conceptos básicos de la simulación -...
TRANSCRIPT

Conceptos básicos de simulación
20
Capítulo 2
Conceptos básicos de la simulación
2.1 Topología de los parques eólicos
Las configuraciones más comunes que se emplean en el diseño de los parques eólicos son la radial y en antena. [18]. De estas dos configuraciones, la topología radial es la más común, debido a su simplicidad y a su reducida inversión. Es decir, es la configuración más económica y la que necesita menor mantenimiento. Sin embargo, tal y como ocurre en las redes de distribución y transporte, es posible optar por topologías de mayor complejidad pero que garanticen una mayor fiabilidad de la instalación.
2.1.1 Modelos de parques eólicos
La introducción de determinadas redundancias y mejoras garantiza una mayor disponibilidad de los aerogeneradores y de la energía que producen.
Por otro lado, estas configuraciones alternativas suponen una mayor inversión en la instalación y en el mantenimiento. De este modo, la elección de un tipo de esquema de parque debe realizarse a través de un compromiso entre la inversión y el incremento de la fiabilidad y disponibilidad de la energía que conlleva. Así, será posible determinar qué configuración permitirá recuperar antes la inversión y de modo más sencillo.
Para facilitar en esta decisión, el presente trabajo desarrolla una herramienta informática que permite analizar económicamente la configuración más apropiada dentro de las condiciones establecidas.
Para desarrollar la herramienta se ha modelado y analizado el comportamiento de cuatro tipos de topologías de parque alternativas a la radial, en las que se han introducido redundancias y mejoras. Del mismo modo, se da la posibilidad de ampliar en el futuro el abanico de configuraciones a analizar.
Las mejoras que se pueden introducir en la configuración básica radial son:
• La colocación de manera adecuada de protecciones y seccionadores que permitan sectorizar el parque, aislar cualquier falta que se produzca y dar una mayor flexibilidad operativa, en general.
• La creación de mallas o anillos en la instalación.
También, se pueden introducir otro tipo de modificaciones para obtener objetivos similares.

Conceptos básicos de simulación
21
Este tipo de mejoras podrían ser, por ejemplo, la transmisión en corriente contínua en el circuito de evacuación en media tensión o alta tensión, o el diseño íntegro del parque en corriente continua [19]. Esto se está desarrollando actualmente en algunos parques experimentales y tiene como finalidad su empleo en parques marítimos con grandes potencias y largas distancias desde la generación hasta la subestación. De este modo, se reducirían las pérdidas en transmisión. Otro ejemplo sería el diseño de parques con varias entradas-salidas en una subestación o con varias subestaciones. Sin embargo, este tipo de soluciones no serán objeto de estudio en este trabajo.
El objetivo del presente trabajo y la herramienta informática se centrará en el análisis de cuatro tipos distintos de topologías, además de la radial:
• Configuración radial con protección intermedia en las ramas. Figura 2.1.
Figura 2.1 Configuración radial con protección intermedia.
• Configuración mallada. Figura 2.2.
Figura 2.2 Configuración mallada.

Conceptos básicos de simulación
22
• Configuración serie [19]. Figura 2.3.
Figura 2.3 Configuración serie.
• Configuración mallada con protección intermedia en las ramas. Figura 2.4.
Figura 2.4 Configuración mallada con protección intermedia.
Conceptos básicos de simulación
23
Además, debido a sus notables diferencias, tanto en tamaño, potencia, inversión y periodo de recuperación, también se permitirá diferenciar entre parques en tierra firme y marinos.
Las principales diferencias entre estos dos tipos de parques radican en:
• El tamaño. Los parques marítimos poseen mayor distancia de separación entre los aerogeneradores, las torres son más altas y las turbinas poseen más potencia nominal.
• En el tipo de régimen al que se pueden acoger cada uno, puesto que es distinto según el actual Real Decreto 661/2007 [8].
Por ello, en el presente trabajo se creará un modelo de parque con cada una de las configuraciones presentadas anteriormente, y se estudiará el efecto de las variaciones en parámetros importantes de cara al estudio de la fiabilidad tales como:
• Distancias de separación entre aerogeneradores y ramas, así como longitudes de línea.
• Número de aerogeneradores y ramas.
• Alturas de las torres.
• Posición de los dispositivos de maniobra intermedios.
• Tipo de aerogenerador.
A modo de comparación, se incluirá un capítulo en el que se podrán observar los resultados de las simulaciones de las cuatro configuraciones distintas con valores de número de aerogeneradores, de ramas, potencia nominal del aerogenerador y distancias iguales. Así, se intentará demostrar la validez de la hipótesis inicial y se analizará el grado de incidencia de las mejoras en las configuraciones.
No obstante, ha sido necesario establecer una serie de criterios y supuestos comunes para todas las configuraciones a analizar, de modo que, las comparaciones de los índices de fiabilidad se produzcan en igualdad de condiciones y se pueda reducir la excesiva dificultad. Estos son:
• Toda la transmisión de la energía será en corriente alterna.
• Existirá una única línea de alimentación de la subestación.
• Los aerogeneradores se distribuirán en cada rama de la manera más equitativa posible.
• La distancia entre los aerogeneradores será constante.
• La altura de las torres será constante en todos los aerogeneradores.
• La distancia de separación entre ramas será constante.
• Se considerará una perfecta calibración de las protecciones de la instalación.
• Todos los aerogeneradores recibirán en cada instante la misma velocidad del viento para cada uno, despreciándose efectos propios de accidentes geográficos, efectos sombra …
• La subestación de salida contará con un único transformador AT/MT.

Conceptos básicos de simulación
24
• Cada aerogenerador contará con un transformador que elevará la tensión a la correspondiente a la de la instalación de media tensión del parque.
• No se considerará la aparición de un fallo durante la reparación de otro.
En los siguientes apartados se procederá a analizar las diferentes topologías consideradas en el estudio.
2.1.2 Análisis de fallos
El objetivo de un parque eólico, o de cualquier sistema de generación, consiste en aprovechar al máximo el recurso eólico y generar la máxima energía posible para su venta. Sin embargo, esto puede verse interrumpido por el fallo de alguno de los componentes de la instalación.
Una falta en cualquier elemento del sistema puede ocasionar la interrupción en la transmisión de una determinada cantidad de energía generada. Así, en el presente estudio se analizarán los posibles fallos de todos los componentes de la instalación, desde el aerogenerador hasta el transformador elevador de la subestación, de manera semejante al mostrado en [17]. Además, el fallo de los componentes será tal que sea perfectamente detectable por las protecciones del sistema.
Por lo que, para poder analizar los fallos de los distintos elementos, se debe establecer un criterio común de estudio y dividir la actuación en dos etapas perfectamente diferenciadas.
Para empezar, se considerará que los componentes se podrán modelar como elementos que posean dos estados perfectamente diferenciadas [15] [17]. Un poco más adelante se indicará cómo sería posible modelar los elementos de la instalación desde el punto de vista del desgaste y deterioro.
Estos dos estados son el de funcionamiento normal y de fallo [15] [17]. Cuando se produzca un fallo en uno de los componentes, se considerará que éste pasará de un estado a otro directamente y sin ninguna etapa intermedia. Una vez reparado o sustituido el elemento, se considerará que las características y el funcionamiento serán como el de un elemento nuevo.
Posteriormente, para poder analizar los fallos de todos los componentes y de todas las configuraciones posibles y que se sea capaz de seguir una única metodología, se describe brevemente el modo de actuación ante el fallo de cualquier componente. Los pasos de dicho procedimiento son:
• Fallo de un componente. Ante el fallo de un componente se produce una falta, lo que determina la actuación de las protecciones correspondientes y la apertura o desconexión de determinadas líneas.
• Localización del fallo producido. Una vez que hayan actuado las protecciones, es necesario localizar el elemento que ha producido la falta. En el caso de fallos en las turbinas puede llegar a ser más fácil gracias al sistema de monitorización de los aerogeneradores, Condition Monitoring System (CMS) [13] y a la activación de alarmas. En el caso de que haya tenido lugar en otro componente, se reconectarán las protecciones para asegurar si se trata de faltas transitorias. En
Conceptos básicos de simulación
25
caso de que la reconexión sea rechazada, será necesario detectar y localizar el componente fallado. La localización del fallo se puede realizar a través de distintos sensores en los componentes, mediante el trabajo de cuadrillas de mantenimiento y reconexiones que permitan sectorizar la falta.
• Aislamiento del componente fallado. Tras la situación del fallo en la instalación, se aislará del resto del sistema para desarrollar la reparación o sustitución de éste. Este aislamiento puede realizarse a través de interruptores y seccionadores telemandados [17], operados manualmente o por medio de cuadrillas con personal cualificado.
• Reconexión del resto de la instalación. Cuando se ha realizado el aislamiento del componente fallado, se puede realizar la reconexión de los aerogeneradores de la instalación que hayan sido desconectados a causa de la actuación de las protecciones. Para ello, se actuará sobre los dispositivos de maniobra que sean convenientes en cada fallo. Así, estos aerogeneradores podrán volver al funcionamiento en condiciones normales de servicio.
• Reparación o sustitución del componente dañado.
• Conexión del componente reparado y funcionamiento normal del parque.
De todas las etapas enunciadas previamente, se pueden derivar dos periodos bien diferenciados en el análisis de un fallo:
1. Primer periodo. En él se lleva a cabo la detección del componente fallado, su aislamiento y la reconexión del resto de la instalación. Esta etapa supone actuar sobre los seccionadores correspondientes, de modo que haya un aislamiento físico de la falta, y volver a conectar los interruptores que no se vean afectadas durante la reparación. Este fase tiene asociada una duración y una potencia o energía interrumpida determinadas. Esta potencia estará establecida para cada configuración en función del número de aerogeneradores desconectados de la subestación. Estos serán incapaces de transmitir energía a la red, bien porque se haya producido un fallo en ellos o en alguno de los componentes que conforman su unidad de generación (protecciones de la turbina, transformador elevador, línea…) o porque alguna de las protecciones, que aparecen en su camino de alimentación a la subestación, haya actuado ante el fallo.
La duración de este periodo depende de diversos factores, principalmente del tipo de mando sobre los interruptores y seccionadores, que pueden ser telemandados o manuales. Otro factor importante es si se trata de un parque marino o en tierra firme. Los primeros requerirán tiempos mucho mayores que los segundos, debido a la dificultad de acceso y a la dependencia de las condiciones meteorológicas.
Para facilitar los cálculos en la simulación, se considerará un tiempo medio de aislamiento y reconexión igual para todos los componentes de la instalación. Este valor del primer periodo será un dato de entrada en la simulación realizada con el programa informático.
2. Segundo periodo. Durante este periodo tendrá lugar la reparación o sustitución del componente fallado. A esta etapa también le corresponde una duración determinada y una potencia o energía no suministrada. Esta última queda reflejada por el número de aerogeneradores que dejan de suministrar energía a la subestación y la velocidad

Conceptos básicos de simulación
26
del viento durante este periodo, ya que éste determina la potencia extraíble en cada instante.
El tiempo de este periodo se define para cada componente por medio del valor estadístico del tiempo medio de reparación. Este dato, junto a la tasa de fallos del componente, serán valores de entrada fundamentales para poder llevar a cabo la simulación del parque.
En definitiva, establecidas las dos fases de estudio de cualquier fallo, se presentarán todas las configuraciones que se simulan en el presente estudio. Para cada una de las topologías se analizará el fallo de cada uno de los componentes que lo forman y se distinguirán dos etapas distintas correspondientes a las dos fases comentadas anteriormente.
De esta forma, se recogerán en una tabla las protecciones que actuarán para cada elemento que falle y se distinguirán las dos etapas. Para la primera etapa, se deberán definir los seccionadores que se van a abrir para realizar el aislamiento del fallo, los interruptores a reconectar, el tiempo y potencia o energía que no se suministra y que, por tanto, se pierde en dicha fase. Para la segunda etapa, se deberá registrar la potencia perdida o energía y la duración del periodo.
De este modo, se conseguirá crear un modelo de comportamiento ante el fallo para cada configuración y este comportamiento será a la vez base de la simulación realizada por la herramienta informática.
2.1.3 Configuraciones de parques eólicos
A continuación se exponen de manera detallada cada una de las topologías que se estudiarán y simularán en este trabajo. Se proporcionará un ejemplo de cada uno de ellas y en el anexo del trabajo se adjuntará un análisis de los fallos de cada uno de los componentes del ejemplo.
2.1.3.1 Configuración radial
Es la topología más sencilla de estudio y la más empleada en el diseño de parques eólicos. Se caracteriza por su simplicidad y bajo coste de inversión y mantenimiento.
Para el análisis de comportamiento ante el fallo, se presenta un caso sencillo de topología o configuración de un parque eólico compuesto por 15 aerogeneradores repartidos equitativamente en tres ramas iguales, como se muestra en la Figura 2.5.

Conceptos básicos de simulación
27
Ic1
Sct1.1.2
T1.1G1.1 L1.1
La1.1 Sct1.1.1
Ict1.1 Se1.1It1.1Ia1.1
Sc1.1
Ss1.1
Sct1.2.2
T1.2G1.2 L1.2
La1.2 Sct1.2.1
Ict1.2 Se1.2It1.2Ia1.2
Ss1.2
Sct1.3.2
T1.3G1.3 L1.3
La1.3 Sct1.3.1
Ict1.3 Se1.3It1.3Ia1.3
Ss1.3
Sct1.4.2
T1.4G1.4 L1.4
La1.4 Sct1.4.1
Ict1.4 Se1.4It1.4Ia1.4
Ss1.4
L1.5Se1.5
Sct1.5.2
T1.5G1.5
La1.5 Sct1.5.1
Ict1.5It1.5Ia1.5
Sct2.1.2
T2.1G2.1 L2.1
La2.1 Sct2.1.1
Ict2.1 Se2.1It2.1Ia2.1
Ss2.1
Sct2.2.2
T2.2G2.2 L2.2
La2.2 Sct2.2.1
Ict2.2 Se2.2It2.2Ia2.2
Ss2.2
Sct2.3.2
T2.3G2.3 L2.3
La2.3 Sct2.3.1
Ict2.3 Se2.3It2.3Ia2.3
Ss2.3
Sct2.4.2
T2.4G2.4 L2.4
La2.4 Sct2.4.1
Ict2.4 Se2.4It2.4Ia2.4
Ss2.4
L2.5Se2.5
Sct2.5.2
T2.5G2.5
La2.5 Sct2.5.1
Ict2.5It2.5Ia2.5
Sct3.1.2
T3.1G3.1 L3.1
La3.1 Sct3.1.1
Ict3.1 Se3.1It3.1Ia3.1
Ss3.1
Sct3.2.2
T3.2G3.2 L3.2
La3.2 Sct3.2.1
Ict3.2 Se3.2It3.2Ia3.2
Ss3.2
Sct3.3.2
T3.3G3.3 L3.3
La3.3 Sct3.3.1
Ict3.3 Se3.3It3.3Ia3.3
Ss3.3
Sct3.4.2
T3.4G3.4 L3.4
La3.4 Sct3.4.1
Ict3.4 Se3.4It3.4Ia3.4
Ss3.4
L3.5Se3.5
Sct3.5.2
T3.5G3.5
La3.5 Sct3.5.1
Ict3.5It3.5Ia3.5
Sc1.2
Ic2
Sc2.1
Sc2.2
Ic3
Sc3.1
Sc3.2
Isub
Ssub
Tsub
Figura 2.5 Configuración radial

