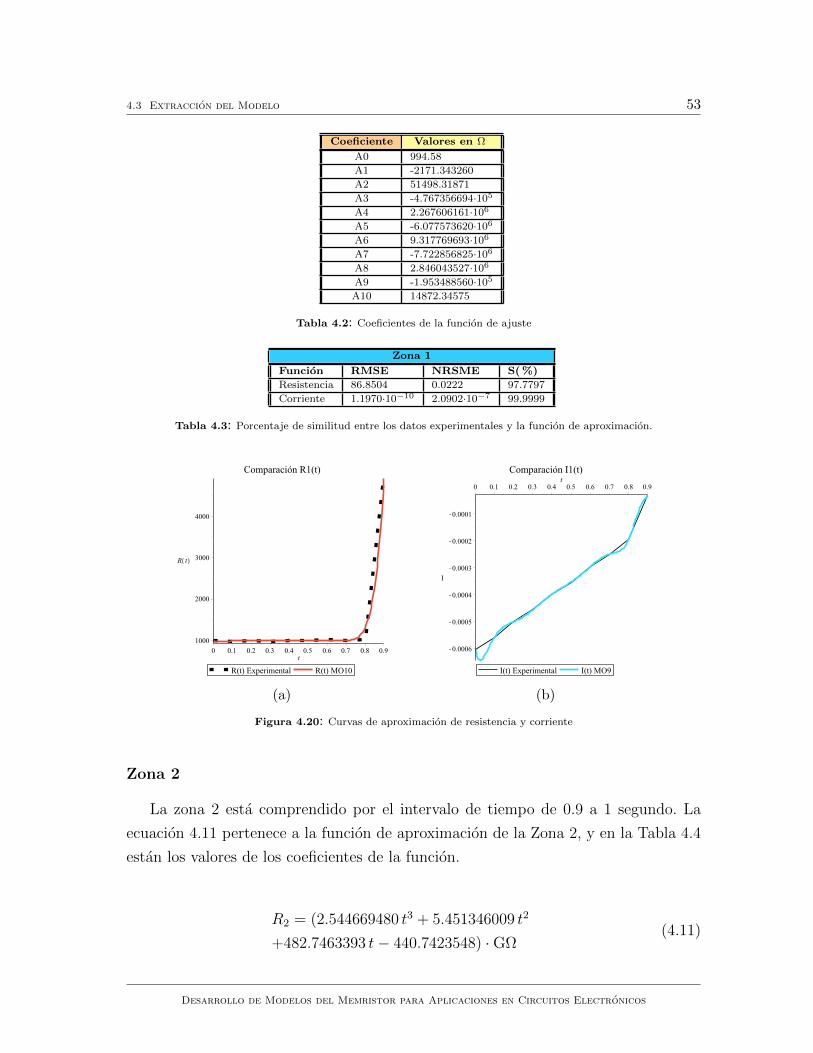
4.3 Extraccion del Modelo 53
Coeficiente Valores en Ω
A0 994.58
A1 -2171.343260
A2 51498.31871
A3 -4.767356694·105
A4 2.267606161·106
A5 -6.077573620·106
A6 9.317769693·106
A7 -7.722856825·106
A8 2.846043527·106
A9 -1.953488560·105
A10 14872.34575
Tabla 4.2: Coeficientes de la funcion de ajuste
Zona 1
Funcion RMSE NRSME S( %)
Resistencia 86.8504 0.0222 97.7797
Corriente 1.1970·10−10 2.0902·10−7 99.9999
Tabla 4.3: Porcentaje de similitud entre los datos experimentales y la funcion de aproximacion.
(a) (b)
Figura 4.20: Curvas de aproximacion de resistencia y corriente
Zona 2
La zona 2 esta comprendido por el intervalo de tiempo de 0.9 a 1 segundo. La
ecuacion 4.11 pertenece a la funcion de aproximacion de la Zona 2, y en la Tabla 4.4
estan los valores de los coeficientes de la funcion.
R2 = (2.544669480 t3 + 5.451346009 t2
+482.7463393 t− 440.7423548) ·GΩ(4.11)
Desarrollo de Modelos del Memristor para Aplicaciones en Circuitos Electronicos

54 4. Fabricacion de Dispositivo Memristivo
Coeficiente Valores
A0 -4.407423548·1011
A1 4.827463393·1011
A2 5.451346009·109
A3 2.544669480·109
Tabla 4.4: Coeficientes de la funcion de ajuste
Los valores de los calculos de los errores RMSE y NRMSE se encuentran en la
Tabla 4.5 ası como el porcentaje de similitud.
Zona 2
Funcion RMSE NRSME S( %)
Resistencia 3.436592977·106 0.6873186628·10−4 99.9931
Corriente – – –
Tabla 4.5: Porcentaje de similitud entre los datos experimentales y la funcion de aproximacion.
Las grafica 4.21a muestra la curva de la funcion de ajuste comparado con los
valores de resistencia experimental, y en la Figura 4.21b muestra la curva de ajuste
de la corriente.
(a) (b)
Figura 4.21: Curvas de aproximacion de resistencia y corriente
Zona 3
El intervalo de tiempo que abarca la toza 3 es de t = 1 a t = 1.2 En la Tabla 4.6
se encuentran los valores de la ecuacion 4.12 para mejor visualizacion.
R3 = (200− 250 t) ·GΩ (4.12)
Departamento de Electronica Instituto Nacional de Astrofısica, Optica y Electronica

4.3 Extraccion del Modelo 55
Coeficiente Valores
A0 3·1011
A1 -2.5·1011
A2 0
Tabla 4.6: Coeficientes de la funcion de ajuste
En la Tabla 4.7 se encuentran los valores de los errores RMSE, NRMSE y el
porcentaje de similitud de la funcion de aproximacion con respecto a los valores
experimental.
Zona 3
Funcion RMSE NRSME S( %)
Resistencia 80.9543 1.619086162·10−9 99.9999
Corriente – – –
Tabla 4.7: Porcentaje de similitud entre los datos experimentales y la funcion de aproximacion.
Las graficas de la Figura 4.22 muestran las curvas de resistencia y corriente en
comparacion a los resultados experimentales.
(a) (b)
Figura 4.22: Curvas de aproximacion de resistencia y corriente
Resultados de la Zona 4 a la Zona 10
En esta seccion se presentan de manera resumida los resultados obtenidos del
analisis realizado de la zona 4 a la zona 10, es importante mencionar que existe
continuidad entre cada una de las 10 zonas que comprenden el modelo; la Tabla 4.8
muestra el intervalo de tiempo correspondiente a cada zona.
Desarrollo de Modelos del Memristor para Aplicaciones en Circuitos Electronicos

56 4. Fabricacion de Dispositivo Memristivo
Intervalo de tiempo por zona
Zona 4 Zona 5 Zona 6 Zona 7 Zona 8 Zona 9 Zona 10
1.2− 2.3 2.3 - 2.4 2.4 - 3.3 3.3 - 3.4 3.4 - 3.6 3.6 - 4.7 4.7 - 4.8
Tabla 4.8: Intervalos de tiempo del dispositivo
Las ecuaciones que se encuentran en la Tabla 4.9 muestran las ecuaciones de ajuste
correspondiente a cada una de las zonas de la resistencia dependiente del tiempo.
Zona 4 R4 = (−300 + 250 t) ·GΩ
Zona 5 R5 = (6599999977− 274999999 t+ 2 t2) · Ω
Zona 6R6 = (323.0141041− 1053.507806 t+ 1482.630767 t2
−1178.785987 t3 + 580.1412032 t4 − 181.2239972 t5
+35.12666904 t6 − 3.865813115 t7 + 0.1850694228 t8) ·MΩ
Zona 7R7 = (−2792.033935 + 2013.657036 t− 731.0567199 t2
+131.6918676 t3 + 6.317718693 t4 − 5.045564877 t5
+0.4653099288 t6) ·GΩ
Zona 8 R8 = (900− 250 t) ·GΩ
Zona 9 R9 = (−900 + 250 t) ·GΩ
Zona 10
R10 = (1.320001852 · 1013 − (2.750007481 · 1012) · t− (1.787809225 · 106) · t2+(9.510311124 · 105) · t3 + (65134.88241) · t4 − (56567.15831) · t5+(2661.705655) · t6 + (637.6209148) · t7 + (66.22164248) · t8−(26.15799275) · t9 + (1.493646815) · t10) · Ω
Tabla 4.9: Ecuaciones de ajuste correspondientes a las zonas 4-10
Posteriormente se ordenaron los valores numericos de los coeficientes correspon-
dientes a cada una de las funciones de las zonas de interes, los cuales se muestran en
la Tabla 4.10.
Ademas en la Figura 4.23 se muestran los graficos correspondientes a cada zona
de la resistencia dependiente del tiempo, que muestra las curvas de la funcion de la
aproximacion en comparacion con los resultados experimentales.
Departamento de Electronica Instituto Nacional de Astrofısica, Optica y Electronica

4.3 Extraccion del Modelo 57
CoeficientesValores
Zona 4 Zona 5 Zona 6 Zona 7 Zona 8 Zona 9 Zona 10
A0 −3 · 1011 6.5999 · 1012 3.2301 · 108 −2.7920 · 1012 9 · 1011 −9 · 1011 1.3200 · 1013
A1 2.5 · 1011 −2.7499 · 1012 −1.0535 · 109 2.0136 · 1012 −2.5 · 1011 2.5 · 1011 −2.7500 · 1012
A2 0 2 1.4826 · 109 −7.3105 · 1011 0 0 -1.7878·106
A3 0 0 −1.1787 · 109 1.3169 · 1011 0 0 9.5103·105
A4 0 0 5.8014 · 108 6.3177 · 109 0 0 65134.8824
A5 0 0 −1.8122 · 108 −5.0455 · 109 0 0 -56567.1583
A6 0 0 3.5126 · 107 4.6530 · 108 0 0 2661.7056
A7 0 0 −3.8658 · 106 0 0 0 637.6209
A8 0 0 1.8506 · 105 0 0 0 66.2216
A9 0 0 0 0 0 0 −26.1579
A10 0 0 0 0 0 0 1.4936
Tabla 4.10: Coeficientes de las funciones de ajuste de las zonas 4-10
Figura 4.23: Curvas de aproximacion de resistencia de las zonas 4 a la 10
Desarrollo de Modelos del Memristor para Aplicaciones en Circuitos Electronicos

