centro nacional de actualizaciÓn …20carlos… · diagrama de escalera ... frecuencia de...
TRANSCRIPT

CNAD - Mecatrónica
DGETI SElT
CENTRO NACIONAL DE ACTUALIZACIÓN DOCENTE EN MECATR~NICA
C
CNAD - Cenidet
PROYECTO
WMULACI~N DE MANUFACTURA CON MECANISMOS AUTOMATIZADOS (SIMMA)"
I Protodpo Mecatrónico '
Qu, L presentan: Para obtener el reconocimiento de especialistas en Ingeniería Mecatrónica
SUBESPECIALIDAD MAQUINAS: ' SUBESPECIALIDAD CONTROL:
Ing. Carlos Santuario Ramírez Ing. Victor Carlos Hofmann Castillo
Ing. Raúl Rosado Acal Ing. Santi Trejo González
ASESORES Máquinas: Ing. Rodolfo González Manzano Control: Pedagogía: Lic. Arturo Pérez Canales Experto Japonés: Ing. lsao lwaki
Ing. José Luis Flores Galarza
Junio de 1999.
SE.$ CENIDIET DGPT CENTRO DE WFORMACION

SEP SEIT Centro Nacionai de
Actualización Docente Mecatronica Av. Ertvnirlao Ramirez sin eso. Mar dc 18s lluvias CT 09FMP00010
DGETI
Col. Sclene Delegacid" :Tláhum Tel. F a x 8 4 1 1431 841 I432 México. O.F.
I3 de agosto de 1999
C.P. 12430
Asunto: Autorización de Impresión del Trabajo Recepcional
C.C Carlos A. Santuario Ramírez Victor Carlos Hofmann Castillo Raúl Rosado Acal Santi Trejo González Docentes en formación de la 6". Generación P R E S E N T E S
Una vez que ha sido revisado el informe académico elaborado como trabajo recepcional del proyecto mecatrónico titulado "Simulación de manufactura con mecanismos automatizados (SIMMA)" por los asesores de las tres áreas y al no encontrar errores en los aspectos técnicos, en la estructura de contenidos y en la redacción de cada uno de los apartados que lo integran, se ha determinado que el informe cumple con los aspectos técnicos necesarios para que pueda imprimirse de forma definitiva.
A T E N T A M E N T E
ASESORES
,
L..< ..I.!. Ing. odolfo González Manzano Ing. José Luis Flores Galana Contraparte del área de Máquinas Contraparte del área de Control
A Lic. Arturo Pére Canales Ing. Isao Iwaki Contraparte del área de Pedagogía Experto Japonés

INDICE 01 INTRODUCCION
CAPITULO 1 SISTEMA DE CONTROL
1.1 Descripción del sistema de control 1.1.1. Descripción del P.L.C. 1 .I .2. 1.1.3. Tarjetas de sensores Ópticos 1.2.3. motores de corriente directa 1.1.5. Programa del P.L.C.
1.2.1. Diagrama eléctrico 1.2.2. Fuente de alimentación
Control del motor a pasos de la garra.
1.2. Tablero de control.
04 04 07 12 16 17
18 19 22
CAPITULO 2
2.1. Brazo manipulador Electromecánico 2.1 .I 2.1.2 Componentes 2.1.3 Funciones 2.1.4 Memoria de cálculos 2.1.5 Justificación de secciones criticas
2.2.1 Descripción 2.2.2 Funcionamiento
Mecanismo de Leva - Manivela 2.3.1. Descripción 2.3.2. Funcionamiento 2.3.3. Componentes principales 2.3.4. Memoria de cálculo 2.3.5. Leva Excéntrica
2.4.1. Descripción 2.4.2. Funcionamiento
SISTEMA MECANICO
Descripción de características técnicas
2.2 Pinza
2.3.
2.4 Alimentador
CONCLUSIONES BlBLlOGRAFlA APENDICE
A. B. Lista de partes C. Dibujos de fabricación D. Cálculo del disipador E. Características del sensor inductivo F. Programas de PLC G. H. Cronograma de Actividades I. Prácticas Didácticas
Lista de materiales y costos
Programas APT de Piñón - Cremallera
proyecto Equipo 3
25 25 26 29 30 31 32 33 34 35 35 36 36 43 45 49 49 49 50 51
CNAD ~ Mecatronica
INTRODUCCION
Diseñar un sistema didáctico modular que simule un proceso de clasificación de piezas de diferentes materiales y que permita analizar la transmisión de movimientos de los elementos mecánicos que lo componen, operados mediante un Controládor Lógico Programable (P.L.C.).
Con esto se pretende apoyar el docente en las diversas asignaturas tanto en las especialidades de mecánica y de control, este sistema cuenta con diversos sensores que permiten automatizarlo mediante P.L.C.
Diseñar y construir mecanismos modulares y escalables que sean fáciles de integrar y fabricar en los planteles dependientes del sistema DGETI, ya que por su bajo costo y constitución, son sencillos de maniobrar e interpretar, aunado a que en las escuelas no existe este tipo material didáctico de apoyo para las materias como son elementos de maquinas, mantenimiento industrial y teoria de control.
Los componentes serán fácilmente operados por alumnos y docentes debido a SU
sencillez de su parte mecánica y el hecho de contar con sensores facilitan establecer controles automáticos.
Este sistema cumple con los requerimientos necesarios para que se considere mecatrónico pues contiene mecanismos (levas, engranes, bujes, baleros, flechas, etc.), actuadores eléctricos, motores, sensores, y el control por medio de circuitos electrónicos y programación, en donde se incluyen conocimientos básicos como computación, control, electrónica y mecánica.
Para la elaboración de este prototipo es necesario emplear los conocimientos adquiridos en las asignaturas de Maquinas - herramientas, Control numérico, Mantenimiento mecatrónico, Circuitos de control, Programación y Circuitos eléctricos.
Siguiendo la nueva tendencia de la educación se busca que el alumno obtenga una instrucción diseñada con situaciones cognitivas y utilizando estos mecanismos para la transmisión de movimientos y sus respectivos sensores y controles permitirán que el alumno observe fisicamente lo explicado en el aula, permitiendo obtener un conocimiento más real y efectivo. Este proceso de simulación esta constituido de elementos que son fabricados como. un sistema modular, escalable. Dentro de las innovaciones que logramos esta el dispositivo de leva y brazo electromecánico los cuales no existe en el C.N.A.D., ampliar la capacidad del modulo de control, ya que las consolas que'se
Proyecto SlMMA 1 Equipo 3

. .
nosotros proponemos ampliarlo a 16 salidas, además las consolas cuentan con 4 relevadores y la disponibilidad para 8 relevadores.
Otra de las innovaciones será crear un tablero de control. que le permita a la persona integrar los mecanismos, conectar. los controles y los sensores de forma rápida y fácil, en donde estarán los bornes de conexlón.
Todo este conjunto tiene como finalidad reforzar los conocimientos de la mecánica, la transmisión de movimientos, y la aplicación de ellos, permitiendo utilizar diversas modos de operación seleccionando la forma de control con la cual se automatizara el funcionamiento de los dispositivos, con esto el alumno podrá observar y comprobar que la combinación de movimientos es tan importante para facilitar el trabajo, y así también mejorar la transmisión de conocimientos del docente al alumno.
Descripción del sistema
El proceso consiste en el dispositivo de leva como alimentador de piezas, una vez que la pieza llega al lugar predeterminado es detectado por los sensores y se determina su naturaleza, metal o no metal, mediante el uso de los sensores de proximidad inductivo y óptico de barrera de luz, los dos sensores detectan el tipo de material de la pieza si es metálico es llevado al lado derecho en caso de ser no metálico es llevado al lado izquierdo.
La siguiente figura muestra el diagrama a bloques del sistema
Sensor fotoeléctrico
- Pieza
metálica Celda de
piezas
Pieza no Control metálica
t I
Diagrama a bloques del sistema
I
2 Equipo 3 Proyecto SlMMA
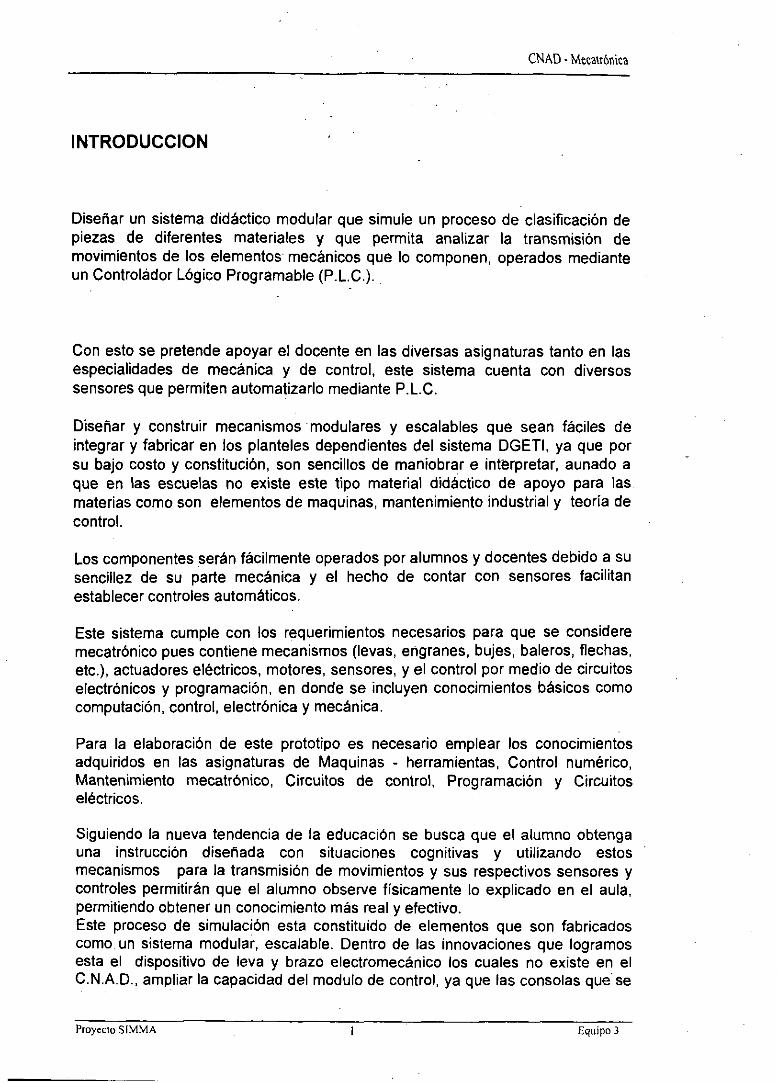
El siguiente diagrama de Rujo muestra la operación del sistema
RELEVADORES
CONECTAR ALlMENTAClON
DE ENERC~A
PLC
SE HACEN LAS CONEXIONES EN LOS BORNES DE LAS TERMINALES DE LOS RELEVADORES
3 Equipo 3 Pro)ecio SlMMA
SEESTABLECENLAS CONEXIONES PARA EL PLC
SE EJECUTA EL PROGRAMA DEL PLC

CAPITULO 1 SISTEMA DE CONTROL
1.1 Diseño del Sistema de Control El diseño consta de cuatro grandes areas; control de los motores de D.C.. control del motor a pasos de la garra, sensores ópticos y P.L.C. (características del equipo y su programa).
1.1.1 Descripción del P.L.C.
El P.L.C. utilizado, de la marca OMRON modelo Sysmac C60K, tienen el siguiente diagrama a bloques.
alimentaci6n
Programador rc-7 I ,&,
t & Microprocecador 4
Cuyas características son las siguientes:
Entrada
El PLC C60K esta constituida por 32 terminales de entrada divididas en dos bloques de direcciones
Bloque 1: 0000-0015 Bloque 2: 0200-0215
Proyecto CIMMA 4 Equipo 3

Estas terminales de entrada al PLC C60K tienen un fotoeléctrico como se muestra en la sig'uie.nte figura
............................................................................................. 4 i
lnternalo Circuito
.... j
70
COM !
i ...... I,.' fotoacoplador . : . .
+24 i ............................................................................................ ; V CD
Terminales de entrada del PLC
Principales características
'arreglo de acoplamiento
Voltaje de alimentación: Corriente de entrada: Voltaje de encendido: Voltaje de apagado: Tiempo de retardo de encendido: Tiempo de retardo de apagado:
24 Vcd 7 mA a 24 Vcd 15 Vcd Min. 5 Vcd Max. 2.5 ms. Max. 2.5 ms. Max.
Salida
El PLC C60K está constituido por 28 terminales de salida, separados en dos bloques
Bloque 1: Bloque 2:
direcciones O100 - O1 11 direcciones 0300 - 0315
Las terminales de salida del C60K, tienen un arreglo como se muestra en la
5 Equipo 3 Proyecto SIMMA
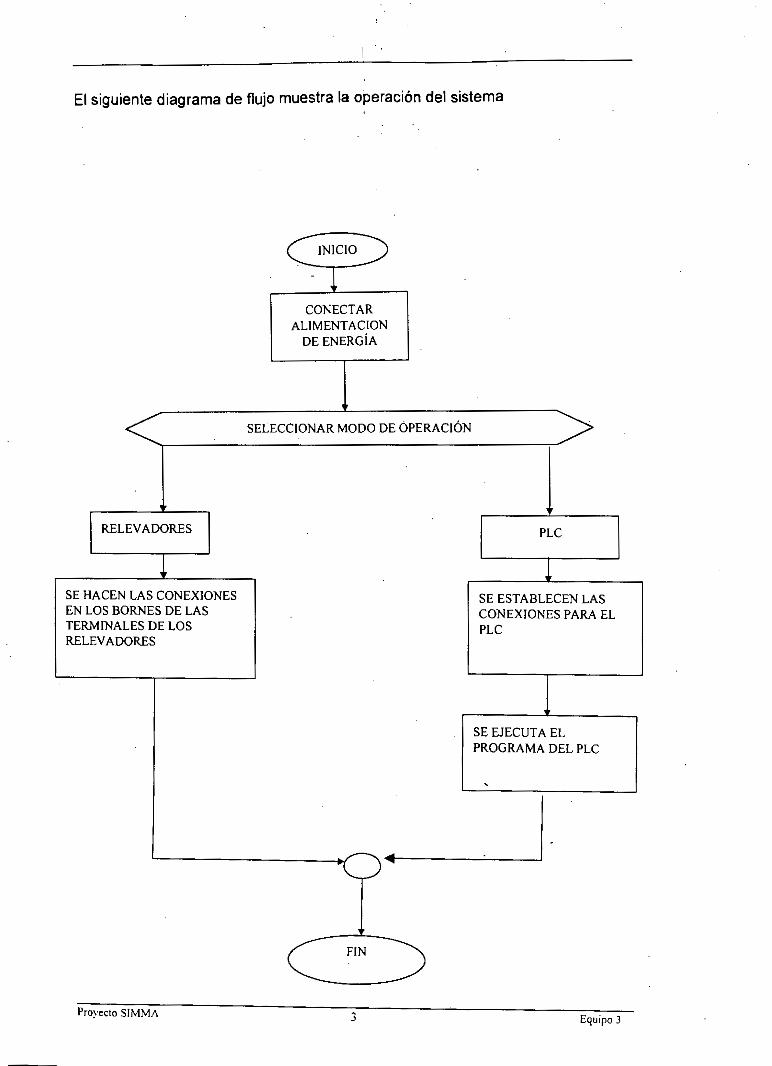
Especificaciones de las terminales de salida
Salida a relevador
Tiempo de encendido Tiempo de apagado
CPU
Elementos principales de control: Método de programación: Longitud de la instrucción:
Numero de instrucciones: Tiempo de ejecución: Capacidad de memoria: Relevadores internos (IR): Relevadores (SR): Relevadores (HR): Ternporizadores y contadores:
Contador de alta velocidad:
Vida útil de la batería:
500mA a 250 vca 2 A a 24 vcd 15 ms. Max. 15 ms. Max.
MPU, C-MOS, LS-TTL Diagrama de escalera 1 dirección / instrucción, 6 bytes 49. 10 ps /instrucción 11 94 direcciones 136 (1000 a 1807). 16 (1808 a 1907). 160 (O00 a 915). 48. TIM 00-47 (O a 999.9 s,), TIM H O0 -47 (O a 99.9 s.). CNT O0 a 47 (O a 9999 cuentas). CNTR 00- 47 (O a 9999 cuentas). Entrada del contador O000 Entrada de reset físico 0001. Reset software 1807. Frecuencia de respuesta Max. 2Khz Contador reversible 5 años a 25 grados centígrados.
6 Equipo 3 Proyecto SlMMA
. -
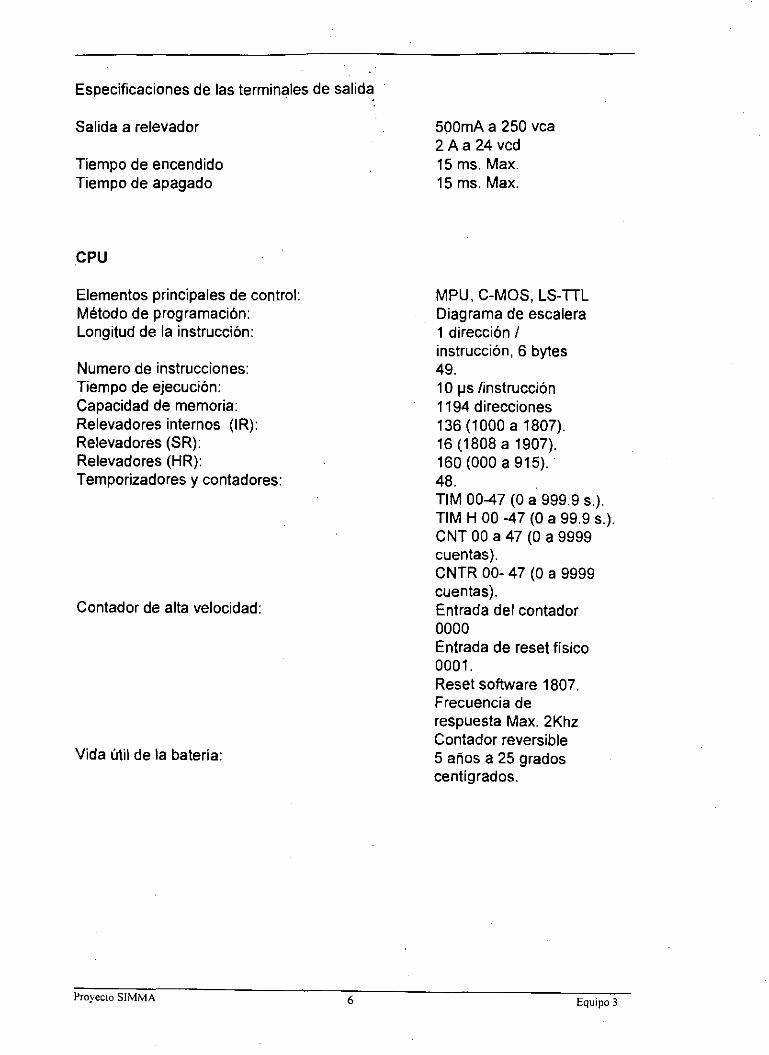
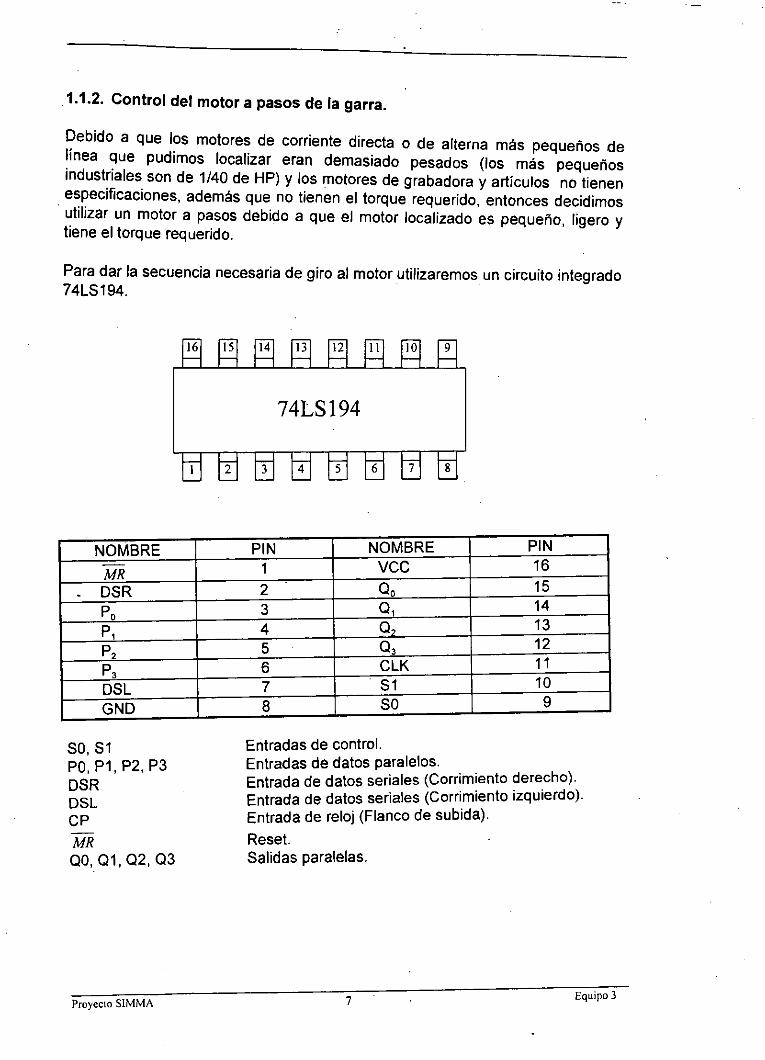
1.1.2. Control del motor a pasos de la garra.
Debido a que los motores de corriente directa o de alterna más pequeños de línea que pudimos localizar eran demasiado pesados (los más pequeños industriales son de 1/40 de HP) y los motores de grabadora y artículos no tienen especificaciones, además que no tienen el torque requerido, entonces decidimos utilizar un motor a pasos debido a que el motor localizado es pequeño, ligero y tiene el torque requerido.
Para dar la secuencia necesaria de giro al motor utilizaremos un circuito integrado 74LS194.
74LS 194
L
so, S I Entradas de control. PO, PI , P2, P3 DSR DSL CP MR Reset. QO, QI, Q2, Q3
Entradas de datos paralelos. Entrada de datos seriales (Corrimiento derecho). Entrada de datos seriales (Corrimiento izquierdo). Entrada de reloj (Flanco de subida).
Salidas paralelas.
-
7 Equipo 3 Proyecto SlMMA

