criterios para determinar si un polinomio es …sgpwe.izt.uam.mx/files/users/uami/bah/tesis.pdf ·...
TRANSCRIPT
UNIVERSIDAD AUTONOMA METROPOLITANAUNIDAD IZTAPALAPA
DEPARTAMENTO DE MATEMATICAS
CRITERIOS PARA DETERMINARSI UN POLINOMIO ES POLINOMIO HURWITZ
REPORTE DE LOS SEMINARIOS DE INVESTIGACION I Y IIQUE PARA OBTENER EL TITULO DE
M A T E M A T I C O
PRESENTACARLOS ARTURO LOREDO VILLALOBOS
DIRECTOR DE SEMINARIOSDR. BALTAZAR AGUIRRE HERNANDEZ
Iztapalapa, D.F. Enero de 2005

A toda mi familiapor su apoyo y paciencia.
A la gente de la Universidadque ha confiado en mi.


Indice general
Introduccion I
1. Polinomios Hurwitz de grado pequeno 1
2. Condiciones necesarias 11
3. Criterio de Routh-Hurwitz 17
4. El Teorema de Hermite-Biehler... 294.1. Teorema de la fase . . . . . . . . . . . . . . . . . . . . . . . . . . 294.2. Teoremas sobre estabilidad . . . . . . . . . . . . . . . . . . . . . 31
4.2.1. Teorema de la interseccion de la frontera . . . . . . . . . . 324.2.2. Principio de Exclusion del cero . . . . . . . . . . . . . . . 34
4.3. Teorema de Hermite-Biehler . . . . . . . . . . . . . . . . . . . . . 35
5. Test de estabilidad de polinomios 45
6. Criterio de Routh 516.1. Indices de Cauchy . . . . . . . . . . . . . . . . . . . . . . . . . . 51
6.1.1. Teorema de Sturm . . . . . . . . . . . . . . . . . . . . . . 556.2. Algoritmo de Routh . . . . . . . . . . . . . . . . . . . . . . . . . 60
7. Criterio de Lienard-Chipart 697.1. Formas cuadraticas . . . . . . . . . . . . . . . . . . . . . . . . . . 697.2. Matrices de Hankel infinitas de rango finito . . . . . . . . . . . . 737.3. Indice de una funcion racional arbitraria . . . . . . . . . . . . . . 777.4. Criterio de estabilidad de Lienard-Chipart . . . . . . . . . . . . . 88
7.4.1. Otra demostracion del Criterio de Routh-Hurwitz . . . . 887.4.2. El Criterio de estabilidad de Lienard-Chipart . . . . . . . 91
Conclusiones 95
A. 97
Bibliografıa 103

Introduccion
La estabilidad en el origen de un sistema lineal de ecuaciones diferencialesx = Ax, donde A es una matriz con entradas constantes, se determina estudian-do los valores propios de la matriz A, lo que es equivalente a estudiar las raıcesdel polinomio caracterıstico de A. De esta manera se tiene que si las raıces delpolinomio caracterıstico tienen parte real negativa, entonces el sistema x = Axresulta estable. Por otra parte, por los trabajos que Liapunov presento en 1892,en su artıculo Le probleme general de la stabilite du mouvment, se sabe que bajociertas condiciones la estabilidad local de un sistema no lineal x = Ax + g(x)esta determinada por la estabilidad de la parte lineal x = Ax.
Ahora bien, el problema de determinar la estabilidad en un sistema a partirdel estudio de las raıces del polinomio caracterıstico de A:
p(λ) = a0λn + a1λ
n−1 + · · ·+ an−1λ + an (a0 6= 0)
asociado al sistema lineal, se traduce en la tarea de encontrar condiciones nece-sarias y suficientes para las cuales todas las raıces de una ecuacion algebraicase localicen en la mitad izquierda del plano.
Este problema fue formulado por primera vez en 1868 por Maxwell, quienobtuvo una solucion para n = 3. En 1877, Routh dio una solucion mas general aeste problema. Su solucion fue un algoritmo, en el cual fueron formuladas con-diciones explıcitas para n = 4 y n = 5. La solucion propiamente analıtica fueobtenida por Hurwitz [4] en 1895. El algoritmo de Routh y el criterio de Hurwitzson equivalentes, aunque son diferentes en la forma. Las condiciones establecidaspor Routh y por Hurwitz son conocidas en nuestros dıas como el Criterio deRouth-Hurwitz. Es interesante mencionar que los trabajos de Maxwell en estaarea fueron resultado de sus investigaciones sobre reguladores mecanicos, mien-tras que Hurwitz, como matematico, se involucro con este problema porque elprofesor A. Stodola lo invito a resolverlo. Sin embargo, el problema propuestopor Maxwell ya habıa sido resuelto en escencia por el matematico frances Her-mite en 1856, en su artıculo Sur le nombre des racines dune quation algebriquecomprise entre des limites donnes, donde establecio una conexion cercana entreel numero de raıces de un polinomio complejo en un plano y la signatura de unacierta forma cuadratica. Pero los trabajos de Hermite no habıan sido llevados a
I

II INTRODUCCION
un nivel en el cual pudieran ser usados por especialistas aplicados y por lo tantosu artıculo no recibio ningun reconocimiento. Un nuevo criterio de estabilidadfue elaborado en 1914 por los matematicos franceses Lienard y Chipart. Ellosusaron una forma cuadratica especial para obtener su criterio, el cual posee unaventaja sobre el criterio de Routh-Hurwitz.
En este trabajo presentamos algunos de los diferentes criterios que existenpara verificar cuando las raıces de un polinomio tienen parte real negativa.Ademas, junto con el desarrollo de la teorıa, presentamos ejemplos sencillos yalgunas aplicaciones que aparecen en sistemas fısicos. Este trabajo fue motivadopor el curso Temas Selectos de Matematicas Aplicadas I, impartido por el Dr.Baltazar Aguirre del Departamento de Matematicas de la UAM-I en el trimestre03-I.
A grandes rasgos el material esta conformado por propiedades de los poli-nomios Hurwitz y seis criterios desarrollados a lo largo de siete capıtulos. En elCapıtulo 1 se definen los polinomios Hurwitz y se presentan algunos teoremaspara determinar estabilidad en el caso de polinomios de grado pequeno, ası comosu aplicabilidad a sistemas de ecuaciones diferenciales conocidos. En el Capıtulo2 presentamos condiciones necesarias (pero no suficientes) para que un polino-mio sea Hurwitz. En el Capıtulo 3 enunciamos y probamos el criterio quizasmas popular: el Criterio de Routh-Hurwitz. La demostracion presentada aquidifiere de las establecidas, cada una por su cuenta, por Routh (desarrollado en elCapıtulo 6) y por Hurwitz (puede consultarse su trabajo original en [4]),y tienela particularidad de no utilizar conocimientos avanzados de matematicas. En elCapıtulo 4 abordamos el criterio de Hermite-Biehler y el de Leonhard-Mihailov.Estos criterios son parecidos entre sı, pero son completamente distintos al deRouth-Hurwitz. Estan basicamente desarrollados en el analisis de las raıces deun polinomio complejo. Cabe mencionar que estos dos criterios no siempre seencuentran en la bibliografıa clasica del tema y en el caso de Hermite no espropiamente la prueba que el elaboro. En el Capıtulo 5 presentamos un metodoalgorıtmico para verificar si un polinomio es o no Hurwitz. Este metodo al igualque el criterio de Routh-Hurwitz es tambien de facil comprension y practico ylo hemos llamado Test de Estabilidad. En el Capıtulo 6 desarrollamos el cri-terio dado por Routh. Para tal fin se da una breve introduccion a los ındicesde Cauchy y a las sucesiones de Sturm. Damos al final el algoritmo establecidopor Routh. En el ultimo capıtulo abordamos el Criterio de Lienard-Chipart.Para ello desarrollamos parte de la teorıa de formas cuadraticas y las formasde Hankel. En este capıtulo damos una prueba alternativa de dicho criterio, lacual difiere de la propuesta originalmente por Lienard y Chipart. Ası tambiendamos otra demostracion del Criterio de Routh-Hurwitz que esta estrechamenterelacionada con la prueba que damos aquı del Criterio de Lienard-Chipart.
Capıtulo 1
Polinomios Hurwitz degrado menor que 5 yaplicaciones
Comenzamos este capıtulo obteniendo criterios para determinar si un poli-nomio es Hurwitz para los casos mas sencillos, cuando los polinomios son degrado pequeno. El problema de determinar si un polinomio de grado arbitrarioes Hurwitz fue planteado por James Maxwell en 1868.
James C. Maxwell (1831-1879)Nacio en Edimburgo. Se graduo enTrinity College en 1854. Uno de losmas importantes logros de Maxwellfue su extension y formulacion ma-tematica de las teorıas de electrici-dad y magnetismo de M. Faraday.Gano el Premio Adams de 1857 conun artıculo referente al movimientode los anillos de Saturno. Alrededorde 1862 propuso que el fenomeno dela luz es un fenomeno electromagne-tico. En 1866, independientementede L. Boltzmann, formula la Teorıacinetica de los gases. Alrededor de1874 formula cuatro ecuaciones dife-renciales parciales que hoy se cono-cen como Ecuaciones de Maxwell.
Definicion 1.1 Decimos que un polinomio de coeficientes reales es Hurwitz sitodas sus raıces tienen parte real negativa, i.e., estan en C− = a+ ib : a < 0 .
Ejemplo 1.1
1. p(t) = t2 + 3t + 2 es Hurwitz pues p(t) = (t + 2)(t + 1) y t = −2 y t = −1son sus raıces.
2. q(t) = t2 + 2t + 2 es Hurwitz pues q(t) = (t + 1 + i)(t + 1− i) y t = −1− iy t = −1 + i son sus raıces.
3. s(t) = t3 + t2 + t + 1 no es Hurwitz, ya que
s(t) = t2(t + 1) + t + 1 = (t2 + 1)(t + 1)
y sus raıces son t = i, t = −i, t = 1.
Teorema 1.1 El polinomio p(t) = t + a1 es Hurwitz si y solo si a1 > 0.
Demostracion. La raız de p(t) es t = −a1. Luego t = −a1 ∈ C− si y solo sia1 > 0.
Teorema 1.2 El polinomio p(t) = t2 + a1t + a2 es Hurwitz si y solo si a1 > 0y a2 > 0.
1

2 CAPITULO 1. POLINOMIOS HURWITZ DE GRADO PEQUENO
Demostracion. Por el teorema fundamental del algebra
p(t) = (t− λ1)(t− λ2), λi ∈ C
⇒ p(t) = t2 − (λ1 + λ2)t + λ1λ2 = t2 + a1t + a2
⇒ a1 = −(λ1 + λ2), a2 = λ1λ2
Si λ1, λ2 ∈ R y si p(t) es Hurwitz entonces λ1 < 0 y λ2 < 0. Entonces tenemosque
λ1 + λ2 < 0 y λ1λ2 > 0
es decira1 = −(λ1 + λ2) > 0 y a2 = λ1λ2 > 0
Supongamos ahora que a1, a2 > 0. Como a2 = λ1λ2 entonces λ1 y λ2 son delmismo signo y como a1 = −(λ1 + λ2) y a1 > 0 entonces λ1 + λ2 < 0. Por lo queλ1 < 0 y λ2 < 0 y entonces p(t) es Hurwitz.Si λ1 = α + iβ y λ2 = α− iβ con β 6= 0, entonces
λ1 + λ2 = 2α, λ1λ2 = α2 + β2
⇒ a1 = −(λ1 + λ2) = −2α, a2 = λ1λ2 = α2 + β2
si p(t) es Hurwitz entonces α < 0. Entonces −2α > 0 y por lo tanto a1 = −2α >0 y tambien se cumple que a2 = α2 + β2 > 0.Ahora supongamos que a1 > 0 y a2 > 0 entonces como a1 = −2α > 0 se tieneque α < 0. Por lo tanto p(t) es Hurwitz.
Ejemplo 1.2 Aplicando el teorema 1.2, podemos decir que
a) p(t) = t2 + 5t + 7 es Hurwitz.
b) p(t) = t2 + 2t− 3 no es Hurwitz.
c) p(t) = t2 − 6t + 2 no es Hurwitz.
d) p(t) = t2 + t no es Hurwitz.
e) p(t) = t2 + 1 no es Hurwitz.
Corolario 1.1
a) f(t) = b0t + b1 es Hurwitz si y solo si b0, b1 son del mismo signo.
b) p(t) = a0t2 + a1t + a2 es Hurwitz si y solo si a0, a1, a2 son del mismo
signo.

3
Demostracion. Daremos la demostracion de b), la de a) es similar.Considerar el polinomio p(t) = a0t
2 + a1t + a2 con a0 6= 0; p(t) es Hurwitz si ysolo si
t2 +a1
a0t +
a2
a0
es Hurwitz. Y esto es si y solo si (por teorema 1.2)
a1
a0> 0 y
a2
a0> 0
que equivale a que a0, a1, a2 sean del mismo signo.
Ejemplo 1.3
1. p(t) = 3t2 + 6t + 5 es Hurwitz.
2. p(t) = −2t2 − 3t− 2 es Hurwitz.
3. p(t) = −t2 + 5t + 2 no es Hurwitz.
4. p(t) = 3t + 2 no es Hurwitz.
A continuacion mostraremos algunas aplicaciones.
Aplicacion 1.1 (Oscilador armonico amortiguado)Considerese una masa m sujeta a un extremo de un resorte (fig. 1.1).
Figura 1.1:
Supongase que estiramos el resorte una cierta distancia y luego lo soltamos.El movimiento que describe la masa (junto con el resorte) esta descrito por laecuacion
md2x
dt2+ β
dx
dt+ kx = 0
donde β es la constante de amortiguamiento y k es la constante del resorte,ademas β > 0 y k > 0. La ecuacion caracterıstica de la ecuacion diferencial es
p(λ) = mλ2 + βλ + k = 0
Como m, β, k > 0 entonces p(λ) es Hurwitz. Ademas
1. si λ1, λ2 ∈ R− entonces x(t) = Aeλ1t + Beλ2t.
2. si λ1 = α + iβ y λ2 = α − iβ, con α < 0, entonces x(t) = Aeαt cos βt +Beαt senβt.

4 CAPITULO 1. POLINOMIOS HURWITZ DE GRADO PEQUENO
Luego cualquier solucion x(t) cumple que x(t) → 0 si t →∞.
Aplicacion 1.2 (Circuitos electricos)Considere el diagrama del circuito mostrado en la figura 1.2, donde E es elvoltaje (medido en volts), R la resistencia (medida en Ohms), L la inductancia(medida en Henrios) y C la capacitancia (medida en Faradios). La variacion delvoltaje en un tiempo t esta dada por la ecuacion
Ld2i
dt2+ R
di
dt+
1ci =
dE
dt
Si E es constante entoncesdE
dt= 0
Bajo la suposicion de que E es constante, la ecuacion caracterıstica es
p(λ) = Lλ2 + Rλ +1c
= 0
Luego p(λ) es Hurwitz. Por lo tanto podemos asegurar que i(t) → 0 cuandot →∞. Una explicacion fısica de esto es que i(t) → 0 cuando t →∞ debido alconsumo de energıa de la resistencia.
Figura 1.2: circuito electrico
Aplicacion 1.3 (Modelo Lotka-Volterra de 2 especies)El modelo esta expresado por el siguiente sistema de ecuaciones diferenciales
x = x(2− 3x + y)y = y(1 + 2x− 3y)
(0, 0) y (1, 1) son los puntos crıticos. La matriz Jacobiana en (1, 1) es
A =(−3 1
2 −3
)el polinomio caracterıstico es pA(λ) = λ2 + 6λ + 7 el cual es Hurwitz. Por lotanto cerca del punto (1, 1) las soluciones convergen.

5
Pueden darse tambien condiciones necesarias y suficientes para que polinomiosde la forma
p(t) = t3 + a1t2 + a2t + a3
p(t) = t4 + a1t3 + a2t
2 + a3t + a4
sean Hurwitz. Primero hacemos una observacion y establecemos una propiedad.
Observacion 1.1 Si los polinomios p(t) y q(t) tienen coeficientes positivos en-tonces p(t)q(t) tambien tiene coeficientes positivos.
Teorema 1.3 Si p(t) es un polinomio Hurwitz de grado n entonces todos suscoeficientes son del mismo signo.
Demostracion. Por el teorema fundamental del algebra
p(t) = an(t + α1) · · · (t + αs)(t2 + β1t + γ1) · · · (t2 + βrt + γr) αi, βj , γj ∈ R
Como p(t) es Hurwitz entonces αi, βj , γj > 0∀ i = 1, . . . , s; j = 1, . . . , r. Seag(t) = (t + α1) · · · (t + αs) y h(t) = (t2 + β1t + γ1) · · · (t2 + βrt + γr). Por laobservacion anterior el polinomio
g(t)h(t) = (t + α1) · · · (t + αs)(t2 + β1t + γ1) · · · (t2 + βrt + γr)
tiene todos sus coeficientes positivos. Entonces todos los coeficientes de p(t) =ang(t)h(t) tienen el mismo signo.
Teorema 1.4 El polinomio p(t) = t3 + a1t2 + a2t + a3 es Hurwitz si y solo si
a1, a2, a3 > 0 y a1a2 − a3 > 0.
Demostracion. Por el teorema fundamental del algebra
p(t) = (t + α)(t2 + βt + γ) = t3 + (αβ)t2 + (αβ + γ)t + αγ
igualandoa1 = α + β, a2 = αβ + γ, a3 = αγ
⇒): supongamos que p(t) es Hurwitz. Por el teorema 1.3, a1, a2, a3 > 0. Faltaprobar que a1a2 − a3 > 0. Entonces
a1a2 − a3 = (α + β)(αβ + γ)− αγ
= α2β + αβ2 + αγ + βγ − αγ
= α2β + αβ2 + βγ
Ahora p(t) = (t + α)(t2 + βt + γ) es Hurwitz por lo tanto todos sus coeficientesson del mismo signo. Luego en el factor (t + α) se tiene que α > 0 pues en casocontrario p(t) no serıa Hurwitz . Por lo tanto α, β, γ > 0. Entonces el productoα2β + αβ2 + βγ > 0. Ası a1a2 − a3 > 0.⇐): supongamos que a1, a2, a3 > 0 y que a1a2 − a3 > 0. Entonces
α + β > 0, αβ + γ > 0, αγ > 0, α2β + αβ2 + βγ > 0

6 CAPITULO 1. POLINOMIOS HURWITZ DE GRADO PEQUENO
De la ultima condicion β(α2 + αβ + γ > 0). Como αβ + γ > 0 entonces α2 +αβ + γ > 0. Por lo tanto β > 0. Como αγ > 0 entonces α, γ < 0 o α, γ > 0.Ahora αβ + γ > 0 y β > 0, entonces no puede ser que α y γ sean negativos almismo tiempo. Ası α, γ > 0. Entonces (t + α) y (t2 + βt + γ) son Hurwitz. Porlo tanto p(t) es Hurwitz.
Ejemplo 1.4
1. Sea p(t) = t3 + 2t2 + 3t + 7, luego a1 = 2, a2 = 3, a3 = 7. Entonces
a1a2 − a3 = 6− 7 = −1 < 0
Por lo tanto p(t) no es Hurwitz.
2. Sea p(t) = t3 + 3t2 + 3t + 1, entonces
a1a2 − a3 = 9− 1 = 8 > 0
Por lo tanto p(t) es Hurwitz.
Teorema 1.5 El polinomio p(t) = t4 + a1t3 + a2t
2 + a3t + a4 es Hurwitz si ysolo si a1, a2, a3, a4 > 0 y a1a2a3 − a2
3 − a21a4 > 0.
Demostracion. Por el teorema fundamental del algebra
f(t) = (t2 + αt + β)(t2 + γt + δ)
= t4 + (α + γ)t3 + (β + αγ + δ)t2 + (βγ + αδ)t + βδ
igualando tenemos
a1 = α + γ, a2 = β + αγ + δ, a3 = βγ + αδ, a4 = βδ
a1a2a3 − a23 − a2
1a4 = αγ[(β − δ)2 + (α + γ)(βγ + αδ)
]⇒): Supongamos que f es Hurwitz entonces t2 + αt + β y t2 + γt + δ sonHurwitz. Entonces por el teorema 1.3 α, β, γ, δ > 0. Se sigue entonces quea1, a2, a3, a4 > 0 y a1a2a3 − a2
3 − a21a4 > 0.
⇐): Supongamos que a1, a2, a3, a4 > 0 y a1a2a3 − a23 − a2
1a4 > 0. Entonces
α + γ > 0, β + αγ + δ > 0, βγ + αδ > 0, βδ > 0
αγ[(β − δ)2 + (α + γ)(βγ + αδ)
]> 0
Como α + γ > 0 y βγ + αδ > 0 entonces
(β − δ)2 + (α + γ)(βγ + αδ) > 0
y comoαγ[(β − δ)2 + (α + γ)(βγ + αδ)
]> 0
entonces αγ > 0. Por lo tanto α y γ tienen el mismo signo. Pero α y γ no puedenser negativos pues α + γ > 0. Ası α > 0 y γ > 0. Por otra parte como βδ > 0entonces β y δ son del mismo signo. No puede ocurrir que β y δ sean negativaspues sabemos α > 0 y γ > 0 y por lo tanto no se cumplirıa que βγ + αδ > 0.Por lo tanto β > 0 y δ > 0. Entonces t2 + αt + β y t2 + γt + δ son Hurwitz.Entonces f(t) es Hurwitz pues es el producto de estos polinomios.

7
Ejemplo 1.5
1. Sea p(t) = t4 + t3 + 5t2 + 7t + 2, luego a1 = 1, a2 = 5, a3 = 7, a4 = 2.Entonces
a1a2a3 − a23 − a2
1a4 = (1)(5)(7)− (7)2 − (1)2(2) = −16 < 0
Por lo tanto p(t) no es Hurwitz.
2. Sea p(t) = t4 + 4t3 + 6t2 + 4t + 1, entonces
a1a2a3 − a23 − a2
1a4 = (4)(6)(4)− (4)2 − (4)2(1) = 64 > 0
Por lo tanto p(t) es Hurwitz.
Corolario 1.2
a) p(t) = a0t3 + a1t
2 + a2t + a3 es Hurwitz si y solo si a0, a1, a2, a3 son delmismo signo y a1a2 − a3a0 > 0.
b) p(t) = a0t4 +a1t
3 +a2t2 +a3t+a4 es Hurwitz si y solo si a0, a1, a2, a3, a4
son del mismo signo y a1a2a3−a23a0−a2
1a4a0
> 0.
Demostracion.
a) p(t) = a0t3 + a1t
2 + a2t + a3 es Hurwitz si y solo si
t3 +a1
a0t2 +
a2
a0t +
a3
a0(a0 6= 0)
es Hurwitz.
⇔ a1
a0> 0,
a2
a0> 0,
a3
a0> 0 y
(a1
a0
)(a2
a0
)−(
a3
a0
)> 0
⇔(
a1
a0
)(a2
a0
)>
(a3
a0
)⇔ a1a2 − a0a3 > 0
b) p(t) = a0t4 + a1t
3 + a2t2 + a3t + a4 es Hurwitz si y solo si
t4 +a1
a0t3 +
a2
a0t2 +
a3
a0t +
a4
a0a0 6= 0
es Hurwitz.⇔ a1
a0> 0,
a2
a0> 0,
a3
a0> 0
a4
a0> 0 y(
a1
a0
)(a2
a0
)(a3
a0
)−(
a3
a0
)2
−(
a1
a0
)2(a4
a0
)> 0
⇔ a1a2a3
a30
>a23
a20
+(
a21
a20
)(a4
a0
)

8 CAPITULO 1. POLINOMIOS HURWITZ DE GRADO PEQUENO
⇔ a1a2a3
a0>
a23a0 + a2
1a4
a0
⇔ a1a2a3 − a23a0 − a2
1a4
a0> 0
Aplicacion 1.4 Considere el circuito electrico mostrado en la figura 1.3.
Figura 1.3: circuito electrico
Las ecuaciones diferenciales que describen la variacion de voltaje son
Ld2i2dt2
+ Rdi2dt
+1C
(i2 − i1) = 0
d3i2dt3
+R
L
d2i2dt2
+2
LC
di2dt
+R
L2Ci2 =
1L2C
dE
dt
Si E es constante entonces dE/dt = 0. La ecuacion caracterıstica es
p(λ) = λ3 +R
Lλ2 +
2LC
λ +R
L2C
luego, este polinomio es Hurwitz pues los coeficientes son positivos y(R
L
)(2
LC
)−(
R
L2C
)=
R
L2C> 0
Por lo tanto i2(t) → 0, cuando t → ∞, debido al consumo de energıa de laresistencia.
Aplicacion 1.5 (Sistema de Lorenz)El sistema es el siguiente
x = σ(y − x)y = rx− y − xz
z = xy − bz
con σ, r, b > 0. El punto (0, 0, 0) es un punto crıtico. La matriz Jacobiana en(0, 0, 0) es
A =
−σ σ 0r −1 00 0 −b

9
El polinomio caracterıstico es
pA(λ) = λ3 + [b + (1 + σ)]λ2 + [σ(1− r) + b(1 + σ)]λ + b(1− r)σ
Si r < 1 entonces
b + (1 + σ) > 0, σ(1− r) + b(1 + σ) > 0, b(1− r)σ > 0
ademas
[b+(1+σ)][σ(1−r)+ b(1+σ)]− b(1−r)σ = (1+σ)[b2 +σ(1−r)+ b(1+σ)] > 0
por lo tanto pA(λ) es Hurwitz y (0, 0, 0) es punto estable localmente.
Finalizamos este capıtulo con el siguiente teorema que sera de utilidad enposteriores resultados.
Teorema 1.6 Sea p(t) = a0tn + a1t
n−1 + a2tn−2 + . . . + an. Se tiene que p(t)
es Hurwitz si y solo si q(t) = a0 + a1t + a2t2 + . . . + antn es Hurwitz.
Demostracion.
⇒): Supongamos que p(t) es Hurwitz y consideremos el polinomio
q(t) = a0 + a1t + a2t2 + . . . + antn
Sean ξ1, ξ2, . . . , ξn raıces de p(t). Como p(t) es Hurwitz entonces Re ξk < 0para k = 1, 2, . . . , n. Luego
p(t) = a0tn + a1t
n−1 + a2tn−2 + . . . + an
= tn
[a0 + a1
(1t
)+ a2
(1t
)2
+ . . . + an
(1t
)n]
= tnq
(1t
)Ahora
p(ξk) = 0 ∀ k = 1, 2, . . . , n
entonces para k = 1, 2, . . . , n
p(ξk) = (ξk)nq
(1ξk
)= 0
como ξk 6= 0, puesto que p(t) es Hurwitz, entonces
q
(1ξk
)= 0 ∀ k = 1, 2, . . . , n
es decir, los inversos de las n raıces de p(t) son raıces de q(t); con estomostramos que q(t) tiene n raıces. Luego dado que ξk ∈ C−, tambien1ξk∈ C− ∀ k = 1, 2, . . . , n. Por lo tanto q(t) es Hurwitz.
⇐): La demostracion es similar a la condicion anterior.

