compactaciÓn inteligente de suelos, bases y rita …
TRANSCRIPT
COMPACTACIÓN INTELIGENTE DE SUELOS, BASES Y
SUB-BASES EN COLOMBIA
RITA ESQUIVEL CARRANZA
Cód.: 201010820
Asesora:
SILVIA CARO-SPINEL Ph.D.
FACULTAD DE INGENIERÍA
DEPARTAMENTO DE INGENIERÍA CIVIL Y AMBIENTAL
MAESTRÍA EN INGENIERÍA CIVIL
INFRAESTRUCTURA VIAL
DICIEMBRE DE 2011
BOGOTÁ D.C.

ii
Tabla de contenido
ANTECEDENTES ................................................................................................................ 1
1. INTRODUCCIÓN ........................................................................................................ 3
2. OBJETIVOS .................................................................................................................... 4
2.1. GENERAL .............................................................................................................. 4
2.2. ESPECÍFICOS ........................................................................................................ 4
3. COMPACTACIÓN DE SUELOS ................................................................................ 5
3.1. GENERALIDADES ............................................................................................... 5
3.2. COMPACTACIÓN EN EL LABORATORIO .................................................... 6
3.3. COMPACTACIÓN VIBRATORIA ..................................................................... 8
3.3.1. Amplitud ......................................................................................................... 8
3.3.2. Frecuencia ....................................................................................................... 9
3.3.3. Masa Activa .................................................................................................... 9
3.3.4. Velocidad de Avance .................................................................................. 10
3.3.5. Vibración ....................................................................................................... 11
4. COMPACTACIÓN INTELIGENTE ........................................................................ 13
4.1. CONTEXTO HISTÓRICO .................................................................................. 14
4.2. FUNCIONAMIENTO ......................................................................................... 16
4.2.1. Sistema de Instrumentación ....................................................................... 16
4.2.2. Sistema de Documentación ........................................................................ 17
4.2.3. Tipos de Medición ....................................................................................... 19
4.3. BENEFICIOS ........................................................................................................ 20
4.3.1. Mejoramiento de la Densidad .................................................................... 20
4.3.2. Incremento de la Productividad ................................................................ 20
4.3.3. Reducción en Costos de Mantenimiento .................................................. 21
4.3.4. Registro de los Valores de Rigidez ............................................................ 21
4.3.5. Áreas no Compactables .............................................................................. 21

iii
4.3.6. Compactación a profundidad .................................................................... 22
4.3.7. Para los Contratistas .................................................................................... 22
4.4. COMPACTADORES .......................................................................................... 23
4.4.1. Hamm AG ..................................................................................................... 23
4.4.2. Bomag ............................................................................................................ 27
4.4.3. Sakai ............................................................................................................... 30
4.4.4. Dynapac ........................................................................................................ 32
4.4.5. Ammann/Case ............................................................................................ 35
4.4.6. Caterpillar (CAT) ......................................................................................... 37
5. COMPACTACIÓN INTELIGENTE EN EL MUNDO .......................................... 41
5.1. EUROPA ............................................................................................................... 42
5.1.1. Austria ........................................................................................................... 42
5.1.2. Alemania ....................................................................................................... 44
5.1.3. Suecia ............................................................................................................. 45
5.2. ESTADOS UNIDOS ............................................................................................ 46
5.2.1. Texas .............................................................................................................. 48
5.2.2. Kansas............................................................................................................ 49
5.2.3. Dakota del Norte.......................................................................................... 50
5.2.4. Indiana ........................................................................................................... 51
5.2.5. Mississippi .................................................................................................... 52
5.2.6. Nueva York ................................................................................................... 54
5.2.7. Controles de Calidad para IC .................................................................... 55
5.2.8. Especificaciones de la Federal Highway Administration (FHWA) ..... 57
6. COMPACTACIÓN INTELIGENTE EN COLOMBIA: UNA TECNOLOGÍA
EMERGENTE ..................................................................................................................... 59
6.1. ACTUALIDAD .................................................................................................... 59
6.1.1. Pruebas In Situ ............................................................................................. 60
6.1.2. Especificaciones para Compactación Convencional .............................. 61
iv
6.2. COMPACTACIÓN INTELIGENTE EN COLOMBIA: UNA TECNOLOGÍA
EMERGENTE ................................................................................................................. 63
6.2.1. Costos de implementación ......................................................................... 64
6.2.2. Percepción al cambio ................................................................................... 65
7. CONCLUSIONES Y RECOMENDACIONES ........................................................ 72
BIBLIOGRAFÍA ................................................................................................................. 74
ANEXOS ............................................................................................................................. 78
v
Lista de Figuras Figura 1. Curva Típica de Compactación ......................................................................... 7
Figura 2. Comparación curva de compactación Proctor (1) y Proctor Mod. (2) ........ 7
Figura 3. Diferencias de velocidad y separación de puntos de impacto ................... 10
Figura 4. Masa centrifuga del tambor. ............................................................................ 11
Figura 5. Ejemplo de sistema de instrumentación y documentación. ....................... 16
Figura 6. Proceso compactación completo con IC ........................................................ 19
Figura 7. Panel de Control Hammtronic ........................................................................ 24
Figura 8. Componentes del Hamm Compaction Quality- HCQ ................................ 25
Figura 9. Mapa de compactación o número de pasadas .............................................. 26
Figura 10. Sistemas de Compactación Dinámica .......................................................... 26
Figura 11. VARIOCONTROL - EVIB .............................................................................. 28
Figura 12. ECONOMIZER ................................................................................................ 28
Figura 13. Sistema BCM 05 ............................................................................................... 29
Figura 14. GPS de los sistemas BOMAG ........................................................................ 30
Figura 15. Visualización del CIS ...................................................................................... 31
Figura 16. Visualización del software de evaluación- Aithon PD .............................. 32
Figura 17. Componentes del Compaction Meter .......................................................... 33
Figura 18.DCA-S ................................................................................................................ 34
Figura 19. DCA-S con GPS ............................................................................................... 35
Figura 20. Experto de Compactación Ammann – ACE ................................................ 36
Figura 21. ACE Plus DCA-S con GPS ............................................................................. 37
Figura 22. Sistema de compactación AccuGrade .......................................................... 38
Figura 23. Receptor GPS para generar posicionamiento en 3D .................................. 39
Figura 24. Proceso de compactación en Deponie Asten .............................................. 44
Figura 25. Estados que implementan Compactación Inteligente (IC) ....................... 47
Figura 26. Sitio de la demostración y Equipo empleado ............................................. 48
Figura 27. Compactador pata de cabra tambor sencillo: Caterpillar y Sakai ............ 49

vi
Figura 28. Equipos CAT empelados en el tramo de prueba US12, Marmarth-
Dakota del Norte................................................................................................................ 50
Figura 29. Maquinaria CAT en la pista de prueba SR-25 West Lafayette, Indiana. . 52
Figura 30. Sitio de la demostración en US 84 Wayne, Mississippi. ............................ 53
Figura 31. Sitio de prueba de la US219Springville, NY................................................ 54
Figura 32. Curva de compactación graficada en el software VEDA .......................... 56
Figura 33. Años de experiencia de los encuestados en procesos de compactación . 67
Figura 34. Técnicas de compactación .............................................................................. 68
Figura 35. Porcentaje de conocedores de compactación inteligente .......................... 68
Figura 36. Percepción sobre compactación inteligente ................................................ 69
Figura 37. Le gustaría trabajar con esta tecnología? ..................................................... 70

vii
Lista de Tablas
Tabla 1. Requisitos de instrumentación.......................................................................... 17
Tabla 2. Marcas que implementan Compactación Inteligente en sus compactadores
de tambor sencillo. ............................................................................................................. 40
Tabla 3. Tramos de prueba realizados en US12, Marmarth- Dakota del Norte ....... 51
Tabla 4. Cronología de estados que implementan Compactación Inteligente. ........ 55
Tabla 5. Resumen especificaciones FHWA. ................................................................... 58
Tabla 6. Controles de calidad IDU .................................................................................. 63
Tabla 7. Relación de encuestas. ........................................................................................ 66

COMPACTACIÓN INTELIGENTE DE SUELOS, BASES Y SUB-BASES EN COLOMBIA
1
ANTECEDENTES
En nuestro país hoy por hoy es lamentable el grado de desapego hacia las obras
viales que forman parte primordial de la sociedad y que prestan un valioso
servicio a la comunidad. En general, la red vial del país presenta un deterioro
prematuro quitándole la oportunidad de cumplir a cabalidad con su función de
proveer las posibilidades de transportar bienes y personas de forma eficiente y
segura. Esto no solo evidencia la falta de compromiso o de recursos por parte de
las entidades competentes sino también de los contratistas, quienes en su afán de
aumentar beneficios propios, y de paso sus utilidades, dejan de lado la calidad que
ameritan las obras civiles.
No se debe seguir permitiendo que se construyan estructuras de pavimento que a
los 10 años ya necesiten ser rehabilitadas, para no mencionar las que fallan a muy
corta edad.
Generalmente, la planeación de los proyectos se centra en los costos, sin hablar del
desafortunado procedimiento de la licitación, en el que muchas veces se otorga el
contrato a la cotización más baja (modalidad incluso obligatoria en algunos entes
oficiales), con la consecuente mala ejecución y el deterioro anunciado de las
estructuras (Arcila, 2001).
Es un deber social de quienes son conscientes de esta situación y de quienes
cuentan con el conocimiento técnico requerido, difundir hasta el cansancio que
construir pensando en la durabilidad nos incluye a todos y, de paso, es un buen
negocio; así como en insistir ante las entidades estatales que tienen a su cargo las
COMPACTACIÓN INTELIGENTE DE SUELOS, BASES Y SUB-BASES EN COLOMBIA
2
obras de infraestructura vial del país, la necesidad de mejorar en los
procedimientos y normativas para que el tema de la durabilidad se convierta en
parte fundamental de las especificaciones de los proyecto.
No es más caro construir mejor, es muy rentable a futuro cuando se realizan los
procesos adecuadamente, con materiales de calidad y se aplican las políticas de
mantenimientos apropiadas, de manera que se conserven nuestras vías por largo
tiempo.

COMPACTACIÓN INTELIGENTE DE SUELOS, BASES Y SUB-BASES EN COLOMBIA
3
1. INTRODUCCIÓN
En la construcción de obras viales uno de los procesos más importantes es la
compactación de las diferentes capas. No cabe duda que la calidad final de una
estructura de pavimento está íntimamente ligada a los controles de calidad que se
realizan en campo durante la compactación de los materiales, pues la verificación
de densidades está relaciona con problemas de aceptación de la obra y su
subsecuente pago.
En la actualidad, se ha demostrado como procesos de compactación inadecuados
conllevan a la falla prematura de las estructuras de pavimento. Lo anterior pone de
manifiesto la necesidad de efectuar un vuelco total a la forma convencional como
se realiza la compactación, pues es este el punto de partida para garantizar la
calidad en el largo plazo, de cualquier tipo de proyecto, especialmente los
proyectos viales.
Con este proyecto se busca describir el funcionamiento de una innovación
tecnológica que, aplicada a los procesos de compactación de materiales sin
cementar, proporciona densidades mayores, mejores y mucho más uniformes en
un menor tiempo, y por lo tanto estructuras de pavimento más durables. Al mismo
tiempo, este proyecto busca resaltar experiencias exitosas que se han llevado a
cabo en países europeos y en Estados Unido, en donde ya se han establecido
estándares y especificaciones que condicionan su implementación, y en otros se
han iniciado los procesos de formulación y formalización de los mismos.
COMPACTACIÓN INTELIGENTE DE SUELOS, BASES Y SUB-BASES EN COLOMBIA
4
2. OBJETIVOS
2.1. GENERAL
Evaluar el estado actual del conocimiento sobre la tecnología de Compactación
Inteligente para suelos, bases y subbases granulares, tomando como referencia los
países que ya la han implementado, de manera que se puedan identificar aspectos
relevantes que conduzcan a realizar comparaciones con los procesos de
compactación convencionales empleados en Colombia.
2.2. ESPECÍFICOS
Definir las características esenciales de la tecnología de compactación
inteligente.
Evaluar experiencias de otros países al implementar la compactación
inteligente en sus proyectos viales.
Establecer las implicaciones económicas y sociales que trae consigo la
implementación de esta tecnología en nuestro país.
Analizar los costos en que se incurre para adecuar maquinaria existen y para
adquirir maquinaria nueva de la tecnología de compactación inteligente.
COMPACTACIÓN INTELIGENTE DE SUELOS, BASES Y SUB-BASES EN COLOMBIA
5
3. COMPACTACIÓN DE SUELOS
3.1. GENERALIDADES
La compactación se define como el proceso mecánico de densificación de suelos a
través de la reacomodación de partículas y reducción de vacios, mediante el cual se
mejoran las características y propiedades fundamentales de dicho material.
El objetivo principal de la compactación es obtener un suelo más estructurado de
manera que posea y mantenga su comportamiento mecánico adecuadamente a lo
largo de la vida útil de la obra (Del Castillo y Rico, 2005).
Con el tiempo todos los materiales tienden a densificarse de manera natural.
Mediante la compactación ese tiempo se reduce de años a horas o al tiempo que
requiera obtener la compactación deseada. Al densificar el suelo, éste es capaz de
soportar cargas mayores sin sufrir deformaciones apreciables o significativas
(Arenas, 2000).
Son diversos los factores que se deben tener en cuenta para lograr una
compactación óptima: el tipo de suelo a compactar, su contenido de agua, las
curvas de compactación obtenidas en el laboratorio, la energía de compactación, el
número de pasadas, condiciones climáticas y ambientales, entre otros; y de igual
manera, en la escogencia del equipo de compactación influyen no sólo las
especificaciones establecidas para el proyecto sino también la experiencia del
contratista.
COMPACTACIÓN INTELIGENTE DE SUELOS, BASES Y SUB-BASES EN COLOMBIA
6
El mercado actual brinda gran variedad de equipos de compactación. Estos
incluyen equipos neumáticos, metálicos, de rodillo pata de cabra, o de rodillos
vibratorios, entre otros. Cada uno de ellos ofrece mejor desempeño y mejores
resultados de acuerdo con las características o especificaciones propias de cada
obra y de cada proyecto.
3.2. COMPACTACIÓN EN EL LABORATORIO
Los ensayos de compactación permiten corroborar la relación entre las variables
empíricas y su técnica normalizada para obtener resultados reproducibles que fijen
referencias para juzgar la eficiencia del proceso.
El ensayo de compactación Proctor (AASHTO T 99, ASTM D 698 , en Colombia
INV E-141), es un método estandarizado para evaluar la densidad del suelo en
función de su porcentaje de humedad óptimo. Proctor estableció una
correspondencia entre el peso volumétrico seco de un suelo compactado y su
resistencia, en la cual se construye una curva de compactación correspondiente a
diferentes densidades de suelo alcanzadas a diferentes contenidos de agua. Esta
curve se emplea en campo para controlar el proceso de compactación. Durante la
compactación se espera que el contenido de humedad del suelo se encuentre cerca
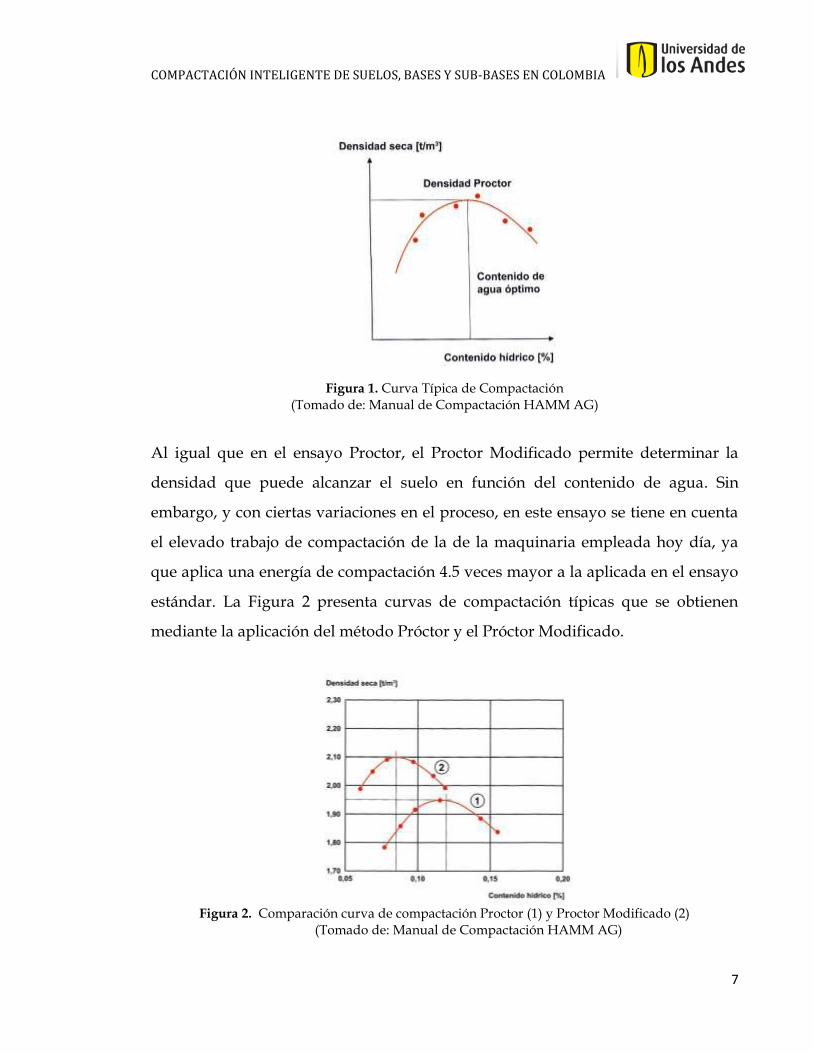
al valor que proporciona la mayor densidad (i.e., humedad óptima, Figura 1).
COMPACTACIÓN INTELIGENTE DE SUELOS, BASES Y SUB-BASES EN COLOMBIA
7
Figura 1. Curva Típica de Compactación (Tomado de: Manual de Compactación HAMM AG)
Al igual que en el ensayo Proctor, el Proctor Modificado permite determinar la
densidad que puede alcanzar el suelo en función del contenido de agua. Sin
embargo, y con ciertas variaciones en el proceso, en este ensayo se tiene en cuenta
el elevado trabajo de compactación de la de la maquinaria empleada hoy día, ya
que aplica una energía de compactación 4.5 veces mayor a la aplicada en el ensayo
estándar. La Figura 2 presenta curvas de compactación típicas que se obtienen
mediante la aplicación del método Próctor y el Próctor Modificado.
Figura 2. Comparación curva de compactación Proctor (1) y Proctor Modificado (2)
(Tomado de: Manual de Compactación HAMM AG)
COMPACTACIÓN INTELIGENTE DE SUELOS, BASES Y SUB-BASES EN COLOMBIA
8
3.3. COMPACTACIÓN VIBRATORIA
Las diferentes formas de compactación dinámica ofrecen una mejora en el efecto de
compactación en profundidad que la ofrecida por los rodillos estáticos (Schröder,
2009).
La mayoría de rodillos dinámicos funcionan con vibración. Para el caso de
compactación de suelos, bases y sub-bases granulares, cabe mencionar que el
compactador de rodillo vibratorio es el más empleado en la actualidad. Este tipo
de compactadores opera a través de la aplicación de una carga vertical de corta
duración, alta frecuencia y baja amplitud (Arenas, 2000). En otras palabras, esta
maquinaria mediante una sucesión de impactos sobre la superficie de suelo en que
se trabaja, origina ondas de presión que penetran en el suelo y propician el
reacomodamiento de partículas, lo que da como resultado la disminución
volumétrica del suelo.
Los siguientes son factores específicos del equipo, que determinan el buen
resultado de la compactación con rodillos dinámicos o vibratorios (Del Castillo et
al. 2000):
3.3.1. Amplitud
En compactación, la amplitud se refiere a la distancia que se desplaza el tambor en
vibración desde su posición de salida. Cuanto mayor sea la amplitud, mayor será
la energía de compactación generada por el rodillo vibrante. Cabe resaltar que la
masa activa del rodillo también influye, y en gran medida, sobre la energía de
compactación generada.
COMPACTACIÓN INTELIGENTE DE SUELOS, BASES Y SUB-BASES EN COLOMBIA
9
Las amplitudes típicas para compactar suelos y material granular, como bases y
sub-bases, varía entre 0.7 mm y 2.0 mm. En la práctica, una amplitud más elevada
con la misma masa vibrante se traduce en mayor efecto en compactación y
profundidad.
3.3.2. Frecuencia
Se entiende por frecuencia el número de revoluciones por segundo que da la masa
centrifuga excéntrica del tambor. Las frecuencias se miden en hercios (Hz) y se
deben elegir en función de la amplitud ajustada de la máquina.
En obra, los suelos y materiales granulares, utilizan una frecuencia que varía entre
25 y 50 Hz, en función del material y de la amplitud ajustada.
Empíricamente se maneja la fórmula de:
Baja amplitud>>>Frecuencia Alta
Alta Amplitud>>>Frecuencia Baja
3.3.3. Masa Activa
La carga sobre el eje del rodillo está compuesta por una masa vibratoria y una
masa amortiguada. La masa amortiguada suele llamarse masa activa por lo que
parte de ella está separada del tambor mediante topes de caucho. La masa del
rodillo esta en relación directamente proporcional con la masa activa.
La masa vibratoria está constituida por el tambor, el motor hidráulico y la unidad
vibratoria, separada del resto del equipo por topes de caucho.
COMPACTACIÓN INTELIGENTE DE SUELOS, BASES Y SUB-BASES EN COLOMBIA
10
La masa activa ejerce presión por su propio peso sobre el material a compactar,
contribuyendo así con el resultado de la compactación. También la masa en
vibración y la relación entre las dos magnitudes influye en la potencia.
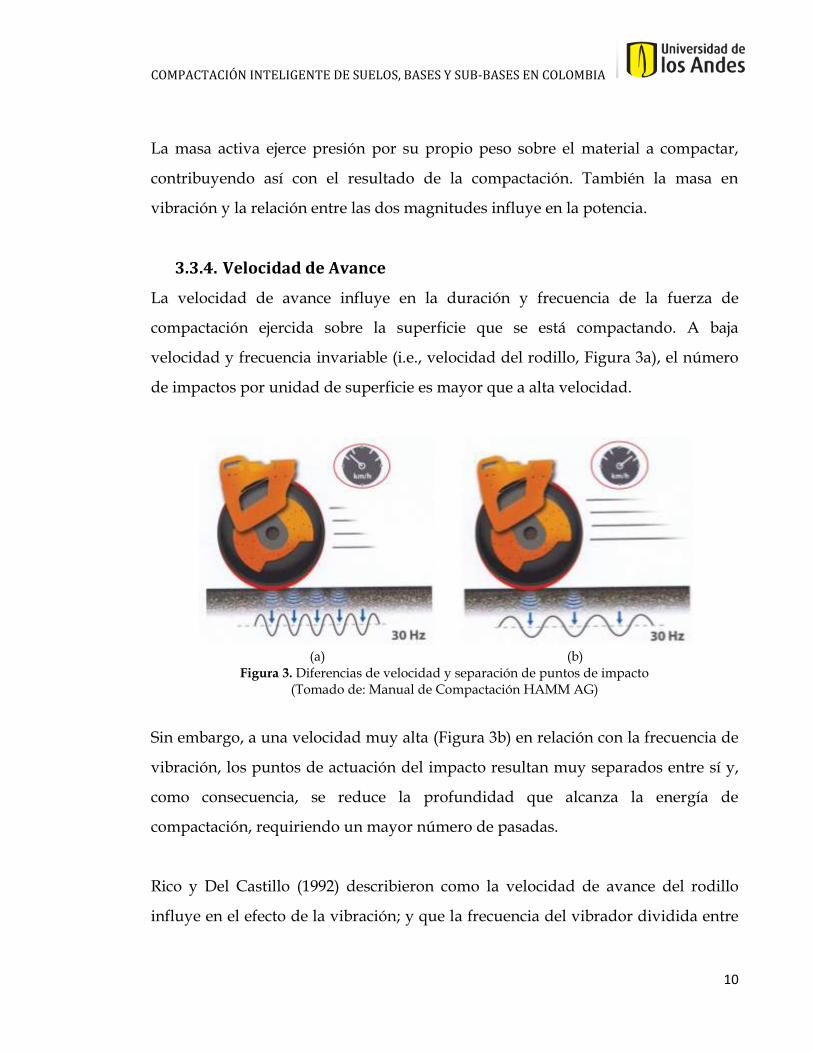
3.3.4. Velocidad de Avance
La velocidad de avance influye en la duración y frecuencia de la fuerza de
compactación ejercida sobre la superficie que se está compactando. A baja
velocidad y frecuencia invariable (i.e., velocidad del rodillo, Figura 3a), el número
de impactos por unidad de superficie es mayor que a alta velocidad.
(a)
(b)
Figura 3. Diferencias de velocidad y separación de puntos de impacto (Tomado de: Manual de Compactación HAMM AG)
Sin embargo, a una velocidad muy alta (Figura 3b) en relación con la frecuencia de
vibración, los puntos de actuación del impacto resultan muy separados entre sí y,
como consecuencia, se reduce la profundidad que alcanza la energía de
compactación, requiriendo un mayor número de pasadas.
Rico y Del Castillo (1992) describieron como la velocidad de avance del rodillo
influye en el efecto de la vibración; y que la frecuencia del vibrador dividida entre