58 4. Fabricacion de Dispositivo Memristivo
Finalmente, se llevo a cabo un analisis de error de las funciones de ajuste, las
cuales fueron elegidos por el mayor porcentaje de aproximacion a los resultados ex-
perimentales, dichos valores son mostrados en la Tabla 4.11; importante notar que el
porcentaje de similitud de las zonas 4 y 9 es del 100 %, y se debe a que que error
RMSE esta dividido por la diferencia de las abscisas la cual es muy grande por lo que
da el valor de cero, de igual manera sucede al calcular el RMSE.
Resultados
Resistencia Zona 4 Zona 5 Zona 6 Zona 7 Zona 8 Zona 9 Zona 10
RMSE 0 817.1265 17.6589 707.5024 80.9543 0 4637.5218
NRMSE 0 2.9713·10−9 0.156·10−1 1.4150·10−8 1.6190·10−9 0 1.6863·10−8
S % 100 99.9999 98.4358 99.9999 99.9999 100 99.9999
Tabla 4.11: Porcentaje de similitud de la zona 4 a la 10
Modelo Unificado
Hasta este punto ya se han encontrado las expresiones de la resistencia para cada
zona, por lo que es posible emplear dichas expresiones para modelar la resistencia
durante un periodo completo con el uso de una funcion no lineal definida a tramos.
En seguida se muestra la funcion que define el comportamiento del dispositivo:
R(t) =
R1 = A0 + A1 · t+ A2 · t2 + A3 · t3 + A4 · t4 + A5 · t5+A6 · t6 + A7 · t7 + A8 · t8 + A9 · t9 + A10 · t10
0 ≤ t ≤ 0.9
R2 = A0 + A1 · t+ A2 · t2 + A3 · t3 0.9 ≤ t ≤ 1
R3 = A0 + A1 · t+ A2 · t2 1 ≤ t ≤ 1.2
R4 = A0 + A1 · t+ A2 · t2 1.2 ≤ t ≤ 2.3
R5 = A0 + A1 · t+ A2 · t2 2.3 ≤ t ≤ 2.4
R6 = A0 + A1 · t+ A2 · t2 + A3 · t3 + A4 · t4 + A5 · t5+A6 · t6 + A7 · t7 + A8 · t8
2.4 ≤ t ≤ 3.3
R7 = A0 + A1 · t+ A2 · t2 + A3 · t3 + A4 · t4 + A5 · t5+A6 · t6
3.3 ≤ t ≤ 3.4
R8 = A0 + A1 · t+ A2 · t2 3.4 ≤ t ≤ 3.6
R9 = A0 + A1 · t+ A2 · t2 3.6 ≤ t ≤ 4.7
R10 = A0 + A1 · t+ A2 · t2 + A3 · t3 + A4 · t4 + A5 · t5+A6 · t6 + A7 · t7 + A8 · t8 + A9 · t9 + A10 · t10
4.7 ≤ t ≤ 4.8
La ecuacion anterior describe la resistencia en el tiempo para el dispositivo de
Al/Graf/ITO, donde cada coeficiente es mostrado en la Tabla de la siguiente pagina.
Departamento de Electronica Instituto Nacional de Astrofısica, Optica y Electronica
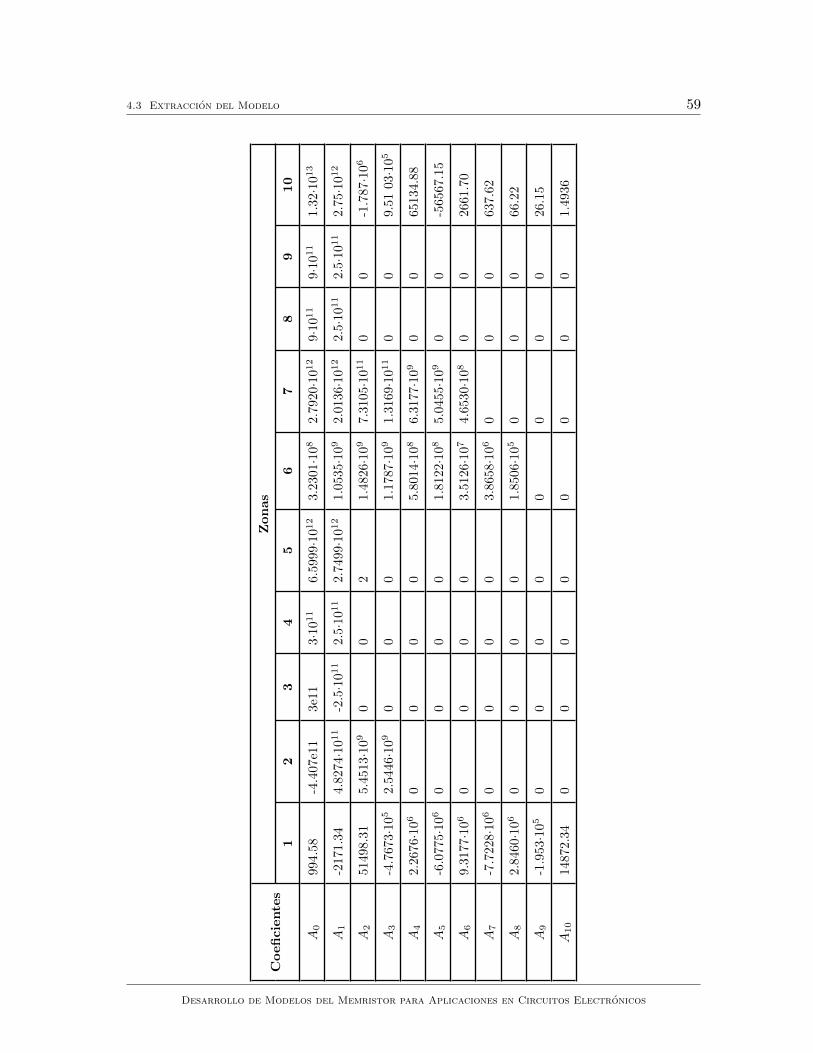
4.3 Extraccion del Modelo 59
Coefi
cie
nte
sZ
on
as
12
34
56
78
910
A0
994.
58-4
.407
e11
3e11
3·1011
6.5
999·
101
23.2
301·
108
2.7
920·1
012
9·1011
9·101
11.3
2·1013
A1
-217
1.34
4.82
74·1
011
-2.5·1
011
2.5·1
011
2.7
499·
101
21.0
535·
109
2.0
136·1
012
2.5·1
011
2.5·1
011
2.7
5·1012
A2
5149
8.31
5.45
13·1
09
00
21.4
826·
109
7.3
105·1
011
00
-1.7
87·1
06
A3
-4.7
673·1
05
2.54
46·1
09
00
01.1
787·
109
1.3
169·1
011
00
9.5
103·1
05
A4
2.26
76·1
06
00
00
5.8
014·
108
6.3
177·1
09
00
65134.8
8
A5
-6.0
775·1
06
00
00
1.8
122·
108
5.0
455·1
09
00
-56567.1
5
A6
9.31
77·1
06
00
00
3.5
126·
107
4.6
530·1
08
00
2661.7
0
A7
-7.7
228·1
06
00
00
3.8
658·
106
00
0637.6
2
A8
2.84
60·1
06
00
00
1.8
506·
105
00
066.2
2
A9
-1.9
53·1
05
00
00
00
00
26.1
5
A10
1487
2.34
00
00
00
00
1.4
936
Desarrollo de Modelos del Memristor para Aplicaciones en Circuitos Electronicos

60 4. Fabricacion de Dispositivo Memristivo
La comparacion entre el modelo y la curva experimental de resistencia y corriente
se muestra en la Figura 4.24 respectivamente.
(a) (b)
Figura 4.24: Curvas de resistencia y corriente del modelo
La Figura 4.24a se muestra la comparacion de las curvas de resistencia de los
resultados experimentales y los resultados obtenidos con el modelo desarrollado, de
igual manera en la Figura 4.24b se muestra la comparacion de las curvas de corriente
obtenidas del modelo y los resultados experimentales.
Figura 4.25: Lazo de histeresis del modelo
El modelo extraıdo si bien es del tipo no lineal a tramos, permite tener una
expresion analıtica para la memristancia en funcion del tiempo y puede ser extendido
a la generacion de las curvas de histeresis corriente-voltaje como se muestra en la
Figura 4.25. Que cumple con las huellas de identidad del memristor.
Departamento de Electronica Instituto Nacional de Astrofısica, Optica y Electronica


Capıtulo 5
Aplicaciones en Circuitos Caoticos
En este capıtulo se lleva a cabo el estudio de tres circuitos caoticos en los cuales se
implementaron los modelos desarrollados en este trabajo (modelo armonico, modelo
carga-flujo y el modelo comportamental del dispositivo fabricado) con la finalidad de
comprobar la fiabilidad de los modelos y su uso en la aplicacion en circuitos caoticos.
Se han utilizado tres circuitos como casos de estudio.
La Tabla 5.1 muestra el esquema de generacion de resultados para los tres circuitos
con los diversos modelos desarrollados en el presente trabajo. Las simulaciones fueron
realizadas en H-SPICE para el caso de modelos en codigo VERILOG-A y en MATLAB
para modelos funcionales.
Circuitos Armonico q-φ Comportamental
1 H-Spice y Matlab X H-SPICE
2 X Matlab X
3 X Matlab X
Tabla 5.1: Esquema de resultados
5.1. Circuito 1
El esquema del circuito pasivo propuesto de tercer orden se muestra en la Figura
5.1, que consta de un memcapacitor, dos resistencias, un condensador convencional,
un inductor y una fuente de voltaje sinusoidal.
El memcapacitor es emulado por el arreglo circuital (mencionado en la seccion
2.4) mostrado en la Figura 5.2, que contiene un resistor, un amplificador operacional,
[62]