Capıtulo 2
Condiciones necesarias
En este capıtulo damos algunas condiciones necesarias para que un polino-mio sea Hurwitz. Dichas condiciones se establecen para polinomios de gradoarbitrario n.
Primero retomemos el resultado del teorema 1.3 del capıtulo anterior, esdecir, dado un polinomio Hurwitz p(t) se debe tener que sus coeficientes son delmismo signo. Esto nos da un criterio para determinar cuando un polinomio noes Hurwitz, lo cual establecemos en la siguiente observacion.
Observacion 2.1 Si los coeficientes de un polinomio p(t) no tienen el mismosigno entonces p(t) no es Hurwitz.
Ejemplo 2.1
1. p(t) = 3t6 + 5t5 − 3t4 + t3 + 2t2 + 3t + 6 no es Hurwitz.
2. p(t) = −2t7 + 3t6 − 2t5 + t4 + t3 + t2 + t + 1 no es Hurwitz.
Observacion 2.2 El teorema 1.3 es una condicion necesaria, pero no suficiente,para que un polinomio sea Hurwitz. En otras palabras, si un polinomio p(t) tienesus coeficientes del mismo signo, p(t) no necesariamente es Hurwitz, lo cual esilustrado en el siguiente ejemplo.
Ejemplo 2.2 Sea p(t) = t3 + 2t2 + 5t + 174, entonces
p(t) = (t2 − 4t + 29)(t + 6) = (t− 2 + 5i)(t− 2− 5i)(t + 6)
Por lo tanto p(t) no es Hurwitz.
A continuacion mostramos otra propiedad importante de los polinomios Hur-witz.
Teorema 2.1 Si p(t) es un polinomio Hurwitz de grado n entonces p′(t) esHurwitz.
11

12 CAPITULO 2. CONDICIONES NECESARIAS
Demostracion. Sean w1, w2, . . . , wn las raıces de p(t). Como p(t) es Hurwitzentonces Re wi < 0 ∀ i (1 ≤ i ≤ n). Sea t tal que Re t ≥ 0. Como Re (−wi) > 0entonces Re (t− wi) = Re t + Re (−wi) > 0. De aquı que
Re(
1t− wi
)> 0
⇒ Re
(n∑
i=1
1t− wi
)> 0
Por lo tanton∑
i=1
1t− wi
6= 0
peron∑
i=1
1t− wi
=p′(t)p(t)
Por lo tanto p′(t) 6= 0 ∀ t (Re t ≥ 0), de donde las raıces de p′(t) estan en C−.
Corolario 2.1 Si p′(t) no es Hurwitz entonces p(t) no es Hurwitz.
Ejemplo 2.3 Sea p(t) = 15 t5 + t4 + 2t3 + 15t2 + 6t + 5, ahora
p′(t) = t4 + 4t3 + 6t2 + 30t + 6
luegoa1a2a3 − a2
3 − a21a4 = (4)(6)(30)− (30)2 − (4)(6) < 0
Entonces p′(t) no es Hurwitz. Por lo tanto p(t) no es Hurwitz.
Observacion 2.3 El teorema 2.1 nos da una condicion necesaria, pero no sufi-ciente, es decir, si p′(t) es Hurwitz p(t) no necesariamente lo es. Esto lo ilustrael siguiente ejemplo.
Ejemplo 2.4 Sea f(t) = 8t3 + 3t2 + 8t + 52 . Ahora
(8)(3)− (8)(
52
)= (8)
(3− 5
2
)= (8)
(12
)= 4 > 0
Por lo tanto f(t) es Hurwitz. Luego hagamos
hc(t) =∫
f(t)dt = 2t4 + t3 + 4t2 +52t + c
Se tiene que
(1)(4)− (2)(52) = 4− 5 < 0
Luego, hc(t) no es Hurwitz para ningun valor de c. Ası al hacer f(t) = p′(t) quees Hurwitz, se tiene que hc(t) = p(t) no es Hurwitz.

13
El siguiente teorema establece otra condicion necesaria para que un polinomiosea Hurwitz
Teorema 2.2 Si f(x) = a0 + a1x + a2x2 + . . . + anxn es Hurwitz y ξ ∈ C se
tiene que
a) si Re ξ > 0 entonces |f(ξ)| > |f(−ξ)|
b) si Re ξ = 0 entonces |f(ξ)| = |f(−ξ)|
c) si Re ξ < 0 entonces |f(ξ)| < |f(−ξ)|
Observacion 2.4 Si f(x) es un polinomio real tal que no se cumple alguno delos incisos a), b) o c) entonces f(x) no es Hurwitz.
Antes de dar la demostracion del teorema mostraremos un ejemplo de su apli-cacion.
Ejemplo 2.5 Sea f(x) = x3 + 3x2 + 16x + 130, tomar ξ = 1 + 5i. Entonces
f(ξ) = (1 + 5i)3 + 3(1 + 5i)2 + 16(1 + 5i) + 130
= 1 + 3(5i) + 3(5i)2 + 125(i3) + 3(1 + 10i + 25i2) + 16 + 80i + 130= 1− 75 + 15i− 125i + 3− 75 + 30i + 16 + 130 + 80i
= 0
Luego |f(ξ)| = 0; por otro lado
f(−ξ) = (−1− 5i)3 + 3(−1− 5i)2 + 16(−1− 5i) + 130
= −1 + 3(5i)− 3(−5i)2 + (−5i)3 + 3(1 + 10i− 25)− 16− 80i + 130= −1 + 75− 15i + 125i + 3− 75 + 30i− 16 + 130− 8i
= 116 + 60i
Luego |f(−ξ)| > 0. Entonces no se cumple |f(ξ)| > |f(−ξ)|. Por lo tanto f(x)no es Hurwitz.
Demostracion. (Teorema 2.2) Por el teorema fundamental del algebra sepuede escribir
f(x) = an(x− α1)(x− α2) · · · (x− αn) αi ∈ C−
tenemos dos casos:i) Si αk ∈ R− (αk < 0), tomemos ξ = a + ib, luego
|ξ − αk| < | − ξ − αk|
⇔ |ξ − αk|2 > | − ξ − αk|2
⇔ |a + ib− αk|2 > | − a− ib− αk|2
⇔ (a− αk)2 + b2 > (a + αk)2 + b2

14 CAPITULO 2. CONDICIONES NECESARIAS
⇔ (a− αk)2 − (a + αk)2 > 0 ⇔ (−2αk)(2a) > 0 ⇔ a > 0 ⇔ Re ξ > 0
Analogamente si Re ξ = 0 entonces |ξ −αk| = | − ξ −αk| y si Re ξ < 0 entonces|ξ − αk| < | − ξ − αk|ii) pares de raıces conjugadas, tomamos
αr = γ + iδ, αs = γ − iδ, γ > 0, δ > 0
(no olvidar que αi ∈ C−). Entonces
|ξ − αr|2 = |a + ib− γ − iδ|= (a− γ)2 + (b− δ)2
|ξ − αs|2 = |a + ib− γ + iδ|= (a− γ)2 + (b + δ)2
Similarmente| − ξ − αr|2 = (a + γ)2 + (b + δ)2
| − ξ − αs|2 = (a + γ)2 + (b− δ)2
Ahora
|ξ − αr|2|ξ − αs|2 = (a− γ)4 + (a− γ)2[(b− δ)2 + (b + δ)2] + (b− δ)2(b + δ)2
| − ξ−αr|2| − ξ−αs|2 = (a+ γ)4 +(a+ γ)2[(b− δ)2 +(b+ δ)2] + (b− δ)2(b+ δ)2
⇒ |ξ − αr|2|ξ − αs|2 > | − ξ − αr|2| − ξ − αs|2
⇔ (a−γ)4 +(a−γ)2[(b− δ)2 +(b+ δ)2] > (a+γ)4 +(a+γ)2[(b− δ)2 +(b+ δ)2]
Por otra parte
(a− γ)2 > (a + γ)2 ⇔ (a− γ)2 − (a + γ)2 > 0
⇔ (−2γ)(2a) > 0 ⇔ a > 0 ⇔ Re ξ > 0
Por lo tanto si Re ξ > 0 entonces
(a− γ)2 > (a + γ)2 y (a− γ)4 > (a + γ)4
Entonces|ξ − αr||ξ − αs| > | − ξ − αr|| − ξ − αs|
Analogamente, si Re ξ = 0 entonces |ξ − αr||ξ − αs| = | − ξ − αr|| − ξ − αs| y siRe ξ < 0 entonces |ξ − αr||ξ − αs| < | − ξ − αr|| − ξ − αs|.Por lo tanto los incisos a), b) y c) se cumplen.
Observacion 2.5 El teorema 2.2 es una condicion necesaria pero no suficiente,es decir, si f(x) satisface todos los incisos a), b) y c), f(x) no necesariamentees Hurwitz. Veamos el siguiente ejemplo.

15
Ejemplo 2.6 La idea es considerar polinomios Hurwitz h(x) y por lo tantosatisfacen las siguientes condiciones:
a) si Re (ξ) > 0 entonces |h(ξ)| > |h(−ξ)|;
b) si Re (ξ) = 0 entonces |h(ξ)| = |h(−ξ)|;
c) si Re (ξ) < 0 entonces |h(ξ)| < |h(−ξ)|.
Sea g(x) un polinomio que no sea Hurwitz y que cumpla que |g(ξ)| = |g(−ξ)|.Por ejemplo, consideremos g(x) = xn con n = 1, 2, . . . , entonces:
|g(ξ)| = |ξn| = |ξ|n
|g(−ξ)| = | − ξn| = | − ξ|n = |ξ|n
Sea h(x) un polinomio Hurwitz y supongamos que Re (ξ) > 0. Entonces por elinciso a) del teorema 2.2 tenemos que |h(ξ)| > |h(−ξ)|. Ahora
|g(ξ)||h(ξ)| > |g(ξ)||h(−ξ)|
la desigualdad se conserva pues Re (ξ) > 0 y por lo tanto |g(ξ)| > 0. Entonces
|g(ξ)||h(ξ)| > |g(−ξ)||h(−ξ)|
ademas|g(ξ)||h(ξ)| = |g(ξ)h(ξ)|
Similarmente, se tiene que |h(ξ)| < |h(−ξ)|, si Re (ξ) < 0. Tomemos f(x) =g(x)h(x). Este polinomio satisface los 3 incisos a), b) y c), pero como g(x) noes Hurwitz entonces f(x) tampoco lo es.
Capıtulo 3
Criterio de Routh-Hurwitz
Al final del siglo XIX el ingeniero austriaco A. Stodola, el descubridor dela teorıa del vapor y las turbinas de gas, sin conocer los trabajos de Routh,propuso el problema de encontrar condiciones bajo las cuales todas las raıces deuna ecuacion algebraica tuvieran parte real negativa. En 1895, A. Hurwitz enbase a los trabajos de Hermite dio una solucion al problema (independiente dela dada por Routh).
Adolf Hurwitz (1859-1919)Nacio en Hildesheim, Hanover. Segraduo en la Universidad de Berlın.En 1884 acepta la invitacion deLindemann para ocupar una pla-za en Konisberg donde permanece8 anos. Ahı dio clases a Hilbert yMinkowski. En 1892 ocupa el lugarque dejo Frobenius en Eidgenossis-che Polytechnikum Zurich (Suiza).Hurwitz permanecio el resto de suvida en Zurich. Estudio la superficiede Riemann y la teorıa de funcionescomplejas.
Existen varias pruebas del criterio de Routh-Hurwitz. La demostracion quepresentamos en este capıtulo tiene la sobresaliente propiedad de que no utilizaconocimientos avanzados de matematicas.Notacion. Usaremos la siguiente notacion
Pn denota al conjunto de polinomios reales de grado n.
Hn denota al conjunto de polinomio reales que son Hurwitz y tienen gradon.
H+n denota al conjunto de polinomios Hurwitz de grado n con coeficientes
reales positivos.
Definicion 3.1 Dado w ∈ R, definimos la funcion Tw : Pn → Pn−1
b0 + b1x + . . . + bnxn 7→
2b0b1+2w(b1b2−b0b3)x+2b0b3x2+2w(b1b3−b0b5)x3+...+
2b0bnxn−1 n impar
2wb1bnxn−1 n par
y denotemos Tw(g(x)) = Twg(x)
Observacion 3.1 Notese que para x 6= 0 se cumple la siguiente igualdad
xTwg(x) =[b0
(1− w
x
)+ b1w
]g(x)−
[b0
(1− w
x
)− b1w
]g(−x)
Si definimos
A(x) = b0
(1− w
x
)+ b1w, B(x) = b0
(1− w
x
)− b1w
17

18 CAPITULO 3. CRITERIO DE ROUTH-HURWITZ
entonces podemos escribir la igualdad como
xTwg(x) = A(x)g(x)−B(x)g(−x)
Lema 3.1 Si b0 > 0, b1 > 0 y w ∈ R+ es tal que para x ∈ C, x 6= 0 se satisfaceRe(w/x) < 1 entonces |A(x)| > |B(x)|.
Demostracion. Sea x = α + iβ tal que Re(w/x) < 1 entonces
w
x=
w
α + iβ=
w(α− iβ)α2 + β2
=wα− iwβ
α2 + β2,
luegowα
α2 + β2< 1.
Por otra parte|A(x)| > |B(x)|
⇔ |b0 −b0wα
α2 + β2+ i
b0wβ
α2 + β2+ b1w| > |b0 −
b0wα
α2 + β2+ i
b0wβ
α2 + β2− b1w|
⇔(b0 − b0wα
α2+β2 + b1w)2
+(
bowβα2+β2
)2
>(b0 − b0wα
α2+β2 − b1w)2
+(
bowβα2+β2
)2
⇔(
b0 −b0wα
α2 + β2+ b1w
)2
−(
b0 −b0wα
α2 + β2− b1w
)2
> 0
⇔ (2b1w)(2)(
b0 −b0wα
α2 + β2
)> 0 ⇔
(1− wα
α2 + β2
)> 0 ⇔ wα
α2 + β2< 1
Ya queRe
w
x=
wa
α2 + β2< 1,
el lema queda demostrado.
Proposicion 3.1 Dado f(z) = a0zn + a1z
n−1 + . . . + an, con a0 6= 0 yM = max |a1
a0|, |a2
a0|, . . . , |an
a0| . Si f(z0) = 0 entonces |z0| < M + 1.
Demostracion. Tenemos dos casos:
caso 1. M = 0.Aquı tenemos que ak = 0 ∀k = 1, 2, . . . , n. Por lo tanto f(z) = a0z
n yentonces z0 = 0 y claramente |z0| < 1.
caso 2. M 6= 0.Tenemos que
f(z)− a0zn = a1z
n−1 + a2zn−2 + . . . + an
Como a0 6= 0 entonces
f(z)− a0zn
a0=
a1
a0zn−1 +
a2
a0zn−2 + . . . +
an
a0

19
Por lo tanto∣∣∣∣f(z)− a0zn
a0
∣∣∣∣ ≤ ∣∣∣∣a1
a0
∣∣∣∣ |z|n−1 +∣∣∣∣a2
a0
∣∣∣∣ |z|n−2 + . . . +∣∣∣∣an
a0
∣∣∣∣≤ M
(|z|n−1 + |z|n−2 + . . . + |z|+ 1
)(3.1)
puesto que M es el maximo. Pero
M(|z|n−1 + |z|n−2 + . . . + |z|+ 1
)=|z|n − 1|z| − 1
M
Supongamos que z es un punto tal que |z| ≥ M + 1 entonces
|z| − 1 ≥ M > 0
de dondeM
|z| − 1≤ 1
Sustituyendo en (3.1) se tiene que∣∣∣∣f(z)− a0zn
a0
∣∣∣∣ ≤ |z|n − 1 < |z|n
para puntos z tales que |z| ≥ M + 1, o equivalentemente escribimos
|f(z)− a0zn| < |z|n|a0|
De aquı se tiene que si |z| ≥ M + 1 entonces z no puede ser un cero z0 def(z) porque si lo fuera tendrıamos
|f(z0)− a0zn0 | < |z0|n|a0|
y entonces |a0zn0 | < |z0|n|a0|, lo cual es una contradiccion.
Lema 3.2 Dado f(x) = b0 + b1x + b2x2 + . . . + bnxn, con b0 6= 0 y b1 6=
0, definimos L = 1 + max| b1b2−b0b3
b0b1|, | b3b1
|, | b1b4−b0b5b0b1
|, | b5b1|, . . .
. Si 0 < w <
max(1, 12L ) entonces para todas las raıces x de Twf(x) se tiene que Re(w
x ) < 1.
Demostracion. Sea x raız de Twf(x) entonces
2b0b1 + 2w(b1b2 − b0b3)x + 2b0b3x2 + 2w(b1b3 − b0b5)x3 + . . . + cxn−1 = 0
donde
c =
2b0bn n impar2wb1bn n par
Como b0 6= 0 y b1 6= 0 se tiene que x 6= 0 y podemos entonces dividir entre xn−1
para obtener
2b0b1(1x )n−1+2w(b1b2−b0b3)(
1x )n−2+2b0b3x2( 1
x )n−3+2w(b1b3−b0b5)(1x )n−4+...+c=0

20 CAPITULO 3. CRITERIO DE ROUTH-HURWITZ
Por la proposicion 3.1 se tiene∣∣∣∣ 1x∣∣∣∣ < 1 + max
∣∣∣∣w(b1b2 − b0b3)b0b1
∣∣∣∣ , ∣∣∣∣b3
b1
∣∣∣∣ , ∣∣∣∣w(b1b4 − b0b5)b0b1
∣∣∣∣ , ∣∣∣∣b5
b1
∣∣∣∣ , . . .pero |w| < 1 pues 0 < w < max(1, 1
2L ), de aquı que∣∣∣∣ 1x∣∣∣∣ < 1 + max
∣∣∣∣b1b2 − b0b3
b0b1
∣∣∣∣ , ∣∣∣∣b3
b1
∣∣∣∣ , ∣∣∣∣b1b4 − b0b5
b0b1
∣∣∣∣ , ∣∣∣∣b5
b1
∣∣∣∣ , . . .entonces ∣∣∣w
x
∣∣∣ = |w| 1|x|
<1
2LL =
12
de donde
−12
< Rew
x<
12
por lo tanto Rewx < 1.
Lema 3.3 Si f(x) = b0 + b1x + . . . + bnxn es Hurwitz entonces Twf(x) esHurwitz ∀w
(0 < w < max(1, 1
2L )).
Demostracion. Supongamos que f(x) es Hurwitz y tomemos w tal que 0 <w < max(1, 1
2L ). Mostraremos que Twf es Hurwitz. Sea ξ raız de Twf . Veamosque Re ξ < 0. Por el lema 3.2 tenemos que Rew
ξ < 1. Por el lema 3.1
|A(ξ)| > |B(ξ)| (3.2)
Pero por la observacion 3.1
ξ Twf(ξ) = A(ξ)f(ξ)−B(ξ)f(−ξ)
Como Twf(ξ) = 0 entonces
A(ξ)f(ξ)−B(ξ)f(−ξ) = 0
es decirA(ξ)f(ξ) = B(ξ)f(−ξ)
esto implica que |A(ξ)f(ξ)| = |B(ξ)f(−ξ)|. De (3.2) se tiene que |A(ξ)| > |B(ξ)|por lo tanto |f(ξ)| ≤ |f(−ξ)|. Entonces por el teorema 2.2 se tiene que Re ξ ≤ 0,y no puede ocurrir que |f(ξ)| = |f(−ξ)|. Nuevamente por el teorema 2.2 si|f(ξ)| 6= |f(−ξ)| entonces Re ξ 6= 0. Por lo tanto Re ξ < 0.
Lema 3.4 Dado f(x) = b0 + b1x + . . . + bnxn, con b0 6= 0 y N = 1 +max | b1b0
|, | b2b0|, . . . , | bn
b0| , si 0 < w < max(1, 1
2N ) entonces para todas las raıcesx de f(x) se tiene que Rew
x < 1.

21
Demostracion. Si f(x) = 0 entonces b0 + b1x + . . . + bnxn = 0. Como b0 6= 0entonces se tiene que x 6= 0. Entonces
b0
(1x
)n
+ b1
(1x
)n−1
+ . . . + bn = 0
Por la proposicion 3.1∣∣∣∣ 1x∣∣∣∣ < 1 + max
∣∣∣∣b1
b0
∣∣∣∣ , ∣∣∣∣b2
b0
∣∣∣∣ , . . . , ∣∣∣∣bn
b0
∣∣∣∣ = N
⇒∣∣∣wx
∣∣∣ = |w|∣∣∣∣ 1x∣∣∣∣ < 1
2NN =
12
Por lo tanto Rewx < 1.
Observacion 3.2 Sabemos que A(x)f(x) − B(x)f(−x) = xTwf(x), entoncesevaluando en −x
(−x)Twf(−x) = A(−x)f(−x)−B(−x)f(x)
⇒ B(−x)f(x)−A(−x)f(−x) = xTwf(−x)
Observacion 3.3 Se tiene la igualdad
f(x)[A(x)A(−x)−B(x)B(−x)] = xA(−x)Twf(x)− xB(x)Twf(−x)
A partir de la igualdad anterior
f(x) =A(−x)f(−x) + xTwf(−x)
B(−x)
y a partir de A(x)f(x)−B(x)f(−x) = xTwf(x) se tiene
f(−x) =A(x)f(x)− xTwf(x)
B(x)
entonces
f(x) =A(−x)f(−x)
B(x)+
xTwf(−x)B(−x)
=A(−x)
[A(x)f(x)− xTwf(x)
B(x)
]B(−x)
+xTwf(−x)
B(−x)
=A(−x)A(x)B(−x)B(x)
f(x)− xA(−x)Twf(x)B(−x)B(x)
+xTwf(−x)
B(−x)
de donde despejando f(x)
f(x) =1
1− A(−x)A(x)B(−x)B(x)
[−xA(−x)Twf(x)
B(−x)B(x)+
xTwf(−x)B(−x)
]

22 CAPITULO 3. CRITERIO DE ROUTH-HURWITZ
es decir
f(x) =xA(−x)Twf(x)
A(x)A(−x)−B(x)B(−x)− xB(x)Twf(−x)
A(x)A(−x)−B(x)B(−x)
Observacion 3.4 Tambien se cumple que A(x)A(−x)−B(x)B(−x) = 4b0b1w.En efecto
A(x) = b0
(1− w
x
)+ b1w
⇒ A(−x) = b0
(1 +
w
x
)+ b1w
Luego
A(x)A(−x) = b20
(1− w2
x2
)+ 2b0b1w + b2
1w2
Analogamente
B(x)B(−x) = b20
(1− w2
x2
)− 2b0b1w + b2
1w2
Por lo tantoA(x)A(−x)−B(x)B(−x) = 4b0b1w
Observacion 3.5 De la observacion 3.3 y 3.4 se tiene que
4b0b1wf(x) = xA(−x)Twf(x)− xB(x)Twf(−x)
Proposicion 3.2 Si b0 > 0, b1 > 0, w > 0 y x ∈ C, con x 6= 0, entonces|A(−x)| > |B(x)| si y solo si Re 1
x > − b1b0
.
Demostracion. Sea x = α + iβ. Luego:
|A(−x))| > |B(x)|
⇔∣∣∣∣b0 +
b0wα
α2 + β2− i
b0wβ
α2 + β2+ b1w
∣∣∣∣ > ∣∣∣∣b0 −b0wα
α2 + β2+ i
b0wβ
α2 + β2− b1w
∣∣∣∣⇔(b0 + b0wα
α2+β2 + b1w)2
+(
b0wβα2+β2
)2
>(b0 − b0wα
α2+β2 − b1w)2
+(
b0wβα2+β2
)2
⇔ 4b0(2)(
b0wα
α2 + β2+ b1w
)> 0 ⇔ b0wα
α2 + β2+ b1w > 0
⇔ b0α
α2 + β2+ b1 > 0 ⇔ α
α2 + β2> −b1
b0⇔ Re
1x
> −b1
b0
Lema 3.5 Sea f(x) = b0 + b1x + . . . + bnxn con b0, b1 > 0 y sea w > 0. SiTwf(x) es Hurwitz entonces f(x) es Hurwitz.

23
Demostracion. Supongamos que Twf(x) es Hurwitz. Sea ξ raız de f(x), mos-traremos que Re ξ < 0.Si
Re1ξ≤ −b1
b0
entoncesRe
1ξ
< 0
por lo tanto Re ξ < 0.Si
Re1ξ
> −b1
b0
entonces por la proposicion 3.2, |A(−ξ)| > |B(ξ)|.Por otra parte, por la observacion 3.5 se tiene que
4b0b1wf(x) = xA(−x)Twf(x)− xB(x)Twf(−x)
como f(ξ) = 0, entonces
ξA(−ξ)Twf(ξ)− ξB(ξ)Twf(−ξ) = 0
Como b0 6= 0 y b1 6= 0 entonces ξ 6= 0. Luego
A(−ξ)Twf(ξ)−B(ξ)Twf(−ξ) = 0
es decirA(−ξ)Twf(ξ) = B(ξ)Twf(−ξ)
⇒ |A(−ξ)||Twf(ξ)| = |B(ξ)|Twf(−ξ)|
Como |A(−ξ)| > |B(ξ)| obtenemos que |Twf(ξ)| < |Twf(−ξ)|. Ahora, ya queTwf(x) es Hurwitz, por el teorema 2.2 debemos tener que 1 Reξ < 0.
Teorema 3.1 (Algoritmo recursivo descendente) Dados los polinomios
f(x) = b0 + b1x + . . . + bnxn
Twf(x)=2b0b1+2w(b1b2−b0b3)x+2b0b3x2+2w(b1b3−b0b5)x3+...+
2b0bnxn−1 n impar
2wb1bnxn−1 n par
Definimos
N = 1 + max ∣∣∣∣b1
b0
∣∣∣∣ , ∣∣∣∣b2
b0
∣∣∣∣ , . . . , ∣∣∣∣bn
b0
∣∣∣∣ L = 1 + max
∣∣∣∣b1b2 − b0b3
b0b1
∣∣∣∣ , ∣∣∣∣b3
b1
∣∣∣∣ , ∣∣∣∣b1b4 − b0b5
b0b1
∣∣∣∣ , ∣∣∣∣b5
b1
∣∣∣∣ , . . .Si w es tal que 0 < w < max(1, 1
2L , 12N ) entonces se cumple lo siguiente:
f(x) es Hurwitz si y solo si Twf(x) es Hurwitz.1razonando como en el lema 3.3

24 CAPITULO 3. CRITERIO DE ROUTH-HURWITZ
Demostracion. Es inmediata a partir del lema 3.3 y del lema 3.5.
Ejemplo 3.1 Determinaremos si es Hurwitz el polinomio
f(t) = t6 + 6t5 + 15t4 + 20t3 + 15t2 + 6t + 1
Solucion: Escribimos
f(t) = 1 + 6t + 15t2 + 20t3 + 15t4 + 6t5 + t6
y tomamos
b0 = 1, b1 = 6, b2 = 15, b3 = 20, b4 = 15, b5 = 6, b6 = 1
luego
Twf(t) = 2(1)(6) + 2w(6(15)− 1(20))t + 2(1)(20)t2 + 2w(6(15)− 1(6))t3
+ 2(1)(6)t4 + 2w(6)(1)t5
= 12 + 140wt + 40t2 + 168wt3 + 12t4 + 12wt5
nuevamente aplicamos Tw
TwTwf(t) = T 2wf(t)
= 3360w + 7168wt2 + 4032wt2 + 3072wt3 + 288wt4
ahora, T 2wf(t) ∈ H+
4 si y solo si
h(t) = 105 + 224wt + 126wt2 + 96wt3 + 9t4 ∈ H+4
y utilizando el criterio del Teorema 1.5, se tiene que h(t) es Hurwitz.
En conclusion, la funcion Tw reduce el grado de un polinomio y conjunta-mente con el teorema 3.1 permite determinar si el polinomio original es o noHurwitz.
Definicion 3.2 (Matriz de Hurwitz) Dado el polinomio
f(x) = a0xn + a1x
n−1 + . . . + an
denotamos por H(f) a la matriz de Hurwitz de f , la cual queda definida como
H(f) =
a1 a3 a5 · · · 0a0 a2 a4 · · · 00 a1 a3 · · · 0...
......
. . ....
0 0 0 · · · an
A continuacion presentamos el resultado mas importante del presente capıtu-
lo.

