caulculo diferencial - pptx
TRANSCRIPT

1
Herramientas de Colaboración Digital
Grupo Nº10
Cálculo Diferencial
Integrantes: Heiner Cedeño Jose Gonzales Andy Menoscal
ESPOL
2
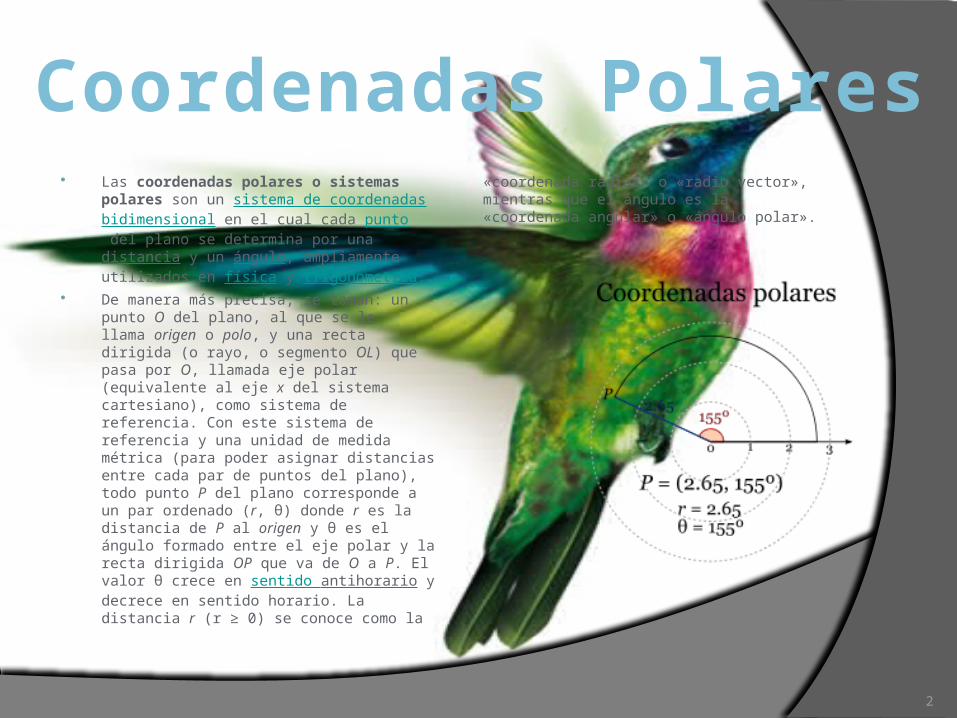
Las coordenadas polares o sistemas polares son un sistema de coordenadas bidimensional en el cual cada punto del plano se determina por una distancia y un ángulo, ampliamente utilizados en física y trigonometría.
De manera más precisa, se toman: un punto O del plano, al que se le llama origen o polo, y una recta dirigida (o rayo, o segmento OL) que pasa por O, llamada eje polar (equivalente al eje x del sistema cartesiano), como sistema de referencia. Con este sistema de referencia y una unidad de medida métrica (para poder asignar distancias entre cada par de puntos del plano), todo punto P del plano corresponde a un par ordenado (r, θ) donde r es la distancia de P al origen y θ es el ángulo formado entre el eje polar y la recta dirigida OP que va de O a P. El valor θ crece en sentido antihorario y decrece en sentido horario. La distancia r (r ≥ 0) se conoce como la «coordenada radial» o «radio vector», mientras que el ángulo es la «coordenada angular» o «ángulo polar».
