curso introduccion al plc
TRANSCRIPT

Introduccióna los
ControladoresLógicos
Programables
2
AGENDAQue es un PLC?• Arquitectura de un PLC• PLC compactos• Estructura semimodular• Estructura modular• Funcionamiento de un PLC• Micrologix 1200 - Hardware Overview• Cableado del controlador• ROCKWELL SOFTWARE • RSLinx Lite• RSLOGIX 500• Introducción a la programación de PLCs• Ejercicios

3
INTRODUCCION

4
Que es un PLC?
• Un controlador lógico programable o PLC es una computadora industrial, digital y de estado sólido.
• Es una computadora industrial, en la cual dispositivos de control, ya sean limit switches, botoneras, sensores, etc. Proveen señales de control a la unidad. Estas señales de control interactúan con el programa lógico, lo que indica al PLC como reaccionar a estas señales de entrada y manda estas señales a dispositivos de control de campo como ser luces, solenoides, motores, etc.
5
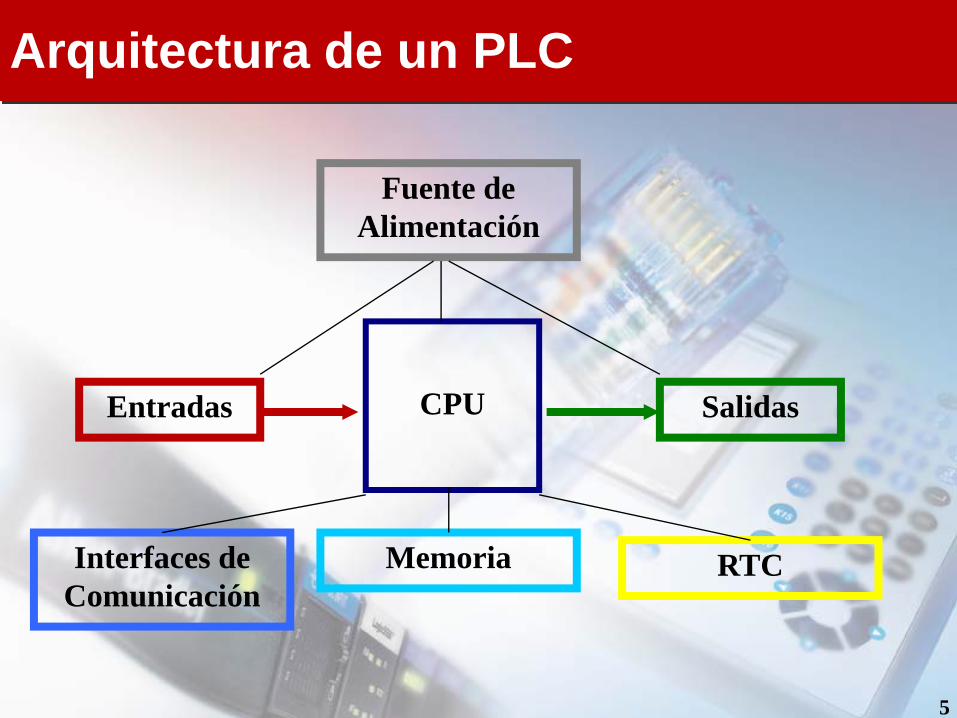
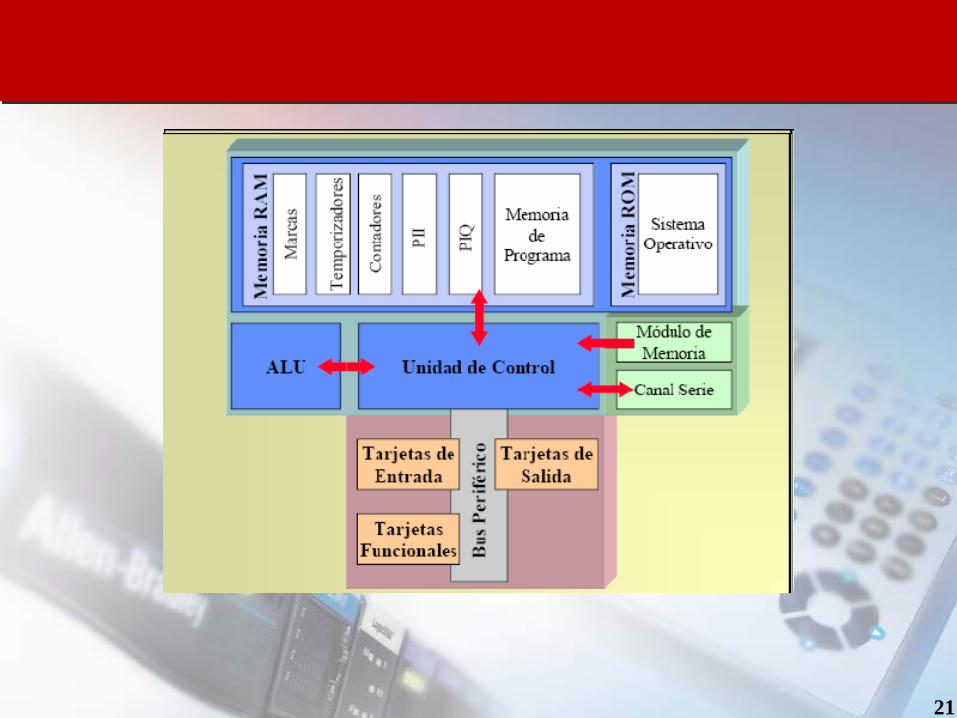
Arquitectura de un PLC
CPUEntradas Salidas
Fuente de Alimentación
Memoria RTCInterfaces de Comunicación
6
• EL PLC es un aparato electrónico operado digitalmente que usa una memoria programable para el almacenamiento interno de instrucciones las cuales implementan funciones especificas tales como lógicas, secuénciales, temporización, conteo y aritméticas, para controlar a través de módulos de entrada /salida digitales y analógicas, varios tipos de máquinas o procesos.
Funcionamiento del PLC
7
Características de un PLC
• Estructura externaSe refiere al aspecto físico exterior del mismo, bloques o elementos en que está dividido.Actualmente son tres las estructuras más significativas que existen en el mercado:– Estructura compacta.– Estructura semi-modular.– Estructura modular.

8
Estructura Compacta
• Este tipo de autómatas se distingue por presentar en un solo bloque todos sus elementos, esto es, fuente de alimentación, CPU, memorias, entradas/salidas, etc...

9
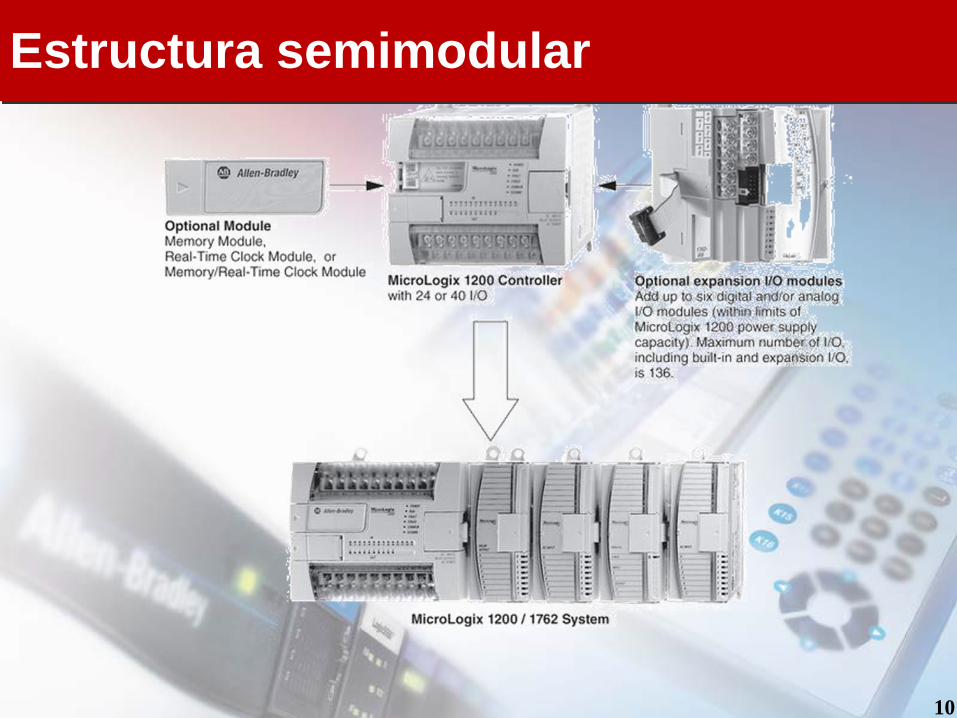
Estructura semimodular
• Se caracteriza por separar las E/S del resto del autómata, de tal forma que en un bloque compacto están reunidas las CPU, memoria de usuario o de programa y fuente de alimentación y separadamente las unidades de E/S.
10
Estructura semimodular
11
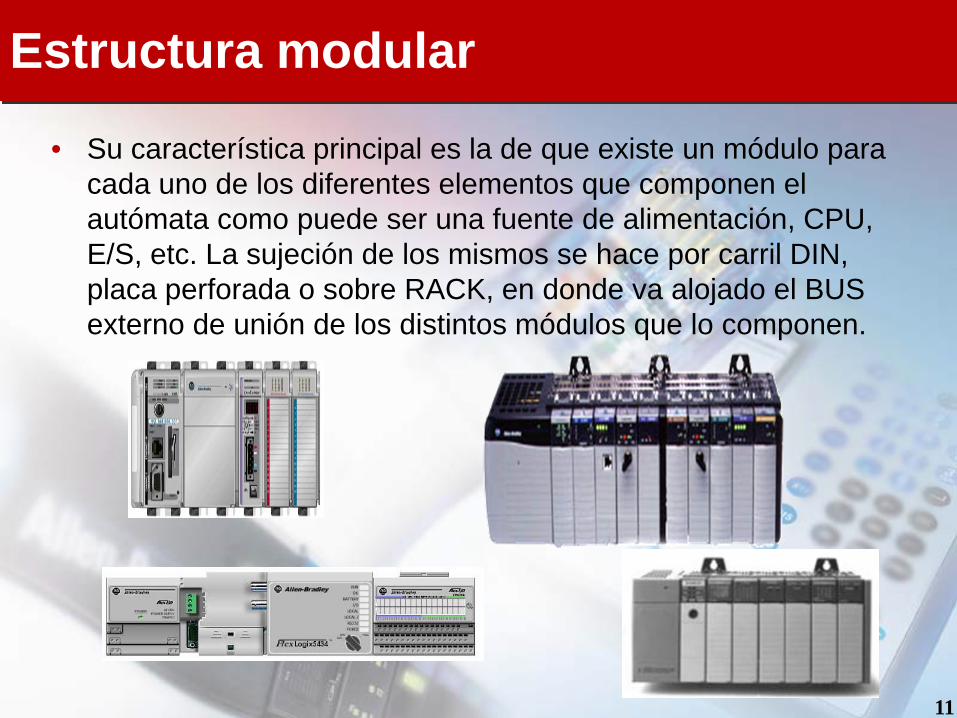
Estructura modular
• Su característica principal es la de que existe un módulo para cada uno de los diferentes elementos que componen el autómata como puede ser una fuente de alimentación, CPU, E/S, etc. La sujeción de los mismos se hace por carril DIN, placa perforada o sobre RACK, en donde va alojado el BUS externo de unión de los distintos módulos que lo componen.

12
Características de un PLC
ESTRUCTURA INTERNA
• El autómata está constituido por diferentes elementos, pero tres son los básicos:– CPU– Entradas– Salidas
• Con las partes mencionadas podemos decir que tenemos un autómata pero para que sea operativo son necesarios otros elementos tales como:– Fuente de alimentación– Interfaces– Unidad de programación

13
CPU (Unidad Central de Proceso)
La CPU (Central Procesing Unit) es la parte inteligente del sistema. Interpreta las instrucciones del programa de usuario y consulta el estado de las entradas. Dependiendo de dichos estados y del programa, ordena la activación de las salidas deseadas.
La CPU está constituida por los siguientes elementos:
– Procesador– Memoria monitor del sistema– Circuitos auxiliares

14
1. Procesador» Microprocesador» Circuitos de la unidad aritmética y lógica o ALU» Circuitos de la unidad de control» Acumulador» Flags
15
CPU
En general cada autómata contiene y realiza las siguientes funciones:• Vigilar que el tiempo de ejecución del programa de usuario no exceda de un determinado tiempo máximo. A esta función se le denomina Watchdog.• Ejecutar el programa usuario.• Crear una imagen de las entradas, ya que el programa de usuario no debe acceder directamente a dichas entradas.• Renovar el estado de las salidas en función de la imagen de las mismas, obtenida al final del ciclo de ejecución del programa usuario.• Chequeo del sistema.
16
• Fuente de Alimentación – La fuente de alimentación proporciona las
tensiones necesarias para el funcionamiento de los distintos circuitos del sistema.

17
Interfaces
De entre todos los tipos de interfaces que existen, las interfaces específicas permiten la conexión con elementos muy concretos del proceso de automatización. Se pueden distinguir entre ellas tres grupos bien diferenciados:
• Entradas / salidas especiales• Entradas / salidas inteligentes.• Procesadores periféricos inteligentes.