5.1 Circuito 1 63
MemC1
L
+
−
R1
R2C
Figura 5.1: Circuito 1
un capacitor y un memristor.
MemCM
R
C
R
Figura 5.2: Emulador de memcapacitor
Posteriormente elemento memcapacitivo es reemplazado del circuito por el emu-
lador tal como se muestra en la Figura 5.3.
R2
M
1 L
+
−
Rx
Cx
R
C
Figura 5.3: Circuito caotico con el emulador del memcapacitor
Ademas las ecuaciones KCL y KVL de este circuito se dan en la ecuacion 5.1, donde
F y ω son la amplitud y la frecuencia angular de la fuente de voltaje respectivamente.
dvc1dt =
(F ·sin(ωt)−vc1
R1−iL)
C1
dvc2dt =
iL−vc2R2−ic2C2
diLdt = vc1−vc2
L
(5.1)
Desarrollo de Modelos del Memristor para Aplicaciones en Circuitos Electronicos

64 5. Aplicaciones en Circuitos Caoticos
Sustituimos x = vc1, y = vc2 y z = iL en la ecuacion 5.1 para obtener las ecuaciones
de estado, dadas como:
x =(F ·sin(ωt)−x
R1−z)
C1
y =z− y
R2−ic2C2
z = x−yL
(5.2)
En la Tabla 5.2 se muestran los valores de los elementos que componen el circuito
caotico.
Parametros Valores
R1 80 Ω
R2 5 kΩ
C1 0.1 F
L 0.1 H
Rx 0.5 Ω
Cx 0.1 µF
Tabla 5.2: Valores de los elementos del circuito caotico
5.1.1. Resultados de H-SPICE Usando el Modelo Armonico
Para utilizar los modelos simbolicos de las ecuaciones 3.10, 3.11 y 3.12, las expre-
siones para Mo1k5, Mo2k5 y Mo3k5 se han introducido en un modulo VERILOG-A (los
codigos de los modelos se muestran en el Apendice B), para poder llevar a cabo su
simulacion.
Resultados con el Modelo de Orden 1
Los resultados de la simulacion se presentan en la Figura 5.4. La forma de onda en
dominio del tiempo de la variable de estado x, y, z se muestra en la Figura 5.4a, 5.4b
y 5.4c, y los diagramas de fase de iL vs Vc1 y VMemC vs Vc2 dado en la Figura 5.4d
Departamento de Electronica Instituto Nacional de Astrofısica, Optica y Electronica

5.1 Circuito 1 65
y 5.4e, el diagrama de fase 3D se muestra en la Figura 5.4f con la condicion inicial
(0.001, 0, 0).
0 500 1000 1500 2000 2500 3000
Time
-0.1
-0.08
-0.06
-0.04
-0.02
0
0.02
0.04
0.06
0.08
0.1
I L
0 500 1000 1500 2000 2500 3000
Time
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
V C
1
0 500 1000 1500 2000 2500 3000
Time
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
V M
em
C
(a) (b) (c)
-0.15 -0.1 -0.05 0 0.05 0.1 0.15 0.2
V C1
-0.1
-0.08
-0.06
-0.04
-0.02
0
0.02
0.04
0.06
0.08
0.1
I L
-0.15 -0.1 -0.05 0 0.05 0.1 0.15 0.2
V C1
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
V M
em
C
-0.1
0.2
-0.05
0
I L
V MemC
0.05
0
0.2
0.1
0.150.1
V C1
0.050
-0.05-0.2 -0.1
-0.15
(d) (e) (f)
Figura 5.4: Curvas y diagramas de fase con modelo de orden 1 y k=5
En el apendice D se presentan los resultados de la simulacion usando los modelos
de orden 2 y 3.
5.1.2. Resultados de H-SPICE Usando el Modelo Compor-
tamental
En esta seccion se muestran los resultados del circuito caotico utilizando el modelo
comportamental el cual se ha introducido en un bloque de VERILOG-A (El codigo
del modelo se muestra en el Apendice C).
Desarrollo de Modelos del Memristor para Aplicaciones en Circuitos Electronicos

66 5. Aplicaciones en Circuitos Caoticos
5 10 15 20 25
−0.2
−0.15
−0.1
−0.05
0
0.05
0.1
0.15
Tiempo
IL
5 10 15 20 25−0.4
−0.3
−0.2
−0.1
0
0.1
0.2
0.3
Tiempo
VC
1
5 10 15 20 25
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
Tiempo
V M
emC
(a) (b) (c)
−0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4−0.2
−0.15
−0.1
−0.05
0
0.05
0.1
0.15
0.2
VC1
IL
−0.4−0.2
00.2
0.4
−1
−0.5
0
0.5
1−0.2
−0.1
0
0.1
0.2
VC1 V MemC
iL
(d) (e)
Figura 5.5: Curvas y diagramas de fase con modelo comportamental
5.1.3. Resultados de MATLAB Usando el Modelo Armonico
La simulacion numerica usando la integracion MATLAB ode23 se adopto para
investigar los comportamientos dinamicos de este circuito de memcapacitor.
−0.1 −0.05 0 0.05 0.1
−0.02
−0.01
0
0.01
0.02
0.03
VC1
VC
2
(a) (b)
Figura 5.6: Diagramas de fase de las variables de estado del circuito 1
Departamento de Electronica Instituto Nacional de Astrofısica, Optica y Electronica

5.2 Circuito 2 67
5.2. Circuito 2
Los resultados del comportamiento dinamico correspondiente al sistema es tomado
del circuito de la Figura 5.7 el cual muestra un modelo de circuito caotico memristivo.
Figura 5.7: Circuito 2
Las ecuaciones de estado son obtenidas de las Leyes de Kirchhoff, dadas como:
dv1dt
= 1C1
(il −W (φ)v1)
dv2dt
= 1C1
(Gv2 − iL)
diLdt
= 1L
(v2 − v1 −R il)
dφdt
= v1
(5.3)
Donde W (φ) es un memristor controlado por flujo, el cual es expresado por la
ecuacion cubica 5.4
q(φ) = 2 · 10−3φ3 − 6.7646 · 10−15φ2 − 3 · 10−9φ (5.4)
y se tiene que
W (φ) =dq(φ)
dφ
por lo que la ecuacion 5.4 queda expresada como
Desarrollo de Modelos del Memristor para Aplicaciones en Circuitos Electronicos

68 5. Aplicaciones en Circuitos Caoticos
W (φ) = 6 · 10−3φ2 − 13.5292 · 10−15φ− 3 · 10−9 (5.5)
Se sustituye x = v1, y = v2, z = iL y w = φ. El sistema de ecuaciones 5.3 puede
ser expresado como las siguientes ecuaciones:
x = 1C1
(z −W (φ)x)
y = 1C2
(Gy − z)
z = 1L
(y − x−Rz)
w = x
(5.6)
Los valores correspondiente a las elementos del circuito se presentan el la Tabla
5.3.
Parametros Valores
C1 0.5 F
C2 1 F
L 1 H
R 0.1 Ω
G 0.7 S
Tabla 5.3: Valores de los elementos del circuito caotico
5.2.1. Resultados de MATLAB Usando el Modelo q-φ
Las condiciones iniciales del circuito son (0,0.01,0,0), en la Figura 5.8a se muestra
el diagrama de fase de las variables de estado VC1 y VC2, y en la Figura 5.8b se
presentan las tres variables de estado.
Departamento de Electronica Instituto Nacional de Astrofısica, Optica y Electronica

5.3 Circuito 3 69
−30 −20 −10 0 10 20 30−30
−20
−10
0
10
20
30
VC1
VC
2
(a) (b)
Figura 5.8: Diagramas de fase de las variables de estado del circuito 2
5.3. Circuito 3
El circuito caotico con un memristor controlado por flujo se muestra en la Figura
5.9. Este circuito se desarrollo a partir del circuito caotico de Chua al reemplazar el
diodo de Chua con un circuito de dos terminales que consiste en una conductancia
negativa y un memristor controlado por flujo.
Figura 5.9: Circuito 3
Aplicando la ley de circuito de Kirchhoff al circuito en la Figura 5.9, obtenemos un
conjunto de cuatro ecuaciones diferenciales de primer orden, que definen la relacion
entre las cuatro variables de circuito:
dv1dt
= 1C1
(v2−v1R
+Gv1 −W (φ) v1)dv2dt
= 1C1
(v1−v2R− iL)
diLdt
= 1L
(v2 − r il)dφdt
= v1
(5.7)
donde se tiene que x = v1, y = v2, z = iL y w = φ. La ecuacion 5.7 puede ser
Desarrollo de Modelos del Memristor para Aplicaciones en Circuitos Electronicos

70 5. Aplicaciones en Circuitos Caoticos
transformada a:
x = 1C1
(y−xR
+Gx−W (φ) v1)
y = 1C2
(x−yR− z)
z = 1L
(y − r z)
w = x
(5.8)
ademas W (φ) esta dada como:
W (φ) = 6 · 10−3φ2 − 13.5292 · 10−15φ− 3 · 10−9
Los valores correspondientes a los elementos del circuito caotico se muestran el la
Tabla 5.4.
Parametros Valores
C1 2.5 µF
C2 0.2 F
L 12.5 mH
R 5 Ω
r 1.25 mΩ
G 0.32 S
Tabla 5.4: Valores de los elementos del circuito caotico
5.3.1. Resultados de MATLAB Usando el Modelo q-φ
Las condiciones iniciales para este sistema caotico son (0.01,0,0,0), en la Figura
5.10a se muestra el diagrama de fase de VC1 contra VC2, y en la Figura 5.10b se
muestra en 3D las variables de estado que componen el sistema.
−30 −20 −10 0 10 20 30−30
−20
−10
0
10
20
VC1
VC
2
(a) (b)
Figura 5.10: Diagramas de fase de las variables de estado del circuito 3
Departamento de Electronica Instituto Nacional de Astrofısica, Optica y Electronica
5.3 Circuito 3 71
El modelo carga-flujo esta orientado a realizar simulacion de los circuitos a traves
de resolver el sistema de ecuaciones de estado que los define. Su uso por H-SPICE
u otro simulador electrico se ve limitado debido al hecho de que carga y flujo no
estan disponibles como variables en el motor de analisis. Si uno quisiera utilizarlo
se debe aplicar integracion numerica a voltaje y corriente para determinar flujo y
carga respectivamente, lo cual implica depender del esquema de integracion interno
del simulador, ademas de que se requiere de configuraciones de lazos integradores.
El modelo armonico y el modelo comportamental del dispositivo fabricado son
utiles en simulacion electrica para el circuito 1. Mayor trabajo debe realizarse para
su utilizacion para otros circuitos caoticos. Adicionalmente, el modelo del dispositi-
vo fabricado posee serios problemas para la simulacion con MATLAB, debido a su
naturaleza no continua.
Desarrollo de Modelos del Memristor para Aplicaciones en Circuitos Electronicos