25
Teorema 3.2 (Criterio de Routh-Hurwitz) Sea
f(x) = a0xn + a1x
n−1 + . . . + an
con a0 > 0, f(x) es Hurwitz si y solo si ∆1 > 0, ∆2 > 0, . . . , ∆n > 0, donde∆1, ∆2, . . . , ∆n son los menores principales diagonales de H(f), es decir
∆1 = det(a1), ∆2 = det(
a1 a3
a0 a2
), ∆3 = det
a1 a3 a5
a0 a2 a4
0 a1 a3
, . . .
Demostracion. Dado f(x) = a0xn + a1x
n−1 + . . . + an, construimos su matrizde Hurwitz H(f):
H(f) =
a1 a3 a5 · · · 0a0 a2 a4 · · · 00 a1 a3 · · · 0...
......
. . ....
0 0 0 · · · an
y definimos
g(x) = a0 + a1x + . . . + anxn
Luego, f(x) es Hurwitz si y solo si g(x) es Hurwitz por el teorema 1.6. Ahora,por el teorema 3.1, g(x) es Hurwitz si y solo si 1
2Twg(x) es Hurwitz, con w > 0.Pero
12Twg(x) = a0a1 + w(a1a2− a0a3)x + a0a3x
2 + . . . +
a0anxn−1, n imparwa1anxn−1, n par
Ahora definimos
p(x) = a0a1xn−1 + w(a1a2 − a0a3)xn−2 + a0a
n−33 + . . .
luego 12Twg(x) es Hurwitz si solo si p(x) es Hurwitz (teorema 1.6). Construimos
ahora la matriz de Hurwitz para p(x)
H(p) =
w(a1a2 − a0a3) w(a1a4 − a0a5) w(a1a6 − a0a7) . . . 0
a0a1 a0a3 a0a5 . . . 00 w(a1a2 − a0a3) w(a1a4 − a0a5) . . . 0...
......
. . ....
0 0 0 . . . 0
los menores diagonales D1, D2, . . . , Dn−1 de H(p) estan dados por
D1 = w(a1a2 − a0a3) = w det(
a1 a3
a0 a2
)= w ∆2

26 CAPITULO 3. CRITERIO DE ROUTH-HURWITZ
D2 = wa0(a1a2a3−a0a23−a2
1a4+a0a1a5) = wa0 det
a1 a3 a5
a0 a2 a4
0 a1 a3
= wa0 ∆3
D3 = w2a0a1∆4, . . .
Como f es Hurwitz y a0 > 0 entonces todos sus coeficientes son positivos, yademas w > 0, entonces en general Dk y ∆k+1 (k = 1, 2, . . . , n− 1) difieren porun factor positivo. Aplicando induccion matematica, p es Hurwitz si y solo silos menores diagonales D1, D2, . . . , Dn−1 de H(p) son positivos. Por lo tanto pes Hurwitz si y solo si ∆1 > 0, ∆2 > 0, . . . , ∆n > 0.
Ejemplo 3.2 Verifiquemos si el polinomio f(t) = t5 +7t4 +19t3 +25t2 +16t+4es Hurwitz.Solucion. Hacemos
a0 = 1, a1 = 7, a2 = 19, a3 = 25, a4 = 16, a5 = 4
y construimos la matriz de Hurwitz de f
H(f) =
7 25 4 0 01 19 16 0 00 7 25 4 00 1 19 16 00 0 7 25 4
Luego
∆1 = 7 > 0∆2 = 7(19)− 25 > 0∆3 = 25[7(19)− 25]− 7[7(16)− 4] = 2700− 756 > 0∆4 = 16[2700]− 19[4(7(19)− 25)− 7(0)] + [4(7(16)− 4)− 25(0)]
= 43200− 8208 + 432 > 0∆5 = 4∆4 > 0
Por el Teorema 3.2, f es Hurwitz.
Ejemplo 3.3 Determinemos si f(t) = t3 + 3t2 + 2t + 8 es Hurwitz.Solucion. Hacemos
a0 = 1, a1 = 3, a2 = 2, a3 = 8
y construimos la matriz de Hurwitz de f :
H(f) =
3 8 01 2 00 3 8

27
Luego
∆1 = 3 > 0∆2 = 3(2)− 8(1) = 6− 8 = −2 < 0
Por lo tanto f(t) no es Hurwitz.
Corolario 3.1 Sea f(x) = a0xn +a1x
n−1 + . . .+an un polinomio real. f(x) esHurwitz si y solo si
a0 ∆1 > 0, ∆2 > 0, a0 ∆3 > 0, . . .
a0 ∆n > 0, n impar∆n > 0, n par
Ejemplo 3.4 Determinemos si es Hurwitz el polinomio
f(x) = −x3 − 3x2 − 3x− 1
Solucion. Construimos la matriz de Hurwitz de f .
H(f) =
−3 −1 0−1 −3 0
0 −3 −1
Luego
a0 ∆1 = (−1)(−3) > 0∆2 = (−3)(−3)− (−1)(−1) = 8 > 0
a0 ∆3 = (−1)(−1)∆2 = (−1)(−1)8 > 0
Por lo tanto f es Hurwitz.
Ahora que tenemos un criterio para determinar si un polinomio de gradoarbitrario es Hurwitz, podemos ilustrar su importancia en el estudio de la esta-bilidad de sistemas de ecuaciones diferenciales.
Aplicacion 3.1 Considerese el sistema de ecuaciones diferenciales x = Ax,donde
A =
0 1 0 · · · 00 0 1 · · · 00 0 0 · · · 0...
...−an −an−1 −an−2 · · · −a1
puede demostrarse 2 que el polinomio caracterıstico de A, pA(t), esta dado porpA(t) = tn + a1t
n−1 + a2tn−2 + . . . + an. Si pA(t) es Hurwitz entonces el origen
es un punto de equilibrio asintoticamente estable. Y el hecho de que pA(t) sea ono sea Hurwitz podemos determinarlo utilizando el Criterio de Routh-Hurwitz.Debido a esto a los polinomios Hurwitz tambien se les conoce como polinomiosestables.
2ver Apendice


Capıtulo 4
El Teorema deHermite-Biehler y elTeorema deLeonhard-Mihailov
Charles Hermite (1822-1901)Nacio en Lorraine (Fra.). En 1843,Hermite, sin ser graduado, ayudo aLiouville en el resultado que hoyse conoce como Teorema de Liou-ville. Hermite realizo importantescontribuciones a la teorıa de nume-ros, polinomios ortogonales, funcio-nes elıpticas y teorıa de formas cua-draticas. Aunque una ecuacion al-gebraica de quinto grado no puedeser resuelta con radicales (resultadoprobado por Ruffini y Abel), Hermi-te mostro en 1858 que una ecuacionalgebraica de quinto grado podıa serresuelta usando funciones elıpticas.En 1873 Hermite publico la primerademostracion de que e es un numerotrascendental. Hermite es mejor co-nocido por las entidades matemati-cas que llevan su nombre: Polino-mios de Hermite, Ec. diferencialde Hermite, Formula de interpola-cion de Hermite y Matrices Hermi-tianas. H. Poincare es ciertamenteuno de los mas famosos alumnos deHermite.
4.1. Teorema de la fase
Definicion 4.1 Dado el polinomio con coeficientes reales p(t) considerar p(iω),w ∈ R; p(iω) = α(ω) + iβ(ω) determina una curva en el plano complejo:
p : R → Cω 7→ α(ω) + iβ(ω)
Al argumento de p(iω), arg p(iω), lo llamamos la fase de p(iω).
Ejemplo 4.1
1. p(t) = t2 + 5t + 3
p(iω) = (iw)2 + 5iω + 3 = 3− w2 + i(5w)
2. p(t) = 5t3 + 6t2 − 7t− 2
p(iω) = −2− 6ω2 + i(−7ω − 5ω3)
Teorema 4.1 (de la fase) Si p(t) es un polinomio Hurwitz de grado n, en-tonces arg p(iω) es una funcion estrictamente creciente de la variable ω sobre(−∞,+∞). Ademas el cambio neto en la fase de −∞ a +∞ es
arg[p(+i∞)]− arg[p(−i∞)]1 = nπ
1arg[p(±i∞)] significa el lımω→±∞
arg p(iω)
29

30 CAPITULO 4. EL TEOREMA DE HERMITE-BIEHLER...
Demostracion. Por el teorema fundamental del algebra
p(t) = an(t− a1 − ib1)(t− a2 − ib2) · · · (t− anibn)
entonces
p(iω) = an[−a1 + i(w − b1)][−a2 + i(w − b2)] · · · [−an + i(w − bn)]
luego calculamos la fase de p(iω)
arg p(iω) = arg(an) + arg[−a1 + i(ω − b1)] + . . . + arg[−an + i(ω − bn)]
= arg(an) + arctan(
ω − b1
−a1
)+ . . . + arctan
(ω − bn
−an
)Ahora
d
dω[arg p(iω)] =
1
1 +(
ω − b1
−a1
)2
(− 1
a1
)+ . . . +
1
1 +(
ω − bn
−an
)2
(− 1
an
)
y para todo k = 1, . . . , n se tiene que ak < 0, pues ak + ibk es raız de p(t) quees Hurwitz. Por lo tanto arg p(iω) es una funcion creciente de ω. Ahora
lımω→+∞
arg p(iω) = arg(an) +π
2+ . . . +
π
2= arg(an) +
nπ
2
lımω→−∞
arg p(iω) = arg(an)− π
2− . . .− π
2= arg(an)− nπ
2por lo tanto
arg[p(+i∞)]− arg[p(−i∞)] = nπ
Ejemplo 4.2 Determinaremos si es Hurwitz el polinomio p(t) = t3 + 3t2 + 3.Solucion. Calculamos p(iω)
p(iω) = (iω)3 + 3(iω)2 + (iω) + 3 = 3− 3ω2 + iω(1− ω2)
entonces la fase de p(iω) es
arg p(iω) = arctanω(1− ω2)3− 3ω2
= arctanω(1− ω2)3(1− ω2)
= arctanω
3
luegolım
ω→+∞arg p(iω) = lım
ω→+∞arctan
ω
3=
π
2
lımω→−∞
arg p(iω) = lımω→−∞
arctanω
3= −π
2por lo tanto
arg[p(+i∞)]− arg[p(−i∞)] = π 6= 3π
Ası, p(t) no es Hurwitz 2.2Puede verificarse que arg p(iω) es una funcion creciente, por lo que es necesario verificar
tambien el cambio neto en la fase.

4.2. TEOREMAS SOBRE ESTABILIDAD 31
4.2. Teoremas sobre estabilidad
Teorema 4.2 Sean P (t) = a0 + a1t + . . . + antn = an
∏mj=1(t− sj)kj , an 6= 0 y
Q(t) = (a0 + ε0) + (a1 + ε1)t + . . . + (an + εn)tn y considerar un cırculo Ck deradio Rk centrado en sk donde 0 < Rk < mın |sk− sj | para j = 1, . . . , k− 1, k +1, . . . ,m, entonces existe ε > 0 tal que si |εi| < ε∀i = 1, . . . , n entonces Q(t)tiene rk ceros dentro de Ck, donde rk es el numero de ceros de P (t) dentro deCk.
Demostracion. Sea R(t) = ε0 + ε1t + . . . + εntn. Observar que Q(t) = P (t) +R(t). Queremos probar que |R(t)| < |P (t)| ∀ t ∈ Ck. Ahora, |P (t)| es una funcioncontinua y distinta de cero sobre el compacto Ck. Entonces |P (t)| alcanza unvalor mınimo sobre Ck, digamos δk, entonces
|P (t)| ≥ δk > 0 ∀ t sobre Ck
Por otra parte
|R(t)| = |ε0 + ε1t + . . . + εntn|≤ |ε0|+ |ε1||t|+ . . . + |εn||tn|≤ |ε0|+ |ε1|(|t− sk|+ |sk|) + . . . + |εn|(|t− sk|+ |sk|)n
Como t esta sobre Ck, si tomamos εi < ε se cumple que
|R(t)| ≤ ε
n∑j=0
(Rk + |sk|)j
llamemos
Mk =n∑
j=0
(Rk + |sk|)j
donde Mk esta fijo. Si escogemos ε tal que ε < δk
Mk, entonces
|R(t)| ≤ Mk <δk
MkMk = δk
entonces|R(t)| < δk ≤ |P (t)|
sobre Ck. Entonces por el teorema de Rouche 3 P (t) y P (t) + R(t) tienen elmismo numero de raıces dentro de Ck. Como Q(t) = P (t) + R(t) y P (t) tienerk raıces dentro de Ck entonces Q(t) tiene rk raıces dentro de Ck.
Corolario 4.1 Fijemos m cırculos C1, . . . , Cm que son ajenos por parejas yestan centrados en s1, . . . , sm respectivamente. Aplicando sucesivamente el teo-rema anterior podemos decir que existe ε > 0 tal que para cualquier conjunto
3ver Apendice

32 CAPITULO 4. EL TEOREMA DE HERMITE-BIEHLER...
de numeros ε0, . . . , εn satisfaciendo |εi| < ε ∀ i = 1, . . . , n, Q(s) tiene preci-samente rj ceros dentro de cada cırculo Cj donde
P (t) = a0 + a1t + . . . + antn = an
m∏j=1
(t− sj)kj an 6= 0
Q(t) = (a0 + ε0) + (a1 + ε1)t + . . . + (an + εn)tn
Observacion 4.1 Por el corolario 4.1 y el teorema 4.2 el conjunto de polinomiosHurwitz de grado n, es decir Hn, es un conjunto abierto: si p(t) = a0 + a1t +. . . + antn ∈ Hn entonces existe ε > 0 tal que si |εi| < ε ∀ i = 0, . . . , n entoncesse cumple que Q(t) = (a0 + ε0) + (a1 + ε1)t + . . . + (an + εn)tn ∈ Hn.
4.2.1. Teorema de la interseccion de la frontera
Consideremos una familia de polinomios P (λ, s) que satisfagan la siguientecondicion:
Hipotesis 4.1 P (λ, s) es una familia de polinomios
1. de grado fijo n.
2. continuos con respecto de la variable λ para λ ∈ [a, b].
Ejemplo 4.3 Considerese
P (λ, t) = λtn + (λ + 2)tn−1 + λtn−2 + . . . +
λ + 2, n parλ, n impar
Ahora
1. con λ ∈ [1, 2], P (λ, t) es una familia que satisface la Hipotesis 4.1.
2. con λ ∈ [0, 3], P (λ, t) es una familia que no satisface la hipotesis, puespara λ = 0 se tiene un polinomio de grado menor que n.
Teorema 4.3 (de la interseccion de la frontera) Si P (λ, t) satisface laHipotesis 4.1 y P (a, t) tiene todas sus raıces en C− (P (a, t) ∈ H) y P (b, t)tiene al menos una raız en C+, entonces existe un numero ρ ∈ (a, b] tal que
a) P (ρ, t) tiene todas sus raıces en C− ∪ iR.
b) P (ρ, t) tiene al menos una raız en iR.
Demostracion. Para probar este resultado introducimos el conjunto E denumeros reales r tales que r ∈ (a, b] y que satisfacen la siguiente propiedadP:
∀ r′ ∈ (a, r), P (r′, t) es Hurwitz
Por la observacion 4.1, el conjunto E es no vacıo. Sea ρ = sup E. Este supremoexiste pues E esta acotado superiormente por b. Por ser ρ cota superior de E

4.2. TEOREMAS SOBRE ESTABILIDAD 33
entonces para todo r < ρ, P (r, t) tiene raıces en C−. Tomando el lımite cuandor → ρ se tiene que las raıces de P (ρ, t) estan en C−∪ iR. Por lo tanto se cumpleel inciso a).Si P (ρ, t) tuviera todas sus raıces en C− entonces por el teorema 4.2 se puedeencontrar un ε > 0 tal que si r ∈ [a, ρ + ε] entonces P (r, t) es Hurwitz. Porlo tanto ρ no serıa el supremo. Por lo tanto P (ρ, t) tiene al menos una raız eniR = ∂C−. Con lo anterior queda probado b).
Observacion 4.2 El resultado es mas general pues se puede tomar una parti-cion de los complejos: V ∪W ∪ Z, tal que V, Z son abiertos y W = ∂V = ∂Z,V ∩ Z = ∅. Si P (a, t) tiene todas sus raıces en V y P (b, t) tiene al menos unaraız en Z entonces existe ρ tal que
a) P (ρ, t) tiene sus raıces en V ∪W .
b) P (ρ, t) tiene al menos una raız en W = ∂V .
Ejemplo 4.4 Sean p(t) = t+3 y q(t) = t−2. Considere la familia de polinomios
f(λ, t) = (1− λ)(t + 3) + λ(t− 2), con λ ∈ [0, 1]
Esta familia satisface la Hipotesis 4.1. Ahora
f(0, t) = t + 3 es Hurwitzf(1, t) = t− 2 no es Hurwitz
Por el teorema de la interseccion de la frontera, existe λ ∈ (0, 1) tal que
a) f(λ, t) tiene todas sus raıces en C− ∪ iR. Tomemos por ejemplo λ = 3/5,entonces
f(3/5, t) =25(t + 3) +
35(t− 2) = t
y su raız es 0 ∈ (C− ∪ iR).
b) f(λ, t) tiene al menos una raız en iR. Segun el inciso a) basta con tomarλ = 3/5.
Teorema 4.4 Sea fn(t) una sucesion de polinomios Hurwitz de grado menoro igual a N y supongamos que fn(t) → Q(t). Entonces las raıces de Q(t) estanen C− ∪ iR.
Demostracion. Escribamos
Q(t) = a0 + a1t + . . . + aN tN
fm(t) = am0 + am
1 t + . . . + amN tN
Supongamos que Q(t) tiene una raız t ∈ C+, que es abierto, entonces existe uncırculo C con centro en t tal que que el cırculo y su interior estan completamente
34 CAPITULO 4. EL TEOREMA DE HERMITE-BIEHLER...
contenidos en C+. Por lo tanto, por el teorema 4.2 existe ε > 0 tal que si|εi| < ε∀ i = 0, 1, . . . , N entonces
P (t) = (b0 + ε0) + (b1 + ε1)t + . . . + (bN + εN )tN
tiene al menos una raız dentro del cırculo C y por lo tanto dicha raız esta enC+. Como fn(t) → Q(t) entonces existe fk(t) = ak
0 + ak1t + . . . + ak
N tN tal que|b0 − ak
0 |, |b1 − ak1 |, . . . , |bN − ak
N | < ε. Luego
fk(t) = b0 + (ak0 − b0) + [b1 + (ak
0 − b1)]t + . . . + [bN + (akN − bN )]tN
Entonces fk(t) tiene al menos una raız en C+, pero esto es una contradiccionpues fn(t) es Hurwitz para todo n = 1, . . ..
4.2.2. Principio de Exclusion del cero
Teorema 4.5 (Principio de exclusion del cero) Supongamos que tenemosuna familia f(p, t) de polinomios tal que p ∈ Ω ⊂ Rn donde Ω es arco-conexo. Lafamilia es de grado constante y al menos hay un polinomio Hurwitz. Entoncestoda la familia es Hurwitz si y solo si f(p, iω) 6= 0∀ω ∈ R y ∀ p ∈ Ω.
Demostracion.
⇒): Por el teorema de la fase.
⇐): Tomemos f(q, t) un elemento arbitrario de la familia, probaremos quef(q, t) es Hurwitz. Sabemos que existe al menos un elemento f(q0, t) quees un polinomio Hurwitz. Ya que Ω es arco-conexo existe una trayectoriacontenida en Ω que une a q0 con q. Sea γ : [a, b] → Ω una parametri-zacion de esta trayectoria, es decir γ(a) = q0 y γ(b) = q. Consideremosla subfamilia: f(γ(t), t) = p(λ, t). Asi p(a, t) = f(q0, t) es Hurwitz. Sip(b, t) = f(q, t) no fuera Hurwitz entonces tendrıa una raız en iR o en C+.Si p(b, iω) = f(q, iω) = 0 entonces hay una contradiccion. Si p(b, t) tieneuna raız en C+, entonces por el teorema de interseccion de la fronteraexiste ρ ∈ (a, b] tal que
1. p(ρ, t) tiene sus raıces en C− ∪ iR.
2. al menos una raız esta en iR
Por 2) existe ω0 tal que p(ρ, iω0) = f(γ(ρ), iω0) = 0, pero esto es unacontradiccion. Por lo tanto p(b, t) = f(q, t) es Hurwitz para todo q ∈ Ω.
Ejemplo 4.5 Dado f(t) = t3 + kt + 2t + 3, k > 0, busquemos para que valoresde k resulta Hurwitz el polinomio.Solucion. Calculamos
f(iω) = −iω3 − kω2 + 2iω + 3 = (3− kω2) + iω(2− ω2)

4.3. TEOREMA DE HERMITE-BIEHLER 35
Luego f(iω) = 0 si y solo si
3− kω2 = 0 y ω(2− ω2) = 0
si y solo si
k =32
y ω2 = 2 oω = 0
Entonces hay dos posibilidades:
a) f(t) es Hurwitz ∀ k ∈ (0, 3/2);
b) f(t) es Hurwitz ∀ k ∈ (3/2,∞)
Busquemos un k para el cual f(t) sea Hurwitz, digamos k = 2: f(t) = t3 +2t2 +2t + 3. La matriz de Hurwitz de este polinomio es
H(f) =
2 3 01 2 00 2 3
y ademas
∆1 = 2 > 0, ∆2 = 1 > 0, ∆3 = 3∆3 > 0
Tenemos entonces un elemento de la familia que es Hurwitz (k = 2), entonces,por el principio de exclusion del cero f(t) = t3 + kt2 + 2t + 3 es Hurwitz paratodo k ∈ (3/2,∞).
4.3. Teorema de Hermite-Biehler
Definicion 4.2 Considerar el polinomio real p(t) = a0 +a1t+a2t2 + . . .+antn.
Podemos escribir a p(t) de la siguiente forma
p(t) = (a0 + a2t2 + a4t
4 + . . .) + t(a1 + a3t2 + a5t
4 + . . .)
al evaluar en iω
p(iω) = (a0 − a2ω2 + a4ω
4 − . . .) + iω(a1 − a3ω2 + a5ω
4 − . . .)
Definimospe(ω) = a0 − a2ω
2 + a4ω4 − . . .
po(ω) = a1 − a3ω2 + a5ω
4 − . . .
ppar(t) = a0 + a2t2 + a4t
4 + . . .
pimp(t) = a1t + a3t3 + a5t
5 + . . .
Observacion 4.3 Notese que
ppar(iω) = pe(ω)
pimp(iω) = iωpo(ω)
36 CAPITULO 4. EL TEOREMA DE HERMITE-BIEHLER...
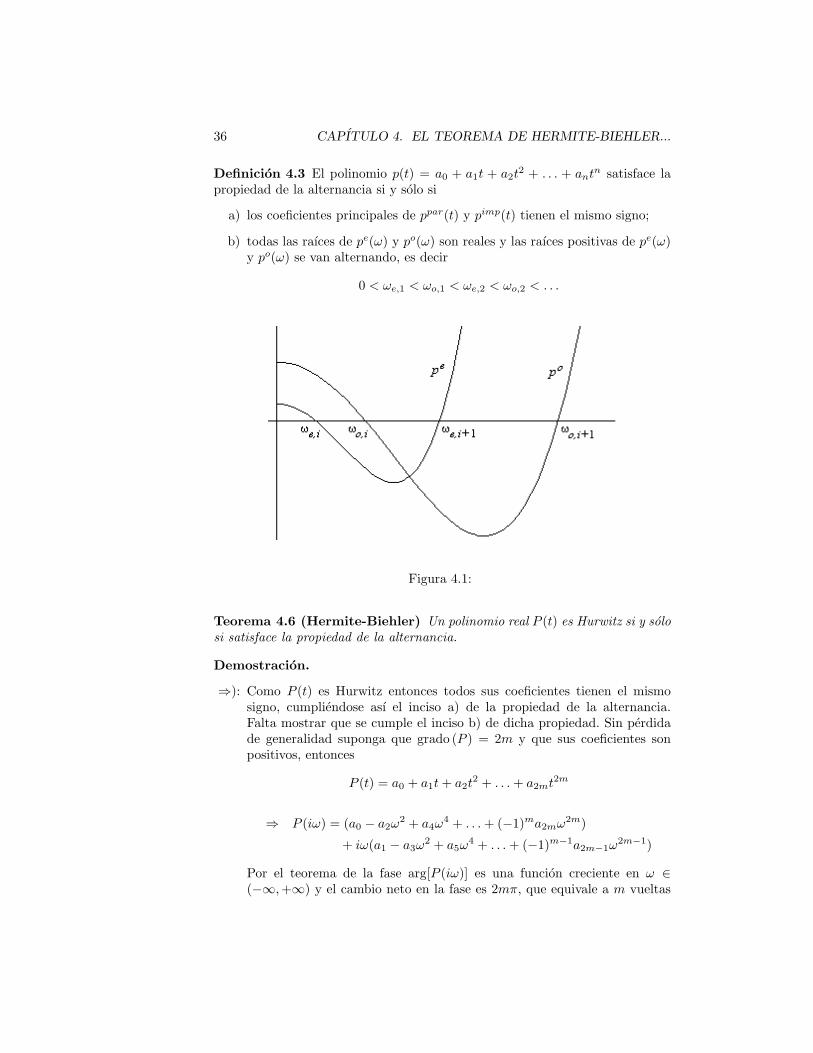
Definicion 4.3 El polinomio p(t) = a0 + a1t + a2t2 + . . . + antn satisface la
propiedad de la alternancia si y solo si
a) los coeficientes principales de ppar(t) y pimp(t) tienen el mismo signo;
b) todas las raıces de pe(ω) y po(ω) son reales y las raıces positivas de pe(ω)y po(ω) se van alternando, es decir
0 < ωe,1 < ωo,1 < ωe,2 < ωo,2 < . . .
Figura 4.1:
Teorema 4.6 (Hermite-Biehler) Un polinomio real P (t) es Hurwitz si y solosi satisface la propiedad de la alternancia.
Demostracion.
⇒): Como P (t) es Hurwitz entonces todos sus coeficientes tienen el mismosigno, cumpliendose ası el inciso a) de la propiedad de la alternancia.Falta mostrar que se cumple el inciso b) de dicha propiedad. Sin perdidade generalidad suponga que grado (P ) = 2m y que sus coeficientes sonpositivos, entonces
P (t) = a0 + a1t + a2t2 + . . . + a2mt2m
⇒ P (iω) = (a0 − a2ω2 + a4ω
4 + . . . + (−1)ma2mω2m)
+ iω(a1 − a3ω2 + a5ω
4 + . . . + (−1)m−1a2m−1ω2m−1)
Por el teorema de la fase arg[P (iω)] es una funcion creciente en ω ∈(−∞,+∞) y el cambio neto en la fase es 2mπ, que equivale a m vueltas