18
Entradas / Salidas Hay dos tipos de entradas:
• Entradas digitalesLos módulos de entrada digitales permiten conectar al autómata,captadores de tipo todo o nada como finales de carrera, pulsadores, etc.El proceso de adquisición de la señal digital consta de varias etapas:- Protección contra sobre tensiones- Filtrado- Puesta en forma de la onda• Entradas analógicasLos módulos de entrada analógicas permiten que los autómatasprogramables trabajen con accionadores de mando analógico y leanseñales de tipo analógicoEl proceso de adquisición de la señal analógica consta de varias
etapas:- Filtrado- Conversión A/D- Memoria interna
19
Entradas / SalidasHay dos tipos de salidas: • Salidas digitales
Un módulo de salida digital permite al autómataprogramable actuar sobre los preaccionadores yaccionadores que admitan órdenes de tipo todo o nada.El proceso de envío de la señal digital consta de varias etapas:- Puesta en forma- Aislamiento- Circuito de mando (relé interno)- Protección electrónica- Tratamiento cortocircuitos
• Salidas analógicasLos módulos de salida analógica permiten que el valor de una
variable numéricainterna del autómata se convierta en tensión o intensidad.El proceso de envío de la señal analógica consta de varias etapas:- Aislamiento galvánico- Conversión D/A- Circuitos de amplificación y adaptación- Protección electrónica de la salida

20
MemoriaExisten diferentes tipos de memorias utilizadas hoy en día:• RAM (Random Access Memory).- Ésta memoria mantiene
almacenado los datos mientras se encuentre energía eléctrica• ROM (Read Only Memory).- Es una memoria permanente que
no puede ser borrada. Se utiliza usualmente para guardar el sistema operativo del PLC.
• EPROM (Erasable Programmable Read Only Memory).- Ésta memoria pude ser programada como una ROM, pero éste tipo de memoria corre el riesgo de ser borrada por medio de luz ultravioleta y ser reprogramada.
• EEPROM (Electronically Erasable Programmable Read Only Memory). - Éste tipo de memoria trabaja como una memoria ROM. Puede ser programada y borrada electrónicamente, por lo que se ha vuelto más popular que las EPROM’s.
• Todo PLC utiliza una memoria RAM en su CPU y una memoria ROM para guardar el sistema operativo básico. Mientras exista alimentación eléctrica, los datos almacenados en la RAM se guardarán; por lo que originalmente se añadía una batería al PLC. Éste método continúa utilizándose, pero actualmente también se usan EPROM’s.
21

22
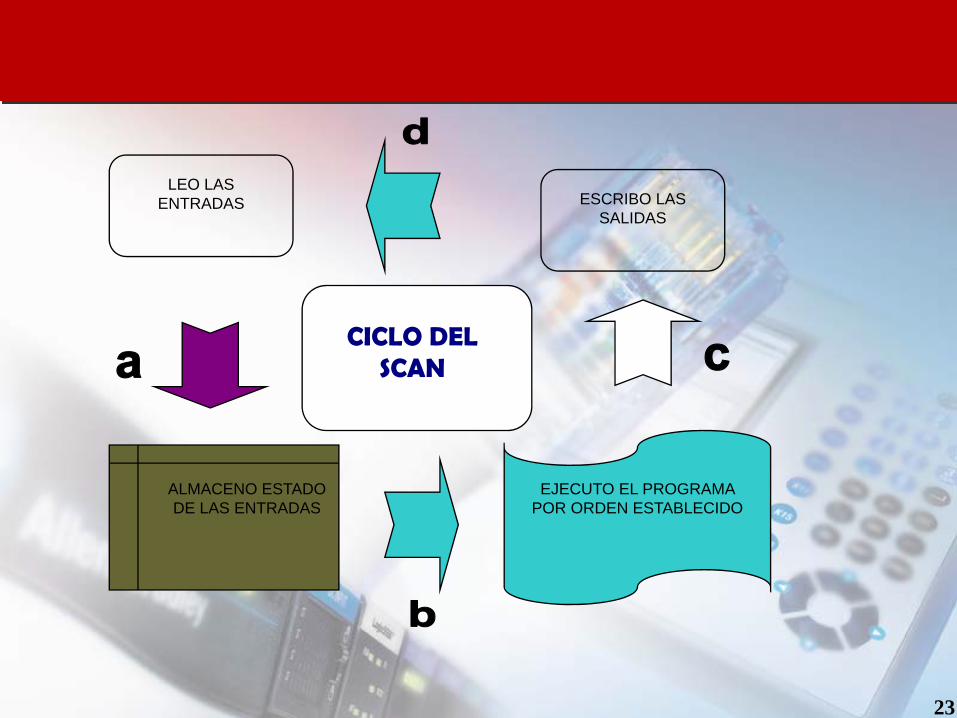
Funcionamiento de un PLC
El autómata está siempre repitiendo un ciclo, llamado ciclo de SCAN, que consiste en lo siguiente:
– En primer lugar, lee todas las entradas y almacena el estado de cada una de ellas.
– En segundo lugar, ejecuta las operaciones del programa siguiendo el orden en que se han grabado.
– En tercer lugar, escribe el resultado de las operaciones en las salidas
– Una vez escritas todas las salidas (activando o desactivando las que el resultado de las operaciones así lo requieran) vuelve al paso A.
Este ciclo de Scan se realiza indefinidamente hasta que pasemos el conmutador de la CPU a la posición STOP.
23
LEO LAS ENTRADAS ESCRIBO LAS
SALIDAS
EJECUTO EL PROGRAMA POR ORDEN ESTABLECIDO
ALMACENO ESTADO DE LAS ENTRADAS
CICLO DEL SCAN

24

25
Micrologix 1200 - Hardware Overview
• El controlador MicroLogix 1200 está compuesto por una unidad base, que contiene; una fuente de alimentación, entradas, salidas y un procesador. Además de esto se pueden añadir E/S adicionales.

26
Micrologix 1200 - Hardware Overview
Feature Description Feature Description
1 Terminal Blocks (Removable Terminal Blocks on 40-point controllers only.) 7 Terminal Doors and Labels
2 Bus Connector Interface to Expansion I/O 8 Trim Pots
3 Input LEDs 9 Communications Toggle Push Button
4 Output LEDs 10 Memory Module Port Cover(1) -or- Memory Module and/or Real –Time Clock(2)
5 Communication Port/Channel 0 11 DIN Rail Latches
6 Status LEDs 12 Programmer/HMI Port(Equipped with 1762-LxxxxxR controllers only)

27
Micrologix 1200 - Hardware Overview
Opciones de comunicación• El MicroLogix 1200 puede conectarse a una
computadora personal.• Además puede conectarse a una red-485
mediante un conversor (1761-NET-AIC), a una red Ethernet usando una interface Ethernet (1761-NET-ENI), o a una red DeviceNet™ utilizando la interface Devicenet (1761-NET-DNI). El controlador puede conectarse además a redes SCADA Modbus™ como RTU esclavo.
28
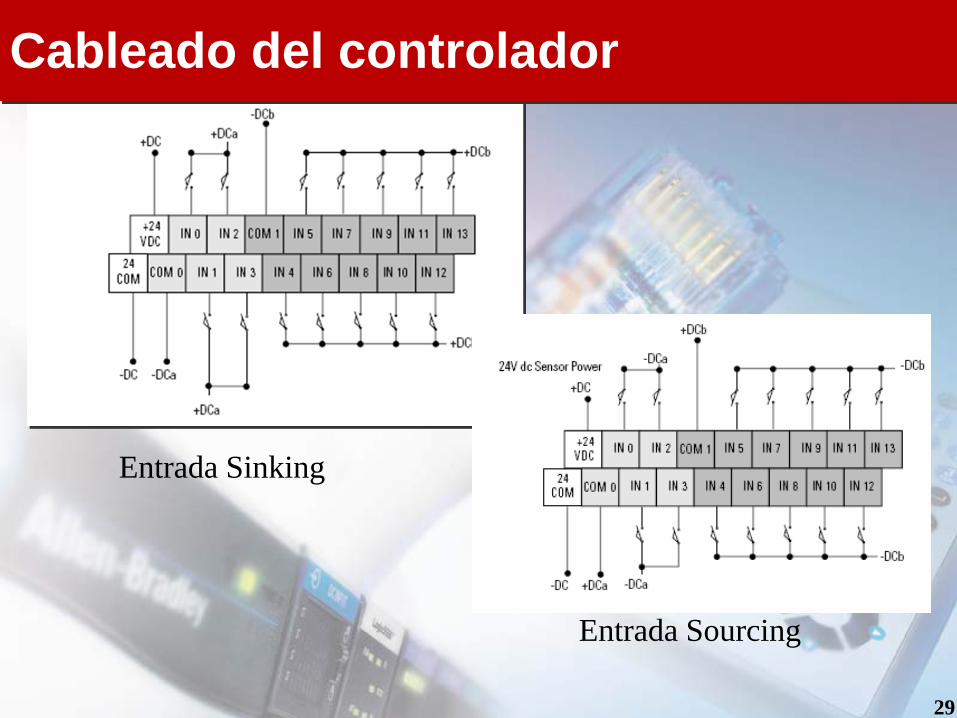
Cableado del controlador• Los controladores con entradas DC pueden ser cableadas
para trabajar con configuración sinking o sourcing (NPN o PNP).
• “Sinking” o “sourcing” son términos utilizados para describir el flujo de la corriente a través de un dispositivo en relación con la alimentación y la E/S asociada.
• Entrada “Sinking”: Conexión de un dispositivo PNP. La entrada es energizada cuando un nivel alto es aplicado a la entrada. VDC (-) de la fuente de alimentación debe ser conectado a la terminal DC COM.
• Entrada “Sourcing”. Conexión de un dispositivo NPN. La entrada es energizada cuando un nivel bajo es aplicado a la entrada. VDC (+) de la fuente de alimentación debe ser conectado a la terminal DC COM.
29
Entrada Sinking
Entrada Sourcing
Cableado del controlador
30
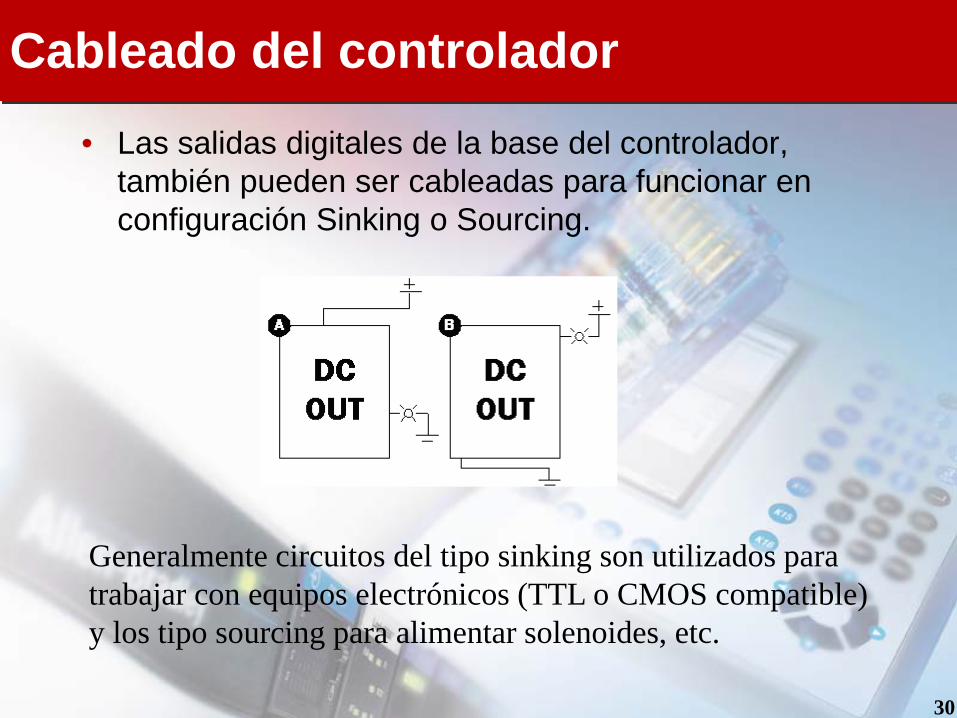
Cableado del controlador• Las salidas digitales de la base del controlador,
también pueden ser cableadas para funcionar en configuración Sinking o Sourcing.
Generalmente circuitos del tipo sinking son utilizados para trabajar con equipos electrónicos (TTL o CMOS compatible) y los tipo sourcing para alimentar solenoides, etc.
31
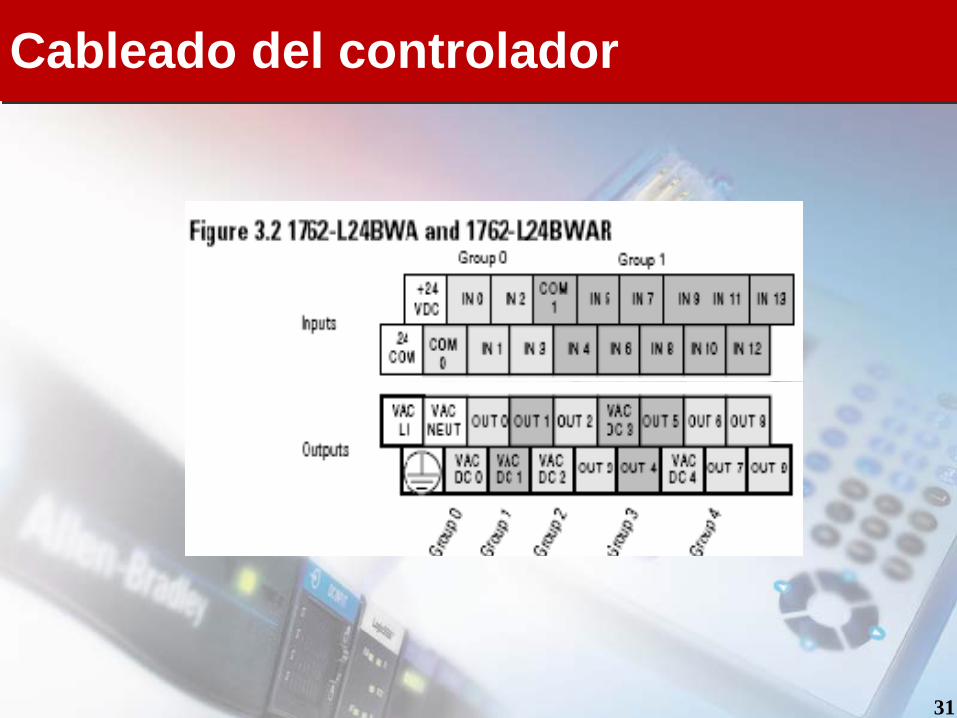
Cableado del controlador
32
Cableado del controlador
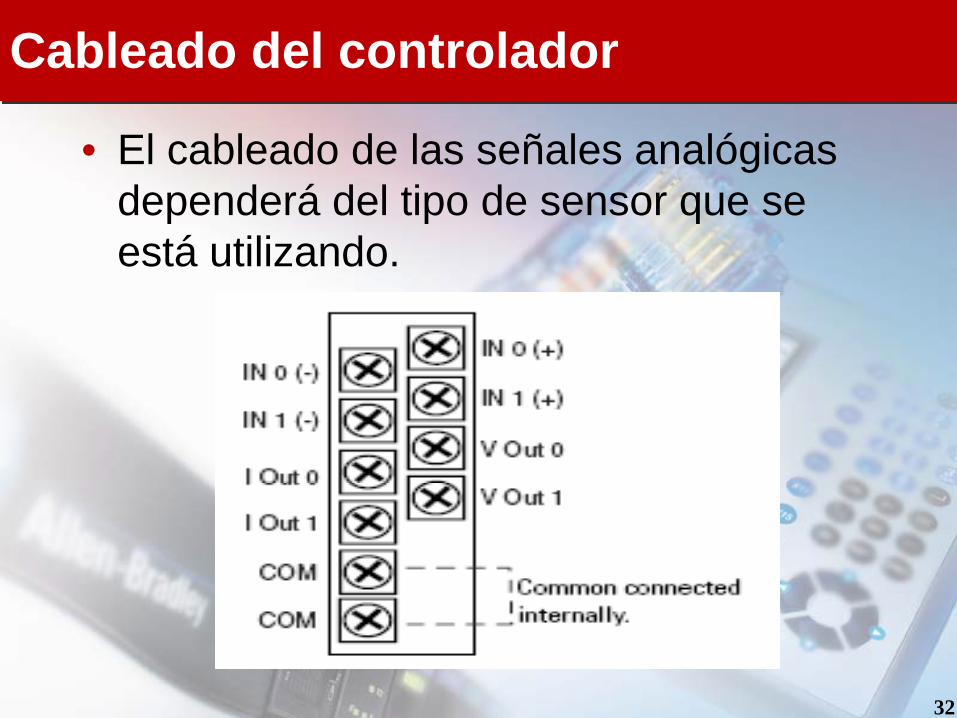
• El cableado de las señales analógicas dependerá del tipo de sensor que se está utilizando.