Capıtulo 6
Conclusiones
El presente trabajo ha demostrado la factibilidad de utilizar modelos analıticos,
tanto teoricos como provenientes de dispositivos fabricados, en la simulacion de
circuitos caoticos.
Los modelos teoricos desarrollados vienen en dos variantes. El primer modelo esta
dado por una funcion de memristancia variante en el tiempo y con una estructura
armonica anidada. El segundo modelo esta definido por una funcion constitutiva de
rama carga-flujo.
Tambien se desarrollo un modelo analıtico de un dispositivo real, el cual es un
dispositivo planar constituido por una pelıcula de grafeno depositado por medio de
recubrimiento por inmersion sobre un substrato de aluminio y utilizando contactos
de oxido de indio y estano (ITO). El modelo resultante consiste en un conjunto de
funciones no-lineales a trozos de memristancia variante en el tiempo. Es importante
senalar que la generacion del modelo del dispositivo fabricado involucro las tareas de
fabricacion, medicion, caracterizacion y extraccion del modelo durante la estancia de
movilidad en la Universidade Federal do ABC.
El modelo de memristor armonico y el modelo comportamental han sido codifi-
cados en lenguaje de descripcion de alto nivel VERILOG-A para ser utilizados en
simulacion electrica por la herramienta por excelencia de simulacion H-SPICE. El
modelo q-φ es codificado en una funcion analıtica para su uso en MATLAB.
Los circuitos utilizados como casos de estudio fueron seleccionados de tal manera
que ofrecen diversos retos a los modelos desarrollados. Los modelos armonico y com-
[73]

74 6. Conclusiones
portamental superan la dificultad de ser utilizados en un emulador de memcapacitor
que a su vez se incorpora al circuito primario. El modelo carga-flujo es utilizado en
los casos donde la funcion de rama forma parte de la ecuacion diferencial que define
el comportamiento del circuito.
Trabajo a Futuro
Varias lineas de investigacion pueden ser consideradas como trabajo a realizar en
el futuro, entre otras se pueden mencionar:
En este trabajo se realizo tambien la extraccion de los parametros fısicos del
dispositivo, por lo que a futuro se pretende mejorar el modelo desarrollado del mismo,
el cual ahora no solo dependa del tiempo sino de los parametros fısicos, ası como
obtener una ecuacion continua que modele el comportamiento del dispositivo
Desarrollar modelos flujo-carga a traves de inversion directa de las aproxima-
ciones PWL.
Generar un modelo del dispositivo fabricado donde se incluyan los parametros
fısicos y de fabricacion.
Desarrollar un modelo carga-flujo del dispositivo fabricado.
Estudiar la factibilidad del modelo comportamental en otras aplicaciones no
lineales.
Departamento de Electronica Instituto Nacional de Astrofısica, Optica y Electronica

Apendices
[75]

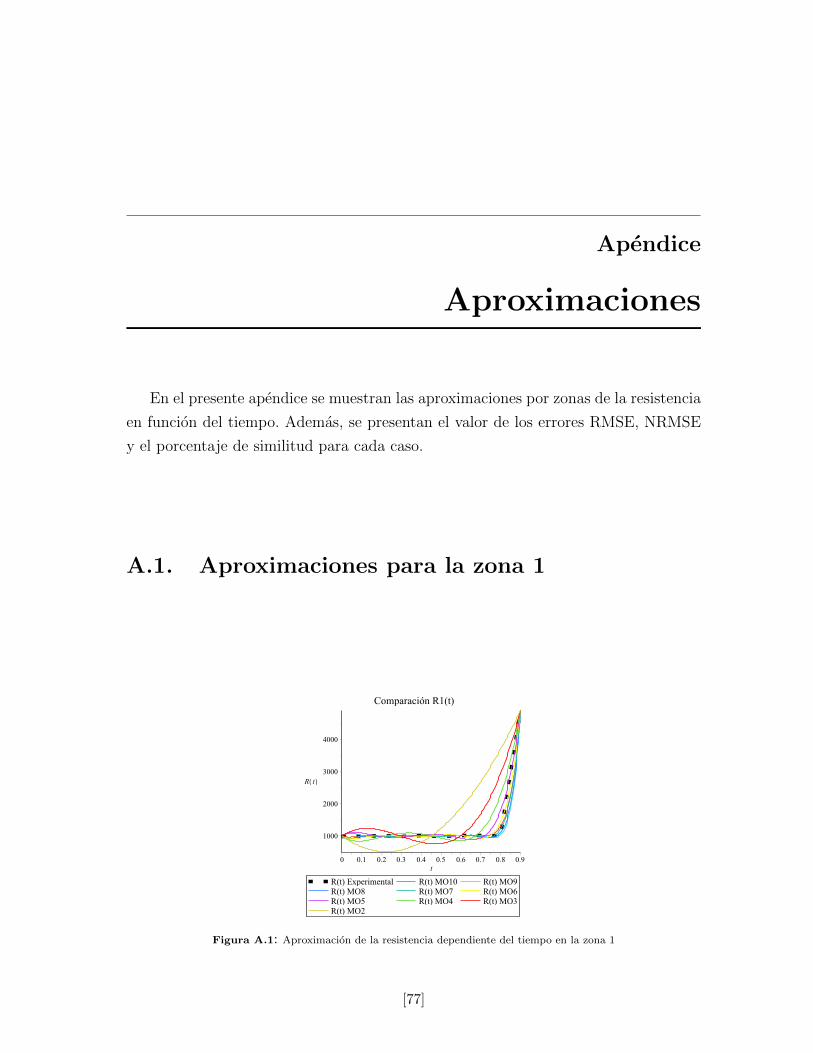
Apendice
Aproximaciones
En el presente apendice se muestran las aproximaciones por zonas de la resistencia
en funcion del tiempo. Ademas, se presentan el valor de los errores RMSE, NRMSE
y el porcentaje de similitud para cada caso.
A.1. Aproximaciones para la zona 1
Figura A.1: Aproximacion de la resistencia dependiente del tiempo en la zona 1
[77]

78 A. Aproximaciones
R1(t)
Orden de aproximacion RMSE NRMSE S( %)
Orden 2 1063.4561 0.2721 72.7833
Orden 3 657.1630 0.1681 83.1814
Orden 4 409.7747 0.1048 89.5127
Orden 5 246.4820 0.630e-1 93.6918
Orden 6 135.6551 0.347e-1 96.5282
Orden 7 64.8406 0.165e-1 98.3405
Orden 8 23.7102 0.0060 99.3931
Orden 9 0.00029 7.6330*10ˆ(-8) 97.77973077
Orden 10 86.85043 0.2220e-1 99.99999237
Tabla A.1: Errores RMS, NRMSE y porcentaje de similitud de la resistencia en la zona 1
A.2. Aproximaciones para la zona 2
Figura A.2: Aproximacion de la resistencia dependiente del tiempo en la zona 2
R2(t)
Orden de aproximacion RMSE NRMSE S( %)
Orden 2 7.334320796*10ˆ6 0.0001466 99.98533136
Orden 3 3.436592977*10ˆ6 0.0000687 99.99732348
Orden 4 3.607165857*10ˆ6 0.000072143 99.99278567
Orden 5 1.338261112*10ˆ6 0.000026765 99.99312681
Orden 6 3.163153329*10ˆ7 0.63250e-3 99.93674958
Orden 7 9.860968813*10ˆ6 0.1971e-3 99.98028074
Orden 8 7.176162486*10ˆ7 0.001434085 99.85659148
Orden 9 5.373742498*10ˆ7 0.001074318 99.89256812
Orden 10 9.366573067*10ˆ8 0.01880837 98.11916204
Tabla A.2: Errores RMS, NRMSE y porcentaje de similitud de la resistencia en la zona 2
Departamento de Electronica Instituto Nacional de Astrofısica, Optica y Electronica

A.3 Aproximaciones para la zona 3 79
A.3. Aproximaciones para la zona 3
Figura A.3: Aproximacion de la resistencia dependiente del tiempo en la zona 3
R3(t)
Orden de aproximacion RMSE NRMSE S( %)
Orden 2 80.954 1.619086162*10ˆ(-9) 99.99999984
Orden 3 103.699 2.073991318*10ˆ(-9) 99.99999979
Orden 4 80.95430 1.619086162*10ˆ(-9) 99.99999984
Orden 5 80.9543 1.619086162*10ˆ(-9) 99.99999984
Orden 6 106.5532 2.131065462*10ˆ(-9) 99.99999979
Orden 7 213.8073 4.276147800*10ˆ(-9) 99.99999957
Orden 8 80.9543 1.619086162*10ˆ(-9) 99.99999984
Orden 9 334.0562 6.681125734*10ˆ(-9) 99.99999933
Orden 10 80.9543 1.619086162*10ˆ(-9) 99.99999984
Tabla A.3: Errores RMS, NRMSE y porcentaje de similitud de la resistencia en la zona 3
A.4. Aproximaciones para la zona 4
R4(t)
Orden de aproximacion RMSE NRMSE S( %)
Orden 2 0 0 100
Orden 3 115.470 4.198911047*10ˆ(-10) 99.99999996
Orden 4 0 0 100
Orden 5 0 0 100
Orden 6 135.4006 4.923659640*10ˆ(-10) 99.99999995
Orden 7 95.7427 3.481553119*10ˆ(-10) 99.99999997
Orden 8 0 0 100
Orden 9 329.1402 1.196873795*10ˆ(-9) 99.99999988
Orden 10 0 0 100
Tabla A.4: Errores RMS, NRMSE y porcentaje de similitud de la resistencia en la zona 4
Desarrollo de Modelos del Memristor para Aplicaciones en Circuitos Electronicos

