control automatico 2013
TRANSCRIPT
CONTROL AUTOMÁTICOTeoría de diseño, construcción de prototipos,
modelado, identificación y pruebas experimentales
Victor Manuel Hernández GuzmánRamón Silva Ortigoza
Roberto Valentín Carrillo Serrano
COLECCIÓN CIDETEC
CO
NT
ROL
AUT
OM
ÁTIC
OVi
ctor
Man
uel H
erná
ndez
Guz
mán
Ra
món
Silv
a Orti
goza
Robe
rto V
alen
tín C
arril
lo S
erra
no
El Centro de Innovación y Desarrollo Tecnológico en Cómputo del Instituto Politécnico Nacional, presenta un libro cuyo objetivo es el de contribuir hacia la reducción de la brecha existente entre la teoría y la práctica en la enseñanza del Control Automático. Por esta razón, aunque el contenido del libro es de nivel Licenciatura puede ser de gran utilidad incluso para aquellas personas involucradas en el proceso enseñanza-aprendizaje del Control Automático en el nivel de Posgrado.
La característica principal de esta obra es que se describe de manera detallada cómo diseñar, construir y probar experimentalmente varios sistemas de control. Para ello, primero se describe la tarea que debe realizar el sistema de control bajo estudio y se obtiene su modelo matemático. Luego, se explica de manera detallada cómo construir el prototipo experimental y cómo estimar los valores numéricos de los parámetros del modelo obtenido previamente (identificación experimental del modelo). Entonces se diseña el controlador correspondiente utilizando la teoría presentada en los primeros capítulos de la obra. Finalmente, se muestra cómo construir el controlador diseñado previamente utilizando electrónica analógica o digital y se presentan los resultados obtenidos experimentalmente.
El libro es especialmente útil para estudiantes y profesores en las carreras de Ingeniería Eléctrica, Electrónica, Mecánica, Mecatrónica e incluso Robótica.
Instituto Politécnico Nacional
Victor Manuel Hernández Guzmán. Nació en Querétaro, Qro., México. Recibió el título de Ingeniero Industrial en Eléctrica por parte del Instituto Tecnológico de Querétaro en 1988, el grado de Maestro en Ciencias en Ingeniería Eléctrica (Control) por parte del Instituto Tecnológico de la Laguna, en Torreón, Coah., en 1991 y el grado de Doctor en Ciencias en Ingeniería Eléctrica (Mecatrónica) por parte del CINVESTAV-IPN, en México, D.F., en 2003. Actualmente es Profesor en los programas de Licenciatura y Maestría en Instrumentación y Control de la Universidad Autónoma de Querétaro. Su trabajo de investigación trata sobre el control de robots manipuladores y sistemas electro-mecánicos. Tiene particular interés en la construcción de prototipos didácticos para la enseñanza de técnicas de control clásicas y modernas (no lineales).
Roberto Valentín Carrillo Serrano. Nació en Querétaro, Qro., México en 1976. Recibió el título de Ingeniero en Instrumentación y Control de Procesos por la Universidad Autónoma de Querétaro, donde también obtuvo los grados de Maestro en Ciencias en Instrumentación y Control Automático, y de Doctor en Ingeniería en 2000, 2008 y 2011 respectivamente. Trabajó en Kellogg de México de 1999 a 2006. Las áreas de interés del Dr. Carri l lo Serrano son los robots manipuladores, control de máquinas eléctricas y control de sistemas mecatrónicos. Actualmente es Profesor en el programa de Licenciatura en Ingeniería en Automatización y de la Maestría en Instrumentación y Control Automático de la Universidad Autónoma de Querétaro, además de ser miembro del Sistema Nacional de Investigadores, México. En cuanto a publicaciones se refiere, estas se encuentran en estándares internacionales que pertenecen a la base de datos Journal Citation Reports (JCR) e ISI-Thomson.
Ramón Silva Ortigoza. Recibió el título de Licenciado en Electrónica por la Benemérita Universidad Autónoma de Puebla en 1999, y los grados de Maestro y Doctor en Ciencias en Ingeniería Eléctrica (Opción Mecatrónica) por el CINVESTAV-IPN, en 2002 y 2006, r e s p e c t i v a m e n t e . A c t u a l m e n t e , e s Investigador del Departamento de Posgrado del Área de Mecatrónica en el CIDETEC del Instituto Politécnico Nacional, y miembro del Sistema Nacional de Investigadores. Es coautor del libro Control Design Techniques in Power Electronics Devices (Springer-Verlag, London, 2006), y coeditor del libro Mecatrónica (Colección CIDETEC, México, 2010). Se ha desempeñado como jurado en el Premio de Ingeniería de la Ciudad de México y Premio a la Investigación en el IPN, así como Evaluador de Programas de Posgrado presentados en el marco del PNPC de CONACYT. Sus áreas de interés incluyen el control de sistemas mecatrónicos, la robótica móvil y el control aplicado a electrónica de potencia.
Victor Manuel Hernandez Guzman
Ramon Silva Ortigoza
Roberto Valentın Carrillo Serrano
CONTROL AUTOMATICO
Teorıa de diseno, construccion de prototipos,
modelado, identificacion y pruebas
experimentales
Mexico, D.F. Enero 2013.
Control AutomaticoTeorıa de diseno, construccion de prototipos,modelado, identificacion y pruebas experimentales
Autores:Victor Manuel Hernandez GuzmanRamon Silva OrtigozaRoberto Valentın Carrillo Serrano
Primera Edicion 2013D.R. c© 2013Instituto Politecnico NacionalLuis Enrique Erro s/n.Unidad Profesional “Adolfo Lopez Mateos”Zacatenco, 07738, Mexico, D.F.
CIDETECAv. Juan de Dios Batiz S.N. esq. Miguel Othon de MendizabalCol. Nueva Industrial VallejoDel. Gustavo A. Madero C.P. 07700
ISBN: 978-607-414-362-1Hecho en Mexico / Made in Mexico

V
A mi esposa, padres y hermanos.Victor.
Para mis maravillosos hijos, Rhomina y Joserhamon, y a mi madre.Ramon.
A Dios, a mis padres, a mi esposa, a mis profesores y alumnos.Roberto.


Prefacio
El Control Automatico es una de las disciplinas que soporta de maneraimportante el tecnologicamente avanzado modo de vida que conocemos hoyen dıa. Sus aplicaciones se encuentran en casi todas las actividades que elser humano realiza en el siglo XXI: desde el funcionamiento del telescopioespacial Hubble y de numerosas naves espaciales hasta el refrigerador que seencuentra en los hogares asegurando la conservacion de los alimentos. Desdelos depositos de agua residenciales hasta las grandes industrias que producentodos los satisfactores de los seres humanos: automoviles, aviones, alimentos,bebidas y medicinas, por mencionar algunos.
Aunque se sabe que las primeras aplicaciones del Control Automatico apa-recieron hace mas de 2000 anos, fue la Revolucion Industrial la que detono sudesarrollo como un conjunto de conocimientos cientıficos destinados a resol-ver problemas tecnologicos. Desde entonces, el uso del Control Automaticoha sido fundamental para que las actividades productivas del ser humano sehagan cada vez mas eficaces incrementando la calidad y la repetitibilidad delos productos.
Por esta razon, los cursos sobre Control Automatico se han hecho comunesen las carreras de Ingenierıa Electrica, Electronica, Mecanica, Quımica y, masrecientemente, Mecatronica y Robotica. Sin embargo, el hecho de que las tecni-cas de Control Automatico convencionales esten soportadas por herramientasmatematicas ha planteado tradicionalmente una dificultad en la ensenanza deesta disciplina: para aprender a disenar sistemas de control primero se debetener un buen conocimiento de como se resuelven las ecuaciones diferencia-les lineales de coeficientes constantes mediante el uso de la transformada deLaplace. Este hecho plantea un importante obstaculo dado que la solucionde ecuaciones diferenciales es algo que normalmente es complicado para lamayorıa de los estudiantes de Licenciatura. El problema se complica mas aunporque en Control Automatico lo mas importante de resolver una ecuacion di-ferencial es saber interpretar el resultado cuando la mayorıa de los estudiantesde Licenciatura se quedan perdidos en como resolver la ecuacion diferencial.
VIII Prefacio
Otra dificultad en la ensenanza del Control Automatico es como mostrarla manera de relacionar los resultados matematicos con los aspectos practicosde un sistema de control: ¿Como construir practicamente un controlador queesta expresado en terminos de la variable de Laplace (funcion de transferen-cia)? ¿Como se construye un controlador usando electronica digital o usandoelectronica analogica? ¿Como tomar en cuenta las ganancias de los sensores yde los amplificadores de potencia? ¿Como determinar esta ganancia en un am-plificador de potencia basado en modulacion por ancho de pulso? ¿Que efectostienen estas ganancias en un sistema de control?
La manera en que tradicionalmente se ha resuelto el problema de la practi-ca descrito en el parrafo anterior ha sido la compra de prototipos didacticoscomerciales. Sin embargo, esto tiene dos desventajas: 1) estos equipos nor-malmente son excesivamente caros pues son construidos en el extranjero y 2)muchos de los aspectos involucrados en el funcionamiento de un sistema decontrol permanecen “invisibles” para el estudiante; esto es debido a que estosequipos estan disenados pensando que el estudiante de Control Automatico notiene porque saber como se resuelven los detalles practicos relacionados con laelectronica y la programacion, por ejemplo, de los diferentes componentes deun sistema de control. Este es el caso de ¿Como construir un amplificador depotencia? ¿Como disenar y construir un controlador basado en amplificado-res operacionales o un controlador basado en un microcontrolador? ¿Existenalternativas a la practica comun de comprar sensores en el extranjero?
La presente obra pone a la disposicion de los estudiantes y de los profeso-res de nivel Licenciatura un material con el cual se pretende ayudar a resolveralgunas de las dificultades arriba mencionadas. Con el fin de facilitar el apren-dizaje de los aspectos teoricos se incluye un capıtulo dedicado exclusivamentea la solucion de ecuaciones diferenciales lineales y de coeficientes constantesusando la transformada de Laplace. Si bien ese capıtulo puede ser visto comoun curso de ecuaciones diferenciales, la principal diferencia respecto del cursode matematicas que sobre este tema se lleva en el tronco comun de Licencia-tura (Ingenierıa) es que en nuestro libro se hace enfasis en la interpretacionde la solucion de una ecuacion diferencial. Ademas se resalta el efecto quetienen los parametros de una ecuacion diferencial en la forma grafica de lasolucion. Debemos subrayar que la experiencia de los autores es que los librosexistentes sobre Control Automatico (incluso los mas importantes) se limitana presentar un breve prontuario de soluciones de ecuaciones diferenciales yno consiguen que el estudiante razone acerca de lo que esta haciendo. Parasalvar este problema, en el presente libro se recurre a ejemplificar cada tipode ecuacion diferencial con una situacion practica que cualquier estudiante deLicenciatura ha observado en algun momento de su vida. Es decir, se recurrea la experiencia cotidiana del estudiante para que comprenda lo que significanlos resultados matematicos.
La problematica relacionada con los aspectos practicos de los sistemas decontrol es resuelta mediante la aplicacion a varios sistemas de control experi-mentales. En cada uno de estos ejemplos se procede de igual manera. Primero

Prefacio IX
se describe la tarea que ejecuta el sistema de control bajo estudio y luegose explica al lector como construir cada uno de los componentes de dichosistema de control. Posteriormente se muestra como obtener el modelo ma-tematico correspondiente para despues explicar a detalle como obtener, demanera experimental, el valor numerico de cada uno de los parametros delmodelo. Entonces se usan las tecnicas de control presentadas previamente enlos primeros capıtulos del libro para disenar (matematicamente) el controladorcorrespondiente. Se presenta tambien la manera de construir el controladorusando electronica analogica o digital y finalmente se presentan los resultadosexperimentales obtenidos al controlar el prototipo que se ha construido.
A continuacion se explica como esta organizada la presente obra. En elcapıtulo 1 se presenta una panoramica general del Control Automatico con elfin de que el lector entienda a grandes rasgos cual es el objetivo de disenarsistemas de control. Esto se realiza utilizando un ejemplo que cuyo funciona-miento es bien conocido por la mayorıa de las personas: el control de un canonantiaereo. Tambien se presenta una breve historia del Control Automatico y serelaciona con el contenido de la obra para que el lector identifique cuales sonlas razones por las que cada herramienta de control ha sido desarrollada. En elcapıtulo 2 se aborda el problema de obtener el modelo matematico de sistemasfısicos comunes en Ingenierıa Electrica, Electronica, Mecanica y Mecatronica.Una razon importante de incluir este tema es que el lector se de cuenta de quelos sistemas de control estan descritos por ecuaciones diferenciales lineales yde coeficientes constantes. Esto motiva el estudio de la solucion de las ecuacio-nes diferenciales en el capıtulo 3, pues esto es importante para entender comoresponde un sistema de control y que hay que modificar en el para conseguirla respuesta deseada.
En los capıtulos 4 al 7 se presentan las herramientas utilizadas en el disenode sistemas de control clasico y moderno: criterios de estabilidad y error enestado estacionario (capıtulo 4), la tecnica del lugar de las raıces (capıtulo 5),la tecnica de la respuesta en frecuencia (capıtulo 6) y la tecnica de las variablesde estado (capıtulo 7). La exposicion de estos temas esta dirigida hacia suaplicacion en los ejemplos practicos presentados en los ultimos capıtulos dela obra. De este modo, muchos de los ejemplos presentados en los primeroscapıtulos tratan sobre el diseno de controladores que despues seran construidosy probados experimentalmente en los ultimos capıtulos.
La estructura de los capıtulos 8 al 14 es la misma, pues tienen el mismoobjetivo: se presenta la aplicacion de las tecnicas de control desarrolladasen los capıtulos 4 al 7 al analisis y diseno de sistemas de control practicos.Los controladores correspondientes son construidos al igual que el sistemade control completo, utilizando materiales de bajo costo y que son facilesde conseguir por un estudiante de licenciatura. Finalmente, se presentan losresultados obtenidos experimentalmente al probar los sistemas de control enla practica.
En el capıtulo 8 se estudian y disenan varios circuitos electronicos realimen-tados, entre ellos algunos circuitos osciladores con forma de onda sinusoidal

X Prefacio
basados en amplificadores operacionales (audiofrecuencia) y en transistores(radiofrecuencia). En los capıtulos 9 y 10 se controla la velocidad y la posi-cion, respectivamente, de un motor de corriente directa con escobillas e imanespermanentes. Un sistema de levitacion magnetica es controlado en el capıtulo11 mientras que en el capıtulo 12 se controla un mecanismo muy popular enControl Automatico y que es conocido como Ball and Beam. Finalmente, enlos capıtulos 13 y 14 se presentan dos mecanismos que incluyen pendulos: elpendulo de Furuta y el pendulo con rueda inercial. Por ultimo, se debe decirque la importancia de todos estos prototipos experimentales es reconocida enlos cursos de control en todo el mundo y por eso han sido seleccionados comobancos de prueba en la presente obra.
El primer autor reconoce y agradece el apoyo de sus dos coautores. Sucolaboracion ha sido de gran valor no solo en la elaboracion de la presente obrasino, ademas, en diversas actividades de investigacion que han realizado desdeque eran estudiantes de Doctorado (con el segundo autor) y desde que el tercerautor realizo sus estudios de Maestrıa y Doctorado, los cuales el primer autortuvo la fortuna de dirigir. Un reconocimiento y un agradecimiento especialpara los Drs. Hebertt Sira Ramırez (Director de tesis) y Gerardo Silva Navarro,ambos investigadores del CINVESTAV-IPN quienes fueron fundamentales enlos estudios de Doctorado del primer autor. Tambien se reconoce y agradeceal Dr. Vıctor Santibanez del Instituto Tecnologico de la Laguna con quienel primer autor ha mantenido una importante colaboracion cientıfica desde2004 en el area de control de robots manipuladores. Un reconocimiento ala importante colaboracion cientıfica con los Drs. Ricardo Campa (InstitutoTecnologico de la Laguna) y Arturo Zavala Rıo (IPICYT).
Las ideas que han motivado este trabajo tomaron forma durante los cursosque sobre Control Automatico ha impartido el primer autor a nivel Licencia-tura y Maestrıa en la Facultad de Ingenierıa de la Universidad Autonoma deQueretaro, Institucion a la que esta adscrito desde 1995. Se agradece a es-ta Institucion el apoyo recibido durante todos estos anos. Un agradecimientoal Sistema Nacional de Investigadores por el apoyo economico recibido des-de 2005 y al CIDETEC del Instituto Politecnico Nacional por facilitar losmedios editoriales requeridos para la impresion de este libro. Una mencion es-pecial para mi esposa Judith de quien siempre he recibido el apoyo necesariopara realizar no solo esta obra sino todo el trabajo de investigacion que hedesarrollado desde que decidı hacer mis estudios de Doctorado.
El segundo autor reconoce y agradece la invitacion del primer autor paraparticipar en la elaboracion de este y otros proyectos ambiciosos, academicosy de investigacion. Su apoyo ha sido fundamental en el desarrollo profesio-nal del segundo autor y en la formacion conjunta de estudiantes de nivelmaestrıa. El segundo autor agradece de forma muy especial a los DoctoresGilberto Silva Ortigoza y Hebertt Sira Ramırez, investigadores de la BUAPy del CINVESTAV-IPN, por ser sus mentores; el primero a lo largo de todasu trayectoria y el segundo en sus estudios de formacion de posgrado. Tam-bien, se reconoce y agradece la importante colaboracion academica con las

Prefacio XI
Doctoras Magdalena Marciano Melchor (CIDETEC-IPN), Griselda SaldanaGonzalez (Universidad Tecnologica de Puebla) y Mariana Marcelino Aran-da (UPIICSA-IPN). El segundo autor agradece el apoyo recibido por partedel CIDETEC del Instituto Politecnico Nacional, Centro de Investigacion alque esta adscrito desde 2006, el soporte economico recibido de la SIP y delos programas EDI y COFAA del Instituto Politecnico Nacional, ası como delSistema Nacional de Investigadores. Mencion especial merecen mis hijos, Rho-mina y Joserhamon, por su apoyo moral y ser la inspiracion que me permiteesforzarme cada dıa para dar siempre lo mejor.
El tercer autor agradece primeramente al Dr. V. M. Hernandez Guzman laatenta invitacion a participar en la realizacion de la presente obra. Al ConsejoNacional de Ciencia y Tecnologıa que me beco para mis estudios de Maestrıa yDoctorado (perıodo de realizacion de la presente obra). A mi segunda casa, laUniversidad Autonoma de Queretaro, espacio para la docencia, investigaciony difusion de la cultura que me ha ensenado a ser un mejor ser humano,manteniendome dıa con dıa en constante superacion en todos los sentidos. ADios, a mis padres Valentın y Alicia, y a mi esposa Lizbeth, por el apoyorecibido en todo momento.
V. M. Hernandez Guzman Queretaro, Qro., FI-UAQ.R. Silva Ortigoza Mexico, D.F., Instituto Politecnico Nacional.R. V. Carrillo Serrano Queretaro, Qro., FI-UAQ.
Enero de 2013.


Indice general
1. Introduccion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.1. Sistema de control de un canon antiaereo . . . . . . . . . . . . . . . . . . . 21.2. Historia del Control Automatico . . . . . . . . . . . . . . . . . . . . . . . . . . . 81.3. Prototipos didacticos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111.4. Resumen del capıtulo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121.5. Preguntas de repaso . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
Referencias . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2. Modelado matematico de sistemas fısicos . . . . . . . . . . . . . . . . . . 152.1. Energıa y variables generalizadas del sistema . . . . . . . . . . . . . . . . 162.2. Almacenadores de energıa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.2.1. Sistemas mecanicos traslacionales . . . . . . . . . . . . . . . . . . . . 202.2.2. Sistemas mecanicos rotativos . . . . . . . . . . . . . . . . . . . . . . . . 222.2.3. Sistemas electricos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
2.3. Disipadores de energıa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 272.3.1. Sistemas mecanicos traslacionales . . . . . . . . . . . . . . . . . . . . 272.3.2. Sistemas mecanicos rotativos . . . . . . . . . . . . . . . . . . . . . . . . 292.3.3. Sistemas electricos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
2.4. Fuentes de energıa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 302.4.1. Sistemas mecanicos traslacionales . . . . . . . . . . . . . . . . . . . . 312.4.2. Sistemas mecanicos rotativos . . . . . . . . . . . . . . . . . . . . . . . . 312.4.3. Sistemas electricos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
2.5. Convertidores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 322.5.1. Transformadores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 322.5.2. Adaptadores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
2.6. Ejemplos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 422.7. Caso de estudio. Un convertidor electronico de potencia de
CD a CD tipo resonante serie de alta frecuencia . . . . . . . . . . . . . 832.8. Resumen del capıtulo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 872.9. Preguntas de repaso . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
XIV Indice general
2.10. Ejercicios propuestos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
Referencias . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
3. Base matematica: ecuaciones diferenciales . . . . . . . . . . . . . . . . . 973.1. Ecuacion diferencial de primer orden . . . . . . . . . . . . . . . . . . . . . . . 993.2. Un integrador . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1083.3. Ecuacion diferencial de segundo orden . . . . . . . . . . . . . . . . . . . . . . 1123.4. Raıces reales diferentes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1253.5. Raıces reales repetidas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1293.6. Raıces complejas conjugadas diferentes . . . . . . . . . . . . . . . . . . . . . 1343.7. Raıces complejas conjugadas repetidas . . . . . . . . . . . . . . . . . . . . . 1403.8. Una ecuacion diferencial general . . . . . . . . . . . . . . . . . . . . . . . . . . . 1443.9. Polos y ceros en sistemas de orden superior . . . . . . . . . . . . . . . . . 150
3.9.1. Cancelacion polo-cero y modelos reducidos . . . . . . . . . . . 1503.9.2. Polos dominantes y modelos reducidos . . . . . . . . . . . . . . . 152
3.10. El principio de superposicion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1553.11. Caso de estudio. Un convertidor electronico de potencia de
CD a CD tipo resonante serie de alta frecuencia . . . . . . . . . . . . . 1603.12. Resumen del capıtulo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1673.13. Preguntas de Repaso . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1683.14. Ejercicios propuestos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 169
Referencias . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 175
4. Criterios de estabilidad y error en estado estacionario . . . . . 1774.1. Diagramas de bloques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1794.2. Regla de los signos para determinar la ubicacion de las raıces
de un polinomio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1874.2.1. Polinomios de segundo grado . . . . . . . . . . . . . . . . . . . . . . . 1874.2.2. Polinomios de primer grado . . . . . . . . . . . . . . . . . . . . . . . . . 1904.2.3. Polinomios de grado 3 o mayor . . . . . . . . . . . . . . . . . . . . . . 190
4.3. Criterio de estabilidad de Routh . . . . . . . . . . . . . . . . . . . . . . . . . . . 1914.4. Error en estado estacionario . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 200
4.4.1. Referencia tipo escalon . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2044.4.2. Referencia tipo rampa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2054.4.3. Referencia tipo parabola . . . . . . . . . . . . . . . . . . . . . . . . . . . 206
4.5. Resumen del capıtulo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2134.6. Preguntas de repaso . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2144.7. Ejercicios propuestos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 215
Referencias . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 219
Indice general XV
5. Diseno usando la respuesta en el tiempo . . . . . . . . . . . . . . . . . . . 2215.1. Diseno con el lugar de las raıces . . . . . . . . . . . . . . . . . . . . . . . . . . . 223
5.1.1. Reglas para construir el lugar de las raıces. . . . . . . . . . . . 2255.2. Ejemplos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 232
5.2.1. Control proporcional de posicion . . . . . . . . . . . . . . . . . . . . 2325.2.2. Control proporcional-derivativo (PD) de posicion . . . . . . 2355.2.3. Control de posicion usando un compensador de adelanto2385.2.4. Control proporcional-integral (PI) de velocidad . . . . . . . . 2415.2.5. Control proporcional-integral-derivativo (PID) de
posicion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2485.2.6. Asignacion de los polos de lazo cerrado deseados . . . . . . 2575.2.7. Control proporcional-integral-derivativo (PID) de un
sistema de levitacion magnetica . . . . . . . . . . . . . . . . . . . . . 2645.2.8. Control de un sistema ball and beam . . . . . . . . . . . . . . . . 268
5.3. Caso de estudio. Notas adicionales sobre el control PID deposicion de un motor de CD . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 275
5.4. Resumen del capıtulo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2805.5. Preguntas de repaso . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2815.6. Ejercicios propuestos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 282
Referencias . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 289
6. Diseno usando la respuesta en frecuencia . . . . . . . . . . . . . . . . . . 2916.1. Un circuito RC de corriente alterna . . . . . . . . . . . . . . . . . . . . . . . . 292
6.1.1. Representaciones graficas comunes . . . . . . . . . . . . . . . . . . . 2946.1.2. Modelo matematico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2986.1.3. Componentes de frecuencia . . . . . . . . . . . . . . . . . . . . . . . . . 3016.1.4. Relacion entre la respuesta en la frecuencia y en la
respuesta en el tiempo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3056.2. Sistemas arbitrarios de orden n . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3076.3. Graficas polares y de Bode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3096.4. Graficas de respuesta en frecuencia. Ejemplos . . . . . . . . . . . . . . . 319
6.4.1. Ejemplo 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3196.4.2. Ejemplo 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3216.4.3. Ejemplo 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 322
6.5. Criterio de estabilidad de Nyquist . . . . . . . . . . . . . . . . . . . . . . . . . 3256.5.1. Recorridos cerrados alrededor de polos y ceros . . . . . . . . 3266.5.2. Trayectoria de Nyquist . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3296.5.3. Polos y ceros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3316.5.4. Criterio de Nyquist. Caso especial . . . . . . . . . . . . . . . . . . . 3316.5.5. Criterio de Nyquist. Caso general . . . . . . . . . . . . . . . . . . . . 332
6.6. Margenes de estabilidad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3346.7. Relacion entre las caracterısticas de respuesta en la frecuencia
y en el tiempo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3366.7.1. Respuesta en lazo abierto . . . . . . . . . . . . . . . . . . . . . . . . . . . 337
XVI Indice general
6.7.2. Respuesta en lazo cerrado . . . . . . . . . . . . . . . . . . . . . . . . . . 3376.8. Ejemplos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 338
6.8.1. Ejemplo de analisis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3386.8.2. Un sistema ball and beam . . . . . . . . . . . . . . . . . . . . . . . . . . 3446.8.3. Control PD de posicion de un motor de CD . . . . . . . . . . . 3556.8.4. Rediseno del control PD de posicion de un motor de CD3636.8.5. Control PID de posicion de un motor de CD . . . . . . . . . . 368
6.9. Caso de estudio. Control PID de un sistema de levitacionmagnetica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 376
6.10. Resumen del capıtulo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3826.11. Preguntas de repaso . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3836.12. Ejercicios propuestos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 384
Referencias . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 391
7. La tecnica de las variables de estado . . . . . . . . . . . . . . . . . . . . . . . 3937.1. Representacion en variables de estado . . . . . . . . . . . . . . . . . . . . . . 3947.2. Linealizacion aproximada de ecuaciones de estado no lineales . . 399
7.2.1. Procedimiento para ecuaciones de primer orden sinentrada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 400
7.2.2. Procedimiento general para ecuaciones de ordenarbitrario y numero de entradas arbitrario . . . . . . . . . . . . 402
7.3. Algunos resultados del algebra lineal . . . . . . . . . . . . . . . . . . . . . . . 4077.4. Solucion de una ecuacion dinamica, lineal e invariante en el
tiempo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4107.5. Estabilidad de una ecuacion dinamica . . . . . . . . . . . . . . . . . . . . . . 4127.6. Controlabilidad y observabilidad . . . . . . . . . . . . . . . . . . . . . . . . . . 413
7.6.1. Controlabilidad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4147.6.2. Observabilidad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 416
7.7. Funcion de transferencia de una ecuacion dinamica . . . . . . . . . . 4187.8. Una de las ecuaciones dinamicas que corresponden a una
funcion de transferencia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4237.9. Ecuaciones dinamicas equivalentes . . . . . . . . . . . . . . . . . . . . . . . . . 4257.10. Control por realimentacion del estado . . . . . . . . . . . . . . . . . . . . . . 4287.11. Observadores de estado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4317.12. El principio de separacion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4337.13. Caso de estudio. El pendulo con rueda inercial . . . . . . . . . . . . . . 438
7.13.1. Obtencion de la forma en (7.75) . . . . . . . . . . . . . . . . . . . . . 4387.13.2. Control por realimentacion del estado . . . . . . . . . . . . . . . . 439
7.14. Resumen del capıtulo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4407.15. Preguntas de repaso . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4417.16. Ejercicios propuestos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 441
Referencias . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 445
Indice general XVII
8. Circuitos electronicos realimentados . . . . . . . . . . . . . . . . . . . . . . . 4478.1. Circuitos electronicos para reducir no linealidades . . . . . . . . . . . 448
8.1.1. Reduccion de la distorsion en amplificadores . . . . . . . . . . 4498.1.2. Reduccion de la zona muerta en amplificadores. . . . . . . . 451
8.2. Construccion analogica de controladores . . . . . . . . . . . . . . . . . . . . 4568.3. Diseno de osciladores con forma de onda sinusoidal . . . . . . . . . . 458
8.3.1. Diseno basado en un amplificador operacional. Puentede Wien . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 459
8.3.2. Diseno basado en un amplificador operacional. RedRC de defasaje . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 468
8.3.3. Diseno basado en un transistor . . . . . . . . . . . . . . . . . . . . . . 4728.4. Resumen del capıtulo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4948.5. Preguntas de repaso . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 494
Referencias . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 497
9. Control de velocidad de un motor de CD . . . . . . . . . . . . . . . . . . 4999.1. Modelo matematico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5009.2. Amplificador de potencia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5039.3. Control de corriente . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5049.4. Identificacion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5079.5. Control de velocidad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 509
9.5.1. Un controlador PI modificado . . . . . . . . . . . . . . . . . . . . . . . 5099.5.2. Un controlador con dos grados de libertad . . . . . . . . . . . . 512
9.6. Prototipo experimental . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5159.6.1. Control de corriente . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5189.6.2. Amplificador de potencia . . . . . . . . . . . . . . . . . . . . . . . . . . . 518
9.7. Resultados experimentales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5199.8. Calculo numerico de la integral . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5229.9. Programacion del microcontrolador PIC16F877A . . . . . . . . . . . . 5239.10. Resumen del capıtulo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5279.11. Preguntas de repaso . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 527
Referencias . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 529
10. Control de posicion de un motor de CD . . . . . . . . . . . . . . . . . . . 53110.1. Identificacion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53210.2. Control sin perturbaciones externas (Tp = 0) . . . . . . . . . . . . . . . . 535
10.2.1. Control proporcional con realimentacion de velocidad . . 53510.2.2. Control con un compensador de adelanto . . . . . . . . . . . . . 537
10.3. Control bajo el efecto de perturbaciones externas . . . . . . . . . . . . 54010.3.1. Un controlador PID modificado . . . . . . . . . . . . . . . . . . . . . 54110.3.2. Un controlador con dos grados de libertad . . . . . . . . . . . . 54410.3.3. Un controlador PID clasico . . . . . . . . . . . . . . . . . . . . . . . . . 549
10.4. Seguimiento de trayectorias . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 553
XVIII Indice general
10.5. Calculo numerico de los algoritmos de control . . . . . . . . . . . . . . . 55510.6. Construccion del sistema de control . . . . . . . . . . . . . . . . . . . . . . . . 55610.7. Programacion del microcontrolador PIC16F877A . . . . . . . . . . . . 55910.8. Control basado en una computadora personal . . . . . . . . . . . . . . . 56210.9. Resumen del capıtulo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57110.10.Preguntas de repaso . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 571
Referencias . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 573
11. Control de un sistema de levitacion magnetica . . . . . . . . . . . . . 57511.1. Modelo matematico no lineal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57811.2. Modelo lineal aproximado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 581
11.2.1. Obtencion de un modelo en variables de estado . . . . . . . . 58111.2.2. Aproximacion lineal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 583
11.3. Construccion del prototipo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58411.3.1. Esfera . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58411.3.2. Electroiman . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58411.3.3. Sensor de posicion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58411.3.4. Controlador . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58611.3.5. Lazo de corriente . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58711.3.6. Amplificador de potencia . . . . . . . . . . . . . . . . . . . . . . . . . . . 587
11.4. Identificacion experimental de los parametros del modelo . . . . . 58711.4.1. Resistencia del electroiman, R . . . . . . . . . . . . . . . . . . . . . . 58711.4.2. Inductancia del eletroiman, L(y) . . . . . . . . . . . . . . . . . . . . 58711.4.3. Ganancia del sensor de posicion, As . . . . . . . . . . . . . . . . . 58811.4.4. Masa de la esfera, m . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 589
11.5. Diseno del controlador . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59011.5.1. Un controlador proporcional . . . . . . . . . . . . . . . . . . . . . . . . 59311.5.2. Un controlador proporcional-integral-derivativo (PID) . . 594
11.6. Resultados experimentales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59511.7. Resumen del capıtulo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59911.8. Preguntas de repaso . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 599
Referencias . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 601
12. Control de un sistema Ball and Beam . . . . . . . . . . . . . . . . . . . . . 60312.1. Modelo matematico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60512.2. Construccion del prototipo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 608
12.2.1. Medicion de la posicion x del balın . . . . . . . . . . . . . . . . . . 60912.2.2. Medicion de la inclinacion θ de la varilla . . . . . . . . . . . . . 61212.2.3. Interfaces y amplificador de potencia . . . . . . . . . . . . . . . . . 612
12.3. Identificacion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61412.3.1. Sistema de medicion de la inclinacion θ de la varilla . . . 61412.3.2. Sistema de medicion de la posicion x del balın . . . . . . . . 61412.3.3. Subsistema motor-varilla . . . . . . . . . . . . . . . . . . . . . . . . . . . 614
Indice general XIX
12.3.4. Dinamica del balın . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61512.4. Diseno del controlador . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61712.5. Construccion del controlador . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62012.6. Resultados experimentales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62112.7. Control basado en el microcontrolador
PIC16F877A . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63012.7.1. Construccion del sistema de control . . . . . . . . . . . . . . . . . . 63012.7.2. Diseno del controlador . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63312.7.3. Resultados experimentales . . . . . . . . . . . . . . . . . . . . . . . . . . 63312.7.4. Programa utilizado en el microcontrolador PIC16F877A 635
12.8. Un sistema de medicion mejorado para la posicion del balın . . . 63912.9. Resumen del capıtulo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64112.10.Preguntas de repaso . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 641
Referencias . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 643
13. Control de un pendulo de Furuta . . . . . . . . . . . . . . . . . . . . . . . . . . 64513.1. Modelo matematico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64713.2. Modelo lineal aproximado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65013.3. Construccion del pendulo de Furuta e indentificacion de sus
parametros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65313.4. Diseno del controlador . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65613.5. Construccion del controlador . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65713.6. Resultados experimentales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66113.7. Resumen del capıtulo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66513.8. Preguntas de repaso . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 665
Referencias . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 667
14. Control de un pendulo con rueda inercial . . . . . . . . . . . . . . . . . . 66914.1. Pendulo con rueda inercial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67014.2. Modelo matematico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67214.3. Controlador no lineal para levantar el pendulo . . . . . . . . . . . . . . 67414.4. Controlador para atrapar el pendulo . . . . . . . . . . . . . . . . . . . . . . . 67814.5. Construccion del pendulo con rueda inercial e identificacion
de sus parametros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68014.6. Construccion del controlador . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68714.7. Resultados experimentales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69114.8. Resumen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69914.9. Preguntas de repaso . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 699
Referencias . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 701
Indice alfabetico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 703

1
Introduccion
Las aplicaciones del control automatico en la actualidad son muy extensas,variadas e importantes. Quiza una de las mas populares es la del control derobots manipuladores en la industria de manufactura. Desde la lıneas de en-samble de automoviles hasta las celdas robotizadas de soldadura. Las razonesprincipales para este exito es la alta calidad del trabajo, el ahorro de tiempoy la reduccion del costo de produccion.
2 1 Introduccion
Objetivos del capıtulo
Comprender de manera intuitiva los conceptos basicos de realimentaciony control en lazo cerrado, ası como los objetivos de un sistema de control.Conocer la historia del Control Automatico para comprender por que sedesarrollaron este conjunto de herramientas de diseno.Relacionar los capıtulos de la presente obra con los hechos historicos quemotivaron los conocimientos descritos en cada capıtulo.
Con el fin de explicar de que se trata el Control Automatico (o simplementecontrol) y cual es su proposito, a continuacion se describe como funciona elsistema de control del direccionamiento de un canon antiaereo. Las razonesde haber elegido este ejemplo son las siguientes. i) Se trata de un sistemacuyo objetivo y funcionamiento basico pueden ser entendidos facilmente por lamayorıa de las personas debido a la gran cantidad de pelıculas, video-juegos,programas de television, etc., que de alguna manera u otra muestran paraque sirve este sistema de control. ii) Es un problema historicamente muyimportante pues motivo el desarrollo de gran parte de las ideas y tecnicasbasicas del Control Automatico durante la Segunda Guerra Mundial. Esteejemplo tambien sera utilizado para que el lector pueda relacionar el contenidodel presente libro con algunos de los aspectos de los sistemas de control.
1.1. Sistema de control de un canon antiaereo
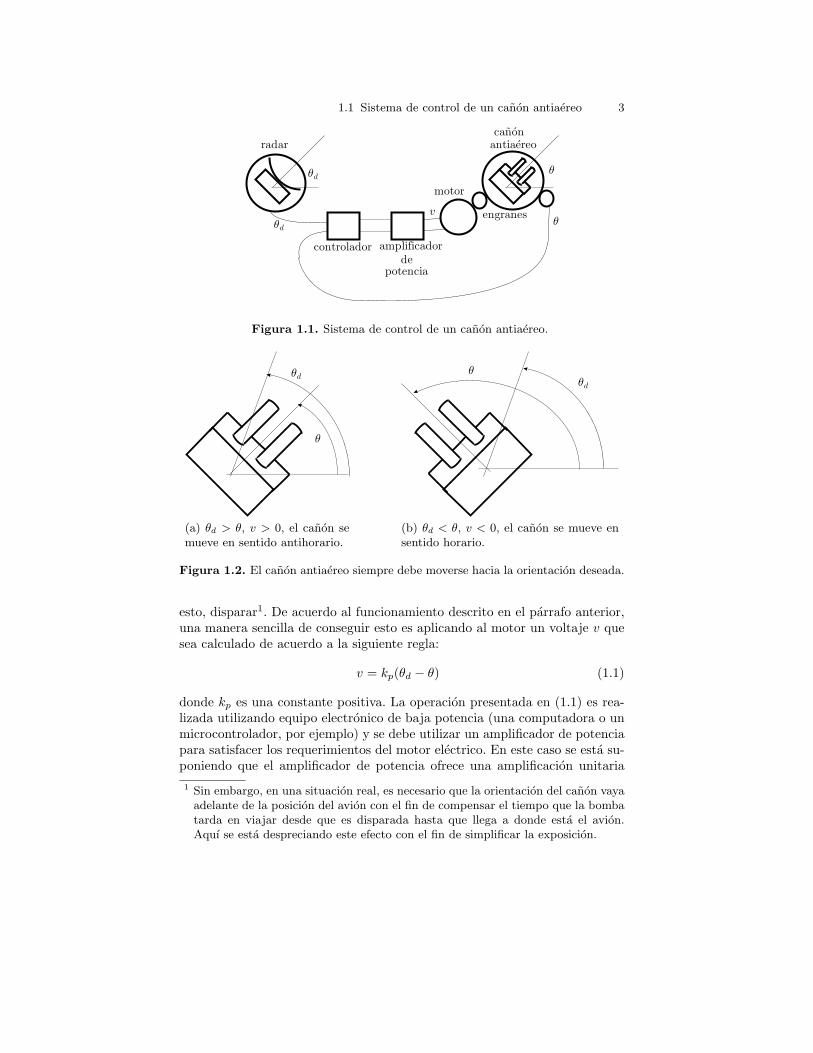
En la figura 1.1 se muestra un esquema de este sistema de control. El canonantiaereo debe apuntar hacia un avion y derribarlo. Para conseguir esto, elcanon debe tener varios movimientos independientes que permitan ajustar suorientacion (θ) en el plano horizontal y su inclinacion respecto de la horizontal.Con el fin de simplificar la descripcion del problema, en lo que sigue solo seconsiderara el control de la orientacion en el plano horizontal θ.
Para ajustar la orientacion θ del canon se utiliza un motor electrico. Estose consigue acoplando mecanicamente el motor al canon mediante un juego deengranes. El conjunto motor-canon funciona, a grandes rasgos, del siguientemodo. Si se aplica un voltaje positivo al motor entonces el canon recibe unpar en sentido antihorario, por lo que el canon tiende a moverse en sentidoantihorario. Si se aplica un voltaje negativo al motor entonces el canon recibeun par en sentido horario, por lo que el canon tiende a moverse en sentidohorario. Si el voltaje que se aplica al motor es igual a cero, entonces el paraplicado sobre el canon es igual a cero, por lo que el canon tiende a detenerse.
La posicion del avion se determina mediante el uso de un radar y se usa estedato como el valor θd que se desea alcance la orientacion del canon θ. Es decir,se desea conseguir que θ = θd lo mas rapido posible para, una vez conseguido
1.1 Sistema de control de un canon antiaereo 3
canàoónantiaeóreo
motor
engranesòd ò
amplificadorde
potencia
controlador
radar
v
òòd
Figura 1.1. Sistema de control de un canon antiaereo.
ò
òd
(a) θd > θ, v > 0, el canon semueve en sentido antihorario.
òòd
(b) θd < θ, v < 0, el canon se mueve ensentido horario.
Figura 1.2. El canon antiaereo siempre debe moverse hacia la orientacion deseada.
esto, disparar1. De acuerdo al funcionamiento descrito en el parrafo anterior,una manera sencilla de conseguir esto es aplicando al motor un voltaje v quesea calculado de acuerdo a la siguiente regla:
v = kp(θd − θ) (1.1)
donde kp es una constante positiva. La operacion presentada en (1.1) es rea-lizada utilizando equipo electronico de baja potencia (una computadora o unmicrocontrolador, por ejemplo) y se debe utilizar un amplificador de potenciapara satisfacer los requerimientos del motor electrico. En este caso se esta su-poniendo que el amplificador de potencia ofrece una amplificacion unitaria
1 Sin embargo, en una situacion real, es necesario que la orientacion del canon vayaadelante de la posicion del avion con el fin de compensar el tiempo que la bombatarda en viajar desde que es disparada hasta que llega a donde esta el avion.Aquı se esta despreciando este efecto con el fin de simplificar la exposicion.
4 1 Introduccion
en voltaje, pero realiza una gran amplificacion en corriente electrica (vease elcapıtulo 9, seccion 9.2). De acuerdo a la figura 1.2 se puede presentar algunade las siguientes situaciones:
Si θ < θd, entonces v > 0 y el canon gira en sentido antihorario de modoque θ se aproxima a θd.Si θ > θd, entonces v < 0 y el canon gira en sentido horario de modo queθ se aproxima a θd.Si θ = θd, entonces v = 0 y el canon no gira por lo que la condicion θ = θd
se puede mantener para siempre.
A partir de este razonamiento se concluye que la regla presentada en (1.1) paradeterminar el voltaje que se ha de aplicar al motor tiene buenas posibilidadesde funcionar en la practica.
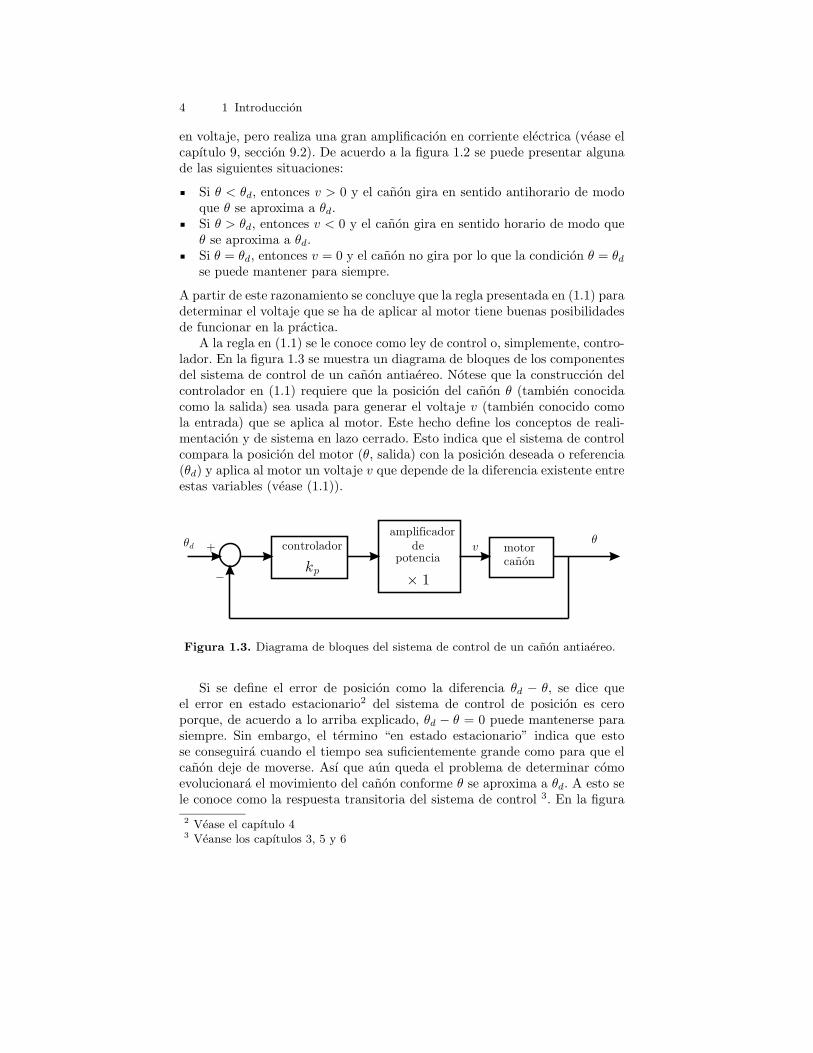
A la regla en (1.1) se le conoce como ley de control o, simplemente, contro-lador. En la figura 1.3 se muestra un diagrama de bloques de los componentesdel sistema de control de un canon antiaereo. Notese que la construccion delcontrolador en (1.1) requiere que la posicion del canon θ (tambien conocidacomo la salida) sea usada para generar el voltaje v (tambien conocido comola entrada) que se aplica al motor. Este hecho define los conceptos de reali-mentacion y de sistema en lazo cerrado. Esto indica que el sistema de controlcompara la posicion del motor (θ, salida) con la posicion deseada o referencia(θd) y aplica al motor un voltaje v que depende de la diferencia existente entreestas variables (vease (1.1)).
motorcanàoón
amplificadorde
potenciacontrolador+
à
òòd v
kp â 1
Figura 1.3. Diagrama de bloques del sistema de control de un canon antiaereo.
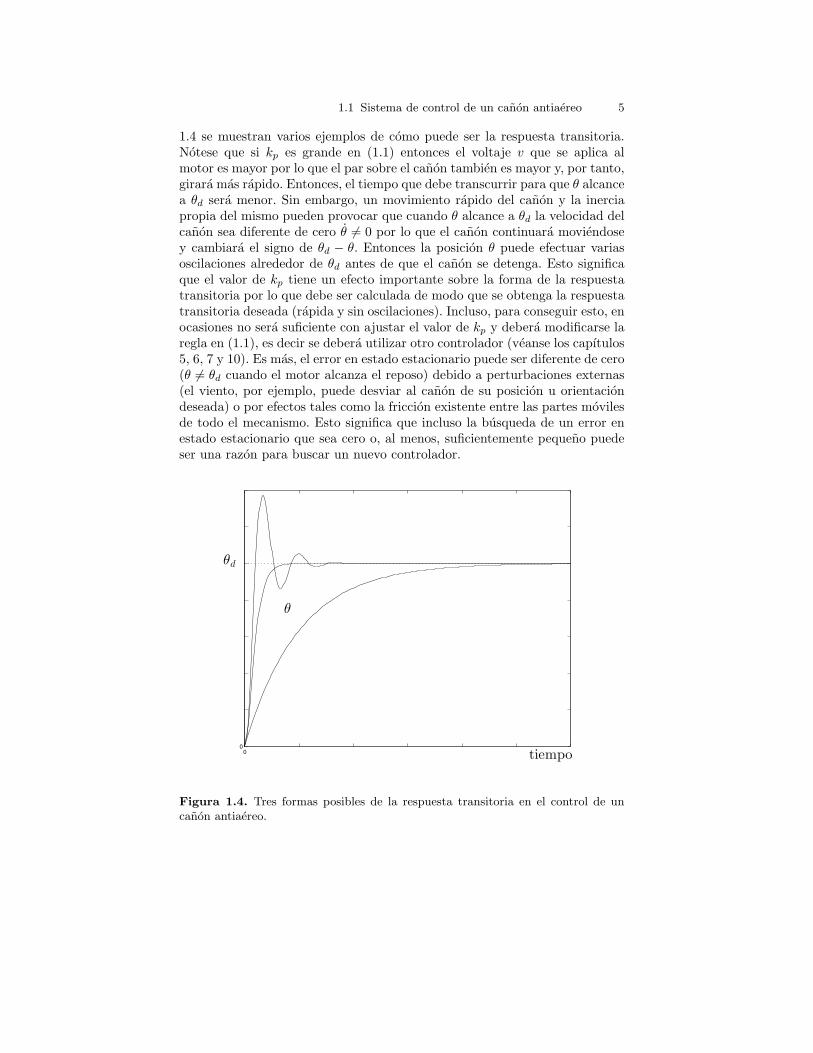
Si se define el error de posicion como la diferencia θd − θ, se dice queel error en estado estacionario2 del sistema de control de posicion es ceroporque, de acuerdo a lo arriba explicado, θd − θ = 0 puede mantenerse parasiempre. Sin embargo, el termino “en estado estacionario” indica que estose conseguira cuando el tiempo sea suficientemente grande como para que elcanon deje de moverse. Ası que aun queda el problema de determinar comoevolucionara el movimiento del canon conforme θ se aproxima a θd. A esto sele conoce como la respuesta transitoria del sistema de control 3. En la figura
2 Vease el capıtulo 43 Veanse los capıtulos 3, 5 y 6
1.1 Sistema de control de un canon antiaereo 5
1.4 se muestran varios ejemplos de como puede ser la respuesta transitoria.Notese que si kp es grande en (1.1) entonces el voltaje v que se aplica almotor es mayor por lo que el par sobre el canon tambien es mayor y, por tanto,girara mas rapido. Entonces, el tiempo que debe transcurrir para que θ alcancea θd sera menor. Sin embargo, un movimiento rapido del canon y la inerciapropia del mismo pueden provocar que cuando θ alcance a θd la velocidad delcanon sea diferente de cero θ 6= 0 por lo que el canon continuara moviendosey cambiara el signo de θd − θ. Entonces la posicion θ puede efectuar variasoscilaciones alrededor de θd antes de que el canon se detenga. Esto significaque el valor de kp tiene un efecto importante sobre la forma de la respuestatransitoria por lo que debe ser calculada de modo que se obtenga la respuestatransitoria deseada (rapida y sin oscilaciones). Incluso, para conseguir esto, enocasiones no sera suficiente con ajustar el valor de kp y debera modificarse laregla en (1.1), es decir se debera utilizar otro controlador (veanse los capıtulos5, 6, 7 y 10). Es mas, el error en estado estacionario puede ser diferente de cero(θ 6= θd cuando el motor alcanza el reposo) debido a perturbaciones externas(el viento, por ejemplo, puede desviar al canon de su posicion u orientaciondeseada) o por efectos tales como la friccion existente entre las partes movilesde todo el mecanismo. Esto significa que incluso la busqueda de un error enestado estacionario que sea cero o, al menos, suficientemente pequeno puedeser una razon para buscar un nuevo controlador.
00
tiempo
òd
ò
Figura 1.4. Tres formas posibles de la respuesta transitoria en el control de uncanon antiaereo.
6 1 Introduccion
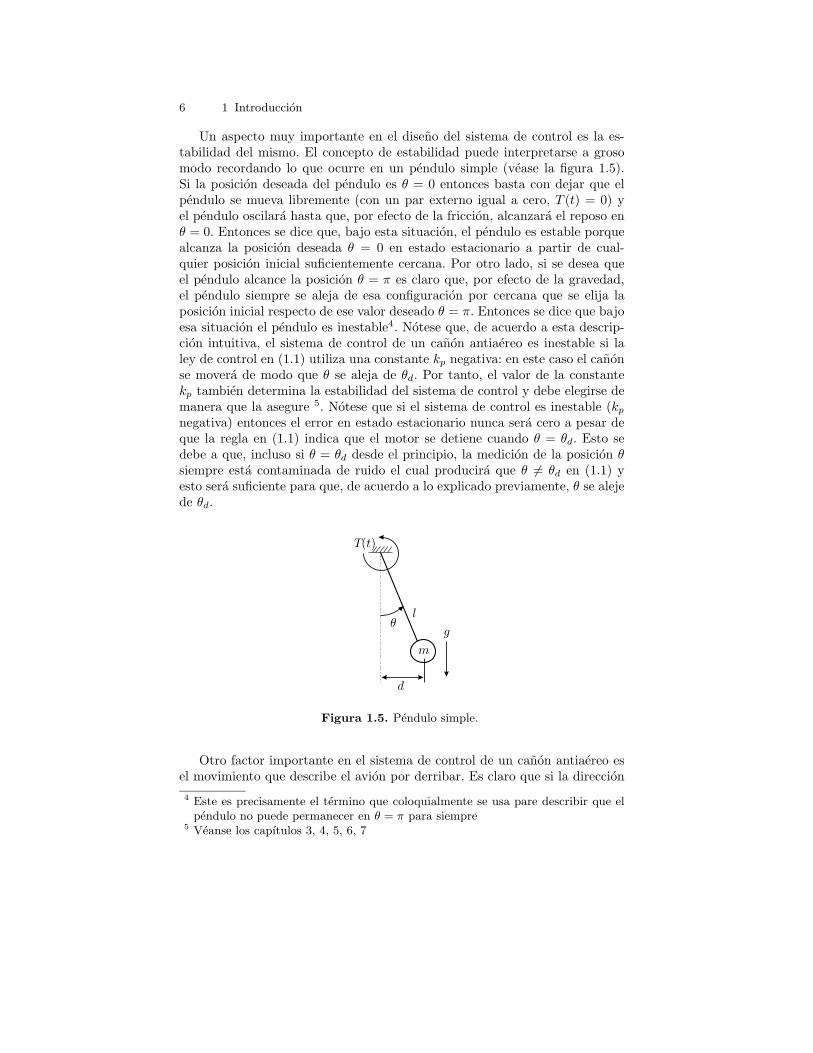
Un aspecto muy importante en el diseno del sistema de control es la es-tabilidad del mismo. El concepto de estabilidad puede interpretarse a grosomodo recordando lo que ocurre en un pendulo simple (vease la figura 1.5).Si la posicion deseada del pendulo es θ = 0 entonces basta con dejar que elpendulo se mueva libremente (con un par externo igual a cero, T (t) = 0) yel pendulo oscilara hasta que, por efecto de la friccion, alcanzara el reposo enθ = 0. Entonces se dice que, bajo esta situacion, el pendulo es estable porquealcanza la posicion deseada θ = 0 en estado estacionario a partir de cual-quier posicion inicial suficientemente cercana. Por otro lado, si se desea queel pendulo alcance la posicion θ = π es claro que, por efecto de la gravedad,el pendulo siempre se aleja de esa configuracion por cercana que se elija laposicion inicial respecto de ese valor deseado θ = π. Entonces se dice que bajoesa situacion el pendulo es inestable4. Notese que, de acuerdo a esta descrip-cion intuitiva, el sistema de control de un canon antiaereo es inestable si laley de control en (1.1) utiliza una constante kp negativa: en este caso el canonse movera de modo que θ se aleja de θd. Por tanto, el valor de la constantekp tambien determina la estabilidad del sistema de control y debe elegirse demanera que la asegure 5. Notese que si el sistema de control es inestable (kp
negativa) entonces el error en estado estacionario nunca sera cero a pesar deque la regla en (1.1) indica que el motor se detiene cuando θ = θd. Esto sedebe a que, incluso si θ = θd desde el principio, la medicion de la posicion θsiempre esta contaminada de ruido el cual producira que θ 6= θd en (1.1) yesto sera suficiente para que, de acuerdo a lo explicado previamente, θ se alejede θd.
T(t)
òl
m
g
d
Figura 1.5. Pendulo simple.
Otro factor importante en el sistema de control de un canon antiaereo esel movimiento que describe el avion por derribar. Es claro que si la direccion
4 Este es precisamente el termino que coloquialmente se usa pare describir que elpendulo no puede permanecer en θ = π para siempre
5 Veanse los capıtulos 3, 4, 5, 6, 7
1.1 Sistema de control de un canon antiaereo 7
θd, que indica en donde se encuentra el avion, es constante entonces el avionsera derribado mas facilmente que si el avion se aleja a gran velocidad (cuan-do θd cambia rapidamente) o cuando el avion acelera para escapar (cuando lasegunda derivada de θd es grande). Por tanto, la ley de control en (1.1) debeser disenada de manera que el sistema de control responda correctamente ba-jo cualquiera de las tres situaciones anteriormente descritas. En caso que θd
tenga una forma diferente a las consideradas, se supone que el sistema de con-trol respondera correctamente si responde bien ante las tres situaciones antesconsideradas. Esta es la idea detras del diseno del error en estado estacionariodel sistema, descrito en el capıtulo 4.
De acuerdo a lo anterior, se puede decir que las tres caracterısticas fun-damentales de un sistema de control son la respuesta transitoria, la respuestaen estado estacionario (o error en estado estacionario) y la estabilidad. Elcontrolador debe ser disenado de manera que estas tres partes fundamenta-les de la respuesta de un sistema de control cumplan con las especificacionesrequeridas: rapidez y pocas oscilaciones (respuesta transitoria), que la posi-cion del canon alcance (o sea muy cercana a) la posicion deseada cuando eltiempo sea suficientemente grande (respuesta en estado estacionario) y queel sistema de control sea estable. Para conseguir esto, las tecnicas de controlestudiadas en la presente obra se basan en el estudio del modelo matematicodel sistema de control completo. De acuerdo a lo expuesto en el capıtulo 2,este modelo matematico esta dado en terminos de una ecuacion diferencialordinaria, lineal y de coeficientes constantes. Por esta razon, en el capıtulo 3se estudia la solucion de este tipo de ecuaciones diferenciales para definir laspropiedades que determinan su estabilidad ası como la forma transitoria de lasolucion y el valor final de la misma. El conocimiento de como es la solucionde estas ecuaciones diferenciales es fundamental para los metodos de disenode controladores que se estudian en este libro.
Los metodos de diseno que se usan en esta obra pueden dividirse en clasicasy modernas. Las tecnicas de control clasicas son estudiadas en los capıtulos3, 4, 5, 6 y existen dos metodologıas diferentes: las tecnicas de respuesta enel tiempo (capıtulo 5) y las tecnicas de la respuesta en la frecuencia (capıtulo6). Las tecnicas de control clasico estan basadas en el uso de la transformadade Laplace para resolver y analizar ecuaciones diferenciales. Las tecnicas dela respuesta en el tiempo se basan en determinar la forma de la respuestatemporal de un sistema de control a partir de la ubicacion de los polos de lafuncion de transferencia correspondiente (capıtulo 3) y el metodo principal dediseno es el Lugar de las Raıces (capıtulo 5). Las tecnicas de la respuesta en lafrecuencia explotan la idea fundamental detras de la Transformada de Fourier:los sistemas de control (lineales) funcionan como filtros de tal manera que,ante una orden, la respuesta del sistema de control esta basicamente dadacomo esa orden filtrada por el sistema de control. Es por esta razon quelas herramientas fundamentales de diseno para esta tecnica son las graficaspolares y de Bode (capıtulo 6) ampliamente utilizadas en el diseno y analisisde filtros (pasa altas, pasa bajas, pasa banda, etc.). En los capıtulos 8, 9, 10,

8 1 Introduccion
11 y 12 se presentan algunas aplicaciones experimentales de las tecnicas decontrol clasico.
Por otro lado, las tecnicas modernas que se abordan en este libro estanrepresentadas por las basadas en las variables de estado (capıtulo 7) las cua-les, a diferencia de las tecnicas clasicas permiten estudiar el comportamientodel “interior” del sistema de control. Esto significa que las variables de estadosuministran mas informacion que puede ser aprovechada para conseguir me-jores resultados. Ejemplos de aplicaciones de estas tecnicas son mostrados enlos capıtulos 13 y 14.
1.2. Historia del Control Automatico
Una vez que se ha descrito a groso modo que es lo que se persigue al disenarun sistema de control ası como algunos conceptos utiles para conseguirlo, acontinuacion se presenta una breve historia del Control Automatico. El obje-tivo es que el lector se de cuenta de como han sido formulados estos conceptosy, ademas, pueda apreciar cuales han sido las necesidades ingenieriles que hanmotivado estas ideas. Tambien se indican las partes del presente libro en don-de se abordan los principales conceptos y tecnicas de los sistemas de control.El contenido de esta seccion esta basado en la informacion reportada en [1].
El Control Automatico se ha usado desde hace mas de 2000 anos. Se tieneconocimiento de la existencia de relojes de agua, construidos por Ktesibios,hacia el ano 270 antes de Cristo, ası como una variedad de mecanismos in-geniosos construidos en Alejandrıa y descritos por Heron. Sin embargo, des-de el punto de vista de la ingenierıa, el avance mas importante en ControlAutomatico se debio a James Watt en 1789 al introducir un regulador de ve-locidad para su maquina de vapor. Sin embargo, a pesar de su importancia, elregulador de velocidad de Watt tenıa varios problemas. Se observaba que enocasiones la velocidad variaba de manera oscilatoria en lugar de permanecerconstante o crecıa sin lımite. Tratando de determinar bajo que condiciones sepodıa asegurar un funcionamiento estable, entre 1826 y 1851 J.V. Poncelety G.B. Airy mostraron que era posible utilizar ecuaciones diferenciales pararepresentar el funcionamiento completo de la maquina de vapor junto con elregulador de velocidad (vease el capıtulo 2 para el problema del modelado desistemas fısicos).
En esas fechas los matematicos sabıan que la estabilidad de una ecuaciondiferencial estaba determinada por la ubicacion de las raıces de la ecuacioncaracterıstica correspondiente y se sabıa que habıa inestabilidad si la partereal de una raız era positiva (vease el captulo 3, seccion 3.8). Sin embargo, noera sencillo calcular el valor numerico de dichas raıces y en ocasiones ni siquie-ra era posible. Ası, en 1868 J.C. Maxwell mostro la manera de determinar laestabilidad de las maquinas de vapor con el regulador de Watt simplementeexaminando los coeficientes de la ecuacion diferencial que la representa. Sinembargo, este resultado solo era util para ecuaciones diferenciales de segundo,
1.2 Historia del Control Automatico 9
tercero y cuarto orden. Mas tarde, entre 1877 y 1895 y de manera indepen-diente, E.J. Routh y A. Hurwitz dedujeron un metodo para determinar laestabilidad de sistemas de cualquier orden, resolviendo el problema que Max-well habıa dejado abierto. Este metodo ahora es conocido como el Criterio deRouth o de Routh-Hurwitz (vease el capıtulo 4, seccion 4.3).
Durante gran parte del siglo XIX se desarrollaron muchas aplicacionesrelacionadas con el Control Automatico entre las cuales estaban el controlde temperatura, de presion, de nivel de lıquidos y la velocidad de maquinasrotativas. Por otro lado, se empezo a usar el vapor para mover grandes canonesy para actuar sobre el sistema de direccion de barcos cada vez mas grandes.Incluso, por esa epoca, en Francia se introdujeron los terminos de servomotory servomecanismo para describir un movimiento generado por un servidor oesclavo. Sin embargo, la mayorıa de los controladores de ese entonces erandel tipo encendido-apagado y fueron personas como E. Sperry y M.E. Leedsquienes se dieron cuenta de que los mejores operadores humanos empleabanel sentido de anticipacion disminuyendo la potencia conforme la variable acontrolar se acercaba a su valor deseado. Fue N. Minorsky quien en 1922presento un analisis claro de los sistemas de control de posicion y formulo loque hoy en dıa se conoce como controlador PID (vease el capıtulo 5, seccion5.2.5). Este controlador fue deducido observando la manera en que el pilotohumano de un barco controla su direccion.
Por otro lado, desde 1920 la amplificacion habıa producido muchos proble-mas a las companıas telefonicas ya que se distorsionaba fuertemente la senalde audio. Fue en esa epoca que H.S. Black encontro que si una pequena can-tidad de la senal obtenida a la salida de un amplificador se utilizaba para serrealimentada a la entrada del mismo se podıa reducir la distorsion producidapor el amplificador. Durante el desarrollo de este trabajo, Black fue ayudadopor H. Nyquist quien, a partir de esas experiencias, publico en 1932 un trabajotitulado “Regeneration Theory” en donde establecio las bases de lo que ahoraes conocido como el Analisis de Nyquist (vease el capıtulo 6, seccion 6.5).
Durante el perıodo 1935-1940, las companıas telefonicas deseaban ampliarel ancho de banda de sus sistemas de comunicacion para aumentar el numerode sus usuarios. Para esto necesitaban que sus lıneas telefonicas presentaranuna buena caracterıstica de respuesta en frecuencia (vease el capıtulo 6): unaganancia constante sobre un amplio rango de frecuencias con un pequenoangulo de atraso y una aguda pendiente de atenuacion a partir de una deter-minada frecuencia de corte. Motivado por este problema, H. Bode estudio larelacion existente entre una caracterıstica de atenuacion dada y el mınimocorrimiento de fase que se le puede asociar. Como resultado introdujo los con-ceptos de margen de ganancia y margen de fase (vease el capıtulo 6, seccion6.6) y empezo a manejar el punto (−1, 0) del plano complejo como un puntocrıtico en lugar del punto (+1, 0) manejado por Nyquist. Detalles completosdel trabajo de Bode aparecieron en 1945 en su libro “Network Analysis andFeedback Amplifier Design”.

10 1 Introduccion
Pero fue la Segunda Guerra Mundial la que hizo que el trabajo en sistemasde control se concentrara en unos pocos problemas especıficos. El mas impor-tante de estos fue el relacionado con el direccionamiento de canones antiaereos.El trabajo en este problema motivo el desarrollo de nuevas ideas en el controlde servomecanismos. G. S. Brown del Instituto Tecnologico de Massachusettsmostro que muchos sistemas electricos y mecanicos pueden ser representadosy manipulados usando diagramas de bloques (vease el capıtulo 4, seccion 4.1)y A. C. Hall mostro en 1943 que manejando los bloques como funciones detransferencia (vease el capıtulo 3) podıa obtenerse la funcion de transferenciadel sistema completo para finalmente usar el criterio de estabilidad de Nyquisty determinar los margenes de ganancia y de fase.
Los investigadores en el Instituto Tecnologico de Massachusetts usaroncircuitos de adelanto (vease el capıtulo 10, seccion 10.2.2) en el trayecto directopara modificar el desempeno del sistema de control, mientras que en el ReinoUnido se usaron varios lazos internos para modificar la respuesta del sistemade control.
Hacia el final de la Segunda Guerra Mundial las tecnicas de respuesta enfrecuencia basadas en el metodo de Nyquist y las graficas de Bode ya estabanbien establecidas, describiendo el desempeno del sistema de control en termi-nos de ancho de banda, frecuencia de resonancia, margen de fase y margende ganancia (vease el capıtulo 6). El enfoque alternativo a estas tecnicas sebasaba en la solucion de las ecuaciones diferenciales usando la Transforma-da de Laplace y describıan el desempeno del sistema de control en terminosdel tiempo de subida, sobre paso, error en estado estacionario y el amorti-guamiento (vease el capıtulo 3, seccion 3.3). Muchos ingenieros preferıan estemetodo porque los resultados estaban expresados en terminos “reales”. Peroeste enfoque tenıa la desventaja de que no existıa una manera sencilla quepermitiera al disenador relacionar los cambios en los parametros con cambiosen la manera en que respondıa el sistema. Fue precisamente el metodo delLugar de las Raıces (vease el capıtulo 5, secciones 5.1 y 5.2) introducido en1948 y 1950 por W. Evans el que permitio librar estos obstaculos. Ası, haciaesas fechas las ahora llamadas tecnicas de control clasico estaban bien estable-cidas y estaban orientadas a sistemas que podıan ser descritos por ecuacionesdiferenciales lineales con coeficientes constantes y con una sola entrada.
Entonces vino la era de los vuelos supersonicos y espaciales. Era necesarioutilizar modelos fısicos detallados representables en ecuaciones diferencialesque podıan ser lineales o no lineales. Los ingenieros que trabajaban en lasindustrias aeroespaciales encontraron que siguiendo las ideas de Poincare eraposible formular ecuaciones diferenciales generales en terminos de un conjuntode ecuaciones diferenciales de primer orden y ası empezo a nacer lo que hoyse conoce como la tecnica de las variables de estado (vease el capıtulo 7).Un gran impulsor de esta tecnica fue R. Kalman quien, alrededor de 1960,presento los conceptos de controlabilidad y observabilidad (vease la seccion7.6).
1.3 Prototipos didacticos 11
Finalmente, se debe decir que a partir de esas fechas se han detectado nue-vos problemas en los sistemas de control que han motivado la introduccionde diversas tecnicas de control que aun hoy en dıa se siguen desarrollando.Por ejemplo, las no linealidades encontradas en los servomecanismos ha mo-tivado el desarrollo de las tecnicas de control no lineal. El control de avionessupersonicos, que deben operar bajo amplios rangos de temperatura, presion,velocidad, etc., motivo el desarrollo de control adaptable. La introduccionde sistemas de control basados en radar motivo el desarrollo de tecnicas decontrol para sistemas en tiempo discreto, etc.
1.3. Prototipos didacticos
En las secciones previas se ha mencionado que el Control Automatico hasido desarrollado con el fin de resolver problemas de ingenierıa importantes.Sin embargo, la ensenanza de las tecnicas del Control Automatico necesita queel estudiante pueda practicar aplicando sus conocimientos de manera experi-mental. Como es difıcil hacer uso de instalaciones industriales complejas o delaboratorios de alta tecnologıa con este proposito, en la ensenanza del ControlAutomatico se recurre a los llamados “prototipos didacticos”. Un prototipodidactico es un dispositivo que tiene dos caracterısticas principales: i) essuficientemente sencillo como para que pueda ser construido y ser puesto enmarcha usando diferentes controladores, e ii) que sea un modelo suficiente-mente complejo como para que se puedan apreciar los diferentes aspectos deun sistema de control. A continuacion se listan los prototipos didacticos usadosen este libro y se indica cuales son las herramientas del Control Automaticoque son utilizadas en dichos prototipos:
Circuitos electronicos osciladores basados en amplificadores operacionalesy transistores (capıtulo 8). Respuesta en frecuencia, criterio de estabilidadde Nyquist y criterio de estabilidad de Routh.Motores de CD con escobillas e iman permanente (capıtulos 9 y 10). Disenode varios controladores basicos en servomecanismos utilizando la respuestaen el tiempo: proporcional, proporcional-derivativo, proporcional-integral,proporcional-integral-derivativo, compensadores de adelanto, controlado-res con dos grados de libertad.Sistema de levitacion magnetica (capıtulo 11). Diseno de un controladorPID usando el concepto de aproximacion lineal de un sistema no lineal yel metodo del lugar de las raıces.Sistema “ball and beam” (capıtulo 12). Diseno de un sistema multilazousando la respuesta en frecuencia (criterio de Nyquist y graficas de Bode)y el lugar de las raıces.Pendulo de Furuta (capıtulo 13). Diseno de un controlador por realimen-tacion del estado usando la tecnica de la variable de estado. Se utiliza unaaproximacion lineal de un sistema no lineal.
12 1 Introduccion
Pendulo con rueda inercial (capıtulo 14). Diseno de dos controladores porrealimentacion del estado usando la tecnica de la variable de estado. Unode los controladores es disenado utilizando el modelo no lineal completodel mecanismo y es utilizado para dar al lector una pequena introduccional control de sistemas no lineales.
1.4. Resumen del capıtulo
En el presente capıtulo se ha explicado de manera intuitiva cual es la ideafundamental de controlar un sistema en lazo cerrado. Para esto se ha descritocomo funciona el sistema de control de un canon antiaereo. Tambien se ha ex-plicado, mediante el mismo ejemplo, que es lo que se busca cuando se disenaun sistema de control. Se ha presentado una breve descripcion de la historiadel Control Automatico para que el lector entienda que todos los conceptosdetras de las herramientas de los sistemas de control han sido motivados porproblemas tecnologicos importantes. Esta descripcion historica ha sido utili-zada para indicar en que partes de la presente obra se abordan las diferentesherramientas del Control Automatico.
1.5. Preguntas de repaso
1. ¿Para que podrıa el lector usar el Control Automatico?2. ¿Podrıa hacer una lista del equipo domestico que utilice la realimentacion?3. Investigue como funciona un reloj de pared (que utiliza un pendulo)
¿Como cree que intervenga la realimentacion en el funcionamiento de estosrelojes?
4. ¿Por que es historicamente importante el regulador de velocidad de Wattpara una maquina de vapor?
5. ¿Que significa que un sistema de control sea inestable?6. ¿Que entiende por rapidez de respuesta?7. ¿Por que se dice que un pendulo invertido es inestable?8. ¿Por que se desarrollaron primero las tecnicas de respuesta en frecuencia
antes de las tecnicas de respuesta en el tiempo?

Referencias
1. S. Bennett, A brief history of automatic control, IEEE Control Systems Maga-zine, pp. 17-25, June 1996.
2. G.W. Evans, The story of Walter R. Evans and his textbook Control-SystemsDynamics, IEEE Control Systems Magazine, pp. 74-81, December 2004.
3. D.A. Mindell, Anti-aircraft fire control and the develoment of integrated systemsat Sperry, 1925-1940, IEEE Control Systems Magazine, pp. 108-113, April 1995.
4. S.W. Herwald, Recollection of the early development of servomechanism andcontrol systems, IEEE Control Systems Magazine, pp. 29-32, november 1984.
5. D.S. Bernstein, Feedback control: an invisible thread in the history of technology,IEEE Control Systems Magazine, pp. 53-68, April 2002.
6. W. Oppelt, On the early growth of conceptual thinking in the control systemtheory- The German role up to 1945, IEEE Control Systems Magazine, pp.16-22, November 1984.
7. S. Bennett, Nicolas Minorsky and the automatic steering of ships, IEEE ControlSystems Magazine, pp. 10-15, November 1984.

2
Modelado matematico de sistemas fısicos
El modelado matematico de sistemas fısicos consiste en obtener un conjun-to de ecuaciones que, al ser resueltas, muestran como evolucionan las variablesimportantes del sistema. Esto se consigue describiendo matematicamente, ypor separado, a cada una de las partes que componen al sistema por mo-delar. Finalmente, estos modelos matematicos aislados deben ser conectadosde acuerdo a la configuracion que mantienen dentro del sistema completo,respetando las leyes de la naturaleza que los rigen.
16 2 Modelado matematico de sistemas fısicos
Objetivos del capıtulo
Darse cuenta de que el modelo matematico de los sistemas fısicos esta cons-tituido por ecuaciones diferenciales.Aprender a obtener el modelo matematico de sistemas mecanicos, electri-cos y electromecanicos.Identificar a los sistemas fısicos como la interconexion de procesadores deenergıa.Identificar las analogıas entre sistemas de diferente naturaleza, a partir dela manera en que procesan la energıa.
Tradicionalmente, cuando se aborda el modelado de sistemas fısicos se re-curre a los metodos especıficos desarrollados para cada tipo de sistema. Esdecir, los sistemas electricos son modelados usando los metodos desarrolladosen la teorıa de circuitos electricos y cuando se trata de sistemas mecanicosse usan los metodos desarrollados en ingenierıa mecanica. Sin embargo, pro-ceder de esta manera tiene varias desventajas: i) la persona no especializadaen el tema en cuestion debe simplemente aceptar (sin muchas explicaciones)los metodos de modelado desarrollados en esa rama del conocimiento, ii) elestudiante no se da cuenta de que las leyes fısicas utilizadas para el modeladode sistemas de diferente naturaleza estan relacionadas por analogıas; aunqueen todo curso de control automatico siempre se tratan de resaltar las ana-logıas, estas tienen que ser explicadas a partir de las ecuaciones resultantesdel modelado y no se puede ver que es la esencia del fenomeno la que tiene sucontraparte en sistemas de diferente naturaleza.
Una manera de estudiar el modelado de sistemas fısicos de diferente natu-raleza bajo una perspectiva unificada es utilizando un concepto que es comuna varios ambitos de la ingenierıa: la energıa del sistema. Por esta misma razonen esta obra el modelado de sistemas se limita a sistemas electricos y mecani-cos los cuales pueden estudiarse usando conceptos generales de energıa queson comunes a todos estos sistemas. La idea fundamental del uso de la energıapara el modelado es que los componentes de cada sistema bajo estudio suminis-tran, almacenan o disipan energıa y cuando se unen para formar un sistemacomplejo es cuestion de determinar como esa energıa es transmitida de uncomponente a otro.
Este enfoque de usar la energıa para el modelado (y, por tanto, el presentecapıtulo) esta basado en las ideas introducidas en [1].
2.1. Energıa y variables generalizadas del sistema
En dos sistemas que se encuentran conectados el intercambio de energıase realiza a traves de un puerto, el cual puede ser conceptualmente descritocomo formado por dos terminales comunes a ambos sistemas (vease la figura2.1). La energıa es intercambiada entre estos sistemas atraves de dos variables

2.1 Energıa y variables generalizadas del sistema 17
generalizadas que se identifican bajo los conceptos generales de esfuerzo ey flujo f . Estas variables, al ser generalizadas, estan definidas en cualquiersistema independientemente de su naturaleza. Por tanto, no se confundanestas variables con las variables esfuerzo y flujo definidas en resistencia demateriales (esfuerzo) y mecanica de fluidos (flujo). Las variables generalizadasde esfuerzo y flujo pueden ser distinguidas a partir de la manera en que sonmedidas. El esfuerzo es medido utilizando un instrumento que se conectaentre ambas terminales del puerto (en la literatura en ingles se usa el terminoacross para describir estas variables). Ejemplos de estas variables son el voltaje(sistemas electricos), la presion (sistemas de fluidos) y la velocidad (sistemasmecanicos): estas variables se miden entre dos puntos porque necesitan sermedidas respecto a un valor de referencia. El flujo es medido utilizando uninstrumento que se conecta a lo largo de una de las terminales del puerto (enla literatura en ingles se usa el termino through para describir estas variables).En este caso no se necesita especificar un valor de referencia sino que se midela variable que fluye a traves del sistema. Ejemplos de estas variables son elflujo de fluidos (sistemas de fluidos), la corriente electrica (sistemas electricos)y la fuerza (sistemas mecanicos).
Sistema1
Sistema2
f
e
puerto
Figura 2.1. Dos sistemas conectados a traves de un puerto.
En este enfoque en el cual lo sistemas son considerados como procesadoresde energıa, el producto de las variables de esfuerzo y flujo es igual a la potenciainstantanea (w) intercambiada a traves del puerto:
w = ef
Para cada uno de los componentes del sistema se debe definir una convencionde signos para las variables generalizadas de esfuerzo y de flujo (vease la figura2.2). De este modo, si la potencia w tiene signo positivo para el componente ientonces este componente recibe energıa en ese instante. Si la potencia w tienesigno negativo para el elemento i entonces el componente entrega energıa alos otros componentes del sistema en ese instante.
La energıa intercambiada (E) en el intervalo de tiempo [0, t] esta dadacomo la integral de la potencia instantanea:

18 2 Modelado matematico de sistemas fısicos
Componente
f
ie
Figura 2.2. Sentidos definidos como positivos para las variables de esfuerzo y flujo.
E =
∫ t
0
ef dt (2.1)
Si la energıa E es positiva para el componente i, entonces E representa laenergıa que este componente ha recibido en el intervalo de tiempo [0, t], pero siE es negativa entonces E representa la cantidad de energıa que el componenteha entregado a los otros componentes del sistema en el intervalo de tiempo[0, t].
Ejemplo 2.1 En un circuito electrico, la potencia (w) esta dada como elproducto de la corriente electrica i (A, Amperes) a traves del circuito y elvoltaje v (V, volts) medido entre las terminales del circuito, mientras que laenergıa (E) intercambiada (puede ser recibida o entregada dependiendo delsigno de E) en el intervalo de tiempo [0, t] se calcula como la integral de lapotencia:
w = iv, E =
∫ t
0
iv dt
En un sistema mecanico traslacional, la potencia (w) esta dada como elproducto de la fuerza aplicada F (N, Newton) y la velocidad v (m/s, me-tros/segundo), mientras que la energıa (E) intercambiada en el intervalo detiempo [0, t] se calcula como la integral de la potencia:
w = Fv, E =
∫ t
0
Fv dt
En un sistema mecanico rotativo, la potencia (w) esta dada como el productodel par aplicado T (Nm, Newton×metro) y la velocidad angular ω (rad/s,radian/segundo), mientras que la energıa (E) intercambiada en el intervalode tiempo [0, t] se calcula como la integral de la potencia:
w = Tω, E =
∫ t
0
Tω dt
En un sistema de fluidos, la potencia (w) esta dada como el producto de la pre-sion P (N/m2, Newton/metro2) y el flujo del fluido Q (m3/s, metro3/segundo),mientras que la energıa (E) intercambiada en el intervalo de tiempo [0, t] secalcula como la integral de la potencia:

2.2 Almacenadores de energıa 19
w = PQ, E =
∫ t
0
PQ dt
Se recomienda hacer el analisis dimensional correspondiente en cada caso pa-ra verificar que la energıa siempre esta dada en Joules=Newton×metro y lapotencia en Joules/segundo.
Los componentes de un sistema pueden clasificarse de la siguiente manera,de acuerdo a la accion que realizan sobre la energıa E que intercambian:
Almacenadores de energıa.Disipadores de energıa.Fuentes de energıa.Convertidores.
A continuacion se estudia cada una de estas funciones.
2.2. Almacenadores de energıa
Existen dos maneras de almacenar la energıa: i) mediante el almacena-miento de esfuerzo e ii) mediante el almacenamiento de flujo. Estas dos ma-neras de almacenar la energıa definen dos nuevas variables: la acumulacion deesfuerzo (ea) y la acumulacion de flujo (fa):
ea =
∫ t
0
e dt, e =dea
dt
fa =
∫ t
0
f dt, f =dfa
dt
Notese que a partir de estas expresiones tambien se puede escribir:
e dt = dea, f dt = dfa
lo cual, al ser sustituido en (2.1) da origen a las siguientes expresiones parala energıa almacenada en terminos de la acumulacion de esfuerzo:
E =
∫ ea(t)
ea(0)
f dea (2.2)
y para la energıa almacenada en terminos de la acumulacion de flujo:
E =
∫ fa(t)
fa(0)
e dfa (2.3)
Para poder calcular la integral en (2.2) es necesario que el flujo f se puedaescribir como funcion de la acumulacion de esfuerzo ea, es decir que se puedaescribir:

20 2 Modelado matematico de sistemas fısicos
f = φ(ea)
Por otro lado, para poder calcular la integral en (2.3) es necesario que elesfuerzo e se pueda escribir como funcion de la acumulacion de flujo fa, esdecir que se pueda escribir:
e = ϕ(fa)
En cada caso, las funciones φ y ϕ se conocen como las funciones constituti-vas del componente del sistema que realiza la accion de almacenamiento deesfuerzo o de flujo. A continuacion se estudian los componentes que realizanel almacenamiento de esfuerzo o de flujo en sistemas de diferente naturaleza.
2.2.1. Sistemas mecanicos traslacionales
Almacenamiento de flujo
En la figura 2.3 se muestra un cuerpo rıgido (sin flexibilidad) de masa m(positiva) que se mueve con velocidad v12 (v12 = e, esfuerzo) bajo el efecto deuna fuerza F (F = f , flujo). Se supone que no existe friccion entre el cuerpoy el medio que lo rodea. Los sentidos mostrados para la fuerza y la velocidadson los sentidos que se definen como positivos para este tipo de componentede sistema. Bajo estas condiciones, la Segunda Ley de Newton [2], pag. 89,establece que:
F = ma (2.4)
donde a = dv12
dt es la aceleracion del cuerpo. La siguiente manera de definir elmomentum p:
p = mv12 (2.5)
es muy conveniente porque se puede integrar (2.5) y (2.4) para concluir que elmomentum es la acumulacion de flujo (p = fa), es decir que se puede escribir:
p =
∫ t
0
F dt + p(0)
A partir de (2.5) se concluye que la funcion constitutiva es:
v12 = ϕ(p) =1
mp, (e = ϕ(fa))
Entonces, sustituyendo v12 = e, p = fa y v12 = p/m en (2.3) y suponiendoque p(0) = 0, se encuentra que la energıa almacenada esta dada como:
E =
∫ p
0
1
mp dp =
1
2mp2 =
1
2mv2
12
lo cual constituye la expresion bien conocida para la energıa cinetica.
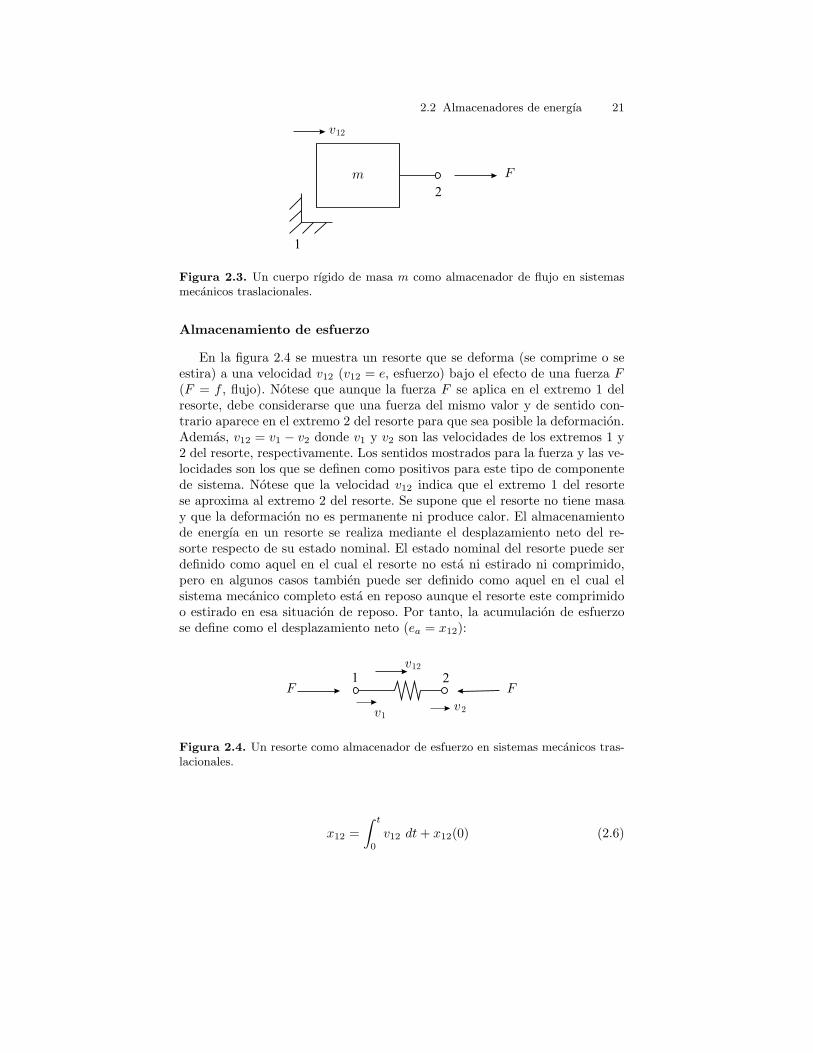
2.2 Almacenadores de energıa 21
F
v12
m
1
2
Figura 2.3. Un cuerpo rıgido de masa m como almacenador de flujo en sistemasmecanicos traslacionales.
Almacenamiento de esfuerzo
En la figura 2.4 se muestra un resorte que se deforma (se comprime o seestira) a una velocidad v12 (v12 = e, esfuerzo) bajo el efecto de una fuerza F(F = f , flujo). Notese que aunque la fuerza F se aplica en el extremo 1 delresorte, debe considerarse que una fuerza del mismo valor y de sentido con-trario aparece en el extremo 2 del resorte para que sea posible la deformacion.Ademas, v12 = v1 − v2 donde v1 y v2 son las velocidades de los extremos 1 y2 del resorte, respectivamente. Los sentidos mostrados para la fuerza y las ve-locidades son los que se definen como positivos para este tipo de componentede sistema. Notese que la velocidad v12 indica que el extremo 1 del resortese aproxima al extremo 2 del resorte. Se supone que el resorte no tiene masay que la deformacion no es permanente ni produce calor. El almacenamientode energıa en un resorte se realiza mediante el desplazamiento neto del re-sorte respecto de su estado nominal. El estado nominal del resorte puede serdefinido como aquel en el cual el resorte no esta ni estirado ni comprimido,pero en algunos casos tambien puede ser definido como aquel en el cual elsistema mecanico completo esta en reposo aunque el resorte este comprimidoo estirado en esa situacion de reposo. Por tanto, la acumulacion de esfuerzose define como el desplazamiento neto (ea = x12):
F
v12
F
v1v2
1 2
Figura 2.4. Un resorte como almacenador de esfuerzo en sistemas mecanicos tras-lacionales.
x12 =
∫ t
0
v12 dt + x12(0) (2.6)
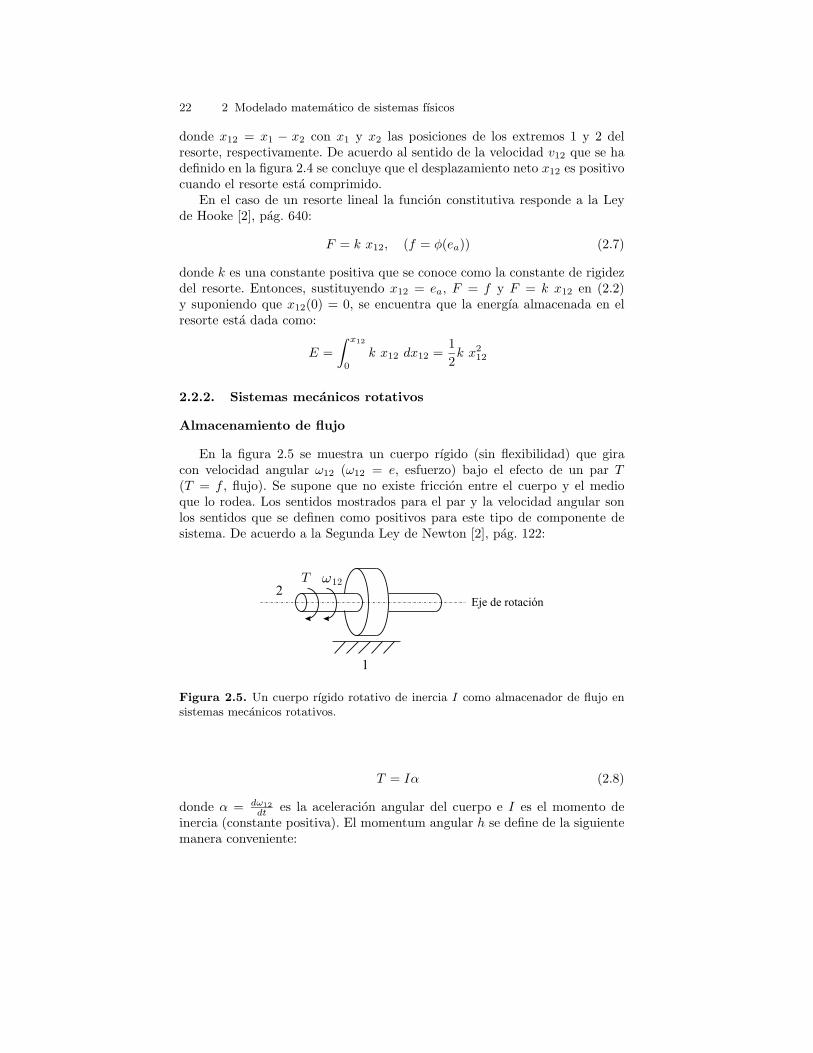
22 2 Modelado matematico de sistemas fısicos
donde x12 = x1 − x2 con x1 y x2 las posiciones de los extremos 1 y 2 delresorte, respectivamente. De acuerdo al sentido de la velocidad v12 que se hadefinido en la figura 2.4 se concluye que el desplazamiento neto x12 es positivocuando el resorte esta comprimido.
En el caso de un resorte lineal la funcion constitutiva responde a la Leyde Hooke [2], pag. 640:
F = k x12, (f = φ(ea)) (2.7)
donde k es una constante positiva que se conoce como la constante de rigidezdel resorte. Entonces, sustituyendo x12 = ea, F = f y F = k x12 en (2.2)y suponiendo que x12(0) = 0, se encuentra que la energıa almacenada en elresorte esta dada como:
E =
∫ x12
0
k x12 dx12 =1
2k x2
12
2.2.2. Sistemas mecanicos rotativos
Almacenamiento de flujo
En la figura 2.5 se muestra un cuerpo rıgido (sin flexibilidad) que giracon velocidad angular ω12 (ω12 = e, esfuerzo) bajo el efecto de un par T(T = f , flujo). Se supone que no existe friccion entre el cuerpo y el medioque lo rodea. Los sentidos mostrados para el par y la velocidad angular sonlos sentidos que se definen como positivos para este tipo de componente desistema. De acuerdo a la Segunda Ley de Newton [2], pag. 122:
Eje de rotación
T
1
2!12
Figura 2.5. Un cuerpo rıgido rotativo de inercia I como almacenador de flujo ensistemas mecanicos rotativos.
T = Iα (2.8)
donde α = dω12
dt es la aceleracion angular del cuerpo e I es el momento deinercia (constante positiva). El momentum angular h se define de la siguientemanera conveniente:

2.2 Almacenadores de energıa 23
h = Iω12 (2.9)
porque integrando (2.8) y (2.9) se encuentra que el momentum angular es laacumulacion de flujo (h = fa) porque se puede escribir:
h =
∫ t
0
T dt + h(0)
A partir de (2.9) se concluye que la funcion constitutiva es:
ω12 = ϕ(h) =1
Ih, (e = ϕ(fa))
Entonces, sustituyendo ω12 = e, h = fa y ω12 = h/I en (2.3) y suponiendoque h(0) = 0, se encuentra que la energıa almacenada esta dada como:
E =
∫ h
0
1
Ih dh =
1
2Ih2 =
1
2Iω2
12
lo cual constituye la expresion bien conocida para la energıa cinetica.
Almacenamiento de esfuerzo
En la figura 2.6 se muestra un resorte que se deforma (mediante una flexionangular) a una velocidad ω12 (ω12 = e, esfuerzo) bajo el efecto de un par T(T = f , flujo). Notese que aunque el par T se aplica en el extremo 1 del resorte,debe considerarse que un par del mismo valor y de sentido contrario apareceen el extremo 2 del resorte para que sea posible la deformacion. Ademas,ω12 = ω1 − ω2 con ω1 y ω2 las velocidades de los extremos 1 y 2 del resorte,respectivamente. Los sentidos mostrados para la fuerza y las velocidades sonlos que se definen como positivos para este tipo de componente de sistema.Se supone que el resorte no tiene momento de inercia (o masa) y que ladeformacion no es permanente ni produce calor. El almacenamiento de energıaen un resorte se realiza mediante el desplazamiento angular neto del resorterespecto de su estado nominal. El estado nominal del resorte puede ser definidocomo aquel en el cual el resorte no esta flexionado en ni en sentido horarioni antihorario, pero en algunos casos tambien puede ser definido como aquelen el cual el sistema mecanico completo esta en reposo aunque el resorte esteflexionado en esa situacion de reposo. Por tanto, la acumulacion de esfuerzose define como el desplazamiento angular neto (ea = θ12):
θ12 =
∫ t
0
ω12 dt + θ12(0) (2.10)
donde θ12 = θ1 − θ2 con θ1 y θ2 las posiciones angulares de los extremos 1 y2 del resorte, respectivamente. De acuerdo al sentido de la velocidad ω12 que

24 2 Modelado matematico de sistemas fısicos
se ha definido en la figura 2.6 se concluye que el desplazamiento angular netoθ12 es positivo cuando el resorte se flexiona de modo que θ1 > θ2.
En el caso de un resorte lineal, la funcion constitutiva responde a la Leyde Hooke:
T = k θ12, (f = φ(ea)) (2.11)
donde k es una constante positiva que se conoce como la constante de rigideztorsional del resorte. Entonces, sustituyendo θ12 = ea, T = f y T = k θ12 en(2.2) y suponiendo que θ12(0) = 0, se encuentra que la energıa almacenada enel resorte esta dada como:
E =
∫ θ12
0
k θ12 dθ12 =1
2k θ2
12
2.2.3. Sistemas electricos
Almacenamiento de esfuerzo
En la figura 2.7 se muestra un inductor a traves del cual circula una corrien-te electrica i (i = f , flujo) bajo el efecto de un voltaje v12 (v12 = e, esfuerzo)aplicado entre sus extremos. Se supone que no existen efectos parasitos, esdecir, el inductor no tiene resistencia electrica interna ni existe capacitanciaentre sus espiras. Los sentidos mostrados para la corriente electrica y el voltajeson los sentidos que se definen como positivos para este tipo de componentede sistema.
Faraday fue el primero en darse cuenta de que un inductor (y en generalcualquier circuito electrico suficientemente largo, dado que un inductor es unconductor electrico arrollado sobre un nucleo) tiene propiedades analogas alas que tiene el momentum en sistemas mecanicos. Lo que Faraday llamo el
T T
1 2
!2!1
!12
Figura 2.6. Un resorte como almacenador de esfuerzo en sistemas mecanicos rota-tivos.
+ à
v12
i1 2
Figura 2.7. Un inductor como almacenador de esfuerzo en sistemas electricos.

2.2 Almacenadores de energıa 25
“momentum electrodinamico” es mas conocido actualmente como el flujo con-catenado λ y es igual al flujo magnetico que es encerrado por el inductor.Faraday encontro que el flujo concatenado es proporcional a la corriente i quefluye a traves del inductor y a una constante positiva L que depende de laforma geometrica en que el conductor esta arrollado para formar el inductor.La constante L recibe el nombre de inductancia. Por tanto, se puede escribir:
λ = Li (2.12)
El flujo concatenado determina el voltaje que se produce en los extremos deun inductor mediante lo que hoy se conoce como la Ley de Faraday [2], pag.606, [3], pag. 325:
v12 =dλ
dt= L
di
dt(2.13)
Esto significa que el flujo concatenado representa la acumulacion de voltaje oesfuerzo (λ = ea).
λ =
∫ t
0
v12 dt + λ(0)
Por tanto, a partir de la expresion en (2.12) se concluye que:
i = φ(λ) =1
Lλ, (f = φ(ea))
Entonces, sustituyendo i = f , λ = ea e i = λ/L en (2.2) y suponiendo queλ(0) = 0, se encuentra que la energıa almacenada esta dada como:
E =
∫ λ
0
1
Lλ dλ =
1
2Lλ2 =
1
2Li2 (2.14)
lo cual constituye la expresion bien conocida para la energıa magnetica alma-cenada en un inductor.
Almacenamiento de flujo
Un capacitor se forma donde quiera que se encuentren dos conductoreselectricos con potenciales electricos diferentes, separados por un material noconductor a una distancia suficientemente pequena como para que se genereun campo electrico entre ellos. Cada uno de los conductores electricos recibeel nombre placa. En la figura 2.8 se muestra un capacitor a traves del cualcircula una corriente electrica i (i = f , flujo) bajo el efecto de un voltaje v12
(v12 = e, esfuerzo) aplicado entre sus terminales. Se supone que no existenefectos parasitos, es decir que no existe corriente de fuga entre las placas delcapacitor y que no existen efectos inductivos debidos a las placas del capa-citor. Debido a la diferencia de potencial que existe entre los conductores se

26 2 Modelado matematico de sistemas fısicos
producira una acumulacion de carga electrica. Se usa la letra q para repre-sentar dicha carga electrica, la cual es igual pero de signo contrario en cadauno de los conductores. Con el fin de cuantificar la cantidad de carga electricaque puede ser almacenada, se define la capacitancia C (constante positiva)del siguiente modo [3], pag. 121:
C =q
v12(2.15)
La capacitancia C depende de la forma geometrica y la cercanıa de los con-ductores (placas), ası como de las propiedades dielectricas del material noconductor colocado entre ellos. La corriente electrica se define a partir de lacarga electrica del siguiente modo:
i =dq
dt(2.16)
Por tanto, la carga electrica representa la acumulacion de flujo (de corrienteelectrica) (q = fa):
q =
∫ t
0
i dt + q(0)
A partir de la expresion en (2.15) se concluye que
v12 = ϕ(q) =1
Cq, (e = ϕ(fa))
Entonces, sustituyendo v12 = e, q = fa y v12 = q/C en (2.3) y suponiendoque q(0) = 0, se encuentra que la energıa almacenada esta dada como:
E =
∫ q
0
1
Cq dq =
1
2Cq2
lo cual constituye la expresion bien conocida para la energıa electrica alma-cenada en un capacitor.
+ àv12
i1 2
Figura 2.8. Un capacitor como almacenador de flujo en sistemas electricos.

2.3 Disipadores de energıa 27
2.3. Disipadores de energıa
Un disipador es un componente que basicamente convierte la energıa enotra forma de energıa (generalmente termica) la cual no es recuperable por elsistema. A diferencia de los almacenadores de energıa, la disipacion de energıasolo se realiza mediante un unico proceso. Ası, un disipador es un componentecuya funcion constitutiva relaciona de manera estatica (sin integrales de pormedio) a las variables generalizadas de esfuerzo y de flujo:
e = ϕ(f)
En este caso no hay energıa almacenada y solo se puede hablar de que lapotencia instantanea que se disipa esta dada por el producto de las variablesgeneralizadas de esfuerzo y flujo:
w = ef (2.17)
A continuacion se estudian los componentes disipadores de energıa en sistemasde diferente naturaleza.
2.3.1. Sistemas mecanicos traslacionales
Cualquier objeto mecanico que requiere de la aplicacion permanente deuna fuerza para poder mantener un valor de velocidad presenta efectos di-sipativos. Normalmente la disipacion de potencia ocurre porque la energıacinetica esta siendo convertida en energıa termica por efecto de la friccion, lacual aparece siempre que dos cuerpos hacen contacto mientras existe movi-miento relativo entre ellos. La funcion constitutiva de un disipador mecanicogeneral esta dada como:
v12 = ϕ(F )
donde v12 (e, esfuerzo) es la velocidad relativa entre los cuerpos y F (f , flujo)es la fuerza aplicada. Un caso particular muy importante de friccion es lafriccion viscosa, la cual esta representada por una funcion constitutiva linealde la forma:
v12 =1
bF, friccion viscosa (2.18)
donde b es una constante positiva conocida como el coeficiente de friccionviscosa. Este tipo de friccion ocurre, por ejemplo, cuando una placa planay llena de orificios se desplaza dentro de una camara cerrada llena de aire,como se muestra en la figura 2.9. Debido a que el aire debe fluir a traves delos orificios conforme la placa se mueve a velocidad v12, es necesario aplicaruna fuerza F para mantener la velocidad del movimiento. Ademas, v12 =v1−v2 donde v1 y v2 son las velocidades de los extremos 1 y 2 del dispositivo,
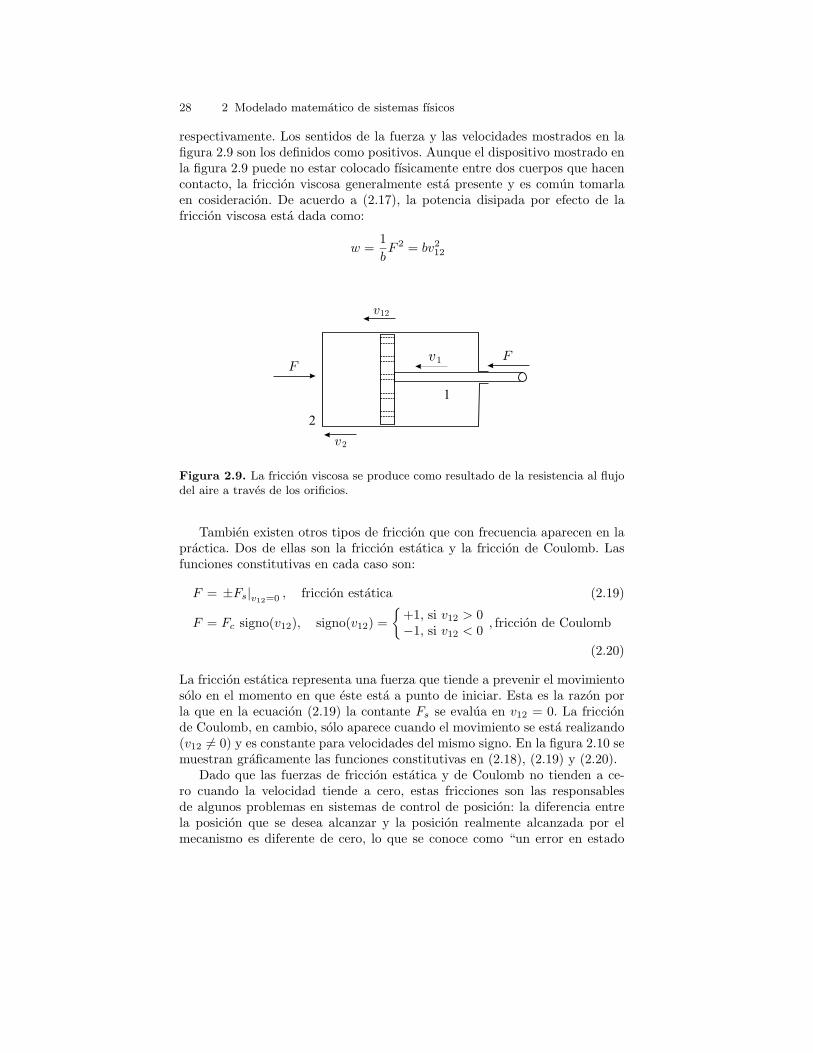
28 2 Modelado matematico de sistemas fısicos
respectivamente. Los sentidos de la fuerza y las velocidades mostrados en lafigura 2.9 son los definidos como positivos. Aunque el dispositivo mostrado enla figura 2.9 puede no estar colocado fısicamente entre dos cuerpos que hacencontacto, la friccion viscosa generalmente esta presente y es comun tomarlaen cosideracion. De acuerdo a (2.17), la potencia disipada por efecto de lafriccion viscosa esta dada como:
w =1
bF 2 = bv2
12
1
2
F
v12
v2
Fv1
Figura 2.9. La friccion viscosa se produce como resultado de la resistencia al flujodel aire a traves de los orificios.
Tambien existen otros tipos de friccion que con frecuencia aparecen en lapractica. Dos de ellas son la friccion estatica y la friccion de Coulomb. Lasfunciones constitutivas en cada caso son:
F = ±Fs|v12=0 , friccion estatica (2.19)
F = Fc signo(v12), signo(v12) =
+1, si v12 > 0−1, si v12 < 0
, friccion de Coulomb
(2.20)
La friccion estatica representa una fuerza que tiende a prevenir el movimientosolo en el momento en que este esta a punto de iniciar. Esta es la razon porla que en la ecuacion (2.19) la contante Fs se evalua en v12 = 0. La friccionde Coulomb, en cambio, solo aparece cuando el movimiento se esta realizando(v12 6= 0) y es constante para velocidades del mismo signo. En la figura 2.10 semuestran graficamente las funciones constitutivas en (2.18), (2.19) y (2.20).
Dado que las fuerzas de friccion estatica y de Coulomb no tienden a ce-ro cuando la velocidad tiende a cero, estas fricciones son las responsablesde algunos problemas en sistemas de control de posicion: la diferencia entrela posicion que se desea alcanzar y la posicion realmente alcanzada por elmecanismo es diferente de cero, lo que se conoce como “un error en estado

2.3 Disipadores de energıa 29
F F F
Fs
à Fc
Fc
à Fs
b
v12 v12 v12
Figura 2.10. Funciones constitutivas definidas en (2.18), (2.19) y (2.20).
estacionario diferente de cero”. Por otro lado, dado que las fricciones estaticay de Coulomb tienen funciones constitutivas no lineales y discontinuas, nopueden ser manejadas usando tecnicas de control por sistemas lineales ni porlas tecnicas de control para sistemas no lineales “suaves”. Esta es la razonpor las que con frecuencia no son consideradas en el modelado de sistemas.Sin embargo, hay que tener presente que en cualquier situacion experimentalse observaran los efectos de estas dos fricciones. Se sugiere consultar [4] si sedesea conocer algunos metodos para medir los parametros de distintos tiposde friccion.
2.3.2. Sistemas mecanicos rotativos
Los disipadores en sistemas mecanicos rotativos (vease la figura 2.11) sonidenticos a los disipadores en sistemas mecanicos traslacionales. La unica di-ferencia es que las variables generalizadas de esfuerzo y flujo estan expresadasen terminos de velocidad angular ω12 (ω12 = e, esfuerzo) y par T (T = f ,flujo):
ω12 =1
bT, friccion viscosa (2.21)
T = ±Ts|ω12=0 , friccion estatica
T = Tc signo(ω12), signo(ω12) =
+1, si ω12 > 0−1, si ω12 < 0
, friccion de Coulomb
2.3.3. Sistemas electricos
El componente disipador en sistemas electricos es aquel en el cual es ne-cesario aplicar un voltaje v12 (v12 = e, esfuerzo) entre sus terminales paramantener el flujo de una corriente i (i = f , flujo) a traves de el. La funcionconstitutiva correspondiente relaciona de manera estatica estas dos variables

30 2 Modelado matematico de sistemas fısicos
T T
!12
!1 !2
Figura 2.11. Un disipador en sistemas mecanicos rotativos.
y esta definida por la Ley de Ohm [2], pag. 530, en el caso de que el disipadorsea lineal:
v12 = iR (2.22)
donde R es una constante positiva conocida como la resistencia electrica deldisipador. En la figura 2.12 se muestra una resistencia electrica por la quefluye una corriente i y se aplica un voltaje v12. Los sentidos mostrados son losdefinidos como positivos. De acuerdo a w = ef , la potencia disipada en unaresistencia electrica esta dada como:
w = i2R =1
Rv212
1 2+ ài
v12
Figura 2.12. Una resistencia como disipador en sistemas electricos.
2.4. Fuentes de energıa
Las fuentes de energıa pueden ser de dos tipos: fuentes de esfuerzo (e) yfuentes de flujo f . En las figuras 2.13(a) y 2.13(b) se muestran ambos tiposde fuentes y los sentidos definidos como positivos para el esfuerzo y el flujo.Tambien se muestran dos dibujos en los que especifica que una fuente deesfuerzo (o de flujo) entrega un esfuerzo (o un flujo) que es independiente(constante) del flujo (o esfuerzo) a traves de la fuente. Mas aun, cuando lapotencia w = ef es positiva, entonces w es la potencia que la fuente entregaa los otros componentes del sistema; cuando la potencia w = ef es negativa,entonces w es la potencia que la fuente recibe desde los otros componentes delsistema.

2.4 Fuentes de energıa 31
Recibepotencia
Entregapotencia
e1+
à
f
e1
f
e
(a)
Recibepotencia
Entregapotencia
+
à
f
e
1f1f
e
(b)
Figura 2.13. Fuentes de esfuerzo y de flujo.
2.4.1. Sistemas mecanicos traslacionales
Una fuente de fuerza es una fuente de flujo, por lo que la fuente entregauna fuerza cuyo valor es independiente de la velocidad (esfuerzo) del compo-nente del sistema sobre el cual se esta aplicando dicha fuerza. Una fuente develocidad es una fuente de esfuerzo, por lo que la velocidad que produce esindependiente de la fuerza (flujo) ejercida sobre el componente del sistemacorrespondiente. Claramente es mucho mas facil visualizar lo que es una fuen-te de fuerza que una fuente de velocidad. Sin embargo, algunos fenomenospueden ser modelados de manera conveniente como fuentes de velocidad.
2.4.2. Sistemas mecanicos rotativos
Las fuentes se definen como en el caso de sistemas mecanicos traslacionales,pero en terminos de par (flujo) y velocidad angular (esfuerzo).
2.4.3. Sistemas electricos
Una fuente de corriente electrica es una fuente de flujo, por lo que la fuenteentrega una corriente electrica cuyo valor es independiente del voltaje (esfuer-zo) entre sus terminales. Una fuente de voltaje es una fuente de esfuerzo, porlo que el voltaje entre sus terminales es independiente de la corriente electricaa traves de ella. Tal como sucede en los sistemas mecanicos, es mas facil visua-lizar una clase de fuentes: el concepto de fuente de voltaje es mas claro que elde una fuente de corriente electrica. Sin embargo, el uso de fuentes de corrien-te es un artificio muy util para modelar algunos efectos que se presentan, porejemplo, en circuitos electronicos.
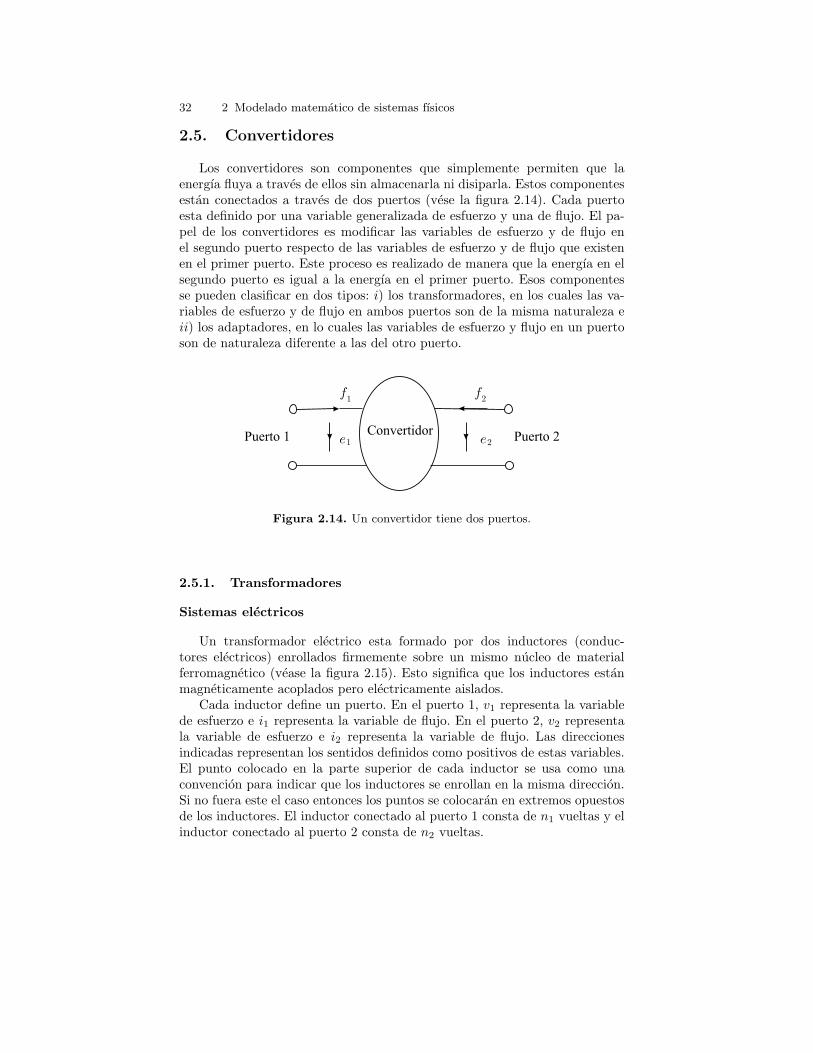
32 2 Modelado matematico de sistemas fısicos
2.5. Convertidores
Los convertidores son componentes que simplemente permiten que laenergıa fluya a traves de ellos sin almacenarla ni disiparla. Estos componentesestan conectados a traves de dos puertos (vese la figura 2.14). Cada puertoesta definido por una variable generalizada de esfuerzo y una de flujo. El pa-pel de los convertidores es modificar las variables de esfuerzo y de flujo enel segundo puerto respecto de las variables de esfuerzo y de flujo que existenen el primer puerto. Este proceso es realizado de manera que la energıa en elsegundo puerto es igual a la energıa en el primer puerto. Esos componentesse pueden clasificar en dos tipos: i) los transformadores, en los cuales las va-riables de esfuerzo y de flujo en ambos puertos son de la misma naturaleza eii) los adaptadores, en lo cuales las variables de esfuerzo y flujo en un puertoson de naturaleza diferente a las del otro puerto.
Convertidore1 e2
f1 2
f
Puerto 1 Puerto 2
Figura 2.14. Un convertidor tiene dos puertos.
2.5.1. Transformadores
Sistemas electricos
Un transformador electrico esta formado por dos inductores (conduc-tores electricos) enrollados firmemente sobre un mismo nucleo de materialferromagnetico (vease la figura 2.15). Esto significa que los inductores estanmagneticamente acoplados pero electricamente aislados.
Cada inductor define un puerto. En el puerto 1, v1 representa la variablede esfuerzo e i1 representa la variable de flujo. En el puerto 2, v2 representala variable de esfuerzo e i2 representa la variable de flujo. Las direccionesindicadas representan los sentidos definidos como positivos de estas variables.El punto colocado en la parte superior de cada inductor se usa como unaconvencion para indicar que los inductores se enrollan en la misma direccion.Si no fuera este el caso entonces los puntos se colocaran en extremos opuestosde los inductores. El inductor conectado al puerto 1 consta de n1 vueltas y elinductor conectado al puerto 2 consta de n2 vueltas.
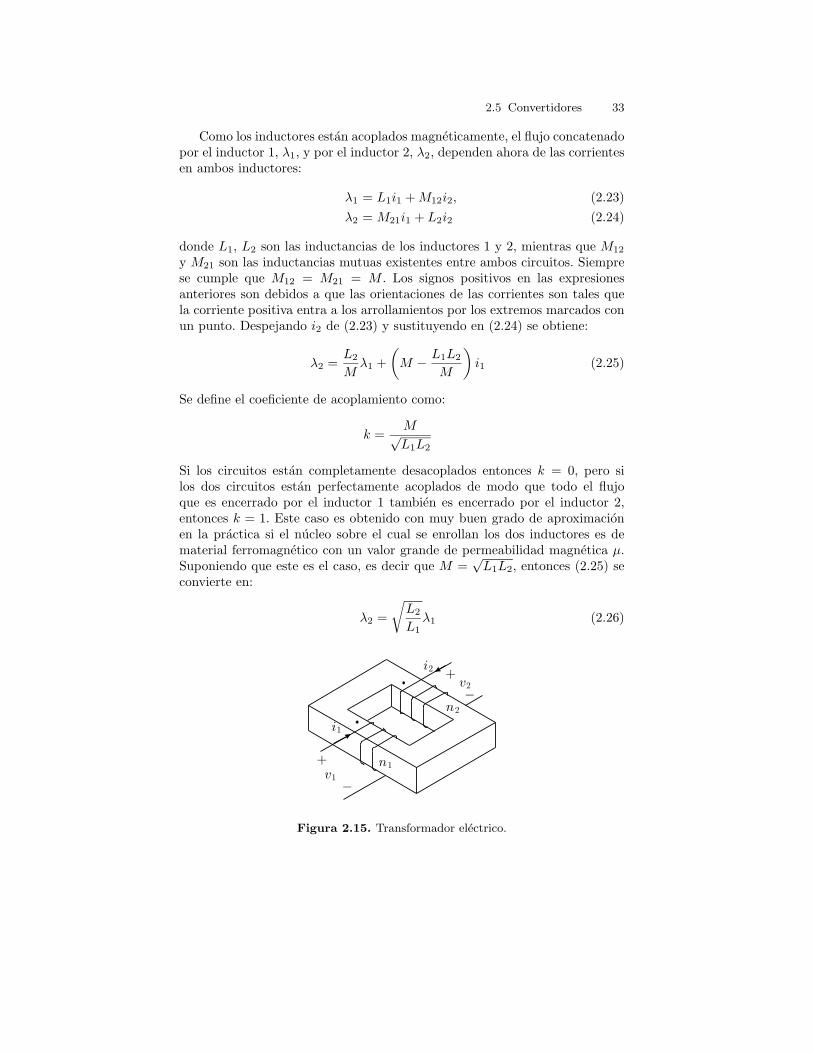
2.5 Convertidores 33
Como los inductores estan acoplados magneticamente, el flujo concatenadopor el inductor 1, λ1, y por el inductor 2, λ2, dependen ahora de las corrientesen ambos inductores:
λ1 = L1i1 + M12i2, (2.23)
λ2 = M21i1 + L2i2 (2.24)
donde L1, L2 son las inductancias de los inductores 1 y 2, mientras que M12
y M21 son las inductancias mutuas existentes entre ambos circuitos. Siemprese cumple que M12 = M21 = M . Los signos positivos en las expresionesanteriores son debidos a que las orientaciones de las corrientes son tales quela corriente positiva entra a los arrollamientos por los extremos marcados conun punto. Despejando i2 de (2.23) y sustituyendo en (2.24) se obtiene:
λ2 =L2
Mλ1 +
(M − L1L2
M
)i1 (2.25)
Se define el coeficiente de acoplamiento como:
k =M√L1L2
Si los circuitos estan completamente desacoplados entonces k = 0, pero silos dos circuitos estan perfectamente acoplados de modo que todo el flujoque es encerrado por el inductor 1 tambien es encerrado por el inductor 2,entonces k = 1. Este caso es obtenido con muy buen grado de aproximacionen la practica si el nucleo sobre el cual se enrollan los dos inductores es dematerial ferromagnetico con un valor grande de permeabilidad magnetica µ.Suponiendo que este es el caso, es decir que M =
√L1L2, entonces (2.25) se
convierte en:
λ2 =
√L2
L1λ1 (2.26)
+
àv1
v2à
+i2
i1
n1
n2
Figura 2.15. Transformador electrico.

34 2 Modelado matematico de sistemas fısicos
Por otro lado, dividiendo (2.24) entre (2.23), con M12 = M21 = M , y usando(2.26):
λ2
λ1=
Mi1 + L2i2L1i1 + Mi2
=
√L2
L1
A partir de esto se puede escribir:
i2i1
=
√L1L2 − M
L2 −√
L2
L1M
=
√L1√L2
(√
L1L2 − M)√
L1L2 − M=
√L1
L2(2.27)
La inductancia de cada circuito esta dada como:
L1 = µn2
1A
l
L2 = µn2
2A
l
donde A, l y µ son, respectivamente, el area, la longitud media y la permea-bilidad magnetica del nucleo. Por tanto
√L1
L2=
n1
n2(2.28)
Usando esto y (2.13) se obtiene, de (2.26):
v2 =n2
n1v1
y de (2.27):
i2 =n1
n2i1
Lo cual significa que la potencia en ambos puertos es igual porque:
w2 = v2i2 =n2
n1v1
n1
n2i1 = v1i1 = w1
Sistemas mecanicos traslacionales
En la figura 2.16 se muestra un transformador mecanico traslacional ası co-mo las variables definidas y los sentidos definidos positivos de las mismas. Setrata de una palanca con brazos de longitud a y b. Las posiciones x1 y x2 seobtienen por simple geometrıa:

2.5 Convertidores 35
x1 = a sin(α), x2 = b sin(α)
Derivando respecto al tiempo y dividiendo ambos resultados se obtiene larelacion entre esfuerzos:
v2 =b
av1
La relacion entre las fuerzas (flujos) en cada puerto se obtiene usando elprincipio del trabajo virtual:
F1δx1 = F2δx2
δx1 = aδ sin(α), δx2 = bδ sin(α)
F2 =a
bF1
Notese que la potencia en ambos puertos es igual:
w2 = v2F2 =b
av1
(a
bF1
)= F1v1 = w1
v2
v1
F1
F2
a
b
ë
Figura 2.16. Transformador mecanico traslacional.
Sistemas mecanicos rotativos
En la figura 2.17 se muestran dos ruedas dentadas de radios r1 y r2 unidas,cada una, a un eje rotativo. La rueda de radio r1 tiene n1 dientes mientras quela rueda de radio r2 tiene n2 dientes. En la figura 2.17 tambien se muestranlos sentidos definidos como positivos de los pares y las velocidades angulares

36 2 Modelado matematico de sistemas fısicos
en cada rueda. El hecho de que las ruedas sean dentadas evita que las ruedaspuedan patinar. Esto asegura que la longitud de arco de cırculo s generadopor un angulo θ1 descrito en el eje 1 sea igual a la longitud de arco generadopor un angulo θ2 en el eje 2. Existe una relacion geometrica que relaciona alradio de un cırculo, el angulo descrito por el mismo y la longitud del arco decırculo generado. Aplicando esta relacion en ambos ejes se tiene:
s = θ1 r1, s = θ2 r2 (2.29)
donde θ1 y θ2 deben estar dados en radianes. De lo anterior se obtiene:
θ1 r1 = θ2 r2 (2.30)
n1
n2
sr1 r2
T1T2
!2!1
ò1 ò2
F
Figura 2.17. Caja de engranes.
Por otro lado, se sabe que el paso de los engranes α (ancho de cada diente)es igual en ambos ejes, pues esto es necesario para que dichos dientes seadapten correctamente al girar. Esto significa que:
p1 = αn1, p2 = αn2
p1 = 2πr1, p2 = 2πr2
donde p1 y p2 representan los perımetros de cada una de las ruedas dentadas.Combinando estas expresiones se tiene:
r1
r2=
n1
n2(2.31)
Combinando (2.30) y (2.31):
θ1 =n2
n1θ2
Derivando respecto al tiempo se obtiene:

2.5 Convertidores 37
ω1 =n2
n1ω2 (2.32)
donde ω1 y ω2 son las velocidades angulares de cada rueda. Por otro lado, lafuerza F aplicada en el punto donde hacen contacto las ruedas es igual paraambas. Esta fuerza satisface:
T1 = Fr1, T2 = Fr2
donde T1 y T2 son los pares aplicados a cada eje. Despejando F e igualando:
T1 =r1
r2T2 =
n1
n2T2 (2.33)
Usando (2.33) y (2.32) se encuentra que la potencia en ambos puertos es igual:
w1 = T1ω1 =n1
n2T2
n2
n1ω2 = T2ω2 = w2
2.5.2. Adaptadores
Sistemas mecanicos
Considere el sistema pinon-cremallera mostrado en la figura 2.18. El puerto1 esta definido en terminos de variables rotativas: la velocidad angular ω1 esel esfuerzo y el par T1 es el flujo, mientras que el puerto 2 esta definido enterminos de variables de traslacion: la velocidad v2 es el esfuerzo y la fuerzaF2 es el flujo. Por definicion, el par T1 y la fuerza F2 se relacionan a travesde:
T1 = rF2 (2.34)
donde r es el radio del pinon, mientras que la velocidad angular ω1 y lavelocidad v2 se relacionan a traves de (vease (2.29)):
v2 = rω1 (2.35)
Por tanto, la potencia en ambos puertos es igual:
w1 = T1ω1 = rF21
rv2 = F2v2 = w2
Los sentidos mostrados en la figura 2.18 son los definidos como positivos.
Sistemas electromecanicos
En la figura 2.19 se muestra una espira cuadrada de area A = l2 colocadadentro de un campo magnetico B. Por la espira circula una corriente electricai, en el sentido indicado, por efecto de una fuente de voltaje externa de valor E.
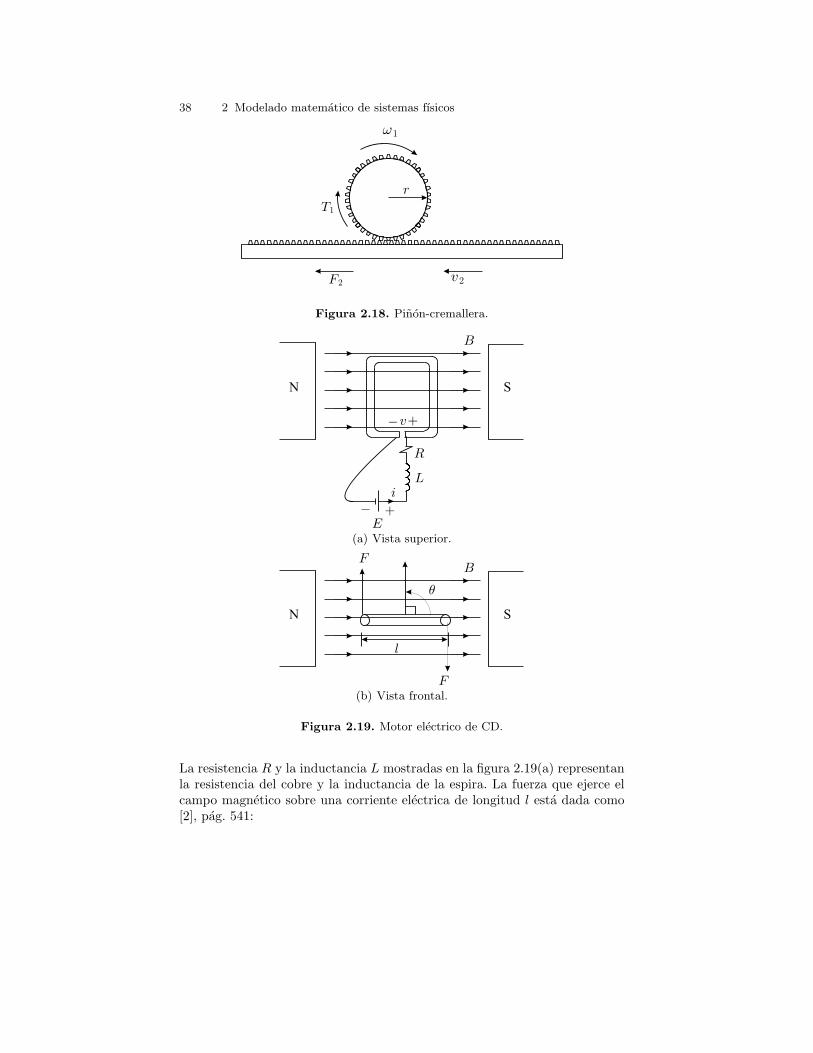
38 2 Modelado matematico de sistemas fısicos
F2
T1
r
v2
!1
Figura 2.18. Pinon-cremallera.
N S
B
E+à
à +v
iL
R
(a) Vista superior.
ò
l
N S
BF
F(b) Vista frontal.
Figura 2.19. Motor electrico de CD.
La resistencia R y la inductancia L mostradas en la figura 2.19(a) representanla resistencia del cobre y la inductancia de la espira. La fuerza que ejerce elcampo magnetico sobre una corriente electrica de longitud l esta dada como[2], pag. 541:

2.5 Convertidores 39
F = ilu × B (2.36)
donde u es un vector unitario en el mismo sentido de la corriente electrica yse usa la barra arriba de las variables para indicar que se trata de vectores.El sımbolo “×” representa el producto vectorial. Por tanto, bajo la situacionmostrada en la figura 2.19(b), es decir cuando θ = 90, el campo magneticoejerce sobre los lados izquierdo y derecho de la espira la fuerza:
F = ilB
en el sentido indicado. Esto significa que sobre el eje de la espira se ejerce unpar de valor:
T = 2l
2F = iBl2 = iBA
donde se ha considerado que el par debido a la fuerza en cada lado es lF/2(fuerza por radio) y que hay dos fuerzas aplicadas de la misma magnitud: unaaplicada sobre el lado izquierdo y otra sobre el lado derecho de la espira. Ellector puede verificar que, de acuerdo a (2.36), las fuerzas sobre los lados dela espira que estan atras y adelante no producen ningun par de giro. Todolo anterior significa que la espira gira con una velocidad angular ω = −θ, esdecir, en sentido contrario al definido para θ en la figura 2.19(b) donde θ es elangulo formado por las direcciones del campo magnetico y la perpendiculara la espira. De acuerdo a la Ley de Faraday [3], pag. 325, este movimientoinduce un voltaje v en las terminales de la espira el cual esta dado de acuerdoa (2.13), es decir:
v =dλ
dt
donde λ es el flujo magnetico concatenado por la espira el cual esta dado por:
λ = BA cos(θ)
Por tanto, usando estas dos expresiones se encuentra:
v = −BAθ sin(θ) = BAω sin(θ)
Notese que, de acuerdo a la Ley de Lenz [3], pag. 327, el voltaje inducido vtiene una polaridad tal (vease la figura 2.19(a)) que se opone a la causa quelo produce la cual en este caso es, a fin de cuentas, la corriente que circula i.Ahora suponga que se colocan varias espiras con diferentes inclinaciones, demanera que un conmutador mecanico automaticamente conecte y desconectelas espiras de tal modo que siempre este conectada solamente la espira parala cual θ = 90. Entonces, el voltaje en las terminales del conjunto esta dadocomo:
v = BAω

40 2 Modelado matematico de sistemas fısicos
Lo que se acaba de describir es el funcionamiento de un motor electrico de CD(corriente directa). Sean el voltaje v y la corriente i las variables de esfuerzoy flujo, respectivamente, del puerto 1 y sean la velocidad angular ω y el par Tlas variables de esfuerzo y flujo, respectivamente, del puerto 2. Las relacionesentre las variables de ambos puertos estan dadas por:
v = BAω (2.37)
i =1
BAT
Si se considera que en el puerto 1 se aplica un par T a una velocidad ω,produciendo en el puerto 2 un voltaje v y una corriente electrica i, entoncesse tiene un generador electrico de CD y ambas expresiones en (2.37) aun sonvalidas. Notese que en cualquiera de estos casos, la potencia en ambos puertoses igual:
w1 = vi =1
BATBAω = Tω = w2
En situaciones mas generales se acostumbra escribir las expresiones en (2.37)del siguiente modo:
v = keω (2.38)
T = kmi (2.39)
donde ke > 0 y km > 0 se conocen, respectivamente, como la constante defuerza contra electromotriz y la constante de par. Estas constantes se intro-ducen para tomar en consideracion la presencia de varias espiras en serie yotras variantes en la construccion de motores y generadores de CD. Se puedeusar el hecho de que la potencia en ambos puertos es igual:
w1 = vi = keω1
kmT = Tω = w2
para mostrar que ke = km en cualquier motor (generador) de CD. Sin embar-go, hay que tener cuidado con las unidades: ke = km se cumple siempre queestas constantes se expresen en el sistema internacional de unidades (metro-kilogramo-segundo).
Sistemas electromecanicos: fuerza debida a un campo magnetico
En la figura 2.20 se muestra una barra de material ferromagnetico colocadaa una distancia x de un electroiman. El electroiman consiste de un inductorarrollado sobre un nucleo del mismo material ferromagnetico que la barra. Porel inductor circula una corriente electrica i por efecto de un voltaje v aplicadoen sus terminales.
La inductancia L(x) es dependiente de la posicion x de la barra debido a losiguiente. De acuerdo a (2.12), el flujo magnetico esta dado como el producto
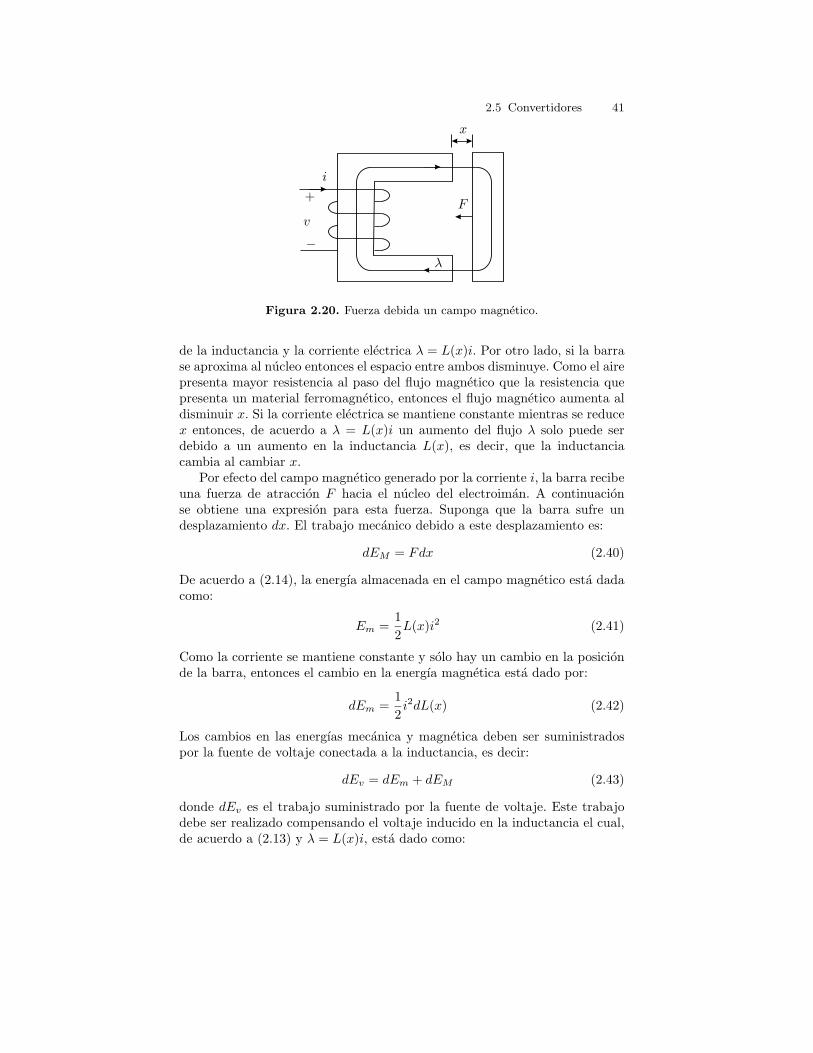
2.5 Convertidores 41
x
i
v
õ
F+
à
Figura 2.20. Fuerza debida un campo magnetico.
de la inductancia y la corriente electrica λ = L(x)i. Por otro lado, si la barrase aproxima al nucleo entonces el espacio entre ambos disminuye. Como el airepresenta mayor resistencia al paso del flujo magnetico que la resistencia quepresenta un material ferromagnetico, entonces el flujo magnetico aumenta aldisminuir x. Si la corriente electrica se mantiene constante mientras se reducex entonces, de acuerdo a λ = L(x)i un aumento del flujo λ solo puede serdebido a un aumento en la inductancia L(x), es decir, que la inductanciacambia al cambiar x.
Por efecto del campo magnetico generado por la corriente i, la barra recibeuna fuerza de atraccion F hacia el nucleo del electroiman. A continuacionse obtiene una expresion para esta fuerza. Suponga que la barra sufre undesplazamiento dx. El trabajo mecanico debido a este desplazamiento es:
dEM = Fdx (2.40)
De acuerdo a (2.14), la energıa almacenada en el campo magnetico esta dadacomo:
Em =1
2L(x)i2 (2.41)
Como la corriente se mantiene constante y solo hay un cambio en la posicionde la barra, entonces el cambio en la energıa magnetica esta dado por:
dEm =1
2i2dL(x) (2.42)
Los cambios en las energıas mecanica y magnetica deben ser suministradospor la fuente de voltaje conectada a la inductancia, es decir:
dEv = dEm + dEM (2.43)
donde dEv es el trabajo suministrado por la fuente de voltaje. Este trabajodebe ser realizado compensando el voltaje inducido en la inductancia el cual,de acuerdo a (2.13) y λ = L(x)i, esta dado como:

42 2 Modelado matematico de sistemas fısicos
v =dλ
dt= i
dL(x)
dt
Por tanto:
dEv = vidt = i2dL(x) (2.44)
Sustituyendo (2.42) y (2.44) en (2.43):
dEM = i2dL(x) − 1
2i2dL(x) =
1
2i2dL(x)
es decir, la mitad del trabajo realizado por la fuente de voltaje se dedica acambiar la energıa magnetica y la otra mitad se dedica a realizar el trabajomecanico, es decir;
dEm = dEM (2.45)
Por otro lado, como el cambio en la energıa magnetica solo se debe al cambioen la posicion x, entonces se puede escribir:
dEm =∂Em
∂xdx
Entonces, de acuerdo a esto, (2.40), (2.45) y (2.41) se concluye que:
F =∂Em
∂x=
1
2i2
∂L(x)
∂x(2.46)
El desarrollo aquı presentado se basa en las ideas reportadas en [5], cap. 5.
2.6. Ejemplos
Una vez que se han establecido las funciones constitutivas de cada ele-mento de sistema se debe abordar el problema de conectar varios de estoselementos para obtener el modelo matematico de sistemas mas o menos com-plejos. La clave para interconectar los elementos de un sistema mecanico esconsiderar que todos ellos se conectan mediante uniones rıgidas. Esto significaque la velocidad a ambos lados de una union es igual. Para ser mas claros, acontinuacion se presentan varios ejemplos.
Ejemplo 2.2 Considere el sistema masa-resorte-amortiguador mostrado enla figura 2.21(a) donde se aplica una fuerza externa F (t) sobre el cuerpo demasa m. Este sistema quiza sea el mas sencillo desde el punto de vista delmodelado, pero es muy importante desde el punto de vista de control porquerepresenta el comportamiento basico de los sistemas de control de posicion.
En la figura 2.21(b) se muestra el diagrama de cuerpo libre correspondien-te. Notese que en cada union entre componentes existen dos fuerzas iguales

2.6 Ejemplos 43
aplicadas en sentidos contrarios. Esto es con el fin de satisfacer la TerceraLey de Newton [2], pag. 88, que establece que a cada accion (del cuerpo Asobre el cuerpo B) corresponde una reaccion (del cuerpo B sobre el cuerpoA). Las ruedas debajo del cuerpo se usan para indicar que no existe friccioncon el suelo sobre el cual se apoya. Esto tambien significa que el efecto de lagravedad no interviene. Sin embargo, equivalentemente se podrıa eliminar elamortiguador colocado en el extremo derecho para ser sustituido por friccionentre el cuerpo y el suelo. El modelado de la friccion entre el cuerpo y el sue-lo se realiza de manera identica a como se considera el amortiguador en elprocedimiento que sigue.
K F t( )
m
b
(a)
mFK
FK
F t( ) Fb
Fb
vbvK vm
(b) Diagrama de cuerpo libre.
Figura 2.21. Sistema masa-resorte-amortiguador.
La nomenclatura utilizada es la siguiente:
vm = dxm
dt , donde xm es la posicion del cuerpo.
vb = dxb
dt , donde xb es la posicion del extremo movil del amortiguador.
vK = dxK
dt , donde xK es la posicion del extremo movil del resorte.
Usando la figura 2.21(b), ası como (2.4), (2.7), (2.18) se obtienen las siguien-tes expresiones:
masa: mdvm
dt= F (t) + FK − Fb (2.47)
resorte: KxK = FK (2.48)
amortiguador: bvb = Fb (2.49)
Notese que, de acuerdo a la convencion de signos mostrada en la figura 2.3, lasfuerzas que actuan sobre la masa m y que tienen el mismo sentido que vm enla figura 2.21(b) aparecen con signo positivo en (2.47) y por esa misma razonFb aparece afectada por un signo negativo. Los signos a ambos lados de lasexpresiones en (2.48) y (2.49) respetan las convenciones de signos definidasen las figuras 2.4 y 2.9, respectivamente. Notese que uno de los extremos delresorte y del amortiguador esta en reposo y que son los extremos moviles los

44 2 Modelado matematico de sistemas fısicos
que en las figuras 2.4 y 2.9 tienen una velocidad y una fuerza aplicadas en elmismo sentido. Notese tambien que se ha definido:
vK =dxK
dt(2.50)
Considerando que los diferentes elementos de sistema se conectan medianteuniones rıgidas, de acuerdo a la figura 2.21(b) se puede escribir:
vK = −vm = −vb (2.51)
De acuerdo a esto se concluye que se puede escribir:
xK = −xm + c1 = −xb + c2
donde c1 y c2 son dos constantes. Si se usa la convencion de definir xK = 0,xm = 0 y xb = 0 como aquellos puntos ocupados por el extremo movil delresorte, el centro del cuerpo de masa m y el extremo movil del amortiguador,respectivamente, cuando el sistema esta en reposo con F (t) = 0, entonces sepuede decir que c1 = c2 = 0 y, por tanto:
xK = −xm = −xb
Usando estas relaciones, tambien se puede escribir (2.47), (2.48), (2.49) co-mo:
md2xm
dt2+ b
dxm
dt+ Kxm = F (t) (2.52)
Esta ultima expresion es una ecuacion diferencial ordinaria, de segundo or-den, lineal y de coeficientes constantes, que representa el modelo matematicodel sistema masa-resorte-amortiguador. Esto significa que si se conocen losparametros m, b y K, ası como las condiciones iniciales xm(0), dxm
dt (0) y lafuerza externa aplicada F (t) como una funcion del tiempo, entonces se puederesolver dicha ecuacion diferencial para obtener la posicion xm(t) y la velo-cidad dxm
dt (t) del cuerpo como funciones del tiempo. Dicho de otro modo, sepuede conocer la posicion y la velocidad del cuerpo en cualquier instante detiempo presente o en el futuro, es decir, para todo t ≥ 0. Finalmente, cuandose estudia la solucion de las ecuaciones diferenciales es conveniente expresaruna ecuacion diferencial de manera que el coeficiente de la potencia mayorsea igual a la unidad, es decir, es mas conveniente escribir (2.52) como:
xm +b
mxm +
K
mxm =
1
mF (t) (2.53)
donde xm = d2xm
dt2 y xm = dxm
dt .
Ejemplo 2.3 En la figura 2.22(a) se muestra un sistema masa-resorte-amortiguador con un resorte y un amortiguador colocados en un mismo ex-tremo del cuerpo de masa m. El objetivo de este ejemplo es mostrar que elmodelo matematico en este caso es identico al obtenido en el ejemplo previo.La nomenclatura utilizada es la siguiente:
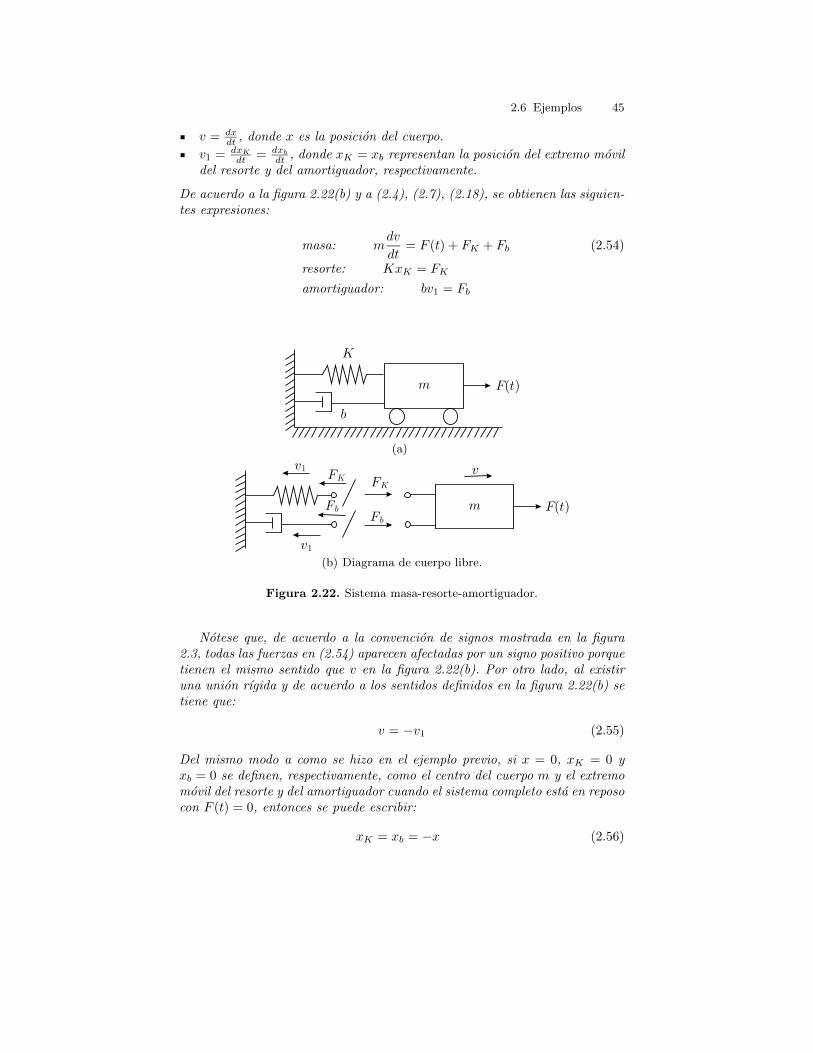
2.6 Ejemplos 45
v = dxdt , donde x es la posicion del cuerpo.
v1 = dxK
dt = dxb
dt , donde xK = xb representan la posicion del extremo movildel resorte y del amortiguador, respectivamente.
De acuerdo a la figura 2.22(b) y a (2.4), (2.7), (2.18), se obtienen las siguien-tes expresiones:
masa: mdv
dt= F (t) + FK + Fb (2.54)
resorte: KxK = FK
amortiguador: bv1 = Fb
K
m
b
F(t)
(a)
m
FK
Fb
FK
Fb
vv1
v1
F(t)
(b) Diagrama de cuerpo libre.
Figura 2.22. Sistema masa-resorte-amortiguador.
Notese que, de acuerdo a la convencion de signos mostrada en la figura2.3, todas las fuerzas en (2.54) aparecen afectadas por un signo positivo porquetienen el mismo sentido que v en la figura 2.22(b). Por otro lado, al existiruna union rıgida y de acuerdo a los sentidos definidos en la figura 2.22(b) setiene que:
v = −v1 (2.55)
Del mismo modo a como se hizo en el ejemplo previo, si x = 0, xK = 0 yxb = 0 se definen, respectivamente, como el centro del cuerpo m y el extremomovil del resorte y del amortiguador cuando el sistema completo esta en reposocon F (t) = 0, entonces se puede escribir:
xK = xb = −x (2.56)

46 2 Modelado matematico de sistemas fısicos
No es difıcil darse cuenta que combinando las expresiones en (2.54) y usando(2.56), (2.55) se obtiene:
x +b
mx +
K
mx =
1
mF (t)
donde x = d2xdt2 y x = dx
dt . Este modelo matematico es identico al mostrado en(2.53) si se considera que x = xm.
Ejemplo 2.4 En la figura 2.23(a) se muestran dos cuerpos unidos por unresorte cuando se aplica una fuerza externa F (t) sobre el cuerpo de la izquier-da. Esta situacion representa el caso practico en el que el cuerpo 1 transmitemovimiento al cuerpo 2 pero ambos cuerpos estan conectados mediante unapieza mecanica que presenta flexibilidad. Esta flexibilidad no es introducidade manera intencional sino que es un problema no deseado que aparece debidoa la rigidez finita del material con el que esta hecha la pieza mecanica queune a los cuerpos 1 y 2. Con frecuencia es muy importante estudiar cual esel efecto de esta flexibilidad en el desempeno del sistema de control y por esodebe ser tomada en consideracion durante el modelado. Los amortiguadoresse introducen para considerar el efecto de la friccion de cada cuerpo con sussoportes (o el suelo).
KF t( )
m2m1
b1 b2
(a)
KF t( )
m2m1F b1
F b1 FK1
v1
FK2FK2 Fb2
Fb2
v2
vb2
vb1
vm1
FK1
vK vm2
(b) Diagrama de cuerpo libre.
Figura 2.23. Dos cuerpos unidos por un resorte.
El diagrama de cuerpo libre correspondiente se muestra en la figura 2.23(b).La nomenclatura utilizada es la siguiente:
vm1 = dxm1
dt , donde xm1 es la posicion del cuerpo 1.
vm2 = dxm2
dt , donde xm2 es la posicion del cuerpo 2.
vb1 = dxb1
dt , donde xb1 es la posicion del extremo movil del amortiguador1.

2.6 Ejemplos 47
vb2 = dxb2
dt , donde xb2 es la posicion del extremo movil del amortiguador2.v1 = dx1
dt , donde x1 es la posicion del extremo del resorte unido al cuerpo1.v2 = dx2
dt , donde x2 es la posicion del extremo del resorte unido al cuerpo2.
Usando la figura 2.23(b), ası como (2.4), (2.7), (2.18), se obtienen las si-guientes expresiones:
masa 1: m1dvm1
dt= F (t) + Fb1 − FK1 (2.57)
masa 2: m2dvm2
dt= FK2 − Fb2 (2.58)
resorte: KxK = FK1 = FK2
amortiguador 1: b1vb1 = Fb1
amortiguador 2: b2vb2 = Fb2
Las fuerzas que tienen el mismo sentido que vm1 y vm2, y que actuan sobrecada uno de los cuerpos, aparecen afectadas con un signo positivo y con unsigno negativo en caso contrario. Notese tambien que se ha definido:
vK =dxK
dt= v1 − v2
Considerando que todos los elementos del sistema se conectan mediante unio-nes rıgidas entonces, de acuerdo a la figura 2.23(b) se tiene que:
vm1 = −vb1 = v1 (2.59)
vm2 = vb2 = v2
De acuerdo a esto, si se definen xm1 = 0, xm2 = 0, xb1 = 0, xb2 = 0,x1 = 0, x2 = 0 como aquellos puntos ocupados por el centro del cuerpo 1, elcentro del cuerpo 2, el extremo movil del amortiguador 1, el extremo movildel amortiguador 2, el extremo del resorte que esta unido al cuerpo 1 y elextremo del resorte que esta unido al cuerpo 2, respectivamente, cuando todoel sistema esta en reposo con F (t) = 0, entonces se concluye que:
xm1 = −xb1 = x1, (2.60)
xm2 = xb2 = x2
Por tanto, las expresiones en (2.57) y (2.58) se pueden escribir como:
masa 1: m1dvm1
dt= F (t) + b1vb1 − KxK
masa 2: m2dvm2
dt= KxK − b2vb2

48 2 Modelado matematico de sistemas fısicos
Usando (2.59) y (2.60) se obtiene:
masa 1: m1d2xm1
dt2= F (t) − b1
dxm1
dt− KxK
masa 2: m2d2xm2
dt2= KxK − b2
dxm2
dt
Por otro lado, de acuerdo al parrafo que sigue a (2.6) se tiene que xK =x1 − x2, por lo que se puede escribir:
masa 1: m1d2xm1
dt2= F (t) − b1
dxm1
dt− K(x1 − x2)
masa 2: m2d2xm2
dt2= K(x1 − x2) − b2
dxm2
dt
Finalmente, usando de nuevo (2.60) se obtiene que el modelo matematicocorrespondiente esta dado por las dos siguientes ecuaciones diferenciales, lascuales deben ser resueltas simultaneamente:
masa 1:d2xm1
dt2+
b1
m1
dxm1
dt+
K
m1(xm1 − xm2) =
1
m1F (t)
masa 2:d2xm2
dt2+
b2
m2
dxm2
dt− K
m2(xm1 − xm2) = 0
Estas dos ecuaciones diferenciales no pueden ser combinadas para obteneruna sola ecuacion diferencial, ya que las variables xm1 y xm2 son linealmenteindependientes, es decir, no se cuenta con ninguna expresion algebraica querelacione a estas variables.
Ejemplo 2.5 En la figura 2.24(a) se muestran dos cuerpos conectados a tresresortes y un amortiguador. En este caso, el amortiguador representa la fric-cion existente entre los dos cuerpos y, por esto, no puede ser sustituido por laposible friccion existente entre cada cuerpo y el suelo (si no estuvieran colo-cadas las ruedas debajo de cada cuerpo). El diagrama de cuerpo libre corres-pondiente se muestra en la figura 2.24(b). La nomenclatura utilizada es lasiguiente:
x1 = dx1
dt , donde x1 es la posicion del cuerpo 1.
x2 = dx2
dt , donde x2 es la posicion del cuerpo 2.
vb1 = dxb1
dt , donde xb1 es la posicion del extremo del amortiguador queesta conectado al cuerpo 1.vb2 = dxb2
dt , donde xb2 es la posicion del extremo del amortiguador queesta conectado al cuerpo 2.v1 = dx
dt , donde x es la posicion del extremo del resorte unido al cuerpo 1.
v2 = dydt , donde y es la posicion del extremo del resorte unido al cuerpo 2.
vK1 = dxK1
dt , donde xK1 es la posicion del extremo movil del resorte co-nectado solo al cuerpo 1.
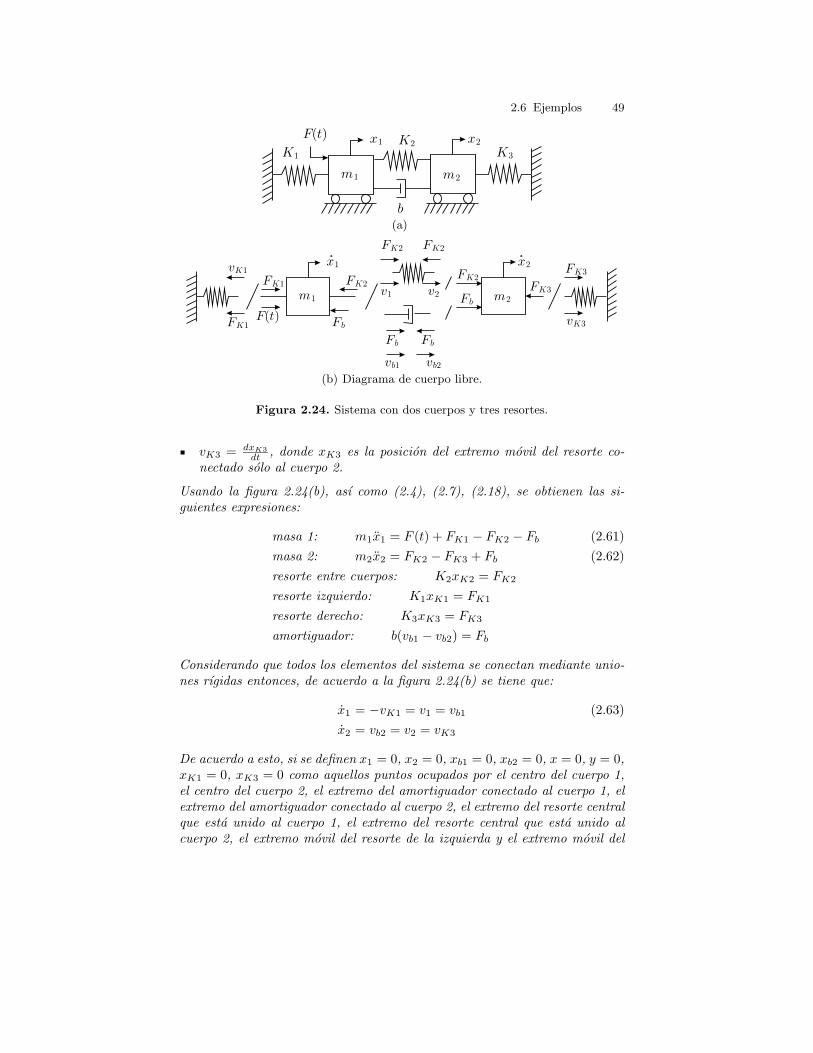
2.6 Ejemplos 49
m2m1
K1
x1
b
x2K2K3
F(t)
(a)
m2m1
FK1
FK1 FK2
FK2 FK2
Fb
v1
Fb
vb1 vb2
FK2
Fb
vK3
FK3
FK3
x1 x2vK1
F(t)
v2
Fb
(b) Diagrama de cuerpo libre.
Figura 2.24. Sistema con dos cuerpos y tres resortes.
vK3 = dxK3
dt , donde xK3 es la posicion del extremo movil del resorte co-nectado solo al cuerpo 2.
Usando la figura 2.24(b), ası como (2.4), (2.7), (2.18), se obtienen las si-guientes expresiones:
masa 1: m1x1 = F (t) + FK1 − FK2 − Fb (2.61)
masa 2: m2x2 = FK2 − FK3 + Fb (2.62)
resorte entre cuerpos: K2xK2 = FK2
resorte izquierdo: K1xK1 = FK1
resorte derecho: K3xK3 = FK3
amortiguador: b(vb1 − vb2) = Fb
Considerando que todos los elementos del sistema se conectan mediante unio-nes rıgidas entonces, de acuerdo a la figura 2.24(b) se tiene que:
x1 = −vK1 = v1 = vb1 (2.63)
x2 = vb2 = v2 = vK3
De acuerdo a esto, si se definen x1 = 0, x2 = 0, xb1 = 0, xb2 = 0, x = 0, y = 0,xK1 = 0, xK3 = 0 como aquellos puntos ocupados por el centro del cuerpo 1,el centro del cuerpo 2, el extremo del amortiguador conectado al cuerpo 1, elextremo del amortiguador conectado al cuerpo 2, el extremo del resorte centralque esta unido al cuerpo 1, el extremo del resorte central que esta unido alcuerpo 2, el extremo movil del resorte de la izquierda y el extremo movil del

50 2 Modelado matematico de sistemas fısicos
resorte de la derecha, respectivamente, cuando todo el sistema esta en reposocon F (t) = 0, entonces se concluye que:
x1 = −xK1 = x = xb1 (2.64)
x2 = xb2 = y = xK3
Por tanto, las expresiones en (2.61) y (2.62) se pueden escribir como:
masa 1: m1x1 = F (t) + K1xK1 − K2xK2 − b(vb1 − vb2)
masa 2: m2x2 = K2xK2 − K3xK3 + b(vb1 − vb2)
Usando (2.63) y (2.64) se obtiene:
masa 1: m1x1 = F (t) − K1x1 − K2xK2 − b(x1 − x2)
masa 2: m2x2 = K2xK2 − K3x2 + b(x1 − x2)
Por otro lado, de acuerdo al parrafo que sigue a (2.6) se tiene que xK2 =x1 − x2, por lo que se puede escribir:
masa 1: m1x1 = F (t) − K1x1 − K2(x1 − x2) − b(x1 − x2)
masa 2: m2x2 = K2(x1 − x2) − K3x2 + b(x1 − x2)
Finalmente, se obtiene que modelo matematico correspondiente esta dado porlas dos siguientes ecuaciones diferenciales, las cuales deben ser resueltas si-multaneamente:
masa 1: x1 +b
m1(x1 − x2) +
K1
m1x1 +
K2
m1(x1 − x2) =
1
m1F (t)
masa 2: x2 −b
m2(x1 − x2) +
K3
m2x2 −
K2
m2(x1 − x2) = 0
Tal como ocurre en el ejemplo anterior, estas dos ecuaciones diferenciales nopueden ser combinadas para obtener una sola ecuacion diferencial, ya que lasvariables x1 y x2 son linealmente independientes, es decir, no se cuenta conninguna expresion algebraica que relacione a estas variables. Notese tambienque los terminos correspondientes al resorte central y al amortiguador aparecencon signo contrario en cada una de estas ecuaciones diferenciales. Esto esdebido a que la fuerza que produce el resorte central o el amortiguador sobreel cuerpo 1 es en sentido contrario a la fuerza que ejerce sobre el cuerpo 2.
Ejemplo 2.6 En la figura 2.25(a) se muestra un cuerpo rotativo unido a dosmuros a traves de un resorte y un amortiguador. Sobre este cuerpo se aplicaun par externo T (t). En este caso, el amortiguador representa la friccionexistente entre el cuerpo y los rodamientos sobre los que se apoya. El resorterepresenta la flexibilidad del eje o flecha del cuerpo giratorio. El diagrama decuerpo libre correspondiente se muestra en la figura 2.25(b). La nomenclaturautilizada es la siguiente:
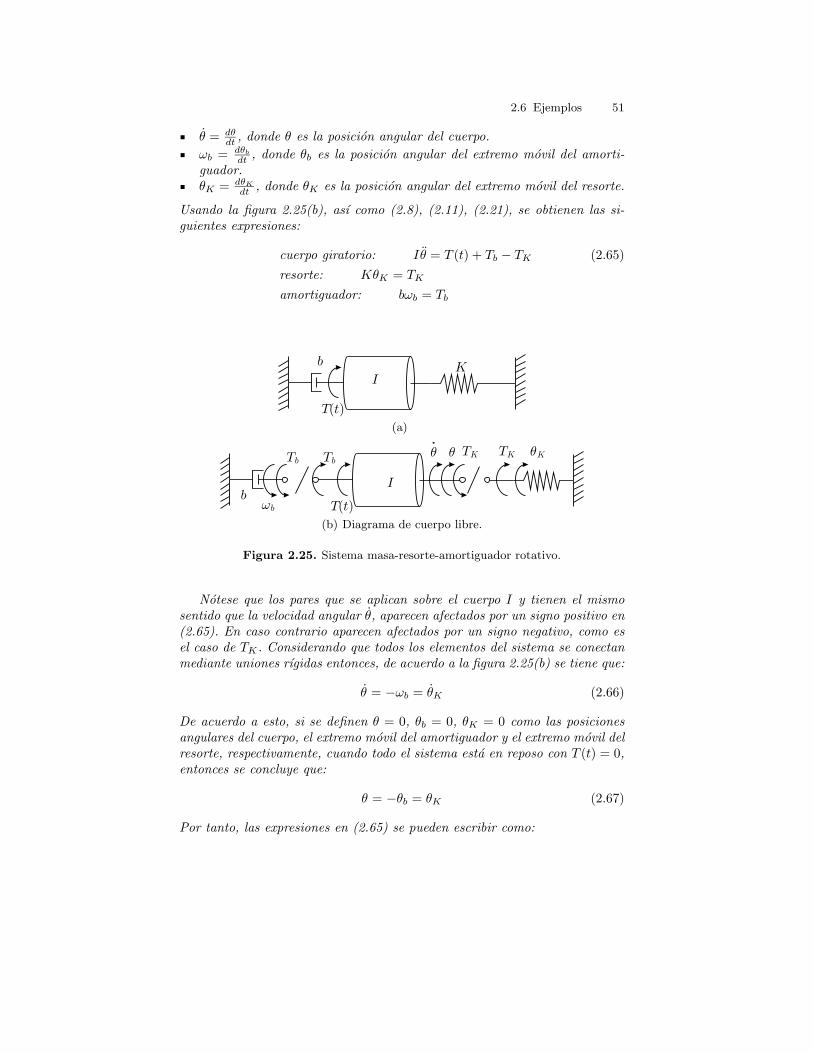
2.6 Ejemplos 51
θ = dθdt , donde θ es la posicion angular del cuerpo.
ωb = dθb
dt , donde θb es la posicion angular del extremo movil del amorti-guador.θK = dθK
dt , donde θK es la posicion angular del extremo movil del resorte.
Usando la figura 2.25(b), ası como (2.8), (2.11), (2.21), se obtienen las si-guientes expresiones:
cuerpo giratorio: Iθ = T (t) + Tb − TK (2.65)
resorte: KθK = TK
amortiguador: bωb = Tb
IKb
T(t)
(a)
òò
b
òK
!b T(t)
TbTbTKTK
I
(b) Diagrama de cuerpo libre.
Figura 2.25. Sistema masa-resorte-amortiguador rotativo.
Notese que los pares que se aplican sobre el cuerpo I y tienen el mismosentido que la velocidad angular θ, aparecen afectados por un signo positivo en(2.65). En caso contrario aparecen afectados por un signo negativo, como esel caso de TK . Considerando que todos los elementos del sistema se conectanmediante uniones rıgidas entonces, de acuerdo a la figura 2.25(b) se tiene que:
θ = −ωb = θK (2.66)
De acuerdo a esto, si se definen θ = 0, θb = 0, θK = 0 como las posicionesangulares del cuerpo, el extremo movil del amortiguador y el extremo movil delresorte, respectivamente, cuando todo el sistema esta en reposo con T (t) = 0,entonces se concluye que:
θ = −θb = θK (2.67)
Por tanto, las expresiones en (2.65) se pueden escribir como:

52 2 Modelado matematico de sistemas fısicos
Iθ = T (t) + bωb − KθK
= T (t) − bθ − Kθ
Finalmente, se obtiene que el modelo matematico correspondiente esta dadopor la siguiente ecuacion diferencial:
θ +b
Iθ +
K
Iθ =
1
IT (t) (2.68)
Notese que este modelo matematico es identico al presentado en (2.53) paraun sistema masa-resorte-amortiguador traslacional si se sustituye la inerciapor la masa, la posicion angular θ por la posicion xm y el par externo T (t)por la fuerza externa F (t).
Ejemplo 2.7 En la figura 2.26(a) se muestran dos cuerpos rotativos unidospor una cremallera. Sobre el cuerpo rotativo de la izquierda se aplica un parexterno T (t). Ası que se puede pensar que el cuerpo de la izquierda es unmotor el cual debe transmitir movimiento al cuerpo rotativo de la derechaa traves de una cremallera. Siguiendo las convenciones de signo mostradasen las figuras 2.3, 2.5, 2.9 y 2.18 se obtienen los diagramas de cuerpo libremostrados en las figuras 2.26(b) y 2.26(c). En la figura 2.26(b) se muestrala parte correspondiente a la conexion de los dos cuerpos rotativos mediantedos adaptadores tipo pinon-cremallera, mientras que en la figura 2.26(c) semuestra el diagrama de cuerpo libre de cada uno de los cuerpos rotativos1. Lanomenclatura utilizada es la siguiente:
vm = dxm
dt , donde xm es la posicion de la cremallera de masa m.
ω1 = dθ1
dt , donde θ1 es la posicion angular del cuerpo rotativo 1.
ω2 = dθ2
dt , donde θ2 es la posicion angular del cuerpo rotativo 2.v1 es la velocidad traslacional que se produce en la cremallera como resul-tado de que el cuerpo 1 gira con velocidad ω1.v2 es la velocidad traslacional que se produce en la cremallera como resul-tado de que el cuerpo 2 gira con velocidad ω2.ωb1 = dθb1
dt , donde θb1 es la posicion angular del extremo movil del amorti-guador unido al cuerpo rotativo 1 (friccion del cuerpo 1 con los rodamien-tos).ωb2 = dθb2
dt , donde θb2 es la posicion angular del extremo movil del amor-tiguador unido al 2 (friccion del cuerpo 2 con los rodamientos).vb = dxb
dt , donde xb es la posicion del extremo del amortiguador unido ala cremallera m. Este amortiguador representa la friccion de la cremalleracon el suelo.
1 En un sistema pinon-cremallera debe utilizarse el principio de que a toda fuerza(o par) de accion corresponde una fuerza (o par) de reaccion solo en uno de lospuertos, pues el par (o fuerza) en uno de los puertos es simplemente el reflejo dela fuerza (o par) en el otro puerto. Vease tambien el ejemplo 2.9
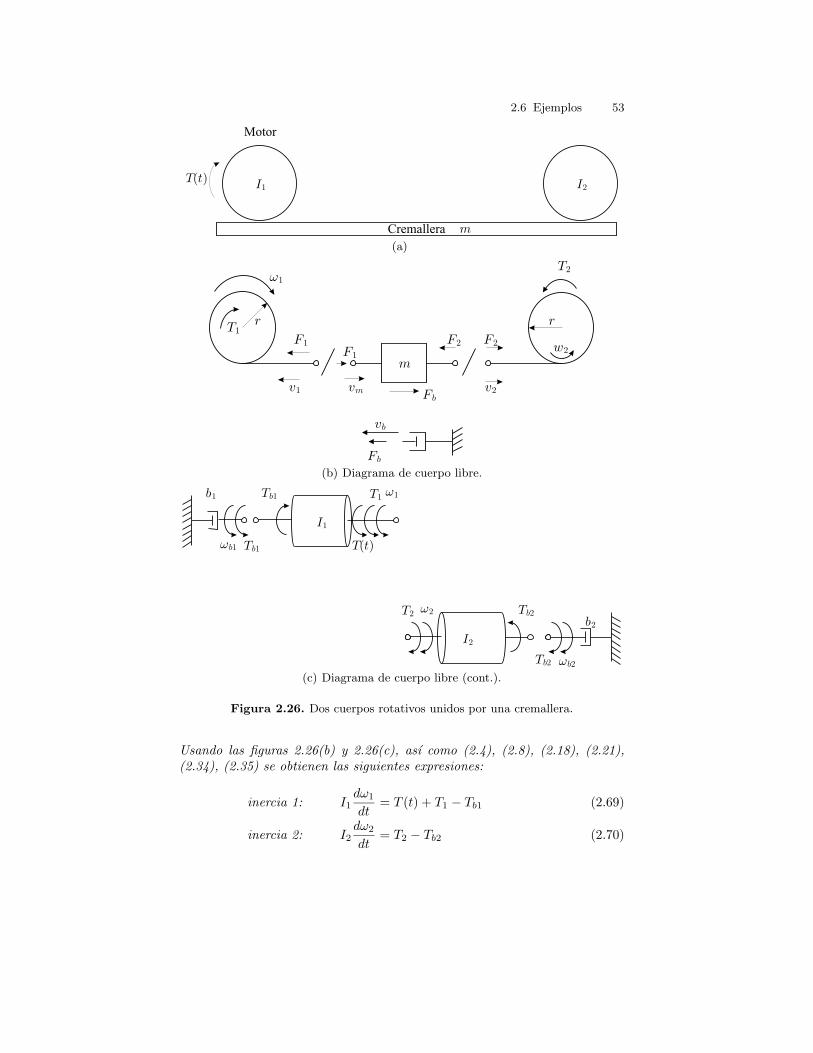
2.6 Ejemplos 53
Motor
I1 I2
Cremallera m
T(t)
(a)
T1r
F1F1
m
Fb
F2 F2
T2
r
w2
!1
v1 vm v2
Fb
vb
(b) Diagrama de cuerpo libre.
b1
Tb1
Tb1
I1
T1
T2 Tb2
I2
Tb2
b2
!b1
!1
!2
!b2
T(t)
(c) Diagrama de cuerpo libre (cont.).
Figura 2.26. Dos cuerpos rotativos unidos por una cremallera.
Usando las figuras 2.26(b) y 2.26(c), ası como (2.4), (2.8), (2.18), (2.21),(2.34), (2.35) se obtienen las siguientes expresiones:
inercia 1: I1dω1
dt= T (t) + T1 − Tb1 (2.69)
inercia 2: I2dω2
dt= T2 − Tb2 (2.70)

54 2 Modelado matematico de sistemas fısicos
masa: mdvm
dt= F1 − F2 + Fb (2.71)
amortiguador izquierdo: b1ωb1 = Tb1
amortiguador derecho: b2ωb2 = Tb2
amortiguador central: bvb = Fb
pinon-cremallera izquierda: T1 = rF1, v1 = rω1 (2.72)
pinon-cremallera derecha: T2 = rF2, v2 = rω2 (2.73)
Notese que las fuerzas que tienen el mismo sentido que ω1, ω2 y vm aparecenafectadas con un signo positivo en (2.69), (2.70), (2.71) y con un signo nega-tivo en caso contrario. Considerando que todos los elementos del sistema seconectan mediante uniones rıgidas entonces, de acuerdo a las figuras 2.26(b)y 2.26(c) se tiene que:
vm = −v1 = v2 = −vb (2.74)
ω1 = ωb1, ω2 = ωb2 (2.75)
De acuerdo a esto, si se definen xm = 0, θ1 = 0, θ2 = 0, xb = 0, θb1 = 0, θb2 =0 como las posiciones de la cremallera, el cuerpo rotativo 1, el cuerpo rotativo2 y los extremos moviles de los amortiguadores conectados a la cremallera ya los cuerpos rotativos 1 y 2, respectivamente, cuando todo el sistema esta enreposo con T (t) = 0, entonces se concluye que:
xm = −xb (2.76)
θ1 = θb1, θ2 = θb2
Por tanto, las expresiones en (2.69), (2.70) y (2.71) se pueden escribir como:
inercia 1: I1dω1
dt= T (t) + rF1 − b1ωb1 (2.77)
inercia 2: I2dω2
dt= rF2 − b2ωb2 (2.78)
masa: mdvm
dt= F1 − F2 + bvb (2.79)
Recordando que v1 = −v2, se pueden usar (2.72) y (2.73) para encontrarque ω1 = −ω2. Entonces se puede usar este resultado ası como (2.75) para,restando (2.78) a (2.77), encontrar:
(I1 + I2)dω1
dt= T (t) + r(F1 − F2) − (b1 + b2)ω1 (2.80)
Por otro lado, usando −vm = v1 = rω1 = vb se puede escribir (2.79) como
−mrdω1
dt= F1 − F2 − bvm

2.6 Ejemplos 55
Despejando F1 − F2 de esta expresion y sustituyendo en (2.80) se obtienefinalmente:
(I1 + I2 + mr2)dω1
dt= T (t) − (b1 + b2 + r2b)ω1
Esta ecuacion diferencial representa el modelo matematico del sistema en lafigura 2.26(a). En este caso se pudieron combinar tres ecuaciones diferencia-les distintas en una sola ecuacion diferencial. Esto es debido a que las tresvariables ω1, ω2 y vm son linealmente dependientes pues estan relacionadasmediante las expresiones algebraicas −vm = rω1 = −rω2. Notese tambiencomo el radio de los pinones interviene para adaptar i) la masa de la crema-llera a la inercia equivalente que se produce sobre el eje de la inercia 1 e ii)la friccion equivalente que sobre el eje de la inercia 1 produce la friccion de lacremallera con el suelo.
Ejemplo 2.8 En la figura 2.27(a) se muestran dos cuerpos rotativos unidospor un resorte. Sobre el cuerpo de la izquierda se aplica un par externo T (t).Entonces, el sistema mostrado en la figura 2.27(a) representa el caso de unmotor (cuerpo de la izquierda) que mueve a una carga (cuerpo de la derecha)y que el eje que une a ambos cuerpos es flexible. Esta flexibilidad normal-mente no es introducida intencionalmente, sino que es una caracterıstica nodeseada que surge como resultado de la rigidez finita de los materiales con quese construye el eje que une al motor y la carga. En situaciones como esta esmuy importante tomar en cuenta dicha flexibilidad para estudiar como afec-ta al desempeno del sistema de control. Siguiendo las convenciones de signomostradas en las figuras 2.5, 2.6 y 2.11 se obtiene el diagrama de cuerpo libremostrado en la figura 2.27(b). La nomenclatura utilizada es la siguiente:
ω2 = dθ2
dt , donde θ2 es la posicion angular del cuerpo 1.
ω5 = dθ5
dt , donde θ5 es la posicion angular del cuerpo 2.
ω1 = dθ1
dt , donde θ1 es la posicion angular del extremo movil del amorti-guador conectado al cuerpo 1.ω6 = dθ6
dt , donde θ6 es la posicion angular del extremo movil del amorti-guador conectado al cuerpo 2.ω3 = dθ3
dt y ω4 = dθ4
dt , donde θ3 y θ4 son las posiciones angulares de losextremos del resorte.
Usando la figura 2.27(b), ası como (2.8), (2.11), (2.21), se obtienen lassiguientes expresiones:
cuerpo 1: I1ω2 = T (t) + T1 − T3 (2.81)
cuerpo 2: I2ω5 = T4 − T6 (2.82)
amortiguador izquierdo: b1ω1 = T1
amortiguador derecho: b2ω6 = T6
resorte: KxK = T3 = T4, xK = θ3 − θ4

56 2 Modelado matematico de sistemas fısicos
b1
I1 I2
b2K
T(t)
(a)
I1T1
T3 T3
T4
T4 T6 T6!1 T1 !2
T(t) !3
!4
!5 !6
I2
(b) Diagrama de cuerpo libre.
Figura 2.27. Dos cuerpos rotativos unidos por un resorte.
donde la ultima expresion se obtiene de acuerdo al parrafo que sigue a (2.10).Notese que, en las expresiones (2.81) y (2.82), los pares que tienen el mismosentido que ω2 y ω5 aparecen afectadas con un signo positivo y con un signonegativo en caso contrario. Considerando que todos los elementos del sistemase conectan mediante uniones rıgidas entonces, de acuerdo a la figura 2.27(b)se tiene que:
ω2 = −ω1 = ω3, ω5 = ω6 = ω4 (2.83)
De acuerdo a esto, si se definen ω2 = 0, ω5 = 0, ω1 = 0, ω6 = 0, ω3 = 0 yω4 = 0 como las posiciones angulares del cuerpo 1, del cuerpo 2, del extremomovil del amortiguador izquierdo, del extremo movil del amortiguador derechoy de los extremos izquierdo y derecho del resorte, respectivamente, cuando todoel sistema esta en reposo con T (t) = 0, entonces se concluye que:
θ2 = −θ1 = θ3, θ5 = θ6 = θ4 (2.84)
Por tanto, las expresiones en (2.81) y (2.82) se pueden escribir como:
cuerpo 1: I1ω2 = T (t) + b1ω1 − K(θ3 − θ4)
cuerpo 2: I2ω5 = K(θ3 − θ4) − b2ω6
Usando (2.83) y (2.84) se encuentra finalmente que el modelo matematicoesta dado por las siguientes dos ecuaciones diferenciales que deben ser resuel-tas simultaneamente:
cuerpo 1: I1θ2 + b1θ2 + K(θ2 − θ5) = T (t)
cuerpo 2: I2θ5 + b2θ5 − K(θ2 − θ5) = 0
Estas dos ecuaciones diferenciales no pueden ser agrupadas en una sola porquelas variables θ2 y θ5 son linealmente independientes, es decir, no se cuentacon una expresion algebraica que relacione a estas dos variables.

2.6 Ejemplos 57
Ejemplo 2.9 En la figura 2.28(a) se muestran dos cuerpos rotativos unidosa traves de una caja de engranes. Sobre el cuerpo de la izquierda se aplicaun par externo T (t), por lo que este sistema puede ser interpretado comoun motor electrico (cuerpo de la izquierda) que transmite movimiento a unacarga (cuerpo de la derecha) a traves de una caja de engranes. Siguiendo lasconvenciones de signo mostradas en las figuras 2.5, 2.11, 2.17 se obtiene eldiagrama de cuerpo libre mostrado en la figura 2.28(b)2. La nomenclaturautilizada es la siguiente:
ω = dθdt , donde θ es la posicion angular del cuerpo 1.
ω4 = dθ4
dt , donde θ4 es la posicion angular del cuerpo 2.
ωb1 = dθb1
dt , donde θb1 es la posicion angular del extremo movil del amor-tiguador conectado al cuerpo 1.ωb2 = dθb2
dt , donde θb2 es la posicion angular del extremo movil del amor-tiguador conectado al cuerpo 2.ωn1 y ωn2 son las velocidades angulares en las ruedas dentadas que resultandel movimiento de los cuerpos 1 y 2.Tn1 y Tn2 son los pares que aparecen en las ruedas dentadas como resultadodel movimiento de los cuerpos 1 y 2.
I1
b1 n1
n2
I2
b2
T(t)
(a)
I1
Tb1 Tb1 Tn1
Tn2 T3 Tb2 Tb2
I2!b1 T(t)
! !n1
!n2
!4
!b2(b) Diagrama de cuerpo libre.
Figura 2.28. Dos cuerpos unidos a traves de una caja de engranes.
Usando la figura 2.28(b), ası como (2.8), (2.21), (2.32), (2.33) se obtienenlas siguientes expresiones:
cuerpo 1: I1ω = T (t) − Tb1 − Tn1 (2.85)
2 En una caja de engranes debe utilizarse el principio de que a todo par de accioncorresponde un par de reaccion solo en uno de los puertos, pues el par en uno delos puertos es simplemente el reflejo del par en el otro puerto. Vease tambien elejemplo 2.7

58 2 Modelado matematico de sistemas fısicos
cuerpo 2: I2ω4 = T3 + Tb2 (2.86)
amortiguador izquierdo: b1ωb1 = Tb1
amortiguador derecho: b2ωb2 = Tb2
engranes: Tn1 =n1
n2Tn2, ωn1 =
n2
n1ωn2, Tn2 = T3 (2.87)
donde la ultima expresion se debe a que, de acuerdo a la tercera ley de Newton,una accion del cuerpo A sobre el cuerpo B produce una reaccion (en sentidocontrario) del cuerpo B sobre el cuerpo A. Notese que, en las expresiones(2.85) y (2.86) los pares que tienen el mismo sentido que ω y ω4 aparecenafectadas con un signo positivo y con un signo negativo en caso contrario.Considerando que todos los elementos del sistema se conectan mediante unio-nes rıgidas entonces, de acuerdo a la figura 2.28(b) se tiene que:
ω = ωb1 = −ωn1, ω4 = −ωb2 = −ωn2 (2.88)
De acuerdo a esto, si se definen θ = 0, θ4 = 0, θb1 = 0, θb2 = 0, θn1 = 0,θn2 = 0 como las posiciones angulares del cuerpo 1, del cuerpo 2, del extremomovil del amortiguador izquierdo, del extremo movil del amortiguador derecho,de la rueda dentada 1 y de la rueda dentada 2 cuando todo el sistema esta enreposo con T (t) = 0, entonces se concluye que:
θ = θb1 = −θn1, θ4 = −θb2 = −θn2 (2.89)
Por tanto, usando (2.88) y (2.89) las expresiones en (2.85) y (2.86) se puedenescribir como:
cuerpo 1: I1ω = T (t) − b1ω − n1
n2T3 (2.90)
cuerpo 2: I2ω4 = T3 − b2θ4 (2.91)
Por otro lado, de (2.87) y (2.88) se tiene ω = n2
n1ω4. Usando esto, despejan-
do T3 de (2.91), sustituyendo en (2.90) y despues de acomodar terminos seencuentra:
(I2 +
(n2
n1
)2
I1
)θ4 +
(b2 +
(n2
n1
)2
b1
)θ4 =
n2
n1T (t) (2.92)
Notese que las dos ecuaciones diferenciales en (2.90) y (2.91) se han podi-do combinar en una sola ecuacion gracias a que las variables ω y ω4 sonlinealmente dependientes pues estan relacionadas a traves de ω = n2
n1ω4. Esta
ecuacion diferencial representa el modelo matematico buscado: si se conoce elpar externo aplicado T (t) entonces se puede conocer la posicion θ4 del cuerpo2 al resolver la ecuacion diferencial anterior.
Ejemplo 2.10 En la figura 2.29(a) se muestra el mismo mecanismo de lafigura 2.26(a) (estudiado en el ejemplo 2.7) pero ahora la cremallera es fle-xible. Esta flexibilidad no se introduce de manera intencional, sino que es un

2.6 Ejemplos 59
problema no deseado que aparece debido a la rigidez finita del material conel que esta hecha la cremallera. Para encontrar el modelo matematico en estecaso se puede aprovechar el desarrollo realizado en el ejemplo 2.7. Es decir, sepuede partir de las ecuaciones (2.77), (2.78) y (2.79), las cuales se reescribena continuacion para facilitar la referencia:
inercia 1: I1dω1
dt= T (t) + rF1 − b1ωb1
inercia 2: I2dω2
dt= rF2 − b2ωb2
masa: mdvm
dt= F1 − F2 + bvb
considerando ahora que, de acuerdo a la figura 2.29(b) y las convenciones enla figura 2.4 y (2.7):
F1 = K1(xA − xB), F2 = K2(xC − xD)
con:
vA = dxA
dt y vB = dxB
dt , donde xA y xB son las posiciones de los extremosdel resorte de la izquierda.vC = dxC
dt y vD = dxD
dt , donde xC y xD son las posiciones de los extremosdel resorte de la derecha.
I2I1 K2K1
A B C D
m
xm
(a)
F1F1
vA vB
vAB
K1
F2F2
vC vD
vCD
K2
(b) Flexibilidad en la cremallera.
Figura 2.29. Sistema de transmision tipo cremallera con flexibilidad.
Entonces, usando esto y (2.74) y (2.75) se encuentra:
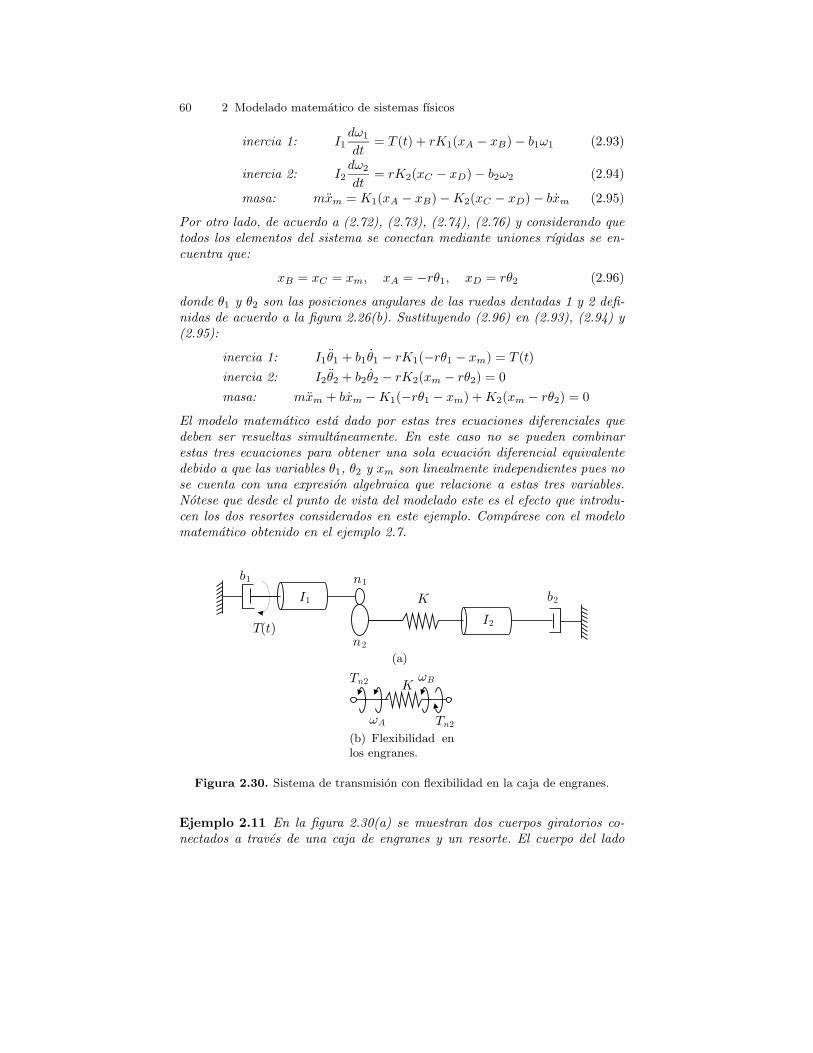
60 2 Modelado matematico de sistemas fısicos
inercia 1: I1dω1
dt= T (t) + rK1(xA − xB) − b1ω1 (2.93)
inercia 2: I2dω2
dt= rK2(xC − xD) − b2ω2 (2.94)
masa: mxm = K1(xA − xB) − K2(xC − xD) − bxm (2.95)
Por otro lado, de acuerdo a (2.72), (2.73), (2.74), (2.76) y considerando quetodos los elementos del sistema se conectan mediante uniones rıgidas se en-cuentra que:
xB = xC = xm, xA = −rθ1, xD = rθ2 (2.96)
donde θ1 y θ2 son las posiciones angulares de las ruedas dentadas 1 y 2 defi-nidas de acuerdo a la figura 2.26(b). Sustituyendo (2.96) en (2.93), (2.94) y(2.95):
inercia 1: I1θ1 + b1θ1 − rK1(−rθ1 − xm) = T (t)
inercia 2: I2θ2 + b2θ2 − rK2(xm − rθ2) = 0
masa: mxm + bxm − K1(−rθ1 − xm) + K2(xm − rθ2) = 0
El modelo matematico esta dado por estas tres ecuaciones diferenciales quedeben ser resueltas simultaneamente. En este caso no se pueden combinarestas tres ecuaciones para obtener una sola ecuacion diferencial equivalentedebido a que las variables θ1, θ2 y xm son linealmente independientes pues nose cuenta con una expresion algebraica que relacione a estas tres variables.Notese que desde el punto de vista del modelado este es el efecto que introdu-cen los dos resortes considerados en este ejemplo. Comparese con el modelomatematico obtenido en el ejemplo 2.7.
I1
b1 n1
n2
I2
b2K
T(t)
(a)
Tn2
Tn2!A
!BK
(b) Flexibilidad enlos engranes.
Figura 2.30. Sistema de transmision con flexibilidad en la caja de engranes.
Ejemplo 2.11 En la figura 2.30(a) se muestran dos cuerpos giratorios co-nectados a traves de una caja de engranes y un resorte. El cuerpo del lado

2.6 Ejemplos 61
izquierdo recibe un par externo T (t). Por tanto, este ejemplo representa elcaso de un motor (cuerpo izquierdo) que transmite movimiento a una carga(cuerpo derecho) a traves de una caja de engranes cuyos dientes son flexibles.Esta flexibilidad es un problema no deseado que, sin embargo, aparece en lapractica debido a la rigidez finita del material con el que se hacen los engranes(acero). Para resolver este problema se puede aprovechar el desarrollo presen-tado en el ejemplo 2.9 para modelar el sistema mostrado en la figura 2.28(a).Por tanto, se puede regresar a las expresiones en (2.90) y (2.91), las cualesse reescriben a continuacion para facilitar la referencia:
cuerpo 1: I1ω = T (t) − b1ω − n1
n2Tn2 (2.97)
cuerpo 2: I2ω4 = Tn2 − b2θ4 (2.98)
pero ahora, de acuerdo a las figuras 2.30(b) y 2.6 y a (2.11):
Tn2 = K(θA − θB)
donde ωA = θA y ωB = θB con θA y θB las posiciones angulares de losextremos del resorte. Por otro lado, de acuerdo a (2.87) se tiene que θ = n2
n1θA,
porque ωA = −ωn2 y ωn1 = −θ, donde θ y θA son las posiciones angularesdel cuerpo 1 y del extremo del resorte conectado a la rueda dentada 2, segunse define en la figura 2.30(b). Notese ademas que θB = θ4. Sustituyendo todoesto en (2.97) y (2.98) se encuentra:
cuerpo 1: I1θ + b1θ +n1
n2K
(n1
n2θ − θ4
)= T (t)
cuerpo 2: I2θ4 + b2θ4 − K
(n1
n2θ − θ4
)= 0
Estas dos ecuaciones diferenciales deben ser resueltas simultaneamente y re-presentan el modelo matematico buscado. Notese que estas dos ecuacionesdiferenciales no pueden ser combinadas en una sola debido a que las variablesθ y θ4 son linealmente independientes, es decir no se cuenta con una expresionalgebraica que relacione a estas variables. Esta es la principal diferencia conel problema resuelto en el ejemplo 2.9 y es debida a la introduccion del resorteen el presente ejemplo.
Ejemplo 2.12 (tomado de [6], pp. 122). En la figura 2.31 se muestra unservomecanismo, es decir, se trata de un motor de CD con escobillas que seusa para mover un cuerpo de masa M atraves de una caja de engranes yde un adaptador del tipo pinon-cremallera. El cuerpo M se mueve sobre unplano horizontal, por lo que no es necesario tomar en consideracion el efectode la gravedad. Siguiendo las convenciones de signo mostradas en las figuras2.5, 2.3, 2.11, 2.9, 2.17, 2.18, 2.19 se obtienen los diagramas de cuerpo libremostrados en la figura 2.32. En la figura 2.32(a) se desglosan los componentes
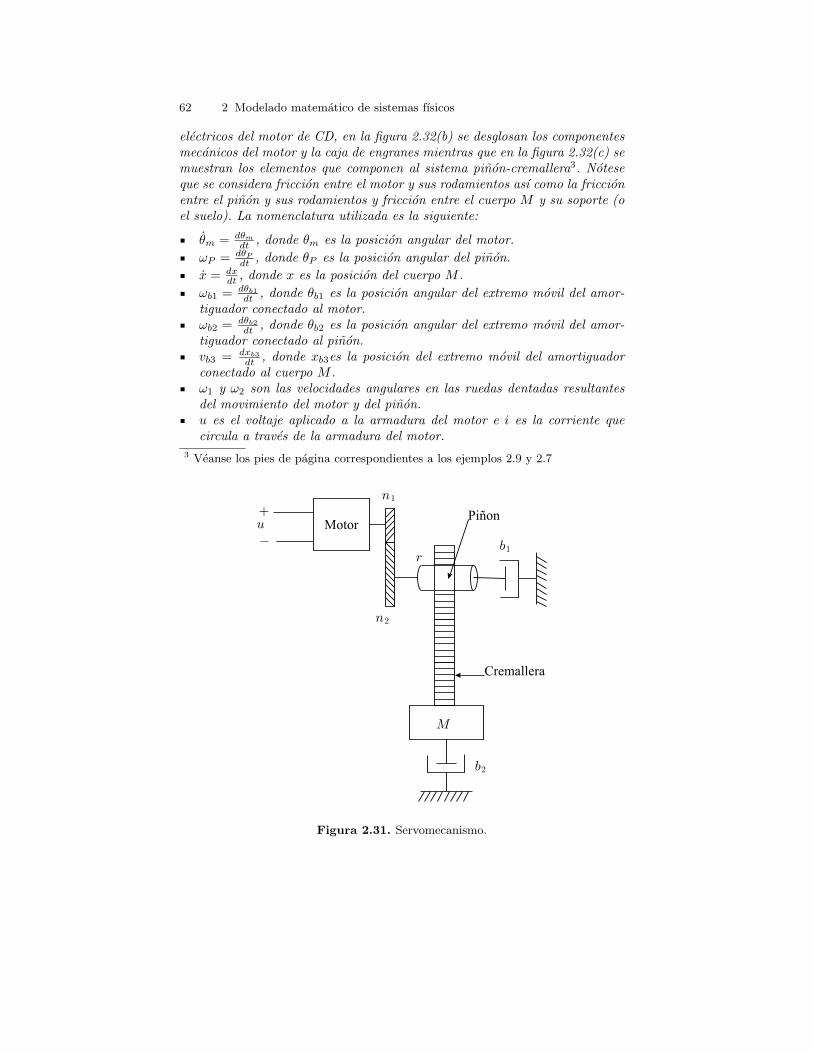
62 2 Modelado matematico de sistemas fısicos
electricos del motor de CD, en la figura 2.32(b) se desglosan los componentesmecanicos del motor y la caja de engranes mientras que en la figura 2.32(c) semuestran los elementos que componen al sistema pinon-cremallera3. Noteseque se considera friccion entre el motor y sus rodamientos ası como la friccionentre el pinon y sus rodamientos y friccion entre el cuerpo M y su soporte (oel suelo). La nomenclatura utilizada es la siguiente:
θm = dθm
dt , donde θm es la posicion angular del motor.
ωP = dθP
dt , donde θP es la posicion angular del pinon.
x = dxdt , donde x es la posicion del cuerpo M .
ωb1 = dθb1
dt , donde θb1 es la posicion angular del extremo movil del amor-tiguador conectado al motor.ωb2 = dθb2
dt , donde θb2 es la posicion angular del extremo movil del amor-tiguador conectado al pinon.vb3 = dxb3
dt , donde xb3es la posicion del extremo movil del amortiguadorconectado al cuerpo M .ω1 y ω2 son las velocidades angulares en las ruedas dentadas resultantesdel movimiento del motor y del pinon.u es el voltaje aplicado a la armadura del motor e i es la corriente quecircula a traves de la armadura del motor.
3 Veanse los pies de pagina correspondientes a los ejemplos 2.9 y 2.7
u+
à
n1
n2
rb1
b2
M
MotorPiñon
Cremallera
Figura 2.31. Servomecanismo.
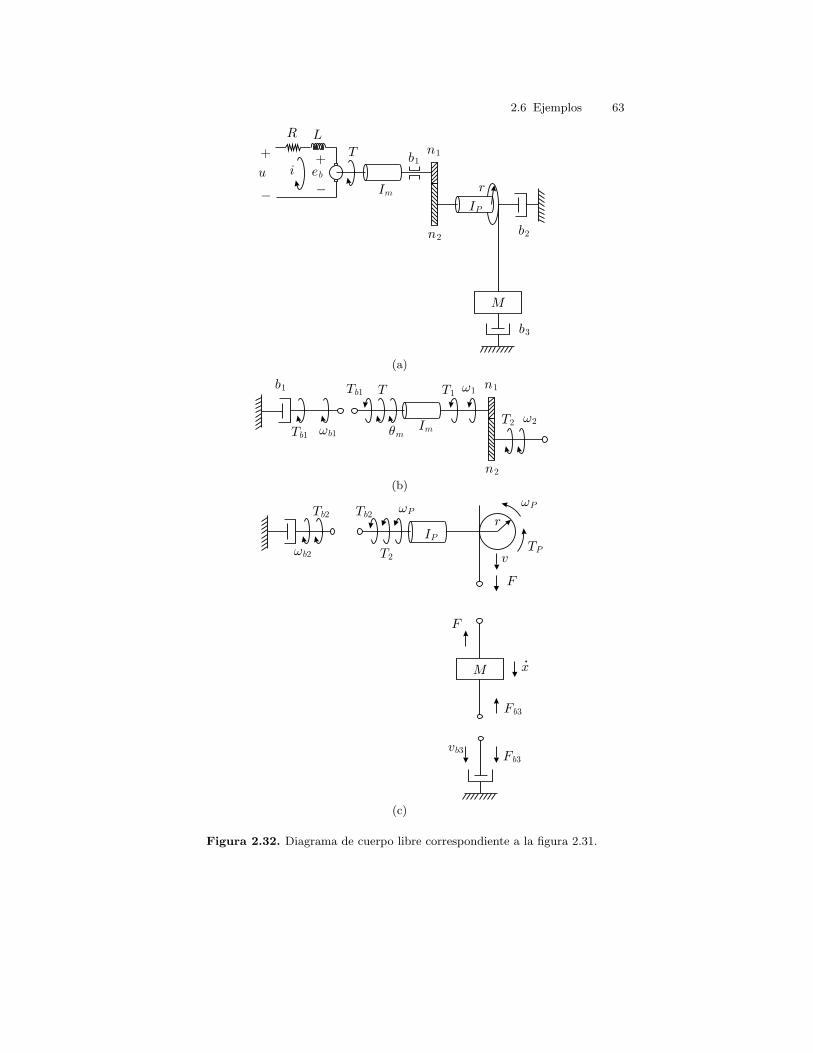
2.6 Ejemplos 63
R L
u
+
ài eb
+
à
T b1n1
n2b2
b3
M
r
IP
Im
(a)
n1
n2
b1
Tb1
Tb1
òm
T1
T2!b1 Im
!1
!2
T
(b)
Tb2 Tb2
T2
r
F
F
x
Fb3
Fb3
!b2
!P
IP
!P
TPv
vb3
M
(c)
Figura 2.32. Diagrama de cuerpo libre correspondiente a la figura 2.31.

64 2 Modelado matematico de sistemas fısicos
F , TP y v son la fuerza, el par y la velocidad traslacional que se producenen el sistema pinon-cremallera como resultado del movimiento del pinony la masa M .
Usando la figura 2.32, ası como (2.4), (2.8), (2.18), (2.21), (2.32), (2.33),(2.34), (2.35) se obtienen las siguientes expresiones:
inercia motor: Imθm = T − T1 − Tb1 (2.99)
inercia pinon: IP θP = T2 + Tb2 + TP (2.100)
masa M : Mx = −F − Fb3 (2.101)
amortiguador motor: b1ωb1 = Tb1
amortiguador pinon: b2ωb2 = Tb2
amortiguador masa M : b3vb3 = Fb3
engranes: T1 =n1
n2T2, ω1 =
n2
n1ω2 (2.102)
pinon-cremallera: v = rωP , TP = rF (2.103)
Notese que, en las expresiones (2.99), (2.100) y (2.101), las fuerzas que tienenel mismo sentido que θm, ωP y x aparecen afectadas con un signo positivo ycon un signo negativo en caso contrario. Considerando que todos los elementosdel sistema se conectan mediante uniones rıgidas entonces, de acuerdo a lafigura 2.32 se tiene que:
v = x = vb3 (2.104)
θm = ωb1 = −ω1, ω2 = ωb2 = −ωP (2.105)
De acuerdo a esto, si se definen x = 0, xb3 = 0, θm = 0, θb1 = 0, θb2 = 0 comolas posiciones del cuerpo M , el extremo movil del amortiguador conectado alcuerpo M , el rotor del motor, el extremo movil del amortiguador conectadoal rotor del motor y el extremo movil del amortiguador conectado al pinon,respectivamente, cuando todo el sistema esta en reposo con T = 0, entoncesse concluye que:
x = xb3 (2.106)
θm = θb1 (2.107)
Por tanto, las expresiones en (2.99), (2.100) y (2.101) se pueden escribircomo:
inercia motor: Imθm = T − n1
n2T2 − b1ωb1
inercia pinon: IP θP = T2 + b2ωb2 + rF
masa M : Mx = −F − b3vb3
Usando (2.104) y (2.105):

2.6 Ejemplos 65
inercia motor: Imθm = T − n1
n2T2 − b1θm (2.108)
inercia pinon: IP θP = T2 − b2ωP + rF (2.109)
masa M : Mx = −F − b3x (2.110)
Por otro lado, de acuerdo a (2.102), (2.103), (2.104) y (2.105) se encuentraque θm = n2
n1r x. Usando esto, despejando T2 de (2.109) y sustituyendo en(2.108):
Imn2
n1rx + b1
n2
n1rx = T − n1
n2[IP ωP + b2ωP − rF ] (2.111)
De (2.103) y (2.104) se tiene que x = rωP . Usando esto en (2.111) y susti-tuyendo F de (2.110) se encuentra:
Imn2
n1rx + b1
n2
n1rx = T −
(n1
n2rIP +
n1
n2rM
)x −
(n1
n2rb2 +
n1
n2rb3
)x
Agrupando terminos se obtiene finalmente:(
Im
(n2
n1r
)2
+ IP1
r2+ M
)x +
(b1
(n2
n1r
)2
+ b21
r2+ b3
)x =
n2
n1rT
(2.112)
Por otro lado, usando la Ley de voltajes de Kirchhoff (vease el ejemplo 2.14)al circuito de la figura 2.32(a) se obtiene:
Ldi
dt+ Ri + eb = u (2.113)
Usando (2.38), (2.39) y θm = n2
n1r x se encuentra que el voltaje inducido y elpar generado estan dados como:
eb = keθm = ken2
n1rx, T = kmi
Entonces, usando este resultado, (2.113) y (2.112) se encuentra, finalmente,que el modelo matematico buscado esta representado por las dos ecuacionesdiferenciales siguientes, las cuales deben ser resueltas simultaneamente:
Ldi
dt+ Ri + ke
n2
n1rx = u (2.114)
(Im
(n2
n1r
)2
+ IP1
r2+ M
)x +
(b1
(n2
n1r
)2
+ b21
r2+ b3
)x =
n2
n1rkmi
(2.115)
Otra manera de expresar este modelo matematico es mediante una sola ecua-cion diferencial obtenida al combinar (2.114) y (2.115). Para esto, derıvese

66 2 Modelado matematico de sistemas fısicos
una vez respecto al tiempo a (2.115). Esto produce la aparicion de didt en el
miembro derecho de la ecuacion resultante. A continuacion se sustituye el va-lor de di
dt obtenido al despejar de (2.114). Con esto se obtiene una ecuacion
diferencial en terminos de de d3xdt3 , x, x e i. Para eliminar i, se despeja esta
variable de (2.115) y se sustituye. Ası, se obtiene una ecuacion diferencial detercer orden en la variable x con el voltaje u como excitacion. De este modoel modelo matematico queda representado por una sola ecuacion diferencial apartir de la cual se puede conocer la posicion x de la masa M si se conoce elvoltaje u aplicado al motor. Se deja como ejercicio para el lector el realizar elprocedimiento descrito.
Ejemplo 2.13 En la figura 2.33(a) se muestra un pendulo simple donde θrepresenta la posicion angular del pendulo respecto de la vertical y θ = dθ
dt .Se supone que toda la masa m del pendulo esta concentrada en el extremo yque la varilla, de longitud l, no tiene masa (o esta es despreciable comparadacon la masa m). El diagrama de cuerpo libre correspondiente se muestra en lafigura 2.33(b). El pendulo puede ser considerado un cuerpo rotativo de inercia:
I = ml2
la cual corresponde a la inercia de una partıcula de masa m que describe unmovimiento circular con un radio constante l [7], cap. 9. Se considera quesobre el pendulo actuan tres pares: 1) el par externo T (t), 2) el par debidoa la friccion, Tb, existente en el punto de donde se sostiene el pendulo y 3)el par debido a la fuerza de gravedad, Tg. De acuerdo a las figuras 2.33(a) y2.33(b), el par Tg esta aplicado en sentido contrario a como se define θ y sumagnitud es igual a:
Tg = peso del pendulo × brazo de palanca
= mg × d, d = l sin(θ)
= mgl sin(θ) (2.116)
Usando la figura 2.33(b), ası como (2.8), (2.21), se obtienen las siguientesexpresiones:
cuerpo giratorio: Iθ = T (t) + Tb − Tg (2.117)
amortiguador: bωb = Tb
Notese que los pares que se aplican sobre el cuerpo I y tienen el mismo sentidoque la velocidad angular θ, aparecen afectados por un signo positivo en (2.117).En caso contrario aparecen afectados por un signo negativo, como es el casode Tg. Considerando que todos los elementos del sistema se conectan medianteuniones rıgidas entonces, de acuerdo a la figura 2.33(b) se tiene que:
θ = −ωb (2.118)

2.6 Ejemplos 67
T(t)
òl
m
g
d(a)
òò
b!b T(t)
TbTb
I
Tg
(b) Diagrama de cuerpo libre.
Figura 2.33. Pendulo simple.
Por tanto, si se definen θ = 0, θb = 0 (con ωb = θb) como las posicionesangulares del pendulo y el extremo movil del amortiguador, respectivamente,cuando todo el sistema esta en reposo con T (t) = 0, entonces se concluye que:
θ = −θb (2.119)
Entonces, las expresiones en (2.117) y (2.116) se pueden escribir como:
Iθ = T (t) + bωb − mgl sin(θ)
= T (t) − bθ − mgl sin(θ)
Finalmente, se obtiene que el modelo matematico correspondiente esta dadopor la siguiente ecuacion diferencial:
ml2θ + bθ + mgl sin(θ) = T (t)
Notese que esta es una ecuacion diferencial de segundo orden pero no lineal,caracterıstica que es debida al hecho de que aparece la funcion sin(θ). Enla seccion 7.2 del capıtulo 7 se explica la manera de manipular este tipo deecuaciones diferenciales. Mas aun, en los capıtulos 11, 13 y 14 se muestracomo disenar controladores para este tipo de ecuaciones diferenciales.
Ejemplo 2.14 En la figura 2.34(a) se muestra un circuito RLC conectadoen serie y alimentado con una fuente de voltaje. La manera de relacionar alos elementos del circuito en este tipo de conexion electrica es usando la Leyde Kirchhoff de voltajes [8], pag. 67:
Propiedad 2.1 Ley de Kirchhoff de voltajes. La suma de los voltajesalrededor de un trayecto cerrado es igual a cero.
Usando las convenciones de signo de las figuras 2.7, 2.8, 2.12 se obtieneel diagrama mostrado en la figura 2.34(b). Entonces, a partir de esta figura y
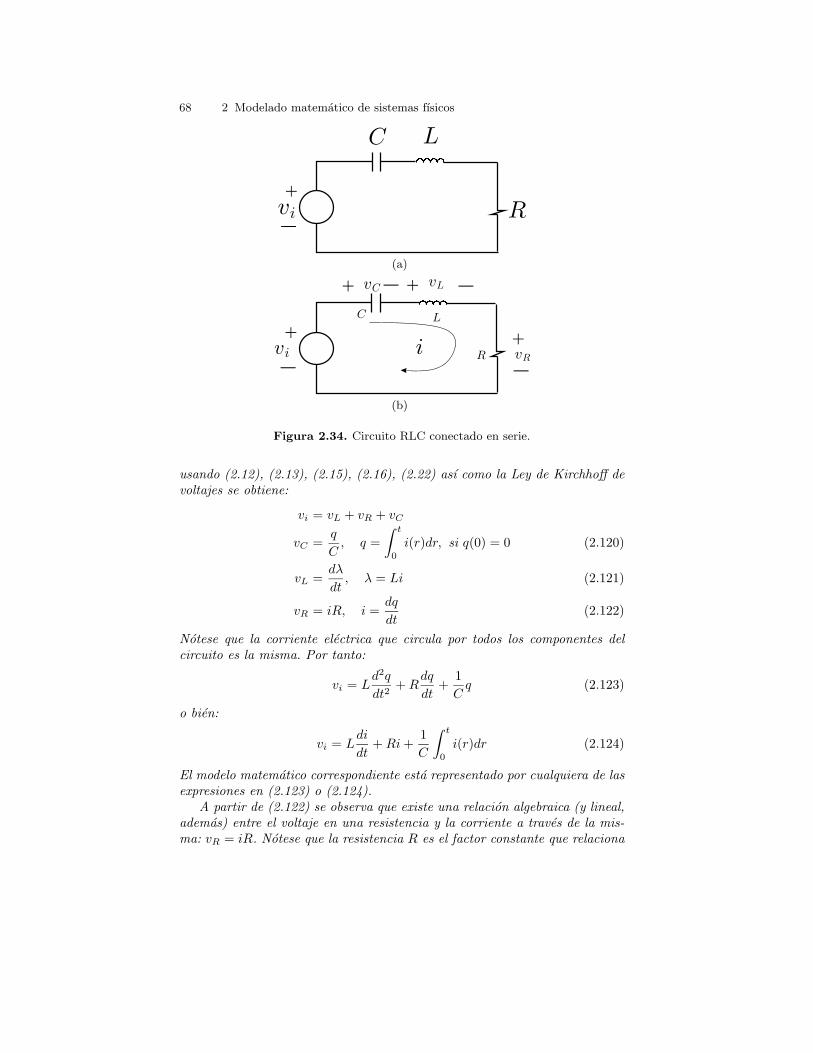
68 2 Modelado matematico de sistemas fısicos
+
àvi
C L
R
(a)
+
àvi R
LC
+ +
+
à à
ài vR
vLvC
(b)
Figura 2.34. Circuito RLC conectado en serie.
usando (2.12), (2.13), (2.15), (2.16), (2.22) ası como la Ley de Kirchhoff devoltajes se obtiene:
vi = vL + vR + vC
vC =q
C, q =
∫ t
0
i(r)dr, si q(0) = 0 (2.120)
vL =dλ
dt, λ = Li (2.121)
vR = iR, i =dq
dt(2.122)
Notese que la corriente electrica que circula por todos los componentes delcircuito es la misma. Por tanto:
vi = Ld2q
dt2+ R
dq
dt+
1
Cq (2.123)
o bien:
vi = Ldi
dt+ Ri +
1
C
∫ t
0
i(r)dr (2.124)
El modelo matematico correspondiente esta representado por cualquiera de lasexpresiones en (2.123) o (2.124).
A partir de (2.122) se observa que existe una relacion algebraica (y lineal,ademas) entre el voltaje en una resistencia y la corriente a traves de la mis-ma: vR = iR. Notese que la resistencia R es el factor constante que relaciona

2.6 Ejemplos 69
corriente y voltaje en una resistencia vR
i = R. Este hecho motiva el cuestio-narse si acaso existe una relacion similar entre la corriente y el voltaje enun inductor y en un capacitor. Sin embargo, a partir de (2.120) y (2.121) seobserva que, a menos que se introduzca algun artificio matematico, esto noes posible por que estan de por medio una derivada y una integral. Entonces,el artificio matematico que se usa es la transformada de Laplace ya que estatiene las siguientes propiedades:
L
dx
dt
= sX(s), L
∫ t
0
x(r)dr
=
1
sX(s), si x(0)=0 (2.125)
donde X(s) es la transformada de Laplace de x(t), es decir Lx(t) = X(s).Por tanto, a partir de (2.120) y (2.121) se obtiene, mediante el uso de latransformada de Laplace y considerando todas las condiciones iniciales igualesa cero:
VC(s) =1
sCI(s)
VL(s) = sLI(s)
donde LvC(t) = VC(s), LvL(t) = VL(s) y Li(t) = I(s). Por tanto, aho-ra se tiene una relacion algebraica entre las transformadas de Laplace de losvoltajes y las corrientes en un inductor y un capacitor. Al factor que relacionaa estas variables se le denomina “impedancia” y se representa como:
Z(s) =V (s)
I(s)(2.126)
Es decir, la impedancia de un inductor es:
ZL(s) =VL(s)
I(s)= sL (2.127)
mientras que la impedancia en un capacitor es:
ZC(s) =VC(s)
I(s)=
1
sC(2.128)
Entonces, usando la transformada de Laplace y el concepto de impedancia sepuede escribir el modelo matematico en (2.124) como:
Vi(s) = sLI(s) + RI(s) +1
sCI(s)
Vi(s) = ZL(s)I(s) + RI(s) + ZC(s)I(s)
Vi(s) = (ZL(s) + R + ZC(s))I(s)
lo cual motiva el definir la impedancia total del circuito serie como:

70 2 Modelado matematico de sistemas fısicos
Zt(s) = ZL(s) + R + ZC(s)
Zt(s) = sL + R +1
sC, Zt(s) =
Vi(s)
I(s)(2.129)
Con lo anterior se prueba una propiedad importante en circuitos electricosconectados en serie:
Propiedad 2.2 La impedancia total de un circuito serie es igual a la sumade las impedancias de todos los elementos conectados en serie.
El concepto de impedancia es muy importante en circuitos electricos y esuna de las herramientas que normalmente se utilizan para modelar y analizarcircuitos en ingenierıa. Es decir, las expresiones en (2.129) tambien represen-tan el modelo matematico del circuito en la figura 2.34(a).
Ejemplo 2.15 En la figura 2.35(a) se muestra un circuito RLC conectado enparalelo y alimentado con una fuente de corriente. La manera de relacionarlos componentes del circuito en este tipo de conexion electrica es usando laLey de Kirchhoff de corrientes [8], pag. 68:
Propiedad 2.3 Ley de Kirchhoff de corrientes.. La suma de las corrien-tes que entran a un nodo es igual a la suma de las corrientes que salen delmismo nodo.
ii L C R
(a)
ii iL iC iR
+
àL C R v
(b)
Figura 2.35. Circuito RLC conectado en paralelo.
Usando las convenciones de signo de las figuras 2.7, 2.8, 2.12 se obtieneel diagrama mostrado en la figura 2.35(b). Entonces, a partir de esta figura y

2.6 Ejemplos 71
usando (2.12), (2.13), (2.15), (2.16), (2.22) ası como la Ley de Kirchhoff decorrientes se obtiene:
ii = iL + iR + iC
q = vC, q =
∫ t
0
iC(r)dr, si q(0) = 0 ⇒ iC = Cdv
dt(2.130)
iL =1
L
∫ t
0
v(r)dr, v = LdiLdt
(2.131)
iR =v
R(2.132)
Notese que el voltaje es el mismo en todos los componentes del circuito. Portanto, el modelo matematico esta representado por:
ii =1
L
∫ t
0
v(r)dr +v
R+ C
dv
dt(2.133)
A partir de (2.130) y (2.131) se obtiene, mediante el uso de la transformada deLaplace (vease (2.125)) y considerando todas las condiciones iniciales igualesa cero:
IC(s) = sCV (s)
IL(s) =1
sLV (s)
donde LiC(t) = IC(s), LiL(t) = IL(s) y Lv(t) = V (s). Al factor querelaciona a las transformadas de Laplace de la corriente y el voltaje en unelemento de circuito se le denomina “admitancia” y se representa como:
Y (s) =I(s)
V (s)(2.134)
Es decir, la admitancia de un inductor es:
YL(s) =IL(s)
V (s)=
1
sL(2.135)
mientras que la admitancia en un capacitor es:
YC(s) =IC(s)
V (s)= sC (2.136)
Entonces, usando la transformada de Laplace y el concepto de admitancia sepuede escribir el modelo matematico en (2.133) como:
Ii(s) =1
sLV (s) +
1
RV (s) + sCV (s)
Ii(s) = YL(s)V (s) +1
RV (s) + YC(s)V (s)
Ii(s) = (YL(s) +1
R+ YC(s))V (s)

72 2 Modelado matematico de sistemas fısicos
lo cual motiva el definir la admitancia total del circuito en paralelo como:
YT (s) = YL(s) +1
R+ YC(s)
YT (s) =1
sL+
1
R+ sC, YT (s) =
Ii(s)
V (s)(2.137)
Con lo anterior se prueba una propiedad importante en circuitos electricosconectados en paralelo:
Propiedad 2.4 La admitancia total de un circuito en paralelo es igual a lasuma de las admitancias de todos los elementos conectados en paralelo.
El concepto de admitancia es muy importante en circuitos electricos y es laotra herramienta que normalmente se utiliza para modelar y analizar circuitosen ingenierıa. Es decir, las expresiones en (2.137) tambien representan elmodelo matematico del circuito en la figura 2.35(a).
A partir de las definiciones de impedancia y admitancia en (2.126) y(2.134) es claro que la admitancia es la inversa de la impedancia, es decir:
Y (s) =1
Z(s)(2.138)
Esto tambien se comprueba al comparar las definiciones de impedancia y ad-mitancia en un inductor y un capacitor mostradas en (2.127), (2.128), (2.135)y (2.136). Entonces, a partir de (2.137) se puede escribir:
1
ZT (s)=
1
ZL(s)+
1
R+
1
ZC(s), YT (s) =
1
ZT (s)
donde ZT (s) representa la impedancia total del circuito conectado en paralelomostrado en la figura 2.35(a). No debe relacionarse ZT (s) con Zt(s) definidaen (2.129) como la impedancia total del circuito conectado en serie mostra-do en la figura 2.34(a). Generalizando la expresion anterior al caso en quese tienen n elementos de circuito conectados en paralelo, se encuentra la si-guiente expresion general para el calculo de la impedancia total de n elementosconectados en paralelo:
1
ZT (s)=
1
Z1(s)+
1
Z2(s)+ . . . +
1
Zn(s)(2.139)
En el caso en que solo dos elementos de circuito estan conectado en paraleloes facil comprobar que la expresion anterior se reduce a:
ZT (s) =Z1(s)Z2(s)
Z1(s) + Z2(s)(2.140)
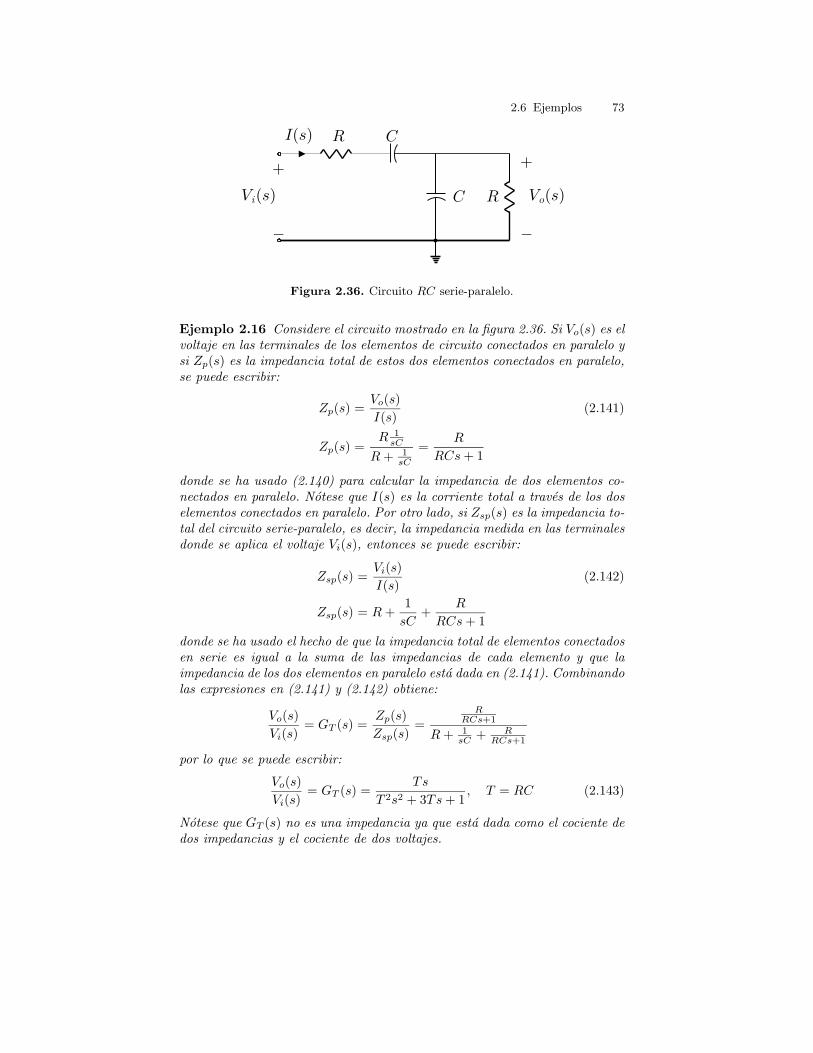
2.6 Ejemplos 73
I(s) R
R
C
C
++
à à
V i(s) Vo(s)
Figura 2.36. Circuito RC serie-paralelo.
Ejemplo 2.16 Considere el circuito mostrado en la figura 2.36. Si Vo(s) es elvoltaje en las terminales de los elementos de circuito conectados en paralelo ysi Zp(s) es la impedancia total de estos dos elementos conectados en paralelo,se puede escribir:
Zp(s) =Vo(s)
I(s)(2.141)
Zp(s) =R 1
sC
R + 1sC
=R
RCs + 1
donde se ha usado (2.140) para calcular la impedancia de dos elementos co-nectados en paralelo. Notese que I(s) es la corriente total a traves de los doselementos conectados en paralelo. Por otro lado, si Zsp(s) es la impedancia to-tal del circuito serie-paralelo, es decir, la impedancia medida en las terminalesdonde se aplica el voltaje Vi(s), entonces se puede escribir:
Zsp(s) =Vi(s)
I(s)(2.142)
Zsp(s) = R +1
sC+
R
RCs + 1
donde se ha usado el hecho de que la impedancia total de elementos conectadosen serie es igual a la suma de las impedancias de cada elemento y que laimpedancia de los dos elementos en paralelo esta dada en (2.141). Combinandolas expresiones en (2.141) y (2.142) obtiene:
Vo(s)
Vi(s)= GT (s) =
Zp(s)
Zsp(s)=
RRCs+1
R + 1sC + R
RCs+1
por lo que se puede escribir:
Vo(s)
Vi(s)= GT (s) =
Ts
T 2s2 + 3Ts + 1, T = RC (2.143)
Notese que GT (s) no es una impedancia ya que esta dada como el cociente dedos impedancias y el cociente de dos voltajes.
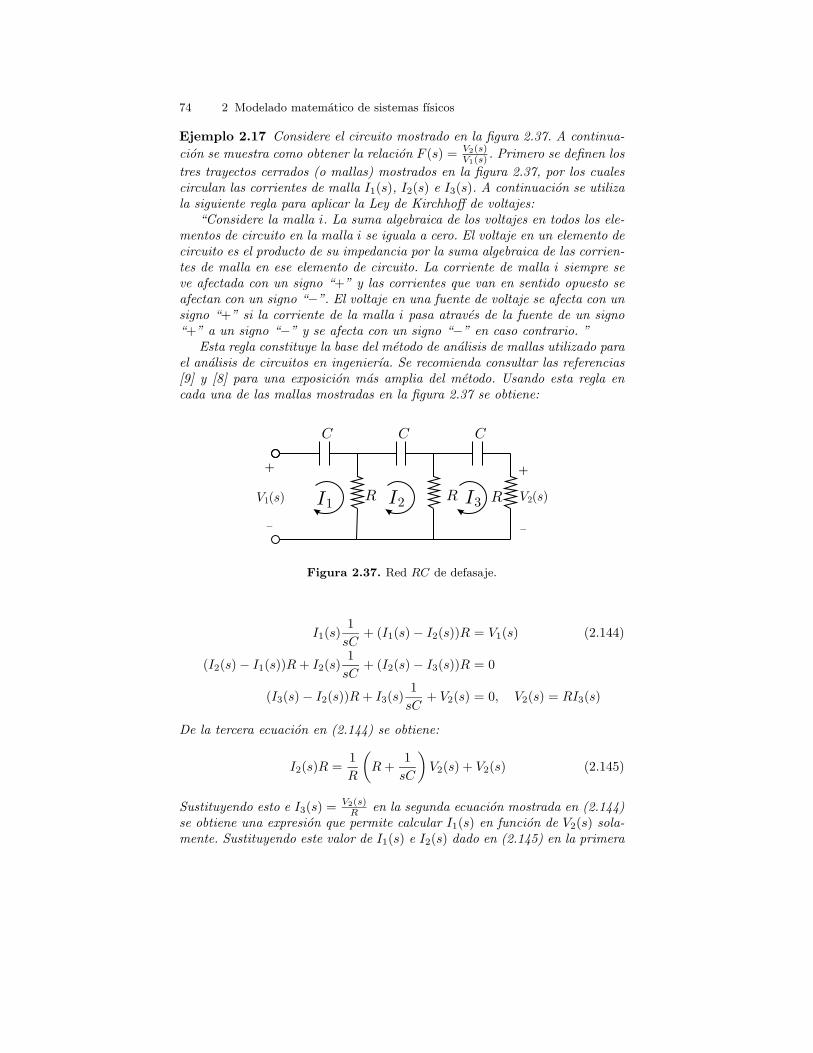
74 2 Modelado matematico de sistemas fısicos
Ejemplo 2.17 Considere el circuito mostrado en la figura 2.37. A continua-
cion se muestra como obtener la relacion F (s) = V2(s)V1(s)
. Primero se definen los
tres trayectos cerrados (o mallas) mostrados en la figura 2.37, por los cualescirculan las corrientes de malla I1(s), I2(s) e I3(s). A continuacion se utilizala siguiente regla para aplicar la Ley de Kirchhoff de voltajes:
“Considere la malla i. La suma algebraica de los voltajes en todos los ele-mentos de circuito en la malla i se iguala a cero. El voltaje en un elemento decircuito es el producto de su impedancia por la suma algebraica de las corrien-tes de malla en ese elemento de circuito. La corriente de malla i siempre seve afectada con un signo “+” y las corrientes que van en sentido opuesto seafectan con un signo “−”. El voltaje en una fuente de voltaje se afecta con unsigno “+” si la corriente de la malla i pasa atraves de la fuente de un signo“+” a un signo “−” y se afecta con un signo “−” en caso contrario. ”
Esta regla constituye la base del metodo de analisis de mallas utilizado parael analisis de circuitos en ingenierıa. Se recomienda consultar las referencias[9] y [8] para una exposicion mas amplia del metodo. Usando esta regla encada una de las mallas mostradas en la figura 2.37 se obtiene:
+
I1 I2 I3R R R
C C C
à
+
à
V1(s) V2(s)
Figura 2.37. Red RC de defasaje.
I1(s)1
sC+ (I1(s) − I2(s))R = V1(s) (2.144)
(I2(s) − I1(s))R + I2(s)1
sC+ (I2(s) − I3(s))R = 0
(I3(s) − I2(s))R + I3(s)1
sC+ V2(s) = 0, V2(s) = RI3(s)
De la tercera ecuacion en (2.144) se obtiene:
I2(s)R =1
R
(R +
1
sC
)V2(s) + V2(s) (2.145)
Sustituyendo esto e I3(s) = V2(s)R en la segunda ecuacion mostrada en (2.144)
se obtiene una expresion que permite calcular I1(s) en funcion de V2(s) sola-mente. Sustituyendo este valor de I1(s) e I2(s) dado en (2.145) en la primera

2.6 Ejemplos 75
ecuacion mostrada en (2.144) se obtiene V1(s) como funcion de V2(s) so-lamente. Finalmente, acomodando terminos convenientemente se obtiene laexpresion buscada:
V2(s)
V1(s)=
R3C3s3
R3C3s3 + 6R2C2s2 + 5RCs + 1= F (s) (2.146)
Ejemplo 2.18 Un convertidor electronico de potencia de CD/CD es un cir-cuito que en su entrada recibe un voltaje de CD y en su salida entrega otrovoltaje de CD pero de valor diferente al recibido en su entrada. En la figura2.38(a) se muestra el circuito de un convertidor electronico de potencia deCD/CD tipo Boost o elevador de voltaje. Esto significa que el voltaje de CDen la salida del convertidor es mayor que el voltaje de CD en su entrada. Sepuede observar que la construccion del sistema se realiza mediante dispositivossemiconductores (transistor-diodo). El transistor Q tiene dos posibles estados:el estado apagado (corte) u = 0, y el estado encendido (saturacion) u = 1. Enel estado apagado el diodo D se polariza directamente, y permite el paso dela energıa entre la fuente de voltaje E y la carga del sistema R. En el estadoencendido el diodo D se polariza inversamente, y en consecuencia no existeconexion entre la fuente de voltaje E y la carga del sistema R.
El modelo matematico asociado al convertidor de potencia de CD/CDBoost esta definido por:
Ldi
dt= E − (1 − u)υ (2.147)
Cdυ
dt= (1 − u)i − υ
R(2.148)
donde i es la corriente electrica a traves del inductor L, v es el voltaje en lasterminales del capacitor C y la constante E representa el voltaje de CD quese aplica en la entrada del sistema. Este sistema tiene por salida v, el cualtiene la caracterıstica de satisfacer la siguiente desigualdad υ ≥ E. La entradade control u representa la funcion de posicion del interruptor, la cual es unasenal que solo toma el valor de 0 o de 1.
Para la obtencion del modelo matematico del convertidor de potencia deCD/CD Boost (2.147)-(2.148) y el analisis del mismo, se introduce el con-cepto de interruptor ideal, mostrado en la figura 2.38(b). En este circuito elinterruptor ideal tiene dos posibles posiciones: el caso en el cual u = 0 quecorresponde al circuito equivalente mostrado en la figura 2.39(a), asociado alhecho de que el transistor Q este apagado. Mientras que para el caso u = 1, elcircuito equivalente que se obtiene es el mostrado en la figura 2.39(b), estandoel transistor Q encendido.Partiendo de los circuitos equivalentes mostrados en las figuras 2.39(a) y2.39(b), el empleo de la Ley de Kirchhoff de Voltajes (LVK) y la Ley de Kir-chhoff de Corrientes (LCK), se procede a la obtencion del modelo matematicoasociado al convertidor de potencia de CD/CD Boost:
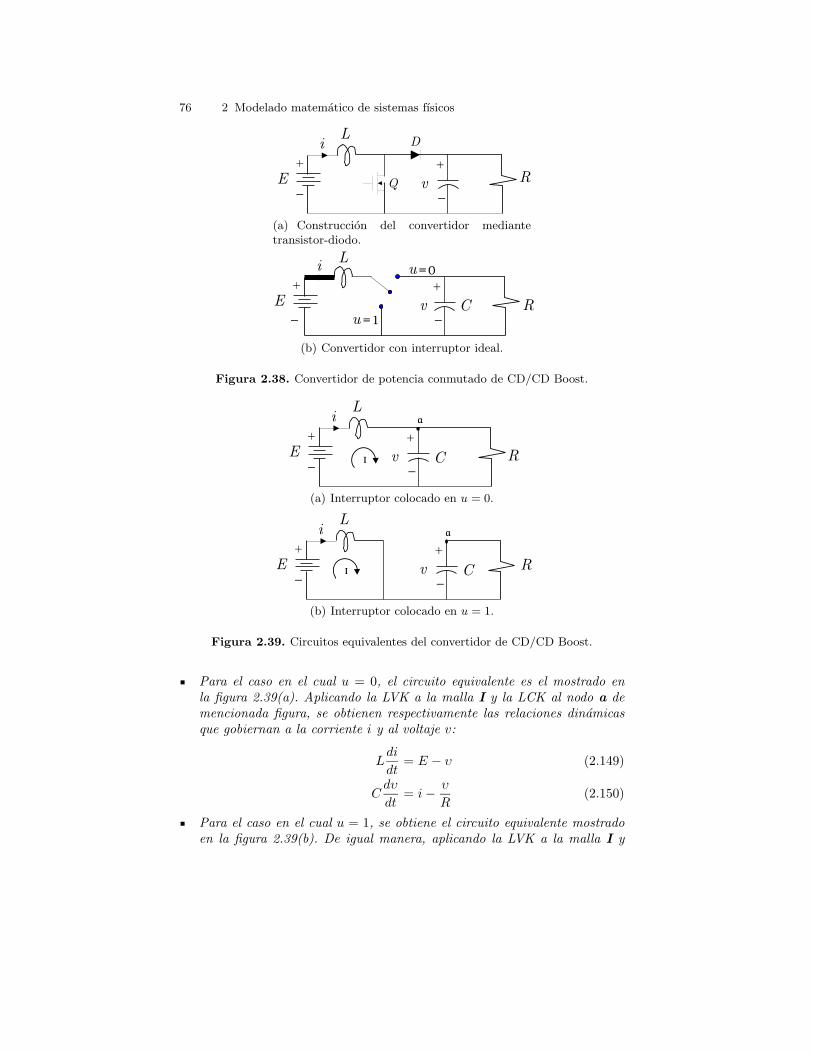
76 2 Modelado matematico de sistemas fısicos
E
L
v
i D
Q R
(a) Construccion del convertidor mediantetransistor-diodo.
i
v
L
E
u
u
RC
(b) Convertidor con interruptor ideal.
Figura 2.38. Convertidor de potencia conmutado de CD/CD Boost.
E
L
v RC
i
I
a
(a) Interruptor colocado en u = 0.
L
v C
i
I
a
E R
(b) Interruptor colocado en u = 1.
Figura 2.39. Circuitos equivalentes del convertidor de CD/CD Boost.
Para el caso en el cual u = 0, el circuito equivalente es el mostrado enla figura 2.39(a). Aplicando la LVK a la malla I y la LCK al nodo a demencionada figura, se obtienen respectivamente las relaciones dinamicasque gobiernan a la corriente i y al voltaje v:
Ldi
dt= E − υ (2.149)
Cdυ
dt= i − υ
R(2.150)
Para el caso en el cual u = 1, se obtiene el circuito equivalente mostradoen la figura 2.39(b). De igual manera, aplicando la LVK a la malla I y

2.6 Ejemplos 77
la LCK al nodo a de la figura en cuestion, las ecuaciones que se obtienenpara la corriente i y el voltaje v, respectivamente son:
Ldi
dt= E (2.151)
Cdυ
dt= − υ
R(2.152)
Mediante simple inspeccion se pueden relacionar las ecuaciones obtenidas enlos circuitos equivalentes, mostrados en las figuras 2.39(a) y 2.39(b), a travesde la variable u, de la siguiente manera:
Ldi
dt= E − (1 − u)υ (2.153)
Cdυ
dt= (1 − u)i − υ
R(2.154)
ya que cuando u = 0 o u = 1, se generan los sistemas (2.149)-(2.150) y(2.151)-(2.152), respectivamente. De esta forma, el modelo matematico delconvertidor de potencia de CD/CD Boost esta determinado por el sistemade ecuaciones diferenciales no lineales (2.153)-(2.154). A este conjunto deecuaciones se le denomina modelo conmutado, que hace referencia al hechode que la posicion del interruptor u solo puede tomar el valor de 0 o de 1.
Con la intencion de conocer el valor en estado estacionario de las variablesasociadas al sistema (2.153)-(2.154), se parte del modelo promedio del con-vertidor. En este modelo se supone que la conmutacion (encendido-apagado)del transistor ocurre a muy alta frecuencia de modo que se puede expresar elmodelo en terminos de variables promedio, es decir:
Ldi
dt= E − (1 − uav)υ (2.155)
Cdυ
dt= (1 − uav)i − υ
R(2.156)
donde i y υ representan, respectivamente, la corriente y el voltaje promedio enel inductor y el capacitor. Mientras que la entrada uav ahora denota la entradade control promedio, la cual puede tomar valores en el intervalo continuo [0,1),siendo esta la funcion de posicion promedio del interruptor.
Como consecuencia de imponer que la entrada del convertidor sea uav =
U = constante, se encuentra que en estado estacionario (cuando didt = 0 y
dυdt = 0) el sistema (2.155)-(2.156) genera que:
[0 (1 − U)
(1 − U) − 1R
] [iυ
]=
[E0
](2.157)
Ası, resolviendo (2.157) se encuentra que en estado estacionario i y υ satis-facen las siguientes relaciones:

78 2 Modelado matematico de sistemas fısicos
i =1
R
E
(1 − U)2(2.158)
υ =E
(1 − U)(2.159)
De esta manera, a partir de las relaciones en estado estacionario, determi-nadas por (2.158)-(2.159), es claro que se tiene la siguiente relacion estatica(en estado estacionario) promedio:
H(U) =υ
E=
1
(1 − U)(2.160)
De (2.160) se puede observar que el cociente υE es mayor o igual a uno,
pues U ∈ [0, 1), de ahı que a este convertidor se le conozca como elevador devoltaje. Finalmente, en la figura 2.40 se puede observar la curva caracterısticaestatica del convertidor Boost, donde claramente se ve cumplida la desigualdadυ ≥ E.
0 0.2 0.4 0.6 0.8 10
1
2
3
4
5
6
7
8
9
10
U
H(U
)
Figura 2.40. Ganancia de voltaje estatico del convertidor de potencia Boost.
Ejemplo 2.19 El circuito de un convertidor de potencia de CD/CD tipoBoost-Boost ideal, es decir sintetizado con interruptores, se muestra en lafigura 2.41. Mientras que el circuito practico es el que se muestra en la figura2.42.
En el sistema mostrado en la figura 2.41 las entradas u1 y u2 solo puedentomar el valor de 0 o de 1, que corresponden fısicamente a la posicion de losinterruptores (vease la figura 2.41). Estas posiciones en la practica se efectuanpor medio de transistores en modo de operacion de corte/saturacion, como seilustra en figura 2.42. Cabe mencionar que el estado de corte de los transistoresequivale al caso en el que u1 = 0, u2 = 0, y el estado de saturacion de lostransistores equivale a tener u1 = 1, u2 = 1 en la figura 2.41.
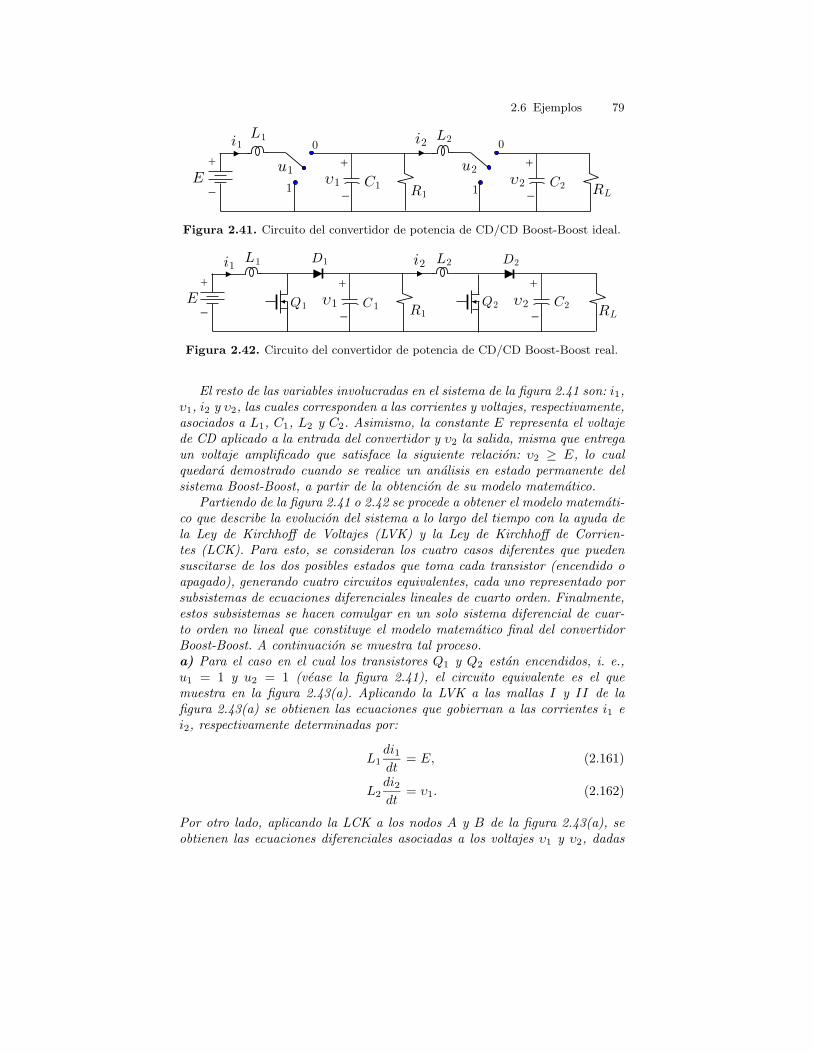
2.6 Ejemplos 79
Figura 2.41. Circuito del convertidor de potencia de CD/CD Boost-Boost ideal.
Figura 2.42. Circuito del convertidor de potencia de CD/CD Boost-Boost real.
El resto de las variables involucradas en el sistema de la figura 2.41 son: i1,υ1, i2 y υ2, las cuales corresponden a las corrientes y voltajes, respectivamente,asociados a L1, C1, L2 y C2. Asimismo, la constante E representa el voltajede CD aplicado a la entrada del convertidor y υ2 la salida, misma que entregaun voltaje amplificado que satisface la siguiente relacion: υ2 ≥ E, lo cualquedara demostrado cuando se realice un analisis en estado permanente delsistema Boost-Boost, a partir de la obtencion de su modelo matematico.
Partiendo de la figura 2.41 o 2.42 se procede a obtener el modelo matemati-co que describe la evolucion del sistema a lo largo del tiempo con la ayuda dela Ley de Kirchhoff de Voltajes (LVK) y la Ley de Kirchhoff de Corrien-tes (LCK). Para esto, se consideran los cuatro casos diferentes que puedensuscitarse de los dos posibles estados que toma cada transistor (encendido oapagado), generando cuatro circuitos equivalentes, cada uno representado porsubsistemas de ecuaciones diferenciales lineales de cuarto orden. Finalmente,estos subsistemas se hacen comulgar en un solo sistema diferencial de cuar-to orden no lineal que constituye el modelo matematico final del convertidorBoost-Boost. A continuacion se muestra tal proceso.a) Para el caso en el cual los transistores Q1 y Q2 estan encendidos, i. e.,u1 = 1 y u2 = 1 (vease la figura 2.41), el circuito equivalente es el quemuestra en la figura 2.43(a). Aplicando la LVK a las mallas I y II de lafigura 2.43(a) se obtienen las ecuaciones que gobiernan a las corrientes i1 ei2, respectivamente determinadas por:
L1di1dt
= E, (2.161)
L2di2dt
= υ1. (2.162)
Por otro lado, aplicando la LCK a los nodos A y B de la figura 2.43(a), seobtienen las ecuaciones diferenciales asociadas a los voltajes υ1 y υ2, dadas

80 2 Modelado matematico de sistemas fısicos
por:
C1dυ1
dt= − υ1
R1− i2, (2.163)
C2dυ2
dt= − υ2
RL. (2.164)
b) Para el caso en el que Q1 esta encendido y Q2 apagado, i. e., u1 = 1 yu2 = 0, a partir de la figura 2.41, el circuito equivalente es el que muestra enla figura 2.43(b). Aplicando la LVK a las mallas I y II de la figura 2.43(b)se obtienen las ecuaciones para i1 e i2 respectivamente:
L1di1dt
= E, (2.165)
L2di2dt
= υ1 − υ2. (2.166)
De igual forma, aplicando la LCK en los nodos A y B de la figura 2.43(b), seobtienen las ecuaciones que gobiernan a los voltajes υ1 y υ2:
C1dυ1
dt= − υ1
R1− i2, (2.167)
C2dυ2
dt= i2(t) −
υ2
RL. (2.168)
c) Cuando Q1 esta apagado y Q2 encendido, i. e., u1 = 0 y u2 = 1, el circuitoresultante es el que muestra en la figura 2.43(c) y aplicando la LVK en lasmallas I y II, se logra el planteamiento de las ecuaciones que describen elcomportamiento de las corrientes i1 e i2 respectivamente:
L1di1dt
= −υ1 + E, (2.169)
L2di2dt
= υ1. (2.170)
Asimismo, valiendose de la LCK para los nodos A y B de la figura 2.43(c),se tiene lo siguiente:
C1dυ1
dt= i1 −
υ1
R1− i2, (2.171)
C2dυ2
dt= − υ2
RL. (2.172)
d) Finalmente, cuando u1 = 0 y u2 = 0, el cual corresponde al caso en el quelos transistores se encuentran apagados, el circuito equivalente es el que semuestra en la figura 2.43(d). Para obtener las ecuaciones que gobiernan a losvoltajes y corrientes ilustrados en la figura 2.43(d), de igual forma, se aplicala LVK para las mallas I y II obteniendo lo siguiente:

2.6 Ejemplos 81
L1di1dt
= −υ1 + E, (2.173)
L2di2dt
= υ1 − υ2. (2.174)
Mientras que, aplicando la LCK para los nodos A y B, se tiene:
C1dυ1
dt= i1 −
υ1
R1− i2, (2.175)
C2dυ2
dt= i2 −
υ2
RL. (2.176)
Ası, mediante inspeccion, al comparar las ecuaciones (2.161)-(2.162),(2.165)-(2.166), (2.169)-(2.170) y (2.173)-(2.174), se producen como resul-tado las ecuaciones que gobiernan el comportamiento de i1 e i2, determinadasrespectivamente por (2.177) y (2.179). Realizando un proceso similar para lasvariables υ1 y υ2, determinadas por las ecuaciones (2.163)-(2.164), (2.167)-(2.168), (2.171)-(2.172) y (2.175)-(2.176), se obtienen las ecuaciones (2.178)y (2.180) respectivamente. De esta manera, el modelo matematico del converti-dor Boost-Boost queda determinado por el sistema de ecuaciones diferencialesde cuarto orden no lineal, siguiente:
L1di1dt
= −(1 − u1)υ1 + E, (2.177)
C1dυ1
dt= (1 − u1)i1 −
υ1
R1− i2, (2.178)
L2di2dt
= υ1 − (1 − u2)υ2, (2.179)
C2dυ2
dt= (1 − u2)i2 −
υ2
RL. (2.180)
Ası, las ecuaciones (2.177)-(2.180) constituyen el modelo matematico del con-vertidor de potencia Boost-Boost. Si se desea corroborar que estas ecuacionesreproducen los cuatro modos de operacion del convertidor (o circuitos equiva-lentes de la figura 2.43), basta con asignarle los valores correspondientes a lasentradas u1 y u2.
Con la finalidad de conocer las propiedades del convertidor de potenciaBoost-Boost en estado estacionario se parte de su modelo promedio asociado,el cual se obtiene suponiendo que ambos transistores conmutan a alta frecuen-cia y esta determinado como:
L1di1dt
= −(1 − u1av)υ1 + E, (2.181)
C1dυ1
dt= (1 − u1av )i1 −
υ1
R1− i2, (2.182)
L2di2dt
= υ1 − (1 − u2av)υ2, (2.183)

82 2 Modelado matematico de sistemas fısicos
(a) Circuito equivalente del convertidor de potencia Boost-Boostcuando u1 = 1 y u2 = 1.
(b) Circuito equivalente del convertidor de potencia Boost-Boostcuando u1 = 1 y u2 = 0.
(c) Circuito equivalente del convertidor de potencia Boost-Boostpara u1 = 0 y u2 = 1.
(d) Circuito equivalente del convertidor de potencia Boost-Boostcuando u1 = 0 y u2 = 0.
Figura 2.43. Modos de operacion del convertidor de potencia de CD/CD Boost-Boost.
C2dυ2
dt= (1 − u2av )i2 −
υ2
RL, (2.184)
donde i1, υ1, i2 y υ2 representan las corrientes y los voltajes promedio asocia-dos a L1, C1, L2 y C2 respectivamente. Las entradas u1av y u2av representanlas entradas de control promedio, las cuales pueden tomar valores en el in-tervalo continuo [0, 1), siendo estas las funciones de posicion promedio de losinterruptores.
De esta manera, partiendo del modelo promedio (2.181)-(2.184), se procedea obtener los valores en estado estacionario del sistema que aparecen cuandolas entradas del convertidor u1av y u2av son constantes en algun valor dentrodel intervalo [0, 1). Esto se consigue suponiendo que di1
dt = 0, dυ1
dt = 0, di2dt = 0

2.7 Caso de estudio 83
y dυ2
dt = 0, para encontrar:
0 −(1 − u1av) 0 0(1 − u1av) − 1
R1−1 0
0 1 0 −(1 − u2av)0 0 (1 − u2av) − 1
RL
ı1υ1
ı2υ2
=
−E000
,
Resolviendo para i1, υ1, i2 y υ2, se obtiene lo siguiente:
ı1υ1
ı2υ2
=
ER1RL
R1+RL(1−u2av)2
(1−u1av)2(1−u2av)2E
1−u1avE
RL
1(1−u1av)(1−u2av)2
E(1−u1av)(1−u2av)
. (2.185)
De esta manera, (2.185) permite conocer de manera directa los valores quetoman las variables promedio i1, υ1, i2 y υ2, en estado estacionario. Asi-mismo, a partir de la ultima relacion en (2.185) se puede observar que lasalida satisface la desigualdad υ2 ≥ E, pues recordemos que u1av ∈ [0, 1) yu1av ∈ [0, 1).
2.7. Caso de estudio. Un convertidor electronico depotencia de CD a CD tipo resonante serie de altafrecuencia
Muchos equipos en la actualidad utilizan para su funcionamiento unagran diversidad de circuitos electronicos los cuales, precisamente debido a sugran diversidad, necesitan ser alimentados con diferentes niveles de voltaje decorriente directa (CD). Para alimentar estos equipos se puede utilizar un grantransformador que cuente con varias derivaciones en el secundario de modoque a partir de cada una de ellas se pueda utilizar un arreglo rectificador-filtro para obtener un voltaje de CD diferente. Sin embargo, este metodo yano es utilizado porque requiere de componentes (inductores y capacitores) devalores grandes, resultando en equipos voluminosos, ademas de producir laperdida de grandes cantidades de energıa. La estrategia utilizada actualmentepara resolver este problema consiste en contar con varios circuitos electronicosde potencia que mediante dispositivos de conmutacion obtienen, a su salida,valores de voltaje de CD diferentes a partir de un unico voltaje de CD desuministro. Estos circuitos reciben el nombre de convertidores electronicos depotencia de CD a CD y resuelven el problema arriba mencionado reduciendolas perdidas de energıa y el volumen de los equipos. De hecho, la miniatu-rizacion de los equipos electronicos modernos se debe en gran parte al usode convertidores electronicos de potencia. En los ejemplos 2.18 y 2.19 se hanmodelado algunos de los convertidores electronicos de potencia utilizados enla actualidad.
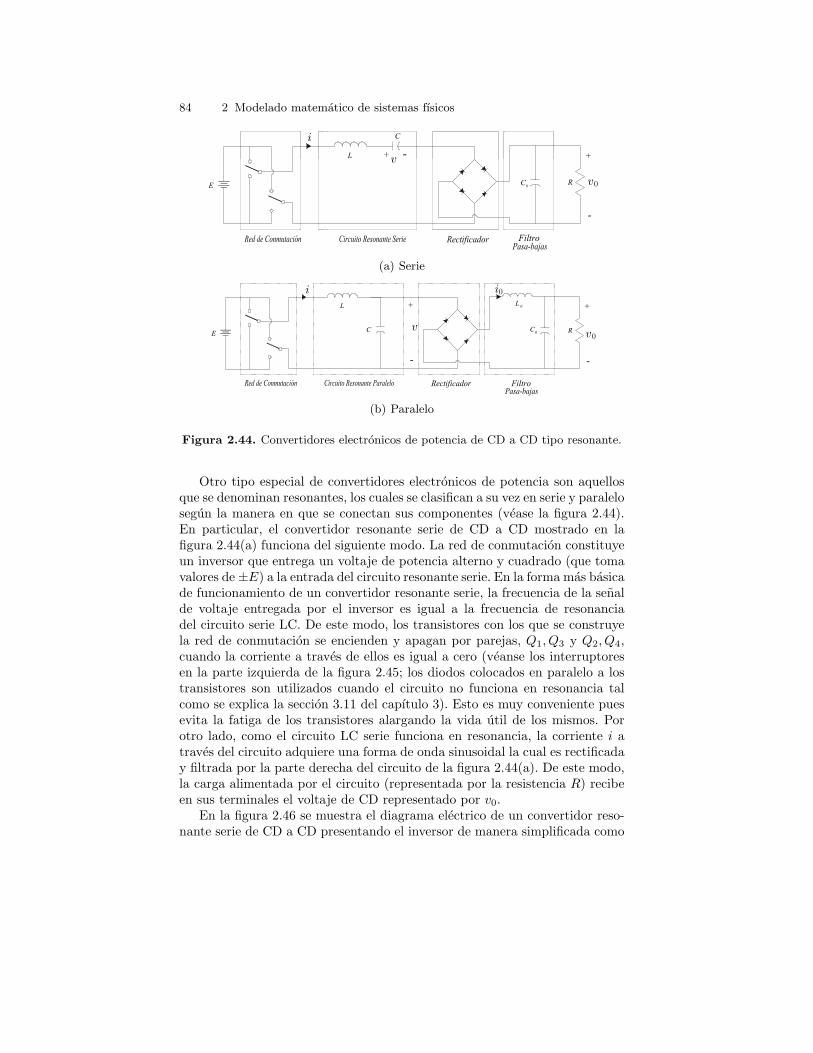
84 2 Modelado matematico de sistemas fısicos
E
L
C
R
+-
+
-
C0
v0
i
v
(a) Serie
E
L
R
+
-
+
-
L0
0C v0
v
i i0
(b) Paralelo
Figura 2.44. Convertidores electronicos de potencia de CD a CD tipo resonante.
Otro tipo especial de convertidores electronicos de potencia son aquellosque se denominan resonantes, los cuales se clasifican a su vez en serie y paralelosegun la manera en que se conectan sus componentes (vease la figura 2.44).En particular, el convertidor resonante serie de CD a CD mostrado en lafigura 2.44(a) funciona del siguiente modo. La red de conmutacion constituyeun inversor que entrega un voltaje de potencia alterno y cuadrado (que tomavalores de ±E) a la entrada del circuito resonante serie. En la forma mas basicade funcionamiento de un convertidor resonante serie, la frecuencia de la senalde voltaje entregada por el inversor es igual a la frecuencia de resonanciadel circuito serie LC. De este modo, los transistores con los que se construyela red de conmutacion se encienden y apagan por parejas, Q1, Q3 y Q2, Q4,cuando la corriente a traves de ellos es igual a cero (veanse los interruptoresen la parte izquierda de la figura 2.45; los diodos colocados en paralelo a lostransistores son utilizados cuando el circuito no funciona en resonancia talcomo se explica la seccion 3.11 del capıtulo 3). Esto es muy conveniente puesevita la fatiga de los transistores alargando la vida util de los mismos. Porotro lado, como el circuito LC serie funciona en resonancia, la corriente i atraves del circuito adquiere una forma de onda sinusoidal la cual es rectificaday filtrada por la parte derecha del circuito de la figura 2.44(a). De este modo,la carga alimentada por el circuito (representada por la resistencia R) recibeen sus terminales el voltaje de CD representado por v0.
En la figura 2.46 se muestra el diagrama electrico de un convertidor reso-nante serie de CD a CD presentando el inversor de manera simplificada como
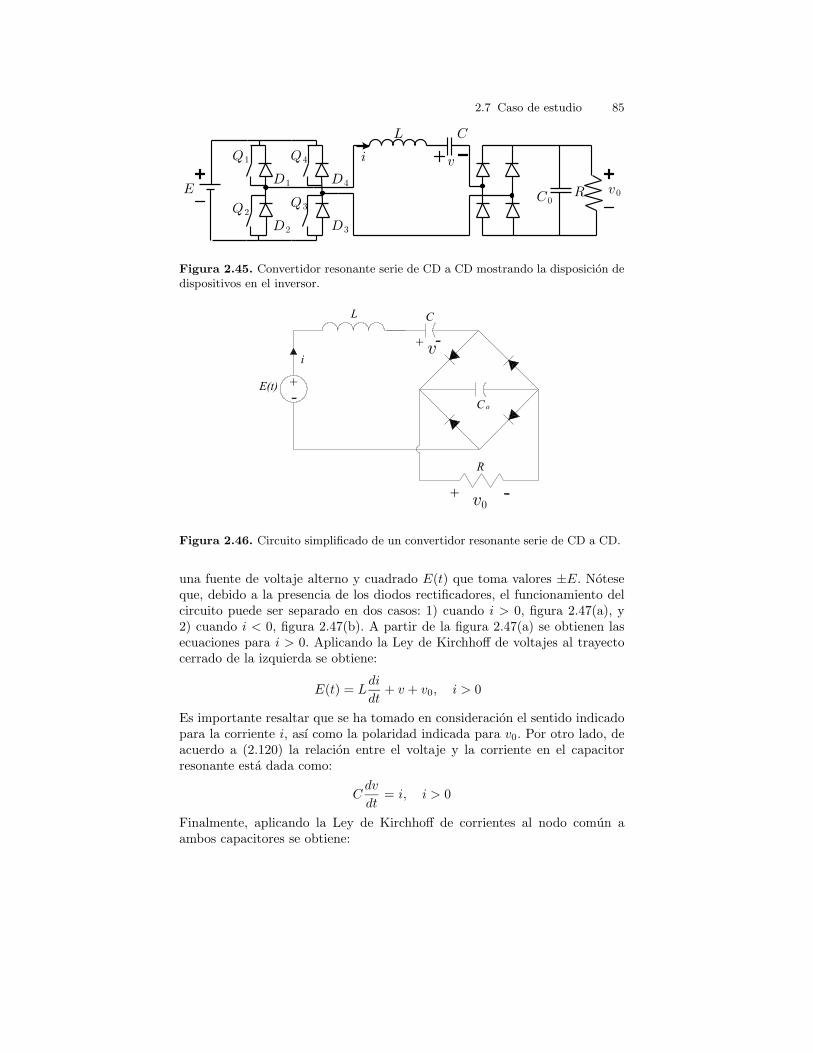
2.7 Caso de estudio 85
Q1 Q4
Q3Q2
D2 D3
D1 D4
L C
C0Rïï ï
ï
+ àvi+
àv0
+
àE
Figura 2.45. Convertidor resonante serie de CD a CD mostrando la disposicion dedispositivos en el inversor.
E(t)
L C
C
i
+ -
R
o-
+
v
v0
Figura 2.46. Circuito simplificado de un convertidor resonante serie de CD a CD.
una fuente de voltaje alterno y cuadrado E(t) que toma valores ±E. Noteseque, debido a la presencia de los diodos rectificadores, el funcionamiento delcircuito puede ser separado en dos casos: 1) cuando i > 0, figura 2.47(a), y2) cuando i < 0, figura 2.47(b). A partir de la figura 2.47(a) se obtienen lasecuaciones para i > 0. Aplicando la Ley de Kirchhoff de voltajes al trayectocerrado de la izquierda se obtiene:
E(t) = Ldi
dt+ v + v0, i > 0
Es importante resaltar que se ha tomado en consideracion el sentido indicadopara la corriente i, ası como la polaridad indicada para v0. Por otro lado, deacuerdo a (2.120) la relacion entre el voltaje y la corriente en el capacitorresonante esta dada como:
Cdv
dt= i, i > 0
Finalmente, aplicando la Ley de Kirchhoff de corrientes al nodo comun aambos capacitores se obtiene:

86 2 Modelado matematico de sistemas fısicos
i = C0dv0
dt+
v0
R, i > 0
E(t)
L C
C0
i+ - +
-
R
+
- v0
v
(a) i > 0
E(t)
L C
C 0
i + -
+
-
R
+
-
v
v0
(b) i < 0
Figura 2.47. Circuitos equivalentes para i > 0 e i < 0.
Por otro lado, a partir de la figura 2.47(b) se obtienen las ecuaciones parai < 0. Aplicando la Ley de Kirchhoff de voltajes al trayecto cerrado de laizquierda se obtiene:
E(t) = Ldi
dt+ v − v0, i < 0
Notese que v0 esta afectado por un signo “−” porque la polaridad indica-da para este voltaje esta en sentido opuesto al definido por el sentido de lacorriente electrica i. Sin embargo, la relacion entre el voltaje y la corriente enel capacitor resonante no sufre cambios:
Cdv
dt= i, i < 0
Finalmente, aplicando la Ley de Kirchhoff de corrientes al nodo comun aambos capacitores se obtiene:
i = −v0
R− C0
dv0
dt, i < 0
Notese que el sentido correcto de la corriente en el capacitor C0 y en la resis-tencia es de la terminal marcada con “+” a la terminal marcada con “−”, esdecir, es contrario al sentido indicado para i.