33
Cableado de señales analógicas
34
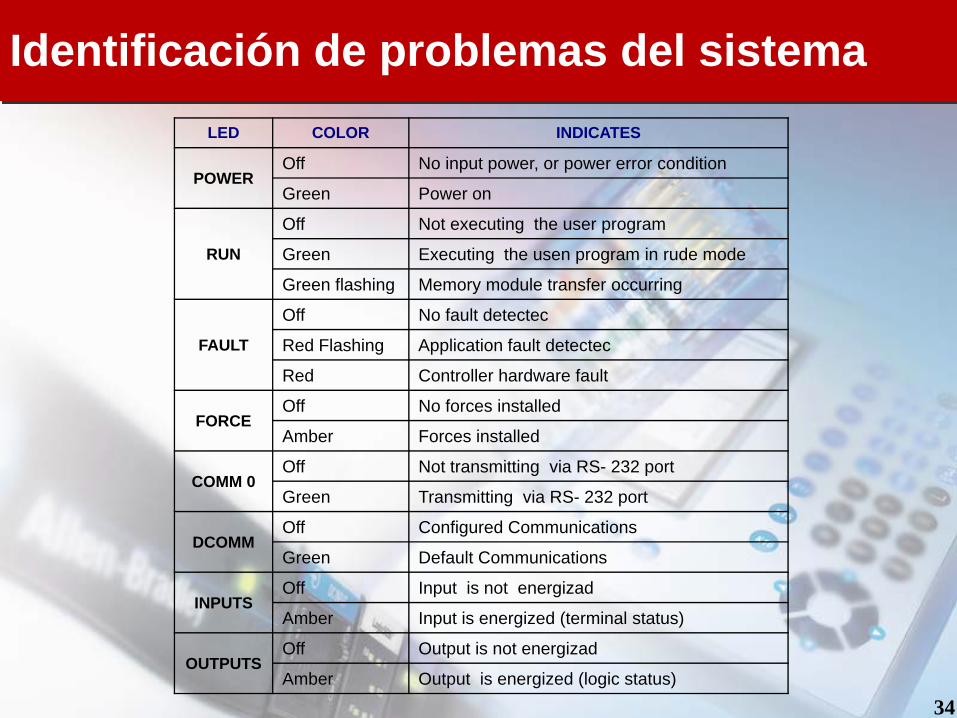
Identificación de problemas del sistema LED COLOR INDICATES
POWEROff No input power, or power error condition
Green Power on
RUN
Off Not executing the user program
Green Executing the usen program in rude mode
Green flashing Memory module transfer occurring
FAULT
Off No fault detectec
Red Flashing Application fault detectec
Red Controller hardware fault
FORCEOff No forces installed
Amber Forces installed
COMM 0Off Not transmitting via RS- 232 port
Green Transmitting via RS- 232 port
DCOMMOff Configured Communications
Green Default Communications
INPUTSOff Input is not energizad
Amber Input is energized (terminal status)
OUTPUTSOff Output is not energizad
Amber Output is energized (logic status)
35
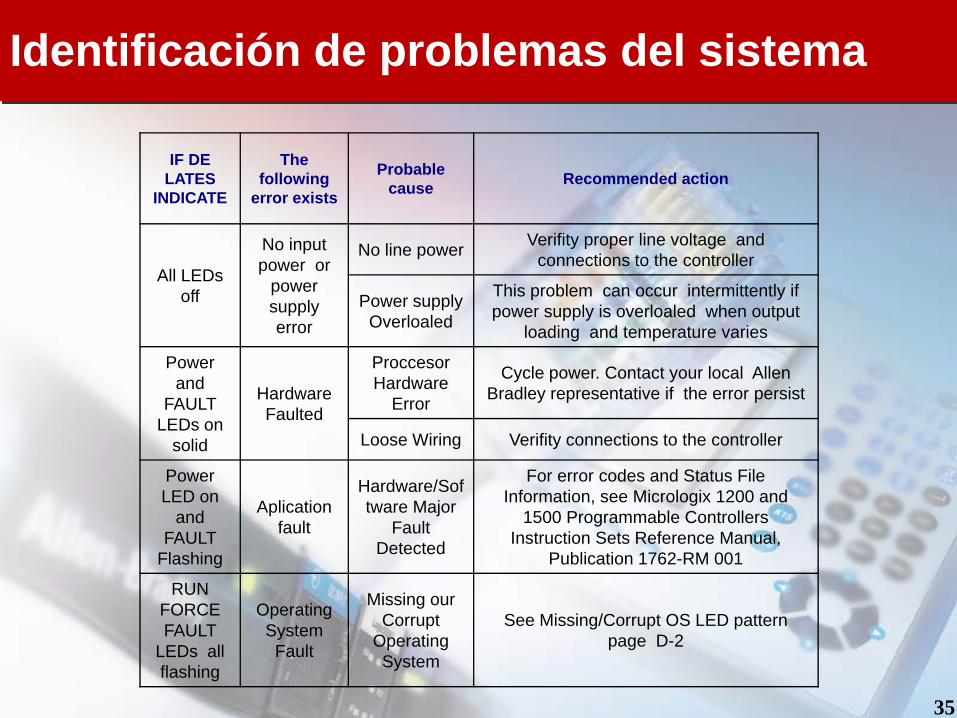
Identificación de problemas del sistema
IF DE LATES
INDICATE
The following
error exists
Probable cause Recommended action
All LEDs off
No input power or
power supply error
No line power Verifity proper line voltage and connections to the controller
Power supply Overloaled
This problem can occur intermittently if power supply is overloaled when output
loading and temperature varies
Power and
FAULT LEDs on
solid
Hardware Faulted
Proccesor Hardware
Error
Cycle power. Contact your local Allen Bradley representative if the error persist
Loose Wiring Verifity connections to the controller
Power LED on
and FAULT
Flashing
Aplication fault
Hardware/Software Major
Fault Detected
For error codes and Status File Information, see Micrologix 1200 and
1500 Programmable Controllers Instruction Sets Reference Manual,
Publication 1762-RM 001
RUNFORCEFAULT
LEDs all flashing
Operating System
Fault
Missing our Corrupt
Operating System
See Missing/Corrupt OS LED pattern page D-2

36
ROCKWELLSOFTWARE

37
ROCKWELL SOFTWARE
SOFTWARE DE COMUNICACIÓN RSLINXRSLinx es el software de comunicaciones de Rockwell
38
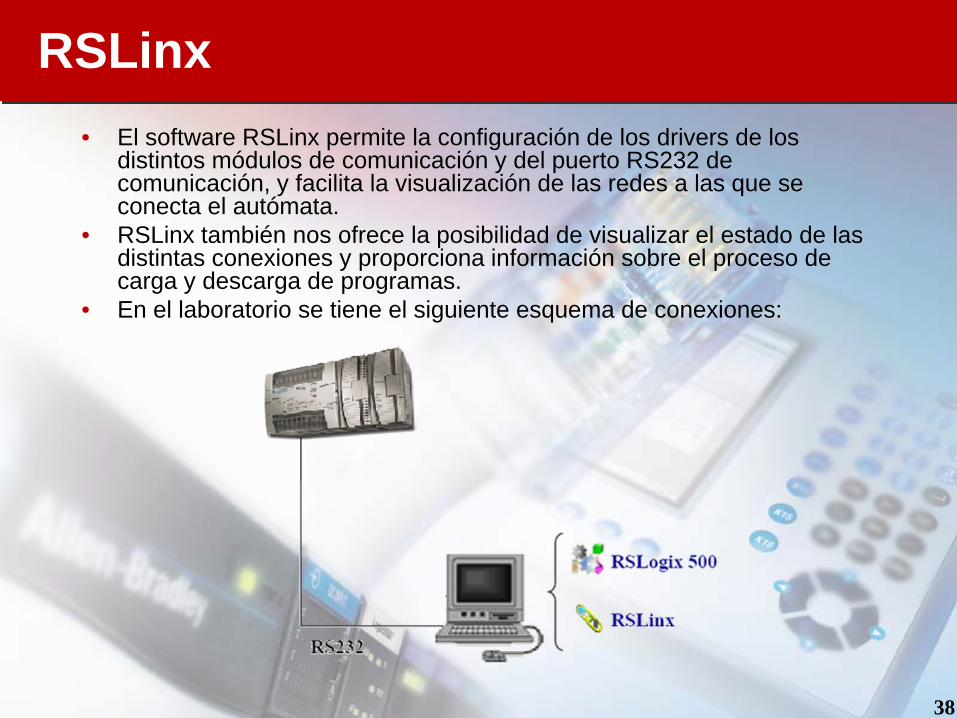
RSLinx• El software RSLinx permite la configuración de los drivers de los
distintos módulos de comunicación y del puerto RS232 de comunicación, y facilita la visualización de las redes a las que se conecta el autómata.
• RSLinx también nos ofrece la posibilidad de visualizar el estado de las distintas conexiones y proporciona información sobre el proceso de carga y descarga de programas.
• En el laboratorio se tiene el siguiente esquema de conexiones:
39
RSLinx Lite
Las siguientes características y ventajas están disponibles con RSLinx Lite:
• Compatibilidad con productos de Rockwell Software y Allen-Bradley.
• Análisis de las redes disponibles a través de RSWho y visualización de diagnósticos de los drivers.