80 A. Aproximaciones
Figura A.4: Aproximacion de la resistencia dependiente del tiempo en la zona 4
A.5. Aproximaciones para la zona 5
Figura A.5: Aproximacion de la resistencia dependiente del tiempo en la zona 5
R5(t)
Orden de aproximacion RMSE NRMSE S( %)
Orden 2 817.1265 2.971369267*10ˆ(-9) 99.99999970
Orden 3 1201.3399 4.368509100*10ˆ(-9) 99.99999956
Orden 4 1311.1894 4.767961679*10ˆ(-9) 99.99999952
Orden 5 1127.019 4.098254080*10ˆ(-9) 99.99999959
Orden 6 1493.2165 5.429878536*10ˆ(-9) 99.99999946
Orden 7 3252.7043 1.182801580*10ˆ(-8) 99.99999882
Orden 8 1476.217 5.368063267*10ˆ(-9) 99.99999946
Orden 9 9666.7561 3.515184297*10ˆ(-8) 99.99999648
Orden 10 1170.544 4.256524485*10ˆ(-9) 99.99999957
Tabla A.5: Errores RMS, NRMSE y porcentaje de similitud de la resistencia en la zona 5
Departamento de Electronica Instituto Nacional de Astrofısica, Optica y Electronica

A.6 Aproximaciones para la zona 6 81
A.6. Aproximaciones para la zona 6
Figura A.6: Aproximacion de la resistencia dependiente del tiempo en la zona 6
R6(t)
Orden de aproximacion RMSE NRMSE S( %)
Orden 2 295.8693 0.23799794 76.20020545
Orden 3 183.6689 .157417 84.25823166
Orden 4 109.6718 0.95033e-1 90.49667991
Orden 5 64.5815 0.5745438e-1 94.25456176
Orden 6 33.4225 0.029730 97.02699638
Orden 7 17.21183 0.157329e-1 98.42670590
Orden 8 17.6589 0.1564e-1 98.43587730
Orden 9 970.1026 1.385860 38.586
Orden 10 21.93452 0.019566 98.04330739
Tabla A.6: Errores RMS, NRMSE y porcentaje de similitud de la resistencia en la zona 6
A.7. Aproximaciones para la zona 7
R7(t)
Orden de aproximacion RMSE NRMSE S( %)
Orden 2 398.1956 7.963913191*10ˆ(-9) 99.99999920
Orden 3 340.5286 6.810573540*10ˆ(-9) 99.99999743
Orden 4 478.2549 9.565098635*10ˆ(-9) 99.99999904
Orden 5 449.8797 8.997595120*10ˆ(-9) 99.99999910
Orden 6 1283.9625 2.567925157*10ˆ(-8) 99.99999932
Orden 7 707.5024 1.415005033*10ˆ(-8) 99.99999858
Orden 8 734.7052 1.469410513*10ˆ(-8) 99.99999853
Orden 9 1298.1767 2.596353667*10ˆ(-8) 99.99999740
Orden 10 576.1595 1.152319048*10ˆ(-8) 99.99999885
Tabla A.7: Errores RMS, NRMSE y porcentaje de similitud de la resistencia en la zona 7
Desarrollo de Modelos del Memristor para Aplicaciones en Circuitos Electronicos
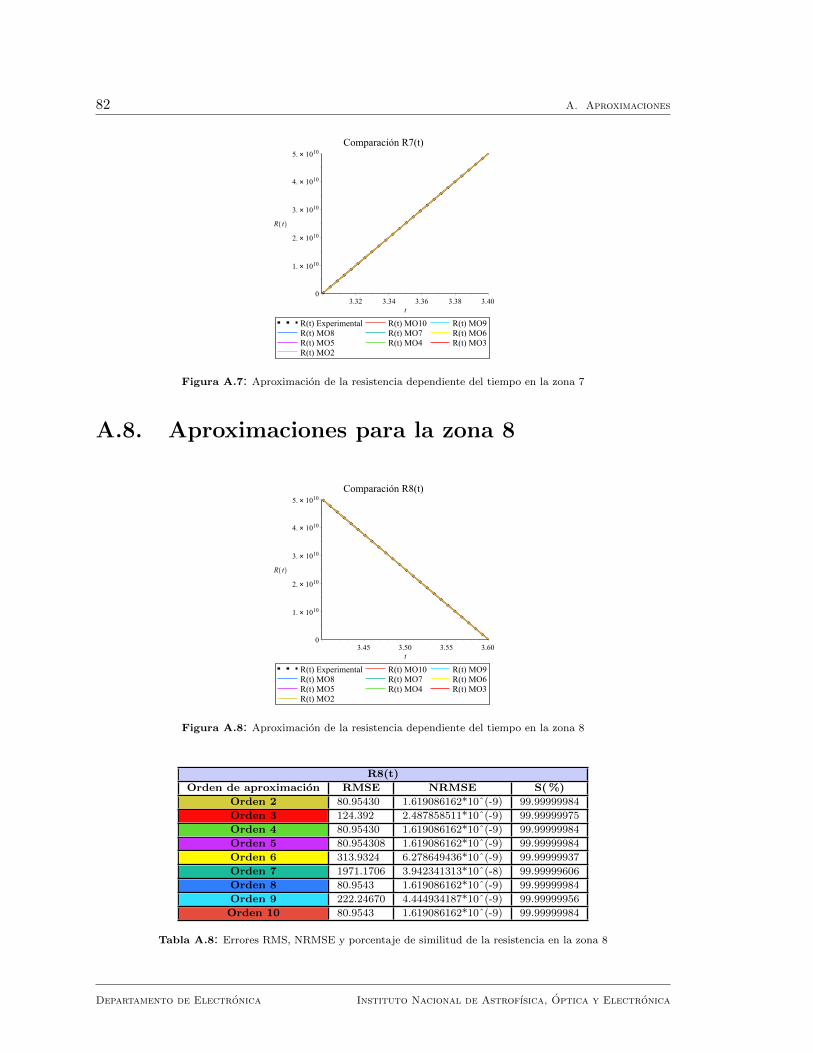
82 A. Aproximaciones
Figura A.7: Aproximacion de la resistencia dependiente del tiempo en la zona 7
A.8. Aproximaciones para la zona 8
Figura A.8: Aproximacion de la resistencia dependiente del tiempo en la zona 8
R8(t)
Orden de aproximacion RMSE NRMSE S( %)
Orden 2 80.95430 1.619086162*10ˆ(-9) 99.99999984
Orden 3 124.392 2.487858511*10ˆ(-9) 99.99999975
Orden 4 80.95430 1.619086162*10ˆ(-9) 99.99999984
Orden 5 80.954308 1.619086162*10ˆ(-9) 99.99999984
Orden 6 313.9324 6.278649436*10ˆ(-9) 99.99999937
Orden 7 1971.1706 3.942341313*10ˆ(-8) 99.99999606
Orden 8 80.9543 1.619086162*10ˆ(-9) 99.99999984
Orden 9 222.24670 4.444934187*10ˆ(-9) 99.99999956
Orden 10 80.9543 1.619086162*10ˆ(-9) 99.99999984
Tabla A.8: Errores RMS, NRMSE y porcentaje de similitud de la resistencia en la zona 8
Departamento de Electronica Instituto Nacional de Astrofısica, Optica y Electronica
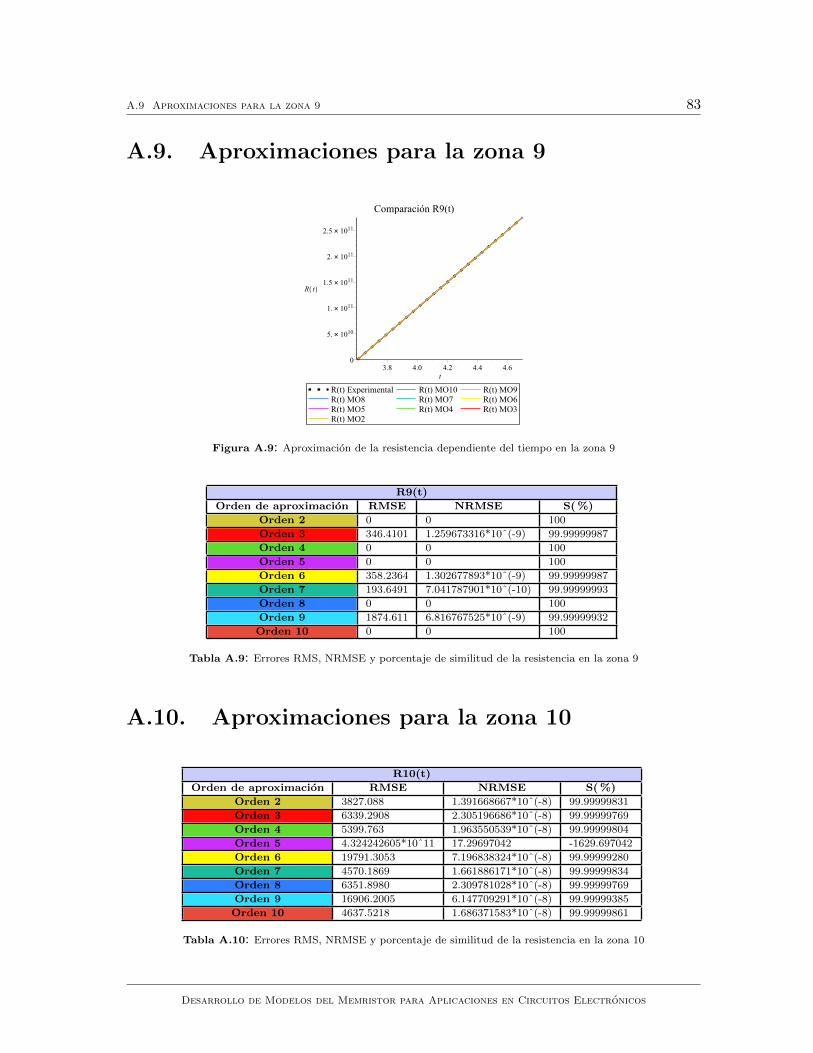
A.9 Aproximaciones para la zona 9 83
A.9. Aproximaciones para la zona 9
Figura A.9: Aproximacion de la resistencia dependiente del tiempo en la zona 9
R9(t)
Orden de aproximacion RMSE NRMSE S( %)
Orden 2 0 0 100
Orden 3 346.4101 1.259673316*10ˆ(-9) 99.99999987
Orden 4 0 0 100
Orden 5 0 0 100
Orden 6 358.2364 1.302677893*10ˆ(-9) 99.99999987
Orden 7 193.6491 7.041787901*10ˆ(-10) 99.99999993
Orden 8 0 0 100
Orden 9 1874.611 6.816767525*10ˆ(-9) 99.99999932
Orden 10 0 0 100
Tabla A.9: Errores RMS, NRMSE y porcentaje de similitud de la resistencia en la zona 9
A.10. Aproximaciones para la zona 10
R10(t)
Orden de aproximacion RMSE NRMSE S( %)
Orden 2 3827.088 1.391668667*10ˆ(-8) 99.99999831
Orden 3 6339.2908 2.305196686*10ˆ(-8) 99.99999769
Orden 4 5399.763 1.963550539*10ˆ(-8) 99.99999804
Orden 5 4.324242605*10ˆ11 17.29697042 -1629.697042
Orden 6 19791.3053 7.196838324*10ˆ(-8) 99.99999280
Orden 7 4570.1869 1.661886171*10ˆ(-8) 99.99999834
Orden 8 6351.8980 2.309781028*10ˆ(-8) 99.99999769
Orden 9 16906.2005 6.147709291*10ˆ(-8) 99.99999385
Orden 10 4637.5218 1.686371583*10ˆ(-8) 99.99999861
Tabla A.10: Errores RMS, NRMSE y porcentaje de similitud de la resistencia en la zona 10
Desarrollo de Modelos del Memristor para Aplicaciones en Circuitos Electronicos