Coordenadas Polares

3
Tabla de Contenido
Coordenadas Polares Limites Continuidad Derivadas
4
Paso de coordenadas polares a cartesianas y viceversa
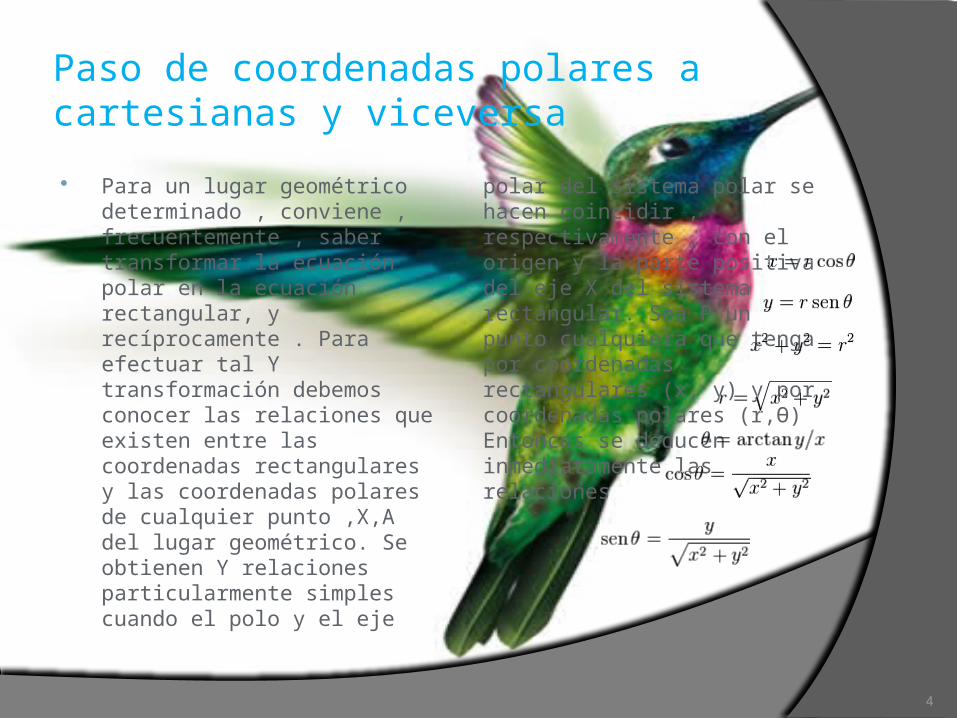
Para un lugar geométrico determinado , conviene , frecuentemente , saber transformar la ecuación polar en la ecuación rectangular, y recíprocamente . Para efectuar tal Y transformación debemos conocer las relaciones que existen entre las coordenadas rectangulares y las coordenadas polares de cualquier punto ,X,A del lugar geométrico. Se obtienen Y relaciones particularmente simples cuando el polo y el eje polar del sistema polar se hacen coincidir , respectivamente , con el origen
y la parte positiva del eje X del sistema rectangular. Sea P un punto cualquiera que tenga por coordenadas rectangulares (x, y) y por coordenadas polares (r,Ѳ) Entonces se deducen inmediatamente las relaciones
5
Conversión de coordenadas rectangulares a polares
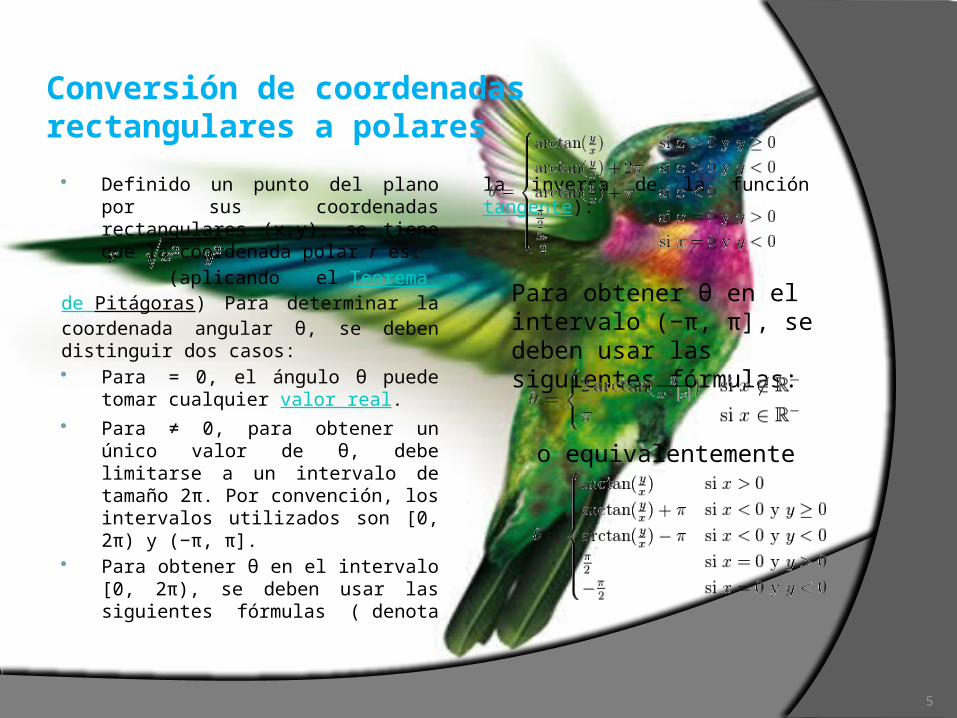
Definido un punto del plano por sus coordenadas rectangulares (x,y), se tiene que la coordenada polar r es:
(aplicando el Teorema de Pitágoras) Para determinar la coordenada angular θ, se deben distinguir dos casos: Para = 0, el ángulo θ puede tomar
cualquier valor real. Para ≠ 0, para obtener un único valor
de θ, debe limitarse a un intervalo de tamaño 2π. Por convención, los intervalos utilizados son [0, 2π) y (−π, π].