COMPACTACIÓN INTELIGENTE DE SUELOS, BASES Y SUB-BASES EN COLOMBIA
11
dicha velocidad es una medida tosca del número de ciclos de carga que se
imparten al suelo y, por ende, influye notoriamente en su densificación para un
equipo dado.
3.3.5. Vibración
La vibración es el método con mayor eficiencia comprobada disponible en el
mercado. El efecto de compactación con rodillos vibratorios es producto de la
acción combinada de la frecuencia inductora de la fuerza centrifuga excéntrica, de
la amplitud, la velocidad de avance, el peso propio del rodillo y el área de
contacto. También, se debe tener en cuenta que la compactación depende de las
propiedades del material y de las condiciones externas al momento de realizar el
proceso de compactación.
La vibración del tambor es producida por la masa centrifuga excéntrica que
determina, con base en su régimen de revoluciones, la frecuencia de la vibración.
Esta masa está compuesta de una pieza fija y otra suelta, como muestra la Figura
4a.
(a)
(b)
Figura 4. Masa centrifuga del tambor. (Tomado de: Manual de Compactación HAMM AG)

COMPACTACIÓN INTELIGENTE DE SUELOS, BASES Y SUB-BASES EN COLOMBIA
12
La Figura 4b presenta la posición de la pieza suelta o peso reversible, el cual
depende de la dirección de giro de la onda inductora. En función de la dirección de
giro, el peso efectivo de la masa centrifuga aumenta o se reduce, permitiendo que
el tambor gire con dos amplitudes distintas.
COMPACTACIÓN INTELIGENTE DE SUELOS, BASES Y SUB-BASES EN COLOMBIA
13
4. COMPACTACIÓN INTELIGENTE
La Compactación Inteligente ha sido definida por la Federal Highway
Administration (2005) como la compactación de suelos, bases y sub-bases
granulares o mezclas asfálticas, lograda a través de un rodillo vibratorio de tambor
liso equipado con un sistema integrado de medición, evaluación y documentación,
sistema de posicionamiento global- GPS, y opcionalmente, control de
retroalimentación.
Este sistema permite un monitoreo del proceso de compactación en tiempo real,
incluye sensores que reciben información y adaptan el desempeño del
compactador de manera continua, optimizando así todo el proceso de
compactación para alcanzar las condiciones requeridas.
Con la compactación inteligente se controlan diferentes parámetros del rodillo
como vibración del tambor, amplitud, frecuencia y velocidad de trabajo del rodillo
(distancia de impacto). El parámetro de salida es el módulo del suelo, el cual se
calcula continuamente en tiempo real basado en la aceleración del tambor.
La compactación es uno de los procesos más importantes en la construcción de
obras viales, ya que es el proceso responsable de lograr materiales para
pavimentos de alta calidad y uniformidad que se traduzcan en un mejor
desempeño de la estructura y de las vías a largo plazo.

COMPACTACIÓN INTELIGENTE DE SUELOS, BASES Y SUB-BASES EN COLOMBIA
14
4.1. CONTEXTO HISTÓRICO
La primera vez que se hablo de Compactación Inteligente se hizo a través del
concepto de Valores de Medición de Compactación Inteligente (ICMV- Intelligent
Compaction Mesuarement Values), investigado en 1974 por el Dr. Heinz Thurner de
la Administración Sueca de Vías, quien realizó pruebas de campo sobre suelos
granulares instrumentando rodillos vibratorios de tambor liso de DYNAPAC con
acelerómetros. Estas pruebas evidenciaron que la relación entre la amplitud de la
aceleración de la primera armónica y la amplitud de la frecuencia fundamental de
la vibración del tambor, era un indicador de la rigidez o módulo del suelo (Chang
et al. 2011).
En 1975, Dr. Thurner fundó GEODYNAMIK en compañía de Åke Sandström, con
el objeto de continuar investigando y desarrollando en concepto de ICMV. En
1976, GEODYNAMIC desarrolló el Compactómetro TM (CMV- Compaction Meter
Value) en cooperación con el Departamento de Investigaciones de DYNAPAC. En
los años 80, se realizó en Paris la Primera Conferencia Internacional sobre
Compactación, en la que Thurner, Sandström, Forssblad, Hansbo, Pramborg and
Machet presentaron artículos técnicos sobre la medida de los valores de
compactación inteligente y sus aplicaciones (Chang et al. 2011).
Fue en 1983 que GEODYNAMIK introdujo el valor de medida de la oscilación
adimensional (OMV- Oscillometer Value) para rodillos oscilatorios, el cual es
obtenido de la amplitud de la aceleración horizontal del tambor. Luego, HAMM
adoptó dicha tecnología para sus rodillos de tambor oscilante. Sin embargo en la
literatura no se encuentra información alguna sobre dicha experiencia ni sobre la

COMPACTACIÓN INTELIGENTE DE SUELOS, BASES Y SUB-BASES EN COLOMBIA
15
relación del valor de medida de la oscilación- OMV y las propiedades de los
suelos.
A principios de los años 80, BOMAG desarrolló un sistema de medida del valor
Omega -Terrameter®, el cual provee una medida de la energía de compactación
transmitida al suelo utilizando los datos del acelerómetro. Luego en 2000, BOMAG
introdujo el Módulo Vibratorio (EVIB), que reemplazó al valor Omega, al emplear
los datos del acelerómetro para determinar el desplazamiento del tambor, de
manera que se pueda estimar la fuerza aplicada y un modelo dinámico del rodillo-
suelo (Kröber et al. 2001).
AMMANN introdujo el valor de medida rodillo-rigidez a finales de los años 90.
Dicho valor proporciona una medida de rigidez casi estática a través de la medida
del desplazamiento del tambor, la fuerza aplicada estimada y un modelo resorte-
amortiguador que representa la interacción rodillo-suelo (Anderegg and
Kauffmann 2004).
En 2004, SAKAI introdujo el valor de control de compactación (CCV- Compaction
Control Value), un parámetro adimensional similar al CMV, pero que considera la
frecuencia fundamental y sub armónica (Scherocman et al. 2007).
En la actualidad GEODYNAMIK, BOMAG, AMMANN, DYNAPAC, SAKAI,
INGERSOL- RAND, HAMM AG y CATERPILAR ofrecen en sus equipos la
tecnología de compactación inteligente, en la cual la amplitud de vibración o la
frecuencia son ajustadas automáticamente cuando el umbral del valor de medida
del rodillo es alcanzado.

COMPACTACIÓN INTELIGENTE DE SUELOS, BASES Y SUB-BASES EN COLOMBIA
16
4.2. FUNCIONAMIENTO
La tecnología de compactación inteligente equipa a los compactadores de rodillos
vibratorios con instrumentación que alimentan un sistema de documentación y
control de retroalimentación. Este sistema procesa la información en tiempo real y
permiten estimar el módulo dinámico del suelo, mejorando la uniformidad del
trabajo y reduciendo el esfuerzo efectivo de compactación.
Figura 5. Ejemplo de sistema de instrumentación y documentación.
(Tomado de: Sitio web de AMMANN/CASE)
4.2.1. Sistema de Instrumentación
El tambor del rodillo está equipado con un sensor, que puede ser compactómetro o
acelerómetro, el cual monitorea el movimiento del tambor, el esfuerzo de
compactación aplicado, la frecuencia y la respuesta del material que se está
compactando, con el objeto de determinar la efectividad del proceso de
compactación.

COMPACTACIÓN INTELIGENTE DE SUELOS, BASES Y SUB-BASES EN COLOMBIA
17
De igual manera, usando el Sistema de Posicionamiento Global- GPS o cualquier
sistema similar, se puede obtener la ubicación exacta del rodillo, velocidad y
número de pasadas que han sido necesarias para completar el trabajo de
compactación (Adam 2007). La Tabla 1 resume los diferentes ítems que componen
el sistema de instrumentación y su respectiva función.
Tabla 1. Requisitos de instrumentación.
ÍTEM FUNCIÓN
Acelerómetro Mide la aceleración del tambor.
Unidad de procesamiento Calcula el ICMV.
Unidad de visualización
Permite ver el proceso en tiempo real: *Panel de Control *Pantalla
Unidad de documentación
Almacenamiento de datos medidos para posterior evaluación.
GPS Sistema de posicionamiento
4.2.2. Sistema de Documentación
El control de retroalimentación ajusta continuamente la fuerza y la frecuencia del
tambor requeridos para efectuar la compactación, maximizando la eficiencia y
efectividad del trabajo. Un dispositivo ubicado en el panel de control, dentro de la
cabina de operación, alerta al operador cuando se ha alcanzado el grado de
compactación deseado.
Ésta es quizás la característica más representativa de la compactación inteligente,
puesto que gracias a que el sistema recopila, procesa y analiza las mediciones en
tiempo real, el operador de la máquina tiene la oportunidad de conocer no sólo la
ubicación del rodillo, sino también el número de pasadas, el esfuerzo de
compactación acumulado y la respuesta del material. Además, visualizar toda esta
COMPACTACIÓN INTELIGENTE DE SUELOS, BASES Y SUB-BASES EN COLOMBIA
18
información a través de códigos de colores o mapas colorimétricos, disponibles en
una pantalla ubicada dentro de la cabina del compactador.
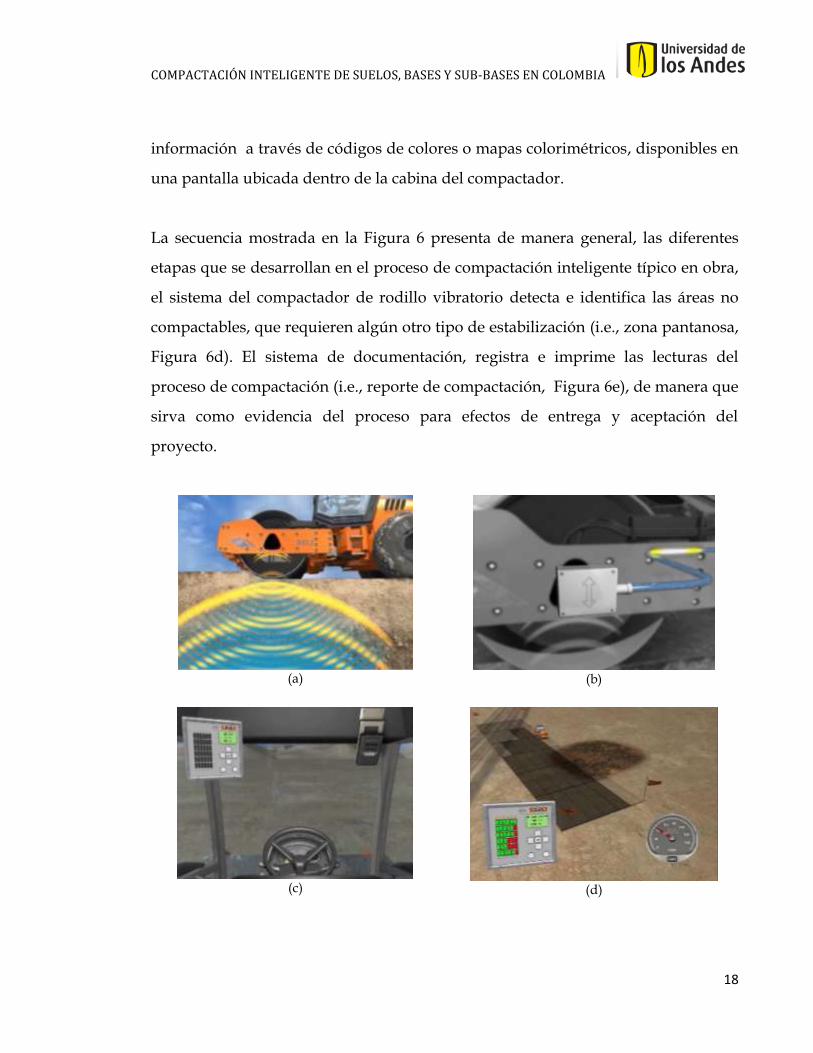
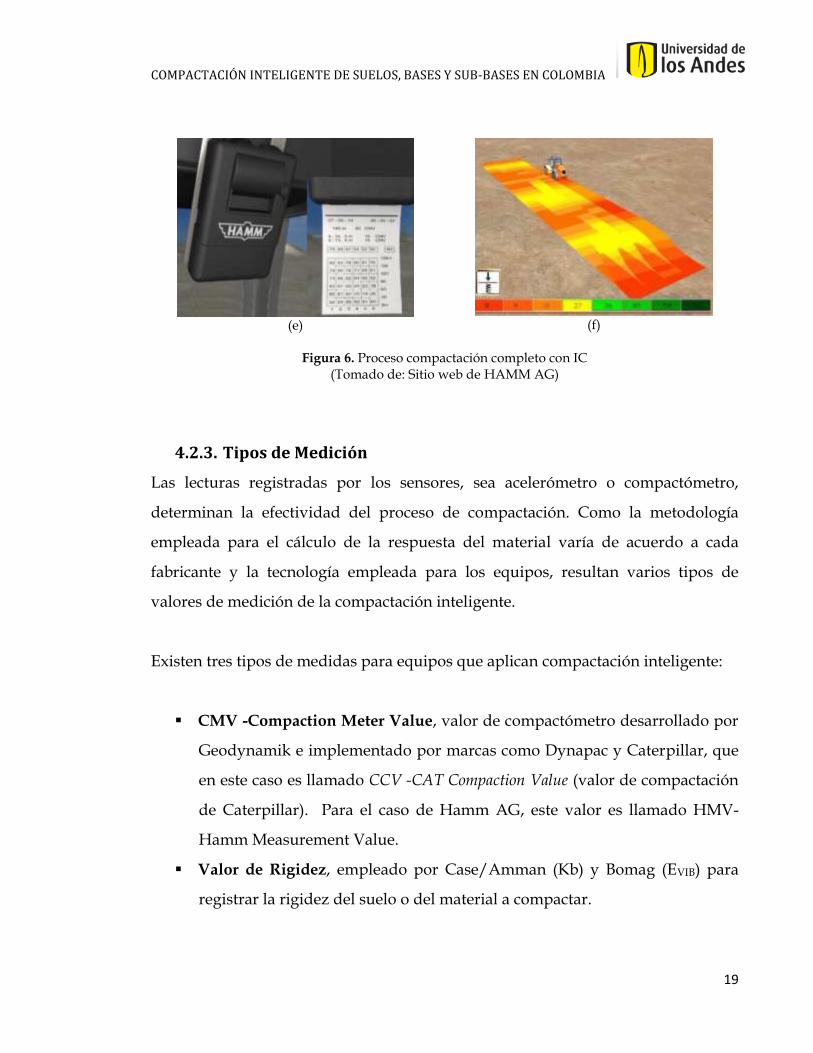
La secuencia mostrada en la Figura 6 presenta de manera general, las diferentes
etapas que se desarrollan en el proceso de compactación inteligente típico en obra,
el sistema del compactador de rodillo vibratorio detecta e identifica las áreas no
compactables, que requieren algún otro tipo de estabilización (i.e., zona pantanosa,
Figura 6d). El sistema de documentación, registra e imprime las lecturas del
proceso de compactación (i.e., reporte de compactación, Figura 6e), de manera que
sirva como evidencia del proceso para efectos de entrega y aceptación del
proyecto.
(a)
(b)
(c)
(d)
COMPACTACIÓN INTELIGENTE DE SUELOS, BASES Y SUB-BASES EN COLOMBIA
19
(e)
(f)
Figura 6. Proceso compactación completo con IC (Tomado de: Sitio web de HAMM AG)
4.2.3. Tipos de Medición
Las lecturas registradas por los sensores, sea acelerómetro o compactómetro,
determinan la efectividad del proceso de compactación. Como la metodología
empleada para el cálculo de la respuesta del material varía de acuerdo a cada
fabricante y la tecnología empleada para los equipos, resultan varios tipos de
valores de medición de la compactación inteligente.
Existen tres tipos de medidas para equipos que aplican compactación inteligente:
CMV -Compaction Meter Value, valor de compactómetro desarrollado por
Geodynamik e implementado por marcas como Dynapac y Caterpillar, que
en este caso es llamado CCV -CAT Compaction Value (valor de compactación
de Caterpillar). Para el caso de Hamm AG, este valor es llamado HMV-
Hamm Measurement Value.
Valor de Rigidez, empleado por Case/Amman (Kb) y Bomag (EVIB) para
registrar la rigidez del suelo o del material a compactar.

COMPACTACIÓN INTELIGENTE DE SUELOS, BASES Y SUB-BASES EN COLOMBIA
20
MDP -Machine Drive Power, método desarrollado por Caterpillar que se
refiere a la potencia de accionamiento de la máquina, basado en la
interacción suelo-máquina (Hambleton y Drescher, 2008)
Estas medidas son calibradas mediante un procedimiento que correlaciona el valor
de medición de la compactación inteligente (ICMV-Intelligent Compaction
Measurement Value) con el módulo del material o con la densidad medida en campo
a través de otros métodos.
4.3. BENEFICIOS
La Compactación Inteligente proporciona beneficios inmediatos en obras de tierra
y pavimentos. Enfocándonos en las obras que involucran la compactación de
suelos, bases y sub-bases granulares, podemos mencionar (Transtec Group, Inc.,
2008):
4.3.1. Mejoramiento de la Densidad
En muchos países del mundo, especialmente de Europa, Asia y USA se han
documentado exitosamente el potencial de la tecnología de compactación
inteligente en el mejoramiento de las densidades in situ, mostrando una
significante disminución en la variabilidad de las densidades medidas.
4.3.2. Incremento de la Productividad
La optimización de la productividad es uno de los principales logros de la
tecnología de compactación inteligente, ya que se alcanza la densidad óptima o

COMPACTACIÓN INTELIGENTE DE SUELOS, BASES Y SUB-BASES EN COLOMBIA
21
deseada del terreno con un mínimo número de pasadas, haciendo de la
compactación un proceso mucho más eficiente.
4.3.3. Reducción en Costos de Mantenimiento
El incremento de las densidades se evidencia en pavimentos con vidas de servicios
más prolongadas y en la reducción en costos de mantenimientos de los mismos,
puesto se ha demostrado que densidades de campo pobres influyen notablemente
en la falla prematura de los pavimentos, y por consiguiente en cortas vidas de
servicio.
Adicionalmente, el mejoramiento en términos de eficiencia en las operaciones de
compactación se traduce en bajos costos para los contratistas y por ende, para las
entidades gubernamentales.
4.3.4. Registro de los Valores de Rigidez
La posibilidad de leer los valores de rigidez del suelo en tiempo real
proporcionada por esta tecnología, propicia un proceso de compactación con
resultados óptimos y de mayor eficiencia, pues permite identificar las áreas sobre
las que aún se debe trabajar o compactar nuevamente y evita que se
sobrecompacten aquellas zonas que ya han alcanzado el valor de densidad
requerido. Asimismo, ofrece la posibilidad de incluir valores de módulo reales a
los diseños, e incluso mejorar especificaciones.
4.3.5. Áreas no Compactables
Conocer los valores de rigidez en tiempo real, permite evaluar y determinar las
áreas sobre la cuales no se puede llevar a término la compactación del material
adecuadamente. La capacidad de detectar las zonas del proyecto que no tienen el

