capítulo 4 - universidad de...
TRANSCRIPT
Capítulo 4 – Implementación hardware mediante DSP 43
Capítulo 4:
Implementación hardware mediante DSP
En este capítulo se va a presentar la evolución desde la plataforma de tiempo real detallada en el
capítulo anterior a una plataforma de menor coste para realizar la misma función. La decisión de tomar
este cambio de plataforma es debido a que el ordenador en tiempo real utilizado para realizar el RCP es
un equipo de elevado coste y que su función reside en la prueba de prototipos previos y modelos de
seguridad en una primera fase de diseño de un proyecto. Una vez probados los elementos de seguridad
y la máquina de estados del control, el paso siguiente es llevar el equipo a un plano precomercial en el
que se utiliza DSPs para ejecutar los algoritmos de control desarrollados del dispositivo.
Este capítulo describe la plataforma DSP utilizada, ventajas y necesidades requeridas en la misma.
También se comenta el diseño de la tarjeta de adaptación necesaria para poder utilizar el DSP debido a
que el rango de tensión de los medidores y las salidas del propio equipo no están en los niveles de
tensiones adecuados. Otro elemento que comprende la tarjeta de adaptación es la lógica de protección
comentada en el capítulo anterior y la cual es necesaria también en este dispositivo.
Por último, se muestran los resultados experimentales obtenidos en el laboratorio del control del VSC
mediante la plataforma DSP.
4.1. Descripción de la plataforma DSP
Un procesador digital de señales o DSP es un sistema basado en un procesador o microprocesador que
posee un conjunto de instrucciones, un hardware y un software optimizados para aplicaciones que
requieran operaciones numéricas a muy alta velocidad. Por este motivo es especialmente útil para el
procesado de algoritmos de control que utilizan señales analógicas en tiempo real que se adquieren a
través de un conversor analógico/digital (ADC).
Dada la definición anterior de DSP se puede ver claramente que este dispositivo es idóneo para el
control en tiempo real de un VSC. En el mercado hay una infinidad de DSPs de distintos tipos, clases y
marcas. Hay modelos específicos para control de motores, tratamiento de señales de audio, simulación,
etc. Para elegir un DSP adecuado es importante primero identificar las necesidades de entradas, salidas
y tiempo de muestreo. Las características fundamentales a tener en cuenta son:
Entradas analógicas: son necesarias, al menos, siete entradas analógicas para contralar el
sistema: tres intensidades alternas, tres tensiones alternas y una tensión continua.
Frecuencia de muestreo inferior a 50μs: Es necesario que el DSP sea capaz de muestrear las
señales analógicas en este tiempo debido a que el control que se va a implementar es muy
sensible al tiempo de muestreo.

44 Capítulo 4 – Implementación hardware mediante DSP
Salidas PWM: son necesarias seis salidas PWM para cada uno de los drivers de los IGBTs el
convertidor.
Salidas/entradas digitales: Para el funcionamiento correcto del convertidor se necesitan una
serie de entradas y salidas en el DSP, para activar el PWM vía hardware, cerrar contactores, etc.
Comunicación UDP: una vez que esté implementado el DSP en el VSC y se haya comprobado que
todo funciona correctamente, la comunicación mediante UDP será utilizada para mandar las
consignas de operación del mismo de forma remota.
Un factor determinante en la elección del DSP es la forma de programación que facilite. Debido al
proceso seguido en el diseño de este proyecto, se ha pasado previamente por una plataforma de tiempo
real de un lenguaje de programación de muy alto nivel (programación de SpeedGoat mediante Matlab-
Simulink), por ello es interesante poder adquirir un dispositivo DSP que sea capaz de poder utilizar todo
el trabajo realizado previamente, o al menos, la mayor parte del mismo.
Después de sondear el mercado y realizar comparativas entre distintos modelos de DSPs, el dispositivo
elegido es de la marca Texas Instruments, en concreto el modelo Concerto. En la Figura 39 se puede ver
una imagen del dispositivo en cuestión. Este DSP permite de una forma cuasi-automática la
programación desde Matlab-Simulink hasta su software de programación Code Composer.
FIGURA 39 – DSP CONCERTO
Las características más reseñables de este equipo son las siguientes:
Procesador ARM Cortex a 100MHz y 32bits: Este procesador es el encargado de las
comunicaciones que soporta el DSP, entre ellas la UDP. Este procesador es el primario, dando la
posibilidad de dar los privilegios de control de la memoria y otros recursos al procesador
secundario o procesador de control.
o Memoria flash de 256 kB.
o Memoria Ram de 20 kB.
o Memoria Rom de 64 kB.
o 32 canales DMA.
o 4 contadores.
o 2 puertos CaN.
o 5 puertos UART.
o 4 puertos SSI.
o 2 puertos I2C.