Para obtener θ en el intervalo [0, 2π), se deben usar las siguientes fórmulas ( denota la inversa de la función tangente):
Para obtener θ en el intervalo (−π, π], se deben usar las siguientes fórmulas:
o equivalentemente
6
Ecuaciones Polares
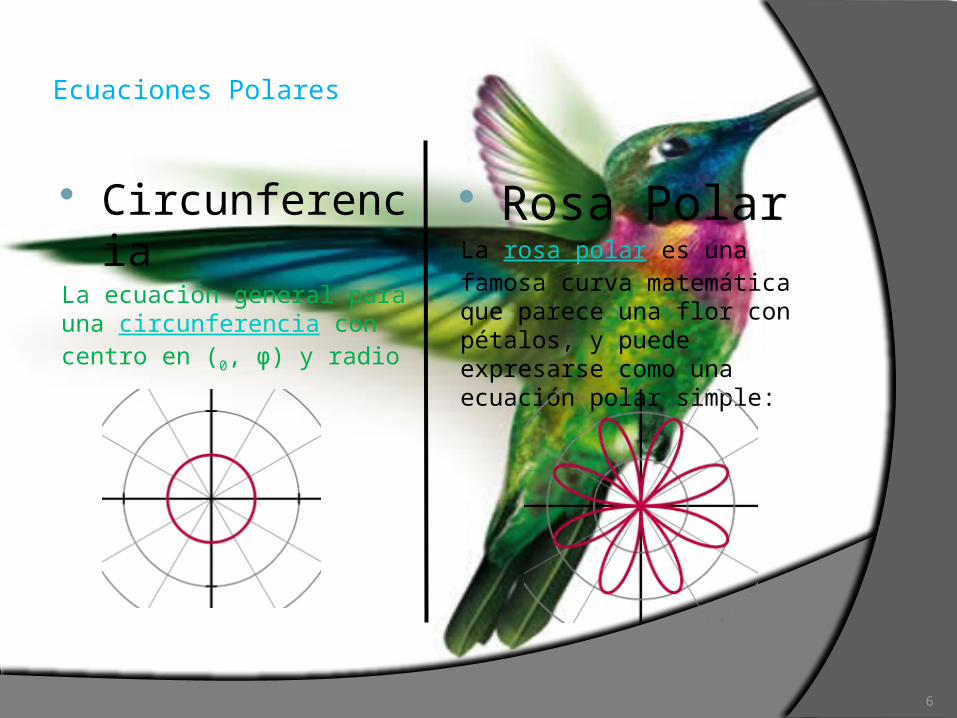
CircunferenciaLa ecuación general para una circunferencia con centro en (0, φ) y radio
Rosa PolarLa rosa polar es una famosa curva matemática que parece una flor con pétalos, y puede expresarse como una ecuación polar simple:

7
Espiral de Arquímedes
La espiral de Arquímedes es una famosa espiral descubierta por Arquímedes, la cual puede expresarse también como una ecuación polar simple. Se representa con la ecuación:
Secciones Cónicas
Una sección cónica con un foco en el polo y el otro en cualquier punto del eje horizontal (de modo que el semieje mayor de la cónica descanse sobre el eje polar) es dada por:
𝑟 (∅ )=𝑎+𝑏∅ 𝑟=𝑙
1+𝑒cos (∅ )
8
Límites Laterales Además del límite ordinario en el sentido
anterior es posible definir para funciones de una variable los límites unilaterales por la derecha y por la izquierda. El límite por la derecha (cuando existe) es el límite de la sucesión:
Análogamente el límite por la izquierda (cuando existe) es:
9
En análisis real para funciones de una variable, se puede hacer una definición de límite similar a la de límite de una sucesión, en la cual, los valores que toma la función dentro de un intervalo o radio de convergencia se van aproximando a un punto fijado c, independientemente de que éste pertenezca al dominio de la función. El punto c es punto de acumulación del dominio de la función.1 Esto se puede generalizar aún más a funciones de varias variables o funciones en distintos espacios métricos.