COMPACTACIÓN INTELIGENTE DE SUELOS, BASES Y SUB-BASES EN COLOMBIA
22
soporte necesario o suficiente ofrece a los responsables del proyecto las
herramientas precisas para tomar decisiones que conduzcan a realizar las acciones
correctivas, ya sea removiendo dicho material, empleando alguna técnica de
estabilización o modificando los requisitos de compactación para dicho material.
4.3.6. Compactación a profundidad
La magnitud de amplitud máxima de los compactadores con compactación
inteligente es significativamente mayor a la de los compactadores convencionales.
Esto hace posible optimizar el esfuerzo de compactación basado en la rigidez
medida del suelo, e incrementar la eficiencia al compactar capas más profundas de
todo tipo de materiales granulares.
4.3.7. Para los Contratistas
La compactación puede llegar a ser un proceso elaborado. La variabilidad de las
condiciones climáticas, las diferencias en las propiedades de los materiales y el
manejo de los equipos contribuyen a esta complejidad, y a que no siempre sea fácil
alcanzar los requisitos de compactación (Rutledge et al. 2001).
La tecnología de compactación inteligente da acceso a los contratistas de
obra, a registros y visualización de toda la operación de compactación:
números de pasadas, características de la operación y medidas en tiempo
real. El resultado final: un mejor trabajo y un producto de excelente calidad.
Ya mencionado anteriormente, la identificación de puntos débiles
proporciona al contratista la oportunidad de tomar las medidas correctivas
propicias. Esta es probablemente, el beneficio más significativo para los
contratistas.
COMPACTACIÓN INTELIGENTE DE SUELOS, BASES Y SUB-BASES EN COLOMBIA
23
Con la compactación inteligente, el contratista optimiza recursos al tener
mayor cobertura en el área de trabajo sin pasadas innecesarias.
Los compactadores dotados con compactación inteligente proporcionan un
ahorro enorme de recursos mediante el mejoramiento de la eficiencia y la
calidad de compactación, lo que conduce a un impacto menos nocivo para el
ambiente al reducir el consumo de combustibles y emisión de gases de
escape de las máquinas compactadoras.
4.4. COMPACTADORES
Para la compactación de suelos, bases y sub-bases es común emplear
compactadores de tambor sencillo. A continuación se listan las marcas que, en la
actualidad, proporcionan maquinaria dotada con la tecnología de compactación
inteligente:
4.4.1. Hamm AG
Los compactadores para material granular de esta marca son conocidos en el
mercado como la Serie 3000. Esta serie consta de compactadores de rodillo sencillo
dotados con características e innovaciones que le permiten desempeñarse
inteligentemente, con alto rendimiento, gran maniobrabilidad y un mínimo nivel
de ruido. Esta categorización incluye Hammtronic, Hamm Compaction Quality-
HCQ y Oscilación. A continuación se presenta una corta descripción de cada uno
de ellos:
COMPACTACIÓN INTELIGENTE DE SUELOS, BASES Y SUB-BASES EN COLOMBIA
24
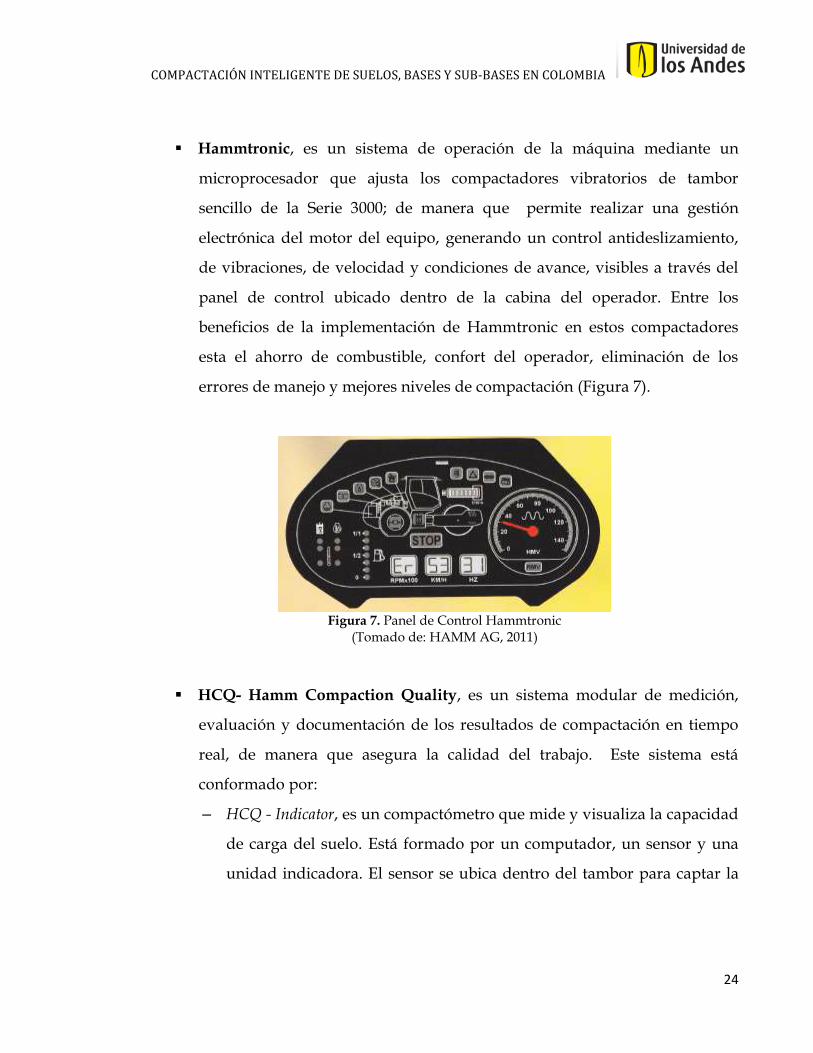
Hammtronic, es un sistema de operación de la máquina mediante un
microprocesador que ajusta los compactadores vibratorios de tambor
sencillo de la Serie 3000; de manera que permite realizar una gestión
electrónica del motor del equipo, generando un control antideslizamiento,
de vibraciones, de velocidad y condiciones de avance, visibles a través del
panel de control ubicado dentro de la cabina del operador. Entre los
beneficios de la implementación de Hammtronic en estos compactadores
esta el ahorro de combustible, confort del operador, eliminación de los
errores de manejo y mejores niveles de compactación (Figura 7).
Figura 7. Panel de Control Hammtronic
(Tomado de: HAMM AG, 2011)
HCQ- Hamm Compaction Quality, es un sistema modular de medición,
evaluación y documentación de los resultados de compactación en tiempo
real, de manera que asegura la calidad del trabajo. Este sistema está
conformado por:
– HCQ - Indicator, es un compactómetro que mide y visualiza la capacidad
de carga del suelo. Está formado por un computador, un sensor y una
unidad indicadora. El sensor se ubica dentro del tambor para captar la

COMPACTACIÓN INTELIGENTE DE SUELOS, BASES Y SUB-BASES EN COLOMBIA
25
aceleración vertical del mismo, y a partir de esta señal se obtiene el valor
de medición HAMM (HMV- Hamm Mesuarament Value)
– HCQ - Printer, es un sistema de visualización y almacenamiento que
ilustra gráficamente la medida de compactación sobre un área definida
y proporciona la opción de imprimir el reporte correspondiente a dicha
área (los valores HMV).
– HCQ- GPS- Navigator, este módulo determina la posición exacta del
compactador a través de un GPS. De igual forma, permite al operador
visualizar en pantalla los resultados de la compactación ya sea en
número de pasadas o capacidad de carga obtenida, haciendo posible
conocer los puntos que ya obtuvieron el grado de compactación deseado
y los que aun no (Figuras 8 y 9). Cabe anotar que este módulo es
adaptable a cualquier equipo de compactación Hamm ya en uso.
Figura 8. Componentes del Hamm Compaction Quality- HCQ
(Tomado de: HAMM AG, 2011)

COMPACTACIÓN INTELIGENTE DE SUELOS, BASES Y SUB-BASES EN COLOMBIA
26
Figura 9. Mapa de compactación o número de pasadas
(Tomado de: HAMM AG, 2011)
Oscilación, a través de la oscilación de la masa del tambor se introduce al
material una fuerza tangencial que permite el contacto constante rodillo-
suelo, lo cual logra una mejor y más rápida compactación (Figura 10).
Figura 10. Sistemas de Compactación Dinámica
(Tomado de: HAMM AG, 2011)

COMPACTACIÓN INTELIGENTE DE SUELOS, BASES Y SUB-BASES EN COLOMBIA
27
La oscilación funciona mediante el movimiento oscilatorio del tambor,
equipado con dos ejes centrífugos excéntricos que giran sincronizados en
direcciones opuestas, de manera que forzan al tambor a realizar un giro de
avances y uno de retroceso alternadamente; de este modo, se transmiten
fuerzas de cizallamiento y el tambor nunca se levanta del suelo, a diferencia
de los rodillos de tambor vibratorio.
4.4.2. Bomag
BOMAG ha creado un sistema denominado VARIOCONTROL que provee a sus
compactadores con la tecnología de compactación inteligente al permitir la
adaptación automática de la amplitud durante el proceso de compactación, de
forma que las áreas con baja capacidad de carga son compactadas mediante una
amplitud efectiva alta y las áreas con alta capacidad de carga son compactadas con
una amplitud efectiva baja. Este procedimiento permite que la máxima energía de
compactación posible sea transferida sin que el tambor rebote y sin causar sobre
compactación. Los equipos que ofrece este fabricante constan de los siguientes
componentes (BOMAG, 2011):
Terrameter BTM, es una herramienta estándar de los rodillos con
VARIOCONTROL; este proporciona una medida directa de la rigidez del
suelo en MN/m2 durante todo el proceso de compactación, la cual se estima
con base en la relación del la fuerza de contacto con el suelo y la deflexión
del rodillo. También permite la impresión de resultados en tiempo real. La
Figura 11 ilustra los componentes de esta herramienta.

COMPACTACIÓN INTELIGENTE DE SUELOS, BASES Y SUB-BASES EN COLOMBIA
28
Figura 11. VARIOCONTROL - EVIB
(Tomado de: BOMAG, 2011)
EVIB, es el valor de medida llamado modulo de vibración, que relaciona el
modulo de deformación. Este parámetro es medido en NM/m2.
ECONOMIZER, es un sistema de medición y visualización para el control
de la compactación continua durante el proceso, que permite ubicar las
áreas que aún requieren compactación (Figura 12).
Figura 12. ECONOMIZER
(Tomado de: BOMAG, 2011)

COMPACTACIÓN INTELIGENTE DE SUELOS, BASES Y SUB-BASES EN COLOMBIA
29
Gestión de Compactación BCM 05, es un sistema de gestión de
compactación empleado como una aplicación suplementaria en los equipos
de compactación de rodillos de tambor simple. Este sistema ofrece un
manejo eficiente de los datos medidos y posibilidades de documentación y
evaluación (Figura 13).
Figura 13. Sistema BCM 05
(Tomado de: BOMAG, 2011)
Posicionamiento Global, es un software desarrollado por BOMAG para
establecer conectividad GPS local ó sistemas ATS (Advanced Tracking Sensor)
en los sistemas de medición BOMAG (Figura 14). Una limitante a la que se
enfrentan actualmente radica en la necesidad de la instalación previa del
Sistema de Gestión de Compactación BCM 05.

COMPACTACIÓN INTELIGENTE DE SUELOS, BASES Y SUB-BASES EN COLOMBIA
30
Figura 14. GPS de los sistemas BOMAG
(Tomado de: BOMAG, 2011)
4.4.3. Sakai
Esta marca, con innovadora tecnología del Sistema de Información de
Compactación – CIS (Compaction Information System), provee un sistema digital de
medición y posicionamiento global para sus equipos de compactación de suelos y
pueden ser empleados a través de una variedad de aplicaciones (Sakai, 2011). Un
resumen de los componentes del sistema se ilustra en la Figura 15.

COMPACTACIÓN INTELIGENTE DE SUELOS, BASES Y SUB-BASES EN COLOMBIA
31
Figura 15. Visualización del CIS
(Tomado de: SAKAI, 2011)
El Sistema de Información de Compactación emplea información de
posicionamiento GPS y es compatible con casi cualquier sistema GPS usado en la
actualidad en proyectos de construcción. CIS también incluye una pantalla de
visualización táctil y un software de gestión de documentación (AithonMT) y de
evaluación (AithonPD) que permite documentar el proceso de compactación para
realizar análisis y reportes con los resultados finales.
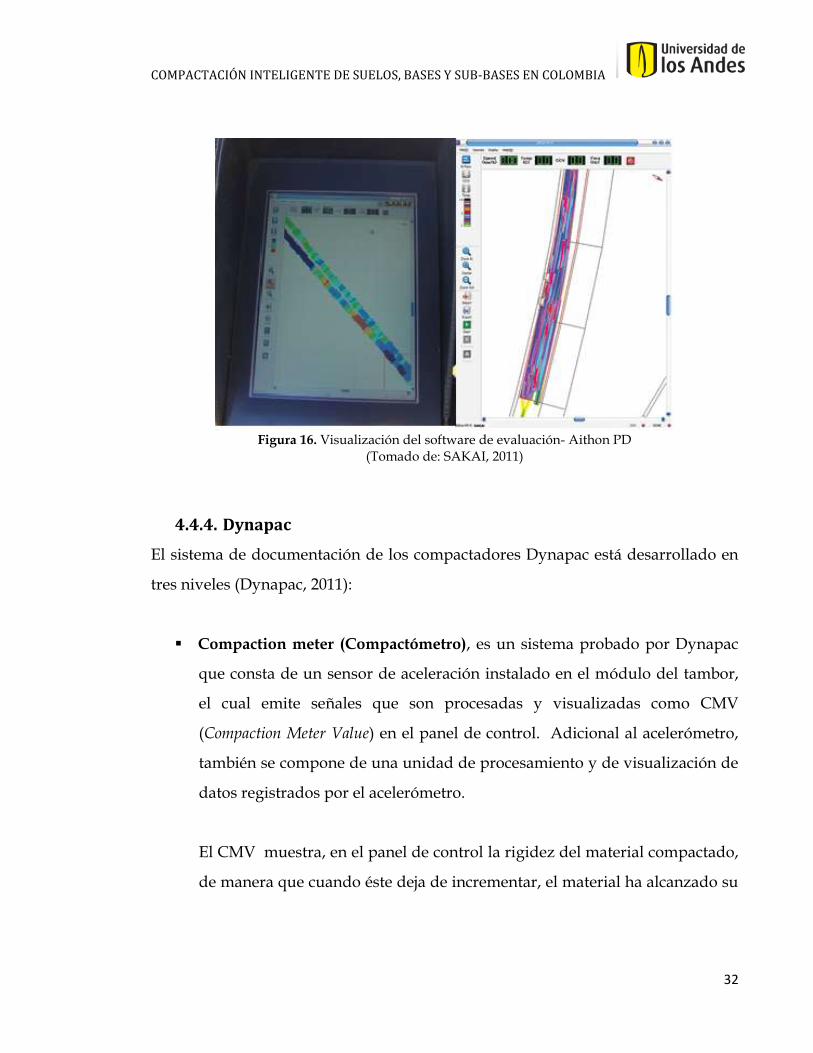
El CIS indica el grado de compactación a través del CCV (Compaction Control
Value), el cual incrementa a medida que pasa el rodillo del compactador ya que se
mide la aceleración del tambor de acuerdo a la interacción tambor-suelo,
calculando el valor de compactación –CCV (Figura 16).
COMPACTACIÓN INTELIGENTE DE SUELOS, BASES Y SUB-BASES EN COLOMBIA
32
Figura 16. Visualización del software de evaluación- Aithon PD
(Tomado de: SAKAI, 2011)
4.4.4. Dynapac
El sistema de documentación de los compactadores Dynapac está desarrollado en
tres niveles (Dynapac, 2011):
Compaction meter (Compactómetro), es un sistema probado por Dynapac
que consta de un sensor de aceleración instalado en el módulo del tambor,
el cual emite señales que son procesadas y visualizadas como CMV
(Compaction Meter Value) en el panel de control. Adicional al acelerómetro,
también se compone de una unidad de procesamiento y de visualización de
datos registrados por el acelerómetro.
El CMV muestra, en el panel de control la rigidez del material compactado,
de manera que cuando éste deja de incrementar, el material ha alcanzado su

COMPACTACIÓN INTELIGENTE DE SUELOS, BASES Y SUB-BASES EN COLOMBIA
33
máximo grado de compactación evitando así, pasadas innecesarias que se
traducen en ahorro de combustible y de desgaste de la máquina (Figura 17).
Figura 17. Componentes del Compaction Meter
(Tomado de: DYNAPAC, 2011)
Analizador de Compactación para Suelos (DCA-S. Dynapac Compaction
Analyzer for Soil), es un sistema para el control de la compactación, el cual
proporciona los resultados de medición y los registra, mientras el operador
los visualiza en su unidad DCA.
Básicamente, cumple las mismas funciones de Compaction Meter, con la
ventaja que documenta los resultados para el aseguramiento de la calidad y
entrega de obra. Esta información puede ser transferida fácilmente a otros
computadores o ser impresos (Figura 18).

COMPACTACIÓN INTELIGENTE DE SUELOS, BASES Y SUB-BASES EN COLOMBIA
34
Figura 18.DCA-S
(Tomado de: DYNAPAC, 2011)
Analizador de Compactación para Suelos con GPS, el DCA muestra la
posición del compactador una vez establecido un punto o línea de
referencia. Así mismo, le presenta al operador una imagen gráfica de todo el
trabajo de compactación mostrando las variaciones de CMV en una escala
colorimétrica que le permite identificar fácilmente las áreas que requieren
compactación adicional (i.e., mapa de compactación).
Además, el DCA-S con GPS permite ver el número de pasadas que requirió
cada área para alcanzar el CMV deseado (Figura 19).

COMPACTACIÓN INTELIGENTE DE SUELOS, BASES Y SUB-BASES EN COLOMBIA
35
Figura 19. DCA-S con GPS
(Tomado de: DYNAPAC, 2011)
4.4.5. Ammann/Case
Los compactadores con Compactación Inteligente de Amman proporcionan una
respuesta precisa e inmediata a las obras civiles que requieren del proceso de
compactación (AMMANN, 2011).
Experto de Compactación Amman (ACE- Ammann Compaction Expert), es
un sistema de medición y control disponible para los compactadores de
rodillo vibratorio, el cual calcula el grado de compactación del suelo y ajusta
la amplitud y la frecuencia de compactación de acuerdo a la condición de la
capa que está compactando. El sistema también calcula la velocidad ideal
del tambor y la cantidad de energía que debe ser transferida a la capa.
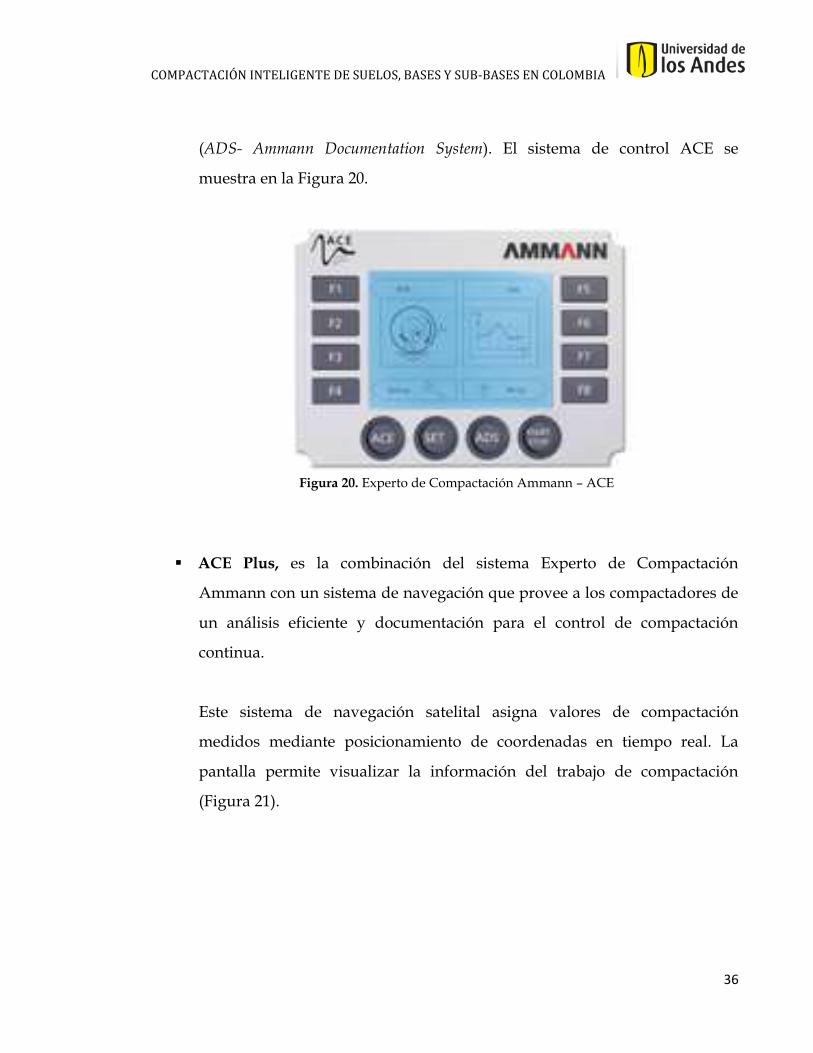
ACE visualiza y documenta la información de trabajo del proceso de
compactación a través de su sistema integrado de documentación Ammann
COMPACTACIÓN INTELIGENTE DE SUELOS, BASES Y SUB-BASES EN COLOMBIA
36
(ADS- Ammann Documentation System). El sistema de control ACE se
muestra en la Figura 20.
Figura 20. Experto de Compactación Ammann – ACE
ACE Plus, es la combinación del sistema Experto de Compactación
Ammann con un sistema de navegación que provee a los compactadores de
un análisis eficiente y documentación para el control de compactación
continua.
Este sistema de navegación satelital asigna valores de compactación
medidos mediante posicionamiento de coordenadas en tiempo real. La
pantalla permite visualizar la información del trabajo de compactación
(Figura 21).

COMPACTACIÓN INTELIGENTE DE SUELOS, BASES Y SUB-BASES EN COLOMBIA
37
Figura 21. ACE Plus DCA-S con GPS
(Tomado de: AMMANN, 2011)
4.4.6. Caterpillar (CAT)
Las soluciones desarrolladas por CAT son útiles en diferentes frentes de trabajo.
Dentro de éstas, AccuGrade es un sistema de medición de compactación que
permite incrementar la productividad hasta un 40% a la vez que reduce costos,
puesto que mide el movimiento del tambor con el fin de determinar la firmeza del
suelo y proporcionar a los operadores, contratistas y propietarios de proyectos
beneficios como aumentos de productividad y simplificación de papeleo en los
sitios de trabajo (CAT, 2011). Los siguientes son los diferentes sistemas que ofrece
este fabricante:
AccuGrade Compaction, con el sistema GPS y de medición permite
documentar el control y aseguramiento de calidad. Este sistema de
compactación inteligente mide la rigidez del material o la habilidad de
dicho material a resistir la deformación bajo una carga, en lugar de la
COMPACTACIÓN INTELIGENTE DE SUELOS, BASES Y SUB-BASES EN COLOMBIA
38
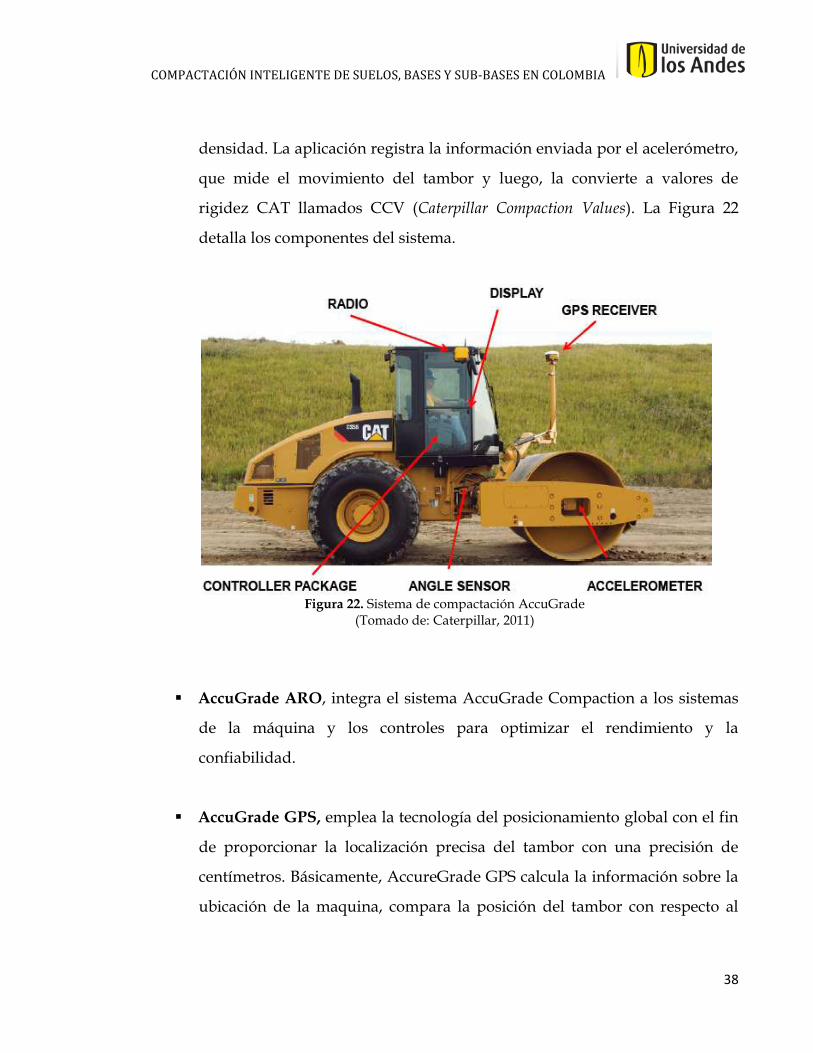
densidad. La aplicación registra la información enviada por el acelerómetro,
que mide el movimiento del tambor y luego, la convierte a valores de
rigidez CAT llamados CCV (Caterpillar Compaction Values). La Figura 22
detalla los componentes del sistema.
Figura 22. Sistema de compactación AccuGrade
(Tomado de: Caterpillar, 2011)
AccuGrade ARO, integra el sistema AccuGrade Compaction a los sistemas
de la máquina y los controles para optimizar el rendimiento y la
confiabilidad.
AccuGrade GPS, emplea la tecnología del posicionamiento global con el fin
de proporcionar la localización precisa del tambor con una precisión de
centímetros. Básicamente, AccureGrade GPS calcula la información sobre la
ubicación de la maquina, compara la posición del tambor con respecto al

COMPACTACIÓN INTELIGENTE DE SUELOS, BASES Y SUB-BASES EN COLOMBIA
39
plan de diseño y muestra la información a través de una pantalla de
visualización.
El sistema incluye un GPS sencillo y un receptor de GPS, el primero ofrece
control de calidad en tres dimensiones-3D de todo el tambor. El sistema
utiliza una posición 3D del receptor GPS en combinación con la información
del sensor de ángulo para determinar la posición del tambor (Figura 23).
Figura 23. Receptor GPS para generar posicionamiento en 3D
(Tomado de: Caterpillar, 2011)
AccuGrade Office, es un software que ofrece un paquete de soluciones para
que de forma inalámbrica se establezca comunicación entre las maquinas
que se encuentran en un mismo proyecto.
La Tabla 2 resume los diferentes sistemas de compactación inteligente disponibles
actualmente en el mercado internacional.