4.3. TEOREMA DE HERMITE-BIEHLER 37
en ω ∈ (−∞,+∞), o bien a m2 vueltas en ω ∈ (0,+∞). Para ω ∈ (0,+∞)
las raıces de P e(ω) y P o(ω) deben estar ordenadas de la siguiente manera:
0 < ωe,1 < ωo,1 < ωe,2 < ωo,2 < . . .
Cuando da una vuelta pasa por dos raıces de P e(ω) y tambien por dosraıces de P o(ω). Como da m/2 vueltas pasa por m raıces de P e(ω) y porm raıces de P o(ω), estas son reales y positivas. Entonces
0 < ωe,1 < ωo,1 < ωe,2 < ωo,2 < . . . < ωo,m−1 < ωe,m
cumpliendose ası el inciso b) de la propiedad de la alternancia. Similar-mente se cumple si grado(P ) = 2m + 1.
⇐): Supongamos que P (t) satisface las condiciones de la alternancia. Sin perdi-da de generalidad supongamos que grado(P ) = 2m y que sus coeficientesson positivos. Entonces
P (t) = a0 + a1t + a2t2 + . . . + a2mt2m
P (iω) = P e(ω) + iωP o(ω)
dondeP e(ω) = a0 − a2ω
2 + a4ω4 + . . . + (−1)ma2mω2m
P o(ω) = a1 − a3ω2 + a5ω
4 + . . . + (−1)m−1a2m−1ω2m−1
Como se satisface la propiedad de la alternancia entonces
0 < ωPe,1 < ωP
o,1 < ωPe,2 < ωP
o,2 < . . . < ωPo,m−1 < ωP
e,m
Tomemos ahora un polinomio Hurwitz arbitrario de grado 2m, por ejemplof(t) = (t+1)2m, el cual escribimos como f(t) = b0+b1t+b2t
2+. . .+b2mt2m.Por la implicacion que ya esta demostrada, f satisface la propiedad de laalternancia, es decir:
0 < ωfe,1 < ωf
o,1 < ωfe,2 < ωf
o,2 < . . . < ωfo,m−1 < ωf
e,m
Notese que f(iω) no tiene raıces imaginarias entonces para cualquier ω ∈ Rse tiene que f(iω) 6= 0. Tomemos ahora λ tal que 0 < λ < 1, entonces
0 < λωPe,1 + (1− λ)ωf
e,1 < λωPo,1 + (1− λ)ωf
o,1 < . . . < λωPe,m + (1− λ)ωf
e,m
Definamos
gparλ (t) = [λa2m + (1− λ)b2m][(λωP
e,1 + (1− λ)ωfe,1)
2 + t2] · · ·· · · [(λωP
e,m + (1− λ)ωfe,m)2 + t2]
gimpλ (t) = [λa2m−1 + (1− λ)b2m−1]t[(λωP
o,1 + (1− λ)ωfo,1)
2 + t2] · · ·
· · · [(λωPo,m−1 + (1− λ)ωf
o,m−1)2 + t2]

38 CAPITULO 4. EL TEOREMA DE HERMITE-BIEHLER...
Considerar la familia de polinomios
g(λ, t) = gparλ (t) + gimp
λ (t) con λ ∈ [0, 1]
Notese que la familia es de grado constante. Ahora para λ = 0
g(0, s) = [(ωfe,1)
2 + t2] · · · [(ωfe,m)2 + t2] + t[(ωf
o,1)2 + t2] · · · [(ωf
o,m−1)2 + t2]
g(0, iω) = fe(ω) + iωfo(ω)
Por lo tantog(0, t) = f(t)
Recordemos que f es Hurwitz, entonces la familia g(λ, t) tiene al menos unelemento que es Hurwitz. Entonces por el principio de exclusion del cerotodos los elementos de la familia son polinomios Hurwitz. En particularcuando λ = 1 se tiene que g(1, t) = P (t).
Ejemplo 4.6 Verificar si los siguientes polinomios son Hurwitz
1. p(t) = t3 + 2t2 + 5t + 3.Calculamos
p(iω) = 3− 2ω2 + iω(5− ω2)
pe(ω) = 3− 2ω2, po(ω) = 5− ω2
Ahorappar(t) = 3 + 2t2, pimp(t) = 5t + t3
Vemos que el inciso a) de la propiedad de la alternancia se satisface. Ahora,verificamos el inciso b)
pe(ω) = 0 ⇔ ω = ±√
3/2
po(ω) = 0 ⇔ ω = ±√
5
Luego, we,1 =√
3/2 y wo,1 =√
5. Entonces tenemos que we,1 < wo,1
satisfaciendose ası el inciso b) de la propiedad de la alternancia. Por lotanto por el teorema 4.6 tenemos que p(t) es Hurwitz.
2. p(t) = t4 + 2t3 + 3t2 + 7t + 2.Tenemos que
ppar(t) = 2 + 3t2 + t4, pimp(t) = 7t + 2t3
Por otra parte
p(iω) = 2− 3ω2 + ω4 + iω(7− 2ω2)
pe(ω) = 2− 3ω2 + ω4, po(ω) = 7− 2ω2
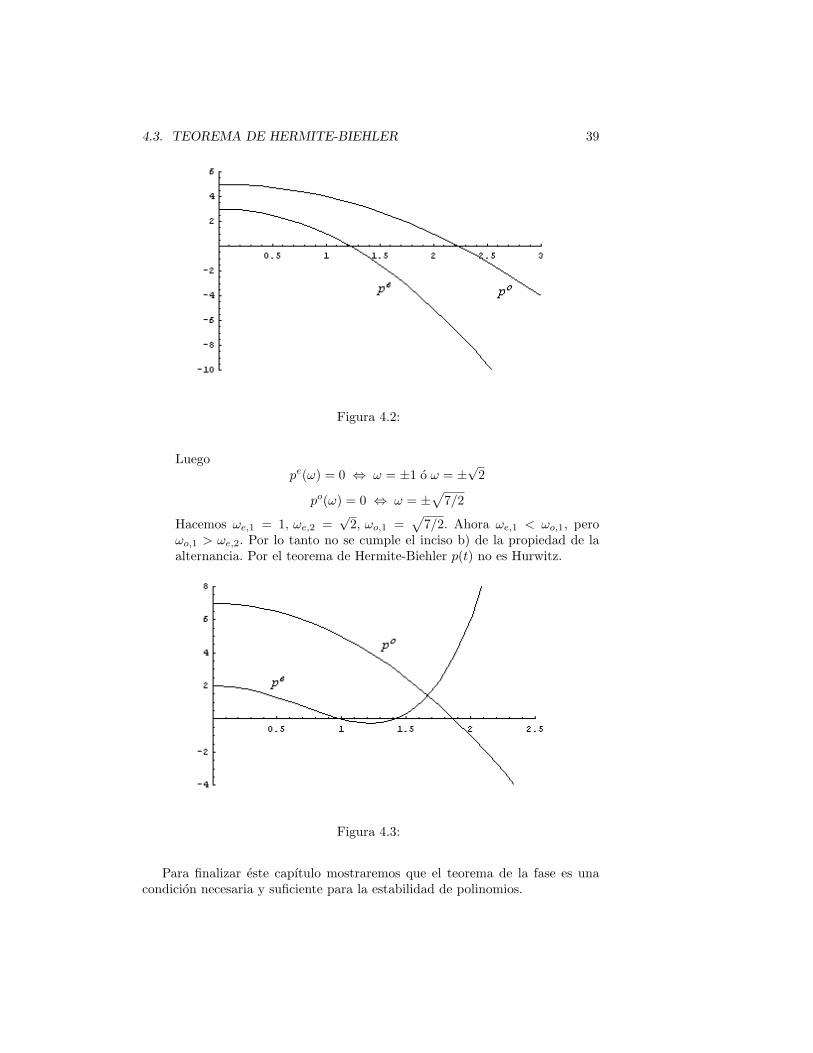
4.3. TEOREMA DE HERMITE-BIEHLER 39
Figura 4.2:
Luegope(ω) = 0 ⇔ ω = ±1 o ω = ±
√2
po(ω) = 0 ⇔ ω = ±√
7/2
Hacemos ωe,1 = 1, ωe,2 =√
2, ωo,1 =√
7/2. Ahora ωe,1 < ωo,1, peroωo,1 > ωe,2. Por lo tanto no se cumple el inciso b) de la propiedad de laalternancia. Por el teorema de Hermite-Biehler p(t) no es Hurwitz.
Figura 4.3:
Para finalizar este capıtulo mostraremos que el teorema de la fase es unacondicion necesaria y suficiente para la estabilidad de polinomios.

40 CAPITULO 4. EL TEOREMA DE HERMITE-BIEHLER...
Teorema 4.7 (Leonhard-Mihailov) Sea P (t) un polinomio de grado n. P (t)es Hurwitz si y solo si arg[P (iω)] (tambien conocida como la fase) es una funcioncontinua y estrictamente creciente en ω ∈ (−∞,+∞) y el cambio neto cumplearg[P (+i∞)]− arg[P (−i∞)] = nπ.
Demostracion.
⇒): Teorema de la fase
⇐): Tenemos queP (iω) = P e(ω) + iωP o(ω)
Sin perdida de generalidad supongase que los coeficientes de P son posi-tivos. Como arg[P (iω)] es creciente entonces las raıces de P e(ω) y P o(ω)se van alternando. Ademas como el cambio neto en la fase es nπ entoncestodas las raıces de P e(ω) y P o(ω) son reales. Por lo tanto P (t) satisfacela propiedad de la alternancia. Por lo tanto P (t) es Hurwitz.
El Teorema de Leonhard-Mihailov y el Teorema de Hermite Biehler tienenel mismo significado. Podemos decir que el Teorema de Leonhard-Mihailov es laversion geometrica mientras que el Teorema de Hermite-Biehler la version alge-braica. La figura 4.4 ilustra el hecho de que arg[P (iω)] es una funcion creciente;esto significa que la grafica de P (iω), en el plano complejo, se va moviendo ensentido contrario a las manecillas del reloj. Otra caracterıstica interesante es quesi n es el grado del polinomio p(t), entonces la grafica de P (iω) da n/2 vueltasal origen.
Figura 4.4:
Ejemplo 4.7 Verificar si el polinomio p(t) = (t + 1)8 es Hurwitz.Solucion. Evaluando en iω tenemos que:
p(iω) = (iω + 1)8

4.3. TEOREMA DE HERMITE-BIEHLER 41
la grafica de p(iω) se muestra en la figura 4.5. Calculamos a continuacion la fasede p(iω):
arg p(iω) = 8 arg(iω + 1) = 8 arctan(ω)
luego 8 arctan(ω) es continua y creciente. Ahora
lımω→+∞
arg p(iω) = lımω→+∞
8 arctan(ω) = 4π
lımω→−∞
arg p(iω) = lımω→−∞
8 arctan(ω) = −4π
Por lo tantoarg[p(+i∞)]− arg[p(−i∞)] = 8π
Entonces, por el teorema de Leonard-Mihailov, p(t) es Hurwitz.
Figura 4.5: grafica de p(iω) = (iω + 1)8 en el plano complejo y un acercamientode la misma.
Ejemplo 4.8 Verificar si el polinomio p(t) = (t + 2)3(t− 1)2 es Hurwitz.Solucion. Calculamos p(iω):
p(iω) = (iω + 2)3(iω − 1)2
y a continuacion la fase:
arg p(iω) = 3 arg(iω + 2) + 2 arg(iω − 1) = 3 arctanω
2+ 2 arctan(−ω)
luego, arg p(iω) es continua pero no es creciente para ω ∈ (−∞,+∞). Por lotanto, aplicando el teorema de Leohnard-Mihailov, p(t) no es Hurwitz. Podemosverificar que no se cumple que el cambio neto en la fase sea 5π:
lımω→+∞
arg p(iω) = lımω→+∞
(3 arctan
ω
2+ 2 arctan(−ω)
)=
π
2

42 CAPITULO 4. EL TEOREMA DE HERMITE-BIEHLER...
analogamentelım
ω→−∞arg p(iω) = −π
2
y finalmentearg[p(+i∞)]− arg[p(−i∞)] = π 6= 5π
El hecho de que p(iω) no sea una funcion creciente se manifiesta en la figura 4.6,al comprobar que el argumento de los puntos sobre la grafica crece y decrece.Mas aun puede observarse que la grafica nunca cruza el eje imaginario y alocurrir esto el argumento no tiene oportunidad de completar una vuelta, demanera creciente, con respecto al origen.
Figura 4.6: grafica de p(iω) = (iω + 2)3(iω − 1)2.
Observacion 4.4 Aparantemente hay un problema practico en aplicar el Teo-rema de Leohnard-Mihailov pues debemos dibujar la curva P (iω) con ω ∈(−∞,+∞). Consideremos el polinomio
P (t) = a0 + a1t + . . . + a2mt2m
y supongamos que deseamos verificar si es Hurwitz. Entonces
P (iω) = a0 − a2ω2 + a4ω
4 + . . . + (−1)ma2mω2m
+ iω(a1 − a3ω2 + a5ω
4 + . . . + (−1)ma2m−1ω2(m−1))
Sea
M = max∣∣∣∣ a0
a2m
∣∣∣∣ , ∣∣∣∣ a2
a2m
∣∣∣∣ , . . . , ∣∣∣∣a2(m−1)
a2m
∣∣∣∣

4.3. TEOREMA DE HERMITE-BIEHLER 43
N = max∣∣∣∣ a1
a2m−1
∣∣∣∣ , ∣∣∣∣ a3
a2m−1
∣∣∣∣ , . . . , ∣∣∣∣a2m−3
a2m−1
∣∣∣∣Si L = max(M,N) y ω es una raız de P e(ω) o P o(ω), entonces por el teorema3.1 se tiene que ω < L+1. Por lo tanto solo necesitamos dibujar la curva P (iω)para valores ω ∈ [−L− 1, L + 1].

Capıtulo 5
Test de estabilidad depolinomios
En este capıtulo desarrollamos un procedimiento basado en el Teorema deHermite-Biehler y en el Teorema de la interseccion de la frontera, para determi-nar cuando un polinomio es Hurwitz. Este procedimiento consiste en determinarsi un polinomio es Hurwitz, verificando si un polinomio de grado menor lo es.De esta manera, aplicando el procedimiento un numero finito de veces, se veri-ficara si un polinomio de grado pequeno es Hurwitz.
Definicion 5.1 Dado el polinomio P (t) = antn + an−1tn−1 + . . . + a1t + a0, si
an−1 6= 0, definimos
Q(t) = an−1tn−1 +
(an−2 −
an
an−1an−3
)tn−2 + an−3t
n−3+
+(
an−4 −an
an−1an−5
)tn−4 + . . . (5.1)
Observacion 5.1
Q(t) =1
an−1
[a2
n−1tn−1 + (an−1an−2 − anan−3)tn−2 + an−1an−3t
n−3+
+(an−1an−4 − anan−5)tn−4 + . . .]
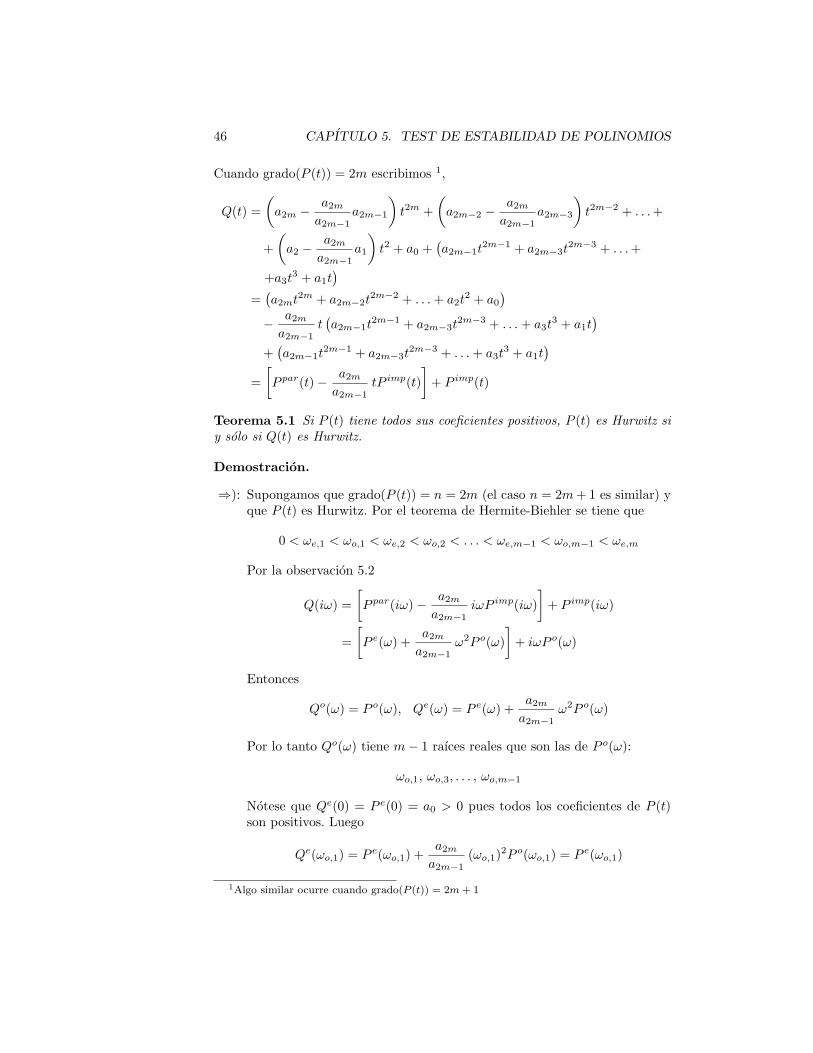
Observacion 5.2 Dado P (t) sabemos que P (t) = P par(t) + P imp(t). Supon-gamos que grado(P (t)) = 2m, entonces
Q(t) =[P par(t)− a2m
a2m−1tP imp(t)
]+ P imp(t)
Analogamente, si grado(P (t)) = 2m + 1 entonces
Q(t) =[P imp − a2m−1
a2mtP par(t)
]+ P par(t)
45
46 CAPITULO 5. TEST DE ESTABILIDAD DE POLINOMIOS
Cuando grado(P (t)) = 2m escribimos 1,
Q(t) =(
a2m − a2m
a2m−1a2m−1
)t2m +
(a2m−2 −
a2m
a2m−1a2m−3
)t2m−2 + . . .+
+(
a2 −a2m
a2m−1a1
)t2 + a0 +
(a2m−1t
2m−1 + a2m−3t2m−3 + . . .+
+a3t3 + a1t
)=(a2mt2m + a2m−2t
2m−2 + . . . + a2t2 + a0
)− a2m
a2m−1t(a2m−1t
2m−1 + a2m−3t2m−3 + . . . + a3t
3 + a1t)
+(a2m−1t
2m−1 + a2m−3t2m−3 + . . . + a3t
3 + a1t)
=[P par(t)− a2m
a2m−1tP imp(t)
]+ P imp(t)
Teorema 5.1 Si P (t) tiene todos sus coeficientes positivos, P (t) es Hurwitz siy solo si Q(t) es Hurwitz.
Demostracion.
⇒): Supongamos que grado(P (t)) = n = 2m (el caso n = 2m + 1 es similar) yque P (t) es Hurwitz. Por el teorema de Hermite-Biehler se tiene que
0 < ωe,1 < ωo,1 < ωe,2 < ωo,2 < . . . < ωe,m−1 < ωo,m−1 < ωe,m
Por la observacion 5.2
Q(iω) =[P par(iω)− a2m
a2m−1iωP imp(iω)
]+ P imp(iω)
=[P e(ω) +
a2m
a2m−1ω2P o(ω)
]+ iωP o(ω)
Entonces
Qo(ω) = P o(ω), Qe(ω) = P e(ω) +a2m
a2m−1ω2P o(ω)
Por lo tanto Qo(ω) tiene m− 1 raıces reales que son las de P o(ω):
ωo,1, ωo,3, . . . , ωo,m−1
Notese que Qe(0) = P e(0) = a0 > 0 pues todos los coeficientes de P (t)son positivos. Luego
Qe(ωo,1) = P e(ωo,1) +a2m
a2m−1(ωo,1)2P o(ωo,1) = P e(ωo,1)
1Algo similar ocurre cuando grado(P (t)) = 2m + 1

47
puesto que ωo,1 es una raız de P o(ω) = Qo(ω); ademas como 0 < ωe,1 <ωo,1 < ωe,2 necesariamente P e(ωo,1) < 0. Siguiendo el razonamiento ante-rior tenemos
Qe(ωo,2) = P e(ωo,2) > 0Qe(ωo,3) = P e(ωo,3) < 0
...Qe(ωo,m−2) = P e(ωo,m−2) tiene el signo de (−1)m−2
Qe(ωo,m−1) = P e(ωo,m−1) tiene el signo de (−1)m−1
Por el teorema del valor intermedio se concluye que Q(t) satisface la pro-piedad de la alternancia. Luego por el teorema de Hermite-Biehler, Q(t)es Hurwitz.
⇐): Supongamos que Q(t) es Hurwitz. Escribimos
P (t) =[Qpar(t) +
a2m
a2m−1tQimp(t)
]+ Qimp(t)
Similarmente se tiene que
P o(ω) = Qo(ω), P e(ω) = Qe(ω)− a2m
a2m−1ω2Qo(ω)
Como Q(t) es Hurwitz entonces satisface la propiedad de la alternancia ycomo P o(ω) = Qo(ω) entonces las raıces de P o(ω) son reales. Utilizandoun razonamiento similar al anterior y aplicando el teorema del valor inter-medio se concluye que P (t) satisface la propiedad de la alternancia. Porlo tanto P (t) es Hurwitz.
El teorema anterior muestra como verificar si un polinomio P (t) es Hurwitzpor medio de la reduccion sucesiva de su grado. Este resultado nos permite darun algoritmo para verificar si un polinomio es o no Hurwitz.
Algoritmo 5.1
1) Hacer P (0)(t) = P (t).
2) Verificar que todos los coeficientes de P (i)(t) sean positivos.
3) Si el polinomio no satisface 2) detener el proceso y entonces P (t) no esHurwitz. En otro caso ir al paso 4).
4) Si grado P (i)(t) ≤ 2 entonces detener el proceso y por lo tanto P (t) esHurwitz. En otro caso construir P (i+1)(t) = Q(t) segun la ecuacion (5.1)y regresar al paso 2).

48 CAPITULO 5. TEST DE ESTABILIDAD DE POLINOMIOS
Observacion 5.3 Es importante notar que para verificar si un polinomio esHurwitz por medio del Test de Estabilidad, dicho polinomio debe satisfacer quetodos sus coeficientes sean positivos.
A continuacion mostraremos un par de ejemplos de como aplicar el algoritmoanterior.
Ejemplo 5.1 Verifiquemos si el polinomio
p(x) = x6 + x5 + 2x4 + x3 + 2x2 + x + 1
es Hurwitz.Solucion. Hacemos
P (0)(x) = x6 + x5 + 2x4 + x3 + 2x2 + x + 1
Ahora construimos P (1)(x) = Q(x) tomando
a5 = 1, a4 = 2, a3 = 1, a2 = 2, a1 = 1, a0 = 1
entonces
P (1)(x) = x5 + (2− 1(1))x4 + x3 + (2− 1(1))x2 + x + (1− 1(0))x0
= x5 + x4 + x3 + x2 + x + 1
Analogamente
P (2)(x) = x4 + (1− 1(1))x3 + x2 + (1− 1(1))x + 1
= x4 + 2x2 + 1
Observar que no todos los coeficientes de P (2)(x) son positivos, ya que los coe-ficientes de x3 y x son cero. Entonces falla el paso 2) del algoritmo, por lo tantop(x) no es Hurwitz.
Ejemplo 5.2 Verifiquemos si el polinomio
q(x) = x5 + 5x4 + 10x3 + 10x2 + 5x + 1
es Hurwitz.Solucion. Hacemos
P (0)(x) = x5 + 5x4 + 10x3 + 10x2 + 5x + 1
Luego construimos P (1)(x):
P (1)(x) = 5x4 +(
10− 15
10)
x3 + 10x2 +(
5− 15
1)
x + 1
= 5x4 + 8x3 + 10x2 +245
x + 1

49
Los coeficientes de P (1)(x) son todos positivos cumpliendose ası el paso 2) delalgoritmo, entonces construimos P (2)(x):
P (2)(x) = 8x3 +(
10− 58
(245
))x2 +
245
x +(
1− 58
0)
= 8x3 + 7x2 +245
x + 1
Vemos que P (2)(x) cumple el paso 2) del algoritmo, entonces construimos acontinuacion P (3)(x):
P (3)(x) = 7x2 +(
245− 8
7(1))
x + 1
= 7x2 +12875
x + 1
Como P (3)(x) es de grado 2 y todos sus coeficientes son positivos entonces, porel paso 4) del algoritmo, podemos concluir que q(x) es Hurwitz 2.
2Aplicando el Corolario 1.1, puede verse que P (3)(x) es Hurwitz puesto que todos suscoeficientes son del mismo signo.