84 A. Aproximaciones
Figura A.10: Aproximacion de la resistencia dependiente del tiempo en la zona 10
Departamento de Electronica Instituto Nacional de Astrofısica, Optica y Electronica
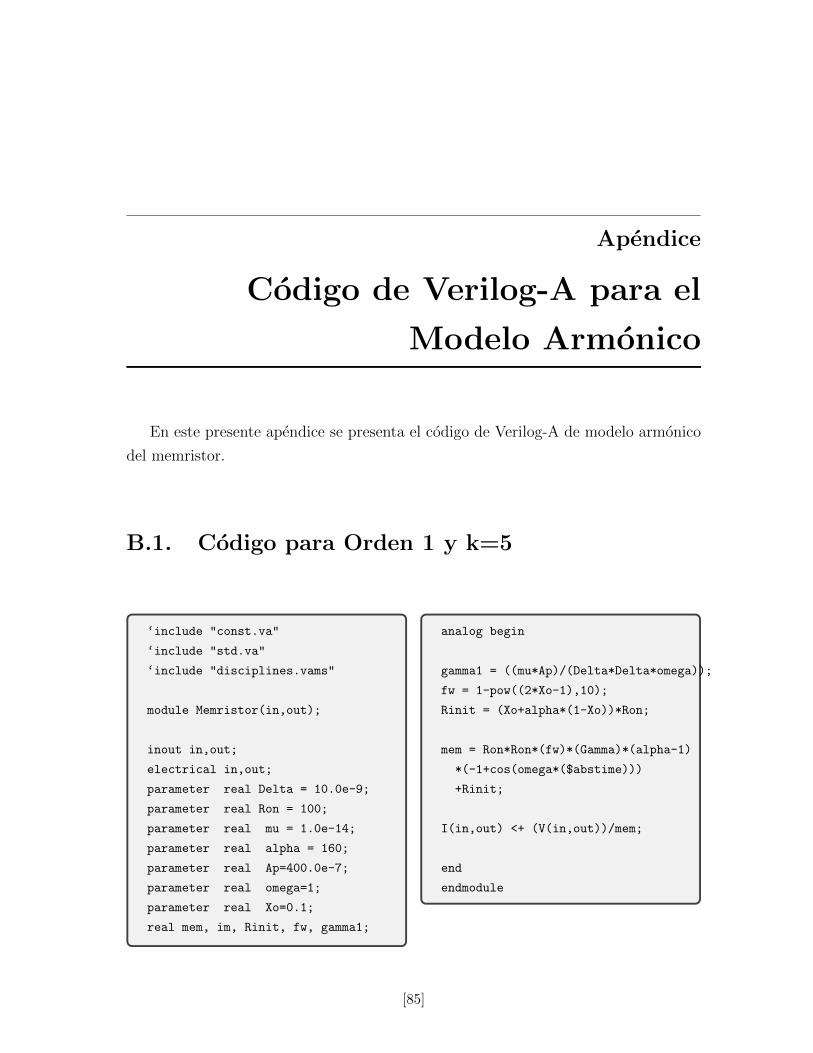
Apendice
Codigo de Verilog-A para el
Modelo Armonico
En este presente apendice se presenta el codigo de Verilog-A de modelo armonico
del memristor.
B.1. Codigo para Orden 1 y k=5
‘include "const.va"
‘include "std.va"
‘include "disciplines.vams"
module Memristor(in,out);
inout in,out;
electrical in,out;
parameter real Delta = 10.0e-9;
parameter real Ron = 100;
parameter real mu = 1.0e-14;
parameter real alpha = 160;
parameter real Ap=400.0e-7;
parameter real omega=1;
parameter real Xo=0.1;
real mem, im, Rinit, fw, gamma1;
analog begin
gamma1 = ((mu*Ap)/(Delta*Delta*omega));
fw = 1-pow((2*Xo-1),10);
Rinit = (Xo+alpha*(1-Xo))*Ron;
mem = Ron*Ron*(fw)*(Gamma)*(alpha-1)
*(-1+cos(omega*($abstime)))
+Rinit;
I(in,out) <+ (V(in,out))/mem;
end
endmodule
[85]

86 B. Codigo de Verilog-A para el Modelo Armonico
Departamento de Electronica Instituto Nacional de Astrofısica, Optica y Electronica
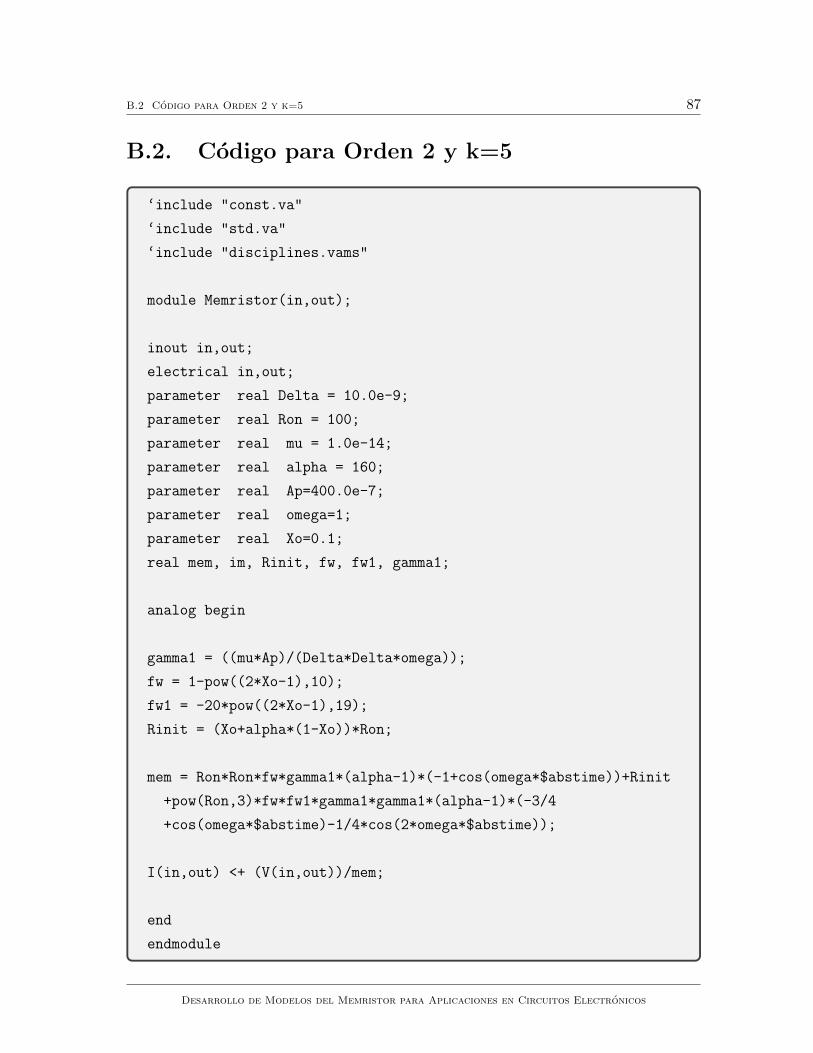
B.2 Codigo para Orden 2 y k=5 87
B.2. Codigo para Orden 2 y k=5
‘include "const.va"
‘include "std.va"
‘include "disciplines.vams"
module Memristor(in,out);
inout in,out;
electrical in,out;
parameter real Delta = 10.0e-9;
parameter real Ron = 100;
parameter real mu = 1.0e-14;
parameter real alpha = 160;
parameter real Ap=400.0e-7;
parameter real omega=1;
parameter real Xo=0.1;
real mem, im, Rinit, fw, fw1, gamma1;
analog begin
gamma1 = ((mu*Ap)/(Delta*Delta*omega));
fw = 1-pow((2*Xo-1),10);
fw1 = -20*pow((2*Xo-1),19);
Rinit = (Xo+alpha*(1-Xo))*Ron;
mem = Ron*Ron*fw*gamma1*(alpha-1)*(-1+cos(omega*$abstime))+Rinit
+pow(Ron,3)*fw*fw1*gamma1*gamma1*(alpha-1)*(-3/4
+cos(omega*$abstime)-1/4*cos(2*omega*$abstime));
I(in,out) <+ (V(in,out))/mem;
end
endmodule
Desarrollo de Modelos del Memristor para Aplicaciones en Circuitos Electronicos