40
RSWho
• RSWHO es la ventana activa de RSLinx mediante la cual se pueden ver las redes de las que consta el sistema, así como todos los dispositivos conectados a las mismas.
41
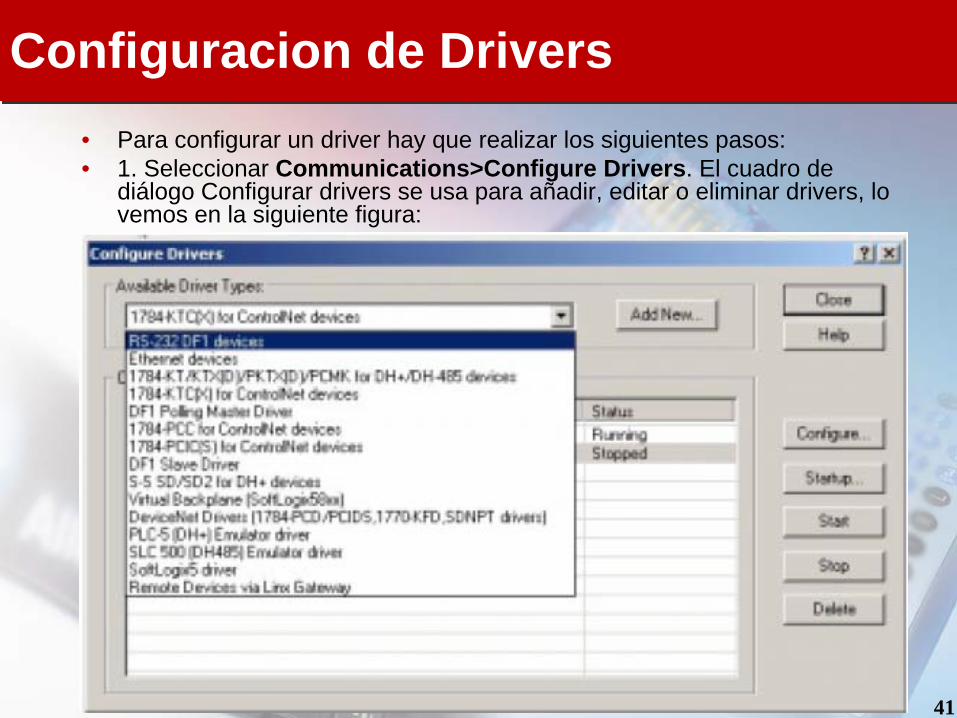
• Para configurar un driver hay que realizar los siguientes pasos:• 1. Seleccionar Communications>Configure Drivers. El cuadro de
diálogo Configurar drivers se usa para añadir, editar o eliminar drivers, lo vemos en la siguiente figura:
Configuracion de Drivers
42
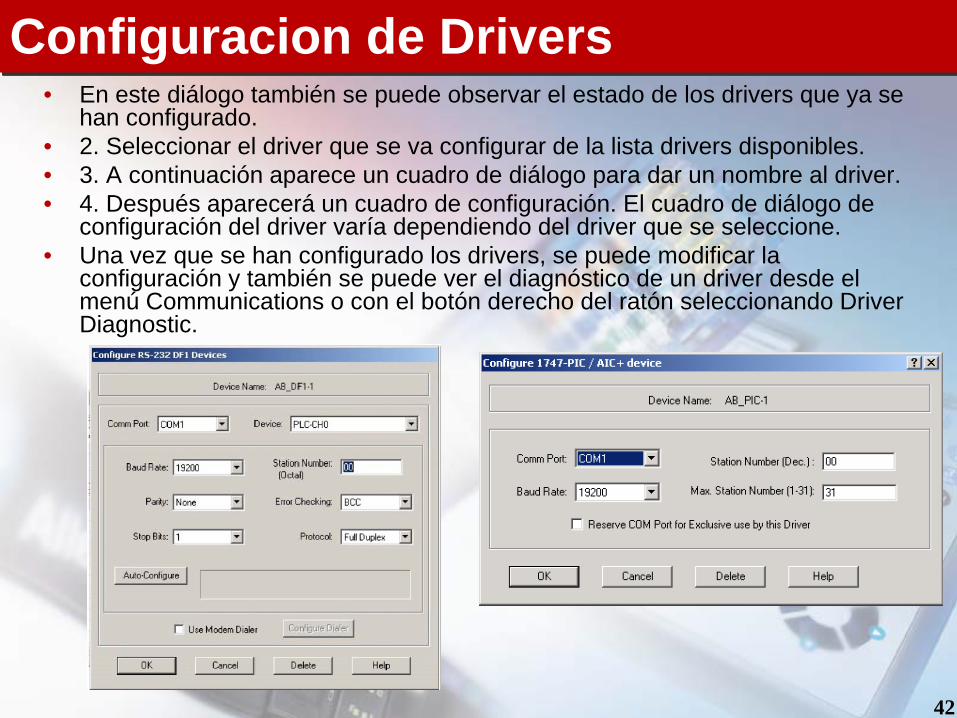
• En este diálogo también se puede observar el estado de los drivers que ya se han configurado.
• 2. Seleccionar el driver que se va configurar de la lista drivers disponibles.• 3. A continuación aparece un cuadro de diálogo para dar un nombre al driver.• 4. Después aparecerá un cuadro de configuración. El cuadro de diálogo de
configuración del driver varía dependiendo del driver que se seleccione.• Una vez que se han configurado los drivers, se puede modificar la
configuración y también se puede ver el diagnóstico de un driver desde el menú Communications o con el botón derecho del ratón seleccionando Driver Diagnostic.
Configuracion de Drivers

43
SOFTWARE DE PROGRAMACIÓN RSLOGIX 500
• El software de programación RSLogix de Rockwell Software permite la configuración, programación y monitoreo de los valores de diferentes controladores
• Con RsLogix 500 se puede programar a los controladores de la familia SLC500 y todos los controladores de la familia Micrologix.

44
SOFTWARE DE PROGRAMACIÓN RSLOGIX 500
• Instalación• Activación

45
Explorando RsLogix 500
46
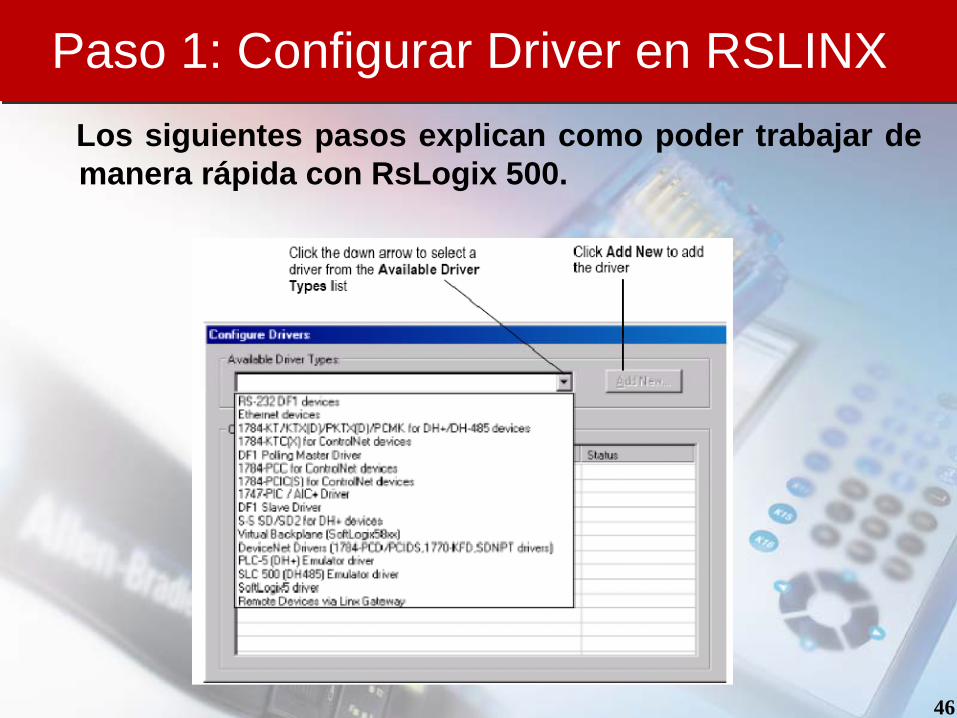
Paso 1: Configurar Driver en RSLINXLos siguientes pasos explican como poder trabajar demanera rápida con RsLogix 500.

47
Paso 2: Configurar parámetros de comunicación de sistema
Existen dos tipos de configuración de comunicación en RSLogix 500.
– System communications, que son establecidas de forma global. Cuando se establece los parámetros de comunicación, estos parámetros son por defecto para cada nuevo proyecto de RSLogix 500.
– Controller communications, que son parámetros de comunicación específicos para cada proyecto, estos parámetros sobrescriben los de sistema sólo para ese proyecto en especial.

48
Paso 3: Crear un Nuevo proyecto/abrir un proyecto
•Crear un proyecto nuevo•Abrir un proyecto existente•Uso del project tree
49
Paso 4: Crear el programa y Data Table Files
• Los archivos de programa (Program files) contienen información del controlador, el programa escalera principal y cualquier subrutina.• Los archivos de tablas de datos (Data table files) contienen la información del estado asociada con las E/S y cualquier otra instrucción que se usa en el programa principal o subrutina.• Por otra parte estos archivos guardan información acerca del funcionamiento del controlador. También se puede utilizar estos archivos para guardar recetas o tablas.
50
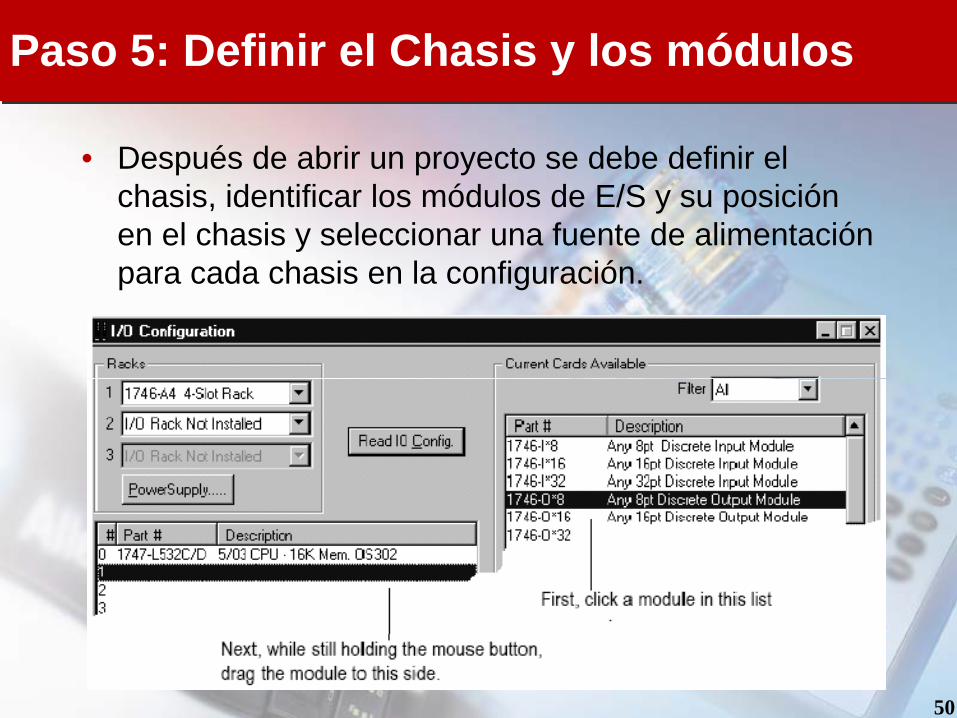
Paso 5: Definir el Chasis y los módulos
• Después de abrir un proyecto se debe definir el chasis, identificar los módulos de E/S y su posición en el chasis y seleccionar una fuente de alimentación para cada chasis en la configuración.

51
Configuración I/O
52
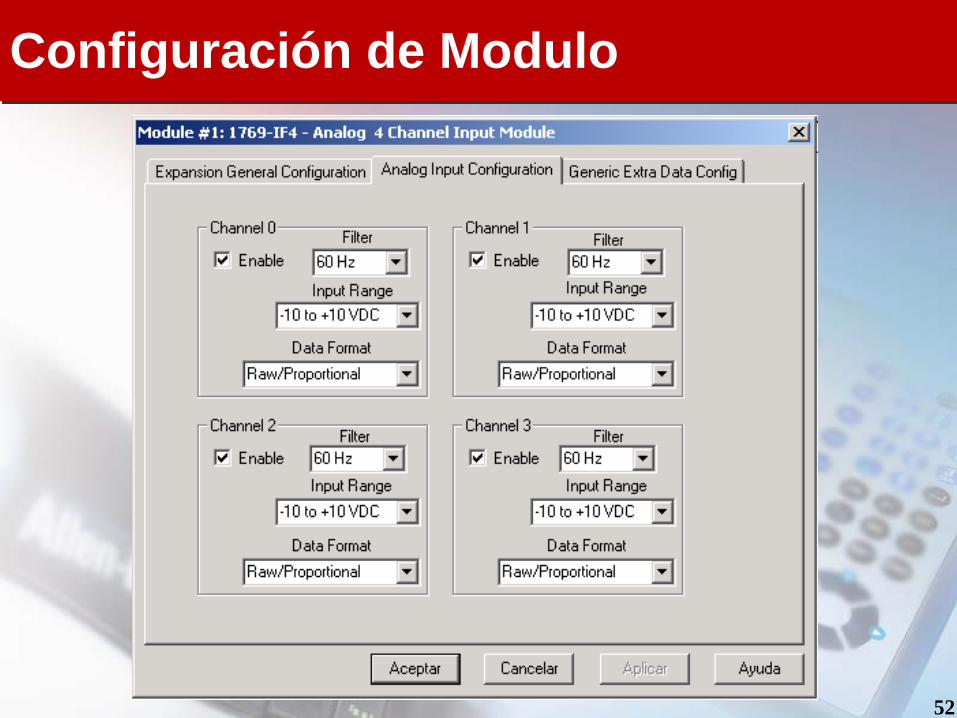
Configuración de Modulo

53
Paso 6: Programar en diagrama escalera

54
Paso 7: Documentar el programaPaso 8: Validación del Proyecto
55
Paso 9: Configurar el canal de comunicación, bajar el programa y monitorear en línea.
• Antes de poder comunicarse en línea, es necesario definir los parámetros de comunicación como ser el baud rate y ciertas formas de control del protocolo.
• Dependiendo del tipo de procesador que se esté usando y del método de comunicación (directa vs. red o modem), la complejidad de esto varia.
• Haga doble click en el icono de configuración de canal (channel configuration) en el project tree, para establecer estos parámetros.
• Finalmente haga clic en Download > Comms para bajar el programa. RSLogix 500 preguntará si se desea ir en línea. Haga click en Yes para ir en línea con el controlador.
56
Paso 10: Buscar y reemplazar instrucciones
Se puede usar RSLogix 500 para monitorear los archivos de datos.
• Al monitorear estos archivos se puede:• Definir como se va a desplegar la grilla de datos• Cambiar valores en la tabla de datos• Cambiar la forma de despliegue.• Ver las direcciones que están siendo usadas en la
lógica escalera.• Switch entre archivos• Ir rápidamente a otra dirección en el archive de tabla
de datos
57
INTRODUCCIÓN A PROGRAMACIÓN DE
CONTROLADORES LÓGICOS PROGRAMABLES
58
Representación binaria de datos.
Los computadores y PLC’s manipulan y almacenan los datos usando interruptores electrónicos que están ENCENDIDOS o APAGADOS.
• Los unos y los ceros se usan para representar los dos estados posibles de un componente electrónico.
• Los 1 representan el estado ENCENDIDO, y los 0 representan el estado APAGADO.
• Se denominan dígitos binarios o bits.
59
Representación binaria de datos.
• El sistema numérico que se usa más a menudo es el sistema numérico decimal, o de Base 10.
• Cada posición de columna de un valor, pasando de derecha a izquierda, se multiplica por el número 10, que es el número de base, elevado a una potencia, que es el exponente.
• Cuando un número decimal se lee de derecha a izquierda, el primer número o el número que se ubica más a la derecha representa 100 (1), mientras que la segunda posición representa 101 (10 x 1= 10), etc.
Ejemplo:
2134 = (2x103) + (1x102) + (3x101) + (4x100)