Capıtulo 6
Criterio de Routh
En 1875 Edward J. Routh, usando el Teorema de Sturm y la teorıa de ındicesde Cauchy, elaboro un algoritmo para determinar el numero k de raıces conparte real positiva de un polinomio real. En el caso particular cuando k = 0 estealgoritmo provee un criterio de estabilidad.
Edward John Routh (1831-1907)Nacio en Quebec, Canada. Llego aInglaterra en 1842 y estudio bajo elcuidado de De Morgan en Londres.Routh fue el mas famoso instructoren Cambridge donde publico variostextos de matematicas aplicadas: ATreatise on Dynamics of Rigid Bo-dies (1860), A Treatise on Analy-tic Statistics (1891) y A Treatiseon Dynamics of a Particle (1898).En 1877 Routh recibio el PremioAdams por sus trabajos en estabi-lidad dinamica. Fue miembro de laRoyal Society.
6.1. Indices de Cauchy
Definicion 6.1 El ındice de Cauchy de una funcion racional real R(x) entrelos lımites a y b (denotado Ib
aR(x), a, b ∈ R o a = b = ±∞) es la diferenciaentre el numero de saltos de R(x) desde −∞ hasta +∞ y el numero de saltosdesde +∞ hasta −∞, cuando la variable x cambia desde a hasta b.
Observacion 6.1 Al contar el numero de saltos, los valores extremos a y b noson incluidos.
Observacion 6.2 Notese que si
R(x) =p(x)q(x)
y grado(q(x)) = m, m ∈ N, entonces el numero de saltos es menor o igual a m.Por lo tanto, para cualquier intervalo [a, b], a, b ∈ R
−m ≤ IbaR(x) ≤ m
Ejemplo 6.1 Considerese la funcion racional
R1(x) =1x
+1
x− 1+
1x− 2
Es claro que x = 0, x = 1, x = 2 son asıntotas. La grafica de la funcion semuestra en la figura 1. Notese que en el intervalo [−1, 3] no hay saltos de +∞a −∞ y hay 3 saltos de −∞ a +∞. Por lo tanto:
I3−1R1(x) = (saltos de −∞ a +∞)− (saltos de +∞ a −∞) = 3− 0 = 3
51

52 CAPITULO 6. CRITERIO DE ROUTH
AdemasI∞−∞R1(x) = 3, I4
12R1(x) = 2, I3
32R1(x) = 1
Figura 6.1: grafica de R1(x) = 1x + 1
x−1 + 1x−2
Observacion 6.3 El ındice de Cauchy puede tomar valores negativos.
Ejemplo 6.2 Sea la funcion racional Q(x) = −R1(x). En el intervalo [−∞,∞]hay 3 saltos de −∞ a ∞. Ası I+∞
−∞Q(x) = −3.
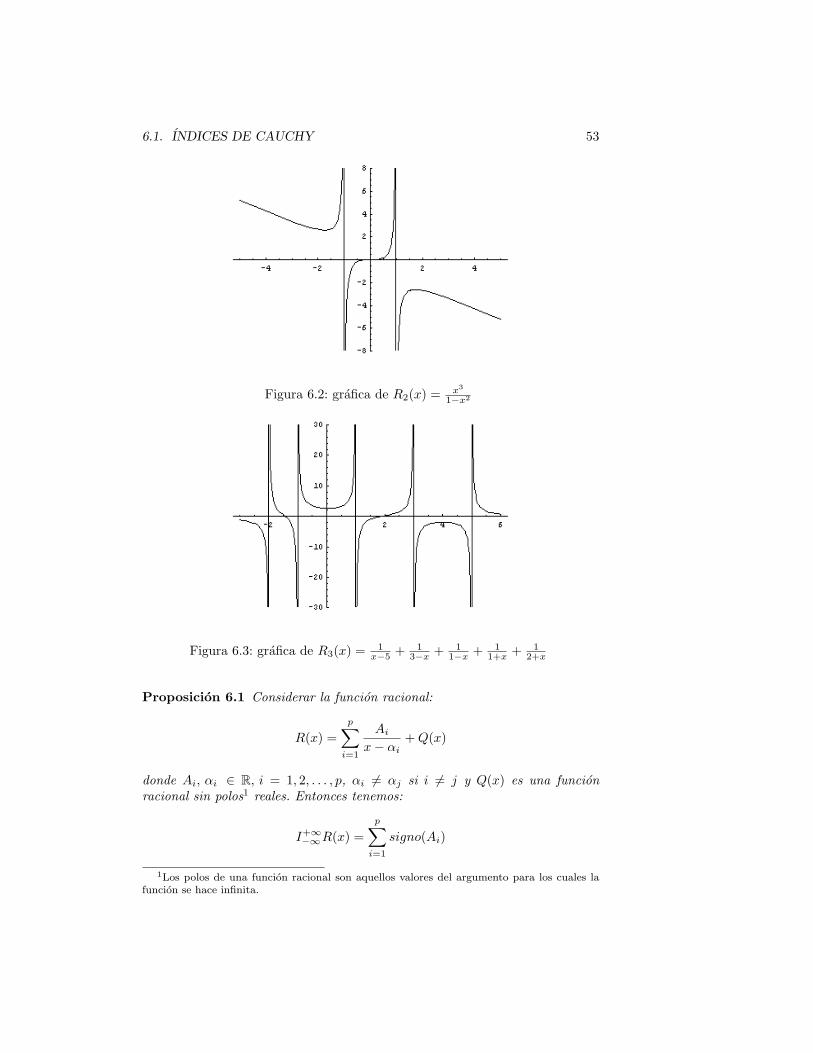
Ejemplo 6.3 Considere la funcion racional
R2(x) =x3
1− x2
Al descomponer en fracciones parciales se tiene
R2(x) = − 12(x− 1)
− 12(x + 1)
− x
Luego I+∞−∞R1(x) = −2 (vease figura 6.2).
Ejemplo 6.4 Sea la funcion racional
R3(x) =1
x− 5+
13− x
+1
1− x+
11 + x
+1
2 + x
Las asıntotas de esta funcion son x = 5, x = 3, x = 1, x = −1, x = −2 (vease
figura 6.3.). Ahora I+∞−∞R3(x) = 3− 2 = 1 pero I
52− 3
2R3(x) = 0
6.1. INDICES DE CAUCHY 53
Figura 6.2: grafica de R2(x) = x3
1−x2
Figura 6.3: grafica de R3(x) = 1x−5 + 1
3−x + 11−x + 1
1+x + 12+x
Proposicion 6.1 Considerar la funcion racional:
R(x) =p∑
i=1
Ai
x− αi+ Q(x)
donde Ai, αi ∈ R, i = 1, 2, . . . , p, αi 6= αj si i 6= j y Q(x) es una funcionracional sin polos1 reales. Entonces tenemos:
I+∞−∞R(x) =
p∑i=1
signo(Ai)
1Los polos de una funcion racional son aquellos valores del argumento para los cuales lafuncion se hace infinita.

54 CAPITULO 6. CRITERIO DE ROUTH
Demostracion. 1x−α tiene un salto en αi de −∞ a +∞, para un i fijo. Entonces,
para i fijo:
Ai
x− αitiene un salto
de −∞ a +∞, si Ai > 0de +∞ a −∞, si Ai < 0
es decir
Ai
x− αitiene un salto
de −∞ a +∞, si signo(Ai) = +1de +∞ a −∞, si signo(Ai) = −1
Entonces podemos escribir
I+∞−∞R(x) =
p∑i=1
signo(Ai)
Proposicion 6.2 Si f(x) = a0(x − α1)n1(x − α2)n2 · · · (x − αm)nm es un po-linomio con coeficientes reales, con αi 6= αj , i 6= j, i, j = 1, 2, . . . ,m, y si entresus raıces α1, α2, . . . , αm solo las primeras p son reales, entonces Ib
af ′(x)f(x) (a < b)
es igual al numero de raıces reales distintas de f(x),es decir es igual a p, en elintervalo (a, b).
Demostracion. Por la proposicion A.1. tenemos:
f ′(x)f(x)
=m∑
k=1
nk
x− αk=
p∑k=1
nk
x− αk+ Q(x) (6.1)
donde Q(x) es una funcion racional sin polos reales. A partir de (6.1), el indicede Cauchy
Iba
f ′(x)f(x)
(a < b)
es igual al numero de raıces reales distintas de f(x) en el intervalo (a, b) ya quepor lo dicho anteriormente 1
x−αitiene un salto de αi de −∞ a +∞, por lo que
ni
1−αitiene un salto de −∞ a +∞ en αi, 1 ≤ i ≤ p, ni ≥ 1.
Observacion 6.4 Una funcion real racional R(x) puede ser siempre represen-tada en la forma
R(x) =p∑
i=1
(A
(i)1
x− αi+ . . . +
A(i)ni
(x− αi)ni
)+ R1(x)
con α, A ∈ R, A(i) 6= 0, i = 1, 2, . . . , p y R1(x) no tiene polos reales.
Ahora,I+∞−∞R(x) =
∑ni impar
signo A(i)ni

6.1. INDICES DE CAUCHY 55
pues en las raıces de multiplicidad par no hay saltos de −∞ a +∞ ni de +∞ a−∞, ya que dada
F (x) =Ai
(x− αi)2nn ∈ N
si Ai > 0 entonceslım
x→α−i
F (x) = lımx→α+
i
F (x) = +∞
si Ai < 0 entonceslım
x→α−i
F (x) = lımx→α+
i
F (x) = −∞
por ello no se contabilizan al calcular el ındice de Cauchy. Ahora consideremos
G(x) =Bi
(x− αi)2n+1n ∈ N
si x < αi,
signo
(1
(x− αi)2n+1
)= (−1)2n+1 = −1
entonces, si x > αi, el signo de G(x) es (−1)2n+1Bi = −Bi, i.e., el signo de G(x)coincide con signo (−Bi). Analogamente, si x > ai el signo de G(x) coincide consigno (Bi).De aquı que
IbaR(x) =
∑a<αi<bni impar
signo A(i)ni
(a < b)
6.1.1. Teorema de Sturm
Uno de los metodos para calcular el ındice IbaR(x) esta basado en el teorema
de Sturm.
Definicion 6.2 Considere una sucesion de polinomios reales
f1(x), f2(x), . . . , fm(x) (6.2)
Decimos que dicha sucesion es una sucesion de Sturm en (a, b) si se cumplenlas siguientes propiedades:
1. para toda x ∈ (a, b), si cualquier fk(x) se anula entonces las dos fun-ciones adyacentes fk−1(x) y fk+1(x) tienen valores distintos de cero yson de signo opuesto, i.e., para a < x < b si fk(x) = 0 entoncesfk−1(x)fk+1(x) < 0;
2. la ulitma funcion fm(x) no se anula en el intervalo (a, b), i.e. fm(x) 6= 0para a < x < b.
Denotemos por V (x) el numero de variaciones de signo en (6.2) para un valorfijo de x. Entonces tenemos el siguiente resultado.
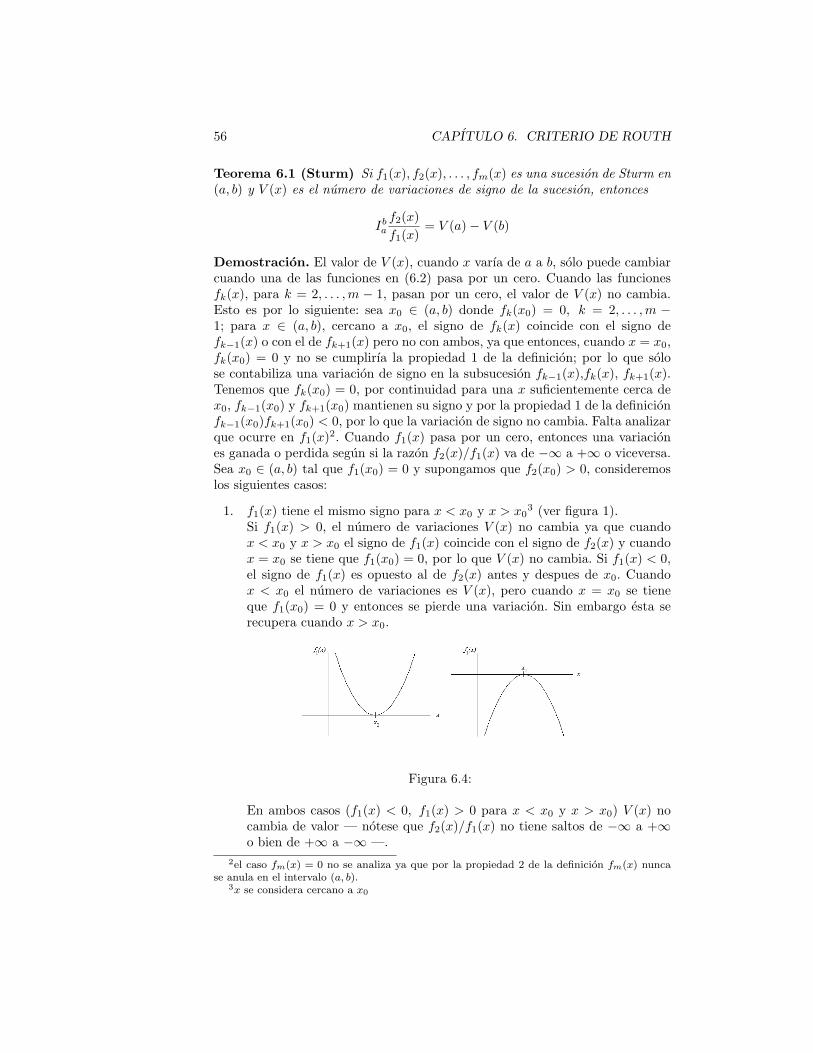
56 CAPITULO 6. CRITERIO DE ROUTH
Teorema 6.1 (Sturm) Si f1(x), f2(x), . . . , fm(x) es una sucesion de Sturm en(a, b) y V (x) es el numero de variaciones de signo de la sucesion, entonces
Iba
f2(x)f1(x)
= V (a)− V (b)
Demostracion. El valor de V (x), cuando x varıa de a a b, solo puede cambiarcuando una de las funciones en (6.2) pasa por un cero. Cuando las funcionesfk(x), para k = 2, . . . ,m − 1, pasan por un cero, el valor de V (x) no cambia.Esto es por lo siguiente: sea x0 ∈ (a, b) donde fk(x0) = 0, k = 2, . . . ,m −1; para x ∈ (a, b), cercano a x0, el signo de fk(x) coincide con el signo defk−1(x) o con el de fk+1(x) pero no con ambos, ya que entonces, cuando x = x0,fk(x0) = 0 y no se cumplirıa la propiedad 1 de la definicion; por lo que solose contabiliza una variacion de signo en la subsucesion fk−1(x),fk(x), fk+1(x).Tenemos que fk(x0) = 0, por continuidad para una x suficientemente cerca dex0, fk−1(x0) y fk+1(x0) mantienen su signo y por la propiedad 1 de la definicionfk−1(x0)fk+1(x0) < 0, por lo que la variacion de signo no cambia. Falta analizarque ocurre en f1(x)2. Cuando f1(x) pasa por un cero, entonces una variaciones ganada o perdida segun si la razon f2(x)/f1(x) va de −∞ a +∞ o viceversa.Sea x0 ∈ (a, b) tal que f1(x0) = 0 y supongamos que f2(x0) > 0, consideremoslos siguientes casos:
1. f1(x) tiene el mismo signo para x < x0 y x > x03 (ver figura 1).
Si f1(x) > 0, el numero de variaciones V (x) no cambia ya que cuandox < x0 y x > x0 el signo de f1(x) coincide con el signo de f2(x) y cuandox = x0 se tiene que f1(x0) = 0, por lo que V (x) no cambia. Si f1(x) < 0,el signo de f1(x) es opuesto al de f2(x) antes y despues de x0. Cuandox < x0 el numero de variaciones es V (x), pero cuando x = x0 se tieneque f1(x0) = 0 y entonces se pierde una variacion. Sin embargo esta serecupera cuando x > x0.
Figura 6.4:
En ambos casos (f1(x) < 0, f1(x) > 0 para x < x0 y x > x0) V (x) nocambia de valor — notese que f2(x)/f1(x) no tiene saltos de −∞ a +∞o bien de +∞ a −∞ —.
2el caso fm(x) = 0 no se analiza ya que por la propiedad 2 de la definicion fm(x) nuncase anula en el intervalo (a, b).
3x se considera cercano a x0
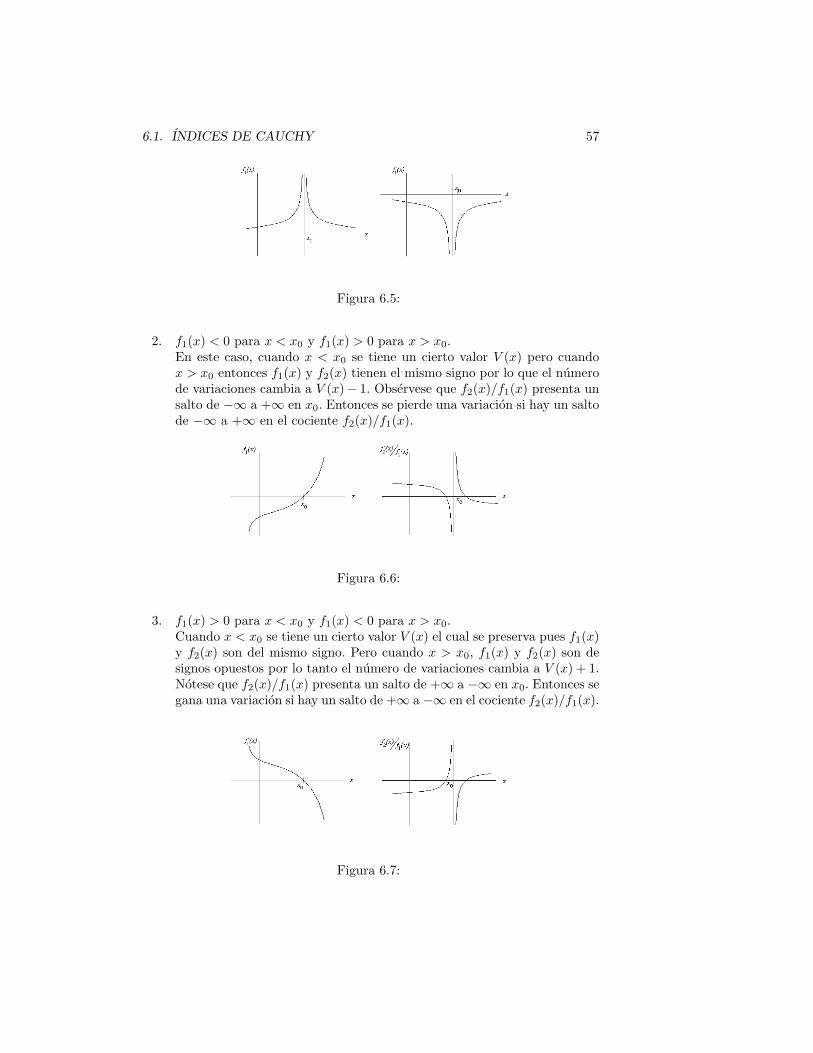
6.1. INDICES DE CAUCHY 57
Figura 6.5:
2. f1(x) < 0 para x < x0 y f1(x) > 0 para x > x0.En este caso, cuando x < x0 se tiene un cierto valor V (x) pero cuandox > x0 entonces f1(x) y f2(x) tienen el mismo signo por lo que el numerode variaciones cambia a V (x)− 1. Observese que f2(x)/f1(x) presenta unsalto de −∞ a +∞ en x0. Entonces se pierde una variacion si hay un saltode −∞ a +∞ en el cociente f2(x)/f1(x).
Figura 6.6:
3. f1(x) > 0 para x < x0 y f1(x) < 0 para x > x0.Cuando x < x0 se tiene un cierto valor V (x) el cual se preserva pues f1(x)y f2(x) son del mismo signo. Pero cuando x > x0, f1(x) y f2(x) son designos opuestos por lo tanto el numero de variaciones cambia a V (x) + 1.Notese que f2(x)/f1(x) presenta un salto de +∞ a −∞ en x0. Entonces segana una variacion si hay un salto de +∞ a −∞ en el cociente f2(x)/f1(x).
Figura 6.7:

58 CAPITULO 6. CRITERIO DE ROUTH
Un analisis similar se presenta considerando f2(x) < 0.Por lo anterior, la sucesion de Sturm tiene una cierta variacion V (a) cuandox inicia su recorrido a traves de (a, b). V (a) se incrementa o disminuye segunlos saltos del cociente f2(x)/f1(x), ya que como dijimos anteriormente V (a) nocambiara cuando las funciones fk(x) se anulen (k = 2, . . . ,m− 1). Por lo tanto
V (b) = V (a)− (# saltos de −∞ a +∞) + (# saltos de +∞ a −∞)
= V (a)− Iba
f2(x)f1(x)
Observacion 6.5 Multipliquemos todos los terminos de una sucesion de Sturmpor un mismo polinomio arbitrario d(x), entonces
f1(x)d(x), f2(x)d(x), . . . , fm(x)d(x)
La sucesion de polinomios ası obtenida es llamada sucesion de Sturm generali-zada.
El teorema de Sturm sigue siendo valido para sucesiones generalizadas ya que
Iba
f2(x)d(x)f1(x)d(x)
= Iba
f2(x)f1(x)
= V (a)− V (b)
Si f(x) y g(x) son cualesquiera dos polinomios, donde el grado de f(x) esmenor que el grado de g(x), entonces podemos siempre construir una suce-sion generalizada de Sturm por medio del algoritmo de Euclides, iniciando conf1(x) ≡ f(x), f2(x) ≡ g(x). Si denotamos por −f3(x) el residuo de dividir f1(x)por f2(x), −f4(x) el residuo de la division de f2(x) por f3(x), etc., entonces setiene la sucesion de identidades:
f1(x) = q1(x)f2(x)− f3(x)f2(x) = q2(x)f3(x)− f4(x)
...fk−1(x) = qk−1(x)fk(x)− fk+1(x) (6.3)
fk(x) = qk(x)fk+1(x)− fk+2(x)fk+1(x) = qk+1(x)fk+2(x)− fk+3(x)
...fm−1(x) = qm−1(x)fm(x)
donde el ultimo residuo fm(x) que no es identicamente cero es el maximo comundivisor de f(x), g(x) y de todas las funciones de la sucesion anterior.
Proposicion 6.3 Si fm(x) 6= 0, con a < x < b, entonces la sucesion (6.3) esuna sucesion de Sturm.

6.1. INDICES DE CAUCHY 59
Demostracion. Debemos verificar las propiedades 1) y 2) de la definicion. Seaa < x0 < b arbitraria y supongamos que fk(x0) = 0, entonces a partir de que:
fk−1(x0) = qk−1fk(x0)− fk−1(x0)
⇒ fk−1(x0) = −fk+1(x0) 6= 0
pues de no ser ası entonces fm(x0) = 0 y esto contradice la hipotesis. Por lotanto la propiedad 1) y 2) se cumplen.
Sean x0, x1, . . . , xr ∈ (a, b) todas las raıces de fm(x), entonces
fm(x) = (x− x0)(x− x1) · · · (x− xr)s(x)
Hagamos d(x) = (x− x0)(x− x1) · · · (x− xr), entonces en (6.3)
fm−1(x) = d(x)s(x)qm−1(x)
Notese que al hacer esta sustitucion d(x) aparece como factor en la sucesion(6.3). A continuacion construyamos la siguiente sucesion
f1(x)d(x)
,f2(x)d(x)
, . . . ,fm−1(x)
d(x),fm(x)d(x)
esta es una sucesion de Sturm, ademas
f1(x)d(x)
= q1(x)f2(x)d(x)
− f3(x)d(x)
...fm−1(x)
d(x)= qm−1(x)
fm(x)d(x)
Observacion 6.6 En el caso de que fm(x) no tenga raıces se toma d(x) = 1
Proposicion 6.4 Sean x0, x1, . . . , xr raıces de fm(x) en (a, b) y definimosd(x) = (x− x0)(x− x1) · · · (x− xr). Considerar la sucesion
f1(x)d(x)
,f2(x)d(x)
, . . . ,fm−1(x)
d(x),fm(x)d(x)
Entonces esta sucesion es una sucesion de Sturm.
Demostracion. Notese que fm(x)d(x) 6= 0 pues en caso contrario no habrıa suce-
sion. Luego, la propiedad 1) se cumple por la proposicion 6.3.
Corolario 6.1 f1, . . . , fm es una sucesion generalizada de Sturm.
En conclusion, el ındice de toda funcion racional R(x) puede ser determinadopor el Teorema de Sturm. Escribimos
R(x) = Q(x) +g(x)f(x)

60 CAPITULO 6. CRITERIO DE ROUTH
donde Q(x), f(x), g(x) son polinomios y el grado de g(x) no es mayor que elde f(x). Si construimos la sucesion generalizada de Sturm para f(x) y g(x) setiene que:
Iba R(x) = Ib
a
(Q(x) +
g(x)f(x)
)= Ib
a
g(x)f(x)
6.2. Algoritmo de Routh
El problema de Routh consistıa en determinar el numero k de raıces deun polinomio real f(z) en la mitad derecha del plano complejo (Re z > 0).Analizaremos primero el caso donde f(z) no tiene raıces sobre el eje imaginario.Sobre el semiplano derecho construimos un cırculo de radio R con su centro enel origen y consideramos el dominio acotado por este semicırculo y el segmentodel eje imaginario. Denotemos esta region por C. Para R suficientemente grande
Figura 6.8: region C
todos los ceros de f(z) con parte real positiva caen dentro de esta region. Si
f(z) = a0
n∏i=1
(z − zi)
con zi un cero de f(z), entonces
∆ arg f(z) =n∑
i=1
∆ arg (z − zi)
Si el punto zi cae dentro del dominio en cuestion, entonces ∆ arg (z− zi) = 2π;si zi cae fuera del dominio, entonces ∆ arg (z − zi) = 0. Por lo tanto arg f(z)se incrementa 2kπ cuando R va en la direccion positiva a lo largo del contornodel dominio. Por otro lado analizamos el incremento de arg f(z) a lo largo del

6.2. ALGORITMO DE ROUTH 61
semicırculo de radio R cuando R →∞. Consideremos
f(z) = a0zn + b0z
n−1 + a1zn−2 + b1z
n−3 + . . . (6.4)
donde a0 6= 0, y la variable z en su forma polar
z = Reiθ, −π
2≤ θ ≤ π
2
entoncesf(z) = a0R
neinθ + b0Rn−1ei(n−1)θ + . . .
⇒ f(z)|θ= π2
= a0Rnei nπ
2 + b0Rn−1ei nπ
2 + . . .
analogamente
f(z)|θ=−π2
= a0Rne−i nπ
2 + b0Rn−1e−i nπ
2 + . . .
Luego escribimos
f(z)|θ= π2
= a0Rn[cos nπ
2 + i sen nπ2
]+ b0R
n−1[cos (n−1)π
2 + i sen (n−1)π2
]+ . . .
entonces
arg(f(z)|θ= π
2
)= arctan
a0Rn sen nπ
2 + b0Rn−1 sen (n−1)π
2 + . . .
a0Rn cos nπ2 + b0Rn−1 cos (n−1)π
2 + . . .
tomando lımite
lımR→∞
arg(f(z)|θ= π
2
)= arctan
sen nπ2
cos nπ2
= arctan(tan
nπ
2
)=
nπ
2
Analogamente tenemos que
lımR→∞
arg(f(z)|θ=−π
2
)= −nπ
2
Por lo tanto
lımR→∞
(arg f(z)|θ= π
2− arg f(z)|θ=−π
2
)=
nπ
2−(−nπ
2
)= nπ
Por el principio del argumento
∆Carg f(z) = 2kπ
pero∆Carg f(z) = ∆C+
1arg f(z) + ∆C−2
arg f(z)

62 CAPITULO 6. CRITERIO DE ROUTH
donde C+1 es el semicırculo de radio R (recorrido en sentido positivo) y C−2 es la
recta sobre el eje imaginario (recorrida en sentido negativo). Luego
2kπ = nπ + ∆C−2arg f(z)
⇒ ∆C−2arg f(z) = 2kπ − nπ
⇒ ∆C+2arg f(z) = nπ − 2kπ = (n− 2k)π
Por lo tanto el incremento del arg f(z) a lo largo del eje imaginario (recorridoen sentido positivo), cuando R →∞, es (n− 2k)π
∆+∞−∞arg f(z) = (n− 2k)π (6.5)
Tomemos la ecuacion (6.4), luego al evaluarla en iω obtenemos
f(iω) = a0(iω)n + b0(iω)n−1 + a1(iω)n−2 + b1(iω)n−3 + . . .
si n es par definimos
U(ω) = (−1)n2 (a0ω
n − a1ωn−2 + a2ω
n−4 − . . .)
V (ω) = (−1)n2−1(b0ω
n−1 − b1ωn−3 + b2ω
n−5 − . . .)
y si n es impar definimos
U(ω) = (−1)n−1
2 (b0ωn−1 − b1ω
n−3 + b2ωn−5 − . . .)
V (ω) = (−1)n−1
2 (a0ωn − a1ω
n−2 + a2ωn−4 − . . .)
entonces escribimosf(iω) = U(ω) + iV (ω)
La funcion f(iω) describe una curva en el plano complejo, ademas
arg f(iω) = arctanV (ω)U(ω)
= arc cotU(ω)V (ω)
Si el grado de f es impar, tomemos el cociente U(ω)/V (ω), con U, V como sedefinieron anteriormente para n impar. Notese que en este caso
lımω→∞
U(ω)V (ω)
= 0
Ahora, U(ω)/V (ω) se indetermina en las raıces de V (ω). Cuando la curva pasapor una raız de V (ω), entonces f(iω) = U(ω), i.e. f(iω) cruza el eje real yU(ω)/V (ω) presenta un salto 4. Cuando V (ω) se anula en algun ωk y la orien-tacion de la curva es positiva, entonces el salto es de −∞ a +∞ en ωk; pero siel sentido de la curva es negativo, entonces el salto es de +∞ a −∞ en ωk (ver
4Podemos decir tambien que U(ω)/V (ω) cuenta el numero de cruces del eje real.

