departamento de investigaciÓn en fÍsica maestrÍa …
TRANSCRIPT

PROCESAMIENTO DIGITAL DE SEÑALES
INTRODUCIÓN.
Responsable: DRA. MILKA DEL CARMEN ACOSTA ENRIQUEZ
Colaboradora: DRA. MA. ELENA ZAYAS SAUCEDO
AGOSTO 2019
DEPARTAMENTO DE INVESTIGACIÓN EN FÍSICA
MAESTRÍA EN CIENCIAS EN ELECTRÓNICA
Orígenes del DSP
El procesamiento digital de señales (DSP, por sus siglas en inglés) tiene sus
orígenes en los años 60s y 70s con la invención y uso de la primera
computadora digital.
Las áreas clave para su aplicación fueron:
Radar y sonar
Exploración petrolera
Exploración espacial
Imagenología médica
En los 80s y 90s se exploran nuevas aplicaciones principalmente motivadas por necesidades gubernamentales y militares. Poco a poco fueron incursionando a la par necesidades comerciales, como:
• Espaciales (fotografía espacial, compresión de datos, monitoreo remoto y análisis de datos remotos).
• Médicas (diagnósticos por imagen, análisis electrocardiogramas, almacenamiento/recuperación de imágenes médicas).
• Comercial (compresión de sonido e imagen, efectos especiales en películas, llamadas de video conferencia).
• Telefonía (compresión de voz y datos, reducción de eco, multiplexión de señales, filtrado).
• Militar (radar, sonar, guiado de artillería, comunicaciones seguras).
• Industrial (prospección de petróleo y minerales, procesos de monitoreo y control, pruebas no destructivas, herramientas de diseño y CAD).
• Científicas (registro y análisis de terremotos, adquisición de datos, análisis espectral, modelado y simulación).

Terminología
Señal continua
Señal discreta
Amplitud
Variable dependiente
Variable independiente
Número de muestras
Función
Dominio del tiempo
Dominio de la frecuencia
Dominio espacial

FILTROS.

Esquema de tolerancia de un filtro pasabajas
ESPECIFICACIONES DEL FILTRO

Ejemplo:
Si la frecuencia de muestreo es 104
muestras (T=10-4 s)
La ganancia |Heff( j)| debe diferir de la
unidad menos de un factor de ±0.01 en la
banda 0 ≤ ≤ 2(2000).
La ganancia no debe ser mayor que 0.001
en la banda de frecuencias 2 (3000) ≤ .
p1 = p2 = 0,01
s = 0,001
ωp = 0,4 radianes
ωs = 0,6 radianes.
Por tanto, en este caso, la ganancia ideal en la banda de paso
es igual a la unidad y puede variar entre (1+p1 ) y (1−p2 ), y la
ganancia en la banda eliminada varía entre 0 y s.
Ganancia ideal de la banda de paso en dBs = 20log10(1) =0 dB
Ganancia máxima de la banda de paso en dBs = 20log10(1,01)
=0,0864 dB
Ganancia mínima en el límite de la banda de paso en dBs =
20log10(0,99) =−0,873 dB
ganancia máxima de la banda de eliminada en dBs =
20log10(0,001) =−60dB

DISEÑO DE FILTROS IIR EN TIEMPO DISCRETO A PARTIR DE
FILTROS EN TIEMPO CONTINUO
Técnicas de diseño de filtros IIR en tiempo discreto se basaron en la transformación de
un filtro en tiempo continuo en un filtro en tiempo discreto que cumpla las
especificaciones preestablecidas.
Motivación:
• El arte del diseño de filtros IIR en tiempo continuo está muy avanzado, y como se
pueden obtener resultados útiles, es ventajoso utilizar los procedimientos de diseño
que ya se han desarrollado para los filtros en tiempo continuo.
• Muchos métodos útiles de diseño de filtros IIR en tiempo continuo dan como resultado
fórmulas de diseño simples en forma cerrada. Por tanto, los métodos de diseño de
filtros IIR en tiempo discreto que se basan en esas fórmulas estándar de diseño de
filtros IIR en tiempo continuo son fáciles de realizar.
• Los métodos de aproximación estándar que funcionan bien para el diseño de filtros IIR
en tiempo continuo no producen fórmulas de diseño simples en forma cerrada cuando
se aplican directamente al caso IIR en tiempo discreto, debido a que la respuesta en
frecuencia de un filtro en tiempo discreto es periódica, y la de un filtro en tiempo
continuo no lo es.
1. Al diseñar un filtro en tiempo discreto transformando un filtro prototipo en tiempo
continuo, las especificaciones del filtro en tiempo continuo se obtienen mediante una
transformación de las especificaciones del filtro en tiempo discreto deseado. Se
obtienen a continuación la función de transferencia Hc(s) o la respuesta al impulso hc(t)
del filtro en tiempo continuo.
2. Se obtiene la función de transferencia H(z) o la respuesta al impulso h[n] del filtro en
tiempo discreto aplicando a Hc(s) o a hc(t).
3. Al llevar a cabo esa transformación, se desea generalmente que la respuesta en
frecuencia del filtro en tiempo discreto resultante conserve las propiedades esenciales
de la respuesta en frecuencia del filtro en tiempo continuo.