Informalmente, se dice que el límite de la función f(x) es L cuando x tiende a c, y se
escribe:
Limites de una función
lim𝑥→𝑐
𝑓 (𝑥 )=𝐿
10
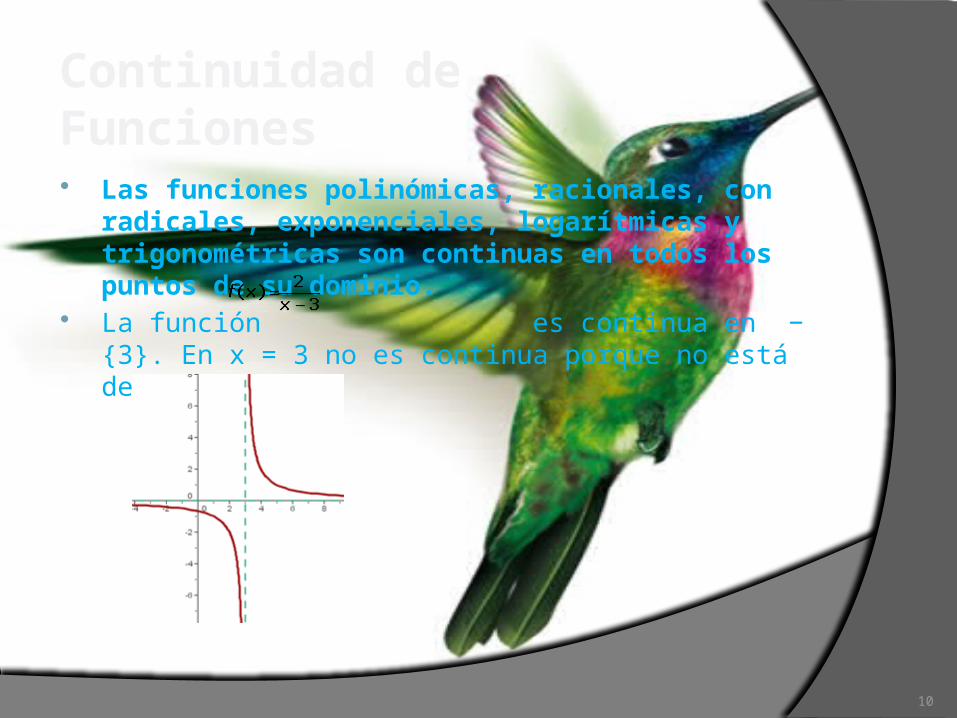
Las funciones polinómicas, racionales, con radicales, exponenciales, logarítmicas y trigonométricas son continuas en todos los puntos de su dominio.
La función es continua en − {3}. En x = 3 no es continua porque no está definida.
Continuidad de Funciones
11
Funciones definidas a trozos
Las funciones definidas a trozos son continuas si cada función lo es en su intervalo de definición, y si lo son en los puntos de división de los intervalos, por tanto tienen que coincidir sus límites laterales.
es continua en R
Operaciones con funciones continuas
Si f y g son continuas en x = a, entonces: f + g es continua en x = a. f · g es continua en x = a. f / g es continua en x = a,
si g(a) ≠ 0. f ο g es continua en x = a.