60
Representación binaria de datos.
• La posición, o el lugar, que ocupa cada dígito de derecha a izquierda en el sistema numérico binario representan un 2, el número de base, elevado a una potencia o exponente, comenzando desde 0.
• Estos valores posiciónales son, de derecha a izquierda, 20, 21, 22, 23, 24, 25, 26 y 27, o sea, 1, 2, 4, 8, 16, 32, 64 y 128, respectivamente.
Ejemplo:
101102 = (1 x 24 = 16) + (0 x 23 = 0) + (1 x 22 = 4) + (1 x 21 = 2) + (0 x 20 = 0) = 22 (16 + 0 + 4 + 2 + 0)
61
Representación binaria de datos.
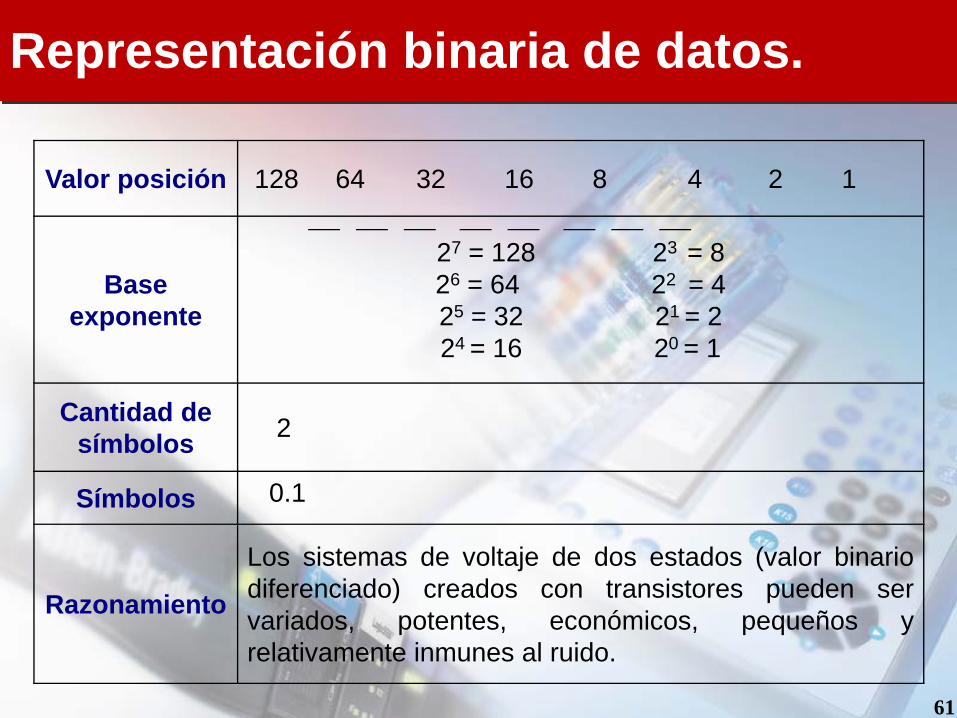
Valor posición 128 64 32 16 8 4 2 1
Base exponente
27 = 128 23 = 826 = 64 22 = 425 = 32 21 = 224 = 16 20 = 1
Cantidad de símbolos 2
Símbolos 0.1
Razonamiento
Los sistemas de voltaje de dos estados (valor binariodiferenciado) creados con transistores pueden servariados, potentes, económicos, pequeños yrelativamente inmunes al ruido.

62
• Ejercicio:– Realice la conversión de los siguientes
números decimales a binarios:128d=?224d=?
Realice la conversión de los siguientes números bianrios a decimal:
01110011=?11110000=?11111111=?
63
Programación en lenguaje escalera
• El LADDER, también denominado lenguaje de contactos o en escalera, es un lenguaje de programación gráfico muy popular dentro de los controladores programables debido a que está basado en los esquemas eléctricos de control clásicos.

64
Elementos del Lenguaje Escalera

65
LADDER
66
LADDER
67
Variables internas y bits de sistema
• Las variables internas son bits auxiliares que pueden ser usados según convenga sin necesidad de que representen ningún elemento del autómata.
• Se suele indicar mediante los caracteres B ó N y tienen tanto bobinas como contactos.
• Su utilidad fundamental es la de almacenar información intermedia para simplificar esquemas y programación.
• Los bits de sistema son contactos que el propio autómata activa cuando conviene o cuando se dan unas circunstancias determinadas.
• Existe una gran variedad, siendo los más importantes, los de arranque y los de reloj.

68
Programación
• Una vez conocidos los elementos que LADDER proporciona para su programación, resulta importante resaltar cómo se estructura un programa y cuál es el orden de ejecución.
•El orden de ejecución es generalmente de arriba a bajo y de izquierda a derecha, primero los contactos y luego las bobinas, de manera que al llegar a éstas ya se conoce el valor de los contactos y se activan si procede.
69
Instrucciones
• Instrucciones de tipo Relé.Durante la operación el controlador puede energizar o desenergizar el bit.
Examinar si Energizado (XIC):Cuando un dispositivo de entrada cierra su circuito o una terminal de entrada manda una señal de energizado, el contacto se cierra dando una señal de 1.

70
InstruccionesExaminar si Desenergizado (XIO):
Esta instrucción deja pasar la energía eléctrica cuando el dispositivo de entrada no está accionado, es decir cuando la entrada se encuentra desenergizada.
Energizar salida (OTE): ( )El estado de una terminal de salida es indicado a través de un bit específico del archivo de salida.
71
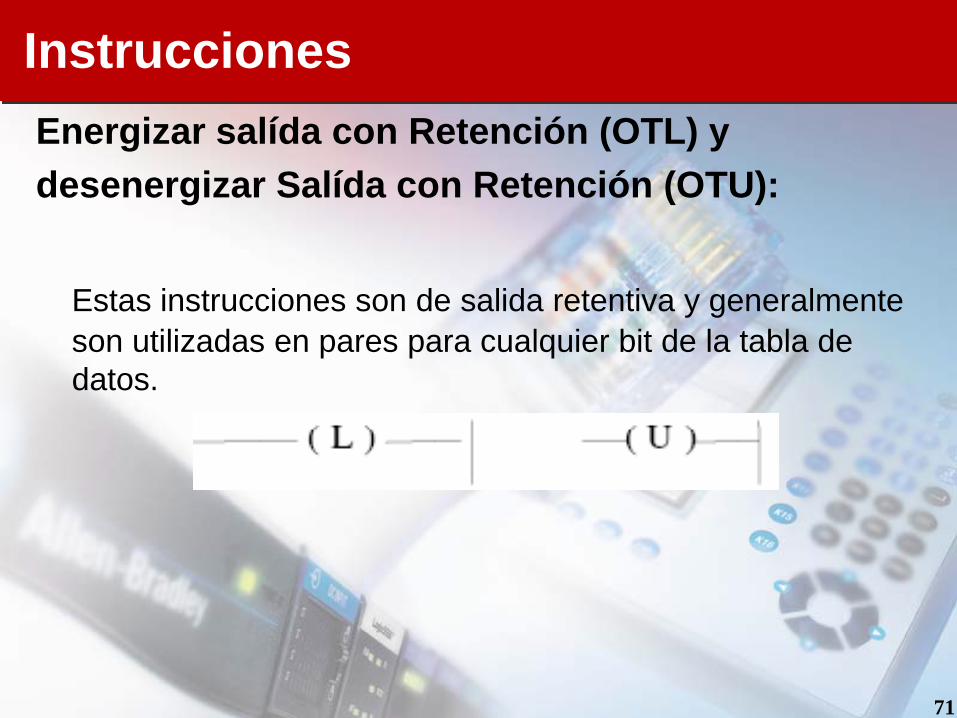
InstruccionesEnergizar salída con Retención (OTL) ydesenergizar Salída con Retención (OTU):
Estas instrucciones son de salida retentiva y generalmente son utilizadas en pares para cualquier bit de la tabla de datos.
72
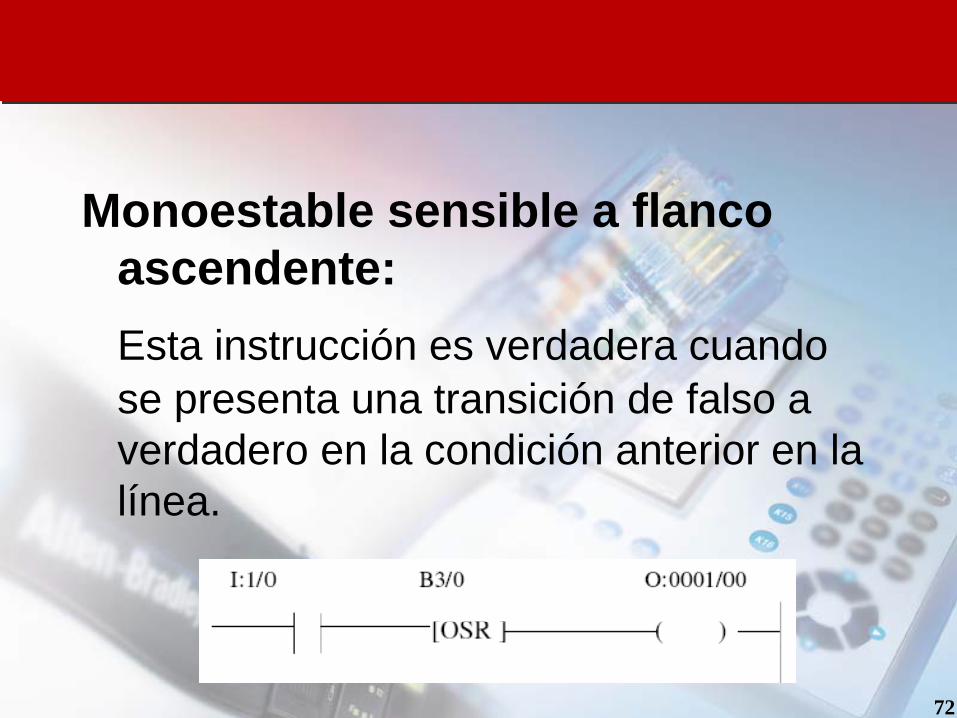
Monoestable sensible a flanco ascendente:Esta instrucción es verdadera cuando se presenta una transición de falso a verdadero en la condición anterior en la línea.