2.8 Resumen del capıtulo 87
Comparando estos dos conjuntos de ecuaciones, se puede obtener un unicoconjunto de ecuaciones que representa a ambos casos i > 0 e i < 0:
E(t) = Ldi
dt+ v + v0sign(i) (2.186)
Cdv
dt= i (2.187)
abs(i) = C0dv0
dt+
v0
R(2.188)
donde:
sign(i) =
+1, i > 0−1, i < 0
(2.189)
mientras que abs(i) representa el valor absoluto de i, es decir abs(i) = i sii > 0 y abs(i) = −i si i < 0. Las ecuaciones en (2.186)-(2.188) constituyenel modelo matematico del convertidor electronico de potencia de CD a CDtipo resonante serie. En la seccion 3.11 del capıtulo 3 se retomara el estudiode este tipo de convertidor electronico de potencia. A partir del estudio delmodelo (2.186)-(2.188) se vera como funciona este circuito y se explicara porque recibe el calificativo de “alta frecuencia”. Para mas informacion sobre elmodelado de este tipo de convertidores electronicos de potencia se recomiendaconsultar [10].
2.8. Resumen del capıtulo
El modelo matematico de un sistema fısico es una ecuacion o un conjuntode ecuaciones diferenciales que describen la evolucion de las variables impor-tantes del sistema fısico cuando son sometidas a condiciones especıficas. Taldescripcion sera obtenida mediante la solucion de dichas ecuaciones diferen-ciales en el capıtulo 3.
Se ha mostrado que el modelo matematico de los sistemas mecanicos,electricos y electromecanicos puede ser obtenido utilizando el concepto deenergıa, cantidad fısica que los ingenieros estan acostumbrados a manejar. Deacuerdo a este enfoque, se puede considerar que las partes que componen a lossistemas fısicos son procesadores de energıa y el modelo matematico describecomo intercambian la energıa dichos componentes.
Comparando la manera en que los sistemas procesan la energıa se puedenestablecer analogıas entre sistemas de diferente naturaleza. Por ejemplo, lamasa y la inercia (sistemas mecanicos) son analogas a la inductancia (sistemaselectricos), un resorte (sistemas mecanicos) es analogo a un capacitor (sistemaselectricos), y la friccion viscosa (sistemas mecanicos) es analoga a la resistencia(sistemas electricos). Ademas, una caja de engranes y una barra apoyada enun punto (sistemas mecanicos) son analogas a un transformador (sistemas
88 2 Modelado matematico de sistemas fısicos
electricos), mientras que un sistema pinon-cremallera (sistemas mecanicos) esanalogo a un motor electrico (sistemas electromecanicos).
En lo que resta de la presente obra, el modelo matematico del sistema acontrolar sera utilizado para disenar un controlador (otra ecuacion diferencialen general). El objetivo es que al conectar el controlador en realimentacioncon el sistema a controlar se genere otra ecuacion diferencial (en lazo cerrado)cuyas propiedades (estudiadas en el capıtulo 3) aseguren que la variable queinteresa controlar evolucione en el tiempo de la manera deseada.
2.9. Preguntas de repaso
1. ¿Cuales son las leyes fundamentales de la fısica que se usan para describirla interconexion de componentes en sistemas mecanicos y en sistemaselectricos?
2. ¿Por que el modelo obtenido en el ejemplo 2.7 es una ecuacion diferen-cial de primer orden mientras que el modelo obtenido en el ejemplo 2.8esta constituido por dos ecuaciones diferenciales de segundo orden cadauna? Notese que en el ejemplo 2.7 hay tres cuerpos mientras que en elejemplo 2.8 hay dos cuerpos involucrados.
3. ¿Por que el modelo en (2.92) no tiene el termino correspondiente a θ4, esdecir, a la posicion?
4. ¿Por que los modelos matematicos de un circuito RL y de un circuitoRC son ecuaciones diferenciales de primer orden mientras que el modelomatematico de un circuito RLC es una ecuacion diferencial de segundoorden?
5. En la seccion 2.2.3 se menciona que “Faraday fue el primero en darse cuen-ta de que un inductor (y en general cualquier circuito electrico suficien-temente largo) tiene propiedades analogas a las que tiene el momentumen sistemas mecanicos”. ¿Puede explicar a que se refiere esta afirmacion?¿Ha observado que cuando se trata de desconectar un circuito altamenteinductivo salta una chispa? ¿Recuerda lo que establece la Primera Ley deNewton?
6. Se ha visto que en un motor electrico de CD se cumple que ke = km. Porotro lado, es claro que el subsistema electrico debe transmitir energıa alsubsistema mecanico para realizar el movimiento. ¿Puede dar el ejemplode una situacion en la que el subsistema mecanico transmite energıa alsubsistema electrico? ¿Que papel juega en este caso el hecho de que ke =km?
7. Se ha visto que una caja de engranes es analoga al transformador electrico¿Podrıa listar las caracterısticas existentes entre las corrientes y voltajesen ambos devanados de un transformador electrico? ¿Algo similar puedeestablecerse para las velocidades y pares en ambos lados de la caja deengranes? ¿Podrıa listar las ventajas, desventajas y aplicaciones de estascaracterısticas en una caja de engranes y en un transformador electrico?

2.10 Ejercicios propuestos 89
8. De acuerdo a la pregunta anterior ¿Por que un automovil debe viajar maslentamente para subir una pendiente muy pronunciada pero puede viajarmas rapido en terrenos planos?
9. Si un transformador electrico puede elevar el voltaje eligiendo una ta-za n1/n2 apropiada ¿Por que se usan circuitos electronicos basados entransistores para amplificar senales en sistemas de comunicaciones (queprocesan corriente alterna) en lugar de transformadores electricos?
10. Si un transformador electrico y una caja de engranes conservan la potenciaen ambos puertos ¿De que manera intervienen las perdidas en ambosdispositivos? ¿A que se pueden deber dichas perdidas?
2.10. Ejercicios propuestos
1. Considere el sistema masa-resorte-amortiguador mostrado en la figura2.22(a) y estudiado en el ejemplo 2.3. Ahora suponga que este mecanismoesta girado 90 en sentido horario, es decir, que ahora existe el efecto dela gravedad sobre la direccion del desplazamiento del resorte y del amorti-guador (la masa cuelga del techo a traves del resorte y del amortiguador).Demuestre que el modelo matematico correspondiente es:
y +b
my +
K
my =
1
mF (t)
donde y = x − x0 con x0 = mg/K y g la aceleracion de la gravedad.¿Que significa esto?
2. Considere el sistema mecanico del ejemplo 2.9. Suponga que sobre el cuer-po de la derecha se aplica un par externo de perturbacion Tp(t). Tambiensuponga que el par externo aplicado T (t) es producido por un motorelectrico de CD como en el ejemplo 2.12. Obtenga el modelo matematicocorrespondiente y comparelo con el obtenido en (9.9) y (9.10) del capıtulo9.
3. Realice las manipulaciones algebraicas que sobre el modelo (2.114) y(2.115) se sugieren en el ultimo parrafo del ejemplo 2.12.
4. Realice las manipulaciones algebraicas del ejercicio anterior sobre el mo-delo obtenido en el ejercicio 2 de esta seccion.
5. Considere el circuito electrico mostrado en la figura 2.48. Demuestre queel voltaje v indicado en la figura es igual a:
v =1
2(v1 − v2)
6. Considere el circuito RC mostrado en la figura 2.49. Demuestre que elvoltaje en la resistencia esta dado como:
Vo(s) =s
s + 1RC
Vi(s) −vc(0)
s + 1RC
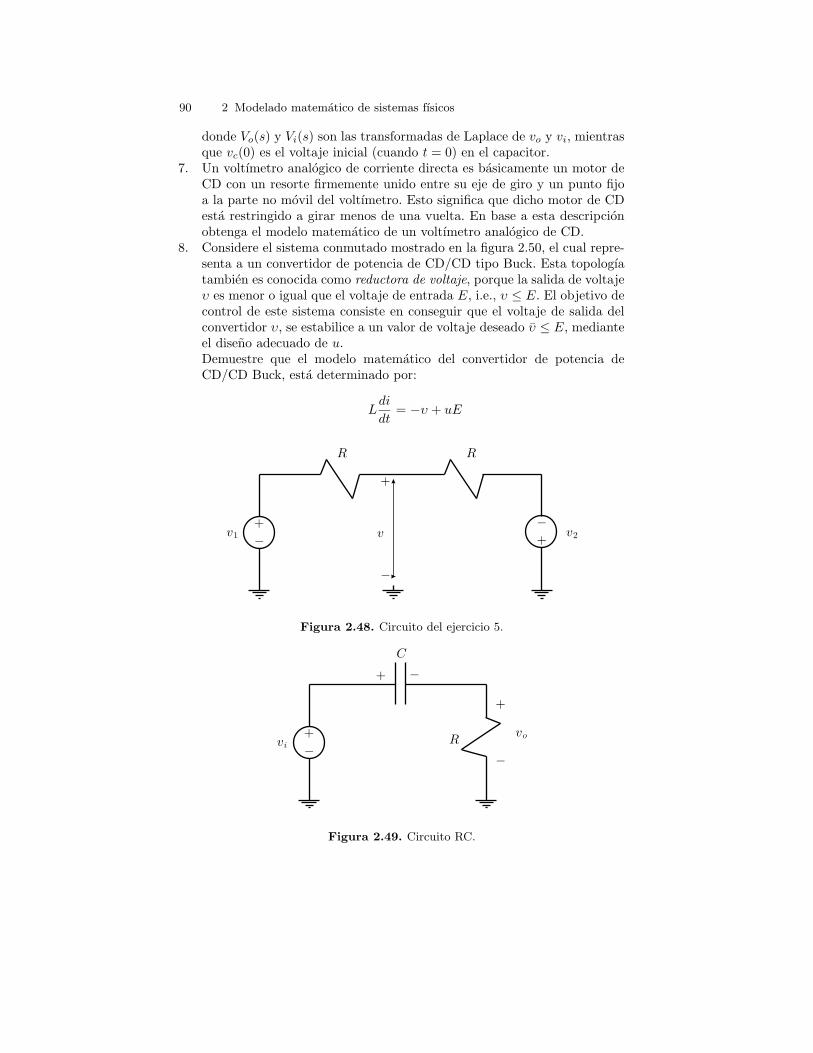
90 2 Modelado matematico de sistemas fısicos
donde Vo(s) y Vi(s) son las transformadas de Laplace de vo y vi, mientrasque vc(0) es el voltaje inicial (cuando t = 0) en el capacitor.
7. Un voltımetro analogico de corriente directa es basicamente un motor deCD con un resorte firmemente unido entre su eje de giro y un punto fijoa la parte no movil del voltımetro. Esto significa que dicho motor de CDesta restringido a girar menos de una vuelta. En base a esta descripcionobtenga el modelo matematico de un voltımetro analogico de CD.
8. Considere el sistema conmutado mostrado en la figura 2.50, el cual repre-senta a un convertidor de potencia de CD/CD tipo Buck. Esta topologıatambien es conocida como reductora de voltaje, porque la salida de voltajeυ es menor o igual que el voltaje de entrada E, i.e., υ ≤ E. El objetivo decontrol de este sistema consiste en conseguir que el voltaje de salida delconvertidor υ, se estabilice a un valor de voltaje deseado υ ≤ E, medianteel diseno adecuado de u.Demuestre que el modelo matematico del convertidor de potencia deCD/CD Buck, esta determinado por:
Ldi
dt= −υ + uE
+
+
+
à
àà
v1 v2v
R R
Figura 2.48. Circuito del ejercicio 5.
+
àR
C
vivo
+
à
+ à
Figura 2.49. Circuito RC.
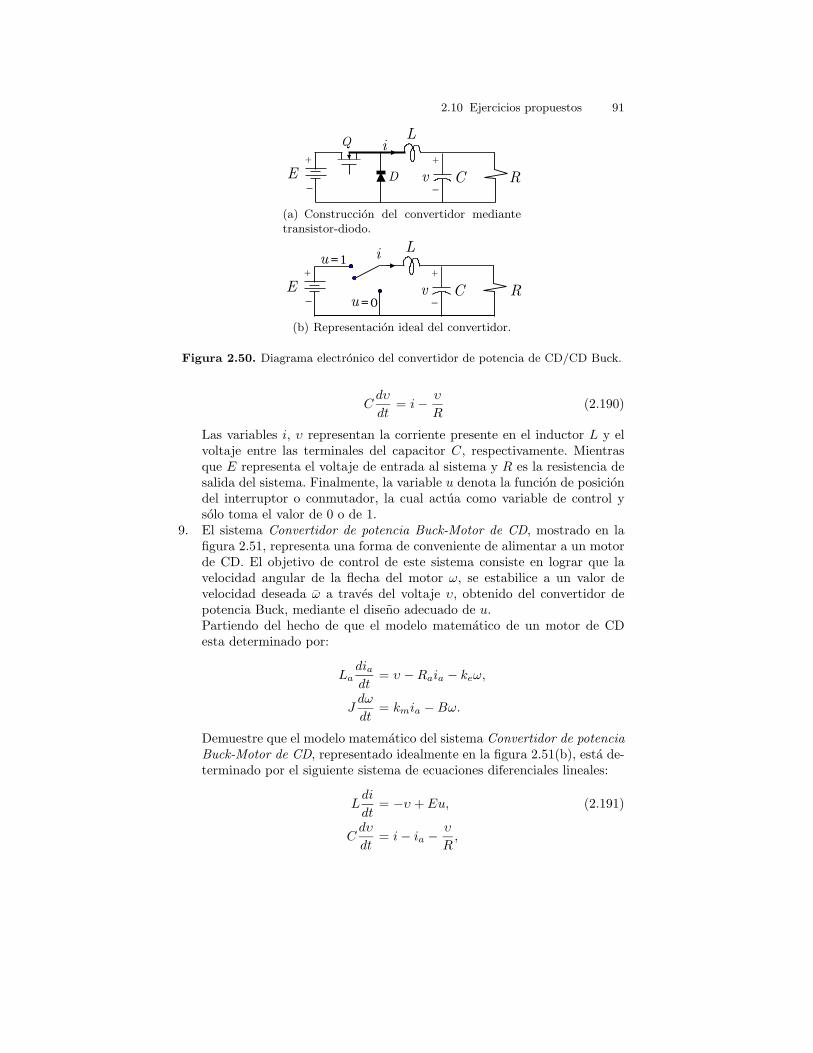
2.10 Ejercicios propuestos 91
Li
v C RE D
Q
(a) Construccion del convertidor mediantetransistor-diodo.
Li
u
u
v C RE
(b) Representacion ideal del convertidor.
Figura 2.50. Diagrama electronico del convertidor de potencia de CD/CD Buck.
Cdυ
dt= i − υ
R(2.190)
Las variables i, υ representan la corriente presente en el inductor L y elvoltaje entre las terminales del capacitor C, respectivamente. Mientrasque E representa el voltaje de entrada al sistema y R es la resistencia desalida del sistema. Finalmente, la variable u denota la funcion de posiciondel interruptor o conmutador, la cual actua como variable de control ysolo toma el valor de 0 o de 1.
9. El sistema Convertidor de potencia Buck-Motor de CD, mostrado en lafigura 2.51, representa una forma de conveniente de alimentar a un motorde CD. El objetivo de control de este sistema consiste en lograr que lavelocidad angular de la flecha del motor ω, se estabilice a un valor develocidad deseada ω a traves del voltaje υ, obtenido del convertidor depotencia Buck, mediante el diseno adecuado de u.Partiendo del hecho de que el modelo matematico de un motor de CDesta determinado por:
Ladiadt
= υ − Raia − keω,
Jdω
dt= kmia − Bω.
Demuestre que el modelo matematico del sistema Convertidor de potenciaBuck-Motor de CD, representado idealmente en la figura 2.51(b), esta de-terminado por el siguiente sistema de ecuaciones diferenciales lineales:
Ldi
dt= −υ + Eu, (2.191)
Cdυ
dt= i − ia − υ
R,

92 2 Modelado matematico de sistemas fısicos
Ladiadt
= υ − Raia − keω,
Jdω
dt= kmia − Bω.
donde:• i es la corriente presente en el inductor del convertidor Buck.• υ es el voltaje de salida del convertidor y a su vez es el voltaje aplicado
en las terminales de armadura del motor.• u representa la funcion de posicion del interruptor o conmutador, la
cual actua como variable de control y solo toma el valor de 0 o de 1.• L denota la inductancia del convertidor Buck.• C representa la capacitancia del convertidor Buck.• E es el voltaje de alimentacion del sistema convertidor Buck-Motor de
CD.• R denota la resistencia de salida del convertidor.• ia es la corriente electrica de armadura.• ω es la velocidad angular del rotor del motor.• La representa la inductancia de armadura.• Ra es la resistencia de armadura.
D
Q
!
Convertidor Buck Motor de CD
(a) Construccion del sistema convertidor Buck-Motor de CDmediante transistor-diodo.
!
Convertidor Buck Motor de CD
(b) Representacion ideal del sistema convertidor Buck-Motor de CD.
Figura 2.51. Diagrama electronico del sistema convertidor de potencia de CD/CDBuck-Motor de CD.
2.10 Ejercicios propuestos 93
• J es la inercia del rotor del motor.• ke representa la constante de fuerza contra-electromotriz.• km representa la constante de par del motor.• B es la constante de friccion viscosa del motor.
10. Considere el circuito RLC en serie del ejemplo 2.14, cuyo modelo ma-tematico esta dado en (2.123). La Energıa almacenada en el circuito esigual a la energıa magnetica de el inductor mas la energıa electrica en elcapacitor E = 1
2Li2 + 12C q2. Compruebe que E = ivi−Ri2. ¿Que significa
cada termino de esta expresion?11. Considere el sistema inercia-resorte-amortiguador del ejemplo 2.6, cuyo
modelo matematico esta dado en (2.68). La Energıa almacenada en elsistema es igual a la energıa cinetica mas la energıa en el resorte E =12Iθ2 + 1
2Kθ2. Compruebe que E = T θ− bθ2. ¿Que significa cada terminode esta expresion?
12. Considere el modelo en (2.114),(2.115), correspondiente al sistema electro-mecanico del ejemplo 2.12. La energıa almacenada en este sistema es iguala la energıa magnetica en el inductor de armadura mas la energıa cineticadel mecanismo. ¿Puede proceder como en los dos ejemplos previos paraencontrar la expresion correspondiente a dE
dt ? ¿Que significa cada uno de
los terminos que aparecen en dEdt ? ¿Puede identificar a los terminos que
representan el intercambio de energıa entre los subsistemas electrico ymecanico?


Referencias
1. P.E. Wellstead, Physical system modelling, Academic Press, Londres, 1979.2. M. Alonso and E.J. Finn, Fısica, Addison-Wesley Iberoamericana, Wilmington,
Delaware, 1995.3. R.K. Wangsness, Campos Electromagneticos, Limusa-Noriega Editores, Mexico,
D.F., 1987.4. R. Kelly, J. Llamas, and R. Campa, A measurement procedure for viscous and
coulomb friction, IEEE Transactions on Instrumentation and Measurement, vol.49, no. 4, pp. 857-861, 2000.
5. C.T.A. Johnk, Teorıa electromagnetica: campos y ondas, Limusa-Noriega Edi-tores, Mexico, D.F., 1993.
6. N.S. Nise, Sistemas de control para ingenierıa, 1a. edicion en espanol, 1a. Re-impresion, CECSA, Mexico, 2004.
7. F. W. Sears, M. W. Zemansky y H. D. Young, Fısica Universitaria, 6a. Edicion,Addison-Wesley Iberoamericana, Wilmington, Delaware, 1988.
8. M.E. Van Valkenburg, Analisis de redes, Limusa-Noriega Editores, Mexico, D.F.,1994.
9. W. H. Hayt y J. E. Kemmerly, Analisis de circuitos en ingenierıa, McGraw-Hill,Mexico, D.F., 1985.
10. R. Silva Ortigoza, Control de convertidores resonantes mediante planitud dife-rencial: diseno y construccion, Tesis Maestrıa en Ciencias, CINVESTAV-IPN(Zacatenco), Febrero (2002).

3
Base matematica: ecuaciones diferenciales
0 0.5 1 1.5 2
x 10-4
-50
0
50
t [s]
[V]
E(t)
0 2 4 6 8
x 10-4
0
10
20
30
t [s]
[Wa
tt]
P(t)
-500 -250 0 250 500-1.5
-0.5
0.5
1.5
[V]
[A]
v(t)
i(t)
Las ecuaciones diferenciales describen el comportamiento de los sistemasfısicos y de los sistemas de control en lazo cerrado. Por ejemplo, en los cir-cuitos electricos y electronicos, resolviendo las ecuaciones diferenciales corres-pondientes se puede contar con una descripcion cuantitativa y cualitativa delas corrientes en los inductores y los voltajes en los capacitores. A partir deestos valores se pueden calcular otras variables importantes como la potenciay la energıa.

98 3 Base matematica: ecuaciones diferenciales
Objetivos del capıtuloEn el capıtulo 2 se ha mostrado que la evolucion de los sistemas fısicos queinteresa controlar en esta obra esta descrita por ecuaciones diferenciales ordi-narias, lineales y de coeficientes constantes. Es de mucha utilidad identificarcuales son las propiedades que determinan la forma de la solucion de este tipode ecuaciones diferenciales porque, segun se vera en capıtulos posteriores, eldiseno de un controlador consiste en construir un dispositivo que modifiqueconvenientemente esas propiedades para conseguir una respuesta satisfactoria.El presente capıtulo pretende que el lector aprenda lo siguiente respecto de lasecuaciones diferenciales ordinarias, lineales y de coeficientes constantes:
Que es la respuesta forzada y que es la respuesta natural, y que la solu-cion completa de la ecuacion diferencial esta dada como la suma de estasrespuestas.Como depende la solucion de la ecuacion diferencial de las raıces del po-linomio caracterıstico (o, equivalentemente, de los polos de la funcion detransferencia).Identificar graficamente como es la solucion de las ecuaciones diferencia-les de primero y segundo orden e interpretar con ejemplos practicos elsignificado de dichas formas graficas. A partir de este estudio, ser capazde comprender cuales son las posibles formas graficas de las ecuacionesdiferenciales de orden arbitrario.Identificar cuales son las caracterısticas que determinan la forma de larespuesta transitoria, el valor final de la respuesta y la estabilidad de laecuacion diferencial.Identificar el principio de superposicion como la propiedad fundamentalque determina la linealidad de una ecuacion diferencial.
Las tecnicas de control que se utilizan en esta obra requieren del modelomatematico del proceso fısico a controlar. Estos modelos matematicos resul-tan ser ecuaciones diferenciales. El diseno del controlador se realiza buscandoque la ecuacion diferencial que representa al sistema controlado en lazo cerra-do tenga las propiedades matematicas que aseguran que el sistema de controlrespondera como se desea. Por tanto, es importante saber cuales son las ca-racterısticas de una ecuacion diferencial que determinan como es su solucion.Aunque existen varios enfoques para estudiar ecuaciones diferenciales, sin em-bargo el uso de la transformada de Laplace es el metodo preferido en la teorıade control clasico. Es por esta razon que en este capıtulo se estudian las ecua-ciones diferenciales ordinarias, lineales, de coeficientes constantes usando latransformada de Laplace.
La transformada de Laplace se define del siguiente modo. Suponga quese tiene una funcion del tiempo f(t), la transformada de Laplace de f(t) serepresenta por F (s) y se puede calcular como [2], pag. 185,[3], pag. 285:
F (s) = Lf(t) =
∫ ∞
0
f(t)e−stdt

3.1 Ecuacion diferencial de primer orden 99
El resultado fundamental de la transformada de Laplace que se utiliza en lasolucion de ecuaciones diferenciales ordinarias, lineales, de coeficientes cons-tantes es el siguiente [2], pag. 192,[3], pag. 293:
L
dnf(t)
dtn
=
snF (s) − sn−1f(0) − sn−2f (1)(0) − · · · − sf (n−2)(0) − f (n−1)(0) (3.1)
donde el exponente entre parentesis indica el orden de la derivada respecto altiempo. Tambien es util la siguiente propiedad [2], pag. 193,[3], pag. 293:
L∫ t
0
f(τ)dτ
=
F (s)
s(3.2)
Otro resultado importante es el teorema del valor final [1], pag. 25, [3], pag.304:
lımt→∞
f(t) = lıms→0
sF (s) (3.3)
expresion que es valida si dichos lımites existen.
3.1. Ecuacion diferencial de primer orden
Considere la siguiente ecuacion diferencial ordinaria, lineal, de coeficientesconstantes de primer orden:
y + a y = k u, y(0) = y0 (3.4)
donde k y a son constantes reales, y0 se conoce como el valor inicial o la con-dicion inicial de y(t) y y = dy
dt . El objetivo de resolver esta ecuacion diferenciales, conociendo los valores de a, k y de la funcion del tiempo u, obtener y co-mo una funcion del tiempo que al ser sustituida en (3.4) satisfaga la igualdadahı establecida. Usando (3.1) en (3.4) se obtiene:
sY (s) − y0 + a Y (s) = k U(s) (3.5)
Despejando Y (s) se puede escribir:
Y (s) =k
s + aU(s) +
1
s + ay0 (3.6)
Para continuar es necesario especificar la funcion del tiempo u. Suponga que:
u = A, U(s) =A
s(3.7)
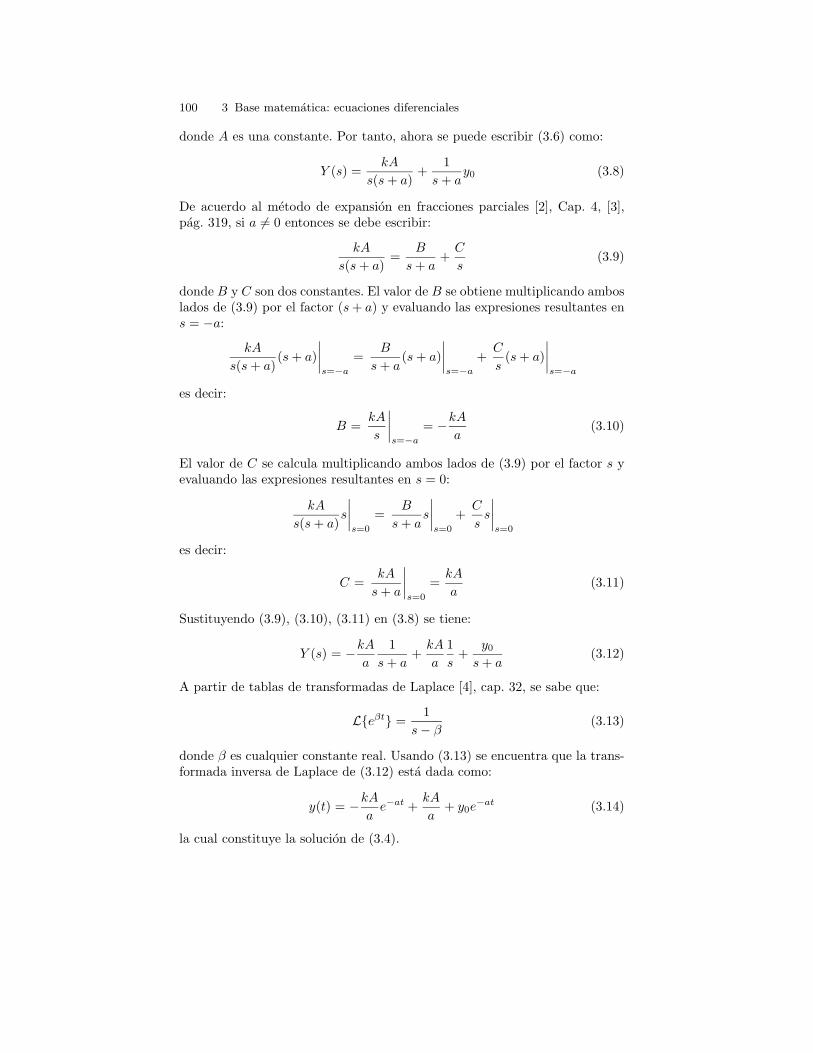
100 3 Base matematica: ecuaciones diferenciales
donde A es una constante. Por tanto, ahora se puede escribir (3.6) como:
Y (s) =kA
s(s + a)+
1
s + ay0 (3.8)
De acuerdo al metodo de expansion en fracciones parciales [2], Cap. 4, [3],pag. 319, si a 6= 0 entonces se debe escribir:
kA
s(s + a)=
B
s + a+
C
s(3.9)
donde B y C son dos constantes. El valor de B se obtiene multiplicando amboslados de (3.9) por el factor (s + a) y evaluando las expresiones resultantes ens = −a:
kA
s(s + a)(s + a)
∣∣∣∣s=−a
=B
s + a(s + a)
∣∣∣∣s=−a
+C
s(s + a)
∣∣∣∣s=−a
es decir:
B =kA
s
∣∣∣∣s=−a
= −kA
a(3.10)
El valor de C se calcula multiplicando ambos lados de (3.9) por el factor s yevaluando las expresiones resultantes en s = 0:
kA
s(s + a)s
∣∣∣∣s=0
=B
s + as
∣∣∣∣s=0
+C
ss
∣∣∣∣s=0
es decir:
C =kA
s + a
∣∣∣∣s=0
=kA
a(3.11)
Sustituyendo (3.9), (3.10), (3.11) en (3.8) se tiene:
Y (s) = −kA
a
1
s + a+
kA
a
1
s+
y0
s + a(3.12)
A partir de tablas de transformadas de Laplace [4], cap. 32, se sabe que:
Leβt =1
s − β(3.13)
donde β es cualquier constante real. Usando (3.13) se encuentra que la trans-formada inversa de Laplace de (3.12) esta dada como:
y(t) = −kA
ae−at +
kA
a+ y0e
−at (3.14)
la cual constituye la solucion de (3.4).

3.1 Ecuacion diferencial de primer orden 101
Ejemplo 3.1 Para comprobar que (3.14) es la solucion de (3.4) se procededel siguiente modo. Primero se obtiene la derivada de y(t) = −kA
a e−at + kAa +
y0e−at, es decir:
y(t) = kAe−at − ay0e−at
y se sustituye y(t) e y(t) en (3.4) para obtener:
y(t) + ay(t) = kAe−at − ay0e−at + a
(−kA
ae−at +
kA
a+ y0e
−at
)= kA = ku
porque en (3.7) se ha definido u = A. Esto significa que la expresion paray(t) presentada en (3.14) satisface a (3.4) y, por tanto, se ha comprobado que(3.14) es la solucion de (3.4). Este procedimiento debe seguirse para comprobarla solucion de cualquier ecuacion diferencial.
La solucion dada en (3.14) se puede descomponer en dos partes:
y(t) = yn(t) + yf (t) (3.15)
yn(t) =
(−kA
a+ y0
)e−at (3.16)
yf (t) =kA
a(3.17)
donde yn(t) y yf (t) reciben los nombres de respuesta natural y respuestaforzada, respectivamente.
La respuesta forzada yf (t) recibe este nombre porque es debida unica-mente a la presencia de la funcion del tiempo u. Por otro lado, la respuestanatural yn(t) recibe dicho nombre porque esta determinada unicamente por laestructura (o naturaleza) de la ecuacion diferencial, es decir, por los terminosy+ay presentes en el lado izquierdo de (3.4). Todo esto se explica del siguientemodo. Considere el procedimiento de solucion previo suponiendo por un mo-mento que y0 = 0. La expansion en fracciones parciales presentada en (3.9) yla subsecuente aplicacion de la transformada inversa de Laplace muestran quey(t) es obtenida como la suma de varias funciones del tiempo cuyas “formas”dependen de las fracciones 1
s y 1s+a . Notese que la presencia de la primera
de estas fracciones, 1s , en (3.9) es debida a que U(s) = A
s esta presente en(3.8) lo cual, a su vez, se debe a que u = A donde A es una constante. Noteseque la respuesta forzada yf (t) es una constante que resulta del termino kA
a1s
en (3.12), es decir, tiene su origen en la fraccion 1s . Esto confirma que yf (t)
depende unicamente de la funcion del tiempo u. Por otro lado, la presencia dela fraccion 1
s+a es debida a los terminos y+ay ya que Ly+ay = (s+a)Y (s).
De acuerdo a (3.13) esta fraccion da origen a la funcion e−at que conforma a larespuesta natural yn(t). Esto confirma que yn(t) esta determinada unicamentepor la estructura (o naturaleza) de la ecuacion diferencial. Una consecuenciaimportante de este hecho es que yn(t) siempre estara dada en este ejemplo co-mo una funcion de la forma e−at sin importar cual sea el valor de u. El lector

102 3 Base matematica: ecuaciones diferenciales
puede repasar el procedimiento seguido para resolver la ecuacion diferencial ydarse cuenta que la condicion inicial y0 siempre aparecera en la solucion y(t)como parte de la respuesta natural yn(t).
Antes de continuar, un poco de nomenclatura. En sistemas de control yy u se conocen como la salida y la entrada, respectivamente. El polinomioque surge de aplicar la transformada de Laplace a la ecuacion diferencial, esdecir s + a que tiene su origen en Ly + ay = (s + a)Y (s), se conoce comoel polinomio caracterıstico.
La solucion en (3.14) o, equivalentemente, en (3.15) puede tener uno delos siguientes comportamientos.
1. Si a > 0, es decir si la raız del polinomio caracterıstico s = −a es negativa,entonces lımt→∞ yn(t) = 0 y lımt→∞ y(t) = yf (t).
2. Si a < 0, es decir si la raız del polinomio caracterıstico s = −a es positiva,entonces yn(t) y y(t) crecen sin lımite conforme el tiempo crece.
3. El caso en el que a = 0, es decir cuando la raız del polinomio caracterısticoesta en s = 0, no puede ser estudiado con las formulas desarrolladashasta aquı y se estudia como un caso especial en la siguiente seccion. Sinembargo, con el fin de presentar un resumen de todos los casos, aquı seanticipa lo que se va a encontrar en la siguiente seccion. Cuando la raızdel polinomio caracterıstico esta en s = −a = 0, la respuesta naturalpermanece constante yn(t) = y0, ∀t ≥ 0 y la respuesta forzada es la
integral de la entrada yf (t) = k∫ t
0u(t)dt.
Estudio grafico de la solucion
En esta seccion se estudia la forma grafica de la solucion en (3.15). Deacuerdo a lo que se acaba de estudiar, si a > 0 entonces la respuesta natu-ral tiende a cero conforme el tiempo crece: lımt→∞ yn(t) = 0 y, por tanto,para tiempos muy grandes la solucion de la ecuacion diferencial es igual a larespuesta forzada unicamente: lımt→∞ y(t) = yf (t) = kA
a . Esto significa quemientras mas rapido desaparezca la respuesta natural yn(t) (lo cual ocurreconforme a > 0 es mayor) mas rapido la solucion completa y(t) alcanzara ala respuesta forzada yf (t). Por tanto, se puede pensar que la respuesta na-tural es el medio que permite que la solucion completa y(t) transite desde elvalor inicial y(0) = y0 hasta la respuesta forzada yf (t). La existencia de talintermediario se justifica recordando que la solucion de la ecuacion diferencialordinaria en (3.4), es decir y(t), es una funcion continua del tiempo. Esto sig-nifica que no pueden existir brincos discontinuos en y(t) y, por tanto, no sepuede saltar jamas desde el valor y(t) = y0 a y(t) = yf (t) 6= y0 en un intervalode tiempo de duracion cero.
En la figura 3.1 se muestra graficada la solucion en (3.15) cuando y0 = 0y a > 0, es decir:
y(t) =kA
a
(1 − e−at
)(3.18)

3.1 Ecuacion diferencial de primer orden 103
Se define la constante de tiempo:
τ =1
a(3.19)
como una medida de la rapidez con la que desaparece la respuesta natural, esdecir, la rapidez con la que y(t) alcanza a la respuesta forzada yf (t). Mediantesustitucion directa de (3.19) en (3.18), es sencillo comprobar que:
y(τ) = 0.632kA
a(3.20)
Finalmente, es importante senalar que y(t) crece sin lımite si a < 0. Si a = 0entonces se tiene el caso estudiado en la seccion 3.2, es decir y(t) = kAt crecesin lımite al aumentar el tiempo.
ü ü ü ü ü ü ü
akAakAakA
0:632 akA
tiempo
y(t)
Figura 3.1. Estudio grafico de y(t) en (3.18).
Funcion de transferencia
Suponga que la condicion inicial es cero, y0 = 0, entonces (3.6) se puedeescribir como:
Y (s) =k
s + aU(s)

104 3 Base matematica: ecuaciones diferenciales
o tambien:
Y (s)
U(s)= G(s) =
k
s + a(3.21)
La funcion G(s) se conoce como la funcion de transferencia de la ecuaciondiferencial en (3.4). El polinomio que divide en G(s), es decir s+ a, se conocecomo el polinomio caracterıstico y sus raıces se conocen como los polos deG(s). En este caso solo existe un polo en s = −a. De acuerdo al estudioprevio se pueden hacer las siguientes afirmaciones en lo que se refiere a lasalida y(t) de la funcion de transferencia G(s):
Si el polo ubicado en s = −a es negativo (a > 0) entonces al crecerel tiempo la respuesta natural yn(t) desaparece y la respuesta total y(t)alcanza a la respuesta forzada yf (t). Si u(t) = A es una constante, entoncesyf (t) = kA
a .La rapidez con la que y(t) alcanza a yf (t) (rapidez con la que yn(t) de-saparece) es mayor conforme el polo en s = −a esta colocado mas haciala izquierda del punto s = 0. Esta rapidez se puede cuantificar usando laconstante de tiempo τ = 1
a . Una constante de tiempo grande implica unarespuesta lenta y una constante de tiempo pequena implica una respuestarapida.Si k = a > 0 entonces se dice que la funcion de transferencia G(s) esde ganancia unitaria en estado estacionario, porque si u(t) = A es unaconstante entonces se puede usar el teorema del valor final (3.3) paraencontrar que:
lımt→∞
y(t) = lıms→0
sY (s) = lıms→0
sk
s + a
A
s=
k
aA = A (3.22)
En general, la ganancia en estado estacionario de la funcion de transferen-cia en (3.21) se calcula como el cociente k
a .Si el polo ubicado en s = −a es positivo (a < 0) entonces al crecer eltiempo la respuesta total y(t) crece sin lımite. Notese que esto implica queel polo esta colocado en el lado derecho del plano s (vease la figura 3.2).El caso cuando el polo esta ubicado en s = a = 0, no puede ser estudiadocon las formulas desarrolladas hasta aquı y se estudia como un caso especialen la siguiente seccion. Sin embargo, de nuevo, con el fin de presentar unresumen de todos los casos aquı se anticipa lo que se va a encontrar en lasiguiente seccion. Cuando el polo esta ubicado en s = a = 0, la respuestanatural no desaparece pero no crece sin lımite y la respuesta forzada es laintegral de la entrada yf (t) = k
∫ t
0u(t)dt.
Ejemplo 3.2 Suponga que se tiene un tanque que almacena un lıquido incom-presible como el agua (vease la figura 3.3). El tanque es de paredes paralelas,es decir de seccion constante cuya area es representada por C. El lıquido es

3.1 Ecuacion diferencial de primer orden 105
Re s( )
Im s( )
à aà aa > 0 a < 0
0
Figura 3.2. Ubicacion de polos de la funcion de transferencia en (3.21). Es costum-bre representar un polo en el plano s usando una cruz “×”.
introducido al tanque a razon de un flujo de entrada (en m3/s) representa-do por qi. El lıquido sale del tanque a traves de una valvula de salida cuyaresistencia hidraulica es R. La rapidez con la que sale el lıquido del tanqueesta dada por el flujo de salida (en m3/s) el cual se representa por qo. Elnivel del agua dentro del tanque es h. El modelo matematico que describe estesistema se obtiene a partir de la Ley de Conservacion de la Materia, ya queal ser el agua incompresible esta ley puede ser expresada en terminos de lamasa o del volumen del agua. Suponga que durante un intervalo de tiempo deduracion ∆t, entra un volumen de lıquido ∆V (entra) y sale un volumen delıquido ∆V (sale). La rapidez con la que se incrementa el volumen de lıquidoen el tanque durante ese intervalo de tiempo se puede calcular como:
∆V (dentro del tanque)
∆t=
∆V (entra)
∆t− ∆V (sale)
∆t(3.23)
Por otro lado, se tienen las siguientes relaciones:
∆V (dentro del tanque) = C∆h
∆V (entra) = qi∆t
∆V (sale) = qo∆t
Sustituyendo en (3.23) y suponiendo pequenos incrementos tales que ∆t → dt,∆h → dh:
Cdh
dt= qi − qo (3.24)
Por otro lado, si el flujo a traves de la valvula de salida es laminar, entoncesse cumple [1], pag. 155:
qo =h
R(3.25)
Para entender el porque de esta expresion considere los siguientes casos.

106 3 Base matematica: ecuaciones diferenciales
qi
h
qoR
Figura 3.3. Sistema de nivel de lıquido.
a) Suponga que la valvula de salida se mantiene con la misma abertura,es decir que R se mantiene constante. Ahora suponga que aumenta el nivelde lıquido en el tanque, es decir que h crece. La experiencia y la expresion en(3.25) nos indican que el flujo de salida qo aumenta bajo esta situacion.
b) Suponga que se mantiene constante el nivel de lıquido h, usando unabomba hidraulica para compensar exactamente el lıquido que sale, y que secierra, poco a poco, la valvula de salida, es decir que R aumenta. La experien-cia y la expresion en (3.25) indican que el flujo de salida qo disminuye bajoesta situacion.
Sustituyendo (3.25) en (3.24):
Cdh
dt= qi −
h
R
Entonces, el modelo matematico del sistema de nivel de la figura 3.3 quedaexpresado como:
Cdh
dt+
1
Rh = qi
Dividiendo entre C, se puede expresar este modelo como la siguiente ecuaciondiferencial ordinaria, lineal, de coeficientes constantes, de primer orden:
dh
dt+ ah = kqi
a =1
RC, k =
1
C(3.26)
La razon por la cual esta ecuacion diferencial es el modelo de este sistemade nivel de lıquido es porque mediante su solucion se puede conocer comoevoluciona el nivel h(t) en el tiempo, si se conocen el flujo del lıquido que seintroduce qi(t), el area de la seccion del tanque C, si se tiene informacion acerca de que tan grande es la abertura de la vavula de salida, es decir si seconoce R, y si se conoce el nivel inicial.

3.1 Ecuacion diferencial de primer orden 107
Ejemplo 3.3 Considere el tanque que contiene agua mostrado en la figura3.3. En el ejemplo 3.2 se encontro que el modelo matematico correspondientees:
dh
dt+ ah = kqi
a =1
RC> 0, k =
1
C(3.27)
Notese que esta ecuacion diferencial se puede escribir como la ecuacion en(3.4) si se considera que y = h, u = qi y y0 = h0. Esto significa que si qi = A,entonces la solucion h(t) tiene la misma forma que (3.14), es decir:
h(t) = −kA
ae−at +
kA
a+ h0e
−at, h0 = h(0) (3.28)
A continuacion se explica como la expresion en (3.28) describe correctamentela evoluacion del nivel de lıquido ante diferentes situaciones.
1. Suponga que el tanque esta inicialmente vacıo (h0 = 0) y que se empiezaa introducir lıquido con un flujo constante de valor A > 0. De acuerdo alo anteriormente expuesto, el nivel del lıquido en el tanque h(t) es descritograficamente como en la figura 3.1 considerando que h(t) = y(t) (noteseque a = 1
RC > 0). A partir de esta figura y la solucion en (3.28) se puedenestudiar varios casos. Para comprobar que el comportamiento descrito en(3.28) es correcto, el lector puede usar su experiencia previa para verificarque lo descrito a continuacion verdaderamente se observa en un depositode agua:
Si A es mayor entonces el nivel final alcanzado por el lıquido h(∞) =kAa = RA tambien es mayor.
Si la valvula de salida se ajusta a con una abertura menor (R mayor)entonces el nivel final alcanzado por el lıquido lımt→∞ h(t) = kA
a = RAes mayor.El area de la seccion transversal del tanque no tiene efecto en el valorfinal del nivel alcanzado, es decir, el nivel final es igual para un tanquemuy delgado y para uno muy grueso.Si el producto RC es mayor, entonces a es menor, por lo que la res-puesta es mas lenta, es decir, debe transcurrir mas tiempo para al-canzar el nivel h(τ) = 0.632kA
a = 0.632RA y, por tanto, el nivel final
lımt→∞ h(t) = kAa = RA. Esto se debe a que la funcion e−at tiende
a cero mas lentamente cuando a = 1RC > 0 es menor. Notese que un
valor grande de RC puede obtenerse incrementando C (el area de laseccion transversal del tanque), es decir usando un tanque mas grueso,o disminuyendo la abertura de la valvula de salida (aumentando R).
2. Suponga que no se introduce lıquido al tanque, es decir, que qi(t) = A = 0y que el tanque inicialmente contiene una cantidad determinada de agua,es decir que h0 > 0. A partir de la solucion en (3.28) y usando la expe-riencia del lector se puede verificar (vease la figura 3.4) que el nivel del

108 3 Base matematica: ecuaciones diferenciales
tanque decrece (notese que a = 1RC > 0) hasta que el tanque se vacıa
lımt→∞ h(t) = 0. Esto ocurre mas rapido si el producto RC es menor(cuando a es mayor) y mas lentamente cuando RC es mayor (cuando aes menor).
tiempo
h0
h(t)
R1C1 R2C2
Figura 3.4. Comportamiento del nivel cuando h0 > 0 y qi(t) = A = 0 (R1C1 <R2C2).
3. El caso cuando a < 0 no es posible en un sistema de nivel de lıquidoporque C y R solo pueden ser positivas (no existen areas de seccionestransversales negativas ni aberturas negativas). Sin embargo, la situacionen la que a < 0 ocurre con frecuencia en sistemas de control realimentados,debido a la interconexion de diversos componentes.
4. El caso cuando a = 0 se estudia a continuacion.
3.2. Un integrador
Considere la siguiente ecuacion diferencial:
y = ku (3.29)
donde k es una constante real diferente de cero. Notese que esta ecuacion seobtiene a partir de (3.4) cuando a = 0. Integrando directamente:
∫ y(t)
y(0)
dy =
∫ t
0
ku dt
y(t) = k
∫ t
0
u(t) dt + y(0) (3.30)

3.2 Un integrador 109
y(t) = yn(t) + yf (t)
yn(t) = y(0), yf (t) = k
∫ t
0
u(t) dt
En este caso yn(t) permanece constante cuando el tiempo crece. Notese que siu = A es constante, entonces la respuesta forzada crece sin lımite yf (t) = kA t.En la figura 3.5 se muestra graficada la solucion y(t) = y(0) + kA t, para loscasos a) y(0) 6= 0 y u = A =constante positiva, y b) y(0) 6= 0 y u = A = 0. Alos sistemas fısicos representados por este tipo de ecuacion diferencial se lesllama “integradores” porque, si y(0) = 0 la solucion y(t) (salida) es la integralde la entrada u.
Ejemplo 3.4 Considere el tanque con agua mostrado en la figura 3.3. Su-ponga que la valvula de salida esta totalmente cerrada por lo que R → ∞.Entonces, el modelo en (3.26) se reduce a:
dh
dt= kqi
porque a = 1RC → 0 cuando R → ∞. Entonces, la evolucion del nivel en el
tiempo esta descrita por (3.30), es decir:
h(t) = h(0) + k
∫ t
0
qi(t) dt
Por tanto, el sistema de nivel de lıquido se comporta en este caso como unintegrador. Si qi = A > 0, entonces:
h(t) = h(0) + kAt (3.31)
Se puede hacer uso de la figura 3.5, haciendo h(t) = y(t) y qi(t) = u, paraapreciar graficamente la solucion en (3.31) en los casos i) h(0) > 0 y qi =A =constante positiva, e ii) h(0) > 0 y qi = A = 0. Notese que el nivelpermanece constante si no se introduce lıquido (cuando A = 0) y que el nivelcrece sin lımite cuando A > 0 es constante. El lector puede usar su experienciaprevia para comprobar que estas dos situaciones verdaderamente suceden enun sistema de nivel de lıquido real.
Ejemplo 3.5 La ecuacion diferencial en (3.29) tambien puede resolverseusando expansion en fracciones parciales, es decir, usando el metodo de laseccion 3.1. Usando (3.1) en (3.29) se obtiene:
sY (s) − y0 = k U(s)
Despejando Y (s) se puede escribir:
Y (s) =k
sU(s) +
1
sy0 (3.32)

110 3 Base matematica: ecuaciones diferenciales
00
kA
y(t)
y0
tiempo
(a) y0 6= 0 y u = A =constante positiva
tiempo
y(t)
y0
(b) y0 6= 0 y u = A = 0
Figura 3.5. Solucion de la ecuacion diferencial en (3.29).
Para continuar es necesario especificar la funcion del tiempo u. Suponga que:
u = A, U(s) =A
s
donde A es una constante. Por tanto, ahora se puede escribir (3.32) como:
Y (s) =kA
s2+
1
sy0 (3.33)
De acuerdo al metodo de expansion en fracciones parciales [2], Cap. 4, [3],Cap 7, se debe escribir:

3.2 Un integrador 111
kA
s2=
B
s+
C
s2(3.34)
donde B y C son dos contantes. El valor de C se obtiene multiplicando amboslados de (3.34) por s2 y evaluando en s = 0, es decir:
s2 kA
s2
∣∣∣∣s=0
=B
ss2
∣∣∣∣s=0
+C
s2s2
∣∣∣∣s=0
De donde se obtiene que C = kA. Para calcular B se multiplican ambos ladosde (3.34) por s2, se deriva una vez respecto a s y se evalua en s = 0:
d
ds
(s2 kA
s2
)∣∣∣∣s=0
=d
ds
(B
ss2
)∣∣∣∣s=0
+d
ds
(C
s2s2
)∣∣∣∣s=0
De donde se obtiene que B = 0. Por tanto, usando estos valores y (3.34) sepuede escribir (3.33) como:
Y (s) =kA
s2+
1
sy0 (3.35)
A partir de tablas de transformadas de Laplace [4], cap. 32, se sabe que:
Lt =1
s2(3.36)
Usando (3.36) se encuentra que la transformada inversa de Laplace de (3.35)esta dada como:
y(t) = kAt + y0 (3.37)
la cual constituye la solucion de (3.29). Esta solucion se puede descomponeren dos partes:
y(t) = yn(t) + yf (t) (3.38)
yn(t) = y0
yf (t) = kAt
donde yn(t) y yf (t) reciben los nombres de respuesta natural y respuesta for-zada, respectivamente.
Tal como se explico en la seccion 3.1, la respuesta natural yn(t) recibedicho nombre porque esta determinada unicamente por la estructura (o natu-raleza) de la ecuacion diferencial, es decir, por la transformada de Laplace dey presente en el lado izquierdo de (3.29). Esto da origen al termino 1
sy0 en(3.35), lo cual permite tener yn(t) = y0 en (3.38).
La respuesta forzada yf (t) es debida a la excitacion (entrada) u = A.Sin embargo, en este caso la respuesta forzada tambien recibe el efecto de latransformada de Laplace del termino y presente en el lado izquierdo de (3.29),pues ambos generan el termino kA
s2 , del cual se obtiene yf (t) = kAt.

112 3 Base matematica: ecuaciones diferenciales
El polinomio caracterıstico de la ecuacion diferencial en (3.29) es s y, portanto, solo tiene una raız en s = 0. Por tanto, la funcion de transferenciacorrespondiente G(s) (cuando y0 = 0):
Y (s)
U(s)= G(s) =
k
s(3.39)
solo tiene un polo en s = 0. Notese que la entrada U(s) = As tambien tiene
un polo en s = 0. La combinacion de estos dos polos repetidos en (3.33)produce una respuesta forzada de la forma yf (t) = kAt (un polinomio deltiempo de primer grado), cuando la entrada es u = A (un polinomio deltiempo de grado cero). Notese que la respuesta forzada correspondiente a laecuacion diferencial en (3.4) tiene la forma yf (t) = kA
a (un polinomio deltiempo de grado cero) cuando la entrada es u = A (un polinomio del tiempode grado cero). A partir de estos dos ejemplos se llega a la siguiente conclusionimportante:
“La respuesta forzada de una ecuacion diferencial de primer orden excita-da con una entrada constante, tambien sera constante si el polinomio carac-terıstico no tiene raıces en s = 0.”
En la figura 3.2 se muestra la ubicacion en el plano s del polo de la funcionde transferencia en (3.39), es decir, el polo en s = 0. El lector debe aprender arelacionar la ubicacion en el plano s de los polos de la funcion de transferenciacorrespondiente con la forma en el tiempo de la solucion y(t) correspondiente(veanse los casos listados antes del ejemplo 3.2).
3.3. Ecuacion diferencial de segundo orden
Considere la siguiente ecuacion diferencial ordinaria, lineal, con coeficientesconstantes, de segundo orden:
y + 2ζωny + ω2ny = kω2
nu, y(0) = y0, y(0) = y0 (3.40)
donde ωn y k son constantes reales positivas. Supongase que u = A es unaconstante. Usando (3.1) y U(s) = A/s se puede escribir:
s2Y (s) − sy0 − y0 + 2ζωn(sY (s) − y0) + ω2nY (s) = kω2
nU(s)
para obtener:
Y (s) = kω2
nA
(s2 + 2ζωns + ω2n)s
+y0(s + 2ζωn) + y0
s2 + 2ζωns + ω2n
(3.41)
Suponga primero que las condiciones iniciales son cero y0 = 0, y0 = 0, enton-ces:
Y (s) = kA ω2
n
(s2 + 2ζωns + ω2n)s

3.3 Ecuacion diferencial de segundo orden 113
Suponga tambien que 0 ≤ ζ < 1 es una constante real, entonces:
s2 + 2ζωns + ω2n = (s − a)(s − a) (3.42)
a = σ + jωd, a = σ − jωd, j =√−1
ωd = ωn
√1 − ζ2 > 0, σ = −ζωn ≤ 0
Ahora, notese que:
s2 + 2ζωns + ω2n = (s − [σ + jωd])(s − [σ − jωd]) = (s − σ)2 + ω2
d
De acuerdo al metodo de expansion en fracciones parciales [2], cap. 4, [3], cap.7, en este caso se debe escribir:
Y (s) = kAω2
n
(s2 + 2ζωns + ω2n)s
= kAω2
n
[(s − σ)2 + ω2d]s
=Bs + C
(s − σ)2 + ω2d
+D
s
(3.43)
donde B, C y D son constantes que deben ser calculadas. La transformadainversa de (3.43) esta dada como:
y(t) = kA
[1 − e−ζωnt
√1 − ζ2
sin (ωdt + φ)
](3.44)
φ = arctan
√1 − ζ2
ζ
Que constituye la solucion de (3.40) cuando las condiciones iniciales son ceroy0 = 0, y0 = 0. A continuacion se presenta el procedimiento detallado que seutiliza para obtener (3.44) a partir de (3.43). El lector que no este interesadoen los detalles tecnicos de este procedimiento puede pasar directamente a laecuacion (3.49).
Multiplicando ambos miembros de (3.43) por el factor (s − σ)2 + ω2d y
evaluando en s = a (vease (3.42)) se puede escribir:
kAω2
n
[(s − σ)2 + ω2d]s
[(s − σ)2 + ω2d]
∣∣∣∣s=a
=Bs + C
(s − σ)2 + ω2d
[(s − σ)2 + ω2d]
∣∣∣∣s=a
+D
s[(s − σ)2 + ω2
d]
∣∣∣∣s=a
para obtener:
kAω2
n
σ + jωd= B(σ + jωd) + C
Multiplicando el lado izquierdo por (σ − jωd)/(σ − jωd):
kAω2n
(σ − jωd)
σ2 + ω2d
= Bσ + C + jBωd

114 3 Base matematica: ecuaciones diferenciales
Igualando partes imaginarias se tiene:
B = − kAω2n
σ2 + ω2d
(3.45)
Igualando partes reales se tiene:
Bσ + C =kAω2
nσ
σ2 + ω2d
Sustituyendo (3.45):
C =2kAω2
nσ
σ2 + ω2d
(3.46)
Usando (3.45) y (3.46) se puede escribir:
Bs + C
(s − σ)2 + ω2d
=− kAω2
n
σ2+ω2d
s +2kAω2
nσ
σ2+ω2d
(s − σ)2 + ω2d
= − kAω2n
(σ2 + ω2d)
(s − σ)
[(s − σ)2 + ω2d]
+kAω2
nσ
(σ2 + ω2d)
1
[(s − σ)2 + ω2d]
Usando las transformaciones inversas [4], cap. 32:
L−1
s − σ
(s − σ)2 + ω2d
= eσt cos(ωdt)
L−1
ωd
(s − σ)2 + ω2d
= eσt sin(ωdt)
se obtiene:
L−1
Bs + C
(s − σ)2 + ω2d
= − kAω2
n
σ2 + ω2d
eσt cos(ωdt) +kAω2
nσ
ωd(σ2 + ω2d)
eσt sin(ωdt)
=kAω2
n
σ2 + ω2d
eσt[− cos(ωdt) +σ
ωdsin(ωdt)]
=kAω2
n
σ2 + ω2d
eσt [sin β cos(ωdt) + cos β sin(ωdt)]
√(σ
ωd
)2
+ 1
Notese que en el ultimo paso se han usado algunas relaciones de la figura3.6(a). Por otro lado, se puede seguir reduciendo:
sinβ cos(ωdt) + cos β sin(ωdt) =1
2[sin(β − ωdt) + sin(β + ωdt)] +
+1
2[sin(ωdt − β) + sin(ωdt + β)]
= sin(ωdt + β)

3.3 Ecuacion diferencial de segundo orden 115
ì
à 1
û=!d
! dûðñ 2 +
1r
(a)
ì
CO
CAà( )
à( )
(b)
Figura 3.6. Relaciones importantes para el ejemplo de la seccion 3.3.
porque sin(−x) = − sin(x). Con esto se obtiene:
L−1
Bs + C
(s − σ)2 + ω2d
= kAω2
n
√(σωd
)2
+ 1
σ2 + ω2d
eσt sin(ωdt + β)
Por otro lado, de la figura 3.6(a):
tan β =−1
σ/ωd=
−1
(−ζωn)/(ωn
√1 − ζ2)
=−1−ζ√1−ζ2
β = π + arctan
√1 − ζ2
ζ
donde se ha tomado en consideracion el signo del cateto adyacente y del catetoopuesto para determinar que β representa un angulo en el tercer cuadrante(ver figura 3.6(b)). Esto permite hacer la siguiente simplificacion [4], cap. 5:
sin(ωdt + β) = sin (ωdt + π + φ)
= − sin (ωdt + φ)
φ = arctan
√1 − ζ2
ζ
por lo que ahora se puede reescribir:
L−1
Bs + C
(s − σ)2 + ω2d
= −kAω2
n
√(σωd
)2
+ 1
σ2 + ω2d
eσt sin (ωdt + φ)
= −kAω2n
√σ2 + ω2
d
ωd(σ2 + ω2d)
eσt sin (ωdt + φ)
= −kAω2n
1
ωd
√σ2 + ω2
d
eσt sin (ωdt + φ)

116 3 Base matematica: ecuaciones diferenciales
L−1
Bs + C
(s − σ)2 + ω2d
= −kA
1√1 − ζ2
eσt sin (ωdt + φ) (3.47)
donde se ha usado σ = −ζωn y ωd = ωn
√1 − ζ2. Por otro lado, el valor de
D en (3.43) se obtiene facilmente multiplicando ambos miembros de dichaexpresion por el factor s y evaluando en s = 0:
D =kA ω2
n
s2 + 2ζωns + ω2n
∣∣∣∣s=0
= kA (3.48)
Usando (3.43), (3.47) y (3.48) se encuentra la solucion buscada:
y(t) = kA
[1 − e−ζωnt
√1 − ζ2
sin (ωdt + φ)
]
Si ahora se considera que las condiciones iniciales no son cero entonces:
y(t) = kA
[1 − e−ζωnt
√1 − ζ2
sin (ωdt + φ)
]+ p(t) (3.49)
donde:
p(t) = L−1
y0(s + 2ζωn) + y0
s2 + 2ζωns + ω2n
(3.50)
La transformacion inversa de Laplace que define a p(t) puede ser obtenidausando un procedimiento similar al que se acaba de mostrar. Mas aun, ellector puede darse cuenta que p(t) esta dada por una funcion de la formapresentada en (3.47) y que su coeficiente depende de y0 y y0.
La solucion dada en (3.44) se puede descomponer en dos partes:
y(t) = yn(t) + yf (t) (3.51)
yn(t) = −kAe−ζωnt
√1 − ζ2
sin (ωdt + φ) (3.52)
yf (t) = kA (3.53)
donde yn(t) y yf (t) constituyen la respuesta natural y la respuesta forzada,respectivamente. Notese que de acuerdo a (3.43) y (3.47), la respuesta naturalen (3.52) es debida unicamente a la estructura (o naturaleza) de la ecuaciondiferencial pues depende del polinomio caracterıstico s2 + 2ζωns + ω2
n = (s−σ)2 + ω2
d que resulta de aplicar la transformada de la Laplace al terminoy + 2ζωny + ω2
ny. Ası que sin importar cual sea el valor de u, la respuestanatural yn(t) tendra la forma presentada en (3.52). Por otro lado, notese quela respuesta forzada en (3.53) debe su origen al termino D/s en (3.43) elcual, a su vez, es introducido por la presencia de la funcion constante u = A,

3.3 Ecuacion diferencial de segundo orden 117
ya que U(s) = A/s. Notese que de acuerdo al parrafo que sigue a (3.50),cuando las condiciones iniciales son diferentes de cero estas solo afectan a larespuesta natural en el sentido de que su coeficiente se vera afectado por lascondiciones iniciales y0 y y0, pero la “forma” de la funcion del tiempo siempresera e−ζωnt sin (ωdt + φ). De hecho, p(t) forma parte de la respuesta naturalcuando las condiciones iniciales son diferentes de cero.
El lector puede revisar el procedimiento presentado despues de (3.44) paracomprobar que en el caso en que −1 < ζ < 0 con k y ωn positivos, la solucionen (3.51) o, equivalentemente, en (3.44) se transforma en:
y(t) = yn(t) + yf (t) (3.54)
yn(t) = kAe−ζωnt
√1 − ζ2
sin
(ωdt − arctan
(√1 − ζ2
abs(ζ)
))
yf (t) = kA
donde abs(·) representa la funcion valor absoluto.Utilizando (3.51) cuando 0 ≤ ζ < 1 y (3.54) cuando −1 < ζ < 0 se
concluye que la solucion de la ecuacion diferencial en (3.40) tiene uno de lossiguientes comportamientos.
1. Si 0 < ζ < 1, es decir si las dos raıces del polinomio caracterıstico, ubi-cadas en s = −ζωn ± jωd, tienen parte real negativa −ζωn < 0, entonceslımt→∞ yn(t) = 0 y lımt→∞ y(t) = yf (t).
2. Si −1 < ζ < 0, es decir si las dos raıces del polinomio caracterıstico,ubicadas en s = −ζωn±jωd, tienen parte real positiva −ζωn > 0, entoncesyn(t) y y(t) crecen sin lımite, de manera oscilatoria, conforme el tiempocrece.
3. Si ζ = 0, es decir si las dos raıces del polinomio caracterıstico, ubicadasen s = −ζωn ± jωd, tienen parte real cero −ζωn = 0, entonces de (3.51)se obtiene:
y(t) = yn(t) + yf (t) (3.55)
yn(t) = −kA cos(ωnt), yf (t) = kA
cuando las condiciones iniciales son cero, es decir, yn(t) es una funcionoscilatoria cuya amplitud no aumenta pero tampoco disminuye. Esto sig-nifica que aunque y(t) no crece sin lımite, sin embargo no alcanzara demanera permanente a la respuesta forzada yf (t).
4. El comportamiento obtenido cuando ζ esta fuera del rango −1 < ζ < 1 esestudiado en las secciones que siguen bajo los casos en los que las raıcesdel polinomio caracterıstico son reales y repetidas o reales y diferentes.
Finalmente, notese que de acuerdo a lo anteriormente expuesto y a (3.49),(3.50), la solucion de una ecuacion diferencial de segundo orden puede pre-sentar oscilaciones sostenidas (ζ = 0) aun cuando la entrada o excitacion seacero (u = 0) si las condiciones iniciales son diferentes de cero. Esto explica el

118 3 Base matematica: ecuaciones diferenciales
funcionamiento de los circuitos osciladores presentados en el capıtulo 8 (veaseel ultimo parrafo de la seccion 8.3.1).
Estudio grafico de la solucion
A continuacion se estudia de manera grafica la solucion presentada en(3.51) para la ecuacion diferencial en (3.40). Recuerdese que se supone que0 ≤ ζ < 1, que ωn, k son constantes positivas y que las condiciones inicialesson cero y0 = 0, y0 = 0. Notese que la respuesta natural tiende a cero conformeel tiempo crece si 0 < ζ < 1:
lımt→∞
yn(t) = lımt→∞
(−kA
e−ζωnt
√1 − ζ2
sin (ωdt + φ)
)= 0 (3.56)
porque ζωn > 0. Recuerdese tambien que en el caso en que las condicionesiniciales no son cero, la respuesta natural tambien tiende a cero al crecerel tiempo. Por tanto, para tiempos muy grandes la solucion de la ecuaciondiferencial es igual a la respuesta forzada unicamente:
lımt→∞
y(t) = yf (t) = kA (3.57)
Esto significa que mientras mas rapido desaparezca la respuesta natural yn(t)(lo cual ocurre conforme el producto ζωn > 0 es mayor) mas rapido la solucioncompleta y(t) alcanzara a la respuesta forzada yf (t). Tal como se menciono pa-ra las ecuaciones diferenciales de primer orden, la respuesta natural permiteque la respuesta total y(t) transite de manera continua desde el valor dictadopor las condiciones iniciales (iguales a cero en este caso) hasta la respuestaforzada yf (t).
Dos caracterısticas importantes de la respuesta en (3.51) son el tiempo desubida tr y el sobre paso Mp, las cuales se indican en la figura 3.7. La manerade medir el sobre paso es mediante la expresion:
Mp(%) =yp − yf
yf× 100 (3.58)
donde yf = kA representa la respuesta forzada. Recuerdese que se supone quey0 = y0 = 0. A partir del analisis detallado de la expresion en (3.51) se puededemostrar que [1], pag. 232:
tr =1
ωd
[π − arctan
(√1 − ζ2
ζ
)](3.59)
Mp(%) = 100 × e− ζ√
1−ζ2π
En las figuras 3.8 y 3.9 se muestra como se ve afectada la solucion en (3.51)cuando los parametros ζ y ωn cambian. Notese que el sobre paso Mp es afec-tado exclusivamente por ζ mientras que el tiempo de subida tr es afectadoprincipalmente por ωn, aunque ζ tambien tiene un pequeno efecto sobre tr.

3.3 Ecuacion diferencial de segundo orden 119
tr
yf
yp
tiempo
y(t)
Figura 3.7. Caracterısticas de y(t) en (3.51).
Finalmente, es importante senalar que cuando u = A = 0 pero alguna delas condiciones iniciales y0 o y0 es diferente de cero, la forma de la respuestay(t) es como la funcion del tiempo en (3.52) y su aspecto grafico es comola parte oscilatoria sin la componente constante (alrededor de y = 0) encualquiera de las figuras 3.7, 3.8 o 3.9. Esto es debido a la funcion p(t) queaparece en (3.49).
Funcion de transferencia
Suponga que las condiciones iniciales son y0 = 0, y0 = 0, entonces (3.41)se puede escribir como:
Y (s) =kω2
n
s2 + 2ζωns + ω2n
U(s) (3.60)
o tambien:
Y (s)
U(s)= G(s) =
kω2n
s2 + 2ζωns + ω2n
(3.61)
donde G(s) es la funcion de transferencia de la ecuacion diferencial en (3.40).Notese que G(s) definida en (3.61) tiene un polinomio caracterıstico (polino-mio en el denominador) de segundo grado por lo que G(s) tiene dos polos
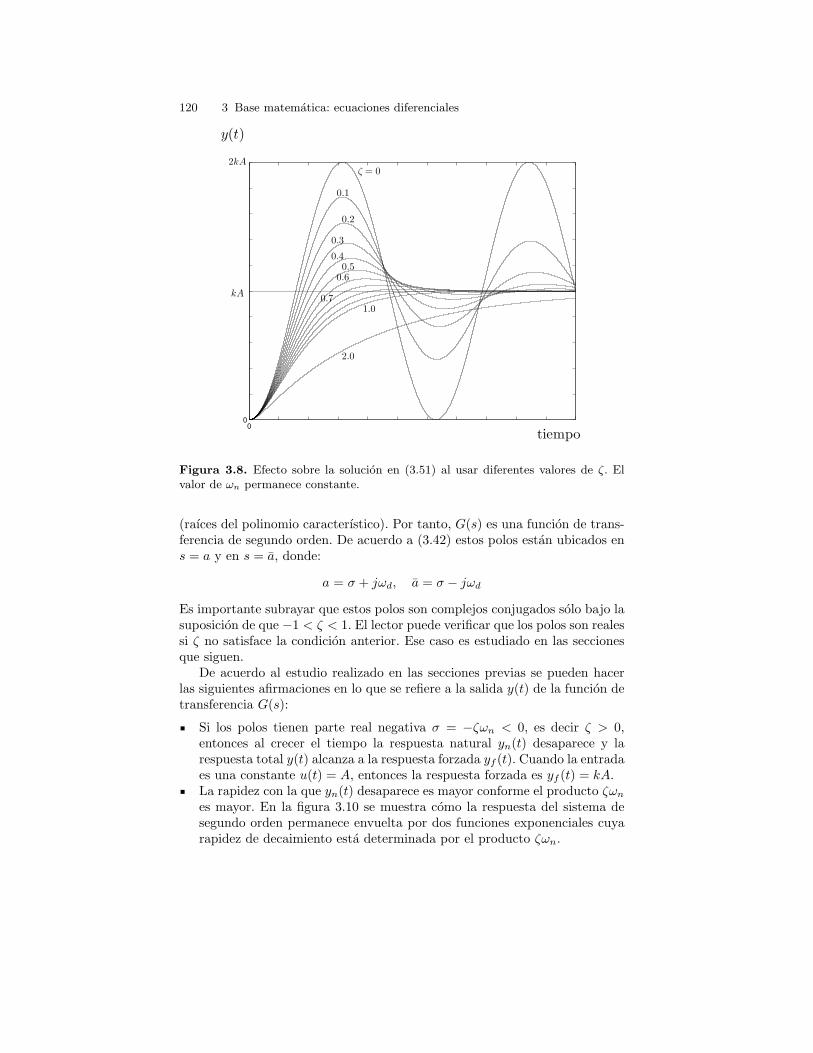
120 3 Base matematica: ecuaciones diferenciales
ð = 0
0:1
0:2
0:3
0:40:5
0:6
0:71:0
2:0
tiempo
y(t)
kA
2kA
Figura 3.8. Efecto sobre la solucion en (3.51) al usar diferentes valores de ζ. Elvalor de ωn permanece constante.
(raıces del polinomio caracterıstico). Por tanto, G(s) es una funcion de trans-ferencia de segundo orden. De acuerdo a (3.42) estos polos estan ubicados ens = a y en s = a, donde:
a = σ + jωd, a = σ − jωd
Es importante subrayar que estos polos son complejos conjugados solo bajo lasuposicion de que −1 < ζ < 1. El lector puede verificar que los polos son realessi ζ no satisface la condicion anterior. Ese caso es estudiado en las seccionesque siguen.
De acuerdo al estudio realizado en las secciones previas se pueden hacerlas siguientes afirmaciones en lo que se refiere a la salida y(t) de la funcion detransferencia G(s):
Si los polos tienen parte real negativa σ = −ζωn < 0, es decir ζ > 0,entonces al crecer el tiempo la respuesta natural yn(t) desaparece y larespuesta total y(t) alcanza a la respuesta forzada yf (t). Cuando la entradaes una constante u(t) = A, entonces la respuesta forzada es yf (t) = kA.La rapidez con la que yn(t) desaparece es mayor conforme el producto ζωn
es mayor. En la figura 3.10 se muestra como la respuesta del sistema desegundo orden permanece envuelta por dos funciones exponenciales cuyarapidez de decaimiento esta determinada por el producto ζωn.
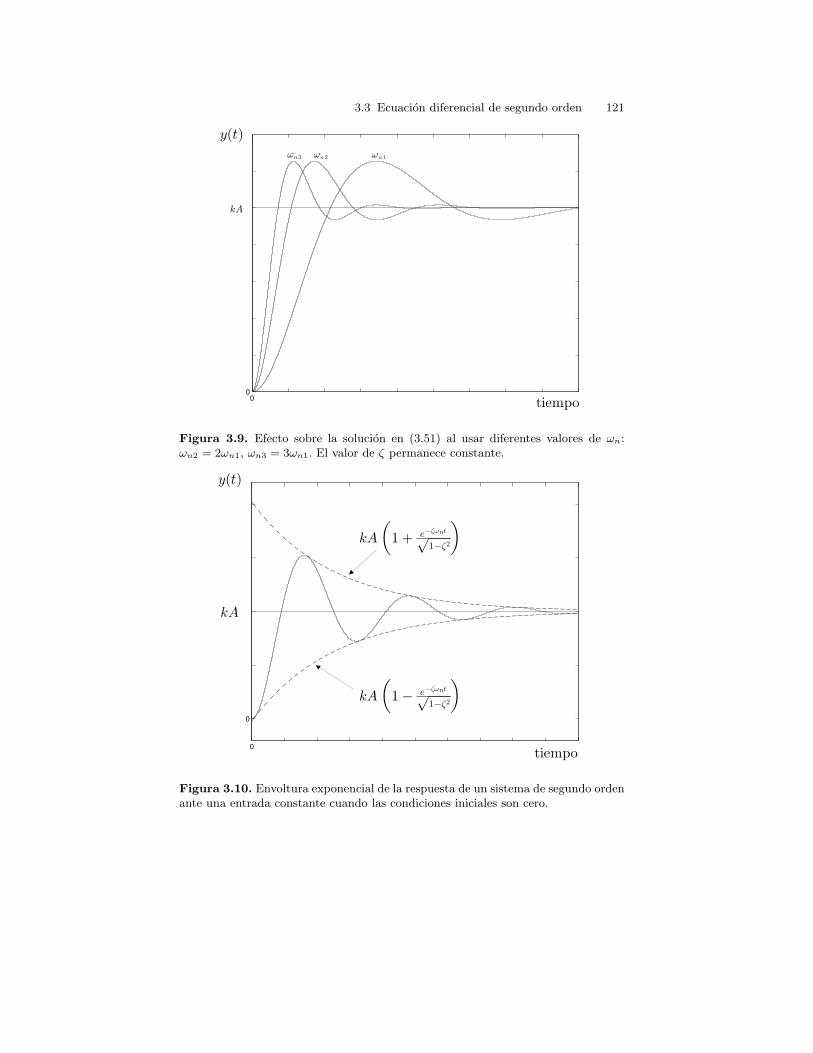
3.3 Ecuacion diferencial de segundo orden 121
y(t)
tiempo
kA
!n1!n2!n3
Figura 3.9. Efecto sobre la solucion en (3.51) al usar diferentes valores de ωn:ωn2 = 2ωn1, ωn3 = 3ωn1. El valor de ζ permanece constante.
tiempo
kA
y(t)
kA 1 +1àð2peàð!nt
ò ó
kA 1à1àð2peàð!nt
ò ó
Figura 3.10. Envoltura exponencial de la respuesta de un sistema de segundo ordenante una entrada constante cuando las condiciones iniciales son cero.

122 3 Base matematica: ecuaciones diferenciales
El tiempo de subida tr disminuye si se incrementa ωn. Esto se puedecomprobar al observar que si ωn aumenta entonces, de acuerdo a (3.42),ωd aumenta y, de acuerdo a (3.59), tr disminuye.El sobre paso Mp disminuye si ζ aumenta.De acuerdo a la figura 3.11: i) el tiempo de subida tr disminuye conformelos polos complejos conjugados estan mas alejados de s = 0 porque ωn crece(vease (3.59) junto con ωd = ωn
√1 − ζ2), ii) el parametro ζ aumenta (y
por tanto, el sobre paso Mp disminuye) conforme la ubicacion de los poloscomplejos conjugados forma un angulo θ mayor porque ζ = sin(θ), iii) larapidez con la que yn(t) desaparece es mayor conforme los polos complejosconjugados estan ubicados mas hacia la izquierda del punto s = 0 porqueel producto ζωn es mayor.Si k = 1 entonces se dice que la funcion de transferencia G(s) es de ganan-cia unitaria en estado estacionario, porque cuando u = A es una constantese puede usar el teorema del valor final (3.3) para encontrar que:
lımt→∞
y(t) = lıms→0
sY (s) = lıms→0
skω2
n
s2 + 2ζωns + ω2n
A
s=
kω2n
ω2n
A = A(3.62)
La constante k representa la ganancia en estado estacionario de la funcion
!n
ò
à ð!n Re s( )
Im s( )
j!d
Figura 3.11. Uno de los polos de G(s) en (3.61) cuando 0 < ζ < 1.
de transferencia en (3.61).Si −1 < ζ < 0 entonces la parte real de los polos σ = −ζωn es positiva porlo que la respuesta total y(t) crece sin lımite al crecer el tiempo. Noteseque esto implica que los polos complejos conjugados se encuentran en ellado derecho del plano s.El coeficiente ζ recibe el nombre de factor de amortiguamiento porque esel que determina que tan oscilatoria es la respuesta y(t) (vease (3.59), parael sobre paso, y la figura 3.8).

3.3 Ecuacion diferencial de segundo orden 123
La constante ωd se conoce como la frecuencia natural amortiguada porque,de acuerdo a lo visto previamente (vease (3.51)), ωd es la frecuencia deoscilacion de y(t) cuando el amortiguamiento ζ es diferente de cero. Noteseque la frecuencia de oscilacion ωd es la parte imaginaria de los polos de lafuncion de transferencia en (3.61) (vease (3.42)).La constante ωn se conoce como la frecuencia natural no amortiguadaporque, de acuerdo a (3.51) y (3.55), ωn es la frecuencia de oscilacion dela respuesta cuando el amortiguamiento es cero.
Ejemplo 3.6 Considere el sistema masa-resorte-amortiguador mostrado enla figura 3.12. En el ejemplo 2.3 de la seccion 2.6 en el capıtulo 2 se mues-tra que la posicion x del carrito esta determinada por la siguiente ecuaciondiferencial de segundo orden:
mx = −Kx − bx + f (3.63)
donde K es la constante de rigidez del resorte, b es el coeficiente de friccionviscosa del amortiguador, m es la masa del carrito y f es una fuerza externa.La expresion en (3.63) se puede escribir como:
x +b
mx +
K
mx =
1
mf
lo cual, a su vez, se puede escribir como la expresion en (3.40):
x + 2ζωnx + ω2nx = kω2
nf (3.64)
2ζωn =b
m, ω2
n =K
m, k =
1
K
donde x juega el papel de la salida y mientras que f juega el papel de la entradau. Por tanto, x(t) tiene la forma mostrada para y(t) en (3.51) si 0 ≤ ζ < 1cuando las condiciones iniciales son cero. Notese que todas las constantesen (3.63) son positivas: la masa m, el coeficiente de friccion viscosa b y laconstante de rigidez del resorte K solo pueden ser positivas. De acuerdo a(3.64), el factor de amortiguamiento esta dado como:
ζ =b
2√
mK(3.65)
Por tanto, si se aplica una fuerza constante f = A se pueden usar los resul-tados en las figuras 3.7, 3.8 y 3.9 para concluir lo siguiente.
Si no hay friccion, es decir si b = 0, entonces ζ = 0 y el carrito osci-lara permanentemente alrededor de la posicion xf = kA = 1
K A. En elcaso en que la fuerza externa aplicada sea cero f = 0 pero alguna de lascondiciones iniciales x0 o x0 sea diferente de cero, entonces el carrito tam-bien oscilara permanentemente pero alrededor de la posicion x = 0, comolo describe la funcion p(t) que aparece en (3.49).
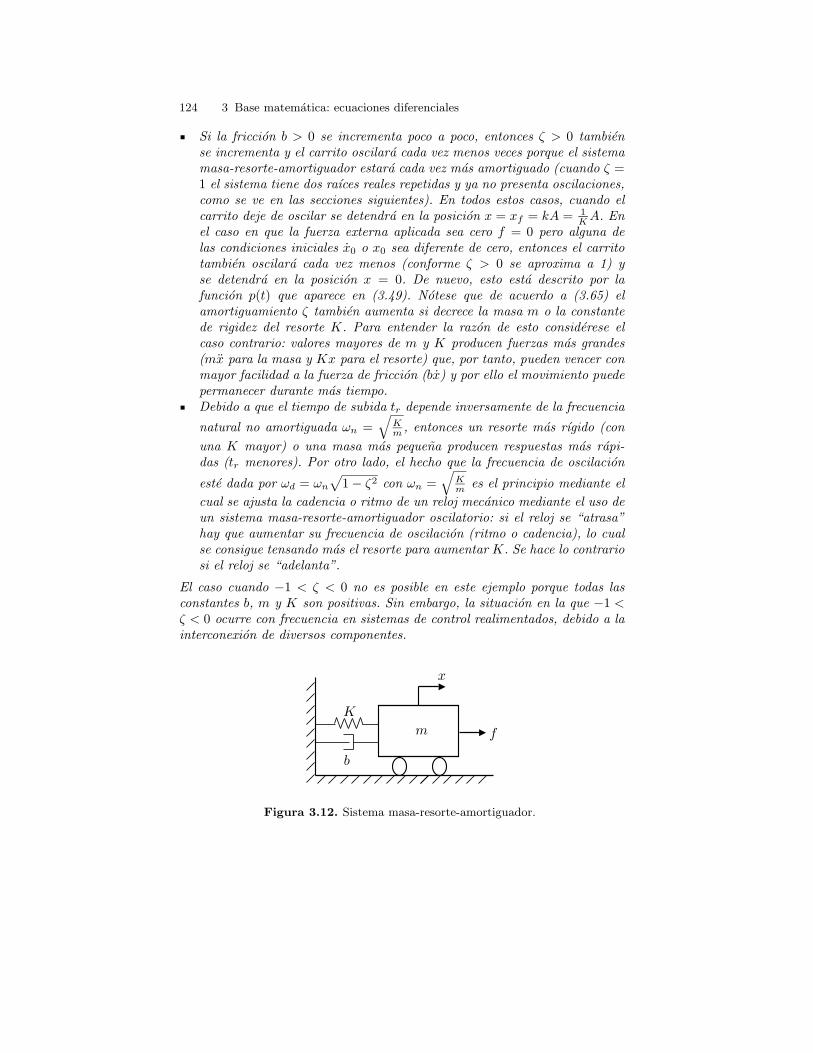
124 3 Base matematica: ecuaciones diferenciales
Si la friccion b > 0 se incrementa poco a poco, entonces ζ > 0 tambiense incrementa y el carrito oscilara cada vez menos veces porque el sistemamasa-resorte-amortiguador estara cada vez mas amortiguado (cuando ζ =1 el sistema tiene dos raıces reales repetidas y ya no presenta oscilaciones,como se ve en las secciones siguientes). En todos estos casos, cuando elcarrito deje de oscilar se detendra en la posicion x = xf = kA = 1
K A. Enel caso en que la fuerza externa aplicada sea cero f = 0 pero alguna delas condiciones iniciales x0 o x0 sea diferente de cero, entonces el carritotambien oscilara cada vez menos (conforme ζ > 0 se aproxima a 1) yse detendra en la posicion x = 0. De nuevo, esto esta descrito por lafuncion p(t) que aparece en (3.49). Notese que de acuerdo a (3.65) elamortiguamiento ζ tambien aumenta si decrece la masa m o la constantede rigidez del resorte K. Para entender la razon de esto considerese elcaso contrario: valores mayores de m y K producen fuerzas mas grandes(mx para la masa y Kx para el resorte) que, por tanto, pueden vencer conmayor facilidad a la fuerza de friccion (bx) y por ello el movimiento puedepermanecer durante mas tiempo.Debido a que el tiempo de subida tr depende inversamente de la frecuencia
natural no amortiguada ωn =√
Km , entonces un resorte mas rıgido (con
una K mayor) o una masa mas pequena producen respuestas mas rapi-das (tr menores). Por otro lado, el hecho que la frecuencia de oscilacion
este dada por ωd = ωn
√1 − ζ2 con ωn =
√Km es el principio mediante el
cual se ajusta la cadencia o ritmo de un reloj mecanico mediante el uso deun sistema masa-resorte-amortiguador oscilatorio: si el reloj se “atrasa”hay que aumentar su frecuencia de oscilacion (ritmo o cadencia), lo cualse consigue tensando mas el resorte para aumentar K. Se hace lo contrariosi el reloj se “adelanta”.
El caso cuando −1 < ζ < 0 no es posible en este ejemplo porque todas lasconstantes b, m y K son positivas. Sin embargo, la situacion en la que −1 <ζ < 0 ocurre con frecuencia en sistemas de control realimentados, debido a lainterconexion de diversos componentes.
m
K
b
f
x
Figura 3.12. Sistema masa-resorte-amortiguador.

3.4 Raıces reales diferentes 125
3.4. Raıces reales diferentes
Considere la siguiente ecuacion diferencial ordinaria, lineal, con coeficientesconstantes de orden n:
y(n) + an−1y(n−1) + · · · + a1y + a0y = ku (3.66)
donde los coeficientes ai, i = 0, . . . , n − 1, son constantes reales e y(j) = djydtj .
Aplicando la transformada de Laplace (3.1) a (3.66) se obtiene:
snY (s) + an−1sn−1Y (s) + · · · + a1sY (s) + a0Y (s) + P (s) = kU(s)
donde P (s) es un polinomio de s cuyos coeficientes dependen de las condicionesiniciales y(0), y(0),...,y(n−1)(0) y de los coeficientes de la ecuacion diferencial.Entonces puede escribirse:
Y (s) =k
sn + an−1sn−1 + · · · + a1s + a0U(s)− P (s)
sn + an−1sn−1 + · · · + a1s + a0
Suponga que u(t) = A es una constante, es decir U(s) = A/s. Entonces:
Y (s) =k
N(s)
A
s− P (s)
N(s)
N(s) = sn + an−1sn−1 + · · · + a1s + a0
Suponga por lo pronto que todas las condiciones iniciales son cero. Esto sig-nifica que P (s) = 0 y se puede escribir:
Y (s) =k
N(s)
A
s
Suponga que N(s) solo tiene raıces reales, distintas entre sı y, ademas, distintasde s = 0, es decir:
N(s) = (s − p1)(s − p2) · · · (s − pn)
donde pi 6= 0, i = 1, . . . , n, con pj 6= pi si i 6= j, representan las raıces deN(s). De acuerdo al metodo de expansion en fracciones parciales [2], cap. 4,[3], cap. 7, en este caso se debe escribir:
Y (s) =k
N(s)
A
s=
c1
s − p1+
c2
s − p2+ · · · + cn
s − pn+
f
s(3.67)
donde ci, i = 1, . . . , n, y f representan constantes reales que deben ser calcula-das. Una manera de calcular ci es la siguiente. Multiplıquense ambos miembrosde (3.67) por el factor (s − pi) y evaluese toda la expresion en s = pi paraobtener:

126 3 Base matematica: ecuaciones diferenciales
ci =k
N(s)
A
s(s − pi)
∣∣∣∣s=pi
, i = 1, . . . , n
De manera similar se puede calcular:
f =kA
N(s)
∣∣∣∣s=0
Usando la transformacion inversa de Laplace, [4], cap.32:
L−1
k
s − a
= keat
se obtiene finalmente:
y(t) = c1 ep1t + c2 ep2t + · · · + cn epnt + f
que representa la solucion buscada. Notese que se puede escribir:
y(t) = yn(t) + yf (t)
yn(t) = c1 ep1t + c2 ep2t + · · · + cn epnt (3.68)
yf (t) = f
donde la respuesta natural yn(t) solo depende de las raıces del polinomiocaracterıstico N(s) mientras que la respuesta forzada yf (t) solo depende dela fraccion 1
s introducida por U(s). Considerense las siguientes posibilidades.
1. Si todas las raıces del polinomio caracterıstico N(s) son negativas, esdecir si pi < 0 para toda i = 1, . . . , n, entonces lımt→∞ yn(t) = 0 ylımt→∞ y(t) = yf (t).
2. Si al menos una raız del polinomio caracterıstico N(s) es positiva, es decirsi pi > 0 para alguna i, entonces, yn(t) → ∞ y y(t) → ∞, conformet → ∞.
Por ultimo, si las condiciones iniciales no son cero, entonces la solucion tienela forma:
y(t) = c1 ep1t + c2 ep2t + · · · + cn epnt + f + q(t)
donde:
q(t) = L−1
−P (s)
N(s)
(3.69)
La transformacion inversa de Laplace que define a q(t) puede ser obtenidausando un procedimiento similar al que se acaba de mostrar. Mas aun, ellector puede darse cuenta de que q(t) esta dada por una funcion de la formapresentada para yn(t) en (3.68) y que sus coeficientes dependen de las condi-ciones iniciales y(0) . . . , y(n−1)(0). Esto significa que si yn(t) → ∞ en (3.68)entonces q(t) → ∞ tambien y si yn(t) → 0 en (3.68) entonces q(t) → 0 tam-bien. De hecho, q(t) forma parte de la respuesta natural cuando las condicionesiniciales no son cero.

3.4 Raıces reales diferentes 127
Ejemplo 3.7 Considere la siguiente ecuacion diferencial de segundo ordendada en (3.40):
y + 2ζωny + ω2ny = kω2
nu, y(0) = y0, y(0) = y0 (3.70)
Si ζ > 1 entonces las dos raıces, p1 y p2, del polinomio caracterıstico N(s) =s2 + 2ζωns + ω2
n son reales y diferentes:
p1 = −ζωn + ωn
√ζ2 − 1
p2 = −ζωn − ωn
√ζ2 − 1
p1 6= p2
Ademas, ambas raıces son negativas:
p1 < 0, p2 < 0
Aunque esto es obvio para p2, para p1 se requiere un poco de observacion: note-se que −ζωn + ωn
√ζ2 = 0, y como −ζωn + ωn
√ζ2 > −ζωn + ωn
√ζ2 − 1,
entonces −ζωn + ωn
√ζ2 − 1 < 0. En la figura 3.13 se muestra la solucion
y(t) de la ecuacion diferencial en (3.70) cuando ζ > 1, u = A y las condicio-nes iniciales son cero. Notese que y(t) no presenta oscilaciones en este caso.Recuerdese que cuando −1 < ζ < 1 la frecuencia de oscilacion es igual a laparte imaginaria de ambas raıces. Por tanto, cuando ζ > 1 no hay oscilacionporque al ser cero la parte imaginaria de ambas raıces, la frecuencia de lasoscilaciones tambien es cero.
Ejemplo 3.8 Considerese de nuevo el sistema masa-resorte-amortiguadordel ejemplo 3.6. Recuerdese que (3.64) describe el movimiento del carrito.Suponga que:
ζ =b
2√
mK> 1
Entonces, de acuerdo al ejemplo anterior, las raıces, p1 y p2, del polinomiocaracterıstico s2 + 2ζωns + ω2
n son reales, distintas y negativas. Notese queeste caso se presenta cuando el coeficiente de friccion viscosa b > 0 es muygrande o bien cuando la constante de rigidez del resorte K > 0 o la masam del carrito son muy pequenas. Notese tambien que una de las raıces (p1 =
−ζωn + ωn
√ζ2 − 1 < 0) se aproxima al origen conforme ζ > 1 se hace mas
grande. De acuerdo a lo expuesto en la presente seccion, esto significa queel movimiento del carrito es cada vez mas lento conforme ζ crece porque lafuncion ep1t tarda mas tiempo en desaparecer (a pesar de que la funcion ep2t
desaparece mas rapido porque p2 = −ζωn − ωn
√ζ2 − 1 < 0 se aleja cada vez
mas del origen). Esto explica porque en la figura 3.13 se obtienen respuestascada vez mas lentas conforme ζ > 1 es mas grande.

128 3 Base matematica: ecuaciones diferenciales
tiempo
y(t)
kA
ð > 1
ð = 1
0 < ð < 1
(a) Respuesta en el tiempo
à ð!n Re s( )
Im s( )
ïp1p2
(b) Ubicacion de los polos cuando ζ > 1
Figura 3.13. Solucion de una ecuacion diferencial de segundo orden en (3.70),cuando ζ > 1, y en (3.75), cuando ζ = 1, con u = A y las condiciones iniciales soncero.
Ejemplo 3.9 Considere la siguiente ecuacion:
y + cy + dy = eu, y(0) = y0, y(0) = y0
con c, d y e constantes reales. Las dos raıces, p1 y p2, del polinomio carac-terıstico N(s) = s2 + cs + d estan dadas como:
p1 = − c
2+
√c2 − 4d
2
p2 = − c
2−
√c2 − 4d
2

3.5 Raıces reales repetidas 129
Se tienen los siguientes casos:
Si d < 0 entonces:
p1 = − c
2+
√c2 + 4 abs(d)
2
p2 = − c
2−
√c2 + 4 abs(d)
2
las dos raıces son reales y diferentes siendo una positiva y otra negativa,sin importar el valor de c. En el ejemplo 7.3 del capıtulo 7 se muestra queeste caso corresponde al de un sistema masa-resorte-amortiguador con co-eficiente de rigidez negativo y que esto se obtiene en la practica cuando unpendulo simple funciona alrededor de su configuracion invertida (tambienllamada inestable).Si c > 0 y d > 0 se recupera el caso estudiado en la seccion 3.3 cuando1 > ζ > 0 y en la presente seccion cuando ζ > 1.Si c < 0 y d > 0, con abs(c) pequeno y d grande, se recupera el casoestudiado en la seccion 3.3 cuando −1 < ζ < 0. La situacion cuandoζ < −1 tambien se obtiene en este caso cuando abs(c) es grande y d espequeno, pero las dos raıces son positivas y diferentes:
p1 = −ζωn + ωn
√ζ2 − 1 > 0
p2 = −ζωn − ωn
√ζ2 − 1 > 0
p1 6= p2
Los casos ζ = −1 y ζ = 1 se estudian en la siguiente seccion.
3.5. Raıces reales repetidas
Considere la siguiente ecuacion diferencial ordinaria, lineal, con coeficientesconstantes de orden n:
y(n) + an−1y(n−1) + · · · + a1y + a0y = ku (3.71)
donde u(t) = A es una constante, es decir U(s) = A/s. Procediendo como enla seccion 3.4 se obtiene:
Y (s) =k
N(s)
A
s− P (s)
N(s)
N(s) = sn + an−1sn−1 + · · · + a1s + a0
Suponga por lo pronto que todas las condiciones iniciales son cero, es decirP (s) = 0, entonces:
Y (s) =k
N(s)
A
s

130 3 Base matematica: ecuaciones diferenciales
Suponga que N(s) solo tiene una raız la cual esta repetida n veces y que esdiferente de cero, es decir:
N(s) = (s − p)n
con p 6= 0. De acuerdo al metodo de expansion en fracciones parciales [2], cap.4, [3], cap. 7, en este caso se debe escribir:
k
N(s)
A
s=
cn
(s − p)n+
cn−1
(s − p)n−1+
cn−2
(s − p)n−2+ · · · + c2
(s − p)2+
c1
s − p+
f
s
(3.72)
donde ci, i = 1, . . . , n, y f representan constantes reales que deben ser calcu-ladas. Una manera de calcular cn es multiplicando ambos miembros de (3.72)por el factor (s − p)n y evaluando en s = p para obtener:
cn =kA
p
Por otro lado, las constantes ci, i = 1, . . . , n − 1, se pueden calcular multipli-cando ambos miembros de (3.72) por el factor (s− p)n, derivando n− i vecesrespecto a s y evaluando en s = p para obtener:
ci =dn−i
dsn−i
(kA
s
)∣∣∣∣s=p
, i = 1, . . . , n − 1
Finalmente, la constante f se puede calcular multiplicando ambos miembrosde (3.72) por el factor s y evaluando en s = 0 para obtener:
f =kA
N(s)
∣∣∣∣s=0
Entonces, se puede escribir:
Y (s) =cn
(s − p)n+
cn−1
(s − p)n−1+
cn−2
(s − p)n−2+ · · · + c2
(s − p)2+
c1
s − p+
f
s
Usando la transformacion inversa de Laplace [4], cap. 32:
L−1
1
(s − a)j
=
tj−1
(j − 1)!eat, j = 1, 2, 3, . . . , 0! = 1
se obtiene finalmente:
y(t) = cntn−1
(n − 1)!ept + cn−1
tn−2
(n − 2)!ept + cn−2
tn−3
(n − 3)!ept + · · ·
+ c2t ept + c1 ept + f

3.5 Raıces reales repetidas 131
que representa la solucion buscada. Notese que se puede escribir:
y(t) = yn(t) + yf (t)
yn(t) = cntn−1
(n − 1)!ept + cn−1
tn−2
(n − 2)!ept + cn−2
tn−3
(n − 3)!ept + · · ·
+c2t ept + c1 ept (3.73)
yf (t) = f
Observese de nuevo que yn(t) solo depende de las raıces del polinomio ca-racterıstico N(s) y que yf (t) solo depende de la fraccion 1
s introducida porU(s). Finalmente, si las condiciones iniciales son diferentes de cero entoncesla solucion esta dada como:
y(t) = cntn−1
(n − 1)!ept + cn−1
tn−2
(n − 2)!ept + cn−2
tn−3
(n − 3)!ept + · · ·
+ c2t ept + c1 ept + f + q(t)
q(t) = L−1
−P (s)
N(s)
donde q(t) es una funcion del tiempo cuya “forma” es identica a la de yn(t)en (3.73) y cuyos coeficientes dependen de las condiciones iniciales. De hecho,q(t) forma parte de la respuesta natural en el caso en que las condicionesiniciales son diferentes de cero.
Considerense las siguientes posibilidades:
1. Si p < 0 es de utilidad calcular el siguiente lımite, donde j es cualquiernumero entero positivo:
lımt→∞
tj ept = lımt→∞
tj
e−pt
lo cual da una indeterminacion porque −pt → +∞. Entonces puede usarsela regla de L’Hopital [13], pag. 303:
lımt→∞
tj ept = lımt→∞
tj
e−pt= lım
t→∞
dtj
dtde−pt
dt
= lımt→∞
j tj−1
−p e−pt
Como se sigue obteniendo una indeterminacion se puede aplicar L’Hopitalde nuevo varias veces hasta obtener:
lımt→∞
tj ept = lımt→∞
tj
e−pt= lım
t→∞
dtj
dtde−pt
dt
= lımt→∞
j tj−1
−p e−pt
= lımt→∞
j(j − 1) tj−2
(−p)2 e−pt= · · · = lım
t→∞
j!
(−p)j e−pt= 0
Aplicando esto a la solucion obtenida se concluye que lımt→∞ yn(t) = 0,lımt→∞ y(t) = yf (t) para cualquier valor p < 0 sin importar que tancercano a cero este dicho valor.

132 3 Base matematica: ecuaciones diferenciales
2. Si p > 0 es claro que yn(t) → ∞ y y(t) → ∞ conforme t → ∞.3. Por ultimo, para considerar el caso en el que el polinomio caracterıstico
tiene n raıces repetidas en p = 0 suponga que U(s) = 0. Por tanto:
Y (s) = −P (s)
N(s), N(s) = sn
Entonces, de acuerdo al metodo de expansion en fracciones parciales [2],cap 4, [3], cap. 7, en este caso se debe escribir:
−P (s)
sn=
cn
sn+
cn−1
sn−1+
cn−2
sn−2+ · · · + c2
s2+
c1
s
Usando la transformada de Laplace [4], cap.32:
L−1
1
sj
=
tj−1
(j − 1)!, j = 1, 2, 3, . . . , 0! = 1
se obtiene:
y(t) = yn(t) = cntn−1
(n − 1)!+ cn−1
tn−2
(n − 2)!+ cn−2
tn−3
(n − 3)!+ · · ·
+c2t + c1 (3.74)
yf (t) = 0
Es claro que yn(t) → ∞ y y(t) → ∞ cuando t → ∞ para n ≥ 2 y queyn(t) es una constante si n = 1. Notese que en el caso en que U(s) = A/s,yn(t) contendrıa, ademas de los terminos en (3.74), el termino tn mientrasque yf (t) estarıa dada como:
yf (t) =
∫ t
0
· · ·∫ t
0︸ ︷︷ ︸n integrales
A dtn . . . dt1︸ ︷︷ ︸n diferenciales
=kA
n!tn
Ejemplo 3.10 Considere la siguiente ecuacion diferencial de segundo ordendada en (3.40):
y + 2ζωny + ω2ny = kω2
nu, y(0) = y0, y(0) = y0 (3.75)
Si ζ = 1 entonces las dos raıces, p1 y p2, del polinomio caracterıstico N(s) =s2 + 2ζωns + ω2
n son reales, negativas e iguales:
p1 = p2 = −ζωn
En la figura 3.13 se muestra la solucion y(t) de la ecuacion diferencial en(3.75) cuando ζ = 1, u = A y las condiciones iniciales son cero. Notese quey(t) no presenta oscilaciones en este caso porque ambas raıces tienen parteimaginaria igual a cero. Este caso, ζ = 1, representa la frontera entre unasolucion oscilatoria ζ < 1 y una solucion que no oscila ζ > 1. De hecho elcaso ζ = 1 produce la respuesta mas rapida sin que haya oscilaciones ya quecuando ζ > 1 la respuesta es cada vez mas lenta conforme ζ crece.

3.5 Raıces reales repetidas 133
Ejemplo 3.11 Considerese de nuevo el sistema masa-resorte-amortiguadordel ejemplo 3.6. Recuerdese que (3.64) describe el movimiento del carrito.Suponga que:
ζ =b
2√
mK= 1
Entonces, en este caso el polinomio caracterıstico s2 + 2ζωns + ω2n solo tiene
una raız real y negativa:
p = −ζωn
la cual esta repetida dos veces. La posicion x(t) del carrito evoluciona exac-tamente de la misma forma en que lo hace y(t) en la figura 3.13. Este tipode respuesta puede ser de mucha utilidad si se desea que el movimiento delcarrito sea rapido y sin oscilaciones.
Ejemplo 3.12 Suponga que en la figura 3.12 no existe ningun resorte niamortiguador, es decir, suponiendo que b = 0 y K = 0 la ecuacion (3.63) sereduce a:
mx = f (3.76)
Notese que el polinomio caracterıstico es en este caso s2 el cual tiene unaraız real p = 0 repetida dos veces. Ahora suponga que todas las condicionesiniciales son cero y que el carrito recibe una pequena perturbacion descritapor:
f =
ε0, 0 ≤ t ≤ t10, en otro caso
(3.77)
donde ε0 > 0 y t1 > 0 son numeros constantes pequenos. Integrando (3.76)una vez se obtiene:
x(t) =1
m
∫ t
0
f(τ)dτ + x(0)
Integrando de nuevo se tiene (suponiendo que x(0) = 0):
x(t) =1
m
∫ t
0
∫ r
0
f(τ)dτ
dr + x(0)
x(t) =1
m
∫ t
0
∫ r
0
f(τ)dτ
dr, x(0) = 0
Sustituyendo (3.77) se obtiene:
x(t) =
1
2mε0t2, 0 ≤ t ≤ t1
12mε0t
21 + 1
mε0t1(t − t1), t > t1

134 3 Base matematica: ecuaciones diferenciales
Notese que x(t) → ∞ conforme t → ∞ (vease la figura 3.14) a pesar de quef = 0 para t > t1, es decir, a pesar de que la respuesta forzada es cero paratodo t > t1. Esto significa que la respuesta natural xn(t) → ∞ cuando t → ∞,lo cual confirma los resultados obtenidos en la presente seccion para raıcesreales iguales a cero que estan repetidas dos veces o mas. El lector puederecurrir a su experiencia para verificar que un pequeno golpe (f en (3.77))sobre el carrito es suficiente para que este empiece a moverse para nuncadetenerse (x(t) → ∞) si no existe friccion entre el carrito y el piso.
t s[ ]t1
x(t)
2m"0 t2
m"0 t1
Figura 3.14. Posicion del carrito de la figura 3.12 cuando es perturbado y no existeningun resorte ni amortiguador.
Ejemplo 3.13 Considere la siguiente ecuacion diferencial de segundo ordendada en (3.40):
y + 2ζωny + ω2ny = kω2
nu, y(0) = y0, y(0) = y0
Si ζ = −1 entonces las dos raıces, p1 y p2, del polinomio caracterıstico N(s) =s2 + 2ζωns + ω2
n son reales, positivas e iguales:
p1 = p2 = −ζωn > 0
3.6. Raıces complejas conjugadas diferentes
Considere la siguiente ecuacion diferencial ordinaria, lineal, con coeficientesconstantes de orden n:
y(n) + an−1y(n−1) + · · · + a1y + a0y = ku (3.78)
donde u(t) = A es una constante, es decir U(s) = A/s. Procediendo como enla seccion 3.4 se obtiene:

3.6 Raıces complejas conjugadas diferentes 135
Y (s) =k
N(s)
A
s− P (s)
N(s)
N(s) = sn + an−1sn−1 + · · · + a1s + a0
Suponga por lo pronto que todas las condiciones iniciales son cero, es decirP (s) = 0, entonces:
Y (s) =k
N(s)
A
s
Suponga que N(s) tiene n/2 raıces complejas conjugadas diferentes, es decir:
N(s) =
i=n/2∏
i=1
[(s − σi)2 + ω2
di]
donde σi 6= σj o ωdi 6= ωdj si i 6= j. Entonces, de acuerdo al metodo deexpansion en fracciones parciales [2], cap. 4, [3], cap. 7, en este caso se debeescribir:
k
N(s)
A
s=
i=n/2∑
i=1
Fis + Ci
[(s − σi)2 + ω2di]
+f
s
donde f es una constante que se puede calcular como en las secciones previas,es decir:
f =kA
N(s)
∣∣∣∣s=0
mientras que Fi y Ci son constantes que pueden calcularse del mismo modoen que se calculan B y C en la seccion 3.3. Por tanto, usando (3.47) se puedeescribir:
y(t) = yn(t) + yf (t) (3.79)
yn(t) =
i=n/2∑
i=1
βie−ζiωnit sin (ωdit + φi)
yf (t) = f
donde βi, ωni, ζi y φi, i = 1, . . . , n/2, son constantes reales (vease la seccion3.3). El comportamiento de la solucion en (3.79) satisface uno de los siguientescasos.
1. Si 0 < ζi < 1 para toda i = 1, . . . , n/2, es decir si la parte real de to-das las raıces del polinomio caracterıstico N(s) es estrictamente negativa,−ζiωni < 0 para toda i = 1, . . . , n/2, entonces y(t) oscila de manera quelımt→∞ yn(t) = 0 y lımt→∞ y(t) = yf (t).

136 3 Base matematica: ecuaciones diferenciales
2. Si −1 < ζi < 0 para alguna i = 1, . . . , n/2, es decir si la parte real dealguna de las raıces del polinomio caracterıstico N(s) es estrictamentepositiva, −ζiωni > 0 para alguna i = 1, . . . , n/2, entonces y(t) oscila demanera que yn(t) y y(t) crecen sin lımite conforme el tiempo aumenta.
3. Si ζi = 0 para toda i = 1, . . . , n/2, es decir si la parte real de todas lasraıces del polinomio caracterıstico N(s) es cero, −ζiωni = 0 para todai = 1, . . . , n/2, entonces yn(t) no desaparece al crecer el tiempo perotampoco crece sin lımite. Por tanto, aunque y(t) no crece sin lımite, sinembargo no converge a yf (t). Notese que para que esta situacion ocurraes suficiente que ζi = 0 para al menos una i y que para todas las demas ise cumpla 0 < ζi < 1.
Finalmente, si las condiciones iniciales son diferentes de cero, entonces:
y(t) = yn(t) + yf (t) + q(t)
yn(t) =
i=n/2∑
i=1
βie−ζiωnit sin (ωdit + φi)
yf (t) = f
donde:
q(t) = L−1
−P (s)
N(s)
Es sencillo verificar que q(t) esta dado por funciones de la misma “forma” quelas funciones que componen a yn(t). De hecho q(t) forma parte de la respuestanatural cuando las condiciones iniciales son diferentes de cero.
Es importante senalar que si ζ ≥ 1 o ζ ≤ −1 entonces se obtienen raıcesreales y se recupera uno de los casos de las secciones 3.4 o 3.5.
Es conveniente aclarar que se asume que las raıces complejas siempre apa-recen con sus parejas conjugadas debido a que esa es la unica manera enque el producto (s − a)(s − a), con a un numero complejo y a su conjugado,resulte en un polinomio cuyos coeficientes son todos numeros reales. Enton-ces, cualquier polinomio que contenga raıces complejas y tambien sus parejasconjugadas solo tendra coeficientes reales. Este es un aspecto importante eningenierıa de control donde las ecuaciones diferenciales representan sistemasfısicos que, por tanto, solo manejan variables y parametros reales. Por ejemplo,el polinomio caracterıstico del sistema masa-resorte-amortiguador presentadoen (3.64) esta dado como s2 + b
ms + Km donde los coeficientes representan la
masa, el coeficiente de friccion viscosa y la constante de rigidez del resorte.Es claro que ninguno de estos parametros pueden tener parte imaginaria puesrepresentan propiedades cuyos efectos pueden ser apreciados experimental-mente.
Ejemplo 3.14 En el ejemplo 2.5 del capıtulo 2 se ha obtenido el modelomatematico del sistema compuesto por dos cuerpos y tres resortes mostrado

3.6 Raıces complejas conjugadas diferentes 137
en la figura 3.15. A partir de ese resultado se puede abordar el caso en el queel resorte de la izquierda no esta presente. Esto se consigue considerando queK1 = 0, es decir:
x1 +b
m1(x1 − x2) +
K2
m1(x1 − x2) =
1
m1F (t)
x2 −b
m2(x1 − x2) +
K3
m2x2 −
K2
m2(x1 − x2) = 0
m2m1
K1
x1
b
x2K2K3
F(t)
Figura 3.15. Sistema con dos cuerpos y tres resortes.
Aplicando la transformada de Laplace (3.1) a cada una de estas ecuacionesdiferenciales y considerando todas las condiciones iniciales iguales a cero seobtiene:
X1(s) =
1m1
F (s) +(
bm1
s + K2
m1
)X2(s)
s2 + bm1
s + K2
m1
X2(s) =
(b
m2s + K2
m2
)X1(s)
s2 + bm2
s + K2+K3
m2
Sustituyendo la segunda ecuacion en la primera y despues de realizar algunasmanipulaciones algebraicas se obtiene:
X1(s) =
1m1
(s2 + b
m2s + K2+K3
m2
)F (s)
(s2 + b
m1s + K2
m1
) (s2 + b
m2s + K2+K3
m2
)−
(b
m1s + K2
m1
)(b
m2s + K2
m2
)
Con el fın de simplificar el algebra correspondiente, supongamos que b = 0,entonces:
X1(s) =
1m1
(s2 + K2+K3
m2
)
(s2 + K2
m1
) (s2 + K2+K3
m2
)− K2
2
m1m2
F (s)
o, equivalentemente:

138 3 Base matematica: ecuaciones diferenciales
X1(s) =
1m1
(s2 + K2+K3
m2
)
s4 +(
K2
m1+ K2+K3
m2
)s2 + K2K3
m1m2
F (s) (3.80)
Por otro lado, notese que si se multiplican dos polinomios de segundo ordencon coeficientes reales a, d, c, e, se obtiene:
(s2 + as + c)(s2 + ds + e) = s4 + (a + d)s3 + (c + ad + e)s2 + (cd + ea)s + ce
Esto significa que la siguiente simplificacion:
(s2 + as + c)(s2 + ds + e) = s4 + (c + ad + e)s2 + ce (3.81)
es posible si y solo si:
a + d = 0 y cd + ea = 0 (3.82)
La primera condicion implica que a = −d lo cual, sustituido en la segundacondicion, implica que d(c−e) = 0. Por tanto, la igualdad en (3.81) es posiblesi y solo si ocurre una de las siguientes posibilidades: i) d = a = 0, ii)c = e 6= 0, a = −d, o bien, iii) d = a = e = c = 0. La razon de estudiar laigualdad en (3.81) es el poder determinar como se puede descomponer en dosfactores el polinomio en el denominador de (3.80). En este sentido, noteseque la situacion en iii) no es de interes porque en tal caso solo aparecerıa eltermino de s4 en el lado derecho de (3.81). Por otro lado, cuando es aplicadoal polinomio en el denominador de (3.80), el caso en ii) implica que:
2e − a2 =K2
m1+
K2 + K3
m2
e =
√K2K3
m1m2
Combinando ambas expresiones se obtiene:
a2 = 2
√K2K3
m1m2−
(K2
m1+
K3
m2
)− K2
m2< 0 (3.83)
La razon para la desigualdad al final de esta expresion es que, por definicion,el siguiente binomio al cuadrado siempre es positivo o cero:
(√K2
m1−
√K3
m2
)2
=K2
m1+
K3
m2− 2
√K2K3
m1m2≥ 0
Por tanto, de acuerdo a (3.83), el valor de a serıa un numero imaginario.Este caso debe desecharse porque viola la hipotesis inicial de que todos loscoeficientes a, d, c, e, deben ser reales (vease tambien el parrafo previo a este

3.6 Raıces complejas conjugadas diferentes 139
ejemplo). Entonces, el unico caso posible es i) d = a = 0, el cual, cuando esaplicado al polinomio en el denominador de (3.80), implica:
c + e =K2
m1+
K2 + K3
m2(3.84)
ce =K2K3
m1m2(3.85)
Definiendo f = K2
m1+ K2+K3
m2y g = K2K3
m1m2se tiene, de la segunda expresion,
c = g/e y, sustituyendo en la primera expresion, g/e + e = f . Finalmente,multiplicando este resultado por e se obtiene:
e2 − ef + g = 0
Es interesante observar que, siguiendo el mismo procedimiento, se encuentraque la misma ecuacion es valida para c:
c2 − cf + g = 0
Resolviendo estas ecuaciones cuadraticas se encuentran las siguientes dos so-luciones:
e1 = c1 =
K2
m1+ K2+K3
m2+
√(K2
m1− K2+K3
m2
)2
+4K2
2
m1m2
2
e2 = c2 =
K2
m1+ K2+K3
m2−
√(K2
m1− K2+K3
m2
)2
+4K2
2
m1m2
2
Notese que el caso e = c no es posible porque entonces (3.84) y (3.85) impli-carıan que:
K2
m1+
K2 + K3
m2= 2
√K2K3
m1m2
lo cual conducirıa a:
(√K2
m1−
√K3
m2
)2
= −K2
m2
que no es posible porque el miembro izquierdo de esta expresion no puede sernegativo. De este modo, solo son posibles los casos: a) e = e1 y c = c2 o, b)e = e2 y c = c1, los cuales son equivalentes porque, debido a que d = a = 0,(3.80) se puede escribir como:
X1(s) =
1m1
(s2 + K2+K3
m2
)
(s2 + c)(s2 + e)F (s) (3.86)

140 3 Base matematica: ecuaciones diferenciales
Por otro lado, es claro que K2
m1+ K2+K3
m2+
√(K2
m1− K2+K3
m2
)2
= 2K2
m1, lo
cual asegura que e1 = c1 > 0. Observese, sin embargo, que aunque K2
m1+
K2+K3
m2−
√(K2
m1− K2+K3
m2
)2
= 2K2+K3
m2> 0 esto no asegura que e2 = c2 > 0
por el termino adicional4K2
2
m1m2dentro del radical. Este problema se resuelve
recurriendo a (3.85): los valores de e y c deben tener el mismo signo porqueel miembro derecho de (3.85) es positivo. Entonces, ambos e y c deben serpositivos porque de acuerdo a los unicos casos posibles a) y b) se debe usare = e1 > 0 (lo cual fuerza que c = c2 > 0) o c = c1 > 0 (lo cual fuerzaque e = e2 > 0). Finalmente, el razonamiento al principio de este parrafotambien muestra que, a excepcion de algunos posibles valores muy especialespara m1,m2,K2,K3, ambos e1 = c1 y e2 = c2, son diferentes de K2+K3
m2. Esto
asegura que no existen cancelaciones entre los polinomios del numerador ydel denominador en (3.86) y el hecho de que e y c sean positivos y diferentesasegura que el polinomio caracterıstico de (3.86) tiene dos pares de raıcescomplejas (imaginarias puras) conjugadas diferentes.
3.7. Raıces complejas conjugadas repetidas
Considere la siguiente ecuacion diferencial ordinaria, lineal, con coeficientesconstantes de orden n:
y(n) + an−1y(n−1) + · · · + a1y + a0y = ku (3.87)
donde u(t) = A es una constante, es decir U(s) = A/s. Procediendo como enla seccion 3.4 se obtiene:
Y (s) =k
N(s)
A
s− P (s)
N(s)
N(s) = sn + an−1sn−1 + · · · + a1s + a0
Suponga por lo pronto que todas las condiciones iniciales son cero, es decirP (s) = 0, entonces:
Y (s) =k
N(s)
A
s
Suponga que el polinomio caracterıstico N(s) tiene dos raıces complejas con-jugadas repetidas n/2 veces (para tener un total de n raıces):
N(s) = (s2 + 2ζωns + ω2n)n/2 = [(s − σ)2 + ω2
d]n/2
Entonces, la expansion en fracciones parciales correspondiente a este caso es[2], cap. 4:

3.7 Raıces complejas conjugadas repetidas 141
k
N(s)
A
s=
F1s + C1
[(s − σ)2 + ω2d]n/2
+F2s + C2
[(s − σ)2 + ω2d]n/2−1
+ · · ·
+Fn/2−1s + Cn/2−1
[(s − σ)2 + ω2d]2
+Fn/2s + Cn/2
(s − σ)2 + ω2d
+f
s
En el caso de raıces reales se encontro que cuando estas son sencillas intro-ducen terminos de la forma ept donde p es la raız en cuestion. Cuando dicharaız es repetida j veces, se encontro que los terminos introducidos se transfor-man en la forma tj−1 ept. En el caso de raıces complejas conjugadas repetidasocurre algo similar. En este caso no se hara una demostracion formal de loque sigue debido a la complejidad del tema. Solo se presenta la idea intuitivade la solucion para comprender el porque de la forma obtenida.
Usando la transformacion inversa obtenida en (3.47) se encontro que unaraız compleja conjugada no repetida (sencilla) introduce en el tiempo un termi-no de la forma:
L−1
Bs + C
(s − σ)2 + ω2d
= βeσt sin(ωdt + φ)
para algunas constantes β y φ. Entonces y(t), formada por el efecto de raıcescomplejas conjugadas repetidas, tiene la forma:
y(t) = yn(t) + yf (t) (3.88)
yn(t) = βn/2tn/2−1eσt sin(ωdt + φn/2) + βn/2−1t
n/2−2eσt sin(ωdt + φn/2−1)
+ · · · + β2teσt sin(ωdt + φ2) + β1e
σt sin(ωdt + φ1)
yf (t) = f
La solucion en (3.88) tiene uno de los siguientes comportamientos.
1. Si la raız compleja conjugada tiene parte real positiva σ = −ζωn > 0, esdecir si −1 < ζ < 0, es facil ver que yn(t) → ∞ y y(t) → ∞ conformet → ∞.
2. Si la raız compleja conjugada tiene parte real negativa σ = −ζωn < 0, esdecir si 0 < ζ < 1, se puede proceder como en la seccion 3.5 para calcularel siguiente lımite:
lımt→∞
tj eσt sin(ωd t + φ) = 0
para cualquier entero j positivo y cualquier numero real estrictamentenegativo σ. Entonces, para raıces complejas conjugadas, repetidas, conparte real negativa se tiene que lımt→∞ yn(t) = 0 y lımt→∞ y(t) = yf (t).
3. Si la raız repetida tiene parte real cero, es decir, σ = 0. Entonces:
y(t) = yn(t) + yf (t)
yn(t) = βn/2tn/2−1 sin(ωdt + φn/2) + βn/2−1t
n/2−2 sin(ωdt + φn/2−1) + · · ·+β2t sin(ωdt + φ2) + β1 sin(ωdt + φ1)
yf (t) = f

142 3 Base matematica: ecuaciones diferenciales
Notese que en este caso la respuesta natural, yn(t), crece sin lımite confor-me el tiempo crece en el caso en que la raız se repita al menos dos veces.Pero si la raız es sencilla entonces yn(t) esta formada por una funcion os-cilatoria cuya amplitud no crece ni disminuye, es decir, aunque y(t) nuncaalcanzara de manera permanente a yf (t) la solucion y(t) permanece sincrecer demasiado.
Finalmente, es sencillo verificar que si las condiciones iniciales no son ceroentonces:
y(t) = yn(t) + yf (t) + q(t)
yn(t) = βn/2tn/2−1eσt sin(ωdt + φn/2) + βn/2−1t
n/2−2eσt sin(ωdt + φn/2−1)
+ · · · + β2teσt sin(ωdt + φ2) + β1e
σt sin(ωdt + φ1)
yf (t) = f
donde:
q(t) = L−1
−P (s)
N(s)
La funcion q(t) esta dada por las mismas funciones que componen a yn(t) ylas tres posibilidades enumeradas previamente tambien siguen vigentes en estecaso. De hecho q(t) forma parte de la respuesta natural cuando las condicionesiniciales son diferentes de cero.
Ejemplo 3.15 (Tomado de [2], cap. 4)Considere el sistema masa-resortemostrado en la figura 3.12. Suponga que no existe ningun amortiguador, esdecir que b = 0, y que se aplica una fuerza externa con la forma f = F0 sin(ωt)
donde ω =√
Km . Se desea describir la posicion del carrito x(t) si x(0) = 0
y x(0) = 0. No es necesario calcular el valor numerico de las constantes queaparecen en x(t).
Solucion. La ecuacion diferencial que describe la situacion en la figura 3.12cuando b = 0 es:
mx + Kx = f, f = F0 sin(ωt), ω =
√K
m(3.89)
Aplicando la transformada de Laplace a (3.89):
s2X(s) +K
mX(s) =
1
mF (s)
Notese que esta expresion tiene la forma:
s2X(s) + ω2nX(s) = γω2
nF (s)
donde ωn =√
Km = ω, γ = 1
K . Se sabe que:

3.7 Raıces complejas conjugadas repetidas 143
F (s) =F0ω
s2 + ω2
Entonces:
X(s) =γω3F0
(s2 + ω2)2
Expandiendo en fracciones parciales:
X(s) =As + B
(s2 + ω2)2+
Cs + D
s2 + ω2
Por tanto, de acuerdo a lo expuesto en la presente seccion, se puede escribir:
x(t) = β1t sin(ωt + φ1) + β2 sin(ωt + φ2)
Donde β1, β2, φ1, φ2 son algunas constantes reales. En la figura 3.16 se mues-
tra una grafica de x(t) cuando ω =√
Km = 10[rad/s], m = 1[Kg] y F0 = 1[N].
A este fenomeno se le conoce como “resonancia” y significa que aunque laentrada es acotada la salida puede alcanzar valores muy grandes a pesar deque el polinomio caracterıstico no tiene raıces con parte real positiva ni repe-tidas en s = 0, por lo que este es un fenomeno diferente al que se presenta enel ejemplo 3.12. Notese que el problema de la resonancia aparece cuando unsistema (ecuacion diferencial) esta mal amortiguado (ζ ≈ 0) y se excita conuna senal oscilatoria cuya frecuencia es igual (o muy cercana) a la frecuencianatural del sistema. Debido a que la posicion del carrito crece sin lımite laresonancia es un fenomeno que se considera peligroso.
0 2 4 6 8 10 12 14 16 18 20
-0,8
-0,6
-0,4
-0,2
0
0,2
0,4
0,6
0,8
t s[ ]
x m[ ]
Figura 3.16. Posicion de un sistema masa-resorte sometido a condiciones de reso-nancia.

144 3 Base matematica: ecuaciones diferenciales
3.8. Una ecuacion diferencial general
Una ecuacion diferencial ordinaria, lineal, con coeficientes constantes deorden n siempre puede escribirse como:
y(n) + an−1y(n−1) + · · · + a1y + a0y = b0u + b1u + · · · + bmu(m) (3.90)
donde n ≥ m. Si n < m la ecuacion diferencial no tiene sentido fısico, esdecir, en la practica no existe ningun dispositivo real que este representadopor dicha ecuacion diferencial y, por tanto, no es de interes para los ingenie-ros. Notese que todas las derivadas que aparecen son con respecto al tiempo.Esta caracterıstica permite llamar a estas ecuaciones diferenciales sistemasdinamicos. La funcion y es la incognita de la ecuacion mientras que u es unafuncion del tiempo conocida que tambien es llamada excitacion. El objetivode resolver la ecuacion diferencial es encontrar la funcion y(t) que satisfaga laigualdad definida por la ecuacion diferencial. Para encontrar y(t) es necesarioconocer u(t), las constantes reales ai, i = 0, . . . , n − 1, bj , j = 0, . . . ,m, y elconjunto de n constantes y(0), y(0) ... y(n−1)(0), conocidas como condicionesiniciales del problema, que representan los valores que la funcion incognita ysus derivadas tienen en t = 0.
Aplicando la transformada de Laplace (3.1) a (3.90):
snY (s) + an−1sn−1Y (s) + · · · + a1sY (s) + a0Y (s) + P (s)
= b0U(s) + b1sU(s) + · · · + bmsmU(s)
donde P (s) es un polinomio de s cuyos coeficientes dependen de las condicionesiniciales y(0), y(0),...,y(n−1)(0), u(0), u(0),...,u(m−1)(0) y los coeficientes de laecuacion diferencial. Entonces se puede escribir:
Y (s) =b0 + b1s + · · · + bmsm
sn + an−1sn−1 + · · · + a1s + a0U(s)− P (s)
sn + an−1sn−1 + · · · + a1s + a0
Suponga que u(t) = A es una constante, es decir U(s) = A/s. Entonces:
Y (s) =B(s)
N(s)
A
s− P (s)
N(s)
N(s) = sn + an−1sn−1 + · · · + a1s + a0
B(s) = b0 + b1s + · · · + bmsm
Suponga por lo pronto que todas las condiciones iniciales son cero. Esto sig-nifica que P (s) = 0 y se puede escribir:
Y (s) =B(s)
N(s)
A
s
De acuerdo al metodo de expansion en fracciones parciales [2], cap. 4, [3], cap.7, la solucion en el tiempo y(t) depende de las raıces del polinomio carac-terıstico N(s), es decir, de los polos de la siguiente funcion de transferencia:

3.8 Una ecuacion diferencial general 145
Y (s)
U(s)= G(s) =
B(s)
N(s)(3.91)
y del factor 1s introducido por U(s) = A/s. La variable y(t) se conoce como
la salida y u(t) como la entrada de la funcion de transferencia G(s). El ordende G(s) se define como el grado del polinomio caracterıstico N(s). Como unpolinomio de grado n tiene n raıces, entonces una funcion de transferencia deorden n tiene n polos (vease el parrafo que sigue a (3.21)). Por otro lado, lasraıces del polinomio B(s) se conocen como los ceros de la funcion de transfe-rencia G(s). Si B(s) es de grado m entonces G(s) tiene m ceros. Recuerdesela condicion n ≥ m impuesta al principio de esta seccion. En las seccionesprevias se ha visto que siempre se puede escribir y(t) = yn(t) + yf (t) y queel efecto de las condiciones iniciales siempre se pueden considerar como partede yn(t). Tambien se ha visto que yn(t) depende de la naturaleza de las raıcesdel polinomio caracterıstico N(s), es decir, si son reales, sencillas o repetidas,si son complejas conjugadas, sencillas o repetidas y si tienen parte real nega-tiva, positiva o cero. Si yn(t) tiende a cero conforme el tiempo crece se diceque la ecuacion diferencial en (3.90) o, equivalentemente, que la funcion detransferencia G(s) es estable. Resumiendo todos los casos estudiados en lassecciones anteriores ahora se puede afirmar lo siguiente:
Condiciones para la estabilidad de una funcion de transferencia
1. Si todos los polos de G(s) tienen parte real estrictamente negativa entoncesG(s) es estable.
2. Si todos los polos de G(s) tienen parte real estrictamente negativa a ex-cepcion de algunos polos sencillos (no repetidos) que tienen parte real ceroentonces la funcion de transferencia G(s) es marginalmente estable. Estosignifica que aunque yn(t) no desaparece al crecer el tiempo sin embargotampoco crece sin lımite.
3. Si al menos un polo de G(s) tiene parte real estrictamente positiva en-tonces la funcion de transferencia G(s) es inestable, es decir, yn(t) crecehasta el infinito conforme el tiempo crece.
4. Si existe al menos un polo de G(s) con parte real cero que esta repetidoal menos dos veces entonces G(s) es inestable.
Por otro lado, tambien se ha visto que yf (t) depende de la entrada u(t) yque, de hecho, ambas tienen la misma “forma” si el polinomio caracterısticono tiene raıces en s = 0 (si G(s) no tiene polos en s = 0). Esto significa queen un sistema de control la variable u(t) puede ser usada como el valor quese desea que alcance la salida y(t), es decir, u(t) puede ser usada para espe-cificar el valor deseado de y(t). Esto se consigue de la siguiente manera. Si lafuncion de transferencia es estable (es decir, yn(t) → 0) entonces y(t) → yf (t)y, por tanto, solo resta asegurar que yf (t) = u. A continuacion se establecenlas condiciones para cumplir esto en el caso en que u = A es una constante.

146 3 Base matematica: ecuaciones diferenciales
Condiciones que aseguran que lımt→∞ y(t) = A.La respuesta total y(t) alcanza a la salida deseada u = A conforme el tiem-
po crece, es decir yf (t) = A y yn(t) → 0, si G(s) es estable y los coeficientesde los terminos independientes de los polinomios B(s) y N(s) son iguales, esdecir, si B(0) = N(0). Esto se comprueba usando el teorema del valor final(3.3):
lımt→∞
y(t) = lıms→0
sY (s) = lıms→0
sB(s)
N(s)
A
s=
B(0)
N(0)A = A (3.92)
Bajo estas condiciones se dice que G(s) es una funcion de transferencia deganancia unitaria en estado estacionario. Cuando u no es una constante yse desea que lımt→∞ y(t) = u(t), tambien se requiere que G(s) sea estable,yn(t) → 0, pero algunas condiciones adicionales deben ser satisfechas. Ladeterminacion de estas condiciones y la manera de satisfacerlas es parte de loque se estudia en los capıtulos restantes de esta obra (vease la seccion 4.4).
Ejemplo 3.16 Considere la situacion presentada en el ejemplo 3.12. A partirde ese ejemplo se puede establecer un experimento que nos permite saber si unsistema, ecuacion diferencial o funcion de transferencia es estable o inestable:
Si se perturba ligeramente a un sistema que originalmente esta en “reposo”puede haber dos comportamientos:
Si el sistema es estable entonces se “mueve” y despues de cierto tiemporegresa al reposo en el mismo lugar en que originalmente se encontrabaSi el sistema es inestable entonces se “mueve” cada vez mas de maneraque se aleja mas y mas del lugar en donde inicialmente estaba.
Ejemplo 3.17 Considere el tanque que contiene agua estudiado en el ejemplo3.2 y mostrado en la figura 3.3. Suponga que se utiliza una bomba de agua queproduce un flujo qi que es proporcional al voltaje u aplicado en las terminalesde la bomba, es decir:
qi = k1u (3.93)
donde k1 es una constante positiva. Suponga tambien que el voltaje aplicadoa la bomba se obtiene de acuerdo a la expresion:
u = kp(hd − h) (3.94)
donde hd es un valor constante que representa el nivel de agua deseado, h es elnivel de agua actual en el tanque y kp es una constante positiva. Combinandoestas expresiones junto con el modelo en (3.26) se obtiene:
dh
dt+ ah = kk1kp(hd − h)
Agrupando terminos:

3.8 Una ecuacion diferencial general 147
dh
dt+ b1h = b2hd (3.95)
b1 = a + kk1kp > 0, b2 = kk1kp > 0, b1 > b2
Notese que esta expresion tiene la forma de la ecuacion diferencial en (3.4)de manera que b1, b2, h y hd juegan los papeles, respectivamente,de a, k, y yu. Entonces la solucion h(t) tiene la misma forma que (3.14), es decir:
h(t) = −b2hd
b1e−b1t +
b2hd
b1+ h0e
−b1t, h0 = h(0)
Notese que, debido a que b1 > b2 > 0:
lımt→∞
h(t) =b2hd
b1< hd (3.96)
es el valor que alcanza en estado estacionario el nivel de agua en el tanque y esmenor (diferente) que el nivel deseado hd. Esto puede explicarse usando (3.92)del siguiente modo. La funcion de transferencia de la ecuacion diferencial en(3.95) es:
G(s) =H(s)
Hd(s)=
b2
s + b1
Entonces:
lımt→∞
h(t) = lıms→0
sH(s) = lıms→0
sb2
s + b1
hd
s=
b2
b1hd < hd
Ahora bien, este resultado tambien puede explicarse usando la experienciacotidiana del siguiente modo. Supongase por un momento que lımt→∞ h(t) =hd. Entonces, de acuerdo a (3.93) y (3.94):
qi = k1kp(hd − h) = 0
el flujo de agua que entra al tanque es cero porque h = hd. Como el agua con-tinua fluyendo a traves de la valvula de salida, qo 6= 0, lo anterior resultara enh < hd de nuevo. Esto significa que no es posible mantener h = hd de manerapermanente, lo que justifica el resultado en (3.96).
Ahora suponga que se usa (3.93) junto con:
u = kp(hd − h) + ki
∫ t
0
(hd − h(r))dr (3.97)
donde ki es una constante positiva. Combinando (3.93), (3.97) y (3.26) seobtiene:
dh
dt+ ah = kk1
(kp(hd − h) + ki
∫ t
0
(hd − h(r))dr
)

148 3 Base matematica: ecuaciones diferenciales
Derivando una vez respecto al tiempo a toda la ecuacion se tiene:
d2h
dt2+ a
dh
dt= kk1
(kp
d
dt(hd − h) + ki(hd − h)
)
Agrupando terminos:
d2h
dt2+ (a + kk1kp)
dh
dt+ kk1kih = kk1kp
dhd
dt+ kk1kihd
Usando la transformada de Laplace bajo la suposicion de condiciones inicialesiguales a cero se obtiene la siguiente funcion de transferencia:
G(s) =H(s)
Hd(s)=
kk1kps + kk1ki
s2 + (a + kk1kp)s + kk1ki
Usando (3.92) se obtiene:
lımt→∞
h(t) = lıms→0
sH(s) = lıms→0
skk1kps + kk1ki
s2 + (a + kk1kp)s + kk1ki
hd
s=
kk1ki
kk1kihd = hd
(3.98)
lo cual es completamente cierto si a + kk1kp > 0 y kk1ki > 0 (se deja comoejercicio consultar la seccion 4.2.1, del capıtulo 4, para verificar que estascondiciones aseguran que las dos raıces del polinomio caracterıstico s2 + (a +kk1kp)s + kk1ki tienen parte real negativa). De nuevo, este resultado puedeser explicado usando la experiencia cotidiana. Dado que h = hd en estadoestacionario, entonces es de esperarse que la senal de error e = hd−h tenga uncomportamiento como el mostrado en la figura 3.17. Recuerdese que la integral∫ t
0(hd−h(r))dr es el area debajo de la curva mostrada en la figura 3.17 la cual
es positiva. Esto significa que cuando h = hd la integral permanece constante(el integrando vale cero) en un valor positivo. Entonces, de acuerdo a (3.93)y (3.97) continua entrando agua al tanque con un flujo qi que permanececonstante en este valor positivo multiplicado por k1ki > 0. Este flujo resultaser exactamente igual al flujo del agua que sale qo de manera que el nivel deagua h = hd permanece igual al nivel deseado, tal como lo predice (3.98).
Ejemplo 3.18 Considere el sistema masa-resorte-amortiguador estudiado enel ejemplo 3.6 pero ahora suponga que no hay ningun resorte. Haciendo K = 0en (3.63) se obtiene:
mx + bx = f
Suponga que se utiliza algun dispositivo (un motor tan rapido que su ecuaciondiferencial puede no ser considerada, por ejemplo) que genera una fuerza deacuerdo a la siguiente expresion:
f = kp(xd − x) (3.99)

3.8 Una ecuacion diferencial general 149
t s[ ]
e m[ ]
Figura 3.17. La integral∫ t
0(hd − h(r))dr es el area sombreada debajo de la curva
definida por e = hd − h. Se supone que hd > h(0).
donde kp es una constante positiva, xd es una constante que representa laposicion deseada y x es la posicion medida del carrito. Combinando estasexpresiones se obtiene:
mx + bx = kp(xd − x)
y agrupando:
x +b
mx +
kp
mx =
kp
mxd
Usando la transformada de Laplace bajo la suposicion de condiciones inicialesiguales a cero se encuentra la siguiente funcion de transferencia:
G(s) =X(s)
Xd(s)=
kp
m
s2 + bms +
kp
m
Se deja como ejercicio encontrar las raıces del polinomio caracterıstico s2 +bms+
kp
m y comprobar que ambas tienen parte real negativa si bm > 0 y
kp
m > 0.Entonces, usando (3.92) se encuentra que la posicion alcanzada en estadoestacionario:
lımt→∞
x(t) = lıms→0
sX(s) = lıms→0
skp
m
s2 + bms +
kp
m
xd
s=
kp
mkp
m
xd = xd
es igual a la posicion deseada xd. La razon de este resultado puede explicar-se usando, de nuevo, la experiencia: cuando x = xd la fuerza producida deacuerdo a (3.99) es f = 0 por lo que el carrito puede detenerse y permaneceren dicha posicion. Mas aun, si x < xd entonces f > 0 y el carrito incrementasu posicion x acercandose a xd (vease la figura 3.12 para recordar la direccionen se aumenta x y en la que f es positiva). Si x > xd entonces f < 0 y elcarrito decrementa su posicion x acercandose, de nuevo, a xd.

150 3 Base matematica: ecuaciones diferenciales
Se deja como ejercicio que el lector haga el analisis correspondiente paraverificar que en el caso que exista un resorte, es decir cuando K > 0, entonceslımt→∞ x(t) 6= xd si xd 6= 0. Notese sin embargo que, de nuevo, esto puedeexplicarse de manera sencilla usando la experiencia:
Si x = xd entonces, de acuerdo a (3.99), la fuerza externa aplicada sobreel carrito es cero f = 0 y la fuerza de friccion tambien es cero −bx = 0 si sesupone que el carrito ya esta en reposo. Sin embargo, si x = xd 6= 0 entoncesla fuerza del resorte sobre el carrito −Kx es diferente de cero por lo que elcarrito abandonara la posicion x = xd 6= 0. El carrito alcanzara el reposo enuna posicion x tal que la fuerza del resorte y la fuerza f en (3.99) se cancelenexactamente, es decir, donde kp(xd − x) = Kx.
3.9. Polos y ceros en sistemas de orden superior
En los sistemas de orden 3 o mayor no es posible hacer un estudio graficodetallado de la respuesta y(t) como se ha hecho en el caso de sistemas de pri-mer y segundo orden. La principal razon es la complejidad de las expresionesobtenidas cuando una funcion de transferencia tiene tres polos o mas. Por estarazon, cuando se tiene un sistema de orden alto es importante poder apro-ximarlo usando un sistema de orden menor. Hay dos maneras de conseguiresto: i) cancelando algunos polos con algunos ceros de la funcion de transfe-rencia correspondiente e ii) despreciando el efecto de los polos “rapidos”. Acontinuacion se presentan algunos ejemplos de como se puede hacer esto.
3.9.1. Cancelacion polo-cero y modelos reducidos
Considere el siguiente sistema de segundo orden:
Y (s) =k(s − d)
(s − p1)(s − p2)U(s) (3.100)
Suponga que U(s) = A/s, p1 6= p2, p1 < 0, p2 < 0, d < 0, y que p1p2 ≈ −kdcon el fin de que la funcion de transferencia en (3.100) sea de ganancia apro-ximadamente unitaria en estado estacionario. Usando expansion en fraccionesparciales:
Y (s) =k(s − d)
(s − p1)(s − p2)
A
s=
B
s − p1+
C
s − p2+
D
s(3.101)
Multiplicando ambos miembros por el factor (s − p1) y evaluando en s = p1
se obtiene:
B =k(s − d)A
(s − p2)s
∣∣∣∣s=p1
=k(p1 − d)A
(p1 − p2)p1
3.9 Polos y ceros en sistemas de orden superior 151
Multiplicando ambos miembros de (3.101) por el factor (s − p2) y evaluandoen s = p2 se obtiene:
C =k(s − d)A
(s − p1)s
∣∣∣∣s=p2
=k(p2 − d)A
(p2 − p1)p2
Multiplicando ambos miembros de (3.101) por el factor s y evaluando en s = 0se obtiene:
D =k(s − d)A
(s − p1)(s − p2)
∣∣∣∣s=0
= − kdA
p1p2
Si p1 ≈ d < 0 entonces, de acuerdo a la condicion p1p2 ≈ −kd, se tiene quek ≈ −p2 y, por tanto:
B ≈ 0 (3.102)
C ≈ k(p2 − d)A
(p2 − d)p2=
kA
p2(3.103)
D ≈ −kA
p2(3.104)
para obtener finalmente:
y(t) ≈ kA
p2ep2t − kA
p2(3.105)
El lector puede verificar que:
y(t) =kA
p2ep2t − kA
p2(3.106)
es la solucion de:
Y (s) =k
s − p2U(s) (3.107)
con U(s) = A/s y k = −p2. Por tanto, se concluye. Si un polo y un cero de unafuncion de transferencia estan muy cercanos, entonces se pueden cancelar paraobtener una funcion de transferencia de orden reducido. Es decir, se puedeusar (3.107) en lugar de (3.100) para obtener resultados muy similares. Lasventajas de usar el modelo (3.107) son: i) se trata un modelo de orden menorque (3.100) e ii) no tiene ningun cero. La ventaja de disponer de un modelo deorden reducido que describe aproximadamente a un modelo de orden superiores que con mucha frecuencia el modelo reducido es de orden suficientementepequeno de modo que su respuesta puede especificarse graficamente comoel de un sistema de primer o segundo orden. Por otro lado, un cero en lafuncion de transferencia modifica su respuesta de una manera que no es facilde cuantificar por lo que es muy conveniente que la funcion de transferenciano tenga ceros.
Es importante mencionar que la cancelacion de un polo y un cero solo espermitida si ambos tienen parte real negativa, pues de otro modo su efecto sehara presente, tarde o temprano, conforme el tiempo crece.

152 3 Base matematica: ecuaciones diferenciales
3.9.2. Polos dominantes y modelos reducidos
Considere la siguiente funcion de transferencia:
Y (s) =k
s + 1RC
d
s + aU(s) (3.108)
donde U(s) = A/s. Usando expansion en fracciones parciales:
Y (s) =k
s + 1RC
d
s + a
A
s=
B
s + 1RC
+C
s + a+
D
s(3.109)
Multiplicando ambos miembros por el factor s+ 1RC y evaluando en s = − 1
RC :
B = kd
s + a
A
s
∣∣∣∣s=− 1
RC
= kd
a − 1RC
A(− 1
RC
) (3.110)
Multiplicando ambos miembros de (3.109) por el factor s + a y evaluando ens = −a:
C = kd
s + 1RC
A
s
∣∣∣∣s=−a
= kd
−a + 1RC
A
(−a)(3.111)
Multiplicando ambos miembros de (3.109) por el factor s y evaluando en s = 0:
D = kd
s + 1RC
A
(s + a)
∣∣∣∣s=0
= kd1
RC
A
a(3.112)
Si a ≫ 1RC > 0 entonces:
B ≈ −kd
a
A1
RC
(3.113)
C ≈ kdA
a2≪ D (3.114)
Por tanto, usando (3.109) y despreciando C se obtiene:
y(t) ≈ −kd
a
A1
RC
e−1
RCt + k
d1
RC
A
a(3.115)
El lector puede verificar que:
y(t) = −kd
a
A1
RC
e−1
RCt + k
d1
RC
A
a(3.116)
es la solucion de:
Y (s) =kd
a(s + 1RC )
U(s) (3.117)

3.9 Polos y ceros en sistemas de orden superior 153
con U(s) = A/s. Por tanto, se puede utilizar (3.117) en lugar de (3.108). Lacondicion a ≫ 1
RC se interpreta diciendo que “el polo en s = −a es muyrapido comparado con el polo en s = − 1
RC ”. Al polo en s = − 1RC se le conoce
como el polo dominante porque su efecto es el que sobresale en la respuesta delsistema. Por tanto, se concluye. Si un polo es mucho mas rapido que los otros,entonces se puede obtener una funcion de transferencia de orden reducido sise desprecia el polo rapido y se conservan los polos dominantes (lentos). Uncriterio aceptado es que los polos rapidos (los que se pueden despreciar) tienenuna parte real de al menos 5 veces la parte real de los polos dominantes (los quese conservan). Notese, sin embargo, que no es cuestion de simplemente hacerdesaparecer el factor s + a en el denominador de la funcion de transferencia:la constante a aun aparece dividiendo en (3.117) porque es necesaria paraconservar la ganancia en estado estacionario de la funcion de transferencia en(3.108).
Una manera sencilla de obtener (3.117) a partir de (3.108) es la siguiente:
Y (s) =k
s + 1RC
d
s + aU(s) =
k
s + 1RC
d
a( 1as + 1)
U(s) (3.118)
Si a es muy grande se puede suponer que 1as ≪ 1 y, por tanto:
Y (s) ≈ kd
a(s + 1RC )
U(s) (3.119)
que es la expresion en (3.117).Finalmente, es importante mencionar que una reduccion de orden como la
presentada es valida solo si el polo que se desprecia tiene parte real negativa.Si el polo que se desprecia tiene parte real positiva entonces, por pequena quesea C la contribucion de este polo crecera con el tiempo hasta el infinito y nopodra ser despreciada de ninguna manera.
Ejemplo 3.19 De acuerdo al ejercicio 9 y el ejemplo 2.12 del capıtulo 2, elmodelo de un motor de CD esta dado como:
Ladiadt
= υ − Raia − keω,
Jdω
dt= kmia − Bω (3.120)
donde ω es la velocidad del motor (veanse tambien (9.9) y (9.10) del capıtu-lo 9). Suponga que este motor acciona un sistema hidraulico que por efectocentrıfugo produce un flujo de agua, qi, que es proporcional a la velocidad delmotor, es decir, qi = γω, donde γ es una constante positiva. Finalmente, esteflujo de agua es utilizado para llenar el tanque del ejemplo 3.2 en el presentecapıtulo, cuyo modelo esta dado en (3.26) y que por facilidad de referencia sereescribe a continuacion:

154 3 Base matematica: ecuaciones diferenciales
dh
dt+ ah = kqi
a =1
RC, k =
1
C
Usando la transformada de Laplace (3.1) y considerando todas las condicionesiniciales iguales a cero, no es difıcil comprobar que las ecuaciones correspon-dientes adquieren la forma:
I(s) =1/La
s + Ra
La
(V (s) − keω(s)) (3.121)
ω(s) =km/J
s + BJ
I(s) (3.122)
H(s) =1/C
s + 1RC
Qi(s) (3.123)
Combinando (3.121) y (3.122) se obtiene:
ω(s) =km/J
s + BJ
1/La
s + Ra
La
(V (s) − keω(s))
De acuerdo a (3.118) se puede escribir:
ω(s) =km/J
BJ
(JB s + 1
) 1/La
Ra
La
(La
Ras + 1
) (V (s) − keω(s))
En motores de CD pequenos, la inductancia La y la constante de friccionviscosa B son pequenas por lo que La
Ra≪ J
B . Por tanto, se puede considerar
que La
Ras ≪ 1 solamente y que entonces se puede aproximar:
ω(s) =1
s + BJ
km
JRa(V (s) − keω(s))
Para continuar, se pueden reagrupar los terminos que contienen ω(s) parareescribir esta expresion del siguiente modo:
ω(s) =km
JR
s +(
BJ + kmke
JRa
)V (s)
Sustituyendo esto y Qi(s) = γω(s) en (3.123) se encuentra:
H(s) =1C
s + 1RC
γkm
JR
s +(
BJ + kmke
JRa
)V (s)
Procediendo de nuevo como en (3.118) se puede escribir:

3.10 El principio de superposicion 155
H(s) =γC
1RC (RCs + 1)
km
JR(BJ + kmke
JRa
)(1
BJ
+ kmkeJRa
s + 1
)V (s)
Si el tanque tiene una seccion suficientemente amplia, el motor alcanzara suvelocidad nominal mucho tiempo antes de que el nivel de agua en el tanquese incremente apreciablemente. Esto se cuantifica de manera mas precisa es-tableciendo que la constante de tiempo del tanque es muy grande comparadacon la constante de tiempo del motor, es decir, que RC ≫ 1
BJ
+ kmkeJRa
. Enton-
ces, se puede decir que 1BJ
+ kmkeJRa
s ≪ 1 solamente y que, por tanto, se puede
aproximar:
H(s) =γC
1RC (RCs + 1)
km
JR(BJ + kmke
JRa
)V (s)
o bien:
H(s) =1C
s + 1RC
km
JRγ(BJ + kmke
JRa
)V (s)
Por lo que definiendo:
k1 =km
JRγBJ + kmke
JRa
y comparando con (3.123) se justifica la expresion presentada en (3.93), esdecir, que se puede considerar que el flujo de agua es proporcional al vol-taje aplicado al motor a traves de una constante k1. Esto es posible si: 1)la constante de tiempo de la dinamica electrica del motor es mas pequenaque la constante de tiempo de la dinamica mecanica del motor, es decir siLa
Ra≪ J
B , y 2) si la constante de tiempo del tanque es muy grande comparada
con la constante de tiempo del motor completo, es decir si RC ≫ 1BJ
+ kmkeJRa
.
Finalmente, es importante mencionar que este procedimiento es valido porqueBJ + kmke
JRa> 0 y Ra
La> 0, es decir, los polos despreciados son negativos.
3.10. El principio de superposicion
Toda ecuacion diferencial lineal satisface el principio de superposicion. Masaun, el hecho de que una ecuacion diferencial satisfaga el principio de super-posicion se acepta como una prueba de que la ecuacion diferencial es lineal.Con el fin de simplificar la exposicion, a continuacion se presenta el principiode superposicion para el caso en el que todas las condiciones iniciales son cero.

156 3 Base matematica: ecuaciones diferenciales
Principio de superposicion. Considere la siguiente ecuacion diferencialordinaria, lineal con coeficientes constantes de orden n:
y(n) + an−1y(n−1) + · · · + a1y + a0y = b0u + b1u + · · · + bmu(m) (3.124)
donde n ≥ m. Suponga que todas las condiciones iniciales son cero. Supongatambien que y1(t) es la solucion de (3.124) cuando u1(t) se usa como entra-da y que y2(t) es la solucion de (3.124) cuando u2(t) se usa como entrada.Entonces, α1y1(t) + α2y2(t), donde α1 y α2 son constantes arbitrarias, es lasolucion de (3.124) cuando α1u1(t) + α2u2(t) se usa como entrada.
A continuacion se presenta una manera de comprobar este resultado. Comola ecuacion diferencial en (3.124) es lineal y todas las condiciones iniciales soncero entonces se puede expresar en terminos de su funcion de transferencia:
Y (s) = G(s)U(s) (3.125)
Esto significa que se puede escribir:
Y1(s) = G(s)U1(s)
Y2(s) = G(s)U2(s)
Sumando estas expresiones se obtiene:
α1Y1(s) + α2Y2(s) = α1G(s)U1(s) + α2G(s)U2(s)
= G(s)(α1U1(s) + α2U2(s))
Esto es posible gracias a que α1 y α2 son constantes. Esta expresion compruebaque α1y1(t)+α2y2(t) es la solucion de (3.125) y, por tanto, de (3.124) cuandoα1u1(t) + α2u2(t) se usa como entrada.
Ejemplo 3.20 En el circuito mostrado en la figura 3.18(a) se desea conocerel voltaje en la impedancia Z4(s), segun la polaridad mostrada. Con el finde simplificar el circuito y conseguir el objetivo planteado, se hara uso de unresultado importante en el analisis de circuitos: el teorema de intercambio defuentes.
Teorema 3.1 Teorema de intercambio de fuentes [5], pag. 214, [11],pag. 61.
Cuando se tiene en serie una impedancia, Z(s), y una fuente de vol-taje, Vfv(s), entre dos terminales a y b, se le puede sustituir por unafuente de corriente, Ifc(s), conectada en paralelo a la misma impedan-cia del circuito serie. La magnitud de la fuente de corriente es igual aIfc(s) = Vfv(s)/Z(s).Cuando se tiene en paralelo una impedancia, Z(s), y una fuente de corrien-te, Ifc(s), entre dos terminales a y b, se le puede sustituir por una fuente devoltaje, Vfv(s), conectada en serie a la misma impedancia del circuito pa-ralelo. La magnitud de la fuente de voltaje es igual a Vfv(s) = Z(s)Ifc(s).
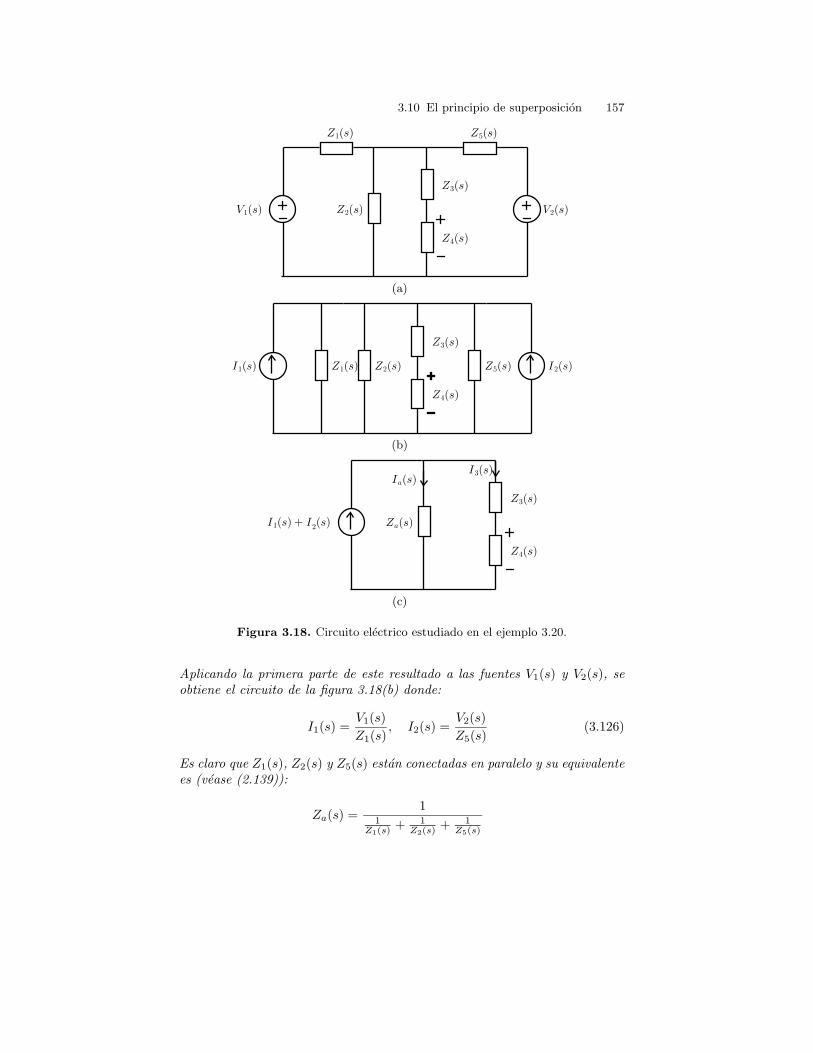
3.10 El principio de superposicion 157
+à à
+
Z1(s)
Z2(s)
Z3(s)
Z4(s)
+
à
Z5(s)
V1(s) V2(s)
(a)
Z1(s) Z2(s)
Z3(s)
Z4(s)
+
à
Z5(s)I1(s) I2(s)
(b)
Z3(s)
Z4(s)
+
à
I1(s) + I2(s) Za(s)
Ia(s)I3(s)
(c)
Figura 3.18. Circuito electrico estudiado en el ejemplo 3.20.
Aplicando la primera parte de este resultado a las fuentes V1(s) y V2(s), seobtiene el circuito de la figura 3.18(b) donde:
I1(s) =V1(s)
Z1(s), I2(s) =
V2(s)
Z5(s)(3.126)
Es claro que Z1(s), Z2(s) y Z5(s) estan conectadas en paralelo y su equivalentees (vease (2.139)):
Za(s) =1
1Z1(s)
+ 1Z2(s)
+ 1Z5(s)

158 3 Base matematica: ecuaciones diferenciales
Usando esto y la combinacion de las fuentes de corriente se obtiene el circuitode la figura 3.18(c). A continuacion se hara uso de otro resultado importanteen el analsis de circuitos electicos: el divisor de corriente.
Resultado 3.1 Divisor de corriente [5], pag. 176, [11], pag. 38.Cuando se tienen dos impedancias en paralelo que estan a su vez conectadasen paralelo a una fuente de corriente, la corriente que circula por cualquierimpedancia es igual a el valor de la fuente de corriente multiplicada por laimpedancia contraria a la que se desea calcular la corriente y dividida ente lasuma de las dos impedancias.
Por tanto, aplicando la regla de divisor de corriente y la Ley de Ohm al circuitoen la figura 3.18(c) se obtienen las siguientes relaciones:
I3(s) =Za(s)
Za(s) + Z3(s) + Z4(s)(I1(s) + I2(s))
Vz4(s) = Z4(s)I3(s)
donde Vz4(s) es el voltaje en la impedancia Z4(s). Combinando estas expre-siones se obtiene:
Vz4(s) =Za(s)Z4(s)
Za(s) + Z3(s) + Z4(s)(I1(s) + I2(s))
Finalmente, utilizando (3.126) se encuentra:
Vz4(s) =Za(s)Z4(s)
Za(s) + Z3(s) + Z4(s)
(V1(s)
Z1(s)+
V2(s)
Z5(s)
)
Se concluye que el voltaje en la impedancia Z4(s) se puede obtener como la su-ma de los voltajes en Z4(s) debidos a cada una de las fuentes, V1(s) y V2(s),cuando la otra fuente es puesta en corto circuito (igual a cero) y sumandoambos resultados. Esto es precisamente lo que establece el principio de super-posicion. Es interesante subrayar que el principio de superposicion ha sidoestablecido mas arriba en la presente seccion, suponiendo que las diferentesentradas se suman directamente y luego se aplican al sistema. Sin embargo,este ejemplo muestra que el principio de superposicion es valido en sistemaslineales aun y cuando las fuentes de voltaje, V1(s) y V2(s), no se pueden sumarinmediatamente (vease la figura 3.18(a)).
Ejemplo 3.21 En el circuito mostrado en la figura 3.19(a) se desea conocerel voltaje en la impedancia Z3(s), segun la polaridad mostrada. Con el fin desimplificar el problema y conseguir el objetivo planteado, primero se obtiene elcircuito equivalente mostrado en la figura 3.19(b). Entonces se puede hacer usodel teorema de intercambio de fuentes (vease el ejemplo previo) para obtenerel circuito de la figura 3.19(c), donde:
I1(s) =V1(s)
Z1(s)(3.127)
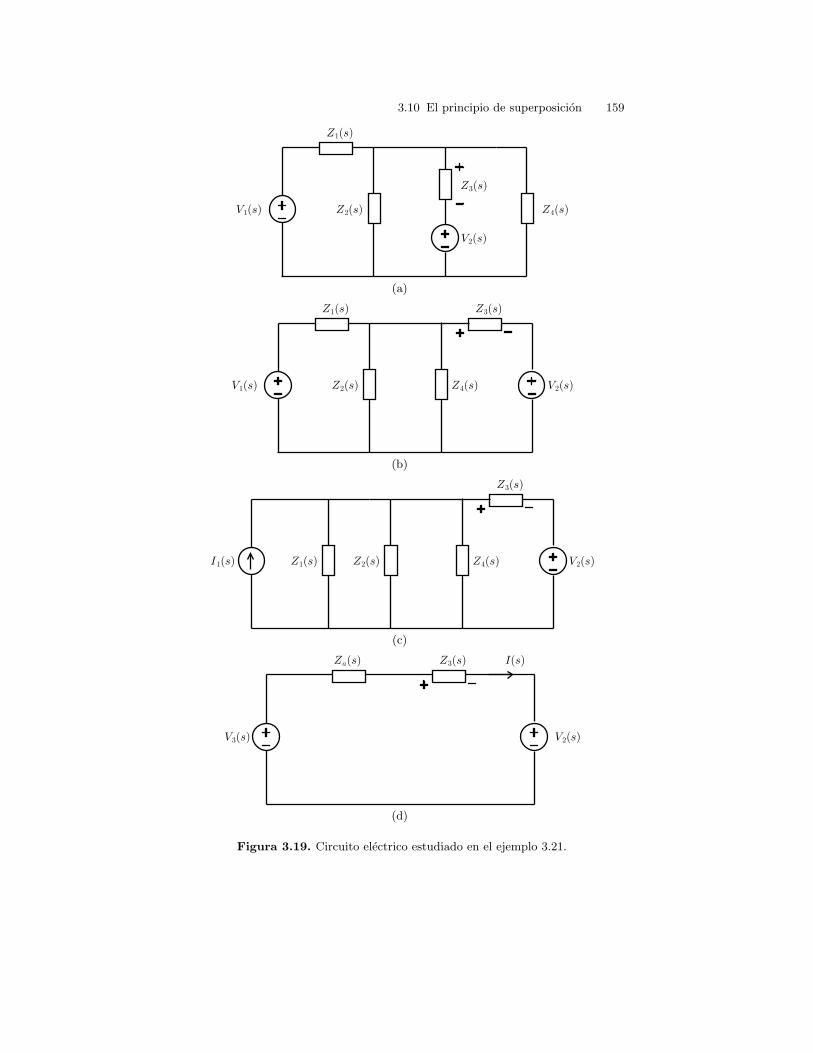
3.10 El principio de superposicion 159
+à
à+
Z1(s)
Z2(s)
Z3(s)
Z4(s)
+
àV1(s)
V2(s)
(a)
+à à
+
Z1(s)
Z2(s)
Z3(s)
Z4(s)
+ à
V1(s) V2(s)
(b)
à+Z1(s) Z2(s)
Z3(s)
Z4(s)
+ à
V2(s)I1(s)
(c)
à+
Z3(s)
+ à
V2(s)V3(s)
Za(s) I(s)
+à
(d)
Figura 3.19. Circuito electrico estudiado en el ejemplo 3.21.

160 3 Base matematica: ecuaciones diferenciales
Como las impedancias Z1(s), Z2(s) y Z4(s) estan conectadas en paralelo,se encuentra que su equivalente esta dado como (vease (2.139)):
Za(s) =1
1Z1(s)
+ 1Z2(s)
+ 1Z4(s)
Como la impedancia equivalente Za(s) queda conectada en paralelo con lafuente de corriente I1(s), se puede usar la segunda parte del teorema de in-tercambio de fuentes, listado en el ejemplo previo, para obtener el circuito dela figura 3.19(d), donde:
V3(s) = Za(s)I1(s)
I(s) =V3(s) − V2(s)
Za(s) + Z3(s)
Vz3(s) = Z3(s)I(s)
donde Vz3(s) es el voltaje en la impedancia Z3(s). Combinando estas expre-siones y usando (3.127) se obtiene:
Vz3(s) =Z3(s)
Za(s) + Z3(s)(V3(s) − V2(s))
=Z3(s)
Za(s) + Z3(s)(Za(s)I1(s) − V2(s))
=Z3(s)
Za(s) + Z3(s)
(Za(s)
Z1(s)V1(s) − V2(s)
)
Se concluye, de nuevo, que el voltaje en la impedancia Z3(s) se puede obtenercomo la suma de los voltajes en Z3(s) debidos a cada una de las fuentes,V1(s) y V2(s), cuando la otra fuente es puesta en corto circuito (igual a cero)y sumando ambos resultados. Ademas, este ejemplo tambien muestra que elprincipio de superposicion es valido en sistemas lineales aun y cuando lasfuentes de voltaje, V1(s) y V2(s), no se pueden sumar inmediatamente (veasela figura 3.19(a)).
3.11. Caso de estudio. Un convertidor electronico depotencia de CD a CD tipo resonante serie de altafrecuencia
En la seccion 2.7 del capıtulo 2 se obtuvo el modelo matematico de unconvertidor electronico de potencia de CD a CD tipo resonante serie de altafrecuencia. Este modelo es presentado en (2.186)-(2.188) y a continuacion sereescribe para facilitar la referencia:

3.11 Caso de estudio 161
Ldi
dt= −v − v0sign(i) + E(t) (3.128)
Cdv
dt= i (3.129)
C0dv0
dt= abs(i) − v0
R(3.130)
donde:
sign(i) =
+1, i > 0−1, i < 0
(3.131)
mientras que abs(i) representa el valor absoluto de i. En la presente seccion seestudiara el funcionamiento de este circuito mediante la solucion del modeloen (3.128)-(3.130). Para esto, es de mucha utilidad realizar un cambio decoordenadas para las variables involucradas en el modelo. Por esta razon sedefinen las siguientes variables (vease la seccion 2.7 del capıtulo 2 para unaexplicacion del significado de los parametros involucrados):
z1 =i
E
√L
C, z2 =
v
E, z3 =
v0
E, τ =
t√LC
(3.132)
Sustituyendo esto en (3.128), (3.129), (3.130) se tiene:
Ld
(E
√CL z1
)
d(τ√
LC) = −Ez2 − Ez3sign(z1) + E(t)
Cd (Ez2)
d(τ√
LC) = z1E
√C
L
C0d(Ez3)
d(τ√
LC) = abs
(E
√C
Lz1
)− Ez3
R
Simplificando se encuentra:
z1 = −z2 − z3sign(z1) + u (3.133)
z2 = z1 (3.134)
αz3 = abs(z1) −z3
Q(3.135)
donde el punto “·” representa la derivada respecto al tiempo normalizado τmientras que α = C0/C, Q = R
√C/L y u es una variable que solo toma los
valores de +1 (cuando E(t) = +E) y −1 (cuando E(t) = −E). Normalmente,el valor del capacitor de salida C0 se selecciona muy grande comparado conel valor del capacitor resonante C porque esto asegura que z3, es decir v0, semantendra aproximadamente constante durante varios ciclos de la corriente

162 3 Base matematica: ecuaciones diferenciales
resonante z1, es decir i. Por tanto, bajo esta suposicion (z3 constante), sepuede despreciar (3.135) y el uso de (3.133) y (3.134) es suficiente para re-presentar la evolucion de las variables resonantes z1 y z2, al menos durantevarias oscilaciones.
Por otro lado, para conseguir que el circuito opere en resonancia, los tran-sistores Q1, Q3 se activan (conducen) cuando z1 > 0 (es decir i > 0) con loque u = +1 (porque E(t) = +E en este caso), de acuerdo a las figuras 2.44(a),2.45 y 2.46, mientras que los transistores Q2, Q4 se activan (conducen) cuandoz1 < 0 (es decir i < 0) con lo que u = −1 (porque E(t) = −E en este ca-so). Una manera abreviada de indicar esto es especificando que u = sign(z1),donde sign(z1) = +1 si z1 > 0 y sign(z1) = −1 si z1 < 0. Lo anterior significaque, de acuerdo a (3.133) y (3.134), la evolucion de las variables resonantespuede ser descrita como:
z1 = −z2 + ve (3.136)
z2 = z1 (3.137)
ve =
1 − z3, Q1, Q3 conducen
−(1 − z3), Q2, Q4 conducen
donde z3 se considera constante. Aplicando el cambio de variable z4 = z2 − ve
a las ecuaciones anteriores se obtiene z4 = z2 = z1, porque ve = 0 al ser ve
constante, y z4 = z1 = −z2 + ve = −z4, es decir:
z4 + z4 = 0 (3.138)
Notese que se trata de una ecuacion diferencial ordinaria, de segundo orden,lineal y de coeficientes constantes, como la definida en (3.40) con ζ = 0 yωn = 1. Como ademas la excitacion, o entrada, de esta ecuacion diferencial esigual a cero entonces A = 0 y la solucion completa esta dada por la respuestanatural unicamente. Por tanto, de acuerdo a la seccion 3.3 y, en particular, a(3.49) y (3.50), la solucion de (3.138) esta dada como:
z4(τ) = p(τ) = L−1
z40(s + 2ζωn) + z40
s2 + 2ζωns + ω2n
= L−1
z40s + z40
s2 + 1
= L−1
z40s
s2 + 1+
z40
s2 + 1
= z40 cos(τ) + z40 sin(τ) (3.139)
donde se han usado los pares transformados [4], cap. 32:
L−1
s
s2 + a2
= cos(aτ)
L−1
a
s2 + a2
= sin(aτ)
mientras que z40 = z4(0) = z2(0) − ve y z40 = z4(0) = z1(0). Derivando(3.139) una vez respecto a τ se obtiene:

3.11 Caso de estudio 163
z4(τ) = −z40 sin(τ) + z40 cos(τ) (3.140)
Entonces, usando (3.139) y (3.140) es sencillo verificar que:
z24(τ) + z2
4(τ) = z240 + z2
40 (3.141)
Esto significa que si la solucion de (3.138) se dibuja sobre un plano donde el ejehorizontal es z4 y el eje vertical es z4, entonces se obtiene un cırculo centradoen el origen, (z4, z4) = (0, 0), que tiene un radio (constante) determinadopor las condiciones iniciales, es decir
√z240 + z2
40. Mas aun, de acuerdo a loscambios de variable z4 = z2 − ve y z4 = z1, se concluye que si la solucionde (3.136), (3.137), se dibuja sobre un plano donde el eje horizontal es z2
y el eje vertical es z1, entonces se obtiene un cırculo centrado en el punto(z2, z1) = (ve, 0), que tiene un radio (constante) igual a
√(z20 − ve)2 + z2
10
donde z20 = z2(0) y z10 = z1(0). Es importante mencionar que, de acuerdo a(3.136) y (3.137), los valores de z1 y z2 no pueden presentar discontinuidadesporque para eso se necesitarıan valores infinitos de z1 y z2, respectivamente,lo cual no es posible dado que los miembros derechos de (3.136) y (3.137)no toman valores infinitos. Esto significa que, al combinar las soluciones enambas regiones (cuando z1 > 0 y cuando z1 < 0), las condiciones iniciales encada region deben ser iguales a los valores finales de la solucion alcanzados enla region previa. Todo lo anterior se muestra graficamente en la figura 3.20. Latrayectoria cerrada mostrada en esta figura indica que las variables resonantesz2, z1 (es decir v e i) oscilan de manera permanente. Se debe subrayar que estatrayectoria cerrada se recorre en sentido horario porque, de acuerdo a (3.137),z2 crece cuando z1 > 0 (si z2 > 0 entonces z2 crece) y z2 disminuye cuandoz1 < 0. Notese que debido a que ve puede tomar dos valores diferentes, 1− z3
(cuando z1 > 0) y −(1 − z3) (cuando z1 < 0), la unica manera de conseguirla situacion mostrada en la figura 3.20 es que z3 = 1, es decir, que ve = 0 enambas regiones. Esto significa que el voltaje entregado a la salida es igual alvoltaje de suministro v0 = E.
A continuacion se muestra como puede ser utilizado un convertidor re-sonante serie de CD a CD para entregar voltajes de salida menores que launidad z3 < 1 (es decir v0 < E), lo cual es una aplicacion importante de estetipo de convertidores. Sea la funcion s = z1 − γz2, con γ una constante posi-tiva, y asıgnese u = sign(s). Esto define las regiones mostradas en la figura3.21. Notese que los transistores Q1, Q3 estan encendidos cuando u = +1 (porencima de la lınea recta definida por z1 = γz2), pero solo conducen cuandoz1 > 0 pues, aunque Q1, Q3 esten encendidos, cuando z1 < 0 la corrienteelectrica fluye a traves de los diodos D1,D3 (cualquiera de los transistoresQ1, Q2, Q3, Q4 solo conducen en una direccion). Por otro lado, los transistoresQ2, Q4 estan encendidos cuando u = −1 (por debajo de la lınea recta definidapor z1 = γz2), pero solo conducen cuando z1 < 0 pues, aunque Q2, Q4 estenencendidos, cuando z1 > 0 la corriente electrica fluye a traves de los diodosD2,D4.

164 3 Base matematica: ecuaciones diferenciales
Z2
Z1
(à 1+Z3;0) (1àZ3;0)
Figura 3.20. Evolucion de las variables resonantes z2 y z1 cuando u = sign(z1).
Las variables resonantes siguen evolucionando de acuerdo a (3.136) y(3.137) pero ahora ve toma los siguientes los valores constantes:
ve =
1 − z3, Q1, Q3 conducen, (z1 > γz2, z1 > 0)−(1 − z3), Q2, Q4 conducen, (z1 < γz2, z1 < 0)
1 + z3, D1,D3 conducen, (z1 > γz2, z1 < 0)−(1 + z3), D2,D4 conducen, (z1 < γz2, z1 > 0)
Esto significa que, de nuevo y de acuerdo a los argumentos establecidos entre(3.136) y el parrafo que sigue de (3.141), las variables resonantes describencırculos sobre el plano z2 − z1. El radio de estos cırculos esta determinadopor las condiciones iniciales en cada region (iguales a los valores finales enla region previa). El centro de estos cırculos esta ubicado en los siguientespuntos, dependiendo de la region en que se esta trabajando:
(z2, z1) = (1 − z3, 0), z1 > γz2, z1 > 0,

3.11 Caso de estudio 165
D2;D4
D1;D3
Q1;Q3
Q2;Q4
z1 = íz2
à 1+ z3à 1à z3 1à z3 1+ z3
z1 > 0
z1 > 0
z1 < 0 z1 < 0
z1 < íz2
z1 < íz2
z1 > íz2
z1 > íz2
z1
z2
s = 0
Figura 3.21. Evolucion de las variables resonantes z2 y z1 cuando u = sign(s) cons = z1 − γz2.
(z2, z1) = (−1 + z3, 0), z1 < γz2, z1 < 0,
(z2, z1) = (1 + z3, 0), z1 > γz2, z1 < 0,
(z2, z1) = (−1 − z3, 0), z1 < γz2, z1 > 0
En la figura 3.21 se muestra la situacion correspondiente cuando γ = 3 que,como antes, implica que las variables resonantes z2, z1 (es decir v e i) oscilan demanera permanente. El lector puede proceder del siguiente modo para obtenerla trayectoria cerrada mostrada en la figura 3.21. Proponga cualquier valor talque z3 < 1 y utilice cualquier punto sobre el plano z2 − z1 como valor inicial.Usando un compas dibuje cırculos con centro en los puntos arriba listadossegun la region en cuestion. Recuerde que, segun se explico previamente yde acuerdo a (3.137), estos cırculos deben ser recorridos en sentido horario.

166 3 Base matematica: ecuaciones diferenciales
Notara que se empezara a obtener una trayectoria con forma de espiral, comola lınea punteada mostrada en la figura 3.21, que finalmente terminara en unatrayectoria cerrada. El hecho de que dicha trayectoria cerrada sea alcanzada apartir de cualquier punto inicial sobre el plano z2 − z1 es una muestra de quetal trayectoria cerrada es estable (o atractiva). El lector puede proceder de lamisma manera usando un valor z3 > 1 para verificar que en este caso no seconsigue alcanzar ninguna trayectoria cerrada. Esto es un indicativo de queen un convertidor resonante serie no es posible obtener un voltaje de salida v0
que sea mayor que el voltaje de suministro E, es decir no es posible obtenerun valor de z3 mayor que la unidad (recuerdese que v0 = Ez3). Si se deseaun voltaje de salida tal que v0 > E se puede utilizar el convertidor resonanteparalelo mostrado en la figura 2.44(b).
Por otro lado, en la figura 3.21, los arcos de cırculo con centro en(z2, z1) = (1 − z3, 0) y (z2, z1) = (−1 − z3, 0) se dibujan de manera conse-cutiva. Entonces, si ambos estuvieran centrados en el origen (z2, z1) = (0, 0),juntos completarıan un angulo de 180 grados. Sin embargo, los centros de estosarcos de cırculo estan colocados en el cuadrante donde z2 tiene signo contrarioal cuadrante donde esta ubicado dicho arco de cırculo. Esta observacion juntocon el uso de geometrıa basica permite concluir que los arcos de cırculo concentro en (z2, z1) = (1 − z3, 0) y (z2, z1) = (−1 − z3, 0) describen juntos unangulo menor que 180 grados a pesar de que juntos completan un semiciclocompleto en ambas variables resonantes z2, z1. Por tanto, los cuatro arcos decırculo que componen a la trayectoria cerrada completa en la figura 3.21 des-criben juntos un angulo menor que 360 grados a pesar de que describen unciclo completo en ambas variables resonantes. Notese que la frecuencia con laque se recorren los arcos de cırculo mencionados sigue siendo ωn = 1 pero, deacuerdo a lo recien explicado, ahora se requiere menos tiempo para realizaruna oscilacion completa porque los cuatro arcos de cırculo describen un angu-lo menor a la misma velocidad angular. Por tanto, la frecuencia de operacionωo de las variables resonantes es mayor que ωn = 1, es decir ωo > ωn. Usando(3.132) se puede comprobar que:
ωnt =ωn√LC
=1√LC
, ωot =ωo√LC
> ωnt
donde ωnt y ωot representan, respectivamente, la frecuencia de resonancia delcircuito y la frecuencia de operacion del circuito, expresadas respecto a labase de tiempo real t. Por tanto, se concluye que el circuito debe operar afrecuencias mayores que la frecuencia de resonancia para entregar voltajes desalida menores que el voltaje de suministro v0 < E (es decir z3 < 1). Por estarazon, cuando los transistores se activan de acuerdo a la regla u = sign(s),el circuito en las figuras 2.44(a) y 2.45 se denomina convertidor electronicode potencia de CD a CD tipo resonante serie de alta frecuencia. Para mayorinformacion sobre convertidores de potencia de CD a CD tipo resonantesse recomienda consultar [8], donde se disenan, construyen, controlan y seprueban experimentalmente (ambos tipos: serie y paralelo), y [7], donde se

3.12 Resumen del capıtulo 167
abunda sobre el metodo aquı presentado para obtener la respuesta de unconvertidor resonante serie usando arcos de cırculo. Por otro lado, en [9] y [10]se introdujo por primera vez el uso del plano de fase (z2 − z1) para estudiarel funcionamiento de convertidores electronicos de potencia tipo resonantes.
3.12. Resumen del capıtulo
Los sistemas que interesa controlar en ingenierıa, ası como cada uno delos componentes de un sistema de control en lazo cerrado, estan descritospor ecuaciones diferenciales ordinarias, lineales, de coeficientes constantes.Ası que, para el ingeniero de control, el estudio de las ecuaciones diferencialesdebe estar dirigido hacia la comprension de las caracterısticas de una ecuaciondiferencial que determinan la forma grafica de la solucion.
La solucion de una ecuacion diferencial lineal y de coeficientes constantesesta dada como la suma de la respuesta natural y la respuesta forzada. Larespuesta natural depende exclusivamente del polinomio caracterıstico de laecuacion diferencial y siempre esta presente, aunque la excitacion o entradasea igual a cero. En cambio, la respuesta forzada depende de la entrada apli-cada y si esta es cero entonces la respuesta forzada tambien es cero. Cuando elpolinomio caracterıstico no tiene raıces con parte real igual a cero y la entra-da es un polinomio del tiempo, entonces la respuesta forzada tambien es unpolinomio del tiempo del mismo grado que la entrada. La importancia de estehecho es que, si la respuesta natural tiende a cero (si la ecuacion diferenciales estable), entonces la respuesta total convergera a la respuesta forzada. Portanto, la entrada de una ecuacion diferencial puede ser seleccionada de modotal que represente la manera en que se desea se comporte la solucion de laecuacion diferencial.
De este modo, el diseno de sistemas de control se reduce a lo siguiente:dado un sistema a controlar (ecuacion diferencial), seleccionar un controlador(otra ecuacion diferencial, en general) para que al ser conectado en realimen-tacion con el sistema a controlar se obtenga una nueva ecuacion diferencialque 1) sea estable, 2) la respuesta forzada sea igual a la entrada aplicada alsistema realimentado (o valor deseado a la salida) y 3) que la respuesta naturaldesaparezca suficientemente rapido y sin producir demasiadas oscilaciones.
Las caracterısticas listadas en el parrafo anterior se consiguen del siguientemodo:
1. Estabilidad. Esta propiedad esta determinada exclusivamente por lasraıces del polinomio caracterıstico de la ecuacion diferencial o, equiva-lentemente, de los polos de la funcion de transferencia que representa alsistema de control (vease la seccion 3.8).
2. Respuesta en estado estacionario. Este aspecto tiene que ver con el con-seguir que la respuesta forzada sea igual a la entrada aplicada al sistemarealimentado. En la seccion 3.8 se indica que, en el caso de que la entrada
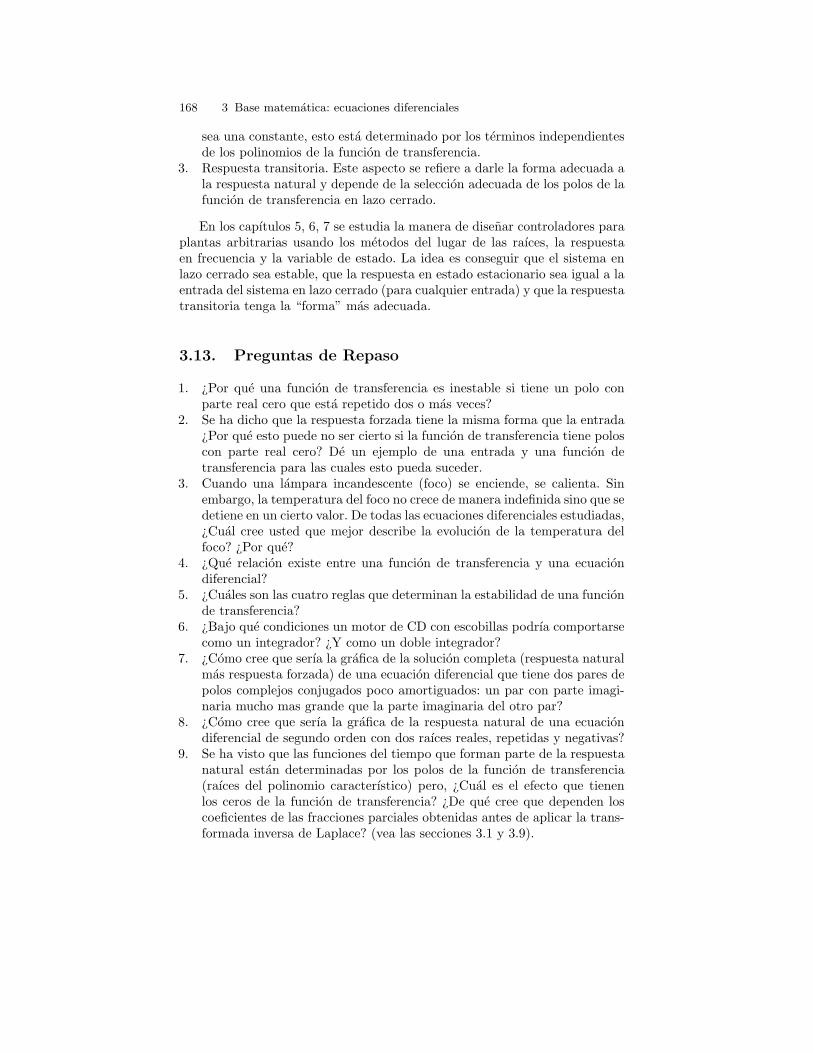
168 3 Base matematica: ecuaciones diferenciales
sea una constante, esto esta determinado por los terminos independientesde los polinomios de la funcion de transferencia.
3. Respuesta transitoria. Este aspecto se refiere a darle la forma adecuada ala respuesta natural y depende de la seleccion adecuada de los polos de lafuncion de transferencia en lazo cerrado.
En los capıtulos 5, 6, 7 se estudia la manera de disenar controladores paraplantas arbitrarias usando los metodos del lugar de las raıces, la respuestaen frecuencia y la variable de estado. La idea es conseguir que el sistema enlazo cerrado sea estable, que la respuesta en estado estacionario sea igual a laentrada del sistema en lazo cerrado (para cualquier entrada) y que la respuestatransitoria tenga la “forma” mas adecuada.
3.13. Preguntas de Repaso
1. ¿Por que una funcion de transferencia es inestable si tiene un polo conparte real cero que esta repetido dos o mas veces?
2. Se ha dicho que la respuesta forzada tiene la misma forma que la entrada¿Por que esto puede no ser cierto si la funcion de transferencia tiene poloscon parte real cero? De un ejemplo de una entrada y una funcion detransferencia para las cuales esto pueda suceder.
3. Cuando una lampara incandescente (foco) se enciende, se calienta. Sinembargo, la temperatura del foco no crece de manera indefinida sino que sedetiene en un cierto valor. De todas las ecuaciones diferenciales estudiadas,¿Cual cree usted que mejor describe la evolucion de la temperatura delfoco? ¿Por que?
4. ¿Que relacion existe entre una funcion de transferencia y una ecuaciondiferencial?
5. ¿Cuales son las cuatro reglas que determinan la estabilidad de una funcionde transferencia?
6. ¿Bajo que condiciones un motor de CD con escobillas podrıa comportarsecomo un integrador? ¿Y como un doble integrador?
7. ¿Como cree que serıa la grafica de la solucion completa (respuesta naturalmas respuesta forzada) de una ecuacion diferencial que tiene dos pares depolos complejos conjugados poco amortiguados: un par con parte imagi-naria mucho mas grande que la parte imaginaria del otro par?
8. ¿Como cree que serıa la grafica de la respuesta natural de una ecuaciondiferencial de segundo orden con dos raıces reales, repetidas y negativas?
9. Se ha visto que las funciones del tiempo que forman parte de la respuestanatural estan determinadas por los polos de la funcion de transferencia(raıces del polinomio caracterıstico) pero, ¿Cual es el efecto que tienenlos ceros de la funcion de transferencia? ¿De que cree que dependen loscoeficientes de las fracciones parciales obtenidas antes de aplicar la trans-formada inversa de Laplace? (vea las secciones 3.1 y 3.9).
3.14 Ejercicios propuestos 169
10. Dibuje el plano complejo s y sobre el ubique la zona donde deben colocarsei) los polos reales que corresponden a respuestas rapidas, ii) los poloscomplejos conjugados que corresponden a respuestas poco oscilatorias, iii)los polos complejos conjugados que corresponden a respuestas rapidas, iv)los polos complejos conjugados que corresponden a respuestas que oscilande manera permanente y v) los polos inestables.
3.14. Ejercicios propuestos
1. Considere el tanque con agua descrito en el ejemplo 3.2. La grafica mos-trada en la figura 3.22 se obtiene cuando se aplica un flujo qi constante yel tanque tiene una seccion de 0.5[m2]. Encuentre los valores de R y qi.
t s[ ]
hm[ ]
Figura 3.22. Nivel en un tanque cuando se aplica un flujo de entrada constante.
2. Considere el control proporcional de nivel presentado en el ejemplo 3.17(cuando se usa u = kp(hd−h), es decir, la expresion en (3.94)). Utilice lasexpresiones obtenidas en este caso para el nivel de agua para determinarlo que sucede con la diferencia hd − h(t), cuando t → ∞, conforme seutilizan valores cada vez mayores de kp > 0. Use su experiencia cotidianapara explicar por que sucede esto.
3. Considere el control proporcional-integral de nivel presentado en el ejem-plo 3.17 (cuando se usa la expresion en (3.97)). Demuestre que existiran

170 3 Base matematica: ecuaciones diferenciales
oscilaciones en el nivel de agua si se utiliza un valor suficientemente grandede ki > 0. ¿Como puede explicar este fenomeno de acuerdo a su experien-cia cotidiana?
4. Dada la siguiente ecuacion diferencial:
y + 127y + 570y = 3990u, y(0) = 0, y(0) = 0, u = 1
encuentre los valores de ζ, ωn y el parametro k introducido en la ecuacion(3.40). Usando estos datos diga como esta expresada y(t).
5. Considere el sistema masa-resorte-amortiguador descrito en el ejemplo3.6. La grafica mostrada en la figura 3.23 se obtiene cuando se aplica unafuerza f=0.5[Nm] constante. Encuentre los valores de b, K y m.
xm[ ]
t s[ ]
Figura 3.23. Posicion de la masa en un sistema masa-resorte-amortiguador cuandose aplica una fuerza de entrada constante. La lınea punteada representa el valor finalde la posicion de la masa.
6. Considere las siguientes funciones de transferencia:
Y1(s) = G1(s)U(s), Y2(s) = G2(s)U(s)
G1(s) =ab
(s + a)(s + b), G2(s) =
b
s + b, a > 0, b > 0
donde U(s) = A/s, con A una constante. Realice simulaciones en las queuse valores de a que aumentan desde valores pequenos hasta valores muy

3.14 Ejercicios propuestos 171
grandes (respecto a b) y compare graficamente a y1(t) e y2(t). Explique loque observa.
7. De acuerdo a la seccion 3.1, se sabe que para cualquier condicion inicialla siguiente ecuacion diferencial y + 7y = 2 tiene una solucion de la formay(t) = Ee−7t + D donde E y D son algunas constantes que no interesacalcular en este ejercicio. Encuentre del mismo modo la solucion para cadauna de las siguientes ecuaciones diferenciales.
y + 4y + y = 2
−y + y + 10y = 3t
y + 7y = 2 sin(t)
y + 3y + 2y = 2e−t
y + 2y + 2y = 2 cos(2t) − 4 sin(2t)
y − 4y = 8t2 − 4
y(4) + 11y(3) + 28y = 10
8. Para las siguientes ecuaciones diferenciales diga cuanto vale lımt→∞ y(t).Notese que el mismo resultado se obtiene sin importar el valor de lascondiciones iniciales.
y(3) + y − 2y + y = 8
y + y − 10y = cos(5t)
y + ay + by = kA, a > 0, b > 0, a, b, A, k son constantes
9. Diga cual de las soluciones de las siguientes ecuaciones diferenciales pre-senta menor sobre paso y cual tiene un tiempo de subida mas corto.
3y + 3y + y6 = 2A
y + 4y + 10y = 9A
A es una constante.10. Considere la solucion de una ecuacion diferencial de segundo orden ante
una entrada constante o tipo escalon, considerando condiciones inicialescero, presentada en (3.44). Obtenga los maximos de dicha respuesta yresolviendo para el primero de dichos maximos demuestre que el sobrepaso se puede calcular como:
Mp(%) = 100 × e− ζ√
1−ζ2π
Encuentre los instantes de tiempo en los cuales la respuesta natural escero y resolviendo para el primero de esos instantes demuestre que:
tr =1
ωd
[π − arctan
(√1 − ζ2
ζ
)]
172 3 Base matematica: ecuaciones diferenciales
11. Considere las siguientes expresiones:
Y (s) =as + b
s2 + cU(s), Z(s) =
d
s2 + cU(s)
donde U(s) = A/s con A, a, b, c, d constantes positivas. Exprese y(t) enfuncion de z(t).
12. Considere la siguiente funcion de transferencia:
G(s) =c
s2 + bs + c
¿Que debe hacer con b y/o c para que el sistema responda mas rapido?,¿Que debe hacer con b y/o c para que el sistema responda con menososcilaciones?
13. Considere la solucion y(t) de una ecuacion diferencial lineal de coeficientesconstantes de orden n arbitrario.
Si la excitacion o entrada es acotada, ¿Cuales son las condiciones paraque y(t) sea acotada para todo tiempo? Es decir, para que y(t) no sehaga infinita.¿Cuales son las condiciones para que, cuando el tiempo tiende a infi-nito, la unica parte de y(t) que permanezca sea la llamada respuestaforzada?Suponga que la excitacion o entrada es cero. Diga cuales son las dife-rentes posibilidades para el comportamiento de y(t) cuando el tiempocrece y bajo que condiciones se presenta cada una de ellas.Suponga que la excitacion o entrada es un polinomio del tiempo. De-muestre que la solucion no puede tener un polinomio del tiempo degrado mayor que el contenido en la excitacion o entrada si todas lasraıces del polinomio caracterıstico de la ecuacion diferencial tienenparte real negativa.Suponga que la entrada o excitacion esta dada como la suma de muchasfunciones seno y coseno del tiempo, de diferentes frecuencias. Recor-dando como es la respuesta ante una excitacion tipo seno o cosenodel tiempo y el principio de superposicion ¿Puede explicar el resultadofundamental de la respuesta de las ecuaciones diferenciales lineales quedice ([6], pag. 389) “si la excitacion es una funcion periodica cualquierade periodo T y si todas las raıces del polinomio caracterıstico tienenparte real negativa, entonces cuando t → ∞ la solucion y(t) tambienes una funcion periodica de periodo T aunque con una forma de ondaposiblemente diferente a la de la excitacion”? (recuerde el concepto deseries de Fourier).
14. Verifique las siguientes igualdades:
i)5
s2 + s − 2=
−5/3
s + 2+
5/3
s − 1
ii)2
s(s + 2)(s − 1)=
1/3
s + 2+
2/3
s − 1+
−1
s

3.14 Ejercicios propuestos 173
iii)1
s3 − s2 − s + 1=
1/2
(s − 1)2+
−1/4
s − 1+
1/4
s + 1
iv)1
s4 − s3 − s2 + s=
1
s+
1/2
(s − 1)2+
−3/4
s − 1+
−1/4
s + 1
v)2
s3 + 2s=
1
s+
−s
s2 + 2
vi)3
s4 − 3s3=
−1
s3+
−1/3
s2+
−1/9
s+
1/9
s − 3
vii)8
s(s + 4)(s − 4)=
−1/2
s+
1/4
s + 4+
1/4
s − 4
viii)8
s2 − 16=
1
s − 4+
−1
s + 4
ix)4
s4 + s3 + 2s2=
2
s2+
−1
s+
s − 1
s2 + s + 2
x)4
s5 + 3s4 + 4s3 + 4s2 + 3s=
2
(s + 1)3+
2
(s + 1)2+
1
s + 1+
−s − 1
s2 + 1
xi)3s2 + 3s − 2
s3 + 2s2=
−1
s2+
2
s+
1
s + 2
xii)s + 2
s2(s + 1)2=
2
s2+
−3
s+
1
(s + 1)2+
3
s + 1
15. Un horno de induccion consiste basicamente de un inductor (L) dentrodel cual se coloca un recipiente de material refractario que contiene unacantidad de metal (conductor de la electricidad) a fundir. En serie alinductor se conecta un capacitor (C) para corregir el factor de potencia. Alcircuito se le aplica un voltaje alterno de alta frecuencia (audiofrecuencia)con lo cual se inducen corrientes de remolino (o de eddy) en el metalcontenido dentro del recipiente refractario, por lo que se produce calor yel metal se funde.El dispositivo constituye un circuito RLC en serie donde la resistencia (R)es el equivalente de la resistencia electrica del metal a fundir. El voltajealterno de alta frecuencia que se aplica al circuito esta dado como unaonda cuadrada de valor u = E sign(i) donde i es la corriente electrica atraves del circuito, E es una constante positiva y sign(i) = +1 si i ≥ 0 osign(i) = −1 si i < 0.
Considere que el valor inicial de la corriente electrica en el circuito escero. Demuestre que si el coeficiente de amortiguamiento del circuitoes menor que la unidad (0 < ζ < 1) la corriente en el inductor es cero
de manera periodica cada π/ωd segundos, donde ωd = ωn
√1 − ζ2,
ωn = 1√LC
y ζ = R2Lωn
.
De acuerdo a u = E sign(i), el voltaje aplicado, u, cambia de valorcada que i = 0. Considerando esto y un valor inicial vc(0) para elvoltaje en el capacitor, encuentre una expresion para el voltaje en elcapacitor que sea valida en el proximo instante en el que i = 0.
174 3 Base matematica: ecuaciones diferenciales
Proponga los valores numericos que desee para R, L y C (tales que0 < ζ < 1). Sabiendo que el voltaje en el capacitor y la corriente en elinductor no son discontinuos cuando el valor de u cambia (¿Por que?),use de manera iterativa (utilizando un programa de computadora) laformula obtenida en el inciso anterior para calcular de manera numeri-ca el voltaje en el capacitor despues de varios cambios en el valor deu. Verifique que al crecer el tiempo el voltaje en el capacitor convergea un valor constante cada que i = 0.Simule el comportamiento del circuito RLC en serie cuando u =E sign(i), para comprobar los resultados del inciso anterior.
16. De acuerdo al ejemplo 3.19, cuando la inductancia de armadura se consi-dera despreciable, el modelo de un motor de CD esta dado como:
ω(s) =km
JR
s +(
BJ + kmke
JRa
)V (s)
donde ω(s) y V (s) son las transformadas de Laplace de la velocidad delmotor y del voltaje aplicado en las terminales de armadura.
Suponga que el voltaje aplicado es cero y que la velocidad inicial esdiferente de cero. Notese que aplicar un voltaje igual a cero en las ter-minales del motor equivale a poner en corto las terminales de armaduray el voltaje inducido es diferente de cero si la velocidad es diferente decero. Dibuje la respuesta natural bajo estas condiciones. ¿Como puedehacer que la respuesta natural desaparezca mas rapido? ¿Que pasa conla corriente electrica? ¿Puede explicar por que la respuesta natural dis-minuye mas rapidamente si la resistencia de armadura tiende a cero?¿Conoce lo que significa el termino “frenado dinamico”? ¿Por que laconstante de tiempo depende directamente de la inercia?¿Que signifi-ca esto desde el punto de vista de las Leyes de la Mecanica (Leyes deNewton)? ¿Por que la constante de tiempo depende inversamente dela constante de fuerza contraelectromotriz?Suponga que se aplica un voltaje diferente de cero a partir de una ve-locidad inicial igual a cero. Dibuje la respuesta total del sistema. ¿Porque la velocidad final no depende de la inercia J? De una interpretaciondesde el punto de vista de la fısica.