CORRIMIENTO DER.
CARGA PARALELA
El elemento activo elegido para alimentar el motor a pasos es Dar Darlintong TIP 100, cuyo equivalente es ECG2343, el cual es del tipo NPN.
._ ._ H H I X H x s; q, q 3 H H L h I X X L q o Qi q, H L h h X X H q o Qi q, H H h X X P, Po P, P, P,
TIP 100
1 i 3 2 E
Para proporcionar los pulsos de excitación del motor a pasos se eligió el circuito integrado NE555 en su presentaci6n DIP8.
El circuito utilizado es: 5v
8 Equipo 3 Proyecto CIMMA

CT=(0.47 lif) * 2 CT=0.94 pif)
ti= 0.695 (R,+R,)* CT t,=0.695 (10 KR + 10 k R ) * (0.94 pf) t,=0.013066 seg.
t,=0.695*(RB)*CT t2=0.695*(10 KR)*(0.94 pif) t2=0.006533 seg.
T= t, + t,=0.013066 + 0.006533 = 0.019599 T= 19.6 mSeg.
1 T
f = - = 5L.02 HZ MOTOR A PASOS
El motor seleccionado es el PM42L - 048 - SY04 de marca Minebea Electronics Co. LTD.
El dibujo de la izquierda muestra la disposición de los cables de las termínales del motor y el dibujo de la derecha muestra la correspondencia de dichos cables con la conexión interna del motor a pasos de 4 fases.
O 0 0 r o j o r o j o vcc vcc
1 2 3
O 0 0 4 5 6
PIN COLOR PM COLOR 1 NEGRO 4 NARANJA 2 ROJO 5 ROJO 3 CAFE 6 AMARILLO
negro c a f e na ran ja a m a r i l l o
Secuencia de polarización de las terminales para los respectivos sentidos. de giro del motor.
Secuencia a la izquierda Naranja Negro
Amarillo Café
Secuencia a la derecha Café
Amarillo Negro
Naranja
Proyecio SlMMA 9 Equipo 3

Este motor tiene un paso de 1.8' por cada pulso o cambio de secuencia eso quiere decir que se necesitan 200 pulsos para que el motor de una vuelta completa, luego entonces si el reloj es de 51 pulsos por segundo, entonces la velocidad del motor es:
1 - 3.9215 segundos, es decir vel = =.255RPS O
200 51 3.92 15seg
una vuelta cada - -
vel = 0.255seg * 60 = 15 WM.
Botones pulsadores utilizados en la operación manual
DERECHA IZQUIERDA
GND GND
A l o s transistores
Equipo 3 Proyecto SIMMA 10

Este es el circuito completo del control del motor de la garra.
24" *Y e
$ 9 - 0 6 0 0 I I Equipo 3 Proyecto CIMMA

1.1.3. Tarjeta de sensores ópticos.
ECG Input voltaje Type. Res. Nom. Arrang. VDC Ohms Power Type
MW
DS2E-M 12 00.002 180 SPDT
De acuerdo a las características de funcionamiento del prototipo se seleccionaron los siguientes sensores
Max. Curr.
0.6 Amp.
Para la detención de posición de los mecanismos. Se opto por el uso de Sensor Óptico de luz infrarroja en forma de herradura, el cual seria accionado por el corte de la luz por los seguidores.
El funcionamiento propuesto, es el foto transistor para que siempre esté detectando el haz.de luz, cuando el palpador o (perro de arrastre), corte dicho haz, este sensor activará un TIP 122 y éste a su vez accionará un relevador.
El circuito propuesto es el siguiente:
DS2E-M-
12 +V
- .
CLEMA
3rrm Contacto
s
Equipo 3 Pioyecto SlMMA 12

Para la detección de piezas metálicas y no metálicas en el alimentador y la base 1:
La figura siguiente muestra la forma en que se detecta la pieza de trabajo.
Amplificador Led infrarrojo fototransistor
J
Unidad de salida
Fuente de alimentación
C L W
Continuación : 12"
cow11 3:
Diagrama del circuito
La setial recogida por el sensor es enviada a un transistor que estará en corte y saturación dependiendo de las condiciones de entrada y éste llevará a la energización de la bobina del relé. Cabe mencionar que el prototipo no podrá trabajar en la intemperie, los rayos del sol a traves de la luz infrarroja que emiten afectan el funcionamiento de los censores.
13 Equipo 3 Proyecto SlMMA

Con base a las pruebas realizadas se obtuvieron las siguientes características de la detección de la pieza
~
Características técnicas
Led infrarrojo Tipo led de luz infrarroja Material de cristal de unión PN Ga As (Arsenuro de Galio)
Distancia de detección Objeto de detección
Distancia de operación Distancia de restablecimiento
Longitud de onda Voltaje en sentido directo Angulo de operación Fototransistor Tipo Voltaje de colector a emisor Elevación y caída
10 cm pieza del alimentador y de la base 1 5cm 3cm
940 nm. 1 . 3 ~ tipico 1 . 7 ~ max. 27 grados
fototransistor de silicio 7.0V 5 P
Objeto de detección
Bobina de detección ......... - ........... ...... ( s j - - - q _ .................... -.. ..... ................ ..... 0 ;
...... ........ ....... ..... i ................... i
.-
f
I I
...... Oscilaci6n de alta frecuencia
Elementos interruptor
del
14 Equipo 3 Proyecto SlMMA

La impedancia del circuito cambia y se produce una señal de encendido y apagado cuando un objeto metálico se acerca al circuito generador de alta frecuencia.
Característica técnicas del sensor magnético.
Rango de voltaje de operacion
Rango de temperatura de operación Corriente de carga Consumo de corriente
Modelo E2EV - X2C1
detectada
10 a 30V. Permisible ripple 20% max (p-p -10 a + 55°C 1 O0 mA MAX. 15 mA MAX.
I Distancia de detección estándar I2mm Movimiento diferencial 1 pérdida de mas del 20% de la distancia)
I
Equipo 3 Proyecio SlMMA 15

1.1.4
El control de velocidad de los movimientos de los mecanismos se hizo en base a motores de corriente directa con reductores de velocidad
Las especificaciones del motor aparece en la tabla siguiente
Control de los motores de corriente directa.
MATSUSHITA ELECTRIC LTD
Voltaje de operación
Velocidad sin carga
Corriente de carga
Relación de vueltas
PN GMX - 6MP009A
24Vcd
470rpm
0.240 A
8 : 1
Prueba de resultados de laboratorio
SPEED (RPM) Corriente (A) 398
TORQUE (OZ - IN)
050 1
300
186
55 I I I
108 2
168 3
220 4
El voltaje que se utilizó para generar el movimiento de mecanismos fue de 5 volts y 12 volts, por lo que la relación de voltaje y las revoluciones por minutos es la siguiente.
24 VCD 5 VCD 12 VCD
470 RPM 97.9 RPM 235 RPM
16 Equipo 3 Proyecto SlMMA

Los mecanismos del prototipo utilizan dos giros, izquierda y derecha:
Para la inversión del giro de cada motor se utilizó 'dos reveladores, ésta configuración se basó en la tabla de verdad de la compuerta xor.
1 1 0
A continuación se muestra el diagrama con relevadores de la inversión del giro del motor
Ri R l Ri
1 .I .5 Programa del P.L.C.
Nota: Este programa se anexa en el apéndice "G".
17 Equipo 3 Proyccio CIMMA

1.2 Tablero de Control
El tablero de control es el instrumento que nos permitirá hacer las COnexiOneS propias del P.L.C. y hacia los mecanismos, y mediante el auxilio de éste es posible llevar a cabo el desarrollo de prácticas diversas.
Consta de 8 Relevadores de 127 VAC que permitirán hacer prácticas de control de los mecanismos sin utilizar P.L.C. y también como auxiliar de éste.
Consta de 16 entradas las cuales pueden ser de .voltaje directo o alterno dependiendo del P.L.C. que se disponga. En este caso utilizaremos uno que dispone de entradas a 24 VDC y salida a relevador, estas entradas son del tipo hembra, compatible con los conectores tipo banana, los cuales tienen asociados botones pulsadores independientes en cada entrada, lo cual permite simular señales de sensores hacia el P.L.C.
También consta de 16 salidas con su común independiente, cubriendo con esto la posibilidad de que utilicen distintos voltajes en los actuadores, el tipo de conector es similar a los utilizados en las entradas.
Las interconexiones se llevarán a cabo mediante cables con conectores banana - banana apilables.
A continuación se muestra un segmento del tablero de control.
O ' Bobina
o NC o O
o NC o o NC o Bobina
18 Equipo 3 Proyecto SlMMA

s Entrada r - l
Común de la salida
Equipo 3 Proyecro SlMMA 19

1.2.1. Diagrama Eléctrico
La conexión interna del tablero es la siguiente:
Entrada del
- Q G - Entrada de - - Sensores
Para facilidad en las conexiones internas se estableció el siguiente código de colores, tomando en cuenta que son 16 entradas y se consideran 8 colores, se infiere que estos serán repetidos en el orden original.
Amarillo Violeta Blanco Naranja Azul Café Gris Verde
Entrada 1 Entrada 2 Entrada 3 Entrada 4 Entrada 5 Entrada 6 Entrada 7 Entrada 8
Proyecto SlMMA 20 Equipo 3

Para las salidas se sigue el mismo patrón
Amarillo - Negro Violeta - Negro Naranja - Negro Azul - Negro Café - Negro Blanco - Negro Gris - Negro Café - Negro
Bornes de las alimentaciones Rojo Naranja Amarillo Negro Negro Negro
Negro
Bornes de los relevadores
Blanco y Azul Naranja y rojo Café y amarillo Violeta y gris
Salida 1 Común Salida 2 Común Salida 3 Común Salida 4 Común Salida 5 Común Salida 6 Común Salida 7 Común Salida 8 Común
24 VDC 12VDC 5VDC GND Fase Neutro
Alimentación de entradas
Bobina Común Contacto normalmente cerrado Contacto normalmente abierto
Pro)ecto SlMMA 21 Equipo 3

1.2.2. Fuente de alimentación
Hay tres voltajes necesarios para el funcionamiento de nuestro sistema; el primero de ellos es un voltaje de 24V a 2A. Este voltaje alimentará al PLC. El voltaje de 12V a 2A alimentará a las 12 tarjetas de sensores y a uno de los motores. Y el ultimo voltaje de 5V por 5A, éste alimentará a una tarjeta que contiene un circuito T L y a los motores de corriente directa .
En la siguiente figura se muestra un diagrama a bloques de la fuente de alimentación
i
Cada una de las tres alimentaciones de cd necesarias para el proyecto esta constituida por seis módulos básicos: una sección de transformador para reducir la tensión de la red de 127 Vca . Un rectificador para convertir c.a. en c.d., un fusible para proteger al regulador , un capacitor para filtrar la señal con un pequeño rizado, un regulador que estabiliza la salida a un nivel de tensión determinado, un capacitor de acoplamiento.
Capacitor Regulador - Capacitor de Transformador Rectificador Fusible de filtro de voltaje acoplamiento
Diagrama a bloques de la fuente de alimentación.
Las tarjetas fueron diseñadas con el paquete de software circuit maker y Trax maker y elaboradas por el método de serigrafia
Diagrama de la fuente de alimentación
Proyecto SlMMA 22 Equipo 3

Circuito de señalización ,
La función de este circuito es: tener una señal luminosa que nos indique que la salida de voltaje esta activa.
Diceiío para 5 Volts.
Se utiliza un diodo emisor de luz (led) se serie con un resistor Se propone una corriente de 10 mA para el led. La caída de tensión en el led es de 2.2.V. El resistor será (5- 2.2)VIlOma = 280 ohms (330 ).
La figura siguiente muestra el circuito con sus valores comerciales.
Circuito de indicacion luminosa.
Diseno para 12 Volts.
Se utiliza un diodo emisor de luz (led en serie con un resistor.) Se propone una corriente de loma para el led. La caída de tensión es el led es de 2.2. El resistor será 12-2.2 vIlOma = 980 ohms (1K).
Proyecto SlMMA 23 Equipo 3

La figura muestra el circuito con sus valores comerciales
12v
Circuito de indicación luminosa.
Diseno para 24 Volts.
Se utiliza un diodo emisor de luz (led ) en serie con un resistor Se propone una corriente de loma para el led. La caída de tensión es el led es de 2.2. El resistor será 24-2.2 v/lOma = 2180 ohms (2.2K).
Circuito de indicación luminosa.
El cálculo del disipador para los reguladores de voltaje se indica en el apéndice F.
24 Equipo 3 Proyecto CIMMA

CAPITULO 2 1
SISTEMA MECANICO
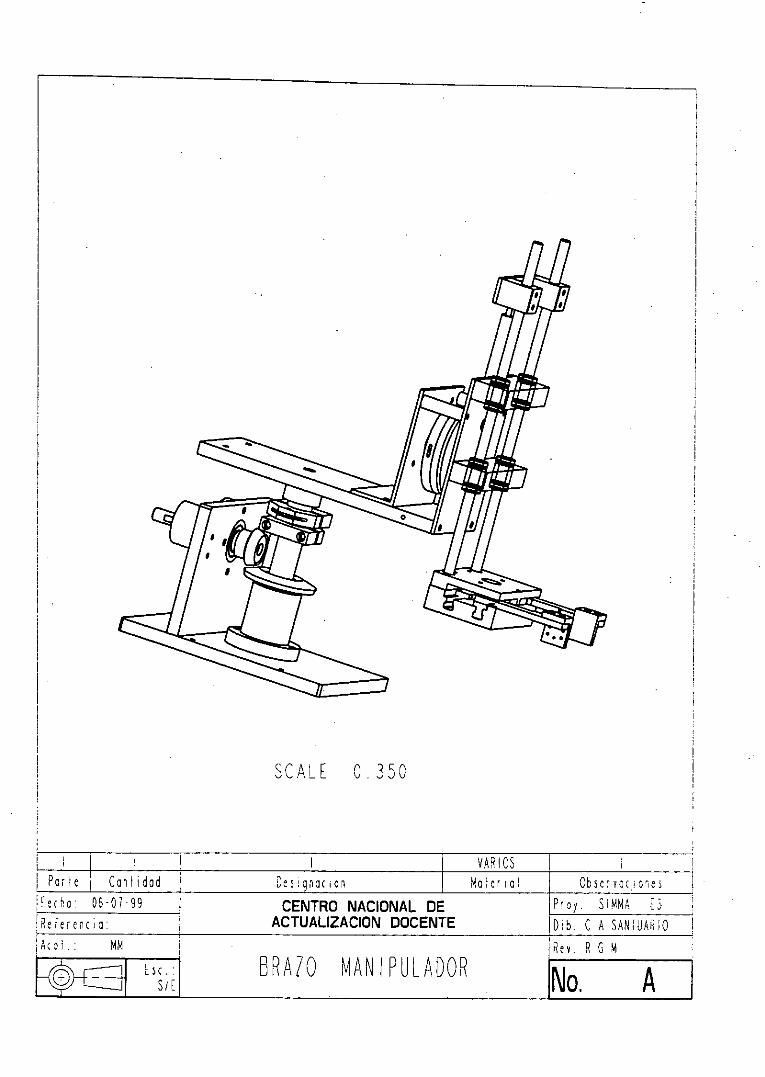
2.1 Brazo Manipulador Electromecánico
El brazo manipulador electromecánico es una parte principal de este prototipo, ya que es el medio a través del cual se manipulará la materia prima que estará en proceso. Dentro de los elementos que constituyen el brazo manipulador se considera como parte de vital importancia el mecanismo de la pinza ya que este elemento es quien realiza la sujeción directa del material, por tal motivo se le dedicó gran parte de tiempo para su diseno y elaboración, siendo el primer elemento mecánico en ser sometido a pruebas
2.1.1 Descripción de características técnicas
I
El brazo manipulador está compuesto básicamente por tres mecanismos, y su elaboración se realizó en gran parte con aluminio, también se utilizó acero 1045 para las partes que realizan mayor esfuerzo en su funcionamiento o que se utilizan para la transmisión de movimiento, como por ejemplo engranes y flechas.
Las dimensiones generales del brazo son:
Sin elementos de control, ni motor de giro: Con elementos de control, y sin motor de giro:
ANCHO 150 ALTO 400 -3...-. .”., 210
#, ,:< ALTO 400
LARGO 470 ! LARGO 111
Proyecto SlMMA 25 Equipa 3

i
De acuerdo con las dimensiones y por girar en un eje requiere de un área libre para desplazamiento de 1/2 metro cuadrado.
El brazo cuenta con dos movimientos (grados de libertad):
Movimiento de giro de 270 grados sobre un eje principal. Movimiento ascendente y descendente de las pinzas.
NOTA: El movimiento de giro se puede lograr a 360 grados, cuando las pinzas se encuentran en su posición más alta.
Las dimensiones del ancho del material que puede sostener la pinza del brazo son de:
Mínimo de 5mm Máximo de 55 mm
El mantenimiento que requiere es mínimo ya que solamente se tendrá que lubricar el par de engranes cónicos y en caso de requerirlo, también se lubricaran los bujes balín y baleros.
2.1.2 Componentes.
El brazo manipulador electromecánico consta de mecanismos y otros elementos los cuales se enlistan a continuación.
- Mecanismo de transmisión de movimiento por acoplamiento de
- Mecanismo de biela manivela. - Mecanismo de pinza mecánica - Sistema de deslizamiento. - Rodamientos. - Piezas mecánicas
engranes.
A continuación se describe cada uno de los elementos mencionados a excepción de la pinza, lo que se tratara en el subtema 2.2 Pinza.
Proyecto SlMMA 26 Equipo 3
r

Mecanismo de transmisión de movimiento por acoplamiento de engranes.
Cuenta con un engrane recto de módulo 1, Diámetro exterior 88 rnm, Número. de dientes 80 y Anguio primitivo 45 grados, de acero 1045
Juego de engranes cónicos rectos:
~
CARACTERiSTlCAS
I
I
i
I I I I CARACTERiSTlCAS ENGRANE I E N G F E I 42 I A
I Módulo Real 2.5 2.5 No. De dientes (z) 36 18 Angulo de Presión 20" 20" I
Angulo primitivo 45" 45"
I Diámetro Primitivo 90 22.5 Diámetro Exterior 91.46 51 .O1 Adendum 2.5 2.5
Estos engranes fueron adquiridos con un proveedor, ya que el CNAD no cuenta con la maquinaria y herramentai necesarios para su elaboración. I
MOTOR -
1
EN DONDE
1 ENGRANE RECTO 2 ENGRANE RECTO 3 ENGRANE
CONIC0 RECTO B
4 ENGRANE CONIC0 RECTO A
27 Equipo 3 Proyecto SlMMA

Mecanismo de biela - manivela.
Este mecanismo está constituido por 5 piezas, de las cuales 2 de ellas forman la biela y las restantes constituyen la manivela,
De este total de piezas se maquinaron 3 , la biela y el eje de la manivela ya que las otras dos que son un par de rotulas se adquirieron con un proveedor, por no poderse elaborar en el CNAD.
MANIVELA 1
Sistema de deslizamiento.
Este sistema está formado principalmente por un par de flechas rectificadas de diámetro de 8 mm y por 4 bujes balín (baleros longitudinales), estos acoplados entre si por medio de una estructura de aluminio formada por varias piezas que fueron maquinadas en su totalidad en el CNAD. Las flechas y los bujes balín fueron adquiridos por proveedores debido a que son elementos de uso común, comerciales y de gran precision. Este sistema es el soporte de las pinzas mecánicas que forman parte del brazo manipulador.
Rodamientos.
El brazo cuenta con 4 rodamientos, 2 6000-2ZlC3 y 2 6201-221C3 del proveedor SKF, estos rodamientos se utilizaron para el mecanismo de transmisión de movimiento, esto es, transmitir el movimiento del motor acoplado al brazo para darle el movimiento de giro del mismo.
Proyecto SlMMA 28 Equipo 3

!
CNAD - Mecalrónica
Piezas mecánicas
El brazo está formado por un total de 53 piezas, de las cuales se maquinó un 78 % esto es 41 piezas, sin considerar aquellas piezas que se utilizan como soportes de los elementos electrónicos (1 1 piezas, maquinadas en su totalidad en el CNAD). I
Entre estas piezas se encuentran ejes, placas de soporte y sujeción así como cremalleras y piñón, entre otras.
2.1.3 Funciones.
Brazo.
El brazo tiene como función principal la de manipular el material a procesar, colocándolo en la posición correcta para el proceso determinado de acuerdo al tipo de material.
Transmisión por acoplamiento de engranes.
Transmitir el movimiento del motor acoplado al brazo, para dar el movimiento de giro del brazo.
Mecanismo de biela manivela
Dar movimiento ascendente y descendente a las pinzas para que sea fácil de manipular el material a procesar.
Sistema de deslizamiento. i
Reducir al minimo el esfuerzo y eliminar el rozamiento en el movimiento de subir y bajar las pinzas mecánicas.
Los rodamientos.
Facilitar y dar mayor vida a los elementos que intervienen en el mecanismo de transmisión de movimiento, ejes y soportes.
Proyecto CIMMA 29 Equipo 3

CNAD - Mecatrónica
I Las piezas mecánicas.
Servir como soporte y acoplamiento entre todos los elementos que integran el brazo manipulador electromecánico.
2.1.4 Memoria de cálculo. I
Para la elaboración del piñón y de las cremalleras se utiliz6 la electroerosionadora de corte por alambre, por lo que se realizó un programa de APT para obtener la programación en Control Numérico y poder programar en esta máquina.
Los datos utilizados para el programa en APT fueron los siguientes:
Pinón,
Módulo ( M ) de 0.5 Número de dientes ( z ) 26 Diámetro primitivo ( di ) 11.843 mm Diámetroexterior (D) 14 mm
En donde:
di = D - 2 ( 1.0785 ) di = 14 - 2 ( 1.0785 ) di = 11.843 mm
Cremallera.
Módulo ( M ) de 0.5 Adendum 0.5 Dedendum 0.625 Paso 1.571 Radio de la raíz 0.19 Radio de la cresta 0.1 Angulo de salida 20"
D = M x ( z + 2 ) D = 0.5 x (26 + 2 ) D = 1 4 m m
Proyecto SIMMA 30 Equipo 3