Capítulo 4 – Implementación hardware mediante DSP 45
o 1 puerto de comunicación Ethernet.
Procesador F28335 a 150MHz y 32bits: Este procesador es el encargado de gestionar las
entradas y salidas del dispositivo. Por lo tanto, es el encargado de gestionar los PWM,
capturadores, entradas y salidas, sincronización y otras características.
o Memoria flash de 256 kB.
o Memoria Ram de 20 kB.
o Memoria Rom de 64 kB.
o 6 canales DMA.
o 12 módulos PWM.
o 24 entradas/salidas digitales.
o 6 capturadores de 32 bits.
o 18 entradas analógicas de 64 bit.
De forma adicional, este dispositivo permite programar en Matlab-Simulink y posteriormente volcarlo
mediante un compilador a su software base (Code Composer). Debido a esta ventaja, todo el proceso de
simulación anteriormente comentado se puede aprovechar casi al completo.
El inconveniente de este dispositivo, común a todos los DSP, son los niveles de tensión que maneja. Para
todo tipo de entradas, ya sean analógicas o digitales, los niveles de tensión están en el rango 0-3,3V.
Resultando, por este motivo, necesario una tarjeta de adaptación de señales que lleve los niveles de
tensión de todas las entradas a los valores adecuados.
4.2. Tarjeta de adaptación
La tarjeta de adaptación diseñada es la que se muestra en la Figura 40. Como se puede ver en la Figura
40, el DSP se ha implementado en la placa mediante un conector específico de 100 pines, con lo que se
consigue un dispositivo de control más compacto y con menos problemas de conexión.
En este apartado se expone la lógica de seguridad, la monitorización de las faltas, la adaptación de las
señales analógicas y las entradas/salidas utilizadas.

46 Capítulo 4 – Implementación hardware mediante DSP
FIGURA 40 - TARJETA DE ADAPTACIÓN DSP
4.2.1. Lógica de seguridad
La placa de adaptación para el DSP es más compleja que la placa mostrada en el apartado de SpeedGoat,
pero comparten algunas partes fundamentales. Una parte que no ha sufrido ninguna modificación, es la
parte de la lógica de seguridad. Como se ha comentado en apartados anteriores es necesaria una lógica
de control que impida que los IGBTs de la misma columna se cierren a la vez. Esta lógica está comentada
en el apartado 3.2. La lógica de control también tiene implementado un filtro como el diseño anterior,
aunque este dispositivo provoca menores efectos de ruido en la salida PWM, se ha colocado dicho filtro
por seguridad.