Porque las funciones que la componen son polinómicas y los límites laterales en los puntos de división coinciden.
12
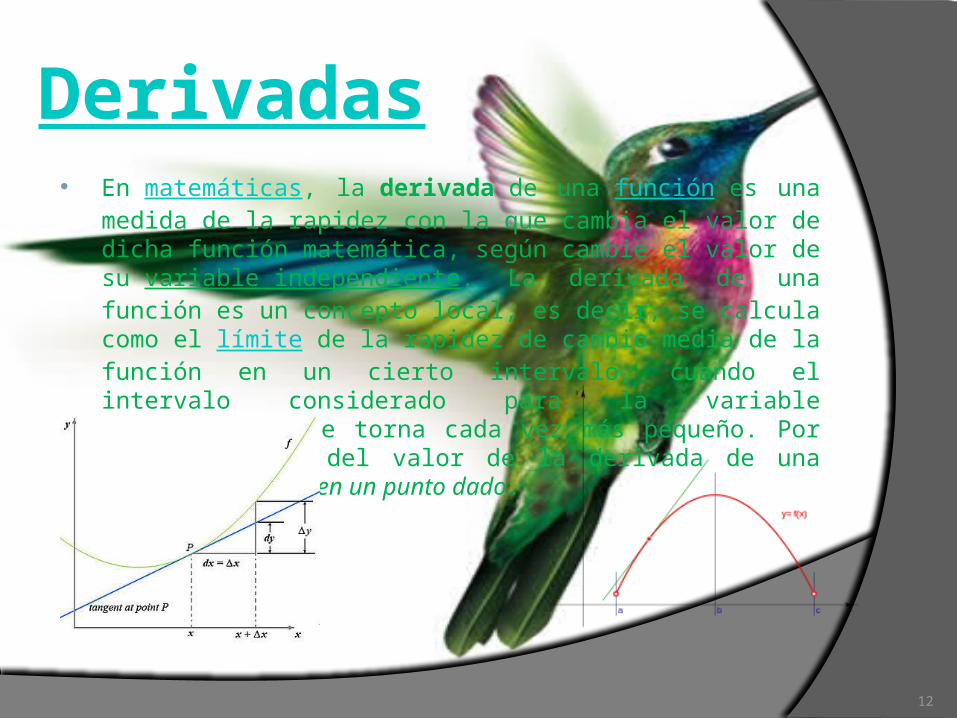
En matemáticas, la derivada de una función es una medida de la rapidez con la que cambia el valor de dicha función matemática, según cambie el valor de su variable independiente. La derivada de una función es un concepto local, es decir, se calcula como el límite de la rapidez de cambio media de la función en un cierto intervalo, cuando el intervalo considerado para la variable independiente se torna cada vez más pequeño. Por ello se habla del valor de la derivada de una cierta función en un punto dado.
Derivadas
13
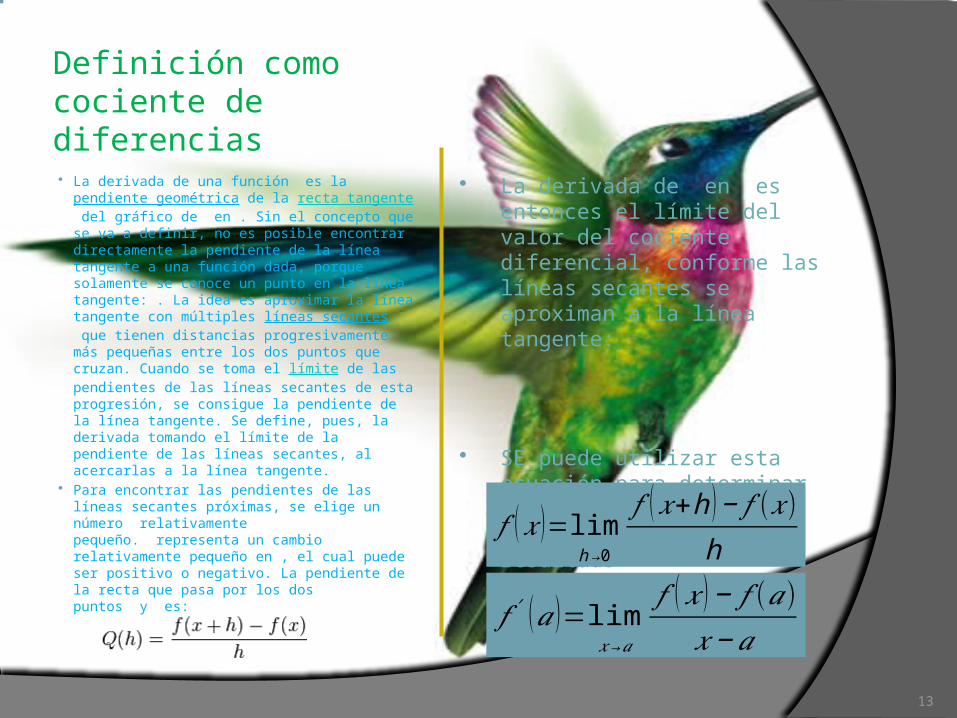
Definición como cociente de diferencias
La derivada de una función es la pendiente geométrica de la recta tangente del gráfico de en . Sin el concepto que se va a definir, no es posible encontrar directamente la pendiente de la línea tangente a una función dada, porque solamente se conoce un punto en la línea tangente: . La idea es aproximar la línea tangente con múltiples líneas secantes que tienen distancias progresivamente más pequeñas entre los dos puntos que cruzan. Cuando se toma el límite de las pendientes de las líneas