CNAD - Mecatrónica
I
En donde:
Adendum = 1 x M = 1 x 0.5 = 0.5 Dedendum = 1.25 x M = 1.25 x 0.25 = 0.625 Paso = n x M = 3.1416 x 0.5 = 1.571 Radio de la raíz 0.38 x M = 0.38 x 0.5 = 0.19 Radio de la cresta = 0.20 x M = 0.20 x 0.5 = 0.1
i
La longitud de la sección dentada de la cremallera es de 51.843 mm. ( Paso x z = 1.571 x 33 )
El desplazamiento de las cremalleras es de 40.84 mm por cada vuelta que de el piñón y de 1.57 mm. Por cada diente de desplazamiento.
Velocidad de las cremalleras
La velocidad angular ( o ) del piñón es de 0.25 revlseg. ( 1.5708 radkeg. La distancia del centro del piñón al punto de contacto con la cremallera (r) es 5.921 mm.
Va = r o = 5.921 mm x 1.5708 rad/seg = 9.3 mmlseg
Como la apertura máxima es de 60 mm cada cremallera tendría que desplazarse 30 mm para lograr esto.
Por lo tanto 30l9.3 = 3.3
Por lo que las pinzas tardarían 3.3 seg en abrir en caso de estar cerradas totalmente o viceversa
I
2.1.5 Justificación de secciones criticas
Se considera como parte critica el mecanismo de deslizamiento que soporta a las pinzas, debido a que se deberá de eliminar al máximo el rozamiento y el esfuerzo entre los elementos del mecanismo para facilitar el trabajo. Esto se logra con la utilización de los bujes balín y las flechas rectificadas. El esfuerzo es mínimo ya que lo único que se tendrá que superar, es el peso de las pinzas, esto por encontrarse en posición vertical ya que para el caso de encontrarse en posición horizontal este no se presenta.
Proyecto SlMMA 31 Equipo 3
CNAD - Mecalrónica
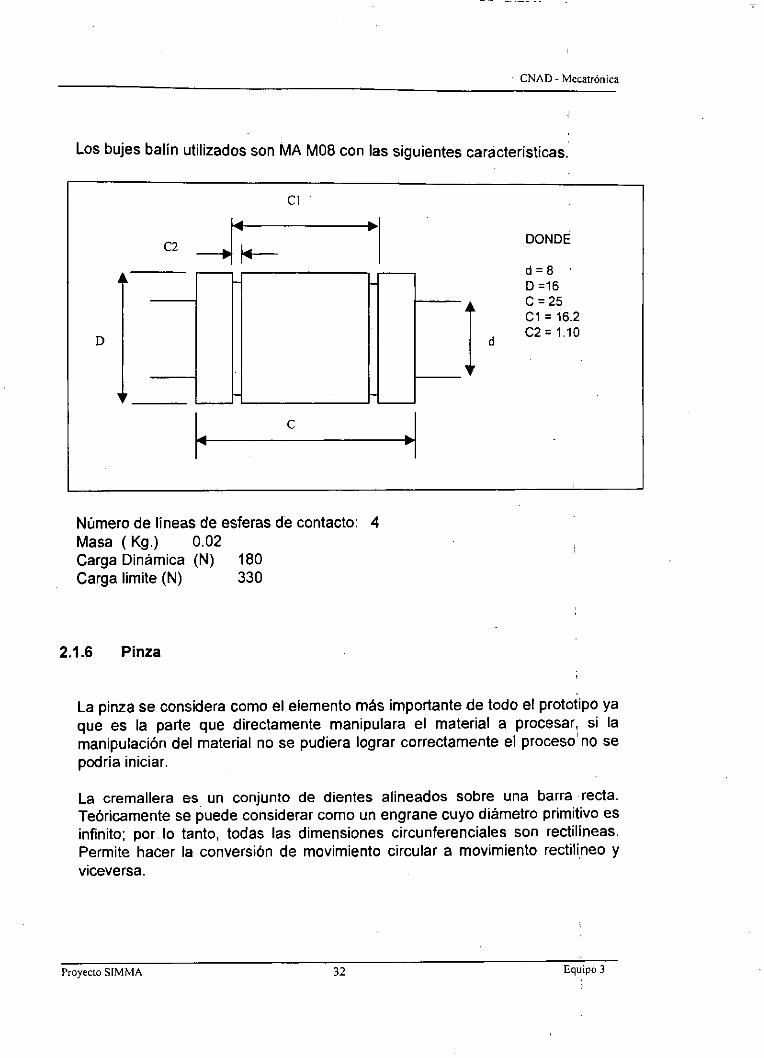
Los bujes balin utilizados son MA M08 con las siguientes características.
DONDE
d = 8 '
D =16 C = 25 C1 = 16.2 c2 = 1.10 II
Número de lineas de esferas de contacto: 4 Masa (Kg.) 0.02 Carga Dinámica (N) 180 Carga limite (N) 330
2.1.6 Pinza
La pinza se considera como el elemento más importante de todo el prototipo ya que es la parte que directamente manipulara el material a procesar, si la manipulación del material no se pudiera lograr correctamente el proceso'no se podria iniciar.
La cremallera es un conjunto de dientes alineados sobre una barra recta. Teóricamente se puede considerar como un engrane cuyo diámetro primitivo es infinito; por lo tanto, todas las dimensiones circunferenciales son rectilineas. Permite hacer la conversión de movimiento circular a movimiento rectilineo y viceversa.
Proyecto SlMMA 32 Equipo 3

CNAD - Mecatrónica
2.2.1 Descripción.
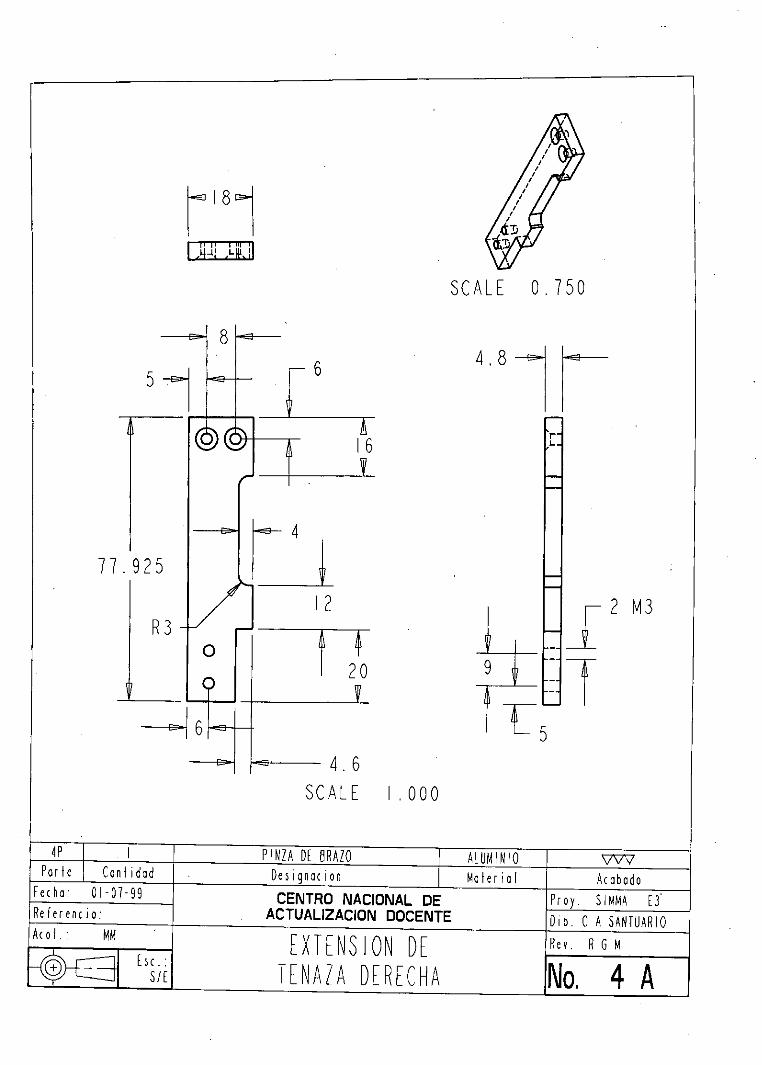
La pinza esta formada por 9 piezas que se mencionan a continuación:
- Base de pinzas - Cremalleras (2) - Piñón - Extensiones de tenazas (2) -Tenazas (2) - Tapa de cremalleras
Todas las piezas fueron maquinadas en aluminio y los dibujos de dichas piezas se presentan en los anexos al igual que los programas de APT para la elaboración de las cremalleras y el piñón.
Las cremalleras son de 33 dientes de módulo 0.5 Con un ancho de 12 mm más la altura del diente ( 1,125 mm).
El piñón es de (z) 26 dientes, módulo 0.5, diámetro exterior de 14 mm Diámetro primitivo de 11.843.
La pinza tiene una apertura máxima de la garra de 60 mm y un cierre de 5 mm, sin considerar los interruptores de limite de carrera. Las dimensiones de la pinza son:
'
Sin considerar el motor
ANCHO 110
LARGO 90
Proyecto SlMMA 33 Equipo 3

CNAD - Mecatrónica
Con motor
ANCHO 710
2.2.2 Funcionamiento.
La base de las cremalleras cuenta con una ranura que sirve como guía- para que las cremalleras realicen un movimiento rectilíneo uniforme sobre su mismo eje, y así evitar variaciones en el movimiento de apertura y cierre de las garras como se muestra en la figura "a" 1
CREMALLERA " A
i cz 3 CREMALLERA "E
figura "a"
Proyecio CIMMA 34 Equjpo 3
I
CNAD ~ Mecatrónica
Descripción del movimiento: AI girar el piñón en sentido de las manecillas del reloj, iniciando el movimiento de la cremallera “ A en un sentido y la cremallera “6” en sentido contrario, accionando así la apertura de la garra, si gira en sentido contrario los movimientos se realizan en dirección contraria accionándose así el cierre de las garras.
I Se recomienda hacer un buen ensamble de las extensiones de la tenaza con las cremalleras para evitar que exista juego entre estas piezas y lograr así un buen accionamiento de las pinzas, y que tengan una buena sujeción de los objetos.
Las pruebas realizadas al ensamble de la pinza fueron satisfactorias, ya que el deslizamiento de las cremalleras es correcto, y no sé tuvo que realizar ningún ajuste en el ensamble de las piezas que constituyen la pinza.
NOTA: Las ranuras se elaboraron de acuerdo a normas, por adecuarse a la herramienta de corte de dimensiones más pequeñas con que se contaba.
2.2 Mecanismo de Leva- Manivela
2.3.1 Descripción
Se integra por diversas piezas para formar un mecanismo capaz de generar movimientos y desplazamientos generados por un motor y su uso es en forma didáctica para su aplicación, su forma es horizontal cuyas dimensiones generales son:
Altura = 15 mm. Ancho = 216mm. Largo = 336mm.
Los diversos componentes que integran este prototipo están montados sobre una placa de aluminio para una mejor presentación y también evitar la corrosión.
Proyecto SlMMA 35 Equipo 3

CNAD - Mecatrónica
2.3.2. Funcionamiento
Este mecanismo tiene como particularidad el demostrar la transmis’ión de movimientos de una posición horizontal a vertical y posteriormente circular para que este movimiento sea trasmitido por una leva descentrada y por medio de una flecha guiada enviar un empuje para alimentar otra posición.
Este movimiento es generado por un motor de corriente directa
Por el empuje que realiza este mecanismo se tiene un bloque de alimentación en donde una pieza cuadrada es empujada, donde será detectada y llegara a una posici6n indicada para posteriormente ser sujetada por el otro mecanismo y realizar sus movimientos programados
2.3.3. Componentes Principales
Este prototipo dentro de sus mecanismos tiene partes principales y secundarias como son: a. Motor b. Engranes cónicos rectos c. Engrane recto de acoplamiento d. Flechas e. Baleros f. Leva excéntrica g. Perro sensor h Postes i. Apoyo para eje vertical j. Placa superior k Guía de empuje Mecanismos principales
Equipo 3 1 Proyecto SIMMA 36

CNAD - Mecatrónica
I
I MECANISMO PRINCIPAL DE MOVIMIENTO
I 10
a 1
1
EN DONDE:
1.- Motoreductor 2.- Flecha de motor 3.- Engrane de arrastre 4.- Perno de acoplamiento 5.- Engrane de acoplamiento 6.- Flecha horizontal 7.- Engrane cónico menor 8.- Flecha vertical 9.- Engrane cónico mayor 10.- Apoyo para leva 11 .- Leva Excéntrica
Proyecto SlMMA 31 Equipo 3

CNAD - Mecatrónica
Corriente (A) 398 050 1 300 108 2
55 220 4
- 186 n 168 3
Motor
La función de este motor es el accionamiento de un eje principal con los engranes colocados para su transmisión, y sus características son las siguientes:
Laboratorio prueba de resultados SPEED (RPM) TORQUE (02 - IN)
Este motor tiene como función transmitir el movimiento y el par de fuerza necesario para que los demás componentes actúen con el rendimiento necesario.
Engranes cónicos rectos
Con el objeto de dar el movimiento de rotación se optó por utilizar este tipo de engranes que son usados normalmente para trasmitir la fuerza por medio de flechas y su utilidad es excelente ya que son los más versátiles, .
Este tipo de engrane es utilizado, ya que la prolongación de los dientes rectos se intersectan en el eje del otro engrane.
Ante la imposibilidad de poder construir estos engranes en el CNAD, por disponer solo de fresas con husillo vertical, los engranes fueron adquiridos externamente, con las siguientes características:
Proyecto CIMMA 38 Equipo 3

CNAD - Mecatrónica
Módulo Real (m) No de dientes (2)
Angulo de presión L Angulo primitivo (.c p) Diámetro primitivo (Dp) Addendum (Ad) Diámetro exterior (D)
ENGRANE MAYOR
2.5 36 20 o 4 50 90 2.5 91.46
Módulo Real (m) No de dientes (2)
Angulo de presión ( L ) Angulo primitivo (= P) Diámetro primitivo (Dp) Addendum (Ad) Diámetro exterior (D)
2.5 18 200 45 22.5 2.5 51 .O1
[Teoria de maquinas y mecanismos pag. 1351
Proyecto SIMMA 39 Equipo 3

CNAD - Mecatr6nica
Módulo Diámetro exterior Número de dientes Angulo primitivo
ENSAMBLE DE ENGRANES CONICOS
1 .o 88mm 80 450
ENGRANAJE RECTO
El engrane recto de acoplamiento o de arrastre es empleado para mover la flecha donde esta colocado el engrane cónico menor y donde hace la intersección con el otro engrane cónico mayor, como se muestra en el dibujo de ensamble. Considerando el ensamble de estos engranes rectos que giran a 97.916 r.p.m. se desea que este movimiento sea trasmitido a la flecha donde están los engranes cónicos. Capaz de generar el movimiento a la leva excéntrica.
Por lo tanto tenemos:
Proyecto SlMMA 40 Equipo 3

CNAD-Mecatrónica
Dimensiones de la rueda dentada
d = da = df = P = m = h = hf =
diámetro del circulo primitivo diámetro del circulo de cabeza diámetro del circulo de pie paso modulo altura del diente = hf + ha altura del pie del diente = 716 m
ha = altura de cabeza de diente z = numero de dientes
Donde: d = m * z P = i I * m z m = p l n = d l z
Por lo tanto d = ( p l n ) * z
dicha relación es diz = pin = m
Esta relación es equivalente para emplear la magnitud (módulo) medida en mm.
El módulo es una magnitud normalizada que permite el cálculo con cifras fijas
Los cálculos de la fabricación de los engranes rectos son: Solución:
P = m'3.14 =I mm*3.14 = 3.14mm Ha = m = 1Omm. Hf = 716 m = 716 1 mm. = 8.71 mm. H = ha + hf = 1mm. + 7mm = 9.71mm. D = z m = 80 * Imm. = 80 mm. D a = d + l * m =80+2mm = 82 mm. Df = d -1 * hf = 71 5 9 mm =80 - 8.41
Flechas
Este mecanismo requirió de dos flechas siendo las siguientes: a).- Una flecha vertical de conexión del motor y que se prolonga a la intersección de los engranes cónicos b).- una segunda flecha que transmite el movimiento desde la flecha principal hasta la leva descentrada.
Proyecto SlMMA 41 Equipo 3

CNAD - Mecatrónica
RODAMIENTO
6000 - 2 2 6001 - 2 2
Estos elementos fueron construidos en acero SAE 1045 y sus dimensiones se especifican en los dibujos del apéndice C y fueron elaborados mediante maquinado en torno convencional del C.N.A.D.
Cajas para baleros
DIMENSIONES d D B
10 26 a 12 28 0
Se fabricaron cuatro cajas para dos tipos de rodamientos realizados en material de aluminio, de acuerdo a las dimensiones de los diámetros interior y exterior de los baleros y considerando que el trabajo del prototipo es didáctico se empleo un ajuste de j5 para el montaje de dichos elementos.
Estas piezas fueron realizadas en el centro de maquinado tomando en cuenta el ajuste que debe de tener para su alojamiento.
Rodamientos
La selección de este rodamiento se hizo en base a las dimensiones de las flechas y del espacio disponible así como de las características del prototipo eligiéndose los siguientes:
2 rodamientos rígidos de bolas con placas de protección . SKF 6000-22
2 rodamientos rígidos de bolas con placas de protección SKF 6000-22
Las principales dimensiones de dichos rodamientos son:
d
H
--r--ll I L B
Proyecto SlMMA 42 Equipo 3

CNAD - Mecatrónica
Acero
Para realizar el maquinado de estas piezas se elaboraron programas empleando el software y el equipo Fanuc
F = 0.1 110.22 irn/rev. P = 0.5/3 mm. S = 900 a 1400 r.p.m. F = 400 mmlrev. P = 2.5 mm
F = 400 mmlrev. P = 2.5 mm
2.3.4. Memoria de cálculo
Momento de torsión
Las características del motor empleado son:
Velocidad 197.916 r.p.m. Alimentación 15V 1 A.
Potencia mecánica: La ecuación empleada para su cálculo es:
P = V L n F p
En donde: P = potencia mecánica V = Voltaje (volts) L = Consumo de corriente (Amp) q = Eficiencia del motor (YO) = 0.51 Fp = factor de potencia (%) = 0.50
Sustituyendo valores
P = 5 (1)(0.50 ) ( O 5 1 ) = 1.275 W
torqué a la salida del reductor de velocidad
Proyecto S l M M A 43 Equipo 3

CNAD . Mecatrónica
En virtud de que el motor esta provisto de un mecanismos reductor de velocidad con relación de reducción de 97.961 a 12.
T = 85.68 WIN
En donde
Reducción de la relación del motor
T = par de torsión (N-M) W = potencia transmitida en watts N = la velocidad angular de la flecha en r.p.m.
Sustituyendo valores
T = 85.68 112.23 = 7 N-m
Fuerzas en los engranes
Como se dijo anteriormente el engranaje principal se compone de dos engranes rectos en estos, las perdidas por rozamientos son tan pequeñas que puede considerarse que el engranaje opera con una eficiencia del 100 %. a)- fuerza tangencia1 (Ft), que es la fuerza transmitida al engranaje. b)- la fuerza separadora o radial (Fr), la cual esta siempre dirigida al centro del engrane.
Las ecuaciones empleadas para calcular dichas fuerzas son: Ft = T Ir (1) Fr = Ft tan 0 I diámetro
T = momento torsional en el engrane (r) R = radio primitivo del engrane 0 = ángulo de presión.
(2) En donde:
Proyecto SlMMA 44 Equipo 3
CNAD - Mecatrónica
Si el radio primitivo del piñón es de 7 cm y el ángulo de presión es de 20" sustituyendo valores en las ecuaciones 1 y 2 tenderemos:
Ft = 7/0.017 = 41 1.76 N Fr = a 41 1.76 (tan 20") = 149.88 N
2.3.5. Leva Excéntrica
Datos caracteristicos y representativos de la carrera de un circulo excéntrico (leva) La más grande posibilidad de carrera "H máxima de la excéntrica llega hacer un giro de 180"
H,, = 2 * e.
Datos:
H =Carrera E =Excéntrico a =Angula de cuña D =Diámetro mayor IS =180"
Por lo tanto se observa que un circulo excéntrico 9 = 180" al llegar a girar, desaparece el ángulo y nuevamente desciende
Esto es con la finalidad de generar una fuerza de empuje para desplazar una pieza. Además es conveniente el campo de sujeción donde se observa un ángulo f de30"
Proyecto SlMMA 45 Equipo 3

CNAD . Mecatrónica
Campo de sujeción
El diámetro del disco "D, la excentricidad "e" y también el diámetro del pivote de giro no deberán elegirse caprichosamente, D y e son dependientes del sistema de autorretencion.
Proyecio SlMMA 46 Equipo 3
CNAD - Mecatr6nica
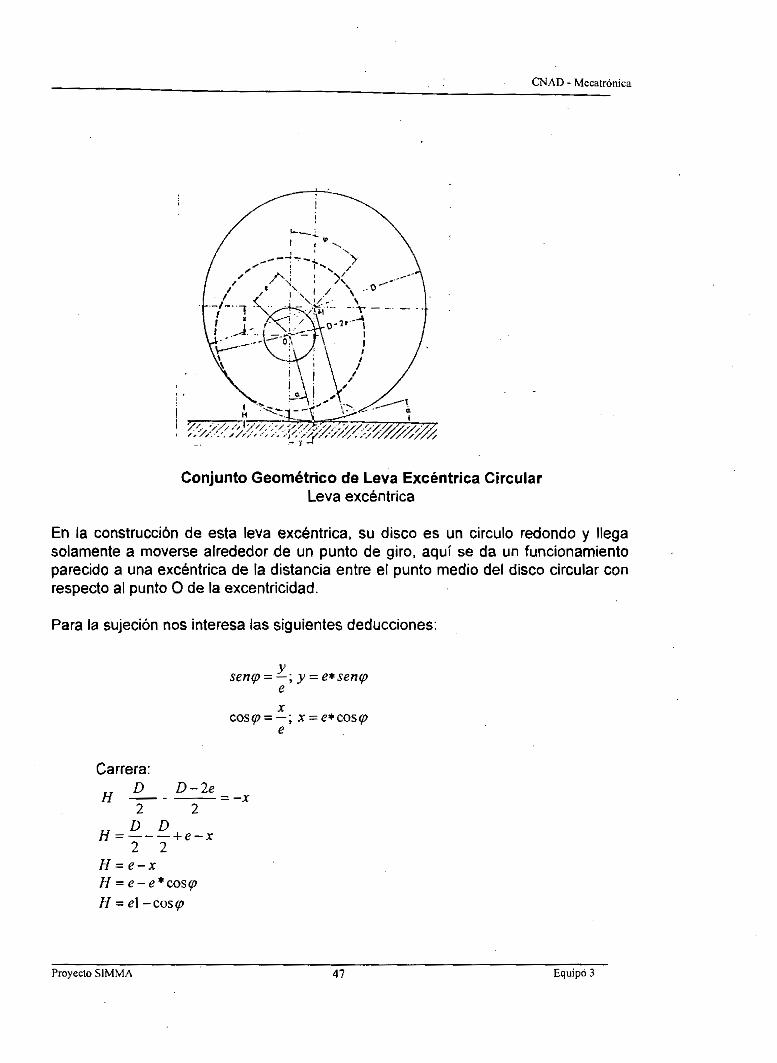
Conjunto Geométrico de Leva Excéntrica Circular Leva excéntrica
En la construcción de esta leva excéntrica, su disco es un circulo redondo y llega solamente a moverse alrededor de un punto de giro, aquí se da un funcionamiento parecido a una excéntrica de la distancia entre el punto medio del disco circular con respecto al punto O de la excentricidad.
Para la sujeción nos interesa las siguientes deducciones:
Carrera: D D - 2 e 2 2
D D 2 2
H
H = - - - + e - x
H = e - x H = e - e * c o s p H = e l - c o s o
47 Equipo 3 Proyecto SlMMA