Capítulo 4 – Implementación hardware mediante DSP 47
4.2.2. Monitorización de faltas
Un bloque que es similar, pero con una modificación, es el control de faltas. En la Figura 41 se puede ver
el esquemático del bloque de monitorización de faltas en DSP. La modificación con respecto al
mencionado para SpeedGoat es la incorporación de una resistencia en paralelo de 8,2 kΩ. Esta
resistencia es una resistencia pull-up.
La resistencia pull-up permite fijar la tensión del punto de falta a 5 voltios cuando la falta no se
produzca, y por lo tanto, ese punto no queda como una tensión flotante. Al ser esta resistencia de un
valor elevado, cuando la falta se produzca y se conecte el punto denominado “Falta” al GND del
convertidor, esta resistencia no entrará en funcionamiento, se comportara como un circuito abierto.
Debido a que son 6 faltas las que contempla el convertidor y que el DSP no necesita saber qué IGBT es el
que ha sufrido la falta, se ha colocado un integrado adicional que proporcione una salida cuando se
produzca la falta en algún IGBT. El integrado elegido es una puerta NAND de 8 entradas, la cual, dará
una salida a cinco voltios cuando alguna falta se active
FIGURA 41 – MONITORIZACIÓN DE LAS FALTAS EN DSP
4.2.3. Adaptación de señales
Un bloque totalmente nuevo en esta placa es el dedicado a la adaptación de señales analógicas para las
entradas del DSP. El acondicionamiento de señal es una parte indispensable del sistema en el caso de
que se deseen utilizar entradas analógicas dado que el DSP sólo admite entradas en un rango limitado
de tensiones. Si la señal de entrada estuviese fuera de los márgenes permitidos, la tarjeta podría sufrir
daños irreparables.
Según se especifica en el datasheet del DSP, las señalas de entrada para el módulo de conversión
analógica-digital (ADC) debe estar comprendida en el rango 0-3 V. Por lo tanto se limitan las salidas del
acondicionador de señales sólo a tensiones dentro de este rango.
Por otra parte, se deben tener en cuenta las variaciones de la señal de entrada que, en este caso se
obtienen de los sensores de medida, señales en un rango de tensión de ±4 VRMS.
48 Capítulo 4 – Implementación hardware mediante DSP
En resumen, con el fin de mantener la señal siempre fija dentro del rango de valores admisibles por el
DSP, las especificaciones del acondicionamiento de señal son:
Valor de la señal de entrada: ±4 VRMS.
Valor de la señal de salida: 0-3 V.
Si el circuito de adaptación se rige por la ecuación:
(4.1)
Hay que calcular los valores de A y B que hacen que, para todo valor de entrada, la señal de salida se
mantenga dentro de los rangos establecidos.
(4.2)
Y por lo tanto:
(4.3)
Entonces se tiene:
(4.4)
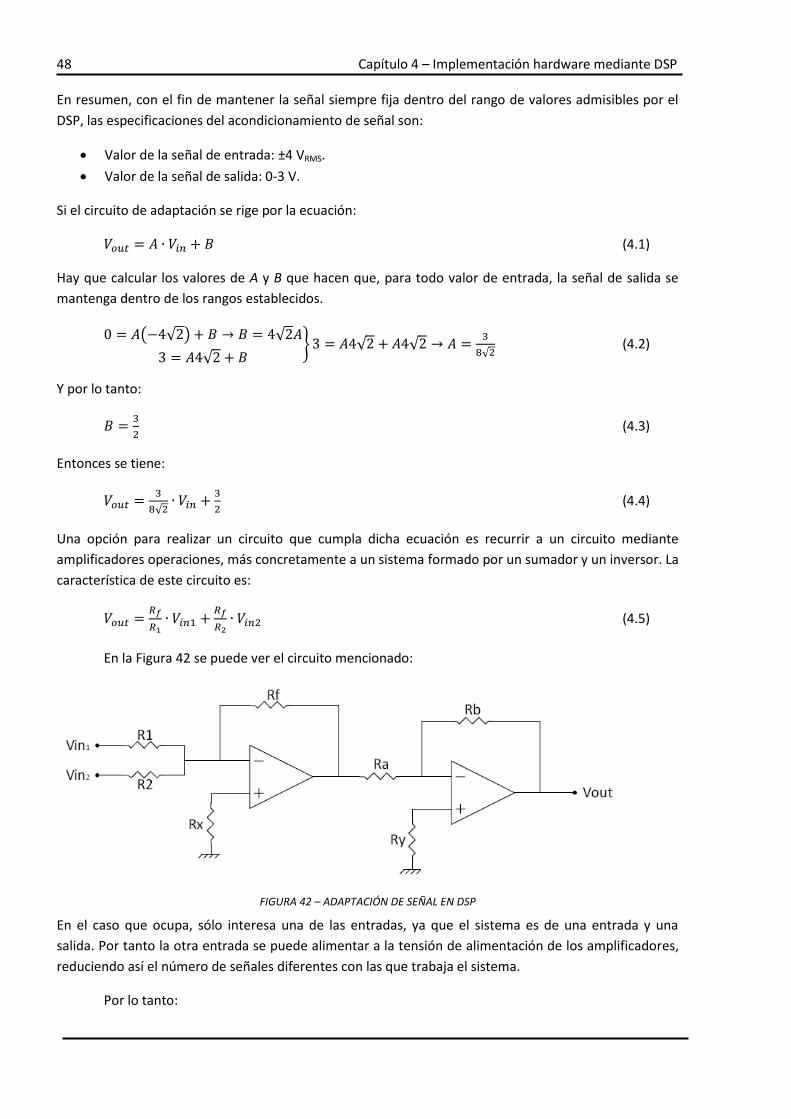
Una opción para realizar un circuito que cumpla dicha ecuación es recurrir a un circuito mediante
amplificadores operaciones, más concretamente a un sistema formado por un sumador y un inversor. La
característica de este circuito es:
(4.5)
En la Figura 42 se puede ver el circuito mencionado:
FIGURA 42 – ADAPTACIÓN DE SEÑAL EN DSP
En el caso que ocupa, sólo interesa una de las entradas, ya que el sistema es de una entrada y una
salida. Por tanto la otra entrada se puede alimentar a la tensión de alimentación de los amplificadores,
reduciendo así el número de señales diferentes con las que trabaja el sistema.
Por lo tanto:

Capítulo 4 – Implementación hardware mediante DSP 49
(4.6)
Entonces se tiene:
(4.7)
Por otro lado:
(4.8)
Una vez obtenidos los valores de y para que se cumpla la ecuación de adaptación hay que
asegurarse de que los valores de resistencia sean normalizados. Si no fuera el caso habría que buscar
resistencias normalizadas lo más cercanas posibles o hacer relaciones serie/paralelo para conseguirlas.
Para el cálculo de las resistencias y del inversor, se recurre a valores del mismo orden de
magnitud que las resistencias usadas en el sumador y, dado que ambas resistencias deben ser iguales,
se estima que un valor adecuado es:
(4.9)
Por último, sólo queda realizar el cálculo de y . La función de estas resistencias es la de disminuir
el efecto de las corrientes de polarización. Los valores de y que minimizan los efectos de las
corrientes de polarización de salida son:
(4.10)
(4.11)
Un posible amplificador operacional válido para este circuito es el UA741, este amplificador es
ampliamente conocido y tiene unas características que se adaptan perfectamente a las necesidades.
Los cálculos anteriormente mostrados son validos para las entradas de tensión alterna proporcionada
por los transductores de tensión e intensidad. Para la adaptación de la tensión de corriente continua
que proporciona el bus de continua es necesario otro tipo de adaptación. Utilizando el mismo
amplificador operacional, pero en este caso como se muestra a continuación.
En el caso de la tensión de corriente continua, con el fin de mantener la señal siempre fija dentro del
rango de valores admisibles por el DSP, las especificaciones del acondicionamiento de señal son:
Valor de la señal de entrada: 0-8 V.
Valor de la señal de salida: 0-3 V.
Si el circuito de adaptación se rige por la ecuación:
(4.12)

50 Capítulo 4 – Implementación hardware mediante DSP
Hay que calcular los valores de A y B que hacen que, para todo valor de entrada, la señal de salida se
mantenga dentro de los rangos establecidos.
(4.13)
Entonces se tiene:
(4.14)
Una opción para realizar un circuito que cumpla dicha ecuación es recurrir a un circuito mediante
amplificadores operaciones, más concretamente a un restador. La característica de este circuito es:
(4.15)
En la Figura 43 se puede ver el circuito mencionado:
FIGURA 43 – ADAPTACIÓN DE TENSIÓN CONTINUA PARA DSP
En el caso que ocupa, sólo interesa una de las entradas, ya que el sistema es de una entrada y una salida
y además, el segundo término de la ecuación es cero. Por tanto la otra entrada se puede alimentar al
GND de los amplificadores, reduciendo así el número de señales diferentes con las que trabaja el
sistema.
Por lo tanto:
(4.16)
Entonces se tiene:
(4.17)
Por otro lado:
(4.18)
Los valores de y mostrados son valores normalizados, dando lugar a pequeñas variaciones sobre
el valor exacto.