Referencias
1. K. Ogata, Ingenierıa de Control Moderna, 4a. edicion, Pearson Prentice-Hall,Madrid, 2003.
2. E. Kreyszig, Matematicas avanzadas para ingenierıa, Vol. 1, Limusa, Mexico,1980.
3. C. Ray Wylie, Matematicas superiores para ingenierıa, McGraw-Hill, 4a. Edi-cion, Mexico, 1994.
4. M. R. Spiegel, Manual de formulas y tablas matematicas., McGraw-Hill, SerieSchaum, Mexico, 2002.
5. I. Benitez Serrano, Analisis de redes electricas: Circuitos 1, Instituto PolitecnicoNacional, ESIME, Mexico, D.F., 1983.
6. C.-T. Chen, Linear system theory and design, Holt, Rinehart and Winston, NewYork, 1984.
7. V. Hernandez Guzman, A new stability analysis method for DC to DC seriesresonant converters, Computacion y Sistemas, vol. 11, no. 1, pp. 14-25, 2007.
8. R. Silva Ortigoza, Control de convertidores resonantes mediante planitud dife-rencial: diseno y construccion, Tesis Maestrıa en Ciencias, CINVESTAV-IPN(Zacatenco), Febrero (2002).
9. R. Oruganti y F.C. Lee, Resonant power processors, Part I-State plane analysis,IEEE Trans. Industry Applications, vol. AI-21, no. 6, pp. 1453-1460, 1985.
10. R. Oruganti y F.C. Lee, Resonant power processors, Part II-Methods of control,IEEE Trans. Industry Applications, vol. AI-21, no. 6, pp. 1461-1471, 1985.
11. W. H. Hayt y J. E. Kemmerly, Analisis de circuitos en ingenierıa, McGraw-Hill,Mexico, D.F., 1985.
12. V. Valkenburg, Analisis de redes, Limusa, Mexico, D.F., 1994.13. J. Stewart, Calculo. Diferencial e integral, International Thomson Editores,
Mexico, D.F., 2003.
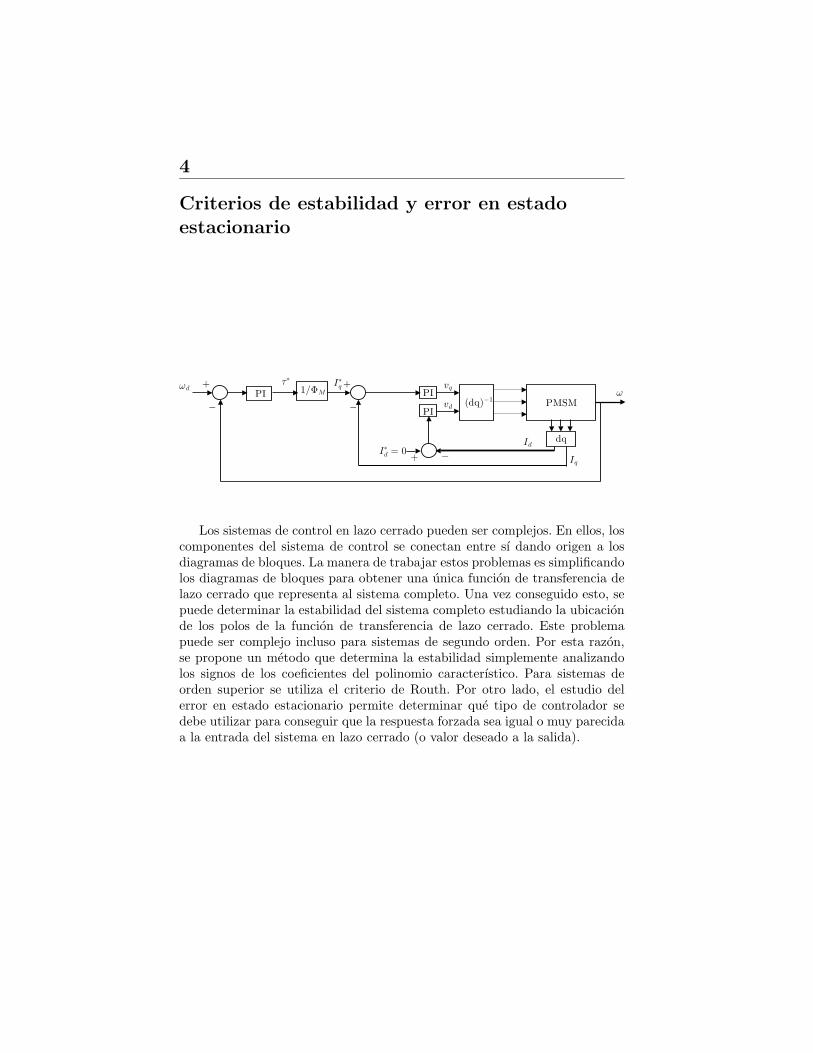
4
Criterios de estabilidad y error en estadoestacionario
++
àà
Iãd = 0+ à
PI
PIIãq1=ÐMPI
vd
vqüã!d
Iq
Id
!(dq)à1
dq
PMSM
Los sistemas de control en lazo cerrado pueden ser complejos. En ellos, loscomponentes del sistema de control se conectan entre sı dando origen a losdiagramas de bloques. La manera de trabajar estos problemas es simplificandolos diagramas de bloques para obtener una unica funcion de transferencia delazo cerrado que representa al sistema completo. Una vez conseguido esto, sepuede determinar la estabilidad del sistema completo estudiando la ubicacionde los polos de la funcion de transferencia de lazo cerrado. Este problemapuede ser complejo incluso para sistemas de segundo orden. Por esta razon,se propone un metodo que determina la estabilidad simplemente analizandolos signos de los coeficientes del polinomio caracterıstico. Para sistemas deorden superior se utiliza el criterio de Routh. Por otro lado, el estudio delerror en estado estacionario permite determinar que tipo de controlador sedebe utilizar para conseguir que la respuesta forzada sea igual o muy parecidaa la entrada del sistema en lazo cerrado (o valor deseado a la salida).
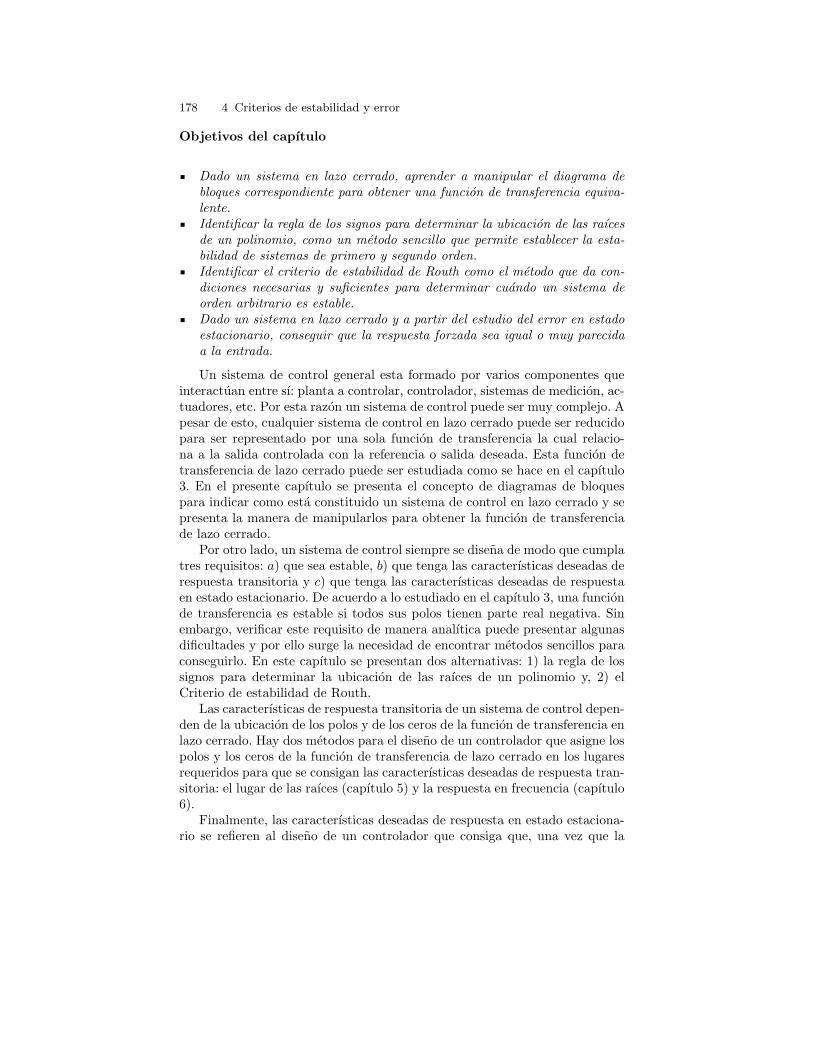
178 4 Criterios de estabilidad y error
Objetivos del capıtulo
Dado un sistema en lazo cerrado, aprender a manipular el diagrama debloques correspondiente para obtener una funcion de transferencia equiva-lente.Identificar la regla de los signos para determinar la ubicacion de las raıcesde un polinomio, como un metodo sencillo que permite establecer la esta-bilidad de sistemas de primero y segundo orden.Identificar el criterio de estabilidad de Routh como el metodo que da con-diciones necesarias y suficientes para determinar cuando un sistema deorden arbitrario es estable.Dado un sistema en lazo cerrado y a partir del estudio del error en estadoestacionario, conseguir que la respuesta forzada sea igual o muy parecidaa la entrada.
Un sistema de control general esta formado por varios componentes queinteractuan entre sı: planta a controlar, controlador, sistemas de medicion, ac-tuadores, etc. Por esta razon un sistema de control puede ser muy complejo. Apesar de esto, cualquier sistema de control en lazo cerrado puede ser reducidopara ser representado por una sola funcion de transferencia la cual relacio-na a la salida controlada con la referencia o salida deseada. Esta funcion detransferencia de lazo cerrado puede ser estudiada como se hace en el capıtulo3. En el presente capıtulo se presenta el concepto de diagramas de bloquespara indicar como esta constituido un sistema de control en lazo cerrado y sepresenta la manera de manipularlos para obtener la funcion de transferenciade lazo cerrado.
Por otro lado, un sistema de control siempre se disena de modo que cumplatres requisitos: a) que sea estable, b) que tenga las caracterısticas deseadas derespuesta transitoria y c) que tenga las caracterısticas deseadas de respuestaen estado estacionario. De acuerdo a lo estudiado en el capıtulo 3, una funcionde transferencia es estable si todos sus polos tienen parte real negativa. Sinembargo, verificar este requisito de manera analıtica puede presentar algunasdificultades y por ello surge la necesidad de encontrar metodos sencillos paraconseguirlo. En este capıtulo se presentan dos alternativas: 1) la regla de lossignos para determinar la ubicacion de las raıces de un polinomio y, 2) elCriterio de estabilidad de Routh.
Las caracterısticas de respuesta transitoria de un sistema de control depen-den de la ubicacion de los polos y de los ceros de la funcion de transferencia enlazo cerrado. Hay dos metodos para el diseno de un controlador que asigne lospolos y los ceros de la funcion de transferencia de lazo cerrado en los lugaresrequeridos para que se consigan las caracterısticas deseadas de respuesta tran-sitoria: el lugar de las raıces (capıtulo 5) y la respuesta en frecuencia (capıtulo6).
Finalmente, las caracterısticas deseadas de respuesta en estado estaciona-rio se refieren al diseno de un controlador que consiga que, una vez que la

4.1 Diagramas de bloques 179
respuesta natural es cero1, la respuesta del sistema en lazo cerrado alcance lareferencia o salida deseada de manera exacta o, al menos, dentro de ciertosmargenes de tolerancia. Esto se consigue si la respuesta forzada del sistemaen lazo cerrado es igual o muy cercana a la referencia o salida deseada. Estetema tambien es estudiado en el presente capıtulo.
4.1. Diagramas de bloques
A continuacion se muestra, a base de ejemplos, como se puede manipularun diagrama de bloques formado por la interconexion de varias funciones detransferencia para ser simplificado y ser representado por una sola funcion detransferencia. Tambien se muestra como se pueden simplificar los diagramasde bloques correspondientes a sistemas que tienen dos (o mas) entradas.
Ejemplo 4.1 Suponga que se tienen dos sistemas tales que la entrada de unoes la salida del otro (conectados en cascada), como se muestra en la figura4.1. Entonces se puede escribir:
Y1(s) = G1(s)U1(s), Y2(s) = G2(s)U2(s), U1(s) = Y2(s)
para obtener:
Y1(s) = G1(s)G2(s)U2(s), G(s) = G1(s)G2(s)
Y1(s) = G(s)U2(s)
)U2(s)G1(s)G2(s)
Y1(s) U2(s) Y1(s)G(s)
Figura 4.1. Sistemas conectados en cascada.
Esto significa que los sistemas conectados en cascada, como en la figura4.1, pueden ser representados por una sola funcion de transferencia G(s) quese calcula como el producto de las funciones de transferencia de los sistemasen cascada. El lector puede verificar que esto es cierto sin importar el numerode sistemas conectados en cascada.
Ejemplo 4.2 Suponga que se tienen dos sistemas conectados en paralelo co-mo se muestra en la figura 4.2. Entonces se puede escribir:
Y1(s) = G1(s)U(s), Y2(s) = G2(s)U(s)
1 Cuando el tiempo es suficientemente grande, o en estado estacionario
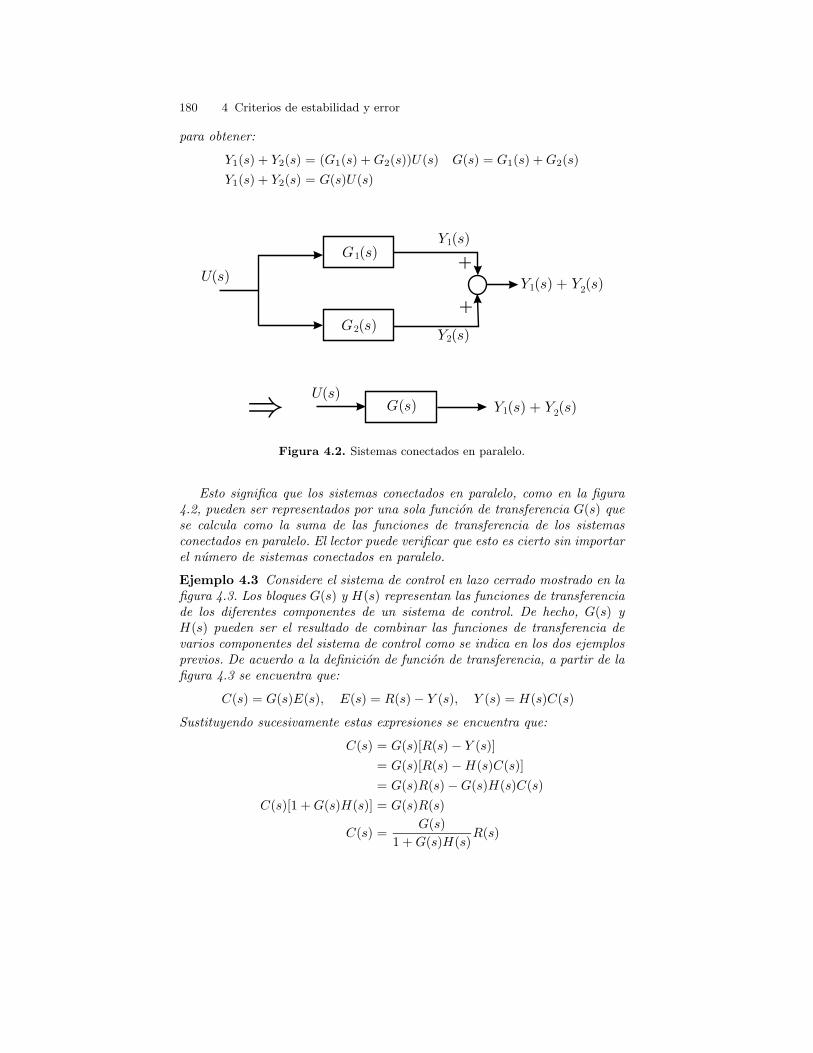
180 4 Criterios de estabilidad y error
para obtener:
Y1(s) + Y2(s) = (G1(s) + G2(s))U(s) G(s) = G1(s) + G2(s)
Y1(s) + Y2(s) = G(s)U(s)
+
+
)
U(s)
Y1(s)
Y2(s)
Y1(s) + Y2(s)
Y1(s) + Y2(s)U(s)
G1(s)
G2(s)
G(s)
Figura 4.2. Sistemas conectados en paralelo.
Esto significa que los sistemas conectados en paralelo, como en la figura4.2, pueden ser representados por una sola funcion de transferencia G(s) quese calcula como la suma de las funciones de transferencia de los sistemasconectados en paralelo. El lector puede verificar que esto es cierto sin importarel numero de sistemas conectados en paralelo.
Ejemplo 4.3 Considere el sistema de control en lazo cerrado mostrado en lafigura 4.3. Los bloques G(s) y H(s) representan las funciones de transferenciade los diferentes componentes de un sistema de control. De hecho, G(s) yH(s) pueden ser el resultado de combinar las funciones de transferencia devarios componentes del sistema de control como se indica en los dos ejemplosprevios. De acuerdo a la definicion de funcion de transferencia, a partir de lafigura 4.3 se encuentra que:
C(s) = G(s)E(s), E(s) = R(s) − Y (s), Y (s) = H(s)C(s)
Sustituyendo sucesivamente estas expresiones se encuentra que:
C(s) = G(s)[R(s) − Y (s)]
= G(s)[R(s) − H(s)C(s)]
= G(s)R(s) − G(s)H(s)C(s)
C(s)[1 + G(s)H(s)] = G(s)R(s)
C(s) =G(s)
1 + G(s)H(s)R(s)
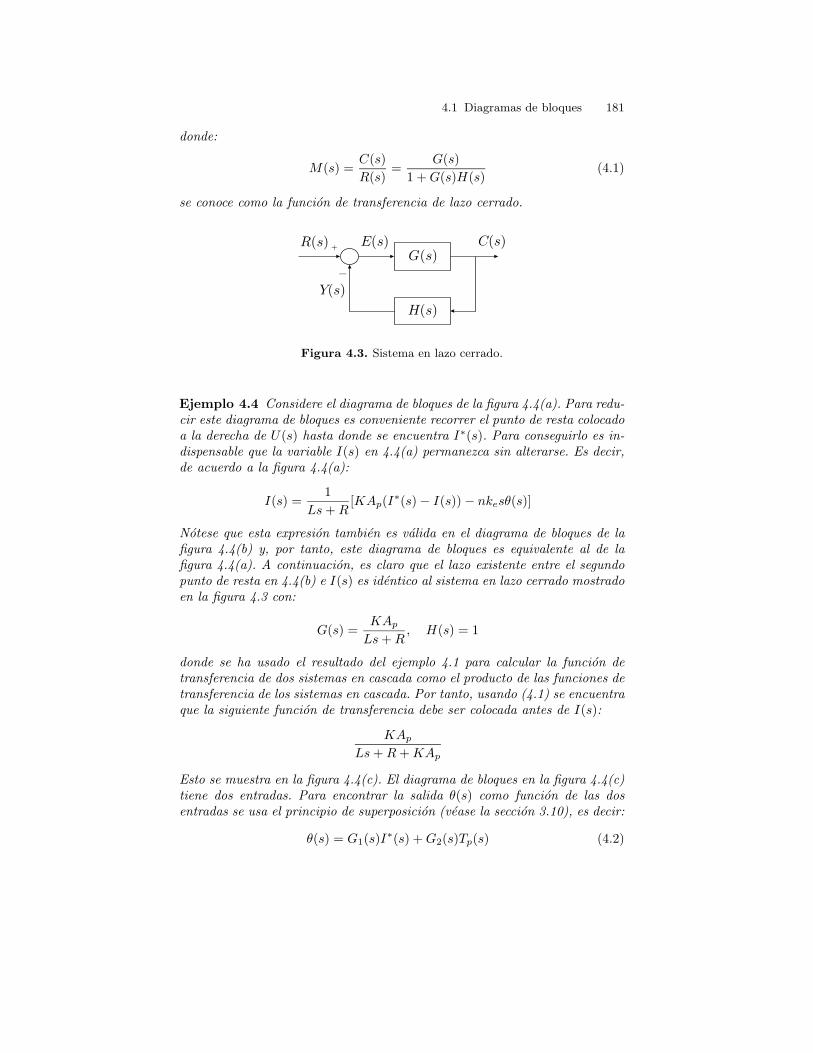
4.1 Diagramas de bloques 181
donde:
M(s) =C(s)
R(s)=
G(s)
1 + G(s)H(s)(4.1)
se conoce como la funcion de transferencia de lazo cerrado.
+
à
R(s) E(s) C(s)
Y(s)
G(s)
H(s)
Figura 4.3. Sistema en lazo cerrado.
Ejemplo 4.4 Considere el diagrama de bloques de la figura 4.4(a). Para redu-cir este diagrama de bloques es conveniente recorrer el punto de resta colocadoa la derecha de U(s) hasta donde se encuentra I∗(s). Para conseguirlo es in-dispensable que la variable I(s) en 4.4(a) permanezca sin alterarse. Es decir,de acuerdo a la figura 4.4(a):
I(s) =1
Ls + R[KAp(I
∗(s) − I(s)) − nkesθ(s)]
Notese que esta expresion tambien es valida en el diagrama de bloques de lafigura 4.4(b) y, por tanto, este diagrama de bloques es equivalente al de lafigura 4.4(a). A continuacion, es claro que el lazo existente entre el segundopunto de resta en 4.4(b) e I(s) es identico al sistema en lazo cerrado mostradoen la figura 4.3 con:
G(s) =KAp
Ls + R, H(s) = 1
donde se ha usado el resultado del ejemplo 4.1 para calcular la funcion detransferencia de dos sistemas en cascada como el producto de las funciones detransferencia de los sistemas en cascada. Por tanto, usando (4.1) se encuentraque la siguiente funcion de transferencia debe ser colocada antes de I(s):
KAp
Ls + R + KAp
Esto se muestra en la figura 4.4(c). El diagrama de bloques en la figura 4.4(c)tiene dos entradas. Para encontrar la salida θ(s) como funcion de las dosentradas se usa el principio de superposicion (vease la seccion 3.10), es decir:
θ(s) = G1(s)I∗(s) + G2(s)Tp(s) (4.2)
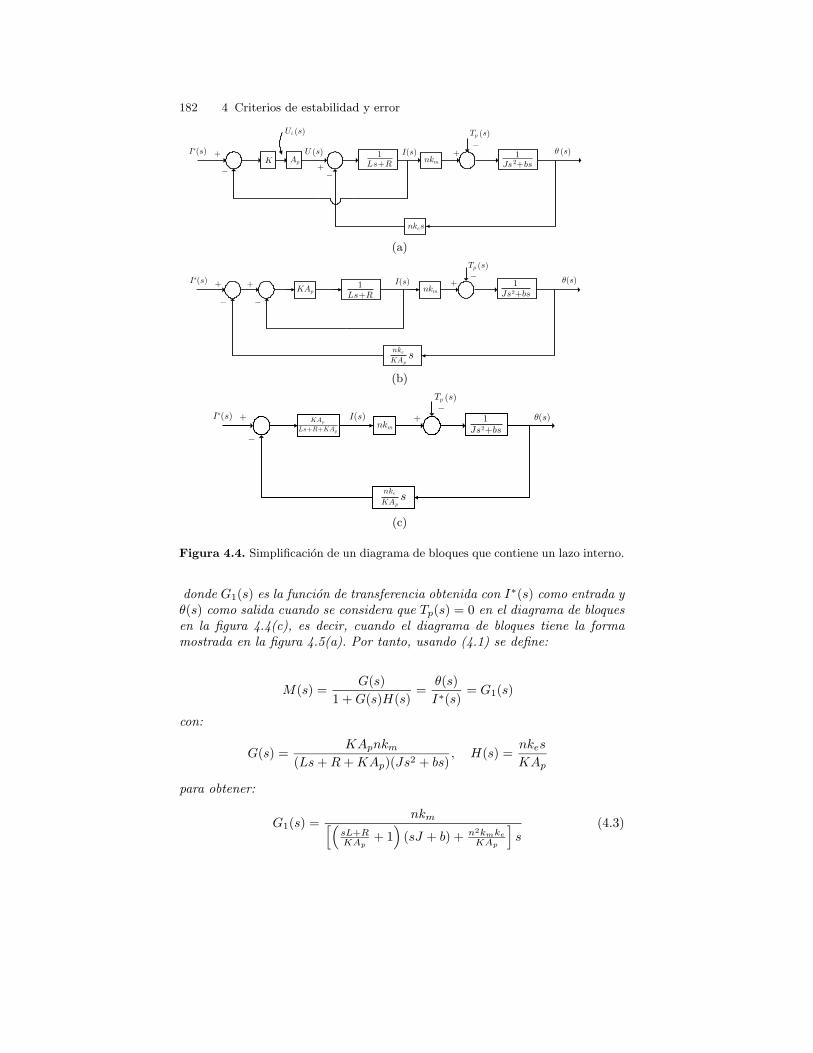
182 4 Criterios de estabilidad y error
+
+à à
Iã(s) I(s) +àTp s( )
ò s( )nkmAp
U s( )
nkes
Ui s( )
K Ls+R1
Js 2+bs1
(a)
Js2+bs1
Ls+R1
Iã(s) +
à à
+ I(s) +à ò(s)
Tp s( )
nkmKAp
KAp
nke s
(b)
Js2+bs1Iã(s) +
à
+à
ò(s)I(s)
Tp s( )
nkm
KAp
nke s
Ls+R+KAp
KAp
(c)
Figura 4.4. Simplificacion de un diagrama de bloques que contiene un lazo interno.
donde G1(s) es la funcion de transferencia obtenida con I∗(s) como entrada yθ(s) como salida cuando se considera que Tp(s) = 0 en el diagrama de bloquesen la figura 4.4(c), es decir, cuando el diagrama de bloques tiene la formamostrada en la figura 4.5(a). Por tanto, usando (4.1) se define:
M(s) =G(s)
1 + G(s)H(s)=
θ(s)
I∗(s)= G1(s)
con:
G(s) =KApnkm
(Ls + R + KAp)(Js2 + bs), H(s) =
nkes
KAp
para obtener:
G1(s) =nkm[(
sL+RKAp
+ 1)
(sJ + b) + n2kmke
KAp
]s
(4.3)
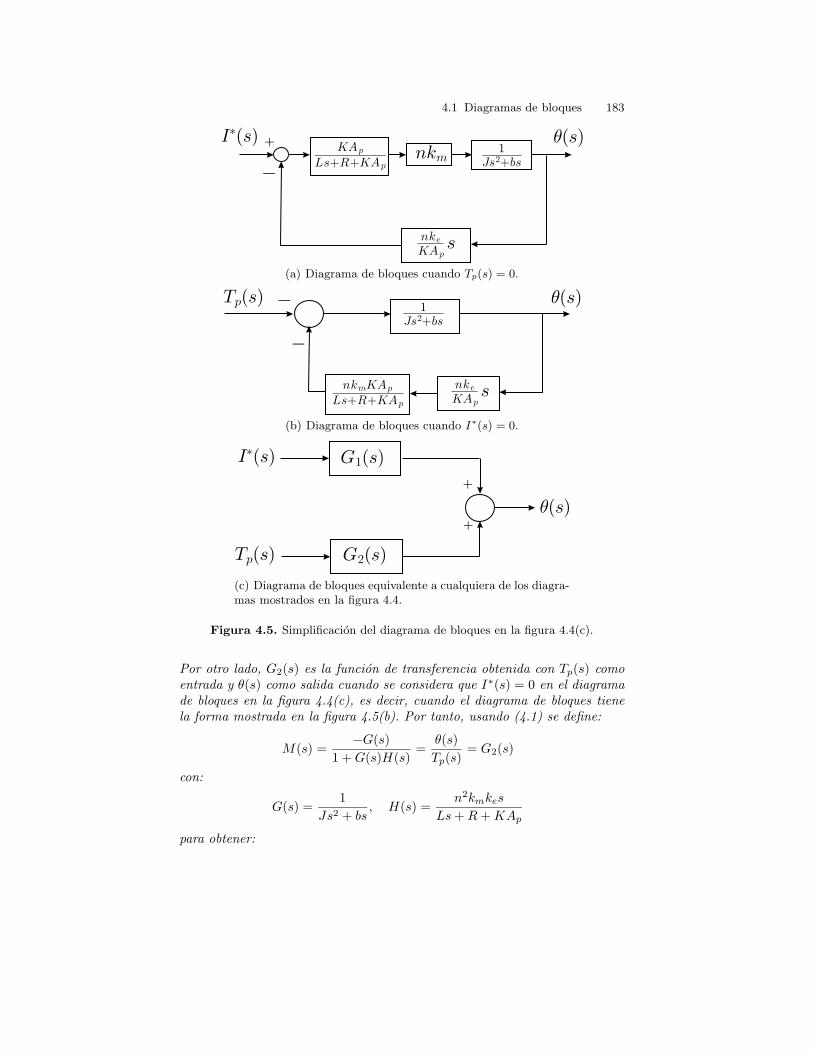
4.1 Diagramas de bloques 183
+
à Ls+R+KAp
KAp
Js2+bs1
KAp
nke s
nkmò(s)Iã(s)
(a) Diagrama de bloques cuando Tp(s) = 0.
à
àJs2+bs
1
Ls+R+KAp
nkmKAp
KAp
nke s
Tp(s) ò(s)
(b) Diagrama de bloques cuando I∗(s) = 0.
+
+
G1(s)
G2(s)
Iã(s)
Tp(s)
ò(s)
(c) Diagrama de bloques equivalente a cualquiera de los diagra-mas mostrados en la figura 4.4.
Figura 4.5. Simplificacion del diagrama de bloques en la figura 4.4(c).
Por otro lado, G2(s) es la funcion de transferencia obtenida con Tp(s) comoentrada y θ(s) como salida cuando se considera que I∗(s) = 0 en el diagramade bloques en la figura 4.4(c), es decir, cuando el diagrama de bloques tienela forma mostrada en la figura 4.5(b). Por tanto, usando (4.1) se define:
M(s) =−G(s)
1 + G(s)H(s)=
θ(s)
Tp(s)= G2(s)
con:
G(s) =1
Js2 + bs, H(s) =
n2kmkes
Ls + R + KAp
para obtener:

184 4 Criterios de estabilidad y error
G2(s) =−
(sL+RKAp
+ 1)
[(sL+RKAp
+ 1)
(sJ + b) + n2kmke
KAp
]s
(4.4)
Por tanto, cualquiera de los diagramas de bloques de las figuras 4.4(a), 4.4(b)o 4.4(c) se puede representar como el diagrama de bloques de la figura 4.5(c)con G1(s) y G2(s) dadas en (4.3) y (4.4).
Ejemplo 4.5 Considere el sistema en lazo cerrado mostrado en la figura4.6(a). Este ejemplo representa un esquema de control conocido como contro-lador con dos grados de libertad. Este es un sistema con dos entradas y unasalida. Por tanto, se puede proceder como en el ejemplo previo para, usandoel principio de superposicion, escribir:
C(s) = G1(s)R(s) + G2(s)D(s)
donde G1(s) es la funcion de transferencia obtenida usando R(s) como entraday C(s) como salida cuando D(s) = 0, es decir, cuando se usa el diagrama debloques de la figura 4.6(b). Por otro lado, G2(s) es la funcion de transferenciaobtenida usando D(s) como entrada y C(s) como salida cuando R(s) = 0, esdecir, cuando se usa el diagrama de bloques de la figura 4.6(c).
Primero se procede a obtener G1(s). Para simplificar el diagrama de blo-ques de la figura 4.6(b) notese que:
V (s) = Gc1(s)(R(s) − C(s)) − Gc2(s)C(s)
= Gc1(s)(R(s) − C(s)) + Gc2(s)(R(s) − C(s)) − Gc2(s)R(s)
= (Gc1(s) + Gc2(s))(R(s) − C(s)) − Gc2(s)R(s)
Por lo que se obtienen, sucesivamente, los diagramas de bloques de las figu-ras 4.7(a), 4.7(b) y 4.7(c). Notese que, de acuerdo al ejemplo 4.2, se puedeescribir:
F (s) =
[1 − Gc2(s)
Gc1(s) + Gc2(s)
]R(s)
=Gc1(s) + Gc2(s) − Gc2(s)
Gc1(s) + Gc2(s)R(s)
=Gc1(s)
Gc1(s) + Gc2(s)R(s) (4.5)
Por otro lado, se puede hacer uso de (4.1) junto con:
G(s) = (Gc1(s) + Gc2(s))Gp(s), H(s) = 1
para obtener:
C(s) =(Gc1(s) + Gc2(s))Gp(s)
1 + (Gc1(s) + Gc2(s))Gp(s)F (s) (4.6)
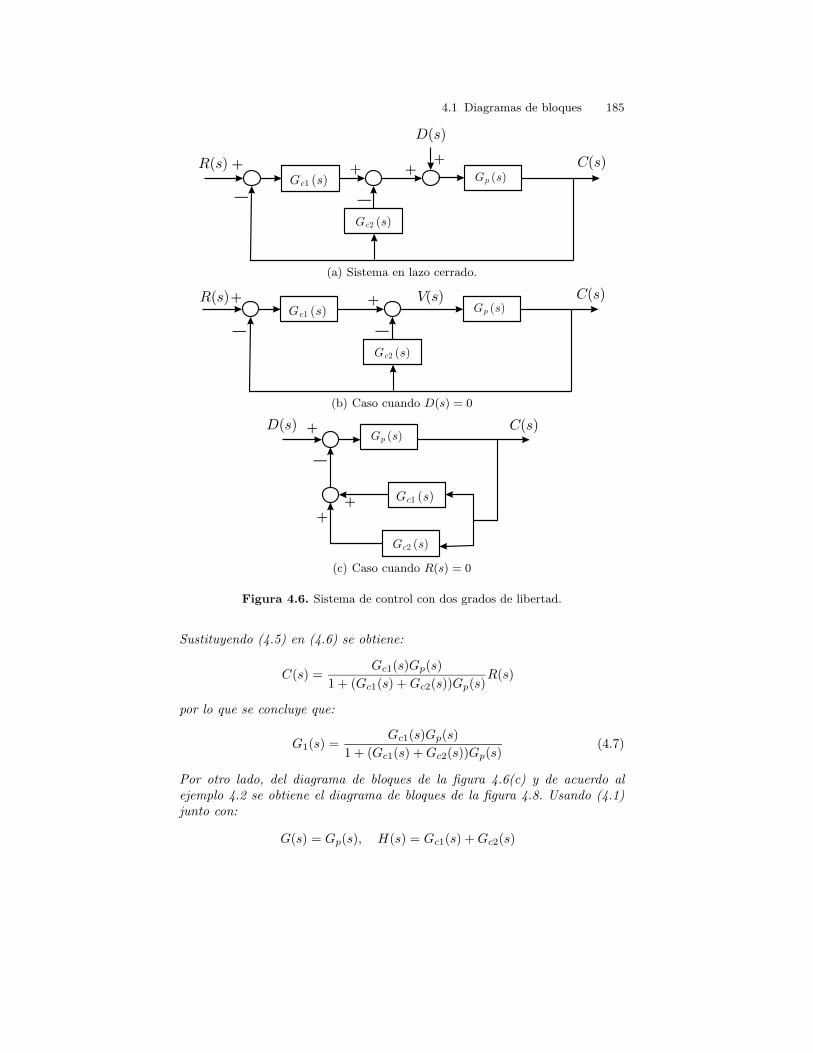
4.1 Diagramas de bloques 185
+
àGp s( )
Gc2 s( )
Gc1 s( )+ +
à+ C(s)R(s)
D(s)
(a) Sistema en lazo cerrado.
+
àGp s( )
Gc2 s( )
Gc1 s( )+
àC(s)R(s) V(s)
(b) Caso cuando D(s) = 0
+
àGp s( )
Gc2 s( )
Gc1 s( )++
C(s)D(s)
(c) Caso cuando R(s) = 0
Figura 4.6. Sistema de control con dos grados de libertad.
Sustituyendo (4.5) en (4.6) se obtiene:
C(s) =Gc1(s)Gp(s)
1 + (Gc1(s) + Gc2(s))Gp(s)R(s)
por lo que se concluye que:
G1(s) =Gc1(s)Gp(s)
1 + (Gc1(s) + Gc2(s))Gp(s)(4.7)
Por otro lado, del diagrama de bloques de la figura 4.6(c) y de acuerdo alejemplo 4.2 se obtiene el diagrama de bloques de la figura 4.8. Usando (4.1)junto con:
G(s) = Gp(s), H(s) = Gc1(s) + Gc2(s)
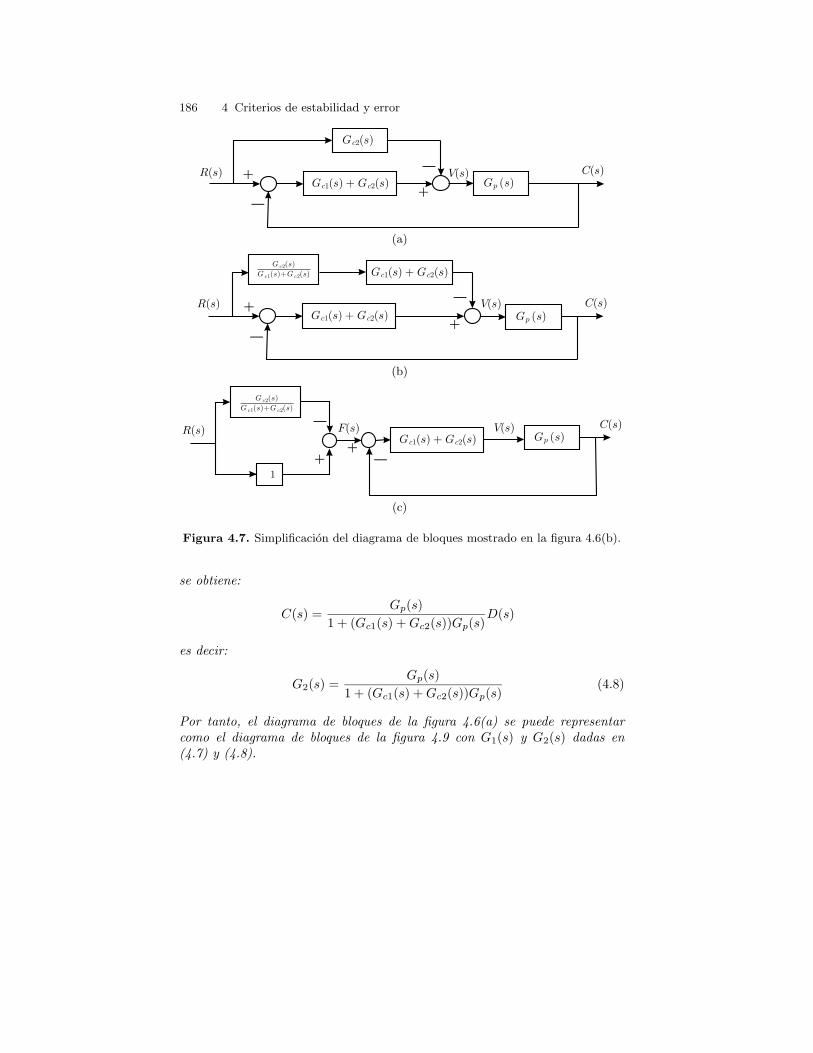
186 4 Criterios de estabilidad y error
+
àGp s( )
+
à C(s)
Gc2(s)
Gc1(s) + Gc2(s)R(s) V(s)
(a)
+
àGp s( )
+
à C(s)R(s) V(s)Gc1(s) + Gc2(s)
Gc1(s) + Gc2(s)G c1(s)+G c2(s)
G c2(s)
(b)
+
àGp s( )
+ à1
G c1(s)+G c2(s)
G c2(s)
Gc1(s) + Gc2(s)V(s) C(s)
R(s) F(s)
(c)
Figura 4.7. Simplificacion del diagrama de bloques mostrado en la figura 4.6(b).
se obtiene:
C(s) =Gp(s)
1 + (Gc1(s) + Gc2(s))Gp(s)D(s)
es decir:
G2(s) =Gp(s)
1 + (Gc1(s) + Gc2(s))Gp(s)(4.8)
Por tanto, el diagrama de bloques de la figura 4.6(a) se puede representarcomo el diagrama de bloques de la figura 4.9 con G1(s) y G2(s) dadas en(4.7) y (4.8).
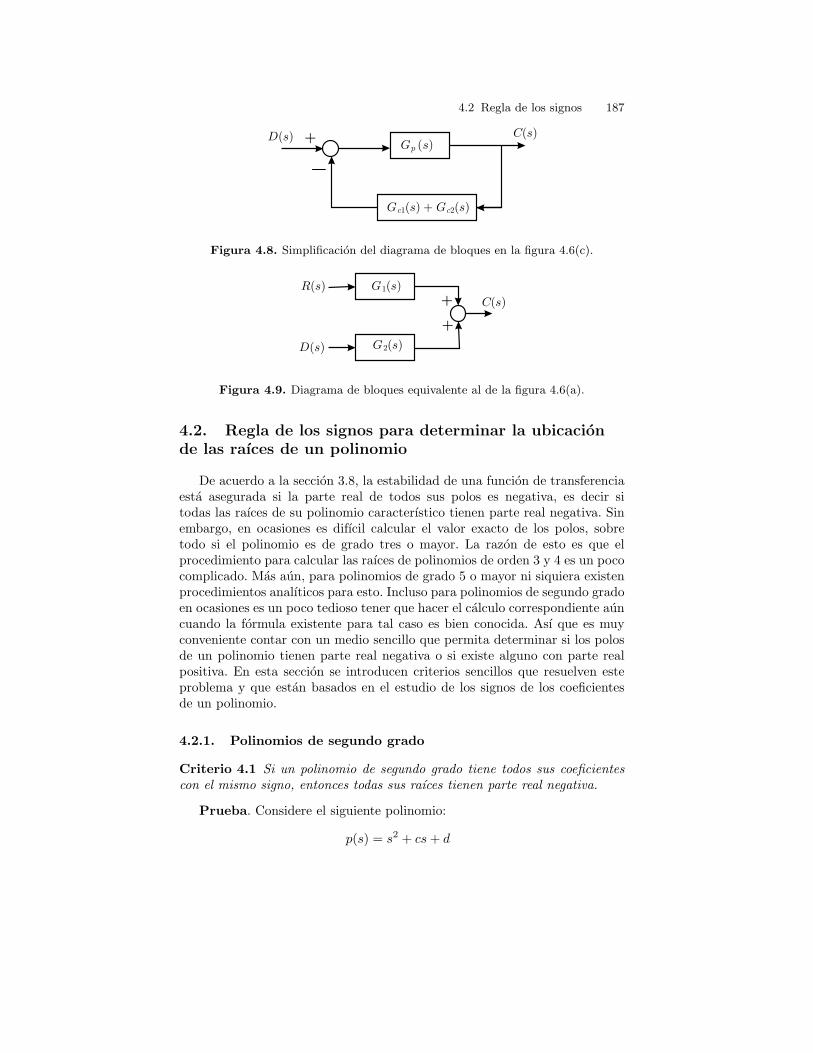
4.2 Regla de los signos 187
Gp s( )+
àGc1(s) + Gc2(s)
C(s)D(s)
Figura 4.8. Simplificacion del diagrama de bloques en la figura 4.6(c).
+
+
R(s)
D(s)
G1(s)
G2(s)
C(s)
Figura 4.9. Diagrama de bloques equivalente al de la figura 4.6(a).
4.2. Regla de los signos para determinar la ubicacionde las raıces de un polinomio
De acuerdo a la seccion 3.8, la estabilidad de una funcion de transferenciaesta asegurada si la parte real de todos sus polos es negativa, es decir sitodas las raıces de su polinomio caracterıstico tienen parte real negativa. Sinembargo, en ocasiones es difıcil calcular el valor exacto de los polos, sobretodo si el polinomio es de grado tres o mayor. La razon de esto es que elprocedimiento para calcular las raıces de polinomios de orden 3 y 4 es un pococomplicado. Mas aun, para polinomios de grado 5 o mayor ni siquiera existenprocedimientos analıticos para esto. Incluso para polinomios de segundo gradoen ocasiones es un poco tedioso tener que hacer el calculo correspondiente auncuando la formula existente para tal caso es bien conocida. Ası que es muyconveniente contar con un medio sencillo que permita determinar si los polosde un polinomio tienen parte real negativa o si existe alguno con parte realpositiva. En esta seccion se introducen criterios sencillos que resuelven esteproblema y que estan basados en el estudio de los signos de los coeficientesde un polinomio.
4.2.1. Polinomios de segundo grado
Criterio 4.1 Si un polinomio de segundo grado tiene todos sus coeficientescon el mismo signo, entonces todas sus raıces tienen parte real negativa.
Prueba. Considere el siguiente polinomio:
p(s) = s2 + cs + d

188 4 Criterios de estabilidad y error
donde c > 0, d > 0. Si todos los coeficientes de un polinomio tuvieran signonegativo, entonces se puede factorizar dicho signo y proceder como se muestraa continuacion. Las dos raıces de p(s) se obtienen usando la formula general:
s1,2 =−c ±
√c2 − 4d
2(4.9)
Caso i): c2 − 4d < 0.En este caso ambas raıces son complejas conjugadas con parte real negativaporque c > 0:
s1,2 =−c
2±
√4d − c2
2j
Caso ii): c2 − 4d > 0.En este caso
c2 > c2 − 4d > 0
porque d > 0. Aplicando la raız cuadrada en ambos lados de la desigualdadse obtiene:
c >√
c2 − 4d
porque la raız cuadrada es una funcion estrictamente creciente. Entonces:
c −√
c2 − 4d > 0
De acuerdo a (4.9), esto significa que ambas raıces son reales, distintas ynegativas en este caso:
s1 = −c +√
c2 − 4d
2< 0
s2 = −c −√
c2 − 4d
2< 0
Caso iii): c2 − 4d = 0.En este caso ambas raıces son reales, iguales y negativas:
s1,2 =−c
2(4.10)
Ejemplo 4.6 Notese que el polinomio s2 +s+1 satisface el caso i) por lo quesus raıces son complejas conjugadas con parte real negativa. De hecho, no esdifıcil verificar que estas raıces son −0.5 + j0.866 y −0.5 − j0.866. Por otrolado, el polinomio s2 + 2.5s + 1 satisface el caso ii) por lo que sus dos raıcesson reales, distintas y negativas. No es difıcil verificar que dichas raıces son−2 y −0.5. Finalmente, el polinomio s2 + 2s + 1 satisface el caso iii) por loque sus dos raıces son reales, iguales y negativas. No es difıcil verificar quedichas raıces son −1 y −1.

4.2 Regla de los signos 189
Criterio 4.2 Si un polinomio de segundo grado tiene algunos de sus coefi-cientes con signo contrario al de los otros coeficientes, entonces al menos unade sus raıces tiene parte real positiva.
Prueba. Considere el siguiente polinomio:
p(s) = s2 + cs + d
donde hay tres posibilidades:
1) c < 0, d > 0.2) c > 0, d < 0.3) c < 0, d < 0.
Las dos raıces correspondientes se obtienen usando la formula general:
s1,2 =−c ±
√c2 − 4d
2(4.11)
Caso i): c2 − 4d < 0.En este caso ambas raıces son complejas conjugadas con parte real positivasi se cumple 1). Los casos 2) y 3) no son posibles porque d < 0 implicaque c2 − 4d > 0.Caso ii): c2 − 4d > 0.Este caso es posible para d < 0, con c < 0 o c > 0 y algunos valorespequenos de d > 0 con c < 0. Para valores mayores de d > 0 se recuperael caso i). Si d < 0 entonces:
c2 < c2 − 4d
Aplicando la raız cuadrada en ambos lados de la desigualdad se obtiene:
abs(c) <√
c2 − 4d
porque la raız cuadrada es una funcion estrictamente creciente. Entonces:
abs(c) −√
c2 − 4d < 0
Esto significa que ambas raıces son reales y distintas con una de ellaspositiva:
s1 = −c +√
c2 − 4d
2< 0
s2 = −c −√
c2 − 4d
2> 0
Si d > 0 con c < 0 entonces:
c2 > c2 − 4d

190 4 Criterios de estabilidad y error
Aplicando la raız cuadrada en ambos lados de la desigualdad se obtiene:
abs(c) >√
c2 − 4d
abs(c) −√
c2 − 4d > 0
Como c < 0, ya que d > 0, entonces hay dos raıces reales positivas:
s1 = −c +√
c2 − 4d
2> 0
s2 = −c −√
c2 − 4d
2> 0
Caso iii): c2 − 4d = 0.En este caso d = c2/4 > 0, por lo que c < 0 (vease 1)). Esto implica queambas raıces son reales, iguales y positivas:
s1,2 =−c
2> 0 (4.12)
Ejemplo 4.7 A continuacion se presentan varios polinomios de segundo or-den y sus correspondientes raıces. Se deja como ejercicio para el lector queverifique estos resultados, que identifique a que caso de los anteriores corres-ponde cada uno y que compruebe que se cumplen las predicciones hechas en elanalisis arriba presentado.
s2 + 2s − 1, raıces: −2.4142 y 0.4142.s2 − 2.5s + 1, raıces: 2 y 0.5.s2 − s − 1, raıces: 1.618 y −0.618.s2 − s + 1, raıces: 0.5 + j0.866 y 0.5 − j0.866.s2 − 2s + 1, raıces: 1 y 1.
4.2.2. Polinomios de primer grado
En este caso es muy facil demostrar que se cumple algo similar a los poli-nomios de segundo grado:
Criterio 4.3 Si los dos coeficientes tienen el mismo signo entonces la unicaraız es real y negativa. Si un coeficiente tiene signo contrario al otro coeficienteentonces la unica raız es real y positiva.
4.2.3. Polinomios de grado 3 o mayor
Criterio 4.4 Si al menos un coeficiente tiene signo contrario a los otros coefi-cientes entonces es seguro que existe al menos una raız con parte real positiva.

4.3 Criterio de estabilidad de Routh 191
Prueba. Considere el siguiente polinomio donde n ≥ 3:
p(s) = sn + an−1sn−1 + . . . + a1s + a0 = (s − p1)(s − p2) · · · (s − pn)(4.13)
Del estudio de polinomios de segundo grado se sabe que el producto (s −pi)(s − pj) = s2 + cs + d sera tal que c < 0 y/o d < 0 si una de las raıcespi o pj o ambas tienen parte real positiva. Por otro lado, el polinomio deprimer orden (s − pk) tiene un coeficiente negativo si su raız pk es positiva.Notese tambien que los coeficientes aj , j = 0, . . . , n − 1 que se encuentran enel lado izquierdo de (4.13) se obtienen como la suma de los productos de loscoeficientes de los polinomios de la forma s2 + cs+d y (s− pk) que existen enel miembro de la derecha de (4.13). Entonces, la unica manera de que existaun coeficiente aj < 0 en el lado izquierdo de (4.13) es que exista una raız conparte real positiva en el miembro derecho de (4.13), es decir que alguno de lospolinomios s2 + cs + d o (s − pk) tenga un coeficiente negativo.
Criterio 4.5 Aun cuando todos los coeficientes tengan el mismo signo, nopuede asegurarse que todas las raıces tienen parte real negativa.
Esto puede explicarse usando los mismos argumentos del parrafo anterior,recordando que el producto de dos coeficientes negativos da un resultado po-sitivo. Entonces, aun cuando todos los coeficientes del polinomio en el ladoizquierdo de (4.13) sean positivos, existe la posibilidad de que dos coeficien-tes negativos (raıces con parte real positiva) del lado derecho de (4.13) semultipliquen para dar un coeficiente positivo del lado izquierdo de (4.13).
Ejemplo 4.8 Para ilustrar lo que sucede cuando un polinomio es de ordenmayor a 2, a continuacion se presentan algunos polinomios y sus raıces. Ellector puede comprobar estos resultados verificando que s3 +a2s
2 +a1s+a0 =(s−p1)(s−p2)(s−p3) donde p1, p2, p3 son las raıces del polinomio en cuestion.
s3 + s2 + s + 1.5, raıces: −1.2041, 0.102 + j1.1115 y 0.102 − j1.1115.Dos raıces con parte real positiva, a pesar de que todos los coeficientes delpolinomio tienen el mismo signo.s3 − s2 + s + 1, raıces: 0.7718 + j1.1151, 0.7718 − j1.1151 y −0.5437.Dos raıces con parte real positiva porque un coeficiente del polinomio tienesigno contrario a los otros coeficientes.s3 +s2 +1, raıces: −1.4656, 0.2328+ j0.7926, 0.2328− j0.7926. Dos raıcescon parte real positiva porque un coeficiente tiene valor cero, aunque losdemas coeficientes tienen el mismo signo.s3 + s2 + 3s + 1, raıces: −0.3194 + j1.6332, −0.3194− j1.6332 y −0.3611.Todas las raıces tienen parte real negativa y todos los coeficientes del poli-nomio tienen el mismo signo.
4.3. Criterio de estabilidad de Routh
Como se ve en la seccion anterior, la regla de los signos para determinarla ubicacion de las raıces de un polinomio, aunque muy comoda, tiene su

192 4 Criterios de estabilidad y error
principal desventaja cuando se trata de aplicar a polinomios de grado mayoro igual a 3: si todos los coeficientes de dicho polinomio tienen el mismo signonada se puede asegurar a cerca del signo de la parte real de sus raıces. Lasolucion a este problema la da el criterio de estabilidad de Routh el cual,dado un polinomio de grado arbitrario, establece condiciones necesarias ysuficientes para asegurar que todas las raıces tienen parte real negativa.
Tabla 4.1. Tabla que se debe construir para aplicar el criterio de Routh.
sn an an−2 an−4 an−6 . . . 0
sn−1 an−1 an−3 an−5 an−7 . . . 0
sn−2 b1 b2 b3 b4 . . . 0
sn−3 c1 c2 c3 c4 . . . 0
sn−4 d1 d2 d3 d4 . . . 0...
......
...... . . . 0
s2 p1 p2 0
s1 q1 0
s0 p2
Dado un polinomio arbitrario, ordenelo en orden descendente de potencias:
ansn + an−1sn−1 + · · · + a1s + a0 (4.14)
El criterio de estabilidad de Routh consiste en realizar los siguientes dos pasos:
1. Construya la tabla 4.1. Notese que los primeros dos renglones de la tablaanterior se construyen usando directamente los coeficientes del polinomiobajo estudio. Observe tambien que los ultimos elementos de los dos pri-meros renglones terminan en ceros, pues ese es el valor de los coeficientesde las potencias que no aparecen en el polinomio en (4.14). Los elementosde los otros renglones se calculan de acuerdo a las siguientes reglas:
b1 =an−1an−2 − anan−3
an−1, b2 =
an−1an−4 − anan−5
an−1,
b3 =an−1an−6 − anan−7
an−1
...
c1 =b1an−3 − an−1b2
b1, c2 =
b1an−5 − an−1b3
b1, c3 =
b1an−7 − an−1b4
b1
...
d1 =c1b2 − b1c2
c1, d2 =
c1b3 − b1c3
c1, d3 =
c1b4 − b1c4
c1
...

4.3 Criterio de estabilidad de Routh 193
Notese que, de acuerdo a estas reglas, el ultimo elemento de cada renglones cero y que la tabla tiene una forma triangular.
2. Analice unicamente la primera columna de la tabla construida. El numerode cambios de signos al recorrer de arriba hacia abajo los elementos de laprimera columna es igual al numero de raıces con parte real positiva.
A continuacion se presentan varios ejemplos.
Ejemplo 4.9 Sea el siguiente polinomio de segundo orden:
s2 + as + b
con a y b dos constantes reales. Dado que este polinomio es de segundo grado(tiene dos raıces) entonces se puede usar la regla de los signos vista en laseccion 4.2 para concluir que las dos raıces tiene parte real negativa si
a > 0, b > 0
ya que el coeficiente de s2 es positivo e igual a uno. Ahora se hara uso delcriterio de Routh para verificar este resultado. De acuerdo a las reglas delcriterio de Routh se construye la tabla 4.2. El criterio de Routh estableceque el numero de cambios de signo al recorrer los elementos de la primeracolumna es igual al numero de raıces con parte real positiva. Por tanto, sino hay cambios de signo entonces las dos raıces tendran parte real negativa.Como el primer elemento de la primera columna es igual a 1, el cual es unnumero positivo, entonces las condiciones:
a > 0, b > 0
deben cumplirse simultaneamente para asegurar que ambas raıces tienen partereal negativa. De este modo, el criterio de Routh y la regla de los signos de laseccion 4.2 dan el mismo resultado, como se esperaba.
Tabla 4.2. Aplicacion del criterio de Routh al polinomio s2 + as + b.
s2 1 b 0
s1 a 0
s0 b
Ejemplo 4.10 Sea el siguiente polinomio:
s3 + 5s2 + 2s − 8
Dado que existe un coeficiente de signo contrario al de los otros (−8) se puedeusar la regla de los signos vista en la seccion 4.2 para concluir que existe almenos una raız con parte real positiva. Ahora se hara uso del criterio de Routh

194 4 Criterios de estabilidad y error
para verificar este resultado. De acuerdo a las reglas del criterio de Routh seconstruye la tabla 4.3. El criterio de Routh establece que el numero de cambiosde signo al recorrer los elementos de la primera columna es igual al numerode raıces con parte real positiva. Por tanto, se concluye que el polinomio s3 +5s2 + 2s− 8 tiene una raız con parte real positiva. De hecho, usando softwareespecializado se pueden usar metodos numericos para encontrar que:
s = −2, s = 1, s = −4
son las raıces del polinomio en cuestion.
Tabla 4.3. Aplicacion del criterio de Routh al polinomio s3 + 5s2 + 2s − 8.
s3 1 2 0
s2 5 -8 0
s1 5×2−1×(−8)5
= 3.6 0
s0 −8
Ejemplo 4.11 Sea el siguiente polinomio:
s3 + 1.8s2 + 0.61s + 2.02
Notese que todos los coeficientes del polinomio tienen el mismo signo (todosson positivos). En este caso la regla de los signos vista en la seccion 4.2 no esde utilidad porque el polinomio es de tercer grado. En este tipo de situacionesel criterio de Routh es de gran utilidad. De acuerdo a las reglas del criterio deRouth se construye la tabla 4.4. El criterio de Routh establece que el numerode cambios de signo al recorrer los elementos de la primera columna es igualal numero de raıces con parte real positiva. Por tanto, se concluye que elpolinomio s3 +1.8s2 +0.61s+2.02 tiene dos raıces con parte real positiva. Dehecho, usando software especializado se pueden usar metodos numericos paraencontrar que:
s = −2, s = 0.1 + j, s = 0.1 − j
son las raıces del polinomio en cuestion.
Tabla 4.4. Aplicacion del criterio de Routh al polinomio s3 + 1.8s2 + 0.61s + 2.02.
s3 1 0.61 0
s2 1.8 2.02 0
s1 1.8×0.61−1×2.021.8
= −0.512 0
s0 2.02

4.3 Criterio de estabilidad de Routh 195
Ejemplo 4.12 Sea el siguiente polinomio:
s3 + as2 + bs + c
donde a, b y c son constantes reales desconocidas. Este tipo de situaciones esmuy comun en sistemas de control donde los coeficientes del polinomio carac-terıstico dependen de las ganancias del controlador, las cuales no se conocende antemano y deben ser determinadas de modo que se asegure la estabilidaden lazo cerrado. Esto se consigue asegurando que todas las raıces del polino-mio caracterıstico de lazo cerrado tengan parte real negativa. Sin embargo, elcalculo de las raıces de un polinomio de tercer orden usando formulas analıti-cas es un proceso tedioso y, por tanto, esa no es una solucion practica. Estees otro tipo de problema en el que el criterio de Routh es de gran utilidad.De acuerdo a las reglas del criterio de Routh se construye la tabla 4.5. Elcriterio de Routh establece que el numero de cambios de signo al recorrer loselementos de la primera columna es igual al numero de raıces con parte realpositiva. Por tanto, como el primer elemento de la columna es igual a 1, esdecir es positivo, entonces si:
a > 0,ab − c
a> 0 c > 0 (4.15)
se asegura que las tres raıces tiene parte real negativa. Notese que las condi-ciones en (4.15) son equivalentes a:
a > 0, b >c
a> 0 c > 0
Esto indica que aunque a los coeficientes a y c solo se les exige que deben serpositivos, en el caso del coeficiente b esto no es suficiente y se le exige un pocomas: b > c
a > 0.
Tabla 4.5. Aplicacion del criterio de Routh al polinomio s3 + as2 + bs + c.
s3 1 b 0
s2 a c 0
s1 ab−1×ca
0
s0 c
Ejemplo 4.13 (Caso especial. Solo el elemento de la primera colum-na de un renglon es igual a cero) Sea el siguiente polinomio:
s5 + 2s4 + 3s3 + 6s2 + 5s + 3
De acuerdo a las reglas del criterio de Routh se construye la tabla 4.6. Sinembargo, la construccion de la tabla se detiene en el renglon correspondiente a

196 4 Criterios de estabilidad y error
s3 porque el elemento de la primera columna de ese renglon es cero. Esto traecomo consecuencia algunas divisiones entre cero al continuar construyendo lossiguientes renglones. Se recomienda sustituir el cero de la primera columnapor un valor ε > 0 pequeno pero positivo y continuar construyendo la tablacomo se muestra en la tabla 4.7.
Tabla 4.6. Aplicacion del criterio de Routh al polinomio s5+2s4+3s3+6s2+5s+3.
s5 1 3 5
s4 2 6 3
s3 2×3−1×62
= 0 2×5−1×32
= 3.5 0
s2
s1
s0
Tabla 4.7. Aplicacion del criterio de Routh al polinomio s5+2s4+3s3+6s2+5s+3(continuacion).
s5 1 3 5
s4 2 6 3
s3 ε 3.5 0
s2 ε×6−2×3.5ε
ε×3−2×0ε
= 3 0
s1 42ε−49−6ε2
12ε−140
s0 3
Ahora determınese el numero de cambios de signo en la primera columnaconforme ε > 0 tiende a cero. Notese que en el caso de este ejemplo hay doscambios de signo. Esto significa que el polinomio bajo estudio tiene dos raıcescon parte real positiva. De hecho, se puede usar software especializado paraencontrar, usando metodos numericos, que las raıces del polinomio s5 +2s4 +3s3 + 6s2 + 5s + 3 son:
s = 0.3429 + j1.5083, s = 0.3429 − j1.5083, s = −1.6681,
s = −0.5088 + j0.7020, s = −0.5088 − j0.7020
Si al considerar ε > 0 no hubiera cambios de signo al recorrer la primeracolumna entonces el sistema es marginalmente estable, es decir, hay raıcessobre el eje imaginario.
Ejemplo 4.14 (Caso especial. Un renglon esta formado por cerosexclusivamente o un renglon esta formado por un solo elemento elcual, ademas, es cero) Sea el siguiente polinomio:

4.3 Criterio de estabilidad de Routh 197
s3 + 3s2 + s + 3
De acuerdo a las reglas del criterio de Routh se construye la tabla 4.8. Sinembargo, la construccion de la tabla se detiene en el renglon correspondien-te a s1 porque todo ese renglon esta formado exclusivamente por ceros. Estees un caso especial que indica la existencia de raıces: 1) simetricas y reales,2) simetricas e imaginarias, o 3) 4 raıces colocadas sobre los vertices de unrectangulo centrado en el origen. Para continuar con el metodo se debe for-mar un polinomio con los elementos del renglon inmediato superior al renglonformado exclusivamente por ceros:
P (s) = 3s2 + 3,
se obtiene su derivada:
dP (s)
ds= 6s
y se sustituyen estos coeficientes en el renglon formado exclusivamente porceros, como se muestra en la tabla 4.9, para continuar construyendo la tabla.
Tabla 4.8. Aplicacion del criterio de Routh al polinomio s3 + 3s2 + s + 3.
s3 1 1 0
s2 3 3 0
s1 3×1−1×33
= 0 0
s0
Tabla 4.9. Aplicacion del criterio de Routh al polinomio s3 + 3s2 + s + 3 (conti-nuacion).
s3 1 1 0
s2 3 3 0
s1 6 0
s0 3
Como no hay cambios de signo al recorrer los elementos de la primeracolumna se concluye que no hay raıces con parte real positiva y se concluye,por tanto, que de los tres casos mencionados anteriormente solo es posible elcaso 2): hay raıces simetricas e imaginarias. Es mas, un aspecto importanteen este caso especial es el siguiente:
“Con los elementos del renglon inmediato superior al renglon formado ex-clusivamente por ceros forme un polinomio. Las raıces de dicho polinomiotambien son raıces del polinomio original”.

198 4 Criterios de estabilidad y error
Esto significa que las raıces del polinomio 3s2 + 3 tambien son raıces delpolinomio s3 + 3s2 + s + 3. Estas raıces se pueden obtener como:
3s2 + 3 = 0, ⇒ s = ±j
Por tanto, el polinomio s3 + 3s2 + s + 3 tiene una raız en s = j y otra ens = −j. De hecho, se puede usar software especializado para encontrar, usandometodos numericos, que las raıces del polinomio s3 + 3s2 + s + 3 son:
s = −3, s = j, s = −j
Ejemplo 4.15 (Caso especial. Un renglon esta formado por cerosexclusivamente o un renglon esta formado por un solo elemento elcual, ademas, es cero) Sea el siguiente polinomio:
s4 + s2 + 1
De acuerdo a las reglas del criterio de Routh se construye la tabla 4.10. Comohay un renglon formado exclusivamente por ceros se procede como en el ejem-plo anterior. El polinomio formado con los elementos del renglon inmediatosuperior (igual al polinomio original en este caso) es derivado respecto a s:
P (s) = s4 + s2 + 1,dP (s)
ds= 4s3 + 2s
Tabla 4.10. Aplicacion del criterio de Routh al polinomio s4 + s2 + 1.
s4 1 1 1 0
s3 0 0 0
s2
s1
s0
Tabla 4.11. Aplicacion del criterio de Routh al polinomio s4+s2+1 (continuacion).
s4 1 1 1 0
s3 4 2 0
s2 4×1−1×24
= 0.5 4×1−1×04
= 1
s1 0.5×2−4×10.5
= −1.5 0
s0 1
Los coeficientes del polinomio resultante se sustituyen en el renglon for-mado exclusivamente por ceros y se continua con la construccion de la tabla
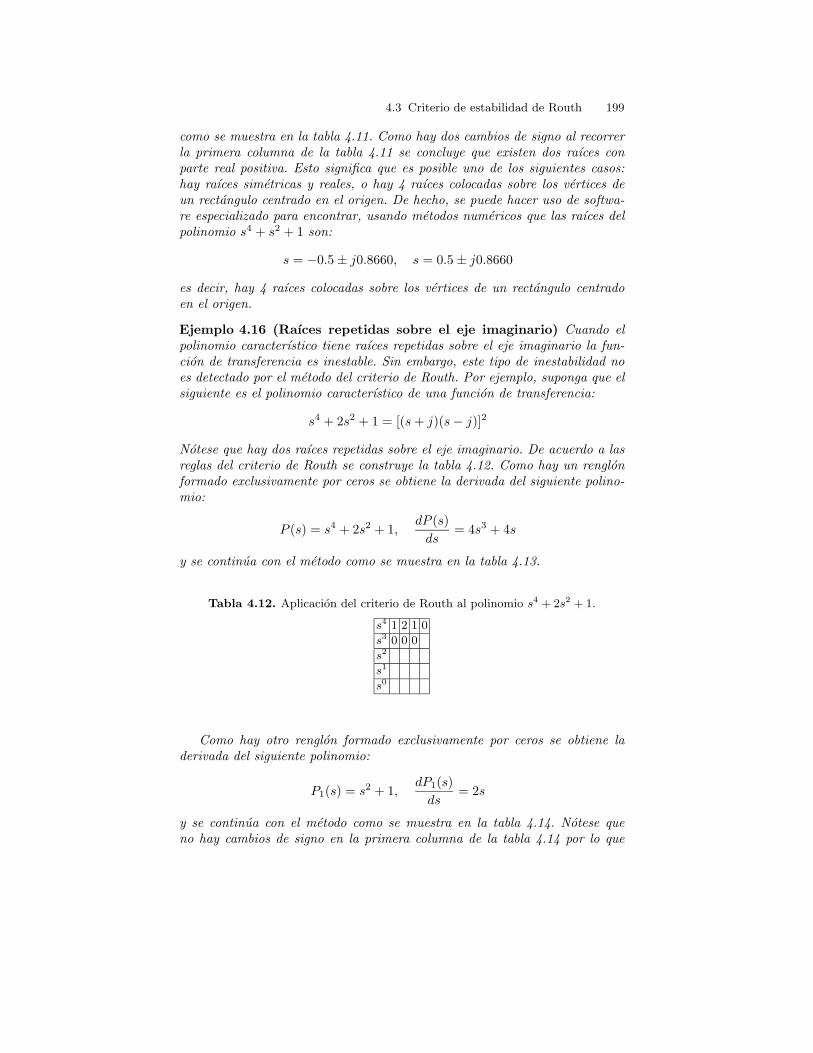
4.3 Criterio de estabilidad de Routh 199
como se muestra en la tabla 4.11. Como hay dos cambios de signo al recorrerla primera columna de la tabla 4.11 se concluye que existen dos raıces conparte real positiva. Esto significa que es posible uno de los siguientes casos:hay raıces simetricas y reales, o hay 4 raıces colocadas sobre los vertices deun rectangulo centrado en el origen. De hecho, se puede hacer uso de softwa-re especializado para encontrar, usando metodos numericos que las raıces delpolinomio s4 + s2 + 1 son:
s = −0.5 ± j0.8660, s = 0.5 ± j0.8660
es decir, hay 4 raıces colocadas sobre los vertices de un rectangulo centradoen el origen.
Ejemplo 4.16 (Raıces repetidas sobre el eje imaginario) Cuando elpolinomio caracterıstico tiene raıces repetidas sobre el eje imaginario la fun-cion de transferencia es inestable. Sin embargo, este tipo de inestabilidad noes detectado por el metodo del criterio de Routh. Por ejemplo, suponga que elsiguiente es el polinomio caracterıstico de una funcion de transferencia:
s4 + 2s2 + 1 = [(s + j)(s − j)]2
Notese que hay dos raıces repetidas sobre el eje imaginario. De acuerdo a lasreglas del criterio de Routh se construye la tabla 4.12. Como hay un renglonformado exclusivamente por ceros se obtiene la derivada del siguiente polino-mio:
P (s) = s4 + 2s2 + 1,dP (s)
ds= 4s3 + 4s
y se continua con el metodo como se muestra en la tabla 4.13.
Tabla 4.12. Aplicacion del criterio de Routh al polinomio s4 + 2s2 + 1.
s4 1 2 1 0
s3 0 0 0
s2
s1
s0
Como hay otro renglon formado exclusivamente por ceros se obtiene laderivada del siguiente polinomio:
P1(s) = s2 + 1,dP1(s)
ds= 2s
y se continua con el metodo como se muestra en la tabla 4.14. Notese queno hay cambios de signo en la primera columna de la tabla 4.14 por lo que

200 4 Criterios de estabilidad y error
Tabla 4.13. Aplicacion del criterio de Routh al polinomio s4+2s2+1 (continuacion).
s4 1 2 1 0
s3 4 4 0
s2 4×2−4×14
= 1 4×1−1×04
= 1 0
s1 0 0
s0
Tabla 4.14. Aplicacion del criterio de Routh al polinomio s4+2s2+1 (continuacion).
s4 1 2 1 0
s3 4 4 0
s2 1 1 0
s1 2 0
s0 1
el metodo indica, correctamente, que no hay raıces con parte real positiva.Ademas, las raıces del polinomio P1(s) = s2 + 1 son s = ±j, por lo que seconcluye estabilidad marginal. Notese que esto es incorrecto porque el poli-nomio s4 + 2s2 + 1 tiene dos raıces imaginarias repetidas dos veces, lo cualimplica inestabilidad. Ası que debe tenerse cuidado con estos casos.
4.4. Error en estado estacionario
Se ha visto que la solucion de una ecuacion diferencial siempre esta dadacomo la suma de la respuesta natural y la respuesta forzada. Si la ecuaciondiferencial es estable o, equivalentemente, si la funcion de transferencia es es-table entonces la respuesta natural desaparece al crecer el tiempo y la solucionalcanza la respuesta forzada. Recuerdese que la respuesta forzada depende de(o es similar a) la entrada aplicada a la ecuacion diferencial. De acuerdo aeste razonamiento, en un sistema de control en lazo cerrado se procede delsiguiente modo. 1) La entrada del sistema en lazo cerrado es una senal querepresenta el valor que se desea alcance la salida del sistema en lazo cerrado.Por esto, a dicha senal de entrada se le conoce como la referencia o la salidadeseada. 2) El controlador se disena de manera que el sistema en lazo cerradosea estable y que la respuesta forzada del sistema en lazo cerrado sea igual omuy cercana a la referencia o salida deseada.
En esta seccion se estudian las propiedades que debe tener un sistema decontrol en lazo cerrado para que la respuesta forzada del sistema realimentadosea igual o muy cercana a la entrada del sistema en lazo cerrado, es decir a lareferencia o salida deseada. Notese que esto equivale a conseguir que la senalde error, definida como la diferencia entre la salida del sistema y la referenciao salida deseada, sea cero o muy cercana a cero en estado estacionario, es
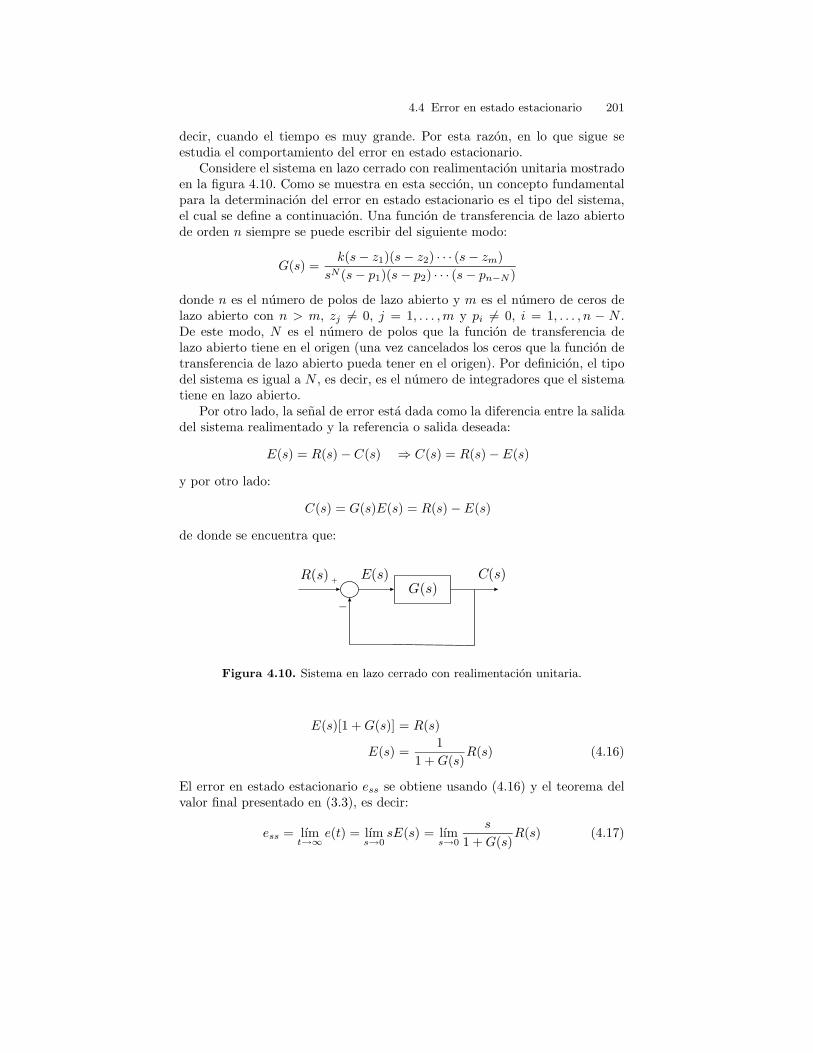
4.4 Error en estado estacionario 201
decir, cuando el tiempo es muy grande. Por esta razon, en lo que sigue seestudia el comportamiento del error en estado estacionario.
Considere el sistema en lazo cerrado con realimentacion unitaria mostradoen la figura 4.10. Como se muestra en esta seccion, un concepto fundamentalpara la determinacion del error en estado estacionario es el tipo del sistema,el cual se define a continuacion. Una funcion de transferencia de lazo abiertode orden n siempre se puede escribir del siguiente modo:
G(s) =k(s − z1)(s − z2) · · · (s − zm)
sN (s − p1)(s − p2) · · · (s − pn−N )
donde n es el numero de polos de lazo abierto y m es el numero de ceros delazo abierto con n > m, zj 6= 0, j = 1, . . . ,m y pi 6= 0, i = 1, . . . , n − N .De este modo, N es el numero de polos que la funcion de transferencia delazo abierto tiene en el origen (una vez cancelados los ceros que la funcion detransferencia de lazo abierto pueda tener en el origen). Por definicion, el tipodel sistema es igual a N , es decir, es el numero de integradores que el sistematiene en lazo abierto.
Por otro lado, la senal de error esta dada como la diferencia entre la salidadel sistema realimentado y la referencia o salida deseada:
E(s) = R(s) − C(s) ⇒ C(s) = R(s) − E(s)
y por otro lado:
C(s) = G(s)E(s) = R(s) − E(s)
de donde se encuentra que:
+
à
R(s) E(s) C(s)G(s)
Figura 4.10. Sistema en lazo cerrado con realimentacion unitaria.
E(s)[1 + G(s)] = R(s)
E(s) =1
1 + G(s)R(s) (4.16)
El error en estado estacionario ess se obtiene usando (4.16) y el teorema delvalor final presentado en (3.3), es decir:
ess = lımt→∞
e(t) = lıms→0
sE(s) = lıms→0
s
1 + G(s)R(s) (4.17)

202 4 Criterios de estabilidad y error
Como el error en estado estacionario es la diferencia entre la salida del siste-ma c(t) y la referencia o salida deseada r(t), en estado estacionario, es logicoque en la expresion anterior ess dependa de la referencia R(s). Por tanto, paracontinuar con el estudio es necesario conocer el valor de R(s) lo cual motiva ladefinicion de senales de prueba. Una senal de prueba debe ser una funcion deltiempo con dos caracterısticas: 1) que tenga un significado fısico de importan-cia en aplicaciones reales y 2) que sea sencilla de manejar matematicamente.A continuacion se definen algunas de las senales (o entradas) de prueba mascomunes en control clasico.
Considere el problema del control de la posicion de un canon antiaereo.En este problema se desea que el canon apunte todo el tiempo hacia un avionque se mueve a gran velocidad. Algunas situaciones que pueden presentarseson las siguientes.
Entrada de prueba escalon. Suponga que el avion se dirige directa-mente hacia el canon sobre una direccion de valor constante A. Si el canoninicialmente apunta hacia una direccion diferente (cero) a donde se en-cuentra el avion, entonces la referencia o la direccion en la que se deseaapunte el canon tiene la forma mostrada en la figura 4.11. Esta senal seconoce como escalon y representa un cambio muy rapido (discontinuo) enla direccion en que se desea apunte el canon. Entonces el canon debe mo-verse rapidamente para que la direccion en que realmente apunta alcancela direccion deseada, mostrada en la figura 4.11. Mas aun, se desea que enestado estacionario la diferencia entre estas senales sea cero o al menos,en el peor de los casos, muy cercana a cero. Si r(t) es un escalon:
r(t) =
0, t < 0A, t ≥ 0
donde A es una constante, entonces R(s) = Lr(t) = As es una funcion
suficientemente sencilla para ser manejada matematicamente.
A
t
r(t)
0
Figura 4.11. Entrada de prueba escalon.
Entrada de prueba rampa. Suponga que el avion pasa enfrente delcanon con velocidad constante A, dirigiendose hacia otro punto, y que

4.4 Error en estado estacionario 203
inicialmente el canon esta apuntando hacia el avion (en cero). Entonces lareferencia o la direccion en la que se desea apunte el canon tiene la formamostrada en la figura 4.12. Esta senal se conoce como rampa e indicaque se desea que la direccion en la que apunta el canon cambie con unavelocidad constante A (la velocidad del avion). Si r(t) es una rampa:
r(t) =
0, t < 0At, t ≥ 0
donde A = dr(t)dt es una constante que representa la velocidad con que
r(t) cambia, entonces R(s) = Lr(t) = As2 es una funcion suficientemente
sencilla para ser manejada matematicamente.
A
t0
r(t)
Figura 4.12. Entrada de prueba rampa.
Entrada de prueba parabola. Suponga que ahora el avion pasa enfrentedel canon con aceleracion constante A (tratando de escapar), dirigiendosehacia otro punto, y que inicialmente el canon esta apuntando hacia el avion(en cero). Entonces la referencia o la direccion en la que se desea apunteel canon tiene la forma mostrada en la figura 4.13. Esta senal se conocecomo parabola e indica que se desea que la direccion en la que apunta elcanon cambie con una aceleracion constante A (la aceleracion del avion).Si r(t) es una parabola:
r(t) =
0, t < 012At2, t ≥ 0
donde A = d2r(t)dt2 es una constante que representa la aceleracion con que
r(t) cambia, entonces R(s) = Lr(t) = As3 es una funcion suficientemente
sencilla para ser manejada matematicamente.
Como cualquiera de las tres situaciones anteriores puede aparecer duranteel funcionamiento del sistema de control de posicion del canon antiaereo, eldiseno del controlador debe ser tal que el error de estado estacionario sea ceroo muy pequeno ante cualquiera de las tres senales de prueba. A continuacionse determinan las condiciones que permiten conseguir estas especificacionespara cada senal de prueba.

204 4 Criterios de estabilidad y error
r(t)
t0
21At2
Figura 4.13. Entrada de prueba parabola.
4.4.1. Referencia tipo escalon
Suponga que R(s) = A/s es un escalon de altura A. Usando la expresionen (4.17) se obtiene:
ess = lıms→0
s
1 + G(s)
A
s
=A
1 + kp, kp = lım
s→0G(s)
donde kp se conoce como la constante de error estatica de posicion y su va-lor esta directamente relacionado con el tipo del sistema. Por esta razon seconsideran los siguientes casos:
Sistemas tipo 0 (N = 0). En este caso la funcion de transferencia de lazoabierto tiene la forma:
G(s) =k(s − z1)(s − z2) · · · (s − zm)
(s − p1)(s − p2) · · · (s − pn)
por lo que:
kp = lıms→0
G(s) =k(−z1)(−z2) · · · (−zm)
(−p1)(−p2) · · · (−pn)
kp es finito. Esto significa que el error en estado estacionario es diferentede cero:
ess =A
1 + kp6= 0
Sistemas tipo mayor o igual a 1 (N ≥ 1). En este caso la funcion detransferencia de lazo abierto tiene la forma:
G(s) =k(s − z1)(s − z2) · · · (s − zm)
sN (s − p1)(s − p2) · · · (s − pn−N )
por lo que:

4.4 Error en estado estacionario 205
kp = lıms→0
G(s) =k(−z1)(−z2) · · · (−zm)
sN (−p1)(−p2) · · · (−pn−N )→ ∞
Esto significa que el error en estado estacionario es igual a cero:
ess =A
1 + kp= 0
4.4.2. Referencia tipo rampa
Suponga que R(s) = A/s2 es una rampa de pendiente A. Usando la ex-presion en (4.17) se obtiene:
ess = lıms→0
s
1 + G(s)
A
s2
=A
kv, kv = lım
s→0sG(s)
donde kv se conoce como la constante de error estatica de velocidad y suvalor esta directamente relacionado con el tipo del sistema. Por esta razon seconsideran los siguientes casos:
Sistemas tipo 0 (N = 0). En este caso la funcion de transferencia de lazoabierto tiene la forma:
G(s) =k(s − z1)(s − z2) · · · (s − zm)
(s − p1)(s − p2) · · · (s − pn)
por lo que:
kv = lıms→0
sG(s) = (0)k(−z1)(−z2) · · · (−zm)
(−p1)(−p2) · · · (−pn)= 0
Esto significa que el error en estado estacionario crece sin lımite (tiende ainfinito):
ess =A
kv→ ∞
Sistemas tipo igual a 1 (N = 1). En este caso la funcion de transferenciade lazo abierto tiene la forma:
G(s) =k(s − z1)(s − z2) · · · (s − zm)
s(s − p1)(s − p2) · · · (s − pn−1)
por lo que:
kv = lıms→0
sG(s) =k(−z1)(−z2) · · · (−zm)
(−p1)(−p2) · · · (−pn−1)

206 4 Criterios de estabilidad y error
kv es un numero diferente de cero y finito. Esto significa que el error enestado estacionario es diferente de cero:
ess =A
kv6= 0
Sistemas tipo mayor o igual a 2 (N ≥ 2). En este caso la funcion detransferencia de lazo abierto tiene la forma:
G(s) =k(s − z1)(s − z2) · · · (s − zm)
sN (s − p1)(s − p2) · · · (s − pn−N )
por lo que:
kv = lıms→0
sG(s) =k(−z1)(−z2) · · · (−zm)
sN−1(−p1)(−p2) · · · (−pn−N )→ ∞
porque N − 1 ≥ 1. Esto significa que el error en estado estacionario esigual a cero:
ess =A
kv= 0
4.4.3. Referencia tipo parabola
Suponga que R(s) = A/s3 es una parabola con segunda derivada igual aA. Usando la expresion en (4.17) se obtiene:
ess = lıms→0
s
1 + G(s)
A
s3
=A
ka, ka = lım
s→0s2G(s)
donde ka se conoce como la constante de error estatica de aceleracion y suvalor esta directamente relacionado con el tipo del sistema. La funcion detransferencia de lazo abierto tiene la forma:
G(s) =k(s − z1)(s − z2) · · · (s − zm)
sN (s − p1)(s − p2) · · · (s − pn−N )
por lo que:
ka = lıms→0
s2G(s) =k(−z1)(−z2) · · · (−zm)
sN−2(−p1)(−p2) · · · (−pn−N )
Esto significa que:
El error en estado estacionario crece sin lımite (tiende a infinito) parasistemas tipo menor o igual a 1:
ess =A
kv→ ∞, N ≤ 1

4.4 Error en estado estacionario 207
El error en estado estacionario es diferente de cero para sistemas tipo iguala 2:
ess =A
kv6= 0, N = 2
El error en estado estacionario es igual a cero para sistemas tipo mayor oigual a 3:
ess =A
kv= 0, N ≥ 3
Notese que, para las tres referencias o senales de prueba consideradas, elerror en estado estacionario se hace cero si se incrementa convenientemente elnumero de integradores que tiene la funcion de transferencia de lazo abierto(tipo del sistema). Esto explica porque algunos controladores incluyen unintegrador (vease la seccion 5.2.4 donde se estudia el controlador PI). Porotro lado, es muy importante subrayar que los resultados que se acaban depresentar solo se cumplen si se asegura que el sistema en lazo cerrado esestable ya que los resultados anteriores se han obtenido suponiendo que larespuesta natural tiende a cero conforme el tiempo crece. Mas adelante, en loscapıtulos 5 y 6, se explica que el adicionar polos de lazo abierto (integradores,cuando dichos polos estan en s = 0) tiende a hacer inestable al sistema en lazocerrado. Ası que no siempre sera posible, o conveniente, disenar un sistemade control con error en estado estacionario igual a cero y se debera conformarcon un error en estado estacionario pequeno.
Finalmente, y por razones didacticas, en la figura 4.14 se muestra grafica-mente el comportamiento de la salida c(t) con respecto a la referencia r(t),cuando esta es una rampa, para los distintos tipos de sistema.
t0
r(t)
c(t)ess = 0ess 6=0
ess ! 1
Figura 4.14. Comportamiento de la salida c(t) cuando la referencia r(t) es unarampa. Notese que ess = 0 cuando el tipo es mayor o igual a 2, ess 6= 0 cuando eltipo es igual a 1 y ess → ∞ cuando el tipo es igual a 0.
Ejemplo 4.17 En la figura 4.15 se muestra un sistema de control de veloci-dad de un motor de CD (vease el capıtulo 9). El modelo del motor esta dado

208 4 Criterios de estabilidad y error
por la funcion de transferencia Gm(s) = ks+a , con k > 0 y a > 0, mientras que
la constante positiva kp representa la funcion de transferencia de un controla-dor proporcional. Esto significa que la corriente usada como senal de controlse calcula como:
i∗ = kp(ωd − ω)
donde ω es la velocidad medida, ωd es la velocidad deseada e I∗(s) es latransformada de Laplace de i∗. La funcion de transferencia de lazo abierto es:
G(s)H(s) =kpk
s + a
Notese que al ser a > 0 este sistema es tipo 0 porque la funcion de transferen-cia de lazo abierto no tiene ningun polo en el origen (en s = 0). Por tanto,de acuerdo a la seccion 4.4.1, si la velocidad deseada es constante (es decir,un escalon) entonces el error en estado estacionario ess = ωd − lımt→∞ ω(t)es constante y diferente de cero, es decir, un controlador proporcional de ve-locidad no es util para conseguir que el motor alcance la velocidad deseada.Notese que, de acuerdo a las secciones 4.4.2 y 4.4.3, el problema es mas grave(es decir, el error en estado estacionario es mayor) si la velocidad deseadatuviera la forma de una rampa o de una parabola.
+
àIã(s) !(s)!d(s)
s+akkp
Figura 4.15. Sistema de control proporcional de velocidad.
La manera de resolver este problema, cuando la velocidad deseada es unaconstante, es usando un controlador proporcional-integral (PI). El controladorPI realiza la siguiente operacion sobre el error de velocidad:
i∗ = kpe + ki
∫ t
0
e(r)dr, e = ωd − ω
donde kp y ki son constantes positivas.Usando la transformada de Laplace seobtiene:
I∗(s) = kpE(s) + kiE(s)
s
=
(kp +
ki
s
)E(s)
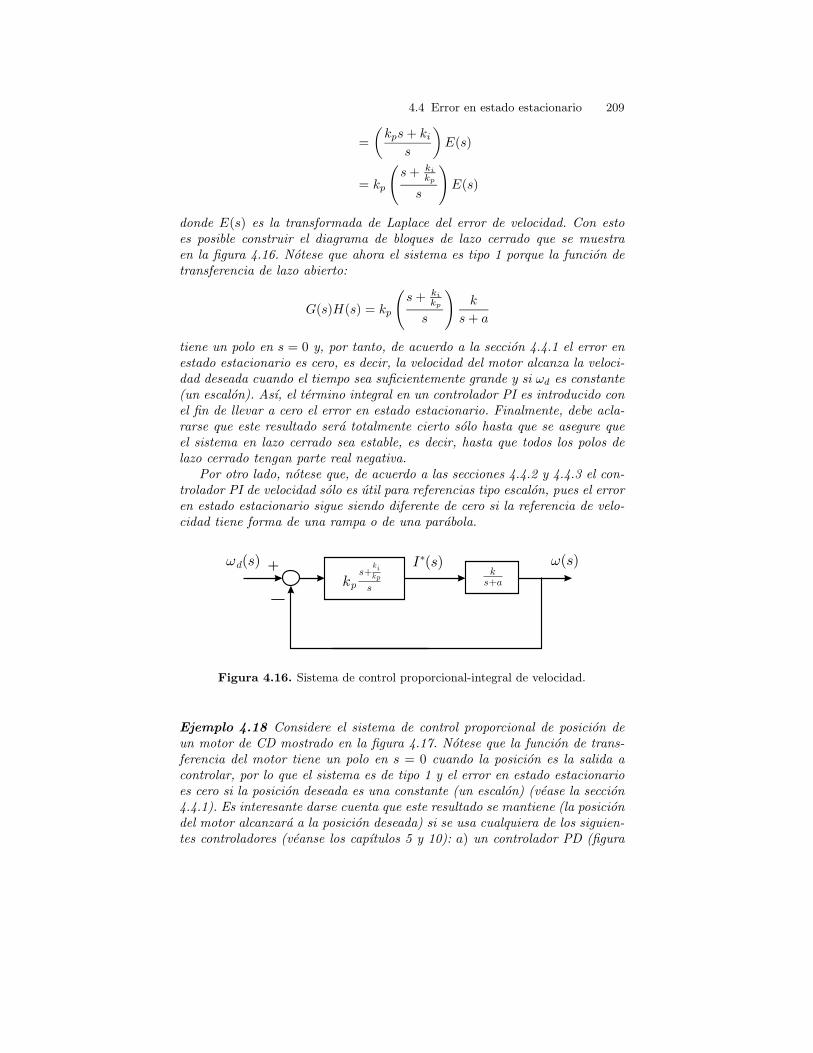
4.4 Error en estado estacionario 209
=
(kps + ki
s
)E(s)
= kp
(s + ki
kp
s
)E(s)
donde E(s) es la transformada de Laplace del error de velocidad. Con estoes posible construir el diagrama de bloques de lazo cerrado que se muestraen la figura 4.16. Notese que ahora el sistema es tipo 1 porque la funcion detransferencia de lazo abierto:
G(s)H(s) = kp
(s + ki
kp
s
)k
s + a
tiene un polo en s = 0 y, por tanto, de acuerdo a la seccion 4.4.1 el error enestado estacionario es cero, es decir, la velocidad del motor alcanza la veloci-dad deseada cuando el tiempo sea suficientemente grande y si ωd es constante(un escalon). Ası, el termino integral en un controlador PI es introducido conel fin de llevar a cero el error en estado estacionario. Finalmente, debe acla-rarse que este resultado sera totalmente cierto solo hasta que se asegure queel sistema en lazo cerrado sea estable, es decir, hasta que todos los polos delazo cerrado tengan parte real negativa.
Por otro lado, notese que, de acuerdo a las secciones 4.4.2 y 4.4.3 el con-trolador PI de velocidad solo es util para referencias tipo escalon, pues el erroren estado estacionario sigue siendo diferente de cero si la referencia de velo-cidad tiene forma de una rampa o de una parabola.
+
àkp s
s+kp
kiIã(s) !(s)!d(s)
s+ak
Figura 4.16. Sistema de control proporcional-integral de velocidad.
Ejemplo 4.18 Considere el sistema de control proporcional de posicion deun motor de CD mostrado en la figura 4.17. Notese que la funcion de trans-ferencia del motor tiene un polo en s = 0 cuando la posicion es la salida acontrolar, por lo que el sistema es de tipo 1 y el error en estado estacionarioes cero si la posicion deseada es una constante (un escalon) (vease la seccion4.4.1). Es interesante darse cuenta que este resultado se mantiene (la posiciondel motor alcanzara a la posicion deseada) si se usa cualquiera de los siguien-tes controladores (veanse los capıtulos 5 y 10): a) un controlador PD (figura
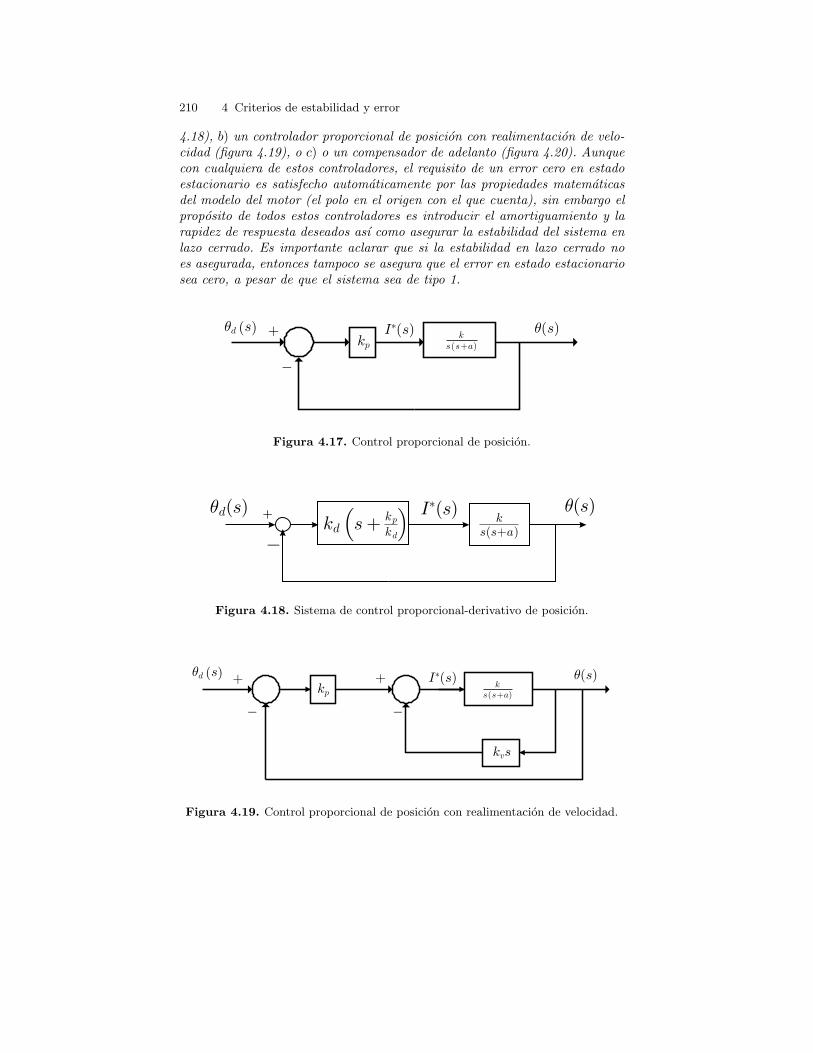
210 4 Criterios de estabilidad y error
4.18), b) un controlador proporcional de posicion con realimentacion de velo-cidad (figura 4.19), o c) o un compensador de adelanto (figura 4.20). Aunquecon cualquiera de estos controladores, el requisito de un error cero en estadoestacionario es satisfecho automaticamente por las propiedades matematicasdel modelo del motor (el polo en el origen con el que cuenta), sin embargo elproposito de todos estos controladores es introducir el amortiguamiento y larapidez de respuesta deseados ası como asegurar la estabilidad del sistema enlazo cerrado. Es importante aclarar que si la estabilidad en lazo cerrado noes asegurada, entonces tampoco se asegura que el error en estado estacionariosea cero, a pesar de que el sistema sea de tipo 1.
Iã(s) ò(s)+
à
òd s( )kp s s+a( )
k
Figura 4.17. Control proporcional de posicion.
+
à s(s+a)k
Iã(s) ò(s)òd(s)kd s+
kd
kpð ñ
Figura 4.18. Sistema de control proporcional-derivativo de posicion.
+
à
Iã(s)+
à
ò(s)òd s( )kp s s+a( )
k
kvs
Figura 4.19. Control proporcional de posicion con realimentacion de velocidad.

4.4 Error en estado estacionario 211
+
à
Iã(s) ò(s)òd s( )
s s+a( )kí
s+cs+d
Figura 4.20. Control de posicion con un compensador de adelanto.
Ejemplo 4.19 ¿Que sucede en un motor de CD que pueda explicar el porque,cuando la referencia es un escalon, un controlador proporcional de velocidadno puede conseguir un error cero en estado estacionario y, en cambio, sı lopuede conseguir un controlador proporcional de posicion?
La respuesta a esta pregunta es la siguiente. Cuando en un sistema decontrol proporcional de posicion el error es igual a cero (cuando la posiciondel motor es igual a la posicion deseada) entonces la corriente i∗ = kp(θd − θ)ordenada al motor es cero, el motor se detiene y, por tanto, la condicionθd = θ puede mantenerse para siempre.
En cambio, en un sistema de control proporcional de velocidad, si la velo-cidad del motor es igual a la velocidad deseada entonces la corriente ordenadaal motor i∗ = kp(ωd − ω) es cero y el motor se detendrıa. Esto significa quela condicion ωd = ω no puede mantenerse para siempre y como resultado,en un sistema de control proporcional de velocidad esta variable alcanza, enestado estacionario, un valor constante tal que la diferencia entre ω y ωd seasuficiente para generar una corriente i∗ = kp(ωd − ω) que mantenga girandoal motor en esa velocidad. Cuando se utiliza un controlador PI de velocidadentonces la integral del error
∫ t
0(ωd − ω(r))dr es constante cuando ωd = ω y
ese valor constante, multiplicado por la ganancia integral ki es suficiente paraproducir una corriente que mantiene girando al motor a la velocidad deseada.
Ejemplo 4.20 Considere un sistema de control de posicion de un motor deCD que cuenta con un controlador PID, es decir, la consigna de corrienteesta dada como:
i∗ = kpe + kdde
dt+ ki
∫ t
0
e(r)dr, e = θd − θ
Usando la transformada de Laplace se obtiene:
I∗(s) = kpE(s) + kdsE(s) + kiE(s)
s
=
(kp + kds +
ki
s
)E(s)
= kd
s2 +kp
kds + ki
kd
sE(s)
De este modo se obtiene el diagrama de bloques mostrado en la figura 4.21.Notese que el motor tiene un polo en s = 0 y el controlador tiene otro polo en
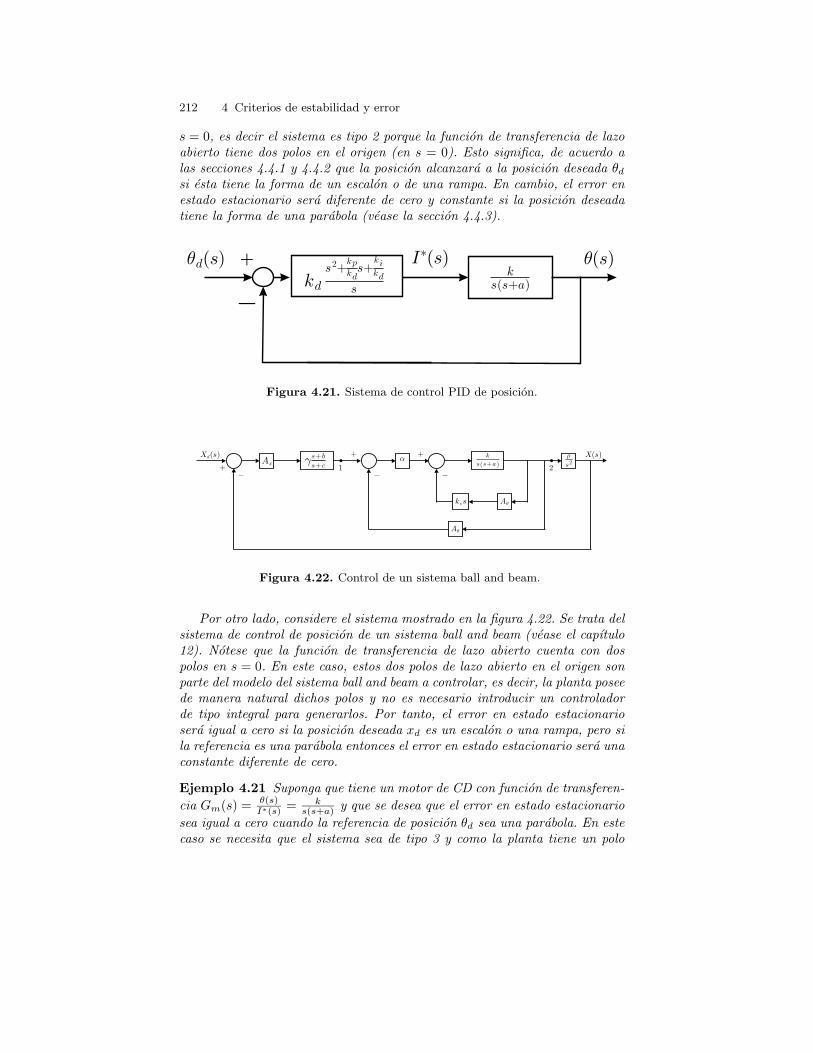
212 4 Criterios de estabilidad y error
s = 0, es decir el sistema es tipo 2 porque la funcion de transferencia de lazoabierto tiene dos polos en el origen (en s = 0). Esto significa, de acuerdo alas secciones 4.4.1 y 4.4.2 que la posicion alcanzara a la posicion deseada θd
si esta tiene la forma de un escalon o de una rampa. En cambio, el error enestado estacionario sera diferente de cero y constante si la posicion deseadatiene la forma de una parabola (vease la seccion 4.4.3).
+
àkd s
s2+kd
kps+kd
ki Iã(s) ò(s)òd(s)
s(s+a)k
Figura 4.21. Sistema de control PID de posicion.
s s+a( )
kís+ c
s+ bs2ú
+
+ +
à à àAx
Aò
Aò
ë
kýs
Xd(s) X(s)ï ï1 2
Figura 4.22. Control de un sistema ball and beam.
Por otro lado, considere el sistema mostrado en la figura 4.22. Se trata delsistema de control de posicion de un sistema ball and beam (vease el capıtulo12). Notese que la funcion de transferencia de lazo abierto cuenta con dospolos en s = 0. En este caso, estos dos polos de lazo abierto en el origen sonparte del modelo del sistema ball and beam a controlar, es decir, la planta poseede manera natural dichos polos y no es necesario introducir un controladorde tipo integral para generarlos. Por tanto, el error en estado estacionariosera igual a cero si la posicion deseada xd es un escalon o una rampa, pero sila referencia es una parabola entonces el error en estado estacionario sera unaconstante diferente de cero.
Ejemplo 4.21 Suponga que tiene un motor de CD con funcion de transferen-
cia Gm(s) = θ(s)I∗(s) = k
s(s+a) y que se desea que el error en estado estacionario
sea igual a cero cuando la referencia de posicion θd sea una parabola. En estecaso se necesita que el sistema sea de tipo 3 y como la planta tiene un polo

4.5 Resumen del capıtulo 213
en s = 0 es necesario introducir un controlador que tenga dos polos en s = 0.Por tanto, se propone un controlador de la forma:
i∗ = kpe + kdde
dt+ ki
∫ t
0
e(r)dr + kii
∫ t
0
∫ r
0
e(τ)dτdr, e = θd − θ
el cual se puede escribir como:
I∗(s) =kds
3 + kps2 + kis + kii
s2E(s) (4.18)
donde E(s) es la transformada de Laplace del error de posicion, lo cual mues-tra que tiene dos polos en s = 0 y que, por tanto, es util para resolver elproblema en cuestion. Notese que ademas de introducir el termino de la in-tegral doble, con ganancia kii, tambien se ha incluido el termino de una in-tegral sencilla con ganancia ki. Esto se hace para mejorar la estabilidad enlazo cerrado. Si no se introduce el termino de la integral sencilla entonces seobtendran pobres desempenos en la respuesta transitoria o incluso se puedeproducir inestabilidad. Como regla general, si el controlador ha de introduciruna integral iterada de orden k entonces se deberan incluir tambien terminosque incluyan todas las integrales iteradas de orden 1 hasta k−1. Esto con el finde mejorar la respuesta transitoria y asegurar la estabilidad en lazo cerrado.
4.5. Resumen del capıtulo
En este capıtulo se han presentado las herramientas preliminares basicaspara el analisis y diseno de sistemas de control de orden arbitrario. Primero sedebe entender que la respuesta de cualquier sistema de control en lazo cerra-do, por complejo que sea, esta determinada por la funcion de transferenciaequivalente en lazo cerrado.
La representacion de un sistema de control mediante diagramas de bloquesy su correspondiente simplificacion son fundamentales para obtener la funcionde transferencia de lazo cerrado. A partir de esta funcion de transferencia sepuede determinar i) la estabilidad en lazo cerrado y la respuesta transitoria(polos de la funcion de transferencia de lazo cerrado), y ii) la respuesta enestado estacionario (o valor final).
En el capıtulo 3 se explica que para que una funcion de transferencia seaestable es necesario y suficiente que todos sus polos tengan parte real negativa.Sin embargo, el verificar esta condicion mediante el calculo exacto de dichospolos es un problema complejo. Esto es particularmente cierto cuando el valorde los coeficientes del polinomio no se conocen numericamente. Esta situaciones frecuente en el diseno de sistemas de control ya que los coeficientes del poli-nomio caracterıstico dependen de las ganancias del controlador las cuales aunno se conocen. Mas aun, es deseable que las ganancias del controlador puedanseleccionarse dentro de un rango de valores con el fin de hacer flexible el di-seno del sistema de control. Estas caracterısticas requieren el uso de tecnicas
214 4 Criterios de estabilidad y error
analıticas (y no numericas) para determinar cuando el sistema de control enlazo cerrado es estable. Este hecho representa un grave problema porque lasformulas analıticas para determinar las raıces de polinomios de grado superiorson complejas. Mas aun, no existe solucion analıtica para polinomios de gradoquinto o mayor. Esta problematica es resuelta, finalmente, usando el crite-rio de estabilidad de Routh el cual, debe recordarse, simplemente representauna herramienta para verificar si todas las raıces del polinomio caracterısticotienen sus partes reales negativas. Por otro lado, la regla de los signos paradeterminar la ubicacion de las raıces de un polinomio, vista en la seccion 4.2,es un metodo que tiene sus limitaciones. Sin embargo, al ser mucho mas simpleque el criterio de Routh puede tener algunas ventajas en ciertas aplicacionesy por eso tambien se ha presentado en este capıtulo.
El estudio del error en estado estacionario que se ha presentado en estecapıtulo, establece criterios para seleccionar el controlador mas convenientea fin de conseguir que la respuesta en estado estacionario alcance al valordeseado. Dicho de otro modo, para que la respuesta forzada sea igual, o muycercana, a la entrada del sistema en lazo cerrado o valor deseado a la salida.Finalmente, la seleccion del controlador tambien debe hacerse de modo que seconsiga la respuesta transitoria deseada, a partir de una adecuada ubicacionde los polos de lazo cerrado. La solucion de este problema se presenta en elcapıtulo siguiente.
4.6. Preguntas de repaso
1. ¿Que es el tipo de un sistema en lazo cerrado?2. ¿Como se puede aumentar el tipo de un sistema de control?3. ¿Cual es la relacion entre el criterio de estabilidad de Routh y el requeri-
miento de que todas las raıces del polinomio caracterıstico tengan partereal negativa?
4. ¿Para que sirve y cual es la principal desventaja de la regla de los signosvista en la seccion 4.2?
5. Suponga que de acuerdo al estudio del error en estado estacionario se con-cluye que el valor final de la salida alcanzara el valor deseado ¿Por que esnecesario que el sistema sea estable para que esto sea completamente cier-to?
6. Suponga que para conseguir un error en estado estacionario igual a ceronecesita usar un controlador que incluya una integral quıntuple (5 inte-grales anidadas) ¿Por que debe incluir tambien las integrales cuadruple(4 integrales anidadas), triple y doble? ¿Tambien debe incluir la integralsencilla? ¿Por que? Justifique su respuesta usando un motor de CD comoplanta y usando el criterio de Routh.
7. ¿Que relacion existe entre el estudio del error en estado estacionario, pre-sentado en este capıtulo, y el objetivo de conseguir que la respuesta for-
4.7 Ejercicios propuestos 215
zada alcance a la entrada del sistema en lazo cerrado (o valor deseado ala salida)?
8. Considere el tanque que contiene agua estudiado en el ejemplo 3.2 delcapıtulo 3. ¿Por que un controlador proporcional de nivel no consigue unerror en estado estacionario igual a cero, pero un controlador proporcional-integral sı puede conseguirlo? Justifique su respuesta tambien desde elpunto de vista de la fısica del sistema: ¿Que pasa con el flujo de entradacuando el nivel es igual al nivel deseado?
9. ¿Que cuidado debe tener al aplicar el criterio de Routh a polinomios conraıces repetidas con parte real cero?
10. El estudio del error en estado estacionario que se ha presentado solo consi-dera valores deseados a la salida tipo escalon, rampa y parabola ¿Que su-cede en aplicaciones como la del canon antiaereo (capıtulo 1) donde no seconoce de manera exacta cual es la salida deseada?
4.7. Ejercicios propuestos
1. En base al conocimiento del tipo que debe tener un sistema para asegurarun error en estado estacionario igual a cero para referencias escalon, ram-pa y parabola, demuestre que la funcion de transferencia de lazo cerradocorrespondiente (vease la figura 4.10) debe tener las siguientes caracterısti-cas:
Los terminos independientes de s, en el numerador y en el denomina-dor, deben ser iguales para conseguir un error cero en estado estacio-nario ante una referencia tipo escalon.Los terminos independientes de s ası como los de primer orden en s,tanto en el numerador como en el denominador, deben ser iguales paraconseguir un error cero en estado estacionario ante una referencia tiporampa.Los terminos independientes de s ası como los de primer orden y los desegundo orden en s, en el numerador y en el denominador, deben seriguales para conseguir un error cero en estado estacionario ante unareferencia tipo parabola.
Notese que esto significa que el controlador tambien debe asignar conve-nientemente los ceros de la funcion de transferencia, lo cual respalda losargumentos presentados en el ejemplo 4.21 (vease (4.18)).
2. En los ejemplos 3.17 y 3.18 del capıtulo 3 se presentan explicacionesbasadas en la experiencia cotidiana para entender porque el controlproporcional-integral (expresion en (3.97)) de nivel de agua y el controlproporcional de un sistema masa-amortiguador consiguen que h → hd yx → xd cuando t → ∞ y hd y xd son constantes. Ahora revise esos ejem-plos y explique esos resultados a partir del conocimiento del tipo de dichossistemas de control.

216 4 Criterios de estabilidad y error
3. Considere el sistema masa-resorte-amortiguador presentado en el ejemplo3.6 del capıtulo 3. Si se aplica una fuerza constante de valor A y la masaalcanza el reposo, es decir x = 0 y x = 0, entonces sustituyendo estodirectamente en la ecuacion diferencial correspondiente se obtiene que laposicion que alcanza la masa es x = A
K . Ahora utilice el teorema del valorfinal para calcular el valor final de x cuando f = A. ¿Que relacion existeentre las condiciones x = 0 y x = 0 y el requisito s → 0 del teorema delvalor final?
4. Considere el sistema masa-resorte-amortiguador rotativo:
Jθ + fθ + Kθ = T
donde J es la inercia, f es el coeficiente de friccion viscosa, K es la cons-tante de rigidez del resorte, θ es la posicion angular del cuerpo y T es elpar aplicado el cual esta dado como el siguiente controlador PID:
T = kpe + kdde
dt+ ki
∫ t
0
e(r)dr, e = θd − θ
Use el criterio de Routh para demostrar que las siguientes condiciones:
J > 0 ki > 0, K + kp > 0,f + kd
J>
ki
K + kp> 0
aseguran la estabilidad en lazo cerrado. Notese que una ganancia integralki grande tiende a producir inestabilidad y que este efecto puede ser com-pensado usando valores grandes de kp y de kd. Tambien puede observarseque una inercia J pequena permite el uso de ganancias integrales masgrandes antes de que aparezca la inestabilidad y que lo mismo ocurre si laconstante de rigidez K es grande. ¿Puede encontrar una explicacion desdeel punto de vista de la mecanica (fısica) para este fenomeno?
5. Procediendo como en el ejemplo 4.3 de este capıtulo, demuestre que lafuncion de transferencia del sistema de lazo cerrado mostrado en la figura4.3 es:
M(s) =C(s)
R(s)=
G(s)
1 − G(s)H(s)
cuando el sistema tiene realimentacion positiva, es decir, cuando el tra-yecto de realimentacion se suma (en lugar de restarse) en la figura 4.3.
6. Considere el sistema mecanico mostrado en la figura 4.23. En el ejemplo2.4 del capıtulo 2 se encontro que el modelo matematico correspondienteesta dado como:
d2xm1
dt2+
b1
m1
dxm1
dt+
K
m1(xm1 − xm2) =
1
m1F (t)
d2xm2
dt2+
b2
m2
dxm2
dt− K
m2(xm1 − xm2) = 0
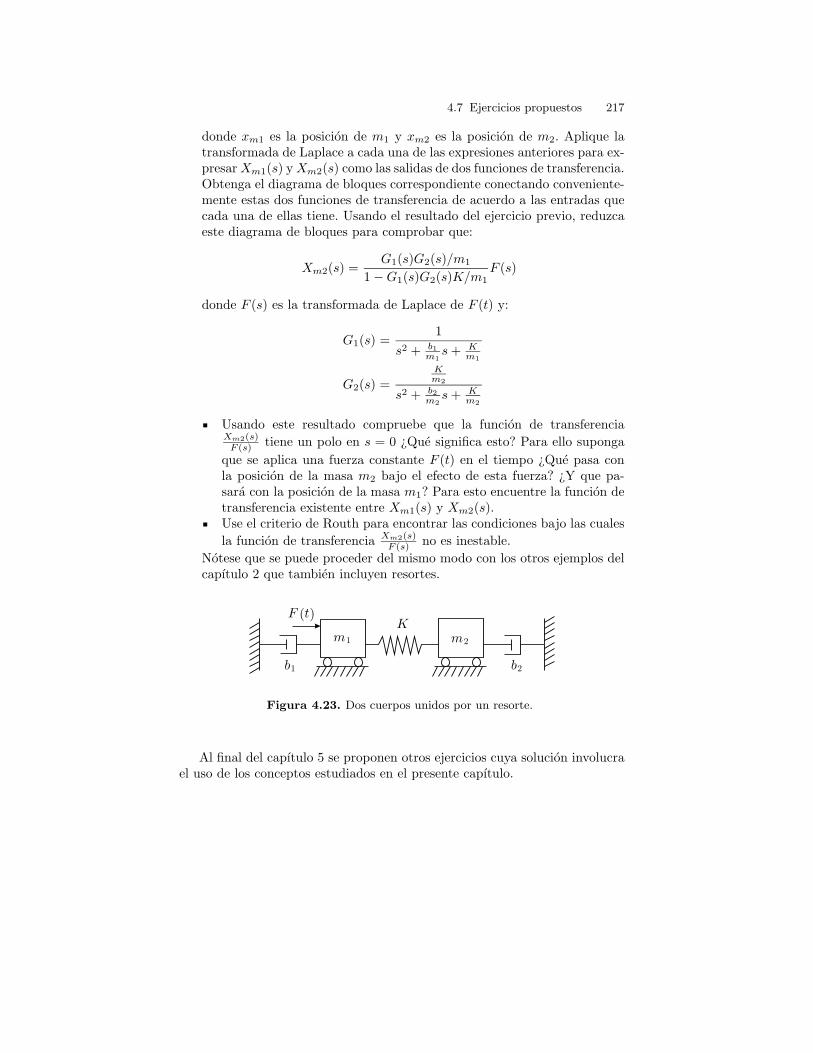
4.7 Ejercicios propuestos 217
donde xm1 es la posicion de m1 y xm2 es la posicion de m2. Aplique latransformada de Laplace a cada una de las expresiones anteriores para ex-presar Xm1(s) y Xm2(s) como las salidas de dos funciones de transferencia.Obtenga el diagrama de bloques correspondiente conectando conveniente-mente estas dos funciones de transferencia de acuerdo a las entradas quecada una de ellas tiene. Usando el resultado del ejercicio previo, reduzcaeste diagrama de bloques para comprobar que:
Xm2(s) =G1(s)G2(s)/m1
1 − G1(s)G2(s)K/m1F (s)
donde F (s) es la transformada de Laplace de F (t) y:
G1(s) =1
s2 + b1m1
s + Km1
G2(s) =Km2
s2 + b2m2
s + Km2
Usando este resultado compruebe que la funcion de transferenciaXm2(s)
F (s) tiene un polo en s = 0 ¿Que significa esto? Para ello suponga
que se aplica una fuerza constante F (t) en el tiempo ¿Que pasa conla posicion de la masa m2 bajo el efecto de esta fuerza? ¿Y que pa-sara con la posicion de la masa m1? Para esto encuentre la funcion detransferencia existente entre Xm1(s) y Xm2(s).Use el criterio de Routh para encontrar las condiciones bajo las cuales
la funcion de transferencia Xm2(s)F (s) no es inestable.
Notese que se puede proceder del mismo modo con los otros ejemplos delcapıtulo 2 que tambien incluyen resortes.
KF t( )
m2m1
b1 b2
Figura 4.23. Dos cuerpos unidos por un resorte.
Al final del capıtulo 5 se proponen otros ejercicios cuya solucion involucrael uso de los conceptos estudiados en el presente capıtulo.


Referencias
1. S. Bennett, A brief history of automatic control, IEEE Control Systems Maga-zine, pp. 17-25, June 1996.
2. K. Ogata, Ingenierıa de Control Moderna, 4a. edicion, Pearson Prentice-Hall,Madrid, 2003.
3. N.S. Nise, Sistemas de control para ingenierıa, 1a. edicion en espanol, 1a. Re-impresion, CECSA, Mexico, 2004.
4. R.C. Dorf y R.H. Bishop, Sistemas de control moderno, 10a. edicion, PearsonPrentice-Hall, Madrid, 2008.
5. B.C. Kuo, Sistemas de control automatico, 7a. edicion, Prentice-Hall Hispanoa-mericana, Mexico, 1995.
6. G.H. Hostetter, C.J. Savant y R.T. Stefani, Sistemas de control, 1a. edicion enespanol, McGraw-Hill, Mexico, 1992.


5
Diseno usando la respuesta en el tiempo
La herramienta mas importante para disenar sistemas de control usando larespuesta en el tiempo es el metodo del lugar de las raıces propuesto por W.R.Evans entre 1948 y 1950. El propio Evans dijo que la motivacion especıfica querecibio para desarrollar el metodo del lugar de las raıces vino de una preguntaque le planteo un alumno durante un curso que impartıa en North AmericanAviation. De hecho, los primeros en usar el metodo fueron los disenadores deNorth American Aviation.

222 5 Diseno usando la respuesta en el tiempo
Objetivos del capıtulo
Entender que significa “lugar de las raıces”.Aprender a dibujar el lugar de las raıces.Analizar y disenar sistemas de control usando el metodo del lugar de lasraıces.
Considere el sistema en lazo cerrado mostrado en la figura 5.1. En el ejem-plo 4.3 de la seccion 4.1 se muestra que la funcion de transferencia del sistemaen lazo cerrado esta dada como:
M(s) =C(s)
R(s)=
G(s)
1 + G(s)H(s)(5.1)
En el capıtulo 3 se explica que la respuesta en el tiempo c(t) = L−1C(s) =
+
àG(s)
H(s)
C(s)R(s)
Figura 5.1. Sistema en lazo cerrado.
L−1M(s)R(s) esta dada como la suma de la respuesta natural y de larespuesta forzada: c(t) = cn(t)+ cf (t). Los objetivos del sistema de control enla figura 5.1 son:
Que el sistema de control en lazo cerrado sea estable, es decir quelımt→∞ cn(t) = 0, lo cual se asegura si todos los polos de la funcion detransferencia de lazo cerrado M(s) tienen parte real menor que cero. Estoes importante porque consigue que conforme el tiempo crece la respuestadel sistema c(t) converge a la respuesta forzada cf (t).Que la convergencia cn(t) → 0 sea conseguida rapidamente.Que la respuesta forzada sea igual a la salida deseada cf (t) = r(t) =L−1R(s).
El ultimo punto constituye las caracterısticas de respuesta en estado estacio-nario y la manera de asegurar que el sistema en lazo cerrado responde con lascaracterısticas deseadas se estudia en la seccion 4.4. El segundo punto cons-tituye las caracterısticas de respuesta transitoria deseadas y en este capıtulose estudia la manera de disenar un controlador que asegure que el sistema enlazo cerrado responda con las caracterısticas deseadas. Debe subrayarse que alasegurar que se obtienen las caracterısticas deseadas de respuesta transitoriatambien se debe asegurar la estabilidad del sistema en lazo cerrado.

5.1 Diseno con el lugar de las raıces 223
El problema de disenar un controlador consiste en asignar conveniente-mente los polos 1 + G(s)H(s) = 0 y los ceros G(s) = 0 de la funcion detransferencia de lazo cerrado M(s). En control clasico los polos y los ceros dela planta siempre se consideran conocidos y la estructura del controlador sepropone como algo conocido (para satisfacer las caracterısticas de respuestaen estado estacionario, por ejemplo). Sin embargo la ubicacion exacta de lospolos y los ceros del controlador debe ser seleccionada de modo que se asegureque los polos de lazo cerrado 1 + G(s)H(s) = 0 esten colocados en los valoresdeseados y que los ceros de lazo cerrado G(s) = 0 esten colocados convenien-temente. En este capıtulo se presenta una de las herramientas principales decontrol clasico para resolver este problema: el metodo del lugar de las raıces.Este metodo determina la ubicacion de los polos de la funcion de transferenciade lazo cerrado M(s) a partir del estudio de la funcion de transferencia delazo abierto G(s)H(s). Ademas, es posible ubicar los ceros de la funcion detransferencia de lazo cerrado M(s) de modo que su efecto sobre la respuestadel sistema en lazo cerrado sea pequeno.
5.1. Diseno con el lugar de las raıces. Caracterısticasdeseadas de la respuesta transitoria
Suponiendo que los polos y los ceros de la planta se conocen, el metodo dellugar de las raıces es una herramienta grafica que es util para determinar cualesseran los polos de lazo cerrado si se usa un controlador que contiene ciertospolos y ceros que se proponen o que se deben calcular. Por otro lado, tambienes posible utilizar el lugar de las raıces para conseguir que uno o varios ceros delazo cerrado se cancelen con uno o varios polos de lazo cerrado. De acuerdo a laseccion 3.9.1 esto permite reducir el orden del sistema y eliminar la presenciade ceros de manera que la respuesta transitoria del sistema en lazo cerradopuede ser aproximada por uno de los casos sencillos estudiados en las secciones3.1 y 3.3. Estas caracterısticas facilitan la tarea de disenar el controlador demanera que la funcion de transferencia de lazo cerrado M(s) tenga los polosy los ceros que aseguren las caracterısticas deseadas de respuesta transitoria.
El lugar de las raıces esta representado por varias curvas cuyos puntos cons-tituyen los polos del sistema de lazo cerrado obtenidos conforme un parametro,k, es variado desde k = 0 hasta k = +∞. De acuerdo a (5.1), todo punto sque sea un polo de lazo cerrado (y que, por tanto, pertenezca al lugar de lasraıces) debe cumplir 1 + G(s)H(s) = 0. El lugar de las raıces se construyeproponiendo puntos s en el plano complejo s, los cuales deben ser verificadossi satisfacen la condicion para ser polos de lazo cerrado: 1 + G(s)H(s) = 0.Para verificar esta condicion de una manera sencilla se propone un conjuntode reglas que se listan a continuacion. Estas reglas dan lugar a la construcciongrafica del lugar de las raıces el cual se dibuja a partir de los polos y los cerosde la funcion de transferencia de lazo abierto G(s)H(s). Esto significa que los

224 5 Diseno usando la respuesta en el tiempo
polos de lazo cerrado seran determinados a partir de los polos y los ceros delazo abierto.
La funcion de transferencia de lazo abierto se puede escribir como:
G(s)H(s) = k
∏mj=1(s − zj)∏ni=1(s − pi)
, n > m (5.2)
donde zj , j = 1, . . . ,m, son los ceros de lazo abierto y pi, i = 1, . . . , n, sonlos polos de lazo abierto. Siendo zj , pi y s numeros complejos, en general,ubicados en el plano s se puede escribir:
s − zj = lj∠θj
s − pi = li∠θi
como se ilustra en la figura 5.2. Entonces:
Re s( )
Im s( )
zj pi
s
lj li
òjòi
sàz j
sàpi
Figura 5.2. Representacion grafica de los factores s − zj y s − pi.
G(s)H(s) = k
∏mj=1 lj∠θj∏ni=1 li∠θi
= k
∏mj=1 lj∏ni=1 li
∠
m∑
j=1
θj −n∑
i=1
θi
(5.3)
Por otro lado, los valores de s que satisfacen lo siguiente son los polos de lazocerrado:
1 + G(s)H(s) = 0 (5.4)
Esto significa que los polos de lazo cerrado son los valores de s que satisfacen:
G(s)H(s) = −1 = 1∠ ± (2q + 1)180, q = 0, 1, 2, . . . (5.5)
Usando (5.3) y (5.5) se obtiene la condicion de magnitud (5.6) y la condicionde angulo (5.7) que debe satisfacer todo s que sea polo de lazo cerrado y que,por tanto, pertenezca al lugar de las raıces:
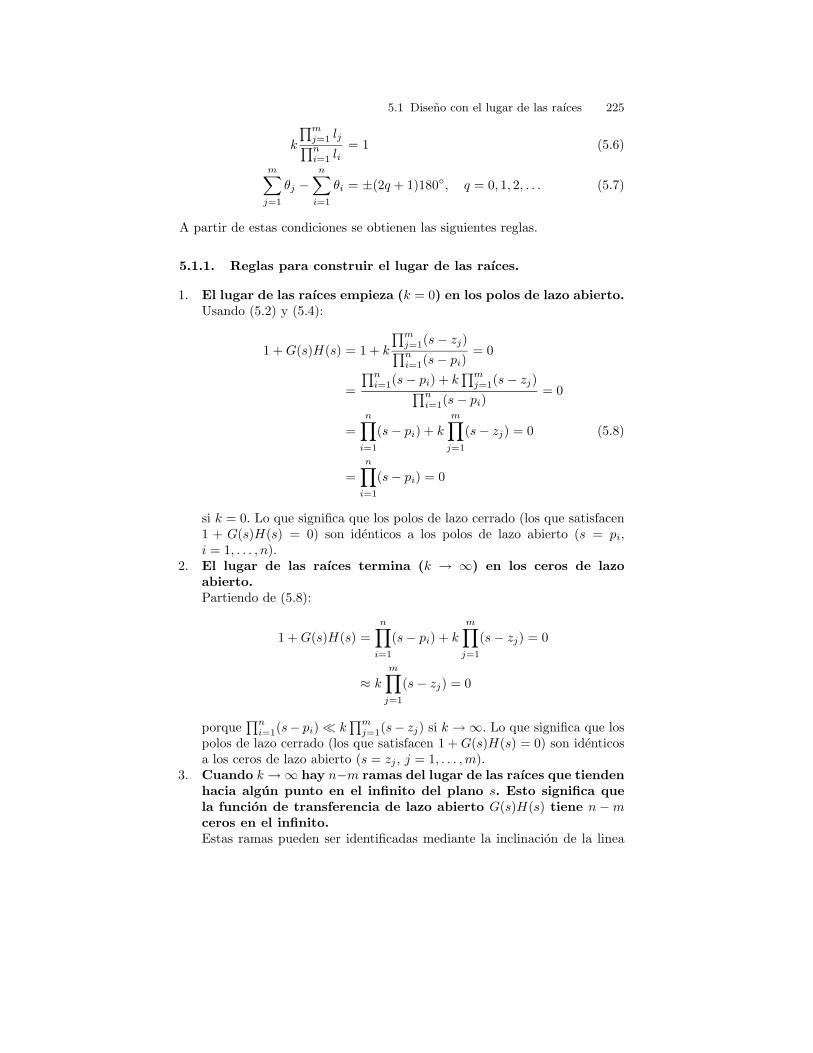
5.1 Diseno con el lugar de las raıces 225
k
∏mj=1 lj∏ni=1 li
= 1 (5.6)
m∑
j=1
θj −n∑
i=1
θi = ±(2q + 1)180, q = 0, 1, 2, . . . (5.7)
A partir de estas condiciones se obtienen las siguientes reglas.
5.1.1. Reglas para construir el lugar de las raıces.
1. El lugar de las raıces empieza (k = 0) en los polos de lazo abierto.Usando (5.2) y (5.4):
1 + G(s)H(s) = 1 + k
∏mj=1(s − zj)∏ni=1(s − pi)
= 0
=
∏ni=1(s − pi) + k
∏mj=1(s − zj)∏n
i=1(s − pi)= 0
=
n∏
i=1
(s − pi) + k
m∏
j=1
(s − zj) = 0 (5.8)
=
n∏
i=1
(s − pi) = 0
si k = 0. Lo que significa que los polos de lazo cerrado (los que satisfacen1 + G(s)H(s) = 0) son identicos a los polos de lazo abierto (s = pi,i = 1, . . . , n).
2. El lugar de las raıces termina (k → ∞) en los ceros de lazoabierto.Partiendo de (5.8):
1 + G(s)H(s) =n∏
i=1
(s − pi) + km∏
j=1
(s − zj) = 0
≈ k
m∏
j=1
(s − zj) = 0
porque∏n
i=1(s− pi) ≪ k∏m
j=1(s− zj) si k → ∞. Lo que significa que lospolos de lazo cerrado (los que satisfacen 1 + G(s)H(s) = 0) son identicosa los ceros de lazo abierto (s = zj , j = 1, . . . ,m).
3. Cuando k → ∞ hay n−m ramas del lugar de las raıces que tiendenhacia algun punto en el infinito del plano s. Esto significa quela funcion de transferencia de lazo abierto G(s)H(s) tiene n − mceros en el infinito.Estas ramas pueden ser identificadas mediante la inclinacion de la linea

226 5 Diseno usando la respuesta en el tiempo
recta a la que cada una de dichas ramas tiende asintoticamente conformek → ∞. El angulo que cada asıntota forma con el eje real positivo sepuede calcular como:
angulo de la asıntota =±180(2q + 1)
n − m, q = 0, 1, 2, . . . (5.9)
Esta formula se puede obtener del siguiente modo. Cuando se considera un
Re s( )
Im s( ) s
ò
polos y cerosde lazo abierto
asíntota
Figura 5.3. Polos y ceros de lazo abierto para determinar las asıntotas de la regla3.
punto s que se encuentra muy lejos del origen sobre una asıntota, todoslos polos y todos los ceros de G(s)H(s), o de lazo abierto, se observantodos reunidos en un punto del plano s, como se muestra en la figura 5.3.Por tanto, el angulo con que contribuye cada polo y cada cero de lazoabierto a la condicion en (5.7) (vease la figura 5.3) es identico al de losdemas, es decir, representando dicho angulo por θ la condicion de angulo(5.7) se puede escribir como:
m∑
j=1
θj −n∑
i=1
θi = (m − n)θ = ±(2q + 1)180, q = 0, 1, 2, . . .
Despejando θ de esta expresion se obtiene:
θ =±(2q + 1)180
n − m, q = 0, 1, 2, . . .
lo cual se convierte en (5.9) al hacer θ =angulo de la asıntota (vease lafigura 5.3).
4. El punto σa donde las asıntotas intersectan el eje real se calculacomo [5], Cap. 6:
σa =
∑i pi −
∑j zj
n − m

5.1 Diseno con el lugar de las raıces 227
5. Considere un punto sobre el eje real del plano s. Suponga que ala derecha de dicho punto existe un numero de polos (No. po-losD) y de ceros (No. cerosD) reales que al ser sumados (N=No.polosD+No. cerosD) dan un numero impar N . Entonces dichopunto sobre el eje real forma parte del lugar de las raıces. Encaso contrario tal punto no pertenece al lugar de las raıces.Observe la figura 5.4 y considere la condicion de angulo (5.7). Notese quedos polos o dos ceros complejos conjugados producen angulos que al su-marse son iguales a 0 o a 360 por lo que no tienen contribucion en lacondicion de angulo (5.7). Esto significa que, en este caso, en la expre-sion (5.7) solo se deben considerar los polos y ceros reales. Por otro lado,notese que todo polo y cero real que se encuentre colocado a la izquierdadel punto de prueba s contribuye con un angulo cero. Esto significa queen la expresion (5.7) solo se deben considerar los polos y ceros reales quese encuentren a la derecha del punto de prueba s. Notese que cada ceroreal a la derecha del punto s contribuye con un angulo de +180 y cadapolo a la derecha del mismo punto contribuye con un angulo de −180.Por tanto, en angulo total con el que contribuyen todos los polos y cerosque estan a la derecha del punto de prueba es:
m∑
j=1
θj −n∑
i=1
θi = No.cerosD × (+180) + No.polosD × (−180)
Por otro lado, si la resta de dos numeros es un numero impar entonces
Re s( )
Im s( )
s
òi
òj
180î180î
0î0î
ò0jò0i
Figura 5.4. Polos y ceros de lazo abierto para estudiar la regla 5.
la suma de los mismos numeros es un numero impar. Por tanto, si:
m∑
j=1
θj −n∑
i=1
θi = (No.cerosD − No.polosD) × (+180) = ±(2q + 1)180

228 5 Diseno usando la respuesta en el tiempo
para algun q = 0, 1, 2, . . ., es decir (No. cerosD−No. polosD) es impar,entonces tambien se cumple:
m∑
j=1
θj −n∑
i=1
θj = N × (+180) = ±(2q + 1)180
para algun q = 0, 1, 2, . . ., es decir con N =(No. PolosD+No. cerosD)impar. Notese que esta ultima expresion constituye la condicion de angulo(5.7) por lo que el punto de prueba s en la figura 5.4 es un polo de lazocerrado y forma parte del lugar de las raıces.
6. El lugar de las raıces es simetrico respecto al eje horizontal.Esto se entiende facilmente si se recuerda que todo polo complejo aparecesiempre simultaneamente con su pareja conjugada (vease el ultimo parrafode la seccion 3.6).
7. El angulo de salida de un polo complejo se calcula como:angulo de salida de un polo complejo=±(2q + 1)180 +
∑[angulos de vectores desde los ceros hacia el polo en
cuestion]−
∑[angulos de vectores desde los otros polos hacia el polo en cuestion]
(5.10)
La explicacion de esta formula es como sigue. Considere la figura 5.5. El
Re s( )
Im s( )sòpv
òi òj
pv
pi zj
Figura 5.5. Polos y ceros de lazo abierto para estudiar la regla 7.
punto s es un punto que pertenece al lugar de las raıces y que esta infini-tesimalmente cercano al polo en el punto pv. El angulo θpv medido comoel angulo formado con respecto al eje horizontal positivo por el vectortrazado desde el polo en pv hacia el punto s es igual al angulo de salidadel polo complejo en pv. La condicion de angulo (5.7) establece que:
m∑
j=1
θj −n∑
i=1
θi =

5.1 Diseno con el lugar de las raıces 229
= (θz1 + θz2 + · · · + θzm) − (θp1 + θp2 + · · · + θpv + · · · + θpn)
= ±(2q + 1)180, q = 0, 1, 2, . . .
donde θzj y θpi representan los angulos debidos a los ceros y a los polos delazo abierto, respectivamente (puede considerarse que s = pv). Despejandoθpv:
θpv = ±(2q + 1)180 + (θz1 + θz2 + · · · + θzm) − (θp1 + θp2 + · · · + θpn)
para q = 0, 1, 2, . . ., que equivale a la formula (5.10).8. El angulo de llegada a un cero complejo se calcula como:
angulo de llegada a un cero complejo=±(2q + 1)180 −∑
[angulos de vectores desde los otros ceros hacia el ceroen cuestion]+
∑[angulos de vectores desde los polos hacia el cero en cuestion]
(5.11)
La explicacion de esta formula es como sigue. Considere la figura 5.6. El
Re s( )
Im s( )s
òi òj
pi zj
zvòzv
Figura 5.6. Polos y ceros de lazo abierto para estudiar la regla 8.
punto s es un punto que pertenece al lugar de las raıces y que esta infini-tesimalmente cercano al cero en el punto zv. El angulo θzv medido comoel angulo formado con respecto al eje horizontal positivo por el vectortrazado desde el cero en zv hacia el punto s es igual al angulo de llegadaal cero en zv. La condicion de angulo (5.7) establece que:
m∑
j=1
θj −n∑
i=1
θi =
= (θz1 + θz2 + · · · + θzv + · · · + θzm) − (θp1 + θp2 + · · · + θpn)
= ±(2q + 1)180
donde q = 0, 1, 2, . . ., mientras que θzj y θpi representan los angulos de-bidos a los ceros y a los polos de lazo abierto, respectivamente (puedeconsiderarse que s = zv). Despejando θzv:

230 5 Diseno usando la respuesta en el tiempo
θzv = ±(2q + 1)180 − (θz1 + θz2 + · · · + θzm) + (θp1 + θp2 + · · · + θpn)
para q = 0, 1, 2, . . ., que equivale a la formula (5.11).9. La ganancia de lazo abierto, k, requerida para que un punto s,
perteneciente al lugar de las raıces, verdaderamente sea selec-cionado como un polo de lazo cerrado se calcula de manera quese satisfaga la condicion de magnitud (5.6):
k =
∏ni=1 li∏mj=1 lj
10. Los puntos de cruce con el eje imaginario se pueden obtener usando elcriterio de Routh (vease la seccion 4.3).
Finalmente dos reglas practicas:11. Un polo de lazo abierto (en el semiplano izquierdo) agregado
al lugar de las raıces tiende a inestabilizar al sistema en lazocerrado. Este efecto inestabilizante es mayor conforme el polose coloque cada vez mas cerca del origen.Considere la figura 5.7, donde s representa un punto que pertenece al lugarde las raıces y se esta considerando un sistema que en lazo abierto no tieneceros y solo tiene los dos polos mostrados. De acuerdo a la condicion deangulo (5.7):
−(θp1 + θp2) = −180
En la figura 5.8 se conservan los polos en p1 y en p2 pero se agrega un
Re s( )
Im s( )s
òp1òp2
p1p2
Figura 5.7. Un punto perteneciente al lugar de las raıces de un sistema con dospolos en lazo abierto.
tercer polo en p3. Ahora la condicion de angulo (5.7) se escribe como:

5.1 Diseno con el lugar de las raıces 231
Re s( )
Im s( ) s
òp1òp2
p1p2
òp3
p3
Figura 5.8. El lugar de las raıces es empujado hacia la derecha al introducir unpolo adicional de lazo abierto.
−(θp1 + θp2 + θp3) = −180
Esto significa que la suma θp1 + θp2 debe ser menor en la figura 5.8 queen la figura 5.7 lo cual se consigue si el punto s en la figura 5.7 se recorrehacia la derecha como en la figura 5.8, es decir, si el lugar de las raıces esdoblado hacia la derecha en la figura 5.8. Es facil ver que esta desviaciones mayor (el lugar de las raıces es empujado cada vez mas hacia la zonade inestabilidad) conforme θp3 es mayor, es decir, conforme p3 es mascercano al origen. Esto es una muestra de que un controlador integraltiende a inestabilizar a un sistema en lazo cerrado.
12. Un cero de lazo abierto (en el semiplano izquierdo) agregado allugar de las raıces tiende a aumentar la estabilidad del sistemaen lazo cerrado. Este efecto estabilizante es mayor conforme elcero se coloque cada vez mas cerca del origen.Considere de nuevo la figura 5.7. De acuerdo a la condicion de angulo(5.7):
−(θp1 + θp2) = −180
En la figura 5.9 se conservan los polos en p1 y en p2 pero se agrega uncero en z1. Ahora la condicion de angulo (5.7) se escribe como:
θz1 − (θp1 + θp2) = −180
Esto significa que la suma θp1 + θp2 debe ser mayor en la figura 5.9 queen la figura 5.7 lo cual se consigue si el punto s en la figura 5.7 se recorrehacia la izquierda como en la figura 5.9, es decir, si el lugar de las raıces esdoblado hacia la izquierda en la figura 5.9. Es facil ver que esta desviaciones mayor (el sistema es halado cada vez mas hacia la zona de mayorestabilidad) conforme θz1 es mayor, es decir, conforme z1 es mas cercano

232 5 Diseno usando la respuesta en el tiempo
Re s( )
Im s( )s
òp1òp2
p1p2
òz1
z1
Figura 5.9. El lugar de las raıces es halado hacia la izquierda al introducir un ceroadicional de lazo abierto.
al origen. Esto es una muestra de que el controlador derivativo tiende aestabilizar a un sistema.
5.2. Ejemplos
5.2.1. Control proporcional de posicion
De acuerdo al capıtulo 10, el siguiente es el modelo de un motor de CDcuando no existen perturbaciones externas:
θ(s) =k
s(s + a)I∗(s) (5.12)
a =b
J> 0, k =
nkm
J> 0
donde θ(s) e I∗(s) representan la posicion (salida) y la consigna de corriente(entrada), respectivamente. Suponga que se usa el siguiente control propor-cional de posicion:
I∗(s) = kp(θd(s) − θ(s))
donde θd(s) es la posicion deseada y kp es una constante conocida como laganancia proporcional. El sistema en lazo cerrado se puede representar comoen la figura 5.10, de donde se concluye que la funcion de transferencia en lazoabierto esta dada como:
G(s)H(s) =kpk
s(s + a)(5.13)

5.2 Ejemplos 233
Notese que el sistema es tipo 1 por lo que el error en estado estacionario escero cuando la posicion deseada es un escalon. Por tanto, el unico problemade diseno que resta es seleccionar el valor de kp de manera que los polos delazo cerrado esten ubicados en los lugares deseados. A continuacion se estudiaeste problema usando el metodo del lugar de las raıces. La ganancia kp es
+
àkp
Iã(s) ò(s)òd(s)
s(s+a)k
Figura 5.10. Sistema de control proporcional de posicion.
variada por el metodo para que tome valores desde 0 hasta +∞. Primero sereescribe G(s)H(s) en la siguiente forma:
G(s)H(s) =kpk
l1l2∠ − (θ1 + θ2)
donde se han definido los vectores s − 0 = l1∠θ1, s − (−a) = l2∠θ2 (veasela figura 5.11). Las dos condiciones fundamentales que definen el lugar de lasraıces son las condiciones de angulo (5.7) y de magnitud (5.6) las cuales seexpresan, respectivamente, como:
−(θ1 + θ2) = ±(2q + 1)180, q = 0, 1, 2, . . .
kpk
l1l2= 1
La regla 5 indica que sobre el eje real solo existe lugar de las raıces entre lospuntos s = 0 y s = −a. Ademas, de acuerdo a la regla 1, el lugar de las raıcesinicia (kp = 0) en s = 0 y s = −a. Por otro lado, de acuerdo a las reglas 2 y3, cuando kp tiende a +∞ las ramas que inician en los puntos s = 0 y s = −adeben terminar en algun cero de lazo abierto (no existe ninguno en este caso)o en algun punto en el infinito del plano s. Por tanto, el lugar de las raıcesdebe alejarse de los puntos s = 0 y s = −a, sobre el eje real, conforme kp
crece de manera que debe existir un punto de separacion en algun lugar entredichos puntos para luego dirigirse hacia el infinito sobre el plano s.
Por otro lado, de acuerdo a la condicion de angulo, −(θ1 + θ2) = −180 =−(α+θ1) en la figura 5.11, se concluye que α = θ2 y, por lo que los triangulost1 y t2 deben ser identicos para cualquier polo de lazo cerrado s. Entonces,las dos ramas mencionadas anteriormente y que son mostradas en la figura5.11 deben ser paralelas al eje imaginario. Esto significa que el punto dondelas dos ramas se separan del eje real esta ubicado en el punto medio entre lospolos ubicados en s = 0, s = −a, es decir en (0− a)/2 = −a/2. Esto tambien

234 5 Diseno usando la respuesta en el tiempo
Re s( )
Im s( )
à a 0à2a
l1l2t1 t2
s
ë ò1ò2
ìì
Figura 5.11. Lugar de las raıces para G(s)H(s) =kpk
s(s+a).
puede verificarse usando las reglas 3 y 4. Finalmente, de acuerdo a la regla 6ambas ramas son simetricas respecto al eje horizontal.
La condicion de magnitud se usa cuando se necesita conocer el valor exactode kp que permita conseguir un punto especıfico sobre el lugar de las raıces.Notese, por ejemplo, que al crecer kp hacia +∞ las longitudes l1 y l2 debencrecer para satisfacer la condicion de magnitud
kpk
l1l2= 1 (5.14)
lo cual significa que los polos de lazo cerrado correspondientes a valores gran-des de kp tienden a algun punto en el infinito del plano s. Por tanto, seconcluye: i) los dos polos de lazo cerrado son reales, negativos y diferentescuando kp > 0 es pequena y ambos se aproximan al punto s = −a/2; estosignifica que la rapidez del sistema aumenta porque el polo mas lento se alejadel origen, ii) de acuerdo a la condicion de magnitud, cuando:
kp =l1l2k
=a2
4k, con l1 = l2 =
a
2,
los dos polos de lazo cerrado son reales, repetidos, negativos y ubicados ens = −a
2 ; por lo que se alcanza la mayor rapidez sin que haya oscilaciones, iii)
conforme kp > a2
4k se incrementa los dos polos se alejan del eje real (uno haciaarriba y el otro hacia abajo) sobre la linea vertical que pasa por s = −a
2 ;esto significa que el sistema es mas rapido (porque ωn, la distancia de lospolos al origen, aumenta; vease la seccion 3.3) y la respuesta del sistema

5.2 Ejemplos 235
en lazo cerrado (de segundo orden) es cada vez mas oscilatoria (porque elangulo 90 −α disminuye y el amortiguamiento, dado como ζ = sin(90 −α),disminuye; vease la seccion 3.3).
Todo lo anterior significa que no es posible conseguir simultaneamente unarespuesta tan rapida y tan amortiguada como se desee. Esto es una consecuen-cia directa de que los polos de lazo cerrado no pueden ser ubicados en cualquierlugar del plano s y solo pueden ser colocados sobre la linea gruesa mostradaen la figura 5.11. En el siguiente ejemplo se muestra que la introduccion deun cero en la funcion de transferencia de lazo abierto permite colocar los dospolos de lazo cerrado en cualquier punto del plano s.
5.2.2. Control proporcional-derivativo (PD) de posicion
Considere de nuevo el modelo de un motor de CD mostrado en (5.12), peroahora junto con el siguiente controlador proporcional-derivativo:
i∗ = kpe + kdde
dt, e = θd − θ
donde kp es, como antes, la ganancia proporcional y kd es una constanteconocida como la ganancia derivativa. Usando la transformada de Laplace seobtiene:
I∗(s) = kpE(s) + kdsE(s)
= (kp + kds)E(s)
= kd
(s +
kp
kd
)E(s)
por lo que se obtiene el diagrama de bloques mostrado en la figura 5.12.Entonces, la funcion de transferencia de lazo abierto esta dada como:
G(s)H(s) =kdk(s + c)
s(s + a), c =
kp
kd> 0 (5.15)
Notese que ahora es kd la ganancia que el metodo varıa desde 0 hasta +∞ para
+
à s(s+a)k
Iã(s) ò(s)òd(s)kd s+
kd
kpð ñ
Figura 5.12. Sistema de control proporcional-derivativo de posicion.
dibujar el lugar de las raıces. Primero se reescribe G(s)H(s) en la siguienteforma:
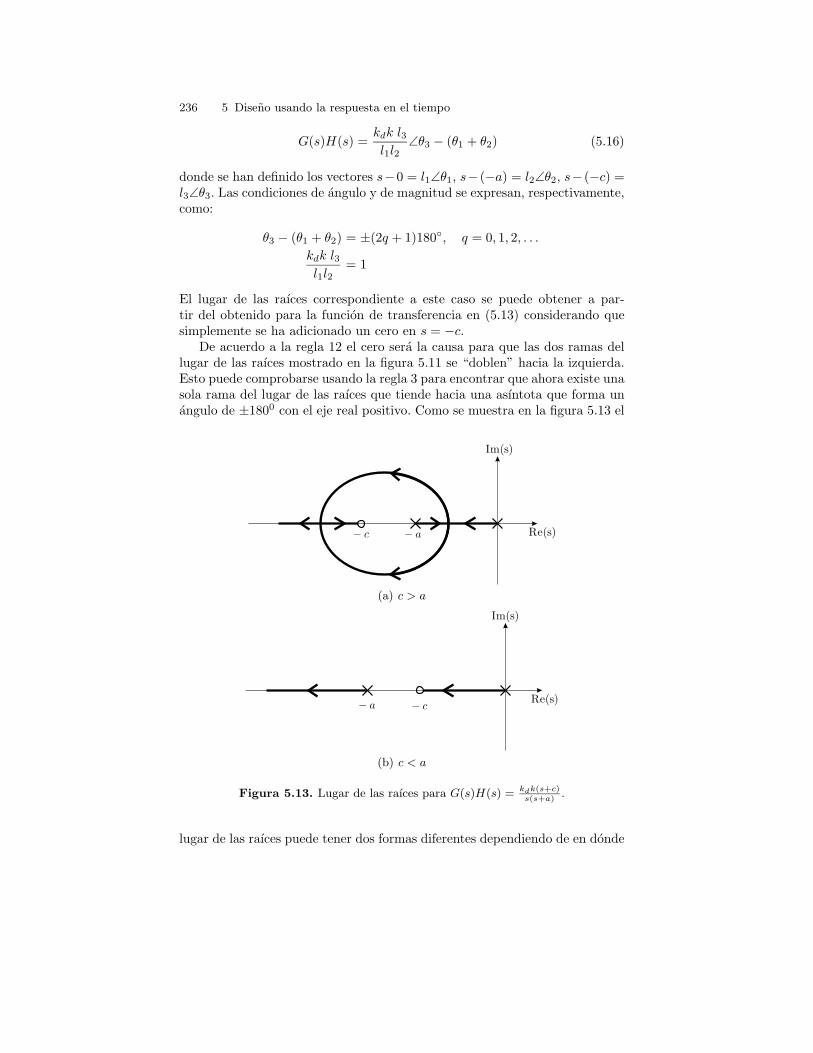
236 5 Diseno usando la respuesta en el tiempo
G(s)H(s) =kdk l3l1l2
∠θ3 − (θ1 + θ2) (5.16)
donde se han definido los vectores s−0 = l1∠θ1, s− (−a) = l2∠θ2, s− (−c) =l3∠θ3. Las condiciones de angulo y de magnitud se expresan, respectivamente,como:
θ3 − (θ1 + θ2) = ±(2q + 1)180, q = 0, 1, 2, . . .
kdk l3l1l2
= 1
El lugar de las raıces correspondiente a este caso se puede obtener a par-tir del obtenido para la funcion de transferencia en (5.13) considerando quesimplemente se ha adicionado un cero en s = −c.
De acuerdo a la regla 12 el cero sera la causa para que las dos ramas dellugar de las raıces mostrado en la figura 5.11 se “doblen” hacia la izquierda.Esto puede comprobarse usando la regla 3 para encontrar que ahora existe unasola rama del lugar de las raıces que tiende hacia una asıntota que forma unangulo de ±1800 con el eje real positivo. Como se muestra en la figura 5.13 el
à aà c Re(s)
Im(s)
(a) c > a
à a à c
Im(s)
Re(s)
(b) c < a
Figura 5.13. Lugar de las raıces para G(s)H(s) = kdk(s+c)s(s+a)
.
lugar de las raıces puede tener dos formas diferentes dependiendo de en donde

5.2 Ejemplos 237
se coloque el cero en s = −c. Si se coloca a la izquierda del polo en s = −a(como en la figura 5.13(a)) entonces, de acuerdo a la regla 5, existira lugar delas raıces sobre dos segmentos del eje real negativo: entre los puntos s = 0 ys = −a y a la izquierda del cero en s = −c. Ademas, de acuerdo a las reglas2 y 3 una de las dos ramas del lugar de las raıces que inician (kd = 0) enlos polos de lazo abierto colocados en s = 0 y s = −a debe tender al cero ens = −c mientras que la otra rama debe tender hacia el infinito del plano ssiguiendo la asıntota que forma un angulo de ±1800 con el eje real positivo. Portanto, debe existir un punto de separacion entre los puntos s = 0 y s = −a.Ademas, como el lugar de las raıces es simetrico respecto al eje real (regla6) entonces despues de separarse estas ramas deben formar dos semicırculoshacia la izquierda del punto de separacion para volverse a unir sobre el ejereal negativo en un punto a la izquierda del cero en s = −c para que, luego,una de las ramas se aproxime al cero en s = −c y la otra se vaya hacia elinfinito sobre el eje real negativo.
Por otro lado, si el cero en s = −c se coloca entre los polos de lazo abiertoen s = 0 y s = −a entonces, de acuerdo a la regla 5, existira lugar de las sobrelos segmentos del eje real negativo colocados entre los puntos s = −c y s = 0ası como a la izquierda del polo en s = −a. Notese que ahora la rama queinicia (kd = 0) en s = 0 tiende al cero en s = −c mientras que la rama queinicia (kd = 0) en s = −a tiende al infinito sobre el eje real negativo. Notesetambien que esto es posible sin necesidad de que existan ramas fuera del ejereal, como se muestra en la figura 5.13(b).
A partir de este estudio del lugar de las raıces, se puede ver que el sistemaen lazo cerrado es estable para cualquier kp > 0 y kd > 0 porque las dosposibilidades para el lugar de las raıces que han sido presentadas en la figura5.13 muestran que los polos de lazo cerrado siempre estan sobre el semipla-no complejo izquierdo s (polos con parte real negativa). A continuacion semuestra que siempre existen ganancias kp y kd que permiten colocar los polosde lazo cerrado en cualquier punto sobre el semi plano complejo izquierdo sque se desee. De acuerdo a (5.1), la funcion de transferencia de lazo cerradoesta dada como:
θ(s)
θd(s)=
kdk(s + c)
s2 + (a + kdk)s + ckdk(5.17)
es decir, existen dos polos de lazo cerrado, dados por el lugar de las raıces, yun cero en s = −c que es precisamente el cero de lazo abierto que aparece enlos lugares de las raıces mostrados en la figura 5.13. Notese que el polinomiocaracterıstico en (5.17) tiene la forma estandar:
s2 + 2ζωns + ω2n (5.18)
Por esta razon se pueden igualar ambos polinomios para concluir que, igua-lando coeficientes:
ω2n = ckdk = kpk, ζ =
a + kdk
2√
kpk(5.19)

238 5 Diseno usando la respuesta en el tiempo
polos deseados en lazo cerrado: s = −ζωn ± ωn
√ζ2 − 1
Esto significa que usando kp y kd se pueden colocar los polos de lazo cerrado encualquier punto del semiplano complejo izquierdo s porque se puede asignarcualquier valor a ζ y a ωn. Por a otro lado, es comun ubicar los polos delazo cerrado (complejos conjugados) de manera que se consiga el tiempo desubida tr y el sobre paso Mp(%) deseados. Para esto, normalmente se usanlas expresiones en (3.59) para encontrar:
ζ =abs(ln(Mp(%)/100))√π2 + ln2(Mp(%)/100)
(5.20)
ωd =1
tr
(π − atan
(√1 − ζ2
ζ
))
ωn =ωd√1 − ζ2
(5.21)
Sin embargo, en el caso del control PD de posicion que se esta estudiando,la ubicacion de los polos de lazo cerrado en los puntos deseados no aseguraque se obtendra la respuesta transitoria deseada debido a la presencia del cerocolocado en s = −c en la funcion de transferencia de lazo cerrado presentadaen (5.17). Este problema motiva el ejemplo mostrado a continuacion en el cualse usa un compensador de adelanto para controlar la posicion. Sin embargo,antes de continuar, es conveniente aclarar que a pesar del inconveniente quese acaba de mencionar para el control PD de posicion su uso es muy comunen las aplicaciones. Esto se debe a que la sintonıa del control PD en este tipode aplicaciones no necesita del calculo exacto de las ganancias, pues estas sepueden seleccionar a prueba y error usando la siguiente regla (recuerde que lafuncion de transferencia en (5.17) es estable si kp > 0 y kd > 0):
Fije kd > 0 en un valor e incremente kp > 0 hasta obtener una respuestasuficientemente rapida. Esto trae como consecuencia una respuesta muyoscilatoria porque el amortiguamiento disminuye al incrementar kp (vease(5.19)). En ese momento continue con el siguiente paso.Mantenga kp > 0 en el ultimo valor obtenido en el paso anterior y em-piece a incrementar kd > 0 hasta obtener una respuesta suficientementeamortiguada. Esto, sin embargo, reduce la rapidez de la respuesta porqueel amortiguamiento aumenta. Ası que mantenga el ultimo valor de kd, re-grese al punto anterior y repita el procedimiento hasta tener la rapidez yel sobre paso (amortiguamiento) deseados.
5.2.3. Control de posicion usando un compensador de adelanto
Considere de nuevo el modelo de un motor de CD mostrado en (5.12), peroahora junto con el siguiente controlador:
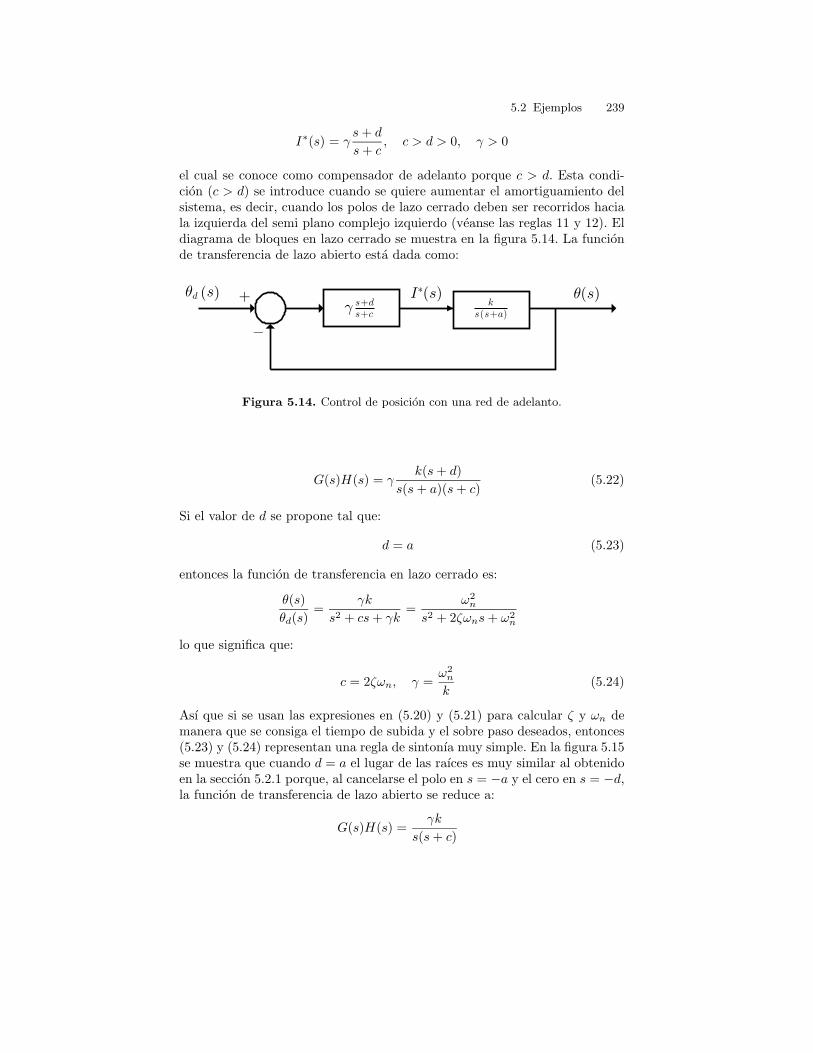
5.2 Ejemplos 239
I∗(s) = γs + d
s + c, c > d > 0, γ > 0
el cual se conoce como compensador de adelanto porque c > d. Esta condi-cion (c > d) se introduce cuando se quiere aumentar el amortiguamiento delsistema, es decir, cuando los polos de lazo cerrado deben ser recorridos haciala izquierda del semi plano complejo izquierdo (veanse las reglas 11 y 12). Eldiagrama de bloques en lazo cerrado se muestra en la figura 5.14. La funcionde transferencia de lazo abierto esta dada como:
+
à
Iã(s) ò(s)òd s( )
s s+a( )kí
s+cs+d
Figura 5.14. Control de posicion con una red de adelanto.
G(s)H(s) = γk(s + d)
s(s + a)(s + c)(5.22)
Si el valor de d se propone tal que:
d = a (5.23)
entonces la funcion de transferencia en lazo cerrado es:
θ(s)
θd(s)=
γk
s2 + cs + γk=
ω2n
s2 + 2ζωns + ω2n
lo que significa que:
c = 2ζωn, γ =ω2
n
k(5.24)
Ası que si se usan las expresiones en (5.20) y (5.21) para calcular ζ y ωn demanera que se consiga el tiempo de subida y el sobre paso deseados, entonces(5.23) y (5.24) representan una regla de sintonıa muy simple. En la figura 5.15se muestra que cuando d = a el lugar de las raıces es muy similar al obtenidoen la seccion 5.2.1 porque, al cancelarse el polo en s = −a y el cero en s = −d,la funcion de transferencia de lazo abierto se reduce a:
G(s)H(s) =γk
s(s + c)

240 5 Diseno usando la respuesta en el tiempo
Re(s)
Im(s)
à c à2c à a
à d
Figura 5.15. Lugar de las raıces para G(s)H(s) en (5.22) cuando d = a.
que es identica a la funcion de transferencia en (5.13) intercambiando kp porγ y a por c. La diferencia radica en que, en el presente caso, al seleccionar cde acuerdo a (5.24) se asegura que el lugar de las raıces pasara por los puntosdeseados del semiplano izquierdo complejo s:
s1 = −ζωn + jωn
√1 − ζ2, s2 = −ζωn − jωn
√1 − ζ2
cuando, de acuerdo a la condicion de magnitud (vease (5.14) y la figura 5.11con c en lugar de a y γ en lugar de kp):
γk
l1l2= 1, l1 = l2 = |s1| = |s2| = ωn ⇒ γ =
ω2n
k
Por tanto, si d = a no es necesario dibujar el lugar de las raıces. A continuacionse obtiene el lugar de las raıces para el caso en que d 6= a, con el fin de entenderque sucederıa en tal caso. Por tanto, considerese la funcion de transferenciade lazo abierto presentada en (5.22). La constante γ es la ganancia que elmetodo varıa desde 0 hasta +∞ para dibujar el lugar de las raıces. Noteseque, de acuerdo a (5.1) y la figura 5.14, la funcion de transferencia de lazocerrado tiene la forma:
θ(s)
θd(s)=
γ k(s + d)
(s − e)(s − g)(s − h)(5.25)
donde e, g y h representan las ubicaciones de los tres polos de lazo cerrado.Primero se reescribe G(s)H(s) en la siguiente forma:
G(s)H(s) =γ k l3l1l2l4
∠[θ3 − (θ1 + θ2 + θ4)] (5.26)
donde se han definido los vectores s−0 = l1∠θ1, s− (−a) = l2∠θ2, s− (−d) =l3∠θ3, s− (−c) = l4∠θ4. Las condiciones de angulo (5.7) y de magnitud (5.6)se expresan, respectivamente, como:

5.2 Ejemplos 241
θ3 − (θ1 + θ2 + θ4) = ±(2q + 1)180, q = 0, 1, 2, . . . (5.27)
γ k l3l1l2l4
= 1 (5.28)
Notese que ahora se tiene n = 3, m = 1, p1 = 0, p2 = −a, p3 = −c, z1 = −d.De acuerdo a las reglas 1, 2 y 3, una de las tres ramas que inician (γ = 0)en los puntos s = 0, s = −a, s = −c (polos de lazo abierto) debe terminar(γ = +∞) en el cero de lazo abierto colocado en s = −d. Por tanto, existirandos ramas del lugar de las raıces que tienden a algun punto del infinito sobre elplano s. De acuerdo a la regla 3, los angulos de las asıntotas a las que tiendenestas ramas son:
±180(2 × 0 + 1)
n − m=
±180(2 × 0 + 1)
3 − 1= ±90
Ademas, de acuerdo a la regla 4 la interseccion de estas asıntotas con el ejereal puede ser ajustada usando el cero en s = −d y el polo en s = −c:
σa =p1 + p2 + p3 − (−d)
n − m=
0 − a − c + d
2(5.29)
Como c y d deben ser positivas por motivos de estabilidad entonces las asınto-tas se mueven hacia la izquierda (mayor estabilidad) conforme el cero es ubi-cado mas cerca del origen (d → 0) y/o el polo en −c es movido hacia laizquierda. Esto significa que los polos de lazo cerrado se pueden ubicar del si-guiente modo: e y g complejos conjugados, mientras que h se selecciona comoreal y cercano al cero colocado en s = −d. De este modo, el polo y el cerotienden a disminuir sus efectos sobre la respuesta transitoria del sistema enlazo cerrado, la cual tiende a ser parecida a la de una funcion de transferenciacon la forma:
θ(s)
θd(s)=
eg
(s − e)(s − g)(5.30)
es decir, la forma estandar de segundo orden (5.18) para que el tiempo desubida y el sobre paso puedan ser calculados a partir de los valores e y g usando(3.59) o (5.20) y (5.21). Notese, sin embargo, que esto solo sera completamentecierto si d = a.
De acuerdo a la regla 5 existe lugar de las raıces sobre dos segmentosdel eje real porque se tienen cuatro polos y ceros reales de lazo abierto. Laubicacion de dichos segmentos sobre el eje real dependen del valor de d usado,como se muestra en las figuras 5.16(a) y 5.16(b). Sin embargo, notese que encualquiera de estos casos existe un polo de lazo cerrado que se aproxima alcero en s = −d conforme γ crece, lo cual es una caracterıstica deseable paraconseguir (5.30) y que ocurre cuando d = a.
5.2.4. Control proporcional-integral (PI) de velocidad
De acuerdo al capıtulo 9, el siguiente es el modelo de un motor de CDcuando la salida a controlar es la velocidad ω(s):
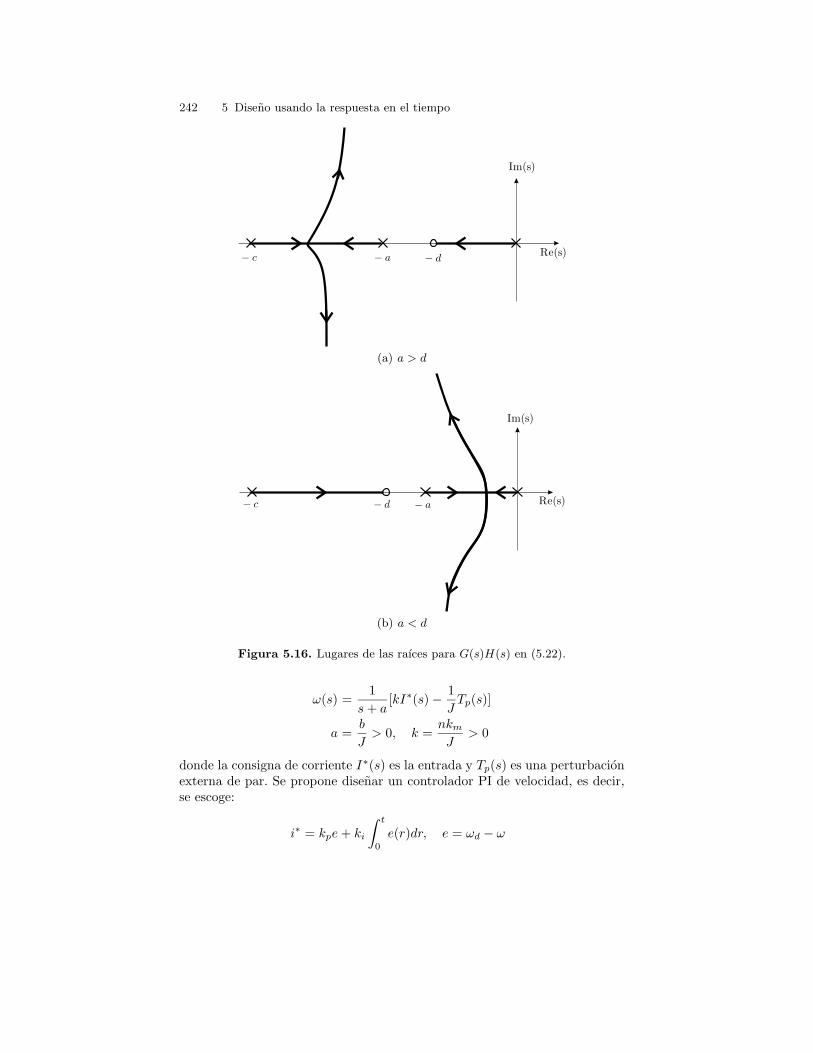
242 5 Diseno usando la respuesta en el tiempo
à aà c à d Re(s)
Im(s)
(a) a > d
à aà c à d
Im(s)
Re(s)
(b) a < d
Figura 5.16. Lugares de las raıces para G(s)H(s) en (5.22).
ω(s) =1
s + a[kI∗(s) − 1
JTp(s)]
a =b
J> 0, k =
nkm
J> 0
donde la consigna de corriente I∗(s) es la entrada y Tp(s) es una perturbacionexterna de par. Se propone disenar un controlador PI de velocidad, es decir,se escoge:
i∗ = kpe + ki
∫ t
0
e(r)dr, e = ωd − ω

5.2 Ejemplos 243
donde ωd es la velocidad deseada, kp es la ganancia proporcional y la constanteki es conocida como la ganancia integral. Usando la transformada de Laplace:
I∗(s) = kpE(s) + kiE(s)
s
=
(kp +
ki
s
)E(s)
=
(kps + ki
s
)E(s)
= kp
(s + ki
kp
s
)E(s)
Por tanto, en lazo cerrado se obtiene el diagrama de bloques mostrado en lafigura 5.17(a). Como este sistema tiene dos entradas, se puede hacer uso delprincipio de superposicion (vease la seccion 3.10) para escribir:
ω(s) = G1(s)ωd(s) + G2(s)Tp(s)
donde G1(s) es la funcion de transferencia usando ωd(s) como la entrada yω(s) como la salida cuando Tp(s) = 0, es decir, cuando se usa el diagrama debloques de la figura 5.17(b), mientras que G2(s) es la funcion de transferenciausando Tp(s) como la entrada y ω(s) como la salida cuando ωd(s) = 0, esdecir, cuando se usa el diagrama de bloques de la figura 5.17(c). Es importantesubrayar que cuando Tp(s) es la entrada entonces ω(s) representa la desviacionde la velocidad (respecto de ωd(s)) producida por la perturbacion.
A continuacion se estudia el problema de seleccionar las ganancias delcontrolador PI de manera que la respuesta en lazo cerrado tenga las carac-terısticas deseadas de respuesta transitoria ante la referencia de velocidad ωd.Para esto se usa el diagrama de bloques de la figura 5.17(b), de donde seobserva que la funcion de transferencia de lazo abierto es:
G(s)H(s) =kpk(s + c)
s(s + a), c =
ki
kp(5.31)
Notese que el sistema es tipo 1, lo cual asegura que ω(t) = ωd en estadoestacionario si ωd es una constante. Esta es una de las razones de haber elegidousar un controlador PI en este ejemplo. Por tanto, como las caracterısticasdeseadas de la respuesta en estado estacionario estan aseguradas (la velocidadalcanza la velocidad deseada) solo resta seleccionar las ganancias kp y ki demanera que sean satisfechas las caracterısticas de respuesta transitoria. Paraesto, notese que la funcion de transferencia en lazo abierto mostrada en (5.31)es identica a la funcion de transferencia mostrada en (5.15) correspondiente alcontrol PD de posicion ya que solo hay que reemplazar kd por kp. Por tanto, ellugar de las raıces correspondiente al control PI de velocidad es identico a losdos casos mostrados en la figura 5.13 y se obtienen las mismas conclusiones: i)
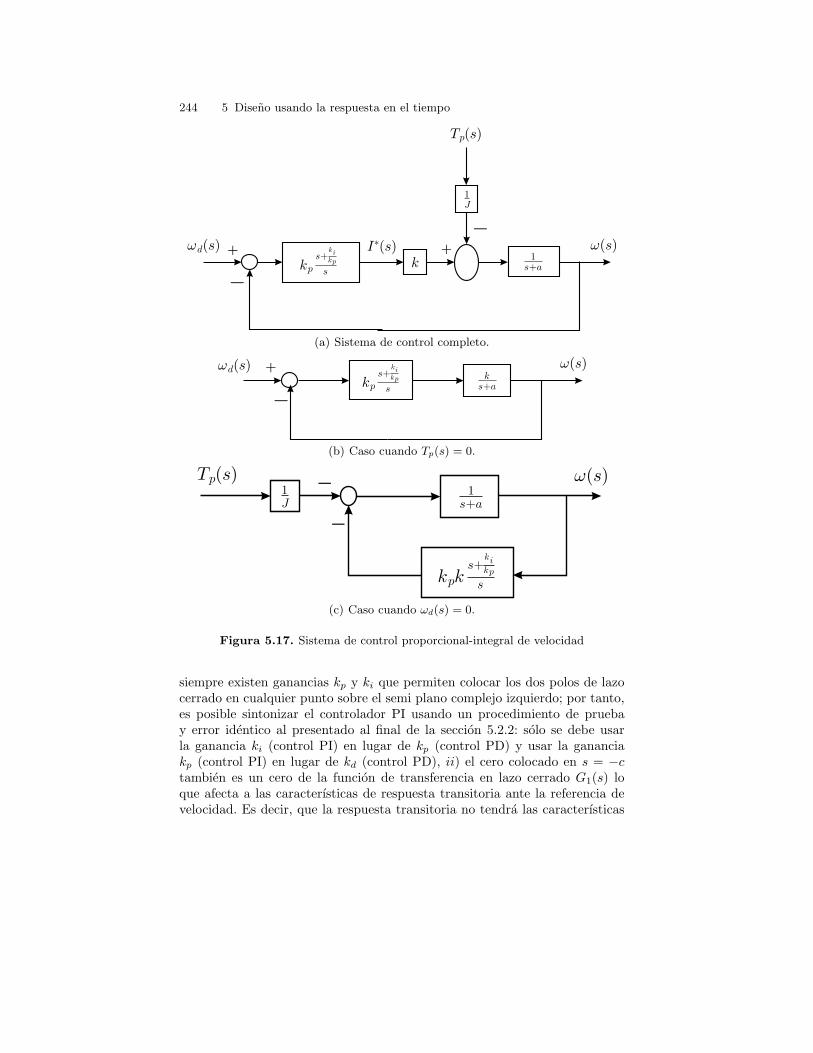
244 5 Diseno usando la respuesta en el tiempo
+
à+
àkp s
s+kp
ki
k s+a1
Iã(s) !(s)!d(s)
Tp(s)
J1
(a) Sistema de control completo.
+
àkp s
s+kp
ki
s+ak
!d(s) !(s)
(b) Caso cuando Tp(s) = 0.
àà !(s)
s+a1
kpk s
s+kp
ki
J1
Tp(s)
(c) Caso cuando ωd(s) = 0.
Figura 5.17. Sistema de control proporcional-integral de velocidad
siempre existen ganancias kp y ki que permiten colocar los dos polos de lazocerrado en cualquier punto sobre el semi plano complejo izquierdo; por tanto,es posible sintonizar el controlador PI usando un procedimiento de pruebay error identico al presentado al final de la seccion 5.2.2: solo se debe usarla ganancia ki (control PI) en lugar de kp (control PD) y usar la gananciakp (control PI) en lugar de kd (control PD), ii) el cero colocado en s = −ctambien es un cero de la funcion de transferencia en lazo cerrado G1(s) loque afecta a las caracterısticas de respuesta transitoria ante la referencia develocidad. Es decir, que la respuesta transitoria no tendra las caracterısticas

5.2 Ejemplos 245
disenadas usando (5.20) y (5.21) para seleccionar los polos de lazo cerrado.Esto plantea las siguientes dos posibilidades para el diseno.
1. El problema indicado en el inciso ii) puede ser eliminado si se elige:
c = a =ki
kp(5.32)
porque en tal caso, de acuerdo a la figura 5.17(b) y a (5.1), la funcion detransferencia de lazo cerrado es:
ω(s)
ωd(s)=
kpk
s + kpk
Esto significa que la repuesta en lazo cerrado, ante la referencia de velo-cidad, es como la de un sistema de primer orden con ganancia unitaria enestado estacionario y una constante de tiempo igual a 1
kpk . Entonces, si se
especifica una constante de tiempo deseada igual a τ se debe establecer:
kpk =1
τ(5.33)
Ası que las condiciones en (5.33) y (5.32) representan una sencilla regla
à cà a Re(s)
Im(s)
Figura 5.18. Lugar de las raıces para c = a, G(s)H(s) =kpk
s.
de sintonıa. Finalmente, el lugar de las raıces correspondientes al caso quese acaba de estudiar (c = a, G(s)H(s) =
kpks ) se muestra en la figura
5.18. Esto puede deducirse facilmente usando las reglas 3 y 5, ya que alsolo existir un polo de lazo abierto, solo existe un polo de lazo cerrado, elcual debe ser real y debe tender a un cero en el infinito (sobre el eje real,sobre una asıntota que forma −180 con el eje real positivo) porque nohay ningun cero de lazo abierto. Ademas, la condicion de magnitud:
kpk
l1= 1

246 5 Diseno usando la respuesta en el tiempo
donde l1 es la distancia del polo de lazo cerrado deseado al origen, estableceque el polo deseado en lazo cerrado ubicado en s = − 1
τ es alcanzadocuando:
kpk = l1, l1 =1
τ⇒ kpk =
1
τ
lo cual coincide con (5.33). Sin embargo, a continuacion se muestra queesta regla de sintonıa trae un problema en cuanto a la respuesta del sistemaen lazo cerrado ante la perturbacion externa Tp(s). Para esto, considereseel diagrama de bloques de la figura 5.17(c). Si se selecciona c = a entoncesla funcion de transferencia de lazo cerrado es:
ω(s)
Tp(s)=
− kJ s
(s + kpk)(s + a)(5.34)
Usando el teorema del valor final se encuentra que:
lımt→∞
ω(t) = lıms→0
sω(s)
= lıms→0
s− k
J s
(s + kpk)(s + a)
tds
= 0
la desviacion producida por una perturbacion externa de par de valorconstante igual a td es reducida a cero en estado estacionario. Esta es laotra razon por la cual se ha elegido usar un controlador PI de velocidad.Sin embargo, existe un problema. La rapidez con la que tal desviacion esllevada a cero depende de los polos de la funcion de transferencia mostradaen (5.34), los cuales estan ubicados en s = −kpk y s = −a. Aunque unode estos polos puede ser hacerse tan rapido como se desee usando un valorgrande de kp, la rapidez del otro polo (s = −a) no puede ser modificada ydepende de la rapidez que el motor de CD tiene en lazo abierto. Esto traecomo consecuencia que la desviacion debida a la perturbacion puede serllevada a cero muy lentamente, lo cual representa un serio inconveniente.
2. Tratando de resolver el problema que se acaba de indicar se puede optarpor abandonar la regla de sintonıa representada por (5.33) y (5.32). Comoahora c 6= a, la funcion de transferencia de lazo cerrado correspondienteal diagrama de bloques de la figura 5.17(c) es:
ω(s)
Tp(s)=
− kJ s
s2 + (a + kpk)s + kpkc(5.35)
Usando de nuevo el teorema del valor final se puede verificar facilmenteque si la perturbacion externa es constante Tp(s) = td
s entonces la desvia-cion producida en estado estacionario es cero de nuevo: lımt→∞ ω(t) = 0,debido a que la funcion de trasferencia en (5.35) tiene un cero en s = 0.Por otro lado, los polos de la funcion de transferencia en (5.35), que son los
5.2 Ejemplos 247
que determinan la rapidez con la que la desviacion de velocidad desapare-
ce, son identicos a los polos de la funcion de transferencia ω(s)ωd(s) = G1(s),
por lo que pueden ser determinados usando el metodo del lugar de lasraıces a partir de (5.31). Tal como ya se ha explicado, el lugar de lasraıces correspondiente es identico a los dos casos mostrados en la figura5.13 sustituyendo el uso de kd por el de kp. Es muy importante subrayarque la funcion de transferencia en (5.35) no tiene el cero en s = −c quese muestra en el lugar de las raıces de la figura 5.13. Esto significa queninguno de los dos polos de lazo cerrado obtenidos con el metodo del lugarde las raıces podra cancelarse con el cero en s = −c y el polo mas lentotendra el efecto mas importante sobre la rapidez con la que la desviaciondebida a la perturbacion es llevada a cero. Con esto en mente se concluyelo siguiente.
Con el fin de que el cero en s = −c tenga poco efecto sobre la respuestatransitoria ante la referencia de velocidad, uno de los polos de lazocerrado debe seleccionarse cerca del cero en s = −c. El otro polo delazo cerrado (el mas rapido) se aleja hacia la izquierda y tiende alinfinito conforme el polo lento se acerca a s = −c.Esto significa que el polo rapido determina las caracterısticas de res-puesta transitoria (constante de tiempo) ante la referencia de velo-cidad. Entonces, si se desea establecer cierto valor para la constantede tiempo (de manera que el polo rapido ocupe un punto finito sobreel eje real negativo), el polo lento siempre estara relativamente lejosdel cero en s = −c (a donde convergerıa cuando el polo rapido llegueal infinito). Esto significa que la respuesta transitoria estara afecta-da por los dos polos y el cero en s = −c. Por tanto, si c 6= a, no sepuede determinar una regla de sintonıa que de manera exacta fije lascaracterısticas de respuesta transitoria ante la referencia de velocidad.Es mas conveniente seleccionar c > a porque el polo de lazo cerradomas lento (el que se aproxima a s = −c) queda colocado mas a laizquierda (es mas rapido) que si selecciona c < a.Por esta misma razon, si se quiere aumentar la rapidez con la que elefecto de la perturbacion desaparece, se debe seleccionar c 6= a conc > 0 cada vez mas grande. De acuerdo a c = ki/kp, esto significa quese necesita una ganancia integral mayor.
Por tanto, aunque es posible aumentar la rapidez con la que desaparecela desviacion producida por la perturbacion, se concluye que no se pue-den calcular de manera exacta las ganancias kp y ki que aseguren quese consiguen, simultaneamente, las caracterısticas deseadas de respuestatransitoria ante la referencia deseada y un rechazo rapido de los efectosde la perturbacion. Esta afirmacion es verificada experimentalmente enel capıtulo 9 y, por ello, en ese capıtulo se presenta un controlador PImodificado de velocidad que resuelve este problema.

248 5 Diseno usando la respuesta en el tiempo
Previendo su uso experimental en el capıtulo 9, a continuacion se propone unaregla de sintonıa para el caso cuando c 6= a. De acuerdo a (5.31) la condicionde magnitud es:
kpkl1l3l2
= 1
donde s − (0) = l2∠θ2, s − (−a) = l3∠θ3, s − (−c) = l1∠θ1. El criteriode sintonıa seleccionado es proponer que el polo mas lento este ubicado enun valor conocido s = −p1, para fijar un lımite inferior en la rapidez conla que se rechaza el efecto de la perturbacion. Por otro lado, de acuerdo alos puntos listados previamente, se propone c cercano a p1 de manera quep1 > c. Entonces, usando la condicion de magnitud previa se obtiene la reglade sintonıa:
ki
kp= c, c < p1, kp =
l2l3l1k
(5.36)
l1 = abs(−p1 + c), l2 = abs(−p1), l3 = abs(−p1 + a)
De acuerdo a lo expuesto previamente, la respuesta ante la referencia de ve-locidad sera mucho mas rapida que la dictada por el polo en s = −p1. Parapropositos de comparacion, esto es muy importante pues en el capıtulo 9 sedisenan algunos controladores de velocidad que consiguen simultaneamenterespuestas transitorias ante una referencia de velocidad y una perturbacionexterna que son determinadas por un polo en s = −p1. En cambio con elcontrol PI de velocidad aquı estudiado, si se desea aumentar la rapidez de res-puesta ante una perturbacion externa (con un polo en s = −p1), la respuestaante la referencia de velocidad debe ser mucho mas rapida.
5.2.5. Control proporcional-integral-derivativo (PID) de posicion
Considere de nuevo el modelo de un motor de CD pero ahora considerandola presencia de una perturbacion externa:
θ(s) =1
s(s + a)[kI∗(s) − 1
JTp(s)]
junto con el siguiente controlador proporcional-integral-derivativo:
i∗ = kpe + kdde
dt+ ki
∫ t
0
e(r)dr, e = θd − θ
donde θd es la posicion deseada y las constantes kp, kd y ki se conocen comolas ganancias proporcional, derivativa e integral, respectivamente. Usando latransformada de Laplace se obtiene:

5.2 Ejemplos 249
I∗(s) = kpE(s) + kdsE(s) + kiE(s)
s
=
(kp + kds +
ki
s
)E(s)
= kd
s2 +kp
kds + ki
kd
sE(s)
por lo que se obtiene el diagrama de bloques mostrado en la figura 5.19(a).Como este sistema tiene dos entradas entonces se puede usar el principio desuperposicion (vease la seccion 3.10) para escribir:
θ(s) = G1(s)θd(s) + G2(s)Tp(s)
donde G1(s) es la funcion de transferencia usando θd(s) como la entrada yθ(s) como la salida cuando Tp(s) = 0, es decir, cuando se usa el diagrama debloques de la figura 5.19(b) para encontrar:
θ(s)
θd(s)= G1(s) =
kdk(s2 +
kp
kds + ki
kd
)
s3 + (a + kdk)s2 + kpks + kik, Tp(s) = 0 (5.37)
Por otro lado, G2(s) es la funcion de transferencia usando Tp(s) como laentrada y θ(s) como la salida cuando θd(s) = 0, es decir, cuando se usa eldiagrama de bloques de la figura 5.19(c) para encontrar:
θ(s)
Tp(s)= G2(s) =
− kJ s
s3 + (a + kdk)s2 + kpks + kik, θd(s) = 0 (5.38)
Es importante subrayar que cuando Tp(s) es la entrada entonces θ(s) re-presenta la desviacion de la posicion (respecto de θd(s)) producida por laperturbacion. Usando el teorema del valor final se encuentra que:
lımt→∞
θ(t) = lıms→0
sθ(s)
= lıms→0
s− k
J s
s3 + (a + kdk)s2 + kpks + kik
tds
= 0
la desviacion de posicion en estado estacionario producida por una pertur-bacion externa de par constante Tp(s) = td
s es cero. Utilizando de nuevo elteorema del valor final, no es difıcil comprobar que, usando (5.37), el valorfinal de posicion θ es igual al valor deseado θd cuando este es constante. Estasson las principales razones para usar un controlador PID de posicion.
A continuacion se estudia el problema de seleccionar las ganancias delcontrolador PID de manera que la respuesta en lazo cerrado tenga las ca-racterısticas deseadas de respuesta transitoria ante la referencia de posicionθd. Con este proposito, los tres polos de la funcion de transferencia en (5.37)deben ser asignados en los puntos deseados sobre el semiplano complejo iz-quierdo. Esto se consigue igualando el polinomio caracterıstico de la funcion
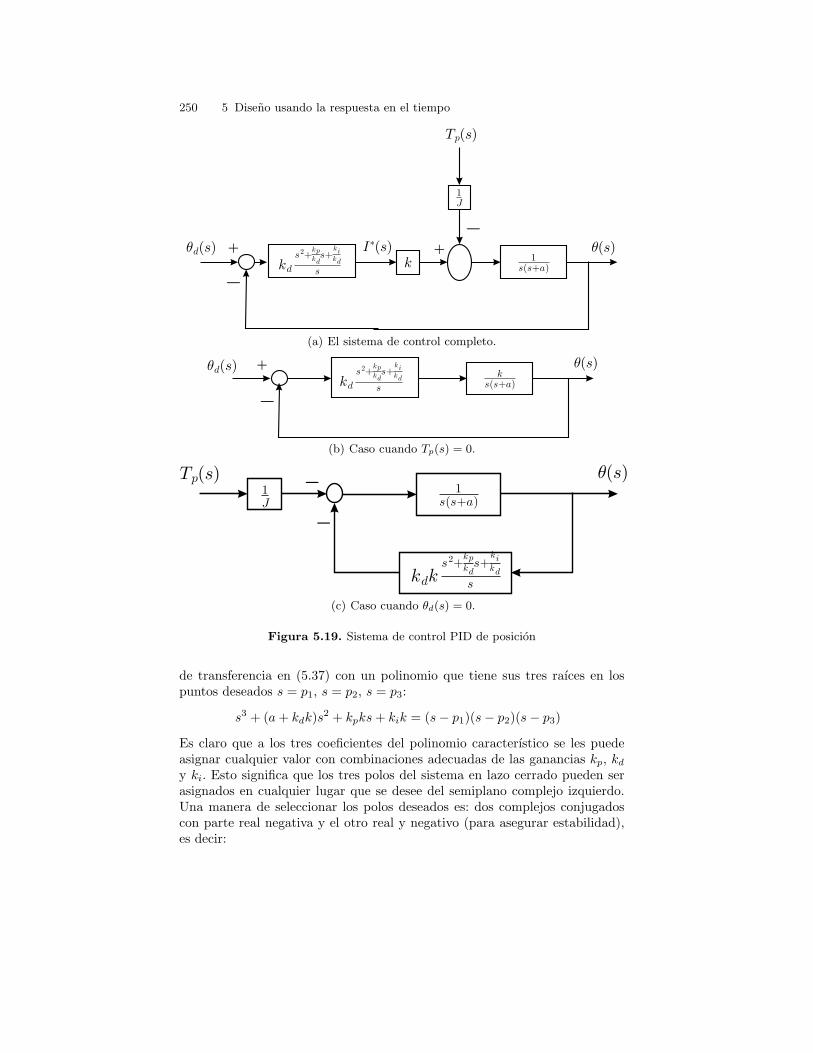
250 5 Diseno usando la respuesta en el tiempo
+
à+
àkd s
s2+kd
kps+kd
ki
k s(s+a)1
Iã(s) ò(s)òd(s)
Tp(s)
J1
(a) El sistema de control completo.
+
àkd s
s2+kd
kps+kd
ki
s(s+a)k
ò(s)òd(s)
(b) Caso cuando Tp(s) = 0.
àà ò(s)
s(s+a)1
kdk s
s2+kd
kps+kd
ki
J1
Tp(s)
(c) Caso cuando θd(s) = 0.
Figura 5.19. Sistema de control PID de posicion
de transferencia en (5.37) con un polinomio que tiene sus tres raıces en lospuntos deseados s = p1, s = p2, s = p3:
s3 + (a + kdk)s2 + kpks + kik = (s − p1)(s − p2)(s − p3)
Es claro que a los tres coeficientes del polinomio caracterıstico se les puedeasignar cualquier valor con combinaciones adecuadas de las ganancias kp, kd
y ki. Esto significa que los tres polos del sistema en lazo cerrado pueden serasignados en cualquier lugar que se desee del semiplano complejo izquierdo.Una manera de seleccionar los polos deseados es: dos complejos conjugadoscon parte real negativa y el otro real y negativo (para asegurar estabilidad),es decir:

5.2 Ejemplos 251
p1 = σ1 + jω1, p2 = σ1 − jω1, p3 < 0, σ1 < 0, ω1 > 0
Si se desea que la respuesta sea dominada por los dos polos complejos conju-gados entonces se puede proponer:
|p3| > 6|σ1|
Con estos datos se obtiene:
s3 + (a + kdk)s2 + kpks + kik = (s − p1)(s − p2)(s − p3) (5.39)
= s3 − (2σ1 + p3)s2 + (σ2
1 + ω21 + 2σ1p3)s − p3(σ
21 + ω2
1)
de donde, igualando coeficientes, se obtiene la siguiente regla de sintonıa:
kd =−(2σ1 + p3) − a
k(5.40)
kp =σ2
1 + ω21 + 2σ1p3
k
ki =−p3(σ
21 + ω2
1)
k
Notese que las tres ganancias del controlador son positivas. Aunque la partereal e imaginaria de los polos en p1 y p2 pueden ser calculadas usando (5.20) y(5.21) de manera que se obtenga el tiempo de subida tr y el sobre paso Mp(%)deseados, sin embargo la respuesta obtenida tendra diferencias importantesrespecto de estos valores deseados debido a los dos ceros que tiene la funcionde transferencia en (5.37). Aunque esta es una desventaja importante de laregla de sintonıa en (5.40), estos valores pueden ser usados como una simpleaproximacion de las ganancias requeridas del controlador para posteriormentehacer ajustes finos, a prueba y error, hasta obtener las caracterısticas deseadasde respuesta transitoria. Para esto, dado que el sistema en lazo cerrado es detercer orden, es muy importante tener presente la regla de estabilidad obtenidaen el ejemplo 4.12 de la seccion 4.3. La posibilidad de ajustar a prueba y errorlas ganancias de un controlador PID (vease la seccion 5.3) es una de lasprincipales razones por las que este tipo de controlador tiene tanto uso en laindustria.
Con el fin de buscar una regla de sintonıa que permita calcular de mane-ra exacta las ganancias de un controlador PID, a continuacion se procede aestudiar el lugar de las raıces para el control PID de posicion. Para esto seusa el diagrama de bloques de la figura 5.19(b), de donde se observa que lafuncion de transferencia de lazo abierto es:
G(s)H(s) =kdk(s + α)(s + β)
s2(s + a), (s + α)(s + β) = s2 +
kp
kds +
ki
kd(5.41)
para algunas constantes α y β diferentes de cero cuyos valores se proponencomo parte del proceso del diseno para despues, a partir de estos valores,

252 5 Diseno usando la respuesta en el tiempo
calcular kp y ki. Notese que kd es la ganancia que el metodo varıa desde 0hasta +∞ para dibujar el lugar de las raıces. Es claro que el sistema es tipo2 (el motor tiene un integrador por naturaleza y el otro integrador es debidoal controlador PID) y, por tanto, el error en estado estacionario ante unareferencia de posicion constante es cero.
En la figura 5.20 se presentan tres posibilidades para el lugar de las raıcescorrespondiente, las cuales dependen de los valores propuestos para α y β. Seinvita al lector a usar las reglas presentadas en la seccion 5.1.1 para comprobarestos resultados. De acuerdo a la figura 5.20(a), se puede disenar el sistemade control de manera que dos polos de lazo cerrado sean muy proximos alos dos ceros colocados en s = −α y s = −β para que el sistema en lazocerrado responda como un sistema de primer orden con un polo real y negativo.Tambien se puede elegir que un polo de lazo cerrado sea muy proximo al ceroen s = −α de modo que el sistema en lazo cerrado responda como un sistemade segundo orden, con polos complejos conjugados, que contiene un cero.Aunque la presencia de este cero modifica la forma de la respuesta transitoria,es una manera de conseguir una respuesta con especificaciones aproximadasde tiempo de subida y sobre paso deseados. Este es el criterio de diseno quese usa a continuacion.
En casos como este, los metodos tradicionales del lugar de las raıces pro-ponen seguir los siguientes tres pasos:
Disene un controlador PD de posicion con funcion de transferencia:
kd(s + β)
de manera que se obtengan el tiempo de subida y el sobre paso deseados.A la funcion de transferencia de lazo abierto disenada en el paso anterior,agregue el factor:
s + α
s
con α un valor positivo muy cercano a cero.Calcule las ganancias PID usando (5.41), es decir:
kp = (α + β)kd, ki = αβkd (5.42)
A continuacion se disena un controlador PD de la forma kd(s + β) parala planta k
s(s+a) , es decir, cuando el sistema en lazo cerrado tiene la forma
presentada en la figura 5.21 y la funcion de transferencia de lazo abierto es:
G(s)H(s) =kdk(s + β)
s(s + a)(5.43)
La funcion de transferencia de lazo cerrado es, en este caso:
θ(s)
θd(s)=
kdk(s + β)
s2 + (a + kdk)s + kdkβ
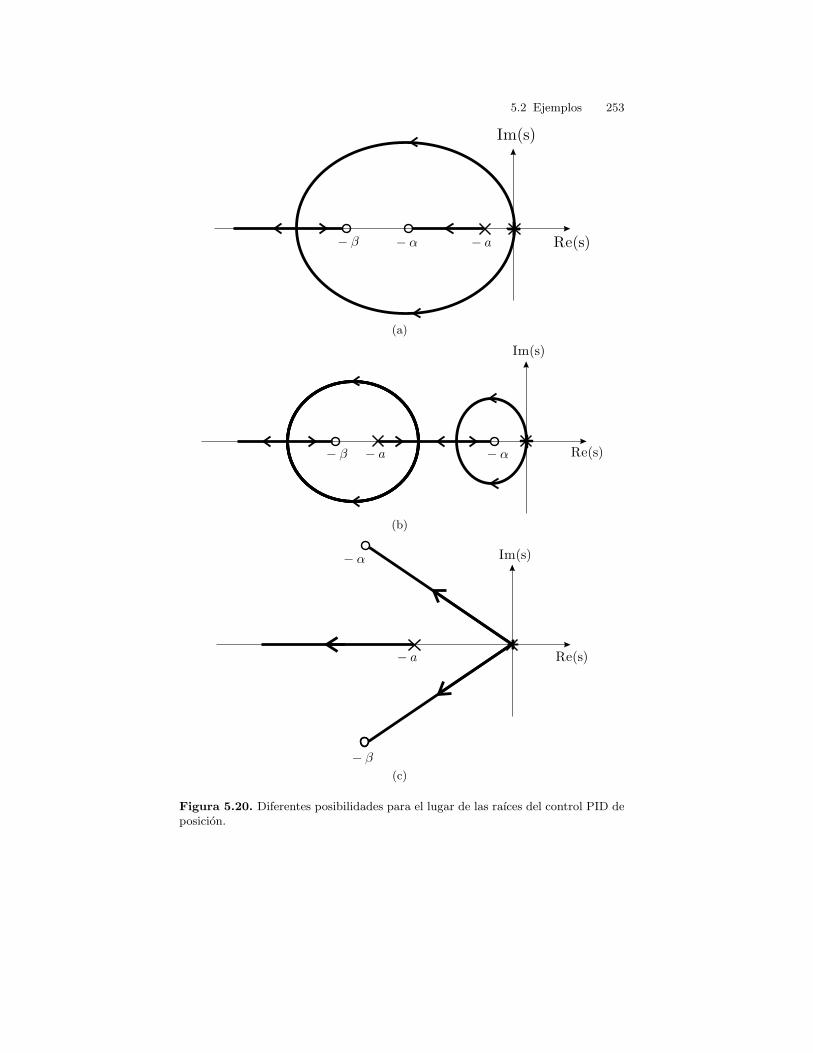
5.2 Ejemplos 253
à ì à ë à a+
Im(s)
Re(s)
(a)
à ì à ëà a Re(s)
Im(s)
+
(b)
à ì
à ë
à a+
Re(s)
Im(s)
(c)
Figura 5.20. Diferentes posibilidades para el lugar de las raıces del control PID deposicion.

254 5 Diseno usando la respuesta en el tiempo
Igualando a un polinomio de segundo grado estandar:
s2 + (a + kdk)s + kdkβ = s2 + 2ζωns + ω2n
se obtiene:
kd =2ζωn − a
k, β =
ω2n
kdk(5.44)
Los valores de ζ y ωn se pueden calcular usando (5.20) y (5.21) a partir de
+
àkd(s+ ì)
s(s+a)k
ò(s)òd(s)
Figura 5.21. Control PD de posicion.
los valores deseados de tiempo de subida y sobre paso. El lugar de las raıcescorrespondiente a este caso se muestra en la figura 5.22 y es identico al casoc > a mostrado en la figura 5.13, porque solo en este caso el control PD deposicion puede producir polos complejos conjugados de lazo cerrado. A partirde (5.43) se encuentra que las condiciones de angulo y de magnitud establecen:
θ3 − (θ1 + θ2) = ±180(2q + 1), q = 1, 2, . . .kdkl3l1l2
= 1 (5.45)
donde l1, l2, l3, θ1, θ2 y θ3 estan definidas en la figura 5.22. Cuando se agrega elfactor s+α
s a la funcion de transferencia de lazo abierto en (5.43) se encuentraque la funcion de transferencia de lazo abierto ahora es:
G(s)H(s) =kdk(s + β)(s + α)
s2(s + a)(5.46)
Como α > 0 es pequena, el lugar de las raıces correspondiente tiene la formamostrada en la figura 5.23 (se invita al lector a usar las reglas presentadasen la seccion 5.1.1 para comprobar este resultado). Las condiciones de anguloy de magnitud correspondientes a este caso se establecen a partir de (5.46)como:
θ3 + θ5 − (2θ1 + θ2) = ±180(2q + 1), q = 1, 2, . . .kdkl3l5
l21l2= 1 (5.47)
donde l1, l2, l3, θ1, θ2 y θ3 son identicas a las definidas en la figura 5.22,mientras que l5 y θ5 se definen en la figura 5.23. La razon de seleccionar
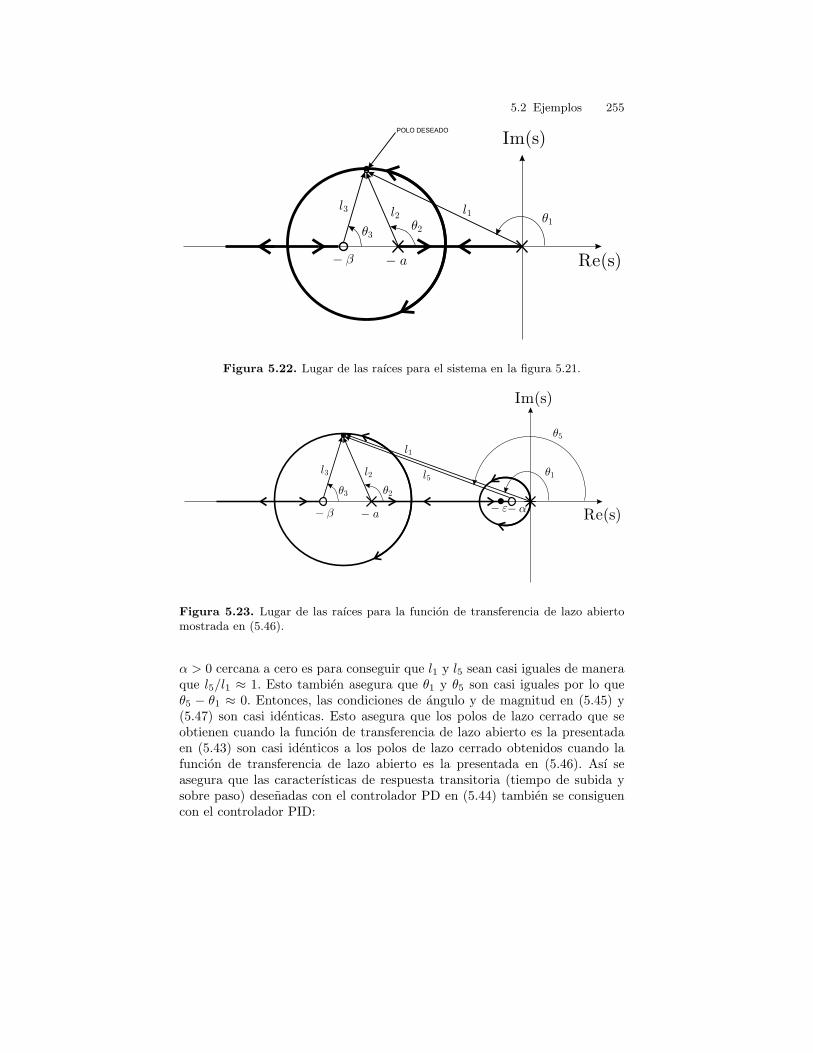
5.2 Ejemplos 255
à ì
ò3ò2
ò1l1l2
l3
POLO DESEADO
à a Re(s)
Im(s)
Figura 5.22. Lugar de las raıces para el sistema en la figura 5.21.
à ì
ò3 ò2
ò1
l1
l2l3 l5
à ëà "
ò5
+à a
ïRe(s)
Im(s)
Figura 5.23. Lugar de las raıces para la funcion de transferencia de lazo abiertomostrada en (5.46).
α > 0 cercana a cero es para conseguir que l1 y l5 sean casi iguales de maneraque l5/l1 ≈ 1. Esto tambien asegura que θ1 y θ5 son casi iguales por lo queθ5 − θ1 ≈ 0. Entonces, las condiciones de angulo y de magnitud en (5.45) y(5.47) son casi identicas. Esto asegura que los polos de lazo cerrado que seobtienen cuando la funcion de transferencia de lazo abierto es la presentadaen (5.43) son casi identicos a los polos de lazo cerrado obtenidos cuando lafuncion de transferencia de lazo abierto es la presentada en (5.46). Ası seasegura que las caracterısticas de respuesta transitoria (tiempo de subida ysobre paso) desenadas con el controlador PD en (5.44) tambien se consiguencon el controlador PID:
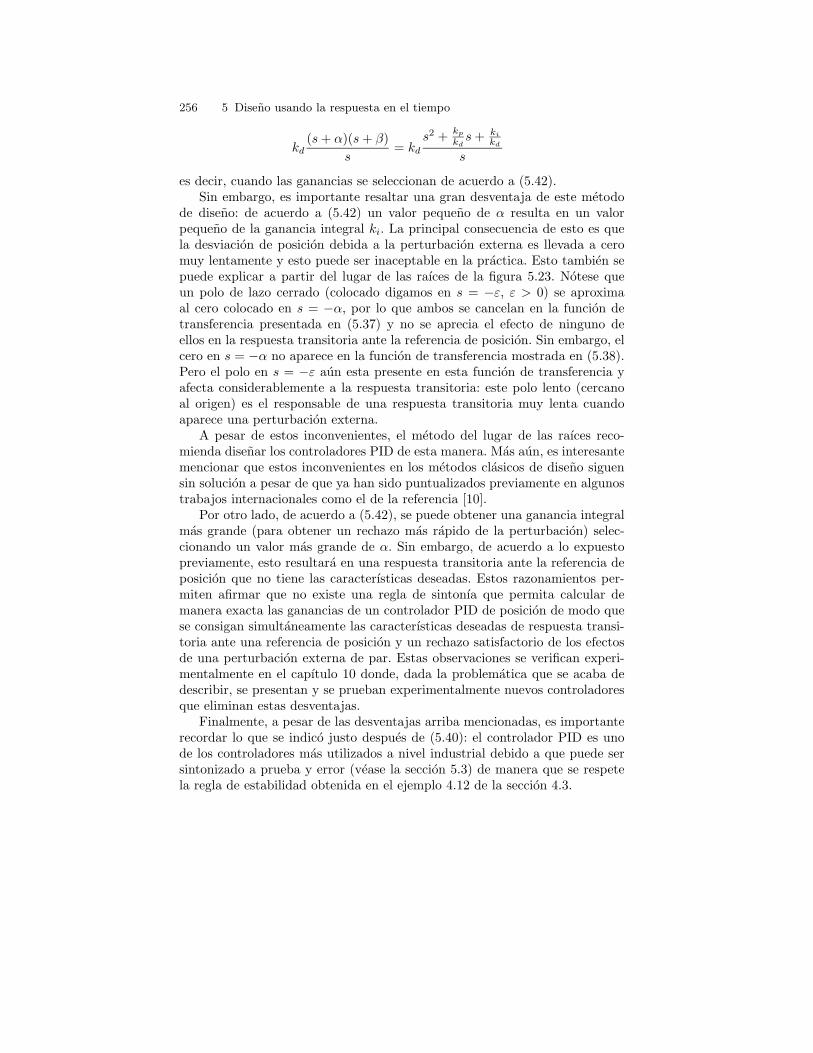
256 5 Diseno usando la respuesta en el tiempo
kd(s + α)(s + β)
s= kd
s2 +kp
kds + ki
kd
s
es decir, cuando las ganancias se seleccionan de acuerdo a (5.42).Sin embargo, es importante resaltar una gran desventaja de este metodo
de diseno: de acuerdo a (5.42) un valor pequeno de α resulta en un valorpequeno de la ganancia integral ki. La principal consecuencia de esto es quela desviacion de posicion debida a la perturbacion externa es llevada a ceromuy lentamente y esto puede ser inaceptable en la practica. Esto tambien sepuede explicar a partir del lugar de las raıces de la figura 5.23. Notese queun polo de lazo cerrado (colocado digamos en s = −ε, ε > 0) se aproximaal cero colocado en s = −α, por lo que ambos se cancelan en la funcion detransferencia presentada en (5.37) y no se aprecia el efecto de ninguno deellos en la respuesta transitoria ante la referencia de posicion. Sin embargo, elcero en s = −α no aparece en la funcion de transferencia mostrada en (5.38).Pero el polo en s = −ε aun esta presente en esta funcion de transferencia yafecta considerablemente a la respuesta transitoria: este polo lento (cercanoal origen) es el responsable de una respuesta transitoria muy lenta cuandoaparece una perturbacion externa.
A pesar de estos inconvenientes, el metodo del lugar de las raıces reco-mienda disenar los controladores PID de esta manera. Mas aun, es interesantemencionar que estos inconvenientes en los metodos clasicos de diseno siguensin solucion a pesar de que ya han sido puntualizados previamente en algunostrabajos internacionales como el de la referencia [10].
Por otro lado, de acuerdo a (5.42), se puede obtener una ganancia integralmas grande (para obtener un rechazo mas rapido de la perturbacion) selec-cionando un valor mas grande de α. Sin embargo, de acuerdo a lo expuestopreviamente, esto resultara en una respuesta transitoria ante la referencia deposicion que no tiene las caracterısticas deseadas. Estos razonamientos per-miten afirmar que no existe una regla de sintonıa que permita calcular demanera exacta las ganancias de un controlador PID de posicion de modo quese consigan simultaneamente las caracterısticas deseadas de respuesta transi-toria ante una referencia de posicion y un rechazo satisfactorio de los efectosde una perturbacion externa de par. Estas observaciones se verifican experi-mentalmente en el capıtulo 10 donde, dada la problematica que se acaba dedescribir, se presentan y se prueban experimentalmente nuevos controladoresque eliminan estas desventajas.
Finalmente, a pesar de las desventajas arriba mencionadas, es importanterecordar lo que se indico justo despues de (5.40): el controlador PID es unode los controladores mas utilizados a nivel industrial debido a que puede sersintonizado a prueba y error (vease la seccion 5.3) de manera que se respetela regla de estabilidad obtenida en el ejemplo 4.12 de la seccion 4.3.

5.2 Ejemplos 257
5.2.6. Asignacion de los polos de lazo cerrado deseados
En esta parte se presenta un ejemplo para mostrar como se usa el lugarde las raıces para disenar un controlador de modo que se asignen los polos delazo cerrado deseados. Considere la siguiente funcion de transferencia:
G(s)H(s) =k
(s − 35.7377)(s + 36.5040)(5.48)
La ganancia k es variada por el metodo para que tome valores desde 0 hasta+∞. Primero se reescribe G(s)H(s) en la siguiente forma:
G(s)H(s) =k
l1l2∠ − (θ1 + θ2)
donde se han definido los vectores s − 35.7377 = l1∠θ1, s − (−36.5040) =l2∠θ2. Las dos condiciones fundamentales que definen el lugar de las raıcesson las condiciones de angulo (5.7) y de magnitud (5.6) las cuales se expresan,respectivamente, como:
−(θ1 + θ2) = ±(2q + 1)180, q = 0, 1, 2, . . .
k
l1l2= 1
La regla 5 indica que sobre el eje real solo existe lugar de las raıces entrelos puntos s = 35.7377 y s = −36.5040. Ademas, de acuerdo a la regla 1, ellugar de las raıces inicia (k = 0) en s = 35.7377 y s = −36.5040. Por otrolado, de acuerdo a las reglas 2 y 3, cuando k tiende a +∞ las ramas queinician en los puntos s = 35.7377 y s = −36.5040 deben terminar en alguncero de lazo abierto (no existe ninguno en este caso) o en algun punto en elinfinito del plano s. Por tanto, el lugar de las raıces debe alejarse de los puntoss = 35.7377 y s = −36.5040, sobre el eje real, conforme k crece de maneraque debe existir un punto de separacion en algun lugar entre dichos puntospara luego dirigirse hacia el infinito sobre el plano s.
Por otro lado, de acuerdo a la condicion de angulo, −(θ1 + θ2) = −180 =−(α + θ1), y la figura 5.24 se puede observar que α = θ2 y, por tanto, quelos triangulos t1 y t2 deben ser identicos para cualquier polo de lazo cerrados. Entonces, las dos ramas mencionadas anteriormente y que son mostradasen la figura 5.24 deben ser paralelas al eje imaginario. Esto significa que elpunto donde las dos ramas se separan del eje real esta ubicado en el puntomedio entre los polos ubicados en s = 35.7377, s = −36.5040, es decir en(35.7377 − 36.5040)/2 = −0.7663. Esto tambien puede verificarse usando lasreglas 3 y 4. Finalmente, de acuerdo a la regla 6 ambas ramas son simetricasrespecto al eje horizontal.
La condicion de magnitud se usa cuando se necesita conocer el valor exactode k que permita conseguir un punto especıfico sobre el lugar de las raıces.
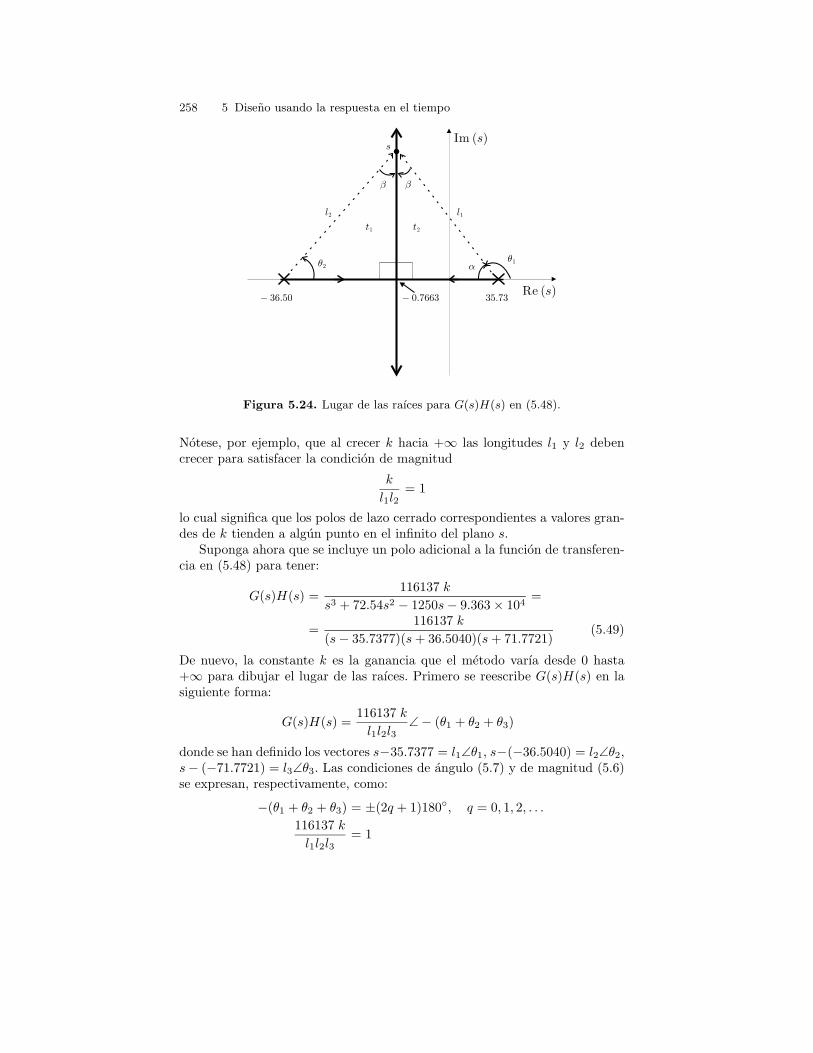
258 5 Diseno usando la respuesta en el tiempo
ìì
t2t1
ò1ò2 ë
à 36:50 à 0:7663 35:73
s
Re s( )
Im s( )
l1l2
Figura 5.24. Lugar de las raıces para G(s)H(s) en (5.48).
Notese, por ejemplo, que al crecer k hacia +∞ las longitudes l1 y l2 debencrecer para satisfacer la condicion de magnitud
k
l1l2= 1
lo cual significa que los polos de lazo cerrado correspondientes a valores gran-des de k tienden a algun punto en el infinito del plano s.
Suponga ahora que se incluye un polo adicional a la funcion de transferen-cia en (5.48) para tener:
G(s)H(s) =116137 k
s3 + 72.54s2 − 1250s − 9.363 × 104=
=116137 k
(s − 35.7377)(s + 36.5040)(s + 71.7721)(5.49)
De nuevo, la constante k es la ganancia que el metodo varıa desde 0 hasta+∞ para dibujar el lugar de las raıces. Primero se reescribe G(s)H(s) en lasiguiente forma:
G(s)H(s) =116137 k
l1l2l3∠ − (θ1 + θ2 + θ3)
donde se han definido los vectores s−35.7377 = l1∠θ1, s−(−36.5040) = l2∠θ2,s − (−71.7721) = l3∠θ3. Las condiciones de angulo (5.7) y de magnitud (5.6)se expresan, respectivamente, como:
−(θ1 + θ2 + θ3) = ±(2q + 1)180, q = 0, 1, 2, . . .
116137 k
l1l2l3= 1

5.2 Ejemplos 259
El lugar de las raıces correspondiente a este caso se puede obtener a par-tir del obtenido para la funcion de transferencia en (5.48) considerando quesimplemente se ha adicionado un polo en s = −71.7721.
De acuerdo a la regla 11 el nuevo polo sera causa para que las dos ramas dellugar de las raıces mostrado en la figura 5.24 se “doblen” hacia la derecha comose alcanza a apreciar ligeramente en la figura 5.25. Esto puede comprobarseusando la regla 3 para encontrar que ahora existen tres ramas del lugar de lasraıces que tienden hacia asıntotas que forman angulos de ±180 y ±60 conel eje real positivo.
−80 −60 −40 −20 0 20 40−15
−10
−5
0
5
10
15Root Locus
Real Axis
Imag
inar
y A
xis
Figura 5.25. Lugar de las raıces para G(s)H(s) en (5.49).
Por otro lado, el punto de separacion entre los puntos s = 35.7377 ys = −36.5040 que en la figura 5.24 estaba colocado en el punto (35.7377 −36.5040)/2 = −0.7663 ahora en la figura 5.25 se encuentra colocado mas haciala derecha que −0.7663. La razon de esto se explica en la figura 5.26 donde s′
y s representan dos puntos sobre el lugar de las raıces que estan muy cerca delpunto de separacion para el caso de las figuras 5.24 y 5.25, respectivamente.Como en la figura 5.25 se debe cumplir que −(θ1 + θ2 + θ3) = −180 mientrasque en la figura 5.24 se debe cumplir −(θ′1 + θ′2) = −180, entonces ambos θ1
y θ2 deben ser menores que θ′1 y θ′2. Esto significa que el punto s debe estardesplazado hacia la derecha del punto s′. Notese que este desplazamiento delpunto de separacion hacia la derecha del punto −0.7663 es mayor conformeel angulo θ3 introducido por el polo en s = −71.7721 sea mayor, es decir,
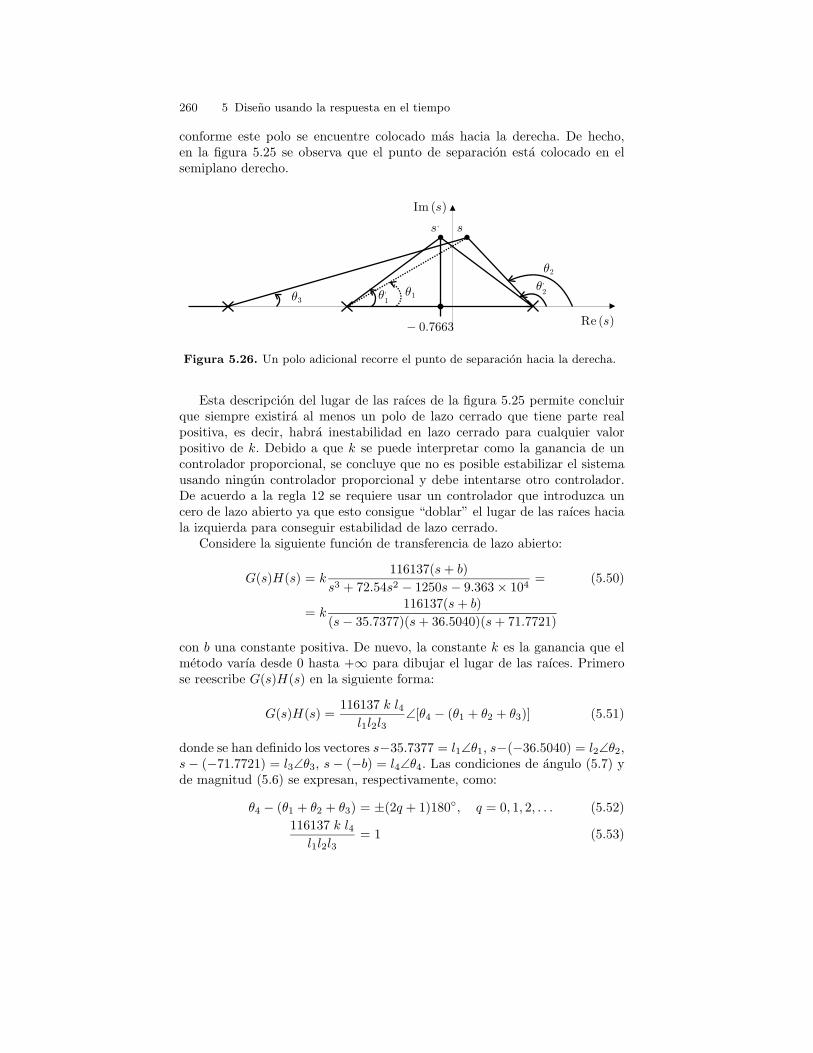
260 5 Diseno usando la respuesta en el tiempo
conforme este polo se encuentre colocado mas hacia la derecha. De hecho,en la figura 5.25 se observa que el punto de separacion esta colocado en elsemiplano derecho.
ò3ò1
ò2
ò;
2ò;
1
ss;
à 0:7663
Im s( )
Re s( )
Figura 5.26. Un polo adicional recorre el punto de separacion hacia la derecha.
Esta descripcion del lugar de las raıces de la figura 5.25 permite concluirque siempre existira al menos un polo de lazo cerrado que tiene parte realpositiva, es decir, habra inestabilidad en lazo cerrado para cualquier valorpositivo de k. Debido a que k se puede interpretar como la ganancia de uncontrolador proporcional, se concluye que no es posible estabilizar el sistemausando ningun controlador proporcional y debe intentarse otro controlador.De acuerdo a la regla 12 se requiere usar un controlador que introduzca uncero de lazo abierto ya que esto consigue “doblar” el lugar de las raıces haciala izquierda para conseguir estabilidad de lazo cerrado.
Considere la siguiente funcion de transferencia de lazo abierto:
G(s)H(s) = k116137(s + b)
s3 + 72.54s2 − 1250s − 9.363 × 104= (5.50)
= k116137(s + b)
(s − 35.7377)(s + 36.5040)(s + 71.7721)
con b una constante positiva. De nuevo, la constante k es la ganancia que elmetodo varıa desde 0 hasta +∞ para dibujar el lugar de las raıces. Primerose reescribe G(s)H(s) en la siguiente forma:
G(s)H(s) =116137 k l4
l1l2l3∠[θ4 − (θ1 + θ2 + θ3)] (5.51)
donde se han definido los vectores s−35.7377 = l1∠θ1, s−(−36.5040) = l2∠θ2,s − (−71.7721) = l3∠θ3, s − (−b) = l4∠θ4. Las condiciones de angulo (5.7) yde magnitud (5.6) se expresan, respectivamente, como:
θ4 − (θ1 + θ2 + θ3) = ±(2q + 1)180, q = 0, 1, 2, . . . (5.52)
116137 k l4l1l2l3
= 1 (5.53)

5.2 Ejemplos 261
Notese que ahora se tiene n = 3, m = 1, p1 = 35.7377, p2 = −36.5040,p3 = −71.7721, z1 = −b. De acuerdo a las reglas 1, 2 y 3, una de las tres ramasque inician (k = 0) en los puntos s = 35.7377, s = −36.5040, s = −71.7721(polos de lazo abierto) debe terminar (k = +∞) en el cero de lazo abiertocolocado en s = −b. Por tanto, existiran dos ramas del lugar de las raıces quetienden a algun punto del infinito sobre el plano s. De acuerdo a la regla 3,los angulos de las asıntotas a las que tienden estas ramas son:
±180(2 × 0 + 1)
n − m=
±180(2 × 0 + 1)
3 − 1= ±90
Ademas, de acuerdo a la regla 4 la ubicacion de estas asıntotas sobre el ejereal puede ser ajustada usando el cero en s = −b:
σa =p1 + p2 + p3 − (−b)
n − m=
35.7377 − 36.5040 − 71.7721 + b
2(5.54)
Notese que b debe ser positivo pues de otra manera una rama del lugar de lasraıces serıa halado hacia el semiplano derecho generando polos de lazo cerradoinestables. Notese tambien que las asıntotas se mueven hacia la izquierda(mayor estabilidad) conforme el cero es ubicado mas cerca del origen, es decirconforme b tiende a cero. Todo esto significa que existe un lımite en cuantoa que tan a la izquierda se pueden colocar los polos complejos conjugados delazo cerrado.
De acuerdo a la regla 5 ahora existira lugar de las raıces sobre dos seg-mentos del eje real porque ahora se tienen cuatro polos y ceros reales de lazoabierto. La ubicacion de dichos segmentos sobre el eje real depende del va-lor de b usado, como se muestra en las figuras 5.27(a) y 5.27(b). Mas aun,en la figura 5.27(c) se muestra que si se selecciona b = 36.5040 entonces secancela el cero de lazo abierto en s = −b con el polo de lazo abierto ubicados = −36.5040. Esto significa que, en tal caso, solo existira lugar de las raıcesen un segmento del eje real.
En la figura 5.27(c) se aprecia que solo existen dos polos de lazo cerrado.En las figuras 5.27(a) y 5.27(b) se puede apreciar que existen tres polos delazo cerrado y que uno de esos polos estara en el semiplano complejo dere-cho (inestabilidad en lazo cerrado) si la ganancia k es demasiado pequena. Porotro lado, si k es demasiado grande se tendran dos polos complejos conjugadoscon parte imaginaria demasiado grande, por lo que la respuesta oscilara rapi-damente. Aunque en teorıa esto puede funcionar porque los tres polos tienenparte real negativa, sin embargo un valor grande de k hace que se sature elamplificador de potencia por lo que el sistema de control no podra funcionarsatisfactoriamente en la practica. Ası que un buen diseno sera aquel que per-mita obtener los polos de lazo cerrado deseados usando una ganancia k queno sea ni muy grande ni muy pequena.
Suponga que se desean los siguientes polos complejos conjugados de lazocerrado s = −25 ± j40. A continuacion se presenta la manera de calcular los
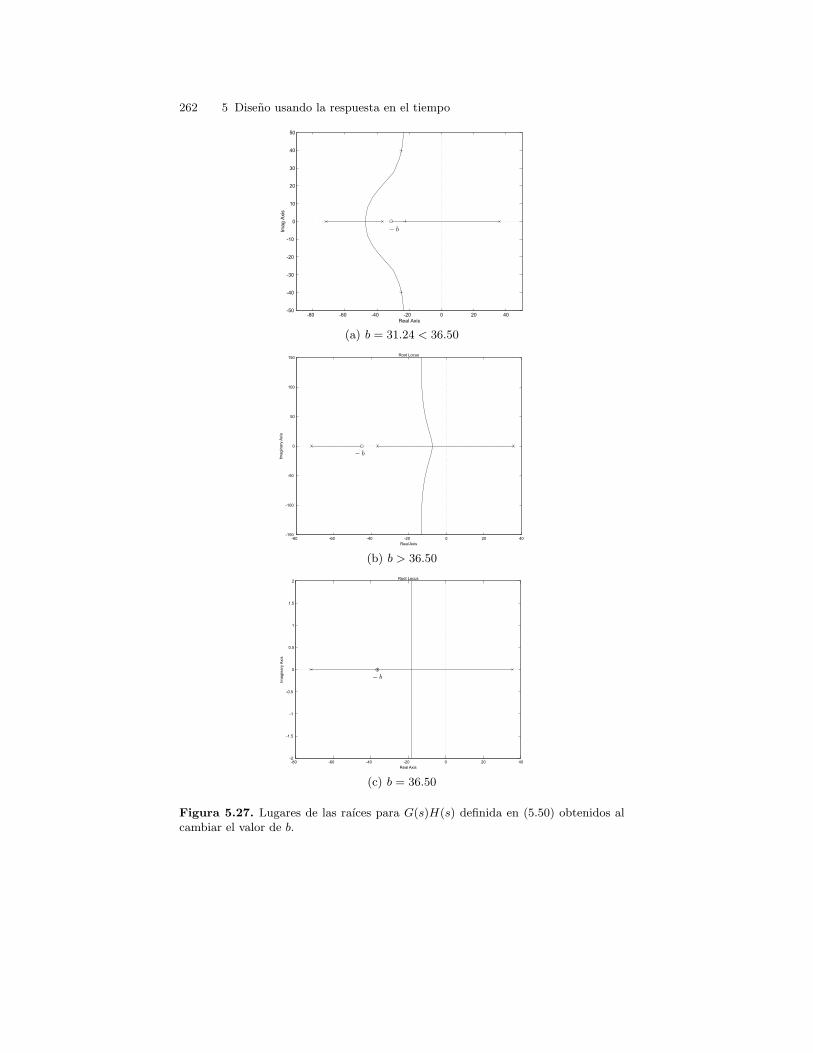
262 5 Diseno usando la respuesta en el tiempo
à b
(a) b = 31.24 < 36.50
-80 -60 -40 -20 0 20 40-150
-100
-50
0
50
100
150Root Locus
Real Axis
Imagin
ary
Axis
à b
(b) b > 36.50
-80 -60 -40 -20 0 20 40-2
-1.5
-1
-0.5
0
0.5
1
1.5
2Root Locus
Real Axis
Ima
gin
ary
Axis
à b
(c) b = 36.50
Figura 5.27. Lugares de las raıces para G(s)H(s) definida en (5.50) obtenidos alcambiar el valor de b.
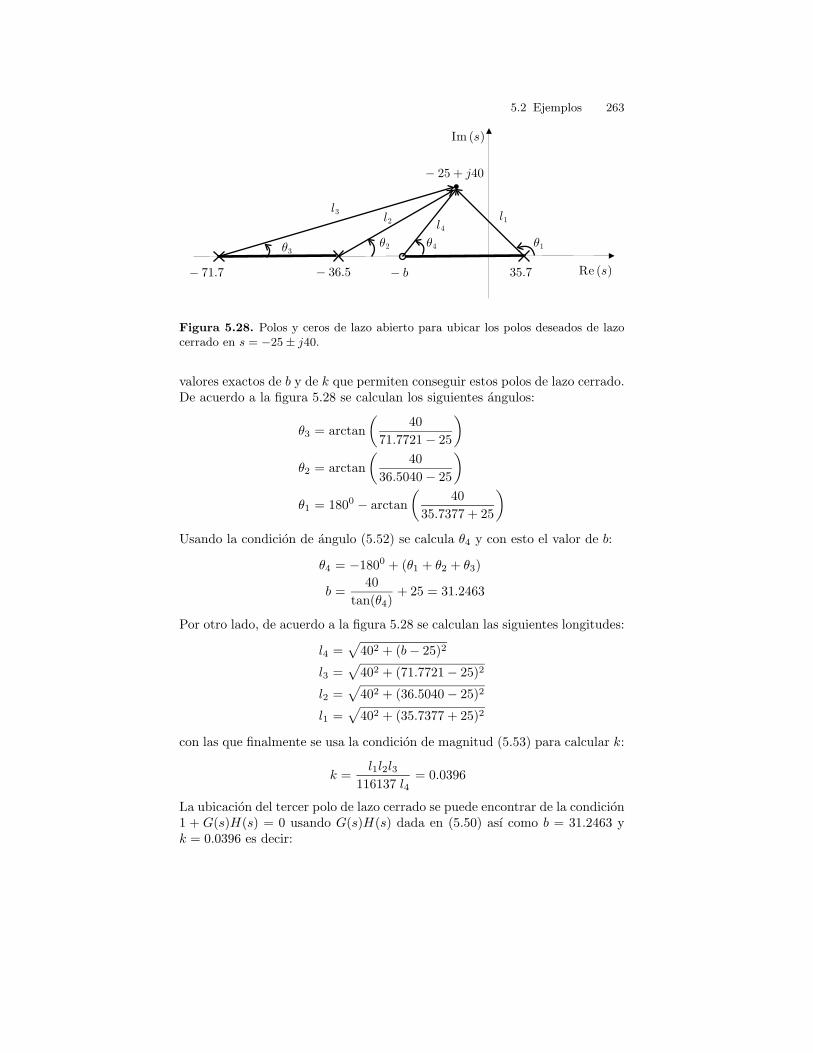
5.2 Ejemplos 263
ò1ò2ò3ò4
l3l2 l1
l4
à bà 71:7 35:7
à 25 + j40
à 36:5 Re s( )
Im s( )
ï
Figura 5.28. Polos y ceros de lazo abierto para ubicar los polos deseados de lazocerrado en s = −25 ± j40.
valores exactos de b y de k que permiten conseguir estos polos de lazo cerrado.De acuerdo a la figura 5.28 se calculan los siguientes angulos:
θ3 = arctan
(40
71.7721 − 25
)
θ2 = arctan
(40
36.5040 − 25
)
θ1 = 1800 − arctan
(40
35.7377 + 25
)
Usando la condicion de angulo (5.52) se calcula θ4 y con esto el valor de b:
θ4 = −1800 + (θ1 + θ2 + θ3)
b =40
tan(θ4)+ 25 = 31.2463
Por otro lado, de acuerdo a la figura 5.28 se calculan las siguientes longitudes:
l4 =√
402 + (b − 25)2
l3 =√
402 + (71.7721 − 25)2
l2 =√
402 + (36.5040 − 25)2
l1 =√
402 + (35.7377 + 25)2
con las que finalmente se usa la condicion de magnitud (5.53) para calcular k:
k =l1l2l3
116137 l4= 0.0396
La ubicacion del tercer polo de lazo cerrado se puede encontrar de la condicion1 + G(s)H(s) = 0 usando G(s)H(s) dada en (5.50) ası como b = 31.2463 yk = 0.0396 es decir:

264 5 Diseno usando la respuesta en el tiempo
1 + 0.0396116137(s + 31.2463)
s3 + 72.54s2 − 1250s − 9.363 × 104= 0 (5.55)
de donde:
s3 + 72.54s2 + (0.0396 × 116137 − 1250)s
+(0.0396 × 116137 × 31.2463 − 9.363 × 104) = 0
Las raıces de este polinomio son los polos de lazo cerrado conseguidos conb = 31.2463 y k = 0.0396. Usando un programa de computadora se encuentraque estas raıces son −25.0037 + j39.9630, −25.0037 − j39.9630 y −22.5326.Estos polos tambien son mostrados en la figura 5.27(a) usando signos “+”.Notese que se han conseguido los polos complejos conjugados deseados y eltercer polo, el cual es real, tambien esta colocado en el semiplano complejoizquierdo, es decir, se ha conseguido estabilidad en lazo cerrado. Recuerdeseque el factor k(s + b) representa un controlador proporcional-derivativo.
Es importante mencionar que este sistema de control es utilizado pararegular la salida en un valor deseado igual a cero. Esto implica que indepen-dientemente del tipo del sistema la salida deseada sera alcanzada . Ası que noes necesaria ninguna consideracion respecto a la respuesta en estado estacio-nario.
En la figura 5.29 se muestra la respuesta en lazo cerrado (lınea continua)ante una entrada cero, r = 0 (vease la figura 5.1). Se usa (5.50), b = 31.2463y k = 0.0396. Tambien se muestra, con lınea interrumpida, la respuesta de
un sistema cuya funcion de transferencia esω2
n
s2+2ζωns+ω2n
cuyos polos estan
ubicados en s = −25 ± j40. Por tanto, este sistema representa el modelo dereferencia pues su respuesta posee las caracterısticas deseadas de la respuestatransitoria. Ambas respuestas inician a partir de un valor de salida igual a2.85. Notese que ambas respuestas son parecidas. Sin embargo, las diferenciasexistentes entre ellas se deben al cero en s = −31.2463 y al polo de lazocerrado en s = −22.5326, los cuales no estan suficientemente cerca como paraque sus efectos sean cancelados completamente.
5.2.7. Control proporcional-integral-derivativo (PID) de unsistema de levitacion magnetica
En esta seccion se presenta la manera de usar el lugar de las raıces paraseleccionar las ganancias de un controlador PID para el sistema de levitacionmagnetica que se construye y se prueba experimentalmente en el capıtulo 11.La funcion de transferencia de lazo abierto es la siguiente:
G(s)H(s) =11613700 kd
s3 + 2739s2 − 1250s − 3.536 × 106
(s2 +
kp
kds + ki
kd
s
)(5.56)
donde kd es el parametro que varıa el metodo desde 0 hasta +∞ para dibujarel lugar de las raıces, mientras que los valores de
kp
kdy ki
kddeben ser propuestos.

5.2 Ejemplos 265
0 0.05 0.1 0.15 0.2 0.25−0.5
0
0.5
1
1.5
2
2.5
3
Figura 5.29. Respuesta en lazo cerrado del sistema (5.50) a partir de una condicioninicial diferente de cero. Lınea continua: respuesta disenada. Lınea interrumpida:respuesta deseada. Eje vertical: y[m]. Eje horizontal: tiempo en segundos.
En el capıtulo 11 se explica que se utiliza un controlador PID para asegurar quese alcanza la posicion deseada (constante) aun cuando exista incertidumbre enel peso de la bola a levitar. Notese que el controlador PID introduce dos cerosde lazo abierto. Usando software especializado se encuentra que los cuatropolos de lazo abierto estan colocados en:
s1 = 35.9, s2 = −2739.4, s3 = −35.9, s4 = 0
Usando la regla 3 se encuentra que existen n−m = 4− 2 = 2 ramas del lugarde las raıces que tienden al infinito en el plano s siguiendo asıntotas cuyosangulos estan dados como:
±180
2= ±90
Ademas, de acuerdo a la regla 4, el punto sobre el eje real donde estas asıntotasse intersectan es:
σa =35.9 − 2739.4 − 35.9 + σz1 + σz2
2
donde −σz1 < 0 y −σz2 < 0 son las partes reales de los dos ceros de lazo abier-to introducidos por el controlador PID (estos valores deben ser propuestos).Es claro que σa se mueve hacia la izquierda (lo que implica que el sistema de

266 5 Diseno usando la respuesta en el tiempo
lazo cerrado se hace mas estable) si −σz1 < 0 y −σz2 < 0 se eligen cercanosa cero. Notese que esto esta de acuerdo con la regla 12. A partir de esto seconcluye que σa < −1100 esta colocado muy a la izquierda del origen. Usandoestas observaciones, ası como las reglas 1, 2, 5 y 6 se encuentra que existenlas tres posibilidades mostradas en la figura 5.30 para el lugar de las raıces deeste problema.
Si se conociera la ubicacion de los polos de lazo cerrado que resultan enun buen desempeno experimental del sistema en lazo cerrado, se podrıa pro-ceder como en la seccion 5.2.6 para determinar la ubicacion adecuada de losceros de lazo abierto (introducidos por el controlador PID). Sin embargo, esteno es el caso de este problema y por ello el principal objetivo del diseno essimplemente conseguir que el sistema en lazo cerrado sea estable. Como yase menciono, es preferible que los dos ceros de lazo abierto esten colocadoscerca del origen. Esto significa que es preferible que el lugar de las raıces ten-ga la forma mostrada en la figura 5.30(a). Por otro lado, dos ceros complejosforzarıan la existencia de polos complejos conjugados de lazo cerrado, lo cualresulta en un sistema menos amortiguado (mas difıcil de estabilizar). Por estarazon, tambien se desecha el lugar de las raıces de figura 5.30(c). Por tanto,buscando obtener el lugar de las raıces de la figura 5.30(a) se proponen lossiguientes valores:
kp
kd= 31.24,
ki
kd=
31.24
0.8(5.57)
pues esto coloca los dos ceros de lazo abierto en:
s5 = −29.9355, s6 = −1.3045
es decir, estan colocados entre los polos de lazo abierto ubicados en:
s3 = −35.9, s4 = 0
Notese que el hecho de que σa < −1100 esta colocado muy a la izquierda delorigen y que las asıntotas forman angulos de ±90 asegura que existe un valormınimo de kd a partir del cual todos los polos de lazo cerrado estan colocadosen el semi plano complejo izquierdo. Usando los valores numericos en (5.57)se utiliza el criterio de Routh para encontrar que:
kd > 0.01 (5.58)
asegura que todos los polos de lazo cerrado estan colocados en el semi planocomplejo izquierdo y que el sistema en lazo cerrado es estable. Esto se hacedel siguiente modo. De la condicion 1+G(s)H(s) = 0 (es decir, usando (5.56)y (5.57)) se obtiene el polinomio caracterıstico:
s4 + a3s3 + a2s
2 + a1s + a0 = 0 (5.59)
a3 = 2739, a2 = 11613700 kd − 1250,
a1 = 11613700 × 31.24 kd − 3.536 × 106,
a0 = 11613700 × 31.28
8kd
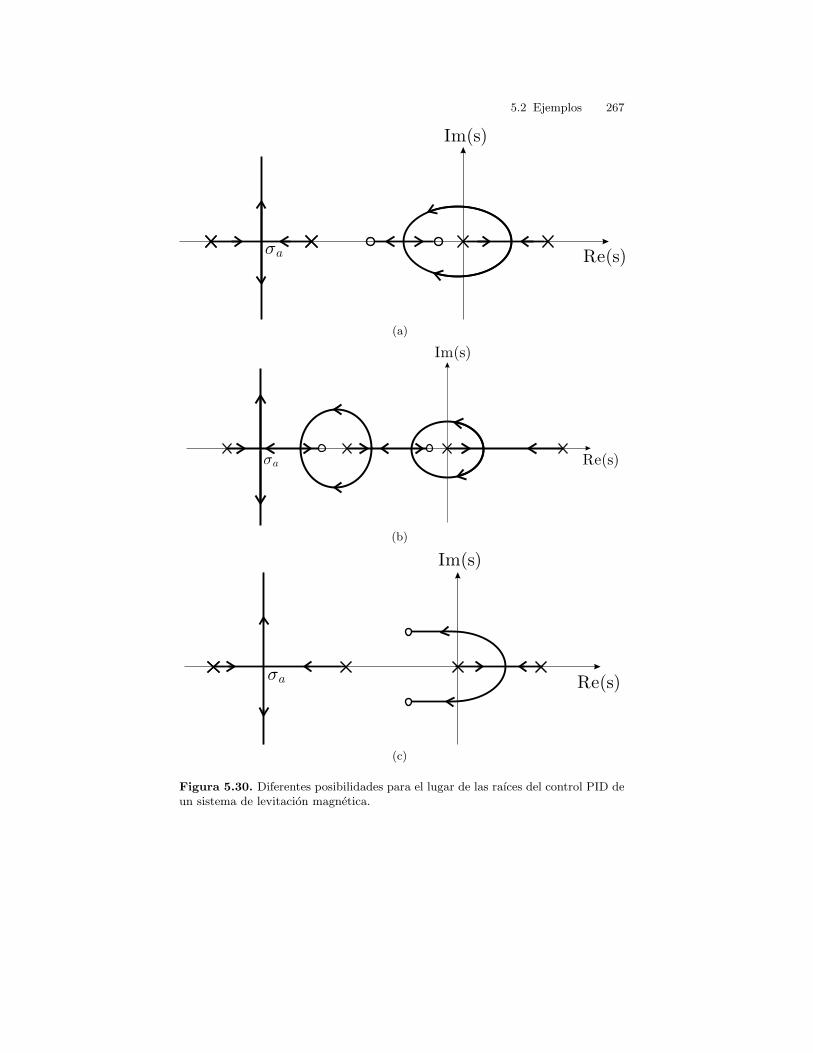
5.2 Ejemplos 267
ûa Re(s)
Im(s)
(a)
Im(s)
Re(s)ûa
(b)
Im(s)
Re(s)ûa
(c)
Figura 5.30. Diferentes posibilidades para el lugar de las raıces del control PID deun sistema de levitacion magnetica.

268 5 Diseno usando la respuesta en el tiempo
Para aplicar el criterio de Routh se construye la tabla 5.1. Para que haya
Tabla 5.1. Aplicacion del criterio de Routh al polinomio en (5.59).
s4 1 a2 a0
s3 a3 a1 0
s2 a3a2−a1
a3= e a0 0
s1 ea1−a3a0
e0
s0 a0
estabilidad en lazo cerrado se requiere que no haya cambios de signo en laprimera columna de la tabla 5.1, es decir que:
a3a2 − a1
a3> 0,
ea1 − a3a0
e> 0, a3 > 0, a0 > 0 (5.60)
Notese que la tercera condicion en (5.60) se satisface de manera natural mien-tras que de la primera y la ultima condiciones se encuentra que:
kd > −3.5695 × 10−6, kd > 0 (5.61)
De la segunda condicion en (5.60) se obtiene:
k2d +
(b1
b2− b3
b4− 27392 b5
b2b4
)kd − b1b3
b2b4> 0 (5.62)
b1 = 112250, b2 = 3.1447 × 1010, b3 = 3.536 × 106,
b4 = 11613700 × 31.24, b5 = 1161370031.28
8
Dado que se trata de un polinomio de segundo grado, no es difıcil encontrarque las raıces del polinomio en (5.62) son kd = 0.01 y kd = −3.5× 10−6. Masaun, se puede evaluar numericamente para encontrar que:
(kd − 0.01)(kd + 3.5 × 10−6) > 0, si kd < −3.5 × 10−6
(kd − 0.01)(kd + 3.5 × 10−6) < 0, si − 3.5 × 10−6 < kd < 0.01
(kd − 0.01)(kd + 3.5 × 10−6) > 0, si kd > 0.01
Por tanto, para satisfacer simultaneamente (5.61) y (5.62) y asegurar estabili-dad en lazo cerrado, se debe seleccionar (5.58). En el capıtulo 11 se usan estosresultados para proponer varios conjuntos de ganancias para el controladorPID que son probados experimentalmente.
5.2.8. Control de un sistema ball and beam
En esta seccion se disena un controlador para el sistema ball and beamque se construye y prueba experimentalmente en el capıtulo 12, seccion 12.7.

5.2 Ejemplos 269
Inicialmente suponga que se usara un controlador proporcional de ganancia γ.Lo primero que se procede a hacer es estudiar la posibilidad de que el sistemaen lazo cerrado pueda ser estable para algun valor positivo de la ganancia γ(los otros parametros tambien son positivos pero no se pueden cambiar). Eldiagrama de bloques en lazo cerrado correspondiente se muestra en la figura5.31. La funcion de transferencia de lazo cerrado es:
à+
Ax s s+a( )
k
s2ú
íXd(s) X(s)
Figura 5.31. Sistema en lazo cerrado. Control proporcional de ganancia γ.
X(s)
Xd(s)=
γAxkρ
s4 + as3 + γAxkρ
Ax = 5.3750, k = 16.6035, a = 3.3132, ρ = 5
La estabilidad del sistema en lazo cerrado se estudia usando el criterio deRouth. Para ello se construye la tabla 5.2 usando el polinomio caracterısticode lazo cerrado s4 + as3 + γAxkρ. Notese que un elemento de la primera
Tabla 5.2. Aplicacion del criterio de Routh al polinomio s4 + as3 + γAxkρ.
s4 1 0 γAxkρ
s3 a 0 0
s2 0 ≈ ε γAxkρ
s1 −aγAxkρ
ε0
s0 γAxkρ
columna es igual a cero por lo que, de acuerdo al metodo, debe ser sustituidopor un valor ε > 0 pequeno. Notese que bajo esta condicion, existen doscambios de signo en la primera columna de la tabla 5.2 y que esto no puedeser modificado ajustando el valor de γ (positivo). Entonces, se concluye queno existe ningun controlador proporcional que pueda hacer que el sistema enlazo cerrado sea estable y debe intentarse con otro controlador.
De acuerdo a la regla 12 de la seccion 5.1.1 un controlador PD hace masestable aquello que no lo es, porque un controlador PD introduce un cero delazo abierto. Sin embargo, un controlador PD amplifica el ruido debido a suparte derivativa. Esto se ve claramente en el capıtulo 6 porque un contro-lador PD es un filtro pasa altas y el ruido es una senal de alta frecuencia.
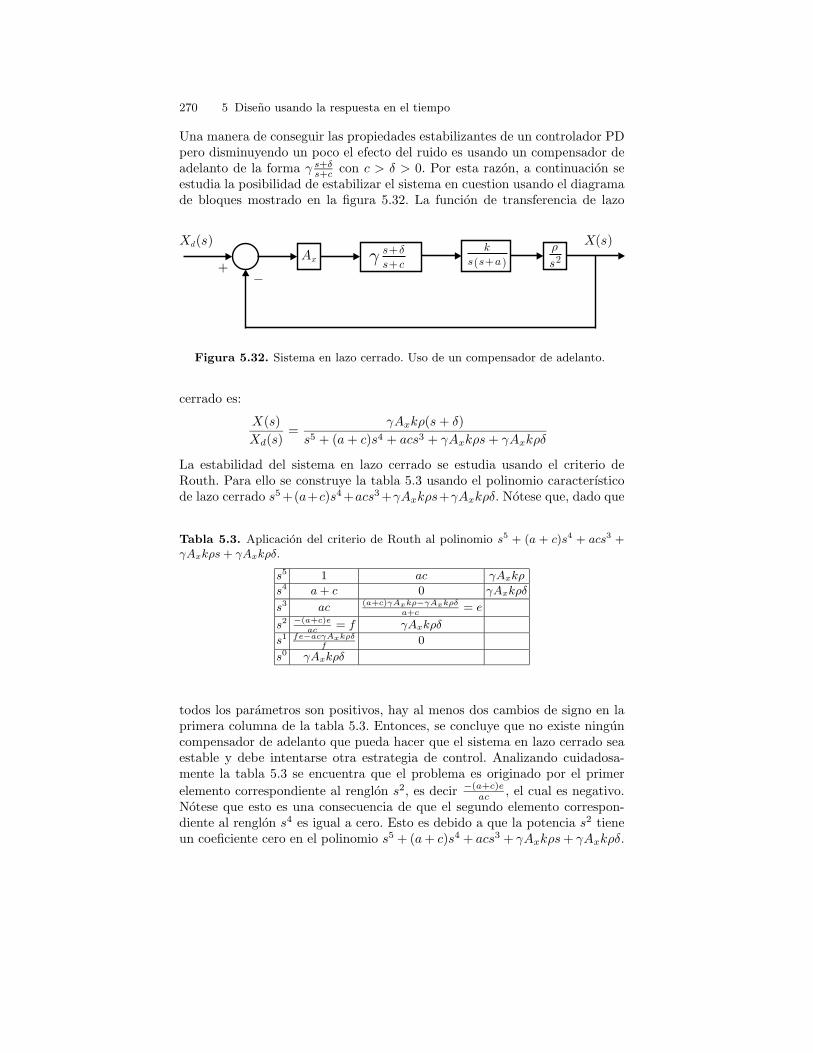
270 5 Diseno usando la respuesta en el tiempo
Una manera de conseguir las propiedades estabilizantes de un controlador PDpero disminuyendo un poco el efecto del ruido es usando un compensador deadelanto de la forma γ s+δ
s+c con c > δ > 0. Por esta razon, a continuacion seestudia la posibilidad de estabilizar el sistema en cuestion usando el diagramade bloques mostrado en la figura 5.32. La funcion de transferencia de lazo
à+
Ax s s+a( )
k
s2ú
ís+ c
s+îXd(s) X(s)
Figura 5.32. Sistema en lazo cerrado. Uso de un compensador de adelanto.
cerrado es:
X(s)
Xd(s)=
γAxkρ(s + δ)
s5 + (a + c)s4 + acs3 + γAxkρs + γAxkρδ
La estabilidad del sistema en lazo cerrado se estudia usando el criterio deRouth. Para ello se construye la tabla 5.3 usando el polinomio caracterısticode lazo cerrado s5 +(a+c)s4 +acs3 +γAxkρs+γAxkρδ. Notese que, dado que
Tabla 5.3. Aplicacion del criterio de Routh al polinomio s5 + (a + c)s4 + acs3 +γAxkρs + γAxkρδ.
s5 1 ac γAxkρ
s4 a + c 0 γAxkρδ
s3 ac (a+c)γAxkρ−γAxkρδ
a+c= e
s2 −(a+c)eac
= f γAxkρδ
s1 fe−acγAxkρδ
f0
s0 γAxkρδ
todos los parametros son positivos, hay al menos dos cambios de signo en laprimera columna de la tabla 5.3. Entonces, se concluye que no existe ninguncompensador de adelanto que pueda hacer que el sistema en lazo cerrado seaestable y debe intentarse otra estrategia de control. Analizando cuidadosa-mente la tabla 5.3 se encuentra que el problema es originado por el primer
elemento correspondiente al renglon s2, es decir −(a+c)eac , el cual es negativo.
Notese que esto es una consecuencia de que el segundo elemento correspon-diente al renglon s4 es igual a cero. Esto es debido a que la potencia s2 tieneun coeficiente cero en el polinomio s5 + (a + c)s4 + acs3 + γAxkρs + γAxkρδ.