COMPACTACIÓN INTELIGENTE DE SUELOS, BASES Y SUB-BASES EN COLOMBIA
40
Tabla 2. Marcas que implementan Compactación Inteligente en sus compactadores de tambor sencillo.
MARCA MODELO SISTEMA DE MEDICIÓN
VALOR DE MEDIDA
SISTEMA OPERATIVO
SISTEMA DE DOCUMENTACIÓN
Y EVALUACIÓN
SISTEMA DE COMPACTACIÓN
GPS
HAMM AG SERIE 3000
HCQ (Hamm
Compaction Quality)
HMV (Adimensional)
Hammtronic HCQ
(Hamm Compaction Quality)
Vibración / Oscilación
(según el modelo)
HCQ-GPS-Navigator
BOMAG BW 177 DH-4 BVC BW 213 DH-4 BVC BW 226 DH-4 BVC
VARIOCONTROL EVIB
(NM/m2) Terrameter
Sistema de Gestión de Compactación BCM
05 Vibración
Requiere previa
instalación Sistema BCM
05
SAKAI Serie SV610 Serie SV510 Serie SV505
CIS (Compaction
Intelligent System)
CCV (Adimensional)
N/A AithonMT -S / AithonPD
Vibración
Compatible con la
mayoría de GPS en el mercado
DYNAPAC
CA 150/250/260/280 (solo compaction
meter) CA 152–702
DCA (Dynapac
Compaction Analyzer)
CMV (Adimensional)
Compaction Meter
DCA (Dynapac
Compaction Analyzer)
Vibración DCA-GPS
AMMANN / CASE
SERIE SV ACE
(Ammann Compaction Expert)
Kb (NM/m)
N/A
ADS (Ammann
Documentation System)
Vibración ACE Plus
CATERPILLAR
CS563E CS573E CS583E CS663E CS683E
Sistema AccuGrade
CCV (Adimensional)
N/A AccureGrade Office Vibración AccuGrade
GPS

COMPACTACIÓN INTELIGENTE DE SUELOS, BASES Y SUB-BASES EN COLOMBIA
41
5. COMPACTACIÓN INTELIGENTE EN EL MUNDO
Han pasado poco más de 30 años desde que se mencionó la Compactación
Inteligente en la Conferencia sobre compactación en París, y aunque en nuestro
país es un concepto nuevo, en países Europeos la compactación inteligente inició
hace muchos años como un aplicativo en los trabajos viales que requerían
compactación de suelos, bases y sub-bases. Esta técnica luego se extendió a campos
más amplios de la ingeniería que incluyendo desde grandes autopista hasta
ferrocarriles, pistas de aeropuertos, presas, rellenos sanitarios y cimentación de
estructuras y edificios.
En el mundo de hoy, cada día aumenta el reto de gestionar proyecto de bajo costo,
ambientalmente amigables y con resultados concretos. Es aquí donde se destaca la
compactación inteligente como una tecnología que se ha convertido en una
salvación, pues no solo ayuda a prevenir el deterioro prematuro de los pavimentos
debido a procesos de compactación inadecuados, sino que también hace posible
hacerlo a bajo costo, pues evita pasadas innecesarias y ahorra dinero y tiempo.
La compactación inteligente ha sido reglamentada en normas y especificaciones
nacionales en países como Austria (RVS 8S.02.6), Alemania (ZTVE StB94), Suecia
(VAG 94), y Finlandia. También países como Francia, Irlanda y Holanda han
previsto la introducción de estándares relacionados con esta tecnología.
Hasta ahora, las normas difieren un poco, principalmente, en lo relacionado con las
rutinas y procedimientos de calibración de los valores de medida de la

COMPACTACIÓN INTELIGENTE DE SUELOS, BASES Y SUB-BASES EN COLOMBIA
42
compactación, no obstante se espera que la Comunidad Europea llegue a un
consenso de unificación de dichos estándares (Briaud y Seo, 2003).
El uso eficiente de la compactación inteligente presume un cierto nivel de
educación y cualificación de contratistas respecto a al uso de equipos, manejo
adecuado de la documentación generada y utilización organizada de la experiencia
acumulada (Heinz y Sandström, 2000). A continuación se resumen experiencias
relacionadas con la implementación y empleo de sistemas de compactación
inteligente en el mundo.
5.1. EUROPA
La compactación inteligente, conocida en los países europeos como Control de
Compactación Continuo (CCC- Continuos Compaction Control) ha sido aplicada
exitosamente en los últimos años, en muchos de los proyectos desarrollados en
Austria, Alemania, Suecia y otros países Europeos, tal como se explica a
continuación (Chang et al. 2011).
5.1.1. Austria
En Austria los estándares para la construcción de vías, autopistas y carreteras
mediante la compactación inteligente fueron establecidos desde 1998 y declarados
obligatorios desde Julio de 1999. La norma RVS 8S.02.6 “Kontinuierlicher
Walzenintegrierter Verdichtungsnachweis”-(rodillo de compactación continua
prueba integrada) contiene los campos de aplicación, requerimientos del rodillo,
tipos de suelo, el sistema de compactación inteligente y los limites contractuales de
aceptación de los trabajos (Kolymbas y Fellin, 2000).

COMPACTACIÓN INTELIGENTE DE SUELOS, BASES Y SUB-BASES EN COLOMBIA
43
Es interesante mencionar que la Sociedad Internacional De Mecánica de Suelos e
Ingeniería Geotécnica (ISSMGE –International Society of Soil Mechanics and
Geotechnical Engineering) adoptó las especificaciones austriacas como estándares
para el uso de la compactación inteligente.
Un caso relevante sobre el uso de compactación inteligente es el de Deponie Asten.
En 1998 se tenía un nuevo concepto sobre la disposición final de aguas residuales y
lodos, se necesitaba la remover una capa de material puesto que la exploración de
suelo reveló que la zona era un antiguo foso de arena, por lo que era necesario
remover dicho material. Se instaló un revestimiento de material fino tratado con
cenizas volantes de 25 cm de espesor en la base y 30 cm en las laderas, las cuales
tenían una inclinación casi del 7%.
El proceso de compactación fue optimizado con la compactación inteligente, o
control de compactación continua como era conocida en ese entonces, y fue
implementado tanto en la base como en las laderas. Para ello, se empleó una
retroexcavadora situada en lo alto de ladera, que jalaba al compactador, dada la
inclinación de la ladera, tal como se ilustra en la Figura 24.

COMPACTACIÓN INTELIGENTE DE SUELOS, BASES Y SUB-BASES EN COLOMBIA
44
Figura 24. Proceso de compactación en Deponie Asten
(Tomado de: Kolymbas y Fellin, 2000).
5.1.2. Alemania
Las especificaciones alemanas para obras de infraestructura incluyen el uso de la
compactación inteligente. Estas fueron introducida desde 1994 y luego
actualizadas en 1997. Conocida como la ZTVE-StB, la norma alemana es aplicada a
subrasantes y suelos (Mooney et al. 2010). La falta de especificaciones para bases y
sub-bases se basa en la creencia de que el rodillo mide valores de compactación
más allá de los 20 ó 30 cm, que es el espesor estándar de las capas usadas en
Alemania.

COMPACTACIÓN INTELIGENTE DE SUELOS, BASES Y SUB-BASES EN COLOMBIA
45
En Alemania, la compactación inteligente se utiliza de dos maneras: la primera,
para implementarla a través de una calibración inicial del valor de medición del
rodillo con módulo medido a través del ensayo de placa de carga (PLT - plate load
test) o densidad, y la segunda, para la identificación o detección de zonas débiles
con poco soporte, para que éstas sean ensayadas mediante PLT, LWD
(Deflectómetro de Impacto Liviano - Light Weight Deflectometer) u otros métodos
de densidad. Estos enfoques están a la espera de futuras revisiones de la norma.
La construcción del la Línea de Ferrocarril Deutsche Bahn forma parte
fundamental de la red ferroviaria de alta velocidad en Europa, con una longitud de
177 km se extiende desde Colonia hasta Rin/Main y con una inversión de casi 4.6
millones de dólares se convierte en uno de los mayores proyectos en Europa
(Briaud y Seo, 2003).
En este proyecto aproximadamente 4 millones de m3 de tierra tuvieron que ser
retirados, 2 millones de m3 empleados en terraplenes y 250.000 m3 de sub-base
extendida. El requerimiento para la compactación fue de al menos el 97% de la
densidad Proctor con una contenido de vacíos inferior al 12%. Para ello, se
extendieron capas de 23 a 30 cm de espesor compactadas con equipos BOMAG
integrados con sistemas de medición de compactación, siendo de gran ayuda para
realizar el aseguramiento de la calidad del trabajo.
5.1.3. Suecia
La compactación inteligente y sus especificaciones para materiales no ligados
fueron introducidas en Suecia desde 1994. Las especificaciones (ATB Vag 2005)
para el uso de compactadores de rodillo integrado con compactación inteligente
rigen desde el 2005 (Mooney et al. 2010).
COMPACTACIÓN INTELIGENTE DE SUELOS, BASES Y SUB-BASES EN COLOMBIA
46
El cumplimiento normativo de los materiales no ligados mantiene dos niveles de
superficie, el primero, el nivel superior de la capa de base y el segundo, capas de
30 a 75 cm por debajo del nivel superior de la capa de base. En Suecia,
generalmente se trabajan espesores de capas de base de 30 a 70 cm y de 30 a 50 cm
para capas de sub-bases (Mooney et al. 2010).
5.2. ESTADOS UNIDOS
La compactación inteligente es una tecnología emergente en los Estados Unidos.
Dado sus múltiples aplicaciones en la implementación de compactación de
materiales para carreteras, varios estados en cabeza de sus Departamentos de
Transporte (DOT - State Departments of Transportation) han iniciado el proceso de
formulación y aprobación de especificaciones que regulen la implementación de
esta tecnología.
Son 12 los estados que se han motivado a participan en proyectos de demostración
en campo y que, además, conducen al establecimiento de especificaciones para la
compactación inteligente. Ellos son el estado de Georgia, Indiana, Kansas,
Maryland, Minnesota, Mississippi, North Dakota, New York, Pennsylvania, Texas,
Virginia y Wisconsin (Chang et al. 2011).
El propósito de estas demostraciones de la técnica de Compactación Inteligente es
evaluar el desempeño de esta tecnología en suelos y materiales granulares al ser
comparado con procesos de compactación convencional, y dar a conocer las
bondades de la compactación inteligente al ser implementado en los procesos de
calidad y de compactación, logrando módulos y densidades más uniformes al

COMPACTACIÓN INTELIGENTE DE SUELOS, BASES Y SUB-BASES EN COLOMBIA
47
proveer al operador de mejores herramientas para la toma de decisiones (Chang et
al. 2011). También, busca acelerar la formulación de especificaciones e identificar y
priorizar los aspectos que requieren mejoramiento tanto en la investigación como
en la maquinaria empleada.
Figura 25. Estados que implementan Compactación Inteligente (IC)
(Tomado de: Chang et al. 2011)
La gráfica anterior muestra como año tras año son más estados los que se suman al
propósito de formular y formalizar proyectos que implementan esta tecnología.
Dado el enfoque del presente trabajo, se hará referencia exclusivamente a los
Estados que han adelantado proyectos de demostración en campo, realizando
tramos de prueba que involucran el tipo de material de interés para este estudio:
suelos, bases y sub-bases granulares. Algunos de estos estados son: Kansas, Texas,
Mississippi, Nueva York, Indiana y Dakota del Norte.
COMPACTACIÓN INTELIGENTE DE SUELOS, BASES Y SUB-BASES EN COLOMBIA
48
5.2.1. Texas
El Departamento de Transporte del Estado de Texas desarrolló un proyecto para
demostrar la eficiencia de la compactación inteligente en suelos cohesivos, base
granular y suelos estabilizados.
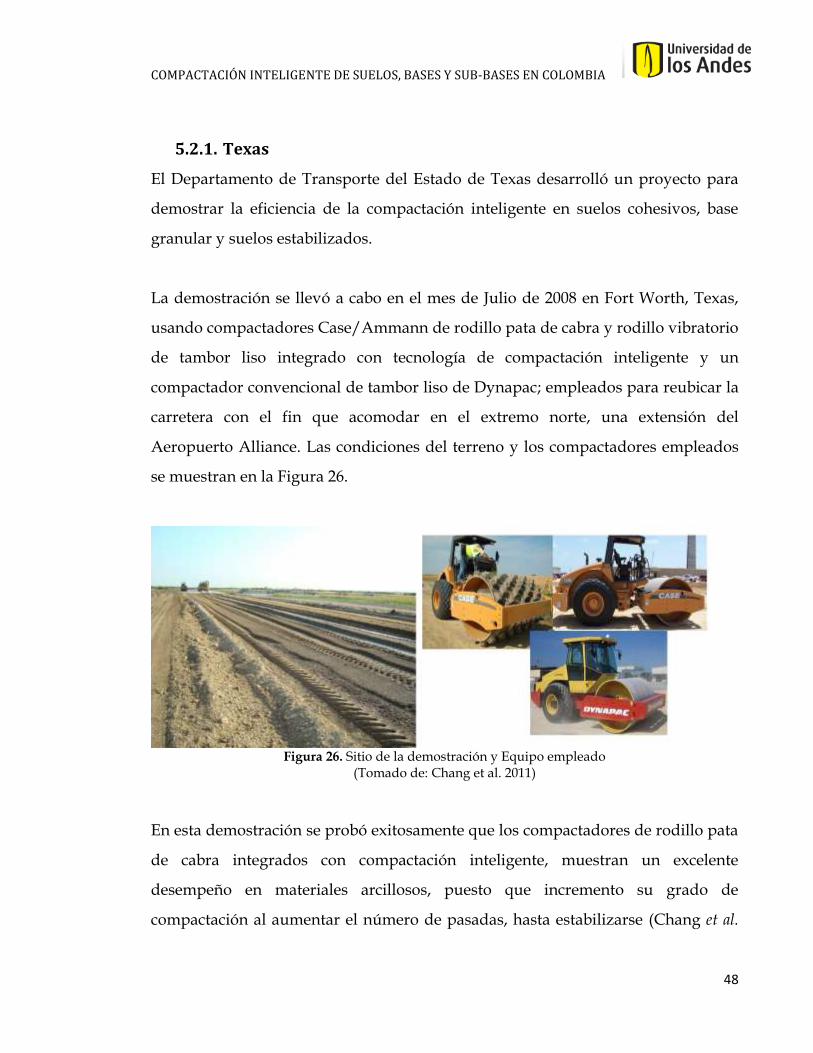
La demostración se llevó a cabo en el mes de Julio de 2008 en Fort Worth, Texas,
usando compactadores Case/Ammann de rodillo pata de cabra y rodillo vibratorio
de tambor liso integrado con tecnología de compactación inteligente y un
compactador convencional de tambor liso de Dynapac; empleados para reubicar la
carretera con el fin que acomodar en el extremo norte, una extensión del
Aeropuerto Alliance. Las condiciones del terreno y los compactadores empleados
se muestran en la Figura 26.
Figura 26. Sitio de la demostración y Equipo empleado
(Tomado de: Chang et al. 2011)
En esta demostración se probó exitosamente que los compactadores de rodillo pata
de cabra integrados con compactación inteligente, muestran un excelente
desempeño en materiales arcillosos, puesto que incremento su grado de
compactación al aumentar el número de pasadas, hasta estabilizarse (Chang et al.

COMPACTACIÓN INTELIGENTE DE SUELOS, BASES Y SUB-BASES EN COLOMBIA
49
2008). También se comprobó como los compactadores con compactación
inteligente son capaces de identificar los puntos débiles como zonas no
compactables, y materiales duros como rocas o alcantarillas, en las capas inferiores
del pavimento.
5.2.2. Kansas
El sitio de la demostración realizado por el Departamento de Transporte de Kansas
hizo parte de un proyecto de expansión de la US69 en Pleasanton, al norte de Fort
Scott, Kansas (Chang et al. 2010).
La demostración de campo se llevó a cabo en agosto de 2008 usando
compactadores IC pata de cabra de tambor sencillo Caterpillar y Sakai (Figura 27)
para la compactación de suelos cohesivos. La demostración incluyó la comparación
de la tecnología de compactación inteligente y la convencional al evaluar la
correlación de mediciones del compactador IC y los puntos medidos in situ, así
como también, evaluando parámetros de los equipos como velocidad, amplitud y
frecuencia, entre otros.
Figura 27. Compactador pata de cabra tambor sencillo: Caterpillar y Sakai
(Tomado de: Chang et al. 2010)
COMPACTACIÓN INTELIGENTE DE SUELOS, BASES Y SUB-BASES EN COLOMBIA
50
Los resultados indicaron que los valores de medición de los compactadores Sakai y
Caterpillar son repetibles, los compactadores pata de cabra mostraron valores de
compactación similares empleando diferentes configuraciones con amplitudes
altas, que los obtenidos con bajas amplitudes o configuraciones estáticas (Chang et
al. 2010).
5.2.3. Dakota del Norte
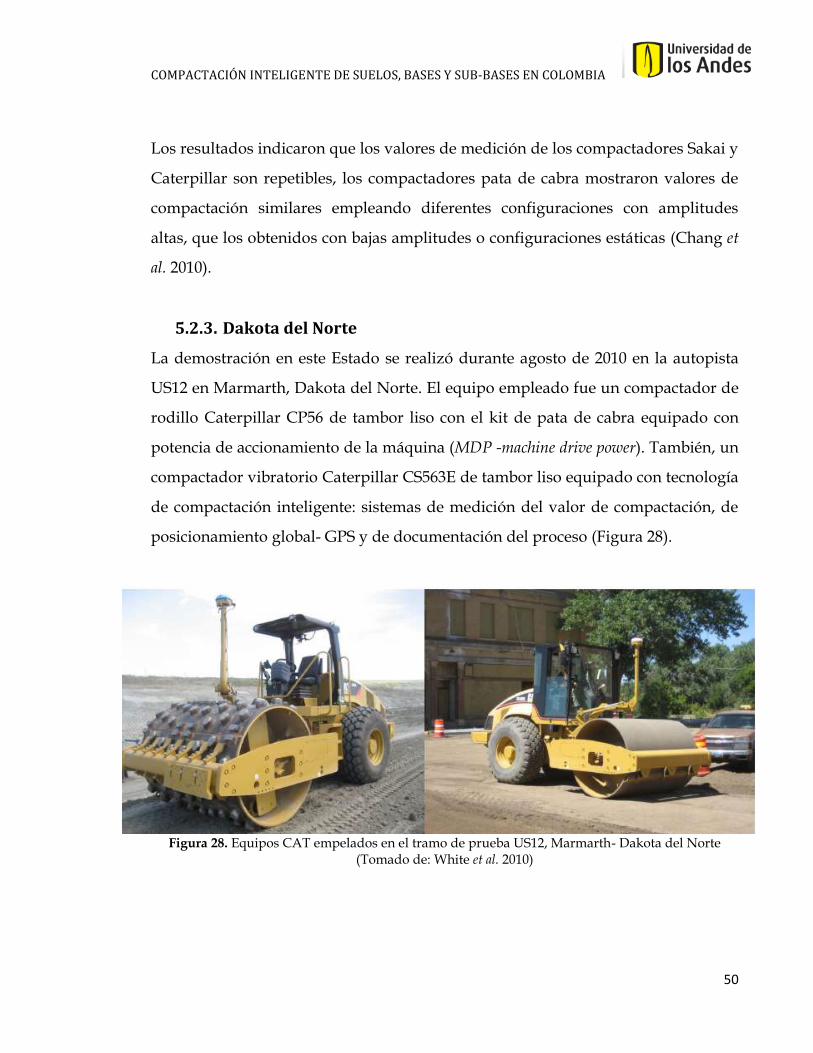
La demostración en este Estado se realizó durante agosto de 2010 en la autopista
US12 en Marmarth, Dakota del Norte. El equipo empleado fue un compactador de
rodillo Caterpillar CP56 de tambor liso con el kit de pata de cabra equipado con
potencia de accionamiento de la máquina (MDP -machine drive power). También, un
compactador vibratorio Caterpillar CS563E de tambor liso equipado con tecnología
de compactación inteligente: sistemas de medición del valor de compactación, de
posicionamiento global- GPS y de documentación del proceso (Figura 28).
Figura 28. Equipos CAT empelados en el tramo de prueba US12, Marmarth- Dakota del Norte
(Tomado de: White et al. 2010)

COMPACTACIÓN INTELIGENTE DE SUELOS, BASES Y SUB-BASES EN COLOMBIA
51
Para esta demostración se construyeron y ensayaron siete tramos de prueba: cuatro
realizados con suelo limoso compactados con el rodillo pata de cabra y los otros
tres, con material de base granular compactados con el rodillo de tambor liso. La
Tabla 3 resume las características de los tramos de prueba.
Tabla 3. Tramos de prueba realizados en US12, Marmarth- Dakota del Norte
EQUIPO
EMPLEADO
TRAMO
DE
PRUEBA
TIPO DE SUELO CARACTERÍSTICAS
CAT CP56
Tambor liso con
el kit de pata de
cabra
1 SUELO COHESIVO 3 carriles trabajados con compactación
estática, frecuencia baja y alta.
2 SUELO COHESIVO Sección con señales de ahuellamiento
3 SUELO COHESIVO Área de producción
7 SUELO COHESIVO Área de producción
CAT CS563E
Tambor liso
4 BASE GRANULAR Dos capas reforzadas con Geomalla TX5
5 BASE GRANULAR Material sin tratar
6 BASE GRANULAR Material parcialmente tratado
De estos tramos se obtuvieron valores de MPD (machine power drive) y valores de
compactación, corroborados con realizados in situ con el densímetro nuclear,
LWD, FWD, DCP, Cono dinámico de penetración, BST (White et al. 2010).
5.2.4. Indiana
La demostración de campo en este Estado se realizó sobre la ruta estatal 25 (SR-25),
la cual es una autopista reciente que conecta a la I-65 con la CR750E en el norte de
Buck Creek, West Lafayette, Indiana (White et al. 2011).