CNAD - Mecatrónica
Y d - X
2
Taga = -- -
sen a, taga = -- - D -cosy, 2e
Para cerrar la información acerca de la construcción de la excéntrica circular (leva) la siguiente tabla contiene valores para una relación de excentricidad (D/e=20), y para una fuerza humana igual a 15 Kp.
Proyecto SlMMA 48 . Equipo 3

CNAD - Mecatrónica
2.4 Alimentador
Este módulo nos permite almacenar piezas de trabajo de diferente material el cual será suministrado al brazo manipulador electromecánico en acción conjunta con el módulo leva - manivela.
2.4.1 Descripción
Para todo tipo de proceso se requiere de una pieza que nos lleve a otro punto para realizar alguna operación por lo que en este punto construimos un alimentador en donde demostraremos como la pieza será alimentada y detectada a lo largo de un desplazamiento en forma diagonal tratando con esto de que dicha pieza o producto, sea posible detectarlo y definir su tipo de material.
Este alimentador fue elaborado en aluminio con diferentes características:
a) Utilizar el tipo de material de los mecanismos b) Hacerlo más sencillo y funcional posible c) Facilitar a los sensores la colocación.
2.4.2 Funcionamiento
. Para facilitar el trabajo de un proceso con este tipo de mecanismos didácticos se optó por realizar este alimentador con la finalidad de suministrar piezas al mecanismo del brazo electromecánico en donde se hace un proceso de colocación de la pieza para realizar otra.
Su funcionamiento es muy sencillo y consiste en que la pieza colocada en una torre hueca para alojar una cantidad de piezas de diferentes materiales por medio de gravedad, esta a su vez es detectada por medio de un sensor Óptico que serán desplazadas mediante una leva excéntrica.
Durante su trayecto se detectará el tipo de material del que esta formado la pieza en este deslizamiento llegara, por gravedad a un alojamiento, donde volverá a ser detectada la presencia de material, en ese momento se termina el recorrido de una pieza ylo producto.
Acto seguido el siguiente mecanismos - brazo manipulador- la sujetará y desarrollará los movimientos generados mediante un programa de P.L.C.
Proyecto CIMMA 49 Equipo 3
Proyecto CIMMA 50 Equipo 3

CNAD - Mecatronica
Bibliografía Autores Robert Boylestad Louis Nashelsky Electrónica Teoría de circuitos Quinta edición Editorial Prentice Hall.
Manual Fast and LS TTL Data Editorial Motorola
Autor Martin Albarran Jiménez. Manual de Circuitos de control Editorial C.N.A.D.
Autor: A.L. Casillas Maquinas (Cálculos de taller) Editorial: Hispanoamericana edición 1981
Autor: German Jütz Eduard Scharkus Rolf Lubert Tablas para la industria metalúrgica Editorial Reverte S.A. Tercera edición
Autor Siegbert Hbllger Matemática aplicada para técnica mecánica Editorial Sociedad Alemana de Cooperación Técnica 1985
Autor: Robert C. Juvinall Fundamentos de Diseño para Ingeniería Mecánica Editorial Limusa Tercera edición.
Autor: Joseph Edward Shigley John Joseph Uicker, Jr. Teoría de maquinas y mecanismos Editorial Mc. Graw Hill
Proyecto SlMMA 51 Equipo 3

APENDICE A:
Lista de materiales y costos

Costos de materiales
Borne de 3 vias 16 A paso 5mm Porta fusible con centro europeo Plug banana rojo y negro Fusible 0.1A /250V de respuesta rapida FL - 105 porta fusible europeo rosca Sensor mod e2ev-x2cl Hoja de master circuit A-1 Hoja de master circuit A 4 Hoja de master circuit A-7 Hoja de master circuit A-8 Relay de 2 A 2P 12 VCD DS2E-M-DC12 H21A1 switch optico salida transistor T15124 transformador de fuente 5A 24V F/4700/50 filtro 4700 uf 50V RS404L puente rectificador 4N400V Tip 122 transistor NPN TO-220D 74LS194 registro de corrimiento Cable calibre #18 Portafusible europeo de rosca Fusible de 1A/250V rapido Push botton tipo VCR Condensador de tantalio l u f 50V Condensador 0.001 uF1500V 1 N4148 diodio rectificador Placa fenolica 30 X 30 1 cara Placa fenolica 20 X 20 1 cara 3301 0.5 W resistencia de carbon NE555 Soldadura 60/40 80m Rc-1OW 0.5 resistencia de carbon Push botton abierto Porta fusible con centro europeo Fusible 1A 1250V Fusible 2A 1250V Fusible 1.6A /250V Transformador 5A 24V Transformador 5A 124V Micro switch c/larninilla y rodillo Push botton tipo VCR Rc-1OW 0.5 resistencia de carbon Portafusible cartucho tipo americano Fusible tipo americano 250V 6A Fusible tipo americano 250V 5A RS607L puente rectificador 6N800V
Pza Pza Pza Pza Pza Pza Pza Pza Pza Pza Pza Pza Pza Pza Pza Pza Pza mts Pza Pza Pza Pza Pza Pza Pza Pza Pza Pza Pza Pza Pza Pza Pza Pza Pza Pza Pza Pza Pza Pza Pza Pza Pza Pza
40 20 40 80 2 1 4 4 4 4 15 15 1 2 2 17 2 20 2 1 2 2 6 15 6 1 20 3 1 30 18 5 2 2 1 1 1 2 4 35 2 2 2 3
$253,00 $87,40 $92,00 $173,88 $7.91 $1.070,85 $25,76 $25,76 $25,76 $25,76 $712,42 $289,80 $83,75 $68,42 $24,21 $121,60 $1.5.27 $21,39 $7,91 $1,96 $519 $5,31 $4,83 $552 $191,40 $16,51 $4,60 $65,40 $78,20 $32,70 $72,45 $2,20 $3,06 $3,06 $3,06 $69,00 $87,40 $1,73 $1 1 ,O5 $36,22 $739 $2,99 $2,07 $54.85

Costos de materiales
TN 153 BF led infrarrojo 5mm azul claro RNI 828 phototransistor tipo led HC2-H-AC115V relay HL2 base para relay Mica pitransistor TO-220 1OuF 25V capacitor de tantalio ECG1940 ECG1936 ECG473 HC2-H-AC115V relay ML2 base para relay Jack banana rojo Jack banana negro
Pza Pza Pza Pza Pza Pza Pza Pza Pza
' Pza Pza Pza Pza
5 5 10 10 1 2 2 2 2 6 6 40 40
$20.12 $23,57 $1.593,90 $782,00 $0,46 $1 1 ,O4 $1 19,20 $137,08 $1 12,93 $1.259,25 $389.57 $80,00 $80,00 $8.510,31

Lista de materiales y costos
1.40 Kg solera de aluminio 9.5 x 50.8 x 3660mm. 7.70Kg Solera de aluminiol2.7 x 152,4 x 3660 mrn 0.44Kg solera de alumnio 12.7 x 25.4 x 3660 mm
pza pza pza
12.60 Kg barra redonda de alumnio 6061 T-6 76.2 x 3660 m pza 1.10 Kg barra redonda de alumnio 6061 T-6 22.2 x 3660 mm pza 0.30 Kg barra redonda de alumnio 6061 T-6 11.1 x 3660 mm pza 3.95Kg barra cuadrada de alumnio 6065 T-5 50.8 x 3660mm pza 0.90Kg barra cuadrada de alumnio 6065 T-5 25.4 x 3660mm pza 1.40Kg barra cuadrada de alumnio 6065 T-5 31 .I x 3660mm pza 7.10 Kg lamina lisa en hoja 12.7 x 914 x 2440 mrn 14.00Kg solera de aluminio 4.7 x 0.70 mm machuelo metro AC un juego 5.0 x 0.80 mm machuelo'metro AC un juego 10.0 x 1.50 mm machuelo metro AC un juego 3 x.0.50 mm machuelo metro AC un juego T-9 de 1.5 a 10 juego de llaves allen 1.5mm broca con zanco recto 2.5mm broca con zanco recto A.V. 8mm broca con zanco recto A.V. 0.794 mm broca con zanco recto 1.5 mm broca con zanco recto IBD-800 baleros IKO TM-3 balero de rotula seguros1 300-56 flecha de acero marca thomsom 8 x 300 mm Tomilos cabeza allen 4 x 8 Tomilos cabeza allen 4 x 10 Tornilos cabeza allen 4 x 16 Tornilos cabeza allen 4 x 25 Tomilos cabeza allen 5 x 10 Tomilos cabeza allen 5 x 12 Tomilos cabeza allen 5 x 20 Tornilos cabeza allen 10 x 20 rondanas de presion M4 rondanas de presion M5 rondanas de presion Mi0 rondana plana 5 rondana plana 10 opresor allen 3 x 10 opresor alien 4 x 5 lamina de aluminio0 calibre 76 1.65 x 1.22 x 3.0 m canal de alunio 3.2 x 31.7 x12.7 x 366 mm cortador en T de 1/4 x 112 x 2 de 3 cortador end Mill 5 mm 4 Gav. barra redonda de aluminio GB4EF11045 31.7 x 500 mm barra redonda de aluminio GB4EF11005 19.0 x 500 mm balero 6000 22
1 1 1 1 1 1 1 1 1 1 1 3 3 3 3 1 4 4 2 8 8 4 2 8 2
12 12 24 12 29 19 19 4
69 74 4
74 4 8
15 1 1 1 1 1 1 2
6838 378,86 21,65
619,96 54 , l l 14,76
169,75 44,28 68,88
379,ll 688,85 231,33 253,33 307,42 185,81 49,89 28.06 25,16 38,24 38.24
276,18 1 o34
224,25 6,71
448.5 12 12 13 15 20 19 19 4 8
10 2
12 3 8
15 731.51 24.59 448.5
130.52 M,89 13.47 5244

Lista de materiales y costos
Balero 6001-22 pza. 4 111.78 Balero 6201-22 P a . 4 103.50 Cortador vertical de 3.1 de 9.5mrn pza. 2 180.78 Cortador vertical de carburo de tugsteno 4G pza.. 1 89.25
Total : $7.921.44

. .
APENDICE B:
Lista de partes

Lista de partes
Bioque "A"
1. Base principal 2. Soporte eje horizontal 3. 4. Guía eje vertical 5. Guía eje horizontal 6. Ejevertical 7. Eje horizontal 8. Buje eje horizontal 9. Buje eje vertical 10. gula de cremalleras 11. Cremallera 12. Engrane 13. Extensi6n de tenaza derecha 14. Extensi6n de tenaza izquierda 15. Tenaza derecha 16. Tenaza izquierda 17. Tapa de pinza 18. Flecha soporte 19. Guía de flechas soporte 20. Soporte de flecha 21. Biela A 22. Nombre del modelo 23. Seguidor 24. Complemento de seguidor 25. Placa para seguidores 26. Placa soporte biela 27. Balero eje vertical modelo 6201 - 2DC3 28. Balero de eje horizontal modelo 6000 - 2DC3 29. Buje balín 30. Poste de separación 31. Placa soporte mecanismo de pinzas
Base de motor movimiento ascendente descendente

LISTA DE PARTES
Bloque ’I B “
1- Placa base de mecanismo 2.- Apoyo eje horizontal 3.- Postes de mecanismo 4.- Perro sensor 5.- Eje horizontal 6.- Eje vertical 7.- Placa superior 8.- Apoyo balero 9.- Empujador 10.-Guia de empujador 11 .-Tapa de guía 12.-Apoyo para leva 13.-leva 14.-Base para conectadores 15.-Placa para sensores 16.-Engrane de arrastre
Bloque “ C y
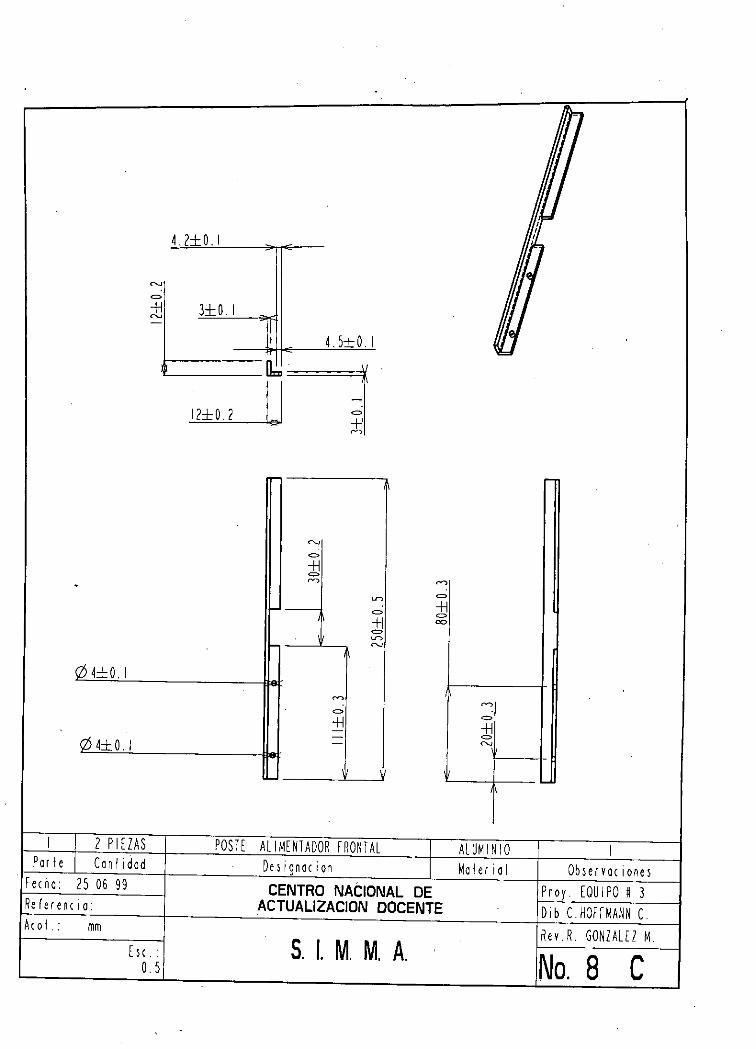
1 .- Placa base de alimentador 2.- Postes para deslizador 3.- Sujetador de placa deslizadora 4.- Placa deslizadora 5.- Guía de placa deslizadora 6.- Base para postes 7.- Poste alimentador frontal. 7C Poste alimentador trasero. 8.- Poste alimentador frontal 8C. Poste alimentador trasero 9.- Base para pieza 10.-Resbaladera de acomodo

Bloque " D "
1 .-Placa base de motor leva 2.Apoyo de motor 3.-Mesa de colocación
APENDICE C:
Dibujos de fabricación
S C A L E 0.350
; I I ! I V A R I O S 1 i ~
I P o i l e I C a n t i d a d 1 2 e s 1 9 a a c , o n M a i e r I O !
j 2 : í e i e n c i o : ACTUALIZACION DOCENTE j r t t h ~ . 0 6 - 0 1 - 9 9 CENTRO NACIONAL DE
Ob st: YOC.; c ' i e j
D i ! . C A S A N T U A 2 l O ~
i -. Prey. S i M M t L !

U

i
!
i
I I
1
~
i I
j
i 1 i
I
i
; ? o r i e l C a n i i d a d I D e r i g n a c i o n ~ M o i e : ! o i
i R : i e r e n c i a : ACTUALIZACION DOCENTE !;::>a ! ' U 6 - 0 j - 9 1 CENTRO NACIONAL DE
0 b s e : u o c i o o : i !
D i b . C A S A N i U A R i r ? ~
! ?:cy S i H M A ' - 3 I 1
í S ( P I N Z A M E C A N S I E

i I
I ! ~ P s i i t 1 Contijod I 2:s lona( i o n ; M O i l i i G i 0 b s e i v u c : o n : s ,
r e í h ~ : 0 6 - $ 7 ~ 9 1 i I CENTRO NACIONAL DE P r o y . SiMMb E3 ~
R e i e r e n c io. ACTUALIZACION DOCENTE b i b . C A S A N T U A R l O j A t O i . . MM R e v . iC G M
I
I

S C A L E 0 . 5 0 0
I P I I a r t e I C a n t i d a d t h o I I 05-99 í e r e n t i o
3 1 MM
S C A L E 0 . 7 5 0
- P I N Z A DE BRAZO A L U M 1 NI0 rn
A t a b a d o D e ~ i g n a c i o n M a t e r i a l
CENTRO NACIONAL DE P r o y S l M M A E3 ACTUALIZACION DOCENTE D i b C A S A N T U A R I O
6 0 4
E 5 c G U l A D E C R E M A L L E R A S S I E
R e v A G M
No. 1 A

I 6 5
3 D E D E N D U M O . 6 2 5
---f 6
4 L5.9 I
---f 6
S C A L E 1 . 0 0 0
1 2 . 5
M3-- t- I , I , I I I ,
h L A L L 1 2 . 5 I , I , I I I ,
h L A L L
2 P I 2 ' a r l e I C a n t i d a d
: í e r e n c i o : :(ha: 0 1 - 0 7 - 9 9
. . . . R e v R G M O 1 MM
C R E M A 1 t E R A No, 2 A E S (
S I E
P I N Z A DE B R A Z O A L U M 1 NI0 vL7y D e s i g n a c i o n M o l e r ¡ a l A c a b a d o CENTRO NACIONAL DE P r o y . SlMMA E 3
D i b . C A SANTUARIO ACTUALIZACION DOCENTE

&----’
- - I 3 - -
S C A L E 2 . 0 0 0
i
I 3P 1 P a r t e 1 C a n t i d a d e c h a : 0 1 - 0 7 ~ 9 9 : í e r e n c i o : : o f . : MM
E s c . : S I E
E N G R A N E M O D U L O O . 5 # D E P A S O I # E X T E R I O R 2 I 2 6
P I N Z A DE B R A Z O A L U M I N I O D e s i g n a ( i o n M a t e r ¡ a l A c a b a d o CENTRO NACIONAL DE P r o y . S I M M A E3
D i b . C A S A N T U A R I O R e v . F G M
ACTUALIZACION DOCENTE
No. 3 A E N G R A N E
S C A L E 0.750
4 P I I P a r t e I C a n t i d a d : t h o : 0 1 - 0 7 - 9 9 : í e r e n c i a : o f . : MM
2 M3
P I N Z A DE BRAZO ALUM I N I 0 m D e s i g n a c i o n M a t e r i o 1 A c a b a d o CENTRO NACIONAL DE P r o y . S l M M A E 3
D i b . C A S A N T U A R I O ACTUALIZACION DOCENTE
S C A L E 1.000
E X T E N S I O N D E T E N A Z A D E R E C H A
E l c . : S / E
R e v . R G M
No. 4 A I

S C A L E 0.500
JP I 1 h i l e I C a n t i d a d ( h a : 0 1 - 0 7 - 9 9 f e r e n t i a :
S C A L E C m P I N Z A DE B R A Z O
D e s i g n a ( i o n CENTRO NACIONAL DE P r o y . S I M M A E 3
ALUM1 N I O M a t e r i a l A c a b a d o
ACTUALIZACION DOCENTE D i b . C A S A N T U A R I O
1 6
I
0 1 . : MM E X T E N S I O N D E T E N A Z A I Z Q U I E R D A
E S ( , : S I E
I05
I
R e v . R G M
No. 5 A ,
150 4.6XL6

t-- 2 0 - + 7 +
6 P 1 I ' a r i e I C a n t i d a d k c h a O2 0 7 9 9
í e r e n c i a
0 1 MM
E s c S I f
6
P I N Z A D E B R A Z O A t U M I N I O m Der i g n a c i o n M a l e r i a l A c a b a d o CENTRO NACIONAL DE P r o y S l M M A E3
D i b C A SANTUARIO R e v R G M
ACTUALIZACION DOCENTE
No. 6 A T E N A Z A D E R E C H A
J1 3 . 8
-7 - 3 I
P 1 4
L
S C A L E 1,000 C H A F L A N I . 5
S C A L E 2 . 0 0 0

20 -E
7 P I I P a r t e I C a n t i d a d
- F e c h a O 2 0 7 9 9 R e l e r e n c l a
A c o t MM
6
vim A c a b a d o
PINZA DE BRAZO ALUM1 N I O D e s i g n a c i o n M a t e r i a l
CENTRO NACIONAL DE P r o y S I M M A E 3 D i b C A S A N T U A R I O ACTUALIZACION DOCENTE
P S C A L E 1 . 0 0 0
C H A F L A N 1 . 5
S C A L E 2 . 0 0 0

O C L ' O 31V3S
m


i
? e v A G M mm
No. E l ( B R A Z O M A N I P U L A D O 8 Sli
V A A IGS I I
p o r i ? I C o n l i d a d 1 D e s i g n a c i o n M a i e r iai i t h a : 0 6 - 9 1 - 9 9 : i t r e n t ¡ a . ACTUALIZACION DOCENTE
I
1 CENTRO NACIONAL DE
111/ ,
G b r e r v a t i o n e i 1
D i b . C A S A N T U A R I C I F r o y . S I M M A Ej 1

I50
O I
I B A 1 I ' a r t e I C a n t i d a d , ( h a 1 5 - 0 5 - 9 9
í e r e n c i a nk 1111
S C A L E 0 .400
B R A Z O M A N I P U L A D O R I A L U M I N I O w D e s i g n a c ion M a t e r i a l A c a b a d o CENTRO NACIONAL DE PROY S l M M A E 3
D I B C A S A N T U A R I O ACTUALIZACION DOCENTE
S C A L E 0 . 2 5 0
" I I.,,,,
ES( SIE
a S E C T I O N C A - C A
R e v R G M B A S E P R I NC I P A L No. 9 A

S C A L E 0.300
F I 5 0
I
2BR I I
F e c h a 15 0 5 - 9 9 R e í e r e n c i a A t o 1 M M
P a r l e I C a n t i d a d
I I A -'
VvV A c a b a d o
B R A Z O M A N I P U L A D O R A L U M 1 N I O D e s i g n a c i o n M a t e r i a l CENTRO NACIONAL DE P r o y S I M M A E 3
ACTUALIZACION DOCENTE D i b C A S A N T U A R I O
:Il= 3 M5 iX20)
S E C T I O N A - A
SOPORTE EJE HOR I ZONTAL
E S ( S / E
R e v A G M
No. 10 A