5.2 Ejemplos 271
Por tanto, se concluye que el sistema en lazo cerrado puede ser estable si elpolinomio caracterıstio de la funcion de transferencia de lazo abierto tiene lapotencia s2 con un coeficiente positivo. A continuacion se muestra que esto esposible si se usan dos lazos internos como se muestra en la figura 5.33. Noteseque se sigue manteniendo el uso del compensador de adelanto. En este caso,
s s+a( )
kís+ c
s+ bs2ú
+
+ +
à à àAx
Aò
Aò
ë
kýs
Xd(s) X(s)ï ï1 2
Figura 5.33. Sistema en lazo cerrado. Uso de lazos internos y un compensador deadelanto.
la funcion de transferencia de lazo abierto esta dada como:
G(s)H(s) =Ax ρ γ
Aθ
s + b
s + c
αkAθ
s2 + (a + kvkAθ)s + αkAθ
1
s2
c > b > 0, γ > 0, Aθ = 0.9167
Notese que el sistema es tipo 2, por lo que el error en estado estacionario escero si la referencia deseada es una constante o una rampa. El lector pue-
de obtener la funcion de transferencia de lazo cerrado X(s)Xd(s) para verificar
que el polinomio caracterıstico correspondiente es de grado 5 y con todos loscoeficientes de sus potencias positivos (incluido el coeficiente de s2), como seesperaba. De acuerdo a la discusion previa, esto significa que existe la posibili-dad de encontrar valores positivos para γ, c, b (con c > b), kv y α que consiganque el sistema en lazo cerrado sea estable. A continuacion se encuentran estosvalores usando el metodo del lugar de las raıces.
Suponga que las raıces del polinomio s2 + (a + kvkAθ)s + αkAθ son com-plejas conjugadas, es decir, que se puede escribir:
s2 + (a + kvkAθ)s + αkAθ = (s + σ + jω)(s + σ − jω), σ > 0, ω > 0
De acuerdo a la regla 3 existen n − m = 4 ramas del lugar de las raıces quetienden hacia el infinito del plano s sobre cuatro asıntotas cuyos angulos estandados como:
±180
4= ±45
±180(3)
4= ±3(45) = ±135
Por tanto, usando estos resultados ası como las reglas 1,2 y 5, se concluye que
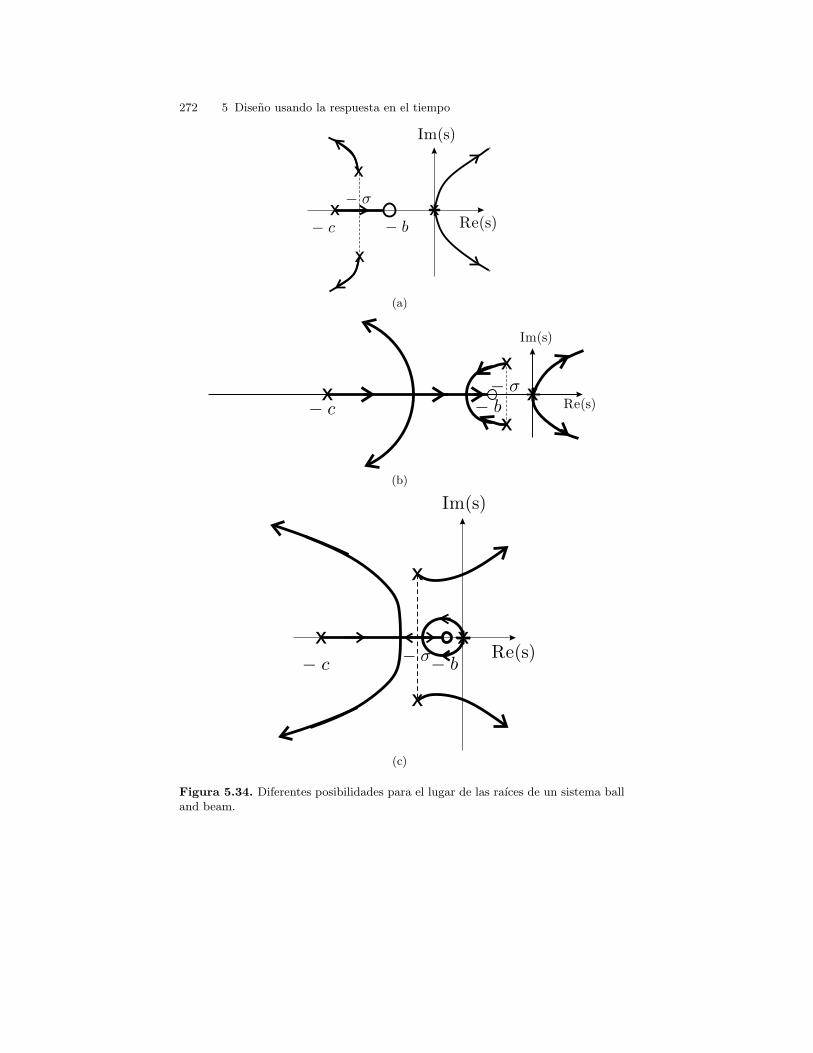
272 5 Diseno usando la respuesta en el tiempo
à bà cx
x
x
x+à û
Re(s)
Im(s)
(a)
à cx x+à b
à ûx
xRe(s)
Im(s)
(b)
à bà cx
à ûx+
x
x
Re(s)
Im(s)
(c)
Figura 5.34. Diferentes posibilidades para el lugar de las raıces de un sistema balland beam.

5.2 Ejemplos 273
existen las posibilidades mostradas en la figura 5.34. De acuerdo a la regla 4,el punto donde se intersectan las asıntotas mencionadas anteriormente con eleje real esta dado como:
σa =−2σ + (b − c)
4
Esto significa que las 4 ramas son haladas hacia la izquierda (por lo que elsistema en lazo cerrado tiende a ser mas estable) si:
Se elige un valor mayor de σ > 0, es decir, si el sistema:
αkAθ
s2 + (a + kvkAθ)s + αkAθ(5.63)
esta suficientemente amortiguado, lo cual se consigue usando un valor su-ficientemente grande de la ganancia kv > 0.b > 0 se aproxima a cero y c > 0 es grande, es decir si c > b. Notese queesto esta en completo acuerdo con las reglas 11 y 12.
Siguiendo la segunda opcion se obtiene el diagrama del lugar de las raıcesmostrado en la figura 5.34(b). Notese que las dos ramas que inician en los dospolos colocados en s = 0 siempre permanecen sobre el semiplano complejoderecho, lo cual implica que el sistema en lazo cerrado es inestable. La principalrazon para este comportamiento es que las ramas que inician en los polos dela funcion de transferencia en (5.63) son halados hacia el segmento sobreel eje real entre s = −c y s = −b. Esto, a su vez, se debe a que los dospolos complejos de lazo abierto estan muy cerca del segmento entre s = −cy s = −b. Si dichos polos complejos se alejan de dicho segmento entonces seabre la posibilidad de que las dos ramas que inician en los polos colocados ens = 0 sean haladas hacia el segmento entre s = −c y s = −b para obtenerel diagrama mostrado en la figura 5.34(c). Esto implica que hay estabilidaden lazo cerrado para algunos valores pequenos de la ganancia de lazo. Paraconseguir esto, es necesario usar valores grandes del coeficiente αkAθ (estoincrementa la distancia al origen de los polos complejos de lazo abierto arribamencionados), es decir, usando un valor grande de α.
La discusion anterior indica que se deben usar valores grandes de kv yα. Sin embargo, en la practica estos valores estan limitados por el contenidode ruido del sistema, por lo que kv y α deben ser obtenidos usando pruebasexperimentales. De hecho, el ruido tambien es una razon importante para noseleccionar reales los polos de la funcion de transferencia en (5.63): obtenerpolos reales implica un sistema muy amortiguado lo cual requiere un valorde kv aun mayor. De acuerdo a las pruebas experimentales reportadas en elcapıtulo 12 se seleccionaron los siguientes valores:
α = 12, kv = 0.2
Por tanto, los unicos valores que falta determinar son γ, c y b. Aunque estosparametros se pueden determinar de manera que los polos de lazo cerrado

274 5 Diseno usando la respuesta en el tiempo
sean asignados en los valores deseados (usando la metodologıa presentadaen la seccion 5.2.6), sin embargo en este problema no se conoce cual es laubicacion de los polos de lazo cerrado que resultan en un buen desempeno.Por esta razon, el objetivo de diseno es simplemente que el sistema en lazocerrado sea estable. Para conseguir esto se procede del siguiente modo.
Se proponen valores para b y c de modo que c > b > 0.Se hace uso de software especializado para dibujar el lugar de las raıces.Se elige un valor de γ > 0 para el cual todos los polos de lazo cerradoesten ubicados en el semi plano complejo izquierdo. Esto significa que γ esel parametro usado por el metodo para dibujar el lugar de las raıces.Si no existe tal valor de γ > 0 se regresa al primer paso.
De este modo se obtiene el lugar de las raıces de la figura 5.35 donde seobserva que todos los polos de lazo cerrado (marcados con el sımbolo “+”)tienen parte real negativa si se usa:
γ = 1.2, c = 20, b = 2.5
Finalmente, es conveniente decir que se debe incluir un paso adicional para elprocedimiento arriba listado:
Una vez seleccionados los valores de γ, c y b se deben realizar pruebasexperimentales para verificar que se obtiene un buen desempeno con elsistema de control disenado. Si no es ası, entonces regrese de nuevo alprimer paso del procedimiento arriba listado.
−20 −15 −10 −5 0
−15
−10
−5
0
5
10
15
Root Locus
Real Axis
Imag
inar
y A
xis
Figura 5.35. Lugar de las raıces del sistema ball and beam disenado.

5.3 Caso de estudio 275
5.3. Caso de estudio. Notas adicionales sobre el controlPID de posicion de un motor de CD
En la seccion 5.2.5 se estudia el uso de un controlador PID para regularla posicion de un motor de CD. Ahı se encontro que la posicion del motor serelaciona con la posicion deseada y la perturbacion externa de par, a travesde dos funciones de transferencia que, sin embargo, tienen el mismo polinomiocaracterıstico:
s3 + (a + kdk)s2 + kpks + kik (5.64)
Tambien se encontro que si se desean asignar los siguientes polos de lazocerrado p1, p2, p3:
p1 = σ1 + jω1, p2 = σ1 − jω1, p3 < 0, σ1 < 0, ω1 > 0
entonces las ganancias del controlador se deben seleccionar de acuerdo a(5.40), es decir:
kd =−(2σ1 + p3) − a
k> 0 (5.65)
kp =σ2
1 + ω21 + 2σ1p3
k> 0 (5.66)
ki =−p3(σ
21 + ω2
1)
k> 0 (5.67)
Por otro lado, en el ejemplo 4.12, del capıtulo 4, se encontro que todas lasraıces del siguiente polinomio:
s3 + as2 + bs + c
tienen parte real negativa si y solo si:
a > 0, b >c
a> 0 c > 0
Aplicando estas condiciones al polinomio caracterıstico dado en (5.64) se ob-tiene:
a + kdk > 0, kpk >kik
a + kdk, kik > 0 (5.68)
Usando las expresiones en (5.65), (5.66), (5.67) y (5.68) se puede concluir quelas ganancias de un controlador PID de posicion para un motor de CD tienenlos siguientes efectos sobre la respuesta del sistema en lazo cerrado:
Valores mayores y positivos de la ganancia integral, ki, resultan en unarespuesta mas rapida y que oscila cada vez mas. La primera parte de estaobservacion se justifica a partir de (5.67), donde ω2
n = σ21 +ω2
1 , recordando

276 5 Diseno usando la respuesta en el tiempo
que dos polos complejos conjugados producen una respuesta mas rapida siωn es mayor y que un polo real y negativo, p3 < 0, produce una respuestamas rapida si su valor absoluto, −p3, es mayor. La segunda parte de laobservacion se justifica a partir de la segunda desigualdad en (5.68), esdecir kpk > kik
a+kdk . Si ki es mayor, entonces esta condicion tiende a no servalida, es decir, el sistema en lazo cerrado se acerca a la inestabilidad ypor eso oscila cada vez mas.Valores mayores y positivos de la ganancia proporcional, kp, resultan enuna respuesta mas rapida cuyas oscilaciones, al menos, no se incrementande manera importante. La primera parte de esta observacion se justifica apartir de (5.66) usando argumentos similares a los de la ganancia integralen el parrafo anterior: recordando que ω2
n = σ21 + ω2
1 , σ1p3 > 0, que dospolos complejos conjugados producen una respuesta mas rapida si ωn esmayor y que un polo real y negativo, p3, produce una respuesta mas rapi-da si su valor absoluto es mayor. La segunda parte de la observacion sejustifica, de nuevo, a partir de la segunda desigualdad en (5.68), es decirkpk > kik
a+kdk . Si kp es mayor, entonces esta condicion es cada vez mas vali-da, es decir, el sistema en lazo cerrado se hace cada vez mas estable. Sinembargo, esto, unido al incremento en la rapidez (que en general tiendea aumentar las oscilaciones de la respuesta), puede resultar en un com-portamiento transitorio donde, al menos, las oscilaciones no aumentan demanera importante.Valores mayores y positivos de la ganancia derivativa, kd, producen unarespuesta que oscila menos. Esta observacion se justifica a partir de lasegunda desigualdad en (5.68), es decir kpk > kik
a+kdk . Notese que si kd > 0es mayor, entonces esta condicion es mas valida y, por tanto, el sistema enlazo cerrado es mas estable. Ası, un valor mayor de kd > 0 puede reducir lasoscilaciones debidas a un valor grande de ki > 0. Por otro lado, a partir de(5.65) se concluye que valores mayores de kd > 0 producen valores mayoresde −σ1 > 0 y/o de −p3 > 0. Usando este hecho, junto con (5.66), (5.67), ysi kp y ki se mantienen constantes, se concluye que si ω2
n = σ21+ω2
1 aumenta(o disminuye), al variar σ1, entonces −p3 disminuye (o aumenta) por loque la rapidez de respuesta no se ve claramente afectada. Sin embargo,en la pratica es comun encontrar que al aumentar kd > 0 la rapidez derespuesta del sistema en lazo cerrado disminuye un poco.
Es conveniente advertir que la funcion de transferencia entre la posicion ysu valor deseado (G1(s) en (5.37)) tiene dos ceros cuyo efecto sobre la respuestatransitoria no es del todo clara. Ası que es posible que en algunas ocasionesexistan algunas variaciones respecto de los efectos que se acaban de mencionarpara las ganancias de un controlador PID. Ademas, estas variantes pueden serfavorecidas por el hecho de que en algunos mecanismos la perturbacion externaesta presente desde que se ordena un nuevo valor deseado de posicion.
Para ilustrar mejor estas ideas, a continuacion se presentan los resultadosobtenidos de manera experimental al controlar la posicion de un motor de

5.3 Caso de estudio 277
CD. El prototipo experimental es el mismo que se describe en el capıtulo 10con una variante adicional (no presente en dicho capıtulo): la flecha del motorse une firmemente a un pendulo como el mostrado en la figura 5.36. De estemodo, y por efecto de la gravedad g, se introduce una perturbacion de parque trata de desviar la posicion del motor respecto de su valor deseado. En lafigura 5.36, T (t) representa el par generado por el motor y θ es la variable quese controla. Los parametros del pendulo l y m no se miden para mostrar que sepuede sintonizar un controlador PID sin necesidad de conocer los parametrosde la planta, si se entienden cuales son los efectos de las ganancias de uncontrolador PID (listados mas arriba).
T(t)
òl
m
g
d
Figura 5.36. Pendulo simple que se conecta a la flecha de un motor de CD.
En las figuras 5.37 y 5.38 se muestran los resultados experimentales corres-pondientes. Se usa el valor deseado de posicion θd = π/2[rad] pues es ahı dondela perturbacion de par debida a la gravedad tiene su mayor efecto. Ademas semuestra una lınea vertical ubicada en t = 0.13[s] y una lınea horizontal ubica-da en θ = 1.8[rad] para indicar el tiempo de subida y el sobre paso deseados.La intencion es variar un parametro a la vez con el fin de apreciar claramentesu efecto. De este modo, las curvas dibujadas en la figura 5.37 correspondena los siguientes parametros de controlador PID:
1. Grafica superior:Lınea contınua: kp = 0.5, ki = 0, kd = 0.Lınea-punto: kp = 1, ki = 0, kd = 0.Lınea punteada: kp = 1, ki = 0, kd = 0.05.
2. Grafica inferior:Lınea contınua: kp = 1, ki = 2, kd = 0.05.Lınea-punto: kp = 1, ki = 5, kd = 0.05.Lınea punteada: kp = 2, ki = 5, kd = 0.05.Lınea interrumpida: kp = 2, ki = 5, kd = 0.1.
Como el sistema en lazo cerrado es de tercer orden cuando se usa un con-trolador PID y, ademas, no se conocen los parametros del motor a controlar,

278 5 Diseno usando la respuesta en el tiempo
es difıcil saber que ganancias del controlador hay que utilizar para evitar lainestabilidad. Ası que lo mejor es iniciar con un controlador PD (asignandoki = 0), que produce un sistema en lazo cerrado de segundo orden el cual esestable para cualquier valor positivo de kp con kd = 0 (pues todo mecanismoreal posee un poco de friccion). Posteriormente, de acuerdo a la respuestatransitoria que se vaya obteniendo y a las reglas de sintonıa arriba listadas,se podra empezar a ajustar las ganancias ki y kd de manera que se consiganrespuestas estables. Por esta razon, en la parte superior de la figura 5.37 seutiliza un controlador PD. Notese que se obtiene un error en estado esta-cionario diferente de cero debido a la perturbacion de par que introduce lagravedad (porque ki = 0). En esta parte del experimento, la idea es acercarla rapidez del sistema a la rapidez deseada asegurando un comportamientosuficientemente estable. Por esta razon, primero se incrementa la gananciaproporcional hasta kp = 1 y luego se incrementa la ganancia derivativa has-ta kd = 0.05. De este modo, en la parte inferior de la figura 5.37, se puedeintroducir el termino integral que aunque lleva a cero el error en estado es-tacionario produce respuestas mas oscilatorias. De nuevo, la idea es tratar deaproximarse a la rapidez de respuesta deseada. Esto se consigue incrementan-do primero la ganancia integral hasta ki = 5. Como esto tambien incrementalas oscilaciones, posteriormente se usa kp = 2 consiguiendo mayor rapidez perosin aumentar notablemente las oscilaciones. Finalmente, se usa kd = 0.1 paraobtener una respuesta suficientemente amortiguada. Notese que el incrementode kd reduce un poco la rapidez de la repuesta (tiempo de subida mayor).
Las curvas dibujadas en la figura 5.38 corresponden a los siguientesparametros de controlador PID:
1. Grafica superior:Lınea contınua: kp = 2, ki = 5, kd = 0.1.Lınea-punto: kp = 2, ki = 5, kd = 0.2.Lınea punteada: kp = 2, ki = 8, kd = 0.2.
2. Grafica inferior:Lınea contınua: kp = 2, ki = 8, kd = 0.2.Lınea-punto: kp = 2.5, ki = 8, kd = 0.2.Lınea punteada: kp = 3, ki = 8, kd = 0.2.Lınea interrumpida: kp = 3.5, ki = 8, kd = 0.2.
En la grafica superior de la figura 5.38 se observa que la respuesta es aun masamortiguada y mas lenta al incrementar la ganancia derivativa de kd = 0.1a kd = 0.2. Como en este momento la respuesta es muy lenta y el sobrepaso es muy pequeno, se usa ki = 8 para producir un sistema mas rapidoy con un sobre paso mayor que coincide con el sobre paso deseado. Con elfin de incrementar la rapidez, sin afectar notablemente el sobre paso, en laparte inferior de la figura 5.38 se incrementa la ganancia proporcional hastakp = 3.5. De este modo se consigue la rapidez y el sobre paso deseados.
Es conveniente aclarar lo siguiente. Al conectar un pendulo a la flecha deun motor de CD, el sistema de control es no lineal. Esto significa que en ciertas
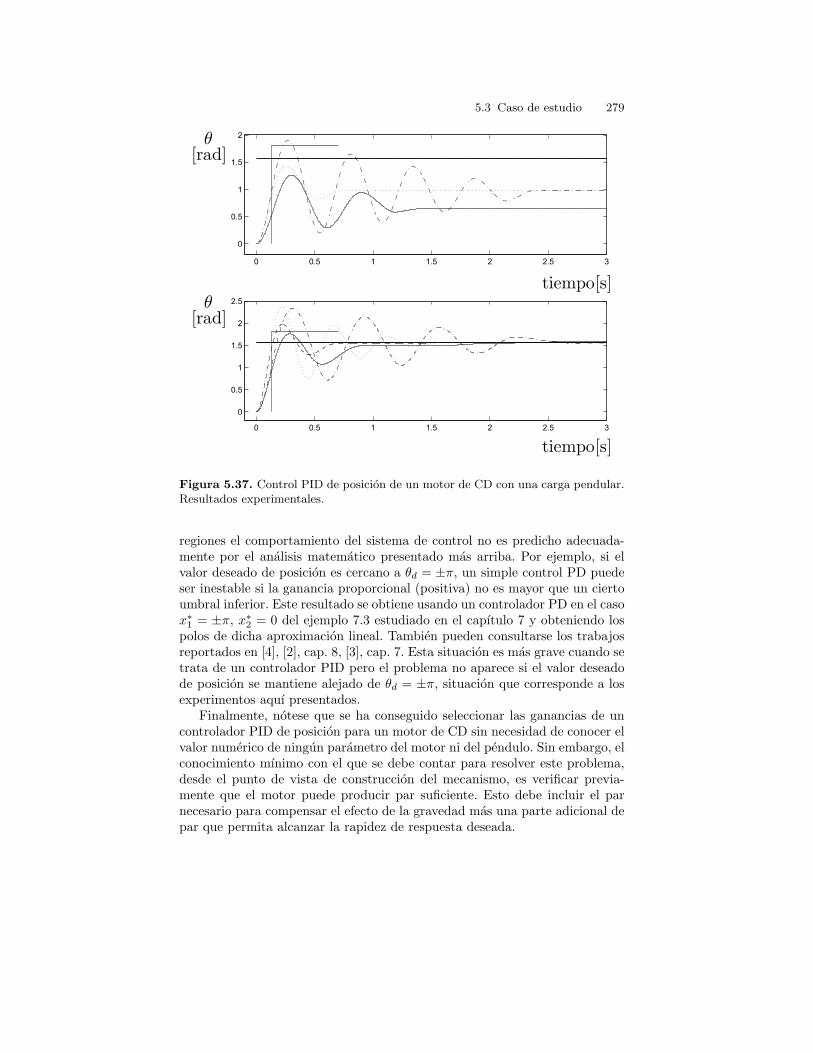
5.3 Caso de estudio 279
ò
ò
[rad]
[rad]
tiempo[s]
tiempo[s]
Figura 5.37. Control PID de posicion de un motor de CD con una carga pendular.Resultados experimentales.
regiones el comportamiento del sistema de control no es predicho adecuada-mente por el analisis matematico presentado mas arriba. Por ejemplo, si elvalor deseado de posicion es cercano a θd = ±π, un simple control PD puedeser inestable si la ganancia proporcional (positiva) no es mayor que un ciertoumbral inferior. Este resultado se obtiene usando un controlador PD en el casox∗
1 = ±π, x∗2 = 0 del ejemplo 7.3 estudiado en el capıtulo 7 y obteniendo los
polos de dicha aproximacion lineal. Tambien pueden consultarse los trabajosreportados en [4], [2], cap. 8, [3], cap. 7. Esta situacion es mas grave cuando setrata de un controlador PID pero el problema no aparece si el valor deseadode posicion se mantiene alejado de θd = ±π, situacion que corresponde a losexperimentos aquı presentados.
Finalmente, notese que se ha conseguido seleccionar las ganancias de uncontrolador PID de posicion para un motor de CD sin necesidad de conocer elvalor numerico de ningun parametro del motor ni del pendulo. Sin embargo, elconocimiento mınimo con el que se debe contar para resolver este problema,desde el punto de vista de construccion del mecanismo, es verificar previa-mente que el motor puede producir par suficiente. Esto debe incluir el parnecesario para compensar el efecto de la gravedad mas una parte adicional depar que permita alcanzar la rapidez de respuesta deseada.
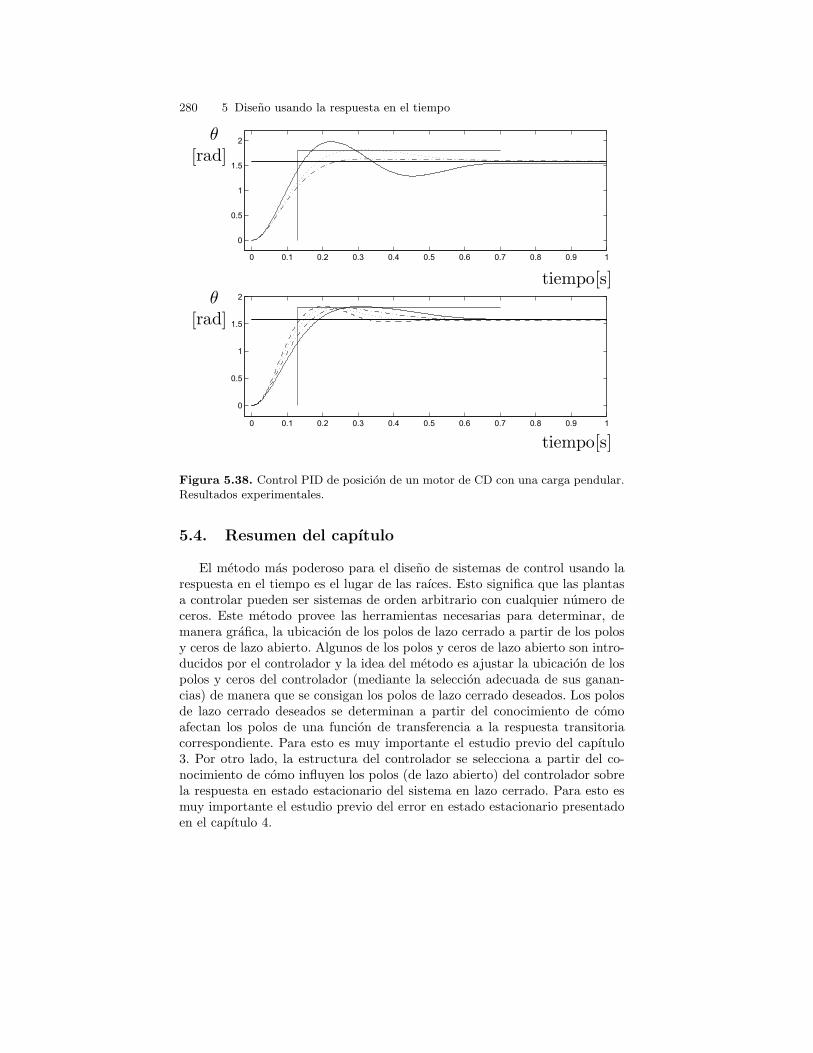
280 5 Diseno usando la respuesta en el tiempo
tiempo[s]
tiempo[s]
òrad[ ]
rad[ ]ò
Figura 5.38. Control PID de posicion de un motor de CD con una carga pendular.Resultados experimentales.
5.4. Resumen del capıtulo
El metodo mas poderoso para el diseno de sistemas de control usando larespuesta en el tiempo es el lugar de las raıces. Esto significa que las plantasa controlar pueden ser sistemas de orden arbitrario con cualquier numero deceros. Este metodo provee las herramientas necesarias para determinar, demanera grafica, la ubicacion de los polos de lazo cerrado a partir de los polosy ceros de lazo abierto. Algunos de los polos y ceros de lazo abierto son intro-ducidos por el controlador y la idea del metodo es ajustar la ubicacion de lospolos y ceros del controlador (mediante la seleccion adecuada de sus ganan-cias) de manera que se consigan los polos de lazo cerrado deseados. Los polosde lazo cerrado deseados se determinan a partir del conocimiento de comoafectan los polos de una funcion de transferencia a la respuesta transitoriacorrespondiente. Para esto es muy importante el estudio previo del capıtulo3. Por otro lado, la estructura del controlador se selecciona a partir del co-nocimiento de como influyen los polos (de lazo abierto) del controlador sobrela respuesta en estado estacionario del sistema en lazo cerrado. Para esto esmuy importante el estudio previo del error en estado estacionario presentadoen el capıtulo 4.
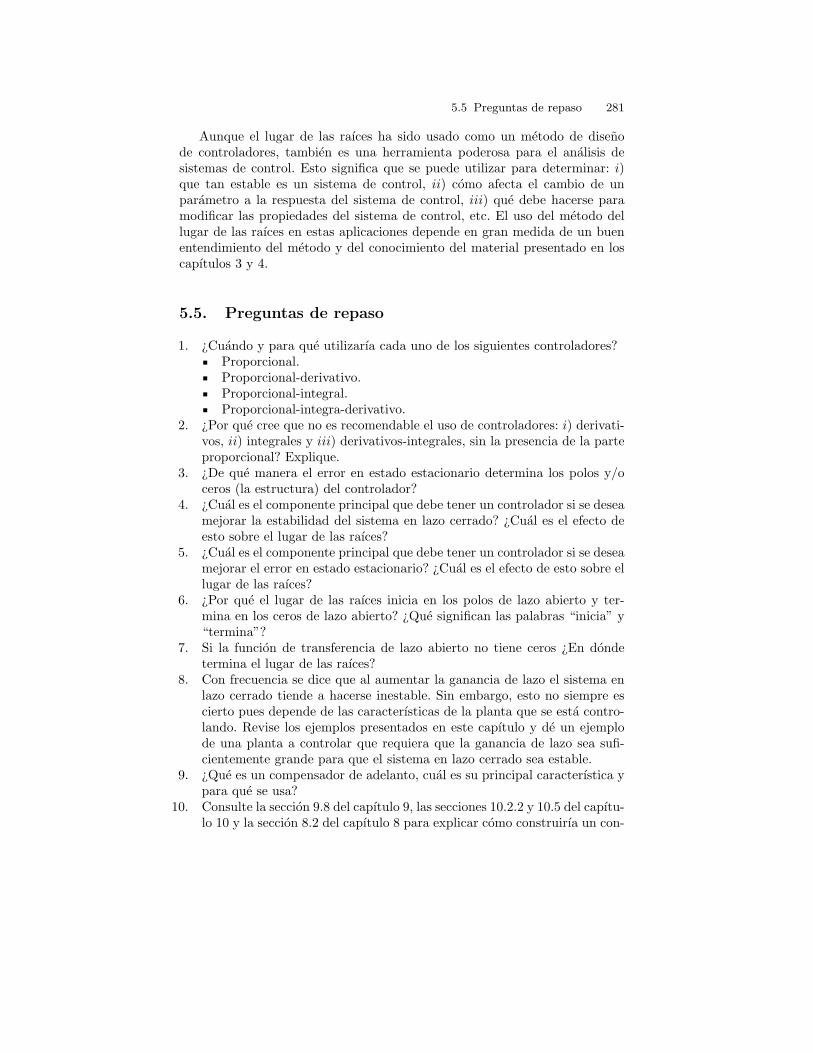
5.5 Preguntas de repaso 281
Aunque el lugar de las raıces ha sido usado como un metodo de disenode controladores, tambien es una herramienta poderosa para el analisis desistemas de control. Esto significa que se puede utilizar para determinar: i)que tan estable es un sistema de control, ii) como afecta el cambio de unparametro a la respuesta del sistema de control, iii) que debe hacerse paramodificar las propiedades del sistema de control, etc. El uso del metodo dellugar de las raıces en estas aplicaciones depende en gran medida de un buenentendimiento del metodo y del conocimiento del material presentado en loscapıtulos 3 y 4.
5.5. Preguntas de repaso
1. ¿Cuando y para que utilizarıa cada uno de los siguientes controladores?Proporcional.Proporcional-derivativo.Proporcional-integral.Proporcional-integra-derivativo.
2. ¿Por que cree que no es recomendable el uso de controladores: i) derivati-vos, ii) integrales y iii) derivativos-integrales, sin la presencia de la parteproporcional? Explique.
3. ¿De que manera el error en estado estacionario determina los polos y/oceros (la estructura) del controlador?
4. ¿Cual es el componente principal que debe tener un controlador si se deseamejorar la estabilidad del sistema en lazo cerrado? ¿Cual es el efecto deesto sobre el lugar de las raıces?
5. ¿Cual es el componente principal que debe tener un controlador si se deseamejorar el error en estado estacionario? ¿Cual es el efecto de esto sobre ellugar de las raıces?
6. ¿Por que el lugar de las raıces inicia en los polos de lazo abierto y ter-mina en los ceros de lazo abierto? ¿Que significan las palabras “inicia” y“termina”?
7. Si la funcion de transferencia de lazo abierto no tiene ceros ¿En dondetermina el lugar de las raıces?
8. Con frecuencia se dice que al aumentar la ganancia de lazo el sistema enlazo cerrado tiende a hacerse inestable. Sin embargo, esto no siempre escierto pues depende de las caracterısticas de la planta que se esta contro-lando. Revise los ejemplos presentados en este capıtulo y de un ejemplode una planta a controlar que requiera que la ganancia de lazo sea sufi-cientemente grande para que el sistema en lazo cerrado sea estable.
9. ¿Que es un compensador de adelanto, cual es su principal caracterıstica ypara que se usa?
10. Consulte la seccion 9.8 del capıtulo 9, las secciones 10.2.2 y 10.5 del capıtu-lo 10 y la seccion 8.2 del capıtulo 8 para explicar como construirıa un con-
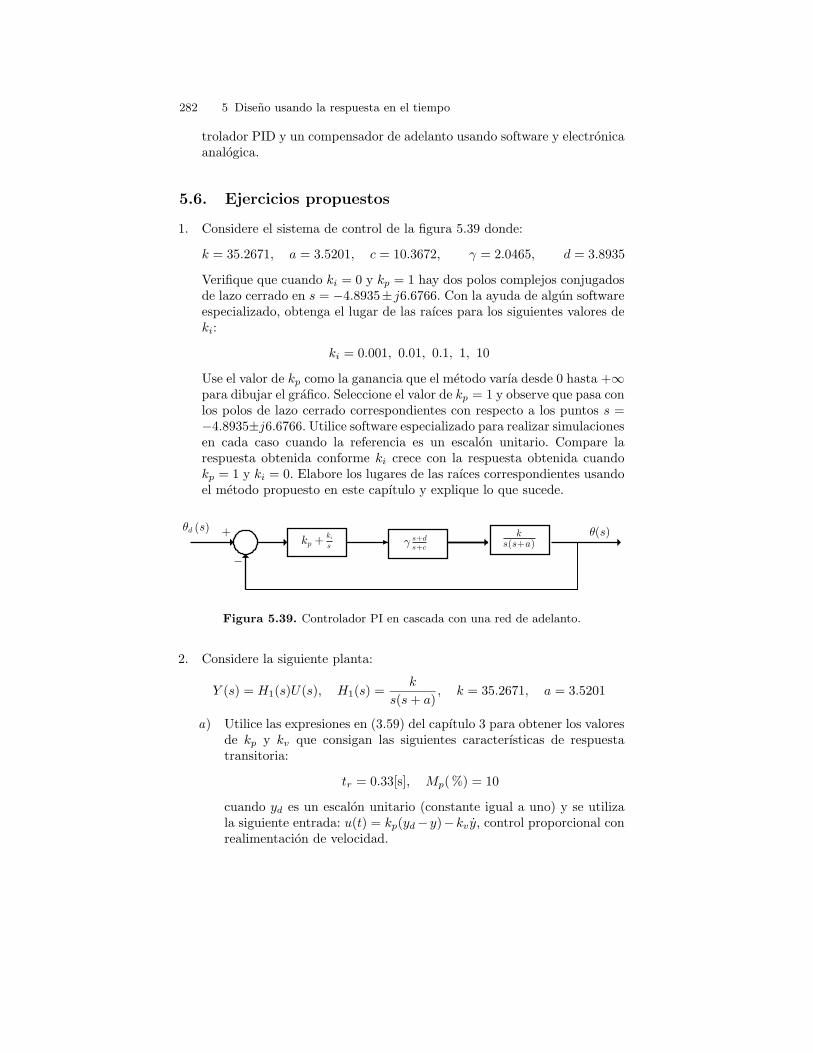
282 5 Diseno usando la respuesta en el tiempo
trolador PID y un compensador de adelanto usando software y electronicaanalogica.
5.6. Ejercicios propuestos
1. Considere el sistema de control de la figura 5.39 donde:
k = 35.2671, a = 3.5201, c = 10.3672, γ = 2.0465, d = 3.8935
Verifique que cuando ki = 0 y kp = 1 hay dos polos complejos conjugadosde lazo cerrado en s = −4.8935± j6.6766. Con la ayuda de algun softwareespecializado, obtenga el lugar de las raıces para los siguientes valores deki:
ki = 0.001, 0.01, 0.1, 1, 10
Use el valor de kp como la ganancia que el metodo varıa desde 0 hasta +∞para dibujar el grafico. Seleccione el valor de kp = 1 y observe que pasa conlos polos de lazo cerrado correspondientes con respecto a los puntos s =−4.8935±j6.6766. Utilice software especializado para realizar simulacionesen cada caso cuando la referencia es un escalon unitario. Compare larespuesta obtenida conforme ki crece con la respuesta obtenida cuandokp = 1 y ki = 0. Elabore los lugares de las raıces correspondientes usandoel metodo propuesto en este capıtulo y explique lo que sucede.
+
à
ò(s)òd s( )ís+cs+dkp + s
kis(s+a)
k
Figura 5.39. Controlador PI en cascada con una red de adelanto.
2. Considere la siguiente planta:
Y (s) = H1(s)U(s), H1(s) =k
s(s + a), k = 35.2671, a = 3.5201
a) Utilice las expresiones en (3.59) del capıtulo 3 para obtener los valoresde kp y kv que consigan las siguientes caracterısticas de respuestatransitoria:
tr = 0.33[s], Mp(%) = 10
cuando yd es un escalon unitario (constante igual a uno) y se utilizala siguiente entrada: u(t) = kp(yd − y)−kv y, control proporcional conrealimentacion de velocidad.

5.6 Ejercicios propuestos 283
b) Considere que la entrada esta dada como:
u(t) = kp(yd − y) + kdd(yd − y)
dt, control proporcional-derivativo
Obtenga la funcion de transferencia de lazo cerrado y use las expre-siones en (3.59) del capıtulo 3 para determinar kp y kd de manera quelos polos de lazo cerrado se ubiquen en lugares tales que determinenlas siguientes carcterısticas de lazo cerrado:
tr = 0.33[s], Mp(%) = 10
Haga simulaciones para cada uno de los incisos anteriores y compare lasrespuestas obtenidas. ¿A que se debe la diferencia existente entre estasrespuestas? ¿Los ceros de una funcion de transferencia pueden afectar laforma exacta de la respuesta? ¿Puede usar el lugar de las raıces paraexplicar esta diferencia?
3. Considere un sistema en lazo cerrado como el de la figura 5.1 con H(s) = 1y G(s) = 1
s3+s2+s+1 .Usando las reglas presentadas en la seccion 5.1.1 construya el lugar delas raıces correspondiente a un controlador proporcional. Compruebeque el sistema en lazo cerrado es inestable para cualquier valor positivode la ganancia del controlador proporcional. Use el criterio de Routhcomo alternativa para encontrar este resultado.Con el fin de estabilizar el sistema en lazo cerrado y para conseguir unerror cero en estado estacionario ante una referencia tipo escalon diseneun controlador PID del siguiente modo. i) Proponga kds
2 +kps+ki =kd(s − z1)(s − z2), con z1 = −0.5 + 1.3j, z2 = −0.5 − 1.3j. Usandolas reglas presentadas en la seccion 5.1.1 dibuje el lugar de las raıcescorrespondiente para verificar que no existe ningun valor positivo de laganancia derivativa que produzca un sistema en lazo cerrado estable.ii) Proponga kds
2+kps+ki = kd(s−z1)(s−z2), con z1 = −0.25+1.3j,z2 = −0.25 − 1.3j. Usando las reglas presentadas en la seccion 5.1.1dibuje el lugar de las raıces correspondiente para verificar que existe unrango de valores positivos de la ganancia derivativa kd que producenun sistema en lazo cerrado estable. Utilice el criterio de Routh paraencontrar el rango de valores de kd que consiguen estabilidad en lazocerrado.De acuerdo a lo anterior ¿Como debe seleccionar los ceros de un con-trolador PID para mejorar la estabilidad del sistema en lazo cerrado?
4. Verifique que la funcion de transferencia del circuito mostrado en la figura5.40 es:
Vo(s)
Vi(s)=
s + a
s + b, a =
1
R1C, b =
1
R1C+
1
R2C
Notese que como b > a esta red electrica puede usarse como un compen-sador de adelanto.
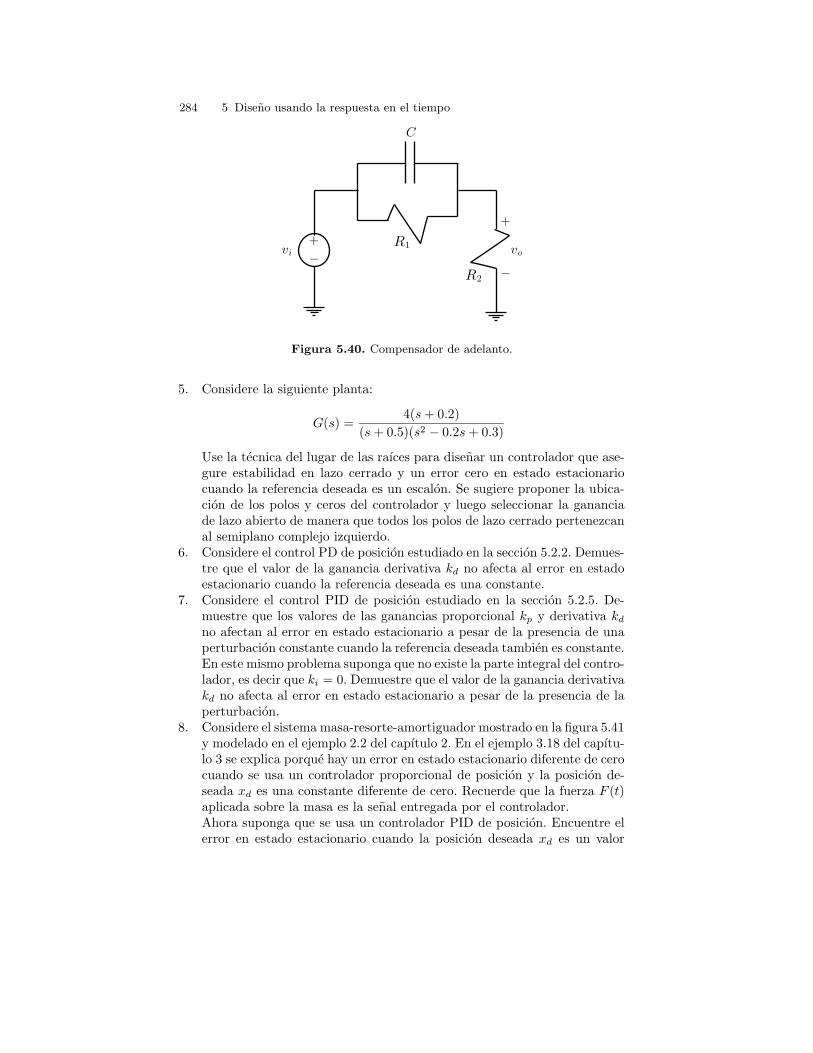
284 5 Diseno usando la respuesta en el tiempo
+
à
C
vi vo
+
à
R1
R2
Figura 5.40. Compensador de adelanto.
5. Considere la siguiente planta:
G(s) =4(s + 0.2)
(s + 0.5)(s2 − 0.2s + 0.3)
Use la tecnica del lugar de las raıces para disenar un controlador que ase-gure estabilidad en lazo cerrado y un error cero en estado estacionariocuando la referencia deseada es un escalon. Se sugiere proponer la ubica-cion de los polos y ceros del controlador y luego seleccionar la gananciade lazo abierto de manera que todos los polos de lazo cerrado pertenezcanal semiplano complejo izquierdo.
6. Considere el control PD de posicion estudiado en la seccion 5.2.2. Demues-tre que el valor de la ganancia derivativa kd no afecta al error en estadoestacionario cuando la referencia deseada es una constante.
7. Considere el control PID de posicion estudiado en la seccion 5.2.5. De-muestre que los valores de las ganancias proporcional kp y derivativa kd
no afectan al error en estado estacionario a pesar de la presencia de unaperturbacion constante cuando la referencia deseada tambien es constante.En este mismo problema suponga que no existe la parte integral del contro-lador, es decir que ki = 0. Demuestre que el valor de la ganancia derivativakd no afecta al error en estado estacionario a pesar de la presencia de laperturbacion.
8. Considere el sistema masa-resorte-amortiguador mostrado en la figura 5.41y modelado en el ejemplo 2.2 del capıtulo 2. En el ejemplo 3.18 del capıtu-lo 3 se explica porque hay un error en estado estacionario diferente de cerocuando se usa un controlador proporcional de posicion y la posicion de-seada xd es una constante diferente de cero. Recuerde que la fuerza F (t)aplicada sobre la masa es la senal entregada por el controlador.Ahora suponga que se usa un controlador PID de posicion. Encuentre elerror en estado estacionario cuando la posicion deseada xd es un valor
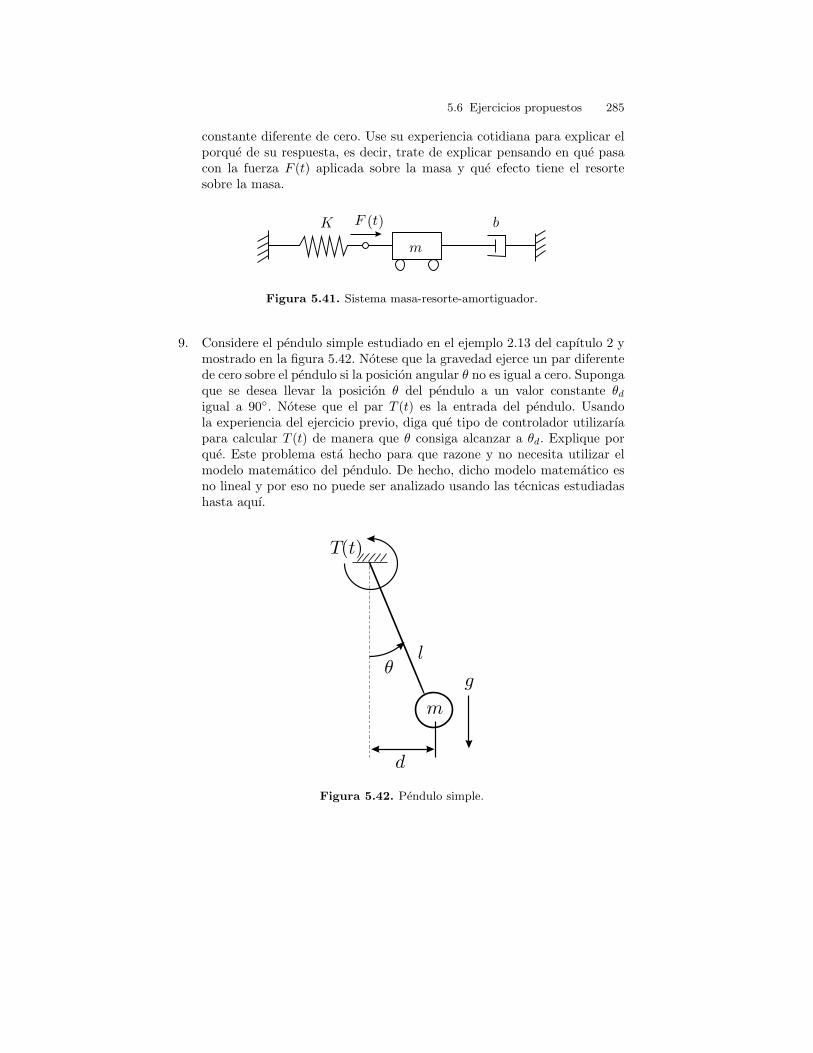
5.6 Ejercicios propuestos 285
constante diferente de cero. Use su experiencia cotidiana para explicar elporque de su respuesta, es decir, trate de explicar pensando en que pasacon la fuerza F (t) aplicada sobre la masa y que efecto tiene el resortesobre la masa.
K F t( )
m
b
Figura 5.41. Sistema masa-resorte-amortiguador.
9. Considere el pendulo simple estudiado en el ejemplo 2.13 del capıtulo 2 ymostrado en la figura 5.42. Notese que la gravedad ejerce un par diferentede cero sobre el pendulo si la posicion angular θ no es igual a cero. Supongaque se desea llevar la posicion θ del pendulo a un valor constante θd
igual a 90. Notese que el par T (t) es la entrada del pendulo. Usandola experiencia del ejercicio previo, diga que tipo de controlador utilizarıapara calcular T (t) de manera que θ consiga alcanzar a θd. Explique porque. Este problema esta hecho para que razone y no necesita utilizar elmodelo matematico del pendulo. De hecho, dicho modelo matematico esno lineal y por eso no puede ser analizado usando las tecnicas estudiadashasta aquı.
T(t)
òl
m
g
d
Figura 5.42. Pendulo simple.

286 5 Diseno usando la respuesta en el tiempo
10. Considere una planta cualquiera G(s) y los siguientes controladores colo-cados en cascada con G(s):
Gc(s) =s + a
s + b, 0 < a < b
Gd(s) =s + c
s + d, c > d > 0
Gc(s) se conoce como un compensador de adelanto mientras que Gd(s) seconoce como un compensador de atraso.
¿Cual es el efecto de cada uno de estos compensadores sobre el erroren estado estacionario ante una referencia escalon?¿Cual es el efecto de cada uno de estos compensadores sobre la esta-bilidad relativa del sistema en lazo cerrado?¿Con cual de estos compensadores se relaciona un controlador PI ycon cual un controlador PD? Explique por que.¿Como construirıa con estos dos compensadores un controlador quetenga caracterısticas similares a las de un PID? Explique.
11. En un barco es comun contar con un unico girocompas que indica el rum-bo actual de barco. Sin embargo, se debe contar con esta informacion endiferentes puntos del barco por lo que es necesario transmitir esta infor-macion electronicamente para exhibirla en cada punto del barco donde senecesita usando un instrumento de aguja. La posicion angular de la agujaes ajustada con un motor de CD usando la informacion suministrada porel girocompas como la posicion deseada. Disene un sistema de control enlazo cerrado de manera que la posicion de la aguja del instrumento sigafielmente a la orientacion suministrada por el girocompas de acuerdo a lassiguientes especificaciones:
Que ante un cambio tipo escalon de 8 en la orientacion del girocompas,el error en estado estacionario se reduzca y se mantenga en menos de1 en 0.3 segundos o menos y que el sobre paso sea menor o igual al25%.Cuando la orientacion del girocompas cambie de acuerdo a una rampade 5 por segundo, que el error en estado estacionario sea de 0.3 omenos.No existen perturbaciones externas.
¿Bajo que condiciones de operacion del barco pueden ocurrir estas situa-ciones? La funcion de transferencia entre el voltaje aplicado al motor y laposicion de la aguja en grados es:
G(s) =45.84 × 10−5
s(4.4 × 10−9s2 + 308.5 × 10−9s + 3.3 × 10−6)
Sugerencia.i) En base las especificaciones suministradas decida que controlador de-bera usar. ii) Usando la primera especificacion determine una zona, en el

5.6 Ejercicios propuestos 287
dominio del tiempo, dentro de la cual debe estar la respuesta del siste-ma en lazo cerrado. iii) Recuerde que, de acuerdo a la figura 3.10 en elcapıtulo 3, la respuesta de un sistema de segundo orden esta contenidadentro de dos envolventes exponenciales que dependen de ζ y de ωn. Conesta informacion, usando el amortiguamiento deseado y usando el puntoii) anterior, determine la zona del plano complejo s dentro de la cual de-ben caer los polos dominantes (complejos conjugados) del sistema en lazocerrado. iv) Determine un punto conveniente sobre la frontera de dichazona del plano s y use las reglas vistas para construir el lugar de las raıcespara determinar las ganancias de un controlador que consiga que dichopunto sea un polo de lazo cerrado. v) Una vez conseguido esto, seleccio-ne una ganancia de lazo abierto que asegure que todos los polos de lazocerrado esten dentro de la zona deseada. vi) Verifique que se cumple la se-gunda especificacion y, si no es ası, redisene el controlador. vii) Mediantesimulaciones verifique que se satisfacen todas las especificaciones.


Referencias
1. G.W. Evans, The story of Walter R. Evans and his textbook Control-SystemsDynamics, IEEE Control Systems Magazine, pp. 74-81, December 2004.
2. R. Kelly, V. Santibanez and A. Lorıa, Control of robot manipulators in jointspace, Springer, London, 2005.
3. R. Kelly y V. Santibanez, Control de movimiento de robots manipuladores, Pear-son Prentice Hall, Madrid, 2003.
4. R. Kelly, PD control with desired gravity compensation of robotic manipulators:a review, The International Journal of Robotcs Research, vo. 16, No. 5, pp. 660-672, 1997.
5. K. Ogata, Ingenierıa de Control Moderna, 4a. edicion, Pearson Prentice-Hall,Madrid, 2003.
6. N.S. Nise, Sistemas de control para ingenierıa, 1a. edicion en espanol, 1a. Re-impresion, CECSA, Mexico, 2004.
7. R.C. Dorf y R.H. Bishop, Sistemas de control moderno, 10a. edicion, PearsonPrentice-Hall, Madrid, 2008.
8. B.C. Kuo, Sistemas de control automatico, 7a. edicion, Prentice-Hall Hispanoa-mericana, Mexico, 1995.
9. G.H. Hostetter, C.J. Savant y R.T. Stefani, Sistemas de control, 1a. edicion enespanol, McGraw-Hill, Mexico, 1992.
10. W. Ali and J.H. Burghart, Effects of lag controllers on the transient response,IEE Proceedings-D, Control theory and applications, vol. 138, no. 2, pp. 119-122,March 1991.

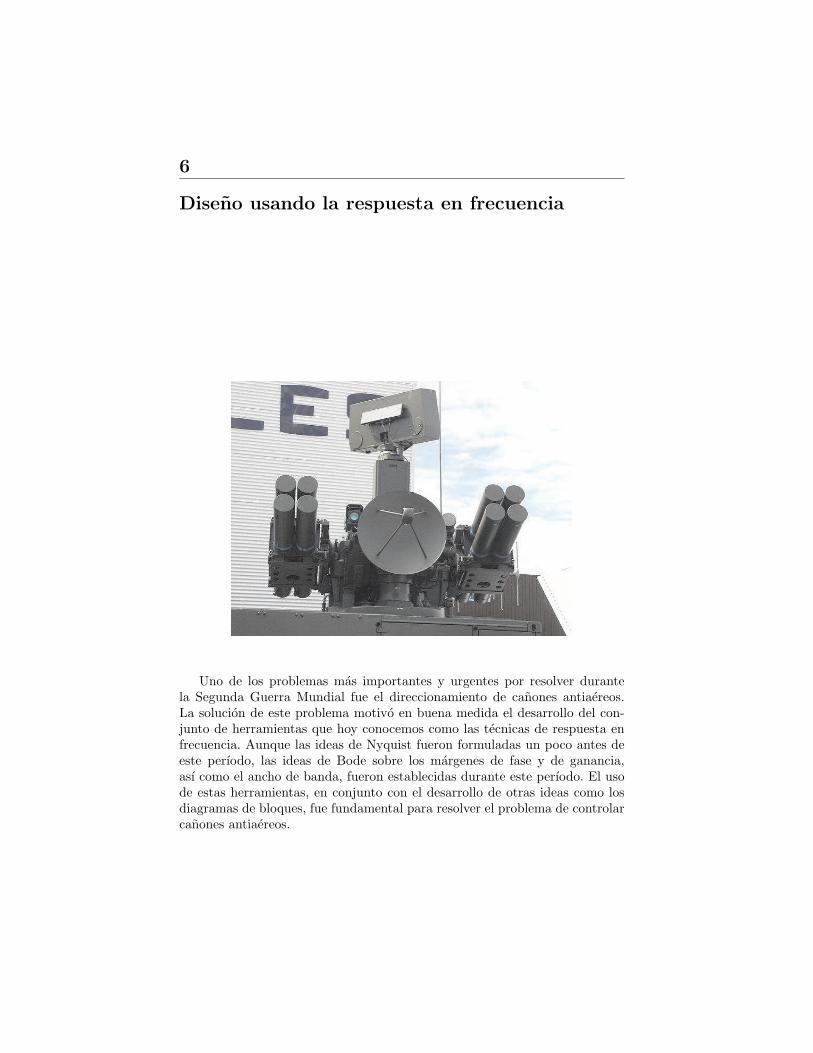
6
Diseno usando la respuesta en frecuencia
Uno de los problemas mas importantes y urgentes por resolver durantela Segunda Guerra Mundial fue el direccionamiento de canones antiaereos.La solucion de este problema motivo en buena medida el desarrollo del con-junto de herramientas que hoy conocemos como las tecnicas de respuesta enfrecuencia. Aunque las ideas de Nyquist fueron formuladas un poco antes deeste perıodo, las ideas de Bode sobre los margenes de fase y de ganancia,ası como el ancho de banda, fueron establecidas durante este perıodo. El usode estas herramientas, en conjunto con el desarrollo de otras ideas como losdiagramas de bloques, fue fundamental para resolver el problema de controlarcanones antiaereos.
292 6 Diseno usando la respuesta en frecuencia
Objetivos del capıtulo
Entender que significa respuesta en frecuencia y conocer los conceptos fun-damentales de este enfoque.Conocer la relacion entre las caracterısticas de respuesta en frecuencia ylas caracterısticas de respuesta en el tiempo.Usar los conceptos de respuesta en frecuencia para el analisis y diseno desistemas de control.
En el capıtulo 5 se presenta un metodo para disenar sistemas de controlque se conoce como el metodo de la respuesta en el tiempo. La caracterısticaprincipal de ese metodo es que trata de ubicar convenientemente los polos delazo cerrado de manera que la respuesta transitoria tenga las caracterısticasdeseadas. Para ese metodo es fundamental saber como es la respuesta transi-toria en el tiempo que introducen los polos de lazo cerrado: reales, complejosconjugados, sencillos, repetidos, etc.
En el presente capıtulo se introduce un nuevo metodo para el diseno desistemas de control que se conoce como el metodo de la respuesta en frecuencia.Fundamental para este estudio es entender que si una ecuacion diferenciallineal se excita con una entrada que es una funcion sinusoidal del tiempo,entonces la salida tambien sera, en estado estacionario, una funcion sinusoidaldel tiempo de la misma frecuencia que la entrada pero con una amplitud yuna fase diferentes. La base de este metodo radica en estudiar como varıan laamplitud y la fase de la senal de salida al cambiar la frecuencia de la senalsinusoidal aplicada a la entrada. Esto es lo que se conoce como respuesta enfrecuencia. Como se muestra en este capıtulo, la manera en que cambian laamplitud y la fase de la senal de salida depende de como son y en donde estanubicados los polos y los ceros de la funcion de transferencia correspondiente ala ecuacion diferencial bajo estudio. La estrategia de diseno en este metodo esmodificar convenientemente las caracterısticas de respuesta en frecuencia delsistema en lazo abierto de manera que se obtengan las caracterısticas deseadasde la respuesta en el tiempo del sistema en lazo cerrado.
Puede afirmarse que cualquier problema de diseno en control clasico puedeser resuelto usando cualquiera de los metodos: el metodo de la respuesta enel tiempo o el metodo de la respuesta en frecuencia. Esto significa que ambosmetodos suministran las herramientas necesarias para cualquier problema decontrol clasico. Sin embargo, dado que cada metodo analiza el mismo problemadesde puntos de vista diferentes, cada uno suministra informacion que puedeser complementaria a la suministrada por el otro metodo. Ası que es muyimportante que se dominen ambos metodos.
6.1. Un circuito RC de corriente alterna
A continuacion se presentan algunos resultados experimentales obtenidoscon el circuito electrico de la figura 6.1(a). Se utiliza un generador de senales
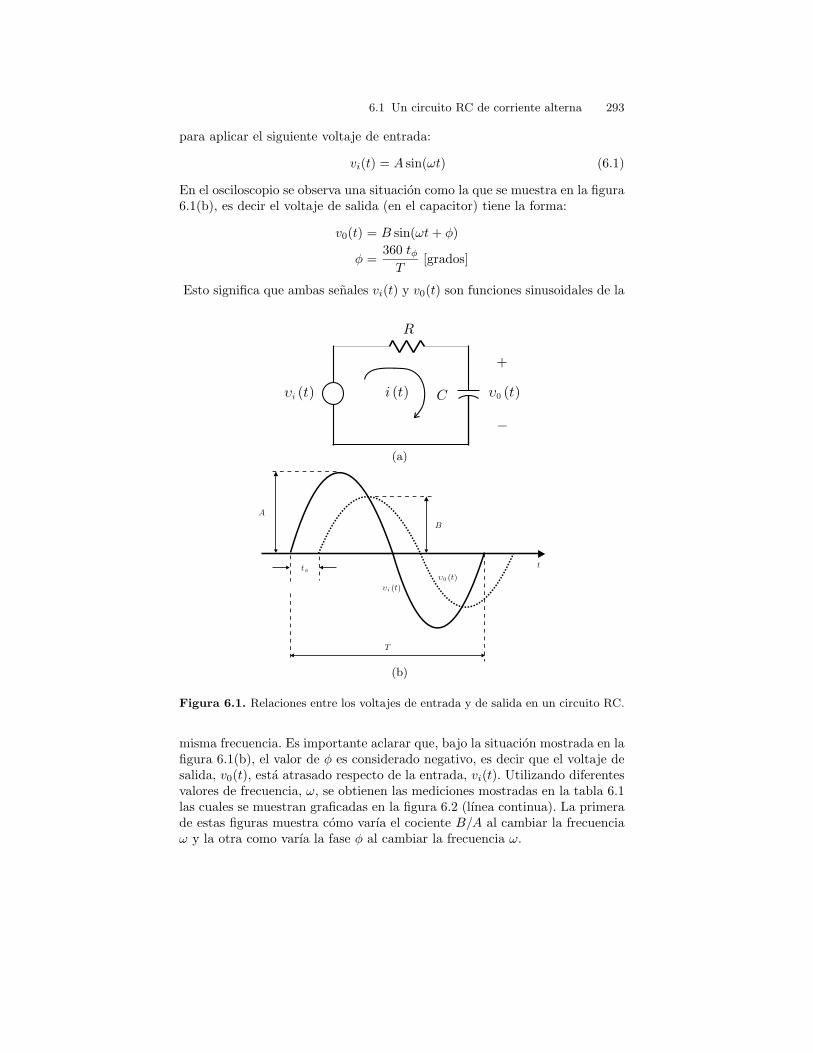
6.1 Un circuito RC de corriente alterna 293
para aplicar el siguiente voltaje de entrada:
vi(t) = A sin(ωt) (6.1)
En el osciloscopio se observa una situacion como la que se muestra en la figura6.1(b), es decir el voltaje de salida (en el capacitor) tiene la forma:
v0(t) = B sin(ωt + φ)
φ =360 tφ
T[grados]
Esto significa que ambas senales vi(t) y v0(t) son funciones sinusoidales de la
R
Cýi t( ) ý0 t( )
à
+
i t( )
(a)
A
B
tþ
ý i t( )
ý0 t( )
T
t
(b)
Figura 6.1. Relaciones entre los voltajes de entrada y de salida en un circuito RC.
misma frecuencia. Es importante aclarar que, bajo la situacion mostrada en lafigura 6.1(b), el valor de φ es considerado negativo, es decir que el voltaje desalida, v0(t), esta atrasado respecto de la entrada, vi(t). Utilizando diferentesvalores de frecuencia, ω, se obtienen las mediciones mostradas en la tabla 6.1las cuales se muestran graficadas en la figura 6.2 (lınea continua). La primerade estas figuras muestra como varıa el cociente B/A al cambiar la frecuenciaω y la otra como varıa la fase φ al cambiar la frecuencia ω.
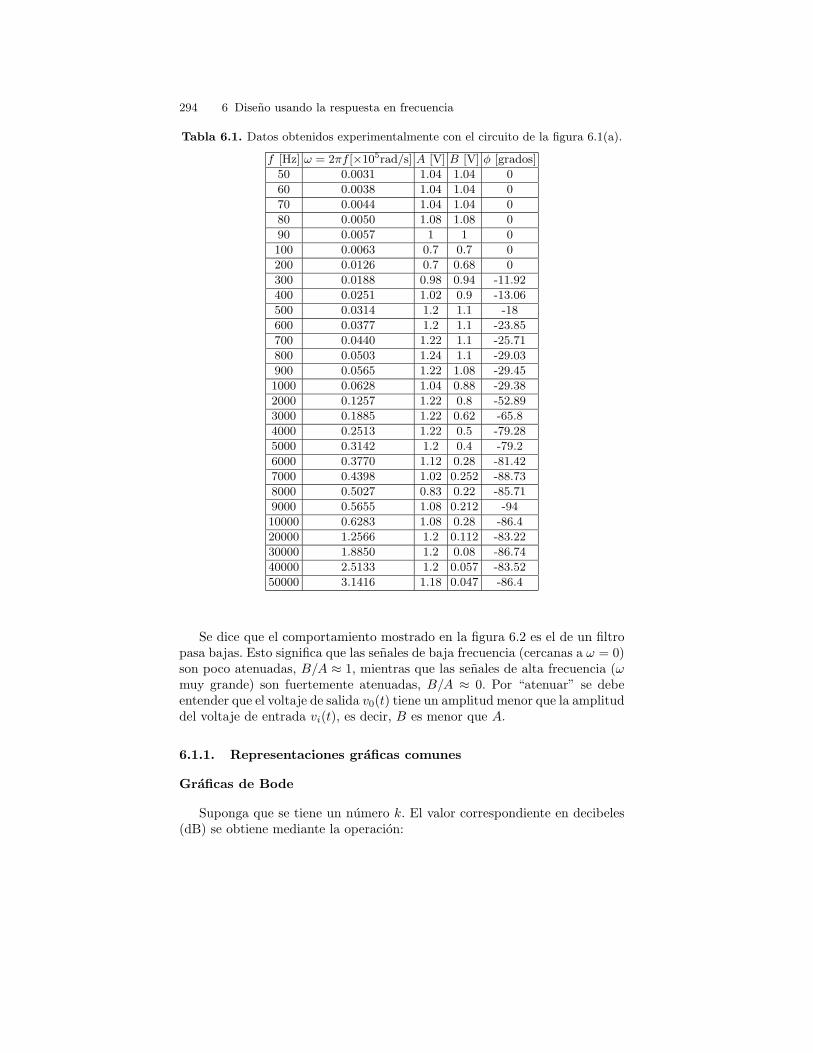
294 6 Diseno usando la respuesta en frecuencia
Tabla 6.1. Datos obtenidos experimentalmente con el circuito de la figura 6.1(a).
f [Hz] ω = 2πf [×105rad/s] A [V] B [V] φ [grados]
50 0.0031 1.04 1.04 0
60 0.0038 1.04 1.04 0
70 0.0044 1.04 1.04 0
80 0.0050 1.08 1.08 0
90 0.0057 1 1 0
100 0.0063 0.7 0.7 0
200 0.0126 0.7 0.68 0
300 0.0188 0.98 0.94 -11.92
400 0.0251 1.02 0.9 -13.06
500 0.0314 1.2 1.1 -18
600 0.0377 1.2 1.1 -23.85
700 0.0440 1.22 1.1 -25.71
800 0.0503 1.24 1.1 -29.03
900 0.0565 1.22 1.08 -29.45
1000 0.0628 1.04 0.88 -29.38
2000 0.1257 1.22 0.8 -52.89
3000 0.1885 1.22 0.62 -65.8
4000 0.2513 1.22 0.5 -79.28
5000 0.3142 1.2 0.4 -79.2
6000 0.3770 1.12 0.28 -81.42
7000 0.4398 1.02 0.252 -88.73
8000 0.5027 0.83 0.22 -85.71
9000 0.5655 1.08 0.212 -94
10000 0.6283 1.08 0.28 -86.4
20000 1.2566 1.2 0.112 -83.22
30000 1.8850 1.2 0.08 -86.74
40000 2.5133 1.2 0.057 -83.52
50000 3.1416 1.18 0.047 -86.4
Se dice que el comportamiento mostrado en la figura 6.2 es el de un filtropasa bajas. Esto significa que las senales de baja frecuencia (cercanas a ω = 0)son poco atenuadas, B/A ≈ 1, mientras que las senales de alta frecuencia (ωmuy grande) son fuertemente atenuadas, B/A ≈ 0. Por “atenuar” se debeentender que el voltaje de salida v0(t) tiene un amplitud menor que la amplituddel voltaje de entrada vi(t), es decir, B es menor que A.
6.1.1. Representaciones graficas comunes
Graficas de Bode
Suponga que se tiene un numero k. El valor correspondiente en decibeles(dB) se obtiene mediante la operacion:
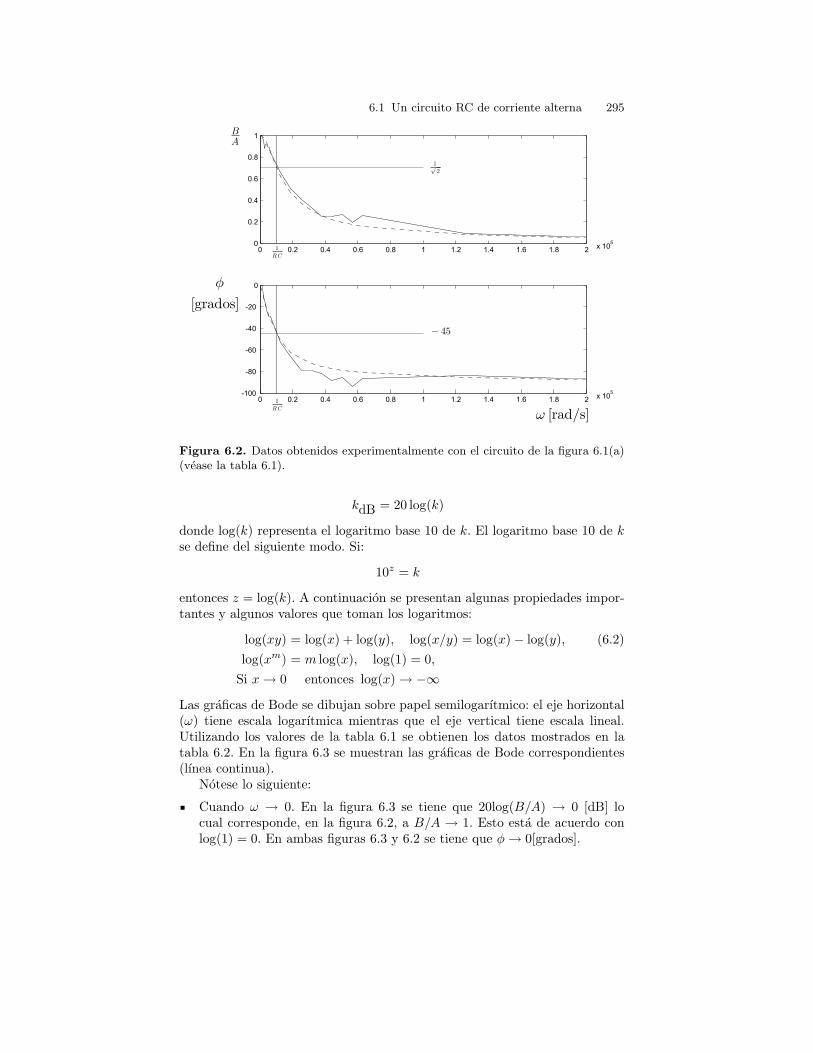
6.1 Un circuito RC de corriente alterna 295
AB
þ
grados[ ]
! rad=s[ ]RC
1
RC
1
2p1
à 45
Figura 6.2. Datos obtenidos experimentalmente con el circuito de la figura 6.1(a)(vease la tabla 6.1).
kdB = 20 log(k)
donde log(k) representa el logaritmo base 10 de k. El logaritmo base 10 de kse define del siguiente modo. Si:
10z = k
entonces z = log(k). A continuacion se presentan algunas propiedades impor-tantes y algunos valores que toman los logaritmos:
log(xy) = log(x) + log(y), log(x/y) = log(x) − log(y), (6.2)
log(xm) = m log(x), log(1) = 0,
Si x → 0 entonces log(x) → −∞
Las graficas de Bode se dibujan sobre papel semilogarıtmico: el eje horizontal(ω) tiene escala logarıtmica mientras que el eje vertical tiene escala lineal.Utilizando los valores de la tabla 6.1 se obtienen los datos mostrados en latabla 6.2. En la figura 6.3 se muestran las graficas de Bode correspondientes(lınea continua).
Notese lo siguiente:
Cuando ω → 0. En la figura 6.3 se tiene que 20log(B/A) → 0 [dB] locual corresponde, en la figura 6.2, a B/A → 1. Esto esta de acuerdo conlog(1) = 0. En ambas figuras 6.3 y 6.2 se tiene que φ → 0[grados].
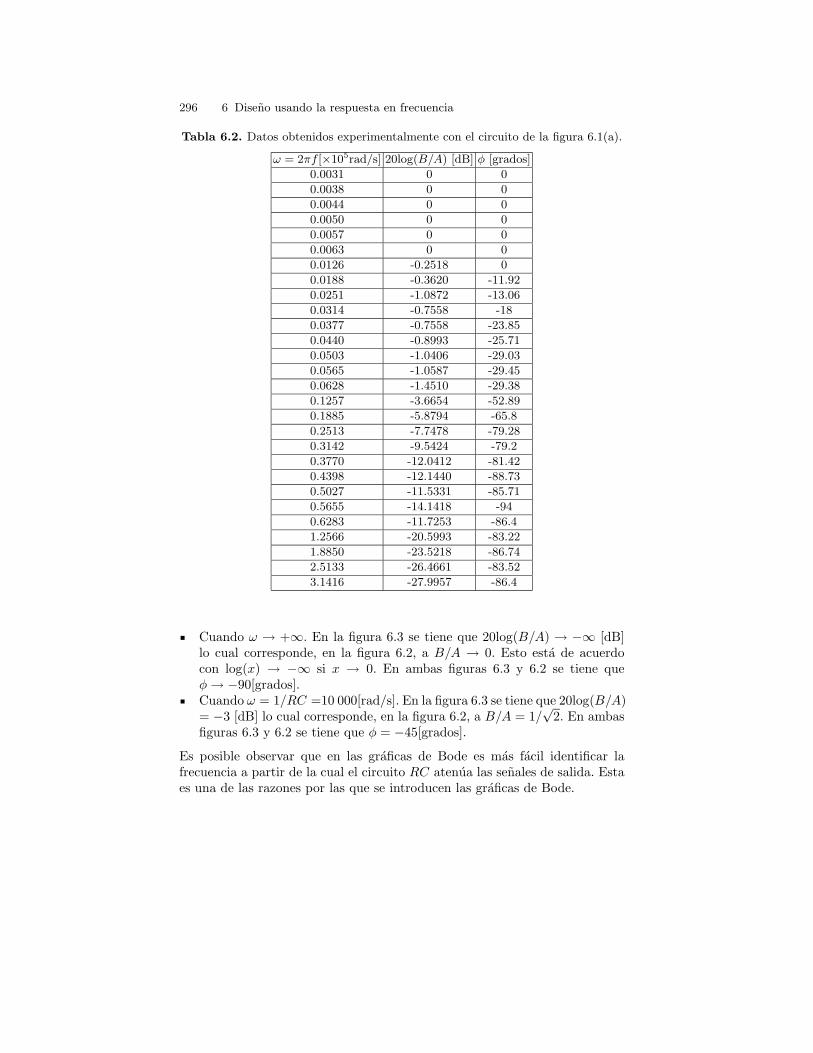
296 6 Diseno usando la respuesta en frecuencia
Tabla 6.2. Datos obtenidos experimentalmente con el circuito de la figura 6.1(a).
ω = 2πf [×105rad/s] 20log(B/A) [dB] φ [grados]
0.0031 0 0
0.0038 0 0
0.0044 0 0
0.0050 0 0
0.0057 0 0
0.0063 0 0
0.0126 -0.2518 0
0.0188 -0.3620 -11.92
0.0251 -1.0872 -13.06
0.0314 -0.7558 -18
0.0377 -0.7558 -23.85
0.0440 -0.8993 -25.71
0.0503 -1.0406 -29.03
0.0565 -1.0587 -29.45
0.0628 -1.4510 -29.38
0.1257 -3.6654 -52.89
0.1885 -5.8794 -65.8
0.2513 -7.7478 -79.28
0.3142 -9.5424 -79.2
0.3770 -12.0412 -81.42
0.4398 -12.1440 -88.73
0.5027 -11.5331 -85.71
0.5655 -14.1418 -94
0.6283 -11.7253 -86.4
1.2566 -20.5993 -83.22
1.8850 -23.5218 -86.74
2.5133 -26.4661 -83.52
3.1416 -27.9957 -86.4
Cuando ω → +∞. En la figura 6.3 se tiene que 20log(B/A) → −∞ [dB]lo cual corresponde, en la figura 6.2, a B/A → 0. Esto esta de acuerdocon log(x) → −∞ si x → 0. En ambas figuras 6.3 y 6.2 se tiene queφ → −90[grados].Cuando ω = 1/RC =10 000[rad/s]. En la figura 6.3 se tiene que 20log(B/A)= −3 [dB] lo cual corresponde, en la figura 6.2, a B/A = 1/
√2. En ambas
figuras 6.3 y 6.2 se tiene que φ = −45[grados].
Es posible observar que en las graficas de Bode es mas facil identificar lafrecuencia a partir de la cual el circuito RC atenua las senales de salida. Estaes una de las razones por las que se introducen las graficas de Bode.
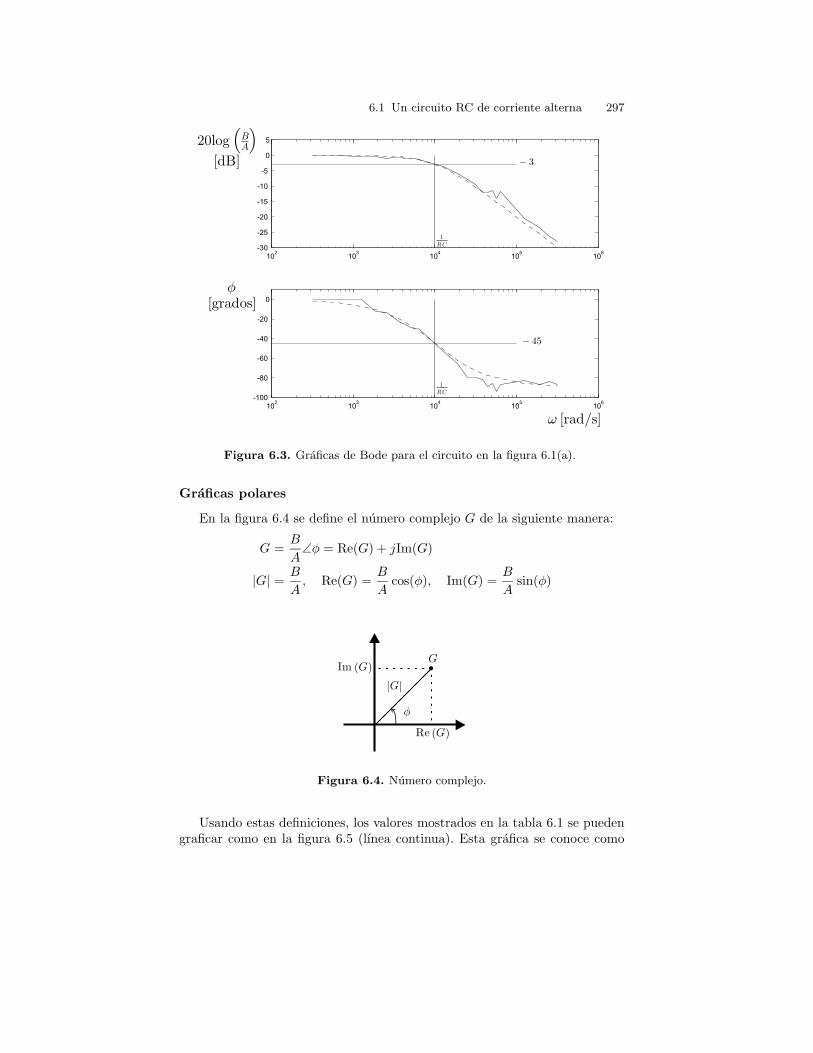
6.1 Un circuito RC de corriente alterna 297
à 45
à 3
RC
1
RC
1
! rad=s[ ]
20log ABð ñ
dB[ ]
þgrados[ ]
Figura 6.3. Graficas de Bode para el circuito en la figura 6.1(a).
Graficas polares
En la figura 6.4 se define el numero complejo G de la siguiente manera:
G =B
A∠φ = Re(G) + jIm(G)
|G| =B
A, Re(G) =
B
Acos(φ), Im(G) =
B
Asin(φ)
þ
G
Gj jIm G( )
Re G( )
Figura 6.4. Numero complejo.
Usando estas definiciones, los valores mostrados en la tabla 6.1 se puedengraficar como en la figura 6.5 (lınea continua). Esta grafica se conoce como

298 6 Diseno usando la respuesta en frecuencia
grafica polar. En esta grafica la frecuencia crece desde ω = 0 hasta ω = +∞de acuerdo a la direccion indicada por la flecha. De acuerdo a la definicion deG, el cociente B/A esta determinado por la distancia hacia el origen medidadesde el punto correspondiente y φ es el angulo medido respecto del eje realpositivo. Con estas observaciones es posible identificar los puntos a los cualesω = 0, ω = +∞ y ω = 1/RC (aquel en el cual el angulo formado con el ejereal positivo es −45[grados]). La razon principal por la que se introduce lagrafica polar tiene que ver con el criterio de estabilidad que se presentara masadelante.
ïï
ï! =
RC
1
! = +1 ! = 0
à 45
Re(G)
Im(G)
Figura 6.5. Grafica polar para el circuito de la figura 6.1(a).
6.1.2. Modelo matematico
Aplicando la ley de voltajes de Kirchhoff al circuito de la figura 6.1(a) seencuentra:
vi(t) = iR +1
C
∫ t
0
i(τ)dτ, v0(t) =1
C
∫ t
0
i(τ)dτ
Aplicando la transformada de Laplace (3.2):
Vi(s) = I(s)R +1
sCI(s), V0(s) =
1
sCI(s)

6.1 Un circuito RC de corriente alterna 299
Combinando estas expresiones se tiene:
V0(s) =a
s + aVi(s), a =
1
RC(6.3)
Sea vi(t) la senal presentada en (6.1), entonces su transformada de Laplaceesta dada como:
Vi(s) =ωA
s2 + ω2(6.4)
Por tanto, expandiendo en fracciones parciales:
V0(s) =a
s + a
ωA
s2 + ω2=
F
s + a+
Cs + D
s2 + ω2(6.5)
Las constantes C y de D se calculan del siguiente modo. Multiplicando ambosmiembros de (6.5) por el factor s2 + ω2 y evaluando en s = jω:
aωA
jω + a= jωC + D
Multiplicando el miembro izquierdo por el factor (−jω +a)/(−jω +a) e igua-lando partes reales e imaginarias se tiene:
D =a2ωA
ω2 + a2, C =
−aωA
ω2 + a2
Entonces:
Cs + D
s2 + ω2=
−aωA
ω2 + a2
s
s2 + ω2+
a2A
ω2 + a2
ω
s2 + ω2
Usando los pares transformados:
Lcos(ωt) =s
s2 + ω2, Lsin(ωt) =
ω
s2 + ω2
se encuentra:
L−1
Cs + D
s2 + ω2
=
aA
ω2 + a2[−ω cos(ωt) + a sin(ωt)]
De acuerdo a la figura 6.6 se puede escribir:
L−1
Cs + D
s2 + ω2
=
aA√
ω2 + a2
ω2 + a2[sin(φ) cos(ωt) + cos(φ) sin(ωt)]
= Aa√
ω2 + a2sin(ωt + φ), φ = atan
(−ω
a
)(6.6)
Por tanto, aplicando la transformada inversa de Laplace a (6.5) se obtiene:

300 6 Diseno usando la respuesta en frecuencia
þ
a
a 2+! 2
pà !
Figura 6.6. Triangulo definido por la fase φ.
v0(t) = F e−at + Aa√
ω2 + a2sin(ωt + φ)
Como a = 1RC > 0 entonces:
v0(t) → B sin(ωt + φ), B = Aa√
ω2 + a2(6.7)
conforme t → ∞. Esto significa que si el voltaje de entrada vi(t) es unafuncion seno del tiempo entonces, en estado estacionario, el voltaje de salidav0(t) tambien es una funcion seno del tiempo con la misma frecuencia ω perocon amplitudes y fases diferentes.
A continuacion se muestra que los valores de B/A y φ obtenidos en (6.6)y (6.7) tambien se pueden calcular a partir de la funcion de transferencia en(6.3) usando el cambio de variable s = jω. Defina:
G(s) =a
s + a
y considere el cambio de variable s = jω, entonces:
|G(jω)| =
∣∣∣∣a
jω + a
∣∣∣∣ =
∣∣∣∣a
jω + a
a − jω
a − jω
∣∣∣∣ =
=
∣∣∣∣a(a − jω)
ω2 + a2
∣∣∣∣ =a√
ω2 + a2=
B
A(6.8)
φ = ∠G(jω) = atan
(Im(G(jω))
Re(G(jω))
)= atan
(−ω
a
)(6.9)
En este punto es conveniente recordar que una funcion de transferencia sedefine como el cociente de la salida sobre la entrada, es decir G(s) = a
s+a =V0(s)Vi(s)
. Ası que no es extrano que |G(jω)| este dado como el cociente de las
amplitudes de la salida y de la entrada. Por otro lado, si de manera intuitiva seasume que G(jω), V0(jω), Vi(jω) son numeros complejos, entonces el angulo

6.1 Un circuito RC de corriente alterna 301
de V0(jω) debe obtenerse como la suma de los angulos de G(jω) y de Vi(jω)porque V0(jω) = G(jω)Vi(jω). Esto significa que la diferencia de angulo entreVi(jω) y V0(jω) es igual al angulo de G(jω).
En las figuras 6.2, 6.3 y 6.5 se muestran las graficas correspondientes (lıneainterrumpida) obtenidas utilizando |G(jω)| y φ definidas en (6.8) y (6.9).La semejanza que se aprecia en estas figuras entre las lıneas continuas y lasinterrumpidas son una muestra de que las relaciones obtenidas analıticamenterepresentan satisfactoriamente la situacion experimental.
De acuerdo a (6.7), (6.8), (6.9) si vi(t) esta dada como en (6.1) entonces:
v0(t) = A|G(jω)| sin(ωt + φ), φ = atan
(Im(G(jω))
Re(G(jω))
)(6.10)
Por otro lado, puede repetirse el procedimiento anterior para encontrar que sivi(t) = A cos(ωt) entonces:
v0(t) = A|G(jω)| cos(ωt + φ), φ = atan
(Im(G(jω))
Re(G(jω))
)(6.11)
6.1.3. Componentes de frecuencia
De acuerdo a las Series de Fourier, cualquier senal periodica puede serrepresentada como la suma de muchas senales seno y coseno de frecuenciasdiferentes. Por ejemplo, sea la funcion f(t) presentada en la figura 6.7. Suexpansion en series de Fourier esta dada como [1], pag. 457:
f(t) =4k
π
(sin(t) +
1
3sin(3t) +
1
5sin(5t) + · · ·
)(6.12)
El espectro de frecuencias |F (ω)| es una funcion de la frecuencia ω que indicalas frecuencias contenidas en la funcion f(t) y cual es la contribucion de cadauna de esas frecuencias a la senal total f(t). El espectro |F (ω)| puede serinterpretado como la amplitud que tiene la senal seno o coseno de frecuenciaω, es decir 4k
π , 4kπ
13 , 4k
π15 ,. . ., en (6.12). El espectro de frecuencias obtenido con
las series de Fourier es discreto, es decir, solo existe contribucion de frecuenciasque son multiplos enteros de una frecuencia fundamental. En el caso de (6.12)la frecuencia fundamental es 1, mientras que 3, 5,. . . son sus multiplos enterosa los que se hace referencia.
El uso de la transformada de Fourier permite representar cualquier funcionno periodica como la suma de senales seno y coseno de muchas frecuencias. Eneste caso, el espectro de frecuencias es continuo, es decir, |F (ω)| esta definidopara frecuencias que no necesitan ser multiplos enteros de ninguna frecuenciafundamental. A las frecuencias que contribuyen al espectro |F (ω)| se les conocecomo componentes de frecuencia.
El razonamiento que se presenta a continuacion es intuitivo pues un analisisexacto esta fuera del alcance de este libro. Considere el sistema:
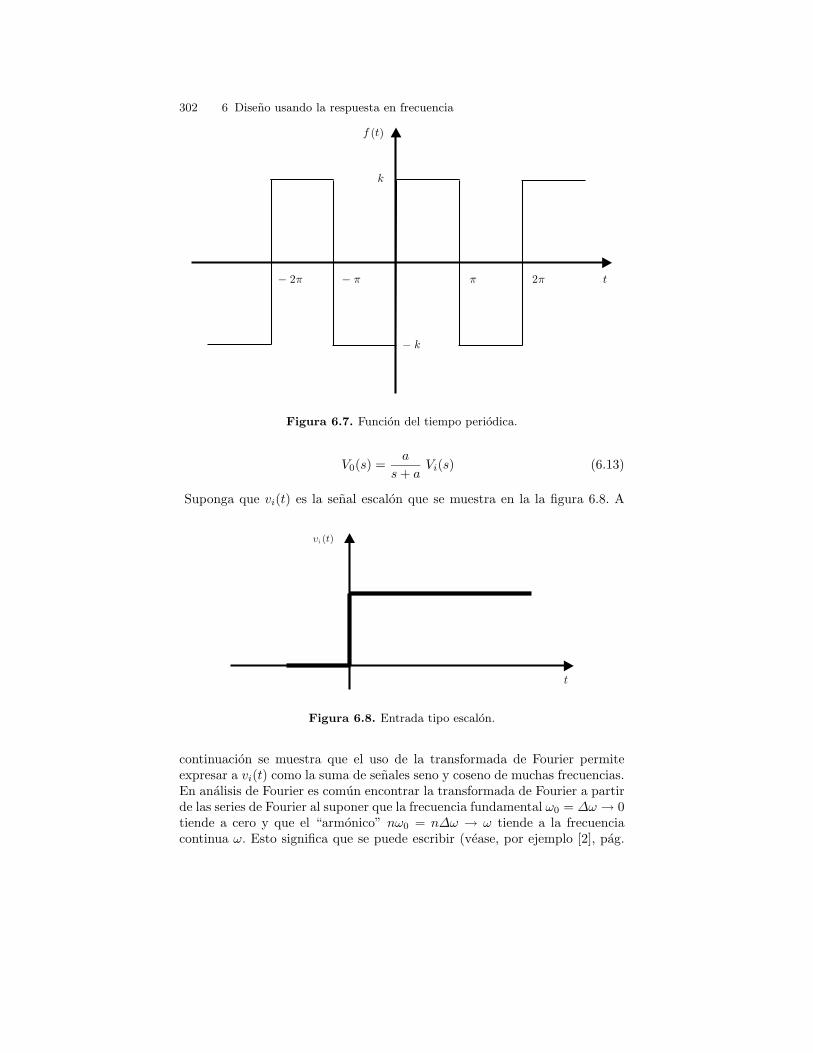
302 6 Diseno usando la respuesta en frecuencia
à 2ù à ù ù 2ù t
f t( )
à k
k
Figura 6.7. Funcion del tiempo periodica.
V0(s) =a
s + aVi(s) (6.13)
Suponga que vi(t) es la senal escalon que se muestra en la la figura 6.8. A
ýi t( )
t
Figura 6.8. Entrada tipo escalon.
continuacion se muestra que el uso de la transformada de Fourier permiteexpresar a vi(t) como la suma de senales seno y coseno de muchas frecuencias.En analisis de Fourier es comun encontrar la transformada de Fourier a partirde las series de Fourier al suponer que la frecuencia fundamental ω0 = ∆ω → 0tiende a cero y que el “armonico” nω0 = n∆ω → ω tiende a la frecuenciacontinua ω. Esto significa que se puede escribir (vease, por ejemplo [2], pag.

6.1 Un circuito RC de corriente alterna 303
72):
vi(t) =n=+∞∑
n=−∞An[cos(n∆ωt) + j sin(n∆ωt)]∆ω (6.14)
donde, j =√−1, el factor ∆ω colocado en el extremo derecho se introduce
para asegurar la convergencia de la sumatoria, que en el lımite ω0 = ∆ω → 0se convierte en una integral y ∆ω se convierte en una diferencial, y An es engeneral un numero complejo que representa la amplitud del “armonico” defrecuencia n∆ω → ω.
De acuerdo a lo expuesto en la seccion 3.10 el sistema en (6.13) es linealy, por tanto, satisface el principio de superposicion, es decir si v01(t) es lasolucion cuando vi1(t) es la entrada y v02(t) es la solucion cuando vi2(t) es laentrada entonces α1v01(t)+α2v02(t) es la solucion cuando α1vi1(t)+α2vi2(t)es la entrada, donde α1 y α2 son constantes arbitrarias. Por tanto, se puedeusar el principio de superposicion, (6.10), (6.11), (6.14) para obtener:
v0(t) =n=+∞∑
n=−∞An|G(jn∆ω)| [cos(n∆ωt + φn) + j sin(n∆ωt + φn)]∆ω
φn = atan
(Im(G(jn∆ω))
Re(G(jn∆ω))
)(6.15)
Es decir, la contribucion de cada una de las senales seno y coseno a la funciondel tiempo v0(t) esta determinada por las componentes de frecuencia ω = n∆ωde la senal de entrada y por la amplificacion o atenuacion que el sistemaefectua sobre cada una de esas componentes de frecuencia. Esto significa quela salida, v0(t), contiene basicamente las mismas componentes de frecuenciaque, vi(t), pero amplificadas o atenuadas segun lo determine el sistema, G(s).Tambien se dice que la salida se obtiene como el filtraje de la entrada bajo elefecto del sistema.
Componentes de frecuencias grandes
En la figura 6.9 se muestran dos senales con forma de onda seno de diferentefrecuencia. Notese que una senal de frecuencia mayor muestra variaciones masrapidas en el tiempo. Esto significa que si f(t) tiene componentes de frecuenciamayores entonces f(t) contiene variaciones mas rapidas. Por ejemplo, sea lafuncion f(t) presentada en la figura 6.7. Su expansion en series de Fourieresta dada como:
f(t) =4k
π
(sin(t) +
1
3sin(3t) +
1
5sin(5t) + · · ·
)
En la figura 6.10 se muestran varias aproximaciones de esta funcion que in-cluyen diferentes componentes de frecuencia [1], pag. 458. Notese que mien-tras exista mayor contenido de frecuencias grandes la funcion obtenida tiene
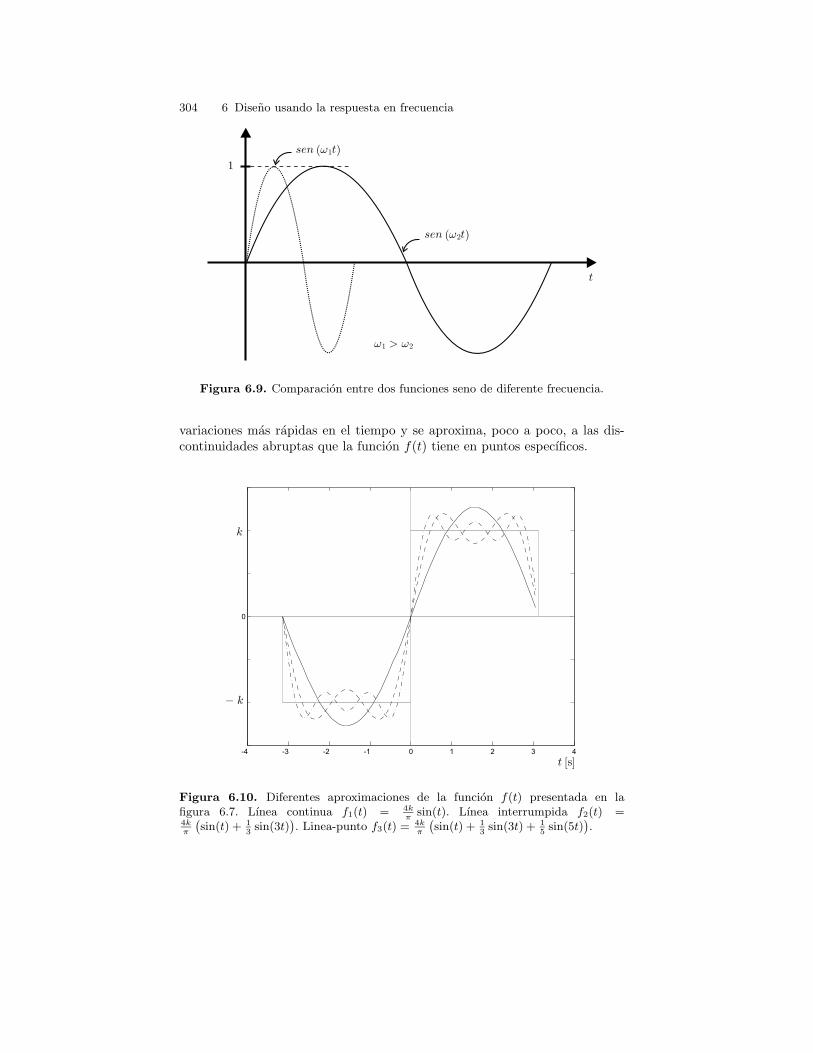
304 6 Diseno usando la respuesta en frecuencia
sen !1t( )
sen !2t( )
1
!1 > !2
t
Figura 6.9. Comparacion entre dos funciones seno de diferente frecuencia.
variaciones mas rapidas en el tiempo y se aproxima, poco a poco, a las dis-continuidades abruptas que la funcion f(t) tiene en puntos especıficos.
à k
k
t s[ ]
Figura 6.10. Diferentes aproximaciones de la funcion f(t) presentada en lafigura 6.7. Lınea continua f1(t) = 4k
πsin(t). Lınea interrumpida f2(t) =
4kπ
(sin(t) + 1
3sin(3t)
). Linea-punto f3(t) = 4k
π
(sin(t) + 1
3sin(3t) + 1
5sin(5t)
).

6.1 Un circuito RC de corriente alterna 305
Ruido
El ruido es una senal indeseable que varıa rapidamente. Esto significa queel ruido tiene componentes de frecuencia muy grandes.
Componentes de frecuencia cero
Una senal de frecuencia cero es una senal constante. Esto se puede concluirpartir de lo siguiente:
Au cos(ωt) = Au = constante, si ω = 0
Entonces, usando terminos propios de las ingenieras electrica y electronica,una senal f(t) que contiene una componente de frecuencia cero es una senalque tiene una componente de CD. Esto significa que si f(t) presenta varia-ciones entonces estas se realizan alrededor de un valor constante diferente decero.
6.1.4. Relacion entre la respuesta en la frecuencia y en larespuesta en el tiempo
De acuerdo a lo expuesto en la seccion previa se concluye lo siguiente:
Considere el sistema en (6.13). Si vi(t) = A es una senal constante, es decirde frecuencia cero ω = 0, entonces la salida correspondiente, en estadoestacionario, es v0(t) = A|G(j0)| = A (veanse (6.14) y (6.15)), porque|G(j0)| = |G(jω)|ω=0 = 1 y φ = 0 cuando ω = 0 (vease (6.9)).Es interesante darse cuenta que esto tambien se cumple, en estado estacio-nario, cuando a un sistema de control se le aplica una entrada tipo escalon.En la seccion 3.8 se muestra que si vi(t) es un escalon de altura A enton-ces el valor final (en estado estacionario) de la salida se calcula usando elteorema del valor final, es decir:
lımt→∞
v0(t) = lıms→0
sV0(s) = lıms→0
sG(s)A
s= G(0)A
donde es importante observar que que si s = σ + jω → 0 tambien se tieneque ω → 0.En la siguiente seccion se explica que estos resultados tambien se puedengeneralizar al caso en que G(s) es una funcion de transferencia arbitraria deorden n. Por tanto, se puede afirmar que dada una funcion de transferenciaG(s), la cantidad |G(jω)|ω=0 representa: i) la relacion entre la entrada y lasalida cuando la entrada es constante, o bien ii) la relacion entre la entraday la salida, en estado estacionario, cuando la entrada es un escalon. Noteseque en una funcion de transferencia arbitraria no se cumple, en general,que G(0) = 1.
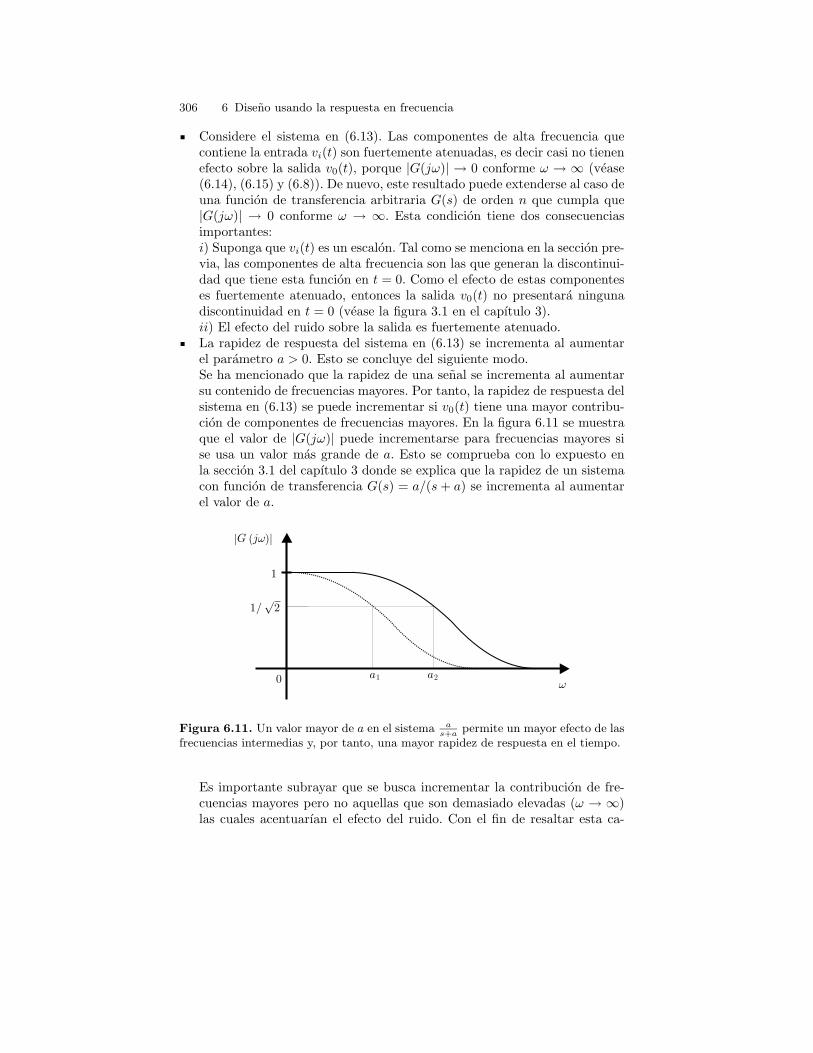
306 6 Diseno usando la respuesta en frecuencia
Considere el sistema en (6.13). Las componentes de alta frecuencia quecontiene la entrada vi(t) son fuertemente atenuadas, es decir casi no tienenefecto sobre la salida v0(t), porque |G(jω)| → 0 conforme ω → ∞ (vease(6.14), (6.15) y (6.8)). De nuevo, este resultado puede extenderse al caso deuna funcion de transferencia arbitraria G(s) de orden n que cumpla que|G(jω)| → 0 conforme ω → ∞. Esta condicion tiene dos consecuenciasimportantes:i) Suponga que vi(t) es un escalon. Tal como se menciona en la seccion pre-via, las componentes de alta frecuencia son las que generan la discontinui-dad que tiene esta funcion en t = 0. Como el efecto de estas componenteses fuertemente atenuado, entonces la salida v0(t) no presentara ningunadiscontinuidad en t = 0 (vease la figura 3.1 en el capıtulo 3).ii) El efecto del ruido sobre la salida es fuertemente atenuado.La rapidez de respuesta del sistema en (6.13) se incrementa al aumentarel parametro a > 0. Esto se concluye del siguiente modo.Se ha mencionado que la rapidez de una senal se incrementa al aumentarsu contenido de frecuencias mayores. Por tanto, la rapidez de respuesta delsistema en (6.13) se puede incrementar si v0(t) tiene una mayor contribu-cion de componentes de frecuencias mayores. En la figura 6.11 se muestraque el valor de |G(jω)| puede incrementarse para frecuencias mayores sise usa un valor mas grande de a. Esto se comprueba con lo expuesto enla seccion 3.1 del capıtulo 3 donde se explica que la rapidez de un sistemacon funcion de transferencia G(s) = a/(s + a) se incrementa al aumentarel valor de a.
G j!( )j j
a1 a2!
1
0
1= 2p
Figura 6.11. Un valor mayor de a en el sistema as+a
permite un mayor efecto de lasfrecuencias intermedias y, por tanto, una mayor rapidez de respuesta en el tiempo.
Es importante subrayar que se busca incrementar la contribucion de fre-cuencias mayores pero no aquellas que son demasiado elevadas (ω → ∞)las cuales acentuarıan el efecto del ruido. Con el fin de resaltar esta ca-

6.2 Sistemas arbitrarios de orden n 307
racterıstica, se usa el termino “frecuencias intermedias” para referirse aaquellas frecuencias que se utilizan para mejorar la rapidez de respuesta.Esta idea puede extenderse al caso de una funcion de transferencia arbi-traria G(s) de orden n, indicando que su rapidez de respuesta es mayorconforme sus polos se colocan mas lejos del origen.
6.2. Sistemas arbitrarios de orden n
Los conceptos presentados en la seccion 6.1 se han realizado considerandola funcion de transferencia en (6.13). Esto se ha hecho con el proposito deexplicar de manera sencilla los conceptos introducidos ahı. En la presenteseccion se muestra que todas las ideas expuestas en la seccion 6.1 tambienpueden generalizarse al caso de sistemas lineales arbitrarios de orden n.
Considere la funcion de transferencia arbitraria de orden n:
Y (s)
U(s)= G(s) =
E(s)
N(s)(6.16)
N(s) = sn + an−1sn−1 + · · · + a1s + a0
E(s) = b0 + b1s + · · · + bmsm
donde n ≥ m y u(t) = A sin(ωt), por lo que U(s) = A ωs2+ω2 . Sustituyendo
U(s) en (6.16) y usando expansion en fracciones parciales:
Y (s) = G(s)Aω
s2 + ω2= Yn(s) +
Cs + D
s2 + ω2(6.17)
donde Yn(s) = Lyn(t) es la respuesta natural la cual, de acuerdo al capıtulo3, satisface lımt→∞ yn(t) = 0 si G(s) es estable. Con el fin de facilitar laexposicion se supone que G(s) no tiene polos en s = ±jω. Multiplicandoambos miembros de (6.17) por el factor s2 + ω2 y evaluando en s = jω seencuentra:
ωAG(jω) = jωC + D
Igualando partes reales e imaginarias se obtiene:
C = AIm(G(jω)), D = ωARe(G(jω))
donde G(jω) = Re(G(jω)) + jIm(G(jω)). Por tanto:
Cs + D
s2 + ω2= AIm(G(jω))
s
s2 + ω2+ ARe(G(jω))
ω
s2 + ω2
Usando los pares transformados:
Lcos(ωt) =s
s2 + ω2, Lsin(ωt) =
ω
s2 + ω2

308 6 Diseno usando la respuesta en frecuencia
se obtiene:
L−1
Cs + D
s2 + ω2
= A[Im(G(jω)) cos(ωt) + Re(G(jω)) sin(ωt)]
Usando la figura 6.12 se encuentra que:
L−1
Cs + D
s2 + ω2
= A|G(jω)| [sin(φ) cos(ωt) + cos(φ) sin(ωt)] (6.18)
= B sin(ωt + φ), B = A|G(jω)|,
φ = atan
(Im(G(jω))
Re(G(jω))
),
|G(jω)| =
√Re2(G(jω)) + Im2(G(jω))
Entonces, de acuerdo a (6.17) se encuentra que:
þ
Re2 G
j!()
(
)
p
+Im
2 Gj!()
(
)
Im G j!( )( )
Re G j!( )( )
Figura 6.12. Triangulo definido por la fase φ.
y(t) → A|G(jω)| sin(ωt + φ)
conforme t → ∞ si G(s) es estable. Por tanto, si la entrada u(t) de un sistemalineal G(s) de orden n es una funcion seno, entonces la salida y(t) tambienes, en estado estacionario, una funcion seno de la misma frecuencia pero conuna amplitud y una fase que son, en general, diferentes a la amplitud y a lafase de la entrada. La relacion entre la amplitud de la entrada y la amplitudde la salida a la frecuencia ω se puede calcular como:
B
A= |G(jω)|
y se conoce como magnitud de la funcion de transferencia mientras que ladiferencia de fase entre la entrada y la salida esta dada por φ en (6.18) y seconoce como fase de la funcion de transferencia. Este resultado es identico al
6.3 Graficas polares y de Bode 309
encontrado en la seccion 6.1. Por tanto, todas las afirmaciones realizadas paraG(s) en esa seccion son validas cuando G(s) es una funcion de transferenciaarbitraria de orden n. Entonces, se esta en posicion de afirmar lo siguiente:
Por respuesta en frecuencia debemos entender, la descripcion de:
Como varıa el cociente de la amplitud de la senal de salida entre la am-plitud de la senal de entrada cuando se varıa la frecuencia de la senal deentrada.Como varıa el defasaje entre la senal de entrada y la senal de salida cuandose varıa la frecuencia de la senal de entrada
Estas dos cracterısticas son muy importantes, pues permiten determinar demanera exacta la manera en que responde un sistema de control: respues-ta transitoria (rapidez y oscilaciones) y respuesta en estado estacionario.Ademas, tal como se muestra en las secciones subsecuentes, tambien se pue-den establecer metodos que permiten determinar la estabilidad de un sistemaen lazo cerrado. En este sentido es importante mencionar que todas las ideasexpuestas en las secciones 6.1 y 6.2 tambien pueden ser extendidas a funcionesde transferencia inestables: solo hay que recordar que, aunque en tal caso larespuesta natural no desaparece al crecer el tiempo, la respuesta forzada esuna sinusoide si la entrada tambien lo es.
6.3. Graficas polares y de Bode
Un concepto importante en graficas de Bode es el denominado “decada”cuya abreviacion es “dec”. En graficas de Bode es de mucho interes analizarla frecuencia ω por decadas. Una decada representa un incremento de diezveces en el valor de la frecuencia. Por ejemplo si ω1 = 2.5 y ω2 = 25 entoncesse dice que hay una decada entre ω1 y ω2.
La funcion de transferencia arbitraria de orden n definida en (6.16) sepuede escribir como:
G(s) =bm
∏j=mj=1 (s − zj)
∏i=ni=1 (s − pi)
(6.19)
donde zj , j = 1, . . . ,m, son los ceros de G(s) y pi, i = 1, . . . , n, son los polos deG(s). Dado que los polos y los ceros pueden ser reales o complejos conjugadosentonces las graficas polares y de Bode de G(s) siempre pueden construirsea partir del conocimiento de las graficas polares y de Bode de los siguientesfactores fundamentales de primero y segundo orden:
s,1
s,
s + a
a,
a
s + a, (6.20)
s2 + 2ζωns + ω2n
ω2n
,ω2
n
s2 + 2ζωns + ω2n

310 6 Diseno usando la respuesta en frecuencia
por esta razon, en las figuras 6.13, 6.14, 6.15 y 6.16 se presentan las graficasde Bode y polares de estos factores.
Recuerdese que las graficas de Bode de magnitud son curvas que represen-tan la cantidad:
20 log (|G(jω)|)
como funcion de la frecuencia ω. Las graficas de Bode de fase son curvas querepresentan la cantidad:
φ = atan
(Im(G(jω))
Re(G(jω))
)
como funcion de la frecuencia ω. Por otro lado, cada punto de las graficaspolares representa la cantidad:
G(jω) = Re(G(jω)) + jIm(G(jω)) = |G(jω)|∠φ
Las flechas que aparecen en las graficas polares siempre apuntan en el sentidoen el que la frecuencia crece, es decir, desde ω = −∞ pasando por ω = 0hasta ω = +∞. El lector puede recurrir a [3], [4] si desea conocer el metododetallado que se utiliza normalmente para obtener las graficas mostradas enlas figuras 6.13, 6.14, 6.15 y 6.16.
Las lıneas gruesas en las graficas de Bode de las figuras 6.13 y 6.14 seconocen como asıntotas, mientras que las lıneas finas representan el valorexacto de las funciones representadas. Las asıntotas solo son aproximacionesque, sin embargo, son de mucha utilidad para reconocer la forma fundamen-tal de las graficas de Bode correspondientes. Notese que en algunas de lasgraficas de Bode de magnitud las asıntotas forman una esquina. La frecuen-cia a la cual ocurre dicha esquina se conoce como “frecuencia de esquina” yesta directamente relacionada con el cero o el polo del factor de primero osegundo orden que se representa. Recuerdese que, de acuerdo a la seccion 3.3,ωn es la distancia medida desde la raız correspondiente (polo o cero) hastael origen y que las raıces de un factor de segundo orden estan dadas comos = −ζωn ± jωn
√1 − ζ2.
De acuerdo a lo que describen las asıntotas, para frecuencias menores a lafrecuencia de esquina la magnitud de todos los factores en (6.20) (a excepcionde s y 1/s) es de 0[dB], pero para frecuencias mayores que la frecuencia deesquina la magnitud crece (ceros) o disminuye (polos) con una rapidez de±20[dB/dec] para los factores de primer orden y de ±40[dB/dec] para losfactores de segundo orden. Notese que en el caso de los factores de segundoorden, el comportamiento de la curva exacta cerca de la frecuencia de esquinadepende fuertemente del factor de amortiguamiento ζ. De hecho, si ζ < 0.7071,alrededor de la frecuencia de esquina existe un maximo de magnitud cuyo valorcrece hacia el infinito conforme ζ tiende a cero. Este maximo de magnitud seconoce como pico de resonancia y su valor se representa por Mr.
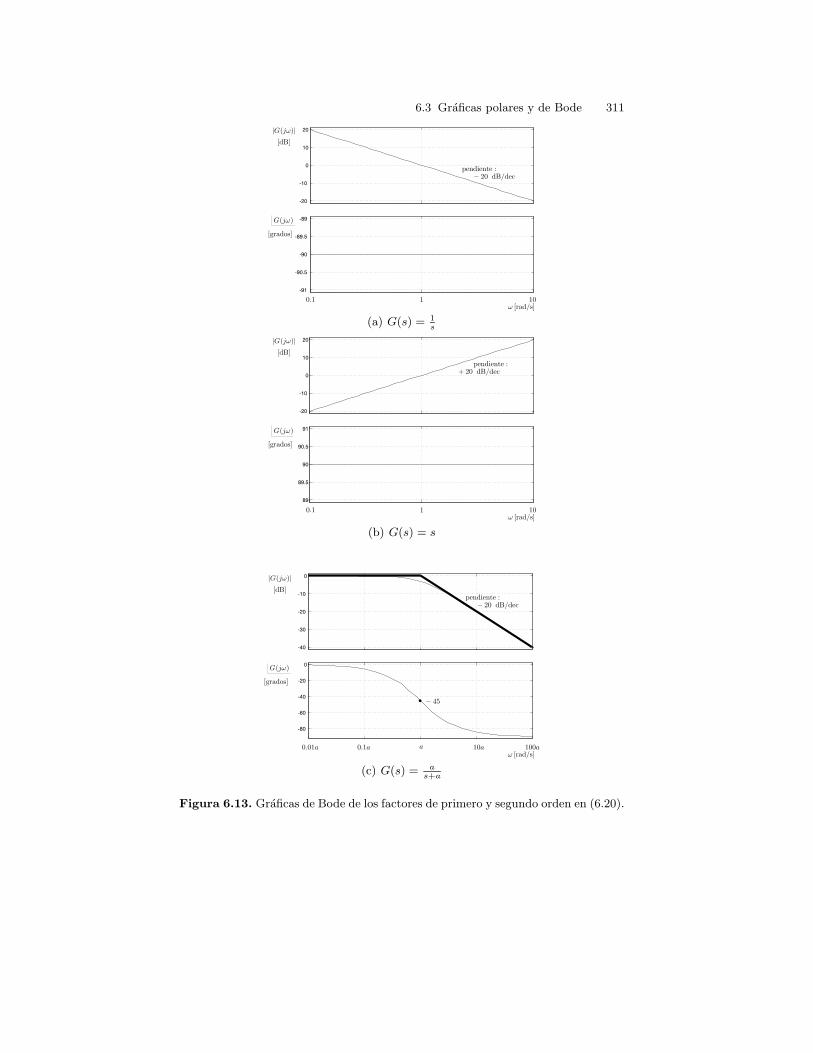
6.3 Graficas polares y de Bode 311
1 100:1! rad=s[ ]
G(j!)j jdB[ ]
G(j!)
grados[ ]
pendiente :à 20 dB=dec
(a) G(s) = 1s
pendiente :+ 20 dB=dec
G(j!)j jdB[ ]
G(j!)
grados[ ]
! rad=s[ ]1 100:1
(b) G(s) = s
G(j!)j jdB[ ]
G(j!)
grados[ ]
! rad=s[ ]a 10a 100a0:1a0:01a
pendiente :à 20 dB=dec
ï à 45
(c) G(s) = as+a
Figura 6.13. Graficas de Bode de los factores de primero y segundo orden en (6.20).
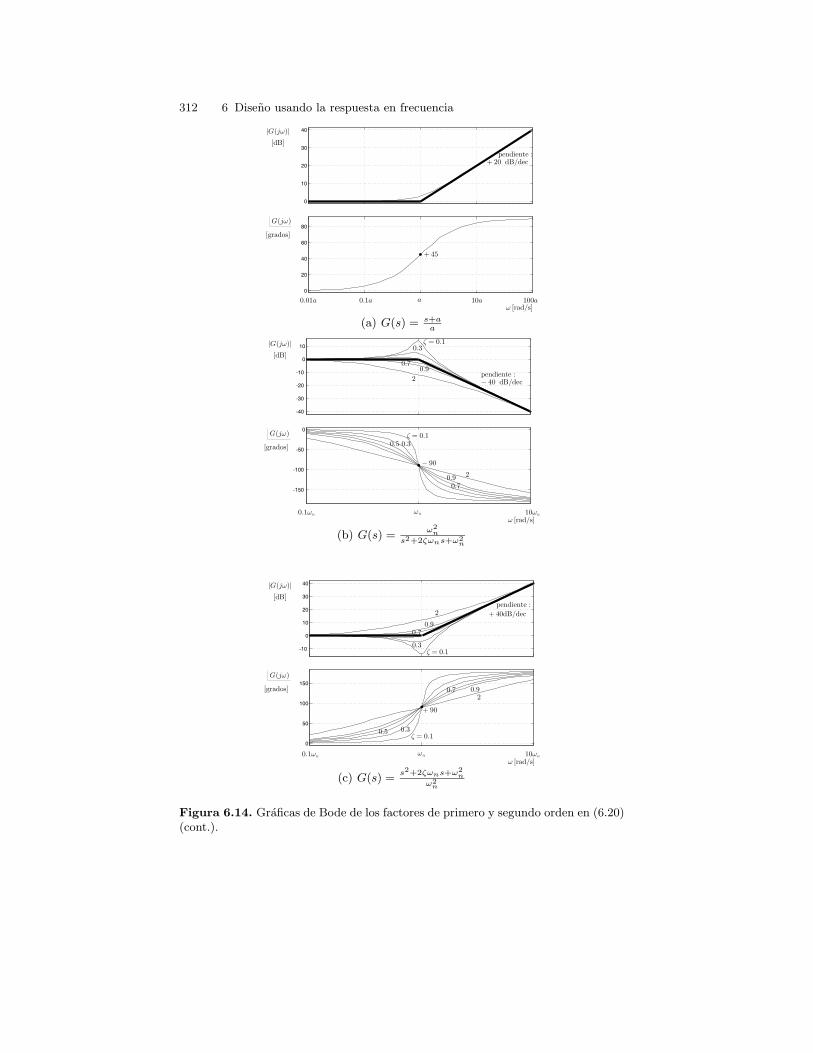
312 6 Diseno usando la respuesta en frecuencia
G(j!)j jdB[ ]
G(j!)
grados[ ]
! rad=s[ ]
+ 20 dB=decpendiente :
a 10a 100a0:1a0:01a
ï+ 45
(a) G(s) = s+aa
G(j!)j jdB[ ]
G(j!)
grados[ ]
! rad=s[ ]
pendiente :à 40 dB=dec
!n 10!n0:1!n
ïà 90
ð = 0:1
ð = 0:1
0:3
0:30:5
0:7
0:7
0:9
0:9
2
2
(b) G(s) =ω2
n
s2+2ζωns+ω2n
G(j!)j jdB[ ]
G(j!)
grados[ ]
! rad=s[ ]
pendiente :
+ 40dB=dec
!n 10!n0:1!n
ï+ 90
ð = 0:10:3
0:70:9
2
20:90:7
0:3ð = 0:1
0:5
(c) G(s) =s2+2ζωns+ω2
n
ω2n
Figura 6.14. Graficas de Bode de los factores de primero y segundo orden en (6.20)(cont.).
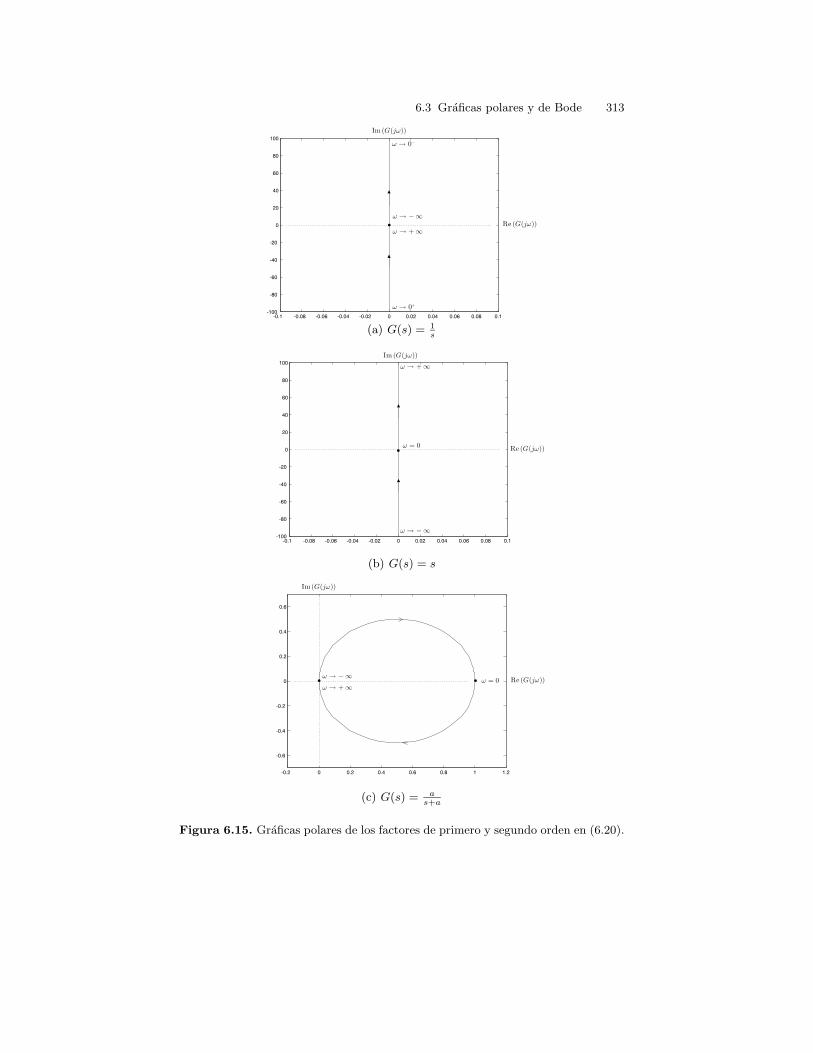
6.3 Graficas polares y de Bode 313
Im G(j!)( )
Re G(j!)( )ï
! ! 0+
! ! 0à
! ! +1
! ! à1
(a) G(s) = 1s
ï
! ! à1
! ! +1
! = 0
Im G(j!)( )
Re G(j!)( )
(b) G(s) = s
Im G(j!)( )
Re G(j!)( )! = 0ïï! ! +1! ! à1
(c) G(s) = as+a
Figura 6.15. Graficas polares de los factores de primero y segundo orden en (6.20).
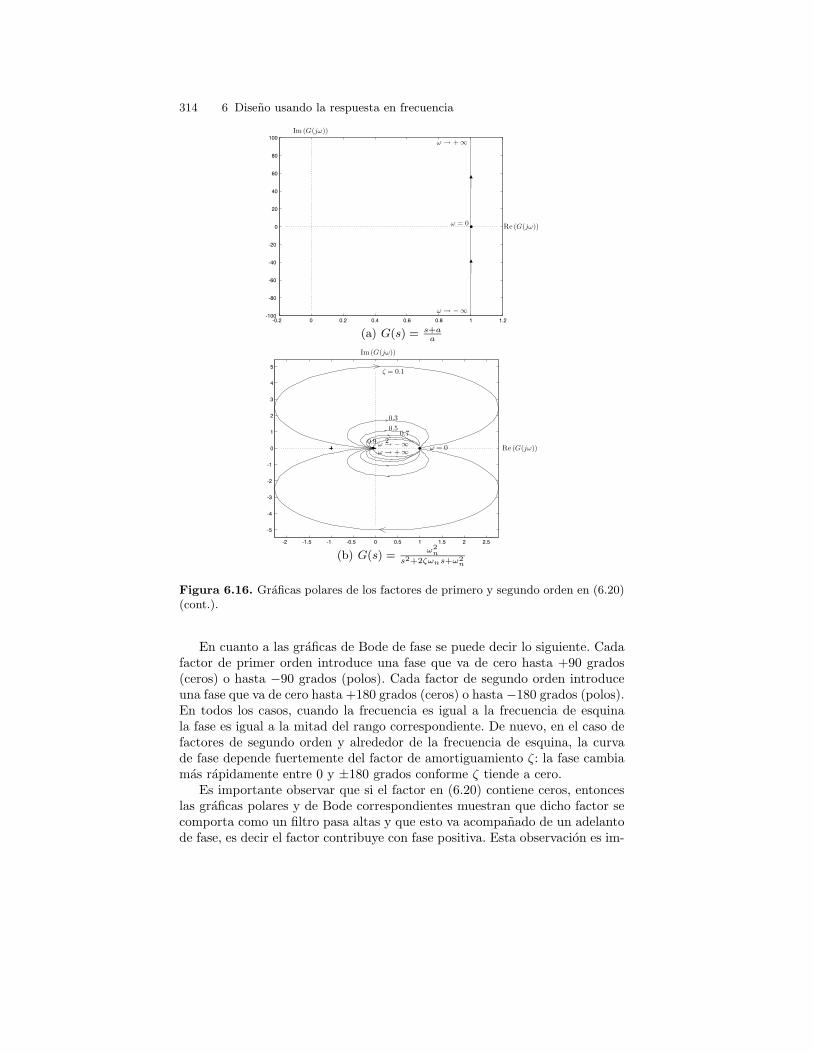
314 6 Diseno usando la respuesta en frecuencia
Im G(j!)( )
Re G(j!)( )
! ! +1
! ! à1
! = 0ï
(a) G(s) = s+aa
Im G(j!)( )
Re G(j!)( )! = 0ï! ! à1! ! +1ï
ð = 0:1
0:3
0:50:7
0:9 2
(b) G(s) =ω2
n
s2+2ζωns+ω2n
Figura 6.16. Graficas polares de los factores de primero y segundo orden en (6.20)(cont.).
En cuanto a las graficas de Bode de fase se puede decir lo siguiente. Cadafactor de primer orden introduce una fase que va de cero hasta +90 grados(ceros) o hasta −90 grados (polos). Cada factor de segundo orden introduceuna fase que va de cero hasta +180 grados (ceros) o hasta −180 grados (polos).En todos los casos, cuando la frecuencia es igual a la frecuencia de esquinala fase es igual a la mitad del rango correspondiente. De nuevo, en el caso defactores de segundo orden y alrededor de la frecuencia de esquina, la curvade fase depende fuertemente del factor de amortiguamiento ζ: la fase cambiamas rapidamente entre 0 y ±180 grados conforme ζ tiende a cero.
Es importante observar que si el factor en (6.20) contiene ceros, entonceslas graficas polares y de Bode correspondientes muestran que dicho factor secomporta como un filtro pasa altas y que esto va acompanado de un adelantode fase, es decir el factor contribuye con fase positiva. Esta observacion es im-

6.3 Graficas polares y de Bode 315
portante porque significa que los ceros de una funcion de transferencia tiendena incrementar el efecto que el ruido tiene sobre un sistema de control. Estoimplica que el uso de una ganancia derivativa excesivamente grande en un con-trolador PD o PID puede resultar en un sistema de control cuyo desempeno seve deteriorado. Para entender esto observese que un controlador PD introduceun cero de lazo abierto mientras que un controlador PID introduce dos cerosde lazo abierto. Por otro lado, tal como se menciona en la seccion 5.1.1, uncero de lazo abierto tiende a mejorar la estabilidad de un sistema de controlen lazo cerrado. Ası que al disenar un sistema de control se debe de tratarde establecer un compromiso entre estabilidad y deterioro del desempeno porefectos del ruido. En la seccion 6.6 se explica que el efecto estabilizante de uncero de lazo abierto se debe al adelanto de fase que introduce en la respuestaen frecuencia de la funcion de transferencia de lazo abierto.
Por otro lado, si el factor en (6.20) contiene polos, entonces las graficaspolares y de Bode correspondientes muestran que dicho factor se comportacomo un filtro pasa bajas y que esto va a companado de un atraso de fase, esdecir el factor contribuye con fase negativa. Esto significa que los polos de unafuncion de transferencia reducen el efecto del ruido. Por otro lado, tal comose menciona en la seccion 5.1.1, un polo de lazo abierto tiende a deteriorarla estabilidad de un sistema de control en lazo cerrado. En la seccion 6.6 seexplica que este efecto se debe al atraso de fase que un polo introduce en larespuesta en frecuencia de la funcion de transferencia de lazo abierto.
Las graficas de respuesta en frecuencia de la funcion de transferencia arbi-traria de orden n definida en (6.19) se obtiene mediante la combinacion de losfactores en (6.20). En el caso de las graficas de Bode este proceso de combina-cion de factores de primero y segundo orden es muy sencillo, como se explicaa continuacion. Notese que la funcion de transferencia arbitraria de orden n,G(s), dada en (6.19) se puede escribir como:
G(s) = β
k=r∏
k=1
Gk(s)
para alguna constante real β y algun numero entero positivo r, donde Gk(s),para k = 1, . . . , r, tiene la forma de uno de los factores presentados en (6.20).Entonces:
|G(jω)| =
∣∣∣∣∣βk=r∏
k=1
Gk(jω)
∣∣∣∣∣ = |β|k=r∏
k=1
|Gk(jω)|
De acuerdo a esto, a la definicion de decibeles |G(jω)|dB = 20 log(|G(jω)|) ya la propiedad log(xy) = log(x)+ log(y) presentada en (6.2) se puede escribir:
|G(jω)|dB = 20 log(|β|) +
k=r∑
k=1
20 log(|Gk(jω)|)

316 6 Diseno usando la respuesta en frecuencia
Esto significa que la grafica de Bode de magnitud (y la grafica de Bode defase) de una funcion de transferencia arbitraria de orden n, G(s), siempre sepuede obtener como la suma de las graficas de Bode de magnitud (y de lasgraficas de Bode de fase) de todos los factores de primero y de segundo ordende G(s)1. Notese, sin embargo, que esto no es cierto para las graficas polaresdonde se debera realizar el producto de las magnitudes y la suma de las fasesde todos los factores de primero y segundo orden de G(s). Para simplificar esteprocedimiento se recomienda obtener primero las graficas de Bode y a partirde ellas obtener la informacion requerida para dibujar las graficas polarescorrespondientes. En la siguiente seccion se presentan algunos ejemplos deaplicacion de estas ideas.
Ejemplo 6.1 (Resonancia). Sea el sistema masa-resorte-amortiguador mos-trado en la figura 6.17. La funcion de transferencia es en este caso igual a ladel ejemplo 3.6 del capıtulo 3, es decir:
X(s) = G(s)F (s), G(s) =kω2
n
s2 + 2ζωns + ω2n
ωn =
√K
m, ζ =
b
2√
mK, k =
1
K
donde x = 0 se define como la posicion en la cual el sistema alcanza el reposocuando f(t) = 0 y bajo el efecto del peso de la masa y el resorte. La disposicionde la figura 6.17 es equivalente a la de un automovil que se encuentra en repososobre el suelo: m representa la masa del automovil, K representa la rigidezdel sistema de suspension y b representa el efecto de los amortiguadores. Laexperiencia cotidiana nos ha ensenado que, aunque es muy pesado, un autopequeno puede ser volteado por unas pocas personas si las personas lo sometena una fuerza como la siguiente. Se empuja el auto hacia arriba y se le sueltapara que despues de rebotar abajo se le vuelve a aplicar la misma fuerza haciaarriba cuando el auto se encuentra moviendose hacia arriba. Aunque la fuerzaaplicada cada vez es pequena como para voltear al auto, sin embargo, despuesde aplicar esta misma accion varias veces se consigue voltear el auto. Este esun ejemplo claro de lo que puede conseguirse cuando se somete un automovila resonancia y a continuacion se analiza dicha situacion.
La fuerza que es aplicada por las personas tiene una forma periodica quetiene una componente fundamental con forma de onda coseno. Cuando es-ta fuerza es positiva se empuja al auto hacia arriba, cuando es negativa sedeja caer el auto. El hecho de aplicar fuerza solo cuando el auto se muevehacia arriba implica que esta componente cosenoidal tiene una frecuencia ωque es igual a la frecuencia natural de oscilacion del auto ωn. Si se suponeque no hay amortiguadores entonces b = 0, lo cual implica que ζ = 0. Deacuerdo a la figura 6.14(b), bajo esta situacion la salida x(t) (posicion del
1 Recuerdese que dados tres numeros complejos z, x, y tales que z = xy, la fase dez es igual a la suma de las fases de x y de y

6.3 Graficas polares y de Bode 317
K b
m
x
f
Figura 6.17. Suspension de un automovil.
auto) esta atrasada 90 respecto de la fuerza aplicada. Esto significa que sif(t) = A cos(ωt) entonces x(t) = B sin(ωt), para alguna constante B positiva,si ω = ωn. Entonces, de acuerdo a la figura 6.18, se aplica una fuerza maxima(f tiene una cresta) justo cuando el auto se esta moviendo hacia arriba (xesta pasando de un valle a una cresta), lo cual esta en completo acuerdo conla aplicacion intuitiva de fuerza por parte de las personas. Ademas si ω = ωn
y ζ = 0 la amplitud B de la osiclacion descrita por el auto crecera sin lımiteaun cuando la amplitud de la fuerza de entrada A sea pequena (B = |G(ωn)|Ay |G(ωn)| → ∞) por lo que finalmente el auto podra ser volteado.
Ahora se presentara una explicacion desde el punto de vista de la fısicaque ayude a entender porque sucede esto. La energıa del sistema esta dadacomo la suma de la energıa cinetica mas la energıa potencial:
E = Ec + Ep,
Ec =1
2mx2, Ep =
1
2Kx2
El efecto de la gravedad no se toma en consideracion porque se ha supuestoque x = 0 es la posicion en la que el cuerpo alcanza el reposo cuando f = 0bajo el efecto de la gravedad y del resorte. Conforme el tiempo transcurre lavariacion de esta energıa esta dada como:
E = Ec + Ep = mxx + Kxx
Utilizando el modelo para calcular x, es decir:
x = − b
mx − K
mx +
1
mf
se obtiene que:
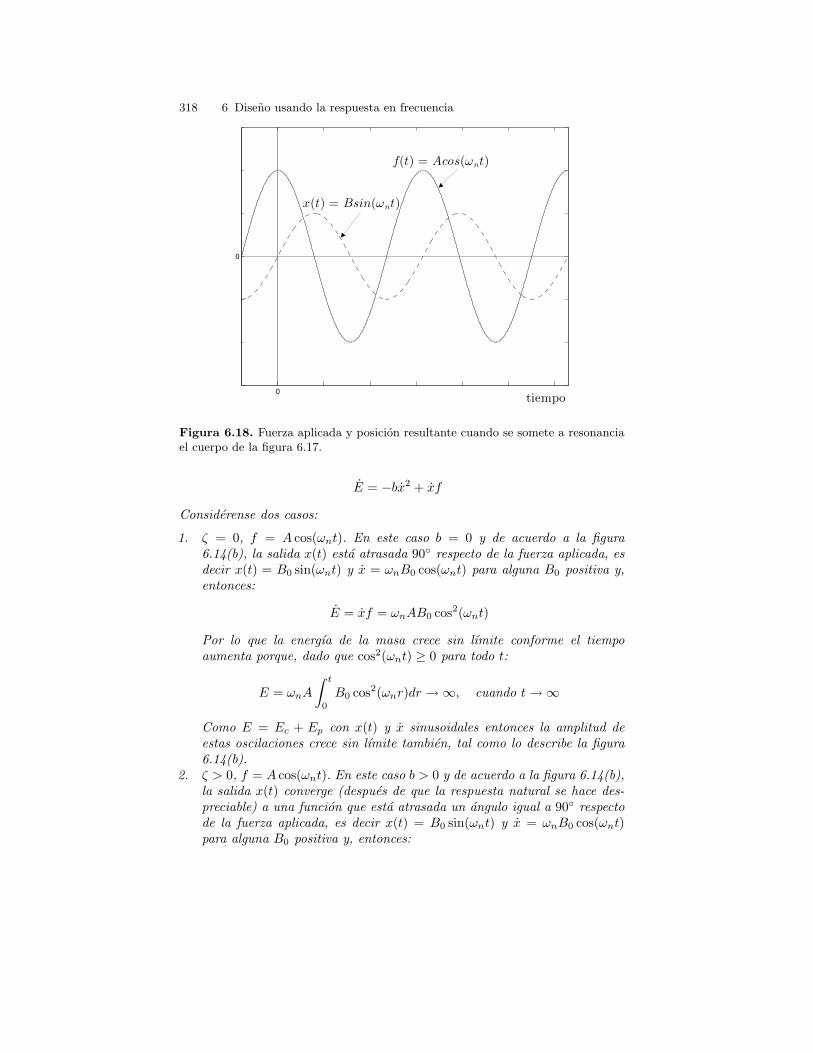
318 6 Diseno usando la respuesta en frecuencia
tiempo
f(t) = Acos(!nt)
x(t) = Bsin(!nt)
Figura 6.18. Fuerza aplicada y posicion resultante cuando se somete a resonanciael cuerpo de la figura 6.17.
E = −bx2 + xf
Considerense dos casos:
1. ζ = 0, f = A cos(ωnt). En este caso b = 0 y de acuerdo a la figura6.14(b), la salida x(t) esta atrasada 90 respecto de la fuerza aplicada, esdecir x(t) = B0 sin(ωnt) y x = ωnB0 cos(ωnt) para alguna B0 positiva y,entonces:
E = xf = ωnAB0 cos2(ωnt)
Por lo que la energıa de la masa crece sin lımite conforme el tiempoaumenta porque, dado que cos2(ωnt) ≥ 0 para todo t:
E = ωnA
∫ t
0
B0 cos2(ωnr)dr → ∞, cuando t → ∞
Como E = Ec + Ep con x(t) y x sinusoidales entonces la amplitud deestas oscilaciones crece sin lımite tambien, tal como lo describe la figura6.14(b).
2. ζ > 0, f = A cos(ωnt). En este caso b > 0 y de acuerdo a la figura 6.14(b),la salida x(t) converge (despues de que la respuesta natural se hace des-preciable) a una funcion que esta atrasada un angulo igual a 90 respectode la fuerza aplicada, es decir x(t) = B0 sin(ωnt) y x = ωnB0 cos(ωnt)para alguna B0 positiva y, entonces:

6.4 Graficas de respuesta en frecuencia. Ejemplos 319
E = −bx2 + xf = −bω2nB2
0 cos2(ωnt) + ωnAB0 cos2(ωnt)
Por tanto, la energıa de la masa esta dada como:
E =
∫ t
0
[−bω2nB2
0 cos2(ωnr) + ωnAB0 cos2(ωnr)]dr
=
∫ t
0
[−bω2nB2
0 + ωnAB0] cos2(ωnr)dr (6.21)
Mientras la amplitud B0 de la posicion sea pequena se cumplira que−bω2
nB20 +ωnAB0 > 0 y, por tanto, la energıa E y la amplitud B0 aumen-
tan. Entonces B0 aumentara hasta que −bω2nB2
0 + ωnAB0 < 0 porque Aes constante. En ese momento, la energıa deja de aumentar y se obtieneun estado estacionario cuando bω2
nB2 = ωnAB, es decir, la amplitud dela posicion B permanece constante en un valor finito dado como:
B =A
bωn=
A
2ζ√
mK√
Km
=A
2ζK=
kA
2ζ(6.22)
Notese que la amplitud de la posicion B crece sin lımite conforme ζ tiendea cero, lo cual esta en completo acuerdo con la figura 6.14(b) y al mismotiempo explica porque el pico de resonancia disminuye conforme aumentaζ. En este sentido, observese que el termino −bx2 ≤ 0 si b > 0 (es decir,si ζ > 0). Esto representa la energıa que se disipa en forma de calor pormotivos de rozamiento (friccion). Ası que la friccion es la que evita quela energıa y, por tanto, la amplitud de las oscilaciones crezcan sin lımite.Se puede afirmar que mientras mas rozamiento haya un mayor porcentajede la energıa suministrada a la masa mediante la fuerza f se convierteen calor y es menos la energıa que se almacena en la masa y por ello lamenor amplitud de las oscilaciones.Finalmente notese que |G(jω)|ω=ωn
= k2ζ , lo cual esta en completo acuer-
do con (6.22). Tambien es importante recordar que el pico de resonanciaocurre a una frecuencia ligeramente diferente a ωn cuando ζ > 0. Sinembargo, la magnitud de la funcion de transferencia en ω = ωn tambiencrece cuando ζ se aproxima a cero.
6.4. Graficas de respuesta en frecuencia. Ejemplos
6.4.1. Ejemplo 1
Considere la siguiente funcion de transferencia:
Gd(s) =s + 1
T
s + 1ξT
, 0 < ξ < 1, T > 0 (6.23)

320 6 Diseno usando la respuesta en frecuencia
De acuerdo a las propiedades en (6.2) la grafica de Bode de magnitud (endB) de Gd(s) en (6.23) se obtiene como la suma de las graficas de Bode demagnitud de dos factores de primer orden:
Gd(s) =1T1
ξT
s + 1T
1T
1ξT
s + 1ξT
(6.24)
El polo tiene una frecuencia de esquina en ω = 1ξT la cual es mayor que la
frecuencia de esquina del cero ω = 1T porque 0 < ξ < 1. Este hecho determina
que Gd(s) introduzca un adelanto de fase y que tenga las caracterısticas de unfiltro pasa altas: las frecuencias bajas son atenuadas pero las frecuencias altasno. El adelanto de fase maximo producido y la atenuacion a bajas frecuenciasdependen solamente de la constante ξ, es decir de la separacion existente entrelas frecuencias de esquina del polo y del cero. Estas observaciones puedenapreciarse en la figura 6.19 donde se muestran las graficas de Bode de Gd(s)y de los factores que la componen.
0
fasegrados[ ]
à 90
!
iii)
ii)
!
i)
0
dB
T
1øT
1
ii)
iii)
T
1
øT
1
+ 90
iv)
iv)
Figura 6.19. Graficas de Bode para el ejemplo 1 (vease (6.24)): i) 0 <1T1
ξT
< 1, ii)
s+ 1T
1T
, iii)1
ξT
s+ 1ξT
, iv) Gd(s).
La funcion de transferencia en (6.23) es muy util para disenar un tipo es-pecial de controladores que reciben el nombre de compensadores de adelanto.

6.4 Graficas de respuesta en frecuencia. Ejemplos 321
Esta aplicacion, sin embargo, es facilitada si se utilizan algunas manipulacio-nes algebraicas:
Gd(Ts) =Ts + 1
Ts + 1ξ
Al hacer el cambio de variable s = jω se obtiene:
Gd(jωT ) =jωT + 1
jωT + 1ξ
Las graficas de Bode se pueden obtener facilmente al descomponer esta ex-presion en los factores de primer orden que la componen:
Gd(jωT ) =jωT + 1
1
1/ξ
jωT + 1ξ
ξ
considerando que el producto ωT es la variable que se usa como variableindependiente, es decir en el eje horizontal de la figura 6.20. Aquı se muestranlas graficas de Bode de Gd(s) para diferentes valores de 0 < ξ < 1.
Por otro lado, la grafica polar de Gd(Ts) se puede obtener facilmente uti-lizando la informacion proporcionada por las graficas de Bode en la figura6.19. Para esto se debe recordar que la grafica de Bode de magnitud esta endB pero la grafica polar no. Se deben observar la magnitud y la fase paralas frecuencias cero e infinito para dibujar en la grafica polar trazos que re-presenten los comportamientos correspondientes. Luego se dibujan trazos querepresenten, aproximadamente, los comportamientos a las frecuencias inter-medias y que satisfagan los trazos correspondientes a las frecuencias cero einfinito. Finalmente, las graficas polares para frecuencias negativas, es decirdesde ω = −∞ hasta ω = 0 son las imagenes al espejo de las graficas parafrecuencias positivas. Compare la grafica polar mostrada en la figura 6.21 ylas graficas de Bode en la figura 6.19.
6.4.2. Ejemplo 2
Considere la funcion de transferencia:
G(s)H(s) =Axγk
s + a
ρ
s3(6.25)
donde las constantes Ax, γ, k, a, ρ son todas positivas. Descomponiendo estafuncion de transferencia en los factores fundamentales que la forman se puedeescribir:
G(s)H(s) =ρAxγk
a
a
s + a
1
s3
De acuerdo a las propiedades en (6.2), la grafica de Bode de magnitud delfactor 1
s3 es una linea recta de pendiente igual a −60[dB/dec]. En la figura
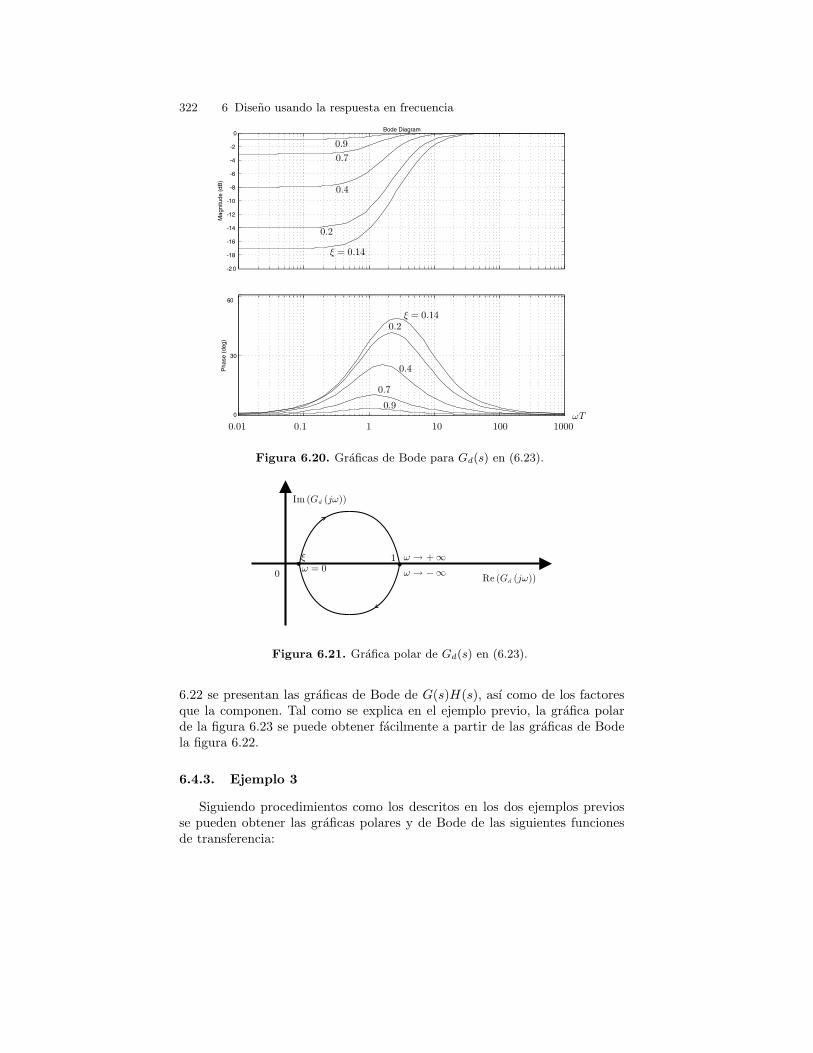
322 6 Diseno usando la respuesta en frecuencia
!T1 10 100 10000:10:01
0:2
0:2
0:4
0:4
0:7
0:7
0:9
0:9
ø = 0:14
ø = 0:14
Figura 6.20. Graficas de Bode para Gd(s) en (6.23).
0ï! = 0
ï ! ! +1! ! à1
1ø
Im Gd j!( )( )
Re Gd j!( )( )
Figura 6.21. Grafica polar de Gd(s) en (6.23).
6.22 se presentan las graficas de Bode de G(s)H(s), ası como de los factoresque la componen. Tal como se explica en el ejemplo previo, la grafica polarde la figura 6.23 se puede obtener facilmente a partir de las graficas de Bodela figura 6.22.
6.4.3. Ejemplo 3
Siguiendo procedimientos como los descritos en los dos ejemplos previosse pueden obtener las graficas polares y de Bode de las siguientes funcionesde transferencia:
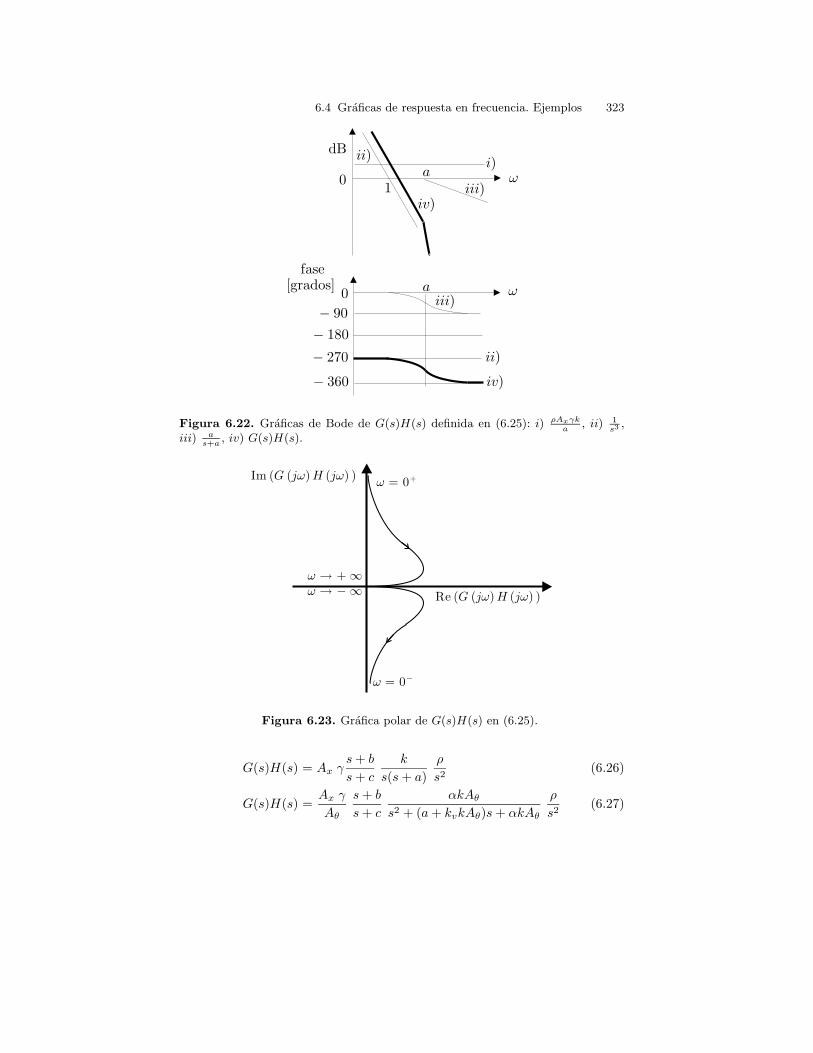
6.4 Graficas de respuesta en frecuencia. Ejemplos 323
0
fasegrados[ ]
à 90
!iii)
ii)
!i)
0
dB ii)
iii)iv)
iv)
a1
à 180
à 270
à 360
a
Figura 6.22. Graficas de Bode de G(s)H(s) definida en (6.25): i) ρAxγk
a, ii) 1
s3 ,iii) a
s+a, iv) G(s)H(s).
! = 0+Im G j!( )H j!( )( )
Re G j!( )H j!( )( )
! = 0à
! ! à1! ! +1
Figura 6.23. Grafica polar de G(s)H(s) en (6.25).
G(s)H(s) = Ax γs + b
s + c
k
s(s + a)
ρ
s2(6.26)
G(s)H(s) =Ax γ
Aθ
s + b
s + c
αkAθ
s2 + (a + kvkAθ)s + αkAθ
ρ
s2(6.27)

324 6 Diseno usando la respuesta en frecuencia
donde Ax, Aθ, γ, k, a, ρ, b, c, α, kv son constantes positivas. Las graficascorrespondientes se muestran en las figuras 6.24, 6.25, 6.26 y 6.27.
0
fasegrados[ ]
à 90
!iii)
ii)
!i)
0
dBii)
iii)iv)
a1
à 180
à 270
à 360
a
v)
vi)
b c
b c+ 90
v)
iv)
vi)
Figura 6.24. Graficas de Bode de G(s)H(s) en (6.26): i) Ax γbkρ
ac, ii) 1
s3 , iii) as+a
,
iv) cs+c
, v) s+bb
, vi) G(s)H(s).
! = 0+Im G j!( )H j!( )( )
Re G j!( )H j!( )( )
! ! +1! ! à1
! = 0à
Figura 6.25. Grafica polar de G(s)H(s) en (6.26).
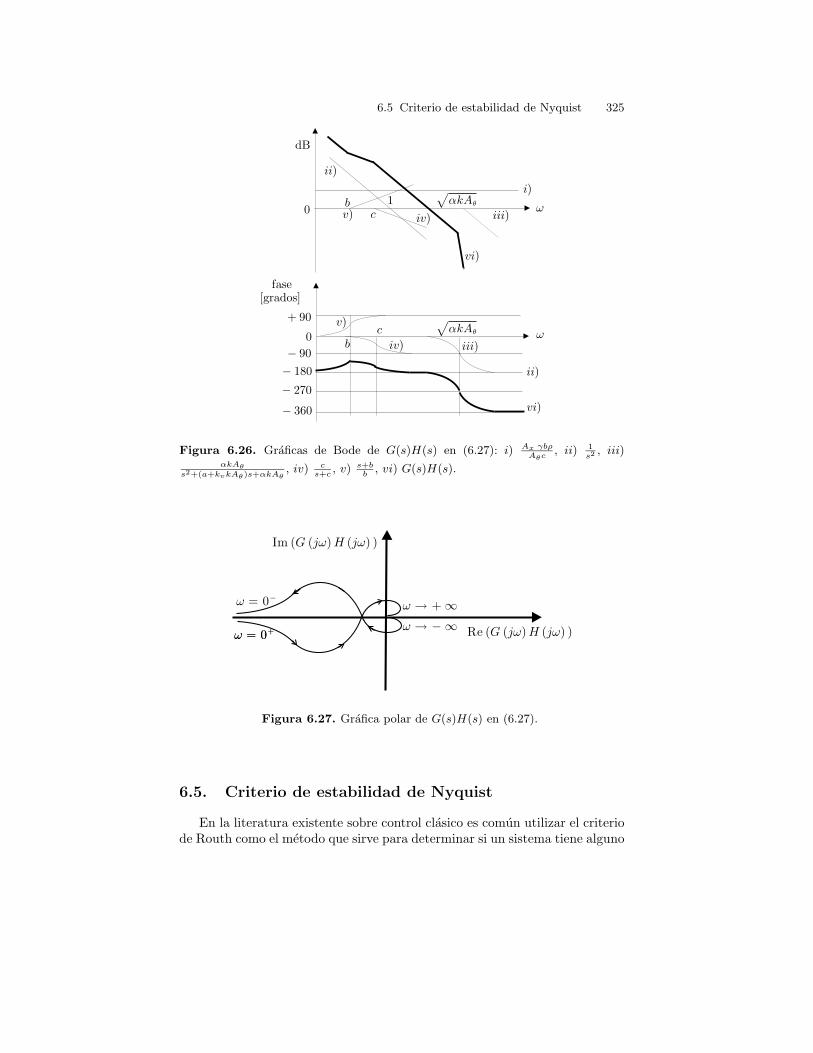
6.5 Criterio de estabilidad de Nyquist 325
0
fasegrados[ ]
à 90
!iii)
ii)
!
i)
0
dB
ii)
iii)iv)
1
à 180
à 270
à 360
v)
vi)
bc
bc
+ 90 v)
iv)
vi)
ëkAò
p
ëkAò
p
Figura 6.26. Graficas de Bode de G(s)H(s) en (6.27): i) Ax γbρ
Aθc, ii) 1
s2 , iii)αkAθ
s2+(a+kvkAθ)s+αkAθ, iv) c
s+c, v) s+b
b, vi) G(s)H(s).
! = 0+ Re G j!( )H j!( )( )
Im G j!( )H j!( )( )
! = 0+
! = 0à
! ! à1! ! +1
Figura 6.27. Grafica polar de G(s)H(s) en (6.27).
6.5. Criterio de estabilidad de Nyquist
En la literatura existente sobre control clasico es comun utilizar el criteriode Routh como el metodo que sirve para determinar si un sistema tiene alguno

326 6 Diseno usando la respuesta en frecuencia
de sus polos en el semiplano derecho. De no ser ası entonces todos los polosdeben estar en el semiplano izquierdo y entonces se asegura su estabilidad. Elcriterio de Routh debe aplicarse al polinomio caracterıstico del sistema en lazocerrado y se introduce como el criterio de estabilidad para sistemas de controlcuando se estudian desde el punto de vista de su respuesta en el tiempo. Ellector puede consultar el capıtulo 4 de la presente obra, o las referencias [3],[4], para mayor informacion a cerca del uso del criterio de Routh.
Ahora se introduce un nuevo criterio de estabilidad para sistemas de con-trol en lazo cerrado que esta fundamentado, sin embargo, en la respuesta enfrecuencia del mismo sistema pero en lazo abierto. Esta curiosa caracterısticadebe ser entendida correctamente pues es frecuente confundirse por completodebido a la siguiente pregunta: ¿Como es posible determinar la estabilidad delsistema en lazo cerrado estudiando la respuesta en frecuencia del sistemaen lazo abierto? En esta seccion se presenta la respuesta a tal pregunta y elcriterio que resuelve este problema se conoce como el Criterio de Nyquist.
6.5.1. Recorridos cerrados alrededor de polos y ceros
Considere la siguiente funcion de transferencia:
G(s) = s − a
donde a es cualquier numero constante, real o complejo. Notese que este siste-ma solo posee un cero en s = a. Considere una trayectoria cerrada Γ trazadasobre el plano s encerrando al cero en s = a y que es recorrida en sentidohorario (vease la figura 6.28). Cuando G(s) se evalua sobre Γ significa queel argumento s de G(s) toma sucesivamente todos los valores de s que seencuentran sobre Γ . Evaluese G(s) sobre Γ :
G(s) = l∠θ, l = |s − a|, θ = ∠(s − a)
Notese que s − a puede ser representado como un vector que inicia en ay termina en s. Es facil observar que cada vez que el recorrido sobre Γ secompleta una vez el angulo θ tiene un incremento negativo (sentido horario)de −2π radianes. Por otro lado, como Γ no pasa sobre s = a entonces l > 0en todo el recorrido. Esto significa que cada que el recorrido horario Γ escompletado una vez el vector l∠θ describe una vuelta horaria alrededor delorigen. Como G(s) = l∠θ decimos que la vuelta horaria ha sido completadaalrededor del origen del plano G(s), es decir, alrededor de G(s) = 0 (vease lafigura 6.29).
A partir de esto no es difıcil ver que si G(s) solo tiene m ceros y si Γencierra por completo a todos esos ceros, entonces cada vez que se completaun recorrido horario sobre Γ se completan m vueltas horarias alrededor delorigen del plano G(s).
Considere ahora la siguiente funcion de transferencia:
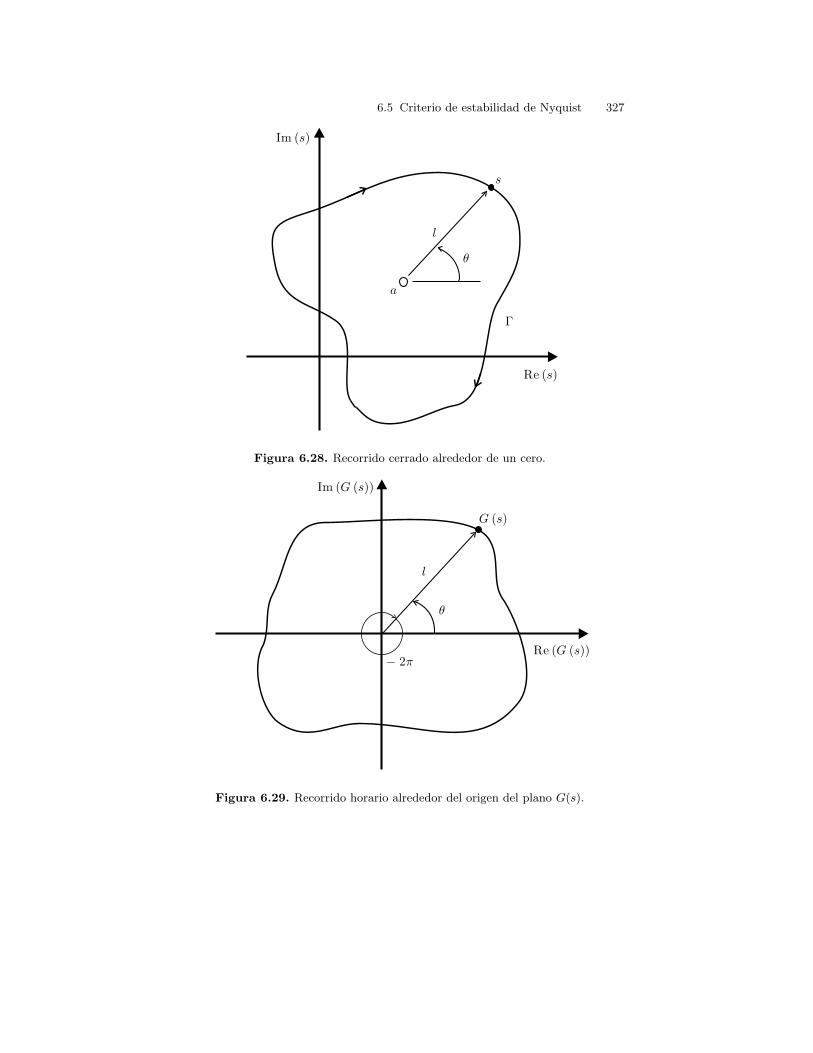
6.5 Criterio de estabilidad de Nyquist 327
a
l
ò
È
Re s( )
Im s( )
s
Figura 6.28. Recorrido cerrado alrededor de un cero.
ò
l
à 2ù
Im G s( )( )
Re G s( )( )
G s( )
Figura 6.29. Recorrido horario alrededor del origen del plano G(s).

328 6 Diseno usando la respuesta en frecuencia
G(s) =1
s − a
donde a es cualquier numero constante, real o complejo. Notese que este siste-ma solo posee un polo en s = a. Considere una trayectoria cerrada Γ trazadasobre el plano s encerrando al polo en s = a y que es recorrida en sentidohorario (vease la figura 6.30). Evaluese G(s) sobre Γ :
G(s) =1
l∠θ=
1
l∠ − θ, l = |s − a|, θ = ∠(s − a)
Notese, de nuevo, que s−a puede ser representado como un vector que inicia
a
l
ò
È
Re s( )
Im s( )
s
Figura 6.30. Recorrido cerrado alrededor de un polo.
en a y termina en s. Es facil observar que cada vez que el recorrido sobreΓ se completa una vez el angulo −θ tiene un incremento positivo (sentidoantihorario) de +2π radianes. Por otro lado, como Γ no pasa sobre s = aentonces 1/l > 0 (y es finito) en todo el recorrido. Esto significa que cada vezque el recorrido horario Γ es completado una vez el vector 1
l ∠ − θ describeuna vuelta antihoraria alrededor del origen. Como G(s) = 1
l ∠ − θ decimosque la vuelta antihoraria ha sido completada alrededor del origen del planoG(s), es decir, alrededor de G(s) = 0 (vease la figura 6.31).
A partir de esto no es difıcil ver que si G(s) solo tiene n polos y si Γencierra por completo a todos esos polos, entonces cada vez que se completa
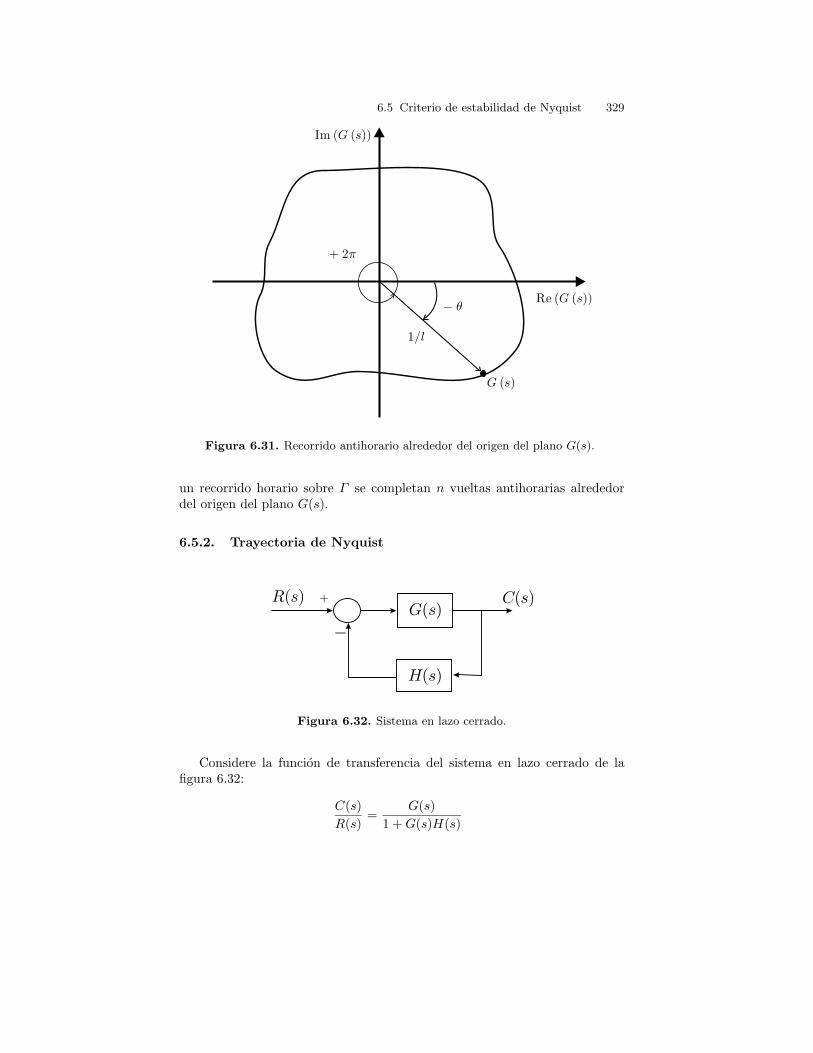
6.5 Criterio de estabilidad de Nyquist 329
à ò
1=l
+ 2ù
Im G s( )( )
Re G s( )( )
G s( )
Figura 6.31. Recorrido antihorario alrededor del origen del plano G(s).
un recorrido horario sobre Γ se completan n vueltas antihorarias alrededordel origen del plano G(s).
6.5.2. Trayectoria de Nyquist
+
àG(s)
H(s)
C(s)R(s)
Figura 6.32. Sistema en lazo cerrado.
Considere la funcion de transferencia del sistema en lazo cerrado de lafigura 6.32:
C(s)
R(s)=
G(s)
1 + G(s)H(s)

330 6 Diseno usando la respuesta en frecuencia
Si se consigue probar que esta funcion de transferencia no tiene polos en elsemiplano derecho entonces la estabilidad del sistema en lazo cerrado esta ase-gurada. La idea es investigar la existencia de tales polos usando una trayectoriacerrada como en la seccion previa. Suponga que se usa una trayectoria cerra-da como la mostrada en figura 6.33, la cual es recorrida en sentido horario.Notese que esta trayectoria encierra por completo a cualquier polo o cero que
la funcion G(s)1+G(s)H(s) tenga en el semiplano derecho. Esta trayectoria cerrada
se conoce como “Trayectoria de Nyquist”. Suponga que la funcion de transfe-
rencia G(s)1+G(s)H(s) tiene p polos y z ceros en el semiplano derecho. De acuerdo
a la seccion anterior, si se recorre la trayectoria de Nyquist una vez el nume-
ro de vueltas horarias alrededor del origen del plano G(s)1+G(s)H(s) sera igual a
z − p, donde un resultado negativo significa numero de vueltas antihorarias.Suponga que tal numero de vueltas es igual a z, es decir, z − p = z. Estoimplicarıa que p = 0, es decir, no habrıa ningun polo de lazo cerrado en elsemiplano derecho y por tanto se asegurarıa estabilidad del sistema en lazocerrado. Esta es la idea fundamental detras del criterio de Nyquist que se des-arrolla a continuacion. Sin embargo, algunas sutilezas deben ser consideradasantes.
r ! 1
à1
+1
Re s( )
Im s( )
0
Figura 6.33. Trayectoria de Nyquist.

6.5 Criterio de estabilidad de Nyquist 331
El criterio de Nyquist fue desarrollado bajo la siguiente consigna. Dado unsistema en lazo cerrado, la funcion de transferencia de lazo abierto G(s)H(s)es conocida (planta y controlador) pero la funcion de transferencia de lazo
cerrado G(s)1+G(s)H(s) es desconocida. Es decir, aun cuando los polos y ceros de
G(s)H(s) son conocidos, los polos de G(s)1+G(s)H(s) son desconocidos. Si se cono-
cieran los polos de G(s)1+G(s)H(s) el problema de estabilidad ya estarıa resuelto y
cualquier criterio de estabilidad estarıa de mas. Entonces, una de las consignasdel criterio de Nyquist es determinar la estabilidad en lazo cerrado a partirdel conocimiento de la funcion de transferencia de lazo abierto solamente.
Lo anterior significa que la funcion G(s)1+G(s)H(s) no puede ser evaluada mien-
tras se hace el recorrido de la trayectoria de Nyquist como se describe en losparrafos anteriores. Esto implica que no puede conocerse el numero de vueltas
obtenidas al rededor del origen de G(s)1+G(s)H(s) y, por tanto, dicho metodo debe
ser modificado. Esto es lo que se hace en las siguientes secciones.
6.5.3. Polos y ceros
Considere la funcion de transferencia del sistema en lazo cerrado de lafigura 6.32:
C(s)
R(s)=
G(s)
1 + G(s)H(s)(6.28)
Los polos del sistema en lazo cerrado son los ceros de 1 + G(s)H(s). Re-cuerdese que los polos de lazo cerrado son los valores de s que satisfacen1 + G(s)H(s) = 0.Los polos de G(s)H(s) (polos de lazo abierto) tambien son los polos de1 + G(s)H(s). Notese que si G(s)H(s) → ∞ entonces 1 + G(s)H(s) → ∞tambien.
6.5.4. Criterio de Nyquist. Caso especial
Suponga que G(s)H(s) tiene P polos en el semiplano derecho (polos delazo abierto inestables con parte real positiva), es decir, de acuerdo a la seccionprevia, la funcion 1+G(s)H(s) tiene P polos en el semiplano derecho. Tambiensuponga que la funcion 1 + G(s)H(s) tiene Z ceros en el semiplano derecho(polos de lazo cerrado inestables). Suponga que, una vez que se recorre ensentido horario la trayectoria de Nyquist, se obtienen N vueltas alrededor delorigen del plano 1 + G(s)H(s), es decir N = Z − P . Si N = −P < 0 esdecir, si se consiguen P vueltas antihorarias alrededor del origen del plano1 + G(s)H(s) entonces el numero de polos de lazo cerrado inestables es cero,Z = 0, y se asegura la estabilidad del sistema en lazo cerrado.
Solo falta un pequeno detalle para terminar de establecer el criterio deNyquist. El origen del plano 1+G(s)H(s) satisface la condicion 1+G(s)H(s) =
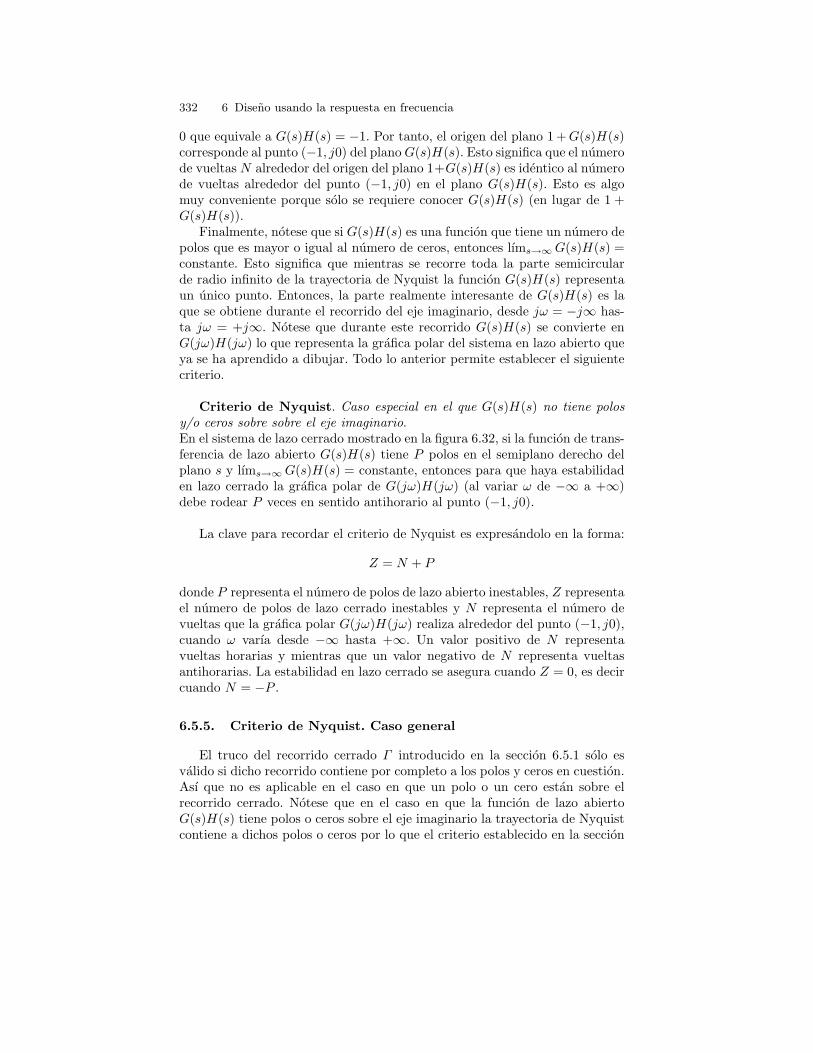
332 6 Diseno usando la respuesta en frecuencia
0 que equivale a G(s)H(s) = −1. Por tanto, el origen del plano 1 + G(s)H(s)corresponde al punto (−1, j0) del plano G(s)H(s). Esto significa que el numerode vueltas N alrededor del origen del plano 1+G(s)H(s) es identico al numerode vueltas alrededor del punto (−1, j0) en el plano G(s)H(s). Esto es algomuy conveniente porque solo se requiere conocer G(s)H(s) (en lugar de 1 +G(s)H(s)).
Finalmente, notese que si G(s)H(s) es una funcion que tiene un numero depolos que es mayor o igual al numero de ceros, entonces lıms→∞ G(s)H(s) =constante. Esto significa que mientras se recorre toda la parte semicircularde radio infinito de la trayectoria de Nyquist la funcion G(s)H(s) representaun unico punto. Entonces, la parte realmente interesante de G(s)H(s) es laque se obtiene durante el recorrido del eje imaginario, desde jω = −j∞ has-ta jω = +j∞. Notese que durante este recorrido G(s)H(s) se convierte enG(jω)H(jω) lo que representa la grafica polar del sistema en lazo abierto queya se ha aprendido a dibujar. Todo lo anterior permite establecer el siguientecriterio.
Criterio de Nyquist. Caso especial en el que G(s)H(s) no tiene polosy/o ceros sobre sobre el eje imaginario.En el sistema de lazo cerrado mostrado en la figura 6.32, si la funcion de trans-ferencia de lazo abierto G(s)H(s) tiene P polos en el semiplano derecho delplano s y lıms→∞ G(s)H(s) = constante, entonces para que haya estabilidaden lazo cerrado la grafica polar de G(jω)H(jω) (al variar ω de −∞ a +∞)debe rodear P veces en sentido antihorario al punto (−1, j0).
La clave para recordar el criterio de Nyquist es expresandolo en la forma:
Z = N + P
donde P representa el numero de polos de lazo abierto inestables, Z representael numero de polos de lazo cerrado inestables y N representa el numero devueltas que la grafica polar G(jω)H(jω) realiza alrededor del punto (−1, j0),cuando ω varıa desde −∞ hasta +∞. Un valor positivo de N representavueltas horarias y mientras que un valor negativo de N representa vueltasantihorarias. La estabilidad en lazo cerrado se asegura cuando Z = 0, es decircuando N = −P .
6.5.5. Criterio de Nyquist. Caso general
El truco del recorrido cerrado Γ introducido en la seccion 6.5.1 solo esvalido si dicho recorrido contiene por completo a los polos y ceros en cuestion.Ası que no es aplicable en el caso en que un polo o un cero estan sobre elrecorrido cerrado. Notese que en el caso en que la funcion de lazo abiertoG(s)H(s) tiene polos o ceros sobre el eje imaginario la trayectoria de Nyquistcontiene a dichos polos o ceros por lo que el criterio establecido en la seccion
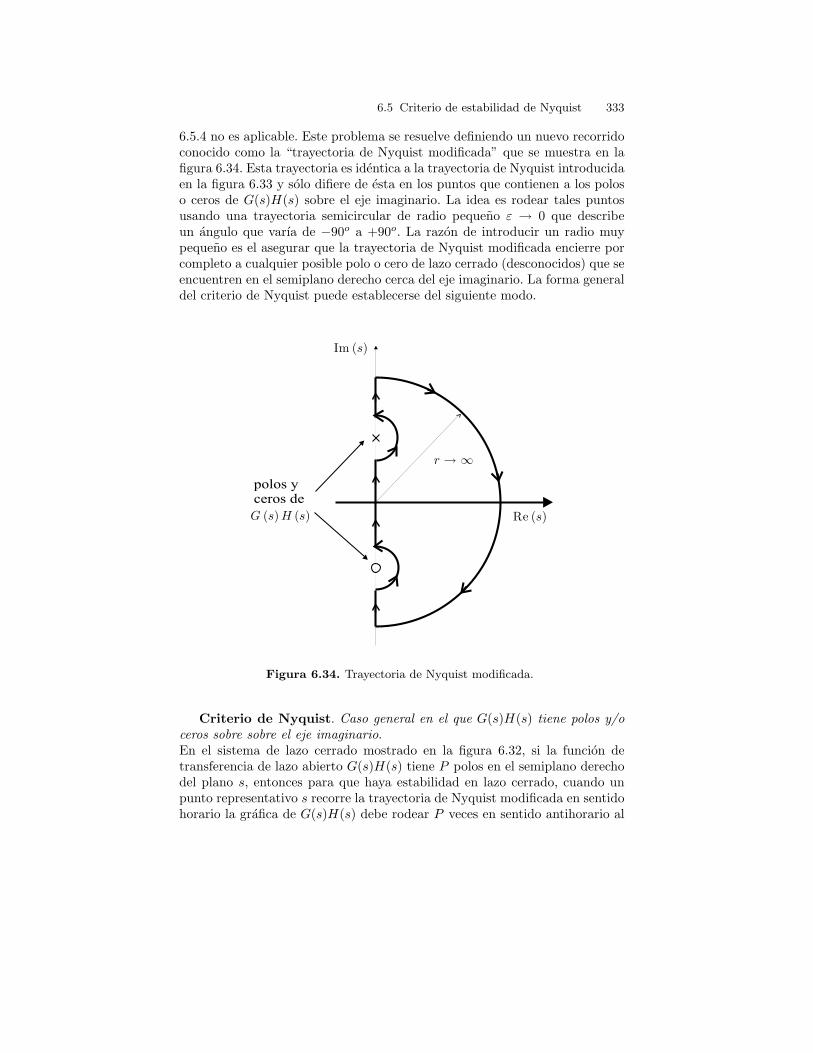
6.5 Criterio de estabilidad de Nyquist 333
6.5.4 no es aplicable. Este problema se resuelve definiendo un nuevo recorridoconocido como la “trayectoria de Nyquist modificada” que se muestra en lafigura 6.34. Esta trayectoria es identica a la trayectoria de Nyquist introducidaen la figura 6.33 y solo difiere de esta en los puntos que contienen a los poloso ceros de G(s)H(s) sobre el eje imaginario. La idea es rodear tales puntosusando una trayectoria semicircular de radio pequeno ε → 0 que describeun angulo que varıa de −90o a +90o. La razon de introducir un radio muypequeno es el asegurar que la trayectoria de Nyquist modificada encierre porcompleto a cualquier posible polo o cero de lazo cerrado (desconocidos) que seencuentren en el semiplano derecho cerca del eje imaginario. La forma generaldel criterio de Nyquist puede establecerse del siguiente modo.
r ! 1
polos yceros de
G s( )H s( )
Im s( )
Re s( )
Figura 6.34. Trayectoria de Nyquist modificada.
Criterio de Nyquist. Caso general en el que G(s)H(s) tiene polos y/oceros sobre sobre el eje imaginario.En el sistema de lazo cerrado mostrado en la figura 6.32, si la funcion detransferencia de lazo abierto G(s)H(s) tiene P polos en el semiplano derechodel plano s, entonces para que haya estabilidad en lazo cerrado, cuando unpunto representativo s recorre la trayectoria de Nyquist modificada en sentidohorario la grafica de G(s)H(s) debe rodear P veces en sentido antihorario al

334 6 Diseno usando la respuesta en frecuencia
punto (−1, j0).
Es importante subrayar que en este caso tambien se requiere que G(s)H(s)→ constante cuando s → ∞, es decir, que G(s)H(s) tenga un numero de polosmayor o igual al numero de sus ceros. Ademas, tambien sigue aplicandose larelacion Z = N +P con Z el numero de polos inestables de lazo cerrado, P elnumero de polos inestables de lazo abierto y N el numero de vueltas alrededordel punto (−1, j0).
6.6. Margenes de estabilidad
El criterio de Nyquist es valido para sistemas cuyas funciones de trans-ferencia son de fase mınima o de fase no mınima, es decir, se trata de unresultado que se puede aplicar a cualquier caso. Sin embargo, lo que a conti-nuacion se describe se hace suponiendo que el sistema tiene una funcion detransferencia de lazo abierto de fase mınima (todos los polos y ceros tienenparte real menor o igual que cero), pues esta consideracion simplifica grande-mente la exposicion de las ideas.
Si el sistema es de fase mınima entonces P = 0 por lo que la estabilidad delazo cerrado queda asegurada si N = 0, entonces el criterio de Nyquist puedesimplificarse a lo siguiente:
“Considere que la frecuencia ω varıa unicamente desde 0 hasta +∞. Tracela grafica polar de G(s)H(s) correspondiente a estas frecuencias. Supongaque esta grafica representa un camino que usted puede recorrer sobre el papeldesde ω = 0 hasta ω → +∞. Si el punto (−1, j0) queda a la izquierda dedicho camino recorrido entonces el sistema en lazo cerrado es estable. Si talpunto queda a la derecha entonces hay inestabilidad.”
Ante esta descripcion salta a la vista la siguiente pregunta: ¿Que sucede sila grafica polar obtenida pasa exactamente sobre el punto (−1, j0)? En tal casose dice que se esta en el lımite de la estabilidad, lo que significa que hay polosde lazo cerrado que tienen parte real cero. En base a esto se puede afirmar quemientras el punto (−1, j0) este mas lejos de la grafica polar de G(s)H(s)|s=jω
pero siempre a su izquierda entonces el sistema en lazo cerrado sera masestable (mas lejos de la inestabilidad). A la lejanıa que guarda el sistema enlazo cerrado respecto a la inestabilidad se le llama margen de estabilidad yexisten dos maneras de medir dicha lejanıa: el margen de fase y el margen deganancia.
Margen de fase. Es la cantidad de atraso de fase que se requiere anadira la frecuencia de cruce de ganancia ω1, para llevar el sistema al bor-de de la inestabilidad. La frecuencia de cruce de ganancia es aquella ala cual |G(jω1)H(jω1)| = 1. Sea Kf el margen de fase y φ la fase deG(jω1)H(jω1), entonces:
Kf = 180o + φ

6.6 Margenes de estabilidad 335
En la figura 6.35 puede observarse que un margen de fase negativo implicainestabilidad en lazo cerrado, mientras que un margen de fase positivo im-plica estabilidad en lazo cerrado. De acuerdo a estos razonamientos un ceroque se agregue en lazo abierto tiende a mejorar la estabilidad del sistemaen lazo cerrado porque introduce una fase positiva, es decir, incrementa ohace positivo el valor de Kf . Notese que, de acuerdo a las graficas en lasfiguras 6.13 y 6.15, el adelanto de fase debido un cero es mayor para unafrecuencia especıfica conforme la frecuencia de esquina es menor (la cual esnumericamente igual al valor absoluto de la ubicacion del cero). Por tanto,el efecto estabilizante del cero de lazo abierto aumenta conforme este secoloca mas cerca del origen (dentro del semiplano izquierdo).Por otro lado, un polo que se agregue en lazo abierto tiende a hacer menosestable al sistema en lazo cerrado porque introduce una fase negativa, esdecir, disminuye o hace negativo el valor de Kf . Notese que, de acuer-do a las graficas en las figuras 6.13 y 6.15, el atraso de fase debido unpolo es mayor para una frecuencia especıfica conforme la frecuencia deesquina es menor (la cual es numericamente igual al valor absoluto de laubicacion del polo). Por tanto, el efecto inestabilizante del polo de lazoabierto aumenta conforme este se coloca mas cerca del origen (dentro delsemiplano izquierdo).Margen de ganancia. Sea Kg el margen de ganancia, entonces:
Kg =1
|G(jω2)H(jω2)|
donde ω2 representa la frecuencia en la que la fase de G(jω2)H(jω2) es−180[grados ] (ω2 tambien es conocida como frecuencia de cruce de fase).En la figura 6.35 puede observarse que Kg > 1 (20 log(Kg) > 0[dB])implica estabilidad en lazo cerrado, mientras que Kg < 1 (20 log(Kg) <0[dB]) implica inestabilidad en lazo cerrado.
Es importante resaltar que los margenes de fase y de ganancia estan definidossobre las graficas de respuesta en frecuencia de la funcion de transferenciade lazo abierto y, sin embargo, dan informacion sobre la estabilidad y lascaracterısticas de respuesta transitoria del sistema en lazo cerrado.
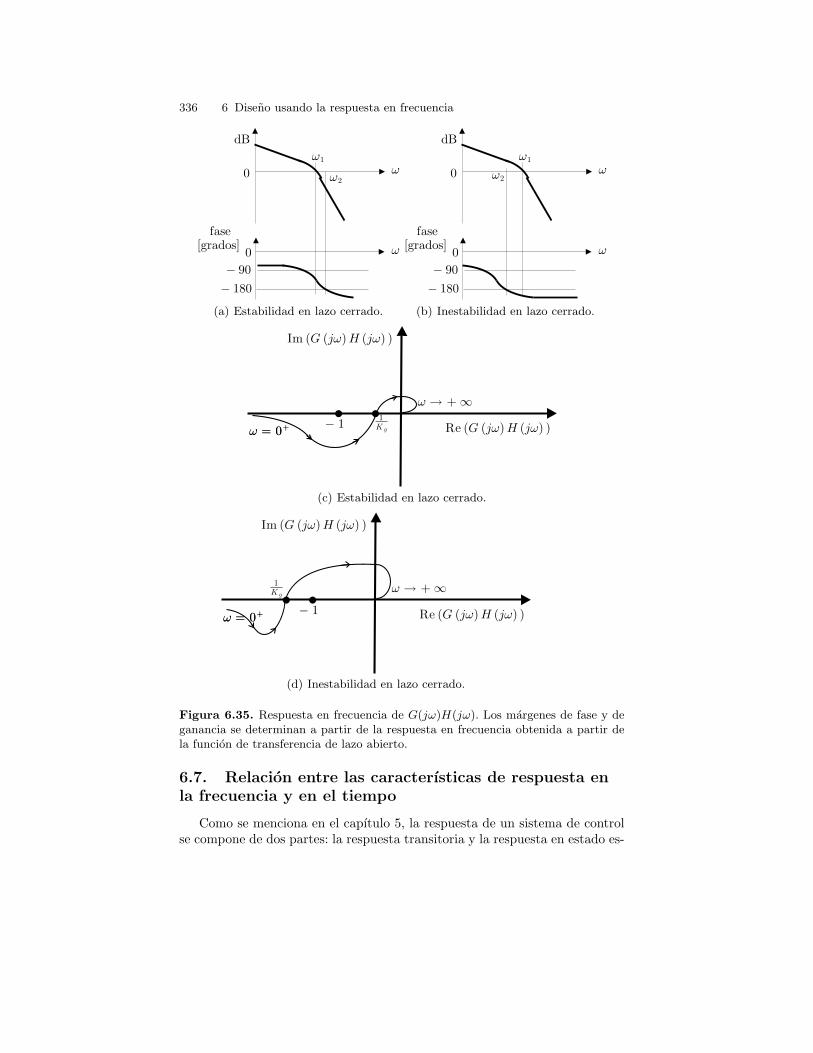
336 6 Diseno usando la respuesta en frecuencia
0
fasegrados[ ]
à 90
!
0
dB
à 180
!!1
!2
(a) Estabilidad en lazo cerrado.
0
fasegrados[ ]
à 90
!
0
dB
à 180
!!1
!2
(b) Inestabilidad en lazo cerrado.
! = 0+ Re G j!( )H j!( )( )
Im G j!( )H j!( )( )
! = 0+
! ! +1ïà 1ïK g
1
(c) Estabilidad en lazo cerrado.
! = 0+ Re G j!( )H j!( )( )
Im G j!( )H j!( )( )
! = 0+
! ! +1ïà 1ïK g
1
(d) Inestabilidad en lazo cerrado.
Figura 6.35. Respuesta en frecuencia de G(jω)H(jω). Los margenes de fase y deganancia se determinan a partir de la respuesta en frecuencia obtenida a partir dela funcion de transferencia de lazo abierto.
6.7. Relacion entre las caracterısticas de respuesta enla frecuencia y en el tiempo
Como se menciona en el capıtulo 5, la respuesta de un sistema de controlse compone de dos partes: la respuesta transitoria y la respuesta en estado es-
6.7 Relacion entre las caracterısticas de respuesta en la frecuencia y en el tiempo 337
tacionario. Es importante saber como se relacionan las caracterısticas de estasrespuestas en el tiempo con las caracterısticas de la respuesta en frecuenciadel sistema a controlar, a fin de saber que es lo que se debe modificar en estasultimas para poder disenar adecuadamente las primeras. A continuacion sedescriben los puntos mas sobresalientes de esta relacion.
6.7.1. Respuesta en lazo abierto
Existe una relacion muy estrecha entre las caracterısticas de respuesta enfrecuencia de un sistema en lazo abierto y las caracterısticas de respuesta enel tiempo del mismo sistema en lazo abierto, como se describe a continuacion.
1. La altura del pico de resonancia Mr esta relacionada inversamente conel valor del amortiguamiento, ζ: cuanto mayor es Mr menor es ζ (veasela figura 6.14(b)). Recuerdese que menores amortiguamientos ζ producenmayores sobre pasos, Mp(%), en la respuesta en el tiempo cuando se aplicaun escalon. Por tanto, el sobre paso es mayor (y el sistema presenta masoscilaciones) conforme Mr es mayor. En terminos muy generales puedeafirmarse que cuando 1.0 < Mr < 1.4 (0[dB]< Mr < 3[dB]) entonces elamortiguamiento esta en el rango 0.7 > ζ > 0.4 [3] pag. 571, [4] pag. 637.
2. La magnitud de la frecuencia de esquina indica la velocidad de respuestadel sistema [3] pag. 573, [4] pag 638. Recuerdese que en un sistema desegundo orden la frecuencia de esquina es ωn la cual, cuando aumenta,reduce el tiempo de subida (vease la seccion 3.3). En el caso de un sistemade primer orden la frecuencia de esquina es igual al valor absoluto del polodel sistema. De acuerdo a la seccion 3.1 el tiempo de respuesta (constantede tiempo) se reduce si el valor absoluto del polo tiene un valor mayor.En el caso general de un sistema arbitrario de orden n se define el anchode banda para describir su rapidez de respuesta en el tiempo en terminosde su respuesta en frecuencia. El ancho de banda es la frecuencia a la cualla magnitud de la funcion de transferencia se reduce en −3[dB] respectode su magnitud a frecuencia cero. La rapidez de respuesta en el tiempodel sistema es mayor conforme su ancho de banda es mayor.
3. El valor final de la salida del sistema definido por Y (s) = G(s)U(s) anteuna entrada tipo escalon de altura A esta determinada por la respuestadel sistema a frecuencia cero G(jω)|ω=0:
lımt→∞
y(t) = lıms→0
sG(s)A
s= G(0)A = |G(j0)|A
Notese que los dos ultimos puntos estan en completo acuerdo con lo examinadoen la seccion 6.1.4.
6.7.2. Respuesta en lazo cerrado
Tambien existe una relacion entre la respuesta en frecuencia de la funcionde lazo abierto G(s)H(s) y la respuesta en el tiempo del sistema en lazo

338 6 Diseno usando la respuesta en frecuencia
cerrado C(s)R(s) . Esta relacion es muy importante para el diseno de sistemas de
control realimentados.
1. El margen de fase Kf (medido a partir de la respuesta en frecuencia delsistema en lazo abierto) se relaciona con el factor de amortiguamiento delsistema en lazo cerrado de acuerdo a la siguiente tabla [3] pag. 570,[4] pag.648:
Tabla 6.3. Relacion entre el margen de fase (lazo abierto) y el amortiguamiento deun sistema en lazo cerrado.
Kf [grados] 0 11 23 33 43 52 59 65 70 74 76
ζ 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Notese que para el rango 0 ≤ ζ ≤ 0.6 se cumple aproximadamente queζ =
Kf
100 . Debe aclararse que estas relaciones se calculan a partir de larespuesta de un sistema de segundo orden sin ceros. Aunque para sistemasde orden mayor y con ceros se esperan diferencias respecto a estos valoressin embargo es posible considerarlos como directivas para el diseno.
2. A mayor frecuencia de cruce de ganancia (medida a partir de la respuestaen frecuencia del sistema en lazo abierto) mayor es la rapidez del sistemaen lazo cerrado [3], pag. 571. Esto puede explicarse del siguiente modo. Lafrecuencia de cruce de ganancia es la frecuencia a la cual |G(jω)H(jω)| =0[dB] y generalmente esta magnitud disminuye al aumentar la frecuencia.Por tanto, una mayor frecuencia de cruce de ganancia en lazo abiertoimplica un mayor ancho de banda en lazo cerrado y esto ultimo implicauna mayor rapidez de respuesta del sistema en lazo cerrado.
3. El error en estado estacionario de la respuesta en lazo cerrado se obtienea partir de la respuesta de la funcion de lazo abierto a frecuencia cero.Por ejemplo, si en el sistema en lazo cerrado se tiene que R(s) = A/sentonces:
ess = lımt→∞
[r(t) − y(t)] =A
1 + kp, kp = G(0)H(0) = |G(jω)H(jω)|ω=0
6.8. Ejemplos
6.8.1. Ejemplo de analisis
En esta parte se presenta un ejemplo de analisis usando la tecnica de larespuesta en frecuencia. Este ejemplo es estudiado usando el metodo del lugarde las raıces en la seccion 5.2.6.

6.8 Ejemplos 339
Analisis de estabilidad
Considere la siguiente funcion de transferencia:
G(s)H(s) =116137 k
s3 + 72.54s2 − 1250s − 9.363 × 104(6.29)
=116137 k
(s − 35.7377)(s + 36.5040)(s + 71.7721)
=116137 k
(35.7377)(36.5040)(71.7721)
35.7377
(s − 35.7377)
36.5040
(s + 36.5040)
71.7721
(s + 71.7721)
Para este ejemplo es importante encontrar las caracterısticas de respuesta enfrecuencia de la siguiente funcion de transferencia:
G1(s) =a
s − a, a > 0
Usando el cambio de variable s = jω se puede obtener:
G1(jω) =a
jω − a
=a
jω − a
−jω − a
−jω − a
=a(−jω − a)
ω2 + a2
=a√
ω2 + a2
ω2 + a2∠atan
(−ω
−a
)
=a√
ω2 + a2∠atan
(−ω
−a
)
|G1(jω)| =a√
ω2 + a2, ∠G1(jω) = atan
(−ω
−a
)
De aquı se encuentra que:
si ω = 0 : |G1(jω)| = 1, ∠G1(jω) = −180o
si ω → ∞ : |G1(jω)| → 0, ∠G1(jω) → −90o
si ω = a : |G1(jω)| =1√2, ∠G1(jω) = −135o
Usando esta informacion y los resultados de la seccion 6.3 se obtienen lasgraficas de Bode mostradas en la figura 6.36. Usando estas graficas de Bodese obtiene la grafica polar de la figura 6.37. Es conveniente aclarar que tambienes correcto decir que:
si ω = 0 : |G1(jω)| = 1, ∠G1(jω) = +180o
si ω → ∞ : |G1(jω)| → 0, ∠G1(jω) → +270o
si ω = a : |G1(jω)| =1√2, ∠G1(jω) = +225o
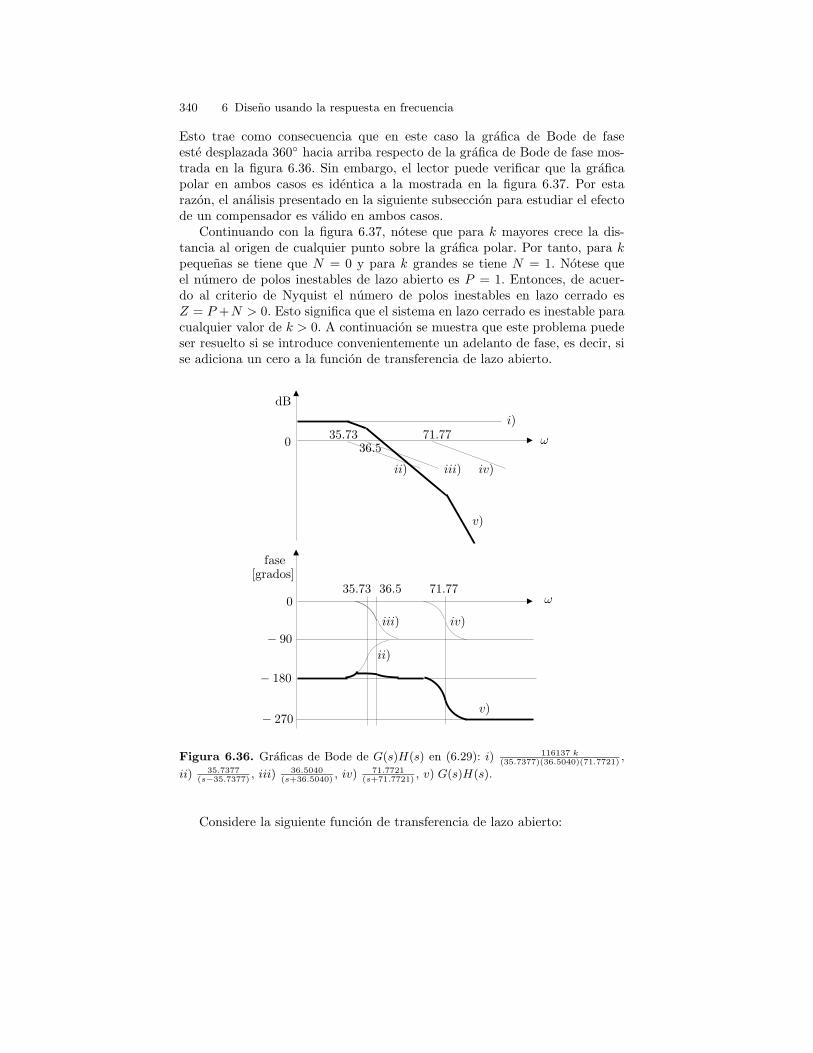
340 6 Diseno usando la respuesta en frecuencia
Esto trae como consecuencia que en este caso la grafica de Bode de faseeste desplazada 360 hacia arriba respecto de la grafica de Bode de fase mos-trada en la figura 6.36. Sin embargo, el lector puede verificar que la graficapolar en ambos casos es identica a la mostrada en la figura 6.37. Por estarazon, el analisis presentado en la siguiente subseccion para estudiar el efectode un compensador es valido en ambos casos.
Continuando con la figura 6.37, notese que para k mayores crece la dis-tancia al origen de cualquier punto sobre la grafica polar. Por tanto, para kpequenas se tiene que N = 0 y para k grandes se tiene N = 1. Notese queel numero de polos inestables de lazo abierto es P = 1. Entonces, de acuer-do al criterio de Nyquist el numero de polos inestables en lazo cerrado esZ = P +N > 0. Esto significa que el sistema en lazo cerrado es inestable paracualquier valor de k > 0. A continuacion se muestra que este problema puedeser resuelto si se introduce convenientemente un adelanto de fase, es decir, sise adiciona un cero a la funcion de transferencia de lazo abierto.
!
i)
ii) iii) iv)
0
dB
35:7336:5
71:77
v)
0
fasegrados[ ]
à 90
!
iii) iv)
v)
ii)
à 180
à 270
35:73 36:5 71:77
Figura 6.36. Graficas de Bode de G(s)H(s) en (6.29): i) 116137 k(35.7377)(36.5040)(71.7721)
,
ii) 35.7377(s−35.7377)
, iii) 36.5040(s+36.5040)
, iv) 71.7721(s+71.7721)
, v) G(s)H(s).
Considere la siguiente funcion de transferencia de lazo abierto:
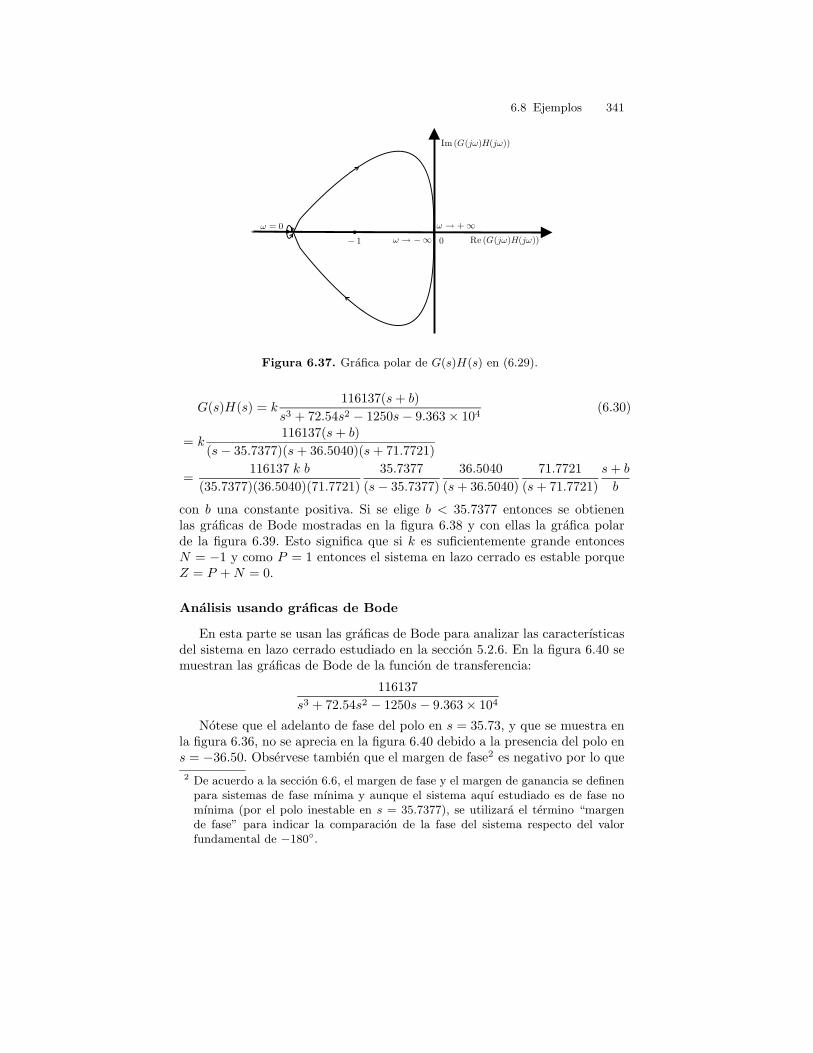
6.8 Ejemplos 341
ïRe G(j!)H(j!)( )
Im G(j!)H(j!)( )
0ï! = 0 ! ! +1
! ! à1à 1
Figura 6.37. Grafica polar de G(s)H(s) en (6.29).
G(s)H(s) = k116137(s + b)
s3 + 72.54s2 − 1250s − 9.363 × 104(6.30)
= k116137(s + b)
(s − 35.7377)(s + 36.5040)(s + 71.7721)
=116137 k b
(35.7377)(36.5040)(71.7721)
35.7377
(s − 35.7377)
36.5040
(s + 36.5040)
71.7721
(s + 71.7721)
s + b
b
con b una constante positiva. Si se elige b < 35.7377 entonces se obtienenlas graficas de Bode mostradas en la figura 6.38 y con ellas la grafica polarde la figura 6.39. Esto significa que si k es suficientemente grande entoncesN = −1 y como P = 1 entonces el sistema en lazo cerrado es estable porqueZ = P + N = 0.
Analisis usando graficas de Bode
En esta parte se usan las graficas de Bode para analizar las caracterısticasdel sistema en lazo cerrado estudiado en la seccion 5.2.6. En la figura 6.40 semuestran las graficas de Bode de la funcion de transferencia:
116137
s3 + 72.54s2 − 1250s − 9.363 × 104
Notese que el adelanto de fase del polo en s = 35.73, y que se muestra enla figura 6.36, no se aprecia en la figura 6.40 debido a la presencia del polo ens = −36.50. Observese tambien que el margen de fase2 es negativo por lo que
2 De acuerdo a la seccion 6.6, el margen de fase y el margen de ganancia se definenpara sistemas de fase mınima y aunque el sistema aquı estudiado es de fase nomınima (por el polo inestable en s = 35.7377), se utilizara el termino “margende fase” para indicar la comparacion de la fase del sistema respecto del valorfundamental de −180.
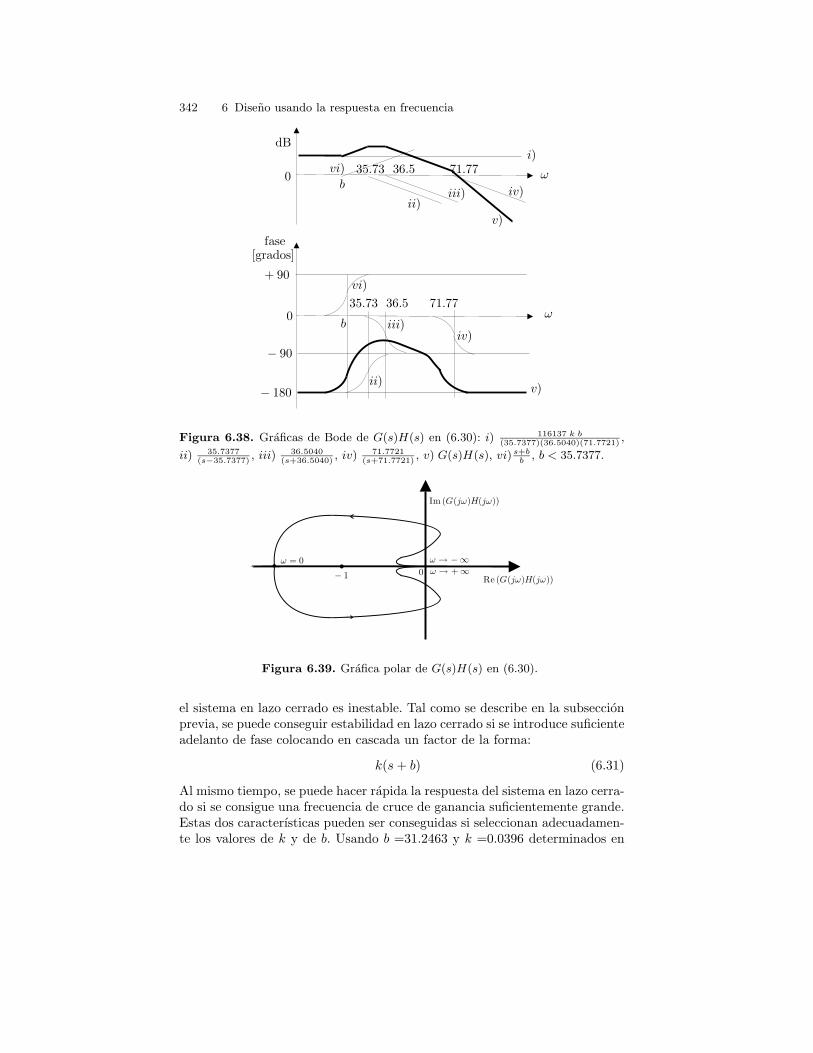
342 6 Diseno usando la respuesta en frecuencia
!
i)
ii)iii) iv)
0
dB
35:73 36:5 71:77
v)
b
vi)
0
fasegrados[ ]
à 90
!iii)
iv)
v)ii)
à 180
35:73 36:5 71:77
b
vi)+ 90
Figura 6.38. Graficas de Bode de G(s)H(s) en (6.30): i) 116137 k b(35.7377)(36.5040)(71.7721)
,
ii) 35.7377(s−35.7377)
, iii) 36.5040(s+36.5040)
, iv) 71.7721(s+71.7721)
, v) G(s)H(s), vi) s+bb
, b < 35.7377.
ïRe G(j!)H(j!)( )
Im G(j!)H(j!)( )
0ï ! = 0 ï
à 1 ! ! +1! ! à1
Figura 6.39. Grafica polar de G(s)H(s) en (6.30).
el sistema en lazo cerrado es inestable. Tal como se describe en la subseccionprevia, se puede conseguir estabilidad en lazo cerrado si se introduce suficienteadelanto de fase colocando en cascada un factor de la forma:
k(s + b) (6.31)
Al mismo tiempo, se puede hacer rapida la respuesta del sistema en lazo cerra-do si se consigue una frecuencia de cruce de ganancia suficientemente grande.Estas dos caracterısticas pueden ser conseguidas si seleccionan adecuadamen-te los valores de k y de b. Usando b =31.2463 y k =0.0396 determinados en
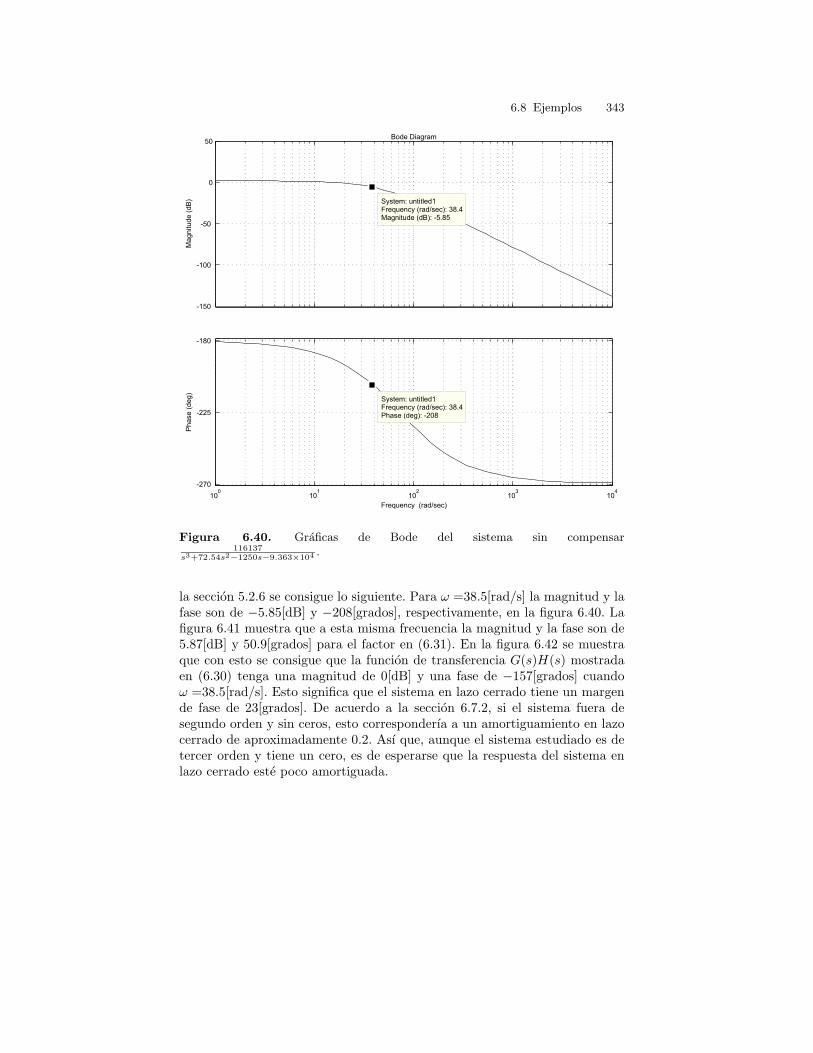
6.8 Ejemplos 343
Figura 6.40. Graficas de Bode del sistema sin compensar116137
s3+72.54s2−1250s−9.363×104 .
la seccion 5.2.6 se consigue lo siguiente. Para ω =38.5[rad/s] la magnitud y lafase son de −5.85[dB] y −208[grados], respectivamente, en la figura 6.40. Lafigura 6.41 muestra que a esta misma frecuencia la magnitud y la fase son de5.87[dB] y 50.9[grados] para el factor en (6.31). En la figura 6.42 se muestraque con esto se consigue que la funcion de transferencia G(s)H(s) mostradaen (6.30) tenga una magnitud de 0[dB] y una fase de −157[grados] cuandoω =38.5[rad/s]. Esto significa que el sistema en lazo cerrado tiene un margende fase de 23[grados]. De acuerdo a la seccion 6.7.2, si el sistema fuera desegundo orden y sin ceros, esto corresponderıa a un amortiguamiento en lazocerrado de aproximadamente 0.2. Ası que, aunque el sistema estudiado es detercer orden y tiene un cero, es de esperarse que la respuesta del sistema enlazo cerrado este poco amortiguada.
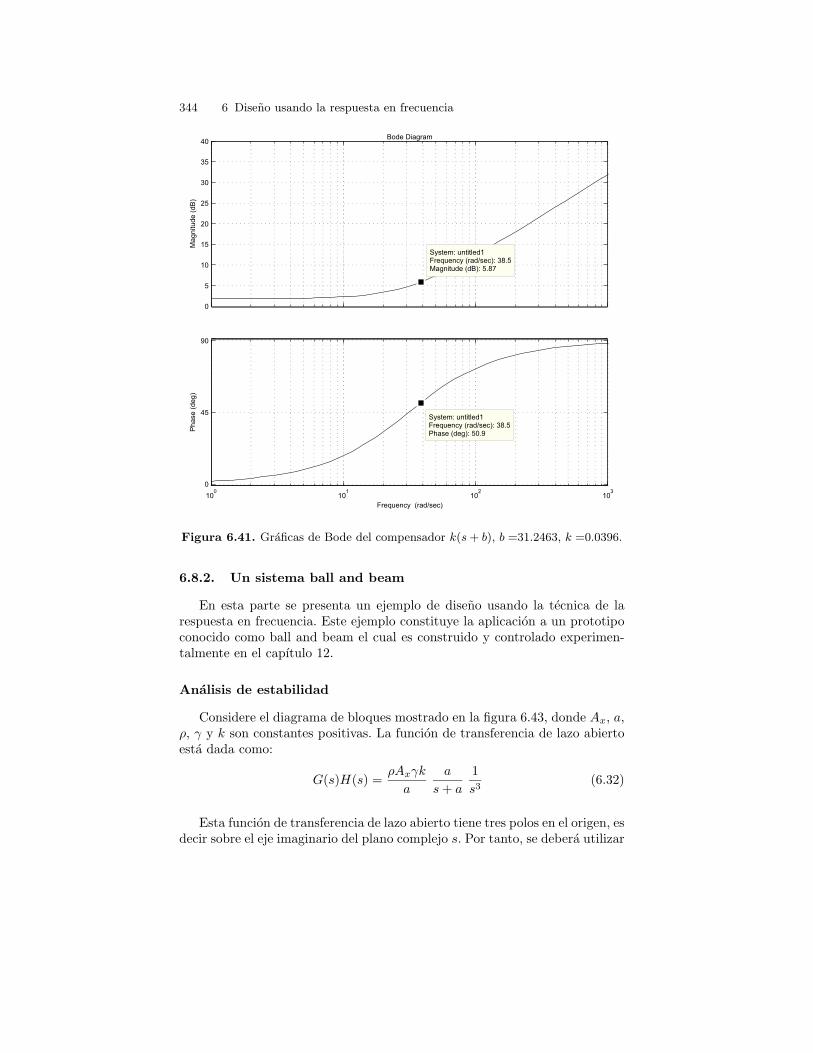
344 6 Diseno usando la respuesta en frecuencia
Figura 6.41. Graficas de Bode del compensador k(s + b), b =31.2463, k =0.0396.
6.8.2. Un sistema ball and beam
En esta parte se presenta un ejemplo de diseno usando la tecnica de larespuesta en frecuencia. Este ejemplo constituye la aplicacion a un prototipoconocido como ball and beam el cual es construido y controlado experimen-talmente en el capıtulo 12.
Analisis de estabilidad
Considere el diagrama de bloques mostrado en la figura 6.43, donde Ax, a,ρ, γ y k son constantes positivas. La funcion de transferencia de lazo abiertoesta dada como:
G(s)H(s) =ρAxγk
a
a
s + a
1
s3(6.32)
Esta funcion de transferencia de lazo abierto tiene tres polos en el origen, esdecir sobre el eje imaginario del plano complejo s. Por tanto, se debera utilizar
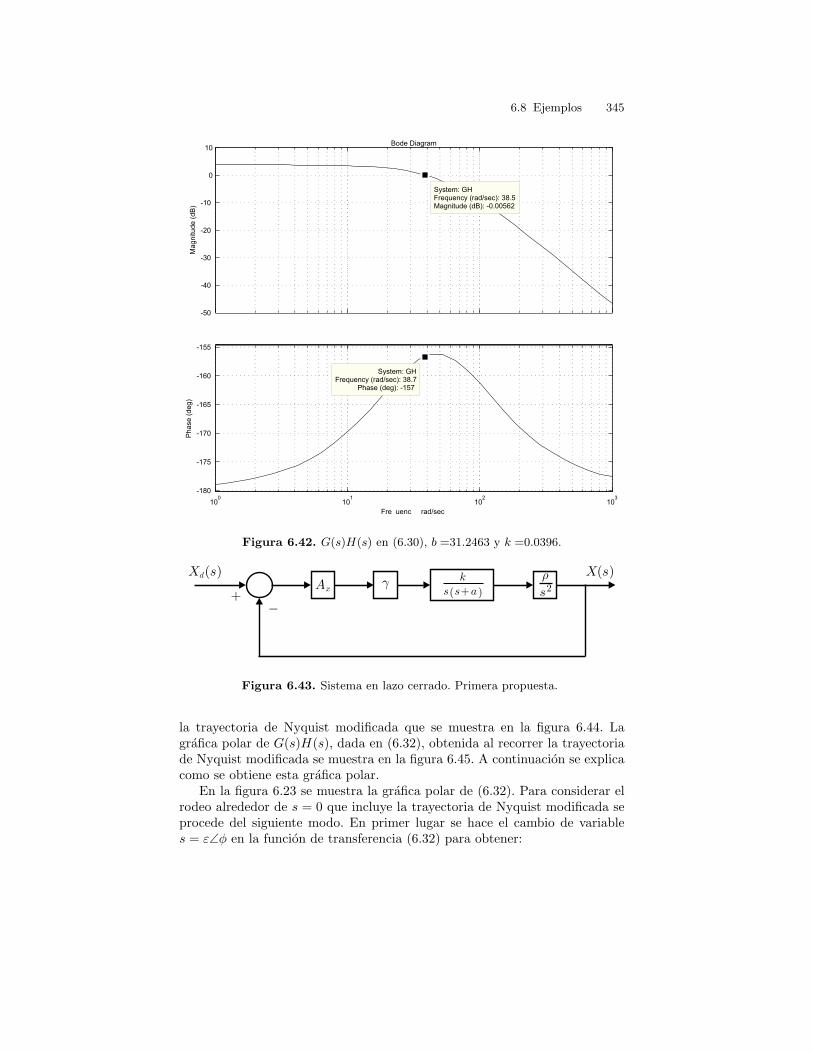
6.8 Ejemplos 345
Figura 6.42. G(s)H(s) en (6.30), b =31.2463 y k =0.0396.
à+
Ax s s+a( )
k
s2ú
íXd(s) X(s)
Figura 6.43. Sistema en lazo cerrado. Primera propuesta.
la trayectoria de Nyquist modificada que se muestra en la figura 6.44. Lagrafica polar de G(s)H(s), dada en (6.32), obtenida al recorrer la trayectoriade Nyquist modificada se muestra en la figura 6.45. A continuacion se explicacomo se obtiene esta grafica polar.
En la figura 6.23 se muestra la grafica polar de (6.32). Para considerar elrodeo alrededor de s = 0 que incluye la trayectoria de Nyquist modificada seprocede del siguiente modo. En primer lugar se hace el cambio de variables = ε∠φ en la funcion de transferencia (6.32) para obtener:

346 6 Diseno usando la respuesta en frecuencia
à j!
j!
! = 0à
! = 0+
r ! 1
þ = + 90
þ = à 90
s = "äþ
"
Im s( )
Re s( )
Figura 6.44. Trayectoria de Nyquist modificada usada en la seccion 6.8.2.
G(s)H(s) =ρAxγk
ε∠φ + a
1
ε3∠ − 3φ
Como ε → 0 es un valor constante muy pequeno se puede considerar quea ≫ ε para aproximar:
G(s)H(s) =ρAxγk
aε3∠ − 3φ = β1 ∠ − 3φ
donde β1 = ρAxγkaε3 → +∞ es una constante real muy grande porque ε → 0. Por
otro lado, φ varıa desde −90 (cuando ω = 0−) hasta +90 (cuando ω = 0+).Entonces se tiene que:
G(s)H(s) = β1 ∠ − 3φ =
β1 ∠ + 270, cuando ω = 0−
β1 ∠ − 270, cuando ω = 0+ (6.33)
Esto explica la presencia de las circunferencias de radio infinito que aparecenen la figura 6.45 y que, de acuerdo a (6.33), deben ser recorridas en sentidohorario al pasar desde ω = 0− hasta ω = 0+.

6.8 Ejemplos 347
! = 0à
! = 0+
! ! à1
! ! +1r ! 1
à 1
+ 270o
à 270o
Re G j!( )H j!( )( )
Im G j!( )H j!( )( )
Figura 6.45. Grafica polar de G(s)H(s) en (6.32) obtenida al recorrer la trayectoriade Nyquist modificada mostrada en la figura 6.44.
Notese que P = 0 porque G(s)H(s) dada en (6.32) no tiene polos conparte real positiva y que N = 2 porque al recorrer la trayectoria de Nyquistmodificada en el sentido mostrado, la grafica polar en la figura 6.45 da dosvueltas en sentido horario al punto (−1, j0). Por tanto, la aplicacion del cri-terio de Nyquist Z = N + P = 2 indica que existen dos polos de lazo cerradoque estan en el semiplano complejo derecho y, por tanto, el sistema en lazocerrado de la figura 6.43 es inestable. Notese tambien que debido a que en lafigura 6.45 hay circunferencias de radio infinito este resultado no cambia auncuando se redujera el valor de la ganancia:
ρAxγk
a(6.34)
reduciendo por ejemplo el valor del parametro γ. Esto se debe a que el valorde β1 tiende a infinito para cualquier valor finito de (6.34) porque ε → 0 y,por tanto, se sigue cumpliendo que P = 0, N = 2 y Z = 2.
à+
Ax s s+a( )
k
s2ú
ís+ c
s+îXd(s) X(s)
Figura 6.46. Sistema en lazo cerrado. Segunda propuesta.