COMPACTACIÓN INTELIGENTE DE SUELOS, BASES Y SUB-BASES EN COLOMBIA
52
En agosto de 2010, se construyeron seis pistas de prueba y se evaluaron los valores
de MPD (machine power drive) y de compactación en conjunto con variados
ensayos realizados in situ: densidad, humedad, CBR y módulo elástico, los cuales
demostraron que esto valores incrementaban proporcional al aumento de la
capacidad portante del suelo (White et al. 2011). La demostración requirió la
compactación de suelo cohesivo, para lo que se empleó un compactador CAT CS56
de tambor liso con el kit de pata de cabra, y material granular compactado con un
equipo de rodillo vibratorio CAT CS563E de tambor liso, ambos compactadores
equipados con tecnología de compactación inteligente (Figura 29).
Figura 29. Maquinaria CAT en la pista de prueba SR-25 West Lafayette, Indiana.
(Tomado de: White et al. 2011).
5.2.5. Mississippi
El sitio de las pruebas en este Estado fue la autopista US 84 en el condado Wayne,
Mississippi. En julio de 2009 se construyó un tramo vía de dos carriles de 4 millas
de longitud. Las primeras 6 pulg de la sub-base granular fueron tratadas con ~5%
de cemento como método de estabilización acorde con las especificaciones de
Departamento de Transporte de Mississippi- MSDOT (Chang et al. 2010).

COMPACTACIÓN INTELIGENTE DE SUELOS, BASES Y SUB-BASES EN COLOMBIA
53
Un compactador CAT de tambor sencillo pata de cabra y un Case/Ammann, de
rodillo con liso fue el equipo utilizado en esta demostración. Todos los equipos
estaban equipados con la tecnología de compactación inteligente: sistema GPS,
Sistema de medición de valores de compactación y de documentación. Se
realizaron un total de nueve tramos de prueba que involucraban la compactación
del material estabilizado, bases y sub-bases granulares, con el objeto de obtener
valores medidos de compactación corroborados con ensayos realizados in situ
(Chang et al. 2010). La Figura 30 ilustra el proyecto en proceso.
Figura 30. Sitio de la demostración en US 84 Wayne, Mississippi.
(Tomado de: Chang et al. 2010).
Los resultados obtenidos en los tramos de prueba contribuyeron a desarrollar
relaciones empíricas de correlación entre los valores de medición de la
compactación inteligente (ICMV- intelligent compaction mesuarement values) y los
valores hallados mediante los ensayos realizados in situ. Sin embargo, estas
correlaciones muestran algunas debilidades al ser evaluadas independientemente
para cada tramo de prueba, quizás por el reducido rango de mediciones. Estas

COMPACTACIÓN INTELIGENTE DE SUELOS, BASES Y SUB-BASES EN COLOMBIA
54
correlaciones mejoran significativamente cuando la información se combina con
información con rango de medición más amplia (Chang et al. 2010).
5.2.6. Nueva York
En este Estado, la demostración se realizó sobre la US 219 en Springville, Nueva
York compactadores de tambor sencillo dotados con compactación inteligente,
Bomag y Caterpillar. Se realizaron diez tramos de prueba en los que se
extendieron materiales de base y sub-base granular (Figura 31).
Figura 31. Sitio de prueba de la US219Springville, NY.
(Tomada de: Chang et al. 2010)
El Departamento de Transporte de Nueva York –NYDOT, tiene especificaciones
concretas sobre la compactación, relacionadas con el esfuerzo uniforme de
compactación. Esta demostración explicó exitosamente que los compactadores
equipados con compactación inteligente tienen la capacidad de mapear la sub-base
existente y hacer seguimiento a los niveles de compactación a capas de base
granular (Chang et al. 2010).

COMPACTACIÓN INTELIGENTE DE SUELOS, BASES Y SUB-BASES EN COLOMBIA
55
La Tabla 4 resume las experiencias reportadas en Estados Unidos con el uso de
Compactación Inteligente.
Tabla 4. Cronología de estados que implementan Compactación Inteligente.
DOT AÑO EQUIPO
EMPLEADO TIPO DE EQUIPO
TIPO DE MATERIAL
Kansas 2008 SAKAI
Pata de Cabra/
Suelo cohesivo Tambor Liso
CATERPILLAR Pata de Cabra
Texas 2008
AMMANN Pata de Cabra Suelo cohesivo
DYNAPAC
Tambor Liso Material estabilizado
Tambor Liso Base granular
Mississippi 2009
CATERPILLAR Pata de Cabra Material estabilizado
AMMANN/CASE Tambor Liso Sub-base granular
Nueva York 2009 BOMAG Tambor Liso Base granular
CATERPILLAR Tambor Liso Sub-base granular
Indiana 2010 CATERPILLAR Pata de Cabra Suelo cohesivo
Tambor Liso Base granular
Dakota del Norte 2010 CATERPILLAR Pata de Cabra Suelo cohesivo
Tambor Liso Base granular
5.2.7. Controles de Calidad para IC
Los procesos de compactación convencionales dificultan el control de calidad de la
operación dado que ésta sólo puede ser evaluada hasta después de completar el

COMPACTACIÓN INTELIGENTE DE SUELOS, BASES Y SUB-BASES EN COLOMBIA
56
trabajo y corroborar si los resultados cumplen con las especificaciones iniciales del
proyecto.
En USA, la FHWA en colaboración con el Departamento de Transporte de
Minnesota, desarrolló un estudio para realizar control de calidad en los proyectos
que emplean la tecnología de compactación inteligente, optimizados con una
herramienta de manejo de información –VEDA. Esta herramienta es usada para
crear curvas de compactación y graficar los valores medidos de compactación
inteligente (ICMV- inteligente compaction mesuarement values) versus el número de
pasadas del compactador (Figura 32), de esta manera es posible determinar el
ICMV requerido y el numero de pasadas optimo para cada proyecto especifico.
Figura 32. Curva de compactación graficada en el software VEDA
(Tomado de: Transtec Group, 2008)
Así mismo, el sistema VEDA permite visualizar y analizar información geo-
espacial del proceso de varios compactadores con tecnología de compactación

COMPACTACIÓN INTELIGENTE DE SUELOS, BASES Y SUB-BASES EN COLOMBIA
57
inteligente al mismo tiempo, sin importar el fabricante; de manera que está en
capacidad de presentar información estandarizada de manera rápida en el sito de
trabajo y en tiempo real (Victor Lee Gallivan, Funcionario de US Department of
Transportation. Entrevista, Accelerating Infrastructure Innovations. Julio, 2011).
VEDA, es en la actualidad un software de análisis de información estandarizada
requerido por la Federal Highway Administration -FHWA en sus especificaciones
para la compactación inteligente de suelos y bases granulares.
5.2.8. Especificaciones de la Federal Highway Administration (FHWA)
A la fecha, pocos Estados han formulado especificaciones para regular el uso de la
tecnología de compactación inteligente, en la cual se detalla además las
responsabilidades de los contratistas al incluir en sus proyectos las especificaciones
relacionan los requerimientos contractuales, los equipos, el personal de obra y sus
correspondientes funciones, los métodos constructivos y los controles de calidad.
Adjunto, se anexan las especificaciones básicas que actualmente emplea la FHWA
para la compactación inteligente de suelos y bases. La Tabla 5 resume las
principales especificaciones vigentes en la actualidad (Ver Anexo 1.
Especificaciones FHWA para Compactación Inteligente de suelos y bases)

COMPACTACIÓN INTELIGENTE DE SUELOS, BASES Y SUB-BASES EN COLOMBIA
58
Tabla 5. Resumen especificaciones FHWA.
REQUERIMIENTO GENERALIDADES
SUELOS BASES GRANULARES EQUIPOS
Compactadores equipados con toda la instrumentación requerida en la compactación inteligente: *Acelerómetros *Sistemas de medición de valores de compactación *Sistema de documentación *Sistema GPS
CONTROL DE CALIDAD El plan de aseguramiento de la calidad debe incluir: *Control de Materiales *Control de Equipos *Control de Operaciones de construcción Personal Calificado para implementar dicho plan : *Administrador del Plan *Técnico de Control de Calidad *Operador del Compactador IC
CONSTRUCCIÓN
Asistencia Técnica 1, durante los 7 días siguientes al inicio de la obra Luego, tantas como sean necesarias
Áreas de Construcción Áreas ≤ 25.000 ft2 Requiere evaluación
Áreas parciales ≤ 5.000 ft2 Evaluación se incluye en la zona
anterior Áreas parciales ≥ 5.000 ft2 Constituye un área completa
PAGO Los ítems de pago deben incluir: *Combustible *Operador *Sistema GPS *Ensayos y soporte técnico de GPS

COMPACTACIÓN INTELIGENTE DE SUELOS, BASES Y SUB-BASES EN COLOMBIA
59
6. COMPACTACIÓN INTELIGENTE EN COLOMBIA: UNA
TECNOLOGÍA EMERGENTE
A nivel mundial, la compactación se ha convertido en el pilar fundamental en la
construcción de obras civiles, y más aún, en el eje principal para la construcción de
vías más duraderas. Por las investigaciones realizadas durante este proyecto, es
posible constatar que esta es una tecnología emergente a la cual el país no le ha
otorgado la importancia suficiente.
6.1. ACTUALIDAD
Durante el proceso de compactación es necesario definir los procesos de control de
calidad mediante los cuales se verificará el resultado final del proceso. Como se
mencionó con anterioridad, densidades más uniformes acorde a los requerimientos
y especificaciones de diseños, se traducen en vías con vidas de servicio más
prolongadas, y en menores costos de mantenimiento durante dicha vida útil.
El proceso de compactación se puede controlar durante su ejecución llevando a
cabo la verificación de resultados obtenidos midiendo las propiedades físicas y
mecánicas de la capa compactada y realizando controles sobre la forma como se
utiliza el material. Cualquiera de estos métodos, determina la eficiencia del proceso
basado en el Grado de Compactación al relacionar el peso volumétrico obtenido in
situ y el peso volumétrico seco ensayado en el laboratorio (Arenas, 2000).

COMPACTACIÓN INTELIGENTE DE SUELOS, BASES Y SUB-BASES EN COLOMBIA
60
6.1.1. Pruebas In Situ
En Colombia, los ensayos más empleados para obtener la densidad de la capa
compactada, son:
Densímetro nuclear, el empleo de sondas radiométricas permite determinar
la densidad de los suelos de una manera rápida y no destructiva. Este
método se basa en el principio de que los suelos absorben menos radiación
que aquellos que están más densos, por lo que los rayos gamma de una
fuente radioactiva penetran en el suelo, pero sólo un porcentaje de ellos se
refleja, según sea el porcentaje de vacíos presente en dicho suelo. Los rayos
reflejados son registrados y detectados en un contador y luego, convertidos
a unidades de densidad y humedad mediante una serie de correlaciones.
A diferencia de otros métodos que requieren mucho tiempo, con el
densímetro nuclear se obtiene la medición radiométrica que proporciona
resultados en pocos minutos.
Cono de Arena, se pueden realizar pruebas para determinara la densidad
humedad y la densidad seca, y a partir de éstas la densidad Proctor con la
que se determina el grado de compactación.
Básicamente, el procedimiento consiste en extraer material compactado
hasta unos 15 cm de profundidad, luego se pesa dicho material, se seca en el
horno y se pesa nuevamente para obtener la humedad del suelo. El
volumen del material extraído se determina llenando con arena de
características conocida, de manera que conociendo el peso del cono de

COMPACTACIÓN INTELIGENTE DE SUELOS, BASES Y SUB-BASES EN COLOMBIA
61
arena antes y después, es posible conocer el volumen de la material extraído
inicialmente.
Globo de Agua (balón de densidad), el balón de densidad o densímetro de
Washington consta de un cilindro transparente lleno de agua, el cual
permite conocer el volumen de la muestra extraída. El procedimiento es
similar al método del cono de arena, pero en este caso el material de
características conocidas es agua.
6.1.2. Especificaciones para Compactación Convencional
Actualmente las entidades estatales competentes en la gestión de proyectos de
infraestructura exigen de manera obligatoria fases experimentales, en las que se
realicen tramos de prueba con material, longitudes, anchos y espesores definidos,
que permitan probar el desempeño de los equipos de compactación y a la vez,
definir los programas de trabajo a desarrollar en cada proyecto especifico, de
manera que se cumplan a cabalidad los requisitos de diseño y parámetros
contractuales establecidos.
En el caso de que los parámetros no se ajusten a lo previamente dispuesto, se
requiere la implementación de las correcciones pertinentes hasta lograr resultados
satisfactorios.
A nivel distrital, el Instituto de Desarrollo Urbano –IDU dispone consideraciones
para la compactación se suelos, bases y sub-bases:
Suelos, se refiere a la subrasante o el apoyo de la estructura de pavimento,
por lo general requiere compactación. Sin embargo, puede presentarse el
COMPACTACIÓN INTELIGENTE DE SUELOS, BASES Y SUB-BASES EN COLOMBIA
62
caso en los documentos contractuales, explícitamente, se indique que la
subrasante no requiere compactación (IDU, 2006).
Las comprobaciones de densidad de la capa por lo general se realizan una
vez por semana en una proporción de al menos una cada doscientos
cincuenta metro cuadrados (250m2). Para los tramos de comprobación se
realizan al menos seis, en sitios escogidos al azar o de acuerdo a
indicaciones de la interventoría. La densidad media del tramo debe ser
como mínimo el 95 % de la densidad máxima de referencia obtenida en el
ensayo de compactación Proctor modificado, realizado acorde a las normas
Invias INV E-142.
Para bases y sub-bases, se maneja densidades media mayor o igual al 95%
del ensayo Proctor o del 100%, respectivamente (IDU, 2006).
Cada ensayo individual debe ser igual o superior al 98% del valor medio del
tramo, y solo se admitirá un resultado por debajo de dicho límite, siempre y
cuando sea mayor al 90%.
La tabla 6 resume los controles de calidad para compactación que son requeridos
en la actualidad por el Instituto de Desarrollo urbano de Bogotá.

COMPACTACIÓN INTELIGENTE DE SUELOS, BASES Y SUB-BASES EN COLOMBIA
63
Tabla 6. Controles de calidad IDU
Los controles de calidad de densidad de la capa compactada se efectúan acorde a
los métodos aplicables de ensayos o pruebas in situ. Estos ensayos se realizan de
acuerdo a lo descrito en las normas INVIAS: INV E-161, INV E- 162, INV E- 163 y
INV E- 164. Una vez, efectuados los controles de calidad, el contratista debe
rellenar las excavaciones que para tal fin se realizaron, con material de igual
calidad al originalmente dispuesto.
6.2. COMPACTACIÓN INTELIGENTE EN COLOMBIA: UNA
TECNOLOGÍA EMERGENTE
La compactación inteligente es un concepto poco o nada conocido en nuestro país.
Al consultar a empresas del sector de construcción que se dedican al desarrollo de
proyectos de infraestructura vial, sólo unas pocas están familiarizadas con el
concepto, y de éstas, solo tres empresas no sólo conocen sobre compactación
inteligente sino que también la implementan en sus proyectos más recientes, solo
con fines de control de calidad interno.
MATERIAL DENSIDAD MEDIA
TRAMO (Dm)
DENSIDAD INDIVIDUAL
(De cada ensayo)
Suelos Terraplenes/rellenos ≥ 90% Proctor 98% Dm
Subrasante ≥ 95% Proctor
Base
100% Proctor 98% Dm
Sub-base
≥ 95% Proctor 98% Dm
Se permite al menos 1 ensayo con densidad inferior a la Densidad individual, siempre y cuando sea ≥ 90% Proctor

COMPACTACIÓN INTELIGENTE DE SUELOS, BASES Y SUB-BASES EN COLOMBIA
64
Según Moreno*,1en Colombia es complicado implementar tecnologías nuevas en
proyectos estatales y más aún, tecnologías que no han sido estandarizadas ni
reglamentadas por las entidades competentes.
Por esta razón, se cree que es en los entes estatales en donde se debe motivar el
cambio, pues son quienes poseen poder de decisión y están involucrados en los
procesos de planeación de los proyectos. Además son ellos quienes aún no actúan
acorde con la necesidad e importancia de construir infraestructura más duradera,
ya que éste no sólo es un problema económico sino también intergeneracional,
social e inclusive político. Los beneficios de implementar la compactación
inteligente han sido identificados y es sabido que son impresionantemente notorios
y muy significativos, no sólo para contratistas sino también para las entidades
estatales.
6.2.1. Costos de implementación
Dado que los compactadores de suelos equipados con la tecnología de
compactación inteligente requieren de instrumentación especial y sistemas de
documentación y posicionamiento global, es evidente que se requiere una
inversión mayor a la que se realiza al adquirir compactadores convencionales.
El costo de la implementación se estimó como parte de este estudio al realizar un
sondeo comercial, en casa distribuidoras y comerciales en general (Hamm Ag,
Bomag y Caterpillar). Se encontró que el precio del equipo nuevo varía de acuerdo
al fabricante, sin embargo, este valor oscila entre los doscientos y doscientos
ochenta millones de pesos colombianos ($ 200.000.000 – $280.000.000 m/cte.), los
* ENTREVISTA con Felipe Moreno, Director de obras de la empresa Mario Huertas Cotes, Bogotá, 29 de septiembre de 2011.

COMPACTACIÓN INTELIGENTE DE SUELOS, BASES Y SUB-BASES EN COLOMBIA
65
cuales corresponden, además del valor del equipo, a impuestos de importación,
nacionalización y transporte hasta Colombia. Asimismo, este valor incluye
capacitaciones y entrenamiento a operarios e ingenieros residentes en el manejo de
estos equipos, dependiendo del número de equipos que se adquieren. Vale la pena
resaltar que el precio de los equipos está sujeto al mercado cambiario, debido a que
las casas matrices de la mayoría de fabricantes de compactadores con
compactación inteligente se ubican en Europa y sus transacciones se realizan en
euros.
No obstante, es de destacar que los compactadores ya existentes pueden ser
adaptados con instrumentación y sistemas de documentación que les permitan a
los contratitas llevar a cabo los procesos de compactación inteligente de igual
manera que los que realizan los equipos nuevos dotados con esta tecnología desde
fábrica. Pensando en esto, algunos fabricantes ofrecen dentro de su línea de
productos, un kit básico que permiten equipar las máquinas, siempre y cuando
correspondan al mismo fabricante. El kit incluye el sistema de instrumentación, de
documentación y de posicionamiento global.
El sondeo comercial realizado permitió estimar el valor de estos kits entre € 30.000
y € 35.000, es decir entre ochenta y noventa millones de pesos colombianos ($
80.000.000 - $ 90.000.000 m/cte.) aproximadamente, dependiendo de la TRM del
euro.
6.2.2. Percepción al cambio
Con el fin de indagar y vislumbrar la percepción general acerca de los procesos de
compactación que actualmente se llevan a cabo en nuestro país, se realizó una
sencilla encuesta (Ver Anexo 2. Formato de Encuesta), que permitió identificar las

COMPACTACIÓN INTELIGENTE DE SUELOS, BASES Y SUB-BASES EN COLOMBIA
66
nociones sobre compactación inteligente entre ingenieros y operarios de
compactadores.
Las encuestas se realizaron en la ciudad de Bogotá D.C., en obras ubicadas entre la
Calle 147 y 170 con Carrera 9, y entre las Carreras 18 y 19 con Calle 6. También, se
realizaron en obras a las afueras de la ciudad, en los municipios de Madrid, La
Vega, Sasmina y San Juan de Rio Seco pertenecientes a la Concesión Vial
Panamericana S.A.S.
Se entrevistaron un total de 15 ingenieros, entre residentes de contratista e
interventoría, y 9 operarios de equipos de compactación con amplia y variada
experiencia en procesos de compactación. La ficha técnica de la encuesta se
muestra en la tabla 7 y en la Figura 33 se esquematiza el perfil de los ingenieros y
operarios encuestados.
Tabla 7. Relación de encuestas.
OBRA CONTRATISTA
NÚMERO DE ENCUESTADOS
INGENIEROS OPERARIOS
Calle 147 y 170 con Carrera 9
MHC 3 1
carreras 18 y 19 con Calle 6
--- 2 2
Madrid
Concesión Vial Panamericana S.A.S
2 1
La Vega 3 2
Sasmina 1 1
San Juan de Rio Seco 2 1
Villeta 2 1
TOTAL 15 9