I L 2 M3
210
I
t- '"A
o---
- I O
4 4 7 . .
'8
O . 200
1
T-
80
1 - ' SCALE 0.500
c
26
4' M5
T
- I O

@J O
4 8 R I I P a r l e I C a n t i d a d e c h a 1 5 - 0 5 - 9 9 e f e r e n c i o
: o 1 MM
E S ( SIE
S C A L E 0 . 7 5 0
B R A 7 0 M A N I P U L A D O R A t UM I N I O ow D e s i g n a c i o n M a t e r i a l A c a b a d o CENTRO NACIONAL DE P r o y S l M H A E3
ACTUALIZACION DOCENTE D i b C A S A N T U A R I O Rev R G M
No. 12 A G U I A E J E V E R T I C A L
-l----------r-
, (
v,
I
I I
I , I , I I I 1 I 1 I I , I I , I , I I 1 I I ,
S C A L E 0 . 5 0 0
S E C T I O N A I - A I

- o
c
SCALE 0.500
A
S E C T I O N A - A
__
\ I V
li h \ I
er 6 0 < , o
5BR I I ' a r t e I C a n t i d a d s t h a 15 O 5 9 9 f e r e n c i a 0 1 MM
Esc SIE
B R A Z O MANIPULADOR ALUM1 N 10 m D e s i g n a c i o n M a t e r i a l A c a b a d o CENTRO NACIONAL DE Proy SIMMA E3
D i b C A S A N T U A R I O R e v R G M
ACTUALIZACION DOCENTE
No. 13 A G U l A E J E H O R I Z O N T A L

SCALE 0 . 5 0 0
: t ? a I / U > Y Y
: f e r e n t i a o t MM
r--- I I
I I
I 7
I
!
CENTRO NACIONAL DE P r o y S l M M A E3 ACTUALIZACION DOCENTE D i b C A S A N T U A R I O
R e v R G M
S C A L E 0 . 7 5 0 M I O = I
CUERDA M XI5 E N E X T R E M O
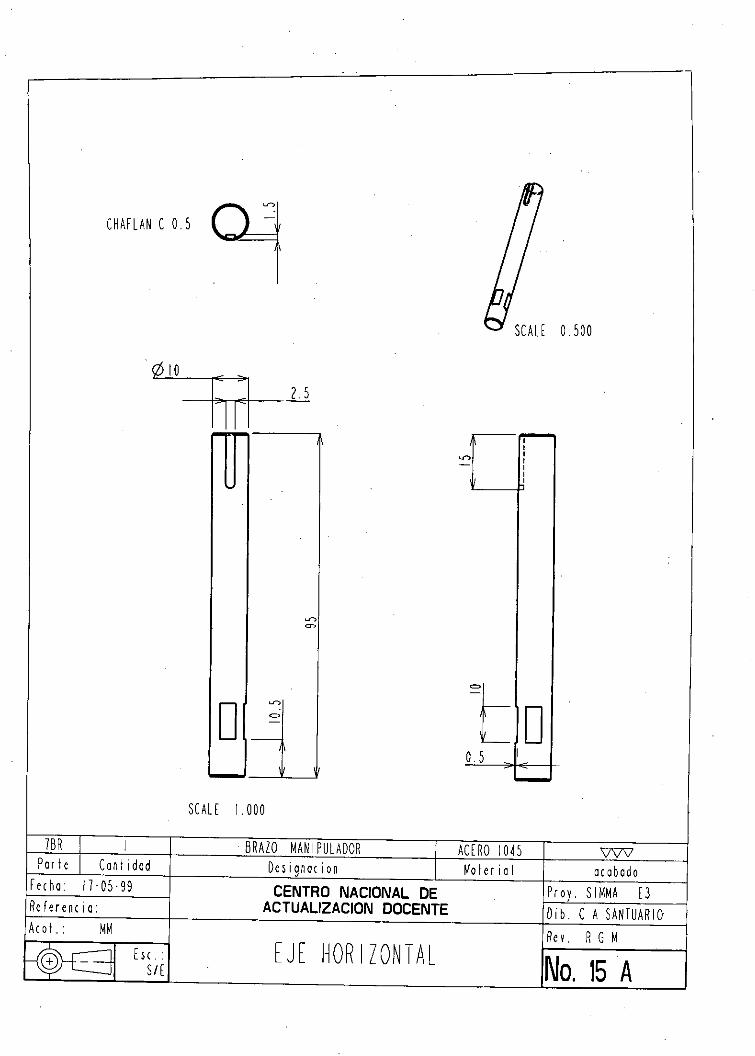
Q4 C H A F L A N C 0 . 5
7BR I 1 ’ a r l e I C a n l i d a d : ( h a : 1 7 - 0 5 - 9 9 : f e r e n c i a : 0 1 . : MM
! S C A L E 0 . 5 0 0
m D e s i g n a c i o n M a t e r ¡ a l a c a b a d o CENTRO NACIONAL DE Proy . S l M M A E 3
B R A Z O M A N I P U L A D O R 1 ACERO 1 0 4 5
D i b . C A S A N T U A R I O R e v . R G M
ACTUALIZACION DOCENTE
13
2 . 5
S C A L E 1 . 0 0 0
I

c
S C A L E 3 . 0 0 0
S C A L E 1 . 5 0 0
SECTION A - A

S C A L E 1 . 5 0 0
B R A Z O M A N I P U L A D O R I ACERO 1045 I 9BR 1 P a r t e I C a n t i d a d D e s i g n a c i o n M a t e r i a l
e c h a : 0 7 - 0 6 - 9 9 CENTRO NACIONAL DE i e í e r e n c io: ACTUALIZACION DOCENTE
\ c o t . : MM BUJE EJE E s c . : S I E V E R T I C A L
I ! I
*-J
I I S E C T I O N A A
m A c a b a d o
P r ' o y . S l M M A E 3 D i b . C A S A N T U A R I O R e v . R G M
No. 17 A
S C A L E 2 . 5 0 0

3 0 0
I O B R I 2 P I N Z A - BRAZO ACERO P a r t e I C a n t i d a d D e s i g n a r i o n M a t e r i a l e r h a 0 8 - 0 6 - 9 9 CENTRO NACIONAL DE
' e r e t o n r , o ACTUALiZAClON DOCENTE
S C A L E 0 . 2 5 0
VVim A r a b a d o
P r o y S lMMA E 3 D i b C A S A N T U A R I O
C H A F L A N 0 . 5
_ _ ~
i < Q t MM
ES( S I E
S C A L E 0 . 5 0 0
R e v R G M
No. 18 A F L E C H A S O P O R T E

S C A L E 0 . 5 0 0
, / ,- ,-, -1
n /
- - C H A F L A N DE C 2
5 - -

I
/"'- I , I I , I I , 1 ,
C H A F L A N C 2 S C A L E 2 . 0 0 0
S C A L E I . 0 0 0

S C A L E ' O . 750
1 3 B R I I B R A Z O M A N I P U L A D O R ALUM1 N I O mm P o r t e 1 C o n i i d o d D e s t g n o c i o n M o t e r t o 1 A t o b o d o e c h o 0 2 - 0 7 - 9 9 CENTRO NACIONAL DE P r o y S l M M A E3 .. e í e r e n ( I o ACTUALlZAClON DOCENTE D i b C A S A N T U A R I O
~
SECTION E - E
S C A L E 0.500
r o i . : MM I sitl E s c . : B I E L A A I R e v . R G M I
INo. 21 A 1

1 6 .
: f e r e n t i a t o t MM
3 4 - S E C T I O N C - C
ACTUALlZACiON DOCENTE I D i b C A S A N T U A R I O
R e v R G M ~- -
S C A L E 0 . 5 0 0 S C A L E 0 . 7 5 0
E s c . SIL : B I L L A t) \No. 22 A

I I 5
1 5 E R , I 3 P a r t e I C a n t i d a d e c h a : 0 3 - 0 7 - 9 9 e í e r e n c i a : c o l . : M M
5 . 5
I
R I O
B R A Z O M A N I P U L A D O R A t UMI N I O D e s i g n a c i o n M a t e r i a l A t a b a d o
ACTUALIZACION DOCENTE CENTRO NACIONAL DE P r o y . SlMMA E 3
D i b . C A S A N T U A R I O R e v . R G M
S C A L E 0 . 7 5 0
S C A L E 1.000

r 5 r 4 I
1 6 E R I 3 B R A Z O M A N I P U L A D O R A t U M I N I O P a r t e I C a n i i d a d D e s i g n a c i o n M a t e r i a l e c h o : 0 3 ~ 0 7 - 9 9 e f e r e n c i a :
CENTRO NACIONAL DE ACTUALIZACION DOCENTE
c o l . : ! M M C O M P L E M E N T O D E E s c . S I E : SEGUIDOR
I I-31 4
va7 A t a b a d o
P r o y . S l M M A E 3 D i b . C A S A N T U A R I O R e v . A G M
No. 24 A
S C A L E 1.000
S C A L E 0 . 7 5 0
2 M 4 ( X 2 5 ) ' J.-

R 3
178A 1 5 SEGUIDORES Y B I ELE-MAN IBELA I COLED ROLLED P a r t e 1 , C a n i i d a d Des i g n a c i o n M a t e r i a l
‘ e c h o : 0 3 - 0 7 - 9 9 CENTRO NACIONAL DE l e f e r e n c i a : ACTUALIZACION DOCENTE
S C A L E 3.000
A c a b a d o P r o y . S lMMA E 3 D i b . C A S A N T U A R I O
S C A L E 2.000
E S ( S I E
“I r
(No. 25 A P L A C A P i S E G U I DORES i c . 0 1 . : MM I ] R e v . R G M

I O
S C A L E 0.300
4 - 4 5
S C A L E 0.500
95

I
S C A L E 1 . 0 0 0
19ER 1 2 BRAZO M A N I P U L A D O R ACERO P a r t e 1 C a n t i d a d D e s i g n a c i o n M a t e r i o 1
F e c h a 0 3 - 0 7 99 CENTRO NACIONAL DE R e f e r e n c i a ACTUALIZACION DOCENTE
A c o t MM B A L E R O D E E J E V E R T I C A L MODELO 6201 - 2 Z I C 3 E S (
S I E
S C A L E 1 . 5 0 0
A c a b a d o P r o y S l M M A E 3 D i b C A S A N T U A R I O
R e v R G M
No. 21 A

S C A L E I .O00
20 I 2 BRAZO M A N I P U L A D O R ACERO P a r l e I C a n t i d a d D e s i g n a c i o n I ' M a t e r i a l e t h a : 0 4 - 0 7 - 9 9 CENTRO NACIONAL DE
l e f e r e n c i o : ACTUALIZACION DOCENTE
\ c o t . : ,Mi4 B A L E R O DE EJE H O R I Z O N T A L E s c . S I E : MODE t O 6 O0 O - 2 Z /C 3
S C A L E 2.000
A c a b a d o P r o y . S l M M A E 3 D i b . C A SANTUARIO R e v . R G M
No. 28 A

o
2 1 I 2
1 4 . 9 9 5 r-@---l
B R A Z O M A N I P U L A D O R ACERO
n
P a r t e 1 C a n t i d a d : t h o : 0 3 - 0 7 - 9 9 r f e r e n t i a : c o t . : MM
S C A L E 1 . 5 0 0
D e s i g n a c i o n M a t e r i o 1 A c a b a d o
CENTRO NACIONAL DE P r o y , S l M M A E 3 ACTUALIZACION DOCENTE D i b . C A S A N T U A R I O
R e v . R G M
S C A L E 2.000
E s c SIE INo. 29 A B U J E B A L I N

l.000
22BR I , 2 P a r t e I C a n t i d a d ! ( h a : 0 5 - 0 7 - 9 9 : f e r c n c i o :
15
3 1 i
BRAZO MANIPULADOR A t UMI N I O ' W D c s í g n o c I o n Ma t e r I o I A c a b a d o
ACTUALIZACION DOCENTE CENTRO NACIONAL DE P r o y . S i M M A E3
D i b . C A S A N T U A R I O
S C A L E 2.000

S C A L E 0.300
1--80+ S C A L E 0.500

.-
' . I 80
L
rrirrrn i L * O F 3
S C A L E
3 0 I--
/ /
4 4 '
- 4 #5
I O
r 60
I
O . 500
1 40
1
S C A L E 1 . 0 0 0

.

3 5 1 0 . 3
P a r t e I C a n t i d a d e c h a 2 5 0 6 9 9 e í e r e n r io
9 0 1 0 . 3
D e s i g n o c i o n M o l e r i a l O b s e r v a c l o n e $ CENTRO NACIONAL DE P r o y EQUIPO # 3
ACTUALIZACION DOCENTE D i b C HOFFMANN C c o l . : mm I
S. I. M. M. A. 1 R e v . R . F O N Z A L E Z M
INo. 1 'B

SCALE 0 . 5 0 0
e c h a . 25 0 6 9 9 i f e r e n c 1 0 .
o * o . I
~
CENTRO NACIONAL DE ACTUALIZACION DOCEN
c c t r o:
10+0.2
\
,
-L
3 o i o . 7 5 0 4 ~ 0 . 3 1
I A I I I M I N i í ? I I .
~~
ITE I D ¡ b . C . H O F F M A N N C . R e v . R . GONZALEZ M . : o t , : mm
No, 2 B E s c . : S. I. M. M. A. 0 . 5

S C A L E 0 . 5 0 0
1 I 4 P I E Z A S P a r l e 1 C a n t i d a d e c h o : 25 0 6 9 9
! t i e r e n ( io: , c o l . : mm
E s c . : 0 . 5
I P O S T E S DE M E C A N I S M O ACERO S A E 1 0 4 5 D e s i g n a c i o n M a l e r i a l O b s e r v a c i o n e s
CENTRO NACIONAL DE Proy. E Q U I P O # 3 ACTUALIZACION DOCENTE O i b . C . HOFFMANN C ,
R e v . R . G O N 7 A L E Z M .
No 3 B S. I. M. M. A.

I I 2 P I E Z A S P a r t e I C a n i i d a d , ( h a 2 5 O6 9 9 ' i e r e n c i o
0 1 mrn
E S ( 0 5
P E R R O SENSOR A L U M 1 N I 0 I D e s i g n o ( i o n M a t e r i a l Observa( i o n e s
CENTRO NACIONAL DE P r o y EQUIPO 13 D i b C HOFFMANN R e v R G O N Z A L E Z M
ACTUALIZACION DOCENTE
No. 4 B 5. I. M. M. A.
n
R e v A G O N L A L E Z M
S C A L E 0.-500
I I P I E Z A ' a r t e 1 C a n t i d a d ( h a : 2 5 0 6 9 9 í e r e n c ¡ a : o f ' mm
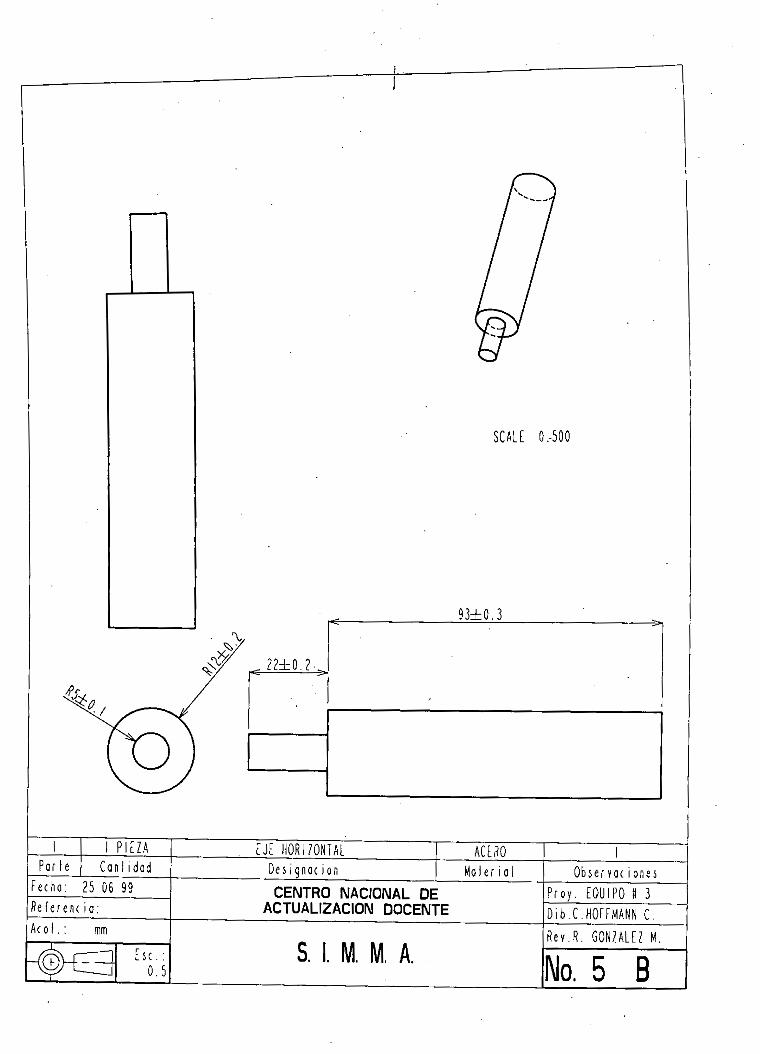
9 3 f 0 . 3 h
ACERO I EJE HOR 1 ZONTAL O b s e r v a c i o n e s
P r o y . EQUIPO 1 3 D i b . C . H O F F M A N N C . i
D e s i g n a ( i o n M a t e r i a l CENTRO NACIONAL DE
ACTUALlZACiON DOCENTE 11,111
E S ( S. I. M. M. A. o 5

I I P I E Z A EJE V E R T I C A L 1 ACERO P a r t e I C a n t i d a d D e s i g n a c i o n M a t e r i a l e c h a 2 5 06 9 9 CENTRO NACIONAL DE e f e r e n c i a ACTUALIZACION DOCENTE ,tot.: mm I
S A E 1 0 4 5 O b s e r v a c i o n e s
P r o y E Q U I P O 1 3 D i b C HOFFMANN
S. I. M. M. A. R e v . R . G O N L A l E Z M . h

o o
$i o m
I I p i e i a ' a r t e 1 C a n l i d a d ( h a : 2 5 06 9 9 í e r e n t ia: 0 1 . : mm
Ei,. ;. 0 . 5
o o $I Lo Ln
ACERO I PLACA SUPERIOR D e s i g n a t i o n M a t e r i a l O b s e r v a ( . i o n e s CENTRO NACIONAL DE P r a y . EQUIPO # 3
D i b . C , HOFFMANN ( , ACTUALIZACION DOCENTE
R e v . R . g o n r a l e r m .
No.7 B C., I. M. M. A.
o o
$I o a

I
I I P I E Z A P a r f e 1 C a n t i d a d 1 I
F e ( h a : 0 7 - 0 7 -99 R e í e r e n r i a : A t o t . : mm.
APOYO^ B A L E R O At UM 1 N IO I D e s ignat i o n M a t e r i a l O b s e r v a r i o n e i CENTRO NACIONAL DE
ACTUALIZACION DOCENTE P r o y . E Q U l P 0 # 3 Di b . V . C . H O F F M A N N C.

_.____.__ - - ~ ___.-
r--------e
I P I E Z A ' a r t e I C a n t i d a d t h o 2 5 O 6 9 9
I
m
E M P U J A D O R A L U M I N I O I D e s iqnac i o n M a t e r i a l O b s e r v a c t o n e s CENTRO NACIONAL DE P r o v EQUIPO # l
B
f e r e n c i a : ACTUALIZACION- DO~EÑYE
21kO.2
1 ~~~ - . -
D i b . C . HOFFMANN C .
SCALE 0.250
" I llllll
E S ( o 5
1 3 I 0 . 2
R e v R GON2ALEZ M
N o 9 B C. I. M. M. A.

I I . I
I
4
I P I I Z A ' a r t e I C a n t i d a d ( h a 25 06 99 f e r e n c io 0 1 mm
ES( 0 5
G U I A DE EMPUJADOR A L U M 1 N I O I D e s i g n a c i o n M a t e r i a I O b s e r v a c i o n e s CENTRO NACIONAL DE Proy EQUIPO 1 3
D i b C HOFFMANN C R e v R G O N Z A L E Z M
ACTUALIZACION DOCENTE
No. 10 B S. I. M. M. A.

f 1 3 8 1 0 . 5
1 P I E Z A ' a r t e I C a n t i d a d ( h a : 2 5 06 9 9 i e r e n t i a : o f . : mm
I
E s c . : 0 . 5
I I T A P A DE G U l A ALUM1 N I O
D e s i g n a ( i o n M a t e r i a I O b s e r v a c i o n e s CENTRO NACIONAL DE P r o y , E Q U I P O fi 3
ACTUALIZACION DOCENTE D i b . C . HOFFMANN C. R e v . R . G O N Z A L E Z M..
No. 11 B S. I. M. M. A.

N I
I I P I E Z A ' a r t e I C a n t i d a d t h o 2 5 0 6 9 9 f e r e n c i a o 1 rnm
N
o + 00
I O b s e r v a ( i o n e s
IAPOYO PARA L E V A ALUM1 N I O D e s i g n a c i o n M o l e r i a l CENTRO NACIONAL DE Proy E Q U I P O ! 3
D i b C HOFFMANN C ACTUALIZACION DOCENTE
ES( C. I. M. M. A. o 5
R e v R G O N Z A L E Z M
No. 12 B

llztO.2
I I P I E Z A a r t e 1 C a n l i d a d ( h a 1 5 0 6 9 9 í e r e n c i a a t mrn
E s c O 5
A L U M N I O I M a t e r i a l O b s e r v a ( i o n e s
Proy E Q U I P O # 3 0 i b C HOFFMANN C R e v R GONZALEZ M
L E V A D e r i g n a c i o n
CENTRO NACIONAL DE ACTUALIZACION DOCENTE
No 13 B S. I. M. M. A.

1
I 1 I P I E Z A 1 ' o r l e 1 C a n l i d o d t h o : 2 5 06 99 í e r e n t io: a l . : mm
E s t . : 0 . 5
I. 60h0.3
A L U M 1 NI0 I B A S E P A R A C O N E C T O A L S I
D e s ¡gnat i o n M a t e r i a l O b s e r v a r i o n e s CENTRO NACIONAL DE P r o y . E Q U I P O # 3
R e v . R . G O N Z A L E Z M .
ACTUALlZAClON DOCENTE Di b . C . HOFFMANN
No 14 B S. I. M. M. A.

i
I 1 I P l E L A l ' a r t e I C o n l i d o d i t h a : 2 5 O 6 $ 9 , f e r e n c i o : 0 1 . : mm
A L U M I N I O I ' Ma t e r i a I
P L A C A PARA SENSORES D e s i g n a c i o n
CENTRO NACIONAL DE 'ACTUALIZACION DOCENTE
O b s e r v a c i o n e s P r o y . E Q U I P O 13 D I b .C. HOFFMANN

A C E R O I I I 2 P I E Z A S I I E N G R A N E DE A R R A S T R E
R e í e r e n t i a : A t o i . : mm
ACTUALIZACION DOCENTE D i b . C . HOFFMANN C . n * ~ . , ~ . . _ ~ . ,
1 I e V . K . bUNLALtL M .
No. 16 B E s c . : S. I. M. M. A. 0 . 5


o $I N N
P
I I P I E Z A a r t e I C a n i i d a d
( h a 2 5 0 6 9 9 f e r e n c l a
0 1 mm
E s c 0 5
A L U M I N I O I P L A C A B A S E DE A L I M E N T A D O R D e s i g n a t i o n M a t e r i a l O b s e r v a ( i o n e s
CENTRO NACIONAL DE P r o y E Q U I P O U 3 D i b C H O F F M A N N C R e v R G O N L A L E L M
ACTUALIZACION DOCENTE
No. 1 C S. I. M. M. A.