Diseño de filtros mediante invariancia al impulso
La invariancia al impulso proporciona un método directo para calcular muestras de la salida de
un sistema en tiempo continuo de banda limitada cuando las señales de entrada son de banda
limitada.
En este caso, la respuesta al impulso del filtro en tiempo discreto es proporcional a muestras
igualmente espaciadas de la respuesta al impulso del filtro en tiempo continuo.
h[n] = Tdhc(nTd)Td es el intervalo de muestreo

Tipos de filtros


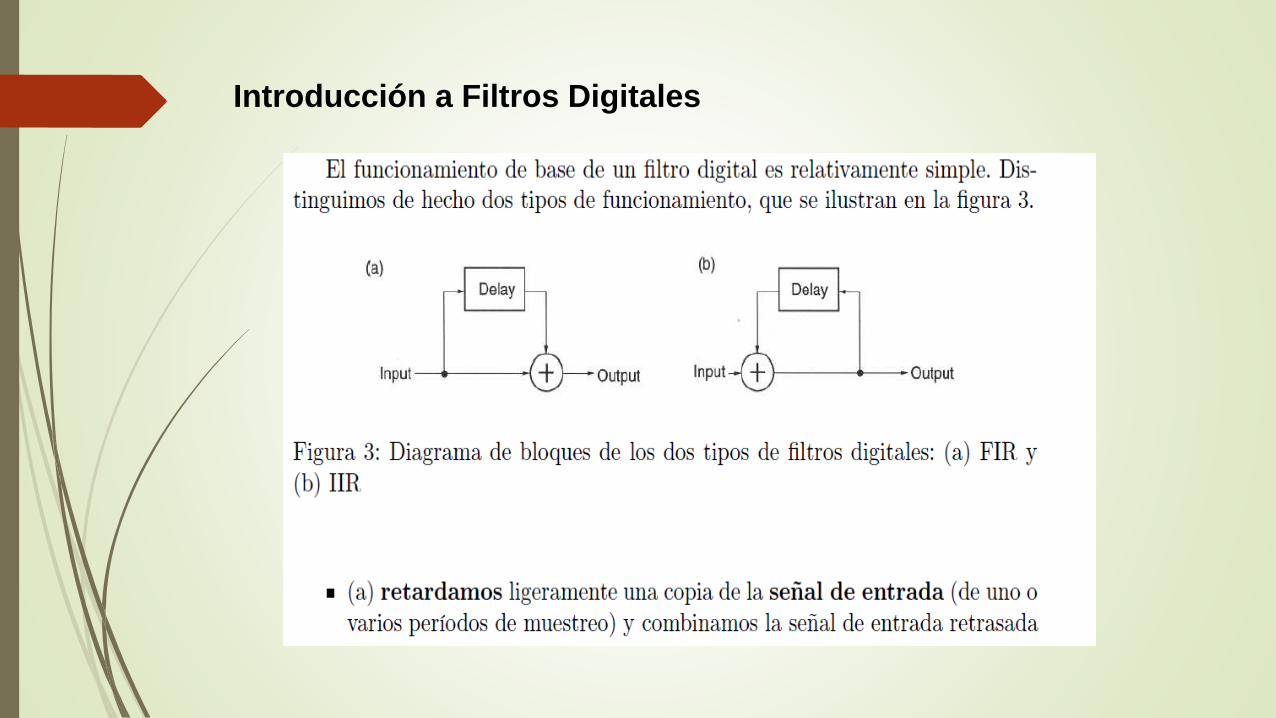
Introducción a Filtros Digitales


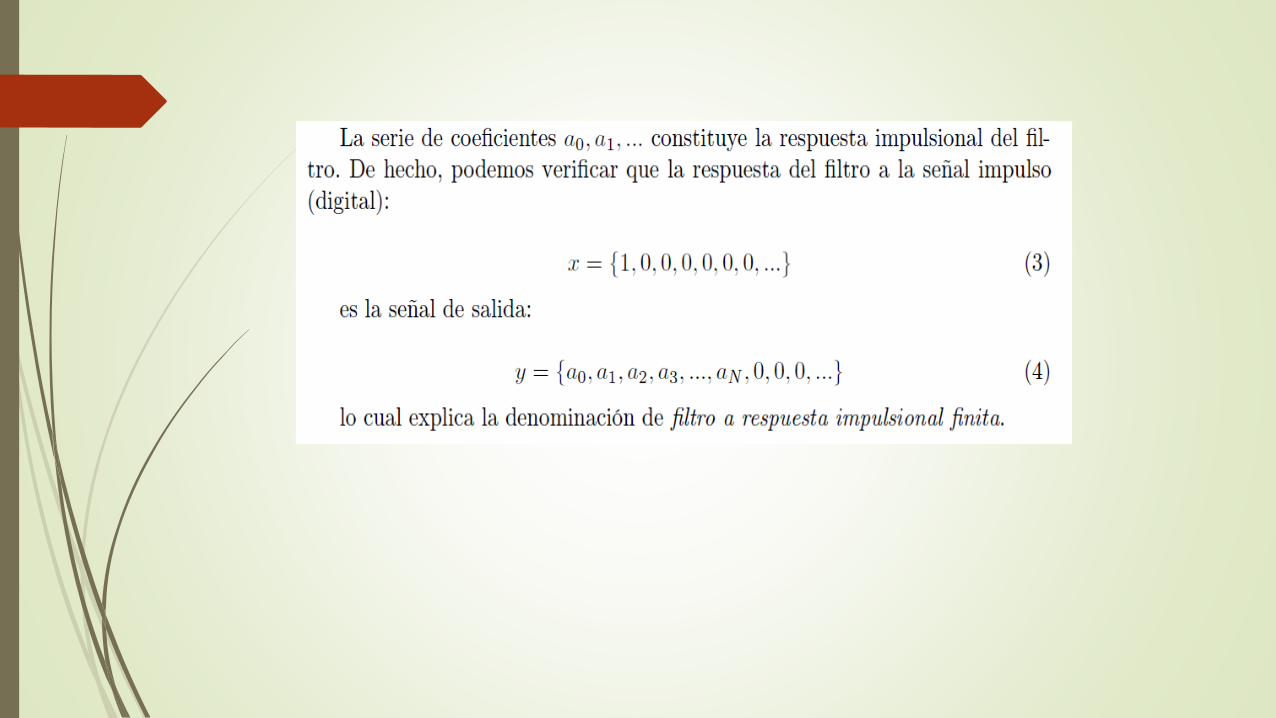
Filtros con Respuesta Impulsional Finita (FIR)
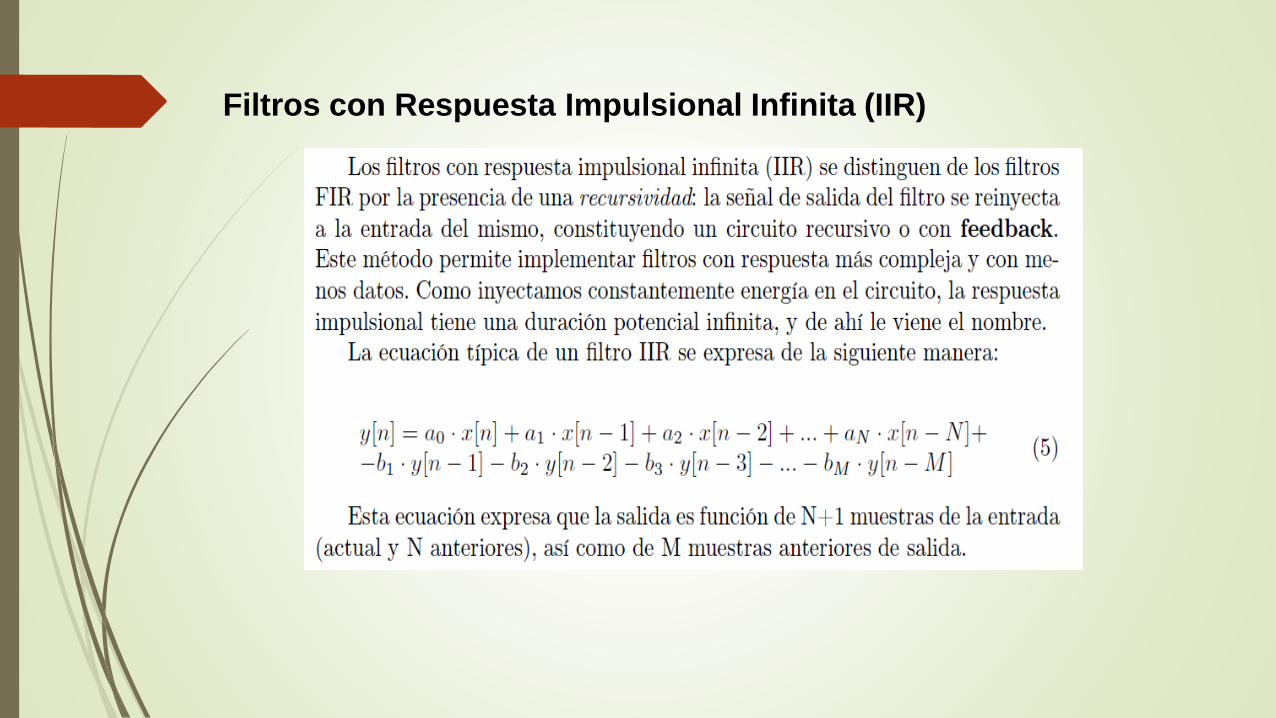
Filtros con Respuesta Impulsional Infinita (IIR)