COMPACTACIÓN INTELIGENTE DE SUELOS, BASES Y SUB-BASES EN COLOMBIA
67
Figura 33. Años de experiencia de los encuestados en procesos de compactación
A continuación se presentan los resultados obtenidos al aplicar las encuestas:
A la pregunta si siempre ha empleado la misma técnica de compactación sin
importar el tipo de material o equipo con el que está trabajando (subbases,
bases y carpetas asfálticas), un 100% de los encuestados respondió que no
dado que la técnica de compactación a emplear se define en los tramos de
prueba, de acuerdo al tipo de material a compactar y equipo empleado
(Figura 34).
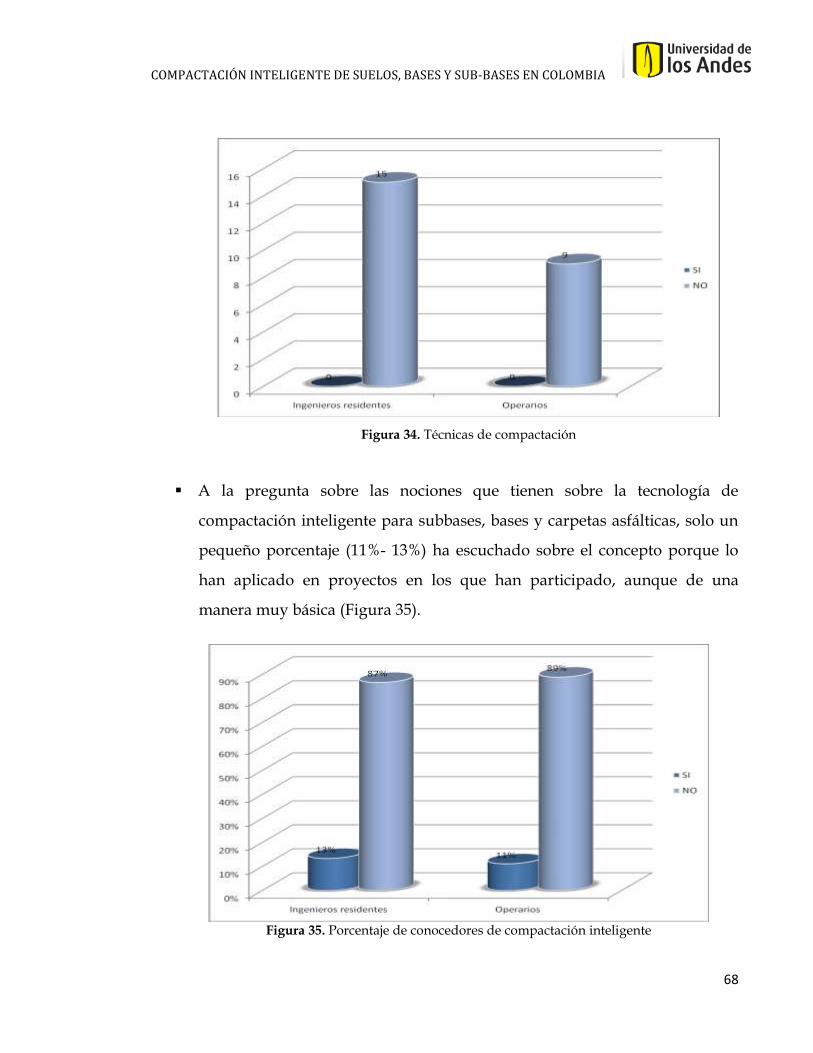
COMPACTACIÓN INTELIGENTE DE SUELOS, BASES Y SUB-BASES EN COLOMBIA
68
Figura 34. Técnicas de compactación
A la pregunta sobre las nociones que tienen sobre la tecnología de
compactación inteligente para subbases, bases y carpetas asfálticas, solo un
pequeño porcentaje (11%- 13%) ha escuchado sobre el concepto porque lo
han aplicado en proyectos en los que han participado, aunque de una
manera muy básica (Figura 35).
Figura 35. Porcentaje de conocedores de compactación inteligente
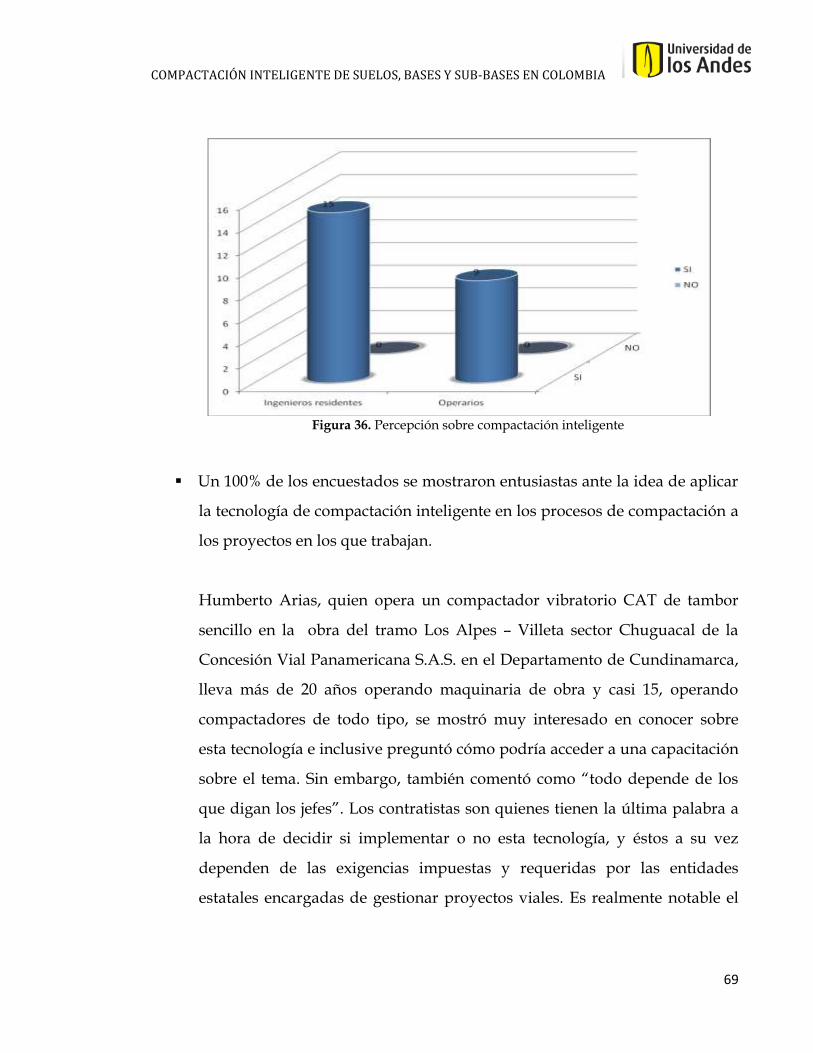
COMPACTACIÓN INTELIGENTE DE SUELOS, BASES Y SUB-BASES EN COLOMBIA
69
Figura 36. Percepción sobre compactación inteligente
Un 100% de los encuestados se mostraron entusiastas ante la idea de aplicar
la tecnología de compactación inteligente en los procesos de compactación a
los proyectos en los que trabajan.
Humberto Arias, quien opera un compactador vibratorio CAT de tambor
sencillo en la obra del tramo Los Alpes – Villeta sector Chuguacal de la
Concesión Vial Panamericana S.A.S. en el Departamento de Cundinamarca,
lleva más de 20 años operando maquinaria de obra y casi 15, operando
compactadores de todo tipo, se mostró muy interesado en conocer sobre
esta tecnología e inclusive preguntó cómo podría acceder a una capacitación
sobre el tema. Sin embargo, también comentó como “todo depende de los
que digan los jefes”. Los contratistas son quienes tienen la última palabra a
la hora de decidir si implementar o no esta tecnología, y éstos a su vez
dependen de las exigencias impuestas y requeridas por las entidades
estatales encargadas de gestionar proyectos viales. Es realmente notable el
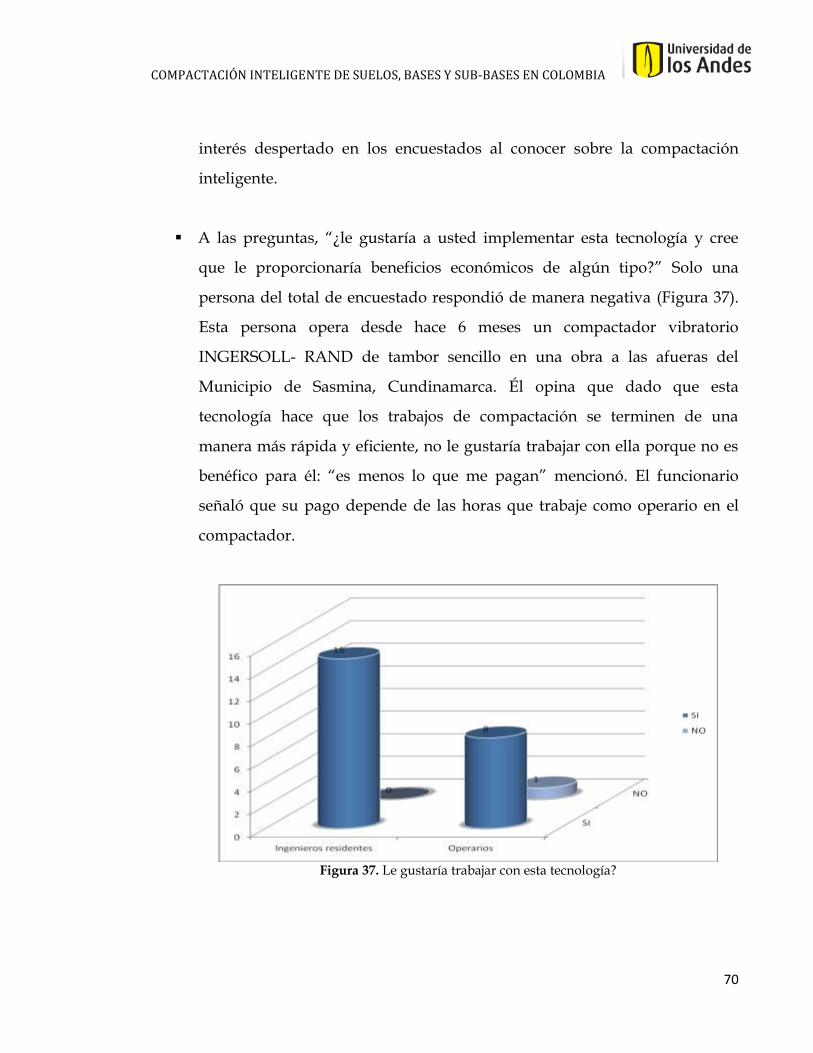
COMPACTACIÓN INTELIGENTE DE SUELOS, BASES Y SUB-BASES EN COLOMBIA
70
interés despertado en los encuestados al conocer sobre la compactación
inteligente.
A las preguntas, “¿le gustaría a usted implementar esta tecnología y cree
que le proporcionaría beneficios económicos de algún tipo?” Solo una
persona del total de encuestado respondió de manera negativa (Figura 37).
Esta persona opera desde hace 6 meses un compactador vibratorio
INGERSOLL- RAND de tambor sencillo en una obra a las afueras del
Municipio de Sasmina, Cundinamarca. Él opina que dado que esta
tecnología hace que los trabajos de compactación se terminen de una
manera más rápida y eficiente, no le gustaría trabajar con ella porque no es
benéfico para él: “es menos lo que me pagan” mencionó. El funcionario
señaló que su pago depende de las horas que trabaje como operario en el
compactador.
Figura 37. Le gustaría trabajar con esta tecnología?

COMPACTACIÓN INTELIGENTE DE SUELOS, BASES Y SUB-BASES EN COLOMBIA
71
En conclusión, se observa un desconocimiento casi generalizado acerca de lo que
es compactación inteligente. Sin embargo, una vez realizada una breve
introducción sobre lo que es y lo que esta implica, se percibe gran entusiasmo y
ansias de cambio para emplear tecnologías nuevas que proporcionen una mejor
calidad a las obras de infraestructura que se realizan en el país.
Los contratistas se muestran interesados en construir infraestructura vial durable y
de calidad. Aun así, son las entidades competentes quienes deben estar atentas a
estas innovaciones, pues son ellos quienes tienen poder de decisión para
determinar especificaciones y requerimientos de los diversos proyectos.

COMPACTACIÓN INTELIGENTE DE SUELOS, BASES Y SUB-BASES EN COLOMBIA
72
7. CONCLUSIONES Y RECOMENDACIONES
Las principales conclusiones y recomendaciones obtenidas durante este trabajo
incluyen:
Se describieron las características y beneficios esenciales que trae consigo la
implementación de la compactación inteligente en los procesos de
compactación de subrasantes, bases y subbases granulares en obras viales
de una manera detallada.
No cabe duda alguna que la adquisición de compactadores equipados con
compactación inteligente representa una inversión elevada comparada a la
de un compactador convencional. No obstante, es un costo justificable por
los innumerables beneficios que proporciona, y que fueron descritos a lo
largo de este trabajo.
La tecnología de compactación inteligente es aún reciente. Sería interesante
realizar tramos de prueba en Colombia que permitan comparar el
desempeño de equipos y la eficiencia del proceso de compactación al
utilizar compactadores convencionales y compactadores equipados con
compactación inteligente, con el objeto de dar a conocer beneficios más
prácticos al emplear materiales locales en dichas demostraciones.
Es importante y recomendable que los contratistas y funcionarios públicos
encargados de ejecutar o administrar proyectos viales estén atentos a

COMPACTACIÓN INTELIGENTE DE SUELOS, BASES Y SUB-BASES EN COLOMBIA
73
información innovadora y relevante presentada en eventos venideros, como
el Taller sobre Compactación Inteligente incluido en el marco del Simposio
Internacional sobre Pavimentos Asfálticos y Puentes de Losa Asfáltica, que
realizará la Sociedad Internacional de Pavimentos Asfálticos- ISAP 2012, el
23 de Mayo de 2012 en la ciudad de Nanjing, provincia de Jiansu, China.
Asimismo, el I Taller Nacional sobre Compactación Inteligente (I FHWA
Intelligent Compaction National Workshop) auspiciado por el
Departamento de Transporte de Estados Unidos, que tendrá lugar en el
próximo 13 de diciembre de 2011 en Atlanta, USA. (Ver Anexo 3. Folletos
informativos).
Teniendo en cuenta que la formulación de estándares que rijan la tecnología
de compactación inteligente se encuentra en una etapa de desarrollo, se
debe estar atento también a los avances documentados de su aplicabilidad
en futuros proyectos.
Colombia es un país ávido de cambios en la forma como se construye su
infraestructura vial. La tecnología de compactación inteligente no solo
proporciona mejores calidades en obra que se traducen en estructuras de
pavimentos más durables, sino también otros beneficios que han sido
mencionados en este trabajo y que la convierte en ese cambio tan anhelado.

COMPACTACIÓN INTELIGENTE DE SUELOS, BASES Y SUB-BASES EN COLOMBIA
74
BIBLIOGRAFÍA
ADAM, Dietmar. (2007). “Roller-integrated Continuous Compaction Control (CCC) Technical Contractual Provisions & Recommendations.” GOMES CORREIRA, Antonio; MOMOYA, Yoshitsugu y TATSUOKA, Fumio. Design and Construction of Pavements and Rail Tracks: Geotechnical Aspects and Processed Materials. Taylor & Francis, London, 111- 138. AMMANN. (2011). “Intelligent Ground Compaction”. <http://www.ammann-group.com/en/home/technology/intelligent-ground-compaction/>, (Octubre 30, 2011). ANDEREGG, D.A., y KAUFMANN, K. (2004). “Intelligent compaction with vibratory rollers - feedback control systems in automatic compaction and compaction control,” Transportation Research Record No. 1868, Journal of the Transportation Research Board, National Academy Press, 124-134. ARCILA, Carlos.(2001). “Diseñar y Construir estructuras durables.” NOTICRETO, La revista de la técnica y la Construcción, 60(Julio - Septiembre), 22 – 25.
ARENAS, Hugo León. (2000) “Mecanismos del Proceso de Compactación de los Suelos.” Teoría de los pavimentos. Universidad del Cauca. Facultad de Ingeniería Civil, Popayán, 60 – 87.
BOMAG. (2011). “Sistemas de medición y de documentación de la compactación”. Fayat Group. <http://www.bomag.com/world/en/application-products/measuring-systems-innovations.htm>, (Octubre 11, 2011). BRIAUD, Jean-Louis. SEO, Jeongbok. (2003). “INTELLIGENT COMPACTION: OVERVIEW AND RESEARCH NEEDS”. Texas A&M University. Austin, Texas, 25-54.
CATERPILLAR. (2011). “ACCUGRADE compaction SYSTEM: GPS Mapping and Measurement for Soil Compactors”. < http://www.cat.com/technology/earth-moving-solutions/accugrade-grade-control-system>, (Octubre 27, 2011) CHANG, George., MERRITT, David., XU, Qinwu., HORAN, Bob., WHITE, David., VENNAPUSA, Pavana., GIESELMAN, Heath., JOHANSEN, Luke., GOLDSMITH, Rachel. (2008). “IC Field Demonstration on Cohesive Subgrade, Stabilized Subgrade, and

COMPACTACIÓN INTELIGENTE DE SUELOS, BASES Y SUB-BASES EN COLOMBIA
75
Flex Base: Final Report”. TEXAS DEPARTMENT OF TRANSPORTATION. Austin, Texas, 71 . CHANG, George., MERRITT, David., XU, Qinwu., HORAN, Bob., WHITE, David., VENNAPUSA, Pavana., GIESELMAN, Heath., JOHANSEN, Luke., GOLDSMITH, Rachel. (2010). “Cohesive Subgrade IC Demonstration US 69 Kansas: Final Report” KANSAS DEPARTMENT OF TRANSPORTATION. Kansas, 102. CHANG, George., XU, Qinwu., HORAN, Bob., WHITE, David., VENNAPUSA, Pavana., GIESELMAN, Heath., FLEMING, Bradley., JOHANSEN, Luke., QUIST, Stephen. (2010). “Stabilized Subbase and HMA IC Demonstration US 84, Mississippi: Final Report.” MISSISSIPPI DEPARTMENT OF TRANSPORTATION. Mississippi, 44- 146. CHANG, George., XU, Qinwu., MERRITT, David., HORAN, Bob., MICHAEL, Larry., WHITE, David., VENNAPUSA, Pravana., GIESELMAN, Heath., JOHANSON, Luke., GOLDSMITH, Rachel., ZHANG, Jiake., QUIST, Stephen. (2010). “Soils/Subbase and HMA IC Demonstration US 219, Springville, NY: Draft Report.” FEDERAL HIGHWAY ADMINISTRATION. NEW YORK DEPARTMENT OF TRANSPORTATION. Springville, NY, 179-180. CHANG, George. XU, Qinwu. RUTLEDGE, Jennifer. HORAN, Bob. MICHAEL, Larry. WHITE, David. VENNAPUSA, Pavana. (2011). “Accelerated Implementation of Intelligent Compaction Technology for Embankment Subgrade Soils, Aggregate Base, and Asphalt Pavement Materials- Final Report.” FEDERAL HIGHWAY ADMINISTRATION. Washington D.C., 60-73. DEL CASTILLO, Hermilo y RICO, Alfonso. (2005). “La Ingeniería de Suelos en las Vías Terrestres: Carreteras, Ferrocarriles y Aeropistas” Limusa, México, 153- 234. DYNAPAC. (2011). “Dynapac Documentation System: Soil Compaction”. <http://www.dynapac.com/en/Products/?product=663&cat=36>, (Octubre 2, 2011). HAMBLETON, J.P., y DRESCHER, A. (2008). “Development of Improved Test Rolling Methods for Roadway Embankment Construction. MnDOT Report # MN/RC 2008-08”. Minnesota Department of Transportation.Minnesota. HEINZ, Thurner y SANDSTRÖM, Åke. (2000). “CONTINUOUS COMPACTION CONTROL” European Workshop of Compaction of soil and granular materials”. Paris, 237- 246. HORAN, B., FERRAGUT, T. FEDERAL HIGHWAY ADMINISTRATION (2005). “Intelligent Compaction Strategic Plan. “ Beltsville, Maryland.

COMPACTACIÓN INTELIGENTE DE SUELOS, BASES Y SUB-BASES EN COLOMBIA
76
INSTITUTO DE DESARROLLO URBANO (IDU). (2006). “Especificaciones Técnicas Generales de Materiales y Construcción para Proyectos de Infraestructura Vial y de Espacio Público en Bogotá D.C.: Documento técnico”. Bogotá D.C., 4- 96. KOLYMBAS, D. FELLIN, W. (2000). “Compaction of soils, granulates and powders: Advances in geotechnical engineering and tunneling.” Balkema, Rotterdam, 127. KRÖBER, W., FLOSS, E., WALLRATH, W. (2001). “Dynamic soil stiffness as quality criterion for soil compaction,” Geotechnics for Roads, Rail Tracks and Earth Structures, A.A.Balkema Publishers, Lisse, Abingdon, Exton (PA), Tokyo, 189-199. MOONEY, Michael, RINEHART, Robert., FACAS, Norman., MUSIMBI, Odon., WHITE, David., VENNAPUSA, Pavana. (2010). “Intelligent Soil Compaction Systems: Report 676”. NATIONAL COOPERATIVE HIGHWAY RESEARCH PROGRAM. Washington D.C., 32-34. RUTLEDGE, Jennifer. CHANG, George. GALLIVAN, Lee. (2011). “Benefits of Intelligent Compaction to Contractors”. Modern Contractor Solutions. (August), 42- 43. SAKAI. (2011). “CIS – Compaction Information System”. Sakai Heavy Industries, Ltd. <http://www.sakainet.co.jp/english/index.html>, (Octubre 7, 2011). SCHEROCMAN, J., RAKOWSKI, S., y UCHIYAMA, K. (2007). “Intelligent compaction, does it exist?.” Canadian Technical Asphalt Association (CTAA) Conference, Victoria, BC, 1–25. SCHRÖDER, Ralf. (2009) “Compactación en el asfalto y obras de tierra”. WRITGEN GROUP (HAMM AG). Tirschenreuth, Alemania, 22-27. RICO, Alfonso y DEL CASTILLO, Hermilo. (1992). ”Consideraciones Sobre Compactación De Suelos En Obras De Infraestructura De Transporte”. Documento técnico No. 7: INSTITUTO MEXICANO DEL TRANSPORTE, Sanfandila, Querétaro, 66-68. TRANSTEC GROUP, INC. (2008). “VEDA Software”. Intelligent Compaction. <http://www.intelligentcompaction.com/index.php?q=node/240>, (Septiembre 9, 2011). TRANSTEC GROUP, INC. (2008). “Benefits of IC”. Intelligent Compaction. <http://www.intelligentcompaction.com/index.php?q=node/6>, (Septiembre 25, 2011). WHITE, David., VENNAPUSA, Pavana., GIESELMAN, Heath., ZHANG, Jiake., EIDEM, Michael. (2010). “Accelerated Implementation of Intelligent Compaction Technology for Embankment Subgrade Soils, Aggregate Base, and Asphalt Pavement Materials: US 12 Marmarth, North Dakota: Final Report ER10-08.” EARTHWORKS ENGINEERING RESEARCH CENTER. Marmarth, North Dakota, 72- 74.
COMPACTACIÓN INTELIGENTE DE SUELOS, BASES Y SUB-BASES EN COLOMBIA
77
WHITE, David., VENNAPUSA, Pavana., GIESELMAN, Heath. (2011). ”Accelerated Implementation Of Intelligent Compaction Technology For Embankment Subgrade Soils, Aggregate Base, And Asphalt Pavement Materials: Sr-25 West Lafayette, Indiana. Final Report”. EARTHWORKS ENGINEERING RESEARCH CENTER. West Lafayette, Indiana, 47.