73
Circuitos combinacionales
AND lógico
OR lógico

74
Circuitos combinacionales
Función NAND
Función NOR
75
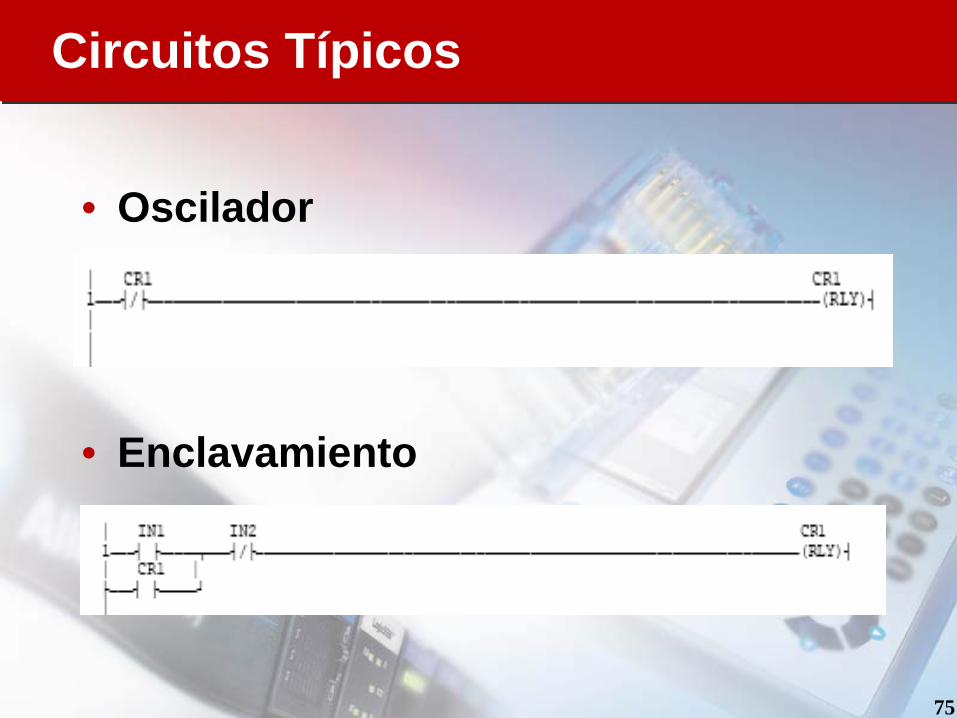
Circuitos Típicos
• Oscilador
• Enclavamiento
76
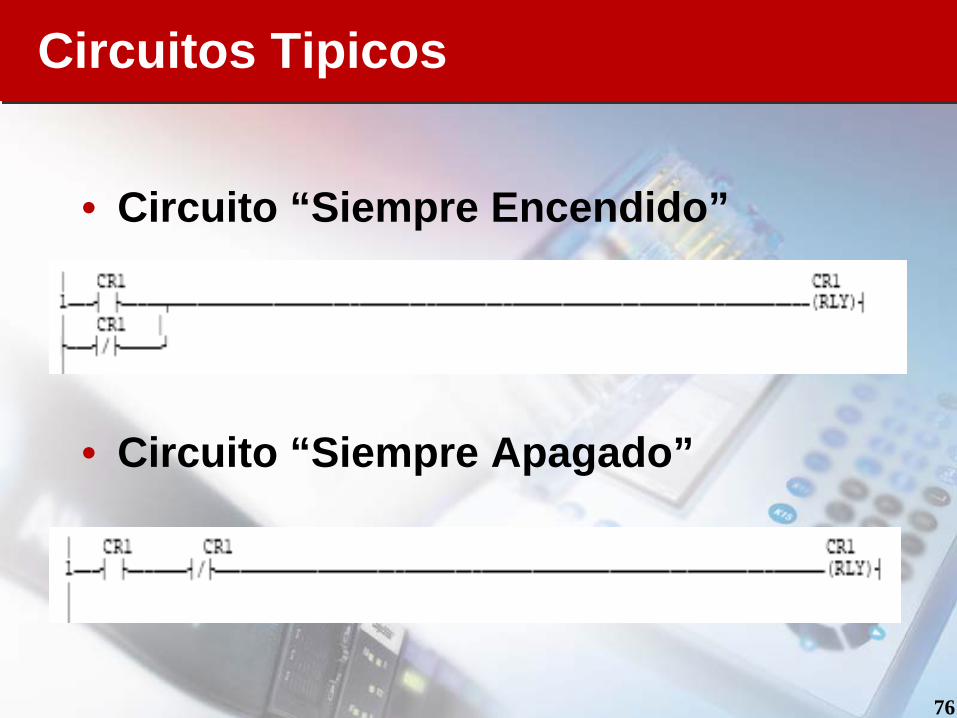
Circuitos Tipicos
• Circuito “Siempre Encendido”
• Circuito “Siempre Apagado”
77
Ejercicios
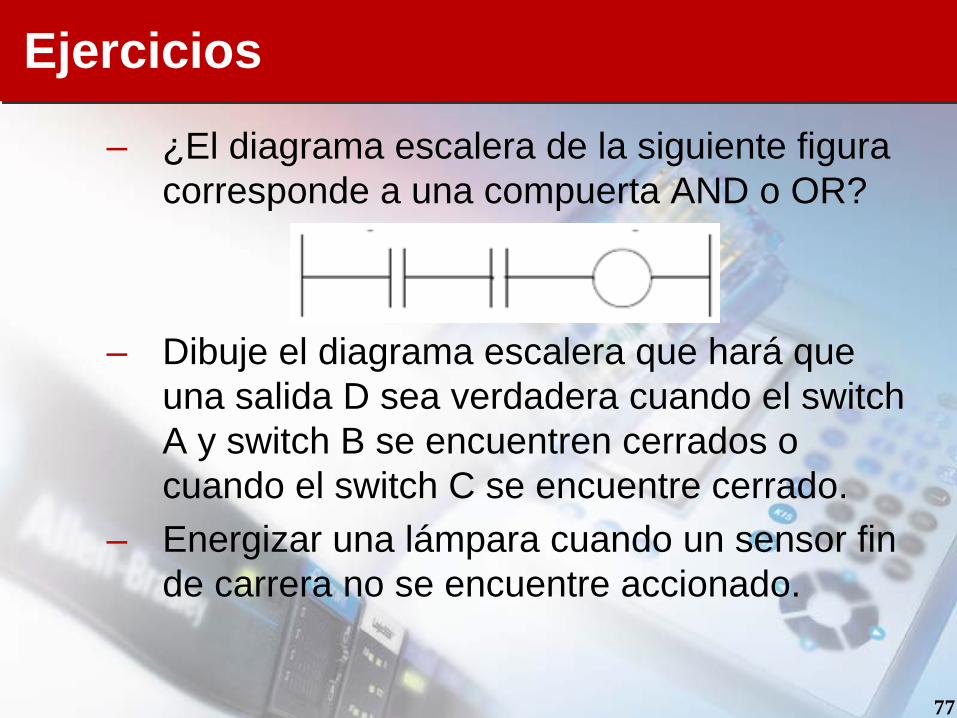
– ¿El diagrama escalera de la siguiente figura corresponde a una compuerta AND o OR?
– Dibuje el diagrama escalera que hará que una salida D sea verdadera cuando el switch A y switch B se encuentren cerrados o cuando el switch C se encuentre cerrado.
– Energizar una lámpara cuando un sensor fin de carrera no se encuentre accionado.

78
Ejercicios
– Accionar una sirena cuando un presostato se accione.
– Dibuje el diagrama escalera y escriba la función para un programa que acepte entradas de los switches IN1, IN2, IN3, IN4 e IN5 y energice la salida OUT123 cuando únicamente una de las salidas está encendida.
– Escribir la función de:

79
Ejercicios
Dibuje la lógica escalera que prenderá las salidas según los siguientes patrones, cuando las entradas correspondientes sean oprimidas.

80
Ejercicios
– Desarrollar un programa para unarranque directo de un motor conseñalización del arranque, paro ysobrecarga.
81
Ejercicios• Diseñe la lógica escalera para el programa de un
auto, el programa deberá considerar las variables a continuación para controlar el motor M. Además añada una segunda salida que utilice una salida libre para controlar el motor.
–- puertas abiertas/cerradas (D)–- llave en el contacto (K)–- motor funcionando (M)–- Transmision in park (P)–- Inicio (I)
• Si la llave se encuentra en el contacto, P y se da inicio, el motor arranca.
• Si las llaves se encuentran en su lugar y se abren las puertas se prende una alarma.
82
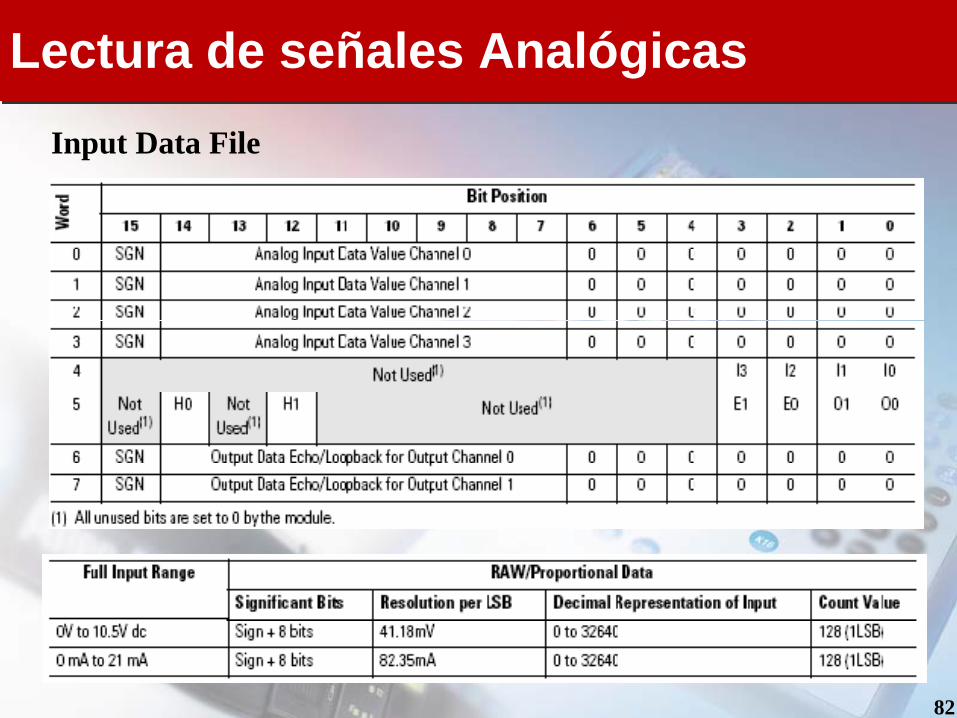
Lectura de señales AnalógicasInput Data File
83
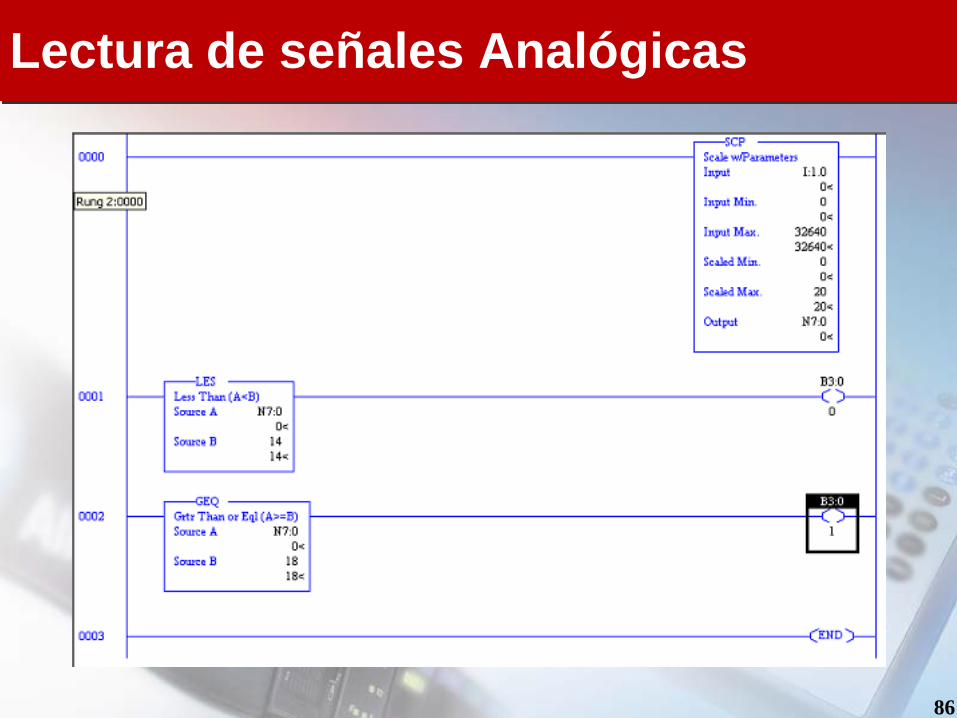
Escalamiento de señales (SCP)

84
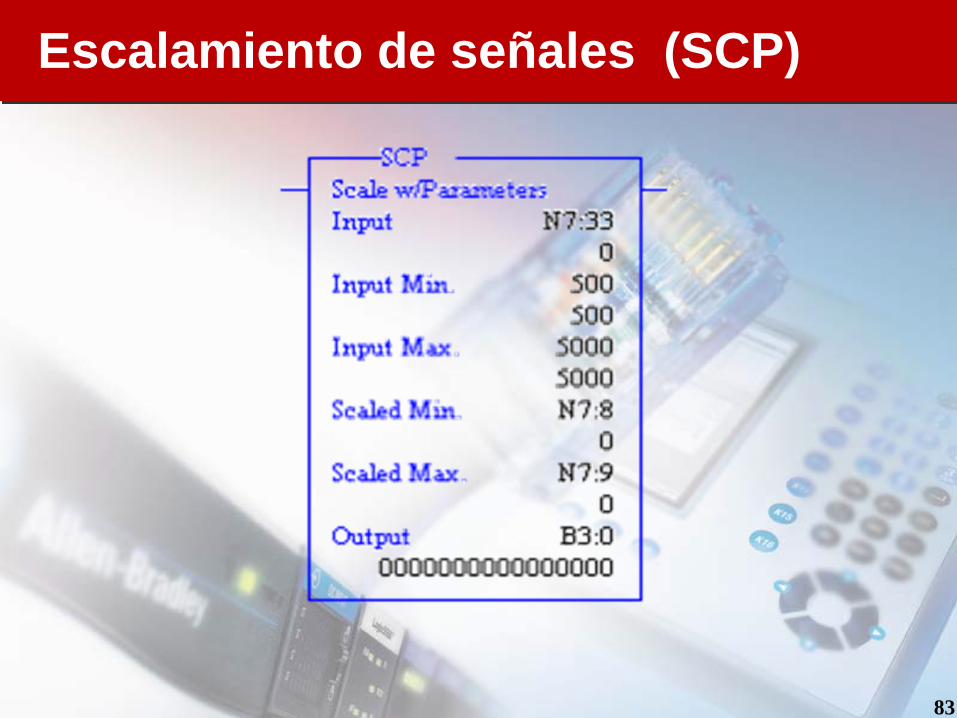
Escalamiento de señales (SCP)Esta instrucción de salida consiste en seisparámetros. Los parámetros pueden ser deltipo integer, long, floating point o direccionesde entradas/salidas.
Parámetros de la instrucción• Input – Introducir el valor a ser escalado. • Input Min – El valor mínimo que puede tomar la entrada. • Input Max - El valor máximo que puede tomar la entrada. • Scaled Min – Introducir el valor mínimo que representa el
limite inferior al cual se desea escalar la señal.• Scaled Max- Introducir el valor máximo que representa el
limite superior al cual se desea escalar la señal.• Output – Introducir la dirección en la cual se vera la señal
escalada.