Conceptos básicos de simulación
28
En este ejemplo se presentan los componentes más comunes en la instalación eléctrica de un parque eólico. Estos están divididos en tres partes distintas [9] [11]:
• Subestación del parque eólico:
o Transformador elevador de Media Tensión a Alta Tensión, Tsub.
o Seccionador de la subestación, Ssub.
o Interruptor de protección de la subestación, Isub.
• Sistema de media tensión interna:
o Seccionadores en la cabecera de las ramas, Sc.
o Interruptores en la cabecera de la rama, Ic.
o Seccionadores de las celdas de entrada y de salida del centro de transformación de cada aerogenerador, Se y Ss.
o Interruptor y seccionador de la celda de protección del centro de transformación, Ict y Sct respectivamente.
o Líneas eléctricas de media tensión, L1.1y Lx.y.
• Instalación eléctrica de baja tensión de cada aerogenerador.
o Protecciones de la línea que conectan el aerogenerador con el transformador, Ia e It.
o Línea eléctrica que conecta el aerogenerador con el transformador, La.
o Transformador elevador de media tensión, T.
o Aerogenerador, G.
Todos estos componentes se encuentran también incluidos en el resto de topologías de parques que se analizarán con posterioridad.
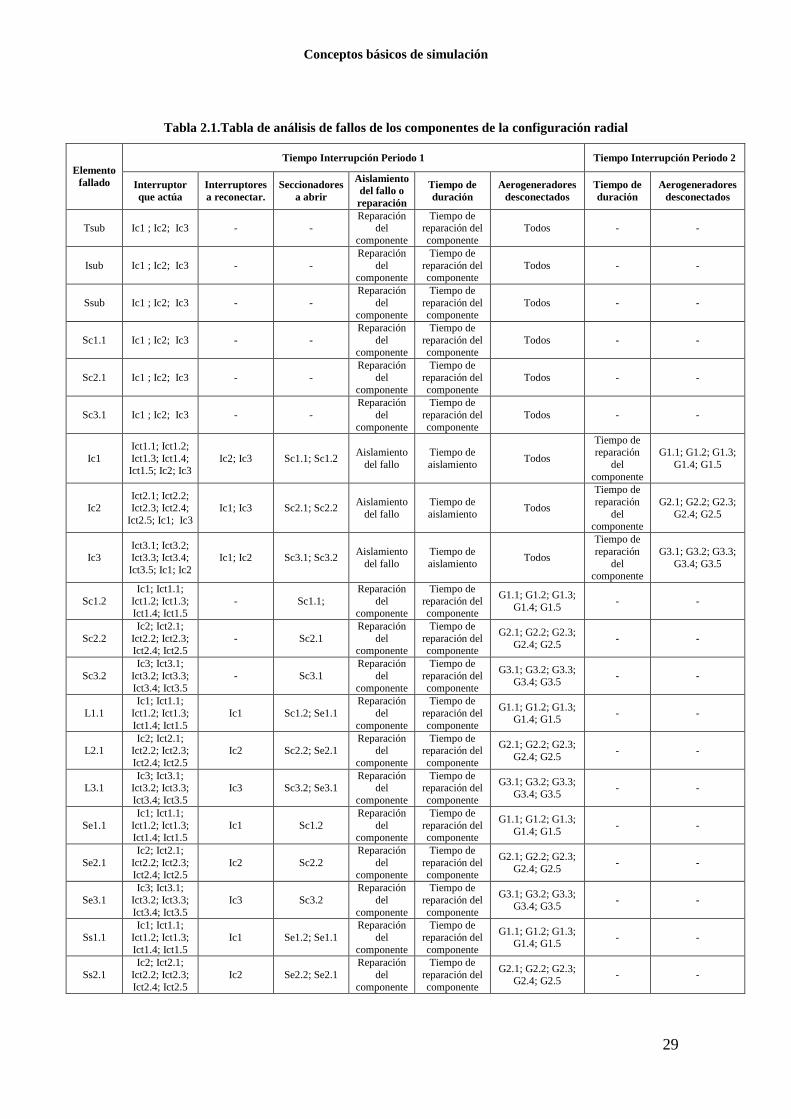
En la Tabla 2.1 se incluyen un pequeño fragmento de la tabla de fallos de los elementos de la instalación adjuntada en el anexo. Para cada uno de los fallos se especifican sus dos periodos característicos, cada uno de ellos con un número de aerogeneradores interrumpidos y una duración determinada.
En la primera columna se relacionan los elementos que han sufrido daño. En la siguiente, se registran los interruptores que actúan ante un fallo en dicho componente. Después, se describe la información de cada uno de los dos periodos de tiempos definidos para cada elemento fallado.
En la primera de estas fases, si el fallo se pudiera aislar por actuación de los dispositivos de maniobra automáticos, se registran los seccionadores a abrir para aislar el fallo y los interruptores a reconectar. La quinta columna aclara si es útil o no aislar el componente fallado en términos de energía que vuelva a transmitirse. La sexta columna indica la duración del primer periodo y la séptima los aerogeneradores que dejan de volcar energía a la red por su desconexión, en esta primera fase de fallo.
Conceptos básicos de simulación
29
Tabla 2.1.Tabla de análisis de fallos de los componentes de la configuración radial
Elemento fallado
Tiempo Interrupción Periodo 1 Tiempo Interrupción Periodo 2
Interruptor que actúa
Interruptores a reconectar.
Seccionadores a abrir
Aislamiento del fallo o reparación
Tiempo de duración
Aerogeneradores desconectados
Tiempo de duración
Aerogeneradores desconectados
Tsub Ic1 ; Ic2; Ic3 - - Reparación
del componente
Tiempo de reparación del componente
Todos - -
Isub Ic1 ; Ic2; Ic3 - - Reparación
del componente
Tiempo de reparación del componente
Todos - -
Ssub Ic1 ; Ic2; Ic3 - - Reparación
del componente
Tiempo de reparación del componente
Todos - -
Sc1.1 Ic1 ; Ic2; Ic3 - - Reparación
del componente
Tiempo de reparación del componente
Todos - -
Sc2.1 Ic1 ; Ic2; Ic3 - - Reparación
del componente
Tiempo de reparación del componente
Todos - -
Sc3.1 Ic1 ; Ic2; Ic3 - - Reparación
del componente
Tiempo de reparación del componente
Todos - -
Ic1 Ict1.1; Ict1.2; Ict1.3; Ict1.4; Ict1.5; Ic2; Ic3
Ic2; Ic3 Sc1.1; Sc1.2 Aislamiento
del fallo Tiempo de aislamiento
Todos
Tiempo de reparación
del componente
G1.1; G1.2; G1.3; G1.4; G1.5
Ic2 Ict2.1; Ict2.2; Ict2.3; Ict2.4;
Ict2.5; Ic1; Ic3 Ic1; Ic3 Sc2.1; Sc2.2
Aislamiento del fallo
Tiempo de aislamiento
Todos
Tiempo de reparación
del componente
G2.1; G2.2; G2.3; G2.4; G2.5
Ic3 Ict3.1; Ict3.2; Ict3.3; Ict3.4; Ict3.5; Ic1; Ic2
Ic1; Ic2 Sc3.1; Sc3.2 Aislamiento
del fallo Tiempo de aislamiento
Todos
Tiempo de reparación
del componente
G3.1; G3.2; G3.3; G3.4; G3.5
Sc1.2 Ic1; Ict1.1;
Ict1.2; Ict1.3; Ict1.4; Ict1.5
- Sc1.1; Reparación
del componente
Tiempo de reparación del componente
G1.1; G1.2; G1.3; G1.4; G1.5
- -
Sc2.2 Ic2; Ict2.1;
Ict2.2; Ict2.3; Ict2.4; Ict2.5
- Sc2.1 Reparación
del componente
Tiempo de reparación del componente
G2.1; G2.2; G2.3; G2.4; G2.5
- -
Sc3.2 Ic3; Ict3.1;
Ict3.2; Ict3.3; Ict3.4; Ict3.5
- Sc3.1 Reparación
del componente
Tiempo de reparación del componente
G3.1; G3.2; G3.3; G3.4; G3.5
- -
L1.1 Ic1; Ict1.1;
Ict1.2; Ict1.3; Ict1.4; Ict1.5
Ic1 Sc1.2; Se1.1 Reparación
del componente
Tiempo de reparación del componente
G1.1; G1.2; G1.3; G1.4; G1.5
- -
L2.1 Ic2; Ict2.1;
Ict2.2; Ict2.3; Ict2.4; Ict2.5
Ic2 Sc2.2; Se2.1 Reparación
del componente
Tiempo de reparación del componente
G2.1; G2.2; G2.3; G2.4; G2.5
- -
L3.1 Ic3; Ict3.1;
Ict3.2; Ict3.3; Ict3.4; Ict3.5
Ic3 Sc3.2; Se3.1 Reparación
del componente
Tiempo de reparación del componente
G3.1; G3.2; G3.3; G3.4; G3.5
- -
Se1.1 Ic1; Ict1.1;
Ict1.2; Ict1.3; Ict1.4; Ict1.5
Ic1 Sc1.2 Reparación
del componente
Tiempo de reparación del componente
G1.1; G1.2; G1.3; G1.4; G1.5
- -
Se2.1 Ic2; Ict2.1;
Ict2.2; Ict2.3; Ict2.4; Ict2.5
Ic2 Sc2.2 Reparación
del componente
Tiempo de reparación del componente
G2.1; G2.2; G2.3; G2.4; G2.5
- -
Se3.1 Ic3; Ict3.1;
Ict3.2; Ict3.3; Ict3.4; Ict3.5
Ic3 Sc3.2 Reparación
del componente
Tiempo de reparación del componente
G3.1; G3.2; G3.3; G3.4; G3.5
- -
Ss1.1 Ic1; Ict1.1;
Ict1.2; Ict1.3; Ict1.4; Ict1.5
Ic1 Se1.2; Se1.1 Reparación
del componente
Tiempo de reparación del componente
G1.1; G1.2; G1.3; G1.4; G1.5
- -
Ss2.1 Ic2; Ict2.1;
Ict2.2; Ict2.3; Ict2.4; Ict2.5
Ic2 Se2.2; Se2.1 Reparación
del componente
Tiempo de reparación del componente
G2.1; G2.2; G2.3; G2.4; G2.5
- -

Conceptos básicos de simulación
30
Las siguientes dos últimas columnas corresponden al segundo periodo del fallo. Indican la duración de dicha fase y los aerogeneradores desconectados, en caso de que en el segundo periodo haya podido realizarse el aislamiento del componente fallado.
A la hora de definir la configuración radial del parque eólico, es preciso indicar los valores de las distancias de separación de los aerogeneradores a lo largo de cada rama, la separación entre las ramas y la longitud de la línea de baja tensión que conecta el aerogenerador con el transformador de cada uno.
De la información contenida en la tabla de fallos adjuntada, se puede observar que los fallos con mayor repercusión en la fiabilidad y disponibilidad del parque eólico son los de los componentes de la subestación (transformador, interruptor y seccionador) y los primeros componentes de cada rama (seccionadores de cabecera Sc, interruptores, Ic, y los primeros tramos de líneas) y seccionadores de las celdas de entrada, Se y salida, Ss.
Es de destacar que un fallo en un tramo de línea del sistema de media tensión produce la desconexión, durante toda la reparación, de los aerogeneradores situados en aguas abajo de dicho tramo, debido a la ausencia de conexiones alternativas a la subestación. Lo mismo ocurre para las faltas en los seccionadores de las celdas de entrada y salida.
2.1.3.2 Configuración radial con protección intermedia en las ramas.
Esta topología (Figura 2.6) introduce una pequeña mejora respecto a la configuración radial anterior, puesto que incluyendo un interruptor, con sus respectivos seccionadores, en uno de los tramos de línea deseados entre celdas de entrada y salida.
Se puede observar una configuración del tipo en la Figura 2.6. El parque considerado, a modo de ejemplo, posee, como en el caso anterior explicado, 15 aerogeneradores distribuidos en tres ramas de manera equitativa. El interruptor y los seccionadores adicionales se han introducido en el tramo de línea entre el segundo y tercer aerogenerador.

Conceptos básicos de simulación
31
Ic1
Sct1.1.2
T1.1G1.1 L1.1
La1.1
Isub
Ssub
Tsub
Sct1.1.1
Ict1.1 Se1.1It1.1Ia1.1
Sc1.1
Ss1.1
Sct1.2.2
T1.2G1.2 L1.2
La1.2 Sct1.2.1
Ict1.2 Se1.2It1.2Ia1.2
Ss1.2
Sct1.3.2
T1.3G1.3 L1.3
La1.3 Sct1.3.1
Ict1.3 Se1.3It1.3Ia1.3
Ss1.3
Sct1.4.2
T1.4G1.4 L1.4
La1.4 Sct1.4.1
Ict1.4 Se1.4It1.4Ia1.4
Ss1.4
L1.5Se1.5
Sct1.5.2
T1.5G1.5
La1.5 Sct1.5.1
Ict1.5It1.5Ia1.5
Sct2.1.2
T2.1G2.1 L2.1
La2.1 Sct2.1.1
Ict2.1 Se2.1It2.1Ia2.1
Ss2.1
Sct2.2.2
T2.2G2.2 L2.2
La2.2 Sct2.2.1
Ict2.2 Se2.2It2.2Ia2.2
Ss2.2
Sct2.3.2
T2.3G2.3 L2.3
La2.3 Sct2.3.1
Ict2.3 Se2.3It2.3Ia2.3
Ss2.3
Sct2.4.2
T2.4G2.4 L2.4
La2.4 Sct2.4.1
Ict2.4 Se2.4It2.4Ia2.4
Ss2.4
L2.5Se2.5
Sct2.5.2
T2.5G2.5
La2.5 Sct2.5.1
Ict2.5It2.5Ia2.5
Sct3.1.2
T3.1G3.1 L3.1
La3.1 Sct3.1.1
Ict3.1 Se3.1It3.1Ia3.1
Ss3.1
Sct3.2.2
T3.2G3.2 L3.2
La3.2 Sct3.2.1
Ict3.2 Se3.2It3.2Ia3.2
Ss3.2
Sct3.3.2
T3.3G3.3 L3.3
La3.3 Sct3.3.1
Ict3.3 Se3.3It3.3Ia3.3
Ss3.3
Sct3.4.2
T3.4G3.4 L3.4
La3.4 Sct3.4.1
Ict3.4 Se3.4It3.4Ia3.4
Ss3.4
L3.5Se3.5
Sct3.5.2
T3.5G3.5
La3.5 Sct3.5.1
Ict3.5It3.5Ia3.5
Sc1.2
Ic2
Sc2.1
Sc2.2
Ic3
Sc3.1
Sc3.2
Ir1
L1.3.2
Sr1.1
Sr1.2
L1.3.1
Ir2
L2.3.2
Sr2.1
Sr2.2
L2.3.1
Ir3
L3.3.2
Sr3.1
Sr3.2
L3.3.1
Figura 2.6 Configuración radial con protección intermedia.