348 6 Diseno usando la respuesta en frecuencia
Ahora considere el diagrama de bloques mostrado en la figura 6.46, dondeδ y c son constantes positivas. La motivacion para usar este diagrama debloques es el tratar de conseguir estabilidad en lazo cerrado mediante el usode un controlador PD con funcion de transferencia (γs + γδ). Sin embargo,en lugar de un controlador PD se propone usar una red de adelanto confuncion de transferencia γ s+δ
s+c con δ < c pues este tipo de controlador reduceel efecto del ruido que introduce un controlador PD. En este caso la funcionde transferencia de lazo abierto esta dada como:
G(s)H(s) =ρAxγδk
ac
s + δ
δ
c
s + c
a
s + a
1
s3(6.35)
Esta funcion de transferencia de lazo abierto tambien tiene tres polos en elorigen, es decir sobre el eje imaginario del plano complejo s y, por tanto, sedebera utilizar la trayectoria de Nyquist modificada que se muestra en la figura6.44. La grafica polar de G(s)H(s), dada en (6.35), obtenida al recorrer latrayectoria de Nyquist modificada se muestra en la figura 6.47. A continuacionse explica como se obtiene esta grafica polar.
! = 0à
! = 0+
! ! +1
! ! à1r ! 1
à 1
+ 270o
à 270o
Re G j!( )H j!( )( )
Im G j!( )H j!( )( )
Figura 6.47. Grafica polar de G(s)H(s) en (6.35) obtenida al recorrer la trayectoriade Nyquist modificada mostrada en la figura 6.44.
En la figura 6.25 se muestra la grafica polar de (6.35). Para considerar elrodeo al rededor de s = 0 que incluye la trayectoria de Nyquist modificada seprocede del siguiente modo. Primero se hace el cambio de variable s = ε∠φen la funcion de transferencia (6.35) para obtener:
G(s)H(s) = ρAxγkε∠φ + δ
(ε∠φ + c)(ε∠φ + a)
1
ε3∠ − 3φ
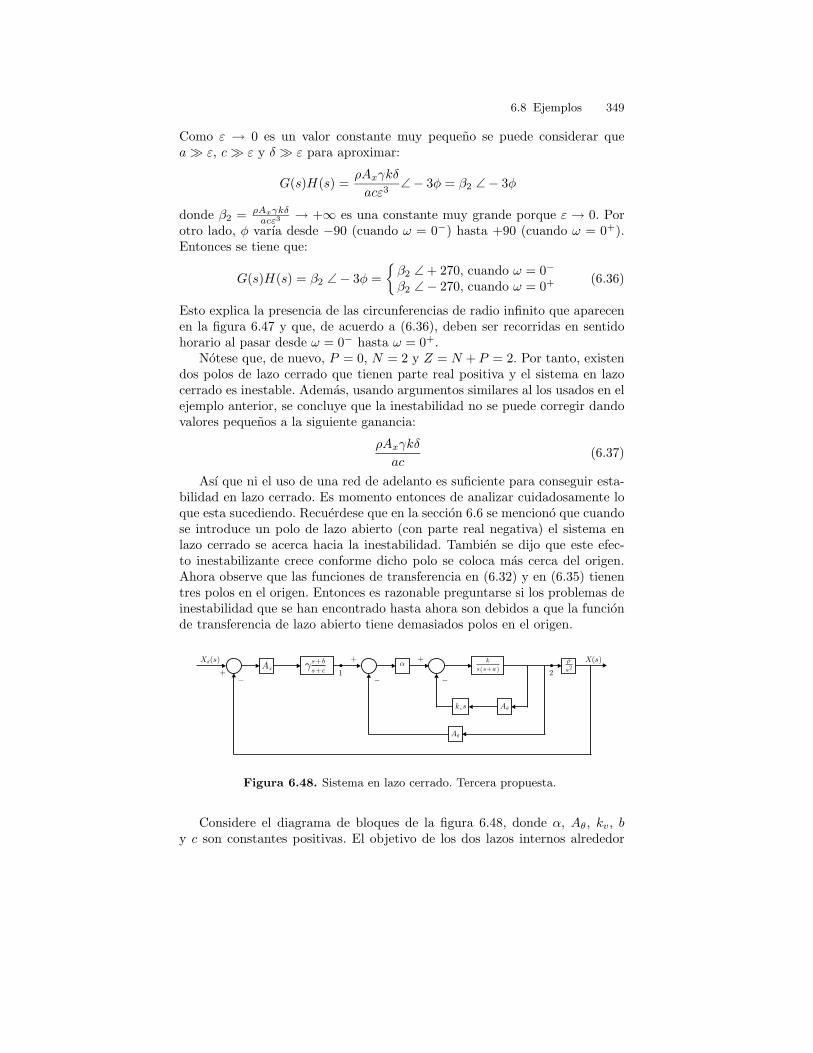
6.8 Ejemplos 349
Como ε → 0 es un valor constante muy pequeno se puede considerar quea ≫ ε, c ≫ ε y δ ≫ ε para aproximar:
G(s)H(s) =ρAxγkδ
acε3∠ − 3φ = β2 ∠ − 3φ
donde β2 = ρAxγkδacε3 → +∞ es una constante muy grande porque ε → 0. Por
otro lado, φ varıa desde −90 (cuando ω = 0−) hasta +90 (cuando ω = 0+).Entonces se tiene que:
G(s)H(s) = β2 ∠ − 3φ =
β2 ∠ + 270, cuando ω = 0−
β2 ∠ − 270, cuando ω = 0+ (6.36)
Esto explica la presencia de las circunferencias de radio infinito que aparecenen la figura 6.47 y que, de acuerdo a (6.36), deben ser recorridas en sentidohorario al pasar desde ω = 0− hasta ω = 0+.
Notese que, de nuevo, P = 0, N = 2 y Z = N + P = 2. Por tanto, existendos polos de lazo cerrado que tienen parte real positiva y el sistema en lazocerrado es inestable. Ademas, usando argumentos similares al los usados en elejemplo anterior, se concluye que la inestabilidad no se puede corregir dandovalores pequenos a la siguiente ganancia:
ρAxγkδ
ac(6.37)
Ası que ni el uso de una red de adelanto es suficiente para conseguir esta-bilidad en lazo cerrado. Es momento entonces de analizar cuidadosamente loque esta sucediendo. Recuerdese que en la seccion 6.6 se menciono que cuandose introduce un polo de lazo abierto (con parte real negativa) el sistema enlazo cerrado se acerca hacia la inestabilidad. Tambien se dijo que este efec-to inestabilizante crece conforme dicho polo se coloca mas cerca del origen.Ahora observe que las funciones de transferencia en (6.32) y en (6.35) tienentres polos en el origen. Entonces es razonable preguntarse si los problemas deinestabilidad que se han encontrado hasta ahora son debidos a que la funcionde transferencia de lazo abierto tiene demasiados polos en el origen.
s s+a( )
kís+ c
s+ bs2ú
+
+ +
à à àAx
Aò
Aò
ë
kýs
Xd(s) X(s)ï ï1 2
Figura 6.48. Sistema en lazo cerrado. Tercera propuesta.
Considere el diagrama de bloques de la figura 6.48, donde α, Aθ, kv, by c son constantes positivas. El objetivo de los dos lazos internos alrededor

350 6 Diseno usando la respuesta en frecuencia
de la funcion de transferencia ks(s+a) es sacar uno de los polos del origen re-
corriendolo hacia la izquierda. Notese tambien que la red de adelanto esta dadacomo:
Gc(s) = γs + b
s + c, 0 < b < c (6.38)
La funcion de transferencia entre los puntos 1 y 2 de la figura 6.48 esta dadacomo:
Gm(s) =αk
s2 + (a + kvkAθ)s + αkAθ
Por tanto, la funcion de transferencia de lazo abierto es:
G(s)H(s) =Ax ρ γb
cAθ
s + b
b
c
s + c
αkAθ
s2 + (a + kvkAθ)s + αkAθ
1
s2(6.39)
Notese que esta funcion de transferencia de lazo abierto tiene dos polos en elorigen, es decir sobre el eje imaginario del plano complejo s y, por tanto, sedebera utilizar la trayectoria de Nyquist modificada que se muestra en la figura6.44. La grafica polar de G(s)H(s), dada en (6.39), obtenida al recorrer latrayectoria de Nyquist modificada se muestra en la figura 6.49. A continuacionse explica como se obtiene esta grafica polar.
! = 0à
! = 0+ ! ! à1
! ! +1
r ! 1
à 1! = 0+ à 1 Re G j!( )H j!( )( )
Im G j!( )H j!( )( )
à 180î
+ 180î
Figura 6.49. Grafica polar de G(s)H(s) en (6.39) obtenida al recorrer la trayectoriade Nyquist modificada mostrada en la figura 6.44.
En la figura 6.27 se muestra la grafica polar de (6.39). Para considerar elrodeo alrededor de s = 0 que incluye la trayectoria de Nyquist modificada se

6.8 Ejemplos 351
procede del siguiente modo. Primero se hace el cambio de variable s = ε∠φen la funcion de transferencia (6.39) para obtener:
G(s)H(s) = Ax ρ γε∠φ + b
ε∠φ + c
αk
ε2∠2φ + (a + kvkAθ)ε∠φ + αkAθ
1
ε2∠ − 2φ(6.40)
Como ε → 0 es un valor constante muy pequeno se puede aproximar:
G(s)H(s) =Ax ρ γ b
cAθε2∠ − 2φ (6.41)
donde β3 = Ax ρ γ bcAθε2 → +∞ es una constante muy grande porque ε → 0. Por
otro lado, φ varıa desde −90 (cuando ω = 0−) hasta +90 (cuando ω = 0+).Entonces se tiene que:
G(s)H(s) = β3 ∠ − 2φ =
β3 ∠ + 180, cuando ω = 0−
β3 ∠ − 180, cuando ω = 0+ (6.42)
Esto explica la presencia de la circunferencia de radio infinito que aparece enla figura 6.49 y que, de acuerdo a (6.42), debe ser recorrida en sentido horarioal pasar desde ω = 0− hasta ω = 0+.
Notese que ahora se tiene P = 0, N = 0 y Z = N + P = 0. Por tanto,no existe ningun polo de lazo cerrado con parte real positiva y entonces elsistema en lazo cerrado es estable.
Diseno usando graficas de Bode
Considere los siguientes valores numericos:
k = 16.51, a = 3.04, Aθ = 1.43, (6.43)
Ax = 5.64, ρ = 5, α = 4, kv = 0.2
Las constantes α y kv forman parte del controlador a disenar, por lo que serequiere de un criterio para su seleccion. Sin embargo, este criterio depende deaspectos practicos y solo puede definirse en base a las condiciones del prototipoexperimental que se va a controlar. En el capıtulo 12 se define dicho criterioy se explica como se pueden seleccionar α y kv. En la figura 6.50 se muestranlas graficas de Bode de la siguiente funcion de transferencia:
Ax ρ
Aθ
αkAθ
s2 + (a + kvkAθ)s + αkAθ
1
s2(6.44)
las cuales son obtenidas usando los valores presentados en (6.43). Puede verseque la fase es aproximadamente igual a −208 grados cuando la magnitud esigual a 0[dB] (cuando ω = 4.8[rad/s]). Esto significa que el margen de fasees negativo y, por tanto, el sistema en lazo cerrado obtenido con (6.44) comofuncion de transferencia de lazo abierto serıa inestable. Con el fin de estabilizar
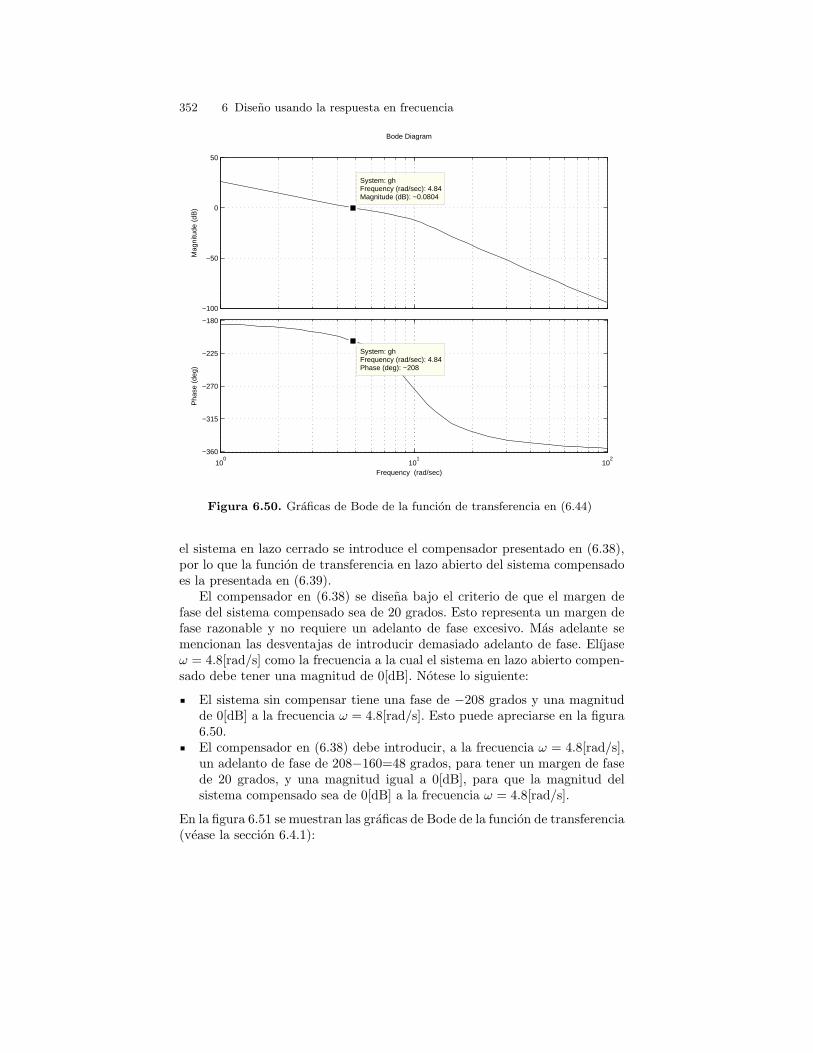
352 6 Diseno usando la respuesta en frecuencia
Bode Diagram
Frequency (rad/sec)10
010
110
2−360
−315
−270
−225
−180
System: ghFrequency (rad/sec): 4.84Phase (deg): −208
Pha
se (
deg)
−100
−50
0
50
System: ghFrequency (rad/sec): 4.84Magnitude (dB): −0.0804
Mag
nitu
de (
dB)
Figura 6.50. Graficas de Bode de la funcion de transferencia en (6.44)
el sistema en lazo cerrado se introduce el compensador presentado en (6.38),por lo que la funcion de transferencia en lazo abierto del sistema compensadoes la presentada en (6.39).
El compensador en (6.38) se disena bajo el criterio de que el margen defase del sistema compensado sea de 20 grados. Esto representa un margen defase razonable y no requiere un adelanto de fase excesivo. Mas adelante semencionan las desventajas de introducir demasiado adelanto de fase. Elıjaseω = 4.8[rad/s] como la frecuencia a la cual el sistema en lazo abierto compen-sado debe tener una magnitud de 0[dB]. Notese lo siguiente:
El sistema sin compensar tiene una fase de −208 grados y una magnitudde 0[dB] a la frecuencia ω = 4.8[rad/s]. Esto puede apreciarse en la figura6.50.El compensador en (6.38) debe introducir, a la frecuencia ω = 4.8[rad/s],un adelanto de fase de 208−160=48 grados, para tener un margen de fasede 20 grados, y una magnitud igual a 0[dB], para que la magnitud delsistema compensado sea de 0[dB] a la frecuencia ω = 4.8[rad/s].
En la figura 6.51 se muestran las graficas de Bode de la funcion de transferencia(vease la seccion 6.4.1):
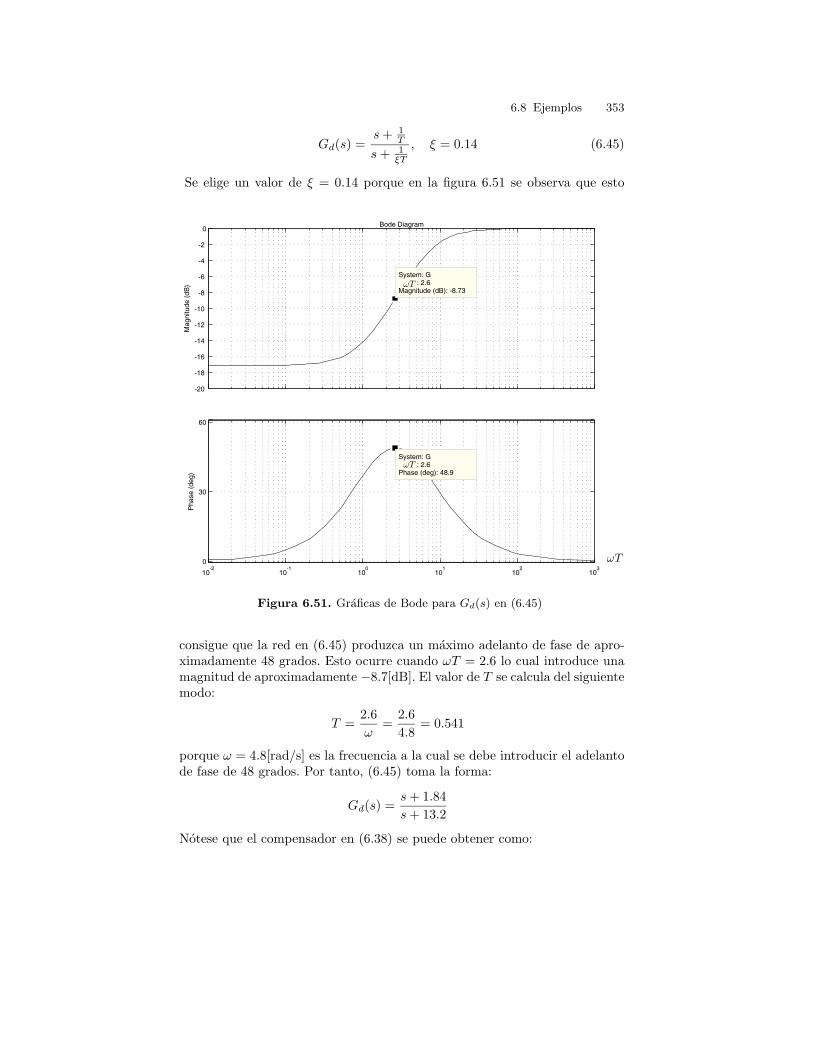
6.8 Ejemplos 353
Gd(s) =s + 1
T
s + 1ξT
, ξ = 0.14 (6.45)
Se elige un valor de ξ = 0.14 porque en la figura 6.51 se observa que esto
!T
!T
!T
Figura 6.51. Graficas de Bode para Gd(s) en (6.45)
consigue que la red en (6.45) produzca un maximo adelanto de fase de apro-ximadamente 48 grados. Esto ocurre cuando ωT = 2.6 lo cual introduce unamagnitud de aproximadamente −8.7[dB]. El valor de T se calcula del siguientemodo:
T =2.6
ω=
2.6
4.8= 0.541
porque ω = 4.8[rad/s] es la frecuencia a la cual se debe introducir el adelantode fase de 48 grados. Por tanto, (6.45) toma la forma:
Gd(s) =s + 1.84
s + 13.2
Notese que el compensador en (6.38) se puede obtener como:

354 6 Diseno usando la respuesta en frecuencia
Gc(s) = γGd(s) (6.46)
si se selecciona b = 1.84 y c = 13.2. El compensador Gc(s) debe introducir unamagnitud de 0[dB] a la frecuencia ω = 4.8[rad/s]. De acuerdo a (6.46), estacantidad esta dada como la suma en decibeles de la magnitud de la funcionde transferencia Gd(s) a dicha frecuencia (es decir, −8.7[dB]) y el equivalenteen decibeles de la ganancia γ:
−8.7[dB] + 20 log(γ) = 0[dB]
Despejando se obtiene:
γ = 108.720 ≈ 2.6
Finalmente, se puede escribir:
Gc(s) = 2.6s + 1.84
s + 13.2(6.47)
En la figura 6.52 se muestra la grafica de Bode del sistema compensado (6.39)usando el controlador (6.47). Notese que la frecuencia de cruce de gananciaes aproximadamente ω = 4.8[rad/s] y que el margen de fase es de aproxima-damente 22 grados, lo cual comprueba que se satisfacen las especificacionesde diseno. En la figura 6.53 se muestra la respuesta al escalon del sistema enlazo cerrado de la figura 6.48 usando (6.47) y los valores numericos en (6.43).Notese que la respuesta es poco amortiguada debido al pequeno margen defase. Sin embargo, este tipo de respuesta es satisfactoria en la practica paraun sistema ball and beam.
Finalmente, es conveniente aclarar los siguiente. La frecuencia de crucede ganancia (4.8[rad/s] en este ejemplo) determina la rapidez de respuestadel sistema en lazo cerrado. Sin embargo, (exceptuando las aproximacionesde segundo orden) no existe una regla exacta que permita calcular el valorde la frecuencia de cruce de ganancia en funcion de la rapidez deseada. Loque se sabe es que aumentando esta frecuencia se obtienen respuestas masrapidas. Por otro lado, elegir una frecuencia de cruce de ganancia grandetambien incrementa el efecto del ruido. Ası que es recomendable proponer unafrecuencia de cruce de ganancia, hacer el diseno con ella y al final verificar si larapidez en lazo cerrado es la deseada y si el efecto del ruido no es prohibitivo. Sila respuesta fuera muy lenta y el efecto del ruido no es importante, entoncespropongase una frecuencia de cruce de ganancia mayor y repita el procesohasta obtener la rapidez y el desempeno que se deseen.
En este ejemplo se ha decidido no intentar mejorar la rapidez de los resul-tados obtenidos en la figura 6.53. Por un lado, puede observarse en esta figuraque el sistema alcanza el reposo en casi 3[s] lo cual es un tiempo muy buenopara un sistema ball and beam en la practica. Por otro lado, de acuerdo a lafigura 6.50, si se elige una frecuencia de cruce de ganancia mayor entonces senecesitara incrementar el adelanto de fase que debe introducir el compensador
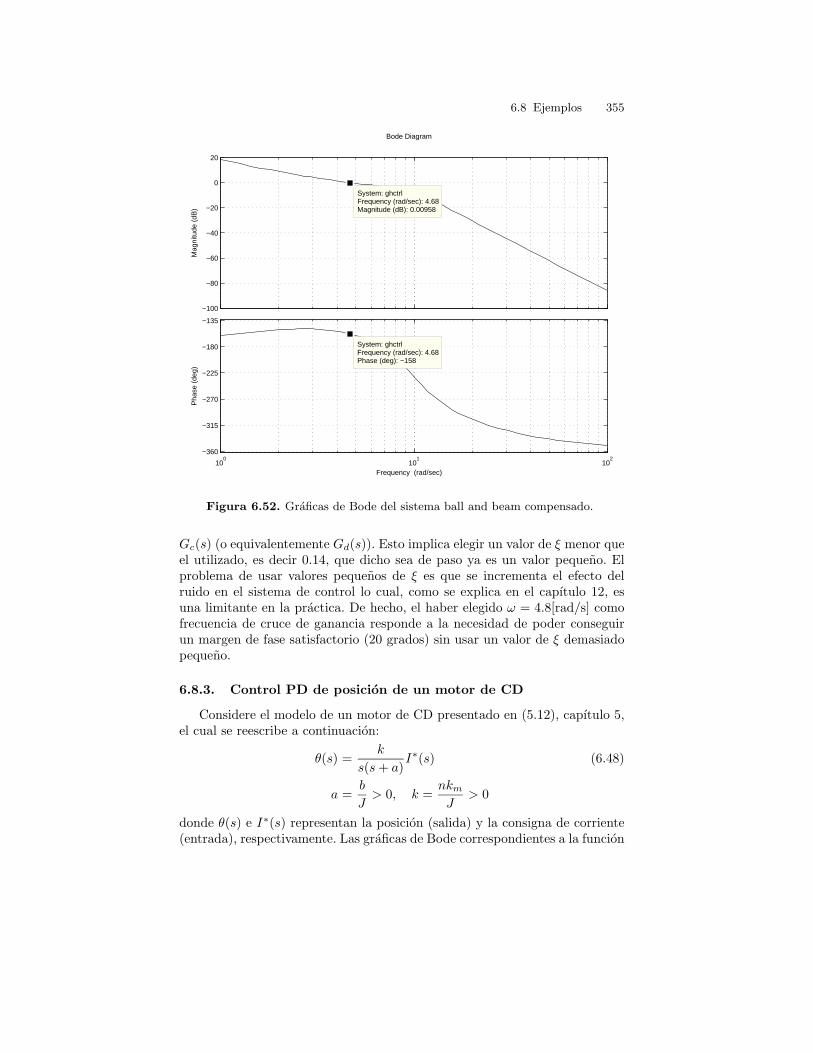
6.8 Ejemplos 355
Bode Diagram
Frequency (rad/sec)
−100
−80
−60
−40
−20
0
20
System: ghctrlFrequency (rad/sec): 4.68Magnitude (dB): 0.00958
Mag
nitu
de (
dB)
100
101
102
−360
−315
−270
−225
−180
−135
System: ghctrlFrequency (rad/sec): 4.68Phase (deg): −158
Pha
se (
deg)
Figura 6.52. Graficas de Bode del sistema ball and beam compensado.
Gc(s) (o equivalentemente Gd(s)). Esto implica elegir un valor de ξ menor queel utilizado, es decir 0.14, que dicho sea de paso ya es un valor pequeno. Elproblema de usar valores pequenos de ξ es que se incrementa el efecto delruido en el sistema de control lo cual, como se explica en el capıtulo 12, esuna limitante en la practica. De hecho, el haber elegido ω = 4.8[rad/s] comofrecuencia de cruce de ganancia responde a la necesidad de poder conseguirun margen de fase satisfactorio (20 grados) sin usar un valor de ξ demasiadopequeno.
6.8.3. Control PD de posicion de un motor de CD
Considere el modelo de un motor de CD presentado en (5.12), capıtulo 5,el cual se reescribe a continuacion:
θ(s) =k
s(s + a)I∗(s) (6.48)
a =b
J> 0, k =
nkm
J> 0
donde θ(s) e I∗(s) representan la posicion (salida) y la consigna de corriente(entrada), respectivamente. Las graficas de Bode correspondientes a la funcion
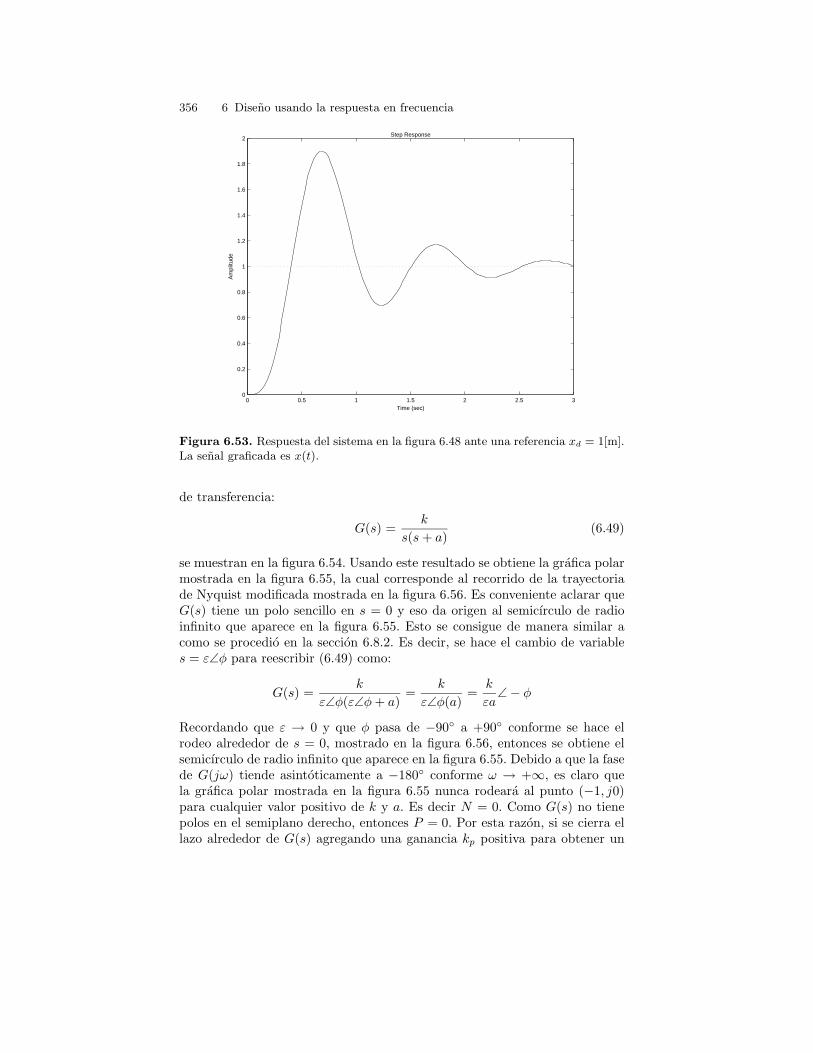
356 6 Diseno usando la respuesta en frecuencia
0 0.5 1 1.5 2 2.5 30
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2Step Response
Time (sec)
Am
plitu
de
Figura 6.53. Respuesta del sistema en la figura 6.48 ante una referencia xd = 1[m].La senal graficada es x(t).
de transferencia:
G(s) =k
s(s + a)(6.49)
se muestran en la figura 6.54. Usando este resultado se obtiene la grafica polarmostrada en la figura 6.55, la cual corresponde al recorrido de la trayectoriade Nyquist modificada mostrada en la figura 6.56. Es conveniente aclarar queG(s) tiene un polo sencillo en s = 0 y eso da origen al semicırculo de radioinfinito que aparece en la figura 6.55. Esto se consigue de manera similar acomo se procedio en la seccion 6.8.2. Es decir, se hace el cambio de variables = ε∠φ para reescribir (6.49) como:
G(s) =k
ε∠φ(ε∠φ + a)=
k
ε∠φ(a)=
k
εa∠ − φ
Recordando que ε → 0 y que φ pasa de −90 a +90 conforme se hace elrodeo alrededor de s = 0, mostrado en la figura 6.56, entonces se obtiene elsemicırculo de radio infinito que aparece en la figura 6.55. Debido a que la fasede G(jω) tiende asintoticamente a −180 conforme ω → +∞, es claro quela grafica polar mostrada en la figura 6.55 nunca rodeara al punto (−1, j0)para cualquier valor positivo de k y a. Es decir N = 0. Como G(s) no tienepolos en el semiplano derecho, entonces P = 0. Por esta razon, si se cierra ellazo alrededor de G(s) agregando una ganancia kp positiva para obtener un
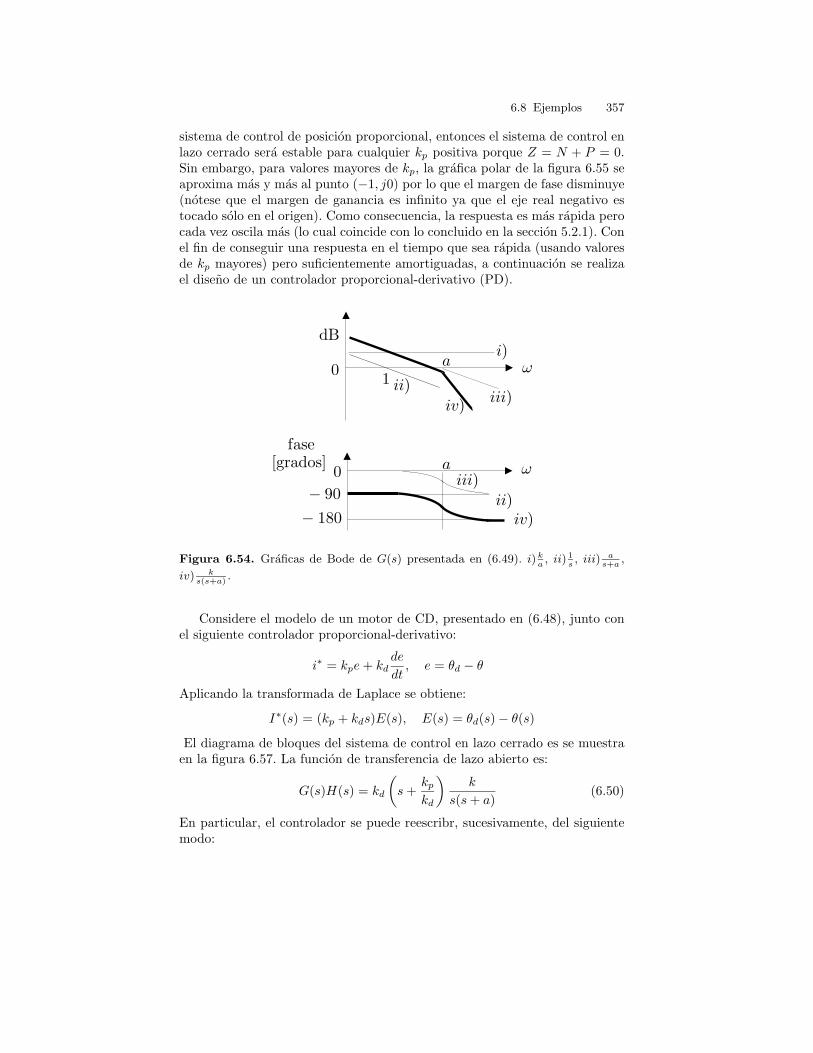
6.8 Ejemplos 357
sistema de control de posicion proporcional, entonces el sistema de control enlazo cerrado sera estable para cualquier kp positiva porque Z = N + P = 0.Sin embargo, para valores mayores de kp, la grafica polar de la figura 6.55 seaproxima mas y mas al punto (−1, j0) por lo que el margen de fase disminuye(notese que el margen de ganancia es infinito ya que el eje real negativo estocado solo en el origen). Como consecuencia, la respuesta es mas rapida perocada vez oscila mas (lo cual coincide con lo concluido en la seccion 5.2.1). Conel fin de conseguir una respuesta en el tiempo que sea rapida (usando valoresde kp mayores) pero suficientemente amortiguadas, a continuacion se realizael diseno de un controlador proporcional-derivativo (PD).
[0
fasegrados]
à 90
!iii)
ii)
!i)
0
dB
ii)iii)
iv)
iv)
a1
à 180
a
Figura 6.54. Graficas de Bode de G(s) presentada en (6.49). i) ka, ii) 1
s, iii) a
s+a,
iv) ks(s+a)
.
Considere el modelo de un motor de CD, presentado en (6.48), junto conel siguiente controlador proporcional-derivativo:
i∗ = kpe + kdde
dt, e = θd − θ
Aplicando la transformada de Laplace se obtiene:
I∗(s) = (kp + kds)E(s), E(s) = θd(s) − θ(s)
El diagrama de bloques del sistema de control en lazo cerrado es se muestraen la figura 6.57. La funcion de transferencia de lazo abierto es:
G(s)H(s) = kd
(s +
kp
kd
)k
s(s + a)(6.50)
En particular, el controlador se puede reescribr, sucesivamente, del siguientemodo:

358 6 Diseno usando la respuesta en frecuencia
! = 0+
Im G j!( )( )
Re G j!( )( )
! = 0à
! ! à1! ! +1
1
Figura 6.55. Grafica polar de G(s) presentada en (6.49).
à j!
j!
! = 0à
! = 0+
r ! 1
þ = + 90
þ = à 90
s = "äþ
"
Im s( )
Re s( )
Figura 6.56. Trayectoria de Nyquist modificada para la funcion de transferenciaen (6.49).
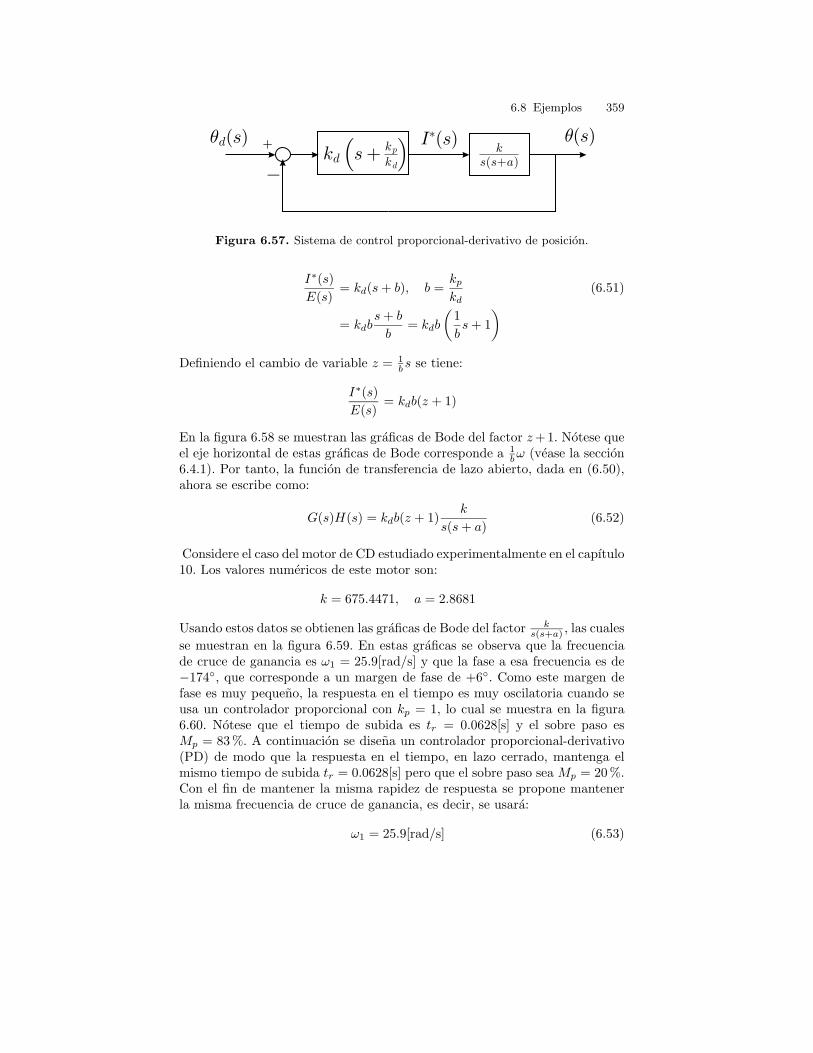
6.8 Ejemplos 359
+
à s(s+a)k
Iã(s) ò(s)òd(s)kd s+
kd
kpð ñ
Figura 6.57. Sistema de control proporcional-derivativo de posicion.
I∗(s)
E(s)= kd(s + b), b =
kp
kd(6.51)
= kdbs + b
b= kdb
(1
bs + 1
)
Definiendo el cambio de variable z = 1b s se tiene:
I∗(s)
E(s)= kdb(z + 1)
En la figura 6.58 se muestran las graficas de Bode del factor z +1. Notese queel eje horizontal de estas graficas de Bode corresponde a 1
b ω (vease la seccion6.4.1). Por tanto, la funcion de transferencia de lazo abierto, dada en (6.50),ahora se escribe como:
G(s)H(s) = kdb(z + 1)k
s(s + a)(6.52)
Considere el caso del motor de CD estudiado experimentalmente en el capıtulo10. Los valores numericos de este motor son:
k = 675.4471, a = 2.8681
Usando estos datos se obtienen las graficas de Bode del factor ks(s+a) , las cuales
se muestran en la figura 6.59. En estas graficas se observa que la frecuenciade cruce de ganancia es ω1 = 25.9[rad/s] y que la fase a esa frecuencia es de−174, que corresponde a un margen de fase de +6. Como este margen defase es muy pequeno, la respuesta en el tiempo es muy oscilatoria cuando seusa un controlador proporcional con kp = 1, lo cual se muestra en la figura6.60. Notese que el tiempo de subida es tr = 0.0628[s] y el sobre paso esMp = 83%. A continuacion se disena un controlador proporcional-derivativo(PD) de modo que la respuesta en el tiempo, en lazo cerrado, mantenga elmismo tiempo de subida tr = 0.0628[s] pero que el sobre paso sea Mp = 20%.Con el fin de mantener la misma rapidez de respuesta se propone mantenerla misma frecuencia de cruce de ganancia, es decir, se usara:
ω1 = 25.9[rad/s] (6.53)
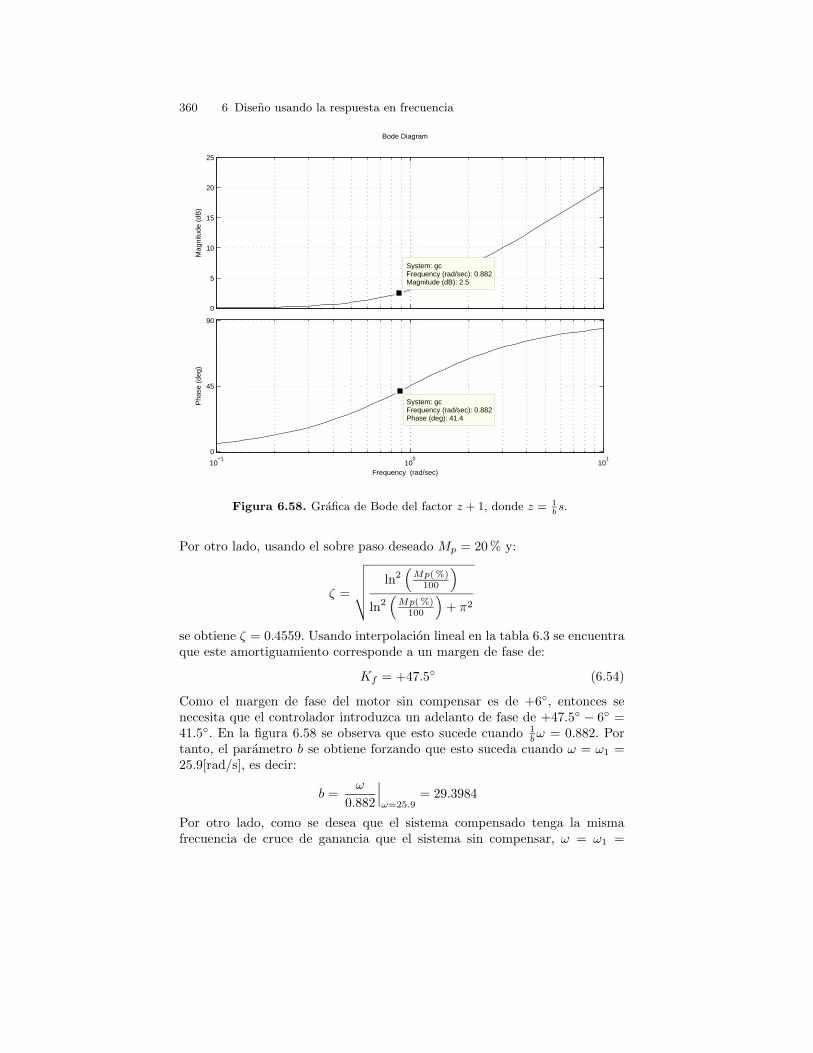
360 6 Diseno usando la respuesta en frecuencia
Bode Diagram
Frequency (rad/sec)10
−110
010
10
45
90
System: gcFrequency (rad/sec): 0.882Phase (deg): 41.4
Pha
se (
deg)
0
5
10
15
20
25
System: gcFrequency (rad/sec): 0.882Magnitude (dB): 2.5
Mag
nitu
de (
dB)
Figura 6.58. Grafica de Bode del factor z + 1, donde z = 1bs.
Por otro lado, usando el sobre paso deseado Mp = 20% y:
ζ =
√√√√√ln2
(Mp( %)
100
)
ln2(
Mp( %)100
)+ π2
se obtiene ζ = 0.4559. Usando interpolacion lineal en la tabla 6.3 se encuentraque este amortiguamiento corresponde a un margen de fase de:
Kf = +47.5 (6.54)
Como el margen de fase del motor sin compensar es de +6, entonces senecesita que el controlador introduzca un adelanto de fase de +47.5 − 6 =41.5. En la figura 6.58 se observa que esto sucede cuando 1
b ω = 0.882. Portanto, el parametro b se obtiene forzando que esto suceda cuando ω = ω1 =25.9[rad/s], es decir:
b =ω
0.882
∣∣∣ω=25.9
= 29.3984
Por otro lado, como se desea que el sistema compensado tenga la mismafrecuencia de cruce de ganancia que el sistema sin compensar, ω = ω1 =
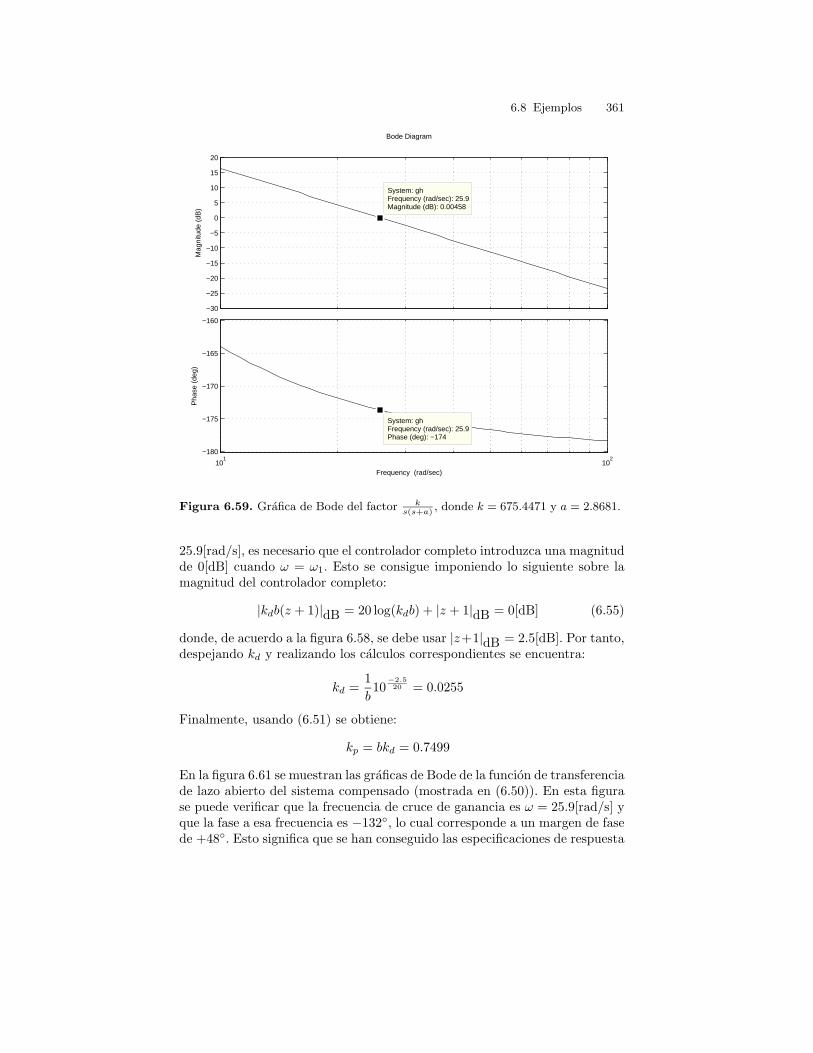
6.8 Ejemplos 361
Bode Diagram
Frequency (rad/sec)
−30
−25
−20
−15
−10
−5
0
5
10
15
20
System: ghFrequency (rad/sec): 25.9Magnitude (dB): 0.00458
Mag
nitu
de (
dB)
101
102
−180
−175
−170
−165
−160
System: ghFrequency (rad/sec): 25.9Phase (deg): −174
Pha
se (
deg)
Figura 6.59. Grafica de Bode del factor ks(s+a)
, donde k = 675.4471 y a = 2.8681.
25.9[rad/s], es necesario que el controlador completo introduzca una magnitudde 0[dB] cuando ω = ω1. Esto se consigue imponiendo lo siguiente sobre lamagnitud del controlador completo:
|kdb(z + 1)|dB = 20 log(kdb) + |z + 1|dB = 0[dB] (6.55)
donde, de acuerdo a la figura 6.58, se debe usar |z+1|dB = 2.5[dB]. Por tanto,despejando kd y realizando los calculos correspondientes se encuentra:
kd =1
b10
−2.520 = 0.0255
Finalmente, usando (6.51) se obtiene:
kp = bkd = 0.7499
En la figura 6.61 se muestran las graficas de Bode de la funcion de transferenciade lazo abierto del sistema compensado (mostrada en (6.50)). En esta figurase puede verificar que la frecuencia de cruce de ganancia es ω = 25.9[rad/s] yque la fase a esa frecuencia es −132, lo cual corresponde a un margen de fasede +48. Esto significa que se han conseguido las especificaciones de respuesta
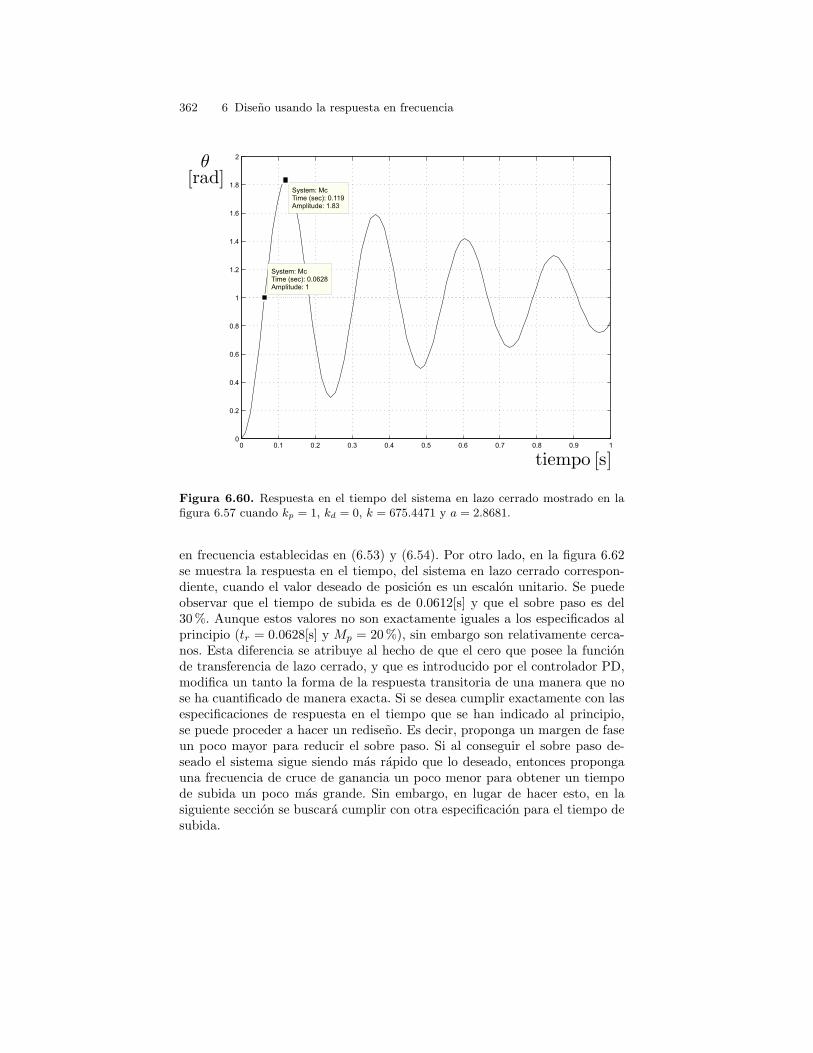
362 6 Diseno usando la respuesta en frecuencia
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
System: McTime (sec): 0.0628Amplitude: 1
System: McTime (sec): 0.119Amplitude: 1.83
òrad[ ]
tiempo s[ ]
Figura 6.60. Respuesta en el tiempo del sistema en lazo cerrado mostrado en lafigura 6.57 cuando kp = 1, kd = 0, k = 675.4471 y a = 2.8681.
en frecuencia establecidas en (6.53) y (6.54). Por otro lado, en la figura 6.62se muestra la respuesta en el tiempo, del sistema en lazo cerrado correspon-diente, cuando el valor deseado de posicion es un escalon unitario. Se puedeobservar que el tiempo de subida es de 0.0612[s] y que el sobre paso es del30%. Aunque estos valores no son exactamente iguales a los especificados alprincipio (tr = 0.0628[s] y Mp = 20%), sin embargo son relativamente cerca-nos. Esta diferencia se atribuye al hecho de que el cero que posee la funcionde transferencia de lazo cerrado, y que es introducido por el controlador PD,modifica un tanto la forma de la respuesta transitoria de una manera que nose ha cuantificado de manera exacta. Si se desea cumplir exactamente con lasespecificaciones de respuesta en el tiempo que se han indicado al principio,se puede proceder a hacer un rediseno. Es decir, proponga un margen de faseun poco mayor para reducir el sobre paso. Si al conseguir el sobre paso de-seado el sistema sigue siendo mas rapido que lo deseado, entonces propongauna frecuencia de cruce de ganancia un poco menor para obtener un tiempode subida un poco mas grande. Sin embargo, en lugar de hacer esto, en lasiguiente seccion se buscara cumplir con otra especificacion para el tiempo desubida.
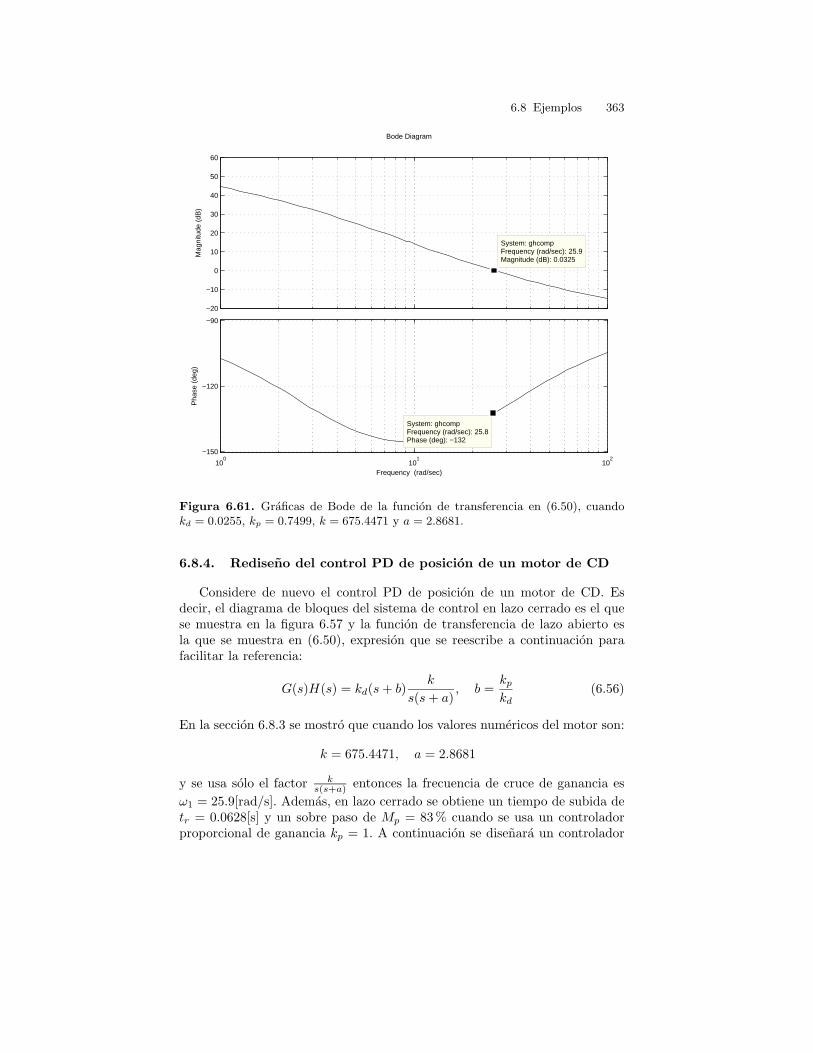
6.8 Ejemplos 363
−20
−10
0
10
20
30
40
50
60
System: ghcompFrequency (rad/sec): 25.9Magnitude (dB): 0.0325
Mag
nitu
de (
dB)
100
101
102
−150
−120
−90
System: ghcompFrequency (rad/sec): 25.8Phase (deg): −132
Pha
se (
deg)
Bode Diagram
Frequency (rad/sec)
Figura 6.61. Graficas de Bode de la funcion de transferencia en (6.50), cuandokd = 0.0255, kp = 0.7499, k = 675.4471 y a = 2.8681.
6.8.4. Rediseno del control PD de posicion de un motor de CD
Considere de nuevo el control PD de posicion de un motor de CD. Esdecir, el diagrama de bloques del sistema de control en lazo cerrado es el quese muestra en la figura 6.57 y la funcion de transferencia de lazo abierto esla que se muestra en (6.50), expresion que se reescribe a continuacion parafacilitar la referencia:
G(s)H(s) = kd(s + b)k
s(s + a), b =
kp
kd(6.56)
En la seccion 6.8.3 se mostro que cuando los valores numericos del motor son:
k = 675.4471, a = 2.8681
y se usa solo el factor ks(s+a) entonces la frecuencia de cruce de ganancia es
ω1 = 25.9[rad/s]. Ademas, en lazo cerrado se obtiene un tiempo de subida detr = 0.0628[s] y un sobre paso de Mp = 83% cuando se usa un controladorproporcional de ganancia kp = 1. A continuacion se disenara un controlador
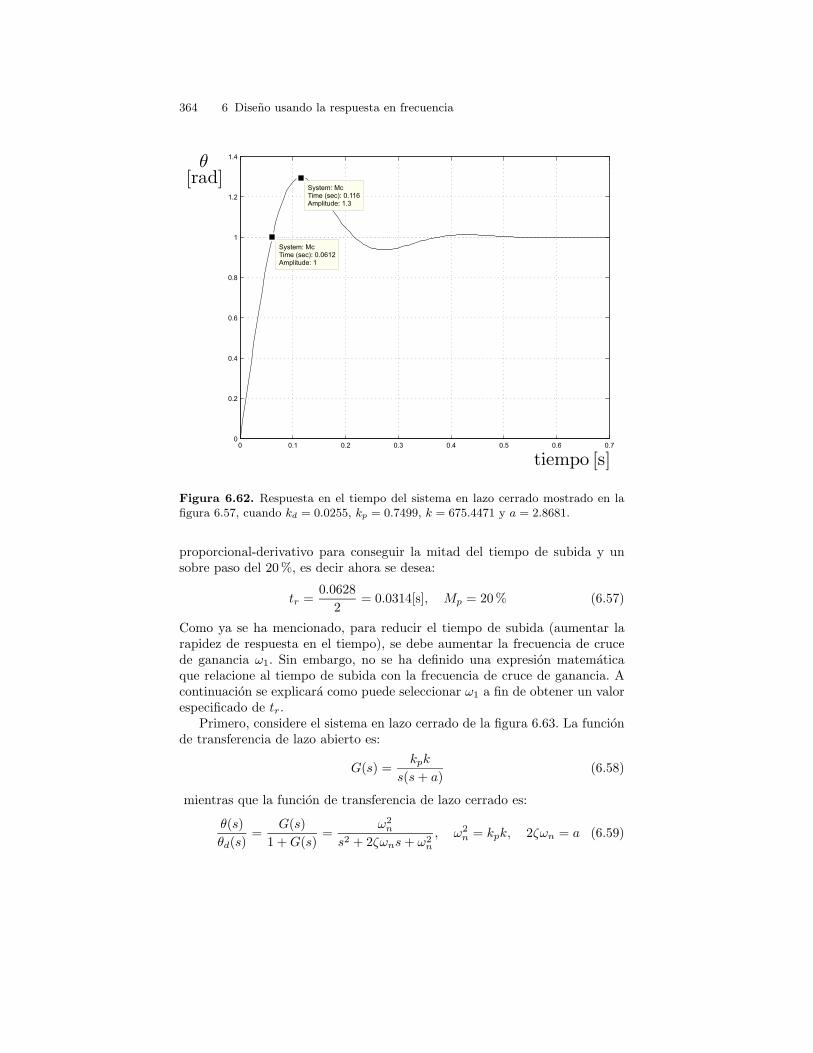
364 6 Diseno usando la respuesta en frecuencia
0 0.1 0.2 0.3 0.4 0.5 0.6 0.70
0.2
0.4
0.6
0.8
1
1.2
1.4
System: McTime (sec): 0.0612Amplitude: 1
System: McTime (sec): 0.116Amplitude: 1.3
tiempo s[ ]
òrad[ ]
Figura 6.62. Respuesta en el tiempo del sistema en lazo cerrado mostrado en lafigura 6.57, cuando kd = 0.0255, kp = 0.7499, k = 675.4471 y a = 2.8681.
proporcional-derivativo para conseguir la mitad del tiempo de subida y unsobre paso del 20%, es decir ahora se desea:
tr =0.0628
2= 0.0314[s], Mp = 20% (6.57)
Como ya se ha mencionado, para reducir el tiempo de subida (aumentar larapidez de respuesta en el tiempo), se debe aumentar la frecuencia de crucede ganancia ω1. Sin embargo, no se ha definido una expresion matematicaque relacione al tiempo de subida con la frecuencia de cruce de ganancia. Acontinuacion se explicara como puede seleccionar ω1 a fin de obtener un valorespecificado de tr.
Primero, considere el sistema en lazo cerrado de la figura 6.63. La funcionde transferencia de lazo abierto es:
G(s) =kpk
s(s + a)(6.58)
mientras que la funcion de transferencia de lazo cerrado es:
θ(s)
θd(s)=
G(s)
1 + G(s)=
ω2n
s2 + 2ζωns + ω2n
, ω2n = kpk, 2ζωn = a (6.59)
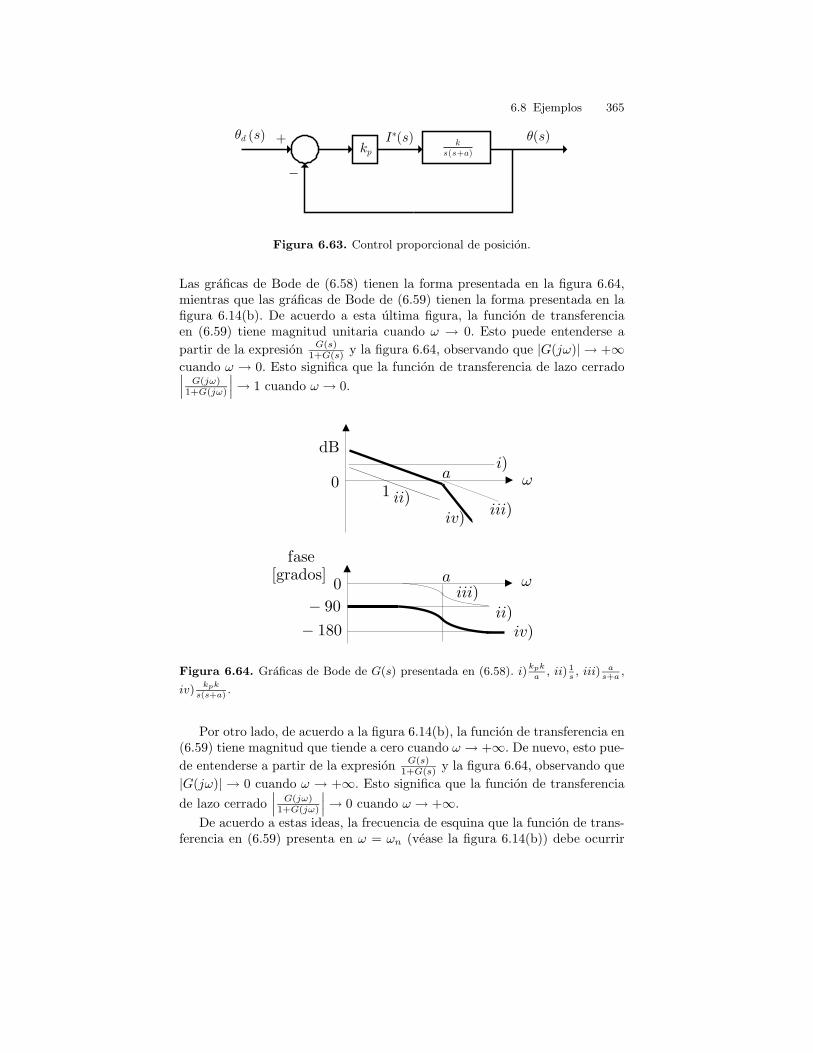
6.8 Ejemplos 365
Iã(s) ò(s)+
à
òd s( )kp s s+a( )
k
Figura 6.63. Control proporcional de posicion.
Las graficas de Bode de (6.58) tienen la forma presentada en la figura 6.64,mientras que las graficas de Bode de (6.59) tienen la forma presentada en lafigura 6.14(b). De acuerdo a esta ultima figura, la funcion de transferenciaen (6.59) tiene magnitud unitaria cuando ω → 0. Esto puede entenderse a
partir de la expresion G(s)1+G(s) y la figura 6.64, observando que |G(jω)| → +∞
cuando ω → 0. Esto significa que la funcion de transferencia de lazo cerrado∣∣∣ G(jω)1+G(jω)
∣∣∣ → 1 cuando ω → 0.
[0
fasegrados]
à 90
!iii)
ii)
!i)
0
dB
ii)iii)
iv)
iv)
a1
à 180
a
Figura 6.64. Graficas de Bode de G(s) presentada en (6.58). i)kpk
a, ii) 1
s, iii) a
s+a,
iv)kpk
s(s+a).
Por otro lado, de acuerdo a la figura 6.14(b), la funcion de transferencia en(6.59) tiene magnitud que tiende a cero cuando ω → +∞. De nuevo, esto pue-
de entenderse a partir de la expresion G(s)1+G(s) y la figura 6.64, observando que
|G(jω)| → 0 cuando ω → +∞. Esto significa que la funcion de transferencia
de lazo cerrado∣∣∣ G(jω)1+G(jω)
∣∣∣ → 0 cuando ω → +∞.
De acuerdo a estas ideas, la frecuencia de esquina que la funcion de trans-ferencia en (6.59) presenta en ω = ωn (vease la figura 6.14(b)) debe ocurrir

366 6 Diseno usando la respuesta en frecuencia
aproximadamente cuando se alcanza la frecuencia de cruce de ganancia en la
figura 6.64 (cuando |G(jω)| ≈ 1 y, por tanto,∣∣∣ G(jω)1+G(jω)
∣∣∣ empieza a decrecer de
manera importante). Esta observacion permite concluir que ωn en la figura6.14(b) crece si ω1, medida en la figura 6.64, tambien crece.
Por otro lado, de acuerdo a:
tr =1
ωn
√1 − ζ2
[π − arctan
(√1 − ζ2
ζ
)], ωd = ωn
√1 − ζ2,
si se desea reducir el tiempo de subida a la mitad (despreciando el efectodebido a la variacion del amortiguamiento ζ) entonces debe aumentarse ωn aldoble. Esto significa, de acuerdo a la discusion anterior, que la frecuencia decruce de ganancia ω1 debe aumentarse al doble.
Entonces, si tr = 0.0628[s] cuando ω1 = 25.9[rad/s], debe usarse:
ω1 = 51.8[rad/s] (6.60)
para conseguir el tiempo de subida tr = 0.0314[s]. Por otro lado, en la seccion6.8.3 se encontro que para obtener un sobre paso del 20% se debe buscar unmargen de fase de:
Kf = +47.5 (6.61)
En la figura 6.65 se muestran las graficas de Bode de ks(s+a) cuando k =
675.4471 y a = 2.8681. Se observa que la magnitud y la fase valen −12[dB]y −177 cuando ω = 51.8[rad/s]. Esto corresponde a un margen de fase de+3. Como el margen de fase deseado es de +47.5 entonces se necesita queel controlador introduzca una fase positiva de 47.5 − 3 = 44.5 cuando ω =51.8[rad/s]. Recuerdese que, de acuerdo a (6.52), la funcion de transferenciade lazo abierto del sistema compensado esta dada como:
G(s)H(s) = kdb(z + 1)k
s(s + a)
donde kdb(z +1) = kds+kp, con b =kp
kdy z = 1
b s, es el controlador PD. En lafigura 6.66 se muestran las graficas de Bode del factor z + 1. Recuerdese queen estas graficas el eje horizontal corresponde a 1
b ω (vease la seccion 6.4.1). Eladelanto de fase requerido de +44.5 ocurre cuando 1
b ω = 0.982. Como esteadelanto de fase debe ocurrir cuando la frecuencia sea igual a la frecuencia decruce de ganancia deseada ω = 51.8[rad/s] entonces:
b =ω
0.982
∣∣∣ω=51.8
= 52.8033
Por otro lado, se desea que la frecuencia de cruce de ganancia sea ω =51.8[rad/s]. Esto requiere que el controlador introduzca, a esta frecuencia,

6.8 Ejemplos 367
Bode Diagram
Frequency (rad/sec)
−40
−30
−20
−10
0
10
20
30
40
50
60
System: ghFrequency (rad/sec): 51.8Magnitude (dB): −12M
agni
tude
(dB
)
100
101
102
−180
−150
−120
−90
System: ghFrequency (rad/sec): 51.7Phase (deg): −177
Pha
se (
deg)
Figura 6.65. Graficas de Bode de ks(s+a)
cuando k = 675.4471 y a = 2.8681.
la misma magnitud, pero de signo contrario, que la magnitud introducida(−12[dB]) por el factor k
s(s+a) en esta frecuencia (para que la magnitud del
sistema compensado sea de 0[dB] a la nueva frecuencia de cruce de ganancia).Esto implica que se debe exigir lo siguiente:
|kdb(z + 1)|dB = 20 log(kdb) + |z + 1|dB = 12[dB] (6.62)
donde, de acuerdo a la figura 6.66, se debe usar |z + 1|dB = 2.95[dB]. Portanto, despejando kd y realizando los calculos correspondientes se encuentra:
kd =1
b10
12−2.9520 = 0.0537
Finalmente, usando b =kp
kdse obtiene:
kp = bkd = 2.8347
En la figura 6.67 se muestran las graficas de Bode de la funcion de transferenciade lazo abierto del sistema compensado (mostrada en (6.56)). En esta figurase puede verificar que la frecuencia de cruce de ganancia es ω = 51.8[rad/s]
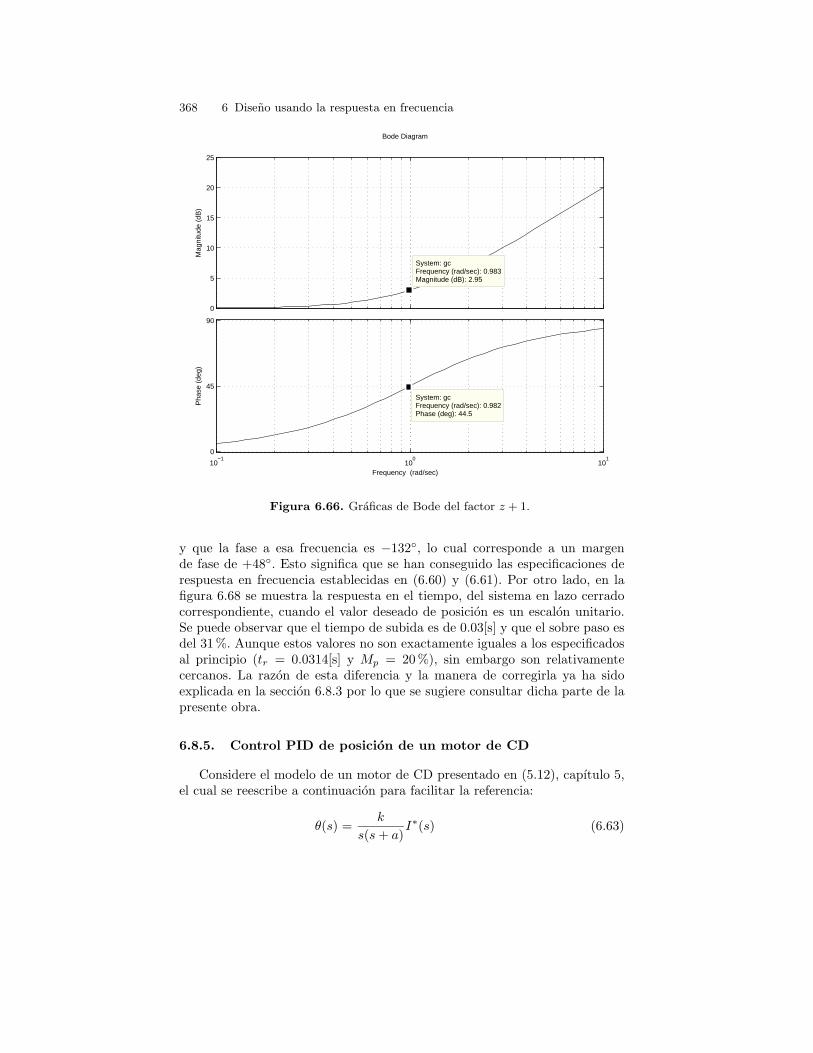
368 6 Diseno usando la respuesta en frecuencia
Bode Diagram
Frequency (rad/sec)10
−110
010
10
45
90
System: gcFrequency (rad/sec): 0.982Phase (deg): 44.5
Pha
se (
deg)
0
5
10
15
20
25
System: gcFrequency (rad/sec): 0.983Magnitude (dB): 2.95
Mag
nitu
de (
dB)
Figura 6.66. Graficas de Bode del factor z + 1.
y que la fase a esa frecuencia es −132, lo cual corresponde a un margende fase de +48. Esto significa que se han conseguido las especificaciones derespuesta en frecuencia establecidas en (6.60) y (6.61). Por otro lado, en lafigura 6.68 se muestra la respuesta en el tiempo, del sistema en lazo cerradocorrespondiente, cuando el valor deseado de posicion es un escalon unitario.Se puede observar que el tiempo de subida es de 0.03[s] y que el sobre paso esdel 31%. Aunque estos valores no son exactamente iguales a los especificadosal principio (tr = 0.0314[s] y Mp = 20%), sin embargo son relativamentecercanos. La razon de esta diferencia y la manera de corregirla ya ha sidoexplicada en la seccion 6.8.3 por lo que se sugiere consultar dicha parte de lapresente obra.
6.8.5. Control PID de posicion de un motor de CD
Considere el modelo de un motor de CD presentado en (5.12), capıtulo 5,el cual se reescribe a continuacion para facilitar la referencia:
θ(s) =k
s(s + a)I∗(s) (6.63)
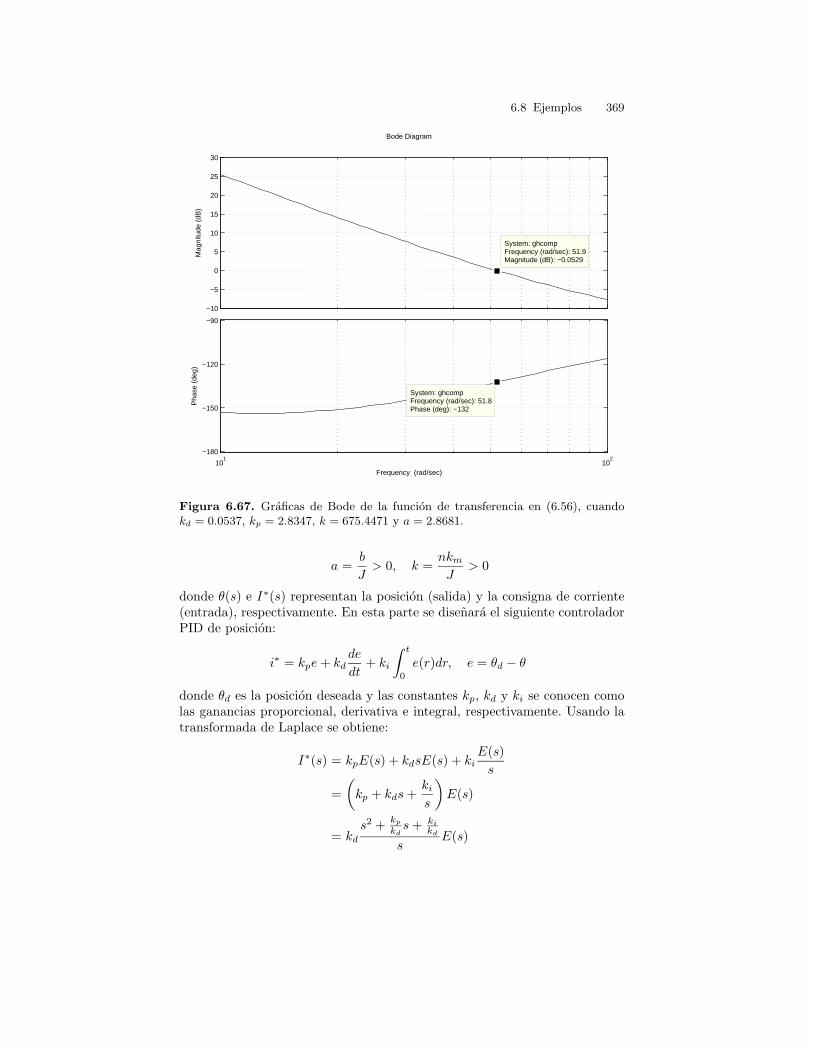
6.8 Ejemplos 369
Bode Diagram
Frequency (rad/sec)
−10
−5
0
5
10
15
20
25
30
System: ghcompFrequency (rad/sec): 51.9Magnitude (dB): −0.0529
Mag
nitu
de (
dB)
101
102
−180
−150
−120
−90
System: ghcompFrequency (rad/sec): 51.8Phase (deg): −132
Pha
se (
deg)
Figura 6.67. Graficas de Bode de la funcion de transferencia en (6.56), cuandokd = 0.0537, kp = 2.8347, k = 675.4471 y a = 2.8681.
a =b
J> 0, k =
nkm
J> 0
donde θ(s) e I∗(s) representan la posicion (salida) y la consigna de corriente(entrada), respectivamente. En esta parte se disenara el siguiente controladorPID de posicion:
i∗ = kpe + kdde
dt+ ki
∫ t
0
e(r)dr, e = θd − θ
donde θd es la posicion deseada y las constantes kp, kd y ki se conocen comolas ganancias proporcional, derivativa e integral, respectivamente. Usando latransformada de Laplace se obtiene:
I∗(s) = kpE(s) + kdsE(s) + kiE(s)
s
=
(kp + kds +
ki
s
)E(s)
= kd
s2 +kp
kds + ki
kd
sE(s)
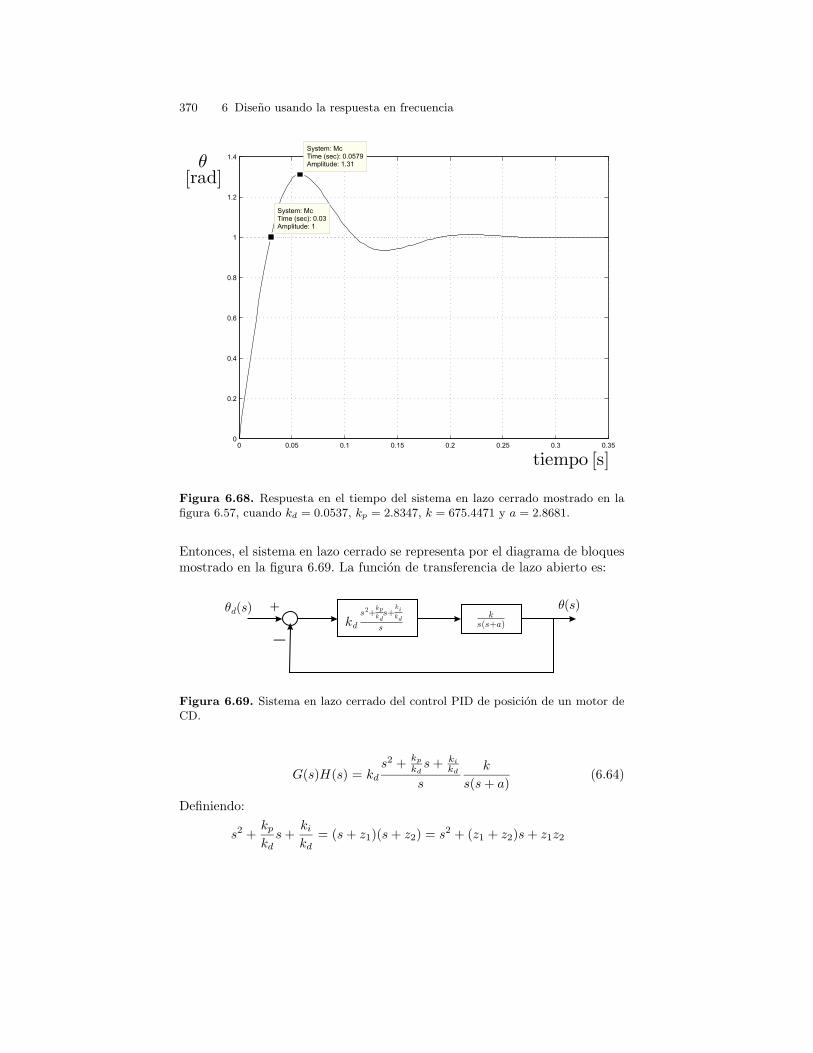
370 6 Diseno usando la respuesta en frecuencia
0 0.05 0.1 0.15 0.2 0.25 0.3 0.350
0.2
0.4
0.6
0.8
1
1.2
1.4
System: McTime (sec): 0.03Amplitude: 1
System: McTime (sec): 0.0579Amplitude: 1.31
tiempo s[ ]
òrad[ ]
Figura 6.68. Respuesta en el tiempo del sistema en lazo cerrado mostrado en lafigura 6.57, cuando kd = 0.0537, kp = 2.8347, k = 675.4471 y a = 2.8681.
Entonces, el sistema en lazo cerrado se representa por el diagrama de bloquesmostrado en la figura 6.69. La funcion de transferencia de lazo abierto es:
+
àkd s
s2+kd
kps+kd
ki
s(s+a)k
ò(s)òd(s)
Figura 6.69. Sistema en lazo cerrado del control PID de posicion de un motor deCD.
G(s)H(s) = kd
s2 +kp
kds + ki
kd
s
k
s(s + a)(6.64)
Definiendo:
s2 +kp
kds +
ki
kd= (s + z1)(s + z2) = s2 + (z1 + z2)s + z1z2

6.8 Ejemplos 371
se concluye que:
kp
kd= z1 + z2,
ki
kd= z1z2 (6.65)
En la figura 6.70 se muestra un bosquejo de la grafica polar de (6.64) cuandose recorre la trayectoria de Nyquist modificada mostrada en la figura 6.56.Notese que existen dos polos en s = 0 y se debe proceder de nuevo como enla seccion 6.8.3 para rodear el origen en el plano s. Esta es la razon para elcırculo de radio infinito en la figura 6.70. Ademas, no es difıcil darse cuentaque, para 0 < ω < +∞, la grafica polar del factor k
s2(s+a) es como la mostrada
en la figura 6.55, pero girada 90 en sentido horario (en sentido antihorariopara −∞ < ω < 0). Por tanto, el adelanto de fase debido al factor de segundo
orden s2 +kp
kds + ki
kddebe modificar la grafica polar como en la figura 6.70.
De este modo se obtiene estabilidad en lazo cerrado pues P = 0, N = 0 yZ = N + P = 0. Para alcanzar este objetivo se propone usar el siguientecriterio de diseno:
! = 0à
! = 0+ ! ! à1
! ! +1
r ! 1
à 1! = 0+ à 1 Re G j!( )H j!( )( )
Im G j!( )H j!( )( )
à 180î
+ 180î
Figura 6.70. Grafica polar de (6.64) cuando se recorre la trayectoria de Nyquistmodificada mostrada en la figura 6.56.
z1 = a (6.66)
porque esto simplifica a la funcion de transferencia de lazo abierto, presentadaen (6.64), del siguiente modo:
G(s)H(s) = kd(s + z2)k
s2(6.67)
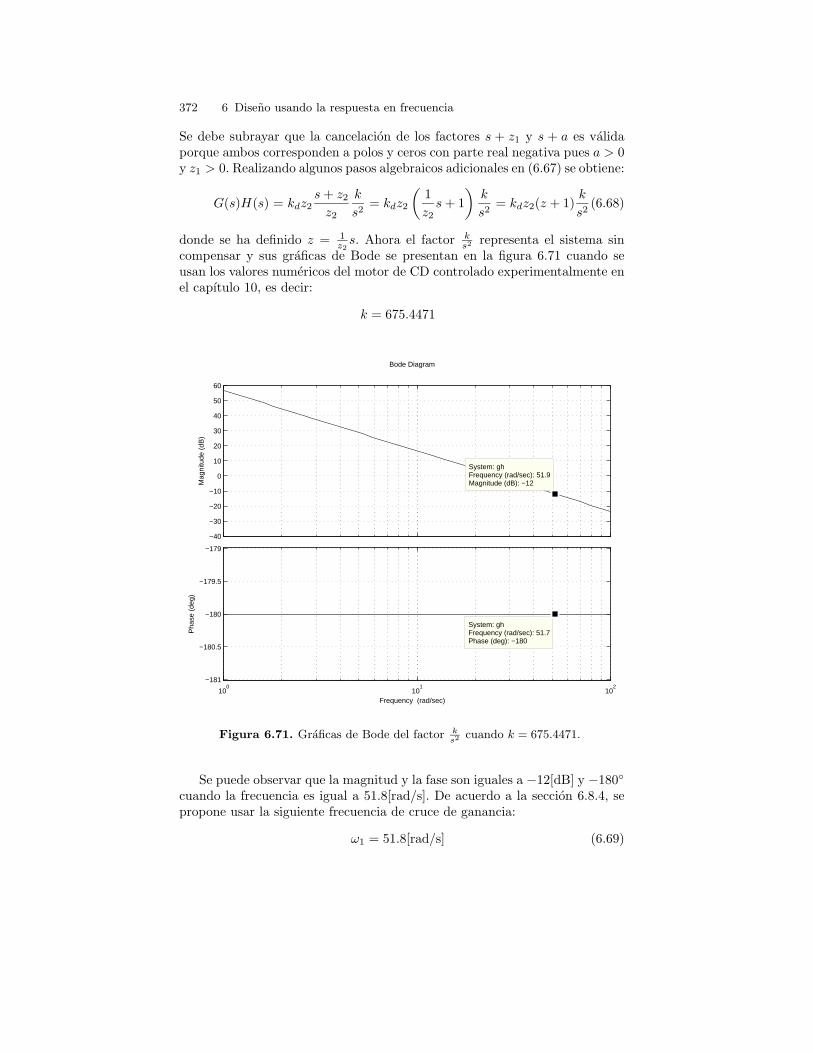
372 6 Diseno usando la respuesta en frecuencia
Se debe subrayar que la cancelacion de los factores s + z1 y s + a es validaporque ambos corresponden a polos y ceros con parte real negativa pues a > 0y z1 > 0. Realizando algunos pasos algebraicos adicionales en (6.67) se obtiene:
G(s)H(s) = kdz2s + z2
z2
k
s2= kdz2
(1
z2s + 1
)k
s2= kdz2(z + 1)
k
s2(6.68)
donde se ha definido z = 1z2
s. Ahora el factor ks2 representa el sistema sin
compensar y sus graficas de Bode se presentan en la figura 6.71 cuando seusan los valores numericos del motor de CD controlado experimentalmente enel capıtulo 10, es decir:
k = 675.4471
100
101
102
−181
−180.5
−180
−179.5
−179
System: ghFrequency (rad/sec): 51.7Phase (deg): −180
Pha
se (
deg)
Bode Diagram
Frequency (rad/sec)
−40
−30
−20
−10
0
10
20
30
40
50
60
System: ghFrequency (rad/sec): 51.9Magnitude (dB): −12M
agni
tude
(dB
)
Figura 6.71. Graficas de Bode del factor ks2 cuando k = 675.4471.
Se puede observar que la magnitud y la fase son iguales a −12[dB] y −180
cuando la frecuencia es igual a 51.8[rad/s]. De acuerdo a la seccion 6.8.4, sepropone usar la siguiente frecuencia de cruce de ganancia:
ω1 = 51.8[rad/s] (6.69)
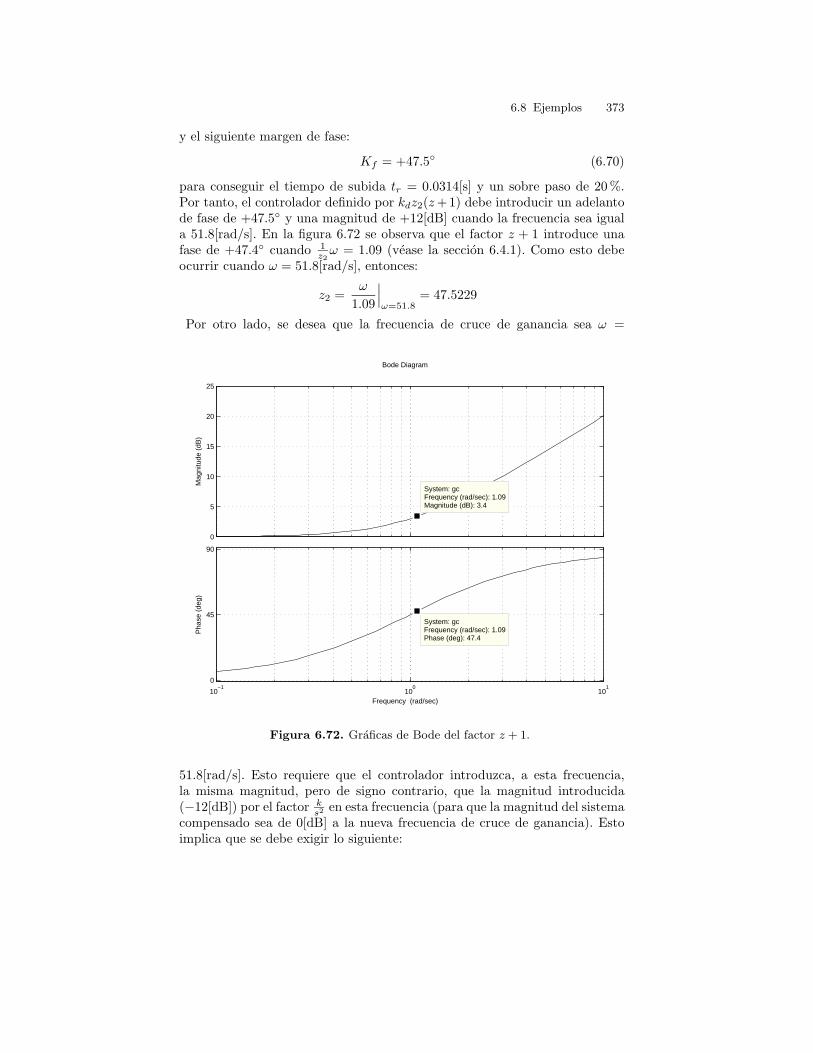
6.8 Ejemplos 373
y el siguiente margen de fase:
Kf = +47.5 (6.70)
para conseguir el tiempo de subida tr = 0.0314[s] y un sobre paso de 20%.Por tanto, el controlador definido por kdz2(z +1) debe introducir un adelantode fase de +47.5 y una magnitud de +12[dB] cuando la frecuencia sea iguala 51.8[rad/s]. En la figura 6.72 se observa que el factor z + 1 introduce unafase de +47.4 cuando 1
z2ω = 1.09 (vease la seccion 6.4.1). Como esto debe
ocurrir cuando ω = 51.8[rad/s], entonces:
z2 =ω
1.09
∣∣∣ω=51.8
= 47.5229
Por otro lado, se desea que la frecuencia de cruce de ganancia sea ω =
0
5
10
15
20
25
System: gcFrequency (rad/sec): 1.09Magnitude (dB): 3.4
Mag
nitu
de (
dB)
Bode Diagram
Frequency (rad/sec)10
−110
010
10
45
90
System: gcFrequency (rad/sec): 1.09Phase (deg): 47.4
Pha
se (
deg)
Figura 6.72. Graficas de Bode del factor z + 1.
51.8[rad/s]. Esto requiere que el controlador introduzca, a esta frecuencia,la misma magnitud, pero de signo contrario, que la magnitud introducida(−12[dB]) por el factor k
s2 en esta frecuencia (para que la magnitud del sistemacompensado sea de 0[dB] a la nueva frecuencia de cruce de ganancia). Estoimplica que se debe exigir lo siguiente:

374 6 Diseno usando la respuesta en frecuencia
|kdz2(z + 1)|dB = 20 log(kdz2) + |z + 1|dB = 12[dB] (6.71)
donde, de acuerdo a la figura 6.72, se debe usar |z+1|dB = 3.4[dB]. Por tanto,despejando kd y realizando los calculos correspondientes se encuentra:
kd =1
z210
12−3.420 = 0.0566
Finalmente, usando (6.65), (6.66) y a = 2.8681 (vease el capıtulo 10) se ob-tiene:
kp = kd(z1 + z2) = 2.8540, ki = kdz1z2 = 7.7196
En la figura 6.73 se muestran las graficas de Bode de la funcion de transferenciade lazo abierto, del sistema compensado, mostrada en (6.64). En esta figurase puede verificar que la frecuencia de cruce de ganancia es ω = 51.8[rad/s]y que la fase a esa frecuencia es −133, lo cual corresponde a un margende fase de +47. Esto significa que se han conseguido las especificaciones derespuesta en frecuencia establecidas en (6.69) y (6.70). Por otro lado, en lafigura 6.74 se muestra la respuesta en el tiempo, del sistema en lazo cerradocorrespondiente, cuando el valor deseado de posicion es un escalon unitario. Sepuede observar que el tiempo de subida es de 0.0291[s] y que el sobre paso esdel 33%. Aunque estos valores no son exactamente iguales a los especificadosal principio (tr = 0.0314[s] y Mp = 20%), sin embargo son relativamentecercanos. La razon de esta diferencia y la manera de corregirla ya ha sidoexplicada en la seccion 6.8.3 por lo que se sugiere consultar dicha parte de lapresente obra.
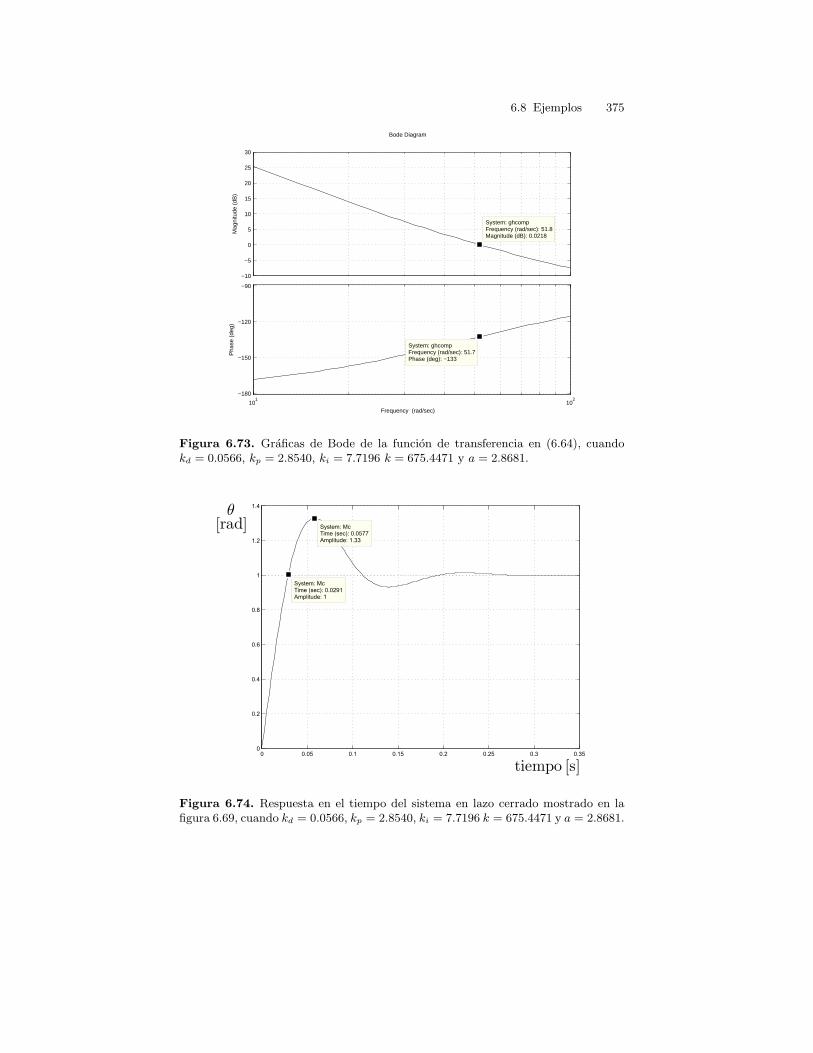
6.8 Ejemplos 375
Bode Diagram
Frequency (rad/sec)
−10
−5
0
5
10
15
20
25
30
System: ghcompFrequency (rad/sec): 51.8Magnitude (dB): 0.0218
Mag
nitu
de (
dB)
101
102
−180
−150
−120
−90
System: ghcompFrequency (rad/sec): 51.7Phase (deg): −133
Pha
se (
deg)
Figura 6.73. Graficas de Bode de la funcion de transferencia en (6.64), cuandokd = 0.0566, kp = 2.8540, ki = 7.7196 k = 675.4471 y a = 2.8681.
0 0.05 0.1 0.15 0.2 0.25 0.3 0.350
0.2
0.4
0.6
0.8
1
1.2
1.4
System: McTime (sec): 0.0291Amplitude: 1
System: McTime (sec): 0.0577Amplitude: 1.33
tiempo s[ ]
òrad[ ]
Figura 6.74. Respuesta en el tiempo del sistema en lazo cerrado mostrado en lafigura 6.69, cuando kd = 0.0566, kp = 2.8540, ki = 7.7196 k = 675.4471 y a = 2.8681.

376 6 Diseno usando la respuesta en frecuencia
6.9. Caso de estudio. Control PID de un sistema delevitacion magnetica
Considere el modelo de un sistema de levitacion magnetica presentadoen (11.31), capıtulo 11, el cual se reescribe a continuacion para facilitar lareferencia:
G(s) =11613700
s3 + 2739s2 − 1250s − 3.536 × 106
El polinomio caracterıstico de esta funcion de transferencia se puede factorizardel siguiente modo s3 +2739s2−1250s−3.536×106 = (s+35.9)(s−35.9)(s+2739). Ası que este sistema es inestable en lazo abierto debido a que tiene unpolo con parte real positiva ubicado en s = 35.9. Para resolver este problemase usara el siguiente controlador PID (vease la seccion 6.8.5):
kd
s2 +kp
kds + ki
kd
s= kd(s + z1)(s + z2) = kd(s
2 + (z1 + z2)s + z1z2)
kp
kd= z1 + z2,
ki
kd= z1z2 (6.72)
Entonces la funcion de transferencia de lazo abierto es:
G(s)H(s) = kd(s + z1)(s + z2)
s
k
s3 + 2739s2 − 1250s − 3.536 × 106(6.73)
= kd(s + z1)(s + z2)
s
k
(s + 35.9)(s − 35.9)(s + 2739), k = 11613700
De esta manera, el sistema es de tipo 1 y, ante una referencia constante, elerror en estado estacionario sera igual a cero si el sistema en lazo cerradoes estable. El controlador PID debera ser disenado para asegurar que estacondicion se cumple. Para esto se considerara el siguiente criterio de diseno:
z1 = 35.9 (6.74)
De este modo se obtiene:
G(s)H(s) = kd(s + z2)k
s(s − 35.9)(s + 2739)
o bien:
G(s)H(s) = kdz2(z + 1)k
s(s − 35.9)(s + 2739)(6.75)
donde se ha definido z = 1z2
s. Se debe subrayar que la cancelacion de losfactores s+z1 y s+35.9 es valida porque ambos corresponden a polos y ceroscon parte real negativa pues 35.9 > 0 y z1 > 0. En la figura 6.75 se muestraun bosquejo de las graficas de Bode de la funcion de transferencia:
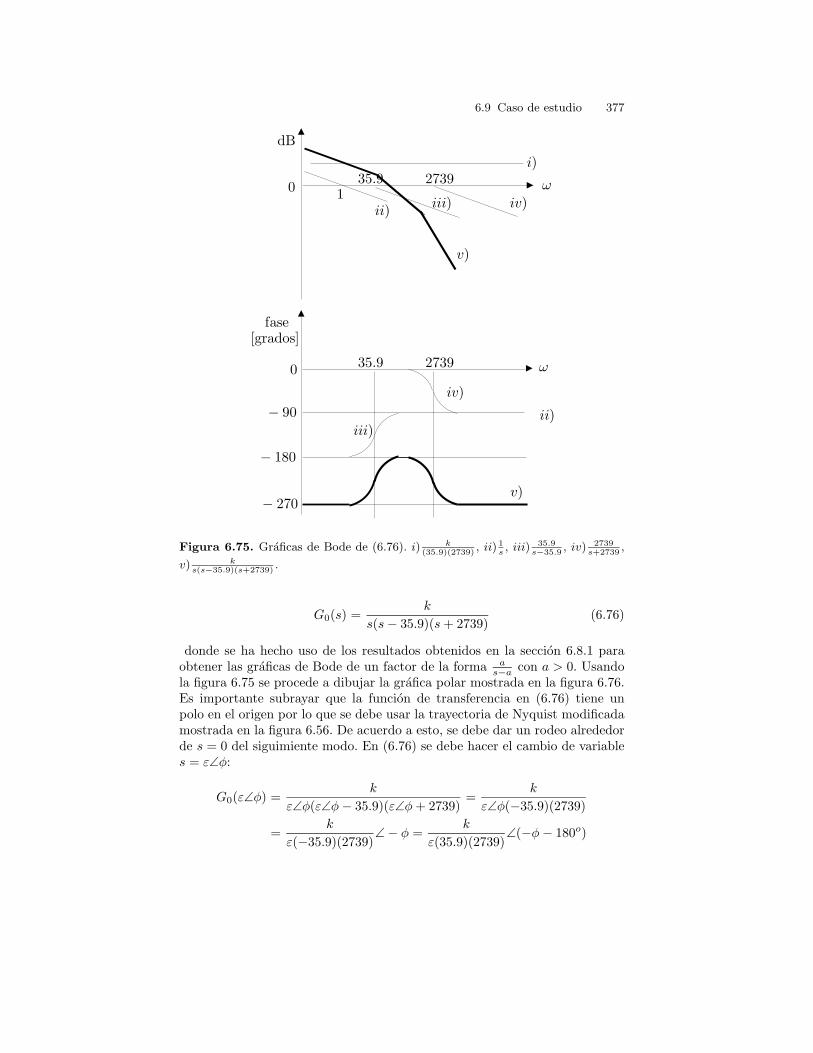
6.9 Caso de estudio 377
!
i)
ii)iii) iv)
0
dB
v)
0
fasegrados[ ]
à 90
!
iii)
iv)
v)
ii)
à 180
à 270
273935:91
35:9 2739
Figura 6.75. Graficas de Bode de (6.76). i) k(35.9)(2739)
, ii) 1s, iii) 35.9
s−35.9, iv) 2739
s+2739,
v) ks(s−35.9)(s+2739)
.
G0(s) =k
s(s − 35.9)(s + 2739)(6.76)
donde se ha hecho uso de los resultados obtenidos en la seccion 6.8.1 paraobtener las graficas de Bode de un factor de la forma a
s−a con a > 0. Usandola figura 6.75 se procede a dibujar la grafica polar mostrada en la figura 6.76.Es importante subrayar que la funcion de transferencia en (6.76) tiene unpolo en el origen por lo que se debe usar la trayectoria de Nyquist modificadamostrada en la figura 6.56. De acuerdo a esto, se debe dar un rodeo alrededorde s = 0 del siguimiente modo. En (6.76) se debe hacer el cambio de variables = ε∠φ:
G0(ε∠φ) =k
ε∠φ(ε∠φ − 35.9)(ε∠φ + 2739)=
k
ε∠φ(−35.9)(2739)
=k
ε(−35.9)(2739)∠ − φ =
k
ε(35.9)(2739)∠(−φ − 180o)

378 6 Diseno usando la respuesta en frecuencia
recordando que ε → 0. Esto justifica el semicırculo de radio infinito que
! = 0à
! = 0+
! ! +1
! ! à1
r ! 1
à 1
à 270o
Re j!( )( )
Im j!( )( )
à 90o
G0
G0
Figura 6.76. Grafica polar de (6.76) cuando se recorre la trayectoria de Nyquistmodificada mostrada en la figura 6.56.
pasa de −90 cuando ω = 0− a −270 cuando ω = 0+ (vease la figura 6.56).En la figura 6.76 es claro que N = 1 y como P = 1 (vease (6.76) entoncesZ = N+P = 2, por lo que habrıa inestabilidad en lazo cerrado. Por esta razon,para conseguir estabilidad en lazo cerrado usando la funcion de transferenciade lazo abierto (6.75) (con un controlador PID), el factor kdz2(z + 1) debeintroducir un adelanto de fase suficiente como para que se obtenga una graficapolar como se muestra en la figura 6.77. De este modo N = −1 y como P = 1entonces Z = N + P = 0 y el sistema en lazo cerrado sera estable. En lafigura 6.78 se muestran las graficas de bode de (6.76). Se puede observar quela magnitud y la fase son iguales a 0[dB] y −212 cuando la frecuencia es iguala 60[rad/s]. Se propone mantener la misma frecuencia de cruce de ganancia:
ω1 = 60[rad/s] (6.77)
y conseguir el siguiente margen de fase3:
Kf = +20 (6.78)
3 Aunque el margen de fase fue presentado en la seccion 6.6 para sistemas de fasemınima, este concepto es aplicable de manera directa en este ejemplo
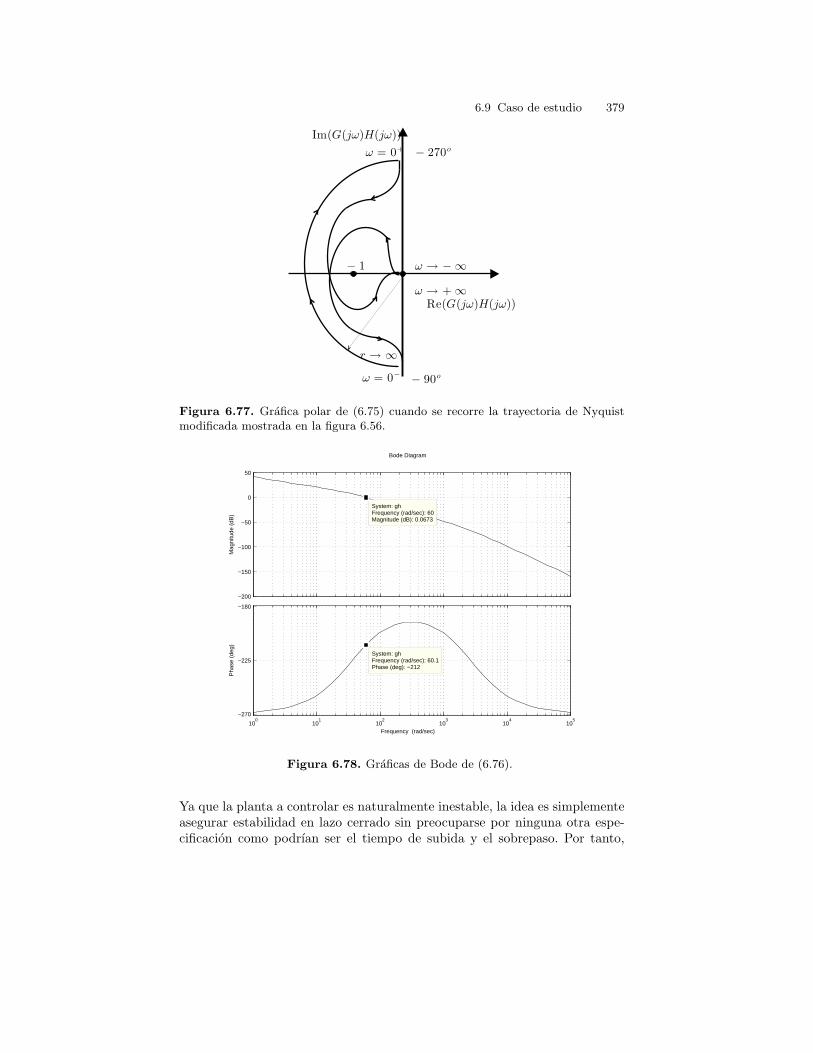
6.9 Caso de estudio 379
! = 0à
! = 0+
! ! +1
! ! à1
r ! 1
à 1
à 270o
à 90o
Im(G(j!)H(j!))
Re(G(j!)H(j!))
Figura 6.77. Grafica polar de (6.75) cuando se recorre la trayectoria de Nyquistmodificada mostrada en la figura 6.56.
100
101
102
103
104
105
−270
−225
−180
System: ghFrequency (rad/sec): 60.1Phase (deg): −212
Pha
se (
deg)
Bode Diagram
Frequency (rad/sec)
−200
−150
−100
−50
0
50
System: ghFrequency (rad/sec): 60Magnitude (dB): 0.0673
Mag
nitu
de (
dB)
Figura 6.78. Graficas de Bode de (6.76).
Ya que la planta a controlar es naturalmente inestable, la idea es simplementeasegurar estabilidad en lazo cerrado sin preocuparse por ninguna otra espe-cificacion como podrıan ser el tiempo de subida y el sobrepaso. Por tanto,
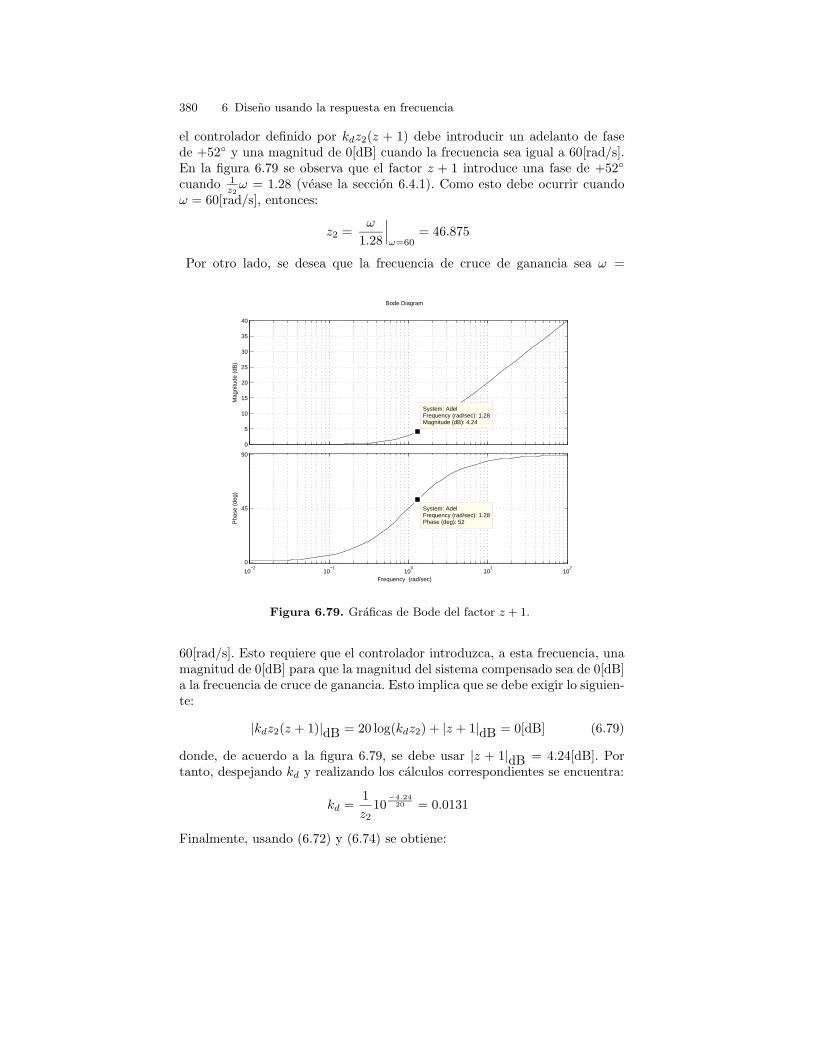
380 6 Diseno usando la respuesta en frecuencia
el controlador definido por kdz2(z + 1) debe introducir un adelanto de fasede +52 y una magnitud de 0[dB] cuando la frecuencia sea igual a 60[rad/s].En la figura 6.79 se observa que el factor z + 1 introduce una fase de +52
cuando 1z2
ω = 1.28 (vease la seccion 6.4.1). Como esto debe ocurrir cuandoω = 60[rad/s], entonces:
z2 =ω
1.28
∣∣∣ω=60
= 46.875
Por otro lado, se desea que la frecuencia de cruce de ganancia sea ω =
Bode Diagram
Frequency (rad/sec)10
−210
−110
010
110
20
45
90
System: AdelFrequency (rad/sec): 1.28Phase (deg): 52P
hase
(de
g)
0
5
10
15
20
25
30
35
40
System: AdelFrequency (rad/sec): 1.28Magnitude (dB): 4.24
Mag
nitu
de (
dB)
Figura 6.79. Graficas de Bode del factor z + 1.
60[rad/s]. Esto requiere que el controlador introduzca, a esta frecuencia, unamagnitud de 0[dB] para que la magnitud del sistema compensado sea de 0[dB]a la frecuencia de cruce de ganancia. Esto implica que se debe exigir lo siguien-te:
|kdz2(z + 1)|dB = 20 log(kdz2) + |z + 1|dB = 0[dB] (6.79)
donde, de acuerdo a la figura 6.79, se debe usar |z + 1|dB = 4.24[dB]. Portanto, despejando kd y realizando los calculos correspondientes se encuentra:
kd =1
z210
−4.2420 = 0.0131
Finalmente, usando (6.72) y (6.74) se obtiene:

6.9 Caso de estudio 381
kp = kd(z1 + z2) = 1.0838, ki = kdz1z2 = 22.0341
En la figura 6.80 se muestran las graficas de Bode de la funcion de transferenciade lazo abierto del sistema compensado (dada en (6.73), es decir, G(s)H(s) =(kp + kds + ki
s
)× k
s3+2739s2−1250s−3.536×106 ). En esta figura se puede verificarque la frecuencia de cruce de ganancia es ω = 60[rad/s] y que la fase a esafrecuencia es −160, lo cual corresponde a un margen de fase de +20. Estosignifica que se han conseguido las especificaciones de respuesta en frecuenciaestablecidas en (6.77) y (6.78). Finalmente, en la figura 6.81 se muestra larespuesta en el tiempo, ante un escalon unitario, cuando se cierra el lazoalrededor de G(s)H(s) =
(kp + kds + ki
s
)k
s3+2739s2−1250s−3.536×106 . Se puedeobservar que el tiempo de subida es de 0.0166[s] y que el sobre paso es del 89%.Como se dijo anteriormente, no se ha procurado hacer nada por conseguirun tiempo de subida y un sobre paso especıficos y solo se busca asegurarla estabilidad en lazo cerrado. Por esta razon, la respuesta en el tiempo dela figura 6.81 se considera satisfactoria. Se deja como ejercicio al lector elconseguir un diseno con el cual se consiga una respuesta mas amortiguada.Para esto, debe especificar un margen de fase mayor.
Bode Diagram
Frequency (rad/sec)
−100
−50
0
50
System: ghFrequency (rad/sec): 60Magnitude (dB): 0.0784
Mag
nitu
de (
dB)
100
101
102
103
104
105
−270
−225
−180
−135
−90
System: ghFrequency (rad/sec): 60Phase (deg): −160
Pha
se (
deg)
Figura 6.80. Graficas de Bode de la funcion de transferencia en (6.73), es de-
cir, G(s)H(s) =(kp + kds + ki
s
)k
s3+2739s2−1250s−3.536×106 con kd = 0.0131, kp =
1.0838, ki = 22.0341.
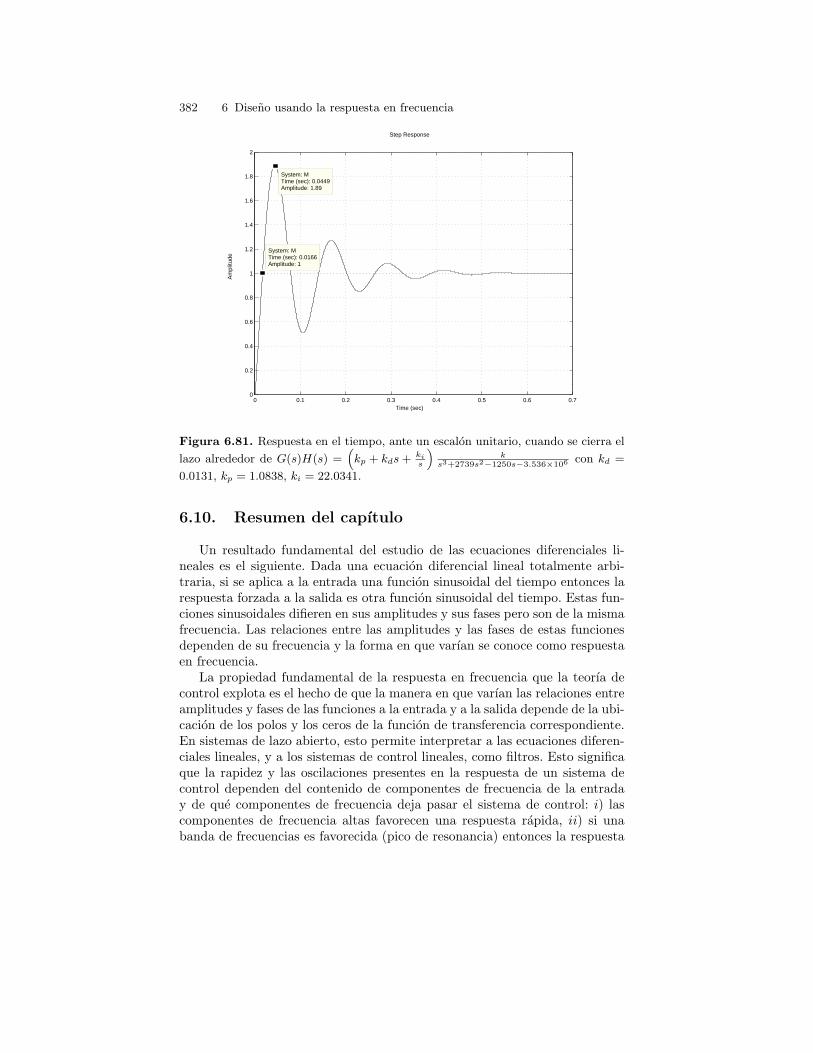
382 6 Diseno usando la respuesta en frecuencia
Step Response
Time (sec)
Am
plitu
de
0 0.1 0.2 0.3 0.4 0.5 0.6 0.70
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
System: MTime (sec): 0.0166Amplitude: 1
System: MTime (sec): 0.0449Amplitude: 1.89
Figura 6.81. Respuesta en el tiempo, ante un escalon unitario, cuando se cierra el
lazo alrededor de G(s)H(s) =(kp + kds + ki
s
)k
s3+2739s2−1250s−3.536×106 con kd =
0.0131, kp = 1.0838, ki = 22.0341.
6.10. Resumen del capıtulo
Un resultado fundamental del estudio de las ecuaciones diferenciales li-neales es el siguiente. Dada una ecuacion diferencial lineal totalmente arbi-traria, si se aplica a la entrada una funcion sinusoidal del tiempo entonces larespuesta forzada a la salida es otra funcion sinusoidal del tiempo. Estas fun-ciones sinusoidales difieren en sus amplitudes y sus fases pero son de la mismafrecuencia. Las relaciones entre las amplitudes y las fases de estas funcionesdependen de su frecuencia y la forma en que varıan se conoce como respuestaen frecuencia.
La propiedad fundamental de la respuesta en frecuencia que la teorıa decontrol explota es el hecho de que la manera en que varıan las relaciones entreamplitudes y fases de las funciones a la entrada y a la salida depende de la ubi-cacion de los polos y los ceros de la funcion de transferencia correspondiente.En sistemas de lazo abierto, esto permite interpretar a las ecuaciones diferen-ciales lineales, y a los sistemas de control lineales, como filtros. Esto significaque la rapidez y las oscilaciones presentes en la respuesta de un sistema decontrol dependen del contenido de componentes de frecuencia de la entraday de que componentes de frecuencia deja pasar el sistema de control: i) lascomponentes de frecuencia altas favorecen una respuesta rapida, ii) si unabanda de frecuencias es favorecida (pico de resonancia) entonces la respuesta
6.11 Preguntas de repaso 383
es oscilatoria, iii) del tratamiento que se de a las componentes de frecuenciasbajas (cero) depende el valor de la salida en estado estacionario, iv) el efectodel ruido se reduce si las componentes de muy alta frecuencia son fuertementeatenuadas.
Un logro importante del estudio de los sistemas de control bajo el en-foque de la respuesta en frecuencia es el poder relacionar las caracterısticasde respuesta en frecuencia en lazo abierto (frecuencia de cruce de gananciay margenes de estabilidad) con las caracterısticas de respuesta en el tiempo(rapidez y oscilaciones de la respuesta) del sistema de control en lazo cerrado.De esta manera se puede disenar un controlador buscando que este modifiqueconvenientemente las graficas de respuesta en frecuencia del sistema en lazoabierto.
6.11. Preguntas de repaso
1. ¿Que entiende por respuesta en frecuencia? ¿Que representan la magnitudy la fase de una funcion de transferencia?
2. Las funciones de transferencia estan constituidas por polos y ceros ¿Cualesde estos componentes contribuyen como filtros pasa altas y cuales comofiltros pasa bajas? ¿Cuales de ellos introducen fase positiva y cuales fasenegativa?
3. Dado un sistema de control en lazo cerrado ¿Por que los ceros contribuyena la estabilidad cuando son colocados en la funcion de transferencia de lazoabierto? ¿Como contribuyen los polos de lazo abierto a la estabilidad?¿Cual es la ventaja de agregar polos en la funcion de transferencia de lazoabierto?
4. ¿Cual es la relacion del criterio de estabilidad de Nyquist con los margenesde estabilidad?
5. Dado un sistema en lazo abierto ¿Por que una frecuencia de corte (ode esquina) mayor contribuye a una mayor rapidez de la respuesta en eltiempo?
6. ¿Que se debe hacer con la frecuencia de cruce de ganancia para conse-guir que el sistema en lazo cerrado tenga una respuesta mas rapida en eltiempo?
7. ¿Como afecta el margen de fase a la respuesta en el tiempo del sistemaen lazo cerrado?
8. ¿Cual es la modificacion que se debe hacer al criterio de estabilidad deNyquist para que pueda ser aplicado a funciones de transferencia de lazoabierto con polos y/o ceros sobre el eje imaginario? ¿Cual es la razon paraesto?
9. ¿Que es un sistema de fase mınima?10. ¿Que es la trayectoria de Nyquist y que es la trayectoria de Nyquist mo-
dificada?

384 6 Diseno usando la respuesta en frecuencia
6.12. Ejercicios propuestos
1. ¿Como obtiene el error en estado estacionario de un sistema en lazo cerra-do ante referencias tipo escalon, rampa y parabola, a partir de las graficasde Bode? Investigue.
2. Considere un sistema integrador:
y(t) = k
∫ t
0
u dt
y un sistema derivador:
y(t) = ku(t)
a) En ambos casos suponga que u = A cos(ωt), con A una constante,y calcule y(t). Haga una grafica donde muestre como varıa la ampli-tud de y(t) respecto de la frecuencia en cada caso y compare con lasgraficas de Bode mostradas en las figuras 6.13(a) y 6.13(b).
b) ¿Cual es el efecto de un derivador cuando u tiene alto contenido deruido? (sinusoide de alta frecuencia). En base a lo anterior respondaque piensa que sucedera en los siguientes casos: ¿Que efecto tieneun controlador que contiene alguna accion derivativa en un sistemade control de posicion que tiene alto contenido de ruido? ¿Cual esel efecto del ruido en un sistema de control que contiene una accionintegral unicamente?
c) Considere el caso de un piston neumatico. El flujo de aire de entradaes u y la posicion del embolo del piston es y. Suponga que el aire nose comprime ni se expande (que es incompresible) dentro del piston yque el embolo del piston no tiene masa. Si se extrae flujo de aire delpiston entonces u < 0, si se introduce flujo de aire al piston entoncesu > 0. Bajo estas condiciones este sistema se comporta como un inte-grador. Suponga que se aplica una entrada de la forma u = A cos(ωt)con un valor de ω que cada vez se acerca mas a cero. Usando su ex-periencia cotidiana explique que sucede con la posicion del piston ycompare con lo que indican las graficas de Bode correspondientes aeste problema y las graficas obtenidas en el primer inciso de este ejer-cicio. ¿Que significa el termino “ganancia infinita a frecuencia cero”?Aunque un motor de CD con escobillas no es exactamente un integra-dor, use su experiencia cotidiana para ver si tiene un comportamientosimilar al descrito cuando y es la posicion y u = A cos(ωt) el voltajeaplicado. Desde el punto de vista del modelo del motor ¿Como puedeexplicar este comportamiento?
3. Considere el siguiente sistema:
Y (s) =a
s + aU(s), a > 0
6.12 Ejercicios propuestos 385
Suponga que u(t) es una onda cuadrada (de perıodo igual a 2) que esigual a la unidad durante el primer medio perıodo e igual a cero durante elsegundo medio perıodo. Utilice algun software especializado para realizarvarias simulaciones utilizando diferentes valores de a desde valores muycercanos a cero hasta valores considerablemente grandes. Observe la formade y(t) en estas simulaciones. ¿Por que cree que y(t) sea muy diferentede u(t) cuando a es muy cercana a cero? ¿Por que cree que y(t) sea cadavez mas parecida a u(t) cuando a es considerablemente grande? ¿Puedeexplicar este comportamiento desde el punto de vista de conceptos basadosen la respuesta en frecuencia de la funcion de transferencia a
s+a?4. Existe un resultado fundamental en la teorıa de sistemas lineales que afir-
ma que si Y (s) = G(s)U(s) con u(t) una funcion periodica y si todoslos polos de G(s) tienen parte real estrictamente negativa, entonces y(t)converge a una funcion periodica con el mismo perıodo de u(t) pero posi-blemente no con la misma forma de onda [5], pag. 389 (vease tambien elejercicio 13 del capıtulo 3) ¿El ejemplo planteado en el ejercicio 3 de estecapıtulo le sugiere alguna explicacion acerca de porque u(t) y y(t) puedanno tener la misma forma de onda? ¿De que depende el que las formas deonda de u(t) y y(t) sean parecidas o muy diferentes?
5. Considere la siguiente ecuacion diferencial:
y + ω2ny = ω2
nu
El problema de calcular y(t) cuando t → ∞ y u(t) = A sin(ωt) se simplificaenormemente usando las graficas de Bode de la figura 6.14(b). Usando estainformacion elabore graficas donde se aprecie como cambia y(t) cuandot → ∞ conforme ω cambia desde un valor ω = ω1 < ωn hasta otro valorω = ω2 > ωn.A partir de lo anterior explique que sucede cuando se hace el mismo ex-perimento pero ahora se tiene una ecuacion diferencial como la siguiente:
y + 2ζωny + ω2ny = ω2
nu
con ωn > 0 y ζ > 0. ¿Que sucede conforme ζ crece? ¿Por que la resonanciase considera peligrosa en muchas aplicaciones?
6. Considere un sistema en lazo cerrado como el de la figura 4.10 y la corres-pondiente expresion para el error dada como E(s) = 1
1+G(s)R(s) donde
E(s) = R(s) − C(s). Si el valor deseado es una sinusoide r(t) = A sin(ωt)¿Que debe hacer para que el error lımt→∞ e(t) sea cada vez menor? ¿Es po-sible que se pueda tener que lımt→∞ e(t) = 0? Si la respuesta es afirmativa,¿Bajo que condiciones? Verifique su respuesta mediante una simulacion.
7. Considere el circuito RLC paralelo mostrado en la figura 6.82. Demuestreque la funcion de transferencia esta dada como:
V (s)
I(s)=
kω2ns
s2 + 2ζωns + ω2n
(6.80)

386 6 Diseno usando la respuesta en frecuencia
donde ωn = 1√LC
, ζ = 12R
√LC , k = L. Dibuje las graficas de Bode corres-
pondientes cuando ζ es cercana a cero (¿Como puede ser esto posible en lapractica?) y compruebe que se trata de un filtro pasa banda alrededor dela frecuencia ω ≈ ωn (de hecho ω → ωn conforme ζ → 0). ¿Como puedevariar el valor de ωn en la practica?
LL CR
+
à
V(s)
I(s)
Figura 6.82. Circuito RLC paralelo.
Una aplicacion interesante e importante de este ejercicio es el radio-receptor de AM mostrado en la figura 6.83 [6], pag. 94-99. Se sugiereal lector que construya este receptor pues no es difıcil hacerlo y a conti-nuacion se detalla sobre la elaboracion de las partes mas importantes.La inductancia se construye enrollando alambre magneto sobre un nucleocilındrico de carton o de plastico de aproximadamente 2.6[cm] de diametroy aproximadamente 10[cm] de largo. Las espiras deben estar colocadasuna junto a la otra sin encimarse y sin dejar huecos apreciables entreellas. Entonces se utiliza papel lija para retirar completamente el barnizque cubre al alambre de cobre sobre una franja a lo largo de todo elcilindro de aproximadamente 0.5[cm] de ancho. Entonces, la inductanciaL se puede variar deslizando un contacto electrico a lo largo de esta franjade alambre desnudo.La antena consiste de un alambre de cobre de 30[m] de largo. Uno de losextremos se fija, a traves de material aislante, a un punto solido sobreuna pared o un poste mientras que el otro extremo se conecta al circuitosintonizador (LC en paralelo). Es importante que la antena no tenga con-tacto electrico con ningun punto que no sea el indicado en la figura 6.83.Notese que la funcion de la antena es recoger la senales electricas que sontransportadas por las ondas electromagneticas que emiten las estacionesradiodifusoras comerciales de AM. Mientras mas larga sea la antena masintensas seran las senales recuperadas.La conexion a tierra se realiza conectando firmemente dicho punto a unatuberıa de agua de cobre. Es importante que la tuberıa sea de cobre y quellegue a una profundidad suficiente dentro del suelo.
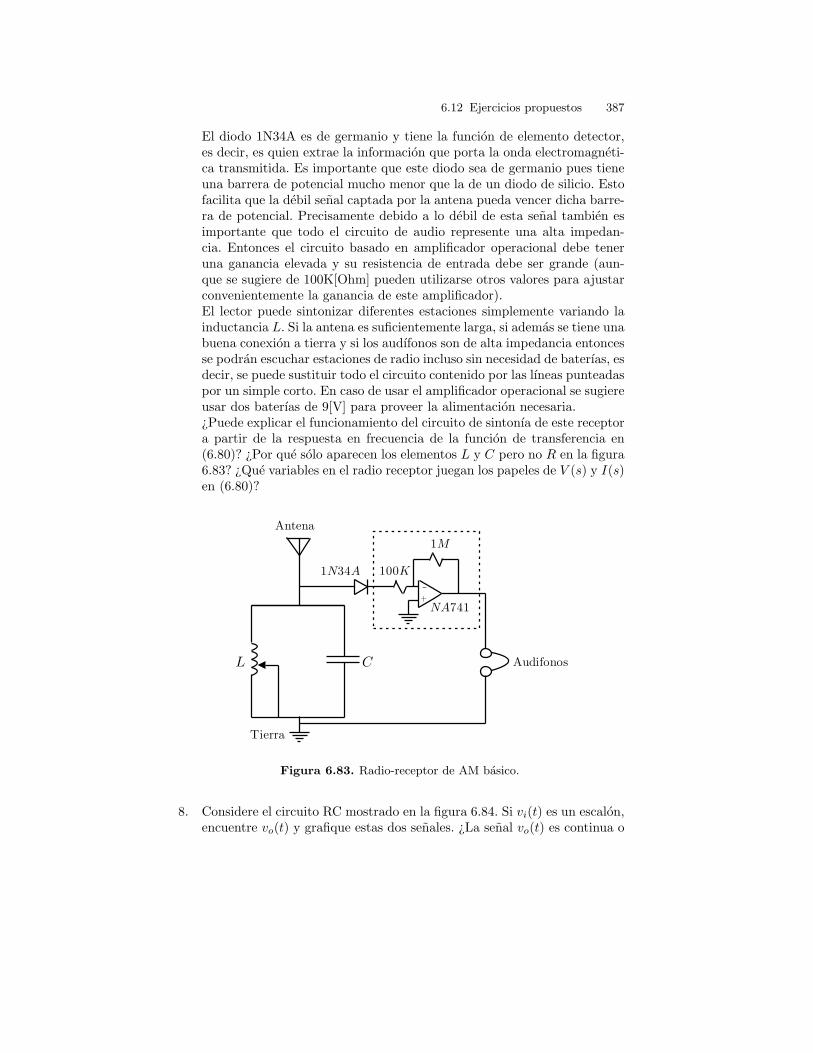
6.12 Ejercicios propuestos 387
El diodo 1N34A es de germanio y tiene la funcion de elemento detector,es decir, es quien extrae la informacion que porta la onda electromagneti-ca transmitida. Es importante que este diodo sea de germanio pues tieneuna barrera de potencial mucho menor que la de un diodo de silicio. Estofacilita que la debil senal captada por la antena pueda vencer dicha barre-ra de potencial. Precisamente debido a lo debil de esta senal tambien esimportante que todo el circuito de audio represente una alta impedan-cia. Entonces el circuito basado en amplificador operacional debe teneruna ganancia elevada y su resistencia de entrada debe ser grande (aun-que se sugiere de 100K[Ohm] pueden utilizarse otros valores para ajustarconvenientemente la ganancia de este amplificador).El lector puede sintonizar diferentes estaciones simplemente variando lainductancia L. Si la antena es suficientemente larga, si ademas se tiene unabuena conexion a tierra y si los audıfonos son de alta impedancia entoncesse podran escuchar estaciones de radio incluso sin necesidad de baterıas, esdecir, se puede sustituir todo el circuito contenido por las lıneas punteadaspor un simple corto. En caso de usar el amplificador operacional se sugiereusar dos baterıas de 9[V] para proveer la alimentacion necesaria.¿Puede explicar el funcionamiento del circuito de sintonıa de este receptora partir de la respuesta en frecuencia de la funcion de transferencia en(6.80)? ¿Por que solo aparecen los elementos L y C pero no R en la figura6.83? ¿Que variables en el radio receptor juegan los papeles de V (s) y I(s)en (6.80)?
L C
+à
100K
1M
NA741
1N34A
Antena
Audifonos
Tierra
Figura 6.83. Radio-receptor de AM basico.
8. Considere el circuito RC mostrado en la figura 6.84. Si vi(t) es un escalon,encuentre vo(t) y grafique estas dos senales. ¿La senal vo(t) es continua o
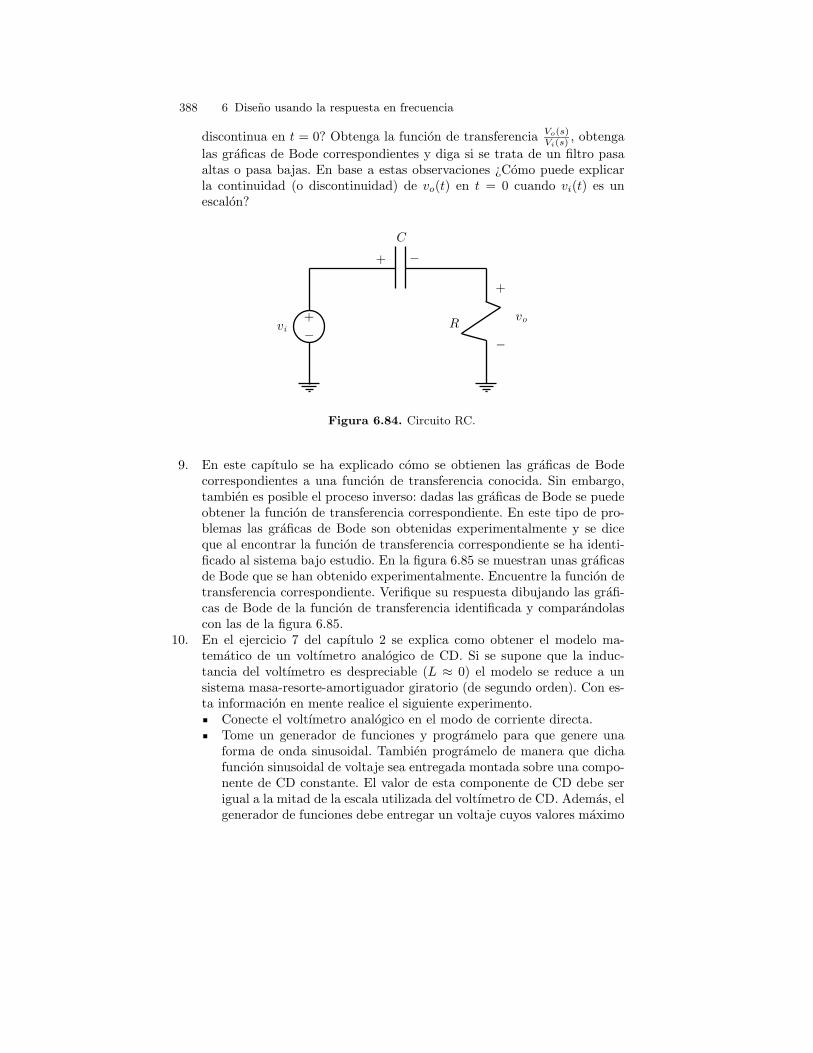
388 6 Diseno usando la respuesta en frecuencia
discontinua en t = 0? Obtenga la funcion de transferencia Vo(s)Vi(s)
, obtenga
las graficas de Bode correspondientes y diga si se trata de un filtro pasaaltas o pasa bajas. En base a estas observaciones ¿Como puede explicarla continuidad (o discontinuidad) de vo(t) en t = 0 cuando vi(t) es unescalon?
+
àR
C
vivo
+
à
+ à
Figura 6.84. Circuito RC.
9. En este capıtulo se ha explicado como se obtienen las graficas de Bodecorrespondientes a una funcion de transferencia conocida. Sin embargo,tambien es posible el proceso inverso: dadas las graficas de Bode se puedeobtener la funcion de transferencia correspondiente. En este tipo de pro-blemas las graficas de Bode son obtenidas experimentalmente y se diceque al encontrar la funcion de transferencia correspondiente se ha identi-ficado al sistema bajo estudio. En la figura 6.85 se muestran unas graficasde Bode que se han obtenido experimentalmente. Encuentre la funcion detransferencia correspondiente. Verifique su respuesta dibujando las grafi-cas de Bode de la funcion de transferencia identificada y comparandolascon las de la figura 6.85.
10. En el ejercicio 7 del capıtulo 2 se explica como obtener el modelo ma-tematico de un voltımetro analogico de CD. Si se supone que la induc-tancia del voltımetro es despreciable (L ≈ 0) el modelo se reduce a unsistema masa-resorte-amortiguador giratorio (de segundo orden). Con es-ta informacion en mente realice el siguiente experimento.
Conecte el voltımetro analogico en el modo de corriente directa.Tome un generador de funciones y programelo para que genere unaforma de onda sinusoidal. Tambien programelo de manera que dichafuncion sinusoidal de voltaje sea entregada montada sobre una compo-nente de CD constante. El valor de esta componente de CD debe serigual a la mitad de la escala utilizada del voltımetro de CD. Ademas, elgenerador de funciones debe entregar un voltaje cuyos valores maximo
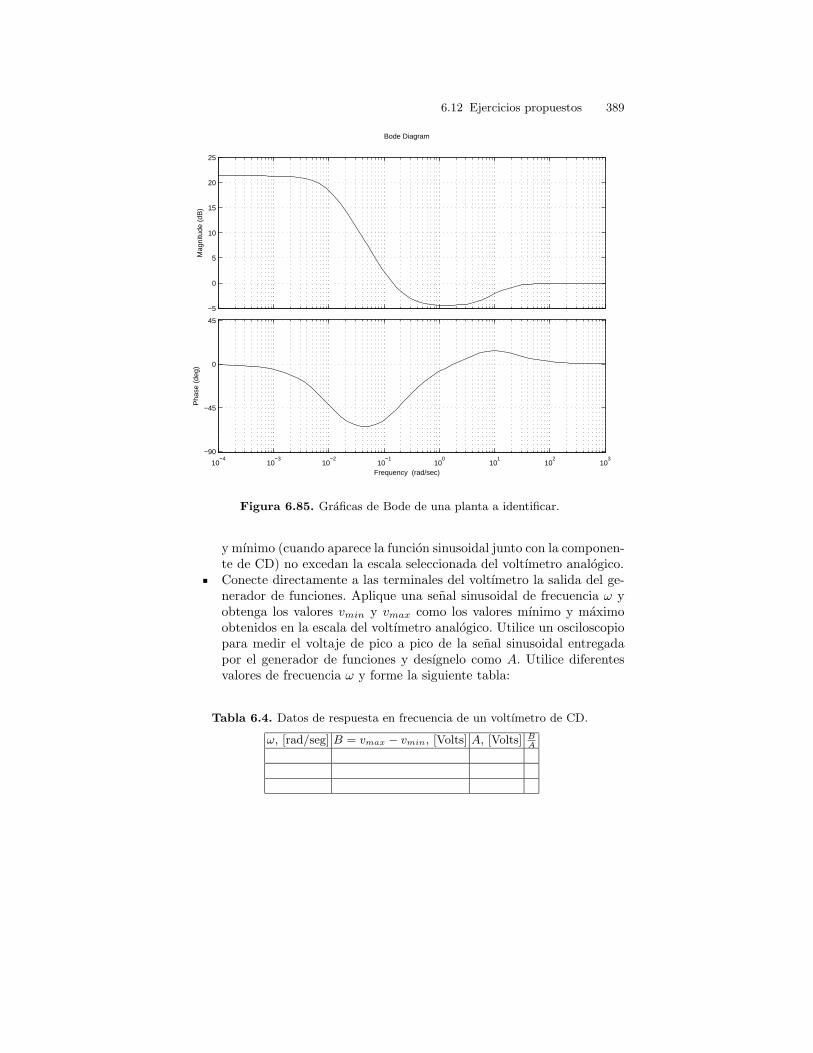
6.12 Ejercicios propuestos 389
−5
0
5
10
15
20
25
Mag
nitu
de (
dB)
10−4
10−3
10−2
10−1
100
101
102
103
−90
−45
0
45
Pha
se (
deg)
Bode Diagram
Frequency (rad/sec)
Figura 6.85. Graficas de Bode de una planta a identificar.
y mınimo (cuando aparece la funcion sinusoidal junto con la componen-te de CD) no excedan la escala seleccionada del voltımetro analogico.Conecte directamente a las terminales del voltımetro la salida del ge-nerador de funciones. Aplique una senal sinusoidal de frecuencia ω yobtenga los valores vmin y vmax como los valores mınimo y maximoobtenidos en la escala del voltımetro analogico. Utilice un osciloscopiopara medir el voltaje de pico a pico de la senal sinusoidal entregadapor el generador de funciones y desıgnelo como A. Utilice diferentesvalores de frecuencia ω y forme la siguiente tabla:
Tabla 6.4. Datos de respuesta en frecuencia de un voltımetro de CD.
ω, [rad/seg] B = vmax − vmin, [Volts] A, [Volts] BA

390 6 Diseno usando la respuesta en frecuencia
Con estos datos dibuje la grafica de Bode de magnitud correspondientey, a partir de ella, obtenga los valores numericos de la funcion de
transferencia G(s) = Vo(s)Vi(s)
donde Vi(s) y Vo(s) son las transformadas
de la place del voltaje entregado por el generador de funciones y elvoltaje medido por el voltımetro, respectivamente. Notese que estafuncion de transferencia debe ser de ganancia unitaria a frecuenciacero porque a este valor de frecuencia es cuando un voltımetro deCD entrega un valor correcto del voltaje medido. Notese tambien queel valor de ωn es un dato que da informacion a cerca de cual es elvalor maximo de frecuencia a la cual el voltımetro de CD entregamediciones correctas. Esta parte del resultado depende mucho de queel osciloscopio y el voltımetro entreguen la misma medicion de voltajea bajas frecuencias.

Referencias
1. E. Kreyszig, Matematicas avanzadas para ingenierıa, Vol. 1, Limusa, Mexico,1980.
2. H. P. Hsu, Analisis de Fourier, Fondo Educativo Interamericano, Mexico, 1973.3. K. Ogata, Ingenierıa de Control Moderna, 4a. edicion, Pearson Prentice-Hall,
Madrid, 2003.4. N.S. Nise, Sistemas de control para ingenierıa, 1a. edicion en espanol, 1a. Re-
impresion, CECSA, Mexico, 2004.5. C.-T. Chen, Linear system theory and design, Holt, Rinehart and Winston, New
York, 1984.6. Fundacion Thomas Alva Edison, Experimentos faciles e increıbles, Ediciones
Roca, Mexico, 1993.7. R.C. Dorf y R.H. Bishop, Sistemas de control moderno, 10a. edicion, Pearson
Prentice-Hall, Madrid, 2008.8. B.C. Kuo, Sistemas de control automatico, 7a. edicion, Prentice-Hall Hispanoa-
mericana, Mexico, 1995.9. G.H. Hostetter, C.J. Savant y R.T. Stefani, Sistemas de control, 1a. edicion en
espanol, McGraw-Hill, Mexico, 1992.


7
La tecnica de las variables de estado
A finales de la decada de 1950 llego la era de los vuelos espaciales. Ellanzamiento, direccionamiento, navegacion y seguimiento de naves espacia-les consiste basicamente en el control de objetos balısticos. Estos problemasrequieren de la construccion de modelos fısicos detallados que puedan ser cons-truidos en terminos de ecuaciones diferenciales, lineales y no lineales. Basadosen el trabajo de Poincare, los ingenieros que trabajaban en las industriasaeroespaciales empezaron a formular los problemas de control en terminos deun conjunto de ecuaciones diferenciales de primer orden. Ası nacio el enfoqueque hoy conocemos como el de las variables de estado.

394 7 La tecnica de las variables de estado
Objetivos del capıtulo
Entender el concepto de variables de estado.Conocer las herramientas principales usadas en el enfoque de las variablesde estado.Conocer la relacion entre la representacion en variables de estado y larepresentacion en funcion de transferencia.Analizar y disenar sistemas de control usando el enfoque de las variablesde estado.
Los metodos de diseno presentados en los capıtulos 5 y 6 constituyen labase de lo que se conoce hoy en dıa como los metodos de Control Clasico. Unade las caracterısticas del control clasico es que se basa en el enfoque entrada-salida dictado por el uso de la funcion de transferencia. Esto significa que unafuncion de transferencia es como una caja negra a la que se le aplica una senal(la entrada) y solo se ve el efecto que se produce en la salida, es decir no sesabe que es lo que ocurre en el interior de la caja negra. Una desventaja deeste metodo es que para disenar un sistema de control solo se puede utilizarla informacion suministrada por una sola senal: la salida. Esto establece unlımite en el desempeno que se puede conseguir.
La tecnica de las variables de estado se introduce con el fin de mejoraralgunos de los aspectos mencionados en el parrafo anterior. Por ejemplo, dadoque la variable de estado es una tecnica que permite utilizar la informacionsuministrada por todas las variables internas de un sistema, ademas de lasalida, es posible disenar sistemas de control que tienen mejores desempenos.Esta es la idea fundamental detras del control por realimentacion del estadoque es explotado por la tecnica de las variables de estado.
El estudio formal de la tecnica de las variables de estado es un tema com-plejo porque involucra el manejo de herramientas matematicas avanzadas. Sinembargo, el objetivo de este capıtulo no es presentar una exposicion formal de-tallada de esta tecnica sino presentar los conceptos basicos que permiten usaresta tecnica para controlar plantas sencillas. Ası, solo se consideran plantasque tienen una entrada y una salida y que son controlables y observables.
7.1. Representacion en variables de estado
Considere las siguientes dos ecuaciones diferenciales lineales de coeficientesconstantes:
Ldi
dt= u − R i − n ke θ (7.1)
Jθ = −b θ + n km i (7.2)
Notese que cada una de estas ecuaciones diferenciales tiene efecto sobre laotra ecuacion diferencial. Se dice que estas ecuaciones diferenciales deben ser

7.1 Representacion en variables de estado 395
resueltas simultaneamente. Una manera muy util de estudiar este tipo deecuaciones diferenciales es el enfoque de las variables de estado. Las variablesde estado pueden ser definidas de la siguiente manera.
Definicion 7.1 ( [1], pag. 83) Si se conoce la entrada u(t) para t ≥ t0, lasvariables de estado son el conjunto de variables cuyo conocimiento en t = t0permite calcular la solucion de las ecuaciones diferenciales para todo t ≥ t0.
Notese que las variables de estado se definen de una manera muy ambi-gua. Aunque esto pudiera parecer una desventaja, sin embargo se convierteen una ventaja porque permite que las variables de estado sean seleccionadasde la manera que mas convenga. De acuerdo a esto, aunque en la literatura seproponen varios criterios diferentes para seleccionar las variables de estado,se debe entender que sin importar cual criterio se utilice las variables selec-cionadas deben ser tales que permitan conocer la solucion de las ecuacionesdiferenciales para todo tiempo futuro. Siguiendo esta lınea de ideas en estaobra se utilizara el siguiente criterio para seleccionar las variables de estado.
Criterio 7.1 Identifique la variable incognita de cada una de las ecuacionesdiferenciales involucradas. Identifique el orden de cada una de las ecuacionesdiferenciales y desıgnelo como r. Seleccione las variables de estado como elconjunto formado por las variables incognita y sus primeras r − 1 derivadasen cada una de las ecuaciones diferenciales involucradas. Tambien se pue-de seleccionar a alguna de estas variables multiplicada por alguna constantediferente de cero.
Es una costumbre usar la letra n para designar el numero de variables deestado. Por otro lado, el estado es un vector cuyas componentes estan dadaspor cada una de las variables de estado. Entonces el estado es un vector de ndimensiones. De acuerdo a este criterio las variables de estado seleccionadaspara las ecuaciones (7.1), (7.2) son i, θ, θ, por lo que n = 3 y el estado sepuede formar como el siguiente vector:
x =
x1
x2
x3
=
iθ
θ
Usando esta nomenclatura, las ecuaciones diferenciales en (7.1), (7.2) se pue-den escribir como:
L x1 = u − R x1 − n ke x3 (7.3)
Jx3 = −b x3 + n km x1 (7.4)
o, de manera vectorial:
d
dt
x1
x2
x3
=
(u − R x1 − n ke x3)/L
x3
(−b x3 + n km x1)/J
(7.5)

396 7 La tecnica de las variables de estado
lo cual se puede escribir de manera compacta como:
x = Ax + Bu
A =
−R
L 0 −n ke
L0 0 1
n km
J 0 − bJ
, B =
1L00
(7.6)
Por otro lado, se acostumbra usar la letra y para representar la salida a con-trolar. Se debe resaltar que el estado x esta constituido por variables que soninternas al sistema y, por tanto, en general no se conocen y no se puedenmedir. En cambio, la salida y representa una variable que siempre se puedemedir. Si la salida se define como la posicion, es decir, si y = θ = x2 entoncesse puede escribir:
y = Cx, C = [0 1 0]
Al conjunto de las dos ecuaciones:
x = Ax + Bu (7.7)
y = Cx (7.8)
se le conoce como ecuacion dinamica lineal e invariante en el tiempo (A, B yC son constantes). La ecuacion en (7.7) se conoce como ecuacion de estado yla ecuacion en (7.8) se conoce como ecuacion de salida.
Aunque la ecuacion de estado en (7.7) se ha obtenido a partir de unaecuacion diferencial que cuenta solo con una entrada, es decir u es un escalar,es muy sencillo extender (7.7) al caso en el que existen p entradas, solo hay quedefinir u como un vector de p componentes, cada una de las cuales representauna entrada, y B debe ser definida como una matriz de n renglones y pcolumnas. Por otro lado, tambien es muy sencillo generalizar la ecuacion desalida en (7.8) al caso en que se tienen q salidas, solo hay que definir y comoun vector de q componentes, cada una de las cuales representa una salida, yC debe ser definida como una matriz de q renglones y n columnas.
Notese que una ecuacion de estado esta constituida por un conjunto den ecuaciones diferenciales de primer orden. Una caracterıstica de (7.7), (7.8),es decir de una ecuacion dinamica lineal e invariante en el tiempo, es queel miembro derecho de cada una de las ecuaciones diferenciales involucradasen (7.7) esta dado como una combinacion lineal de las variables de estado yla entrada a traves del uso de coeficientes constantes. Notese tambien que elmiembro derecho de (7.8) esta constituido por la combinacion lineal de lasvariables de estado a traves del uso de coeficientes constantes.
Una propiedad fundamental de las ecuaciones de estado lineales e inva-riantes en el tiempo es que satisfacen el principio de superposicion, lo cual eslogico ya que este tipo de ecuaciones de estado se obtienen, segun se acabade explicar, a partir de ecuaciones diferenciales lineales, ordinarias y de co-eficientes constantes las cuales, segun se explica en la seccion 3.10, tambiensatisfacen el principio de superposicion.

7.1 Representacion en variables de estado 397
Ejemplo 7.1 Considere el sistema mecanico mostrado en la figura 7.1. Elmodelo matematico correspondiente fue obtenido en el ejemplo 2.5 del capıtulo2 y a continuacion se reescribe para facilitar la referencia
m2m1
K1
x1
b
x2K2K3
F(t)
Figura 7.1. Sistema mecanico.
x1 +b
m1(x1 − x2) +
K1
m1x1 +
K2
m1(x1 − x2) =
1
m1F (t) (7.9)
x2 −b
m2(x1 − x2) +
K3
m2x2 −
K2
m2(x1 − x2) = 0 (7.10)
Notese que se tienen dos ecuaciones diferenciales de segundo orden cada una.Esto significa que solo habran cuatro variables de estado: la incognita de cadauna de estas ecuaciones diferenciales, es decir x1 y x2, y la primer derivadade cada una de estas incognitas, es decir x1 y x2:
x =
x1
x2
x3
x4
=
x1
x2
x1
x2
, u = F (t)
Usando esta nomenclatura, las ecuaciones diferenciales en (7.9), (7.10) sepueden escribir como:
x1 = x3 = − b
m1(x3 − x4) −
K1
m1x1 −
K2
m1(x1 − x2) +
1
m1u
x2 = x4 =b
m2(x3 − x4) −
K3
m2x2 +
K2
m2(x1 − x2)
o, de manera vectorial:
d
dt
x1
x2
x3
x4
=
x3
x4
− bm1
(x3 − x4) − K1
m1x1 − K2
m1(x1 − x2) + 1
m1u
bm2
(x3 − x4) − K3
m2x2 + K2
m2(x1 − x2)
(7.11)
de donde se obtiene la ecuacion de estado:

398 7 La tecnica de las variables de estado
x = Ax + Bu
A =
0 0 1 00 0 0 1
−K1
m1− K2
m1
K2
m1− b
m1
bm1
K2
m2−K2
m2− K3
m2
bm2
− bm2
, B =
001
m1
0
(7.12)
Por otro lado, la ecuacion de salida depende de que se desea controlar. Porejemplo, si lo que interesa controlar es la posicion de la masa 1 entonces:
y = Cx = x1, C = [1 0 0 0]
pero si se desea controlar la posicion de la masa 2 entonces:
y = Cx = x2, C = [0 1 0 0]
Ejemplo 7.2 En el capıtulo 12 se estudia un mecanismo conocido como elsistema ball and beam. En ese capıtulo se obtiene el modelo matematico corres-pondiente y se presenta en la ecuacion (12.16). A continuacion se reescribedicho modelo con el fin de facilitar la referencia:
X(s)
θ(s)=
ρ
s2, θ(s) =
k
s(s + a)I∗(s)
Usando la transformada inversa de Laplace se pueden recuperar las ecuacio-nes diferenciales de las que se han obtenido las funciones de transferenciainvolucradas en las expresiones anteriores, es decir:
x = ρθ, θ + aθ = ki∗ (7.13)
Como se trata de dos ecuaciones diferenciales de segundo orden entonces ha-bra cuatro variables de estado: las incognitas de cada ecuacion diferencial, esdecir x y θ, y las primeras derivadas de dichas incognitas, es decir x y θ:
z =
z1
z2
z3
z4
=
xxθ
θ
, u = i∗
Usando esta nomenclatura, las ecuaciones diferenciales en (7.13) se puedenescribir como:
x = z2 = ρz3, θ = z4 = −az4 + ku
o, de manera vectorial:
d
dt
z1
z2
z3
z4
=
z2
ρz3
z4
−az4 + ku
(7.14)

7.2 Linealizacion aproximada 399
de donde se obtiene la ecuacion de estado:
z = Az + Bu
A =
0 1 0 00 0 ρ 00 0 0 10 0 0 −a
, B =
000k
(7.15)
Tal como se explica en el capıtulo 12 la variable que se desea controlar es xy, por tanto, la ecuacion de salida esta dada como:
y = Cz = x = z1, C = [1 0 0 0]
7.2. Linealizacion aproximada de ecuaciones de estadono lineales
Es muy frecuente encontrar ecuaciones de estado que no son lineales, esdecir, ecuaciones de estado dadas como:
x = f(x, u) (7.16)
f =
f1(x, u)f2(x, u)
...fn(x, u)
, x =
x1
x2
...xn
, u =
u1
u2
...up
donde al menos una de las funciones fi(x, u), i = 1, . . . , n, es una funcionescalar no lineal de x y/o de u, es decir, que no se puede escribir como unacombinacion lineal de las componentes de x y/o de u. Por ejemplo, para unaecuacion de estado con tres variables de estado y dos entradas se puede tener:
fi(x, u) = 3 sin(x3) + x1u2
fi(x, u) =ex1
5x2
fi(x, u) = u21
Es importante subrayar que la notacion fi(x, u) significa que la componente idel vector f es funcion, en general, de las componentes de los vectores estadox y entrada u. Sin embargo, tal como se muestra en los ejemplos anteriores, noes forzoso que fi(x, u) sea funcion de todas las variables de estado y de todasla entradas. Mas aun, puede darse el caso en que fi(x, u) no es funcion deninguna variable de estado pero sı lo es de algunas entradas y viceversa. Unaecuacion de estado de la forma (7.16) que tiene las caracterısticas mencionadasse conoce como una ecuacion de estado no lineal invariante en el tiempo (nodepende explıcitamente del tiempo).

400 7 La tecnica de las variables de estado
El estudio de ecuaciones de estado no lineales es mucho mas complejoque el estudio de ecuaciones de estado lineales. Sin embargo, la mayorıa de losprocesos fısicos que son de interes para los ingenieros de control son no linealespor naturaleza, es decir, sus modelos tienen la forma dada en (7.16). Ası quedeben desarrollarse metodos de estudio y diseno para este tipo de ecuacionesde estado. Uno de los metodos mas sencillos consiste en encontrar una ecuacionde estado lineal como la mostrada en (7.7) que represente satisfactoriamente laevolucion de (7.16). La ventaja de este metodo es que las ecuaciones de estadolineales de la forma (7.7) pueden ser estudiadas con mayor facilidad. Entoncesel analisis y el diseno de controladores para (7.16) se realizan utilizando unmodelo mas sencillo de la forma (7.7). Aunque este metodo es muy util se debemencionar que su principal desventaja es que los resultados que se obtienensolo son validos en una region restringida del espacio de trabajo del procesoque se desea controlar. En las siguientes secciones se explican en detalle todasestas ideas.
7.2.1. Procedimiento para ecuaciones de primer orden sinentrada
Considere una ecuacion diferencial no lineal de primer orden sin entrada:
x = f(x) (7.17)
donde x es un escalar y f(x) es una funcion no lineal de x. Se desea obtener
xã x
m
h x( )
f x( )
f xã( )
Figura 7.2. Aproximacion de una funcion no lineal f(x) usando una linea rectah(x).
una ecuacion diferencial lineal que represente a (7.17) al menos de manera

7.2 Linealizacion aproximada 401
aproximada. Defınase un punto de equilibrio x∗ de (7.17) como aquel valorde x que satisface f(x∗) = 0. De acuerdo a (7.17) esto significa que en unpunto de equilibrio x∗ = f(x∗) = 0, es decir, el sistema puede permanecer en“reposo” en ese punto. En terminos practicos esto significa que un punto deequilibrio x∗ representa la configuracion constante en la que puede mantenersesin movimiento un robot, por ejemplo, bajo la accion de la gravedad.
Suponga que f(x) esta representada por la curva que se muestra en lafigura 7.2. La linea recta punteada h(x) es tangente a f(x) en el punto x∗.Debido a esta caracterıstica, h(x) y f(x) son aproximadamente iguales paravalores de x que sean cercanos a x∗, es decir, si x − x∗ ≈ 0. Sin embargo,la diferencia entre h(x) y f(x) crece conforme los valores de x se alejan dex∗, es decir, para valores grandes de x − x∗. Ası que se puede usar h(x) enlugar de f(x) si la variable x se restringe a tomar solamente valores que seancercanos a x∗. En el caso del ejemplo del robot, esto significa que aunque sı sepermitira que el robot se mueva, sin embargo estos movimientos no deben sertales que la configuracion del robot sufra cambios demasiado grandes respectode su configuracion de equilibrio o “reposo”. En la figura 7.2 se observa que:
m =h(x) − f(x∗)
x − x∗ , m =df(x)
dx
∣∣∣∣x=x∗
(7.18)
donde la constante m es la pendiente de h(x), es decir, la derivada de f(x)evaluada en el punto de punto de equilibrio x∗. Entonces, de la primera ex-presion:
h(x) = m(x − x∗) + f(x∗) (7.19)
y debido a que h(x) ≈ f(x), se puede escribir:
f(x) ≈ m(x − x∗) + f(x∗) (7.20)
Como x∗ es un punto de equilibrio entonces f(x∗) = 0 y se obtiene:
f(x) ≈ m(x − x∗) (7.21)
Entonces la ecuacion (7.17) se puede aproximar por:
x = m(x − x∗) (7.22)
Definiendo una nueva variable z = x− x∗, se tiene z = x, porque x∗ = 0. Portanto, la aproximacion lineal de (7.17) esta dada por:
z = m z (7.23)
la cual es valida solamente bajo la restriccion x− x∗ ≈ 0. Una vez que se usa(7.23) para calcular z se puede usar z = x−x∗ para obtener x ya que el puntode equilibrio x∗ es conocido.

402 7 La tecnica de las variables de estado
7.2.2. Procedimiento general para ecuaciones de orden arbitrarioy numero de entradas arbitrario
Considere ahora la ecuacion diferencial:
x = f(x, u) (7.24)
donde x ∈ Rn es un vector de n dimensiones y u ∈ Rp es un vector de pdimensiones que representa la entrada o excitacion de la ecuacion diferencial.Notese que f(x) debe ser una funcion vectorial de n dimensiones. Esto sig-nifica que (7.24) tiene la forma definida en (7.16). En este caso se prefiereusar el concepto “punto de operacion” en lugar de “punto de equilibrio” yaque este ultimo concepto se define solamente para ecuaciones diferenciales sinentradas. Un punto de operacion se define como aquella pareja (x∗, u∗) tal quef(x∗, u∗) = 0. Esto significa que la solucion de la ecuacion diferencial puedepermanecer en “reposo” en el valor constante x∗, porque x∗ = f(x∗, u∗) = 0,si se aplican las entradas adecuadas u∗ (p entradas) que tambien resultan serconstantes.
Notese que f(x, u) depende de n+p variables. Defınase el siguiente vector:
y =
[xu
](7.25)
de n + p dimensiones. Entonces (7.24) se puede escribir como:
x = f(y) (7.26)
Siguiendo las ideas de la seccion previa, se desea aproximar la funcion nolineal f(y) mediante una funcion h(y) que sea “tangente” a f(y) en el puntode operacion y∗ definido como:
y∗ =
[x∗
u∗
]
Generalizando la expresion en (7.19) al caso de n+p variables se puede escribir:
h(y) = M(y − y∗) + f(y∗) (7.27)
donde M = ∂f(y)∂y
∣∣∣y=y∗
es una matriz constante definida como:
M =
∂f1(x,u)∂x1
∂f1(x,u)∂x2
. . . ∂f1(x,u)∂xn
∂f1(x,u)∂u1
∂f1(x,u)∂u2
. . . ∂f1(x,u)∂up
∂f2(x,u)∂x1
∂f2(x,u)∂x2
. . . ∂f2(x,u)∂xn
∂f2(x,u)∂u1
∂f2(x,u)∂u2
. . . ∂f2(x,u)∂up
......
. . ....
......
. . ....
∂fn(x,u)∂x1
∂fn(x,u)∂x2
. . . ∂fn(x,u)∂xn
∂fn(x,u)∂u1
∂fn(x,u)∂u2
. . . ∂fn(x,u)∂up
x=x∗,u=u∗
Usando f(y) ≈ h(y) se puede aproximar (7.26) por:
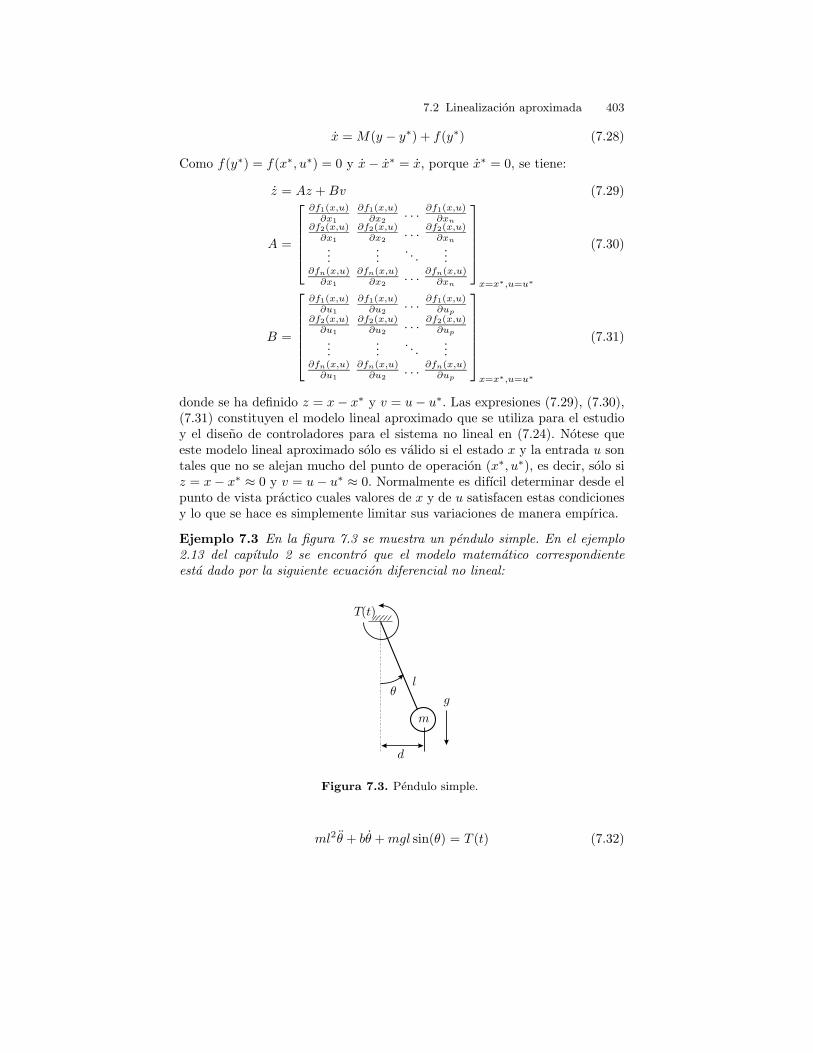
7.2 Linealizacion aproximada 403
x = M(y − y∗) + f(y∗) (7.28)
Como f(y∗) = f(x∗, u∗) = 0 y x − x∗ = x, porque x∗ = 0, se tiene:
z = Az + Bv (7.29)
A =
∂f1(x,u)∂x1
∂f1(x,u)∂x2
. . . ∂f1(x,u)∂xn
∂f2(x,u)∂x1
∂f2(x,u)∂x2
. . . ∂f2(x,u)∂xn
......
. . ....
∂fn(x,u)∂x1
∂fn(x,u)∂x2
. . . ∂fn(x,u)∂xn
x=x∗,u=u∗
(7.30)
B =
∂f1(x,u)∂u1
∂f1(x,u)∂u2
. . . ∂f1(x,u)∂up
∂f2(x,u)∂u1
∂f2(x,u)∂u2
. . . ∂f2(x,u)∂up
......
. . ....
∂fn(x,u)∂u1
∂fn(x,u)∂u2
. . . ∂fn(x,u)∂up
x=x∗,u=u∗
(7.31)
donde se ha definido z = x − x∗ y v = u − u∗. Las expresiones (7.29), (7.30),(7.31) constituyen el modelo lineal aproximado que se utiliza para el estudioy el diseno de controladores para el sistema no lineal en (7.24). Notese queeste modelo lineal aproximado solo es valido si el estado x y la entrada u sontales que no se alejan mucho del punto de operacion (x∗, u∗), es decir, solo siz = x − x∗ ≈ 0 y v = u − u∗ ≈ 0. Normalmente es difıcil determinar desde elpunto de vista practico cuales valores de x y de u satisfacen estas condicionesy lo que se hace es simplemente limitar sus variaciones de manera empırica.
Ejemplo 7.3 En la figura 7.3 se muestra un pendulo simple. En el ejemplo2.13 del capıtulo 2 se encontro que el modelo matematico correspondienteesta dado por la siguiente ecuacion diferencial no lineal:
T(t)
òl
m
g
d
Figura 7.3. Pendulo simple.
ml2θ + bθ + mgl sin(θ) = T (t) (7.32)

404 7 La tecnica de las variables de estado
La caracterıstica de ser una ecuacion diferencial no lineal es determinadaexclusivamente por la funcion sin(θ) que aparece por efecto de la gravedad. Altratarse de una ecuacion diferencial de segundo orden, entonces solo hay dosestados: la incognita θ y su primer derivada θ:
x =
[x1
x2
]=
[θ
θ
], u = T (t)
Usando esta nomenclatura, la ecuacion diferencial en (7.32) se puede escribircomo:
θ = x2 = − b
ml2x2 −
g
lsin(x1) +
1
ml2u
o, de manera vectorial:
d
dt
[x1
x2
]=
[x2
− bml2 x2 − g
l sin(x1) + 1ml2 u
](7.33)
de donde se obtiene la ecuacion de estado:
x = f(x, u)
f(x, u) =
[f1(x, u)f2(x, u)
]=
[x2
− bml2 x2 − g
l sin(x1) + 1ml2 u
]
Notese que en este caso no se puede obtener la forma lineal x = Ax+Bu debidoa la presencia de la funcion sin(θ). Con el fin de obtener una aproximacionlineal de esta ecuacion de estado no lineal, primero se encuentran los puntosde operacion, es decir las parejas (x∗, u∗) que satisfacen f(x∗, u∗) = [0 0]T :
f(x∗, u∗) =
[x∗
2
− bml2 x∗
2 − gl sin(x∗
1) + 1ml2 u∗
]=
[00
]
de donde se obtiene:
x∗2 = 0, u∗ = −mgl sin(x∗
1)
Esto significa que el valor de la entrada, en el punto de operacion, dependedel valor de la posicion del pendulo en el punto de operacion. Esto es debido aque, para mantener al pendulo en reposo, es necesario que la entrada compensede manera exacta al efecto de la gravedad. Para continuar, debe seleccionarsealgun valor especıfico para x∗
1. Aquı se consideraran dos casos:
Cuando x∗1 = 0, x∗
2 = 0, u∗ = 0. Usando las expresiones en (7.29), (7.30),(7.31) se encuentra que:
z = Az + Bv
A =
[∂f1(x,u)
∂x1
∂f1(x,u)∂x2
∂f2(x,u)∂x1
∂f2(x,u)∂x2
]
x=x∗,u=u∗
=
[0 1
− gl cos(x1) − b
ml2
]
x1=x2=u=0

7.2 Linealizacion aproximada 405
=
[0 1− g
l − bml2
]
B =
[∂f1(x,u)
∂u∂f2(x,u)
∂u
]
x=x∗,u=u∗
=
[01
ml2
]
donde se ha definido z = x − x∗ = x y v = u − u∗ = u. Notese que estaecuacion de estado especifica que:
z1 = z2, z2 = −g
lz1 −
b
ml2z2 +
1
ml2v
Al combinar estas dos ecuaciones diferenciales de primer orden se obtienela siguiente ecuacion diferencial de segundo orden, lineal y de coeficientesconstantes:
z1 +b
ml2z1 +
g
lz1 =
1
ml2v (7.34)
La cual puede ser analizada utilizando los conceptos vistos en las secciones3.3 (raıces complejas conjugadas con parte real menor o igual a cero),3.5 (raıces reales, repetidas y negativas) y 3.4 (raıces reales, diferentes ynegativas) del capıtulo 3, ya que corresponde a una ecuacion diferencial dela forma:
y + 2ζωny + ω2ny = kω2
nv
donde:
y = z1, 2ζωn =b
ml2, ω2
n =g
l, k =
1
mgl
con ζ ≥ 0, ωn > 0 y k > 0 porque m > 0, g > 0, l > 0 y b ≥ 0.Cuando x∗
1 = ±π, x∗2 = 0, u∗ = 0. Usando las expresiones en (7.29),
(7.30), (7.31) se encuentra que:
z = Az + Bv
A =
[∂f1(x,u)
∂x1
∂f1(x,u)∂x2
∂f2(x,u)∂x1
∂f2(x,u)∂x2
]
x=x∗,u=u∗
=
[0 1
− gl cos(x1) − b
ml2
]
x1=±π,x2=u=0
=
[0 1gl − b
ml2
]
B =
[∂f1(x,u)
∂u∂f2(x,u)
∂u
]
x=x∗,u=u∗
=
[01
ml2
]
donde se ha definido z = x−x∗ = [x1−x∗1, x2]
T y v = u−u∗ = u. Noteseque esta ecuacion de estado especifica que:

406 7 La tecnica de las variables de estado
z1 = z2, z2 =g
lz1 −
b
ml2z2 +
1
ml2v
Al combinar estas dos ecuaciones diferenciales de primer orden se obtienela siguiente ecuacion diferencial de segundo orden, lineal y de coeficientesconstantes:
z1 +b
ml2z1 −
g
lz1 =
1
ml2v (7.35)
La cual puede ser analizada utilizando los conceptos vistos en la seccion3.4 del capıtulo 3 (raıces reales, diferentes, una positiva y la otra negativa,vease el ejemplo 3.9) ya que corresponde a una ecuacion diferencial de laforma:
y + cy + dy = ev
donde:
y = z1, c =b
ml2≥ 0, d = −g
l< 0, e =
1
ml2
Notese que de acuerdo a (7.34) y a la seccion 3.3 del capıtulo 3, cuando elpendulo funciona alrededor del punto de operacion x∗
1 = 0, x∗2 = 0, u∗ = 0,
oscila con una frecuencia natural dada como ωn =√
gl . Esto significa que
un pendulo mas largo oscila mas lentamente mientras que un pendulo mascorto oscila mas rapidamente. Estas observaciones son utiles, por ejemplo,cuando se desea ajustar la rapidez de un reloj de pendulo que se “atrasa” ose “adelanta”. Mas aun, reacomodando (7.34) se obtiene:
ml2z1 + bz1 + mglz1 = v (7.36)
De acuerdo al ejemplo 2.6 del capıtulo 2 que trata sobre el sistema masa-resorte-amortiguador rotativo mostrado en la figura 7.4, (7.36) significa queel factor K = mgl > 0 equivale al coeficiente de rigidez de un resorte que esintroducido por el efecto de la gravedad. Por otro lado, usando argumentos
IKb
T(t)
Figura 7.4. Sistema masa-resorte-amortiguador rotativo.
similares se observa que, reacomodando (7.35):
ml2z1 + bz1 − mglz1 = v
7.3 Algunos resultados del algebra lineal 407
cuando el pendulo funciona alrededor de los puntos de operacion x∗1 = ±π,
x∗2 = 0, u∗ = 0, su comportamiento es analogo al de un sistema masa resorte
amortiguador que cuenta con un resorte con coeficiente de rigidez negativoK = −mgl < 0. Esto puede verse del siguiente modo. Un coeficiente de rigidezpositivo K > 0 indica que la fuerza ejercida por el resorte siempre va dirigidaen sentido contrario a la deformacion y por eso el resorte forza al cuerpo aregresar a la posicion donde el resorte no esta deformado. Esa es la razonpor la que el pendulo oscila alrededor del punto de operacion x∗
1 = 0, x∗2 = 0,
u∗ = 0. Por otro lado y debido al cambio de signo, un resorte con coeficientede rigidez negativo K < 0 debe hacer lo contrario, es decir, la fuerza ejercidapor el resorte ahora va dirigida en el mismo sentido que la deformacion. Estosignifica que al deformarse el resorte con K < 0 este forza a que el resorte sedeforme aun mas por lo que el cuerpo se aleja de la configuracion en la que elresorte tiene deformacion cero (es decir donde z1 = 0). Esto es precisamentelo que sucede con el pendulo alrededor de los puntos de operacion x∗
1 = ±π,x∗
2 = 0, u∗ = 0: si z1 6= 0 entonces la fuerza de la gravedad forza al penduloa caer y, por tanto a alejarse cada vez mas de la configuracion donde z1 =0, es decir donde x1 = x∗
1 = ±π. Este comportamiento es la comprobacionexperimental de lo que analıticamente queda demostrado al tener un polinomiocaracterıstico con una raız positiva: los puntos de operacion x∗
1 = ±π, x∗2 = 0,
u∗ = 0 son inestables.
Se recomienda consultar las secciones 11.2 (en el capıtulo 11), 13.2 (en elcapıtulo 13) y 14.4 (en el capıtulo 14) para ver otros ejemplos de como utilizarlas expresiones en (7.29), (7.30), (7.31) para encontrar ecuaciones de estadolineales aproximadas de ecuaciones de estado no lineales.
7.3. Algunos resultados del algebra lineal
En esta seccion se presentan algunos resultados que son utiles para elestudio de la tecnica de las variables de estado.
Resultado 7.1 ( [1], cap. 2) Sean w1, w2, . . . , wn, n vectores de n componen-tes cada uno. Estos vectores son linealmente dependientes si y solo si existenn escalares α1, α2, . . . , αn, no todos cero tales que:
α1w1 + α2w2 + . . . + αnwn = 0 (7.37)
donde el cero del lado derecho representa un vector de n componentes todasellas con valor cero. Si la unica manera de satisfacer la expresion anterior esque α1 = α2 = . . . = αn = 0 entonces se dice que w1, w2, . . . , wn, son vectoreslinealmente independientes.
En la version mas simple de la dependencia lineal de vectores, dos vectores dedos componentes son linealmente dependientes si son paralelos. Esto puede

408 7 La tecnica de las variables de estado
verse del siguiente modo. Sean w1 y w2 dos vectores de n = 2 componentes ca-da uno. Estos vectores son linealmente dependientes si existen dos constantesα1 6= 0 y α2 6= 0 tales que:
α1w1 + α2w2 = 0
lo cual significa que se puede escribir:
w1 = −α2
α1w2
Notese que α1 no puede ser cero por razones obvias. Por otro lado, si α2 fueraigual a cero entonces w1 = 0 es la unica posibilidad por lo que no interesa estecaso y, por tanto, se supone que ambos α1 6= 0 y α2 6= 0. Por tanto, como elfactor −α2
α1es un escalar (positivo o negativo), lo anterior significa que w1 y
w2 son vectores que tienen la misma direccion, es decir, que son paralelos1.Cuando se tienen 3 o mas vectores, entonces la dependencia lineal signi-
fica que uno (aunque no todos) de los vectores puede ser obtenido mediantela suma de los otros vectores cuando son “amplificados” convenientementeusando las “ganancias” αi (esto es lo que se conoce como combinacion linealde vectores). Es decir:
w1 = −α2
α1w2 −
α3
α1w3
se obtiene directamente de (7.37) cuando n = 3 y α1 6= 0. Como n = 3, estosignifica que w1, w2 y w3 pertenecen a un mismo plano (o una linea recta, enel peor de los casos) que esta incrustado en un volumen (en R3), es decir, quela combinacion lineal de w1, w2 y w3 no permite obtener otro vector (o vecto-res) que no pertenezcan a dicho plano. De acuerdo a todo esto, tres vectoresde 3 componentes son linealmente independientes si la combinacion lineal deellos permite generar vectores que “cubren” por completo tres dimensiones.Generalizando, la combinacion lineal de n vectores (de n componentes) lineal-mente independientes “cubre” un espacio de n dimensiones. La combinacionlineal de n vectores (de n componentes) linealmente dependientes “cubre” unespacio con un numero de dimensiones menor que n.
Resultado 7.2 ( [1], cap. 2, [2], cap. 10) Sea la siguiente matriz de n × n:
E =[w1 w2 . . . wn
]
donde w1, w2, . . . , wn, son n vectores columna de n componentes. Los vecto-res w1, w2, . . . , wn son linealmente independientes si y solo si la matriz E esno singular, es decir, si y solo si el determinante de E es diferente de cero(det(E) 6= 0).
1 Algunos autores usan el termino “antiparalelos” para designar dos vectores quetienen la misma direccion pero sentido contrario. En esta obra se utiliza el termino“paralelos” para designar dos vectores que tienen la misma direccion sin importarsu sentido.

7.3 Algunos resultados del algebra lineal 409
Para explicar este resultado se hace uso de lo siguiente.
Resultado 7.3 ([1], cap. 2) Suponga una matriz E de n× n. La unica solu-cion de la expresion Ew = 0, donde w representa un vector de n componentes,es w = 0 si y solo si la matriz E es no singular.
Notese que la suma de vectores mostrada en (7.37) se puede escribir como:
α1w1 + α2w2 + . . . + αnwn =[w1 w2 . . . wn
]
α1
α2
...αn
=
00...0
De acuerdo al resultado 7.3, el vector [α1 α2 . . . αn] = [0 0 . . . 0] es la unicasolucion de este sistema homogeneo si y solo si la matriz E = [w1 w2 . . . wn]es no singular. Esto implica que los vectores w1, w2, . . . , wn son linealmenteindependientes si y solo si det(E) 6= 0.
Resultado 7.4 ([1], cap. 2) El rango de una matriz E de n × n es el ordendel determinante mas grande y diferente de cero que puede formarse con loselementos de E. El rango de E es n si y solo si E es no singular. La matrizinversa E−1 existe si y solo si la matriz E es no singular [2], cap. 10.
Resultado 7.5 ([1], cap. 2) Los eigenvalores de una matriz E de n × n sonaquellos escalares λ que satisfacen:
det(λI − E) = 0
donde I representa la matriz identidad de n × n. La expresion det(λI − E)es un polinomio de grado n en la variable λ y se conoce como el polinomiocaracterıstico de la matriz E. Los eigenvalores de una matriz E pueden sernumeros reales o complejos. La matriz E tiene exactamente n eigenvaloresincluyendo aquellos que se puedan repetir.
Resultado 7.6 ([3], cap. 7) Suponga que dos matrices E y E, ambas de n×n,se relacionan a traves de:
E = PEP−1 (7.38)
donde P es una matriz constante y no singular de n × n, entonces ambasmatrices E y E tienen los mismos eigenvalores. Esto significa que:
det(λI − E) = det(λI − E) (7.39)
Para explicar esto es de mucha utilidad lo siguiente.
Resultado 7.7 ([4], pag. 303) Sean D y G dos matrices de n×n. Entonces:
det(DG) = det(D) det(G) (7.40)

410 7 La tecnica de las variables de estado
Como PP−1 = I y det(I) = 1, entonces usando (7.40) se encuentra quedet(P ) det(P−1) = 1, es decir det(P−1) = 1
det(P ) . Por otro lado, de acuerdo a
(7.38), (7.40), el polinomio caracterıstico de E es:
det(λI − E) = det(λI − PEP−1) = det(P [λI − E]P−1)
= det(P ) det(λI − E) det(P−1) = det(λI − E)
Notese que en la ultima expresion se ha recuperado (7.39), lo que compruebaese resultado.
Resultado 7.8 ([4], pag. 334) Sean E y F dos matrices de n×n con F = ET .Los eigenvalores de F son identicos a los eigenvalores de E.
Para explicar esto es de mucha utilidad lo siguiente.
Resultado 7.9 ([2], pag. 504) El determinante de una matriz E es igual ala suma de los productos de los elementos de cualquier columna o renglon deE y sus respectivos cofactores.
Resultado 7.10 ([2], pag. 507) Si det(D) es un determinante cualquieray det(G) es el determinante cuyos renglones son las columnas de det(D),entonces det(D) = det(G).
De acuerdo a lo anterior, det(λI − E) puede calcularse usando, por ejemplo,la primera columna de la matriz λI − E, mientras que det(λI − F ) se puedecalcular usando, por ejemplo, el primer renglon de la matriz λI − F . Noteseque la primera columna de λI − E es igual al primer renglon de λI − F yaque (λI − E)T = λI − F debido a que F = ET . Por esta misma razon, losrenglones del cofactor del elemento en el renglon i y la columna 1 en la matrizλI −E son iguales a las columnas del cofactor del elemento en el renglon 1 yla columna i en la matriz λI −F . Esto demuestra que E y F tienen el mismopolinomio caracterıstico, es decir que:
det(λI − E) = det(λI − F ) (7.41)
y por tanto, los eigenvalores de F son iguales a los eigenvalores de E.
7.4. Solucion de una ecuacion dinamica, lineal einvariante en el tiempo
El calculo de la solucion de la ecuacion dinamica:
x = Ax + Bu, x ∈ Rn, u ∈ R (7.42)
y = Cx, y ∈ R (7.43)
es un problema complejo que require del manejo de conceptos avanzados dealgebra lineal y calculo que estan fuera del alcance de esta obra. Sin embargo,

7.4 Solucion de una ecuacion dinamica 411
se pueden explicar las ideas fundamentales involucradas en el procedimientocorrespondiente si se establece una analogıa con el problema de resolver lasiguiente ecuacion diferencial de primer orden:
x = ax + bu, x, u ∈ R
Aplicando la transformada de Laplace se tiene:
sX(s) − x(0) = aX(s) + bU(s)
donde X(s), U(s) representan, respectivamente, las transformadas de Laplacede x y u. Esto se puede escribir del siguiente modo:
X(s) =b
s − aU(s) +
x(0)
s − a(7.44)
Usando los pares transformados [5]:
Leat
=
1
s − a= G(s) (7.45)
L∫ t
0
g(t − τ)bu(τ)dτ
=
b
s − aU(s), (convolucion)
g(t) = L−1 G(s)
se encuentra que, al aplicar la transformada inversa da Laplace a (7.44), seobtiene:
x(t) =
∫ t
0
g(t − τ)bu(τ)dτ + eatx(0)
Finalmente, usando (7.45) de nuevo se encuentra:
x(t) = eatx(0) +
∫ t
0
ea(t−τ)bu(τ)dτ, x, u, a, b ∈ R
La solucion de la ecuacion de estado en (7.42) es similar a esta ultima ecuaciony solo se debe utilizar notacion matricial, es decir, la solucion de (7.42) es [1],pag. 142:
x(t) = eAtx(0) +
∫ t
0
eA(t−τ)Bu(τ)dτ, x ∈ Rn, u ∈ R (7.46)
donde eAt es una matriz de n × n (notese que eA(t−τ) = eAr|r=t−τ ) y acontinuacion se explica como esta dada.
Si λ es un eigenvalor real (positivo, negativo o cero) y no repetido de lamatriz A entonces al menos uno de lo elementos de la matriz eAt incluyela siguiente funcion:
ceλt
donde c es una constante real.

412 7 La tecnica de las variables de estado
Si λ es un eigenvalor real (positivo, negativo o cero) y repetido r veces dela matriz A entonces cada una de las siguientes funciones:
c0eλt, c1te
λt, c2t2eλt, . . . , cr−1t
r−1eλt
donde ck, k = 1, 2, . . . , r − 1, son constantes reales, esta incluida en almenos uno de los elementos de la matriz eAt.Si λ = a+jb es un eigenvalor complejo de la matriz A donde j =
√−1 con a
un numero real (positivo, negativo o cero) y b un numero real estrictamentepositivo, si el complejo conjugado de λ tambien es un eigenvalor de lamatriz A y si estos eigenvalores no estan repetidos entonces cada una delas siguientes funciones:
ceat sin(bt), deat cos(bt)
donde c y d son constantes reales, esta incluida en al menos uno de loselementos de la matriz eAt.Si λ = a+jb es un eigenvalor complejo de la matriz A donde j =
√−1 con a
un numero real (positivo, negativo o cero) y b un numero real estrictamentepositivo, si el complejo conjugado de λ tambien es un eigenvalor de lamatriz A y si estos eigenvalores estan repetidos r veces entonces cada unade las siguientes funciones:
c0eat sin(bt), , c1te
at sin(bt), c2t2eat sin(bt), . . . , cr−1t
r−1eat sin(bt)
d0eat cos(bt), , d1te
at cos(bt), d2t2eat cos(bt), . . . , dr−1t
r−1eat cos(bt)
(7.47)
donde ck y dk, k = 1, 2, . . . , r − 1, son constantes reales, esta incluida enal menos uno de los elementos de la matriz eAt.
Finalmente, la salida de la ecuacion dinamica en (7.42), (7.43) se calculausando (7.46) como:
y(t) = CeAtx(0) + C
∫ t
0
eA(t−τ)Bu(τ)dτ (7.48)
7.5. Estabilidad de una ecuacion dinamica
De particular interes resulta el estudio de la estabilidad de la siguienteecuacion dinamica sin entrada:
x = Ex (7.49)
y = Cx
donde x ∈ Rn, y ∈ R, E es una matriz constante de n × n y C es un vec-tor renglon constante de n componentes. Aunque una ecuacion dinamica sin
7.6 Controlabilidad y observabilidad 413
entrada puede parecer algo que no corresponde a la realidad, sin embargo enla seccion 7.10 se muestra que una ecuacion dinamica realimentada puede serescrita en la forma (7.49), debido a que en un sistema realimentado la entradase escoge como u = −Kx donde K es un vector renglon de n componentes.Entonces, sustituyendo esta entrada en (7.42) y definiendo E = A − BK seencuentra (7.49). Esta es la principal motivacion para estudiar la estabilidadde dicha ecuacion dinamica sin entrada.
Aunque definicion formal de la estabilidad de (7.49) es algo elaborada,podemos simplificarla diciendo que la ecuacion dinamica (7.49) es estable silımt→∞ x(t) = 0 (y por tanto, lımt→∞ y(t) = 0 tambien) para cualquier estadoinicial x(0) ∈ Rn. Esto significa que si:
x(t) =
x1(t)x2(t)
...xn(t)
entonces lımt→∞ xi(t) = 0 para toda i = 1, 2, . . . , n, y a partir de cualquierestado inicial. De acuerdo a la solucion encontrada en (7.46), la solucion de(7.49) se encuentra usando u = 0 y A = E en (7.46), es decir:
x(t) = eEtx(0)
Como x(0) es un vector constante, la expresion anterior implica que si se ha deconseguir que lımt→∞ x(t) = 0 entonces se debe conseguir que lımt→∞ eEt = 0donde el “0” representa una matriz de n × n con todos sus elementos igualesa cero. De acuerdo a lo expuesto en la seccion previa a cerca de como estanformados los elementos de la matriz eAt (recuerde que A = E) se llega a lasiguiente conclusion:
Teorema 7.1 ([1], pag. 409) La solucion de (7.49) satisface lımt→∞ x(t) = 0,sin importar cual sea el estado inicial x(0), si y solo si todos los eigenvaloresde la matriz E tienen parte real estrictamente negativa. Se dice que bajo estascondiciones el origen x = 0 de (7.49) es globalmente asintoticamente estable.
Para comprobar esto es de mucha utilidad recordar que en la seccion 3.5del capıtulo 3 se ha demostrado que
lımt→∞
tj ept = 0
para cualquier j > 0 entero y cualquier numero real p < 0.
7.6. Controlabilidad y observabilidad
Dos propiedades importantes de la ecuacion dinamica

414 7 La tecnica de las variables de estado
x = Ax + Bu, x ∈ Rn, u ∈ R (7.50)
y = Cx, y ∈ R (7.51)
que seran utilizadas a lo largo de este capıtulo son la controlabilidad y laobservabilidad. A continuacion se definen y estudian estas propiedades.
7.6.1. Controlabilidad
Definicion 7.2 ([1], pag. 176) Una ecuacion de estado es controlable en elinstante t0 si existe un tiempo finito t1 > t0 tal que dados cualquiera dosestados x0 y x1 existe una entrada u que aplicada desde t = t0 hasta t = t1consigue trasferir el estado desde x0 en t = t0 hasta x1 en t = t1. De otromodo la ecuacion de estado es no controlable.
Notese que esta definicion no especifica la trayectoria que se deba seguirpara transferir el estado desde x0 hasta x1 por lo que queda en total liber-tad. Ademas, no es necesario que el estado del sistema permanezca en x1
para instantes posteriores a t1. Notese tambien que la controlabilidad es unapropiedad que solo tiene que ver con la entrada, es decir con la ecuacion deestado, por lo que la ecuacion de salida no juega ningun papel. Finalmente,esta definicion es muy general pues tambien considera la posibilidad de quela ecuacion de estado sea variante en el tiempo, es decir, que los elementos deA y B sean funciones del tiempo.
En el caso de una ecuacion de estado invariante en el tiempo como lamostrada en (7.50), es decir cuando los elementos de A y B son constantes, sila ecuacion de estado es controlable entonces lo es para cualquier t0 ≥ 0 y elinstante t1 es cualquier valor tal que t1 > t0, es decir, la transferencia desde x0
a x1 puede ser realizada en cualquier intervalo de tiempo de duracion no zero.Esto permite obtener una manera muy simple de verificar si una ecuacion deestado es controlable:
Teorema 7.2 ([6], pag. 145) La ecuacion de estado en (7.50) es controlable siy solo si cualquiera de las dos siguientes condiciones equivalentes se satisface:
1. La siguiente matriz de n × n:
Wc(t) =
∫ t
0
eAτBBT(eAτ
)Tdτ =
∫ t
0
eA(t−τ)BBT(eA(t−τ)
)T
dτ
(7.52)
es no singular para cualquier t > 0.2. La matriz de controlabilidad de n × n:
[B AB A2B · · · An−1B
](7.53)
tiene rango igual a n, es decir, su determinante es diferente de cero.

7.6 Controlabilidad y observabilidad 415
La razon de este resultado puede explicarse a grandes rasgos del siguientemodo. La siguiente entrada:
u(t) = −BT(eA(t1−t)
)T
W−1c (t1)[e
At1x0 − x1] (7.54)
transfiere el estado del sistema desde x0 = x(0) en t0 = 0 hasta x1 en t1 > 0.Esto se puede verificar sustituyendo en la solucion presentada en (7.46), peroevaluada en t = t1, es decir:
x(t1) = eAt1x(0) +
∫ t1
0
eA(t1−τ)Bu(τ)dτ
la entrada en (7.54), pero evaluada en t = τ , es decir:
u(τ) = −BT(eA(t1−τ)
)T
W−1c (t1)[e
At1x0 − x1]
para obtener:
x(t1) = eAt1x(0)
+
∫ t1
0
eA(t1−τ)B
−BT
(eA(t1−τ)
)T
W−1c (t1)[e
At1x0 − x1]
dτ
= eAt1x(0)
−∫ t1
0
eA(t1−τ)BBT(eA(t1−τ)
)T
dτ
︸ ︷︷ ︸Wc(t1)
W−1c (t1)[e
At1x0 − x1]
= x1
Notese que este resultado necesita que la matriz Wc(t) de n × n definidaen (7.52) sea no singular (para que W−1
c (t1) exista), lo cual es cierto paracualquier t1 = t > 0 si la ecuacion dinamica es controlable. El hecho de quet1 sea cualquier instante positivo significa que el estado puede pasar de x0 ax1 en cualquier intervalo de tiempo de duracion no cero.
Por otro lado, la igualdad en (7.52) se puede comprobar del siguiente modo.Defınase v = t − τ , entonces:
∫ t
0
eA(t−τ)BBT(eA(t−τ)
)T
dτ =
∫ τ=t
τ=0
eA(t−τ)BBT(eA(t−τ)
)T
dτ
=
∫ v=0
v=t
eAvBBT(eAv
)T(−dv)
=
∫ v=t
v=0
eAvBBT(eAv
)Tdv
lo cual comprueba la igualdad en (7.52) si se usa τ en lugar de v en la ultimaintegral, lo cual es valido porque el uso de v o de τ como variable de integracionen la ultima integral no afecta el resultado.

416 7 La tecnica de las variables de estado
Finalmente, el hecho de que el rango n de la matriz en (7.53) sea unacondicion equivalente a la no singularidad de Wc(t) es de mucha utilidadporque es mas facil verificar que (7.53) tenga rango n que la no singularidadde Wc(t).
7.6.2. Observabilidad
Definicion 7.3 ([1], pag. 193) Una ecuacion dinamica es observable en elinstante t0 si existe un tiempo finito t1 > t0 tal que para cualquier estadodesconocido x0 en t = t0, es suficiente el conocimiento de la entrada u y de lasalida y sobre el intervalo de tiempo [t0, t1] para determinar de manera unicael estado x0. De otro modo la ecuacion dinamica es no observable.
Notese que la observabilidad es una propiedad que tiene que ver con laposibilidad de conocer el estado (interno al sistema) a partir unicamente delconocimiento de mediciones externas al sistema, es decir a partir de la entraday de la salida. Notese tambien que esta definicion es muy general pues tambienconsidera la posibilidad de que la ecuacion de estado sea variante en el tiempo,es decir, que los elementos de A, B y C sean funciones del tiempo. En el casode una ecuacion dinamica invariante en el tiempo como la mostrada en (7.50),(7.51), es decir cuando los elementos de A, B y C son constantes, si la ecuacionde estado es observable entonces lo es para cualquier t0 ≥ 0 y el instante t1es cualquier valor tal que t1 > t0, es decir, la determinacion del estado inicialpuede ser conseguida en cualquier intervalo de tiempo de duracion no zero.Esto permite obtener una manera muy simple de verificar si una ecuacion deestado es observable:
Teorema 7.3 ([6], pag. 155,156) La ecuacion dinamica en (7.50), (7.51), esobservable si y solo si cualquiera de las dos siguientes condiciones equivalentesse satisface:
1. La siguiente matriz de n × n:
Wo(t) =
∫ t
0
(eAτ
)TCT CeAτdτ (7.55)
es no singular para cualquier t > 0.2. La matriz de observabilidad de n × n:
CCACA2
...CAn−1
(7.56)
tiene rango igual a n, es decir, su determinante es diferente de cero.
7.6 Controlabilidad y observabilidad 417
La razon de este resultado puede explicarse a grandes rasgos del siguientemodo. Considere la solucion dada en (7.48) y defina:
y(t) = CeAtx(0) (7.57)
= y(t) − C
∫ t
0
eA(t−τ)Bu(τ)dτ (7.58)
Notese que de acuerdo a (7.58) la funcion y(t) se puede calcular a partir delconocimiento exclusivo de la entrada y de la salida. Multiplicando ambos lados
de (7.57) por(eAt
)TCT e integrando sobre [0, t1] se obtiene:
∫ t1
0
(eAt
)TCT CeAtdt
︸ ︷︷ ︸Wo(t1)
x(0) =
∫ t1
0
(eAt
)TCT y(t)dt
Si la matriz Wo(t1) es no singular, lo cual es cierto si el sistema es observable,entonces el estado inicial x(0) = x0 se puede calcular de manera unica como:
x0 = W−1o (t1)
∫ t1
0
(eAt
)TCT y(t)dt
Notese que este resultado necesita que la matriz Wo(t) de n × n definidaen (7.55) sea no singular (para que W−1
o (t1) exista), lo cual es cierto paracualquier t1 = t > 0 si la ecuacion dinamica es observable. El hecho de que t1sea cualquier instante positivo significa que el estado x0 puede ser calculadocon la informacion obtenida desde la entrada y desde la salida en cualquierintervalo de tiempo de duracion no cero.
Finalmente, el hecho de que el rango n de la matriz en (7.56) sea unacondicion equivalente a la no singularidad de Wo(t) es de mucha utilidadporque es mas facil verificar que (7.56) tenga rango n que la no singularidadde Wo(t).
Ejemplo 7.4 Una manera de estimar el estado actual x(t) (y no el estadoinicial x(0)) es utilizando mediciones de la salida y de la entrada ası comoalgunas de sus derivadas respecto al tiempo. A continuacion se muestra queuna condicion necesaria para este calculo es, de nuevo, que la matriz en (7.56)tenga rango n. Considere la ecuacion dinamica en (7.50), (7.51). Las primerasn − 1 derivadas de la salida se obtienen como:
y = Cx,
y = Cx = CAx + CBu,
y = CAx + CBu = CA2x + CABu + CBu,
y(3) = CA2x + CABu + CBu = CA3x + CA2Bu + CABu + CBu,
...

418 7 La tecnica de las variables de estado
y(i) = CAix + CAi−1Bu + CAi−2Bu + · · · + CBu(i−1),
...
y(n−1) = CAn−1x + CAn−2Bu + CAn−3Bu + · · · + CBu(n−2)
donde el exponente entre parentesis representa el orden de la derivada respectoal tiempo. Acomodando matricialmente estas expresiones:
Y = Dx(t) + U
donde:
Y =
yyy
y(3)
...y(n−1)
, D =
CCACA2
CA3
...CAn−1
,
U =
0CBu
CABu + CBuCA2Bu + CABu + CBu
...CAn−2Bu + CAn−3Bu + · · · + CBu(n−2)
Por tanto, si la matriz en (7.56) tiene rango n entonces la matriz D de n×nes invertible y el estado actual se puede calcular como:
x(t) = D−1(Y − U) (7.59)
es decir, utilizando unicamente mediciones de la salida y la entrada ası comoalgunas de las derivadas respecto al tiempo de estas variables. La gran desven-taja de esta manera de calcular el valor del estado x(t) es que generalmente lasmediciones de cualquier variable estan contaminadas de ruido en la practicay este problema es mas grave conforme se calculan derivadas de orden mayora partir de estas mediciones. Esta es la razon por la que (7.59) no se utilizapara calcular el estado x(t) y se prefieren metodos como el presentado en laseccion 7.11.
7.7. Funcion de transferencia de una ecuacion dinamica
Sea la siguiente ecuacion dinamica de una entrada-una salida:
x = Ax + Bu (7.60)
y = Cx

7.7 Funcion de transferencia de una ecuacion dinamica 419
donde x ∈ Rn, u ∈ R, y ∈ R son funciones del tiempo, A es una matrizconstante de n× n, B es un vector columna constante de n componentes y Ces un vector renglon constante de n componentes. Aplicando la transformadade Laplace a (7.60) se obtiene:
sX(s) − x(0) = AX(s) + BU(s) (7.61)
Y (s) = CX(s) (7.62)
donde X(s), Y (s), U(s) representan, respectivamente, la transformada de La-place del vector de estado x, de la salida escalar y y de la entrada escalaru mientas que x(0) es el valor inicial del estado x. Recuerdese que dado unvector x = [x1, x2, . . . , xn]T que es funcion del tiempo, su transformada deLaplace se obtiene aplicando esta operacion a cada elemento de dicho vector,es decir [3], cap. 4:
X(s) =
Lx1L x2
...Lxn
Una funcion de transferencia siempre se define bajo la suposicion de condicio-nes iniciales cero. Sustituyendo x(0) = 0 en (7.61) y despejando X(s):
X(s) = (sI − A)−1BU(s) (7.63)
donde I representa la matriz identidad de n×n. Sustituyendo (7.63) en (7.62)se obtiene:
Y (s)
U(s)= G(s) = C(sI − A)−1B (7.64)
Notese que la funcion de transferencia G(s) dada en (7.64) es un escalar. Ahorase procede a analizar dicha funcion de transferencia. Con el fin de presentaruna exposicion mas clara de las ideas, a continuacion se supone que n = 3, esdecir que A es una matriz de 3 × 3, I es una matriz identidad de 3 × 3 y queB y C son vectores columna y renglon, respectivamente, de 3 componentes:
A =
a11 a12 a13
a21 a22 a23
a31 a32 a33
, B =
b1
b2
b3
, C =[c1 c2 c3
]
Sin embargo, el lector puede darse cuenta de que el mismo procedimiento esvalido para cualquier valor arbitrario de n. Primero calculese la matriz:
sI − A =
s − a11 −a12 −a13
−a21 s − a22 −a23
−a31 −a32 s − a33

420 7 La tecnica de las variables de estado
cuya matriz inversa esta dada de acuerdo a la formula (sI−A)−1 = Adj(sI−A)det(sI−A)
donde [2], cap. 10:
Adj(sI − A) = CofT (sI − A) =
Cof11 Cof12 Cof13
Cof21 Cof22 Cof23
Cof31 Cof32 Cof33
T
donde Cof(sI−A) es la matriz de cofactores de sI−A y Cofij = (−1)i+jMij
y Mij es el determinante de (n − 1) × (n − 1), es decir de 2 × 2, que quedaal eliminar el renglon i y la columna j del determinante de la matriz sI − A[2], cap. 10. Calculando explıcitamente estos elementos se puede observar queCofij es un polinomio de s cuyo grado es estrictamente menor que n = 3. Porotro lado, desarrollando a traves del primer renglon se encuentra que:
det(sI − A) = (s − a11)
∣∣∣∣s − a22 −a23
−a32 s − a33
∣∣∣∣ + a12
∣∣∣∣−a21 −a23
−a31 s − a33
∣∣∣∣
−a13
∣∣∣∣−a21 s − a22
−a31 −a32
∣∣∣∣
es decir, det(sI −A) es un polinomio de s de grado igual a n = 3. A partir deestas observaciones se concluye que todos los elementos de la matriz:
(sI − A)−1 =Adj(sI − A)
det(sI − A)=
Inv11 Inv12 Inv13
Inv21 Inv22 Inv23
Inv31 Inv32 Inv33
estan dados como el cociente de dos polinomios de s de manera que el polino-mio del numerador es de grado estrictamente menor que n = 3 y el polinomiodel denominador es, para todos los elementos de (sI −A)−1, un polinomio degrado n = 3 que esta dado como det(sI − A).
Por otro lado, el producto (sI − A)−1B es un vector columna de n = 3componentes. Cada uno de estos componentes se obtiene como:
(sI − A)−1B =
d1
d2
d3
=
Inv11 b1 + Inv12 b2 + Inv13 b3
Inv21 b1 + Inv22 b2 + Inv23 b3
Inv31 b1 + Inv32 b2 + Inv33 b3
De acuerdo a lo expuesto en el parrafo anterior sobre la manera en que esta da-do cada uno de los elementos Invij de la matriz (sI − A)−1 y recurriendo ala suma de fracciones con el mismo denominador, se concluye que cada unode los elementos di del vector columna (sI −A)−1B tambien esta dado comoel cociente de dos polinomios de s de manera que el polinomio del numeradortiene grado estrictamente menor que n = 3 mientras que el polinomio deldenominador es det(sI − A) que tiene grado igual a n = 3. Finalmente, seencuentra lo siguiente:
C(sI − A)−1B = c1d1 + c2d2 + c3d3

7.7 Funcion de transferencia de una ecuacion dinamica 421
Razonando de manera similar es posible concluir lo siguiente, lo cual es validopara cualquier valor de n:
Resultado 7.11 ( [1], caps. 6, 7) La funcion de transferencia dada en (7.64)es un escalar que esta dado como el cociente de dos polinomios de s de maneraque el polinomio del numerador tiene grado estrictamente menor que n y elpolinomio del denominador es igual a det(sI − A) el cual tiene grado igual an, es decir:
Y (s)
U(s)= G(s) = C(sI − A)−1B =
bmsm + bm−1sm−1 + · · · + b1s + b0
sn + an−1sn−1 + · · · + a1s + a0
(7.65)
det(sI − A) = sn + an−1sn−1 + · · · + a1s + a0
para algunas constantes reales bk, al, k = 0, 1, . . . ,m, l = 0, 1, . . . , n − 1, conn > m.
Sin embargo, para que esta afirmacion sea cierta es necesario incluir lasiguiente condicion adicional [1], cap 7:
Condicion 7.1 La ecuacion dinamica en (7.60) debe ser controlable, es decir,el determinante de la matriz en (7.53) debe ser diferente de cero.
Si ademas se cumple lo siguiente, entonces los polinomios bmsm+bm−1sm−1
+ · · ·+ b1s+ b0 y sn + an−1sn−1 + · · ·+ a1s+ a0 no tienen raıces comunes [1],
cap 6:
Condicion 7.2 La ecuacion dinamica en (7.60) es observable, es decir, eldeterminante de la matriz en (7.56) es diferente de cero.
Ejemplo 7.5 Con el fin de poner en practica estas ideas, a continuacion seconsidera un caso sencillo: un motor de CD. En el capıtulo 9 se muestra queel modelo de un motor de CD es el siguiente (vease (9.8)):
Jθ + bθ = n km i∗ (7.66)
cuando no existe perturbacion externa. Ademas, se puede considerar que lacorriente electrica i∗ es la senal de entrada cuando se utiliza un lazo internode corriente de alta ganancia. Definiendo las variables de estado como laposicion y la velocidad, no es difıcil darse cuenta de que se obtiene la siguienteecuacion dinamica:
x = Ax + Bu, y = Cx (7.67)
x =
[x1
x2
]=
[θ
θ
], A =
[0 10 − b
J
], B =
[0
nkm
J
], u = i∗
donde C es un vector renglon que se definira mas adelante dependiendo de lasalida que se desee considerar. Notese que la siguiente matriz:

422 7 La tecnica de las variables de estado
[B AB
]=
[0 nkm
Jnkm
J −nkm
JbJ
]
tiene rango n = 2 ya que su determinante es igual a −(
nkm
J
)2 6= 0. A partirde las definiciones en (7.67) se obtienen los siguientes resultados:
sI − A =
[s −10 s + b
J
], det(sI − A) = s
(s +
b
J
),
Cof(sI − A) =
[s + b
J 01 s
], Adj(sI − A) = CofT (sI − A) =
[s + b
J 10 s
],
(sI − A)−1 =Adj(sI − A)
det(sI − A)=
1
s(s + bJ )
[s + b
J 10 s
]
Para obtener la funcion de transferencia correspondiente se consideraran lossiguientes dos casos:
La salida es la posicion, es deicr y = θ = x1 = Cx, donde C = [1 0].Entonces:
G(s) = C(sI − A)−1B =[1 0
] 1
s(s + bJ )
[s + b
J 10 s
] [0
nkm
J
]
G(s) =nkm
J
s(s + bJ )
Notese que en este caso la siguiente matriz:
[C
CA
]=
[1 00 1
]
tiene rango igual a n = 2 ya que su determinante es igual a la unidad, esdecir, es diferente de cero.La salida es la velocidad, es decir y = θ = x2 = Cx, donde C = [0 1].Entonces:
G(s) = C(sI − A)−1B =[0 1
] 1
s(s + bJ )
[s + b
J 10 s
] [0
nkm
J
]
G(s) =nkm
J s
s(s + bJ )
En este caso la siguiente matriz:
[C
CA
]=
[0 10 − b
J
]
tiene rango menor que n = 2 ya que su determinante es igual a cero.
7.8 Funcion de transferencia y ecuacion dinamica 423
Notese que en ambos casos la funcion de transferencia obtenida cumple con loestablecido en (7.65): que el polinomio del denominador es igual a det(sI−A).Notese tambien que esto es cierto gracias a que la matriz [B AB] tiene ran-go igual a n = 2 en ambos casos. Finalmente, se puede apreciar el efecto deque el sistema sea o no observable: en el segundo de los casos el sistema noes observable y por ello la funcion de transferencia correspondiente tiene unpolo y un cero que se cancelan lo cual no ocurre en el primero de los casosporque es observable. Dicha cancelacion polo-cero en el segundo de los casostrae como consecuencia que la funcion de transferencia sea de primer ordenlo cual significa que solo uno de los estados (la velocidad) es descrito por lacorrespondiente funcion de transferencia. Es decir, la posicion del motor notiene ningun efecto cuando se trata de controlar la velocidad del motor. Deesta manera se puede dar una nueva interpretacion a la observabilidad, co-mo se explica a continuacion. Cuando la salida es la posicion, el sistema esobservable porque conociendo la posicion se puede calcular la velocidad (quees la otra variable de estado) derivando la posicion, por ejemplo. Pero si lasalida es la velocidad el conocimiento de esta variable no es suficiente paraconocer la posicion (que es la otra variable de estado) como se explica a conti-nuacion. Aunque se podrıa argumentar que la posicion θ(t) se puede calcularsimplemente integrando la velocidad θ sin embargo, de acuerdo a:
θ(t) − θ(0) =
∫ t
0
θ(r)dr
ademas de conocer la velocidad es necesario conocer la posicion inicial θ(0) lacual es desconocida. Por esto, el sistema no es observable cuando la velocidades la salida. Sin embargo, como ya se menciono, si lo unico que se desea escontrolar la velocidad esto no trae ningun problema porque para eso no senecesita conocer la posicion. Ası que la observabilidad es importante en otrotipo de problemas que se abordaran mas adelante (secciones 7.11 y 7.12).
Finalmente, el lector puede comprobar la exactitud de estos resultados com-parando estas funciones de transferencia con las obtenidas en los capıtulos 9y 10.
7.8. Una de las ecuaciones dinamicas que correspondena una funcion de transferencia
Una de las caracterısticas de la representacion en variables de estado es queno es unica. Es decir, dado un mismo sistema fısico existen muchas ecuacionesdinamicas que lo representan correctamente. Esto significa tambien que dadauna funcion de transferencia existen muchas ecuaciones dinamicas que la re-presentan correctamente. A continuacion se muestra la manera de obtener unade esas ecuaciones dinamicas. Considere la siguiente funcion de transferencia:
Y (s)
U(s)= G(s) =
bmsm + bm−1sm−1 + · · · + b1s + b0
sn + an−1sn−1 + · · · + a1s + a0(7.68)

424 7 La tecnica de las variables de estado
Despejese la salida:
Y (s) =bmsm + bm−1s
m−1 + · · · + b1s + b0
sn + an−1sn−1 + · · · + a1s + a0U(s)
Defınase la nueva variable:
V (s) =1
sn + an−1sn−1 + · · · + a1s + a0U(s) (7.69)
para escribir:
Y (s) = (bmsm + bm−1sm−1 + · · · + b1s + b0)V (s) (7.70)
Considere la expresion (7.69). Pasando el denominador multiplicando al la-do izquierdo, aplicando la transformada inversa de Laplace y despejando laderivada de mayor orden se obtiene:
v(n) = −an−1v(n−1) − · · · − a1v − a0v + u (7.71)
donde V (s) = Lv. De acuerdo a lo expuesto en la seccion 7.1, defınanse lasvariables de estado como la incognita de la ecuacion diferencial (7.71), v, ysus primeras n − 1 derivadas:
x1 = v, x2 = v, x3 = v, . . . , xn = v(n−1) (7.72)
Entonces, (7.71) se puede escribir como:
˙xn = −an−1xn − · · · − a1x2 − a0x1 + u (7.73)
Por otro lado, aplicando la transformada inversa de Laplace a (7.70) se obtiene:
y = bmv(m) + bm−1v(m−1) + · · · + b1v + b0v
Si se considera que m toma su valor maximo, es decir m = n − 1 (recuerdeseque n > m) entonces puede usarse (7.72) para escribir:
y = bn−1xn + bn−2xn−1 + · · · + b1x2 + b0x1 (7.74)
Usando (7.72), (7.73) y (7.74) se obtiene:
˙x = Ax + Bu (7.75)
y = Cx
A =
0 1 0 0 · · · 0 00 0 1 0 · · · 0 00 0 0 1 · · · 0 00 0 0 0 · · · 0 0...
......
.... . .
......
0 0 0 0 · · · 0 1−a0 −a1 −a2 −a3 · · · −an−2 −an−1
, B =
0000...01
,
C =[b0 b1 b2 b3 · · · bn−2 bn−1
],
x =[x1 x2 x3 x4 · · · xn−1 xn
]T

7.9 Ecuaciones dinamicas equivalentes 425
La expresion (7.75) representa una ecuacion dinamica que corresponde a lafuncion de transferencia dada en (7.68) y se dice que esta en la forma canonicade controlabilidad. Como se vera mas adelante la forma canonica de controla-bilidad es muy util para disenar un controlador por realimentacion del estado.
7.9. Ecuaciones dinamicas equivalentes
En la seccion 7.7 se ha mostrado a que cualquier ecuacion dinamica de unaentrada y una salida que sea controlable y que cuya forma sea la mostrada en(7.60) le corresponde una funcion de transferencia de la forma presentada en(7.65). Notese que el requisito de la observabilidad solo sirve para asegurar queno hay cancelaciones de polos y ceros en la funcion de transferencia (7.65).Por otro lado, en la seccion 7.8 se ha mostrado que cualquier funcion detransferencia de la forma (7.65) puede escribirse en la forma de la ecuaciondinamica mostrada en (7.75). Esto significa que cada una de las ecuacionesdinamicas en (7.60) y (7.75) puede ser obtenida a partir de la otra, es decir,que ambas son equivalentes.
A continuacion se muestra como pasar de (7.60) a (7.75), y viceversa, sinnecesidad del paso intermedio de una funcion de transferencia. Considere laecuacion dinamica (7.60) de una entrada y una salida y defina la siguientetransformacion lineal:
x = Px (7.76)
donde P es una matriz constante de n×n que se define a partir de su inversacomo se indica a continuacion [1], cap. 7:
P−1 =[q1 · · · qn−2 qn−1 qn
], (7.77)
qn = B,
qn−1 = AB + an−1B,
qn−2 = A2B + an−1AB + an−2B,
...
q1 = An−1B + an−1An−2B + · · · + a1B
det(sI − A) = sn + an−1sn−1 + · · · + a1s + a0
Es importante subrayar que la matriz P−1 es invertible, es decir, su inversaP siempre existe si la matriz definida en (7.53) tiene rango n [1], cap. 7, esdecir si (7.60) es controlable. Esto puede explicarse del siguiente modo. Sila matriz definida en (7.53) tiene rango n, es decir todas sus columnas sonlinealmente independientes, entonces cuando sus columnas se suman como enlas expresiones anteriores que definen a los vectores q1, . . . , qn−2, qn−1, qn, lascolumnas q1, . . . , qn−2, qn−1, qn resultan ser linealmente independientes. Esto

426 7 La tecnica de las variables de estado
significa que el determinante de P−1 es diferente de cero y, por tanto, suinversa P existe. Usando (7.76) en (7.60), es decir ˙x = P x, se obtiene:
˙x = Ax + Bu
y = Cx
A = PAP−1, B = PB, C = CP−1 (7.78)
La matriz A y los vectores B, C en (7.78) estan dados como en la formacanonica de controlabilidad (7.75) sin importar la forma que tengan A, B yC mientras la matriz definida en (7.53) tenga rango n. La demostracion deesta ultima afirmacion requiere de herramientas matematicas que estan fueradel alcance de este libro y por ello no se presenta. Se recomienda consultar lareferencia [1] para una solucion completa de este problema. El lector puedeverificar estas ideas proponiendo valores numericos para las matrices A, B, Cy realizando los calculos correspondientes. Esto significa que cada una de lasecuaciones dinamicas (7.60) y (7.75) puede ser obtenida a partir de la otra yque la relacion entre las matrices involucradas esta dada por (7.78), es decir,que ambas son equivalentes. Notese que la condicion fundamental para queexista esta equivalencia es que la matriz definida en (7.53) tenga rango n [1],cap 5. Esto se resume del siguiente modo:
Teorema 7.4 ([1], cap. 7) Si (7.60) es controlable, entonces esta ecuaciondinamica es equivalente a (7.75) mediante la transformacion lineal (7.76),(7.77), es decir, a traves de (7.78).
Ejemplo 7.6 En el capıtulo 13 se obtiene la aproximacion lineal de un me-canismo conocido como el pendulo de Furuta. Este modelo se presenta en(13.13), (13.14), y a continuacion se reescribe para facilitar la referencia:
z = Az + Bv (7.79)
A =
0 1 0 0
0 0−gm2
1l21L0
I0(J1+m1l21)+J1m1L2
0
0
0 0 0 1
0 0(I0+m1L2
0)m1l1g
I0(J1+m1l21)+J1m1L2
0
0
, B =
0J1+m1l21
I0(J1+m1l21)+J1m1L2
0
0−m1l1L0
I0(J1+m1l21)+J1m1L2
0
km
ra
Para facilitar la manipulacion algebraica se definen las siguientes constantes:
a =−gm2
1l21L0
I0(J1 + m1l21) + J1m1L20
, b =(I0 + m1L
20)m1l1g
I0(J1 + m1l21) + J1m1L20
c =J1 + m1l
21
I0(J1 + m1l21) + J1m1L20
km
ra, d =
−m1l1L0
I0(J1 + m1l21) + J1m1L20
km
ra
La siguiente matriz tiene la forma:
Co =[B AB A2B A3B
]=
0 c 0 adc 0 ad 00 d 0 bdd 0 bd 0

7.9 Ecuaciones dinamicas equivalentes 427
Despues de un desarrollo algebraico sencillo, aunque laborioso, se obtiene:
det(Co) =m4
1l41L
20g
2
[I0(J1 + m1l21) + J1m1L20]
4
k4m
r4a
6= 0 (7.80)
Por tanto, la ecuacion dinamica en (7.79) es controlable para cualquier con-junto de parametros del pendulo de Furuta. Es decir, este resultado no cambiasi el mecanismo con el que se cuenta es grande o pequeno o si es ligero o pe-sado. Esto significa que la matriz P introducida en (7.76) es no singular y acontinuacion es construida utilizando la formula presentada en (7.77). Parasimplificar los calculos se utilizaran los siguientes valores numericos:
I0 = 1.137 × 10−3[kgm2], J1 = 0.38672 × 10−3[kgm
2], g = 9.81[m/s
2]
l1 = 0.1875[m], m1 = 0.033[kg], L0 = 0.235[m],km
ra= 0.0215[Nm/V]
que corresponden a los parametros del pendulo de Furuta que es construido ycontrolado en el capıtulo 13. Con estos valores se encuentra:
A =
0 1 0 00 0 −35.81 00 0 0 10 0 72.90 0
, B =
013.4684
0−12.6603
Con estos datos, y calculando numericamente, se encuentra que las raıces delpolinomio det(λI − A) son:
λ1 = 0, λ2 = 0, λ3 = 8.5381, λ4 = −8.5381
Entonces se realiza el producto:
(λ − λ1)(λ − λ2)(λ − λ3)(λ − λ4) = λ4 + a3λ3 + a2λ
2 + a1λ + a0
de donde se encuentra, al igualar coeficientes:
a3 = 0, a2 = −72.8992, a1 = 0, a0 = 0 (7.81)
Usando estos valores en (7.77) se encuentra:
P−1 =
−527.8686 0 13.4600 00 −527.8686 0 13.4600
−0.0101 0 −12.6600 00 −0.0101 0 −12.6600
y, por tanto:
P =
−0.0019 0 −0.0020 00 −0.0019 0 −0.0020
0.0000 0 −0.0790 00 0.0000 0 −0.0790
(7.82)

428 7 La tecnica de las variables de estado
Finalmente, con el fin de comprobar las expresiones en (7.78) se realizan lossiguientes productos:
PAP−1 =
0 1.0000 0 00.0008 0 1.0000 0
0 0 0 1.00000.0583 0 72.8992 0
, PB =
0001
Notese que, una vez que se identifican y eliminan algunos errores numericos,estas matrices tienen exactamente la forma presentada en (7.75) para A =PAP−1 y B = PB.
7.10. Control por realimentacion del estado
Considere la ecuacion de estado de una entrada una salida presentada en(7.60) en lazo cerrado con el siguiente controlador:
u = −Kx = −(k1x1 + k2x2 + . . . + knxn) (7.83)
K =[k1 k2 . . . kn
]
donde ki, i = 1, . . . , n, son n escalares constantes. Sustituyendo (7.83) en(7.60) se obtiene:
x = (A − BK)x (7.84)
Al igual que (7.49), la ecuacion dinamica en (7.84) no tiene entrada. Por tanto,el criterio de estabilidad establecido para (7.49) es aplicable a (7.84). Esto sig-nifica que el vector x(t) solucion de (7.84) satisface lımt→∞ x(t) = 0 si y solosi todos los eigenvalores de la matriz A−BK tienen parte real estrictamentenegativa. Sin embargo, desde el punto de vista de una aplicacion practica estono es suficiente debido a que, ademas, se requiere un buen desempeno delsistema en lazo cerrado. Es importante subrayar que la forma de la respuestax(t) de la ecuacion en (7.84) depende de la ubicacion de los eigenvalores deA − BK. Por tanto, los eigenvalores de la matriz A − BK deben poder serasignados en donde se desee. Esto se indica diciendo que tales eigenvalores de-ben poder ser asignados arbitrariamente. Dado que el vector renglon K puedeseleccionarse a voluntad, es de interes saber como seleccionar K de maneraque los eigenvalores de A − BK queden asignados en donde se especifique. Acontinuacion se presenta la solucion a este problema.
Considere la transformacion lineal (7.76), (7.77) y sustituyala en (7.84)para obtener:
˙x = Ax − BKx (7.85)
K = KP−1

7.10 Control por realimentacion del estado 429
con A y B dados como en (7.78) y (7.75). Notese que Kx es un escalar dadocomo:
Kx = k1x1 + k2x2 + . . . + knxn,
K =[k1 k2 . . . kn
]
que, de acuerdo a (7.75), solo afecta el ultimo renglon de (7.85) la cual, portanto, puede escribirse como:
˙x = (A − BK)x,
A − BK =
0 1 0 0 · · · 0 00 0 1 0 · · · 0 00 0 0 1 · · · 0 00 0 0 0 · · · 0 0...
......
.... . .
......
0 0 0 0 · · · 0 1−k1 − a0 −k2 − a1 −k3 − a2 −k4 − a3 · · · −kn−1 − an−2 −kn − an−1
Entonces, si se selecciona:
K =[a0 − a0 a1 − a1 . . . an−1 − an−1
](7.86)
se consigue:
A − BK =
0 1 0 0 · · · 0 00 0 1 0 · · · 0 00 0 0 1 · · · 0 00 0 0 0 · · · 0 0...
......
.... . .
......
0 0 0 0 · · · 0 1−a0 −a1 −a2 −a3 · · · −an−2 −an−1
Notese que de acuerdo a (7.78) y (7.85) se puede escribir:
A − BK = PAP−1 − PBKP−1 = P (A − BK)P−1 (7.87)
Es decir, las matrices A − BK y A − BK satisfacen (7.38) por lo que ambastienen los mismos eigenvalores. De acuerdo a lo visto en las secciones previas,los eigenvalores λ de A − BK satisfacen:
det(λI − [A − BK]) = λn + an−1λn−1 + · · · + a1λ + a0
=
n∏
i=1
(λ − λi)

430 7 La tecnica de las variables de estado
donde λi, i = 1, . . . , n son los eigenvalores deseados y se proponen a voluntaddel disenador. Debe tenerse el cuidado de que todos los eigenvalores deseadoscomplejos aparezcan con sus parejas conjugadas para asegurar que todos loscoeficientes ai, i = 0, 1, . . . , n− 1 sean reales lo cual, a su vez, asegura que lasganancias K y K sean reales. A continuacion se resume el procedimiento [1],cap. 7, para calcular el vector de ganancias K que asigne los eigenvalores quese deseen a la matriz de lazo cerrado A − BK.
Encuentre el polinomio:
det(λI − A) = λn + an−1λn−1 + · · · + a1λ + a0
Proponga los eigenvalores deseados en lazo cerrado λ1, λ2, . . . , λn. Si algu-no de estos eigenvalores es complejo entonces tambien debe proponerse supareja conjugada como uno de los eigenvalores deseados.Calcule:
n∏
i=1
(λ − λi) = λn + an−1λn−1 + · · · + a1λ + a0
Calcule:
K =[a0 − a0 a1 − a1 . . . an−1 − an−1
]
Calcule los vectores q1, . . . , qn−2, qn−1, qn de acuerdo a (7.77), obtenga lamatriz P−1 definida en dicha expresion y encuentre su matriz inversa P .Calcule la matriz de ganancias del controlador en (7.83) como K = KP .
Ejemplo 7.7 Continuando con el ejemplo 7.6, donde se aborda el estudio delpendulo de Furuta, ahora se desea encontrar el vector de ganancias K que, alser utilizado en el controlador (7.83) (con x = z), asigne en:
λ1 = −94, λ2 = −18, λ3 = −0.5, λ4 = −1
a los eigenvalores de la matriz A − BK. Para esto, utilizando los valoresanteriores se forma el siguiente polinomio:
(λ − λ1)(λ − λ2)(λ − λ3)(λ − λ4) = λ4 + a3λ3 + a2λ
2 + a1λ + a0
de donde se encuentra, al igualar coeficientes:
a3 = 113.5, a2 = 1860.5, a1 = 2594, a0 = 846
Con estos valores y los obtenidos en (7.81) se calcula el vector K de acuerdoa(7.86):
K =[846 2594 1933.3 113.5
]
Finalmente, usando estos valores y la matriz P mostrada en (7.82) se calculael vector de ganancias K de acuerdo a K = KP :

7.11 Observadores de estado 431
K =[−1.5997 −4.9138 −154.4179 −14.1895
]
el cual, a excepcion de algunos errores de redondeo, es el vector de gananciasutilizado para controlar experimentalmente el pendulo de Furuta en el capıtulo13.
7.11. Observadores de estado
Como se indico en la seccion 7.1, el estado x esta constituido por variablesque son internas al sistema y, por tanto, en general no se conocen y no sepueden medir. En cambio, la salida y representa una variable que siempre sepuede medir. Esto significa que la construccion practica de un controlador dela forma (7.83) puede ser no posible si no se puede medir todo el estado. Poresta razon es importante contar con una variable x(t) que sea el estimado delestado x(t), el cual pueda ser utilizado para construir un controlador de laforma:
u = −Kx = −(k1x1 + k2x2 + . . . + knxn) (7.88)
K =[k1 k2 . . . kn
], x =
[x1 x2 . . . xn
]T
El mecanismo que se utiliza para calcular el estimado x recibe el nombre de“observador de estado” o simplemente “observador”. Un observador debe cal-cular x exclusivamente a partir de informacion que pueda ser medida, es decirusando la entrada y la salida exclusivamente. Por otro lado, si el controlador(7.88) ha de sustituir al controlador en (7.83), entonces una propiedad funda-mental que debe satisfacer el observador a construir es que debe producir unestimado x que converja lo mas rapido posible al valor real de x, o al menosque lo haga de manera sintotica, es decir, que se asegure que:
lımt→∞
x(t) = x(t)
Un observador que cumple con esta caracterıstica es el siguiente:
˙x = (A − LC)x + Ly + Bu (7.89)
donde L = [L1, L2, . . . , Ln]T es un vector columna constante. Esto puedeexplicarse del siguiente modo. Defınase el error de estimacion como x = x− x.Entonces, restando (7.89) a (7.60) se obtiene:
˙x = Ax − (A − LC)x − Ly
Usando y = Cx en esta expresion:
˙x = Ax − LCx
= (A − LC)x

432 7 La tecnica de las variables de estado
Por tanto, usando los resultados de la seccion 7.5 se concluye que lımt→∞ x(t) =0 y, por tanto, lımt→∞ x(t) = x(t) si y solo si todos los eigenvalores de la ma-triz A−LC tienen parte real estrictamente negativa. Ası que el unico problemaque resta es como seleccionar el vector (columna) de ganancias L de maneraque todos los eigenvalores de la matriz A−LC tengan parte real estrictamentenegativa. Este problema queda resuelto del siguiente modo:
Teorema 7.5 ([1], pag. 358) Si la ecuacion dinamica en (7.60) es observable,entonces su estado puede ser estimado usando el observador en (7.89) y todoslos eigenvalores de la matriz A − LC pueden ser asignados arbitrariamentepreviendo que los eigenvalores complejos aparecen con sus parejas conjugadas.
Para explicar esta afirmacion es de mucha utilidad el siguiente resultado:
Teorema 7.6 ([1], pag. 195) Considere las dos ecuaciones dinamicas siguien-tes:
x = Ax + Bu (7.90)
y = Cx
z = −AT z + CT u (7.91)
γ = BT z
donde u, y, γ ∈ R, mientras que x, z ∈ Rn. La ecuacion en (7.90) es controlable(observable) si y solo si la ecuacion en (7.91) es observable (controlable).
Por tanto, volviendo al problema del observador, como el par (A,C) esobservable entonces el par (−AT , CT ) y, por tanto, el par (AT , CT ) son con-trolables (porque el signo “−” de la matriz AT no afecta la independencialineal de las columnas de la matriz en (7.53), vease la seccion 7.3). A partir deesto se concluye que, siguiendo el procedimiento presentado en la seccion 7.10,siempre se puede encontrar un vector renglon K constante tal que la matrizAT − CT K posee cualquier conjunto de eigenvalores deseados (eigenvaloresarbitrarios). Como los eigenvalores de una matriz son iguales a los eigenvaloresde su matriz transpuesta (vease la seccion 7.3), entonces la matriz A − KT Ctiene los mismos eigenvalores que la matriz AT − CT K (los eigenvalores de-seados). Definiendo L = KT se obtiene el vector columna de ganancias que senecesita para disenar el observador en (7.89).
Cabe aclarar que la idea de que todos los eigenvalores de la matriz A−LCpuedan ser asignados arbitrariamente significa que puedan ser colocados don-de se desee segun el criterio del disenador. Obviamente todos los eigenvaloresdeben tener parte real estrictamente negativa pero, ademas, se debe buscarque esten colocados en lugares del plano complejo que aseguren una rapidaconvergencia de x(t) a x(t). Para decidir donde se deben colocar los eigenvalo-res de la matriz A−LC, son de mucha utilidad los conceptos sobre respuestatransitoria que se estudiaron en el capıtulo 3 respecto de la ubicacion de lospolos de funciones de transferencia como la presentada en (7.65).

7.12 El principio de separacion 433
7.12. El principio de separacion
Cuando se tiene una ecuacion dinamica (planta):
x = Ax + Bu (7.92)
y = Cx
y un observador:
˙x = (A − LC)x + Ly + Bu (7.93)
y se utiliza el siguiente controlador para unirlos (vease la figura 7.5):
u = −Kx = −(k1x1 + k2x2 + . . . + knxn) (7.94)
surge la pregunta de como se vera afectada la estabilidad del sistema en lazocerrado (7.92), (7.93), (7.94), es decir es importante asegurar que se aun secumple que lımt→∞ x(t) = x(t) y que lımt→∞ x(t) = 0.
La respuesta a esta pregunta se conoce como el “principio de separacion”el cual establece lo siguiente:
Resultado 7.12 ([1], pag. 367) Los eigenvalores del sistema en lazo cerrado(7.92), (7.93), (7.94), son la union de los eigenvalores de las matrices A−BKy A − LC.
Esto significa que los eigenvalores del observador no son afectados porla realimentacion en (7.94) y que, al menos en cuanto a los eigenvalores serefiere, no hay diferencia entre realimentar el estimado x(t) o el estado realx(t). Sin embargo, se debe prevenir al lector sobre el hecho de que la respuestatransitoria del sistema generalmente es diferente si se usa x(t) o si se usax(t) para construir la entrada. Lo importante es que se sigue cumpliendo quelımt→∞ x(t) = x(t) y lımt→∞ x(t) = 0. Por tanto, el diseno de las gananciasK del controlador y el diseno de las ganancias L del observador pueden serrealizados de manera independiente.
Ejemplo 7.8 Considere el motor de CD visto en el ejemplo 7.5, es decir,considere la ecuacion dinamica:
x = Ax + Bu, y = Cx (7.95)
x =
[x1
x2
]=
[θ
θ
], A =
[0 10 − b
J
], B =
[0
nkm
J
], C = [1 0], u = i∗
donde se considera que la salida es la posicion mientras que la velocidad nose puede medir y, por tanto, debera ser estimada usando un observador deestado. Suponga que se desea controlar el motor para que alcance una posicionconstante, es decir, los valores deseados de posicion y de velocidad son:
x1d = θd, x2d = 0
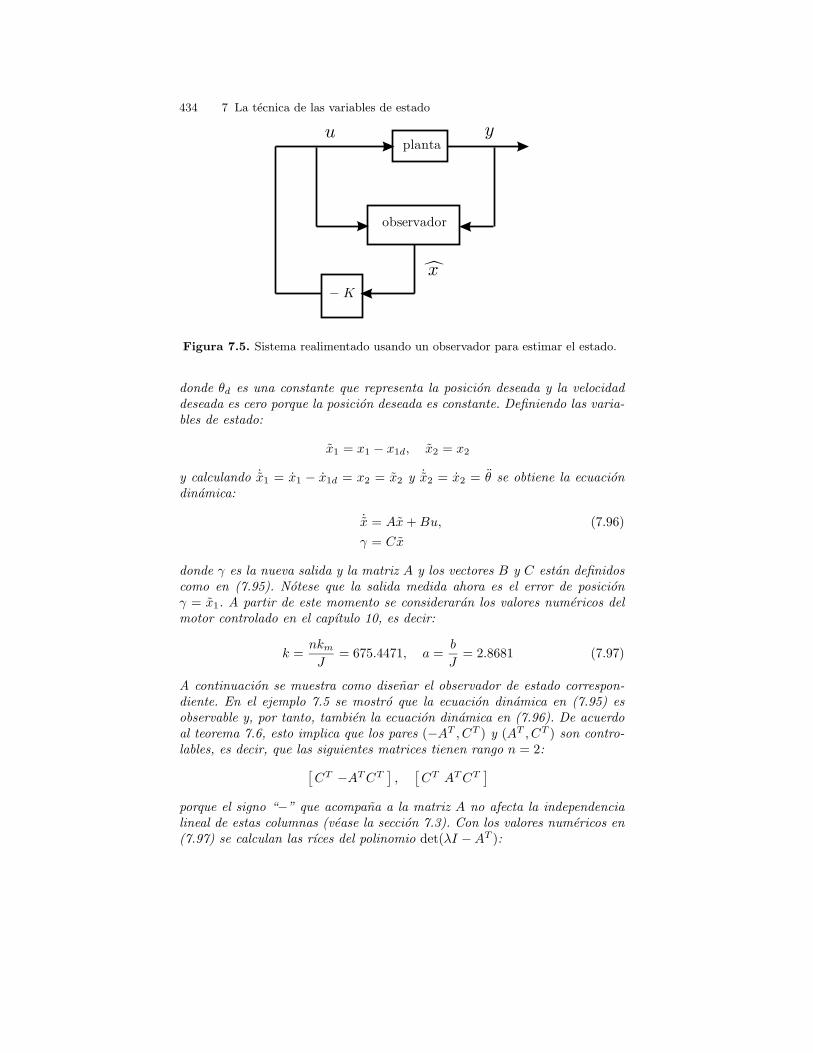
434 7 La tecnica de las variables de estado
planta
observador
à K
u y
xc
Figura 7.5. Sistema realimentado usando un observador para estimar el estado.
donde θd es una constante que representa la posicion deseada y la velocidaddeseada es cero porque la posicion deseada es constante. Definiendo las varia-bles de estado:
x1 = x1 − x1d, x2 = x2
y calculando ˙x1 = x1 − x1d = x2 = x2 y ˙x2 = x2 = θ se obtiene la ecuaciondinamica:
˙x = Ax + Bu, (7.96)
γ = Cx
donde γ es la nueva salida y la matriz A y los vectores B y C estan definidoscomo en (7.95). Notese que la salida medida ahora es el error de posicionγ = x1. A partir de este momento se consideraran los valores numericos delmotor controlado en el capıtulo 10, es decir:
k =nkm
J= 675.4471, a =
b
J= 2.8681 (7.97)
A continuacion se muestra como disenar el observador de estado correspon-diente. En el ejemplo 7.5 se mostro que la ecuacion dinamica en (7.95) esobservable y, por tanto, tambien la ecuacion dinamica en (7.96). De acuerdoal teorema 7.6, esto implica que los pares (−AT , CT ) y (AT , CT ) son contro-lables, es decir, que las siguientes matrices tienen rango n = 2:
[CT −AT CT
],
[CT AT CT
]
porque el signo “−” que acompana a la matriz A no afecta la independencialineal de estas columnas (vease la seccion 7.3). Con los valores numericos en(7.97) se calculan las rıces del polinomio det(λI − AT ):

7.12 El principio de separacion 435
λ1 = 0, λ2 = −2.8681
Entonces se realiza el producto:
(λ − λ1)(λ − λ2) = λ2 + a1λ + a0
de donde se encuentra, al igualar coeficientes:
a1 = 2.8681, a0 = 0 (7.98)
Usando B = CT y AT en lugar de A, la formula en (7.77) se convierte en:
P−1 =[q1 q2
],
q2 = CT ,
q1 = AT CT + a1CT ,
Usando los valores numericos en (7.97) y (7.98), ası como la matriz A y elvector C definidos en (7.95) se obtiene:
P−1 =
[2.8681 1.00001.0000 0
]
y, por tanto:
P =
[0 1.0000
1.0000 −2.8681
](7.99)
Suponga que se desea asignar los siguientes eigenvalores para la matriz A−LC:
λ1 = −150, λ2 = −100 (7.100)
Para esto se forma el siguiente polinomio:
(λ − λ1)(λ − λ2) = λ2 + a1λ + a0
de donde se encuentra, al igualar coeficientes:
a1 = 250, a0 = 15000
Con estos valores y los obtenidos en (7.98) se calcula el vector K de acuerdoa (7.86):
K =[15000 247
]
Usando estos valores y la matriz P mostrada en (7.99) se calcula el vector K,de acuerdo a K = KP , y se asigna L = KT :
L =
[247
14291
](7.101)

436 7 La tecnica de las variables de estado
Por otro lado, siguiendo un procedimiento similar al de los ejemplos 7.13.1 y7.13.2 se encuentra que el vector de ganancias:
K =[1.6889 0.0414
](7.102)
asigna en:
−15.4 + 30.06j, −15.4 − 30.06j (7.103)
a los eigenvalores de la matriz A−BK. Notese que los valores de las gananciasen (7.102) son iguales a las ganancias proporcional y de realimentacion de ve-locidad en el controlador disenado y probado experimentalmente en la seccion10.2.1 del capıtulo 10, en donde los polos de lazo cerrado se asignan en losvalores indicados en (7.103). Finalmente, debe aclararse que el observador aconstruir es:
z = (A − LC)z + Lγ + Bu (7.104)
donde z = [z1 z2]T es el estimado del vector x = [x1 x2]
T y u = i∗. Mientrasque el controlador es:
u = −K
[z1
z2
](7.105)
donde L y K toman los valores indicados en (7.101) y (7.102). Notese que elcontrolador debe utilizar z1, es decir el estimado de x1, a pesar de que x1 esuna variable que se conoce por medicion. Esto es debido a que toda la teorıavista hasta aquı supone que es todo el estado estimado el que se realimenta. Eneste sentido es conveniente aclarar que tambien existen observadores llamadosde orden reducido, los cuales solo estiman una parte del estado si la otra partees conocida. Al lector interesado en este tema se le recomienda consultar lareferencia [1].
En la figura 7.6 se muestran resultados en simulacion cuando se utiliza elobservador en (7.104) y la realimentacion en (7.105) junto con las gananciasen (7.101) y (7.102) para controlar el motor cuyos parametros se muestran en(7.97). La posicion deseada es θd = 2, las condiciones iniciales de observadorson z(0) = [0 0]T , mientras que θ(0) = 0 (es decir, x1(0) = −2) y θ(0) = 2.Observese como los estimados z1 y z2 convergen asintoticamente a los valoresreales x1 y x2. Es interesante darse cuenta de que esta convergencia es con-seguida antes de que el motor termine de responder. Esto se ha conseguidogracias a que los eigenvalores seleccionados para la matriz A−LC (mostradosen (7.100)) son mucho mas rapidos que los eigenvalores asignados a la matrizA−BK (mostrados en (7.103)). Este es el criterio que normalmente se debeutilizar para asignar los eigenvalores del observador.
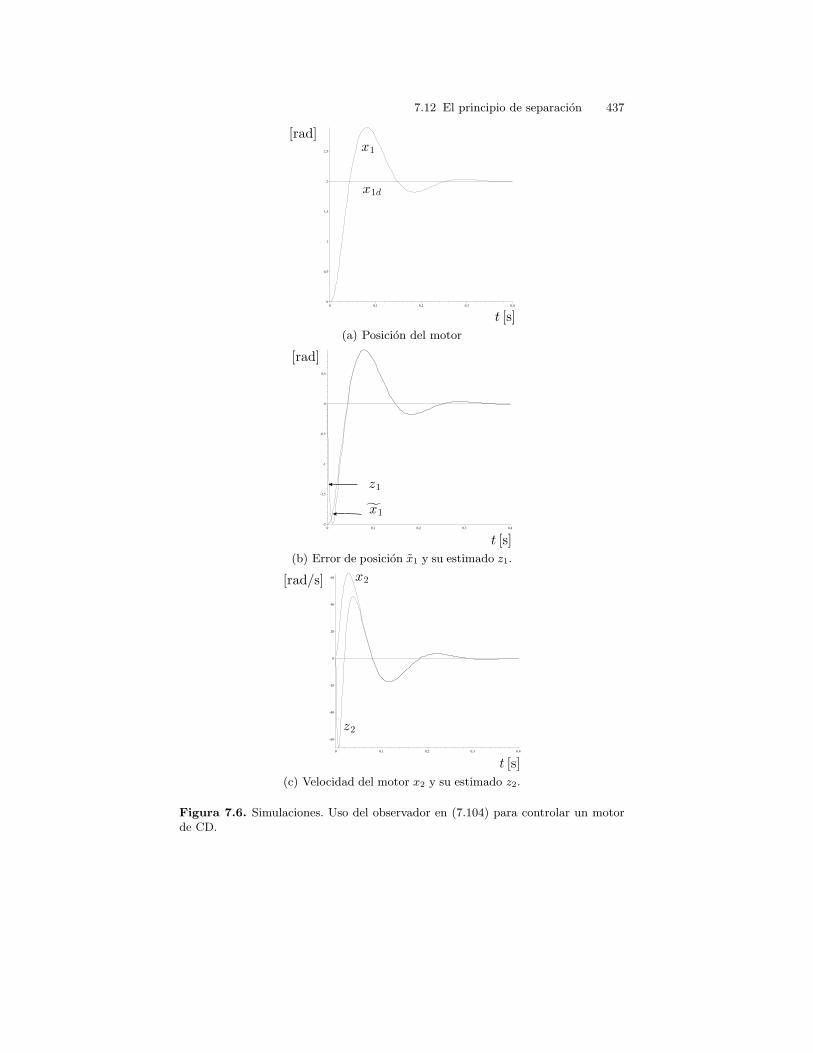
7.12 El principio de separacion 437
0 0,1 0,2 0,3 0,40
0,5
1
1,5
2
2,5x1
x1d
t s[ ]
rad[ ]
(a) Posicion del motor
0 0,1 0,2 0,3 0,4-2
-1,5
-1
-0,5
0
0,5
rad[ ]
t s[ ]
z1
xf1
(b) Error de posicion x1 y su estimado z1.
0 0,1 0,2 0,3 0,4
-60
-40
-20
0
20
40
60 x2
z2
t s[ ]
rad=s[ ]
(c) Velocidad del motor x2 y su estimado z2.
Figura 7.6. Simulaciones. Uso del observador en (7.104) para controlar un motorde CD.