Capítulo 4 – Implementación hardware mediante DSP 51
4.2.4. Entradas/salidas de la placa de adaptación
El último bloque importante de la placa de adaptación son las entradas y salidas que necesita el
dispositivo para un funcionamiento correcto. Las entradas a la placa vienen en un rango de tensión de 5
V, rango que hay que modificar para entrar en el DSP. Esta modificación del nivel de tensión de 5V a
3,3V se realiza mediante un integrado, el UA78M33C. Las entradas a la placa son:
KG_aux: es una entrada para verificar el estado del contactor que une el convertidor con la red.
Input: entrada no definida o en reserva.
En cuanto a las salidas, los niveles de tensión de salida del DSP son de 3,3 V. Por ello es necesaria una
elevación de la tensión hasta 5V para poder poner en funcionamiento los distintos dispositivos que
accionan. El aumento de tensión se realiza mediante los integrados UA4427. Las salidas utilizadas son:
Reset drivers: resetea los drivers del convertidor.
KG_out: actúa sobre el cierre del contactor de conexión a la red.
Relay: actúa sobre el relé del convertidor.
Out: salida no definida o en reserva.
A parte de las señales de entrada y salida mencionadas, hay dos señales que no necesitan modificar sus
niveles de tensión. Estas señales son las señales de sincronización que utilizan los DSPs para sincronizar
sus PWM. Por lo tanto la salida y la entrada es a 3,3 V. Los nombres de estas variables son:
SYNCI: entrada de sincronización
SYNCO: salida de sincronización
4.3. Resultados experimentales
El ensayo realizado con la plataforma DSP es únicamente en STATCOM. Se ha realizado directamente
este montaje debido a que el controlador ya estaba probado y testeado en la plataforma anterior.
En la Figura 44 se muestra la conexión realizada. En esta figura se puede ver que la disposición de los
elementos es la misma sustituyendo la plataforma de control SpeedGoat por el DSP.
En este caso SpeedGoat se utiliza para mandar las referencias de tensión e intensidad al DSP mediante
UDP. La razón de usar este protocolo de comunicación y no TCP, es debido a que UDP no tiene un
tratamiento de pérdida de paquetes. Este protocolo es el que se usa habitualmente en procesos que
impliquen una comunicación en tiempo real, ya que, el protocolo TCP eliminaría la cualidad de tiempo
real.

52 Capítulo 4 – Implementación hardware mediante DSP
FIGURA 44 – ESQUEMA UNIFILAR DE LA CONEXIÓN CON DSP
En la Figura 45 se muestra la intensidad y tensión trifásica en el punto de suministro. La tensión es una
variable fijada por la red, mientras que la intensidad es la que se aporta a la red. Esta intensidad se
controla desde SpeedGoat mediante la intensidad Id. En este ensayo la intensidad de referencia es de
10A pico, la cual está controlada correctamente por el sistema de control.
FIGURA 45 – INTENSIDAD Y TENSIÓN DE SUMINISTRO
En este caso no se pueden obtener gráficas de la intensidad Id o de los valores de eta debido a que el
DSP está limitado en los valores de envío o variables a guardar.

Capítulo 4 – Implementación hardware mediante DSP 53
En la se puede ver la tensión del bus de continua. Como estamos en STATCOM, el convertidor tiene que
controlar la tensión de su bus de continua. Como se aprecia en la gráfica, la variable oscila entre unos
755V y 705V, siendo la tensión de referencia de 730V. Esta oscilación es totalmente admisible y por
seguridad la máquina de estados está calibrada a 775V.
FIGURA 46 – TENSIÓN DEL BUS DE CONTINUA CONTROLADO CON DSP
En la Figura 47 se puede ver el espectro armónico de la intensidad suministrada a la red. Como se
aprecia la parte fundamental corresponde a 50Hz y se tienen armónicos de orden bajo y entorno a la
frecuencia de conmutación, 10kHz.
FIGURA 47 – ESPECTRO ARMÓNICO COMPLETO

54 Capítulo 4 – Implementación hardware mediante DSP
En la Figura 48 se muestra el espectro armónico anterior con más detalle. En el diagrama de barras
superior se muestran los armónicos, en tanto por ciento con respecto al armónico fundamental, desde
el 2 al 13, dado que son los más representativos. En el diagrama de barras inferior se muestran los
armónicos de orden alto. El THD de la intensidad es del 0.024%
FIGURA 48 – DETALLE DEL ESPECTRO ARMÓNICO