ANEXOS
ANEXO 1
ESPECIFICACIONES FHWA PARA COMPACTACIÓN
INTELIGENTE DE SUELOS

Generic - IC Specifications for Soils June 2011 DOT to modify as applicable to meet State Specifications
Intelligent Compaction Technology for Soils Applications
DESCRIPTION
This work shall consist of the construction of the roadway fill embankment utilizing
Intelligent Compaction (IC) rollers within the limits of the work as described in the plans. IC is
defined as a process that uses vibratory rollers equipped with a measurement/documentation
system that automatically records various critical compaction parameters correlated to agency
standard testing protocols in real time during the compaction process. IC uses roller vibration
measurements to assess the mechanistic soils properties and to ensure optimum compaction is
achieved through continuous monitoring of the operations. Additional information on the IC
technology may be found on the website www.intelligentcompaction.com and from the
Transportation Research Board - NCHRP Report 676 on Intelligent Soil Compaction Systems.
The Contractor shall supply sufficient numbers of rollers and other associated equipment
necessary to complete the compaction requirements for the specific materials. The Contractor
will determine the number of IC rollers to use depending on the scope of the project. The IC
roller(s) may be utilized during production with other standard compaction equipment and shall
be used for the evaluation of the compaction operations. EQUIPMENT
The IC rollers shall meet the following specific requirements:
1. IC rollers shall be self propelled single-drum vibratory rollers equipped with
accelerometers mounted in or about the drum to measure the interactions between the
rollers and compacted materials in order to evaluate the applied compaction effort.
Rollers may be smooth or pad footed drums.
2. The output from the roller is designated as the Intelligent Compaction Measurement
Value (IC-MV) which represents the stiffness of the materials based on the vibration of
the roller drums and the resulting response from the underlying materials.
3. The IC rollers shall include an integrated on-board documentation system that is capable
of displaying real-time color-coded maps of IC measurement values including the
stiffness response values, location of the roller, number of roller passes, machine settings,
together with the speed, frequency and amplitude of roller drums. The display unit shall
be capable of transferring the data by means of a USB port.
4. Roller mounted GPS radio and receiver units shall be mounted on each IC roller. RTK-
GPS radio and receivers are required to monitor the location and track the number of
passes of the rollers.
1

Generic - IC Specifications for Soils June 2011 DOT to modify as applicable to meet State Specifications
Real Time Kinematic Global Positioning System (RTK-GPS)
The Universal Transverse Mercator (UTM) Coordinates system divides the surface of
Earth between 80°S and 84°N latitude into 60 zones, each 6° of longitude in width and centered
over a meridian of longitude. Zone 1 is bounded by longitude 180° to 174° W and is centered
on the 177th West meridian. Zones outside of the Continental United States can be acquired on
the web at www.dmap.co.uk/utmworld.htm. The UTM for this project is Zone (xx) N. (DOT to
fill in the zone number)
Base Station - Ground mounted or virtual GPS base units that record values in northing,
easting, and the elevation data in meters using the UTM coordinate system along with the
longitude/latitude of the measurement values shall be provided. The GPS base station shall
broadcast updated correction data to the GPS receivers on the IC rollers and the hand-held
rovers during operations with a survey tolerance of not greater than 1.6 in. (40 mm) in both the
horizontal (x and y) directions.
Rover - A portable hand-held GPS radio/receiver for in-situ point measurements shall be
provided.
Data Analysis Software - Standardized data analysis software (Veda Alfa Vr.8.0 or
later) is available on the website www.intelligentcompaction.com or will be provided by
xxDOT. The software program will utilize the IC-MV data from the IC roller for analysis of
coverage, uniformity, and stiffness values during construction operations. As a minimum, the
following Essential IC Data Information and IC Data Elements shall be available in either
ASCII or text format for post processing.
Essential IC Data Information:
Item Description
No.
1 Section Title
2

Generic - IC Specifications for Soils June 2011
DOT to modify as applicable to meet State Specifications
2 Machine Manufacture
3 Machine Type
4 Machine Model
5 Drum Width (m)
6 Drum Diameter (m)
7 Machine Weight (metric ton)
8 Name index of intelligent compaction measurement values (IC-
MV)
9 Unit index for IC-MV
10 Reporting resolution for independent IC-MVs – 90 degrees
to the roller moving direction (mm) 11 Reporting resolution for independent IC-MVs – in the
roller moving direction (mm)
12 UTM Zone 13 Offset to UTC (hrs) 14 Number of IC data points
Essential IC Data Elements:
Item Date Field Name Example of Data
No.
1 Date Stamp (YYYYMMDD) e.g. 20080701
2 Time Stamp (HHMMSS.S -military e.g. 090504.0 (9 hr 5
format) min. 4.0 s.)
3 Longitude (decimal degrees) e.g. 94.85920403
4 Latitude (decimal degrees) e.g. 45.22777335
5 Easting (m) e.g. 354048.3
6 Northing (m) e.g. 5009934.9
7 Height (m) e.g. 339.9450
8 Roller pass number e.g. 2
9 Direction index e.g., 1 forward, 2 reverse
10 Roller speed (kph) e.g. 4.0
11 Vibration on e.g., 1 for yes, 2 for no
12 Frequency (vpm) e.g. 3500.0
13 Amplitude (mm) e.g. 0.6
14 Surface temperature (oC) - HMA e.g. 120
15 Intelligent compaction measurement e.g. 20.0
values
QUALITY CONTROL PLAN
The Contractor shall prepare and submit a written Quality Control Plan (QCP) for the
project. As a minimum, the QCP shall contain the following information:
3
Generic - IC Specifications for Soils June 2011 DOT to modify as applicable to meet State Specifications
General Requirements.
1. QCP shall be contract specific, stating how the contractor proposes to control the
materials, equipment, and construction operations including subcontractors and
suppliers as well as production facilities and transportation modes to the project
for the embankment operations.
2. The QCP shall include an organizational chart showing all quality control
personnel and how these personnel integrate with other management/production
and construction functions and personnel.
3. The QCP shall be signed and dated by the Contractor’s representative at the time
the QCP is submitted to the Engineer. The QCP shall be submitted no later than
15 days prior to commencing the embankment operations.
4. The xxDOT will review, sign, and date the QCP if the contents of the QCP are in
compliance with the requirements as stated herein.
5. The QCP shall be maintained to reflect the current status of the operations,
and revisions shall be provided in writing prior to initiating the change. The
QCP revision shall not be implemented until the revision has been accepted.
6. The QCP shall contain the name, telephone number, duties, and employer of
all quality control personnel necessary to implement the QCP. The minimum
qualifications of quality control personnel shall be as follows:
a. QCP Field Manager or Plan Administrator. The person responsible for the
execution of the QCP and liaison with the Engineer. Additionally the QCP
Field Manager requirements include:
1. Full-time employee of the Contractor or an independent consultant not
involved with the Quality Assurance (acceptance) activities on the
project.
2. Minimum (x) years experience (as determined by the DOT) in quality
control activities in construction operations
3. Full authority to institute actions necessary for successful
implementation of the QCP.
b. Quality Control Technician (QCT). The person(s) responsible for
conducting quality control and inspection activities to implement the
QCP. There may be more than one QCT on a project.
4

Generic - IC Specifications for Soils June 2011 DOT to modify as applicable to meet State Specifications
1. Full-time employee of the Contractor or an independent consultant
with a minimum (x) years experience (as determined by the DOT) in
quality control activities in construction operations.
2. Completed the xxDOT requirements for the applicable testing.
3. Full authority to institute actions necessary for successful
implementation of the QCP.
c. IC Roller Operator. The person responsible for operating the IC roller and
attached IC equipment. Sufficient training for the roller operator shall be
supplied by a representative of the manufacturer of the equipment.
7. IC Equipment. The Roller supplier, make, roller model, number of IC rollers to
be provided, and the GPS system supplier to be utilized.
8. Embankment operations shall not begin before the QCP has been accepted.
9. The Engineer may require the replacement of ineffective or unqualified
equipment or Quality Control personnel. Construction operations may be
required to stop until Quality Control corrective actions are taken.
References. (to be modified/expanded as applicable by the DOT)
1. AASHTO Standards.
AASHTO T 99 Moisture-Density Relations of Soils Using a 2.5-kg
(5.5-lb) Rammer and a 305-mm (12-in.) Drop
AASHTO T 272 Family of Curves – One-Point Method
2. ASTM Standards.
ASTM D 2583 Measuring Deflections with a Light Weight
Deflectometer (LWD)
ASTM D 6951 Dynamic Cone Penetrometer in Shallow Pavement
Applications (17.6-lb (8-kg) hammer)
3. xxDOT Standards.
xxx Field Determination of Moisture Content of Soils
xxx Field Determination of Deflection Using Light
Weight Deflectometer
5
Generic - IC Specifications for Soils June 2011 DOT to modify as applicable to meet State Specifications
Quality Control Technician. The QCT shall be responsible for the following minimum
functions:
1. GPS check testing for the IC roller(s) and rover(s).
2. Test section construction and establishing target values for the maximum dry
density, optimum moisture content, production moisture content, strength of the
materials using the dynamic cone penetrometer (DCP), light weight deflectometer
(LWD), nuclear gauge, and the IC-roller(s).
3. Monitoring of the construction operations and the IC roller(s) during production
and final proofing operations.
4. Quality control testing for the maximum dry density and moisture content.
5. Downloading and analysis of the IC-data from the roller(s).
6. Daily set-up, take down and secure storage of GPS and IC roller components
Testing Facility. The location of the testing facility and a list of test equipment shall be
included. The testing facility shall be sufficient size to conduct the Quality Control tests, and a
satisfactory base on which compaction of the soil can be achieved in accordance with AASHTO
T 99 Method A (or as otherwise defined by the DOT) shall be provided. A statement of
accessibility of the testing facility shall be included that allows xxDOT personnel to witness
Quality Control activities and to review Quality Control tests.
A list of the testing equipment proposed for Quality Control testing and the test methods
and frequency of calibration or verification of the equipment shall be included. The Contractor
shall maintain a record of all equipment calibration or verification results at the testing facility.
The minimum frequency and procedures shall be as follows:
Equipment Requirement Minimum Frequency Procedure*
Balances Verification 12 months xxx
Sieves Check Physical Condition 12 months xxx
Etc.* * *
*to be filled in by the DOT
Materials Sampling and Testing. The procedures for sampling and testing of the soil
embankment and the frequency of tests shall be identified and include as a minimum the
following: (details to be modified/expanded as applicable by the DOT)
1. Moisture. The procedure for measuring the moisture content of the soil during
production compaction. The minimum frequency of tests per lift of material shall
be one test for each construction area.
6

Generic - IC Specifications for Soils June 2011 DOT to modify as applicable to meet State Specifications
2. Strength. The procedure for measuring the in-place strength of the soil. The
minimum frequency of tests shall be a minimum of one test for each
construction area.
3. Maximum Dry Density and Optimum Moisture Content. The procedure for
measuring the maximum dry density and optimum moisture content of the soil for
the test sections and when there is a change in the soil type.
4. IC Roller Data. The procedure for obtaining the IC roller data. The frequency of
obtaining the data shall be a minimum of two times each day of soil compaction.
The data is date/time stamped which permits for external evaluation at a later
time.
GPS Check Testing. Prior to the start of production, the Contractor, GPS representative
and IC roller manufacturer shall conduct the following to check the proper setup of the GPS, IC
roller(s) and the rover(s) using the same datum:
1. On a location nearby or within the project limits, the GPS base station shall
be established and the IC roller and the GPS rover tied into the base station.
2. Verification that the roller and rover are working properly and that there is
a connection with the base station.
3. The coordinates of the roller from the on-board, color-coded display shall be
recorded.
4. The receiver from the rover shall be removed and placed on top of the
roller receiver and the coordinates shown on the rover display recorded.
5. The roller and rover coordinates shall be compared. If the coordinates calculate
as being within 1.6 in. (40 mm), the comparison is acceptable. If the coordinates
are not within 1.6 in. (40 mm), corrections shall be made as needed and the above
steps repeated until verification is acceptable. Work shall not begin until proper
verification has been obtained.
6. The project plan file provided by xxDOT shall be uploaded into the IC Data
analysis software and depending on the roller manufacture, the on-board IC
computer.
7. GPS check testing shall be conducted daily during production operations.
Test Sections. Test section evaluations are intended to determine the number of passes it
takes to achieve compaction at the optimum moisture content for the materials. Test sections
shall be approximately 225 ft (75 m) long and 24 ft (8 m) wide. The IC roller shall be utilized on
the test sections to establish the target IC-MV as correlated to the xxDOT standard testing
7

Generic - IC Specifications for Soils June 2011 DOT to modify as applicable to meet State Specifications devices. GPS measurements for all testing devices will be obtained with the rover for correlation
to the IC-MV. (test section details to be modified/expanded as applicable by the DOT)
The evaluations shall be conducted for the various material types, on every lift where
there is a change of materials. The rollers shall use the same settings (speed, frequency)
throughout the section while minimizing overlapping of the roller. After each roller pass, a
nondestructive density device shall be used to estimate the density or stiffness of the material at
10 locations uniformly spaced throughout the test section within the width of a single roller
pass. The readings and the number of roller passes will be recorded. The estimated target density
will be the peak of the average of the nondestructive readings. Linear regression relationships
between the in-place density data and the number of passes will be used to determine if process
meets the xxDOT in-place compaction requirements.
The target IC-MV is the point when the increase in the IC-MV of the material between
passes is less than 5 percent on the compaction curve. The IC compaction curve is defined as the
relationship between the IC-MV and the roller passes. A compaction curve example is as
follows:
Target ICMV
ICMV<5%
Optimal pass
Once the target IC-MV is determined, compact an adjoining section using same roller
settings and the estimated roller passes to verify the compaction with the same nondestructive
devices after the final roller pass. Straight line best fit linear regression relationships between the
density testing and IC-MV data will be used to establish the production target IC-MV that meets
the xxDOT in-place compaction requirements. A linear regression curve example is as follows.
Target ICMV
ICM
V
Target % Gmm
% Gmm
8

Generic - IC Specifications for Soils June 2011 DOT to modify as applicable to meet State Specifications
Mapping . Pre-construction mapping/proofing of the initial layer of the fill is
recommended to identify weak areas that may need to be addressed in advance of the production
fill operations. Subsequent mapping may be conducted at anytime to recognize the changes in
the fill that affects the target IC-MV or the density verification testing. At a minimum,
production mapping is recommended at the final surface of the fill and the elevation levels at 1.0
ft., 2.0 ft, 4.0 ft, and 8.0 ft below the final surface as applicable. The stiffness of the underlying
materials should increase with subsequent lifts of soils. The Contractors procedures for mapping
shall be included.
Soil Management. The procedures for management of the borrow pit and soil cut
sections to assure uniform soil material shall be included. The procedures for the necessary
adjustments in compaction because of a change in soil type shall be stated.
Response to Test Results. The response to quality control tests for the test sections and
during production compaction shall include as a minimum the following:
1. Moisture. The procedure for corrective action when the QC moisture tests are not
within -3 and +2 percentage points of the optimum moisture content.
2. Strength. The procedure for corrective action when tests do not meet the xxDOT
requirements for each soil type.
3. Maximum Dry Density and Optimum Moisture Content. The procedure for
corrective action when the maximum dry density and optimum moisture
content test results indicate that there is a change in the soil type.
4. IC Coverage Area and Uniformity Criteria. The procedures for re-working the
construction area when IC criteria for coverage area or the minimum IC-MV are
not met.
Documentation. The documentation shall include the following:
1. Quality Control Tests. The results from the moisture, strength, and maximum dry
density and optimum moisture content tests. All quality control test results shall
be signed by the QCT and submitted to the Engineer within 24 h of testing.
2. Equipment. Documentation of the manufacture, model, and type of rollers used each
day of soil compaction and the IC roller used for mapping the compaction of the soil.
The positioning of the IC roller(s) in the paving operations shall be noted.
3. IC-MV Analysis. The Contractors will analyze the IC-MV data for conformance
to the requirements for coverage area and uniformity and will submit the results to
the Engineer at the completion of the individual IC Construction Area operations.
9

Generic - IC Specifications for Soils June 2011 DOT to modify as applicable to meet State Specifications
IC data will be saved as Time History Data and Post- Processed Data. Post-
Processed Data will be imported using the all-passes and proofing-data formats.
All passes data includes the data from all of the passes and proofing data is the
data from just the last pass within a given area.
IC CONSTRUCTION
Technical Assistance. The Contractor shall coordinate for on-site technical assistance
from the IC roller representative during the initial seven (7) days of production and then as
needed during the remaining operations. As a minimum, the roller representative shall be
present during the initial setup and verification testing of the IC roller(s). The roller
representative shall also assist the Contractor with data management using the data analysis
software including IC data input and processing.
Construction Areas. IC Construction areas are defined as subsections of the project being worked continuously by the Contractor. The magnitude of the evaluation areas may vary
with production but they need to be at least 25,000 ft2 for evaluation. Partial construction areas
of 5000 ft 2 or less will be included in the previous area evaluation. Partial construction areas of
greater than 5000 ft2 will constitute a full area to close out the mixture. Construction areas may
extend over multiple days depending on the operations.
IC Construction Operations Criteria. A minimum coverage of 90% of the individual
construction area shall meet the optimal number of roller passes and 70% of the target IC-MV
determined from the test sections. Construction areas not meeting the IC criteria shall be
reworked and re-evaluated prior to continuing with the operations in that area. The IC
Construction Operations Criteria does not affect the standard xxDOT acceptance processes for
the materials or construction operations. METHOD OF MEASUREMENT
This item will not be measured as it will be paid as a lump sum for providing for the
Intelligent Compaction for Soils on the project. BASIS OF PAYMENT
The incorporating of the Intelligent Compaction process will be paid at the contract
lump sum price for Intelligent Compaction for Soils.
Payment will be made under:
Pay Item Unit
Intelligent Compaction for Soils........................................................ LS
10

Generic - IC Specifications for Soils June 2011 DOT to modify as applicable to meet State Specifications
This item includes all costs related to providing the IC roller including the fuel, roller
operator, GPS system, or any other equipment required for the IC process. All quality control
procedures including IC rollers and GPS systems representatives support and testing facility shall
be included in the contract lump sum price.
11
Generic - IC Specifications for Aggregate Bases June 2011 DOT to modify as applicable to meet State Specifications
Intelligent Compaction Technology for Aggregate Base Applications
DESCRIPTION
This work shall consist of the construction of the aggregate base materials utilizing
Intelligent Compaction (IC) rollers within the limits of the work as described in the plans. IC is
defined as a process that uses vibratory rollers equipped with a measurement/documentation
system that automatically records various critical compaction parameters correlated to agency
standard testing protocols in real time during the compaction process. IC uses roller vibration
measurements to assess the mechanistic properties and to ensure optimum compaction is
achieved through continuous monitoring of the operations. Additional information on the IC
technology may be found on the website www.intelligentcompaction.com and from the
Transportation Research Board - NCHRP Report 676 on Intelligent Soil Compaction Systems.
The Contractor shall supply sufficient numbers of rollers and other associated equipment
necessary to complete the spreading and compaction requirements for the aggregate materials.
The Contractor will determine the number of IC rollers to use depending on the scope of the
project. The IC roller(s) may be utilized during production with other standard compaction
equipment and shall be used for the evaluation of the compaction operations. EQUIPMENT
The IC rollers shall meet the following specific requirements:
5. IC rollers shall be self propelled single-drum vibratory rollers equipped with
accelerometers mounted in or about the drum to measure the interactions between the
rollers and compacted materials in order to evaluate the applied compaction effort.
Rollers shall have smooth drums.
6. The output from the roller is designated as the Intelligent Compaction Measurement
Value (IC-MV) which represents the stiffness of the materials based on the vibration of
the roller drums and the resulting response from the underlying materials.
7. The IC rollers shall include an integrated on-board documentation system that is capable
of displaying real-time color-coded maps of IC measurement values including the
stiffness response values, location of the roller, number of roller passes, machine settings,
together with the speed, frequency and amplitude of roller drums. The display unit shall
be capable of transferring the data by means of a USB port.
8. Roller mounted GPS radio and receiver units shall be mounted on each IC roller. RTK-
GPS radio and receivers are required to monitor the location and track the number of
passes of the rollers.
1
Generic - IC Specifications for Aggregate Bases June 2011 DOT to modify as applicable to meet State Specifications
Real Time Kinematic Global Positioning System (RTK-GPS)
The Universal Transverse Mercator (UTM) Coordinates system divides the surface of
Earth between 80°S and 84°N latitude into 60 zones, each 6° of longitude in width and centered
over a meridian of longitude. Zone 1 is bounded by longitude 180° to 174° W and is centered
on the 177th West meridian. Zones outside of the Continental United States can be acquired on
the web at www.dmap.co.uk/utmworld.htm. The UTM for this project is Zone (xx) N. (DOT to
fill in the zone number)
Base Station - Ground mounted or virtual GPS base units that record values in northing,
easting, and the elevation data in meters using the UTM coordinate system along with the
longitude/latitude of the measurement values shall be provided. The GPS base station shall
broadcast updated correction data to the GPS receivers on the IC rollers and the hand-held
rovers during operations with a survey tolerance of not greater than 1.6 in. (40 mm) in both the
horizontal (x and y) directions.
Rover - A portable hand-held GPS radio/receiver for in-situ point measurements shall be
provided.
Data Analysis Software - Standardized data analysis software (Veda Alfa Vr.8.0 or
later) is available on the website www.intelligentcompaction.com or will be provided by
xxDOT. The software program will utilize the IC-MV data from the IC roller for analysis of
coverage, uniformity, and stiffness values during construction operations. As a minimum, the
following Essential IC Data Information and IC Data Elements shall be available in either
ASCII or text format for post processing.
Essential IC Data Information:
Item Description
No.
1 Section Title
2

Generic - IC Specifications for Aggregate Bases June 2011
DOT to modify as applicable to meet State Specifications
2 Machine Manufacture
3 Machine Type
4 Machine Model
5 Drum Width (m)
6 Drum Diameter (m)
7 Machine Weight (metric ton)
8 Name index of intelligent compaction measurement values (IC-
MV)
9 Unit index for IC-MV
10 Reporting resolution for independent IC-MVs – 90 degrees
to the roller moving direction (mm) 11 Reporting resolution for independent IC-MVs – in the
roller moving direction (mm)
12 UTM Zone 13 Offset to UTC (hrs) 14 Number of IC data points
Essential IC Data Elements:
Item Date Field Name Example of Data
No.
1 Date Stamp (YYYYMMDD) e.g. 20080701
2 Time Stamp (HHMMSS.S -military e.g. 090504.0 (9 hr 5
format) min. 4.0 s.)
3 Longitude (decimal degrees) e.g. 94.85920403
4 Latitude (decimal degrees) e.g. 45.22777335
5 Easting (m) e.g. 354048.3
6 Northing (m) e.g. 5009934.9
7 Height (m) e.g. 339.9450
8 Roller pass number e.g. 2
9 Direction index e.g., 1 forward, 2 reverse
10 Roller speed (kph) e.g. 4.0
11 Vibration on e.g., 1 for yes, 2 for no
12 Frequency (vpm) e.g. 3500.0
13 Amplitude (mm) e.g. 0.6
14 Surface temperature (oC) - HMA e.g. 120
15 Intelligent compaction measurement e.g. 20.0
values
QUALITY CONTROL PLAN
The Contractor shall prepare and submit a written Quality Control Plan (QCP) for the
project. As a minimum, the QCP shall contain the following information:
3

Generic - IC Specifications for Aggregate Bases June 2011 DOT to modify as applicable to meet State Specifications
General Requirements.
7. QCP shall be contract specific, stating how the contractor proposes to control the
materials, equipment, and construction operations including subcontractors and
suppliers as well as production facilities and transportation modes to the project
for the embankment operations.
8. The QCP shall include an organizational chart showing all quality control
personnel and how these personnel integrate with other management/production
and construction functions and personnel.
9. The QCP shall be signed and dated by the Contractor’s representative at the time
the QCP is submitted to the Engineer. The QCP shall be submitted no later than
15 days prior to commencing the embankment operations.
10. The xxDOT will review, sign, and date the QCP if the contents of the QCP are in
compliance with the requirements as stated herein.
11. The QCP shall be maintained to reflect the current status of the operations,
and revisions shall be provided in writing prior to initiating the change. The
QCP revision shall not be implemented until the revision has been accepted.
12. The QCP shall contain the name, telephone number, duties, and employer of
all quality control personnel necessary to implement the QCP. The minimum
qualifications of quality control personnel shall be as follows:
a. QCP Field Manager or Plan Administrator. The person responsible for the
execution of the QCP and liaison with the Engineer. Additionally the QCP
Field Manager requirements include:
1. Full-time employee of the Contractor or an independent consultant not
involved with the Quality Assurance (acceptance) activities on the
project.
2. Minimum (x) years experience (as determined by the DOT) in quality
control activities in construction operations
3. Full authority to institute actions necessary for successful
implementation of the QCP.
b. Quality Control Technician (QCT). The person(s) responsible for
conducting quality control and inspection activities to implement the
QCP. There may be more than one QCT on a project.
4