secantes de esta progresión, se consigue la pendiente de la línea tangente. Se define, pues, la derivada tomando el límite de la pendiente de las líneas secantes, al acercarlas a la línea tangente.
Para encontrar las pendientes de las líneas secantes próximas, se elige un número relativamente pequeño. representa un cambio relativamente pequeño en , el cual puede ser positivo o negativo. La pendiente de la recta que pasa por los dos puntos y es:
La derivada de en es entonces el límite del valor del cociente diferencial, conforme las líneas secantes se aproximan a la línea tangente:
SE puede utilizar esta ecuación para determinar la derivada u esta otra que nos da el mismo resultado
𝑓 (𝑥 )=limh→ 0
𝑓 (𝑥+h )− 𝑓 (𝑥)h
𝑓 (𝑥 )=limh→ 0
𝑓 (𝑥+h )− 𝑓 (𝑥)h
𝑓 ′ (𝑎)=lim𝑥→𝑎
𝑓 (𝑥 )− 𝑓 (𝑎)𝑥−𝑎
14
Teoremas o Notaciones
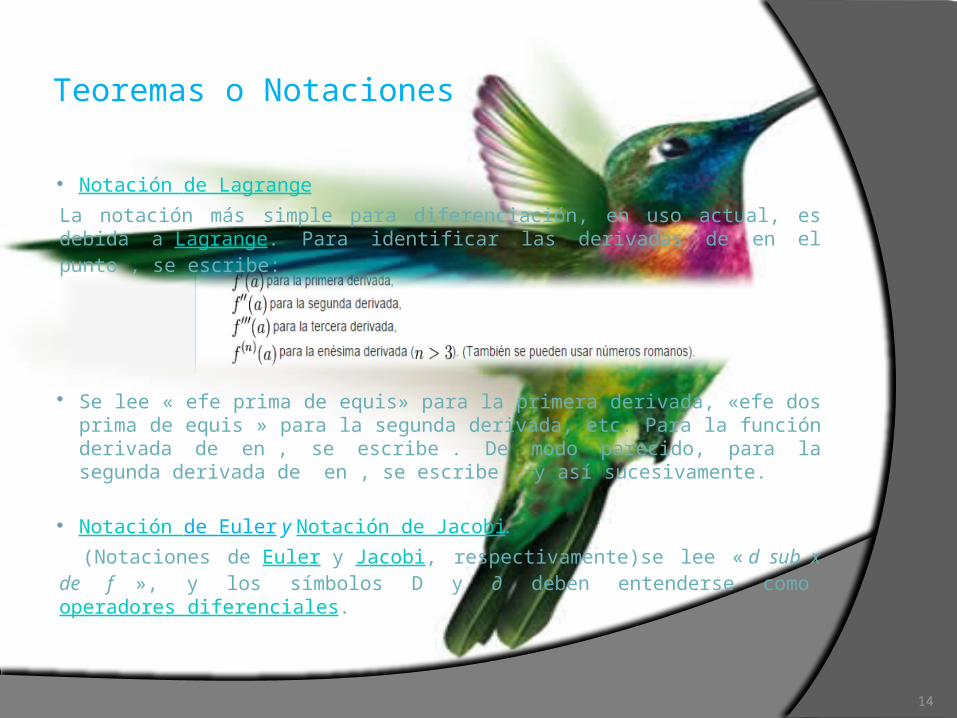
Notación de LagrangeLa notación más simple para diferenciación, en uso actual, es debida a Lagrange. Para identificar las derivadas de en el punto , se escribe:
Se lee « efe prima de equis» para la primera derivada, «efe dos prima de equis » para la segunda derivada, etc. Para la función derivada de en , se escribe . De modo parecido, para la segunda derivada de en , se escribe , y así sucesivamente.