438 7 La tecnica de las variables de estado
7.13. Caso de estudio. El pendulo con rueda inercial
7.13.1. Obtencion de la forma en (7.75)
En el capıtulo 14 se obtiene la aproximacion lineal de un mecanismo cono-cido como el pendulo con rueda inercial. Este modelo se presenta en (14.32),(14.35), y a continuacion se reescribe para facilitar la referencia:
z = Az + Bw, (7.106)
A =
0 1 0
d11mg 0 0
d21mg 0 0
, B =
0
d12
d22
km
R
Para simplificar la manipulacion algebraica se definen las siguientes constan-tes:
a = d11mg, b = d21mg
c = d12km
R, d = d22
km
R
La siguiente matriz tiene la forma:
Co =[B AB A2B
]=
0 c 0c 0 acd 0 bc
Despues de un desarrollo algebraico sencillo se obtiene:
det(Co) = (d12)2
(km
R
)3
mg(d11d22 − d12d21) 6= 0 (7.107)
debido a que d11d22 − d12d21 6= 0 es una propiedad del mecanismo, tal co-mo se explica en el capıtulo 14. Por tanto, la ecuacion dinamica en (7.106)es controlable para cualquier conjunto de parametros del pendulo con ruedainercial. Es decir, este resultado no cambia si el mecanismo con el que se cuen-ta es grande o pequeno o si es ligero o pesado. Esto significa que la matriz Pintroducida en (7.76) es no singular y a continuacion es construida utilizandola formula presentada en (7.77). Para simplificar los calculos se utilizaran lossiguientes valores numericos:
d11 = 0.0014636, d12 = 0.0000076,
d21 = 0.0000076, d22 = 0.0000076,
mg = 0.12597
donde:
D−1 =
[d11 d12
d21 d22
]=
1
d11d22 − d12d21
[d22 −d12
−d21 d11
]

7.13 Caso de estudio. El pendulo con rueda inercial 439
que corresponden a los parametros del pendulo con rueda inercial que es cons-truido y controlado en el capıtulo 14. Con estos valores se encuentra:
A =
0 1.0000 0
86.5179 0 0−86.5179 0 0
, B =
0
−1.2758245.6998
Con estos datos, y calculando numericamente, se encuentra que las raıces delpolinomio det(λI − A) son:
λ1 = 0, λ2 = 9.3015, λ3 = −9.3015
Entonces se realiza el producto:
(λ − λ1)(λ − λ2)(λ − λ3) = λ3 + a2λ2 + a1λ + a0
de donde se encuentra, al igualar coeficientes:
a2 = 0, a1 = −86.5179, a0 = 0 (7.108)
Usando estos valores en (7.77) se encuentra:
P−1 =
0 −1.275 0
5.467 × 10−5 0 −1.275−21147.049 0 245.6998
y, por tanto:
P = 10−5 ×
0 −910.6662 −4.7287
−78379.7677 0 00 −78379.8067 −0.0002
(7.109)
Finalmente, con el fin de comprobar las expresiones en (7.78) se realizan lossiguientes productos:
PAP−1 =
0 1.0000 0
−0.0000 0 1.00000 86.5179 0
, PB =
001
Notese que estas matrices tienen exactamente la forma presentada en (7.75)para A = PAP−1 y B = PB.
7.13.2. Control por realimentacion del estado
Ahora se desea encontrar el vector de ganancias K que, al ser utilizado enel controlador (7.83) (con x = z y u = w), asigne en:
λ1 = −5.8535 + 17.7192j, λ2 = −5.8535 − 17.7192j, λ3 = −0.5268

440 7 La tecnica de las variables de estado
a los eigenvalores de la matriz A − BK. Para esto, utilizando los valoresanteriores se forma el siguiente polinomio:
(λ − λ1)(λ − λ2)(λ − λ3) = λ3 + a2λ2 + a1λ + a0
de donde se encuentra, al igualar coeficientes:
a2 = 12.2338, a1 = 354.4008, a0 = 183.4494
Con estos valores y los obtenidos en (7.108) se calcula el vector K de acuerdoa (7.86):
K =[183.44 440.91 12.23
]
Finalmente, usando estos valores y la matriz P mostrada en (7.109) se calculael vector de ganancias K de acuerdo a K = KP :
K =[−345.5910 −11.2594 −0.0086
]
el cual, a excepcion de algunos errores de redondeo, es el vector de gananciasutilizado para controlar experimentalmente el pendulo con rueda inercial enel capıtulo 14.
7.14. Resumen del capıtulo
La tecnica de las variables de estado constituye la primera herramienta delo que hoy se conoce como control moderno. La manera de trabajar los proble-mas en este enfoque es representando los modelos utilizando un conjunto deecuaciones diferenciales de primer orden que deben ser resueltas simultanea-mente. Por tanto, el estudio se realiza de acuerdo a la respuesta en el tiempo yse abandona el uso de la transformada de Laplace. Esta ultima caracterısticaes fundamental para permitir el estudio de sistemas no lineales, es decir, aque-llos representados por ecuaciones diferenciales no lineales (vease el capıtulo14 para un ejemplo de tales aplicaciones). Recuerdese que la transformadade Laplace no se puede utilizar cuando se tienen ecuaciones diferenciales nolineales.
Aunque existe una equivalencia entre la representacion en variables deestado y la representacion en funcion de transferencia, la primera es masgeneral. Esto se ve reflejado en el hecho de que la funcion de transferenciasolo representa la parte de lo que en variables de estado es controlable yobservable de manera simultanea. Es decir, hay partes de un sistema que nopueden ser descritas por la funcion de transferencia. Sin embargo, el hechode que un sistema sea controlable y observable simplifica mucho las tareasde analisis y diseno de sistemas de control. De hecho, existen resultados muypoderosos para este caso como los presentados en las secciones 7.10 y 7.11.
7.16 Ejercicios propuestos 441
Una ventaja del enfoque de las variables de estado es que con el se pue-den resolver problemas que serıan mas elaborados si se usara el enfoque dela funcion de transferencia. Dos ejemplos de esta situacion son los prototiposcontrolados experimentalmente en los capıtulos 13 y 14, donde se deben con-trolar dos variables simultaneamente: las posiciones del brazo y del pendulo(en el capıtulo 13) y la posicion del pendulo y la velocidad de la rueda inercial(en el capıtulo 14). Estos problemas se complican usando el enfoque de lafuncion de transferencia donde solo se puede controlar una variable: la sali-da. Ademas, otra ventaja del enfoque de las variables de estado es que conel se puede desarrollar una metodologıa general para obtener aproximacioneslineales de sistemas no lineales (vease la seccion 7.2 y los capıtulos 11, 13 y14)
7.15. Preguntas de repaso
1. ¿Que significa el hecho de que una ecuacion dinamica sea controlable?2. ¿Que significa que una ecuacion dinamica sea observable?3. ¿Como verifica si una ecuacion dinamica es controlable y observable?4. ¿Que utilidad tiene el hecho de que una ecuacion dinamica sea controlable?5. ¿Que utilidad tiene el hecho de que una ecuacion dinamica sea observable?6. ¿Que diferencia existe entre la salida y el estado?7. Suponga una ecuacion dinamica que es controlable y observable ¿Que re-
lacion existe entre los polos de la funcion de transferencia correspondientey los eigenvalores de la matriz A?
8. ¿Que significa que el origen sea globalmente asintoticamente estable?9. ¿Cuales son las condiciones para que el origen sea globalmente asintotica-
mente estable?10. ¿Por que es importante que el origen del estado de una ecuacion dinamica
sin entrada sea globalmente asintoticamente estable?11. ¿Que significa control por realimentacion del estado?12. ¿Que es un observador de estado y para que sirve?
7.16. Ejercicios propuestos
1. Diga que entiende por estado y proponga un ejemplo de una planta oproceso fısico indicando cual es su estado.
2. ¿Como sabe si un sistema es controlable u observable? Una vez que sabeesto ¿Cual es su utilidad?
3. ¿Que significa que el estado x = 0 sea globalmente asintoticamente establey como se asegura esto?
4. Verifique que las siguientes ecuaciones dinamicas son controlables:

442 7 La tecnica de las variables de estado
A =
2 1 35 9 70 2 8
, B =
002
, C =[4 7 2
]
A =
0 1 00 −20 500 −5 −250
, B =
00
100
, C =[1 0 0
]
A =
0 1 0 00 0 −0.5 00 0 0 10 0 50 0
, B =
010−5
, C =[1 0 1 0
]
Calcule la matriz P definida en (7.77).Calcule las matrices y vectores A = PAP−1, B = PB, C = CP−1
definidos en (7.78).Compruebe que estas matrices y vectores tienen las formas definidasen (7.75).Con estos resultados diga cual es la funcion de transferencia de laecuacion dinamica dada.Utilice software especializado para calcular la funcion de transferenciade la ecuacion dinamica dada. Verifique que este resultado y el delinciso anterior sean iguales.Use software especializado para simular la respuesta de la ecuaciondinamica dada y de la funcion de transferencia encontrada ante unaentrada escalon unitario. Grafique la salida en ambas simulaciones ycomparelas. ¿Que concluye?
5. Haga un programa de computadora que ejecute el procedimiento listadoal final de este capıtulo para calcular el vector de ganancias K que asig-ne los eigenvalores que se deseen a la matriz de lazo cerrado A − BK.Utilice este programa para calcular las ganancias de los controladores porrealimentacion de estado de los capıtulos 13 y 14.
6. La siguiente expresion constituye un filtro donde y(t) es una aproximacionde la derivada respecto al tiempo de u(t).
Y (s) =as
s + aU(s), a > 0
De hecho, y(t) es conocida como la derivada “sucia” de u(t) y es muyutilizada para estimar la velocidad y(t) en sistemas mecanicos a partirde la posicion u(t). Con el fin de construir en la practica este filtro seprocede obtener una ecuacion dinamica que lo represente. Encuentre dichaecuacion dinamica. Recuerde que u(t) debe ser la entrada. ¿Puede usarlos conceptos de respuesta en frecuencia para elegir el valor de a?

7.16 Ejercicios propuestos 443
7. Considere el sistema ball and beam estudiado en el ejemplo 7.2 del presentecapıtulo, junto con los siguientes valores numericos:
k = 16.6035, a = 3.3132, ρ = 5
Obtenga la ecuacion dinamica correspondiente cuando el estado sedefine como z = [x − xd, x, θ, θ]T y la salida es γ = x − xd, donde xd
es una constante que representa el valor deseado de la posicion x.Disene un controlador por realimentacion de estado que permita esta-bilizar el sistema en x = xd, x = θ = θ = 0. Seleccione los eigenvaloresdeseados del siguiente modo. Proponga dos parejas de tiempo de su-bida y sobre paso deseados. Usando las expresiones presentadas en(3.59) en el capıtulo 3, determine dos parejas de eigenvalores comple-jos conjugados de manera que se obtengan las dos parejas de tiempode subida y sobre paso deseados.Disene un observador de estado que permita estimar todo el estado delsistema. Recuerde que los eigenvalores de la matriz A−LC deben servarias veces mas rapidos que los eigenvalores de la matriz A − BK.Construya un sistema en lazo cerrado que use el observador arribadisenado y un controlador que realimente el estado estimado para es-tabilizar el sistema en x = xd, x = θ = θ = 0. Mediante simulacionesverifique si se han obtenido las caracterısticas de respuesta transitoriadeseadas.


Referencias
1. C.-T. Chen, Linear system theory and design, Holt, Rinehart and Winston, NewYork, 1984.
2. C.R. Wylie, Matematicas superiores para ingenierıa, 2a. edicion en espanol,McGraw-Hill, Mexico, 1994.
3. W.L. Brogan, Modern control theory, 3rd. edition, Prentice Hall, Upper SaddleRiver, 1991.
4. E. Kreyszig, Matematicas avanzadas para ingenierıa, Vol. 1, Limusa, Mexico,1980.
5. M. R. Spiegel, Manual de formulas y tablas matematicas., McGraw-Hill, SerieSchaum, Mexico, 2002.
6. C.-T. Chen, Linear system theory and design, Oxford University Press, NewYork, 1999.
7. K. Ogata, Ingenierıa de Control Moderna, 4a. edicion, Pearson Prentice-Hall,Madrid, 2003.
8. N.S. Nise, Sistemas de control para ingenierıa, 1a. edicion en espanol, 1a. Re-impresion, CECSA, Mexico, 2004.
9. R.C. Dorf y R.H. Bishop, Sistemas de control moderno, 10a. edicion, PearsonPrentice-Hall, Madrid, 2008.

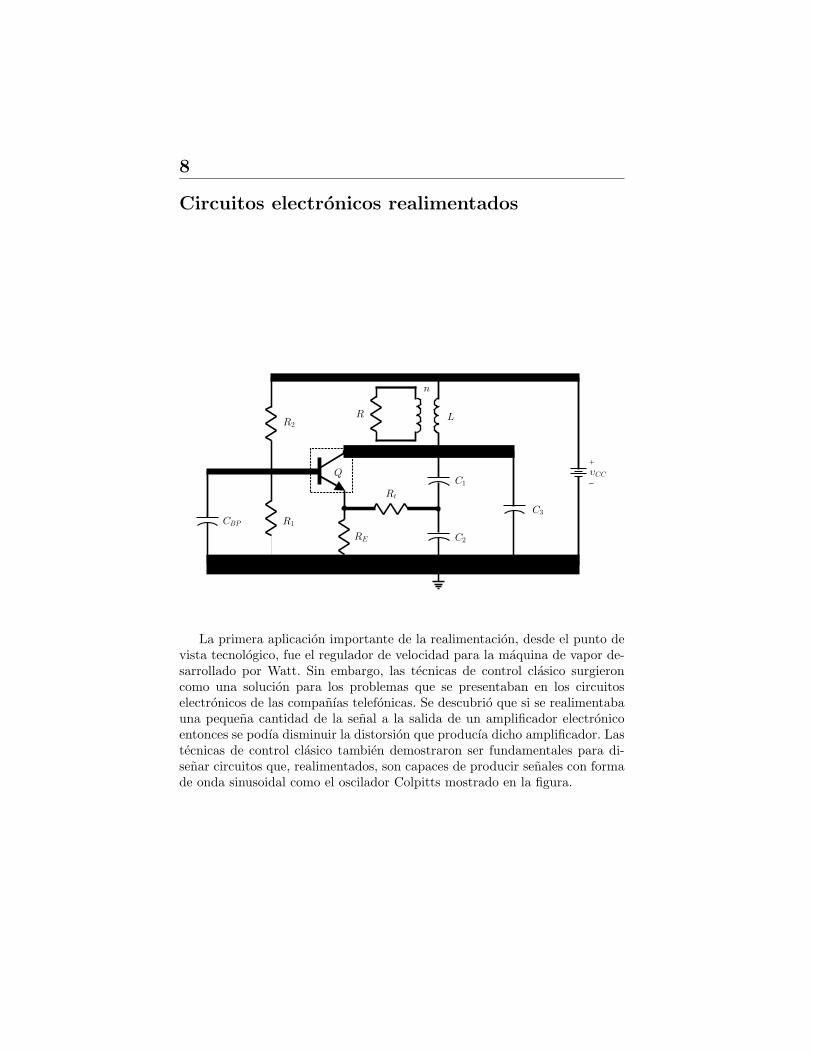
8
Circuitos electronicos realimentados
R2
R1
R
n
L
CBP
RE C2
C1
C3
ýCC
Rt
Q
La primera aplicacion importante de la realimentacion, desde el punto devista tecnologico, fue el regulador de velocidad para la maquina de vapor de-sarrollado por Watt. Sin embargo, las tecnicas de control clasico surgieroncomo una solucion para los problemas que se presentaban en los circuitoselectronicos de las companıas telefonicas. Se descubrio que si se realimentabauna pequena cantidad de la senal a la salida de un amplificador electronicoentonces se podıa disminuir la distorsion que producıa dicho amplificador. Lastecnicas de control clasico tambien demostraron ser fundamentales para di-senar circuitos que, realimentados, son capaces de producir senales con formade onda sinusoidal como el oscilador Colpitts mostrado en la figura.
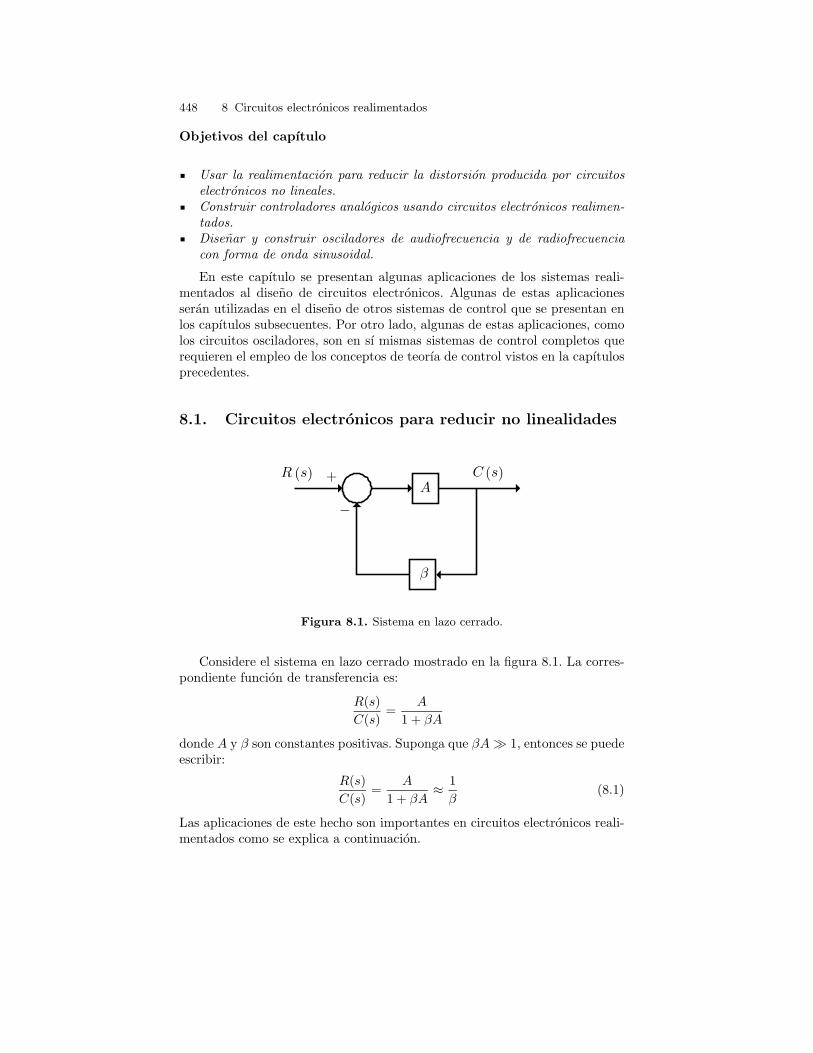
448 8 Circuitos electronicos realimentados
Objetivos del capıtulo
Usar la realimentacion para reducir la distorsion producida por circuitoselectronicos no lineales.Construir controladores analogicos usando circuitos electronicos realimen-tados.Disenar y construir osciladores de audiofrecuencia y de radiofrecuenciacon forma de onda sinusoidal.
En este capıtulo se presentan algunas aplicaciones de los sistemas reali-mentados al diseno de circuitos electronicos. Algunas de estas aplicacionesseran utilizadas en el diseno de otros sistemas de control que se presentan enlos capıtulos subsecuentes. Por otro lado, algunas de estas aplicaciones, comolos circuitos osciladores, son en sı mismas sistemas de control completos querequieren el empleo de los conceptos de teorıa de control vistos en la capıtulosprecedentes.
8.1. Circuitos electronicos para reducir no linealidades
+
àA
ì
R s( ) C s( )
Figura 8.1. Sistema en lazo cerrado.
Considere el sistema en lazo cerrado mostrado en la figura 8.1. La corres-pondiente funcion de transferencia es:
R(s)
C(s)=
A
1 + βA
donde A y β son constantes positivas. Suponga que βA ≫ 1, entonces se puedeescribir:
R(s)
C(s)=
A
1 + βA≈ 1
β(8.1)
Las aplicaciones de este hecho son importantes en circuitos electronicos reali-mentados como se explica a continuacion.
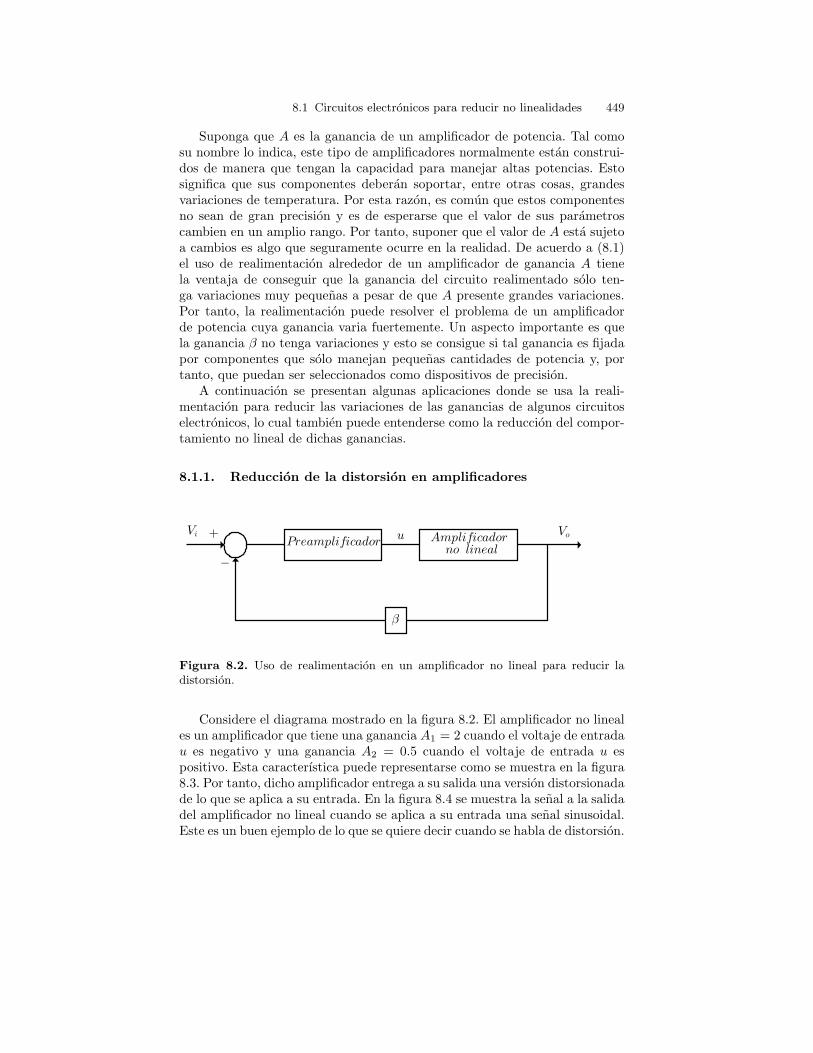
8.1 Circuitos electronicos para reducir no linealidades 449
Suponga que A es la ganancia de un amplificador de potencia. Tal comosu nombre lo indica, este tipo de amplificadores normalmente estan construi-dos de manera que tengan la capacidad para manejar altas potencias. Estosignifica que sus componentes deberan soportar, entre otras cosas, grandesvariaciones de temperatura. Por esta razon, es comun que estos componentesno sean de gran precision y es de esperarse que el valor de sus parametroscambien en un amplio rango. Por tanto, suponer que el valor de A esta sujetoa cambios es algo que seguramente ocurre en la realidad. De acuerdo a (8.1)el uso de realimentacion alrededor de un amplificador de ganancia A tienela ventaja de conseguir que la ganancia del circuito realimentado solo ten-ga variaciones muy pequenas a pesar de que A presente grandes variaciones.Por tanto, la realimentacion puede resolver el problema de un amplificadorde potencia cuya ganancia varia fuertemente. Un aspecto importante es quela ganancia β no tenga variaciones y esto se consigue si tal ganancia es fijadapor componentes que solo manejan pequenas cantidades de potencia y, portanto, que puedan ser seleccionados como dispositivos de precision.
A continuacion se presentan algunas aplicaciones donde se usa la reali-mentacion para reducir las variaciones de las ganancias de algunos circuitoselectronicos, lo cual tambien puede entenderse como la reduccion del compor-tamiento no lineal de dichas ganancias.
8.1.1. Reduccion de la distorsion en amplificadores
u+
àPreamplificador Amplificador
no lineal
ì
VoVi
Figura 8.2. Uso de realimentacion en un amplificador no lineal para reducir ladistorsion.
Considere el diagrama mostrado en la figura 8.2. El amplificador no lineales un amplificador que tiene una ganancia A1 = 2 cuando el voltaje de entradau es negativo y una ganancia A2 = 0.5 cuando el voltaje de entrada u espositivo. Esta caracterıstica puede representarse como se muestra en la figura8.3. Por tanto, dicho amplificador entrega a su salida una version distorsionadade lo que se aplica a su entrada. En la figura 8.4 se muestra la senal a la salidadel amplificador no lineal cuando se aplica a su entrada una senal sinusoidal.Este es un buen ejemplo de lo que se quiere decir cuando se habla de distorsion.

450 8 Circuitos electronicos realimentados
Vo
u
0:5
2
Figura 8.3. Caracterıstica del amplificador no lineal en la figura 8.2.
Combinando el efecto de todos los amplificadores en el trayecto directo seconcluye que el diagrama de bloques de la figura 8.2 se puede representar porun diagrama de bloques como el de la figura 8.1 donde:
A = A1A0, u < 0,
A = A2A0, u > 0,
β = 1, por ejemplo
A0 es la ganancia del preamplificador y tiene un valor muy grande. Noteseque se obtiene la siguiente funcion de transferencia de lazo cerrado:
R(s)
C(s)=
A
1 + βA≈ 1
β= 1
si las ganancias A0 y β son tales que βA ≫ 1 para ambos valores A1, A2.De esta manera el circuito en lazo cerrado de la figura 8.2 funciona comoun amplificador de ganancia constante β para ambos signos de la senal quese desea amplificar. Esto significa que se ha eliminado la distorsion debidaal amplificador no lineal de ganancias A1 y A2. Esto representa la principalventaja de usar la realimentacion mostrada en la figura 8.2 a pesar de quese haya tenido que cambiar la ganancia total del amplificador que ahora es1/β = 1. En la figura 8.5 se muestra la forma de onda obtenida Vo a la salidadel del sistema realimentado de la figura 8.2 cuando Vi es una senal sinusoidal.Observe como es que Vo tiene amplitudes iguales en ambos semiciclos cuandoun amplificador no lineal (de ganancia A) se encuentra inmerso en el sistemarealimentado. A esto se le llama eliminacion o reduccion de la distorsion.
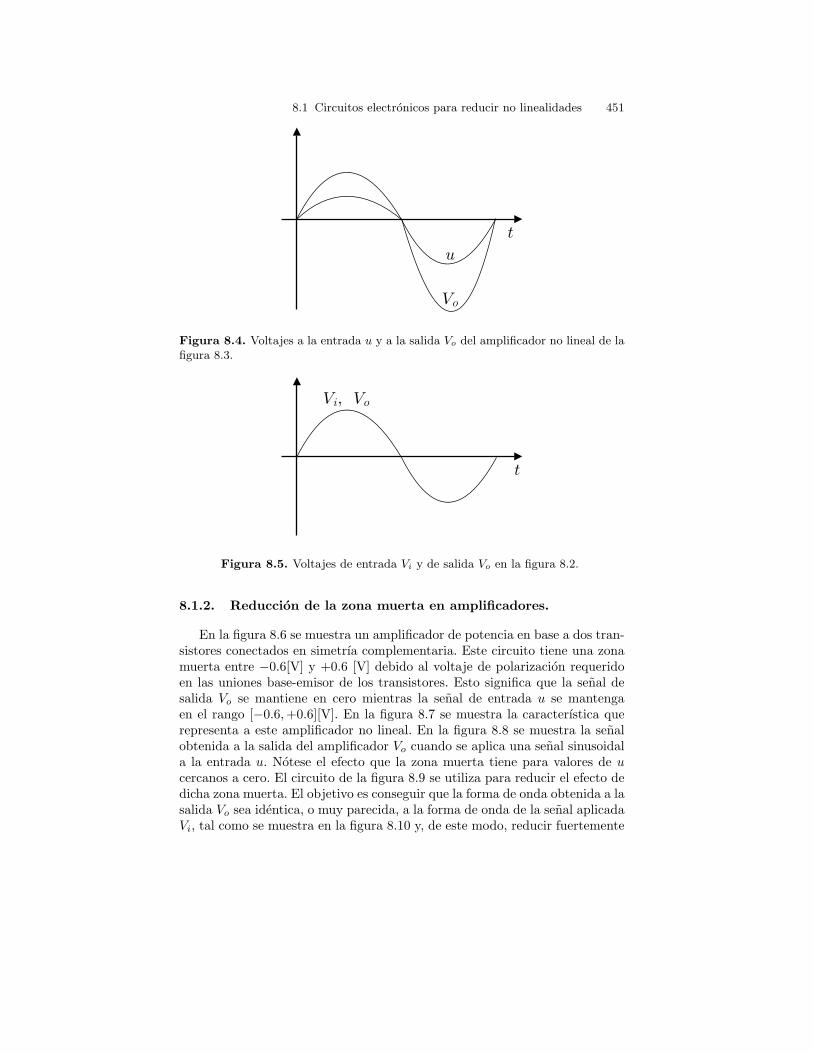
8.1 Circuitos electronicos para reducir no linealidades 451
u
Vo
t
Figura 8.4. Voltajes a la entrada u y a la salida Vo del amplificador no lineal de lafigura 8.3.
Vi; Vo
t
Figura 8.5. Voltajes de entrada Vi y de salida Vo en la figura 8.2.
8.1.2. Reduccion de la zona muerta en amplificadores.
En la figura 8.6 se muestra un amplificador de potencia en base a dos tran-sistores conectados en simetrıa complementaria. Este circuito tiene una zonamuerta entre −0.6[V] y +0.6 [V] debido al voltaje de polarizacion requeridoen las uniones base-emisor de los transistores. Esto significa que la senal desalida Vo se mantiene en cero mientras la senal de entrada u se mantengaen el rango [−0.6,+0.6][V]. En la figura 8.7 se muestra la caracterıstica querepresenta a este amplificador no lineal. En la figura 8.8 se muestra la senalobtenida a la salida del amplificador Vo cuando se aplica una senal sinusoidala la entrada u. Notese el efecto que la zona muerta tiene para valores de ucercanos a cero. El circuito de la figura 8.9 se utiliza para reducir el efecto dedicha zona muerta. El objetivo es conseguir que la forma de onda obtenida a lasalida Vo sea identica, o muy parecida, a la forma de onda de la senal aplicadaVi, tal como se muestra en la figura 8.10 y, de este modo, reducir fuertemente

452 8 Circuitos electronicos realimentados
u Vo
+ Vcc
à VccFigura 8.6. Transistores conectados en simetrıa complementaria. Ejemplo de unamplificador de potencia no lineal.
Vo
u+ 0:6
à 0:61
1
Figura 8.7. Caracterıstica del amplificador no lineal de la figura 8.6.
o eliminar el efecto de la zona muerta gracias al uso de realimentacion. Acontinuacion se explica como es que se consigue esto.
El circuito de la figura 8.9 se puede representar por el diagrama de bloquesde la figura 8.1. Este sistema realimentado tiene un funcion de transferenciaen lazo cerrado dada como:
R(s)
C(s)=
A
1 + βA, R(s) = Vo(s), C(s) = Vi(s)
β =R1
R1 + R2≤ 1
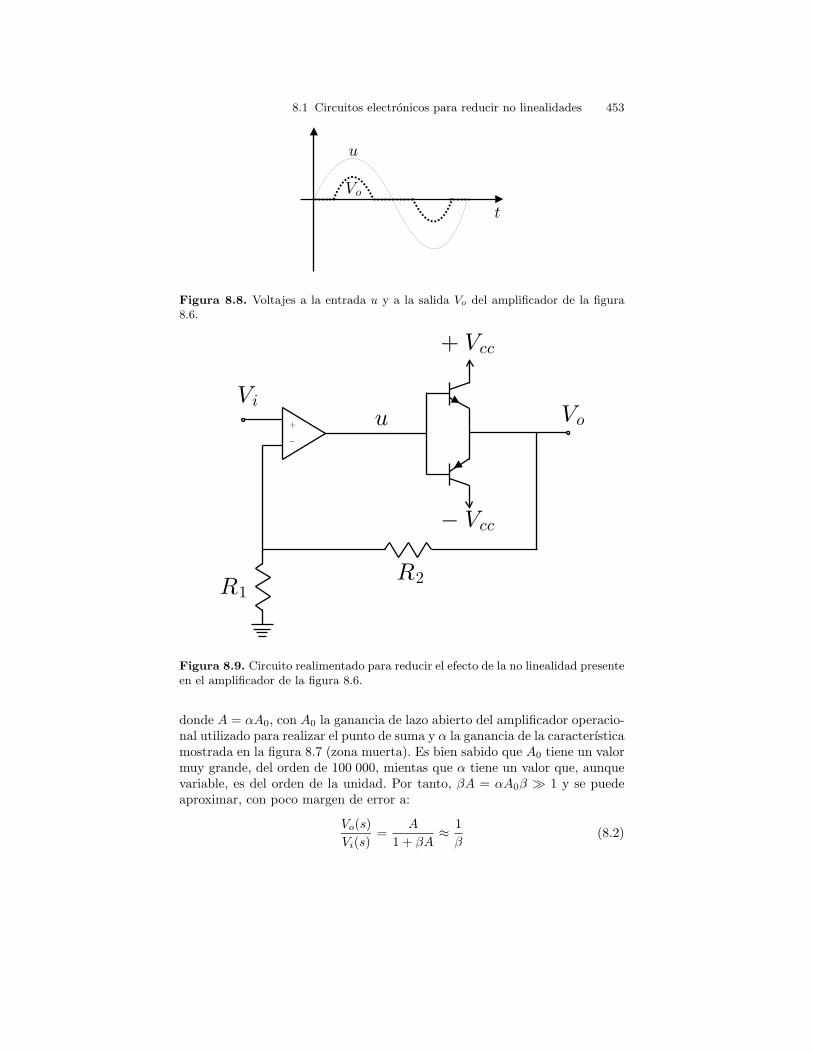
8.1 Circuitos electronicos para reducir no linealidades 453
u
Vo
t
Figura 8.8. Voltajes a la entrada u y a la salida Vo del amplificador de la figura8.6.
+
à
ViVou
+ Vcc
à Vcc
R1R2
Figura 8.9. Circuito realimentado para reducir el efecto de la no linealidad presenteen el amplificador de la figura 8.6.
donde A = αA0, con A0 la ganancia de lazo abierto del amplificador operacio-nal utilizado para realizar el punto de suma y α la ganancia de la caracterısticamostrada en la figura 8.7 (zona muerta). Es bien sabido que A0 tiene un valormuy grande, del orden de 100 000, mientas que α tiene un valor que, aunquevariable, es del orden de la unidad. Por tanto, βA = αA0β ≫ 1 y se puedeaproximar, con poco margen de error a:
Vo(s)
Vi(s)=
A
1 + βA≈ 1
β(8.2)

454 8 Circuitos electronicos realimentados
Vi; Vo
t
Figura 8.10. Voltajes a la entrada Vi y a la salida Vo del circuito de la figura 8.9.
La expresion (8.2) indica que el circuito completo se comporta como un ampli-ficador de ganancia constante 1/β que elimina o reduce fuertemente el efectode la zona muerta de modo que la forma de onda de Vo is igual a la de Vi.
Notese que R1 y R2 se pueden seleccionar de valor grande para asegurarque manejen poca corriente (poca potencia) por lo que pueden usarse resis-tencias de precision. Tambien es importante aclarar lo siguiente. De acuerdo ala figura 8.7 el valor de α es cero para valores de u en el rango [−0.6,+0.6][V].Esto sugiere que la condicion βA = αA0β ≫ 1 no se cumple. Sin embargo,debe entenderse que la caracterıstica mostrada en la figura 8.7 es una ideali-zacion de lo que realmente sucede en la practica y que en la realidad Vo soloes cero cuando u tambien es cero.
En la figura 8.11 se muestran los voltajes u y Vo correspondientes a lafigura 8.6 obtenidos durante un experimento. Se utilizan los transistores tipoDarlington TIP 141 (NPN) y TIP 145 (PNP). Esto significa que el voltaje deunion base-emisor tiene un voltaje nominal de polarizacion directa de alrede-dor de 1.2[V] y, por tanto, la zona muerta en este caso esta en el intervalo[-1.2,+1.2][V] del voltaje de entrada u. El voltaje u es una senal sinusoidalde 2.083[KHz] de 1[V] de pico. Esto situa al voltaje de la union base-emisorclaramente por debajo de su valor de polarizacion directa. Es importante men-cionar que se conecta una resistencia de carga de 1[KOhm] entre los emisoresy tierra. Notese que el voltaje Vo tiene una forma de onda muy distinta auna sinusoide (compare con el trazo punteado en la figura 8.8), por lo que seconfirma experimentalmente que la conexion en simetrıa complementaria dedos transistores distorsiona fuertemente la senal.
En la figura 8.12 se muestran las formas de onda de las senales Vi y Vo
correspondientes a la figura 8.9. Estas mediciones se obtuvieron en un expe-rimento donde se utilizan los transistores tipo Darlington TIP 141 (NPN) yTIP 145 (PNP) y el voltaje Vi es una senal sinusoidal de 2.083[KHz] de 1[V]de pico, es decir, como en el experimento de la figura 8.11. Tambien se utilizanlos valores de resistencia R1 = R2 = 10[KOhm] y una resistencia de carga de1[KOhm] entre los emisores y tierra. El amplificador operacional utilizado esel TL081. Notese que la forma de onda de Vo es como la de Vi, es decir, ambasson sinusoides de la misma frecuencia, aunque la amplitud de Vo es el doble
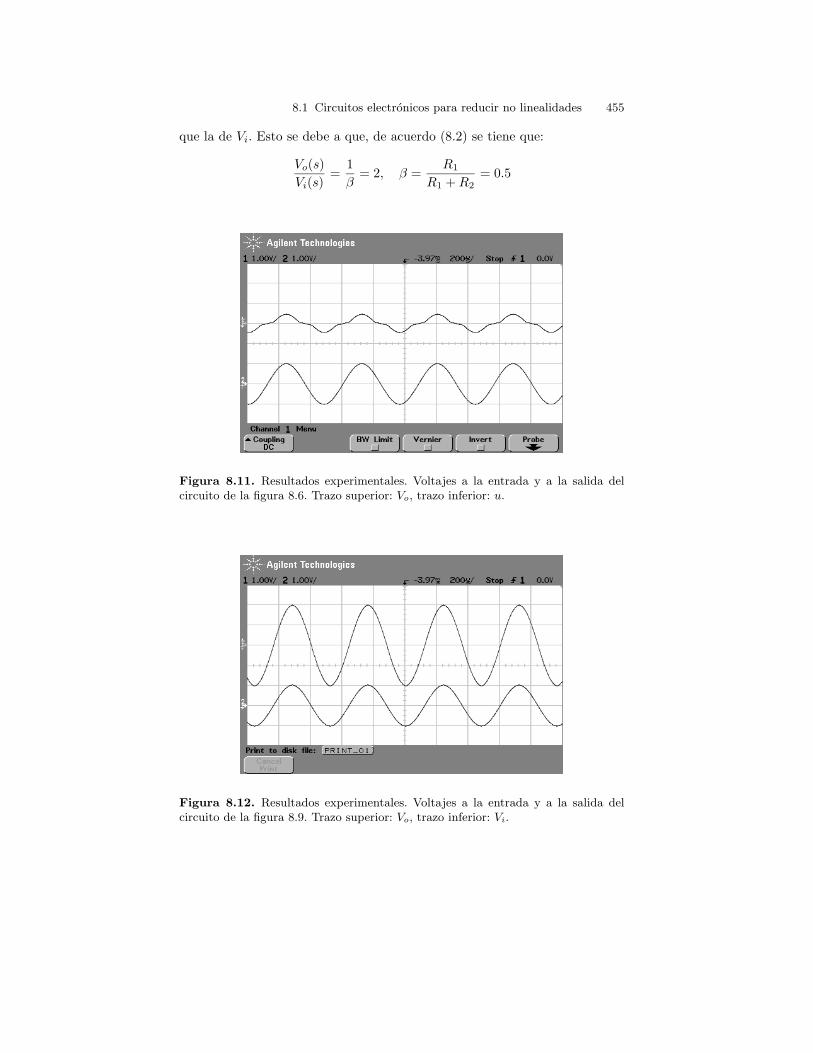
8.1 Circuitos electronicos para reducir no linealidades 455
que la de Vi. Esto se debe a que, de acuerdo (8.2) se tiene que:
Vo(s)
Vi(s)=
1
β= 2, β =
R1
R1 + R2= 0.5
Figura 8.11. Resultados experimentales. Voltajes a la entrada y a la salida delcircuito de la figura 8.6. Trazo superior: Vo, trazo inferior: u.
Figura 8.12. Resultados experimentales. Voltajes a la entrada y a la salida delcircuito de la figura 8.9. Trazo superior: Vo, trazo inferior: Vi.
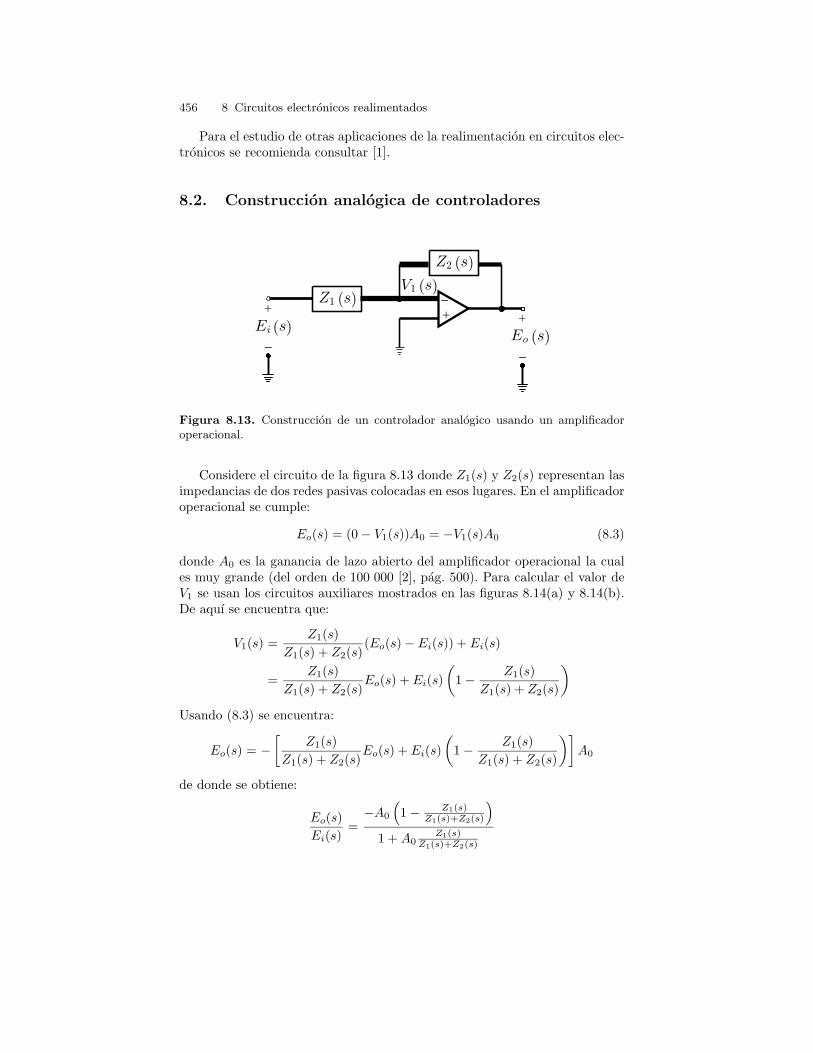
456 8 Circuitos electronicos realimentados
Para el estudio de otras aplicaciones de la realimentacion en circuitos elec-tronicos se recomienda consultar [1].
8.2. Construccion analogica de controladores
Z2 s( )
Z1 s( )
Eo s( )Ei s( )
V1 s( )
Figura 8.13. Construccion de un controlador analogico usando un amplificadoroperacional.
Considere el circuito de la figura 8.13 donde Z1(s) y Z2(s) representan lasimpedancias de dos redes pasivas colocadas en esos lugares. En el amplificadoroperacional se cumple:
Eo(s) = (0 − V1(s))A0 = −V1(s)A0 (8.3)
donde A0 es la ganancia de lazo abierto del amplificador operacional la cuales muy grande (del orden de 100 000 [2], pag. 500). Para calcular el valor deV1 se usan los circuitos auxiliares mostrados en las figuras 8.14(a) y 8.14(b).De aquı se encuentra que:
V1(s) =Z1(s)
Z1(s) + Z2(s)(Eo(s) − Ei(s)) + Ei(s)
=Z1(s)
Z1(s) + Z2(s)Eo(s) + Ei(s)
(1 − Z1(s)
Z1(s) + Z2(s)
)
Usando (8.3) se encuentra:
Eo(s) = −[
Z1(s)
Z1(s) + Z2(s)Eo(s) + Ei(s)
(1 − Z1(s)
Z1(s) + Z2(s)
)]A0
de donde se obtiene:
Eo(s)
Ei(s)=
−A0
(1 − Z1(s)
Z1(s)+Z2(s)
)
1 + A0Z1(s)
Z1(s)+Z2(s)
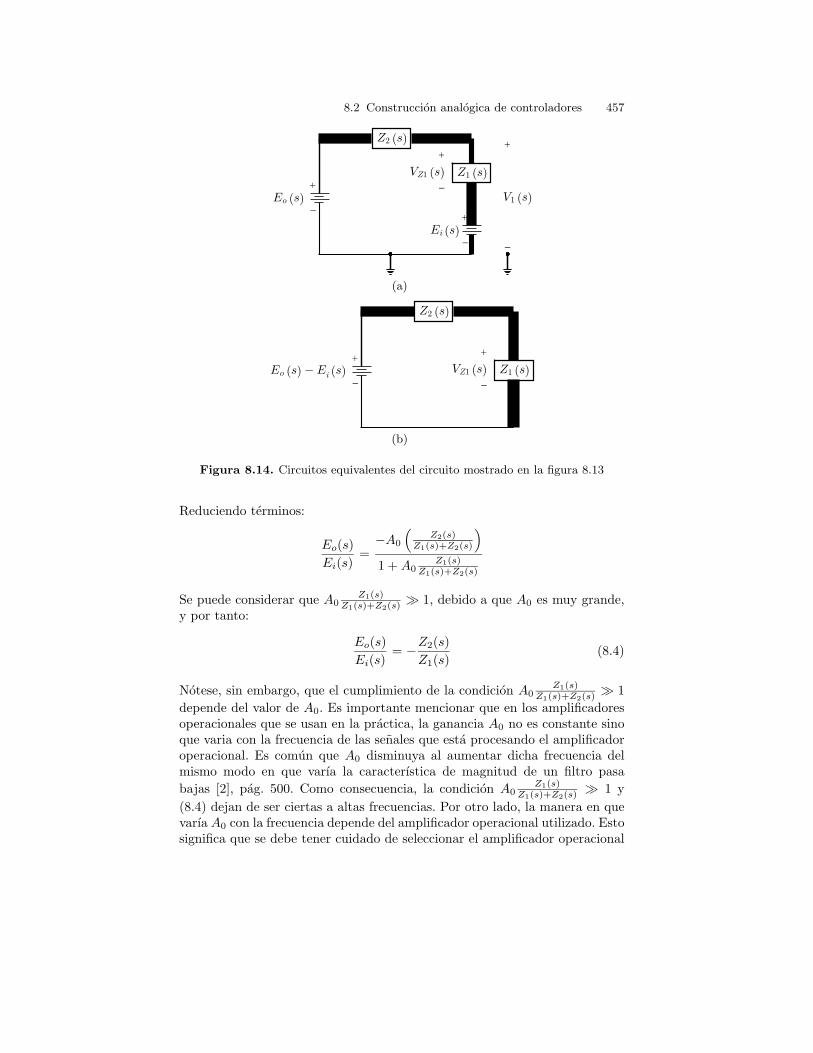
8.2 Construccion analogica de controladores 457
Z2 s( )
Z1 s( )
Ei s( )
Eo s( ) V1 s( )
VZ1 s( )
(a)
Z2 s( )
Z1 s( )Eo s( )à Ei s( ) VZ1 s( )
(b)
Figura 8.14. Circuitos equivalentes del circuito mostrado en la figura 8.13
Reduciendo terminos:
Eo(s)
Ei(s)=
−A0
(Z2(s)
Z1(s)+Z2(s)
)
1 + A0Z1(s)
Z1(s)+Z2(s)
Se puede considerar que A0Z1(s)
Z1(s)+Z2(s)≫ 1, debido a que A0 es muy grande,
y por tanto:
Eo(s)
Ei(s)= −Z2(s)
Z1(s)(8.4)
Notese, sin embargo, que el cumplimiento de la condicion A0Z1(s)
Z1(s)+Z2(s)≫ 1
depende del valor de A0. Es importante mencionar que en los amplificadoresoperacionales que se usan en la practica, la ganancia A0 no es constante sinoque varia con la frecuencia de las senales que esta procesando el amplificadoroperacional. Es comun que A0 disminuya al aumentar dicha frecuencia delmismo modo en que varıa la caracterıstica de magnitud de un filtro pasa
bajas [2], pag. 500. Como consecuencia, la condicion A0Z1(s)
Z1(s)+Z2(s)≫ 1 y
(8.4) dejan de ser ciertas a altas frecuencias. Por otro lado, la manera en quevarıa A0 con la frecuencia depende del amplificador operacional utilizado. Estosignifica que se debe tener cuidado de seleccionar el amplificador operacional
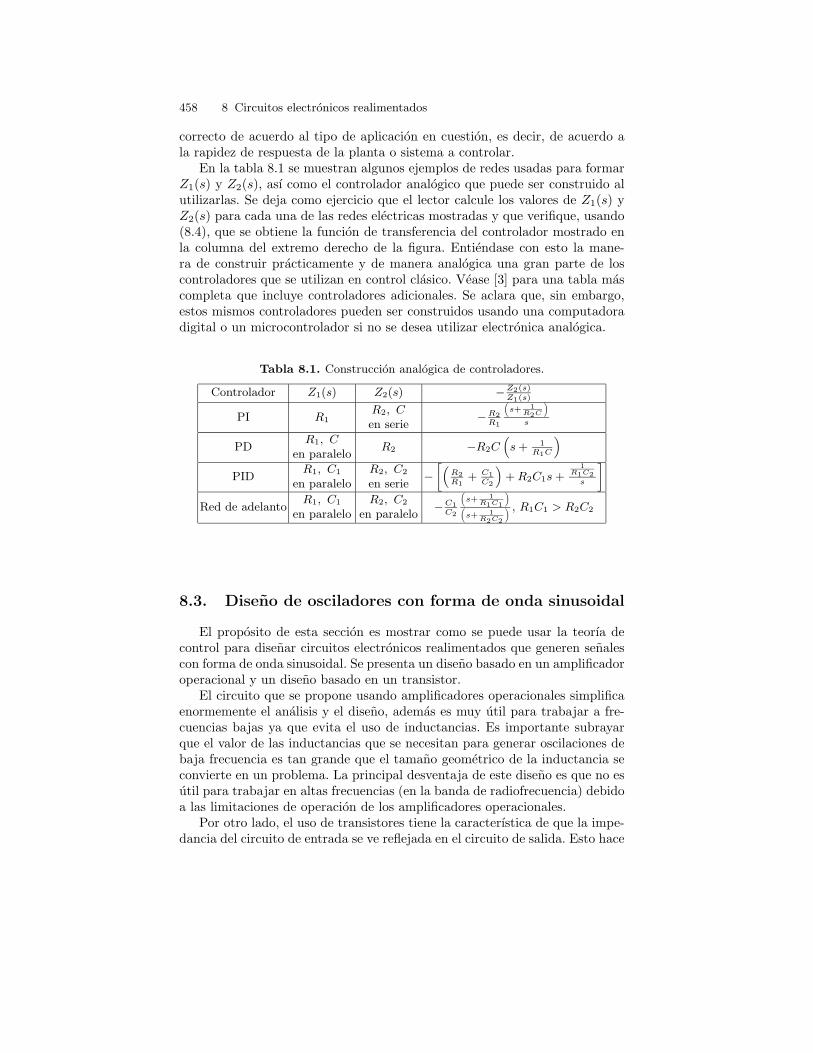
458 8 Circuitos electronicos realimentados
correcto de acuerdo al tipo de aplicacion en cuestion, es decir, de acuerdo ala rapidez de respuesta de la planta o sistema a controlar.
En la tabla 8.1 se muestran algunos ejemplos de redes usadas para formarZ1(s) y Z2(s), ası como el controlador analogico que puede ser construido alutilizarlas. Se deja como ejercicio que el lector calcule los valores de Z1(s) yZ2(s) para cada una de las redes electricas mostradas y que verifique, usando(8.4), que se obtiene la funcion de transferencia del controlador mostrado enla columna del extremo derecho de la figura. Entiendase con esto la mane-ra de construir practicamente y de manera analogica una gran parte de loscontroladores que se utilizan en control clasico. Vease [3] para una tabla mascompleta que incluye controladores adicionales. Se aclara que, sin embargo,estos mismos controladores pueden ser construidos usando una computadoradigital o un microcontrolador si no se desea utilizar electronica analogica.
Tabla 8.1. Construccion analogica de controladores.
Controlador Z1(s) Z2(s) −Z2(s)Z1(s)
PI R1R2, Cen serie
−R2
R1
(s+ 1
R2C
)
s
PDR1, C
en paraleloR2 −R2C
(s + 1
R1C
)
PIDR1, C1
en paraleloR2, C2
en serie−
[(R2
R1+ C1
C2
)+ R2C1s +
1R1C2
s
]
Red de adelantoR1, C1
en paraleloR2, C2
en paralelo−C1
C2
(s+ 1
R1C1
)
(s+ 1
R2C2
) , R1C1 > R2C2
8.3. Diseno de osciladores con forma de onda sinusoidal
El proposito de esta seccion es mostrar como se puede usar la teorıa decontrol para disenar circuitos electronicos realimentados que generen senalescon forma de onda sinusoidal. Se presenta un diseno basado en un amplificadoroperacional y un diseno basado en un transistor.
El circuito que se propone usando amplificadores operacionales simplificaenormemente el analisis y el diseno, ademas es muy util para trabajar a fre-cuencias bajas ya que evita el uso de inductancias. Es importante subrayarque el valor de las inductancias que se necesitan para generar oscilaciones debaja frecuencia es tan grande que el tamano geometrico de la inductancia seconvierte en un problema. La principal desventaja de este diseno es que no esutil para trabajar en altas frecuencias (en la banda de radiofrecuencia) debidoa las limitaciones de operacion de los amplificadores operacionales.
Por otro lado, el uso de transistores tiene la caracterıstica de que la impe-dancia del circuito de entrada se ve reflejada en el circuito de salida. Esto hace
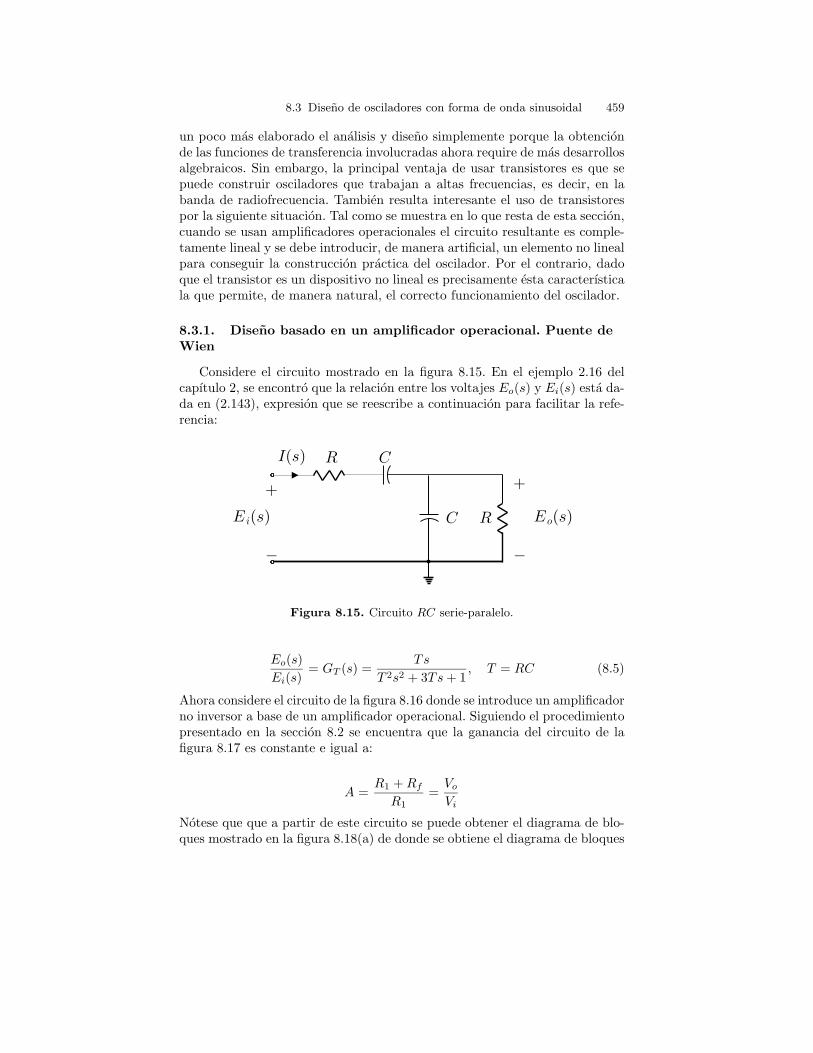
8.3 Diseno de osciladores con forma de onda sinusoidal 459
un poco mas elaborado el analisis y diseno simplemente porque la obtencionde las funciones de transferencia involucradas ahora require de mas desarrollosalgebraicos. Sin embargo, la principal ventaja de usar transistores es que sepuede construir osciladores que trabajan a altas frecuencias, es decir, en labanda de radiofrecuencia. Tambien resulta interesante el uso de transistorespor la siguiente situacion. Tal como se muestra en lo que resta de esta seccion,cuando se usan amplificadores operacionales el circuito resultante es comple-tamente lineal y se debe introducir, de manera artificial, un elemento no linealpara conseguir la construccion practica del oscilador. Por el contrario, dadoque el transistor es un dispositivo no lineal es precisamente esta caracterısticala que permite, de manera natural, el correcto funcionamiento del oscilador.
8.3.1. Diseno basado en un amplificador operacional. Puente deWien
Considere el circuito mostrado en la figura 8.15. En el ejemplo 2.16 delcapıtulo 2, se encontro que la relacion entre los voltajes Eo(s) y Ei(s) esta da-da en (2.143), expresion que se reescribe a continuacion para facilitar la refe-rencia:
E i(s) Eo(s)
I(s) R
R
C
C
++
à à
Figura 8.15. Circuito RC serie-paralelo.
Eo(s)
Ei(s)= GT (s) =
Ts
T 2s2 + 3Ts + 1, T = RC (8.5)
Ahora considere el circuito de la figura 8.16 donde se introduce un amplificadorno inversor a base de un amplificador operacional. Siguiendo el procedimientopresentado en la seccion 8.2 se encuentra que la ganancia del circuito de lafigura 8.17 es constante e igual a:
A =R1 + Rf
R1=
Vo
Vi
Notese que que a partir de este circuito se puede obtener el diagrama de blo-ques mostrado en la figura 8.18(a) de donde se obtiene el diagrama de bloques
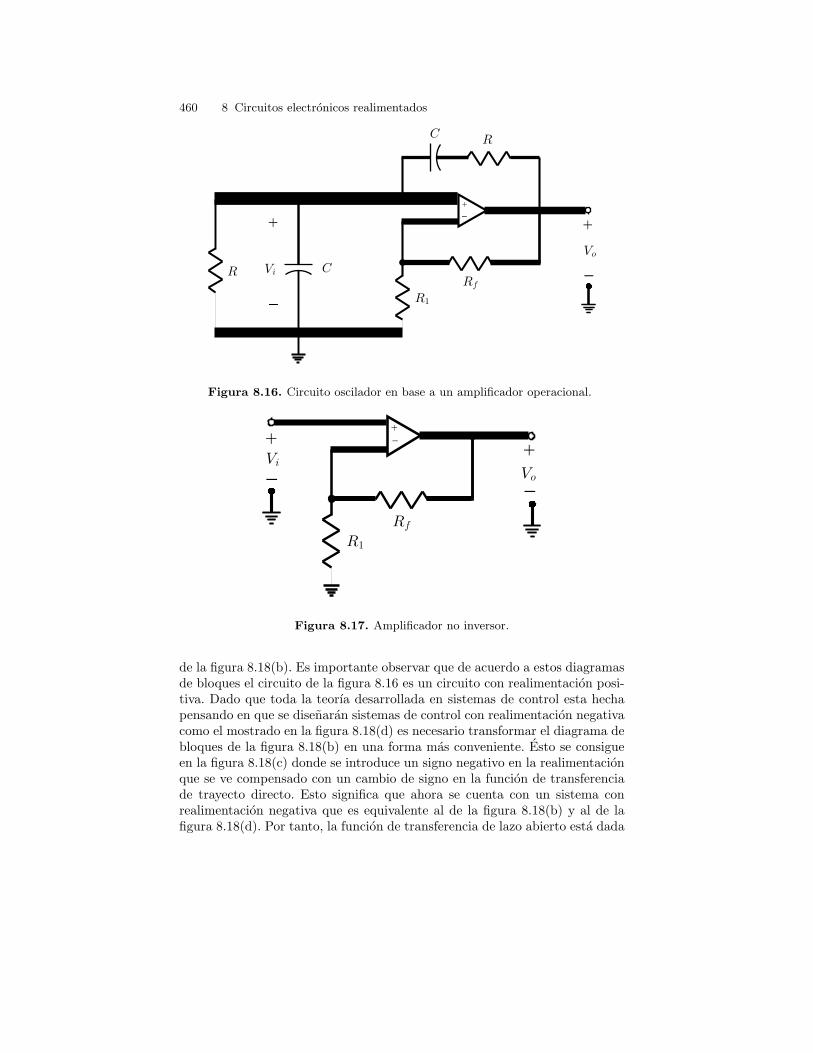
460 8 Circuitos electronicos realimentados
C
R CVi
R1
Rf
Vo
R
Figura 8.16. Circuito oscilador en base a un amplificador operacional.
R1
Rf
VoVi
Figura 8.17. Amplificador no inversor.
de la figura 8.18(b). Es importante observar que de acuerdo a estos diagramasde bloques el circuito de la figura 8.16 es un circuito con realimentacion posi-tiva. Dado que toda la teorıa desarrollada en sistemas de control esta hechapensando en que se disenaran sistemas de control con realimentacion negativacomo el mostrado en la figura 8.18(d) es necesario transformar el diagrama debloques de la figura 8.18(b) en una forma mas conveniente. Esto se consigueen la figura 8.18(c) donde se introduce un signo negativo en la realimentacionque se ve compensado con un cambio de signo en la funcion de transferenciade trayecto directo. Esto significa que ahora se cuenta con un sistema conrealimentacion negativa que es equivalente al de la figura 8.18(b) y al de lafigura 8.18(d). Por tanto, la funcion de transferencia de lazo abierto esta dada
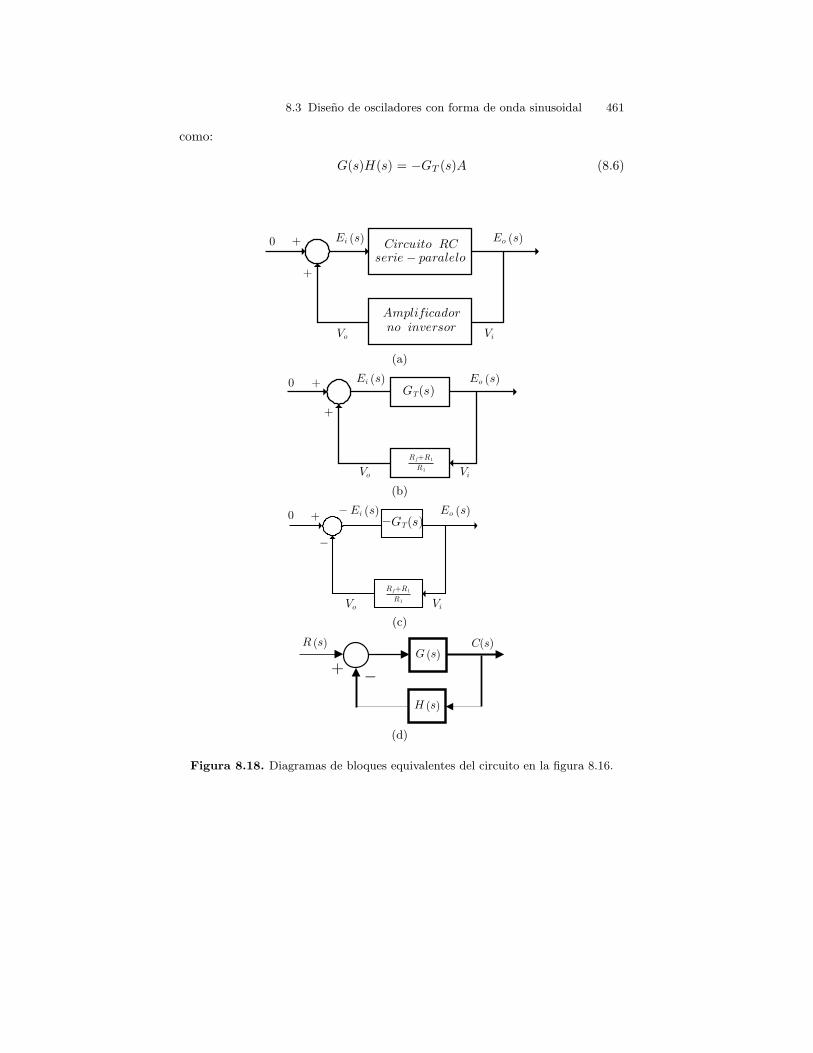
8.3 Diseno de osciladores con forma de onda sinusoidal 461
como:
G(s)H(s) = −GT (s)A (8.6)
+
+
0 Ei s( ) Eo s( )
Vo Vi
Circuito RCserie à paralelo
Amplificadorno inversor
(a)
R1
Rf+R1
+
+
Ei s( ) Eo s( )
ViVo
0GT(s)
(b)
R1
Rf+R1
+
à
Eo s( )
ViVo
à Ei s( )0GT(s)à
(c)
G s( )
à+
R s( )
H s( )
C(s)
(d)
Figura 8.18. Diagramas de bloques equivalentes del circuito en la figura 8.16.

462 8 Circuitos electronicos realimentados
Analisis basado en la respuesta en el tiempo
Este metodo se refiere al estudio del circuito a traves de localizar la ubi-cacion de sus polos. A partir del estudio sobre ecuaciones diferenciales en elcapıtulo 3 se sabe que para tener oscilaciones sostenidas los polos de lazocerrado deben ser imaginarios puros, es decir, con parte real cero y parte ima-ginaria diferente de cero. Bajo esta situacion, la frecuencia de oscilacion, enradianes/segundo, es igual a la parte imaginaria de dichos polos.
Se sabe que los polos de lazo cerrado satisfacen:
1 + G(s)H(s) = 0
Sustituyendo las ecuaciones (8.6) y (8.5) se obtiene:
1 + G(s)H(s) = 1 − GT (s)A = 1 − TAs
T 2s2 + 3Ts + 1
=T 2s2 + 3Ts + 1 − TAs
T 2s2 + 3Ts + 1= 0
y, por tanto, los polos de lazo cerrado satisfacen:
T 2s2 + (3 − A)Ts + 1 = 0
Los polos de lazo cerrado son las raıces del polinomio del lado izquierdo, esdecir:
s1 =−(3 − A)T +
√(3 − A)2T 2 − 4T 2
2T 2
s2 =−(3 − A)T −
√(3 − A)2T 2 − 4T 2
2T 2
Notese lo siguiente:
Ambos polos tienen parte imaginaria diferente de cero y, por tanto, elcircuito presentara oscilaciones si:
(3 − A)2T 2 − 4T 2 < 0
es decir, si 5 > A > 1.Si A > 3, entonces ambos polos tienen parte real positiva, es decir, elcircuito es inestable lo cual es altamente indeseable.Si A < 3, entonces ambos polos tienen parte real negativa, es decir, elcircuito es estable. Esto, sin embargo, tampoco es deseable porque la res-puesta del circuito sera tal que poco a poco dejara de oscilar.Si A = 3, entonces los dos polos tienen parte real cero y, por tanto, sonimaginarios puros, tal como se desea. Estos polos estan ubicados en s1,2 =±j 1
T . Por tanto, la frecuencia de oscilacion es ω = 1T = 1
RC .

8.3 Diseno de osciladores con forma de onda sinusoidal 463
Analisis basado en la respuesta en la frecuencia
Introduzcase el cambio de variable s = jω en (8.5):
GT (jω) =jTω
T 2(jω)2 + 3jTω + 1
Evaluando en la frecuencia ω = 1/T = 1/(RC) se obtiene:
GT (j/T ) =1
3
Para obtener la grafica de Bode de GT (s) se reescribe:
GT (s) = Ts1
T 2
s2 + 3T s + 1
T 2
(8.7)
La grafica de Bode de GT (s) se muestra en la figura 8.19. La magnitud deGT (jω) es maxima (e igual a 1
3 ) en la frecuencia ω = 1/T = 1/(RC), justocuando la fase de GT (jω) es cero.
0
fasegrados[ ]
à 90
!
iii)
ii)
!
i)
0dB
ii)
iii)
iv)
iv)
1
à 180
+ 90
T
1
T
1
Figura 8.19. Graficas de Bode de GT (s) en (8.7). i) T , ii) s, iii)1
T2
s2+ 3T
s+ 1
T2
, iv)
GT (s).
La grafica polar de G(s)H(s) dada en (8.6) se muestra en la figura 8.20. Eluso de la grafica de Bode de GT (s) mostrada en la figura 8.19 permite concluirque la grafica polar de G(s)H(s), mostrada en en la figura 8.20, consiste en unatrayectoria cerrada que es recorrida dos veces en sentido horario. Observeseque el signo negativo en (8.6) cambia la fase en 180 de cada uno de los puntosde la grafica de Bode de GT (s). Notese tambien que la grafica polar de la figura
8.20 cruza el eje real negativo en el punto −R1+Rf
3R1a la frecuencia ω = 1/T =

464 8 Circuitos electronicos realimentados
! = 0ï ! = +1
! = à1! = æ T1
Re G(j!)H(j!)( )
Im G(j!)H(j!)( )
à 3A
ï(à 1; j0)
Figura 8.20. Grafica polar de G(s)H(s) en (8.6).
1/(RC). Por otro lado, como la grafica polar incluye frecuencias positivasy negativas y es simetrica respecto al eje real para frecuencias negativas ypositivas entonces el eje real negativo tambien es cruzado en el punto −R1+Rf
3R1
a la frecuencia ω = −1/T = −1/(RC). Notese tambien que el numero de polosinestables de lazo abierto que tiene la funcion dada en (8.6) es cero, es decirP = 0, ya que todos los coeficientes del polinomio del denominador de GT (s)son positivos (vease la seccion 4.2.1).
Finalmente, antes de aplicar el criterio de Nyquist se debe observar losiguiente. Como G(s)H(s) tiene un cero en s = 0, es decir sobre el eje imagi-nario, se debe hacer un rodeo como el mostrado en la figura 6.44 solo que eneste caso es un cero (en lugar de un polo) el que se debe rodear. Sin embar-go, sobre todo ese rodeo s = ε∠φ donde ε → 0 y, por tanto, G(s)H(s) → 0tambien sobre todo ese rodeo. Es decir, G(s)H(s) representa un solo puntoen el origen para todo ese rodeo. Por tanto, al aplicar el criterio de Nyquistse tienen tres casos:
1. SiR1+Rf
3R1> 1, entonces el numero de vueltas alrededor del punto (−1, j0)
es N = 2, por lo que el numero de polos inestables de lazo cerrado es Z =N + P = 2. Esto significa inestabilidad del circuito lo cual es altamenteindeseable.
2. SiR1+Rf
3R1< 1, entonces el numero de vueltas alrededor del punto (−1, j0)
es N = 0, por lo que el numero de polos inestables de lazo cerrado esZ = N + P = 0. Aunque esto significa que el circuito es estable, sinembargo tampoco es deseable porque la respuesta del circuito sera tal quepoco a poco dejara de oscilar.
3. SiR1+Rf
3R1= 1, entonces el circuito es marginalmente estable, es decir se tie-
nen polos de lazo cerrado que estan sobre el eje imaginario. Esto tambienpuede entenderse del siguiente modo. De acuerdo a la discusion previa,
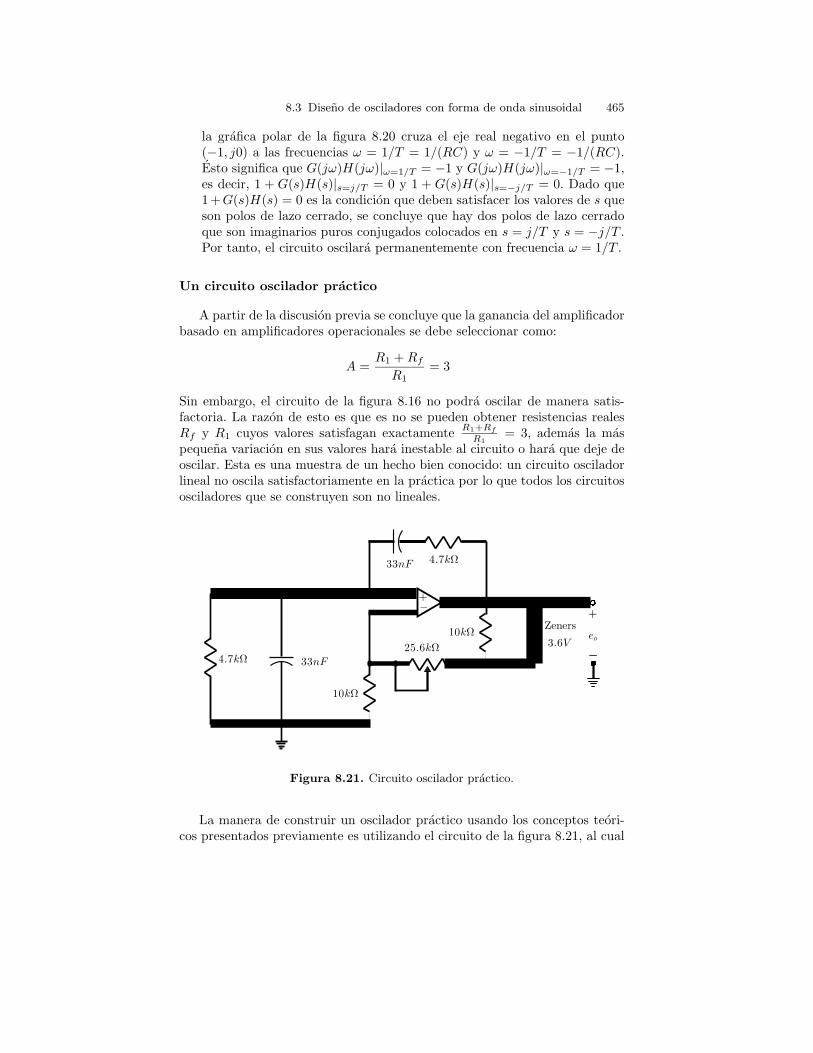
8.3 Diseno de osciladores con forma de onda sinusoidal 465
la grafica polar de la figura 8.20 cruza el eje real negativo en el punto(−1, j0) a las frecuencias ω = 1/T = 1/(RC) y ω = −1/T = −1/(RC).Esto significa que G(jω)H(jω)|ω=1/T = −1 y G(jω)H(jω)|ω=−1/T = −1,es decir, 1 + G(s)H(s)|s=j/T = 0 y 1 + G(s)H(s)|s=−j/T = 0. Dado que1+G(s)H(s) = 0 es la condicion que deben satisfacer los valores de s queson polos de lazo cerrado, se concluye que hay dos polos de lazo cerradoque son imaginarios puros conjugados colocados en s = j/T y s = −j/T .Por tanto, el circuito oscilara permanentemente con frecuencia ω = 1/T .
Un circuito oscilador practico
A partir de la discusion previa se concluye que la ganancia del amplificadorbasado en amplificadores operacionales se debe seleccionar como:
A =R1 + Rf
R1= 3
Sin embargo, el circuito de la figura 8.16 no podra oscilar de manera satis-factoria. La razon de esto es que es no se pueden obtener resistencias realesRf y R1 cuyos valores satisfagan exactamente
R1+Rf
R1= 3, ademas la mas
pequena variacion en sus valores hara inestable al circuito o hara que deje deoscilar. Esta es una muestra de un hecho bien conocido: un circuito osciladorlineal no oscila satisfactoriamente en la practica por lo que todos los circuitososciladores que se construyen son no lineales.
10kÒ
10kÒZeners
4:7kÒ
3:6V25:6kÒ
33nF
4:7kÒ 33nF
eo
+à
Figura 8.21. Circuito oscilador practico.
La manera de construir un oscilador practico usando los conceptos teori-cos presentados previamente es utilizando el circuito de la figura 8.21, al cual
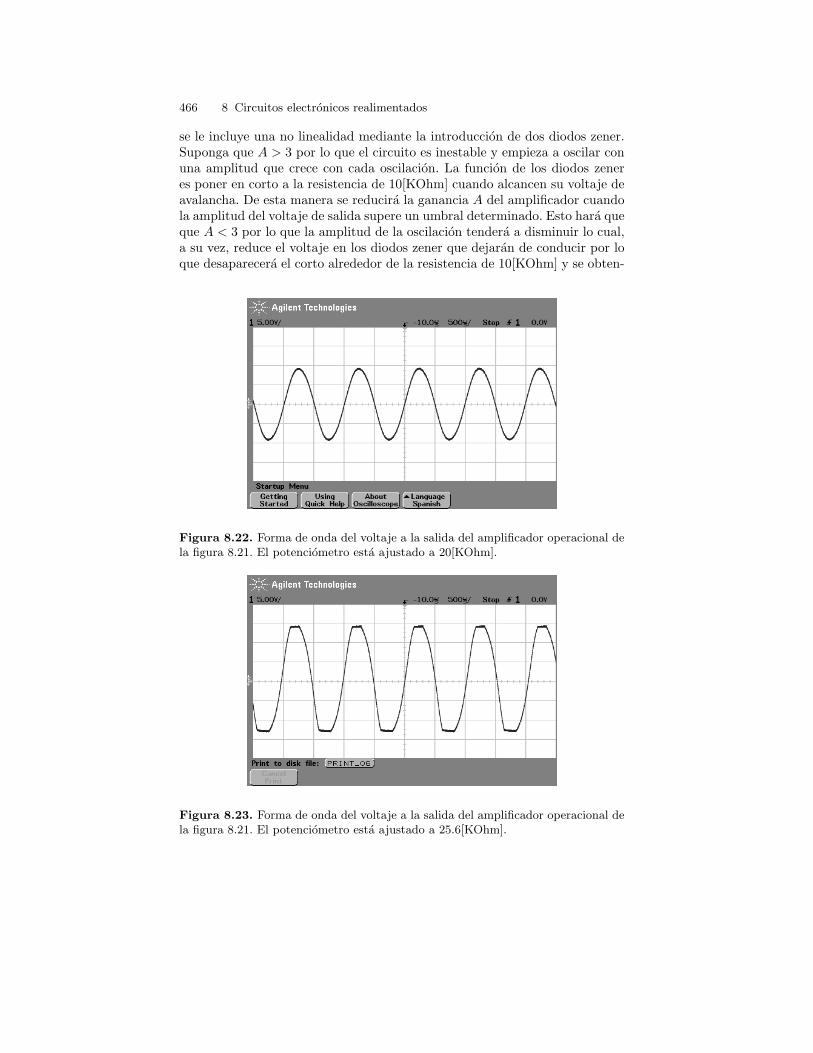
466 8 Circuitos electronicos realimentados
se le incluye una no linealidad mediante la introduccion de dos diodos zener.Suponga que A > 3 por lo que el circuito es inestable y empieza a oscilar conuna amplitud que crece con cada oscilacion. La funcion de los diodos zeneres poner en corto a la resistencia de 10[KOhm] cuando alcancen su voltaje deavalancha. De esta manera se reducira la ganancia A del amplificador cuandola amplitud del voltaje de salida supere un umbral determinado. Esto hara queque A < 3 por lo que la amplitud de la oscilacion tendera a disminuir lo cual,a su vez, reduce el voltaje en los diodos zener que dejaran de conducir por loque desaparecera el corto alrededor de la resistencia de 10[KOhm] y se obten-
Figura 8.22. Forma de onda del voltaje a la salida del amplificador operacional dela figura 8.21. El potenciometro esta ajustado a 20[KOhm].
Figura 8.23. Forma de onda del voltaje a la salida del amplificador operacional dela figura 8.21. El potenciometro esta ajustado a 25.6[KOhm].

8.3 Diseno de osciladores con forma de onda sinusoidal 467
dra A > 3 de nuevo. Finalmente, este proceso producira un estado estacionarioen el que habra una oscilacion sinusoidal de amplitud constante. Notese que,usando los valores de las resistencias en la figura 8.21, A = 45/10 = 4.5 si noconducen los diodos zener y A = 35/10 = 3.5 si conducen los diodos zener.Ası que se debe ajustar el valor del potenciometro de 25.6[KOhm] para obte-ner un valor de A ligeramente mayor que 3 y conseguir la oscilacion sostenida.Notese que la frecuencia de oscilacion esperada es:
ω =1
T=
1
RC=
1
(4.7 × 103)(0.033 × 10−6)= 6447[rad/s],
f =ω
2π=
6447
2π= 1.026[KHz]
En las figuras 8.22 y 8.23 se muestran los resultados experimentales obtenidoscon el circuito de la figura 8.21. El amplificador operacional utilizado es elUA741. La frecuencia obtenida experimentalmente es 1[KHz]. La amplitudde oscilacion puede ser modificada si se incrementa el valor de la resisten-cia del potenciometro de 25.6[KOhm], lo cual incrementa la ganancia de delamplificar operacional realimentado A. Sin embargo, si esta ganancia es muygrande la forma de onda sinusoidal se distorsiona. Esto es lo que ocurre en lafigura 8.23 donde se usa el potenciometro 25.6[KOhm] ajustado a su maximovalor de resistencia. Por el contrario, en la figura 8.22 el potenciometro de25.6[KOhm] se usa ajustado a un valor de aproximadamente 20[KOhm]. Estecomportamiento significa que la conduccion en la zona de avalancha de losdiodos zener es progresiva, y no abrupta, conforme aumenta la amplitud delvoltaje en la salida del amplificador operacional. De esta manera, una mayorganancia de lazo en (8.6) es reducida a la unidad si aumenta la amplitud delas oscilaciones, es decir, si el funcionamiento de los diodos zener se internamas en su region de avalancha.
Finalmente, notese que, de acuerdo a los diagramas de bloques mostradosen la figura 8.18, el circuito oscilador presentado en esa seccion constituye unsistema en lazo cerrado sin entrada, es decir, la entrada que se aplica paraque el circuito oscile es igual a cero. Esto no debe sorprender al lector pues enla seccion 3.3 del capıtulo 3 se explica claramente que un sistema de segundoorden (o de orden mayor) puede oscilar aunque la entrada sea cero si las con-diciones iniciales son diferentes de cero. En este sentido, debe observarse quea pesar de que el circuito este inicialmente desconectado se pueden producirpequenas condiciones iniciales diferentes de cero como consecuencia de que elcircuito es perturbado al momento de conectar las fuentes de alimentacion.Estas condiciones iniciales diferentes de cero, aunque pequenas, son suficientespara que el circuito empiece a oscilar dada la inestabilidad inicial de circuito(ya que A > 3 cuando se enciende el circuito).
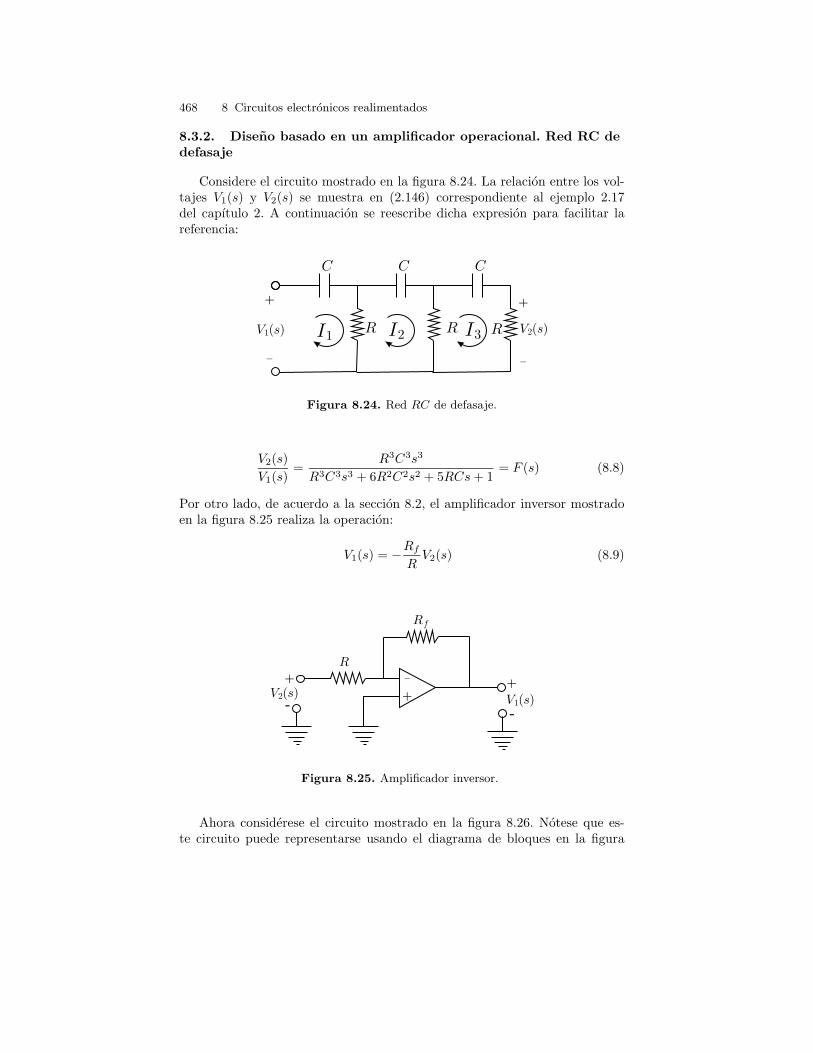
468 8 Circuitos electronicos realimentados
8.3.2. Diseno basado en un amplificador operacional. Red RC dedefasaje
Considere el circuito mostrado en la figura 8.24. La relacion entre los vol-tajes V1(s) y V2(s) se muestra en (2.146) correspondiente al ejemplo 2.17del capıtulo 2. A continuacion se reescribe dicha expresion para facilitar lareferencia:
+
I1 I2 I3R R R
C C C
à
+
à
V1(s) V2(s)
Figura 8.24. Red RC de defasaje.
V2(s)
V1(s)=
R3C3s3
R3C3s3 + 6R2C2s2 + 5RCs + 1= F (s) (8.8)
Por otro lado, de acuerdo a la seccion 8.2, el amplificador inversor mostradoen la figura 8.25 realiza la operacion:
V1(s) = −Rf
RV2(s) (8.9)
-
+
-
Rf
R
+
à+V1(s)
V2(s)
Figura 8.25. Amplificador inversor.
Ahora considerese el circuito mostrado en la figura 8.26. Notese que es-te circuito puede representarse usando el diagrama de bloques en la figura
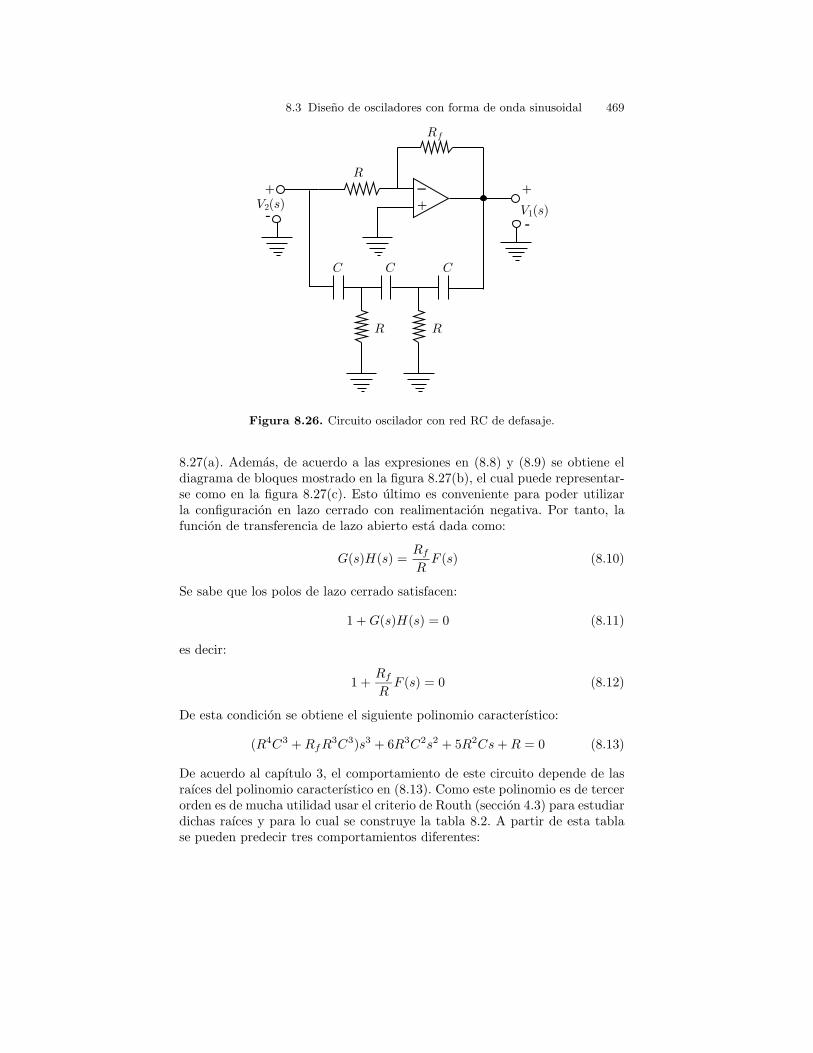
8.3 Diseno de osciladores con forma de onda sinusoidal 469
-
+
-
Rf
R
++
-
R R
C C C
V2(s) V1(s)
Figura 8.26. Circuito oscilador con red RC de defasaje.
8.27(a). Ademas, de acuerdo a las expresiones en (8.8) y (8.9) se obtiene eldiagrama de bloques mostrado en la figura 8.27(b), el cual puede representar-se como en la figura 8.27(c). Esto ultimo es conveniente para poder utilizarla configuracion en lazo cerrado con realimentacion negativa. Por tanto, lafuncion de transferencia de lazo abierto esta dada como:
G(s)H(s) =Rf
RF (s) (8.10)
Se sabe que los polos de lazo cerrado satisfacen:
1 + G(s)H(s) = 0 (8.11)
es decir:
1 +Rf
RF (s) = 0 (8.12)
De esta condicion se obtiene el siguiente polinomio caracterıstico:
(R4C3 + RfR3C3)s3 + 6R3C2s2 + 5R2Cs + R = 0 (8.13)
De acuerdo al capıtulo 3, el comportamiento de este circuito depende de lasraıces del polinomio caracterıstico en (8.13). Como este polinomio es de tercerorden es de mucha utilidad usar el criterio de Routh (seccion 4.3) para estudiardichas raıces y para lo cual se construye la tabla 8.2. A partir de esta tablase pueden predecir tres comportamientos diferentes:
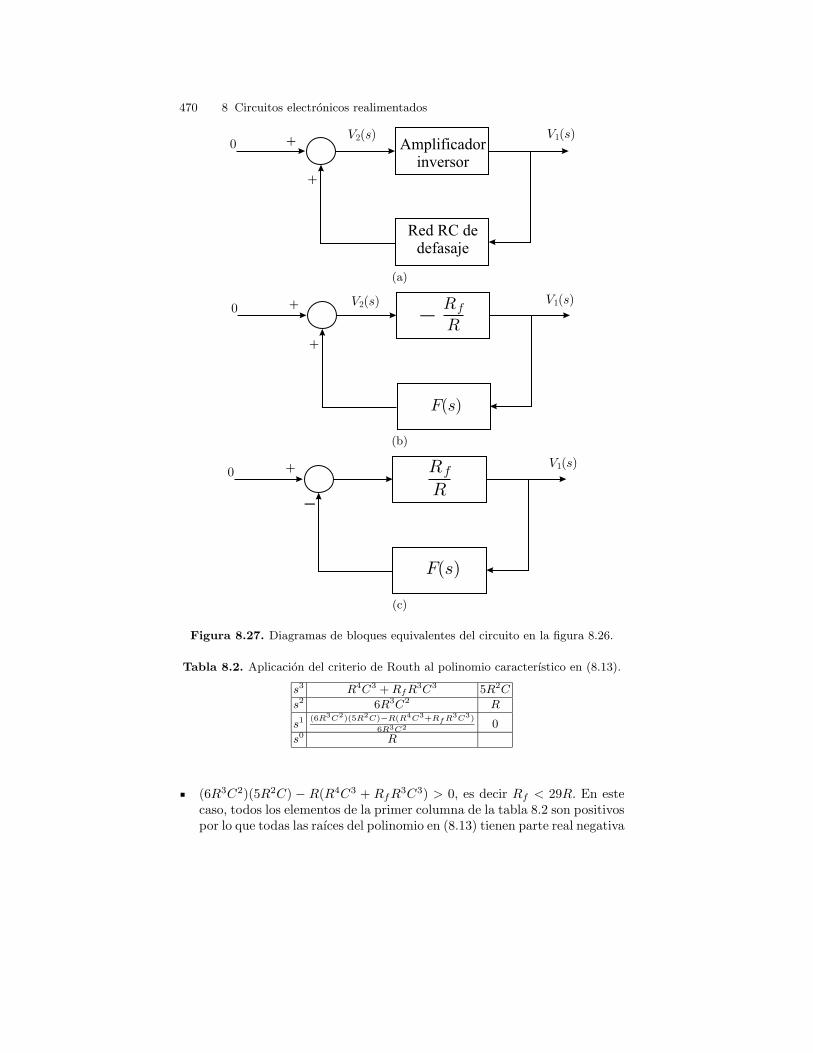
470 8 Circuitos electronicos realimentados
0 +
+
Amplificadorinversor
Red RC dedefasaje
V1(s)V2(s)
(a)
0 +
+
V2(s) V1(s)
F(s)
àR
Rf
(b)
0 +
à R
RfV1(s)
F(s)
(c)
Figura 8.27. Diagramas de bloques equivalentes del circuito en la figura 8.26.
Tabla 8.2. Aplicacion del criterio de Routh al polinomio caracterıstico en (8.13).
s3 R4C3 + RfR3C3 5R2C
s2 6R3C2 R
s1 (6R3C2)(5R2C)−R(R4C3+Rf R3C3)
6R3C2 0
s0 R
(6R3C2)(5R2C) − R(R4C3 + RfR3C3) > 0, es decir Rf < 29R. En estecaso, todos los elementos de la primer columna de la tabla 8.2 son positivospor lo que todas las raıces del polinomio en (8.13) tienen parte real negativa

8.3 Diseno de osciladores con forma de onda sinusoidal 471
y el circuito es estable. Esto significa que aunque el circuito podrıa oscilar,sin embargo esto no serıa de manera permanente ya que las oscilacionesdesapareceran al crecer el tiempo.(6R3C2)(5R2C) − R(R4C3 + RfR3C3) < 0, es decir Rf > 29R. En estecaso, hay dos cambios de signo al recorrer la primera columna de la tabla8.2. Esto significa que hay dos raıces del polinomio en (8.13) que tienenparte real positiva y el circuito es inestable. Esto significa que aunque elcircuito podrıa oscilar, sin embargo la amplitud de las oscilaciones crecerıasin lımite al crecer el tiempo, lo cual no es de utilidad en situacionespracticas.(6R3C2)(5R2C) − R(R4C3 + RfR3C3) = 0, es decir Rf = 29R. En estecaso hay un renglon de la tabla 8.2 que esta formado exclusivamente porceros (el renglon correspondiente a s1). El criterio de Routh establece(vease la seccion 4.3, ejemplo 4.14) que en este caso se debe calcular laderivada del polinomio formado con los elementos del renglon s2, es decirdP (s)
ds = 12R3C2s, donde P (s) = 6R3C2s2+R, sustituir sus coeficientes enel renglon s1 y continuar con la construccion de la tabla como se muestra enla tabla 8.3. Como no hay cambios de signo al recorrer la primera columnade la tabla 8.3 se concluye no existen raıces con parte real positiva y queexisten raıces imaginarias conjugadas. Ası que la condicion:
Tabla 8.3. Aplicacion del criterio de Routh al polinomio caracterıstico en (8.13)(continuacion).
s3 R4C3 + RfR3C3 5R2C
s2 6R3C2 R
s1 12R3C2 0
s0 R
Rf = 29R (8.14)
es necesaria para que el circuito de la figura 8.26 pueda oscilar de manerapermanente. Por tanto, lo unico que resta es determinar la frecuencia deoscilacion. Para esto, es de utilidad recordar otra propiedad de los datosmostrados en la tabla 8.2 (vease la seccion 4.3, ejemplo 4.14): “si uno de losrenglones esta formado exclusivamente por ceros, entonces las raıces delpolinomio obtenido con los datos del renglon inmediato superior a dichorenglon de ceros tambien son raıces del polinomio caracterıstico en (8.13)”.Es decir, las raıces de:
6R3C2s2 + R = 0
tambien son raıces del polinomio caracterıstico mostrado en (8.13). Resol-viendo la expresion anterior se encuentra que las raıces correspondientesson imaginarias, como se esperaba:
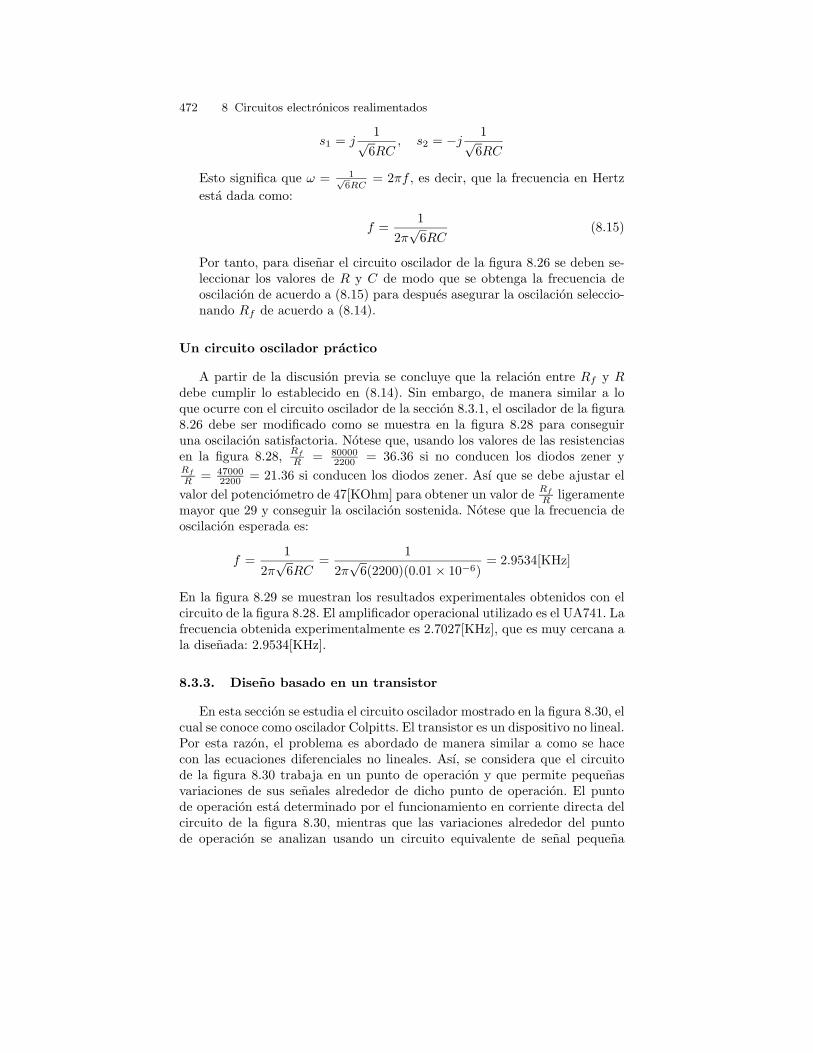
472 8 Circuitos electronicos realimentados
s1 = j1√
6RC, s2 = −j
1√6RC
Esto significa que ω = 1√6RC
= 2πf , es decir, que la frecuencia en Hertz
esta dada como:
f =1
2π√
6RC(8.15)
Por tanto, para disenar el circuito oscilador de la figura 8.26 se deben se-leccionar los valores de R y C de modo que se obtenga la frecuencia deoscilacion de acuerdo a (8.15) para despues asegurar la oscilacion seleccio-nando Rf de acuerdo a (8.14).
Un circuito oscilador practico
A partir de la discusion previa se concluye que la relacion entre Rf y Rdebe cumplir lo establecido en (8.14). Sin embargo, de manera similar a loque ocurre con el circuito oscilador de la seccion 8.3.1, el oscilador de la figura8.26 debe ser modificado como se muestra en la figura 8.28 para conseguiruna oscilacion satisfactoria. Notese que, usando los valores de las resistenciasen la figura 8.28,
Rf
R = 800002200 = 36.36 si no conducen los diodos zener y
Rf
R = 470002200 = 21.36 si conducen los diodos zener. Ası que se debe ajustar el
valor del potenciometro de 47[KOhm] para obtener un valor deRf
R ligeramentemayor que 29 y conseguir la oscilacion sostenida. Notese que la frecuencia deoscilacion esperada es:
f =1
2π√
6RC=
1
2π√
6(2200)(0.01 × 10−6)= 2.9534[KHz]
En la figura 8.29 se muestran los resultados experimentales obtenidos con elcircuito de la figura 8.28. El amplificador operacional utilizado es el UA741. Lafrecuencia obtenida experimentalmente es 2.7027[KHz], que es muy cercana ala disenada: 2.9534[KHz].
8.3.3. Diseno basado en un transistor
En esta seccion se estudia el circuito oscilador mostrado en la figura 8.30, elcual se conoce como oscilador Colpitts. El transistor es un dispositivo no lineal.Por esta razon, el problema es abordado de manera similar a como se hacecon las ecuaciones diferenciales no lineales. Ası, se considera que el circuitode la figura 8.30 trabaja en un punto de operacion y que permite pequenasvariaciones de sus senales alrededor de dicho punto de operacion. El puntode operacion esta determinado por el funcionamiento en corriente directa delcircuito de la figura 8.30, mientras que las variaciones alrededor del puntode operacion se analizan usando un circuito equivalente de senal pequena
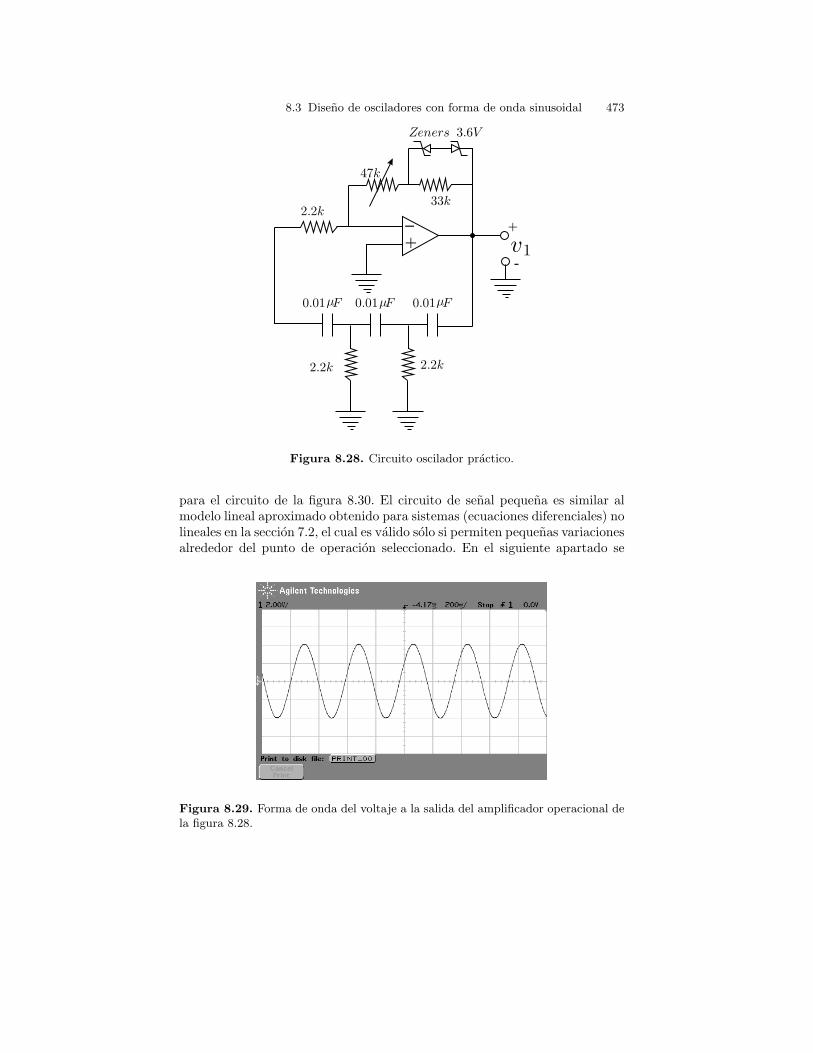
8.3 Diseno de osciladores con forma de onda sinusoidal 473
-
++-
v1
0:01 F0:01 F0:01 F
33k
47k
2:2k
2:2k 2:2k
Zeners 3:6V
öö ö
Figura 8.28. Circuito oscilador practico.
para el circuito de la figura 8.30. El circuito de senal pequena es similar almodelo lineal aproximado obtenido para sistemas (ecuaciones diferenciales) nolineales en la seccion 7.2, el cual es valido solo si permiten pequenas variacionesalrededor del punto de operacion seleccionado. En el siguiente apartado se
Figura 8.29. Forma de onda del voltaje a la salida del amplificador operacional dela figura 8.28.
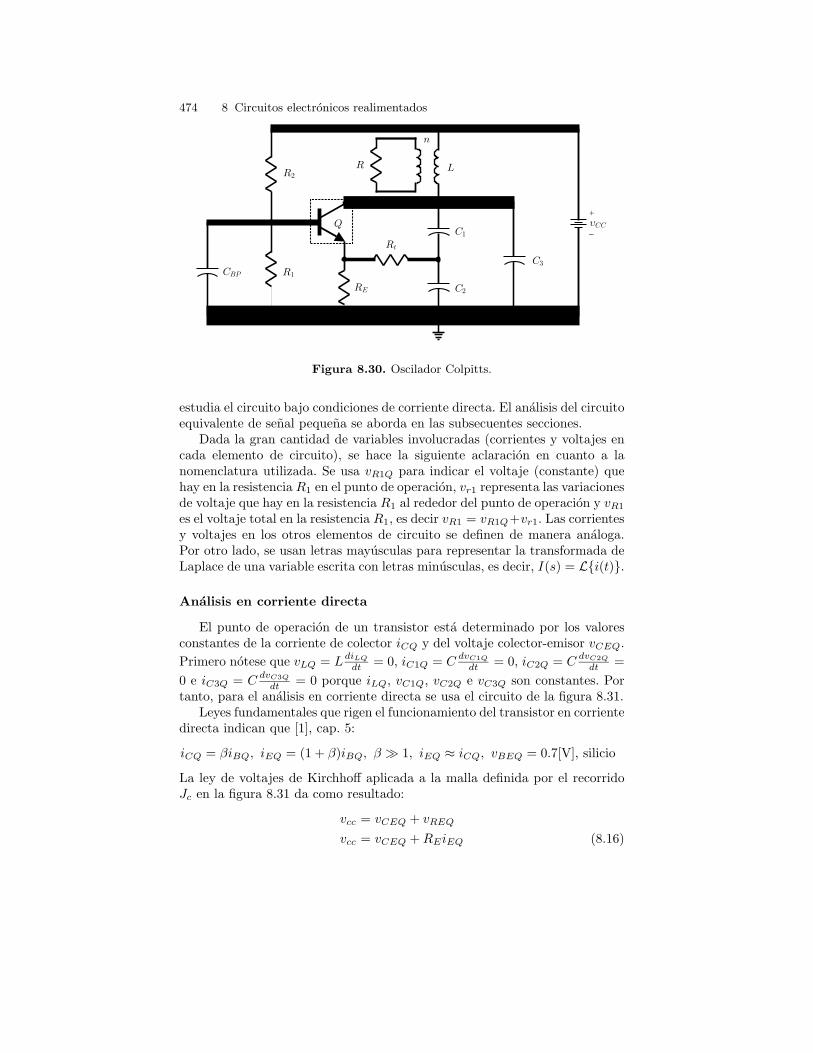
474 8 Circuitos electronicos realimentados
R2
R1
R
n
L
CBP
RE C2
C1
C3
ýCC
Rt
Q
Figura 8.30. Oscilador Colpitts.
estudia el circuito bajo condiciones de corriente directa. El analisis del circuitoequivalente de senal pequena se aborda en las subsecuentes secciones.
Dada la gran cantidad de variables involucradas (corrientes y voltajes encada elemento de circuito), se hace la siguiente aclaracion en cuanto a lanomenclatura utilizada. Se usa vR1Q para indicar el voltaje (constante) quehay en la resistencia R1 en el punto de operacion, vr1 representa las variacionesde voltaje que hay en la resistencia R1 al rededor del punto de operacion y vR1
es el voltaje total en la resistencia R1, es decir vR1 = vR1Q+vr1. Las corrientesy voltajes en los otros elementos de circuito se definen de manera analoga.Por otro lado, se usan letras mayusculas para representar la transformada deLaplace de una variable escrita con letras minusculas, es decir, I(s) = Li(t).
Analisis en corriente directa
El punto de operacion de un transistor esta determinado por los valoresconstantes de la corriente de colector iCQ y del voltaje colector-emisor vCEQ.
Primero notese que vLQ = LdiLQ
dt = 0, iC1Q = CdvC1Q
dt = 0, iC2Q = CdvC2Q
dt =
0 e iC3Q = CdvC3Q
dt = 0 porque iLQ, vC1Q, vC2Q e vC3Q son constantes. Portanto, para el analisis en corriente directa se usa el circuito de la figura 8.31.
Leyes fundamentales que rigen el funcionamiento del transistor en corrientedirecta indican que [1], cap. 5:
iCQ = βiBQ, iEQ = (1 + β)iBQ, β ≫ 1, iEQ ≈ iCQ, vBEQ = 0.7[V], silicio
La ley de voltajes de Kirchhoff aplicada a la malla definida por el recorridoJc en la figura 8.31 da como resultado:
vcc = vCEQ + vREQ
vcc = vCEQ + REiEQ (8.16)

8.3 Diseno de osciladores con forma de onda sinusoidal 475
R2
R1
RE
ýCCQ
Jb
Jc
à
+
Figura 8.31. Circuito equivalente en corriente directa.
La ley de voltajes de Kirchhoff aplicada a la malla definida por el recorridoJb en la figura 8.31 da como resultado:
vR1Q = vBEQ + vREQ
vR1Q = 0.7 + REiEQ (8.17)
Suponga que se dan como datos los valores de iCQ, vCEQ, β y vcc. Usando(8.16) e iEQ ≈ ICQ se calcula el valor de RE . A continuacion se propone iR1Q
a partir de iCQ = βiBQ y la siguiente consideracion importante:
iR1Q ≫ iBQ (8.18)
Entonces puede usarse (8.17) para calcular:
R1 =vR1Q
iR1Q(8.19)
R2 =vcc − vR1Q
iR1Q(8.20)
El valor de los elementos L, C1, C2, C3, CBP y Rt se calculan a partir delanalisis del circuito equivalente de senal pequena como se muestra en lossiguientes apartados.
Circuito equivalente de senal pequena
Primero se determina el modelo de senal pequena del transistor. Aunqueexisten muchos modelos de senal pequena para el transistor (todos ellos correc-tos) en esta obra se considera lo siguiente. La corriente de emisor, correspon-diente al diodo en la union base-emisor, esta dada por la ecuacion de Shockley[1], cap. 5:

476 8 Circuitos electronicos realimentados
iE = IES
[e
vBEVT − 1
](8.21)
donde IES es una constante de valor entre 10−12 [A] y 10−16 [A] mientrasque VT = 0.026[V] para temperaturas de 300 grados Kelvin. Una relacionimportante del transistor indica que iB = (1−α)iE , donde α es una constantepositiva ligeramente menor que 1. Por tanto:
iB = (1 − α)IES
[e
vBEVT − 1
](8.22)
Dado que se considera que el transistor opera en la region activa entonces sepuede despreciar el uno que se resta en la expresion anterior para escribir:
iB = (1 − α)IES
[e
vBEVT
](8.23)
Recordando que iB = iBQ + ib y vBE = vBEQ + vbe se tiene:
iBQ + ib = (1 − α)IES
[e
vBEQ+vbeVT
]
= (1 − α)IESevBEQ
VT evbeVT (8.24)
Recuerdese que pequenos cambios en iB se deben a pequenos cambios en vBE ,es decir, ib = 0 si vbe = 0. Entonces, de acuerdo a la expresion anterior seobtiene:
iBQ = (1 − α)IES
[e
vBEQVT
]
Por tanto, (8.24) se puede escribir como:
iBQ + ib = IBQevbeVT (8.25)
Si solo se permiten valores pequenos de vbe se puede hacer la aproximacion[4], pag. 942:
evbeVT ≈ 1 +
vbe
VT
lo cual, junto con (8.25), implica que:
ib =vbe
rπ, rπ =
VT
IBQ(8.26)
Por otro lado, la siguiente relacion tambien es valida para senal pequena:
ic = βib (8.27)

8.3 Diseno de osciladores con forma de onda sinusoidal 477
ib
ìibrù
ie
+
àýbe
C
E
Bic
(a)
ìib
ie
à
ýbe
CE
hib
ib
B
+
ic
(b)
Figura 8.32. Circuitos equivalentes de senal pequena del transistor.
Usando (8.26) y (8.27) se obtiene el modelo de senal pequena del transistorque se muestra en la figura 8.32(a). Se puede encontrar una equivalencia entreeste modelo y el mostrado en la figura 8.32(b). Notese que la unica diferenciaradica en que el voltaje base-emisor ahora esta dado como una caıda de voltajedebida a la corriente de emisor. Por tanto, la diferencia debe depender del valorde la nueva resistencia hib, es decir:
vbe = hibie (8.28)
Comparando (8.26), (8.28), y aclarando que ie = (1+β)ib tambien se cumple,se obtiene:
hib =vbe
ie=
vbe
(1 + β)ib=
rπ
1 + β=
VT
(1 + β)IBQ=
VT
IEQ(8.29)
Notese que el valor de hib depende de IEQ, es decir, del punto de operacion.Una vez que se cuenta con el modelo de senal pequena del transistor, seprocede a encontrar el circuito equivalente de senal pequena de todo el circuitooscilador.
Considere el circuito de la figura 8.33(a). La ley de voltajes de Kirchhoffaplicada a la malla representada por el recorrido J3 indica que:
vcc = LdiLdt
+ vCE + vRE
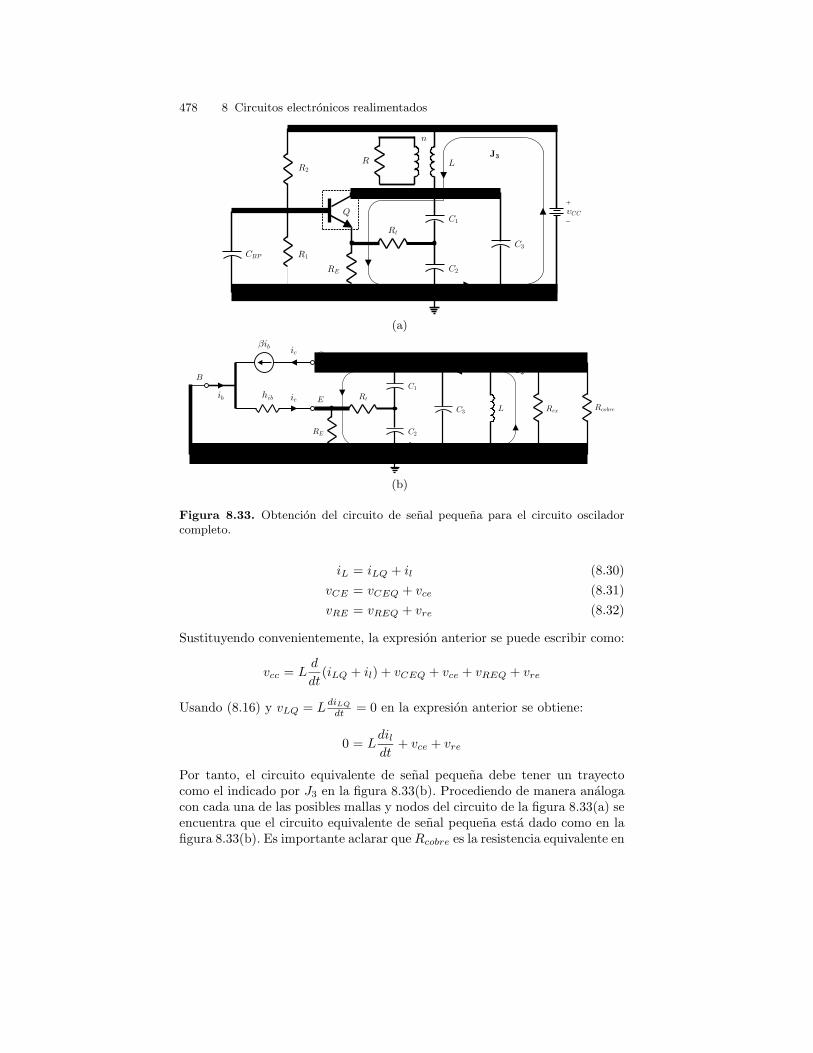
478 8 Circuitos electronicos realimentados
R2
R1
R
n
L
CBP
RE C2
C1
C3
ýCC
Rt
Q
J3
(a)
RE C2
C1
C3
Rt
C
E
B
L Rex Rcobre
ìib
ib hib ie
J3
ic
(b)
Figura 8.33. Obtencion del circuito de senal pequena para el circuito osciladorcompleto.
iL = iLQ + il (8.30)
vCE = vCEQ + vce (8.31)
vRE = vREQ + vre (8.32)
Sustituyendo convenientemente, la expresion anterior se puede escribir como:
vcc = Ld
dt(iLQ + il) + vCEQ + vce + vREQ + vre
Usando (8.16) y vLQ = LdiLQ
dt = 0 en la expresion anterior se obtiene:
0 = Ldildt
+ vce + vre
Por tanto, el circuito equivalente de senal pequena debe tener un trayectocomo el indicado por J3 en la figura 8.33(b). Procediendo de manera analogacon cada una de las posibles mallas y nodos del circuito de la figura 8.33(a) seencuentra que el circuito equivalente de senal pequena esta dado como en lafigura 8.33(b). Es importante aclarar que Rcobre es la resistencia equivalente en

8.3 Diseno de osciladores con forma de onda sinusoidal 479
paralelo de la resistencia interna (debida al cobre) de la inductancia, mientrasque Rex = n2R donde R es la carga externa a la cual alimenta el circuitooscilador y n es el cociente del numero de vueltas de L y el numero de vueltasde la inductancia conectada a R.
Finalmente, las resistencias R1 y R2 en la figura 8.33(a) desaparecen enla figura 8.33(b) porque se considera que la impedancia de CBP (en paralelocon R1 y R2) es muy pequena comparada con el equivalente en paralelo deR1 y R2 a la frecuencia de oscilacion ω1, es decir 1
ω1CBP≪ R1R2
R1+R2. Ademas,
si 1ω1CBP
≪ hib la impedancia del capacitor puede despreciarse.
Ecuaciones del sistema en lazo cerrado
En esta y en las subsecuentes secciones se analiza el circuito oscilador de lafigura 8.30 en base al circuito equivalente de senal pequena dado en la figura8.33(b). Debe recordarse siempre que todo lo que predice este analisis solorepresenta el comportamiento que las senales tienen al rededor del punto deoperacion el cual se determina mediante el analisis en corriente directa.
1
2
ib
B
ie
icì ib
h ib
RE
RtE
C
vout vout
iout iout
ih
i
C1
C2
C3 Rex Rcobre voLRin
Figura 8.34. Circuito usado para propositos de analisis.
Para propositos de analisis se abre el lazo de realimentacion que hay atraves de la resistencia de emisor, tal como se muestra en la figura 8.34 [5],pag. 265, [6], pag. 64. El valor de Rin en la figura 8.34 esta dado como:
Rin = Rt +REhib
RE + hib(8.33)
Ahora se procede a analizar el circuito de la figura 8.34. La impedancia entrelos puntos 1 y 2 esta dada como:
Zf (s) =1
Yf (s)=
1
sC1+
Rin1
sC2
Rin + 1sC2
=sRin(C1 + C2) + 1
sC1(sC2Rin + 1)(8.34)
donde Yf (s) es la admitancia entre los puntos 1 y 2. Por otro lado, Vo(s) eI(s) se relacionan a traves de:

480 8 Circuitos electronicos realimentados
Vo(s) = Zc(s)I(s) (8.35)
donde:
1
Zc(s)= Yf (s) +
1
sL+ sC3 +
1
Rex+
1
Rcobre(8.36)
Despues de algunas manipulaciones algebraicas se obtiene:
Zc(s) =sL(sRin(C1 + C2) + 1)
a3s3 + a2s2 + a1s + 1(8.37)
a3 = L(C1C2 + C3(C1 + C2))Rin
a2 = LC1 + LC3 +Rcobre + Rex
RcobreRexLRin(C1 + C2)
a1 = Rin(C1 + C2) +Rcobre + Rex
RcobreRexL
El voltaje Vout(s) se puede calcular como:
Vout(s) = M(s)Vo(s) (8.38)
donde Vout(s) y Vo(s) se relacionan con la corriente Ih(s) mediante:
Vo(s) =1
Yf (s)Ih(s), Vout(s) =
11
Rin+ sC2
Ih(s) (8.39)
Combinando ambas expresiones en (8.39) se obtiene:
Vo(s) =1
Yf (s)
1 + RinsC2
RinVout(s)
Usando (8.34) se puede escribir:
M(s) =Vout(s)
Vo(s)=
s(R2inC1C2s + RinC1)
R2inC2(C1 + C2)s2 + Rin(2C2 + C1)s + 1
(8.40)
Utilizando sucesivamente (8.38) y (8.35) se encuentra:
Iout(s) =Vout(s)
Rin=
1
RinM(s)Vo(s) =
1
RinM(s)Zc(s)I(s) (8.41)
Por otro lado, aplicando el divisor de corriente en el circuito de emisor de lafigura 8.34 se encuentra:
Ie(s) =−RE
RE + hibIout(s)
Por tanto, si se cumple:
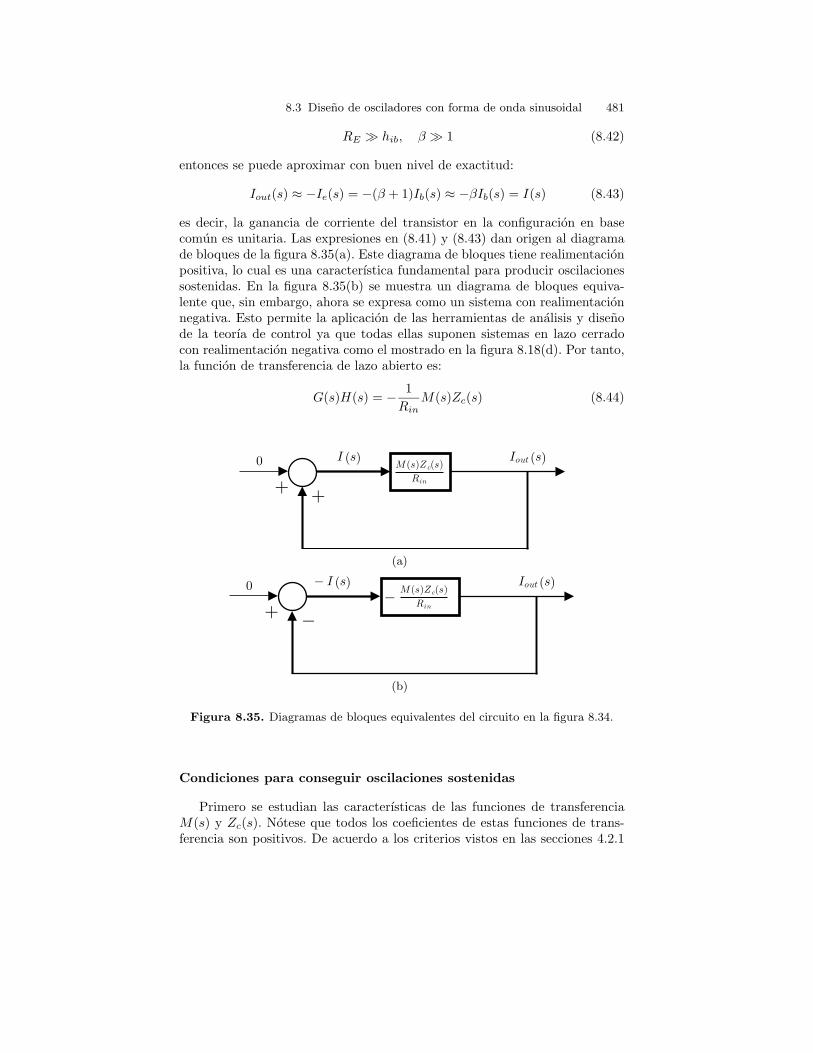
8.3 Diseno de osciladores con forma de onda sinusoidal 481
RE ≫ hib, β ≫ 1 (8.42)
entonces se puede aproximar con buen nivel de exactitud:
Iout(s) ≈ −Ie(s) = −(β + 1)Ib(s) ≈ −βIb(s) = I(s) (8.43)
es decir, la ganancia de corriente del transistor en la configuracion en basecomun es unitaria. Las expresiones en (8.41) y (8.43) dan origen al diagramade bloques de la figura 8.35(a). Este diagrama de bloques tiene realimentacionpositiva, lo cual es una caracterıstica fundamental para producir oscilacionessostenidas. En la figura 8.35(b) se muestra un diagrama de bloques equiva-lente que, sin embargo, ahora se expresa como un sistema con realimentacionnegativa. Esto permite la aplicacion de las herramientas de analisis y disenode la teorıa de control ya que todas ellas suponen sistemas en lazo cerradocon realimentacion negativa como el mostrado en la figura 8.18(d). Por tanto,la funcion de transferencia de lazo abierto es:
G(s)H(s) = − 1
RinM(s)Zc(s) (8.44)
+
I s( ) Iout s( )0
+Rin
M s( )Z c s( )
(a)
à I s( )
+
Iout s( )0
àà
Rin
M s( )Z c s( )
(b)
Figura 8.35. Diagramas de bloques equivalentes del circuito en la figura 8.34.
Condiciones para conseguir oscilaciones sostenidas
Primero se estudian las caracterısticas de las funciones de transferenciaM(s) y Zc(s). Notese que todos los coeficientes de estas funciones de trans-ferencia son positivos. De acuerdo a los criterios vistos en las secciones 4.2.1
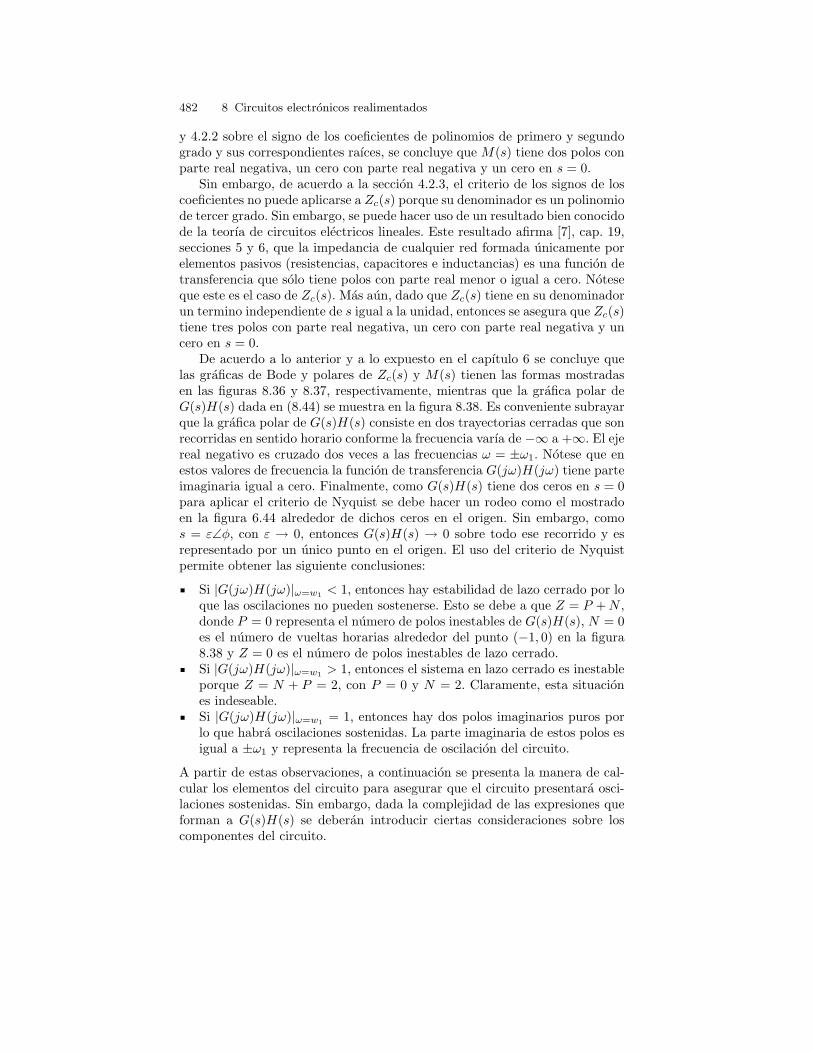
482 8 Circuitos electronicos realimentados
y 4.2.2 sobre el signo de los coeficientes de polinomios de primero y segundogrado y sus correspondientes raıces, se concluye que M(s) tiene dos polos conparte real negativa, un cero con parte real negativa y un cero en s = 0.
Sin embargo, de acuerdo a la seccion 4.2.3, el criterio de los signos de loscoeficientes no puede aplicarse a Zc(s) porque su denominador es un polinomiode tercer grado. Sin embargo, se puede hacer uso de un resultado bien conocidode la teorıa de circuitos electricos lineales. Este resultado afirma [7], cap. 19,secciones 5 y 6, que la impedancia de cualquier red formada unicamente porelementos pasivos (resistencias, capacitores e inductancias) es una funcion detransferencia que solo tiene polos con parte real menor o igual a cero. Noteseque este es el caso de Zc(s). Mas aun, dado que Zc(s) tiene en su denominadorun termino independiente de s igual a la unidad, entonces se asegura que Zc(s)tiene tres polos con parte real negativa, un cero con parte real negativa y uncero en s = 0.
De acuerdo a lo anterior y a lo expuesto en el capıtulo 6 se concluye quelas graficas de Bode y polares de Zc(s) y M(s) tienen las formas mostradasen las figuras 8.36 y 8.37, respectivamente, mientras que la grafica polar deG(s)H(s) dada en (8.44) se muestra en la figura 8.38. Es conveniente subrayarque la grafica polar de G(s)H(s) consiste en dos trayectorias cerradas que sonrecorridas en sentido horario conforme la frecuencia varıa de −∞ a +∞. El ejereal negativo es cruzado dos veces a las frecuencias ω = ±ω1. Notese que enestos valores de frecuencia la funcion de transferencia G(jω)H(jω) tiene parteimaginaria igual a cero. Finalmente, como G(s)H(s) tiene dos ceros en s = 0para aplicar el criterio de Nyquist se debe hacer un rodeo como el mostradoen la figura 6.44 alrededor de dichos ceros en el origen. Sin embargo, comos = ε∠φ, con ε → 0, entonces G(s)H(s) → 0 sobre todo ese recorrido y esrepresentado por un unico punto en el origen. El uso del criterio de Nyquistpermite obtener las siguiente conclusiones:
Si |G(jω)H(jω)|ω=w1< 1, entonces hay estabilidad de lazo cerrado por lo
que las oscilaciones no pueden sostenerse. Esto se debe a que Z = P + N ,donde P = 0 representa el numero de polos inestables de G(s)H(s), N = 0es el numero de vueltas horarias alrededor del punto (−1, 0) en la figura8.38 y Z = 0 es el numero de polos inestables de lazo cerrado.Si |G(jω)H(jω)|ω=w1
> 1, entonces el sistema en lazo cerrado es inestableporque Z = N + P = 2, con P = 0 y N = 2. Claramente, esta situaciones indeseable.Si |G(jω)H(jω)|ω=w1
= 1, entonces hay dos polos imaginarios puros porlo que habra oscilaciones sostenidas. La parte imaginaria de estos polos esigual a ±ω1 y representa la frecuencia de oscilacion del circuito.
A partir de estas observaciones, a continuacion se presenta la manera de cal-cular los elementos del circuito para asegurar que el circuito presentara osci-laciones sostenidas. Sin embargo, dada la complejidad de las expresiones queforman a G(s)H(s) se deberan introducir ciertas consideraciones sobre loscomponentes del circuito.

8.3 Diseno de osciladores con forma de onda sinusoidal 483
0
fasegrados[ ]
à 90
!
!0dB
+ 90
(a) Graficas de Bode de Zc(s)
! = 0
! = +1
! = à1
Re Zc(j!)( )
Im Zc(j!)( )
(b) Grafica polar de Zc(s) (dos vuel-tas).
Figura 8.36. Graficas de respuesta en frecuencia de Zc(s) en (8.37).
Calculo de los componentes del circuito
Primero se obtiene la siguiente expresion:
1
Zc(jω)=
ω2C21Rin
(ωRin(C1 + C2))2 + 1+
1
Rex+
1
Rcobre+
+ j
[ωC1
ω2C2R2in(C1 + C2) + 1
(ωRin(C1 + C2))2 + 1+ ωC3 −
1
ωL
](8.45)
al hacer el cambio de variable s = jω en (8.36), y la siguiente expresion:
M(jω) =R2
inω2(C21 + C1C2) + jωRinC1
1 + R2inω2(C1 + C2)2
(8.46)
al hacer el cambio de variable s = jω en (8.40). Con el fin de facilitar la ob-tencion de esta expresion es importante indicar que, durante el procedimiento
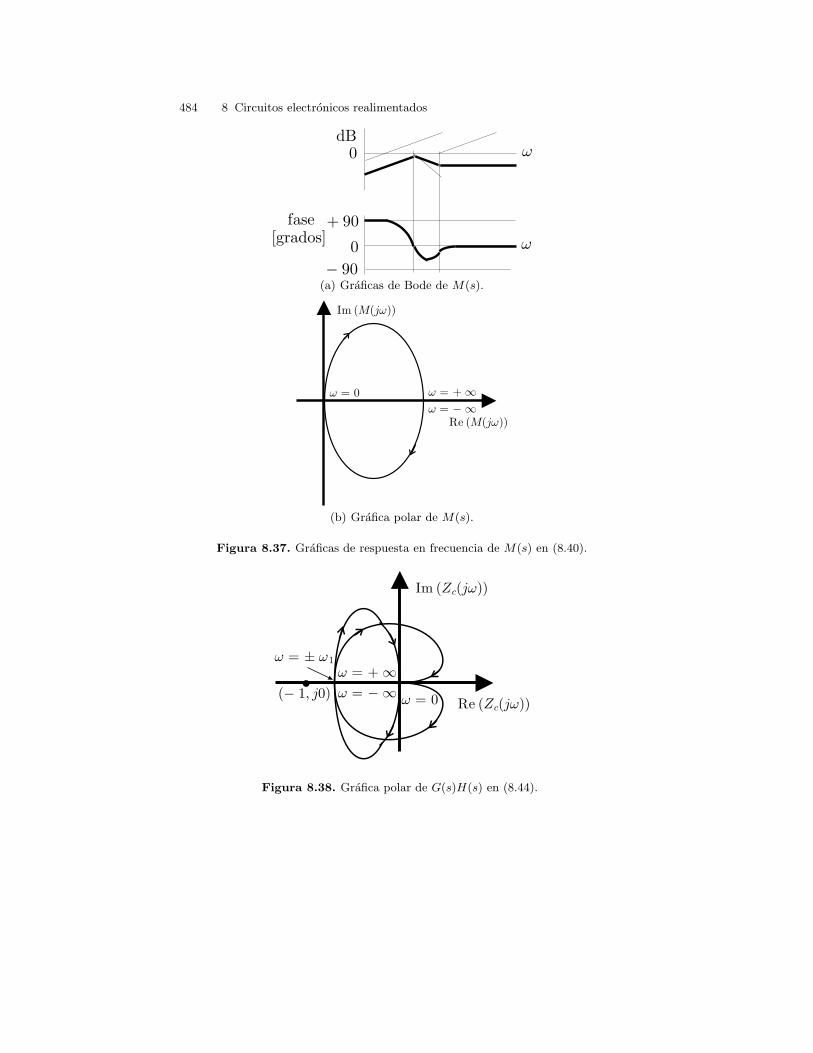
484 8 Circuitos electronicos realimentados
0
fasegrados[ ]
à 90
!
!0dB
+ 90
(a) Graficas de Bode de M(s).
! = 0 ! = +1! = à1
Im M(j!)( )
Re M(j!)( )
(b) Grafica polar de M(s).
Figura 8.37. Graficas de respuesta en frecuencia de M(s) en (8.40).
! = 0
! = +1! = à1
Re Zc(j!)( )
Im Zc(j!)( )
ï(à 1; j0)
! = æ !1
Figura 8.38. Grafica polar de G(s)H(s) en (8.44).
8.3 Diseno de osciladores con forma de onda sinusoidal 485
seguido, el factor 1 + R2inω2C2
2 aparece en el numerador y el denominador deM(jω) por lo que se cancela para obtener finalmente (8.46).
Tal como se menciono previamente la grafica polar de G(jω)H(jω) cruzael eje real negativo a la frecuencia ω1. Esto significa que las partes imaginariasde (8.45) y (8.46) deben ser cero cuando se evaluan en ω = ω1. Aplicando estacondicion a (8.45) se obtiene:
ω1 =1√
L[
C1C2
C1+C2+ C3
] (8.47)
que representa la frecuencia de oscilacion del circuito. Es muy importantemencionar que, con el fin de simplificar las expresiones y obtener (8.47), sedeben hacer las siguientes suposiciones:
R2in ≫ 1
ω21C2(C1 + C2)
, R2in ≫ 1
ω21(C1 + C2)2
(8.48)
Por otro lado, la fase de (8.46) esta dada como:
∠M(jω) = arctan
(1
ω(C1+C2)
Rin
)(8.49)
Notese que esta fase es diferente de cero para cualquier valor de frecuencia.La condicion mencionada previamente que requiere que la parte imaginariade M(jω) sea cero es equivalente a requerir que la fase en (8.49) sea cero.Aunque esto no es posible, sin embargo puede obtenerse una fase cercana acero para ω = ω1 si:
Rin ≫ 1
ω1(C1 + C2)(8.50)
Esta y las otras aproximaciones que se han hecho solo resultaran en pequenasdiferencias entre los valores calculados y los obtenidos experimentalmente dela frecuencia de oscilacion y la ganancia de la funcion de transferencia de lazoabierto.
Finalmente, el valor de G(jω)H(jω)|ω=w1se obtiene como:
|G(jω)H(jω)|ω=w1=
1
RinRe(M(jω))|ω=ω1
Re(Zc(jω))|ω=ω1(8.51)
donde Re(x) representa la parte real de x. A partir de (8.51) y tomando encuenta la suposicion (8.50) se encuentra:
|G(jω)H(jω)|ω=w1=
1
RinC1+C2
C1
1C2
1
Rin(C1+C2)2+ 1
Rex+ 1
Rcobre

486 8 Circuitos electronicos realimentados
Por tanto, de acuerdo a la condicion |G(jω)H(jω)|ω=w1= 1 se concluye que
el circuito oscilara de manera sostenida a la frecuencia dada en (8.47) si:
1
RinC1+C2
C1
1C2
1
Rin(C1+C2)2+ 1
Rex+ 1
Rcobre
= 1 (8.52)
Al igual que en el caso del oscilador basado en amplificador operacional, esimportante subrayar lo siguiente. En la practica no es posible satisfacer lacondicion (8.52) debido a las incertidumbres que existen en los valores delos componentes involucrados en dicha condicion. Ademas, estos parametrospueden cambiar durante la operacion del circuito. La manera de resolver esteproblema en la practica es utilizar la siguiente condicion en lugar de (8.52):
1
RinC1+C2
C1
1C2
1
Rin(C1+C2)2+ 1
Rex+ 1
Rcobre
> 1 (8.53)
Esto hace que al encender el circuito este sea inestable por lo que sus oscilacio-nes incrementaran su amplitud rapidamente. Sin embargo, este crecimiento enla amplitud de las oscilaciones no se mantendra de manera indefinida debidoa que, antes de que esto suceda, el transistor alcanzara las regiones de satura-cion (voltaje de colector a emisor cero) y de corte (corriente de colector cero).Por tanto, la relacion entre Iout e I en la figura 8.35(b) realmente esta deter-minada por una funcion saturacion como I = sat(Iout) mostrada en la figura8.39. La ganancia de corriente del transistor corresponde a la pendiente de
sat(Iout), es decir, a dsat(Iout)dIout
que depende de la amplitud de Iout. Por tanto,el diagrama de bloques de la figura 8.35(b) debe ser cambiado por el de lafigura 8.40 y ahora se tiene que:
G(jω)H(jω)|ω=w1=
dsat(Iout)
dIout
1
RinC1+C2
C1
1C2
1
Rin(C1+C2)2+ 1
Rex+ 1
Rcobre
(8.54)
Notese que la pendiente dsat(Iout)dIout
es igual a la unidad para valores de Iout
cercanos a cero pero disminuye hacia cero conforme Iout se aleja de cero. Portanto, si se satisface (8.53), siempre existe una amplitud de las oscilacionespara la cual el valor dado en (8.54) se convierte en la unidad y se consiguen lasoscilaciones sostenidas que se desean. Aunque esto sugiere que se puede disenarel valor del lado izquierdo de (8.53) tan grande como se desee, sin embargono es recomendable hacer esto y se debe disenar, en cambio, un valor cercanoa la unidad. La razon de esto es que valores muy grandes del lado izquierdode (8.53) requieren que se reduzca fuertemente la ganancia de corriente locual implica que el circuito trabaje en una zona fuertemente no lineal y, comoconsecuencia, la forma de onda sinusoidal sufrira fuertes deformaciones.
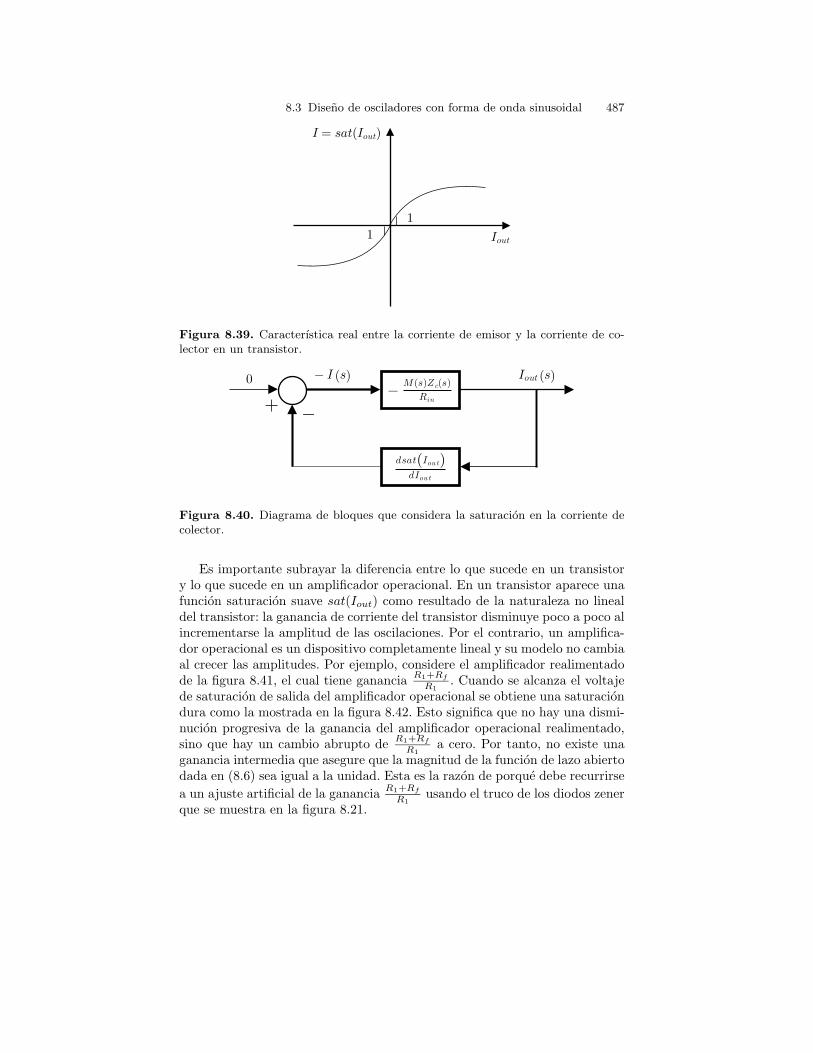
8.3 Diseno de osciladores con forma de onda sinusoidal 487
I = sat(Iout)
Iout
1
1
Figura 8.39. Caracterıstica real entre la corriente de emisor y la corriente de co-lector en un transistor.
à I s( )
+
Iout s( )0
à
dIou t
dsat Iou t( )
àRin
M s( )Z c s( )
Figura 8.40. Diagrama de bloques que considera la saturacion en la corriente decolector.
Es importante subrayar la diferencia entre lo que sucede en un transistory lo que sucede en un amplificador operacional. En un transistor aparece unafuncion saturacion suave sat(Iout) como resultado de la naturaleza no linealdel transistor: la ganancia de corriente del transistor disminuye poco a poco alincrementarse la amplitud de las oscilaciones. Por el contrario, un amplifica-dor operacional es un dispositivo completamente lineal y su modelo no cambiaal crecer las amplitudes. Por ejemplo, considere el amplificador realimentadode la figura 8.41, el cual tiene ganancia
R1+Rf
R1. Cuando se alcanza el voltaje
de saturacion de salida del amplificador operacional se obtiene una saturaciondura como la mostrada en la figura 8.42. Esto significa que no hay una dismi-nucion progresiva de la ganancia del amplificador operacional realimentado,sino que hay un cambio abrupto de
R1+Rf
R1a cero. Por tanto, no existe una
ganancia intermedia que asegure que la magnitud de la funcion de lazo abiertodada en (8.6) sea igual a la unidad. Esta es la razon de porque debe recurrirse
a un ajuste artificial de la gananciaR1+Rf
R1usando el truco de los diodos zener
que se muestra en la figura 8.21.
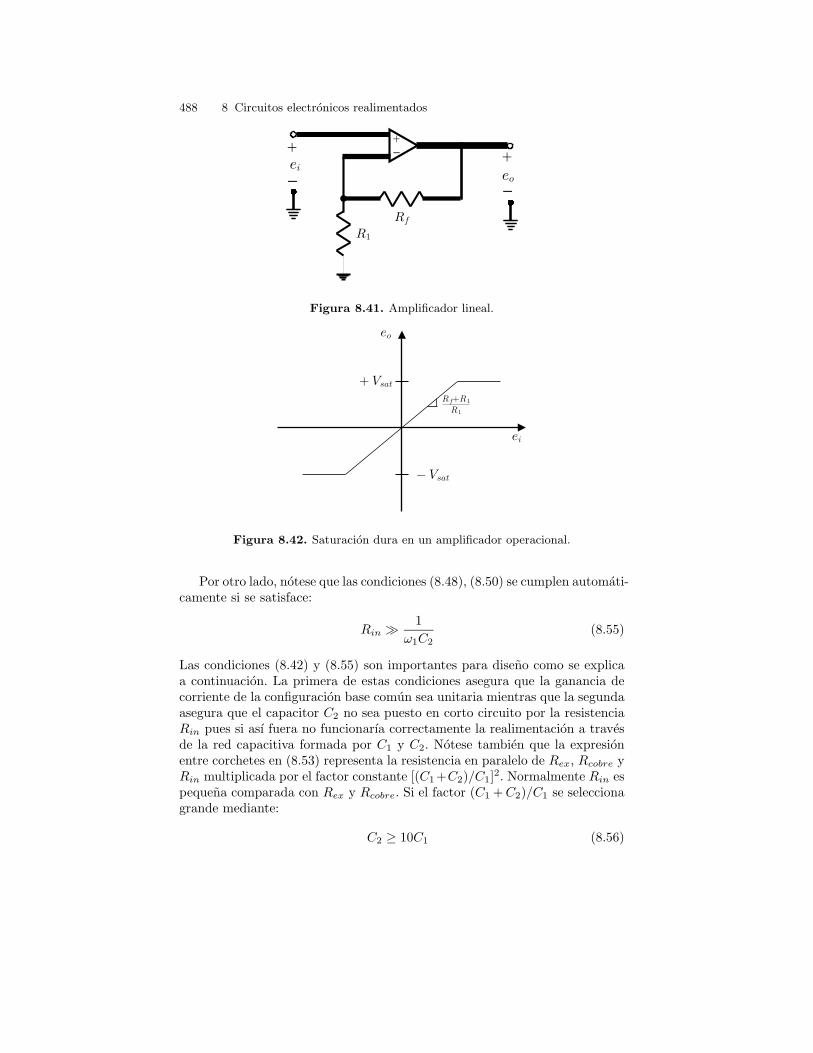
488 8 Circuitos electronicos realimentados
R1
Rf
eoei
Figura 8.41. Amplificador lineal.
R1
Rf+R1
+ Vsat
à Vsat
eo
ei
Figura 8.42. Saturacion dura en un amplificador operacional.
Por otro lado, notese que las condiciones (8.48), (8.50) se cumplen automati-camente si se satisface:
Rin ≫ 1
ω1C2(8.55)
Las condiciones (8.42) y (8.55) son importantes para diseno como se explicaa continuacion. La primera de estas condiciones asegura que la ganancia decorriente de la configuracion base comun sea unitaria mientras que la segundaasegura que el capacitor C2 no sea puesto en corto circuito por la resistenciaRin pues si ası fuera no funcionarıa correctamente la realimentacion a travesde la red capacitiva formada por C1 y C2. Notese tambien que la expresionentre corchetes en (8.53) representa la resistencia en paralelo de Rex, Rcobre yRin multiplicada por el factor constante [(C1+C2)/C1]
2. Normalmente Rin espequena comparada con Rex y Rcobre. Si el factor (C1 + C2)/C1 se seleccionagrande mediante:
C2 ≥ 10C1 (8.56)

8.3 Diseno de osciladores con forma de onda sinusoidal 489
entonces se asegura que el valor del factor entre corchetes en (8.53) es apro-ximadamente la resistencia equivalente de Rex y Rcobre en paralelo. Entoncesel lado izquierdo de (8.53) esta dado por el valor de esta resistencia equiva-lente en paralelo (que es muy grande comparada con Rin) dividido entre elfactor Rin(C1 + C2)/C1. Por tanto, si se usa (8.56) se puede conseguir queeste cociente sea tan solo un poco mayor que la unidad. Por tanto, las reglasde diseno del oscilador se resumen en (8.42), (8.55), (8.56), (8.47) y (8.53). Esinteresante mencionar que estas condiciones son las que aparecen en los librosque tratan sobre el diseno electronico de este tipo de osciladores [6], pag. 65,[8], pag. 9-13.
Finalmente, es interesante resaltar las ventajas que en este problema tieneel enfoque basado en la respuesta en frecuencia respecto del enfoque basado ala respuesta en el tiempo (el estudio de la ubicacion de los polos del sistema enlazo cerrado). Si se intenta aplicar el segundo de estos metodos se encuentra unpolinomio caracterıstico de grado cinco. Al intentar usar el criterio de Routhpara establecer las condiciones en las que hay polos imaginarios puros de lazocerrado se encuentra un gran problema: las condiciones resultantes quedanexpresadas de manera muy complicada y es muy difıcil encontrar reglas dediseno claras como las indicadas en (8.42), (8.47), (8.53), (8.55), (8.56).
Resultados experimentales
A continuacion se disena un circuito que genera una onda sinusoidal de1.8 [MHz]. Los datos de diseno son los siguientes. vCC = 12[V], iEQ ≈ iCQ =1.3[mA], vCEQ = 10.7[V].
Se selecciona un transistor PN2222A que cuenta con un valor de β = 200.Usando (8.16) se encuentra:
RE = 1[KOhm]
A partir de iCQ = βiBQ se encuentra que iBQ = 6.5 × 10−3[mA]. Por tanto,de acuerdo a (8.18) se propone iR1Q = 1[mA]. Con esto y (8.17), (8.19), (8.20)se calcula:
R1 = 2[KOhm], R2 = 10[KOhm]
Se cuenta con una inductancia de valor L = 0.328×10−3[Hy], con una resisten-cia interna en paralelo Rcobre = 101677[Ohm], capacitores C1 = 27×10−12[F],C2 = 200×10−12[F] y se supondra que no existe el capacitor C3, es decir, queC3 = 0. Notese que esta seleccion de capacitores satisface aproximadamente(8.56). Por tanto, usando (8.47) se encuentra que la frecuencia de oscilaciondel circuito es f1 = 1.8018[MHz], es decir ω1 = 2πf1 = 1.132 × 107[rad/s].
Por otro lado, tambien se supondra que el oscilador no alimenta ningunacarga externa lo cual significa que Rex → ∞, es decir 1/Rex = 0. UsandoRt = 10000[Ohm], VT = 0.026[V], iEQ = 1.3[mA], (8.29) y (8.33) se encuentraRin = 10020[Ohm]. Con estos datos se obtiene:
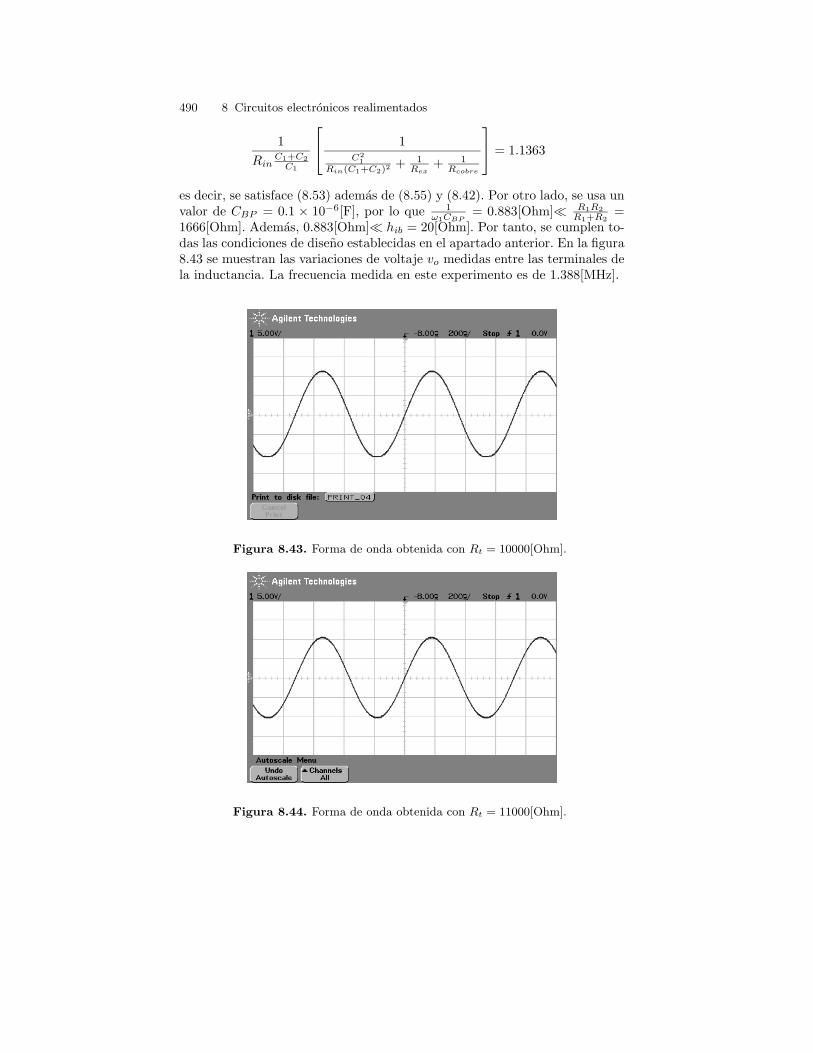
490 8 Circuitos electronicos realimentados
1
RinC1+C2
C1
1C2
1
Rin(C1+C2)2+ 1
Rex+ 1
Rcobre
= 1.1363
es decir, se satisface (8.53) ademas de (8.55) y (8.42). Por otro lado, se usa unvalor de CBP = 0.1 × 10−6[F], por lo que 1
ω1CBP= 0.883[Ohm]≪ R1R2
R1+R2=
1666[Ohm]. Ademas, 0.883[Ohm]≪ hib = 20[Ohm]. Por tanto, se cumplen to-das las condiciones de diseno establecidas en el apartado anterior. En la figura8.43 se muestran las variaciones de voltaje vo medidas entre las terminales dela inductancia. La frecuencia medida en este experimento es de 1.388[MHz].
Figura 8.43. Forma de onda obtenida con Rt = 10000[Ohm].
Figura 8.44. Forma de onda obtenida con Rt = 11000[Ohm].

8.3 Diseno de osciladores con forma de onda sinusoidal 491
En la figura 8.44 se muestran las variaciones de vo cuando se utiliza unvalor de Rt = 11000[Ohm], con lo cual se obtiene:
1
RinC1+C2
C1
1C2
1
Rin(C1+C2)2+ 1
Rex+ 1
Rcobre
= 1.0460 (8.57)
Esto significa que la ganancia de lazo disminuye. Notese que al tener unaganancia de lazo menor se requieren oscilaciones menos amplias y, por tanto,una incursion menor de la senal dentro de la region no lineal del transistor paraconseguir la ganancia de lazo unitaria que asegura las oscilaciones sostenidas.La mayor amplitud de las oscilaciones en el caso de la figura 8.43, cuando seusa Rt = 10000[Ohm], tambien se explica de esta manera. De hecho, puedealcanzarse a apreciar una ligera distorsion en la parte inferior de la ondasinusoidal en el caso cuando se usa Rt = 10000[Ohm].
Finalmente, en las figuras 8.45(a), 8.45(b) y 8.46(a) se muestran, respec-tivamente, las graficas polares de M(s), Zc(s) y G(s)H(s) obtenidas con losvalores numericos mencionados y Rt = 11000[Ohm]. Notese el parecido entrelas figuras 8.45(a) y 8.37(b) ası como entre las figuras 8.45(b) y 8.36(b). Porotro lado, las figuras 8.38 y 8.46(a) tambien son muy parecidas. La aparentediferencia a frecuencias cercanas a cero se debe a que dicha parte no se alcanzaa apreciar en la figura 8.46(a) porque ocurre a frecuencias muy bajas. Esto severifica en la figura 8.46(b) donde se presenta un acercamiento en dicha partede la figura 8.46(a) y se alcanza a apreciar la parte de la grafica polar a lacual el eje real positivo es tangente en la figura 8.38. En la figura 8.46(a) sepuede apreciar que se cumple (8.57).
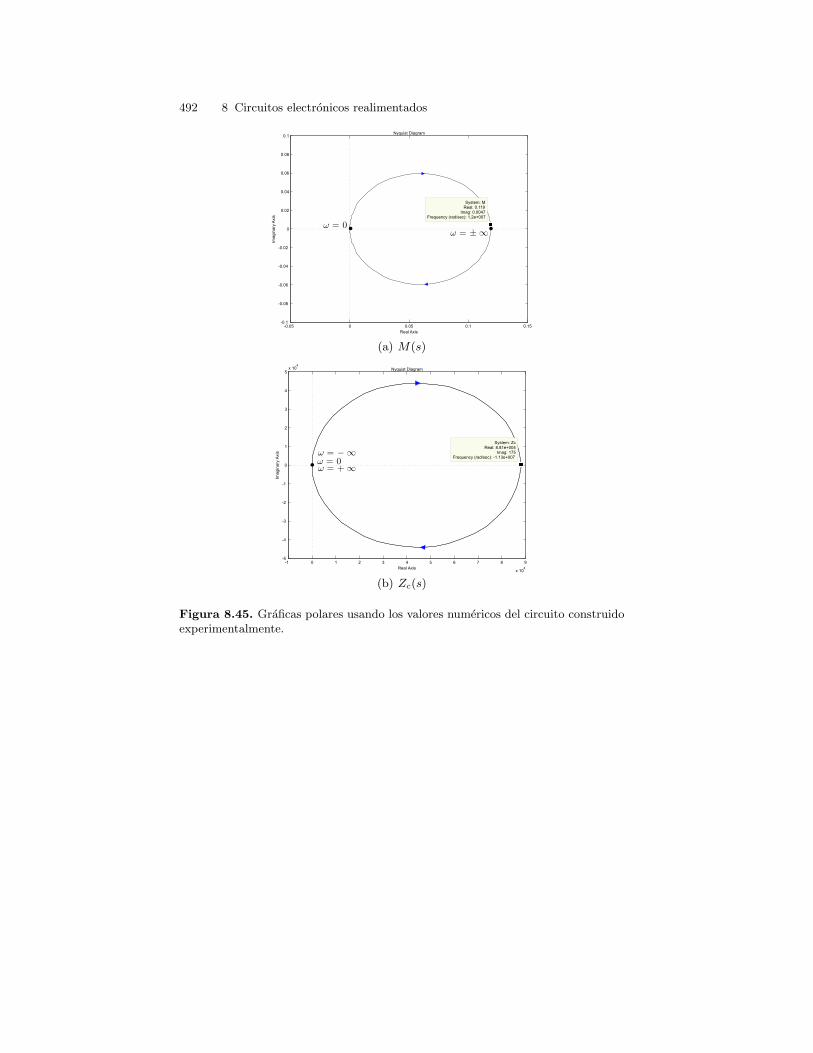
492 8 Circuitos electronicos realimentados
Nyquist Diagram
Real Axis
Ima
gin
ary
Axis
-0.05 0 0.05 0.1 0.15-0.1
-0.08
-0.06
-0.04
-0.02
0
0.02
0.04
0.06
0.08
0.1
System: MReal: 0.119
Imag: 0.0047Frequency (rad/sec): 1.2e+007
ï! = 0! = æ1ï
(a) M(s)
ï ! = 0! = à1! = +1
(b) Zc(s)
Figura 8.45. Graficas polares usando los valores numericos del circuito construidoexperimentalmente.
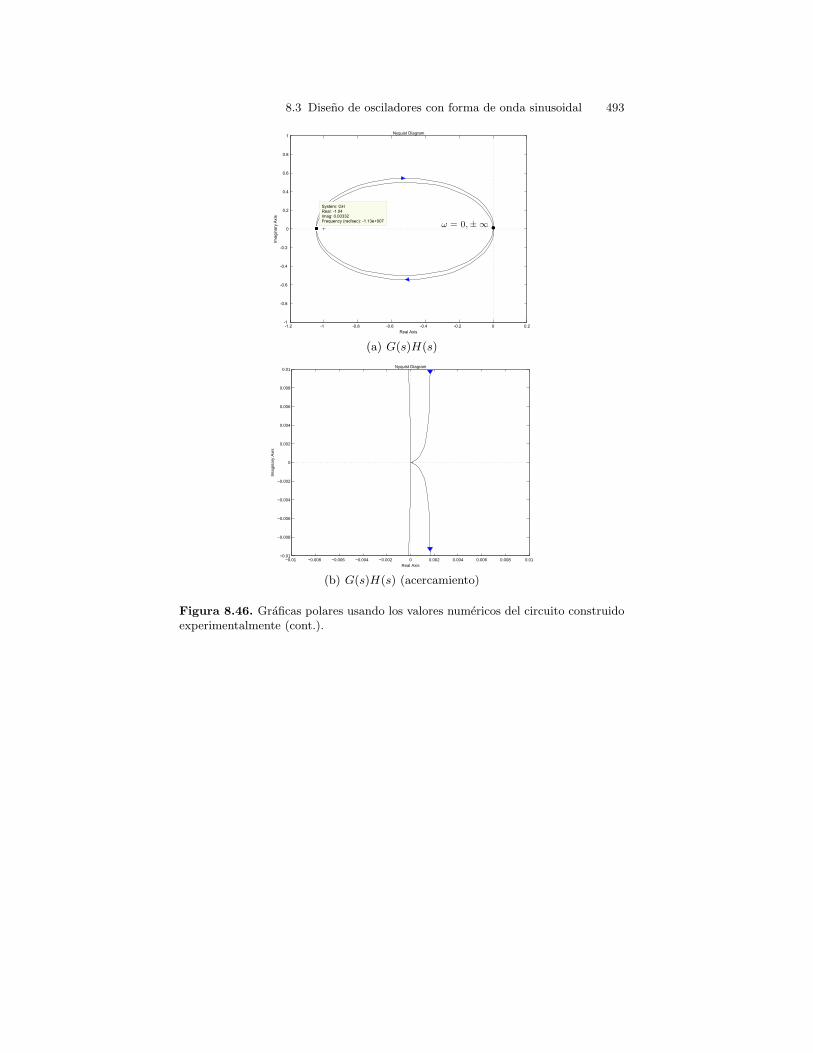
8.3 Diseno de osciladores con forma de onda sinusoidal 493
-1.2 -1 -0.8 -0.6 -0.4 -0.2 0 0.2-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
System: GHReal: -1.04Imag: 0.00332Frequency (rad/sec): -1.13e+007
Nyquist Diagram
Real Axis
Ima
gin
ary
Axis
! = 0;æ1 ï
(a) G(s)H(s)
−0.01 −0.008 −0.006 −0.004 −0.002 0 0.002 0.004 0.006 0.008 0.01−0.01
−0.008
−0.006
−0.004
−0.002
0
0.002
0.004
0.006
0.008
0.01Nyquist Diagram
Real Axis
Imag
inar
y A
xis
(b) G(s)H(s) (acercamiento)
Figura 8.46. Graficas polares usando los valores numericos del circuito construidoexperimentalmente (cont.).
494 8 Circuitos electronicos realimentados
8.4. Resumen del capıtulo
En este capıtulo se ha mostrado como reducir la distorsion producida porcircuitos electronicos no lineales, construir controladores analogicos usandocircuitos electronicos realimentados y disenar y construir circuitos osciladorescon forma de onda sinusoidal. La herramienta fundamental para resolver estosproblemas es la teorıa de control clasico, que incluye la respuesta en el tiempoy la respuesta en frecuencia.
En el caso de reducir la distorsion producida por circuitos electronicosno lineales, la idea fundamental es el uso de la funcion de transferencia de
sistema en lazo cerrado C(s)R(s) = G(s)
1+G(s)H(s) . La solucion no incluye ningun
analisis de estabilidad ya que se considera que los circuitos involucrados notienen dinamica, es decir, que se pueden modelar como simples ganancias(posiblemente no lineales) y no como ecuaciones diferenciales.
En el caso de la construccion de controladores analogicos es importanteseleccionar el amplificador operacional mas adecuado para cada aplicacion. Enparticular, se debe recordar que la ganancia de lazo abierto del amplificadoroperacional (denominada A0 en el presente capıtulo) en realidad no es unaconstante sino que varıa con la frecuencia a manera de un filtro pasa bajas.Esto significa que si la planta a controlar funciona a altas frecuencias (lo cualdepende de la rapidez de la misma planta) entonces el valor de A0 puedeverse reducido a esa frecuencia. Por tanto, se debera usar un amplificadoroperacional que tenga un ancho de banda adecuado.
Finalmente, en el caso de los circuitos osciladores, es de fundamental im-portancia el concepto de estabilidad marginal. Por tanto, los componentes delcircuito se deben seleccionar de manera que se alcance esta caracterıstica defuncionamiento. Las herramientas fundamentales para analizar y disenar estoscircuitos son la tecnica de la respuesta en el tiempo (ubicacion de los polos delazo cerrado), en el caso de circuitos basados en amplificadores operacionales,y la tecnica de la respuesta en frecuencia (criterio de estabilidad de Nyquist),en el caso de circuitos basados en transistores.
8.5. Preguntas de repaso
1. ¿Cuando se dice que un sistema es marginalmente estable? ¿Por que esimportante este concepto para construir circuitos osciladores?
2. ¿Por que se dice que no se puede construir un buen oscilador usando uncircuito electronico completamente lineal? ¿Por que un circuito electronicono lineal resuelve el problema?
3. Un transistor es un dispositivo electronico no lineal, entonces ¿Por que seusan tecnicas de control lineal (funcion de transferencia y respuesta enfrecuencia) para disenar circuitos osciladores basados en transistores?

8.5 Preguntas de repaso 495
4. ¿Por que se necesita usar diodos zener en los osciladores basados en am-plificadores operacionales? ¿Por que no se usan diodos zener en los osci-ladores basados en transistores?
5. ¿Que es un modelo de senal pequena para un transistor?6. ¿Por que cree que los circuitos osciladores sean sistemas con realimenta-
cion positiva?7. Explique el mecanismo mediante el cual es posible reducir, usando reali-
mentacion, la distorsion producida por circuitos electronicos no lineales.8. ¿Por que se debe disenar un circuito oscilador de manera que sea ligera-
mente inestable?9. ¿Que opina de la siguiente afirmacion? La funcion de transferencia de lazo
abierto de un circuito oscilador es un filtro pasa banda.10. De acuerdo a la pregunta anterior, ¿Que determina la frecuencia de osci-
lacion?


Referencias
1. A.R. Hambley, Electronics. A top-down approach to computer-aided circuit de-sign, Macmillan Publishing Company, New York, 1994.
2. R.F. Coughlin and F. F. Driscoll, Amplificadores operacionales y circuitos inte-grados lineales, 4a. edicion, Prentice Hall Hispanoamericana, Mexico, 1993.
3. N.S. Nise, Sistemas de control para ingenierıa, 1a. edicion en espanol, 1a. Re-impresion, CECSA, Mexico, 2004.
4. M. Alonso and E.J. Finn, Fısica, Addison-Wesley Iberoamericana, Wilmington,Delaware, 1995.
5. W. Hayward, Introduction to radio frequency design, The American Radio RelayLeague Inc., 1994.
6. P. H. Young, Electronic communication techniques, Merrill Publishing Company,1990.
7. C.A. Desoer and E.S. Kuh, Basic circuit theory, International Student Edition,McGraw-Hill, Tokyo, 13th printing 1983.
8. M. Kaufman y A.H. Seidman, Manual para ingenieros y tecnicos en electronica,McGraw-Hill, Mexico, 1987.


9
Control de velocidad de un motor de CD
u
+
à
i
R L
ea
+
à
T Ê Tc n1
n2
bmTL ò
bLJm
JLTp
Figura 9.1. Motor de CD con carga.
El problema del control de velocidad de un motor de CD es quiza unode los mas sencillos debido a que el modelo de la planta a controlar es deprimer orden y a que, dada la disponibilidad de motores de CD comercialesde diferentes capacidades, casi no es necesaria la construccion adicional departes mecanicas. Por otro lado, los sistemas de control de velocidad tienendiversas e importantes aplicaciones en la industria que van desde las bandastransportadoras hasta los procesos de aplanado de laminas metalicas usandorodillos. Finalmente, otra razon para incluir este problema de control en lapresente obra es el hecho de que otros procesos de diferente naturaleza, comolos sistemas de control de temperatura y los sistemas de control de nivel,pueden controlarse de manera similar (usando controladores proporcional-integral) ya que sus modelos tienen la misma estructura.
500 9 Control de velocidad de un motor de CD
Objetivos del capıtulo
Construir controladores tipo proporcional-integral usando un microcontro-lador.Construir la totalidad de las interfases electronicas necesarias para cons-truir el sistema de control completo.Identificar las ventajas y desventajas de los controladores proporcional-integral.Aplicar a una situacion experimental los conceptos de la teorıa de controlclasico.
Un motor electrico es un dispositivo que es utilizado para proveer movi-miento a un sistema mecanico. Existen muchos tipos de motores electricos: deinduccion [1], caps. 10 y 11, de paso a paso [2], sıncronos [3], de reluctanciavariable [4], de CD con escobillas y sin escobillas [5], cap. 10, etc. Sin embargo,el motor de corriente directa (CD) con escobillas y con iman permanente es elmas sencillo de controlar. Mas aun, dado que su modelo matematico es linealy de una entrada-una salida, es el motor ideal para ser usado como prototipoexperimental durante las etapas iniciales de aprendizaje en control automati-co. En este capıtulo se estudia el control de velocidad de un motor de CDcon escobillas y con iman permanente. En el proximo capıtulo se estudia elcontrol de posicion de este mismo tipo de motor.
9.1. Modelo matematico
En la figura 9.1 se muestra un motor de CD con escobillas y con imanpermanente que mueve a una carga a traves de una caja de engranes. Lanomenclatura utilizada es la siguiente.
u es el voltaje aplicado en las terminales de armadura del motor.i es la corriente electrica de armadura.Θ es la posicion angular del rotor del motor.θ es la posicion angular de la carga.ea = keΘ es la fuerza contra-electromotriz, donde ke es la constante defuerza contra-electromotriz.T = kmi es el par electromagnetico generado, donde km es la constante depar del motor.Tc es el par equivalente de la carga reflejado sobre la flecha del motor. Estepar se opone al movimiento del motor (sentido contrario a Θ).TL es el par aplicado (por el motor) sobre la carga.Tp es un par de perturbacion que se aplica desde el exterior. Se suponeque este par se opone al movimiento de la carga (sentido contrario a θ). Sino es ası todo es cuestion de considerar que Tp es negativo.L es la inductancia de armadura.

9.1 Modelo matematico 501
R es la resistencia de armadura.Jm es la inercia del rotor del motor.bm es la constante de friccion viscosa del motor.JL es la inercia de la carga.bL es la constante de friccion viscosa de la carga.n1 y n2 representan el numero de dientes del engrane del eje del motor ydel eje de la carga, respectivamente.
Notese que un motor de CD es un sistema electromecanico compuesto porun subsistema electrico y un subsistema mecanico. El modelo matematicocorrespondiente se encuentra modelando por separado cada uno de estos sub-sistemas para luego unirlos. A continuacion se obtiene el modelo de cada unade estas partes.
Modelo del subsistema electrico del motor
Aplicando la Ley de Kirchhoff de voltajes (vease la figura 9.1) se tiene:
voltaje aplicado =∑
caıdas de voltaje en la malla
u = caıda en la inductancia + caıda en la resistencia +
+fuerza contraelectromotriz
u = Ldi
dt+ R i + ea (9.1)
donde, de acuerdo a (2.38) en el capıtulo 2, la fuerza contraelectromotrizesta dada como:
ea = keΘ
y el punto “ ˙ ” representa la primera derivada respecto al tiempo.
Modelo del subsistema mecanico del motor
En esta parte debe usarse la Segunda Ley de Newton. Como existen doscuerpos diferentes debe aplicarse la Segunda Ley de Newton a cada uno deestos cuerpos por separado.
Modelo del rotor
inercia × aceleracion angular =∑
pares sobre la inercia Jm
Jm Θ = par generado − par de friccion − par de carga
Jm Θ = T − bmΘ − Tc (9.2)

502 9 Control de velocidad de un motor de CD
donde, de acuerdo a (2.39) en el capıtulo 2, el par electromagnetico generadoesta dado como:
T = km i
La suma en el miembro derecho de (9.2) es una suma vectorial por lo que elsigno indica el sentido en que se aplican los pares. Un signo negativo indicaque dicho par se opone al movimiento de la inercia Jm mientras que un signopositivo indica que dicho par favorece el movimiento de la inercia Jm.
Modelo de la carga
Dada la presencia de una caja de engranes, es necesario utilizar (2.32) y(2.33), vistas en el capıtulo 2, para concluir que:
Θ = n θ, n =n2
n1(9.3)
TL = n Tc (9.4)
donde n1 y n2 representan, respectivamente, el numero de dientes del engraneunido al eje del motor y al eje de la carga. Aplicando la Segunda Ley deNewton a la carga:
inercia × aceleracion angular =∑
pares sobre la inercia JL
JL θ = TL − bLθ − Tp (9.5)
Usando (9.2), (9.5), (9.3) y (9.4) se obtiene el modelo combinado del motorde CD y la carga como:
Jm Θ = km i − bmΘ − 1
nTL
Jm Θ = km i − bmΘ − 1
n
(JL θ + bLθ + Tp
)
n Jm θ = km i − bm nθ − 1
n
(JL θ + bLθ + Tp
)
(n2 Jm + JL
)θ +
(n2bm + bL
)θ = n km i − Tp (9.6)
Si se define:J = n2 Jm + JL, b = n2 bm + bL (9.7)
entonces se puede escribir (9.6) como:
Jθ + bθ = n km i − Tp (9.8)
Finalmente, el modelo matematico del motor completo esta dado por (9.1) y(9.8), es decir:

9.2 Amplificador de potencia 503
Ldi
dt= u − R i − n ke θ (9.9)
Jθ = −b θ + n km i − Tp (9.10)
Notese que la ecuacion diferencial en (9.10) es identica a la presentada en(2.92) correspondiente al sistema mostrado en la figura 2.28(a) de capıtulo 2.Las unicas diferencias se deben a que (2.92) se deja expresada en terminos delpar externo aplicado (igual a km i en un motor de CD) y que en (2.92) no seconsidera ningun par externo sobre el cuerpo 2 (Tp = 0).
Las ecuaciones diferenciales (9.9) y (9.10) representan el modelo matemati-co del conjunto motor de CD-carga porque si se conocen todas las constantesası como el voltaje de armadura aplicado, u, se puede resolver la ecuacion di-ferencial para calcular la posicion de la carga, θ, como una funcion del tiempo.Aplicando la transformada de Laplace a las ecuaciones (9.9) y (9.10) conside-rando todas las condiciones iniciales iguales a cero se encuentra:
I(s) =1
sL + R[U(s) − n ke sθ(s)] (9.11)
θ(s) =1
s2J + sb[n km I(s) − Tp(s)] (9.12)
donde I(s), U(s), θ(s), Tp(s) representan las transformadas de Laplace de i,u, θ y Tp, respectivamente.
9.2. Amplificador de potencia
Es importante subrayar la necesidad de usar un amplificador de potencia.Un sistema de control se puede dividir en dos partes: i) la parte de control yii) la parte de potencia. La parte de control incluye a toda la parte electronicaencargada de procesar la informacion (sensores y algoritmos de control) quees utilizada para determinar cual es la orden que debe ser enviada al procesoa controlar. Esta tarea requiere de circuitos precisos que funcionan utilizandoniveles bajos de corriente, es decir, procesan informacion pero no procesanniveles importantes de potencia por lo que las ordenes que envıan son debiles.Sin embargo, estas ordenes deben ser capaces de producir cambios importan-tes en la entrada del proceso a controlar y generalmente la entrada del procesomaneja niveles importantes de potencia para poder producir los cambios es-perados en el proceso. Esta es la razon de incluir la etapa de potencia en unsistema de control. La etapa de potencia normalmente consiste de un ampli-ficador de potencia que a su entrada recibe la debil senal entregada por elcontrolador (senal de control) y a su salida entrega una senal de alta potenciaque se aplica directamente a los actuadores colocados en la entrada del pro-ceso a controlar. Por ejemplo, en los sistemas electromecanicos los actuadoresutilizados son motores electricos que son equipos capaces de transformar unasenal electrica en la fuerza o el par que necesita el mecanismo para realizar el

504 9 Control de velocidad de un motor de CD
movimiento deseado. La senal de control es una senal electrica debil entrega-da por el controlador (computadora, microcontrolador o circuitos electronicosanalogicos) mientras que un motor electrico necesita una senal de gran poten-cia para producir la fuerza requerida. Ası, el amplificador de potencia utilizadose debe colocar entre la senal entregada por el controlador y la senal aplicadaal motor electrico. De acuerdo a esto, un amplificador de potencia se puedemodelar como una ganancia Ap que relaciona al voltaje recibido en su entradaui (senal de control) con el voltaje entregado en su salida u (en las terminalesde armadura del motor):
u = Ap ui (9.13)
9.3. Control de corriente
Una tecnica de control para motores electricos que es muy usada en laindustria [5], pag. 76, [6], [7], consiste en colocar un lazo interno de corriente.En su forma mas sencilla este lazo consiste en un controlador proporcional decorriente. Esto significa que la senal de control se calcula como:
ui = K(i∗ − i) (9.14)
donde K es una constante positiva que representa la ganancia del controladorproporcional de corriente mientras que i∗ representa la consigna de corrienteque debe ser obtenida como la salida de otro controlador (lazo externo) que seencarga de controlar la variable deseada, es decir, la velocidad o la posicion.Mas adelante se explicara como se disena dicho lazo externo de control. Porlo pronto supongase que i∗ es simplemente el valor deseado de corriente quesera especificado de algun modo. Usando (9.13) y (9.14) se encuentra que elvoltaje aplicado en las terminales de armadura del motor de CD esta dadocomo:
u = Ap K(i∗ − i) (9.15)
Aplicando la transformada de Laplace a (9.15) se encuentra:
U(s) = Ap K(I∗(s) − I(s)) (9.16)
donde I∗(s) es la transformada de Laplace de i∗. Combinando (9.11), (9.12) y(9.16) se obtiene el diagrama de bloques de la figura 9.2(a). Como se muestraen el ejemplo 4.4 de la seccion 4.1 a partir de la figura 9.2(a) se puedenhacer las simplificaciones mostradas en las figuras 9.2(b) y 9.2(c). Tambien semuestra en el ejemplo 4.4 de la seccion 4.1 que, a partir de la figura 9.2(c), sepuede escribir:
θ(s) = G1(s)I∗(s) + G2(s)Tp(s) (9.17)
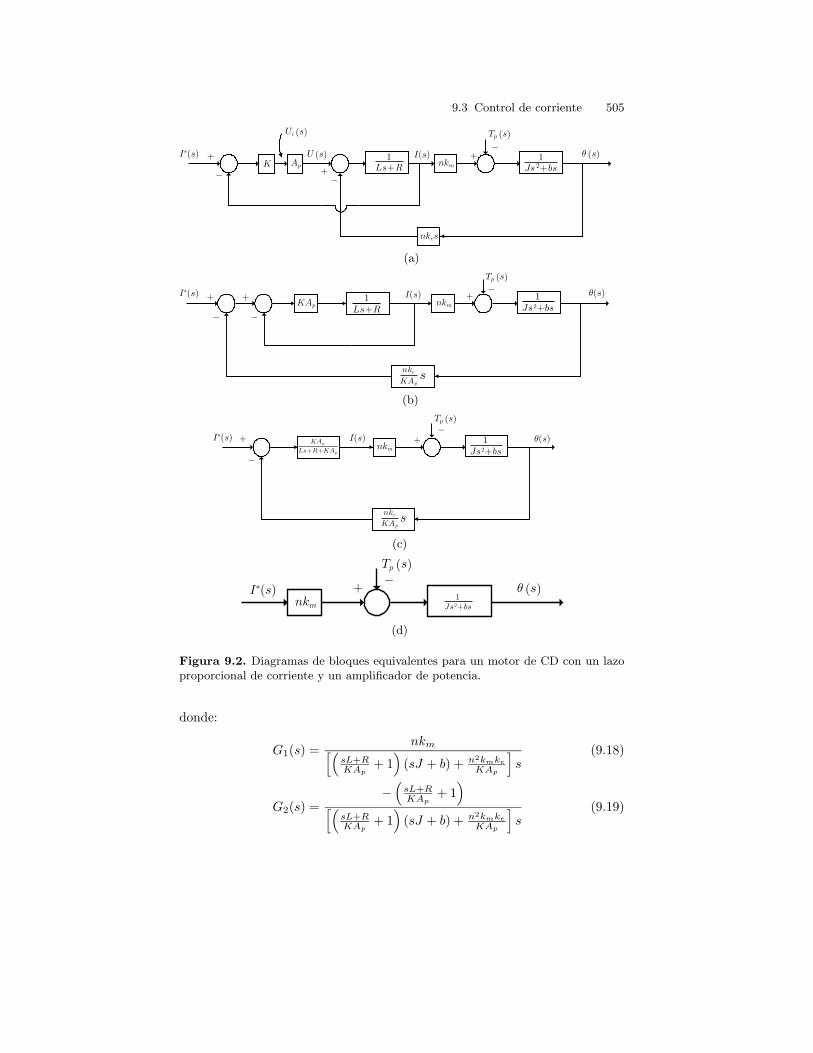
9.3 Control de corriente 505
+
+à à
Iã(s) I(s) +àTp s( )
ò s( )nkmAp
U s( )
nkes
Ui s( )
K Ls+R1
Js 2+bs1
(a)
Js2+bs1
Ls+R1
Iã(s) +
à à
+ I(s) +à ò(s)
Tp s( )
nkmKAp
KAp
nke s
(b)
Js2+bs1Iã(s) +
à
+à
ò(s)I(s)
Tp s( )
nkm
KAp
nke s
Ls+R+KAp
KAp
(c)
+Iã(s)à
nkm
Tp s( )
Js2+bs1
ò s( )
(d)
Figura 9.2. Diagramas de bloques equivalentes para un motor de CD con un lazoproporcional de corriente y un amplificador de potencia.
donde:
G1(s) =nkm[(
sL+RKAp
+ 1)
(sJ + b) + n2kmke
KAp
]s
(9.18)
G2(s) =−
(sL+RKAp
+ 1)
[(sL+RKAp
+ 1)
(sJ + b) + n2kmke
KAp
]s
(9.19)

506 9 Control de velocidad de un motor de CD
Si la ganancia K se selecciona suficientemente grande entonces se puede con-siderar que [5], pag. 76:
sL + R
KAp≈ 0,
n2kmke
KAp≈ 0
para aproximar (9.18) y (9.19) como:
G1(s) =nkm
s2J + sb(9.20)
G2(s) =−1
s2J + bs(9.21)
Usando (9.20) y (9.21) en (9.17) se obtiene:
θ(s) =1
s2J + sb[nkmI∗(s) − Tp(s)] (9.22)
lo cual se representa usando un diagrama de bloques en la figura 9.2(d). Noteseque el objetivo del control de corriente mostrado en (9.15) es hacer desprecia-ble la dinamica electrica del motor de manera que el modelo del motor ahorasolo esta representado por la parte mecanica del mismo. Esto puede apreciarseclaramente si se comparan (9.22) y (9.12). Estas dos expresiones indican queahora puede considerarse que es la corriente la que se utiliza como variablede control y no el voltaje como se indicaba en (9.11). Es claro que el voltajesigue siendo la variable que se manipula directamente como lo indica (9.15),sin embargo, para propositos de analisis y diseno del sistema de control sepuede suponer que es la corriente la que se manipula directamente a travesde la consigna de corriente i∗. El proposito del control de corriente (9.15) esconseguir que el valor actual de la corriente i siga de cerca a la consigna i∗
para lo cual es muy conveniente usar un valor grande de la ganancia K. Noteseque la expresion en (9.22) se puede reescribir como se muestra a continuacion:
θ(s) =1
s(s + a)[kI∗(s) − 1
JTp(s)] (9.23)
a =b
J, k =
nkm
J
Finalmente, dado que la velocidad ω y la posicion θ se relacionan a traves deω = dθ
dt , entonces usando la transformada de Laplace con condiciones inicialescero se tiene que ω(s) = sθ(s). Por tanto, la expresion en (9.23) se puedereescribir como:
ω(s) = sθ(s) =1
s + a[kI∗(s) − 1
JTp(s)] (9.24)
En lo que resta de este capıtulo se utilizara el modelo dado en (9.24) paradisenar controladores de velocidad. Tambien se presentaran algunos resultadosexperimentales obtenidos con dichos controladores.
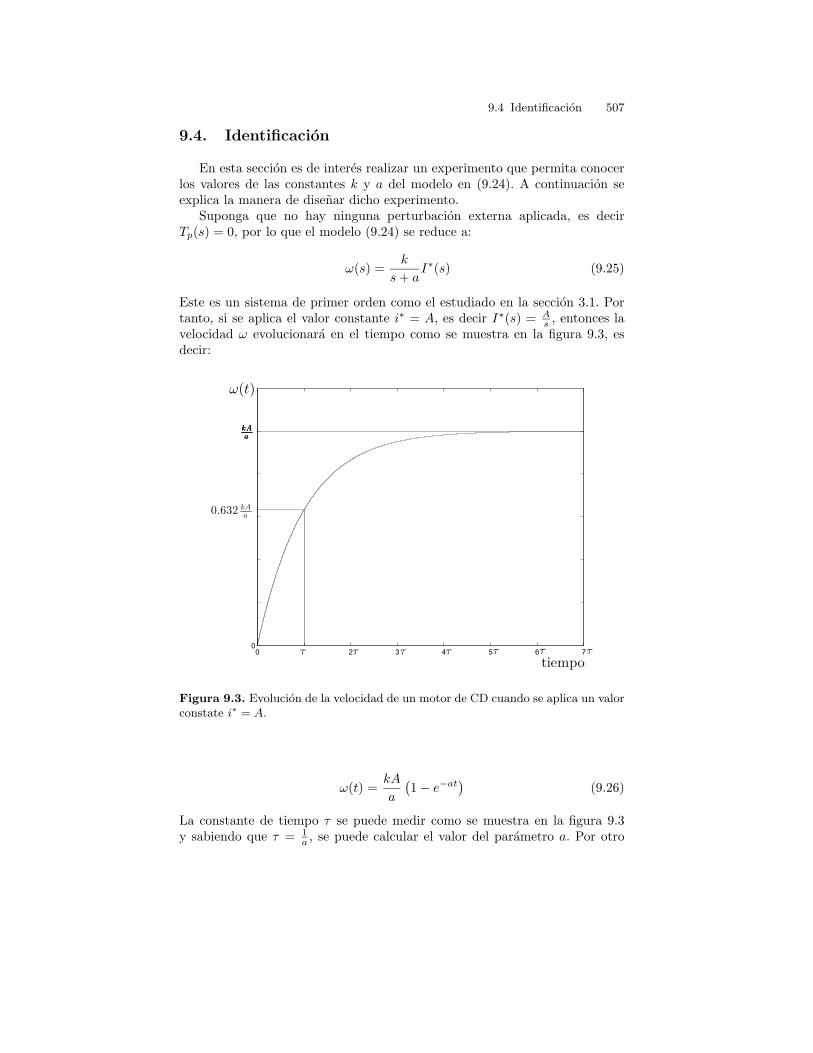
9.4 Identificacion 507
9.4. Identificacion
En esta seccion es de interes realizar un experimento que permita conocerlos valores de las constantes k y a del modelo en (9.24). A continuacion seexplica la manera de disenar dicho experimento.
Suponga que no hay ninguna perturbacion externa aplicada, es decirTp(s) = 0, por lo que el modelo (9.24) se reduce a:
ω(s) =k
s + aI∗(s) (9.25)
Este es un sistema de primer orden como el estudiado en la seccion 3.1. Portanto, si se aplica el valor constante i∗ = A, es decir I∗(s) = A
s , entonces lavelocidad ω evolucionara en el tiempo como se muestra en la figura 9.3, esdecir:
ü ü ü ü ü ü ü
akAakAakA
0:632 akA
tiempo
!(t)
Figura 9.3. Evolucion de la velocidad de un motor de CD cuando se aplica un valorconstate i∗ = A.
ω(t) =kA
a
(1 − e−at
)(9.26)
La constante de tiempo τ se puede medir como se muestra en la figura 9.3y sabiendo que τ = 1
a , se puede calcular el valor del parametro a. Por otro
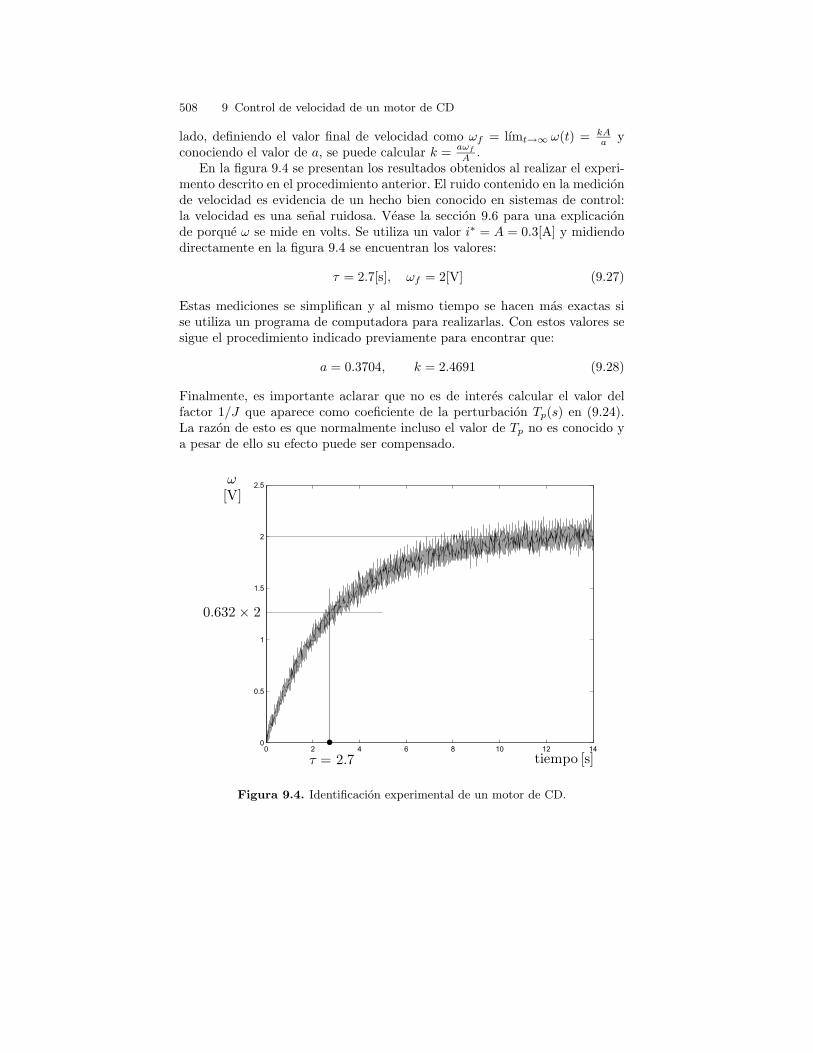
508 9 Control de velocidad de un motor de CD
lado, definiendo el valor final de velocidad como ωf = lımt→∞ ω(t) = kAa y
conociendo el valor de a, se puede calcular k =aωf
A .En la figura 9.4 se presentan los resultados obtenidos al realizar el experi-
mento descrito en el procedimiento anterior. El ruido contenido en la medicionde velocidad es evidencia de un hecho bien conocido en sistemas de control:la velocidad es una senal ruidosa. Vease la seccion 9.6 para una explicacionde porque ω se mide en volts. Se utiliza un valor i∗ = A = 0.3[A] y midiendodirectamente en la figura 9.4 se encuentran los valores:
τ = 2.7[s], ωf = 2[V] (9.27)
Estas mediciones se simplifican y al mismo tiempo se hacen mas exactas sise utiliza un programa de computadora para realizarlas. Con estos valores sesigue el procedimiento indicado previamente para encontrar que:
a = 0.3704, k = 2.4691 (9.28)
Finalmente, es importante aclarar que no es de interes calcular el valor delfactor 1/J que aparece como coeficiente de la perturbacion Tp(s) en (9.24).La razon de esto es que normalmente incluso el valor de Tp no es conocido ya pesar de ello su efecto puede ser compensado.
tiempo s[ ]
!V[ ]
ü = 2:7
ï
0:632â 2
Figura 9.4. Identificacion experimental de un motor de CD.

9.5 Control de velocidad 509
9.5. Control de velocidad
El diseno de un controlador tiene como objetivo asegurar que en lazo cerra-do se consigan las caracterısticas deseadas de respuesta transitoria y en estadoestacionario. Las caracterısticas de respuesta transitoria se refieren a la cons-tante de tiempo (rapidez de respuesta) deseada, la cual se asigna mediantela ubicacion conveniente de los polos de lazo cerrado. Por otro lado, las ca-racterısticas de respuesta en estado estacionario se consiguen al asegurar quecuando el tiempo crece el valor de la velocidad ω alcanza la velocidad deseadaωd a pesar de la presencia de una perturbacion externa Tp(s). El controla-dor es el dispositivo que se encarga de que se satisfagan las caracterısticas derespuesta transitoria y en estado estacionario del sistema en lazo cerrado.
Suponga que la velocidad deseada es una constante o un escalon, es decirωd es una constante. Dado que la planta en (9.24) no tiene polos en s = 0entonces es de tipo 0. Esto significa que el uso de un controlador proporcionalde velocidad de la forma i∗ = kp(ωd − ω), con kp > 0, no puede conseguirque ω = ωd en estado estacionario incluso si no hay perturbaciones externasde par, es decir, aun cuando Tp = 0. La solucion a este problema es utilizarun controlador que tenga una accion integral, para que el sistema sea de tipo1, es decir usar un controlador proporcional-integral (PI). Sin embargo, talcomo se explica en la seccion 5.2.4, un controlador PI no puede conseguirsimultaneamente las caracterısticas de respuesta transitoria deseadas y unrechazo satisfactorio de las perturbaciones externas Tp(s). Por esta razon, acontinuacion se muestra la manera de construir un controlador PI modificadoque puede conseguir simultaneamente estos requerimientos.
9.5.1. Un controlador PI modificado
Aplicando la transformada inversa de Laplace a (9.24) se obtiene la si-guiente ecuacion diferencial:
ω + aω = ki∗ − 1
JTp (9.29)
A continuacion se demuestra que el siguiente controlador:
i∗ = kp(ωd − ω) + ki
∫ t
0
(ωd − ω(r))dr +a
kωd + k1(ω(0) − ωd) (9.30)
donde ω(0) es la velocidad inicial, consigue que ante una velocidad deseadaconstante ωd la velocidad ω alcance dicho valor deseado en estado estacionario,que responda con una constante de tiempo fijada a voluntad y que el efectode una perturbacion constante Tp desaparezca tan rapido como se desee.
Sustituyendo (9.30) en (9.29) y acomodando terminos se encuentra:
ω + (a + kpk)(ω − ωd) + kik
∫ t
0
(ω(r) − ωd)dr = k1k(ω(0) − ωd) −1
JTp

510 9 Control de velocidad de un motor de CD
Definiendo:
kp = k′p + k1
se obtiene:
ω + (a + k′pk)(ω − ωd) + kik
∫ t
0
(ω(r) − ωd)dr
+k1k[ω − ωd − (ω(0) − ωd)] = − 1
JTp
Notese que:
ω − ωd − (ω(0) − ωd) =
∫ t
0
(ω(r) − ωd)dr
y si ademas de define:
ki = k′ik1
entonces:
ω + (a + k′pk)(ω − ωd) + k1k
∫ t
0
[k′i(ω(r) − ωd) + (ω(r) − ωd)] dr
= − 1
JTp (9.31)
Pero como ωd es una constante, entonces ωd = 0. Ası que si se define:
k′i = a + k′
pk
ξ =
∫ t
0
[ω(r) + k′i(ω(r) − ωd)] dr
entonces se puede escribir (9.31) como:
ξ + k1kξ = − 1
JTp
Aplicando la transformada de Laplace con condiciones iniciales cero:
ξ(s) =− 1
J
s + k1kTp(s)
o tambien:
sξ(s) =− 1
J s
s + k1kTp(s) (9.32)
Si Tp = td es una constante, es decir Tp(s) = td
s entonces:
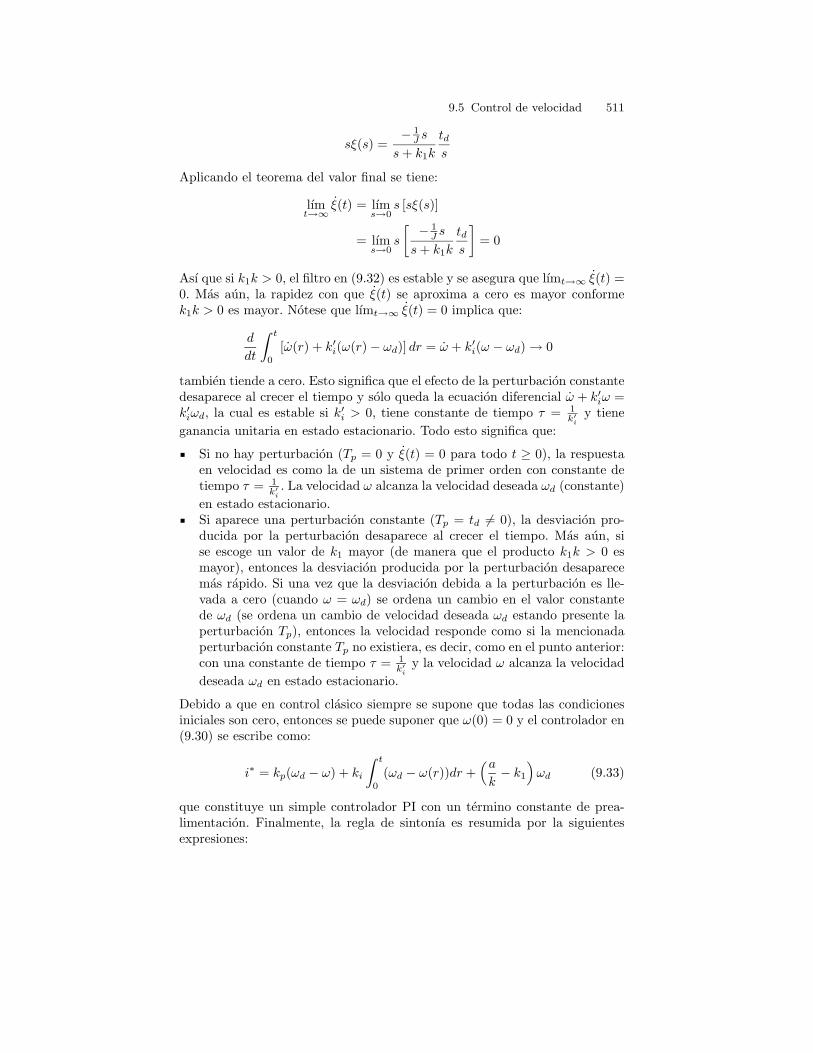
9.5 Control de velocidad 511
sξ(s) =− 1
J s
s + k1k
tds
Aplicando el teorema del valor final se tiene:
lımt→∞
ξ(t) = lıms→0
s [sξ(s)]
= lıms→0
s
[ − 1J s
s + k1k
tds
]= 0
Ası que si k1k > 0, el filtro en (9.32) es estable y se asegura que lımt→∞ ξ(t) =0. Mas aun, la rapidez con que ξ(t) se aproxima a cero es mayor conformek1k > 0 es mayor. Notese que lımt→∞ ξ(t) = 0 implica que:
d
dt
∫ t
0
[ω(r) + k′i(ω(r) − ωd)] dr = ω + k′
i(ω − ωd) → 0
tambien tiende a cero. Esto significa que el efecto de la perturbacion constantedesaparece al crecer el tiempo y solo queda la ecuacion diferencial ω + k′
iω =k′
iωd, la cual es estable si k′i > 0, tiene constante de tiempo τ = 1
k′
iy tiene
ganancia unitaria en estado estacionario. Todo esto significa que:
Si no hay perturbacion (Tp = 0 y ξ(t) = 0 para todo t ≥ 0), la respuestaen velocidad es como la de un sistema de primer orden con constante detiempo τ = 1
k′
i. La velocidad ω alcanza la velocidad deseada ωd (constante)
en estado estacionario.Si aparece una perturbacion constante (Tp = td 6= 0), la desviacion pro-ducida por la perturbacion desaparece al crecer el tiempo. Mas aun, sise escoge un valor de k1 mayor (de manera que el producto k1k > 0 esmayor), entonces la desviacion producida por la perturbacion desaparecemas rapido. Si una vez que la desviacion debida a la perturbacion es lle-vada a cero (cuando ω = ωd) se ordena un cambio en el valor constantede ωd (se ordena un cambio de velocidad deseada ωd estando presente laperturbacion Tp), entonces la velocidad responde como si la mencionadaperturbacion constante Tp no existiera, es decir, como en el punto anterior:con una constante de tiempo τ = 1
k′
iy la velocidad ω alcanza la velocidad
deseada ωd en estado estacionario.
Debido a que en control clasico siempre se supone que todas las condicionesiniciales son cero, entonces se puede suponer que ω(0) = 0 y el controlador en(9.30) se escribe como:
i∗ = kp(ωd − ω) + ki
∫ t
0
(ωd − ω(r))dr +(a
k− k1
)ωd (9.33)
que constituye un simple controlador PI con un termino constante de prea-limentacion. Finalmente, la regla de sintonıa es resumida por la siguientesexpresiones:

512 9 Control de velocidad de un motor de CD
kp = k′p + k1 (9.34)
ki = k′ik1
k′i = a + k′
pk
donde:
k′p > 0 se elige de modo que quede fijada la constante de tiempo deseada
τ = 1k′
i= 1
a+k′
pk , la cual siempre es menor que la constante de tiempo de
la planta a controlar 1a , lo cual es muy conveniente.
k1 > 0 se elige grande para reducir rapidamente a cero la desviacion de-bida a la perturbacion. Esto puede hacerse al tanteo o puede calcularserecordando que 1
k1k es la constante de tiempo del filtro en (9.32), el cuales el responsable de eliminar la desviacion producida por la perturbacion.
Otra manera (mas conocida) de disenar un controlador PI con las mismasventajas que el que se acaba de presentar es usando el concepto de contro-ladores con dos grados de libertad. Esto es lo que se muestra en la siguienteseccion.
9.5.2. Un controlador con dos grados de libertad
Un sistema en lazo cerrado que cuenta con un controlador con dos gradosde libertad tiene la estructura mostrada en la figura 9.5. El controlador estaformado por los dos componentes con funciones de transferencia Gc1(s) yGc2(s), mientras que Gp(s) es la planta que se desea controlar. Tambien setoma en cuenta la presencia de una perturbacion a la entrada de la plantaD(s). En el ejemplo 4.5 de la seccion 4.1 se muestra que la salida del sistemaen lazo cerrado se puede calcular como:
ω(s) = G1(s)ωd(s) + G2(s)D(s)
donde:
G1(s) =Gc1(s)Gp(s)
1 + (Gc1(s) + Gc2(s))Gp(s)
G2(s) =Gp(s)
1 + (Gc1(s) + Gc2(s))Gp(s)(9.35)
son las funciones de transferencia:
G1(s) =ω(s)
ωd(s), cuando D(s) = 0
G2(s) =ω(s)
D(s), cuando ωd(s) = 0
La razon por la cual este esquema recibe el nombre de controlador de dosgrados de libertad es que las dos funciones de transferencia definidas en (9.35)

9.5 Control de velocidad 513
pueden ser sintonizadas independientemente una de la otra utilizando paraello, como variables independientes (o grados de libertad), a las dos partes delcontrolador Gc1(s) y Gc2(s). Dado que la planta que interesa en este capıtulo
+
à
Iã(s)
+à
+
+
D(s)
Gp s( )Gc1 s( )
Gc2 s( )
!d(s) !(s)
Figura 9.5. Sistema en lazo cerrado usando un controlador con dos grados delibertad.
es un motor de CD, suponga que:
Gp(s) =k
s + a
Suponga tambien que Gc1(s) y Gc2(s) son controladores PI, es decir:
Gc1(s) =kp1s + ki1
s, Gc2(s) =
kp2s + ki2
s
Gc(s) = Gc1(s) + Gc2(s) =kps + ki
s, kp = kp1 + kp2, ki = ki1 + ki2
Por tanto, la primera funcion de transferencia en (9.35) se puede escribir como:
ω(s)
ωd(s)=
Gc1(s)k
s+a
1 +kps+ki
sk
s+a
=skGc1(s)
s2 + (a + kpk)s + kik(9.36)
Suponga que se desea que la respuesta en lazo cerrado, ante una referenciadeseada, sea la de un primer orden con un polo en s = −p1, con p1 > 0.Entonces el polinomio caracterıstico en la expresion anterior debe satisfacer:
s2 + (a + kpk)s + kik = (s + p1)(s + f)
= s2 + (p1 + f)s + p1f
donde la raız en s = −f , f > 0, se introduce solo para conseguir un poli-nomio de segundo orden en el miembro derecho de esta expresion. Igualandocoeficientes en ambos miembros se obtiene:

514 9 Control de velocidad de un motor de CD
a + kpk = p1 + f, kik = p1f
de donde se encuentra:
kp =p1 + f − a
k, ki =
p1f
k
Por otro lado, con el fin de que la respuesta ante una referencia deseada seala de un primer orden con un polo en s = −p1, la funcion de transferencia en(9.36) debe tener la forma:
ω(s)
ωd(s)=
p1(s + f)
s2 + (a + kpk)s + kik=
p1(s + f)
(s + p1)(s + f)=
p1
s + p1(9.37)
Por tanto, igualando (9.36) y (9.37) se encuentra que:
skGc1(s) = p1(s + f)
de donde se concluye que Gc1(s) es un controlador PI:
Gc1(s) =kp1s + ki1
s, kp1 =
p1
k, ki1 =
p1f
k
Con este resultado se puede calcular Gc2(s) como:
Gc2(s) = Gc(s) − Gc1(s) =kp2s + ki2
s, kp2 =
f − a
k, ki2 = 0
Es decir, Gc2(s) = kp2 es un controlador proporcional. Por otro lado, la se-gunda funcion de transferencia en (9.35) toma la forma:
ω(s)
D(s)=
ks+a
1 +kps+ki
sk
s+a
=ks
s2 + (a + kpk)s + kik
=ks
(s + p1)(s + f)(9.38)
Usando esta expresion y el teorema del valor final se puede comprobar queel efecto de una perturbacion externa constante D(s) = − td
Jks desaparececonforme el tiempo crece. Mas aun, la rapidez con que esto sucede es mayorconforme f y p1 son mayores. Como p1 esta fijada por la rapidez de respuestadeseada ante una referencia constante, entonces f es el parametro que que-da libre. Entonces, f debe escogerse grande. De acuerdo a la figura 9.5, elcontrolador esta dado como:
I∗(s) = Gc1(s)(ωd(s) − ω(s)) − Gc2(s)ω(s)
= kp1(ωd(s) − ω(s)) + ki1(ωd(s) − ω(s))
s− kp2ω(s)

9.6 Prototipo experimental 515
= (kp1 + kp2)(ωd(s) − ω(s)) + ki1(ωd(s) − ω(s))
s− kp2ωd(s)
= kp(ωd(s) − ω(s)) + ki1(ωd(s) − ω(s))
s− kp2ωd(s)
(9.39)
Usando la transformada inversa de Laplace se obtiene finalmente:
i∗ = kp(ωd − ω) + ki1
∫ t
0
(ωd − ω(r))dr − kp2ωd (9.40)
Notese que los controladores en (9.40) y (9.33) son identicos si se define:
k1 =f
k, p1 = k′
i
Por tanto, se deja al criterio del lector decidir cual de los enfoques presentadosen las secciones 9.5.1 o 9.5.2 para obtener este controlador es el que prefiere.
9.6. Prototipo experimental
A continuacion se listan los componentes principales del sistema de control.
Microcontrolador PIC16F877A [8].Convertidor digital/analogico de 8 bits DAC0800LCN.2 motores de CD con escobillas e iman permanente. Voltaje nominal de24[V], corriente nominal de 2.3[A].
Las flechas de los dos motores se unen de modo que uno de los motores seutiliza como generador. El voltaje generado es utilizado como la medicion dela velocidad del otro motor el cual es controlado de acuerdo a la ley de controlen (9.33).
En la figura 9.6 se muestra el diagrama electrico utilizado para construirel sistema de control de velocidad. El algoritmo de control en (9.33) se calculausando el microcontrolador PIC16F877A. Es decir, conocido el valor deseadode velocidad ωd y la medicion de la velocidad ω, el microcontrolador calculael valor de la senal de control i∗ en (9.33). En la seccion 9.9 se muestra ellistado del programa utilizado.
A continuacion se describe la manera en que el microcontrolador PIC16F877A realiza su funcion de controlador. Antes que nada se debe aclarar que noes el proposito presentar toda una exposicion de como trabaja este micro-controlador. Lo que se presenta es una descripcion de los recursos de estemicrocontrolador que se utilizan para construir el controlador bajo prueba.
Se usa el canal 0 del convertidor analogico/digital con que cuenta este mi-crocontrolador. Solo se utilizan los 8 bits mas significativos de este convertidorel cual tiene un rango analogico de entrada de [0,+5][V]. Por tanto, el dato
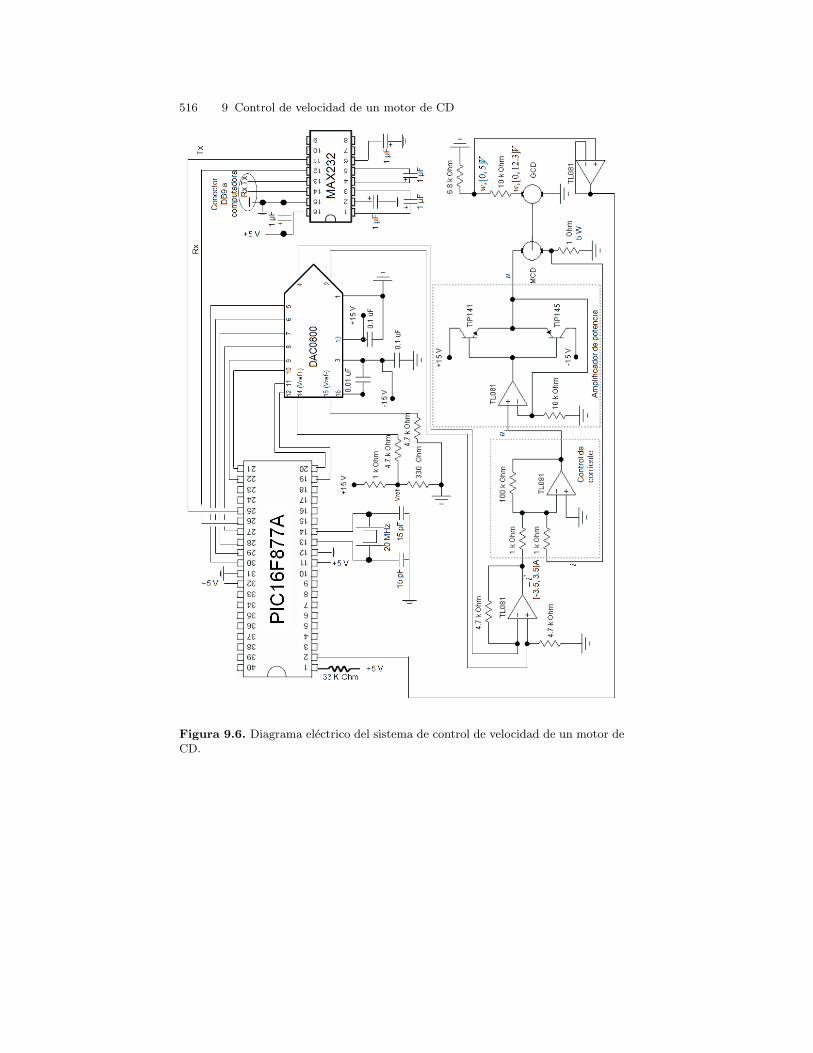
516 9 Control de velocidad de un motor de CD
Figura 9.6. Diagrama electrico del sistema de control de velocidad de un motor deCD.

9.6 Prototipo experimental 517
entregado por el convertidor t 0 es sometido a la operacion: w=0.0196*t 0(donde 0.0196=5/255) para obtener en la variable w el voltaje a la entradadel convertidor analogico/digital. Este voltaje es el entregado por el motor quese utiliza como generador y es proporcional a la velocidad del motor que sequiere controlar. Por tanto, se asume que este voltaje representa el valor me-dido de velocidad. Notese que antes de entrar al convertidor analogico/digital(por el pin 2 del microcontrolador), el voltaje del generador pasa a traves de undivisor de tension que tiene como funcion adaptar el maximo voltage generado(12.3[V] a velocidad maxima) a un valor de 5[V], es decir dentro del rango delvoltaje analogico que maneja el convertidor analogico/digital. El amplificadoroperacional TL081 es utilizado para proteger al microcontrolador.
Tal como se indica en la figura 9.6 el valor de −i∗ debe aparecer a la entra-da del amplificador operacional TL081 dentro del recuadro titulado “controlde corriente”. Esto se consigue del siguiente modo. Primero, en el programalistado en la seccion 9.9 se hace iast=-iast, para cambiar el signo de i∗ a −i∗.El microcontrolador debe entregar un codigo digital (iastd) de 8 bits al conver-tidor digital/analogico de 8 bits DAC0800LCN. Para esto, el microcontroladorrealiza la operacion:
iastd = 36.4286 ∗ iast + 127
la cual obedece a la relacion mostrada graficamente en al figura 9.7. Una vez
iast3:5à 3:5
255
127
iastd
Figura 9.7. Acondicionamiento de la senal i∗ que debe ser enviada al convertidordigital-analogico.
calculada “iastd” se entrega al convertidor digital/analogico a traves del puer-to D (PORTD=iastd). El convertidor digital/analogico trabaja en conjuntocon un amplificador operacional TL081. Estos dispositivos estan conectadosde acuerdo a las sugerencias del fabricante [9]. Esto asegura que a la salida del

518 9 Control de velocidad de un motor de CD
amplificador operacional se obtiene un voltaje cuyo valor numerico correspon-de al de −i∗. Este valor es recibido por otro amplificador operacional TL081que se encarga de evaluar el lazo de corriente:
ui = 100(i∗ − i)
La razon de que deba aparecer −i∗ en el lugar que se indica en la figura 9.6tiene que ver con la compatibilidad de signos que deben respetar los amplifi-cadores operacionales colocados en dicha figura. Por otro lado, el amplificadorde potencia de ganancia unitaria esta constituido por un tercer amplificadoroperacional TL081 junto con dos transistores de potencia TIP141 y TIP145,conectados en simetrıa complementaria
El Manejador/Receptor MAX232 se encarga de enviar la velocidad medi-da ω y la senal de control i∗ hacia una computadora portatil (a traves de unconector USB a serie) cuyo unico proposito es el graficado de dichas variables.Esto se hace a traves de las variables “cuentaH=0x00” y “cuentaL=t 0” (paraenviar la velocidad) o “cuentaH=0x00” y “cuentaL=(iastd) &(0xFF)” (paraenviar la senal de control). Estos datos son enviados a la computadora portatilmediante las instrucciones: putc(0xAA); putc(cuentaH); putc(cuentaL);. Fi-nalmente, el timer TMR0 es utilizado para establecer un periodo de muestreoT = 0.002[seg] (40 cuentas del timer 0).
9.6.1. Control de corriente
El lazo de corriente presentado en (9.14) se construye del siguiente modo.Se conecta una resistencia de potencia (de ceramica) de 1[Ohm] en serie conla armadura del motor de CD. Esto permite que en las terminales de dicharesistencia aparezca un voltaje que numericamente es igual a la corriente ique circula por el motor. Entonces, el amplificador operacional mostrado enel bloque “control de corriente” de la figura 9.6 realiza la operacion indicadaen (9.14) con K = 100.
9.6.2. Amplificador de potencia
De acuerdo a lo expuesto en la seccion 8.1.2 el bloque denominado “ampli-ficador de potencia” en la figura 9.6 permite reducir la zona muerta introdu-cida por los transistores de potencia conectados en simetrıa complementaria.Ademas, con los valores ahı presentados se consigue Ap = 1 en (9.13) y en(9.15). Esto permite obtener ApK = 100. Este valor fue elegido porque conel se obtuvieron resultados satisfactorios. Es ilustrativo resaltar que en losmanejadores comerciales para uso industrial es comun encontrar valores tangrandes como ApK = 700 [7].
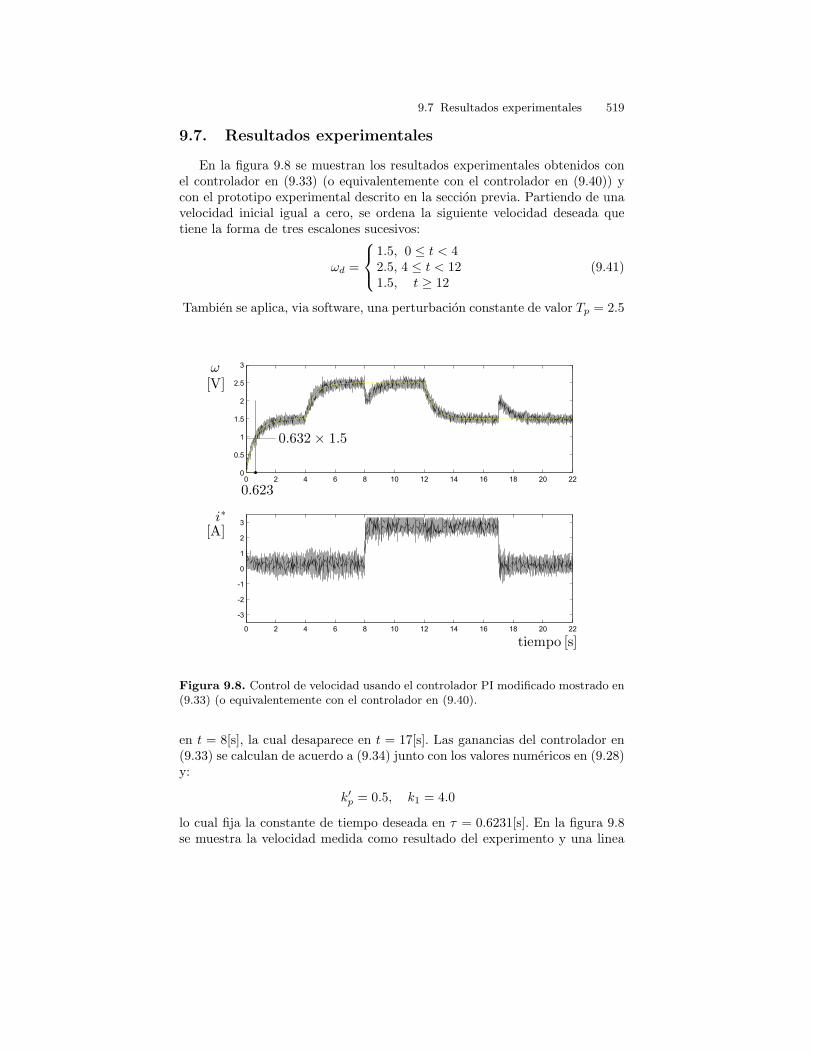
9.7 Resultados experimentales 519
9.7. Resultados experimentales
En la figura 9.8 se muestran los resultados experimentales obtenidos conel controlador en (9.33) (o equivalentemente con el controlador en (9.40)) ycon el prototipo experimental descrito en la seccion previa. Partiendo de unavelocidad inicial igual a cero, se ordena la siguiente velocidad deseada quetiene la forma de tres escalones sucesivos:
ωd =
1.5, 0 ≤ t < 42.5, 4 ≤ t < 121.5, t ≥ 12
(9.41)
Tambien se aplica, via software, una perturbacion constante de valor Tp = 2.5
0 2 4 6 8 10 12 14 16 18 20 220
0.5
1
1.5
2
2.5
3
0 2 4 6 8 10 12 14 16 18 20 22
-3
-2
-1
0
1
2
3
tiempo s[ ]
V[ ]
A[ ]
!
iã
0:623
0:632â 1:5
ï
Figura 9.8. Control de velocidad usando el controlador PI modificado mostrado en(9.33) (o equivalentemente con el controlador en (9.40).
en t = 8[s], la cual desaparece en t = 17[s]. Las ganancias del controlador en(9.33) se calculan de acuerdo a (9.34) junto con los valores numericos en (9.28)y:
k′p = 0.5, k1 = 4.0
lo cual fija la constante de tiempo deseada en τ = 0.6231[s]. En la figura 9.8se muestra la velocidad medida como resultado del experimento y una linea

520 9 Control de velocidad de un motor de CD
blanca que representa la respuesta, obtenida en simulacion, del sistema sinperturbaciones:
ω + k′iω = k′
iωd (9.42)
con k′i = 1
0.6231 , es decir el valor calculado de acuerdo a (9.34), y con ωd dada en(9.41). Notese que la respuesta experimental de velocidad sigue exactamentela respuesta teorica dictada por (9.42) y que esto sigue siendo cierto durantela transicion de ωd = 2.5 a ωd = 1.5 en t = 12[s] a pesar de que durante dichatransicion sigue aplicada la perturbacion constante Tp = 2.5. Esto compruebalas afirmaciones establecidas justo antes de (9.33). Ademas, es importantesubrayar que se han conseguido exactamente las especificaciones de respuestatransitoria y de estado estacionario y ademas las desviaciones que aparecencuando se aplica y desaparece la perturbacion externa son llevadas a cerorapidamente.
A continuacion se muestran los resultados obtenidos con un controladorPI clasico con el fin de comparar con los resultados obtenidos en la figura 9.8.En la figura 9.9 se muestran los resultados obtenidos usando un controladorPI clasico cuando se seleccionan las ganancias de acuerdo a:
ki
kp= a, τ =
1
kpk= 0.6231[s] (9.43)
segun se discute en la seccion 5.2.4, con τ la constante de tiempo deseada enlazo cerrado. La velocidad deseada ωd es identica a la mostrada en (9.41) y seaplica una perturbacion identica a la usada en la figura 9.8, es decir, se aplicavia software una perturbacion constante de valor Tp = 2.5 en t = 8[s], la cualdesaparece en t = 17[s]. Se observa lo siguiente:
La parte transitoria de la respuesta, aunque cercana a la deseada, no estan exacta como en la figura 9.8 (la lınea tenue representa la respuestatransitoria deseada).La velocidad medida en estado estacionario alcanza la velocidad deseadacuando no hay perturbacion externa aplicada, es decir, antes de t = 8[s].La desviacion producida por la aparicion de una perturbacion externa esmucho mas grande que en la figura 9.8 y tarda mucho mas tiempo en sercompensada. De hecho esta desviacion no alcanza a ser compensada antesde que aparezca el nuevo cambio de valor deseado de velocidad en t = 12[s].Se aprecia lo mismo cuando la perturbacion desaparece en t = 17[s]. Deacuerdo a la seccion 5.2.4, esto se debe a que la dinamica de respuestaante la perturbacion tiene una constante de tiempo dominante igual a laconstante de tiempo del motor en lazo abierto 1
a , la cual es de 2.7[s] comose indica en (9.27).
En la figura 9.10 se muestran los resultados obtenidos usando un contro-lador PI clasico cuando se seleccionan las ganancias de acuerdo a:
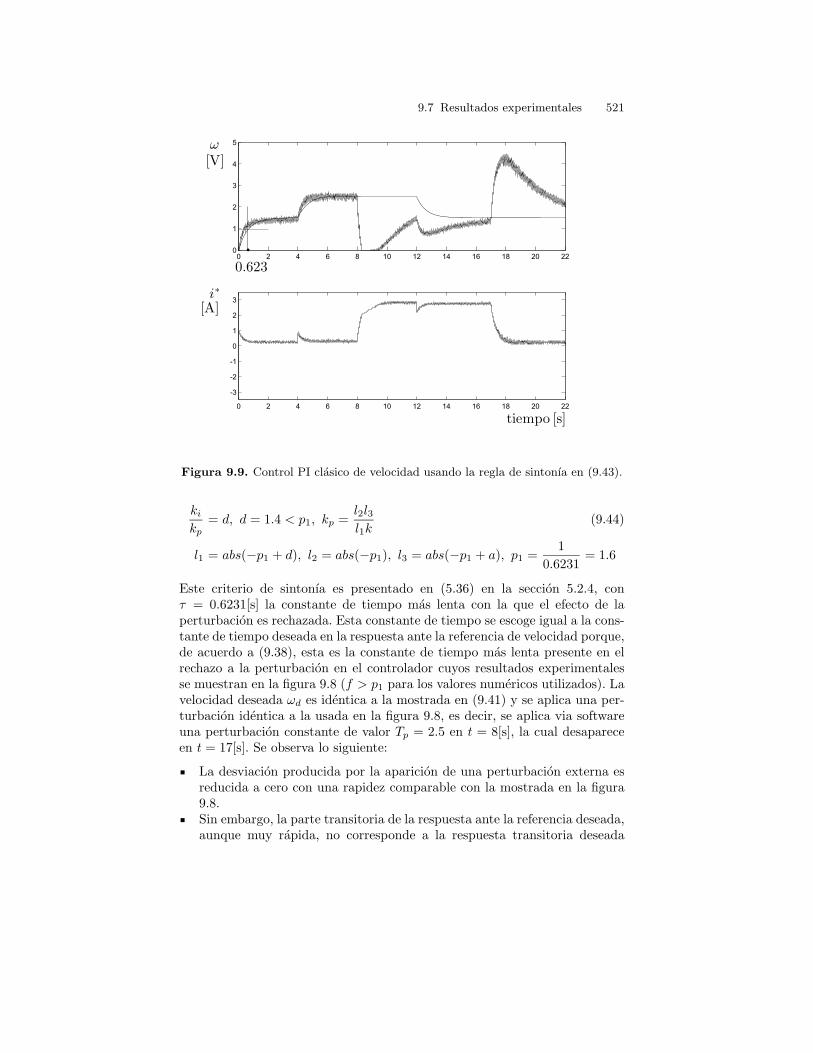
9.7 Resultados experimentales 521
0 2 4 6 8 10 12 14 16 18 20 220
1
2
3
4
5
0 2 4 6 8 10 12 14 16 18 20 22
-3
-2
-1
0
1
2
3
!
iã
tiempo s[ ]
V[ ]
A[ ]
0:623
ï
Figura 9.9. Control PI clasico de velocidad usando la regla de sintonıa en (9.43).
ki
kp= d, d = 1.4 < p1, kp =
l2l3l1k
(9.44)
l1 = abs(−p1 + d), l2 = abs(−p1), l3 = abs(−p1 + a), p1 =1
0.6231= 1.6
Este criterio de sintonıa es presentado en (5.36) en la seccion 5.2.4, conτ = 0.6231[s] la constante de tiempo mas lenta con la que el efecto de laperturbacion es rechazada. Esta constante de tiempo se escoge igual a la cons-tante de tiempo deseada en la respuesta ante la referencia de velocidad porque,de acuerdo a (9.38), esta es la constante de tiempo mas lenta presente en elrechazo a la perturbacion en el controlador cuyos resultados experimentalesse muestran en la figura 9.8 (f > p1 para los valores numericos utilizados). Lavelocidad deseada ωd es identica a la mostrada en (9.41) y se aplica una per-turbacion identica a la usada en la figura 9.8, es decir, se aplica via softwareuna perturbacion constante de valor Tp = 2.5 en t = 8[s], la cual desapareceen t = 17[s]. Se observa lo siguiente:
La desviacion producida por la aparicion de una perturbacion externa esreducida a cero con una rapidez comparable con la mostrada en la figura9.8.Sin embargo, la parte transitoria de la respuesta ante la referencia deseada,aunque muy rapida, no corresponde a la respuesta transitoria deseada
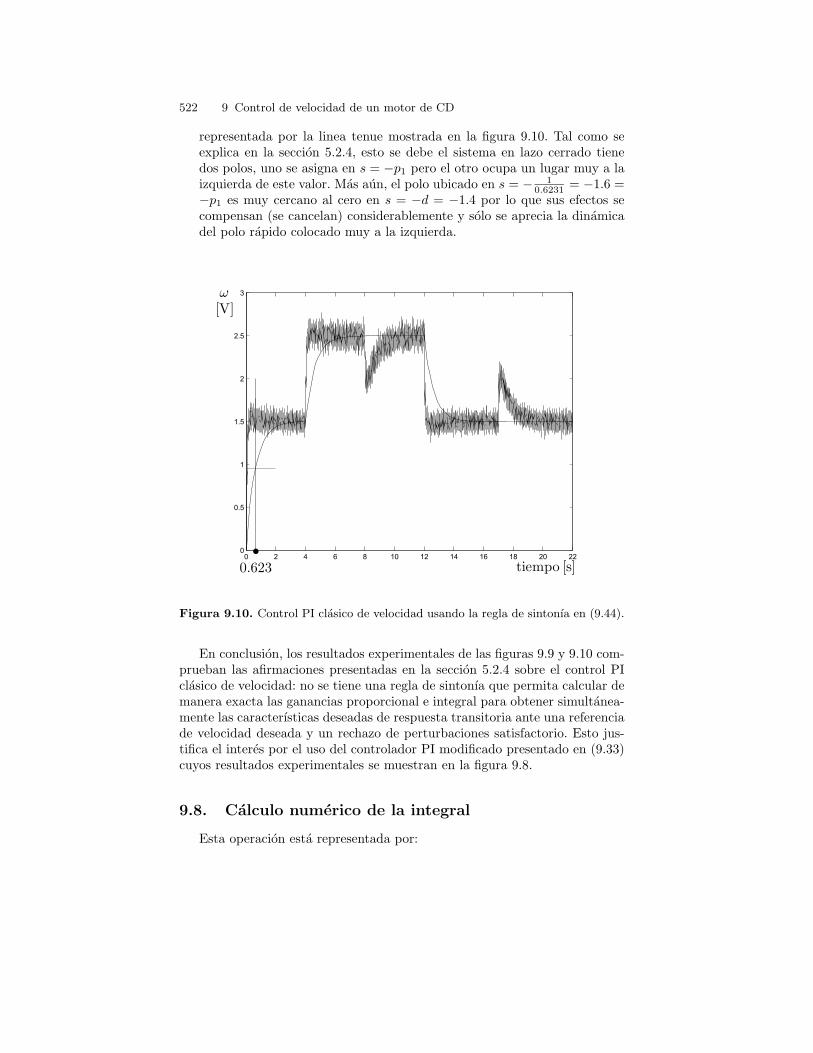
522 9 Control de velocidad de un motor de CD
representada por la linea tenue mostrada en la figura 9.10. Tal como seexplica en la seccion 5.2.4, esto se debe el sistema en lazo cerrado tienedos polos, uno se asigna en s = −p1 pero el otro ocupa un lugar muy a laizquierda de este valor. Mas aun, el polo ubicado en s = − 1
0.6231 = −1.6 =−p1 es muy cercano al cero en s = −d = −1.4 por lo que sus efectos secompensan (se cancelan) considerablemente y solo se aprecia la dinamicadel polo rapido colocado muy a la izquierda.
0 2 4 6 8 10 12 14 16 18 20 220
0.5
1
1.5
2
2.5
3
V[ ]!
tiempo s[ ]ï
0:623
Figura 9.10. Control PI clasico de velocidad usando la regla de sintonıa en (9.44).
En conclusion, los resultados experimentales de las figuras 9.9 y 9.10 com-prueban las afirmaciones presentadas en la seccion 5.2.4 sobre el control PIclasico de velocidad: no se tiene una regla de sintonıa que permita calcular demanera exacta las ganancias proporcional e integral para obtener simultanea-mente las caracterısticas deseadas de respuesta transitoria ante una referenciade velocidad deseada y un rechazo de perturbaciones satisfactorio. Esto jus-tifica el interes por el uso del controlador PI modificado presentado en (9.33)cuyos resultados experimentales se muestran en la figura 9.8.
9.8. Calculo numerico de la integral
Esta operacion esta representada por:
9.9 Programacion del microcontrolador PIC16F877A 523
y =
∫ t
0
w(s)ds
y se puede aproximar numericamente mediante:
y(k + 1) = y(k) + w(k)∆t (9.45)
donde y(k) es el valor de la integral calculado en el instante de muestreopresente con y(0) = 0 y y(k + 1) es el valor de la integral en el instante demuestreo proximo inmediato en el futuro. Esto significa que y(k) debe usarsecomo el valor del termino integral en el instante presente mientras que y(k+1)debe calcularse en el instante presente pero debe ser utilizado como el valordel termino integral solo hasta el siguiente instante de muestreo. La expresionen (9.45) se obtiene a partir de la interpretacion geometrica de la integral dew, es decir, el area debajo de la curva definida por w. Ası, el termino w(k)∆trepresenta el area que se incrementa en cada instante de muestreo: w(k) y ∆trepresentan, respectivamente, la altura y la base del rectangulo que aproximaa dicho incremento de area.
9.9. Programacion del microcontrolador PIC16F877A
Se recomienda consultar la referencia [10] para una explicacion precisa decada una de las instrucciones que aparecen en el siguiente listado.
// Programa para comunicacion serial entre PC y proyecto Control
// Con el PIC16F877A y el compilador PCWH V3.43
#include<16f877A.h>
#include<stdlib.h>
#include<math.h>
#fuses HS,NOWDT,PUT,NOBROWNOUT,NOLVP,NOWRT,NOPROTECT,NOCPD
#use delay(clock=20000000) //Base de tiempo para
//retardos(frecuencia del Xtal)
//Config.P.Serie
#use rs232(baud=115200,XMIT=PIN_C6,RCV=PIN_C7,BITS=8,PARITY=N)
//direcciones de los puertos y algunos registros
#byte OPTION= 0x81
#byte TMR0 = 0x01
#byte PORTA = 0x05
#byte PORTB = 0x06
#byte PORTC = 0x07
#byte PORTD = 0x08
#byte PORTE = 0x09
524 9 Control de velocidad de un motor de CD
#byte ADCON0= 0x1F
#byte ADCON1= 0x9F
#bit PC0 = 0x07.0
#bit PC1 = 0x07.1
//------------Declaracion de variables------------//
int16 inter,cuenta;
int8 cuentaH,cuentaL,puerto,AB,AB_1,aux;
int8 cont,iastd,cont2,cont3,cont4,t_0;
float w,error,iast,wm1,kp,ki,ie,k,a,wd,tiempo,kpp,k3,kib,cte;
unsigned int u,i;
//------------Rutina de interrupcion------------//
#int_rb void rb_isr()
puerto=PORTB;
AB=((puerto)&(0x30))>>4;
aux=AB^AB_1;
if(aux!=0)
if(aux!=3)
if(((AB_1<<1)^AB)&(0x02))
cuenta--;
else
cuenta++;
AB_1=AB;
//------------Programa principal------------//
void main(void)
setup_adc(ADC_CLOCK_INTERNAL ); //ADC (reloj interno)
set_tris_a(0b11111111);
set_tris_b(0b11111111);
set_tris_c(0b10000000); //comunicacion serial
set_tris_d(0b00000000);
set_tris_e(0b11111111);
OPTION=0x07; //prescaler timer0, 1:256
PORTC=0;
TMR0=0;
cuenta=0;
AB=0;
AB_1=0;
enable_interrupts(global);
enable_interrupts(int_rb);
cont=4;
cont2=0;
cont3=0;
cont4=0;
PORTD=127;
9.9 Programacion del microcontrolador PIC16F877A 525
k=2.4691;
a=1/2.7;
kpp=0.5;
k3=4.0;
kp=kpp+k3;
kib=a+k*kpp;
ki=kib*k3;
cte=a/k-k3;
tiempo=0.0;
wm1=0.0;
ie=0.0;
ADCON1=0x04;
ADCON0=0x81;
while(cont2<3)
while(cont3<255)
TMR0=0;
while(TMR0<255)
cont3++;
cont2++;
TMR0=0;
while(TRUE)
cont++;
ADCON0=0x81; //Cambiando a CH0
for(i=0;i<37;i++); //estabilizar capacitor interno
t_0=read_adc(); //leer ADC
w=0.0196*t_0;
if(tiempo<4.0)
wd=1.5;
else
if(tiempo<12.0)
wd=2.5;
else
wd=1.5;
// wd=2.5;
error=wd-w;
/* Controlador */
iast=kp*error+ki*ie+cte*wd;
ie=ie+0.002*error;
/* ___________________________________________ */
if(iast<-3.3)
iast=-3.3;
if(iast>3.3)
526 9 Control de velocidad de un motor de CD
iast=3.3;
// iast=0.3;
iast=-iast;
if(tiempo>8.0)
if(tiempo<17.0)
iast=iast+2.5;
iastd=(unsigned int)(36.4286*iast+127);
PORTD=iastd;
wm1=w;
/*
// inter=(cuenta)&(0xFF00);
cuentaH=0x00; //inter>>8;
cuentaL=t_0;//(cuenta)&(0x00FF);
putc(0xAA); //reconocimieno al puerto serial
putc(cuentaH); //mandando cuenta al puerto serial
putc(cuentaL);
if(cont==5)
cont=0;
cont4++;
if(cont4==255)
cont4=0;
*/
if(tiempo>8.0)
if(tiempo<17.0)
iast=iast-2.5;
iast=-iast;
iastd=(unsigned int)(36.4286*iast+127);
// inter=(cuenta)&(0xFF00);
cuentaH=0x00; //inter>>8;
cuentaL=(iastd)&(0xFF);
putc(0xAA); // reconocimieno al puerto serial
putc(cuentaH); //mandando cuenta al puerto serial
putc(cuentaL);
if(cont==5)
cont=0;
cont4++;
if(cont4==255)
cont4=0;
PC1=1; //inicia espera del timer
while(TMR0<40) // 1 cuenta=(4/FXtal)*256 seg, 40=2 ms
9.11 Preguntas de repaso 527
PC1=0; //termina espera del timer
TMR0=0;
tiempo=tiempo+0.002;
//cierre del while infinito
//cierre del main
9.10. Resumen del capıtulo
Se ha presentado la manera de controlar la velocidad de un motor deCD. Para esto se ha mostrado la manera de construir de manera practica yexperimental dos controladores de velocidad: uno es un PI clasico y el otroes un PI modificado. Se ha mencionado cuales son los problemas que tiene elcontrolador PI clasico y como resolverlos usando el controlador PI modificado.Tambien se ha descrito la manera de construir las interfases necesarias parael correcto funcionamiento del sistema de control y como se puede programarun microcontrolador para realizar la funcion de un controlador digital.
Es importante resaltar el hecho de que en la literatura sobre control demotores electricos es comun usar como entrada al par generado por el motor(o bien, la corriente electrica de armadura). Esto se hace a pesar de que esel voltaje aplicado al motor la variable que se puede manipular directamenteen el motor mientras que el par es un producto que resulta de la ecuaciondiferencial que describe al circuito electrico de armadura. En este capıtulose ha explicado que si se usa un lazo interno de corriente de alta gananciase puede, efectivamente, usar la corriente de armadura (y, por tanto, el pargenerado ya que ambas variables son proporcionales) como la variable deentrada. Tambien se ha explotado este ejemplo para resaltar el papel quejuega un amplificador de potencia en un sistema de control.
Un problema importante que se debe resolver antes de disenar un contro-lador es el de determinar los valores numericos de los parametros del modelode la planta a controlar. En este capıtulo se ha mostrado una manera ex-perimental que es efectiva para resolver este problema en un motor de CD.Basicamente la idea es explotar el hecho de que el modelo de la planta es deprimer orden, modelos cuya respuesta ante una entrada escalon es bien cono-cida. El metodo que se propone es ampliamente recomendable porque con unsimple experimento se puede resolver el problema completo.
9.11. Preguntas de repaso
1. ¿Que es un lazo de corriente y para que se usa?2. ¿Por que un controlador PI es suficiente para controlar la velocidad de un
motor de CD? ¿Por que no usar un controlador PID?
528 9 Control de velocidad de un motor de CD
3. Se ha dicho que un controlador PI lleva a cero el error en estado esta-cionario en un sistema de control de velocidad a pesar de la presencia decualquier perturbacion constante ¿Que precaucion debe tomar en cuentaen la practica para que efectivamente se pueda compensar la presencia deuna perturbacion constante?
4. ¿Un controlador PI es efectivo para llevar a cero el error en estado esta-cionario cuando el valor deseado de velocidad no es constante? ¿Y si laperturbacion no es constante? Explique.
5. ¿Como usarıa las ideas expuestas en el presente capıtulo para controlarel voltaje producido por un generador electrico que es impulsado por unmotor de CD?
6. ¿Como usarıa las ideas expuestas en el presente capıtulo para controlarun sistema de control de temperatura y un sistema de control de nivel delıquido?
7. ¿Que controlador usarıa para los sistemas de la pregunta anterior? ¿Usarıaun controlador PID? ¿Por que?
8. ¿Bajo que condiciones el modelo de velocidad de un motor de CD se con-vertirıa en un integrador? ¿Que controlador usarıa bajo estas condicionespara compensar el efecto de una perturbacion constante? Justifique surespuesta.
9. Si un controlador PI clasico compensa muy lentamente el efecto de unaperturacion ¿Que ajustes harıa en las ganancias del controlador?
10. ¿Cuales son los efectos de las ganancias proporcional e integral en uncontrolador PI clasico?