Conceptos básicos de simulación
32
Además de los componentes indicados en la anterior topología, esta nueva configuración cuenta con nuevos elementos que serán analizados en caso de falta. Éstos son los interruptores intermedios de las ramas, Ir , y los seccionadores que los acompañan, Sr. La introducción de estos nuevos componentes supone un incremento de la inversión respecto a la que correspondería a una topología radial. En el anexo se muestra la tabla correspondiente a esta configuración dentro del ejemplo.
Como puede verse, la redundancia introducida tiene su mayor influencia en los fallos producidos en los componentes que se encuentran a continuación de la protección intermedia. Una falta producida en alguno de estos dispositivos o líneas hará que se produzca la actuación de la protección intermedia. Asumiendo una perfecta calibración de las protecciones, los aerogeneradores que se encuentra por encima del interruptor intermedio no se verán desconectados a causa de fallos producidos aguas debajo del interruptor de maniobra intermedio.
Esta mejora tiene especial interés para parques eólicos marítimos, en los que los tiempos de localización y aislamiento del fallo pueden ser significativamente mayores que los de un parque en tierra.
Así mismo, a la hora de modelar este tipo de configuración es preciso establecer los valores de distancia entre ramas y aerogeneradores, al igual que la colocación del dispositivo automático de maniobra intermedio a lo largo de la rama.
2.1.3.3 Configuración mallada.
Esta topología introduce una modificación importante respecto a la configuración radial. La estructura mallada consiste básicamente en hacer que los aerogeneradores pasen a estar conectados en malla o anillo (operación radial o abierta), para que ante un fallo en algún componente existan líneas por las que recircular la energía.
Para el caso presentado en este trabajo, la configuración mallada será semejante a la configuración radial. La única excepción es que los extremos de las ramas se conectarán con un interruptor automático y dos seccionadores, de modo que se pueda cerrar el circuito en forma de malla por cada dos ramas.
El ejemplo a analizar es un parque eólico compuesto por 15 aerogeneradores distribuidos en tres ramas, como los dos casos anteriores. Además, contará con conexiones en los extremos que permitirán cerrar los anillos. Estas conexiones adicionales en los extremos se componen de las líneas Lm, los interruptores Im y los seccionadores Sm. La Figura 2.7 muestra la estructura de la instalación del caso considerado.

Conceptos básicos de simulación
33
Ic1
Sct1.1.2
T1.1G1.1 L1.1
La1.1 Sct1.1.1
Ict1.1 Se1.1It1.1Ia1.1
Sc1.1
Ss1.1
Sct1.2.2
T1.2G1.2 L1.2
La1.2 Sct1.2.1
Ict1.2 Se1.2It1.2Ia1.2
Ss1.2
Sct1.3.2
T1.3G1.3 L1.3
La1.3 Sct1.3.1
Ict1.3 Se1.3It1.3Ia1.3
Ss1.3
Sct1.4.2
T1.4G1.4 L1.4
La1.4 Sct1.4.1
Ict1.4 Se1.4It1.4Ia1.4
Ss1.4
Sct2.1.2
T2.1G2.1 L2.1
La2.1 Sct2.1.1
Ict2.1 Se2.1It2.1Ia2.1
Ss2.1
Sct2.2.2
T2.2G2.2 L2.2
La2.2 Sct2.2.1
Ict2.2 Se2.2It2.2Ia2.2
Ss2.2
Sct2.3.2
T2.3G2.3 L2.3
La2.3 Sct2.3.1
Ict2.3 Se2.3It2.3Ia2.3
Ss2.3
Sct2.4.2
T2.4G2.4 L2.4
La2.4 Sct2.4.1
Ict2.4 Se2.4It2.4Ia2.4
Ss2.4
Sct3.1.2
T3.1G3.1 L3.1
La3.1 Sct3.1.1
Ict3.1 Se3.1It3.1Ia3.1
Ss3.1
Sct3.2.2
T3.2G3.2 L3.2
La3.2 Sct3.2.1
Ict3.2 Se3.2It3.2Ia3.2
Ss3.2
Sct3.3.2
T3.3G3.3 L3.3
La3.3 Sct3.3.1
Ict3.3 Se3.3It3.3Ia3.3
Ss3.3
Sct3.4.2
T3.4G3.4 L3.4
La3.4 Sct3.4.1
Ict3.4 Se3.4It3.4Ia3.4
Ss3.4
Sc1.2
Ic2
Sc2.1
Sc2.2
Ic3
Sc3.1
Sc3.2
Sct1.5.2
T1.5G1.5 L1.5
La1.5 Sct1.5.1
Ict1.5 Se1.5It1.5Ia1.5
Ss1.5 Sct2.5.2
T2.5G2.5 L2.5
La2.5 Sct2.5.1
Ict2.5 Se2.5It2.5Ia2.5
Ss2.5 Sct3.5.2
T3.5G3.5 L3.5
La3.5 Sct3.5.1
Ict3.5 Se3.5It3.5Ia3.5
Ss3.5
Sm1.1 Sm1.2
Im1
Lm1 Lm2 Sm2.1 Sm2.2
Im2
Lm3 Lm4
Isub
Ssub
Tsub
Figura 2.7 Configuración mallada

Conceptos básicos de simulación
34
Para el análisis de fallos de la configuración es necesario señalar que los interruptores que cierran la malla del circuito, Im, se encuentran en estado normalmente abierto durante el funcionamiento normal de la instalación. En el caso de producirse una falta que repercuta en alguna rama, el interruptor Im correspondiente cerrará la conexión, una vez que se haya aislado el fallo. Esto permitirá recircular la energía de aquellos aerogeneradores que vean interrumpidos sus conexiones normales a la subestación.
Como puede verse en la tabla de análisis de fallos adjuntada en el anexo, la introducción de esta redundancia reduce, en gran medida, los efectos de las faltas de componentes sobre la energía no suministrada. Esta influencia se hace más visible en las faltas producidas en las líneas de la red interna de media tensión y en los seccionadores de las celdas de entrada y salida. Una vez aislados estos elementos, se permite la conexión de los aerogeneradores no involucrados directamente en la línea fallada y la recirculación de su energía a través da la malla, pasando a lo largo de la rama adyacente.
Este tipo de configuración supone un incremento de la inversión en lo referente a:
• Costes de instalación de las conexiones que cierran la malla. Estos se componen de los costes de los tramos de línea enterradas, de los interruptores Im y seccionadores Sm.
• Sobredimensionamiento de las líneas. Al tener que recircular energía, proveniente de ramas adyacentes, se verá obligado a transmitir corrientes mayores que las correspondientes a los aerogeneradores de su rama.
2.1.3.4 Configuración serie
Esta configuración resulta ser totalmente diferente al resto de configuraciones, pero su estudio se hace de gran interés. Esta topología consiste en la distribución de los aerogeneradores, creando una red mallada constante. En ella, los aerogeneradores se distribuyen a lo largo de algunas de las líneas de la malla [19]. En el caso de la Figura 2.8 las líneas que alojan a los aerogeneradores son las líneas representadas en horizontal. Este modelo incluye interruptores automáticos y seccionadores en ambos extremos de estas líneas, Ic y Sc. Así, como líneas que conectan las ramas de los aerogeneradores cerrando las mallas, Lm.
Con esta configuración se garantiza que, ante un fallo cualquiera, siempre haya una vía alternativa por la que recircular la energía. El modo de funcionamiento de esta configuración consistiría en volcar la energía generada por una única línea lateral de la instalación, considerando que los interruptores del lado contrario se encuentren abiertos. En caso de fallo, se cierran los interruptores oportunos de modo que se conduzca la energía por los caminos de alimentación disponibles.
Como se puede observar en el ejemplo, se tiene una instalación formada por 15 aerogeneradores distribuidos en tres líneas. Estas líneas están unidas por ambos laterales, que se conectan al punto común de la subestación. En ambos extremos de las líneas que albergan los aerogeneradores, así como en las cabeceras de las líneas laterales, se disponen interruptores y seccionadores como protección y maniobra.

Conceptos básicos de simulación
35
Figura 2.8 Configuración serie.

Conceptos básicos de simulación
36
Como se puede ver en la tabla adjuntada en el anexo, esta topología presenta un buen comportamiento ante los fallos. Si se añade una rápida actuación para detectar y aislar la falta, la pérdida de energía será inferior a la de las anteriores configuraciones.
Los resultados del análisis muestran que todo fallo, producido en tramos de líneas pertenecientes a la red de media tensión del parque, no supone la desconexión de ningún aerogenerador durante la fase de reparación. Además, los fallos en seccionadores de entrada y salida suponen la desconexión de un solo aerogenerador
La inversión necesaria para este parque es muy elevada, debido a:
• El cambio en la estructura de la instalación respecto al resto de las configuraciones.
• Una mayor longitud en línea instalada y la necesidad de un mayor sobredimensionamiento de éstas para poder transmitir corrientes más altas.
• Instalación de todos los interruptores y seccionadores necesarios.
• Elevado coste de mantenimiento de la instalación.
2.1.3.5 Configuración mallada con protección intermedia en las ramas.
Esta topología surge de la combinación de la configuración mallada y la adición de dispositivos automáticos de maniobra (interruptores) intermedios en las ramas que las componen. Esta configuración sugiere una respuesta mejor ante el fallo que la de las dos que la conforman.
La formación de anillos para cada dos ramas garantiza que ante un fallo en algún tramo de línea de media tensión, o en algún seccionador de entrada o salida, exista una vía alternativa por la que evacuar la energía. Además, el interruptor intermedio asegura que ante un fallo ocurrido en algún componente situado a continuación de dicho interruptor los elementos aguas arriba de la protección permanezcan inalterados. Para ello, es necesaria una correcta calibración de las protecciones.
También es necesario destacar que el funcionamiento del parque con esta configuración es semejante a la configuración mallada. Las ramas estarán desconectadas sin formar anillo durante el funcionamiento normal de la instalación. De modo que, en caso de producirse un fallo que suponga la desconexión de un número de aerogeneradores de la propia subestación, se producirá la conexión de la rama con su adyacente y se evacuará la energía a través de esta rama.
Como se puede observar en la Figura 2.9, las conexiones entre ramas para formar anillos se realizan a través de las líneas Lm, los interruptores Im y los seccionadores Sm. Los interruptores intermedios se denominan igual que en la segunda configuración: interruptores Ir y seccionadores Sr.

Conceptos básicos de simulación
37
Ic1
Sct1.1.2
T1.1G1.1 L1.1
La1.1 Sct1.1.1
Ict1.1 Se1.1It1.1Ia1.1
Sc1.1
Ss1.1
Sct1.2.2
T1.2G1.2 L1.2
La1.2 Sct1.2.1
Ict1.2 Se1.2It1.2Ia1.2
Ss1.2
Sct1.3.2
T1.3G1.3 L1.3
La1.3 Sct1.3.1
Ict1.3 Se1.3It1.3Ia1.3
Ss1.3
Sct1.4.2
T1.4G1.4 L1.4
La1.4 Sct1.4.1
Ict1.4 Se1.4It1.4Ia1.4
Ss1.4
Sct2.1.2
T2.1G2.1 L2.1
La2.1 Sct2.1.1
Ict2.1 Se2.1It2.1Ia2.1
Ss2.1
Sct2.2.2
T2.2G2.2 L2.2
La2.2 Sct2.2.1
Ict2.2 Se2.2It2.2Ia2.2
Ss2.2
Sct2.3.2
T2.3G2.3 L2.3
La2.3 Sct2.3.1
Ict2.3 Se2.3It2.3Ia2.3
Ss2.3
Sct2.4.2
T2.4G2.4 L2.4
La2.4 Sct2.4.1
Ict2.4 Se2.4It2.4Ia2.4
Ss2.4
Sct3.1.2
T3.1G3.1 L3.1
La3.1 Sct3.1.1
Ict3.1 Se3.1It3.1Ia3.1
Ss3.1
Sct3.2.2
T3.2G3.2 L3.2
La3.2 Sct3.2.1
Ict3.2 Se3.2It3.2Ia3.2
Ss3.2
Sct3.3.2
T3.3G3.3 L3.3
La3.3 Sct3.3.1
Ict3.3 Se3.3It3.3Ia3.3
Ss3.3
Sct3.4.2
T3.4G3.4 L3.4
La3.4 Sct3.4.1
Ict3.4 Se3.4It3.4Ia3.4
Ss3.4
Sc1.2
Ic2
Sc2.1
Sc2.2
Ic3
Sc3.1
Sc3.2
Ir1
L1.3.2
Sr1.1
Sr1.2
L1.3.1
Ir2
L2.3.2
Sr2.1
Sr2.2
L2.3.1
Ir3
L3.3.2
Sr3.1
Sr3.2
L3.3.1
Sct1.5.2
T1.5G1.5 L1.5
La1.5 Sct1.5.1
Ict1.5Se1.5
It1.5Ia1.5
Ss1.5 Sct2.5.2
T2.5G2.5 L2.5
La2.5 Sct2.5.1
Ict2.5Se2.5
It2.5Ia2.5
Ss2.5 Sct3.5.2
T3.5G3.5 L3.5
La3.5 Sct3.5.1
Ict3.5Se3.5
It3.5Ia3.5
Ss3.5
Sm1.1 Sm1.2
Im1
Lm1 Lm2 Sm2.1 Sm2.2
Im2
Lm3 Lm4
Isub
Ssub
Tsub
Figura 2.9 Configuración mallada con protección intermedia.