I I I I P I E Z A a r t e I C a n t i d a d ( h a : 2 5 O6 9 9 í e r e n c i a : o f . : mm
E s c . : 0 . 5
At UM I N I O I POSTE P . D E S L I Z A D O R
Des I g n a c i o n M a t e r i a l O b s e r v a ( ¡ o n e s P r o y . EQUIPO # 3 D i b . C . H O F f M A N N C . R e v . R . G O N Z A L E Z M .
CENTRO NACIONAL DE ACTUALIZACION DOCENTE
No. 2 C C. I. M. M. A.

.u 15 0 . 2
I I P I E Z A o r i e I C a n l i d a d t h o : 2 5 O6 9 9 l e i e n c i a : " 1 . _ _
f I
ALUM1 N I O I SUJETADOR DE P L A C A D E S L I Z A D O R A D e s ignac i o n M a l e r i a l O b s e r v a c ¡ o n e s CENTRO NACIONAL DE P r o y . E Q U I P O 1 3
D i b . C . HOFFMANN C . ACTUALIZACION DOCENTE V I . . 111111 I ñII E s c . : C. I. M. M. A.
~~
R e v . A . G O N 2 A L E Z M .
Inin 2 r T " " I I U U . J b -
I

I
I P I E Z A P o r t e I C a n t i d a d
I
F e c h o 25 O 6 99 R e f e r e n c i o
A t o f mm
I PLACA DESL I ZADORA A L U M I N I O I M a t e r i a l O b s e r v o c i o n e s D e s i g n a c i o n
CENTRO NACIONAL DE P r o y E Q U I P O # 3 D i b C HOFFMANN C
R e v R GONZALEZ M
ACTUALIZACION DOCENTE

I I 2 P I E Z A S P a r t e 1 C a n t i d a d
F e c h a : 2 5 O6 9 9 R e f e r e n c i a : A c a t . : mm
E s c . : O . 5
ALUM1 N I O I G U l A DE PLACA D E S L I Z A D O R A
D e s i g n a c i o n M a t e r i o 1 O b s e r v a c i o n e s CENTRO NACIONAL DE
ACTUALIZACION DOCENTE P r o y . E Q U I P O # 3 D i b . C . H O F F M A N N C R e v . R.GONZAL E L M.
-
No. 5 C S. I. M. M. A.

r
Y- . -
I
--
I P I E Z A
>I 10&0.2
' a r t e I C a n l i d a d c h a 2 5 0 6 9 9 f e r e n c i a o t rnrn
E s t O 5
SCALE
B A S E P A R A P O S T E S A L U M 1 N I O I D e s i g n a c i o n M a l e r i a l O b s e r v a ( i o n e s CENTRO NACIONAL DE P r o y E Q U I P O # 3
D i b C HOFFMANN C R e v R GONZALEZ M
ACTUALIZACION DOCENTE
No. 6 C S. I. M. M. A.
0.500

I
I I I P I E Z A ' a r t e 1 C a n t i d a d ( h a : 2 5 06 9 9 l e i e n c i a : 0 1 . : mm
E s c . : 0 . 5
POSTE A L I M E N T A D O R A L U M I N I O I D e s i g n a ( i o n M a l e r i a l O b s e r v a ( ¡ o n e s CENTRO NACIONAL DE P r o y , E Q U I P O 1 3
D i b . C . HOFFMANN C . ACTUALIZACION DOCENTE
Re Y . A . G O N Z A L E Z M .
No. 7 C S. I. M. M. A.

N
o $I N -
I 1 2 PIEZAS a r t e 1 C a n t i d a d ( h a : 2 5 0 6 9 9 í e r e n c io: o f . : mm
E s c , : 0 . 5
@ 4+0. I
@ 4 1 0 . I
P O S T E A L I M E N T A D O R F R O N T A L ALUM1 N I O I D e s i g n a c i o n M o l e r i o 1 O b s e r v a ( i o n e s CENTRO NACIONAL DE P r o y . E Q U I P O U 3
ACTUALIZACION DOCENTE D i b , C . HOFFMANN C . R e v . , . G O N Z A L E Z M .
No. 8 C S. I. M. M. A.
f N
o
3 7

y ! !
. . ~
I/
'!
I
! !
I P I E Z A POSTE At IMENTADOR IR A L U M I N I O I P a r l e 1 C a n t i d a d i t h a : 25 0 6 9 9 ' i f e r e n c i a :
D e s i g n a c i o n M O t e ' ! i i O I O b s e r v a ( ¡ o n e s P r o y . E Q U I P O # 3
ACTUALIZACION DOCENTE II Dib.C.HOFFMANN C II CENTRO NACIONAL DE
,I I : o 1 rnm
E S ( C. ¡. M. M. A. I/
o 5
R e v R GONZALIi M
No.8 C TR

I I P I E Z A B A S E P A R A P I E Z A A L U M 1 NI0 P a r t e I C a n t i d a d D e s i q n a c i o n M a t e r i a l
F e c h o 2 5 O6 9 9 CENTRO NACIONAL DE R e f e r e n c i a ACTUALIZACION DOCENTE A c o t mm
E s c C. I. M. M. A. O 5
I O b s e r v o c t o n e s
P r o y E O U l P O # 3 D i b C HOFFMANN C R e v R G O N Z A L E Z M
No. 9 C

~ I I , ,
I I
I I 3 P I E Z A S P o r l e 1 C a n t i d a d e c h a . 2 5 O 6 9 9 e f e r e n t i a : c o l . : mm
E s c . : 0.5
L 50f0.3
I RESBALADERA DE ACOMODO ALUM1 NI0 I D e s i g n a c i o n M a t e r i a l O b s e r v a ( i o n e :
CENTRO NACIONAL DE P r o y . E Q U I P O 1 3 ACTUALIZACION DOCENTE D i b . C . HOfFMANN C .
R e v . R . G O N L A l E Z M.
No 10 C C. I. M. M. A.

l o
I
. I
I P I E Z A I P L A C A EASE MOTOR L E V A A L U M 1 N I O I P a r t e I C a n t i d a d : ( h a : 2 5 O 6 9 9 : f e r e n c i a : : o t . : mm
E S C . . /I 0 . 5
D e s i g n a c i o n M o l e r ¡ a l O b s e r v a r i o n e s CENTRO NACIONAL DE P r o y . . E Q U I P O # 3
ACTUALIZACION DOCENTE D i b . C . HOFFMANN C . R e v . R . G O N L A L E L M .
No, 1 .D C.' I. M. M. A.

?F 3 & 0 . I
I I APOYO DE MOTOR ACE AO I
6 7 . 5 5 0 . 3
P a r t e 1 C a n t i d a d e t h a : 25 O6 99 e f e r e n t i a :
D e s i g n a t i o n M a t e r 1 a I O b s e r v a c i o n e s CENTRO NACIONAL DE P r o y E Q U I P O # 3
ACTUALIZACION DOCENTE D i b . C . HOFFMANN C . t o t mm
Es t o 5
R e v R G O N Z A L E Z M
No. 2 D C. I. M. M. A.

9 1 1 0 . 3 J I I P I E Z A M E S A DE C O L O C A C I O N A L U M 1 N I O I
P o r l e 1 C o n i i d o d e c h o : 2 5 0 6 9 9 e i e r e n t i o : c o t . : mm
D e s i g n o c i o n M o i e r i o 1 O b s e r v o c i o n e s
CENTRO NACIONAL DE P r o y . E Q U I P O i! 3 ACTUALIZACION DOCENTE D i b . C . HOFFKiAVN C .
R e v . R . G O N Z A L E Z M .

APENDICE D:
Cálculos del disipador

Cálculos del disipador de calor para el regulador de voltaje NTE 1936
Características del regulador
e,, = 2Oc1 w e, = 0 5 ~ c i w PD =(17-12)Vt2A PD = 10“ PD=(17-O)V*2.4A PD = 40.8 PD=(17-O)V10.6A ~ 1 0 . 2 ” PD = 50W 8, (TOT) = ((125OC - 6OoC) / 10“ = 65OC / w
8’ (TOT) = ((1 5OoC- 6OoC) I40.8W = 22OC / W
e, = e (TOT) - e, = (2.2 - 2.010 c / w e, = e,,(TOT) - e,, = (6.5- 2 . 0 ) ’ ~ w = 45Oc/ w
e, = 2 O c / w
e, =2Oc/w T, = i 2 5 ° - ( 2 0 C / W + 0 5 0 C / W ) ( 5 V ) ( 2 A ) = 100°C
E = aluminio pulido 0.05 Seleccionar H =3.5
hc= 2.21~10”((100~C-60~C)/35”) ’
hc= 4.06X10-’W/in20C hr = 1.47X10~’0(0.05)((1000C - 60°C) / 2) + 273)’ hr = 0.18X10-’ h = hc + hr = 4.06~10‘’ + 0.18x10-’ = 424X10-’ B = 1.75
Se va muy grande la q
H = 6 ”
hc = 2.21~10-’(40/6)”~ = 221x10”(1.6068)
hc= 3.55~10:’Wlin~~C
h = 3.73x10-’W/inZoC q=70%
1
D-1

Para H=4”
hc= 221x10”(100°C-600C)~’4 = 3.92~10-’
B = 2 h = 4.1~10” H=45 hc= 221~10-’(40/45)”~ = 3.8ixlO-’
h = 4xlO-I B = 2 5 H = 5
hc = 221x10-’(40/5)”‘ = 3.71x10-’ h = 3.89~10-’ B = 2 5 H = 5 5
Cambiando E = 0.66 hr = l.47x10~’0(0.66)((100- 60) 12) + 273)’ = 2.44~10” Con H=3.5” y B=1.75 h = 65x10-’ 8 , = l/2(6“)2(0.70)(3.73~10‘3) = i/2(36)(0.49)(3.73~10-’) = 7.6OCIW
Con cold roll q =0.86 q l = 0.86x.7 =0.602 . e, = i/2(35”)2(o.602)(65x~o-3)= 1 0 . 4 3 0 ~ 1 ~
ConH=4“ B = 2
hc = 3.92~10” h = 6.36~10-’
q =0.92 q = 0.644
8% = i1 ( (2) (16) (6 .36~10-’ )=7 .63~C/W Con H = 4.5” B = 2.25 h = 6 2 5 ~ 1 0 ” ~ C I W q = 0.90 q = 0.63 eJA = 1 /(2(45)2(o.63)(625x10-i)) = 627oc/ w
q = 0.75
H=6“ B = 3
q1= 0.525 1
D-2

6, = l/2(36)(O525)(5.99Xi0-')=4.4loC/W H=8" . B = 4
hc=221~10"(40 /8 )~ '~ = 3.30~10" hr = 5.7x10-' q = 55 q1 = 0.385 6, = 1 / (2(64)(0.385)(5.7~iO~') = 356OC/ W
Con lo cual se deduce que se requiere una placa cuadrada de 8 pulgadas por lado, para obtener la disipacih de calor adecuada, y como nuestro gabinete del tablero de control tiene una superficie mucho mayor de aluminio, entonces asumimos que no es necesario un disipador si los elementos son montados en el chasis
Para una corriente de 2.2. Amp.
NTE 1936
ejc = 2 " C M ecs = 0 . 5 ~ ~ ~ PD = (17-12) V * 2A
PD = (17-12) V * 2.2 A Nominal: PD = 1OWatts
PD = 11 Watts Dando margenes calcularemos para 12 watts
ejA (TOT) = (125°C - 6OoC)i12 watts = 65"C/l2W = 5.4 "CMI
ejA = ejA (TOT) - ejc = 5.4 "CNV - 2"CNv = 3.4 "CAN
H = 3.5" Ts = 125" - (2"CIw + 0.5 CMI) (5V)(2.2A TS = 125" - 27.5" = 97.5"
)
h c = 2.21~10~'((97.5~C-60"C)/3.5")"' = 3 . 9 9 ~ 1 0 ~ ' ~ C
hr = 1.47~10~'~(0.92)((975~C-60~C)2 +273))' hr = 3 . 3 5 ~ 1 O-'
H = 4 . 5 hc=221~10"((975-60)/45)~'~ = 3.75~10" h = 7.10x10-' H = 5.5" hc = 2.21~1 O"((975 - 60) / 55)"4 = 35x10" 3.35~10" + 35xIO-' = 6.85~10"
D-3
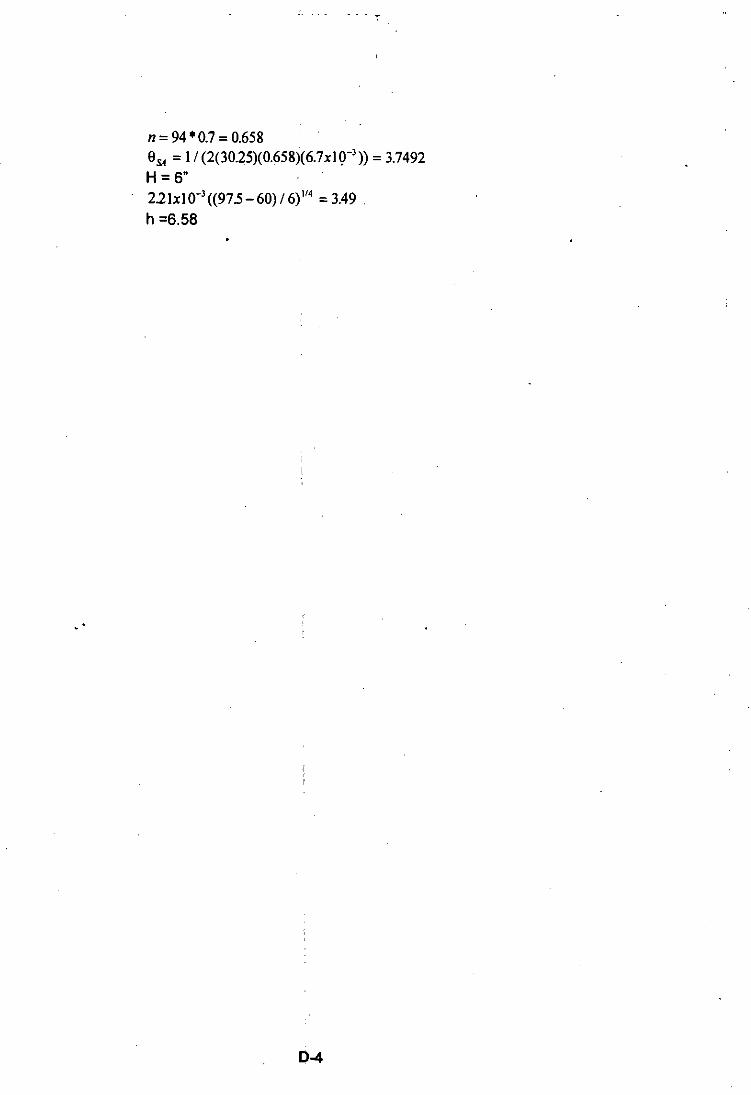
D-4

il I l f 0 . 2
I I 2 P I E Z A S P a r t e 1 C o n l i d a d
F e c h o : 25 0 6 9 9 R e f e r e n c i a : A t o t . : mm
E s c . : 0 . 5
L 25OkO.5 J
G U I A DE P L A C A D E S L I Z A D O R A ALUM1 NI0 I D e s iglnac ion M o l e r ¡ a l O b s e r v a c i o n e s CENTRO NACIONAL DE P r o y . E Q U I P O # 3
ACTUALIZACION DOCENTE D i b . C . HOFFMANN C . Rev.R.GONLA1EZ M . .
No. 5 C 5. I. M. M. A.

APENDICE E:
Características del sensor inductivo
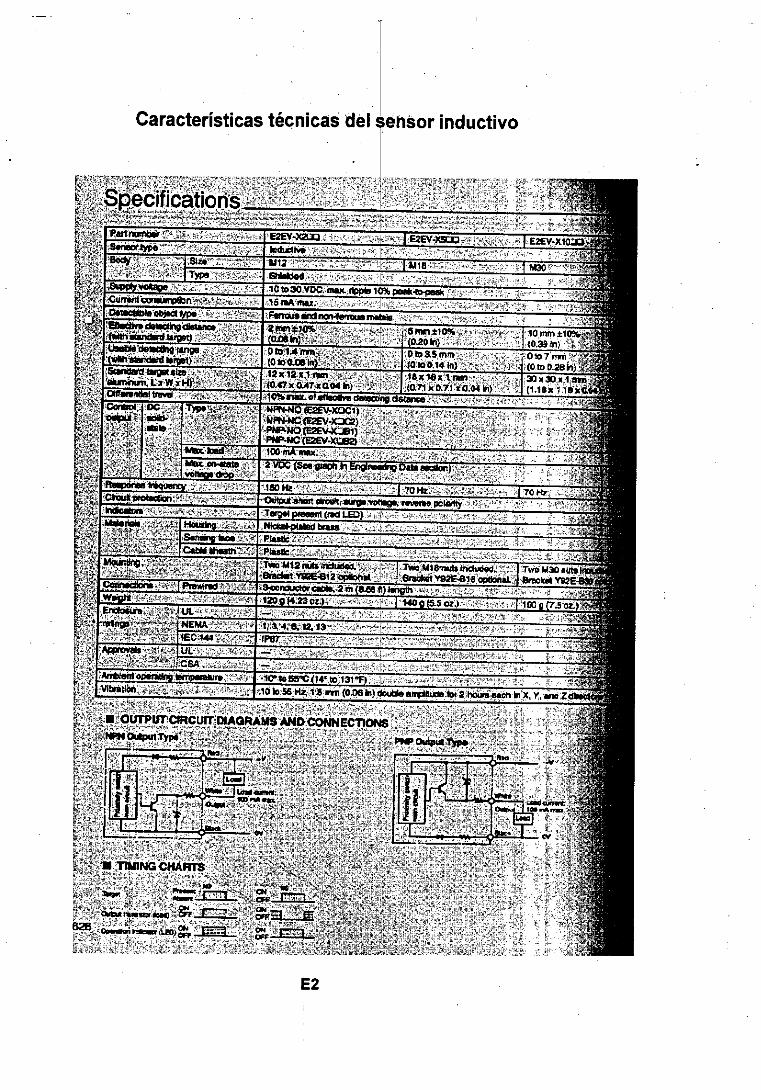
~
Características técnicas del sensor inductivo
E2

Características técnicas del sensor inductivo
E l

E3

Características técnicas del sensor inductivo
EZEV E2EV OmRon
Engineering Data OPERATING RANGE
E Z E v - m
I -ma- I P a l r i m I lrn!
SENSING DISTANCE vs. SRE
EZW-Xñp
UEV-Xsco
- P
1 -M- I RDLlM "l"."!
I
AND MATERIAL OF TARGET
EZEV-XSm
- .x ion
I ON-STATE VOLTAGE DROP
E4

APENDICE F:
Programa de P.L.C.

!I t- j O O O O O 2 001200 001204
1004
3000
o013
Obi2h 001204 -001202 1- /'-I TIU O000 f o o l 0
TOO00 001200 00120!
O068
0Cii
OC:6
U U B I
! . ,


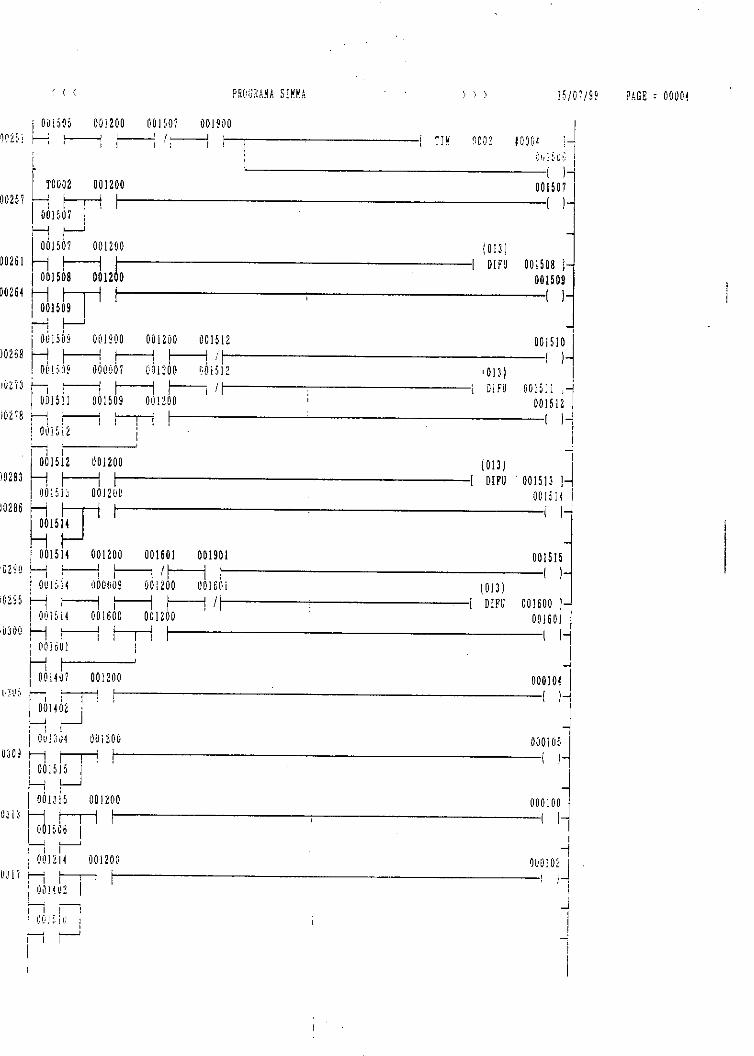


Relación de entradas y salidas del programa de P.L.C.
Entradas:
Número 02 03 04 05 06 07
o9 10 11 12 13 0200
oa
Salidas:
Número 1 O0 101 102 103 104 105 106
Significado Material en alimentador. Material en rampa. Leva en posición retraída Leva empujando. Brazo biela abajo. Brazo biela arriba. Sensor garra Brazo frente. Brazo derecha. Start (inicio). Stop (Paro). Brazo izquierda. Sensor inductivo.
Significado Abrir garra. Cerra garra. Brazo cw (subir/bajar). Leva cw. Brazo cw (giro .
Brazo ccw (subidbajar). Brazo ccw (gir i ).