Generic - IC Specifications for Aggregate Bases June 2011 DOT to modify as applicable to meet State Specifications
4. Full-time employee of the Contractor or an independent consultant
with a minimum (x) years experience (as determined by the DOT) in
quality control activities in construction operations.
5. Completed the xxDOT requirements for the applicable testing.
6. Full authority to institute actions necessary for successful
implementation of the QCP.
d. IC Roller Operator. The person responsible for operating the IC roller and
attached IC equipment. Sufficient training for the roller operator shall be
supplied by a representative of the manufacturer of the equipment.
10. IC Equipment. The Roller supplier, make, roller model, number of IC rollers to
be provided, and the GPS system supplier to be utilized.
11. Material placement and compaction operations shall not begin before the QCP has
been accepted.
12. The Engineer may require the replacement of ineffective or unqualified
equipment or Quality Control personnel. Construction operations may be
required to stop until Quality Control corrective actions are taken.
References. (to be modified/expanded as applicable by the DOT)
1. AASHTO Standards.
AASHTO T 99 Moisture-Density Relations of Soils Using a 2.5-kg
(5.5-lb) Rammer and a 305-mm (12-in.) Drop
AASHTO T 272 Family of Curves – One-Point Method
2. ASTM Standards.
3. xxDOT Standards.
Quality Control Technician. The QCT shall be responsible for the following minimum
functions:
7. GPS check testing for the IC roller(s) and rover(s).
8. Test section construction and establishing target values for the maximum dry
density, optimum moisture content, production moisture content, strength of the
5

Generic - IC Specifications for Aggregate Bases June 2011 DOT to modify as applicable to meet State Specifications
materials using the light weight deflectometer (LWD), nuclear gauge, and the IC-
roller(s).
3. Monitoring of the construction operations and the IC roller(s) during production
and final proofing operations.
4. Quality control testing for the maximum dry density and moisture content.
5. Downloading and analysis of the IC-data from the roller(s).
6. Daily set-up, take down and secure storage of GPS and IC roller components
Testing Facility. The location of the testing facility and a list of test equipment shall be
included. The testing facility shall be sufficient size to conduct the Quality Control tests, and a
satisfactory base on which compaction of the aggregates can be achieved in accordance with
AASHTO T 99 Method A (or as otherwise defined by the DOT) shall be provided. A statement
of accessibility of the testing facility shall be included that allows xxDOT personnel to witness
Quality Control activities and to review Quality Control tests.
A list of the testing equipment proposed for Quality Control testing and the test methods
and frequency of calibration or verification of the equipment shall be included. The Contractor
shall maintain a record of all equipment calibration or verification results at the testing facility.
The minimum frequency and procedures shall be as follows:
Equipment Requirement Minimum Frequency Procedure*
Balances Verification 12 months xxx
Sieves Check Physical Condition 12 months xxx
Etc.* * *
*to be filled in by the DOT
Materials Sampling and Testing. The procedures for sampling and testing of the
aggregates and the frequency of tests shall be identified and include as a minimum the following: (details to be modified/expanded as applicable by the DOT)
1. Moisture. The procedure for measuring the moisture content of the aggregates
during production compaction. The minimum frequency of tests per lift of
material shall be one test for each construction area.
2. Strength. The procedure for measuring the in-place strength of the aggregates.
The minimum frequency of tests shall be a minimum of one test for each
construction area.
3. Maximum Dry Density and Optimum Moisture Content. The procedure for
measuring the maximum dry density and optimum moisture content of the
aggregates in the test sections.
6

Generic - IC Specifications for Aggregate Bases June 2011 DOT to modify as applicable to meet State Specifications
4. IC Roller Data. The procedure for obtaining the IC roller data. The frequency of
obtaining the data shall be a minimum of two times each day of aggregate base
production. The data is date/time stamped which permits for external evaluation at
a later time.
GPS Check Testing. Prior to the start of production, the Contractor, GPS representative
and IC roller manufacturer shall conduct the following to check the proper setup of the GPS, IC
roller(s) and the rover(s) using the same datum:
5. On a location nearby or within the project limits, the GPS base station shall
be established and the IC roller and the GPS rover tied into the base station.
6. Verification that the roller and rover are working properly and that there is
a connection with the base station.
7. The coordinates of the roller from the on-board, color-coded display shall be
recorded.
8. The receiver from the rover shall be removed and placed on top of the
roller receiver and the coordinates shown on the rover display recorded.
9. The roller and rover coordinates shall be compared. If the coordinates calculate
as being within 1.6 in. (40 mm), the comparison is acceptable. If the coordinates
are not within 1.6 in. (40 mm), corrections shall be made as needed and the above
steps repeated until verification is acceptable. Work shall not begin until proper
verification has been obtained.
10. The project plan file provided by xxDOT shall be uploaded into the IC Data
analysis software and depending on the roller manufacture, the on-board IC
computer.
11. GPS check testing shall be conducted daily during production operations.
Test Sections. Test section evaluations are intended to determine the number of passes it
takes to achieve compaction at the optimum moisture content for the materials. Test sections
shall be approximately 225 ft (75 m) long and 24 ft (8 m) wide. The IC roller shall be utilized on
the test sections to establish the target IC-MV as correlated to the xxDOT standard testing
devices. GPS measurements for all testing devices will be obtained with the rover for correlation
to the IC-MV. (test section details to be modified/expanded as applicable by the DOT)
The rollers shall use the same settings (speed, frequency) throughout the section while
minimizing overlapping of the roller. After each roller pass, a nondestructive density device
shall be used to estimate the density or stiffness of the material at 10 locations uniformly spaced
throughout the test section within the width of a single roller pass. The readings and the number
of roller passes will be recorded. The estimated target density will be the peak of the average of
the nondestructive readings. Linear regression relationships between the in-place density data
7
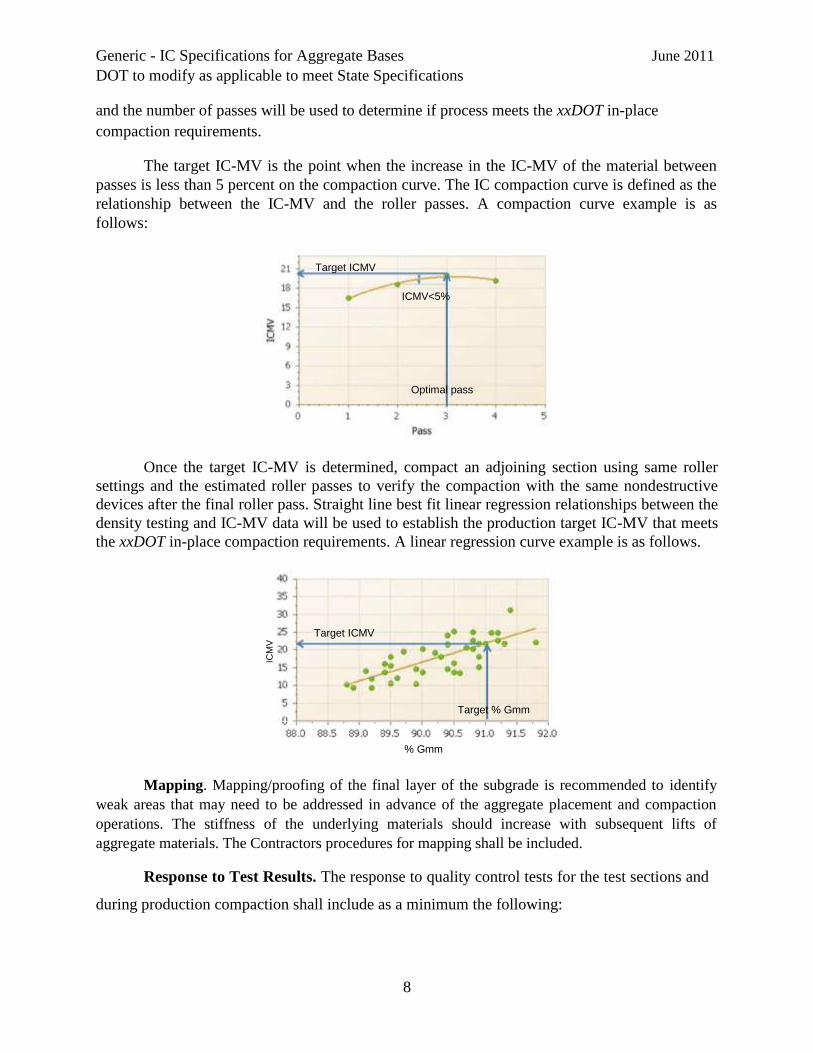
Generic - IC Specifications for Aggregate Bases June 2011 DOT to modify as applicable to meet State Specifications and the number of passes will be used to determine if process meets the xxDOT in-place
compaction requirements.
The target IC-MV is the point when the increase in the IC-MV of the material between
passes is less than 5 percent on the compaction curve. The IC compaction curve is defined as the
relationship between the IC-MV and the roller passes. A compaction curve example is as
follows:
Target ICMV
ICMV<5%
Optimal pass
Once the target IC-MV is determined, compact an adjoining section using same roller
settings and the estimated roller passes to verify the compaction with the same nondestructive
devices after the final roller pass. Straight line best fit linear regression relationships between the
density testing and IC-MV data will be used to establish the production target IC-MV that meets
the xxDOT in-place compaction requirements. A linear regression curve example is as follows.
Target ICMV
ICM
V
Target % Gmm
% Gmm
Mapping. Mapping/proofing of the final layer of the subgrade is recommended to identify
weak areas that may need to be addressed in advance of the aggregate placement and compaction
operations. The stiffness of the underlying materials should increase with subsequent lifts of
aggregate materials. The Contractors procedures for mapping shall be included.
Response to Test Results. The response to quality control tests for the test sections and
during production compaction shall include as a minimum the following:
8

Generic - IC Specifications for Aggregate Bases June 2011 DOT to modify as applicable to meet State Specifications
4. Moisture. The procedure for corrective action when the QC moisture tests are not
within -3 and +2 percentage points of the optimum moisture content.
5. Strength. The procedure for corrective action when tests do not meet the xxDOT
requirements for aggregate bases.
6. Maximum Dry Density and Optimum Moisture Content. The procedure for
corrective action when the maximum dry density and optimum moisture
content test results indicate that there is a change in the aggregate source.
7. IC Coverage Area and Uniformity Criteria. The procedures for re-working the
construction area when IC criteria for coverage area or the minimum IC-MV are
not met.
Documentation. The documentation shall include the following:
1. Quality Control Tests. The results from the moisture, strength, and maximum dry
density and optimum moisture content tests. All quality control test results shall
be signed by the QCT and submitted to the Engineer within 24 h of testing.
2. Equipment. Documentation of the manufacture, model, and type of rollers used
each day of aggregate compaction and the IC roller used for mapping the
compaction of the aggregate. The positioning of the IC roller(s) in the
operations shall be noted.
3. IC-MV Analysis. The Contractors will analyze the IC-MV data for conformance
to the requirements for coverage area and uniformity and will submit the results to
the Engineer at the completion of the individual IC Construction Area operations.
IC data will be saved as Time History Data and Post-Processed Data. Post-
Processed Data will be imported using the all-passes and proofing-data formats.
All passes data includes the data from all of the passes and proofing data is the
data from just the last pass within a given area.
IC CONSTRUCTION
Technical Assistance. The Contractor shall coordinate for on-site technical assistance
from the IC roller representative during the initial seven (7) days of production and then as
needed during the remaining operations. As a minimum, the roller representative shall be
present during the initial setup and verification testing of the IC roller(s). The roller
representative shall also assist the Contractor with data management using the data analysis
software including IC data input and processing.
Construction Areas. IC Construction areas are defined as subsections of the project
being worked continuously by the Contractor. The magnitude of the evaluation areas may vary
9
Generic - IC Specifications for Aggregate Bases June 2011 DOT to modify as applicable to meet State Specifications
with production but they need to be at least 25,000 ft2 for evaluation. Partial construction areas
of 5000 ft 2 or less will be included in the previous area evaluation. Partial construction areas of
greater than 5000 ft2 will constitute a full area to close out the material. Construction areas may
extend over multiple days depending on the operations.
IC Construction Operations Criteria. A minimum coverage of 90% of the individual
construction area shall meet the optimal number of roller passes and 70% of the target IC-MV
determined from the test sections. Construction areas not meeting the IC criteria shall be
reworked and re-evaluated prior to continuing with the operations in that area. The IC
Construction Operations Criteria does not affect the standard xxDOT acceptance processes for
the materials or construction operations. METHOD OF MEASUREMENT
This item will not be measured as it will be paid as a lump sum for providing for the
Intelligent Compaction for Aggregates on the project. BASIS OF PAYMENT
The incorporating of the Intelligent Compaction process will be paid at the contract
lump sum price for Intelligent Compaction for Aggregates.
Payment will be made under:
Pay Item Unit
Intelligent Compaction for Aggregates.............................................. LS
This item includes all costs related to providing the IC roller including the fuel, roller
operator, GPS system, or any other equipment required for the IC process. All quality control
procedures including IC rollers and GPS systems representatives support and testing facility shall
be included in the contract lump sum price.
10
ANEXO 2
FORMATO DE ENCUESTA
UNIVERSIDAD DE LOS ANDES
FACULTAD DE INGENIERÍA
DEPARTAMENTO DE INGENIERÍA CIVIL Y AMBIENTAL
MAESTRIA EN INGENIERIA CIVIL
Sondeo de percepción: Compactación -Operarios
1. Cuanto tiempo lleva como operario de maquinaria de compactación? ____________
2. Emplea usted la misma técnica de compactación sin importar el tipo de material sobre el que está
trabajando (subbases, bases y carpetas asfálticas)?
Sí No
Explique:
3. Emplea usted la misma técnica de compactación sin importar la clase de equipo de compactación
con el que esté trabajando?
Sí No
Explique:
4. Conoce sobre la tecnología de compactación inteligente para subbases, bases y carpetas asfálticas?
Sí No
5. Le gustaría contar con la tecnología de CI en Colombia?
Sí No
6. Estaría dispuesto a recibir capacitación que le permita poder trabajar con esta tecnología?
Sí No
7. Considera necesaria, la implementación de esta tecnología en nuestro país?
Sí No
8. Cree usted que la implementación de esta tecnología le proporcionaría beneficios económicos?
Sí No

UNIVERSIDAD DE LOS ANDES
FACULTAD DE INGENIERÍA
DEPARTAMENTO DE INGENIERÍA CIVIL Y AMBIENTAL
MAESTRIA EN INGENIERIA CIVIL
Sondeo de percepción: Compactación –Residentes/Directores
1. Años de experiencia en proyectos que requirieron compactación? ____________
2. Para la compactación, siempre ha empleado la misma técnica sin importar el tipo de material
sobre el que está trabajando (subbases, bases y carpetas asfálticas)?
Sí No
Explique:
3. Para la compactación, siempre ha empleado la misma técnica sin importar la clase de equipo de
compactación con el que esté trabajando?
Sí No
Explique:
4. Conoce sobre la tecnología de compactación inteligente para subbases, bases y carpetas asfálticas?
Sí No
5. Le gustaría contar con la tecnología de CI en Colombia?
Sí No
6. Estaría dispuesto a recibir capacitación que le permita poder trabajar con esta tecnología?
Sí No
7. Considera necesaria, la implementación de esta tecnología en nuestro país?
Sí No
Explique:
8. Cree usted que la implementación de esta tecnología le proporcionaría beneficios económicos?
Sí No
ANEXO 3
FOLLETOS INFORMATIVOS

Intelligent Compaction Workshop Hosted by ISAP 2012
Supported by US FHWA
May 23, 2012, Nanjing, China Background Intelligent compaction (IC), also known as Continuous Compaction Control (CCC), is an evolving
technology to maximize the compaction effort using vibratory rollers that equipped with roller-integrated
measurements, global positioning system, onboard report system, and, optionally, auto-feedbacks. The
IC technologies are proven and demonstrate immediate benefits to agencies and contractors alike. For
heavy duty asphalt pavements, IC can be used to provide adequate compaction in order to optimize
asphalt densities for supporting heavy loading. This workshop will guide the attendees along the shortest
path to IC implementation by overcoming gaps and barriers through streamlined strategies. Purposes
Familiar attendees with fundamentals of intelligent compaction Demonstrate real world applications of IC Demonstrate latest IC machines and systems
Demonstrate the shortest route to successful IC implementation.
Presenters Mr. Lee Gallivan, US Federal Highway Administration (FHWA)
Dr. George Chang, P.E., Transtec Group, USA Representatives from Ammann, Bomag, Caterpillar, Dynapac, Wirtgen/HAMM, Sakai,
Trimble, and TopCon Agenda
Sessions Topics Presenter Length (min.)
1 Introduction and Overview Lee/Chang 10
2 Fundamentals of Intelligent Compaction Chang 40
3 IC Data Management Chang 30
break 10
4 IC Systems from Vendors (I) Vendors 90
Lunch break 60
5 IC Systems from Vendors (II) Vendors 80
break 10
6 Open Panel Discussion on Vendors’ IC System Vendors 60
7 Standardization of IC Lee 30
8 IC Machine Demonstration Vendors 60
Total 480
Contact Info Workshop content: Dr. George Chang., PE, Transtec Group, 6111 Balcones Drive, Austin TX 78731,
USA, (512) 451-6233, [email protected], www.IntelligentCompaction.com Sponsorship/Exhibition: Dr.Chunying Wu, Principal Engineer, Jiangsu Transportation Research
Institute Co., Ltd, (China) (86-25)86575445, [email protected] and [email protected]
www.ISAP2012.net

FHWA Intelligent Compaction
National Workshop
Dec 13, 2011 Atlanta, GA
Sheraton Gateway Hotel
Atlanta Airport
1900 S ULLIVAN R OAD A TLANTA , G EORGIA 30337
770 - 997 - 1100 Who Should Attend DOT Construction Engineers,
QC/QA Personnel, Spec Writers
Paving Managers,
Superintendent, QC Personnel
Earthworks Managers, Intelligent Compaction (IC) is an equipment-based technology for better
quality
Superintendent, QC Personnel
IC Roller Vendors
GPS Vendors
Sponsored by
Supported by
control that results in longer pavement lives. IC machines are vibratory rollers
with accelerometers mounted on the axel of drums, global positioning system,
infra-red temperature sensors (for asphalt), and on-board computers that can
display color-coded maps in real-time to track roller passes, asphalt surface
temperatures, and stiffness of compacted materials. The FHWA has been leading a national effort to advance the IC technology through
numerous projects since 2008 to improve compaction quality of materials that
include granular soils, cohesive soils, stabilized base, and Hot Mix Asphalt (HMA)
pavements. To further accelerate the implementation of IC, FHWA is con-ducting IC
national workshops for technology transfer and training. The purposes of this workshop are to: Familiarize attendees with fundamentals of intelligent
compaction;
Demonstrate the route to successful IC implementation; and Develop attendees into technology champions of IC for their
organizations or companies.
More information is available at:
www.IntelligentCompaction.com
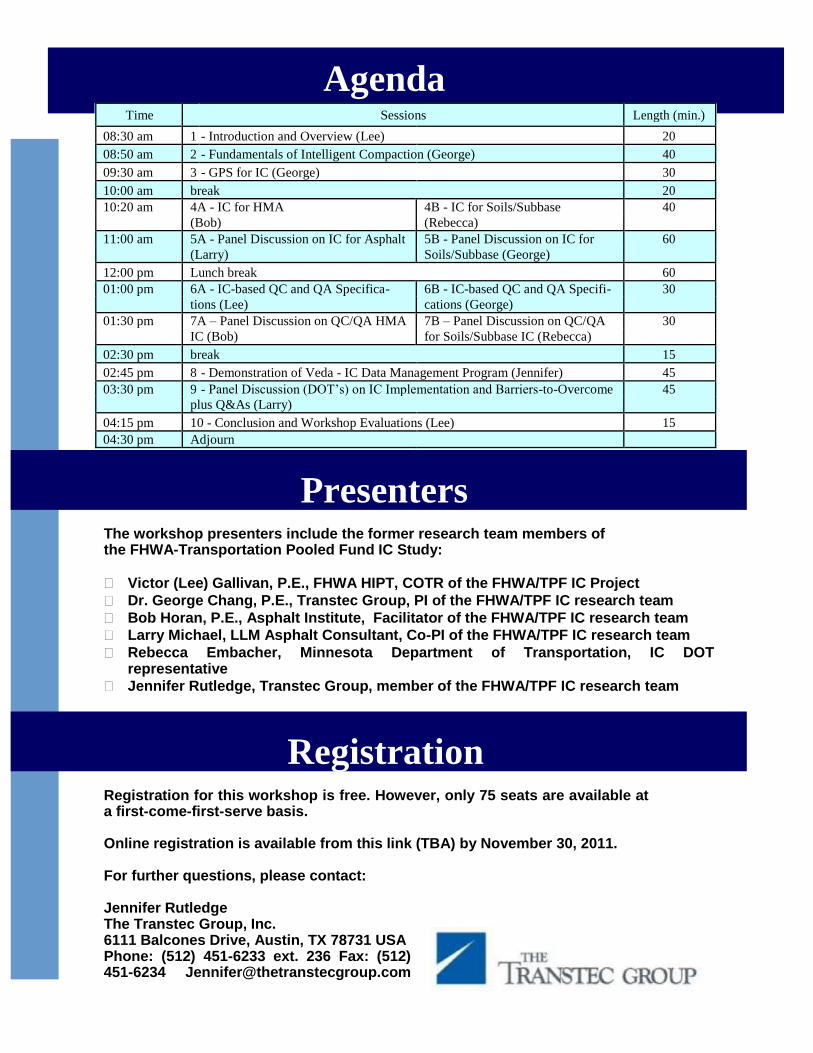
Agenda
Time Sessions Length (min.)
08:30 am 1 - Introduction and Overview (Lee) 20 08:50 am 2 - Fundamentals of Intelligent Compaction (George) 40
09:30 am 3 - GPS for IC (George) 30
10:00 am break 20 10:20 am 4A - IC for HMA 4B - IC for Soils/Subbase 40
(Bob) (Rebecca)
11:00 am 5A - Panel Discussion on IC for Asphalt 5B - Panel Discussion on IC for 60 (Larry) Soils/Subbase (George)
12:00 pm Lunch break 60 01:00 pm 6A - IC-based QC and QA Specifica- 6B - IC-based QC and QA Specifi- 30
tions (Lee) cations (George)
01:30 pm 7A – Panel Discussion on QC/QA HMA 7B – Panel Discussion on QC/QA 30 IC (Bob) for Soils/Subbase IC (Rebecca)
02:30 pm break 15 02:45 pm 8 - Demonstration of Veda - IC Data Management Program (Jennifer) 45 03:30 pm 9 - Panel Discussion (DOT’s) on IC Implementation and Barriers-to-Overcome 45
plus Q&As (Larry)
04:15 pm 10 - Conclusion and Workshop Evaluations (Lee) 15 04:30 pm Adjourn
Presenters
The workshop presenters include the former research team members of the FHWA-Transportation Pooled Fund IC Study:
Victor (Lee) Gallivan, P.E., FHWA HIPT, COTR of the FHWA/TPF IC Project
Dr. George Chang, P.E., Transtec Group, PI of the FHWA/TPF IC research team
Bob Horan, P.E., Asphalt Institute, Facilitator of the FHWA/TPF IC research team
Larry Michael, LLM Asphalt Consultant, Co-PI of the FHWA/TPF IC research team
Rebecca Embacher, Minnesota Department of Transportation, IC DOT representative
Jennifer Rutledge, Transtec Group, member of the FHWA/TPF IC research team
Registration
Registration for this workshop is free. However, only 75 seats are available at a first-come-first-serve basis.
Online registration is available from this link (TBA) by November 30, 2011.
For further questions, please contact:
Jennifer Rutledge The Transtec Group, Inc. 6111 Balcones Drive, Austin, TX 78731 USA Phone: (512) 451-6233 ext. 236 Fax: (512) 451-6234 [email protected]