Referencias
1. R. Ortega, A. Lorıa, P. J. Nicklasson and H. Sira-Ramırez, Passivity-based con-trol of Euler-Lagrange Systems, Springer, London, 1998.
2. V.M Hernandez Guzman and R.V. Carrillo Serrano, Global PID position controlof PM stepper motors and PM synchronous motors, International Journal ofControl, vol. 84, no. 11, pp. 1807-1816, 2011.
3. V.M Hernandez Guzman and R. Silva-Ortigoza, PI control plus electric currentloops for PM synchronous motors, IEEE Transactions on Control Systems Te-chnology, vol. 19, no. 4, pp. 868-873, 2011.
4. G. Espinosa-Perez, P. Maya-Ortiz, M. Velasco-Villa and H. Sira-Ramırez,Passivity-based control of switched reluctance motors with nonlinear magne-tic circuits, IEEE Transactions on Control Systems Technology , Vol. 12, pp.439–448, 2004.
5. J. Chiasson, Modeling and High-performance control of electric machines, IEEEPress-Wiley Interscience, New Jersey, 2005.
6. Parker Automation, Position systems and Controls, Training and Product Ca-talog DC-ROM, Compumotor’s Virtual Classroom, 1998.
7. R. Campa, E. Torres, V. Santibanez and R. Vargas, Electromechanical dyna-mics characterization of a brushless direct-drive servomotor. Proc. VII MexicanCongress on Robotics, COMRob 2005, Mexico, D.F., October 27-28, 2005.
8. PIC16F877A Enhanced Flash Microcontroller, Data sheet, Microchip Techno-logy Inc., 2003.
9. DAC0800 8-bit Digital-to-Analog Converter, Data sheet, National Semiconduc-tor Corporation, 1995.
10. Custom Computer Services Incorporated, CCS C Compiler Reference Manual,2003.

10
Control de posicion de un motor de CD
El problema de control de posicion tiene muchas e importantes aplicacio-nes en la industria. Quiza una de las aplicaciones mas claras es la del controlde robots manipuladores. En estas tareas, el robot debe ensamblar las piezasque conforman a un componente mas complejo. Para ello, el robot debe to-mar una pieza, llevarla a un lugar especificado y colocarla dentro del espaciocorrespondiente. Para conseguir esto, se coloca un motor electrico (frecuen-temente de CD y con escobillas) en cada una de las partes moviles del robot(conocidas como uniones). Entonces se debe controlar la posicion de cadamotor de manera individual para alcanzar un valor de posicion deseado. Laposicion deseada de cada motor es seleccionada de manera que si cada motorla alcanza, entonces el extremo del robot consigue colocar la pieza por ensam-blar en el lugar correcto. Un problema comun en esta tarea es la presenciadel efecto de la gravedad, la cual aparece como una perturbacion de par quedebe ser compensada. Una vez que el robot se detiene, esta perturbacion depar es constante.

532 10 Control de posicion de un motor de CD
Objetivos del capıtulo
Construir controladores tipo proporcional-integral-derivativo usando unmicrocontrolador y una computadora personal.Construir la totalidad de las interfaces electronicas necesarias para el sis-tema de control completo.Identificar de manera experimental los parametros del modelo de un motorde CD.Identificar las ventajas y las desventajas de los controladores proporcional-integral-derivativo.Aplicar a una situacion experimental los conceptos de la teorıa de controlclasico.
En este capıtulo se continua con el control de un motor de CD con es-cobillas e iman permanente, pero ahora se considera el control de posicion.Con este fın, se recurre al modelo obtenido en (9.23) despues de colocar unamplificador de potencia y un lazo de corriente (veanse las secciones 9.2 y9.3). Este modelo se reescribe a continuacion para facilitar su referencia:
θ(s) =1
s(s + a)[kI∗(s) − 1
JTp(s)] (10.1)
a =b
J, k =
nkm
J
donde θ(s) es la posicion a controlar, I∗(s) es la variable de entrada o decontrol y Tp(s) es una perturbacion de par externa.
10.1. Identificacion
En esta seccion es de interes realizar un experimento que permita conocerlos valores de las constantes k y a del modelo en (10.1). A continuacion seexplica la manera de disenar dicho experimento. Suponga que no hay ningunaperturbacion externa aplicada, es decir Tp(s) = 0, por lo que el modelo (10.1)se reduce a:
θ(s) =k
s(s + a)I∗(s) (10.2)
Suponga que i∗ se disena como un controlador proporcional de posicion, esdecir, de manera que:
i∗ = kp(θd − θ) (10.3)
o, mediante el uso de la transformada de Laplace:
I∗(s) = kp(θd(s) − θ(s)) (10.4)
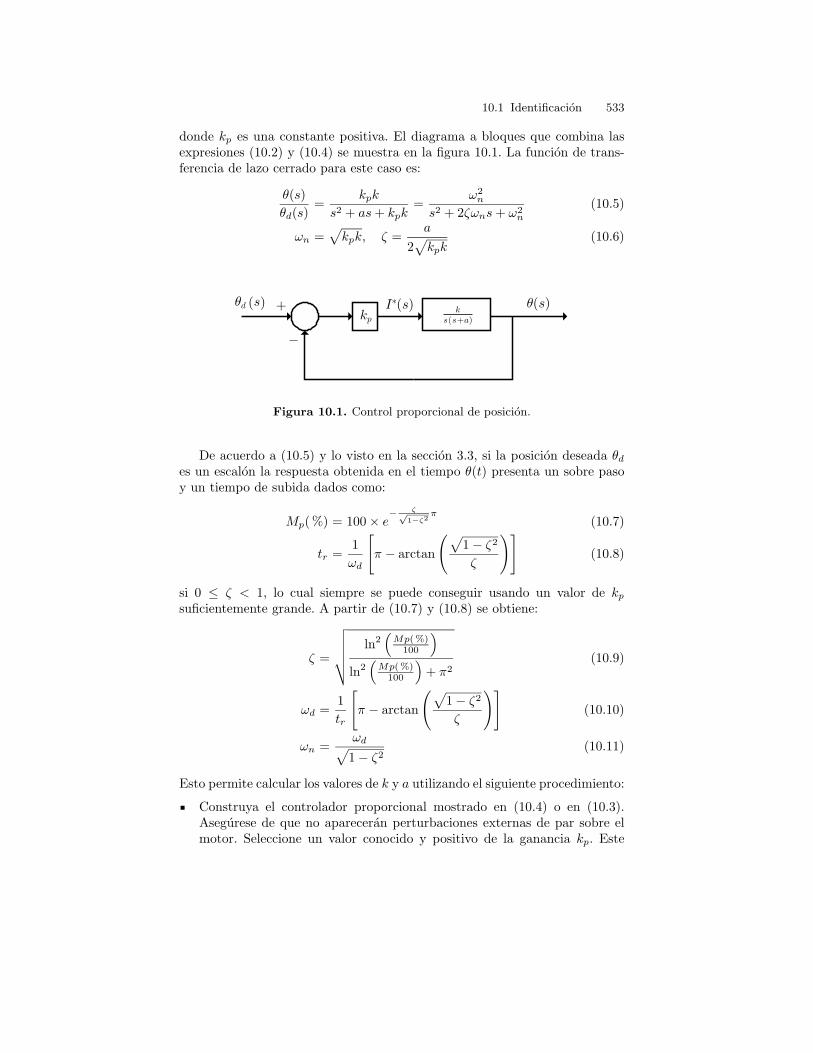
10.1 Identificacion 533
donde kp es una constante positiva. El diagrama a bloques que combina lasexpresiones (10.2) y (10.4) se muestra en la figura 10.1. La funcion de trans-ferencia de lazo cerrado para este caso es:
θ(s)
θd(s)=
kpk
s2 + as + kpk=
ω2n
s2 + 2ζωns + ω2n
(10.5)
ωn =√
kpk, ζ =a
2√
kpk(10.6)
Iã(s) ò(s)+
à
òd s( )kp s s+a( )
k
Figura 10.1. Control proporcional de posicion.
De acuerdo a (10.5) y lo visto en la seccion 3.3, si la posicion deseada θd
es un escalon la respuesta obtenida en el tiempo θ(t) presenta un sobre pasoy un tiempo de subida dados como:
Mp(%) = 100 × e− ζ√
1−ζ2π
(10.7)
tr =1
ωd
[π − arctan
(√1 − ζ2
ζ
)](10.8)
si 0 ≤ ζ < 1, lo cual siempre se puede conseguir usando un valor de kp
suficientemente grande. A partir de (10.7) y (10.8) se obtiene:
ζ =
√√√√√ln2
(Mp( %)
100
)
ln2(
Mp( %)100
)+ π2
(10.9)
ωd =1
tr
[π − arctan
(√1 − ζ2
ζ
)](10.10)
ωn =ωd√1 − ζ2
(10.11)
Esto permite calcular los valores de k y a utilizando el siguiente procedimiento:
Construya el controlador proporcional mostrado en (10.4) o en (10.3).Asegurese de que no apareceran perturbaciones externas de par sobre elmotor. Seleccione un valor conocido y positivo de la ganancia kp. Este
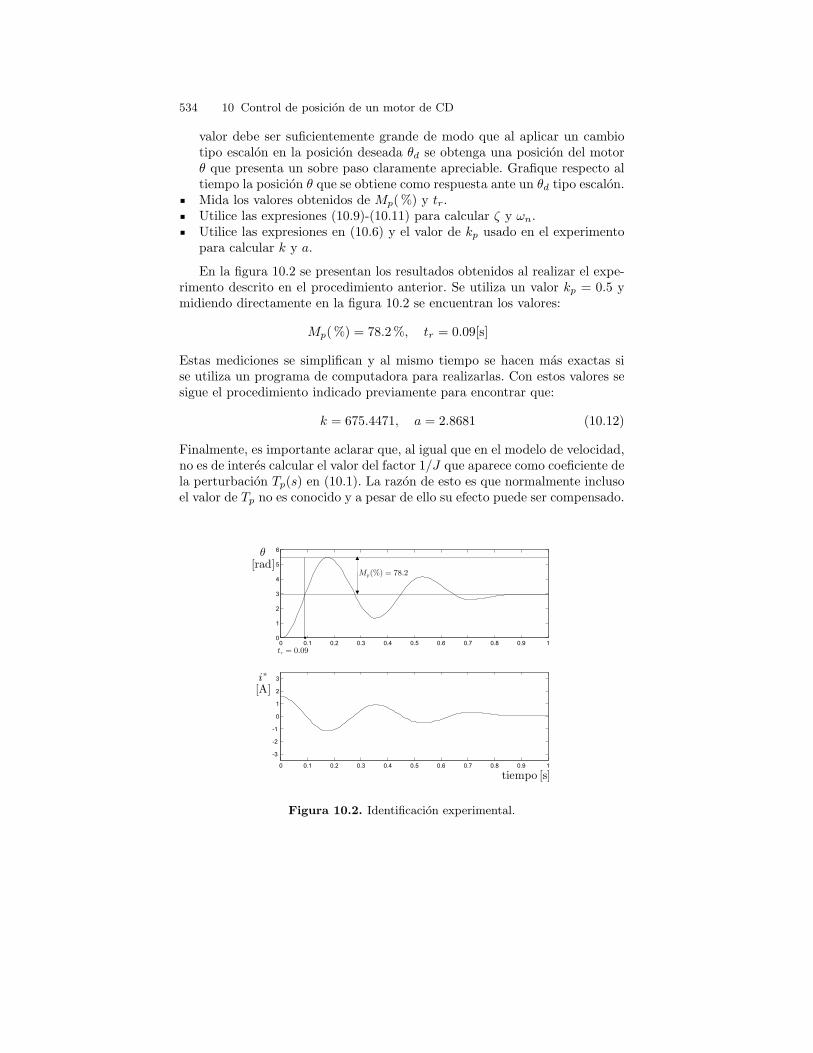
534 10 Control de posicion de un motor de CD
valor debe ser suficientemente grande de modo que al aplicar un cambiotipo escalon en la posicion deseada θd se obtenga una posicion del motorθ que presenta un sobre paso claramente apreciable. Grafique respecto altiempo la posicion θ que se obtiene como respuesta ante un θd tipo escalon.Mida los valores obtenidos de Mp(%) y tr.Utilice las expresiones (10.9)-(10.11) para calcular ζ y ωn.Utilice las expresiones en (10.6) y el valor de kp usado en el experimentopara calcular k y a.
En la figura 10.2 se presentan los resultados obtenidos al realizar el expe-rimento descrito en el procedimiento anterior. Se utiliza un valor kp = 0.5 ymidiendo directamente en la figura 10.2 se encuentran los valores:
Mp(%) = 78.2%, tr = 0.09[s]
Estas mediciones se simplifican y al mismo tiempo se hacen mas exactas sise utiliza un programa de computadora para realizarlas. Con estos valores sesigue el procedimiento indicado previamente para encontrar que:
k = 675.4471, a = 2.8681 (10.12)
Finalmente, es importante aclarar que, al igual que en el modelo de velocidad,no es de interes calcular el valor del factor 1/J que aparece como coeficiente dela perturbacion Tp(s) en (10.1). La razon de esto es que normalmente inclusoel valor de Tp no es conocido y a pesar de ello su efecto puede ser compensado.
òrad[ ]
A[ ]iã
tiempo s[ ]
ï
tr = 0:09
Mp(%) = 78:2
Figura 10.2. Identificacion experimental.

10.2 Control sin perturbaciones externas (Tp = 0) 535
10.2. Control sin perturbaciones externas (Tp = 0)
El diseno de un controlador tiene como objetivo asegurar que en lazocerrado se consigan las caracterısticas deseadas de respuesta transitoria y enestado estacionario. Las caracterısticas de respuesta transitoria se refieren altiempo de subida (rapidez de respuesta) y al sobre paso (amortiguamiento)deseados. Estas caracterısticas se satisfacen mediante la ubicacion convenientede los polos de lazo cerrado. Por otro lado, las caracterısticas de respuesta enestado estacionario se consiguen al asegurar que cuando el tiempo crece elvalor de la posicion θ alcanza la posicion deseada θd. El controlador es eldispositivo que se encarga de que se satisfagan las caracterısticas de respuestatransitoria y en estado estacionario del sistema en lazo cerrado.
Suponga que la posicion deseada es una constante o un escalon, es de-cir θd = A es una constante. Dado que la planta en (10.1) contiene un poloen s = 0 entonces es de tipo 1 lo que asegura que θ = θd = A en estadoestacionario, si se usa un controlador proporcional de posicion y si no hayperturbaciones externas de par, es decir, si Tp = 0. Esto significa que el re-quisito de alcanzar la posicion deseada es satisfecho de manera natural porla planta (el motor de CD). Por tanto, el diseno del controlador debe reali-zarse simplemente buscando que se satisfagan las caracterısticas de respuestatransitoria, es decir, colocando adecuadamente los polos de lazo cerrado. Ası,en el caso de un motor de CD hay dos controladores sencillos que permitenubicar adecuadamente los polos de lazo cerrado: i) control proporcional conrealimentacion de velocidad e ii) control con una red de adelanto.
10.2.1. Control proporcional con realimentacion de velocidad
En este caso, el controlador esta dado como:
i∗(t) = kp(θd − θ) − kv θ (10.13)
donde kp y kv son constantes positivas. Usando la transformada de Laplacese obtiene:
I∗(s) = kp(θd(s) − θ(s)) − kvsθ(s) (10.14)
El diagrama de bloques que resulta de combinar (10.14) y (10.2) es mostradoen la figura 10.3. La funcion de transferencia de lazo cerrado esta dada como:
θ(s)
θd(s)=
kpk
s2 + (a + kvk)s + kpk=
ω2n
s2 + 2ζωns + ω2n
ωn =√
kpk, ζ =a + kvk
2√
kpk(10.15)
Por tanto, siempre se pueden hallar valores positivos de kv y kp que consi-gan los valores deseados de ζ y ωn. Esto significa que siempre se pueden ubicar
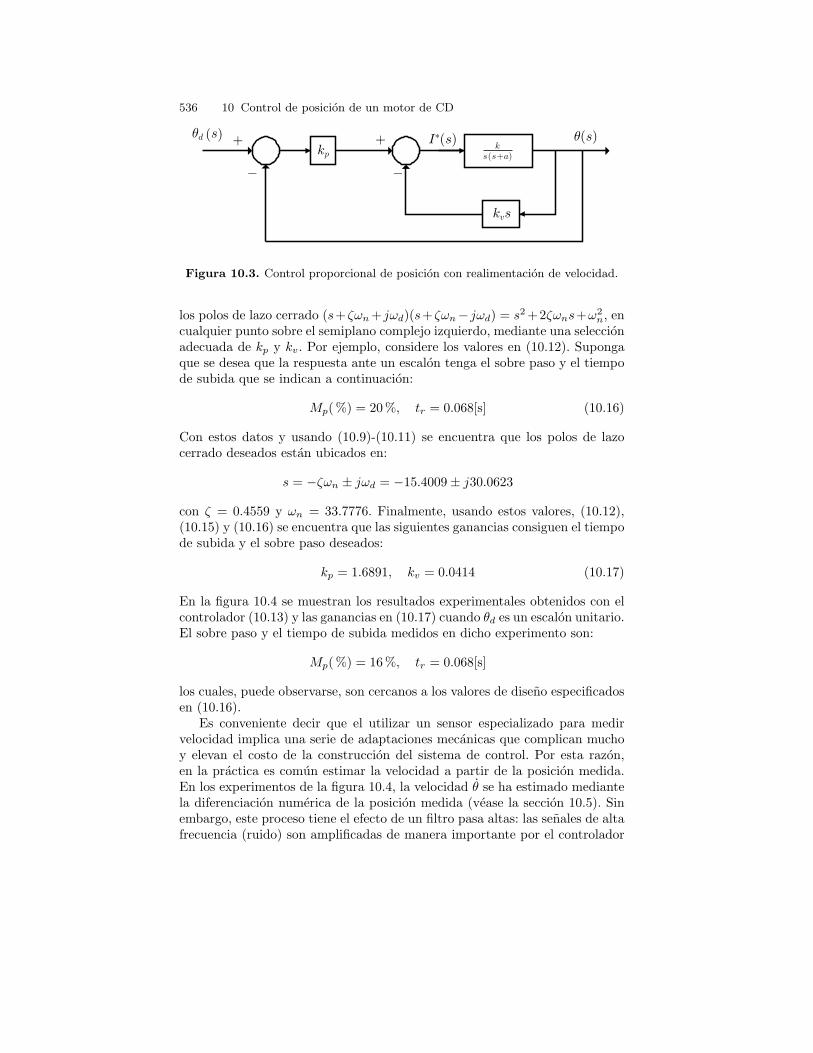
536 10 Control de posicion de un motor de CD
+
à
Iã(s)+
à
ò(s)òd s( )kp s s+a( )
k
kvs
Figura 10.3. Control proporcional de posicion con realimentacion de velocidad.
los polos de lazo cerrado (s+ζωn + jωd)(s+ζωn− jωd) = s2 +2ζωns+ω2n, en
cualquier punto sobre el semiplano complejo izquierdo, mediante una seleccionadecuada de kp y kv. Por ejemplo, considere los valores en (10.12). Supongaque se desea que la respuesta ante un escalon tenga el sobre paso y el tiempode subida que se indican a continuacion:
Mp(%) = 20%, tr = 0.068[s] (10.16)
Con estos datos y usando (10.9)-(10.11) se encuentra que los polos de lazocerrado deseados estan ubicados en:
s = −ζωn ± jωd = −15.4009 ± j30.0623
con ζ = 0.4559 y ωn = 33.7776. Finalmente, usando estos valores, (10.12),(10.15) y (10.16) se encuentra que las siguientes ganancias consiguen el tiempode subida y el sobre paso deseados:
kp = 1.6891, kv = 0.0414 (10.17)
En la figura 10.4 se muestran los resultados experimentales obtenidos con elcontrolador (10.13) y las ganancias en (10.17) cuando θd es un escalon unitario.El sobre paso y el tiempo de subida medidos en dicho experimento son:
Mp(%) = 16%, tr = 0.068[s]
los cuales, puede observarse, son cercanos a los valores de diseno especificadosen (10.16).
Es conveniente decir que el utilizar un sensor especializado para medirvelocidad implica una serie de adaptaciones mecanicas que complican muchoy elevan el costo de la construccion del sistema de control. Por esta razon,en la practica es comun estimar la velocidad a partir de la posicion medida.En los experimentos de la figura 10.4, la velocidad θ se ha estimado mediantela diferenciacion numerica de la posicion medida (vease la seccion 10.5). Sinembargo, este proceso tiene el efecto de un filtro pasa altas: las senales de altafrecuencia (ruido) son amplificadas de manera importante por el controlador
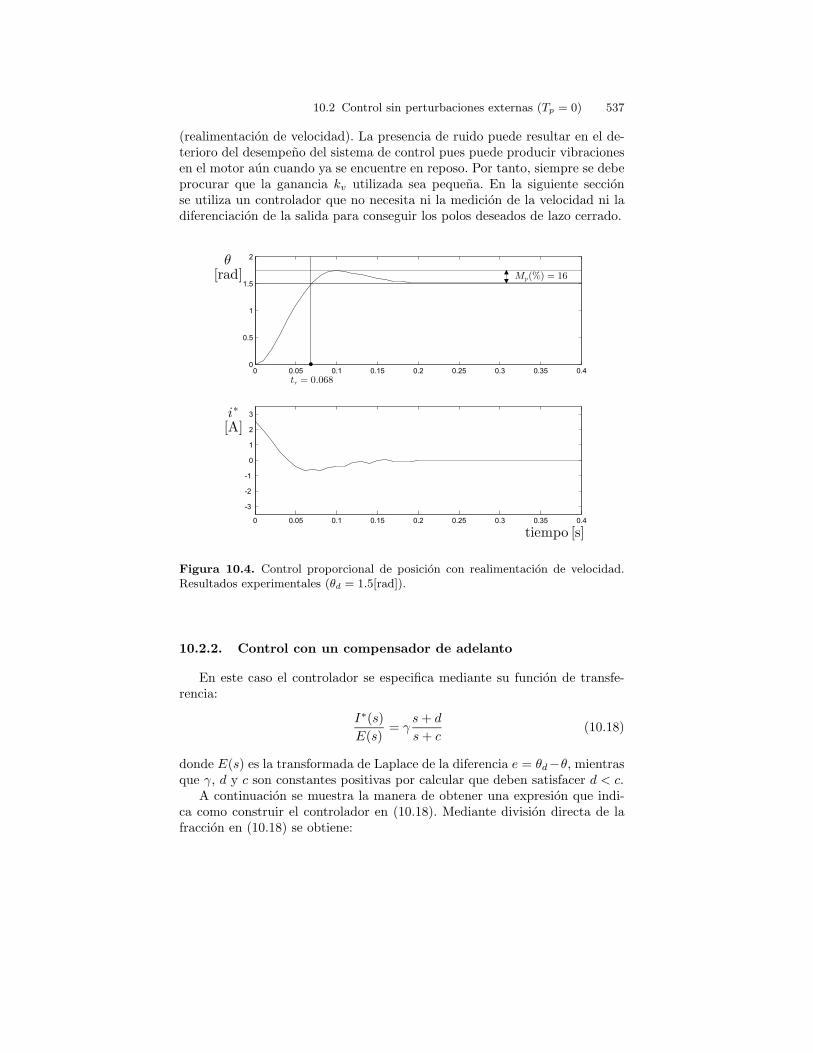
10.2 Control sin perturbaciones externas (Tp = 0) 537
(realimentacion de velocidad). La presencia de ruido puede resultar en el de-terioro del desempeno del sistema de control pues puede producir vibracionesen el motor aun cuando ya se encuentre en reposo. Por tanto, siempre se debeprocurar que la ganancia kv utilizada sea pequena. En la siguiente seccionse utiliza un controlador que no necesita ni la medicion de la velocidad ni ladiferenciacion de la salida para conseguir los polos deseados de lazo cerrado.
Mp(%) = 16
tr = 0:068
ï
ò
iã
rad[ ]
A[ ]
tiempo s[ ]
Figura 10.4. Control proporcional de posicion con realimentacion de velocidad.Resultados experimentales (θd = 1.5[rad]).
10.2.2. Control con un compensador de adelanto
En este caso el controlador se especifica mediante su funcion de transfe-rencia:
I∗(s)
E(s)= γ
s + d
s + c(10.18)
donde E(s) es la transformada de Laplace de la diferencia e = θd−θ, mientrasque γ, d y c son constantes positivas por calcular que deben satisfacer d < c.
A continuacion se muestra la manera de obtener una expresion que indi-ca como construir el controlador en (10.18). Mediante division directa de lafraccion en (10.18) se obtiene:
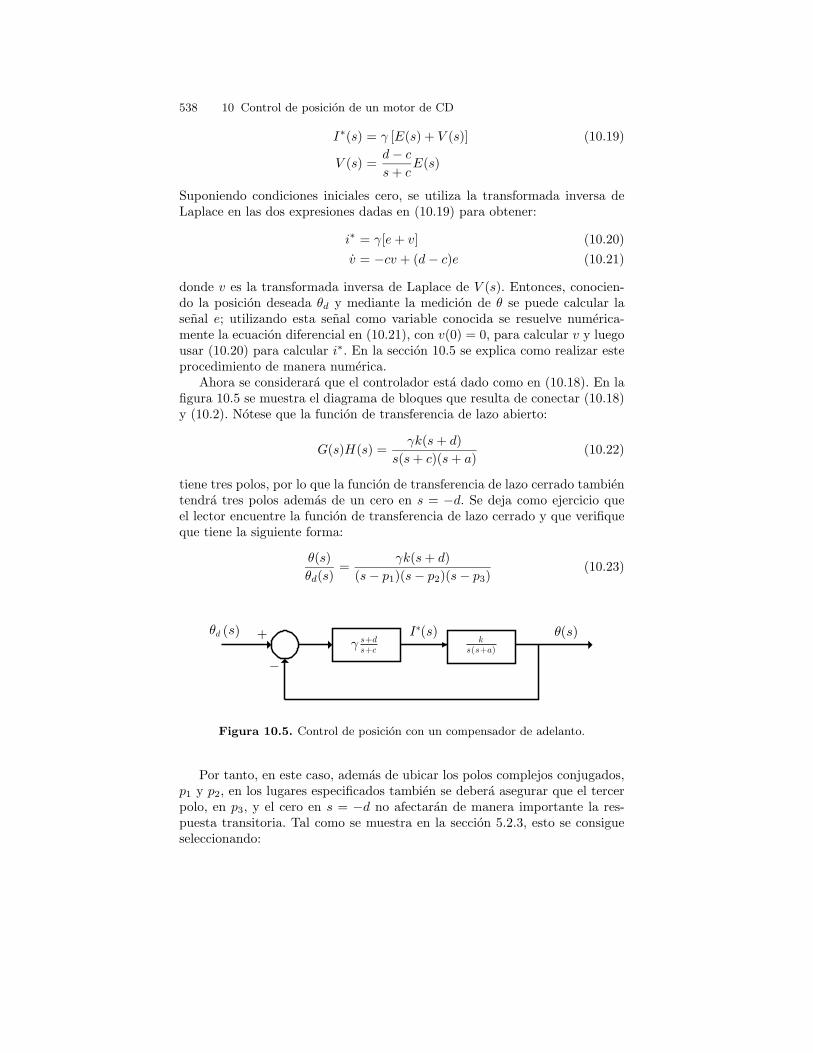
538 10 Control de posicion de un motor de CD
I∗(s) = γ [E(s) + V (s)] (10.19)
V (s) =d − c
s + cE(s)
Suponiendo condiciones iniciales cero, se utiliza la transformada inversa deLaplace en las dos expresiones dadas en (10.19) para obtener:
i∗ = γ[e + v] (10.20)
v = −cv + (d − c)e (10.21)
donde v es la transformada inversa de Laplace de V (s). Entonces, conocien-do la posicion deseada θd y mediante la medicion de θ se puede calcular lasenal e; utilizando esta senal como variable conocida se resuelve numerica-mente la ecuacion diferencial en (10.21), con v(0) = 0, para calcular v y luegousar (10.20) para calcular i∗. En la seccion 10.5 se explica como realizar esteprocedimiento de manera numerica.
Ahora se considerara que el controlador esta dado como en (10.18). En lafigura 10.5 se muestra el diagrama de bloques que resulta de conectar (10.18)y (10.2). Notese que la funcion de transferencia de lazo abierto:
G(s)H(s) =γk(s + d)
s(s + c)(s + a)(10.22)
tiene tres polos, por lo que la funcion de transferencia de lazo cerrado tambientendra tres polos ademas de un cero en s = −d. Se deja como ejercicio queel lector encuentre la funcion de transferencia de lazo cerrado y que verifiqueque tiene la siguiente forma:
θ(s)
θd(s)=
γk(s + d)
(s − p1)(s − p2)(s − p3)(10.23)
+
à
Iã(s) ò(s)òd s( )
s s+a( )kí
s+cs+d
Figura 10.5. Control de posicion con un compensador de adelanto.
Por tanto, en este caso, ademas de ubicar los polos complejos conjugados,p1 y p2, en los lugares especificados tambien se debera asegurar que el tercerpolo, en p3, y el cero en s = −d no afectaran de manera importante la res-puesta transitoria. Tal como se muestra en la seccion 5.2.3, esto se consigueseleccionando:
10.2 Control sin perturbaciones externas (Tp = 0) 539
d = a, c = 2ζωn, γ =ω2
n
k
Usando esta regla de sintonıa y los parametros en (10.12) se encuentra que eluso de las ganancias:
c = 30.8018, γ = 1.6891, d = 2.8681
en el controlador dado en (10.18), o equivalentemente en (10.20), (10.21),ubica dos polos de lazo cerrado en:
s = −ζωn ± jωd = −15.4009 ± j30.0623
Ası, se consigue especificar por diseno un tiempo de subida de 0.068[s] y unsobre paso del 20%.
En la figura 10.6 se muestran los resultados experimentales obtenidos cuan-do θd es un escalon de 1.5[rad]. Las caracterısticas de respuesta transitoriamedidas en esta figura son Mp(%) = 9.6%, tr = 0.068[s]. Notese el parecidode estos valores con los valores de diseno: tr = 0.068[s] y Mp(%) = 20%.Finalmente, es importante subrayar que el uso de la red de adelanto (figura10.6) tambien resulta en un pequeno error de estado estacionario.
El lector puede preguntarse ¿Que se debe usar como valor final para calcu-lar el sobre paso? ¿El valor deseado de 1.5[rad] o el valor final de 1.4[rad]? Elvalor de Mp(%) = 9.6% se obtuvo usando 1.5[rad] como valor final. Noteseque el sobre paso puede ser un poco mas cercano al valor deseado del 20%si se mide usando como valor final 1.4[rad]. Esta decision se deja a criteriodel lector. Por otro lado, el tiempo de subida es exactamente el valor deseadosi se usa como valor final el valor deseado de 1.5[rad]. Estos problemas sondebidos a la existencia de un error en estado estacionario que es mucho masapreciable que con el controlador proporcional con realimentacion de veloci-dad. Este error en estado estacionario es debido a la presencia de friccion nolineal: estatica y de Coulomb (vease (2.21)).
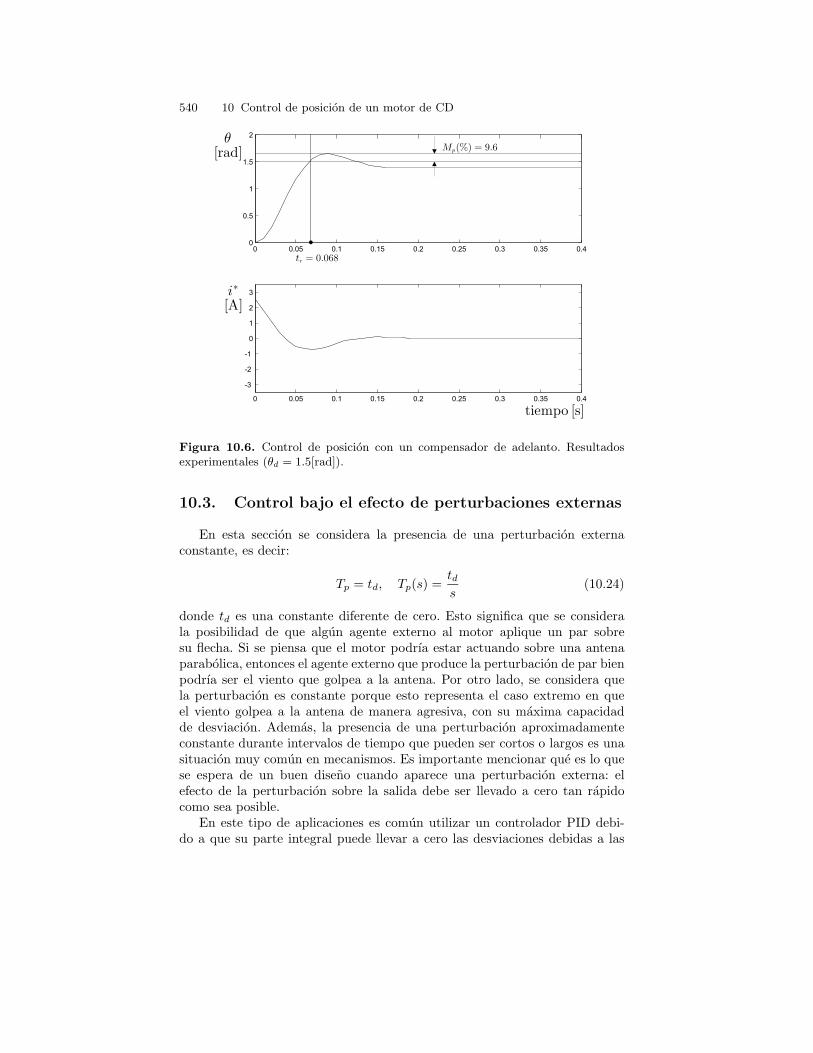
540 10 Control de posicion de un motor de CD
tiempo s[ ]
rad[ ]
A[ ]
ò
iã
tr = 0:068
ï
Mp(%) = 9:6
Figura 10.6. Control de posicion con un compensador de adelanto. Resultadosexperimentales (θd = 1.5[rad]).
10.3. Control bajo el efecto de perturbaciones externas
En esta seccion se considera la presencia de una perturbacion externaconstante, es decir:
Tp = td, Tp(s) =tds
(10.24)
donde td es una constante diferente de cero. Esto significa que se considerala posibilidad de que algun agente externo al motor aplique un par sobresu flecha. Si se piensa que el motor podrıa estar actuando sobre una antenaparabolica, entonces el agente externo que produce la perturbacion de par bienpodrıa ser el viento que golpea a la antena. Por otro lado, se considera quela perturbacion es constante porque esto representa el caso extremo en queel viento golpea a la antena de manera agresiva, con su maxima capacidadde desviacion. Ademas, la presencia de una perturbacion aproximadamenteconstante durante intervalos de tiempo que pueden ser cortos o largos es unasituacion muy comun en mecanismos. Es importante mencionar que es lo quese espera de un buen diseno cuando aparece una perturbacion externa: elefecto de la perturbacion sobre la salida debe ser llevado a cero tan rapidocomo sea posible.
En este tipo de aplicaciones es comun utilizar un controlador PID debi-do a que su parte integral puede llevar a cero las desviaciones debidas a las

10.3 Control bajo el efecto de perturbaciones externas 541
perturbaciones constantes. Sin embargo, tal como se menciona en la seccion5.2.5, no se cuenta con una regla de sintonıa que permita calcular de maneaexacta las ganancias de un controlador PID que consigan simultaneamentelas caracterısticas deseadas de respuesta transitoria (tiempo de subida y so-bre paso) y un rechazo satisfactorio de los efectos de la perturbacion externa.Por esta razon, en las siguientes dos secciones se presentan dos controlado-res que son disenados especıficamente para satisfacer simultaneamente estasespecificaciones.
10.3.1. Un controlador PID modificado
Primero se usa la transformada inversa de Laplace para obtener, a partirde (10.1), la siguiente ecuacion diferencial:
θ + aθ = ki∗ − 1
JTp (10.25)
A continuacion se muestra que el siguiente controlador permite obtener unaregla de sintonıa para calcular de manera exacta sus ganancias de modo quese consiguen simultaneamente las caracterısticas deseadas de respuesta transi-toria (tiempo de subida y sobre paso) y un rechazo satisfactorio de los efectosde la perturbacion externa:
i∗ = κp(θd − θ) − κdθ + k1κpk
∫ t
0
(θd − θ(r))dr − k1(θ − θ(0))
−k1(a + κdk)(θ − θ(0)) (10.26)
donde θd es una constante que representa el valor deseado de posicion mien-tras que θ(0) y θ(0) representan los valores iniciales de posicion y velocidad,respectivamente. Utilizando el hecho de que:
θ − θ(0) =
∫ t
0
θ(r)dr
θ − θ(0) =
∫ t
0
θ(r)dr
el controlador anterior se puede escribir como:
i∗ = κp(θd − θ) − κdθ + k1κpk
∫ t
0
(θd − θ(r))dr − k1
∫ t
0
θ(r)dr
−k1(a + κdk)
∫ t
0
θ(r)dr
= κp(θd − θ) − κdθ − k1
∫ t
0
[θ(r) + (a + κdk)θ(r) + κpk(θ(r) − θd)
]dr
Sustituyendo esto en (10.25) se obtiene:

542 10 Control de posicion de un motor de CD
θ + (a + κdk)θ + κpk(θ − θd)
+k1k
∫ t
0
[θ(r) + (a + κdk)θ(r) + κpk(θ(r) − θd)
]dr = − 1
JTp
Esto se puede escribir como:
ξ + k1kξ = − 1
JTp (10.27)
si se define:
ξ =
∫ t
0
[θ(r) + (a + κdk)θ(r) + κpk(θ(r) − θd)
]dr
Aplicando la transformada de Laplace a (10.27), considerando las condicionesiniciales iguales a cero, se obtiene:
ξ(s) =− 1
J
s + k1kTp(s)
o tambien:
sξ(s) =− 1
J s
s + k1kTp(s) (10.28)
Si la perturbacion es una constante, es decir Tp(s) = td
s , entonces se puedeusar el teorema del valor final para encontrar:
lımt→∞
ξ(t) = lıms→0
s[sξ(s)]
= lıms→0
s− 1
J s
s + k1k
tds
= 0
Ası que si k1k > 0, el filtro en (10.28) es estable y se asegura que lımt→∞ ξ(t) =0. Mas aun, la rapidez con que ξ(t) se aproxima a cero es mayor conformek1k > 0 es mayor. Notese que lımt→∞ ξ(t) = 0 implica que:
d
dt
∫ t
0
[θ(r) + (a + κdk)θ(r) + κpk(θ(r) − θd)
]dr
= θ + (a + κdk)θ + κpk(θ − θd) → 0
tambien tiende a cero. Esto significa que el efecto de la perturbacion constantedesaparece al crecer el tiempo y solo queda la ecuacion diferencial θ + (a +κdk)θ + κpkθ = κpkθd, la cual es estable si κp > 0 y κd > 0, tiene gananciaunitaria en estado estacionario y las ganancias κp y κd pueden ser usadas paraasignar arbitrariamente los dos polos de dicho sistema. Todo esto significa que:
Si no hay perturbacion (Tp = 0 y ξ(t) = 0 para todo t ≥ 0), la respuestaen posicion es como la de un sistema de segundo orden con un tiempo desubida y un sobre paso que pueden ser seleccionados a voluntad escogiendoconvenientemente los valores de κp y κd. La posicion θ alcanza la posiciondeseada θd (constante) en estado estacionario.

10.3 Control bajo el efecto de perturbaciones externas 543
Si aparece una perturbacion constante (Tp = td 6= 0), la desviacion pro-ducida por la perturbacion desaparece al crecer el tiempo. Mas aun, si seescoge un valor de k1 mayor (de manera que el producto k1k > 0 es ma-yor), entonces la desviacion producida por la perturbacion desaparece masrapido. Si una vez que la desviacion debida a la perturbacion es llevada acero (cuando θ = θd) se ordena un cambio en el valor constante de θd (seordena un cambio de posicion deseada θd estando presente la perturbacionTp), entonces la posicion responde como si la mencionada perturbacionconstante Tp no existiera, es decir, como en el punto anterior: con el tiem-po de subida y el sobre paso deseados y la posicion θ alcanza la velocidaddeseada θd en estado estacionario.
Debido a que en control clasico siempre se supone que todas las condicionesiniciales son cero, entonces se puede suponer que θ(0) = 0, θ(0) = 0 y elcontrolador en (10.26) se escribe como:
i∗ = κp(θd − θ) − κdθ + k1κpk
∫ t
0
(θd − θ(r))dr − k1θ − k1(a + κdk)θ
= [κp + k1(a + κdk)](θd − θ) − (κd + k1)θ + k1κpk
∫ t
0
(θd − θ(r))dr
−k1(a + κdk)θd
= KP (θd − θ) − KD θ + KI
∫ t
0
(θd − θ(r))dr − k1(a + kdk)θd (10.29)
KP = κp + k1(a + κdk), KD = κd + k1, KI = k1κpk
que constituye un simple controlador PID con un termino constante de prea-limentacion. Notese que el termino derivativo no contiene la derivada de laposicion deseada. Finalmente, la regla de sintonıa del controlador en (10.29)puede resumirse del siguiente modo:
κp > 0 y κd > 0 se eligen de modo que queden fijados el tiempo de subiday el sobre paso deseados mediante la adecuada ubicacion de las raıces delpolinomio caracterıstico s2 + (a + κdk)s + κpk, es decir:
a + κdk = 2ζωn, κpk = ω2n (10.30)
k1 > 0 se elige grande para reducir rapidamente a cero la desviacion de-bida a la perturbacion. Esto puede hacerse al tanteo o puede calcularserecordando que 1
k1k es la constante de tiempo del filtro en (10.28), el cuales el responsable de eliminar la desviacion producida por la perturbacion.
Otra manera (mas conocida) de disenar un controlador PID con las mismasventajas que el que se acaba de presentar es usando el concepto de contro-ladores con dos grados de libertad. Esto es lo que se muestra en la siguienteseccion.
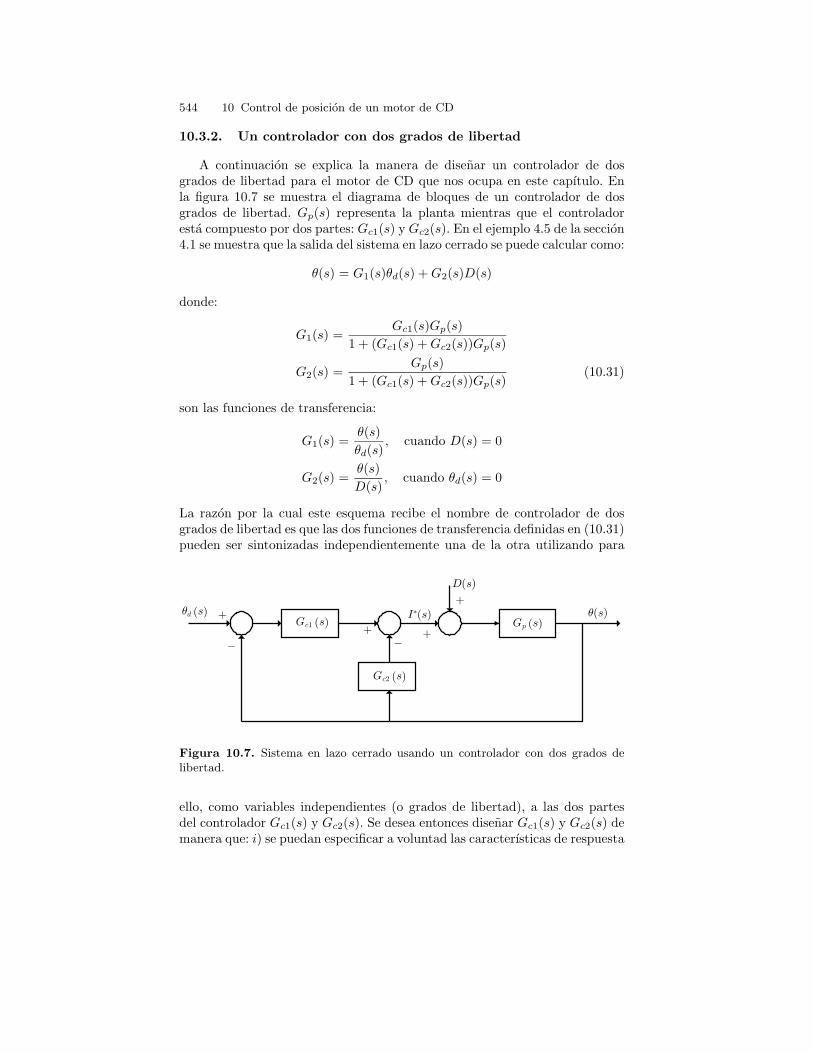
544 10 Control de posicion de un motor de CD
10.3.2. Un controlador con dos grados de libertad
A continuacion se explica la manera de disenar un controlador de dosgrados de libertad para el motor de CD que nos ocupa en este capıtulo. Enla figura 10.7 se muestra el diagrama de bloques de un controlador de dosgrados de libertad. Gp(s) representa la planta mientras que el controladoresta compuesto por dos partes: Gc1(s) y Gc2(s). En el ejemplo 4.5 de la seccion4.1 se muestra que la salida del sistema en lazo cerrado se puede calcular como:
θ(s) = G1(s)θd(s) + G2(s)D(s)
donde:
G1(s) =Gc1(s)Gp(s)
1 + (Gc1(s) + Gc2(s))Gp(s)
G2(s) =Gp(s)
1 + (Gc1(s) + Gc2(s))Gp(s)(10.31)
son las funciones de transferencia:
G1(s) =θ(s)
θd(s), cuando D(s) = 0
G2(s) =θ(s)
D(s), cuando θd(s) = 0
La razon por la cual este esquema recibe el nombre de controlador de dosgrados de libertad es que las dos funciones de transferencia definidas en (10.31)pueden ser sintonizadas independientemente una de la otra utilizando para
+
à
Iã(s)
+à
+
+
ò(s)
D(s)
òd s( )Gp s( )Gc1 s( )
Gc2 s( )
Figura 10.7. Sistema en lazo cerrado usando un controlador con dos grados delibertad.
ello, como variables independientes (o grados de libertad), a las dos partesdel controlador Gc1(s) y Gc2(s). Se desea entonces disenar Gc1(s) y Gc2(s) demanera que: i) se puedan especificar a voluntad las caracterısticas de respuesta
10.3 Control bajo el efecto de perturbaciones externas 545
transitoria y en estado estacionario ante una referencia deseada, θd(s), e ii)el efecto de una perturbacion externa, D(s), sea reducido a cero tan rapidocomo se desee.
Dado que la planta que interesa en este capıtulo es un motor de CD su-ponga que:
Gp(s) =k
s(s + a)(10.32)
El diseno del controlador con dos grados de libertad que se presenta aquı sefundamenta en considerar que Gc1(s) y Gc2(s) son controladores PID [5], cap.10, y por tanto que se puede escribir:
Gc1(s) =kd1s
2 + kp1s + ki1
s
Gc2(s) =kd2s
2 + kp2s + ki2
s
Gc(s) = Gc1(s) + Gc2(s) =kds
2 + kps + ki
s
=kd(s + α)(s + β)
s=
kd(s2 + (α + β)s + αβ)
s(10.33)
kd = kd1 + kd2, kp = kp1 + kp2, ki = ki1 + ki2
para algunas constantes α y β. Entonces:
θ(s)
θd(s)=
Gc1(s)Gp(s)
1 + Gc(s)Gp(s)
Sustituyendo (10.32) y (10.33) en la expresion anterior se tiene:
θ(s)
θd(s)=
Gc1(s)k
s(s+a)
1 + kd(s2+(α+β)s+αβ)s
ks(s+a)
=skGc1(s)
s2(s + a) + kdk(s2 + (α + β)s + αβ)
=skGc1(s)
s3 + (a + kdk)s2 + kdk(α + β)s + kdkαβ(10.34)
Suponga que se desea que la respuesta transitoria sea la de dos polos complejosconjugados dominantes dados como s = −σ + jωd y s = −σ − jωd, σ > 0,ωd > 0. Entonces el polinomio caracterıstico debe satisfacer:
s3 + (a + kdk)s2 + kdk(α + β)s + kdkαβ
= (s + σ + jωd)(s + σ − jωd)(s + f)
= s3 + (2σ + f)s2 + (σ2 + ω2d + 2σf)s + (σ2 + ω2
d)f
de donde se obtienen las siguientes relaciones:
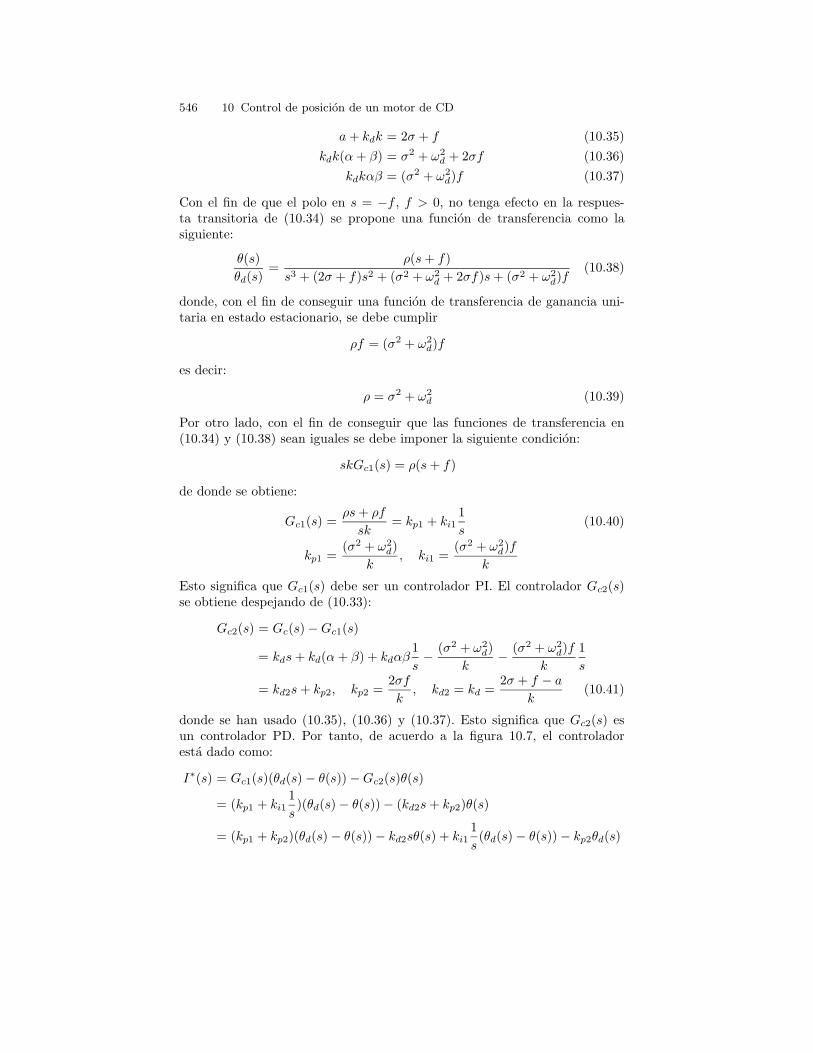
546 10 Control de posicion de un motor de CD
a + kdk = 2σ + f (10.35)
kdk(α + β) = σ2 + ω2d + 2σf (10.36)
kdkαβ = (σ2 + ω2d)f (10.37)
Con el fin de que el polo en s = −f , f > 0, no tenga efecto en la respues-ta transitoria de (10.34) se propone una funcion de transferencia como lasiguiente:
θ(s)
θd(s)=
ρ(s + f)
s3 + (2σ + f)s2 + (σ2 + ω2d + 2σf)s + (σ2 + ω2
d)f(10.38)
donde, con el fin de conseguir una funcion de transferencia de ganancia uni-taria en estado estacionario, se debe cumplir
ρf = (σ2 + ω2d)f
es decir:
ρ = σ2 + ω2d (10.39)
Por otro lado, con el fin de conseguir que las funciones de transferencia en(10.34) y (10.38) sean iguales se debe imponer la siguiente condicion:
skGc1(s) = ρ(s + f)
de donde se obtiene:
Gc1(s) =ρs + ρf
sk= kp1 + ki1
1
s(10.40)
kp1 =(σ2 + ω2
d)
k, ki1 =
(σ2 + ω2d)f
k
Esto significa que Gc1(s) debe ser un controlador PI. El controlador Gc2(s)se obtiene despejando de (10.33):
Gc2(s) = Gc(s) − Gc1(s)
= kds + kd(α + β) + kdαβ1
s− (σ2 + ω2
d)
k− (σ2 + ω2
d)f
k
1
s
= kd2s + kp2, kp2 =2σf
k, kd2 = kd =
2σ + f − a
k(10.41)
donde se han usado (10.35), (10.36) y (10.37). Esto significa que Gc2(s) esun controlador PD. Por tanto, de acuerdo a la figura 10.7, el controladoresta dado como:
I∗(s) = Gc1(s)(θd(s) − θ(s)) − Gc2(s)θ(s)
= (kp1 + ki11
s)(θd(s) − θ(s)) − (kd2s + kp2)θ(s)
= (kp1 + kp2)(θd(s) − θ(s)) − kd2sθ(s) + ki11
s(θd(s) − θ(s)) − kp2θd(s)

10.3 Control bajo el efecto de perturbaciones externas 547
Aplicando la transformada inversa de Laplace se obtiene:
i∗ = (kp1 + kp2)(θd − θ) − kd2θ + ki1
∫ t
0
(θd − θ(r))dr − kp2θd (10.42)
Tal como se ha hecho hasta ahora, se desea que ante una referencia escalonhaya una respuesta transitoria con 0.068[s] como tiempo de subida y 20% desobre paso. En las secciones anteriores se ha visto que los polos de lazo cerradocorrespondientes estan dados como s = −σ ± jωd donde:
σ = 15.4009, ωd = 30.0623 (10.43)
Por otro lado, el valor dado a f no afecta a la parte de la respuesta transito-ria ante una referencia deseada porque su efecto es cancelado (vease (10.38)).¿Cual es el efecto de f entonces y como seleccionarla? La clave de esta res-puesta esta centrada en dos partes:
Primero se tiene el hecho de que, de acuerdo a (10.35), una vez que se fijanσ (polos deseados) y a, k (modelo de la planta) la ganancia derivativa kd
es mayor si f es mayor. De acuerdo a lo mencionado en las seccionesprecedentes, ganancias derivativas grandes no son deseables por el ruidoque eso introduce. Ası que un criterio es seleccionar f tan pequena comose pueda.Segundo, la funcion de transferencia ante una perturbacion dada en (10.31)se calcula como:
θ(s)
D(s)=
ks
(s + σ + jωd)(s + σ − jωd)(s + f)
Notese que en esta funcion de transferencia el polo en s = −f no puede sercancelado de ninguna manera por lo que su efecto sera muy importante enla parte transitoria de la respuesta ante una perturbacion externa. Ası quemientras menor sea el valor de f mas lenta sera la rapidez con la queel efecto de la perturbacion sera eliminado, lo cual puede ser una grandesventaja. En este sentido, notese que puede usarse el teorema del valorfinal para comprobar que el cero que esta funcion de transferencia tieneen s = 0 asegura que el efecto en estado estacionario de una perturbacionconstante sera reducido a cero.
Ası que la seleccion de f debe cumplir un compromiso entre la rapidez conla que las perturbaciones son rechazadas y el ruido que pueda introducirse.Propongase:
f = 40 (10.44)
Finalmente, usando los parametros de la planta:
k = 675.4471, a = 2.8681
ası como (10.40), (10.41), (10.43), (10.44) se encuentra:

548 10 Control de posicion de un motor de CD
Gc1(s) = 1.6891 + 67.56591
s(10.45)
Gc2(s) = 0.1006s + 1.8241 (10.46)
De acuerdo a (10.40), (10.41) y (10.42), el controlador esta dado como:
i∗ = 3.5132(θd − θ) − 0.1006θ + 67.5659
∫ t
0
(θd − θ(r))dr − 1.8241θd
(10.47)
Finalmente, una ultima observacion. El lector puede comprobar que el con-trolador en (10.42) es identico al controlador en (10.29) si se respeta (10.30)y se establece que:
k1 =f
k, σ = ζωn, σ2 + ω2
d = ω2n
Por tanto, se deja al criterio del lector decidir cual de los enfoques presentadosen las secciones 10.3.1 o 10.3.2 para obtener este controlador es el que prefiere.
En la figura 10.8 se presentan resultados experimentales obtenidos cuandose usa el controlador (10.47). Las caracterısticas de respuesta transitoria medi-das ante la referencia constante son tr = 0.068[s] y Mp(%) = 19.3%, los cualesson casi identicos a los deseados (tr = 0.068[s] y Mp(%) = 20%). Tambien seconsidera la presencia de una perturbacion constante D(s) = −Tp(s)/(Jk) =−0.5/s. Esta perturbacion ha sido introducida por software como una senalque se suma a i∗, dada en (10.47), a partir de t = 0.7[s]. Notese que el erroren estado estacionario ante una referencia constante es cero, a pesar de lapresencia de friccion no lineal (estatica y de Coulomb) que se describio en lassecciones anteriores. Por otro lado, se puede observar la excelente respuestadel sistema de control ante la perturbacion. Tambien es interesante observarque esto se consigue gracias a que se usa un valor muy grande de f = 40, locual, a su vez, es posible gracias al bajo contenido de ruido en la medicion dela posicion θ (se usa un encoder para medir la posicion).
En la figura 10.9 se muestran otros resultados experimentales obtenidoscon el controlador (10.47). En este caso se usa la siguiente posicion deseadaque tiene la forma de tres escalones sucesivos:
θd =
1.5, 0 ≤ t < 1.53, 1.5 ≤ t < 41.5, t ≥ 4
(10.48)
Se considera la presencia de la siguiente perturbacion externa:
Tp =
0, 0 ≤ t < 0.70.5, 0.7 ≤ t < 2.550, 2.55 ≤ t < 3.250.5, 3.25 ≤ t < 5.10, 5.1 ≤ t < 5.80.5, t ≥ 5.8
(10.49)
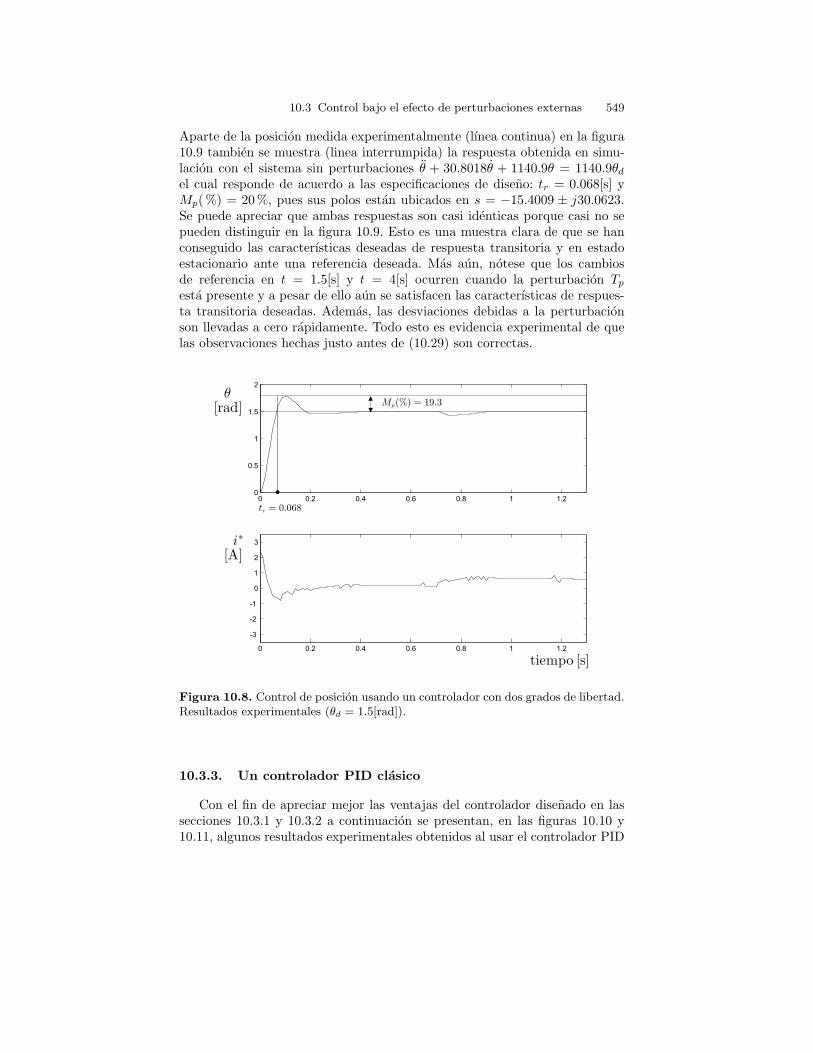
10.3 Control bajo el efecto de perturbaciones externas 549
Aparte de la posicion medida experimentalmente (lınea continua) en la figura10.9 tambien se muestra (linea interrumpida) la respuesta obtenida en simu-lacion con el sistema sin perturbaciones θ + 30.8018θ + 1140.9θ = 1140.9θd
el cual responde de acuerdo a las especificaciones de diseno: tr = 0.068[s] yMp(%) = 20%, pues sus polos estan ubicados en s = −15.4009 ± j30.0623.Se puede apreciar que ambas respuestas son casi identicas porque casi no sepueden distinguir en la figura 10.9. Esto es una muestra clara de que se hanconseguido las caracterısticas deseadas de respuesta transitoria y en estadoestacionario ante una referencia deseada. Mas aun, notese que los cambiosde referencia en t = 1.5[s] y t = 4[s] ocurren cuando la perturbacion Tp
esta presente y a pesar de ello aun se satisfacen las caracterısticas de respues-ta transitoria deseadas. Ademas, las desviaciones debidas a la perturbacionson llevadas a cero rapidamente. Todo esto es evidencia experimental de quelas observaciones hechas justo antes de (10.29) son correctas.
Mp(%) = 19:3
tr = 0:068
ï
tiempo s[ ]
rad[ ]
A[ ]
ò
iã
Figura 10.8. Control de posicion usando un controlador con dos grados de libertad.Resultados experimentales (θd = 1.5[rad]).
10.3.3. Un controlador PID clasico
Con el fin de apreciar mejor las ventajas del controlador disenado en lassecciones 10.3.1 y 10.3.2 a continuacion se presentan, en las figuras 10.10 y10.11, algunos resultados experimentales obtenidos al usar el controlador PID
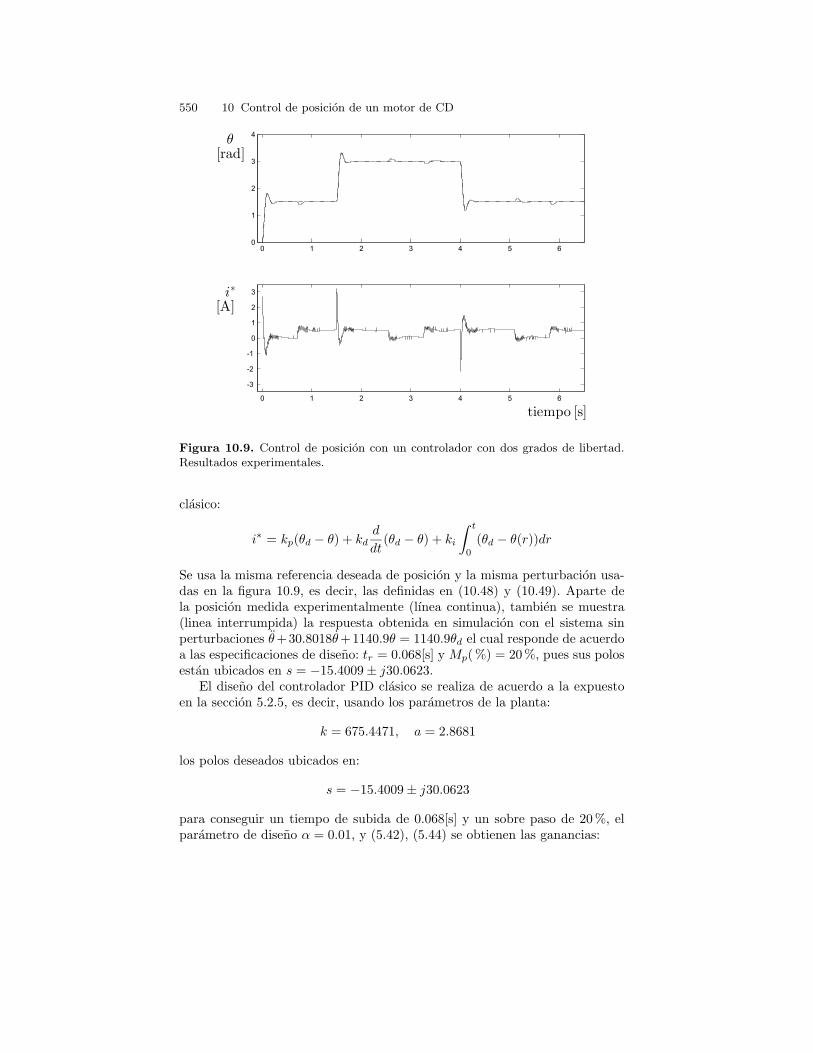
550 10 Control de posicion de un motor de CD
ò
iã
tiempo s[ ]
rad[ ]
A[ ]
Figura 10.9. Control de posicion con un controlador con dos grados de libertad.Resultados experimentales.
clasico:
i∗ = kp(θd − θ) + kdd
dt(θd − θ) + ki
∫ t
0
(θd − θ(r))dr
Se usa la misma referencia deseada de posicion y la misma perturbacion usa-das en la figura 10.9, es decir, las definidas en (10.48) y (10.49). Aparte dela posicion medida experimentalmente (lınea continua), tambien se muestra(linea interrumpida) la respuesta obtenida en simulacion con el sistema sinperturbaciones θ+30.8018θ+1140.9θ = 1140.9θd el cual responde de acuerdoa las especificaciones de diseno: tr = 0.068[s] y Mp(%) = 20%, pues sus polosestan ubicados en s = −15.4009 ± j30.0623.
El diseno del controlador PID clasico se realiza de acuerdo a la expuestoen la seccion 5.2.5, es decir, usando los parametros de la planta:
k = 675.4471, a = 2.8681
los polos deseados ubicados en:
s = −15.4009 ± j30.0623
para conseguir un tiempo de subida de 0.068[s] y un sobre paso de 20%, elparametro de diseno α = 0.01, y (5.42), (5.44) se obtienen las ganancias:

10.3 Control bajo el efecto de perturbaciones externas 551
kd = 0.0414, kp = 1.6896, ki = 0.0169
Es importante subrayar que de acuerdo al metodo de diseno presentado enla seccion 5.2.5, el valor α = 0.01 se elige muy cercano a cero para que larespuesta transitoria ante la referencia de posicion tenga las caracterısticasdeseadas lo cual, puede observarse en la figura 10.10, es conseguido para elprimer cambio tipo escalon de la referencia (antes de que aparezca algunaperturbacion externa). Sin embargo, los problemas aparecen una vez que seaplica la perturbacion externa:
El uso de un valor pequeno para α resulta en una ganancia integral muypequena lo cual produce un ajuste integral tan lento que el efecto de la per-turbacion no es compensando en la figura 10.10. Es mas, aunque en t ≈ 3[s]y t ≈ 5.5[s] la posicion medida alcanza a la posicion deseada, esto es debido aque la perturbacion externa desaparece en esos instantes de tiempo.
Tal como se explica en la seccion 5.2.5, se pueden conseguir gananciasintegrales mas grandes si se elige un valor grande para α. Por esta razon sepropone α = 10, lo cual resulta en las siguientes ganancias:
kd = 0.0414, kp = 2.1027, ki = 16.8915
En la figura 10.11 se muestran los resultados experimentales correspondientes.Notese que la desviacion debida a la perturbacion es compensada rapidamen-te. Sin embargo, esto es conseguido al precio de producir una respuesta antela referencia deseada con caracterısticas muy diferentes a las disenadas. Estaes la principal desventaja del control PID clasico: no se pueden calcular demanera exacta las ganancias que permitan conseguir simultaneamente las ca-racterısticas deseadas de respuesta transitoria ante una referencia de entraday un rechazo satisfactorio de las perturbaciones externas. Por el contrario,este problema es resuelto con el controlador disenado en las secciones 10.3.1y 10.3.2 y cuyos resultados experimentales se muestran en la figura 10.9.

552 10 Control de posicion de un motor de CD
A[ ]
rad[ ]
tiempo s[ ]
ò
iã
Figura 10.10. Control de posicion con un controlador PID clasico (α = 0.01).Resultados experimentales.
tiempo s[ ]
rad[ ]
A[ ]iã
ò
Figura 10.11. Control de posicion con un controlador PID clasico (α = 10). Re-sultados experimentales.

10.4 Seguimiento de trayectorias 553
10.4. Seguimiento de trayectorias
En esta seccion se disena un controlador que permite que la posicion delmotor alcance una posicion deseada que es variable en el tiempo, es decir,θd(t) ya no es constante sino que cambia con el tiempo. Se supone que noexiste ninguna perturbacion externa, es decir que Tp(s) = 0, y que se puede
calcular la primera y la segunda derivada de θd(t), es decir θd(t) y θd(t) seconocen y son continuas. Considerese el modelo (10.1) una vez que se le aplicala transformada inversa de Laplace, con Tp(s) = 0, es decir:
θ + aθ = ki∗ (10.50)
Sea el siguiente controlador, calculado a partir del conocimiento de θd, θd yθd:
i∗(t) =1
k
[d2θd(t)
dt2− kd
(dθ(t)
dt− dθd(t)
dt
)− kp (θ(t) − θd(t)) + a
dθ(t)
dt
]
(10.51)
Notese que dθ(t)dt representa la velocidad medida del motor. Sustituyendo
(10.51) en (10.50) se obtiene:
d2θ(t)
dt2− d2θd(t)
dt2+ kd
(dθ(t)
dt− dθd(t)
dt
)+ kp (θ(t) − θd(t)) = 0
(10.52)
Defınase el error de seguimiento como ε(t) = θ(t) − θd(t) y su transformadade Laplace E(s). Entonces (10.52) se puede escribir como:
s2E(s) − sε(0) − dε(0)
dt+ kdsE(s) − kdε(0) + kpE(s) = 0 (10.53)
y finalmente:
E(s) =(kd + s)ε(0) + dε(0)
dt
s2 + kds + kp(10.54)
De acuerdo al capıtulo 3 la solucion de (10.54) tiene la forma:
ε(t) = εn(t) + εf (t)
donde la respuesta forzada es cero εf (t) = 0 porque la exitacion de la ecuaciondiferencial en (10.53) es cero. Por tanto, ε(t) = εn(t) lo cual tiende a ceroconforme el tiempo crece si las dos raıces del polinomio caracterıstico s2 +kds + kp tienen parte real negativa. Esta situacion es la deseable porque siε(t) tiende a cero entonces θ(t) tiende a θd(t) conforme el tiempo crece. Porotro lado, como el polinomio caracterıstico s2 + kds + kp es de segundo orden
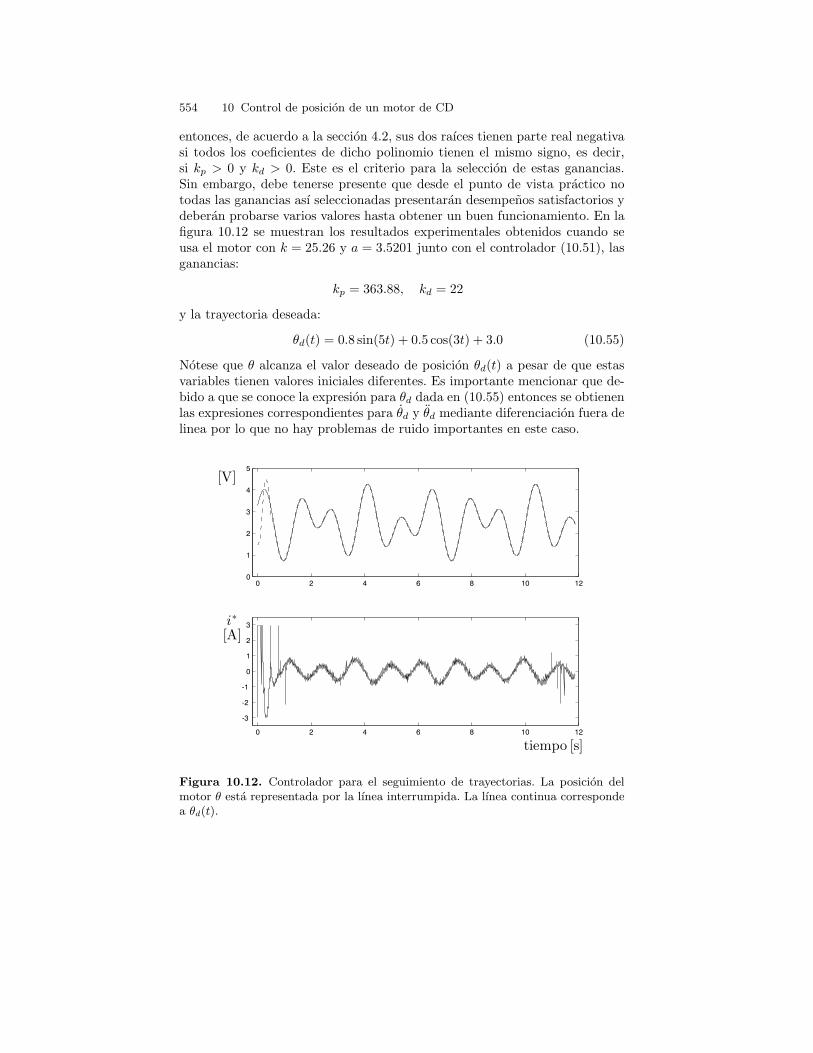
554 10 Control de posicion de un motor de CD
entonces, de acuerdo a la seccion 4.2, sus dos raıces tienen parte real negativasi todos los coeficientes de dicho polinomio tienen el mismo signo, es decir,si kp > 0 y kd > 0. Este es el criterio para la seleccion de estas ganancias.Sin embargo, debe tenerse presente que desde el punto de vista practico notodas las ganancias ası seleccionadas presentaran desempenos satisfactorios ydeberan probarse varios valores hasta obtener un buen funcionamiento. En lafigura 10.12 se muestran los resultados experimentales obtenidos cuando seusa el motor con k = 25.26 y a = 3.5201 junto con el controlador (10.51), lasganancias:
kp = 363.88, kd = 22
y la trayectoria deseada:
θd(t) = 0.8 sin(5t) + 0.5 cos(3t) + 3.0 (10.55)
Notese que θ alcanza el valor deseado de posicion θd(t) a pesar de que estasvariables tienen valores iniciales diferentes. Es importante mencionar que de-bido a que se conoce la expresion para θd dada en (10.55) entonces se obtienenlas expresiones correspondientes para θd y θd mediante diferenciacion fuera delinea por lo que no hay problemas de ruido importantes en este caso.
V[ ]
iã
A[ ]
tiempo s[ ]
Figura 10.12. Controlador para el seguimiento de trayectorias. La posicion delmotor θ esta representada por la lınea interrumpida. La lınea continua correspondea θd(t).

10.5 Calculo numerico de los algoritmos de control 555
10.5. Calculo numerico de los algoritmos de control
Deriferenciacion numerica
Esta es la operacion que permite obtener un estimado de la velocidad paralos controladores en las secciones 10.2.1, 10.3.2 y 10.4. Sea:
y =dw
dt(10.56)
entonces, esta operacion se puede aproximar numericamente mediante:
y ≈ w(k) − w(k − 1)
∆t(10.57)
donde w(k) representa el valor de w medido en el instante de muestreo pre-sente, w(k − 1) es el valor de w medido en el instante de muestreo previo y∆t es el periodo de muestreo utilizado. Para que se obtenga una buena apro-ximacion ∆t debe ser “pequeno” comparado con el tiempo de respuesta delmotor.
Integracion numerica
Se procede como se indica en la seccion 9.8
Compensador de adelanto
Ahora se explica como se calcula la expresion en (10.21) involucrada enel compensador de adelanto presentado en la seccion 10.2.2. De acuerdo a(10.56) y (10.57) se puede hacer un corrimiento en el tiempo para redefinir:
dw
dt≈ w(k + 1) − w(k)
∆t(10.58)
Esto se puede usar para aproximar:
v = −cv(k) + (d − c)e(k) ≈ v(k + 1) − v(k)
∆t(10.59)
y, por tanto:
v(k + 1) = [−cv(k) + (d − c)e(k)]∆t + v(k) (10.60)
Entonces, a partir de la medicion de e(k) = θd(k) − θ(k) se puede calculariterativamente v(k + 1) partiendo del valor inicial v(0) = 0. La forma en que(10.60) esta expresada es muy conveniente pues permite que el primer valorutilizado de v(k) sea cero en k = 0. Recuerdese que v(k + 1) se calcula enel instante de muestreo presente pero solo sera utilizado hasta el instante demuestreo proximo inmediato en el futuro.

556 10 Control de posicion de un motor de CD
10.6. Construccion del sistema de control
En la figura 10.13 se muestra el diagrama electrico del sistema de controlcompleto. A continuacion se listan los componentes utilizados:
Motor de CD con escobillas e iman permanente. Voltaje nominal 20[V],corriente nominal 3[A]. Cuenta con un encoder de 400 pulsos/vuelta, elcual se alimenta con +5[V] de CD.Una computadora portatil Laptop con puerto USB.Conector de USB a serie.Microcontrolador PIC16F877A de Microchip.Convertidor digital/analogico DAC0800LCN.Amplificador operacional cuadruple TL084.Amplificadores operacionales TL081.Manejador/Receptor MAX232.Transistores TIP141 y TIP145.
Funcionamiento
El microcontrolador PIC16F877A tiene la tarea principal de ejecutar elalgoritmo de control correspondiente. Es decir, conocido el valor deseado deposicion θd y la medicion de la posicion actual θ, el microcontrolador calculael valor de la senal de control i∗.
Tal como se indica en la figura 10.13, el valor de −i∗ debe aparecer ala entrada del amplificador operacional TL081 dentro del recuadro titulado“control de corriente”. Esto se consigue del siguiente modo. Primero, en elprograma listado en la seccion 10.7 se hace iast=-iast, para cambiar el signode i∗ a −i∗. El microcontrolador debe entregar un codigo digital (iastd) de8 bits al convertidor digital/analogico de 8 bits DAC0800LCN. Para esto, elmicrocontrolador realiza la operacion:
iastd = 36.4286 ∗ iast + 127
la cual obedece a la relacion mostrada graficamente en al figura 10.14. Elconvertidor digital/analogico trabaja en conjunto con un amplificador opera-cional TL081. Estos dispositivos estan conectados de acuerdo a las sugerenciasdel fabricante [1]. Esto asegura que a la salida del amplificador operacional seobtiene un voltaje cuyo valor numerico corresponde al de −i∗. Este valor esrecibido por un amplificador operacional TL081 que se encarga de evaluar ellazo de corriente:
ui = 100(i∗ − i)
Finalmente, el amplificador de potencia de ganancia unitaria esta constituidopor un tercer amplificador operacional TL081 junto con dos transistores depotencia TIP141 y TIP145, conectados en simetrıa complementaria.
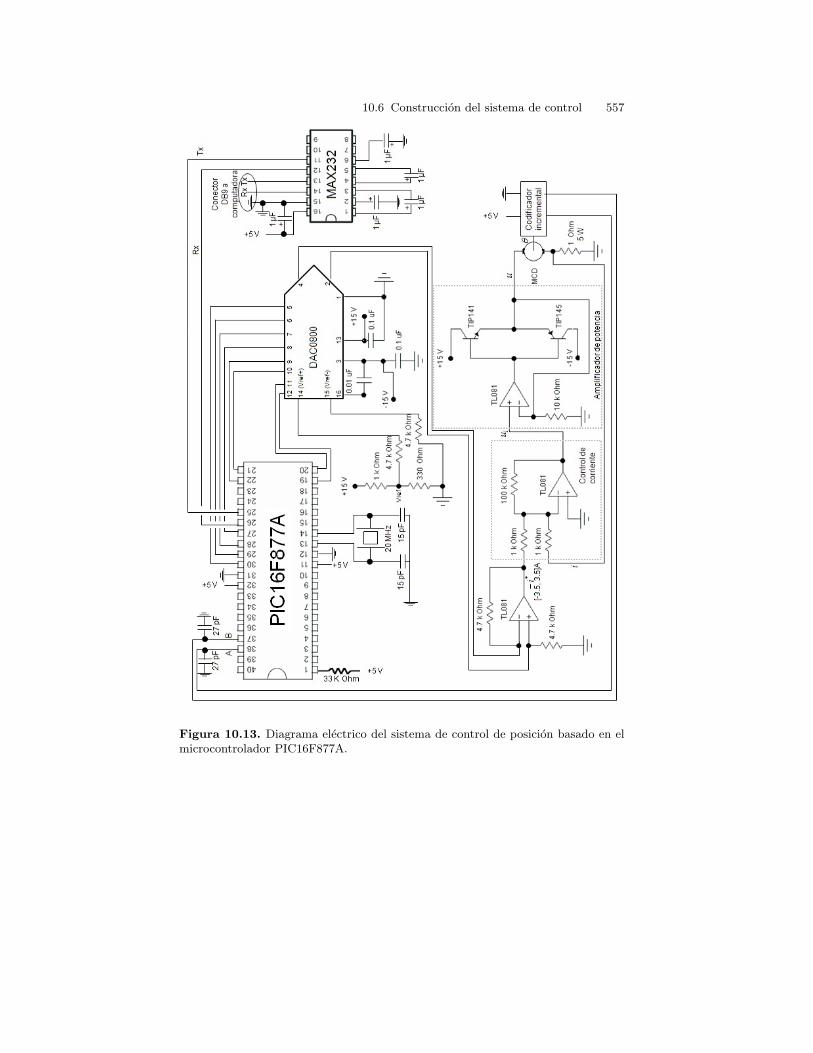
10.6 Construccion del sistema de control 557
Figura 10.13. Diagrama electrico del sistema de control de posicion basado en elmicrocontrolador PIC16F877A.

558 10 Control de posicion de un motor de CD
iast3:5à 3:5
255
127
iastd
Figura 10.14. Acondicionamiento de la senal i∗ que debe ser enviada al convertidordigital/analogico.
El Manejador/Receptor MAX232 se encarga de enviar la posicion medidaθ y la senal de control i∗ hacia una computadora portatil (a traves de unconector USB a serie) cuyo unico proposito es el graficado de dichas variables.
A continuacion se describe la manera en que el microcontrolador PIC16F877A realiza la funcion de controlador. Antes que nada se debe aclarar que noes el proposito presentar toda una exposicion de como trabaja este micro-controlador. Lo que se presenta es una descripcion de los recursos de estemicrocontrolador que se utilizan para construir los controladores bajo prue-ba. En la siguiente seccion se presenta un listado del programa utilizado.
El microcontrolador PIC16F877A [2] es de tecnologıa EEPROM, tiene unavelocidad de operacion maxima de 20 MHz y cuenta con 5 puertos de entrada-salida configurables y 3 temporizadores. El timer TMR0 es utilizado en estecapıtulo para establecer el periodo de muestreo: T = 0.001[seg] (20 cuentas deltimer 0) para los experimentos en las secciones 10.1, 10.2.1 y 10.2.2, mientrasque T = 0.002[seg] (40 cuentas del timer 0) para el experimento en la seccion10.3.2.
La posicion θ se mide desde el encoder usando una subrutina y se alma-cena en la variable “cuenta2” de 16 bits. La posicion en radianes se obtienemediante la operacion pos=cuenta2*0.0039 donde 0.0039=3.1416 rad/(2*400cuentas). Esto es debido a que tratandose de un encoder de 400 pulsos porvuelta, en realidad se obtienen 4×400 cuentas por vuelta (por cada 2π ra-dianes), es decir 2×400 cuentas por cada π radianes. Una vez calculada lasenal de control “iast” se entrega al convertidor digital/analogico a travesdel puerto D (PORTD=iastd). Finalmente, la posicion (a traves de la va-riable “cuenta”) o la senal de control (a traves de la variable “iastd”) sonenviados a la computadora portatil mediante las instrucciones: putc(0xAA);putc(cuentaH); putc(cuentaL);
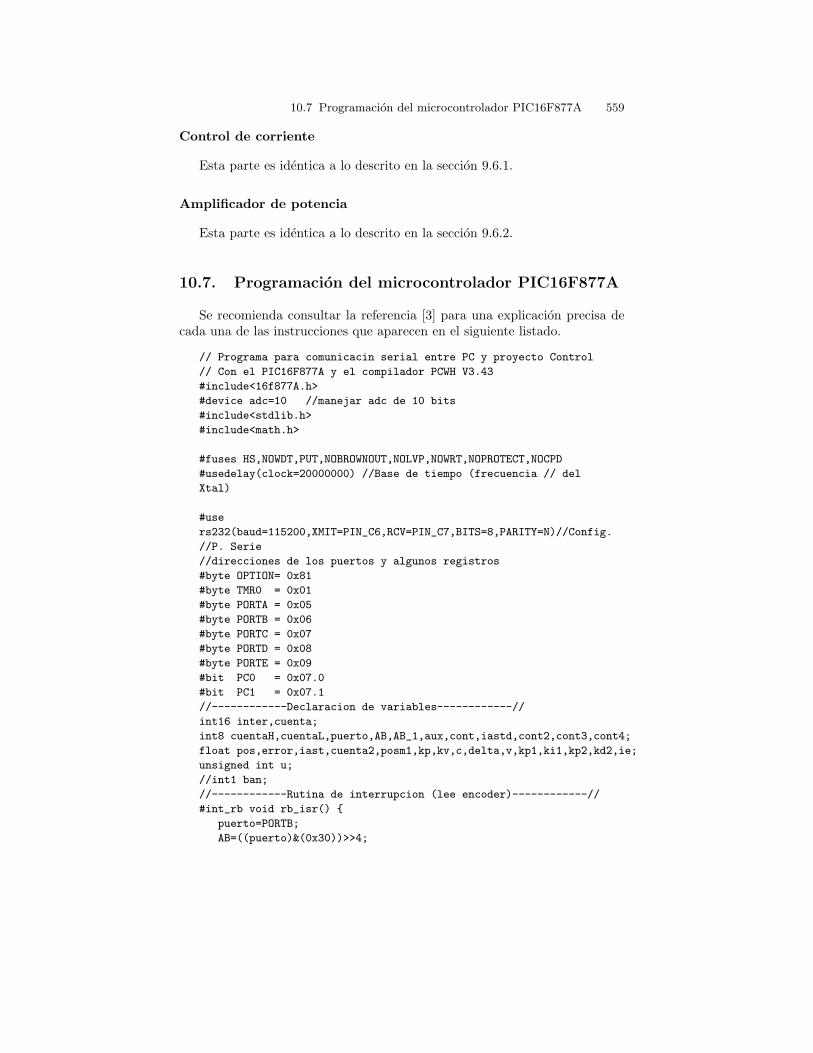
10.7 Programacion del microcontrolador PIC16F877A 559
Control de corriente
Esta parte es identica a lo descrito en la seccion 9.6.1.
Amplificador de potencia
Esta parte es identica a lo descrito en la seccion 9.6.2.
10.7. Programacion del microcontrolador PIC16F877A
Se recomienda consultar la referencia [3] para una explicacion precisa decada una de las instrucciones que aparecen en el siguiente listado.
// Programa para comunicacin serial entre PC y proyecto Control
// Con el PIC16F877A y el compilador PCWH V3.43
#include<16f877A.h>
#device adc=10 //manejar adc de 10 bits
#include<stdlib.h>
#include<math.h>
#fuses HS,NOWDT,PUT,NOBROWNOUT,NOLVP,NOWRT,NOPROTECT,NOCPD
#usedelay(clock=20000000) //Base de tiempo (frecuencia // del
Xtal)
#use
rs232(baud=115200,XMIT=PIN_C6,RCV=PIN_C7,BITS=8,PARITY=N)//Config.
//P. Serie
//direcciones de los puertos y algunos registros
#byte OPTION= 0x81
#byte TMR0 = 0x01
#byte PORTA = 0x05
#byte PORTB = 0x06
#byte PORTC = 0x07
#byte PORTD = 0x08
#byte PORTE = 0x09
#bit PC0 = 0x07.0
#bit PC1 = 0x07.1
//------------Declaracion de variables------------//
int16 inter,cuenta;
int8 cuentaH,cuentaL,puerto,AB,AB_1,aux,cont,iastd,cont2,cont3,cont4;
float pos,error,iast,cuenta2,posm1,kp,kv,c,delta,v,kp1,ki1,kp2,kd2,ie;
unsigned int u;
//int1 ban;
//------------Rutina de interrupcion (lee encoder)------------//
#int_rb void rb_isr()
puerto=PORTB;
AB=((puerto)&(0x30))>>4;
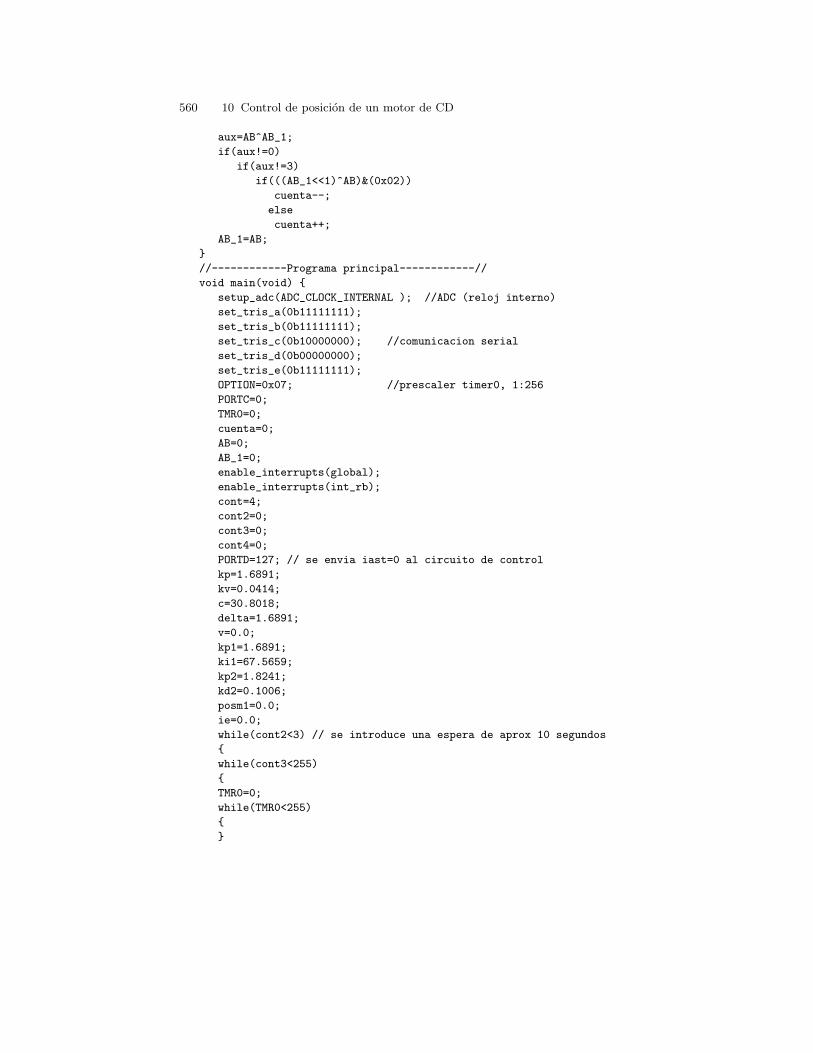
560 10 Control de posicion de un motor de CD
aux=AB^AB_1;
if(aux!=0)
if(aux!=3)
if(((AB_1<<1)^AB)&(0x02))
cuenta--;
else
cuenta++;
AB_1=AB;
//------------Programa principal------------//
void main(void)
setup_adc(ADC_CLOCK_INTERNAL ); //ADC (reloj interno)
set_tris_a(0b11111111);
set_tris_b(0b11111111);
set_tris_c(0b10000000); //comunicacion serial
set_tris_d(0b00000000);
set_tris_e(0b11111111);
OPTION=0x07; //prescaler timer0, 1:256
PORTC=0;
TMR0=0;
cuenta=0;
AB=0;
AB_1=0;
enable_interrupts(global);
enable_interrupts(int_rb);
cont=4;
cont2=0;
cont3=0;
cont4=0;
PORTD=127; // se envia iast=0 al circuito de control
kp=1.6891;
kv=0.0414;
c=30.8018;
delta=1.6891;
v=0.0;
kp1=1.6891;
ki1=67.5659;
kp2=1.8241;
kd2=0.1006;
posm1=0.0;
ie=0.0;
while(cont2<3) // se introduce una espera de aprox 10 segundos
while(cont3<255)
TMR0=0;
while(TMR0<255)
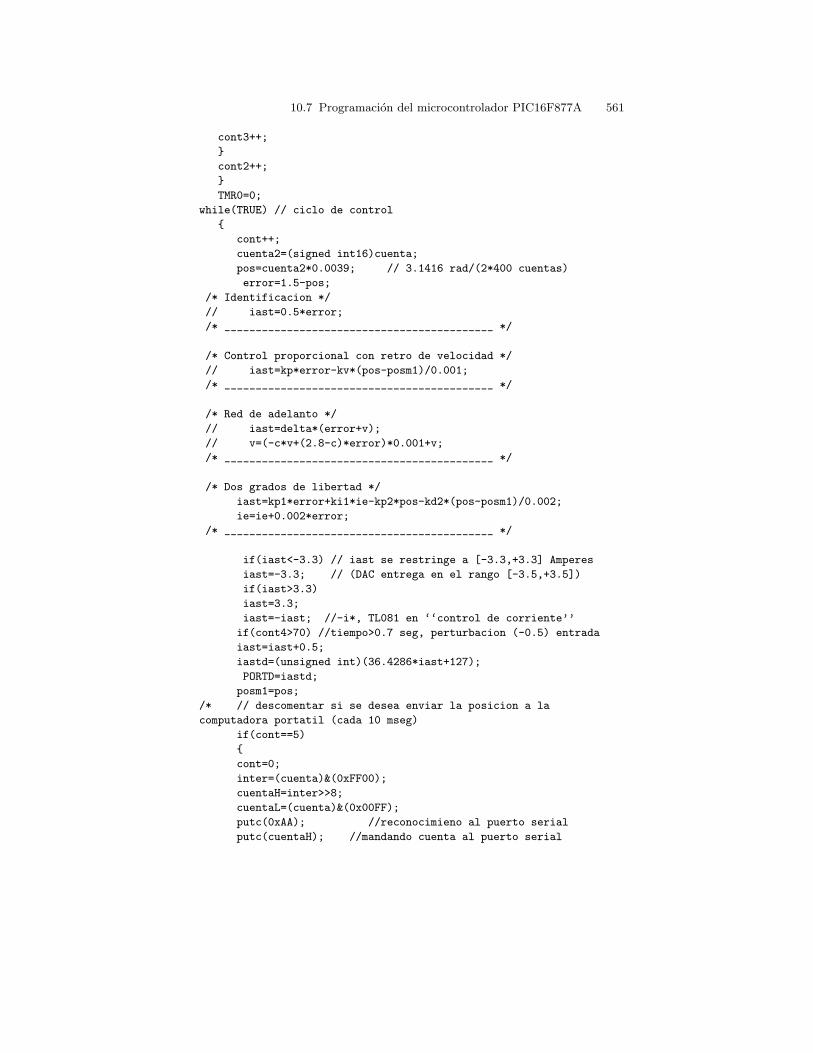
10.7 Programacion del microcontrolador PIC16F877A 561
cont3++;
cont2++;
TMR0=0;
while(TRUE) // ciclo de control
cont++;
cuenta2=(signed int16)cuenta;
pos=cuenta2*0.0039; // 3.1416 rad/(2*400 cuentas)
error=1.5-pos;
/* Identificacion */
// iast=0.5*error;
/* ___________________________________________ */
/* Control proporcional con retro de velocidad */
// iast=kp*error-kv*(pos-posm1)/0.001;
/* ___________________________________________ */
/* Red de adelanto */
// iast=delta*(error+v);
// v=(-c*v+(2.8-c)*error)*0.001+v;
/* ___________________________________________ */
/* Dos grados de libertad */
iast=kp1*error+ki1*ie-kp2*pos-kd2*(pos-posm1)/0.002;
ie=ie+0.002*error;
/* ___________________________________________ */
if(iast<-3.3) // iast se restringe a [-3.3,+3.3] Amperes
iast=-3.3; // (DAC entrega en el rango [-3.5,+3.5])
if(iast>3.3)
iast=3.3;
iast=-iast; //-i*, TL081 en ‘‘control de corriente’’
if(cont4>70) //tiempo>0.7 seg, perturbacion (-0.5) entrada
iast=iast+0.5;
iastd=(unsigned int)(36.4286*iast+127);
PORTD=iastd;
posm1=pos;
/* // descomentar si se desea enviar la posicion a la
computadora portatil (cada 10 mseg)
if(cont==5)
cont=0;
inter=(cuenta)&(0xFF00);
cuentaH=inter>>8;
cuentaL=(cuenta)&(0x00FF);
putc(0xAA); //reconocimieno al puerto serial
putc(cuentaH); //mandando cuenta al puerto serial
562 10 Control de posicion de un motor de CD
putc(cuentaL);
cont4++;
if(cont4==255)
cont4=0;
*/
/* // descomentar si se desea enviar la senal de control a
//la computadora portatil (cada 10 mseg)
iast=-iast; // graficar +i*
if(cont4>70) // senal control graficar sin perturbacion
iast=iast+0.5;
iastd=(unsigned int)(36.4286*iast+127);
if(cont==5)
cont=0;
inter=(cuenta)&(0xFF00);
cuentaH=0x00; //inter>>8;
cuentaL=(iastd)&(0xFF);
putc(0xAA); //reconocimieno puerto serial
putc(cuentaH); //cuenta al puerto serial
putc(cuentaL);
cont4++;
if(cont4==255)
cont4=0;
*/
PC1=1; //inicia espera del timer
while(TMR0<40) //cada cuenta=(4/FXtal)*256 seg,
// (40=2 ms, periodo muestreo)
PC1=0; //termina espera del timer
TMR0=0;
//cierre del while infinito
//cierre del main
10.8. Control basado en una computadora personal
El controlador presentado en la seccion 10.4 para el seguimiento de trayec-torias fue probado experimentalmente usando una computadora personal yuna tarjeta adquisitora de datos. Esto debido a que el calculo de las funcionestrigonometricas seno y coseno que se requieren consumen mucho tiempo en elmicrocontrolador PIC16F877A. Este problema desaparece cuando se usa unacomputadora personal. A continuacion se listan los componentes principalesdel sistema de control.
Computadora personal de escritorio Pentium II a 233 MHz.
10.8 Control basado en una computadora personal 563
Tarjeta adquisitora de datos PCL-812PG de Advantech [4]. Cuenta con 15canales de entrada analogico/digital manejados por un solo convertidor ADde aproximaciones sucesivas de 12 bits, con entrada analogica en el rangode -5[V] a +5[V]. Dos canales de salida digital/analogico, cada uno cuentacon un convertidor DA de 12 bits, con salida analogica en el rango de 0[V]a +5[V]. Tambien se cuenta con dos contadores que son programados paraestablecer el periodo de muestreo en un amplio rango de valores. En elexperimento de la figura 10.12 se uso un periodo de muestreo de 0.005[s].Motor de CD con escobillas e iman permanente. Voltaje nominal de 24[V],corriente nominal de 2.3[A].Sensor de posicion. Potenciometro de precision de 1[KOhm], diez vueltas,con tope.
En la figura 10.15 se presenta el diagrama de bloques del sistema de controlcompleto.
Acoplamiento mecanico del sensor de posicion
Dado que la medicion de la posicion del motor se realiza con un poten-ciometro con tope, es importante preveer la posibilidad de que dicho tope seaalcanzado pues esto puede danar al potenciometro dado el gran par que puededesarrollar el motor. Por esta razon se utiliza un acoplamiento mecanico queconsta de un anillo de goma que se une firmemente a la flecha del motor. Eldiametro de este anillo es tal que el extremo movil del potenciometro puedeentrar en el de manera mas o menos ajustada. De esta manera, si se alcanzael tope del potenciometro, la flexibilidad del anillo de goma permite que laflecha del motor siga girando sin danar la parte movil del potenciometro quepermanecera en reposo.
Interfaz de entrada
El potenciometro usado como sensor de posicion (figura 10.15) entrega a susalida un voltaje θ en el rango de 0[V] a +5[V]. Esto es muy conveniente por-que el convertidor de entrada analogico/digital recibe voltajes en el rango de-5[V] a +5[V]. Ante el voltaje recibido desde el potenciometro, el convertidoranalogico/digital entrega un codigo, “codigoi”, en el rango de 0 a 2n = 4096porque dicho convertidor es de 12 bits. A partir de este codigo debe recupe-rarse una variable ua que numericamente sea igual al voltaje entregado por elpotenciometro θ. De acuerdo a la figura 10.16 esto puede realizarse mediantela operacion:
ua =10.0
4096.0codigoi − 5.0 (10.61)
la cual debe ser efectuada por el programa de computadora.
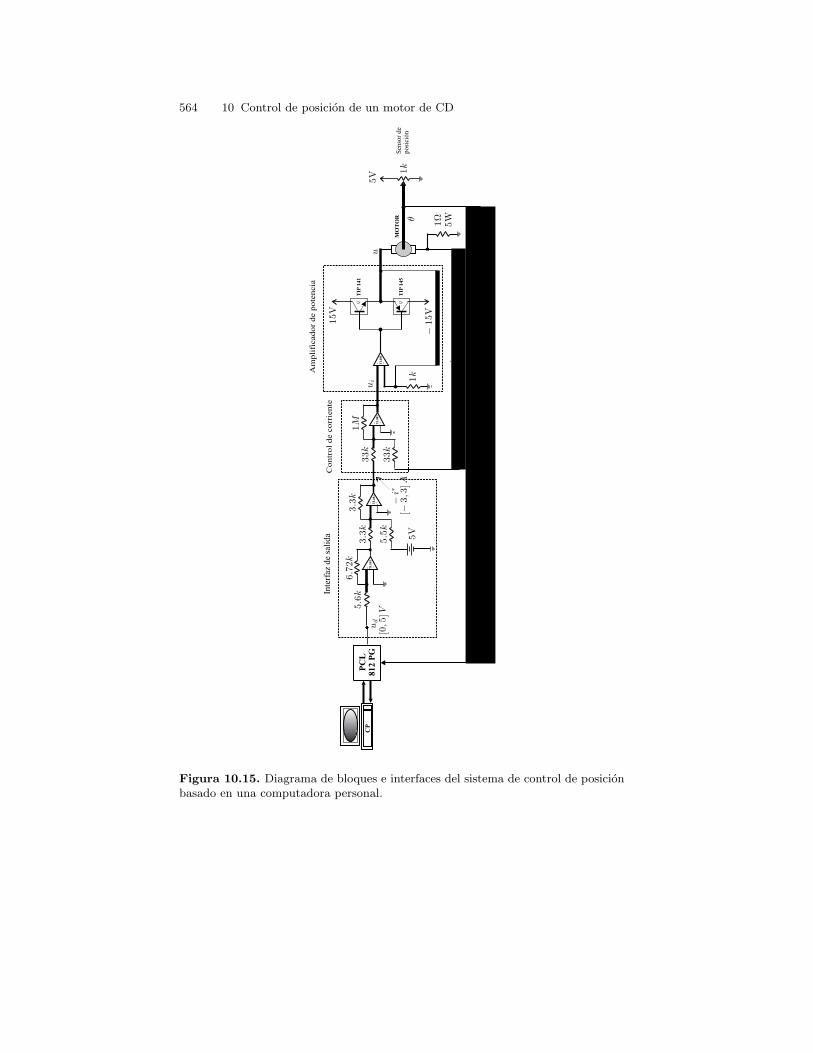
564 10 Control de posicion de un motor de CD
TL
081
PC
L8
12
PG
TL
081
à +à +
TL
081
à +T
L081
à+
Q Q
CP
5:6k
6:72k
3:3k
5:5k
33k
33k
1M
1k
1k
3:3k
5V
5V
15V
à15V
i5W1Òò
TIP
14
5
TIP
14
1
MO
TO
R
Am
pli
ficad
or
de p
ote
ncia
Co
ntr
ol
de c
orr
ien
te
Reali
menta
ciò
n d
e p
osi
ciò
n
Reali
menta
ciò
n d
e c
orr
iente
ud
0;5
[]V
àiã
à3;3
[]A
ui
u
Sen
sor
de
po
sici
ón
Inte
rfaz
de
sali
da
Figura 10.15. Diagrama de bloques e interfaces del sistema de control de posicionbasado en una computadora personal.

10.8 Control basado en una computadora personal 565
ua
à 5
5
4096i
código
Figura 10.16. Acondicionamiento de la senal de posicion entregada por el conver-tidor analogico/digital.
Interfaz de salida
De acuerdo a (10.1) la senal de control es la orden de corriente −i∗ la cual,de acuerdo a las especificaciones del motor, bien puede tomar valores en elrango de -3[A] a +3[A]. Esta senal es calculada por la computadora, la cualenvıa el dato a la tarjeta adquisitora de datos quien debe entregar el valor de−i∗ como una senal de voltaje analogico.
Una vez que el programa de computadora calcula −i∗, mediante el uso delalgoritmo de control correspondiente, se utiliza un conjunto de instruccionesque independientemente del valor de −i∗ este se restringe al rango [-3,+3][V].Despues, sabiendo que el convertidor digital/analogico es de 12 bits, se cons-truye el esquema mostrado en la figura 10.17 para encontrar que el valor de−i∗ debe enviarse al convertidor digital/analogico mediante un codigo calcu-lado como (esto se realiza en el programa de computadora):
codigoo =4096
6(−i∗) + 2048 (10.62)
Como resultado de esta orden el convertidor digital/analogico entregara unvoltaje analogico ud en el rango de 0[V] a +5[V]. Ası que se debe utilizarun circuito analogico de interfase que adapte este voltaje en el rango 0[V]a +5[V] al rango de -3[V] a +3[V] que son los valores que tomara −i∗. Deacuerdo a la figura 10.18 esto se consigue con un circuito analogico, basadoen amplificadores operacionales, que realice la siguiente operacion:
−i∗ =6
5ud − 3 (10.63)

566 10 Control de posicion de un motor de CD
Esta es la funcion que realiza el bloque “interfaz de salida” de la figura 10.151. La razon de que deba aparecer −i∗ como resultado de todas las operacionesdescritas tiene que ver con la compatibilidad de signos que deben respetar loscircuitos que en la figura 10.15 se colocan a continuacion del punto senaladocon −i∗.
4096
3à 3
2048
à iã( )
0código
Figura 10.17. Acondicionamiento de la senal −i∗ que debe ser enviada al conver-tidor digital/analogico.
5
à 3
3
à iã( )
ud
Figura 10.18. Diseno de la interfaz analogica que debe ser colocada a la salida delconvertidor digital/analogico.
1 Todos los amplificadores operacionales usados en la figura 10.15 son TL081. Lostres primeros tienen la terminal “+” conectada a tierra mientras que el conectadoa las bases de los transistores tiene la terminal “+” conectada a ui.
10.8 Control basado en una computadora personal 567
Control de corriente
El amplificador operacional mostrado en el bloque “control de corriente”de la figura 10.15 realiza la operacion indicada en (9.14) con K = 30.
Amplificador de potencia
Esta parte es identica a lo expuesto en la seccion 9.6.2.
Programa de computadora
Todos los algoritmos de control fueron programados en Borland C++. Acontinuacion se lista el codigo utilizado.
#include <stdio.h>
#include <conio.h>
#include <math.h>
#include <stdlib.h>
#include <string.h>
#include <iostream.h>
int alto,bajo,dato,salida,i;
volatile float Ts=0.005;//Periodo de muestreo
/*------------------variables para encoder----------*/
//volatile int alto_dig=0,bajo_dig=0,dato_dig=0;
volatile float y,ir,ym1,v,dv,nv,e,ninte;
volatile float inte,gc1,gc2,tiempo,perturbacion;
/*--------------------------------------------------*/
volatile float r_des=1.0,Kp=1.9434,Kv=0.1777;
//volatile float gama=2.3853,c=12.2734,b=4.8935;
volatile float gama=2.0465,c=10.3672,b=3.8935;
volatile float kp1=1.9434,ki1=9.7170;
volatile float kp2=1.3878,kd2=0.3195;
volatile long double y0;
/*-Direccion base y periodo de muestreo para la tarjeta--*/
int base=0x210;//Direccion base de la tarjeta
int lsb1=0x00;//Periodo de muestreo
int msb1=0x01;//Periodo de muestreo
568 10 Control de posicion de un motor de CD
int lsb2=0x00;//Periodo de muestreo
int msb2=0x01;//Periodo de muestreo
volatile float yy[3000];
volatile float uu[3000];
volatile float ref[3000];
FILE *fp;
char Direccion[30];
void Inicializa(void);
void EscribeArchivo(float datos1,floatdatos2,float datos3);
void Cierra(void); void main()
clrscr();
/*---------Se programa la tarjeta adquisitora--------*/
/*---Vease manual PCL 812-PG de Advantech------*/
outportb(base+11,6);
//CAD iniciada con reloj y transferencia dato por software
outportb(base+9,0);// ganancia 1
outportb(base+10,15);// Canal AD No. 15
outportb(base+3,0x77);//Programacion periodo de muestreo
outportb(base+1,lsb1);//Programacion periodo de muestreo
outportb(base+1,msb1);//Programacion periodo de muestreo
outportb(base+3,0xb7);//Programacion periodo de muestreo
outportb(base+2,lsb2);//Programacion periodo de muestreo
outportb(base+2,msb2);//Programacion periodo de muestreo
i=1;
do
// inicia ciclo de control
/*-------------Conversion AD----------------------------*/
do
while (inportb(base+5)>15);
alto=inportb(base+5);
bajo=inportb(base+4);
dato=256*alto+bajo;
y=(10.0/4096.0)*dato-5.0;//Posicion theta
tiempo=(i-1)*Ts;
/*--------Inicia lectura de encoder---------------------*/
10.8 Control basado en una computadora personal 569
// para la configuracion de entradas digitales
/*
alto_dig=inport(base+7);
alto_dig+=0xff+1;
bajo_dig=inport(base+6);
bajo_dig=(bajo_dig)&(0x00ff);
dato_dig=256*alto_dig+bajo_dig;
po_rad=((6.283185307*dato_dig)/1600);
// 1600 es el numero de cuentas por revolucion.
// gotoxy(10,10); printf("Posicion en radianes: %f",po_rad);
y=po_rad;
*/
/*-------Termina lectura encoder------------------------*/
if(i==1)
//condiciones iniciales
y0=y;
ym1=0.0;
v=0.0;
inte=0.0;
y=y-y0;//Salida fijada a cero
e=r_des-y;
/*------ Control proporcional + retro de velocidad------*/
/*
ir=Kp*(r_des-y)-Kv*(y-ym1)/Ts;
*/
/*----------- Control con red de adelanto --------------*/
/*
dv=(-c*v+(b-c)*e )*Ts;
nv=v+dv;
ir=gama*(e+v);
*/
/*---------- Control dos grados de libertad ------------*/
gc1=kp1*e+inte;
gc2=kp2*y+kd2*(y-ym1)/Ts;
ir=gc1-gc2;
ninte=inte+ki1*e*Ts;
perturbacion=0.0;
if(tiempo>1.5)
perturbacion=0.5;
ir=-ir+perturbacion;
// Saturacion de ir [-3,3][A]
if(ir>2.9 )
ir=2.9;
if(ir<-2.9)
ir=-2.9;
salida=floor(682.66*ir+2048.0);
bajo=salida & 0xff;
alto=salida & 0x0f00;
570 10 Control de posicion de un motor de CD
alto=floor(alto/256.0);
outportb(base+4,bajo); //Manda codigo_o al CDA
outportb(base+5,alto);
yy[i]=y;
uu[i]=ir-perturbacion;
ref[i]=r_des;
ym1=y;
v=nv;
inte=ninte;
i++;
while (!kbhit());// Termina ciclo de control
// while (i<=3000);
ir=0.0;// Se ordena detener el motor
salida=floor(682.66*ir+2048.0);
bajo=salida & 0xff;
alto=salida & 0x0f00;
alto=floor(alto/256.0);
outportb(base+4,bajo);
outportb(base+5,alto);
// Guarda datos en un archivo en el disco duro
cout<<i<<endl;
Inicializa();
i-=1;
for(int jj=1;jj<i;jj++)
EscribeArchivo(yy[jj],uu[jj],ref[jj]);
Cierra();
void Inicializa(void)
strcpy(Direccion,"c:\\motorcd\\sigue.txt");
if( (fp=fopen(Direccion,"w+")) == NULL)
cout<<"No se puede crear el archivo ni modo";
exit(1);
void EscribeArchivo(float datos1,float datos2,float datos3)
fprintf(fp,"%f %f %f \n",datos1,datos2,datos3);
void Cierra(void)
fclose(fp);

10.10 Preguntas de repaso 571
10.9. Resumen del capıtulo
Se ha mostrado como controlar la posicion de un motor de CD bajo elefecto de una perturbacion externa de par. Para esto se han construido doscontroladores: uno es un controlador PID clasico y el otro es un controla-dor PID modificado. Aunque ambos controladores resuelven el problema, elcontrolador PID modificado presenta un mejor desempeno. Como este contro-lador necesita el valor numerico de los parametros del motor, se explica comoidentificar de manera experimental tales parametros. En este capıtulo se hamostrado como sintonizar el controlador PID clasico usando el valor numericode los parametros del motor. Sin embargo, la principal ventaja de este contro-lador es que puede ser sintonizado a prueba y error sin necesidad de conocertales valores numericos (vease la seccion 5.3 del capıtulo 5). Por ultimo, se haconstruido un controlador PD para el seguimiento de trayectorias. Esta es unatarea compleja que necesita del conocimiento de los parametros del motor. Seha explicado de manera detallada como construir estos controladores usandoun microcontrolador y una computadora personal. La razon de usar una com-putadora personal es la construcion del controlador PD para el seguimientode trayectorias ya que se requiere del calculo de funciones sinusoidales deltiempo lo cual consume demasiado tiempo si se utiliza un microcontrolador.
Cuando se construye un sistema de control en la practica, es muy impor-tante que el procesamiento de las senales que realiza el software y el hardwareutilizados corresponda fielmente a las operaciones matematicas que indica elcontrolador. El sistema de control que se ha construido ha sido elaboradoteniendo muy en cuenta este aspecto y la cuidadosa descripcion del mismolo demuestra. Los autores pensamos que, desafortunadamente, en el medioacademico con mucha frecuencia se construyen sistemas de control de maneraun tanto descuidada. Es decir, cuando se controla la posicion de un motorde CD con frecuencia a la gente solo le interesa que el motor se mueva haciadonde se desea y poca antencion se presta a verificar que la respuesta tran-sitoria es la esperada. Normalmente la parte transitoria de la repuesta es lamas afectada por las inconsistencias introducidas en el software y el hardwarea la hora de procesar las senales correspondientes.
10.10. Preguntas de repaso
1. Considere el control PID de posicion de un motor de CD ¿Que pasarıa sila perturbacion y/o la posicion deseada no fueran constantes?
2. En robots industriales se usan controladores PID para el seguimiento detrayectorias en lugar de controladores PD ¿Como cree que se pueda con-seguir esto? ¿Que ventajas cree que tenga el uso de controladores PID enlugar de controladores PD?
3. ¿Como afectan las ganancias de un controlador PID clasico a la respues-ta de un sistema de control de posicion? Si el efecto de la perturbacion
572 10 Control de posicion de un motor de CD
externa es compensada lentamente ¿Que ajustarıa en las ganancias delcontrolador PID para acelerar este proceso?
4. En el capıtulo 9 se ha visto que un controlador PI es adecuado paracompensar el efecto de perturbaciones externas de par en sistemas decontrol de velocidad ¿Por que cree que en sistemas de control de posicionse deba usar un controlador PID en lugar de un controlador PI?
5. Mencione algunas ventajas y desventajas de usar microcontroladores ycomputadoras personales para construir controladores digitales.
6. Un motor de CD tambien se puede controlar sin usar un lazo de corrientesi se supone que la inductancia de armadura es despreciable (sobre todoen motores pequenos) ¿Que cambios tendrıa que hacer a los circuitos delas figuras 10.13 y 10.15 para trabajar sin lazo de corriente?
7. Describa el procedimiento presentado en este capıtulo para la identifica-cion experimental de los parametros de un motor de CD.
8. ¿Que es un compensador de adelanto?9. ¿Cuales son las ventajas y las desventajas de usar compensadores de ade-
lanto como controladores de posicion?10. En teorıa, la respuesta de un sistema de control de posicion se puede hacer
tan rapida y tan amortiguada como se desee usando un controlador PID¿Que problemas pueden presentarse en la practica si las ganancias de uncontrolador PID son muy grandes?

Referencias
1. DAC0800 8-bit Digital-to-Analog Converter, Data sheet, National Semiconduc-tor Corporation, 1995.
2. PIC16F877A Enhanced Flash Microcontroller, Data sheet, Microchip Techno-logy Inc., 2003.
3. Custom Computer Services Incorporated, CCS C Compiler Reference Manual,2003.
4. PCL-812PG User’s Manual, Advantech, Taiwan, 1996.5. K. Ogata, Ingenierıa de Control Moderna, 4a. edicion, Pearson Prentice-Hall,
Madrid, 2003.6. N.S. Nise, Sistemas de control para ingenierıa, 1a. edicion en espanol, 1a. Re-
impresion, CECSA, Mexico, 2004.7. J. Chiasson, Modeling and High-performance control of electric machines, IEEE
Press-Wiley Interscience, New Jersey, 2005.8. Parker Automation, Position systems and Controls, Training and Product Ca-
talog DC-ROM, Compumotor’s Virtual Classroom, 1998.

11
Control de un sistema de levitacion magnetica
Los sistemas de levitacion magnetica son equipos que permiten que uncuerpo hecho de material ferromagnetico “flote” o “levite” en el espacio sintener contacto alguno con los otros cuerpos que lo rodean. El secreto es el usode una fuerza magnetica producida por un poderoso electroiman. La principalrazon para producir tal fenomeno es el hecho de que, al no haber contactomecanico, el cuerpo que levita puede moverse sin que exista friccion y, portanto, desgaste. Este fenomeno es utilizado actualmente en multiples aplica-ciones, quiza la mas conocida es la de algunos trenes de alta velocidad.
576 11 Levitacion magnetica
Objetivos del capıtulo
Construir la totalidad de las partes que componen a un sistema de levita-cion magnetica.Construir un controlador PID usando electronica analogica.Aplicar los conceptos de control clasico a una planta que es inestable pornaturaleza.Identificar de manera experimental los parametros de un sistema relativa-mente complejo.
Actualmente los sistemas de levitacion magnetica son muy importantesdebido a la gran cantidad de aplicaciones que tienen. A estos equipos tambiense les conoce como MagLev, por la abreviacion del termino ingles “MagneticLevitation System”. Una de las principales razones para el uso de sistemas delevitacion magnetica es su capacidad para eliminar la friccion entre las partesmecanicas que lo forman. Algunos ejemplos de aplicacion son los trenes de altavelocidad que viajan flotando sobre un riel con el cual no tienen contacto [1],los rodamientos magneticos [2] que pueden eliminar la friccion y el consecuentedesgaste de las piezas mecanicas involucradas y la construccion de sistemas deposicionamiento de gran exactitud [3] gracias a que se elimina la friccion nolineal. Dada la importancia practica de estos mecanismos, con frecuencia sonutilizados como sistemas experimentales para probar el desempeno de tecnicasde control clasicas y avanzadas [4], [5], [6], [7], [8], [9].
En este capıtulo se disena un sistema de levitacion magnetica sencillo quepuede ser visto como al principio de funcionamiento de las aplicaciones men-cionadas previamente. En la figura 11.1 se muestra el sistema de levitacionmagnetica de interes. Este sistema consiste de una esfera de material ferro-magnetico que es atraıda hacia arriba por la fuerza magnetica debida a unelectroiman. Esta esfera metalica tambien recibe el efecto de la fuerza debidaa la gravedad dirigida hacia abajo. Se desea suspender o levitar a la esfera auna distancia del iman que pueda ser fijada a voluntad. Sin embargo, el prin-cipal problema para conseguirlo es que este sistema es claramente inestablecomo se explica a continuacion. Suponga que el electroiman ejerce sobre laesfera metalica una fuerza hacia arriba de magnitud constante e igual a la queejerce la gravedad hacia abajo. Entonces las fuerzas se cancelan exactamen-te y la esfera metalica permanecera suspendida en el espacio. La experienciaindica que la fuerza del electroiman es mayor conforme se esta mas cerca deel, mientras que la fuerza de la gravedad es siempre la misma. Suponga ahoraque, por alguna razon, la esfera se desplaza un poco hacia arriba respecto dela posicion en donde se encontraba flotando. Esto hace que la fuerza del elec-troiman sea mayor que la fuerza de gravedad, por lo que la esfera sera atraıdahacia el electroiman hasta quedar pegada al mismo. Por otro lado, si la esferase desplaza ligeramente hacia abajo respecto de la posicion en donde se en-contraba flotando, entonces ahora es la fuerza de la gravedad la que vence y laesfera caera hasta el suelo. Una situacion como la recien descrita es muestra
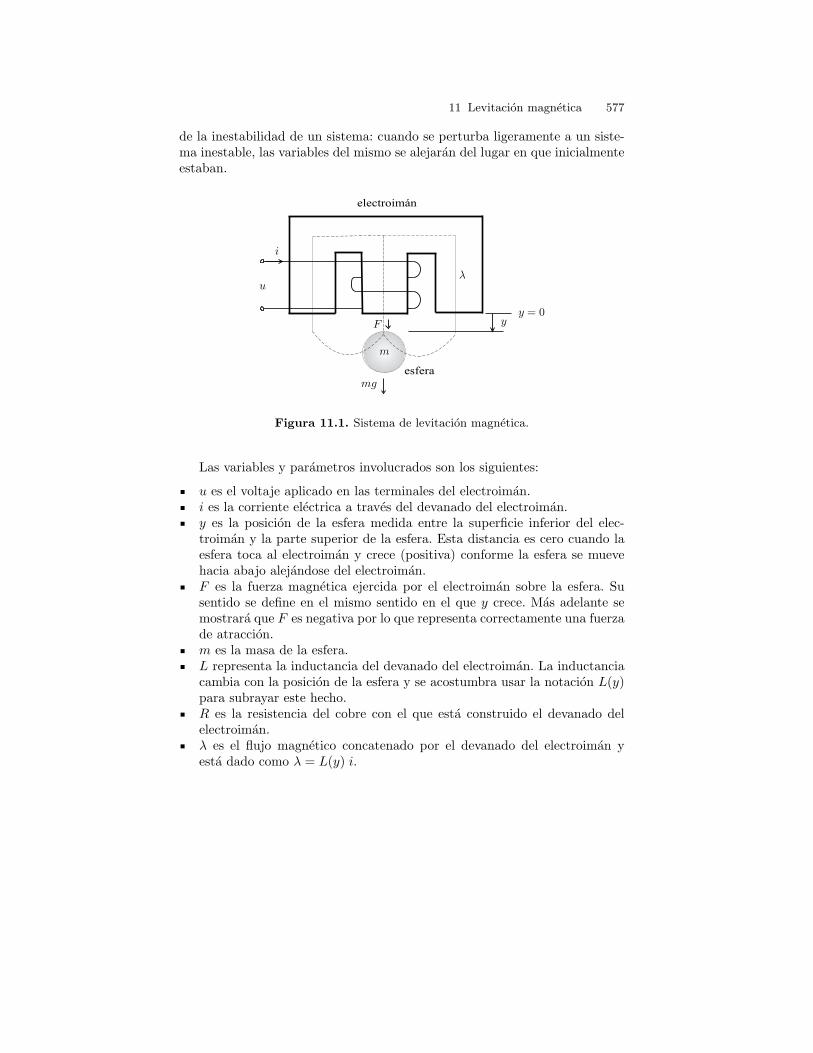
11 Levitacion magnetica 577
de la inestabilidad de un sistema: cuando se perturba ligeramente a un siste-ma inestable, las variables del mismo se alejaran del lugar en que inicialmenteestaban.
u
i
õ
F
mg
m
y = 0y
electroimán
esfera
Figura 11.1. Sistema de levitacion magnetica.
Las variables y parametros involucrados son los siguientes:
u es el voltaje aplicado en las terminales del electroiman.i es la corriente electrica a traves del devanado del electroiman.y es la posicion de la esfera medida entre la superficie inferior del elec-troiman y la parte superior de la esfera. Esta distancia es cero cuando laesfera toca al electroiman y crece (positiva) conforme la esfera se muevehacia abajo alejandose del electroiman.F es la fuerza magnetica ejercida por el electroiman sobre la esfera. Susentido se define en el mismo sentido en el que y crece. Mas adelante semostrara que F es negativa por lo que representa correctamente una fuerzade atraccion.m es la masa de la esfera.L representa la inductancia del devanado del electroiman. La inductanciacambia con la posicion de la esfera y se acostumbra usar la notacion L(y)para subrayar este hecho.R es la resistencia del cobre con el que esta construido el devanado delelectroiman.λ es el flujo magnetico concatenado por el devanado del electroiman yesta dado como λ = L(y) i.

578 11 Levitacion magnetica
11.1. Modelo matematico no lineal
Modelo del subsistema electrico
Notese que el circuito electrico del electroiman esta formado unicamentepor un circuito RL serie en el que aparecen el voltaje aplicado u, la inductanciay la resistencia del devanado del electroiman (vease la figura 11.1). Aplicandola Ley de Kirchhoff de voltajes se tiene:
voltaje aplicado =∑
caıdas de voltaje en la malla
u = caıda en la inductancia + caıda en la resistencia
u =dλ
dt+ R i (11.1)
donde se ha usado la Ley de Faraday para expresar que la caıda en la in-ductancia esta dada por la variacion respecto al tiempo del flujo concatenadodλdt .
El flujo concatenado se relaciona con la corriente electrica a traves de lainductancia del siguiente modo λ = L(y) i, donde la inductancia L(y) noes constante sino que es una funcion de la posicion de la esfera y. Como severa mas adelante, es importante saber como depende la inductancia de la po-sicion de la esfera. En [7], [8] pp.245, [10] pp. 31, se sugiere que la inductanciaesta dada como:
L(y) = k0 +k
1 + ya
(11.2)
donde a, k0 y k son constantes positivas. Es interesante darse cuenta de que k0
y k0 + k representan, respectivamente, los valores de la inductancia cuando laesfera no esta presente (y → ∞) y cuando la esfera esta pegada al electroiman(y = 0). Por tanto, conforme la esfera se aleja del electroiman la inductanciaL(y) variara como se muestra en la figura 11.2. El parametro a representala rapidez con que la inductancia varıa entre k0 + k y k0 conforme crecey. Es importante mencionar que la expresion (11.2) es propuesta de maneraempırica para ajustarse al comportamiento mostrado en la figura 11.2 y, portanto, no es la unica manera de representar a L(y). Otra funcion que tambiense propone con frecuencia es [11], [12]:
L(y) = k0 + ke−ya (11.3)
Puede elegirse cualquiera de las funciones en (11.2) o (11.3) para represen-tar a L(y) siempre que se obtenga el mejor ajuste a los datos experimentales.En la seccion 11.4.2 se explica como realizar un experimento para identifi-car los parametros de la inductancia. En este trabajo se continuara usandoel sımbolo general L(y) para representar la inductancia con el fin de queel lector tenga la posibilidad de utilizar los resultados aquı expuestos para
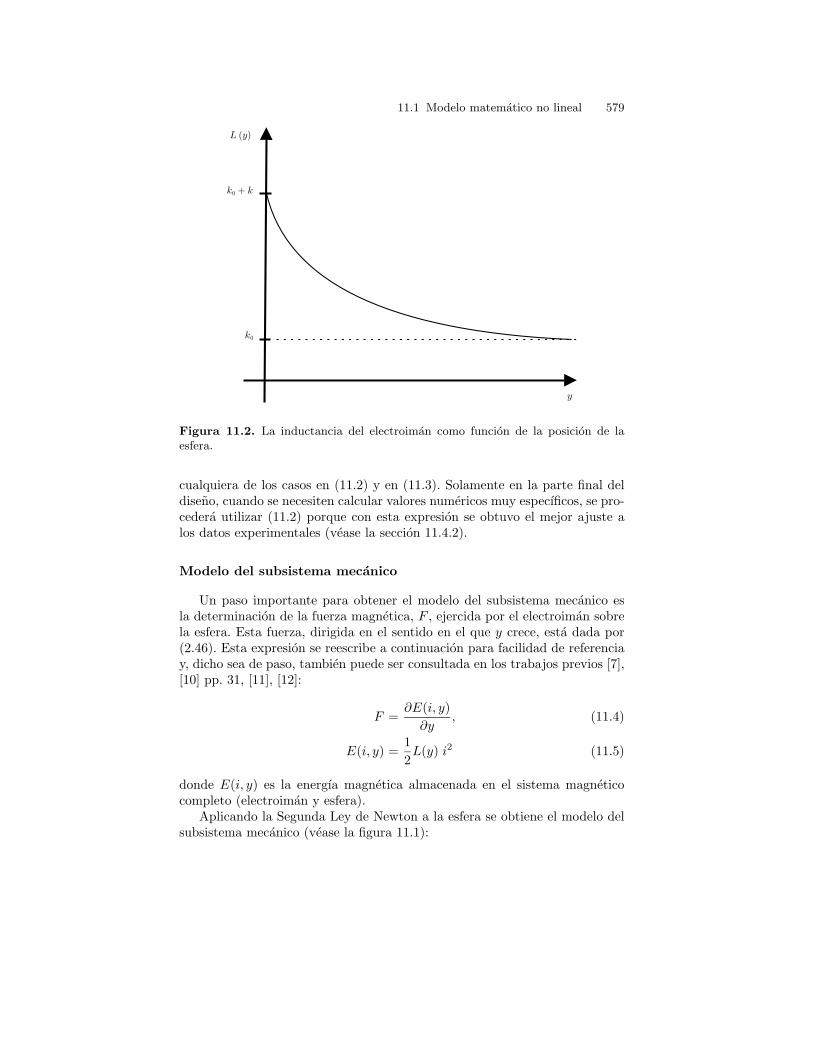
11.1 Modelo matematico no lineal 579
y
L y( )
k0 + k
k0
Figura 11.2. La inductancia del electroiman como funcion de la posicion de laesfera.
cualquiera de los casos en (11.2) y en (11.3). Solamente en la parte final deldiseno, cuando se necesiten calcular valores numericos muy especıficos, se pro-cedera utilizar (11.2) porque con esta expresion se obtuvo el mejor ajuste alos datos experimentales (vease la seccion 11.4.2).
Modelo del subsistema mecanico
Un paso importante para obtener el modelo del subsistema mecanico esla determinacion de la fuerza magnetica, F , ejercida por el electroiman sobrela esfera. Esta fuerza, dirigida en el sentido en el que y crece, esta dada por(2.46). Esta expresion se reescribe a continuacion para facilidad de referenciay, dicho sea de paso, tambien puede ser consultada en los trabajos previos [7],[10] pp. 31, [11], [12]:
F =∂E(i, y)
∂y, (11.4)
E(i, y) =1
2L(y) i2 (11.5)
donde E(i, y) es la energıa magnetica almacenada en el sistema magneticocompleto (electroiman y esfera).
Aplicando la Segunda Ley de Newton a la esfera se obtiene el modelo delsubsistema mecanico (vease la figura 11.1):

580 11 Levitacion magnetica
masa × aceleracion =∑
fuerzas sobre la esfera
md2y
dt2= fuerza del electroiman + peso de la esfera
md2y
dt2= F (i, y) + mg
md2y
dt2=
1
2
∂L(y)
∂yi2 + mg (11.6)
donde se han usado (11.4) y (11.5) para escribir:
F (i, y) =1
2
∂L(y)
∂yi2
El lector puede usar cualquiera de las expresiones en (11.2) y (11.3) paraverificar la siguiente propiedad:
∂L(y)
∂y< 0 (11.7)
para todo valor positivo de y, es decir, para cualquier posicion de la esferaque pueda ser alcanzada en la practica. Notese que el peso mg favorece elincremento de y por lo que debe aparecer con signo positivo en (11.6). Porotro lado, la fuerza F (i, y) tambien aparece afectada con un signo positivoporque se define en la direccion en la que y crece. Sin embargo, su valornegativo debido a (11.7) implica que su efecto es en contra del incremento dey, es decir, en direccion opuesta al peso de la esfera. Por tanto, la propiedaden (11.7) es indispensable para que la esfera pueda levitar venciendo el efectode la gravedad.
Por otro lado, se debe considerar el uso de un amplificador de potenciaa la entrada del electroiman (vease la seccion 9.2) y un lazo de corriente, esdecir u = Apγ(i∗ − i) donde Ap es la ganancia del amplificador de potencia,γ es la ganancia proporcional del lazo de corriente e i∗ es la corriente que sedesea circule a traves del electroiman. El proposito de usar un lazo de corrientepuede explicarse sustituyendo u = Apγ(i∗ − i) en (11.1):
Apγ(i∗ − i) =dλ
dt+ R i (11.8)
Si se elige un valor grande de γ entonces:
i∗ − i =1
Apγ
(dλ
dt+ R i
)≈ 0
por lo que se puede considerar que i = i∗, es decir, que la corriente en elelectroiman es igual a la corriente que se ha ordenado. La ventaja de esto esque ahora el sistema de control es robusto contra cambios de parametros enla dinamica electrica dada en (11.1). Por ejemplo, la resistencia del devanado

11.2 Modelo lineal aproximado 581
puede tener variaciones (incrementos) importantes debidas al calor producidopor la gran corriente electrica que normalmente se necesita para hacer levitarla esfera. Si la resistencia crece, entonces la corriente (y por tanto, la fuerzadel electroiman sobre la esfera) disminuye. Esto requiere aumentar el voltajeaplicado para incrementar la fuerza del iman sobre la bola. Como consecuen-cia, se incrementa el valor de la corriente, aumentando el calor disipado y, portanto, la resistencia vuelve a crecer. Finalmente el voltaje aplicado sera tangrande que alcanzara el valor de saturacion del amplificador de potencia y,entonces, la esfera ya no podra levitar. Al usar el lazo de corriente se con-sigue que la corriente sea igual a la corriente deseada u ordenada, i = i∗,independientemente de los cambios en la resistencia o algun otro parametroen (11.1).
Sustituyendo λ = L(y)i en (11.8) se obtiene:
L(y)di
dt= Apγi∗ − r i − ∂L(y)
∂yy i (11.9)
donde se ha definido r = R+Apγ. Entonces, el modelo del sistema de levitacionmagnetica completo esta dado por:
L(y)di
dt= Apγi∗ − r i − ∂L(y)
∂yy i (11.10)
md2y
dt2=
1
2
∂L(y)
∂yi2 + mg (11.11)
El modelo matematico en (11.10), (11.11), es no lineal porque incluye fun-ciones inversas de y y funciones cuadraticas de i. Estas caracterısticas nopermiten el uso de la transformada de Laplace para disenar el controlador.Una manera de resolver este problema es encontrando un modelo lineal querepresente, al menos de manera aproximada, al modelo no lineal en (11.10),(11.11). Sin embargo, este modelo aproximado y el controlador obtenido apartir de el solo seran de utilidad en una region de tamano reducido.
11.2. Modelo lineal aproximado
11.2.1. Obtencion de un modelo en variables de estado
De acuerdo a lo expuesto en la seccion 7.1, dado un conjunto de ecuacionesdiferenciales como (11.10), (11.11), se puede encontrar una representacion envariables de estado definiendo las componentes del vector de estado x comolas variables incognita de dichas ecuaciones diferenciales y sus primeras q − 1derivadas, donde q es el orden de la ecuacion diferencial correspondiente. Laincognita en (11.10) es i y la ecuacion es de primer orden, por tanto, soloi califica como componente del vector de estado. Por otro lado, la incognitaen (11.11) es y y la ecuacion es de segundo orden, por tanto y y y califican

582 11 Levitacion magnetica
como componentes del vector de estado. De acuerdo a lo anterior, se proponeel siguiente vector de estado:
x =
x1
x2
x3
=
iyy
(11.12)
Es importante aclarar que i∗ no es una variable de estado sino la variablede control, es decir, ahora es la entrada del sistema de levitacion magnetica.Sustituyendo en (11.10), (11.11), las variables definidas en (11.12) se puedeescribir:
x1 =1
L(x2)
(Apγi∗ − r x1 −
∂L(x2)
∂x2x3 x1
)
x2 = x3
x3 = g +1
2m
∂L(x2)
∂x2x1
2
Usando notacion vectorial se obtiene:
x = f(x, i∗) (11.13)
f(x, i∗) =
f1(x, i∗)f2(x, i∗)f3(x, i∗)
=
1L(x2)
(Apγi∗ − r x1 − ∂L(x2)
∂x2x3 x1
)
x3
g + 12m
∂L(x2)∂x2
x12
(11.14)
De acuerdo a la seccion 7.2.2, los puntos de operacion son las parejas (x∗, i∗o)que satisfacen:
f(x∗, i∗o) =
1L(x∗
2)
(Apγi∗o − r x∗
1 −∂L(x∗
2)∂x2
x∗3 x∗
1
)
x∗3
g + 12m
∂L(x∗
2)∂x2
x∗12
=
000
(11.15)
donde L(x∗2) y
∂L(x∗
2)∂x2
indican que dichas funciones estan evaluadas en x2 = x∗2.
Entonces se obtiene:
x∗3 = 0 (11.16)
x∗1 =
√2mg
−∂L(x∗
2)
∂x2
(11.17)
i∗o =r
Apγx∗
1 (11.18)
Recuerdese que −∂L(x∗
2)∂x2
> 0, debido a (11.7). El valor de x∗2 = yd se propone
ya que representa la posicion en la que se desea hacer levitar a la esfera.

11.2 Modelo lineal aproximado 583
11.2.2. Aproximacion lineal
De acuerdo a (7.29), (7.30), (7.31) en la seccion 7.2.2, el modelo no linealdado en (11.13), (11.14) puede ser aproximado por el siguiente modelo lineal:
z = Az + Bv (11.19)
A =
∂f1(x,i∗)∂x1
∂f1(x,i∗)∂x2
∂f1(x,i∗)∂x3
∂f2(x,i∗)∂x1
∂f2(x,i∗)∂x2
∂f2(x,i∗)∂x3
∂f3(x,i∗)∂x1
∂f3(x,i∗)∂x2
∂f3(x,i∗)∂x3
x=x∗,i∗=i∗o
B =
∂f1(x,i∗)∂i∗
∂f2(x,i∗)∂i∗
∂f3(x,i∗)∂i∗
x=x∗,i∗=i∗o
donde z = x − x∗ y v = i∗ − i∗o. Usando (11.14) se obtiene:
A =
a11 0 a13
0 0 1a31 a32 0
, B =
Apγ
L(x∗
2)
00
, (11.20)
a11 = − r
L(x∗2)
, a13 = − 1
L(x∗2)
∂L(x∗2)
∂x2x∗
1
a31 =1
m
∂L(x∗2)
∂x2x∗
1, a32 =1
2m
∂2L(x∗2)
∂x22
x∗21
Recuerdese que el punto de operacion x∗ = [x∗1 x∗
2 x∗3]
T , i∗o, representa cua-tro valores escalares constantes. Usando la transformada de Laplace en cadarenglon de (11.19) junto con los valores dados en (11.20) se obtiene:
Z1(s) =1
s − a11[a13Z3(s) +
Apγ
L(x∗2)
V (s)], Z2(s) =a31
s2 − a32Z1(s),
sZ2(s) = Z3(s) (11.21)
donde Z1(s), Z2(s), Z3(s), V (s) representan las transformadas de Laplace delas funciones del tiempo z1 = x1−x∗
1, z2 = x2−x∗2, z3 = x3−x∗
3 y v = i∗− i∗o,respectivamente. Combinando las expresiones en (11.21) se obtiene:
Z2(s)
V (s)=
a31ApγL(x∗
2)
s3 − a11s2 − (a32 + a31a13)s + a11a32(11.22)
La funcion de transferencia en (11.22) representa el modelo lineal aproximadoque sera utilizado para estudiar y disenar un controlador que permita levitarla esfera. Recuerdese que, de acuerdo a la seccion 7.2, todo lo que se obtenga apartir del uso de (11.22) solo sera valido si x e i∗ permanecen cerca del puntode operacion (x∗, i∗o).

584 11 Levitacion magnetica
11.3. Construccion del prototipo
A continuacion se describe la manera en que fueron construidas las partesprincipales del sistema de levitacion magnetica.
11.3.1. Esfera
La esfera debe ser de material ferromagnetico y, a la vez, debe ser suficien-temente ligera. Por otro lado, con el fin de facilitar la medicion de su posicion,la esfera no debe ser demasiado pequena. Estos requerimientos fueron satisfe-chos seleccionando una esfera de unisel de tamano adecuado (aproximadamen-te 0.03[m] de diametro), de acuerdo al sensor de posicion que sera construido,y se procedio a cubrir toda su superficie con material ferromagnetico. Estoultimo se consiguio insertando pequenas tachuelas de acero sobre la superfi-cie de la esfera. Aunque no se consiguio una superficie esferica perfectamentelisa (quedan espacios no ferromagneticos entre las tachuelas), sin embargo,los resultados muestran que lo obtenido es suficiente. Con el fin de evitar eldesprendimiento de las tachuelas estas se insertaron agregando pegamento.
11.3.2. Electroiman
Se utilizo un transformador al cual se le realizaron las siguientes modifi-caciones. Como la mayorıa de los transformadores, el transformador originalconstaba de un nucleo formado por laminas en forma de E las cuales estabancolocadas en forma encontrada. Esto permite formar un circuito magnetico condos ramas con una dispersion despreciable de las lıneas de campo magnetico.Se procedio a desmontar el nucleo para colocar todas las laminas en formade E en una sola direccion como se muestra en la figura 11.1. Esto permi-te que la esfera al levitar cierre convenientemente el circuito magnetico delelectroiman generandose de esta manera una fuerza magnetica de atracciondel electroiman sobre la esfera. El devanado del electroiman se construyo en-rollando alambre magneto del numero 19. Esto debe hacerse de manera quelas espiras queden perfectamente acomodadas una a lado de la otra, sin quequede una sobre la otra, y formando tantas capas como lo permita el espaciolibre que hay en las laminas en forma de E. Las dimensiones del transformadorutilizado fueron seleccionadas mediante experimentacion: una vez que se haseleccionado la esfera a levitar se verifica si, con las fuentes de alimentacion delas que se dispone, el transformador es capaz de generar una suficiente fuerzade atraccion sobre la esfera. Tambien debe verificarse que el calentamiento delelectroiman obtenido no sea exagerado.
11.3.3. Sensor de posicion
El componente principal es una simple fotorresistencia que se conecta enserie con una resistencia fija para formar un divisor de tension (vease la figura
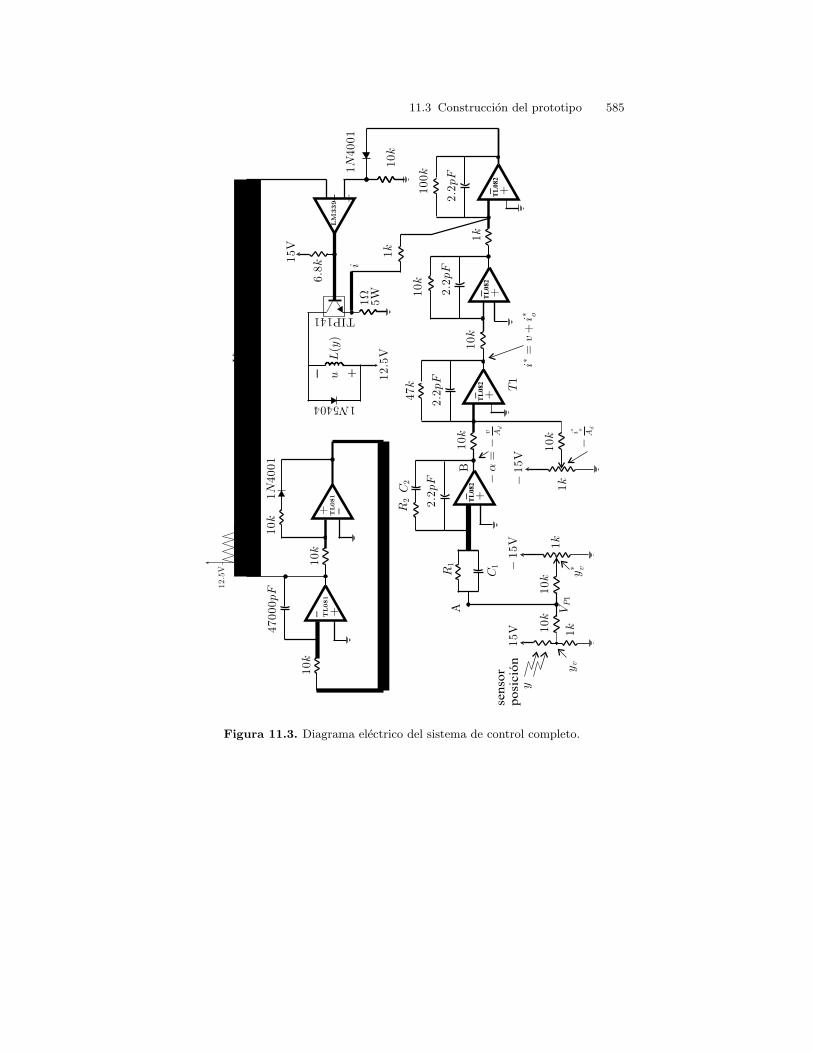
11.3 Construccion del prototipo 585
à +
1k
TL
08
2
à
+
15V
à15V
10k
10k
1k
2:2pF à15V
1k
10k
10k
2:2pF
47k
10k
10k
10k
47000pF
1N4001
12:5V
t
AB
T1
y
senso
rposi
ció
n
R2
R1
C2
C1
à +TL
08
2
à+ TL081
àà +TL081
àà +
à +TL
08
2
2:2pF
2:2pF
à +TL
08
2
LM
339
iã=v+iã o
àAd
iã o
10k
1k
1k
10k
100k1N4001
10k
6:8k15V
1Ò
5W
TIP141
u 12:5V
1N5404
i
L(y)
àë=à
Ad
v
yv
yã v
VP1
Vt
Figura 11.3. Diagrama electrico del sistema de control completo.

586 11 Levitacion magnetica
11.3). La fotorresistencia se coloca dentro de una pelota de Ping-Pong paraaprovechar la dispersion de luz que su superficie consigue. De esta manera,aunque la fotorresistencia es relativamente pequena, sin embargo se obtieneuna variacion uniforme de la luz que incide sobre ella en un amplio rangode posiciones de la esfera. En este sentido, el diametro de la esfera de uniselutilizada para construir la esfera en la seccion 11.3.1 es igual al diametrode la pelota de Ping-Pong. El conjunto se coloca en un extremo de un tubometalico de 0.10[m] de longitud cuyo diametro se ajusta perfectamente a lapelota de Ping-Pong. Las paredes interiores del tubo se cubren con cartulinanegra. La parte de la pelota de Ping-Pong que queda fuera del tubo se pinta denegro. Todo esto permite disminuir la posibilidad de interferencias luminosas.Frente al otro extremo del tubo se coloca una lampara de luz visible. Elconjunto se coloca del siguiente modo. Cuando la esfera toca al electroiman laluz de la lampara es completamente obstruida y la fotorresistencia no recibeluz, por lo que su resistencia es muy grande. Conforme la esfera se aleja(hacia abajo) del electroiman la cantidad de luz que llega desde la lamparahasta la fotorresistencia aumenta, por lo que su resistencia disminuye cada vezmas. Esto permite que el voltaje en el punto yv de la figura 11.3 aumente alaumentar la posicion de la esfera (crece al alejarse la esfera del electroiman).Es interesante darse cuenta que no es necesario un sistema optico basadoen algun tipo de luz no visible (infrarroja) si se asegura que se ha reducidoconsiderablemente la posibilidad de interferencias luminosas. El voltaje yv
representa la medicion en volts de la posicion y en metros (recuerdese quey = x2). El valor deseado de posicion se fija con el voltaje y∗
v en la figura 11.3mediante el uso de un potenciometro. Las dos resistencias entre los puntosyv y y∗
v de la figura 11.3 permiten que el voltaje VP1 en la misma figurasea igual a 1
2z2v, donde z2v = yv − y∗v es el error de posicion medido en
volts (vease el ejercicio 5 en el capıtulo 2). Para obtener estos resultados esrecomendable que cada una de estas resistencias (de 10[KOhm]) sean variasveces mas grandes que las resistencias que estan en serie con la fotorresistenciay con el potenciometro que fija a y∗
v . Por otro lado, las dos resistencias de10[KOhm] deben ser al menos seis veces mas chicas que el valor de R1. Larelacion entre z2v y el error de posicion medido en metros z2 = x2 − x∗
2
esta dada por la ganancia del sensor optico As, es decir:
z2v = Asz2 (11.23)
11.3.4. Controlador
De acuerdo a lo visto en la seccion 8.2, el amplificador operacional colocadoentre los puntos A y B de la figura 11.3 constituye un controlador PID que,ademas, introduce un cambio de signo. Mas adelante, en este capıtulo, seexplica como seleccionar los valores de R1, R2, C1 y C2.
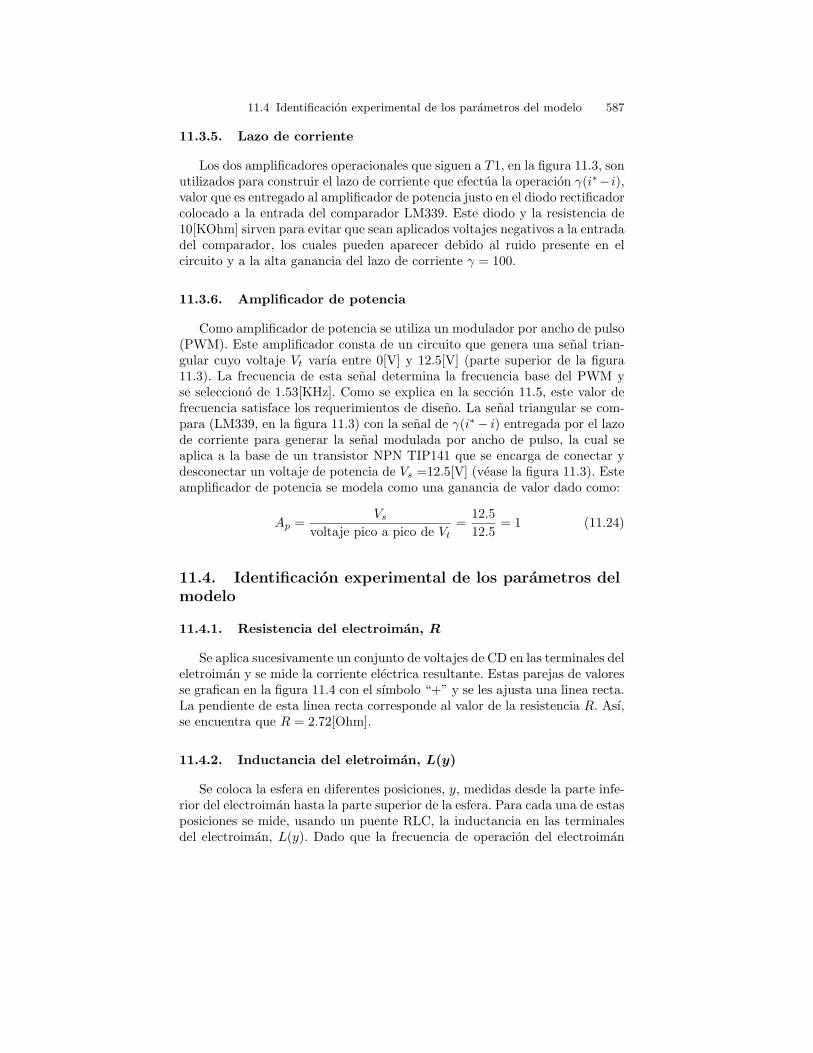
11.4 Identificacion experimental de los parametros del modelo 587
11.3.5. Lazo de corriente
Los dos amplificadores operacionales que siguen a T1, en la figura 11.3, sonutilizados para construir el lazo de corriente que efectua la operacion γ(i∗−i),valor que es entregado al amplificador de potencia justo en el diodo rectificadorcolocado a la entrada del comparador LM339. Este diodo y la resistencia de10[KOhm] sirven para evitar que sean aplicados voltajes negativos a la entradadel comparador, los cuales pueden aparecer debido al ruido presente en elcircuito y a la alta ganancia del lazo de corriente γ = 100.
11.3.6. Amplificador de potencia
Como amplificador de potencia se utiliza un modulador por ancho de pulso(PWM). Este amplificador consta de un circuito que genera una senal trian-gular cuyo voltaje Vt varıa entre 0[V] y 12.5[V] (parte superior de la figura11.3). La frecuencia de esta senal determina la frecuencia base del PWM yse selecciono de 1.53[KHz]. Como se explica en la seccion 11.5, este valor defrecuencia satisface los requerimientos de diseno. La senal triangular se com-para (LM339, en la figura 11.3) con la senal de γ(i∗ − i) entregada por el lazode corriente para generar la senal modulada por ancho de pulso, la cual seaplica a la base de un transistor NPN TIP141 que se encarga de conectar ydesconectar un voltaje de potencia de Vs =12.5[V] (vease la figura 11.3). Esteamplificador de potencia se modela como una ganancia de valor dado como:
Ap =Vs
voltaje pico a pico de Vt=
12.5
12.5= 1 (11.24)
11.4. Identificacion experimental de los parametros delmodelo
11.4.1. Resistencia del electroiman, R
Se aplica sucesivamente un conjunto de voltajes de CD en las terminales deleletroiman y se mide la corriente electrica resultante. Estas parejas de valoresse grafican en la figura 11.4 con el sımbolo “+” y se les ajusta una linea recta.La pendiente de esta linea recta corresponde al valor de la resistencia R. Ası,se encuentra que R = 2.72[Ohm].
11.4.2. Inductancia del eletroiman, L(y)
Se coloca la esfera en diferentes posiciones, y, medidas desde la parte infe-rior del electroiman hasta la parte superior de la esfera. Para cada una de estasposiciones se mide, usando un puente RLC, la inductancia en las terminalesdel electroiman, L(y). Dado que la frecuencia de operacion del electroiman

588 11 Levitacion magnetica
i A[ ]
uV[ ]
Figura 11.4. Medicion experimental de R.
sera de 1.53[KHz], debido a la frecuencia del amplificador de potencia tipoPWM, estas mediciones de inductancia fueron realizadas usando una frecuen-cia de 1[KHz] en el puente RLC. Esta es la frecuencia mas cercana a 1.53[KHz]que permite seleccionar el puente RLC utilizado. En la figura 11.5 se mues-tran graficados con el sımbolo “+” los datos experimentales encontrados. Acontinuacion se proponen diferentes conjuntos de valores para los parametrosk0, k, a y con cada uno de ellos se calcula la funcion L(y) dada en (11.2)para los valores de y utilizados en el experimento. En la figura 11.5 se mues-tran con lınea continua los valores de L(y) que mejor se ajustaron a los datosexperimentales. Los parametros utilizados para conseguir este ajuste son:
k0 = 36.3 × 10−3[H], k = 3.5 × 10−3[H], a = 5.2 × 10−3[m] (11.25)
11.4.3. Ganancia del sensor de posicion, As
Se coloca la esfera a diferentes distancias, y, respecto de la superficie infe-rior del electroiman. Para cada una de estas posiciones se mide el voltaje yv
de la figura 11.3. En la figura 11.6 se grafican con el sımbolo “+” los datosexperimentales obtenidos. A estos puntos se les ajusta una lınea recta queresulta tener una pendiente de 100[V/m]. Esto significa que la ganancia delsensor es:
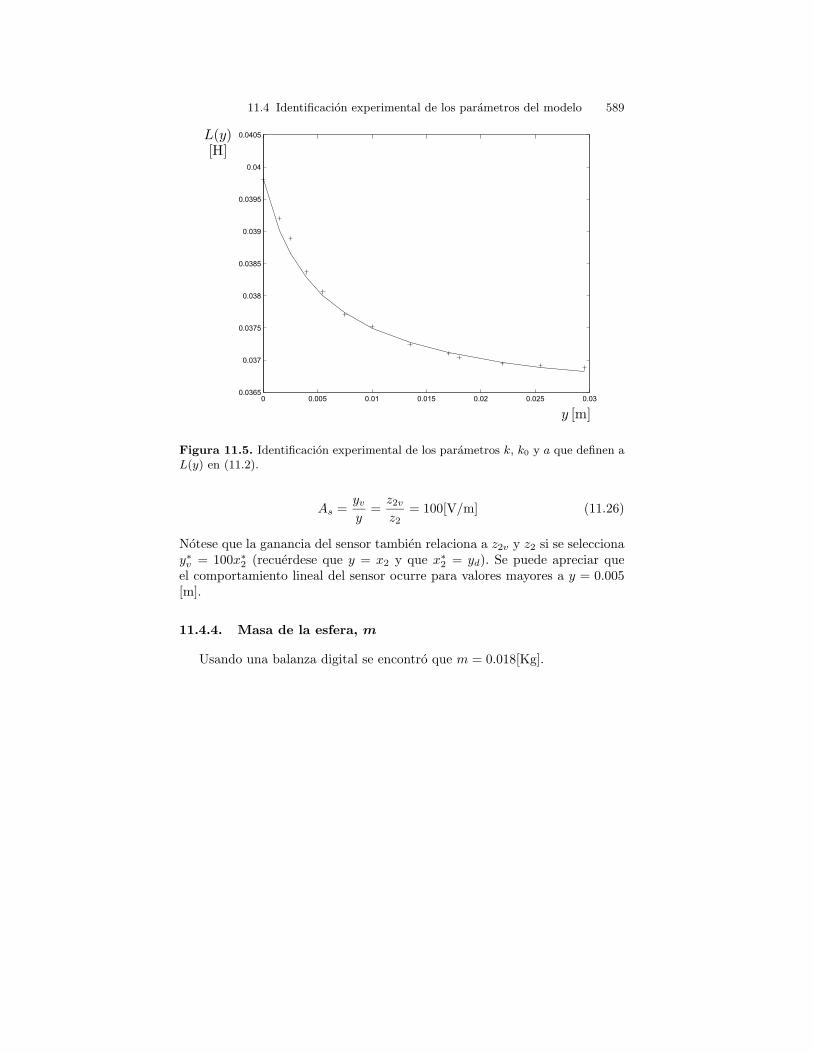
11.4 Identificacion experimental de los parametros del modelo 589
y m[ ]
L(y)H[ ]
Figura 11.5. Identificacion experimental de los parametros k, k0 y a que definen aL(y) en (11.2).
As =yv
y=
z2v
z2= 100[V/m] (11.26)
Notese que la ganancia del sensor tambien relaciona a z2v y z2 si se seleccionay∗
v = 100x∗2 (recuerdese que y = x2 y que x∗
2 = yd). Se puede apreciar queel comportamiento lineal del sensor ocurre para valores mayores a y = 0.005[m].
11.4.4. Masa de la esfera, m
Usando una balanza digital se encontro que m = 0.018[Kg].
590 11 Levitacion magnetica
y m[ ]
yvV[ ]
Figura 11.6. Identificacion experimental de As.
11.5. Diseno del controlador
Primero se debe calcular el punto de operacion deseado. Esto se consigueproponiendo el valor deseado de posicion x∗
2 = yd = 0.01[m] y usando (11.16),(11.17), (11.18) para encontrar x∗
1 = 2.1174[A], x∗3 = 0[m/s], i∗o = 2.1749[A].
Por otro lado, el amplificador operacional marcado con T1 realiza la ope-racion i∗ = v + i∗o, donde v es la senal entregada por el controlador. Esteamplificador operacional introduce una ganancia adicional de valor Ad = 4.7,la cual debe considerarse como una ganancia en cascada con el controlador.Usando los valores numericos mostrados en la seccion 11.4, en (11.24), ası co-mo γ = 100, se puede hacer uso de las expresiones en (11.20) para encontrarque la funcion de transferencia en (11.22) esta dada como:
Z2(s)
V (s)=
−24710
s3 + 2739s2 − 1250s − 3.536 × 106(11.27)
Defınase la siguiente variable:
α(s) =1
AdV (s) (11.28)
Entonces usando (11.27), (11.28) y Ad = 4.7 se puede escribir:
Z2(s)
α(s)=
−24710 × 4.7
s3 + 2739s2 − 1250s − 3.536 × 106(11.29)

11.5 Diseno del controlador 591
Los polos correspondientes estan ubicados en:
s1 = 35.9, s2 = −2739.4, s3 = −35.9 (11.30)
lo cual implica que el sistema de levitacion magnetica es inestable en lazoabierto, tal como se habıa pronosticado al principio del presente capıtulo. Poresta razon, el principal proposito de disenar un controlador consiste en con-seguir que el sistema de control completo sea estable en lazo cerrado. El poloen s2 = −2739.4 corresponde a la parte electrica del sistema de levitacionmagnetica y es muy grande comparado con los otros dos polos (correspon-dientes a la parte mecanica) debido a que se esta usando un lazo de corrientede alta ganancia (γ = 100). Sin embargo, con el fin de seleccionar la frecuenciacorrecta para el amplificador de potencia por modulacion de ancho de pulso sedebe obtener el polo correspondiente a la dinamica electrica antes de aplicarel lazo de corriente. Regresando a (11.1) y usando λ = L(y)i, se encuentra:
L(y)di
dt= u − R i − ∂L(y)
∂yy i
Dado que se trata de una ecuacion diferencial de primer orden en la variable i,a partir de esta expresion se concluye que la constante de tiempo de la dinami-
ca electrica en lazo abierto (en el punto de operacion) esta dada porL(x∗
2)R .
Por tanto, el polo de lazo abierto (antes de aplicar el lazo de corriente) de ladinamica electrica esta en s = − R
L(x∗
2) = −72.5384. Esto significa que el ancho
de banda de la planta a controlar es 72.5384[rad/s] ya que los otros dos polos,correspondientes a la parte mecanica, son mas cercanos al origen en el planos. Es importante asegurar que la planta solo respondera al valor medio de lasenal modulada por ancho de pulso entregada por el amplificador de poten-cia. Esto se consigue si la frecuencia del amplificador de potencia 1.53[KHz],cuando se expresa en radianes por segundo, es muy grande comparada con72.5384[rad/s] lo cual es cierto porque:
72.5384[rad/s] ≪ 1.53 × 103 × 2π = 9613[rad/s]
Finalmente, una caracterıstica importante de la funcion de transferencia en(11.29) es que tiene ganancia negativa. Esto se debe a que incrementos en lavariable de entrada producen decrementos en la variable de salida y viceversa,como se explica a continuacion. Si la corriente ordenada i∗ aumenta, es decirsi v = i∗− i∗o crece, entonces aumenta la fuerza del electroiman sobre la esferapor lo que esta sube y su posicion z2 = x2 − x∗
2 disminuye.En la figura 11.7(a) se muestra el diagrama de bloques propuesto del sis-
tema de control completo. Notese que se esta utilizando realimentacion po-sitiva de la salida. La razon por la que se propone este diagrama de bloquessera comprendida conforme se realice el analisis que sigue a continuacion.
Notese que se pueden combinar (11.23) y (11.29) para obtener:
Z2v(s)
α(s)=
−24710 × 4.7As
s3 + 2739s2 − 1250s − 3.536 × 106
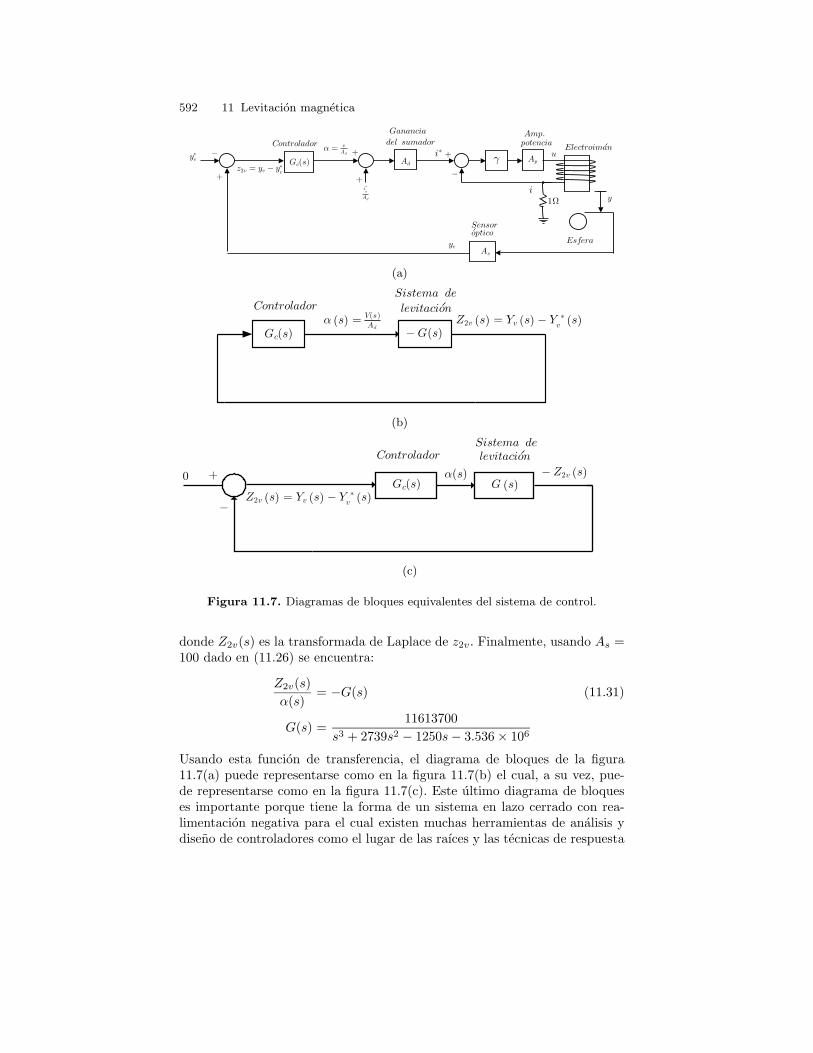
592 11 Levitacion magnetica
à
+
Gc(s)+
+
y
Sensoroptico
Controlador del sumadorAmp:potencia
Electroiman
Esfera
ë =Ad
v
AdAp
As
Ganancia
yãvz2v = yv à yãv
u
yv
í+
à
iã
i1Ò
Ad
ião
ï
(a)
Gc(s)
Controlador
àG(s)
Sistema de
levitacionë s( ) = Ad
V s( ) Z2v s( ) = Yv s( ) à Y ãv s( )
(b)
Gc(s)
ControladorSistema de
ë(s)
à
+0
Z2v s( ) = Yv s( ) à Y ãv s( )
à Z2v s( )
levitacion
G s( )
(c)
Figura 11.7. Diagramas de bloques equivalentes del sistema de control.
donde Z2v(s) es la transformada de Laplace de z2v. Finalmente, usando As =100 dado en (11.26) se encuentra:
Z2v(s)
α(s)= −G(s) (11.31)
G(s) =11613700
s3 + 2739s2 − 1250s − 3.536 × 106
Usando esta funcion de transferencia, el diagrama de bloques de la figura11.7(a) puede representarse como en la figura 11.7(b) el cual, a su vez, pue-de representarse como en la figura 11.7(c). Este ultimo diagrama de bloqueses importante porque tiene la forma de un sistema en lazo cerrado con rea-limentacion negativa para el cual existen muchas herramientas de analisis ydiseno de controladores como el lugar de las raıces y las tecnicas de respuesta
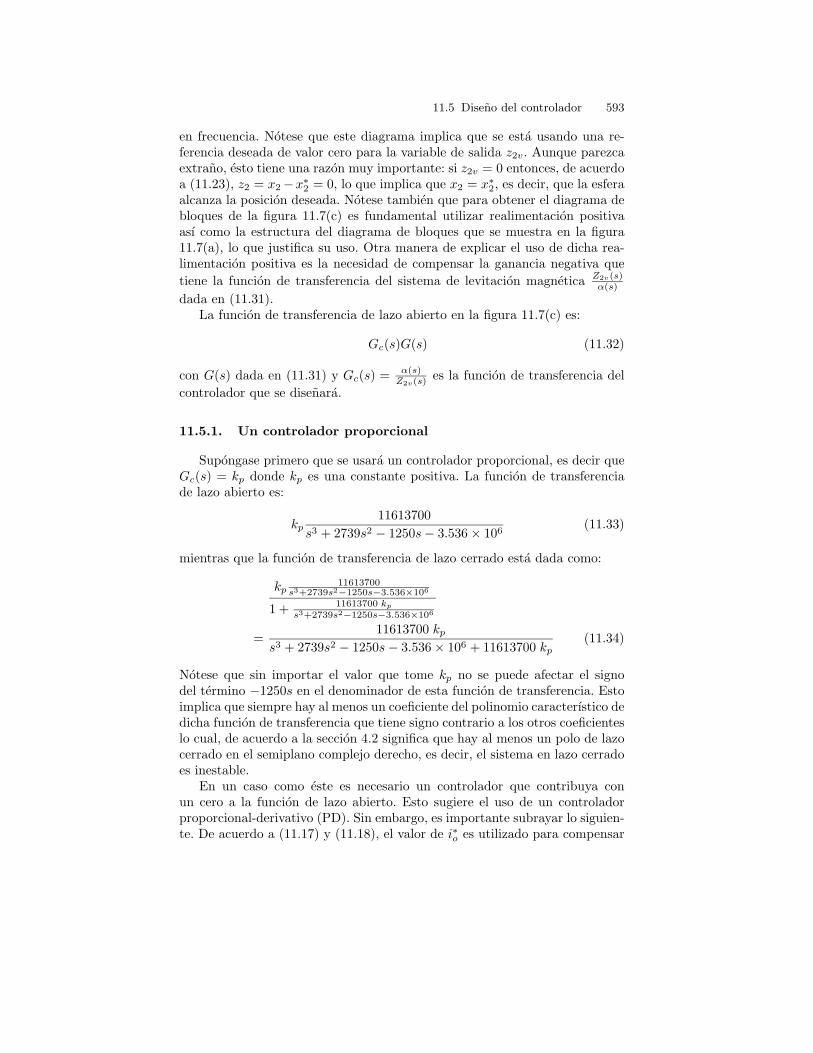
11.5 Diseno del controlador 593
en frecuencia. Notese que este diagrama implica que se esta usando una re-ferencia deseada de valor cero para la variable de salida z2v. Aunque parezcaextrano, esto tiene una razon muy importante: si z2v = 0 entonces, de acuerdoa (11.23), z2 = x2 −x∗
2 = 0, lo que implica que x2 = x∗2, es decir, que la esfera
alcanza la posicion deseada. Notese tambien que para obtener el diagrama debloques de la figura 11.7(c) es fundamental utilizar realimentacion positivaası como la estructura del diagrama de bloques que se muestra en la figura11.7(a), lo que justifica su uso. Otra manera de explicar el uso de dicha rea-limentacion positiva es la necesidad de compensar la ganancia negativa que
tiene la funcion de transferencia del sistema de levitacion magnetica Z2v(s)α(s)
dada en (11.31).La funcion de transferencia de lazo abierto en la figura 11.7(c) es:
Gc(s)G(s) (11.32)
con G(s) dada en (11.31) y Gc(s) = α(s)Z2v(s) es la funcion de transferencia del
controlador que se disenara.
11.5.1. Un controlador proporcional
Supongase primero que se usara un controlador proporcional, es decir queGc(s) = kp donde kp es una constante positiva. La funcion de transferenciade lazo abierto es:
kp11613700
s3 + 2739s2 − 1250s − 3.536 × 106(11.33)
mientras que la funcion de transferencia de lazo cerrado esta dada como:
kp11613700
s3+2739s2−1250s−3.536×106
1 +11613700 kp
s3+2739s2−1250s−3.536×106
=11613700 kp
s3 + 2739s2 − 1250s − 3.536 × 106 + 11613700 kp(11.34)
Notese que sin importar el valor que tome kp no se puede afectar el signodel termino −1250s en el denominador de esta funcion de transferencia. Estoimplica que siempre hay al menos un coeficiente del polinomio caracterıstico dedicha funcion de transferencia que tiene signo contrario a los otros coeficienteslo cual, de acuerdo a la seccion 4.2 significa que hay al menos un polo de lazocerrado en el semiplano complejo derecho, es decir, el sistema en lazo cerradoes inestable.
En un caso como este es necesario un controlador que contribuya conun cero a la funcion de lazo abierto. Esto sugiere el uso de un controladorproporcional-derivativo (PD). Sin embargo, es importante subrayar lo siguien-te. De acuerdo a (11.17) y (11.18), el valor de i∗o es utilizado para compensar

594 11 Levitacion magnetica
de manera exacta el efecto de la gravedad y ası conseguir que el error en estadoestacionario sea cero, es decir que y = yd cuando el tiempo sea suficientemente
grande. Por tanto, cualquier incertidumbre en los valores de mg, de∂L(x∗
2)∂x2
ode la ganancia Ad resultara en un error de estado estacionario diferente decero. Una manera eficiente de resolver este problema es usando un controladorque incluya una accion integral sobre el error de posicion. Por esta razon, acontinuacion se disena un controlador PID.
11.5.2. Un controlador proporcional-integral-derivativo (PID)
El controlador propuesto tiene la siguiente forma:
Gc(s) = kd
(s2 +
kp
kds + ki
kd
s
)(11.35)
En la seccion 5.2.7 se ha encontrado el lugar de las raıces correspondiente a lafuncion de transferencia de lazo abierto Gc(s)G(s) con G(s) dada en (11.31)y Gc(s) dada en (11.35) cuando se elige:
kp
kd= 31.24,
ki
kd=
31.24
0.8(11.36)
De acuerdo a lo encontrado en la seccion 5.2.7, todos los polos de lazo cerradotienen parte real negativa para valores de kd que satisfacen kd > 0.01. En latabla 11.1 se muestran los valores seleccionados de kd y las correspondientesganancias del controlador PID obtenidas usando (11.36).
El controlador PID se construye usando el amplificador operacional colo-cado entre los puntos A y B de la figura 11.3. De acuerdo a la seccion 8.2, lasganancias de este controlador estan dadas como:
κp =R2
R1+
C1
C2, κd = R2C1, κi =
1
R1C2(11.37)
Por otro lado, en la seccion 11.3.3 se indico que las dos resistencias de10[KOhm] conectadas al punto VP1 introducen una ganancia igual a 1/2. Co-mo esta ganancia debe ser considerada como parte del controlador en (11.35)se concluye que:
kp =κp
2, kd =
κd
2, ki =
κi
2(11.38)
Usando (11.37) y (11.38) se calculan los valores de R1, R2, C1 y C2 mos-trados en la tabla 11.1. En esa misma tabla se muestran los valores que seusaron experimentalmente para estos elementos de circuito. Estos valores seconsiguieron combinando resistencias y capacitores de los siguientes valorescomerciales: 330[KOhm] y 330[KOhm] (en paralelo), 22[KOhm] y 47[KOhm](en serie), 47[KOhm] y 33[KOhm] (en serie), 470[KOhm] y 330[KOhm] (enserie), varios capacitores de 0.1[µF] en paralelo, un capacitor de 1[µF] y doscapacitores de 1[µF] en serie.
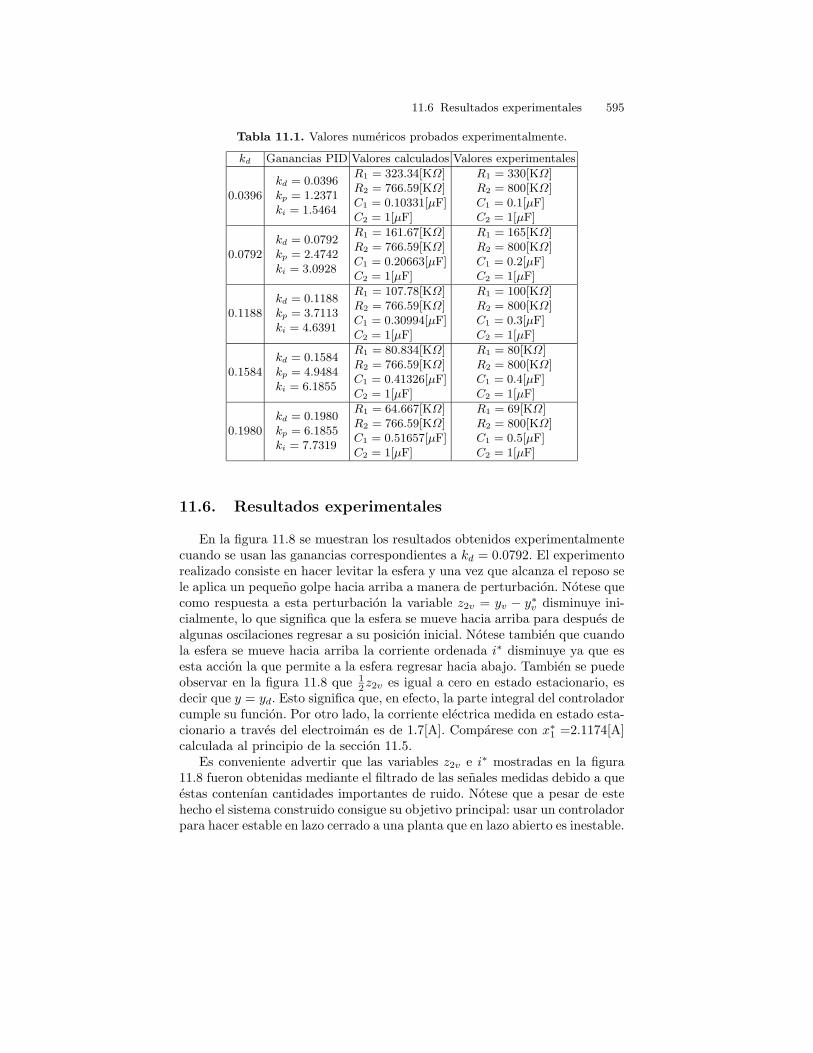
11.6 Resultados experimentales 595
Tabla 11.1. Valores numericos probados experimentalmente.
kd Ganancias PID Valores calculados Valores experimentales
0.0396kd = 0.0396kp = 1.2371ki = 1.5464
R1 = 323.34[KΩ]R2 = 766.59[KΩ]C1 = 0.10331[µF]C2 = 1[µF]
R1 = 330[KΩ]R2 = 800[KΩ]C1 = 0.1[µF]C2 = 1[µF]
0.0792kd = 0.0792kp = 2.4742ki = 3.0928
R1 = 161.67[KΩ]R2 = 766.59[KΩ]C1 = 0.20663[µF]C2 = 1[µF]
R1 = 165[KΩ]R2 = 800[KΩ]C1 = 0.2[µF]C2 = 1[µF]
0.1188kd = 0.1188kp = 3.7113ki = 4.6391
R1 = 107.78[KΩ]R2 = 766.59[KΩ]C1 = 0.30994[µF]C2 = 1[µF]
R1 = 100[KΩ]R2 = 800[KΩ]C1 = 0.3[µF]C2 = 1[µF]
0.1584kd = 0.1584kp = 4.9484ki = 6.1855
R1 = 80.834[KΩ]R2 = 766.59[KΩ]C1 = 0.41326[µF]C2 = 1[µF]
R1 = 80[KΩ]R2 = 800[KΩ]C1 = 0.4[µF]C2 = 1[µF]
0.1980kd = 0.1980kp = 6.1855ki = 7.7319
R1 = 64.667[KΩ]R2 = 766.59[KΩ]C1 = 0.51657[µF]C2 = 1[µF]
R1 = 69[KΩ]R2 = 800[KΩ]C1 = 0.5[µF]C2 = 1[µF]
11.6. Resultados experimentales
En la figura 11.8 se muestran los resultados obtenidos experimentalmentecuando se usan las ganancias correspondientes a kd = 0.0792. El experimentorealizado consiste en hacer levitar la esfera y una vez que alcanza el reposo sele aplica un pequeno golpe hacia arriba a manera de perturbacion. Notese quecomo respuesta a esta perturbacion la variable z2v = yv − y∗
v disminuye ini-cialmente, lo que significa que la esfera se mueve hacia arriba para despues dealgunas oscilaciones regresar a su posicion inicial. Notese tambien que cuandola esfera se mueve hacia arriba la corriente ordenada i∗ disminuye ya que esesta accion la que permite a la esfera regresar hacia abajo. Tambien se puedeobservar en la figura 11.8 que 1
2z2v es igual a cero en estado estacionario, esdecir que y = yd. Esto significa que, en efecto, la parte integral del controladorcumple su funcion. Por otro lado, la corriente electrica medida en estado esta-cionario a traves del electroiman es de 1.7[A]. Comparese con x∗
1 =2.1174[A]calculada al principio de la seccion 11.5.
Es conveniente advertir que las variables z2v e i∗ mostradas en la figura11.8 fueron obtenidas mediante el filtrado de las senales medidas debido a queestas contenıan cantidades importantes de ruido. Notese que a pesar de estehecho el sistema construido consigue su objetivo principal: usar un controladorpara hacer estable en lazo cerrado a una planta que en lazo abierto es inestable.
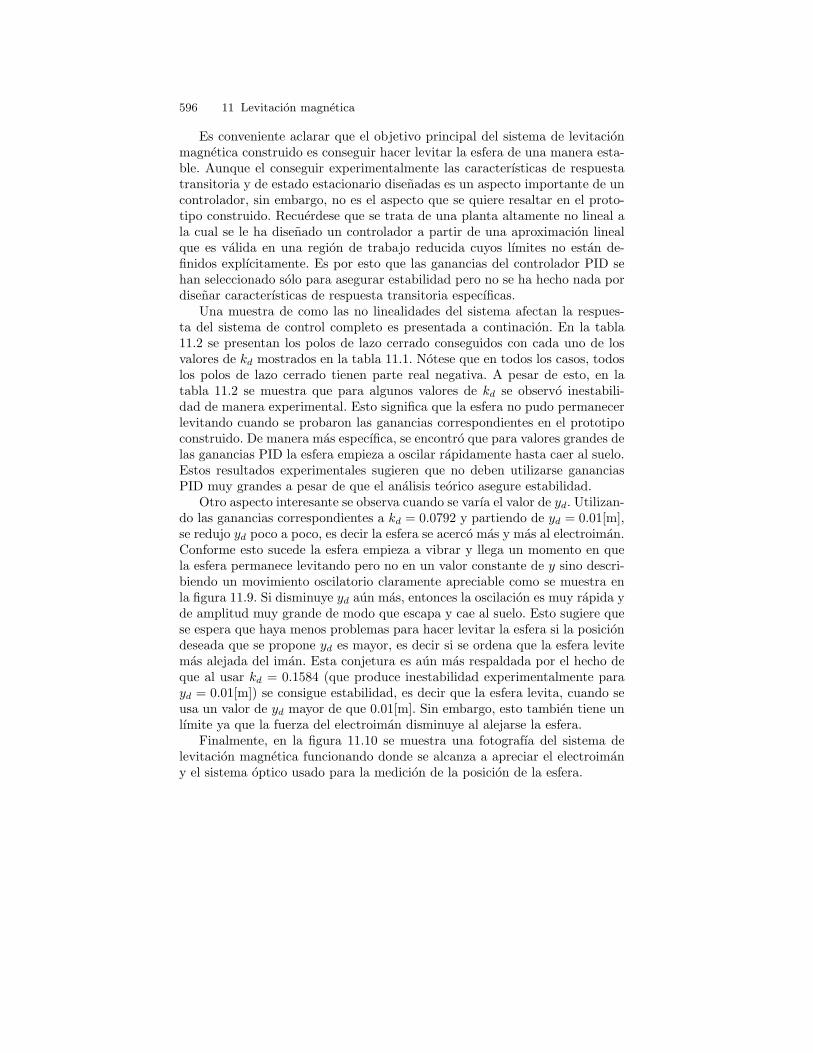
596 11 Levitacion magnetica
Es conveniente aclarar que el objetivo principal del sistema de levitacionmagnetica construido es conseguir hacer levitar la esfera de una manera esta-ble. Aunque el conseguir experimentalmente las caracterısticas de respuestatransitoria y de estado estacionario disenadas es un aspecto importante de uncontrolador, sin embargo, no es el aspecto que se quiere resaltar en el proto-tipo construido. Recuerdese que se trata de una planta altamente no lineal ala cual se le ha disenado un controlador a partir de una aproximacion linealque es valida en una region de trabajo reducida cuyos lımites no estan de-finidos explıcitamente. Es por esto que las ganancias del controlador PID sehan seleccionado solo para asegurar estabilidad pero no se ha hecho nada pordisenar caracterısticas de respuesta transitoria especıficas.
Una muestra de como las no linealidades del sistema afectan la respues-ta del sistema de control completo es presentada a continacion. En la tabla11.2 se presentan los polos de lazo cerrado conseguidos con cada uno de losvalores de kd mostrados en la tabla 11.1. Notese que en todos los casos, todoslos polos de lazo cerrado tienen parte real negativa. A pesar de esto, en latabla 11.2 se muestra que para algunos valores de kd se observo inestabili-dad de manera experimental. Esto significa que la esfera no pudo permanecerlevitando cuando se probaron las ganancias correspondientes en el prototipoconstruido. De manera mas especıfica, se encontro que para valores grandes delas ganancias PID la esfera empieza a oscilar rapidamente hasta caer al suelo.Estos resultados experimentales sugieren que no deben utilizarse gananciasPID muy grandes a pesar de que el analisis teorico asegure estabilidad.
Otro aspecto interesante se observa cuando se varıa el valor de yd. Utilizan-do las ganancias correspondientes a kd = 0.0792 y partiendo de yd = 0.01[m],se redujo yd poco a poco, es decir la esfera se acerco mas y mas al electroiman.Conforme esto sucede la esfera empieza a vibrar y llega un momento en quela esfera permanece levitando pero no en un valor constante de y sino descri-biendo un movimiento oscilatorio claramente apreciable como se muestra enla figura 11.9. Si disminuye yd aun mas, entonces la oscilacion es muy rapida yde amplitud muy grande de modo que escapa y cae al suelo. Esto sugiere quese espera que haya menos problemas para hacer levitar la esfera si la posiciondeseada que se propone yd es mayor, es decir si se ordena que la esfera levitemas alejada del iman. Esta conjetura es aun mas respaldada por el hecho deque al usar kd = 0.1584 (que produce inestabilidad experimentalmente parayd = 0.01[m]) se consigue estabilidad, es decir que la esfera levita, cuando seusa un valor de yd mayor de que 0.01[m]. Sin embargo, esto tambien tiene unlımite ya que la fuerza del electroiman disminuye al alejarse la esfera.
Finalmente, en la figura 11.10 se muestra una fotografıa del sistema delevitacion magnetica funcionando donde se alcanza a apreciar el electroimany el sistema optico usado para la medicion de la posicion de la esfera.

11.6 Resultados experimentales 597
Tabla 11.2. Polos de lazo cerrado para los valores de kd usados cuando yd = 0.01[m].
kdPolos de
lazo cerradoComportamiento
experimental
0.0396
−2562.0−149.4−26.2−1.8
estabilidad
0.0792
−2353.6−355.8−28.4−1.5
estabilidad
0.1188
−2088.3−620.6−29.0−1.4
estabilidad
0.1584
−1635.3−1073.5−29.3−1.4
inestabilidad
0.1980
−1354.3 + j617.1−1354.3 − j617.1−29.4−1.4
inestabilidad
Figura 11.8. Resultados experimentales con el sistema de levitacion magneticacuando yd = 0.01[m]. Trazo superior: 1
2z2v. Trazo inferior: i∗, corriente ordenada.
598 11 Levitacion magnetica
Figura 11.9. Resultados experimentales con el sistema de levitacion magneticacuando se usa un valor deseado de posicion menor que 0.01[m]. Trazo superior:12z2v. Trazo inferior: i∗, corriente ordenada.
Figura 11.10. El sistema de levitacion magnetica funcionando.
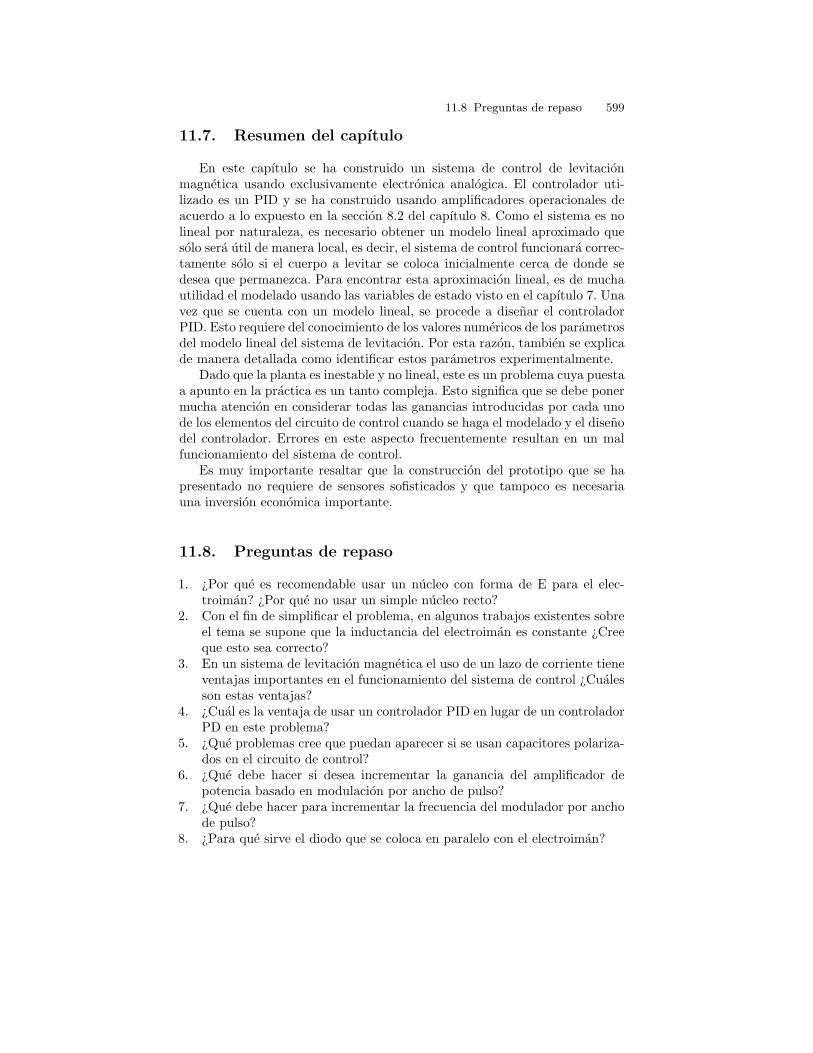
11.8 Preguntas de repaso 599
11.7. Resumen del capıtulo
En este capıtulo se ha construido un sistema de control de levitacionmagnetica usando exclusivamente electronica analogica. El controlador uti-lizado es un PID y se ha construido usando amplificadores operacionales deacuerdo a lo expuesto en la seccion 8.2 del capıtulo 8. Como el sistema es nolineal por naturaleza, es necesario obtener un modelo lineal aproximado quesolo sera util de manera local, es decir, el sistema de control funcionara correc-tamente solo si el cuerpo a levitar se coloca inicialmente cerca de donde sedesea que permanezca. Para encontrar esta aproximacion lineal, es de muchautilidad el modelado usando las variables de estado visto en el capıtulo 7. Unavez que se cuenta con un modelo lineal, se procede a disenar el controladorPID. Esto requiere del conocimiento de los valores numericos de los parametrosdel modelo lineal del sistema de levitacion. Por esta razon, tambien se explicade manera detallada como identificar estos parametros experimentalmente.
Dado que la planta es inestable y no lineal, este es un problema cuya puestaa apunto en la practica es un tanto compleja. Esto significa que se debe ponermucha atencion en considerar todas las ganancias introducidas por cada unode los elementos del circuito de control cuando se haga el modelado y el disenodel controlador. Errores en este aspecto frecuentemente resultan en un malfuncionamiento del sistema de control.
Es muy importante resaltar que la construccion del prototipo que se hapresentado no requiere de sensores sofisticados y que tampoco es necesariauna inversion economica importante.
11.8. Preguntas de repaso
1. ¿Por que es recomendable usar un nucleo con forma de E para el elec-troiman? ¿Por que no usar un simple nucleo recto?
2. Con el fin de simplificar el problema, en algunos trabajos existentes sobreel tema se supone que la inductancia del electroiman es constante ¿Creeque esto sea correcto?
3. En un sistema de levitacion magnetica el uso de un lazo de corriente tieneventajas importantes en el funcionamiento del sistema de control ¿Cualesson estas ventajas?
4. ¿Cual es la ventaja de usar un controlador PID en lugar de un controladorPD en este problema?
5. ¿Que problemas cree que puedan aparecer si se usan capacitores polariza-dos en el circuito de control?
6. ¿Que debe hacer si desea incrementar la ganancia del amplificador depotencia basado en modulacion por ancho de pulso?
7. ¿Que debe hacer para incrementar la frecuencia del modulador por anchode pulso?
8. ¿Para que sirve el diodo que se coloca en paralelo con el electroiman?

600 11 Levitacion magnetica
9. ¿Que es el punto de operacion en un sistema de levitacion magnetica yque lo determina?
10. ¿A que atribuye que el modelo en (11.31) tenga ganancia negativa? ¿Y porque el polinomio en el denominador tiene algunos coeficientes con signonegativo?

Referencias
1. J.D. Kraus, Electromagnetics, McGraw-Hill, Singapore, 1992.2. Autores varios, Special issue on magnetic bearing control, IEEE Transactions on
Control Systems Technology, Vol.4, No. 5, 1996.3. M.Y. Chen, C.F. Tsai, H.H. Huang, and L.C. Fu, Integrated design for a planar
MagLev for micro positioning, in Proc. American Control Conference, pp. 3066-3071, Portland, 2005.
4. J. Levine, J. Lottin, J.C. Ponsart, A nonlinear approach to the control of mag-netic bearings, IEEE Transactions on Control Systems Technology, vol. 4, no.5, pp. 524-544, 1996.
5. M.G. Feemster, Y. Fang and D. Dawson, Disturbance rejection for a magneticlevitation system, IEEE Transactions on Mechatronics, vol. 11, no. 6, pp. 709-717, 2006.
6. J.-C. Shen H∞ control and sliding mode control of magnetic levitation system,Asian Journal of Control, vol. 4, no. 3, pp. 333-340, 2002.
7. R. Ortega, A. van der Schaft, I. Mareels and B. Maschke, Putting energy backin control, IEEE Control Systems Magazine, pp. 18-33, April 2001.
8. R. Ortega, A. Lorıa, P. J. Nicklasson and H. Sira-Ramırez, Passivity-based con-trol of Euler-Lagrange Systems, Springer, London, 1998.
9. M.S. de Queiroz, and D. Dawson, Nonlinear control of active magnetic bearings:a backstepping approach, IEEE Transactions on Control Systems Technology,vol. 4, no. 5, pp. 545-552, 1996.
10. H. Khalil, Nonlinear Systems, 3rd Edition, Prentice-Hall, Upper Saddle River,2002.
11. W. Hurley, M. Hynes and W. Wolfle, PWM Control of a magnetic suspensionsystem, IEEE Transactions on Education, vol. 47, no. 2, pp. 165-173, 2004.
12. W. Hurley, W. Wolfle, Electromagnetic design of a magnetic suspension system,IEEE Transactions on Education, vol. 40, no. 2, pp. 124-130, 1997.

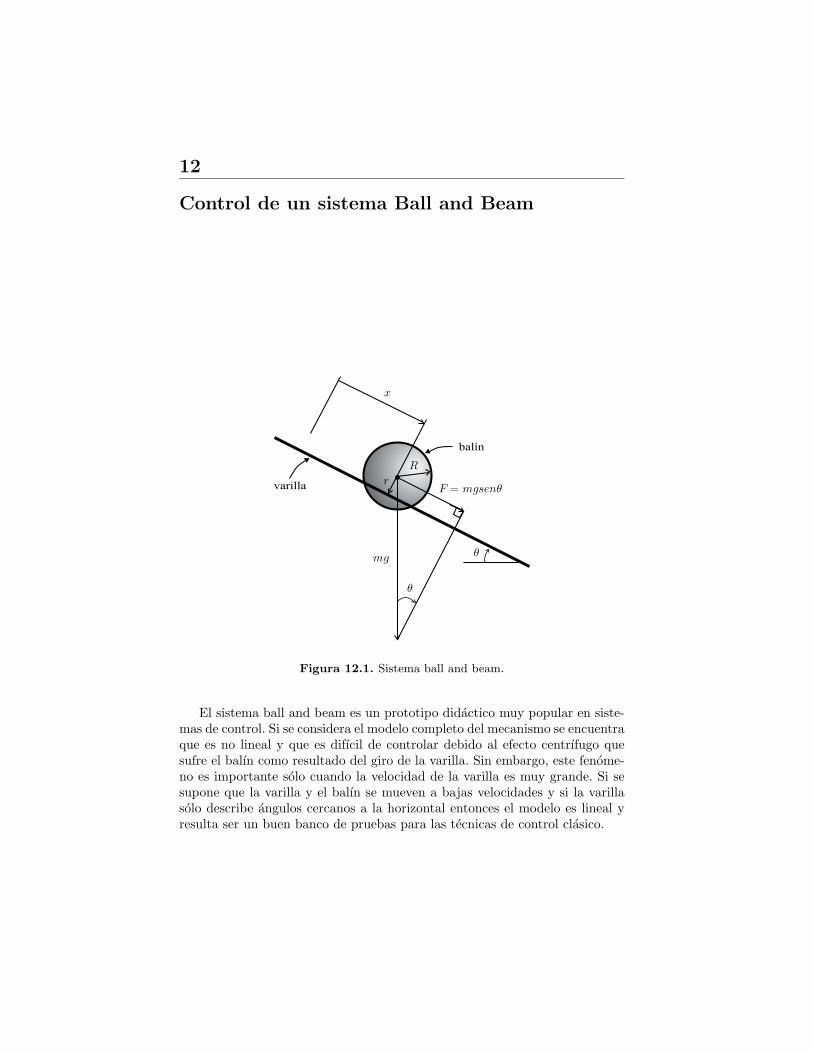
12
Control de un sistema Ball and Beam
balín
varilla
x
R
r
ò
òmg
F = mgsenò
Figura 12.1. Sistema ball and beam.
El sistema ball and beam es un prototipo didactico muy popular en siste-mas de control. Si se considera el modelo completo del mecanismo se encuentraque es no lineal y que es difıcil de controlar debido al efecto centrıfugo quesufre el balın como resultado del giro de la varilla. Sin embargo, este fenome-no es importante solo cuando la velocidad de la varilla es muy grande. Si sesupone que la varilla y el balın se mueven a bajas velocidades y si la varillasolo describe angulos cercanos a la horizontal entonces el modelo es lineal yresulta ser un buen banco de pruebas para las tecnicas de control clasico.
604 12 Control de un sistema Ball and Beam
Objetivos del capıtulo
Construir la totalidad de las partes que componen a un sistema ball andbeam y, en particular, el sensor de la posicion del balın.Usar un microcontrolador y una computadora personal para construir uncontrolador multilazo que emplea un compensador de adelanto.Aplicar los conceptos de control clasico a una planta que es inestable pornaturaleza.Identificar de manera experimental los parametros del mecanismo.
Considere la situacion representada en la figura 12.1. Se trata de unavarilla que cuenta con un canal dentro del cual rueda un balın. La inclinacionde la varilla puede ser modificada usando un motor de corriente directa yesta inclinacion genera el movimiento del balın por efecto de la gravedad.El objetivo de control en este mecanismo es conseguir que el balın alcanceel reposo en una posicion especificada de antemano a lo largo de la varilla.Este mecanismo es conocido en la literatura en ingles bajo el termino “balland beam” y es un prototipo muy utilizado para probar experimentalmentediversos controladores disenados usando tecnicas clasicas y avanzadas [1], [2].Como se muestra en este capıtulo, este mecanismo es inestable y los metodosclasicos de diseno introducen el uso de un lazo interno de control. Estas sonlas razones por las que se desea presentar el problema de control de estemecanismo en el presente capıtulo
La nomenclatura utilizada es la siguiente:
u es el voltaje aplicado en las terminales de armadura del motor.x es la posicion del balın medida desde el extremo izquierdo de la varilla.θ es la inclinacion de la varilla respecto de la horizontal.m es la masa del balın.R y r representan, respectivamente, el radio del balın (esferico) y el radiode giro del balın sobre los bordes del canal.i es la corriente electrica de armadura.L es la inductancia de armadura.Ra es la resistencia de armadura.ke es la constante de fuerza contraeletromotriz.km es la constante de par.Jm es la inercia del rotor del motor.bm es la constante de friccion viscosa del motor.JL es la inercia de la varilla.bL es la constante de friccion viscosa de la varilla.n1 y n2 representan el numero de dientes del engrane del eje del motor ydel eje de la varilla, respectivamente, y n = n2
n1.

12.1 Modelo matematico 605
12.1. Modelo matematico
El modelo matematico que interesa es aquel que indica como se ve afectadala posicion del balın, a lo largo de la varilla, bajo el efecto de un voltajeaplicado en las terminales de armadura del motor.
Es importante observar que conforme el balın se desplaza sobre la varillael peso del primero ejerce un par de giro sobre la varilla el cual depende dela posicion del balın sobre la varilla. Por otro lado, un fenomeno interesanteque puede ocurrir si la varilla se mueve rapidamente es el siguiente. Supongaque el balın trata de escapar, es decir x aumenta, y se cambia rapidamentela inclinacion de la varilla con el fin de hacerlo regresar. Sin embargo, debidoal efecto de la fuerza centrıfuga el balın continuara escapando en lugar deregresar.
Con el fin de que no aparezcan los efectos descritos en el parrafo anteriorse supondra que:
El par ejercido por el peso del balın sobre la varilla es despreciable, lo cuales muy cercano a la realidad si el motor actua sobre la varilla a traves deuna caja de engranes con tasa de reduccion elevada.La varilla se movera con velocidades θ pequenas y la inclinacion θ solotomara valores pequenos alrededor de cero.
Modelo del motor electrico y la varilla
El motor de CD y la varilla se pueden modelar como se hizo en la seccion9.1 considerando que la carga esta representada por la varilla, es decir:
Ldi
dt= u − Ra i − n ke θ (12.1)
Jθ = −b θ + n km i (12.2)
J = n2 Jm + JL, b = n2 bm + bL
Procediendo como en las secciones 9.1, 9.2 y 9.3 se puede usar el lazo decorriente:
ui = K(i∗ − i)
ası como el amplificador de potencia:
u = Ap ui
para encontrar que el modelo del motor de CD y la varilla esta dado como:
θ(s) =k
s(s + a)I∗(s) (12.3)
a =b
J, k =
nkm
J
donde se ha supuesto que no esta presente ninguna perturbacion externa, esdecir Tp = 0.
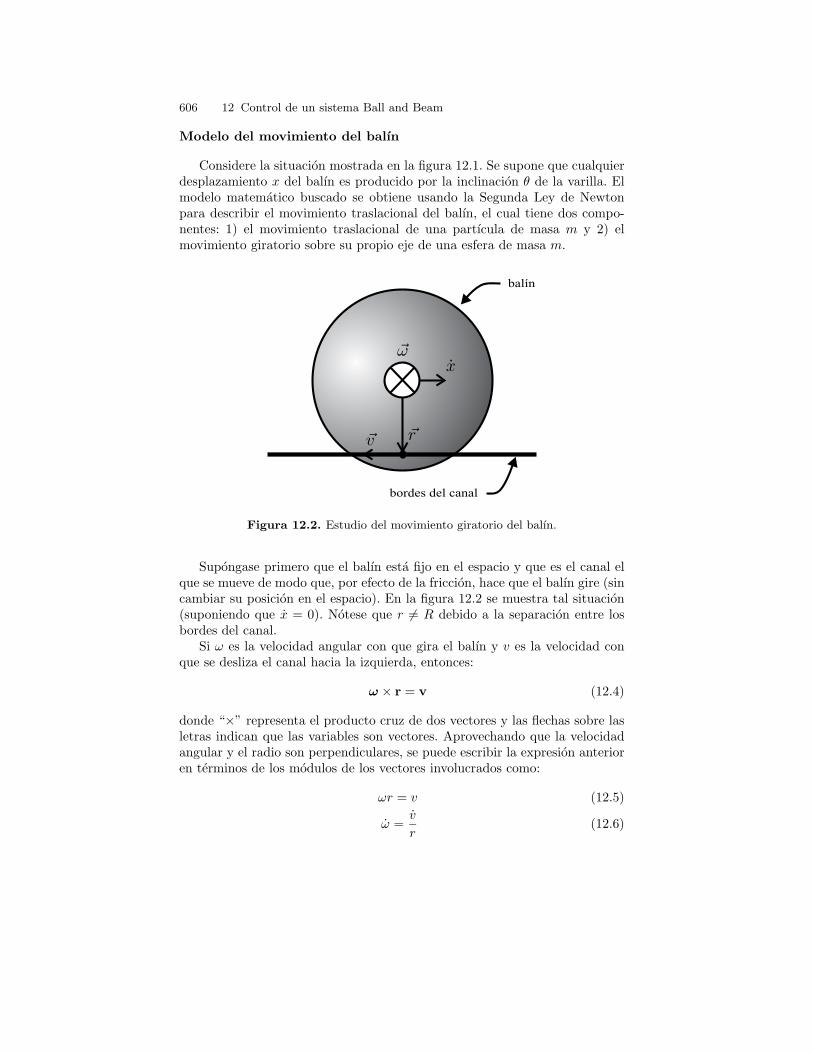
606 12 Control de un sistema Ball and Beam
Modelo del movimiento del balın
Considere la situacion mostrada en la figura 12.1. Se supone que cualquierdesplazamiento x del balın es producido por la inclinacion θ de la varilla. Elmodelo matematico buscado se obtiene usando la Segunda Ley de Newtonpara describir el movimiento traslacional del balın, el cual tiene dos compo-nentes: 1) el movimiento traslacional de una partıcula de masa m y 2) elmovimiento giratorio sobre su propio eje de una esfera de masa m.
balín
bordes del canal
ï
!~
v~ r~
xç
Figura 12.2. Estudio del movimiento giratorio del balın.
Supongase primero que el balın esta fijo en el espacio y que es el canal elque se mueve de modo que, por efecto de la friccion, hace que el balın gire (sincambiar su posicion en el espacio). En la figura 12.2 se muestra tal situacion(suponiendo que x = 0). Notese que r 6= R debido a la separacion entre losbordes del canal.
Si ω es la velocidad angular con que gira el balın y v es la velocidad conque se desliza el canal hacia la izquierda, entonces:
ω × r = v (12.4)
donde “×” representa el producto cruz de dos vectores y las flechas sobre lasletras indican que las variables son vectores. Aprovechando que la velocidadangular y el radio son perpendiculares, se puede escribir la expresion anterioren terminos de los modulos de los vectores involucrados como:
ωr = v (12.5)
ω =v
r(12.6)

12.1 Modelo matematico 607
Sea f la fuerza que ejerce el canal sobre el balın y que hace que este gire. Noteseque dicha fuerza se aplica a una distancia r del centro del balın. Entonces rf esel par que ejerce el canal sobre el balın. Aplicando la Segunda Ley de Newtona esta situacion se encuentra:
Jbω = fr (12.7)
f =2
5mv
R2
r2(12.8)
donde se ha usado (12.6) y Jb = 25mR2 es la inercia de una esfera solida de
masa m y radio R que gira sobre su propio eje (balın) [3], [4], pag. 271.Ahora considerese la situacion real: el canal permanece en reposo y es el
balın el que rueda con lo que su posicion x ahora cambia y la velocidad y laaceleracion del balın estan dadas como (se supone que el balın rueda sobre losbordes del canal sin patinar):
x = −v, x = −v (12.9)
Entonces, f es la fuerza equivalente que el movimiento giratorio del balınejerce sobre sı mismo y que contribuye al desplazamiento del balın a lo largodel canal. Con este antecedente, se puede aplicar la Segunda Ley de Newtonal movimiento traslacional del balın considerando que, ademas del efecto dela gravedad, existe una fuerza f que el giro del balın ejerce sobre sı mismo(vease la figura 12.1):
mx = f + mg sin θ (12.10)
Usando (12.8), (12.9) se tiene:
mx = −2
5mx
R2
r2+ mg sin θ (12.11)
(1 +
2
5
R2
r2
)x = g sin θ (12.12)
Notese que la fuerza f , debida a la inercia del giro del balın, representa unafuerza de oposicion al movimiento traslacional de balın: de acuerdo a la Pri-mera Ley de Newton la inercia representa la oposicion que un cuerpo presentahacia cambios en su situacion actual de movimiento. Con el fin de representarcorrectamente la oposicion de f a la traslacion del balın, f (que incluye unsigno negativo) debe aparecer sumando (y no restando) en (12.10).
Como se ha dicho previamente, se considera que θ siempre es muy pequena(θ ≈ 0) por lo que se puede escribir:
sin θ ≈ θ (12.13)
Es importante mencionar que esta aproximacion require que el angulo θeste dado en radianes [4], pag. 942. Entonces (12.12) se convierte en:
608 12 Control de un sistema Ball and Beam
(1 +
2
5
R2
r2
)x = gθ (12.14)
o, usando la transformada de Laplace con condiciones iniciales cero:
X(s)
θ(s)=
ρ
s2(12.15)
ρ =g
1 + 25
R2
r2
lo cual representa el modelo del movimiento del balın.Finalmente, el modelo del sistema ball and beam esta dado por la combi-
nacion de (12.3) y (12.15), es decir:
X(s)
θ(s)=
ρ
s2, θ(s) =
k
s(s + a)I∗(s) (12.16)
12.2. Construccion del prototipo
En esta parte se describe la manera en que ha sido construido el prototipousado. A continuacion se listan los componentes principales del sistema decontrol.
Computadora personal de escritorio Pentium II a 233 MHz.Tarjeta de adquisicion de datos PCL-812PG de Advantech [5]. Cuenta con15 canales de entrada analogico-digital manejados por un solo convertidorAD de aproximaciones sucesivas de 12 bits, con entrada analogica en elrango de -5[V] a +5[V]. Dos canales de salida digital-analogico, cada unocuenta con un convertidor DA de 12 bits, con salida analogica en el rangode 0[V] a +5[V].Motor de CD con escobillas e iman permanente. Voltaje nominal de 24[V],corriente nominal de 2.3[A].Varilla del sistema ball and beam. Compuesta por: i) una varilla de maderade seccion circular (riel numero uno), ii) una varilla de aluminio de seccioncircular (riel numero dos), iii) una lamina de madera que sirve de soportepara las dos varillas anteriores.Sensor de posicion para la inclinacion de la varilla. Potenciometro de pre-cision de 5[KOhm], una vuelta, sin tope.Sistema de medicion de la posicion del balın. Se describe a continuacion.
En la figura 12.3 se presenta el diagrama de bloques del sistema de controlcompleto.
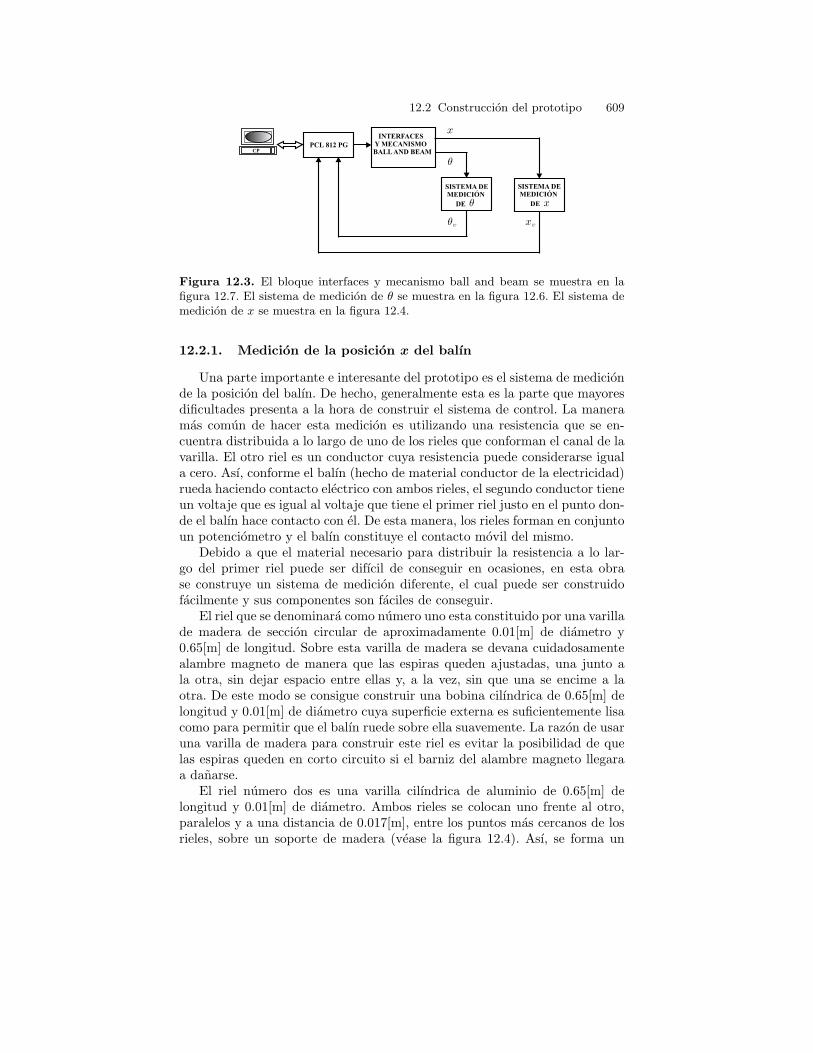
12.2 Construccion del prototipo 609
PCL 812 PGCP
SISTEMA DEMEDICIÓN
DE ò
SISTEMA DEMEDICIÓN
DE x
ò
x
òý xý
INTERFACESY MECANISMOBALL AND BEAM
Figura 12.3. El bloque interfaces y mecanismo ball and beam se muestra en lafigura 12.7. El sistema de medicion de θ se muestra en la figura 12.6. El sistema demedicion de x se muestra en la figura 12.4.
12.2.1. Medicion de la posicion x del balın
Una parte importante e interesante del prototipo es el sistema de medicionde la posicion del balın. De hecho, generalmente esta es la parte que mayoresdificultades presenta a la hora de construir el sistema de control. La maneramas comun de hacer esta medicion es utilizando una resistencia que se en-cuentra distribuida a lo largo de uno de los rieles que conforman el canal de lavarilla. El otro riel es un conductor cuya resistencia puede considerarse iguala cero. Ası, conforme el balın (hecho de material conductor de la electricidad)rueda haciendo contacto electrico con ambos rieles, el segundo conductor tieneun voltaje que es igual al voltaje que tiene el primer riel justo en el punto don-de el balın hace contacto con el. De esta manera, los rieles forman en conjuntoun potenciometro y el balın constituye el contacto movil del mismo.
Debido a que el material necesario para distribuir la resistencia a lo lar-go del primer riel puede ser difıcil de conseguir en ocasiones, en esta obrase construye un sistema de medicion diferente, el cual puede ser construidofacilmente y sus componentes son faciles de conseguir.
El riel que se denominara como numero uno esta constituido por una varillade madera de seccion circular de aproximadamente 0.01[m] de diametro y0.65[m] de longitud. Sobre esta varilla de madera se devana cuidadosamentealambre magneto de manera que las espiras queden ajustadas, una junto ala otra, sin dejar espacio entre ellas y, a la vez, sin que una se encime a laotra. De este modo se consigue construir una bobina cilındrica de 0.65[m] delongitud y 0.01[m] de diametro cuya superficie externa es suficientemente lisacomo para permitir que el balın ruede sobre ella suavemente. La razon de usaruna varilla de madera para construir este riel es evitar la posibilidad de quelas espiras queden en corto circuito si el barniz del alambre magneto llegaraa danarse.
El riel numero dos es una varilla cilındrica de aluminio de 0.65[m] delongitud y 0.01[m] de diametro. Ambos rieles se colocan uno frente al otro,paralelos y a una distancia de 0.017[m], entre los puntos mas cercanos de losrieles, sobre un soporte de madera (vease la figura 12.4). Ası, se forma un
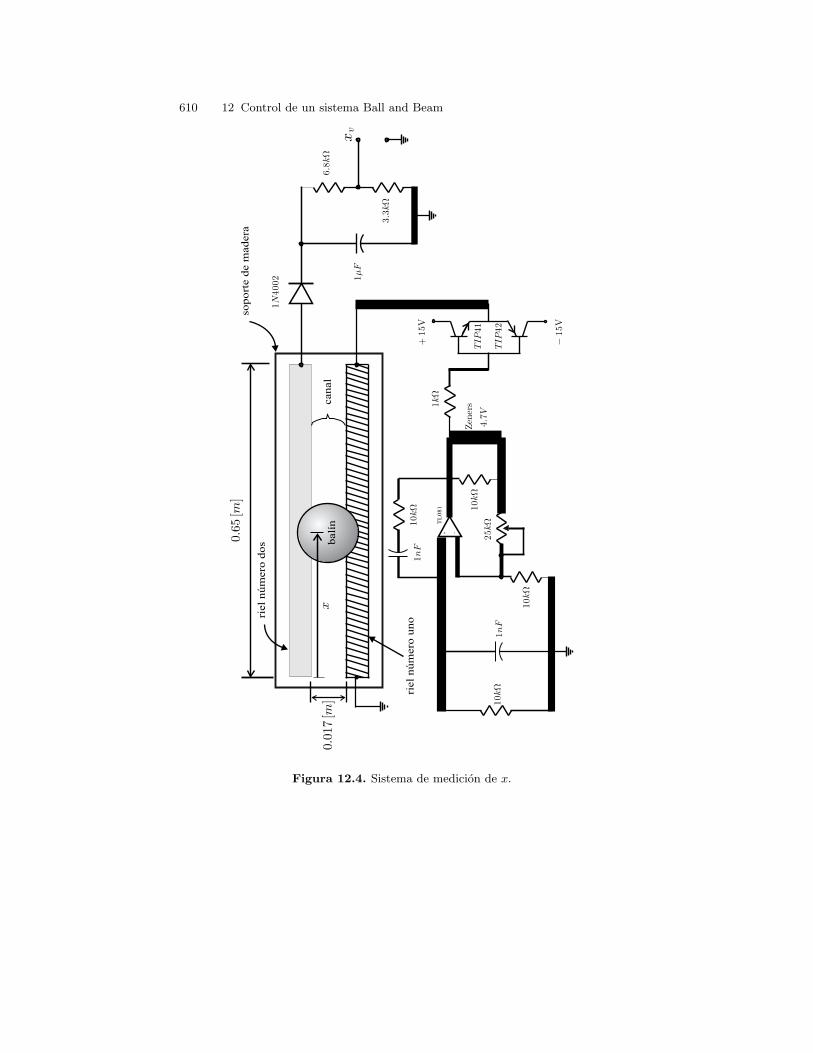
610 12 Control de un sistema Ball and Beam
balí
n
soport
e d
e m
adera
riel
núm
ero
dos
riel
núm
ero
uno
0:65m[]
0:017
m[]
-+
10kÒ
10kÒ
10kÒ
25kÒ
10kÒ
4:7V
Zen
ers
1nF
1nF
1kÒ
6:8kÒ
3:3kÒ
1öF
1N4002
+15V
à15V
TIP
41
TIP
42
TL
081
canal
x
xv
Figura 12.4. Sistema de medicion de x.
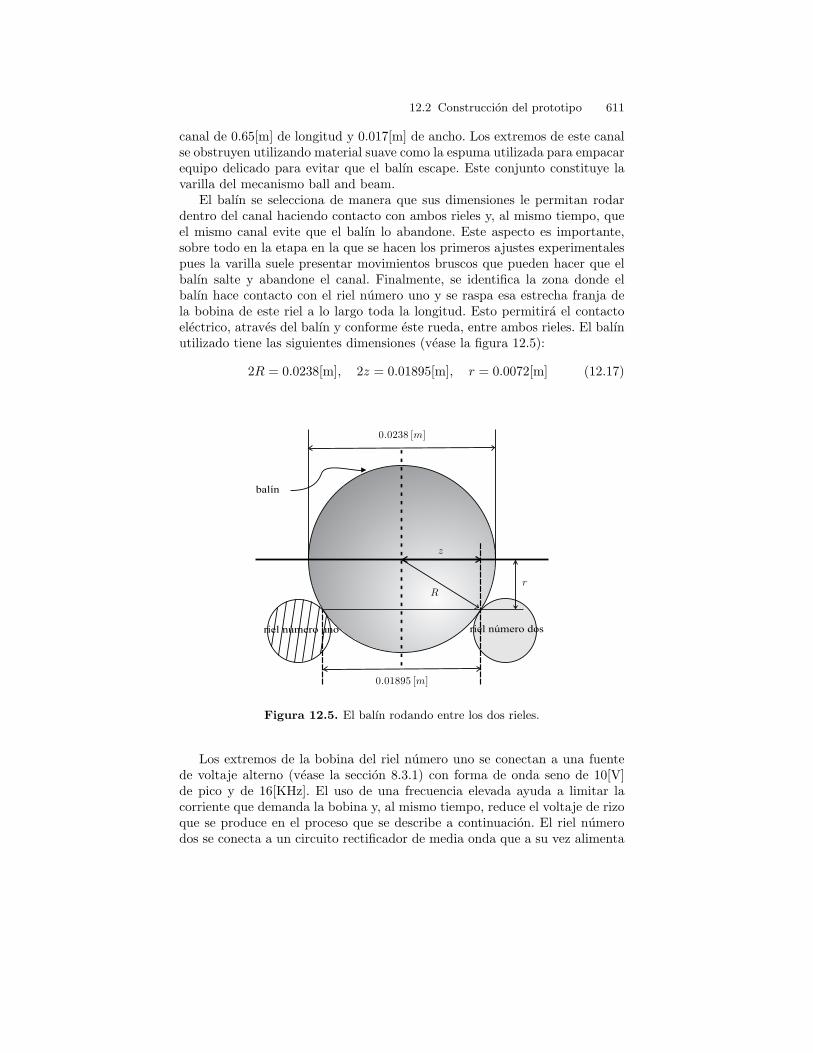
12.2 Construccion del prototipo 611
canal de 0.65[m] de longitud y 0.017[m] de ancho. Los extremos de este canalse obstruyen utilizando material suave como la espuma utilizada para empacarequipo delicado para evitar que el balın escape. Este conjunto constituye lavarilla del mecanismo ball and beam.
El balın se selecciona de manera que sus dimensiones le permitan rodardentro del canal haciendo contacto con ambos rieles y, al mismo tiempo, queel mismo canal evite que el balın lo abandone. Este aspecto es importante,sobre todo en la etapa en la que se hacen los primeros ajustes experimentalespues la varilla suele presentar movimientos bruscos que pueden hacer que elbalın salte y abandone el canal. Finalmente, se identifica la zona donde elbalın hace contacto con el riel numero uno y se raspa esa estrecha franja dela bobina de este riel a lo largo toda la longitud. Esto permitira el contactoelectrico, atraves del balın y conforme este rueda, entre ambos rieles. El balınutilizado tiene las siguientes dimensiones (vease la figura 12.5):
2R = 0.0238[m], 2z = 0.01895[m], r = 0.0072[m] (12.17)
riel número dosriel número uno
balín
0:0238 m[ ]
r
z
R
0:01895 m[ ]
Figura 12.5. El balın rodando entre los dos rieles.
Los extremos de la bobina del riel numero uno se conectan a una fuentede voltaje alterno (vease la seccion 8.3.1) con forma de onda seno de 10[V]de pico y de 16[KHz]. El uso de una frecuencia elevada ayuda a limitar lacorriente que demanda la bobina y, al mismo tiempo, reduce el voltaje de rizoque se produce en el proceso que se describe a continuacion. El riel numerodos se conecta a un circuito rectificador de media onda que a su vez alimenta
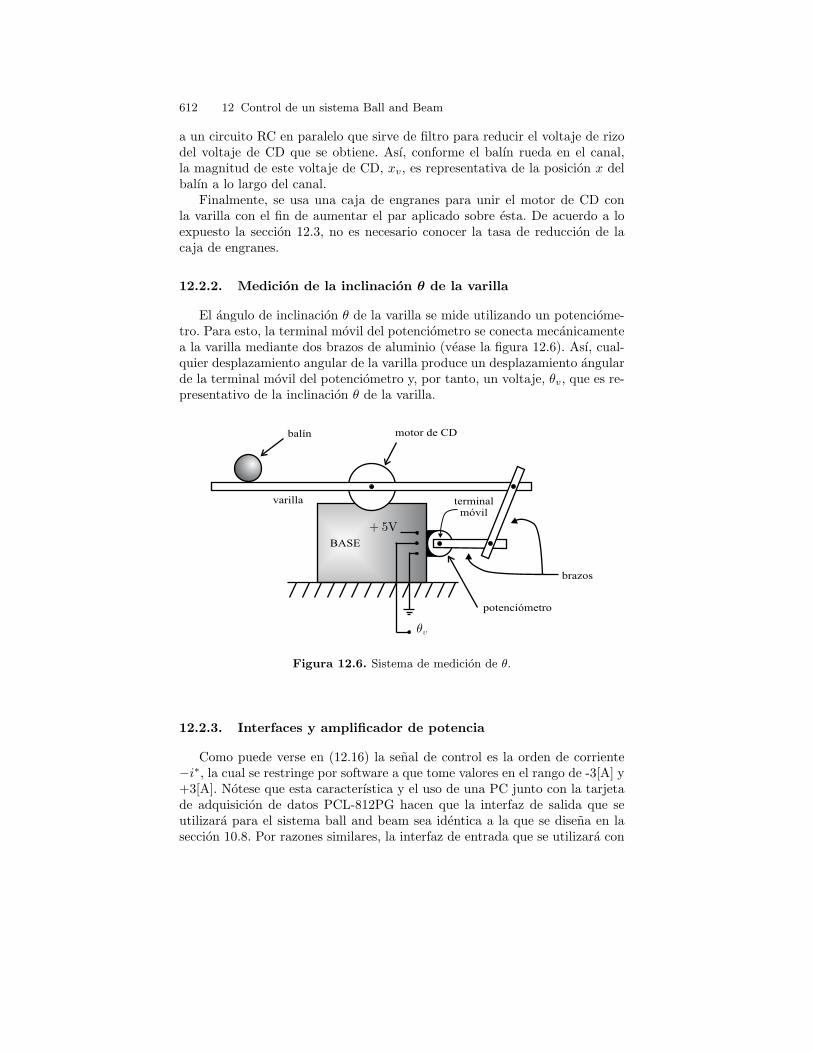
612 12 Control de un sistema Ball and Beam
a un circuito RC en paralelo que sirve de filtro para reducir el voltaje de rizodel voltaje de CD que se obtiene. Ası, conforme el balın rueda en el canal,la magnitud de este voltaje de CD, xv, es representativa de la posicion x delbalın a lo largo del canal.
Finalmente, se usa una caja de engranes para unir el motor de CD conla varilla con el fin de aumentar el par aplicado sobre esta. De acuerdo a loexpuesto la seccion 12.3, no es necesario conocer la tasa de reduccion de lacaja de engranes.
12.2.2. Medicion de la inclinacion θ de la varilla
El angulo de inclinacion θ de la varilla se mide utilizando un potenciome-tro. Para esto, la terminal movil del potenciometro se conecta mecanicamentea la varilla mediante dos brazos de aluminio (vease la figura 12.6). Ası, cual-quier desplazamiento angular de la varilla produce un desplazamiento angularde la terminal movil del potenciometro y, por tanto, un voltaje, θv, que es re-presentativo de la inclinacion θ de la varilla.
balín motor de CD
terminalmóvil
varilla
brazos
potenciómetro
BASE
+ 5V
òý
Figura 12.6. Sistema de medicion de θ.
12.2.3. Interfaces y amplificador de potencia
Como puede verse en (12.16) la senal de control es la orden de corriente−i∗, la cual se restringe por software a que tome valores en el rango de -3[A] y+3[A]. Notese que esta caracterıstica y el uso de una PC junto con la tarjetade adquisicion de datos PCL-812PG hacen que la interfaz de salida que seutilizara para el sistema ball and beam sea identica a la que se disena en laseccion 10.8. Por razones similares, la interfaz de entrada que se utilizara con
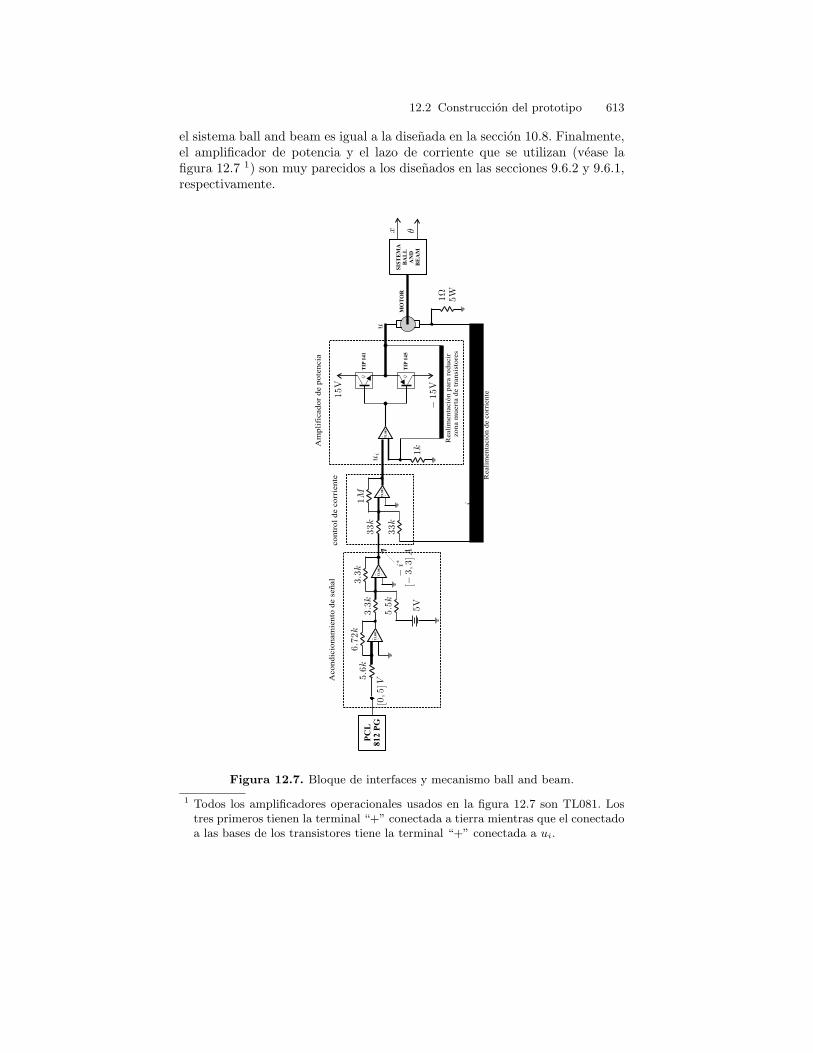
12.2 Construccion del prototipo 613
el sistema ball and beam es igual a la disenada en la seccion 10.8. Finalmente,el amplificador de potencia y el lazo de corriente que se utilizan (vease lafigura 12.7 1) son muy parecidos a los disenados en las secciones 9.6.2 y 9.6.1,respectivamente.
TL
08
1
Aco
nd
icio
nam
ien
to d
e s
eñ
al
PC
L812 P
GT
L0
81
à +à +
TL
08
1à +
TL
08
1à+
Q Q
5:6k
6:72k
3:3k
5:5k
33k
33k
1M
1k
3:3k
5V
15V
à15V
5W1Ò
TIP
145
TIP
141
MO
TO
R
Am
pli
ficad
or
de p
ote
ncia
co
ntr
ol
de c
orr
ien
te Reali
men
tació
n d
e c
orr
ien
te
0;5
[]V
àiã
à3;3
[]A
ui
u
Reali
men
tació
n p
ara
red
ucir
zo
na m
uert
a d
e t
ran
sist
ore
s
SIS
TE
MA
BA
LL
AN
DB
EA
M
x ò
i
Figura 12.7. Bloque de interfaces y mecanismo ball and beam.
1 Todos los amplificadores operacionales usados en la figura 12.7 son TL081. Lostres primeros tienen la terminal “+” conectada a tierra mientras que el conectadoa las bases de los transistores tiene la terminal “+” conectada a ui.