APENDICE G:
Programas APT de Piñón - Cremallera
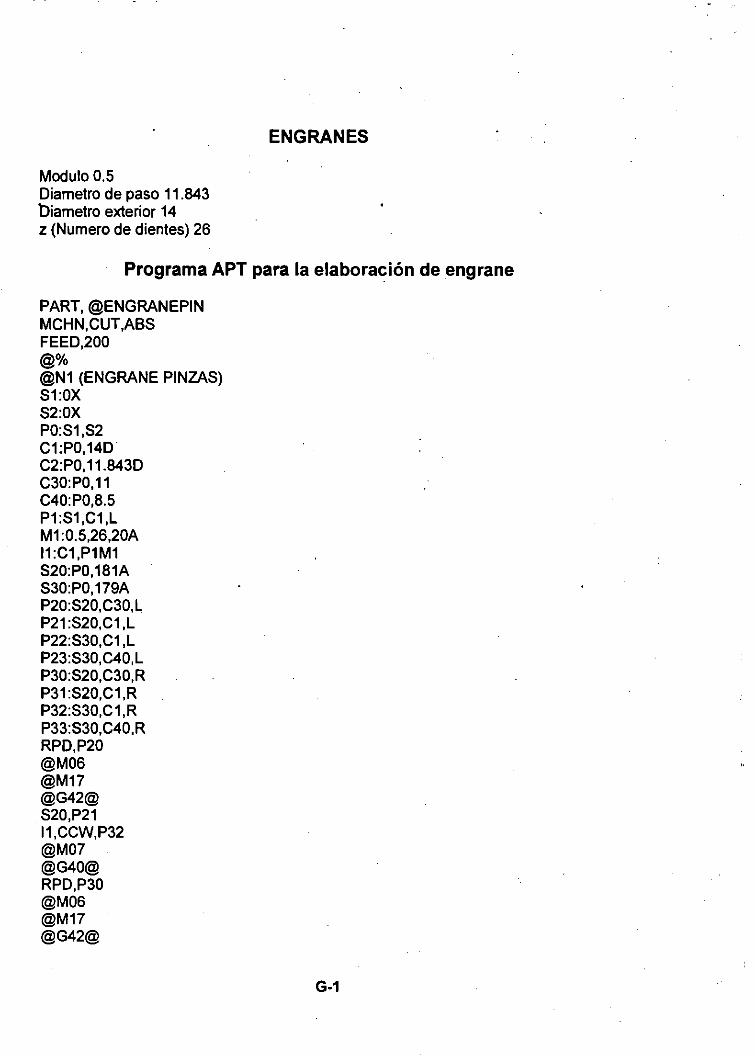
ENGRANES
Modulo 0.5 Diametro de paso 11.843 biametro exterior 14 z (Numero de dientes) 26
Programa APT para la elaboración de engrane
PART, @ENGRANEPIN MCHN,CUT.ABS FEED,200 @% @N1 (ENGRANE PINZAS) 51:0x 52:0x P0:Sl ,s2 Cl:P0,14D C2:P0,11.843D C30:PO.ll C40:P0,8.5 PI:Sl,Cl,L M1:0.5,26.20A I l :Cl ,PlMI S20:P0,181A S30:PO, 179A P2O:S20,C3O,L P21 :s20,c1 ,L P22:S30.C1 ,L P23:S3O,C4O,L P30:S20.C30,R P31:S20,CI,R P32:S3O,C1 ,R P33:S30,C40,R RPD,P20 @M06 @M17 @G42@ S2O,P21 ll,CCW,P32 @M07 @G40@ RPD,P30 @M06 @M17 @G42@
G-1

S20,P31 Il,CCW,P22 @M07 @G40@ RPD,P20 @M99 @N2 (SOPORTES) @M06 @M17 @al@ S2O,P21 c 1 ,P22 S30,P23 @M07 @G40@ RPD,P30 @M06 @M17
S20,P31 Cl,P32 S30,P33 @M07 @G40@ RPD.P30 @M99 @% FEED,200 f1n1 PEND
@G41@
G-2
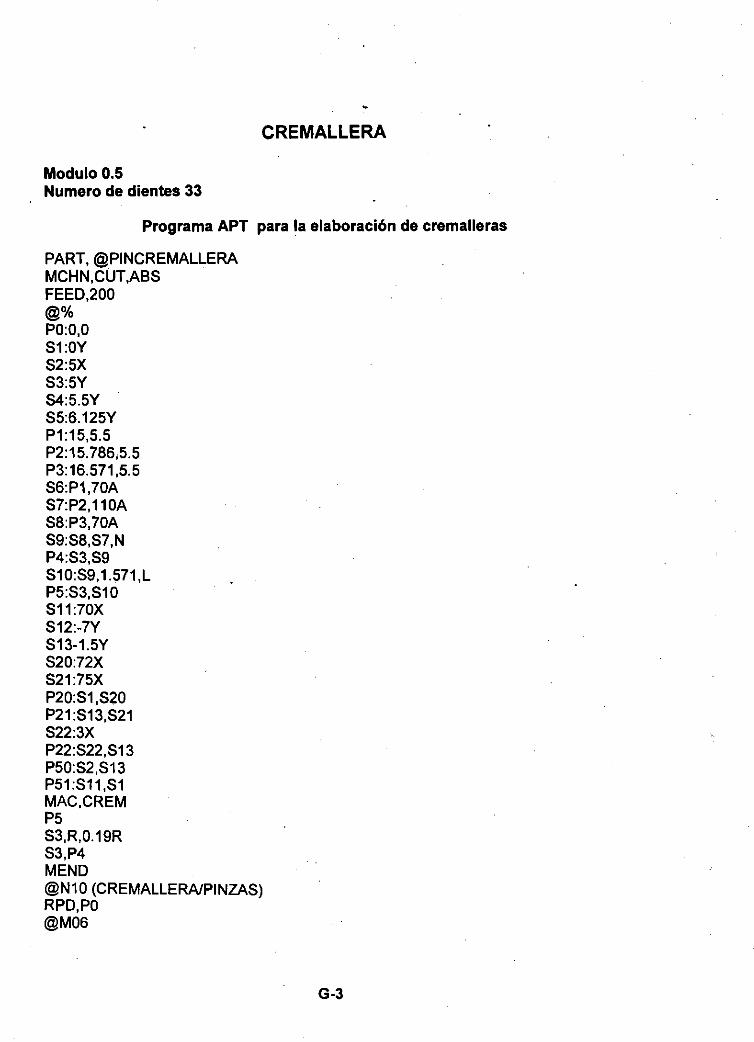
. CREMALLERA
Modulo 0.5 Numero de dientes 33
Programa APT para la elaboración de cremalleras
PART, @PINCREMALLERA MCHN,CUT,ABS FEED.200 @% PO:O,O 51:0y 52:5x 53:5y s4:5.5Y S5:6.125Y P1:15.5.5 P2: 15.786,5.5 P3:16.571,5.5 S6:P1,70A S7:P2,110A S8:P3,7OA S9:S8,S7.N P4:S3,S9 SlO:S9,1.571 ,L P5:S3,Sl o S11:70X S12:-7Y S13-1.5Y S20:72X s21:75x P2O:Sl,S20 P21:S13,S21 S22:3X P22:S22,S13 P50:S2,S13 P51:sll,S1 MAC,CREM P5 S3,R,O. 19R 53,p4 MEND @NI O (CREMALLEWPINZAS) RPD,PO @M06
G -3

@M17 @G41@ 51 S2.0.5R 53,p5 COPY,CREM,33,1.571 .O S3.0.5R Sll,P51 @M07 @MO@ RPD,P21 @M06 @M17
513 S I 1,0.3R S12,0.3R S2,P50 @M07
RPD,PO @M99 @N20 (SOPORTES) RPD, PO @M06 @m17
51 52 S13,P22 @M07
RPD,P21 @M06 @m17 @G42@ S I 3 511 Sl,P20 @M07
RPD,P21 @M99 @% FEED,200 f1n1 PEND
@G41@
@G40@
@ M 2 @
@G40@
@ ~ 4 0 @

Apéndice H
Cronograma de actividades

_, -- ' Id le ]Nombredetarea Duraci6n L I M I M I J I V I S 1 1 */ I ELABORACION MALLA SENS I
~ _ _ _ 20 4. Elaboracion de engranes cónic 4 dias
21 Engranes acoplamiento 3 dias I I I
22 */ Apoyo eje horizontal leva 3 dias
Proyecto: crono Fecha: ma 13/07/99
i
e - I
Páatna 1

I 24 Elaboracion soportes ejes (vert 1 6 dias
25
26
27
28
29
30
31
. Elaboracion guia de pinzas 4 dias
Elaboracionguia flechas brazo 6 dias
Elaboracion ejes vert Y honzin 4 dias
Soporte de giro angular 3 dias
Elaboracion de seguidores 3 dias
5 dias
CI Prueba sistema 15dias
Elaboracion de placas de born
!
i
1
I i ! i 1 j
Proyecto: crono Fecha: ma 13/07/99
Pagina 2 _I ~ ~.
. .
Tarea - Resumen b-v Progreso resumido - Divisi6n ,, ,,., .. ,l,.,,,,.,,, ,,,,,,,, ,, Tarea resumida i. Tareas extemas - Divisidn resumida , , , , , , I , I. ,,,,,,,.,,,.., 1 1 . 1 < 1
Hito 4 Hito resumido o Resumen del proyecto b- Progreso


, ...
%

- - y "
Apéndice I
Prácticas didácticas
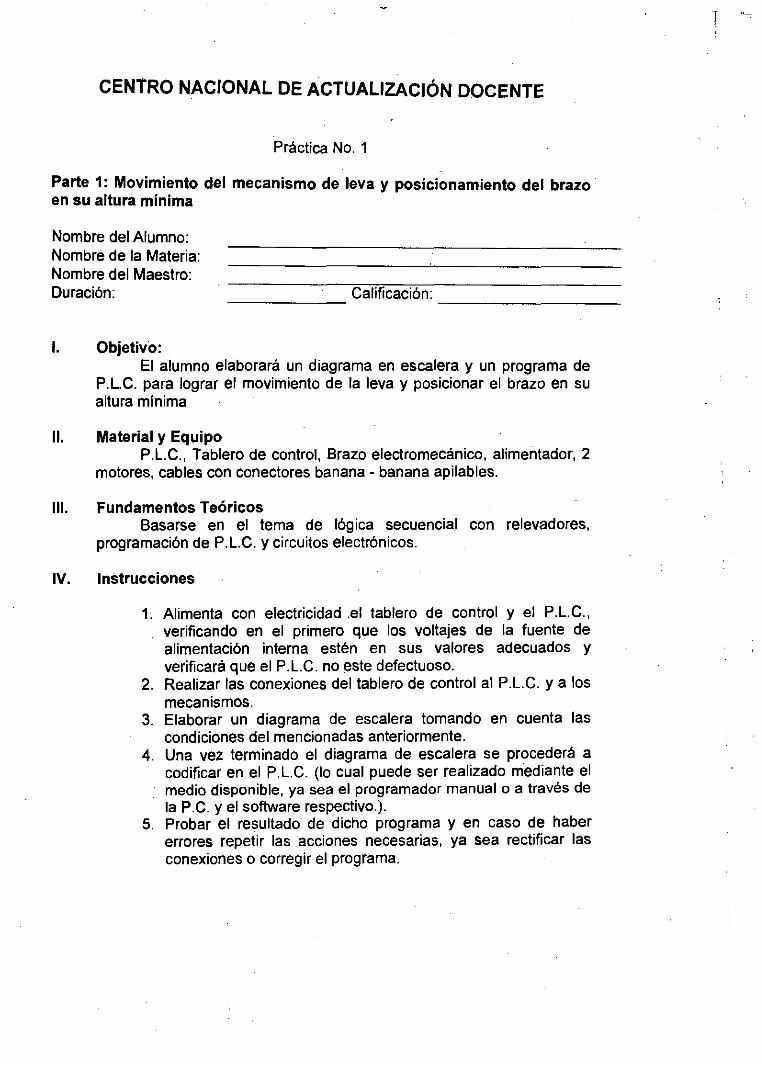
CENTRO NACIONAL DE ACTUALIZACIÓN DOCENTE
Práctica No. 1
Parte 1: Movimiento del mecanismo de leva y posicionamiento del brazo en su altura mínima
Nombre del Alumno: Nombre de la Materia: Nombre del Maestro: Duración: Calificación:
I.
II.
111.
IV.
Objetivo: El alumno elaborará un diagrama en escalera y un programa de
P.L.C. para lograr el movimiento de la leva y posicionar el brazo en su altura mínima
Material y Equipo
motores, cables con conectores banana - banana apilables.
Fundamentos Teóricos
programación de P.L.C. y circuitos electrónicos.
Instrucciones
P.L.C., Tablero de control, Brazo electromecánico, alimentador, 2
Basarse en el tema de lógica secuencia1 con relevadores,
1.
2.
3.
4.
5.
Alimenta con electricidad el tablero de control y el P.L.C., verificando en el primero que los voltajes de la fuente de alimentación interna estén en sus valores adecuados y verificará que el P.L.C. no este defectuoso. Realizar las conexiones del tablero de control al P.L.C. y a los mecanismos. Elaborar un diagrama de escalera tomando en cuenta las condiciones del mencionadas anteriormente. Una vez terminado el diagrama de escalera se procederá a codificar en el P.L.C. (lo cual puede ser realizado mediante el medio disponible, ya sea el programador manual o a través de la P.C. y el software respectivo.). Probar el resultado de dicho programa y en caso de haber errores repetir las acciones necesarias, ya sea rectificar las conexiones o corregir el programa.
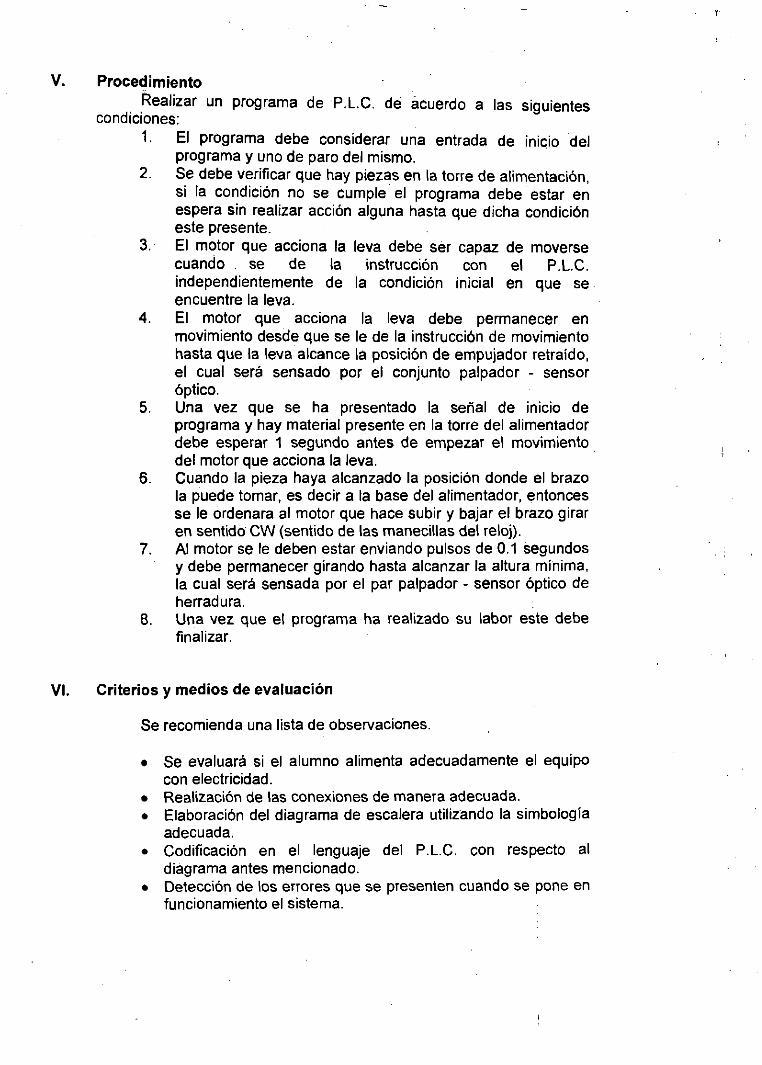
V. Procedimiento Realizar un programa de P.L.C. de acuerdo a las siguientes
condiciones: 1.
2.
3,
4.
5,
6,
7.
8.
El programa debe considerar una entrada de inicio del programa y uno de paro del mismo. Se debe verificar que hay piezas en la torre de alimentación, si la condición no se cumple el programa debe estar en espera sin realizar acción alguna hasta que dicha condición este presente. El motor que acciona la leva debe ser capaz de moverse cuando se de la instrucción con el P.L.C. independientemente de la condición inicial en que se encuentre la leva. El motor que acciona la leva debe permanecer en movimiento desde que se le de la instrucción de movimiento hasta que la leva alcance la posición de empujador retraído, el cual será sensado por el conjunto palpador - sensor
Una vez que se ha presentado la señal de inicio de programa y hay material presente en la torre del alimentador debe esperar 1 segundo antes de empezar el movimiento del motor que acciona la leva. Cuando la pieza haya alcanzado la posición donde el brazo la puede tomar, es decir a la base del alimentador, entonces se le ordenara al motor que hace subir y bajar el brazo girar en sentido CW (sentido de las manecillas del reloj). AI motor se le deben estar enviando pulsos de 0.1 segundos y debe permanecer girando hasta alcanzar la altura mínima, la cual será sensada por el par palpador - sensor Óptico de herradura. Una vez que el programa ha realizado su labor este debe finalizar.
óptico.
VI. Criterios y medios de evaluación
Se recomienda una lista de observaciones
Se evaluará si el alumno alimenta adecuadamente el equipo con electricidad. Realización de las conexiones de manera adecuada. Elaboración del diagrama de escalera utilizando la simboiogía adecuada. Codificación en el lenguaje del P.L.C. con respecto ai diagrama antes mencionado. Detección de los errores que se presenten cuando se pone en funcionamiento el sistema.
I '

0!:l,ju
00005
00010
0001s i

Relación de entradas y salidas del programa de P.L.C.
Entradas:
Número 02 03 04 05 06 07 08 o9 10 11 12 13 0200
Salidas:
Número 1 O0 101 102 103 104 105 106
Significado Material en alimentador. Material en rampa. Leva en posición retraída. Leva empujando. Brazo biela abajo. Brazo biela arriba. Sensor garra Brazo frente. Brazo derecha. Start (inicio). Stop (Paro). Brazo izquierda. Sensor inductivo.
Significado Abrir garra. Cerra garra. Brazo cw (subirlbajar). Leva cw: Brazo cw (giro). Brazo ccw (giro). Brazo ccw (subidbajar)

CENTRO NACIONAL DE ACTUALIZACIÓN DOCENTE
Práctica No. 2
Parte 2: Movimiento de la leva, posicionamiento del brazo en su altura mínima, cerrar la garra y posicionamiento del brazo en su altura maxima.
Nombre del Alumno: Nombre de la Materia: Nombre del Maestro: Duración: Calificación:
I.
11.
111.
IV.
Objetivo: El alumno elaborará un diagrama en escalera y un programa de
P.L.C. para lograr el movimiento de la leva, posicionar el brazo en su altura minima y cerrar la garra.
Material y Equipo
motores, cables con conectores banana - banana apilables.
Fundamentos Teóricos
programación de P.L.C. y circuitos electrónicos.
P.L.C., Tablero de control, Brazo electromecánico, alimentador, 2
Basarse en el tema de lógica secuencia1 con relevadores,
Instrucciones 1. Alimenta con electricidad el tablero de control y el P.L.C.,
verificando en el, primero que los voltajes de la fuente de alimentación interna estén en sus valores adecuados y verificará que el P.L.C. no este defectuoso. Realizar las conexiones del tablero de control al P.L.C. y a los mecanismos. Elaborar un diagrama de escalera tomando en cuenta las condiciones del mencionadas anteriormente. Una vez terminado el diagrama de escalera se procederá a codificar en el P.L.C. (lo cual puede ser realizado mediante el' medio disponible, ya sea el programador manual o a traves de la P.C. y el software respectivo.). Probar el resultad0.de dicho programa y en caso de haber errores repetir las acciones necesarias, ya sea rectificar las conexiones o corregir el programa.
2.
3.
4.
5.