6.2. ALGORITMO DE ROUTH 63
figura 6.9). Sabemos que el ındice de Cauchy mide el numero de saltos de unafuncion; la curva que describe f(iω) en un intervalo (ωj , ωk) puede o no cruzarvarias veces el eje real, y cada cruce incrementa o disminuye el valor del ındiceIωkωj
U(ω)V (ω) dependiendo del sentido de la curva. Notese entonces que el ındice de
Cauchy Iωkωj
U(ω)V (ω) aumenta en dos necesariamente cuando el arg f(iω) ha dado
una vuelta al origen. Es decir la curva puede cruzar varias veces el eje real sindarle una vuelta completa al origen, mientras esto ocurra Iωk
ωj
U(ω)V (ω) aumentara o
disminuira en uno su valor; pero cuando la curva complete una vuelta al origen,es decir el argumento se incremente en 2π, entonces el ındice habra aumentadodos unidades. Contrariamente si el argumento disminuye 2π entonces el ındiceIωkωj
U(ω)V (ω) disminuye en dos unidades.
Figura 6.9: Saltos de −∞ a +∞
Figura 6.10: Saltos de +∞ a −∞
Analogamente si el grado de f es par, tomamos el cociente V (ω)/U(ω) y en estecaso
lımω→∞
V (ω)U(ω)
= 0
Dicho cociente se indetermina en las raıces de U(ω) y los saltos de −∞ a +∞ yde +∞ a −∞ se presentan en el eje imaginario. El comportamiento del ındicede Cauchy Iωk
ωj
V (ω)U(ω) para el intervalo (ωj , ωk) es similar al anterior.
Generalizando los resultados de la discusion anterior tenemos que
1π
∆+∞−∞f(iω) =
I+∞−∞
U(ω)V (ω) para lım
ω→∞U(ω)V (ω) = 0 (n impar)
−I+∞−∞
V (ω)U(ω) para lım
ω→∞V (ω)U(ω) = 0 (n par)
(6.6)

64 CAPITULO 6. CRITERIO DE ROUTH
Haciendo uso de la ecuaciones (6.5) y (6.6) tenemos
I+∞−∞
U(ω)V (ω)
= n− 2k n impar
−I+∞−∞
V (ω)U(ω)
= n− 2k n par
Es decir
I+∞−∞
b0ωn−1 − b1ω
n−3 + b2ωn−5 − . . .
a0ωn − a1ωn−2 + a2ωn−4 − . . .= n− 2k
−I+∞−∞ − b0ω
n−1 − b1ωn−3 + b2ω
n−5 − . . .
a0ωn − a1ωn−2 + a2ωn−4 − . . .= n− 2k
Por lo tanto, para todo n (par o impar)
I+∞−∞
b0ωn−1 − b1ω
n−3 + b2ωn−5 − . . .
a0ωn − a1ωn−2 + a2ωn−4 − . . .= n− 2k (6.7)
Observacion 6.7 La expresion (6.7) se obtuvo bajo la suposicion de que f(z)no tiene raıces sobre el eje imaginario. Sin embargo dicha expresion puede ge-neralizarse considerando que f(z) tiene k raıces en la mitad derecha del planoy s raıces sobre el eje imaginario, y en este caso escribimos 5:
I+∞−∞
b0ωn−1 − b1ω
n−3 + b2ωn−5 − . . .
a0ωn − a1ωn−2 + a2ωn−4 − . . .= n− 2k − s
Para determinar el ındice del lado izquierdo de la igualdad (6.7) usamos elteorema de Sturm. Hacemos
f1(ω) = a0ωn − a1ω
n−2 + . . .
f2(ω) = b0ωn−1 − b1ω
n−3 + . . .
y construimos una sucesion generalizada de Sturm
f1(ω), f2(ω), f3(ω), . . . , fm(ω) (6.8)
por medio del algoritmo de Euclides. Consideramos el caso en el que m = n+1,caso regular. En este caso el grado de cada funcion en la sucesion (6.8) es unomenos que la que le precede y la ultima funcion fm(ω) es de grado cero. De esteultimo hecho se tiene que el caso regular es una sucesion de Sturm ordinaria.
De el algoritmo de Euclides se sigue que
f1(ω) =a0
b0ωf2(ω)− f3(ω)
⇒ f3(ω) =a0
b0ωf2(ω)− f1(ω) = c0ω
n−2 − c1ωn−4 + c2ω
n−6 − . . .
5La prueba de esta generalizacion puede consultarse en Gantmacher (vol. II).

6.2. ALGORITMO DE ROUTH 65
donde
c0 = a1 −a0
b0b1 =
b0a1 − a0b1
b0,
c1 = a2 −a0
b0b2 =
b0a2 − a0b2
b0, (6.9)
c2 = a3 −a0
b0b3 =
b0a3 − a0b3
b0,
...
Analogamente
f4(ω) =b0
c0ωf3(ω)− f2(ω) = d0ω
n−3 − d1ωn−5 + d2ω
n−7 − . . .
donde
d0 = b1 −b0
c0c1 =
c0b1 − b0c1
c0,
d1 = b2 −b0
c0c2 =
c0b2 − b0c2
c0, (6.10)
d2 = b3 −b0
c0c3 =
c0b3 − b0c3
c0,
...
Los coeficientes de los polinomios restantesf5(ω), . . . , fn+1(ω) son similarmentedeterminados. Ahora, cada polinomio
f1(ω), f2(ω), f3(ω), . . . , fn+1(ω) (6.11)
es una funcion par o impar y dos polinomios adyacentes siempre tienen paridadopuesta. Con dichos coeficientes formamos el esquema de Routh:
a0, a1, a3, . . .b0, b1, b3, . . .c0, c1, c3, . . .d0, d1, d3, . . ....
......
(6.12)
Las formulas (6.9) y (6.10) muestran como obtener cada fila de este esquema.El caso regular esta caracterizado por el hecho de que en la aplicacion repetidade esta regla no aparece un cero en la sucesion
b0, c0, d0, . . .
En la figura 6.11 se muestra el esqueleto del esquema de Routh para un npar (n = 6) y un n impar (n = 7). Los elementos del esquema son indicados

66 CAPITULO 6. CRITERIO DE ROUTH
Figura 6.11: n = 6 (izq.) n = 7 (der.)
mediante puntos. En el caso regular, los polinomios f1(ω) y f2(ω) tienen comomaximo comun divisor fn+1(ω) = cte. 6= 0. Por lo tanto estos polinomios, y a suvez U(ω) y V (ω) no se anulan simultaneamente, i.e. f(iω) = U(ω) + iV (ω) 6= 0para ω real.
Cuando aplicamos el teorema de Sturm en el intervalo (−∞,+∞) al ladoderecho de la formula (6.7) obtenemos que
V (−∞)− V (+∞) = n− 2k (6.13)
Observacion 6.8 El signo de fk(ω) para ω = +∞ coincide con el signo delcoeficiente del termino de mayor grado. Cuando ω = −∞ el signo de fk(ω)difiere por un factor de (−1)n−k+1 (k = 1, 2, . . . , n + 1).
Entonces segun la observacion anterior
V (+∞) = V (a0, b0, c0, d0, . . .)
yV (−∞) = V (a0,−b0, c0,−d0, . . .)
Luego, a partir de que hay n elementos en la sucesion (6.11) se tiene que
V (+∞) + V (−∞) = n
por lo queV (−∞) = n− V (+∞) (6.14)
Entonces, a partir de las ecuaciones (6.13) y (6.14)
k = V (a0, b0, c0, d0, . . .) (6.15)
Ası hemos probado el siguiente teorema
Teorema 6.2 (Routh) El numero de raıces de un polinomio real f(z) en elsemiplano derecho (Re z > 0) es igual al numero de variaciones de signo de laprimera columna del esquema de Routh.

6.2. ALGORITMO DE ROUTH 67
Ahora consideramos el caso donde todas las raıces de f(z) tienen parte realnegativa, es decir el caso estable. En este caso al construir para los polinomiosf1(ω) y f2(ω) las sucesion generalizada de Sturm dada en (6.11), como k = 0entonces a partir de la formula (6.13) se tiene
V (−∞)− V (+∞) = n
pero 0 ≤ V (−∞) ≤ m − 1 ≤ n y 0 ≤ V (+∞) ≤ m − 1 ≤ n. Por lo tanto laigualdad anterior solo es posible cuando m = n+1 (caso regular) y V (+∞) = 0y V (−∞) = m− 1 = n.
Corolario 6.2 (Criterio de Routh) Todas las raıces del polinomio real f(z)tienen parte real negativa si y solo si al realizar el algoritmo de Routh todos loselementos de la primera columna del esquema de Routh son diferentes de ceroy del mismo signo
Ejemplo 6.5 Verifiquemos si p(t) = t4 + t3 + 7t2 + 2t + 3 es Hurwitz, constru-yendo el Esquema de Routh.Solucion. Evaluamos p(t) en iω
p(iω) = ω4 − 7ω2 + 3 + i(ω3 − 2ω)
en este caso tenemos que
a0 = 1, a1 = 7, a2 = 3
b0 = 1, b1 = 2
Ahora formamos el esquema de Routh haciendo uso de (6.9) y de (6.10)
c0 =b0a1 − a0b1
b0=
1(7)− 1(2)1
= 5
c1 =b0a2 − a0b2
b0=
1(3)− 1(2)1
= 1
d0 =c0b1 − b0c1
c0=
5(2)− 1(1)5
=95
e0 =d0c1 − c0d1
d0=
(9/5)(1)− 5(0)9/5
= 1
a0 a1 a3 1 7 0b0 b1 1 2c0 c1 5 1d0 9/5e0 1
Como los elementos de la primera columna del esquema de Routh son del mismosigno entonces todas las raıces de p(t) tienen parte real negativa, i.e. p(t) esHurwitz.

68 CAPITULO 6. CRITERIO DE ROUTH
Ejemplo 6.6 Verifiquemos si el polinomio q(t) = t5 + 2t4 − 2t3 − 8t2 − 9t− 2es Hurwitz.Solucion. Evaluamos q en iω
q(iω) = 2ω4 + 8ω2 − 2 + i(ω5 + 2ω3 − 9ω)
= 2ω4 − (−8)ω2 + (−2) + i(ω5 − (−2)ω3 + (−9)ω)
Hacemos:a0 = 2, a1 = −8, a2 = −2
b0 = 1, b1 = −2, b2 = −9
luego
c0 =b0a1 − a0b1
b0=
1(−8)− 2(−2)1
= −4
c1 =b0a2 − a0b2
b0=
1(−2)− 2(−9)1
= 16
d0 =c0b1 − b0c1
c0=−4(−2)− 1(16)
−4= 2
d1 =c0b2 − b0c2
c0=−4(−9)− 1(0)
−4= −9
e0 =d0c1 − c0d1
d0=
(2)(16)− (−4)(−9)2
= −2
f0 =e0d1 − d0e1
e0=−2(−9)− 2(0)
−2= −9
a0 a1 a3 2 −8 0b0 b1 b3 1 −2 0c0 c1 −4 16d0 d1 2 −9e0 −2f0 −9
Observese que los elementos de la primera columa del esquema de Routh no sondel mismo signo. Por lo tanto q(t) no es Hurwitz.
Capıtulo 7
Criterio de Lienard-Chipart
Routh obtuvo su algoritmo aplicando el Teorema de Sturm al calculo delındice de Cauchy de una fraccion racional especial (ver expresion (6.7)). De losdos polinomios de esta fraccion — numerador y denominador — uno contienepotencias pares de la variable ω, mientras que el otro solo potencias impares.En este capıtulo explicaremos el metodo de formas cuadraticas — como lo hizoHermite — y su aplicacion para el problema de Routh-Hurwitz. Por medio deeste metodo se obtiene una expresion para el ındice de una funcion racional ar-bitraria en terminos de los coeficientes del numerador y del denominador. Partede la teorıa de formas cuadraticas desarrollada en este capitulo sera necesariapara establecer el criterio de Lienard-Chipart.
Albert Henri Chipart (1871-1941).Nacio en Armentieres (Fra.). Fueprofesor y director de la Escuela deMinerıa de Saint-Etienne. Fue sub-director de la Escuela de Minerıa deParıs. Hizo investigaciones en teorıagirostatica de la luz, polarizacion ro-tacional natural y estabilidad de sis-temas electrodinamicos. En 1923 re-cibio el Premio Montyon de Mecani-ca de la Academia de Ciencias deFrancia.
7.1. Formas cuadraticas
Usaremos primero las formas cuadraticas en el problema de determinar elnumero de raıces reales distintas de un polinomio. En la solucion de este pro-blema nos restringiremos al caso donde f(z) es un polinomio real.
Observacion 7.1 Suponiendo que f(z) = u(z) + iv(z) es un polinomio com-plejo 1, cada raız real de f(z) anula simultaneamente a u(z) y v(z). Por lo tantoel polinomio complejo f(z) tiene las mismas raıces reales que el polinomio d(z),el maximo comun divisor de u(z) y v(z).
Definicion 7.1 Una forma cuadratica es un polinomio homogeneo de segundogrado con n variables x1, x2, . . . , xn.
Ejemplo 7.1
1. el polinomio f(x1, x2, x3) = x1x2 + 3x2x3 + x21 + 4x2
3 es una forma cua-dratica.
2. el polinomio f(x1, x2) = x21x2 − x2
2 + 3x31 no es una forma cuadratica.
1u(z) y v(z) son polinomios reales.
69

70 CAPITULO 7. CRITERIO DE LIENARD-CHIPART
Una forma cuadratica siempre tiene la representacion
n∑i,j=1
aijxixj
con aij = aji, i, j = 1, 2, . . . , n. Con los coeficientes aij formamos la matrizsimetrica de coeficientes A = (aij), es decir
A =
a11 a12 a13 . . . a1n
a12 a22 a23 . . . a2n
a13 a23 a33 . . . a3n
......
.... . .
...a1n a2n a3n . . . ann
Si denotamos
x =
x1
x2
...xn
la matriz columna y denotamos la forma cuadratica por
A(x, x) =n∑
i,j=1
aijxixj (7.1)
entonces podemos escribir
A(x, x) = xT Ax = (x1, x2, . . . , xn)
a11 a12 a13 . . . a1n
a12 a22 a23 . . . a2n
a13 a23 a33 . . . a3n
......
.... . .
...a1n a2n a3n . . . ann
x1
x2
...xn
(7.2)
Observacion 7.2 Si A = (aij) es una matriz simetrica de numeros reales,entonces la forma (7.1) es llamada real. En este capıtulo solo abordaremos loconcerniente a formas cuadraticas reales.
Observacion 7.3 El rango de la matriz A es tambien llamado el rango de laforma cuadratica.
Una forma cuadratica real A(x, x) puede ser representada de infinitas manerasusando la siguiente expresion:
A(x, x) =r∑
i=1
aiX2i (7.3)

7.1. FORMAS CUADRATICAS 71
donde ai 6= 0 (i = 1, 2, . . . , r) y
Xi =n∑
k=1
αkjxk (i = 1, 2, . . . , r)
son formas lineales reales linealmente independientes respecto a las variablesx1, x2, . . . , xn con r ≤ n 2.
Observacion 7.4 El numero de cuadrados en la representacion (7.3) es siempreigual al rango de la forma 3.
Definicion 7.2 Sea s0, s1, . . . , s2n−2 una sucesion de numeros. Con esos nume-ros construımos una forma cuadratica en n variables:
S(x, x) =n−1∑i,j=0
si+jxixj
Esta forma es llamada forma de Hankel. La matriz S = (si+j)n−1i,j=0 correspon-
diente a dicha forma es llamada matriz de Hankel :
S =
s0 s1 s2 · · · sn−1
s1 s2 s3 · · · sn
s2 s3 s4 · · · sn+1
......
.... . .
...sn−1 sn sn+1 · · · s2n−2
Sea f(z) un polinomio real con raıces α1, α2, . . . , αq distintas de multiplicidadesn1, n2, . . . , nq respectivamente, escribimos
f(z) = a0(z − α1)n1(z − α2)n2 · · · (z − αq)nq (7.4)
con a0 6= 0, ai 6= aj para i 6= j y i, j = 1, 2, . . . , q. Introducimos a continuacionlas denominadas sumas de Newton
sp =p∑
j=1
nj αpj
con p = 0, 1, 2, . . . . Con esas sumas construimos la forma de Hankel, Sn(x, x):
Sn(x, x) =n−1∑i,j=0
si+jxixj (7.5)
donde n es un entero arbitrario tal que n ≥ q.
2en el apendice (Teorema A.4) se enuncia una propiedad importante de la expresion (7.3).3puede verse este resultado en el apendice (Teorema A.5).

72 CAPITULO 7. CRITERIO DE LIENARD-CHIPART
Definicion 7.3 La diferencia entre el numero de cuadrados positivos y el nume-ro de cuadrados negativos en la representacion de A(x, x) es llamada la signaturade la forma A(x, x).
Observacion 7.5 El rango de A(x, x) es igual al numero de cuadrados positivosmas el numero de cuadrados negativos, mientras que la signatura de A(x, x) esla diferencia de dichos cuadrados. Si denotamos por r, π, ν, σ al rango, a loscuadrados positivos, a los cuadrados negativos y la signatura, respectivamente,entonces:
r = π + ν, σ = π − ν
Observese ademas queσ = r − 2ν
Teorema 7.1 Sea f(z) como en la expresion (7.4). Entonces:
a) el numero de todas las raıces distintas de f(z) es igual al rango de la formaSn(x, x);
b) el numero de todas las raıces reales distintas de f(z) es igual a la signaturade la forma Sn(x, x).
Demostracion. De la expresion (7.5) se obtiene la siguiente representacion:
Sn(x, x) =q∑
i=1
ni (x0 + αix1 + α2i x2 + · · ·+ αn−1
i xn−1)2 (7.6)
Para cada raız αi de f(z) existe el correspondiente cuadrado de una forma li-neal Zi = x0 + αix1 + α2
i x2 + · · · + αn−1i xn−1, con i = 1, 2, . . . , q. Las formas
Z1, Z2, . . . , Zq son linealmente independientes, ya que sus coeficientes forman lamatriz de Vandermonde, V = (ak
i ), cuyo rango es igual al numero de distintasαi, en este caso q. Por lo tanto haciendo uso de la observacion 7.4, el rango dela forma Sn(x, x) es q.En la representacion (7.5) para cada raız real αi existe el correspondiente cua-drado positivo. Para cada par de raıces complejas conjugadas αi y αi existenlas correspondientes dos formas complejas conjugadas:
Zi = Pi + iQi, Zi = Pi − iQi
los correspondientes terminos en (7.5) dan juntos un cuadrado positivo y uncuadrado negativo:
niZ2i + niZ
2
i = 2niP2i − 2niQ
2i
Observese que la forma cuadratica Sn(x, x) esta representada como una sumaalgebraica de q cuadrados de formas reales Zi (para αi real) y Pi y Qi (paraαi compleja). Esas formas son linealmente independientes ya que el rango deSn(x, x) es q. Por lo tanto la signatura de Sn(x, x), i.e., la diferencia entre elnumero de cuadrados positivos y negativos, es igual al numero de raıces realesdistintas ai.

7.2. MATRICES DE HANKEL INFINITAS DE RANGO FINITO 73
Usando el Teorema de Jacobi 4, relativo a formas cuadraticas, obtenemosdel teorema el siguiente corolario.
Corolario 7.1 El numero de raıces reales distintas de un polinomio real f(z)es igual al exceso de permanencias de signo sobre las variaciones de signo en lasucesion
1, s0,
∣∣∣∣ s0 s1
s1 s2
∣∣∣∣ , . . . ,
∣∣∣∣∣∣∣∣∣s0 s1 · · · sn−1
s1 s2 · · · sn
......
. . ....
sn−1 sn · · · s2n−2
∣∣∣∣∣∣∣∣∣donde sp (p = 0, 1, . . .) son sumas de Newton para f(z) y n es cualquier enterono menor que el numero de raıces distintas q de f(z) 5.
Observacion 7.6 Esta regla para determinar el numero de raıces reales distin-tas es aplicable solo cuando todos los numeros en la sucesion son diferentes decero.
Corolario 7.2 Todas las formas Sn(x, x), para n = q, q+1, . . ., tienen el mismorango y la misma signatura.
Al aplicar el teorema 7.1 (o el corolario 7.1) para determinar el numero deraıces reales distintas podemos tomar n como el grado de f(z).
El numero de raıces reales distintas de un polinomio real f(z) es igual alındice I+∞
−∞f ′(z)f(z)
6. Por lo tanto al usar el corolario 7.1 y 7.2 y la observacion 7.5obtenemos la siguiente expresion:
I+∞−∞
f ′(z)f(z)
= n− 2V
1, s0
∣∣∣∣ s0 s1
s1 s2
∣∣∣∣ , . . . ,
∣∣∣∣∣∣∣∣∣s0 s1 · · · sn−1
s1 s2 · · · sn
......
. . ....
sn−1 sn · · · s2n−2
∣∣∣∣∣∣∣∣∣
donde sp =
∑qi=1 niα
pi (p = 0, 1, . . .) son sumas de Newton y n es el grado de
f(z).En las siguientes secciones estableceremos una formula para determinar el
ındice de una fraccion racional arbitraria. La informacion sobre matrices deHankel infinitas que requeriremos seran dadas en la siguiente seccion.
7.2. Matrices de Hankel infinitas de rango finito
Notacion. En la matriz de Hankel dada en la definicion 7.2, denotemos lasucesion de menores principales de Sn por D1, D2, . . . , Dn, es decir
Dp = |si+j |p−1i,j=0
con p = 1, 2, . . . , n.4ver Apendice5en particular, n puede ser usada como el grado de f(z)6ver Proposicion 6.2 (capıtulo 6)

74 CAPITULO 7. CRITERIO DE LIENARD-CHIPART
Definicion 7.4 Sea s0, s1, s2, . . . una sucesion de numeros complejos. Con di-cha sucesion construimos una matriz infinita simetrica
S =
s0 s1 s2 · · ·s1 s2 s3 · · ·s2 s3 s4 · · ·...
......
...
la cual es llamada matriz de Hankel infinita.
Los menores principales de S serıan
Dp = |si+j |p−1i,j=0 (p = 1, 2, . . .)
Junto con las matrices de Hankel infinitas consideraremos las matrices de Hankelfinitas Sn = (si+j)n−1
i,j=0 y sus formas de Hankel asociadas.Las matrices infinitas pueden tener rango finito o infinito. En el ultimo ca-
so, dichas matrices tienen menores distintos de cero. El siguiente teorema dauna condicion necesaria y suficiente para generar un matriz Hankel infinitaS = (si+j)∞i,j=0 de rango finito a partir de una sucesion infinita de numeross0, s1, s2, . . .
Teorema 7.2 La matriz infinita S = (si+j)∞i,j=0 es de rango finito r si y solosi existen r numeros α1, α2, . . . , αr tales que
sq =r∑
k=1
αk sq−k (q = r, r + 1, . . .) (7.7)
y r es el menor numero que tiene esta propiedad.
Demostracion.
⇒): Si la matriz S = (si+j)∞i,j=0 tiene rango finito, entonces sus primeras r +1filas R1, R2, . . . , Rr+1 son linealmente dependientes. Entonces, existe unnumero m ≤ r tal que R1, R2, . . . , Rm son linealmente independientes yRm+1 es una combinacion lineal de ellas, es decir
Rm+1 =m∑
k=1
αk Rk =m∑
k=1
αk Rm−k+1
Consideremos a continuacion las filas Rq+1, Rq+2, . . . , Rq+m+1, donde qes cualquier entero no negativo. A partir de como fue construida S, lasfilas Rq+1, Rq+2, . . . , Rq+m+1 se obtienen de R1, R2, . . . , Rm+1 medianteun proceso en el cual los primeros q elementos de R1, R2, . . . , Rm+1 son
7.2. MATRICES DE HANKEL INFINITAS DE RANGO FINITO 75
omitidos 7 . Por lo tanto
Rq+m+1 =m∑
k=1
αk Rq+m−k+1 (q = 0, 1, 2, . . .)
Ası, la (m + 1)-esima fila de S puede ser expresada linealmente en termi-nos de las m filas precedentes y por lo tanto en terminos de las m filaslinealmente independientes. Ahora, el numero de filas linealmente inde-pendientes en una matriz rectangular es igual a su rango (sin importar siel numero de filas es o no finito). Por lo tanto, el rango de S es r = m. Ladependencia lineal
Rq+m+1 =m∑
k=1
αk Rq+m−k+1
despues de reemplazar m por r y escribirla en notacion mas convenienteproduce la expresion
sq =r∑
k=1
αk sq−k
⇐): Si se satisface la expresion (7.7) entonces cada fila (o columna) de S esuna combinacion lineal de las primeras r filas (columnas). Por lo tantotodos los menores de S cuyo orden excedan r son cero y S es a lo mas derango r. Si el rango fuera menor que r, entonces como mostramos en lanecesidad, existirıan expresiones de la forma (7.6) con un valor menor quer. Pero esto contradice la segunda condicion del teorema.
Corolario 7.3 Si la matriz de Hankel infinita S = (si+j)∞i,j=0 es de rango finitor, entonces
Dr = |si+j |r−1i,j=0 6= 0
7Consideremos la fila Rq+m+1 con q = 0, 1, 2, . . .. Luego
Rq+m+1 = (sq+m, sq+m+1, sq+m+2, . . .)
= (
m∑k=1
αksq+m−k,
m∑k=1
αksq+m+1−k,
m∑k=1
αksq+m+2−k, . . .)
= (α1sq+m−1 + . . . + αmsq , α1sq+m + . . . + αmsq+1, . . .)
= α1(sq+m−1, sq+m, . . .) + α2(sq+m−2, sq+m−1, . . .) + · · ·+ αm(sq , sq+1, . . .)
= α1Rq+m + α2Rq+m−1 + · · ·+ αmRq + 1
Observese que:Rm+1 es combinacion lineal de R1, . . . , Rm, cuando q = 0.Rm+2 es combinacion lineal de R2, . . . , Rm+1 y por tanto tambien lo es de R1, . . . , Rm, cuandoq = 1.Y ası sucesivamente.