85
Ejercicios
• Escalar una señal analógica para que el PLC pueda identificar la señal analógica como el nivel de un tanque de agua entre 0-100 m.
86
Lectura de señales Analógicas

87
Instrucciones Matematicas
Suma (ADD):
Resta (SUB):
88
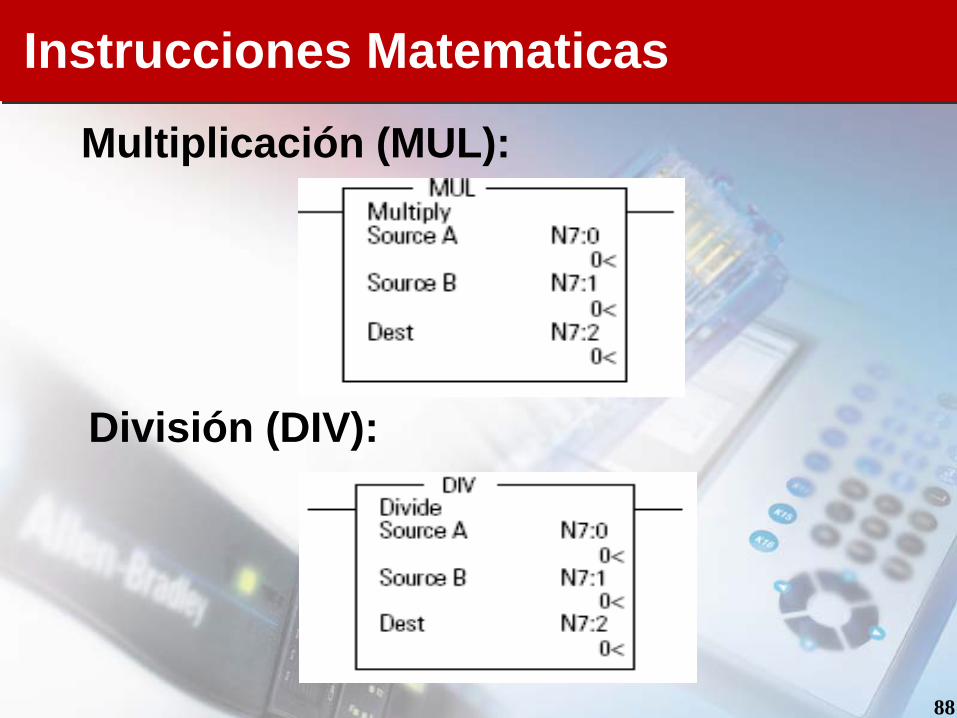
Instrucciones Matematicas
Multiplicación (MUL):
División (DIV):
89
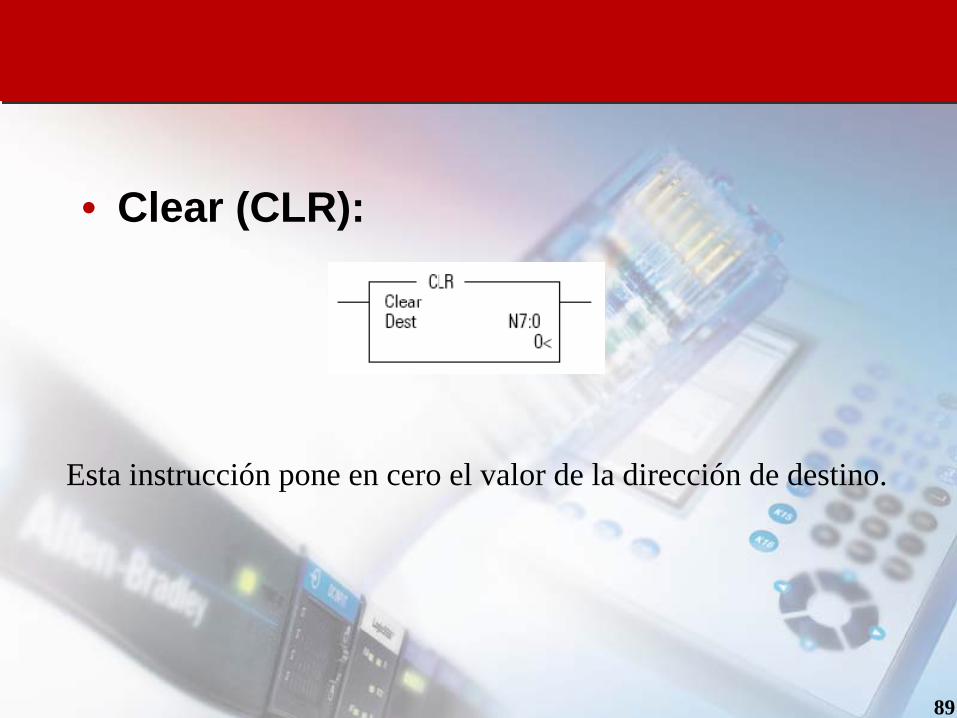
• Clear (CLR):
Esta instrucción pone en cero el valor de la dirección de destino.
90
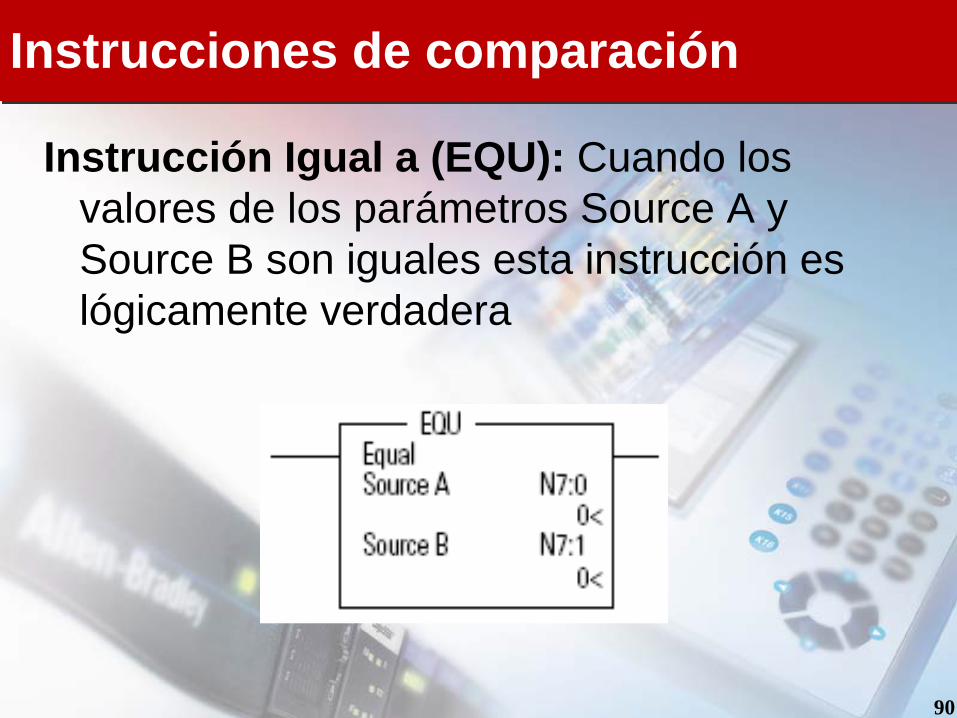
Instrucciones de comparación
Instrucción Igual a (EQU): Cuando los valores de los parámetros Source A y Source B son iguales esta instrucción es lógicamente verdadera
91
Instrucciones de comparación
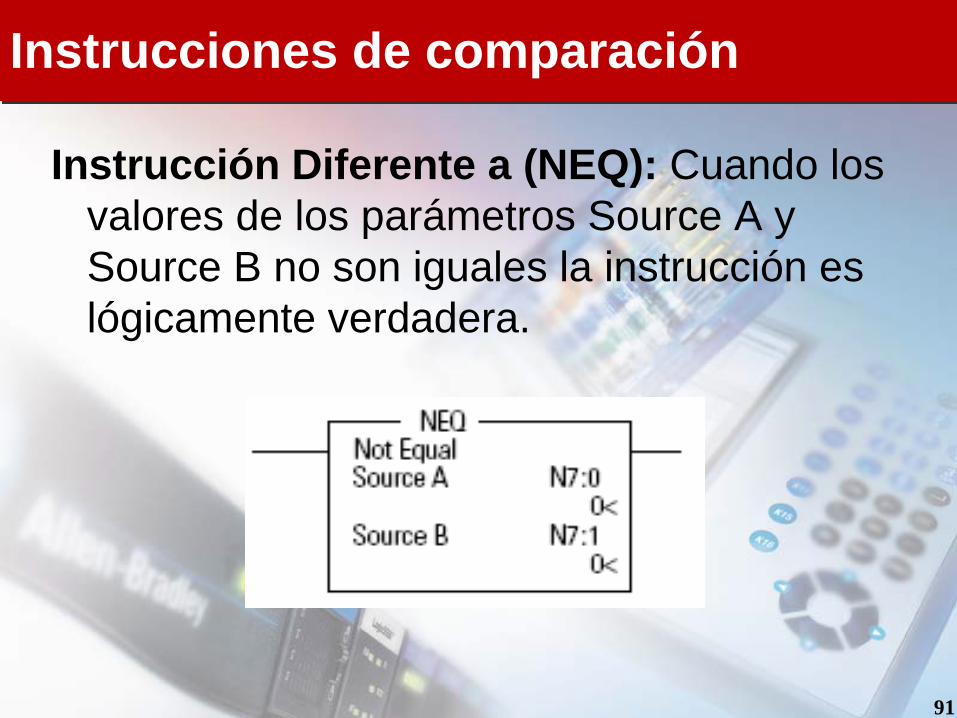
Instrucción Diferente a (NEQ): Cuando los valores de los parámetros Source A y Source B no son iguales la instrucción es lógicamente verdadera.
92
Instrucciones de comparación
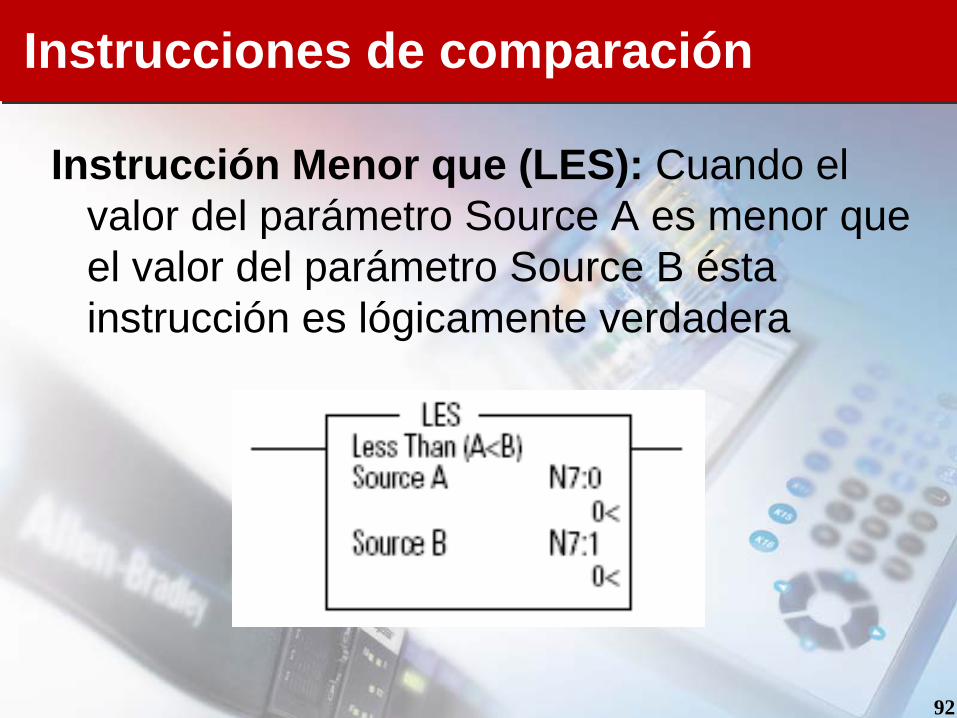
Instrucción Menor que (LES): Cuando el valor del parámetro Source A es menor que el valor del parámetro Source B ésta instrucción es lógicamente verdadera
93
Instrucciones de comparación
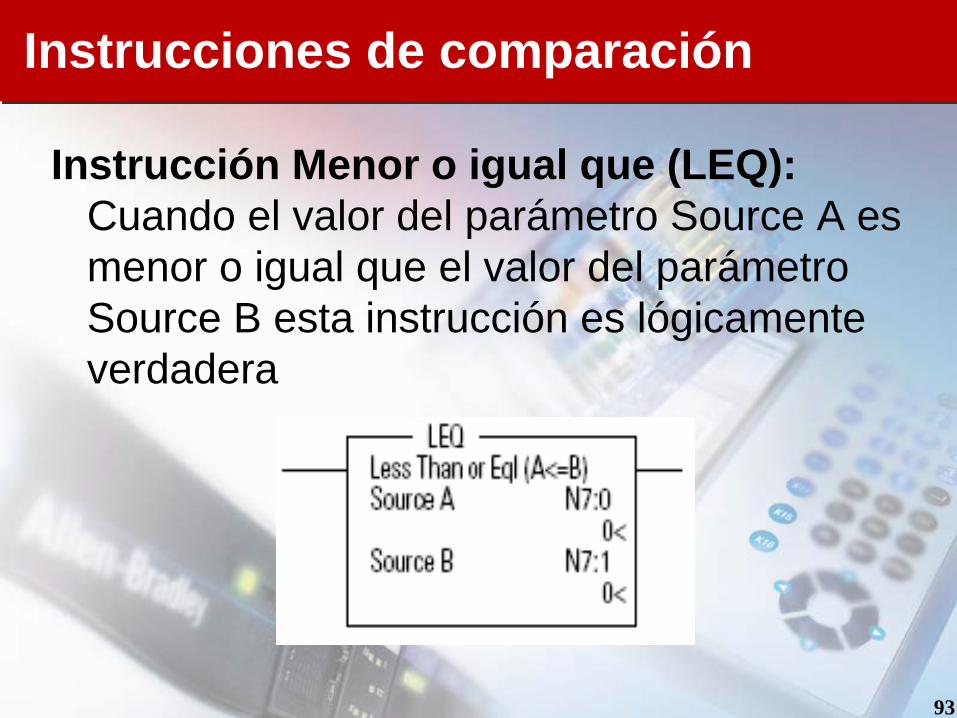
Instrucción Menor o igual que (LEQ):Cuando el valor del parámetro Source A es menor o igual que el valor del parámetro Source B esta instrucción es lógicamente verdadera