V. Procedimiento Realizar un programa de P.L.C. de acuerdo a las siguientes
1. Cuando se alcance esta posición se debe dar la orden de cerrar la garra hasta que se detecte que la garra aprisiono la pieza, para detectar esto se verifica el sensor que se encuentra en la garra.
2. El siguiente paso es ordenar que el motor que sube y baja el brazo gire en CCW (sentido contrario a las manecillas del reloj), hasta alcanzar la altura máxima.
3. La altura será detectada por otro par palpador - sensor Óptico de herradura, recordando que el motor debe recibir pulsos de 01. Segundos.
4. Una vez que el programa ha realizado su labor este debe finalizar.
condiciones:
! ,
VI. Criterios y medios de evaluación
Se recomienda una lista de observaciones.
Se evaluará si el alumno alimenta adecuadamente el equipo con electricidad. Realización de las conexiones de manera adecuada. Elaboración del diagrama de escalera utilizando la simbología adecuada. Codificación en el lenguaje del P.L.C. con respecto al diagrama antes mencionado. Detección de los errores que se presenten cuando se pone en funcionamiento el sistema,
I '

I

BND
I
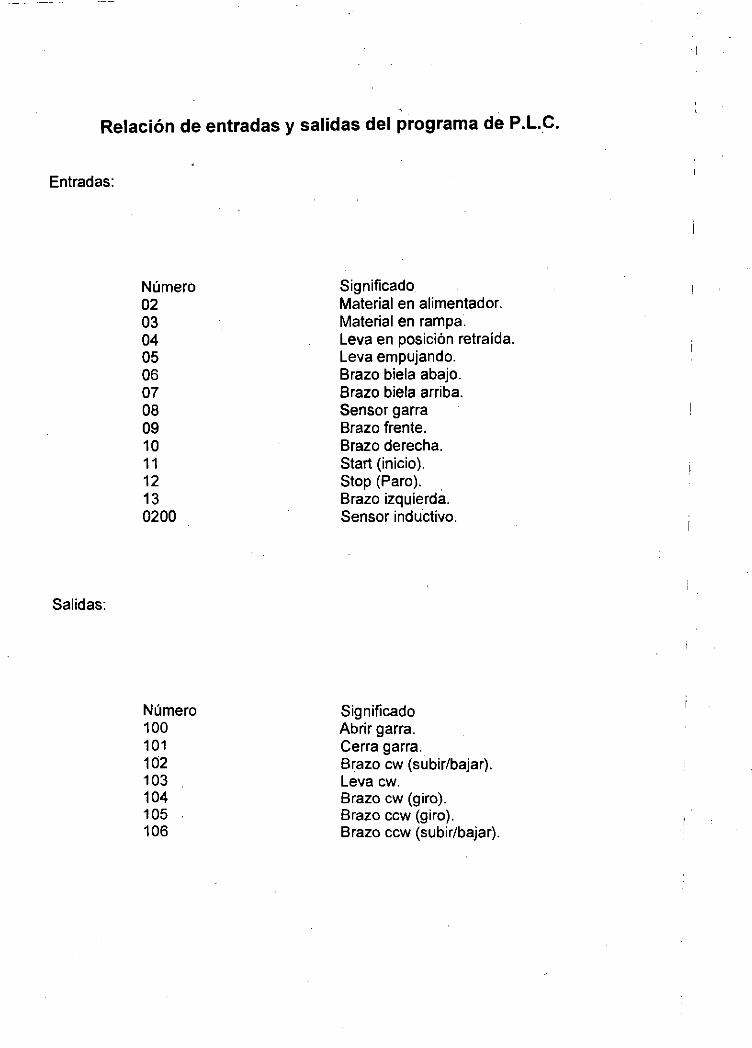
Relación de entradas y salidas del programa de P.L.C.
Entradas:
Número 02 03 04 05 06 07 08 o9 10 11 12 13 0200
Salidas:
Número 1 O0 101 102 103 104 105 106
Significado Material en alimentador. Material en rampa. Leva en posición retraída. Leva empujando. Brazo biela abajo. Brazo biela arriba. Sensor garra Brazo frente. Brazo derecha. Start (inicio). Stop (Paro). Brazo izquierda. Sensor inductivo.
Significado Abrir garra. Cerra garra. Brazo cw (subidbajar). Leva cw. Brazo cw (giro). Brazo ccw (giro). Brazo ccw (subidbajar).
I
I

CENTRO NACIONAL DE ACTUALlZAClÓN DOCENTE
Práctica No. 3
Nombre: Fabricación de una pieza de apoyo para la leva.
Nombre del Alumno: Nombre de la Materia: Nombre del Maestro: Duración: Calificación:
I.
II.
111.
IV.
Objetivo: El alumno realizara la pieza "Apoyo-para Leva" en la maquina de
torno universal convencional logrando desarrollar su dimencionamiento y acabado indicado en los procedimientos de la practica.
Material y Equipo
torno (completa), Equipo de seguridad personal.
Fundamentos Teóricos
Maquinas.
Instrucciones
Aluminio Natural de 40x40~25 mm, Caja de Herramienta para
Deberá basarse en el libro de texto de ejercicios del taller de
1. Verificar que la lubricación de la maquina sea correcta para su funcionamiento.
2. Alimentar con electricidad el torno para poder operarlo, verificando previamente que las condiciones de trabajo sean las adecuadas para la practica.
3. Disponer de la herramienta y del equipo de medición adecuados para lograr un buen desarrollo de la practica a realizar.
4. Revisar previamente los dibujos que indican las operaciones a realizar con el material.
5. Realizar el montaje adecuado del material a trabajar en el desarrollo de la practica.

V. Recomendaciones generales:
a) El alumno deberá revisar su maquina de trabajo. b) Revisar su caja de herramienta completa. c) Desarrollar las indicaciones del texto y de su practica. d) Verificar continuamente las dimensiones de la pieza. e) Trabajar con el equipo adecuado de seguridad. t) Aplicar las medidas de seguridad en el taller.
VI. Criterios y medios de evaluación
Se recomienda una lista de observaciones.
Se evaluará el procedimiento indicado para el desarrollo de la practica. Se verificara el dimencionamiento de la pieza. Se determinara el acabado y limpieza. Seguridad y tiempo en la elaboración de la pieza.
I
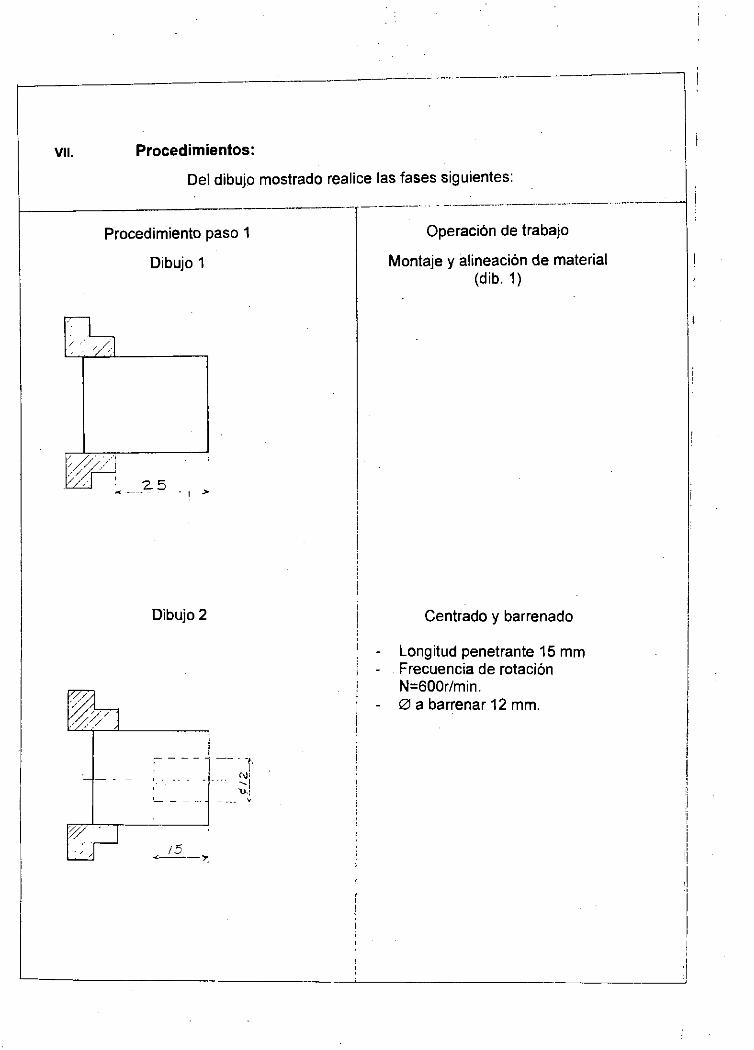
Vil. Procedimientos:
Del dibujo mostrado realice las fases siguientes: _-
Procedimiento paso 1
Dibujo 1
Dibujo 2
.. . -. --
Operación de trabajo
Montaje y alineación de material (dib. 1)
1
i !
I
i !
I !
1
~
1
! i
!
i j I
Centrado y barrenado
Longitud penetrante 15 rnrn Frecuencia de rotación N=GOOr/rnin. 0 a barrenar 12 rnrn.

Dibujo 3
{.- . . - - -
Dibujo 4
L:
Dibujo 5 i
Desbaste de diámetro exterior
Trecuencia de rotación N=900 E 1200 :ode de refrentado 2mm. La cara de referencia es la de Refrentado.
Desbaste diámetro exterior
le r escalón a 18 de 0 x 6 frecuencia de rotación N= 900 a 1000 min.
Desbaste diámetro exterior
-2do. Escalón a 28 mm. de 0 Frecuencia de rotación N= 900 A 1000 min.

Dibujo 6
Dibujo 7
a
Tronzado
muencia de rotación N= 900- 100 min. Balizar la operación para lograr la - ledida indicada 1 ümm.
Ban do
Dimensionar y marcar le posici6n de De los barrenos. Sujetar pieza para barrenar adecuadamente Barrenos pasados de 3mm. 2 barrenos pasados de 2.5mm. Según dibujo p/ cuerda M 3
CENTRO NACIONAL DE ACTUALIZACI~N DOCENTE
Práctica No. 4
Nombre: Fabricación de la tapa para pinza mecánica en fresadora vertical.
Nombre del Alumno: Nombre de la Materia: Nombre del Maestro: Duración: Calificación:
I.
II.
111.
IV.
Objetivo: El alumno realizara la pieza "Tapa de pinza mecánica" en la maquina
convencional fresadora vertical con torreta, logrando desarrollar la habilidad y practica para escuadrar correctamente el material de trabajo, así como también el dimencionamiento de un ranurado y barrenado; obteniendo el acabado indicado en los procedimientos de la practica.
Material y Equipo
fresadora vertical (completa), Equipo de seguridad personal.
Fundamentos Teóricos
Maquinas, para realizar cálculos de avance y velocidad de corte.
Instrucciones
Aluminio Natural de 95~65~12.7 mm, Caja de Herramienta para
Deberá basarse en el libro de texto de ejercicios del taller de
1. Verificar que la lubricación de la maquina sea correcta para su funcionamiento.
2. Alimentar con electricidad la fresadora antes de arrancarla para poder operarla correctamente.
3. Disponer de la herramienta y del equipo de medición adecuados para lograr un buen desarrollo de la practica a realizar.
4. Revisar previamente los dibujos que indican las operaciones a realizar durante la practica.
5. Realizar el montaje adecuado del material a trabajar en el desarrollo de la practica.
6. Realizar las operaciones que se indican en los procedimientos para un buen desarrollo de la practica.

I I
V. Recomendaciones generales: !
a) Examinar diariamente la .maquina en cada uno de los siguientes puntos: Conexiones de corriente eléctrica y motores, Equipos de
operación; Examinar los ruidos, calor y vibraciones extrañas. seguridad, Alimentación de lubricante, Funciones de las partes de I
b) Revisar que la caja de herramienta este completa. c) Ejecutar correctamente las indicaciones de seguridad y operación
d) Seguir todas las indicaciones del texto y de su practica. e) Verificar continuamente las dimensiones de la pieza. f) Trabajar con el equipo adecuado de seguridad.
i de la fresadora.
i
VI. Criterios y medios de evaluación I
Se recomienda una lista de observaciones.
Se evaluará el procedimiento indicado en el desarrollo de la practica. Se verificara el dimencionamiento de la pieza. Se determinara el acabado y limpieza. Seguridad y tiempo en la elaboración de la pieza.

VII. Procedimientos:
Del dibujo mostrado realice las fases siguientes:
Dibujo de la pieza. Operaciones de Fresado - Paralelepipedo rectángulo - Escalonado - Barrenado
Dimencionamiento de la pieza
Material: Aluminio natural Medidas del material:
9 5 ~ 6 5 ~ 1 2 . 7
!
I
i
i
i
i
I
1 .:
!
i

Procedimientos
No. Proceso de Desbaste
1
2
3
Preparación
1
I 4
Elaboración de la primera cara (cara de referencia)
E E N
1 i,
M ' : ..i. :.; v . . . - .... .... *.., ..
' ProtPc< ,on
Elaboración de la cara No. 2
E E
Descripción del trabajo
Verificar las medidas de la pieza Designación de las condiciones de corte DenominaEión de las caras como se ve en el dibujo Considerar 0.5 mm de material excedente por lado de la pieza en el desbaste, para poder dar el corte de acabado.
Considerar la cara de referencia (la cara que tiene la mayor superficie). En el caso de procesamiento de los materiales con rebaba o escoria deben aplicarse plantillas de protección para proteger las caras de sujeción de la prensa. La medida del material es de 13.3 mm. La profundidad es de 2 mm para cada corte, como se ve en el dibujo.
Elaborar la cara rectangular con la cara de referencia. Debe colocar la cara de referencia con la pared de la prensa y presionar la cara contraria con la calza redonda. No dejar muy salida la pieza. La medida de la pieza es de 62 mm La profundidad de corte por pasada es de 2 mm.
I ~
1
, .i
I
!
1
I
1
!
I
I
I
!
1
I
!
!
!
!
1
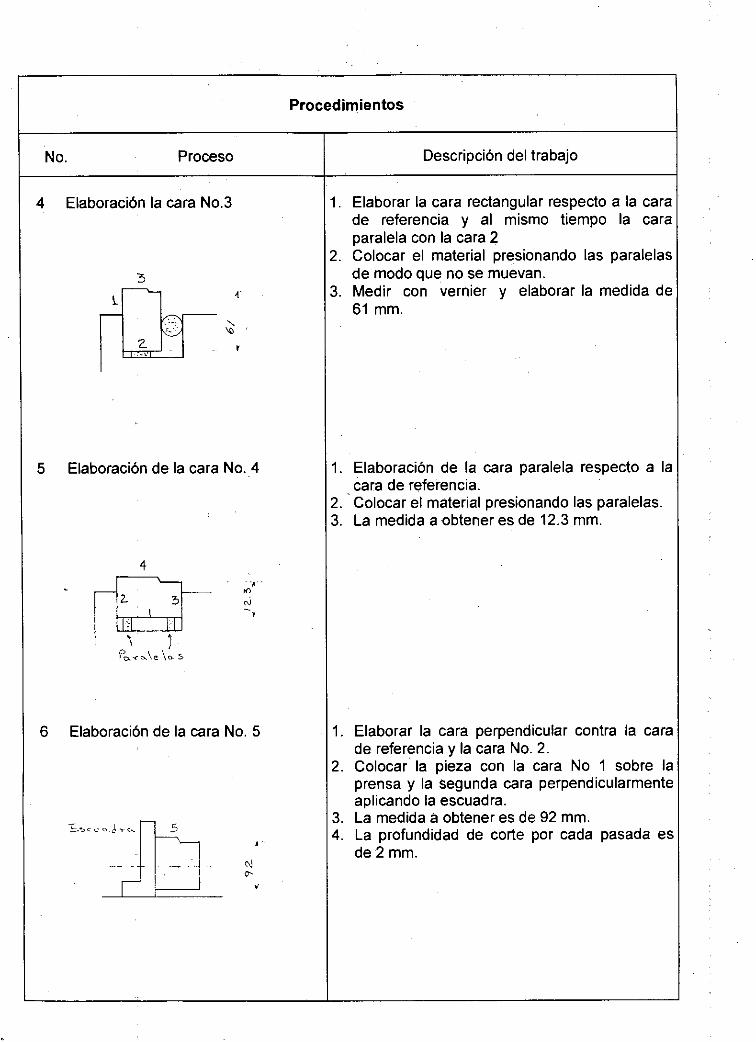
Procedimientos
No. Proceso
4
5
6
Elaboración la cara No.3
3
Elaboración de la cara No. 4
Elaboración de la cara No. 5
Descripción del trabajo
I . Elaborar la cara rectangular respecto a la cara de referencia y al mismo tiempo la cara paralela con la cara 2
!. Colocar el material presionando las paralelas de modo que no se muevan.
1. Medir con vernier y elaborar la medida de 61 mm.
I. Elaboración de la cara paralela respecto a la cara de referencia.
?. Colocar el material presionando las paralelas. 3 . La medida a obtener es de 12.3 mm.
I . Elaborar la cara perpendicular contra la cara de referencia y la cara No. 2.
2. Colocar la pieza con la cara No 1 sobre la prensa y la segunda cara perpendicularmente aplicando la escuadra.
3 . La medida a obtener es de 92 mm. 1. La profundidad de corte por cada pasada es
de 2 mm.

Procedimientos
No. Proceso
Elaboración de la cara No. 6.
. @ ' o-
Verificación.
Descripción del trabajo
, Elaboración de la cara paralela COI respecto a la cara No. 5.
. Colocar la pieza presionándola para que ni se muevan las paralelas.
. La medida a obtener es de 91 mrn.
. Hacer chaflán fino de cada lado comprobar las medidas de la pieza.
i
I
i
I
I
i
I
I

Procedimientos
No. Proceso de Acabado
1
2
3
Preparación ,
4
Elaboración de la primera cara (cara de referencia)
Elaboración de la cara No. 2
E: c
Descripción del trabajo
I , Verificar las medidas de la pieza !. Designación de las condiciones de corte I. Denominación de las caras como se ve en e
dibujo
I . Considerar la cara de referencia (la cara quf tiene la mayor superficie).
!. En el caso de procesamiento de los materiales con rebaba o escoria deben aplicarse plantilla: de protección para proteger las caras df sujeción de la prensa.
1. La medida del material es de 12.8 mm. 1. La profundidad es de 2 mm para cada corte
como se ve en el dibujo.
I. Elaborar la cara rectangular con la cara dc referencia.
1. Debe colocar la cara de referencia con Ií pared de la prensa y presionar la car: contraria con la calza redonda.
3. No dejar muy salida la pieza. 1. La medida de la pieza es de 61.5 mm j . La profundidad de corte por pasada es de 2
mm.
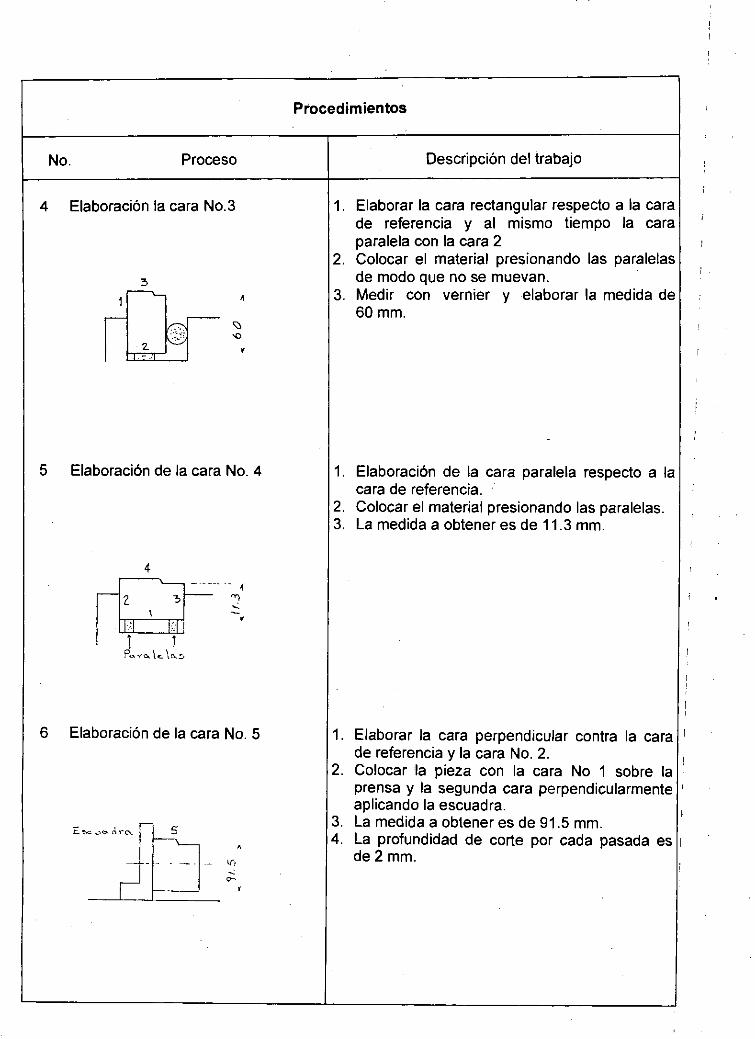
Procedimientos
No. Proceso
4 Elaboración la cara No.3
3
5 Elaboración de la cara No. 4
4
6 Elaboración de la cara No. 5
~
Descripción del trabajo
1. Elaborar la cara rectangular respecto a la car de referencia y al mismo tiempo la car paralela con la cara 2
2. Colocar el material presionando las paralela de modo que no se muevan.
3. Medir con vernier y elaborar la medida d 60 mm.
1. Elaboración de la cara paralela respecto a I cara de referencia.
2. Colocar el material presionando las paralelas. 3. La medida a obtener es de 11.3 mm.
1. Elaborar la cara perpendicular contra la cari de referencia y la cara No. 2.
2 . Colocar la pieza con la cara No 1 sobre li prensa y la segunda cara perpendicularmentc aplicando la escuadra.
3. La medida a obtener es de 91.5 mm. 1. La profundidad de corte por cada pasada e!
de 2 mm.

Procedimientos
No. Proceso
7
a
9
Elaboración de la cara No. 6
Verificación.
Corte de ranurado.
I
3 r
I
i
b L , I
I 4 - I
Descripción del trabajo
, Elaboración de la cara paralela con respecto a la cara No. 5.
!. Colocar la pieza presionándola para que no se muevan las paralelas.
i. La medida a obtener es de 90 mm.
. Hacer chaflán fino de cada lado y comprobar las medidas de la pieza.
I. Colocar la pieza de trabajo como se indica en el dibujo para realizar la operación del pase que sigue.
!, Las medidas del ranurado se indican en el dibujo.
i. Realizar el corte conforme a la figura de la izquierda.
1. Ajuste de cero de la fresa de vástago Tocando ligeramente el material con el diámetro exterior y filo del fondo de la fresa de vástago, hacer ajuste de cero de la mesa y consola.
j, Considerar la profundidad de corte de la herramienta para un ranurado (menos de 112 del 0 de la fresa)
i, Cuidar que no se levante o se mueva el material de la prensa.
I , Poner atención en la instalación de la fresa de vástago, mesa y alineación para evitar vibración.
i
1 ,' !
I
í j
I I
I
I
i !

.- I
I
Procedimientos
lo. Proceso
10 Corte de sección de 6x6 mm.
I A- _. .
i !
Descripción del trabajo
I . Ajuste de cero de la fresa de vástago Tocando ligeramente el material con e diámetro exterior y filo del fondo de la fres: de vástago, hacer ajuste de cero de la mes: y consola.
!. Realice el corte en sentido perpendicular a realizado en el paso anterior para poder logra la sección cuadrada que se indica en el dibujo.
L. El ancho debe dividirse igualmente cor respecto al centro del material
1. Realice la medición con vernier y micrómetrc de espesores.
I . Ajuste a cero como se indica en el punto 1 de paso anterior, para lograr las medidas indicadas en el dibujo.
!. Utilice el indicador digital para posicionar Ií herramienta en el punto de corte (considerando el radio de la herramienta).
I . Cuide que el corte no dañe las calzas de apoyo.
1. La penetración de corte es manual y lenta pars no dañar le herramienta y la pieza.
i. El barreno es pasado.
. Haga el cambio de herramienta por una de c2 10 mm.
I. Realice las operaciones de 1 a la 5 del pasc anterior.

Procedimientos
Proceso
13 Barrenos de 0 3.5 mm.
I 49 2.0. 5
-= _. __~-, 15 Verificación.
Descripción del trabajo
. Realice el trazado correspondiente a las medidas indicadas en el dibujo
!. Los puntos de barrenado se indican en e dibujo.
I. Cerciorase de ubicar correctamente el puntc de corte.
l. Utilice el indicador digital para ubicar e segundo punto de corte.
i. Cuide que la operación de corte no dañe la: calzas de apoyo.
i. Cuidar que no se levante o se mueva e material de la prensa.
I. Después del trazado correspondiente a la: medidas indicadas en el dibujo realice los puntos del 3 al 6 del paso anterior.
. Hacer chaflán fino de cada lado y comprobai las medidas de la pieza.
7 CENTRO DE INFBRMP
I
i
I
I l .
I
í
I
!
I "
i
I
I
I
l
a 10