76 CAPITULO 7. CRITERIO DE LIENARD-CHIPART
Observacion 7.7 Para matrices de Hankel finitas de rango r la desigualdadDr 6= 0 no necesariamente es cierta. Por ejemplo
S2 =(
0 00 k
)con k 6= 0, es de rango 1, pero D1 = 0.
A continuacion explicaremos ciertas conexiones importantes entre las matri-ces de Hankel infinitas y las funciones racionales. Sea
R(z) =g(z)h(z)
una funcion racional propia, donde
h(z) = a0zm + . . . + am (a0 6= 0)
g(z) = b1zm−1 + b2z
m−2 + . . . + bm
Escribimos la expansion de R(z) en series de potencias negativas de z
R(z) =g(z)h(z)
=s0
z+
s1
z2+
s2
z3+ . . . (7.8)
bajo estas consideraciones tenemos el siguiente teorema.
Teorema 7.3 La matriz S = (si+j)∞i,j=0 es de rango finito si y solo si la sumade la serie
R(z) =s0
z+
s1
z2+
s2
z3+ . . .
es una funcion racional de z. En este caso el rango de S es el mismo que elnumero de polos de R(z), contando cada polo con su multiplicidad.
Demostracion.
⇐): Si todos los polos de R(z) se encuentran en el cırculo |z| ≤ a, entonces ellado derecho de la expansion en series:
R(z) =s0
z+
s1
z2+
s2
z3+ . . .
converge para |z| > a. Ahora, multipliquemos ambos lados de (7.8) porh(z):
(a0zm +a1z
m−1 + . . .+am)(s0
z+
s1
z2+ . . .
)= b1z
m−1 +b2zm−2 + . . .+bm
igualando coeficientes de potencias iguales de z en ambos lados de la iden-tidad, obtenemos el siguiente sistema de relaciones:
a0s0 = b1
a0s1 + a1s0 = b0
...a0sm−1 + a1sm−2 + . . . + am−1s0 = bm
(7.9)

7.3. INDICE DE UNA FUNCION RACIONAL ARBITRARIA 77
a0sq + a1sq−1 + . . . + ams0 = 0 (q = m,m + 1, . . .) (7.10)
Haciendoαk = −ak
a0(k = 1, 2, . . . ,m)
podemos escribir las relaciones (7.10) en la forma (7.7), haciendo r =m. Por lo tanto, por el teorema 7.2, la matriz de Hankel infinita S =(si+j)∞i,j=0, formada a partir de los coeficientes s0, s1, s2, . . ., es de rangofinito.
⇒): Si la matriz S = (si+j)∞i,j=0 es de rango finito r, entonces las relaciones en(7.7) se cumplen, y pueden ser escritas en la forma (7.10), haciendo m = r.Entonces, por la forma en que estan definidos los numeros b1, b2, . . . , bm
en las ecuaciones (7.9) tenemos la expansion:
b1zm−1 + b2z
m−2 + . . . + bm
a0zm + a1zm−1 + . . . + am=
s0
z+
s1
z2+
s2
z3+ . . .
Sin perdida de generalidad, si a0 = 1 entonces se tiene que
αk = −ak (k = 1, 2, ...,m)
por tanto, el menor grado m del denominador para el cual se cumple laexpansion es el menor entero para el cual se satisfacen las relaciones (7.7).Entonces este mınimo valor de m es el rango de S, es decir m = r.
7.3. Indice de una funcion racional arbitraria
Supongamos que R(z) es una funcion racional dada. Escribimos su expansionen series de potencias descendente de z:
R(z) = s−u−1zu + . . . + s−2z + s−1 +s0
z+
s1
z2+ . . . (7.11)
La sucesion de coeficientes de potencias negativas de z
s0, s1, s2, . . .
determina una matriz de Hankel infinita S = (si+j)∞i,j=0. Con lo anterior, hemosestablecido la correspondencia
R(z) ∼ S
Observacion 7.8 A dos funciones racionales cuya diferencia es un polinomio 8
les corresponde la misma matriz S. Esto es porque la funcion entera no admiteexpansion con potencias negativas, entonces necesariamente las dos funcionesracionales tienen en comun las potencias negativas en su expansion en series.
8y por lo tanto es una funcion entera

78 CAPITULO 7. CRITERIO DE LIENARD-CHIPART
Sin embargo, no a toda matriz S = (si+j)∞i,j=0 le corresponde la misma fun-cion racional. Como vimos en la seccion anterior, a una matriz infinita S lecorresponde una funcion racional si y solo si es de rango finito. Este rango esigual al numero de polos de R(z), i.e., al grado del denominador h(z) en lafraccion reducida g(z)/h(z) = R(z). Por medio de la expansion (7.11) tenemosuna correspondencia uno a uno entre las funciones racionales propias R(z) y lasmatrices de Hankel S = (si+j)∞i,j=0 de rango finito.
Mencionamos a continuacion algunas propiedades de la correspondencia:
1) Si R1(z) ∼ S1 y R2 ∼ S2, entonces para numeros arbitrarios c1, c2:
c1R1(z) + c2R2(z) ∼ c1S1 + c2S2
En lo siguiente, consideraremos el caso donde los coeficientes del numera-dor y del denominador de R(z) son funciones enteras de un parametro α;R es entonces un funcion racional de z y α. A partir de la expansion (7.11)se sigue en este caso que los numeros s0, s1, s2, . . ., i.e., los elementos deS, dependen de α 9 .
2) Diferenciando (7.11) termino a termino con respecto a α, se tiene que siR(z, α) ∼ S(α), entonces ∂R
∂α ∼∂S∂α , donde
∂S
∂α=(
∂si+j
∂α
)∞i,j=0
y S = (si+j)∞i,j=0
Consideremos a continuacion la expansion de R(z) en fracciones parciales
R(z) = Q(z) +q∑
k=1
[A
(k)1
z − αk+
A(k)2
(z − αk)2+ . . . +
A(k)νk
(z − αk)νk
](7.12)
donde Q(z) es un polinomio; en lo siguiente, mostraremos como construir lamatriz S correspondiente a R(z) a partir de los numeros α y A. Para dichoproposito consideramos primero la funcion racional 1
z−α . Entonces
1z − α
=1z
+α
z2+
α2
z3+ . . . =
∞∑p=0
αp
zp+1
9escribimos a R como
R(z, α) =b1(α)zm−1 + . . . + bm(α)
a0(α)zm + a1(α)zm−1 + . . . + am(α)
y a partir de (7.9)
a0(α)s0 = b1(α)a0(α)s1 + a1(α)s0 = b0(α)
...a0(α)sm−1 + a1(α)sm−2 + . . . + am−1(α)s0 = bm(α)

7.3. INDICE DE UNA FUNCION RACIONAL ARBITRARIA 79
y la matriz correspondiente es:
Sα =
s0(α) s1(α) s2(α) · · ·s1(α) s2(α) s3(α) · · ·s2(α) s3(α) s4(α) · · ·
......
.... . .
=
1 α α2 · · ·α α2 α3 · · ·α2 α3 α4 · · ·...
......
. . .
Dicha matriz la podemos escribir abreviadamente como
Sα = (αi+j)∞i,j=0
Tenemos entonces la siguiente relacion:
1z − α
∼ (αi+j)∞i,j=0
Ahora, la forma de Hankel, Sα,n(x, x), asociada con esta matriz es
Sα,n(x, x) =n−1∑i,j=0
si+1(α)xixj =n−1∑i,j=0
αi+jxixj = (x0 + αx1 + . . . + αn−1xn−1)2
Tomemos a continuacion
R(z) = Q(z) +q∑
k=1
A(k)
z − αk
si tenemos que
Q(z) ∼ S,1
z − αk∼ Sα,k
entonces por la propiedad 1), tenemos que
R(z) ∼q∑
k=1
A(k)Sα,k
para simplificar, hacemos
S =q∑
k=1
A(k)Sα,k
Notese que
S =q∑
k=1
A(k)Sα,k =
(q∑
k=1
A(k)αi+jk
)∞i,j=0
La correspondiente forma cuadratica de S es:
Sn(x, x) =q∑
k=1
A(k)(x0 + αkx1 + . . . + αn−1k xn−1)2

80 CAPITULO 7. CRITERIO DE LIENARD-CHIPART
Para proceder al caso general, primero diferenciamos la relacion
1z − α
∼ S = (ai+j)∞i,j=0
m− 1 veces termino por termino 10. Ası, por ejemplo, para la funcion racional
1z − α
=1z
+α
z2+
α2
z3+
α3
z4+ . . .
le corresponde la matriz
S(0)α =
1 α α2 α3 · · ·α α2 α3 α4 · · ·α2 α3 α4 α5 · · ·
...
Luego a
∂
∂α
(1
z − α
)=
1z2
+2α
z3+
3α2
z4+
4α3
z5+ . . . =
1(z − α)2
le corresponde la matriz
S(1)α =
0 1 2α 3α2 · · ·1 2α 3α2 4α3 · · ·2α 3α2 4α3 5α4 · · ·
...
es decir
S(1)α =
∂
∂αS(0)
α
aplicando las propiedades 1) y 2) tenemos la siguiente relacion
1(z − α)2
∼ S(1)α
Nuevamente, tenemos que a
∂
∂α
(1
(z − α)2
)=
2z3
+6α
z4+
12α2
z5+
20α3
z4+ . . . =
2(z − α)3
le corresponde la matriz
S(2)α =
0 0 2 6α · · ·0 2 6α 12α2 · · ·2 6α 12α2 20α3 · · ·
...
10en general:
∂m−1
∂αm−1
(1
z − α
)=
(m− 1)!
(z − α)m

7.3. INDICE DE UNA FUNCION RACIONAL ARBITRARIA 81
es decir
S(2)α =
∂
∂αS(1)
α
y nuevamente, aplicando las propiedades 1) y 2) tenemos que
1(z − α)3
∼ 12
S(2)α
Siguiendo este razonamiento, se tiene que en general
1(z − α)m
∼ 1(m− 1)!
∂m−1Sα
∂αm−1=((
i + j
m− 1
)αi+j−m+1
)∞i,j=0
(7.13)
con (i + j
m− 1
)= 0 para i + j < m− 1
En conclusion, tenemos que
1(z − α)m
∼ 1(m− 1)!
∂m−1Sα
∂αm−1
entoncesA
(k)m
(z − α)m∼ A
(k)m
(m− 1)!∂m−1Sα
∂αm−1
Regresando al caso general, como
q∑k=1
A(k)
z − αk∼
q∑k=1
A(k)Sαk
si R(z) tiene la expansion (7.12), entonces por la propiedad 1)
R(z) ∼ S =q∑
k=1
(A
(k)1 + A
(k)2
∂
∂αk+ . . . +
1(νk − 1)!
Akνk
∂νk−1
∂ανk−1k
)Sαj
(7.14)
luego por la relacion (7.13)
S =
(q∑
k=1
[A
(k)1 αi+j
k + A(k)2
(i+j1
)αi+j−1
k + . . . + A(k)νk
(i+j
νk−1
)αi+j−νk+1
])∞i,j=0
La correspondiente forma de Hankel Sn(x, x) =∑n−1
i,j=0 si+jxixj es:
Sn(x,x)=q∑
k=1
(A
(k)1 +A
(k)2
∂∂αk
+...+ 1(νk−1)! A
kνk
∂νk−1
∂ανk−1k
)(x0+αkx1+...+αn−1
k xn−1)2

82 CAPITULO 7. CRITERIO DE LIENARD-CHIPART
Observacion 7.9 Si consideramos la funcion racional
P (z) =1
zm=
0z
+0z2
+ . . . +0
zm−1+
1zm
+0
zm+1+ . . .
(observese que s0 = . . . = sm−2 = 0), entonces a dicha funcion, le correspondela matriz
S(m)α =
0 · · · 0
sm−1︷︸︸︷1 0 · · ·
0 · · · 1 0 0 · · ·...
......
...1 · · · 0 0 0 · · ·
y por (7.13):
S(m)α =
1(m− 1)!
∂m−1Sα
∂αm−1
Bajo las anteriores consideraciones podemos enunciar y probar el siguienteteorema.
Teorema 7.4 Si R(z) ∼ S y m es el rango de S 11, entonces el ındice deCauchy I+∞
−∞R(z) es igual a la signatura de la forma Sn(x, x), denotada porσ[Sn(x, x)], para cualquier n ≥ m, i.e:
I+∞−∞R(z) = σ[Sn(x, x)]
Demostracion. Supongamos que la expansion (7.12) se cumple, entonces por(7.14) se tiene que
S =q∑
k=1
Tak
donde cada sumando es de la forma
Tα =(
A1 + A2∂
∂α+ . . . +
1(ν − 1)!
Aν∂ν−1
∂αν−1
)Sα (7.15)
con Sα = (αi + j)∞i,j=0 y la forma cuadratica asociada es
Sn(x, x) =q∑
k=1
Tαk(x, x) =
∑αk∈R
Tαk(x, x) +
∑αk∈C
(Tαk
(x, x) + Tαk(x, x)
)Por el Teorema 7.3, el rango de la matriz Tak
, y por lo tanto de la forma Tak(x, x),
es νk (k = 1, 2, . . . , q) y el rango de Sn(x, x) es:
m =q∑
k=1
νk
11m es el grado del denominador en la representacion reducida de la funcion racional R(z)(ver Teorema 7.3).

7.3. INDICE DE UNA FUNCION RACIONAL ARBITRARIA 83
Pero si el rango de la suma de ciertas formas cuadraticas reales es igual a lasuma de los rangos de las formas constituyentes, entonces la misma relacion secumple para las signaturas
σ[Sn(x, x)] =∑
αk∈Rσ[Tαk
(x, x)] +∑
αk∈Cσ[Tαk
(x, x) + Tαk(x, x)
](7.16)
Consideramos dos casos por separado:
a) α es real.Bajo cualquier variacion de los parametros A1, A2, . . . , Aν−1 y α en
P (z) =A1
z − α+
A2
(z − α)2+ . . . +
Aν−1
(z − α)ν−1+
Aν
(z − α)ν(7.17)
el rango de la matriz Tα correspondiente permanece sin cambios, i.e., esigual a ν. Por lo tanto la signatura de Tα(x, x) tambien permanece sincambios 12. Por lo tanto σ[Tα(x, x)] no cambia si hacemos en (7.16) y(7.17) A1 = A2 = . . . = Aν−1 = 0 y α = 0, es decir:
P (z) =Aν
(z − α)ν
Entonces por la observacion 7.9, para Tα tomamos la matriz
1(ν − 1)!
∂ν−1Sα
∂αν−1=
0 0 · · · 0 Aν 0 · · ·0 0 · · · Aν 0 0 · · ·
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .0 Aν · · · 0 0 0 · · ·
Aν 0 · · · 0 0 0 · · ·0 . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Observese que sν−1 = Aν
13.Ahora, si ν = 2q (q = 1, 2, 3, . . .) entonces la forma cuadratica es:
Sn(x, x) =q∑
i,j=0i+j=ν−1
si+jxixj
= sν−1(x0xν−1 + . . . + x ν2−1x ν
2+ x ν
2x ν
2−1 + . . . + xν−1x0)
= s2q−1(x0x2q−1 + . . . + xq−1xq + xqxq−1 + . . . + x2q−1x0)= 2s2q−1(x0x2q−1 + . . . + xq−1xq)= 2Aν(x0x2q−1 + . . . + xq−1xq)
12ver apendice (Teorema A.7).13recordar que dicha matriz es simetrica.

84 CAPITULO 7. CRITERIO DE LIENARD-CHIPART
Si ν = 2q − 1 entonces hay un numero impar de sν−1. Luego entonces laforma cuadratica tiene la forma:
Sn(x, x) =q∑
i,j=0i+j=ν−1
si+jxixj
= s2q−2(x0x2q−2 + . . . + xqxq−2 + xq−1xq−1++ xq−2xq + . . . + x2q−2x0)
= 2s2q−2(x0x2q−2 + . . . + x2q−2x0) + s2q−2x2q−1
= Aν [2(x0x2q−2 + . . . + x2q−2x0) + x2q−1]
La signatura de la forma cuadratica cuando ν = 2q es igual a cero puestoque no hay variables xl al cuadrado. El signo de la forma cuadratica cuandoν = 2q − 1 es igual al signo de Aν puesto que el unico cuadrado es x2
q−1.Por lo tanto, si α es real entonces:
σ[Tα(x, x)] =
0 si ν es parsigno Aν si ν es impar (7.18)
b) α es complejo.Escribimos
Tα(x, x) =ν∑
l=1
(Pl + iQl)2, Tα(x, x) =ν∑
l=1
(Pl − iQl)2
donde Pl, Ql, con l = 1, 2, . . . , ν, son formas lineales en las variablesx0, x1, . . . , xn−1. Entonces (como se hizo en el Teorema 7.1)
Tα(x, x) + Tα(x, x) = 2ν∑
l=1
P 2l − 2
ν∑l=1
Q2l (7.19)
Las Pl, Ql (l = 1, 2, . . . , ν) son linealmente independientes. Por la observa-cion 7.4 el rango de esta forma cuadratica es 2ν. Luego, por la observacion7.5:
σ = r − 2ν = 2ν − 2ν = 0 (7.20)
Por lo tanto, a partir de (7.18), (7.19) y (7.20) se sigue que
σ[Sn(x, x)] =∑
αk realν impar
signoA(k)ν
Por la observacion 6.4, la suma del lado derecho de esta ecuacion es igual aI+∞−∞ R(z), que es lo que se querıa probar.
Corolario 7.4 Si R(z) ∼ S = (si+j)∞i,j=0 y m es el rango de S, entonces todaslas formas cuadraticas Sn(x, x) =
∑n−1i,j=0 si+jxixj (n = m,m + 1, . . .) tienen
la misma signatura.

7.3. INDICE DE UNA FUNCION RACIONAL ARBITRARIA 85
A partir de la observacion 7.4, del Teorema de Frobenius 14 y del Teoremaanterior obtenemos el siguiente corolario.
Corolario 7.5 El ındice de una funcion racional arbitraria R(z) cuya matrizcorrespondiente S = (si+j)∞i,j=0 es de rango m, esta determinada por la expre-sion
I+∞−∞R(z) = m− 2V (1, D1, D2, . . . , Dm)
donde
Dl = (si+j)l−1i,j=0 =
s0 s1 · · · sl−1
s1 s2 · · · sl
......
...sl−1 sl · · · s2l−2
(l = 1, 2, . . . ,m)
si entre los menores principales diagonales D1, D2, . . . , Dm existe un grupo quese anula 15, i.e.
Dh 6= 0, Dh+1 = . . . = Dh+p = 0, Dh+p+1 6= 0
entonces en el calculo de V (Dh, Dh+1, . . . , Dh+p, Dh+p+1) podemos tomar
signoDh+k = (−1)k(k−1)
2 signoDh (k = 1, 2, . . . , p)
y da como resultado
V (Dh, Dh+1, . . . , Dh+p, Dh+p+1) =
p+12 para p impar
p+1−ε2 para p par
conε = (−1)p/2 signo
Dh+p+1
Dh
Continuando con nuestra discusion para determinar el ındice de una fun-cion racional en terminos de los coeficientes del numerador y denominador sonnecesarios algunos otros resultados que a continuacion revisaremos.
Tomemos como antes
R(z) = Q(z) +g(z)h(z)
donde Q(z), g(z), h(z) son polinomios y
h(z) = a0zm + a1z
m−1 + . . . + am (a0 6= 0), g(z) = b0zm + b1z
m−1 + . . . + bm
Observacion 7.10 En lo siguiente, supondremos que el grado de g(z) no excedeel de h(z).
14ver en el apendice el Teorema de Frobenius.15recuerdese que Dm 6= 0.

86 CAPITULO 7. CRITERIO DE LIENARD-CHIPART
Es claro que
I+∞−∞R(z) = I+∞
−∞g(z)h(z)
Tomemos a continuaciong(z)h(z)
= s−1 +s0
z+
s1
z2+ · · ·
entonces
g(z) = h(z)[s−1 +
s0
z+
s1
z2+ · · ·
]= (a0z
m + a1zm−1 + . . . + am)
[s−1 +
s0
z+
s1
z2+ · · ·
]⇒ b0z
m+b1zm−1+. . .+bm = (a0z
m+a1zm−1+. . .+am)
[s−1 +
s0
z+
s1
z2+ · · ·
]igualando coeficientes
a0s−1 = b0
a0s0 + a1s−1 = b1
...a0sm−1 + a1sm−2 + . . . + ams−1 = bm
(7.21)
a0st + a1st−1 + . . . + amst−m = 0 (t = m,m + 1, . . .) (7.22)
Usando la relacion (7.21) podemos encontrar una expresion para el siguientedeterminante de orden 2p, en el cual aj = 0 y bj = 0 para j > m∣∣∣∣∣∣∣
a0 a1 a2 ··· a2p−1b0 b1 b2 ··· b2p−10 a0 a1 ··· a2p−20 b0 b1 ··· b2p−2
......
......
∣∣∣∣∣∣∣ =∣∣∣∣∣∣∣
1 0 0 ··· 0s−1 s0 s1 ··· s2p−10 1 0 ··· 00 s−1 s0 ··· s2p−3
......
......
∣∣∣∣∣∣∣ ·∣∣∣∣∣∣∣
a0 a1 a2 ··· a2p−10 a0 a1 ··· a2p−20 0 a0 ··· a2p−3
......
.... . .
...0 0 0 ··· a0
∣∣∣∣∣∣∣= (−1)
p(p−1)2 a2p
0
∣∣∣∣∣∣∣∣∣sp−1 sp · · · s2p−2
sp−2 sp−1 · · · s2p−3
......
...s0 s1 sp−1
∣∣∣∣∣∣∣∣∣= a2p
0
∣∣∣∣∣∣∣∣∣s0 s1 · · · sp−1
s1 s2 · · · sp−2
......
...sp−1 sp · · · s2p−2
∣∣∣∣∣∣∣∣∣= a2p
0 Dp (7.23)
Si denotamos
∇2p =
∣∣∣∣∣∣∣∣∣∣∣
a0 a1 a2 · · · a2p−1
b0 b1 b2 · · · b2p−1
0 a0 a1 · · · a2p−2
0 b0 b1 · · · b2p−2
......
......
∣∣∣∣∣∣∣∣∣∣∣(p = 1, 2, . . . ; aj = bj = 0 para j > m)

7.3. INDICE DE UNA FUNCION RACIONAL ARBITRARIA 87
entonces∇2p = a2p
0 Dp (p = 1, 2, . . .)
Por el Corolario 7.5, tenemos el siguiente teorema:
Teorema 7.5 Si ∇2m 6= 0 entonces
I+∞−∞
b0zm + b1z
m−1 + · · ·+ bm
a0zm + a1zm−1 + · · ·+ am= m− 2V (1,∇2,∇4, . . . ,∇2m) (a0 6= 0)
(7.24)donde ∇2p (p = 1, 2, . . . ,m) esta determinado por (7.23); si existe un grupo dedeterminantes que se anulen, i.e.
∇2h 6= 0,∇2h+2 = . . . = ∇2h+2p = 0,∇2h+2p+2 6= 0
entonces al calcularV (1,∇2,∇4, . . . ,∇2m)
debe tomarse
signo∇2h+2k = (−1)k(k−1)
2 signo∇2h (k = 1, 2, . . . , p)
que es equivalente a
V (1,∇2,∇4, . . . ,∇2m) =
p+12 para p impar
p+1−ε2 para p par
conε = (−1)p/2signo
∇2h+2p+2
∇2h
Observacion 7.11 La condicion ∇2m 6= 0 significa que Dm 6= 0.
Observacion 7.12 Si ∇2m 6= 0, i.e., si la fraccion en (7.24) es reducible, en-tonces
I+∞−∞
b0zm + b1z
m−1 + · · ·+ bm
a0zm + a1zm−1 + · · ·+ am= r − 2V (1,∇2,∇4, . . . ,∇2m) (7.25)
donde r es el numero de polos (incluyendo multiplicidades) de la fraccion racio-nal del ındice, i.e. r es el grado del denominador en la fraccion reducida.
Para nuestro caso, estamos interesados en
r − 2V (1, D1, D2, . . . , Dr)
donde r es el rango de la matriz correspondiente S = (si+j)∞i,j=0. Pero ademasla ecuacion (7.23) tambien se cumple para fracciones reducidas, entonces
V (1, D1, D2, . . . , Dr) = V (1,∇2,∇4, . . . ,∇2m)
Entonces, en resumen, la ecuacion (7.25) permite expresar el ındice de cadafuncion racional, en la cual el grado del numerador no exceda al del denominador,en terminos de los coeficientes del numerador y del denominador.

88 CAPITULO 7. CRITERIO DE LIENARD-CHIPART
7.4. Criterio de estabilidad de Lienard-Chipart
Antes de establecer el Criterio de Lienard-Chipart retomaremos el Criteriode Routh-Hurwitz. Existen diferentes pruebas del Criterio de Routh-Hurwitz 16
(en el capıtulo 3 realizamos una de esas demostraciones). En esta seccion, dare-mos primero otra demostracion alternativa basada en el Teorema 7.5 y usandopropiedades de los ındices de Cauchy, posteriormente, de algunas relaciones de-rivadas de esta demostracion alternativa, obtendremos un resultado necesariopara establecer el Criterio de Lienard-Chipart.
7.4.1. Otra demostracion del Criterio de Routh-Hurwitz
Comenzamos mencionando algunas propiedades de los ındices de Cauchy quenecesitaremos. Como antes, consideremos una funcion racional R(x), entonces:
1. Iba R(x) = −Ib
a R(x)
2. Iba Q(x)R(x) = (signoQ(x))Ib
a R(x), si Q(x) 6= 0.
3. Si a < c < b entonces Iba R(x) = Ic
a R(x) + Ibc R(x) + ηc, donde
ηc =
0, si R(c) es finito±1, si R(x) es infinito en c
ηc = +1 corresponde a un salto de −∞ a +∞ en c (cuando se incrementax) y ηc = −1 a un salto de +∞ a −∞.
4. Si R(−x) = −R(x) entonces I0−a R(x) = Ia
0 R(x). Si R(−x) = R(x) en-tonces I0
−a R(x) = −Ia0 R(x).
Observacion 7.13 Los lımites de los ındices en las propiedades anteriores pue-den ser +∞ o −∞.
Estas cuatro propiedades se siguen de la definicion de ındices de Cauchy 17.Consideremos nuevamente el polinomio real
f(z) = a0zn + a1z
n−1 + a2zn−2 + · · ·+ an (a0 > 0)
y los menores principales diagonales ∆1, . . . ,∆n de la matriz de Hurwitz 18 def . Supongamos tambien que cada ∆i 6= 0 (i = 1, . . . , n), es decir el caso regular.Bajo estas consideraciones tenemos el siguiente teorema.
Teorema 7.6 (Routh-Hurwitz) El numero de raıces reales de un polinomioreal f(z) = a0z
n + a1zn−1 + a2z
n−2 + . . . + an en la mitad derecha del planoesta determinada por la formula
k = V (1,∆1,∆3, . . . , ) + V (1,∆2,∆4, . . .) (7.26)16Por ejemplo, en Gantmacher se expone otra demostracion basada en el Teorema de Sturm
y en el Algoritmo de Routh.17Ver Definicion 6.1.18Ver Definicion 3.2.