Conceptos básicos de simulación
38
Como se puede observar en la tabla de análisis de fallos del anexo, esta configuración presenta un comportamiento ante fallos semejante a la configuración mallada. La diferencia con la configuración mallada anterior es que para fallos situados a continuación de la protección intermedia, la sectorización del fallo es mejor y es posible la independencia de los elementos anteriores al interruptor intermedio en cuanto a estos fallos.
En cuanto a la inversión necesaria, ésta se compone de:
• Coste de las conexiones en los extremos de las ramas. • Coste de la instalación de las líneas subterráneas adicionales e incremento de las
secciones. • Instalación de los interruptores y seccionadores intermedios y extremos, así
como la calibración de sus correspondientes relés o protecciones.
2.2 Índices de fiabilidad
La necesidad de cuantificar la calidad de una instalación eléctrica ha dado lugar a que se establezcan unos métodos comunes de cálculo de los distintos aspectos relacionados con la fiabilidad de las instalaciones.
De este modo, se hace habitual el empleo de diversos índices que, aprovechando la base común para su cálculo, permiten la comparación del comportamiento de instalaciones semejantes y el establecimiento de objetivos y valores mínimos obligatorios de calidad y continuidad del suministro.
Estos índices se emplean fundamentalmente en las redes de transporte y distribución. Además, pueden estar referidos a una instalación en concreto o a toda una red o estructura amplia de elementos eléctricos. De este modo, la mayoría de los índices se pueden clasificar en [17] [2]:
• Índices de calidad individual. Están referidos a la calidad de una instalación o de un equipo concreto como una línea, un transformador, una red de abastecimiento de un cliente concreto…
• Índices de calidad global. Son aquellos que muestran el valor medio de la calidad de suministro de una red, una planta de generación, etcétera.
Por otra parte, los distintos índices empleados pueden ser analizados y calculados desde diferentes puntos de vista. Por ejemplo, se pueden distinguir los siguientes tipos [15]:
• Índices de fiabilidad basados en los clientes.
• Índices de fiabilidad basados en la carga.
• Índices de fiabilidad basados en la energía.
En España, los índices de calidad de la red de transporte y distribución se encuentran definidos, según reglamentación nacional y autonómica, a través de La Ley del Sector Eléctrico, Real Decreto 1955/2000 o el Reglamento del Suministro Eléctrico de Cataluña, entre otros [20]. Por ejemplo, según Real Decreto 1955/2000 se definen los siguientes índices [20]:

Conceptos básicos de simulación
39
• Índices de calidad de la red de transporte.
o Índices de calidad individual.
� Índice de indisponibilidad de la instalación (IIi ).
��� = ������ � �������� ���� � �� ���������ó� � �ℎ������� � �����ó� �� ������ �ℎ� × 100
� Índice de disponibilidad de la instalación (IDi ). ��� = 100 − ��� o Índices de calidad globales de toda la red
� Energía no suministrada (ENS).
Energía que se deja de suministrar a los consumidores por un tiempo mayor de 1 minuto, en MWh.
� Tiempo de interrupción medio (TIM).
��� = ��� ������� ���� � �� �� �����
� Índice de indisponibilidad (II ).
�� = ∑ �" × �"#"$%� ∑ �"#"$% × 100
�: número de instalaciones de la red de transporte. �": tiempo de indisponibilidad de la instalación i. �": potencia nominal de la instalación i.
� Índice de disponibilidad (ID). �� = 100 − ��
• Índices de continuidad de suministro de las redes de distribución.
o Índices de calidad individual.
� Tiempo de interrupción anual.
� Número anual de interrupciones.
o Índices de calidad zonal.
� Tiempo de interrupción equivalente de la potencia instalada (TIEPI).
��� � = ∑ �"&"'"$%∑ � == ∑� ������� �������� ������������ × �ℎ���� ������������ �� �ñ�� ������� ����� �������� �horas/año�

Conceptos básicos de simulación
40
� Número de interrupciones equivalentes de la potencia instalada (NIEPI).
��� � = ∑ �"'"$%∑ � = ���� � �� �������� ����������� ����� ������� ����� �������� /�º ���������������ñ� 1
Como se ha dicho anteriormente, el presente trabajo tiene como objetivo el análisis económico de las distintas configuraciones de parques. De manera que, el principal índice en el que se centrará el presente estudio será en la Energía Esperada No Suministrada (EENS). Este índice será el más adecuado para el análisis, ya que se traduce directamente en pérdidas económicas como consecuencia de los fallos producidos en la instalación. Éste índice será calculado en el periodo de un año en kWh no suministrados a la red.
En otro sentido, resulta también conveniente el análisis de otros índices relacionados con la fiabilidad. Por ello, en este trabajo se analizarán algunos índices de fiabilidad probabilística [15] [17]:
� LOLP (Loss of Load Probability). Probabilidad de pérdida de carga. Se define como la probabilidad de que el sistema esté en un estado en el que no pueda suministrar toda la energía generada.
En este trabajo, este índice se calculará por medio de una simulación anual de la configuración del parque, registrando aquellos fallos que produzcan la pérdida de suministro de cualquier cantidad de energía.
� LOLE (Loss of Load Expectation). Pérdida de carga esperada. Se define como el tiempo total (horas) en el que esperamos no suministrar toda la energía como consecuencia de un fallo durante un año. Se calcula multiplicando la probabilidad de pérdida de carga por el tiempo de estudio.
De este modo, para este trabajo se obtendrá calculando previamente la probabilidad de pérdida de carga anual y posteriormente multiplicando por el tiempo de la simulación en el cálculo de LOLP, por ejemplo, un año.
� LOLF (Loss of Load Frequency). Se define como la frecuencia de la pérdida de carga de la instalación. Expresada en fallos/hora.
Para su cálculo se considerarán todos los fallos del parque eólico que supongan una pérdida de energía suministrada durante la simulación.
� LOLD (Loss of Load Duration). Se define como la duración de la pérdida de carga. Se define por medio del cociente de LOLP y LOLF. Se expresa en horas/fallo.
Su cálculo en el presente trabajo se realizará tras la obtención de la probabilidad y frecuencia de fallo.
También cabe indicar que, a través de estos índices de fiabilidad y con la EENS calculada en las simulaciones, es posible el cálculo de los índices TIEPI y NIEPI [17] aplicados a un parque de generación. De esta manera, pueden obtenerse valores representativos del tiempo y del número de fallos equivalentes que desconecten todos

Conceptos básicos de simulación
41
los aerogeneradores. Más adelante se enunciará el método de cálculo de todos los índices de fiabilidad indicados [17].
2.3 Método de Montecarlo
Para poder alcanzar valores de EENS y de otros índices de fiabilidad del parque, es necesario someter al modelo de parque a una simulación durante un intervalo de tiempo determinado. Para la simulación se plantea la posibilidad de aplicar técnicas deterministícas o no determinísticas.
El empleo de métodos determinísticos queda descartado en este trabajo, ya que esta técnica obliga a que el sistema a modelar se mueva en un conjunto cerrado y de determinados valores. Esto lo convierte en un método carente de incertidumbre y variabilidad.
Estos métodos analíticos se basan en modelos matemáticos del sistema y requieren grandes aproximaciones. A pesar de la rapidez de sus soluciones, en ocasiones actúan como caja negra e imposibilitan la evaluación de algunos aspectos internos del modelo [9].
Frente a estos, se encuentran los métodos no determinísticos, también llamados probabilísticos. A pesar de que este tipo de métodos fueron desarrollados más tarde, proporcionan mejor información para el diseño, permiten la simulación con menos aproximaciones (algo que acerca el modelo a la realidad) y mantienen el carácter variable y aleatorio de los procesos [9].
Esta técnica presenta varias ventajas frente a los métodos analíticos. Véanse algunos ejemplos [15]
� La capacidad de esta técnica para producir una distribución de posibles resultados en lugar de los únicos valores esperados con la simulación analítica.
� La habilidad para poder modelar, de manera sencilla, parámetros de componentes como variables aleatorias caracterizadas por funciones de densidad de probabilidad, en lugar de valores constantes.
� La posibilidad de modelar fácilmente modelos complejos de comportamientos del sistema, tales como fallos en cascada, probabilidades condicionales, etc.
Sin embargo, también se presentan algunas desventajas a la hora de optar por esta técnica. Entre ellas destacar:
� La necesidad de un largo tiempo de computación. Esto ha provocado que su aplicación haya crecido a la par que la capacidad de computación de los ordenadores.
� La realización de numerosas iteraciones para poder aproximarse al comportamiento real del sistema.
La base principal del método de Montecarlo es la generación de números aleatorios. Por ello, se debe garantizar la mayor aleatoriedad posible en la generación de estos números.

Conceptos básicos de simulación
42
La aplicación de esta técnica al presente trabajo consistirá en analizar el proceso estocástico que supone el funcionamiento de los componentes del parque, de manera semejante al mostrado en [17].
Como ya se ha mencionado, los componentes del parque podrán encontrarse en dos estados diferentes: disponibles o indisponibles [17]. Al mismo tiempo, el parque se encontrará formado por un número determinado de elementos. De esta manera, el proceso que se quiere simular con este método es el comportamiento de todos los componentes del parque, es decir, los fallos que se producirán en estos a lo largo de un periodo de tiempo determinado, en este caso un año.
Para ello, se considerarán como variables aleatorias el estado de fallo de cada uno de los componentes. También, se supondrá un comportamiento como variable de Bernouilli para cada una de éstas, con su propia probabilidad de fallo [17].
De modo que, la simulación del parque consistirá, definida de manera rápida, en la generación de un número aleatorio por cada uno de los componentes del parque y la comparación de éste con la probabilidad del fallo definida para ese elemento, determinando así el fallo del componente. Esta simulación será sometida a numerosas iteraciones hasta que el valor calculado presente un error pequeño o se realicen un número determinado de estas iteraciones.
También es muy adecuado, para poder obtener resultados fiables y fieles, incluir aspectos cronológicos [9]. Para ello, se realizará la simulación durante un año completo y se empleará la curva de velocidad del viento correspondiente a un año para el emplazamiento seleccionado. Ésta permitirá saber la potencia de los aerogeneradores para cada periodo de simulación.
Así, se dividirá el año de simulación en tantos intervalos de tiempo como el número de medidas o valores de la curva de velocidad anual. Es importante mantener un número mínimos de periodos, ya que a cada uno de ellos le corresponde una iteración del método de Montecarlo. Por lo tanto, para cada iteración se simulará la configuración del parque generando un número aleatorio por cada componente. Una vez comparados estos valores con las probabilidades de fallo, se analizarán los elementos fallados y se calculará la potencia no suministrada a través de la medida de la velocidad del viento correspondiente a ese instante. Esta simulación, realizada para tantas iteraciones como le corresponda, dará lugar a unos valores representativos de la energía no suministrada (EENS) y otros índices de fiabilidad.
2.4 Teoría de la indisponibilidad
Uno de los aspectos fundamentales en el análisis de la fiabilidad de los parques eólicos es el estudio de la disponibilidad y fiabilidad de los propios componentes que lo forman. La fiabilidad de un componente puede definirse como la capacidad de éste para desarrollar su función requerida bajo una condiciones y tiempo establecidos [13].
Como se mencionó anteriormente, el modelado de los elementos del sistema se realizará considerando dos únicos estados posibles de los componentes: estado de fallo y de funcionamiento, como se puede observar en la Figura 2.10. De este modo, cada vez que uno de estos sufre un fallo es reparado o sustituido, se conecta de nuevo al sistema y se

Conceptos básicos de simulación
43
le considera con un funcionamiento como nuevo. Este tipo de modelado es el más sencillo de analizar.
Figura 2.10 Funcionamiento, fallo y reparación de componentes [13].
Sin embargo, también es posible observar los modelos de los componentes teniendo en cuenta que entre el estado de pleno funcionamiento y el de fallo total, existen etapas intermedias en las que se va acumulando el daño por los fallos, véase Figura 2.11. Es decir, modelos en los que se tenga en cuenta el desgaste del elemento [13]. No obstante, este tipo de modelo supone una mayor dificultad a la hora de implementarlo en la simulación. Su utilización está más orientada al estudio del desgaste mecánico de componentes, que forman un sistema con un apropiado equipo de monitorización [13].
Figura 2.11. Modelo de desgaste [13].
La probabilidad de que un componente presente un fallo será definida por medio de una serie de parámetros. Normalmente, estos parámetros suelen ser su tasa de fallos y su tiempo medio de reparación. A continuación se procede a definir cada uno de ellos.
0
1
0 5 10 15 20 25 30 35 40
Estado del
componente
Tiempo
Tiempo de reparaciónTiempo de funcionamiento y desgaste
Aparición del fallo Nuevo funcionamiento
0
1
0 5 10 15 20 25 30
Estado del
componente
Tiempo
Tiempo de funcionamiento y desgaste Tiempo de reparación
Nuevo funcionamientoDaño acumulado

2.4.1 Tasa de fallo
Generalmente, el comportamiento de la fiabilidad de los modelos de los componentes se suele definir a través de una constante propia de dicho componente [15]. La más usual es la tasa de fallos anual del elemento,
2 = �ú
�ú���� � �����������
Cuando este parámetro se considera constante a lo largo de la vida del componente, se incurre en cierto error, ya que no refleja la vida completa del componente. La tafallos tiende a cambiar a lo largo de la vida de éste [15].
Un componente tiende a fallar más cuanto mayor sea su edad. Esto resulta del desgaste y del daño acumulado al que está sometido. De esta forma, se puede admitir que la tasa de fallos, probabilidad de fallo del componente, tiende a crecer a lo largo del tiempo.
También, se puede admitir que la tasa de fallos de un elemento recién instalado o que empieza a funcionar es alta, debido a posibles fallos de fabricación, montaje defectuoso o deterioro durante el transporte. Una vez pasada esta etapa inicial, se puede garantizar que el elemento está en buenas condiciones de instalación y que a partir de ese momento se encontrará con una tasa de fallos más o menos constante.
De este modo, la tasa de falgráfica definida como curva de bañera. Véase en la
Figura 2.12. Modelo de curva de bañera de la tasa de fallos de los
Como se puede observar, la tasa de fallos del elemento empieza con un alto valor correspondiente a un periodo denominado de mortalidad infantil. Como se dijo anteriormente, esta alta tasa se debe a posibles defectos de fabricación, mal montaotro tipo de daños previos. Posteriormente, este valor desciende y pasa a ser aproximadamente constante durante un tiempo prolongado. A esto se le conoce como vida útil del componente.
0
0,2
0,4
0,6
0,8
1
1,2
0 0,2
Tasa de fallos
Mortalidad infantil
Conceptos básicos de simulación
Generalmente, el comportamiento de la fiabilidad de los modelos de los componentes se uele definir a través de una constante propia de dicho componente [15]. La más usual
es la tasa de fallos anual del elemento, λ, y se define como [21]:
ú���� � 4����� ��������
����������� �������� � �ú���� � �ñ�� ��������
Cuando este parámetro se considera constante a lo largo de la vida del componente, se incurre en cierto error, ya que no refleja la vida completa del componente. La tafallos tiende a cambiar a lo largo de la vida de éste [15].
Un componente tiende a fallar más cuanto mayor sea su edad. Esto resulta del desgaste y del daño acumulado al que está sometido. De esta forma, se puede admitir que la tasa
ilidad de fallo del componente, tiende a crecer a lo largo del tiempo.
También, se puede admitir que la tasa de fallos de un elemento recién instalado o que empieza a funcionar es alta, debido a posibles fallos de fabricación, montaje defectuoso
o durante el transporte. Una vez pasada esta etapa inicial, se puede garantizar que el elemento está en buenas condiciones de instalación y que a partir de ese momento se encontrará con una tasa de fallos más o menos constante.
De este modo, la tasa de fallos de un componente se suele representar por medio de una gráfica definida como curva de bañera. Véase en la Figura 2.12 [15] [17].
. Modelo de curva de bañera de la tasa de fallos de los componentes.
Como se puede observar, la tasa de fallos del elemento empieza con un alto valor correspondiente a un periodo denominado de mortalidad infantil. Como se dijo anteriormente, esta alta tasa se debe a posibles defectos de fabricación, mal montaotro tipo de daños previos. Posteriormente, este valor desciende y pasa a ser aproximadamente constante durante un tiempo prolongado. A esto se le conoce como
0,4 0,6 0,8 1Vida útil Envejecimiento y desgaste
44
Generalmente, el comportamiento de la fiabilidad de los modelos de los componentes se uele definir a través de una constante propia de dicho componente [15]. La más usual
�������� �
�º 4�����
�ñ��
Cuando este parámetro se considera constante a lo largo de la vida del componente, se incurre en cierto error, ya que no refleja la vida completa del componente. La tasa de
Un componente tiende a fallar más cuanto mayor sea su edad. Esto resulta del desgaste y del daño acumulado al que está sometido. De esta forma, se puede admitir que la tasa
ilidad de fallo del componente, tiende a crecer a lo largo del tiempo.
También, se puede admitir que la tasa de fallos de un elemento recién instalado o que empieza a funcionar es alta, debido a posibles fallos de fabricación, montaje defectuoso
o durante el transporte. Una vez pasada esta etapa inicial, se puede garantizar que el elemento está en buenas condiciones de instalación y que a partir de ese
los de un componente se suele representar por medio de una [15] [17].
componentes.
Como se puede observar, la tasa de fallos del elemento empieza con un alto valor correspondiente a un periodo denominado de mortalidad infantil. Como se dijo anteriormente, esta alta tasa se debe a posibles defectos de fabricación, mal montaje u otro tipo de daños previos. Posteriormente, este valor desciende y pasa a ser aproximadamente constante durante un tiempo prolongado. A esto se le conoce como
1,2 TiempoEnvejecimiento y desgaste