88 B. Codigo de Verilog-A para el Modelo Armonico
Departamento de Electronica Instituto Nacional de Astrofısica, Optica y Electronica

B.3 Codigo para Orden 3 y k=5 89
B.3. Codigo para Orden 3 y k=5
‘include "const.va"
‘include "std.va"
‘include "disciplines.vams"
module Memristor(in,out);
inout in,out;
electrical in,out;
parameter real Delta = 10.0e-9;
parameter real Ron = 100;
parameter real mu = 1.0e-14;
parameter real alpha = 160;
parameter real Ap=400.0e-7;
parameter real omega=1;
parameter real Xo=0.1;
real mem, im, Rinit, fw, fw1, fw2, Px, gamma1;
analog begin
gamma1 = ((mu*Ap)/(Delta*Delta*omega));
fw = 1-pow((2*Xo-1),10);
fw1 = -20*pow((2*Xo-1),19);
fw2 = -360*pow((2*Xo-1),8);
Px = 9728*pow(Xo,10)+48640*pow(Xo,9)+109440pow(Xo,8)+145920*
pow(Xo,7)+127680pow(Xo,6)+76608pow(Xo,5)+31920pow(Xo,4)
+9120pow(Xo,3)+1710pow(Xo,2)+190Xo+5;
Rinit = (Xo+alpha*(1-Xo))*Ron;
mem = Ron*Ron*fw*gamma1*(alpha-1)*(-1+cos(omega*$abstime))+Rinit
+pow(Ron,3)*fw*fw1*gamma1*gamma1*(alpha-1)*(-3/4
+cos(omega*$abstime)-1/4*cos(2*omega*$abstime))
+pow(Ron,4)*fw*fw2*pow(gamma1,3)*Px*(alpha-1)
*(5/54-5/36*cos(omega*$abstime)+1/18cos(2*omega*$abstime)
-1/108*cos(3*omega*$abstime));
I(in,out) <+ (V(in,out))/mem;
end
endmodule
Desarrollo de Modelos del Memristor para Aplicaciones en Circuitos Electronicos

Apendice
Codigo de Verilog-A para el
Modelo Comportamental
El presente apendice muestra el codigo Verilog-A utilizado para describir el modelo
memristivo comportamental del dispositivo de Al/Graf/ITO.
‘include "const.va"
‘include "std.va"
‘include "disciplines.vams"
‘include "constants.vams"
module Memristor(in,out);
inout in,out;
electrical in,out;
parameter real To=4.8;
//Para la Seccion 1 O10
parameter real A0_R1=994.58;
parameter real A1_R1=-2171.343260;
parameter real A2_R1=51498.31871;
parameter real A3_R1=-4.767356694e5;
parameter real A4_R1=2.267606161e6;
parameter real A5_R1=-6.077573620e6;
parameter real A6_R1=9.317769693e6;
parameter real A7_R1=-7.722856825e6;
parameter real A8_R1=2.846043527e6;
parameter real A9_R1=-1.953488560e5;
parameter real A10_R1=14872.34575;
//Para la Seccion 2 O3
parameter real A0_R2=-4.407423548e11;
parameter real A1_R2=4.827463393e11;
parameter real A2_R2=5.451346009e9;
parameter real A3_R2=2.544669480e9;
//Para la Seccion 3 O2
parameter real A0_R3=3.000000000e11;
parameter real A1_R3=-2.500000000e11;
parameter real A2_R3=0;
//Para la Seccion 4 O2
parameter real A0_R4=-3e11;
parameter real A1_R4=2.5e11;
parameter real A2_R4=0;
//Para la Seccion 5 O2
parameter real A0_R5=6.599999977e12;
parameter real A1_R5=-2.749999990e12;
parameter real A2_R5=2;
//Para la Seccion 6 O8
parameter real A0_R6=3.230141041e8;
parameter real A1_R6=-1.053507806e9;
parameter real A2_R6=1.482630767e9;
parameter real A3_R6=-1.178785987e9;
parameter real A4_R6=5.801412032e8;
parameter real A5_R6=-1.812239972e8;
parameter real A6_R6=3.512666904e7;
parameter real A7_R6=-3.865813115e6;
parameter real A8_R6=1.850694228e5;
//Para la Seccion 7 O6
parameter real A0_R7=-2.792033935e12;
parameter real A1_R7=2.013657036e12;
parameter real A2_R7=-7.310567199e11;
parameter real A3_R7=1.316918676e11;
[90]

91
parameter real A4_R7=6.317718693e9;
parameter real A5_R7=-5.045564877e9;
parameter real A6_R7=4.653099288e8;
//Para la Seccion 8 O2
parameter real A0_R8=9e11;
parameter real A1_R8=-2.5e11;
parameter real A2_R8=0;
//Para la Seccion 9 O2
parameter real A0_R9=-9e11;
parameter real A1_R9=2.5e11;
parameter real A2_R9=0;
//Para la Seccion 10 O10
parameter real A0_R10=1.320001852e13;
parameter real A1_R10=-2.750007481e12;
parameter real A2_R10=-1.787809225e6;
parameter real A3_R10=9.510311124e5;
parameter real A4_R10=65134.88241;
parameter real A5_R10=-56567.15831;
parameter real A6_R10=2661.705655;
parameter real A7_R10=637.6209148;
parameter real A8_R10=66.22164248;
parameter real A9_R10=-26.15799275;
parameter real A10_R10=1.493646815;
real Req;
real n;
analog begin
if ($abstime<To)
n=1;
else if ($abstime>=To && $abstime<2*To)
n=2;
else if ($abstime>=2*To && $abstime<3*To)
n=3;
else if ($abstime>=3*To && $abstime<4*To)
n=4;
else if ($abstime>=4*To && $abstime<5*To)
n=5;
else if ($abstime>=5*To && $abstime<6*To)
n=6;
if ((n-1)*To<=$abstime &&
$abstime<(n-1)*To+0.9 )
Req = A0_R1
+ A1_R1*($abstime-(n-1)*To)
+ A2_R1*pow(($abstime-(n-1)*To),2)
+ A3_R1*pow(($abstime-(n-1)*To),3)
+ A4_R1*pow(($abstime-(n-1)*To),4)
+ A5_R1*pow(($abstime-(n-1)*To),5)
+ A6_R1*pow(($abstime-(n-1)*To),6)
+ A7_R1*pow(($abstime-(n-1)*To),7)
+ A8_R1*pow(($abstime-(n-1)*To),8)
+ A9_R1*pow(($abstime-(n-1)*To),9)
+ A10_R1*pow(($abstime-(n-1)*To),10);
else if ((n-1)*To+0.9 <=$abstime &&
$abstime<(n-1)*To+1)
Req = A0_R2
+ A1_R2*($abstime-(n-1)*To)
+ A2_R2*pow(($abstime-(n-1)*To),2)
+ A3_R2*pow(($abstime-(n-1)*To),3);
else if ((n-1)*To+1 <= $abstime &&
$abstime < (n-1)*To+1.2)
Req = A0_R3
+ A1_R3*($abstime-(n-1)*To)
+ A2_R3*pow(($abstime-(n-1)*To),2);
else if ((n-1)*To+1.2 <= $abstime &&
$abstime < (n-1)*To+2.3)
Req = A0_R4
+ A1_R4*($abstime-(n-1)*To)
+ A2_R4*pow(($abstime-(n-1)*To),2);
else if ((n-1)*To+2.3 <= $abstime &&
$abstime < (n-1)*To+2.4)
Req = A0_R5
+ A1_R5*($abstime-(n-1)*To)
+ A2_R5*pow(($abstime-(n-1)*To),2);
else if ((n-1)*To+2.4 <= $abstime &&
$abstime < (n-1)*To+3.3)
Desarrollo de Modelos del Memristor para Aplicaciones en Circuitos Electronicos

92 C. Codigo de Verilog-A para el Modelo Comportamental
Req = A0_R6
+ A1_R6*($abstime-(n-1)*To)
+ A2_R6*pow(($abstime-(n-1)*To),2)
+ A3_R6*pow(($abstime-(n-1)*To),3)
+ A4_R6*pow(($abstime-(n-1)*To),4)
+ A5_R6*pow(($abstime-(n-1)*To),5)
+ A6_R6*pow(($abstime-(n-1)*To),6)
+ A7_R6*pow(($abstime-(n-1)*To),7)
+ A8_R6*pow(($abstime-(n-1)*To),8);
else if ((n-1)*To+3.3 <= $abstime &&
$abstime < (n-1)*To+3.4)
Req = A0_R7
+ A1_R7*($abstime-(n-1)*To)
+ A2_R7*pow(($abstime-(n-1)*To),2)
+ A3_R7*pow(($abstime-(n-1)*To),3)
+ A4_R7*pow(($abstime-(n-1)*To),4)
+ A5_R7*pow(($abstime-(n-1)*To),5)
+ A6_R7*pow(($abstime-(n-1)*To),6);
else if ((n-1)*To+3.4 <= $abstime &&
$abstime < (n-1)*To+3.6)
Req = A0_R8
+ A1_R8*($abstime-(n-1)*To)
+ A2_R8*pow(($abstime-(n-1)*To),2);
else if ((n-1)*To+3.6 <= $abstime &&
$abstime < (n-1)*To+4.7)
Req = A0_R9
+ A1_R9*($abstime-(n-1)*To)
+ A2_R9*pow(($abstime-(n-1)*To),2);
else
Req = A0_R10
+ A1_R10*($abstime-(n-1)*To)
+ A2_R10*pow(($abstime-(n-1)*To),2)
+ A3_R10*pow(($abstime-(n-1)*To),3)
+ A4_R10*pow(($abstime-(n-1)*To),4)
+ A5_R10*pow(($abstime-(n-1)*To),5)
+ A6_R10*pow(($abstime-(n-1)*To),6)
+ A7_R10*pow(($abstime-(n-1)*To),7)
+ A8_R10*pow(($abstime-(n-1)*To),8)
+ A9_R10*pow(($abstime-(n-1)*To),9)
+ A10_R10*pow(($abstime-(n-1)*To),10);
I(in,out)<+(V(in,out))/Req;
end
endmodule
Departamento de Electronica Instituto Nacional de Astrofısica, Optica y Electronica