Notación de Euler y Notación de Jacobi. (Notaciones de Euler y Jacobi, respectivamente)se lee « d sub x de f », y los símbolos D y ∂ deben entenderse como operadores diferenciales.
15
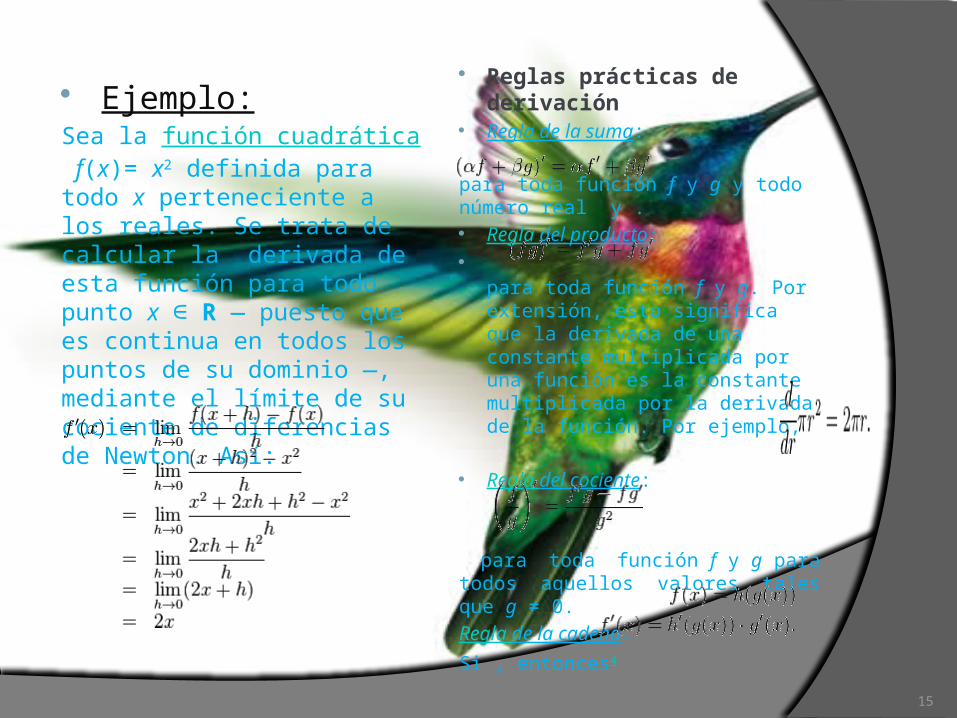
Ejemplo:Sea la función cuadrática f(x)= x2 definida para todo x perteneciente a los reales. Se trata de calcular la derivada de esta función para todo punto x ∈ R — puesto que es continua en todos los puntos de su dominio —, mediante el límite de su cociente de diferencias de Newton. Así:
Reglas prácticas de derivación
Regla de la suma: para toda función f y g y todo número real y . Regla del producto: para toda
función f y g. Por extensión, esto significa que la derivada de una constante multiplicada por una función es la constante multiplicada por la derivada de la función. Por ejemplo,
Regla del cociente: para toda función f y g para todos aquellos valores tales que g ≠ 0.Regla de la cadena: Si , entonces4