Conceptos básicos de simulación
45
Posteriormente, alcanza de nuevo un valor creciente como consecuencia del desgaste y envejecimiento del material. Este periodo supone el fin de la vida útil del componente y es el paso previo a su fallo.
Sin embargo, debido a la dificultad que supone modelar los tres periodos distintos que puede poseer la tasa de fallos de un elemento, y al complicado uso que este presenta para trabajar con él, en numerosas ocasiones se considera que la tasa de fallos es constante a lo largo de la vida del componente. Éste será uno de esos casos.
2.4.2 Tiempo medio de reparación
Otro parámetro de utilidad para el estudio de la fiabilidad de los componentes es el tiempo medio de reparación, Mean Time To Repair (MTTR).
Mientras que algunas reparaciones pueden realizarse con rapidez otras, por diversas circunstancias, requieren más tiempo. De modo que, este parámetro se obtendrá a partir de la media de distintas reparaciones del mismo componente. Así, se define como el tiempo medio esperado en el que se realizará la reparación de uno de estos elementos [15]. � = ������ ���� � ��������ó� =
= ������ ����� � ��������ó� � ��� ������������º � ������������ � ��� ����������� � ℎ4�����
El tiempo medio de reparación, junto con el tiempo medio de fallo, Mean Time To Failure (MTTF) [13] [15], permite hacer una idea del ciclo sufrido por un elemento sometido a un fallo, tal como se observa en la Figura 2.13.
Figura 2.13. Tiempo medio de reparación y fallo de un componente.
De esta forma, resulta imprescindible contar con valores de la tasa de fallos y tiempo medio de reparación apropiados a la instalación que se va a estudiar. Estos valores son difíciles de encontrar, por lo que su obtención se realiza por medio de la recogida y el estudio de un histórico del comportamiento de numerosos componentes similares. Para poder alcanzar la mayor precisión posible, es necesario medir el histórico de fallos del
0
0,2
0,4
0,6
0,8
1
1,2
0 5 10 15 20 25 30 35 40
Estado del
componente
Tiempo
MTTF MTTR

Conceptos básicos de simulación
46
componente para un periodo de tiempo lo suficientemente largo como para proporcionar la cantidad de información necesaria.
Uno de los principales problemas, por ejemplo, para los parques eólicos marinos es que son instalaciones de reciente desarrollo y resulta muy difícil encontrar información estadística fiable de estos sistemas [13].
2.4.3 Modelo de procesos continuos de Markov Todo componente se puede encontrar en dos estados distintos: funcionamiento o no funcionamiento.
Para definir el paso de un estado a otro, se considerará que se rige por una función de densidad de distribución de tipo exponencial. Existen muchos tipos de funciones de densidad de distribución. Algunas de ellas son la normal, la logarítmica o la de Weibull. Sin embargo, la función tipo exponencial es la más común, debido a que se puede definir a través de una única constante: la constante de riesgo, 2, [13] [15] [17].
4��� = 2�678 ���� � > 0 De esta manera, tendremos dos estados con dos procesos de transición definidos por una función de densidad de distribución para cada uno y acompañadas por sus respectivas constantes de riesgo[17] [22]. Esto se puede ver representado en la Figura 2.14.
Figura 2.14 [17] [22].
El paso del estado de funcionamiento al estado de fallo se define por una función de densidad de distribución con la tasa de fallos, λ, como constante. De este modo, la probabilidad de que un componente falle pasando un tiempo, �, vendrá definida por [15] [17] [22]:
4��� = 2�678 ���� � > 0
Siendo λ la tasa de fallos del componente, en fallos/año.
Del mismo modo, el paso del fallo al funcionamiento normal del componente vendrá definido por una función exponencial en la que la constante es la tasa de reparación,
Estado Funcionamiento
Estado funcionamiento
λ
µ
Estado fallo
Conceptos básicos de simulación
47
siendo esta última la inversa del tiempo medio de reparación del componente [15] [17] [22].
4��� = :�6;8 ���� � > 0
Siendo, en este caso, μ = %=
De esta forma, para poder modelar el comportamiento de un elemento y calcular la probabilidad de transición entre estos dos estados, se empleará el modelo de Markov [15] [22].
Este método de modelado se emplea para la simulación de los estados de un sistema y la transición entre estos. Se basa en dos suposiciones iniciales [15]:
• La primera de ellas es la falta de memoria del sistema. La probabilidad de eventos futuros dependerá únicamente del estado presente y no de lo que le haya ocurrido previamente a la entrada al presente estado.
• El sistema es estático, es decir, las probabilidades de transición entre estados son constantes y no depende del tiempo.
A su vez, los procesos de Markov pueden presentarse como discretos o continuos. En el caso estudiado se trata de un proceso de Markov continuo, ya que la transición de un estado a otro puede tener lugar en cualquier instante de tiempo.
De este modo, el cálculo de las probabilidades de transición de un estado a otro se realiza como se indica a continuación [22]:
• Suponiendo que la transición al fallo sigue una ley exponencial con una tasa de fallos constante λ. La tasa de fallos instantánea, o también definida como la probabilidad de que falle en un instante t+∆t sabiendo que en t funcionaba, será:
�� < � < � + @� |� > �� = B�� + @�� − B���1 − B��� = �678 − �67�8CD8��678 =
= 1 − �67D8 ≈ 2@�
Se considera que el proceso contrario, de fallo a funcionamiento, plantea la misma deducción.
De esta forma, si la probabilidad de que un componente en el estado de funcionamiento pase en el instante de tiempo F + GF a sufrir un fallo es de HGF, la probabilidad de que éste se mantenga funcionando será de 1-HGF.
También es posible que el elemento pase de un estado de no funcionamiento a un estado de funcionamiento normal como consecuencia de la reparación de éste. De esta forma la probabilidad de que un elemento que lleva t tiempo en el estado de no funcionamiento pase a funcionamiento en el instante F + GF a funcionamiento será de [22]:

Conceptos básicos de simulación
48
�� < � < � + @� |� > �� = B�� + @�� − B���1 − B��� = �6;8 − �6;�8CD8��6;8 =
= 1 − �6;D8 ≈ :@�
• De modo que, es posible establecer la siguiente matriz de transición entre ambos estados, considerando el estado 1 como el estado de funcionamiento normal, y 2 el estado de no funcionamiento [22]:
I %�� + @�� J�� + @��K = I1 − 2@� :@�2@� 1 − :@�K I %��� J���K
• Al tratarse de una cadena continua de Markov, se pueden considerar las ecuaciones anteriores como ecuaciones diferenciales utilizando límites (@� → 0). %���� = −2 %��� + : J��� J���� = 2 %��� − : J���
• Resolviendo el anterior sistema de ecuaciones diferenciales, se calcula que las
probabilidades para cualquier instante de tiempo t son [22]:
%��� = :2 + : + 2�6�7C;�82 + :
J��� = 22 + : + 2�6�7C;�82 + :
• Considerando un tiempo infinito en ambas ecuaciones, se obtienen las siguientes probabilidades límites [17] [22].
o MN como probabilidad de encontrar al componente en estado disponible o también llamada disponibilidad (availability), y
o MO como probabilidad de encontrar el elemento en estado indisponible, o indisponibilidad (unavailability) [17]:
% = :2 + :
J = 22 + :
Conceptos básicos de simulación
49
Una vez resueltas las anteriores probabilidades para ambos estados, se establece que para definir un componente de cara al estudio llevado a cabo en el presente trabajo es necesario determinar su tasa de fallos y su tiempo medio de reparación. De esta manera, desde el punto de vista de la simulación por medio del método de Montecarlo, el fallo de cada componente supone una variable aleatoria de Bernuoilli definida por la probabilidad J [17].
2.5 Valores de tasa de fallos y tiempos medios de reparación empleados
El valor de la tasa de fallos y el tiempo medio de reparación de los componentes son fundamentales para poder calcular su probabilidad de fallo. Sin embargo, la obtención de este tipo de valores para parques eólicos es todavía difícil, ya que por un lado se trata de un tipo de instalaciones reciente en muchos casos y, por otro, porque los fabricantes de componentes se niegan a revelar este tipo de información [13].
La herramienta informática desarrollada permite la elección por parte del usuario de los valores de tasa de fallos y tiempo de reparación. No obstante, se proporcionarán unos valores establecidos por defecto. Con estos se desarrollarán una serie de ejemplos a continuación. De este modo, el usuario tendrá la posibilidad de realizar la simulación con los valores ofrecidos o introducir algunos de los que desee.
Además, a la hora de proporcionar los valores por defecto se hará distinción entre los valores para parques terrestres o marinos. Esto se debe a que existen algunas diferencias entre ambos tipos, de hecho, fundamentalmente se reflejan en los tiempos medios de reparación.
Para los parques eólicos terrestres se han propuesto los valores de tasas de fallos y tiempos de reparación proporcionados por el artículo nº 99 de la revista ELECTRA de CIGRÉ, “Subestation reliability. Comparison of two methods and suitable presentation of results” [23]. Este artículo ofrece valores de tasas de fallos de componentes propios de subestaciones. Sin embargo, se considerará que estos valores son extrapolables a parques eólicos terrestres debido a la gran dificultad para encontrar los específicos para este tipo de parques.
Además, de los valores obtenidos en el artículo anterior, para los tramos de líneas enterrados de la instalación de media tensión del parque se usarán los valores proporcionados por el libro “Electric Power Distribution Reliability” [15]. En éste se incluyen valores de parámetros de fiabilidad propios de componentes eléctricos industriales.
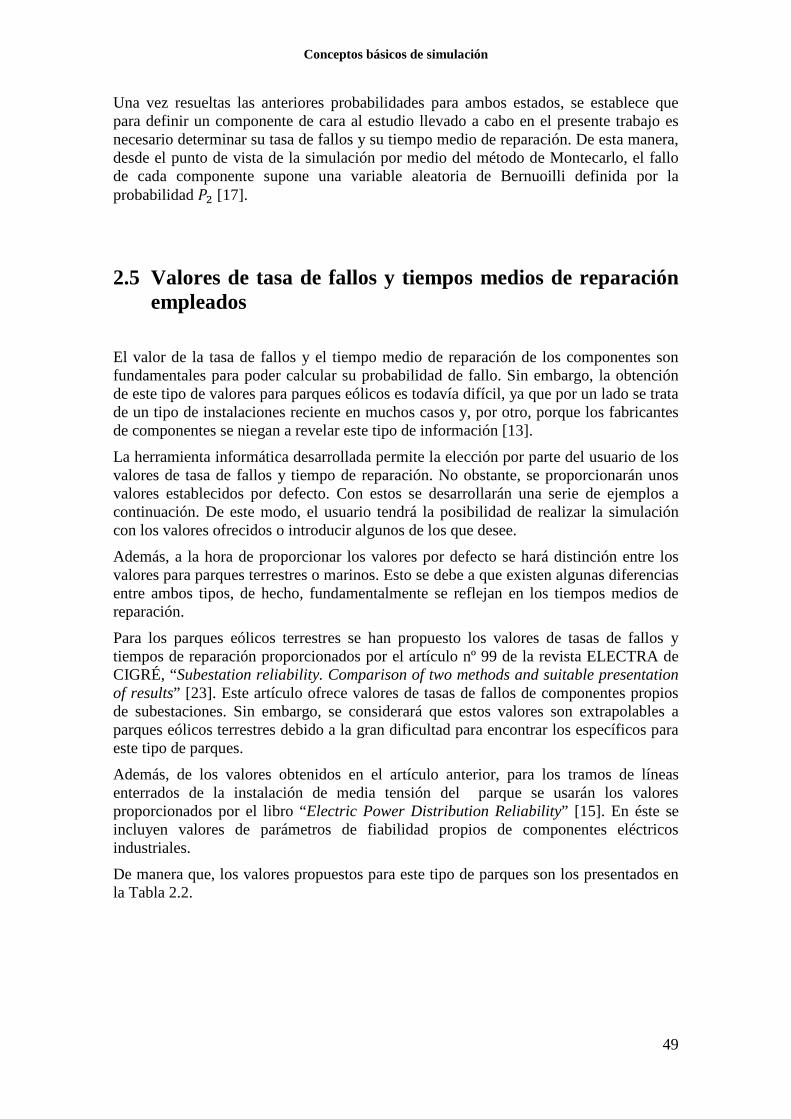
De manera que, los valores propuestos para este tipo de parques son los presentados en la Tabla 2.2.
Conceptos básicos de simulación
50
Tabla 2.2
Tasa de fallos y tiempos medios de reparación de componentes de parque eólicos en tierra firme
Tasa de fallos λ (nº fallos/año)
Tasa de fallos λ (nº fallos/hora)
Tiempo medio de reparación r (horas/fallo)
Transformador de potencia 0.0013 1.48402·10-7 120
Interruptor (AT) 0.0043 4.90868·10-7 12 Seccionador (AT) 0.002 2.28311·10-7 6 Interruptor (MT) 0.0019 2.16895·10-7 3 Seccionador (MT) 0.002 2.28311·10-7 6 Interruptor (BT) 0.0019 2.16895·10-7 3
Línea MT Enterrada (por km) 0.016 1.82648·10-6 35
Línea BT aerogenerador (por km) 0.027 3.08219·10-6 5,5
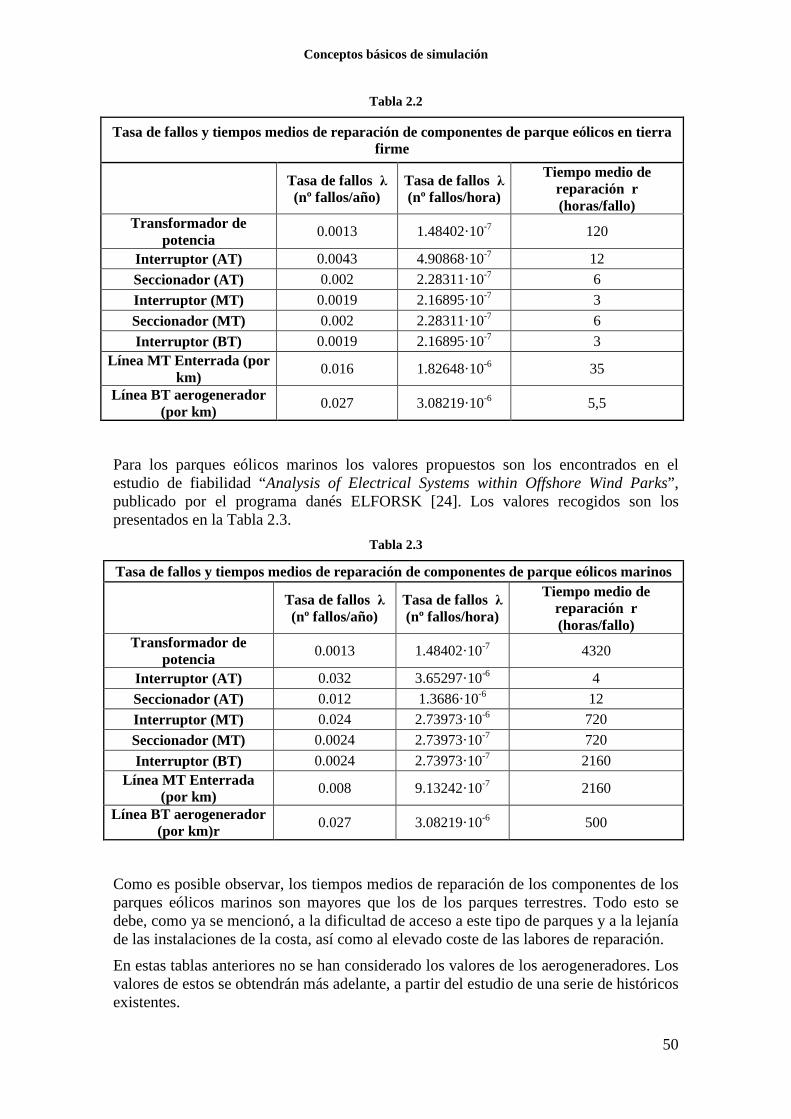
Para los parques eólicos marinos los valores propuestos son los encontrados en el estudio de fiabilidad “Analysis of Electrical Systems within Offshore Wind Parks”, publicado por el programa danés ELFORSK [24]. Los valores recogidos son los presentados en la Tabla 2.3.
Tabla 2.3
Tasa de fallos y tiempos medios de reparación de componentes de parque eólicos marinos
Tasa de fallos λ (nº fallos/año)
Tasa de fallos λ (nº fallos/hora)
Tiempo medio de reparación r (horas/fallo)
Transformador de potencia 0.0013 1.48402·10-7 4320
Interruptor (AT) 0.032 3.65297·10-6 4 Seccionador (AT) 0.012 1.3686·10-6 12 Interruptor (MT) 0.024 2.73973·10-6 720 Seccionador (MT) 0.0024 2.73973·10-7 720 Interruptor (BT) 0.0024 2.73973·10-7 2160
Línea MT Enterrada (por km) 0.008 9.13242·10-7 2160
Línea BT aerogenerador (por km)r 0.027 3.08219·10-6 500
Como es posible observar, los tiempos medios de reparación de los componentes de los parques eólicos marinos son mayores que los de los parques terrestres. Todo esto se debe, como ya se mencionó, a la dificultad de acceso a este tipo de parques y a la lejanía de las instalaciones de la costa, así como al elevado coste de las labores de reparación.
En estas tablas anteriores no se han considerado los valores de los aerogeneradores. Los valores de estos se obtendrán más adelante, a partir del estudio de una serie de históricos existentes.
Conceptos básicos de simulación
51
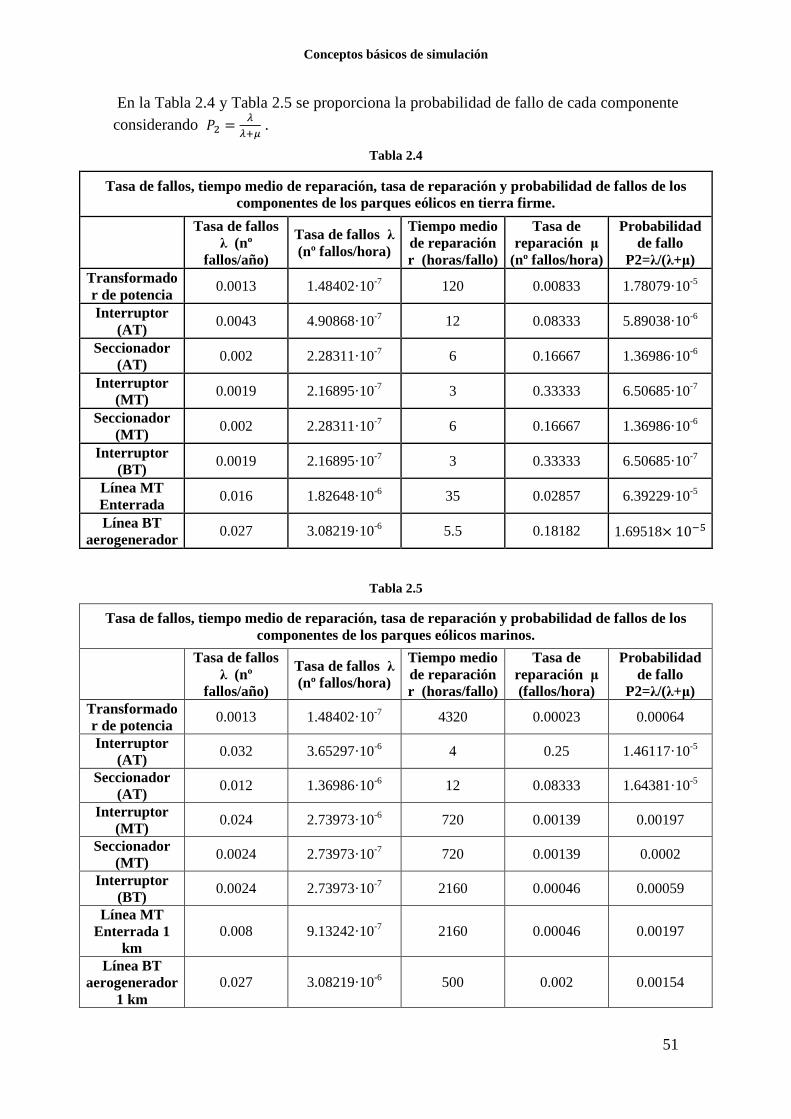
En la Tabla 2.4 y Tabla 2.5 se proporciona la probabilidad de fallo de cada componente considerando J = 77C; .
Tabla 2.4
Tasa de fallos, tiempo medio de reparación, tasa de reparación y probabilidad de fallos de los componentes de los parques eólicos en tierra firme.
Tasa de fallos λ (nº
fallos/año)
Tasa de fallos λ (nº fallos/hora)
Tiempo medio de reparación r (horas/fallo)
Tasa de reparación µ
(nº fallos/hora)
Probabilidad de fallo
P2=λ/(λ+µ) Transformador de potencia
0.0013 1.48402·10-7 120 0.00833 1.78079·10-5
Interruptor (AT)
0.0043 4.90868·10-7 12 0.08333 5.89038·10-6
Seccionador (AT)
0.002 2.28311·10-7 6 0.16667 1.36986·10-6
Interruptor (MT)
0.0019 2.16895·10-7 3 0.33333 6.50685·10-7
Seccionador (MT)
0.002 2.28311·10-7 6 0.16667 1.36986·10-6
Interruptor (BT)
0.0019 2.16895·10-7 3 0.33333 6.50685·10-7
Línea MT Enterrada
0.016 1.82648·10-6 35 0.02857 6.39229·10-5
Línea BT aerogenerador
0.027 3.08219·10-6 5.5 0.18182 1.69518× 106P
Tabla 2.5
Tasa de fallos, tiempo medio de reparación, tasa de reparación y probabilidad de fallos de los componentes de los parques eólicos marinos.
Tasa de fallos λ (nº
fallos/año)
Tasa de fallos λ (nº fallos/hora)
Tiempo medio de reparación r (horas/fallo)
Tasa de reparación µ (fallos/hora)
Probabilidad de fallo
P2=λ/(λ+µ) Transformador de potencia
0.0013 1.48402·10-7 4320 0.00023 0.00064
Interruptor (AT)
0.032 3.65297·10-6 4 0.25 1.46117·10-5
Seccionador (AT)
0.012 1.36986·10-6 12 0.08333 1.64381·10-5
Interruptor (MT)
0.024 2.73973·10-6 720 0.00139 0.00197
Seccionador (MT)
0.0024 2.73973·10-7 720 0.00139 0.0002
Interruptor (BT)
0.0024 2.73973·10-7 2160 0.00046 0.00059
Línea MT Enterrada 1
km 0.008 9.13242·10-7 2160 0.00046 0.00197
Línea BT aerogenerador
1 km 0.027 3.08219·10-6 500 0.002 0.00154
Conceptos básicos de simulación
52
2.6 Perfil de viento y tipo de aerogenerador
Para el cálculo de la energía esperada no suministrada por el parque eólico, resulta fundamental contar con un perfil de viento adecuado en la zona en la que se realiza el estudio, así como las características de la turbina eólica seleccionada. Ambas cosas permitirán determinar la potencia generada por los aerogeneradores en cada momento.
Para la caracterización del viento en las fases de estudio del recurso eólico, se suele recurrir a las herramientas estadísticas. La más común es el modelado de la velocidad por medio de una distribución de frecuencias por intervalos de velocidades [25]. Dentro de las funciones de distribución más empleadas destaca la función de distribución de Weibull.
Sin embargo, en el presente trabajo el enfoque que se va a adoptar es distinto. La simulación del parque eólico se realizará por medio del método de Montecarlo, para el que es vital la introducción del parámetro tiempo. Además, el número de simulaciones, para conseguir resultados más fieles a la realidad, debe ser lo más alto posible. De esta manera, la variabilidad del viento se introducirá en el programa a través del perfil anual del viento en el emplazamiento escogido.
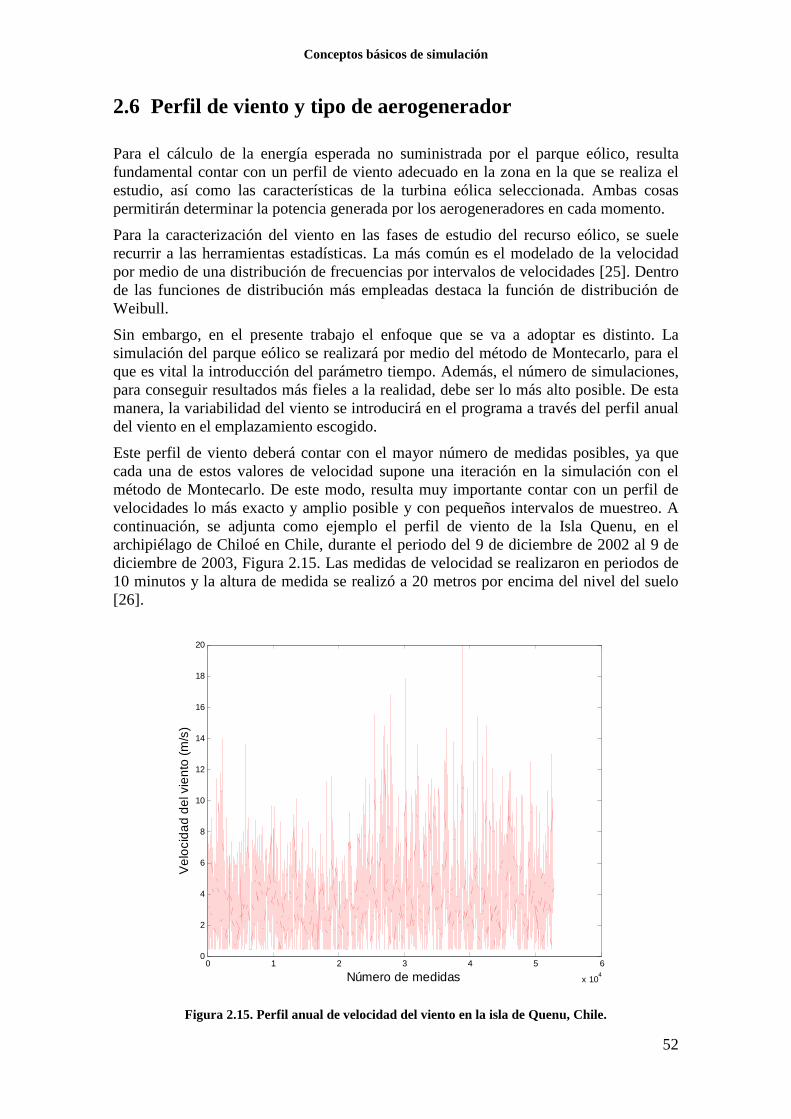
Este perfil de viento deberá contar con el mayor número de medidas posibles, ya que cada una de estos valores de velocidad supone una iteración en la simulación con el método de Montecarlo. De este modo, resulta muy importante contar con un perfil de velocidades lo más exacto y amplio posible y con pequeños intervalos de muestreo. A continuación, se adjunta como ejemplo el perfil de viento de la Isla Quenu, en el archipiélago de Chiloé en Chile, durante el periodo del 9 de diciembre de 2002 al 9 de diciembre de 2003, Figura 2.15. Las medidas de velocidad se realizaron en periodos de 10 minutos y la altura de medida se realizó a 20 metros por encima del nivel del suelo [26].
Figura 2.15. Perfil anual de velocidad del viento en la isla de Quenu, Chile.
0 1 2 3 4 5 6
x 104
0
2
4
6
8
10
12
14
16
18
20
Número de medidas
Ve
loci
da
d d
el v
ien
to (
m/s
)