614 12 Control de un sistema Ball and Beam
12.3. Identificacion
12.3.1. Sistema de medicion de la inclinacion θ de la varilla
Se encontro que cuando la varilla se coloca en posicion perfectamente ho-rizontal (θ = 0[rad]) el potenciometro entrega 1.45[V] y cuando la varilla seinclina 10 grados (θ = 0.174[rad]) el potenciometro entrega 1.7[V]. Se veri-fico que el sistema de medicion es lineal, es decir, que entrega incrementos devoltaje que son proporcionales a los incrementos de angulo θ. Por tanto, laganancia del sistema de medicion esta dada como:
Aθ =θv
θ=
(1.7 − 1.45)[V]
0.174[rad]= 1.43[V/rad] (12.18)
donde θv es la senal de voltaje entregada por el sistema de medicion.
12.3.2. Sistema de medicion de la posicion x del balın
Cuando el balın se coloca en el extremo izquierdo del canal (x = 0[m]) elsistema de medicion entrega 0.03[V] y cuando el balın se coloca en el extremoderecho del canal (x = 0.65[m]) el sistema de medicion entrega 3.7[V]. Severifico que el sistema de medicion es lineal, es decir, que entrega incrementosde voltaje que son proporcionales a los incrementos de la posicion del balın x.Por tanto, la ganancia del sistema de medicion esta dada como:
Ax =xv
x=
(3.7 − 0.03)[V]
0.65[m]= 5.64[V/m] (12.19)
donde xv es la senal de voltaje entregada por el sistema de medicion.Por otro lado, la identificacion experimental de los parametros que apare-
cen en el modelo (12.16) puede realizarse estudiando la dinamica del motory la varilla (12.3) y la dinamica del balın (12.15) por separado. Los procedi-mientos utilizados se describen a continuacion.
12.3.3. Subsistema motor-varilla
El procedimiento utilizado en esta parte en similar al utilizado en la seccion10.1. Se utiliza el siguiente control proporcional de posicion:
I∗(s) = kpAθ(θd(s) − θ(s)) (12.20)
donde se usa Aθ porque θv(s) = Aθθ(s) representa la variable que entrega elsistema de medicion de la inclinacion de la varilla y es la variable que realmentemaneja la computadora utilizada como controlador en el experimento. Estosignifica que el sistema en lazo cerrado (12.3), (12.20) queda representadocomo en la figura 12.8. La funcion de transferencia correspondiente es:
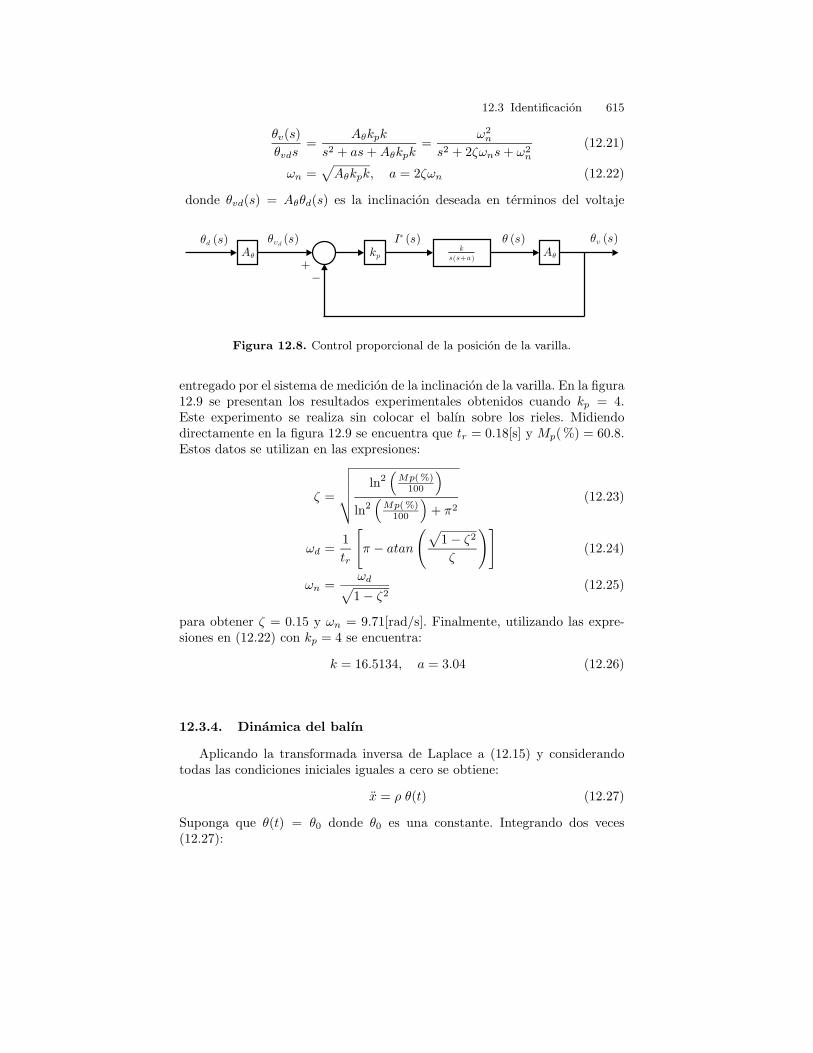
12.3 Identificacion 615
θv(s)
θvds=
Aθkpk
s2 + as + Aθkpk=
ω2n
s2 + 2ζωns + ω2n
(12.21)
ωn =√
Aθkpk, a = 2ζωn (12.22)
donde θvd(s) = Aθθd(s) es la inclinacion deseada en terminos del voltaje
kpòd s( )
Aò
òýd s( )
à+
òý s( )
s s+a( )
k Aò
ò s( )Iã s( )
Figura 12.8. Control proporcional de la posicion de la varilla.
entregado por el sistema de medicion de la inclinacion de la varilla. En la figura12.9 se presentan los resultados experimentales obtenidos cuando kp = 4.Este experimento se realiza sin colocar el balın sobre los rieles. Midiendodirectamente en la figura 12.9 se encuentra que tr = 0.18[s] y Mp(%) = 60.8.Estos datos se utilizan en las expresiones:
ζ =
√√√√√ln2
(Mp( %)
100
)
ln2(
Mp( %)100
)+ π2
(12.23)
ωd =1
tr
[π − atan
(√1 − ζ2
ζ
)](12.24)
ωn =ωd√1 − ζ2
(12.25)
para obtener ζ = 0.15 y ωn = 9.71[rad/s]. Finalmente, utilizando las expre-siones en (12.22) con kp = 4 se encuentra:
k = 16.5134, a = 3.04 (12.26)
12.3.4. Dinamica del balın
Aplicando la transformada inversa de Laplace a (12.15) y considerandotodas las condiciones iniciales iguales a cero se obtiene:
x = ρ θ(t) (12.27)
Suponga que θ(t) = θ0 donde θ0 es una constante. Integrando dos veces(12.27):
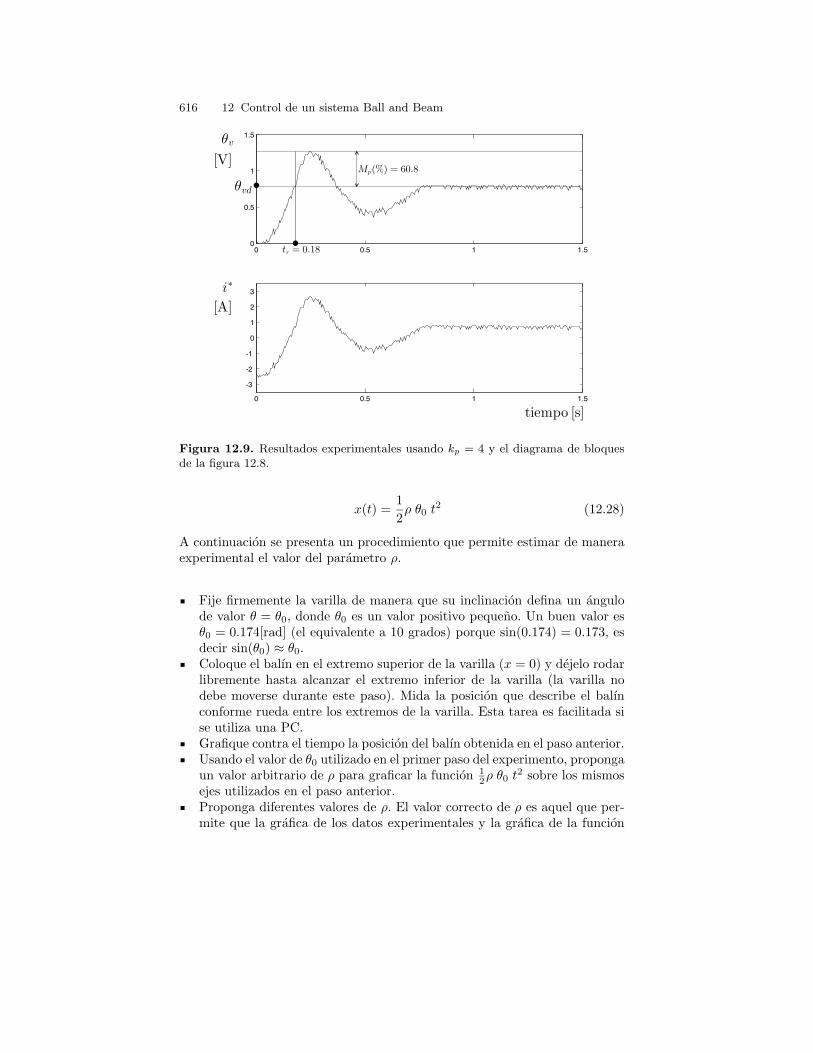
616 12 Control de un sistema Ball and Beam
òv
òvd
iã
V[ ]
A[ ]
tiempo s[ ]
ï
ï
Mp(%) = 60:8
tr = 0:18
Figura 12.9. Resultados experimentales usando kp = 4 y el diagrama de bloquesde la figura 12.8.
x(t) =1
2ρ θ0 t2 (12.28)
A continuacion se presenta un procedimiento que permite estimar de maneraexperimental el valor del parametro ρ.
Fije firmemente la varilla de manera que su inclinacion defina un angulode valor θ = θ0, donde θ0 es un valor positivo pequeno. Un buen valor esθ0 = 0.174[rad] (el equivalente a 10 grados) porque sin(0.174) = 0.173, esdecir sin(θ0) ≈ θ0.Coloque el balın en el extremo superior de la varilla (x = 0) y dejelo rodarlibremente hasta alcanzar el extremo inferior de la varilla (la varilla nodebe moverse durante este paso). Mida la posicion que describe el balınconforme rueda entre los extremos de la varilla. Esta tarea es facilitada sise utiliza una PC.Grafique contra el tiempo la posicion del balın obtenida en el paso anterior.Usando el valor de θ0 utilizado en el primer paso del experimento, propongaun valor arbitrario de ρ para graficar la funcion 1
2ρ θ0 t2 sobre los mismosejes utilizados en el paso anterior.Proponga diferentes valores de ρ. El valor correcto de ρ es aquel que per-mite que la grafica de los datos experimentales y la grafica de la funcion

12.4 Diseno del controlador 617
12ρ θ0 t2 coincidan durante todo el tiempo en el que se realizo el experi-mento.
En la figura 12.10 se muestran las graficas mencionadas en el procedimientoanterior. Se utiliza θ0 = 0.174[rad] y se encuentra que:
ρ = 5 (12.29)
Es importante tener el cuidado de que el valor experimental de x que se gra-fica este expresado en unidades de longitud (metros). Esto puede conseguirseusando x = xv/Ax. Finalmente, es interesante mencionar que la validez deeste valor numerico se ha verificado mediante el uso de (12.15), (12.17) yg = 9.81[m/s2], pues se obtiene un valor igual a 4.687 para ρ.
xexperimental( )
21 úò0t
2
tiempo s[ ]
m[ ]
Figura 12.10. Identificacion experimental del parametro ρ.
12.4. Diseno del controlador
Notese que el modelo de la planta (12.16) tiene tres polos en s = 0 porlo que es inestable en lazo abierto. Ası, un objetivo importante del disenodel sistema de control en lazo cerrado es conseguir su estabilidad. En la fi-gura 12.11(a) se presenta un diagrama de bloques del sistema de control quese disena. Este diagrama de bloques se puede representar como en la figura
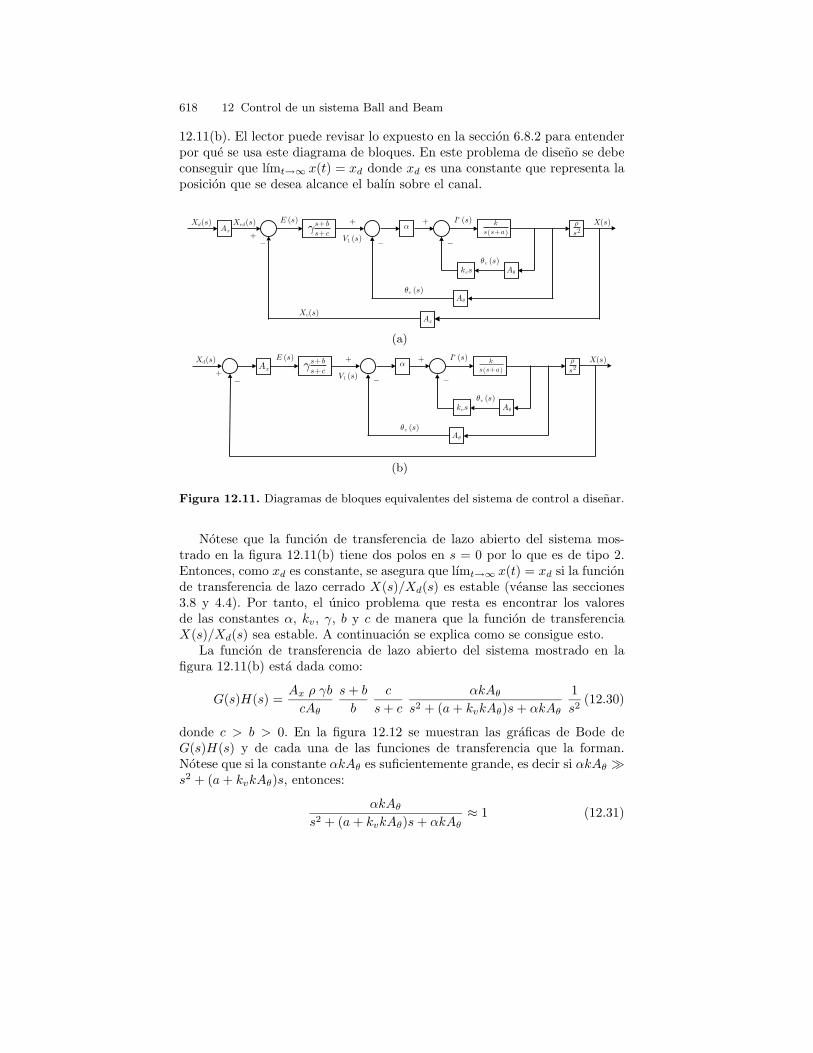
618 12 Control de un sistema Ball and Beam
12.11(b). El lector puede revisar lo expuesto en la seccion 6.8.2 para entenderpor que se usa este diagrama de bloques. En este problema de diseno se debeconseguir que lımt→∞ x(t) = xd donde xd es una constante que representa laposicion que se desea alcance el balın sobre el canal.
+
+ +
à à àAx
Aò
Aò
òý s( )
òý s( )
s s+a( )
kís+ c
s+ bs2úë
Iã s( )
kýs
E s( )
V1 s( )
Xd(s) X(s)
Ax
Xvd(s)
Xv(s)
(a)
+
+ +
à à àAx
Aò
Aò
òý s( )
òý s( )
s s+a( )
kís+ c
s+ bs2úë
Iã s( )
kýs
E s( )
V1 s( )
Xd(s) X(s)
(b)
Figura 12.11. Diagramas de bloques equivalentes del sistema de control a disenar.
Notese que la funcion de transferencia de lazo abierto del sistema mos-trado en la figura 12.11(b) tiene dos polos en s = 0 por lo que es de tipo 2.Entonces, como xd es constante, se asegura que lımt→∞ x(t) = xd si la funcionde transferencia de lazo cerrado X(s)/Xd(s) es estable (veanse las secciones3.8 y 4.4). Por tanto, el unico problema que resta es encontrar los valoresde las constantes α, kv, γ, b y c de manera que la funcion de transferenciaX(s)/Xd(s) sea estable. A continuacion se explica como se consigue esto.
La funcion de transferencia de lazo abierto del sistema mostrado en lafigura 12.11(b) esta dada como:
G(s)H(s) =Ax ρ γb
cAθ
s + b
b
c
s + c
αkAθ
s2 + (a + kvkAθ)s + αkAθ
1
s2(12.30)
donde c > b > 0. En la figura 12.12 se muestran las graficas de Bode deG(s)H(s) y de cada una de las funciones de transferencia que la forman.Notese que si la constante αkAθ es suficientemente grande, es decir si αkAθ ≫s2 + (a + kvkAθ)s, entonces:
αkAθ
s2 + (a + kvkAθ)s + αkAθ≈ 1 (12.31)
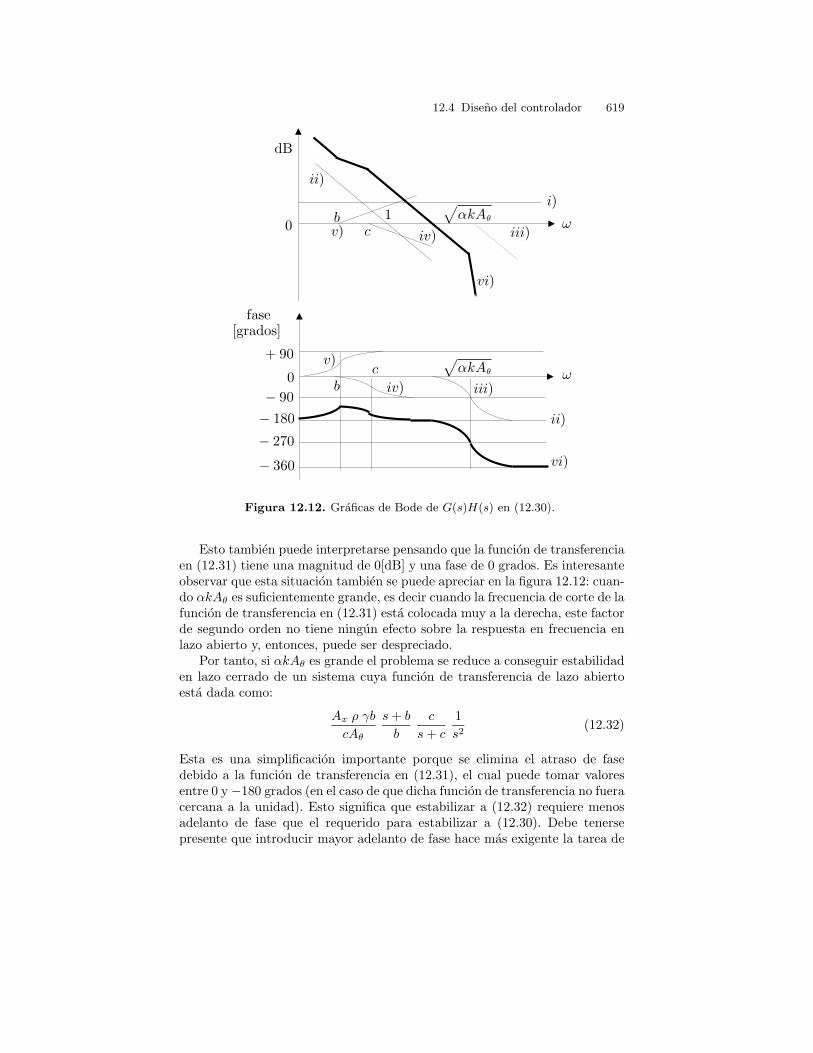
12.4 Diseno del controlador 619
0
fasegrados[ ]
à 90
!iii)
ii)
!
i)
0
dB
ii)
iii)iv)
1
à 180
à 270
à 360
v)
vi)
bc
bc
+ 90 v)
iv)
vi)
ëkAò
p
ëkAò
p
Figura 12.12. Graficas de Bode de G(s)H(s) en (12.30).
Esto tambien puede interpretarse pensando que la funcion de transferenciaen (12.31) tiene una magnitud de 0[dB] y una fase de 0 grados. Es interesanteobservar que esta situacion tambien se puede apreciar en la figura 12.12: cuan-do αkAθ es suficientemente grande, es decir cuando la frecuencia de corte de lafuncion de transferencia en (12.31) esta colocada muy a la derecha, este factorde segundo orden no tiene ningun efecto sobre la respuesta en frecuencia enlazo abierto y, entonces, puede ser despreciado.
Por tanto, si αkAθ es grande el problema se reduce a conseguir estabilidaden lazo cerrado de un sistema cuya funcion de transferencia de lazo abiertoesta dada como:
Ax ρ γb
cAθ
s + b
b
c
s + c
1
s2(12.32)
Esta es una simplificacion importante porque se elimina el atraso de fasedebido a la funcion de transferencia en (12.31), el cual puede tomar valoresentre 0 y −180 grados (en el caso de que dicha funcion de transferencia no fueracercana a la unidad). Esto significa que estabilizar a (12.32) requiere menosadelanto de fase que el requerido para estabilizar a (12.30). Debe tenersepresente que introducir mayor adelanto de fase hace mas exigente la tarea de

620 12 Control de un sistema Ball and Beam
disenar el controlador porque normalmente requiere de un compensador γ s+bs+c
que es mas sensible al ruido introducido por los sensores de posicion.Notese que se puede conseguir un valor grande de αkAθ aumentando el
valor de α pues los valores de k y Aθ son fijos una vez que se ha construidoel prototipo. Sin embargo, un valor grande de αkAθ tiene el efecto de de-teriorar el desempeno del sistema de control. De hecho, durante las pruebasexperimentales que se realizaron para poner a punto el prototipo se utilizaronvalores grandes de αkAθ y se observo que se incrementa el efecto nocivo delruido introducido por los sensores: el mecanismo vibra exageradamente y elsistema de control no funciona adecuadamente. Por tanto, el valor de α quedalimitado por el maximo valor permitido por el prototipo experimental auncuando no se consiga cumplir la condicion (12.31).
Por otro lado, si kv = 0 entonces el sistema en (12.31) estara mal amor-tiguado porque ζ = a/(2
√αkAθ ) sera pequeno. Esto produce un pico de
resonancia en la grafica de Bode de (12.30). El problema del pico de resonan-cia es que incrementa el efecto de las altas frecuencias produciendo vibracionesno deseadas en el mecanismo. Una solucion que ha dado buenos resultados enel prototipo construido es el uso de un valor kv > 0 porque esto aumenta elfactor de amortiguamiento ζ = (a+kvkAθ)/(2
√αkAθ ) del sistema en (12.31)
y, por tanto, se reduce el pico de resonancia en la grafica de Bode de (12.30).En base a estos razonamientos y despues de varias pruebas experimentales
se encontro que los siguientes valores producen resultados satisfactorios:
α = 4, kv = 0.2 (12.33)
Notese que el sistema de la figura 12.11(b), junto con los valores numericosen (12.18), (12.19), (12.26), (12.29), (12.33) conforman un problema identicoal resuelto en la seccion 6.8.2 donde se encontro que la solucion esta dada porel siguiente compensador:
Gc(s) = γs + b
s + c, b = 1.84, c = 13.2, γ = 2.6
12.5. Construccion del controlador
De acuerdo a la figura 12.11(a), el controlador que se debe construiresta dado como:
i∗ = α[v1 − θv] − kv θv (12.34)
donde θv y θv representan la senal entregada por el sensor de inclinacionde la varilla y su derivada, respectivamente. Por otro lado, V1(s) = Lv1esta definida como:
V1(s) = γs + b
s + cE(s)
E(s) = Xvd(s) − Xv(s) (12.35)

12.6 Resultados experimentales 621
donde Xv(s) y Xvd(s) son las transformadas de Laplace de la posicion del balınmedida xv (obtenida a la salida del sistema de medicion correspondiente) yde su valor deseado xvd, respectivamente. Procediendo como en las secciones10.2.2 y 10.5 se encuentra que la funcion del tiempo v1 se puede calcular entiempo discreto como:
v1(k) = γ[e(k) + v(k)]
v(k + 1) = [−cv(k) + (b − c)e(k)]∆t + v(k)
donde e(k) y v1(k) son los valores actuales en tiempo discreto de las funcionesLe = E(s) y Lv1 = V1(s) definidas en (12.35) (es decir e(k) = xvd(k) −xv(k)) y ∆t = 0.005[s] es el periodo de muestreo. Ası, se puede calculariterativamente el valor v(k +1) que representa el valor de v que sera utilizadoen el proximo instante de muestreo. Esto se hace partiendo del valor inicialv(0) = 0. Notese que v(k + 1) se calcula en el instante de muestreo presentepero solo sera utilizado hasta el instante de muestreo proximo inmediato enel futuro.
Finalmente, la senal θv se calcula a partir de la medicion de θv del siguientemodo:
θv ≈ θv(k) − θv(k − 1)
∆t(12.36)
El controlador se programa en Borland C++ y se utiliza una computadorapersonal y una tarjeta adquisitora de datos PCL-812PG de Advantech. Alfinal de la seccion 12.6 se presenta el codigo utilizado. Se debe subrayar queel experimento debe empezar colocando la varilla en una inclinacion tal queθ = 0, con el fin de que el programa de computadora reconozca el valor(diferente de cero) entregado por el sistema de medicion de θ cuando θ = 0.
12.6. Resultados experimentales
En la figura 12.13 se presentan los resultados experimentales obtenidos.Se utiliza una posicion deseada xvd = 1[V] que corresponde a xd = 0.177[m].Es importante mencionar que con el fin de obtener mejores desempenos seajustaron un poco las ganancias del compensador:
Gc(s) = γs + b
s + c(12.37)
de modo que b = 2.5, c = 17.7 y γ = 0.854. Durante estos ajustes se mantuvoconstante el factor ξ = 0.14 disenado en la seccion 6.8.2 de manera que b/c =2.5/17.7 = 1.84/13.2 = 0.14. Al usar b = 2.5 en lugar del valor 1.84 se consiguereducir un poco el efecto del ruido, el cual ha mostrado ser importante en elprototipo construido y puede ser apreciado en la figura 12.13. Dicho sea depaso, mucho del ruido presente es debido al voltaje de rizo en el sistema de

622 12 Control de un sistema Ball and Beam
medicion de x y al contacto intermitente del balın, mientras rueda, con lasespiras del sensor correspondiente (notese que en la figura 12.13(a) el ruidodisminuye cuando el balın se detiene). Por otro lado, el valor de γ = 0.854utilizado es tres veces menor que el valor de 2.6 disenado. Esto se hizo porquese encontro que un valor grande de γ produce vibraciones del mecanismo(efecto del ruido). En la figura 12.14 se muestran las graficas de Bode dela funcion de transferencia de lazo abierto en (12.30) cuando se usa b = 2.5,c = 17.7 y γ = 0.854. El margen de fase obtenido es de alrededor de 20 grados,es decir aproximadamente el mismo margen de fase disenado originalmente.Este pequeno margen de fase explica el gran sobre paso observado en la figura12.13.
Finalmente, un aspecto que vale la pena mencionar es el efecto de las co-nexiones a tierra y de las interferencias electromagneticas que ellas producen,pues fueron varios los problemas observados (mediciones difıciles de entender)por causa de este aspecto. Se recurrio a bibliografıa especializada en este tema[6] y se corrigieron las conexiones a tierra en base a las sugerencias ahı expues-tas. De este modo se eliminaron los problemas observados. La razon por lacual los efectos de las tierras e interferencias electromagneticas se presentaronen este prototipo y no en los otros prototipos que se exponen en esta obra esla longitud de los conductores utilizados para conectar el sistema de medicionde x. Sin embargo, no fue necesario reducir dicha longitud, simplemente seeliminaron lazos de tierras que eran innecesarios.
En la figura 12.15 se presentan los resultados obtenidos en simulacion deldiagrama de bloques en 12.11(a) cuando se usan los valores numericos en(12.18), (12.19), (12.26), (12.29), (12.33), b = 2.5, c = 17.7 y γ = 0.854.Notese el parecido existente entre los resultados de las figuras 12.13 y 12.15 apesar de la presencia importante de ruido tanto en la posicion medida xv comoen la senal de control i∗. Finalmente, se concluye que el sistema de controlcumple con su proposito: estabilizar la posicion del balın xv en un valor muycercano al valor deseado xvd = 1[V]. Finalmente, en la figura 12.16 se muestrauna fotografıa del prototipo de sistema ball and beam construido cuando estafuncionando.
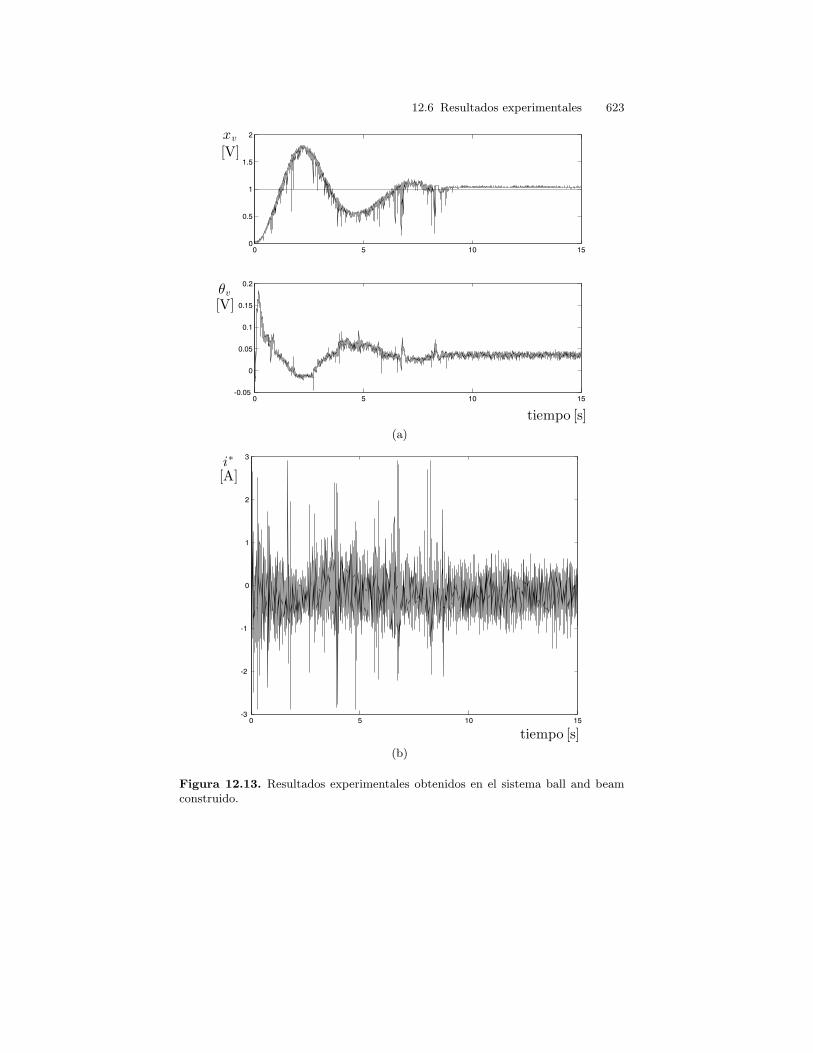
12.6 Resultados experimentales 623
xvV[ ]
òvV[ ]
tiempo s[ ]
(a)
tiempo s[ ]
iã
A[ ]
(b)
Figura 12.13. Resultados experimentales obtenidos en el sistema ball and beamconstruido.
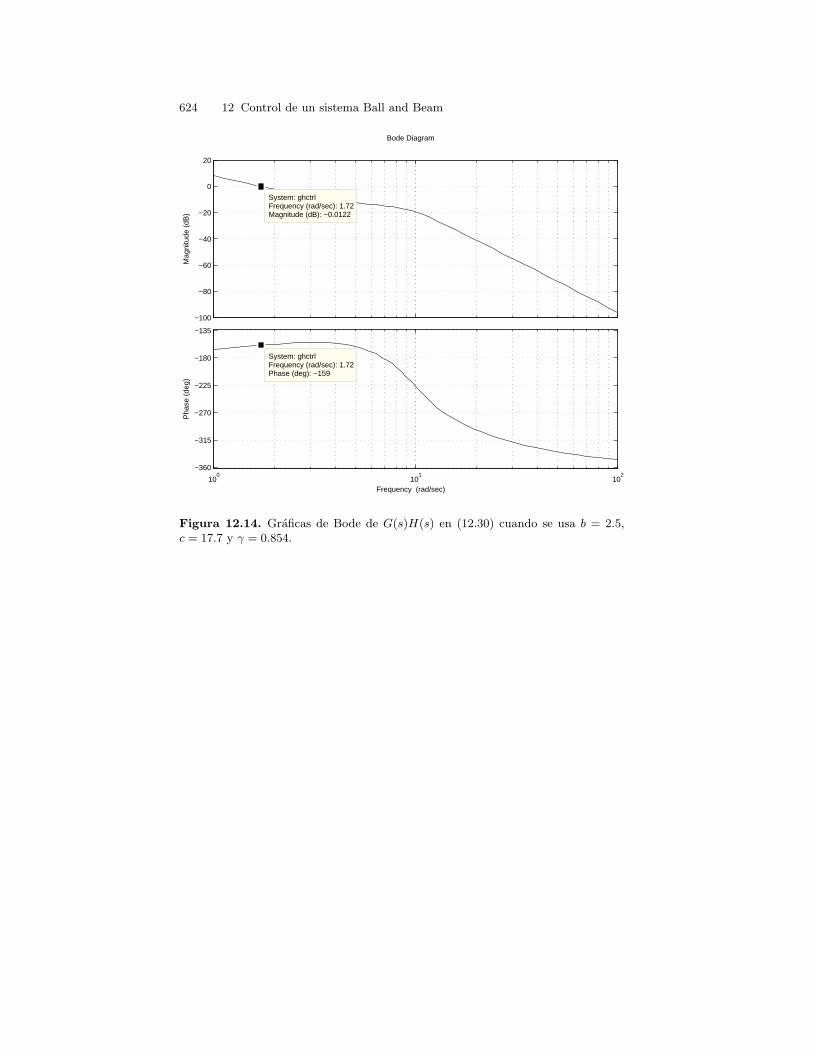
624 12 Control de un sistema Ball and Beam
Bode Diagram
Frequency (rad/sec)
−100
−80
−60
−40
−20
0
20
System: ghctrlFrequency (rad/sec): 1.72Magnitude (dB): −0.0122
Mag
nitu
de (
dB)
100
101
102
−360
−315
−270
−225
−180
−135
System: ghctrlFrequency (rad/sec): 1.72Phase (deg): −159
Pha
se (
deg)
Figura 12.14. Graficas de Bode de G(s)H(s) en (12.30) cuando se usa b = 2.5,c = 17.7 y γ = 0.854.
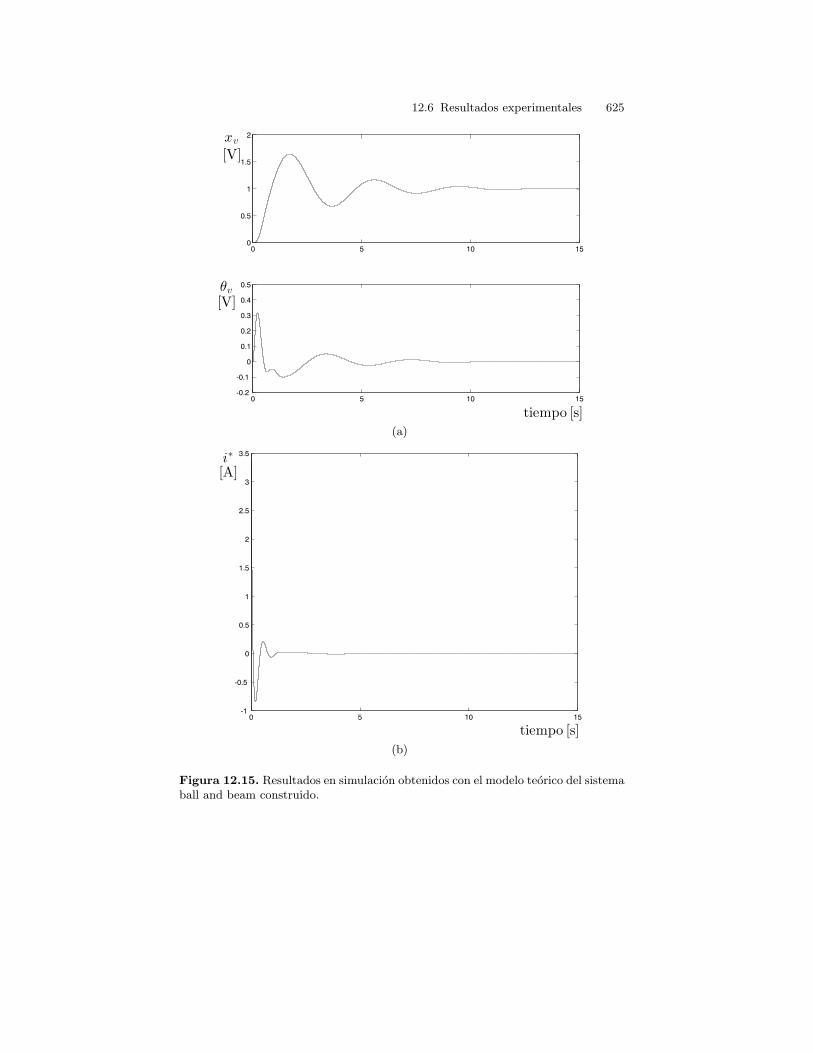
12.6 Resultados experimentales 625
òvV[ ]
V[ ]xv
tiempo s[ ]
(a)
tiempo s[ ]
iã
A[ ]
(b)
Figura 12.15. Resultados en simulacion obtenidos con el modelo teorico del sistemaball and beam construido.

626 12 Control de un sistema Ball and Beam
Figura 12.16. El prototipo ball and beam construido, funcionando.
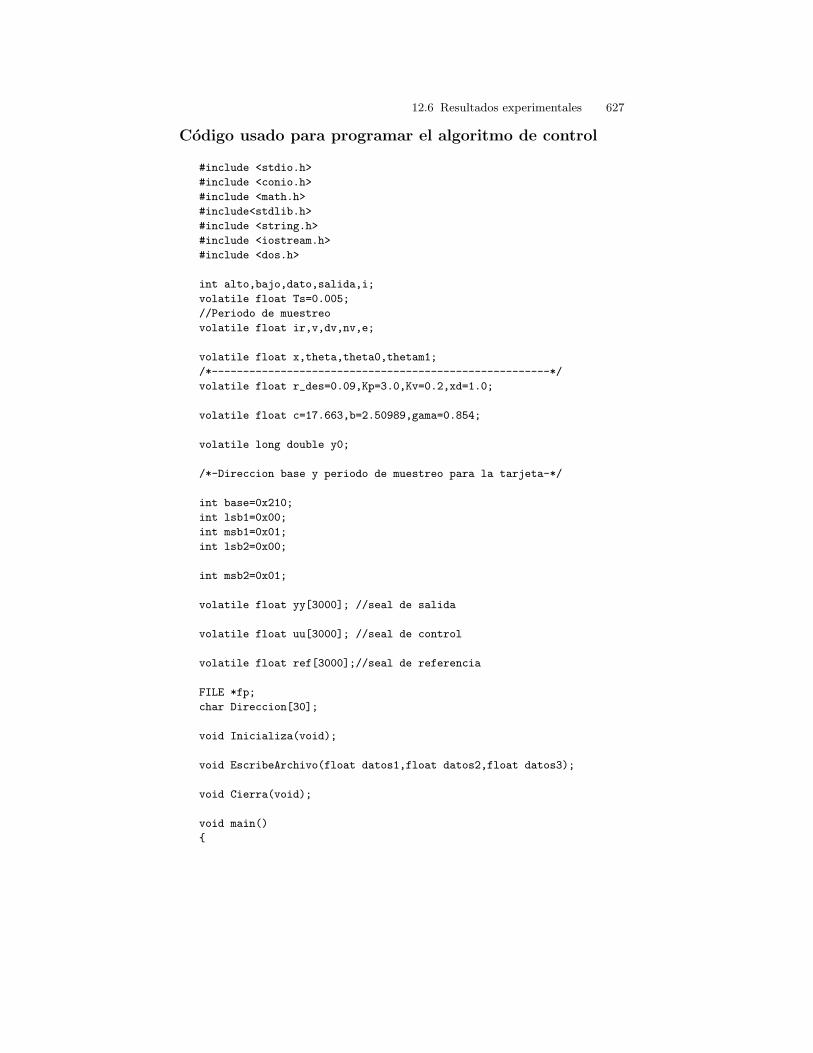
12.6 Resultados experimentales 627
Codigo usado para programar el algoritmo de control
#include <stdio.h>
#include <conio.h>
#include <math.h>
#include<stdlib.h>
#include <string.h>
#include <iostream.h>
#include <dos.h>
int alto,bajo,dato,salida,i;
volatile float Ts=0.005;
//Periodo de muestreo
volatile float ir,v,dv,nv,e;
volatile float x,theta,theta0,thetam1;
/*------------------------------------------------------*/
volatile float r_des=0.09,Kp=3.0,Kv=0.2,xd=1.0;
volatile float c=17.663,b=2.50989,gama=0.854;
volatile long double y0;
/*-Direccion base y periodo de muestreo para la tarjeta-*/
int base=0x210;
int lsb1=0x00;
int msb1=0x01;
int lsb2=0x00;
int msb2=0x01;
volatile float yy[3000]; //seal de salida
volatile float uu[3000]; //seal de control
volatile float ref[3000];//seal de referencia
FILE *fp;
char Direccion[30];
void Inicializa(void);
void EscribeArchivo(float datos1,float datos2,float datos3);
void Cierra(void);
void main()
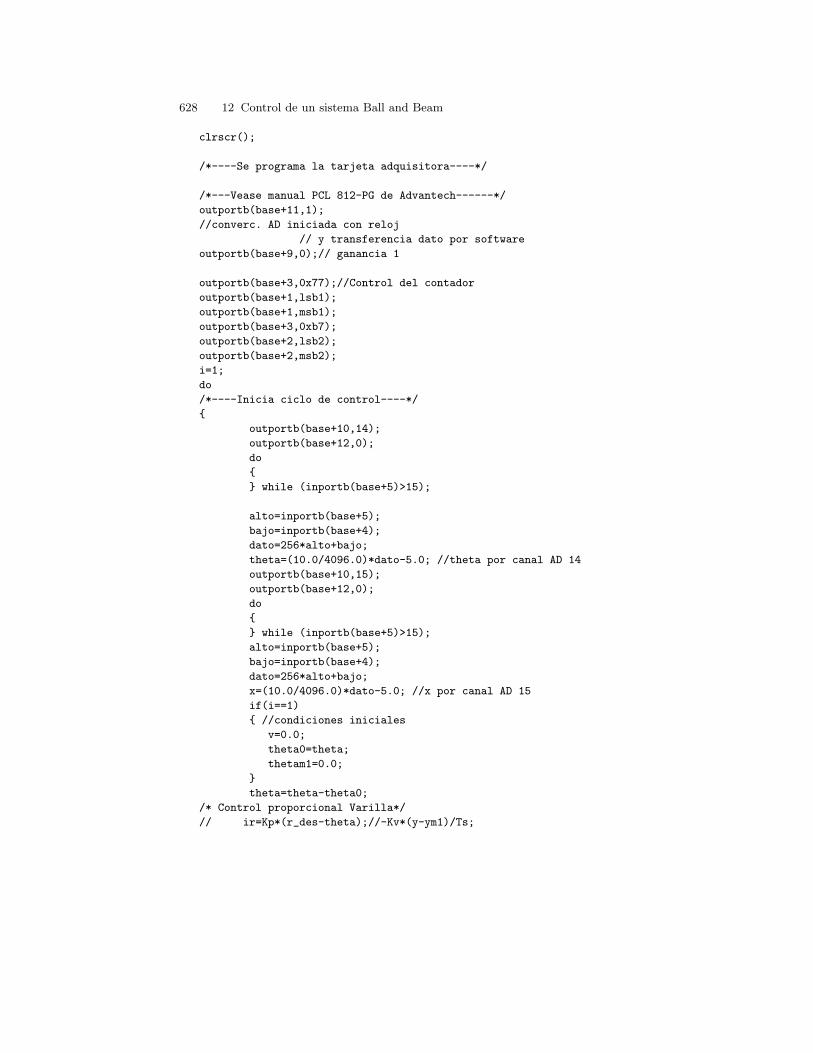
628 12 Control de un sistema Ball and Beam
clrscr();
/*----Se programa la tarjeta adquisitora----*/
/*---Vease manual PCL 812-PG de Advantech------*/
outportb(base+11,1);
//converc. AD iniciada con reloj
// y transferencia dato por software
outportb(base+9,0);// ganancia 1
outportb(base+3,0x77);//Control del contador
outportb(base+1,lsb1);
outportb(base+1,msb1);
outportb(base+3,0xb7);
outportb(base+2,lsb2);
outportb(base+2,msb2);
i=1;
do
/*----Inicia ciclo de control----*/
outportb(base+10,14);
outportb(base+12,0);
do
while (inportb(base+5)>15);
alto=inportb(base+5);
bajo=inportb(base+4);
dato=256*alto+bajo;
theta=(10.0/4096.0)*dato-5.0; //theta por canal AD 14
outportb(base+10,15);
outportb(base+12,0);
do
while (inportb(base+5)>15);
alto=inportb(base+5);
bajo=inportb(base+4);
dato=256*alto+bajo;
x=(10.0/4096.0)*dato-5.0; //x por canal AD 15
if(i==1)
//condiciones iniciales
v=0.0;
theta0=theta;
thetam1=0.0;
theta=theta-theta0;
/* Control proporcional Varilla*/
// ir=Kp*(r_des-theta);//-Kv*(y-ym1)/Ts;
12.6 Resultados experimentales 629
/* Control con red de adelanto */
e=xd-x;
dv=( -c*v+(b-c)*e )*Ts;
nv=v+dv;
ir=(gama*(e+v)-theta)*4.0-Kv*(theta-thetam1)/Ts;
/*-----Se mantiene a theta cercana a cero----*/
if( (theta>(0.5) )&&(ir>=0.0) )
ir=0.0;
if( (theta<(-0.5) )&&(ir<=0.0) )
ir=0.0;
ir=-ir;
//condicion de saturacion de seal de
if(ir>2.9 )
ir=2.9;
if(ir<-2.9)
ir=-2.9;
salida=floor(682.66*ir+2048.0);
bajo=salida & 0xff;
alto=salida & 0x0f00;
alto=floor(alto/256.0);
outportb(base+4,bajo);
outportb(base+5,alto);
yy[i]=x;
uu[i]=ir;
ref[i]=theta;
v=nv;
thetam1=theta;
i++;
delay(5);
if (i>3000) i=3000;
while ( (!kbhit() ) && ( i<=3000 ) );
// while (i<=3000);
ir=0.0;
// detiene el motor
salida=floor(682.66*ir+2048.0);
bajo=salida & 0xff;
alto=salida & 0x0f00;
alto=floor(alto/256.0);
outportb(base+4,bajo);
outportb(base+5,alto);
// Guarda datos en un archivo en el disco duro
cout<<i<<endl;
Inicializa();
i-=1;
for(int jj=1;jj<i;jj++)
630 12 Control de un sistema Ball and Beam
EscribeArchivo(yy[jj],uu[jj],ref[jj]);
Cierra();
void Inicializa(void)
strcpy(Direccion,"c:\\ballbeam\\datos4s8.txt");
if( (fp=fopen(Direccion,"w+")) == NULL)
cout<<"No se puede crear el archivo ni modo";
exit(1);
void EscribeArchivo(float datos1,float datos2,float datos3)
fprintf(fp,"%f %f %f \n",datos1,datos2,datos3);
void Cierra(void)
fclose(fp);
12.7. Control basado en el microcontroladorPIC16F877A
12.7.1. Construccion del sistema de control
En esta parte se utiliza un microcontrolador PIC16F877A [7] para con-trolar al sistema ball and beam. Se debe aclarar que la parte mecanica delprototipo tambien sufrio algunos cambios ligeros los cuales seran descritos enlo que sigue. A continuacion se listan unicamente los componentes nuevos quefueron introducidos.
Una computadora portatil Laptop con puerto USB.Conector de USB a serie.Microcontrolador PIC16F877A de Microchip.Convertidor digital/analogico DAC0800LCN.Amplificadores operacionales TL081.Manejador/Receptor MAX232.
En la figura 12.17 se muestra un diagrama de bloques del sistema de controlque se construyo. El sistema de medicion de x es identico al mostrado en lafigura 12.4. Sin embargo, la ganancia que se midio para este sensor (siguiendoun procedimiento identico al descrito en la seccion 12.3.2) es:
Ax = 5.3750[V/m] (12.38)
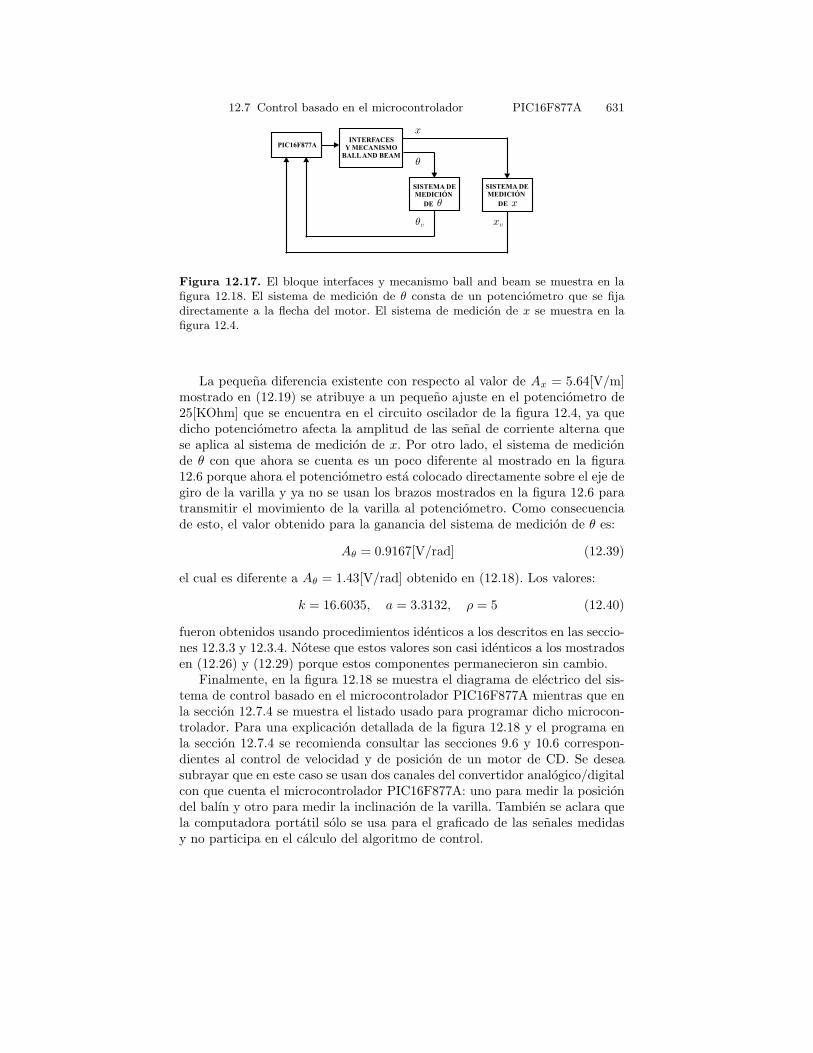
12.7 Control basado en el microcontrolador PIC16F877A 631
PIC16F877A
SISTEMA DEMEDICIÓN
DE ò
SISTEMA DEMEDICIÓN
DE x
ò
x
òý xý
INTERFACESY MECANISMO
BALL AND BEAM
Figura 12.17. El bloque interfaces y mecanismo ball and beam se muestra en lafigura 12.18. El sistema de medicion de θ consta de un potenciometro que se fijadirectamente a la flecha del motor. El sistema de medicion de x se muestra en lafigura 12.4.
La pequena diferencia existente con respecto al valor de Ax = 5.64[V/m]mostrado en (12.19) se atribuye a un pequeno ajuste en el potenciometro de25[KOhm] que se encuentra en el circuito oscilador de la figura 12.4, ya quedicho potenciometro afecta la amplitud de las senal de corriente alterna quese aplica al sistema de medicion de x. Por otro lado, el sistema de medicionde θ con que ahora se cuenta es un poco diferente al mostrado en la figura12.6 porque ahora el potenciometro esta colocado directamente sobre el eje degiro de la varilla y ya no se usan los brazos mostrados en la figura 12.6 paratransmitir el movimiento de la varilla al potenciometro. Como consecuenciade esto, el valor obtenido para la ganancia del sistema de medicion de θ es:
Aθ = 0.9167[V/rad] (12.39)
el cual es diferente a Aθ = 1.43[V/rad] obtenido en (12.18). Los valores:
k = 16.6035, a = 3.3132, ρ = 5 (12.40)
fueron obtenidos usando procedimientos identicos a los descritos en las seccio-nes 12.3.3 y 12.3.4. Notese que estos valores son casi identicos a los mostradosen (12.26) y (12.29) porque estos componentes permanecieron sin cambio.
Finalmente, en la figura 12.18 se muestra el diagrama de electrico del sis-tema de control basado en el microcontrolador PIC16F877A mientras que enla seccion 12.7.4 se muestra el listado usado para programar dicho microcon-trolador. Para una explicacion detallada de la figura 12.18 y el programa enla seccion 12.7.4 se recomienda consultar las secciones 9.6 y 10.6 correspon-dientes al control de velocidad y de posicion de un motor de CD. Se deseasubrayar que en este caso se usan dos canales del convertidor analogico/digitalcon que cuenta el microcontrolador PIC16F877A: uno para medir la posiciondel balın y otro para medir la inclinacion de la varilla. Tambien se aclara quela computadora portatil solo se usa para el graficado de las senales medidasy no participa en el calculo del algoritmo de control.
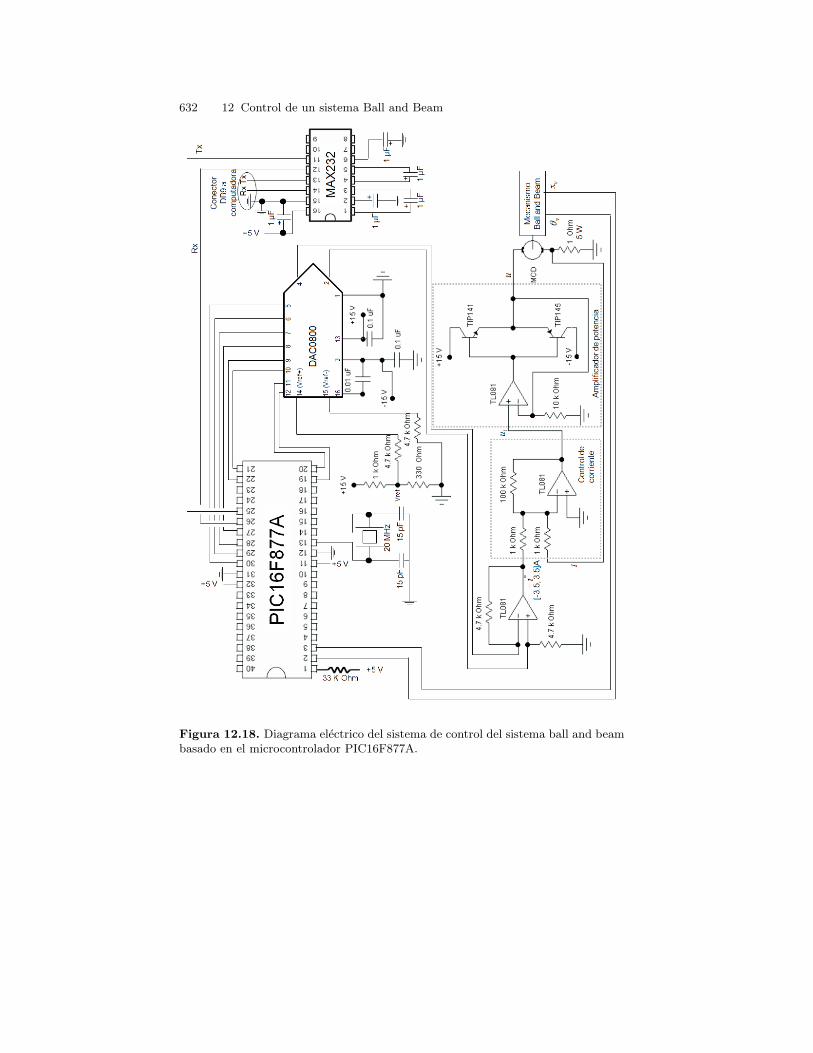
632 12 Control de un sistema Ball and Beam
Figura 12.18. Diagrama electrico del sistema de control del sistema ball and beambasado en el microcontrolador PIC16F877A.
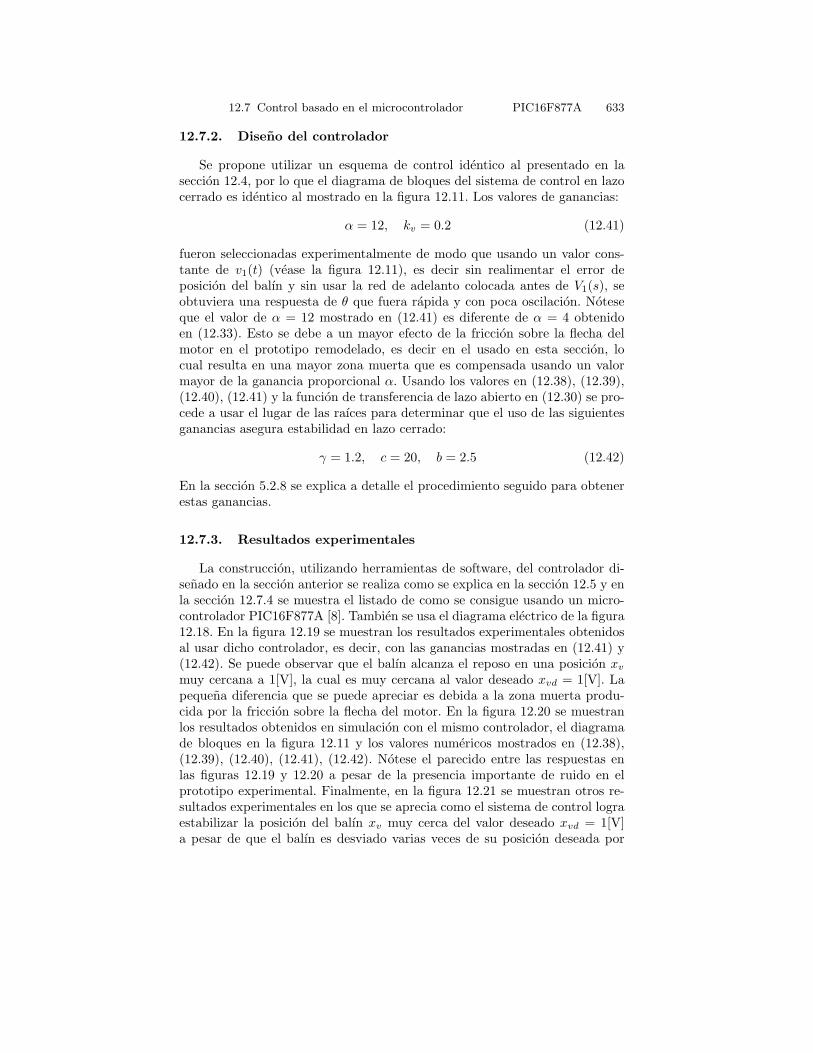
12.7 Control basado en el microcontrolador PIC16F877A 633
12.7.2. Diseno del controlador
Se propone utilizar un esquema de control identico al presentado en laseccion 12.4, por lo que el diagrama de bloques del sistema de control en lazocerrado es identico al mostrado en la figura 12.11. Los valores de ganancias:
α = 12, kv = 0.2 (12.41)
fueron seleccionadas experimentalmente de modo que usando un valor cons-tante de v1(t) (vease la figura 12.11), es decir sin realimentar el error deposicion del balın y sin usar la red de adelanto colocada antes de V1(s), seobtuviera una respuesta de θ que fuera rapida y con poca oscilacion. Noteseque el valor de α = 12 mostrado en (12.41) es diferente de α = 4 obtenidoen (12.33). Esto se debe a un mayor efecto de la friccion sobre la flecha delmotor en el prototipo remodelado, es decir en el usado en esta seccion, locual resulta en una mayor zona muerta que es compensada usando un valormayor de la ganancia proporcional α. Usando los valores en (12.38), (12.39),(12.40), (12.41) y la funcion de transferencia de lazo abierto en (12.30) se pro-cede a usar el lugar de las raıces para determinar que el uso de las siguientesganancias asegura estabilidad en lazo cerrado:
γ = 1.2, c = 20, b = 2.5 (12.42)
En la seccion 5.2.8 se explica a detalle el procedimiento seguido para obtenerestas ganancias.
12.7.3. Resultados experimentales
La construccion, utilizando herramientas de software, del controlador di-senado en la seccion anterior se realiza como se explica en la seccion 12.5 y enla seccion 12.7.4 se muestra el listado de como se consigue usando un micro-controlador PIC16F877A [8]. Tambien se usa el diagrama electrico de la figura12.18. En la figura 12.19 se muestran los resultados experimentales obtenidosal usar dicho controlador, es decir, con las ganancias mostradas en (12.41) y(12.42). Se puede observar que el balın alcanza el reposo en una posicion xv
muy cercana a 1[V], la cual es muy cercana al valor deseado xvd = 1[V]. Lapequena diferencia que se puede apreciar es debida a la zona muerta produ-cida por la friccion sobre la flecha del motor. En la figura 12.20 se muestranlos resultados obtenidos en simulacion con el mismo controlador, el diagramade bloques en la figura 12.11 y los valores numericos mostrados en (12.38),(12.39), (12.40), (12.41), (12.42). Notese el parecido entre las respuestas enlas figuras 12.19 y 12.20 a pesar de la presencia importante de ruido en elprototipo experimental. Finalmente, en la figura 12.21 se muestran otros re-sultados experimentales en los que se aprecia como el sistema de control lograestabilizar la posicion del balın xv muy cerca del valor deseado xvd = 1[V]a pesar de que el balın es desviado varias veces de su posicion deseada por
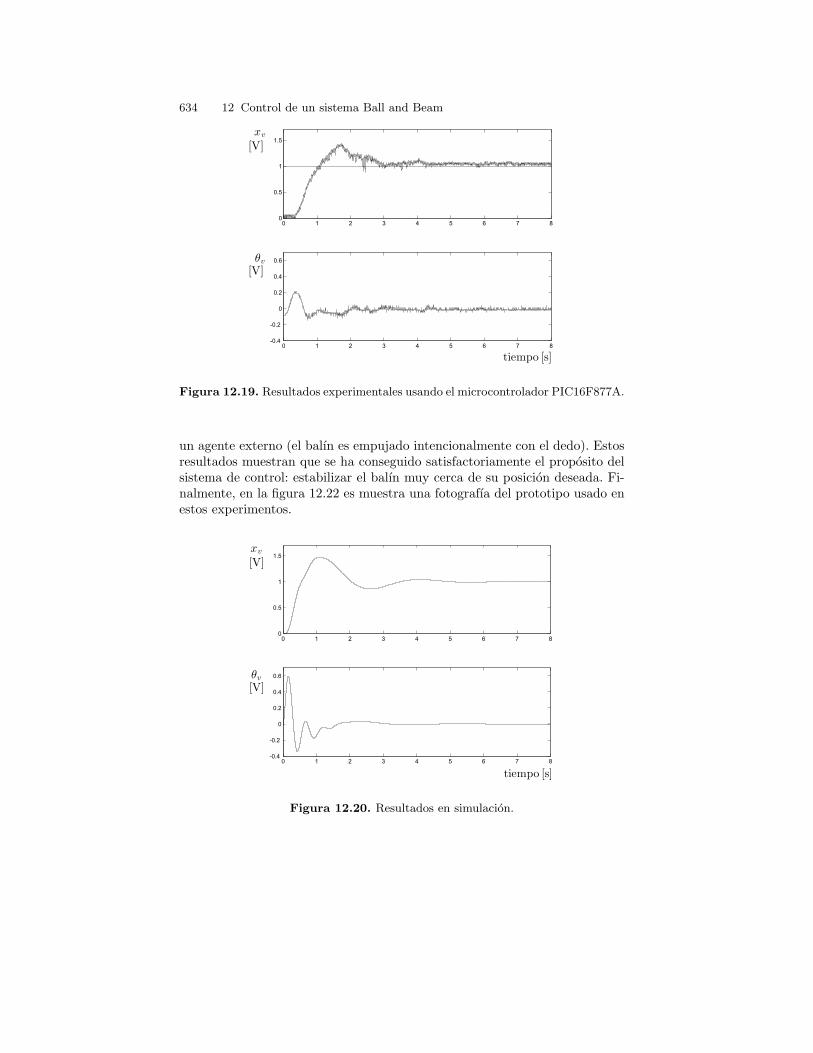
634 12 Control de un sistema Ball and Beam
tiempo s[ ]
V[ ]
V[ ]xv
òv
Figura 12.19. Resultados experimentales usando el microcontrolador PIC16F877A.
un agente externo (el balın es empujado intencionalmente con el dedo). Estosresultados muestran que se ha conseguido satisfactoriamente el proposito delsistema de control: estabilizar el balın muy cerca de su posicion deseada. Fi-nalmente, en la figura 12.22 es muestra una fotografıa del prototipo usado enestos experimentos.
V[ ]
V[ ]
tiempo s[ ]
òv
xv
Figura 12.20. Resultados en simulacion.
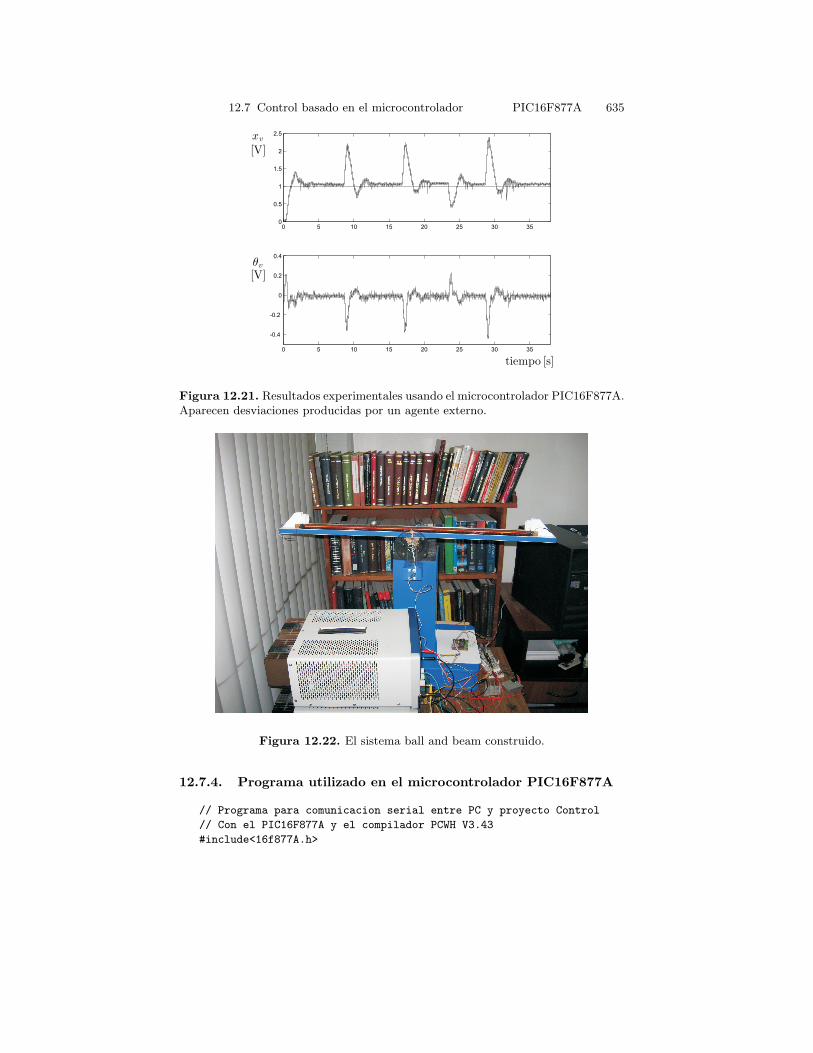
12.7 Control basado en el microcontrolador PIC16F877A 635
xv
òv
tiempo s[ ]
V[ ]
V[ ]
Figura 12.21. Resultados experimentales usando el microcontrolador PIC16F877A.Aparecen desviaciones producidas por un agente externo.
Figura 12.22. El sistema ball and beam construido.
12.7.4. Programa utilizado en el microcontrolador PIC16F877A
// Programa para comunicacion serial entre PC y proyecto Control
// Con el PIC16F877A y el compilador PCWH V3.43
#include<16f877A.h>
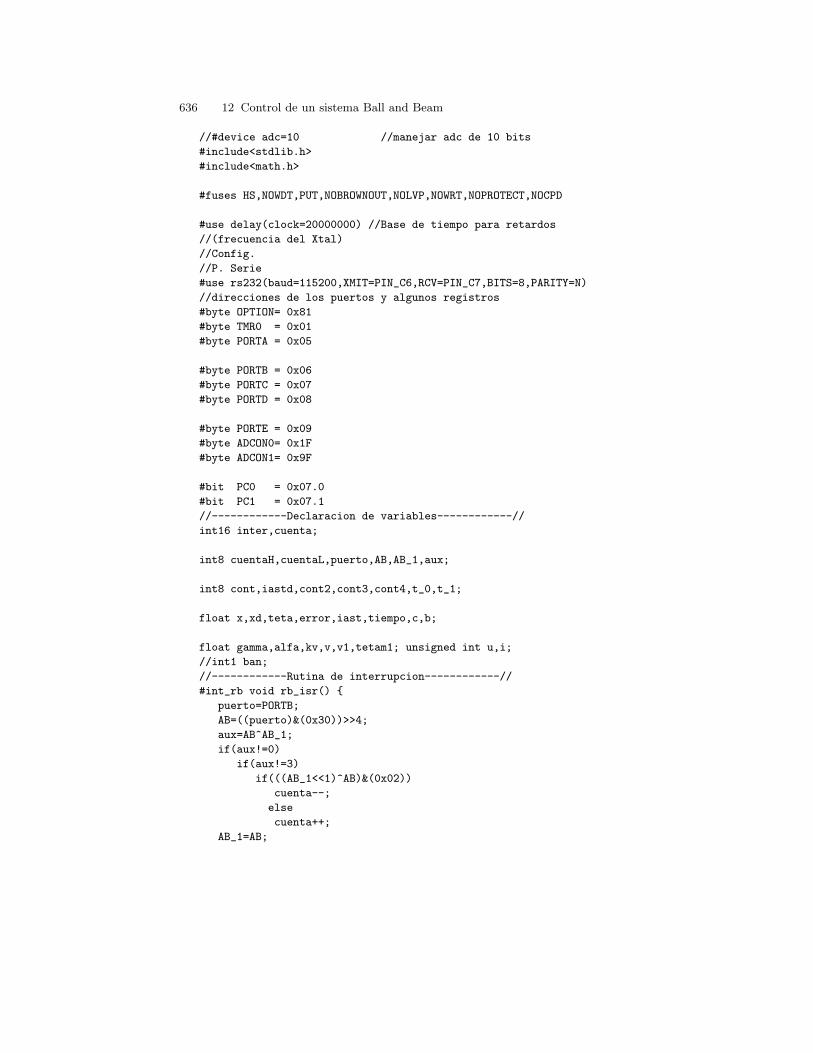
636 12 Control de un sistema Ball and Beam
//#device adc=10 //manejar adc de 10 bits
#include<stdlib.h>
#include<math.h>
#fuses HS,NOWDT,PUT,NOBROWNOUT,NOLVP,NOWRT,NOPROTECT,NOCPD
#use delay(clock=20000000) //Base de tiempo para retardos
//(frecuencia del Xtal)
//Config.
//P. Serie
#use rs232(baud=115200,XMIT=PIN_C6,RCV=PIN_C7,BITS=8,PARITY=N)
//direcciones de los puertos y algunos registros
#byte OPTION= 0x81
#byte TMR0 = 0x01
#byte PORTA = 0x05
#byte PORTB = 0x06
#byte PORTC = 0x07
#byte PORTD = 0x08
#byte PORTE = 0x09
#byte ADCON0= 0x1F
#byte ADCON1= 0x9F
#bit PC0 = 0x07.0
#bit PC1 = 0x07.1
//------------Declaracion de variables------------//
int16 inter,cuenta;
int8 cuentaH,cuentaL,puerto,AB,AB_1,aux;
int8 cont,iastd,cont2,cont3,cont4,t_0,t_1;
float x,xd,teta,error,iast,tiempo,c,b;
float gamma,alfa,kv,v,v1,tetam1; unsigned int u,i;
//int1 ban;
//------------Rutina de interrupcion------------//
#int_rb void rb_isr()
puerto=PORTB;
AB=((puerto)&(0x30))>>4;
aux=AB^AB_1;
if(aux!=0)
if(aux!=3)
if(((AB_1<<1)^AB)&(0x02))
cuenta--;
else
cuenta++;
AB_1=AB;
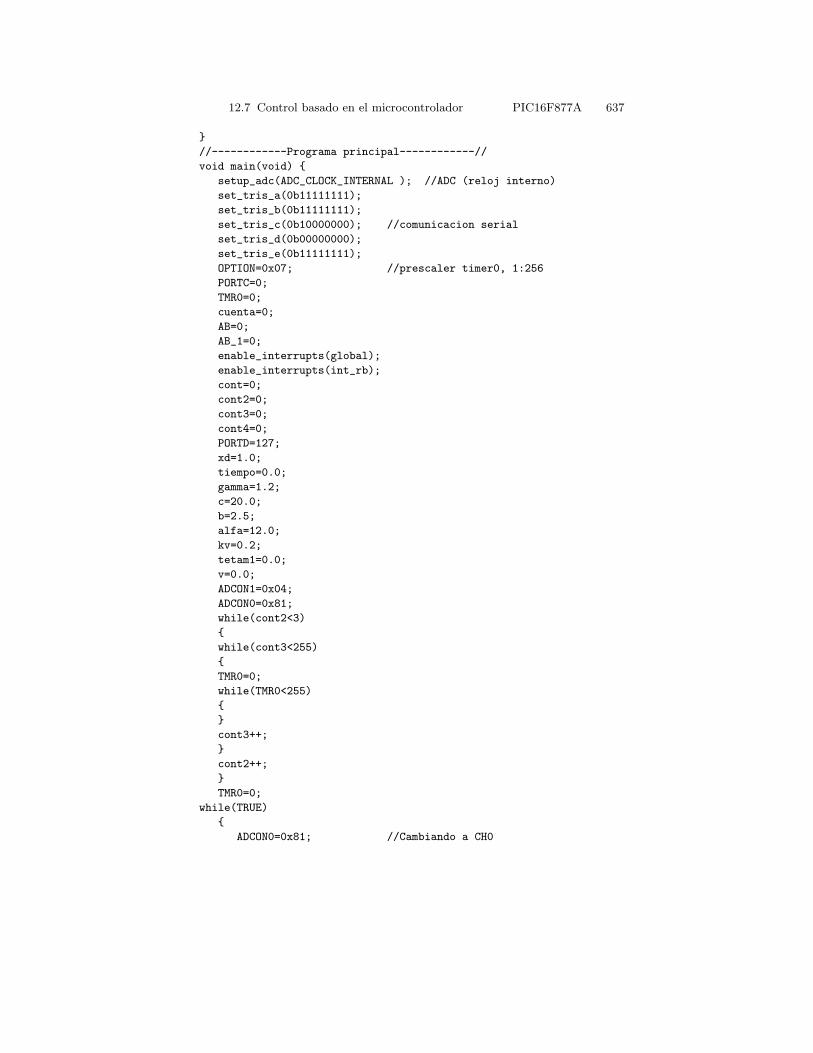
12.7 Control basado en el microcontrolador PIC16F877A 637
//------------Programa principal------------//
void main(void)
setup_adc(ADC_CLOCK_INTERNAL ); //ADC (reloj interno)
set_tris_a(0b11111111);
set_tris_b(0b11111111);
set_tris_c(0b10000000); //comunicacion serial
set_tris_d(0b00000000);
set_tris_e(0b11111111);
OPTION=0x07; //prescaler timer0, 1:256
PORTC=0;
TMR0=0;
cuenta=0;
AB=0;
AB_1=0;
enable_interrupts(global);
enable_interrupts(int_rb);
cont=0;
cont2=0;
cont3=0;
cont4=0;
PORTD=127;
xd=1.0;
tiempo=0.0;
gamma=1.2;
c=20.0;
b=2.5;
alfa=12.0;
kv=0.2;
tetam1=0.0;
v=0.0;
ADCON1=0x04;
ADCON0=0x81;
while(cont2<3)
while(cont3<255)
TMR0=0;
while(TMR0<255)
cont3++;
cont2++;
TMR0=0;
while(TRUE)
ADCON0=0x81; //Cambiando a CH0

638 12 Control de un sistema Ball and Beam
for(i=0;i<37;i++); /estabilizar capacitor interno
t_0=read_adc(); //leer ADC
x=0.0196*t_0;
ADCON0=0x89; //cambiando a CH1
for(i=0;i<37;i++); //estabilizar capacitor interno
t_1=read_adc(); //leer ADC
teta=0.0196*t_1-2.81;//2.81;
error=xd-x;
/* Controlador */
v1=gamma*(error+v);
v=(-c*v+(b-c)*error)*0.002+v;
iast=alfa*(v1-teta)-kv*(teta-tetam1)/0.002;
/* ___________________________________________ */
if(iast<-3.3)
iast=-3.3;
if(iast>3.3)
iast=3.3;
iast=-iast;
iastd=(unsigned int)(36.4286*iast+127);
PORTD=iastd;
tetam1=teta;
cuentaH=t_1;
cuentaL=t_0;
putc(0xAA); //reconocimieno puerto serial
putc(cuentaH); //cuenta al puerto serial
putc(cuentaL);
/*
iast=-iast;
iastd=(unsigned int)(36.4286*iast+127);
cuentaH=0x00;
cuentaL=(iastd)&(0xFF);
putc(0xAA); //reconocimienopuerto serial
putc(cuentaH); //cuenta puerto serial
putc(cuentaL);
*/
PC1=1; //inicia espera del timer
while(TMR0<40) //1 cuenta=(4/FXtal)*256 seg, 20=1 ms
PC1=0; //termina espera del timer
TMR0=0;
tiempo=tiempo+0.002;
//cierre del while infinito
//cierre del main

12.8 Sistema de medicion mejorado 639
12.8. Un sistema de medicion mejorado para laposicion del balın
Durante las pruebas experimentales presentadas en las secciones 12.6 y12.7.3, se observo que el sistema de medicion mostrado en la figura 12.4 puedellegar a producir vibraciones rapidas de la varilla por lo que el balın puede salirdespedido. Se llego a la conclusion de que este comportamiento es producidopor el uso de una senal de corriente alterna de alta frecuencia como partefundamental del sistema de medicion mostrado en la figura 12.4.
En la figura 12.23 se muestra el diagrama electrico de un nuevo sistemade medicion que elimina el problema arriba mencionado. Como se puede ob-servar en esta figura, se continua utilizando el soporte de madera y los rielesnumero uno (alambre magneto arrollado sobre un nucleo cilındrico de made-ra) y numero dos (varilla cilındrica de aluminio) que ya se habıan utilizado enla figura 12.4. La modificacion consiste en que el riel numero uno, el cual seutilizaba como un inductor en la figura 12.4, ahora se utiliza como una simpleresistencia (resistencia del cobre) en la figura 12.23. Esto significa que los dosrieles funcionan en conjunto como un simple potenciometro que en el puntoxv entrega un voltaje de CD que es proporcional a la posicion x del balın.El valor de xv se mide utilizando uno de los convertidores analogico-digitaldel microcontrolador PIC16F877A conectando la terminal etiquetada comoAN1 al pin numero 3 de dicho microcontrolador. Es importante mencionarque, previamente, xv se hace pasar a traves de un filtro pasa bajas con fre-cuencia de corte de 14.6148 [Hz] (R = 33[KOhm], C = 0.33[µF]). Ademas,con el fin de disminuir las posibles variaciones de xv debidas al calentamientodel riel numero uno, el voltaje presente en la terminal etiquetada como AN3(que se conecta al pin 5 del microcontrolador) se utiliza como el voltaje dereferencia para el convertidor analogico-digital encargado de medir xv. Tam-bien es importante decir que, previamente, la senal entregada en AN3 se hacepasar a traves de un filtro pasa bajas con frecuencia de corte de 4.8229 [Hz](R = 100[KOhm], C = 0.33[µF]).
A continuacion se muestra el codigo utilizado para programar el micro-controlador PIC16F877A a fın de realizar la tarea de leer la posicion x delbalın:
#device adc=10 //manejar adc de 10 bits
setup_adc(ADC_CLOCK_INTERNAL); //ADC (reloj interno)
setup_adc_ports(ANALOG_RA3_REF);//RA3(AN3)= referencia ADC
set_adc_channel(1);
conv=read_adc();
x=0.65*(conv-511)/1023; // posicion del balin en metros
La expresion x=0.65*(conv-511)/1023 se obtiene del siguiente modo. Lavariable “conv” varıa en el rango [0,210-1]=[0,1023] porque el convertidoranalogico-digital esta programado para trabajar con 10 bits. Sin embargo, la
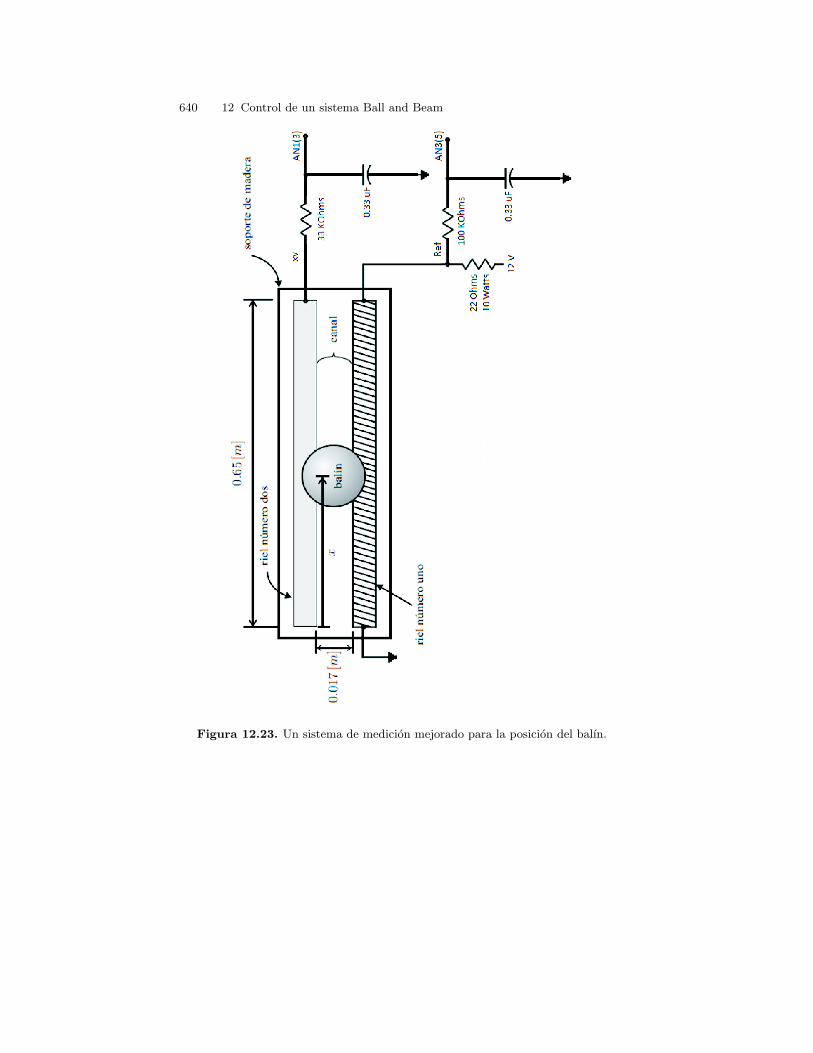
640 12 Control de un sistema Ball and Beam
Figura 12.23. Un sistema de medicion mejorado para la posicion del balın.

12.10 Preguntas de repaso 641
operacion “conv-511” hace que (conv-511) tome valores en el rango [-511,512],lo cual corresponde a valores de x en el rango de [-0.65/2,0.65/2][m] (en laseccion 12.2.1 se especifica que ambos rieles tienen una longitud de 0.65[m]).Entonces se debe cumplir la siguiente regla:
511 → 0.65/2 [m]
(conv-511) → x[m]
De aquı se obtiene la expresion x=0.65*(conv-511)/1023. Por otro lado, unamejora adicional que tambien puede contribuir a reducir el problema citadoal principio de la presente seccion es el uso de un encoder, en lugar de unpotenciometro, para medir el angulo de inclinacion de la varilla θ. En la seccion10.7 se indica como programar el microcontrolador PIC16F877A para leer unencoder.
12.9. Resumen del capıtulo
En este capıtulo se ha construido un sistema ball and beam y todas lasinterfases necesarias para su control en lazo cerrado. El esquema de controlutilizado cuenta con dos lazos. El lazo interno sirve para controlar (controlproporcional con realimentacion de velocidad) el angulo de inclinacion de lavarilla mientras que el lazo externo controla la posicion del balın (compensadorde adelanto). Un aspecto interesante del prototipo construido es el que serefiere al sensor de la posicion del balın. La idea es construir un canal formadopor dos rieles que, juntos, funcionan de manera similar a un potenciometro.Ası, el voltaje entregado por los rieles es proporcional a la posicion del balınsobre la varilla.
Se ha mostrado que el controlador puede ser disenado utilizando las dostecnicas fundamentales del control clasico: la respuesta en el tiempo (el lugarde las raıces) y la respuesta en frecuencia (criterio de de estabilidad de Nyquisty margenes de fase y de ganancia). Desde el punto de vista de la practica enla construccion de sistemas de control, se ha visto que el efecto del ruidoy las correctas conexiones a tierra son muy importantes en este prototipo.Tambien se han presentado algunos metodos experimentales interesantes paraidentificar los parametros del balın y del conjunto motor-varilla. Ademas, seha mostrado como deben ser tomadas en consideracion las ganancias debidasa los sensores, aspecto que generalmente es evitado durante los cursos sobrecontrol automatico en las instituciones educativas.
12.10. Preguntas de repaso
1. ¿Por que se dice que el sistema ball and beam es inestable en lazo abierto?2. ¿Como funciona el sistema de medicion de la posicion del balın?
642 12 Control de un sistema Ball and Beam
3. De una explicacion descriptiva (no analıtica) de por que se necesita con-trolar la inclinacion de la varilla ademas de la posicion del balın.
4. ¿Por que la masa equivalente del balın depende de los radios R y r deacuerdo a (12.12)? ¿Que pasarıa si r = 0 y que significa esto?
5. Describa el procedimiento experimental descrito en la seccion 12.3.4 paraidentificar el unico parametro de la dinamica del balın ¿Que otro proce-dimiento puede usar para esto?
6. El sistema de navegacion automatica de un barco es muy similar a unsistema ball and beam, donde papel de la varilla es sustituido por untimon. En base a esto intente resolver el problema de control automaticode la direccion de un barco.
7. Describa el funcionamiento del amplificador de potencia utilizado8. ¿Por que se dice que un compensador de adelanto introduce menos ruido
que un controlador PD?9. ¿Por que cree que para controlar la inclinacion de la varilla sea preferible
el uso de un controlador proporcional con realimentacion de velocidad enlugar de un controlador PD?
10. En los resultados experimentales obtenidos se alcanza a observar un pe-queno error en estado estacionario. Sin embargo, el sistema de control estipo 2 y la posicion deseada del balın es constante por lo que el error enestado estacionario deberıa ser igual a cero ¿Como explica esto?

Referencias
1. Quanser Inc. 119 Spy Court Markham, Ontario L3R 5H6, Canada. Availableat: http://www.quanser.com
2. P.V. Kokotovic, The joy of feedback: nonlinear and adaptive (1991 Bode PrizeLecture), IEEE Control Systems Magazine, pp. 7-17, June 1992.
3. Hibbeler R. C., 2004, Mecanica vectorial para ingenieros. Dinamica, (10a. edi-cion), Pearson Educacion, Mexico.
4. M. Alonso and E.J. Finn, Fısica, Addison-Wesley Iberoamericana, Wilmington,Delaware, 1995.
5. PCL-812PG User’s Manual, Advantech, Taiwan, 1996.6. J. Balcells, F. Daura, R. Esparza y R. Pallas, Interferencias electromagneticas en
sistemas electronicos, Alfaomega-Marcombo, Serie Mundo Electronico, Mexico,1992.
7. PIC16F877A Enhanced Flash Microcontroller, Data sheet, Microchip Techno-logy Inc., 2003.
8. Custom Computer Services Incorporated, CCS C Compiler Reference Manual,2003.

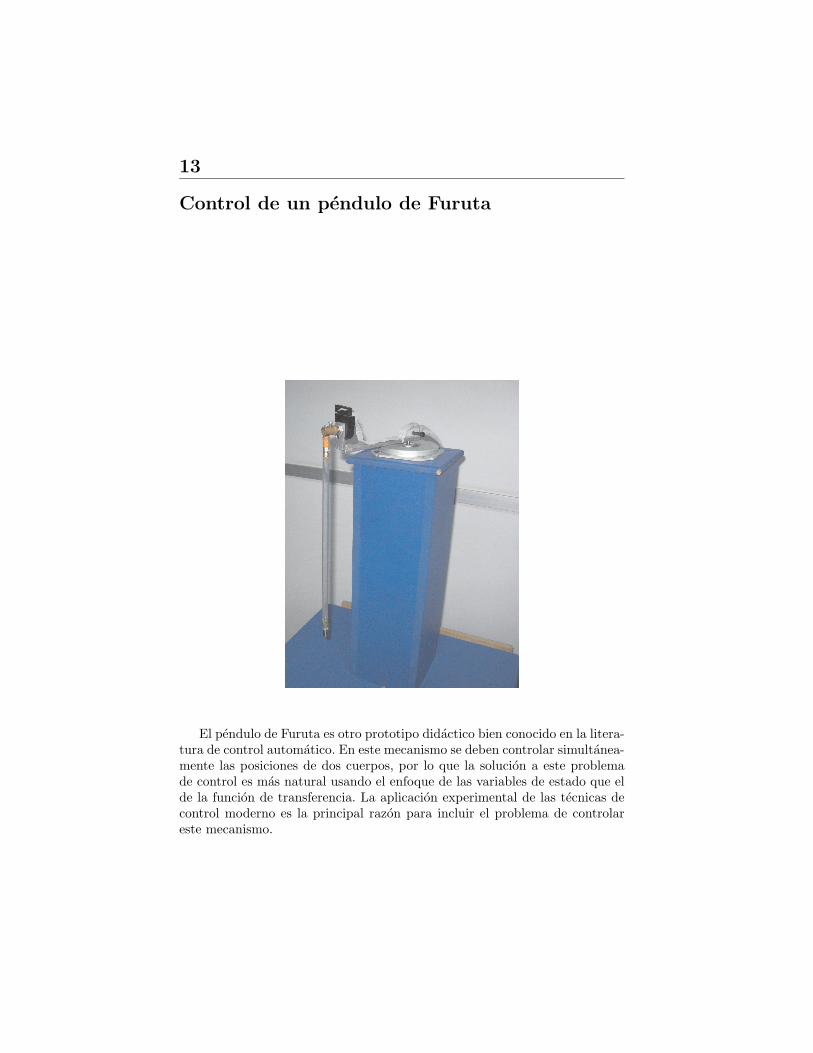
13
Control de un pendulo de Furuta
El pendulo de Furuta es otro prototipo didactico bien conocido en la litera-tura de control automatico. En este mecanismo se deben controlar simultanea-mente las posiciones de dos cuerpos, por lo que la solucion a este problemade control es mas natural usando el enfoque de las variables de estado que elde la funcion de transferencia. La aplicacion experimental de las tecnicas decontrol moderno es la principal razon para incluir el problema de controlareste mecanismo.
646 13 Control de un pendulo de Furuta
Objetivos del capıtulo
Construir un pendulo de Furuta.Construir las interfaces necesarias para el funcionamiento del sistema decontrol.Usar un microcontrolador para construir un controlador por realimentaciondel estado.Aplicar los conceptos de control moderno a una planta que es inestable pornaturaleza.Identificar de manera experimental los parametros del mecanismo.
En este capıtulo se presenta el control de un sistema conocido como elpendulo de Furuta. En la figura 13.1 se muestra un dibujo del pendulo deFuruta. Este problema puede ser descrito de una manera muy ilustrativa ha-ciendo referencia al bien conocido truco de mantener en equilibrio a una escobainvertida colocada sobre la palma de la mano. En un pendulo de Furuta lamano es sustituida por una varilla (conocida tecnicamente como brazo) queen un extremo tiene colocado un motor electrico del cual recibe un par quehace posible su movimiento. Ası, el brazo solo puede moverse sobre un planohorizontal de modo que su extremo opuesto a donde se encuentra el motordescribe una circunferencia. En este extremo se coloca otra varilla (conocidatecnicamente como pendulo) de la cual uno de sus extremos se une al extremolibre del brazo mediante un rodamiento o algun otro dispositivo mecanico quepermite el movimiento libre del pendulo respecto del brazo. Esto significa queno existe ningun motor colocado en esta union mecanica. Sin embargo, el ro-damiento ahı colocado restringe el pendulo a movimientos giratorios sobre unplano perpendicular al brazo. Esto significa que el extremo libre del pendulosolo puede describir una circunferencia cuyo centro esta en el punto donde seunen el brazo y el pendulo.
Una de las caracterısticas que hacen interesante al pendulo de Furuta desdeel punto de vista de control es que es inherentemente inestable. Esto puedeverse facilmente recordando el problema de equilibrar la escoba: esta siempretiende a abandonar su posicion invertida para caer al suelo. Por tanto, lasintonizacion del controlador requerido no es una tarea trivial y requiere deun conocimiento adecuado de las tecnicas de la Teorıa de Control.
Las variables y parametros involucrados en el pendulo de Furuta de lafigura 13.1 son los siguientes:
θ0 es la posicion angular (en radianes) del brazo medida respecto a unaposicion de referencia arbitraria.θ1 es la posicion angular (en radianes) del pendulo medida respecto a suposicion vertical invertida.τ es el par generado por el motor electrico y que es aplicado sobre el brazo.I0 es la inercia del brazo cuando gira alrededor de uno de sus extremosmas la inercia del motor.
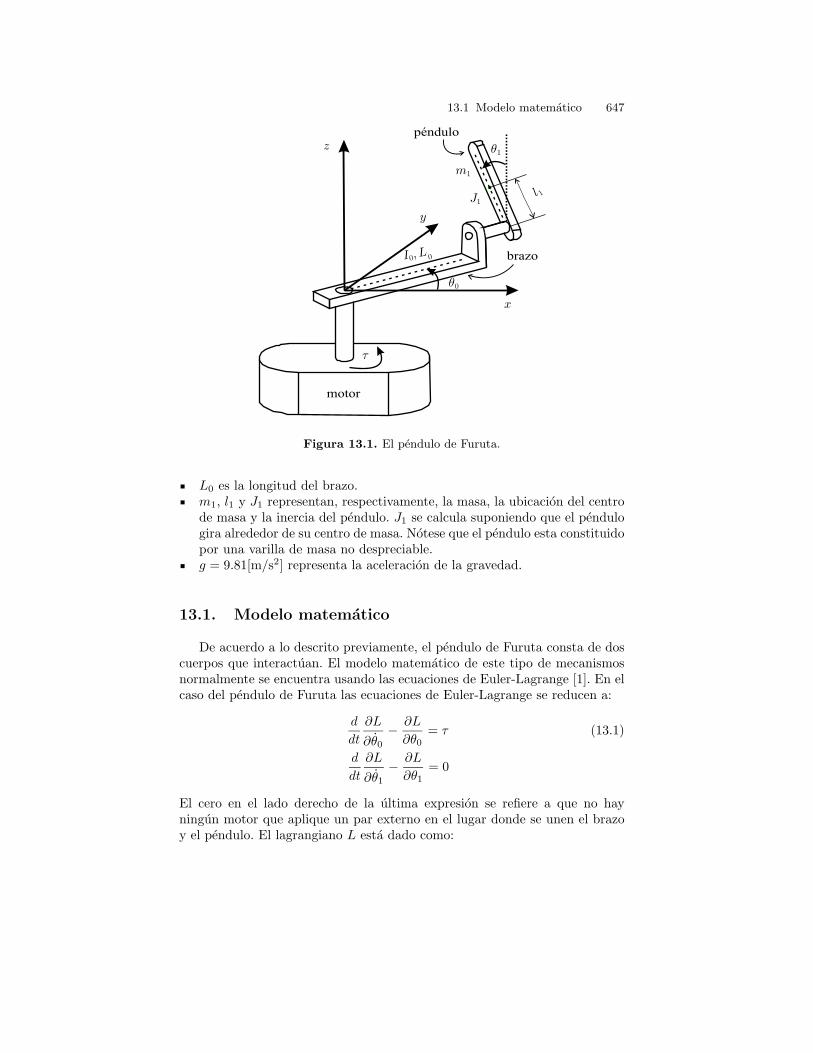
13.1 Modelo matematico 647
ò1
I0; L 0
ü
z
y
x
ò0
J1l 1
m1
péndulo
brazo
motor
Figura 13.1. El pendulo de Furuta.
L0 es la longitud del brazo.m1, l1 y J1 representan, respectivamente, la masa, la ubicacion del centrode masa y la inercia del pendulo. J1 se calcula suponiendo que el pendulogira alrededor de su centro de masa. Notese que el pendulo esta constituidopor una varilla de masa no despreciable.g = 9.81[m/s2] representa la aceleracion de la gravedad.
13.1. Modelo matematico
De acuerdo a lo descrito previamente, el pendulo de Furuta consta de doscuerpos que interactuan. El modelo matematico de este tipo de mecanismosnormalmente se encuentra usando las ecuaciones de Euler-Lagrange [1]. En elcaso del pendulo de Furuta las ecuaciones de Euler-Lagrange se reducen a:
d
dt
∂L
∂θ0
− ∂L
∂θ0= τ (13.1)
d
dt
∂L
∂θ1
− ∂L
∂θ1= 0
El cero en el lado derecho de la ultima expresion se refiere a que no hayningun motor que aplique un par externo en el lugar donde se unen el brazoy el pendulo. El lagrangiano L esta dado como:

648 13 Control de un pendulo de Furuta
L = K − P (13.2)
K = K0 + K1
donde K0 es la energıa cinetica del brazo, K1 es la energıa cinetica del penduloy P es la energıa potencial del pendulo. No se considera la energıa potencialdel brazo porque, al moverse sobre un plano horizontal, su energıa potenciales constante y puede ser considerada igual a cero.
El calculo de la energıa cinetica de un cuerpo cuya masa esta distribuida entodo su volumen puede simplificarse si se descompone en dos partes: una partedebida al movimiento traslacional de su centro de masa (considerado como unapartıcula) y otra parte debida al movimiento giratorio del cuerpo suponiendoque rota alrededor de su centro de masa. Sin embargo, si el movimiento delcuerpo puede ser descrito de manera sencilla entonces no es necesaria estadescomposicion. Por ejemplo, el movimiento del brazo es descrito facilmentecomo el movimiento giratorio de una varilla alrededor de uno de sus extremosy el giro del rotor del motor alrededor del mismo eje. Por tanto, no es difıcilencontrar que:
K0 =1
2I0θ
20 (13.3)
Por otro lado, el movimiento del pendulo es mas complejo pues depende delos movimientos combinados del brazo y del pendulo. En este caso es masconveniente descomponer el movimiento del pendulo en dos partes como semenciono anteriormente: El movimiento del pendulo se descompone en el mo-vimiento traslacional de una partıcula de masa m1 colocada en su centro demasa y el movimiento rotativo de una varilla que gira sobre un eje que pasapor el centro de masa del pendulo. Por tanto:
K1 =1
2J1θ
21 +
1
2m1v
T1 v1 (13.4)
donde v1 es un vector que representa la velocidad traslacional del centro demasa del pendulo, es decir:
v1 =
dXx
dtdXy
dtdXz
dt
, X =
Xx
Xy
Xz
(13.5)
donde Xx, Xy y Xz son las coordenadas cartesianas del centro de masa delpendulo. Esto significa que X es el vector posicion del centro de masa delpendulo. De acuerdo a las figuras 13.2(a) y 13.2(b) se encuentra que:
X =
Xx
Xy
Xz
=
L0 cos(θ0) − l1 sin(θ1) sin(θ0)L0 sin(θ0) + l1 sin(θ1) cos(θ0)
l1 cos(θ1)
(13.6)
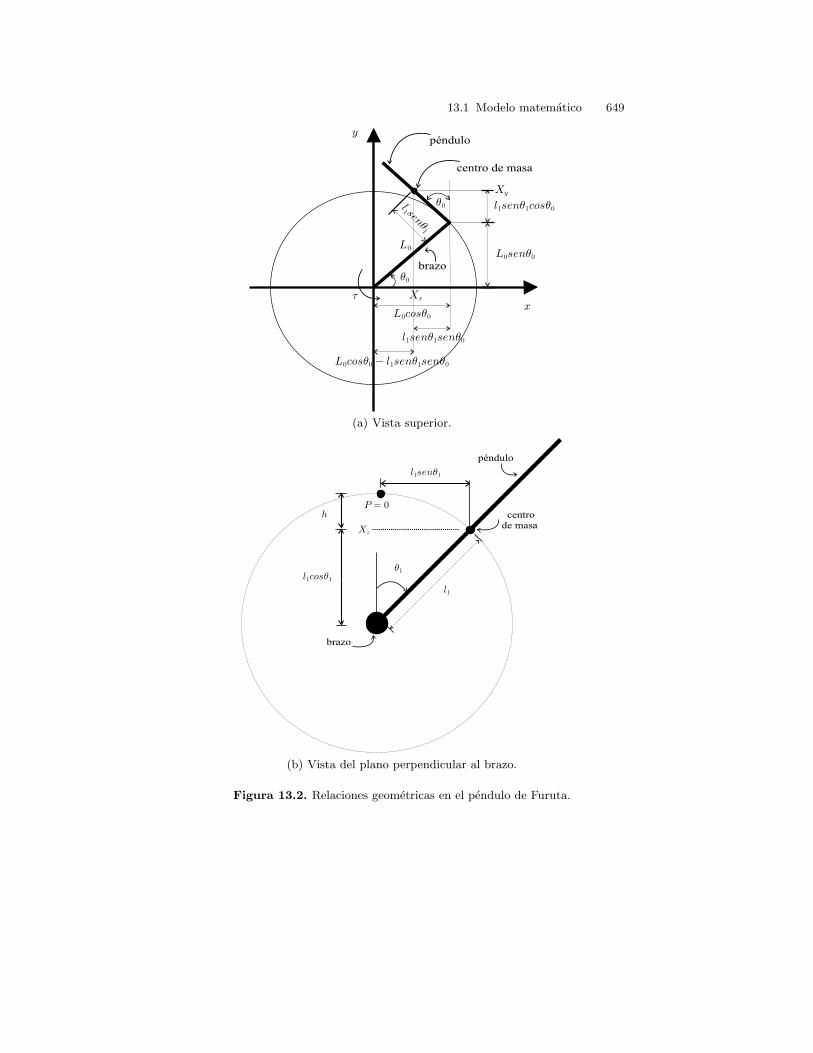
13.1 Modelo matematico 649
centro de masa
péndulo
l1 senò
1
L0
l1senò1cosò0
L0cosò0
L0cosò0 à l1senò1senò0
brazo
l1senò1senò0
ò0
ò0
L0senò0
ü
y
xXx
Xy
(a) Vista superior.
péndulo
l1
l1cosò1
l1senò1
ò1
brazo
h centrode masa
P = 0
Xz
(b) Vista del plano perpendicular al brazo.
Figura 13.2. Relaciones geometricas en el pendulo de Furuta.

650 13 Control de un pendulo de Furuta
Usando (13.4), (13.5), (13.6) y despues de reducir terminos se encuentra:
K1 =1
2J1θ
21 +
1
2m1
[(L0θ0)
2 + (l1θ0)2 sin2(θ1) + (l1θ1)
2 + 2θ0θ1L0l1 cos(θ1)]
(13.7)
Finalmente, para calcular la energıa potencial del pendulo se usa como puntode referencia (donde P = 0) al punto donde θ1 = 0. Entonces, recordandoque la energıa potencial es el producto escalar del vector fuerza aplicada, esdecir el peso del pendulo m1g, y el vector distancia que va desde el centro degravedad del pendulo hasta el punto donde P = 0, se tiene que:
P = −hm1g, h = l1 − l1 cos(θ1)
donde el signo “−” se debe a que los vectores mencionados forman mas de90. Entonces:
P = m1gl1(cos(θ1) − 1) (13.8)
Usando (13.3), (13.7), (13.8) se forma el Lagrangiano, L, de acuerdo a (13.2),para despues sustituir en las ecuaciones de Euler-Lagrange dadas en (13.1).Realizando las operaciones correspondientes y acomodando convenientementelos terminos resultantes se obtiene:
M(q)q + C(q, q)q + g(q) = F (13.9)
M(q) =
[I0 + m1(L
20 + l21 sin2(θ1)) m1l1L0 cos(θ1)
m1l1L0 cos(θ1) J1 + m1l21
]
C(q, q) =
[12m1l
21 θ1 sin(2θ1) −m1l1L0θ1 sin(θ1) + 1
2m1l21θ0 sin(2θ1)
− 12m1l
21θ0 sin(2θ1) 0
]
g(q) =
[0
−m1l1g sin(θ1)
], F =
[τ0
], q =
[θ0
θ1
]
La expresion (13.9) constituye el modelo del pendulo de Furuta, el cual esno lineal porque incluye funciones trigonometricas de θ1 ası como diferentesproductos entre las velocidades θ0 y θ1.
13.2. Modelo lineal aproximado
En esta obra es de interes la aplicacion de tecnicas de control lineal, lascuales no pueden aplicarse directamente cuando el modelo de la planta a con-trolar es no lineal como el mostrado en (13.9). Sin embargo, existe una manerade resolver este problema. La idea fundamental es encontrar un modelo linealaproximado que represente con suficiente exactitud al modelo (13.9) para des-pues usar dicho modelo lineal aproximado en el diseno de un controlador parael pendulo de Furuta. Sin embargo, tal como se indica en la seccion 7.2.2,

13.2 Modelo lineal aproximado 651
el controlador disenado de este modo solo sera de utilidad para equilibrar elpendulo en su posicion invertida θ1 = 0 bajo la condicion de que el pendulose encuentre inicialmente cerca de dicha configuracion, es decir, siempre sedebera cumplir que θ1 ≈ 0.
El primer paso consiste en escribir (13.9) en terminos de variables de esta-do. De acuerdo a lo expuesto en la seccion 7.1, dado un conjunto de ecuacionesdiferenciales como (13.9), se puede encontrar una representacion en variablesde estado definiendo las componentes del vector de estado x como las variablesincognita de dichas ecuaciones diferenciales y sus primeras r − 1 derivadas,donde r es el orden de la ecuacion diferencial correspondiente. Notese que(13.9) esta constituida por dos ecuaciones diferenciales, cada una de segundoorden. Las incognitas en dichas ecuaciones son θ0 y θ1. Por tanto, el vectorde estado puede ser seleccionado como:
x =
x1
x2
x3
x4
=
θ0
θ0
θ1
θ1
Despejese q de (13.9) y defınase:
q =
[w1(x1, x2, x3, x4, τ)w2(x1, x2, x3, x4, τ)
]
= M−1(x1, x3)[−C(x1, x2, x3, x4)[x2, x4]T − g(x1, x3) + F ]
(13.10)
Una propiedad importante de la matriz M(q) = M(x1, x3) es que siemprees no singular, es decir, la matriz M−1(x1, x3) que aparece en la expresionanterior siempre existe [2]. Entonces, la ecuacion de estado correspondiente sepuede escribir como:
x = f(x, u) (13.11)
f(x, u) =
f1(x, u)f2(x, u)f3(x, u)f4(x, u)
=
x2
w1(x1, x2, x3, x4, u)x4
w2(x1, x2, x3, x4, u)
, u = τ
Usando las ideas de la seccion 7.2.2, ahora se obtiene un modelo lineal aproxi-mado que es valido alrededor de un punto de operacion de interes. Los puntosde operacion son las parejas (x∗, u∗) que satisfacen:
f(x∗, u∗) =
0000

652 13 Control de un pendulo de Furuta
es decir, de acuerdo a (13.11), (13.10):
x∗2 = θ∗0 = 0, x∗
4 = θ∗1 = 0,[
w1(x∗1, 0, x∗
3, 0, u∗)w2(x
∗1, 0, x∗
3, 0, u∗)
]= M−1(x∗
1, x∗3)
×−C(x∗
1, 0, x∗3, 0)
[00
]− g(x∗
1, x∗3) +
[u∗
0
]
=
[00
]
Del segundo renglon de estas condiciones se obtiene:[
u∗
0
]= g(x∗
1, x∗3) =
[0
−m1l1g sin(θ∗1)
]
es decir:
u∗ = 0, x∗3 = θ∗1 = ±nπ
donde n puede ser cero o cualquier numero entero. Notese que no existe nin-guna condicion que deba cumplir x∗
1 = θ∗0 lo cual significa que esta variablepuede elegirse de manera totalmente arbitraria. Debido a que se desea esta-bilizar (o “equilibrar”) el pendulo en su posicion vertical invertida (n = 0) seselecciona el siguiente punto de operacion:
x∗ =
x∗1
x∗2
x∗3
x∗4
=
0000
, u∗ = 0 (13.12)
De acuerdo a (7.29), (7.30), (7.31) el modelo no lineal dado en (13.10), (13.11)puede ser aproximado por el siguiente modelo lineal:
z = Az + Bv (13.13)
A =
∂f1(x,u)∂x1
∂f1(x,u)∂x2
∂f1(x,u)∂x3
∂f1(x,u)∂x4
∂f2(x,u)∂x1
∂f2(x,u)∂x2
∂f2(x,u)∂x3
∂f2(x,u)∂x4
∂f3(x,u)∂x1
∂f3(x,u)∂x2
∂f3(x,u)∂x3
∂f3(x,u)∂x4
∂f4(x,u)∂x1
∂f4(x,u)∂x2
∂f4(x,u)∂x3
∂f4(x,u)∂x4
x=x∗,u=u∗
B =
∂f1(x,u)∂u
∂f2(x,u)∂u
∂f3(x,u)∂u
∂f4(x,u)∂u
x=x∗,u=u∗
donde z = x − x∗ y v = u − u∗. El uso de (13.9), (13.10), (13.11), (13.12),(13.13) define un procedimiento matematico (que a pesar de ser un poco largo

13.3 Construccion del pendulo de Furuta 653
solo involucra operaciones matematicas sencillas) al final del cual se obtienelo siguiente:
A =
0 1 0 0
0 0−gm2
1l21L0
I0(J1+m1l21)+J1m1L2
0
0
0 0 0 1
0 0(I0+m1L2
0)m1l1g
I0(J1+m1l21)+J1m1L2
0
0
, B =
0J1+m1l21
I0(J1+m1l21)+J1m1L2
0
0−m1l1L0
I0(J1+m1l21)+J1m1L2
0
(13.14)
La expresion (13.13) junto con (13.14) constituyen el modelo lineal aproxi-mado que se buscaba. Como se menciono anteriormente, usando (13.13) y(13.14) se puede disenar un controlador por realimentacion lineal del estadoel cual, sin embargo, asegura buenos resultados si se restringe que el estadoy la entrada solo evolucionen alrededor del punto de operacion (13.12). Estotambien suele indicarse diciendo que z ≈ 0 y v ≈ 0. Esto significa que unatarea que jamas podra resolver el controlador que se disena en este capıtuloes el llevar el pendulo desde su posicion vertical hacia abajo (θ1 = ±π[rad])hasta su posicion vertical invertida (θ1 = 0). Si el lector esta interesado enresolver dicho problema, se recomienda que consulte las referencias [2] y [3].
13.3. Construccion del pendulo de Furuta eindentificacion de sus parametros
En la figura 13.3 se presenta un dibujo detallado que muestra las partesmecanicas utilizadas para construir el pendulo de Furuta. Algunas de estaspartes se introducen con el fin de acoplar mecanicamente el motor con elbrazo y este con el pendulo. Ademas, se acoplan dos potenciometros, unodirectamente a la flecha del motor (P2) y otro entre el brazo y el pendulo(P1), para medir θ0 y θ1, respectivamente. Todas estas partes tienen masas einercias que deben ser consideradas dentro del modelo del pendulo de Furuta.Para calcular los momentos de inercia del sistema se recurre a expresionesbien conocidas en los libros de texto sobre mecanica clasica para el momentode inercia de determinados cuerpos geometricos tales como varillas, cilindrosy prismas rectangulares. Debe tenerse presente que la manera que a conti-nuacion se describe para calcular los parametos del pendulo de Furuta puedeadmitir algunas variantes. De hecho, estos parametros deben ser consideradoscomo meras aproximaciones cuya exactitud se ve respaldada por el hecho deque los valores obtenidos permiten calcular, mas adelante, las ganancias delcontrolador que, en efecto, permiten resolver el problema de control que in-teresa, es decir, estabilizar o “equilibrar” el pendulo en su posicion verticalinvertida.
Para calcular la inercia I0 se suma la inercia Ibrazo de la varilla que formaal brazo, la inercia Icubo del prisma rectangular C1 (usado para acoplar laflecha del motor al brazo) y la inercia del motor Irotor. Los valores numericos

654 13 Control de un pendulo de Furuta
de estas inercias se calculan como se indica a continuacion. Se mide la longitudtotal del brazo, L0 = 0.235[m], desde el centro del potenciometro P1 hasta elcentro del prisma rectangular C1, es decir, hasta la flecha del motor. La masatotal del brazo mbrazo es la suma de i) la masa de la varilla que forma al brazo,m0, ii) la masa de la abrazadera ab1 (que une el brazo con el potenciometroP1 el cual representa el acoplamiento mecanico entre el brazo y el pendulopues el pendulo se une firmemente a la otra parte movil del potenciometroP1) e iii) la mitad de la masa del potenciometro P1. El momento de inercia deuna varilla que gira respecto de un eje perpendicular a la misma y que pasapor uno de sus extremos se calcula por medio de la expresion [4]:
Ibrazo =1
3mbrazoL
20 = 0.96644 × 10−3[kgm
2]
Para calcular la inercia Icubo del prisma rectangular C1 se utiliza la siguienteexpresion que relaciona su momento de inercia con respecto a un eje de giroque pasa por su centro [4], [5], pag. 271:
Icubo =mcubo
12(b2 + c2) = 1.9333 × 10−6[kgm
2]
donde b y c son las longitudes de los lados de la cara superior del prisma C1
mientras que mcubo es su masa. Por ultimo se calcula la inercia del rotor delmotor. La masa del rotor, mr, se estima como la mitad de la masa del motorcompleto mas la masa de la abrazadera ab2 (la cual une al potenciometro P2
con la flecha del rotor) mas la mitad de la masa del potenciometro P2. La otramitad de la masa de P2 permanece siempre en reposo pues esta fija al soportedel mecanismo. Como el motor es cilındrico, se supone que el rotor tambienlo es y se estima su radio, R, como la mitad del radio de la carcasa del motor.Esto permite estimar la inercia del rotor, sin necesidad de desarmar el motor,del siguiente modo: la inercia de un cuerpo cilındrico de radio R y masa mr
que gira respecto a su eje longitudinal esta dada como [4], [5], pag. 271:
Irotor =1
2mrR
2 = 0.16931 × 10−3[kgm2]
Por tanto, el momento de inercia I0 es:
I0 = Ibrazo + Icubo + Irotor = 1.137 × 10−3[kgm2]
Para calcular el momento de inercia J1 del pendulo se considera que su ma-sa m1 esta formada por la suma de 1) la masa del pendulo, 2) la masa delacoplamiento entre el pendulo y el potenciometro P1 (placa rectangular dealuminio que se observa en la figura 13.3) y 3) la mitad de la masa del poten-ciometro P1. Esto debido a que la otra mitad de la masa del potenciometroP1 pertenece a la masa total del brazo. Para calcular el momento de inerciade una varilla que gira sobre un eje perpendicular a la misma y que pasa atraves de su centro de masa se utiliza la expresion [4], [5], pag. 271:

13.3 Construccion del pendulo de Furuta 655
J1 =1
12m1(2l1)
2 = 0.38672 × 10−3[kgm2]
donde l1 = 0.1875[m] es la distancia desde el centro del potenciometro P1
hasta el centro de gravedad del pendulo (ubicado en el centro del pendulo) yla masa del pendulo es m1 = 0.033[kg].
El modelo (13.13), (13.14) supone que la senal de control v = u (porqueu∗ = 0) es un par. Sin embargo, en la practica la senal de control es un voltajeque se aplica al motor el cual se encarga de generar el par u. Para resolvereste problema se procede del siguiente modo. Suponga que en el modelo (9.9),(9.10) de la seccion 9.1 la dinamica electrica es muy rapida, es decir, que L = 0y ke = 0. Entonces se encuentra que el par generado por el motor esta dadoaproximadamente por:
τ = u =km
raEa (13.15)
donde ra es la resistencia de armadura del motor, Ea es el voltaje aplicado ensus terminales y km es la constante de par del motor. Con el fin de poder usarel voltaje de armadura como senal de control se debe determinar el valor de laconstante km/ra. Esto se consigue mediante el siguiente experimento. El ejedel motor se coloca en posicion horizontal con el brazo y el pendulo montadosen sus posiciones. Se aplica cuidadosamente un voltaje en las terminales dela armadura, de manera que se consiga el equilibrio (reposo) cuando el brazoquede colocado horizontalmente (el pendulo queda colocado verticalmente).Esto significa que se ha conseguido un equilibrio entre el par generado porel motor y el par producido, sobre el eje del rotor, por el peso del brazo yel peso del pendulo. Una vez conseguido esto se mide el voltaje aplicado ala armadura Ea y se calcula el par τ debido al peso del brazo y al peso delpendulo. Con estos datos se usa (13.15) para calcular la constante:
km
ra= 0.0215[Nm/V]
Finalmente, usando (13.13), (13.14), (13.15) y τ = v junto con los valoresnumericos calculados en esta seccion se encuentra el siguiente modelo el cualsera usado para disenar el controlador:
z = Az + BEa (13.16)
A =
0 1 0 00 0 −35.81 00 0 0 10 0 72.90 0
, B = Bkm
ra=
013.4684
0−12.6603
Notese que el voltaje de armadura Ea es ahora la senal de control y que, deacuerdo a (13.15), el valor de esta variable en el punto de operacion dado en(13.12) es E∗
a = 0 .
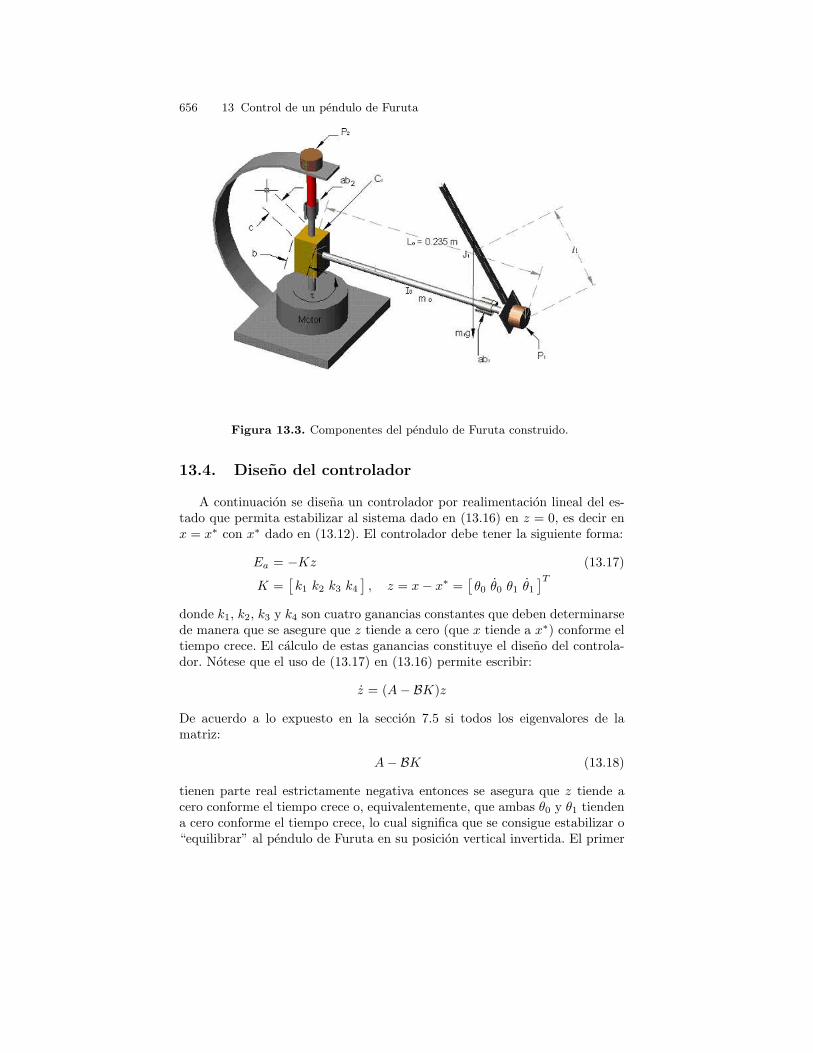
656 13 Control de un pendulo de Furuta
Figura 13.3. Componentes del pendulo de Furuta construido.
13.4. Diseno del controlador
A continuacion se disena un controlador por realimentacion lineal del es-tado que permita estabilizar al sistema dado en (13.16) en z = 0, es decir enx = x∗ con x∗ dado en (13.12). El controlador debe tener la siguiente forma:
Ea = −Kz (13.17)
K =[k1 k2 k3 k4
], z = x − x∗ =
[θ0 θ0 θ1 θ1
]T
donde k1, k2, k3 y k4 son cuatro ganancias constantes que deben determinarsede manera que se asegure que z tiende a cero (que x tiende a x∗) conforme eltiempo crece. El calculo de estas ganancias constituye el diseno del controla-dor. Notese que el uso de (13.17) en (13.16) permite escribir:
z = (A − BK)z
De acuerdo a lo expuesto en la seccion 7.5 si todos los eigenvalores de lamatriz:
A − BK (13.18)
tienen parte real estrictamente negativa entonces se asegura que z tiende acero conforme el tiempo crece o, equivalentemente, que ambas θ0 y θ1 tiendena cero conforme el tiempo crece, lo cual significa que se consigue estabilizar o“equilibrar” al pendulo de Furuta en su posicion vertical invertida. El primer
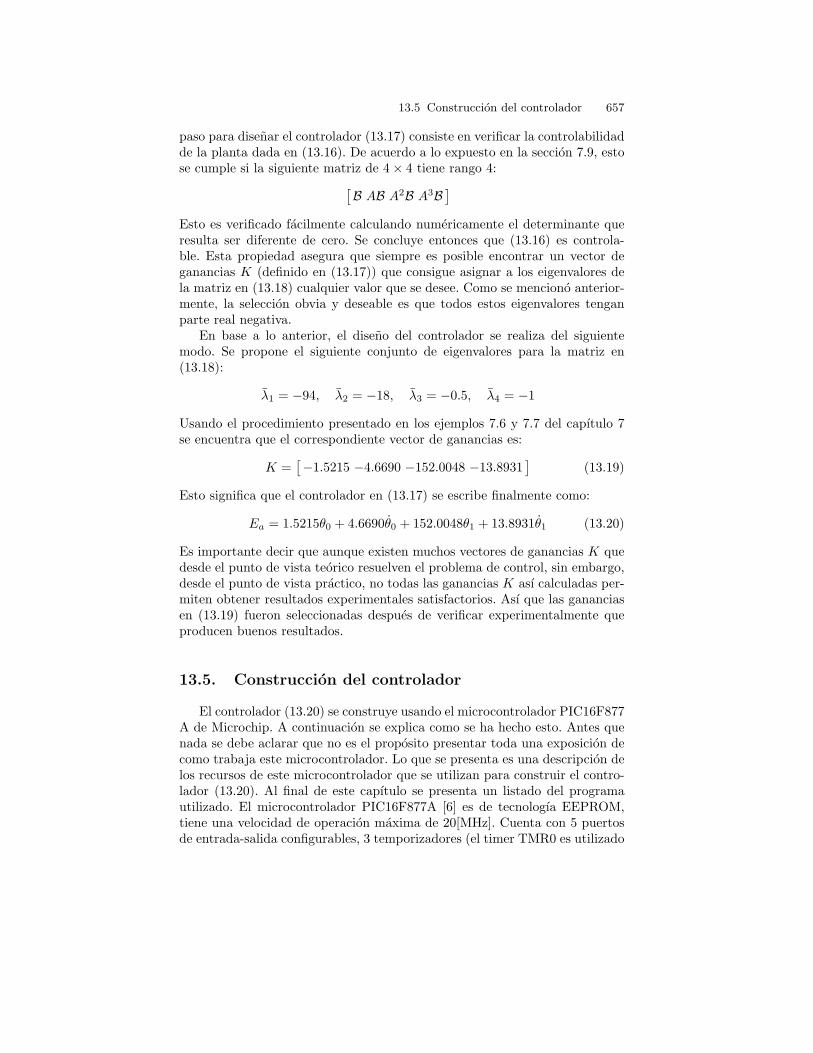
13.5 Construccion del controlador 657
paso para disenar el controlador (13.17) consiste en verificar la controlabilidadde la planta dada en (13.16). De acuerdo a lo expuesto en la seccion 7.9, estose cumple si la siguiente matriz de 4 × 4 tiene rango 4:
[B AB A2B A3B
]
Esto es verificado facilmente calculando numericamente el determinante queresulta ser diferente de cero. Se concluye entonces que (13.16) es controla-ble. Esta propiedad asegura que siempre es posible encontrar un vector deganancias K (definido en (13.17)) que consigue asignar a los eigenvalores dela matriz en (13.18) cualquier valor que se desee. Como se menciono anterior-mente, la seleccion obvia y deseable es que todos estos eigenvalores tenganparte real negativa.
En base a lo anterior, el diseno del controlador se realiza del siguientemodo. Se propone el siguiente conjunto de eigenvalores para la matriz en(13.18):
λ1 = −94, λ2 = −18, λ3 = −0.5, λ4 = −1
Usando el procedimiento presentado en los ejemplos 7.6 y 7.7 del capıtulo 7se encuentra que el correspondiente vector de ganancias es:
K =[−1.5215 −4.6690 −152.0048 −13.8931
](13.19)
Esto significa que el controlador en (13.17) se escribe finalmente como:
Ea = 1.5215θ0 + 4.6690θ0 + 152.0048θ1 + 13.8931θ1 (13.20)
Es importante decir que aunque existen muchos vectores de ganancias K quedesde el punto de vista teorico resuelven el problema de control, sin embargo,desde el punto de vista practico, no todas las ganancias K ası calculadas per-miten obtener resultados experimentales satisfactorios. Ası que las gananciasen (13.19) fueron seleccionadas despues de verificar experimentalmente queproducen buenos resultados.
13.5. Construccion del controlador
El controlador (13.20) se construye usando el microcontrolador PIC16F877A de Microchip. A continuacion se explica como se ha hecho esto. Antes quenada se debe aclarar que no es el proposito presentar toda una exposicion decomo trabaja este microcontrolador. Lo que se presenta es una descripcion delos recursos de este microcontrolador que se utilizan para construir el contro-lador (13.20). Al final de este capıtulo se presenta un listado del programautilizado. El microcontrolador PIC16F877A [6] es de tecnologıa EEPROM,tiene una velocidad de operacion maxima de 20[MHz]. Cuenta con 5 puertosde entrada-salida configurables, 3 temporizadores (el timer TMR0 es utilizado

658 13 Control de un pendulo de Furuta
en este capıtulo para establecer el periodo de muestreo: T = 0.0256[seg]), 8 ca-nales Analogico-Digital los cuales se basan en un CAD (convertidor Analogico-Digital) de 10 bits (de los cuales solo se usan los 8 bits mas significativos eneste capıtulo). Tambien cuenta con 2 modulos PWM de los cuales en estecapıtulo se usa el CCP1 para entregar el voltaje de control a la planta. Es-te PWM se programa para trabajar a una frecuencia de 4.9[KHz] con unaresolucion de 28 − 1 = 255 cuentas.
Las posiciones θ0 y θ1 se miden usando los potenciometros de precisionde una vuelta P2 y P1, respectivamente (ver figura 13.3). Las variaciones devoltaje de estos potenciometros son leıdas usando los canales 0 y 1 del CAD,respectivamente. Se considera que una vuelta completa de cada potenciometroequivale exactamente a 2π radianes y que el rango del CAD (solo se usan los 8bits mas significativos) equivale a tal variacion angular. Mas aun, el centro delas variaciones de cada potenciometro es la posicion correspondiente al puntode operacion dado en (13.12), es decir x∗
1 = θ∗0 = 0 y x∗3 = θ∗1 = 0. Con esto
en mente se hacen las siguientes operaciones:
theta0 =2π
255(CAD0 − 127) (13.21)
theta1 =2π
255(CAD1 − 127) (13.22)
donde CAD0 y CAD1 representan las lecturas entregadas por los canales 0y 1 del CAD, respectivamente, mientras que theta0 y theta1 representan lasmediciones de θ0 y θ1, respectivamente, en radianes. Las velocidades θ0 y θ1
se estiman a partir de las posiciones medidas usando diferenciacion numerica:
dtheta0 =theta0(k) − theta0(k − 1)
T(13.23)
dtheta1 =theta1(k) − theta1(k − 1)
T(13.24)
donde k representa el tiempo discreto, dtheta0 y dtheta1 representan los es-timados de las velocidades θ0 y θ1, respectivamente, en radianes por segundomientras que T = 0.0256[seg] es el periodo de muestreo utilizado. De este mo-do theta0(k) indica el valor de theta0 que se mide en el instante de muestreoactual y theta0(k − 1) indica el valor de theta0 que se midio en el instante demuestreo previo. theta1(k) y theta1(k − 1) se definen de manera similar. Conesta informacion se calcula:
da = 1.5215 theta0 + 4.6690 dtheta0 + 152.0048 theta1 + 13.8931 dtheta1
y se envıa da al PWM del microcontrolador como se describe a continuacion.Se supone que da solo tomara valores en el rango de -5 a +5 volts, por loque su valor se satura por software para restringirlo a ese rango de valoresutilizando instrucciones como las siguientes:

13.5 Construccion del controlador 659
if da > 5 then da = 5
if da < −5 then da = −5
Como la resolucion del PWM es de 28 − 1 = 255 cuentas, entonces la si-guiente cuenta debe ser enviada al PWM del microcontrolador para entregarcorrectamente el valor de da al amplificador de potencia de la planta:
cuenta =255
5abs(da) (13.25)
donde abs(da) representa el valor absoluto de da. El signo de da es almacenadoen dos bits de control. La senal del PWM se entrega a un puente H (L293Dde Texas Instruments) que se encarga de amplificar convenientemente la po-tencia de la senal del PWM. Este puente H esta alimentado con una fuente depotencia de 7[V]. Sin embargo, de acuerdo a la hoja de datos de este disposi-tivo [7] las caidas de voltaje en el mismo determinan que en las terminales delmotor solo sean aplicados ±5[V]. Este dispositivo tiene dos bits a traves delos cuales se le indica el signo del voltaje que debe entregar. Para ello, el signode da se envıa al puente H a traves de los bits 0 y 1 del canal D. Esto significaque el voltaje promedio que el puente H entrega a las terminales del motorsolo varıa en el rango de -5 a +5 volts. Ası, se asegura que en las termina-les del motor de CD se aplica un voltaje Ea cuyo promedio es numericamenteigual a da. Esto es importante porque asegura que la construccion practica delcontrolador respeta el diseno indicado en (13.20). En la figura 13.4 se muestrael diagrama electrico usado para construir el controlador (13.20) en base almicrocontrolador PIC16F877A. Resulta interesante observar la sencillez delhardware utilizado.
660 13 Control de un pendulo de Furuta
Figura 13.4. Diagrama electrico del sistema de control del pendulo de Furuta.

13.6 Resultados experimentales 661
13.6. Resultados experimentales
En la figura 13.5 se muestran los resultados experimentales obtenidos.Notese que aunque la posicion del brazo θ0 no consigue estabilizarse en cero,sin embargo la posicion del pendulo θ1 permanece en cero, es decir, en laconfiguracion vertical invertida. Notese tambien la presencia importante deruido, el cual es debido a los potenciometros usados para medir la posiciondel brazo y del pendulo. Es importante subrayar que, a pesar de esto, losresultados experimentales muestran que se ha conseguido el principal objetivode control: mantener el pendulo “equilibrado” alrededor de su posicion verticalinvertida. En la figura 13.6 se muestra una fotografıa donde se observa elsistema de control funcionando.
rad[ ]
rad[ ]
tiempo s[ ]
ò1
ò0
Figura 13.5. Resultados experimentales.
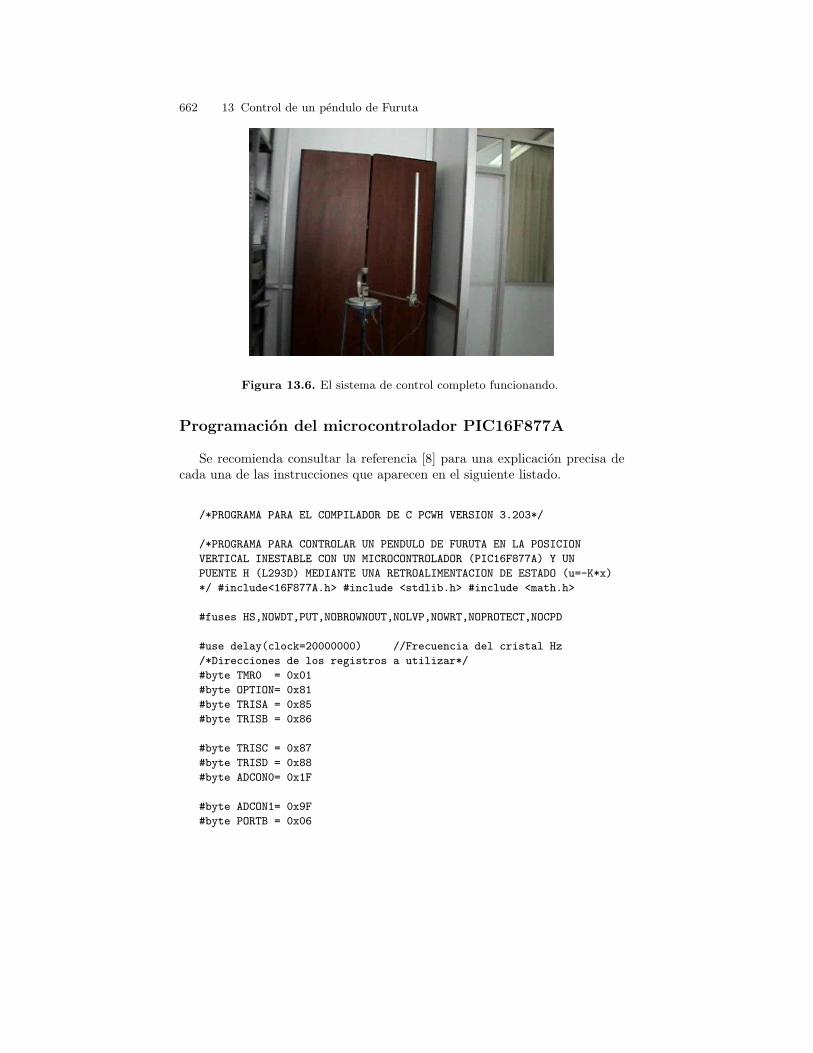
662 13 Control de un pendulo de Furuta
Figura 13.6. El sistema de control completo funcionando.
Programacion del microcontrolador PIC16F877A
Se recomienda consultar la referencia [8] para una explicacion precisa decada una de las instrucciones que aparecen en el siguiente listado.
/*PROGRAMA PARA EL COMPILADOR DE C PCWH VERSION 3.203*/
/*PROGRAMA PARA CONTROLAR UN PENDULO DE FURUTA EN LA POSICION
VERTICAL INESTABLE CON UN MICROCONTROLADOR (PIC16F877A) Y UN
PUENTE H (L293D) MEDIANTE UNA RETROALIMENTACION DE ESTADO (u=-K*x)
*/ #include<16F877A.h> #include <stdlib.h> #include <math.h>
#fuses HS,NOWDT,PUT,NOBROWNOUT,NOLVP,NOWRT,NOPROTECT,NOCPD
#use delay(clock=20000000) //Frecuencia del cristal Hz
/*Direcciones de los registros a utilizar*/
#byte TMR0 = 0x01
#byte OPTION= 0x81
#byte TRISA = 0x85
#byte TRISB = 0x86
#byte TRISC = 0x87
#byte TRISD = 0x88
#byte ADCON0= 0x1F
#byte ADCON1= 0x9F
#byte PORTB = 0x06
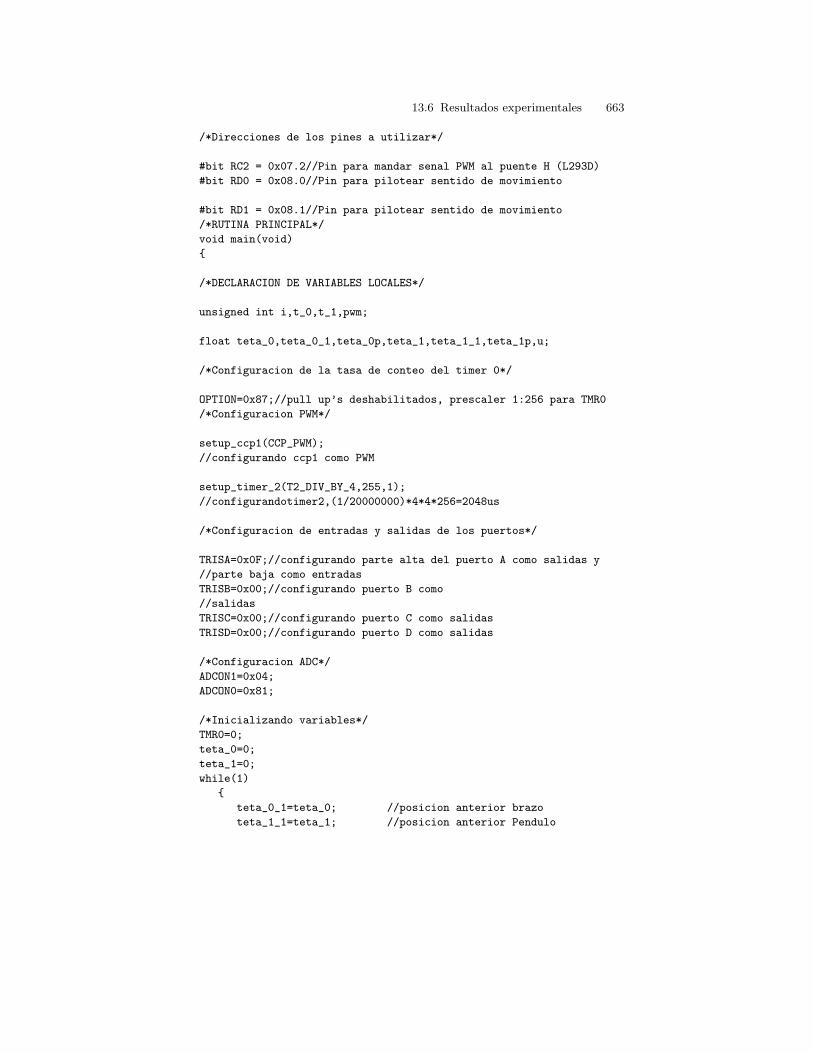
13.6 Resultados experimentales 663
/*Direcciones de los pines a utilizar*/
#bit RC2 = 0x07.2//Pin para mandar senal PWM al puente H (L293D)
#bit RD0 = 0x08.0//Pin para pilotear sentido de movimiento
#bit RD1 = 0x08.1//Pin para pilotear sentido de movimiento
/*RUTINA PRINCIPAL*/
void main(void)
/*DECLARACION DE VARIABLES LOCALES*/
unsigned int i,t_0,t_1,pwm;
float teta_0,teta_0_1,teta_0p,teta_1,teta_1_1,teta_1p,u;
/*Configuracion de la tasa de conteo del timer 0*/
OPTION=0x87;//pull up’s deshabilitados, prescaler 1:256 para TMR0
/*Configuracion PWM*/
setup_ccp1(CCP_PWM);
//configurando ccp1 como PWM
setup_timer_2(T2_DIV_BY_4,255,1);
//configurandotimer2,(1/20000000)*4*4*256=2048us
/*Configuracion de entradas y salidas de los puertos*/
TRISA=0x0F;//configurando parte alta del puerto A como salidas y
//parte baja como entradas
TRISB=0x00;//configurando puerto B como
//salidas
TRISC=0x00;//configurando puerto C como salidas
TRISD=0x00;//configurando puerto D como salidas
/*Configuracion ADC*/
ADCON1=0x04;
ADCON0=0x81;
/*Inicializando variables*/
TMR0=0;
teta_0=0;
teta_1=0;
while(1)
teta_0_1=teta_0; //posicion anterior brazo
teta_1_1=teta_1; //posicion anterior Pendulo
664 13 Control de un pendulo de Furuta
ADCON0=0x81; //Cambiando a CH0
for(i=0;i<37;i++); //estabilizar capacitor interno
t_0=read_adc(); //leer ADC
teta_0=t_0-127.0; //compensando offset potenciometro
teta_0=0.02464*teta_0; //convirtiendo a radianes
ADCON0=0x89; //cambiando a CH1
for(i=0;i<37;i++); //estabilizar capacitor interno
t_1=read_adc(); //leer ADC
teta_1=t_1-127.0; //compensando offset potenciometro
teta_1=0.02464*teta_1; //convirtiendo a radianes
/*Calculo de derivadas*/
teta_0p=(teta_0-teta_0_1)/0.0256;
teta_1p=(teta_1-teta_1_1)/0.0256;
/*Calculando el control u=-K*x*/
u=1.5215*teta_0+4.6690*teta_0p+152.0048*teta_1+13.8931*teta_1p;
u=51.0*u; //escalamiento a volts de salida
/*Control de saturacion de la senal de control para el PWM*/
if(u>254.0)
u=255.0;
if(u<-254.0)
u=-255.0;
/*Piloteando sentido de movimiento del motor (pines al puente H)*/
if(u<0)
RD0=1;
RD1=0;
else
RD0=0;
RD1=1;
pwm=(unsigned int)abs(u);
PORTB=pwm; //valor del pwm por el puerto B
set_pwm1_duty(pwm); //actualizando el valor del PWM
/*Ajuste del periodo de control Ts=0.0256 seg*/
while(TMR0<250); //1 cuenta=0.0000512 seg,(0.0128seg)
TMR0=0;
while(TMR0<250); //1 cuenta=0.0000512 seg,(0.0128seg)
TMR0=0;
13.8 Preguntas de repaso 665
13.7. Resumen del capıtulo
En este capıtulo se ha construido un pendulo de Furuta y todas las interfa-ces necesarias para su control en lazo cerrado. El esquema de control utilizadoes conocido como realimentacion lineal del estado. Consiste en la medicion delas posiciones y las velocidades de los dos cuerpos que componen al mecanismoy, multiplicandolas por constantes, sumarlas para obtener el par que debe sergenerado por el motor de CD usado como actuador. Dado que se trata de unsistema inestable y no lineal, la solucion de este problema de control, ası comola construccion experimental del mismo, es de gran interes. Otra caracterısticaimportante del presente capıtulo es el hecho de mostrar una manera diferen-te de modelar sistemas mecanicos usando las ecuaciones de Euler-Lagrange.Este enfoque es particularmente util cuando se modelan sistemas mecanicoscompuestos por varios cuerpos que se mueven independientemente (grados delibertad).
De particular interes resulta la identificacion del valor numerico de losparametros del prototipo. En la literatura de control se habla de masas, cen-tros de masa e inercias sin entrar en mas detalles. Sin embargo, en la practica,los cuerpos que componen al mecanismo a su vez estan compuestos por torni-llos, acoplamientos, piezas con diferentes formas geometricas y masas, varillas,etc. Esto significa que se debe encontrar la masa, el centro de masa y la inerciaequivalente de todas esas piezas que conforman a cada cuerpo del mecanismo.En el presente capıtulo se ha mostrado una forma de hacer esto utilizandoformulas de la mecanica clasica. Tambien se ha mostrado la manera de obte-ner un modelo lineal, que representa una aproximacion del modelo no linealmas exacto, el cual se emplea para disenar el controlador. Esto resulta en unsistema de control que solo funcionara correctamente si la configuracion inicialdel mecanismo es cercana a la que se desea.
13.8. Preguntas de repaso
1. ¿Por que se dice que el pendulo de Furuta es inestable en lazo abierto?2. De una explicacion descriptiva (no analıtica) de porque se necesita con-
trolar simultaneamente la posicion del brazo y la posicion del pendulo.3. Describa el procedimiento para identificar los diferentes parametros del
mecanismo completo.4. ¿Como se identifican los parametros del motor?5. Describa el funcionamiento del amplificador de potencia utilizado.6. Explique que representan todos los posibles puntos de operacion del
pendulo de Furuta.7. ¿Por que la energıa potencial del mecanismo solo considera la energıa
potencial del pendulo?8. ¿Que representa la aproximacion lineal de un modelo no lineal?

666 13 Control de un pendulo de Furuta
9. ¿Cual es la condicion que debe cumplir el controlador por realimentacionlineal del estado para que el pendulo de Furuta funcione adecuadamente?
10. ¿Por que es importante que el modelo del pendulo de Furuta sea contro-lable? ¿Que se puede hacer si no es controlable?

Referencias
1. H. Goldstein, C. Poole and J. Safko, Cassical Mechanics, Capıtulo 1, 3rd edition,Addison Wesley, New York, 2000.
2. I. Fantoni and R. Lozano, Non-linear control for underactuated mechanichalsystems, Springer, London, 2002.
3. H.I. Torres Rodrıguez, Control de sistemas no linealizables en forma exacta, Te-sis de Mestrıa en Ciencias, CINVESTAV, Departamento de Ingenierıa Electica,Mexico D. F., 2002.
4. R. C. Hibbeler, Mecanica vectorial para ingenieros. Dinamica, (10a. edicion),Pearson Educacion, Mexico, 2004.
5. M. Alonso and E.J. Finn, Fısica, Addison-Wesley Iberoamericana, Wilmington,Delaware, 1995.
6. PIC16F877A Enhanced Flash Microcontroller, Data sheet, Microchip Techno-logy Inc., 2003.
7. L293D Qudruple half-H drivers, Data sheet, Texas Instruments, 2004.8. Custom Computer Services Incorporated, CCS C Compiler Reference Manual,
2003.


14
Control de un pendulo con rueda inercial
El pendulo de con rueda inercial es un mecanismo en el que se debe con-trolar simultaneamente la posicion del pendulo y la velocidad de la rueda. Poresta razon, es natural analizarlo y disenarle un controlador usando la tecnicade las variables de estado. Por otro lado, este mecanismo es, de los prototiposdidacticos subactuados y no lineales, el mas sencillo. Por ello, es ideal paraintroducir al lector en los conceptos de control de sistemas no lineales. Estaes la principal razon para incluir el problema de controlar este mecanismo.

670 14 Control de un pendulo con rueda inercial
Objetivos del capıtulo
Modelar el pendulo con rueda inercial usando las ecuaciones de Euler-Lagrange.Disenar un controlador que levante el pendulo con rueda inercial de suposicion vertical no invertida a su posicion vertical invertida.Disenar un controlador que atrape el pendulo con rueda inercial en suposicion vertical invertida.Construir un pendulo con rueda inercial.Identificar los parametros del pendulo con rueda inercial.Construir los controladores para levantar y atrapar el pendulo con ruedainercial.Obtener resultados experimentales en el pendulo con rueda inercial cons-truido.
14.1. Pendulo con rueda inercial
En este capıtulo se disena una estrategia de control para un mecanismoconocido como el pendulo con rueda inercial (IWP). En la figura 14.1 puedeapreciarse el Pendulo con rueda inercial en la posicion vertical no invertida,mientras que en la figura 14.2 se muestra un esquema de este mecanismo. Setrata de un pendulo que en su extremo tiene fijo un motor de CD el cualmueve a una rueda. En el punto de donde se suspende el pendulo no se aplicaningun par externo. Se dice entonces que este punto no esta actuado mientrasque la rueda esta actuada porque recibe el par generado por el motor de CD.Como el pendulo y la rueda definen dos grados de libertad [1] y solo existe unactuador (en la rueda) se dice que este mecanismo es un sistema subactuado[2].
El pendulo con rueda inercial (IWP) fue presentado por Spong et al. [2],el cual ademas de usarse comunmente con fines academicos ha tenido fuertesaplicaciones en la investigacion como prototipo de referencia para la pruebade algoritmos no lineales de control [2]-[11].
La nomenclatura utilizada es la siguiente:
q1 es la posicion angular del pendulo.q2 es la posicion angular de la rueda.m1 es la masa del pendulo.m2 es la masa de la rueda.τ es el par aplicado a la rueda.lc1 es la distancia al centro de masa del pendulo.l1 es la longitud del pendulo.I1 es la inercia del pendulo cuando gira alrededor de su centro de masa.I2 es la inercia de la rueda (mas la inercia del rotor del motor de CD).g es la aceleracion de la gravedad.
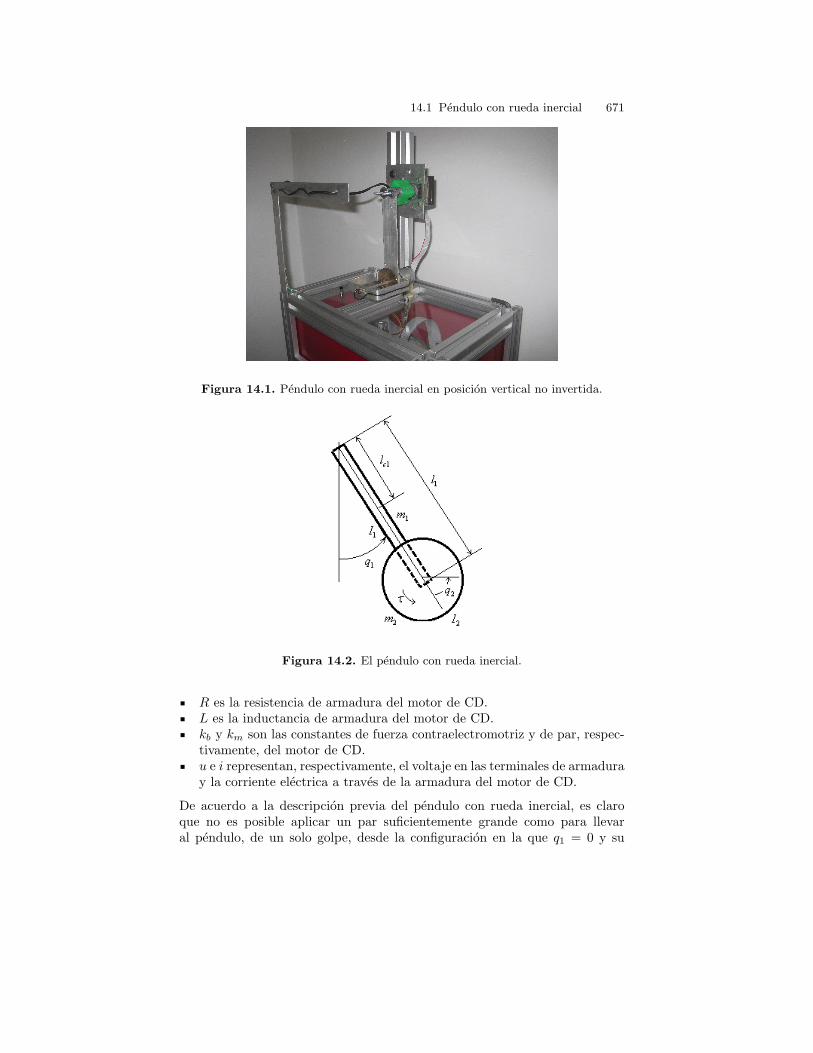
14.1 Pendulo con rueda inercial 671
Figura 14.1. Pendulo con rueda inercial en posicion vertical no invertida.
Figura 14.2. El pendulo con rueda inercial.
R es la resistencia de armadura del motor de CD.L es la inductancia de armadura del motor de CD.kb y km son las constantes de fuerza contraelectromotriz y de par, respec-tivamente, del motor de CD.u e i representan, respectivamente, el voltaje en las terminales de armaduray la corriente electrica a traves de la armadura del motor de CD.
De acuerdo a la descripcion previa del pendulo con rueda inercial, es claroque no es posible aplicar un par suficientemente grande como para llevaral pendulo, de un solo golpe, desde la configuracion en la que q1 = 0 y su

672 14 Control de un pendulo con rueda inercial
velocidad es cero q1 = 0 hasta la configuracion en la que q1 = +π o q1 = −πy q1 = 0. Mas aun, esta ultima configuracion es inestable y se le denomina “laconfiguracion invertida inestable”. Por estas razones resulta de mucho interesdisenar una estrategia de control: i) que lleve al pendulo desde los alrededoresde la configuracion q1 = 0 y q1 = 0 hasta la configuracion invertida inestablee ii) que lo mantenga ahı. A la primera parte de esta tarea se le denomina“levantar el pendulo” y la segunda parte se denomina “balancear el pendulo”o “atrapar el pendulo”.
Como se muestra en este capıtulo, la tarea de levantar el pendulo requierede tecnicas de control no lineal pues las tecnicas de control lineal no tienenla capacidad para resolver este problema ya que el modelo del pendulo conrueda inercial es no lineal. Sin embargo, aunque no lineal, el modelo de estemecanismo es suficientemente sencillo de modo que esta estrategia puede serdisenada usando ideas conceptuales sencillas. Por tanto, el objetivo de presen-tar este problema de control en este capıtulo es introducir al lector, medianteun ejemplo sencillo, a los metodos de diseno de control no lineal.
14.2. Modelo matematico
Dado que el pendulo es un mecanismo compuesto por dos cuerpos queinteractuan, su modelo matematico se obtiene utilizando las ecuaciones deEuler-Lagrange, es decir:
d
dt
∂L
∂q1− ∂L
∂q1= 0 (14.1)
d
dt
∂L
∂q2− ∂L
∂q2= τ
El cero en el lado derecho de la primera expresion indica que no hay ningun parexterno aplicado en el punto de donde se suspende el pendulo. El lagrangianoesta dado como:
L = K − P (14.2)
K = K1 + K2, P = P1 + P2
donde K1 y K2 representan, respectivamente, las energıas cineticas del pendu-lo y de la rueda, mientras que P1 y P2 representan, respectivamente, lasenergıas potenciales del pendulo y de la rueda. Como el pendulo es un cuerpocuya masa esta distribuida a lo largo de una varilla, su energıa cinetica secalcula como la suma de la energıa cinetica de una partıcula de masa m1 quese mueve sobre una circunferencia de radio lc1 mas la energıa cinetica de unavarilla que gira alrededor de su centro de masa, es decir:
K1 =1
2m1l
2c1q
21 +
1
2I1q
21 (14.3)

14.2 Modelo matematico 673
La energıa cinetica de la rueda se obtiene de manera similar. Sin embargo, sedebe tomar en cuenta que la velocidad con la que gira la rueda, medida porun observador fijo en el laboratorio, es q1 + q2. Entonces, se encuentra que:
K2 =1
2m2l
21 q
21 +
1
2I2(q1 + q2)
2 (14.4)
Para calcular la energıa potencial se utiliza como referencia (donde P1 y P2
son iguales a cero) la configuracion en la que q1 = 0. Recuerdese que la energıapotencial del pendulo es el producto de la fuerza aplicada sobre el pendulo(peso del pendulo) y la distancia, en la direccion del peso, que separa al centrode masa del pendulo en la posicion actual q1 respecto de la posicion en la quela energıa potencial es cero, es decir cuando q1 = 0. Entonces:
P1 = gm1lc1(1 − cos(q1)) (14.5)
Procediendo similarmente se encuentra la energıa potencial de la rueda:
P2 = gm2l1(1 − cos(q1)) (14.6)
Por tanto, de acuerdo a (14.2):
L =1
2m1l
2c1q
21 +
1
2I1q
21 +
1
2m2l
21 q
21 +
1
2I2(q1 + q2)
2 − gm(1 − cos(q1))
donde m = m1lc1 +m2l1. Sustituyendo L en las ecuaciones de Euler-Lagrangepresentadas en (14.1) y despues de agrupar convenientemente los terminosresultantes se obtiene:
D
[q1
q2
]+
[mg sin (q1)
0
]=
[0τ
], (14.7)
D =
[d11 d12
d21 d22
]=
[m1l
2c1 + m2l
21 + I1 + I2 I2
I2 I2
]
Es muy sencillo mostrar que el determinante de la matriz D es positivo, esdecir:
det(D) = d11d22 − d12d21 > 0 (14.8)
El modelo en (14.7) es el modelo mas exacto del pendulo con rueda inercial yen la siguiente seccion sera utilizado para disenar la estrategia de control quelo levantara hasta su configuracion invertida inestable.
Finalmente, una aclaracion acerca de la senal de control utilizada. El vol-taje aplicado al motor de CD que actua sobre la rueda es la senal que ver-daderamente se puede manipular directamente, mientras que el par es unavariable que resulta como efecto de aplicar dicho voltaje. Sin embargo, en lapractica es posible suponer que el par es la senal de control si se consideraque la inductancia de armadura es muy pequena. La siguiente ecuacion es el

674 14 Control de un pendulo con rueda inercial
modelo matematico del circuito de armadura del motor de CD con escobillasequipado con iman permanente que actua sobre la rueda:
Ldi
dt+ Ri + kbq2 = u (14.9)
Si L y kb se suponen iguales a cero, entonces:
τ = kmi =km
Ru (14.10)
Esto significa que el voltaje aplicado tiene una accion directa sobre el pargenerado y por eso es valido suponer que el par es la senal de control. Elhecho de suponer kb igual a cero se justifica del siguiente modo. Como pue-de apreciarse en (14.9) este parametro introduce friccion viscosa adicional almecanismo. Como esto normalmente mejora la estabilidad de un sistema decontrol, entonces suponer que kb = 0 solo hace mas interesante el problemade control en el sentido de que el diseno se hara bajo la suposicion de queningun efecto estabilizante esta presente de manera natural en el mecanismo.
14.3. Controlador no lineal para levantar el pendulo
El objetivo en esta secccion es disenar un controlador que levante al pendu-lo con rueda inercial hasta su configuracion invertida inestable, es decir, hastaalguno de los puntos (q1, q1) = (+π, 0) o (q1, q1) = (−π, 0). Mas adelante seexplicara por que no es importante el valor que tengan la posicion y la ve-locidad de la rueda durante el intervalo de tiempo en el que se realiza estatarea.
Despejando q2 del primer renglon en (14.7), sustituyendo este valor en elsegundo renglon de (14.7) y usando (14.10) ası como d12 = d22 se obtiene:
Jq1 + mgl sin(q1) = τ1 (14.11)
J =d22d11 − d21d12
d12, mgl = mg, τ1 = −km
Ru
Notese que J > 0 debido a (14.8). Por tanto, el modelo en (14.11) correspondea un pendulo simple donde J , m, l y g representan, respectivamente, su inercia,su masa y su longitud equivalentes ası como la aceleracion de la gravedad. Laenergıa de este pendulo se obtiene como la suma de su energıa cinetica ypotencial, es decir:
V (q1, q1) =1
2Jq2
1 + mgl(1 − cos(q1)) (14.12)
En la figura 14.3 se muestran las superficies de nivel de V . Esto significaque cada curva en dicha figura representa el conjunto de puntos (q1, q1) quecorresponden un valor constante de V (q1, q1). El lector puede darse cuenta de
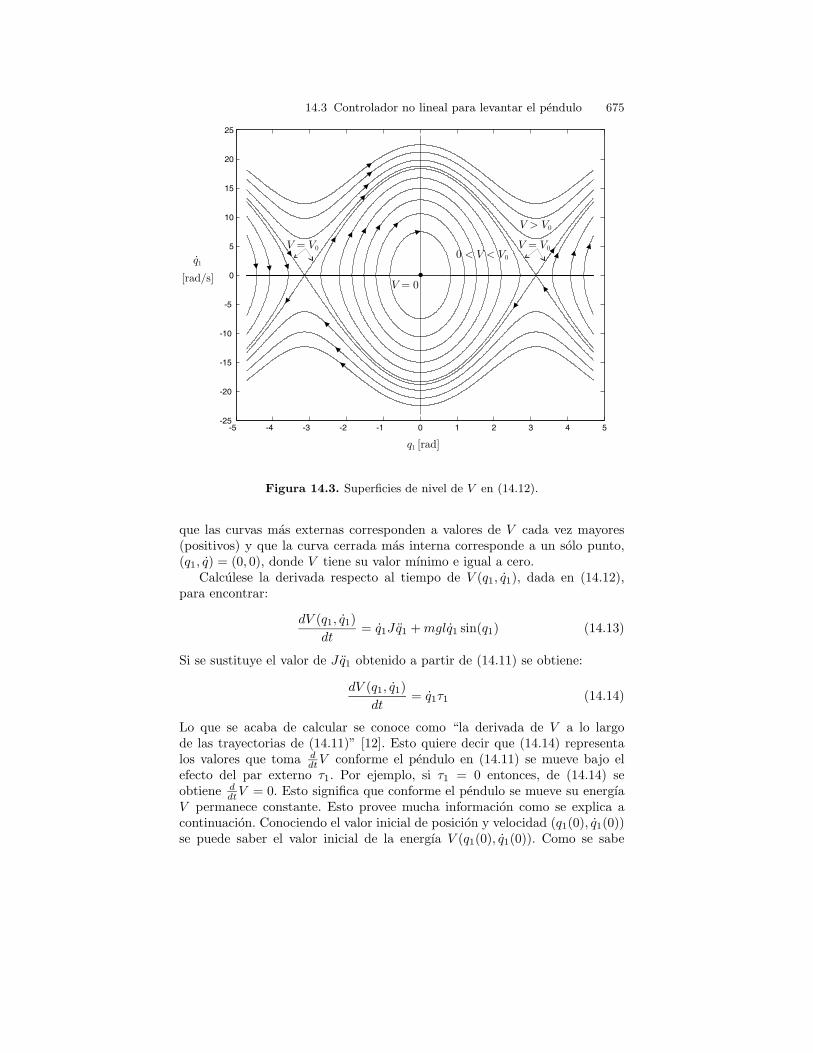
14.3 Controlador no lineal para levantar el pendulo 675
V = V0
V > V0
0 < V < V0
V = 0ï
V = V0
qç1
rad=s[ ]
q1 rad[ ]
Figura 14.3. Superficies de nivel de V en (14.12).
que las curvas mas externas corresponden a valores de V cada vez mayores(positivos) y que la curva cerrada mas interna corresponde a un solo punto,(q1, q) = (0, 0), donde V tiene su valor mınimo e igual a cero.
Calculese la derivada respecto al tiempo de V (q1, q1), dada en (14.12),para encontrar:
dV (q1, q1)
dt= q1Jq1 + mglq1 sin(q1) (14.13)
Si se sustituye el valor de Jq1 obtenido a partir de (14.11) se obtiene:
dV (q1, q1)
dt= q1τ1 (14.14)
Lo que se acaba de calcular se conoce como “la derivada de V a lo largode las trayectorias de (14.11)” [12]. Esto quiere decir que (14.14) representalos valores que toma d
dtV conforme el pendulo en (14.11) se mueve bajo elefecto del par externo τ1. Por ejemplo, si τ1 = 0 entonces, de (14.14) seobtiene d
dtV = 0. Esto significa que conforme el pendulo se mueve su energıaV permanece constante. Esto provee mucha informacion como se explica acontinuacion. Conociendo el valor inicial de posicion y velocidad (q1(0), q1(0))se puede saber el valor inicial de la energıa V (q1(0), q1(0)). Como se sabe

676 14 Control de un pendulo con rueda inercial
que ddtV = 0 porque τ1 = 0 entonces, conforme el tiempo crece, el pendulo
debera moverse unicamente sobre los puntos que representan a la superficie denivel en la cual V (q1(t), q1(t)) = V (q1(0), q1(0)), las cuales se muestran en lafigura 14.3. Las flechas que se dibujan sobre las superficies de nivel representanel sentido en el cual estas son recorridas conforme el pendulo se mueve. Estossentidos son faciles de determinar como se explica a continuacion. El estadodel pendulo simple se define como y = [q1, q]
T . La variable y = [q1, q]T es un
vector cuya direccion indica hacia donde se esta moviendo el estado y. Noteseque la componente horizontal de y, es decir q1, apunta hacia la derecha siempreque la velocidad del pendulo q1 sea positiva. Esto es suficiente para determinarel sentido de las flechas dibujadas sobre las superficies de nivel de V .
De acuerdo a lo expuesto en el parrafo anterior, para levantar al pendulohasta su configuracion invertida inestable solo se necesita conseguir que laenergıa del pendulo alcance el valor:
V (q1, q1)|q1=+π o q1=−π
q1=0
=1
2J(0)2 + mgl(1 − cos(±π)) = 2mgl = V0
y si tal energıa se alcanza en un punto donde (q1, q1) 6= (+π, 0) o (q1, q1) 6=(−π, 0) entonces aplicar un par τ1 que asegure que d
dtV = 0 a partir de eseinstante. Notese que, de acuerdo a la figura 14.3, si V se mantiene constanteuna vez que V = V0 entonces el pendulo se seguira moviendo hasta llegar auno de los puntos (q1, q1) = (+π, 0) o (q1, q1) = (−π, 0). A continuacion semuestra que todo este mecanismo se asegura si se usa:
τ1 = −kd sat(q1) signo(V − V0) (14.15)
sat(q1) =
ε0, q1 > ε0
−ε0, q1 < −ε0
q1, |q1| ≤ ε0
, signo(V − V0) =
+1, V > V0
−1, V < V0
0, V = V0
(14.16)
donde ε0 y kd son constantes positivas arbitrarias. Sustituyendo (14.15) en(14.14):
dV (q1, q1)
dt= −kdq1 sat(q1) signo(V − V0) (14.17)
A partir de (14.16) es facil darse cuenta de que el producto q1 sat(q1) siemprees positivo y es cero solo cuando q1 = 0. Ası que mientras q1 6= 0 se cumplelo siguiente:
Si V < V0 entonces ddtV > 0, por lo que la energıa V aumenta.
Si V > V0 entonces ddtV < 0, por lo que la energıa V disminuye.
Si V = V0 entonces ddtV = 0, por lo que la energıa V permanece en el
valor V0.
Entonces, se asegura que la energıa del pendulo V alcanza el valor necesariopara llegar a uno de los puntos (q1, q1) = (+π, 0) o (q1, q1) = (−π, 0). Mas

14.3 Controlador no lineal para levantar el pendulo 677
aun, la energıa se mantiene en ese valor hasta que uno de dichos puntos esalcanzado. Lo unico que falta es analizar que sucede si q1 = 0. Notese que bajoesa condicion el pendulo esta en reposo. Sin embargo, la unica manera de queq1 = 0 se mantenga para siempre es que q1 = 0 porque solo ahı el pendulopuede permanecer en reposo. Ası que sera necesario aplicar al pendulo unpequeno golpe para que abandone la configuracion (q1, q1) = (0, 0).
Todo el analisis previo asegura que el pendulo alcanzara la configuracioninvertida inestable si, partiendo de la configuracion estable, se le aplica unpequeno golpe que simplemente lo saque del reposo. El lector puede darsecuenta que todo lo anterior se mantiene sin cambio si en el controlador (14.15)se usa sat(V −V0) en lugar de signo(V −V0). Dicho sea de paso, el controladoren (14.15), (14.16) tiene sus orıgenes en las ideas propuestas en [13].
Por otro lado, es importante darse cuenta de que una vez alcanzada laconfiguracion invertida inestable, el controlador (14.15) no asegura que elpendulo vaya a permanecer en dicha configuracion. Para esto es necesariodisenar otro controlador, el cual debe ser puesto en marcha cuando el penduloeste muy cerca de la configuracion invertida inestable. Esto significa que elcontrolador en (14.15) debe ser desconectado a partir de ese momento. En lasiguiente seccion se presenta la manera de disenar el controlador que resuelvela segunda parte del problema de control: balancear o atrapar el pendulo enla configuracion invertida inestable.
Finalmente, notese que nada se ha dicho acerca de lo que sucede con laposicion y la velocidad de la rueda durante el tiempo en el cual el penduloes llevado hasta su configuracion invertida inestable. Dado que la rueda essimetrica y se supone que esta balanceada, entonces la posicion de la ruedano importa. Por otro lado, aunque la velocidad de la rueda crece de maneradesconocida durante el tiempo mencionado, sin embargo el valor de esta ve-locidad en el momento en que el pendulo llega a su configuracion invertidainestable siempre es es finito y, por lo tanto, todo es cuestion de que el con-trolador que atrapa al pendulo en dicha configuracion inestable se encarguede regular la velocidad de la rueda en el valor que esta variable tiene en elmomento en que dicho controlador entra en operacion.
Ejemplo 14.1 Sea el controlador alternativo:
τ1 = −kd (V − V0) sat(q1), u = − R
kmτ1 (14.18)
sat(q1) =
d, q1 > d−d, q1 < −dq1, |q1| ≤ d
, d =umaxkm
kdRV0(14.19)
donde d, umax y kd son constantes positivas arbitrarias. Sustituyendo (14.18)en (14.14):
dV (q1, q1)
dt= −kd (V − V0) q1 sat(q1) (14.20)

678 14 Control de un pendulo con rueda inercial
A partir de (14.19) es facil darse cuenta de que el producto q1 sat(q1) siemprees positivo y es cero solo cuando q1 = 0. Ası que mientras q1 6= 0 se cumplede nuevo lo siguiente:
Si V < V0 entonces ddtV > 0, por lo que la energıa V aumenta.
Si V > V0 entonces ddtV < 0, por lo que la energıa V disminuye.
Si V = V0 entonces ddtV = 0, por lo que la energıa V permanece en el
valor V0.
Entonces, se asegura nuevamente que la energıa del pendulo V alcanza elvalor necesario para llegar a uno de los puntos (q1, q1) = (+π, 0) o (q1, q1) =(−π, 0).
14.4. Controlador para atrapar el pendulo
La estrategia que se utiliza para atrapar al pendulo en la configuracioninvertida inestable es un controlador lineal que es disenado usando un modelolineal aproximado de (14.7). A continuacion se muestra como obtener dichaaproximacion lineal.
Notese que el modelo en (14.7) no depende de la posicion de la rueda q2.Tomando esto en consideracion se puede definir el estado como:
x =
x1
x2
x3
=
q1
q1
q2
, (14.21)
De (14.7) se puede escribir:
[q1
q2
]= D−1
−
[mg sin (q1)
0
]+
[0τ
](14.22)
D−1 =
[d11 d12
d21 d22
]=
1
d11d22 − d12d21
[d22 −d12
−d21 d11
](14.23)
Notese que det(D−1) 6= 0 porque se trata de la inversa de una matriz nosingular. Usando (14.21) y (14.22) el modelo en (14.7) se puede escribir como:
x = f(x, τ) =
x2
−d11mg sin (x1) + d12τ
−d21mg sin (x1) + d22τ
(14.24)
De acuerdo a la seccion 7.2.2, los puntos de operacion (x∗, τ∗) de (14.24) seencuentran a partir de la condicion f(x∗, τ∗) = 0, es decir:
x∗
2
−d11mg sin (x∗1) + d12τ
∗
−d21mg sin (x∗1) + d22τ
∗
=
000
. (14.25)

14.4 Controlador para atrapar el pendulo 679
Es claro que:
x∗2 = 0 (14.26)
Por otro lado, del segundo y tercer renglones de (14.25) se obtiene:
τ∗ =d11mg sin (x∗
1)
d12
(14.27)
τ∗ =d21mg sin (x∗
1)
d22
Igualando estas expresiones:
mg
d12d22
[d11d22 − d21d12
]sin (x∗
1) = 0 (14.28)
Debido a que det(D−1) = d11d22−d21d12 6= 0, entonces (14.28) solo se cumplesi:
x∗1 = ±nπ, n = 0, 1, 2, 3, . . . (14.29)
Sustituyendo esta condicion en cualquiera de las expresiones en (14.27) seobtiene:
τ∗ = 0 (14.30)
Finalmente, como no existe ninguna restriccion sobre x∗3 se concluye:
x∗3 = c. (14.31)
donde c es cualquier numero real. De acuerdo a la seccion 7.2.2, la aproxima-cion lineal del sistema en (14.24) en el punto de operacion (14.26), (14.29),(14.30), (14.31), con n = ±1, esta dada como:
z = Az + Bw, (14.32)
A =∂f(x, τ)
∂x
∣∣∣∣x∗
τ∗
=
∂f1
∂x1
∂f1
∂x2
∂f1
∂x3∂f2
∂x1
∂f2
∂x2
∂f2
∂x3∂f3
∂x1
∂f3
∂x2
∂f3
∂x3
∣∣∣∣∣∣∣x∗
τ∗
=
0 1 0
d11mg 0 0
d21mg 0 0
,
B =∂f(x, τ)
∂τ
∣∣∣∣x∗
τ∗
=
∂f1
∂τ∂f2
∂τ∂f3
∂τ
∣∣∣∣∣∣x∗
τ∗
=
0
d12
d22
donde:
z = x − x∗, (14.33)
w = τ − τ∗. (14.34)
son cantidades pequenas, es decir z ≈ 0, w ≈ 0. Por otro lado, recuerdese queτ∗ = 0 y, por tanto, w = τ . entonces se puede usar (14.10) para encontrar lasiguiente version modificada de (14.32):
680 14 Control de un pendulo con rueda inercial
z = Az + Bu (14.35)
B =
0
d12
d22
km
R
Este es el modelo lineal aproximado que sera utilizado para disenar el contro-lador que atrapa o balancea al pendulo en su configuracion invertida inestable.
Primero se verifica si el par (A,B) es controlable. Para esto, se calcula eldeterminante de la matriz de controlabilidad C = [B|AB|A2B] y se encuentraque esta dado como:
det(C) =mgk3
m
R3d2
12(d11d22 − d12d21) 6= 0, (14.36)
Por tanto, se concluye que el par el par (A,B) es controlable. Esto significaque siempre es posible encontrar un vector de ganancias K tal que todos loseigenvalores de la matriz de lazo cerrado (A−BK) queden ubicados en dondese desee. Esto se consigue usando el controlador:
u = −Kz (14.37)
El valor de K se calcula una vez que se conocen los valores numericos de losparametros involucrados en las matrices A y B. Con el controlador (14.37) seconsigue atrapar el pendulo con rueda inercial en la configuracion invertidainestable definida por el punto de operacion (14.26), (14.29), (14.30), (14.31),con n = ±1. Es importante subrayar que para esto es indispensable que elestado x del mecanismo se encuentre suficientemente cerca de dicha configu-racion inestable en el momento en que el controlador en (14.37) empiece aoperar.
Finalmente, es conveniente aclarar que la constante c introducida en(14.31) toma el valor que la velocidad de la rueda tiene en el instante enel cual el controlador (14.37) empieza operar. Como esta velocidad puede te-ner cualquier valor, entonces es muy adecuado el hecho de que c pueda sercualquier constante real.
14.5. Construccion del pendulo con rueda inercial eidentificacion de sus parametros
En la figura 14.4 se presenta un dibujo detallado que muestra las partesmecanicas utilizadas para construir el pendulo con rueda inercial. Algunas deestas partes son introducidas con el fin de realizar el acoplamiento mecanicoentre las piezas que componen al mecanismo. Tambien se incluye un enco-der incremental y un tacometro para medir, respectivamente, la posicion delpendulo q1 y la velocidad de la rueda q2. En la tabla 14.1 se muestran los
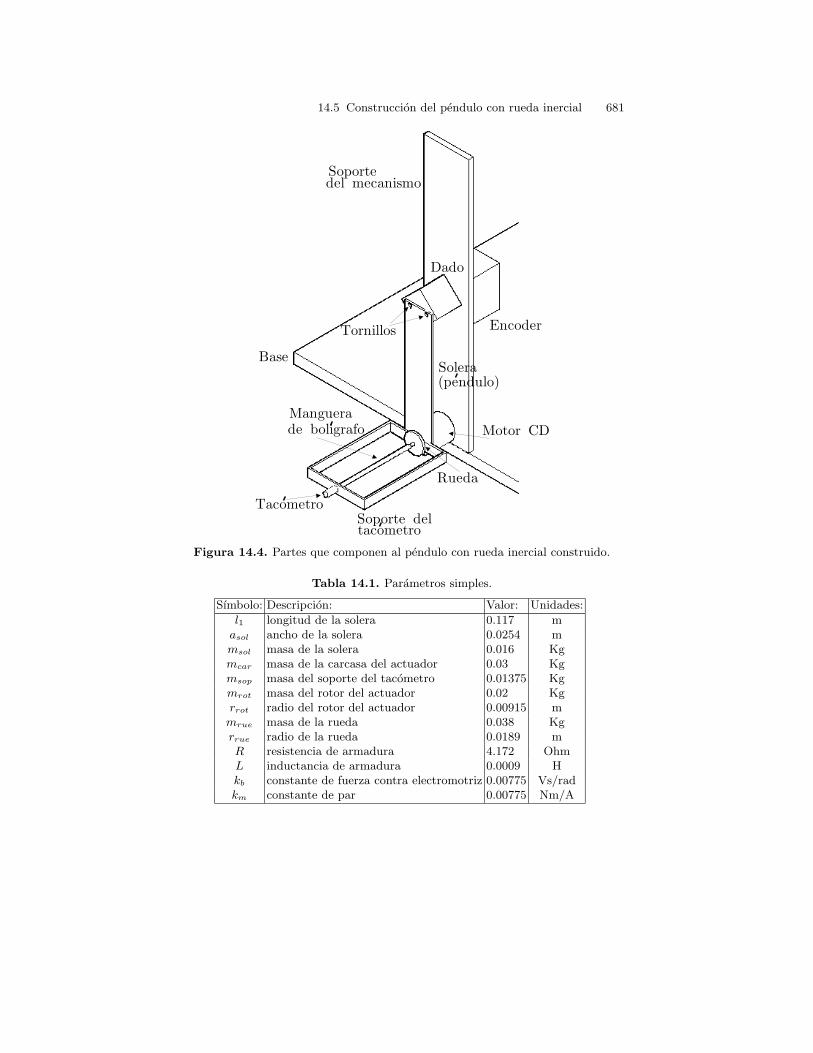
14.5 Construccion del pendulo con rueda inercial 681
Encoder
TacometroSoporte deltacometro
Motor CD
Rueda
Solera(pendulo)
Tornillos
Manguerade boligrafo
Dado
Soportedel mecanismo
Base
Figura 14.4. Partes que componen al pendulo con rueda inercial construido.
Tabla 14.1. Parametros simples.
Sımbolo: Descripcion: Valor: Unidades:
l1 longitud de la solera 0.117 masol ancho de la solera 0.0254 mmsol masa de la solera 0.016 Kgmcar masa de la carcasa del actuador 0.03 Kgmsop masa del soporte del tacometro 0.01375 Kgmrot masa del rotor del actuador 0.02 Kgrrot radio del rotor del actuador 0.00915 mmrue masa de la rueda 0.038 Kgrrue radio de la rueda 0.0189 mR resistencia de armadura 4.172 OhmL inductancia de armadura 0.0009 Hkb constante de fuerza contra electromotriz 0.00775 Vs/radkm constante de par 0.00775 Nm/A

682 14 Control de un pendulo con rueda inercial
parametros medidos de las piezas que componen al pendulo con rueda inercialası como del motor de CD utilizado como actuador.
La masa equivalente del primer grado de libertad m1 se define como:
m1 = msol + mcar + msop = 0.05975 [Kg]. (14.38)
Para calcular el centro de masa del primer grado de libertad con todos suscomponentes, se aplica el principio de la balanza (la suma de pares en el puntode apoyo debe de ser igual a cero), por tanto al aplicar un peso equivalentea una distancia lc1 en el extremo opuesto de la solera, el arreglo de la figura14.5 debe quedar balanceado. Usando (14.38) y los datos de la tabla 14.1 setiene que:
lc1 =msol
l12 + mcarl1 + msopl1
m1= 0.10133 [m]. (14.39)
Figura 14.5. Esquema para calcular lc1.
El momento de inercia de una placa rectangular de masa m, ancho b ylargo d con eje de rotacion x colocado sobre una direccion perpendicular alplano de lados b y d y que pasa por su centro esta dado como [14], [15], pag.271:
Ix =1
12m(b2 + d2) (14.40)
Usando (14.40) y los datos de la tabla 14.1 se obtiene el momento de inerciaI∗ como:
I∗ =1
12msol(a
2sol + l21) = 0.0000191122 [Kg m2] (14.41)
Sin embargo, el momento de inercia I1 esta definido alrededor de un eje quepasa por el centro de masa del pendulo ubicado a una distancia lc1 − l1/2 delcentro de la cara de lados b y d. De acuerdo al teorema del eje paralelo o deSteiner [14], [15], pag. 272:
I1 = I∗ + msol
(lc1 −
l12
)2
= 0.000048463 [Kg m2]
Por otro lado, el momento de inercia de un disco de masa m y radio r conun eje de rotacion x colocado a traves de su centro y que es perpendicular aldisco esta dado como [14], [15], pag. 271:

14.5 Construccion del pendulo con rueda inercial 683
Ix =1
2mr2 (14.42)
Con los datos de la tabla 14.1 y la expresion (14.42) se tiene que el momentode inercia de la rueda Irue esta dado como:
Irue =1
2mruer
2rue = 0.000006787 [Kg m2] (14.43)
El momento de inercia de un cilindro de masa m, radio a y altura l con uneje de rotacion x colocado a traves de su eje longitudinal esta dado como [14],[15], pag. 271:
Ix =1
2ma2. (14.44)
Usando la expresion (14.44) y los datos de la tabla 14.1 se tiene que el momentode inercia del rotor del actuador Irot esta dado como:
Irot =1
2mrotr
2rot = 0.000000837225 [Kg m2] (14.45)
La masa equivalente del segundo grado de libertad m2 se define como:
m2 = mrot + mrue = 0.058 [Kg] (14.46)
Usando (14.43) y (14.45) se tiene que el momento de inercia del segundo gradode libertad I2 esta dado como:
I2 = Irue + Irot = 0.0000076242 [Kg m2] (14.47)
Finalmente con los datos de la tabla 14.1, los parametros en (14.41), (14.38),(14.39), (14.46), (14.47) y g = 9.81[m/s2], se tiene que los valores numericosde los parametros del modelo (14.7) son:
d11 = 0.0014636, d12 = 0.0000076, (14.48)
d21 = 0.0000076, d22 = 0.0000076, (14.49)
mg = 0.12597 (14.50)
Es importante mencionar que la masa del tacometro se considera dentro dela masa del soporte del tacometro, ademas de que el efecto del rotor deltacometro se considera despreciable en el calculo de la inercia I2. Esto debidoa que tiene una masa menor a los 0.0001[Kg] y un radio menor a los 0.001[m]. Por otro lado, los tornillos de sujecion del dado, el dado (de plastico)y el eje del encoder incremental se desprecian para el calculo de la inerciaI1. Esto debido a que la suma de las masas de estos componentes es menora los 0.008[Kg] y, lo mas importante, estan directamente en el eje de girodel pendulo por lo que los radios inerciales son muy pequenos y el efectoinercial producido es despreciable. Finalmente, la masa de los dos alambresconductores (tanto del actuador como del tacometro), ası como la masa dela manguera de bolıgrafo (de plastico) usada para acoplar el tacometro a larueda, no fueron consideradas en el modelado del prototipo experimental.
684 14 Control de un pendulo con rueda inercial
Ejemplo 14.2 A continuacion se presenta la simulacion, usando SIMU-LINK, del pendulo con rueda inercial con los controladores (14.18) y (14.37).Primeramente se muestra el programa de matlab que se encarga de cargar losvalores numericos de las constantes que usara la simulacion:
clc,clear all;
% Constantes del Motor
R=4.172;
km=0.00775;
Umax=13;
% Modelo del IWP
g=9.81;
mgl=0.12597;
mbg=mgl
d11=0.0014636;
d12=0.0000076;
d21=d12;
d22=d21;
J= (d11*d22-d12*d21)/d12;
D=[d11 d12;d21 d22];
Di=inv(D);
di11=Di(1,1)
di12=Di(1,2)
di21=Di(2,1)
di22=Di(2,2)
%Matrices del IWP linealizado en el punto de operacion
A=[0 1 0;di11*mbg 0 0;di21*mbg 0 0]
B=[0;di12*km/R;di22*km/R]
%Determinar la Controlabilidad
disp(’El sistema es controlable?’); Pc=ctrb(A,B); if rank(Pc) ==
size(Pc)
disp(’Si.’);
else
disp(’No.’);
end
%Controlador No-Lineal
Kd=20;
V0=2*mbg
d=(Umax*km)/(R*Kd*V0)
%Control por retroalimentacion de estado en punto de operacion
n=1
c=-570
xd=[n*pi 0 c]
%valores propios deseados en lazo cerrado
lambda1= -9.27 + 20.6i;
lambda2= -9.27 - 20.6i;
lambda3= -0.719;
Vp=[lambda1 lambda2 lambda3]
K = place(A,B,Vp)
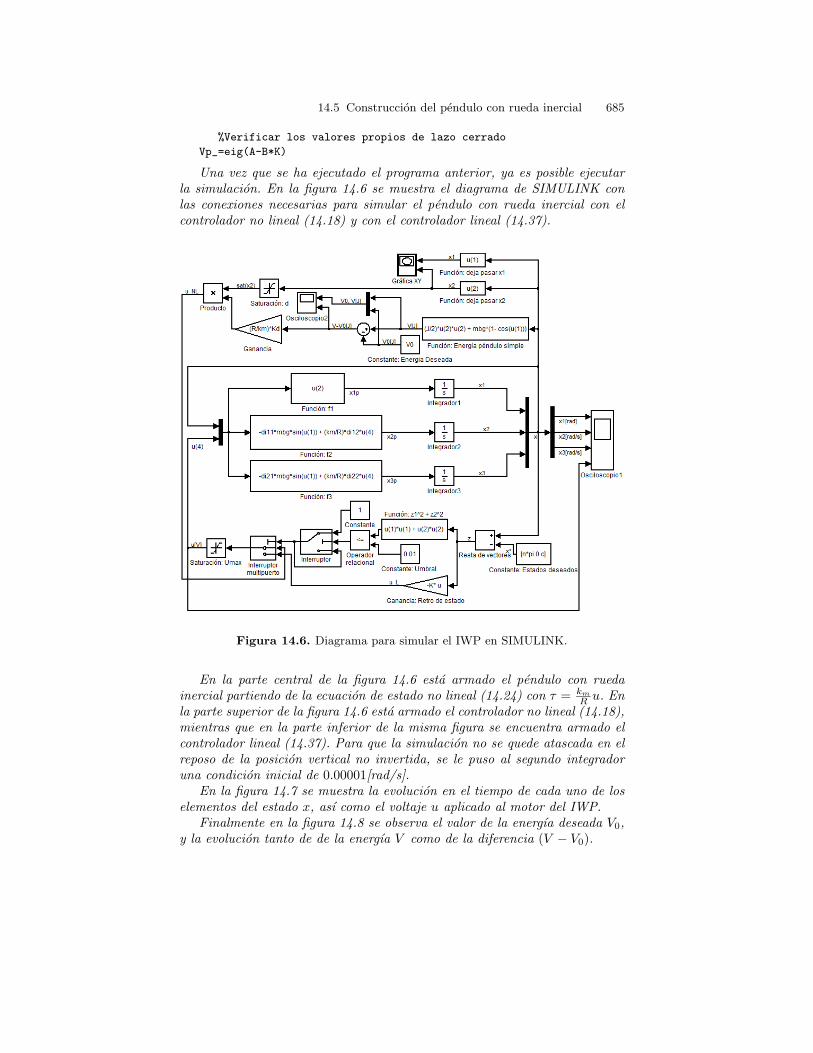
14.5 Construccion del pendulo con rueda inercial 685
%Verificar los valores propios de lazo cerrado
Vp_=eig(A-B*K)
Una vez que se ha ejecutado el programa anterior, ya es posible ejecutarla simulacion. En la figura 14.6 se muestra el diagrama de SIMULINK conlas conexiones necesarias para simular el pendulo con rueda inercial con elcontrolador no lineal (14.18) y con el controlador lineal (14.37).
Figura 14.6. Diagrama para simular el IWP en SIMULINK.
En la parte central de la figura 14.6 esta armado el pendulo con ruedainercial partiendo de la ecuacion de estado no lineal (14.24) con τ = km
R u. Enla parte superior de la figura 14.6 esta armado el controlador no lineal (14.18),mientras que en la parte inferior de la misma figura se encuentra armado elcontrolador lineal (14.37). Para que la simulacion no se quede atascada en elreposo de la posicion vertical no invertida, se le puso al segundo integradoruna condicion inicial de 0.00001[rad/s].
En la figura 14.7 se muestra la evolucion en el tiempo de cada uno de loselementos del estado x, ası como el voltaje u aplicado al motor del IWP.
Finalmente en la figura 14.8 se observa el valor de la energıa deseada V0,y la evolucion tanto de de la energıa V como de la diferencia (V − V0).
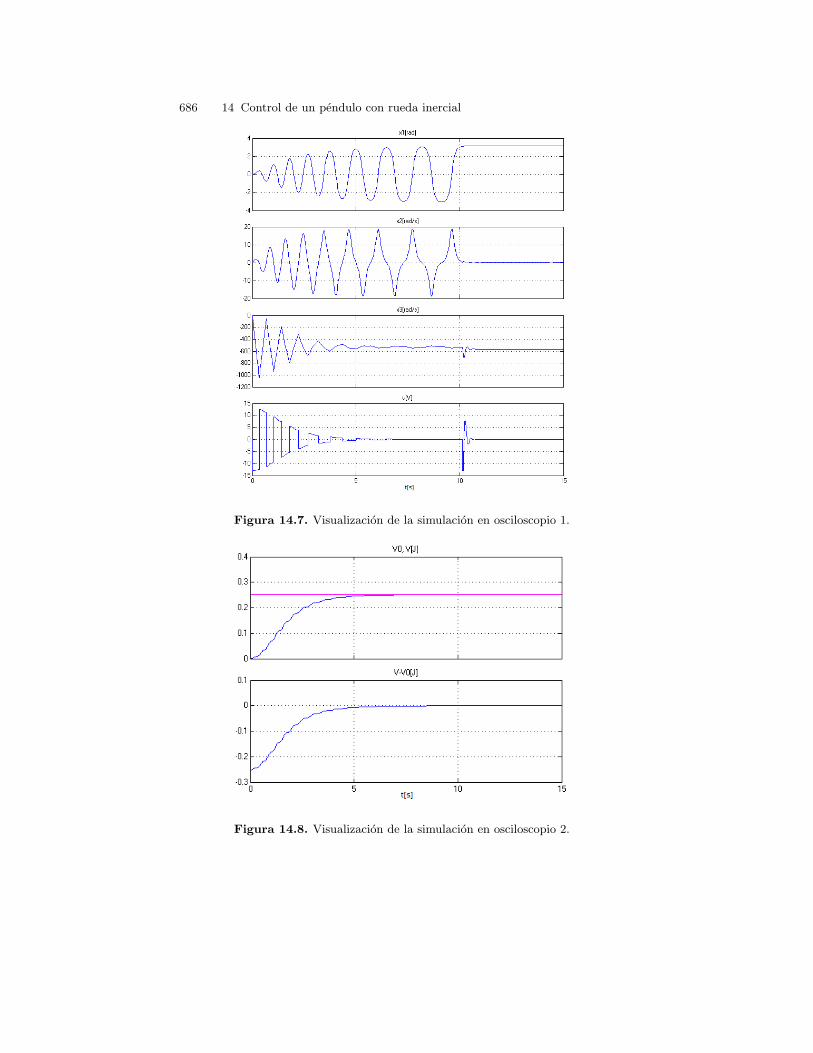
686 14 Control de un pendulo con rueda inercial
Figura 14.7. Visualizacion de la simulacion en osciloscopio 1.
Figura 14.8. Visualizacion de la simulacion en osciloscopio 2.

14.6 Construccion del controlador 687
14.6. Construccion del controlador
Usando los valores numericos de la seccion 14.5, considerando kd = 1 yde acuerdo a (14.11), (14.15) se obtiene el controlador que levanta el pendulohasta su configuracion invertida inestable:
V = C1 q21 + mg(1 − cos(q1)), C1 =
1
2J, V0 = 2mg,
u = C2sat(q1) signo(V − V0), C2 =Rkd
km, ε0 =
umaxkm
kdR, (14.51)
donde umax = 13[V], mientras que las constantes C1 y C2 se calculan una solavez en la inicializacion del programa del controlador, para reducir el numerode multiplicaciones necesarias en la implementacion.
Por otro lado, de acuerdo a las secciones 7.13.1 y 7.13.2, en el capıtulo7, se encuentra que el uso del controlador lineal (14.37) junto con el vectorde ganancias K = [k1, k2, k3] = [−340,−11,−0.0085] ubica los eigenvaloresde la matriz (A − BK) en los siguientes valores: λ1 = −5.8535 + 17.7192j,λ2 = −5.8535 − 17.7192j y λ3 = −0.5268. Por tanto, el controlador (14.37)queda expresado como:
u = −k1(q1 − q1d) − k2q1 − k3(q2 − q2d) (14.52)
donde se usa cualquiera de los valores q1d = +π o q1d = −π, dependiendode a cual valor se acerca primero q1. Recuerdese que q2d = c es el valor quetiene la velocidad de la rueda en el momento en que el controlador en (14.52)empieza a operar.
Defınase la condicion:
(q1 − q1d)2 + q2
1 < δ (14.53)
para alguna constante δ > 0 suficientemente pequena y q1d = +π o q1d = −π.Esta condicion significa que el pendulo se encuentra muy cerca de uno de lospuntos (q1, q1) = (+π, 0) o (q1, q1) = (−π, 0). Esta cercanıa se puede ajustarproponiendo δ (en esta implementacion se manejo δ = 0.3).
La estrategia de control para levantar y atrapar el pendulo con ruedainercial consiste en utilizar (14.51) hasta que se cumpla (14.53) y a partirde ese momento desconectar (14.51) y empezar a utilizar (14.52). Para rea-lizar esta tarea se utiliza el microcontrolador PIC18F4431 de Microchip. Acontinuacion se explica como se hace esto. Antes que nada se debe aclararque no es el proposito presentar toda una exposicion de como trabaja estemicrocontrolador. Lo que se presenta es una descripcion de los recursos deeste microcontrolador que se utilizan para construir la estrategia de control(14.51), (14.52), (14.53).
Al final de este capıtulo se presenta un listado del programa utilizado. Elmicrocontrolador PIC18F4431 [16] es de tecnologıa flash, tiene una velocidadde operacion maxima de 40 MHz (en este capıtulo se usa un cristal de 11

688 14 Control de un pendulo con rueda inercial
MHz ya que el circuito esta armado en tarjeta de pruebas). Cuenta con cincopuertos de entrada-salida configurables, tres temporizadores de 16 bits y unode 8 bits (el temporizador de 8 bits es utilizado para establecer el periodode muestreo: Ts = 0.01 s), nueve canales Analogico-Digital de 10 bits (por elcanal cero se recibe la senal del tacometro). Tambien cuenta con ocho canalesPWM (modulacion de ancho de pulso) de 14 bits de los cuales en este capıtulose usa el CCP1 configurado para trabajar en 8 bits para entregar el voltajede control a la planta.
La posicion q1 se mide usando un codificador incremental optico modeloCP-360-S de Computer Optical Products Inc. [17]. Este dispositivo ya conec-tado al microcontrolador tiene una resolucion de 1440 cuentas por revolucion.El codificador incremental es leıdo a traves de los pines 5 y 6 del canal A(vease la figura 14.9). Las cuentas del codificador incremental son recibidasen dos bytes (de 8 bits cada uno) llamados POSCNTH, el mas significativo, yPOSCNTL, el menos significativo. El valor real de la cuenta se puede calcularcomo:
pos = 256 ∗ POSCNTH + POSCNTL
lo cual es equivalente a hacer 8 corrimientos de POSCNTH hacia la izquierdapara luego sumar POSCNTL. La instruccion “q1=(signed long)pos” asigna ala variable q1 el valor numerico de la cuenta que incluye el signo correspon-diente, es decir positivo si el movimiento es como el mostrado en la figura14.2 o negativo en caso contrario. Finalmente, la posicion q1 es obtenida enradianes mediante la operacion:
q1 =2π
1440q1,
2π
1440= 0.004363
Es importante mencionar que con el fin de obtener una lectura correcta deq1, que represente fielmente la convencion descrita en la figura 14.2 para lamedicion de q1, es necesario energizar el sistema de control cuando el penduloeste en la configuracion de reposo que de acuerdo a la figura 14.2 correspondea q1 = 0. Lo anterior es para que los registros de posicion queden inicializadosen cero cuando el sistema se encuentre en dicha posicion. La velocidad delpendulo q1 se calcula a partir de la medicion de q1, usando diferenciacionnumerica, es decir:
q1 =q1(k) − q1(k − 1)
T(14.54)
donde k representa el tiempo discreto, q1 representa el estimado de la velocidaddel pendulo en radianes por segundo mientras que Ts = 0.01 s[seg] es elperiodo de muestreo utilizado. De este modo q1(k) indica el valor de q1 quese mide en el instante de muestreo actual y q1(k− 1) indica el valor de q1 quese midio en el instante de muestreo previo.
La velocidad de la rueda q2 se mide usando un tacometro modelo 34PC.Se trata de un motor de CD tipo miniatura de los utilizados en los telefonos

14.6 Construccion del controlador 689
celulares como vibrador. El voltaje que entrega el tacometro se filtra utilizandoel circuito RC que se muestra en la figura 14.9.
Se encontro que el tacometro utilizado entrega 0.58[V] cuando la veloci-dad es maxima e igual a 1634 radianes por segundo. Se supuso que cualquiervalor intermedio varıa de manera proporcional. Con el fin de mejorar la re-solucion con que se mide esta velocidad se uso el divisor de tension que seconecta al pin 4 (ver figura 14.9) para fijar en 3.8372[V] el valor mınimo delrango analogico del canal 0 del convertidor analogico-digital (el valor maxi-mo esta fijo en 5[V]). Por otro lado, el tacometro se conecto en serie a otrodivisor de tension de manera que cuando el tacometro esta en reposo (cuan-do q2 = 0) el voltaje leido por el canal 0 del convertidor analogico-digitales de (5-3.8372)/2+3.8372=4.4186[V]. Notese que de esta manera se permi-ten variaciones de aproximadamente 0.58[V] (es decir 1634 radianes por se-gundo) hacia arriba y hacia abajo del punto medio del rango analogico delconvertidor analogico-digital. Ası que cuando q2 = 1634[rad/s] el convertidoranalogico-digital entrega la cuenta 1023 = 210 − 1 (el convertidor AD es de10 bits) y cuando q2 = 0[rad/s] el convertidor analogico-digital entrega lacuenta 1023/2 = 511. Cuentas menores a 511 representan valores negativosde q2. De acuerdo a esta informacion, la velocidad de la rueda se calcula delsiguiente manera. La instruccion “vel=read-adc()-511” asigna a la variable“vel” el codigo correspondiente a la velocidad de la rueda mientras que lasinstrucciones “q2 p=(signed long)vel” y “q2 p=3.2039*q2 p” consiguen asig-nar a la variable “q2 p” un valor que es numericamente igual a la velocidad dela rueda q2 en radianes por segundo (incluyendo su signo). Notese que la cons-tante 3.2039=1634/510[(rad/s)/cuenta] representa la ganancia del sistema demedicion.
Con esta informacion se calcula cualquiera de las expresiones en (14.51) o(14.52), segun sea el caso. El valor de la variable u ası obtenida se envıa alPWM del microcontrolador como se describe a continuacion.
Una manera equivalente de implementar la funcion saturacion en (14.51)con un menor numero de operaciones se realiza sabiendo que u solo tomara va-lores en el rango de -13 a +13 volts, por lo que su valor se satura por softwarepara restringirlo a ese rango de valores utilizando instrucciones como las si-guientes:
if u > 13 then u = 13
if u < −13 then u = −13
Como la resolucion del PWM es de 28 − 1 = 255 cuentas, entonces la si-guiente cuenta debe ser enviada al PWM del microcontrolador para entregarcorrectamente el valor de u al amplificador de potencia de la planta:
cuenta =255
13abs(u)
donde abs(u) representa el valor absoluto de u. El signo de u es almacenadoen dos bits de control. La senal del PWM se entrega a un puente H (L293B
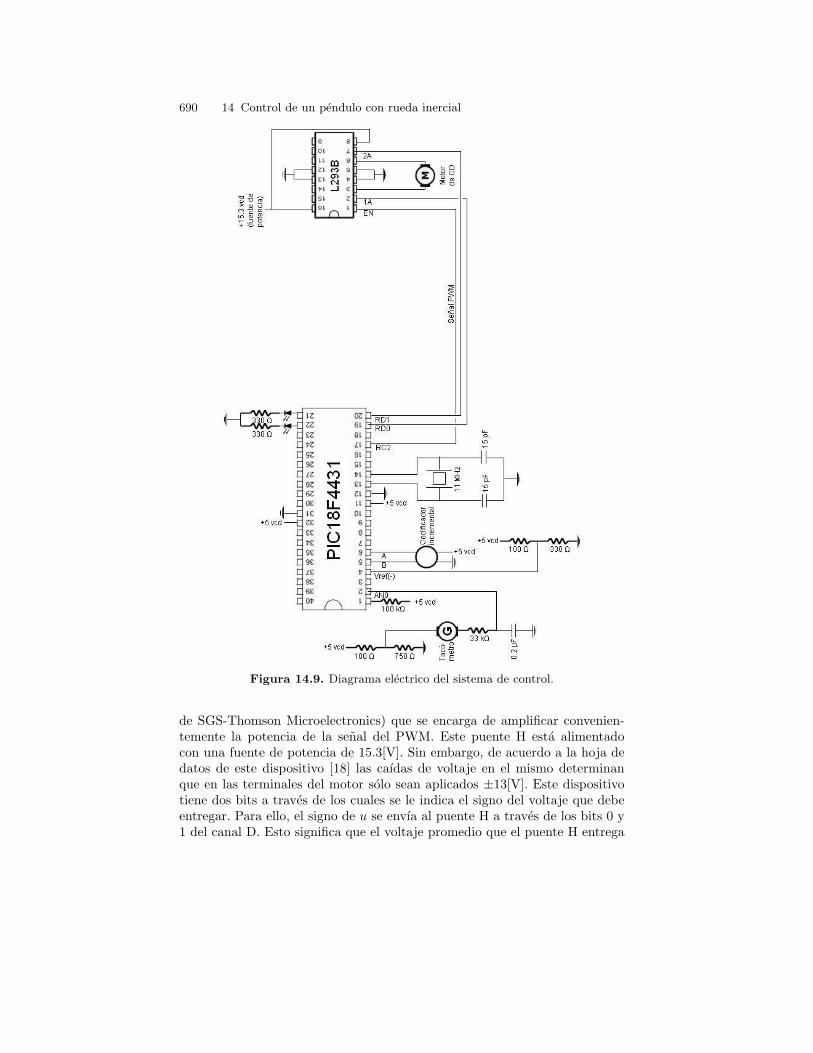
690 14 Control de un pendulo con rueda inercial
Figura 14.9. Diagrama electrico del sistema de control.
de SGS-Thomson Microelectronics) que se encarga de amplificar convenien-temente la potencia de la senal del PWM. Este puente H esta alimentadocon una fuente de potencia de 15.3[V]. Sin embargo, de acuerdo a la hoja dedatos de este dispositivo [18] las caıdas de voltaje en el mismo determinanque en las terminales del motor solo sean aplicados ±13[V]. Este dispositivotiene dos bits a traves de los cuales se le indica el signo del voltaje que debeentregar. Para ello, el signo de u se envıa al puente H a traves de los bits 0 y1 del canal D. Esto significa que el voltaje promedio que el puente H entrega
14.7 Resultados experimentales 691
a las terminales del motor solo varıa en el rango de -13 a +13 volts. Ası, seasegura que en las terminales del motor de CD se aplica un voltaje u cuyopromedio es numericamente igual al valor de u calculado con cualquiera delas expresiones en (14.51) o (14.52). Esto es importante porque asegura que laconstruccion practica del controlador respeta el diseno indicado por los con-troladores correspondientes. En la figura 14.9 se muestra el diagrama electricousado para construir la estrategia de control (14.51), (14.52), (14.53) en baseal microcontrolador PIC18F4431. Resulta interesante observar la sencillez delhardware utilizado.
14.7. Resultados experimentales
En las figuras 14.10, 14.11, 14.12, 14.13 y 14.14 se muestran los resultadosexperimentales obtenidos. Es importante recordar que es necesario aplicar alprincipio un pequeno golpe sobre el pendulo de manera que se abandone elpunto (q1, q1) = (0, 0). Aunque esto se puede evitar si se envıa al principio, atraves del programa, un pequeno pulso de voltaje al motor, sin embargo nose programo la tarea de esta manera.
En la figura 14.10 se muestra como oscila el pendulo, con amplitudes cadavez mayores, hasta alcanzar la posicion q1 = −π con velocidad cero en t ≈ 14[s]y que permanece en esa posicion para todo tiempo futuro. En la figura 14.11se observa que la velocidad de la rueda permanece constante en un valor de380[rad/s] a partir de t ≈ 17[s]. Aquı es interesante aclarar que la velocidadde la rueda es regulada en un valor c ≈ 150[rad/s] que es el valor de la ruedaen t ≈ 14[s], instante en el que el controlador (14.52) empieza a funcionar.La diferencia entre c y la velocidad final de la rueda 380[rad/s] se debe ala friccion existente en la rueda y que no ha sido considerada en el disenorealizado en este capıtulo.
En la figura 14.12 se muestra la senal de control u. Notese que esta variablese satura la mayor parte del tiempo durante la etapa en la cual el pendulo eslevantado (t < 14[s]). Esta es la razon por la cual se usan funciones saturaciony signo en el controlador (14.51). De hecho el valor de ε0 = 0.024 se seleccionade manera que con este valor y el factor 4.172
0.00775 , el valor de u se sature en±13[V].
En la figura 14.13 se muestra como se mueve el pendulo en el mismo planoque se definio en la figura 14.3 de la seccion 14.3. Es claro que, comparandoambas figuras, el pendulo se mueve de manera que su energıa V crece al pasarel tiempo (tambien vease la figura 14.14) hasta que V = V0 = 0.2519. Noteseque V alcanza dicho valor desde t ≈ 11[s] y sin embargo el pendulo es atrapadoo balanceado hasta t ≈ 14[s]. Esta es una prueba de que la energıa es reguladaen V = V0 hasta que se alcanza el punto (q1, q1) = (−π, 0). Es claro que elpendulo tambien pasa cerca del punto (q1, q1) = (+π, 0) en t ≈ 13[s] pero noes atrapado, seguramente porque la condicion en (14.53) no fue satisfecha en
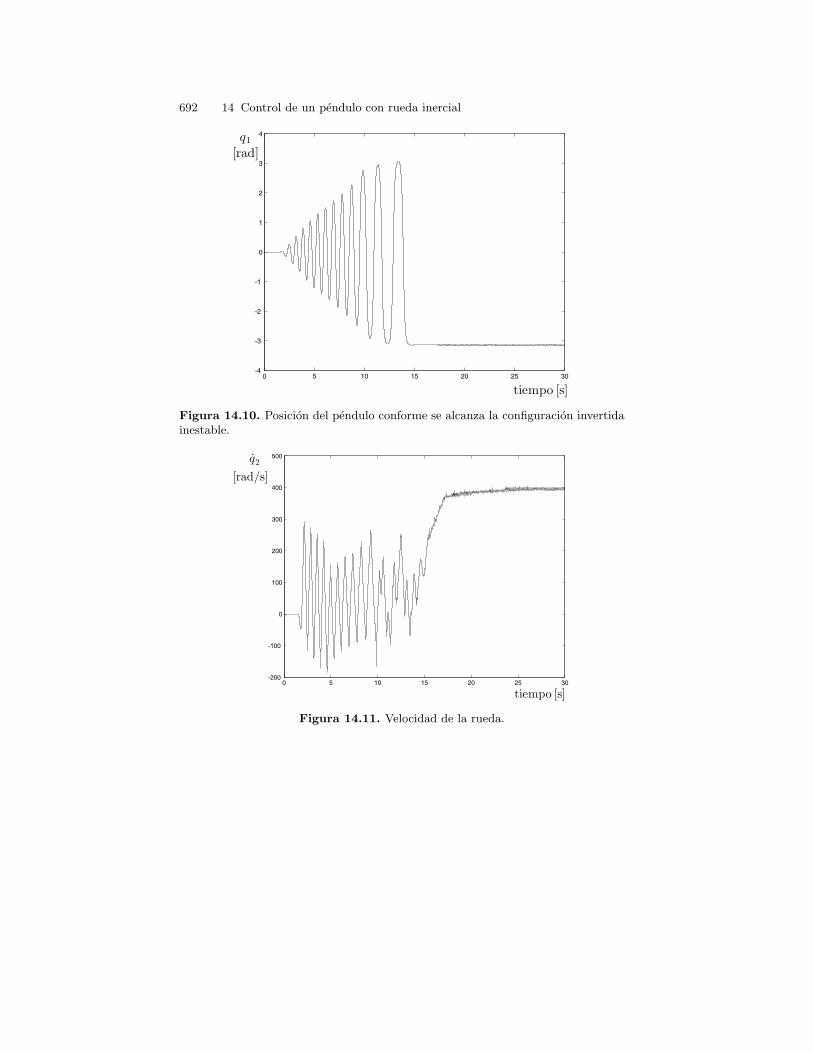
692 14 Control de un pendulo con rueda inercial
q1rad[ ]
tiempo s[ ]
Figura 14.10. Posicion del pendulo conforme se alcanza la configuracion invertidainestable.
tiempo s[ ]
rad=s[ ]
qç2
Figura 14.11. Velocidad de la rueda.
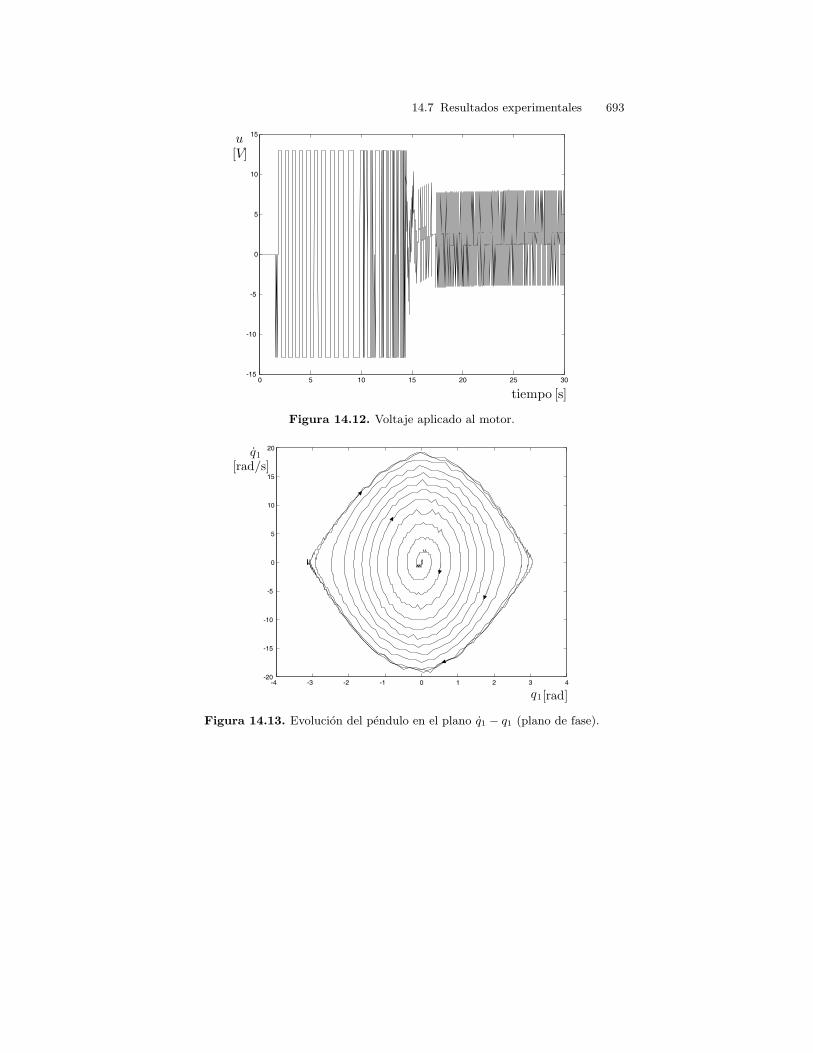
14.7 Resultados experimentales 693
uV[ ]
tiempo s[ ]
Figura 14.12. Voltaje aplicado al motor.
qç1
q1 rad[ ]
rad=s[ ]
Figura 14.13. Evolucion del pendulo en el plano q1 − q1 (plano de fase).
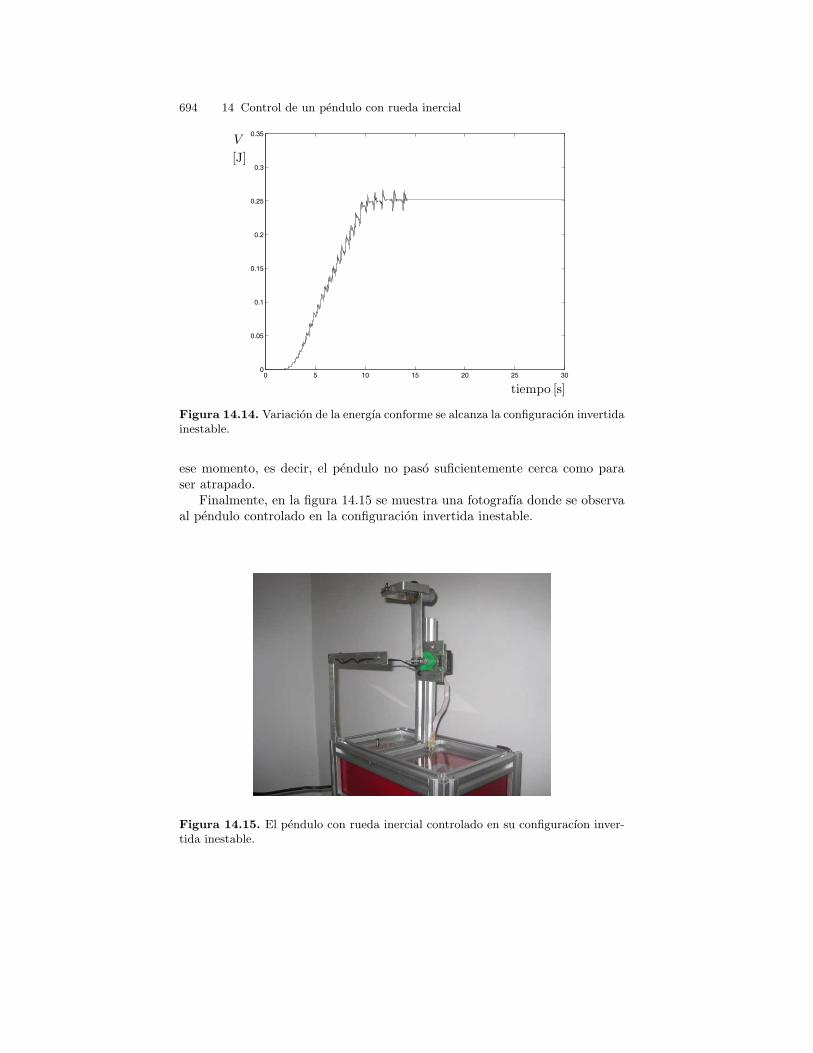
694 14 Control de un pendulo con rueda inercial
V
J[ ]
tiempo s[ ]
Figura 14.14. Variacion de la energıa conforme se alcanza la configuracion invertidainestable.
ese momento, es decir, el pendulo no paso suficientemente cerca como paraser atrapado.
Finalmente, en la figura 14.15 se muestra una fotografıa donde se observaal pendulo controlado en la configuracion invertida inestable.
Figura 14.15. El pendulo con rueda inercial controlado en su configuracıon inver-tida inestable.

14.7 Resultados experimentales 695
Programacion del microcontrolador PIC18F4431
Se recomienda consultar la referencia [19] para una explicacion precisa decada una de las instrucciones que aparecen en el siguiente listado.
//Programa controlar pendulo con rueda inercial para PCW V3.203
#include<18f4431.h>
#device adc=10 //manejar adc de 10 bits
#include<stdlib.h>
#include<math.h>
#fuses HS,NOWDT,NOPROTECT,PUT,NOLVP,NOBROWNOUT,NOWRTC,MCLR,SSP_RC
#define pi_ 3.14159
//ganancia del controlador no lineal
#define kd 1.0
//ganancias del controlador lineal
#define k1 340
#define k2 11
#define k3 0.0085
//parametros
#define mbg 0.12597
#define R 4.172
#define L 0.0009
#define Kb 0.00775
#define Km 0.00775
#define d11 0.0014636
#define d12 0.0000076
#define d21 0.0000076
#define d22 0.0000076
#define delta 0.3
#define ts 0.01
//con timer=108, cada cuenta vale (4/FXtal)*256 seg
/*DIRECCIONES DE REGISTROS DE INTERES*/
#use delay(clock=11000000)
//Base de tiempo para retardos (11 MHz)
#byte porta = 0xf80
//direcciones de los puertos
#byte portb = 0xf81
#byte portc = 0xf82
#byte portd = 0xf83
#byte portd = 0xf84
#byte TMR0H = 0xfd7
#byte TMR0L = 0xfd6
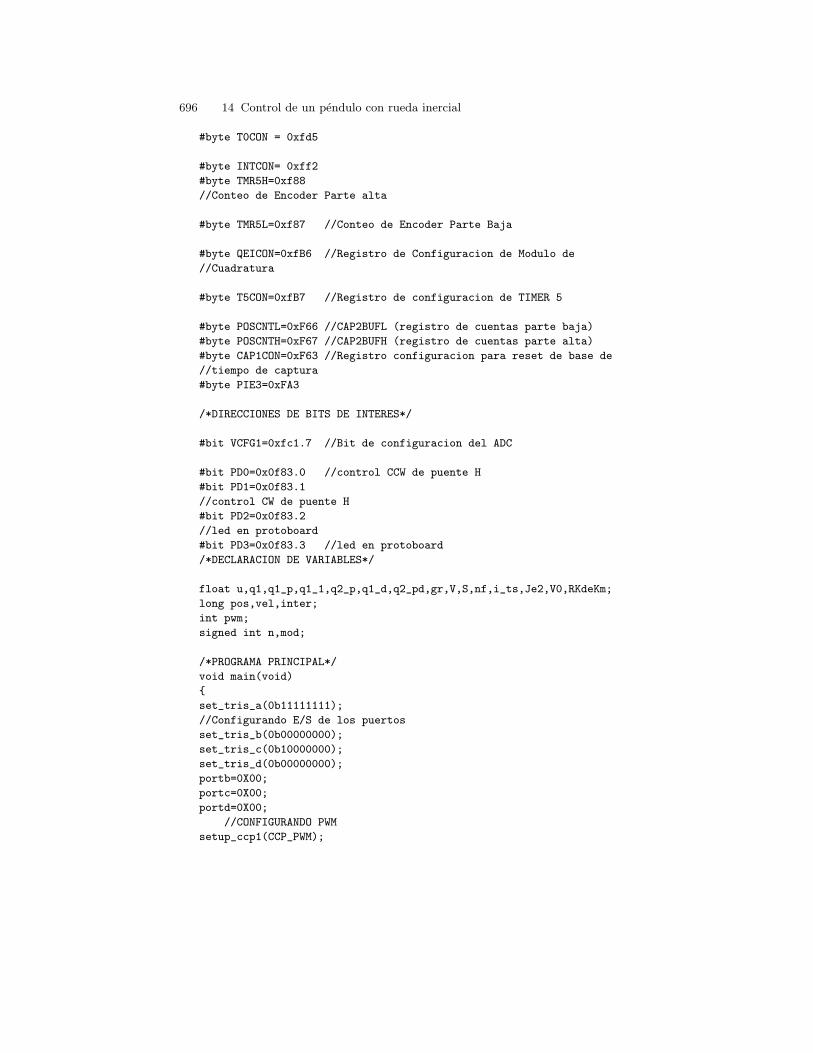
696 14 Control de un pendulo con rueda inercial
#byte T0CON = 0xfd5
#byte INTCON= 0xff2
#byte TMR5H=0xf88
//Conteo de Encoder Parte alta
#byte TMR5L=0xf87 //Conteo de Encoder Parte Baja
#byte QEICON=0xfB6 //Registro de Configuracion de Modulo de
//Cuadratura
#byte T5CON=0xfB7 //Registro de configuracion de TIMER 5
#byte POSCNTL=0xF66 //CAP2BUFL (registro de cuentas parte baja)
#byte POSCNTH=0xF67 //CAP2BUFH (registro de cuentas parte alta)
#byte CAP1CON=0xF63 //Registro configuracion para reset de base de
//tiempo de captura
#byte PIE3=0xFA3
/*DIRECCIONES DE BITS DE INTERES*/
#bit VCFG1=0xfc1.7 //Bit de configuracion del ADC
#bit PD0=0x0f83.0 //control CCW de puente H
#bit PD1=0x0f83.1
//control CW de puente H
#bit PD2=0x0f83.2
//led en protoboard
#bit PD3=0x0f83.3 //led en protoboard
/*DECLARACION DE VARIABLES*/
float u,q1,q1_p,q1_1,q2_p,q1_d,q2_pd,gr,V,S,nf,i_ts,Je2,V0,RKdeKm;
long pos,vel,inter;
int pwm;
signed int n,mod;
/*PROGRAMA PRINCIPAL*/
void main(void)
set_tris_a(0b11111111);
//Configurando E/S de los puertos
set_tris_b(0b00000000);
set_tris_c(0b10000000);
set_tris_d(0b00000000);
portb=0X00;
portc=0X00;
portd=0X00;
//CONFIGURANDO PWM
setup_ccp1(CCP_PWM);
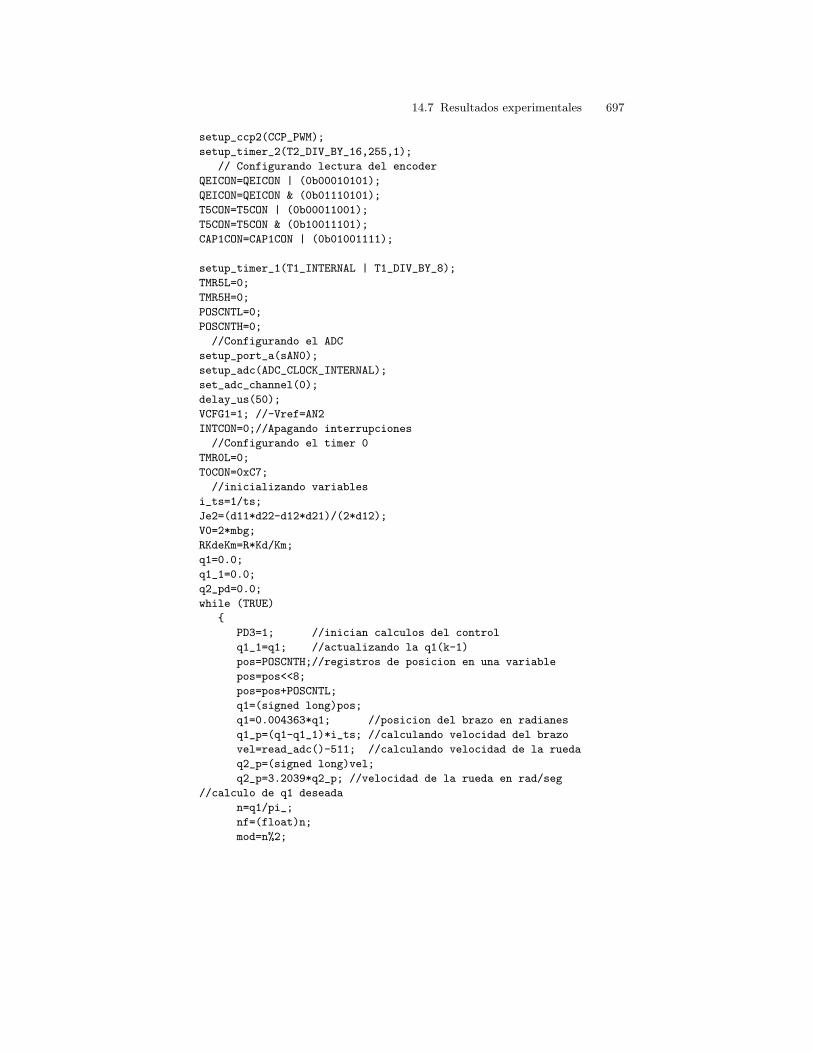
14.7 Resultados experimentales 697
setup_ccp2(CCP_PWM);
setup_timer_2(T2_DIV_BY_16,255,1);
// Configurando lectura del encoder
QEICON=QEICON | (0b00010101);
QEICON=QEICON & (0b01110101);
T5CON=T5CON | (0b00011001);
T5CON=T5CON & (0b10011101);
CAP1CON=CAP1CON | (0b01001111);
setup_timer_1(T1_INTERNAL | T1_DIV_BY_8);
TMR5L=0;
TMR5H=0;
POSCNTL=0;
POSCNTH=0;
//Configurando el ADC
setup_port_a(sAN0);
setup_adc(ADC_CLOCK_INTERNAL);
set_adc_channel(0);
delay_us(50);
VCFG1=1; //-Vref=AN2
INTCON=0;//Apagando interrupciones
//Configurando el timer 0
TMR0L=0;
T0CON=0xC7;
//inicializando variables
i_ts=1/ts;
Je2=(d11*d22-d12*d21)/(2*d12);
V0=2*mbg;
RKdeKm=R*Kd/Km;
q1=0.0;
q1_1=0.0;
q2_pd=0.0;
while (TRUE)
PD3=1; //inician calculos del control
q1_1=q1; //actualizando la q1(k-1)
pos=POSCNTH;//registros de posicion en una variable
pos=pos<<8;
pos=pos+POSCNTL;
q1=(signed long)pos;
q1=0.004363*q1; //posicion del brazo en radianes
q1_p=(q1-q1_1)*i_ts; //calculando velocidad del brazo
vel=read_adc()-511; //calculando velocidad de la rueda
q2_p=(signed long)vel;
q2_p=3.2039*q2_p; //velocidad de la rueda en rad/seg
//calculo de q1 deseada
n=q1/pi_;
nf=(float)n;
mod=n%2;
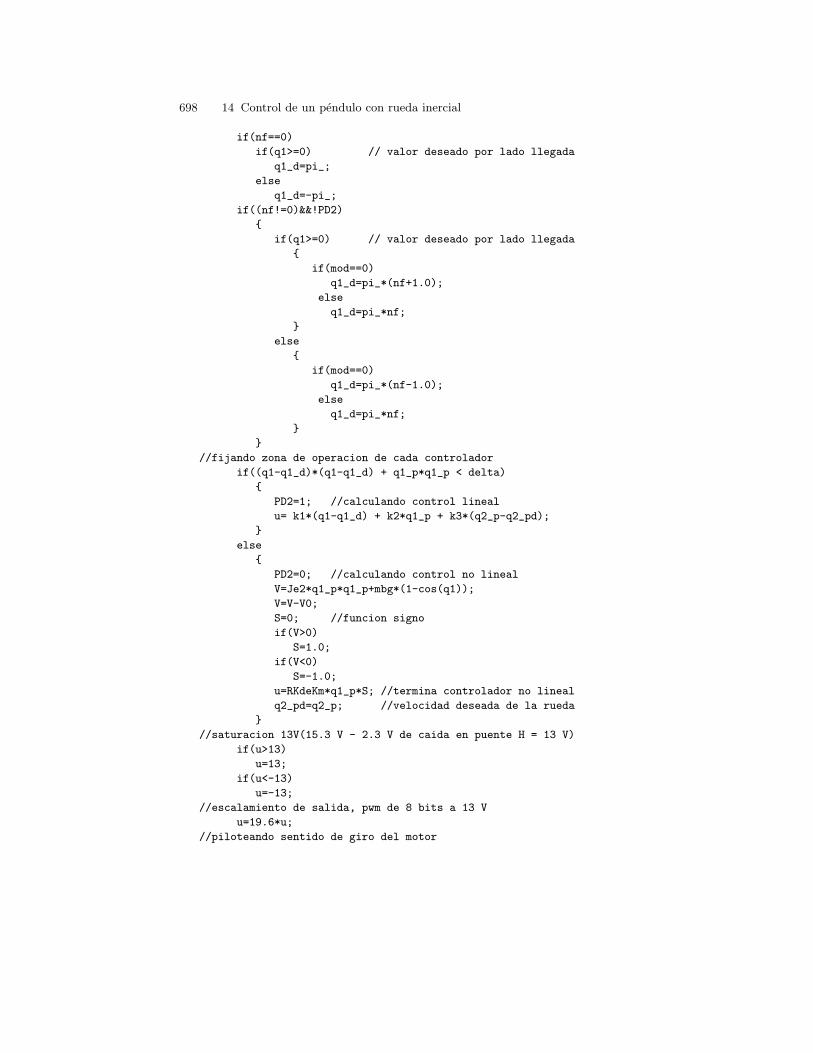
698 14 Control de un pendulo con rueda inercial
if(nf==0)
if(q1>=0) // valor deseado por lado llegada
q1_d=pi_;
else
q1_d=-pi_;
if((nf!=0)&&!PD2)
if(q1>=0) // valor deseado por lado llegada
if(mod==0)
q1_d=pi_*(nf+1.0);
else
q1_d=pi_*nf;
else
if(mod==0)
q1_d=pi_*(nf-1.0);
else
q1_d=pi_*nf;
//fijando zona de operacion de cada controlador
if((q1-q1_d)*(q1-q1_d) + q1_p*q1_p < delta)
PD2=1; //calculando control lineal
u= k1*(q1-q1_d) + k2*q1_p + k3*(q2_p-q2_pd);
else
PD2=0; //calculando control no lineal
V=Je2*q1_p*q1_p+mbg*(1-cos(q1));
V=V-V0;
S=0; //funcion signo
if(V>0)
S=1.0;
if(V<0)
S=-1.0;
u=RKdeKm*q1_p*S; //termina controlador no lineal
q2_pd=q2_p; //velocidad deseada de la rueda
//saturacion 13V(15.3 V - 2.3 V de caida en puente H = 13 V)
if(u>13)
u=13;
if(u<-13)
u=-13;
//escalamiento de salida, pwm de 8 bits a 13 V
u=19.6*u;
//piloteando sentido de giro del motor

14.9 Preguntas de repaso 699
if(u>=0)
PD0=1;
PD1=0;
else
PD0=0;
PD1=1;
//actualizando el valor del pwm
pwm=(unsigned int)abs(u);
set_pwm1_duty(pwm); //actualizando el valor del pwm
PD3=0; //terminan calculos del control
while(TMR0L<108); //cada cuenta vale (4/FXtal)*256 seg
TMR0L=0;
T0CON=0xC7;
//cierre del while infinito
//cierre del main
14.8. Resumen
En este capıtulo se le ha presentado al lector otro sistema no lineal subac-tuado conocido como el pendulo con rueda inercial. Se ha mostrado tambienel modelo matematico del sistema, y en una forma sencilla, se han tratado doscontroladores no lineales que son utiles para la tarea de levantar el pendulocon rueda inercial. Basados en los capıtulos previos del libro, se utilizo un con-trolador por retroalimentacion completa del estado para la tarea de atraparel pendulo con rueda inercial linealizado en su posicion vertical invertida. Conla finalidad de clarificar en su mayorıa los aspectos involucrados en llevar losconocimientos teoricos a la practica, se mostro la construccion e identificacionde los parametros de un sistema pendulo con rueda inercial prototipo. Se hafinalizado con la electronica y la programacion de los dispositivos necesariospara la realizacion de experimentos con el prototipo del pendulo con ruedainercial construido.
14.9. Preguntas de repaso
1. Diga que grado de libertad del IWP es no actuado.2. ¿Por que el IWP tuvo que oscilar varias veces antes de alcanzar la posicion
vertical invertida?3. ¿Que hubiera sucedido si el voltaje umax en lugar de ser de 13[V] fuera de
7[V].?

700 14 Control de un pendulo con rueda inercial
4. ¿Cuanto vale la frecuencia de corte en [rad/s] y en [Hz] del filtro RC deltacometro mostrado en la figura 14.9?
5. ¿Por que mientras el sistema de control esta levantando el IWP la senalde voltaje de la figura 14.7 va dismunuyendo su amplitud?
6. ¿Por que mientras el sistema de control esta levantando el IWP la senalde voltaje de la figura 14.12 mantiene su amplitud entre 13[V] y -13[V]?
7. Identifique en que lınea del programa del microcontrolador se manda apa-gar el led conectado a la terminal 22 del PIC18F4431.

Referencias
1. R. Kelly, V. Santibanez, and A. Loria, Control of robot manipulators in jointspace, Springer, London, 2005.
2. M. W. Spong, P. Corke, and R. Lozano, Nonlinear control of the reaction wheelpendulum, Automatica, vol. 37, no. 11, pp. 1845-1851, 2001.
3. R. Olfati-Saber, Global stabilization of a flat underactuated system: the inertiawheel pendulum, Proc. of the 40th IEEE Conf. on Decision and Control, Orlando,Florida, pp. 3764-3765, 2001.
4. R. Ortega, M. W. Spong, F. Gomez-Estern and G. Blankenstein, Stabilizationof a class of underactuated mechanical systems via interconnection and dampingassignment, IEEE Transactions on Automatic Control, vol. 47, no. 8, pp. 1218-1233, 2002.
5. S. Afkhami, M. J. Yazdanpanah, and P. J. Maralani, Stabilization of inertia wheelpendulum using output feedback back-stepping, Proc. of IEEE Conf. on ControlApplications, vol. 2, pp. 977-982, 2003.
6. D. M. Alonso, F. I. Robbio, E. E. Paolini, and J. L. Moiola, Modelling an inertiawheel pendulum benchmark, Mathematical and Computer Modelling of DynamicalSystems, vol. 11, no. 3, pp. 255-272, 2005.
7. R. Kelly and R. Campa, IDA-PB control of the inertia wheel pendulum: theLagrangian approach (in Spanish), Revista Iberoamericana de Automatica e In-formatica Industrial, vol. 2, no. 1, pp. 36-42, 2005.
8. V. Santibanez, R. Kelly, and J. Sandoval, Control of the inertia wheel pendulumby bounded torques, Proc. of the 44th IEEE Conf. on Decision and Control, andEuropean Control Conf. CDC-ECC ’05, Seville, Spain, pp. 8266-8270, 2005.
9. M. Abrahantes, J. Mulder, and K. Butter, Modeling, identification and controlof an under actuated inertial wheel pendulum, Proc. of the 39th SoutheasternSymposium on System Theory, Macon, Georgia, pp.1-5, 2007.
10. N. Qaiser, N. Iqbal, A. Hussain, and N. Qaiser, Exponential stabilization of aclass of underactuated mechanical systems using dynamic surface control, Inter-national Journal of Control, Automation, and Systems, vol. 5, no. 5, pp. 547-558,2007.
11. R. V. Carrillo-Serrano and V. M. Hernandez-Guzman, Control of the inertiawheel pendulum taking into account the actuator dynamics, International Journalof Innovative Computing, Information and Control, vol. 6, no. 12, pp. 5553-5563,2010.

702 Referencias
12. H. Khalil, Nonlinear Systems, 3rd Edition, Prentice-Hall, Upper Saddle River,2002.
13. A.L. Fradkov, P.Y. Guzenko, D.J. Hill, and A.Y. Pogromsky, Speed gradientcontrol and passivity of nonlinear oscillators, Proc. 3rd. IFAC Symposium on Non-linear control systems (NOLCOS’95), vol. 2, pp. 655-659, 1995.
14. Hibbeler R. C., 2004, Mecanica vectorial para ingenieros. Dinamica, (10a. edi-cion), Pearson Educacion, Mexico.
15. M. Alonso and E.J. Finn, Fısica, Addison-Wesley Iberoamericana, Wilmington,Delaware, 1995.
16. PIC18F4431 Enhanced Flash Microcontroller, Data sheet, Microchip Techno-logy Inc., 2007.
17. CP360S Housed Encoder, Computer Optical Products Inc.,www.opticalencoder.com.
18. L293B Push-Pull Four channel drivers, Data sheet, SGS-Thomson Microelec-tronics, 1993.
19. Custom Computer Services Incorporated, CCS C Compiler Reference Manual,2003.
Indice alfabetico
Adelanto de fase, 314Ancho de banda, 337Atraso de fase, 315
Bodegraficas de, 294
Ceros, 145lazo abierto de, 224lazo abierto, efecto de, 231, 335
Circuito de senal pequena, 473Compensadores de adelanto, 320Componentes de frecuencia cero, 305Componentes de frecuencias grandes,
303Condicion
angulo de, 224magnitud de, 224
Conexionen cascada, 179en lazo cerrado, 181en paralelo, 180
Constante de tiempo, 103, 337Control de corriente, 504Controlabilidad
definicion, 414prueba, 414
Criterio de Nyquistcaso especial, 332caso general, 333
Decada, 309Decibeles, 294Disipador, 27
Ecuacion de Shockley, 475
Ecuacion dinamica
ecuacion de estado, 396
ecuacion de estado no lineal, 399
ecuacion de salida, 396
lineal invariante en el tiempo, 396
solucion, 411
Ecuaciones de Euler-Lagrange, 647, 672
Eigenvalores, 409
Energıa, 17
almacenada en un resorte, 22, 24
cinetica, 20, 23, 648, 672, 674
de un campo magnetico, 41
en sistemas de fluidos, 18
en sistemas electricos, 18
en sistemas mecanicos rotativos, 18
en sistemas mecanicos traslacionales,18
en un capacitor, 26
en una inductancia, 25
magnetica, 579
potencial, 650, 673, 674
Entrada, 102, 145
Entrada de prueba
escalon, 202
parabola, 203
rampa, 202
Espectro de frecuencias, 301
Estabilidad, 145, 413
marginal, 145
Estado, 395
estimado del, 431
704 Indice alfabetico
Factor de amortiguamiento, 122, 338Filtro
pasa altas, 314pasa bajas, 294, 315
Fracciones parciales expansion en, 113raıces complejas conjugadas distintas,
135raıces complejas conjugadas repeti-
das, 140raıces reales distintas, 100, 125raıces reales repetidas, 110, 130
Frecuenciade cruce de fase, 335de cruce de ganancia, 334, 338de esquina, 310, 337
Frecuencia natural amortiguada, 123Frecuencia natural no amortiguada, 123Fuerza magnetica, 579Funcion constitutiva, 20, 22–24, 27Funcion de transferencia, 144
de ganancia unitaria en estadoestacionario, 104, 122, 146
estable, 145fase de una, 308inestable, 145lazo abierto de, 223lazo cerrado de, 222magnitud de una, 308marginalmente estable, 145
Inestabilidad, 145
L’Hopital regla de, 131Ley de Faraday, 25, 39, 578Ley de Hooke, 22, 24Ley de Kirchhoff de corrientes, 70Ley de Kirchhoff de Voltajes, 67, 578Ley de la Conservacion de la Materia,
105Ley de Lenz, 39Ley de Ohm, 30
MagLev, 576Margen
fase de, 334, 338ganancia de, 335
Matriz no singular, 408Microcontrolador
PIC16F877A, 558, 657
PIC18F4431, 687Modelo lineal aproximado, 403Modulador por ancho de pulso, PWM,
587, 591
Objetivo de un sistema de control, 222Observabilidad
definicion, 416prueba, 416
Pico de resonancia, 310, 337Polares
graficas, 297Polinomio caracterıstico, 102, 145Polos, 104, 144
de lazo abierto, efecto de, 230, 335lazo abierto de, 224lazo cerrado de, 223
Potenciadisipada por la friccion viscosa, 28disipada por un resistencia electrica,
30instantanea, 17
Principio de superposicion, 181Puerto, 16, 17, 32Punto de equilibrio, 401Punto de operacion, 402, 474
Rango de una matriz, 409Resonancia, 143, 316Respuesta
en estado estacionario, caracterısticasde, 222
forzada, 101, 111, 116, 126natural, 101, 111, 116, 126transitoria, caracterısticas de, 222
Ruido, 305, 315
Salida, 102, 145Segunda Ley de Newton, 20, 22, 579Series de Fourier, 301Sistema de control en lazo cerrado, 181,
201, 222Sistema inestable, 577Sobre paso, 118
Teoremavalor final del, 99
Tercera Ley de Newton, 43Tiempo de subida, 118, 337
Indice alfabetico 705
Tipo de un sistema, 201Transformacion lineal, 425Transformada
Laplace de, 98Fourier de, 301
Trayectoria de Nyquist, 330modificada, 333
Variables de estadocriterio de seleccion, 395
definicion, 395Variables generalizadas
acumulacion de esfuerzo, 19, 21, 23,25
acumulacion de flujo, 19, 20, 23, 26esfuerzo, 17flujo, 17
Vectoreslinealmente dependientes, 407linealmente independientes, 407

Control AutomaticoTeorıa de diseno, construccion de prototipos,modelado, identificacion y pruebas experimentales
Hecho en MexicoImpreso por:Esteban Becerril CamargoSimon Bolıvar No. 118, Col. Centro,Deleg. Cuauhtemoc, Mexico, D.F., C.P. 06080
1,000 Ejemplares, Junio de 2013