94
Instrucciones de comparación
Instrucción Mayor que (GRT): Cuando el valor del parámetro Source A es mayor que el valor del parámetro Source B esta instrucción es lógicamente verdadera

95
Instrucciones de comparación
Instrucción Mayor o igual que (GEQ):Cuando el valor del parámetro Source A es mayor o igual que el valor del parámetro Source B ésta instrucción es lógicamente verdadera.
96
Instrucciones de comparación
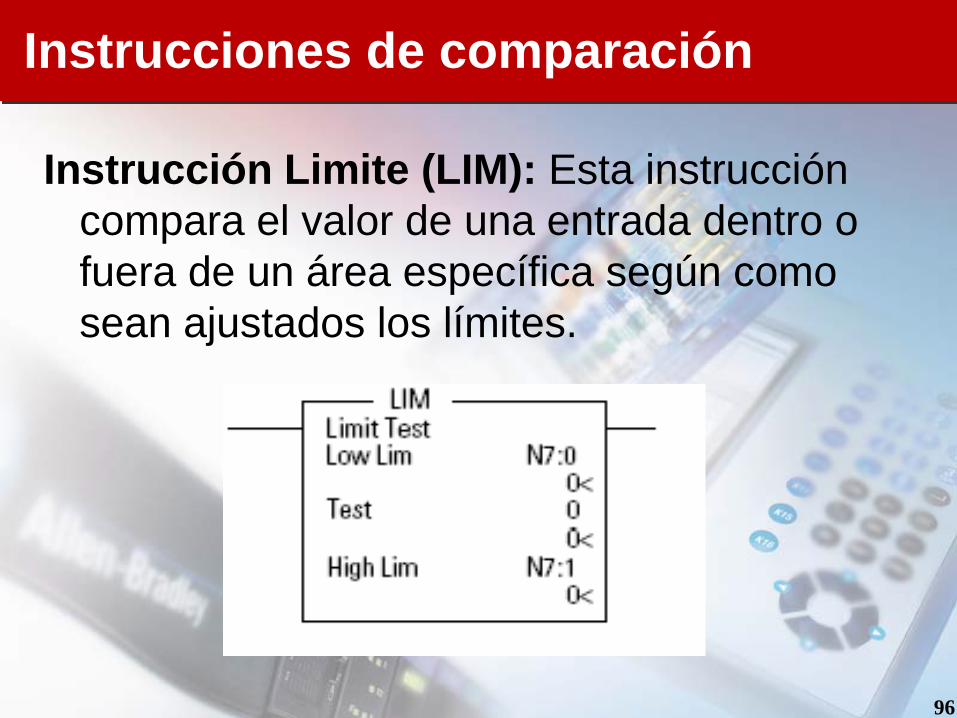
Instrucción Limite (LIM): Esta instrucción compara el valor de una entrada dentro o fuera de un área específica según como sean ajustados los límites.
97
Ejercicios
– Desarrolle la lógica escalera que encenderá una salida, después de que se haya activado el switch A 10 veces. Una segunda entrada reiniciará el contador

98
Temporizadores y Contadores
Temporizadores
El temporizador es un elemento quepermite programar cuentas de tiempo conel fin de activar bobinas.
• Temporizador a la conexión (TON)• Temporizador a la desconexión (TOF)• Temporizador Retentivo (RTO)

99
Temporizadores y Contadores
Temporizador a la conexión (TON): Este temporizador inicia el conteo de los intervalos de tiempo cuando la condición de la línea es verdadera.

100
Temporizador a la conexión (TON):

101
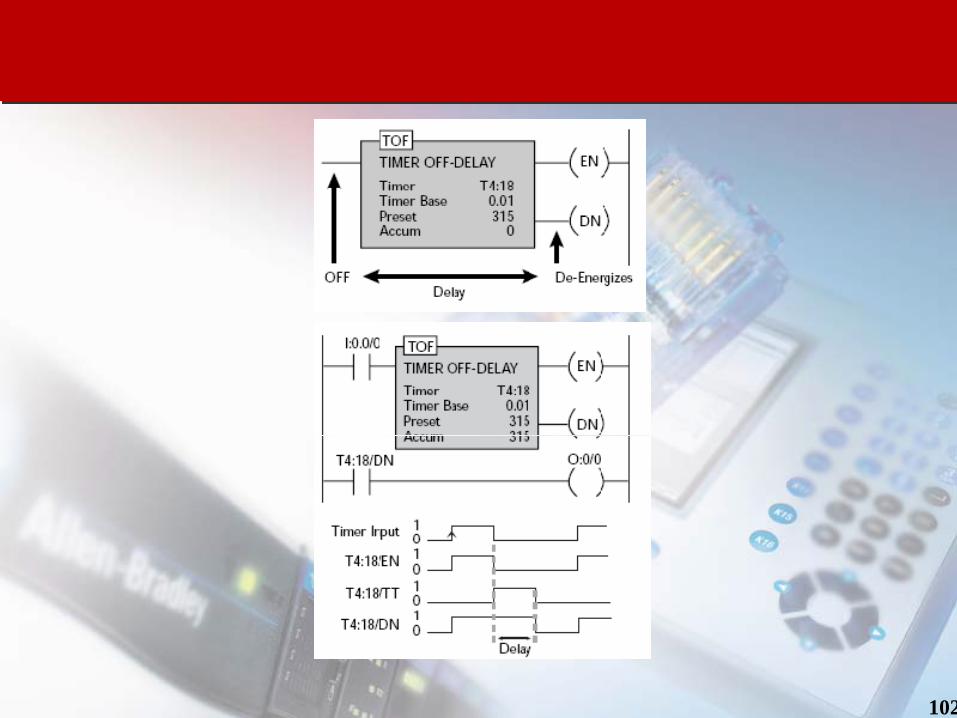
Temporizadores y Contadores
Temporizador a la desconexión (TOF): La instrucción de Temporizador a la desconexión (TOF) empieza a contar los intervalos de tiempo cuando la línea realiza una transición de verdadera a falsa.
102

103
Temporizadores y Contadores
Temporizador Retentivo ( RTO ): La instrucción RTO procede a contar los intervalos de tiempo cuando la condición de línea es verdadera.

104
105
Temporizadores y ContadoresContadores.
El contador es un elemento capaz de llevar elcómputo de las activaciones de sus entradas
• Contador Creciente (CTU): Es un contador que incrementa en cada transición de falso a verdadero.
• Contador Decreciente (CTD): Este contador decrece en cada transición de falso a verdadero.

106
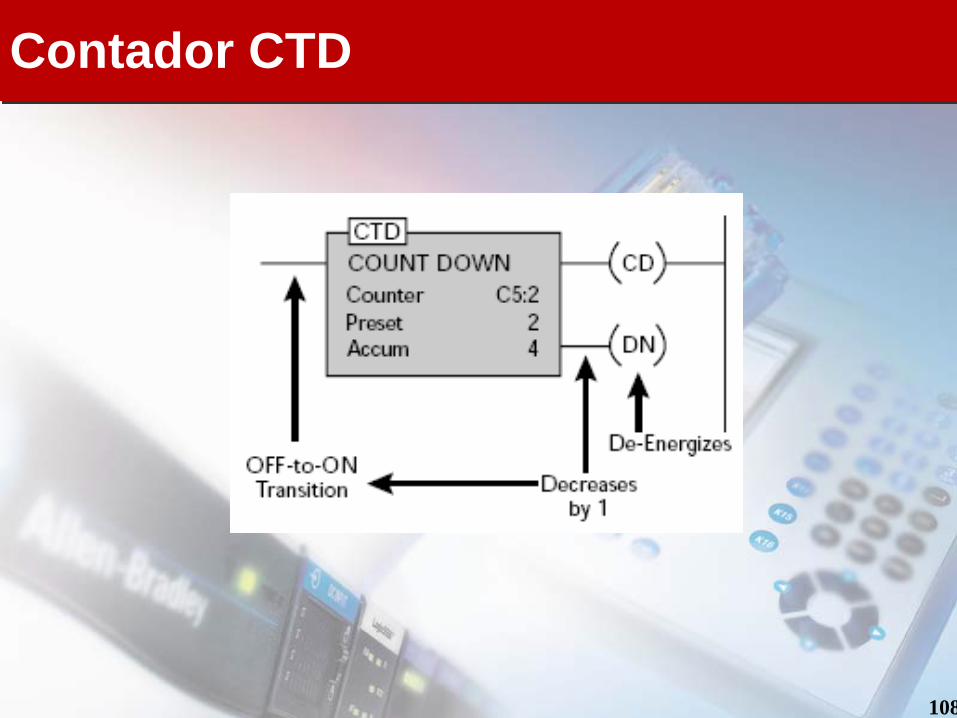
Temporizadores y Contadores
Contador Creciente (CTU) y decreciente (CTD): Las instrucciones de contador creciente (CTU) y decreciente (CTD) cuentan las transiciones de falsa a verdadera que pueden ser creadas por un sensor, etc.

107
Contador CTU
108
Contador CTD

109
Ejercicios
– Desarrolle la lógica escalera que encenderá una salida 15 segundos después de que el switch A se haya encendido.
– Desarrolle la lógica escalera que encenderá una salida, después de que se haya activado el switch A 10 veces. Una segunda entrada reiniciará el contador

110
Ejercicios
– Energizar una lámpara cuando el valor de un tanque almacenado en N7:6 sea igual a 100 metros.
– Accionar una salida cuando la temperatura de un horno, almacenado en N7:10 se encuentre entre 1000 º C Y 1500 º C
111
Ejercicios
– Desarrolle un programa que enclave la salida B, 20 segundos después de que la entrada se ha encendido. Si la entrada A sigue encendida, el temporizador debe reiniciarse y volver a contar 20 seg. hasta que la entrada A se haya apagado. Después de que el temporizador ha contado 3 veces 20 segundos la salida B debe desenclavarse.
112
Ejercicios
– Un motor se va a conectar a un PLC y será controlado por dos switches. El switch GO arrancará el motor y el switch STOP lo detendrá. Si el motor se encuentra funcionando y se presiona el botón GO el motor deberá detenerse. Si se utilizó el botón STOP para detener el botón el switch Go deberá ser presionado dos veces para arrancar el motor. Cuando el motor se encuentre en funcionamiento se debe prender una señal luminosa.
– En procesos peligrosos es común utilizar sensores que requieren que el operador coloque sus dos manos para poder utilizar la máquina. Para esto se tienen dos entradas que deben ser accionadas con un máximo de tiempo de 0.25 s entre ellas antes de que el ciclo de la máquina empiece.
113
– Escriba el diagrama escalera de un programa que haga lo siguiente:• - Cuando se oprima el botón A, una lámpara
parpadeará por 5 seg.• - El parpadeo de la lámpara debe ser 0.25
seg. encendido y 0.75 seg. apagado.• - Si el botón A ha sido oprimido 5 veces, la
lámpara no parpadeará hasta que el sistema se reinicie.
• - El sistema se reinicia oprimiendo el botón B.
114
– Un switch debe incrementar un contadorcada vez que sea oprimido; estecontador puede ser reiniciado por unSegundo switch. El valor del contadordebe ser multiplicado por 5 y el resultadodesplegado como un número binarioutilizando las salidas O:000.

115
116
Preguntas….
Gracias
Ing. Mathias VillarroelEspecialista en Automatización