Conceptos básicos de simulación
53
Además, se debe señalar que es posible obtener el perfil de velocidad del viento en cualquier altura respecto al nivel del suelo, a partir de uno conocido a una altura determinada. Para ello, se denomina a la velocidad conocida como v(ref) y a la altura a la que se mide como Q=RS. La velocidad a la altura deseada z se puede calcular como:
T�Q� = T�Q=RS� × ln QQWln Q=RSQW
En la que QW es la longitud de rugosidad del terreno.
A nivel del suelo, la velocidad del viento es nula debido a la fricción del aire con éste. Conforme se aumenta la altura, la velocidad aumenta más lentamente hasta hacerse constante a aproximadamente dos kilómetros. A este fenómeno se le conoce como cizallamiento.
La longitud de rugosidad QW es la altura sobre el nivel del terreno a la que la velocidad del viento es cero. Este valor depende fundamentalmente de la orografía y del tipo de terreno. En la Tabla 2.6 se proponen valores para distintos tipos.
Tabla 2.6. Valores de longitud de rugosidad.
Longitud de rugosidad de distintos tipos de terrenos
Tipo de Terreno Longitud rugosidad
z0 (m) Áreas de agua 0.0002 Campo abierto con superficie lisa (p.ej. pistas aeropuertos) 0.0024 Tierra de cultivo con edificios y setos resguardantes 0.2 Ciudades grandes con edificios altos 0.8
En cuanto al tipo de turbina eólica en el parque, no existen limitaciones en su elección excepto que el modelo escogido debe ser el empleado en todos los aerogeneradores del parque.
Para poder calcular la energía esperada no suministrada, es necesario conocer la potencia que los aerogeneradores proporcionan para cada velocidad del viento. De esta manera, será necesario introducir la curva potencia-velocidad asociada al aerogenerador escogido. La herramienta informática desarrollada permitirá que el usuario pueda elegir tanto el perfil de viento anual como la curva característica de la turbina escogida. Un ejemplo de curva potencia-velocidad para un aerogenerador de potencia nominal de 1650 kW puede verse en la Figura 2.16.
Conceptos básicos de simulación
54
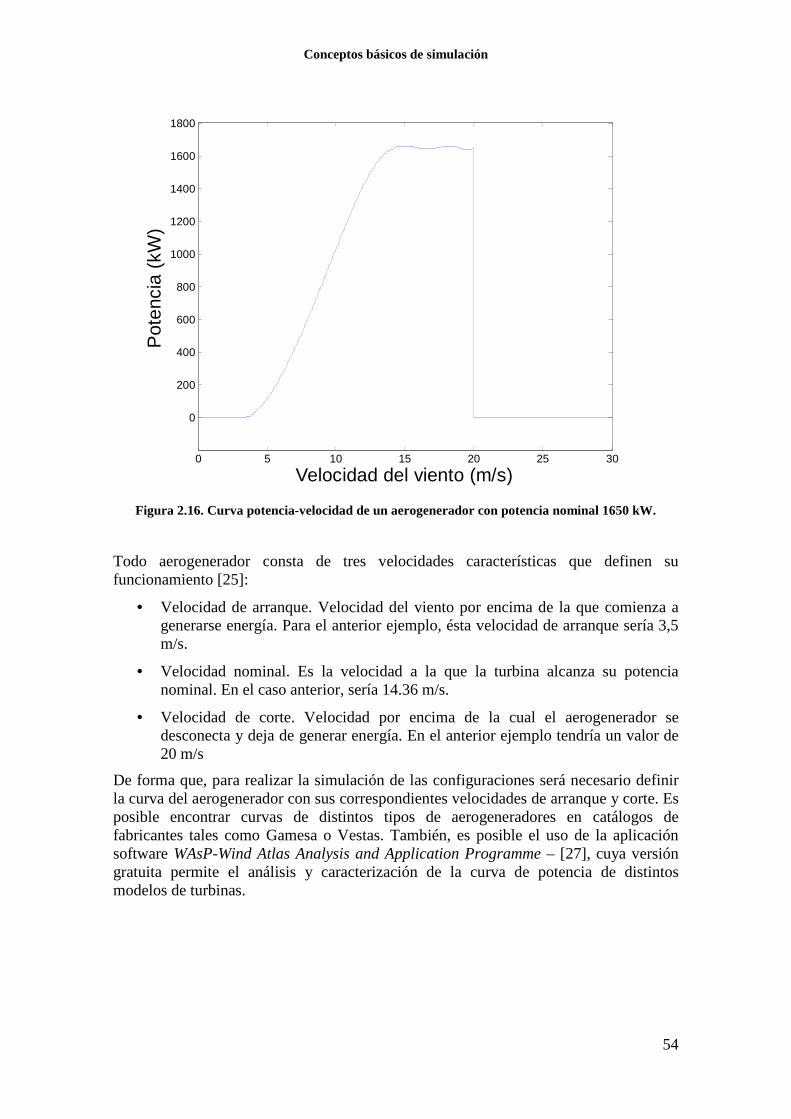
Figura 2.16. Curva potencia-velocidad de un aerogenerador con potencia nominal 1650 kW.
Todo aerogenerador consta de tres velocidades características que definen su funcionamiento [25]:
• Velocidad de arranque. Velocidad del viento por encima de la que comienza a generarse energía. Para el anterior ejemplo, ésta velocidad de arranque sería 3,5 m/s.
• Velocidad nominal. Es la velocidad a la que la turbina alcanza su potencia nominal. En el caso anterior, sería 14.36 m/s.
• Velocidad de corte. Velocidad por encima de la cual el aerogenerador se desconecta y deja de generar energía. En el anterior ejemplo tendría un valor de 20 m/s
De forma que, para realizar la simulación de las configuraciones será necesario definir la curva del aerogenerador con sus correspondientes velocidades de arranque y corte. Es posible encontrar curvas de distintos tipos de aerogeneradores en catálogos de fabricantes tales como Gamesa o Vestas. También, es posible el uso de la aplicación software WAsP-Wind Atlas Analysis and Application Programme – [27], cuya versión gratuita permite el análisis y caracterización de la curva de potencia de distintos modelos de turbinas.
0 5 10 15 20 25 30
0
200
400
600
800
1000
1200
1400
1600
1800
Velocidad del viento (m/s)
Pot
enci
a (k
W)

Conceptos básicos de simulación
55
2.7 Aerogeneradores
Los aerogeneradores son el componente más importante del parque eólico, puesto que son los elementos capaces de transformar la energía cinética del viento en energía eólica. En la actualidad, estos están viendo incrementada su potencia nominal de generación y van adquiriendo constantes mejoras.
Sin embargo, la experiencia muestra que la disponibilidad de un parque eólico depende principalmente de la fiabilidad de los aerogeneradores. Por ejemplo, según [11] la indisponibilidad debida a faltas que ocurren fuera de las turbinas eólicas contabiliza menos del 1% del total de faltas.
Esto obliga a prestar una atención especial a la hora de estudiar la fiabilidad de este componente. Los valores de tasa de fallos y tiempo de reparación que se empleen para este elemento en la simulación deben ser lo más cercanos a la realidad y reflejar su verdadero comportamiento.
De este modo, se calcularán sus valores empleando cuatro fuentes de datos históricos de fallos recogidos en el artículo [13]. A partir de ellos, se obtendrán valores medios de tasa de fallos y tiempo de reparación que se emplearán por defecto en la simulación.
Antes de mostrar los valores de los históricos, es conveniente denominar los componentes en que se divide el aerogenerador según el artículo empleado [13]. Estos son:
• Palas del rótor y el sistema de control del paso. El diseño más común en los aerogeneradores es el de tres palas. Además, el sistema de control de paso tiene como objetivo regular la potencia extraíble del aire a través del giro de las palas en torno a su eje axial. De esta forma, también se incluyen todo el sistema hidráulico y eléctrico para la regulación del paso.
• Buje. Realiza la conexión entre las palas y el eje principal y aloja el equipo eléctrico y mecánico para el control de las palas.
• Estructura. Se compone de torre, cimentación y góndola.
• Transmisión. Formado por el eje, los cojinetes y un acoplamiento entre la caja de engranajes y el generador.
• Caja de engranajes. Transforma las bajas velocidades de giro del rotor en altas revoluciones.
• Generador. Suelen tratarse de generadores de inducción o de inducción doblemente alimentados.
• Sistema de control. Se trata de una computadora central que se sitúa en el interior de la góndola o de la torre, para controlar el paso y el viraje y conseguir la optimización de la potencia. Además, se encuentra conectado a numerosos sensores a lo largo de la estructura.
• Sensores. Son de sensores de medida del viento, de la temperatura, de dirección, vibraciones y otras magnitudes. Normalmente se encuentran conectados al sistema de control.
• Frenos mecánicos. Se tratan de frenos de disco empleados por motivos de seguridad durante la reparación o altas velocidades.

Conceptos básicos de simulación
56
• Sistema hidráulico. Componentes hidráulicos para el control de paso, frenado y viraje.
• Sistema de viraje. Es el sistema de control del giro de la góndola para la orientación y el máximo aprovechamiento del viento.
Los primeros datos estadísticos que se van a emplear son los provenientes del sistema eólico de Suecia, coleccionado por Swedpower AB, que desarrolla este estudio de parte del programa ELFORSK [13] [28]. Esta base de datos recoge información de la producción, los tiempos de interrupción y los fallos del año 2000 al 2004. En la Tabla 2.7se muestran los valores de tasa de fallos y tiempos de interrupción de cada componente.
Tabla 2.7. Base de datos de Swedpower AB 2005. Tasa de fallos y tiempo medio de reparación de los componentes de los aerogeneradores del año 2000 A 2004 [24].
Número medio de fallos y tiempo medio de interrupción de los componentes de una turbina eólica.
Componente Número medio de fallos por año y turbina
Tiempo medio de interrupción por fallo
Buje 0.001 12.5
Palas y control de paso 0.052 91.6
Sistema eléctrico 0.067 106.6
Generador 0.021 210.7
Sistema de control 0.05 184.6
Transmisión 0.004 291.4
Sensores 0.054 49.4
Caja de engranajes 0.045 256.7
Frenos mecánicos 0.005 125.4
Sistema hidráulico 0.061 43.2
Sistema de viraje 0.026 259.4
Estructura 0.006 104.1
Unidad completa 0.011 79.7
En la anterior base de datos se han incluido todos los componentes en que se pueden clasificar los aerogeneradores y el sistema eléctrico del parque. Se puede observar que la tasa de fallos del sistema eléctrico no es muy alta respecto a la tasa de fallos del resto de los componentes. Además, su tiempo de reparación no es tan grande como la de otros elementos, tales como el generador, la transmisión, la caja de engranajes o el sistema de viraje.
Los siguientes datos son los recogidos en parques eólicos de Finlandia, por el centro de investigación VTT. En este estudio se muestran valores de tasa de fallos y tiempos de reparación de componentes de parques del año 2000 a 2004 [13] [29]. Los resultados del estudio se muestran en la Tabla 2.8.

Conceptos básicos de simulación
57
Tabla 2.8. Base de datos de VTT. Tasas de fallos y tiempos de reparación de los componentes de aerogeneradores de Finlandia del año 200 a 2004 [24].
Número medio de fallos y tiempo medio de interrupción de los componentes de una turbina eólica.
Componente Número medio de fallos por año y
turbina
Tiempo medio de interrupción por
fallo Buje 0.01 20
Palas y control de paso 0.02 256
Sistema Eléctrico 0.11 143
Generador 0.08 123
Sistema de control 0.1 42
Transmisión 0 0
Sensores 0.12 42
Caja de engranajes 0.15 602
Frenos mecánico 0.04 146
Sistema Hidráulico 0.36 86
Sistema de viraje 0.1 153
Estructura 0.09 178
Unidad Completa 0 0
Otros 0.06 79
Desconocido 0.03 145
La última base de datos se refiere a parques eólicos de Alemania. Estos datos son recogidos por WMEP (Wissenschaftliches Mess- und Evaluierungs Programm). Se trata de un programa de investigación en el que se realiza el seguimiento de turbinas eólicas durante un periodo mayor de diez años [13]. Los resultados de tasa de fallos y tiempos de reparación han sido realizados para los años 2004 y 2005. En la Tabla 2.9 pueden verse los valores proporcionados.
Con estos valores conseguidos, se realizará el cálculo de la tasa de fallos y el tiempo de reparación del conjunto del aerogenerador, que se compondrá de todos los elementos proporcionados en los estudios a excepción del sistema eléctrico, ya que éste se conforma con todos los componentes que se analizaron en capítulos anteriores.

Conceptos básicos de simulación
58
Tabla 2.9. Base de datos de WMEP. Tasa de fallos y tiempo de reparación de componentes de aerogeneradores de Alemania del año 2004 y 2005 [24].
Número medio de fallos y tiempo medio de interrupción de los componentes de una turbina eólica.
Componente Número medio de fallos por año y
turbine
Tiempo medio de interrupción por
fallo Buje 0.01 9.5
Palas y control de paso 0.22 17.1
Sistema Eléctrico 0.49 20.1
Generador 0.05 17.5
Sistema de control 0.26 18.9
Transmisión 0.05 7.4
Sensores 0.16 8.7
Caja de engranajes 0.12 15.6
Frenos mecánicos 0.1 8.5
Sistema Hidráulico 0.21 6.5
Sistema de viraje 0.13 11.6
Estructura 0.07 7.5
Para el cálculo de los dos valores anteriores, se aplicará un proceso semejante al expuesto en el artículo [24]. Para ello, primero se obtendrá el valor promedio de tasa de fallos y tiempo de reparación de cada uno de los componentes según los tres estudios. Posteriormente, se determinará el tiempo medio anual de desconexión y pérdida de carga.
• Buje. 2 = 0.007 4������ñ�
� = ���Z = 14 ℎ����4����
\ = ������ ���� ����� � ������]�ó� = 2 × � = 0.098 ℎ�����ñ�
• Palas y control de paso.
2 = 0.097 4������ñ�
� = ���Z = 121.567 ℎ����4����
\ = ������ ���� ����� � ������]�ó� = 2 × � = 11.832 ℎ�����ñ�

Conceptos básicos de simulación
59
• Generador. 2 = 0.050 4������ñ�
� = ���Z = 117.067 ℎ����4����
\ = ������ ���� ����� � ������]�ó� = 2 × � = 5.892 ℎ�����ñ�
• Sistema de control.
2 = 0.137 4������ñ�
� = ���Z = 81.833 ℎ����4����
\ = ������ ���� ����� � ������]�ó� = 2 × � = 11.839 ℎ�����ñ�
• Transmisión.
2 = 0.018 4������ñ�
� = ���Z = 99.6 ℎ����4����
\ = ������ ���� ����� � ������]�ó� = 2 × � = 1.793 ℎ�����ñ�
• Sensores.
2 = 0.111 4������ñ�
� = ���Z = 33.3670 ℎ����4����
\ = ������ ���� ����� � ������]�ó� = 2 × � = 3.7150 ℎ�����ñ�
• Caja de engranajes. 2 = 0.105 4������ñ�
� = ���Z = 291.4330 ℎ����4����
\ = ������ ���� ����� � ������]�ó� = 2 × � = 30.6010 ℎ�����ñ�

Conceptos básicos de simulación
60
• Frenos mecánicos. 2 = 0.048 4������ñ�
� = ���Z = 93.3 ℎ����4����
\ = ������ ���� ����� � ������]�ó� = 2 × � = 4.51 ℎ�����ñ�
• Sistema hidráulico. 2 = 0.210 4������ñ�
� = ���Z = 45.23 ℎ����4����
\ = ������ ���� ����� � ������]�ó� = 2 × � = 9.51 ℎ�����ñ�
• Sistema de viraje. 2 = 0.085 4������ñ�
� = ���Z = 141.33 ℎ����4����
\ = ������ ���� ����� � ������]�ó� = 2 × � = 12.06 ℎ�����ñ�
• Estructura. 2 = 0.055 4������ñ�
� = ���Z = 96.53 ℎ����4����
\ = ������ ���� ����� � ������]�ó� = 2 × � = 5.34 ℎ�����ñ�
• Unidad completa. 2 = 0.011 4������ñ�
� = ���Z = 79.7 ℎ����4����
\ = ������ ���� ����� � ������]�ó� = 2 × � = 0.877 ℎ�����ñ�
• Otros. 2 = 0.060 4������ñ�
� = ���Z = 79 ℎ����4����
\ = ������ ���� ����� � ������]�ó� = 2 × � = 4.74 ℎ�����ñ�
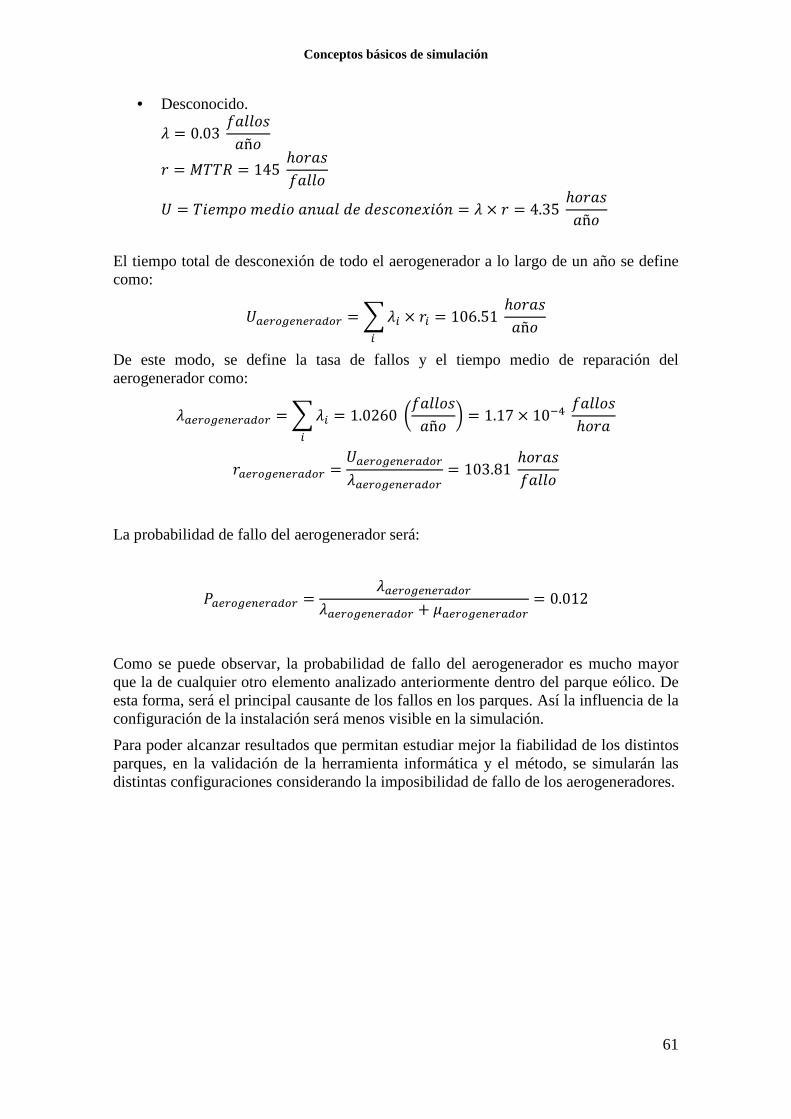
Conceptos básicos de simulación
61
• Desconocido. 2 = 0.03 4������ñ�
� = ���Z = 145 ℎ����4����
\ = ������ ���� ����� � ������]�ó� = 2 × � = 4.35 ℎ�����ñ�
El tiempo total de desconexión de todo el aerogenerador a lo largo de un año se define como:
\dR=efR#R=dge= = h 2" × �"" = 106.51 ℎ�����ñ�
De este modo, se define la tasa de fallos y el tiempo medio de reparación del aerogenerador como:
2dR=efR#R=dge= = h 2" = 1.0260 /4������ñ� 1 = 1.17 × 106i" 4�����ℎ���
�dR=efR#R=dge= = \dR=efR#R=dge=2dR=efR#R=dge= = 103.81 ℎ����4����
La probabilidad de fallo del aerogenerador será:
dR=efR#R=dge= = 2dR=efR#R=dge=2dR=efR#R=dge= + :dR=efR#R=dge= = 0.012
Como se puede observar, la probabilidad de fallo del aerogenerador es mucho mayor que la de cualquier otro elemento analizado anteriormente dentro del parque eólico. De esta forma, será el principal causante de los fallos en los parques. Así la influencia de la configuración de la instalación será menos visible en la simulación.
Para poder alcanzar resultados que permitan estudiar mejor la fiabilidad de los distintos parques, en la validación de la herramienta informática y el método, se simularán las distintas configuraciones considerando la imposibilidad de fallo de los aerogeneradores.

Conceptos básicos de simulación
62
2.8 Cálculo de los índices de fiabilidad
La mejora de la instalación eólica tiene como principal objetivo aumentar los ingresos económicos por venta de energía, ya que las pérdidas de potencia, a causa de fallos, se reducirán. De ahí que, el principal índice en el que basarse se la Energía Esperada No Suministrada (EENS).
La simulación de la configuración frente a un perfil de viento determinado permitirá la obtención de manera directa de este valor. Para el cálculo de EENS es necesario introducir un parámetro propio del emplazamiento, que variará en función del tiempo para cada iteración de la simulación. Esto es, el perfil del viento que de forma indirecta define la potencia que es capaz de dar cada aerogenerador. Es imposible considerar que todos los aerogeneradores proporcionan una potencia constante para toda la simulación, de manera que la necesidad del perfil de velocidad eólica provoca que el cálculo analítico de EENS sea de gran dificultad y que se calcule a través del método de Montecarlo.
Sin embargo, para el cálculo de los índices TIEPI y NIEPI será necesario obtener otros índices de fiabilidad como LOLP o LOLF [17]. Estos últimos se pueden calcular tanto de manera analítica como probabilística. En este trabajo, se elaborará un método de cálculo probabilístico, que se validará por medio del cálculo analítico en el correspondiente capítulo.
2.8.1 Estado del parque eólico.
El estado del parque eólico se encuentra definido por la situación en que se hallan sus componentes. Según el trabajo realizado por D. Pedro José Martínez Lacañina [17], “el estado en el que se encuentra la planta se define por medio de un vector de estado ] = �]%, ]J, ]k … ]#�, siendo n el número de elementos” de la instalación. De esta forma, el espacio de posibles situaciones del sistema se compone del conjunto de combinaciones posibles de estados de los elementos, considerando que los componentes son capaces de encontrarse, únicamente, en dos estados distintos.
Además, anteriormente se ha definido la probabilidad de cambio de estados en los elementos de la instalación, y se ha considerado que sus comportamientos son independientes el uno del otro. De esta forma, la probabilidad de que nuestro parque se encuentre en un estado ] = �]%, ]J, ]k … ]#� será P(x) [17]. Al ser independientes, las probabilidades de estado de los n elementos se define como el producto de las probabilidades de estado de los componentes en el estado x [17]:
�]� = m �]"�#"$%
Conceptos básicos de simulación
63
2.8.2 Funciones de prueba
Para el cálculo de los índices y la evaluación del estado del sistema se emplearán las denominadas funciones de prueba tal y como se muestra y enseña en [17]. Estas B�]� adquirirán un valor determinado cuando alguno de los componentes del parque se encuentre en estado de fallo.
De esta forma, los valores esperados de determinadas funciones de prueba darán los valores medios de los índices de fiabilidad [17]:
��B� = h B�]� × �]�n∈p
En el que P(x) es la probabilidad de que el parque se encuentre en un estado x cualquiera perteneciente al espacio X de estados del sistema.
2.8.3 LOLP ( Loss of Load Probability)
Este índice indica la probabilidad de encontrar el parque en un estado de fallo. Como se ha comentado antes, su cálculo se realiza por medio de una función de prueba. Ésta tomará un valor nulo cuando se trate de un estado en el que no se produzca ningún fallo, y un valor unidad si el estado del sistema cuenta con el fallo de alguno de los elementos [17]. B�]� = 0 �� �� �]���� 4���� � ���qú� ���������� B�]� = 1 �� �]���� �� 4���� � ��q��� � ��� �����������
De esta forma, el método analítico para calcular el valor medio de este índice será aplicando:
�rsrt = h B�]� × �]�n∈p
Siendo X el espacio de estados del parque eólico y x cada uno de los estados que componen dicho espacio, acompañados por la probabilidad de cada uno de estos estados, P(x).
El cálculo probabilístico de este índice se realizará por medio de una simulación de Montecarlo. Para ello, se considerará que el vector de estados del parque eólico se compone de los n estados de los n componentes del parque, esto es, ] = �]%, ]J,]k,…]#�.
Cada estado ]" , en el que se puede encontrar el componente i, está definido por una probabilidad �]"�. De esta manera, en cada iteración de la simulación se generará un número aleatorio con valor igual o menor a 1, por cada uno de los componentes de la configuración de parque a estudiar, y se comparará con la probabilidad de fallo de su

Conceptos básicos de simulación
64
correspondiente elemento. En el caso de que dicho número aleatorio sea inferior a dicha probabilidad, podrá considerarse que el componente entra en estado de indisponibilidad.
Una vez analizados todos los componentes, se obtiene el estado en el que se encuentran todos los elementos en esa iteración. A partir de ahí, según se trate de un estado con algún fallo o no, la función de prueba tomará un valor nulo o unidad.
El valor medio del índice de probabilidad se calculará como: la media muestral del conjunto de valores de las funciones de prueba, tras un largo número de iteraciones. Sin embargo, este elevado número de repeticiones presenta un volumen de información muy grande y puede provocar problemas computacionales. En [17] se explica cómo actualizar los valores de media muestral, varianza muestral e intervalo de confianza, sin necesidad de almacenar los valores de cada iteración.
Media muestral.
�# = 1� × h ]"#
"$% = 1� × u�#6% × �� − 1� + ]#v Siendo: �#= Valor de la media hasta la iteración n. �=Nº de muestras. ]"=Valor de la muestra i. ]#=Valor de la muestra n.
Varianza muestral.
w# = � − 2� − 1 × w#6% + 1� × u�#6% − ]#vJ w#=Valor de la varianza hasta la iteración n. �=Nº de muestras. ]#=Valor de la muestra n.
Intervalo de confianza.
Considerando que el número de muestras, o iteraciones en este caso, es muy grande, la distribución de la media muestral del índice es normal o gaussiana, con una media :nx = �# y una desviación típica de ynx = zw# �{ [17].
|}~��:, y√��

Conceptos básicos de simulación
65
Estandarizando la media muestral, se tiene que:
|} − :y√� = �~��0,1�
Es posible establecer un intervalo dentro del cual los valores de la media muestral se encuentren con una determinada probabilidad. Esto es:
uQ% ≤ Q ≤ QJv = 1 − �
De esta manera, la probabilidad de que el valor de la media muestral se encuentre el intervalo definido por Q%y QJserá de 1-α.
Considerando una distribución simétrica respecto al valor de la media muestral µ, es posible establecer los valores de los extremos del intervalo, de modo que, la probabilidad de encontrar la media en su interior adquiera un valor determinado. Por ejemplo, para el presente caso se considerará que la probabilidad del intervalo sea de 99%. De esta forma:
Figura 2.17 Intervalo de confianza de la media muestral.
�−Q�J ≤ |} − :y√� ≤ Q�J� = 1 − �

Conceptos básicos de simulación
66
Y despejando µ es posible obtener los valores extremos para este valor medio considerado:
I|} − Q�Jy√� ≤ : ≤ |} + Q�J
y√�K = 1 − �
Así, para el presente caso de α=1, el valor de la constante Q�� será de 2,576.
De manera que, tras realizar la simulación, se comparará el valor de la media muestral calculada con el intervalo de confianza establecido de manera analítica. De esta forma, será posible verificar los resultados calculados de forma probabilística [17].
2.8.4 LOLF (Loss of Load Frequency)
Este índice define la frecuencia de la pérdida de carga de la instalación. La función de prueba empleada en su cálculo toma un valor nulo en el caso de tratarse de un funcionamiento normal sin ninguna pérdida de potencia, y el valor de la tasa media de reparación si se trata de un estado de fallo de la instalación [17].
B�]� = 0 �� �� �]���� 4���� � ���qú� ���������� B�]� = : �� �]���� �� 4���� � ��q��� � ��� �����������
El valor medio del índice será calculado de igual modo que para el índice anterior [17]:
�rsr� = h B�]� × �]�n∈p
Siendo:
- X el espacio de estados del parque eólico. - x cada uno de los estados. - P(x) la probabilidad de cada uno de los estados x.
El cálculo probabilístico de este índice se realiza por medio de una simulación de Montecarlo, al igual que para el anterior índice: generación de números aleatorios en sucesivas iteraciones y comparación de estos con las probabilidades de fallo de los componentes.
El valor de la media muestral, la varianza muestral y el intervalo de confianza durante la simulación se calculan igual que para la probabilidad de pérdida de carga, LOLP.

Conceptos básicos de simulación
67
Media muestral.
�# = 1� × h ]"#
"$% = 1� × u�#6% × �� − 1� + ]#v Siendo: �#= Valor de la media hasta la iteración n. �=Nº de muestras. ]"=Valor de la muestra i. ]#=Valor de la muestra n.
Varianza muestral.
w# = � − 2� − 1 × w#6% + 1� × u�#6% − ]#vJ w#=Valor de la varianza hasta la iteración n. �=Nº de muestras. ]#=Valor de la muestra n.
Intervalo de confianza.
El intervalo de confianza de la media muestral será de una probabilidad del 99%.
De esta forma, el valor de la constante Q�� será de 2,576 y los extremos del intervalo
serán definidos a través de la probabilidad:
I|} − QW.WWP y√� ≤ : ≤ |} + QW.WWP y√�K = 1 − 0.01 = 0.99
2.8.5 LOLE ( Loss of Load Expectation)
La pérdida de carga esperada se define como: el tiempo total en el que se espera que no se transmita energía a la subestación, debido a un fallo cualquiera de la instalación.
Su cálculo se realizarán por medio del valor de la probabilidad de fallo, LOLP, multiplicándolo por el tiempo de estudio de la simulación, T [17]. De esta forma:
���� �ℎ����� = ��� × ��ℎ�����

Conceptos básicos de simulación
68
2.8.6 LOLD ( Loss of Load Duration)
Se trata de la duración media de los fallos que producen pérdida de carga. Su cálculo se realizará como: el cociente de la probabilidad de pérdida de carga y la frecuencia de ésta [17].
���� /ℎ����4���� 1 = ��� /���B
2.8.7 TIEPI
El cálculo de manera directa del tiempo de interrupción equivalente a la potencia instalada resulta difícil, ya que definir una función de prueba se hace imposible.
Su cálculo indirecto parte del conocimiento de la energía no suministrada en un periodo determinado de un año. De esta manera, una vez calculada la EENS se divide este valor por la potencia de generación total del parque, del mismo modo que se muestra en [17]. De esta manera se tiene que [17]:
��� � �ℎ� = ∑ �"&"'"$%∑ � = ���� ���ℎ� 8e8d� "#�8d�dgd ����
2.8.8 NIEPI
Se trata del número de interrupciones de toda la potencia instalada equivalente. Su cálculo también será calculado de forma indirecta como el cociente del TIEPI y la duración media de la pérdida de carga LOLD. [17]
��� � /�º ���������������ñ� 1 = �� �� �ℎ�/����� ℎ�����������ó��
2.8.9 EENS
La energía esperada no suministrada es el índice y el valor más importante de este trabajo. A través de él, será posible el cálculo del ahorro económico que suponen las mejoras de la instalación.
Su cálculo se realiza a través del método probabilístico de Montecarlo, de modo semejante al empleado en [17]. Como ya se ha dicho, en cada iteración definida por la toma de medidas de la velocidad del viento se generará un número aleatorio por cada

Conceptos básicos de simulación
69
componente. Estos números aleatorios se compararán con la probabilidad de fallo de los componentes.
Si falla alguno de los componentes, se determinará, por medio del modelo de parque generado previamente, el número de aerogeneradores que dejan de volcar energía a la red y el tiempo de reparación del fallo.
Gracias a estos dos datos, se determina la energía que se deja de suministrar durante toda la reparación de la falta. La velocidad del viento es conocida en cada iteración. De esta manera, será posible, gracias a la curva potencia-velocidad de la turbina escogida, determinar la potencia a la que lo aerogeneradores generarán durante este tiempo de reparación. Finalmente, considerando que todos los aerogeneradores perciben la misma velocidad eólica, la energía no suministrada será determinada como el producto de la potencia en cada intervalo de medida por el número de aerogeneradores desconectados y por la duración de cada intervalo de muestreo.
La repetición de este cálculo a lo largo de todo un perfil anual de viento, proporcionará una estimación aceptable de la energía no suministrada por la configuración de la instalación escogida.