7.4. CRITERIO DE ESTABILIDAD DE LIENARD-CHIPART 89
Demostracion. f(z) puede escribirse como
f(z) = h(z2) + zg(z2)
donde
h(u) = an + an−2u + · · · , g(u) = an−1 + an−3u + · · ·
escribimos
ρ = Iba
a1zn−1 − a3z
n−3 + · · ·a0zn − a2zn−2 + · · ·
(7.27)
ahora por la observacion 6.7:
ρ = n− 2k − s
donde k es el numero de raıces de f(z) con parte real positiva y s es el numerode raıces de f(z) en el eje imaginario.A continuacion transformaremos la expresion (7.27) para ρ. Consideramos doscasos:
i) n = 2m.Tomamos
h(u) = a0um +a2u
m−1+ · · ·+an, g(u) = a1um−1+a3u
m−2+ · · ·+an−1
Usando las propiedades de los ındices de Cauchy y haciendo η = ±1 silım
u→0−
g(u)h(u) = ±∞ respectivamente, η = 0 en otro caso, tenemos que
ρ = I+∞−∞
zg(−z2)h(−z2)
= −I0−∞
zg(−z2)h(−z2)
− I+∞0
zg(−z2)h(−z2)
− η
= −2I0−∞
zg(−z2)h(−z2)
− η = 2I0−∞
g(−z2)h(−z2)
− η = 2I0−∞
g(u)h(u)
− η
= I0−∞
g(u)h(u)
+ I0−∞
g(u)h(u)
− η = I0−∞
g(u)h(u)
− I0−∞
ug(u)h(u)
− η
= I0−∞
g(u)h(u)
+ I+∞0
ug(u)h(u)
− I+∞−∞
ug(u)h(u)
= I0−∞
g(u)h(u)
+ I+∞0
g(u)h(u)
− I+∞−∞
ug(u)h(u)
= I+∞−∞
g(u)h(u)
− I+∞−∞
ug(u)h(u)
ii) n = 2m + 1.De forma analoga, haciendo 19 ζ = signo [g(u)/h(u)]u=0− si lım
u→0−
g(u)h(u) = 0,
19signo [g(u)/h(u)]u=0− significa el signo de g(u)/h(u) para valores negativos de u de modu-lo suficientemente pequeno.

90 CAPITULO 7. CRITERIO DE LIENARD-CHIPART
ζ = 0 en otro caso, tenemos
ρ = I+∞−∞
h(−z2)zg(−z2)
= I0−∞
h(−z2)zg(−z2)
+ I+∞0
h(−z2)zg(−z2)
+ ζ
= 2I0−∞
h(−z2)zg(−z2)
+ ζ = 2I0−∞
h(u)ug(u)
+ ζ
= I0−∞
h(u)ug(u)
− I0−∞
h(u)g(u)
+ ζ = I+∞−∞
h(u)ug(u)
− I+∞−∞
h(u)g(u)
Ası tenemos que
ρ = I+∞−∞
g(u)h(u)
− I+∞−∞
ug(u)h(u)
(n = 2m) (7.28)
ρ = I+∞−∞
h(u)ug(u)
− I+∞−∞
h(u)g(u)
(n = 2m + 1) (7.29)
Supongamos que ∆n 6= 0, esto significa que las fracciones (7.28) y (7.29) estanreducidas y que s = 0, i.e., ρ = n− 2k. Nuevamente consideramos dos casos:
1. n = 2m.Por (7.24), sustituyendo a0, a1, . . . , a2m y b0, b1, . . . , bm por a0, a2, . . . , a2m
y 0, a1, a3, . . . , a2m−1, respectivamente, tenemos que:
I+∞−∞
g(u)h(u)
= m− 2V (1,∆1,∆3, . . . ,∆n−1) (7.30)
Nuevamente por (7.24), sustituyendo a0, a1, . . . , am y b0, b1, . . . , bm pora0, a2, . . . , a2m y a1, a3, . . . , a2m−1, respectivamente, tenemos:
I+∞−∞
ug(u)h(u)
= m−2V (1,−∆2,∆4,−∆6, . . .) = −m+2V (1,∆2,∆4, . . . ,∆n)
(7.31)Entonces por (7.28)
ρ = n− 2V (1,∆1,∆3, . . . ,∆n−1)− 2V (1,∆2,∆4, . . . ,∆n)
pero ρ = n− 2k, entonces
k = V (1,∆1,∆3, . . . ,∆n−1) + V (1,∆2,∆4, . . . ,∆n)
2. n = 2m + 1.Sustituyendo ahora a0, a1, . . . , am+1 y b0, b1, . . . , bm+1 por a0, a2, . . . , a2m
y 0, a1, a3, . . . , a2m+1, respectivamente, en (7.24) tenemos
I+∞−∞
h(u)ug(u)
= m− 2V (1,∆1,∆3, . . . ,∆n) (7.32)

7.4. CRITERIO DE ESTABILIDAD DE LIENARD-CHIPART 91
tambien por (7.24), reemplazando ahora a0, a1, . . . , am y b0, b1, . . . , bm pora1, a3, . . . , a2m+1 y a0, a2, . . . , a2m, respectivamente, obtenemos
I+∞−∞
h(u)g(u)
= m− 2V (1,−∆2,∆4,− · · · ) = −m + 2V (1,∆2,∆4, . . . ,∆n−1)
(7.33)Luego por (7.29)
ρ = n− 2V (1,∆1,∆3, . . . ,∆n)− 2V (1,∆2,∆4, . . . ,∆n−1)
y como ρ = n− 2k entonces
k = V (1,∆1,∆3, . . . ,∆n−1) + V (1,∆2,∆4, . . . ,∆n)
A partir del Teorema 7.6 considerando que todas las raıces de f estan en lamitad izquierda del plano, i.e., k = 0, obtenemos el Criterio de Routh-Hurwitzdado en el capıtulo 3.
Corolario 7.6 (Criterio de Routh-Hurwitz) Todas las raıces del polino-mio real f(z) = a0z
n + · · · + an (a0 > 0) tienen parte real negativa si y solosi
∆1 > 0, ∆2 > 0, . . . , ∆n > 0 (7.34)
7.4.2. El Criterio de estabilidad de Lienard-Chipart
En base a los resultados de las secciones anteriores estamos ya en posibilidadde establecer el criterio de Lienard-Chipart.
Tomemos el polinomio con coeficientes reales
f(z) = a0zn + a1z
n−1 + · · ·+ a0 (a0 > 0)
Si las desigualdades∆1 > 0, ∆2 > 0, . . . , ∆n > 0
se satisfacen, entonces f(z) es Hurwitz. Luego por el Teorema 1.3 todos loscoeficientes de f(z) son del mismo signo, en este caso:
a1 > 0, a2 > 0, . . . , an > 0 (7.35)
Recordemos que el Teorema 1.3 es una condicion necesaria pero no suficientepara que las raıces de f(z) tengan parte real negativa. Resulta que en la in-vestigacion de criterios de estabilidad cuando las condiciones (7.35) se cumplenentonces las desigualdades (7.34) no son independientes entre sı. A saber, eneste caso, la positividad de los menores principales diagonales ∆i de orden parimplica la positividad de los de orden impar y viceversa. Estas circunstanciasfueron investigadas por los matematicos franceses Lienard y Chipart en 1914 yestablecieron un criterio de estabilidad distinto del Criterio de Routh-Hurwitz.

92 CAPITULO 7. CRITERIO DE LIENARD-CHIPART
Lienard y Chipart obtuvieron su criterio por medio una forma cuadrati-ca especial. En esta seccion daremos una demostracion modificada del crite-rio basandonos en el Teorema 7.5 y la teorıa de ındices de Cauchy. Primeroprobaremos un teorema del cual se obtiene como consecuencia el Criterio deLienard-Chipart.
Escribimos a f(z) del modo siguiente
f(z) = h(z2) + zg(z2)
donde, si n = 2m entonces
h(u) = a0um + a2u
m−1 + · · ·+ an, g(u) = a1um−1 + a3u
m−2 + · · ·+ an−1
y si n = 2m + 1 entonces
h(u) = a1um + a3u
m−1 + · · ·+ an, g(u) = a0um + a2u
m−1 + · · ·+ an−1
Bajo estas condiciones tenemos el siguiente teorema.
Teorema 7.7 Si para el polinomio real
f(z) = a0zn + a1z
n−1 + · · ·+ an = h(z2) + zg(z2) (a0 > 0)
los coeficientes de h(z) tienen el mismo signo de a0 y ∆n 6= 0, entonces elnumero de raıces de f(z) en la mitad derecha del plano esta determinado por laformula
k = 2V (1,∆1,∆3, . . . ,∆n−1) = 2V (1,∆2,∆4, . . . ,∆n)
Demostracion. Usamos la notacion 20
ρ = I+∞−∞
a1zn−1 − a3z
n−3 + · · ·a0zn − a2zn−2 + · · ·
Ahora, que los coeficientes de h(z) sean del mismo signo que a0 significa queh(u) no cambia de signo para u > 0 (i.e., h(u) ≥ 0 o h(u) ≤ 0 para u > 0).Probaremos el caso cuando n es par, el caso impar es similar. Supongamos quen = 2m. Entonces, tenemos que h(u) ≥ 0 para todo u positivo. Ademas, sih(u1) = 0 para u1 > 0, entonces g(u1) 6= 0 ya que en otro caso ∆n serıa singulary por hipotesis ∆n 6= 0. Por lo tanto que h(u) ≥ 0 implica que las fraccionesg(u)/h(u) y ug(u)/h(u) no cambian de signo cuando, de 0 a +∞, u cruza u1.Entonces
I+∞0
g(u)h(u)
= I+∞0
ug(u)h(u)
= 0
es decir
I0−∞
g(u)h(u)
= −I0−∞
ug(u)h(u)
20Como se hizo en el Teorema 7.6.

7.4. CRITERIO DE ESTABILIDAD DE LIENARD-CHIPART 93
Ahora
I+∞−∞
g(u)h(u)
= I0−∞
g(u)h(u)
+ I+∞0
g(u)h(u)
= I0−∞
g(u)h(u)
= −I0−∞
ug(u)h(u)
Analogamente
−I+∞−∞
ug(u)h(u)
= I0−∞
g(u)h(u)
Por lo tanto
I+∞−∞
g(u)h(u)
= −I+∞−∞
ug(u)h(u)
Pero por (7.30) y (7.31) tenemos
V (1,∆1,∆3, . . .) = V (1,∆2,∆4, . . .)
y por (7.26) tenemos
k = 2V (1,∆1,∆3, . . . ,∆n−1) = 2V (1,∆2,∆4, . . . ,∆n)
A partir de este teorema, al considerar que f(z) no tiene raıces en la mitadderecha del plano (k = 0), obtenemos el siguiente resultado:
Teorema 7.8 (Criterio de Lienard-Chipart) Un polinomio real
f(z) = a0zn + a1z
n−1 + · · ·+ a0 (a0 > 0)
es estable (i.e. es Hurwitz) si y solo si alguna de las siguientes condiciones sesatisface:
1. an > 0, an−2 > 0, . . . ; ∆1 > 0,∆3 > 0, . . ..
2. an > 0, an−2 > 0, . . . ; ∆2 > 0,∆4 > 0, . . ..
3. an > 0, an−1 > 0, an−3 . . . ; ∆1 > 0,∆3 > 0, . . ..
4. an > 0, an−1 > 0, an−3 . . . ; ∆2 > 0,∆4 > 0, . . ..
Las condiciones 1), 2), 3) y 4) tienen una ventaja sobre el Criterio de Routh-Hurwitz, porque solo deben verificarse aproximadamente la mitad de las desi-gualdades de los menores principales diagonales de la matriz de Hurwitz.
Ejemplo 7.2 Verifiquemos si el polinomio p(t) = t5+10t4+40t3+80t2+80t+1es Hurwitz.Solucion. Construimos la matriz de Hurwitz de p(t)
p(t) =
10 80 1 0 01 40 80 0 00 10 80 1 00 1 40 80 00 0 10 80 1

94 CAPITULO 7. CRITERIO DE LIENARD-CHIPART
Tomemos los coeficientes
a5 = 1, a3 = 80, a1 = 10
todos son positivos, luego∆1 = 10 > 0
∆3 = −10[800− 1] + 80[400− 80] = −7990 + 25600 > 0
∆5 = 80∆3 − det
10 80 101 40 800 1 40
= 80∆3 − 12001 > 0
Por lo tanto, por la condicion 1) del Criterio de Lienard-Chipart tenemos quep(t) es Hurwitz. Observese la ventaja de no tener que calcular los valores delos cinco menores principales ∆1, . . . ,∆5 como sucede al utilizar el Criterio deRouth-Hurwitz.

Conclusiones
El estudio de la estabilidad de sistemas ha sido importante en el desarrollode la matematica y la ciencia. La necesidad de estabilidad en sistemas mecanicosdejo a la matematica, a mediados del siglo XIX, la tarea de establecer condi-ciones para que todas las raıces de un polinomio de grado n con coeficientesreales tuvieran parte real negativa. Lo que hace interesante el problema es elpoder dar respuesta solo en terminos de los coeficientes, evitando los calculosexplıcitos de las raıces. El problema de determinar condiciones de estabilidad apesar de ser un problema algebraico, llevo, como pudo constatarse, a elaborarnuevas tecnicas, la mayorıa refinadas y sobre todo ingeniosas. La estabilidadde sistemas es ahora parte fundamental de la llamada Teorıa de Control. Esen esta area donde los criterios que hemos mencionado encuentran una mayoraplicabilidad. El criterio mas conocido y utilizado, como ya hemos mencionado,es el de Routh-Hurwitz. Este criterio es el que abordan la mayorıa de los textosque se refieren al estudio de la estabilidad.
Los criterios presentados en este trabajo son de comprension relativamentefacil y son secillos de aplicar. Otros criterios utilizan teorıa mas especializada.Mencionaremos algunos de ellos que pueden ser consultados en la bibliografıa.Existen criterios de estabilidad basados en las llamadas fracciones continuadas,y que a su vez se apoyan en el denominado Teorema de Stieltjes. Los crite-rios con fracciones continuadas fueron elaborados por los matematicos rusos P.Chevyshev y A. Markov a finales del siglo XIX. Otro criterio, por ejemplo, uti-liza la teorıa de bezoutianos (desarrollados por Bezout). Otro trabajo digno demencionarse es el que desarrollo Liapunov.
Los criterios de estabilidad fueron desarrollados hace ya mas de un siglo y esun tema que no se ha agotado. Su estudio sigue dando pie a nuevas investigacio-nes para poder establecer otros criterios mas robustos o mas generales. Son porsı mismos interesantes y algunos motivan a resolver ciertas peculiaridades. Eneste sentido, es importante decir que con respecto al Criterio de Lienard-Chipartes interesante determinar cual es el menor numero de menores principales dia-gonales que hay que calcular para poder garantizar la estabilidad de un sistema.
Una de las ventajas de los criterios que aquı abordamos es que al aplicarlospodemos auxiliarnos de una computadora. Estas son de gran utilidad cuando
95

96 CONCLUSIONES
queremos determinar la estabilidad de un sistema que involucre demasiadasecuaciones. Al asistirnos de una computadora tambien lo que buscamos es opti-mizar la labor, entonces aquı surge la pregunta de cual criterio elegir. Quiza lamayorıa preferira usar aquellos criterios basados en matrices. Cuando revisamosel Criterio de Routh y el Test de Estabilidad de polinomios dimos para cada unoun algoritmo. Un problema interesante es determinar cual de los dos algoritmoses computacionalmente mas eficiente, considerando polinomios con coeficientespositivos.
En este proyecto hemos enfocado nuestro estudio en polinomios de gradoarbitrario con coeficientes reales, sin embargo este estudio es mucho mas ge-neral. Es ası que existe tambien todo un desarrollo para polinomios Hurwitzcon coeficientes complejos o tambıen para familias de polinomios Hurwitz. Losresultados mas conocidos en torno a familias de polinomios fueron obtenidospor el matematico ruso Vladimir Kharitonov. Tambien se ha desarrollado unestudio de polinomios cuyas raıces se encuentren dentro un circulo unitario.
Esperamos que este trabajo sea de utilidad para las personas interesadas enel tema de la Estabilidad y que despierte el interes de las nuevas generaciones.

Apendice A
A lo largo de este trabajo hemos utilizado teoremas de areas particulares de lamatematica, pero nuestro objetivo aquı, no es presentar demostraciones de todosellos. Por otra parte, presentarlos dentro del texto desviarıa nuestra atencionprincipal que es la de desarrollar los criterios de estabilidad de polinomios. Porlo tanto, hemos incluıdo un apendice que contenga estos resultados.
Teorema A.1 Sea la matriz
A =
0 1 0 · · · 00 0 1 · · · 00 0 0 · · · 0...
...−an −an−1 −an−2 · · · −a1
(A.1)
Entonces el polinomio caracterıstico de A, pA(t) esta dado por:
pA(t) = tn + a1tn−1 + a2t
n−2 + . . . + an
Demostracion. Por induccion sobre el det(tI −A).
i) Verificamos que la afirmacion se cumple para n = 1. En efecto, A = (−a1)y
pA(t) = det(tI −A) = det(t− (−a1)) = t + a1
ii) Supongamos que la afirmacion es cierta para k = n− 1, i.e., si
B =
0 1 · · · 0 00 0 · · · 0 00 0 · · · 0 0...
......
−an−1 −an−2 · · · −a2 −a1
entonces
pB(t) = tn−1 + a1tn−2 + a2t
n−3 + . . . + an−2t + an−1
97

98 APENDICE A
Debemos probar que la afirmacion se cumple para k = (n − 1) + 1 = n,i.e., si A es como (A.1) entonces
pA(t) = tn + a1tn−1 + a2t
n−2 + . . . + an−1t + an
En efecto:
det(tI −A) = det
t 1 · · · 0 00 t · · · 0 00 0 · · · 0 0...
......
...0 0 · · · t 1an an−1 · · · a2 t + a1
= t[det(tI −B)] + an det
t 1 · · · 0 00 t · · · 0 00 0 · · · 0 0...
......
...0 0 · · · 0 10 0 · · · 0 t
= t(tn−1 + a1t
n−2 + a2tn−3 + . . . + an−2t + an−1) + an
= tn + a1tn−1 + a2t
n−2 + . . . + an−1t + an
Teorema A.2 (Rouche) Sean f(z) y g(z) dos funciones analıticas dentro ysobre una curva cerrada simple C en el plano complejo. Si |g(z)| < |f(z)| paracualquier z sobre C, entonces f(z) y f(z) + g(z) tienen el mismo numero deceros (incluyendo multiplicidades) dentro de C.
Demostracion. Ver [9].
Proposicion A.1 Si f(x) = a0(x− α1)n1 · · · (x− αm)nm es un polinomio concoeficientes reales (con ai 6= ak, i 6= k, i, k = 1, 2, . . . ,m) y si entre sus raıcesα1, . . . , αm solo las primeras p son reales, entonces
f ′(x)f(x)
=p∑
i=1
ni
x− αi+ Q(x)
donde Q(x) es una funcion racional sin polos reales.
Demostracion. Por induccion sobre el numero de raıces reales. Sin perdida degeneralidad tomemos f(x) monico.Supongamos que p = 1, entonces
f(x) = (x− α1)n1g(x)

99
y g(x) sin raıces reales; ahora
f ′(x) = (x− α1)n1g′(x) + n1(x− α1)n1−1g(x)
f ′(x)f(x)
=(x− α1)n1g′(x) + n1(x− α1)n1−1g(x)
(x− α1)n1g(x)
=(x− α1)g′(x) + n1g(x)
(x− α1)g(x)
=n1
x− α1+
g′(x)g(x)
=n1
x− α1+ Q(x)
donde Q(x) no tiene polos reales.Supongamos que la afirmacion es valida para p = k, i.e., supongamos que
f ′(x)f(x)
=k∑
i=1
ni
x− αi+ Q(x)
Debemos probar que la afirmacion es valida para p = k + 1, i.e.
f ′(x)f(x)
=k+1∑i=1
ni
x− αi+ Q(x)
En efecto, sea
f(x) = (x− α1)n1 · · · (x− αk)nk(x− αk+1)nk+1g(x)
entonces
f ′(x)f(x)
=(x− αk+1)nk+1
d
dx[(x− α1)n1 · · · (x− αk)nkg(x)]
(x− α1)n1 · · · (x− αk)nk(x− αk+1)nk+1g(x)
+nk+1(x− αk+1)nk+1−1(x− α1)n1 · · · (x− αk)nkg(x)
(x− α1)n1 · · · (x− αk)nk(x− αk+1)nk+1g(x)
=
d
dx[(x− α1)n1 · · · (x− αk)nkg(x)]
(x− α1)n1 · · · (x− αk)nkg(x)+
nk+1
x− αk+1
=k∑
i=1
ni
x− αi+ Q(x) +
nk+1
x− αk+1
=k+1∑i=1
ni
x− αi+ Q(x)

100 APENDICE A
Teorema A.3 (Principio del argumento) Sea C una curva cerrada simpleen el plano complejo y f(z) una funcion de variable compleja z, analıtica sobreC. Denotemos por Z y por P el numero de polos y ceros, respectivamente, def(z) contenidos en C. Si ∆C arg[f(z)] denota el cambio neto del argumento(angulo) de f(z) cuando z recorre C entonces
∆C arg[f(z)] = 2π(Z − P )
Demostracion. Ver [9].
Teorema A.4 En la representacion de una forma cuadratica real A(x, x) comouna suma
A(x, x) =r∑
i=1
aiX2i
donde X1, X2, . . . , Xr son linealmente idependientes y ai 6= 0, el numero decuadrados positivos y el numero de cuadrados negativos es independiente de larepresentacion elegida.
Demostracion. Supongamos que existe otra representacion de A(x, x):
A(x, x) =r∑
i=1
biY2i
donde bi 6= 0 y las Yi son linealmente independientes. Supongamos ademas que
a1 > 0, a2 > 0, . . . , ag > 0, ag+1 < 0, . . . , ar < 0,
b1 < 0, b2 < 0, . . . , bh < 0, bh+1 > 0, . . . , br > 0,
y que g 6= h, por ejemplo g < h. Entonces en la identidadr∑
i=1
aiX2i =
r∑i=1
biY2i
damos a las variables x1, x2, . . . , xn valores que satisfagan el sistema de r−(h−g)ecuaciones
X1 = 0, X2 = 0, . . . , Xg = 0, Yh+1 = 0, . . . , Yr = 0
y para las cuales al menos una de las formas Xg+1, . . . , Xr no se anule (almenos existe uno de esos valores pues recordemos que las Xi son linealmenteindependientes). Ahora, para esos valores de las variables se tiene que
r∑j=g+1
ajXj < 0
y por otro ladoh∑
k=1
bkYk ≥ 0
Ası, la suposicion de que g 6= h nos lleva a una contradiccion, y el teorema quedaprobado.

101
Teorema A.5 El numero de cuadrados en la forma cuadratica
A(x, x) =r∑
i=1
aiX2i
es siempre igual al rango de la forma
Demostracion. Ver [2] (vol. I).
Teorema A.6 (Jacobi) Si para la forma cuadratica
A(x, x) =n∑
i,j=1
aijxixj
de rango r la desigualdad
Dj =
∣∣∣∣∣∣∣∣∣a11 a12 . . . a1j
a21 a22 . . . a2j
......
. . ....
aj1 aj2 . . . ajj
∣∣∣∣∣∣∣∣∣ 6= 0 (j = 1, 2, . . . , r)
se cumple, entonces el numero de cuadrados positivos (π) y el numero de cua-drados negativos (ν) coincide, respectivamente, con el numero de permanenciasde signo (P ) y el numero de variaciones de signo (V ) en la sucesion
1, D1, D2, . . . , Dr
es decirπ = P (1, D1, D2, . . . , Dr), ν = V (1, D1, D2, . . . , Dr)
y la signaturaσ = r − 2V (1, D1, D2, . . . , Dr)
Demostracion. Ver [2] (vol. I).
Teorema A.7 Si bajo un cambio de los coeficientes de una forma cuadraticael rango permanece sin cambios, entonces la signatura tambien permanece sincambios.
Demostracion. Ver [2] (vol. I).
Teorema A.8 (Frobenius) Para un forma de Hankel real
S(x, x) =n−1∑i,j=0
si+jxixj
de rango r los valores de π, ν y σ pueden ser determinados mediante las formulas
π = P (1, D1, . . . , Dr), ν = V (1, D1, . . . , Dr)
σ = P (1, D1, . . . , Dr)− V (1, D1, . . . , Dr) = r − 2V (1, D1, . . . , Dr)
considerando que

102 APENDICE A
1. paraDh 6= 0, Dh+1 = . . . = Dr = 0 (h < r)
Dr es reemplazado por D(r), donde
D(r) =
∣∣∣∣∣∣∣∣s11 . . . s1h s1n−r+h+1 . . . s1n
s21 . . . s2h s2n−r+h+1 . . . s2n
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .sn1 . . . snh snn−r+h+1 . . . snn
∣∣∣∣∣∣∣∣ 6= 0
2. en cualquier grupo de p determinantes consecutivos iguales a cero
Dh 6= 0, Dh+1 = Dh+2 = . . . = Dh+p = 0, Dh+p+1 6= 0
se atribuye un signo a los determinantes iguales a cero de acuerdo a laformula
signoDh+k = (−1)k(k−1)
2 signoDh
y los valores de P , V y P − V correspondientes a esos determinantes sonentonces:
P (Dh, Dh+1, . . . , Dh+p+1) =
p+12 , p impar
p+1+ε2 , p par
V (Dh, Dh+1, . . . , Dh+p+1) =
p+12 , p impar
p+1−ε2 , p par
conε = (−1)
p2 signo
Dh+p+1
Dh
Demostracion. La prueba de este teorema y la teorıa relacionada puede con-sultarse en [2] (vol. I).
Bibliografıa
[1] Bhattacharyya, S. P., H. Chapellat and L. H. Keel. Robust Control: TheParametric Approach. Prentice-Hall. 1995.
[2] Gantmacher, F. R. Matrix Theory (vol. I y II). AMS Chelsea Publishing.1959.
[3] Hermite, C. Sur le nombre des racines dune equation algebrique compriseentre des limites donnes. J. Reine Angew. Math., vol. 52, pp. 39-51. 1856.
[4] Hurwitz, A. Uber die Bedingungen,unter welchen eine Gleichung nur Wur-zeln mit negativen reellen Teilen besitzt, Math. Ann., vol. 46 pp. 273-84.1895.
[5] Kharitonov, V. L. Asymptotic stability of an equilibrium position of afamily of systems of linear diferential equations. Diferential Uravnen, vol.14, pp. 2086-2088. 1978. Translation in Differential Equations, vol. 14, pp.1483-1485. 1979.
[6] Kostrikin, A. I. Introduccion al algebra. Editorial MIR. 1983.
[7] Lancaster, P. and Miron Tismenetsky. The Theory of Matrices with ap-plications. Academic Press. 1985.
[8] Liapunov, A. M. Probleme general de la stabilite du mouvment. Annalsof Mathematics Studies, vol. 17, pp. 203-469. Princeton University Press.1949.
[9] Marsden, J. E. y M. J. Hoffman. Analisis basico de variable compleja. Ed.Trillas. 2003.
[10] Merkin, D. R. Introduction to the theory of stability. Springer-Verlag. Textin Applied Mathematics num. 24. 1997.
[11] Routh, E. J. A treatise on the stability of a given state of motion. Macmi-llan, London. 1877.
[12] Uspensky, J. V. Teorıa de Ecuaciones, Limusa. 1990.
[13] Zabcyk, J. Mathematical Control Theory: an introduction. Birkhauser.1995.
103