Apendice
Circuito 1: Resultados del Modelo
Armonico de Orden 2 y 3
En el presenta Apendice se presentan los resultados de las simulaciones hechas
con el modelo de orden 2 y orden 3.
D.1. Resultados con el Modelo de Orden 2 y k =
5
0 500 1000 1500 2000 2500 3000
Time
-0.1
-0.08
-0.06
-0.04
-0.02
0
0.02
0.04
0.06
0.08
0.1
I L
0 500 1000 1500 2000 2500 3000
Time
-0.06
-0.04
-0.02
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
V C
1
0 500 1000 1500 2000 2500 3000
Time
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
V M
em
C
(a) (b) (c)
-0.06 -0.04 -0.02 0 0.02 0.04 0.06 0.08 0.1 0.12 0.14
V C1
-0.1
-0.08
-0.06
-0.04
-0.02
0
0.02
0.04
0.06
0.08
0.1
I L
-0.06 -0.04 -0.02 0 0.02 0.04 0.06 0.08 0.1 0.12 0.14
V C1
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
V M
em
C
-0.1
0.2
-0.05
0.150.1
0
I L
0.1
V MemC
0.05
0
V C1
0.05
0.1
-0.10
-0.2 -0.05
(d) (e) (f)
Figura D.1: Curvas y diagramas de fase con modelo de orden 2 y k=5
[93]

94 D. Circuito 1: Resultados del Modelo Armonico de Orden 2 y 3
D.2. Resultados con el Modelo de Orden 3 y k =
5
0 500 1000 1500 2000 2500 3000
Time
-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
I L
0 500 1000 1500 2000 2500 3000
Time
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
V C
1
0 500 1000 1500 2000 2500 3000
Time
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
V M
em
C
(a) (b) (c)
-0.15 -0.1 -0.05 0 0.05 0.1 0.15 0.2
V C1
-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
I L
-0.15 -0.1 -0.05 0 0.05 0.1 0.15 0.2
V C1
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
V M
em
C -0.2
0.2
0.1
V MemC
0
0.20.15
-0.1 0.1
V C1
0.050
-0.05-0.1-0.2
-0.15
0
I L
0.2
(d) (e) (f)
Figura D.2: Curvas y diagramas de fase con modelo de orden 3 y k=5
Como puede notarse los resultados vistos con el modelo de orden 3 Figura D.2
presenta mas desorden que los resultados del modelo de orden 2 Figura D.1 y esto se
debe por que le modelo de orden 2 se comporta parcialmente activo.
Departamento de Electronica Instituto Nacional de Astrofısica, Optica y Electronica

Bibliografıa
[1] L. Chua. Memristor-“the missing circuit element”. IEEE Transactions on,
18(5):507–519, 1971.
[2] Strukov D. & Snider G. & Steward & Williams R. The missing memristor found.
Nature, 453(7191):pp. 80–83, 2008.
[3] L. O. Chua & Sung Mo Kang. Memristive devices and systems. Proceedings of
the IEEE, 64(2):209–223, Feb 1976.
[4] D. Biolek, Z. Biolek, V. Biolkova, and Z. Kolka. Some fingerprints of ideal
memristors. pages 201–204, May 2013.
[5] Shyam Prasad Adhikari et al. Three fingerprints of memristor. IEEE Transac-
tions on Circuits and Systems, 60(11):3008–3021, 2013.
[6] Maheshwar Pd Sah y Shyam Prasad Adhikari. Hyongsuk Kim. Pinched hysteresis
loops is the fingerprint of memristive devices. 2012.
[7] L. O. Chua. A bundary condition-based approach to the modeling of memristor
nanostructures. Appl. Phys. A, 102:2713–2726, 2011.
[8] Y. V. Pershin and M. Di Ventra. Teaching memory circuit elements via
experiment-based learning. Circuits and Systems Magazine, IEEE, 12(1):64–74,
2012.
[9] Y. V. Pershin M. Di Ventra and L. O. Chua. Putting memory into circuit
elements: Memristors, memcapacitors, and meminductors [point of view]. Pro-
ceedings of the IEEE, 97(8):1371–1372, 2009.
[95]
96 BIBLIOGRAFIA
[10] Y. V. Pershin M. Di Ventra and L. O. Chua. Circuit elements with me-
mory: Memristors, memcapacitors, and meminductors. Proceedings of the IEEE,
97(10):1717–1724, Oct. 2009.
[11] Leon O. Chua. The fourth element. in Proceedings of the IEEE. UC Berkeley,
Berkeley, United States, page 1920–1927, June 2012.
[12] Frank Z. Wang. A triangular periodic table of elementary circuit elements. IEEE
Transactions on Circuits and Systems I: Regular Papers, 60(3):616–623, Feb.
2013.
[13] V. Biolkova D. Biolek and Z. Kolka. Mutators simulating memcapacitors and
meminductors. in Circuits and Systems (APCCAS), 2010 IEEE Asia Pacific
Conference on, page 800–803, 2010.
[14] Y. Pershin and M. Di Ventra. Emulation of floating memcapacitors and memin
ductors using current conveyors. Electronics Letters, 47(4):243–244, 2011.
[15] S. Wu M. Lim Y. Guo F. Wang, N. Helian and A. Parker. Delayed switching in
memristors and memristive systems. IEEE Electron Device Lett., 31(7):755–757,
2010.
[16] Y. Guo S. Wu X. Yang M. Lim F. Wang, N. Helian and M. Rashid.
Delayed switching applied to memristor neural networks. J. Appl. Phys.,
111(7):07E317–07E317–3, Dec. 15, 2011.
[17] L.Chua. Resistance switching memories are memristors. Appl. Phys. A,
102:765–783, Jan. 2011.
[18] 1-4. Memristors and memristive systems. R.S., pages 3–16, Springer, New York
(2014).
[19] Y.V. Pershin and M. Di Ventra. Memristive circuits simulate memcapacitors and
meminductors. Electronics letters, 46(7), April 2010.
[20] K. Eshraghian S. F. Al-Sarawi Omid Kavehei, A. Iqbal and D. Abbotti. The
fourth element: characteristics, modelling and electromagnetic theory of the
memristor. Proceedings of the Royal Society A, pages 2175–22027, March 2010.
Departamento de Electronica Instituto Nacional de Astrofısica, Optica y Electronica

BIBLIOGRAFIA 97
[21] Yogesh N Joglekar & Stephen j Wolf. The elusive memristor: properties of basic
electrical circuits. European Journal of Physics, 30(1):p. 661, 2009.
[22] Yojanes Andres Rodrıguez Velasquez. Development of an analytical model for
a charge-controlled memristor and its applications. Electronics letters, INAOE
2017.
[23] Ji-Huan He. Homotopy pertubation method: a new nonlinear analytical techni-
que. Applied Mathematics and computation, 135(1):73–79, 2003.
[24] H Vazques. Generalized homotopy for solving nonlinear diffetential equations.
Computational and Applied Mathematics, 33(1):275–288, 2014.
[25] G. Sarmiento A. & Hernandez L. & Vazques H. & Hernandez, C. &Diaz. A fully
symbolic homotopy-based memristor model for applications to circuit simula-
tion. Journal of Analog Integrated Circuits and Signal Processing, 85(1):65–80,
October 2015.
[26] C. Papavassiliou Prodromakis, B. P. Peh and C. Toumazou. A versatile mem-
ristor model with nonlinear dopant kinetics. Electron Devices, IEEE Transac-
tions on,, 58:3099–3105, Sept 2011.
[27] D. Biolek Z. Biolek and V. Biolkova. Spice model of memristor with nonlinear
dopant drift. Radioengineering, 18(2):3099–3105, 2009.
[28] Shinbuhm Lee Jae Sung Lee and Tae Won Noh. Resistive switching phenomena:
A review of statistical physics approaches. Radioengineering, 18(2):3099–3105,
published online 31 August 2015.
[29] J. F. Verweij and J. H. Klootwijk. Resistive switching phenomena: A review of
statistical physics approaches. Microelectronics J., pages 611–622, 1996.
[30] Georgi Staikov Rainer Waser, Regina Dittmann and Kristof Szot. Redox-based
resistive switching memories – nanoionic mechanisms, prospects, and challenges.
Wiley, InterScience, 21:2632–2663, 2009.
[31] Akihito Sawa. Resistive switching in transition metal oxides. Materials today,
11:28–36, June 2008.
Desarrollo de Modelos del Memristor para Aplicaciones en Circuitos Electronicos

98 BIBLIOGRAFIA
[32] Gyeong-Su Park et al. Observation of electric-field induced ni filament channels
in polycrystalline niox film. Applied Physics Letters, 91:222103–222103, 2007.
[33] Kohei Fujiwara et al. Resistance switching and formation of a conductive bridge
in metal/binary oxide/metal structure for memory devices. Japanese Journal of
Applied Physics, 47:6266–6271, 2008.
[34] Martin Guido Middelhoek. The identification of analytical device model. Ja-
panese Journal of Applied Physics, TU Delft, Delft University of Technology,
1992.
Departamento de Electronica Instituto Nacional de Astrofısica, Optica y Electronica